optymalizacja konstrukcji - wersja.0.95, prof. d. skibicki
TRANSCRIPT

Dariusz Skibickidariusz.skibicki(at)utp.edu.pl
Wydział In żynierii Mechanicznej
Optymalizacja
konstrukcji
Wydział In żynierii MechanicznejUniwersytet Technologiczno – Przyrodniczy im. Jana i J ędrzeja Śniadeckich w Bydgoszczy

Plan wykładu
1. Konstruowanie
a) Konstrukcja dobra
2. Matematyczny model optymalizacji
a) Konstrukcja optymalna
b) Budowa modelu optymalizacji
c) Nieprawidłowe modele optymalizacji
3. Metody optymalizacji
4. Oprogramowanie optymalizacyjne
a) Matlab
b) Excel
c) Ansys
5. Polioptymalizacja
6. Metody globalne optymalizacji
a) Algorytmy genetyczne
2
3. Metody optymalizacji
a) Potrzeba metod optymalizacji
b) Błędy w metodach numerycznych
c) Poszukiwanie ekstremum na kierunku
d) Metody bezgradientowe
e) Metody gradientowe
f) Metody newtonowskie
g) Metody funkcji kary
h) Metoda simplex
a) Algorytmy genetyczne
7. Praktyka (kiedy brak jawnej postaci modelu)
a) MES
b) Aproksymacja, interpolacja
Konstruowanie
1. Projekt jest abstrakcyjnym obrazem wytworu.
2. Projekt jest zapisywany w postaci dokumentacji projektowej.
3. Projektowanie maszyn nazywa się konstruowaniem.
4. Konstruowanie polega na określeniu cech konstrukcyjnych: materiałowych, geometrycznych i montażowych.
3
materiałowych, geometrycznych i montażowych.
5. Cechy konstrukcyjne dobieramy w oparciu o kryteria:
- konstrukcyjne,
- technologiczne,
- eksploatacyjne.
Konstruowanie
1. Kryteria konstrukcyjne: właściwy układ przenoszenia obciążeń, wytrzymałość, sztywność.
2. Kryteria technologiczne: technologiczność, taniość i dostępność materiałów, łatwość montażu.
4
montażu.
3. Kryteria eksploatacyjne: funkcjonalność, ergonomiczność, niezawodność, trwałość, sprawność, łatwość eksploatacji, naprawialność.
Konstruowanie
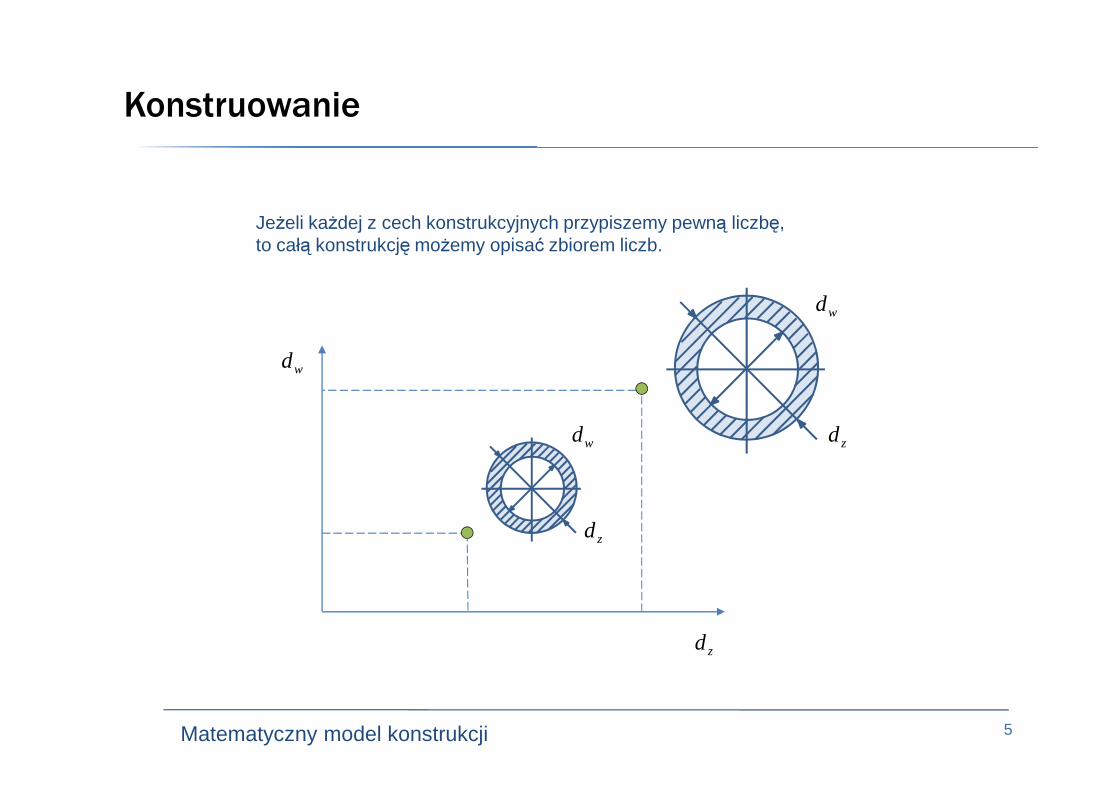
Jeżeli każdej z cech konstrukcyjnych przypiszemy pewną liczbę, to całą konstrukcję możemy opisać zbiorem liczb.
wd
wd
5Matematyczny model konstrukcji
zd
zd
zd
wd
Konstruowanie
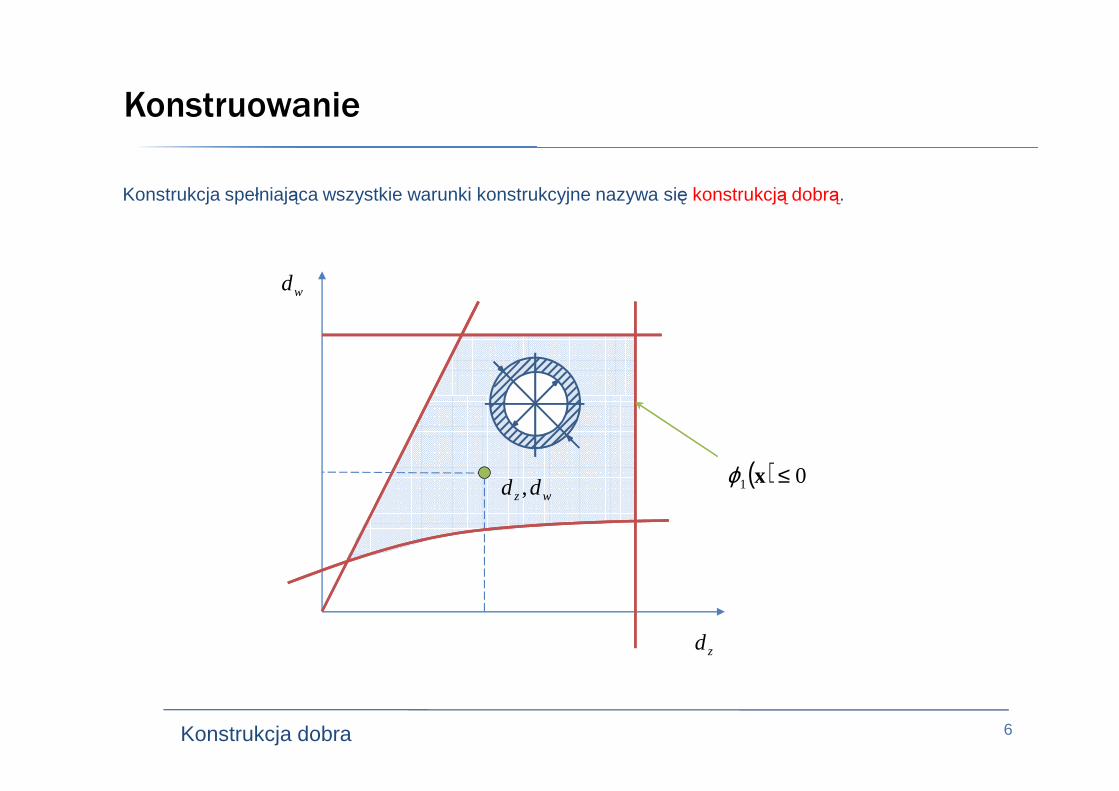
Konstrukcja spełniająca wszystkie warunki konstrukcyjne nazywa się konstrukcją dobrą.
wd
6Konstrukcja dobra
zd
wz dd , ( ) 01 ≤xϕ
Konstruowanie
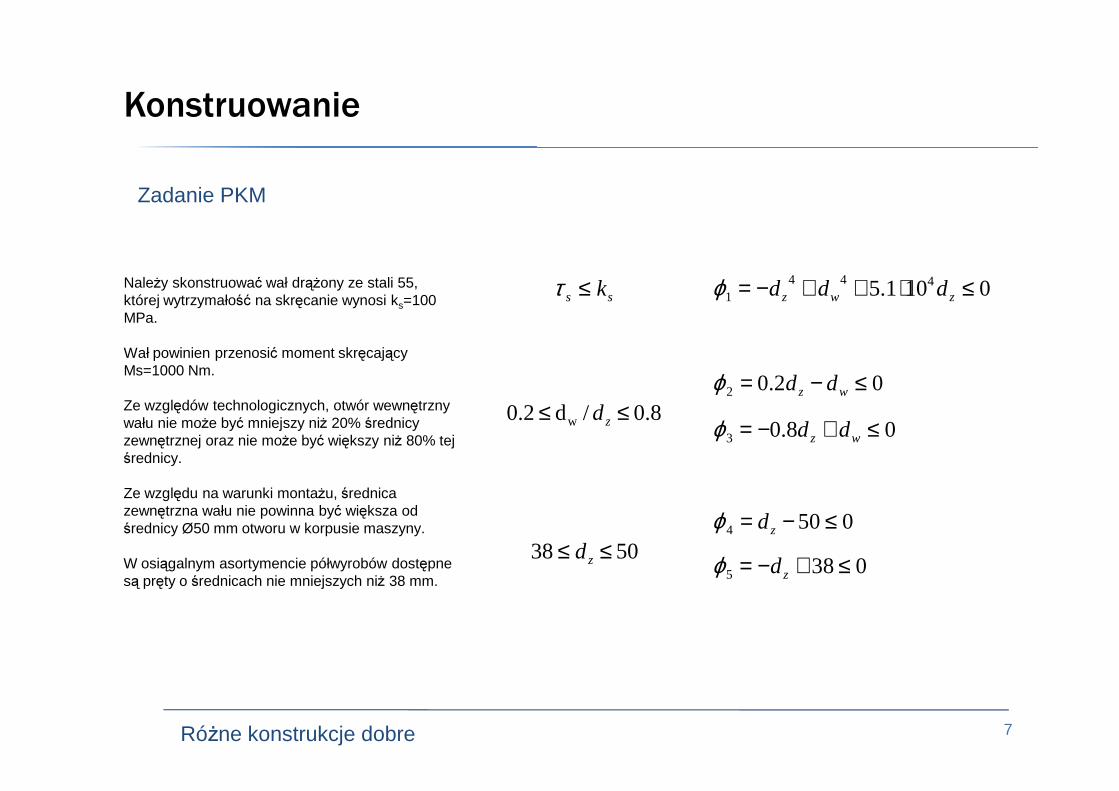
Należy skonstruować wał drążony ze stali 55, której wytrzymałość na skręcanie wynosi ks=100 MPa.
Wał powinien przenosić moment skręcający Ms=1000 Nm.
Zadanie PKM
0101.5 4441 ≤⋅++−= zwz dddϕ
02.02 ≤−= wz ddϕ
ss k≤τ
7Różne konstrukcje dobre
Ze względów technologicznych, otwór wewnętrzny wału nie może być mniejszy niż 20% średnicy zewnętrznej oraz nie może być większy niż 80% tej średnicy.
Ze względu na warunki montażu, średnica zewnętrzna wału nie powinna być większa od średnicy Ø50 mm otworu w korpusie maszyny.
W osiągalnym asortymencie półwyrobów dostępne są pręty o średnicach nie mniejszych niż 38 mm.
2 wz
08.03 ≤+−= wz ddϕ
0504 ≤−= zdϕ
0385 ≤+−= zdϕ
0.8 /d 0.2 w ≤≤ zd
50 38 ≤≤ zd
Konstruowanie
Zadanie PKM
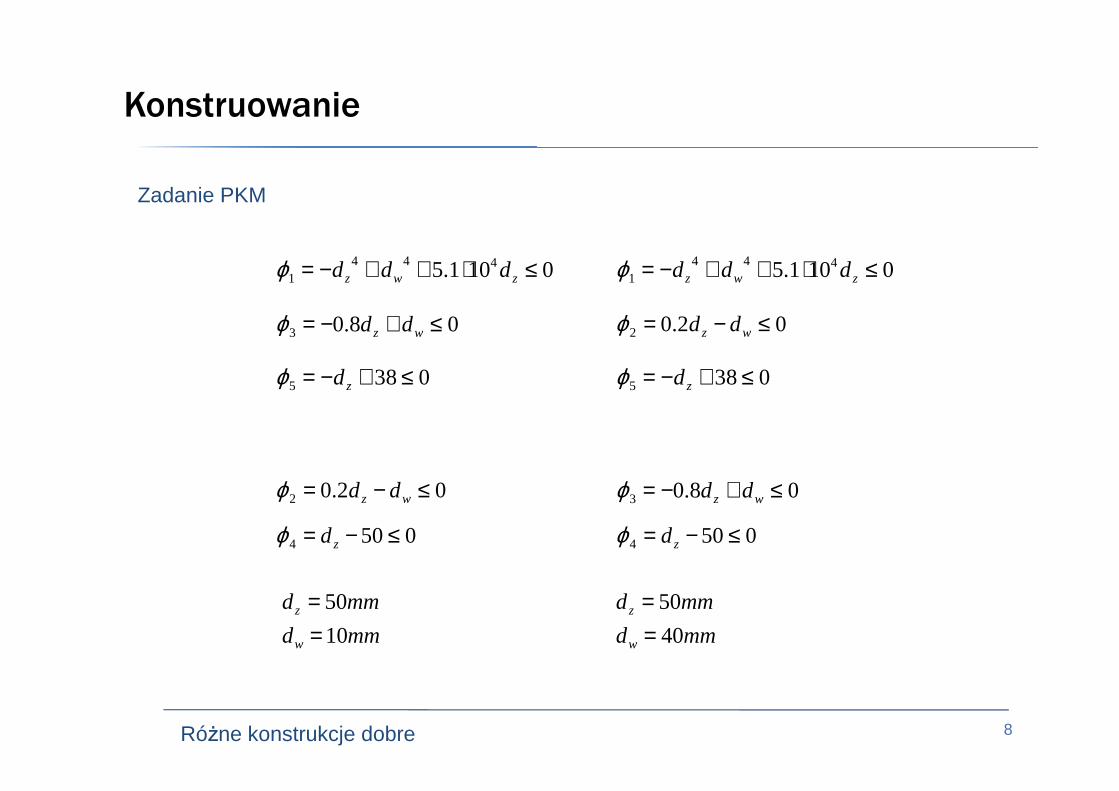
0101.5 4441 ≤⋅++−= zwz dddϕ
08.03 ≤+−= wz ddϕ
0385 ≤+−= zdϕ
0101.5 4441 ≤⋅++−= zwz dddϕ
02.02 ≤−= wz ddϕ
0385 ≤+−= zdϕ
8Różne konstrukcje dobre
02.02 ≤−= wz ddϕ
0504 ≤−= zdϕ
08.03 ≤+−= wz ddϕ
0504 ≤−= zdϕ
10
50
mmd
mmd
w
z
==
40
50
mmd
mmd
w
z
==
Matematyczny model optymalizacji
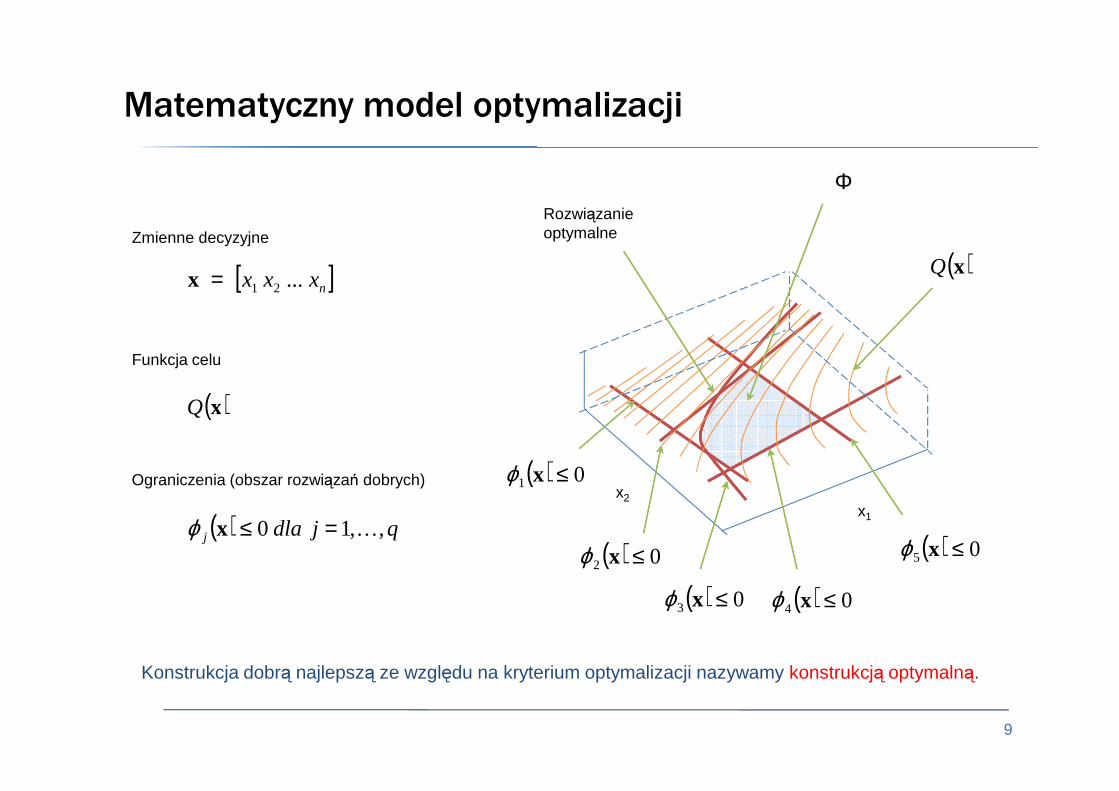
Zmienne decyzyjne
Rozwiązanie optymalne
[ ]n ... x xx 21=x
Funkcja celu
( )xQ
( )xQ
Φ
9
x1
x2
( )xQ
Ograniczenia (obszar rozwiązań dobrych)
( ) qjdlaj ,,10 K=≤xϕ
( ) 03 ≤xϕ ( ) 04 ≤xϕ
( ) 01 ≤xϕ
( ) 02 ≤xϕ ( ) 05 ≤xϕ
Konstrukcja dobrą najlepszą ze względu na kryterium optymalizacji nazywamy konstrukcją optymalną.

