payri_cinemática y equilibrado
TRANSCRIPT


Dirigido por:
-PROF.DR . M. MUNOZ PROF. DR. F. PAYRI catedrático E. T . S . l. l. - U . P.M . catedrático E.T.S.J.I.- U.P.V.
SECCION DE PUBLICACIONES DE LA E.T.S. DE INGENIEROS INDUSTRIALES
. FUNDACION GENERAL-U.P.M.
CAPITULO 20
CINEMA TIC A Y DI NA MICA DE LOS MOTORES Al TERNA TI VOS
20.1. Cinemática del mecanismo biela-manivela
20.2. Reducción de las masas del mecanismo biela-manivela
20.3. Fuerzas generadas por el movimiento de un motor
20.4. Par motor
20.5. Momentos resultantes
20.6. Consideraciones finales . Diagramas polares
•
T. SANCHEZ Dr. lng. Industrial
J. CASANOVA Dr. lng. Industrial
-A. MUNOZ lng. Industrial
:\ . ' •
'
' '

•
20.1. CINEMATICA DEL MECANISMO BIELA-MANIVELA
1 . Introducción
El movimiento alternativo del pistón se transforma en movimiento de rotación del eje, cigüeñal, mediante el mecanismo biela-manivela.
"
Este mecanismo, que se encuentra representado en la figu·ra 20.1, está constituido esencialmente por la manivela OA, la biela AB y el pistón.
•
PMS S
S e
•
L • • •
PM 1
•
,_,-- -- ..
•
Fig. 20.1. Esquema del mecanismo bielamanivela de un motor alternativo -
w
El punto O representa el punto de corte del eje de giro del cigüeñal con el plano formado por la biela y la manivela. La biela va articulada por su pie con el bulón del pistón (punto 8) y por su cabeza con la muñequilla del cigüeñal (punto A). La mani- · vela es uno de los brazos del cigüeñal que unen los muñones de apoyo del mismo a las muñequillas .
Podemos clasificar los mecanismos bielamanivela en dos tipos:
a) Centrado
En este caso la prolongación de la trayectoria del punto B pasa por el punto O. Dicho de otra manera, cuando el eje del pistón corta al cigüeñal.
b) Descentrado
Sería el caso contrario al anterior, es decir, el eje del pistón no corta al cigüeñal. En la figura 20.2 se representa un mecanismo biela-manivela descentrado en sus
•

1 .
Cinemática y dinlllmica de los motores alternativos 553
tipo de los dos mencionados anteriormente.
Como el valor del descentrado es relativamente pequeño, del orden de 0,02 R, en el estudio cinemática no se tiene en cuenta.
El estudio cinemática de un mecanismo es el paso previo para el estudio dinámico y sólo se ocupa del movimiento en sí, sin atender a las causas que lo han originado. Comprende tres partes que serán tratadas a cont inuación: determinación de los desplazamientos, de las velocidades y de las aceleraciones.
Conviene señalar, por último, que consideraremos la velocidad de giro del cigüeñal constante. Aunque esto no es del todo cierto, debido a las irregularidades del par motor, es suficientemente exacto para nuestro estudio. En el caso, por ejemplo, del estudio de vibraciones torsionales sería necesario tener en cuenta las variaciones de dicha velocidad.
2. Movimiento de la manivela
La manivela está unida rígidamente al eje del cigüeñal formando parte de él, por lo que su movimiento será de giro con velocidad angular constante w. Los desplazamientos angulares respecto de su posición cuando el pistón se halla en el PMS, serán representados con el ángulo a, figura 20.1.
3 . Movimiento del pistón
El pistón evoluciona en el interior del cilindro con un movimiento alternativo de trayectoria rectilínea y de velocidad y aceleración no constante.
a) Desplazamiento
Nos vamos a referir a la figura 20.1, empleando la notación allí indicada. Por tanto, cuando la manivela haya girado un ángulo a , el pistón se habrá desplazado desde el PMS una distancia s. Vamos a expresar el desplazamiento s del pistón en función del desplazamiento angular a de la manivela:
- 08, - ( OC + CB l -
R + L - ( R cosa + L cos6l = R [ 1 + L
- (cosa + L
- cos¡3ll
Si hacemos A -R
L
R R
podemos expresar la· ecuacióñ de la forma:

552
( Q)
,......¡._r-).4=::;-eJe del ci li ndro
.8
---+--.......... 1
o
Motores de combustión interna alternativos
~ 0,02 R
( b )
· Fig. 20.2. Mecanismo biela-manivela descentrado
dos versiones: descentramiento del eje del pistón respecto del cigüeñal y descentramiento del bulón respecto del eje del pistón.
La idea del mecanismo biela-maniv,ela descentrado es muy antigua y gran parte de los primitivos motores lentos tenían el eje del cigüeñal descentrado respecto del plano formado por los ejes de los cilindros. La razón fundamenta l que condujo a esta disposición fué la de disminuir el esfuerzo que ejerce el pistón sobre las paredes del cilindro durante la carrera de trabajo y aumentarlo en la compresión, a f in de reducir la fricción y conseguir un desgaste más uniforme. Téngase en cuenta que, mediante el descentrado, disminuye la desviación angular de la biela durante la carrera descendente y aumenta en la ascendente.
Por otra parte, el descentrado reduce la velocidad del pistón en las proximidades del PMS, lo que tiende a mejorar la combustión a volumen constante y desde el punto de vista constructivo resulta menos crítico el espacio necesario para el giro de la cabeza de biela.
Si tenemos en cuenta que el esfuerzo lateral sobre la pared del cilindro es debido a la presión de los gases y a las fuerza s de inercia. y que el descentrado no afecta a estas últimas, se comprende que en motores rápidos esta disposición pierda interés.
En la actualidad, en caso de existir descentramiento, es más frecuente el segundo
Cinemática y dinámica de los motores alternativos
3 1 -- cos2a
1 + - cos4a 8 2 8
6 5 sen a = -- 15 cos2a + 3 1
- cos4a - - cos6a 16 32 16 32
y expresar el desarrollo en serie de ( 1 - A 2 sen2a) Yz de la forma:
en donde:
1 2 1 - (- A + 4
5 \ 6 + - 1\
256 + .. , }
1 2 -A+ 1 A4 + ~- A6 + ... 4
a~ - - (-1 A4 64
16 512
+ ...
1 6 -A + ... 512
Sustituyendo el desarrollo en serie [20.3] en la expresión [20.2], resulta:
555
[20.3]
s = R [1 + -1 · cosa - 2_ {a¿ + a; cos2a + a~ cos4a + a~ cos6a + ... )]
A 'A
que también puede ponerse de la forma:
s = R [a0 - (cosa + a2 cos2a + a4 cos4a + a6 cos6a + ... )] [20.4]
en donde:
1 ' az - - a2 A
1 ' a4 - - a4 A

~.
556 Motores de combustión interna alternativos
Ahora bien, teniendo en cuenta que 1/ 2,5 > A > 1/ 5, no se comete un error sustancial si se desprecia a partir del tercer término de la serie, ya que ésta converge rápidamente. Así, es posible llegar a la siguiente expresión, suficientemente aproximada:
s = R [a0 - {cosa + a2 cos2cr l J
o bien, sustituyendo los coeficientes a0 y a2 por sus valores respectivos:
S - R (1 + A
- - (cosa + A - cos2a)]
4 4 (20.5. ]
Refiriéndonos a esta última expresión del desplazamiento del pistón, estudiaremos su valor para los valores de a más significativos:
- Para a - 0° resulta s = 0: el pistón está en el PMS .
- Para a - 90° resulta s - R ( 1 + ~) > R. 2
- Para a - 180° resulta s = · 2R: el pistón está en el PMI.
I
o ~----~------.~,a-oo~--~----~36~0 O< o
Fig . 20.3. Desplazamiento del pistón
De las consideraciones anteriores se deduce que en los primeros 90° de desplazamiento angular de la manivela el pistón recorre más de la mitad de la carrera. Es evidente que a mayor longitud de la biela este efecto es menor y para una biela de Ion· gitud infinita el pistón habría recorrido la mitad de la carrera para ex = 90°. Esto es debido a que, al crecer la longitud de la biela, la influencia del ángulo (3 sobre el desplazamiento del pistón, va siendo menor {~ ... 0) ; ver la ecuación [20.2). En la figura 20.3 se representa el desplazamiento del pistón en función de a para distintos valores de A.
;
" ·. ~
.. ..
.. ..

~.
556 Motores de combustión interna alternativos
Ahora bien, teniendo en cuenta que 1/ 2,5 > A > 1/ 5, no se comete un error sustancial si se desprecia a partir del tercer término de la serie, ya que ésta converge rápidamente. Así, es posible llegar a la siguiente expresión, suficientemente aproximada:
s = R [a0 - {cosa + a2 cos2cr l J
o bien, sustituyendo los coeficientes a0 y a2 por sus valores respectivos:
S - R (1 + A
- - (cosa + A - cos2a)]
4 4 (20.5. ]
Refiriéndonos a esta última expresión del desplazamiento del pistón, estudiaremos su valor para los valores de a más significativos:
- Para a - 0° resulta s = 0: el pistón está en el PMS .
- Para a - 90° resulta s - R ( 1 + ~) > R. 2
- Para a - 180° resulta s = · 2R: el pistón está en el PMI.
I
o ~----~------.~,a-oo~--~----~36~0 O< o
Fig . 20.3. Desplazamiento del pistón
De las consideraciones anteriores se deduce que en los primeros 90° de desplazamiento angular de la manivela el pistón recorre más de la mitad de la carrera. Es evidente que a mayor longitud de la biela este efecto es menor y para una biela de Ion· gitud infinita el pistón habría recorrido la mitad de la carrera para ex = 90°. Esto es debido a que, al crecer la longitud de la biela, la influencia del ángulo (3 sobre el desplazamiento del pistón, va siendo menor {~ ... 0) ; ver la ecuación [20.2). En la figura 20.3 se representa el desplazamiento del pistón en función de a para distintos valores de A.
;
" ·. ~
.. ..
.. ..

•.
Cinemática y dinámica de los motores alternativo:; 557
b) Velocidad
La velocidad del pistón, corno ya se indicó anteriormente, no es constante y se define una velocidad instantánea e corno la derivada respecto del tiempo del desplazamiento s, es decir:
e ds
dt
- Expresión exacta de la velocidad instantánea
Para calcularla derivamos la expresión [20.2. ]. y obtenemos:
e -d 1
{ R 11 + - (cosa + dt
da donde se ha tenido en cuenta que w
dt
-1
v'1 - ';..? sen2a ) 1 } ;>._
Esta ·expresión puede simplificarse s1 se t iene en cuenta que:
sen{3 = ).. sena y
quedando finalmente:
e = R w (sena + sen{3 cosa 1
-- ) sena cos/3 + sen{3 cosa
Rw
e
- Expresión aproximada
cos{3
sen (a + {3} Rw
cos/3
cos/3
Derivando la expresión t20.4l respecto del tiempo, se obtiene:
e = R w (sena + 2a2 sen2cx ~ 4a4 sen4a + 6 a6 sen6a ..- . .. )
y si se toman sólo los dos primeros términos de la serie, resu lta :
[20.6.]
[20.7.]

558
e - R w (sena +
Motores de combustión interna alternativos
}.. - sen2a) 2
[20.8. 1
expresión que puede ser suficientemente aproximada.
La velocidad se considerará positiva cuando su sentido es hacia el PMI y negativa en caso contrario.
Como valores significativos de la velocidad podemos destacar los correspondientes . al PMS, PMI, a = 90° y su valor máximo:
- a - 0° : pistón en el PMS y e = O.
- a 90°: el pistón ha recorrido más de la mitad de la carrera (s = R (1 + >.. / 2)) y e = w R. Es decir, la velocidad del pistón en ese punto es igual a la velocidad tangencial del eje de la muñequilla (velocidad del punto A de la figura 20. 1).
- a = 180° : pistón en el PMI y e == O.
- El ángulo a para el cual la velocidad es máxima se calcula haciendo de/ da == O. Este ángulo es menor de 90° y se puede comprobar que corresponde, aproximadamente, al momento en que la biela es perpendicular a la manivela . Su valor tiende a 90°, a medida que >.. tiende a c.:ro.
1,; RtJ) ~ = 113
En la figura 20.4, se representa la variación de la velocidad instantánea e del pistón en función de a.
1
o. 8 .. !
O, 2 e) Aceleración
o ~--~::----;r----"'i¡;:---2t-:'60 o Al igual que en los apartados anteriores, -o. 2 calcularemos dos expresiones para la ace--o. 4 ¡ leración del pistón, una exacta y otra sim-
-0. 6 ! plificada más cómoda de utilizar. val or/ exado -o, a Definimos la aceleración instantánea del
-1 +----4----+---..,..,1::-<"-r--+ pistón de la forma:
Fig. 20.4. Velocidad instantánea del pistón a dc/ dt

Cinemática y dinámica de los motores alternativos 559
Expresión exacta.
Derivando la expresión 120 .61 respecto del tiempo y teniendo en cuenta que:
sen¡3 - A sena d
- sen¡3 d
- - ().,sena) - A. w cosa dt dt
cos¡3 d
- cos{3 -dt
~ v1 - A.2 sen2cx - - A.2 w cosa sena/ cos{3 dt
resulta:
sen (ex + {3) e = R w ----- - - R w (sena + cosa sen{3 )
cos¡3 cos¡3
a de d
- R w (sena + cosa dt dt
sen{3 ) _
cos{3
sen{3 1 - R w2 [cosa - sena + .A cps2cx ( --
cos{3 cos{3
y simplificando:
cos (a + (3 ) + , a - R w2
[ ------ 1\
cos{3
Expresión aproximada
Si derivamos la expresión [20. 7] respecto del tiempo, tenemos:
a :::: R w2 (cosa + 4a2 cos2a + 16a4 cos4a + 36a6 cos6cx + ... )
[20.91
[20.10]
y si se considera como una buena aproximación tomar los dos primeros términos de la serie resulta:
a = R "i (cosa + A cos2a) [20. 11)
Como convenio de signos utilizaremos el siguiente: la aceleración se considerará

Cinemática y dinámica de los motores alternativos 559
Expresión exacta.
Derivando la expresión 120 .61 respecto del tiempo y teniendo en cuenta que:
sen¡3 - A sena d
- sen¡3 d
- - ().,sena) - A. w cosa dt dt
cos¡3 d
- cos{3 -dt
~ v1 - A.2 sen2cx - - A.2 w cosa sena/ cos{3 dt
resulta:
sen (ex + {3) e = R w ----- - - R w (sena + cosa sen{3 )
cos¡3 cos¡3
a de d
- R w (sena + cosa dt dt
sen{3 ) _
cos{3
sen{3 1 - R w2 [cosa - sena + .A cps2cx ( --
cos{3 cos{3
y simplificando:
cos (a + (3 ) + , a - R w2
[ ------ 1\
cos{3
Expresión aproximada
Si derivamos la expresión [20. 7] respecto del tiempo, tenemos:
a :::: R w2 (cosa + 4a2 cos2a + 16a4 cos4a + 36a6 cos6cx + ... )
[20.91
[20.10]
y si se considera como una buena aproximación tomar los dos primeros términos de la serie resulta:
a = R "i (cosa + A cos2a) [20. 11)
Como convenio de signos utilizaremos el siguiente: la aceleración se considerará

¡ 1
' }
¡
l 1 ¡ • ' . •
560 Motores de combustión interna alternativos
positiva cuando su sentido es hacia el cigüeñal y negativa en caso contrario.
Los valores máximos de la aceleración, positivo y negativo, se obtendrán igualando a cero la derivada de la expresión [20.11] respecto del ángulo a, ésto es:
d [R w2 (cosa + A cos2a)] .O
da
- sena - 2 A sen2a == O
sena ( 1 + 4 A cosa) == O
Esta ecuación tiene las soluciones siguientes: a == 0°, a == 180° y a == are cos (-1 1 4A) . Las dos primeras corresponden al PMS y al PMI respectivamente. Por tanto:
- en el PMS, a == R w2 (1 + A)
- en el PMI , a == -R w2 ( 1 - A)
- en a == arcos (- 1 1 4A) , a == R w2 ( 1 / 8A + A). Nótese que éste mínimo solo existe si A > 1 14. Por otra parte téngase en cuenta que el valor de a correspondiente a estos mínimos si hubieramos derivado la expresión exacta [20.9] no sería el indicado pero se acercaría mucho (p. ej. si A == 1/ 3 la diferencia es de 1 o) .
De estos resultados se deduce que en el PMS la aceleración es siempre positiva
1 '2 1
0, 8 0, 6
0,4
0, 2 o
- O, 2 -O, 4
-O, 6 -0, 8
-1 - 1, 2
[ ~:: 1/3 J
y en el P M 1 negativa. Si se obtiene la segunda derivada se puede comprobar que en el PMS se da siempre la máxima aceleración, independientemente del valor de A.
~~~~~~~~~~~~~~~Sin embargo, eh el PMI la aceleración lle-
va l or ex a e t o
~ co s2cx
Fig . 20 .5. Acelerac ión instantánea
del pistón
gará o no a su máximo valor negativo dependiendo del valor de A.
()(o En la figura 20.5, se representa la varia-3600 ción de la aceleración en función del ángulo
1 a de giro de la manivela . Como se observa en dicha figura, la curva es muy plana en las proximidades del PMI.
Finalmente, es evidente que la aceleración se anulará en el momento en que la velocioao a1•Co'í'.1.o su \!ato( m.áximo y esto ocu-,
rre, como ya dijimos en el apartado ante-rior, aproximadamente cuando la biela y la
• j • ' '
.. 1
j l ~
.! \
j
J ' i ' ' ··1
1 '

Cinemática y dinámica de los motores alternativos 561
manivela están perpendiculares entre sí.
4. Movimiento de la biela
El movimiento de la biela es un movimiento complejo que se compone de un movimiento de traslación y de otro de giro pendular alrededor del eje del bulón que la une al pistón .
