przegl¹d i porównanie środowisk symulacji robotów mobilnych
TRANSCRIPT
������������� ������������
� ����������������� !����"���#$%�& ��'(� ��)*����
�� +
!,�"�� �-�.�"�� �$��' �#)��� �
��������� ���������� �������������
� � ���� �������
����� �������
!��/&�'#� "�0���1�� �0��#����"�� ���1��"�'����0�"�.� �#��2��&3"�"�0*,4'������ 0�����5&�6 7����" ��� 8�9:8�� 5����" ��� ���/&�'�jne z powodze� �������"����2"0�����5&��������"��$����'(���"�� &��� '������ �#���#2'�������0��'�"�� ����" 2��;$0����0 ����#2'���� �"0��"����� �0���/��/��/.���/6%���b-nie jest w zastosowaniach robotycznych, w których zadanie konstrukcji robota zawieraw<��= � ���0� 0��#����"�� � ��'(�� '���1�$ �&�����'���1� ��������'���1�6 >��0� ����.�������1�� ��"�?$0����0 ����? ��*"��&�1& ?$����/#2'����3�� �8�9:8��"0�4,2'��� / � ����3�� �� ���/&�'�#��� 6 !��/&�'#� ��=��� #�1� ���'��� � 0��"�&� �����'znie���=��������"�� ��&1�����*"��'(�"�� ���=���"�*.��'(���/�'#�'($'������ e����30��'("���'��" �������'��� /69� 3� ���/&�'# ��� �#������2�����������"a-� � �0��3�/$������� �#�����#���������/�������� ��0��3�/""�� �/� �0��"i�,�"�1���'howania robota podczas pierwszych faz uruchomienia. Praca z symulatorem wy�&/'��0�����"�"�@�*�,�=,3�*"��&1�����*" ������'������'(�&�/�0��"� �� �������/�'# ��'(�� '���# �&������ '���#��=���6
Literatura naukowa na temat tworzenia symulatorów ��=��*"��= &��'( "���1�;���" ���'(���/&������#�������/���"�/=�1�6%�#����'��0/=& ��'#�0�'(���21,*"� ���5����" ����"*�'*"���/&����*"[1, 2]6!����������"��5?0/=& ��'�#���" 2�ana jestz programami CAD/CAM w zastosowaniach robotycznych [3–5]. W niniejszej publika'# ��"���� "�� � 0���1&2�/ ����30��'( 5����" �� ���/&�'# ��=��*" ��= &��'(6 !����/4,o"����'��� "�� �"����/��/��5����" ������/&�'�#��1�6�0��'�"�nie ma po cz35' '(�������0���"��� ���&�0��#������*"�0��1����"a� � ������/����*"��=��*"$��*���'('2"���������?0����'#�,����30��'(�a��3�� 6
� !������� � ���� ��������������
A����' �0��#����"�� ���=���$�"��'��1*&��5' ��=�����= &��1�$"���30/#�" �&����,�'( '(�����������'���'( 0/���*" 0��#���/6 % ��"���� ���0�� #��� ��0��#����"anie
�� B !,�"�� �-�.�"�� $��' �#)���
konstrukcji mechanicznej robota na podstawie postawionych a priori "���1�;$zaprojek-��"�� � �&������ � ����/#2'�#$ � " ���0 � ��;'�"�� �0��1����"�� �6 � �'��" ���'(0���'���" 3����5?0��'�/� 0���= �1�?���00����0 �6A���.�� ��&1�����*"�o.�� 3��=�"�? 0� ��0��#����"�� /$ "������ / /�/'(�� �� / � ���0��'�����"�'( /�,a�*""�����"'��'(6 !������ � ���0��'�����"� ��12 =�? /�/'(�� ��� "<�=�'��5' � � 4��l��1� �0�����2��"�� � ��'(�� '���1�6
��&�#��5? ���0*" /0���=� � 0��#��� ������/�"�� � ��=��� �� �������"�1� ����&/ <0�"��/#�$.�" 3����5?0��=&��*" � ���' 21� 3?0��#����"�'(/#�"� �?� 3=3�� ���40 �������;'�"�����0 �0��'68�35?��,�.�;0��#����"�ch postawionych a priori wy��.��"2 � ����&��5? &/= � ���.& "�5? ���& ��'# ��0 ��� �� ���0 � �"����� � �0��1���o"�� �C0��=&��0 ��"���1� ��0/D6E ���*�� ��,�.�� � ������ �/#2'� 0�'�2���"�0��'� ������/�4'�#�� 0�"����2 ��0 ��� 0� �0��'�"�� / 0������& ��"aniu prototypów oprogramowa-nia (problem drugie1� ��0/D6 !���/#2' �0��1����"�� � ���/&�'�#�� <�0��1����"�� �8�9:8��"��& ����3�� �0������0/#2'�1�$��.��/� ��2?0��=&emów obydwu typów.
