robots in automobile industry
TRANSCRIPT

ROBOTS IN AUTOMOBILE
INDUSTRY
Content Introduction Classification Defining Parameter of a Robot Application of Robot Robots in Manufacturing
Where Are Robots Used? 90% of all robots used today are found in factories.
These robots are referred to as industrial robots. Although many types can be found in manufacturing today the most common are jointed arm robots.
Ten years ago, 9 out of 10 robots were being bought by auto companies - now, only 50% of robots made today are bought by car manufacturers.
Robots are slowly finding their way into warehouses, laboratories, research and exploration sites, energy plants, hospitals, even outer space.
Areas of Manufacturing where Robots Are Used
Aerospace Automotive manufacturing and supply Chemical, rubber and plastics
manufacturing Electrical and electronics Entertainment-movie making Food stuff and beverage manufacturing Glass, ceramics and mineral production Printing Wood and furniture manufacturing

Classification of Robots Classification by Degrees of Freedom Classification by Kinematic Structure Classification by Drive Technology Classification by Workspace Geometry Classification by Motion Characteristics
Defining parameter of a Robot
Number of axes Degrees of freedom Working envelope Kinematics Carrying capacity Acceleration Accuracy Repeatability

Uses of Robots General purpose autonomous robots Industrial Robots Dirty ,Dangerous ,dull or inaccessible
tasks Military Robots Mining Robots Health Care Robots Research Robots
Traditional Industrial Robots
Traditional industrial robot control uses robot arms and largely pre-computed motions Programming using “teach box” Repetitive tasks High speed Few sensing operations High precision movements Pre-planned trajectories and
task policies No interaction with humans

