s. menconero, g. bigliardi, s. cappelli, 3d archeolab: rilievo e stampa 3d dei reperti del museo...
TRANSCRIPT

Ferrara, Salone del Restauro, Mercoledi 26 marzo 2013
Tecnologie Open Source per i Beni Culturali:rilievo e modellazione 3D, restauro virtuale, stampa 3D
G. Bigliardi S. Menconero S. Cappelli
www.3d-archeolab.it
[email protected]/3darcheolab

✓ creiamo una banca dati online di modelli 3D di reperti archeologici
✓ riproduciamo i reperti attraverso la tecnologia della stampa 3D
✓ creiamo un laboratorio informatico
✓ allestiamo un percorso museale tattile per ciechi e ipovedenti
✓ organizziamo laboratori didattici per le scuole
creiamo nuove forme di produzione, distribuzione e fruizione della cultura

Perché?

con la cultura non si mangia

con la cultura si mangia

✓ 75,5 miliardi di euro di valore aggiunto nel 2012, il 5,4% dell’intera economia
con la cultura si mangia
✓ 75,5 miliardi di euro di valore aggiunto nel 2012, il 5,4% dell’intera economia
✓ le imprese del sistema produttivo culturale sono aumentate del 3,3% (+14.590 unità), circa 3 punti percentuali in più del totale dell’economia
con la cultura si mangia

✓ 75,5 miliardi di euro di valore aggiunto nel 2012, il 5,4% dell’intera economia
✓ le imprese del sistema produttivo culturale sono aumentate del 3,3% (+14.590 unità), circa 3 punti percentuali in più del totale dell’economia
✓ gli occupati del settore sono cresciuti del +0,5%, a fronte di una fessione dello 0,3% riscontrata per l’intera economia
con la cultura si mangia

✓ 75,5 miliardi di euro di valore aggiunto nel 2012, il 5,4% dell’intera economia
✓ le imprese del sistema produttivo culturale sono aumentate del 3,3% (+14.590 unità), circa 3 punti percentuali in più del totale dell’economia
✓ gli occupati del settore sono cresciuti del +0,5%, a fronte di una fessione dello 0,3% riscontrata per l’intera economia
✓ se consideriamo tutta la ‘fliera della cultura’, il valore aggiunto prodotto schizza al 15.3% del totale dell’economia nazionale, circa 214 miliardi di euro
con la cultura si mangia

con la cultura si mangia

capacità di creare, organizzare e promuovere attività originali imperniate attorno ai Beni Culturali, creando forme nuove di fruizione e comunicazione
con la cultura si mangia

Come?

rilievo 3D di una selezione di reperti archeologici

rilievo 3D di una selezione di reperti archeologici
creazione di una banca dati 3D consultabile online

rilievo 3D di una selezione di reperti archeologici
creazione di una banca dati 3D consultabile online
3d-archeolab.sketchfab.com

rilievo 3D di una selezione di reperti archeologici
stampa 3D dei reperti archeologici
creazione di una banca dati 3D consultabile online

rilievo 3D di una selezione di reperti archeologici
stampa 3D dei reperti archeologici
laboratorio informatico e formazione
creazione di una banca dati 3D consultabile online

rilievo 3D di una selezione di reperti archeologici
stampa 3D dei reperti archeologici
allestimento di un percorso tattile per ciechi
laboratorio informatico e formazione
creazione di una banca dati 3D consultabile online

rilievo 3D di una selezione di reperti archeologici
stampa 3D dei reperti archeologici
allestimento di un percorso tattile per ciechi
organizzazione di laboratori didattici per le scuole
laboratorio informatico e formazione
creazione di una banca dati 3D consultabile online

Chi?

con il patrocinio di
Fondazione Perugiassisi 2019
Museo Archeologico Nazionale dell’Umbria
Istituto di Formazione e Ricerca della Federazione Italiana Club e Centri UNESCO
U.I.C.I. Unione Italiana Ciechi e Ipovedenti ONLUS
RapidLab3D
Evonove
Laboratorio didattico archeologico “I Luoghi della Memoria”
Provincia di Perugia
Progetto a cura di
Associazione culturale 3D Lab