Matematyczny model optymalizacji
Zmienne decyzyjne
Funkcja celu
Należy skonstruować wał drążony ze stali 55, której wytrzymałość na skręcanie wynosi ks=100 MPa.
Wał powinien przenosić moment skręcający Ms=1000 Nm.
Ze względów technologicznych, otwór wewnętrzny
[ ] x wz dd=
Model matematycznyModel opisowy
22wz ddQ −=
10Przykład przewodni 1
Ograniczenia (obszar rozwiązań dobrych)
Ze względów technologicznych, otwór wewnętrzny wału nie może być mniejszy niż 20% średnicy zewnętrznej oraz nie może być większy niż 80% tej średnicy.
Ze względu na warunki montażu, średnica zewnętrzna wału nie powinna być większa od średnicy Ø50 mm otworu w korpusie maszyny.
W osiągalnym asortymencie półwyrobów dostępne są pręty o średnicach nie mniejszych niż 38 mm.
Wał powinien być najlżejszy z możliwych.
0101.5 4441 ≤⋅++−= zwz dddϕ
02.02 ≤−= wz ddϕ
08.03 ≤+−= wz ddϕ
0504 ≤−= zdϕ
0385 ≤+−= zdϕ

Matematyczny model optymalizacji
Zmienne decyzyjne
Funkcja celu
Ograniczenia (obszar rozwiązań dobrych)
[ ] x wz dd=
22wz ddQ −=
0101.5 4441 ≤⋅++−= zwz dddϕ
02.02 ≤−= wz ddϕ
08.03 ≤+−= wz ddϕ
0504 ≤−= zdϕ
0385 ≤+−= zdϕ
( ) 25.0441 101.5: zzw ddd ⋅−≤ϕ
zw dd 2.0:2 ≥ϕ
zw dd 8.0:3 ≤ϕ
50:4 ≤zdϕ
38:5 ≥zdϕ
11Graficzne przedstawienie matematycznego modelu optymalizacji
φ1
φ2
φ3
φ4
φ5
x̂
Φ
xopt

