relative information based distributed control for ... 978-91-7729-300-2 ... många tillämpningar d...
TRANSCRIPT

Relative Information Based Distributed Control forIntrinsic Formations of Reduced Attitudes

Relative Information Based Distributed Controlfor Intrinsic Formations of Reduced Attitudes
SILUN ZHANG
Licentiate ThesisKTH Royal Institute of TechnologySchool of Engineering SciencesDepartment of MathematicsDivision of Optimization and Systems TheoryStockholm, Sweden 2017
TRITA-MATH-A 2017:01ISRN KTH/MAT/A-17/01-SEISBN 978-91-7729-300-2
Department of MathematicsKTH Royal Institute of Technology
100 44 Stockholm, Sweden
Akademisk avhandling som med tillstånd av Kungliga Tekniska Högskolan fram-lägges till offentlig granskning för avläggande av teknologie doktorsexamen, mån-dagen den 17 Mars 2017 klockan 10.00 i sal 3721, Lindstedtsvägen 25, KungligaTekniska Högskolan, Stockholm.
© SILUN ZHANG, 2017
Print: Universitetsservice US AB, Stockholm, 2017

To my parents,and all my mentors


Abstract
This dissertation concerns the formation problems for multiple reduced at-titudes, which are extensively utilized in many pointing applications andunder-actuated scenarios for attitude maneuvers. In contrast to most exist-ing methodologies on formation control, the proposed method does not needto contain any formation errors in the protocol. Instead, the constructed for-mation is attributed to geometric properties of the configuration space andthe designed connection topology. We refer to this type of formation controlas intrinsic formation control. Besides, the control protocols proposed in thiswork are designed directly in space S2, avoiding to use any attitude parame-terisations. At last but not least, along the studies, some elementary tools forreduced attitudes control are developed.
In paper A, a continuous control law is provided for a reduced attitudesystems, by which a regular tetrahedron formation can achieve asymptoticstability under a quite large family of gain functions in the control. Then,with a further restriction on the control gain, almost global stability of thetetrahedron formation is also obtained. In this work, we introduce a novelcoordinates transformation that represents the relative reduced attitudes be-tween the agents. The proposed method is an intrinsic formation control thatdoes not need to involve any information of the desired formation before-hand. Another virtue of the method proposed is that only relative attitudemeasurement is required.
Paper B further concerns the formation control of all regular polyhedralconfigurations (also called Platonic solids) for reduced attitudes. Accordingto the symmetries possessed by regular polyhedra, a unified framework isproposed for their formations. Via using the coordinates transformation pre-viously proposed, it is shown that the stability of the desired formations canbe provided by stabilizing a constrained nonlinear system. Then, a method-ology to investigate the stability of this type of constrained systems is alsopresented.
Paper C considers the problem of tracking and encircling a moving targetby agents in 3-dimensional space. By this work, we show that similar designtechniques proposed for reduced attitudes formations can also be applied tothe formation control for point mass systems. Therein, a group of agentsare driven to some desired formation on a spherical surface and simultane-ously keep the center of this spherical formation coinciding with the targetto be tracked. By properly designing communication topology, the agentsconstitute a cyclic formation along the equator of an encircling sphere.
v

Keywords: Attitude control; distributed control; formation control; non-linear systems.
vi
Sammanfattning
Denna avhandling behandlar formationsstyrningsproblemet för flera agentermed avseende på reducerade orientering. Denna typ av problem uppstår imånga tillämpningar d å underaktuerade agenter ska ställa in sig för att pekai en specifik riktning. I motsats till de flesta befintliga metoder för formation-sstyrning behöver den föreslagna metoden inte information om formations-felet. I stället tillskrivs formationen geometriska egenskaper hos konfigura-tionsrummet och anslutningstopologin. Denna typ av kontrollag kallas förinneboende formationskontroll. Dessutom är styrlagarna som föreslås i dettaarbete utformad direkt på S2, vilket gör att vi kan undvika att använda enspecifik parametrisering av orienteringen. För att åstadkomma detta utveck-las i avhandlingen även vissa elementära verktyg för kontrolldesign vid re-ducerade attitydkontroll.
I artikel A presenteras en familj av kontinuerlig kontrollag för forma-tionsstyrningsproblemet med reducerade attityd, under vilken en formation iform av en regelbunden tetraeder kan uppnå asymptotisk stabilitet. Genomatt begränsa familjen ytterligare kan nästan globala stabiliteten av tetraedenerhålls. I detta arbete presenterar vi en ny koordinattransofmration som rep-resenterar den relativa reducerade attityden mellan agenterna. Den föres-lagna kontrollagen är också en inneboende formationskontroll som inte be-höver innehålla någon information om den önskade formationen i förväg.En annan följd av den föreslagna metoden är att endast relativ mätningar avvinklarna krävs.
Artikel B behandlar formationsstyrningsproblemet med reducerade ori-entering, för alla vanliga polyedriska konfigurationer (även kallade platoniskakroppar). Genom att beakta de symmetrier som regelbunden polyeder be-sitter föreslås ett enhetligt ramverk. Genom att anvn̈da koordinattransfor-mationer som föreslagits tidigare visas att stabilitet för de önskade forma-tionerna kan uppnås genom att stabilisera en begränsat ickelinjärt system.Därefter presenteras även en metod för att undersöka stabiliteten hos dennatyp av begränsade system.
Artikel C behandlar problemet att med hjälp av agenter i 3-dimensionellrymd följa och omslutande ett rörligt mål. Genom detta arbete visar vi attliknande designmetoder som föreslås för formationsstyrningsproblemet medreducerade attityd också kan appliceras på formationsstyrningsproblemet försystem av punktmassor. Specifikt visar vi att en grupp agenter kan styras tillen önskad formation på en sfärisk yta, samtidigt som centrum av den sfäriskaformationen sammanfaller med målet som följs.
vii

