optimal sensor placement methods for active power...
TRANSCRIPT

OPTIMAL SENSOR PLACEMENT METHODS FOR ACTIVE POWER ELECTRONICSYSTEMS
Satya R. T. Peddada, Pamela J. Tannous, Andrew G. Alleyne, James T. AllisonUniversity of Illinois at Urbana-Champaign, Urbana, Illinois-61801, USA
Email: speddad2, tannous2, alleyne, [email protected]
ABSTRACTAccurate temperature estimation of high density active
power electronic systems is vital for dynamic thermal manage-ment. Accurate and reliable estimation is especially important inregions that are close to failure, either due to high temperature orsignificant materials or component sensitivity. Improved estima-tion can support lower safety factors and enhanced system per-formance. An investigation of optimal temperature sensor place-ment methods is presented here, focusing primarily on methodsutilizing information-based metrics. In addition, physics-basedmetrics are explored in an initial study that may have the poten-tial to be more closely aligned with overall system utility. Stud-ies are based on a 2 kW, single-phase, seven-level, GaN-basedinverter. A lumped-parameter reduced-order thermal model, de-veloped in previous work, is used for real-time temperature esti-mation. A continuous relaxation of a 2D placement domain ledto a novel linear programming formulation that supports solu-tion of finely-discretized sensor placement problems with mini-mal computational expense. Improved sensor placement perfor-mance metrics account for multiple loading conditions and esti-mation accuracy with respect to failure prevention.1 Introduction
High power density power electronics systems require care-ful monitoring of temperature in real time to prevent thermalfailure. Sophisticated thermal management can enhance the re-liability and power density for active systems [1]. Estimationaccuracy requirements are spatially-dependent; regions of high-temperature, sensitive materials, or particular components maybe the most likely to fail due to temperature. Accurate tem-perature estimates support both active thermal management, as
well as spatially and temporally tailored operation of power elec-tronics components. Improved temperature estimates can lead toenhanced power density by allowing components to be pushedcloser to failure (reduced safety factors) while maintaining reli-able operation with confidence.
1.1 Related Work
Optimal sensor placement and sensor networks is a well-studied topic across a range of real-time applications, includ-ing structural damage detection [2–6], structural health moni-toring [7], combined sensor and actuator location for intelligentflexible structures [8, 9], gas turbine engine health monitoring[10], robot localization [11], and wireless or mobile sensor net-works [12, 13]. Similar sensor placement studies have been con-ducted for energy efficient buildings [14], data centers [15], out-door wind studies [16], soil moisture monitoring [17], agricul-ture [18], wind and water quality [19], water leak detection [20],and chemical processes [21]. Often the objective in these ef-forts is to maximize information obtained from a given numberof sensors, which can be quantified using the Fisher informationmatrix [6], observability Gramian [22–25], or a Linear quadraticregulator (LQR) based performance metric [9].
1.2 Motivation
Optimal sensor placement has been studied extensively forthermal monitoring of low power density electronics (LPDEs)[26, 27], such as microprocessors [28–32], multi-core proces-sors, Network-on Chip (NoC) and System on Chip (SoC) de-vices [26, 27, 33, 34], data centers [35], and cyber physical sys-tems (CPSs) [36]. LPDEs are electronic devices where thepower to volume ratio is small. As a result, thermal consid-
Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference
IDETC/CIE 2017 August 6-9, 2017, Cleveland, Ohio, USA
DETC2017-68253
1 Copyright © 2017 ASME

erations are not usually a significant design concern. Sensorplacement strategies for power electronics have included uni-form or non-uniform allocation [30], by grid-based or cluster-ing techniques [28,33,37], distance minimization and greedy ap-proaches [32, 38] and entropy-based metrics [34].
While sensor placement has been studied extensively for mi-croprocessors and other LPDEs, high power density electronics(HPDEs) have unique requirements. Mature placement strate-gies for LPDEs, such as coverage, connectivity, and heuristic-based techniques, cannot be extended readily to HPDE sensorplacement decisions. Microprocessors are smaller in size thanpower electronics systems used for mobile transportation, powerdistribution and transmission, and due to system architecture itis often sufficient to focus temperature monitoring on hot spotsin microprocessors. LPDEs often have just a single operatingmode (fixed set of operating conditions), simplifying require-ments. HPDEs involve multiple operating modes (switching lev-els), significantly higher power levels, distinct system architec-tures, and often higher cost. Differences also impact reliabilityconsiderations. If some of the millions of transistors on a mi-croprocessor fail, it can remain functional due to redundancy.In contrast, an HPDE device, such as a power inverter, is com-posed of relatively few function-specific components. Thus, fail-ure of just one component may impact both functionality andoverall system performance. Some HPDEs are safety-critical de-vices (e.g., automotive and aircraft applications), so reliability isparamount. Enhancing the effectiveness of HPDE thermal mon-itoring systems for improved reliability and power density moti-vates the development and investigation of new design methodsspecific for this class of systems.
