optimization lecture 1-9
DESCRIPTION
opTRANSCRIPT

Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineeringin Mechanical Engineeringin Mechanical Engineering
โดยโดย
ผศ.ดร. มนตศกด พมสาร

ป จดประสงคศกษาทฤษฎพนฐานของระเบยบวธการออกแบบเชงออพตมม สาหรบ– ศกษาทฤษฎพนฐานของระเบยบวธการออกแบบเชงออพตมม สาหรบ
การแกปญหาในทางวศวกรรม ซงจะมงเนนวธการออพตมมแบบ Local
optimization เทานน
– ศกษาวธการใชโปรแกรม Matlab เขยนโปรแกรมการออกแบบเชงออพศกษาวธการใชโปรแกรม Matlab เขยนโปรแกรมการออกแบบเชงออพ
ตมม โดยตวแปรในการออกแบบไมเกน 2 ตวแปร ซงจะแบงปญหาเปน
แบบ การออกแบบเชงออพตมมท ไมมเงอนไขของการออกแบบและมแบบ การออกแบบเชงออพตมมท ไมมเงอนไขของการออกแบบและม
เงอนไขของการออกแบบ(Constraints)
– ประยกตใชระเบยบวธการออกแบบเชงออพตมม โดยใช Toolbox ใน
โปรแกรม Matlab ทาการออกแบบปญหาทซบซอน นนหมายถงตวแปรญ
ในการออกแบบมากกวา 2 ตว
ป ( )จดประสงค(ตอ)ศกษาระเบยบวธการ Sh d T l ti i ti เบองตน สาหรบ– ศกษาระเบยบวธการ Shape and Topology optimization เบองตน สาหรบ
การแกปญหาในทางวศวกรรม
– ศกษาระเบยบวธการ Shape and Topology optimization โดยใช
โปรแกรม Optistruct ในการออกแบบเบองตน .โปรแกรม Optistruct ในการออกแบบเบองตน .

การประเมนผล
1. ทดสอบวดผล - 40 คะแนน
2. โครงงานและรายงาน – 60 คะแนน
ตาราประกอบการเรยน
1. Rao, S. , “Engineering Optimization, Theory and
Practice” 3rd Edition, New York, Wiley, 2006
Call number : TA342 R291e 1996

บทนางานทางดานวศวกรรมสวนใหญจะประกอบไปดวยกจกรรมดงนญ
1. การออกแบบ (Design)
2. การวเคราะห (Analysis)
3. การสราง (Fabrication)
4. การทดสอบ (Test)
5 (R h d d l )5. การวจยและพฒนา (Research and development)
ในวชาน จะเนนไปทการออกแบบและเปนการออกแบบทใหผลลพธท ในวชาน จะเนนไปทการออกแบบและเปนการออกแบบทใหผลลพธท
เหมาะสมตามวตถประสงคของการออกแบบ
ขนตอนการออกแบบ
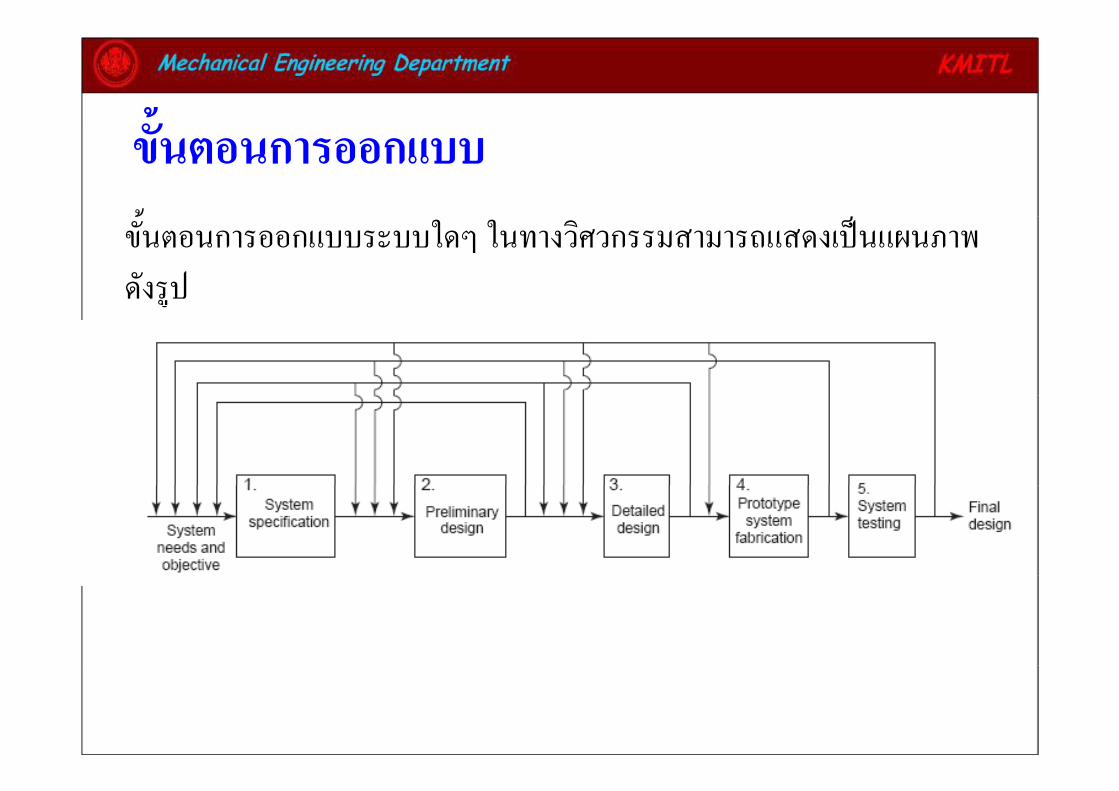
ขนตอนการออกแบบระบบใดๆ ในทางวศวกรรมสามารถแสดงเปนแผนภาพ
ดงรป
1 ความตองการและวตถประสงค (S stem needs and objecti e) โดยผใชงานหรอผออกแบบ1. ความตองการและวตถประสงค (System needs and objective) โดยผใชงานหรอผออกแบบ
เปนคนกาหนด
2. การระบขอกาหนดของระบบ (System specifications) ผออกแบบทาการระบขอกาหนดของ
ระบบหรอผลตภณฑใหขดเจน จากนนขนตอนการออกแบบจงจะสามารถเรมตนได
3. การออกแบบเบองตน (Preliminary design) เปนการออกแบบระบบหรอผลตภณฑเบองตน
วาจะมรปลกษณอยางไร ทางานอยางไร เพอดความเปนไปได หรอใชแบบจาลองอยางงายในวาจะมรปลกษณอยางไร ทางานอยางไร เพอดความเปนไปได หรอใชแบบจาลองอยางงายใน
การออกแบบ ในการออกแบบอาจจะมการใชหลากหลายแนวคด เพอดวาแบบไหนจะดกวา
กน กน
4. การออกแบบเชงลก(Detailed design) เปนการออกแบบเชงลก หาขนาดของชนสวนของ
ระบบ ซงตองมการกาหนดตวแปรของการออกแบบและหาคาทเหมาะสมของตวแปรททาให
ระบบมสมรรถนะตามทไดกาหนดไวหรอใหคณคาระบบสงสด(Maximize systerm worth)
หรอคาประสทธผลทางราคาตาสด (Minimum cost effective)
4 (ตอ) หลงจากการออกแบบแลว จะไดรายละเอยดขนาด วสดทใชของระบบหรอผลตภณฑ 4. (ตอ) หลงจากการออกแบบแลว จะไดรายละเอยดขนาด วสดทใชของระบบหรอผลตภณฑ
ซงจะเขยนเปนรายงาน พรอมภาพเขยนแบบรายละเอยดของชนสวนตงๆ
5. การสรางตนแบบ (Prototype system fabrication) เปนการสรางหรอผลตภณฑหรอระบบ ท
เพงไดออกแบบขนมา
6. การทดสอบระบบ (System testing) การทดสอบสมรรถนะระบบและความทนทาน เพอให
มนใจวา ระบบสามารถใชงานไดและมความทนทาน ตามทไดกาหนดไวมนใจวา ระบบสามารถใชงานไดและมความทนทาน ตามทไดกาหนดไว
เมอระบบหรอผลตภณฑผานการทดสอบแลว(ถาไมมการเปลยนแปลงรายละดอยดแลว) กจะ
ถอวาได การออกแบบสดทายของระบบ(Final design) หรอผลตภณฑตามทตองการ
หมายเหต ขนตอนการออกแบบนน โดยภาพรวมแลวจะตองทาแบบลองผดลองถก(Trial and หมายเหต ขนตอนการออกแบบนน โดยภาพรวมแลวจะตองทาแบบลองผดลองถก(Trial and
error) แตในบางขนตอนนน อาจจะทาเปนแบบอตโนมตไดหรอใชหลกการของการ
ออกแบบเชงออฟตมมได โดยเฉพาะขนตอนการออกแบบรายละเอยด(Detailed design) ออกแบบเชงออฟตมมได โดยเฉพาะขนตอนการออกแบบรายละเอยด(Detailed design)
กระบวนการออกแบบทงหมดอาจใชเวลามากหรอนอย ขนกบความซบซอนของระบบ

การวเคราะหทางวศวกรรมและการออกแบบทาง
วศวกรรม ตางกนอยางไร วศวกรรม ตางกนอยางไร
- การวเคราะหทางวศวกรรมคอ การศกษาพฤตกรรมหรอสมรรถนะของระบบ
ทมอยแลวหรอระบบทพงไดลองออกแบบขนมา ซงขนาดและรปรางของ
ชนสวนของระบบ ถกกาหนดขนมาใหแลว
ป - การออกแบบทางวศวกรรมคอ การหาขนาดและรปรางของชนสวนตางๆของ
ระบบ เพอใหทางานไดตามขอกาหนดทไดระบไว ดงนนจะเหนวา การ
ออกแบบจะใชเวลานานกวา เพราะบางครงตองมการลองผดลองถก อยางไรก
ตามในการออกแบบ ตองมการวเคราะหทางวศวกรรมทกๆครงของการ ๆ
เปลยนแปลงการออกแบบ

โ ไป ฟการออกแบบโดยทวไปกบการออกแบบเชงออฟตมม
ตางกนอยางไรตางกนอยางไร
โ ไป ใ โดยทวไปแลววศวกรตองออกแบบให
1 มประสทธภาพ (Efficient)1 มประสทธภาพ (Efficient)
2 ราคาไมแพง (Cost-effective)( )
แตมความแขงแรงและความคงทนทยอมรบได

การออกแบบโดยทวไป

ฟ การออกแบบเชงออฟตมม
(Optimum design)(Optimum design)
ตวอยางการออกแบบเชงออฟตมมเบองตน
ในการออกแบบเรามกจะตองทาการออกแบบภายใตเงอนไขทกาหนด ทาใหเราตองหา
กรรมวธทจะนามาใชในการออกแบบเพอใหไดตามวตถประสงคและตองอยภายใต
เงอนไขทกาหนดให ในการออกแบบลกษณะนเรยกวา Optimization ตวอยางของการ
ออกแบบเชน การออกแบบคานรบนาหนก โดยใหคานมมวลนอยทสดและทปลายคาน
มการโกงไมเกน 2 มลลเมตรและความเคนวอนมสสงสดในคานตองมคาเปน 50% ของ
กาลงรบแรงดงสงสดของวสด
จากเงอนไขดงกลาว เราสามารถเขยนสมการเปาหมาย (Objective, cost, function)
ไดดงน min ( ) (1)f b h bhLρ= มวลของคานmin ( , ) (1)f b h bhLρ
โดย b = ความกวางของหนาตดคาน L = ความยาวของคาน(กาหนดใหยาวคงท)
h = ความสงของหนาตดคาน ρ = ความหนาแนนของวสดคาน

ดงนนตวแปรของการออกแบบคอ b และ h ซงคาของตวแปรเหลานตองเปนเลขจานวน
จรงบวก หรอเขยนเปนสมการไดดงน
0 (2)0 (3)
bh
>> ( )
3 (4)h b=นอกจากนนเราสามารถกาหนดเงอนไขเพม
( )
และจากเงอนไขทกาหนดใหจากผลของการเสยรปของคานภายใตภาระทกระทาσ (5)
2 (6)
utVon SF
mm
σσ
δ
≤
≤ 2 (6)mmδ ≤
สมการ (2) – (6) คอสมการเงอนไขในการออกแบบ (Constraint equations)สมการ (2) (6) คอสมการเงอนไขในการออกแบบ (Constraint equations)

ปสรป
สงทจะตองมสาหรบการทา Optimization คอ
1. สมการเปาหมาย (Objective function or cost function)
Explicit หรอ Implicit
2 ตวแปรของการออกแบบ (Design variables)2. ตวแปรของการออกแบบ (Design variables)
เลขจานวนจรง หรอ เลขจานวนเตม หรอผสมกนทงจานวนจรงกบเลขจานวนเตม(Mixed)จานวนเตม(Mixed)
3. สมการเงอนไขของการออกแบบหรอสมการบงคบ(Constrained i )equations)
Equality หรอ Inequality
ประเภทของปญหา Optimization ในงานดานโครงสราง
1. Size (Parametric) optimization – การทา optimization โดยพารามเตอร
(ขนาด)ของรปรางถกใชในการออกแบบ ต.ย. ออกแบบคานโดยใชหนา
ตดคานรปแบบ สเหลยม และขนาดความกวางและความสงเปนตวแปร
ออกแบบ เปนตนออกแบบ เปนตน
2. Topology optimization - การทา optimization โดยขอบเขตพนท
(ปรมาตร)ของการออกแบบถกกาหนดขนมา จากนนพนท(ปรมาตร)จะ
ถกลดขนาดลง โดยสวนมากมวลกจะลดลง ต ยเชนการออกแบบคานถกลดขนาดลง โดยสวนมากมวลกจะลดลง ต.ยเชนการออกแบบคาน
โดยใชหนาตดคานรปแบบ สามเหลยม แตจะมการเจาะร หรอทาแพท
เทนบนหนาตดนเทนบนหนาตดน

ประเภทของปญหา Optimization ในงานดานโครงสราง (ตอ)
3. Shape optimization - การทา optimization โดยกาหนดพนทของการ
ออกแบบ จากนนเสนขอบของพนทจะถกกาหนดใหเปนตวแปรของการ
ออกแบบ
4. Topography optimization – การทา optimization โดยกาหนดพนทผว
ของการออกแบบ จากนนการยนเขาออกของผว(ใหนนขนหรอบมลง)จะ
ถกกานดใหเปนตวแปรของการออกแบบ โดยความหนาของผวถอวาคงท
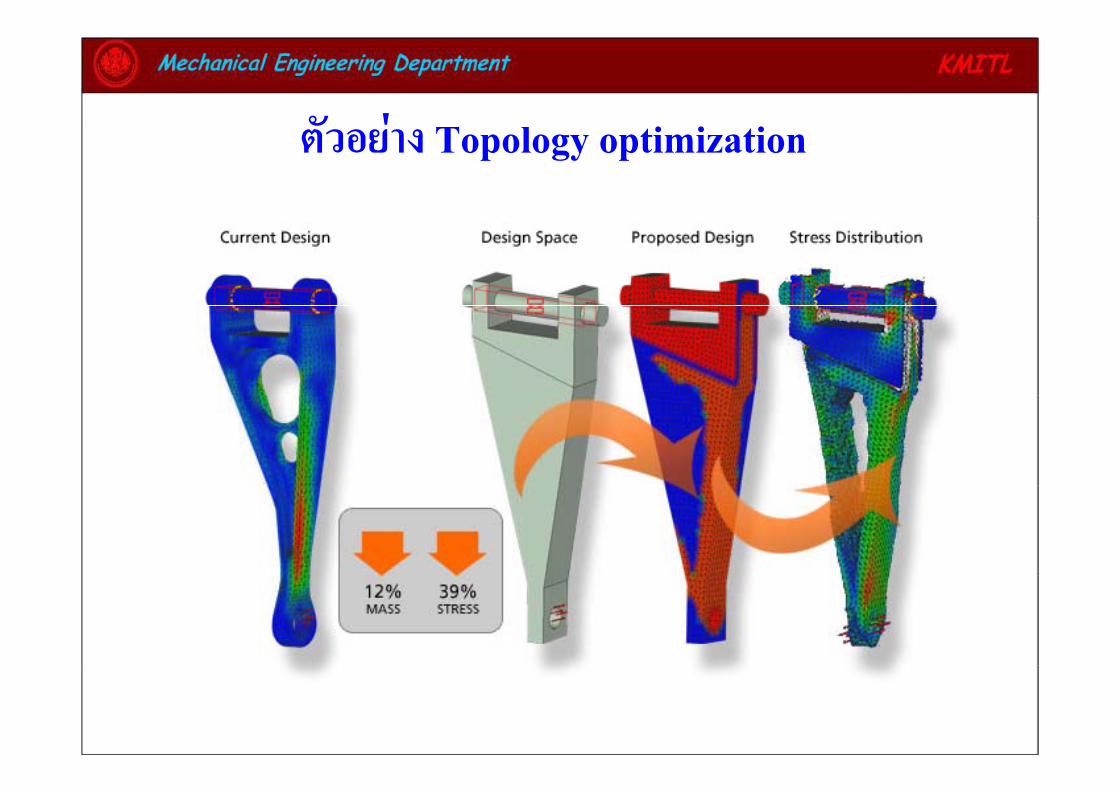
ตวอยาง Topology optimization

ตวอยาง Shape optimization
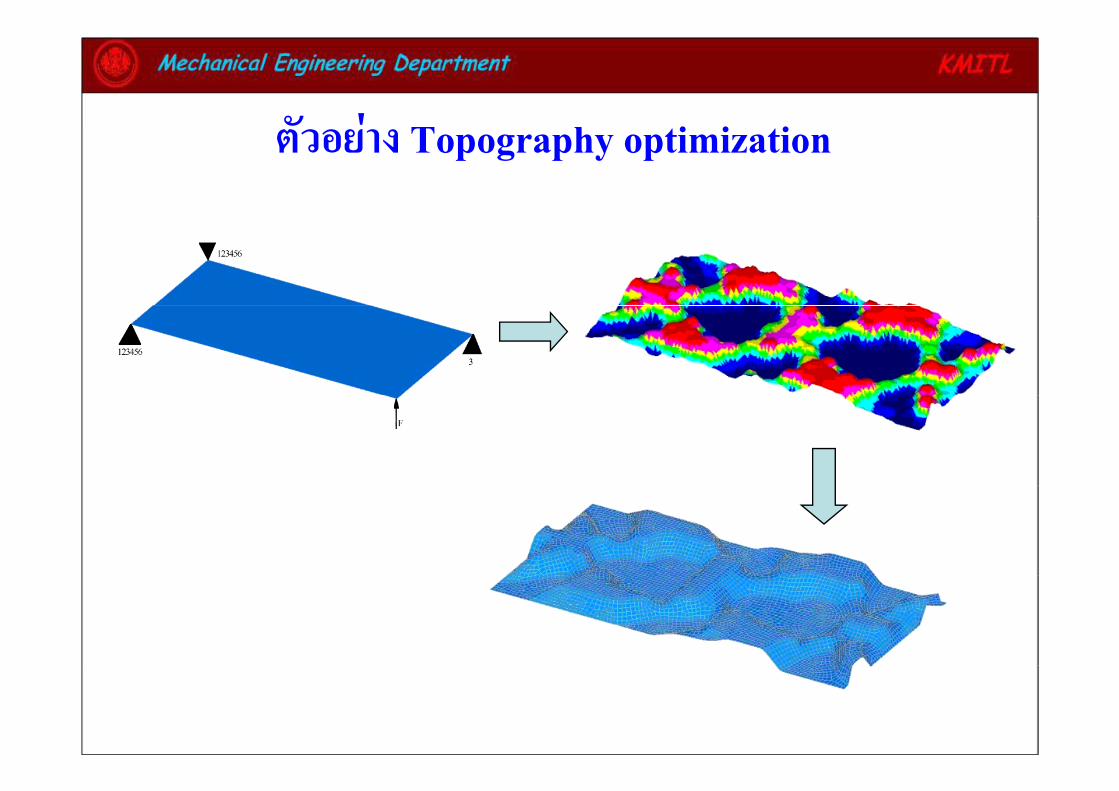
ตวอยาง Topography optimization

ใ ตวอยาง Optimization ในงานวศวกรรมเครองกล
ใ ถาคณถกกาหนดใหทาการออกแบบสปรง เพอใชในการทาแทนรอง
ป เครองกดขนาด 5000 ปอนด จานวนสปรงทตองใชคอ 4 ตว จงทาการ
ออกแบบโดยใหตวแปรออกแบบคอ (1) ขนาดลวดทาสปรง - Wire diameter (d), (2) ขนาดสปรง – Spring diameter (D) และ จานวนขดของสปรง (N) ในการ
ออกแบบใหออกแบบใหสปรงมนาหนกนอยทสด

ใ ตวอยาง Optimization ในวศวกรรมเครองกล(ตอ)
ไ ในการออกแบบนน มเงอนไขทตองคานงถงคอ
1. ระยะยบของสปรงตองไมเกน 0.1 นว. 0.
2. ความเคนเฉอนในสปรงตองไมเกน 10,000 psi
3. ความถธรรมชาตของสปรงตองมากกวา 100 Hz
กาหนดให k = คานจสปรง τ = ความเคนเฉอน f = ความถธรรมชาตกาหนดให k คานจสปรง, τ ความเคนเฉอน, fn ความถธรรมชาต
ใ ตวอยาง Optimization ในวศวกรรมเครองกล(ตอ)
G = โมดลสความเคนเฉอน = 12 x 106 psi
w = นาหนกสปรงw นาหนกสปรง
ρ = ความหนาแนนของสปรง = 0.3 lb/in3
Ks = คาแกไขความเคนเฉอนของสปรง = 1.05
F = คาแรงกดกระทากบสปรงF คาแรงกดกระทากบสปรง
ผลเฉลย ตวแปรการออกแบบคอ

ใ ตวอยาง Optimization ในวศวกรรมเครองกล(ตอ)
สมการเปาหมายการออกแบบคอสมการเปาหมายการออกแบบคอ
สมการเงอนไขจากระยะยบตว
หรอเขยนใหมเปน
สมการเงอนไขจากความเคนเฉอน
หรอเขยนใหมเปน

ใ ตวอยาง Optimization ในวศวกรรมเครองกล(ตอ)
สมการเงอนไขจากความถธรรมชาตสมการเงอนไขจากความถธรรมชาต
หรอเขยนใหมเปน
สมการเงอนไขจากคาตวแปรออกแบบเพมเตม
ทาการแทนคาททราบคาแลว F = 5000/4 = 1250 lb และคาทกาหนดให
ในสไลดกอนหนา เราสามารถเขยนสมการสรปไดดงน

ใ ตวอยาง Optimization ในวศวกรรมเครองกล(ตอ)
W k h 1 O ti i ti เบองตนWorkshop 1 – Optimization เบองตน
จงทาการหาตวแปรออกแบบ(Design variables) สมการเปาหมายของ
กาออกแบบ(Objective function)และสมการบงคบ(Constraints) ของ
ปญหาดงน
1 จงหาขนาดเสนผาศนยกลางและความสงของกระปองรปทรงกระบอก1. จงหาขนาดเสนผาศนยกลางและความสงของกระปองรปทรงกระบอก
ทมปรมาตรเทากบ V ทพนผวของกระปองมคานอยทสด
2. จงหาขนาดของคานรปทรงกระบอก ทตดจากไมทมลกษณะเปนรป
กรวยขนาดความสง h และมรศมทฐานเทากบ r โดยคานจะตองม ฐ
ปรมาตรมากทสด

Single variable optimization without constraint
ในเบองตนเราจะมาดการทา Optimization เมอตวแปรของการออกแบบม
แคหนงตวและไมมสมการเงอนไขเลย เราจะทาการวเคราะหผลลพธได
อยางไร
หาคาตาสดหรอ
สงสดของ f(x)สงสดของ f(x)
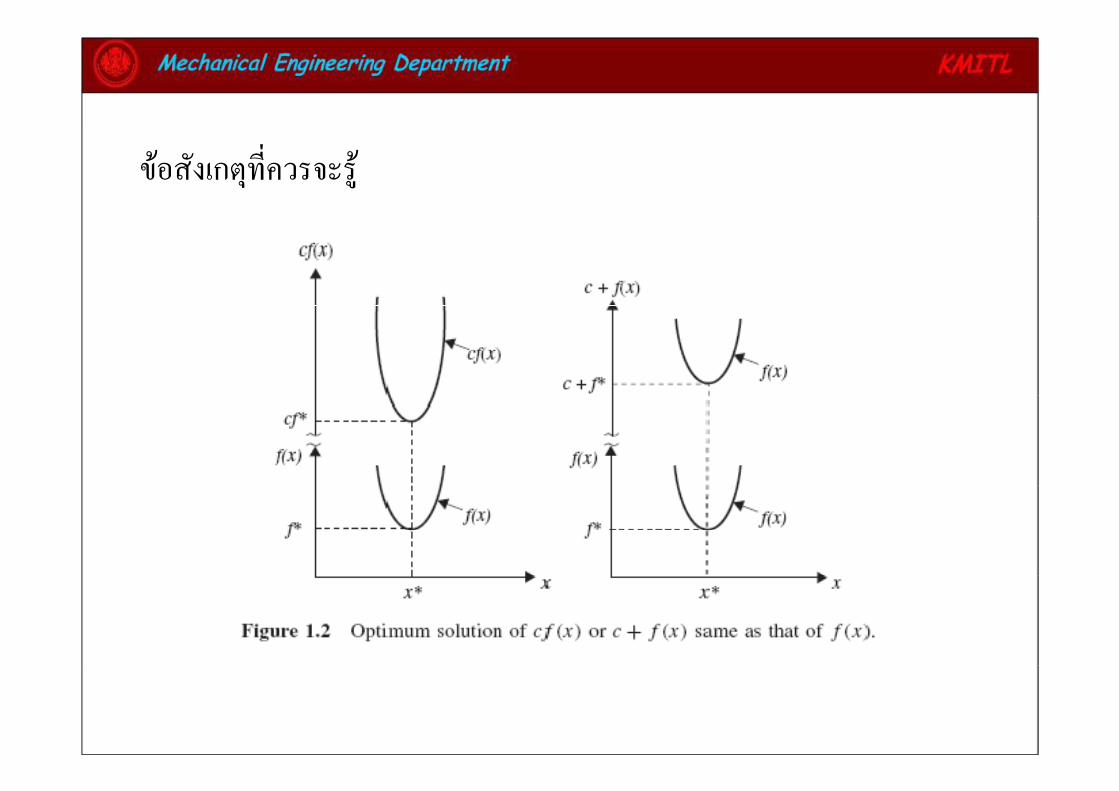
ขอสงเกตทควรจะร

ทฤษฎของ Single variable optimization
without constraintwithout constraint
เงอนไขของการหาคาตาสดของฟงกชนหนงตวแปรมดงน
1. First –order necessary condition สาหรบ (local) relative minimum ของ f(x)
ท x = x*
( ) ( )* * 0 (1)dff x xdx
′ = =( ) ( )dx
สมการนใชเปนเงอนไขในการหาจดททาใหฟงชนมคาความชนเปนศนยนนเอง สมการนใชเปนเงอนไขในการหาจดททาใหฟงชนมคาความชนเปนศนยนนเอง
ซงจะเปนตาแนงของจด relative minimum หรอ relative maximum หรอ จด
เปลยนเวา (S ddl i t)เปลยนเวา (Saddle point)

ใ ป Proof กาหนดให x* เปนจด local minimum ของ f(x) และ x คอจดขางเคยง
( ) ( )* *and 0 ( ) local minimumd x x f f x f x a= − Δ = − ≥( ) ( )
( ) ( ) ( )1จาก Taylor series ของ f(x) รอบจด x*
( ) ( ) ( ) ( )* * * 21 (Remainder)2
Or
f x f x f x d f x d R′ ′′= + + +
( ) ( ) ( ) ( )* * * 21 ( )2
f f x f x f x d f x d R b′ ′′Δ = − = + +
เงอนไขของ (a) จะตองมากกวาหรอเทากบศนยเทานนจงจะเปน local minimum
ไ เทอมแรกดานขวามอจะมผลตอคาสมการ (b) มากทสด เทอมทเหลอตดทงได
เนองจาก d มคาเปนบวกหรอลบกได ดงนนสมการ (a) เปนจรงไดอยางเดยวคอ f
’(x*) = 0 เทานนหรอคอเงอนไขของสมการ (1) นนเอง

2. Sufficient condition สาหรบ local minimum ของ f(x) ท x = x*
( ) ( )2
* * 0 (2)d ff ′′( ) ( )2 0 (2)ff x xdx
′′ = >
ในทานองเดยวกน เราสามารถหา Sufficient condition สาหรบ local maximum
( ) ( )2
* * 0 (3)d ff ′′
ในทานองเดยวกน เราสามารถหา Sufficient condition สาหรบ local maximum
ไดดงน
( ) ( )2 0 (3)ff x xdx
′′ = <
แตถาเงอนไขเปนไปตามสมการท (4) เรายงไมสามารถสรปอะไรได
2d f( ) ( )* *2 0 (4)d ff x x
dx′′ = =
ไป ( rd th) ปสงทตองทาคอทดสอบ ท Higher-order สงขนไปอก (order 3rd และ 4th) เปน
ตน

ใ ป Proof กาหนดให x* เปนจด local minimum ของ f(x) และ x คอจดขางเคยง จาก
สมการเงอนไข ( )* 0f x′ =( ) 0f x
( )* 21ดงนน
( )* 21 ( )2
f f x d R c′′Δ = +
ไ ( ) ป l l i iเงอนไขของ (a) จะตองมากกวาหรอเทากบศนยเทานนจงจะเปน local minimum
เทอมแรกดานขวามอจะมผลตอคาสมการ (c) มากทสด เทอมทเหลอตดทงได
เนองจาก d มคาเปนบวกหรอลบกได แตมนถกยกกาลงสองจะมคาเปนบวก
สถานเดยว ดงนนสมการ (a) เปนจรงไดอยางเดยวคอ f ’’(x*) > 0 เทานนหรอคอ
เงอนไขของสมการ (2) นนเอง จากสมการ (c) ถา f ’’(x*) = 0 เราตองไปพจารณา
High-order term เพอเชคดวา x* เปนจด local minimum หรอไมHigh order term เพอเชคดวา x เปนจด local minimum หรอไม
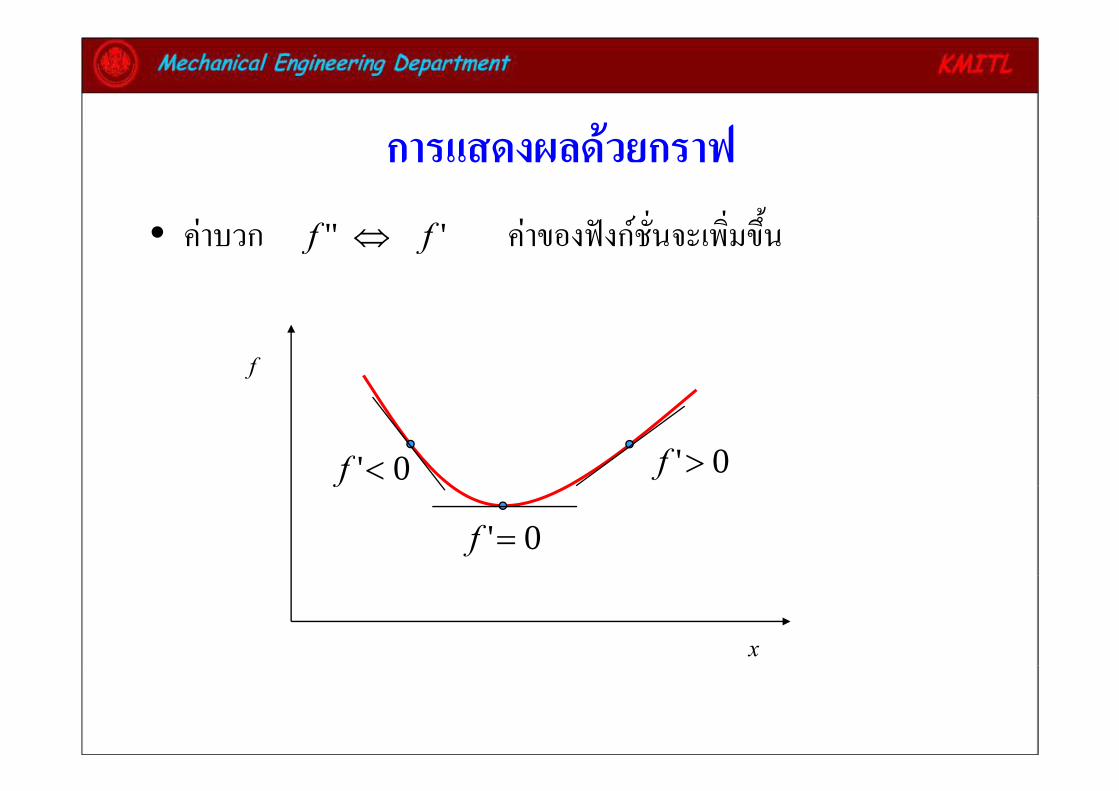
ฟการแสดงผลดวยกราฟ
• คาบวก คาของฟงกชนจะเพมขน '" ff ⇔
f
0'<f 0'>f
0'=f
f
x

การแสดงผลดวยกราฟ(ตอ)
• คาทเปนไปได ณ. จดทม คา f’ = 0
f0"<f 0<f
0"=f
x
0">f

ตวอยาง Single variable optimization
คาถาม จงหาคาตาสดหรอสงสดของฟงกชนน
f(x) = 12x5 - 45x4 + 40x3+ 5 f(x) 12x 45x 40x 5
( ) ( )( )4 3 2 2( ) 60 3 2 60 1 2 0f ′ +
วธทา จากการดฟหนงครงไดอนพนธอนดบท 1
( ) ( )( )4 3 2 2
*
( ) 60 3 2 60 1 2 0
0,1,2
f x x x x x x x
x
′ = − + = − − =
=
การดฟสองครงไดอนพนธอนดบท 2
( )3 2( ) 60 4 9 4f x x x x′′ = +( )( ) 60 4 9 4f x x x x= − +

( )ตวอยาง Single variable optimization(ตอ)
ท x = 1 f”(x) = 60 ดงนน x = 1 คอ local maximum ท x = 1, f (x) = -60 ดงนน x = 1 คอ local maximum
fmax = f( x = 1) = 12
ท x = 2, f”(x) = 240 ดงนน x = 2 คอ local minimum
f f( 2) 11 fmin = f( x = 2) = -11
ท x = 0, f”(x) = 0 ดงนน ตองหาคา อนพนธลาดบถดไป
f ”’(x) =60(12x2 -18x +4) = 240
f ”’( ) ≠ ไ ใ i i i ปเนองจาก f (x) ≠ 0 ดงนนไมใชจด minimum และ maximum แตเปนจด
เปลยนเวา (Saddle point or inflection point)
W k h 2 O ti i ti เบองตนWorkshop 2 – Optimization เบองตน
คาถาม จงทาการหาคาสงสด คาตาสด หรอจดเปลยนเวา(ถาม) ของ
ฟงกชนทกาหนดให
f (x) = 4x3− 18x2 + 27x − 7
Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineering
Lecture Lecture 22
โดยโดย
ผศ.ดร. มนตศกด พมสาร

ทฤษฎของ Multi-variable optimization
without constraintswithout constraints
ปญหาแบบนสามารถเขยนสมการไดญ
1 2Min ( , , )nf x x xK
1x⎧ ⎫⎪ ⎪⎪ ⎪2x⎪ ⎪⎪ ⎪= ⎨ ⎬⎪ ⎪
XM
nx⎪ ⎪⎪ ⎪⎩ ⎭
ตวแปรของการออกแบบม n ตว

ฟ ปสาหรบ Taylor series ของ ฟงกชนหลายตวแปร
* * 2 * 3 *1 1( ) ( ) ( ) ( ) ( )f f df d f d f= + + +X X X X X
* *
( ) ( ) ( ) ( ) ( )2! 3!
1 ( ) ( )n
f f df d f d f
d f R
= + + +
+ + +
X X X X X
X X h
*
( ) ( , )!
Where
nnd f R
n+ + +
= −
X X h
h X X
K
Where =h X X
โดย ดฟเฟอเรนเชยนอนดบ r มคาดงน

ตวอยาง r = 2 n = 3ตวอยาง r = 2, n = 3
หรอเขยนไดเปน 2 2 2f f f⎡ ⎤∂ ∂ ∂⎢ ⎥
{ }
21 1 2 1 3
12 2 2
x x x x xh
f f fh h h h
⎢ ⎥∂ ∂ ∂ ∂ ∂⎢ ⎥ ⎧ ⎫⎢ ⎥∂ ∂ ∂ ⎪ ⎪ =⎢ ⎥ ⎨ ⎬Th Jh{ } *1 2 3 22
2 1 2 2 332 2 2
h h h hx x x x x
hf f f
=⎢ ⎥ ⎨ ⎬∂ ∂ ∂ ∂ ∂⎢ ⎥ ⎪ ⎪⎩ ⎭⎢ ⎥∂ ∂ ∂⎢ ⎥
X=Xh Jh
23 1 3 2 3
f f fx x x x x
⎢ ⎥∂ ∂ ∂ ∂ ∂⎢ ⎥⎣ ⎦

ฟ ป ไ ใ ดงนนสาหรบ Taylor series ของ ฟงกชนหลายตวแปรสามารถเขยนไดใหม
( )2* 1( ) ( ) T Tf f f ( )2* 1( ) ( )2
T Tf f f
Hessian matrix
ο= + ∇ + +
=
X=X* X=X*X X h h Jh h
Jwhere Hessian matrix
f∂⎧ ⎫⎪ ⎪∂
X=X*Jwhere
1xf
⎪ ⎪∂⎪ ⎪∂⎪ ⎪
⎪ ⎪2xf ⎪ ⎪∂= ∇ = ⎨ ⎬
⎪ ⎪⎪ ⎪
cM
n
fx
⎪ ⎪∂⎪ ⎪
⎪ ⎪∂⎩ ⎭⎩ ⎭

ตวอยาง จงหาเกรเดยนของฟงกชนขางลาง ณ x* = (1 8 1 6)ตวอยาง จงหาเกรเดยนของฟงกชนขางลาง ณ. x* = (1.8,1.6)2 2
1 2( ) ( 1) ( 1)f x x= − + −x
วธทา สมการทกาหนดใหคอสมการวงกลม ทจดศนยกลางท x = (1,1) ถาแทน
ไ 2 2 คาของ x* = (1.8,1.6) ได f(x*) = (1.8-1)2 + (1.6-1)2 = 1 คานวณหา
เกรเดยน ณ. จดน ได
(1 8 1 6) 2(1 8 1) 1 6f∂= − =(1.8,1.6) 2(1.8 1) 1.6
(1 8 1 6) 2(1 6 1) 1 2
1xf
= =∂∂
= =(1.8,1.6) 2(1.6 1) 1.2
{1.6,1.2}2
T
x= − =
∂
=c { , }

ตวอยาง จงหาเฮสเซยนเมตรก J ของฟงกชนขางลาง ณ x* = (1 2)ตวอยาง จงหาเฮสเซยนเมตรก J ของฟงกชนขางลาง ณ. x* = (1,2)3 3 2 21 2 1 2 1 2 1 2( ) 2 3 2 4f x x x x x x x x= + + + − + +x
วธทา ทาการดฟสองครงได
f f∂ ∂2 21 1 2 2 2 1
2 2
3 4 2, 3 6 41 2
f fx x x x x xx x
∂ ∂= + − + = + − +
∂ ∂
⎡ ⎤2 2
1 16 4 1 6(1) 4 1(1,2)
21 2
f fx x x x
⎡ ⎤∂ ∂⎢ ⎥∂ ∂ ∂ + − + −⎡ ⎤ ⎡ ⎤⎢ ⎥= = =⎢ ⎥ ⎢ ⎥⎢ ⎥
J2 2
2
2
(1, 2)1 6 6 1 6(2) 6
21 2
xf fx x x
⎢ ⎥ ⎢ ⎥⎢ ⎥ − + − +∂ ∂ ⎣ ⎦⎣ ⎦⎢ ⎥∂ ∂ ∂⎢ ⎥⎣ ⎦
J
10 11 18
−⎡ ⎤= ⎢ ⎥−⎣ ⎦⎣ ⎦
ไสมการเงอนไข จด local minimum
1 First order necessary condition1. First order necessary condition
2 S ffi i di i2. Sufficient condition
1) Relative minimum ถา J เปน Positive definite matrix1) Relative minimum ถา J เปน Positive definite matrix
2) Relative maximum ถา J เปน Negative definite matrix2) Relative maximum ถา J เปน Negative definite matrix
3) Saddle point ถา J ไมไดเปน Positive or Negative definite matrix 3) Saddle point ถา J ไมไดเปน Positive or Negative definite matrix
= indefinite