Robots in Manufacturing Industrial robot is a
Programmable Multi-functional Designed to move materials, parts, tools or
special devices Through programmed motions To perform many different tasks
Specific Robotic Tasks In Manufacturing
Assembling products Handling dangerous
materials Spraying finishes Inspecting parts,
produce, and livestock
Cutting and polishing
Welding
Automation and Robots in Industry
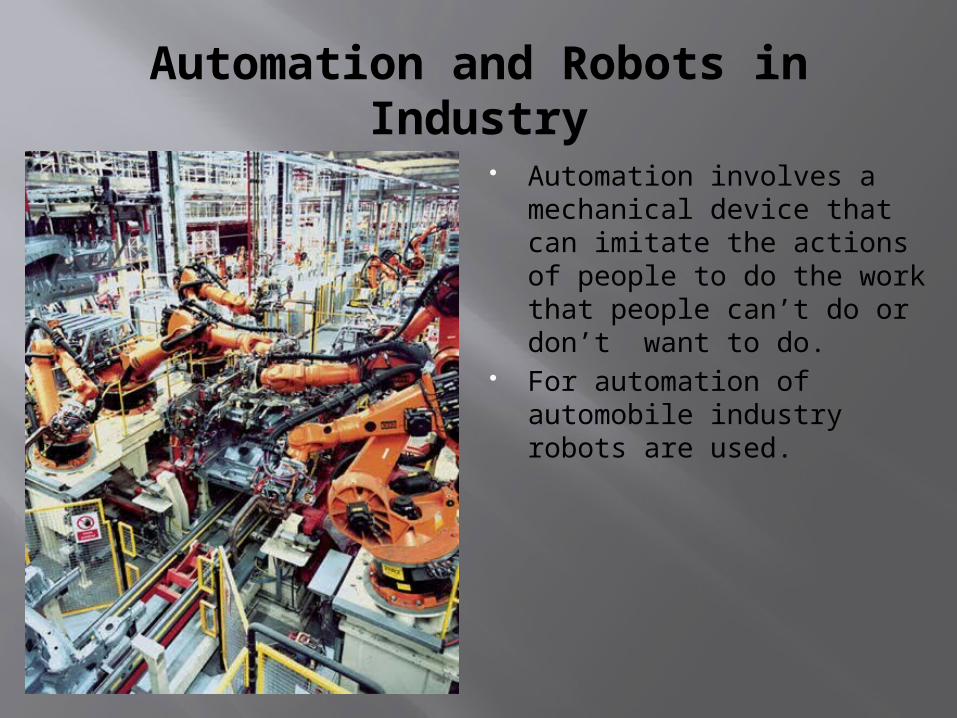
Automation involves a mechanical device that can imitate the actions of people to do the work that people can’t do or don’t want to do.
For automation of automobile industry robots are used.
First industrial robot was developed in the 1950s
Further advancements enable to utilize robots in Variety of types Style Size
Their functionalities may include but not restricted to Welding - Drilling Painting - Military applications Assembly - Explosive material removal Pick-and-place Material handling
A typical robot consists of many different part connected to each other
Most robots resembles a human arm Its motions are controlled by a computer
program Depends on the type of robot, movement
capabilities of them are measured by the term degrees of freedom
How do robots work: there are 3 power sources
Hydraulic drive
Joints are actuated by hydraulic driversThe major disadvantages are: Floor is used by the installation of hydraulic system Leaks may seen often and cause messy floorAdvantages Due to the speed and power, they are used in large industrial robots Also desired to use in the environments where electric-driven robots might cause fire etc.
Electric Drive
Comparison to Hydraulic systems, less power and slower speed
Most common robot types in the industryThere are two distinct group: Stepper motors and Direct
current (DC) servo-motor driven
Pneumatic Drive
Usually installed to small robotsTends to have less degrees of freedomOperations are simple and less cycle timesLess expensive, Since most of the robot parts are
commercially available, small institution can build their own robots
How do we know the location of robot arms? Sensors are used to monitor the motion of
robots Motion of robots is sustained by the power
based on the given input (computer algorithm) Once the order is given, it is important to know
the location of robot’s arm/parts Its movements should be controlled during the
entire motion Robot should also be capable of sensing their
environments Sensors provides feedback to the controller and
give flexibility to robots
Type of sensors being used in robotics1. Position Sensors
Monitors the location of jointsCoordinate information is feedback to controllerThis communication gives the system the capability of location the end-effectors, which is the part usually performs the tasks.
2. Range sensors
Measures the distance between a point in the robot and interest point that surrounds the robotsThe task is usually performed by television cameras or sonar transmitter and receiversIf the sonar or camera misses a point, undesired coincidences may occur
3. Velocity sensors
Estimates the speed using a moving manipulatorDue the the effects caused by, mechanical force, gravity, weight of load etc, desired speed and required force to reach the speed should be computed continuously
4. Proximity sensors
Sense and indication of presence of another object within specified distancesPrevents accidents and locate the existence of work-piece
Robot movements: Robots are feasible when they are fast but also
the stability is high The trade-off between speed and stability is
sustained by a powerful control system Robotics and Control are two joint disciplines
Robotic movements and joints Robots required to perform1. Rotational movements2. Radial movements3. Vertical movements Type of joints1. Rotational joints2. Twisting joints3. Revolving joints4. Linear joints

Analysis of robot motions:Forward and Backward Kinematics concepts Forward Kinematics: Transformation of
coordinate of the end-effectors point from the joint space to the world space
Position of end-effectors is computed based on the joints locations
Backward Kinematics: Transformation of coordinates from world space to joint space
In this concept the position of end-effectors is known in world coordinate system
Required motion is computed based on this information