Nos vamos a limitar aquí al estudio de la aceleración angular de la biela producido por el giro de la biela alrededor de dicho eje, que es perpendicular al plano sobre el que se mueve y paralelo al cigüeñal. Esta aceleración, que denominaremos Eb, es la segunda derivada del ángulo (3 respecto del tiempo, es decir:
Teniendo en cuenta que, sen(3 == ~sena, el desplazamiento angular de la biela será:
{3 == are sen (~ sena)
cuyo desarrollo en serie de potencias de senos es:
40
Mediante transformaciones trigonométricas es posible desarrollar estas potencias de la forma:
f(sena, sen3a)
sen5a == f(sena, s~n3a, sen5a)
quedando finalmente la siguiente expresión en serie:
{3 == b, sena + b3 sen3a + b5 sen5a + ...
en donde:
b, := 1
A? + 3
~5 ~ + + • • •
8 64
b3 1
~3 -3
~ 5 - .. .
24 128

562
3 'A_5
640
Motores de combustión interna alternativo ~
+ ...
Derivando (3 respecto a t, obtendremos la velocidad angular de la biela:
wb == w ( b, cosa + 3b3 cos3a + 5b5 cos5a + ... )
y volviendo a derivar, la aceleración Eb, que será de la forma :
Eb == - w2 (b, sena + 9b3 sen3a + 25b5 sen5a + ... )
20.2. REDUCCION DE LAS MASAS DEL MECANISMO BIELA-MANIVELA
Para acometer el cálculo de los esfuerzos que act~an sobre el motor alternativo y de las cargas sobre los cojinetes del mismo, es necesario conocer las fuerzas que actúan sobre el mecanismo biela -manivela, es decir, la dinámica del motor.
Las fuerzas que actúan sobre el mecanismo biela-manivela serán las debidas a la presión de los gases, las de inercia de las piezas en movimiento y las de rozamiento .
En motores que giran a elevado régimen las fuerzas de inercia son, con mucho, las más importantes,superando a las de los gases y a las de fricción. En general, en este estudio, las fuerzas de fricción se desprecian por ser comparativamente mucho más pequeñas que las otras. Para el estudio de la dinámica del motor, al igual que en el estudio cinemática, mantendremos la hipótesis de que la velocidad de giro del cigüeñal, w, es constante .
El mecanismo compuesto por el pistón, la biela y el cigüeñal, es un mecanismo plano y puede reducirse a una serie de masas puntuales unidas entre sí por barras rígi das ·sin masa . Esta reducción facilita de forma importante el estudio dinámico.
Comenzaremos distinguiendo tres tipos de masas: masa de la biela, masas con movimiento de rotación y masas con movimiento alternativo.
La reducción de una masa a una o varias masas puntuales, ha de cumplir las siguientes condiciones:
a) Equivalencia estática
- La suma de las masas puntuales ha de ser igual a la masa total:
E m¡ == mtotal
¡ 1
~ ' ' •

Cinemática y dinámica de los motores alternativos 563
- El centro de gravedad de las masas puntuales debe coincidir con el de la pieza o piezas reales, es decir:
---+ ~ m· r· - O '-' 1 1 -
donde r¡ son las distancias de las masas al centro de gravedad. Esta ecuación vectorial se traducirá en 1, 2 ó 3 algebraicas, según que el sistema sea lineal , plano o espacial. ·
b ) Equivalencia dinámica.
Es decir, la suma de los momentos de inercia de las masas puntuales respecto a un eje que pase por el centro de gravedad de la pieza, debe ser igual al de la pieza real respecto a dicho eje:
E m¡ rf = 19
donde 19 es el momento de inercia de la pieza real respecto al centro de gravedad.
1 . Reducción de la masa de la biela
La biela realiza un movimiento complejo compuesto de un movimiento de desplazamiento longitudinal y de un movimiento pendular. ~Por ello conviene reducir su masa
L --+-- -
S'
Fig. 20.6. Reducción de la masa de la biela
según un sistema lineal, lo que conduce a que tengan que cumplirse las tres ecuacio
m e nes siguientes:
. -
-+ E m¡ r¡ = O
E m¡ rf = lb
en donde:
mb - masa total de la biela. lb - momento de inercia de la biela
respecto a su c. de g·.
Este sistema de ecuaciones estará determinado si el número de masas es de tres.
Teniendo en cuenta que generalmente la biela es simétrica, supondremos unas ma-

564 Motores de combustión interna alternativos
sas sobre el eje de simetría y ubicadas en el centro del muñon de biela de la manivela {muñequilla), en el centro de gravedad y en el centro del bulón, respectivamente.
En la figura 20.6 se representa la disposición que · acabamos de indicar.
Refiriéndonos a dicha figura , el sistema de ecuaciones genérico anterior se concretará en:
de donde:
m A lb
rA L
ms lb lb
{l-rA) L L2- r L A
mG mb -lb
rA(L-rA)
En general, la masa m G suele ser insignificante frente a mA y m 8 , por lo que podría desprec~arse, o bien repartirla proporcionalmente en dos masas situadas en A y B de la forma siguiente:
con lo cual:
. . , y no ex1st1ra mG.
m GA
m GB
m' A
m' B
mG (l-rA)
L mG mGA + m GB
mG rA
L
.. <.
'¡
.. ; ' '
._.
. ...
.•.. ¡i
' ' .. . •
. ¡~ . , ! ·
::
. .. ;_

Cinemática y dinámica de los motores alternativos
Sustituyendo en estas expresiones los valores de mA, m 8 , mGA y mG8 , anteriormente calculados , tendremos: .
m ' A
m b { L - r A) lb ( L - r A) + --- - - -----------L L
lb m r A lb r A ------- - + - - ------·----(L - rA) L L rA (L - rA)L
Esto equivale a un simple equilibrado estático, pues, como comprobaremos a conti nuación, la condición de equiHbrio dinámico no se cumple, debido a que el momento de inercia resulta d iferente al de la biela real.
- Momento de inercia real : lb == m r dr
- Momento de inercia simplificado: lb == m~ r~ + m~ ( L - r A)2
Esta diferencia en el momento de inercia será equivalente a aplicar un par exterior de valor:
s !
L
A
r
m 11
B
G
m , A
. -
F1g. 2.0.7. Masas reducidas de la biela
en donde Eb es la aceleración angular de la biela.
Posteriormente comprobaremos que su valor es despreciable.
En general , para motores de automoción r 8 == (0, 7 + 0,8) L con lo cual m 8 == =:: (0,2 + 0,3) mb y mA == (0,7 -:- 0,8) mb
Existe otro método suficientemente exacto y sencillo para realizar la reducción de la masa de la biela ·a dos masas ountuales en •
Íos puntos A y B. Dicho método consiste en colocar en A y 8 , sendas masas puntuales, de forma que el momento de inercia de la biela respecto a un eje que pase por 8 . (lbs) y la masa total de la biela ( mb) no varíen respecto a los _.valores reales.S i m~ '

566 l\t1otores de combustión interna alternativos
y m~' son dichas masas (figura 20. 7) ~ tendremos:
, , L2 ~m', -m A A
y
m,, + m'' -......m'' m b =..: A 8 -y- 8
Por el teorema de Steiner:
con lo cual:
m' ' B
m ,, =..: A
El momento de inercia de la biela real respecto al punto 8 .. lb8 ,se puede determinar experimentalrnente colgando la biela por 8, y l-ibre en A se mide su periodo de oscilación (T). SegCJn la ecuación del péndulo se puede establecer:
de donde:
con lo cual tenemos determinado lb8 , pues los demás valores son fácilmente medibles.
2. Reducción de las masas giratorias
Además de la masa puntual m A , perteneciente a una parte de la masa de la biela . situada sobre el eje de la muñequilla del cigüeñal (punto 8), existen las siguientes masas con movimiento giratorio, a saber: masa de los brazos, de los apoyos y de
- --- --~--

• •
•• '
' (
¡
Cinemática y dinámica de los motores alternativos 567
A R
o
Fig. 20.8. Reducción de las masas giratorias
la muñequilla del cigüeñal. Reduciremos estas masas a otras dos situadas en el eje de los apoyos y en el de la muñequilla del cigüeñal, puntos O y A de la figura 20.8, respectivamente, según se explica a . . , cont1nuac1on:
- La masa de los apoyos se reduce al eje del cigüeñal. - La masa de la muñequilla se reduce al eje de la misma. - La masa no equilibrada del brazo se reduce a dos masas una, mbro, situada en O, y la otra mbrA, situada en A.
Para calcular estas dos masas establecemos las dos ecuaciones que representan la equivalencia estática. La equivalencia dinámica no es necesaria establecerla, debido a que el movimiento de la manivela OA es de giro a velocidad w constante. Por tanto:
y resolviendo el sistema de ecuaciones:
R
en donde r0 es la distancia desde O al centro de gravedad de los brazos y mbr la masa no equilibrada de uno de ellos.
El sistema de masas giratorias quedará reducido, por lo tanto, al siguiente:
- Masas en el punto 0:
; - Masas en el punto A:
• f •
en donde los brazos se han supuesto simétricos y m 0 y mm representan:

568 Motores de combustión interna alternativos
m0 - masa reducida de los apoyos.
mm - masa reducida de la muñequilla.
Merece la pena observar que la reducción de masas hecha anteriormente equivale a imponer la condición de que la fuerza centrífuga de la masa real y la de las masas reducidas sean iguales. Las fuerzas centrífugas real y reducida de la muñequilla son,
•
evidentemente, iguales. Las masas de los apoyos, real y reducida, están animadas de un movimiento de rotación sobre su eje. Por último, para los brazos se puede establecer la ecuación siguiente:
•
de ·donde:
2 mbr: ro w
R
que resulta igual al valor obtenido anteriormente para mbrA·
3. Reducción de las masas con movimiento alternativo
Las masas animadas de movimiento alternativo son la parte de masa de la biela, reducida al punto 8 , denominada rh8 , y la masa mp del pistón, incluyéndose en esta última los segmentos, el bufón y las demás piezas que se mueven unidas a aquél. El movimi~nto rotativo que pueda tener el bufón se considera despreciable, siendo nulo cuando dicho bulón esté fijo al pistón y flotante en el pie de biela, o bien puede sumarse a· la masa de la biela en e'l caso contrario.
Por lo tanto, las masas con movimiento alternativo será11:
Como resumen podemos observar que son tres los puntos de masa a considerar con movimiento estacionario (w == cte.) y uno con movimiento complejo, a saber:
- Masas con movimiento alternativo:
- Masas con movimiento giratorio:
mRA == mA + 2mbrA + mm

Cinemática y dinámica de los motores alternativos 569
- Masas con movimiento de rotación sobre su eje:
- Masa con movimiento complejo:
mG - masa reducida de la biela situada en su centro de gravedad.
Esta masa suele despreciarse o repartirse entre las mA y m 8 tal como se explicó anteriormente.
20.3. FUERZAS GENERADAS POR EL MOVIMIENTO DE UN MOTOR MONOCILINDRICO
Durante el funcionamiento de un motor alternativo, debido al movimiento relativo de unas piezas respecto a otras, .se generan diversas fuerzas que pueden clasificarse en dos grupos: fuerzas de inercia y fuerzas de la presión de los gases. El estudio y el cálculo de estas fuerzas se llevará a. cabo para un cierto régimen y suponiendo la velocidad de giro w constante. ,
1 . Fuerzas de inercia
Entendemos como fuerzas de inercia las que se generan a causa de la aceleración de las masas en movimiento. Las podemos clasificar en: fuerzas de inercia de masas con movimiento giratorio, de masas con movimiento rectilíneo y debidas a la aceleración angular de la biela.
1
. w
A
R
Fig. 20.9. Esquema de la manivela
a) Fuerza de inercia de las masas giratorias
Es debida a la aceleración centrípeta de las masas reducidas al punto A, mRA·
Su expresión, en módulo, es:
F - - m Rw2 C - RA
y sigue la dirección OA en sentido de O a A (figura 20.9). El módulo de Fe es constante con a puesto que la velocidad ~, es constante.
1
;

570 Motores de combustión interna alternativos
b) Fuerza de inercia de las masas con movimiento rectilíneo
La fuerza de inercia de las masas con movimiento rectilíneo es debida a la aceleración lineal que sufren las masas animadas de dicho movimiento al funcionar el motor.
Dicha fuerza actúa siempre en la dirección del movimiento, es decir, siguiendo el eje del pistón, recta 80, si el mecanismo es centrado y, en el sentido contrario al de la aceleración en cada instante. Su valor será:
siendo a8 la aceleración del punto B, calculada anteriormente de la cinemática def mecanismo biela-manivela .
•
El signo menos indica que el convenio de signos de las fuerzas es el mismo que el tomado para las aceleraciones, es decir, la fuerza Fa es positiva cuando su sentido es hacia el eje del cigüeñal y negativa en sentido contrario. En el PMS. la aceleración siempre es positiva y por tanto dirigida hacia el cigüeñal, esto quiere decir que en dicho punto el sentido de la fuerza es hacia arriba. Con el convenio de signos señalado anteriormente, al PMS le corresponderá una fuerza negativa, figura 20.10.
Fa . e
1 A=113J
+---~~~~~-4--~~~~~~~---+~~--~--~---+--~+-~--~ ~
72 0
Fig . 20.10. Fuerzas generadas por el movimiento alternativo
j • ' ' . '

:inemática y dinámica de los motores alternativos 571
Por tanto:
R w2 ( cos (a __!_{3) + .>.. cos2a )
cos{3 cos3{3
) bien:
A3 - mRs R w2 (cosa + A cos2a - -- cos4a + ... )
4
Las fúerzas de inercia con movimiento rectilíneo las clasificaremos de la ·forma siguiente:
- Fuerzas de inercia de primer orden: Fa, == - mRs R w2 cosa, cuyo período es de 360°.
· - Fuerzas de inercia de segundo orden : F a11
do es de 180° .
- Fuerzas de inercia de cuarto orden: F a1v
do es de 90°. , . .
y as1 sucesivamente.
- mRs R w2 A cos2a, cuyo perío-
A.3 , mAs R w2
-- cos4a, cuyo peno-4
Solamente son importantes, en magnitud, las de 1 o y 2° orden, pudiéndose despreciar las demás cuando el número de revoluciones del motor es inferior a 5.000 rpm; en caso contrario pueden tomarse hasta las de 4 o orden, pero generalmente nunca . mayores ..
Excepto el período de las de primer orden que corresponde a un número impar de giros del cigüeñal, los demás son números pares, lo que supone una ventaja desde el punto de vista del equilibrado de los motores policilíndricos.
Si se tratase de un mecanismo biela-manivela con descentramiento e, llamando 11 == e l L, la expresión de Fa quedará como sigue:
+ !l (1 +
1 A( --
2
3 2 + -- 11 ) cos2a -A.3 -- cos4a + ... +
2 4
75 A5 !l sen5a + ... 1
128

572
f
' {)
•
....-- -- .....
\
f' t J
Motores de combustión interna alternativos
Se observará que la discrepancia más pronunciada con el correspondiente mecanismo centrado aparece en los términos de primer orden.
e) Fuerza debida a la aceleración angular de la biela
Hasta ahora se ha supuesto la masa real de la biela reducida a dos masas puntuales mA y m 8 • Este sistema de dos masas puntuales, como ya se explicó en el apartado 20.2., no cumple la condición de equivalencia dinámica por no coincidir su mamen- . to de inercia respecto del centro de gravedad lb con el de la biela real , lb.
Fig. 20.11. Fuerzas sobre el mecanismo Por otra parte, en el estudio cinemática, biela-manivela se calculó la aceleración angular de la bie-
la Eb· Pues bien, para que ésta se mueva con dicha aceleración, es necesario que esté sometida a un par lb Eb· Sin embargo, sobre la biela ficticia que se moviese con esa aceleración, actuaría solamente un par lb Eb· Por lo tanto, es necesario, además, aplicar a la biela ficticia BA, un par de fuerzas r de valor:
Si suponemos este par generado por dos fuerzas horizontales iguales aplicadas en A y 8, tal como se representa en la figura 20.11, tendremos:
en donde:
f
.
La fuerza f aplicada en A la podemos descomponer en una fuerza tangencial a la trayectoria de dicho punto y en otra según la dirección de la manivela OA, figura 20.11. El valor de cada una de ellas será, respectivamente:
f cosa (lb .- lb) cosa ------Eb
, L v' 1 - -x._: sen2a

Cinemática y dinámica de los motores alternativos 573
f sena
La fuerza ft contribuye al par motor, pero su valor es realmente pequeño como podemos comprobar desarrollando en serie su expresión:
R
en donde:
e
Fig. 20.12. Coeficientes C2 y C4
1 1 1 1 [ - ·- - - ·-· + ... l
2 A2 32 }.6
1 1 1 1 [ --- -- + ·- ·- ,+ .. . l
4 A4 8 'A6 ·
En la figura 20. 12, se representan los coeficientes C2 y C4 en función de 'A.
2. Fuerzas debidas a la presión de los gases
La ley d'e variación de la presión en el interior del cilindro se puede obtener del diagrama del indicador, figura ~0.13.
La presión multiplicada por la superficie del pistón nos dará la fuerza que actúa sobre el bulón 8, debida a los gases que evolucionan dentro del cilindro. Ahora bien , la fuerza total que actúa sobre 8, será la diferencia entre la que se produce en la parte superior (p9 ) y la que se produce en la parte inferior, esta última debida a la pre
sión de los gases del cárter o de la n1ezcla fresca en el caso de un motor de dos tiem·pos con barrido por cárter (p0 ).
Esto es, si F 9 ~s la resultante de la fuerza de los gases,
F g == ( Pg - Po) Ap
en donde Ap es el área de la superficie transversal del pistón.

574 Motores de combustión interna alternativos
O·
B p·
S
Fg
,,., ' ' 1
o
• ' ' \ \ \
\ \
' \ ' ' ' ...
180°
, ' ' 1
• •
• 1
' 1 \ .
'
360°
... _ --
S o
------2 tiempos
---- ~ tiempos
Fig. 20.13. Fuerza debida a la presión de los gases
F 9 es positiva cuando se dirige hacia el eje del cigüeñal, figura 20.13.
, ,
3. Fuerzas resultantes que actúan sobre el mecanismo biela-manivela de un motor ~
1 1
, 1
Sobre el eje del bulón del pie de biela (punto B), actúa una fuerza F en la dirección 80, que es la suma algebraica de las fuerzas de inercia alternativas y de la fuerza de presión de los gases. En la figura 20.14 se representa su variación con el ángulo girado por la manivela para un motor monocilíndrico de 4 tiempos.
