proyecto de investigacion sip 20071515 - sappisappi.ipn.mx/cgpi/archivos_anexo/20071515_4520.pdf ·...
TRANSCRIPT
PROYECTO DE INVESTIGACION SIP
20071515
CONSTRUCCIÓN DE UNA TARJETA DE
DESARROLLO PARA MICROCONTROLADORES PIC
DE 8 Y 16 BITS, CON MÚLTIPLES SALIDAS
DIGITALES Y ANALÓGICAS QUE PERMITAN
EMPLEARLA COMO INTERFASE DE CONTROL DE
SISTEMAS DE POTENCIA
I N S T I T U T O P O L I T É C N I C O N A C I O N A L
D I R E C T O R D E L P R O Y E C T O J O S É A N T O N I O S I X T O B E R R O C A L
D E S A R RO L L O T E C N I C O D E L A I N V E S T I G AC Ó N
PROYECTO SIP 20071515
RE SUM EN
En este reporte se describen las características, proceso de diseño, construcción y pruebas que se desarrollaron del mes de enero del 2007 a diciembre del mismo año, para construir y programar una tarjeta de desarrollo para microcontroladores PIC de 8 y 16 bits, con entradas y salidas digitales y analógicas, con el fin de emplearla en la implementación de algoritmos de control de sistemas electrónicos de potencia. Este reporte contiene diagramas que muestran la interconexión de los componentes que integran a la tarjeta de desarrollo y a la interfas de potencia con la que se probó su correcto funcionamiento (hardware), además de la programación de un algoritmo de control (software).
Nota: El correcto funcionamiento de la tarjeta de desarrollo se probó implementando un control no crítico, vía el protocolo TCP7IP, del arranque de un motor de CA.
INTRODUCCIÓN
En la actualidad es una práctica común incorporar sistemas electrónicos de control en múltiples procesos industriales. Estos sistemas están constituidos principalmente por tres secciones:
1. Un microprocesador o microcontrolador, junto con sus dispositivos auxiliares.
2. Una etapa de acondicionamiento de señales de entrada y de salida.
3. Una etapa de potencia.
El microprocesador o microcontrolador se encarga de procesar señales (digitales o analógicas) de entrada y en función de estas señales tomar una decisión (por medio del procesamiento de un algoritmo) la cual generalmente se ve reflejada en el estado de una o una serie de salidas digitales. Las señales de entrada y salida del microprocesador o microcontrolador deben estar dentro de márgenes bien definidos; si esto no es así, se hace necesario acondicionar las señales, es decir, ampliar o disminuir su amplitud, tarea que realizan los circuitos acondicionadores de señal. Finalmente, la etapa de potencia es la encargada de transformar las señales (ya acondicionadas) de salida del microprocesador o microcontrolador en acciones de manipulación directa de ciertas variables, generalmente voltaje y corriente.
Claro está que cada proceso tiene sus propias características, por lo que las tres secciones mencionadas anteriormente deberán cambiar siempre en función del proceso que se desea controlar, lo que significa que para cada proceso se deban desarrollar diseños electrónicos específicos.
El propósito de este proyectos es el de diseñar una tarjeta electrónica de control que contenga un microcontrolador junto con sus dispositivos auxiliares (regulador de tención, RESET, cristal oscilador, etc.) que permita, por el número y flexibilidad de sus entradas y salidas digitales y analógicas, ser empleada en diversos procesos. Es decir, se pretende crear una herramienta que permita comprobar algoritmos, configuraciones o estrategias de control sin la necesidad de recurrir a un rediseño del procesador de señales y sus dispositivos auxiliares para cada proceso.
Para el diseño de esta tarjeta se parte de un microcontrolador PIC18f4620. De acuerdo a sus hojas de especificaciones, se implementan los circuitos auxiliares necesarios para su correcto funcionamiento (circuito de RESET, cristal oscilador y alimentación), después se le incorporan circuitos de comunicación (comunicación serie RS232 y ETHERNET) y finalmente se le agregan circuitos periféricos que nos auxiliarán en la implementación de los algoritmos de control y sus pruebas (pantalla LCD, entrada digital por botón, entrada analógica por potenciómetro, LEDs indicadores, un bus de conexiones para entrada y salidas digitales y analógicas y un puerto para la programación del microcontrolador).
Una ves diseñada la tarjeta se implementa, en un protoboard, una serie de circuitos acondicionadores de señal y un circuito de potencia, con los que se controla el arranque de un motor de CA desde INTERNET vía el protocolo TCP/IP, el cual toma como base el STACK de la compañía MICROCHIP fabricante de los microcontroladores PIC. Con esto se comprueba el correcto funcionamiento de la tarjeta y se muestra su potencial como herramienta de investigación en el área de la ingeniería de control y la electrónica de potencia, cubriendo así una necesidad que en el IPN en particular y en los centros de investigación de la ingeniería de control y de electrónica de potencia en general, se tiene de una herramienta como la descrita; debido a su bajo costo, flexibilidad, fácil uso y, principalmente, a que se puede experimentar con nuevos algoritmos y esquemas de control de forma ágil y con baja posibilidad de falla.
MÉTODOS Y MA TERIALES
A continuación se describen las etapas de desarrollo de la tarjeta de control. En cada una de éstas etapas está involucrada una sección de la electrónica auxiliar del microcontrolador que desarrolla una función específica. En cada una de de ellas se hace, si esto es posible, una prueba de funcionamiento, con lo que se demuestra que la sección en cuestión realiza la tarea propuesta.
FUENTE DE ALIMENTACIÓN
En el diseño de la tarjeta se requieren dos fuentes de voltaje: una de 5.0 Volts y una de 3.3 Volts. La primera tiene como finalidad la de alimentar al microcontrolador y al resto de sus circuitos periféricos, excepto al circuito ENC28J60 que es un controlador ETHERNET con una interfase SPI (la cual es una forma de comunicación serial con la que también cuenta el microcontrolador). El circuito ENC28J60 se alimenta con 3.3 Volts y este mismo voltaje está presente en el conector MMC (RJ45) que es el conector de salida de la comunicación ETHERNET. Los integrados que se emplean para obtener estos niveles de voltaje son los reguladores tipo paralelo LM7805, con el que se obtiene los 5.0 Volts y el µA78M33 para obtener los 3.3 Volts. Los voltajes de salida de estos reguladores se obtienen a partir de un voltaje de entrada (POWER IN) de 9 Volts (obtenido de una fuente de CD comúnmente llamada “eliminador”). La figura 1 muestra el diagrama de conexiones en el que, además de los reguladores, también están presentes tres capacitores electrolíticos de 4.7 µF. Estos capacitares tienen la finalidad de mantener estable el voltaje de salida de cada regulador y su valor se estableció en base a los valores típicos que se muestran en las hojas de especificación de dichos dispositivos
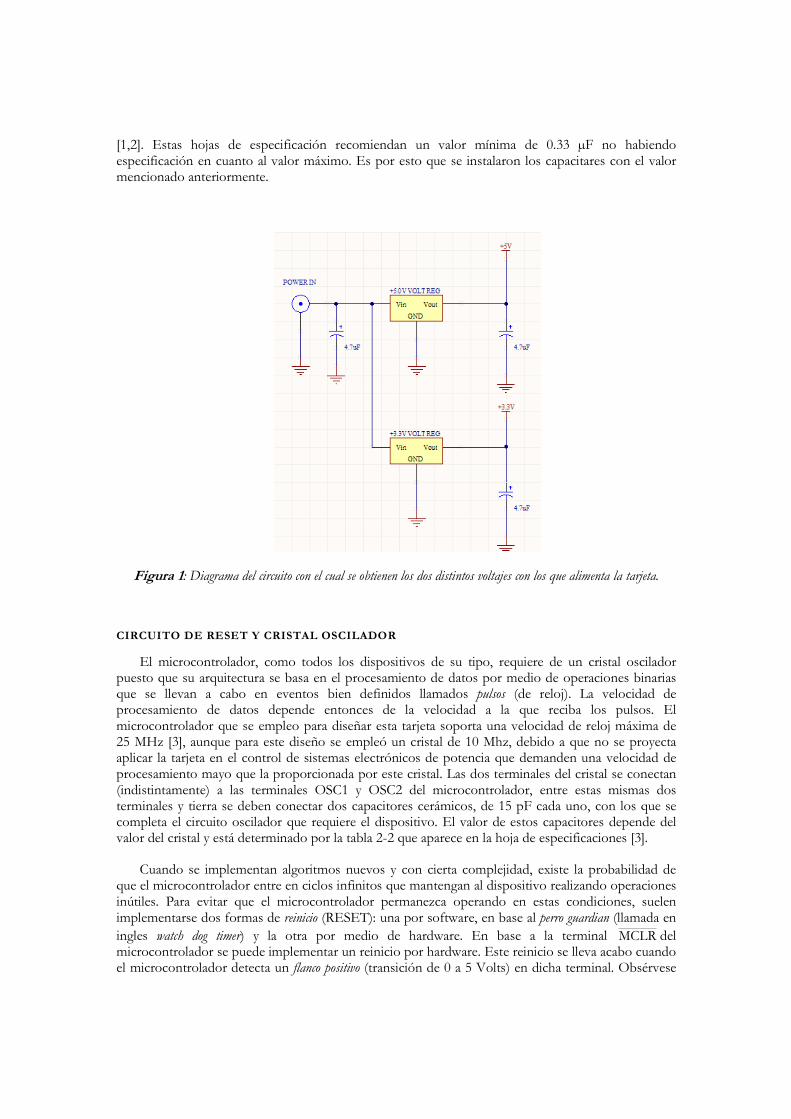
[1,2]. Estas hojas de especificación recomiendan un valor mínima de 0.33 µF no habiendo especificación en cuanto al valor máximo. Es por esto que se instalaron los capacitares con el valor mencionado anteriormente.
