robotics cali, shelby, michelle, taylor, michaela, jackson, michael, martin, genesis, tanairy,...
TRANSCRIPT
RoboticsCali, Shelby, Michelle, Taylor, Michaela,
Jackson, Michael, Martin, Genesis, Tanairy, Justin, Felix, Jose, Trevor, Paul, Omar, Jason,
Owen, Amani, Laneyre, and Mrs.Cost
Things we do in class
• Learned the Engineering Design Process • Windmill kit• Sea Perch • Snap circuits• SolidWorks• Designing our own robot arm• iRobot assembly• Vex robots
Steps of the Engineering Design Process
• Step 1. Identify the need or problem
• Step 2. Research the need or problem
• Step 3. Develop possible solutions
• Step 4. Select the best solution(s)
• Step 5. Construct a prototype

Steps of the Engineering Design Process (cont.)
• Step 6. Test and evaluate the solution(s)
• Step 7. Communicate the solution(s)
• Step 8. Redesign and reevaluate
• And these steps start all over again, the cycle of engineering
What I Learned in Robotics
Felix Martinez

Reverse Engineer a Circuit
• My group and I reverse engineered and rebuilt a control circuit for an Underwater ROV
Using Solid Works
Presented by Taylor Tierney

Solid Works
• You can design parts
• Then you can assemble the parts into one object
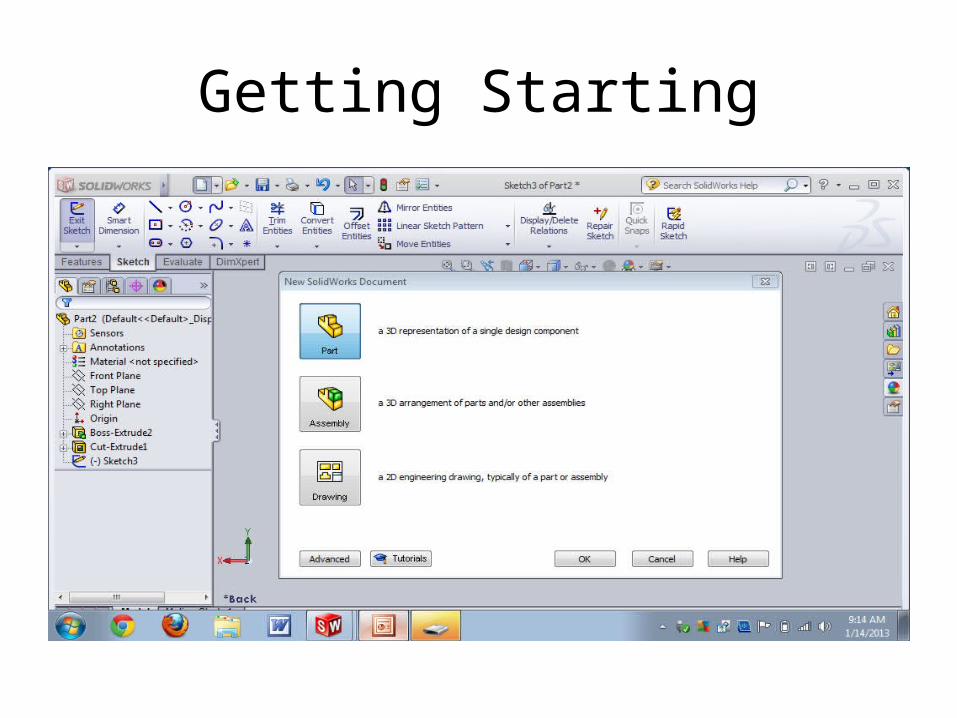
Getting Starting

