power quality improvement with shunt hybrid active power...
TRANSCRIPT

International Journal of Advanced Research in Computer Engineering & Technology (IJARCET)
Volume 4 Issue 9, September 2015
3672
ISSN: 2278 – 1323 All Rights Reserved © 2015 IJARCET
Power Quality Improvement With Shunt Hybrid
Active Power Filter Using ANN-Based Predictive and
Adaptive Controllers Mr. CH. VNV HariKrishna Smt. CH. Sujatha Sri. P. Bala KoteswaraRao M.Tech Scholar Associate professor Assistant professor
Department of EEE Department of EEE Department of EEE
Gudlavalleru Engineering College Gudlavalleru Engineering College Gudlavalleru Engineering College
Gudlavalleru, AP, India. Gudlavalleru, AP, India. Gudlavalleru, AP, India.
-----------------------------------------------------------------------***-----------------------------------------------------------------------
Abstract—This paper ensures that improve the dynamic performance of a shunt type Hybrid active power filter how to compensates the harmonic contents in the network. This paper is combination of adaptive and predictive control techniques for fast convergence and reduced calculations. The adaptive and predictive properties of artificial neural networks are used for fast estimate of the compensating current. Here the dc-link voltage is used in a predictive controller to generate the first estimate the compensating current then after by convergence of the algorithm by an adaptive controller ANN i.e. adaline based network. Weights in adaline are automatically adjusted to minimize the total harmonic distortion of the source current. This paper MATLAB Simulations confirms the validity of the proposed scheme for all kinds of loads i.e. balanced and unbalanced for a three-phase three-wire system. Index Terms—Adaptive, current control, nonlinear loads, shunt active power filter (SAPF), Shunt Hybrid active power filter (HAPF), total harmonic distortion (THD), voltage source inverter(VSI).
I. INTRODUCTION
In recent years power quality distortion becomes serious
problem in electrical power systems due increasing of
nonlinear loads drawing non sinusoidal currents. When source
is connected to linear load there is no effect on source then
system will be stable. Also when source is connected to non
linear load, load will produces harmonics on load side, due to
these harmonics source will become non linear. Control of ac power using thyristors and other semiconductor switches are
mostly employs to fed controlled electrical power to electrical
loads, such as adjustable speed drives, furnaces etc. these
controllers are also used in HVDC systems and renewable
electrical power generation. Harmonics in the network are not
only increase the losses but also produce unwanted
disturbance to the communication network, more voltage
and/or current stress, etc.. Different harmonic elimination
techniques are proposed, e.g., passive filter, active power line
conditioner, and also hybrid active filter, have been proposed
and used [1]–[8]. Recent technological advanced switching devices and availability of low cost controlling devices, e.g.
DSP-/field-programmable-gate-array-based system, makes
active power line conditioner a natural choice to compensate
for harmonics. Shunt-type Hybrid active power filter (HAPF)
is used to eliminate the current harmonics.
The dynamic performance of an HAPF is mainly dependent
on how quickly and accurately the harmonic contents are
extracted from the load current. Many harmonic elimination methods are available, and their performance have been
explored. Proposed techniques include traditional d−q [2] and
p−q theory [3]–[5] based approaches, Shunt active power
filter and application of adaptive filters [6], genetic algorithm, artificial neural network (ANN) etc., for quick estimation of
the compensating current [8]. Hybrid active power filter is the
combination of passive filter and active power filter. Different types of combinations are there for hybrid active power filter.
Here in this paper shunt type series connected hybrid active
filer is proposed.
Recently, Artificial Neural Networks have attracted
much different applications, including the APF. A full
“neuromimetic” strategy involving several adalines has been
reported by Abdslam et al. [15].Active power filters have been
shown to be very interesting alternative to compensate power
distribution systems. Shunt hybrid active power filter are more
suitable to compensate current harmonic components and
displacement power factor, while series topologies present
better characteristics to compensate voltage distortions.
Hybrid topology significantly improves the compensation
characteristics of simple passive filters, making active power
filter available for different high power applications, at
relative lower cost. Better performance has been observes
compared to discrete Fourier transform and fast Fourier
transform, or Kalman filtering-based approaches. Tey et al.
[16] reported a modified version. An additional PI controller
is used to regulate the dc-link voltage. The adaptive controller
can adapts for unbalance and change in working conditions..
An adaline-based harmonic compensation is reported by
Singh et al. [17]. Weights are computed online by the LMS
algorithm. Recently we have to seen lot of applications for
artificial neural networks. Here integration of Ann based
predictive and adaptive control techniques are used to
generate gating pulses for voltage source inverter.
