pic 18f45xx - ies luis de lucena€¦ · características de un motor de corriente contínua (dc)...
TRANSCRIPT

PIC 18F45XX
Control de motores D.C(controlador LM293D)

1. Características de un motor de corriente contínua (DC)
➔ Convierte la energía eléctrica en mecánica (Giro de su eje).
➔ Está compuesto por una parte fija (estator) y un eje móvil (rotor).
➔ Fácil control de posición, velocidad y giro.
➔ Máquina reversible motor/generador. Al mover el eje se produce una
tensión en bornes del motor.
➔ La velocidad de giro es proporcional a la tensión de alimentación.
➔ Para invertir el sentido basta invertir el sentido de la corriente.

2. Ejemplos de motores de DC
Motor sin caja reductora como ventilador en pc's, fuentes de alimentación, etc.
Motor con caja reductora acoplada externamente. Cambiando los engranajes se cambia la reducción (XX:1)
Motor con caja reductora integrada. No se puede cambiar la relación (XX:1)
Motor DC en patinete
Motor DC industrial

3. Características del motor Micro Gear Motor (pololu)
(*) Aumentar la tensión de alimentación produce un aumento de velocidad de giro, pero no conviene superar en más de un 20% el valor nominal para no provocar sobrecalentamientos.
(*) Aumentar la tensión de alimentación produce un aumento de velocidad de giro, pero no conviene superar en más de un 20% el valor nominal para no provocar sobrecalentamientos.
(*) Aumentar la tensión de alimentación produce un aumento de velocidad de giro, pero no conviene superar en más de un 20% el valor nominal para no provocar sobrecalentamientos.
• Voltaje nominal: 6V (*)
• Velocidad de giro RPM: 140
• Fuerza en el eje: (4.7 kg-cm)
• Corriente con eje bloqueado: 1600mA
• Reductora: 210:1
• Tamaño (mm): 1.42" x 0.39" x 0.47"
• Peso: 10g
• PVP: 16 €

4. Tabla comparativa.
Observar que los motores “lentos” (con reductoras grandes) tienen mucha fuerza en el eje y los motores “rápidos” (con reductoras pequeñas) tienen poca fuerza.
La elección de la velocidad del motor es un factor muy importante que habrá que considerar en función de la aplicación a la que vaya destinado.

5. El driver L293D. Características
➔ Cuatro canales de salida (habilitados de dos en dos).
➔ Corriente de salida de hasta 1A por canal.
➔ Señales de control compatibles TTL (max. 7v).
(conexión directa con el PIC)
➔ Posibilidad de controlar hasta cuatro motores sin
inversión de giro o dos motores con control de giro.
➔ Posibilidad de alimentación externa de motores de
hasta 36v DC.
➔ El modelo L293D incluye diodos de protección
internos
La hoja de características original, en inglés, del L293 se puede descargar en:
http://www.iesluisdelucena.es/dpp/docs/l293.rar

6. El driver L293D. Modos de conexión de motores
➔ Vcc1: Tensión de alimentación del driver (normalmente 5v)
➔ Vc: Tensión para las salidas de los motores (Batería externa de hasta 36v)

7. Modo 1: Hasta cuatro motores sin inversión de giro
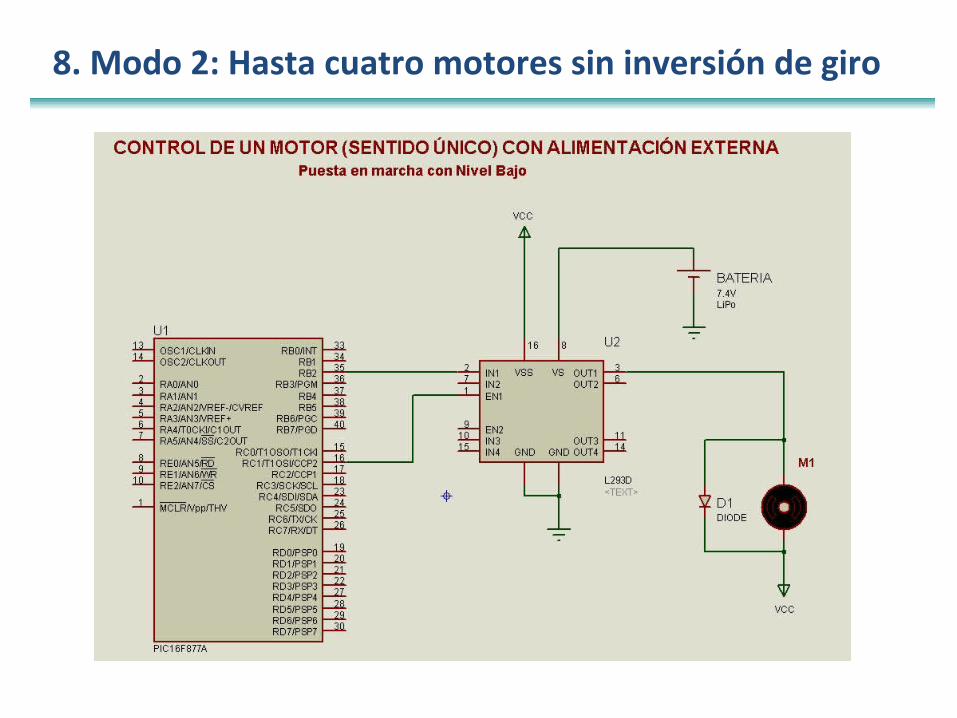
8. Modo 2: Hasta cuatro motores sin inversión de giro