Matematyczny model optymalizacji
Zmienne decyzyjne
Funkcja celu
Nr wydziałuMoc produkcyjna
Normy czasowe dla wyrobu [godz.]
W przedsiębiorstwie złożonym z 4 wydziałów produkcyjnych, specjalizujących się w określonej obróbce, wytwarza się 2 wyroby.
Normy czasowe potrzebne do wykonania jednej sztuki wyrobu na odpowiednich wydziałach oraz moce produkcyjne, jakimidysponują poszczególne wydziały zestawiono w tabeli.
[ ] x 21 xx=
21 2030 xxQ +=
Model matematycznyModel opisowy
12Przykład przewodni 1
Ograniczenia (obszar rozwiązań dobrych)Nr wydziału
Moc produkcyjna wydziału [godz.]
wyrobu [godz.]wyrób 1 wyrób 2
1 12 2 22 9 1 23 16 4 04 14 0 4
Na wyprodukowaniu jednej sztuki pierwszego wyrobu zakład zarabia 30 zł, zaś na wyprodukowaniu sztuki wyrobu drugiego 20 zł.
Ile sztuk wyrobu pierwszego, a ile sztuk wyrobu drugiego powinno się produkować, aby w określonych powyżej warunkach produkcyjnych osiągnąć maksymalny zysk?
01222 211 ≤−+= xxϕ
0921 212 ≤−+= xxϕ
01604 213 ≤−+= xxϕ
01440 214 ≤−+= xxϕ
015 ≤−= xϕ
016 ≤−= xϕ
Matematyczny model optymalizacji
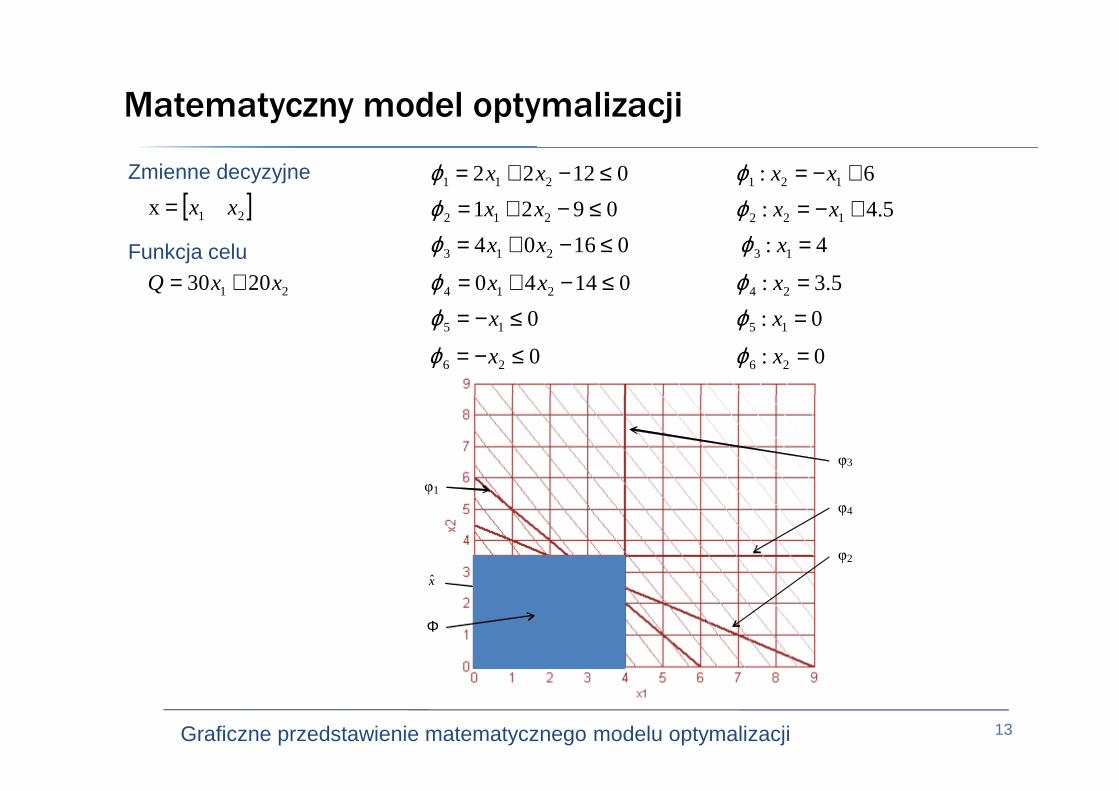
Zmienne decyzyjne
Funkcja celu
[ ] x 21 xx=
21 2030 xxQ +=
01222 211 ≤−+= xxϕ0921 212 ≤−+= xxϕ01604 213 ≤−+= xxϕ01440 214 ≤−+= xxϕ
015 ≤−= xϕ026 ≤−= xϕ
6: 121 +−= xxϕ5.4: 122 +−= xxϕ
4: 13 =xϕ5.3: 24 =xϕ
0: 15 =xϕ0: 26 =xϕ
13Graficzne przedstawienie matematycznego modelu optymalizacji
φ1
x̂
φ2
φ3
φ4
Φ
Matematyczny model optymalizacji
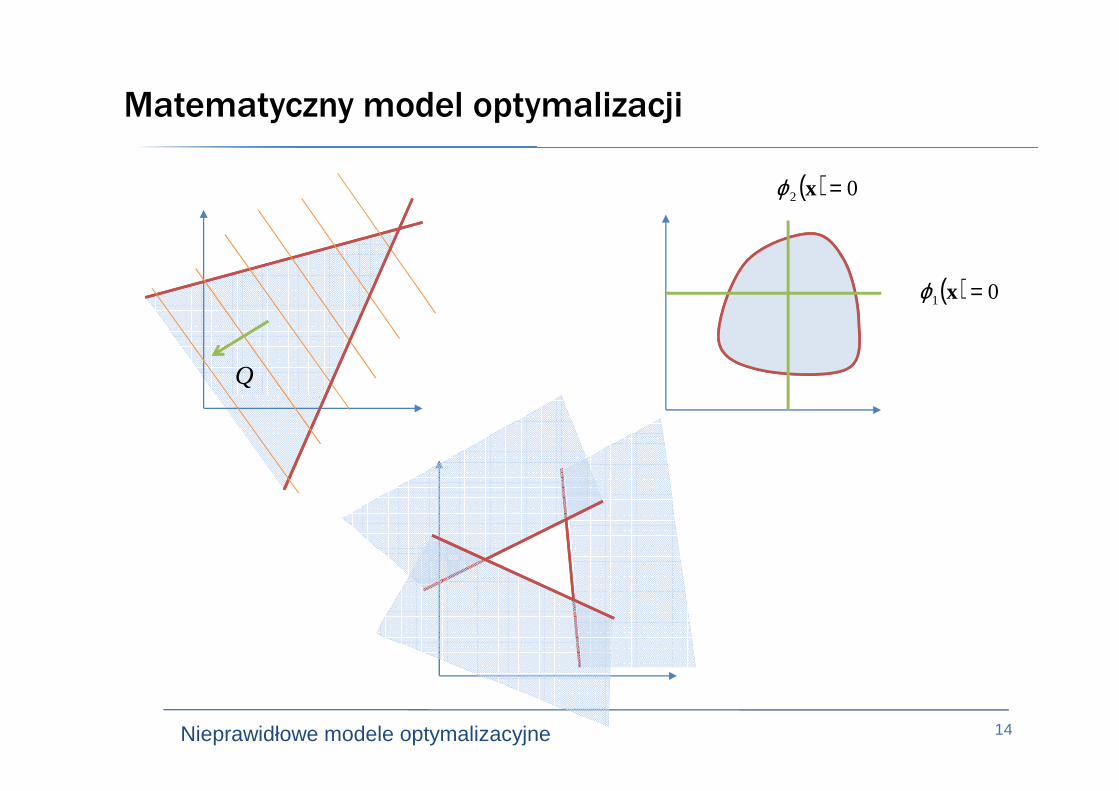
( ) 01 =xϕ
( ) 02 =xϕ
Q
14Nieprawidłowe modele optymalizacyjne

Optymalizacja
x2 x2 x2
x2
15Metoda systematycznego przeszukiwania
x1
x1
x1
x3310=obliczeń
zmiennychpodziałobliczeń =

Optymalizacja
Załóżmy, że zadanie optymalizacji polega na skonstruowaniu najlżejszej kratownicy.Konstrukcja kratownicy złożona jest z 10 prętów. Żądamy spełnienia kryteriówwytrzymałościowych i sztywnościowych. Zakładamy, że średnica pręta może zmieniać się od 0do 100 mm i że interesuje nas dokładność obliczeń rzędu 1 mm. Średnica każdego z 10 prętówmoże przyjąć więc jedną ze 100 wartości.
Musimy sprawdzić, czy nie zostały naruszone ograniczenia dla każdej kombinacji danych. Dlarozwiązań dopuszczalnych musimy policzyć dodatkowo wartość funkcji celu. Jak łatwosprawdzić, mamy do wykonania co najmniej 10010 obliczeń.
16Potrzeba metod numerycznych
Pętlę 100’000 dodawania liczb całkowitych np. a=a+1, komputer z zegarem 2.4 MHz wykonujew czasie 0.157 s. Wynika z tego, że jedna operacja dodawania trwa 1.57*10-6 s.
>> Miliony_Lat = 100^10*1.57*10^-6/60/60/24/365/1000000
Miliony_Lat = 4.9
>> Miliony_Lat = 100^12*1.57*10^-6/60/60/24/365/1000000
Miliony_Lat = 4.9e+004

Błędy w komputerze
1. Błędy wejściowe: wyniki pomiarów, stałe fizyczne.
2. Błędy zaokrągleń
3. Błędy obcięcia
>> x = 0.2>> for i=1:200 x=x+0.2, endx = 40.20000000000003
...!
1...
21
1!1 2 +++++==∑
∞nix x
nxxx
ie
17
4. Uwarunkowanie zadania
=+=+
4,1021,1
102
21
21
xx
xx 3,4 21 == xx
...!
...2
1!0
+++++==∑=i
xn
xxxi
e
=+=+
4,10205,1
102
21
21
xx
xx 1,8 21 == xx