Figura 1: Diagrama del circuito con el cual se obtienen los dos distintos voltajes con los que alimenta la tarjeta.
CIRCUITO DE RESET Y CRISTAL OSCILADOR
El microcontrolador, como todos los dispositivos de su tipo, requiere de un cristal oscilador puesto que su arquitectura se basa en el procesamiento de datos por medio de operaciones binarias que se llevan a cabo en eventos bien definidos llamados pulsos (de reloj). La velocidad de procesamiento de datos depende entonces de la velocidad a la que reciba los pulsos. El microcontrolador que se empleo para diseñar esta tarjeta soporta una velocidad de reloj máxima de 25 MHz [3], aunque para este diseño se empleó un cristal de 10 Mhz, debido a que no se proyecta aplicar la tarjeta en el control de sistemas electrónicos de potencia que demanden una velocidad de procesamiento mayo que la proporcionada por este cristal. Las dos terminales del cristal se conectan (indistintamente) a las terminales OSC1 y OSC2 del microcontrolador, entre estas mismas dos terminales y tierra se deben conectar dos capacitores cerámicos, de 15 pF cada uno, con los que se completa el circuito oscilador que requiere el dispositivo. El valor de estos capacitores depende del valor del cristal y está determinado por la tabla 2-2 que aparece en la hoja de especificaciones [3].
Cuando se implementan algoritmos nuevos y con cierta complejidad, existe la probabilidad de que el microcontrolador entre en ciclos infinitos que mantengan al dispositivo realizando operaciones inútiles. Para evitar que el microcontrolador permanezca operando en estas condiciones, suelen implementarse dos formas de reinicio (RESET): una por software, en base al perro guardian (llamada en ingles watch dog timer) y la otra por medio de hardware. En base a la terminal MCLR del microcontrolador se puede implementar un reinicio por hardware. Este reinicio se lleva acabo cuando el microcontrolador detecta un flanco positivo (transición de 0 a 5 Volts) en dicha terminal. Obsérvese
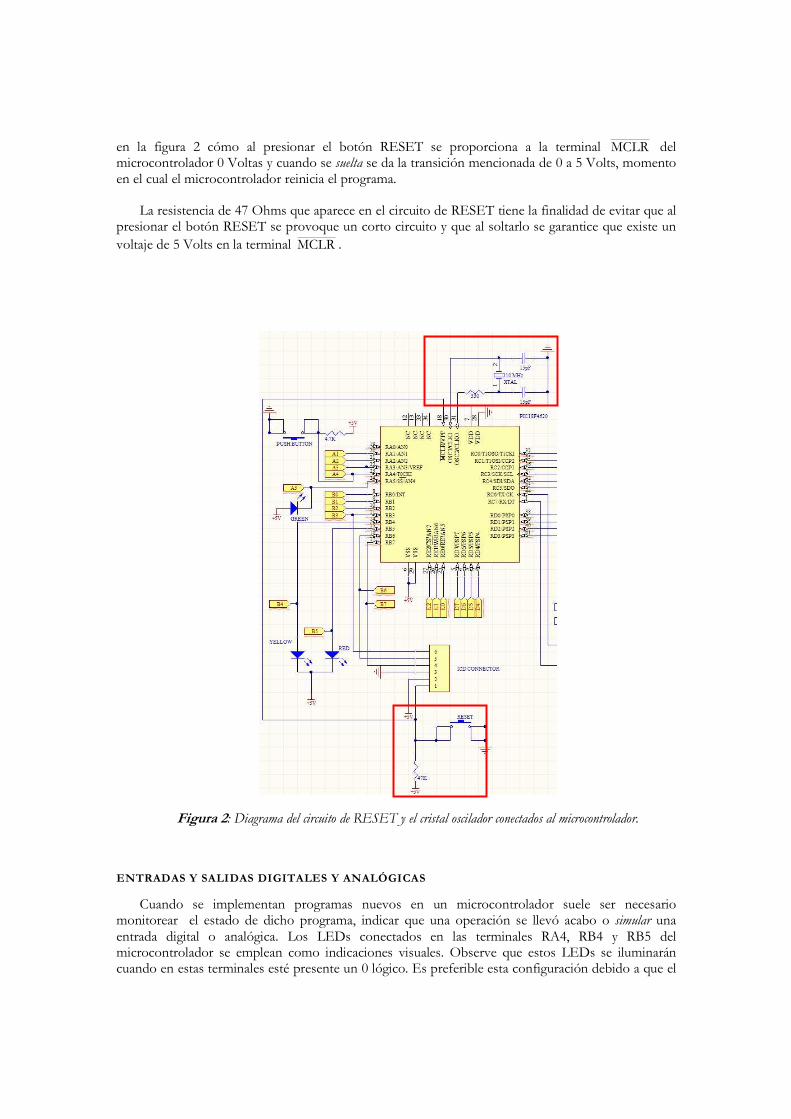
en la figura 2 cómo al presionar el botón RESET se proporciona a la terminal MCLR del microcontrolador 0 Voltas y cuando se suelta se da la transición mencionada de 0 a 5 Volts, momento en el cual el microcontrolador reinicia el programa.
La resistencia de 47 Ohms que aparece en el circuito de RESET tiene la finalidad de evitar que al presionar el botón RESET se provoque un corto circuito y que al soltarlo se garantice que existe un voltaje de 5 Volts en la terminal MCLR .
Figura 2: Diagrama del circuito de RESET y el cristal oscilador conectados al microcontrolador.