%���#�/#2'$.��0��1����"�� ����/&�'�#��=3�� ������" ?�5������� �,�;���0o-,/0��#����"�1� 0,���'����30������0�"�� ��&��&1�����*" ������/�'# ��'(�� '���#��=���$��&�.����=�?$=�5����" ������/&�'# '(����������"�,�� 3����5&���� '�'(a-� 6A��,/1�/�o�*"0/=& ��'# ������#���=�5����" ���F
G ���.& " �,���*"��&�1&�� �0��'0���'��1*&��'(���0�,*"0��#����"�'(6G !����" ,�0&������3H,2'�2'2I"�� ,� " �&/1�/00��#����"�'(6G ���.& " �,�0��'3" �&�����30�2 0��'3���&�2$������&3"���# 6G ���.& " �,�0��'3"5����" ��/���0�����������$=�" �&��5?����&/� ����" �,�
=�� ����&�����;0��#����"�'(6
�=����/&�'#�=�,���/��'������������ ��'���#$��&�.���0�"� ?F
G ��.& "�5? �"����� �: �0����"�� � � �0��1����"�� �8�9:8�� ��*#"�� ���"�1�����&/��=���&/=��"�&��1�#�1��&�����/J
G ��.& "�5? �0����"�� � 0�������*" ����"�'( 1�������'���'( ����30��'( #���"�� � 0��#����"�� �8�9:8��J
G ��.& "�5? ���/&�'# ���' � �����'���1�$ ����� '���1� ���� ���' � " /�,���'( (�4���/& '���'(J
G ��.& "�5?���/&�'# ����� � =��,�����"��#$� ������� ������ 0�,2'��;0���1/4=�"�'(6
Sym/&�"�� � ��'(�"�� � � 3 ��=��� ��= &��1� " ���'��� / "���1� =� ��.& "�=y,�F
G �"����� � ��*#"�� ���"�'(����& ���'��� �JG ���/&�"�� ��� �,�� ��0��1����"���1�����&/"'��� ����'��" ����JG ���/&�"�� � ������'# ��=�������'��� ��JG ���/&�"�� � 0��'� '�/#� �*"F /&����@" 3��"�'($ ������*" &�����"�'( �9 �9$
K%!4/$ .������0��/$ ��'�&�������*"$�����6
%���1&2� 0��*"��� �5����" �����/&�'# ��=��*"��= &��'( �� L
�0��1����"�� � ���/&�'�#�� ��.� � 3 ���? �5���� �� 0��' 0�,2'����'( ���0�,*"0��#����"�'($#�5& 0��1��� 5' =3�2��1& �� �0&������"�?��"�&� ����� � �"���=��4,�:�= ���� ��"�&�� '(��'(�"�� �6A���'�&/"���1�� 3F
G ��.& "�5' 0��,2'��� ����/,*"0��1����"�'(��������#2'�'(���� ����'(����/���/&����� ��12'�'("0,�"�?���= �����&������������/&�����J
G ��.& "�5' ����&�"�� � ���/,*" �� �� �#2'�'( '(������������ �= ���*" "=/��4"���'(�06���/, �0&�����/#2'����' �0��,�.��� ����������"�#'(�����������'�J
G ���/&�'# "5����" ��/" �&�0��'�����"��&/=" �&����0/����"��JG ��.& "�5' "���������� ���'�&������*"�0��3��"�'(�06EM � �%(��N6
A ����30��'( ����� �,�'( 0��*"���� ���&�� ��� 5����" ��� ���/&�'�#�� ��0��40o�/#�����$��*����1,�=�����"�?� 3��'�&*"���/&�'# ��=�����= &��1�&/=�0�,4� �#2'(�?=�� e��*���""6"���1�;6
"� #����������� ��������������$���������������������
W niniejszym ro��� �&� 0�������" ��� & ��3 ����30��'( �����'�#� � 5����" �� �����u&�'# ��=��*"��= &��'(68�35?�"�� �� ���'(� .�#����3�� #����1*&� �����30���� 0��"�'( �0��1����"�� � �0�� ��/�'�$ &/= �0��1����"�� � �����"�1�$ '�35? #�����,�dnikami pakietów komercyjnych.