Metody poszukiwania ekstremum funkcji
1. Metody bezgradientowe . W przypadku tej grupy do znalezienia kierunku poprawy potrzebne są jedynie wartości funkcji. Do metod tej grupy zaliczyć można metody Gaussa-Seidla i Powella.
2. Metody gradientowe . Są to metody, których zastosowanie wymaga wyznaczenia wartości funkcji oraz jej gradientu.
18
wyznaczenia wartości funkcji oraz jej gradientu. Jako przykłady posłużyć mogą: metoda gradientu prostego, metoda najszybszego spadku i metoda gradientu sprzężonego.
3. Metody newtonowskie . Są to metody w których procedura poszukiwania ekstremum funkcji wymaga wyznaczenia wartości, gradientu i hesjanu badanej funkcji. Takimi metodami są np. metoda Newtona-Raphsona i metoda Davidona-Fletchera-Powella.
Ogólny podział metod
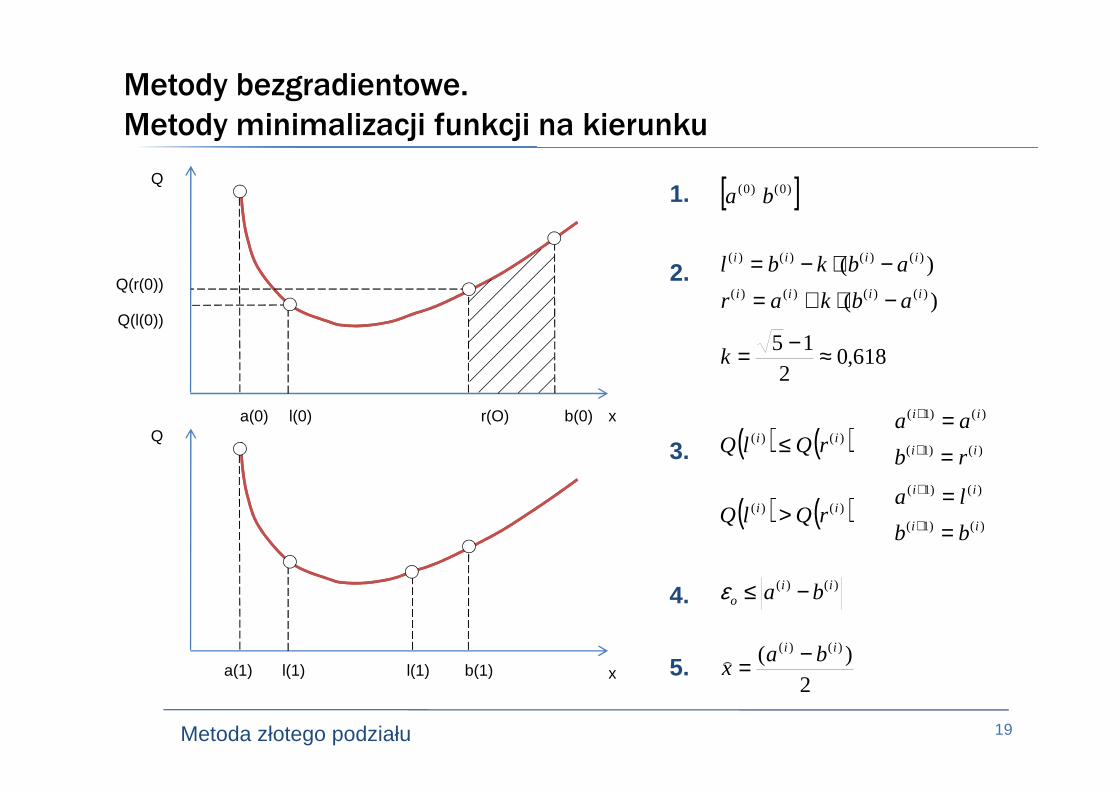
Metody bezgradientowe.
Metody minimalizacji funkcji na kierunku
Q
Q(l(0))
Q(r(0))
[ ])0()0( ba
)(
)()()()()(
)()()()(
iiii
iiii
abkar
abkbl
−⋅+=−⋅−=
618,02
15 ≈−=k
1.
2.
19Metoda złotego podziału
xa(0) r(O) b(0)l(0)
( ) ( ))()( ii rQlQ ≤ )()1(
)()1(
ii
ii
rb
aa
==
+
+
( ) ( ))()( ii rQlQ >)()1(
)()1(
ii
ii
bb
la
==
+
+
2)( )()( ii ba
x−=)
3.
5.
)()( iio ba −≤ε4.
Q
xa(1) b(1)l(1) l(1)
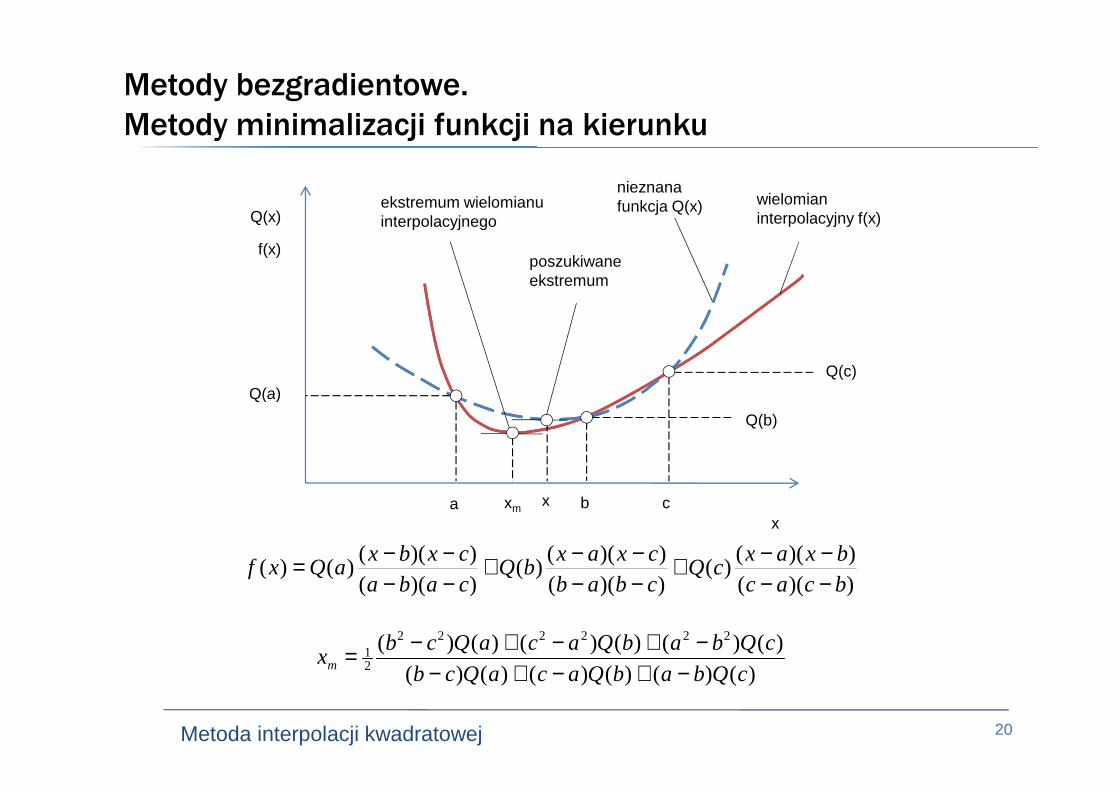
Metody bezgradientowe.
Metody minimalizacji funkcji na kierunku
wielomian interpolacyjny f(x)
poszukiwane ekstremum
nieznana funkcja Q(x)ekstremum wielomianu
interpolacyjnegoQ(x)
f(x)
Q(a)Q(c)
20Metoda interpolacji kwadratowej
)()()()()()(
)()()()()()( 222222
21
cQbabQacaQcb
cQbabQacaQcbxm −+−+−
−+−+−=
cxma x bx
))(())((
)())(())((
)())(())((
)()(bcac
bxaxcQ
cbab
cxaxbQ
caba
cxbxaQxf
−−−−+
−−−−+
−−−−=
Q(a)
Q(b)
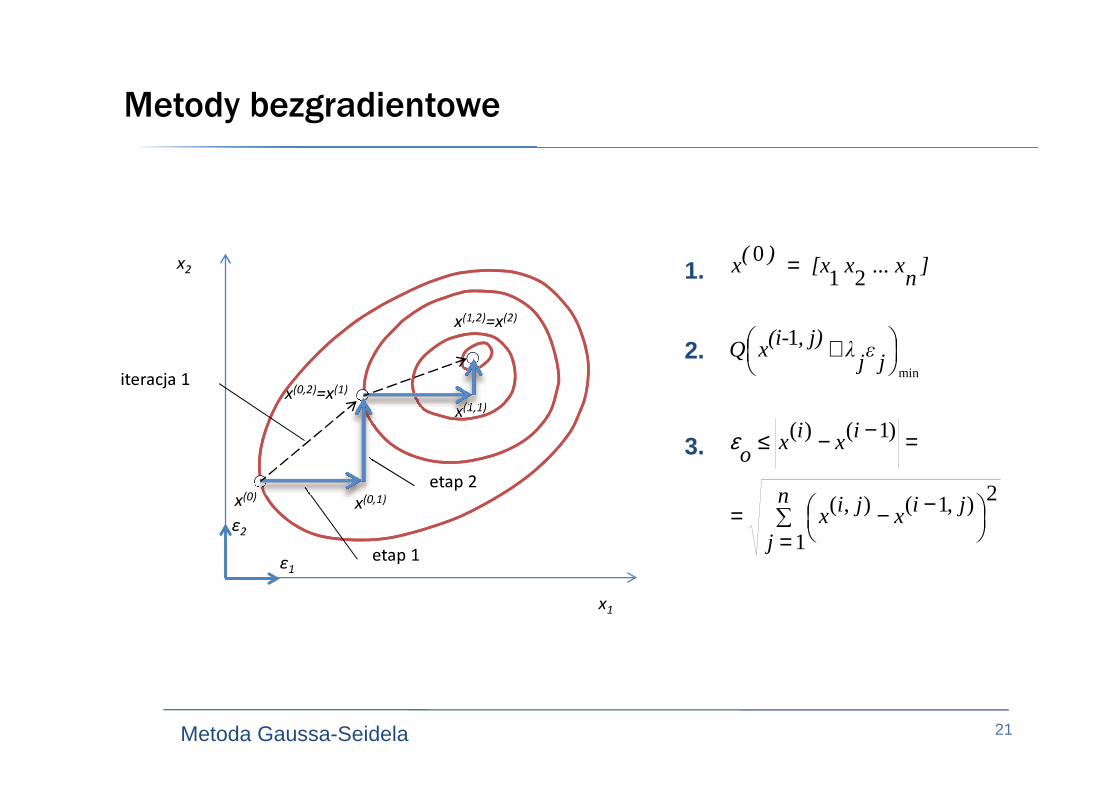
Metody bezgradientowe
x2
x(0,2)
=x(1)
x(1,2)
=x(2)
iteracja 1
]n
... x x [x )(x21
0 =1.
min
1
+
jε
jλ
, j)(i-xQ2.
21Metoda Gaussa-Seidela
ε1
x(0)
x(0,2)
=x(1)
x(0,1)
x(1,1)
x1
ε2
etap 2
etap 1
∑=
−−=
=−−≤
n
j
jixjix
ixixo
1
2),1(),(
)1()(ε3.

Metody bezgradientowe
x2
]n
... x x [x )(x21
0 =1.
min
1
+
jε
jλ
, j)(i-xQ2.
ε3ε5
ε4
x(0,2)
x(0,3)=x(1)
x(1,1)
x(1,2)
ε6
x(1,3)=x(2)),1()1,1( nixnix −−+−
=ε3.
22Metoda Powella
ε1
x1
ε2
∑=
−−=
=−−≤
n
j
jixjix
ixixo
1
2),1(),(
)1()(ε4.x(0) ε1
ε2
ε5
x(0,1)
x(1,1) x(1,3)=x(2)
),1()1,1(
),1()1,1(
1 nixnix
nixnixn −−+−
−−+−=+ε3.