ENTRADAS Y SALIDAS DIGITALES Y ANALÓGICAS
Cuando se implementan programas nuevos en un microcontrolador suele ser necesario monitorear el estado de dicho programa, indicar que una operación se llevó acabo o simular una entrada digital o analógica. Los LEDs conectados en las terminales RA4, RB4 y RB5 del microcontrolador se emplean como indicaciones visuales. Observe que estos LEDs se iluminarán cuando en estas terminales esté presente un 0 lógico. Es preferible esta configuración debido a que el
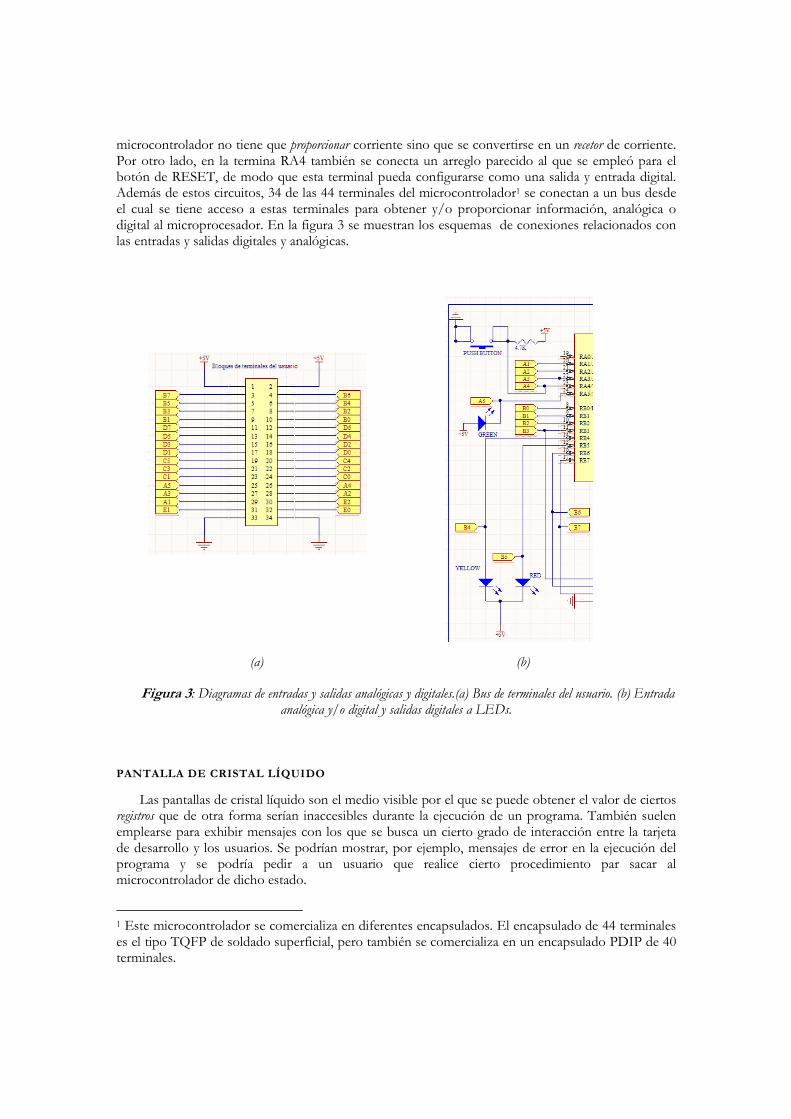
microcontrolador no tiene que proporcionar corriente sino que se convertirse en un recetor de corriente. Por otro lado, en la termina RA4 también se conecta un arreglo parecido al que se empleó para el botón de RESET, de modo que esta terminal pueda configurarse como una salida y entrada digital. Además de estos circuitos, 34 de las 44 terminales del microcontrolador1 se conectan a un bus desde el cual se tiene acceso a estas terminales para obtener y/o proporcionar información, analógica o digital al microprocesador. En la figura 3 se muestran los esquemas de conexiones relacionados con las entradas y salidas digitales y analógicas.
(a) (b)
Figura 3: Diagramas de entradas y salidas analógicas y digitales.(a) Bus de terminales del usuario. (b) Entrada analógica y/o digital y salidas digitales a LEDs.
PANTALLA DE CRISTAL LÍQUIDO
Las pantallas de cristal líquido son el medio visible por el que se puede obtener el valor de ciertos registros que de otra forma serían inaccesibles durante la ejecución de un programa. También suelen emplearse para exhibir mensajes con los que se busca un cierto grado de interacción entre la tarjeta de desarrollo y los usuarios. Se podrían mostrar, por ejemplo, mensajes de error en la ejecución del programa y se podría pedir a un usuario que realice cierto procedimiento par sacar al microcontrolador de dicho estado.
1 Este microcontrolador se comercializa en diferentes encapsulados. El encapsulado de 44 terminales es el tipo TQFP de soldado superficial, pero también se comercializa en un encapsulado PDIP de 40 terminales.
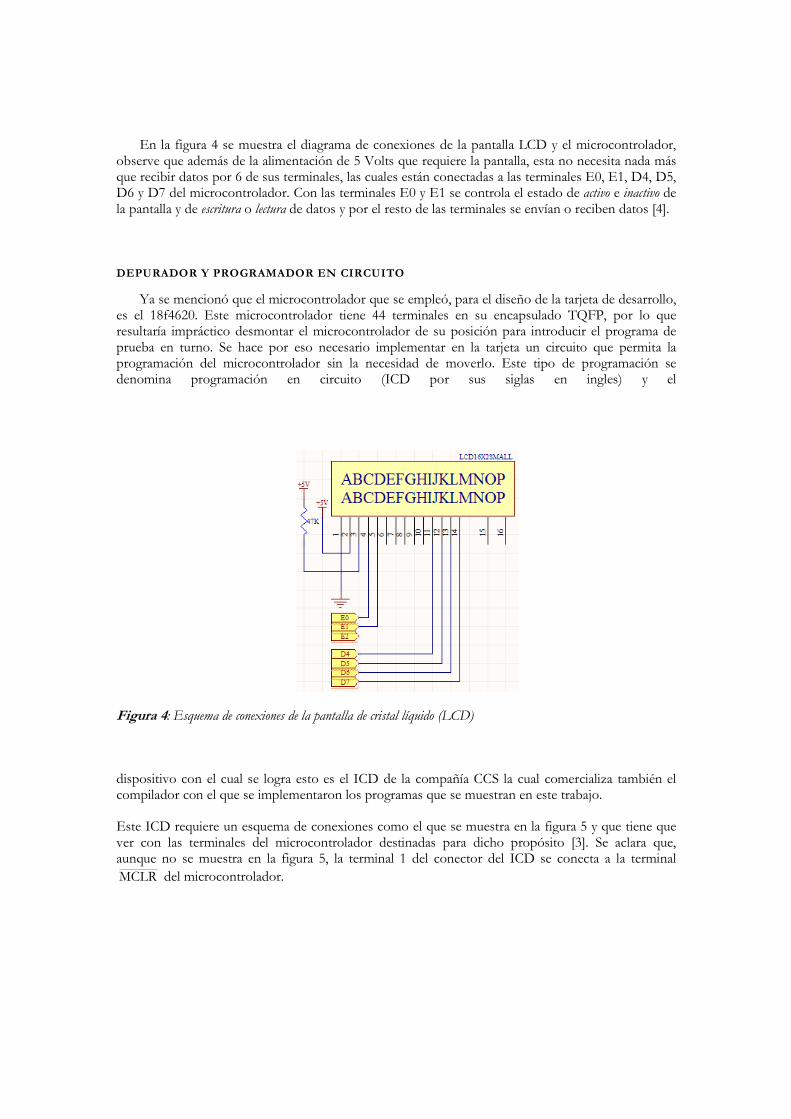
En la figura 4 se muestra el diagrama de conexiones de la pantalla LCD y el microcontrolador, observe que además de la alimentación de 5 Volts que requiere la pantalla, esta no necesita nada más que recibir datos por 6 de sus terminales, las cuales están conectadas a las terminales E0, E1, D4, D5, D6 y D7 del microcontrolador. Con las terminales E0 y E1 se controla el estado de activo e inactivo de la pantalla y de escritura o lectura de datos y por el resto de las terminales se envían o reciben datos [4].
DEPURADOR Y PROGRAMADOR EN CIRCUITO
Ya se mencionó que el microcontrolador que se empleó, para el diseño de la tarjeta de desarrollo, es el 18f4620. Este microcontrolador tiene 44 terminales en su encapsulado TQFP, por lo que resultaría impráctico desmontar el microcontrolador de su posición para introducir el programa de prueba en turno. Se hace por eso necesario implementar en la tarjeta un circuito que permita la programación del microcontrolador sin la necesidad de moverlo. Este tipo de programación se denomina programación en circuito (ICD por sus siglas en ingles) y el
Figura 4: Esquema de conexiones de la pantalla de cristal líquido (LCD)
dispositivo con el cual se logra esto es el ICD de la compañía CCS la cual comercializa también el compilador con el que se implementaron los programas que se muestran en este trabajo.