Basic Builds
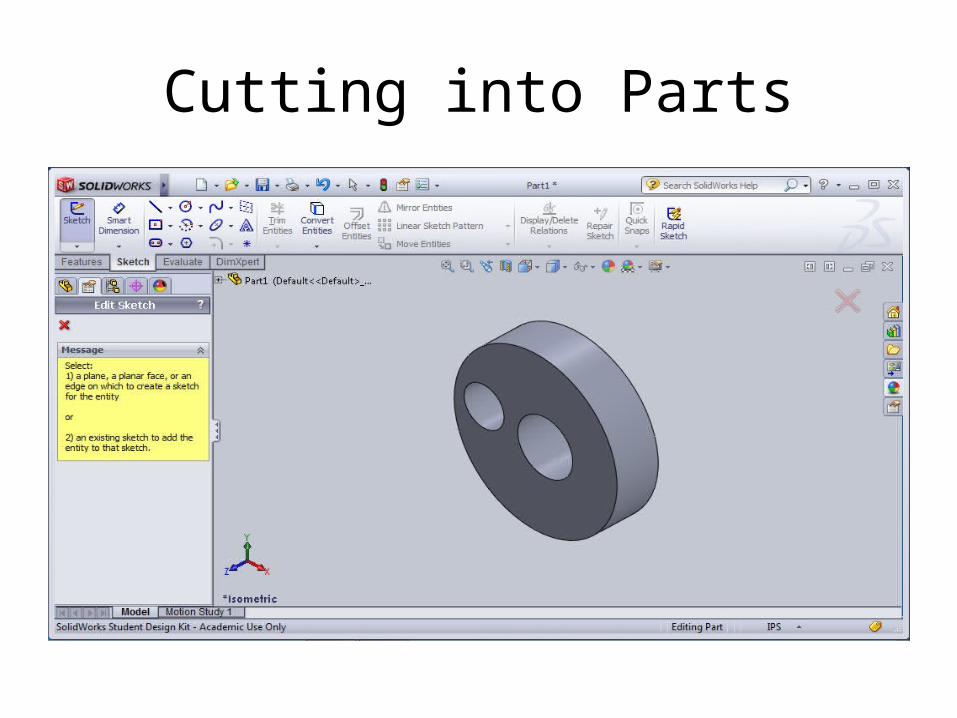
Cutting into Parts
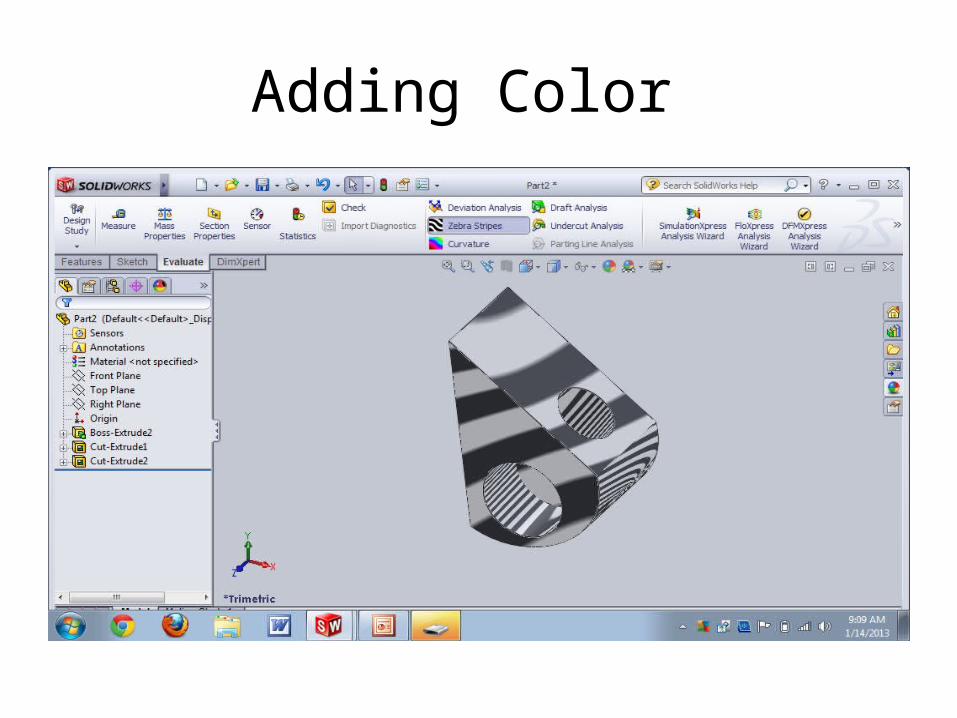
Adding Color