9. Modo 2: Hasta dos motores con inversión de giro

10. El driver L293DD en la Placa Plumabot
➔ Tensión de alimentación de motores seleccionable (VM)
➔ Posibilidad de controlar dos motores con inversión de giro.
➔ Habilitación del MOT1 con el pin RC1 y control de giro con RB2
➔ Habilitación del MOT2 con el pin RC2 y control de giro con RB3

11. Alimentación de motores
Select: (*)
VM: conexión de la alimentación
externa (batería LiPo, etc)
MOT1: conexión del motor1
MOT2: conexión del motor2
(*)

12. Control de motores en C18. Funciones de control (I)
Para poder controlar los motores vamos a crear un archivo “motores.h” con las funciones de todos los movimientos posibles de nuestro robot.
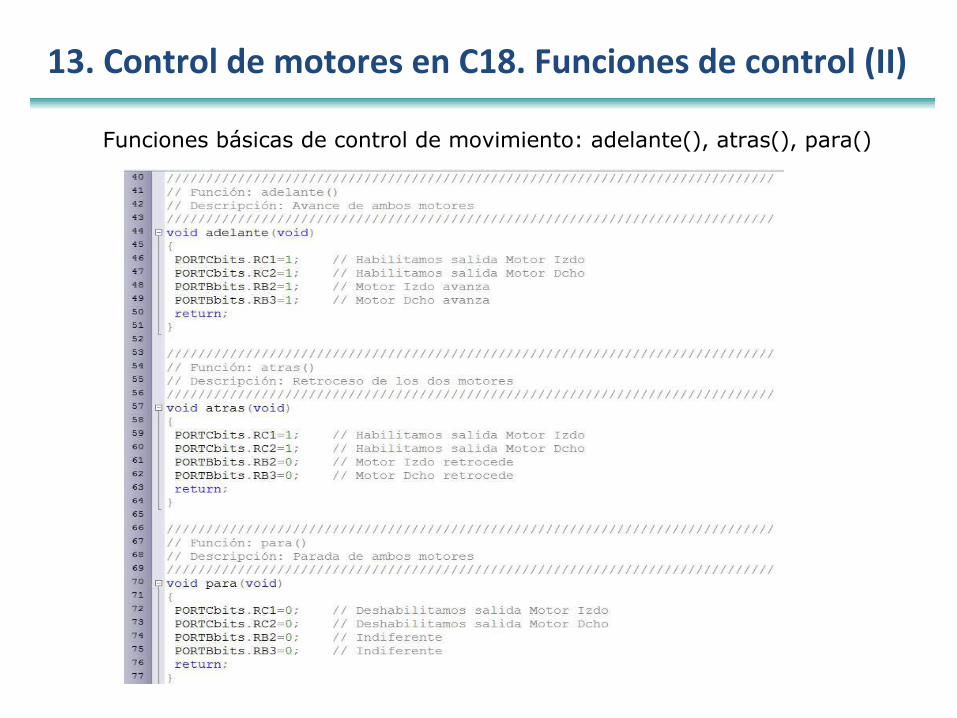
13. Control de motores en C18. Funciones de control (II)
Funciones básicas de control de movimiento: adelante(), atras(), para()