Acknowledgments
First and foremost, I would like to express my deepest gratitude to my supervisor, ProfessorXiaoming Hu. It can be reasonably deduced that I would not have started my PhD studieshere at KTH if I had not been given the chance to do so by you. In the past two years,it is your constant encouragement and generous support that make me accessible to theresearch work and finally facilitates this whole dissertation. You have an excellent way ofapproaching problems, enlightening ideas and encouraging creativity and independence allthe while. It is my great pleasure to work with you. Thank you for these all, every pieceof knowledge you taught, every advice given on my work, and every help offered in mynormal life in Sweden.
Secondly, I want to give my sincere gratitude to my advisor Yu Yao at Harbin Instituteof Technology, for his never ceasing guidance and support during my study there. Hissound knowledge, enthusiasm, and the sense of responsibility impress me a lot and makehim an awesome mentor. I would also like to thank Professor Fenghua He at HIT. Sheguided me back to the academia from the industry, introduced me to some interestingresearch topics, and provided great opportunities around my path of study.
Further, I would like to thank my co-supervisor, Associate Professor Johan Karlsson,for the knowledge on the optimal control you taught me, the domestic and foreign newsyou shared during our go-outside lunch, and also those enjoyable card games we have. Iregard you not only as a great advisor and researcher but also as a good friend.
In addition, I would also express my appreciation to Professor Anders Forsgren andProfessor Krister Svanberg, for the generous help you gave me during my study at theDepartment of Mathematics. Moreover, I am especially grateful to Associate ProfessorPer Enqvist, for acting as a pre-reviewer of this thesis, and many constructive commentsgiven by you.
My thanks must go to all my colleagues at the Division of Optimization and SystemsTheory. You all contributed to the inspiring and enjoyable atmosphere that surroundedme during these years. You are Doctor Yuecheng Yang, Doctor Hildur Æsa Oddsdóttir,
ix

Doctor Johan Thunberg, Doctor Luyuan Qi, Göran Svensson, Axel Ringh, Alexander Au-rell, Michelle Böck, Lovisa Engberg, Han Zhang, Emil Ringh, David Ek. Thank you allso much for the fantastic wine tasting night, the cheer-up "Mr. Sunshine" greeting, thedelectable cakes in 15-Friday fika, and also generous invitations of local tour. I also wantto thank Doctor Wenjun Song and Doctor Johan Markdahl, for leading my adventure onattitude problems, and many in-depth and enlightening discussions during our collabora-tions.
Finally, there are no words adequately expressing my thanks and appreciation to myfamily, and also to my friends in Sweden, especially Thomas Ohlson Timoudas and QianWang. Without their support, I would never have had the daring needed to set out andcontinue on this journey.
Stockholm, January 2017
Silun Zhang
x
Table of Contents
Abstract v
Acknowledgments ix
Table of Contents xi
Part I: Introduction and Preliminaries
1 Introduction 31.1 Background and Motivations . . . . . . . . . . . . . . . . . . . . 3
Multi-agent Systems and Formation Control . . . . . . . . . . . . 3Attitude and Attitude Control . . . . . . . . . . . . . . . . . . . . 5Reduced Attitude . . . . . . . . . . . . . . . . . . . . . . . . . . 8Regular Polyhedra . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.2 Main Contributions and Limitations . . . . . . . . . . . . . . . . 121.3 Summary of the Appended Papers . . . . . . . . . . . . . . . . . 13
Part II: Research Papers
A Intrinsic Tetrahedron Formation of Reduced Attitude 25A.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27A.2 Notation and Preliminary . . . . . . . . . . . . . . . . . . . . . . 29
xi

A.3 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . 32A.4 Regular Tetrahedron Formation . . . . . . . . . . . . . . . . . . . 34A.5 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45A.6 Concluding Remark . . . . . . . . . . . . . . . . . . . . . . . . . 46A.7 Appendix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
B Intrinsic Formation of Regular Polyhedra for Reduced Attitude 53B.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55B.2 Notation and Preliminary . . . . . . . . . . . . . . . . . . . . . . 58B.3 Reduced Attitude Control . . . . . . . . . . . . . . . . . . . . . . 60B.4 Graph Design . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62B.5 Stability Analysis of Desired Formations . . . . . . . . . . . . . . 66B.6 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 75B.7 Conclusion and Future Work . . . . . . . . . . . . . . . . . . . . 77B.8 Appendix . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81B.9 All graphs fulfilling Assumption B.4.4 . . . . . . . . . . . . . . . 81
C Spherical Cyclic Formation Control 83C.1 Introduction . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85C.2 Problem Formulation . . . . . . . . . . . . . . . . . . . . . . . . 87C.3 Spherical Cyclic Formation . . . . . . . . . . . . . . . . . . . . . 90C.4 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98C.5 Conclusion and Future Work . . . . . . . . . . . . . . . . . . . . 98
xii

Keep your eyes on the stars, and your feet on the ground.
–Theodore Roosevelt


Part I:Introduction
1

Chapter: 1
Introduction
1.1 Background and Motivations
Multi-agent Systems and Formation Control
In the last decades, the framework of multi-agent systems has emerged as a sig-nificant conceptual paradigm across control research communities. This unprece-dented trend is inspired by a tremendous amount of collective phenomena pre-sented in bio-communities, such as bee colonies, bird flocks, fish schools and ofcourse our human society. The complexities of such systems stem from the enor-mous scale (the large number) of individuals contained, moreover only via rela-tively simple interplays and coordinations between neighbours, their swarms canexhibit various intricate behaviors [10]. According with the long and rich philo-sophical sense in ontology, any complex entity must be composed of more simple,more fundamental units. 1 Then, this particular perspective–grasping macroscopicphenomena from microscopic scale–also caters for the need in many other disci-plines involving huge clusters, such as material science, biological ethology, statis-tical physics and even micro-economics.
Besides multi-agent systems are regarded as the counterparts of natural phe-
1Based on this thought, ancient Greek philosopher Democritus (c. 460 - c. 370 BC) argued thatthe smallest unit of reality is "atomon" (atoms).
3