CAMERA
Canon EOS 500D15,3 megapixel
+Canon EF-S 50 mm f/1.4 USM
Risoluzione immagine jpg4752 x 3168 pixel
NOTEBOOK
Sony VaioIntel Core 2 Duo CPU T8100 @ 2.10 GHz
3,0 GB RAMATI Mobility Radeon X2300
MS Windows Vista Home Premium 32-bitLinux 2.6.32 (ArcheOS 4)
hardware

dal rilievo alla stampa 3D

Structure-from-Motion e Image-Based modelingdi un'urna funeraria etrusca
limiti e potenzialità

PYTHON PHOTOGRAMMETRY TOOLBOX
v. 0.1 in ArcheOS 4
CLOUDCOMPAREv. 2.4 in Windows
MESHLABv. 1.3.2 in Windows
software

Urna di Thania Vipinei: caccia al cinghiale calidonioAlabastro (cassa) e travertino (coperchio)
II sec. a.C. territorio di ChiusiCollezione del Museo Archeologico di Perugia (Inventario Bellucci 71)
Analisi della forma: bassorilievo con fgure antropomorfe degradate.
Diffcoltà logistiche: manufatto collocato nel chiostro del museo, a ridosso di un muro, per cui non è stato possibile fotografare la parte posteriore.
Luce ambientale diffusa.
oggetto

Iscrizione: Ѳania vipinei tutnasa = “Thania Vipinei, moglie di Tutna”
Iconografa: Meleagro, fglio del re di Calidone, uccide con uno spiedo il feroce cinghiale che Artemide ha scatenato contro la città. Alla caccia partecipa anche Atalanta, al centro, armata di scure. A lei, della quale è segretamente innamorato, egli donerà la preda, dando inizio alla catena di tragici eventi che lo portò alla morte.
oggetto

Come realizzare un modello metrico in poco tempo e senza poter spostare l’oggetto?
SOLUZIONEposizionamento di un metro di legno pieghevole con i decimetri colorati in modo alternato (bianco e
giallo). Tramite il metro con due angoli piegati a 90° è stato possibile ricostruire un sistema di coordinate cartesiane, assegnate come si vede in figura
problematiche

Sono stati eseguiti 3 gruppi di riprese fotografiche per un totale di 68 foto
GRUPPO 121 foto da lontano
inquadramento completo dell’oggetto
GRUPPO 322 foto molto ravvicinate
inquadramento particolare del bassorilievo
GRUPPO 225 foto ravvicinate
inquadramento parziale dell’oggetto
riprese fotografiche

METODO
- capire a che risoluzione massima è possibile processare le fotografie
- capire qual è il migliore set di foto che produce la nuvola più densa a parità di risoluzione
- verificare se il software ha maggiori prestazioni in ambiente Linux o Windows
- documentare i vari tentativi
- produrre la nuvola di punti che verrà successivamente trasformata in mesh
Python Photogrammetry Toolbox
OBIETTIVO
riuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione

OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
FASE 1 – BUNDLE in Linux
FOTO: 25 (gruppo 2)Risoluzione impostata: 3500Tempo di elaborazione: 2 oreNuvola di punti ottenuta: 60.419 vertexOSSERVAZIONI: la risoluzione è buona ma una delle foto non è stata processata.
Processing photo '46.JPG':Found 92546 features
Processing photo '34.JPG':Found 116818 features
Processing photo '37.JPG':Found 0 features
Processing photo '44.JPG':Found 115191 features
Processing photo '42.JPG':Found 114353 features
Processing photo '26.JPG':Found 100298 features
Processing photo '31.JPG':Found 112466 features
Processing photo '32.JPG':Found 101113 features
Processing photo '23.JPG':Found 93196 features
Processing photo '43.JPG':Found 114073 features
Processing photo '22.JPG':Found 104296 features
Processing photo '39.JPG':Found 115197 features
Processing photo '38.JPG':Found 112197 features
Processing photo '30.JPG':Found 118267 features
Processing photo '24.JPG':Found 80768 features
Processing photo '27.JPG':Found 113350 features
Processing photo '40.JPG':Found 113365 features
Processing photo '28.JPG':Found 101924 features
Processing photo '35.JPG':Found 114544 features
Processing photo '29.JPG':Found 117573 features
Processing photo '45.JPG':Found 116180 features
Processing photo '36.JPG':Found 111208 features
Processing photo '41.JPG':Found 119543 features
Processing photo '33.JPG':Found 118735 features
Processing photo '25.JPG':Found 107598 features
Python Photogrammetry Toolbox