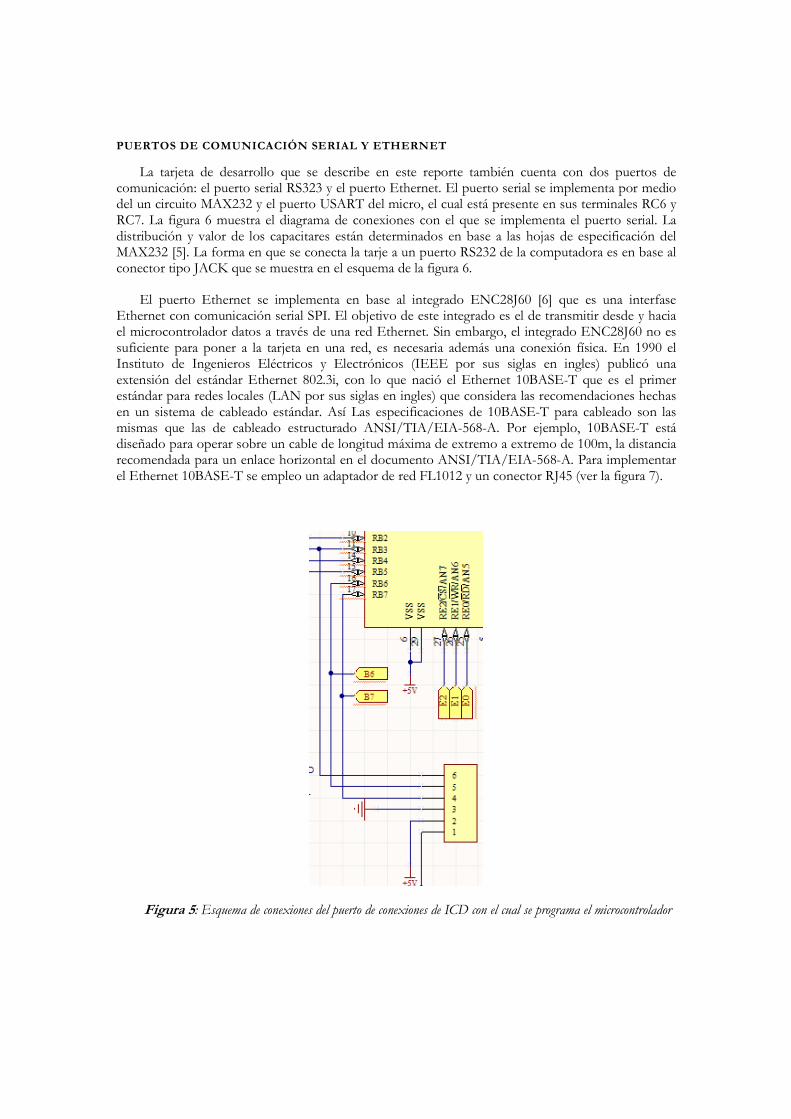
Este ICD requiere un esquema de conexiones como el que se muestra en la figura 5 y que tiene que ver con las terminales del microcontrolador destinadas para dicho propósito [3]. Se aclara que, aunque no se muestra en la figura 5, la terminal 1 del conector del ICD se conecta a la terminal MCLR del microcontrolador.
PUERTOS DE COMUNICACIÓN SERIAL Y ETHERNET
La tarjeta de desarrollo que se describe en este reporte también cuenta con dos puertos de comunicación: el puerto serial RS323 y el puerto Ethernet. El puerto serial se implementa por medio del un circuito MAX232 y el puerto USART del micro, el cual está presente en sus terminales RC6 y RC7. La figura 6 muestra el diagrama de conexiones con el que se implementa el puerto serial. La distribución y valor de los capacitares están determinados en base a las hojas de especificación del MAX232 [5]. La forma en que se conecta la tarje a un puerto RS232 de la computadora es en base al conector tipo JACK que se muestra en el esquema de la figura 6.
El puerto Ethernet se implementa en base al integrado ENC28J60 [6] que es una interfase Ethernet con comunicación serial SPI. El objetivo de este integrado es el de transmitir desde y hacia el microcontrolador datos a través de una red Ethernet. Sin embargo, el integrado ENC28J60 no es suficiente para poner a la tarjeta en una red, es necesaria además una conexión física. En 1990 el Instituto de Ingenieros Eléctricos y Electrónicos (IEEE por sus siglas en ingles) publicó una extensión del estándar Ethernet 802.3i, con lo que nació el Ethernet 10BASE-T que es el primer estándar para redes locales (LAN por sus siglas en ingles) que considera las recomendaciones hechas en un sistema de cableado estándar. Así Las especificaciones de 10BASE-T para cableado son las mismas que las de cableado estructurado ANSI/TIA/EIA-568-A. Por ejemplo, 10BASE-T está diseñado para operar sobre un cable de longitud máxima de extremo a extremo de 100m, la distancia recomendada para un enlace horizontal en el documento ANSI/TIA/EIA-568-A. Para implementar el Ethernet 10BASE-T se empleo un adaptador de red FL1012 y un conector RJ45 (ver la figura 7).
Figura 5: Esquema de conexiones del puerto de conexiones de ICD con el cual se programa el microcontrolador
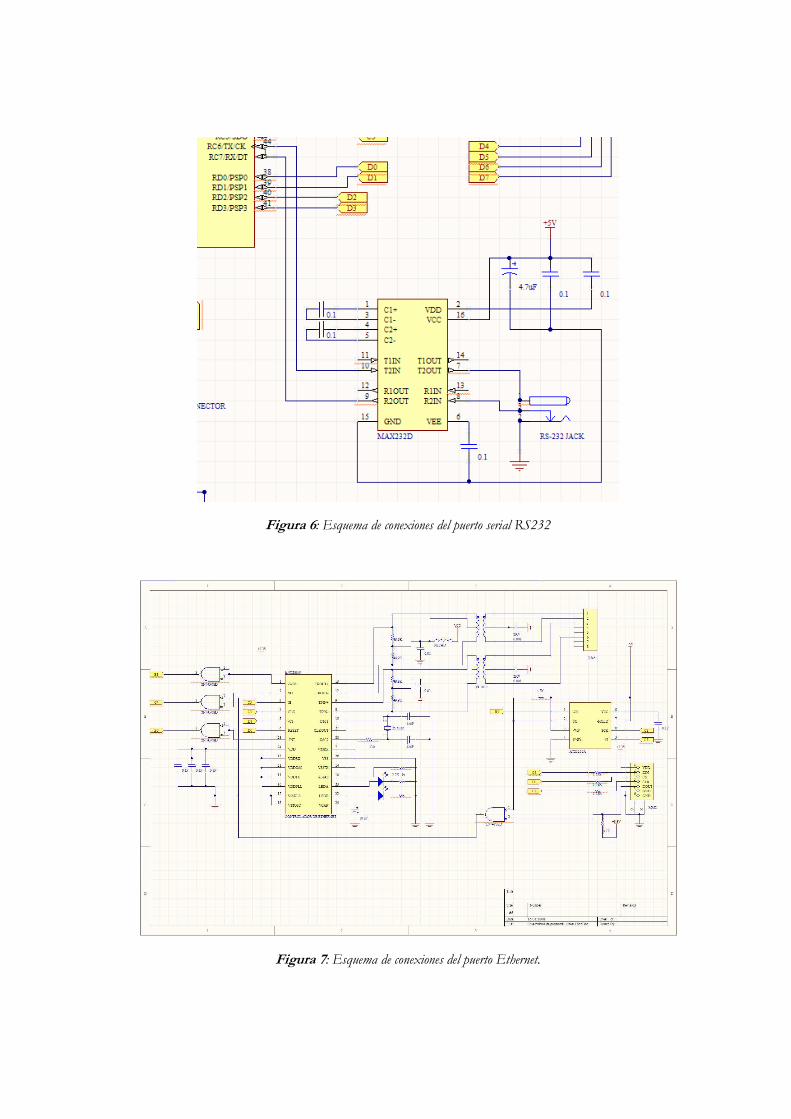
Figura 6: Esquema de conexiones del puerto serial RS232
Figura 7: Esquema de conexiones del puerto Ethernet.

RE SU LTADO S
En la sección anterior se describieron los principales elementos que integran a la tarjeta de desarrollo. El procedimiento que se siguió probar cada uno de estos elementos fue el siguiente:
a) Se propone un diseño previo empleando PROTEL 2004.
b) Una vez propuesta la configuración de dispositivos electrónicos (figuras 1-7), se implementa cada una de estas secciones en un protoboard (figura 8).
c) En caso de ser posible, se prueba cada una de las secciones del diseño implementando diferentes rutinas. Por ejemplo, una vez implementadas en un protoboard las secciones: “Fuente de alimentación”, “circuito de reset” y “cristal oscilador y entradas y salidas digitales y analógicas”, se grabó el programa que se muestra en la Aplicación 1, con el que se comprueba el correcto funcionamiento de estas secciones. Comprobado que estos elementos funcionan adecuadamente, se ensambló la tarjeta en su totalidad (ver la figura 10) y se realizó, a lo lardo de mas de 5 meses, la Aplicación 2. Esta aplicación emplea la mayoría de los elementos de la tarjeta de desarrollo y muestra su potencial.