1. INTRODUCTION
nomena, in many engineering applications [37], implementing a system in the dis-tributed manner also gains advanced features as following:
• The distributed architecture facilitates more robustness for the whole com-munity, where the breakdown of an individual only leads to the local impact.By contrast, in a centralized structure, any failure of the global "supervis-ing coordinator" is fatal and might collapse the whole system even thoughalmost all individuals function well. Moreover, the number of agents in adecentralized network can be altered flexibly by changes of local communi-cation links, which in a sense minimizes the influence to the whole swarm.
• The burden and requirements for each individual in a multi-agent system aredecreased significantly: Since only local interactions and coordinations ex-ist, the agents accessing to less computational capabilities, local sensing andlocal communications can afford to achieve complex collective behaviors.
• "Unity is strength". The coordinations of autonomous individuals can bene-fit the whole system in terms of efficiency, for example, bird herds flying ina formation resembling the Latin letter "V" conserve energy by 20%− 30%.In addition, some specific system-level objectives, in particular involvinga too large scale or extremely high accuracy, are enabled by the coopera-tions among agents, such as in aperture synthesis technology for a collectionof space telescopes [15], and Magnetospheric Multiscale (MMS) missionlaunched by NASA [16].
The study tendency on the coordinations of multi-agent systems origins fromthe so-called synchronization mission, which aims at driving the states of agentsto a global agreement. As refer to the synchronization, it has to be mentioned themost famous consensus protocol–average consensus law–under which each unit’sstate is governed by a velocity in proportion to the average of its neighbors’ states[24, 28]. Substantial researches on consensus problems are developed from thisbasic control law. Following the consensus studies, more attentions are intuitivelyattracted towards more flexible collective objectives, among which the cooperativeformation is an influential one. Formation control can be characterized as con-structing a particular geometrical pattern (or relative state) in a multi-agent swarm.The reason for this research enthusiasm to formation problems is twofold. Onthe one hand, the agreement of states, synchronization, itself can be regarded asa specific pattern of the swarm and each individual in synchronized formations is
4
1.1. Background and Motivations
assigned the identical role. Therefore, as a generalization of consensus, forma-tion problems pose more profound theoretical challenges. On the other hand, themulti-agent formation has considerable potential in a diverse range of applications,such as formation flying [35], sensor placement [8], target encircling [7], terrestrialor oceanographic exploration [11], and collaborative surveillance [42, 46]. Moreviews of formation studies can be found in [38, 27], and the references therein.
Attitude and Attitude Control
The rigid-body attitude control was firstly motivated by urgent need of the aerospacedevelopment in the middle of last century, period of the space race, [2, 17] andthen shed light on many other promising subjects, for instance spacial grabbing ofrobotic manipulators [26], target detection by underwater or ground vehicles [30]and camera calibration in computer vision [20]. What is more, it is gradually re-alized that attitude problems possess more theoretical value on account of the un-common properties of its configuration space.
The attitude of a rigid body describes its orientation with respect to an iner-tial reference frame, which is generally identified by a length-preserving lineartransformation between the body-fixed frame and the reference one. This lineartransformation can be represented via an orthogonal matrix R ∈ R3×3 with thedeterminant +1, which is referred to as a rotation matrix. Under the operationof matrix multiplication, all rotation matrices together constitute the special or-thogonal group, denoted by SO(3) = {R ∈ R3×3 : RRT = I, detR = 1}.This group SO(3) is a compact and non-convex 3-dimensional manifold with thesmooth structure of a Lie group. Due to this non-Euclidean configuration space,some topological obstructions arise in attitude control problems, which mostly em-body two aspects: difficulty in the parameterisation of attitudes and absence of theglobal continuous stabilizer.
–Barrier of parameterisation: In order to refrain from working directly on sucha non-Euclidean manifold SO(3), various attitude parameterisations are appliedin attitude control studies, such as 3-dimensional parameterisations Euler angles[33, 39], Rodrigues parameters [48], and 4-dimensional parameterisations unit-quaternion [18, 32], axis-angle parameters [41]. However, unfortunately, noneof these parameterizations [39] can represent the attitude space both globally anduniquely. Actually, Hopf showed in 1940 that five is the minimum number ofparameters which can represent the rotation group in a bijective manner, but thecorresponding dynamics grows too cumbersome to visit [40].
5