สาหรบเมตรกซ A วธการเชควาเปนเมตรกซแบบไหนใหเชคจาก Determinant สาหรบเมตรกซ A วธการเชควาเปนเมตรกซแบบไหนใหเชคจาก Determinant
หรอ principal minors ของเมตรกซ
เมตรกซ A คอ
1. Positive definite ถา A1, A2,…,An มคาเปนบวก
2. Negative definite ถามเครองหมาย Aj = (-1)j for j =1, 2,3,…,n

3. Positive semidefinite ถา Aj จานวนนงมคาเปนบวก และทเหลอเปนศนย
j4. Negative semidefinite ถามเครองหมาย Aj = (-1)j for j =1, 2,3,…,n และ Aj
จานวนนงมคาเปนศนย
5. Indefinite ถาไมเปนไปตามในขอ 1 ถง 4
หมายเหต ทฤษฎใชไดกตอเมอ Aj ทตดกน (Aj และ Aj+1)ตองมคาไมเปนศนย
พรอมกน ถาเปนศนยพรอมกนตองใชวธอนเชคพรอมกน ถาเปนศนยพรอมกนตองใชวธอนเชค
สาหรบเมตรกซ A วธการเชควาเปนเมตรกซแบบไหนใหเชคจาก Eigenvalue ของสาหรบเมตรกซ A วธการเชควาเปนเมตรกซแบบไหนใหเชคจาก Eigenvalue ของ
เมตรกซ (Ax = λx), λ = Eigenvalue
เมตรกซ A คอ
1. Positive definite ถา λ1, λ2,…, λn มคาเปนบวก
λ λ λ 2. Negative definite ถา λ1, λ2,…, λn มคาเปนลบ
3 Positive semidefinite ถา λj จานวนนงมคาเปนบวก และทเหลอเปนศนย3. Positive semidefinite ถา λj จานวนนงมคาเปนบวก และทเหลอเปนศนย
4. Negative semidefinite ถา λj จานวนนงมคาเปนลบ และทเหลอเปนศนย
5. Indefinite ถา λj จานวนนงมคาเปนบวก และทเหลอเปนลบ เทานน

ไ ปตวอยาง จงวเคราะหวาเมตรกขางลางมคณสมบตอยางไร (เปน positive
definite หรอไม) 1 1 0−⎡ ⎤1 1 00 0 1
⎡ ⎤⎢ ⎥= −⎢ ⎥⎢ ⎥⎣ ⎦
A
วธทา ทาการหา Determinant ยอยไดดงน
0 0 1⎢ ⎥−⎣ ⎦
1 1 01 1
−−1 1
1 1, 0, 1 1 0 01 1
0 0 1= − = − = = = − =
−−
1 2 3A A A
เนองจาก A2 = A3 = 0 ดงนนไมสามารถใช ทฤษฏท principle minorsได
ใ i lตองใชทฤษฎของ การหา Eigenvalue

⎡ ⎤วธทา (ตอ) 1 1 01 1 0 0
λλ
− −⎡ ⎤⎢ ⎥− − =⎢ ⎥
2
0 0 1
( 1 ) ( 1 ) 1 ( 1 )( 2) 0
λ
λ λ λ λ λ
⎢ ⎥⎢ ⎥− −⎣ ⎦
⎡ ⎤2
1 2 3
( 1 ) ( 1 ) 1 ( 1 )( 2) 0,
2, 1, 0
λ λ λ λ λ
λ λ λ
⎡ ⎤− − − − − = − − + =⎣ ⎦∴ = − = − =1 2 3
ดงนนจากทฤษฏของ การหา Eigenvalue สามารถสรปไดวา เมตรกซ A มดงนนจากทฤษฏของ การหา Eigenvalue สามารถสรปไดวา เมตรกซ A ม
คณสมบตเปน Negative semidefinite

N t f t ti i tNature of stationary points• Hessian J positive definite:
– Quadratic formQ– Eigenvalues
0T >h Jh
0>iλ
● Local nature: minimum
i

N f i i (2)Nature of stationary points (2)• Hessian J negative definite:
– Quadratic formQ– Eigenvalues 0<Th Jh
0<iλi
● Local nature: maximum

N t f t ti i t (3)Nature of stationary points (3)• Hessian J indefinite:
– Quadratic formQ– Eigenvalues 0≠Th Jh
0≠iλi
● Local nature: saddle point

Nature of stationary points (4)Nature of stationary points (4)• Hessian J positive semi-definite:
– Quadratic formQ– Eigenvalues 0≥Th Jh
0≥iλJ singular!
● Local nature: valley
i
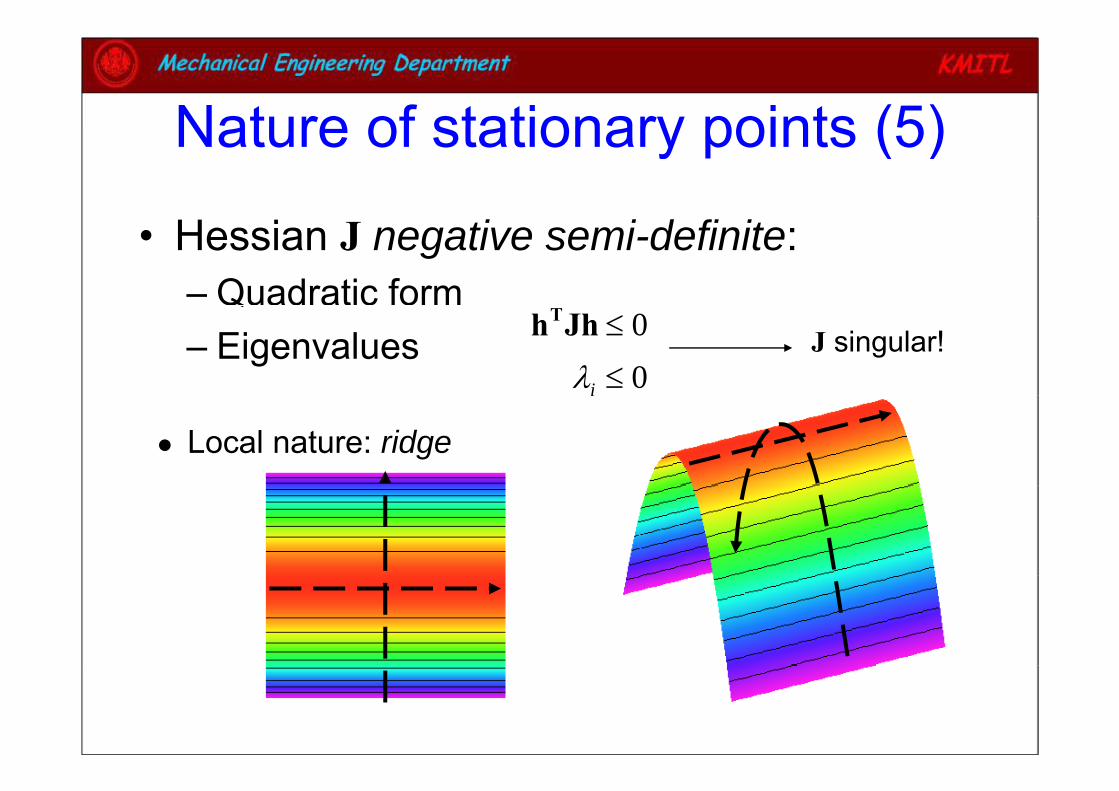
Nature of stationary points (5)Nature of stationary points (5)
• Hessian J negative semi-definite:– Quadratic formQ– Eigenvalues 0≤Th Jh
0≤iλJ singular!
i
● Local nature: ridge

S i iStationary point nature summary
Definiteness J Nature X*Th Jh iλ
Positive d. Minimum0>
Positive semi-d. Valley0≥
Indefinite Saddlepoint0≠
Negative semi-d. Ridge0≤
Negative d. Maximum0<

Global optimality• Optimality conditions for unconstrained
problem:problem:– First order necessity: (stationary point)
S d d ffi i J iti d fi it t *0*)( =∇ xf
– Second order sufficiency: J positive definite at x*
O ti lit diti l lid l ll● Optimality conditions only valid locally:
local minimum*x⇒
● When can we be sure x* is a global minimum?
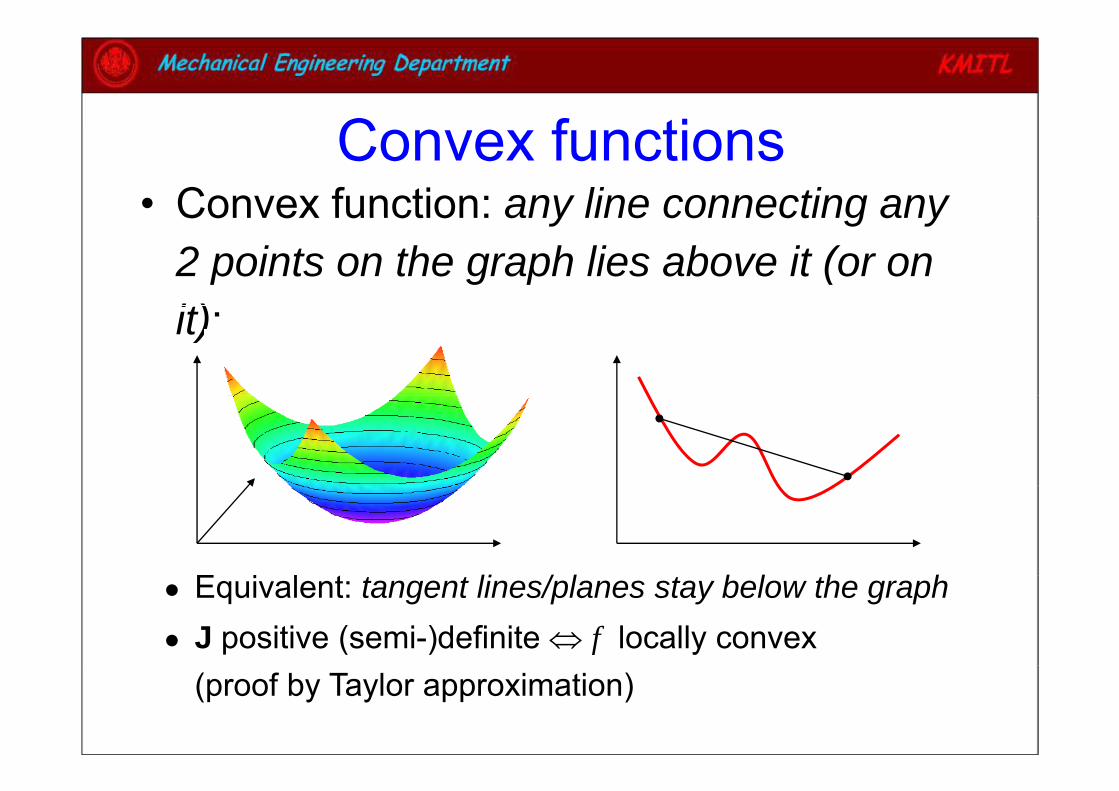
C f tiConvex functions• Convex function: any line connecting anyConvex function: any line connecting any
2 points on the graph lies above it (or on it)it):
E i l li / l b l h h● J positive (semi-)definite ⇔ f locally convex● Equivalent: tangent lines/planes stay below the graph
(proof by Taylor approximation)

C d iConvex domains• Convex set:
“A set S is convex if for every two points x1A set S is convex if for every two points x1, x2 in S, the connecting line also lies completely inside S”completely inside S
C it d l b l ti litConvexity and global optimalityIf:• Objective f = (strictly) convex function• Feasible domain = convex set (Ok for unconstrained
optimization)
Stationary point = (unique) global minimum
● Special case: f, g, h all linear ⇒ Linear programming
● More general class: convex optimization
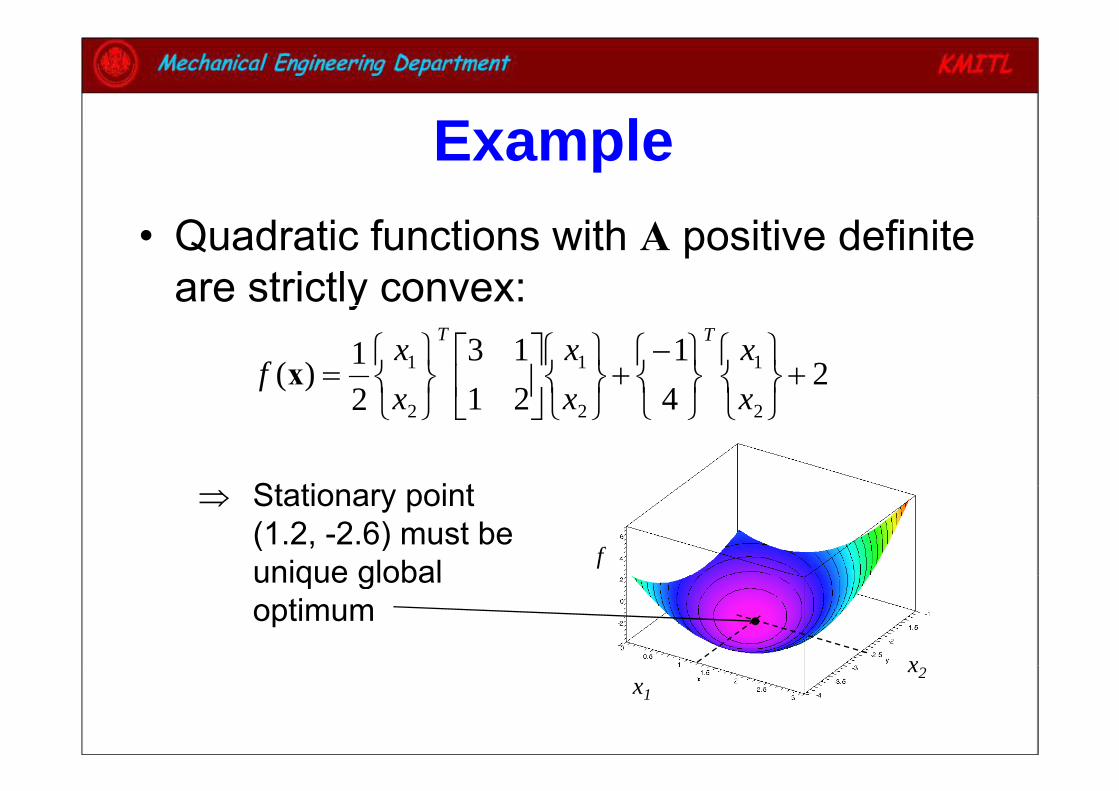
E lExample• Quadratic functions with A positive definite
are strictly convex:y
241
2113
21)( 111 +
⎭⎬⎫
⎩⎨⎧
⎭⎬⎫
⎩⎨⎧−
+⎭⎬⎫
⎩⎨⎧
⎥⎦
⎤⎢⎣
⎡
⎭⎬⎫
⎩⎨⎧
=xx
xx
xx
fTT
x4212 222 ⎭⎩⎭⎩⎭⎩
⎥⎦
⎢⎣⎭⎩ xxx
St ti i t
f
⇒ Stationary point (1.2, -2.6) must be unique global
x
unique global optimum
x1
x2
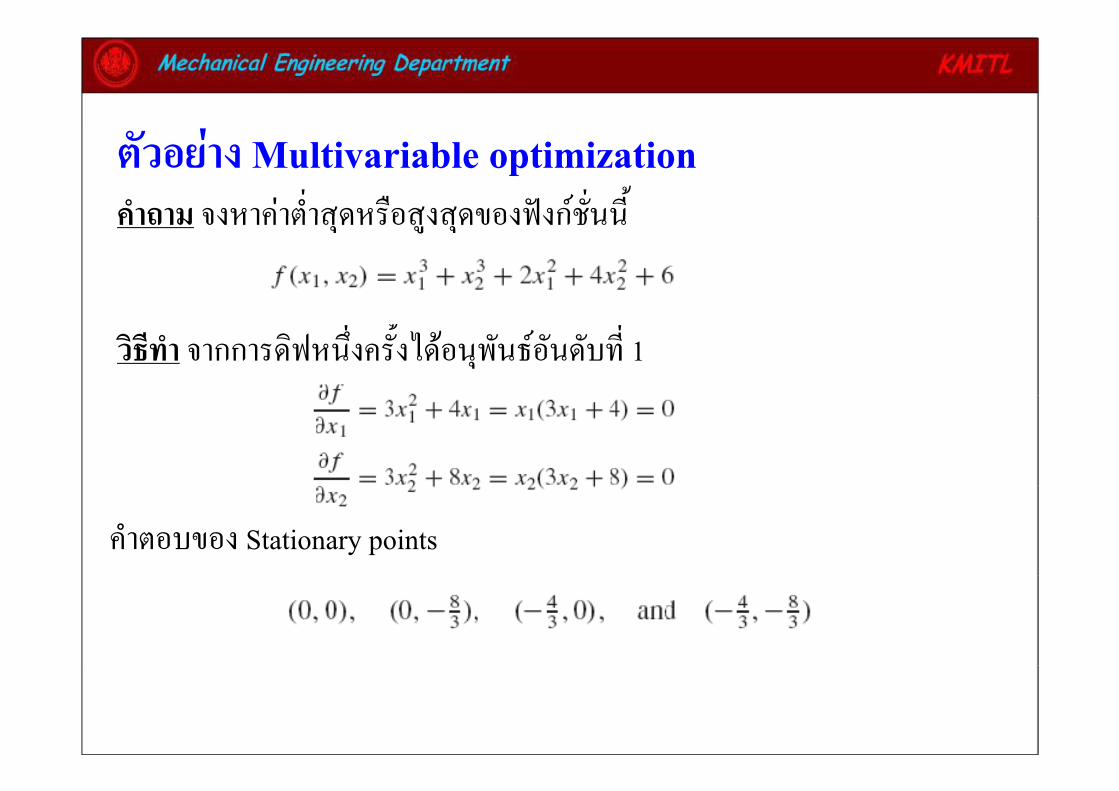
ตวอยาง Multivariable optimizationคาถาม จงหาคาตาสดหรอสงสดของฟงกชนนคาถาม จงหาคาตาสดหรอสงสดของฟงกชนน
วธทา จากการดฟหนงครงไดอนพนธอนดบท 1
คาตอบของ Stationary points

( )ตวอยาง Multivariable optimization(ตอ)
ดงนน H i t i คอดงนน Hessian matrix คอ
นาคาของ Stationary points ทงสไปแทนไดนาคาของ Stationary points ทงสไปแทนได

W k h 1 M lti i bl O ti i ti Workshop 1 – Multivariable Optimization
คาถาม จงทาการหาคาสงสด คาตาสด หรอจดเปลยนเวา(ถาม) ของ
ฟงกชนทกาหนดให
ทฤษฎของ Multi-variable optimization
with equality constraintswith equality constraints
ปญหาแบบนสามารถเขยนสมการไดญ
1 2Min ( , , )Subject to
nf x x xK
Subject to( ) , 1, 2,...,j j m= =
⎧ ⎫
g X 0
1
2
xx
⎧ ⎫⎪ ⎪⎪ ⎪= ⎨ ⎬X
nx
⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
XM
ตวแปรของการออกแบบม n ตว , m < n

วธของ L M lti liวธของ Lagrange Multiplierกาหนดให ฟงกชนของ Lagrange มคาดงน
1 2 1 2 1 1 2 2( , , , , ,..., ) ( ) ( ) ( ) ... ( )h
n m m mL x x x f g g gλ λ λ λ λ λ= + + + +X X X XK
j
WhereLagrange multiplier for ( )jgλ = X
ซงจะทาใหไดเปลยนปญหาไปเปน สมการทไมม Constraints แลว ดงนน
Local minimum หาไดจากเงอนไขของ Necessary condition ดงนLocal minimum หาไดจากเงอนไขของ Necessary condition ดงน
, 1, 2,..., (1)m
jj
gL f i nλ∂∂ ∂
= + = =∑ 01
, , , , ( )
( ) , 1, 2,..., (2)
jji i i
j
x x xL g j m
=∂ ∂ ∂
∂= = =
∑
X 0( ) , , , , ( )jj
g jλ∂

ผลเฉลยของสมการ (1) และ (2) คอ
* *1 1* *2 2
xx
λλ
⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪* *2 2
* *
,x
x
λ
λ
⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
* *X λM M
n mx λ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
โดยท X* คอ Relative constrained minimum ของ f(X) และ λ* คอคาทบอกถง โดยท X คอ Relative constrained minimum ของ f(X) และ λ คอคาทบอกถง
Sensitivity จากนนเราตองเชคเงอนไขของ Sufficient condition วาแทจรงแลวนน
X* คอคาตาสดหรอคาสงสดหรอเปนจดเปลยนเวา
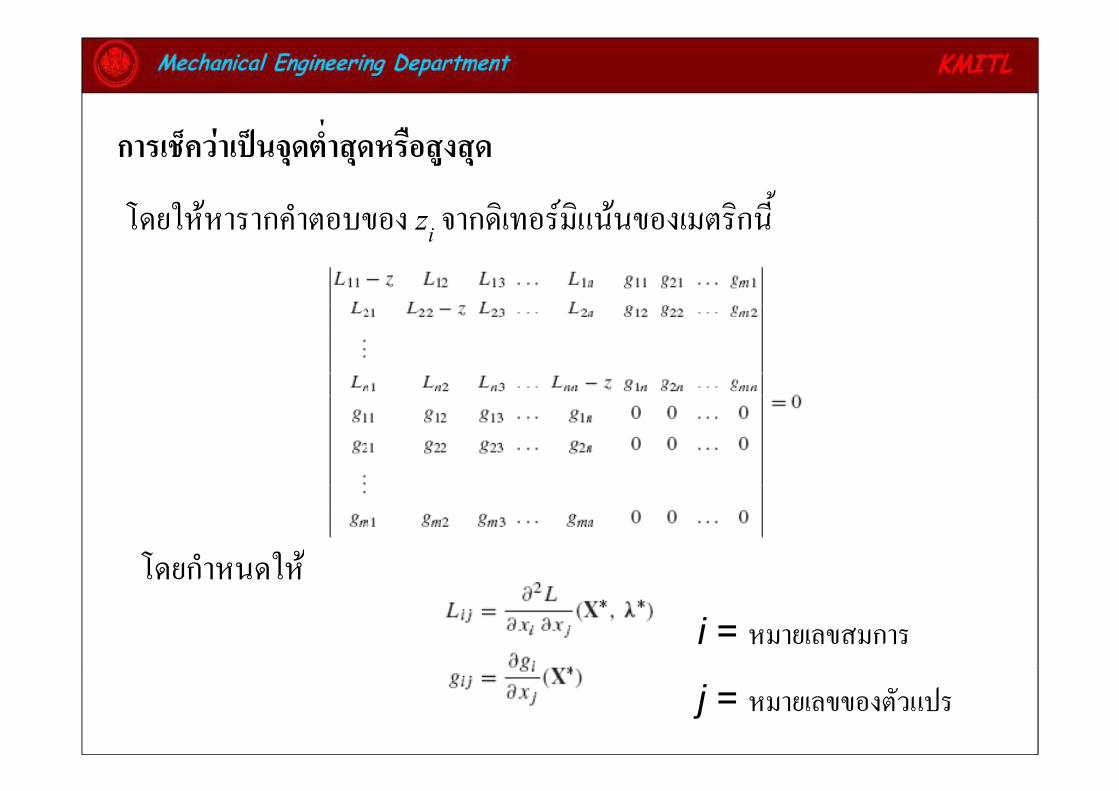
การเชควาเปนจดตาสดหรอสงสด
โดยใหหารากคาตอบของ z จากดเทอรมแนนของเมตรกนโดยใหหารากคาตอบของ zi จากดเทอรมแนนของเมตรกน
โดยกาหนดใหโดยกาหนดให
i = หมายเลขสมการ
j = หมายเลขของตวแปร

ถารากคาตอบของ zi จากดเทอรมแนนของเมตรกน
1. เปนคาบวกทงหมด (n-m ตว) ดงนน X* คอจดตาสด
2. เปนคาลบทงหมด (n-m ตว) ดงนน X* คอจดสงสด
3. เปนคาบวกบางและลบบาง ดงนน X* คอจดเปลยนเวา
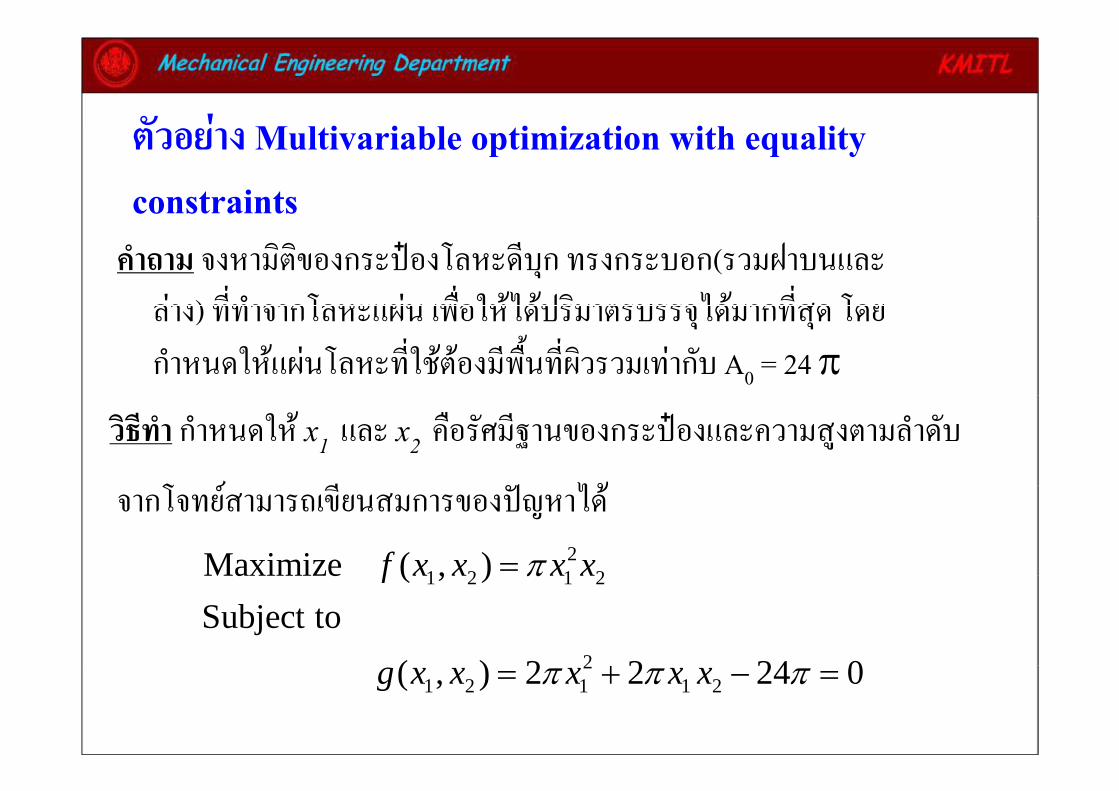
M l i i bl i i i i h li ตวอยาง Multivariable optimization with equality
constraintsคาถาม จงหามตของกระปองโลหะดบก ทรงกระบอก(รวมฝาบนและ
ลาง) ททาจากโลหะแผน เพอใหไดปรมาตรบรรจไดมากทสด โดยลาง) ททาจากโลหะแผน เพอใหไดปรมาตรบรรจไดมากทสด โดย
กาหนดใหแผนโลหะทใชตองมพนทผวรวมเทากบ A0 = 24 π
วธทา กาหนดให x1 และ x2 คอรศมฐานของกระปองและความสงตามลาดบ
โ ป ไ จากโจทยสามารถเขยนสมการของปญหาได
21 2 1 2Maximize ( , )f x x x xπ=1 2 1 2
2
Maximize ( , )Subject to
( ) 2 2 24 0
f x x x xπ
21 2 1 1 2( , ) 2 2 24 0g x x x x xπ π π= + − =

Lagrange function คอ
2 2( ) (2 2 24 )L x x x x x x xλ π λ π π π= + + −
จากเงอนไข Necessary condition
1 2 1 2 1 1 2( , , ) (2 2 24 )L x x x x x x xλ π λ π π π= + +
y
จากการแกสมการ (E1) และ (E2) ไดจากการแกสมการ (E1) และ (E2) ได

ไ จากการแกสมการ (E2) (E3) และ (E4) ได
แทนคา A0 ได0
เชควาเปนคาสงสดจรงโดย

เขยนเปนเมตรกซได
รากคาตอบของ z เปนลบดงนน x และ x คอคาคาตอบททาใหฟงกชนมรากคาตอบของ z เปนลบดงนน x1 และ x2 คอคาคาตอบททาใหฟงกชนม
คาสงสด

Workshop 2 Multivariable Optimization with equality Workshop 2 – Multivariable Optimization with equality
constraints คาถาม จงทาการหาคาตาสด ของฟงกชนทกาหนดให
12000Mi i i ( )f 1 2 2
1 2
Minimize ( , )
Subject to
f x xx x
=
2 21 2 1 2
j( , ) 400 0
20 2 27 3
g x x x x= + − =
* * *1 2
20 2 27 3Answer , 20,3 32003
x x λ= = =

Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineering
Lecture Lecture 33
โดยโดย
ผศ.ดร. มนตศกด พมสาร

ทฤษฎของ Multi-variable optimization
with inequality constraintswith inequality constraints
ปญหาแบบนสามารถเขยนสมการไดญ
1 2Minimize ( , , )Subject to
nf x x xK
Subject to( ) , 1, 2,...,j j m≤ =
⎧ ⎫
g X 0
1
2 Design variable vector
xx
⎧ ⎫⎪ ⎪⎪ ⎪= =⎨ ⎬⎪ ⎪
XM
nx
⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
M
ตวแปรของการออกแบบม n ตว , m < n
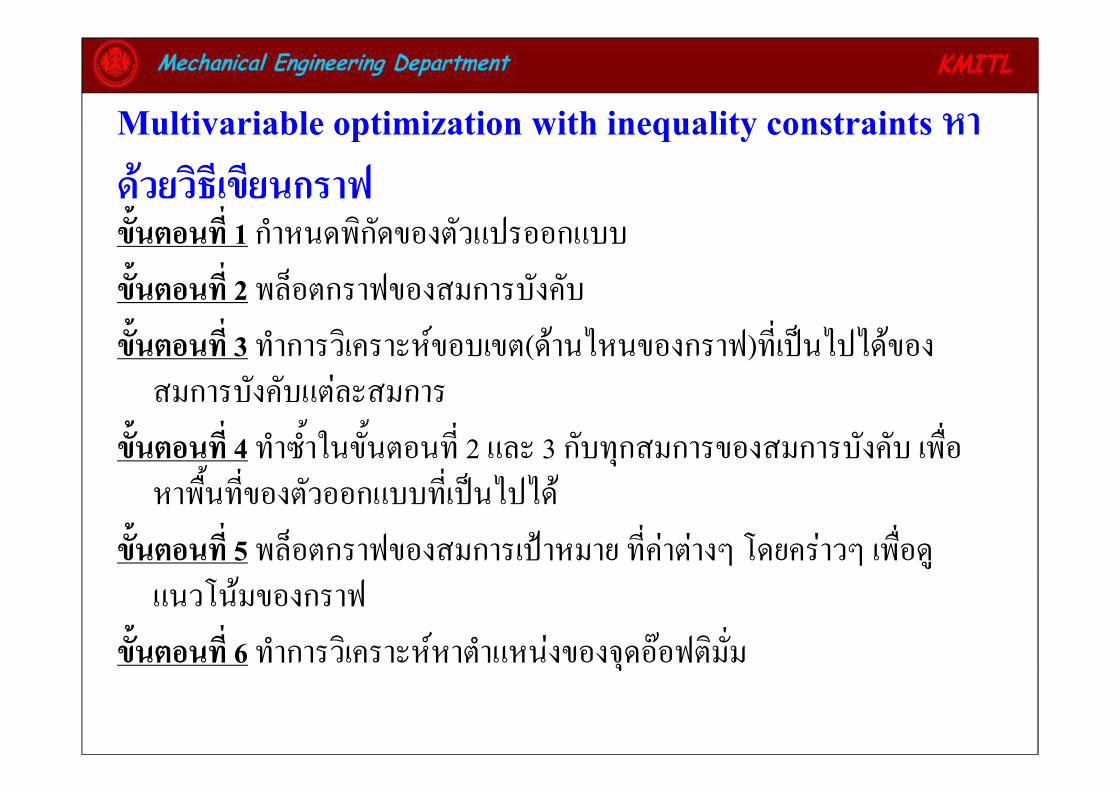
Multivariable optimization with inequality constraints หาMultivariable optimization with inequality constraints หา
ดวยวธเขยนกราฟ ขนตอนท 1 กาหนดพกดของตวแปรออกแบบ
ขนตอนท 2 พลอตกราฟของสมการบงคบ
ขนตอนท 3 ทาการวเคราะหขอบเขต(ดานไหนของกราฟ)ทเปนไปไดของสมการบงคบแตละสมการสมการบงคบแตละสมการ
ขนตอนท 4 ทาซาในขนตอนท 2 และ 3 กบทกสมการของสมการบงคบ เพอ ป ไปไ หาพนทของตวออกแบบทเปนไปได
ขนตอนท 5 พลอตกราฟของสมการเปาหมาย ทคาตางๆ โดยคราวๆ เพอดแนวโนมของกราฟ
ขนตอนท 6 ทาการวเคราะหหาตาแหนงของจดออฟตมม

ตวอยาง Multivariable optimization with inequality ตวอยาง Multivariable optimization with inequality
constraints หาดวยวธเขยนกราฟคาถาม 2 2
1 2 1 2Minimize ( , ) ( 1.5) ( 1.5)Subject to
f x x x x= − + −
1 1 2 1 2
Subject to( , ) 2 0g x x x x= + − ≤
2 1 2 1
3 1 2 2
( , ) 0( , ) 0
g x x xg x x x
= − ≤= − ≤3 1 2 2( )g
วธทา ทาการวเคราะหโดยการเขยนกราฟดงรป

ป ปไ หมายเหต ถาตวแปรออกแบบมากกวา 2 ตว วธการวาดรปไมสามารถทา
ได ตองใชวธอน

Workshop 1 Multivariable Optimization with Workshop 1 – Multivariable Optimization with
inequality constraints(วธการเขยนกราฟ) คาถาม จงทาการหาคา x1 , x2 ททาใหฟงกชนนมคาตาสด กาหนดให
Mi i i ( )f 1 2 1 2Minimize ( , )
Subject tof x x x x= +
2150450
x≥≥ +1 2
1 2
4504 900
x xx x
≥ ++ ≤
1 20, 0x x≥ ≥

เราสามารถเปลยนปญหาไปเปน Equality constraintไดการเพม Slag variables, 2jy
1 2Minimize ( , , )Subject to
nf x x xK
2
Subject to( , ) ( ) , 1, 2,...,j j jG y j m= + = =X Y g X 0
1
2
yy
⎧ ⎫⎪ ⎪⎪ ⎪2 Slack variable vector
y⎪ ⎪= =⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
YM
my⎪ ⎪⎩ ⎭

กาหนดให ฟงกชนของ Lagrange มคาดงน
1( , , ) ( ) ( , )
m
j jj
L f Gλ=
= +∑X Y λ X X Y
กาหนดให ฟงกชนของ Lagrange มคาดงน
1
1
j
λλ
=
⎧ ⎫⎪ ⎪⎪ ⎪2 Lagrange multiplier vectorλ
λ
⎪ ⎪= =⎨ ⎬⎪ ⎪⎪ ⎪⎩ ⎭
λM
mλ⎪ ⎪⎩ ⎭จด Stationary points หาไดจากเงอนไขของ Necessary condition ดงน
m gL f ∂∂ ∂
1( , , ) ( ) , 1, 2,..., (1)j
jji i i
gL f i nx x xL
λ=
∂∂ ∂= + = =
∂ ∂ ∂
∂
∑X Y λ X 0
2( , , ) ( , ) ( ) , 1, 2,..., (2)j j jj
L G g y j m
Lλ∂
= = + = =∂
∂
X Y λ X Y X 0
( , , ) 2 , 1, 2,..., (3)j jj
L y j my
λ∂= = =
∂X Y λ 0
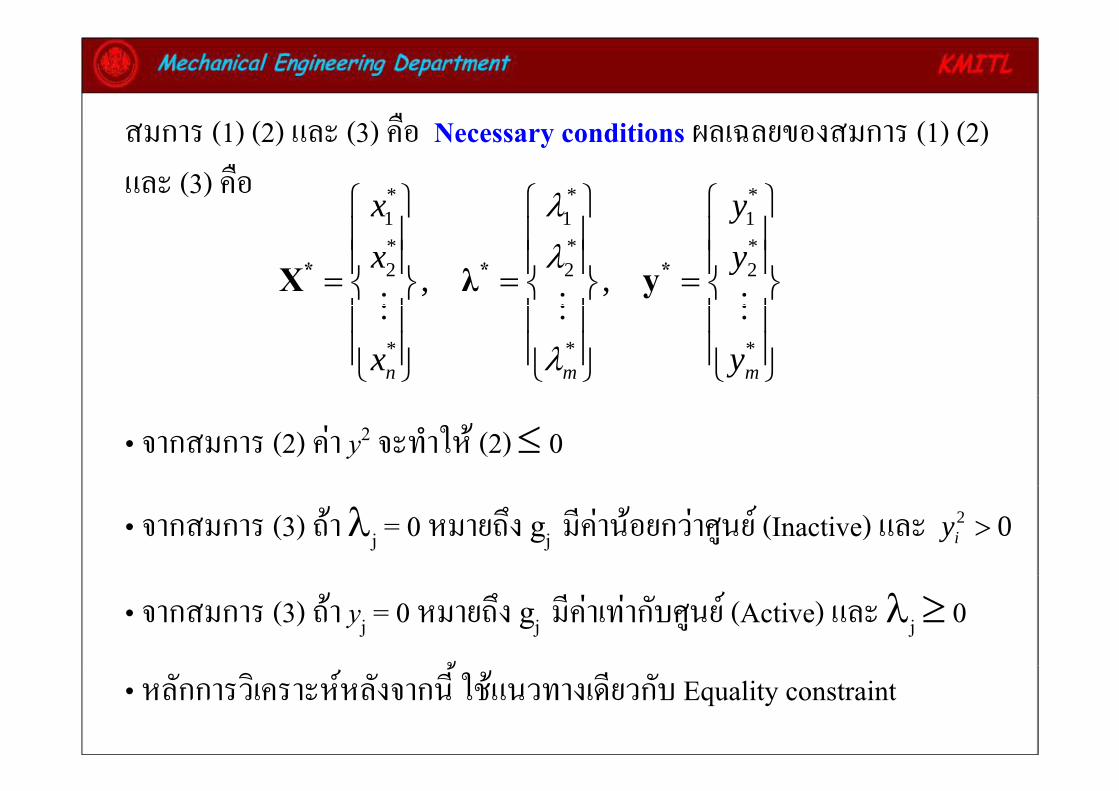
สมการ (1) (2) และ (3) คอ N diti ผลเฉลยของสมการ (1) (2)
* * *1 1 1x yλ⎧ ⎫ ⎧ ⎫ ⎧ ⎫
⎪ ⎪ ⎪ ⎪ ⎪ ⎪
สมการ (1) (2) และ (3) คอ Necessary conditions ผลเฉลยของสมการ (1) (2)
และ (3) คอ1 1 1* * *2 2 2, ,
x yx y
λλ
⎧ ⎫ ⎧ ⎫ ⎧ ⎫⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪= = =⎨ ⎬ ⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪ ⎪ ⎪
* * *X λ yM M M* * *n m mx yλ
⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭ ⎩ ⎭
M M M
• จากสมการ (2) คา y2 จะทาให (2) ≤ 0
• จากสมการ (3) ถา λj = 0 หมายถง gj มคานอยกวาศนย (Inactive) และ 2 0iy >
• จากสมการ (3) ถา yj = 0 หมายถง gj มคาเทากบศนย (Active) และ λj ≥ 0
• หลกการวเคราะหหลงจากน ใชแนวทางเดยวกบ Equality constraint

