optimization in engineering design
TRANSCRIPT

1
Optimization in Engineering Design
Mark Abramson, USAF Institute of Technology
Charles Audet, Gilles Couture,
Ecole Polytecnique. de Montreal
John Dennis, Rice University
Andrew Booker, Evin Cramer,Paul Frank, Joerg Gablonski, Boeing Phantom Works
Thanks to: AFOSR, Boeing, LANL, SANDIA, ExxonMobil, NSF
IMA2003

2
Find the deepest point in a lake
Is it possible to promise the deepest point?
IMA2003

3
Not with a deterministic code
Global optimization is generally impossible
IMA2003

4
If we are lucky...
Let f(x) represent the depth at position x. Sometimes f
and at least its gradient are available so we can use local
models - eg assume that f(x) is a quadratic lake bottom
around the current best point
A quasi-Newton method:
Using information gathered so far, and assuming that the
lake bottom is quadratic, predict the deepest point
Find the depth and the gradient of the depth at the
predicted deepest point and update the depth model
IMA2003

5
Finite difference derivatives?
If the gradient is not available, can we approximate each
partial NorthSouth and EastWest by finite differences?
∂f(x)∂x NorthSouth
uf(x + ∆x NorthSouth)− f(x)
∆x NorthSouth
Maybe, but how to choose ∆x is a serious problem
IMA2003

6
Most cases
What if the only way to measure the depth is to row out
there in 30 dimensions and drop a line?
Or, to wait days for a simulation of the depth to run
based on geophysics,topography, water temperature, etc
And for the resulting estimate to be pretty rough
And if you aren’t sure if depth is what you want to
measure
IMA2003

7
Conflicting objectives in design
Performance Decisions
Payloads Decisions
Propulsion Decisions
Structures Decisions
Systems Decisions
Airplane Architecture
Airplane Level Architecture
IMA2003

8
Design Explorer Applications
Multidisciplinary wingplanform design
777 Engine Duct Seals
Helicopter Rotor Design
Machining,riveting,and drilling database
3-D Fighter Aerodynamics
Engine NozzlePerformance
Shot peen forming of wing skinsSpace Station Power System
Aerospike Nozzle
IMA2003

9
The target optimization problem
The design problem is:
minimize fp(x)
subject to x ∈ X ∩ {x ∈ <n : Cp(x) ≤ 0},
There are parameters and variables:
� Contextual parameters p, supposedly fixed, and
� Optimization or design or control variables x
IMA2003

10
Properties of the target problem
� p is fixed in the simulation, but it is subject to
uncertainty because of incomplete knowledge (e.g.
material properties) or because the product is used
differently (e.g., the altimeter is off by 5%)
� x ∈ X must be satisfied when the underlying simulations
for fp, Cp are called. X is simple, say a polygon
� Cp(x) ≤ 0 only has to hold at the solution
IMA2003

11
Properties of variables and constraints
� Function evaluations typically involve numerically linking
legacy PDE solvers. Evaluations may fail unexpectedly
� There are few correct digits. Accurate approximation of
derivatives is problematic
� Some variables are categorical, i.e., the simulations
only run with certain discrete choices, e.g., choice and
sequencing of manufacturing processes - Lecture 3.
IMA2003

12
Uncertainty in design variables
Instead of specified design x∗, the delivered product
might be the design specified by a nearby x
Very common in engineering design. Good data may be
tough to get
Robustify against such “variability” by giving up some
optimality at a given point in return for optimality over
nearby designs
IMA2003

13
Uncertainty in context variables
Products are designed for optimal performance under
specified operating conditions, loads, etc
We would be willing to give up some performance at the
exact conditions p in return for optimal performance over
all likely nearby conditions q - or we can constrain
probability of failure for the nominal p
Seems to be “chance constrained” formulation - nothing
new
IMA2003

14
Hubris or Sanguinity?
Both types of uncertainty can be modelled for
optimization by incorporation into f, C
minimize f(x)
subject to x ∈ X ∩ {x ∈ <n : C(x) ≤ 0},
where f(x), cj(x) incorporate uncertainty modelled by
the user’s scheme of choice
Still belongs to target class, Bring ‘em on for now, but
seek tighter coupling
IMA2003

15
A confidence builder
Meckesheimer, Booker, and Torng report very good
performance of our approach on some structural
engineering problems in dealing with probability of failure
by constraints or as the objective
“Reliability based design optimization using Design
Explorer” available from [email protected]
From this point on, assume formulation incorporates
uncertainty
IMA2003

16
More problem structure
Typically, fp(x) is actually fp(x, u(x)), where u(x) are
ancillary variables gotten from some simulation with
input x
I.e., given x, solve Fp(x, u) = 0 for u(x). Usually a
discretized PDE or several such legacy solvers. This is a
major reason why fp(x) fails to evaluate - the scheme to
couple the solvers fails to compute u(x)
These are called MDO problems, and they are hard...
IMA2003