APLICACIÓN 1
En el programa 1 se muestran diferentes secciones. La primera es un comentario del programa. En ella se especifica el nombre del programa y lo que este hace. Debajo del comentario aparece el encabezado del programa. En este encabezado se especifican algunas instrucciones de preprocesamiento (como el microcontrolador que se empleará, la frecuencia del cristal oscilador, etc.). En la siguiente sección aparece el cuerpo del programa principal. Con estas instrucciones se le
/////////////////////////////////////////////////// ////////////////////// //// LED.c //// //// Este programa tiene como objeta hacer prender y apagar el led //// //// conectado a la salida digital RB4 en interval os regulares de //// //// 500 micro segundos cuando se le manda cualqui er caracter al //// //// microcontrolador desde el puerto serial de la computadora. //// /////////////////////////////////////////////////// ////////////////////// #include <18F4620.h> #fuses HS,NOWDT,NOPROTECT,NOLVP #use delay(clock=10000000) #use rs232(baud=9600, xmit=PIN_C6, rcv=PIN_C7) void main() printf("Presione cualquier tecla para empezar \n \r"); getc(); printf("Señal de 1 khz activada \n\r"); while (TRUE) output_high(PIN_B4); delay_us(500); output_low(PIN_B4); delay_us(500);
Programa 1: Programa escrito en C y compilado con el compilador PIC C de la compañía CCS que genera una señal de salida cuadrada de 1 kHz en la Terminal RB4 de microcontrolador.
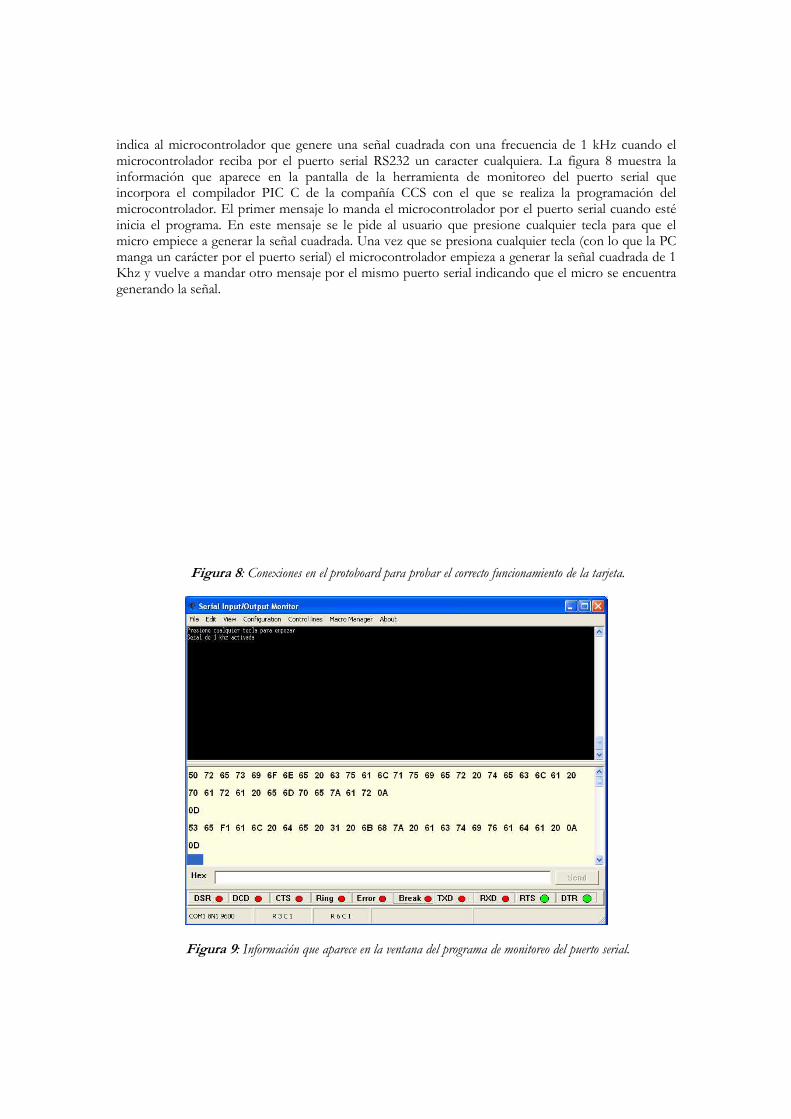
indica al microcontrolador que genere una señal cuadrada con una frecuencia de 1 kHz cuando el microcontrolador reciba por el puerto serial RS232 un caracter cualquiera. La figura 8 muestra la información que aparece en la pantalla de la herramienta de monitoreo del puerto serial que incorpora el compilador PIC C de la compañía CCS con el que se realiza la programación del microcontrolador. El primer mensaje lo manda el microcontrolador por el puerto serial cuando esté inicia el programa. En este mensaje se le pide al usuario que presione cualquier tecla para que el micro empiece a generar la señal cuadrada. Una vez que se presiona cualquier tecla (con lo que la PC manga un carácter por el puerto serial) el microcontrolador empieza a generar la señal cuadrada de 1 Khz y vuelve a mandar otro mensaje por el mismo puerto serial indicando que el micro se encuentra generando la señal.
Figura 8: Conexiones en el protoboard para probar el correcto funcionamiento de la tarjeta.
Figura 9: Información que aparece en la ventana del programa de monitoreo del puerto serial.

Con esto se prueba el correcto funcionamiento de la fuente de alimentación, circuito de reset y cristal oscilador, salidas digitales, depurador y programador en circuito ICD y el puerto de comunicación serial RS232.
APLICACIÓN 2
En la siguiente aplicación se muestra el funcionamiento de los elementos no cubiertos en el programa anterior, de hecho se trata de una aplicación completa que forma parte de una tesis colectiva de licenciatura asesorada por dos de los participantes de este proyecto de investigación [7]. Se trata del diseño e implementación de un arrancador suave de motores de C. A. monofásicos, empleando la menor cantidad posible de componentes electrónicos. En este diseño, además del hardware, también se presenta la programación del microcontrolador (PIC18F4620) el cuál, como ya se dijo, es el dispositivo principal de la tarjeta de desarrollo (que se muestra en la figura 10).
Figura 10: Tarjeta de desarrollo ensamblada con todos sus elementos
El arranque
Desde la aparición de los primeros motores eléctricos, los ingenieros han buscado una manera de
evitar los problemas mecánicos y eléctricos que se producen al utilizar arrancadores de conexión directa o a tensión reducida tipo estrella-delta (para motores trifásicos) o autotransformador.
La conexión de los motores de C. A., utilizados para accionar ventiladores, trituradoras, agitadores, bombas, cintas transportadoras, etc., producen cotidianamente innecesarios picos de
intensidad en las plantas de producción. Estos arranques violentos causan daños de diferente naturaleza. Entre ellos los siguientes: • Problemas eléctricos debidos a transitorios de tensión y de intensidad provocados por los
arranques directos (a tensión plena) o a tensión reducida tipo estrella-delta o autotransformador. Estos transitorios pueden sobrecargar la red y provocar variaciones de tensión que interfieren con el funcionamiento de otros equipos eléctricos conectados a la red.
• Problemas mecánicos que afectan a todo el accionamiento, desde el propio motor hasta el equipo accionador, pudiendo llegar a provocar esfuerzos extremos en los materiales.
• Problemas funcionales, como pueden ser aumentos bruscos de la presión de líquidos bombeados por los motores, daños a productos situados en cintas transportadoras, o un movimiento no suficientemente constante de escaleras mecánicas.
Los arrancadores suaves son la solución idónea y sencilla para todos estos problemas, pues es posible realizar arranques y paros suavemente (con incrementos y decrementos paulatinos de la tensión rms), reduciendo al mínimo tiempo los esfuerzos eléctricos y mecánicos.