มาดเงอนไขของ Necessary condition อกครง
m gL f ∂∂ ∂
1( , , ) ( ) , 1, 2,..., (1)
mj
jji i i
gL f i nx x xL
λ=
∂∂ ∂= + = =
∂ ∂ ∂
∂
∑X Y λ X 0
2( , , ) ( , ) ( ) , 1, 2,..., (2)j j jj
L G g y j m
Lλ∂
= = + = =∂
∂
X Y λ X Y X 0
( , , ) 2 , 1,2,..., (3)j jj
L y j my
λ∂= = =
∂X Y λ 0
ปกตเราสามารถแบง gj เปนสองชนดคอชนดท Active (yj = 0 หรอ gj = 0)
กบชนดท Inactive (g < 0) ดงนนโดยทวไปเราสามารถไมคดสวนทเปน กบชนดท Inactive (gj < 0) ดงนนโดยทวไปเราสามารถไมคดสวนทเปน
inactive ได(โดยมากเราจะไมรลวงหนาวาคอสมการใด) อยางไรกตามถาตด
ไ ไ ไ ป ใ ได เราจะไดเงอนไข จดทเปน minimum point ใหมดงน
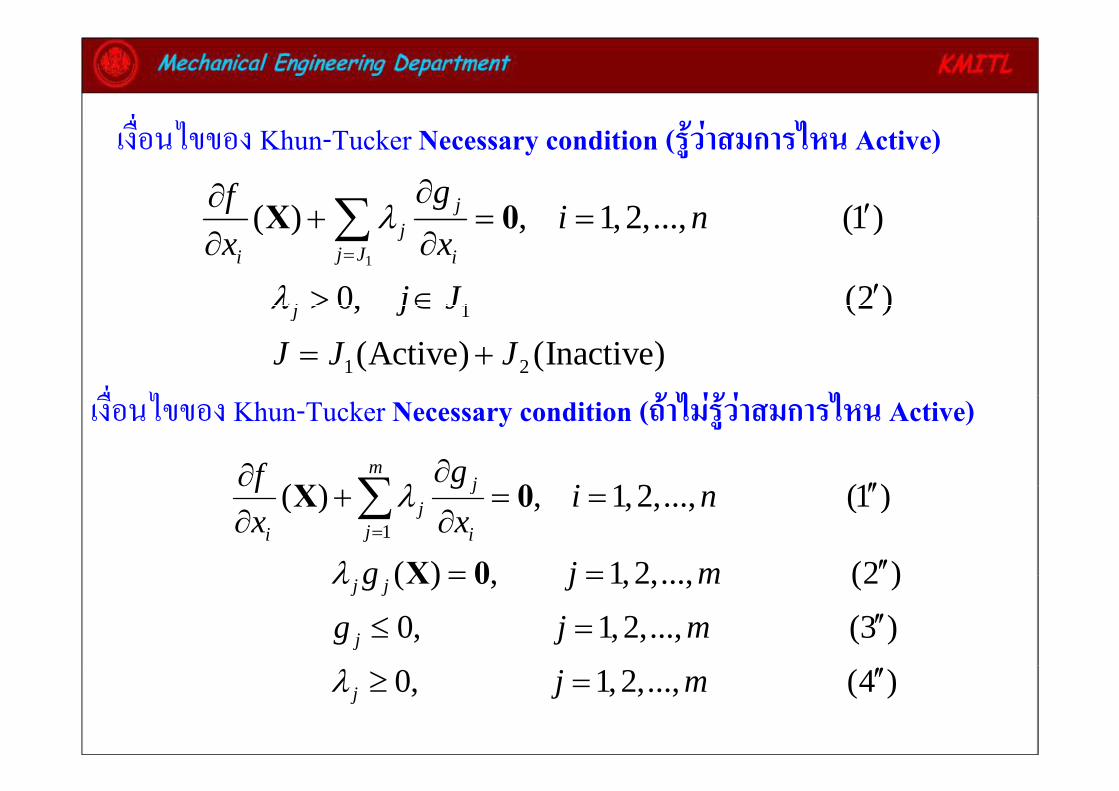
ไ ไเงอนไขของ Khun-Tucker Necessary condition (รวาสมการไหน Active)
( ) 1 2 (1 )jgf i nλ∂∂ ′+ = =∑X 0
1
1
( ) , 1, 2,..., (1 )
0, (2 )
jj Ji i
j
i nx x
j J
λ
λ=
+ = =∂ ∂
′> ∈
∑X 0
1
1 2
0, (2 )(Active) (Inactive)
j j JJ J Jλ > ∈
= +
ไ ไ ไเงอนไขของ Khun-Tucker Necessary condition (ถาไมรวาสมการไหน Active)
( ) 1 2 (1 )m
jgf λ∂∂ ′′∑X 0
1
( ) , 1,2,..., (1 )
( ) 1 2 (2 )
jj
ji i
gf i nx x
g j m
λ
λ=
∂ ′′+ = =∂ ∂
′′= =
∑X 0
X 0( ) , 1, 2,..., (2 )0, 1, 2,..., (3 )
j j
j
g j mg j mλ = =
′′≤ =
X 0
0, 1,2,..., (4 )j j mλ ′′≥ =

ตวอยาง Multivariable optimization with inequality ตวอยาง Multivariable optimization with inequality
constraints ดวย Necessary Conditionsคาถาม 2 2
1 2 1 2Minimize ( , ) ( 1.5) ( 1.5)Subject to
f x x x x= − + −
1 2 1 2
Subject to( , ) 2 0g x x x x= + − ≤
วธทา ทาการสราง ฟงกชนของ Lagrange
2 2 21 2 1 2( 1.5) ( 1.5) ( 2 )L x x x x yλ= − + − + + − +

ไ ปไ จากเงอนไข Necessary condition สามารถสรปไดดงน
L∂1
1
2( 1.5) 0 ( )L x axL
∂= − + =
∂∂
λ
22
2( 1.5) 0 ( )L x bxL
∂= − + =
∂∂
λ
21 2 2 0 ( )L x x y c
L
∂= + − + =
∂∂λ
2 0 ( )L y dy∂
= =∂
λ
จากสมการเหลาน เราม 4 ตวแปรและ 4 สมการ เราตองเรมทสมการ (d)
ป ส แบงเปนสองกรณดงน

กรณท 1 ให y 0 กรณท 1 ให y = 0
1) สมการ (a) – (b) จะได x1 = x21 2
2) นา y = 0 และ x1 = x2 ไปแทนในสมการ (c) ได x2 = 1 ดงนน x1 = 1
3) นา x1 แทนในสมการ (a) ได λ = 1
λกรณท 2 ให λ = 0
1) แทนในสมการ (a) และ (b) จะได x = x = 1 51) แทนในสมการ (a) และ (b) จะได x1 = x2 = 1.5
2) นา x1 = x2 ได 3 – 2 + = 0 หรอ (เปนไปไมได)21y 2
1 1y = −1 2
ดงนนคาตอบคอ กรณท 1 X* = (1,1), λ = 1 , f (X*) = 0.5

ฟ ป ใขอสงเกต ณ. จดตาสดเกรเดยนของฟงกชนเปาหมายกบสมการบงคบ จะชใน
ทศตรงกนขาม
A i นอกจากนนคาตอบจะอยบนสมการบงคบหรอสมการบงคบ บางตวจะ Active
หรอเทากบศนย

ทฤษฎของ Multi-variable optimization
with equality and inequality constraintswith equality and inequality constraints
ปญหาแบบนสามารถเขยนสมการไดญ
1 2Minimize ( , , )Subject to
nf x x xK
Subject to( ) , 1,2,...,
( ) 1 2j j m
k
≤ =g X 0
h X 0
1
( ) , 1,2,...,k k px= =
⎧ ⎫⎪ ⎪⎪ ⎪
h X 0
2 Design variable vectorx⎪ ⎪
⎪ ⎪= =⎨ ⎬⎪ ⎪⎪ ⎪
XM
nx⎪ ⎪⎩ ⎭

สามารถเปลยนไปเปน Equality constraintไดการเพม Slag variables, Minimize ( )f x x x
2jy
1 2
2
Minimize ( , , )Subject to
nf x x xK
2( , ) ( ) , 1, 2,...,
( ) , 1, 2,...,j j j
k
G g y j m
h k p
= + = =
= =
X Y X 0
X 0
1
( ) , , , ,k pyy
⎧ ⎫⎪ ⎪⎪ ⎪2 Slack variable vector
y⎪ ⎪⎪ ⎪= =⎨ ⎬⎪ ⎪⎪ ⎪
YM
my⎪ ⎪⎩ ⎭

pm
∑ ∑
กาหนดให ฟงกชนของ Lagrange มคาดงน
1 1( , , , ) ( ) ( , ) ( )j j k k
j kL f G hλ β
βλ= =
= + +
⎧ ⎫⎧ ⎫
∑ ∑X Y λ β X X Y X
11
22
βλβλ
⎧ ⎫⎧ ⎫⎪ ⎪⎪ ⎪
⎪ ⎪ ⎪ ⎪= =⎨ ⎬ ⎨ ⎬λ β,
pm βλ
⎨ ⎬ ⎨ ⎬⎪ ⎪ ⎪ ⎪⎪ ⎪ ⎪ ⎪⎩ ⎭ ⎩ ⎭
λ βMM
⎩ ⎭ ⎩ ⎭
λj และ βk คอ Lagrange multipliers สาหรบ Gj และ hk ตามลาดบ จด
j j
Stationary points หาไดจากเงอนไขของ Necessary condition ดงน
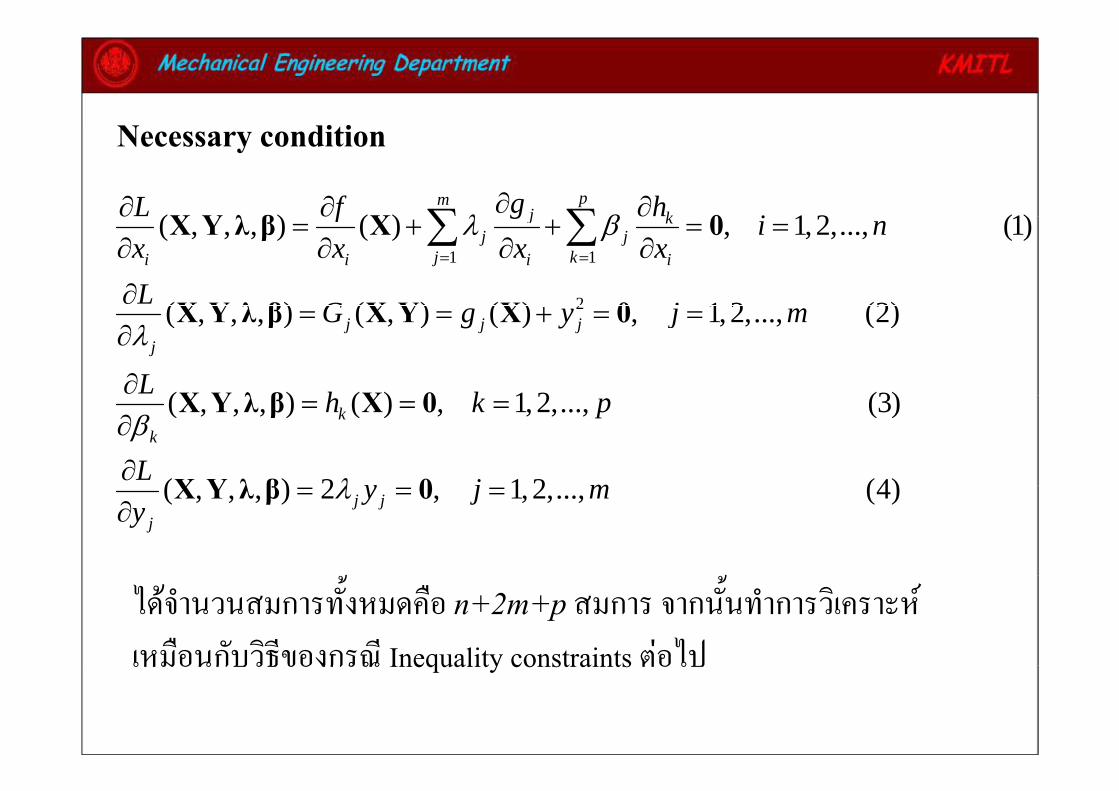
N di iNecessary condition
( ) ( ) 1 2 (1)pm
j kg hL f iλ β∂ ∂∂ ∂ ∑ ∑X Y λ β X 0
1 1
2
( , , , ) ( ) , 1, 2,..., (1)
( ) ( ) ( ) 1 2 (2)
j kj j
j ki i i i
g hL f i nx x x xL G j
λ β= =
∂∂ ∂= + + = =
∂ ∂ ∂ ∂
∂
∑ ∑X Y λ β X 0
X Y λ β X Y X 02( , , , ) ( , ) ( ) , 1, 2,..., (2)
( ) ( ) 1 2 (3)
j j jj
G g y j m
L h k
λ= = + = =
∂
∂
X Y λ β X Y X 0
X Y λ β X 0( , , , ) ( ) , 1, 2,..., (3)
( ) 2 1 2 (4)
kk
h k p
L j
β
λ
= = =∂∂
X Y λ β X 0
X Y λ β 0( , , , ) 2 , 1,2,..., (4)j jj
y j my
λ= = =∂
X Y λ β 0
ไดจานวนสมการทงหมดคอ n+2m+p สมการ จากนนทาการวเคราะห
เหมอนกบวธของกรณ Inequality constraints ตอไปเหมอนกบวธของกรณ Inequality constraints ตอไป

ตวอยาง Multivariable optimization with equality and ตวอยาง Multivariable optimization with equality and
inequality constraintsคาถาม
1 2 1 2Maximize ( , )Subject to
f x x x x=
1 2 1
Subject to( , ) 4 0g x x x= − ≤
1 2 1 2( , ) 10 0h x x x x= + − =
ไ วธทา สราง Lagrange ฟงกชนไดดงน
2( ) ( 4 ) ( 10)L x x x y x xλ β= + + + +X Y λ β 1 2 1 1 1 1 1 2( , , , ) ( 4 ) ( 10)L x x x y x xλ β= + − + + + −X Y λ β

ไ ปไ จากเงอนไข Necessary condition สามารถสรปไดดงน
2 1 1 0 ( )L x aλ β∂= + + =
∂ 2 1 11
1 1 0 ( )
xL x bβ
∂∂
= + =∂ 2
21 14 0 ( )
xL x y cλ
∂∂
= − + =∂ 1
1 2 10 0 ( )L x x d
λ
β
∂∂
= + − =∂ 1
1 12 0 ( )L y ey
β
λ
∂∂
= =∂
จากสมการเหลานเราตองเรมทสมการ (e) แบงเปนสองกรณดงน
1y∂
( )
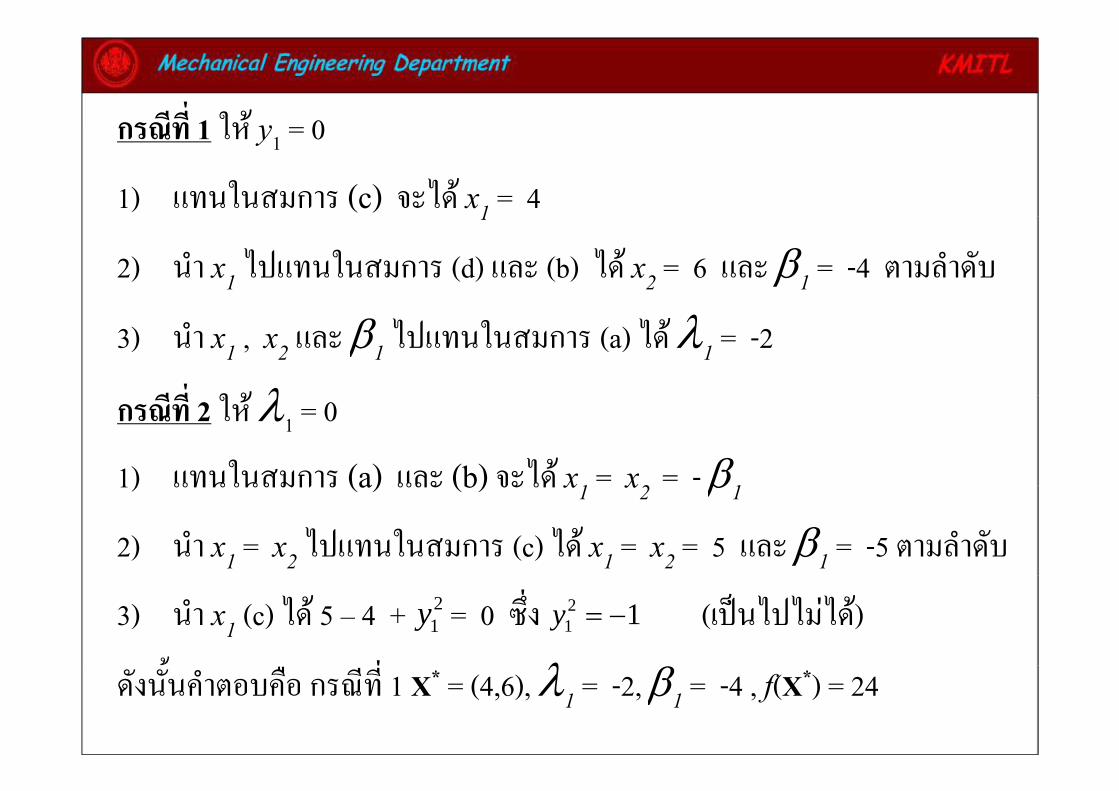
กรณท 1 ให y 0 กรณท 1 ให y1 = 0
1) แทนในสมการ (c) จะได x1 = 4 1
2) นา x1 ไปแทนในสมการ (d) และ (b) ได x2 = 6 และ β1 = -4 ตามลาดบ
3) นา x1 , x2 และ β1 ไปแทนในสมการ (a) ได λ1 = -2
ใ λกรณท 2 ให λ1 = 0
1) แทนในสมการ (a) และ (b) จะได x1 = x2 = - β11) แทนในสมการ (a) และ (b) จะได x1 x2 β1
2) นา x1 = x2 ไปแทนในสมการ (c) ได x1 = x2 = 5 และ β1 = -5 ตามลาดบ
21 1y = −3) นา x1 (c) ได 5 – 4 + = 0 ซง (เปนไปไมได)
λ
21y
ดงนนคาตอบคอ กรณท 1 X* = (4,6), λ1 = -2, β1 = -4 , f(X*) = 24

Workshop 2 Multivariable Optimization with equality Workshop 2 – Multivariable Optimization with equality
and inequality constraints คาถาม จงทาการหาคา x1 , x2 ทเปน Candidate ททาใหฟงกชนนมคา
ตาสด(อาจจะใชหรอไมใชกได ตองใช Sufficient condition เชคอกท) ตาสด(อาจจะใชหรอไมใชกได ตองใช Sufficient condition เชคอกท)
กาหนดให
2 21 2 1 2Minimize ( , ) ( 2) ( 1)
Subject tof x x x x= − + −
1 2
2 1
2 x xx x≥ +≥2 1

เงอนไขของ Khun-Tucker Necessary condition (ถาไมรวาสมการไหน Active)
1 1
( ) , 1, 2,..., (1)pm
j kj k
j ki i i
g hf i nx x x
λ β= =
∂ ∂∂+ + = =
∂ ∂ ∂∑ ∑X 0
2( , ) ( ) , 1, 2,..., (2)
( ) 0 1 2 (3)j j jG g y j m
g j m
= + = =
≤ =
X Y X 0
X( ) 0, 1, 2,..., (3)
( ) 0, 1,2,..., (4)j
k
g j m
h k p
≤ =
= =
X
X
2 0, 1,2,..., (5)
0, 1,2,..., (6)j j
j
y j m
j m
λ
λ
= =
≥ =
is not restricted in sign.j
kβ
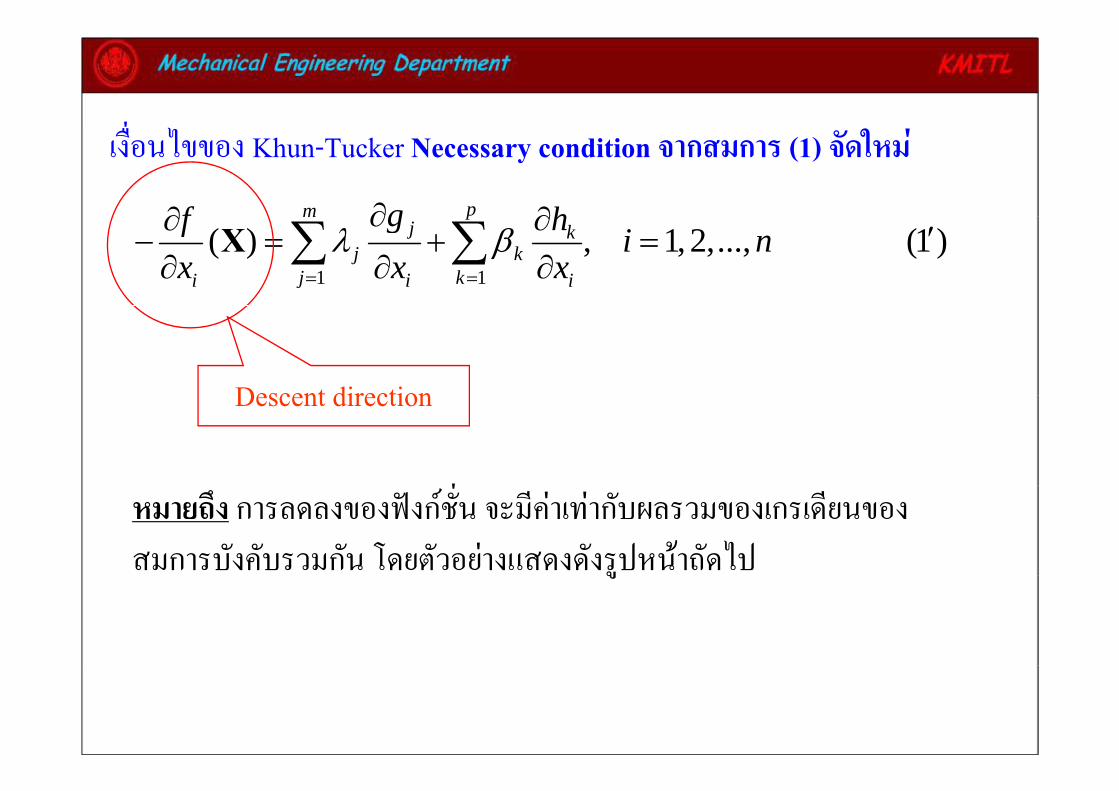
เงอนไขของ Khun-Tucker Necessary condition จากสมการ (1) จดใหม
pm g hf ∂ ∂∂
1 1( ) , 1,2,..., (1 )
pmj k
j kj ki i i
g hf i nx x x
λ β= =
∂ ∂∂ ′− = + =∂ ∂ ∂∑ ∑X
Descent direction
Descent direction
หมายถง การลดลงของฟงกชน จะมคาเทากบผลรวมของเกรเดยนของ
สมการบงคบรวมกน โดยตวอยางแสดงดงรปหนาถดไป

ฟ ป ใขอสงเกต ณ. จดตาสดเกรเดยนของฟงกชนเปาหมายกบสมการบงคบ จะชใน
ทศตรงกนขาม
A i นอกจากนนคาตอบจะอยบนสมการบงคบหรอสมการบงคบ บางตวจะ Active
หรอเทากบศนย

Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineering
Lecture Lecture 44
โดยโดย
ผศ.ดร. มนตศกด พมสาร
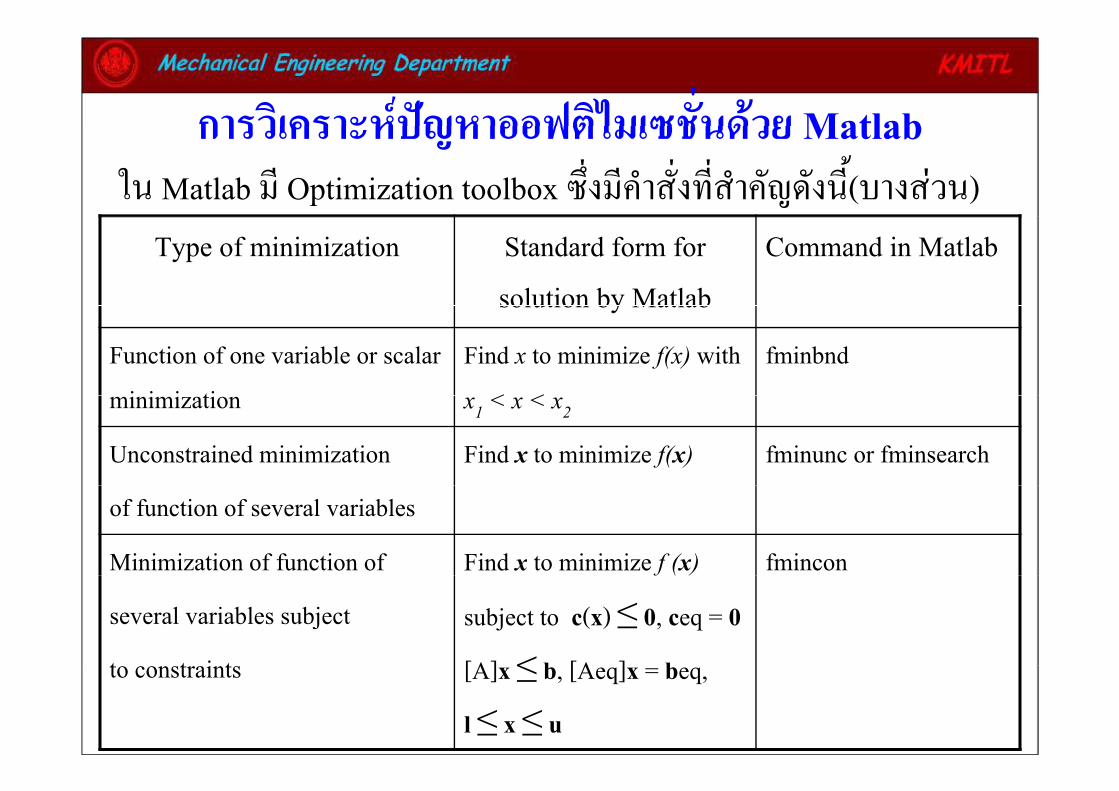
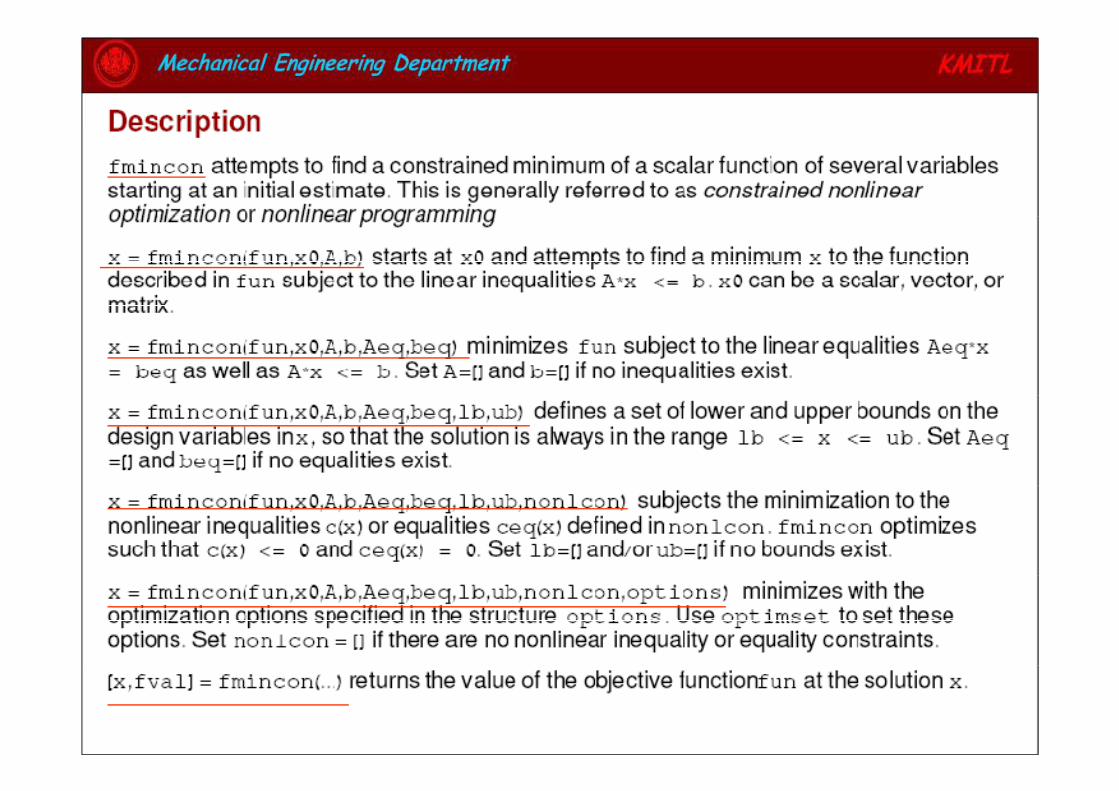
การวเคราะหปญหาออฟตไมเซชนดวย Matlabการวเคราะหปญหาออฟตไมเซชนดวย Matlabใน Matlab ม Optimization toolbox ซงมคาสงทสาคญดงน(บางสวน)
Type of minimization Standard form for
solution by Matlab
Command in Matlab
solution by Matlab
Function of one variable or scalar
i i i ti
Find x to minimize f(x) with
< <
fminbnd
minimization x1 < x < x2
Unconstrained minimization Find x to minimize f(x) fminunc or fminsearch
of function of several variables
Minimization of function of Find x to minimize f (x) fmincon
several variables subject
t t i t
f ( )
subject to c(x) ≤ 0, ceq = 0
[A] ≤ b [A ] bto constraints [A]x ≤ b, [Aeq]x = beq,
l ≤ x ≤ u

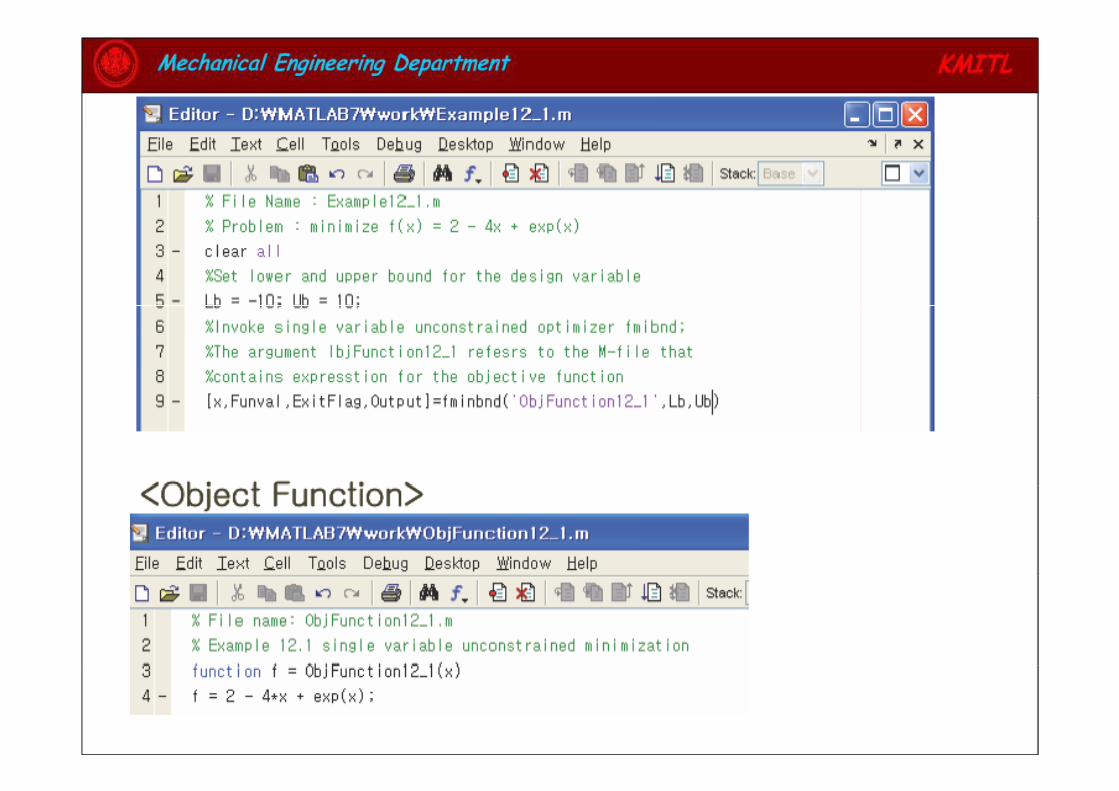
ตวอยาง 1 One variable minimization
Minimize ( ) 2 4Subject to
xf x x e= − +Subject to
10 10x− ≤ ≤
วธทา ทาการวเคราะหโดยการใช Matlab

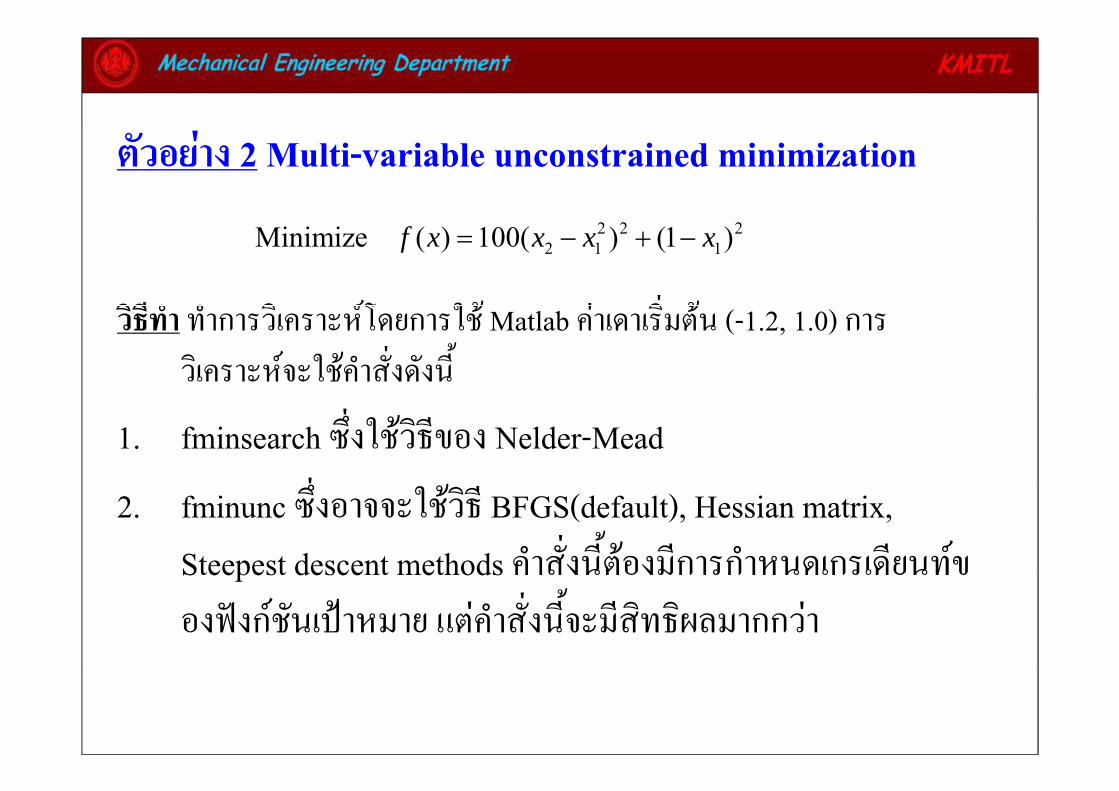
ตวอยาง 2 Multi-variable unconstrained minimization
2 2 22 1 1Minimize ( ) 100( ) (1 )f x x x x= − + −
โ ใ วธทา ทาการวเคราะหโดยการใช Matlab คาเดาเรมตน (-1.2, 1.0) การ
วเคราะหจะใชคาสงดงน
1. fminsearch ซงใชวธของ Nelder-Mead
2. fminunc ซงอาจจะใชวธ BFGS(default), Hessian matrix,
Steepest descent methods คาสงนตองมการกาหนดเกรเดยนทขS eepes desce e ods
องฟงกชนเปาหมาย แตคาสงนจะมสทธผลมากกวา




ไฟลทอธบาย Objective function
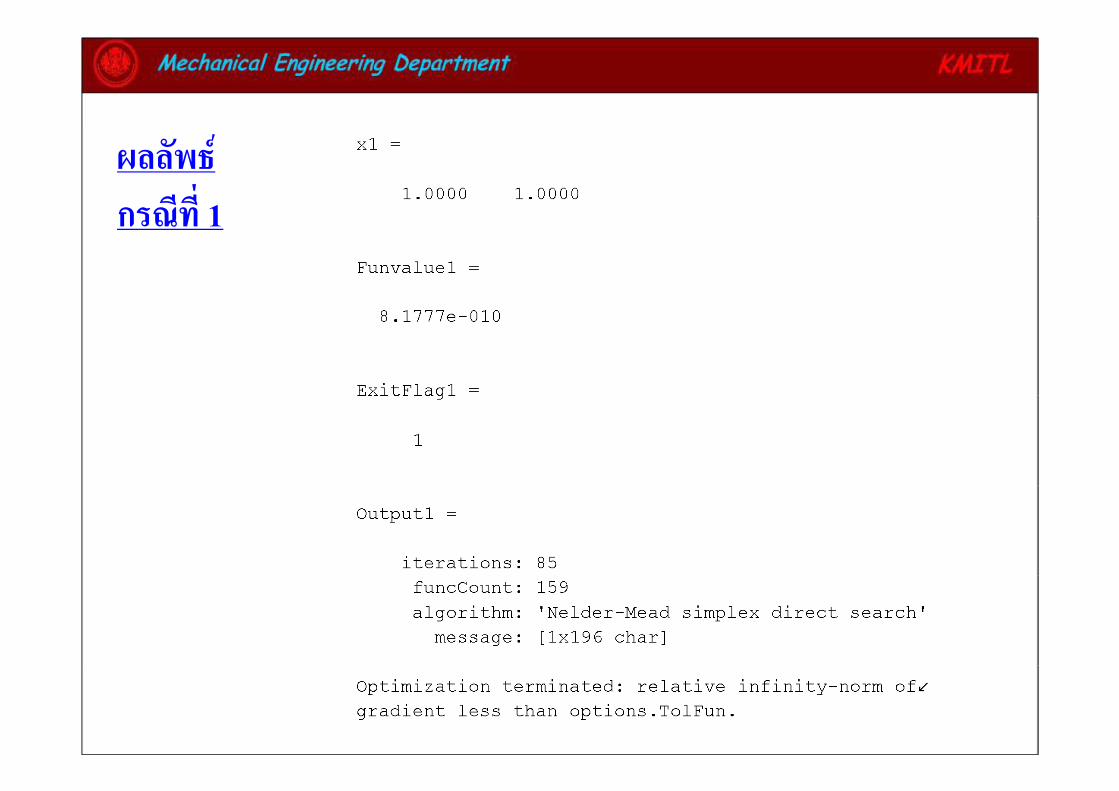
ผลลพธ
กรณท 1กรณท 1