Esta fuerza F puede descomponerse en otras dos: una Fn, normal a la pared del cilindro, y otra Fb, según el eje de la biela. De la figura 20.15, se deduce que:

Cinemática y dinámica de los motores alternativos 575
MEP L.-t i empos
F ,.
~-----~------4---'~: ~~~----~----~----~~========~==~~ 180 o 360° S O 0 720°
Fig. 20.14. Fuerzas resultantes en función de a
La fuerza Fb se traslada a lo largo del eje de la biela y se ejerce sobre la muñequilla del cigüeñal (punto A). A su vez esta fuerza se puede descomponer en otras dos,. Fr y Fr, la primera de ellas en la dirección de la manivela (brazo del cigüeñal) y la se
·gunda, tangente a la trayectoria del punto A, es decir, normal a la manivela. Las expresiones de estas fuerzas son las siguientes:
Fb cos (a + {3)
Fb sen (a + {3)
cos (a + {3) F------
cos{3
F sen (a + ¡3)
cos{3
La fuerza Fr produce un esfuerzo sobre el punto O (apoyo del cigüeñal) , al cual hay que sumar la fuerza fr del apartado anterior, y la Ft generá, junto con la fv el par mo-tor, figura 20. 16. · ,

576
- - A -
Fig. 20.15. Descomposición de las fuerzas alternativas
--
Fig . 20 .16. Descomposición de las fuerzas en A
Motores de combustión interna alternativos
Resumiendo, las fuerzas que actúan en los puntos A y B son:
En la dirección tangencial: Fr == Ft + ft
Punto A En la dirección de la manivela: FR == Fr + fr + Fe
Punto 8, en la dirección normal al eje del pistón: FN == Fn + f
20.4. PAR MOTOR
Se denomina par motor a la resultante de los momentos que actúan sobre el eje del cigüeñal. Las fuerzas que contribuyen al par motor son las siguientes:
- Fuerza de inercia de las masas con movimiento alternativo.
- Fuerza de presión de los gases.
- Fuerza de compensación debida a la velocidad angular de la biela.
En el punto A se ejerce una fuerza tangente a la trayectoria, de valor, Fr == F1 + ft. Si en O aplicamos dos fuerzas opuestas de igual magnitud y dirección que Fr, aparecerá en la manivela un par que hace girar el cigüeñal (par motor) y además una fuerza Ft sobre el apoyo (punto 0) , figura 20. 17.
El valor instantáneo del par motor vendrá dado por:
. <
:: . . ~ , '
. .. '
'
Cinemática y dinámica de los motores alternativos 577
--
sen (a + {3) R + F (lb- lb) w2 (C2 sen2a + C4 sen4a + .. . }
cos{3
R
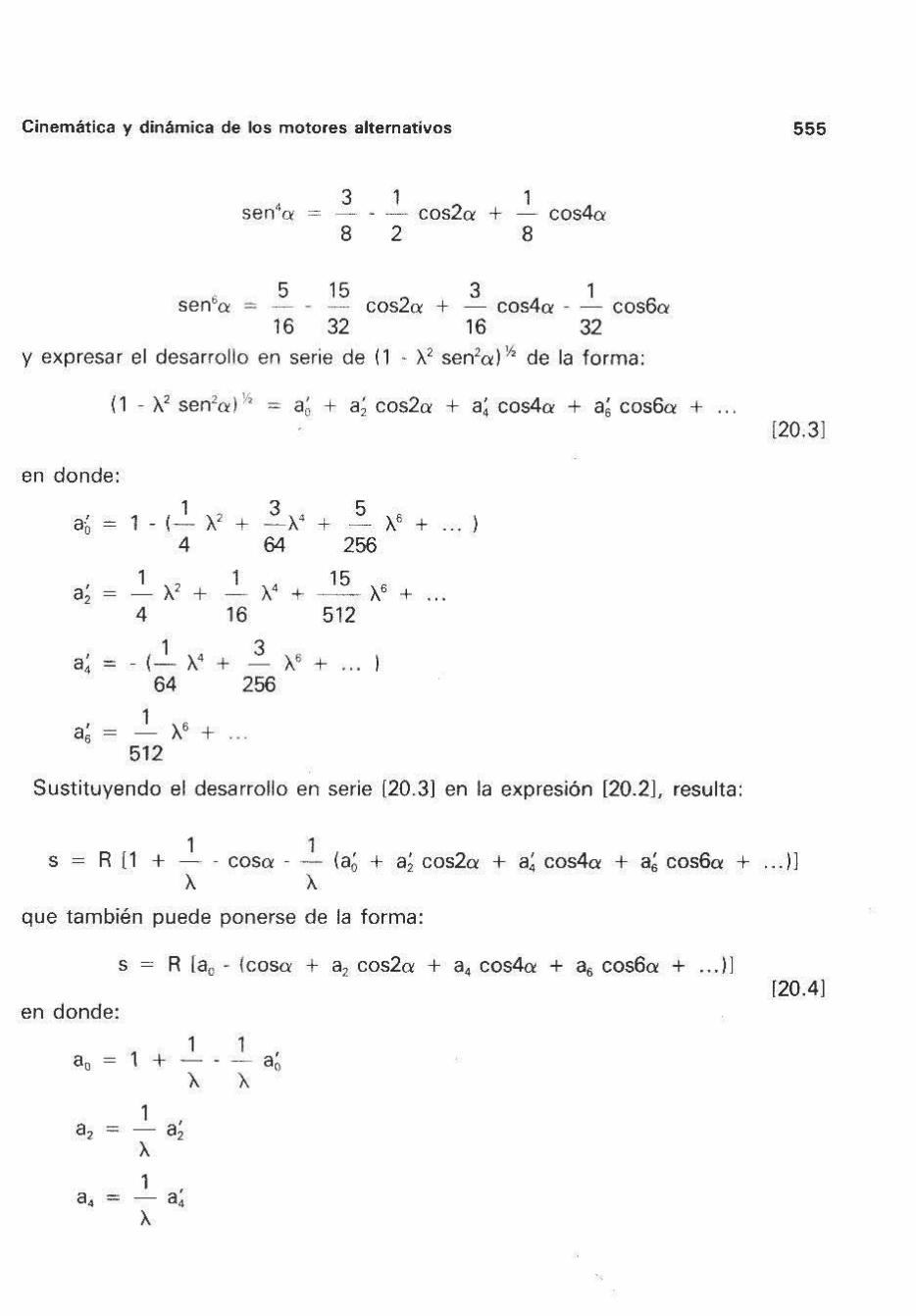
Se ve que dicho par no es constante, depende de a y de F. En la figura 20.18 se representa la variación del par motor de un motor monocilíndrico de cuatro tiempos. La suma algebraica de las áreas positiva y negativa del diagrama es proporcional al trabajo realizado por el fluido motor en un ciclo, ya que el trabajo de las fuerzas de inercia es nulo para cada media vuelta de la manivela (figura 20.10). El área resultante de la suma anterior puede igualarse a la de un rectángulo que tenga como base la misma abcisa (720° en el caso de la figura 20.18) , correspondiendo su altura al valor rnedio del par motor Mm.
Fig. 20 .17. Par motor
Llegado este punto, conviene realizar las siguientes observaciones:
Par mot or med i o Mm
~----~------~-------+~----~-------+---~~~------~----~~
180° 360° 5400 720°
Fig . 20 .18. Par motor instantáneo

578 Motores de combustión interna alternativos
a) La fuerza de inercia de las masas con movimiento alternativo contr.ibuye al par motor instantáneo, pero no al par motor medio.
b) El par motor medio calculado anteriormente es, en general, menor que el par indicado medio. Esta diferencia corresponde a las pérdidas de bombeo (área negativa del diagrama del indicador).
e) El par motor medio y el par efectivo medio Me, difieren en una cantidad que corresponde a las pérdidas mecánicas, excluyendo de éstas las de bombeo.
· d) En general, el par motor debido a la diferencia entre los momentos real y ficticio de la biela , segundo término de la expresión de Mm, se suele despreciar.
/
En el caso de un motor policilíndrico, el par motor se obtendrá sumando gráfica. mente las curvas de par correspondientes a cada cilindro, teniendo en cuenta el orden de encendido y el desfase entre ellos <:/>, figura 20.19.
Para un motor de cuatro t iempos y cuatro cilindros, por ejemplo, el desfase será:
M· J
par motor me di o
o
720 <:/> == 180°
4
par motor instantáneo
cit indro 2
cilindro3
cili ndro1
cilindro 4
Fig. 20.19. Momento de giro sobre la manivela en un motor de cuatro cilindros
Cinemática y dinámica de los motores alternativos 579
Por tanto la curva de par motor total para un motor de cuatro cilindros se repetirá cada 180° .
El par motor medio será:
1
o
F o
j
. J = z E
j = 1 M· da J
20. 5~ MOMENTOS RESULTAN TES
1 . Momentos de vuelco transversales
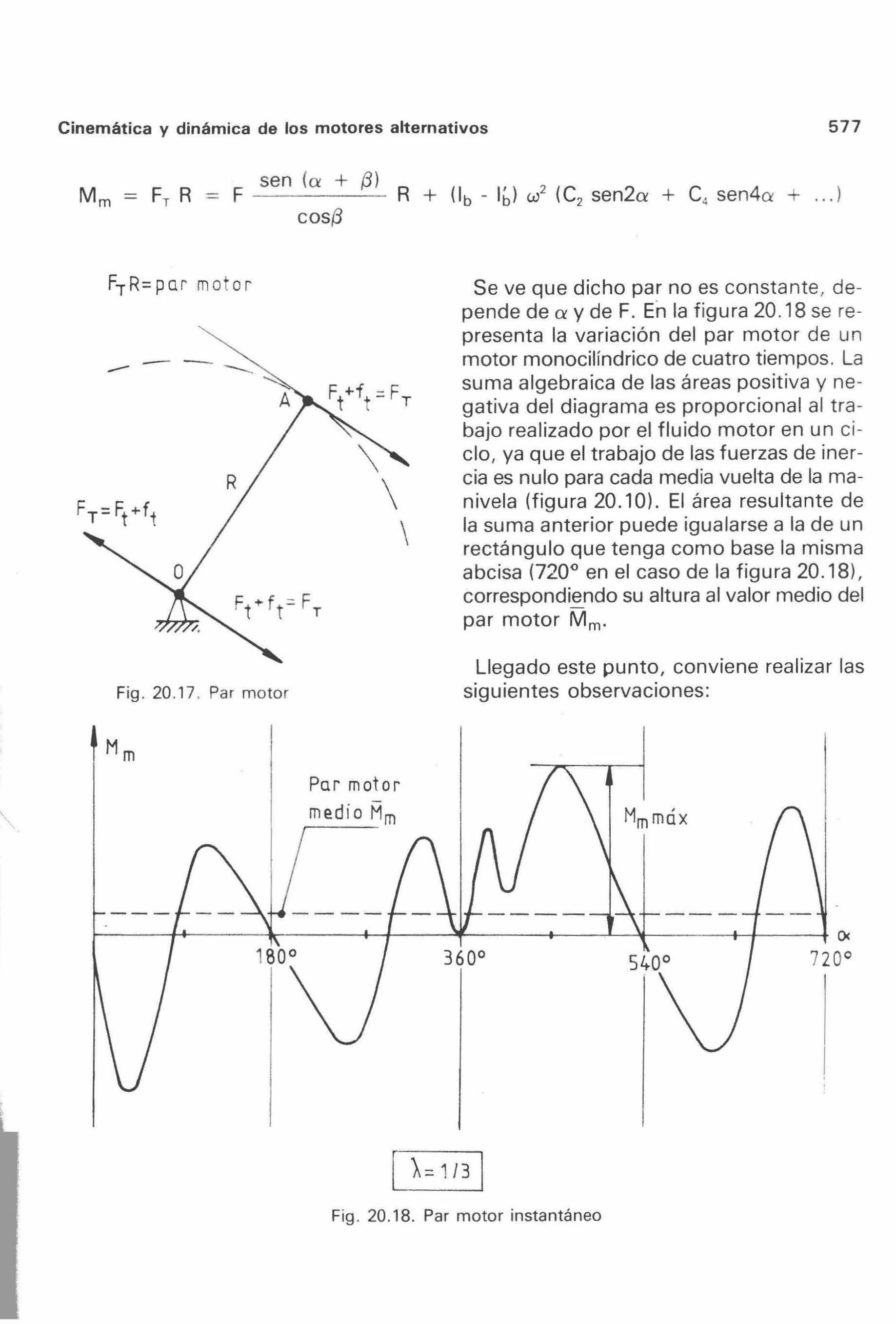
Sobre el apoyo del cigüeñal, punto O, actúan dos fuerzas, la fuerza Ft que vimos en el apartado anterior, y la suma de la Fe' fuerza centrífuga de las masas giratorias y Fr, componente radial de la fuerza Fb en O.
Este vector F 0 , se puede descomponer a su vez en dos vectores, según la horizontal y según la vertical, de forma que ambos valdrán Fn y F, respectivamente.
Fig. 20.20. Composición de fuerzas sobre O
Fn aparece en B y en O con sentidos opuestos, luego crea un par de vuelco de valor:
Mv == - Fn 08 == -F (R cosa + L cos{3) tg{3
- F
L -F tg{3 R (cosa + cos{3)
sen{3
cos{3 R (cosa +
R
sena cos{3)
sen{3
r sen (a + {3) "' ~~rv = - r N == - ltt(m
cos{3
Es decir, el par de vuelco ha de ser igual al par motor, pero de sentido opuesto,

580
1
•
A / --- .......
1 1 \ " .......... _,.,.
\
1 /
t: fuer zas sobre tos apoyos del motor .
Fig . 20.21. Momento de vuelco transversal
Motores de combustión interna alternativos
como era de esperar.
Este par de vuelco deberá ser compensado por los esfuerzos sobre los apoyos exteriores del motor sobre el bastidor o carrocería. A este par de vuelco habría que sumarle el par exterior r de corrección , debido al momento de inercia real de la biela .
2 . Momentos de vuelco longitudinales
En el estudio ant~rior, correspondiente a un motor monocilíndrico, las fuerzas alternativas y giratorias resultantes estaban situadas en un plano. Cuando funciona un motor policilíndrico, los diversos cilindros están situados en planos diferentes, por lo que dichas fuerzas pueden originar pares, como se ve en la figura 20.22, para un ca so particular.
Estos pares de fuerzas generan unos momentos de vuelco que inducen, si no se equilibran, un movimiento de cabeceo longitudinal en el motor. Por ello, se denominan momentos de vuelco longitudinales.
Las fuerzas debidas a las masas giratorias generan momentos de vuelco longitudinales giratorios. Las fuerzas debidas a las masas alternativas generan momentos lon
, ...
--
F
--
cilindro n
a
b
cilindro n .1
punto mt!dio del cigüel'\al
Fig. 20.22. Momentos de vuelco
longitudinal
gitudinales cuyo vector está situado en un plano perpendicular al cigüeñal y su dirección,en el caso de un motor en línea, es perpendicular al plano de los cilindros .
La· disposición de los codos del cigüeñal , así como el orden de encendido, contribuye en parte a disminuir la magnitud de estos momentos, cuyo valor es, genéricamente:
M == Fa
siendo F la fuerza correspondiente/y a la distancia entre los ejes de los cilindros correspondientes a las fuerzas que generan el par, hasta el -plano perpendicular al ci-..,
güeñal por su punto medio. ·,
-¡ ,¡ ., ,ji ••
.,

Cinemática y dinámica de los motores alternativos 581
•
-/ 1
1 \ \
' .........
B
A ......
' \ \ 1
1 /
..........
Por esta razón hay que tomar en consideración tres tipos de momentos de vuelco longitudinales, a saber:
- Los debidos a las fuerzas rotativas. - Los debidos a las fuerzas alternativas de primer orden. - Los debidos a las fuerzas alternativas de segundo orden.
20.6. CONSIDERACIONES FINALES, DIAGRAMAS POLARES
1 . Fuerza resultante vertical
Sobre el ·apoyo del cigüeñal aparece una F · fuerza resultante F vertical y sobre la su -
perficie de la culata actúa la presión de los gases cuya resultante es F9 . Por lo tanto,
Fig. 20.23. Fuerzas resultantes verticales sobre el conjunto del motor aparecerá u-na fuerza resultante de valor: F - F 9 que es
precisamente la fuerza de inercia de las masas alternativas, Fa, como se comprobaría fácilmente.
B
o O.
Fig . 20 .24. Fuerzas resultantes sobre la cabeza de biela

582
F
sentido del giro
muñequ ill a
r--rt
1 ~-brazo
Fig. 20.25. Brazo del cigüeñal
-F r
O'
Fig . 20.26. Generación del diagrama
polar de esfuerzos
Motores de combustión interna alternativos
Esta fuerza será absorbida también por los apoyos del motor sobre el bastidor.
2. Fuerza resultante sobre los cojinetes de la muñequilla de cabeza de biela
Sobre la muñequilla del cigüeñal, punto A, actúan las fuerzas Fb y FeA' fuerza centrífuga de la masa mA reducida de la biela,
ya que las masas del gorrón y de los brazos no producen fuerza centrífuga en el punto A , por estar unidas rígidamente a los apoyos.
La fuerza resultante será pues:
Como F cA es constante y Fb es variable con a, la fuerza RA será variable con dicho ángulo al girar el cigüeñal.
Para el cálculo del engrase, así como para situar el orificio de salida del aceite, en caso de lubricación a presión, es útil conocer cómo es la variación de la fuerza sobre dicho punto A. Esto será posible conociendo el diagrama vectorial o polar de dichas fuerzas. El diagrama polar mostrará el vec--tor RA orientado respecto al brazo del ci-güeñal supuesto como inmóvil. De esta forma, con centro en A, tendremos unos ejes de coordenadas, que en abcisas tendrán valores de Ft y en ordenadas valores de Fr (fi-gura 20.25). ·
De esta forma, como se ve en la figura 20.27, podremos obtener gráfic9me_nte el valor de Fb, para cada valor de Fr y Ft, co
rrespondíente a c¿fifa-poS1~tnró!ft 1 ér~mftP. t a. Si unimos todos los puntos que se ob-

Cinemética y dinámica de los motores alternativos 583
' 1
A= 113
o 360° 720°
-F. R
4.5 450°
·¡
., Fig. 20.27. Diagrama polar de esfuerzos sobre la cabeza -de biela

584
,._ e j e de t o r i f i e i o de en g r a se
Fig. 20.28. Situación del orificio de engrase
Motores de combustión interna alternativos
tienen al girar el cigüeñal 360° en un motor de dos tiempos, o 720° en uno de cuatro tiempos, aparecerá una curva polar con su polo en el punto O' (figura 20.26).