Metody gradientowe
x2
]n
... x x [x )(x21
0 =1.
2.
3.
e
β2e
g2x(2)
x
x(5)
)11-i
)(i-grad Q(g x=
g−=ε
23Metoda największego spadku
x1
4.
3.
e
e
β2e
βe
g1
g0
ε0
x(0)
x(1) x(3)x(4) 1-i1
gi
−=−ε
11
i- eε )(i- (i) += xx
11
i-eε )(i- (i) β+= xx
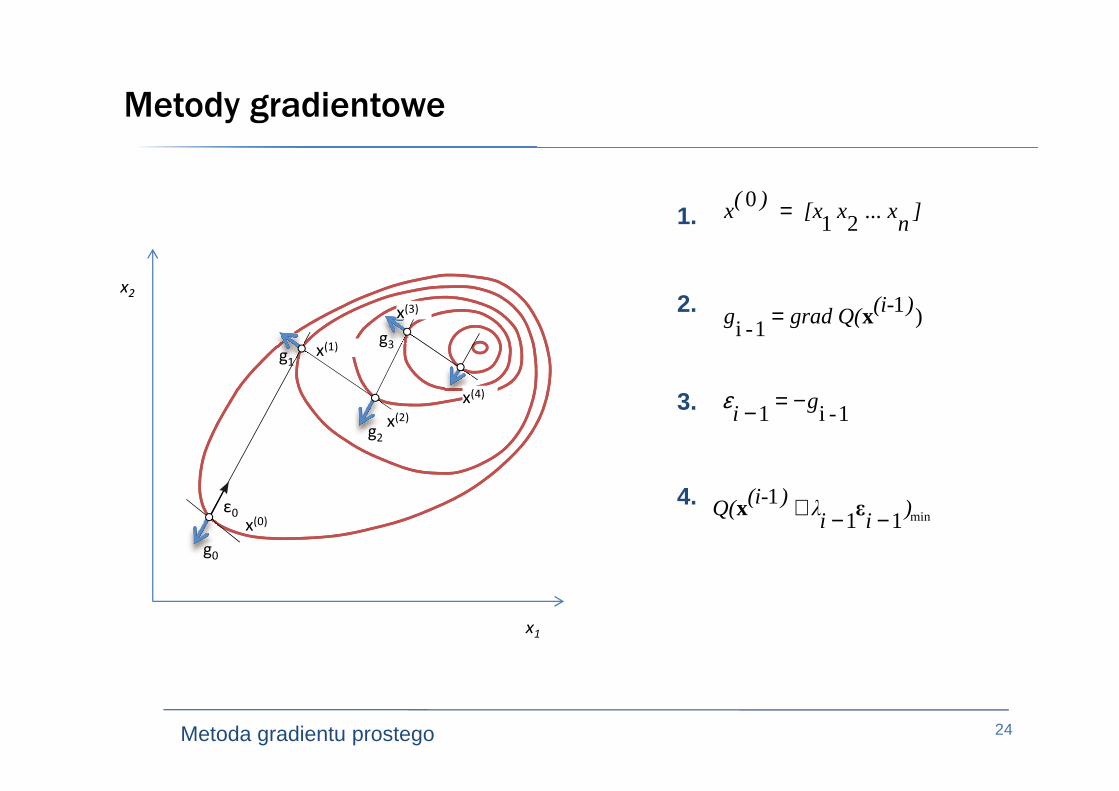
Metody gradientowe
x2
]n
... x x [x )(x21
0 =1.
2.
3.
g1
g3x(1)
x(4)
x(3) )11-i
)(i-grad Q(g x=
g−=ε
24Metoda gradientu prostego
x1
4.
3.
ε0
g0
g2x(2)
x(4)
x(0)
1-i1g
i−=−ε
min111 )
iiλ
)(i-Q( −−+ εx
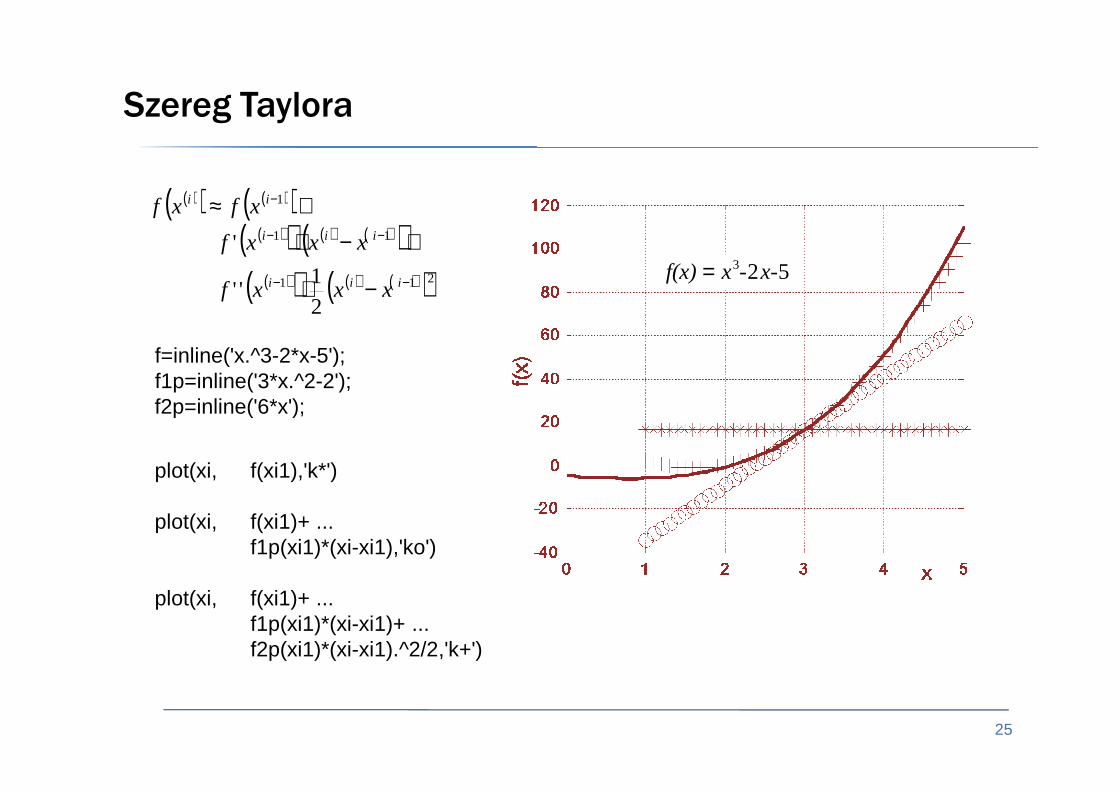
Szereg Taylora
( )( ) ( )( )( )( ) ( ) ( )( )( )( ) ( ) ( )( )211
11
1
21
''
'
−−
−−
−
−⋅
+−⋅+≈
iii
iii
ii
xxxf
xxxf
xfxf
523 x--xf(x) =
f=inline('x.^3-2*x-5');f1p=inline('3*x.^2-2');f2p=inline('6*x');
25
plot(xi, f(xi1),'k*')
plot(xi, f(xi1)+ ... f1p(xi1)*(xi-xi1),'ko')
plot(xi, f(xi1)+ ... f1p(xi1)*(xi-xi1)+ ...f2p(xi1)*(xi-xi1).^2/2,'k+')
f2p=inline('6*x');
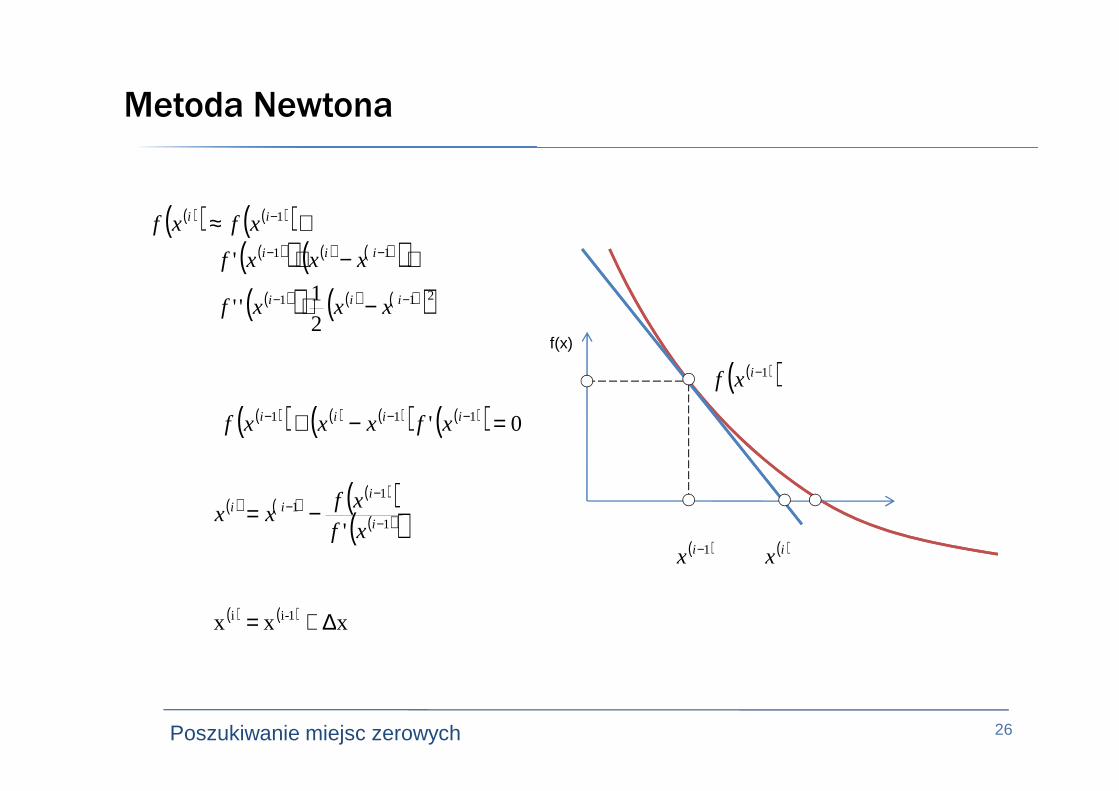
Metoda Newtona
( )( ) ( )( )( )( ) ( ) ( )( )( )( ) ( ) ( )( )211
11
1
21
''
'
−−
−−
−
−⋅
+−⋅+≈
iii
iii
ii
xxxf
xxxf
xfxf
f(x)
( )( )1−ixf
26
( )( ) ( ) ( )( ) ( )( ) 0' 111 =−+ −−− iiii xfxxxf
( ) ( )( )( )( )( )1
11
' −
−− −=
i
iii
xfxf
xx
( ) ( ) x x x 1-ii ∆+=
( )ix( )1−ix
Poszukiwanie miejsc zerowych