1. INTRODUCTION
Figure 1.1: Fig.(a) illustrates the definition of YPR angles for an aircraft. Fig.(b)depicts three Euler angles in a three-axis gimbal. By a rotation through the pitchaxis about π/2, the YPR angles system reach the singular configuration and onerotation degree of freedom is lost which is indicated by the red axis in Fig.(c).
The most frequently-mentioned example [21], Euler angles map the attitudespace SO(3) to a subset of R3. However, when representing some certain attitude,the Euler angle is not unique, and even worse, some attitude angular velocities areimpossible to be represented by this parameterisation. For example, in the aircraftdynamics, orientations are commonly described through the YPR (yaw, pitch, roll)angles system which is an Euler angle definition specified by three successive ro-tations about Z, Y,X axis through ψ, θ, φ respectively. The three YPR axis foran airplane are depicted in Fig.1.1(a). The rotation matrix corresponding to YPRangle (ψ, θ, φ) is
R(ψ,θ,φ)=
1 0 00 cosφ − sinφ0 sinφ cosφ
cos θ 0 sin θ0 1 0
− sin θ 0 cos θ
cosψ − sinψ 0sinψ cosψ 0
0 0 1
.
When θ = π/2, in the YPR angles system rotations about yaw and roll axis areequivalent. It is because
R(ψ, π/2, φ)=
0 0 1sin(φ+ ψ) cos(φ+ ψ) 0− cos(φ+ ψ) sin(φ+ ψ) 0
, (1.1)
6
1.1. Background and Motivations
Attitude Representation Representation of R∗ Global? Unique?
Euler angles solve ψ, θ, φ from equationR∗ = R(ψ,θ,φ). 2 No: gimbal lock No: in case θ = π/2
Rodrigues parameters p = tan(θ/2)u No: when θ = π No: inherit from axis-angleModified Rodrigues pa-rameters p = tan(θ/4)u No: when passing 2π No: inherit from axis-angle
Unit-quaternions p = cos(θ/2)+sin(θ/2)[u1i+u2j+u3k]. 3 Yes No: 2 vectors for every R∗
Axis-angle θ and u Yes No: infinite many if θ = π
Rotation matrix R∗ Yes Yes
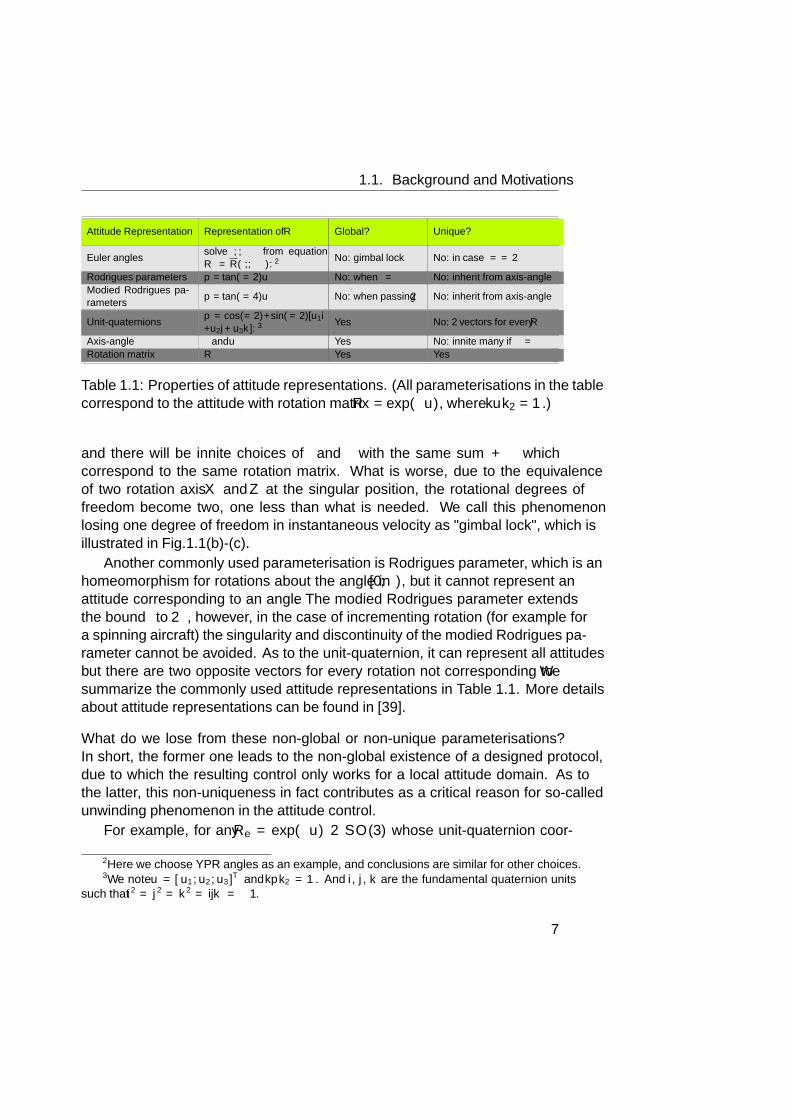
Table 1.1: Properties of attitude representations. (All parameterisations in the tablecorrespond to the attitude with rotation matrix R∗ = exp(θu), where ‖u‖2 = 1.)
and there will be infinite choices of φ and ψ with the same sum φ + ψ whichcorrespond to the same rotation matrix. What is worse, due to the equivalenceof two rotation axis X and Z at the singular position, the rotational degrees offreedom become two, one less than what is needed. We call this phenomenonlosing one degree of freedom in instantaneous velocity as "gimbal lock", which isillustrated in Fig.1.1(b)-(c).
Another commonly used parameterisation is Rodrigues parameter, which is anhomeomorphism for rotations about the angle in [0, π), but it cannot represent anattitude corresponding to an angle π. The modified Rodrigues parameter extendsthe bound π to 2π, however, in the case of incrementing rotation (for example fora spinning aircraft) the singularity and discontinuity of the modified Rodrigues pa-rameter cannot be avoided. As to the unit-quaternion, it can represent all attitudesbut there are two opposite vectors for every rotation not corresponding to π. Wesummarize the commonly used attitude representations in Table 1.1. More detailsabout attitude representations can be found in [39].
–What do we lose from these non-global or non-unique parameterisations?In short, the former one leads to the non-global existence of a designed protocol,due to which the resulting control only works for a local attitude domain. As tothe latter, this non-uniqueness in fact contributes as a critical reason for so-calledunwinding phenomenon in the attitude control.
For example, for any Re = exp(θu) ∈ SO(3) whose unit-quaternion coor-
2Here we choose YPR angles as an example, and conclusions are similar for other choices.3We note u = [u1, u2, u3]
T and ‖p‖2 = 1. And i, j, k are the fundamental quaternion unitssuch that i2 = j2 = k2 = ijk = −1.
7
1. INTRODUCTION
dinate is denoted by qe or −qe, due to the definition in Table 1.1, we have qe and−qe differ by 2π. This fact results in that a rigid-body need rotate about a 2π angleto shift its attitude parameters from qe to −qe, or from −qe to qe. So if a rigid-body is disturbed out from its stable equilibrium qe, by an improper choice of theunit-quaternion representation as −qe, this extremely small perturbation will leadto a rotation of 2π. To overcome this problem, some path-lifting approaches areproposed under the framework of hybrid systems [22].