ผลลพธ
กรณท 2กรณท 2
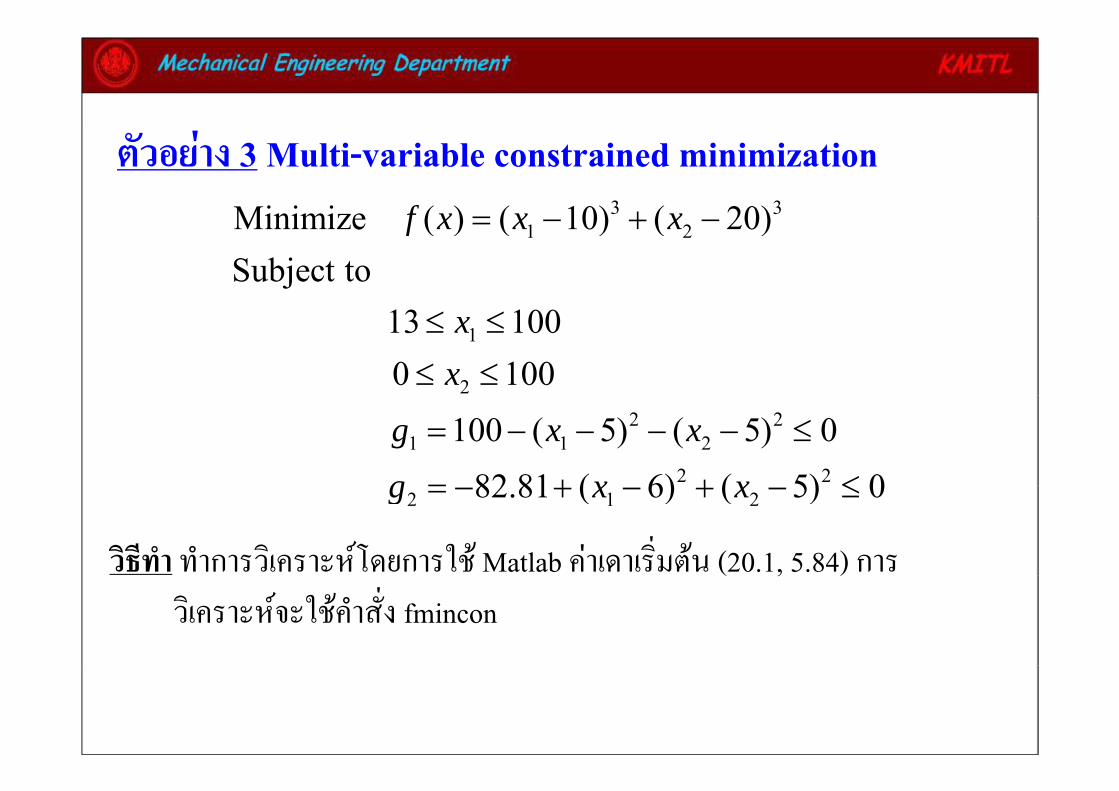
ตวอยาง 3 Multi-variable constrained minimization 3 3Minimize ( ) ( 10) ( 20)f x x x+1 2Minimize ( ) ( 10) ( 20)
Subject tof x x x= − + −
1
2
13 1000 100
xx
≤ ≤≤ ≤
2 21 1 2
2 2
100 ( 5) ( 5) 082 81 ( 6) ( 5) 0
g x xg x x
= − − − − ≤
= + + ≤2 1 282.81 ( 6) ( 5) 0g x x= − + − + − ≤
วธทา ทาการวเคราะหโดยการใช Matlab คาเดาเรมตน (20.1, 5.84) การ( , )
วเคราะหจะใชคาสง fmincon



ไฟลทอธบาย Objective function
ไฟลทอธบาย Constrained equations (Nonlinear equality and inequality)ไฟลทอธบาย Constrained equations (Nonlinear equality and inequality)

ผลลพธผลลพธ
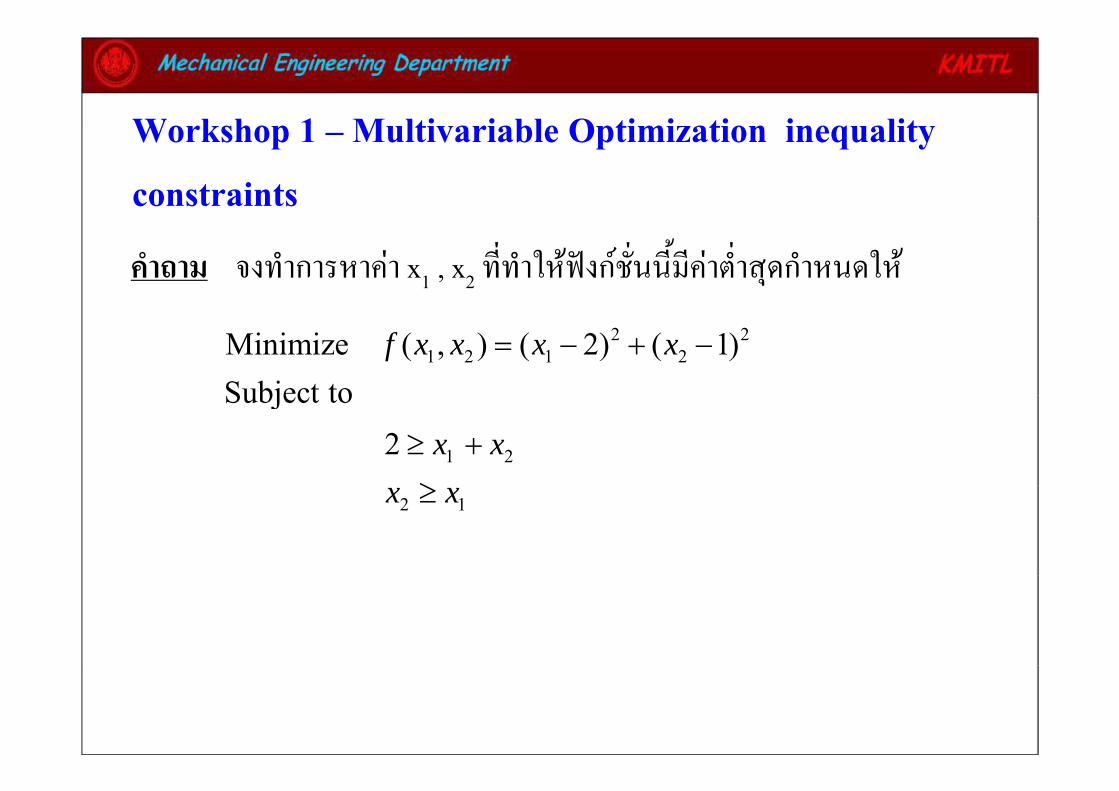
Workshop 1 Multivariable Optimization inequality Workshop 1 – Multivariable Optimization inequality
constraints
คาถาม จงทาการหาคา x1 , x2 ททาใหฟงกชนนมคาตาสดกาหนดให
2 21 2 1 2Minimize ( , ) ( 2) ( 1)
Subject tof x x x x= − + −
1 2
Subject to2 x x≥ +
≥2 1x x≥

Multivariable Optimization with equality and Multivariable Optimization with equality and
inequality constraints
คาถาม ปญหาการออกแบบคานกลมสองสเตปใหมนาหนกเบาทสดจาก
โดยใชขนาดของคานตามรปท และตองการใหมบาเพลา d1 –d2 = 0.01โดย
มคาคงทตางๆดงน ความหนาแนนวสด(ρ) = 7,850 kg/m3, ความเคนๆ (ρ) , g ,
ทยอมใหวสดรบได (σallow)= 1,000 MPa
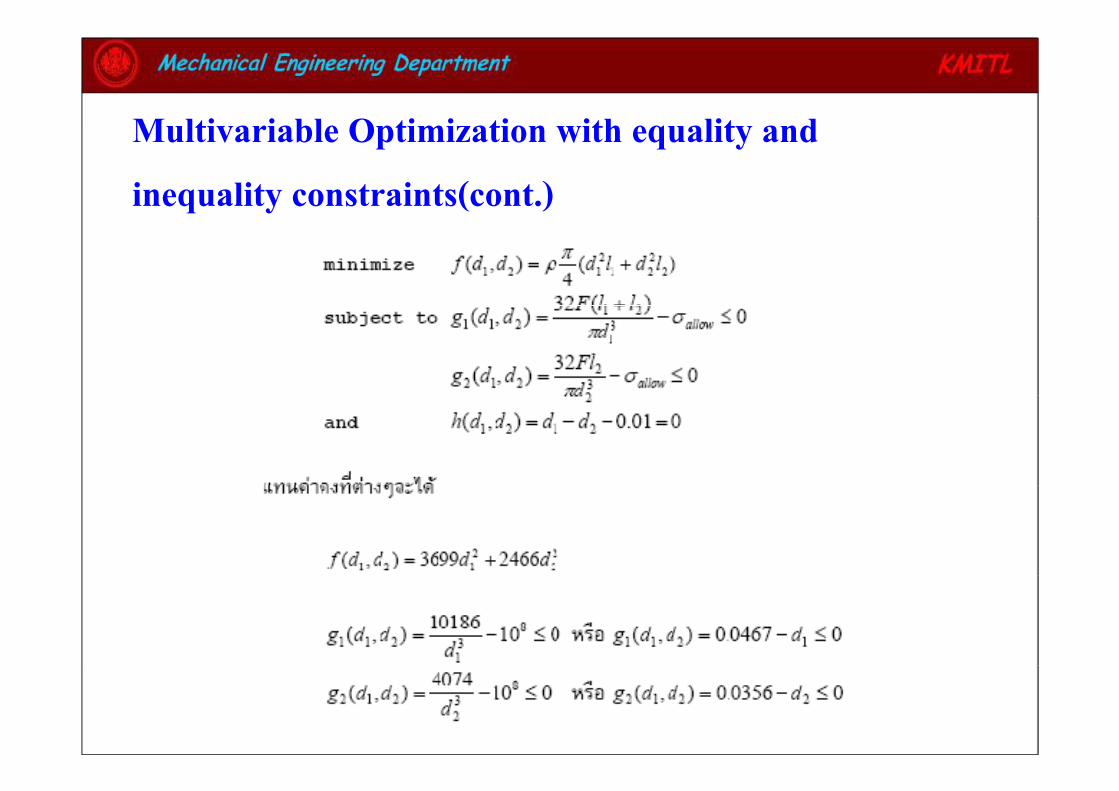
Multivariable Optimization with equality and Multivariable Optimization with equality and
inequality constraints(cont.)

Multivariable Optimization with equality and Multivariable Optimization with equality and
inequality constraints(cont.)
Solution

Real life practical engineering design
โดยทวไปแลวปญหาทางวศวกรรมนน การทาการออกแบบเชงออฟตมม มดงนโดยทวไปแลวปญหาทางวศวกรรมนน การทาการออกแบบเชงออฟตมม มดงน
Step 1: การกาหนดเนอหาของปญหา(Problem statement)
Step 2: การรวบรวมขอมลทเกยวของ (Data and information collection)
Step 3: การกาหนดตวแปรออกแบบ (Identification/Definition of design Step 3: การกาหนดตวแปรออกแบบ (Identification/Definition of design
variables)
Step 4: การกาหนดเปาหมายในการออกแบบ (Identification of a criterion to be
optimized)
Step 5: การกาหนดเงอนไขทเกยวของในการออกแบบ (Identification of
constraints)constraints)
Step 6: การคานวณหาคาตอบ (Solving the problem)

Example 1 Design of coil springs
Step 1: Problem statement : Coil springs are used in numerous practical Step 1: Problem statement : Coil springs are used in numerous practical
applications. Detailed methods for analyzing and designing such
h i l t h b d l d th ( S tt mechanical components have been developed over the years (e.g., Spotts,
1953; Wahl, 1963; Shigley, 1977; Haug and Arora, 1979). The purpose of
this project is to design a minimum mass spring (shown in Figure) to carry
a given axial load (called tension-compression spring) without material
failure and while satisfying two performance requirements: the spring must
deflect by at least Δ (in.) and the frequency of surge waves must not be deflect by at least Δ (in.) and the frequency of surge waves must not be
less than ω0 (Hertz, Hz).

St 2 D t d i f ti ll tiStep 2: Data and information collection
To formulate the problem of designing a coil spring, the following notation
is defined:
Deflection along the axis of the spring δ, in.
Mean coil diameter D, in. , Wire diameter d, in.
Number of active coils, N, Gravitational constant g = 386 in./s2Number of active coils, N, Gravitational constant g 386 in./s
Frequency of surge waves ω, Hz
L t th t i l ti b i Let the material properties be given as
Weight density of spring material γ = 0.285 lb/in.3
Shear modulus G = (1.15 x 107) lb/in.2
Mass density of material (ρ = γ/g) ρ = (7.38342 x 10-4) lb-s2/in.4
Allowable shear stress τa = 80,000 lb/in.2

St 2 D t d i f ti ll ti ( t )Step 2: Data and information collection (cont.)
Other data for the problem are given as
Number of inactive coils Q = 2
Applied load P = 10 lb
Minimum spring deflection Δ = 0.5 in.
Lower limit on surge wave frequency ω = 100 HzLower limit on surge wave frequency ω0 100 Hz
Limit on outer diameter of the coil Do = 1.5 in.
Th d i ti f th i i The design equations for the spring are given as
Load deflection equation : ( )P K aδ=4
3Spring constant: ( )8d GK bD N
=8D N

St 2 D t d i f ti ll ti ( t )Step 2: Data and information collection (cont.)
8Shear stress : ( )kPD cτ = 3Shear stress : ( )
(4 ) 0.615Wahl stress concentration factor: ( )
cdD d dk d
τπ
=
−= +Wahl stress concentration factor: ( )
4( )
Frequency of surge wave : ( )
k dD d D
d G eω
+−
= 2Frequency of surge wave : ( )2 2
eND
ωπ ρ
=
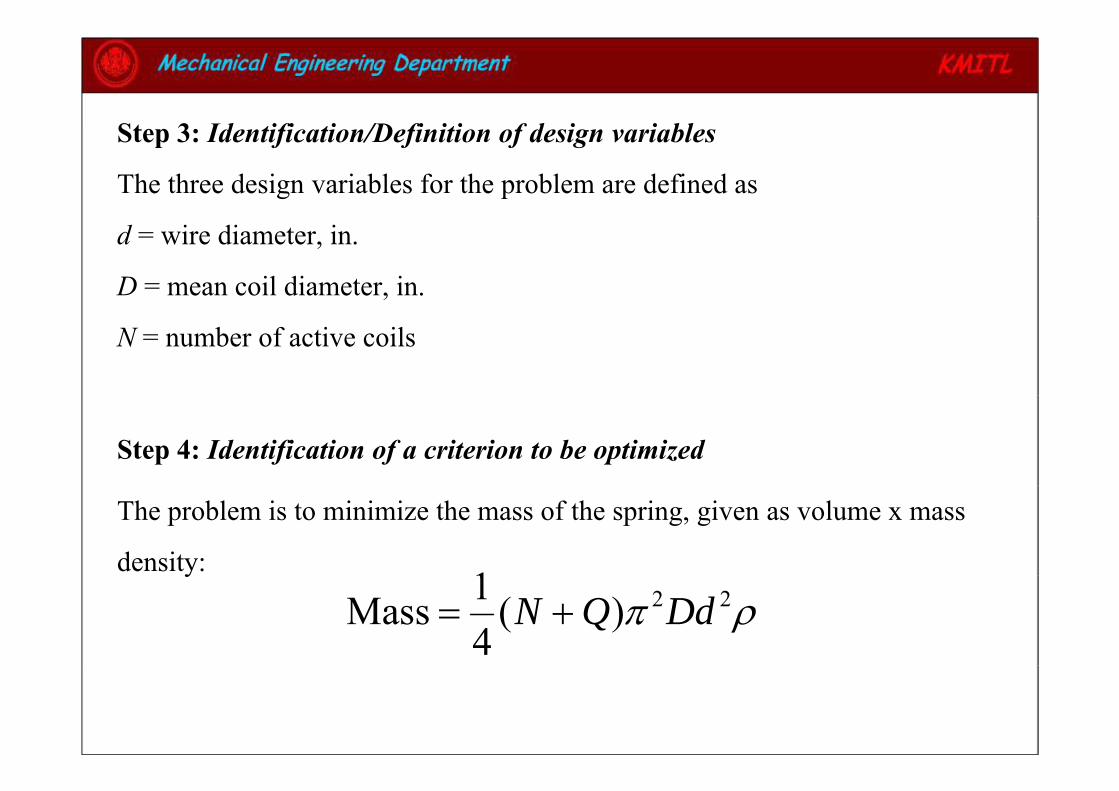
St 3 Id tifi ti /D fi iti f d i i blStep 3: Identification/Definition of design variables
The three design variables for the problem are defined as
d = wire diameter, in.
D = mean coil diameter, in.
N = number of active coils
Step 4: Identification of a criterion to be optimized
The problem is to minimize the mass of the spring, given as volume x mass
density:1
y2 21Mass ( )
4N Q Ddπ ρ= +
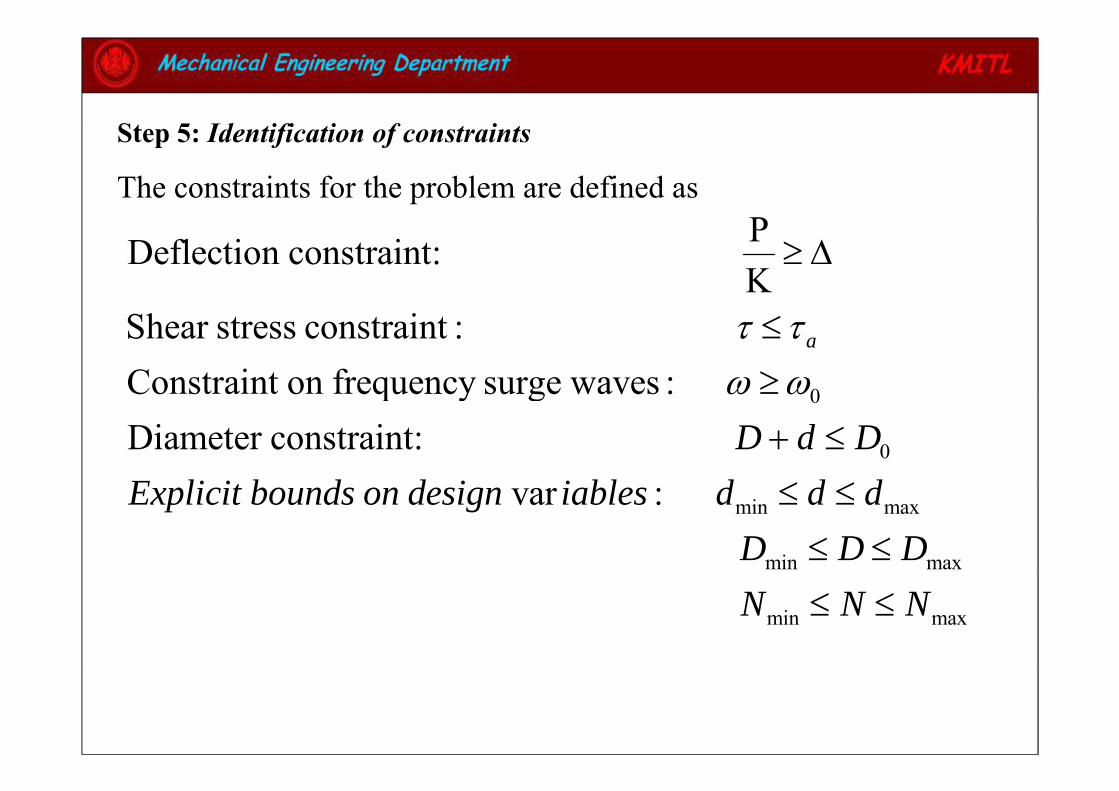
St 5 Id tifi ti f t i tStep 5: Identification of constraints
The constraints for the problem are defined asPDeflection constraint:K
≥ Δ
0
Shear stress constraint :Constraint on frequency surge waves :
aτ τω ω
≤≥ 0
0
q y gDiameter constraint: D d DE li it b d d i i bl d d d
+ ≤≤ ≤min max
min max
var :Explicit bounds on design iables d d dD D D
≤ ≤≤ ≤
min maxN N N≤ ≤

Formulation Formulation
With design variables

Example 2 Design of power screw
Step 1: Problem statement : A power screw, having double square threads, is to
be designed to lift a load with maximum efficiency. (See below figure).
Formulate the optimization problem by treating the major diameter (d) the Formulate the optimization problem by treating the major diameter (d), the
number of threads per inch (N), and the mean diameter of the collar (dc) as
d i i bldesign variables.

Step 2: Data and information collection :
Load, P = 1,500 lb,
Coefficient of friction of threads in nut, μ = 0.08
Coefficient of friction of thrust collar in bearing, μc = 0.08
Height of the screw, h = 6 ing ,
Material is steel and Young’s modulus, E = 30 x 106 psi
Permissible shear stress, τmax = 12,000 psi
Permissible compressive stress σ = 20 000 psiPermissible compressive stress, σmax 20,000 psi
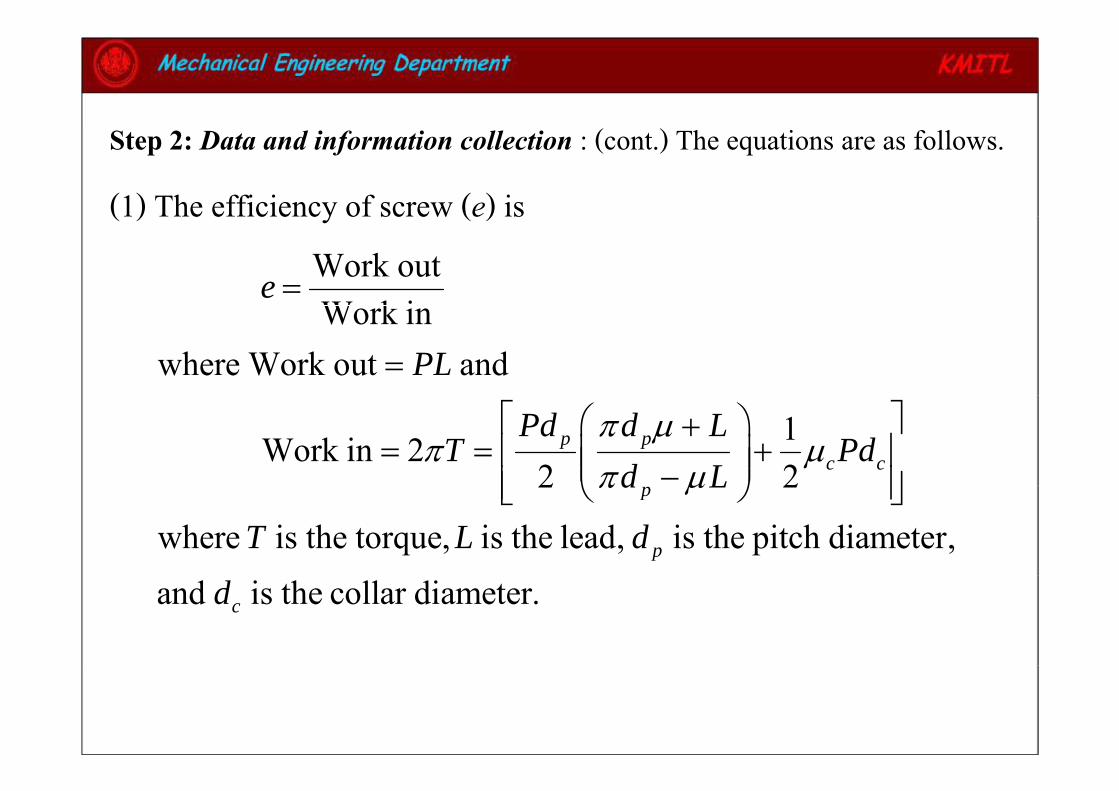
Step 2: Data and information collection : (cont.) The equations are as follows.
(1) The efficiency of screw (e) is(1) The efficiency of screw (e) is
Work outW k i
e =Work in
where Work out andPL=
1Work in 22 2
p pc c
Pd d LT Pd
d Lπ μ
π μπ μ
⎡ ⎤⎛ ⎞+= = +⎢ ⎥⎜ ⎟⎜ ⎟−⎢ ⎥⎝ ⎠⎣ ⎦2 2
where is the torque, is the lead, is the pitch diameter,p
p
d L
T L d
π μ⎢ ⎥⎝ ⎠⎣ ⎦
and is the collar diameter.cd
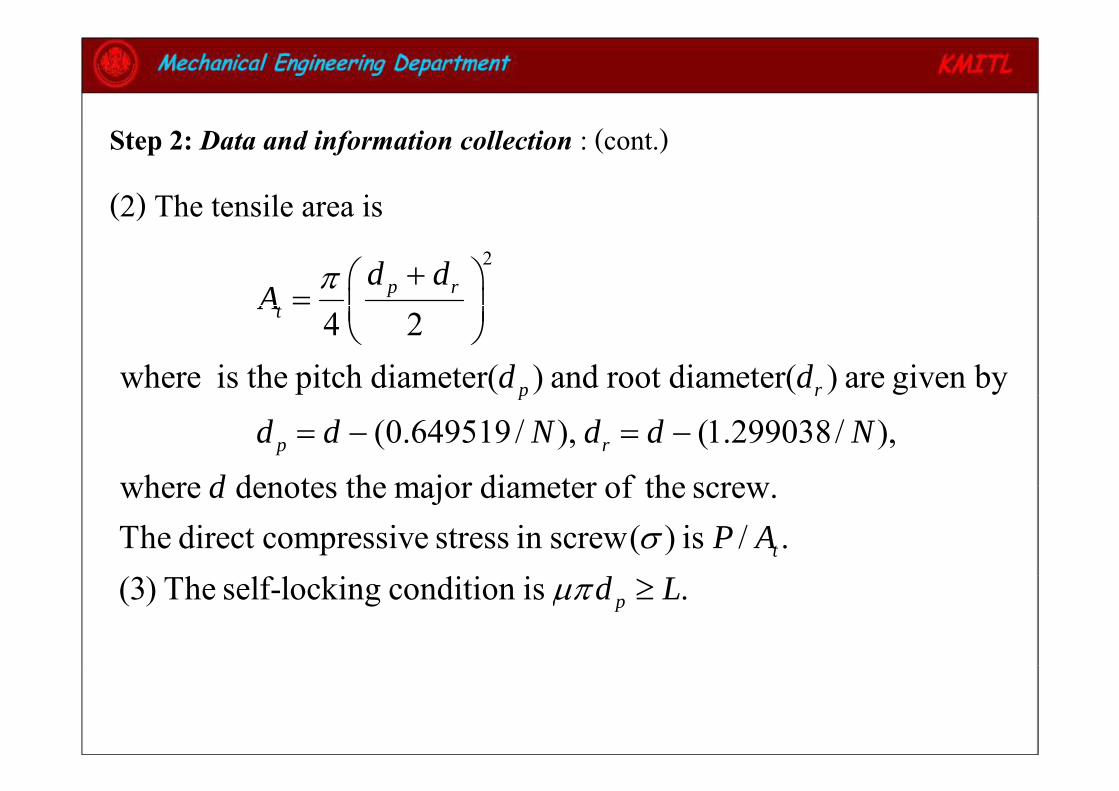
Step 2: Data and information collection : (cont.)
(2) The tensile area is (2) The tensile area is 2
p rd dA π +⎛ ⎞
= ⎜ ⎟4 2where is the pitch diameter( ) and root diameter( ) are given by
t
p r
A
d d
⎜ ⎟⎝ ⎠
(0.649519/ ), (1.299038/ ),
where denotes the major diameter of the screw
p r
p rd d N d d N
d
= − = −
where denotes the major diameter of the screw.The direct compressive stress in screw( ) is / .t
dP Aσ
(3) The self-locking condition is .pd Lμπ ≥
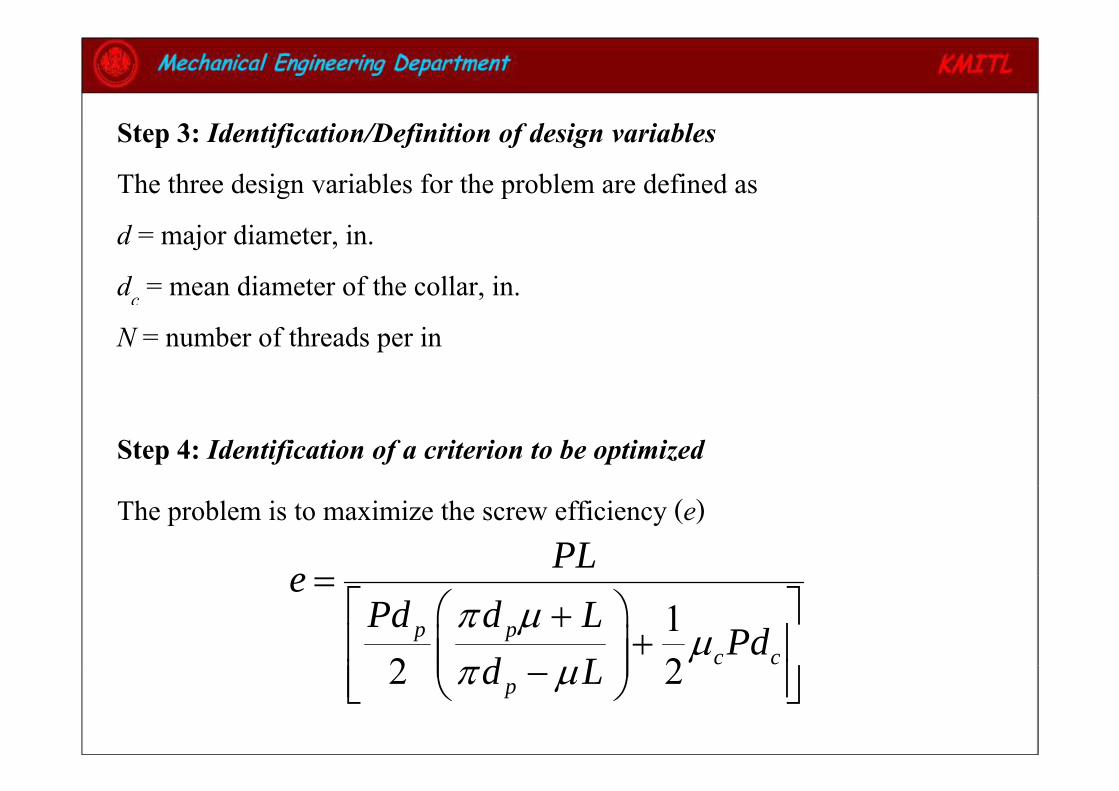
St 3 Id tifi ti /D fi iti f d i i blStep 3: Identification/Definition of design variables
The three design variables for the problem are defined as
d = major diameter, in.
dc = mean diameter of the collar, in.c
N = number of threads per in
Step 4: Identification of a criterion to be optimized
The problem is to maximize the screw efficiency (e)
PLe1
2 2p p
c c
ePd d L
Pdd L
π μμ
=⎡ ⎤⎛ ⎞+
+⎢ ⎥⎜ ⎟⎜ ⎟⎢ ⎥⎝ ⎠2 2pd Lπ μ⎜ ⎟−⎢ ⎥⎝ ⎠⎣ ⎦

St 5 Id tifi ti f t i tStep 5: Identification of constraints
The constraints for the problem are defined as
(1) Direct compressive stress (σ) must be less than σmax.
(2) Direct compressive stress (σ) must be less than buckling stress σ(2) Direct compressive stress (σ) must be less than buckling stress σb.
(3) Shearing of screw threads at minor diameter (dr) in nut must be
avoided.
(4) Shearing of nut at major diameter of the screw must be avoided.( ) g j
(5) Bearing stress in threads must be less than due to (σmax).
(6) Shear stress in screw due to applied torque torque (τ) must be less
than τmax.max
(7) Design variable values must be positive.

Step 5: Identification of constraints (cont )Step 5: Identification of constraints (cont.)
The constraint equations are(1) Th di t i t th i
1 max
(1) The direct compressive stress on the screw is
g 0PA
σ= − ≤
(2) The buckling constraint istA
P2 0
where the buckling stress( ) is given by,assuming pin ends for the screw
bt
b
PgA
σ
σ
= − ≤
42
2
g ( ) g y, g p
,64
b
pb
t
dEI Ih A
ππσ = =
(3) The constraint on shearit
ng of screw threads is given by
0Pg τ ≤3 max 0( )
2r
g hdτ
π= − ≤

Step 5: Identification of constraints (cont )Step 5: Identification of constraints (cont.)(4) The constraint on the shearing of nut threads is
0P≤4 max 0
( )2
(5) The constraint on bearing stress in threads is
g hdτ
π= − ≤
5 max2 2
(5) The constraint on bearing stress in threads is
0( )r
Pg hd dσπ= − ≤
−( )4
where is the pitch of the threads.(6) int
r pp
The constra on the shear stress in the screw due to applied torque is(6) intThe constra on the shear stress in the screw du
6 max3
16 0r
e to applied torque isTr TgJ d
τπ
= = − ≤
7
(7) The constraint for self-locking is0
(8) Nonnegative condition for the design variablespg L dμπ= − ≤
8 9 10
(8) Nonnegative condition for the design variables0, 0, 0cg d g d g N= − ≤ = − ≤ = − ≤

Workshop 2 Multivariable Optimization with equality Workshop 2 – Multivariable Optimization with equality
and inequality constraints
Problem statement: Columns are used as structural members in many
practical applications. Many times such members are subjected to
eccentric loads such as a jib crane. The problem is to design a
minimum mass tubular column that is subjected to an eccentric load,
as shown in Figure. The cross section of the column is a hollow g
circular tube with R and t as the mean radius and wall thickness,
respectivelyrespectively.

E t i lEccentric column


Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineering
Lecture Lecture 55
โดยโดย
ผศ.ดร. มนตศกด พมสาร

Workshop Multivariable Optimization with equality Workshop – Multivariable Optimization with equality
and inequality constraints (Solution)
Problem statement: Columns are used as structural members in many
practical applications. Many times such members are subjected to
eccentric loads such as a jib crane. The problem is to design a
minimum mass tubular column that is subjected to an eccentric load,
as shown in Figure. The cross section of the column is a hollow g
circular tube with R and t as the mean radius and wall thickness,
respectivelyrespectively.