Rotation

Rotating
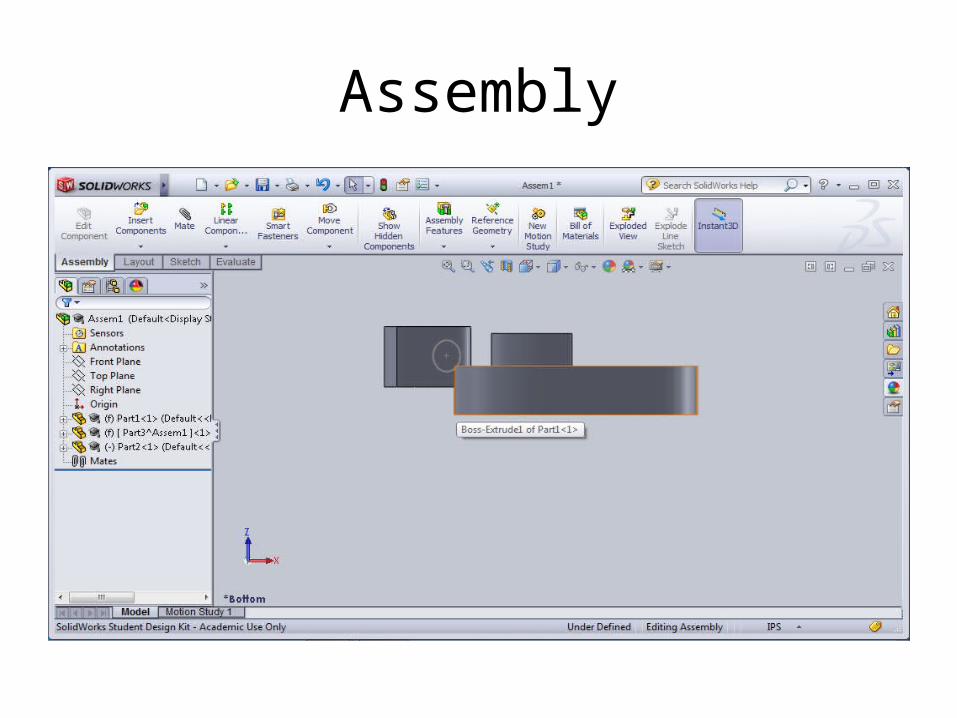
Assembly

Assembly
RoboticsBy: Shelby McKay
We have learned…
Engineering Design processElectrical circuits