FASE 2 – BUNDLE in Linux
FOTO: 25 (gruppo 2)Risoluzione impostata: 3000Tempo di elaborazione: 1,4 oreNuvola di punti ottenuta: 61.288 vertexOSSERVAZIONI: abbassando la risoluzione tutte le foto sono state processate, ma la nuvola è incompleta in basso di lato.
Processing photo '46.JPG':Found 73590 features
Processing photo '34.JPG':Found 88733 features
Processing photo '37.JPG':Found 89597 features
Processing photo '44.JPG':Found 89289 features
Processing photo '42.JPG':Found 89812 features
Processing photo '26.JPG':Found 80217 features
Processing photo '31.JPG':Found 89357 features
Processing photo '32.JPG':Found 81632 features
Processing photo '23.JPG':Found 75529 features
Processing photo '43.JPG':Found 86996 features
Processing photo '22.JPG':Found 81859 features
Processing photo '39.JPG':Found 89991 features
Processing photo '38.JPG':Found 86456 features
Processing photo '30.JPG':Found 89930 features
Processing photo '24.JPG':Found 64498 features
Processing photo '27.JPG':Found 89308 features
Processing photo '40.JPG':Found 86819 features
Processing photo '28.JPG':Found 82237 features
Processing photo '35.JPG':Found 88677 features
Processing photo '29.JPG':Found 88870 features
Processing photo '45.JPG':Found 89471 features
Processing photo '36.JPG':Found 86968 features
Processing photo '41.JPG':Found 90703 features
Processing photo '33.JPG':Found 94254 features
Processing photo '25.JPG':Found 84671 features
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 3 – BUNDLE in Linux
FOTO: 25 (gruppo 2)Risoluzione impostata: 3400Tempo di elaborazione: 2 oreNuvola di punti ottenuta: 68.323 vertexOSSERVAZIONI: prendiamo 3400 come risoluzione massima utilizzabile afnché vengano processate tutte le foto.
Processing photo '46.JPG':Found 87557 features
Processing photo '34.JPG':Found 110039 features
Processing photo '37.JPG':Found 112078 features
Processing photo '44.JPG':Found 108664 features
Processing photo '42.JPG':Found 108733 features
Processing photo '26.JPG':Found 95485 features
Processing photo '31.JPG':Found 106609 features
Processing photo '32.JPG':Found 97348 features
Processing photo '23.JPG':Found 88709 features
Processing photo '43.JPG':Found 107693 features
Processing photo '22.JPG':Found 98923 features
Processing photo '39.JPG':Found 108943 features
Processing photo '38.JPG':Found 105633 features
Processing photo '30.JPG':Found 110807 features