G ����� �O&�'����PBQGO =& ������&�0��1���/���&�=:! �/& ��������'��#2'����40������/��.& " �#2'�0��#����"�� �� �& � �"�'(B49�R����& ����&��*"6%�� �4�� ����2��� ���/&/#2'� ��������3$ " ���$ �/�=/&��'#� ����&/#2'� � �� 3 C1�� ��$1��" ��'#�$0�&���1����'���D6���� �#������"�"���#������� '��6
G �S!��KE�F�=����'�S�=��! �/&����PLQG9�����'���=�����'�#������&5" ���"��*���/.����"� ���.�������&�"�?��=�����= &��1�6%��1���0 ����"#3���/T�!%�&�5����" ��& �/���"�'(��& '��'# K%T6
G O ���=�� '! �/&�� ��%��1���PUQG-3�������0��"�����" �8��� 1VV/.�"��������/&�'# ����� � " �&���1�����"�'( ��=��*"6 T '��'#� ��&�� �&� /.����"� �*"� ������'�#��'(6
G O/1A����P QG9"/"�� ���"����/&�'#���=���6S�=��������/�"���#���"<" �/4�&�����������6����/#���.& "�5?"=/��"�� �" ��=��� '�/#� �*"�=& .�� �"�'(C��&�1,�5' $������� $ �06D69���30��#��� ���.�#3�������0��"�0��"�&�#2'���0��4����=& '��� ��/����'���$��" ��� ����/�'#�"��/���"� ���� =��"��/���"�$��*4����12���& ��"�?03�&�6A���#������"�0��"�&���0�,��"���������� ���.& "�45' ���/&�'# $�&�� �0��"�&�����0 ��"�� � ,���"�� �"'��5� �#0���1���"���'(0��#���*"6
G S�0! �P��QG7����" ���������&�"�� ���=��*"0������,�"�'(6G 9�E��>8W! P��Q G ! &� � � ��� ����� � =��, ����"��'( ��0 ���� '�,��" ' �
"8VV6%��"�&���1�����"�� ���*#"�� ���"�1����'��� ���������&�"�� ���=�4�*"6�0������& '��'# KE�K%T6
�� U !,�"�� �-�.�"�� $��' �#)���
G 9���" �N�S P��Q G !��/&���� ����� � ��0 ����" 5����" ��/���&�=:! �/& ��6A���#������'�#��6A �/�& ��'#�"0����' "�����*"��= ���'("���&�= �6
G >�!�4S�O P��Q G%��1��� �,/.2'�������&�"�� � ��=��*"0������,�"�'(6%��4�/�� �����'�#��6
G ���! �P�XQG!��/&���� ��=��*"��= &��'(6�����30� � � ���30&����������,�� �������'�#��� $�����1'�/#� �*" " �/�& ��'#3 ��*#"�� ���"26
G ���A��� ! �/&�� �� !�/� � P�+Q G 7����" ��� ���/&�'# ����&�"�� � ��=��*"6��.& "�5?����&�"�� ������ � ������'(�"�� �'�/#� �*"6%��#��������'�#��6
G �(�RT���49S�=��! �/&����P�BQG!��/&������=���SA��"5����" ��/�"/"�4� ���"��6%��1����� �,�" 5����" ��/T �/Y6%��1������/� �/#2'� � 3 � ��=�4�����.�=�?��0 ����"-3���/T�!%6
G K"�&�P�LQG!��/&�'#���=���0������,�"�1� #�1� ������'# ����'��� ��6T '��4'#�KE�K%T6
G -/ '�P�UQG��*#"�� ���"�5����" ������/&�'# ����� � ��=���0���/.�' /#3��4��Z%T�6O�����.& "�5' ������'# ����'��� ��C=���'�/#� �*"D6
G �(�0��� ! �/&���� P� Q G 9"/"�� ���"� ���/&���� ��=��� �(�0����6 7����" �������30��0����������T �/Y6T '��'#��&�/.���/� ������'�#��1�6
G � �&�=P��QG����&�"�� ������ � ��=���0������,�"�1�6�0��1����"�� ��0��4����-�M� -�M��96�0��1����"�� ������"�6
G T�> W�Y�0�� P��Q G 7����" ��� ���/&�'# ��=��� ���5' ���.��1�6 9�,2'���� �2@�*�,�"#3���/8VV6T '��'#�KE�K%T6
G � '������S�=�� '�9�M�&�0��!�/� ����UP��QGS9!#������=/��"����5����" 4�� �����/&�'# ��=��*"0������'������&�(�==���*"$ ��/����*" /.����"� �*"�����'�#��'(6�0���� #����� ��'(��&�1 ������'��� �/�,/1C"���&/S>!�D6)2'��4� � � 3 � /�,/12 ������'�� ��0�" ��� �# �/��'#���&��5' $ ��*�� 0��"�& ���/&�"�?$&/= �����"�? ���'��" ���� &/= ���/&�"���� ��=����6 �0��1����"�� � ����30��#��� � ���0,��� � " "���# ������ '� �#$ 0������'����# �&� ��/����*" ���� "���# >Y0����$��*��� �0�� ���0�,��#�/��'#���&��5' 6