Para tener la curva de la carga real sobre el cojinete, habrá que trasladar el polo vertical una cantidad igual a F cA (que es constante con a).
De esta forma aparece el polo OA de la curva polar de los esfuerzos sobre el cojinete. Es costumbre en la representación gráfica hacer coincidir OA con A. Uniendo O A con el punto de la curva pala r correspondiente a cada ángulo a del cigüeñal, tenemos la dir'ección, sentido y módulo de la· fuerza resultante sobre el gorrón de la muñequilla (punto A).
La proyección sobre la vertical de cualquiera de los vectores del diagrama polar, da el valor de la fuerza que actúa en la dirección del brazo del cigüeñal y que tendrá que ser absorbido por el cojinete del apoyo .
.
El diagrama polar se puede representar también en coordenadas cartesianas de RA en función de a y nos servirá para obtener el valor medio de la carga sobre el cojine.
te, muy útil para el cálculo del engrase.
A
r e w
Fig. 20.29. Fuerzas resultantes sobre el apoyo del cigüeñal
Conociendo el diagrama polar podemos calcular el denominado diagrama de desgaste del gorrón de la muñequilla, suponiendo que el desgaste es proporcional a las fuerzas que actúan sobre ella, sin más que ir sumando para cada punto de la periferia del gorrón, el valor de la fuerza R:. que le corresponde, tantas veces como dicha fuerza incida sobre ese punto en un ciclo completo del motor (360° ó 720°).
El punto que corresponda con un mínimo de desgaste teórico será donde deberá ir situado el orificio de engrase.

Cinemática y dinámica de los motores alternativos 585
45
<po
,e -€ o ~
Fig. 20.30. Diagrama polar de los esfuerzos
sobre los cojinetes de apoyo
3. Fuerzas resultantes sobre los cojinetes de apoyo del cigüeñal
Sobre un apoyo del cigüeñal actúan las fuerzas Fb, (véase apartado de par motor) y Fe fuerza centrífuga de las piezas con movimiento giratorio.
En este caso la fuerza centrífuga será la vista anteriormente F eAt la debida al gorrón de la muñequilla, a los brazos y a los contrapesos que existan, es decir:
F -- m R w2 e - RA
donde:
m A - masa reducida a A de la biela. mbr - masa reducida a A de los bra
zos. mm - masa de la muñequilla. me - masa reducida a A de los con
trapesos (si los hay).
Todos estos valores son constantes con a. La suma de todas las masas menos mAl es la masa del cigüeñal reducida al punto A.
Entonces .. el diagrama polar de los esfuerzos sobre el apoyo se podrá dibujar sin más que desplazar vertica lmente el polo del diagrama polar de esfuerzos en la muñequilla una distancia igual a:
Al unir este nuevo polo O con cada punto, tenemos el módulo, dirección y sentido del vector R0 en cada ángulo de giro del cigüeñal, vease la figura 20.30.
Los valores máximos y mínimos de R0 , se utilizan para comprobar el cigüeñal a f\exión.
Un apoyo intermedio entre dos codos contiguos del cigüeñal , absorberá la m itad . .

586 Motores de combustión interna alternativos
-del valor de R0 de un codo y la mitad del otro. El diagrama polar de esta fuerza R0 m,
puede obtenerse conociendo los diagramas polares del apoyo correspondiente a cada codo o brazo y situándolos en el ángulo en que se encuentren_en el cigü~ñal en cuestión. De esta forma , para cada valor de a, habrá un vector R~í y _s>tro R~¡, correspondiente a ambos brazos que se suman_vectorialmente para dar Romí· El lugar geométrico de los extremos de los vectores Romí' al girar el motor un ciclo completo, será el diagrama polar correspondiente, pero el módulo real del vector será la mitad del obtenido en dicho diagrama.
BIBLIOGRAFIA
GIACOSA, D.: Motores endotérmicos. Científico Médica. 1964.
~
JOVAJ, M.S. y MASLOV, G.S. : Motores de automóvil. MIR. 1978.
KHOVAKH, M. : Motor Vehicfe Engines. MIR. 1971.
LAMADRID, A. y CORRAL, A .: Cinemática y dinámica de máquinas. Sección de Publicaciones de la E. T . S . J. J. de Madrid . 1969.
LIST, H.: La dinámica de ros motores de combustión interna. Labor. S.A. 1944.
PAYRI, F.: Dinámica de los motores. Sección de Publicaciones de la E.T.S.f.l. de Madrid. 1978.
;r,.('~t!.úW, c. r-~ :· ¡rrte lht(fr'fYal ' Corñotis11orf Én-gine in Theory and' Practice. Volumen IÍ, MIT Press. 1982. ·

CAPITULO 21 . 1
EQUILIBRADO DE MOTORES
21.1. Concepto de equilibrado
21.2. Equilibrado de cigüeñales
21.3. Equilibrado ·de motores completos
21.4. Irregularidad de la velocidad de giro de un motor
T. SANCHEZ Dr. lng. Industrial
J. CASANOVA Dr. lng. Industrial
A. MUÑOZ 1 ng. 1 ndustrial

21. 1. CONCEPTO DE EQUILIBRADO
Las acciones, fuerzas y momentos que aparecen durante el funcionamiento de un motor alternativo en rég imen estacionario se pueden clasificar en externas e ínter-
•
nas. Entre las llamadas externas se encuentran:
. - peso del motor.
· - fuerzas de reacción de los gases de escape y de los líquidos en movimiento. - par resistente del medio exterior al giro del cigüeñal. -. par resistente del ventilador y otros órganos.
Como acciones internas se consideran las siguientes:
- fuerzas de inercia de las masas con movimiento alternativo. - fuerzas centrífugas de las masas con movimiento giratorio. - par motor.
Tanto las acciones externas como las internas pueden estar equilibradas o no. Se consideran como no equilibradas las· que se transmiten a los apoyos del motor, tales como:
- peso del motor. - fuerzas de reacción de los gases de escape y de los líquidos en movimiento. - fuerzas de inercia de las masas con movimiento alternativo y giratorio. - fuerzas tangenciales de inercia de las masas en rotación cuando la velocidad
' angular es variable .
- par motor.
Las acciones equilibradas son aquellas cuyas fuerzas y momentos resultantes son nulos como por ejemplo :
- fuerzas de presión de los gases. - fuerzas de rozamiento .
Algunas de las acciones no equilibradas que se han citado anteriormente tienen muy poca influencia en el equilibrado del motor, bien porque su magnitud y dirección per-
" ~ • •
1,
f
•• j
•
' 1

¡
590 Motores de combustión interna alternativos
manecen constantes, como es el caso del peso del motor, bien porque yaríen muy poco, o bien porque su magnitud sea despreciable. Como ejemplo de las dos últimas premisas podemos citar las fuerzas de reacción de gases de escape y líquidos en movimiento y las fuerzas tangenciales.
En consecuencia el origen del desequilibrio de un motor se reduce a las fuerzas de inercia de las masas en movimiento alternativo que varían periódicamente en magni~ud y sentido, a las fuerzas centrífugas debidas a las masas con movimiento giratorio que varían continuamente de dirección, y al par motor cuya magnitud es variable con el tiempo.
En un motor desequilibrado la presión sobre los soportes varía continuamente y origina vibraciones que se transmiten al bastidor y al propio vehículo, provocando desajustes, sobrecarga, desgastes y otras consecuencias indeseables. La situación se ve agravada si la frecuencia de las vibraciones provocadas por las acciones no equilibradas se acerca a la frecuencia propia de vibración del sistema o de alguna de sus partes.
Se dice que un motor está. equilibrado ·si durante el funcionamiento estacionario del mismo se transmiten a los soportes de éste fuerzas y momentos constantes en magnitud y dirección o bien nulos. En la práctica se considerará como equilibrado un motor que asegure un grado tolerable de desequilibrio. Ello se consigue seleccionando un número de cilindros apropiado y una disposición de los mismos y de los codos del cigüeñal adecuada, así como utilizando contrapesos.
Para que el equilibrado previsto en el diseño se cumpla, las piezas del motor deben fabricarse en conformidad estricta con las tolerancias en masas y dimensiones. Dichas toier·ancias se establecen a fin de as~gurªr.:
- iguales masas de los grupos de pistones. -_iguales masas e idéntica disposición de los centros de gravedad de las bielas. -equilibrado estático y dinámico del cigüeñal.
21.2. EQUILIBRADO DE CIGÜEÑALES
El equilibrado estático del cigüeñal exige que el centro de gravedad del mismo esté en el eje de rotación , es decir que la resultante de todas las fuerzas centrífugas de las masas con moyimiento giratorio sea igual a cero.
Para que un cigüeñal esté equilibrado dinámicamente es necesario, además de la _c_on.dLciqn _anterior, que la suma de los momentos de las fuerzas centrífugas de la
• •
masas con movimiento giratorio con respecto a cualquie-r--p-únto-de11 ej~-cfe11 éi~'U~an1il 1
sea nula. El equilibrado dinámico se realiza en las máquinas equilibradoras . ..
Equilibrado de motores
A - · -
R
r /
. -
591
Estudiemos a continuación el caso particular de varios tipos de cigüeñal, calculando la masa reducida de los contrapesos para su equilibrado estático.
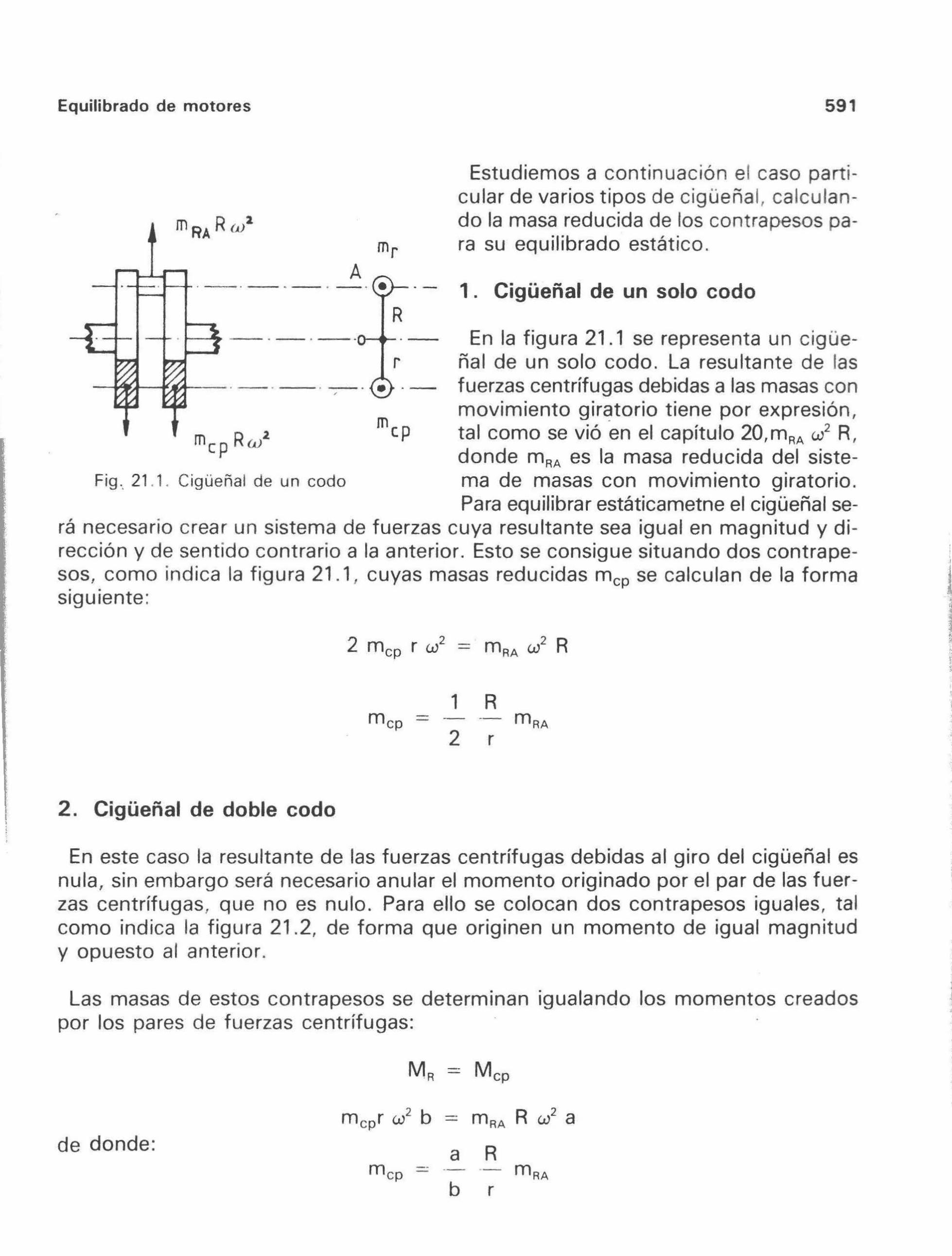
1 . Cigüeñal de un solo codo
En la figura 21.1 se representa un cigüeñal de un solo codo. La resultante de las fuerzas centrífugas debidas a las masas con . . . . . . , movtmtento gtr~tono t1ene por expres1on, tal como se vió en el capítulo 20,mRA w2 R, donde mRA es la masa reducida del siste-
Fig ., 21 .1. Cigüeñal de un codo ma de masas con movimiento giratorio. Para equilibrar estáticametne el cigüeñal se
rá necesario crear un sistema de fuerzas cuya resultante sea igual en magnitud y dirección y de sentido contrario a la anterior. Esto se consigue situando dos contrapesos, como indica la figura 21 .1, cuyas masas reducidas mcp se calculan de la forma siguiente:
2. Cigüeñal de doble codo
2 2 . 2 R mcp r w == mRA w
1
2
R -- mRA r
En este caso la resultante de las fuerzas centrífugas debidas al giro del cigüeñal es nula, sin embargo será necesario anular el momento originado por el par de las fuerzas centrífugas, que no es nulo. Para ello se colocan dos contrapesos iguales, tal como indica la figura 21.2, de forma que originen un momento de igual magnitud y opuesto al anterior.
Las masas de estos contrapesos se determinan igualando los momentos creados por los pares de fuerzas centrífugas:
MR Mcp
mcpr w2 b mRA R w2 a
de donde: a R mcp -- -- mRA
b r
J
J '
i ~ "' •• . • •· t r .1 •¡
1
' •
-1
'
1
r ~
' i
~:
i .
' . {i'.• 1'
fl ~r-i
' 1 . :
:~ ..

592
a
- ---~.....__. --+---6- J -+-......__ . .,__..... r •
1 , R
m Rw2. A
b
Fig. 21.2. Cigüeñal de doble codo
Motores de combustión interna alternativos
3. Cigüeñal simétrico de varios codos
Estos cigüeñales se equilibran, en general, sin necesidad de utilizar contrapesos. No obstante, frecuentemente se colocan éstos para disminuir los momentos que tienden a flexar el cigüeñal sobrecargando
'
los cojinetes de apoyo. Por otra parte, los contrapesos distribuyen más uniformemente la presión a lo largo de la circunferencia del cojinete .
4. Cigüeñal asimétrico de varios codos
Su equilibrio dinámico únicamente es posible con la ayuda de contrapesos. Si por alguna razón no fuera posible colocar contrapesos en la prolongación de los brazos, el momento longitudinal MR debido a las fuerzas centrífugas se equilibrará colocan do el número mínimo de contrapesos que asegure que el momento equilibrador Mcp
sea igual a MR y ambos estén en el mismo plano.
21.3. EQUILIBRADO DE MOTORES COMPLETOS
En este apartado estudiaremos el equilibrado del motor completo funcionando en .r.égim.en estacionario. Las fuerzas y los momentos que se equilibran son los siguientes:
- Fuerzas de inercia alternativas; en general sólo es necesario hacerlo con las de primer y segundo orden por ser las de órdenes superiores de magnitud despreciable.
- Fuerzas centrífugas de las masas en rotación; quedan equilibradas al equilibrar el cigüeñal , como se ha visto anteriormente. ·
'
- Momentos longitudina.les de las fuerzas de inercia de primer y segundo orden y de las centrífugas no equilibradas en su plano (plano que contiene a la fuerza y es perpendicular al eje), debido a que dichas fuerzas se ejercen en planos distintos · perpendiculares al eje del cigüeñal.
El equilibrado consiste en diseñar un sistema-de masas en movimiento tal que unido '
..

Equilibrado de motores 593
al sistema motor (mecanismo biela-manivela) origine fuerzas y momentos resultantes constantes en magnitud y sentido, o iguales a cero.
Conviene, por otra parte, no olvidar la influencia que sobre la dinámica del motór en su conjunto ejerce su orden de encendido. De éste dependen las fases de las fuer-
:· zas y momentos que actúan en los distintos cilindros. ; ¡, • ¡ ¡:
t El orden de encendido se fija atendiendo fundamentalmente a las siguientes 1
~ consideraciones: • • ¡:
- Que l~s encendidos se sucedan a intervalos iguales de tiempo para conseguir un funcionamiento más regular del motor.
- Que los cilindros que se suceden en el encendido estén lo más lejos posible _unos de otros, a fín de disminuir las cargas sobre los cojinetes de apoyo del ·cigüeñal.
- Que la amplitud de las vibraciones torsionales del cigüeñal sea lo menor posible.
En un motor en línea de z cilindros, los encendidos deben producirse, para conseguir la mayor uniformidad de funcionamiento, cada 4 1r 1 z radianes, si es de 4 tiempos y cada 2 1r 1 z si es de 2 tiempos.
En un motor en V, la sucesión de los encendidos depende tanto de la disposición constructiva del cigüeñal como de1 ángulo ~ de incli~ación de los cilindros.
En primer lugar estudiaremos el caso del motor monocilíndrico y posteriormente algunos cas9s particulares de motores policilíndricos en línea y en V.