Funcionamiento Del Arrancador
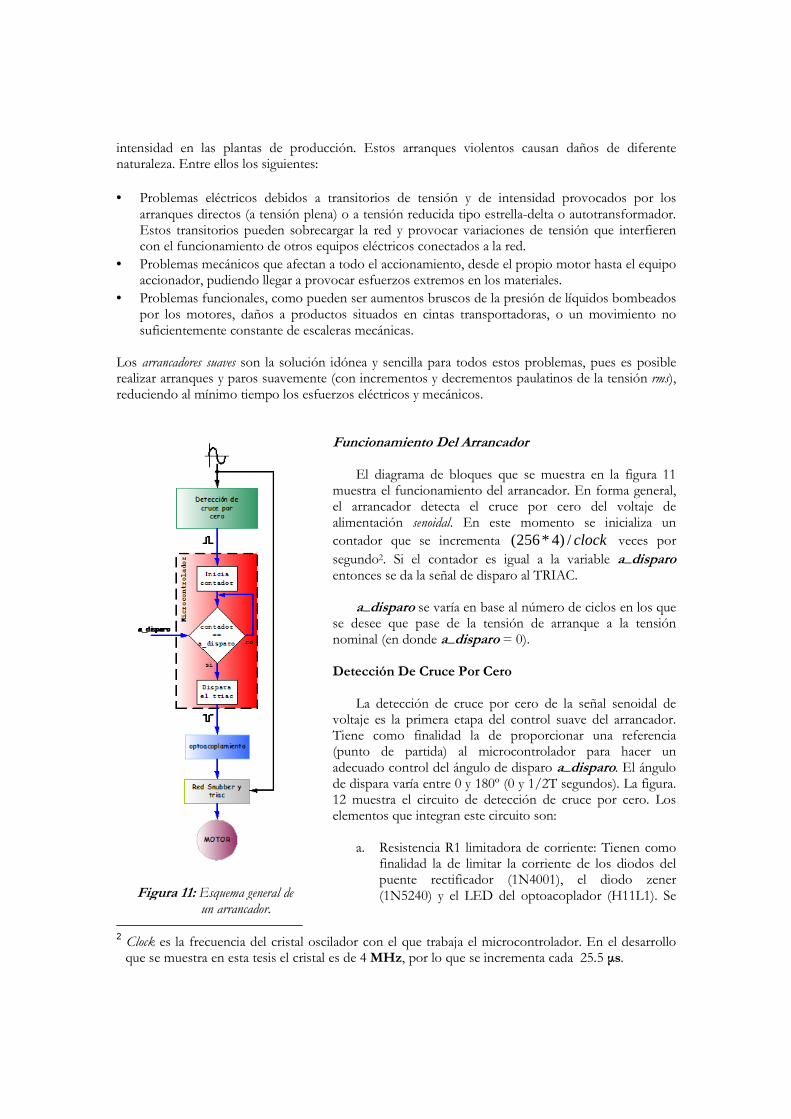
El diagrama de bloques que se muestra en la figura 11 muestra el funcionamiento del arrancador. En forma general, el arrancador detecta el cruce por cero del voltaje de alimentación senoidal. En este momento se inicializa un contador que se incrementa clock/)4*256( veces por segundo2. Si el contador es igual a la variable a_disparo entonces se da la señal de disparo al TRIAC.
a_disparo se varía en base al número de ciclos en los que se desee que pase de la tensión de arranque a la tensión nominal (en donde a_disparo = 0). Detección De Cruce Por Cero
La detección de cruce por cero de la señal senoidal de voltaje es la primera etapa del control suave del arrancador. Tiene como finalidad la de proporcionar una referencia (punto de partida) al microcontrolador para hacer un adecuado control del ángulo de disparo a_disparo. El ángulo de dispara varía entre 0 y 180º (0 y 1/2T segundos). La figura. 12 muestra el circuito de detección de cruce por cero. Los elementos que integran este circuito son:
a. Resistencia R1 limitadora de corriente: Tienen como finalidad la de limitar la corriente de los diodos del puente rectificador (1N4001), el diodo zener (1N5240) y el LED del optoacoplador (H11L1). Se
2 Clock es la frecuencia del cristal oscilador con el que trabaja el microcontrolador. En el desarrollo
que se muestra en esta tesis el cristal es de 4 MHz, por lo que se incrementa cada 25.5 µs.
Figura 11: Esquema general de un arrancador.
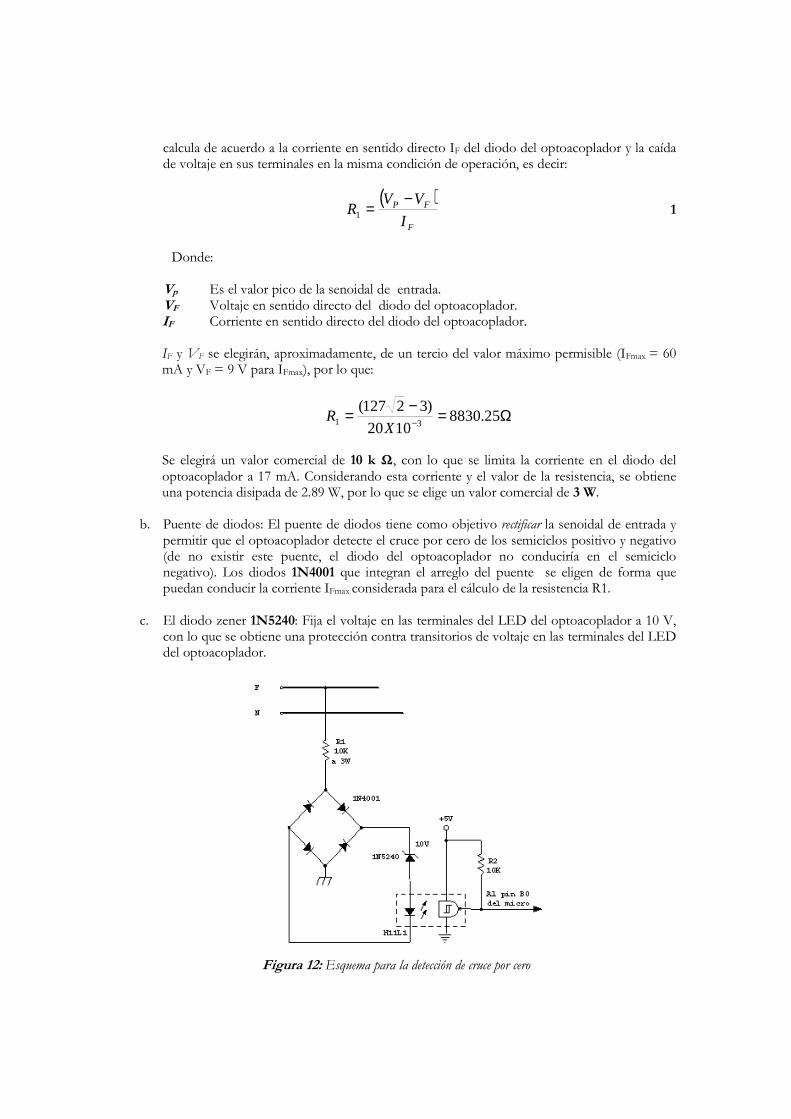
calcula de acuerdo a la corriente en sentido directo IF del diodo del optoacoplador y la caída de voltaje en sus terminales en la misma condición de operación, es decir:
( )
F
FP
I
VVR
−=1 1
Donde:
Vp Es el valor pico de la senoidal de entrada. VF Voltaje en sentido directo del diodo del optoacoplador. IF Corriente en sentido directo del diodo del optoacoplador. IF y VF se elegirán, aproximadamente, de un tercio del valor máximo permisible (IFmax = 60 mA y VF = 9 V para IFmax), por lo que:
Ω=−= − 25.88301020
)32127(31 X
R
Se elegirá un valor comercial de 10 k Ω, con lo que se limita la corriente en el diodo del optoacoplador a 17 mA. Considerando esta corriente y el valor de la resistencia, se obtiene una potencia disipada de 2.89 W, por lo que se elige un valor comercial de 3 W.
b. Puente de diodos: El puente de diodos tiene como objetivo rectificar la senoidal de entrada y permitir que el optoacoplador detecte el cruce por cero de los semiciclos positivo y negativo (de no existir este puente, el diodo del optoacoplador no conduciría en el semiciclo negativo). Los diodos 1N4001 que integran el arreglo del puente se eligen de forma que puedan conducir la corriente IFmax considerada para el cálculo de la resistencia R1.
c. El diodo zener 1N5240: Fija el voltaje en las terminales del LED del optoacoplador a 10 V,
con lo que se obtiene una protección contra transitorios de voltaje en las terminales del LED del optoacoplador.