Note that parallel implementation of predictive control
International Journal of Advanced Research in Computer Engineering & Technology (IJARCET)
Volume 4 Issue 9, September 2015
3673
ISSN: 2278 – 1323 All Rights Reserved © 2015 IJARCET
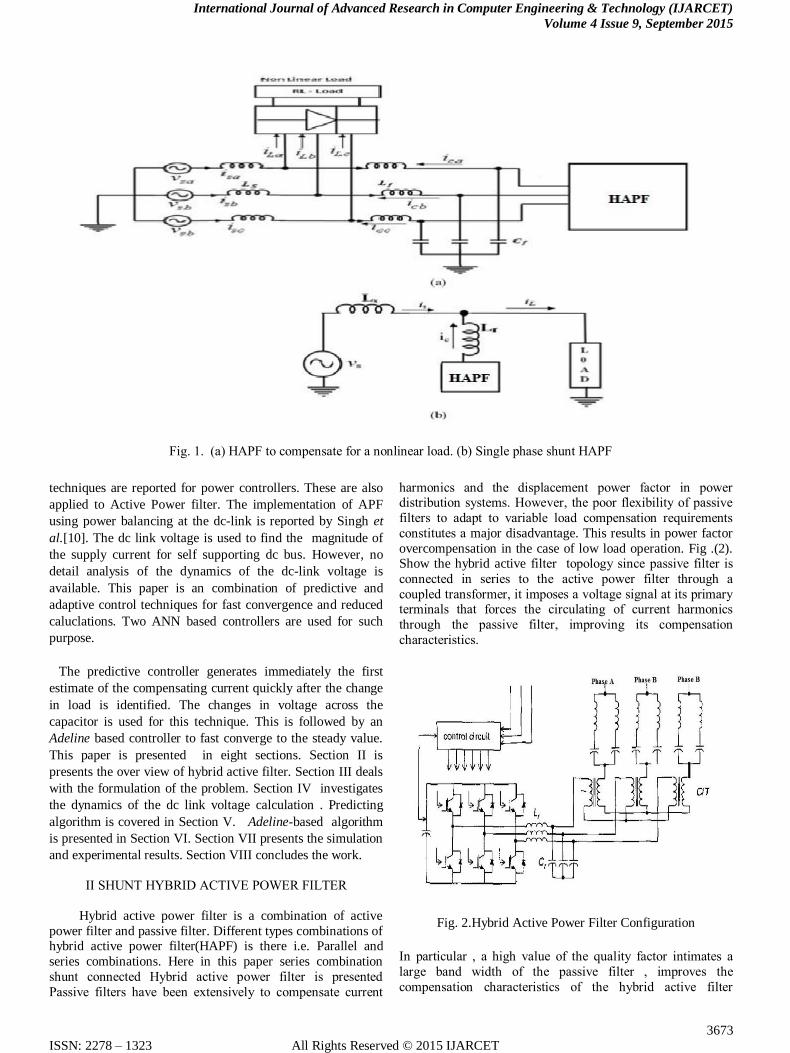
Fig. 1. (a) HAPF to compensate for a nonlinear load. (b) Single phase shunt HAPF
techniques are reported for power controllers. These are also
applied to Active Power filter. The implementation of APF
using power balancing at the dc-link is reported by Singh et
al.[10]. The dc link voltage is used to find the magnitude of
the supply current for self supporting dc bus. However, no
detail analysis of the dynamics of the dc-link voltage is
available. This paper is an combination of predictive and
adaptive control techniques for fast convergence and reduced
caluclations. Two ANN based controllers are used for such
purpose.
The predictive controller generates immediately the first
estimate of the compensating current quickly after the change
in load is identified. The changes in voltage across the
capacitor is used for this technique. This is followed by an
Adeline based controller to fast converge to the steady value.
This paper is presented in eight sections. Section II is
presents the over view of hybrid active filter. Section III deals
with the formulation of the problem. Section IV investigates
the dynamics of the dc link voltage calculation . Predicting
algorithm is covered in Section V. Adeline-based algorithm
is presented in Section VI. Section VII presents the simulation
and experimental results. Section VIII concludes the work.
II SHUNT HYBRID ACTIVE POWER FILTER
Hybrid active power filter is a combination of active
power filter and passive filter. Different types combinations of hybrid active power filter(HAPF) is there i.e. Parallel and
series combinations. Here in this paper series combination
shunt connected Hybrid active power filter is presented
Passive filters have been extensively to compensate current
harmonics and the displacement power factor in power distribution systems. However, the poor flexibility of passive
filters to adapt to variable load compensation requirements
constitutes a major disadvantage. This results in power factor
overcompensation in the case of low load operation. Fig .(2). Show the hybrid active filter topology since passive filter is
connected in series to the active power filter through a
coupled transformer, it imposes a voltage signal at its primary terminals that forces the circulating of current harmonics
through the passive filter, improving its compensation
characteristics.
Fig. 2.Hybrid Active Power Filter Configuration
In particular , a high value of the quality factor intimates a
large band width of the passive filter , improves the
compensation characteristics of the hybrid active filter
International Journal of Advanced Research in Computer Engineering & Technology (IJARCET)
Volume 4 Issue 9, September 2015
3674
ISSN: 2278 – 1323 All Rights Reserved © 2015 IJARCET
topology.