Processing photo '24.JPG':Found 76396 features
Processing photo '27.JPG':Found 106923 features
Processing photo '40.JPG':Found 106343 features
Processing photo '28.JPG':Found 97244 features
Processing photo '35.JPG':Found 108729 features
Processing photo '29.JPG':Found 110467 features
Processing photo '45.JPG':Found 110069 features
Processing photo '36.JPG':Found 105530 features
Processing photo '41.JPG':Found 113047 features
Processing photo '33.JPG':Found 113099 features
Processing photo '25.JPG':Found 102191 features
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 4 – BUNDLE in Linux
FOTO: 21 (gruppo 1)Risoluzione impostata: 3400Tempo di elaborazione: 1,45 oreNuvola di punti ottenuta: 66.788 vertexOSSERVAZIONI: si ottiene una nuvola di punti meno definita rispetto a 25 foto ma la nuvola è completa.
Processing photo '10.JPG':Found 93752 features
Processing photo '20.JPG':Found 67492 features
Processing photo '05.JPG':Found 96558 features
Processing photo '19.JPG':Found 74257 features
Processing photo '04.JPG':Found 95807 features
Processing photo '14.JPG':Found 92966 features
Processing photo '12.JPG':Found 92677 features
Processing photo '17.JPG':Found 103442 features
Processing photo '08.JPG':Found 98695 features
Processing photo '18.JPG':Found 100240 features
Processing photo '16.JPG':Found 93518 features
Processing photo '11.JPG':Found 92304 features
Processing photo '03.JPG':Found 93430 features
Processing photo '15.JPG':Found 91276 features
Processing photo '07.JPG':Found 92826 features
Processing photo '21.JPG':Found 68765 features
Processing photo '01.JPG':Found 84036 features
Processing photo '09.JPG':Found 96388 features
Processing photo '02.JPG':Found 95013 features
Processing photo '06.JPG':Found 94535 features
Processing photo '13.JPG':Found 80297 features
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 5 – BUNDLE in Linux
FOTO: 68 (gruppo 1+2+3)Risoluzione impostata: 3400Tempo di elaborazione: tante oreNuvola di punti ottenuta: 271.129 vertexOSSERVAZIONI: il software riesce a processare tutte le 68 foto insieme, producendo una nuvola di punti molto definita.
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox
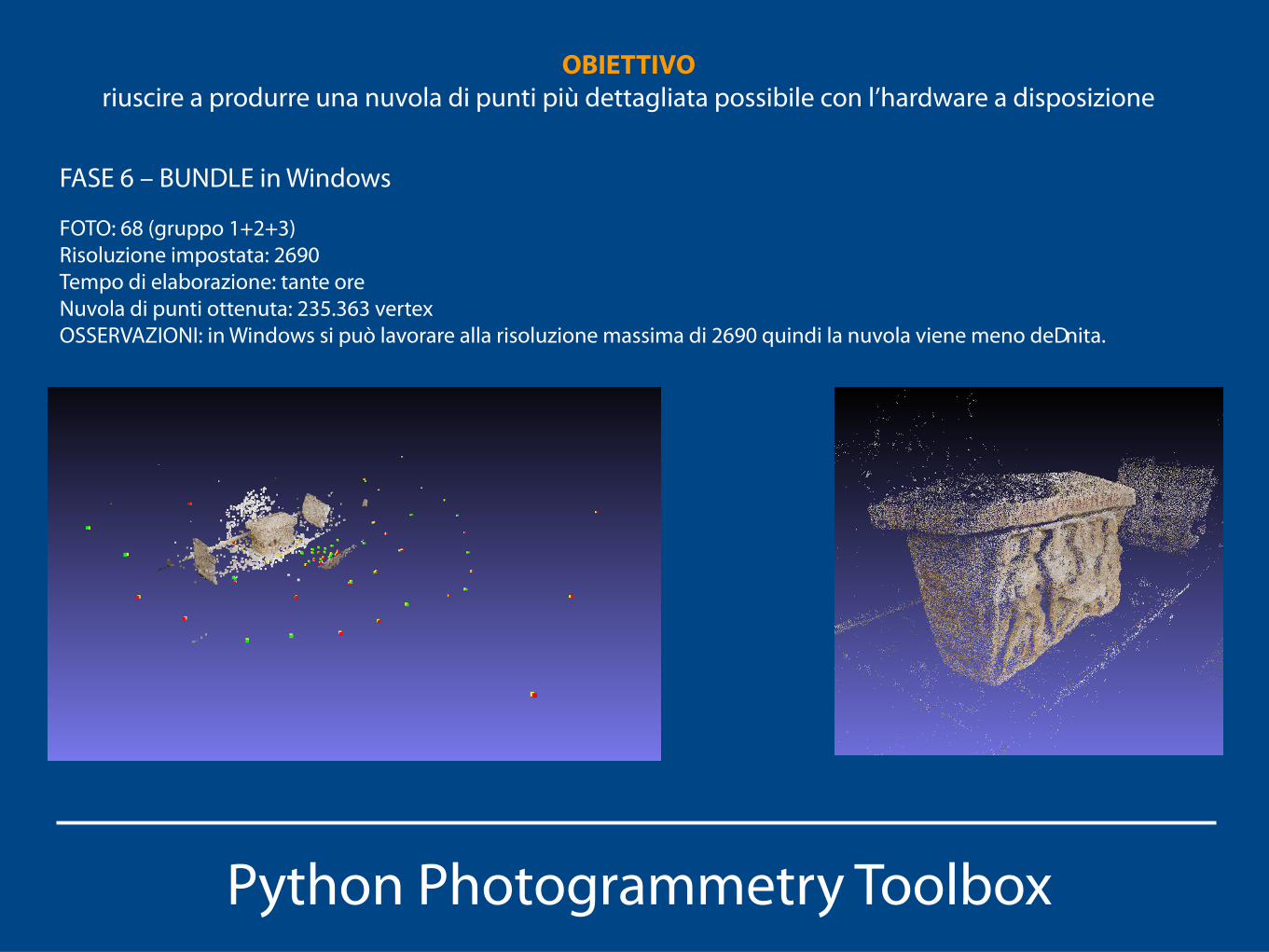
FASE 6 – BUNDLE in Windows
FOTO: 68 (gruppo 1+2+3)Risoluzione impostata: 2690Tempo di elaborazione: tante oreNuvola di punti ottenuta: 235.363 vertexOSSERVAZIONI: in Windows si può lavorare alla risoluzione massima di 2690 quindi la nuvola viene meno definita.