Figura 12: Esquema para la detección de cruce por cero

d. Etapa de optoacoplamiento: El optoacoplador H11L1 tiene un doble propósito: aislar
eléctricamente a la etapa de control (microcontrolador) de la retroalimentación (fuente de voltaje de CA) y, por otro lado, proporcionar una señal de disparo al microcontrolador para empezar el conteo. La figura 13 muestra la señal de salida del optoacoplador. Observe que éstas coinciden con el cruce por cero de los semiciclos positivo y negativo de la señal senoidal de voltaje.
e. Resistencia limitadora de corriente R2: La salida del optoacoplador es una impedancia cero
(entre la salida y tierra) o una impedancia grande, por lo que es necesario conectar la resistencia R2 para obtener salidas lógicas de 0 (0 V) o 1 (5 V). Con este arreglo, cuando la salida del optoacoplador es de impedancia alta, se tendrá una salida de 5 volts los cuales se obtienen a través de la resistencia R2; en cambio, cuando la salida es de impedancia cero, se tiene una salida de 0 volts; en estas circunstancias, la resistencia R2 evita que exista una conexión a tierra de la fuente. Su valor debe ser alto para evitar al máximo la pérdida innecesaria de energía. 10kΩ es un valor que se consideró adecuado pues limita la corriente de fuga por la resistencia a 500 µA.
Figura 13: Oscilogramas de las señales de voltaje de alimentación y las señales de salida del optoacoplador H11L1.
Canal A: señales de voltaje de alimentación; Canal B: señales de salida del optoacoplador H11L1.
La Etapa De Control Como se explicó en el punto anterior, la etapa de control recibe la señal de que el voltaje senoidal a pasado por cero, cuando esto pasa, se activa una interrupción (Parte A del programa) que limpia un contador; a partir de este momento, se estará comparando dicho contador con la variable a_disparo la cual disminuirá progresivamente hasta cero en el tiempo definido de arranque del motor. A continuación se muestra el programa del microcontrolador.
/////////////////////////////////////////////////// ////////////////////// //// LED.c //// //// Este programa tiene como objeta hacer prender y apagar el led //// //// conectado a la salida digital RB4 en interval os regulares de //// //// 500 micro segundos cuando se le manda cualqui er caracter al //// //// microcontrolador desde el puerto serial de la computadora. //// /////////////////////////////////////////////////// //////////////////////

#include <18F4620.h> #fuses HS,NOWDT,NOPROTECT,NOLVP #use delay(clock=1000000) float a_disparo=210; #int_ext void prende() if(a_disparo>0) a_disparo=a_disparo-0.1; set_timer0(0); void main () setup_counters(RTCC_INTERNAL, RTCC_DIV_256); set_timer0 (0); enable_interrupts(INT_EXT); enable_interrupts(GLOBAL); setup_adc(adc_clock_internal); set_adc_channel(0); a_disparo=130; While(true) t=read_adc(); if(get_timer0()<a_disparo) output_high(PIN_A4); else output_low(PIN_A4);
Programa 2: Programa escrito en C y compilado con el compilador PIC C de la compañía CCS con el que se
controla el arranque de un motor de CA a través de la señal digital de entrada RB0 y la señal digital de salida RA4.
En la Etapa A del programa se tiene la subrutina que se ejecuta cuando se detecta una interrupción en la entrada B0 del microcontrolador (que ocurre cuando hay un cruce por cero). En esta etapa se resetea el contador que se configura en la etapa siguiente. Así mismo, se realiza el conteo de los segundos en el tiempo de arranque. La Etapa B del programa configura un contador que se incrementa cada (4*256)/4x106 veces por segundo. Este contador permite tener un control del tiempo (a partir del cruce por cero) en el que el microcontrolador disparará al TRIAC.
En la Etapa C se configura el convertidor Analógico/Digital, con el cual se pueden enviar señales a la página Web para el monitoreo de la planta. Para el proyecto que se presenta en esta tesis no es necesario el uso del convertidor analógico/digital para el tiempo de arranque del motor, ya que se
B
C
D
A
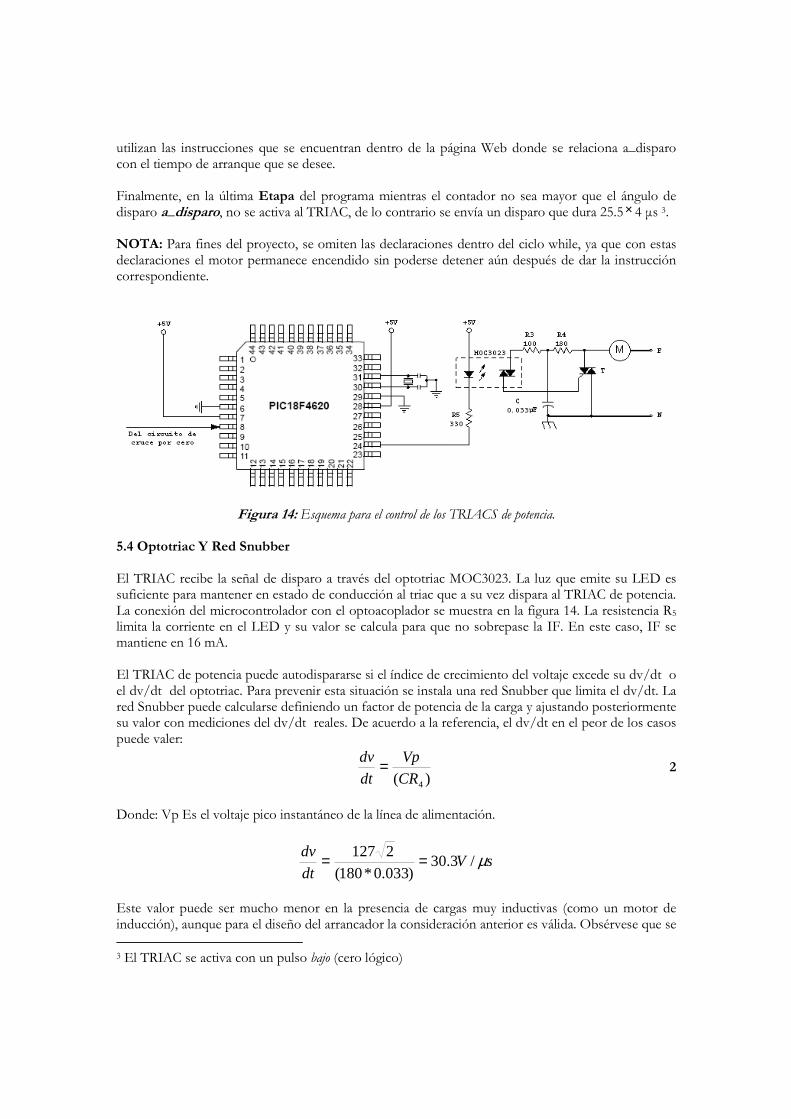
utilizan las instrucciones que se encuentran dentro de la página Web donde se relaciona a_disparo con el tiempo de arranque que se desee. Finalmente, en la última Etapa del programa mientras el contador no sea mayor que el ángulo de disparo a_disparo, no se activa al TRIAC, de lo contrario se envía un disparo que dura 25.5× 4 µs 3. NOTA: Para fines del proyecto, se omiten las declaraciones dentro del ciclo while, ya que con estas declaraciones el motor permanece encendido sin poderse detener aún después de dar la instrucción correspondiente.
Figura 14: Esquema para el control de los TRIACS de potencia. 5.4 Optotriac Y Red Snubber El TRIAC recibe la señal de disparo a través del optotriac MOC3023. La luz que emite su LED es suficiente para mantener en estado de conducción al triac que a su vez dispara al TRIAC de potencia. La conexión del microcontrolador con el optoacoplador se muestra en la figura 14. La resistencia R5 limita la corriente en el LED y su valor se calcula para que no sobrepase la IF. En este caso, IF se mantiene en 16 mA. El TRIAC de potencia puede autodispararse si el índice de crecimiento del voltaje excede su dv/dt o el dv/dt del optotriac. Para prevenir esta situación se instala una red Snubber que limita el dv/dt. La red Snubber puede calcularse definiendo un factor de potencia de la carga y ajustando posteriormente su valor con mediciones del dv/dt reales. De acuerdo a la referencia, el dv/dt en el peor de los casos puede valer:
)( 4CR
Vp
dt
dv = 2
Donde: Vp Es el voltaje pico instantáneo de la línea de alimentación.
sVdt
dv µ/3.30)033.0*180(
2127 ==
Este valor puede ser mucho menor en la presencia de cargas muy inductivas (como un motor de inducción), aunque para el diseño del arrancador la consideración anterior es válida. Obsérvese que se 3 El TRIAC se activa con un pulso bajo (cero lógico)
determinó un valor arbitrario de la resistencia R4 y el capacitor C para calcular el dv/dt, pero en el diseño del arrancador se parte de un valor establecido de dv/dt y de la resistencia R4 para determinar el valor adecuado del capacitor de la red Snubber. La resistencia R3 limita los picos de carga y descarga del capacitor. Su valor se determina de acuerdo al voltaje de disparo requerido por el TRIAC y la corriente máxima que soporta el TRIAC del optoacoplador, es decir:
max3 I
VR pk= 3
Ω== 100)10100(
1033 X
R
Donde: Vpk Es el voltaje de disparo requerido en el gate del TRIAC.