E t i lEccentric column


Identification of design variables:
R = Mean radius of the tube (m)R Mean radius of the tube (m)
t = Wall thickness (m).
Identification the criteria to be optimized:p
The objective is to minimize the mass of the column which is given as
f (x) = ρ L A = (7850) (5) (2π Rt) kg

Identification of constrains:
St t i σ ≤ σ (1)Stress constrain : σ ≤ σa (1)
Buckling load constrain: P ≤ Pcr (2)g cr ( )
Deflection constrain: δ ≤ Δ (3)
Radius/thickness constrain: R/t ≤ 50 (4)
≤ ≤Bounds on the variables: 0.01 ≤ R ≤ 1
0.005 ≤ t ≤ 0.2 (5)0.005 ≤ t ≤ 0.2 (5)
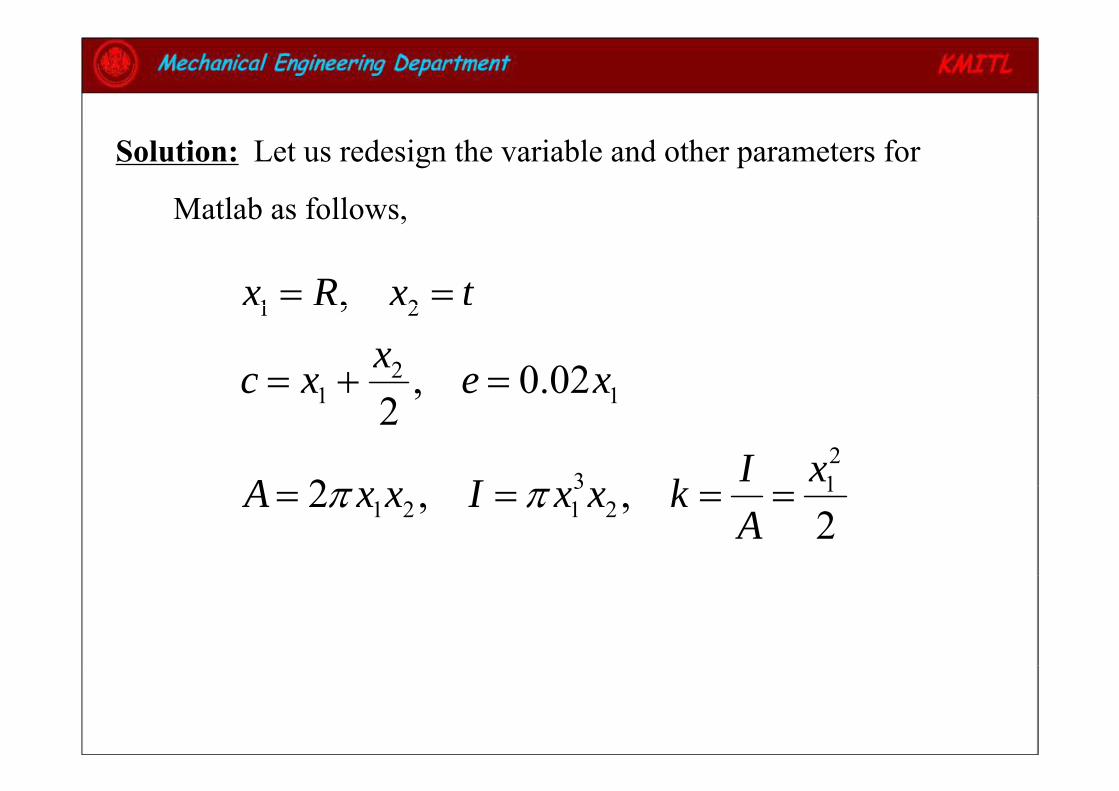
Solution: Let us redesign the variable and other parameters for
Matlab as follows,Matlab as follows,
1 2,x R x t= =1 2
21 1
,
, 0.02
x x txc x e x= + =1 1
23 1
,2
2 I xA I k3 11 2 1 22 , ,
2A x x I x x k
Aπ π= = = =
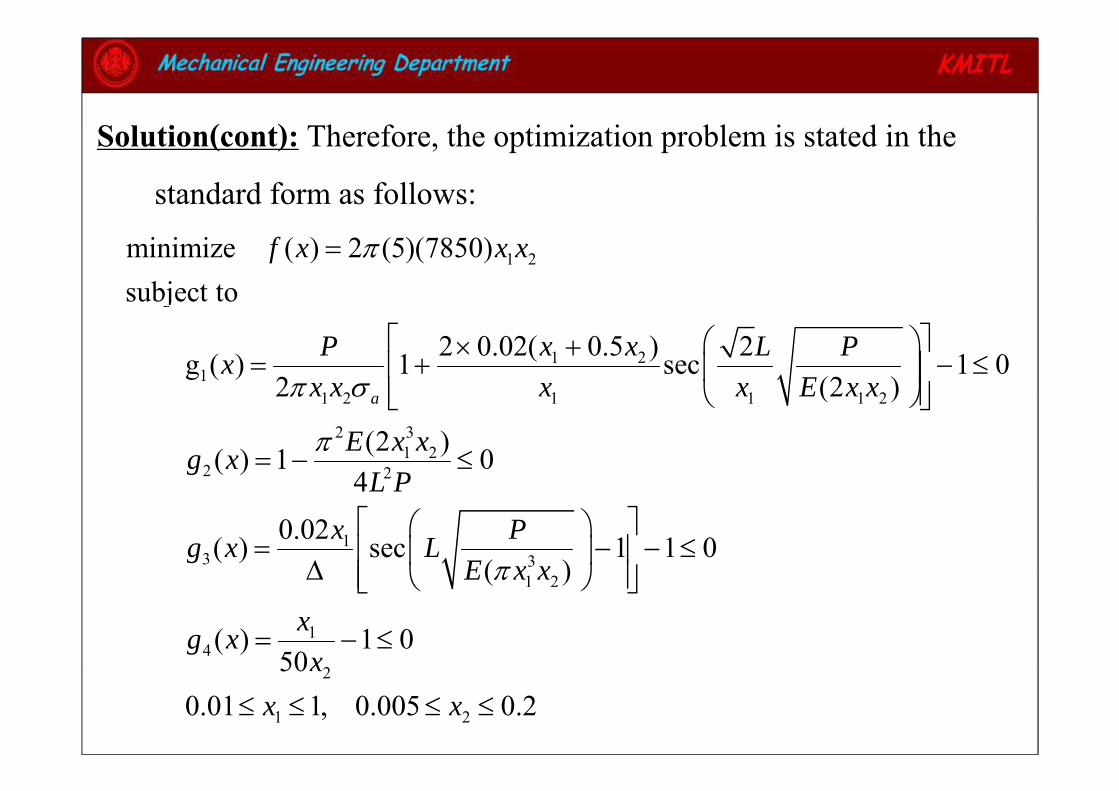
S l i ( ) Th f h i i i bl i d i h Solution(cont): Therefore, the optimization problem is stated in the
standard form as follows:
1 2minimize ( ) 2 (5)(7850)subject to
f x x xπ=
1 21
1 2 1 1 1 2
j
2 0.02( 0.5 ) 2g ( ) 1 sec 1 02 (2 )
P x x L Pxx x x x E x xπ σ
⎡ ⎤⎛ ⎞× += + − ≤⎢ ⎥⎜ ⎟
⎢ ⎥⎝ ⎠⎣ ⎦1 2 1 1 1 2
2 31 2
2 2
2 (2 )
(2 )( ) 1 04
ax x x x E x x
E x xg xL P
π σ
π
⎢ ⎥⎝ ⎠⎣ ⎦
= − ≤
13 3
40.02( ) sec 1 1 0
( )
L Px Pg x L
E x xπ⎡ ⎤⎛ ⎞
= − − ≤⎢ ⎥⎜ ⎟Δ ⎢ ⎥⎝ ⎠⎣ ⎦1 2
14
( )
( ) 1 050
E x x
xg xx
πΔ ⎢ ⎥⎝ ⎠⎣ ⎦
= − ≤250
0.01x
x≤ 1 21, 0.005 0.2x≤ ≤ ≤

Matlab filesMatlab files% File name = column_opt.m (Main file, starting here)l llclear all
% Set optionsoptions = optimset (‘LargeScale’, ‘off’, ‘TolCon’, 1e-8, ‘TolX’, 1e-8);p p ( g% Set the lower and upper bounds for design variablesLb = [0.01 0.005]; Ub = [1 0.2];% Set initial design% Set initial designx0 = [1 0.2];% Invoke the constrained optimization routine, fmincon[x, FunVal, ExitFlag, Output] = . . .fmincon(‘column_objf’, x0, [ ], [ ], [ ], [ ], Lb, Ub, ‘column_conf’, options);xxFunValExitFlag
Answer X = ( 0.0537, 0.0050), FunVal = 66.1922

Matlab files (cont )Matlab files (cont.)
% File name column objf m (Obj ti f ti d i ti )% File name = column_objf.m (Objective function description)% Column designfunction f = column objf (x)function f column_objf (x)% Rename design variablesx1 = x(1); x2 = x(2);% Set input parametersL = 5.0; % length of column (m)h 7850 % d it (k / ^3)rho = 7850; % density (kg/m^3)
f = 2*pi*L*rho*x1*x2; % mass of the column

Matlab files (cont )Matlab files (cont.)% File name = column_conf.m (Constraint description)
C l d i% Column designfunction [g, h] = column_conf (x)
x1 = x(1); x2 = x(2);% Set input parametersP = 50000; % loading (N)
E = 210e9; % Young’s modulus (Pa)gL = 5.0; % length of the column (m)
Sy = 250e6; % allowable stress (Pa)
Delta = 0.25; % allowable deflection (m)Delta 0.25; % allowable deflection (m)
% Inequality constraintsg(1) = P/(2*pi*x1*x2)*(1 + . . .
2*0 02*(x1+x2/2)/x1*sec( 5*sqrt(2)/x1*sqrt(P/E/(2*pi*x1*x2)) ) )/Sy 1;2*0.02*(x1+x2/2)/x1*sec( 5*sqrt(2)/x1*sqrt(P/E/(2*pi*x1*x2)) ) )/Sy - 1;g(2) = 1 - pi^3*E*x1^3*x2/4/L^2/P;g(3) = 0.02*x1*( sec( L*sqrt( P/(pi*E*x1^3*x2) ) ) - 1 )/Delta - 1;g(4) x1 x2/50 1;g(4) = x1/x2/50 - 1;% Equality constraint (none)
h = [];

การหาจดตาทสดของฟงกชนตวแปรเดยวการหาจดตาทสดของฟงกชนตวแปรเดยว
ดวยวธการเชงตวเลขการหาจดตาทสดของฟงกชนตวแปรเดยว ซงฟงกชนมคณสมบตเปน
ป ไ ใ Unimodal (แสดงดงรปท 1) และไมสามารถหาอนพนธ ในการวเคราะห ทา
ไดโดยทาการคนหาตามเสน ดวยการขยบไปเรอยๆทละกาวจนกวาจะพบจด
1. วธการคนหาดวยกาวคงท (Fixed step size search)
ตาสด ซงวธทจะนาเสนอมดงน
( p )
2. วธการคนหาดวยกาวไมคงท (Accelerated step size search)
3. วธการคนหา Exhaustive (คนหาแบบปพรม)
4. วธการคนหา Dichotomous4. วธการคนหา Dichotomous
5. วธการคนหาลดชวงลงครงหนง(Interval Halving Method)

รปท 1 Unimodal functionรปท 1 Unimodal function

วธคนหาแบบกาวคงท (Fixed step size search)
วธการคนหาแบบกาวคงท หลกการคอทาการคนหาจากคาเดาเรมตน และ
ไปใ โ ปกาวไปในทศทางทตองการ โดยคาของกาวจะตองมคานอยๆ ซงวธการนเปน
วธการทงาย แตไมเปนทนยม เพราะชา วธการนมขนตอนดงน
1. เรมจากคาเดาเรมตน x1
2. ทาการคานวณหา f(x1)( )
3. จากนนกาหนด กาหนดระยะกาว s , จากนนคานวณ x2 = x1 + s
4 ทาการคานวณหา f(x2)4. ทาการคานวณหา f(x2)
5. ถา f2 < f1, กใหทาการหาตอไปดวยการกาวไปท x3, x4, …ซงจะหยดเมอ
( ) ( ) โ ( )f(xi) > f(xi-1) โดย xi = x1 + (i-1)s

วธคนหาแบบกาวคงท (Fixed step size search) (ตอ)
6. ทาการหยดท xi และสรปวา xi หรอ xi-1 คอจดตาสด
ใ ป ไป 7. จากขอ 4 ถาพบวา f2 > f1 กใหเปลยนทศทางการคนหา ทาการกาวไปท
จด x-2, x-3, … โดย x-j = x1 + (j-1)s
8. ถา f2=f1 จดตาสดอยระหวาง x1 และ x2 สรปวา x1 หรอ x2 คอจดตาสด
9. ถาพบวา f-2 และ f2 มากกวา f1 แสดงวาจดตาสดอยระหวาง x-2 และ x2
วธการคนหาดวยกาวไมคงท (Accelerated step size search)
วธนจะคลายกบวธการคนหาแบบกาวคงท เพยงแตเมอฟงกชนมการลดลง ก
ใ ป ไป ใหทาการเพมขนาดกาวเปนสองเทา ไปเรอยๆ จนกระทงคาเพมขน ณ จด xi
กจะทาใหเราสามารถเจอชวงของคาตอบระหวาง xi-1 กบ xi หลงจากนนก
ลดขนาดกาวลงและทาการคนหาคาตอบในชวงน โดยการทาซาแบบเดยวกบ
ตอนเรมตน จนกระทงชวงของคาตอบมคานอยกวาคาทกาหนดไว เรากจะได
คาตอบ ซงคอคา xi-1 กบ xi วธการพจารณาจากตวอยางน
คาถาม จงหาคาตาสดของฟงกชน f(x) = x(x-1.5) โดย x เรมตนเทากบ 0 และ
ใ ใชคากาวเรมตนเทากบ 0.05

ไป วธทา ณ. x1 = 0, f1 = 0 จากนนกาวไปทางซาย x-2 = -0.05, f-2 = 0.0775
เนองจาก f2 > f1 ดงนนจากสมมตฐานวาฟงกชนเปน Unimodal ฟงกชน
ดงนนคาตอบไมอยทางดานน ทาการกลบทศการคนหากาวไปทางแกนบวก
x ทาใหไดผลลพธดงน
คาตอบ
หมายเหต ถาหากอยากจะไดคาตอบทดกวาน กใหเรมทาการคนหาใหมโดย
เรมจาก x5 และลดขนาดของกาวลง

%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%% Accelerated step size search%%% 1D Optimization without constraint
B A t P f D M k Pi%%%% By Asst.Prof.Dr. Monsak Pimsarn%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
clear all;s(1) = 0.0; %% Initial Step sizex(1) = 0; %% Starting pointi = 1; ;Diff = -1;f(i) = objf(x(i));fprintf(1 '------------------------------------\n');fprintf(1, \n );fprintf(1,' i s xi = x1+s fi \n');fprintf(1,'------------------------------------\n');fprintf(1 '%d %4 3f %3 2f %5 4f\n' i s(i) x(i) f(i));fprintf(1, %d %4.3f %3.2f %5.4f\n ,i,s(i),x(i),f(i));

while Diff < 0,i = i+1;if i 2if i == 2
s(i)=0.05;else
s(i) = 2*s(i-1); end
x(i) = x(1)+s(i);f(i) = objf(x(i));
fprintf(1,'%d %4.3f %3.2f %5.4f\n',i,s(i),x(i),f(i));p ( , % % % % , , ( ), ( ), ( ));Diff = f(i) - f(i-1);
end

Workshop 1
Find the minimum of the function
10 75 112
0.75 1( ) 0.65 0.65 tan1
f x xx x
−= − −+
using the following methods:using the following methods:
(a) Unrestricted search with a fixed step size of 0.1 from the starting point 0.0
(b) Unrestricted search with an accelerated step size using an initial step size
of 0.1 and starting point of 0.0

วธการคนหาแบบ Exhaustive
วธนใชสาหรบเมอรชวงคาตอบแลว(อยระหวาง xs กบ xf) จากนนทาการแบง
ป โ ชวงออกเปน n+1 ชวงโดยแตละชวงมขนาดเทากน ทาการคานวณคาของ
ฟงกชน ณ ตาแหนงตางๆ จากนนทาการคนหาวา ณ จดไหนฟงกชนมคาตาสด
ตวอยางดงรป n = 8, L0 = xf – xs (Initial uncertainty)
Final uncertainty
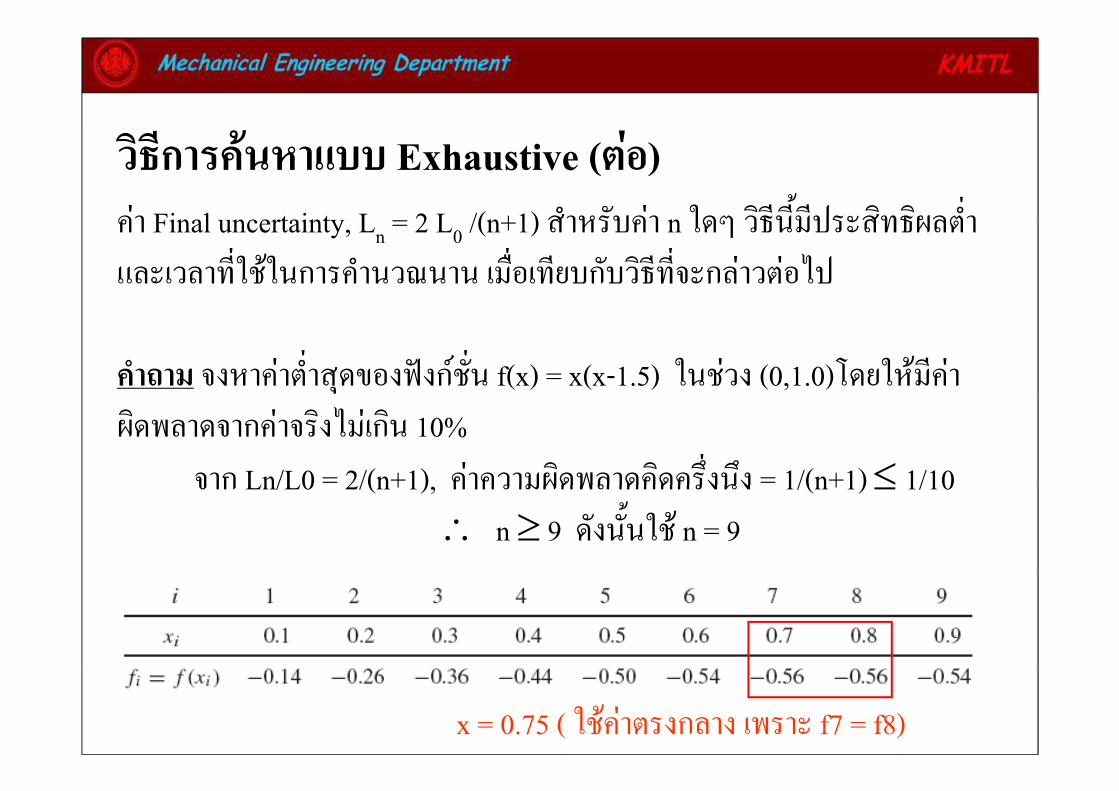
วธการคนหาแบบ Exhaustive (ตอ)คา Fi l t i t L 2 L /( +1) สาหรบคา ใดๆ วธนมประสทธผลตาคา Final uncertainty, Ln = 2 L0 /(n+1) สาหรบคา n ใดๆ วธนมประสทธผลตา
และเวลาทใชในการคานวณนาน เมอเทยบกบวธทจะกลาวตอไป
คาถาม จงหาคาตาสดของฟงกชน f(x) = x(x-1.5) ในชวง (0,1.0)โดยใหมคา
ผดพลาดจากคาจรงไมเกน 10%
จาก Ln/L0 = 2/(n+1) คาความผดพลาดคดครงนง = 1/(n+1) ≤ 1/10จาก Ln/L0 2/(n+1), คาความผดพลาดคดครงนง 1/(n+1) ≤ 1/10
∴ n ≥ 9 ดงนนใช n = 9
x = 0.75 ( ใชคาตรงกลาง เพราะ f7 = f8)

วธการคนหา Dichotomous
วธนใชไดสาหรบการรชวงคาตอบแลว (อยระหวาง xs กบ xf) จากนนม
ใ ไ โ หลกการคอทาการคนหาดวยการตดชวงออกใหไดมากทสด โดยเรมตนจะทา
การทดลองหาคาของฟงกชน 2 คารอบจดกงกลางชวง จด x1 และ x2 ดงรป
ซงอยหางไปทางซายและขวาดวยระยะ δ/2จากคา f1 และ f2 ทาการ
เปรยบเทยบคา และตดชวง
ดานสงออก ตวอยางคอ x2 ดานสงออก ตวอยางคอ x2
ถง xf โดนตดออก(เปนการ
ลดขนาดชวงของคาตอบลง)ลดขนาดชวงของคาตอบลง)

วธการคนหา Dichotomous (ตอ)วธการคนหา Dichotomous (ตอ)
0 0L Lx xδ δ= − = +
จด x1 และ x2 (จานวนจดทดลอง) มคาดงน
หลงจากการตดชวงออก ขนาดของชวงมขนาดลดลงเหลอ 0
2 2L δ
+
1 2,2 2 2 2
x x= = +
โดยทวไป ถามการทาจดทดลอง (Number of experiments) n จด (ตองเปน
2 2
เลขค) สามารถสรปไดเปนสตรของขนาดชวงทเหลอไดดงน
1L ⎛ ⎞0/ 2 / 2
112 2n n n
LL δ ⎛ ⎞= + −⎜ ⎟⎝ ⎠

วธการคนหา Dichotomous (ตอ)วธการคนหา Dichotomous (ตอ)
ตวอยาง
คาถาม จงหาคาตาสดของฟงกชน f(x) = x(x-1.5) ในชวง (0,1.0)โดยใหมคา
ผดพลาดจากคาจรงไมเกน 10% กาหนด δ = 0 001ผดพลาดจากคาจรงไมเกน 10% กาหนด δ = 0.001
วธทา จากสมการกอนหนานเขยนใหมไดดงน
⎛ ⎞/ 2 / 2
0 0
1 11 ,2 2
1 1 1 1 1
nn n
LL L
L
δ
δ
⎛ ⎞= + −⎜ ⎟⎝ ⎠
⎛ ⎞/ 2 / 2
0 0
1 1 1 1 112 10 2 2 5
nn n
LL L
δ ⎛ ⎞≤ ∴ + − ≤⎜ ⎟⎝ ⎠

วธการคนหา Dichotomous (ตอ)วธการคนหา Dichotomous (ตอ)
δ 0 001 L 1 จาก δ = 0.001, L0 = 1 ดงนน
1 1 1 11 or⎛ ⎞+ − ≤⎜ ⎟/ 2 / 2
/ 2/ 2
1 or2 1,000 2 5999 1 995 999or 2 5.0
n n
n
+ ≤⎜ ⎟⎝ ⎠
≤ ≥ ≈/ 2 or 2 5.01,000 2 1,000 199n ≤ ≥
เนองจาก n ตองเปนเลขคดงนน จะได n = 6 ขนตอนการคนหามดงนเนองจาก n ตองเปนเลขคดงนน จะได n 6 ขนตอนการคนหามดงน
กาหนดจดทดลองสองจดแรก
วธการคนหา Dichotomous (ตอ)วธการคนหา Dichotomous (ตอ)
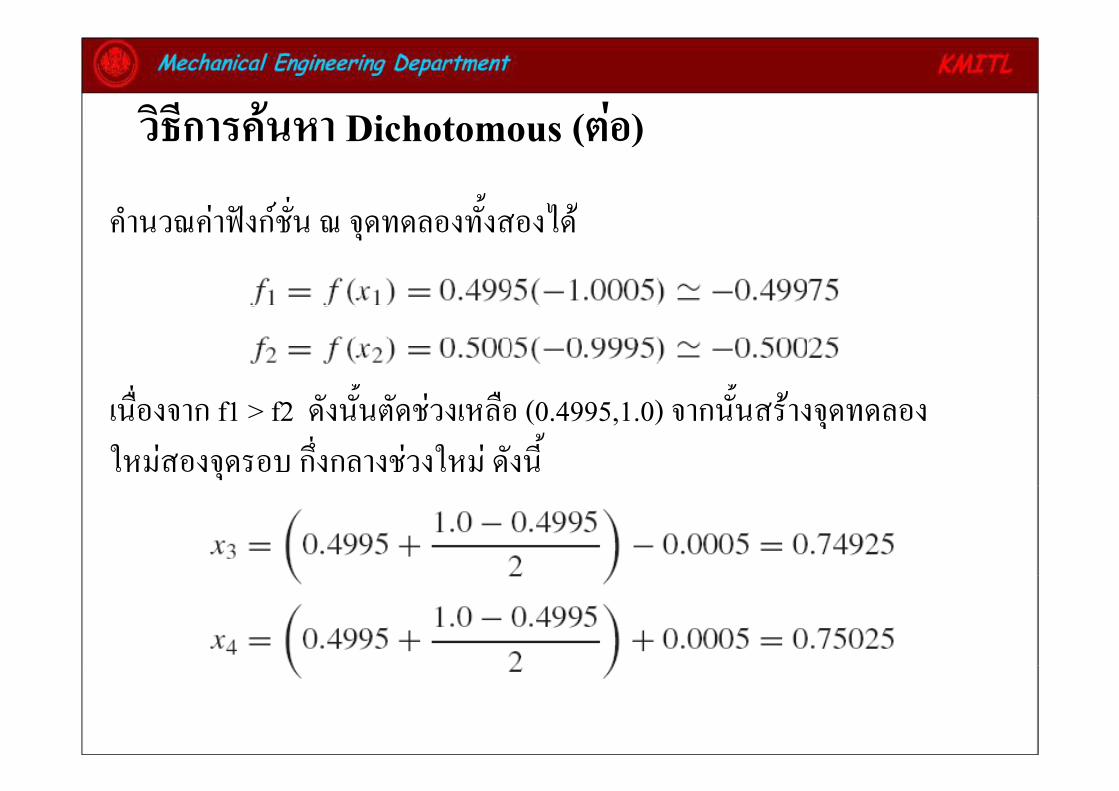
คานวณคาฟงกชน ณ จดทดลองทงสองไดคานวณคาฟงกชน ณ จดทดลองทงสองได
เนองจาก f1 > f2 ดงนนตดชวงเหลอ (0.4995,1.0) จากนนสรางจดทดลอง
ใหมสองจดรอบ กงกลางชวงใหม ดงน

วธการคนหา Dichotomous (ตอ)วธการคนหา Dichotomous (ตอ)
คานวณคาฟงกชน ณ จดทดลองทงสองไดคานวณคาฟงกชน ณ จดทดลองทงสองได
เนองจาก f3 > f4 ดงนนตดชวงเหลอ (0.74925,1.0) จากนนสรางจด
ทดลองใหมสองจดรอบ กงกลางชวงใหม ดงน

วธการคนหา Dichotomous (ตอ)วธการคนหา Dichotomous (ตอ)
คานวณคาฟงกชน ณ จดทดลองทงสองไดคานวณคาฟงกชน ณ จดทดลองทงสองได
เนองจาก f6 > f5 ดงนนตดชวงเหลอ (0.74925,0.875125) = (x3,x6)
ดงนนใชจดกงกลางระหวาง x3 กบ x6 เปนคาตอบไดดงนดงนนใชจดกงกลางระหวาง x3 กบ x6 เปนคาตอบไดดงน

วธการคนหาลดชวงลงครงหนง(I t l H l i วธการคนหาลดชวงลงครงหนง(Interval Halving
Method)Method)วธนมหลกการคอทาการคนหาดวยการตดชวงลงครงหนง ในทกๆครงของการ
โ ใ คนหา โดยในการคนหาครงแรกจะทาการทดลองสมการทดลอง 3 คา จากนน
ในการทดลองครงตอไปจะทาการสมแค 2 คา วธการคนหามดงน
1. แบงชวงคาตอบเรมตน L0 =[a,b] ออกเปน n สวนเทาๆกน กาหนด ณ จด
กงกลางคอ x0 และตาแนงดานซายของ x0 คอ x1 สวนดานขวามอคอ x2 คา
ของจดทงสองจะอยหางจาก x0 เทากบ L0/4
2 ทาการคานวณหาคาของฟงกชน ณ จดทงสาม f1 f2 กบ f02. ทาการคานวณหาคาของฟงกชน ณ จดทงสาม f1, f2 กบ f0
3. (a) ถา f2 > f0 > f1 ดงรป (a) ทาการลบชวง (x0, b) ออก จากนนเปลยน
ไป x1 -> x0 และ x0 -> b ตามลาดบ จากนนขามไปทาขนตอนท 4
วธการคนหาลดชวงลงครงหนง(I t l H l i วธการคนหาลดชวงลงครงหนง(Interval Halving
Method) (ตอ)Method) (ตอ)(b) ถา f2 < f0 < f1 ดงรป (b) ทาการลบชวง (a,x0) ออก จากนนเปลยน x2 ->
ไป x0 และ x0 -> a ตามลาดบ จากนนขามไปทาขนตอนท 4
(c) ถา f1 > f0 และ f0 < f2 ดงรป (c) ทาการลบชวง (a,x1) และ (x2,b) ออก
จากนนเปลยน x1 -> a และ x2 -> b ตามลาดบ จากนนขามไปทาขนตอนท 4
4. ทาการทดสอบดวา ชวงคาตอบ L = b-a ≤ ε (คาเงอนไขของการหยดหา) ( )
ถาเปนจรงกหยด แตถาไมจรงกให เซตคา L0 = L และไปทาขนตอนท 1 ใหม


หมายเหต ขนาดของชวงคาตอบ เมอมการทดลองสมคาไปแลว n
คา โดย n ≥ 3 และเปนเลขคเทานน มคาดงนคา โดย n ≥ 3 และเปนเลขคเทานน มคาดงน( 1)21
n
L L−
⎛ ⎞⎜ ⎟ 02nL L= ⎜ ⎟⎝ ⎠

วธการคนหาลดชวงลงครงหนง(Interval Halving
Method) (ตอ)Method) (ตอ)
คาถาม จงหาคาตาสดของฟงกชน f(x) = x(x-1.5) ในชวง (0,1.0)โดยใหมคา
ผดพลาดจากคาจรงไมเกน 10%
วธทา ถาถอวาคาตอบอยทจดกงกลางชวงอนสดทาย ดงนนวธทา ถาถอวาคาตอบอยทจดกงกลางชวงอนสดทาย ดงนน( 1)2
0 01orn
nL L LL−
⎛ ⎞≤ ≤⎜ ⎟0 0
0or2 10 2 5
1
n L
L
≤ ≤⎜ ⎟⎝ ⎠
=Q 0
( 1) / 2( 1)
1,1 1 or 2 5
5n
n
L
−−
=
≤ ≥
Q
( 1)2 52
n−

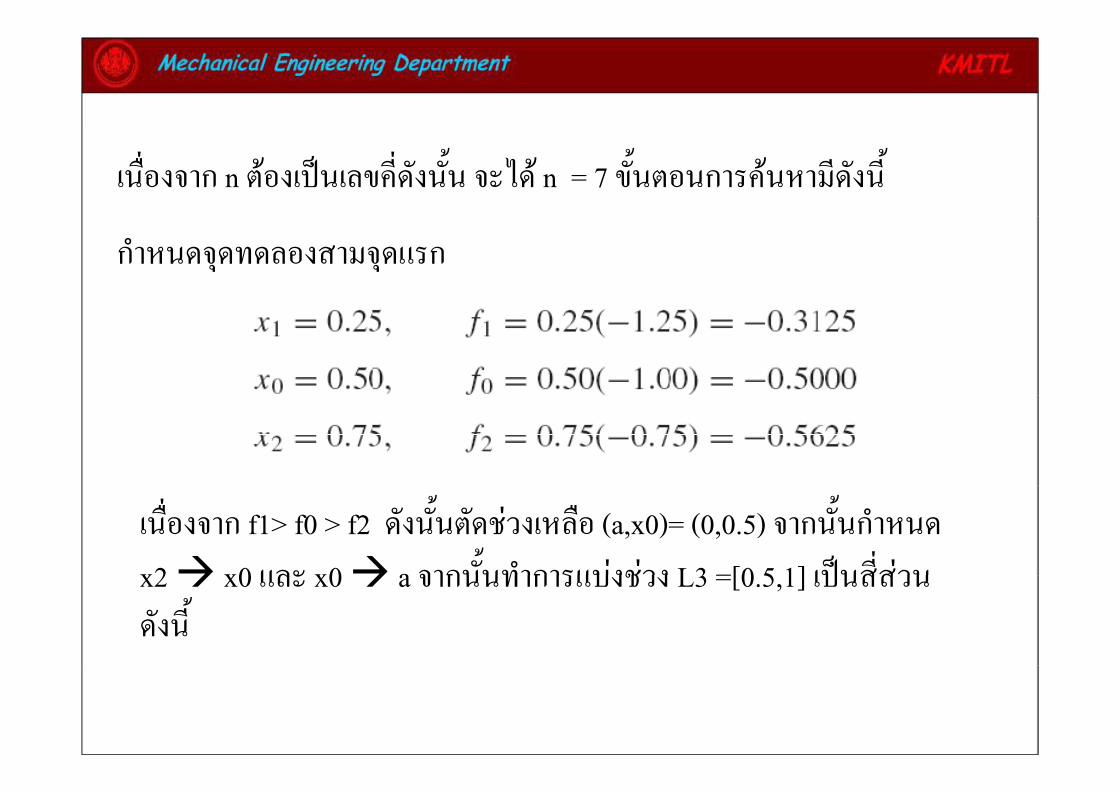
เนองจาก n ตองเปนเลขคดงนน จะได n = 7 ขนตอนการคนหามดงน
กาหนดจดทดลองสามจดแรก
เนองจาก f1> f0 > f2 ดงนนตดชวงเหลอ (a,x0)= (0,0.5) จากนนกาหนด
x2 x0 และ x0 a จากนนทาการแบงชวง L3 =[0 5 1] เปนสสวน x2 x0 และ x0 a จากนนทาการแบงชวง L3 =[0.5,1] เปนสสวน
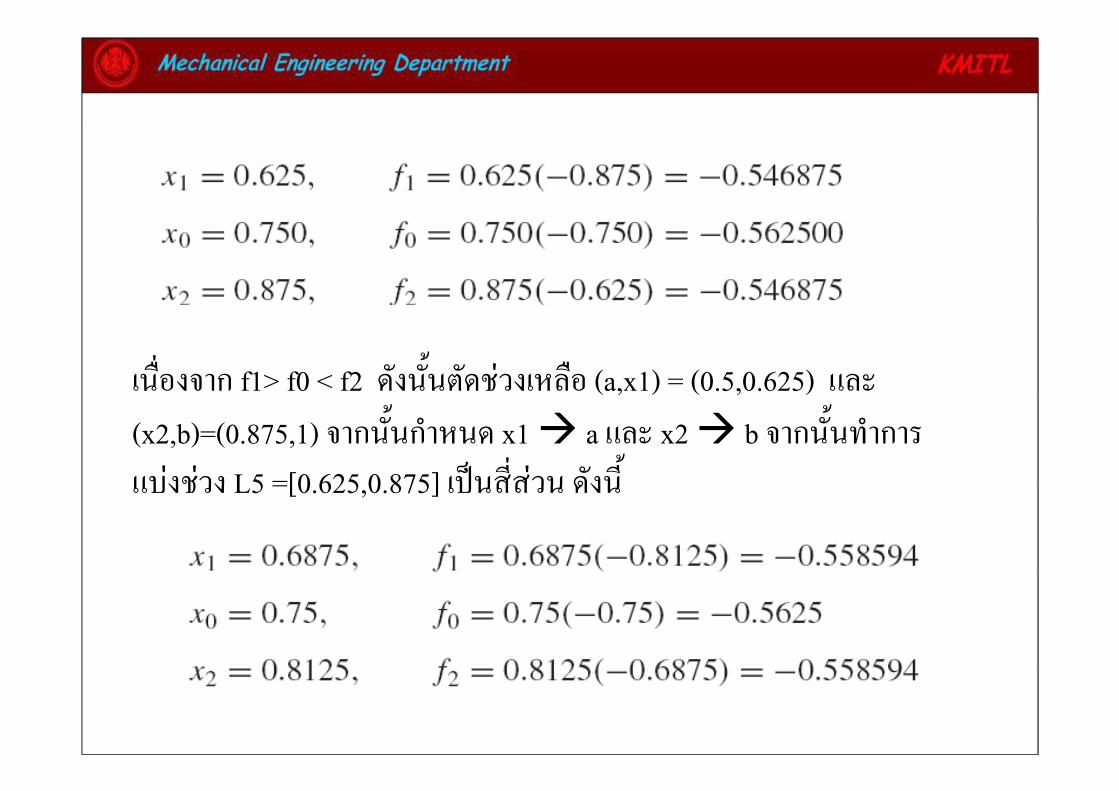
ดงน

เนองจาก f1> f0 < f2 ดงนนตดชวงเหลอ (a,x1) = (0.5,0.625) และ
(x2,b)=(0.875,1) จากนนกาหนด x1 a และ x2 b จากนนทาการ
แบงชวง L5 =[0 625 0 875] เปนสสวน ดงนแบงชวง L5 =[0.625,0.875] เปนสสวน ดงน

เนองจาก f1> f0 < f2 ดงนนตดชวงเหลอ (a,x1) = (0.625,0.6875) และ
(x2 b)=(0 8125 0 875) จากนนกาหนด x1 a และ x2 b จากนนทาการ(x2,b)=(0.8125,0.875) จากนนกาหนด x1 a และ x2 b จากนนทาการ
คานวณแบงชวง L7 =[0.6875,0.8125] จากนนสรางจดทดลอง ณ จดกงกลาง
ไ l iชวงนไดคาตอบจดตาสด ซงตรงกบ exact solution
Workshop 2
Find the minimum of the function
10 75 112
0.75 1( ) 0.65 0.65 tan1
f x xx x
−= − −+
using the following methods:using the following methods:
(a) Dichotomous search method in the interval (0, 3) to achieve an accuracy
δof within 5% of the exact value using a value of δ = 0.0001
(b) Interval halving method in the interval (0, 3) to achieve an accuracy of
within 5% of the exact value

Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineering
Lecture Lecture 66
โดยโดย
ผศ.ดร. มนตศกด พมสาร

การหาจดตาทสดของฟงกชนตวแปรเดยวการหาจดตาทสดของฟงกชนตวแปรเดยว
ดวยวธการเชงตวเลข – (ตอ)( )
5. วธการคนหาลดชวงลงครงหนง(Interval Halving Method)( g )
6. วธโกลเดนเซคชน (Golden section search)

วธการคนหาลดชวงลงครงหนง(I t l H l i วธการคนหาลดชวงลงครงหนง(Interval Halving
Method)Method)วธนมหลกการคอทาการคนหาดวยการตดชวงลงครงนง ในทกๆครงของการ
โ ใ คนหา โดยในการคนหาครงแรกจะทาการทดลองสมการทดลอง 3 คา จากนน
ในการทดลองครงตอไปจะทาการสมแค 2 คา วธการคนหามดงน
1. แบงชวงคาตอบเรมตน L0 =[a,b] ออกเปน n (4 ในเรมตน) กาหนด ณ จด
กงกลางคอ x0 และตาแหนงดานซายของ x0 คอ x1 สวนดานขวามอคอ x2 คา
ของจดทงสองจะอยหางจาก x0 เทากบ L0/3
2 ทาการคานวณหาคาของฟงกชน ณ จดทงสาม f1 f2 กบ f02. ทาการคานวณหาคาของฟงกชน ณ จดทงสาม f1, f2 กบ f0
3. (a) ถา f2 > f0 > f1 ดงรป (a) ทาการลบชวง (x0, b) ออก จากนนเปลยน
ไป x1 -> x0 และ x0 -> b ตามลาดบ จากนนขามไปทาขนตอนท 4

วธการคนหาลดชวงลงครงหนง(I t l H l i วธการคนหาลดชวงลงครงหนง(Interval Halving
Method) (ตอ)Method) (ตอ)(b) ถา f2 < f0 < f1 ดงรป (b) ทาการลบชวง (a,x0) ออก จากนนเปลยน x2 ->
ไป x0 และ x0 -> a ตามลาดบ จากนนขามไปทาขนตอนท 4
(c) ถา f1 > f0 และ f0 < f2 ดงรป (c) ทาการลบชวง (a,x1) และ (x2,b) ออก
จากนนเปลยน x1 -> a และ x2 -> b ตามลาดบ จากนนขามไปทาขนตอนท 4
4. ทาการทดสอบดวา ชวงคาตอบ L = b-a ≤ ε (คาเงอนไขของการหยดหา) ( )
ถาเปนจรงกหยด แตถาไมจรงกให เซตคา L0 = L และไปทาขนตอนท 1 ใหม


หมายเหต ขนาดของชวงคาตอบ เมอมการทดลองสมคาไปแลว n
คา โดย n ≥ 3 และเปนเลขคเทานน มคาดงนคา โดย n ≥ 3 และเปนเลขคเทานน มคาดงน( 1)
21n
L L−
⎛ ⎞⎜ ⎟ 02nL L= ⎜ ⎟⎝ ⎠
วธการคนหาลดชวงลงครงหนง(Interval Halving
Method) (ตอ)Method) (ตอ)
ตวอยาง จงหาคาตาสดของฟงกชน f(x) = x(x-1.5) ในชวง (0,1.0)โดยใหมคา
ผดพลาดจากคาจรงไมเกน 10%
วธทา ถาถอวาคาตอบอยทจดกงกลางชวงอนสดทาย ดงนนวธทา ถาถอวาคาตอบอยทจดกงกลางชวงอนสดทาย ดงนน( 1)
20 01or
n
nL L LL−
⎛ ⎞≤ ≤⎜ ⎟0 0
0or2 10 2 5
1
n L
L
≤ ≤⎜ ⎟⎝ ⎠
=Q 0
( 1) / 2( 1)
1,1 1 or 2 5
5n
n
L
−−
=
≤ ≥
Q
( 1)2 52
n−
เนองจาก n ตองเปนเลขคดงนน จะได n = 7 ขนตอนการคนหามดงน
กาหนดจดทดลองสามจดแรก
เนองจาก f1> f0 > f2 ดงนนตดชวงเหลอ (a,x0)= (0,0.5) จากนนกาหนด
x2 x0 และ x0 a จากนนทาการแบงชวง L3 =[0 5 1] เปนสสวน x2 x0 และ x0 a จากนนทาการแบงชวง L3 =[0.5,1] เปนสสวน
ดงน
เนองจาก f1> f0 < f2 ดงนนตดชวงเหลอ (a,x1) = (0.5,0.625) และ
(x2,b)=(0.875,1) จากนนกาหนด x1 a และ x2 b จากนนทาการ
แบงชวง L5 =[0 625 0 875] เปนสสวน ดงนแบงชวง L5 =[0.625,0.875] เปนสสวน ดงน