III.ESTIMATION OF CURRENT REFERENCE
Fig. 1(a) shows the HAPF compensating a nonlinear load.
Fig. 1(b) shows the single phase shunt HAPF schematic
diagram. A general expression for the load current (Fig. 1(b)
is
iL(t) = iα1(t) + iβ1(t) + ih(t). (1) The in phase and quadrature components of the phase current at fundamental frequency are iα1 and iβ1, respectively. All other harmonics are included in ih. The perphase source voltage and the corresponding in-phase component of the load current may be expressed as
vs(t) = Vm cos ωt (2)
iα1(t) = Iα1 cos ωt. (3)
Assuming that the APF will compensate for harmonic and reactive power the compensating current becomes
Ic(t) = iL(t) − iα1(t) = iL(t) − Iα1 cos ωt (4)
Where 𝐼𝛼1 is the peak magnitude of in phase current that the
mains supply and hence needs to estimated. Once 𝐼𝛼1 is
estimated over, the reference current for the HAPF may easily be set as per (4). iL(t) may measured using current sensors.
In our proposed scheme, estimation of Iα1 is calculated by
two stages. A single layer ANN based algorithm first
predicts the value of Iα1 following which an adaline based
ANN is used for fast convergence. Note that the inverter also
draws a small current isα(t) to maintain the dc-link voltage.
IV. CONTROL OF DC-LINK VOLTAGE IN APF
The dynamics of the dc link voltage is an indirect measure of
the performance of the APF. Whenever there is a change in
the load, the voltage across the dc link capacitor also
undergoes a corresponding change. A controller is used to
keep the voltage regulated at a desire value. In this
following section, a simple process of the dynamics of the
dc-link voltage is first carried out. Parameters that preside
over the dynamics are identified, following which an
algorithm is developed it estimate the compensating current
of the APF. To maintain the dc bus voltage to a desired
magnitude, the capacitor draws in phase i.e., in phase with the
source voltage current isα. This is in addition to the
compensating current ic. From the power balance equation
pdc = cdc vdcdvdc
dt (5)
Where pdc is the power required to maintain the voltage
Vdc across the dc link.
vsi(t)isαi(t)i = a,b,c − Rf(i2sαi(t) i=a,b,c + i2ci(t))
− 1/2 Lfi = a,b,c d/dt(i2sαi(t)+ i2ci (t)) = idc(t)vdc(t)
= pdc (6)
Where Rf and Lf are the resistance and inductance of the inductor that is connected in between the common coupling
point and the voltage source inverter. We remembers that Isα supplies the system loss at the steady state and Charges,
discharges the capacitor during transient to maintain the
dc link voltage. Considering that “power” is a scalar quantity,
(6) for a balanced three-phase system may be expressed as
3vs t isα t − 3Rf i2sα t + i2
c t
−3
2Lf
d
dt i2
sα t + i2c t = idc t vdc t = pdc (7)
Applying small perturbations in is , isα , vdc and vs , the
following new set of variables may be obtained:
is(t) = Ic + ∆ic (8)
isα(t) = Isα + ∆isα (9)
vdc (t) = Vdc + ∆vdc (10)
vs(t) = Vs + ∆vs (11)
where Ic , Isα and Vs are rms and Vdc is the dc value of the
corresponding values at the operating point. After at steady
state
3𝑉𝑠Isα − 3𝑅𝑓(𝐼2sα + 𝐼2
c ) = 0 (12)
Substituting (8)–(12) in (7), the following equation is
obtained:
3 ∆𝑣𝑠𝐼𝑠𝛼 + ∆𝑣𝑠𝑖𝑠𝛼 − 6𝑅𝑓 𝐼𝑠𝛼∆𝑖𝑠𝛼 + 𝐼𝑐∆𝑖𝑐 −
3𝐿𝑓(𝐼𝑠𝛼𝑑∆𝑖𝑠𝛼
𝑑𝑡+𝐼𝑐
𝑑∆𝑖𝑐
𝑑𝑡) = CdcVdc
dΔVdc
dt (13)
Converting the variables to s-domain and after rearranging,
(13) may be expressed as
ΔVdc(s )= KGs (s)G1(s)G2(s)
1+KGs (s)G1(s)G2(s) ΔV∗dc(s)
− G2(s)G3(s)
1 + KGs(s)G1(s)G2(s)ΔIc(s)
+ G2(s)G4(s)
1+KGs (s)G2(s)G4(s) ΔVs(s) (14)
where
K is the small signal gain. Detail derivation of (14)from(13)is available in the Appendix.