Metoda Newtona
( ) ( )( )( )( )( )1
11
' −
−− −= i
iii
xf
xfxx
( ) ( ) x x x 1-ii ∆+=
52)( 3 −−= xxxf
27
f=inline('x.^3-2*x-5');f1p=inline('3*x.^2-2');
for i=2:6x(i)=x(i-1)-f(x(i-1))/f1p(x(i-1));
end
Poszukiwanie miejsc zerowych

Metody Newtonowskie
( ) ( )( )( )( )( )1
11
' −
−− −=
i
iii
xf
xfxx
Poszukiwanie miejsc zerowych
f(x)
x
28Poszukiwanie ekstremum
( ) ( )( )( )( )( )1
11
''
'−
−− −=
i
iii
xf
xfxx
Poszukiwanie ekstremum
x
f'(x)
x

Metody Newtonowskie
22
21 xxf(x) +=
G=inline('[2*x(1);2*x(2)]');
H=inline('[2 2*x(1)+2*x(2);2*x(1)+2*x(2) 2]');
29Poszukiwanie ekstremum
2*x(1)+2*x(2) 2]');
x(:,1)=[1;1];for i=2:5
x(:,i)=x(:,i-1)-H(x(:,i-1))\G(x(:,i-1));end
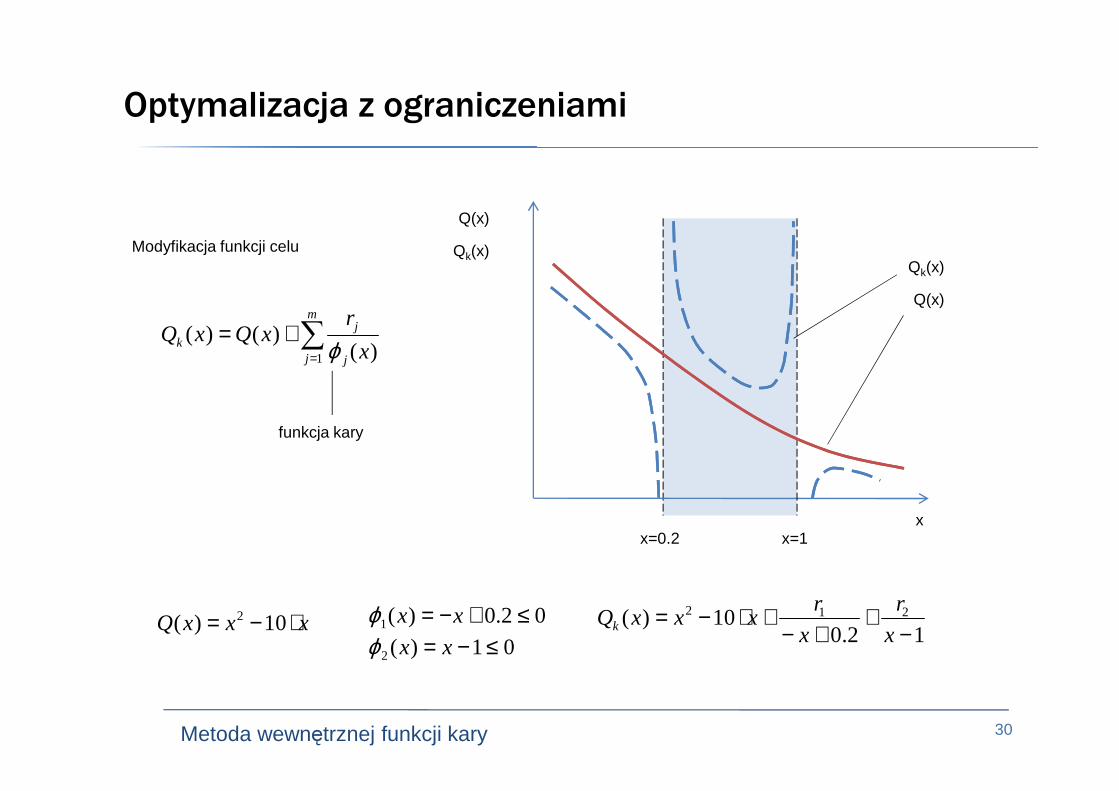
Optymalizacja z ograniczeniami
Modyfikacja funkcji celu
∑=
+=m
j j
jk x
rxQxQ
1 )()()(
ϕ
Q(x)
Qk(x)Qk(x)
Q(x)
30Metoda wewnętrznej funkcji kary
xxxQ ⋅−= 10)( 2 02.0)(1 ≤+−= xxϕ01)(2 ≤−= xxϕ 12.0
10)( 212
−+
+−+⋅−=
x
r
x
rxxxQk
x=0.2
funkcja kary
xx=1

Optymalizacja z ograniczeniami
Modyfikacja funkcji celu
Q(x)
Qk(x) Qk(x)
∑=
+=m
jj
ik x
rxQxQ
1
2)(1
)()( ϕ
31Metoda zewnętrznej funkcji kary
xxxQ ⋅−= 10)( 2 ]01,0[)(1 ≤+−= xxϕ1
22 )1(
10)(r
xxxxQk
−+⋅−=
x=1funkcja kary
x
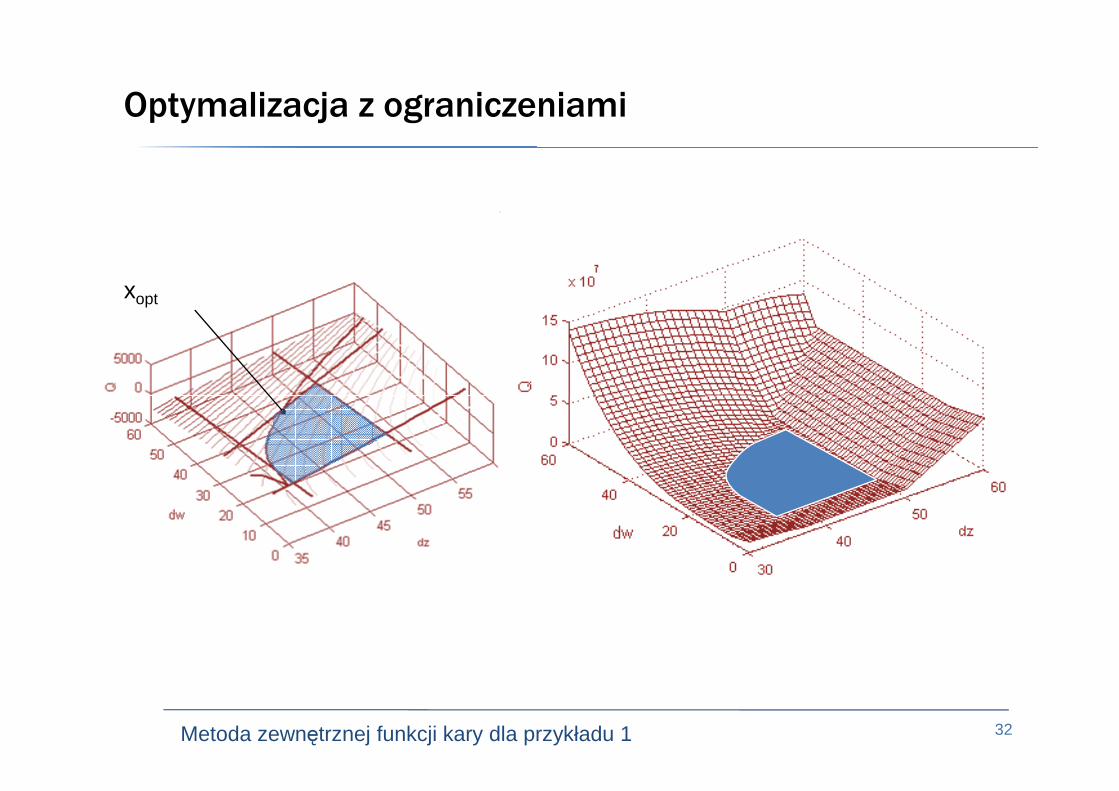
Optymalizacja z ograniczeniami
xopt
32Metoda zewnętrznej funkcji kary dla przykładu 1
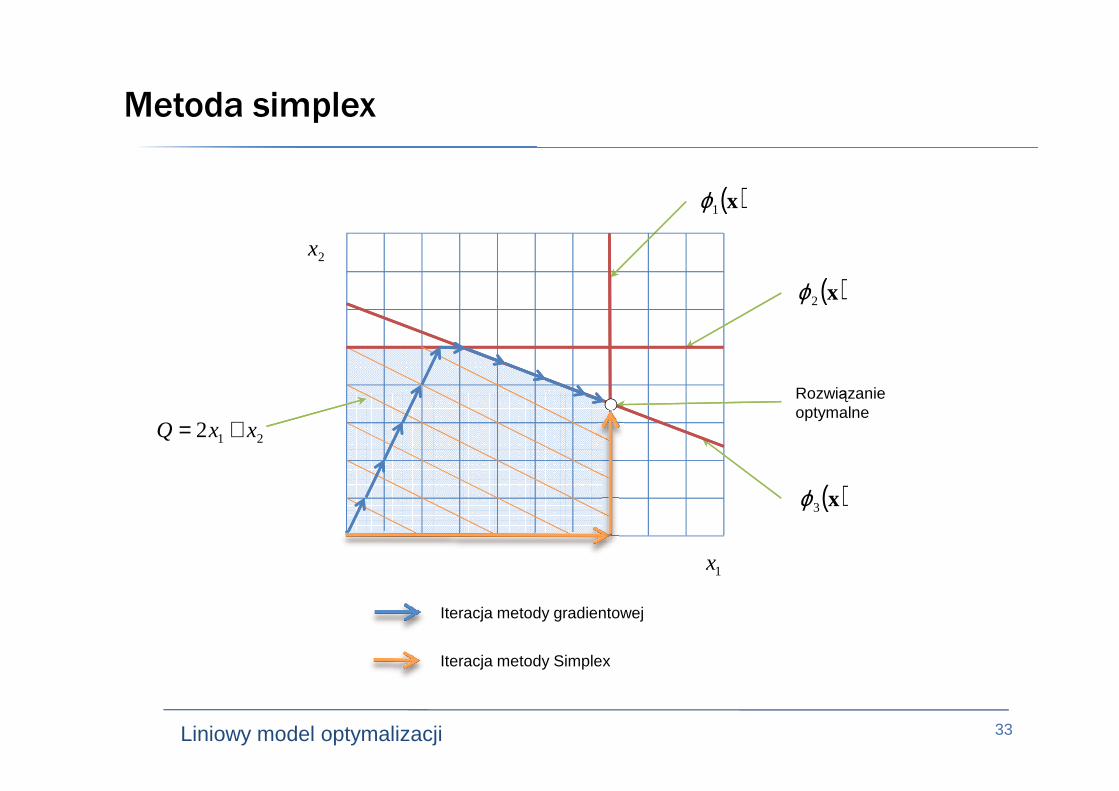
Metoda simplex
Rozwiązanie
( )x1ϕ
( )x2ϕ2x
33Liniowy model optymalizacji
Rozwiązanie optymalne
212 xxQ +=
1x
( )x3ϕ
Iteracja metody Simplex
Iteracja metody gradientowej