Many established sensor placement design strategies utlizeinformation-based metrics, such as observability. Information-based performance metrics are effective tools for observerdesign and estimation purposes, but are normally based on sim-plified system models to aid real-time computational efficiency.These approximate metrics cannot account for the full range ofphenomena that may be important factors in assessing likelihoodof thermal failure, especially for HPDEs. More sophisticatedmeasures are needed to support off-line design decisions suchas sensor placement. These should account for more detail thanthe reduced-order models utilized for observer implementation,including spatially varying properties (component/switch loca-tions, geometry, material properties, etc.). Here we introducean initial study involving simplified physics-based metrics. Weview this effort as a step toward sensor placement methodsthat can accounts for HPDE needs in a more comprehensiveway, working toward an integrated systems approach for sensorplacement decisions. Additional investigation of methods basedon these new metrics beyond what is presented here is needed.These initial results indicate that physics-based metrics may behelpful for making sensor placement decisions in the contextof important system design issues, such as packaging, cooling
system integration, and multiple-power module layouts.
2 System DescriptionA 2 kW dc-ac, single-phase, seven-level, Gallium Nitride
(GaN)–based inverter (a power converter) has been selected foroptimal sensor placement method comparison [39]. The inverterprinted circuit board (PCB) has a planar architecture with dimen-sions 64.7 mm × 47.3 mm, and is a highly power-dense device(216 W/in3, input Vmax = 400 V) with active switching compo-nents. The PCBs can be stacked to attain high power conversioncapacities for different applications. There are 12 GaN transis-tors on each power module. Using capacitive energy storage,this device accepts dc voltage and delivers a desired ac voltageoutput (dc to ac). Figure 1 identifies the inverter componentsthat are important from a thermal perspective. The GaN transis-tors generate the most heat. The Adum5210 devices are isolatedlevel shifters that power the gate drivers. The ceramic capacitorsabove and below the board help transfer electrical energy andreduce stress on switching devices. Each of these GaN-basedpower inverters can be stacked together in 10s or 100s to elec-trify large-scale systems such as aircraft or automobiles. To aidproper functioning of these inverters, it is important to monitortheir temperature online to prevent failure. Senor placement hasa significant impact on the ability to predict temperature distribu-tion accurately. GaN transistor temperature generally increasesas power levels increases. In contrast, the Adum5210 tempera-tures do not change much with power level due to constant con-trol losses. The main PCB is composed of four layers of copper,three layers of FR4, and two solder mask layers. The materialproperties are detailed in Table 1.
FIGURE 1: Multi-level inverter (dc-ac conversion).
3 System ModelModel requirements for real-time control purposes and of-
fline design are distinct. In system design we need models that
2 Copyright © 2017 ASME

TABLE 1: PCB constituent material properties.
Material Specific Heat(J/gC) Thermal Conductivity(W/mK) Density(g/cm3)
Copper 0.385 to 0.4 385 to 390 8.9 to 8.96
FR4 0.6 to 0.95 0.25 to 0.3 1.85 to 1.91
predict system performance accurately for a given design spec-ification. Models must accommodate changes to physical de-sign, maintain acceptable predictive accuracy across the designspace, and compute metrics that align with true design intent. Inthis study we utilize a reduced-order lumped-parameter modelfor real-time estimation, as well as a higher-fidelity physics-based model to predict temperature distributions more accurately(Fig. 2). The latter distributions are used as a benchmark to as-sess, for each load case, how accurate real-time temperature pre-diction is for a given sensor layout and observer design. Here weutilize simple failure models based on temperature thresholds.Future work will incorporate more rigorous reliability metricsbased on system simulation.
FIGURE 2: Left: controls-oriented RC thermal model (coarse,component-based discretization). Right: finer discretization forfinite element analysis (FEA).
3.1 RC Thermal Network Model
An RC (resistor-capacitor) network was used to model thedynamic thermal behavior of the power electronics system forestimation purposes. This model gives up some accuracy forthe benefit of rapid computation. High-fidelity thermal modelswould be impractical for real-time estimation, but are importantfor offline design and assessing the quality of real-time tempera-ture estimates.