1
1 . Motor monocilíndrico ,
Se estudiará como se equilibran las fuerzas de inercia alternativas de primer y se-gundo orden y las centrífugas no equilibradas en el propio cigüeñal.
a) Fuerzas de inercia alternativas .
Estas actúan en la dirección del cilindro y su valor es:
- m R8 R w2 (cosa + ~ cos2a + ~3
cos4a + ... ) = 4
Como puede observase, Fa es función de a, siendo las de primer orden, Fa,, perió-
"}
' , f.
.. • <

'
.. ' r t ,.
~
i
• 1
'\
r
l ! .
•
594
_.,.___ . - · - · - -
•
Motores de combustión interna alternativos
dicas con a, las de segundo orden, Fa 11 ,
periódicas con 2a, las de cuarto orden, F atv' con 4a, etc.
El sistema de masas que anula estas fuerzas deberá actuar también en el plano del eje del cilindro.
- Fuerzas de inercia alternativas de primer orden
Su magnitud es mRs R w2 cosa y su di- · rección la del eje del cilindro. El vector representativo de esta fuerza puede ser considerado como la composición de dos vectores giratorios de magnitud mitad, girando en sent~dos opuestos, como se observa en la figura 21 .3.
Fig. 21.3. Descomposic ión de las fuerzas de
inercia alternativas de pr~mer orden Las fuerzas de inercia alternativas de pri -mer orden podrán ser compensaqas colo
cando dos ejes situados paralela y simétricamente al cigüeñal, accionados por éste, con sendas masas unidas a ellos colocadas en un plano que contiene al eje del cilin dro y perpendicular al eje del cigüeñal, girando en sentidos opuestos pero a la misma velocidad del cigüeñal.
Las masas están montadas de forma que la fuerza centrífuga debida a su giro forma un ángulo con la vertical igual al girado por el cigüeñal. Las componentes horizontales de estas fuerzas centrífugas se anulan mutuamente y las componentes verticales se suman dando una resultante jguaJ a mRB R w2 cos~, pero de sentido contrario a las fuerzas de inercia alternativas de primer orden (véase figura 21.4). El valor de estas masas será tal que:
2 m; r, w2 cosa == F a1 == mAs R w2 cosa
m' 1
1
2
R
- Fuerzas de inercia alternativas de segundo orden
Su magnitud es mR8 R w2 A cos2a, y su dirección la misma que las de primer o den. Debido a esta circunstancia se podrán compensar de la misma manera que lé de primer orden, con dos ejes similares a los anteriores, que portan unas determine das masas. En este caso las fuerzas centrífugas originadas por dichas masas deberá
f~r~~~ ~on la vertical u~ ángulo 2a (doble det"girado por eYclgG.eifalr. ó'eigua1 1rñlfnt!r

'
' 1
l l ~
' t ~
' 1 ! ~ • t ' ' •
; i
Equilibrado de motores
1
B
1 •
1
m¡
•
1 . 1 Fan
2
Fig. 21.4. Compensación de las fuerzas de inercia alternativas de un motor monocilíndrico
595
que en el caso anterior, las componentes horizontales de dichas fuerzas se anulan mutuamente y las verticales se suman dando una resultante igual a mRa R w2 ~ cos 2a (ver figura 21.4)
El valor de las masas que hay que colocar en dichos ejes es:
----2 m;, (2 w)2 cos2a = F811 = mRa R w2 A. cos2a
, _ l '\ R mu " mRa
8 r11
b) Fuerzas centrífugas
Las fuerzas centrífugas no equilibradas por el propio cigüeñal se equilibran mediante contrapesos situados e·n los brazos del cigüeñal, opuestos a las muñequillas, de

596 Motores de · combustión interna alternativos
forma que ambas fuerzas centrífugas, las no equilibradas y las originadas por los contrapesos, se anulen.
· En gran parte de los motores monocilíndricos no se utiliza el sistema anteriormente 1
descrito· por razones de sencillez mecánica y lo que se hace es incrementar la masa ,·de los contrapesos del cigüeñal. Este sistema, denominado equilibrado excesivo, permite reducir la magnitud de la fuerza de inercia de primer orden no equilibrada, pero simultáneamente crea una componente horizontal no equilibrada como causa de la fuerza centrífuga originada por el contrapeso.
En ·general, en estos casos, se equilibra alrededor de un 50% del valor de la fuerza de inercia de primer orden, apareciendo una componente horizontal del mismo valor. Este desequilibrio deberá ser absorbido por las fijaciones del motor o se transmitirá al bastidor.
2. Motores policilíndricos en línea
En lós motores que disponen de dos o más cilindros será posible, en muchos casos, equilibrar las fuerzas que se producen en unos cilindros con las que se producen en otros. Por ello será útil saber qué fuerzas están equilibradas entre sí en el plano perpendicular al eje del cigüeñal.
Tomaremos como referencia el cilindro n° 1, siendo el ángulo a el que determina la posición de la manivela correspondiente al cilindro n° 1 respecto de su PMS y On el ángulo qu·e forma la manivela correspondiente a un cilindro genérico con la del cilindro n° 1 {para el · cilindro n° 1' ()~ = 0).
. eje del cilindro
Fig. 21.5. Representación de la fuerza de inercia alternativa de primer orden de
un motor policilíndrico
Para cada cilindro, la fuerza alternativa de primer orden será la proyección sobre el eje del mismo de una fuerza ficticia de valor mAs w2 R aplicada sobre O que sigue siempre la .dirección de la manivela (ver figura 21.5).
La proyección horizontal de dicha fuerza no existe físicamente. Si las fuerzas ficti cias mAs w2 R correspondientes a cada cilindro forman un sistema de vectores de resultante nula, es evidente que la suma de las proyecciones verticales de dichas fuerzas será nula y se dirá que las fuerzas de
- • • • • 1
inercia de primer orden están equilibrada-s-. En la. figura 21-.6 se representa un _ejemplo para tres cilindros con manivelas a 120°.

Equilibrado de motores
1 1
f f 1 1 1 1
•
1 1 1 1 f 1
1 1
1
CD 00 1 1
Fig. 21 .6. Fuerzas de inercia alternativas de primer orden de
un motor de tres cilindros
597
La fuerza de inercia de 2° orden para el cilindro n° 1 tiene como valor Fa 11 = mAs w2 R 'A cos2a, luego equivale a la proyección en la dirección del eje del cilindro de un vector ficticio que gira a velocidad doble que el cigü.eñal, pero que en el PMS su dirección coincide con la de la manivela.
Para los diversos cilindros del motor, el valor de las fuerzas de inercia de segundo orden será :
en donde On es el ángulo que forma la manivela correspondiente al cilindro en cuestión con la del cilindro no 1 .
Entonces, el vector ficticio giratorio de cada cilindro, cuya proyección vertical es la fuerza de segundo orden, formará un ángulo 2 On con el vector correspondiente al cilindro 1, como se observa en la figura 21.7 para el motor de tres cil indros.
Por simplicidad se considera el cilindro n° 1 en el PMS a fin de que et ángulo a valga cero.

598
cilindro
8=120°
posición d~ l os manivelas
1
2
Motores de combustión interna alternativos
• • 1
pOSICIOn
zii posición de tos vectores de las fuerzas de 2o. orden
Fig. 21 .7. Fuerzas d~ inercia alternativas de 2° orden de un motor de tres cilindros
De igual manera, para cualquier otro orden superior, el vector correspondiente a cada cilindro estará situado formando un ángulo de valor i On con la dirección correspondiente al cilindro n° 1 en el PMS, siendo i el orden de las fuerzas que se estén considerando. Si la estrella de vectores que resulta tiene resultante nula, las fuerzas estarán equilibradas en el plano; si no es así, la resultante será la suma de las proyecciones verticales de los diversos vectores correspondientes a los diversos cilindros.
Para el estudio de los momentos longitudinales producidos por estas fuerzas, se tomarán momentos respecto al punto central del cigüeñal.
~
A continuación se desarrollan algunos ejemplos de equilibrado de motores policilín -dricos en línea .
a) Motor bícílíndrico de 2 tiempos
Las manivelas forman un ángulo de 180° para tener un tiempo igual entre encendidos. Su equilibrado se representa en la figura 21.8.
- Fuerzas de inercia de ter orden
Están equilibradas en el plano vertical, E Fa, == O, lo cual se puede ver por el sistema de los vectores rotativos, anteriormente explicado, o bien analíticamente como
• s1gue: ~·~- ......

Equilibrado de motores
1 •
p
p
b
Fig. 21.8. Equilibrado de un motor de 2 cilindros, 2 tiempos
2
E Fal 1
= mRs R w2 (cosa - cosa) O
- Fuerzas de inercia de 2° orden
F an.
599
No están equilibradas. Se podrían equilibrar por un mecanismo similar al empleado para el motor monocilíndrico:
2
E Fa u == F a111 + F ar12 = mAs R w2 >.. (cos2a + cos2 (a + 180° )f = 1
- Fuerzas centrífugas
Están equililbradas en este motor sin necesidad de contrapesos, al igual que en to-

•
1 ~ '
•
600 Motores de combustión interna alternativos
dos los motores en los que las manivelas formen una estrella equilibrada. De todas formas, se suelen poner contrapesos en muchas ocasiones para descargar los coji netes de apoyo del cigüeñal:
2
E Fe = Fe, + Fc2 = mRA R w2 - mRA R w2 O
1
- Momentos de vuelco longitudinales
Son debidos a que las fuerzas no se ejercen en el mismo plano, sino en diferentes planos perpendiculares al eje\del cigüeñal (ver capítulo 20). Tomando momentos respecto del punto medio del cigüeñal, el momento de vuelco de las fuerzas de inercia alternativa~ de p_r.i.me.r o.rd.e.n Y.a.te.:
a a Fa, + Fa,- 2 mRs w a cosa
2 2
que actúa en el plano de los cilindros. Este momento es compensable, en parte, colocando sendas masas en la prolongación de las manivelas extremas de forma que las fuerzas centrífugas que se originan creen un momento igual y opuesto a M,, es decir, según la figura 21.8.
me e w2 cosa b
y despejando:
R a -e b
en donde e es la distancia del centro de gravedad del contrapeso al eje del cigüeñal.
De esta forma, actúa en el plano horizontal un momento de valor:
que no está compensado.
El momento de vuelco debido a las fuerzas de 2° orden está equilibrado por actuar ambas fuerzas en el mismo sentido:
Si fas fuerzas centrífugas están compensadas en cada cilindro no habrá momento
1
1

Equilibrado de motores 601
de vuelco producido por estas fuerzas, si no es así habrá que compensarlo con con trapesos en las prolongaciones de las manivelas extremas, de forma que el momento creado por ellas sea igual y de sentido contrario al creado por las fuerzas centrífugas no compensadas.
b) Motores bicílíndricos de 4 tiempos
Se utilizan mucho en motocicletas y los codos están calados a 360° para conseguir un desfase igual entr·e encendidos. Su equilibrado se representa en la figura 21.9.
1
o= 360°
- - -- -
Fig . 21.9. Equilibrado de un motor bicilíndrico de 4 tiempos
Su equilibrado es similar al de un motor monocilíndrico, no estando compensadas ninguna de las fuerzas de inercia de 1 o , 2° o cualquier otro orden superior.
2
I: Fa1 == 2 Fa, == 2 mAs R w2 cosa· 1
2
E Fa 11 == 2 mRs R w2 ~ cos2a 1
Pueden compensarse con masas contrarrotantes de forma y disposición similar at motor monocilíndrico, o bien, igual que en aquel para las de 1 er orden, mediante contrapesos, con la consiguiente aparición de fuerzas no compensadas en la dirección horizontal.
Las fuerzas centrífugas se equilibran con contrapesos.
No aparecen momentos de vuelco longitudinales pues todas las fuezas tienen el mismo sentido.

602 Motores de combustión interna alternativos
e) Motor de 3 cHindros de 4 tiempos
Estos motores llevan cigüeñal de 3 codos a 120°. Su equilibrado se representa en la figura 2·1. 1 O.
l •
+ - 8 = 12 0° Fan
Fai G) ,r 3~
1n 1nz 2'21
CD Fan FaiJ 120° 1D. - - -- - - -
0 n
213 2nr ®(]) CD 3!
Fai Far · Fa~ Far Fan Far2
a a
Figura 21 .10. Equilibrado de un motor de 3 cilindros de 4 tiempos
- Fuerzas de inercia de ter y 2° orden
Están equilibradas en el plano, como puede comprobarse analíticamente:
2
E Fa, == mRs R w2 [cosa + cos (a + 120°) -+- cos (a + 240°)1 == O 1
2 - . - .,... ,...,, "
E Fa 11 == mRs R w2 1\ [cos2a + cos2 (a + 120°) + cos2 (a + 240°)1 O 1
Están compensadas hasta las de 4° orden, pero no las de 6° orden.
- Fuerzas centrífugas
No compensadas en su propio plano; están equilibradas en el conjunto.
- Momentos de vuelco longitudinales de _las fuerzas de ter orden
No están equilibrados. En efecto, tomando momentos respecto al plano central del cigüeñal:
F ar1 a - F a13 a mRs R w2 (cosa - cos (a + 240°))
mRs R w2 a (1 ,5 cosa + 0,866 sena)

Equilibrado de motores
cuyo valor máximo es E M,máx a == 330° .
1, 732 mRs R w2 a para los ángulos a
- Momentos de vuelco longitudinales de las fuerzas de 2° orden
Tampoco están compensados:
3
E M" == Fall1 a - F a113 a 1
~
mRe R w2 A a (1 ,5 cos2a + 0,866 sen2a)
cuyo valor máximo es E M11máx == 1,732 mRs R w2 A a /
- Momentos de vuelco longitudinales de las fuerzas centrífugas
603
No están compensados en su plano ya que actúan en planos diferentes para cada cilindro, por lo que el vector resultante se obtendrá mediante la suma vectorial de los momentos debidos a cada cilindro respecto al plano medio del cigüeñal:
-+ -+
MR1 + MR3
Fe1 a cos 30° + Fe3 a cos 30° 1,732 Fe a
-+-
MR2 - o Su dirección forma permanentemente un ángulo ~de 60° con la manivela del cilindro
1. Esta construcción es más conveniente hacerla de forma gráfica como indica la figura 21.11.
CD
Fig . 21 .11 . Compensación de los momentos de vuelco de las fuerzas centrifugas en un motor de 3 cilindros y 4 tiempos
604 Motores de combustión interna alternativos
Para compensar este momento se colocan contrapesos en las prolongaciones de las manivelas, formando un ángulo de 30° con el plano de la manivela del cilindro 1, como muestra la figura 21 .11, a fin de que e.l momento creado sea igual y de senti do contrario al de las fuerzas centrífugas. Este sistema se podría emplear para equili-
•
brar parte del mornento de vuelco de las fuerzas de 1er orden, aunque crearían otro momento de v~elco no compensado en el plano perpendicular al eje de los cilindros.
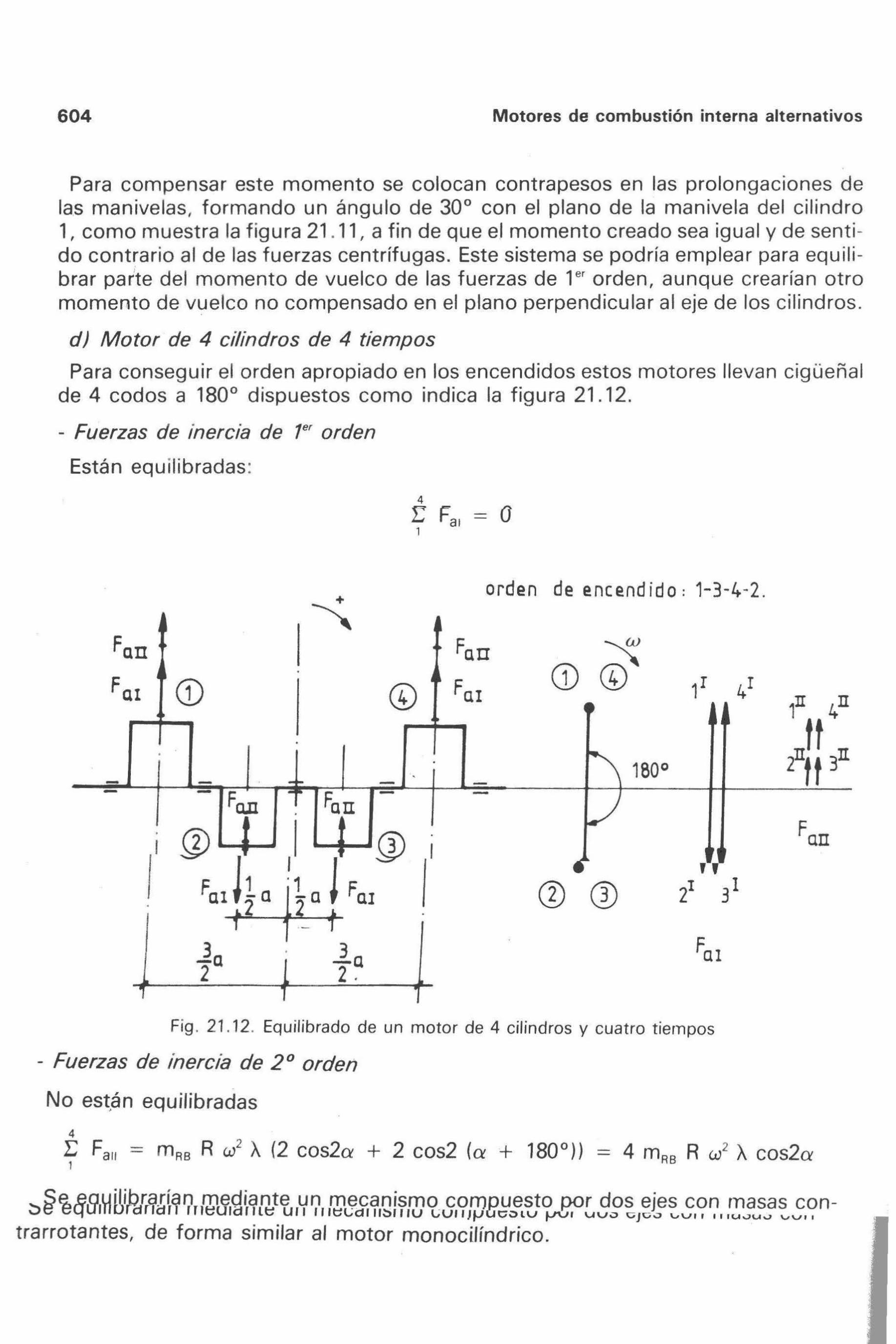
d) Motor de 4 cilindros de 4 tiempos
Para conseguir el orden apropiado en los encendidos estos motores llevan cigüeñal de 4 codos a 180° dispuestos como indica la figura 21.12.