Oprogramowanie optymalizacyjne
Przykład 1 Przykład 2
34Excel

Oprogramowanie optymalizacyjne
Przykład 1
35Excel

Oprogramowanie optymalizacyjne
36Excel

Oprogramowanie optymalizacyjne
Przykład 1
37Matlab

Oprogramowanie optymalizacyjne
Przykład 1
38Matlab
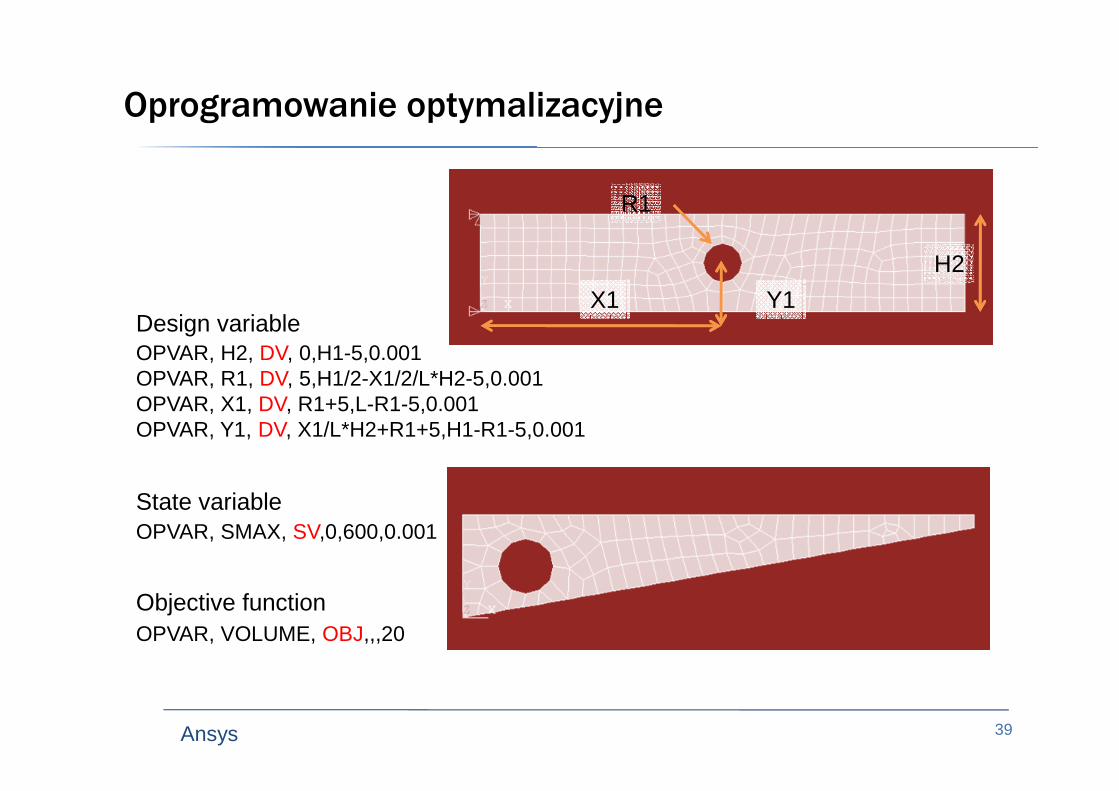
Oprogramowanie optymalizacyjne
OPVAR, H2, DV, 0,H1-5,0.001 OPVAR, R1, DV, 5,H1/2-X1/2/L*H2-5,0.001 OPVAR, X1, DV, R1+5,L-R1-5,0.001
X1
R1
Y1Design variable
H2
39Ansys
OPVAR, X1, DV, R1+5,L-R1-5,0.001 OPVAR, Y1, DV, X1/L*H2+R1+5,H1-R1-5,0.001
OPVAR, SMAX, SV,0,600,0.001
OPVAR, VOLUME, OBJ,,,20
State variable
Objective function
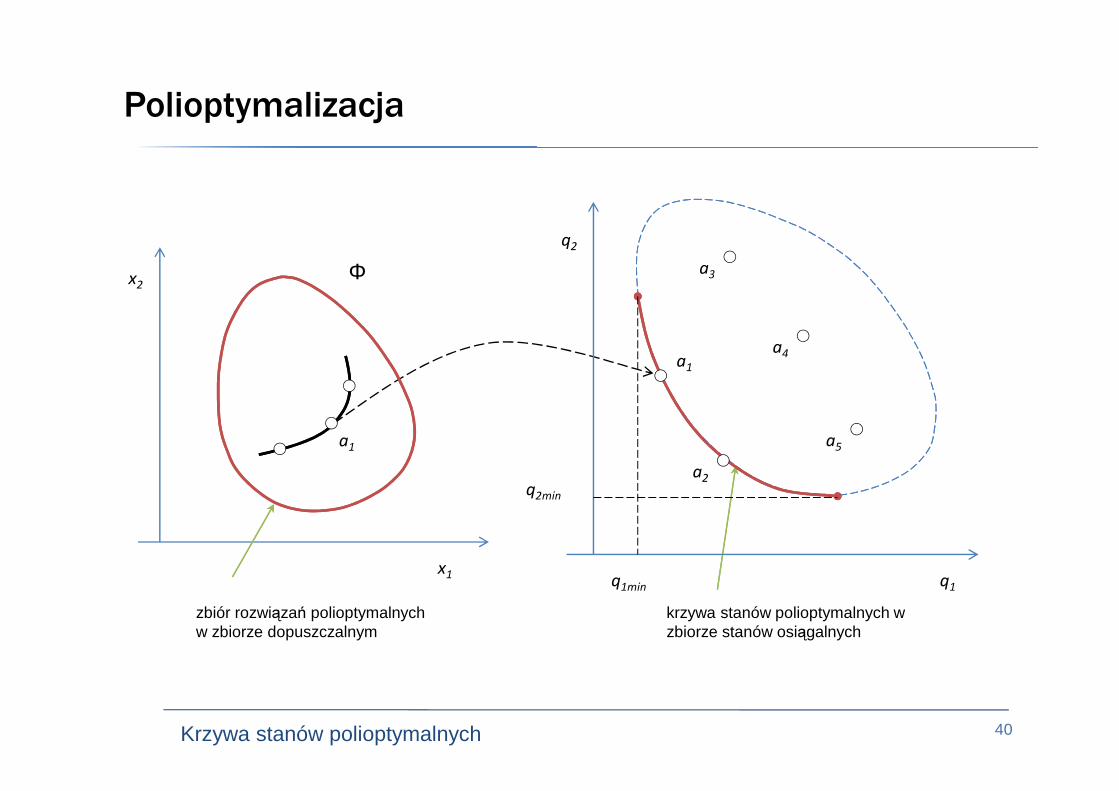
Polioptymalizacja
q2
x2
Φ
a1
a3
a4
40Krzywa stanów polioptymalnych
zbiór rozwiązań polioptymalnychw zbiorze dopuszczalnym
q1
x1
a1
a2
a5
krzywa stanów polioptymalnych w zbiorze stanów osiągalnych
q2min
q1min

Polioptymalizacja
q2
krzywa stanów polioptymalnych w zbiorze stanów osiągalnych
2211 qpqpQ +=
11
2 p
p
pq +−=
41Pseudopolioptymalizacja
q1
)ˆ,ˆ( 21 qq
constQ =
21
22 p
qp
q +−=
∑=
=m
iii qpQ
1
Globalne metody optymalizacji
42

Globalne metody optymalizacji
Zbiory rozmyte1965
Sieci neuronowe1943
Algorytmy genetyczne1975
Automaty komórkowe1948
ązy
wan
ego
prob
lem
u
ść
ść i
roz
wią
zani
a
Fraktale1975
L-systemy
43
Równania różniczkoweXVIII
Statystyka1812
Metody dyskretneMES - 1960
Ska
la r
ozw
iązy
wan
ego
prob
lem
uP
robl
emy
klas
y "N
P"
Pew
ność, d
okła
dnoś
ć i
roz
wią
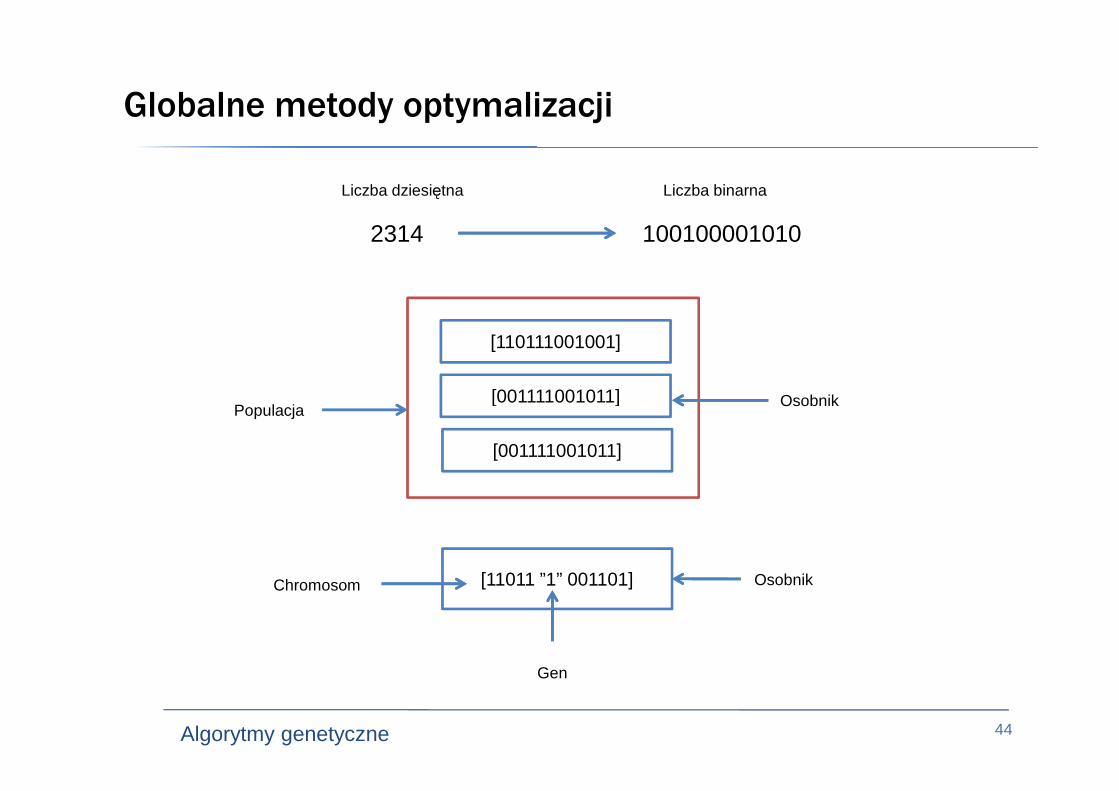
Globalne metody optymalizacji
Osobnik
[110111001001]
2314 100100001010
[001111001011]
Liczba dziesiętna Liczba binarna
44Algorytmy genetyczne
Osobnik
Chromosom
Gen
Populacja
Osobnik[11011 ”1” 001101]
[001111001011]
[001111001011]