The RC network is created using an analogy between elec-trical and thermal systems, where electrical current is a parallelto heat flow (through or flow variables), and voltage is analo-gous to temperature (across or effort variables) [40, 41]. Elec-
FIGURE 3: Heat transfer mechanisms in a two-block system.
trical resistance and capacitance properties are used to modelthermal capacitance and resistance. The thermal model of themulti-level inverter was generated as a 2D RC model. The PCBwas divided into planar regions, each associated with a capaci-tance value. Adjacent regions are via resistances, enabling heatconduction across region interfaces. Heat generation is modeledas a current source. Ambient temperature is modeled as a voltagesource connected to each capacitor through a resistor that repre-sents convective heat transfer. Thermal capacitance is given by:
C = ρcV, (1)
where ρ is material density, c is specific heat capacity, and V isthe region volume. Conduction resistance is:
Rcond =L
KAc, (2)
where L is the length through which the heat is being conducted,K is the thermal conductivity of the material, and Ac is the crosssectional area of the pixel. The convective resistance is given by:
Rconv =1
hAs, (3)
where h is the heat transfer coefficient, and As is the region areaas shown in Fig. 3. A state space model has been constructedusing graph based modeling approach, where each graph vertexrepresents an RC model vertex, and each edge represents resis-tance between vertices. Conservation of thermal energy is ap-plied at each vertex to complete the model:
CkdTk
dt= qk +Qs−
1Rck
(Tk−Ta) (4)
where Ck is the thermal capacitance at node k, Tk is the temper-ature of node k, qi is the net heat flow into node k, and Qs is theheat input from the current source connected to node k. The con-vective heat transfer resistance at node k is Rci, and the ambienttemperature is Ta.
The inverter is partitioned into 39 regions, each with a func-tional board component, and each corresponding to a state in thestate space model. The switches on the PCB are the primaryheat sources. The RC inverter model has been validated exper-imentally [42]. Further model order reduction was performed
3 Copyright © 2017 ASME

to produce a nine-state model that preserves correspondence be-tween the physical system and RC thermal model (Fig. 4). Thecorresponding first order differential equations are:
x = Ax+Bu+Vd (5)y = Cx+Du+We (6)
The state vector x represents the temperature of each node onthe graph of dimension n× 1, where n refers to the number ofstates. The matrices A and C, both of dimension n× n, are thesystem dynamics and output matrices, respectively. The vectoru (dimension c× 1) quantifies the time-varying heat flux pro-duced by heat-generating components, where c is the number ofheat-generating components. B is the input matrix of dimensionn× c, d is the state disturbance trajectory (ambient temperature,assumed here to be 30C). V is the disturbance matrix. The esti-mated output temperature for all nodes is quantified by the vectory. W is a matrix that accounts for sensor noise, and e is the vectorof sensor noise trajectories.
FIGURE 4: Physical correspondence to reduced- (left) and full-order (right) state space models. Each region corresponding to astate is numbered.
3.2 Steady State 2D Thermal Finite Element Model
A 2D thermal finite element model is used to predict the PCBtemperature distribution accurately with fine spatial resolution[43]. It supports more sophisticated assessment of sensor place-ment designs, providing a benchmark for estimation accuracyacross multiple load cases. Steady heat conduction at the surfaceis assumed, and the domain is discretized into 250,000 squareelements. The board material is assumed to be homogeneouscopper throughout the entire domain. This assumption helps inmodel simplification, and has limited effect on model accuracy.Table 1 details material properties of the two main material typesused in the PCB.
Spatial Domain Description: The edges of the spatialdomain (Ω)—solid gray line, Γ, as shown in Fig. 5—are assumedto have simple convection boundary conditions based on the am-bient air temperature T∞, which is assumed here to be a constant30C, and on a free convection constant of air h of 5 W/m2K.
We also assume that the material in the domain Ω has a uniformthermal conductivity k. The heat flux from a component is g0.The governing equations are:
∇ · (k∇T )+g0 = 0 , on Ω (7a)Q = hA(T −T∞),on Γ (7b)
FIGURE 5: FEA model design domain description.
Figure 5 illustrates a sample design domain with four com-ponents, each of which are modeled as lumped heat sources. Thepower loss, size, location, and maximum operating temperatureof each device can be accounted for separately in the model. Ta-ble 2 lists sample component specifications. The 2D finite el-ement modeling has been implemented on the seven-level GaNbased inverter. There are 12 GaN transistors in total and since2 GaN transistors are closer to each other they have combinedin the design domain and temperature distribution across the do-main using the finite element model can be seen in Fig. 6.