G ��O! P��Q G !��/&���� ��� �#2'�1� ��=��� HS�=/��� ��I6 7����" ��� 0��"�&� ������&�"�� � ��'(�"�� � '�/#� �*" " ��� � ������ ��=���6 %��#��� ��0 ��4��"#3���/86�.����"� �����.& "�5?�"����� �",����1���*#"�� ���"�1����4'��� �6
G �0��9���� '>�1 �� P�XQ G E ���&�.�� �� 0&������� = =& ����� ��0 ���� " #3���/8VV�����/&�'# ����� � ' �,�����"��1�$0�#���*"��� ����'($��=��*" <�= ��4�*"�/'(���'(6�=�,/1/#������ �3�/'(/���"*"$���' � �����'#���& �# 6�0������& '��'# KE�K%T6
1 SA�GS�=���"/��,�"�0�� ���#2'�#����&/=�"��������&�����"� �"���5' ������*"62 Visual Programming Language3 http://www.k-team.com/kteam/home.php?rub=0&site=1&version=EN
%���1&2� 0��*"��� �5����" �����/&�'# ��=��*"��= &��'( ��
G %�%O�K!P�+QG7����" ������/&�'# �"/"�� ���"�#0��������� 0������'����1�
�&���=��*"0�� ���#2'�'(=��",����5?6!������0���'�#��T �/Y6
G S�O��%P�BQG�= ����"���� ����"���= =& ����������/&�'# ��=��*"��0 ����
"#3���/8VV6��0&�����/#�� �������30����2 ��"����2$0����0 ����� � �06T '��4
'#�KE�K%T6
G S�O�!! P�LQ G !����� �� ���/&�'# �����"�� � ������/�'# ���� �&1�����*" �&�
��=��*"6 ���.& " � =/��"�� � ��=��*" � ��"�&��'( �����,��'( ",�5' "�5' �'(6
!��/&/#��*.��0�,2'��� �0�� 3���'�35' �� ��=��*"F� ,�"� � $�� �$ �0�����&�4
����� ����"��$ #�� � &� � $ ���"���'(�� ���$ ���� �������6 !����� �=/��"���
��� �#���'(���/,*"$���*��'(��.����.������?/�/'(�� ��������=������4
0/�����69���30��#3��� 0��1����"�� �8VV 8[69���30���2@�*�,���������0 &�4
"���"���#�0��1���/6O���"�� ��� ���0 �& '��'# 6
G S�=��A����P�UQG���������"��5����" ���8�9������&�"�� � ���/&�'# �/'(/
��=��*"0������,�"�'(6S��" 2��� � �����'�#��6
G S�=�A���� P� Q GE���3�� � ������&�"�� � ���/&�"�� � ������*" � ��'���'(6
%��"�&�������&�"�� ���"�&��1��= ���/C��=���D6�����30� � ������#�0��1��� 4
���'��� �� "���������� � " #3����'( /��.& " �#2'�'( ��������� � � = =& ���� �&&6
A���#� �����'�#��6
G !���8�����/'��� P��Q G !��/&���� �0���� �� -�M � /����30� ��� 0�0���� ������#�
AAA6 ���.& " � ����&�"�� � ��=��*" ���/&�'#3 �"/"�� ���"26 E � 0�� ���
�0&������'# 0�,��1����/&���������� � � ������� 6
G A�=���P��QG%��"�&����"����� ���*#"�� ���"�'(H5" ��*"I��� ��&���'(" �&�4
�� ���/&�"���� ��=���� 6 A�0 ��� �"����� � ��,�"�'($ ��.��'( &/= &���#2'�'(
��=��*"6��" ����%���������& ��=��*"$0�,�2� ���2�0���2��! &� �/�9>C�0��
9���� '>�1 ��D$=������/.2= =& ����3����& '�/#� �*"$������*"$����� /��24
���; ���/� ��'�#��'(6 S��" 2��� � �����'�#�� �� �,�#2'� 0�� �������� A �4
��"�$T �/�� ��8�!N6
G ��=�� '�\! �/&�� ��8�����/'� ��!��P��QG!��/&��������� � ' �,�6%������'����
�� ���/&�'# ��=��*" ���'�2'�'(F (/���� �*"$ ��=��*" ���5' ���.��'($ �2� =2�@
'("����*" ���'(��'(�� ��*"6
%� � �������� ��&������� �������������� � ���
���& �� ",�5' "�5' "�.�# "�� �� ���'( 5����" �� ���/&�'# "����/#�$ .� � �
"������ � �0�,� �#2 "����'���� " ����� �&� ��/1 � ������ �6 E ���*�� � � ��" ���#2 ��4
m0&������"���# ����� � =��,� ����"��# &/= � � 0����� 2" �/�& ��"�?����'( ��*#"�4
� a��"�'(6 A ��=�&�'( � �$ �����,� 0�������" ��� �����" �� � ��'( 5����" ��$ ��*��
�0�,� �#20�����"�"�����eria.