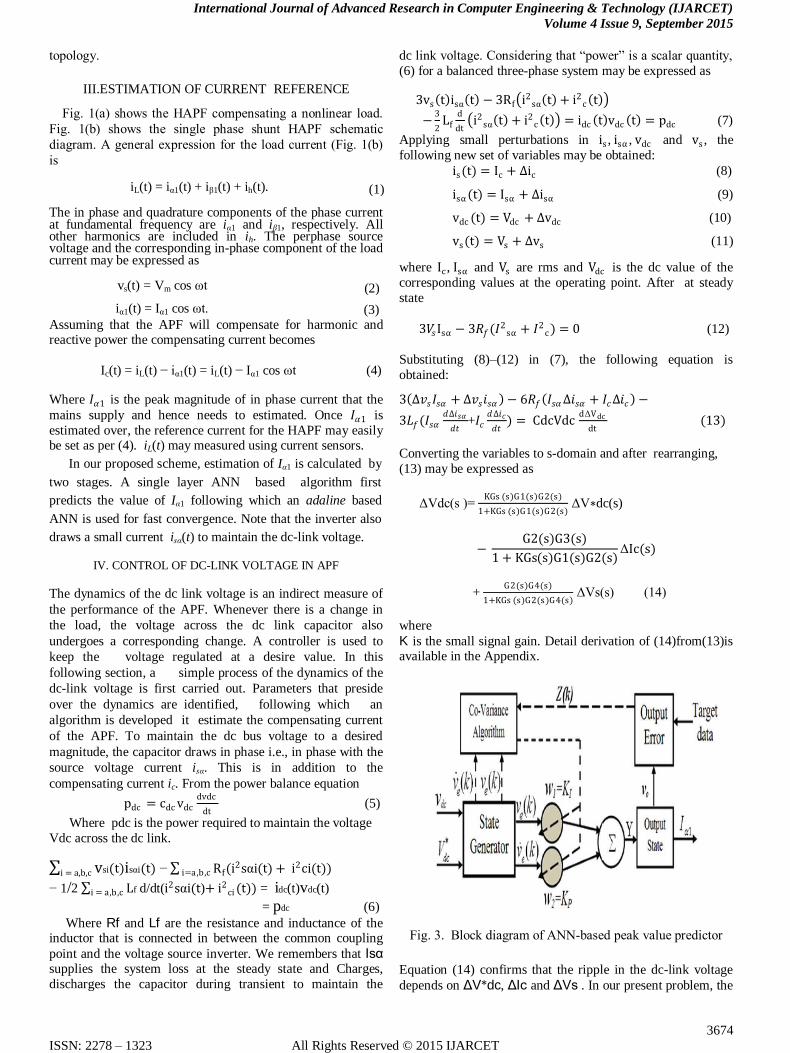
Fig. 3. Block diagram of ANN-based peak value predictor
Equation (14) confirms that the ripple in the dc-link voltage
depends on ΔV*dc, ΔIc and ΔVs . In our present problem, the

International Journal of Advanced Research in Computer Engineering & Technology (IJARCET)
Volume 4 Issue 9, September 2015
3675
ISSN: 2278 – 1323 All Rights Reserved © 2015 IJARCET
distortion in source voltage and reference dc-bus voltage is
not considered. Therefore, (14) further modifies to
ΔVdc(s) = − −G2(s)G3(s)
1+KGs (s)G1(s)G2(s)ΔIc(s). (15)
This explores the possibility of extracting an estimate of the
compensating current from the change in Vdc . The gains of the PI controller used to regulate the dc-link voltage are
preside over by the following two inequalities(26):
Is < cdc v∗dc
3Kp Lf (16)
Is ≤ Kp Vs
2Rf Kp +Lf KI (17)
All the ac quantities in (16) and (17) are expressed as
rms value. Is, 𝑣∗dc and Vs are the source current, reference
dc-link voltage and source voltage, respectively. Equations
(16) and (17) are used to generate an initial guess of Kp and
KI and also to set their limits.
V. ANN-BASED FAST ESTIMATION OF
COMPENSATING CURRENT
An ANN-based PI controller plays a important dual role. It
ensures faster reference generation and is also accountable for
better regulating of dc-bus voltage. The block daigram of the system (i.e. ANN-tuned adaptive PI controller) is shown
in Fig. 4. To reduce computational burden, a single-layer
ANN structure issued. The input vector as expressed in
(18) is gives to the state exchanger. In our scheme, error
voltage and its gradient are chosen as the state of the
system to ensure faster corrective action
u = [𝑉∗𝑑𝑐 𝑣𝑑𝑐 ]𝑇 (18)
The task of the state generator block is to generate states
x1 andx2 as follows:
𝑥1 = 𝑣𝑒 𝑘 𝑥2 =𝛿𝑥1
𝛿𝑘 (19)
Where 𝑣𝑒 𝑘 = 𝑉∗𝑑𝑐 − 𝑣𝑑𝑐 (𝑘).The output error z(k) is
represented as
z(k)= 𝑣0 (k)− 𝑣0 (k−1). (20 )
The output vo(k) is fed to output state to estimateIα1.