Robots
• We can build them in anyway we want.
• We test them out.
• We fix them.
• Then we compete.
Snap Circuits
• Educational electronics kits that provide reusable, circuit parts that snap together.
• Can do many sounds» Police siren» Laser gun» Space war» Bomb» Water space war» Human space war
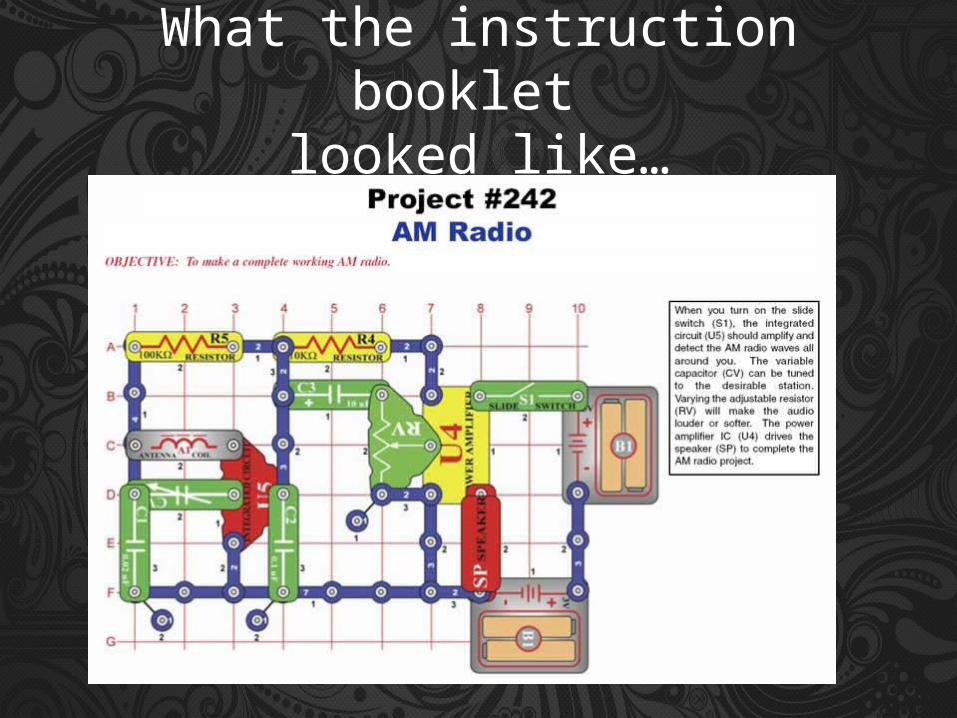
What the instruction booklet looked like…
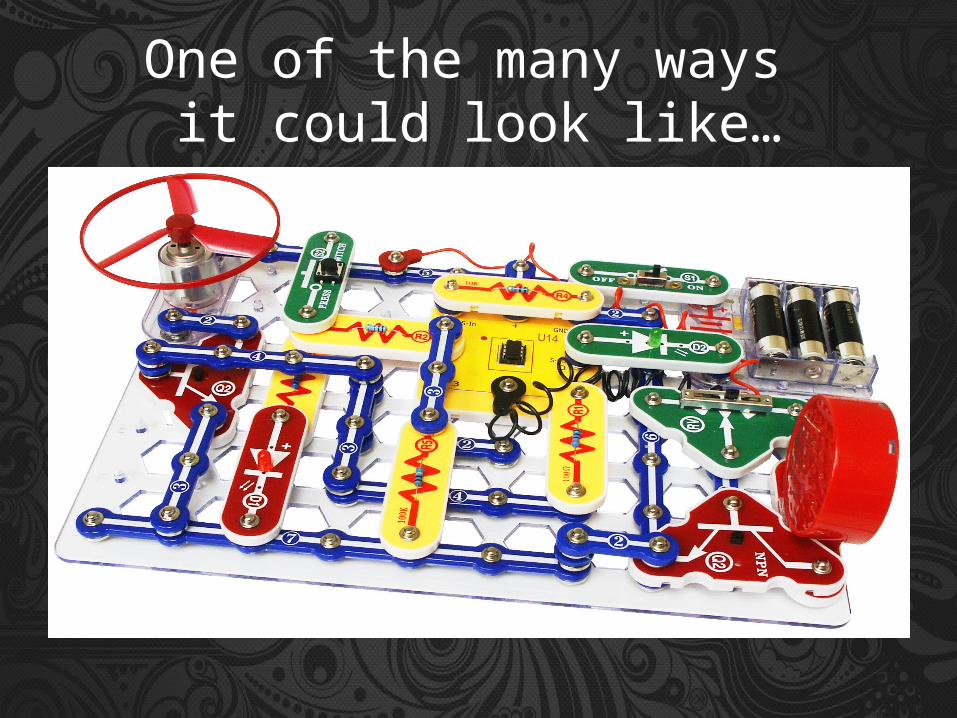
One of the many ways it could look like…
Programming*Connect the USB cable to Cortex
-Hold configure button until the cable is also plugged into to
computer*Download Vexnet Firmware
*(Do the same for the Joystick)**Power both on, then off*Plug in the wireless Key (flash drive) to the Joystick and Cortex*Power them both on
How To Build a Robot
• The Vex Clawbot
Assisted in the final phases of building the clawbot.
• Underwater ROV
Building process
We started working on smaller robots
replace parts as needed .
Then we moved on to the vex robot kit and started building.
Now we have a better idea what we had to do to correctly build our robot.
VEX Claw Bot
Claw machine:• Fun to build
• There was some fixing that we had to do
• Followed the directions to build it
• It took only 4 class periods
Vex roboticsVex roboticsVex robotics was the type of robot we built.Vex robotics was the type of robot we built.The pieces in vex robotics are screws, bolts, The pieces in vex robotics are screws, bolts,
and nuts connecting all pieces of the robot and nuts connecting all pieces of the robot together.together.
The robots were designed to be used in sack The robots were designed to be used in sack attack, a competition game that uses bean attack, a competition game that uses bean bags to gain scores in teams of two.bags to gain scores in teams of two.
Vex robot design.Vex robot design.
There are two types of robot designs used in this There are two types of robot designs used in this class.class.
There was the clawbot that uses a claw to get There was the clawbot that uses a claw to get sacks and move into goalssacks and move into goals
The other robot was made to haveThe other robot was made to have a small claw to grab the sacks in sack attack to a small claw to grab the sacks in sack attack to
gain pointsgain points We redesigned the robot with extras added on We redesigned the robot with extras added on
to make it control better or to get more points in to make it control better or to get more points in sack attack.sack attack.
Field Trip
• Where we went? Worchester Massachusetts QCC (college)
• What we did? Vex competition
• How the day works? 3 teams 6 matches for each team
Field trip cont.
• How the games were set up?
random drawings
• The repairs we did?
any loose parts need to be tighten
• The fun we had on the bus/tournament?
singing, jamming, breaking and fixing robots.