���� !,�"�� �-�.�"�� $��' �#)���
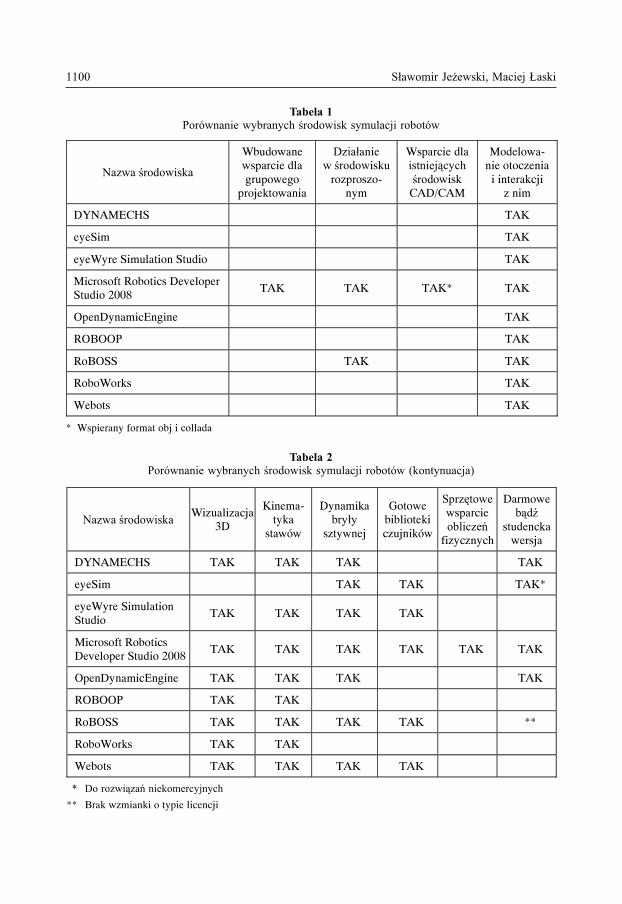
'������%��*"��� �"�=����'(5����" �����/&�'# ��=��*"
* Wspierany format obj i collada
'����� %��*"��� �"�=����'(5����" �����/&�'# ��=��*"C������/�'#�D
� 9����" 2��;� ������'�#��'(
** Brak wzmianki o typie licencji
����������� �
Wbudowane wsparcie dla grupowego
projektowania
�����anie �����isku
rozproszo-nym
Wsparcie dla �������������
��owisk CAD/CAM
Modelowa-nie otoczenia
i interakcji z nim
DYNAMECHS TAK
eyeSim TAK
eyeWyre Simulation Studio TAK
Microsoft Robotics Developer Studio 2008
TAK TAK TAK* TAK
OpenDynamicEngine TAK
ROBOOP TAK
RoBOSS TAK TAK
RoboWorks TAK
Webots TAK
����������� � Wizualizacja
3D
Kinema-tyka
stawów
Dynamika ������
sztywnej
Gotowe biblioteki czujników
���������
wsparcie ��������
fizycznych
Darmowe ����
studencka wersja
DYNAMECHS TAK TAK TAK TAK
eyeSim TAK TAK TAK*
eyeWyre Simulation Studio
TAK TAK TAK TAK
Microsoft Robotics Developer Studio 2008
TAK TAK TAK TAK TAK TAK
OpenDynamicEngine TAK TAK TAK TAK
ROBOOP TAK TAK
RoBOSS TAK TAK TAK TAK **
RoboWorks TAK TAK
Webots TAK TAK TAK TAK
%���1&2� 0��*"��� �5����" �����/&�'# ��=��*"��= &��'( ����
(� �� ����� � ��� ������ ��� �����
)��� � *�+ � ����,�-�� ���.���
!0�5�*�"������ '(0�������" ���'(5����" �����/&�'# $� '������S�=�� '�9�Me-loper Studio jest jednym z najbardziej funkcjonalnych i rozbudowanych symulatorów. Po-� ��� "�0��' � �&� 0��#����"�� � 1�/0�"�1� ��.� �����? /�/'(�� ��� " 5����" ��/���0��������$�� 3� '���/��.��0����0 ����?0��'3"���0�&�0��#����"��6-���#e��4��"�0 ����0��3��"��=& '��� �� ��'���EM � �%(��N$�����0�,� �0�����"�"�"y��41�� �0����" ���5����" �������/&�'# 6���& ��0���'# ""6��=�&�'(/���/#�$.�5����4" ����S9!#�����#&�0��������3�� �������/&�'# ��=�����= &��1� �&���1������,�"�����������0�����/���*""0��#��' �6
!��/&�"��� ��=�� �� ���5' ���,�"� 0&������� �� ����"��� ��" ����� �� /��.&i-" �#2'�� ���&�.�������"�� ���.�����*,69������"���0&�������0�����'o"���#������ 3��"������0� �� �"�=�������1,�" '����#�/#2'�� 3����;'/��� �� �$�*w� �.�'����������0� �� �"�=���6S�=��"�0���.���#���"�����1'�/#� �*" �a����$��*�����.��2������&�"��� "0��"��������������/���/&�'�#��1�6A5�*�'�/#� �*"���#4�/#2� 3F������&�����"���0/!�8�$��&� ����/&����@" 3��"�$������"/�,��� �������4" ��#�������������=��rwacyjne.