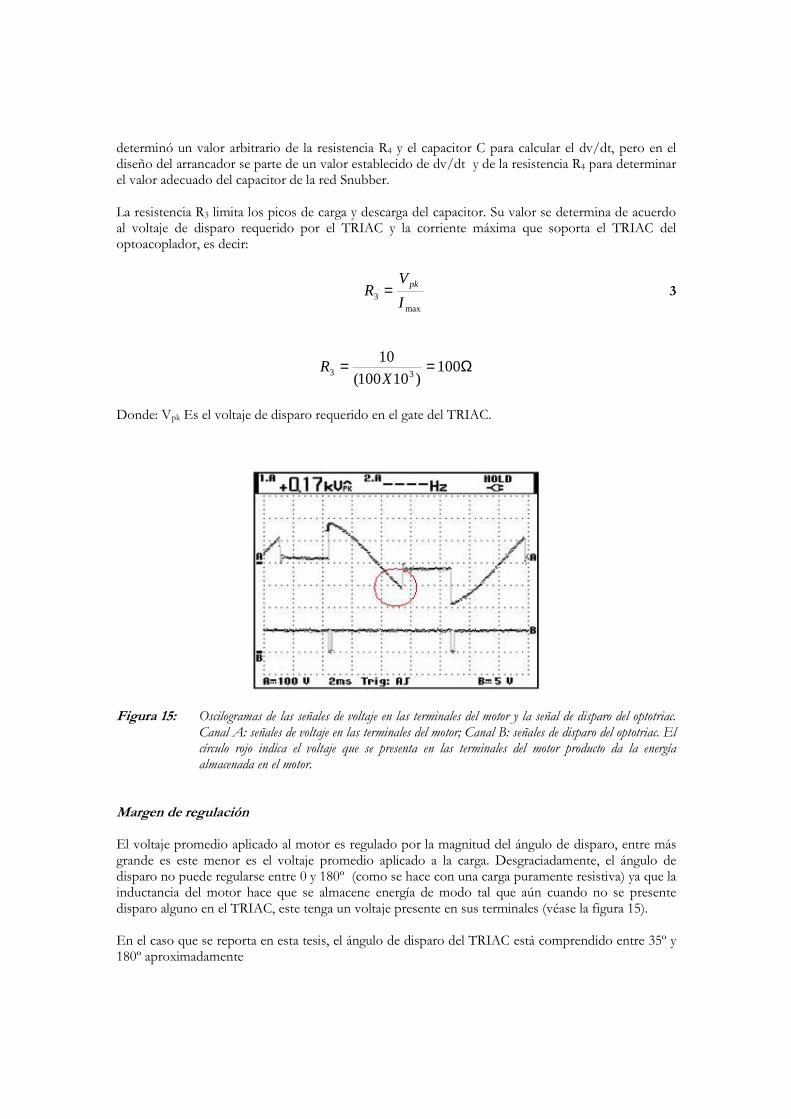
Figura 15: Oscilogramas de las señales de voltaje en las terminales del motor y la señal de disparo del optotriac. Canal A: señales de voltaje en las terminales del motor; Canal B: señales de disparo del optotriac. El círculo rojo indica el voltaje que se presenta en las terminales del motor producto da la energía almacenada en el motor.
Margen de regulación El voltaje promedio aplicado al motor es regulado por la magnitud del ángulo de disparo, entre más grande es este menor es el voltaje promedio aplicado a la carga. Desgraciadamente, el ángulo de disparo no puede regularse entre 0 y 180º (como se hace con una carga puramente resistiva) ya que la inductancia del motor hace que se almacene energía de modo tal que aún cuando no se presente disparo alguno en el TRIAC, este tenga un voltaje presente en sus terminales (véase la figura 15). En el caso que se reporta en esta tesis, el ángulo de disparo del TRIAC está comprendido entre 35º y 180º aproximadamente
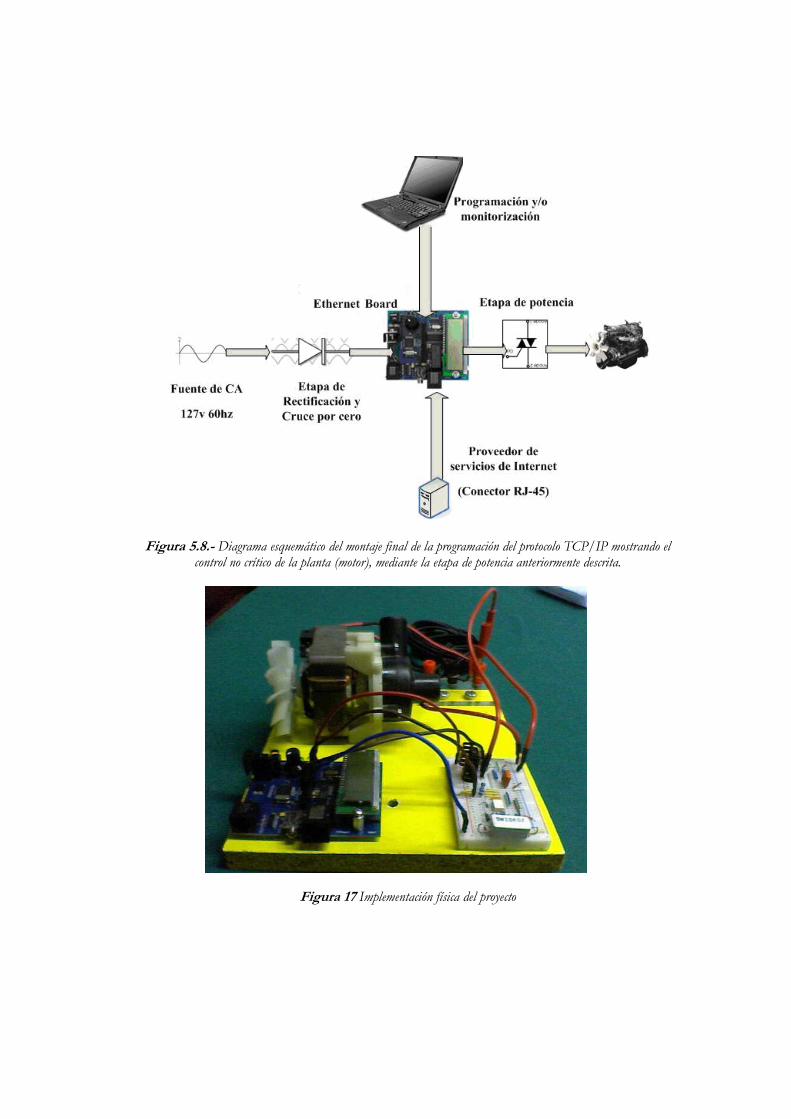
Figura 5.8.- Diagrama esquemático del montaje final de la programación del protocolo TCP/IP mostrando el control no crítico de la planta (motor), mediante la etapa de potencia anteriormente descrita.
Figura 17 Implementación física del proyecto
IMPA CTO
En la sección anterior, se mostraron dos aplicaciones inmediatas de la tarjeta de desarrollo. Una con la que se hacen pruebas preliminares y la otra con una aplicación concreta de electrónica de potencia. Es esta última aplicación la que nos permite visualizar las posibles aplicaciones que con una herramienta así se pueden hacer, teniendo como beneficio:
a) La aplicación de nuevas formas de control de sistemas electrónicos de potencia.
b) El ahorro del rediseño de la electrónica de control.
c) Acortamiento en el tiempo de experimentación.
Los beneficios mencionados anteriormente impactan en la actividad académica y de investigación de la escuela y sirve como base del desarrollo de prototipos. Estos beneficios pueden trascender los muros de la escuela y pueden extenderse con facilidad a la actividad industrial, ya que aplicaciones como las mostradas están presentes, cada ves más frecuentemente, en la actividad industrial.