Globalne metody optymalizacji
Start
Losowanie populacji
początkowej
Selekcja – wybór populacji rodzicielskiej
45Algorytmy genetyczne
populacji rodzicielskiej
Warunek zatrzymania
Najlepszy osobnik
Reprodukcja –zastosowanie operatorów
genetycznych

Globalne metody optymalizacji
46Selekcja

Globalne metody optymalizacji
Crossover
47Reprodukcja
1 0 1 0 0 1 0
↓
1 0 1 0 1 1 0
Mutacja
Globalne metody optymalizacji
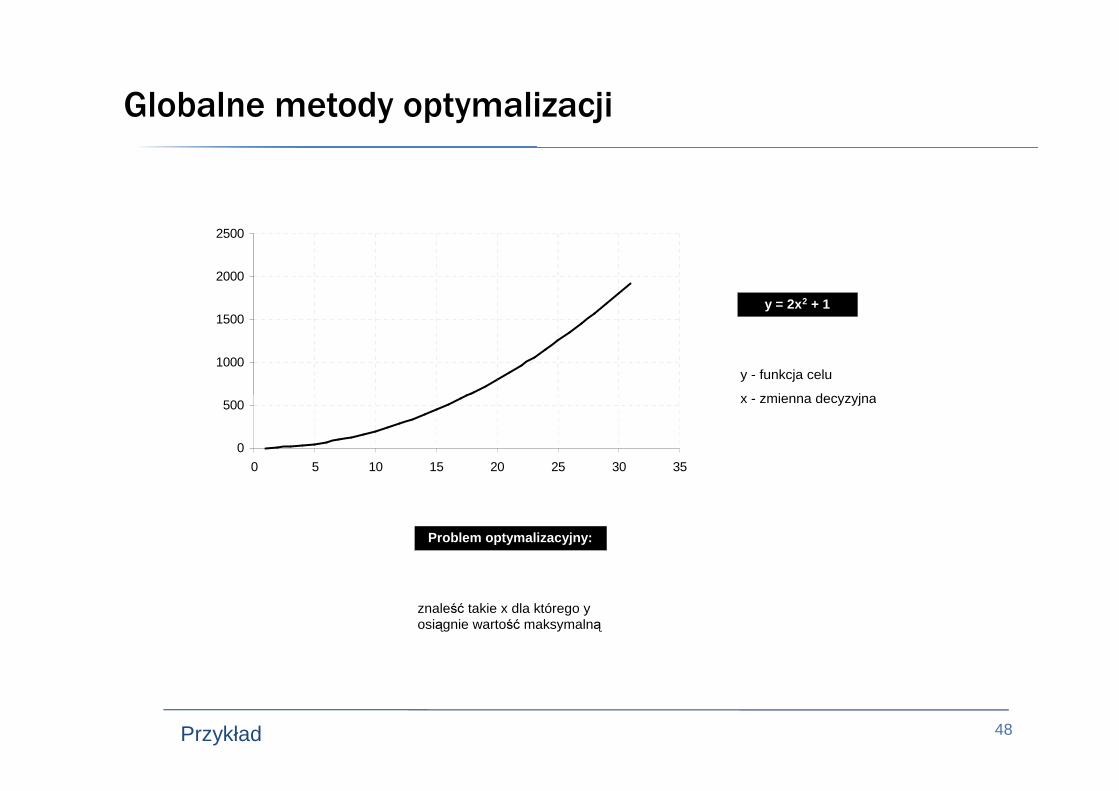
1000
1500
2000
2500
y = 2x 2 + 1
y - funkcja celu
x - zmienna decyzyjna
48Przykład
0
500
0 5 10 15 20 25 30 35
x - zmienna decyzyjna
znaleść takie x dla którego yosiągnie wartość maksymalną
Problem optymalizacyjny:
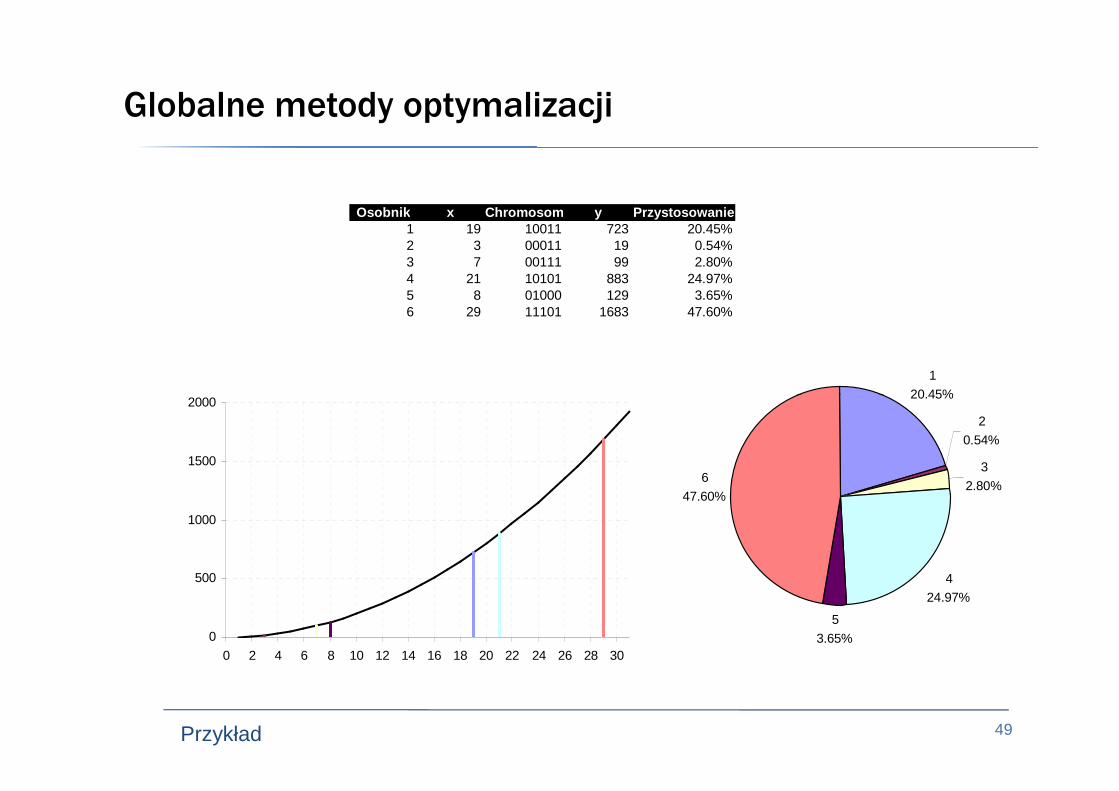
Globalne metody optymalizacji
Osobnik x Chromosom y Przystosowanie1 19 10011 723 20.45%2 3 00011 19 0.54%3 7 00111 99 2.80%4 21 10101 883 24.97%5 8 01000 129 3.65%6 29 11101 1683 47.60%
1
20.45%2000
49Przykład
20.45%
2
0.54%
3
2.80%
4
24.97%
5
3.65%
6
47.60%
0
500
1000
1500
2000
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30

Globalne metody optymalizacji
Nr Losowanie1 97
Osobnik x Chromosom y Przystosowanie1 19 10011 723 20.45%2 3 00011 19 0.54%3 7 00111 99 2.80%4 21 10101 883 24.97%5 8 01000 129 3.65%6 29 11101 1683 47.60%
1
20.45%
2
0.54%
3
2.80%
4
6
47.60%
Nr Dystrubuanta1 20.45%
50Przykład
2 263 544 135 316 88
Nr Dystrubuanta Wylosowane liczby1 20.45% 132 20.98%3 23.78%4 48.76% 26 315 52.40%6 100.00% 97 54 88
24.97%
5
3.65%
1 20.45%2 20.98%3 23.78%4 48.76%5 52.40%6 100.00%
Osobnikpopulacji
Osobnik rodzicielskiejpopulacji P(k) M(k) Chromosom
1 6 001102 4 001003 6 001104 1 000015 4 001006 6 00110

Globalne metody optymalizacji
Wylosowanepary Chromosomy
1 100114 101014 10101
Punkt Podzielone Nowakrzy żowania chromosomy populacja
3 100** ***11 10001101** ***01 10111
2 10*** **101 10101
51Przykład
4 101016 111016 111016 11101
2 10*** **101 1010111*** **101 11101
4 1110* *****1 111011110* *****1 11101

Globalne metody optymalizacji
Populacja P(k)Osobnik Chromosom x y
1 10011 19 7232 00011 3 193 00111 7 994 10101 21 8835 01000 8 1296 11101 29 1683
Średnia: 589
Populacja P(k+1)Osobnik Chromosom x y
1 10001 17 5792 10111 23 10593 10101 21 8834 11101 29 16835 11101 29 16836 11101 29 1683
Średnia: 1262
2000 2000
52Przykład
0
500
1000
1500
2000
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30
0
500
1000
1500
2000
0 2 4 6 8 10 12 14 16 18 20 22 24 26 28 30

Globalne metody optymalizacji
[001111001011]
Warto ść funkcji celu w pokoleniu
200
250
300
350
400
450
0 10 20 30 40 50 60 70 80 90 100 110
53Kratownica

Praktyka (kiedy brak jawnej postaci modelu)
x0 = ones(23,1);
[x, fval] = fmincon( @optym_fc_zuraw, x0,[],[],[],[],[],[],@optym_fo_zuraw)
function [c, ceq] = optym_fo_zuraw(x)
[U F Sigma Epsilon] = MES(n, f, c ,e, 0);
54MES
[U F Sigma Epsilon] = MES(n, f, c ,e, 0);
c = [ 5-x;abs(U)-2;abs(Sigma)-100 ];
end
function waga = optym_fc_zuraw(x)waga=sum(x);
end

Praktyka (kiedy brak jawnej postaci modelu)
Patrz Dodatek 1. Aproksymacja i interpolacja
55Aproksymacja i interpolacja