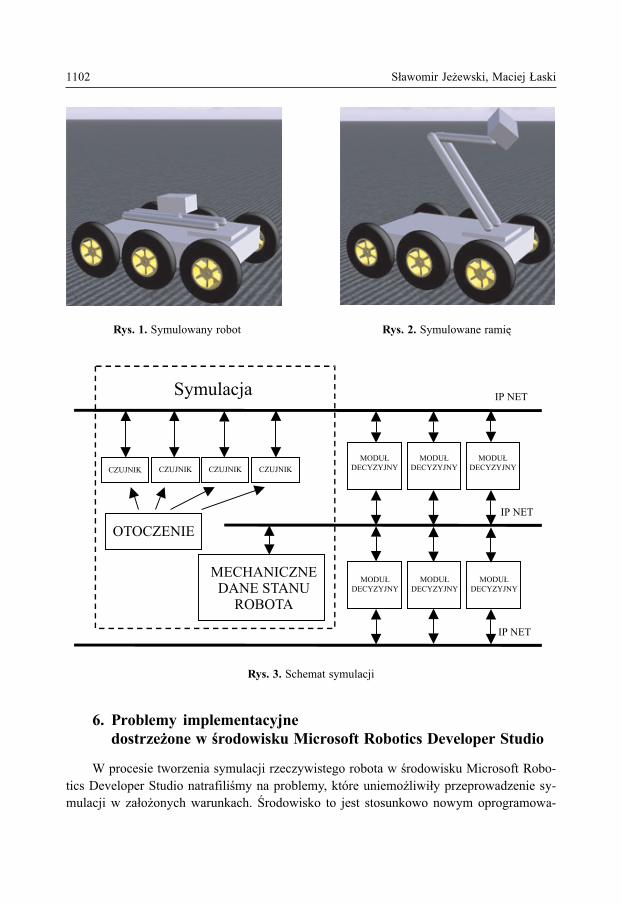
��,�.�� �����/&�'# #���0��������"�� ���=��� #�1���.& "�5' "5����" ��/0o-��=��� �� ���'��" ���1�6 7����" ��� �� ��0�"� �? ���/&�'#3 0�����"�"�'( �#�" ��� ��'���'($��?��.& "�5?������& ���'�35' �� �/'(���� ��=��� C� &� � ��03���#2'���,� �&��������� �� �0������������6� �D����0�= ���?��������/&�"���'('�/#4� �*"6�&1������ ����/#2'� =3�2 �0&������"���" #3���/8 &/=8VV #��� ��"�3��z��0��1�������/� �/#2'�� 3����/&��������0���'2��"�&��1�0������,/6E����/n�/�0�������"�����0�� ���"2���'�0'#35����" ������/&�'�#��1�6!��'�����/&a'# #���5����"i���� '������S�=�� '�9�M�&�0��!�/� ������&����=��� ���'��� �6E���� �����9�)�9>8���-E>�2��"'��5� �#"�0��� ���0��1����&/=�&����oniczne ste��"4� � $ ��*�� =3�2 �������"�,� 0��'3 ��=��� ���� �= ���,� 0����"����,� ���� 0�'(���24'�����/&�'# 6%��"�& ����0*@� �#���0���� �� �� ����/�&1�����*"��0�o'�������4'�&�"� ���#�/#2'� � 3 " ���'��" ���� ��=�' �6 � ��1� 0�"��/ ������#� ���/ni��'�#�����/&����� �/� =�? �1���� � ������#��� 0���'��1*&��'( /��2���; ���#�/#2'�'( � 3"�obocie.