–No global continuous stabilizer: As the configuration space SO(3) is a compactmanifold without boundary, there is no continuous controller which can globallyasymptotically stabilize an equilibrium of the closed-loop system[1]. Thus, forattitude control problems, almost global stabilization becomes the best possibleresult we can expect.
Actually, this result is provided by a well-known theorem claiming that nocompact manifold without boundary is contractible [14, Section 2.4]. We say amanifoldM is contractible if there exist a point q∗ ∈M and a continuous mappingh : [0, 1]×M→M such that for any q ∈ M we have h(0, q) = q and h(1, q) =q∗. Suppose there exists a continuous vector field defined onM under which anequilibrium achieves globally asymptotic stability, and we denote the trajectory ofthis dynamics by Φ(t, x0). Then the mapping h(t, x) = Φ(− ln(1 − t), x) is acontinuous mapping with h(0, x) = x and h(1, x) = x∗ for any x ∈M, where x∗
is the stable equilibrium.We note while the above discussion rules out the existence of globally asymp-
totic stability of an equilibrium, it does not rule out the possibility of global at-tractivity of one equilibrium. For instance, as shown in Fig.1.2, in the unit cir-cle S1 which is also a compact manifold without boundary, the dynamics θ̇ =sin2(θ/2), θ ∈ [0, 2π) is a continuous vector field on S1. Under this dynamics theequilibrium θ = 0 is globally attractive but Lyapunov unstable.
Reduced Attitude
The origin of reduced attitude problems can be traced back to the tide of geomet-ric nonlinear control in 1970s and 1980s, when many study efforts focused onthe controllability, observability and realization theory for systems acting on groupmanifolds [3, 5]. Therein a well-known result on the controllability of attitudesystems claimed that no continuously differentiable feedback control can asymp-totically stabilize the attitude of a spacecraft with only two actuators [5]. Howeverthen Tsiotras [43] showed, in this under-actuated scenario, a smooth feedback can
8
1.1. Background and Motivations
Figure 1.2: A vector field on S1 under which θ = 0 is globally attractive but notstable.
be derived to entail asymptotic stability with respect to two axis and spinning aboutthe under-actuated axis in the closed-loop system.
Inspired by this two-axis stabilization for attitude systems, Bullo et al. [4] pro-posed the reduced attitude problem, where only the pointing direction of a body-fixed axis is concerned, and rotations about this axis are neglected. As it has oneless degree than the full attitude problem, it is named by reduced attitude. Anotherrudimental work of Tsiotras et al. [44] showed that the configuration space of re-duced attitudes possess a manifold structure and can be represented as a complexnumber using the stereographic projection. In their work, this model is shown to beefficient for designing and analyzing this sort of under-actuated attitude systems.What is more, such model is then revealed as a more powerful theoretical frame-work in many other practical applications. For instance, in the orientation controlof the antenna or solar panel for satellites [43, 6], the control objective is pointingthem to a satellite ground station or to the sun. But rotations about the antennaor the normal axis of the solar panel is irrelative. Besides, other similar examplesinclude controlling the thrust vector for quad-copters [19, 31], regulating the fieldof vision for cameras [46], etc..
Compared to full attitudes, a merit of reduced attitudes is that its visualizationis far more easily. We can depict its pointing direction vector directly in a unitsphere S2. In spite of one less dimension it possesses, S2 has the similar specificityin terms of configuration space with full attitudes SO(3). S2 is also a compactmanifold with no boundary, and it also has the analogical representation barrier.For two reasons discussed above, it is a sensible choice to start attitude formation
9