Neuron cell generates controlling signal through interrelated
gathering as
u(k) = u(k−1) +Σ 𝑤𝑖2𝑖=1 𝑘 𝑥𝑖(𝑘) (21)
where wi is the weight of the system.
Here, a neuron is trained by Hebb’s rule [27], [28].
Therefore, the change of weight of the neuron cell at kth
instant may be represented as
𝑤𝑖 𝑘 + 1 = (1 − 𝑐) 𝑤𝑖(k) + η𝑟𝑖(𝑘) (22)
𝑟𝑖 𝑘 = z(k)u(k) 𝑥𝑖(𝑘 ) (23)
where ri is the progressive signal, η is Hebb’s studying ratio
(learning rate), and “c” is a constant. Substituting (22) and (23) in (21), the following equation may be obtained:
Δ 𝑤𝑖(k) i(k) = 𝑤𝑖 𝑘 + 1 − 𝑤𝑖(k)
= − c[𝑤𝑖(k) –η z(k) u(k) 𝑥𝑖(𝑘) /c] (24) Δwi(k)is the change of weight at kth step. Weights of the
neuron are tuned according to Hebb’s assumption. Hebb’s
assumption is popularly known as the covariance algorithm. Finally, for the PI controller, the weights are represented by
𝑤1 (k+1) = 𝑤1 (k) + η 𝐼𝑧(𝑘) 𝑥1 (k) (25)
𝑤2 (k+1) = 𝑤2 (k) + η𝑃𝑧 (k) 𝑥2 (k) (26)
Whenever the ANN is initiated, it starts with a set of
controller gains to generate the first estimate of the
compensating current. These initial values of controller
parameters are set by offline training of the ANN. The controller parameters are then adjusted following (28) and
(29) to regulate the dc-link voltage.
VI . ADAPTIVE CURRENT DETECTION TECHNIQUE
The ANN in Section IV provides an initial guess for any
change in system dynamics. To generate more accurate
reference for APF, load current samples are fed to the
adaline based network shown in Fig. 3. Adaline is designed
to minimize the total harmonic distortion (THD) of source
current. Uncompensated source current sample s(k) may be
represented as
𝑠 𝑘 = 𝐼𝛼1 cos(𝜔𝑘𝑡𝑠) +
𝐼𝛽1 sin (𝜔𝑘𝑡𝑠) + In cos(𝑛𝜔𝑘𝑡𝑠 +Rn=2 𝜙𝑛 ) (27)
Where 𝑡𝑠 is the step size in discrete domain. The square of
error terms for kth sample may be expressed as
ε2(k) =[ [s2 k − 2s k a(k)]
a2(k)+ 1 ] (28)
Where
a2(k)=I2α1(k)cos2 (𝜔𝑘𝑡𝑠) + I2
β1(k)sin2 (𝜔𝑘𝑡𝑠) (29)
Equation (31) may also be represented as
ε2(k) = {s2 (k)−2s k [XT k α k α−T k X(k)]}
XT k α k α−T k X(k) + 1 (30)
where the vector
α(k) = [𝐼𝛼1 𝑘 , 𝐼𝛽1 𝑘 ] (31)
and the input vector
X(k) = [cos 𝜔𝑘𝑡𝑠 , sin 𝜔𝑘𝑡𝑠]𝑇 (32)
The compensating current is then calculated according to (4).
Convergence of this method is faster than existing adaline
based schemes due to the use of less number of tuning blocks.
The orthogonal relationship between the input vectors reduces
the computational burden of the system.