9� ��1��� �; ���/&�'�#��'( ���'���"��� � 3 "���������? 0�����*, �8%:�%$ 1��.#��� ,��"� ����30�� " ���0/����'( ��0/ %8 ���� #��� �1���� � �������"2 -��! C�����
��������� ��� �������� �������D$��*�������,��0��'�"���0����9�S%���0�����=���=���� "�#���"�#6��.�����/,��=�����" ����"�#�1� �������/� ��'�#��$����*�e-1�=3�2 ,2'��? � 3 ��"�3�����0��1��������/#2'�6���/,�� $��*��=3�2��" ���? �"�#�0����$�2F0�����"�C�����"�� �� &� ��� �*,D$ ��� 3C�����"�� �� &� ��� ��� �� �D$�a-����$'�/#� � /&����@" 3��"�$������&�����"���0/!�8�6A����0��*=��.������o"�?��.�����/,����=�� ��"�&� ������"�?���/� �� ������'(6
���� !,�"�� �-�.�"�� $��' �#)���
+�����!��/&�"�����=�� +��� �!��/&�"������ 3
+���"�!'(�������/&�'#
/� �� ����� ���������������
�����0 ����� �����)��� � *�+ � ����,�-�� ���.���
A0��'�� ��"����� ����/&�'# ���'��" ���1���=���"5����" ��/� '������ Robo-� '�9�M�&�0��!�/� ������� & 5����0��=&���$��*��/� ���.& " ,�0���0��"����� ��y-�/&�'# " ��,�.���'("��/���'(6 7����" ��� �� #��� ����/���"���"���0��1����"a-

���������� ������������������������� ��������� ����
���������������������������� �����!��������������"���#��������������$���� �������%�������������������������������������������������������e-��������"&�������� ������������������ �������!�$���� ��������������o-���������!������%�������!��������� ������������������������ji ko-lizyjnych.
���������� ����1�
'�������( �������� ������������������� ��!� )*����+����,$ �� ���� ��d-���������!����������������-$������ ���������������������!� )��������������������������,".����!����������������������dowany model tarcia. Mo#/���������� �������!�#�������������#������������"0�������������u-#����$ ������# ���� ��������������� �� ����#� ���� !������� ����� ��!�#�"*������������������������������������������������!�#��$#�������������u-���!���� � #���������!�#����������� ������� ����������������������y-������!�#�".�����������������������������!����������������z��������!/��$�o!���������!����������������������������!������".������e�������/���#�������� � #����� !����������������#�������!�#�$�������������������"0odel tego tarcia zawiera uproszczenia, jednak na potrzeby testowania i symulacjijest wystarcza����"
������'����������!� ������*��������%���
�������������������!������%�������������������1����������������j-��02.'�����������������������!�������!��������$��������������������!������!� )���������-�������������������������!��,"&��� �� ����������!�$�� ����#����!�#� �����������!�"*���������������!����������������o�����/
���3 '!�����&�#����$0����4���
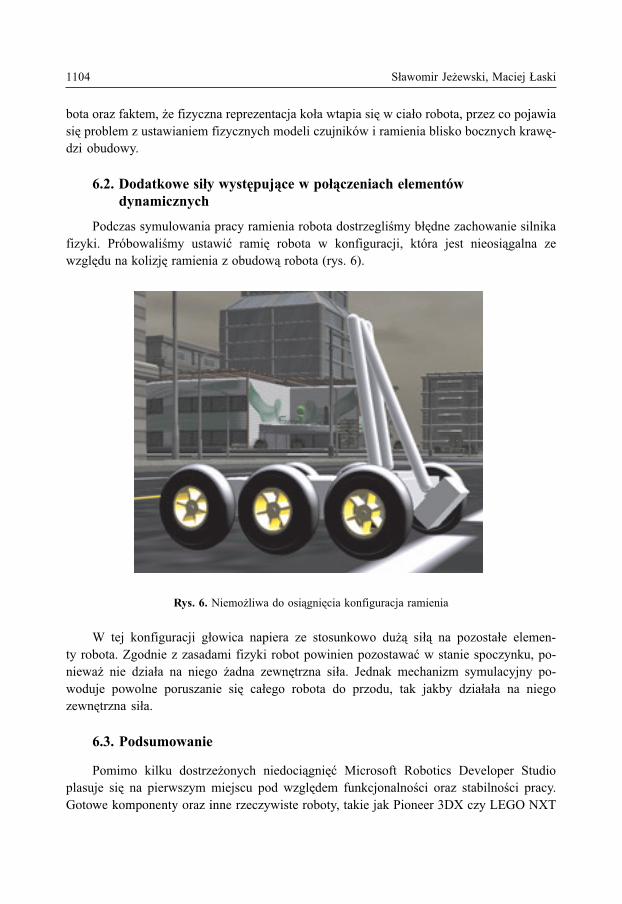
��������%�����$#�%���������������������!���������<��!�������$��������ojawia�������������������%������������������ ���������������z���������/�������"
���� ����������1��������� ����1� ����� ��� ��!�
���� � ��� �
���������������������������������������������!�����������������%���" �� �������� ����� ���� ������ � ���%������$ �� �� ���� ���������� �����������������������������������)���"5,"
������6���#���������������%�������������
* ��� ���%������ �!���� ������ �� ���������� �#� �!� �� �������!� ������/���o����"7�����������%����������������������� ���������������$��/����# �� ��!� �� ���� #��� ���������� �!�" &���� �������� ����������� ��/����� �o����� ��������� �� ��!��� ������ � �����$ ��� ����� ��!�!� �� �����e���������!�"
��"�#���� ������
����� ���� ������#����� �������� 0�����%� 2������ .�8������ '�����a���� �� �� �������������� ��������� %������������� ���� ��������� �����"9otowe komponenty oraz inne����������������$��������������.(���:+9;6(<