17
Target to end 1st Lecture here
IMA2003

18
The target optimization problem
The design problem can be formulated:
minimize f(x, u(x))
subject to x ∈ X ∩ {x ∈ <n : C(x) ≤ 0},
� Optimization or design or control variables x
� x ∈ X must be satisfied when the underlying simulations
for f, C are called. X is simple, say a polygon
� C(x) ≤ 0 may include constraints on u(x)
IMA2003

19
Properties of variables and constraints
� State or ancillary variables u(x) found by solving
F (x, u) = 0
� Function evaluations typically involve numerically linking
legacy PDE solvers, so F (x, u(x)) = 0 can be
complicated
� Solving F (x, u(x)) = 0 when there are multiple
disciplines is called a ”multidisciplinary analysis”
IMA2003

20
An oversimple multidisciplinary analysis
Let
u1(x) = A1(x, u2(x)) or u1(x)−A1(x, u2(x)) = 0
u2(x) = A2(x, u1(x)) or u2(x)−A2(x, u1(x)) = 0
Newton’s method would require differentiating the PDE
solver codes Ai w.r.t. their input - pray for automatic
differentiation to succeed
IMA2003

21
MDA = Multidisciplinary analysisJanuary 3, 2003 6
D1
Aerodynamics
�
?E12
?M1 ≡ M12
A1
?U1
F21
?µ21
-������������������
D2
Structures
-
?E21
?M2 ≡ M21
A2
?U2
F12
?µ12
�DDDDDDDDDDDDDDDDDD
Figure 1: Aeroelastic System
the so-called “design point”, like the viscosity of the air, angle of attack of the wing,and speed. We have completed the MDA for a given decision vectorx when we havefoundu(x) such that the following hold foru = (M1, M2).
F1(x, M1, M2) = E21 ◦ F21 ◦ A1(M1)−M2, (3)
F2(x, M1, M2) = E12 ◦ F12 ◦ A2(M2)−M1. (4)
andA1 is the the flow solver (maybe finite difference) andA2 denotes the structurescode (maybe finite element). TheE, F routines are interface routines that do suchbookkeeping as converting pressures to loads and deflections to shape. Figure 2 pro-vides a more detailed idea of what theE andF boxes look like in that there is probablyone required for each of the other disciplines connected toAi. These interface boxesare the source of many of the difficulties with MDO.
– Why is successive replacements is used in MDA and not Newton? When faced witha system of nonlinear equations to solve, we automatically think of Newton’s method.The problem is the availability of derivatives ofF with respect tou. Each finite dif-ference step would require a single discipline solve, and the number of correct digitsin the difference might be small anyway. Still, one suspects that sparsity is there to beexploited, and the number of variables involved may be too large to use Broyden-typeupdating methods. The most common approach is for the user to apply intuition to asequencing of the single discipline solvers and use successive replacements, i.e., fixu2, . . . uns , solve the first equation block for a newu1. Now fix all but u2 with thenewu1, and useF2 to get a newu2, etc, and iterate. If convergence is a problem, thenreorder the equation and unknowns and try again.
• Formulations of MDO using aeroelastic design example
– MDF or black box or closed equations or control theory method (different fields call itdifferent names. Different engineering disciplines are often different worlds.): This is
� Disciplines D1, D2 with analysis codes A1, A2
� µij is compressed info from Dj needed by Di
IMA2003

22
Mathematical formulation of MDA
Write F (x, u) = 0, but solve F (x,M1,M2) = 0 for M ,
where
F1(x,M1,M2) = E21 ◦ F21 ◦A1(M1)−M2,
F2(x,M1,M2) = E12 ◦ F12 ◦A2(M2)−M1
� A1 finite difference and A2 finite element maybe
� E,F are interface routines that do such bookkeeping as
converting pressures to loads and deflections to shape
IMA2003