International Journal of Advanced Research in Computer Engineering & Technology (IJARCET)
Volume 4 Issue 9, September 2015
3676
ISSN: 2278 – 1323 All Rights Reserved © 2015 IJARCET
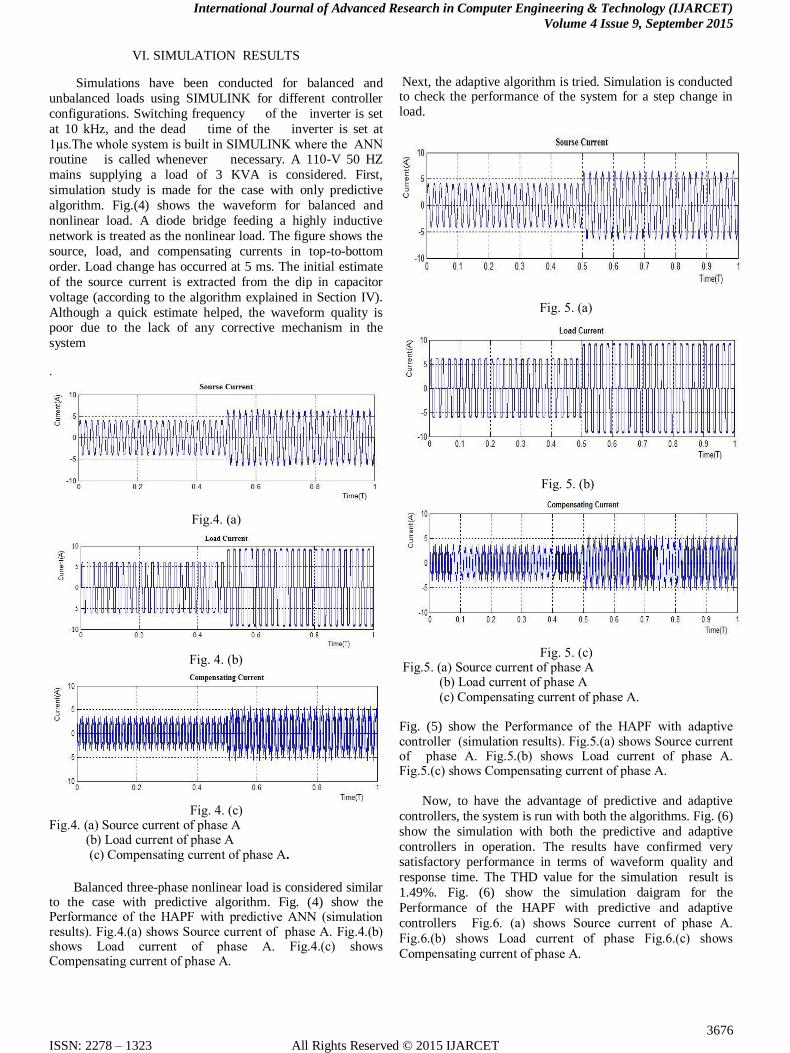
VI. SIMULATION RESULTS
Simulations have been conducted for balanced and
unbalanced loads using SIMULINK for different controller
configurations. Switching frequency of the inverter is set
at 10 kHz, and the dead time of the inverter is set at
1μs.The whole system is built in SIMULINK where the ANN routine is called whenever necessary. A 110-V 50 HZ
mains supplying a load of 3 KVA is considered. First,
simulation study is made for the case with only predictive
algorithm. Fig.(4) shows the waveform for balanced and
nonlinear load. A diode bridge feeding a highly inductive
network is treated as the nonlinear load. The figure shows the
source, load, and compensating currents in top-to-bottom
order. Load change has occurred at 5 ms. The initial estimate
of the source current is extracted from the dip in capacitor
voltage (according to the algorithm explained in Section IV).
Although a quick estimate helped, the waveform quality is poor due to the lack of any corrective mechanism in the
system .
Fig.4. (a)
Fig. 4. (b)
Fig. 4. (c)
Fig.4. (a) Source current of phase A (b) Load current of phase A (c) Compensating current of phase A.
Balanced three-phase nonlinear load is considered similar to the case with predictive algorithm. Fig. (4) show the Performance of the HAPF with predictive ANN (simulation results). Fig.4.(a) shows Source current of phase A. Fig.4.(b) shows Load current of phase A. Fig.4.(c) shows Compensating current of phase A.
Next, the adaptive algorithm is tried. Simulation is conducted to check the performance of the system for a step change in load.
Fig. 5. (a)
Fig. 5. (b)
Fig. 5. (c)
Fig.5. (a) Source current of phase A (b) Load current of phase A (c) Compensating current of phase A. Fig. (5) show the Performance of the HAPF with adaptive controller (simulation results). Fig.5.(a) shows Source current of phase A. Fig.5.(b) shows Load current of phase A. Fig.5.(c) shows Compensating current of phase A.