1. INTRODUCTION
problems from the case of reduced attitudes.To date, some notable results have been obtained for reduced attitude systems.
[4] shows the PD control and optimal control scheme for a single reduced attitude.In [45], by a decomposition of attitude motion into a reduced attitude and an one-axis motion, a control mechanism is proposed for under-actuated axis-symmetricspacecrafts. Based on a spherical parametrization, [29] addresses the formationproblem in S2, yet in which absolute state measurements are required. By appeal-ing to the hybrid control methodology, [23] gives a discontinuous protocol entailingglobally asymptotic stability on a reduced attitude system.
Regular Polyhedra
Five regular polyhedra are the most simple and elementary patterns in 3-dimensionalspace, that are also called five Platonic solids. In many promising engineering ap-plications, such as formation flying [36] and microelectronic networks [13], theseformations attract considerable attentions during the last decades. As regular poly-hedra possess the maximal degree of distributions and the most amount of symme-tries in all spacial polyhedra, their formations constituted by multiple individualsfacilitate more effectiveness in terms of inter-elementary coordinations and coop-erative observations[36]. For example, in the Magnetospheric Multiscale (MMS)mission 4 launched by NASA [16] and the Cluster mission 5 developed by Euro-pean Space Agency [12], four satellites need to form a regular tetrahedron to surveythe magnetic field of the Earth’s magnetosphere.
Five Regular PolyhedraA convex polyhedron is said to be regular if its faces are identical regular poly-
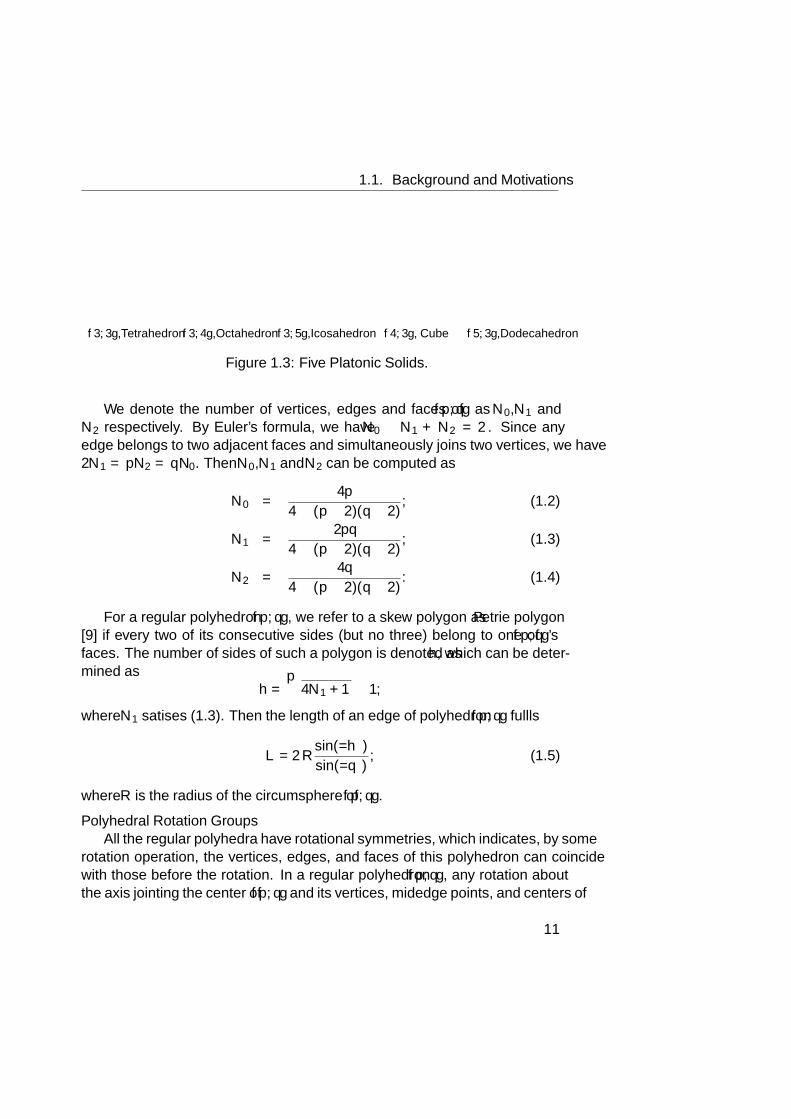
gons and its vertices are all surrounded in the same pattern. The regular polyhedracan be identified by the Schlafli symbol [9], by which a regular polyhedron withthe p-sided regular polygon faces and the vertices surrounded by q of these facesis denoted as {p, q}, where p, q ∈ Z. At every vertex of {p, q}, there are q face-angles in the size of π − 2π/p, and the sum of these q angles are less than 2π.Therefore, we have the inequality 1/p + 1/q > 1/2. This fact leads to that thereexist only five possible combinations of p and q as shown in Fig. 1.3. They are alsoreferred to as five Platonic solids, i.e., tetrahedron, octahedron, icosahedron, cube,and dodecahedron.
4https://mms.gsfc.nasa.gov/5http://www.esa.int/Our_Activities/Operations/Cluster_II_operations
10
1.1. Background and Motivations
1
23
4
{3, 3},Tetrahedron
3
1
24
5
6
{3, 4},Octahedron
3
12
1011
12
4
6
5
8
9
7
{3, 5},Icosahedron
3 1
2
4
6
5
8
7
{4, 3}, Cube
3
1
2
89
5
10
6
12
15
20
7
17
14
161813
11
19
4
{5, 3},Dodecahedron
Figure 1.3: Five Platonic Solids.
We denote the number of vertices, edges and faces of {p, q} as N0,N1 andN2 respectively. By Euler’s formula, we have N0 − N1 + N2 = 2. Since anyedge belongs to two adjacent faces and simultaneously joins two vertices, we have2N1 = pN2 = qN0. Then N0,N1 and N2 can be computed as
N0 =4p
4− (p− 2)(q − 2), (1.2)
N1 =2pq
4− (p− 2)(q − 2), (1.3)
N2 =4q
4− (p− 2)(q − 2). (1.4)
For a regular polyhedron {p, q}, we refer to a skew polygon as Petrie polygon[9] if every two of its consecutive sides (but no three) belong to one of {p, q}’sfaces. The number of sides of such a polygon is denoted as h, which can be deter-mined as
h =√
4N1 + 1− 1,
where N1 satisfies (1.3). Then the length of an edge of polyhedron {p, q} fulfills
L = 2Rsin(π/h)
sin(π/q), (1.5)
where R is the radius of the circumsphere of {p, q}.
Polyhedral Rotation GroupsAll the regular polyhedra have rotational symmetries, which indicates, by some
rotation operation, the vertices, edges, and faces of this polyhedron can coincidewith those before the rotation. In a regular polyhedron {p, q}, any rotation aboutthe axis jointing the center of {p, q} and its vertices, midedge points, and centers of
11