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 7 – PMVS in Linux
Bundle: 68 foto in Linux (fase 6)Nuvola di bundle: 271.129 vertexCluster: 10Nuvola di PMVS: ...OSSERVAZIONI: dopo 4 giorni il computer non aveva ancora prodotto il primo cluster e si è deciso di interrompere.
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 8 – BUNDLE in Linux
FOTO: 24 (scelte da gruppo 1 e 2)Risoluzione impostata: 3400Tempo di elaborazione: 2 oreNuvola di punti ottenuta: 82.248 vertexOSSERVAZIONI: si cerca di ottenere il giusto equilibrio tra le foto da lontano e quelle da vicino con poche foto.
Processing photo '46.JPG':Found 87557 features
Processing photo '34.JPG':Found 110039 features
Processing photo '10.JPG':Found 93752 features
Processing photo '26.JPG':Found 95485 features
Processing photo '31.JPG':Found 106609 features
Processing photo '05.JPG':Found 96558 features
Processing photo '04.JPG':Found 95807 features
Processing photo '14.JPG':Found 92966 features
Processing photo '12.JPG':Found 92677 features
Processing photo '17.JPG':Found 103442 features
Processing photo '08.JPG':Found 98695 features
Processing photo '18.JPG':Found 100240 features
Processing photo '30.JPG':Found 110807 features
Processing photo '16.JPG':Found 93518 features
Processing photo '11.JPG':Found 92304 features
Processing photo '03.JPG':Found 93430 features
Processing photo '35.JPG':Found 108729 features
Processing photo '15.JPG':Found 91276 features
Processing photo '07.JPG':Found 92826 features
Processing photo '01.JPG':Found 84036 features
Processing photo '09.JPG':.Found 96388 features
Processing photo '02.JPG':Found 95013 features
Processing photo '06.JPG':Found 94535 features
Processing photo '13.JPG':Found 80297 features
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 9 – PMVS in Linux
Bundle: 24 foto in Linux (fase 8)Nuvola di bundle: 82.248 vertexCluster: 8Nuvola di PMVS: 817.849 vertexOSSERVAZIONI: durante l’elaborazione sono state rimosse 7 foto, ma il risultato è comunque molto buono.
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 10 – BUNDLE in Linux
FOTO: 46 (scelte da gruppo 1 e 2)Risoluzione impostata: 3400Tempo di elaborazione: molte oreNuvola di punti ottenuta: 150.537 vertexOSSERVAZIONI: ultimo tentativo, se la fase successiva di PMVS va a buon fine, ci si può ritenere soddisfatti.
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