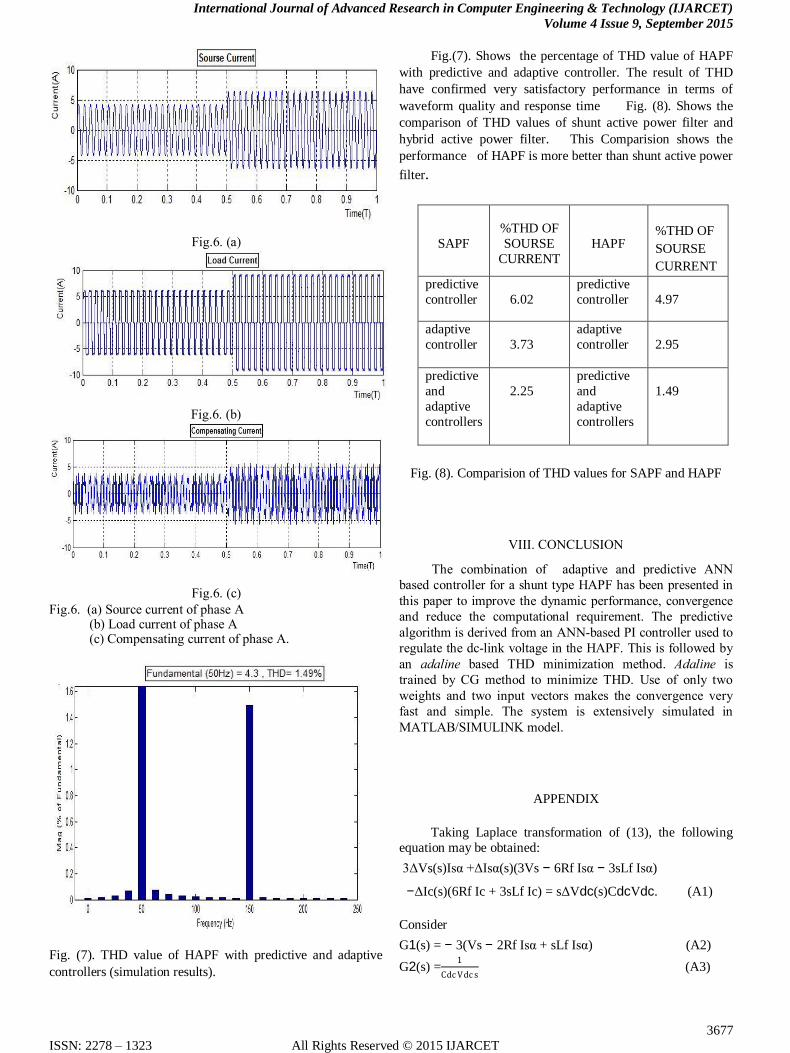
Now, to have the advantage of predictive and adaptive
controllers, the system is run with both the algorithms. Fig. (6)
show the simulation with both the predictive and adaptive
controllers in operation. The results have confirmed very satisfactory performance in terms of waveform quality and
response time. The THD value for the simulation result is
1.49%. Fig. (6) show the simulation daigram for the
Performance of the HAPF with predictive and adaptive
controllers Fig.6. (a) shows Source current of phase A.
Fig.6.(b) shows Load current of phase Fig.6.(c) shows
Compensating current of phase A.
International Journal of Advanced Research in Computer Engineering & Technology (IJARCET)
Volume 4 Issue 9, September 2015
3677
ISSN: 2278 – 1323 All Rights Reserved © 2015 IJARCET
Fig.6. (a)
Fig.6. (b)
Fig.6. (c)
Fig.6. (a) Source current of phase A (b) Load current of phase A (c) Compensating current of phase A.
Fig. (7). THD value of HAPF with predictive and adaptive
controllers (simulation results).
Fig.(7). Shows the percentage of THD value of HAPF
with predictive and adaptive controller. The result of THD
have confirmed very satisfactory performance in terms of
waveform quality and response time Fig. (8). Shows the
comparison of THD values of shunt active power filter and
hybrid active power filter. This Comparision shows the
performance of HAPF is more better than shunt active power
filter.
SAPF
%THD OF
SOURSE
CURRENT
HAPF
%THD OF
SOURSE
CURRENT
predictive
controller
6.02
predictive
controller
4.97
adaptive
controller
3.73
adaptive
controller
2.95
predictive
and
adaptive
controllers
2.25
predictive
and
adaptive
controllers
1.49
Fig. (8). Comparision of THD values for SAPF and HAPF
VIII. CONCLUSION
The combination of adaptive and predictive ANN
based controller for a shunt type HAPF has been presented in
this paper to improve the dynamic performance, convergence
and reduce the computational requirement. The predictive
algorithm is derived from an ANN-based PI controller used to
regulate the dc-link voltage in the HAPF. This is followed by
an adaline based THD minimization method. Adaline is
trained by CG method to minimize THD. Use of only two
weights and two input vectors makes the convergence very
fast and simple. The system is extensively simulated in
MATLAB/SIMULINK model.
APPENDIX
Taking Laplace transformation of (13), the following
equation may be obtained:
3ΔVs(s)Isα +ΔIsα(s)(3Vs − 6Rf Isα − 3sLf Isα)
−ΔIc(s)(6Rf Ic + 3sLf Ic) = sΔVdc(s)CdcVdc. (A1)
Consider
G1(s) = − 3(Vs − 2Rf Isα + sLf Isα) (A2)
G2(s) =1
Cdc Vdc s (A3)

International Journal of Advanced Research in Computer Engineering & Technology (IJARCET)
Volume 4 Issue 9, September 2015
3678
ISSN: 2278 – 1323 All Rights Reserved © 2015 IJARCET
G3(s) =3(2Rf Ic + sLf Ic) (A4)
G4(s) =3Isα. (A5) Substituting (A2)–(A5) in (A1), the following equation may
be derived:
ΔVs(s)G4(s) + ΔIsα(s)G1(s) − ΔIc(s)G3(s)
= ΔVdc(s)1
G2(s) (A6)
The relation between isα and vdc may be expressed as
isα = Kdv dc
dt (A7)
where K is the small-signal gain and isα is the part of the source current used to stabilize the dc-bus voltage.