1. INTRODUCTION
Polyhedral group Isomorphism Ordertetrahedron A4 12
octahedron (or cube) S4 24icosahedron (or dodecahedron) A5 60
Table 1.2: Isomorphism of polyhedral groups
faces, through angle 2π/q, π, and 2π/p respectively, is such a symmetric rotationoperation. The group generated by these rotations is called the polyhedral group of{p, q}. We say polyhedra {p, q} and {q, p} are two reciprocal polyhedra, and theyshare the same polyhedral group.
A polyhedral group of {p, q} is a finite subgroup of SO(3) and its order isdenoted byO{p,q}. We haveO{p,q} = 2N1. Denote the symmetric group of degreen as Sn, which contains all permutation operations for n objects. Similarly, wedenote the alternating group of degree n asAn, which contains all even permutationoperations for n objects . Therefore, the order of symmetric group of degree n isn!, and that of alternating group of degree n is n!/2. Then, any polyhedral rotationgroup is isomorphic to a permutation group which are given in Table 1.2.
1.2 Main Contributions and Limitations
The main contribution of this work includes
• proposing a new mechanism for formation control, intrinsic formation, bywhich regular polyhedral formations are obtained under a unified framework;
• achieving almost globally asymptotic stability under the continuous controlfor tetrahedral formations;
• introducing some new tools for reduced attitudes which are shown to beefficient approaches to reduced attitude formations;
• addressing encirclement problems in 3-dimensional space which indicatesthe proposed techniques have potential to the formation control for pointmass systems.
In this dissertation we reveal that, instead of conventionally using formationerror in control to reduce the "distance" from the current formation to the desired
12
1.3. Summary of the Appended Papers
formation, it is indeed possible to obtain formation by the geometry of space andthe inter-agent topology with a relatively simple control law. We call this machin-ery of formation control as "intrinsic" formation. In the light of results obtained, forformation problems with the states evolving in a compact manifold, more intrinsicformation studies might be carried out.
In addition, the control protocols proposed in our work does not depend onany attitude parameterisations. As the discussion in the last section, this ensuresthe global existence of the control laws, and avoids the risk of unwinding-likephenomena in closed-loop systems.
Furthermore, as the configuration space of reduced attitudes is a compact man-ifold without boundary, there is no continuous controller which can stabilize anequilibrium of the closed-loop system globally asymptotically. Thus, for attitudecontrol problems, the almost global stabilization of a formation becomes the bestpossible result we can expect. This is achieved for the case of regular tetrahedra.
Besides, along the studies of attitude formations, some elementary tools areproposed. For example, we introduce a novel coordinates transformation that ex-plicitly represents the relative reduced attitudes between the agents. Although inthe Euclidean space the analogical idea of relative coordinates transformations isseemingly common, its counterpart in a compact Riemannian manifold is far lesstrivial. Moreover, under these relative coordinates transformations, the systemsevolving in the attitude space might gain considerable redundant degrees of free-dom. The methodology to handle this variable redundance is also provided in thisdissertation.
1.3 Summary of the Appended Papers
Paper A Intrinsic Tetrahedron Formation of Reduced Attitude
This paper is co-authored with Wenjun Song, Fenghua He, Yiguang Hong andXiaoming Hu, and is submitted to Automatica.
In paper A, a continuous control law is proposed for reduced attitudes prob-lems, by which a regular tetrahedron formation can achieve asymptotic stabilityunder a quite large family of gain functions in the control. With a further restrictionon the control gain, almost global stability of the tetrahedron formation is also ob-tained. To this end, we introduce a novel coordinates transformation that representsthe relative reduced attitudes between the agents. Although involved, it is shownto be an efficient approach to reduced attitude formation problems. Moreover, in
13
1. INTRODUCTION
contrast to most existing methodologies on formation control [18, 25, 34], the pro-posed method does not need to have the formation errors in the protocol. Thedesired formation is constructed based on the geometric properties of the manifoldS2 and the designed connection topology. We referred to this type of formationcontrol as intrinsic formation control. Another virtue of the control proposed isthat only relative attitude measurement is required. Although only reduced atti-tudes are considered in the paper, similar design techniques can also be applied tothe formation control of point mass systems [47].
Paper B Intrinsic Formation of Regular Polyhedra for ReducedAttitude
This paper is co-authored with Xiaoming Hu, and is submitted to Automatica
Paper B further concerns the formation control of all regular polyhedral con-figurations (also called Platonic solids) for reduced attitudes. Firstly, according tothe symmetries possessed by regular polyhedra, a unified framework is proposedto represent their vertices sets. Then by assuming that the inter-agent topologiesshare the same symmetry properties, all possible graphs are given out. Followingthat, via using the coordinates transformation proposed in paper A, it is shown thatthe stability of the desired formations can be provided by stabilizing a constrainednonlinear system. Then, a methodology to investigate the stability of this type ofconstrained systems is also presented. In addition, the control proposed is againan intrinsic protocol that does not need to involve any information of the desiredformation beforehand.
Paper C Spherical Cyclic Formation Control
This paper is co-authored with Song Wenjun, He Fenghua and Xiaoming Hu, andis published at Proceedings of Chinese Control Conference, 2016
Paper C considers the problem of tracking and encircling a moving target byagents in 3-dimensional space. Specifically, a group of agents are driven to somedesired formation on a spherical surface and simultaneously keep the center ofthis spherical formation coinciding with the target to be tracked. In the controlproposed, the desired formation information is not used as a reference signal forencircling. Rather by designing the communication topology for the agents wecan achieve the encircling formation using relative positions only. Moreover, if
14
1.3. Summary of the Appended Papers
the north pole vector is specified, the resulting formation can be obtained on theequator with different orientations.
References
[1] S. Bhat and D. Bernstein. A topological obstruction to continuous globalstabilization of rotational motion and the unwinding phenomenon. Systems& Control Letters, 39(1):63–70, 2000.
[2] J. Bower and G. Podraza. Digital implementation of time-optimal attitudecontrol. IEEE Transactions on Automatic Control, 9(4):590–591, 1964.
[3] Roger W Brockett. System theory on group manifolds and coset spaces. SIAMJournal on control, 10(2):265–284, 1972.
[4] F. Bullo, R. Murray, and A. Sarti. Control on the sphere and reduced attitudestabilization. 1995.
[5] C. Byrnes and A. Isidori. On the attitude stabilization of rigid spacecraft.Automatica, 27(1):87–95, jan 1991.
[6] Nalin A Chaturvedi, Amit K Sanyal, and N Harris McClamroch. Rigid-bodyattitude control. Control Systems, IEEE, 31(3):30–51, 2011.
[7] F. Chen, W. Ren, and Y. Cao. Surrounding control in cooperative agent net-works. Systems & Control Letters, 59(11):704–712, 2010.
[8] J. Cortes, S. Martinez, T. Karatas, and F. Bullo. Coverage control for mobilesensing networks. In Robotics and Automation, 2002. Proceedings. ICRA’02.IEEE International Conference on, volume 2, pages 1327–1332. IEEE, 2002.
[9] Harold Scott Macdonald Coxeter. Regular polytopes. Courier Corporation,1973.
[10] M. DeGroot. Reaching a consensus. Journal of the American StatisticalAssociation, 69(345):118–121, 1974.
[11] M. Egerstedt and X. Hu. Formation constrained multi-agent control. Roboticsand Automation, IEEE Transactions on, 17(6):947–951, 2001.
15