14. Simulación en Proteus (I)
(1) Elegir el Motor: MOTOR-DC
(2) Elegir el driver: L293D

15. Simulación en Proteus (II)
Esquema de simulación de motores
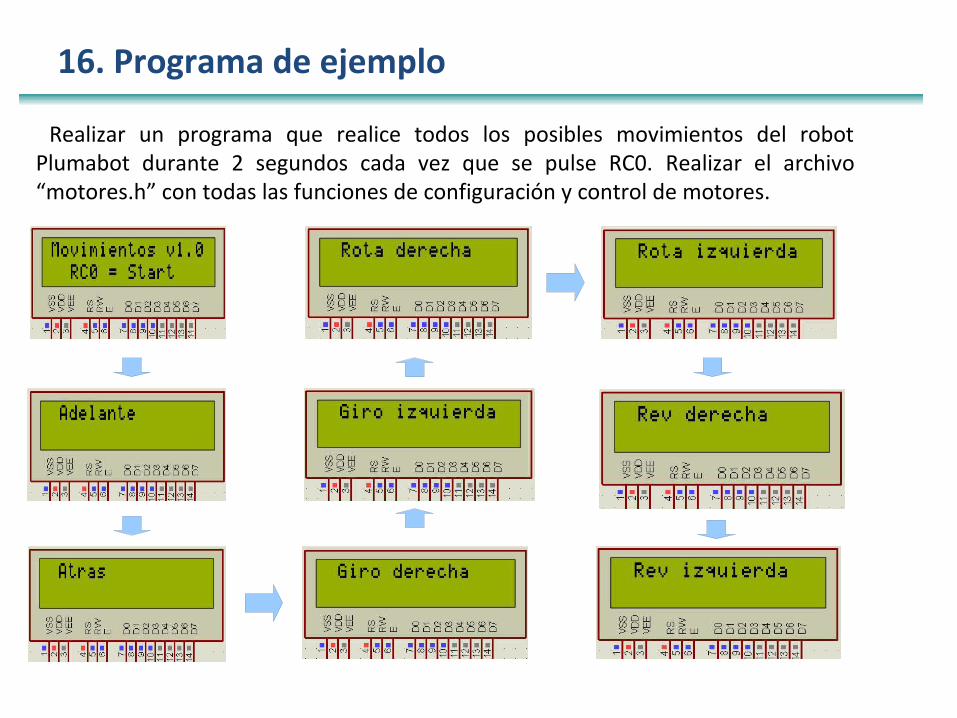
16. Programa de ejemplo
Realizar un programa que realice todos los posibles movimientos del robot Plumabot durante 2 segundos cada vez que se pulse RC0. Realizar el archivo “motores.h” con todas las funciones de configuración y control de motores.
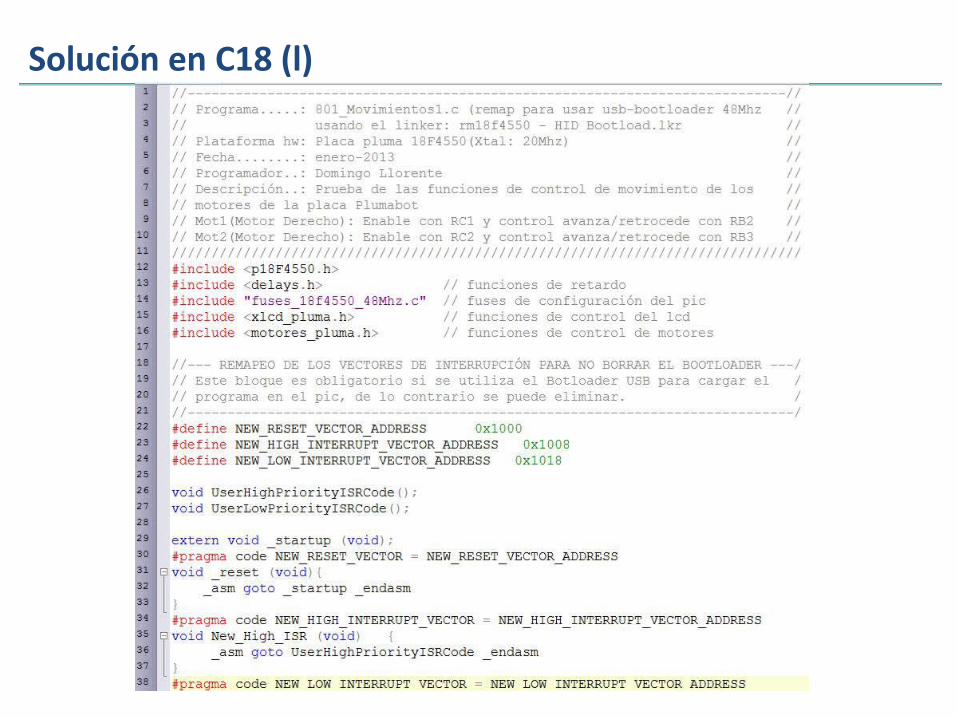
Solución en C18 (l)

Solución en C18 (II)

Solución en C18 (III)

Simulación en Proteus