Robot Configurations
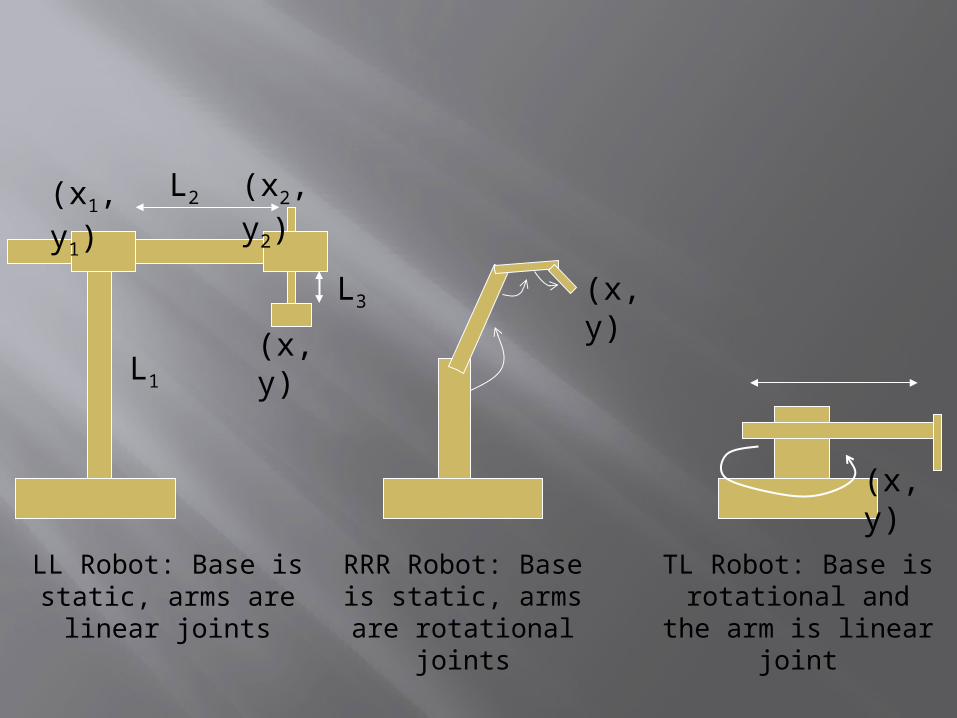
LL Robot: Base is static, arms are linear joints
RRR Robot: Base is static, arms are rotational
joints
TL Robot: Base is rotational and the arm is
linear joint
(x1, y1) (x2, y2)
(x, y)
L2
L1
L3
(x, y)
(x, y)
Essentials of robot programming Requires
The path robot should follow The points it should reach Details about how to interpret the sensor data How and when the end-effectors should be
activated How to move parts between given locations

Essentials of robot programming Programming techniques
Teach-by showing: Robot can repeat the motion already been done
by the programmer Textual language programming
A computer programming is written using logical statements
Some of the languages are: Wave, VAL, AML, RAIL, MCL, TL-10, IRL, PLAW,
SINGLA and ACL

Application The 2013 Escape is their first US-
manufactured car to benefit from the seeing-eye robots. Ford had already been using the robots at their manufacturing plants in Europe but only recently installed 700 of them at their Louisville, Kentucky plant. The robots raise the quality of assembly to “custom-like build,”.
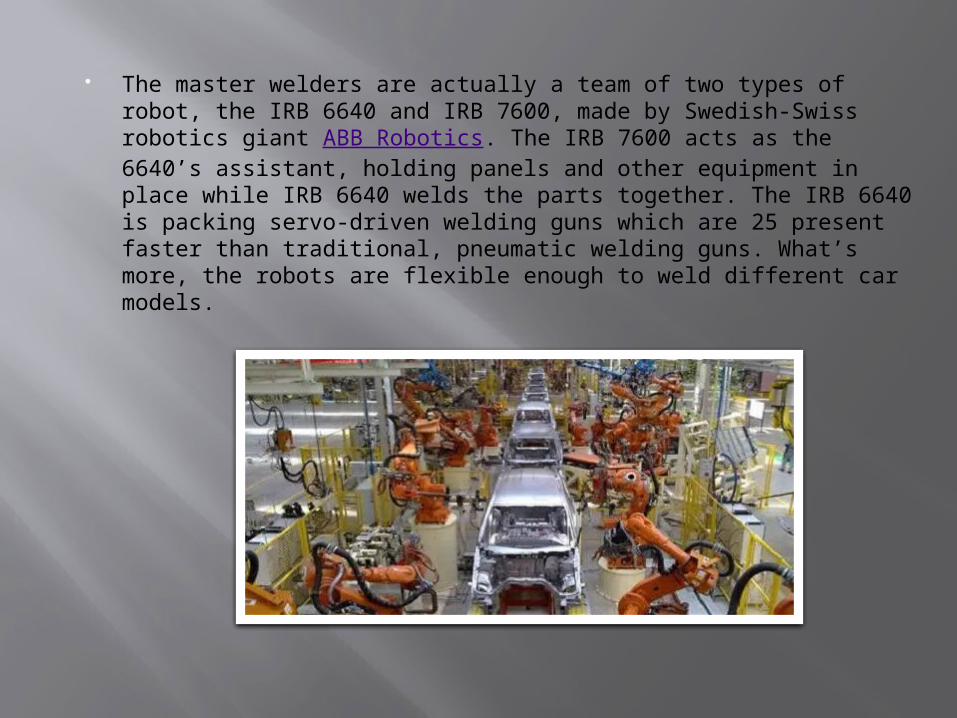
The master welders are actually a team of two types of robot, the IRB 6640 and IRB 7600, made by Swedish-Swiss robotics giant ABB Robotics. The IRB 7600 acts as the 6640’s assistant, holding panels and other equipment in place while IRB 6640 welds the parts together. The IRB 6640 is packing servo-driven welding guns which are 25 present faster than traditional, pneumatic welding guns. What’s more, the robots are flexible enough to weld different car models.
Most used Robots in Industry
1. Robotic Handling Operation 38%2. Robotic Handling 29%3. Robotic Assembly 10%4. Robotic Dispensing 4%5. Robotic Processing 2%
Robotic handling operations
Material handling is the most popular application with 38% of operational stock of industrial robots worldwide. This includes robotic machine tending, palatalizing and various operations for metal machining and plastic moulding. With the introduction of collaborative robots in the last few years, this part of the market is always increasing.