FASE 11 – PMVS in Linux
Bundle: 46 foto in Linux (fase 10)Nuvola di bundle: 150.537 vertexCluster: 8Nuvola di PMVS: 3.091.588 vertexOSSERVAZIONI: durante l’elaborazione sono state rimosse 13 foto, ma il risultato è comunque molto buono.
OBIETTIVOriuscire a produrre una nuvola di punti più dettagliata possibile con l’hardware a disposizione
Python Photogrammetry Toolbox

METODO
- pulire manualmente la nuvola di punti da tutte le parti estranee all’urna
- dimensionare metricamente la nuvola in modo che sia misurabile
- creare una superficie dalla nuvola di punti
CloudCompare
OBIETTIVO
riuscire a dimensionare metricamente la nuvola pulita per la successiva mesh

FASE 1 - pulizia della nuvola di punti
- dalla nuvola sono state eliminate tutte le parti di contesto estranee all’oggetto tramite il comando “Segment”- la nuvola è passata da 3.091.588 vertex a 2.721.744 vertex.
CloudCompare
OBIETTIVOriuscire a dimensionare metricamente la nuvola pulita per la successiva mesh

FASE 2 - dimensionamento metrico
- con il comando “Align two clouds” sono stati selezionati i punti del metro ligneo posizionato come asse cartesiano- ai punti selezionati sono state assegnate le coordinate calcolate grazie ai decimetri colorati del metro
CloudCompare
OBIETTIVOriuscire a dimensionare metricamente la nuvola pulita per la successiva mesh

FASE 3 - mesh
- con il pugin “3D Poisson Mesh Reconstruction” settando il valore di octree a 10 si è ottenuta una mesh con 1.903.212 facce- sono state eseguite le mesh sia della nuvola nella posizione originale sia di quella dimensionata per provare successivamente la texturizzazione sia automatica che manuale
CloudCompare
OBIETTIVOriuscire a dimensionare metricamente la nuvola pulita per la successiva mesh

METODO
- creare la mesh
- applicare il colore alla mesh
- creare la texture del modello in modo manuale e automatico
N.B. per eseguire quest’ultima parte del lavoro si è fatto ricorso ad un nuovo strumento hardware con prestazioni migliori rispetto a quello con cui si è lavorato fino ad ora.
Le caratteristiche del notebook utilizzato sono:
Notebook AcerIntel Core i5-2450M @ 2.5 GHz with Turbo Boost up to 3.1 GHz4 GB RAMNVIDIA GeForce GT 630M (1GB dedicated RAM)MS Windows 7 64-bit
MeshLab
OBIETTIVO
creare la mesh e la texture del modello

FASE 1 - mesh
- la mesh è stata prodotta con il comando “Surface Reconstruction: Poisson” con i valori di Octree Depth e Solver Divide pari a 10 (valori massimi accettabili dall’hardware)- la mesh presenta 1.427.202 facce, inferiori a quelle della mesh eseguita con CloudCompare
MeshLab
OBIETTIVOcreare la mesh e la texture del modello

FASE 2 - colore
Vertex attribute transfer Project active raster color to current mesh
MeshLab
OBIETTIVOcreare la mesh e la texture del modello

FASE 3 - texture
- Utilizzo del comando “Parameterization + texturing from registered raster” con texture size pari a 1800 pixel
MeshLab
OBIETTIVOcreare la mesh e la texture del modello