23
A generic discipline in an MDO problemJanuary 3, 2003 7
Di
XD
?
µi1
?Ei1
PPPPPPPqMi1
µi2
?Ei2
ZZ
Z~Mi2
• • •
µin
?Ein�������)
Min
µi1
?Ei1
� ��?Mi
Ai
?Ui� ��
µ1i?
F1i
�������)
µ2i?
F2i
��
�=
• • •
µni?
Fni
PPPPPPPq
Figure 2: Generic Discipline
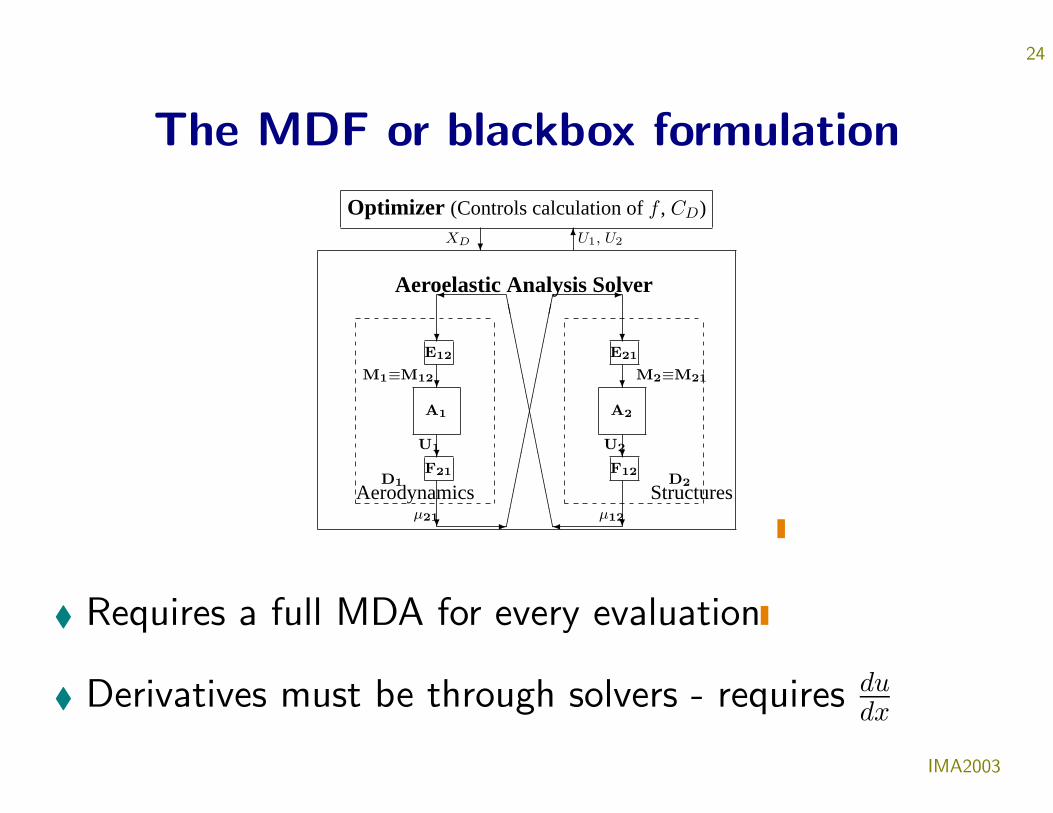
the traditional approach in which a complete MDA foru(x) is done for each choice ofthe design variablesx. Thus, the optimization problem to be solved is a function onlyof the design variablesx, and it looks like (1). An important point is that the objectivefunctionf(x) is almost surely of the formf(x) = f(x, u(x)). The point being that thestate or system variablesu are needed to evaluate the design objective function. Thus,givenx, we solve an MDA problem foru, and then we have the arguments to evaluatef , C. Notice that if there are bounds onu, then they become bounds onu(x), and hencethey are really nonlinear constraints. If bounds onu(x) must be closed, ( for examplebounds onu may represent safety considerations - like operating temperatures of somechemical process), then we may have a nasty difficulty for the optimization algorithm.
∗ Advantage is optimization variables are the design variables (generallynd << ns
and every iterate can be made feasible. Thus, when we stop, we only need torestore feasibility inC(x), often called the side constraints.
∗ Disadvantage is computational effort to complete an MDA for every functionvalue. Even finite difference derivatives with respect tox require an MDA foreach forward difference quotient.
– All-at-once (AAO) or Simultaneous Analysis and Design (SAND) or open equationsor nonlinear programming method: This is the ideal in many ways. It doesn’t alwayswork. There is some analytic and practical evidence that nonsmooth behavior in the so-lution u(x) gets smoothed as it passes throughf(x, u(x)) and so the blackbox methodmay work when the AAO method doesn’t. However, when the AAO approach does
E,F routines are a major headache to write
IMA2003
24
The MDF or blackbox formulationJanuary 3, 2003 8
Optimizer (Controls calculation off , CD)
?XD 6U1, U2
Aeroelastic Analysis Solver
D1Aerodynamics
�
?E12
?M1≡M12
A1
?U1
F21
?µ21 -�������������
D2Structures
-
?E21
?M2≡M21
A2
?U2
F12
?µ12�DDDDDDDDDDDDD
Figure 3: Multidisciplinary Feasible (MDF) Method
Optimizer (Controls calculation off , CD)
?
XD, XU1 , XU2
?
XD, XU1 , XU2
AerodynamicsResidualComputation
? -W1
6
StructuresResidualComputation
?�W2
6
Figure 4: All-At-Once or AAO Formulation
work, it seems most efficient. One solves the AAO problem as:
minx,u
f(x, u) s.t. x ∈ X, F (x, u) = 0, andC(x) ≤ 0 . (5)
Notice that this requires that we “open” the single discipline solvers in order to beable to evaluate their internal residuals ( remember, U is produced by solving an inter-nal system of equations). This is expensive, and generally it is resisted by the singlediscipline specialists.
∗ Advantage is less expensive function values and derivatives as well as a generallyless nonlinear optimization problem
∗ Disadvantage is many more variables (the design variables + the ancillary vari-ablesu, as well as the inability to use legacy disciplinary solvers. Feasible pointalgorithms are not compatible
� Requires a full MDA for every evaluation
� Derivatives must be through solvers - requires dudx
IMA2003