1. INTRODUCTION
[12] C. Escoubet, R. Schmidt, and M. Goldstein. Cluster-science and missionoverview. In The Cluster and Phoenix Missions, pages 11–32. Springer, 1997.
[13] D. Gracias, J. Tien, T. Breen, C. Hsu, and G. Whitesides. Forming electricalnetworks in three dimensions by self-assembly. Science, 289(5482):1170–1172, 2000.
[14] Victor Guillemin and Alan Pollack. Differential topology, volume 370. Amer-ican Mathematical Soc., 2010.
[15] JA Högbom. Aperture synthesis with a non-regular distribution of interfer-ometer baselines. Astronomy and Astrophysics Supplement Series, 15:417,1974.
[16] S. Hughes. Formation design and sensitivity analysis for the magnetosphericmultiscale mission (mms). In AIAA/AAS Astrodynamics Specialist Confer-ence, Honolulu, HI, 2008.
[17] H. Kowalik. A spin and attitude control system for the Isis-I and Isis-B satel-lites. Automatica, 6(5):673–682, sep 1970.
[18] Jonathan R Lawton and Randal W Beard. Synchronized multiple spacecraftrotations. Automatica, 38(8):1359–1364, 2002.
[19] T. Lee, M. Leoky, and N. H. McClamroch. Geometric tracking control of aquadrotor uav on se (3). In 49th IEEE conference on decision and control(CDC), pages 5420–5425. IEEE, 2010.
[20] Y. Ma, S. Soatto, J. Kosecka, and S. Sastry. An invitation to 3-d vision: fromimages to geometric models, volume 26. Springer Science & Business Media,2012.
[21] Johan Markdahl. Rigid-body attitude control and related topics. 2015.
[22] Christopher G Mayhew, Ricardo G Sanfelice, and Andrew R Teel. On path-lifting mechanisms and unwinding in quaternion-based attitude control. IEEETransactions on Automatic Control, 58(5):1179–1191, 2013.
[23] Christopher G Mayhew and Andrew R Teel. Global stabilization of spher-ical orientation by synergistic hybrid feedback with application to reduced-attitude tracking for rigid bodies. Automatica, 49(7):1945–1957, 2013.
16
1.3. Summary of the Appended Papers
[24] Mehran Mesbahi and Magnus Egerstedt. Graph theoretic methods in multia-gent networks. Princeton University Press, 2010.
[25] S. Mou, F. He, and S. Zhang. Formation tracking based on target points.IFAC-PapersOnLine, 48(28):921–926, 2015.
[26] R. Murray, Z. Li, S. Sastry, and S. Sastry. A mathematical introduction torobotic manipulation. CRC press, 1994.
[27] Kwang-Kyo Oh, Myoung-Chul Park, and Hyo-Sung Ahn. A survey of multi-agent formation control. Automatica, 53:424–440, 2015.
[28] R. Olfati-Saber and R. Murray. Consensus problems in networks of agentswith switching topology and time-delays. IEEE Transactions on automaticcontrol, 49(9):1520–1533, 2004.
[29] D. Paley. Stabilization of collective motion on a sphere. Automatica,45(1):212–216, 2009.
[30] KY Pettersen and O Egeland. Position and attitude control of an underactu-ated autonomous underwater vehicle. In Decision and Control, 1996., Pro-ceedings of the 35th IEEE Conference on, volume 1, pages 987–991. IEEE,1996.
[31] J. M. Pflimlin, P. Soueres, T. Hamel, and R. Mahony. Position control andattitude stabilization of a ducted fan vtol uav in crosswind. IFAC ProceedingsVolumes, 39(15):524–529, 2006.
[32] W. Ren. Distributed attitude consensus among multiple networked spacecraft.In American Control Conference, 2006. IEEE, 2006.
[33] W. Ren. Distributed attitude alignment in spacecraft formation flying. Inter-national journal of adaptive control and signal processing, 21(2-3):95–113,2007.
[34] W. Ren. Distributed cooperative attitude synchronization and tracking formultiple rigid bodies. Control Systems Technology, IEEE Transactions on,18(2):383–392, 2010.
[35] W. Ren and R. Beard. Decentralized scheme for spacecraft formation fly-ing via the virtual structure approach. Journal of Guidance, Control, andDynamics, 27(1):73–82, 2004.
17
1. INTRODUCTION
[36] C. Roscoeand, S. Vadali, K. Alfriendand, and P. Desai. Satellite formationdesign in orbits of high eccentricity with performance constraints specifiedover a region of interest: Mms phase ii. Acta Astronautica, 82(1):16–24,2013.
[37] Alain Sarlette. Geometry and symmetries in coordination control. PhD thesis,Université de Liège, 2009.
[38] D. Scharf, F. Hadaegh, and R. Ploen. A survey of spacecraft formation flyingguidance and control. part ii: control. In ACC, 2004. Proceedings of the 2004,volume 4, pages 2976–2985, 2004.
[39] M. Shuster. A survey of attitude representations. Navigation, 8(9):439–517,1993.
[40] J. Stuelpnagel. On the Parametrization of the Three-Dimensional RotationGroup. SIAM Review, 6(4):422–430, oct 1964.
[41] J. Thunberg, W. Song, E. Montijano, Y. Hong, and X. Hu. Distributed attitudesynchronization control of multi-agent systems with switching topologies.Automatica, 50(3):832–840, mar 2014.
[42] R. Tron and R. Vidal. Distributed image-based 3-d localization of camerasensor networks. In Decision and Control, CDC/CCC 2009. Proceedings ofthe 48th IEEE Conference on, pages 901–908. IEEE, 2009.
[43] P. Tsiotras and J. M. Longuski. Spin-axis stabilization of symmetric space-craft with two control torques. Systems & Control Letters, 23(6):395–402,1994.
[44] Panagiotis Tsiotras, Martin Corless, and JM Longuski. A novel approachto the attitude control of axisymmetric spacecraft. Automatica, 31(8):1099–1112, 1995.
[45] Panagiotis Tsiotras and Jihao Luo. Control of underactuated spacecraft withbounded inputs. Automatica, 36(8):1153–1169, 2000.
[46] X. Wang. Intelligent multi-camera video surveillance: A review. Patternrecognition letters, 34(1):3–19, 2013.
[47] S. Zhang, W. Song, F. He, Y. Yao, and X. Hu. Spherical cyclic formationcontrol. In CCC2016 (accepted).
18
1.3. Summary of the Appended Papers
[48] A. Zou, K. Kumar, D. Krishna, and Z. Hou. Attitude coordination controlfor a group of spacecraft without velocity measurements. Control SystemsTechnology, IEEE Transactions on, 20(5):1160–1174, 2012.
19


Most people are other people.Their thoughts are someone else’s opinions,
their lives a mimicry, their passions a quotation.
–Oscar Wilde

Part II:Research Papers
23