- Fuerzas de inercia de Te' orden
Están equilibradas:
~ orden de encendido: 1-3-4-2.
Fan
F QI
•
-•
r
•
CD
-
{D
Fal
la 2
•
Fa.n
1
1a '1 -a 2
Fan ~ C0 Fai CD C0 1r
•
180° - -Fan -
Q) f
Fai 0 Q) 21
Fig. 21 .12. Equilibrado de un motor de 4 cilindros y cuatro tiempos
- Fuerzas de inercia de 2° orden
No est.án equilibradas
4
4!
31
1li 4n
tt ftt 3n
Fan
l: Fa" == m As R w2 A (2 cos2a + 2 cos2 (a + 180°)) == 4 mR8 R w2 A cos2a 1
~e ..eauilibra.rían mediante un m~canismo comouesto por dos ejes con masas con-~l:f BLfUIHUfélrlé:H 1 rTJ~Uiélr Jl~ Uf 1 f f lt:(.;df ~~~·' IU l.,;UI 1 JfJfiv\:)lU tJV• uv~ CJv~ vVI f 11 IUvUv VVI 1
trarrotantes, de forma similar al motor monocilíndrico. ·

• •
¡ ' .
•,
Equilibrado de motores
- Fuerzas centrífugas
Están autoequilibradas
- Momentos de vuelco longitudinales de las fuerzas de 7er orden
605
Están equilibrados. En efecto tornando momentos respecto al punto medio def ci-güeñal, (sentido positivo el de la figura 21.12.). ·
o 1 2 2 2 2
Los momentos de vuelco de las fuerzas de 2° orden y de las fuerzas centrífugas no compensadas en su plano también suman cero, por ser el cigüeñal totalmente sirnétrico respecto a su plano perpendicular medio.
e) Motor de 5 cilindros de 4 tiempos
Este motor, utilizado actualrnente en motores Diesel rápidos, lleva un cigüeñal de 5 codos a 72°, a fin de establecer un orden periódico de encendidos, dispuestos como en la figura 21 .13.
- Fuerzas de inercia alternativas
Están equilibradas hasta el sexto orden, así como las centrífugas no compensadas en su plano.
CD
-
a
-
a 2
+
a 2
o r'd e n d e en e en d i do : 1-3 - S-4-2
7CD ®
Cl
Fig. 21 .13. Equilibrado de un motor de 5 cilindros y 4 tiempos

606 Motores de combustión interna alternativos
- Momentos de vuelco longitudinales de las fuerzas de 1e' orden
No están compensados. Su resultante se obtiene realizando la suma vectorial de momento correspondiente a cada cilindro:
'
Fa,, a
a Fal2-
2
Fal3 O
R 2 a ( + 288o) - mR8 w cos a a
Fat4-2 2
- F ar5 a
El momento de vuelco ·resultante es:
--+ -+ --+ --+
M,, + M12 + M,4 + M,5
que actúa en el pi~ no que contiene el eje de los cilindros, es decir, su dirección es la horizontal según el convenio seguido hasta ahora. Su módulo es variable con a.
Estudiemos el caso particular de a == O, es decir el cilindro n° 1 en el PMS. Para obtener el módulo del momento de vuelco resultante se determina el correspondiente a cada cilindro y se suman entre sí:
2
a mRa R w2 cos 288° -
2
M,5 == mRe R w2 cos 72° a
2
a - mRa R w2 cos 36°
2
.. ·~:

. ;
' i
:.
"
• ¡ • ! 1
'
Equilibrado de motores 607
Esta construcción puede hacerse gráficamente, y como ejemplo determinaremos el momento de vuelco resultante de las fuerzas de inercia de 2° orden para a == O. Para ello sumamos vectorialmente los momentos de los vectores ficticios rotativos correspondientes a cada cilindro, cuando el cilindro n° 1 está en el PMS (a == 0), como se ve en la figura 21.14a. Su proyección en la dirección vertical será el módulo del momento. Por simplificar la figura se ha tomado como dirección de cada momento la de la fuerza que lo origina, por lo que la dirección del momento de vuelco resultante será perpendicular a la proyección representativa de su módulo, es decir, la dirección horizontal. Estos momentos habría que compensarlos colocando ejes auxittares paralelos al eje del cigüeñal y con masas en sus extremos, situadas diametralmente opuestas una a otra en cada eje, figura 21.14b. En el caso de las de primer orden dichos ejes girarán a la velocidad del cigüeñal (w) y en el de las de 2° orden a velocidad doble (2 w) .
M res 5 mR8 Rw2.a I: Mn
1
CDn 1 1. Fres
2n @@ C0 ® @ m Re Rw'" a
2 mR9 Rw1a
mRaRwaa sn 2
0) 0 ® (a)
® G) CD
1 ........ r'· •
. .........
1 . "1 •
1 1
1 ."" 1 . • .
1 1 ~ .
1 ( b)
Fig. 21.14.a y b Representación grafica de los momentos en un motor de cinco cilindros

608 Motores de combustión interna alternativos
- Momento de vuelco longitudinal de las fuerzas centrífugas
Se obtiene fácilmente de forma gráfica como muestra la figura 21.15. Su módulo 5
esE MR y actúa en un plano giratorio. Se puede compensar con contrapesos en las 1 prolongaciones de las manivelas extremas del cigüeñal, situadas como muestra la.~
figura 21.15, es decir, formando un determinado ángulo con las prolongaciones de los brazos del cigüeñal, y de magnitud la necesaria para crear un momento igual y de sentido contrario al creado por las fuerzas centrífugas.
Fig. 21 .15. M omento de vuelco longitudinal de un motor de cinco cilindros •
f) Motores de 6 ctlindros de 4 tiempos
El cigüeñal de estos motores tiene 6 manivelas a 120°, tal como muestra la figura 21.16.
1
- Fuerzas de inercia de 7er y 2° orden
Están equilibradas, figura 21 .17, lo mismo que las centrífugas no compensadas en su plano:
6 -).: Fa, 1
o • !
6 -E Fa" 1
o • o ,
Como el cigüeñal es simétrico respecto al plano perpendicular medio, las resultantes de todos los momentos de vuelco longitudinales son cero.
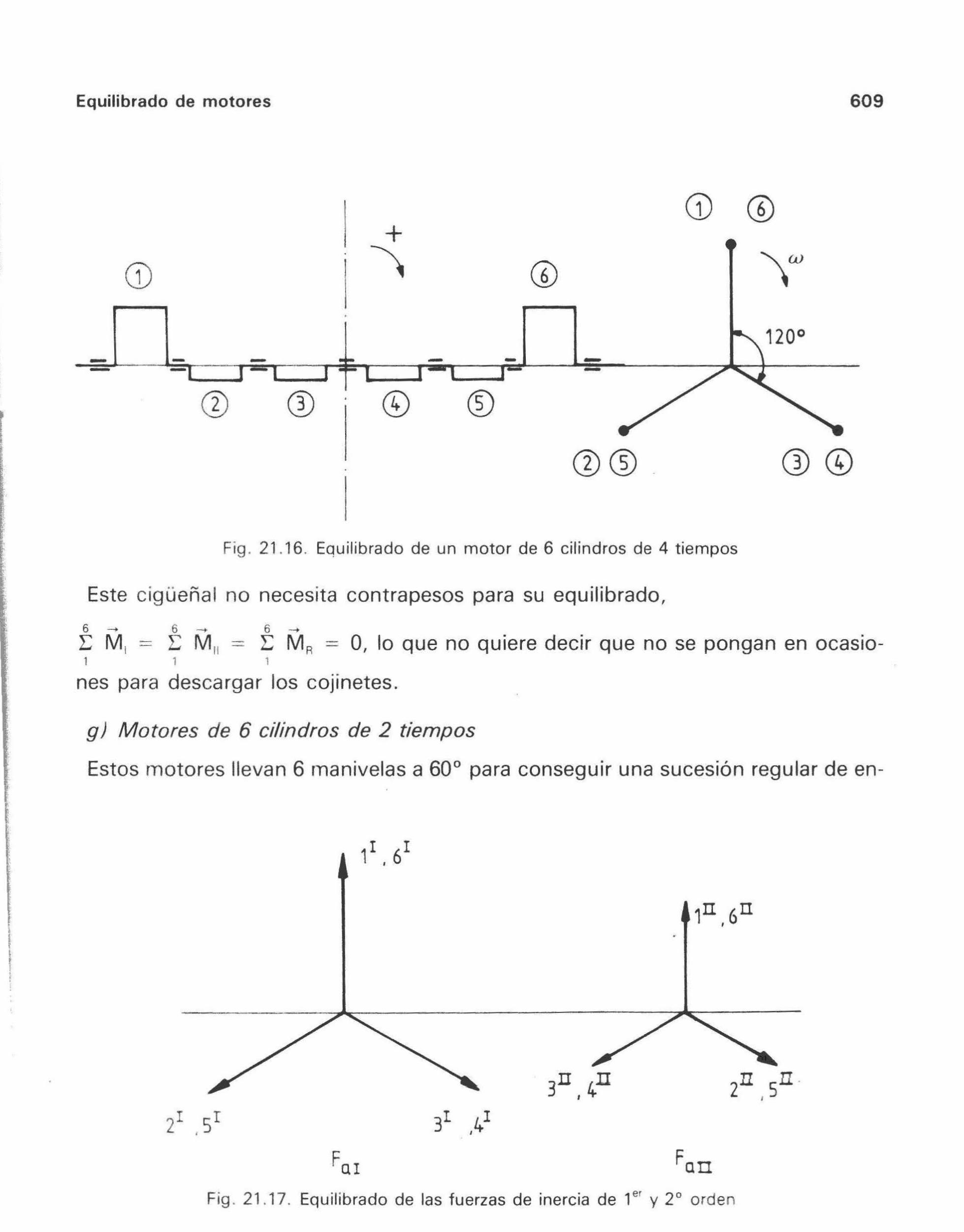
Equilibrado de motores 609
® + ~
-
Fig . 21 .16. Equilibrado de un motor de 6 cilindros de 4 tiempos
Este cigüeñal no necesita contrapesos para su equilibrado,
6 ~ 6 ~ 6 4
E M, == E M 11 == E MR == O, lo que no quiere decir que no se pongan en ocasio-1 1 1
nes para descargar los cojinetes .
g) Motores de 6 c1lindros de 2 tiempos
Estos motores llevan 6 manivelas a 60° para conseguir una sucesión regular de en-
Fig . 21.17. Equilibrado de las fuerzas de inercia de 1er y 2° orden
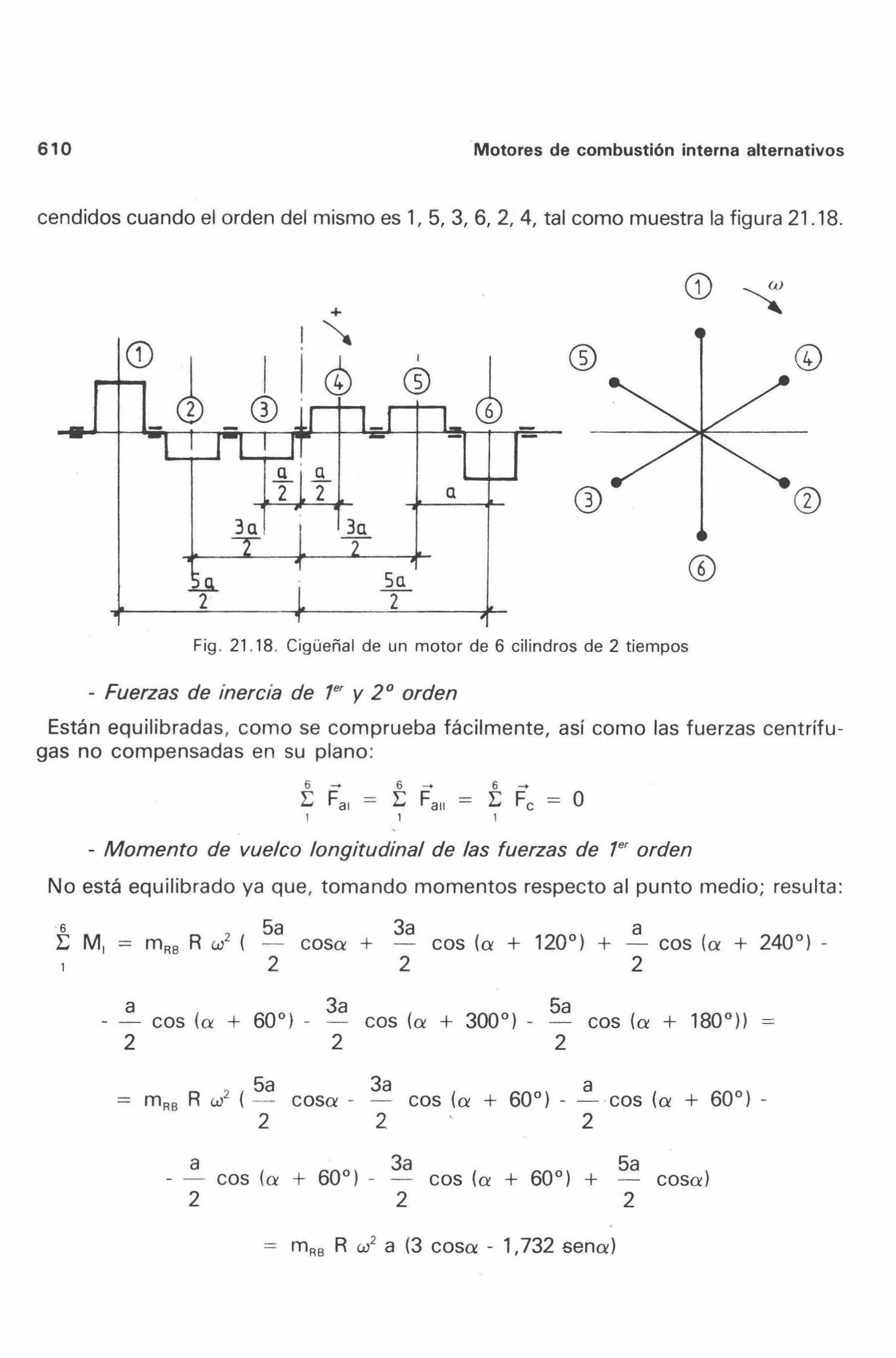
610 Motores de combustión interna alternativos
cendidos cuando el orden del mismo es 1, 5, 3, 6, 2, 4, tal como muestra la figura 21.18.
+
'" 1
3a 3a
S a 2
a
Fig . 21 .18. Cigüeñal de un motor de 6 cilindros de 2 tiempos
- Fuerzas de inercia de Ter y 2° orden
Están equilibradas, como se comprueba fácilmente, así como las fuerzas centrífugas no compensadas en su plano:
6 -+
E Fe == O 1
- Momento de vuelco longitudinal de las fuerzas de Ter orden
No está equilibrado ya que, tomando momentos respecto al punto medio; resulta:
·s 5a 3a a E M, == mR8 R w2
( cosa + cos (a + 120°) + cos (a + 240°) -1 2 2 2
a 3a 5a - cos (a + 60° ) - cos (a + 300°) - cos (a + 180°)) -2
2 ( 5a m Rs R w
2
2 2
3a a cosa - cos (a + 60°) - - -cos (a + 60°) -
2 ~ 2
a 3a 5a - cos {a + 60°) - cos (a + 60°) + cosa) 2 2 2
m Rs R w2 a (3 cosa - 1,732 sena)

í. ~··
' . .. ~
.:·
Equilibrado de moto~~s 611
i El valor máximo de este momento, que se obtendría derivando respecto de a, vale:
6
E M 1máx 1
para valores de a de 150° y 330°.
En algunos motores este momento se equilibra colocando dos ejes con masas contrarrotantes en sus extremos, de forma que creen un momento longitudinal vertical de igual valor al creado por las fuerzas de 1er orden, según el esquema de la figura 21.19.
30°
30°
Fig. 21.19. Equilibrado de los momentos de vuelco en un motor de 6 cilindros 2 tiempos
- Momento de vuelco longitudinal de las fuerzas de 2° orden
6 --.. Está equilibrado: E M 11 == O
1
- Momento de vuelco de las fuerzas centrífugas
No está equilibrado. Su módulo, dirección y sentido se obtienen gráficamente según la figura 21 .19. Se equilibraría por dos contrapesos diametralmente opuestos en las prolongaciones de las manivelas ext-remas, formando un ángulo de 30° con ta vertical.

612 Motores de combustión interna alternativos
Los módulos de cada uno de los momentos debidos a las fuerzas centrífugas valen:
3. Motores policilíndricos en V
Los motores llamados en V son aquellos que están compuestos por dos líneas o bloques de cilindros cuyos pistones -accionan el mismo clguenai formando entre sí un cierto ángulo 'Y .
Para estudiar su equilibrado pueden considerarse como un conjunto de dos motores en línea. Por lo tanto, si en un motor en línea están equilibradas unas determinadas fuerzas de inercia , en el motor en V compuesto de dos bloques, cada uno con el mismo n° de cilindros que el motor en línea y la misma disposición de manivelas del cigüeñal, también estarán equilibradas.