Robotic Welding This segment mostly includes spot welding
and arc welding which is mainly used by the automotive industry. Spot welding is still more popular than robotic arc welding but not for long; as arc welding is becoming very popular in the metal industry. More small work shop are beginning to introduce welding robot into their production. In fact, with the price of robot going down and the various tool now available on the market, it is now easier to automate a welding process.
Robotic Assembly Assembly operations include: fixing, press fitting, inserting, disassembling, etc. This category of robotic applications seems to have decreased over the last few years, even while other robotic applications have increased. The reason why the applications are diversified is because of the introduction of different technologies such as force torque sensors and tactile sensors that gives more sensations to the robot.
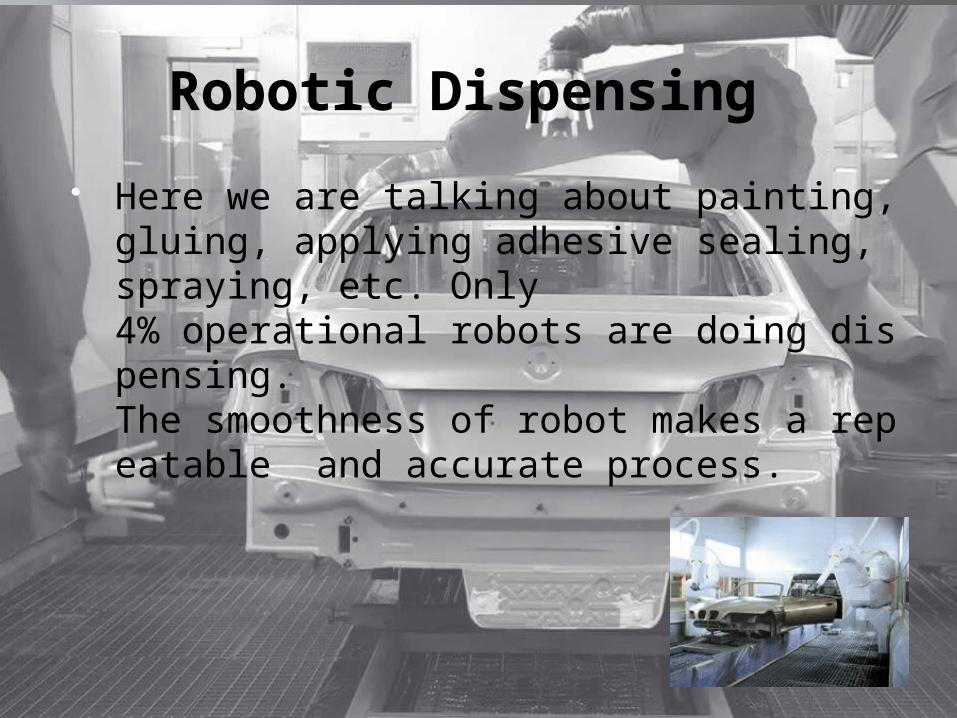
Robotic Dispensing Here we are talking about painting,
gluing, applying adhesive sealing, spraying, etc. Only 4% operational robots are doing dispensing. The smoothness of robot makes a repeatable and accurate process.
Robotic Processing Processing is not a big
segment of industrial robots (only 2%) and this is probably because a lot of automated machines are available on the market to do specifically these applications. The main application areas are mechanical, laser and water jet cutting
Thank You