���������� ������������������������� ��������� ���=
����������������02.'$�����������#���������������������������� �����!��� ������$ ��� ���� ������� �" 7����� ���� ���#� �#� ���!������ ������������� �� l����������� %����" 6��������� ������ ���� ����� �����������$ ����� ������umia!�$�������������� �����#��������$�� �������!����>��?����"
������������������������0�����%�2������.�8������'���$��������������$ #� ���� ��� ������� �������� � ������������� �������� ��������������".������#���� ����������� ���������!����!� ������ �����o�� ������������������$�� ������������������� ��������$�������������������/����$ ���������� ���� ���� � ������� ���� ��������� �!������� ������ ���� ������������!����������������"
2�������
@�A B�������C"$D�]���<"$������ ����� �������� ���� ������� ����� ������"@�1AE�����������F��%��������C���������2�������C�����$EFC2C>��3$.��">��3"
@>A D����"$9�����2"$G������<"$H����C"$��� ���������� ��� � �! ����� ��� �����"����� �
#���������� ����� �������"@�1A����������% ���E�����������F��%��������C8����2�/�����)EFC2>���,$>���"
@�A �������&"$:����H"$I�����"$I��'"$H�����9"$$��%�������� ������ �&E+++F�������'�����$*���������JJ�"
@3A 2����I"$6�����&"$�'�� '������'�� ���� ����� ������ ( '�� ��� ��� ��'���&
@=A ^���_�8`6"$B��a`��8`."$����� � ''�� ���� �� ��'���� ���� ��� ����� � ��"
��� %����� ����� �������&@�1A5��E�����������0�����������F��%������$>��="@5A C�����bD�������$���'!�����&�"���� �& ����������$ ����>��J"@KA C2'b0C96C1bC�������b2����b'�������$ ���'!�����& �& ��&������� ��'�� � ���"��'��������
��������������������)&����$ ����>��J"@?A D�������b'�������b�������$ ���'!�����&����&��� &������� ����������������&���$ ���� >��J�&
@JA D��*����$���'!�����& ���&�����*& &�+������� ������������+��$ ���� >��J"@��A 2��'�$���'!�����& �����&�+�$ ����>��J"@��A .L6C0+FH'$���'!������ ������&���'�� � ������� ���$ ����>��J"@�>A .�����(02$���'!�����& � �����"���� �& ���*���$ ����>��J"@��A +C'L/2;D$���'!�����&���"���& �����'���� �&����$ ����>��J"@�3A ���'�$ ���'!�������� �&��&��&���&����������� ��������&����$ ����>��J"@�=A ���*���b'�������b'���$���'!�����&�������& ���$ ����>��J"@�5A <��bI:C<b>/.b2����b'�������$ ���'!�����& �&���*�&����������,�������� ������$ ���� >��J"@�KA 9����$���'!�������&� �&'��&��� &'��-' +�����$ ����>��J"@�?A &���$���'!�����&���& ��� �� ��$ ����>��J"@�JA B������b'�������$ ���'!�������&�'��& ������������ ����+��'"�������*&����$ ���� >��J"@>�A B����$���'!��+���&����&����$ ����>��J"@>�A :0+bH�M���$ ���'!�����&������������� ������'����&��������$��'����$��������'&����$
����>��J"@>>A 0�����%�b2������b.�8������b'���b>��?$ ���'!�����&�� ������& ����"��������� ��������&�'*$
����>��J"@>�A 0;D'$���'!�������� �&��&��&���&�������$ ����>��J"@>3A ;���.�����+����$���'!�����&����$ ����>��J"
���5 '!�����&�#����$0����4���
@>=A �;�DN9'$ ���'!�����& ���&�����*& &�+������� ������'�'���������&����$ ���� >��J"@>5A 2;D;;�$���'!�����& ����&'������& ������'�$ ����>��J"@>KA 2�D;''$ ���'!������&� ���&��&���&'��-����+���./��0�$ ���� >��J"@>?A 2����*����$���'!�����&��������+�"��& ���$ ����>��J"@>JA 2���*����$���'!�����&�������& ���$ ����>��J"@��A '��F����������$ ���'!�����'��& ��� ������� ����1� �������������� � ���$ ���� >��J"@��A *�����$ ���'!�����& �������� �& ���'���� ����������$ ����>��J"@�>A L������Ob'�������bF����������b'��$ ���'!�������� �& ��������������������&���$ ���� >��J"