En los motores en V se supone, mientras no se indique lo contrario, que en cada muñequilla actúan dos bielas en el mismo plano. De todas formas, se puede comprobar que si no fuese así, el error cometido sería muy pequeño. Tal es el caso de dos bielas una al lado de la otra sobre la misma muñequilla.
la magnitud de una fuerza no equilibrada en un motor en V se determina, para cada conjunto de dos cilindros sobre una misma muñequilla, como la suma vectorial de las fuerzas debidas a cada cilindro, teniendo en cuenta que están desfasadas un ángulo "f, que es el ángulo que forman las dos filas de cilindros. ·
Estudiaremos a continuación unos cuantos ejemplos. En los motores en V, la sucesión uniforme de encendidos depende tanto de la forma del cigüeñal como del ángulo 'Y entre filas de cilindros. Por ello este ángulo se elige teniendo en cuenta el tipo de motor (2 ó 4 tiempos), el equilibrado necesario y razones de tipo constructivo y de tamaño.
a) Motor de dos Cilindros en V
Analicemos en primer lugar el caso general, particularizando posteriormente para 'Y == 90°. Su disposición es la de la figura 21.20. Referiremos el ángulo a al eje del cilindro n 6 1.
- Fuerzas de inercia de 7er orden ..
No están equilibradas. En efecto, dichas fuerzas para los cilindros 1 y 2 son en

Equilibrado de motores 613
R
rnódulo:
y su resultante :
cuyo rnódulo vale :
Fig . 21.20. Motor de 2 cilindros en V
2 -+
E Fa, 1
-+ -+
Fa t1 + Fat2
R -~ -
p
Como se observará es variable en módulo y dirección, no pudiéndose equilibrar con contrapesos.
En el caso particular de 'Y == 90° se tiene,
F a11 == mAs R w2 cosa
. ' ' 1
1
¡ •'

614
2
E Fa, 1
Motores de combustión interna alternativos
vF~ ,, + F~ l2 == mRB R w2 (constante en .módulo)
El ángulo que forma con el eje del 1 er cilindro es:
F a12 mR8 R w2 sena l/; == are tang == are tang a
Es decir su dirección es variable con la posición del cigüeñal, luego se puede equili brar con contrapesos en las prolongaciones de las manivelas. Las masas de estos contrapesos se obtienen de la siguiente forma:
•
' 1
2
R
e Si las bielas no están en el mismo plano, figura 21.21., tomando momentos respec
to al punto medio del cigüeñal se tiene:
' b 1
b M,1 == mRs R w2 cosa -
2
b mRs R w2 sena
2
2
Como b suele ser muy pequeño, este momento longitudinal, que es gi~atorio , también resulta pequeño, y no suele tenerse en cuenta.
- Fuerzas de inercia de 2° orden
No están equilibradas.
En efecto:
Fig . 21 .21. Codo de cigüeña l de motor en V _2
E Fau 1

Equilibrado 'de motores • . 615
. - variable en módulo y dirección, y no se puede equilibrar con contrapesos en et cigüeñaL
Para el caso de 'Y == 90°
F 8112 == mRB R w2 A. cos(2 (90 - a))
El módulo de la fuerza resultante es:
Como se puede observar, el módulo no es constante y su dirección forma un ángulo:
F 8 112 l/;1 == are tang == 135° F 811 1
ó bien -45° con el eje del prin:'er cilindro, es decir, '
actúa en la dirección horizontal. En general no se equilibra.
- Fuerzas centrífugas
Se pueden equilibrar mediante contrapesos en el cigüeñal, teniendo en cuenta que en este caso:
por haber dos bielas en la misma muñequilla.
En este caso no aparecen momentos de vuelco longitudinales a excepción del momento originado por las fuerzas de inercia alternativa~, de primer orden, de magnitud despreciable. '
b) Motores de dos cilindros opuestos de 4 tiempos
Los motores de dos cilindros opuestos suelen llevar cigüeñales de dos muñequillas a 180°, según la figura 21.22.
- Fuerzas de inercia de 1e' y 2° orden
Son en todo momento iguales pero de sentido contrario, por lo que están equilibradas, incluso para cualquier orden superior.
- Fuerzas centrífugas
No compensadas en su plan~; sucede algo similar, es decir:
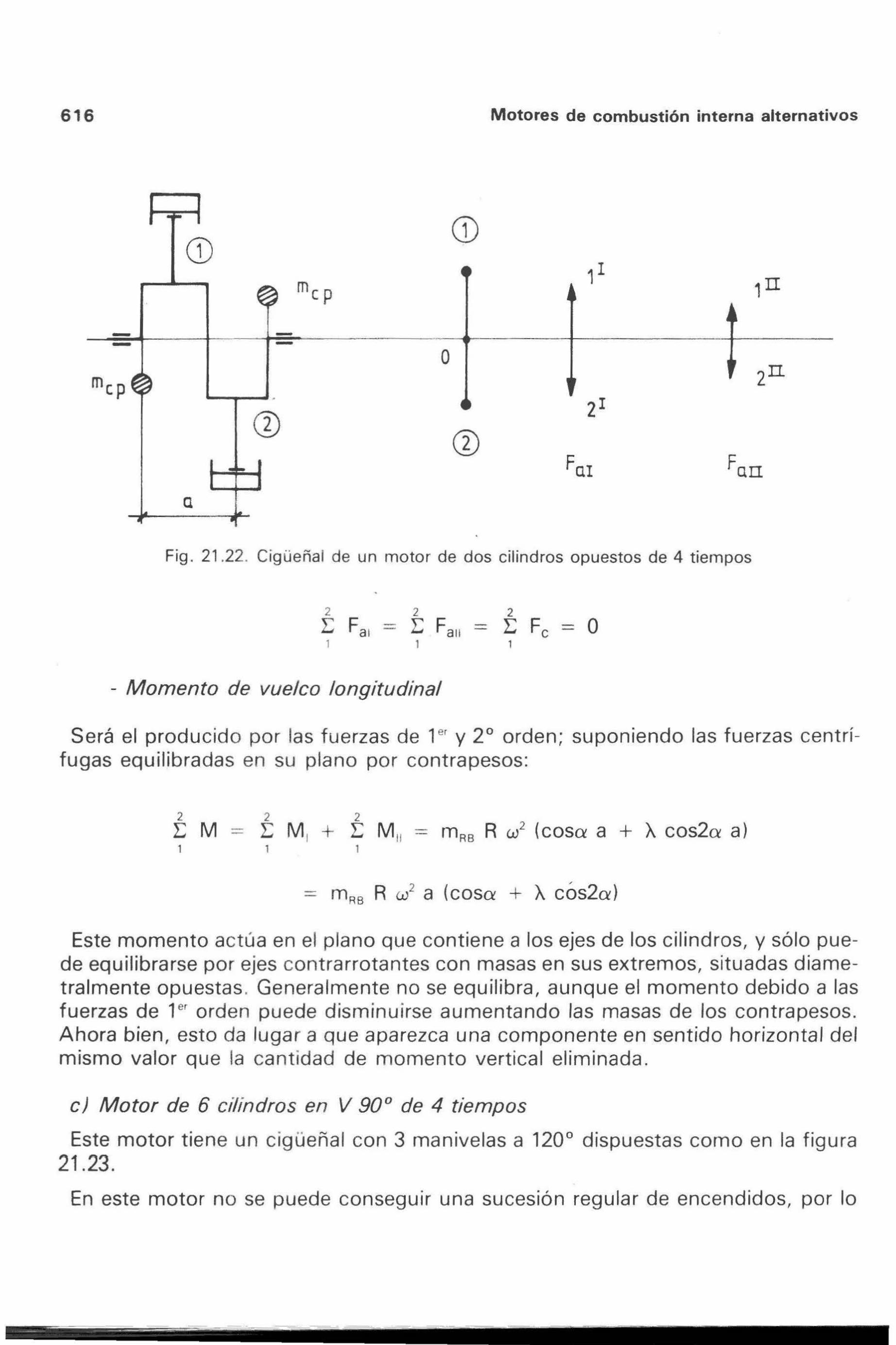
616 Motores de combustión interna alternativos
CD
-- - o mcp 2n
21 0 0
Far Fan
a
•
Fig. 21 .22. Cigüeñal de un motor de dos cilindros opuestos de 4 tiempos
o
- Momento de vuelco longitudinal
Será el producido por las fuerzas de 1 er y 2° orden; suponiendo las fuerzas centrífugas equilibradas en su plano por contrapesos:
2 2 2
I: M E M, + E M 11 == mRs R w2 (cosa a + A cos2a a) 1 1 1
mRs R w2 a (cosa + A cós2a)
Este momento actúa en el plano que contiene a los ejes de los cilindros, y sólo puede equilibrarse por ejes contrarrotantes con masas en sus extremos, situadas diametralmente opuestas. Generalmente no se equilibra, aunque el momento debido a las fuerzas de 1 er orden puede disminuirse aumentando las masas de los contrapesos. Ahora bien, esto da lugar a que aparezca una componente en sentido horizontal del mismo valor que la cantidad de momento vertical eliminada.
e) Motor de 6 cilindros en V 90° de 4 tiempos
Este motor tiene un cigüeñal con 3 manivelas a 120° dispuestas como en la figura 21.23.
En este motor no se puede conseguir una sucesión regular de encendidos, por lo

Equilibrado de motores 617
F ai1 ,'t
w
l 1
a Far 3, 6
Fig . 21 .23. Cigüeñal de un motor de 6 cilindros en V 90°
cual se recurre a montar volantes con momentos de inercia superiores en un 60-70°/o a los de cilindros en línea .
Resulta muy útil dividir el motor en tres secciones, cada una de las cuales corresponde a un motor de V 90° ·de dos cilindros estudiado anteriormente. Por lo tanto, refiriéndonos a los resultados obtenidos en el ·apartado a); ·obtenemos la resultante de las fuerzas en este caso .
- Fuerzas de inercia de te' orden
Están equilibradas, como se ve en la figura 21.23, pues son constantes en módulo y giran en fase con el cigüeñal :
- Fuerzas de inercia de 2° orden
Están también equilibradas:
6
I: Fa 11 == Y2 m Rs R w2 A (cos2a + cos (2 (a+ 120°)) + cos (2 (a+ 240°) )) O 1
- Fuerzas centrífugas no compensadas
No compensadas; también están equilibradas:
6
E F == O e 1

618 Motores de combustión interna alternativos
- Momento de vuelco de las fuerzas de 1er orden
Se obtiene de igual manera que en el caso del motor de 3 cilindros y su valor es:
Actúa en un plano giratorio con el cigüeñal que forma un ángulo de 30° con la pri mera manivela.
- Momento de vuelco de las fuerzas centrífugas
El momento de vuelco de las fuerzas que no están compensadas se obtiene de la misma forma . Su valor es:
y actúa en el mismo plano que el correspondiente al de las fuerzas de primer orden.
Ambos momentos podrían equilibrarse con contrapesos diametralmente opuestos en las prolongaciones de los brazos extremos y formando u~ ángulo de 30° con el plano de la primera manivela.
- Momento de vuelco de las fuerzas de 2° orden
Tiene un valor:
6
E M 1, == V2 mR8 R w2 A a (1,5 cos2a + 0,866 sen 2a) 1
que es variable en módulo, y su dirección es la horizontal. Se podría equilibrar con dos ejes con masas en sus extremos; diametralmente opuestos, girando a velocidad doble que el cigüeñal en sentido opuesto.
· En este motor están también equilibrados entre sí los momentos debidos al caso ... de no estar las dos bielas de la misma muñequilla en el mismo plano .
•
d) Motor de 8 c1lindros en V 90° de 4 tiempos
Para conseguir una sucesión regular de encendidos en estos motores, el orden del mJsmo debe ser 1, 5, 4, 8, 6, 3, 7, 2 y el cigüeñal estar dispuesto como en fa figura 21.24.
El estudio de su equilibrado puede realizarse suponiéndolo compuesto por cuatro motores de dos cilindros en V 90°.
- Fuerzas de inercia de 7er orden
Están eq~ilibradas , lo mismo que las centrífugas no compensadas, como se puede ver en la frgura 21 .24. .
. ' .
' l '
l j ·i
j
l ' ¡

:: • . ;
Equilibrad9 de motores. 619
CD Fai 3,1 F a11,, Fan1,5 F an z, ó
: :
Fig. 21 .24. Equilibrado de un motor en V 90° de 8 cilindros y 4 tiempos
8
E Fa, == O 1
- Fuerzas de inercia de 2° orden
• o 1
Están también equilibradas. En efecto, conociendo su valor para cada par de cilindros, y sabiendo que todas ellas tienen dirección horizontal:
8 I: Fa 11 == f2 mRs R w2 A [ cos2a + cos (2 (a + 90P)) + cos (2 (a + 270°)) + 1
+ cos ( 2 (a + 180 ° ) ) ] ==
== f2 mRs R w2 A [cos2a - cos2a - cos2a + cos2a] == O
- Momentos de vuelco de las fuerzas de inercia de Te' orden y de las fuerzas centrífugas no compensadas en su plano
No están equilibrados por no ser simétrico el cigüeñal. Los momentos resultantes se pueden obtener gráficamente tomando momentos respecto del centro del cigüeñal., según muestra la figura 21.25.
Sus módulos valen:

620 Motores de combustión interna alternativos
E MR = V(3a m~A R w2)2 + (a m~A R w2
)2 = V10 a m~A R w2
1 -
y su dire~ción forma con las manivelas de los cilindros 3° y 2° un ángulo 'P de valor:
® (J)
tg '{)
CD®
'{) == 18° 26'
® ®
p
1
3
3a
Fig . 21 .25. Equilibrado de los momentos de V-uelco en un motor en V 90° de 8 cilindros 4 tiempos
p
Actúan en un plano giratorio con el cigüeñal que forma un ángulo de 71 o 34' con el plano de la primera manivela. Se pueden equilibrar con contrapesos colocados en las prolongaciones de las manivelas extremas, y formando un ángulo de 18° 26' con dichas manivelas/según la figura 21.25, de forma que el momento creado sea igual y de sentido contrario al creado por las fuerzas de inercia de 1 er orden y por las fuerzas centrífugas, es decir:
mcp e w2 b == VfO a (mRs + m~A ) R w2
R (mRB + m~A )
e
-- ----·--·---·- ·-

Equilibrado de motores 621
21 .4. IRREGULARIDAD DE LA VELOCIDAD DE GIRO DE UN MOTOR
Se trata ahora de estudiar la variación de la velocidad instantánea de rotación a lo largo de un ciclo de funcionamiento del motor, es decir, la irregularidad de dicha velocidad. Este estudio nos conducirá al cálculo del volante de inercia que será necesario colocar para mantener dentro de unos límites dicha irregularidad.
Estas variaciones de la velocidad de rotación son, en general, indeseables en las aplicaciones reales de los motores alternativos, no sólo por el efecto pernicioso sobre el elemento arrastrado y la confortabilidad del usuario, sino también por l.os importantes esfuerzos torsionales que pueden aparecer en el eje y en el acoplamiento de salida del motor.
El problema surge a causa de la variación del momento de giro o par motor a lo largo de una revolución del mismo, lo que implica la aparición de aceleraciones y deceleraciones de la velocidad instantánea de rotación.
Un primer método de corregir o atenuar la irregularidad de la velocidad de giro es subdividir el motor en varios cilindros, con lo cual las variaciones de par motor de cada cilindro se compensan en parte por los demás.
El segundo método consiste en colocar una pieza de inercia elevada, llamada volante, en el extremo del cigüeñal, que actúe como acumulador de energía .
A continuación estudiaremos el problema de la irregularidad visto desde dos puntos de vista: compensación de las fuerzas tangenciales, determinadas en el capítulo 20 para velocidad de giro w constante, que conduce a un cálculo aproximado del volante de inercia, y compensación de la energía cinética, lo que conducirá al diagrama de inercia y energía y al cálculo exacto del volante de inercia.
1 . Compensación de los pares producidos por las fuerzas tangenciales
En el capítulo 20 se obtuvo el diagrama de las fuerzas tangenciales sobre el eje de muñequilla ( Fr ) en función del ángulo girado por el cigüeñal {a), lo que condujo al diagrama de par motor para un motor monocilíndrico a velocidad constante de giro:
Si el motor es policilíndrico, la curva de par motor será la suma de tas curvas corresoand\entes a cada c:.\\\nd\:0 , ten\endo en cuenta e\ des"\ ase co'"'"espond\e n \.e "1 e \ o'"_den 'de encend\do . la curva resu\tante se rep\te z veces en 360° en un motor de 2 t 'em-pos y en 720° en uno de 4 tiempos, siendo z el número de cilindr~s del ~?tor. En la figura 21 .26 aparece dicha curva para diversos motores en un cterto reg1men de
funcionamiento.

622 Motores de combustión interna alternativos
1 cil indro
4 tiempos
4 cilindros
2 tiempos
90°
O< 720°
()(
Fíg . 21.26. Curvas de par motor
6 ci li ndros
4 tiempos
120°
4 e it indros •
4 tiempos
()(
O<
Refiriéndonos a un caso particular, recordemos el diagrama de par motor de un motor de 4 cilindros y 4 tiempos funcionando en régimen estacionario, figura 21.27.
La suma de las áreas que están por encima del eje de abcisas tiene que ser mayor que la suma de las áreas por debajo de dicho eje para que el motor suministre un par medio (M m) positivo. La diferencia de áreas en un periodo completo será proporcional al trabajo realizado por el fluido motor. La altura del rectángulo rayado en la figura 21.27. representa el par motor medio. Como se recordará del capítulo 20, las fuerzas de inercia no contribuyen al par motor medio. En un motor, si desaparece la combustión , sólo contribuiría al par motor medio la presión de los gases durante la renovación de la carga, dando una resultante negativa que unida al par resistente (negativo) tenderían a parar al motor.
' ~ i '
J

Equilibrado de motor~s
3 cil indros . 4 cilindros
O<
Fig. 21 .27. Diagrama de par motor de un
4 cilindros 4 tiempos
()(
' o 180° 360° 540° 720°
Fig . 21 .28. Reducción de las masas al eje
de la muñequilla
623
a) Obtención de la velocidad instantánea
Se pueden reducir todas las masas móviles del mecanismo biela-manivela al eje de la muñequilla (m~). La masa resultante de esta reducción será evidentemente variable con el giro del cigüeñal, figura 21.28.
1 /2 m C2 + 1 / 2 mRA R2 w2
RB B
m' A f(a) pues C8
La energía cinética en un cierto instante 1, vale:
1 /2 11 w~
donde:
m~1 - masa reducida a A en el instante 1.
cA, - velocidad de la masa m~ en dicho instante.