เนองจาก f1> f0 < f2 ดงนนตดชวงเหลอ (a,x1) = (0.625,0.6875) และ
(x2 b)=(0 8125 0 875) จากนนกาหนด x1 a และ x2 b จากนนทาการ(x2,b)=(0.8125,0.875) จากนนกาหนด x1 a และ x2 b จากนนทาการ
คานวณแบงชวง L7 =[0.6875,0.8125] จากนนสรางจดทดลองใหมสองจด
ไ l iรอบ กงกลางชวงนไดคาตอบจดตาสด ซงตรงกบ exact solution
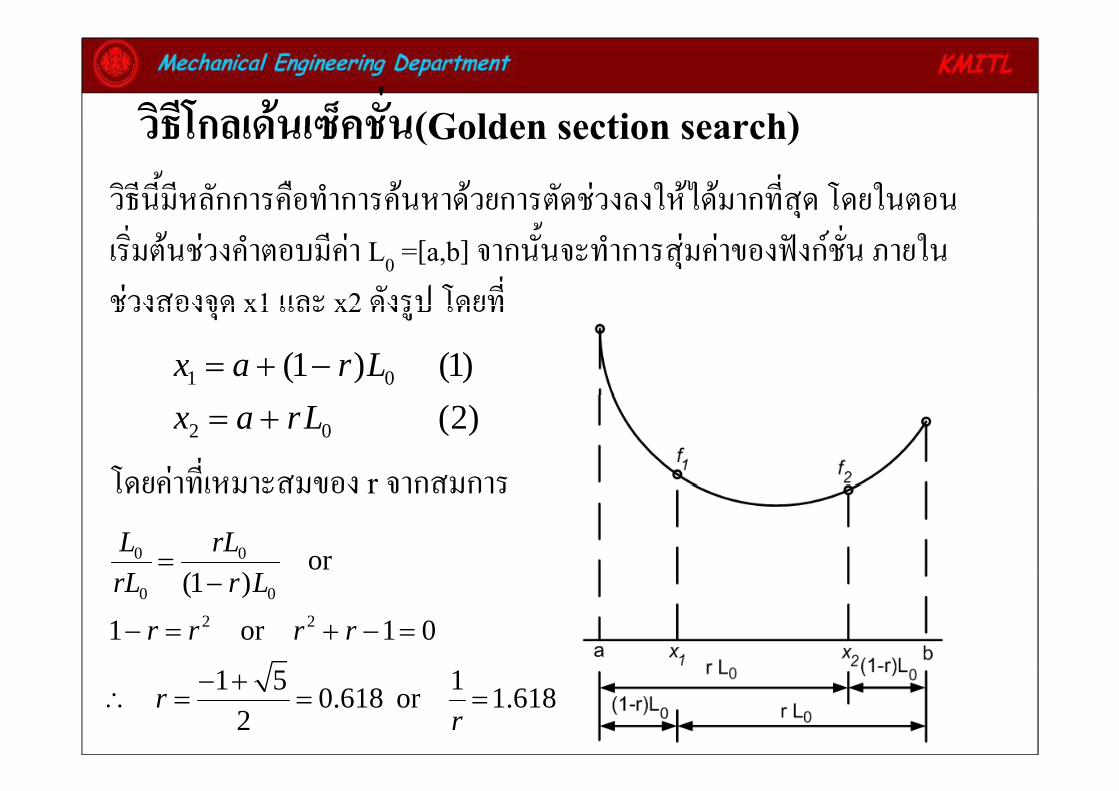
วธโกลเดนเซคชน(Golden section search)วธโกลเดนเซคชน(Golden section search)
วธนมหลกการคอทาการคนหาดวยการตดชวงลงใหไดมากทสด โดยในตอน
เรมตนชวงคาตอบมคา L0 =[a,b] จากนนจะทาการสมคาของฟงกชน ภายใน
ชวงสองจด x1 และ x2 ดงรป โดยท
1 0(1 ) (1)x a r L= + −
ชวงสองจด x1 และ x2 ดงรป โดยท
2 0 (2)x a rL= +
โดยคาทเหมาะสมของ r จากสมการโดยคาทเหมาะสมของ r จากสมการ
0 0 or(1 )
L rLL L
=0 0
2 2
(1 )
1 or 1 0
rL r L
r r r r
−
− = + − =
1 5 10.618 or 1.6182
rr
− +∴ = = =
โ ( ) ( )วธโกลเดนเซคชน(Golden section search) (ตอ)
คา 1 618 มชอเรยกวา อตราสวนทองอตราสวนทอง (Golden ratio) = φ (ตามชอของนกคา 1.618 มชอเรยกวา อตราสวนทองอตราสวนทอง (Golden ratio) = φ (ตามชอของนก
ประตมากรรมชาวกรก Phidias ผปนรปปนประดบบนวหารพารเธนอน 440
) โ โ ใ ป BC) โดยอนโลมสดสวน 2:3, 5:8, 8:13, และ 89:144 ใหเปนสดสวนทสมบรณ
ชาวกรกเชอวามนเปนสดสวนพนฐานของความงามของสรรพสงในจกรวาล
และกฎแหงธรรมชาต เชอกนวาพรามดอยปตกสรางดวยสดสวนน Pythagoras
(560-480 BC) นกคณตศาสตรกรกบอกวามนเปนสดสวนพนฐานของรางกายฐ
มนษยตวอยางของการนาคานมาใชแสดงดงรป
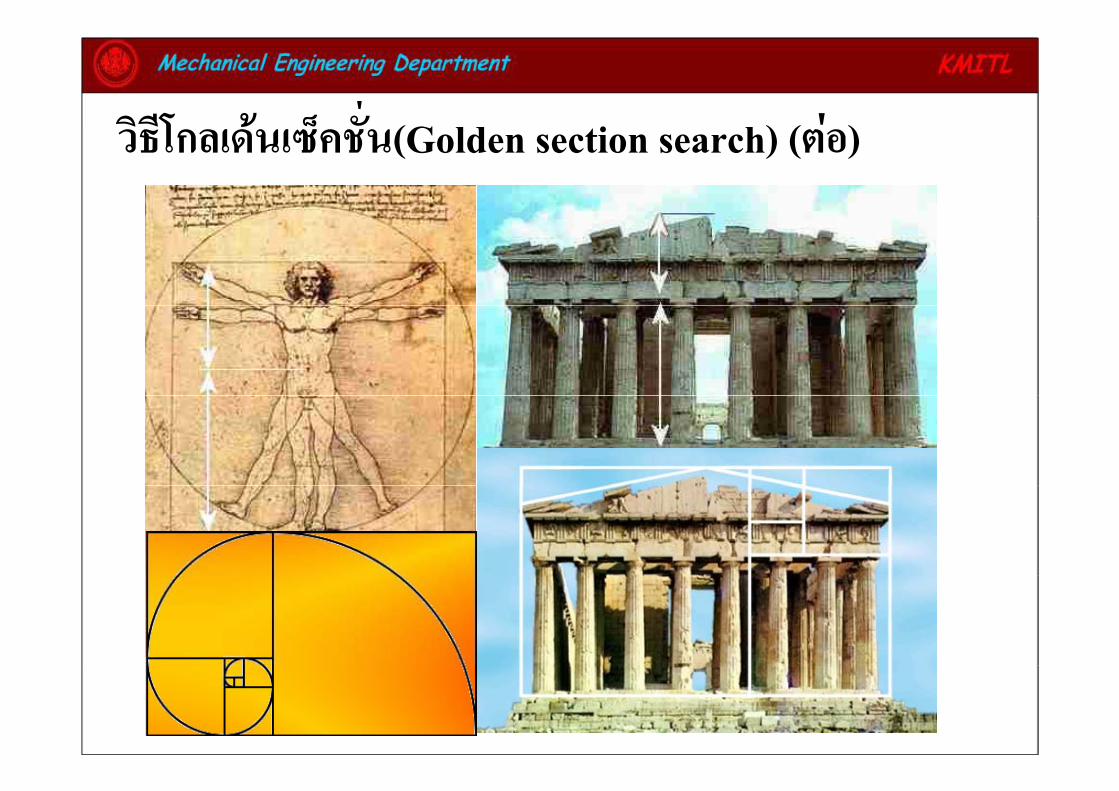
โ ( ) ( )วธโกลเดนเซคชน(Golden section search) (ตอ)

โ ( ) ( )วธโกลเดนเซคชน(Golden section search) (ตอ)
ตวอยางตอไปนคอวธการของโกลเดนเซคชน สมมต L0=[0 1] ดงนนจด 2 จดตวอยางตอไปนคอวธการของโกลเดนเซคชน สมมต L0=[0,1] ดงนนจด 2 จด
ใหมคอ x1 และ x2 หาจาก
1 0
2 0
(1 ) 0 (1 0.618)(1 0) 0.3820 0.618(1) 0.618
x a r Lx a rL
= + − = + − − == + = + =
หรอแสดงตาแหนงไดดงน
จากนนนาคา x1 และ x2 ลงไปแทนในฟงกชนเปาหมาย เพอหาคา f1 และ f2
ตามลาดบ และเปรยบเทยบคาทงสอง
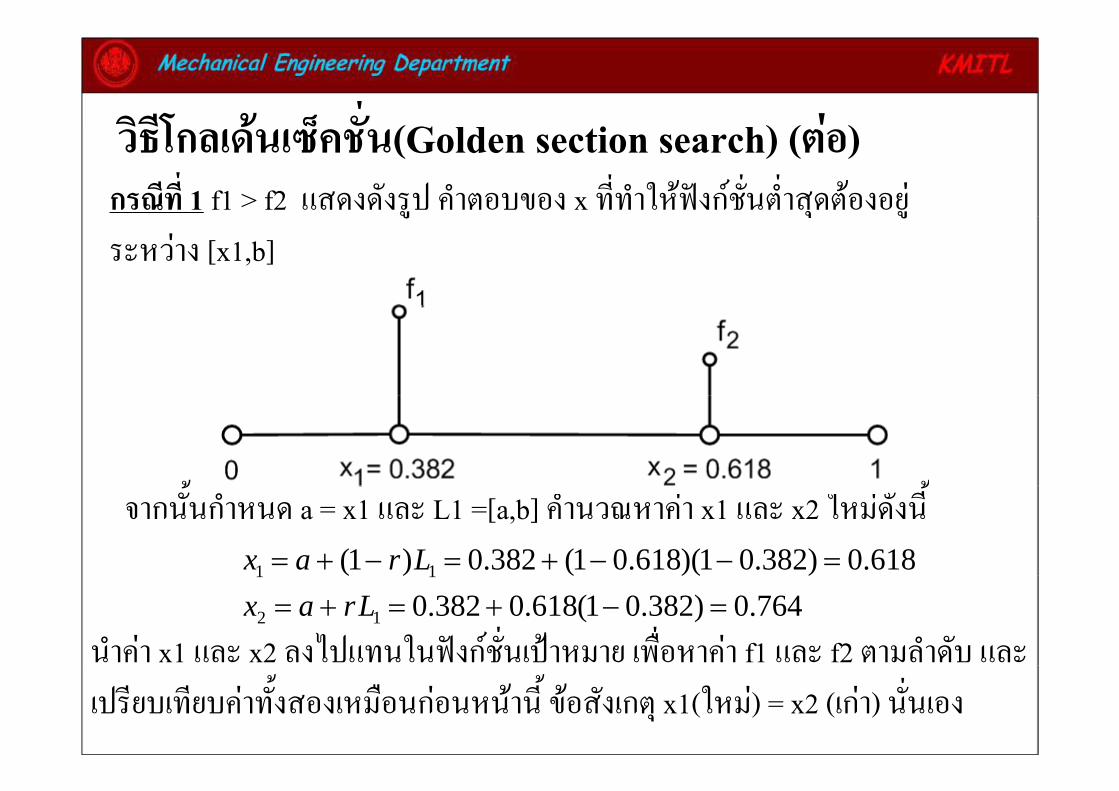
โ ( ) ( )วธโกลเดนเซคชน(Golden section search) (ตอ)กรณท 1 f1 > f2 แสดงดงรป คาตอบของ x ททาใหฟงกชนตาสดตองอย
ระหวาง [x1,b]
1 1(1 ) 0.382 (1 0.618)(1 0.382) 0.618x a r L= + − = + − − =
จากนนกาหนด a = x1 และ L1 =[a,b] คานวณหาคา x1 และ x2 ใหมดงน
1 1
2 1
( ) ( )( )0.382 0.618(1 0.382) 0.764x a rL= + = + − =
นาคา x1 และ x2 ลงไปแทนในฟงกชนเปาหมาย เพอหาคา f1 และ f2 ตามลาดบ และ
เปรยบเทยบคาทงสองเหมอนกอนหนาน ขอสงเกต x1(ใหม) = x2 (เกา) นนเอง

วธโกลเดนเซคชน(G ld ti h) (ตอ)วธโกลเดนเซคชน(Golden section search) (ตอ)กรณท 2 f1 < f2 แสดงดงรป คาตอบของ x ททาใหฟงกชนตาสดตองอย
ระหวาง [a,x2]
1 1(1 ) 0 (1 0.618)(0.618 0) 0.236x a r L= + − = + − − =
จากนนกาหนด b = x2 และ L1 =[a,b] คานวณหาคา x1 และ x2 ใหมดงน
1 1
2 1
( ) ( )( )0 0.618(0.618 0) 0.382x a rL= + = + − =
นาคา x1 และ x2 ลงไปแทนในฟงกชนเปาหมาย เพอหาคา f1 และ f2 ตามลาดบ และ
เปรยบเทยบคาทงสองเหมอนกอนหนาน ขอสงเกต x2(ใหม) = x1 (เกา) นนเอง

วธโกลเดนเซคชน(G ld ti h) (ตอ)วธโกลเดนเซคชน(Golden section search) (ตอ)
จากทงสองกรณจะเหนวา การคานวณหาคา x1 หรอ x2 ใหมนน ในแตละกรณจากทงสองกรณจะเหนวา การคานวณหาคา x1 หรอ x2 ใหมนน ในแตละกรณ
นน สามารถทาการคานวณคาของตาแหนงใหมเพยงตาแหนงเดยวกเพยงพอ
เพราะอกตาแหนงใชคาเดมได ทาใหสามารถลดขนตอนการคานวณได เพราะอกตาแหนงใชคาเดมได ทาใหสามารถลดขนตอนการคานวณได
ขนตอนการคนหามดงน
1. กาหนดคาเงอนไขหยดการคานวณ ε2. กาหนดชวงคาตอบเรมตน L0 = [a,b]
3. เซต k = 1
4. ถา |a-b| ≤ ε คาตอบ x = (a+b)/2
5 คานวณหาตาแหนง x1 และ x2 ตามสมการ5. คานวณหาตาแหนง x1 และ x2 ตามสมการ
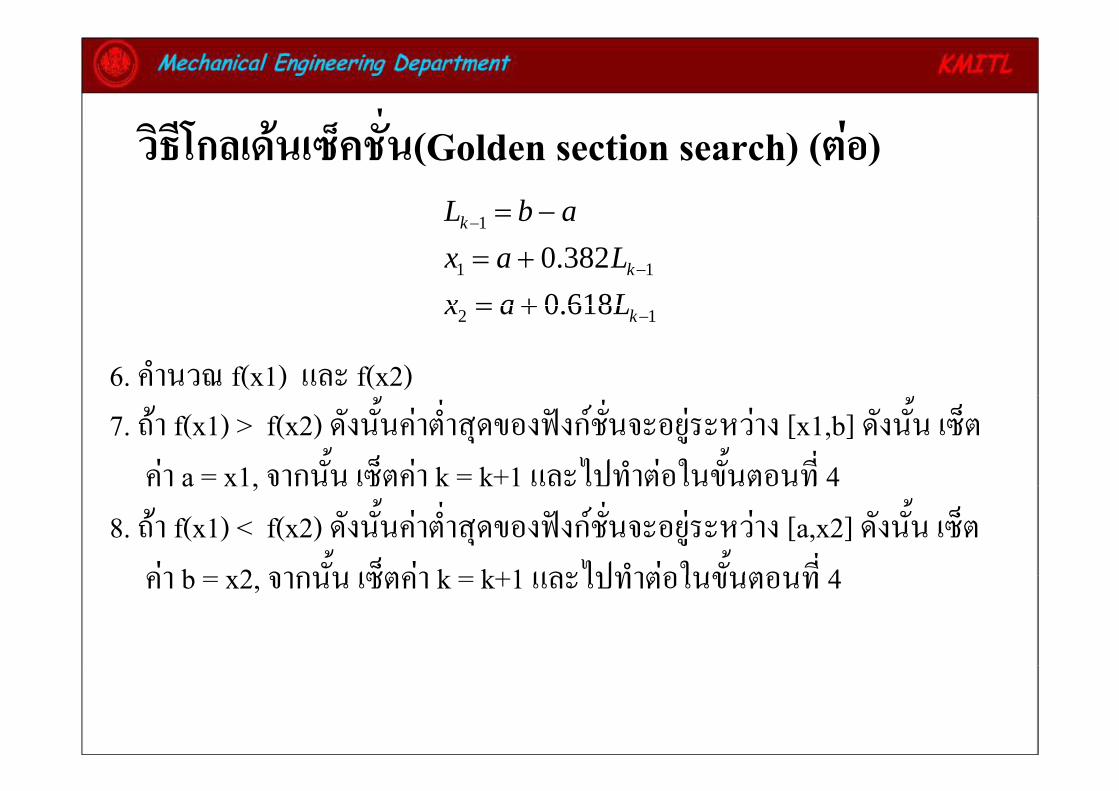
โ วธโกลเดนเซคชน(Golden section search) (ตอ)L b a= −1
1 10.3820 618
k
k
L b ax a Lx a L
−
−
== += +
6. คานวณ f(x1) และ f(x2)
2 10.618 kx a L −= +
7. ถา f(x1) > f(x2) ดงนนคาตาสดของฟงกชนจะอยระหวาง [x1,b] ดงนน เซต
คา a = x1, จากนน เซตคา k = k+1 และไปทาตอในขนตอนท 4คา a x1, จากนน เซตคา k k 1 และไปทาตอในขนตอนท 4
8. ถา f(x1) < f(x2) ดงนนคาตาสดของฟงกชนจะอยระหวาง [a,x2] ดงนน เซต
คา b 2 จากนน เซตคา k k+1 และไปทาตอในขนตอนท 4คา b = x2, จากนน เซตคา k = k+1 และไปทาตอในขนตอนท 4

วธโกลเดนเซคชน(Golden section search) (ตอ)
10 75 1
ตวอยาง จงหาคาตาสดของฟงกชน แสดงขางลาง ในชวง (0,3.0)โดยให k = 5
12
0.75 1( ) 0.65 0.65 tan1
f x xx x
−= − −+
วธทา k = 1; L0 = b-a = 3-0 = 3
การหาจด x1 และ x2
1 1 10.382 0 0.382 3 1.1460x a L −= + = + × =
2 1 1
1 1
0.618 0.618 3 1.8540( ) 0.208654
x a Lf f x
−= + = × =∴ = = −
2 2( ) 0.115124f f x= = −

วธโกลเดนเซคชน(Golden section search) (ตอ)
วธทา เนองจาก f2 > f1 ดงนนทาการลบชวง [x2,3.0] ออกและให
b = x2 = 1.8540
k = 2; L1 = b-a = 1.854-0 = 1.854
การหาจด x1 (หมายเหต x2 ใชคา x1 เดม)การหาจด x1 (หมายเหต x2 ใชคา x1 เดม)
1 2 10.382 0 0.382 1.854 0.7083x a L −= + = + × =
1 1( ) 0.288943f f x∴ = = −
เนองจาก f2 > f1 ดงนนทาการลบชวง [x2,1.8540]=[1.1460,1.8540] ออกและให
b = x2 = 1.1460
k = 3; L2 = b-a = 1.146-0 = 1.146k 3; L2 b a 1.146 0 1.146
การหาจด x1 (หมายเหต x2 ใชคา x1 เดม)

โ วธโกลเดนเซคชน(Golden section search) (ตอ)เนองจาก f2 > f1 ดงนนทาการลบชวง [x2,1.146]=[0.7083,0.1460] ออกและให เนองจาก f2 f1 ดงนนทาการลบชวง [x2,1.146] [0.7083,0.1460] ออกและให
b = x2 = 0.7083
k 4 L b 0 7083 0 0 7083k = 4; L3 = b-a = 0.7083-0 = 0.7083
การหาจด x1 (หมายเหต x2 ใชคา x1 เดม)
1 4 1
1 1
0.382 0 0.382 0.7083 0.2706( ) 0.278434
x a Lf f x
−= + = + × =∴ = = −
เนองจาก f1 > f2 ดงนนทาการลบชวง [0,x1]=[0,0.2706] ออกและให
a = x1 = 0 2706 a = x1 = 0.2706
k = 5; L4 = b-a = 0.7083-0.2706 = 0.4377
ใ การหาจด x2 (หมายเหต x1 ใชคา x2 เดม)

โ วธโกลเดนเซคชน(Golden section search) (ตอ)
k = 5(ตอ);
2 5 10.618 0.2706 0.618 0.4377 0.5411x a L −= + = + × =
k = 5(ตอ);
2 2( ) 0.308234f f x∴ = = −
เนองจาก f2 > f1 ดงนนทาการลบชวง [x2,b]=[0.5411,0.7083] ออกและให
b = x2 = 0.5411
คาตอบ x* = (a+b)/2 = (0.2706 + 0.5411)/2 = 0.4059
ε = |a-b| = | 0 2706 - 0 5411| = 0 2705ε = |a-b| = | 0.2706 - 0.5411| = 0.2705
x*(Matlab) = 0.4809

โ วธโกลเดนเซคชน(Golden section search) (ตอ)
MatlabMatlab
Step 1: เขยน Objective function (objfun.m)
( )function f= objfun(x)
f= 0.65–(0.75/(1+x^2))–0.65*x*atan(1/x);
Step 2: เขยนโปรแกรมหลก (ExampleFile.m) โดยใชคาสง fminbnd
clear all
options = optimset('LargeScale','off');
[x fval] = fminbnd(@objfun 0 0 5 options);[x,fval] = fminbnd(@objfun,0,0.5,options);
x
fval
Workshop 1
ฟ จงหาคาตาสดของฟงกชน
( ) ( 1 5)f x x x= −( ) ( 1.5)f x x x=
โดยคาตอบอยในชวง (0 1) โดยให k = 5 โดยคาตอบอยในชวง (0,1) โดยให k = 5
หมายเหต คาตอบ (Exact solution) ( )
ฟ ปการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลขดวยวธการเชงตวเลข
1. วธการ Steepest descent (พดถงอนน)
2 วธการ Conjugate gradient2. วธการ Conjugate gradient

ฟ ปการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลข (ตอ)ดวยวธการเชงตวเลข (ตอ)
แนวคด 1 ทาการเดาคาคาตอบเรมตน x(0)แนวคด 1. ทาการเดาคาคาตอบเรมตน x( )
2. จากนนทาการปรบปรงคาตาตอบโดยการทาซาจากสตร
( 1) ( ) ( ) 0,1,2,k k kx x x k+ = + Δ =r r r
K
( 1) ( ) ( )
Or
1 to 0 1 2k k kx x x i n k+ = + Δ = =
โดย i คอ หมายเลขของตวแปรออกแบบ k คอ ครงททาซา
1 to , 0,1,2,i i ix x x i n k= + Δ = = K
i k

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลข (ตอ)ดวยวธการเชงตวเลข (ตอ)
แนวคด (ตอ) สวน( )
( ) ( )k kkx dαΔ =rr
step size(positive scalar)αเมอ
( )
step size(positive scalar)
search directionk
kd
α =
=r
3. การคนหาคาตอบจะหยดเมอเจอจด ตาสด โดยเราตองมการ
สรางเงอนไขของการหยดขนมา

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลข (ตอ)ดวยวธการเชงตวเลข (ตอ)
แนวคด (ตอ) แสดงดงรปได( )

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลข (ตอ)ดวยวธการเชงตวเลข (ตอ)ขนตอนการคานวณ(โดยทวไป)
ป ป (0) 1. ประมาณคาตาตอบของตวแปรออกแบบเรมตน x(0) และเซตคาการทาซา k = 0
(k) ฟ 2. คานวณ ทศทางการคนหา(Search direction) d(k) ซงคานวณจากฟงกชนเปาหมาย
ไ ไ ป 3. เชคการลเขาของคาตอบ จากเงอนไขทตงขน ถาเงอนไขเปนจรง กหยด ถาไมจรงใหทาขนตอนตอไป
4. คานวณหาขนาดของระยะกาว(step size), αk, ในทศทางการคนหา d(k)
5. ปรบปรงคาตวแปรออกแบบ x(k+1) = x(k) + αk d(k) จากนนเซต k = k+1
k
และกลบไปทาในขนตอนท 2

วธการหาทศทางการคนหา d(k)วธการหาทศทางการคนหา d
ถา x(k) ไมใชจดตาสด เราตองหาจด x(k+1) ททาใหฟงกชนมคาตากวาไดถา x ไมใชจดตาสด เราตองหาจด x ททาใหฟงกชนมคาตากวาได
( 1) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )k k k k kkf x f x or f x d f xα+ < + <rr r r r
จากนนใช Taylor’s series กบเทอมดานซายมอr
( ) ( ) ( ) ( )( ) ( . ) ( )where
k k k kkf x c d f xα+ <
rr r r
( ) ( )
where( ) gradient of ( )k kc f x f x= ∇ =
r r r
( ) ( )( . ) 0k kk
Or
c dα <rr( )k

(k)วธการหาทศทางการคนหา d(k)
เนองจาก α คอคาเลขบวกเสมอ ดงนนเนองจาก αk คอคาเลขบวกเสมอ ดงนน
( ) ( ). 0k kc d <rr
แสดงวาคาทงสองตองทามม 900 ถง 2700 เพราะทงคคอเวกเตอร ดงนนเรา
ตองทาการคานวณคา d(k) ทอยภายใตเงอนไขดงกลาวซงเราเรยกวา D t ตองทาการคานวณคา d(k) ทอยภายใตเงอนไขดงกลาวซงเราเรยกวา Descent
direction หรอ Downhill direction
ตวอยาง สาหรบฟงกชน
( )2 2
ไ
1 2( )2 21 1 2 2 1( ) 2 2 x xf x x x x x x e += − + − +
r
เชคดวาทศทาง d = (1,2) จากจด (0,0) คอ Descent direction หรอไม

(k)วธการหาทศทางการคนหา d(k)
ไ วธทา ถาทศทาง d = (1,2) คอ Descent direction มนตองเขาเงอนไขทแลว
0c d <rr
1 2 1 2( ) ( )1 2 1 2( ) (2 2 , 4 ) ( 1,1)x x x xc f x x x e x x e+ += ∇ = − − + − + + = −
r r. 0c d <
1. ( 1,1) 1 2 1 0
2c d ⎡ ⎤
= − = − + = >⎢ ⎥⎣ ⎦
rr
2⎣ ⎦
ดงนน ทศทาง d = (1 2) ไมใช Descent direction ดงนน ทศทาง d = (1,2) ไมใช Descent direction
การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลข (ตอ)ดวยวธการเชงตวเลข (ตอ)
สรป
การคนหาจด x(k+1)
1. หาทศทางการคนหาใหไดกอน d(k)
2. จากนนตองหาระยะกาวทเหมาะสม αk (กาวใหญไปกไมได) ซงตอง
ใชวธการของการหาคาจดตาสดของฟงกชนตวแปรเดยว เพราะถอวาใชวธการของการหาคาจดตาสดของฟงกชนตวแปรเดยว เพราะถอวา
ฟงกชน f(x) = f(α) เปนฟงกชนขนกบ α เพยงตวเดยวในขนตอนน

วธการหาระยะกาว α ทเหมาะสมตวอยาง สาหรบฟงกชน ตวอยาง สาหรบฟงกชน
2 21 1 2 2( ) 3 2 2 7f x x x x x= + + +
r
ทศทาง d(k) = (-1,-1) จากจด (1,2) จงคานวณระยะกาว αk ททาให f(x) มคา
1 1 2 2( ) 3 2 2 7f x x x x x+ + +
k
ตาสดในทศทางการคนหาทกาหนด
ใ วธทา จากจดทกาหนดให x(k) = (1,2), f(x(k) )=22 และ d(k) = (-1,-1) อนดบแรก
ทาการเชควา d(k) คอ Descent direction หรอไม
จากการคานวณพบวาคาเกรดยนทจด (1,2), c(k) = (10,10) และ c(k). d(k) = -10-
ใ ไ 10 = -20 ดงนนทศทางนใชได

วธการหาระยะกาว α ทเหมาะสม (ตอ)วธการหาระยะกาว α ทเหมาะสม (ตอ)
วธทา (ตอ) จากนนคานวณ (k+1)วธทา (ตอ) จากนนคานวณ x(k+1)
( 1) ( ) ( )k k kkx x dα+ = +rr r
( 1)1 1 1
k
k
x x d
xor
α
α+
+
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤= +⎢ ⎥ ⎢ ⎥ ⎢ ⎥
2
( 1) ( 1)1 2
2 1
1 , 2k k
orx
x x
α
α α+ +
+⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦⎣ ⎦= − = −1 2( 1) 2 2
2
1 , 2
( ) 3(1 ) 2(1 )(2 ) 2(2 )k
x x
f x
α α
α α α α+∴ = − + − − + −r
2( ) 7 20 22f α α α= − +

วธการหาระยะกาว α ทเหมาะสม (ตอ)
วธทา (ตอ) จากนนคานวณจากเงอนไขของ N และ S ffi i t
210df d f
วธทา (ตอ) จากนนคานวณจากเงอนไขของ Necessary และ Sufficient
condition
2
100 14 20, , 14 07k k
df d fd d
α αα α
= = − = = >
ใ ฟ ใ ( )ดงนน αk = 10/7 ทาใหฟงกชนมคาตาสดในทศทาง d(k) = (-1,-1) จด x(k+1)
( 1)3
1 110 7kx +
⎡ ⎤−⎢ ⎥⎡ ⎤ ⎡ ⎤ ⎡ ⎤1
2
1 110 72 1 47
7
xx
⎢ ⎥−⎡ ⎤ ⎡ ⎤ ⎡ ⎤= + = ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦⎣ ⎦ ⎢ ⎥
⎢ ⎥⎣ ⎦( 1) ( )
754( ) ( ) 227
k kf x f x+
⎢ ⎥⎣ ⎦
= < =r r
หมายเหต ในทางปฎบตเราใช Golden section search หา αk

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธ Steepest descentดวยวธ Steepest descentวธการนทศทางการคนหา กาหนดใหดงน
( )kr
( )( )kd c f x= − = −∇r r
ขนตอนการคานวณ
1. ประมาณคาตาตอบของตวแปรออกแบบเรมตน x(0) เซตคาการทาซา k = 0
ε ( i i )และ กาหนด ε > 0 (convergence criterion)
2. คานวณ c(k) = ∇f(x(k))
3. คานวณ || c(k) || < ε ถาเปนจรง x(k) = x* คอคาตอบ ถาไมเปนจรงใหคานวณ
ในขนตอนตอไปในขนตอนตอไป
4. คานวณ ทศทางการคนหา(Search direction) d(k) = -c(k)

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธ Steepest descent (ตอ)ดวยวธ Steepest descent (ตอ)
ขนตอนการคานวณ(ตอ)
5. คานวณหาขนาดของระยะกาว(step size), αk, ในทศทางการคนหา d(k) ท
ทาให f(x(k) + α d (k) ) มคาตาสด ใชวธอะไรกไดทาให f(x + α d ) มคาตาสด ใชวธอะไรกได
6. ปรบปรงคาตวแปรออกแบบ x(k+1) = x(k) + αk d(k) จากนนเซต k = k+1
และกลบไปทาในขนตอนท 2
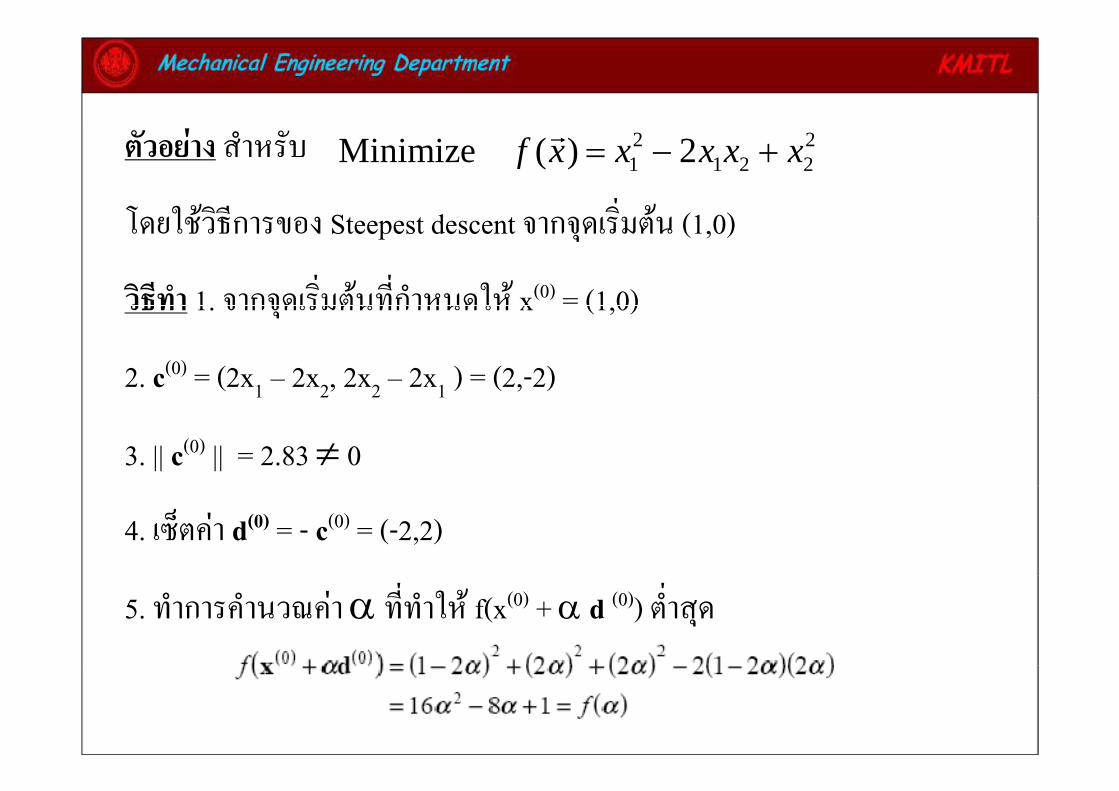
ตวอยาง สาหรบ
โ ใ S d (1 0)
2 21 1 2 2Minimize ( ) 2f x x x x x= − +
r
โดยใชวธการของ Steepest descent จากจดเรมตน (1,0)
วธทา 1 จากจดเรมตนทกาหนดให x(0) = (1 0)วธทา 1. จากจดเรมตนทกาหนดให x (1,0)
2. c(0) = (2x1 – 2x2, 2x2 – 2x1 ) = (2,-2) 1 2 2 1
3. || c(0) || = 2.83 ≠ 0
4. เซตคา d(0) = - c(0) = (-2,2)
5. ทาการคานวณคา α ททาให f(x(0) + α d (0)) ตาสด

วธทา (ตอ) จากนนคานวณจากเงอนไขของ Necessary และ Sufficient
condition
6. ปรบปรงคาตวแปรออกแบบ x(1) = x(0) + αk d(0) = (0.5,0.5)
k ไป ใ จากนนเซต k = 0+1 = 1 และกลบไปทาในขนตอนท 2 คานวณ
c(1) = (2x1 – 2x2, 2x2 – 2x1 ) = (0,0) < ε ดงนน คาตอบคอ x(1) = (0.5,0.5) และ 1 2 2 1
f(x(1) ) = 0

Workshop 2
ฟ จงหาคาตาสดของฟงกชน
2 2( ) 2 4 2f x x x x x x= +r
1 2 1 1 2( ) 2 4 2f x x x x x x= + − −
โดยใหใชคาเดาเรมตน (1,1) ทาซาไปแค 2 ครง (k = 3)
Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineering
Lecture Lecture 77
โดยโดย
ผศ.ดร. มนตศกด พมสาร

ฟ ปการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลข (ตอ)ดวยวธการเชงตวเลข (ตอ)
1. วธ Steepest descent (พดไปแลว คราวทแลว)1. วธ Steepest descent (พดไปแลว คราวทแลว)
2. วธ Conjugate gradient (จะพดถงในวนน)
วธทงสองน เปนตวอยางวธการแกปญหาออฟตมม แบบไมมสมการบงคบ วธทงสองน เปนตวอยางวธการแกปญหาออฟตมม แบบไมมสมการบงคบ
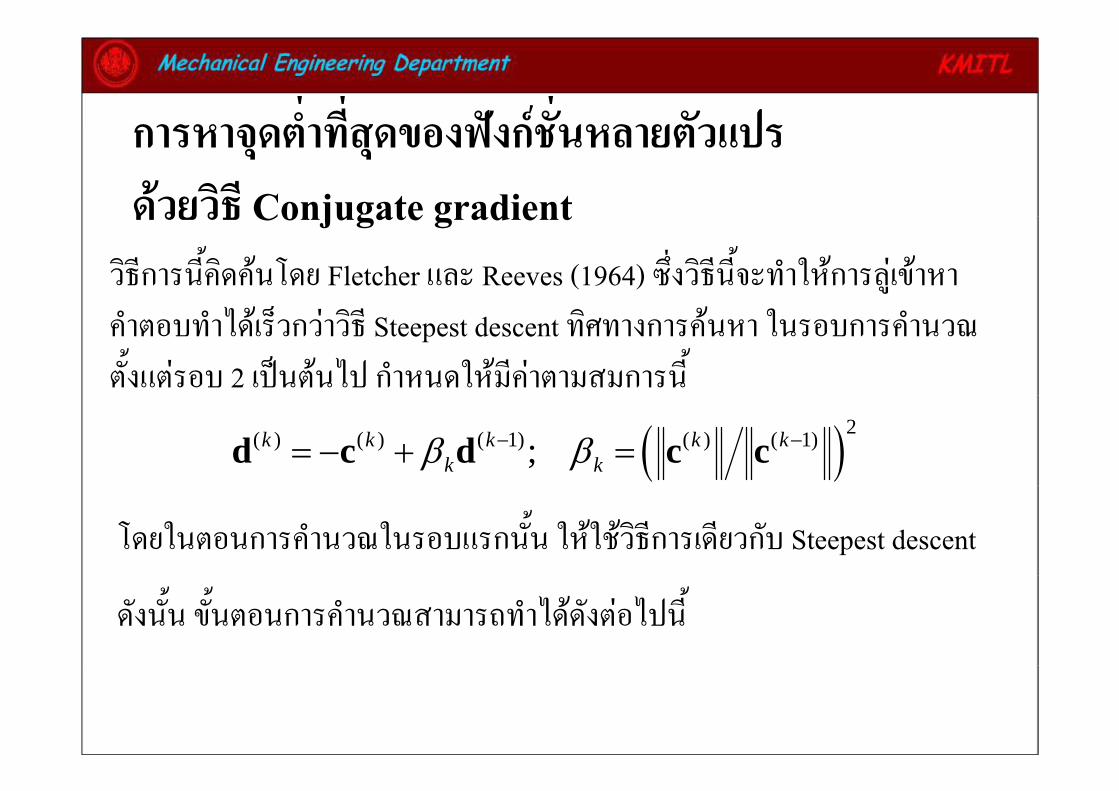
การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธ Conjugate gradientดวยวธ Conjugate gradient
วธการนคดคนโดย Fletcher และ Reeves (1964) ซงวธนจะทาใหการลเขาหา
คาตอบทาไดเรวกวาวธ Steepest descent ทศทางการคนหา ในรอบการคานวณ
ตงแตรอบ 2 เปนตนไป กาหนดใหมคาตามสมการน
( )2( ) ( ) ( 1) ( ) ( 1);k k k k kk kβ β− −= − + =d c d c c
โดยในตอนการคานวณในรอบแรกนน ใหใชวธการเดยวกบ Steepest descent
ดงนน ขนตอนการคานวณสามารถทาไดดงตอไปน

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธ Conjugate gradient (ตอ)ดวยวธ Conjugate gradient (ตอ)
ภาพแสดงทศทางการคนหาดวยวธ Steepest descent และ Conjugate gradientภาพแสดงทศทางการคนหาดวยวธ Steepest descent และ Conjugate gradient
d11

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธ Conjugate gradient (ตอ)ดวยวธ Conjugate gradient (ตอ)ขนตอนการคานวณ
( ) 1. ทาการคานวณ ตามขนตอนของวธ Steepest descent เพอหาคา x(1) จากนนเซต
k = 1
2. คานวณ c(k) = ∇f(x(k))
(k) ป (k) ไ ป ใ 3. คานวณ || c(k) || < ε ถาเปนจรง x(k) = x* คอคาตอบ ถาไมเปนจรงใหคานวณ
ในขนตอนตอไป
4. คานวณ ทศทางการคนหา(Search direction) จากสมการ
( )2( ) ( ) ( 1) ( ) ( 1)k k k k kβ βd d ( )( ) ( ) ( 1) ( ) ( 1);k k k k kk kβ β− −= − + =d c d c c

การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธ Conjugate gradient (ตอ)ดวยวธ Conjugate gradient (ตอ)
ขนตอนการคานวณ(ตอ)
5. คานวณหาขนาดของระยะกาว(step size), αk = α, ในทศทางการคนหา d(k)
ททาให f(x(k) + α d (k) ) มคาตาสด โดยใชวธอะไรกไดททาให f(x + α d ) มคาตาสด โดยใชวธอะไรกได
6. ปรบปรงคาตวแปรออกแบบ x(k+1) = x(k) + αk d(k) จากนนเซต k = k+1 และ
กลบไปทาในขนตอนท 2
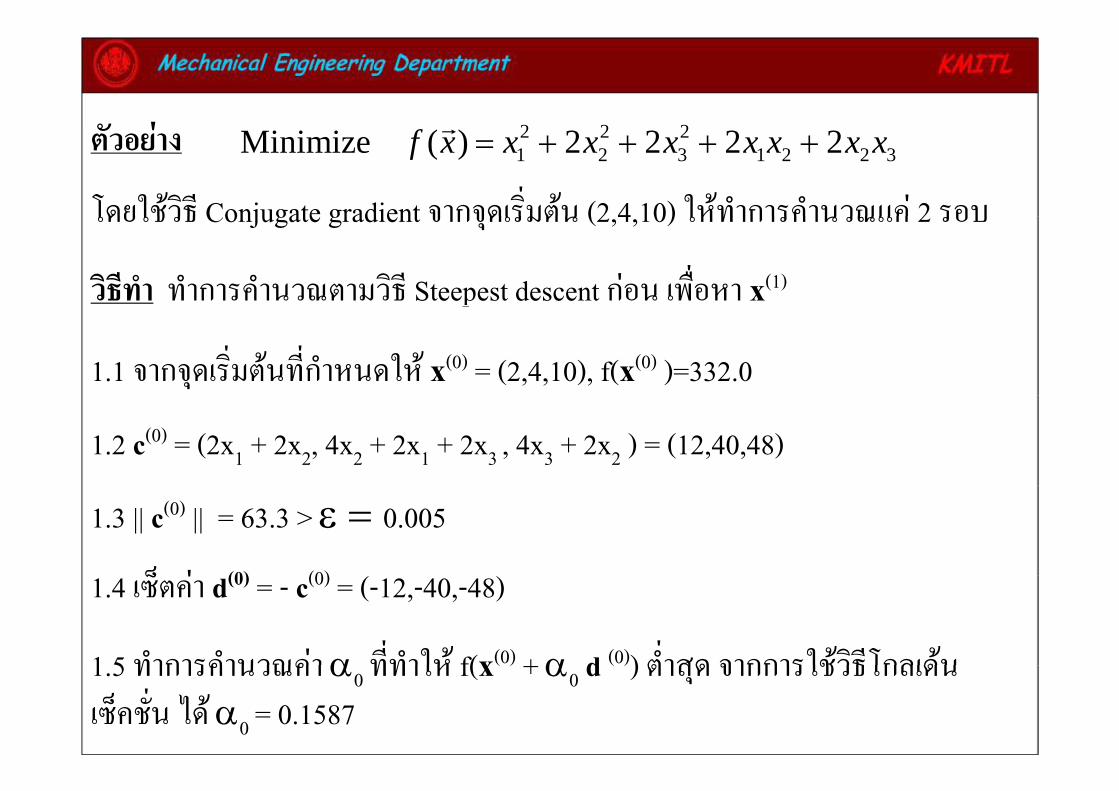
2 2 2ตวอยาง
โดยใชวธ Conjugate gradient จากจดเรมตน (2 4 10) ใหทาการคานวณแค 2 รอบ
2 2 21 2 3 1 2 2 3Minimize ( ) 2 2 2 2f x x x x x x x x= + + + +
r
โดยใชวธ Conjugate gradient จากจดเรมตน (2,4,10) ใหทาการคานวณแค 2 รอบ
วธทา ทาการคานวณตามวธ Steepest descent กอน เพอหา x(1)p
1.1 จากจดเรมตนทกาหนดให x(0) = (2,4,10), f(x(0) )=332.0
1.2 c(0) = (2x1 + 2x2, 4x2 + 2x1 + 2x3 , 4x3 + 2x2 ) = (12,40,48)
1.3 || c(0) || = 63.3 > ε = 0.005
(0) (0)1.4 เซตคา d(0) = - c(0) = (-12,-40,-48)
1 5 ทาการคานวณคา α ททาให f(x(0) + α d (0)) ตาสด จากการใชวธโกลเดน1.5 ทาการคานวณคา α0 ททาให f(x( ) + α0 d ( )) ตาสด จากการใชวธโกลเดน
เซคชน ได α0 = 0.1587

วธทา (ตอ)
1 6 ปรบปรงคาตวแปรออกแบบ x(1) = x(0) + α d(0) = (0 0956 -2 348 2 381) 1.6 ปรบปรงคาตวแปรออกแบบ x x + α0 d (0.0956, 2.348,2.381)
จากนนเซต k = 0+1 = 1 ทาในขนตอนท 2 ตอไป
2. c(1) = (-4.5, -4.438,4.828 ) และ f(x(1) ) = 10.75
3 || c(1) || 7 952 > ε ดงนนทาในขนตอนท 4 ตอ3. || c( ) || = 7.952 > ε ดงนนทาในขนตอนท 4 ตอ
4. β1 = (|| c(1) ||/|| c(0) ||)2 = (7.952/63.3)2 = 0.015633
(1) (1) (0)1
4.500 12 4.312414.438 (0.015633) 40 3.81268β
−⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥= − + = + =⎢ ⎥ ⎢ ⎥ ⎢ ⎥d c d1 4.438 (0.015633) 40 3.81268
4.828 48 5.57838β+ +⎢ ⎥ ⎢ ⎥ ⎢ ⎥
⎢ ⎥ ⎢ ⎥ ⎢ ⎥− − −⎣ ⎦ ⎣ ⎦ ⎣ ⎦
d c d
5 ทาการคานวณคา α ททาให f( (1) + α d (1)) ตาสด จากการใชวธโกลเดน5. ทาการคานวณคา α1 ททาให f(x(1) + α1 d (1)) ตาสด จากการใชวธโกลเดน
เซคชน ได α1 = 0.3156

วธทา (ตอ)
6 ปรบปรงคาตวแปรออกแบบ x(2) = x(1) + α d(1)6 ปรบปรงคาตวแปรออกแบบ x x + α1 d
0.0956 4.31241 1.4566⎡ ⎤ ⎡ ⎤ ⎡ ⎤⎢ ⎥ ⎢ ⎥ ⎢ ⎥(2) (1) (1)
1 2.348 (0.3156) 3.81268 1.14472.381 5.57838 0.6205
α ⎢ ⎥ ⎢ ⎥ ⎢ ⎥= + = − + = −⎢ ⎥ ⎢ ⎥ ⎢ ⎥⎢ ⎥ ⎢ ⎥ ⎢ ⎥−⎣ ⎦ ⎣ ⎦ ⎣ ⎦
x x d
จากนนเซต k = 1+1 = 2 ทาในขนตอนท 2 ในรอบใหม
2. c(2) = (0.6238, -0.4246,0.1926 )
3. || c(2) || = 0.7788 > ε ดงนนทาในขนตอนท 4 ตอ|| ||
4. β2 = || c(2) ||/|| c(1) ||2 = (0.7788 /7.952)2 = 0.0096 ถาทาตอไปจะไดคาตอบ
คาตอบ x* = (0,0,0), f(x* ) = 0

ป การเปรยบเทยบสมรรถนะของ วธ Steepest descent กบ
Conjugate gradient Conjugate gradient
2 2 22 1 1( ) 50( ) (2 )Minimize f x x x= − + −X 2 1 1
0 *
( ) 50( ) (2 )
(5, 5), 0.005, (2,4), ( ) = 0
Minimize f x x x
fε
+
= − = = *
X
X Answer X X
Workshop 1
ฟ จงหาคาตาสดของฟงกชน
2 2( ) 2 2 2f x x x x x x x= − + + +r
1 2 1 1 2 2( ) 2 2 2f x x x x x x x= − + + +
โดยใหใชคาเดาเรมตน (0,0)
คาตอบ จากการทาซาไปสามครง จะพบวา x* = (-1,1.5), f(x* ) = 1 ตวอยางน
x3 = x* นนคอเราจะทาซาแคสามครง กจะรคาตอบ โดยจะหยดเมอ เกรเดยน x3 = x นนคอเราจะทาซาแคสามครง กจะรคาตอบ โดยจะหยดเมอ เกรเดยน
เปนศนย (d(k) = 0)

ฟ ปการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธการเชงตวเลข สาหรบมสมการบงคบดวยวธการเชงตวเลข สาหรบมสมการบงคบ
1. วธ penalty function method
1) Interior penalty function method1) Interior penalty function method
2) Exterior penalty function method

ปรปแบบของ Multi-variable optimization
with equality and inequality constraints (ทบทวน)with equality and inequality constraints (ทบทวน)
ปญหาแบบนสามารถเขยนสมการไดญ
1 2Minimize ( , , )Subject to
nf x x xK
Subject to( ) , 1,2,...,
( ) 1 2j j m
k
≤ =g X 0
h X 0
1
( ) , 1,2,...,k k px
= =
⎧ ⎫⎪ ⎪⎪ ⎪
h X 0
2 Design variable vectorx⎪ ⎪
⎪ ⎪= =⎨ ⎬⎪ ⎪⎪ ⎪
XM
nx⎪ ⎪⎩ ⎭
การหาจดตาทสดของฟงกชนหลายตวแปรการหาจดตาทสดของฟงกชนหลายตวแปร
ดวยวธ Penalty function methodดวยวธ Penalty function method
วธการนเปนการเปลยนรปปญหาจากแบบมสมการบงคบ(Constrained)ไปเปน
ปญหาแบบไมมสมการบงคบ(Unconstrained) จากนนทาการแกปญหาโดยใช
วธการแกปญหาแบบไมมสมการบงคบ อยางไรกตาม โดยวธนแบงยอย
ออกเปน 2 แบบ
1. Interior penalty function method
2. Exterior penalty function method

1. Interior penalty function method
วธการนเปนการเปลยนรปปญหามดงน สมมตสมการบงคบ เปนแบบสมการ
เครองหมายไมเทากบ(Inequality constraints)
Find X which minimizes f(X)
Subject to
gj (X) ≤ 0, j = 1, 2, 3, …,mgj , j , , , ,
เปลยนไปเปน
1m
1
1( , ) ( )( )
m
k kj j
r f rg
φ φ=
= = − ∑X XX
φrk = คาคงท (penalty parameter) > 0, ขอสงเกต φ > f (X)
1. Interior penalty function method (ตอ)
ตวอยาง Find X ={x1} which minimizes f(X) = α x1
Subject toSubject to
g1 (X) = β - x1 ≤ 0,
เปลยนไปเปน
( ) krφ φ X 11
( , ) kk kr x
xφ φ α
β= = −
−X
จากนนทาการแกปญหาโดย ใชวธการแกปญหาแบบไมมสมการบงคบ โดย
ทาการเปลยนคา rk (rk > rk+1) ทาจนกระทงคาคาตอบลเขาหรอแทบจะไมทาการเปลยนคา rk (rk rk+1) ทาจนกระทงคาคาตอบลเขาหรอแทบจะไม
เปลยนแปลง ดกราฟในรป

การลเขาหาคาตอบจาก
ดานใน(Interior)
พนทดานในของ พนทออกแบบ พนทดานในของ พนทออกแบบ
(Design space)

1. Interior penalty function method (ตอ)
โ ใ ขนตอน 1. เรมตนการคนหาคาตอบดวย X1 โดยคานอยภายในพนทการ
ออกแบบ (หรอ ตองอยภายใตเงอนไขของสมการบงคบทกสมการ, gj (X) ≤ 0, j
j = 1, 2, 3, …, m) และกาหนด r1 > 0 กาหนด k = 1
φ โ ใ ไ 2. ทาการหาคาตาสด φ (X, rk) โดยใชวธการหาคาตาสดแบบไมมสมการบงคบ
ซงไดคาตอบ X*k
3. ทาการทดสอบดวาคา X*k คอคาคาตอบตาสดของปญหาเรมตนจรงหรอไม
ถาจรงกยอมรบคาตอบน ถาไมจรง ใหทาในขนตอนตอไป (ขนตอนท 4)ถาจรงกยอมรบคาตอบน ถาไมจรง ใหทาในขนตอนตอไป (ขนตอนท 4)
* * 1/ 22 2 21( ) ( ) ( ) ( ) ( )k kf f orε ε−− ⎡ ⎤≤ Δ + Δ + + Δ ≤⎣ ⎦X X X X X
วธการเชค1 1 2 n 2* ( ) ( ) ... ( )
( )k
orf
ε ε⎡ ⎤≤ Δ + Δ + + Δ ≤⎣ ⎦X X XXการลเขา

1. Interior penalty function method (ตอ)
ขนตอน 4. ทาการหาคา rk+1 (Next penalty parameter) โดย
กาหนด rk+1 = crk c < 1 (0.1, 0.2 or 0.5)
* ไป โ5. เซตคา k = k +1, จากนนกาหนดจดเรมตน X1 = X*k และกลบไปทาซา โดย
เรมตนในขนตอนท 2

1 Interior penalty function method (ตอ)1. Interior penalty function method (ตอ)
31Mi i i ( ) ( 1)f + + 31 2 1 2Minimize ( , ) ( 1)
3Subject to
f x x x x= + +ตวอยาง
1 1 2 1
2 1 2 2
g ( , ) 1 0g ( , ) 0
x x xx x x
= − + ≤= − ≤
วธทา ทาการเปลยนรปแบบปญหาไปเปน
31 2
1 2
1 1 1( , ) ( 1)3 1
r x x rx x
φ⎛ ⎞
= + + − −⎜ ⎟− +⎝ ⎠X
⎝ ⎠
ทาการแกปญหาโดยใชวธแคลคลส หรอ first order necessary condition ได
สมการดงน

rφ∂ 2 2 21 12
1 1
2
( 1) 0, that is, ( 1)(1 )
rx x rx x
r
φ
φ
∂= + − = − =
∂ −∂ 2
222 2
1 0, that is,
These equations give
r x rx xφ∂
= − = =∂
* 1/ 2 1/ 2 * 1/ 21 2
1/ 2 1/ 2 2 1/ 2
These equations give( ) ( 1) , ( )
1 1x r r x r r= + =
1/ 2 1/ 2 2 1/ 2min 3/ 2 2 1/ 2
1 1( ) [( 1) 1] 23 (1/ ) (1/ 1/ )
r r rr r r
φ = + + + −− +
ถาตองการหาคาตอบของปญหาเรมตน เราตองทาดงนถาตองการหาคาตอบของปญหาเรมตน เราตองทาดงน
min min0lim ( )f rφ=min min0
* *1 10
( )
lim ( )r
r
f
x x r
φ→
→=
* *2 20
lim ( )r
x x r→
=

ผลลพธทไดเมอทาการเปลยนคา r

1. Interior penalty function method (ตอ)
Normalization of constraints วธการนมขอควรระวงอกอยางเกยวกบ สมการ
บงคบทมสเกล แตกตางกนเชน ในการออกแบบเชงออฟตมมของโครงสราง
1 max( ) ( ) 0 (1)( ) ( ) 0 (2)
gg
δ δσ σ
= − ≤≤
X XX X2 max( ) ( ) 0 (2)g
whereσ σ= − ≤X X
max
max
0.5 in20,000 psi
δσ
==
สมมต ถา X1 ใหคา g1 และ g2 เทากบ -0.2 และ -10,000 ดงนนคาของ g2 จะมคา
มากกวา g ถง 1 x 104 เทา ในคาของ φ ดงนนเพอลดความแตกตาง วธการมากกวา g1 ถง 1 x 10 เทา ในคาของ φ ดงนนเพอลดความแตกตาง วธการ
แกไขคอการ Normalize สมการเสยกอน ทาใหไดสมการบงคบใหม ดงน

1. Interior penalty function method (ตอ)
11
( ) ( )( ) 1 0 (1 )gg δδ δ
′ ′= = − ≤X XX
max max
22
( ) ( )( ) 1 0 (2 )gg
δ δσ
σ σ′ ′= = − ≤
X XXmax maxσ σ
เมอทาการ Normalize สมการเสยกอน จะทาใหไมเกดปญหาของคาความญ
แตกตางของทงสองสมการมากเหมอนทผานมา
2. Exterior penalty function methodวธการนเปนการเปลยนรปปญหามดงน สมมตสมการบงคบ มเพยงแบบสมการวธการนเปนการเปลยนรปปญหามดงน สมมตสมการบงคบ มเพยงแบบสมการ
เครองหมายไมเทากบ
1
( , ) ( ) ( )qm
k k jj
r f r gφ φ= = + ∑X X X1j=
rk = คาคงท (penalty parameter) > 0, q > 0 (นยมใช q = 2) สวน ⟨ gj(X) ⟩ม
j
นยามดงน( ) max ( ),0j jg g=X X
( ), ( ) 0 (constraint is violated)0, ( ) 0 (constraint is satisfied)
j j
j j
j
g gg
>⎧= ⎨ ≤⎩
X XX, ( ) ( )jg⎩

2. Exterior penalty function method (ตอ)
ตวอยาง Find X ={x1} which minimizes f(X) = α x1
Subject toSubject to
g1 (X) = β - x1 ≤ 0,
เปลยนไปเปน
221 1( , ) max( ,0)k k kr x r xφ φ α β= = + −X
จากนนทาการแกปญหาโดย ใชวธการแกปญหาแบบกอนหนานแบบไมม
สมการบงคบ โดยทาการเปลยนคา rk (rk < rk+1) ทาจนกระทงคาคาตอบสมการบงคบ โดยทาการเปลยนคา rk (rk rk+1) ทาจนกระทงคาคาตอบ
ลเขาหรอแทบจะไมเปลยนแปลง ดกราฟในรป
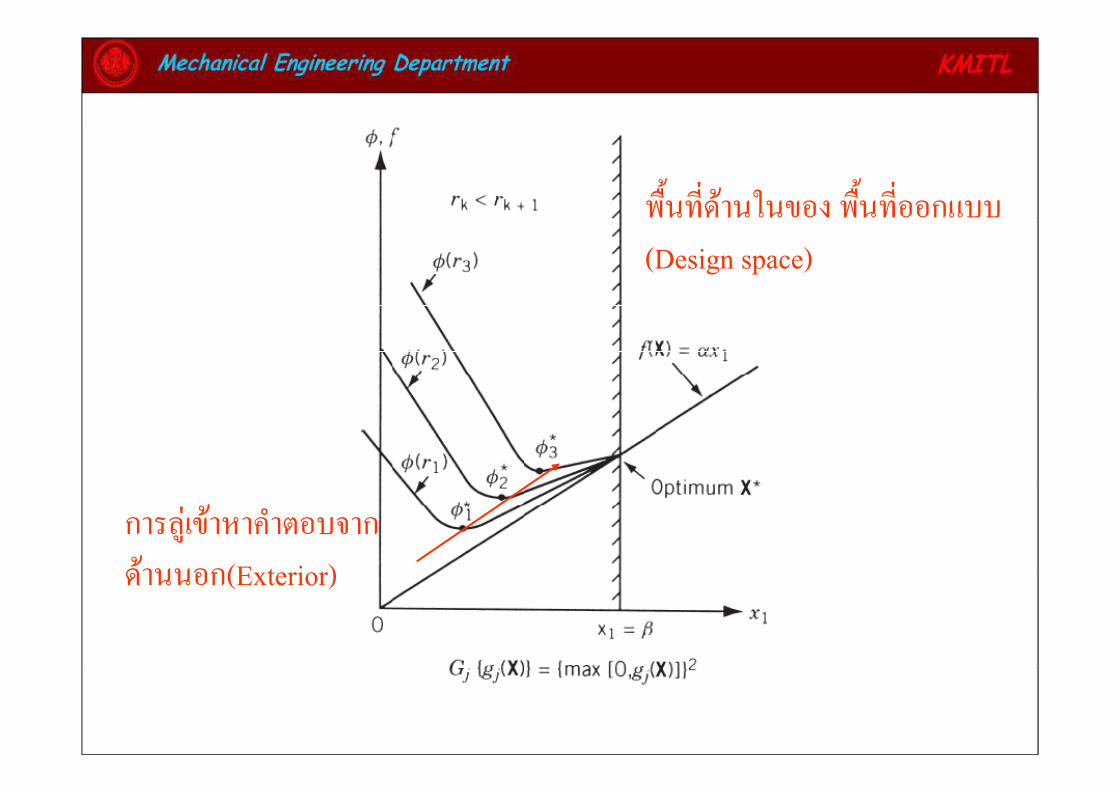
พนทดานในของ พนทออกแบบ พนทดานในของ พนทออกแบบ
(Design space)
การลเขาหาคาตอบจาก
ดานนอก(Exterior)ดานนอก(Exterior)

2. Exterior penalty function method (ตอ)
โ ใ ขนตอน 1. เรมตนการคนหาคาตอบดวย X1 โดยคานอยภายในหรอภายนอก
พนทการออกแบบ (ไดทกกรณ) และกาหนดคา r1 > 0 กาหนด k = 11
2. ทาการหาคาตาสด φ (X, rk) โดยใชวธการหาคาตาสดแบบไมมสมการบงคบ
ไ ซงไดคาตอบ X*k
3 ทาการทดสอบดวาคา X* คอคาคาตอบตาสดของปญหาเรมตนจรงหรอไม 3. ทาการทดสอบดวาคา X k คอคาคาตอบตาสดของปญหาเรมตนจรงหรอไม ถาจรงกยอมรบคาตอบน ถาไมจรง ใหทาในขนตอนตอไป (ขนตอนท 4)
* * 1/ 22 2 21( ) ( ) ( ) ( ) ( )k kf f orε ε−− ⎡ ⎤≤ Δ + Δ + + Δ ≤⎣ ⎦X X X X X
วธการเชค1 1 2 n 2* ( ) ( ) ... ( )
( )k
orf
ε ε⎡ ⎤≤ Δ + Δ + + Δ ≤⎣ ⎦X X XXการลเขา
2. Exterior penalty function method (ตอ)
4. ทาการหาคา rk+1 (Next penalty parameter) โดย
กาหนด rk+1 = crk c > 1
* ไป โ5. เซตคา k = k +1, จากนนกาหนดจดเรมตน X1 = X*k และกลบไปทาซา โดย
เรมตนในขนตอนท 2

2 Exterior penalty function method (ตอ)2. Exterior penalty function method (ตอ)3
1 2 1 21Minimize ( , ) ( 1)3
f x x x x= + +ตวอยาง 1 2 1 23Subject to
g ( ) 1 0x x x= + ≤1 1 2 1
2 1 2 2
g ( , ) 1 0g ( , ) 0
x x xx x x
= − + ≤= − ≤
วธทา ทาการเปลยนรปแบบปญหาไปเปน
[ ] [ ]2 231( ) ( 1) (0 1) (0 )φ X [ ] [ ]31 2 1 2( , ) ( 1) max(0, 1) max(0, )
3r x x r x r xφ = + + + − + + −X
ป โ ใ fi d di i ไ ทาการแกปญหาโดยใชวธแคลคลส หรอ first order necessary condition ได
สมการดงน
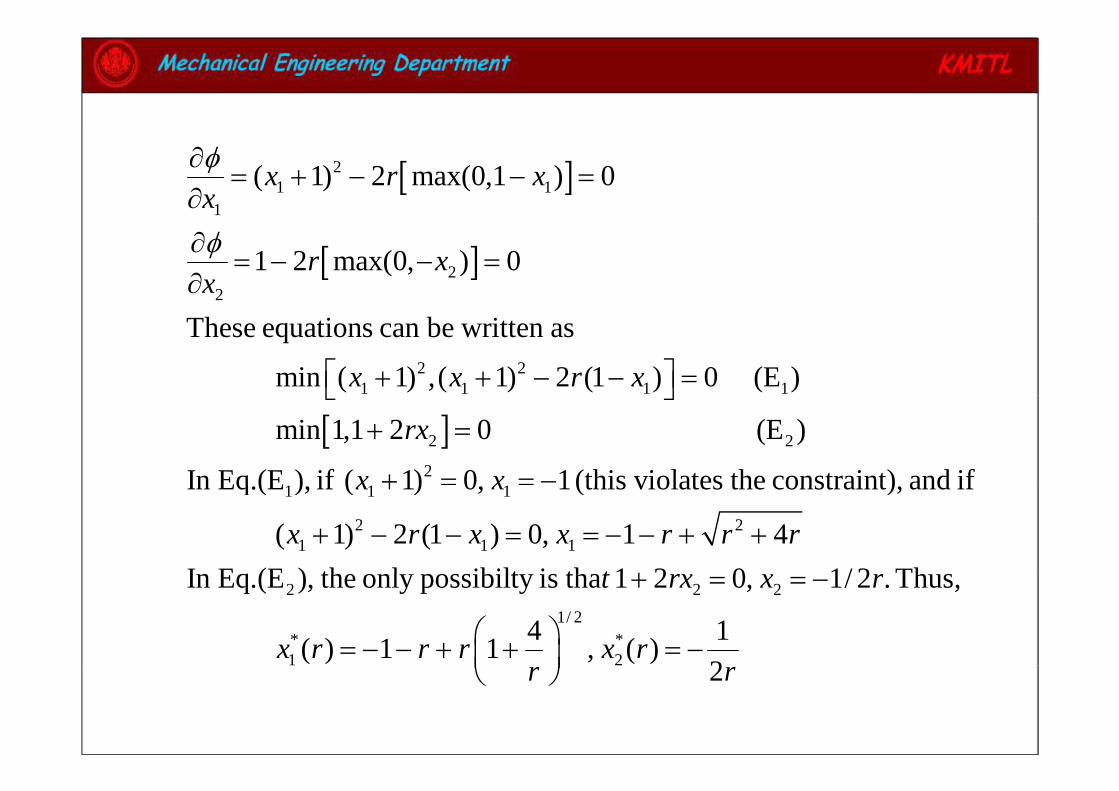
[ ]21 1
1
( 1) 2 max(0,1 ) 0x r xxφ∂
= + − − =∂
[ ]22
1 2 max(0, ) 0r xxφ∂
= − − =∂
2 21 1 1 1
These equations can be written as
min ( 1) ,( 1) 2 (1 ) 0 (E )x x r x⎡ ⎤+ + − − =⎣ ⎦[ ]2 2
21 1 1
min 1,1 2 0 (E )
In Eq (E ) if ( 1) 0 1(this violates the constraint) and if
rx
x x
⎣ ⎦+ =
+ = = −1 1 1
21
In Eq.(E ), if ( 1) 0, 1(this violates the constraint), and if
( 1)
x x
x
+
+ 21 12 (1 ) 0, 1 4
In Eq (E ) the only possibilty is tha 1 2 0 1/ 2 Thusr x x r r r
t rx x r− − = = − − + +
+2 2 21/ 2
* *1 2
In Eq.(E ), the only possibilty is tha 1 2 0, 1/ 2 . Thus,
4 1( ) 1 1 , ( )2
t rx x r
x r r r x r
+ = = −
⎛ ⎞= − − + + = −⎜ ⎟⎝ ⎠
1 2 2r r⎜ ⎟⎝ ⎠

ถาตองการหาคาตอบของปญหาเรมตน เราตองทาดงน
min min0
* *
8lim ( )3r
f rφ→
= =
* *1 10
* *2 2
lim ( ) 1
lim ( ) 0r
x x r
x x r→
= =
= =2 20( )
r→
ซงคาตอบของปญหา สามารถดพฤตกรรมการลขาหาคาตอบไดจากตาราง
ในหนาถดไป

ผลลพธทไดเมอทาการเปลยนคา r
ขอสงเกต ทผานมาสมการบงคบไดถกสมมตใหเปนสมการแบบ
เครองหมายไมเทากบเทานน (Inequality constraint) ถาหากปญหามทง
สมการบงคบแบบเครองหมายเทากบและไมเทากบ หรอปญหาเปน
ดงนดงน
1 2Minimize ( , , )Subject to
nf x x xK
Subject to( ) , 1, 2,...,
( ) 1 2j j m
l
≤ =g X 0
X 0( ) , 1, 2,...,jl j p= =X 0
ดงนนสมการของการเปลยนรปของทงสองวธทไดกลาวมาแลวจะมรปแบบ
อยางไรอยางไร
1 Interior penalty function method1. Interior penalty function method
1 1 pm
∑ ∑
วธการนรปแบบปญหามดงน เมอทาการเพม penalty function เขาไปแลว จะได
2
1 1
1 1( , ) ( ) ( )( )k k j
j jj k
r f r lg r
φ φ= =
= = − +∑ ∑X X XX
2. Exterior penalty function method
วธการนรปแบบปญหามดงน เมอทาการเพม penalty function เขาไปแลว จะได
222
1 1( , ) ( ) ( ) ( )
pm
k k j k jj j
r f r g r lφ φ= =
= = + +∑ ∑X X X X
Workshop 2
ฟ φจงทาการสรางฟงกชน φ ของปญหา
1 1Minimize ( ) 2f x x= −1 1Minimize ( ) 2Subject to
2 10
f x x
x≤ ≤12 10x≤ ≤
โดยใหใชวธโดยใหใชวธ
1. Interior penalty function
2 E t i lt f ti2. Exterior penalty function
จากนนทาการ เปลยนคา rk สก 2 คาแลวพลอตกราฟของ ฟงกชน φ

Workshop 3
ปจงหาคาตาสดของปญหา
21 1 1Minimize ( ) 2 1f x x x= − −1 1 1Minimize ( ) 2 1
Subject to1 0
f x x x
x− ≥11 0x ≥
โดยใหใชวธ Interior penalty function รวมกบวธของแคลคลส ทใชแกปญหาโดยใหใชวธ Interior penalty function รวมกบวธของแคลคลส ทใชแกปญหา
ออฟตมมแบบไมมสมการบงคบ

โป ( )โปรเจค(การเตรยมตว)
ใ โป โ ใ ไป คาสง ใหจบกลมเพอทาโปรเจค โดยใหมคณะทางาน กลมละ 1 คน ไปคดหาปญหามาหรอหาจาก Textbook หรอ Paper เพอนามาจดทาเปน
ใ ป รายงาน ดงตวอยางทแจกในหอง ขอกาหนดปญหามดงน
1 . จานวนตวแปรของการออกแบบตองไมนอยกวา 2 ตว
2. ทาการแกปญหา โดยการใชโปรแกรม Matlab
3 สมการบงคบ ตองมมากเพยงพอ 3. สมการบงคบ ตองมมากเพยงพอ
4. ในการเขยนรายงานตองสามารถระบ ทมาของสมการได (ตองพสจนมา ใหดดวย ดตวอยางในรายงานตวอยาง)
5. เมอไดคาตอบ ควรนาคาตอบมาเชคในสมการบงคบ วา เปนจรงหรอไม
Optimum DesignOptimum DesignOptimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineering
Lecture Lecture 88
โดยโดย
ผศ.ดร. มนตศกด พมสาร
Multi-criterion optimization
1. Size (Parameter) optimization
2. Topology optimization
3. Topography optimization
4. Shape optimization
เปนการหาคาทเหมาะสมทสด โดยการวเคราะห จะตองใชวธการของไฟเปนการหาคาทเหมาะสมทสด โดยการวเคราะห จะตองใชวธการของไฟไนตเอลเมนตมาชวยในการวเคราะห มการใชกนมากในการออกแบบโครงสรางโครงสราง

Finite Element-Based Optimization
1. Size (Parameter) optimization
2. Topology optimization
3. Topography optimization
4. Shape optimization
เปนการหาคาทเหมาะสมทสด โดยการวเคราะห จะตองใชวธการของไฟเปนการหาคาทเหมาะสมทสด โดยการวเคราะห จะตองใชวธการของไฟไนตเอลเมนตมาชวยในการวเคราะห มการใชกนมากในการออกแบบโครงสรางโครงสราง
Size(Parametric) Optimization ในงานดานโครงสราง
ตวอยาง ออกแบบโครงสรางชสซรถบส(Boada, et al.,2007) ใหมมวลนอย
ทสดและ ทอรชนสตฟเนตสงสดโดยใชคานหนาตดแบบสเหลยมกลวง
และใหตวแปรความหนาเปนตวแปรออกแบบ สมการบงคบคอ ความ
เคนตองนอยกวาความเคนครากหารดวยตวประกอบความปลอดภย ไฟเคนตองนอยกวาความเคนครากหารดวยตวประกอบความปลอดภย ไฟ
ไนตเอลเมนตโปรแกรมทใชคอ ANSYS

FEM Modelตวแปรออกแบบ
t1,t2,t3,t4,t5,t6,t7,t8

การออกแบบใช Genetic
algorithm เปนตว Optimizeralgorithm เปนตว Optimizer
เพราะฟงกชนเปาหมายเปน
แบบ Implicit

Topology Optimization ในงานดานโครงสราง
ตวอยาง การออกแบบปรบปรง คนโยกกลไกคลทซ เพอใหมอายการใชงานท ตวอยาง การออกแบบปรบปรง คนโยกกลไกคลทซ เพอใหมอายการใชงานท
นานขน(Kaya, et al., 2010) โดยเปาหมายคอการเพมคาสตฟเนตของ
ไ ชนสวน ผลการออกแบบสามารถลดมวลของชนสวนได 24% และคา
ความเคนสงสดลงได 9% โดยใชกรรมวธ Topology และ Shape
optimization
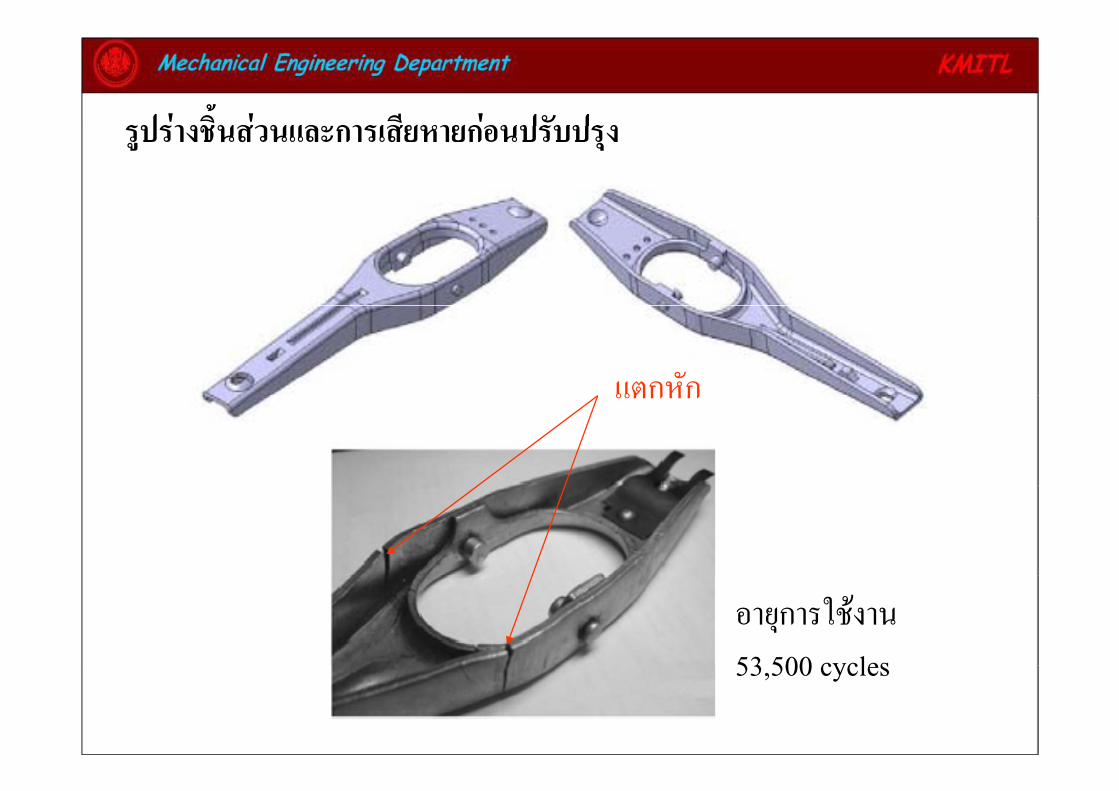
รปรางชนสวนและการเสยหายกอนปรบปรงรปรางชนสวนและการเสยหายกอนปรบปรง
แตกหกแตกหก
อายการใชงาน
53 500 cycles53,500 cycles
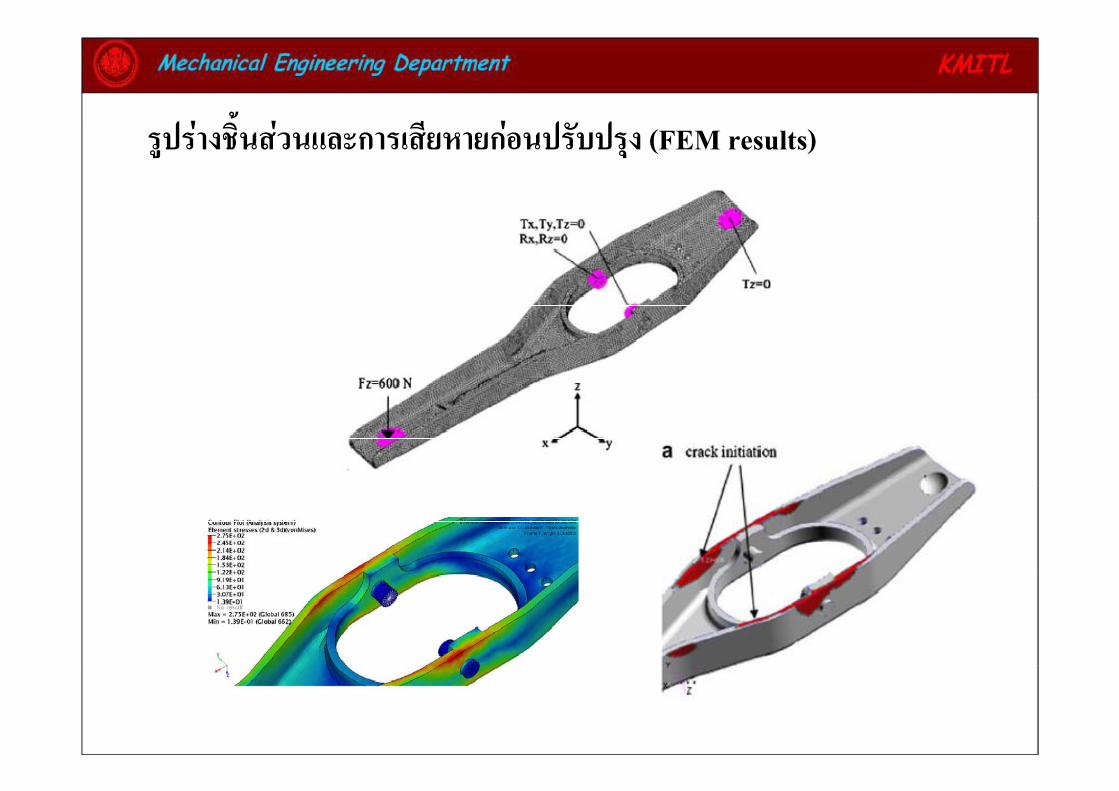
ป ป ปรปรางชนสวนและการเสยหายกอนปรบปรง (FEM results)
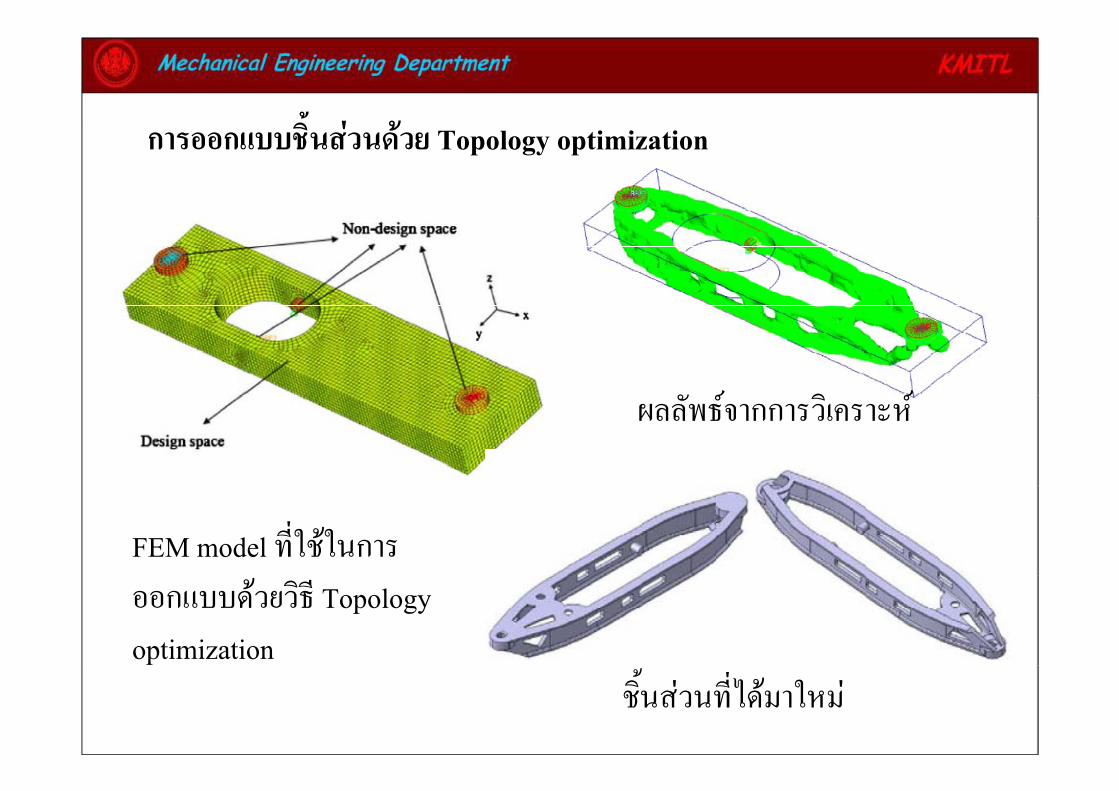
การออกแบบชนสวนดวย Topology optimization
ผลลพธจากการวเคราะห
FEM model ทใชในการ
ออกแบบดวยวธ Topology
optimization
ชนสวนทไดมาใหม
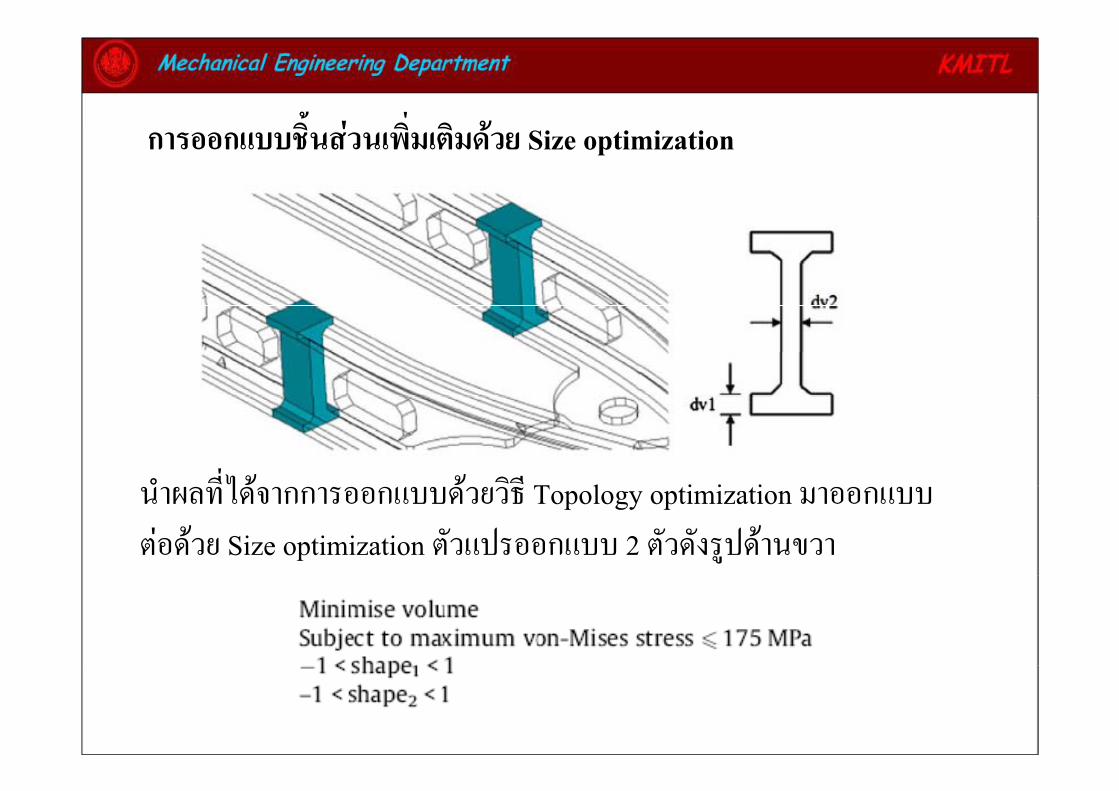
การออกแบบชนสวนเพมเตมดวย Size optimization
ไ T l i i i นาผลทไดจากการออกแบบดวยวธ Topology optimization มาออกแบบ
ตอดวย Size optimization ตวแปรออกแบบ 2 ตวดงรปดานขวา