25
The All-At-Once or SAND formulation
January 4, 2003 8
Optimizer (Controls calculation off , CD)
?XD 6U1, U2
Aeroelastic Analysis Solver
D1Aerodynamics
�
?E12
?M1≡M12
A1
?U1
F21
?µ21 -�������������
D2Structures
-
?E21
?M2≡M21
A2
?U2
F12
?µ12�DDDDDDDDDDDDD
Figure 3: Multidisciplinary Feasible (MDF) Method
Optimizer (Controls calculation off , CD)
?
XD, XU1 , XU2
?
XD, XU1 , XU2
AerodynamicsResidualComputation
? -U1
6
StructuresResidualComputation
?�U2
6
Figure 4: All-At-Once or AAO Formulation
work, it seems most efficient. One solves the AAO problem as:
minx,u
f(x, u) s.t. x ∈ X, F (x, u) = 0, andC(x) ≤ 0 . (5)
Notice that this requires that we “open” the single discipline solvers in order to beable to evaluate their internal residuals ( remember, U is produced by solving an inter-nal system of equations). This is expensive, and generally it is resisted by the singlediscipline specialists.
∗ Advantage is less expensive function values and derivatives as well as a generallyless nonlinear optimization problem
∗ Disadvantage is many more variables (the design variables + the ancillary vari-ablesu, as well as the inability to use legacy disciplinary solvers. Feasible pointalgorithms are not compatible
� (x, u) = (xd, xu) all are optimization variables, and
Fp(xd, xu) = 0 is enforced only in the limit
� Can’t use legacy solvers, but derivatives are simpler - dudx
avoided
IMA2003

26
The IDF or DAO formulationJanuary 3, 2003 9
Optimizer (Controls calculation off , CD, C12, C21)
?
XD, Xµ12
?
XD, Xµ21
AerodynamicsAnalysis
? -F21(XD, U1(X))
(including, e.g.,U1)
6
StructuresAnalysis
?�F12(XD, U2(X))
(including, e.g.,U2)
6
Figure 5: Individual Discipline Feasible or IDF Formulation
– Individual Discipline Feasible (IDF) or In-Between methods: Generally, a small per-centage of the state variables from one discipline’s solver are needed as input to othersolvers. Suppose we reflect this by writingu = (z, u), andz is the smaller subvectorof the solver variablesu actually needed as input to various solvers. We can now posethe MDO problem as:
minx,z
f(x, z, u(z, x)) s.t. x ∈ X, C(x) ≤ 0, (z, u(z, x))− u(x) = 0. (6)
∗ Advantage is ability to use legacy disciplinary solvers as they are and the opti-mization problem is nearer the size of the MDF than the AAO problem. Seems tobe more efficient than the blackbox.
∗ Disadvantage is that the derivatives needed are like those needed for MDA, andfeasible point algorithms are not compatible
Alexandrov and Lewis seem to have rediscovered this formulation, although there maybe some difference we missed, and they do not compare it to IDF. They call it DAOor “distributed analysis optimization”, a nicer name than IDF [3]. Alexandrov andKodiyalam give computational evidence that this is an effective formulation [2].
� MDA only in the limit - many fewer variables than AAO
� Uses legacy solvers, but requires dudx
IMA2003

27
Summary
� Blackbox/MDF is least efficient, but most stable, and
most often used in practice. Derivatives can sometimes
be gotten by adjoint approaches, but not if there are
many constraints
� AAO is most efficient when it works, but incompatibility
with legacy codes is a huge barrier to practical use in
most fields Very common in chemical process control
� IDF/DAO seems a good compromise - generalizes
domain decomposition
IMA2003

28
Summary
� Many designers mistrust a method like AAO or IDF that
doesn’t have all feasible iterates
� I got the idea for IDF from Georg Bock’s direct multiple
shooting
� Blackbox or MDF will be used in my Math Coll.
numerical results for the SMF, which is derivative-free
� A heuristic called “collaborative optimization” mimics
the “by hand” traditional approach
IMA2003

29
� DAKOTA project at SANDIA attacks same problem
class by more heuristic approaches
� Automatic differentiation is the critical technology for
MDO
IMA2003