R - radio de la manivela. 1 - - c2 m' lw0 - m' R2 1 - A1 A1 1 - Al
Por el teorema de las fuerzas vivas, al pasar del instante 1 al 2)a energía cinética variará de Ec1 a Ec2 y su variación será igual al trabajo de los momentos que actúan so bre la manivela (par motor y par resistente) (figura 21.29). Como el momento resultante (M' == Mm- Mr) no es constante, el
trabajo realizado por el mismo será unas veces positivo y otras negativo, Jo que da lugar a que la energía cinética sea variable a lo largo de un ciclo completo de funcionamiento del motor. Si la energía cinética es variable, también lo será la velocidad angular instantánea w.

624
o
•
Motores de combustión interna alternativos
Como la variación de w implica a su vez la de los esfuerzos de inercia sobre los diversos elementos (véase capítulo 20), ca .:. da posición del motor tiene un estado dinámico distinto.
Si nos referimos a la figura 21.30 que representa un diagrama de pares instantáneos imaginarios, para dar generalidad a la explicación, el trabajo realizado entre los estados 1 y 2 es:
Fig . 21 .29. Variación de E e
M'(a) da 1 1
12 w~ - 1, wf 2 2
a ,
donde M'(a) es la diferencia entre el par motor y el par resistente en un instante dado:
M '(a) Mm(a) - Mr(a)
Por lo tanto :
M 'da 1
d( 1 w2)
2
es decir:
M' 1 d( 1 w2
)
;
2 da
con lo cual:
1 di dw - w2 + 1 w 2 da da
Ahora bien, como:
dw da - E Y W
dt dt
se tiene:
J J
j '
.. ¡í

f ~:, f;
Equilibrado de motores
M
M'
E
I
(J)
625
H'máx
180° 360° 540°
Fig . 21.30. Diagrama de pares instantáneos

628 Motores de combustión interna alternativos
a Wmáx y Wmín' puntos aa y ab en )a figura 21.30, se tiene:
ab 1 1
lv W~áx - lv w~ín Wab M'da
a a 2 2
lv (wmáx + Wmín) ( Wmáx - Wmín) == lv w2 o A
2
A es el trabajo realizado entre los puntos de velocidades extremas, y es el máximo que tendrá que acumular el volante para cederlo durante el resto del ciclo.
En la figura 21.31, se representan valores de A para motores de 4 y 2 tiempos con diversos números de cilindros, en función de las fuerzas de inercia propias (sin volan te) en ef punto muerto superior. Como referencia se toma el valor de un motor monocilíndrico sin fuerzas de inercia.
El valor del momento de inercia del volante vale:
A
y el grado de irregularidad resultante:
A
El grado de irregularidad o es más pequeño si crece lv o si crece wm, o bien si de· crece A . El valor de A , como se ve en la figura 21.31, decrece en general con el nú· mero de cilindros, por lo que permitirá volantes más pequeños para un mismo grade de irregularidad, a causa de la propia acción reguladora de unos cilindros sobre otros.
Para valores de A e lv constantes, el aumento de la velocidad de rotación condu ce a una disminución del grado de irregularidad.
Ahora bien, según se observa en la figura 21.31, en algunos casos el trabajo sobrante A aumenta al crecer el valor de las fuerzas de inercia en el PMS, las cuales crecen con wm ·
Un caso muy claro es el motor de 4 cilindros y 4 tiempos en el cual el valor de A crece muy rápidamente con el aumento de _ ~? .v--~~o'"'~Lduaudjc;e,~é~qimrrr, pcr{,~queesfos

Equilibrado de motores 629
10~
o
A
1 ------ - ---:---
3
14 t i empos
8
12 10
FAP~s=fuerzas de en el PM S
A
• • • 1nerc1a prop1as
_r------------- ---
! 2 1 i emP os ]
3
6
Fig. 21 .31. Valores de A en función de las fuerzas de inercia en el PMS
motores necesitan volantes de inercia a altas revoluciones, pero no lo necesitarían a bajas revoluciones.
Otras consideraciones como son esfuerzos en cojinetes, facilidad de arranque, aceleración, deceleración, etc., condicionan el dimensionado final ·del volante de inercia . Volantes de inercia grandes facilitan el arranque del motor.
El proceso de cálculo del volante seguido hasta aquí conduce a buenos resultados en rnotores pesados y lentos, pero en motores ligeros y rápidos conduce a ciertas inexactitudes no admisibles, por lo que a continuación se desarrolla otro proceso de cálculo más exacto y adecuadú para estos motores.
2 . Compensación de la energía cinética. Diagrama de energía-inercia
Hasta este mornento hernos considerado la masa del mecanismo biela-manivela reducida al punto A , siendo dicha masa m~ variable. La energía cinética será en cada instante:
-----------------'

630 Motores de combustión interna alternativos
Este valor de la energía cinética estará compuesto de una parte constante y otra variable con a , para ello vamos a desglosarlo en las partes correspondientes a cada miembro del mecanismo.
- Pistón: Consta de pistón con conjinete de pie de biela, bulón, frenillos y segmentos.
Su masa total es mP y está sometida a un movimiento alternativo de traslación, por lo que su energía cinética es:
- Biela : Consta de biela, cojinete de cabeza de biela y tornillos de fijación del se m icoj i nete.
Su masa es mb y su momento de inercia respecto al centro de gravedad, lb. Está sometida a un movimiento de traslaci.ón y otro de rotación alrededor de su centro de gravedad. Su energía cinética es:
en donde cb es la velocidad lineal de traslación de su centro de gravedad y wb la velocidad angular de rotación de la biela respecto a su centro de grav~dad.
- Cigüeñal: Consta de muñequillas, brazos, apoyos, contrapesos y sus tornillos de fijación.
El cigüeñal esta sornetido a un movimiento de giro, siendo lc9 el .momento de inercia del mismo respecto a su eje de giro.
Su energía cinética es:
1 - lcg w2 2
-En un cierto instante la energía cinética total que posee el sistema, refiriéndonos a un solo cilindro, es igual a la que posee en un instante determinado, por ejemplo en el punto muerto superior, Ec0 , más el trabajo de las fuerzas que actúan sobre el -~L~t~ITL~, ..,e..,s __ d __ e __ qjr .La..,s. tu'"'~L{.a'"'S _d_e. Lo_s ~cta_s_e_~, -~' ~._?.r. c.,e'"'~L~t~r .. t~, -~1 ~ugr '""dve .f~Lc_qLq~, rv .La...,s fuerzas de la gravedad {en general despreciables).
La energía cinética total en un cierto instante, figura 21.32, es:
-------
1
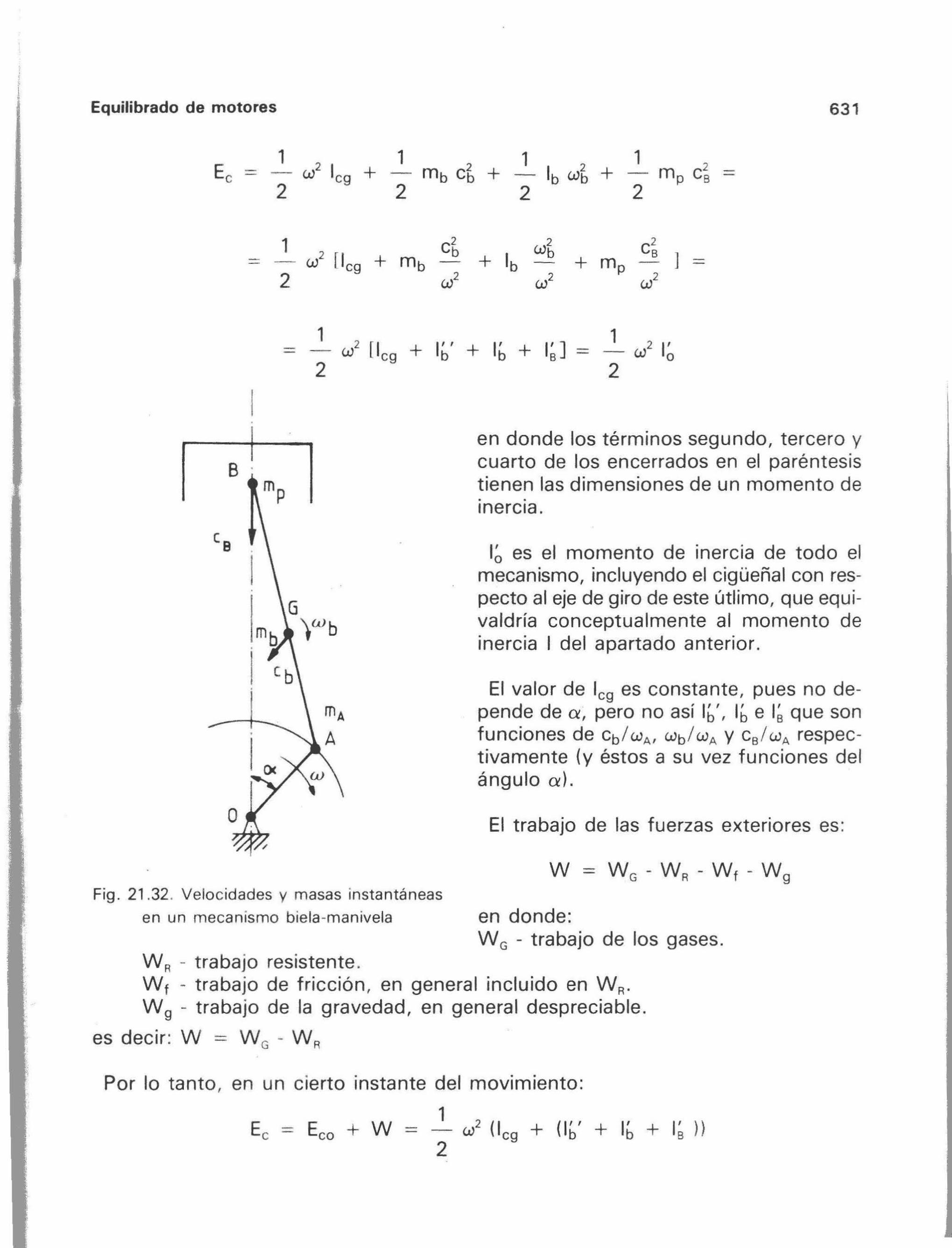
'· '•
,;
• ... ·
<
"
·-.
Equilibrado de motores 631
1 1 lb wt +
2 2
1 - w2
[ 1 cg + 1 b' + 1 b + 1 ~ ] 2
1
2 2 1, w o
1
B
CB
1
o
Fig. 21 .32. Velocidades y masas instantáneas
en un mecanismo biela-manivela
W R - trabajo resistente .
en donde los términos segundo, tercero y cuarto de los encerrados en el paréntesis tienen las dimensiones de un momento de • • tnercta.
1~ es el momento de inercia de todo el mecanismo, incluyendo el cigüeñal con respecto al eje de giro de este útlimo, que equivaldría conceptualmente al momento de inercia 1 del apartado anterior.
El valor de lc9 es constante, pues no depende de a~ pero no así lb', lb e 1 ~ que son funciones de cb / wA, wbl wA y c8/ wA respectivamente (y éstos a su vez funciones del ángulo a).
El trabajo de las fuerzas exteriores es:
w = w - w - wt- w G R 9
en donde: W G - trabajo de los gases.
wf - trabajo de fricción, en general incluido en WR. W 9 - trabajo de la gravedad, en general despreciable.
es decir: W == WG- WR
Por lo tanto, en un cierto instante del movimiento:
1 - w2 (lc9 + (lb' + lb + 1 ~ ) ) 2
Eco + W

632 Motores de combustión interna alternativos
Eco == constante; W == variable; le~ == constante; lb == variables
haciendo 1' == lb ' + lb + 1 ~ queda : lb, 1~ == variables
2
Eco+ W
lcg + 1'
Eco+ W
1' o
Esta última expresión nos llevará posteriormente, una vez conocida la función que liga (Eco + W ) con 1; a la determinación de la velocidad angular w en cualquier instante.
Para obtener la función (Eco + W) == f(l;) procederemos de la forma siguiente:
- Determinación de la función t; == l;(a), figura 21.33a. Esta función será de .forma 1; == 10 + 1' (a) y se puede conocer a partir de los datos propios del mecanismo: masas y dimensiones
- Determinación de la función W == W(a), figura 21.33b, para lo cual es necesario obtener :
W G(a), lo que es factible mediante el diagrama p-a del motor,
b) W R W R(a), que vendrá determinado por el tipo de carga; generalmen-te es una función lineal de a.
w
W=W(c:x)
()e
PMS ( Q) ( b) 180°
motor : 4 e i { indros 4 tiempos
Fig . 21.33. Funciones l;(a) y W (a)

Equilibrado de motores 633
- Eliminando el ángulo a entre las funciones l~(a) y W(a), determinadas anteriormente, se obtiene una función que liga W con 1~, figura 21.34.
- Eco es la energía cinética en el instante inicial (a == 0), por lo que fina lmente:
En la figura 21.34 aparece esta función para las curvas de la figura 21.33, lo que se conoce como diagrama de Wittenbauer, aunque realmente en esta forma se debe a Proeger.
La forma de la curva dependerá del número de cilindros y del tipo de motor. En la
fi9ura2f.~ aPar-ecen varios illagramas de eñer§la-inercla para motores de 4 tiempos y diversos números de cilindros.
Conocida la forma de la curva se puede determinar el momento de inercia del volante necesario para conseguir un determinado grado de irregularidad. En efecto, supongamos que tenemos un motor del cual conocemos su diagrama energía-inercia, figura 21.36, y deseamos conseguir un determinado grado de irregularidad o a una cierta velocidad media w.
f
w
T
(} •. 1
1
1 'o (oc)
Fig. 21.34. Diagrama energía-inercia

634
w
Motores de combustión interna alternativos
[ 4 tiempos j
1 cili ndro 4 cilindros
6 cil indros 8 cilindros
{diferentes esc.atas)
5 cilindros
10 cilindros
I' o
Fig. 21 .35. Diagramas de energía-inercié! de diversos motores
De este diagrama se puede obtener la velocidad en cada punto. En efecto, sea O el ángulo que forma una recta que pasa por O y por un punto genérico P de la curva r 1 figura 21.34, entonces:
por lo que:
tg () W +Eco
1 1 o
w = ~2 tg o'
Wmáx
Wmín
Wm (1 + o ) 2
Wm (1 - O ) 2

·, ~
' ·.•
;·
•
l. j
' ' .. 1
Equilibrado de motores
O'
w
e
e , max
A
r /
I, A
Fig. 21 .36. Diagrama energía -inercia de un motor
con lo cual :
tg Omáx
tg Omín
2 Wrn áx
2
2 Wmín
2
2
2
( 1 +
( 1 - o )2
2
2
2
02 Despreciando frente a o: por ser pequeño (o
4
tg Omáx ( 1 + o ) 2
1
25
02 (1 + + o)
4
1 )
200
635

636 Motores de combustión interna alternativos
w~ -- ( 1 - o)
2
Determinados 8 máx y 8mín para el o deseado se pueden trazar dos rectas tangentes a la curva r que formen dichos ángulos con el eje de abcisas. El punto donde dichas rectas se cortan es el nuevo origen O', figura 21.36. El desplazamiento realizado en sentido horizontal será el valor del momento de inercia lv del volante, y el desplazamiento en sentido vertical Ecv equivale a la energía cinética del mismo cuando se encuentra en el instante inicial (PMS).
,
Esta solución gráfica tiene el inconveniente de que los v9lores de 8máx y Omín están próximos, por lo que en general no es fácil obtener de esta forma el punto O' con
·exactitud, pues pequeños errores del ángulo producirán grandes errores en lv. Para obviar este problema, puede procederse como a continuación se explica.
Refiriéndonos a la figura 21 .36:
DA lv tg Omín
con lo cual :
CD CA - DA
w2 lv m [ ( 1 + O) - ( 1 - O) l
2
Con lo cual :
CD
En otros casos se recurre a trazar dos rectas paralelas con un ángulo Om con la horizontal y tangentes a la curva energía-inercia, siendo:
1 - w~ 2
-
La lon_gitud del segmento que determinan dichas rectas sobre una línea vertical, dis-tancia BA en la figura 21 .37, nos permite determinar un valor aproximado del momento de inercia del volante:

--illlllillllll-------------------------··----·-·- -- . """ ""'"""'""''
i p ;
Equilibrado de motores 637
BA 1 1 V
Como se observa , corresponde al método de compensación de fuerzas tangenciales estudiado en primer lugar, puesto que lo que se hace es suponer que:
Wmáx == Wmín == Wm
lo que equivale a prescindir de los efectos de inercia del mecanismo y tener en cuenta sólo el volante .
El método aproximado siempre calcula los volantes por exceso,aunque cuanto mayor sea el momento de inercia del volante frente a las masas en movimiento, más se acercará el valor de AB al valor de CD, es decir el .método aproximado al método exacto.
Conviene hacer notar que a veces la masa del volante se distribuye parcialmente en forma de contrapesos a lo largo del cigüeñal, a fin de descargar los cojinetes de los apoyos del mismo.
El rnomento de inercia del volante debe ser tal que asegure el funcionamiento del motor en el régimen mínimo (ralentí), lo cual condiciona el máximo valor admisible del grado de irregularidad . Valores bajos de() implican grandes momentos de inercia, lo que dificulta la aceleración del motor y origina ligeros efectos giroscópicos, y pequeños valores de lv dificultan el arranque del motor.
w 8
A
I
Fig. 21.37

638 Motores de combustión interna alternativos
BIBLIOGRAFIA
GIACOSA, D.: Motores endotérmicos. Científico Médica . 1964.
JOVAJ, M.S. y MASLOV, G.S. : Motores de automóvil. MIR. 1978.
KHOVAKH, M. : Motor Vehicle Engines. MIR. 1971.
LAMADRID, A. y CORRAL, A .: Cinemática y dinámica de máquinas. Sección de Publicaciones de la E.T.S .I.I. de Madrid. 1969.
LIST, H.: La dinámica de los motores de combustión interna. Labor, S.A. 1944.
· PA.YRI, F.: Dinámica de los motores. Sección de Publicaciones de la E.T.S.I.I. de Madrid. 1978.
T A YLOR, C.F.: The lnternal Combustion Engine in Theory and Practice. Volumen 11. MIT Press. 1982.
----- ~ r .-• - - ~ -
-----~ . - - - - ~. : ~ .-:_. -