Instantaneous dc link voltage is compared with the reference
dc voltage, and the error voltage in Laplace domain may be
expressed as
Ve(s) = V∗dc
s − Vdc(s). (A8)
A PI controller may be used to maintain the capacitor voltage.
Therefore, the output of the PI controller may be expressed as
Vo(s) = (KP + KI
s )Ve(s). (A9)
Thus, (A7) may be modified as
ΔIsα(s) = KGs(s)( ΔV ∗dc
s − ΔVdc(s)) (A10)
where
(KP + KIs) = Gs(s). (A11)
Substituting values of ΔIsα(s) in (A1), (14) is obtained (in Section IV).
REFERENCES
[1] B. Singh, K. Al-Haddad, and A. Chandra, “A review of active power filters for power quality improvements,” IEEE Trans. Ind. Electron., vol. 46, no. 5, pp. 960–971, Oct. 1999.
[2] S. Bhattacharya, T. M. Frank, D. M. Divan, and B. Banerjee, “Active filter system implementation,” IEEE Ind. Appl. Mag., vol. 4, no. 5, pp. 47–63, Sep./Oct. 1998.
[3] H. Akagi, Y. Kanazawa, and A. Nabae, “Instantaneous reactive power compensators comprising switching devices without energy storage com-ponents,” IEEE Trans. Ind. Appl., vol. IA-20, no. 3, pp. 625–630, May 1984.
[4] F. Z. Peng, G. W. Ott, Jr., and D. J. Adams, “Harmonic and reactive power compensation based on the generalized instantaneous reactive power the-ory for three phase four wire system,” IEEE Trans. Power Electron., vol. 13, no. 6, pp. 1174–1181, Nov. 1998.
[5] R. S. Herrera and P. Salmeron, “Instantaneous reactive power theory: A reference in the nonlinear loads compensation,” IEEE Trans. Ind. Elec-tron., vol. 56, no. 6, pp. 2015–2022, Jun. 2009.
[6] T.Mahalekshmi “Current Harmonic Compensation and Power Factor Improvement by Hybrid Shunt Active Power Filter” International Journal of Computer Applications (0975 – 8887) Volume 4 – No.3, July 2010.
[7] Elsa Susan Daniel and G.Abirami “Selective Harmonic Elimination Using Shunt Hybrid Active Power Filters Operating At Different Switching Frequencies” International Journal of Innovative Research In Electrical & Electronics, Instrumentation And Control Engineering Vol. 1, Issue 1, April 2013.
[8] L. Chen and A. Jouanne, “A Comparison and Assessment of Hybrid Filter Topologies and Control Algorithms”, Proceedings of The IEEE Power Electronics Specialists Conference (PESC), June 17-21, 2001, Vancouver, Canada: IEEE Trans. 2001, Pp. 565-570.
[9] D.Rivas, L.Moran, J. Dixon and J.Espinoza, “A simple control scheme
for hybrid active power filter”, IEE proc-Gener. Transm. Distrib, Vol. 149, No 4, July 2002.
[10] B. N. Singh, B. Singh, A. Chandra, and K. Al-Haddad, “Design and digital implementation of active filter with power balance theory,” Proc Inst. Elect. Eng.—Electr. Power Appl., vol. 152, no. 5, pp. 1149–1160, Sep. 2005.
[11] A. Hamadi, S. Rahmani, and K. Al-Haddad, “A hybrid passive filter configuration for VAR control and harmonic compensation,” IEEE Trans. Ind. Electron., vol. 57, no. 7, pp. 2419–2434, Jul. 2010.
[12] B. Widrow and M. A. Lehr, “30 years of adaptive neural networks: Perceptron, madaline and back propagation,” Proc. IEEE, vol. 78, no. 9, pp. 1415–1442, Sep. 1990.
[13] L. H. Tey, P. L. So, and Y. C. Chu, “Improvement of power quality using adaptive shunt filter,” IEEE Trans. Power Del., vol. 20, no. 2, pp. 1558– 1568, Apr. 2005
[14] power filters,” IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 61–76, Feb. 2007 D. O. Abdeslam, P. Wira, J. Merckle, D. Flieller, and Y. A. Chapuis, “A unified artificial neural network architecture for active.
[15] L. H. Tey, P. L. So, and Y. C. Chu, “Improvement of power quality using adaptive shunt filter,” IEEE Trans. Power Del., vol. 20, no. 2, pp. 1558– 1568, Apr. 2005.
[16] B. Singh, V. Verma, and J. Solanki, “Neural network-based selective compensation of current quality problems in distribution system,” IEEE Trans. Ind. Electron., vol. 54, no. 1, pp. 53–60, Feb. 2007.