ใ โ Topography Optimization ในงานดานโครงสราง
ตวอยาง การออกแบบปรบปรงความถธรรมชาตของ Oil ตวอยาง การออกแบบปรบปรงความถธรรมชาตของ Oil pan
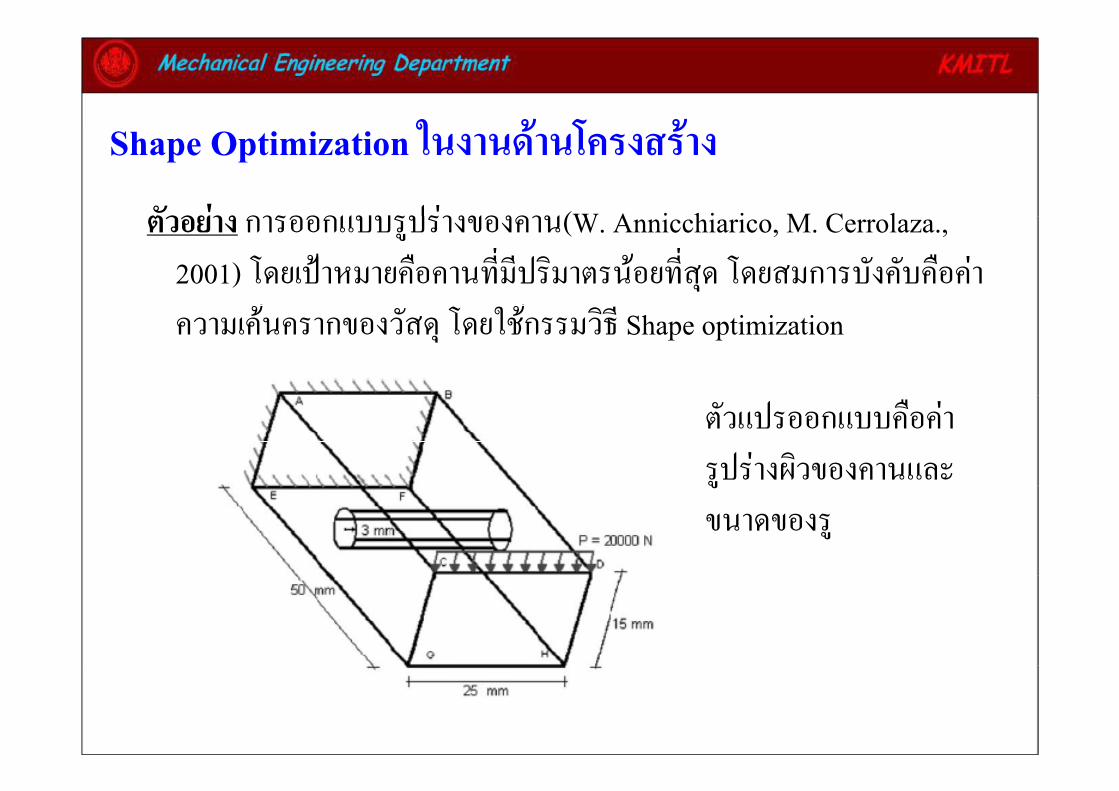
ใ โ Shape Optimization ในงานดานโครงสราง
ตวอยาง การออกแบบรปรางของคาน(W A i hi i M C l ตวอยาง การออกแบบรปรางของคาน(W. Annicchiarico, M. Cerrolaza.,
2001) โดยเปาหมายคอคานทมปรมาตรนอยทสด โดยสมการบงคบคอคา
ความเคนครากของวสด โดยใชกรรมวธ Shape optimization
ตวแปรออกแบบคอคา
รปรางผวของคานและ
ขนาดของร
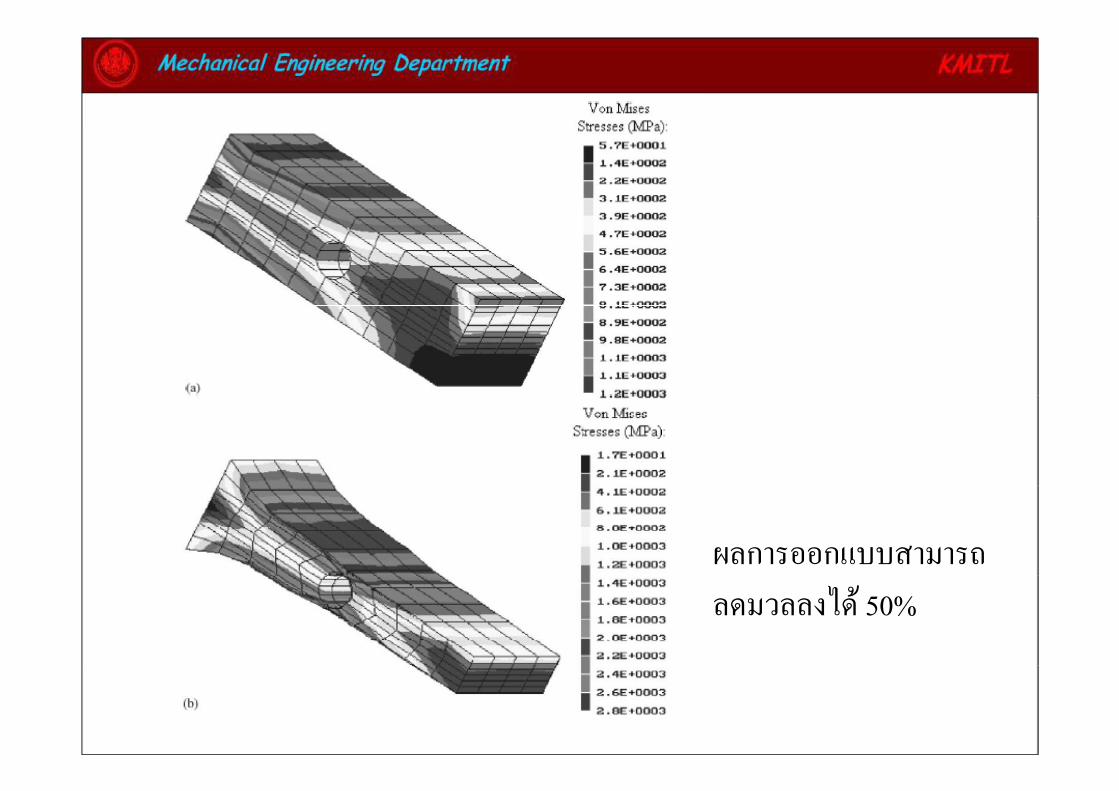
ผลการออกแบบสามารถ
ลดมวลลงได 50%

Optimum DesignOptimum Designin Mechanical Engineeringin Mechanical Engineeringin Mechanical Engineeringin Mechanical Engineering
Lecture 9Lecture 9Lecture 9Lecture 9MultiMulti--Objective OptimizationObjective OptimizationMultiMulti Objective OptimizationObjective Optimization
โดยโดย
ผศ.ดร. มนตศกด พมสาร
Multi-objective optimization(MOO)
• ทผานมาจะเหนวาในการออกแบบนนเรามฟงกชนเปาหมายเพยงเปาหมายเดยว( i l bj ti f ti SO) ตวอยางเชนการออกแบบเพอลดเดยว(single objective function, SO) ตวอยางเชนการออกแบบเพอลดนาหนกโครงสรางหรอชนสวนทางกล เปนตน แตในทางปฎบตนนการออกแบบสามารถมหลายเปาหมายได เชน นอกจากออกแบบเพอลดนาหนกออกแบบสามารถมหลายเปาหมายได เชน นอกจากออกแบบเพอลดนาหนกแลว เปาหมายยงตองการใหโครงสรางหรอชนสวนทางกลมความแขงแรง ป ป เพมมากขนดวย เปนตน ปญหาลกษณะดงกลาวนเรยกวา การหาคาท
เหมาะสมทสดแบบหลายเปาหมาย (multi-objective optimization, MOO)
• ดงนนการหาผลเฉลยของปญหาแบบนจะมความแตกตางจากการหาผลเฉลยของปญหาแบบมฟงกชนเปาหมายเดยว
หลกการพนฐานของ MOO
ไป ป • ถาเราตองการเดนทางไปทองเทยวตางประเทศดวยเครองบน : ดงนนเราควรจะหาซอตวเครองบนทราคาถกทสด(แตตองมการเปลยนเครองบอย) ? หรอ
ใ ใ ควรจะซอตวทใชระยะเวลาในการบนนอยทสด(แตราคาตวมกจะแพง)?
• การซอตว กอใหเกด เปาหมายของการซอสองเปาหมาย เหตผลของการ ตดสนใจ จรงๆแลว อาจจะมเงอนไขอนมารองรบ เชน ถาไมชอบนง
เครองบนนานๆ(เพราะแกแลว)และมฐานะ กอาจจะเลอก ตวทใชเวลาบนนอยทสด แตถาเปนวยรน นงนานไดและมกจะไมมเงนมาก กจะเลอกตวราคาถกทสด
• แตถาอยากไดตวทถกทสดและใชเวลาบนนอยทสด ตอบสนองทงสองเปาหมาย ในความเปนจรงอะไรจะเกดขน?เปาหมาย ในความเปนจรงอะไรจะเกดขน?
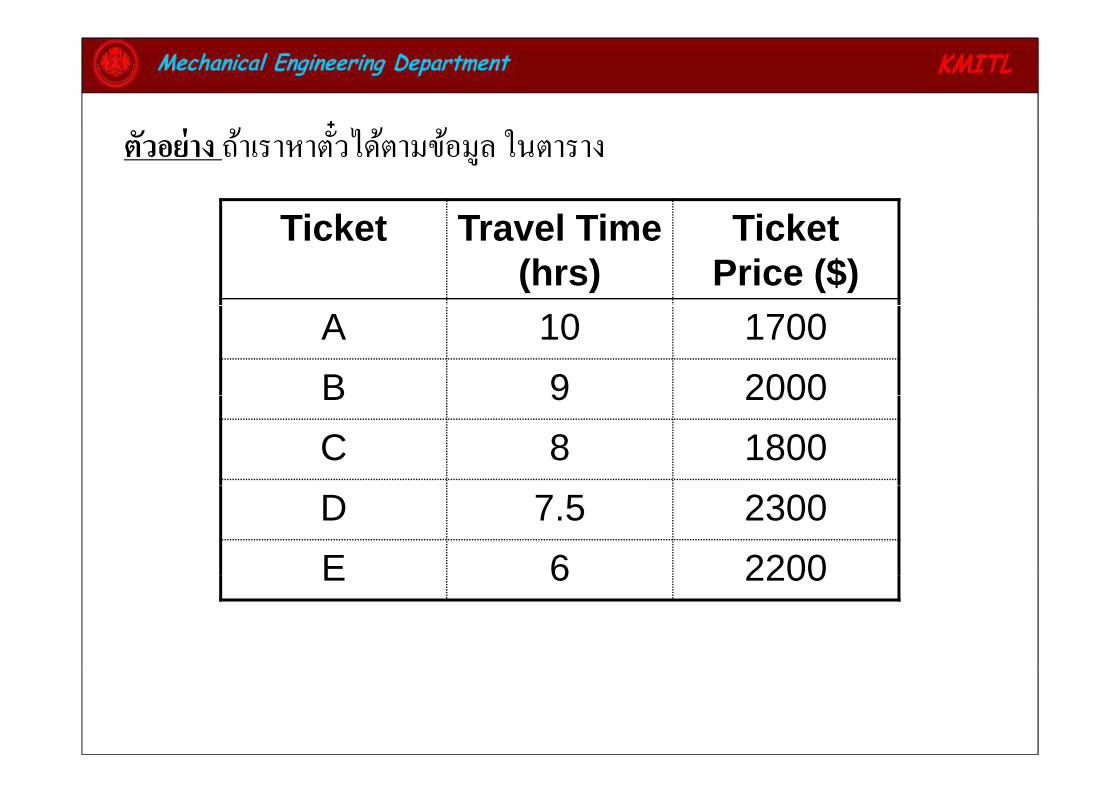
ตวอยาง ถาเราหาตวไดตามขอมล ในตาราง
Ti k t T l Ti Ti k tTicket Travel Time (hrs)
Ticket Price ($)
A 10 1700B 9 2000B 9 2000C 8 1800D 7.5 2300E 6 2200E 6 2200

ป ไ • ถาเราเปรยบเทยบตว A กบ B จะเหนวาไมสามารถ ตอบสนองทงสองเปาหมายได
• ถาเปรยบเทยบตว B กบ C จะพบวาตว C สามารถ ตอบสนองทงสองเปาหมายได ดงนนตว C ดกวา B หรอครอบงา B ( C dominates B)
• ดงนน ถาเรามตวสองทางเลอก B กบ C เรากตองเลอก C แนนอน แตในทนเรามทางเลอกอนอกเรามทางเลอกอนอก
• จากตาราง เราจะเหนวา ตว E ดกวา D หรอครอบงา D ( E dominates D)
• จะเหนวาทางเลอก A, C และ E จะเปนทางเลอกทมผลใหเกดการไดอยางเสยอยาง(trade off) ในเปาหมายทตงไว เราเรยกชดคาตอบนวา เปนชดคาตอบท
ไมมใครดกวากนหรอชดคาตอบทไมมการครอบงา (non-dominated solution set)

ฟ กราฟของคาตอบ
Plane Ticket Options
5000 Feasible Region(บรเวณท
3000
4000
e ($
) D B
g (
หาคาตอบได)
1000
2000Pric
e
AE C
B
00 5 10 15 20 25
Flight Time (hrs)
Pareto front (ขอบหนาพาเรโตตงชอตาม Vilfredo
Pareto นกเศรษฐศาสตรชาวอตาล)

• คาตอบทอยบนเสนขอบหนาพาเรโตคอคาตอบทไมมใครดกวากน
หรอไมมใครครอบงาใคร(non-dominate solution) และเรยกวาเปน ( )
Pareto optimal set หรอเซตของผลเฉลยเหมาะทสดแบบพาเรโต
• คาตอบทอยดานในขอบหนาพาเรโตคอคาตอบทถกครอบงาดวยคาตอบ
บนเสนขอบพาเรโต เพราะคาตอบบนเสนขอบพาเรโตจะมอยางนอยทสด
หนงเปาหมายทดกวาเสมอ
• คาถามตอไป แลวเราจะเลอกคาตอบไหนบนเสนขอบหนาพาเรโต?
โดยทวไปกตองมเงอนไขเพมเตมจงจะตดสนใจไดในทสด

ฟ ปการหาคาทเหมาะทสดแบบหลายฟงกชนเปาหมาย
• ในแงของการออกแบบหรอปญหาจรงๆในทางปฏบต สมการเปาหมายของ
เรายงตองขนอยกบตวแปรอนๆอกมากมาย ไมงายเหมอนตวอยางการซอเรายงตองขนอยกบตวแปรอนๆอกมากมาย ไมงายเหมอนตวอยางการซอ
ตวเครองบนกอนหนาน
• ดงนนในหวขอนจะนาเสนอปญหางายๆ ใหเหนเปนรปธรรมมากขน และ
นาเสนอวธการสรางเสนขอบหนาพาเรโต วามกรรมวธการสรางอยางไร
• หลงจากเขาใจตวอยางนแลว หวขอตอไปจะนาเสนอการแกปญหา เพอหา
ผลเฉลยของการออกแบบ ดวยวธการตางๆ

ปทมาของปญหา
ผลตภณฑ Y แตละหนวยของมนตองใชเวลาในการผลตทสวนการผลตขนผลตภณฑ Y แตละหนวยของมนตองใชเวลาในการผลตทสวนการผลตขน
แรก 2 ชวโมง และใชเวลา 1 ชวโมง ในขนตอนการผลตทสอง ในขณะทแต
ใ ใ ใ ละหนวยของผลตภณฑ Z ตองใชเวลาในการผลตในขนตอนแรกและ
ขนตอนทสอง 3 ชวโมงและ 4 ชวโมงตามลาดบ ถามเวลาในการผลตใน
ข นตอนแรกและขนตอนทสอง 12 ชวโมง แตละหนวยของผลตภณฑ Y จะ
ใหผลกาไร $0.80 และ แตละหนวยของผลตภณฑ Z จะใหผลกาไร $2
ดงนนจงมความจาเปนทจะตองหาวาควรจะทาการผลต ผลตภณฑ Y และ Z
กหนวยเพอใหผลกาไรมากทสด และใหไดจานวนผลตภณฑ Y มากท สดกหนวยเพอใหผลกาไรมากทสด และใหไดจานวนผลตภณฑ Y มากท สด
(ตอบสนองความพงพอใจของผบรโภค)

ปวธการแกปญหา
ถากาหนดให
ป ไ ดงนน สามารถสรางสตรของปญหาไดดงน
จากสมการเปาหมายทงสองและสมการเงอนไขบงคบ สามารถนามาจากสมการเปาหมายทงสองและสมการเงอนไขบงคบ สามารถนามา
พลอตกราฟ ไดผลดงน

2
1
จากกราฟ ถาเปนปญหาแคหนงเปาหมาย ทจด A สมการเปาหมาย f1 จะม
คามากทสดเทากบ 6.72 สวนทจด B สมการเปาหมาย f2 มคาสงสดเทากบ f2
6.0 พนทสเทาคอพนทเปนไปไดของคาตอบ(feasible region)

โ การสรางเสนขอบหนาพาเรโต
จากกราฟกอนหนาน จด A และ B จะถอวาเปนสมาชกของเสนขอบพา จากกราฟกอนหนาน จด A และ B จะถอวาเปนสมาชกของเสนขอบพา
เรโต ของปญหาน สวนจดทเหลอตองหาจาก
1. การประยกตใชวธผลรวมถวงนาหนก (weighted sum method) เพอแปลง
ปญหาแบบสองเปาหมายไปเปนเปาหมายเดยวทสมมลกน ปญหาแบบสองเปาหมายไปเปนเปาหมายเดยวทสมมลกน
2. (เนองปญหานเปน สมการเชงเสน) เราทาการคานวณไดเลย จากกราฟ โดย
การแทนคา ท A, B, 1 และ 2 ลงไปในสมการเปาหมายแลวลากเสนตรงเชอม
ไดเลย ไดเลย
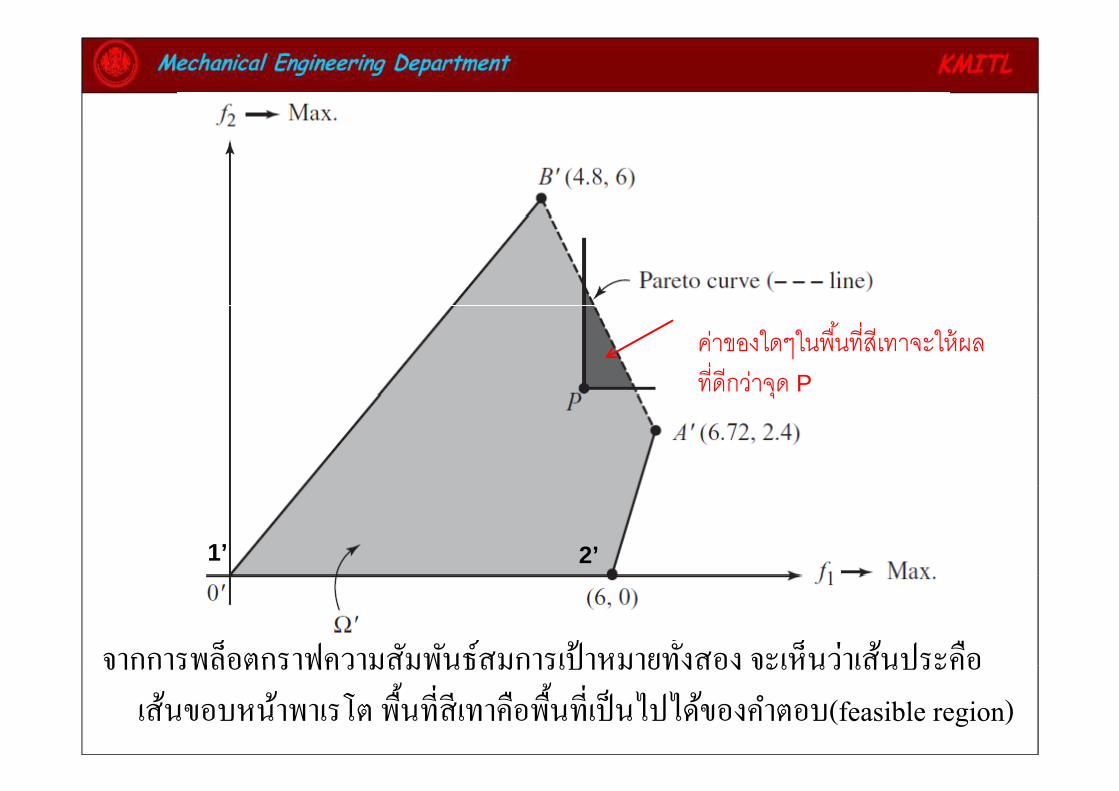
คาของใดๆในพนทสเทาจะใหผล
ทดกวาจด P
1’ 2’
จากการพลอตกราฟความสมพนธสมการเปาหมายทงสอง จะเหนวาเสนประคอจากการพลอตกราฟความสมพนธสมการเปาหมายทงสอง จะเหนวาเสนประคอ
เสนขอบหนาพาเรโต พนทสเทาคอพนทเปนไปไดของคาตอบ(feasible region)
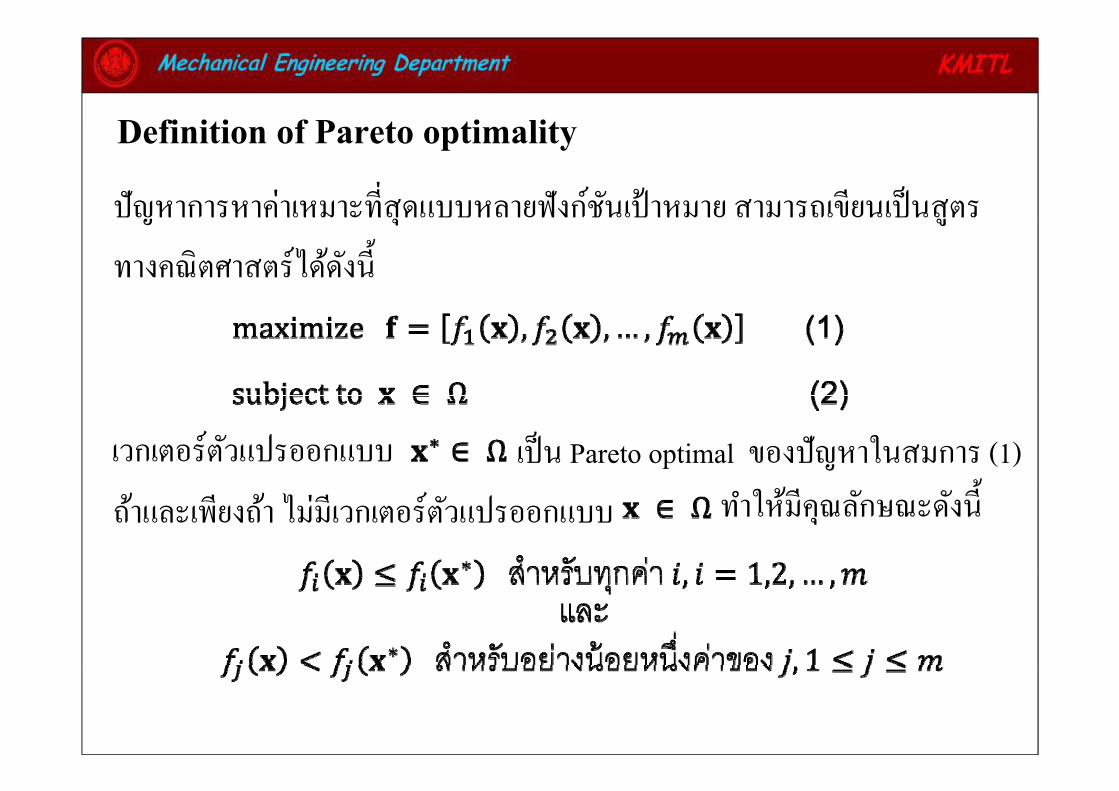
D fi iti f P t ti lit Definition of Pareto optimality
ปญหาการหาคาเหมาะทสดแบบหลายฟงกชนเปาหมาย สามารถเขยนเปนสตรปญหาการหาคาเหมาะทสดแบบหลายฟงกชนเปาหมาย สามารถเขยนเปนสตร
ทางคณตศาสตรไดดงน
เวกเตอรตวแปรออกแบบ เปน Pareto optimal ของปญหาในสมการ (1)
ถาและเพยงถา ไมมเวกเตอรตวแปรออกแบบ ทาใหมคณลกษณะดงน

ตวอยางการ maximize
Pareto optimality
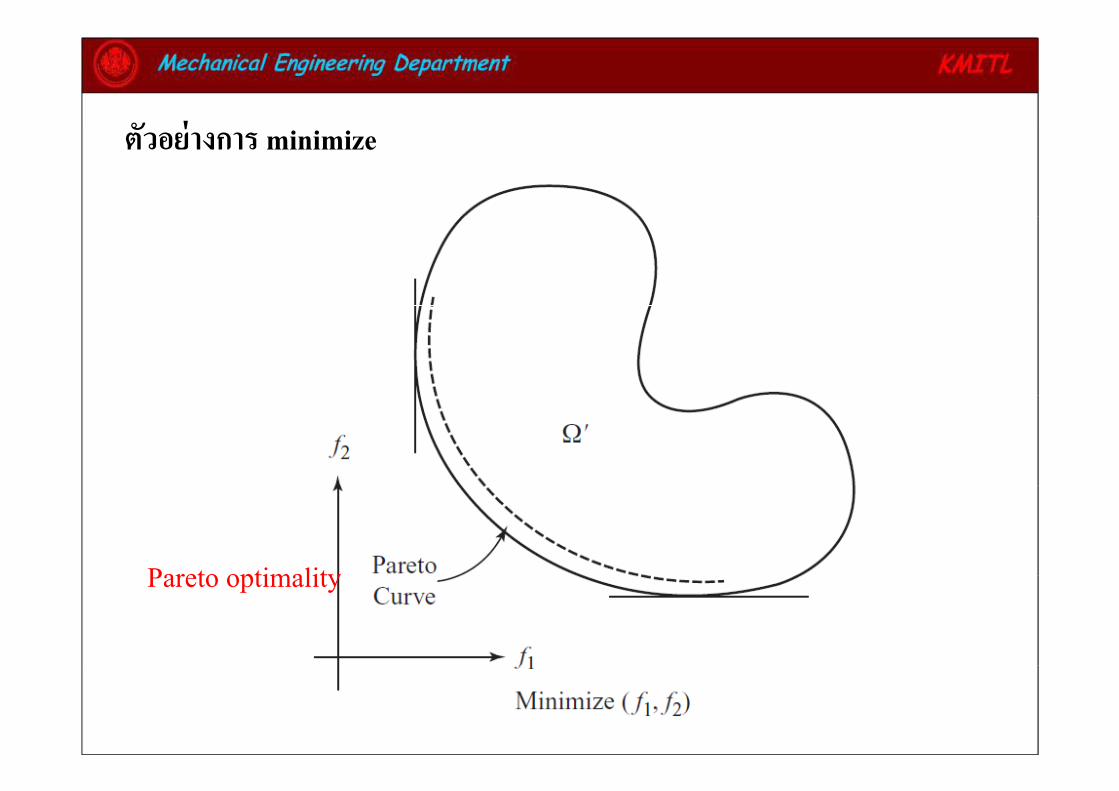
ตวอยางการ minimize
Pareto optimalityPareto optimality

ตวอยาง บรษทผผลตรองเทา ไดทาการกาหนดดชนความสบาย(comfort ตวอยาง บรษทผผลตรองเทา ไดทาการกาหนดดชนความสบาย(comfort
index) และดชนการตอตานการสกหรอ(wear resistant index) ขนมา สาหรบ
ใ รองเทาหกแบบ ตวเลขดชนยงมาก ยงมคณภาพด และมคาแสดงดงในตาราง
แบบท ดชนความสบาย ดชนการตอตานการสกหรอ
1 10 2
2 8 2 252 8 2.25
3 5 2.5
4 5.5 2.5
4 45 4 4.5
6 3.5 6.5
7 3 8
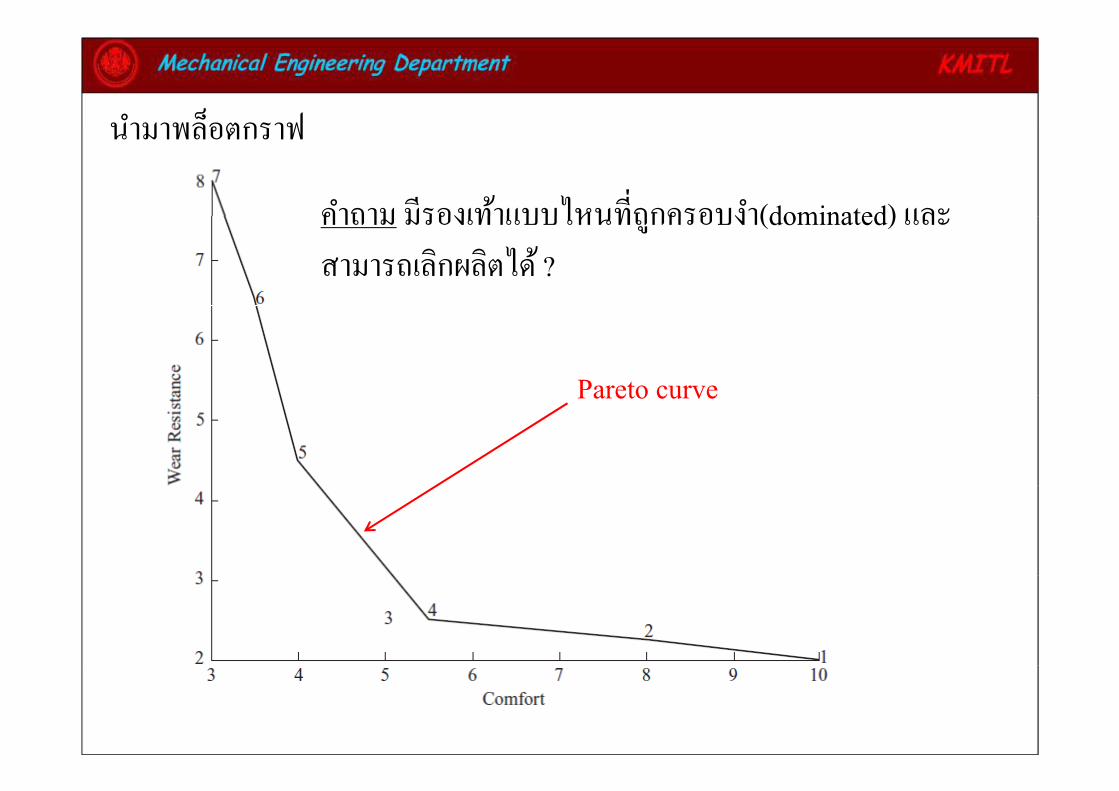
นามาพลอตกราฟนามาพลอตกราฟ
คาถาม มรองเทาแบบไหนทถกครอบงา(dominated) และคาถาม มรองเทาแบบไหนทถกครอบงา(dominated) และ
สามารถเลกผลตได ?
Pareto curvePareto curve
ฟ โการหาสรางกราฟพาเรโต (Generation of Pareto Curve)
ฟ โ โ ไป ไ ไป การสรางเสนกราฟพาเรโตสามารถ โดยทวไปทาไดดวยวธดงตอไปน
1. การใชวธผลรวมถวงนาหนก (weighted sum method) โดยทาการหา
คาตอบทคาตวแปรถวงคาตางๆ แลวนาคาตอบเหลานนมาพลอตกราฟ
2. การใชวธกาหนดคาเปาหมายอนๆใหมคาจากดและใหใชเปาหมายทๆ
เหลอเปนสมการเปาหมาย แลวหาคาตอบ ทาซ าไปเรอยๆโดยเปลยนคา
จากด จากนนนาชดขอมลคาตอบมาทาการพลอตกราฟจากด จากนนนาชดขอมลคาตอบมาทาการพลอตกราฟ

การใชวธผลรวมถวงนาหนก ( i ht d th d)การใชวธผลรวมถวงนาหนก (weighted sum method)

การใชวธกาหนดคาเปาหมายอนๆใหมคาจากดการใชวธกาหนดคาเปาหมายอนๆใหมคาจากด

การหาคาตอบเหมาะทสดเพยงหนงเดยว (Single Best
Compromise Solution )Compromise Solution )
จากกราฟพาเรโต สดทายเราตองหาคาตอบเมหาะทสดเพยงหนงเดยว ซง
สามารถทาไดดวยวธดงตอไปน
1 วธผลรวมถวงนาหนก (weighted sum method) 1. วธผลรวมถวงนาหนก (weighted sum method)
2. วธ min-max
โป ป ( l i )3. การโปรแกรมพงเปา (Goal programming)
หมายเหต จรงๆแลวยงมวธอนๆอก มาก นกศกษาสามารถหาอานไดจาก
หนงสอและเวบไซด
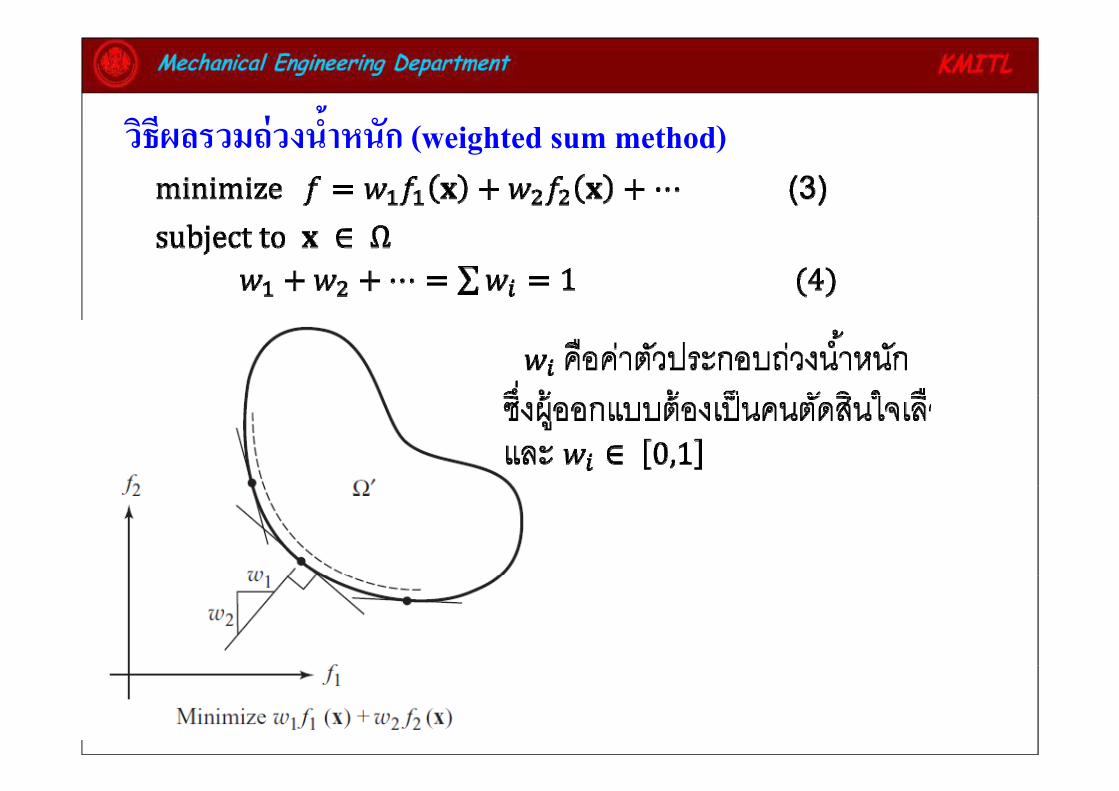
( )วธผลรวมถวงนาหนก (weighted sum method)

วธ i (Mi M h)วธ min-max (Min-Max approach)
โดยทวไปอาจจะทาการนอรมอลไลตคาเบยงเบน ดงนน
ตวอยางเชน มฟงกชนเปาหมายสองฟงกชน ดงแสดงในรป

ใ ตองการหาตาแหนงของจด Q ททาใหคา
เบยงเบนมากทสดเหลาน มคาตาสด

วธทา หาคาตอบจากการใช fminimax function ของ Matlabวธทา หาคาตอบจากการใช fminimax function ของ Matlab

การโปรแกรมพงเปา (Goal programming)การโปรแกรมพงเปา (Goal programming)
โดยทวไปแสดงไดดงกราฟ