FIGURE 6: Temperature distribution across the board obtainedusing 2D thermal finite element model at a dc input 250 volts.
4 Optimal Sensor Placement StrategiesHere we discuss alternative placement strategies, including
methods based on integer programming, continuous relaxation,and intuition-based strategies.
4 Copyright © 2017 ASME

TABLE 2: Sample heating component specifications.
Component Power loss (W) Max Temp(C) Size(mm x mm)
C1 0.4 125 2 x 3
C2 1.5 250 2 x 2
C3 1.1 200 4 x 2
C4 0.6 100 4 x 1
4.1 Information-Based Performance Metrics
A system is observable if state variables can be reconstructedfrom available outputs. The RC model is linear and time invari-ant (LTI), so we can use the linear observability Gramian to quan-tify observability:
Wo,linear =
∫∞
0
eAT tCTCeAtdt (8)
A system is completely observable only when the observabil-ity Gramian matrix has full rank. Additional related measuresof system observability have been used in optimal sensor place-ment studies [23,44,45]. The three most widely used metrics aresummarized here.
Observability Gramian Determinant: Larger observ-ability Gramian determinants are associated with improved sys-tem observability. If det(Wo,linear) = 0, all states cannot be ob-served. The metric commonly used is: D = [det(Wo,linear)]
1/n,where n is the number of system states. This metric is less pre-ferred than the next two because if the determinant is zero, it isdifficult to determine the states actually contributing to systemobservability.
Observability Gramian Condition Number: Thecondition number of a matrix refers to the ratio of its largest andsmallest magnitude eigenvalues. Smaller observability Gramiancondition numbers correspond to improved observability. Oftenlogarithmic scaling is used:
C = log10
[σmax(Wo,linear)
σmin(Wo,linear)
](9)
This metric also been used widely in chemical engineering pro-cesses [24].
Observability Gramian Trace: The observabilityGramian trace refers to the sum of all Gramian eigenvalues:
Trace(Wo,linear) =n
∑i=1
σi(Wo,linear) (10)
Measures based on Gramian condition number and determinantare limited in their ability to get information from the wholerange of states of the system. The trace metric does not havethis limitation. Maximizing it supports maximum informationextraction [45]. It can be thought of as the output observability
energy of a system. The larger this value is, the greater thesystem observability. In studies presented here where only oneinformation-based performance metric is used, the trace metricis chosen.
4.2 Enumeration-Based Placement Solution
One way to view the placement problem is as a discrete deci-sion. If we have ns sensors, in which PCB regions should they beplaced to maximize estimation accuracy? In this approach we donot distinguish between continuous location differences within aPCB region, only if a sensor is in a region or not. A sure methodfor obtaining a globally-optimal solution for this discrete sen-sor placement problem is to enumerate all possible unique place-ments, evaluate each design using the chosen metric, and selectthe design(s) with the best performance. This strategy is possiblefor small test problems, but completely impractical for realisticproblems (especially if we use a fine spatial discretization forimproved placement resolution).
If our model has n states, and we assume that each regioncan have either zero or one sensor, and if we consider the fullrange of possible numbers of sensors (0≤ ns ≤ n), the number ofpossible sensor placement designs for our 39 and 9 state modelsare 239 and 29, respectively. An enumeration of all sensor lo-cation designs has been performed for the reduced-order (nine-state) model, and assessed using all the three information-basedperformance metrics (Fig. 7). If we select a specific number ofsensors, for example, if a designer wants to place 4 sensors ona PCB with 9 states (regions), then
(94
)= 9!
4!(9−4)! = 126 uniqueplacements are possible. This enumeration helps us to under-stand the trends in the performance metrics as a function of thenumber of sensors used.
4.3 Discrete Optimization
Here we formulate the placement problem as a binary inte-ger programming problem. A binary variable ri exists for eachstate/region. If ri = 1, a sensor is placed in region i, and if ri = 0,region i has not sensor. If we want to place exactly k sensors, werequire that ∑
ni=1 ri = k. This problem may be solved with integer
programming methods. A genetic algorithm can be used to solvevery general formulations of this problem approximately. Thisinteger programming strategy has proven to be inefficient forlarge-scale problems, motivating new solution techniques pre-sented later in this section.
The observability matrix Qo (of order np x n, where p refersto the length of output y):
Qo =[C CA CA2 . . .CAn−1
]T (11)must be full rank for the system to be completely observable.The diagonal output matrix C (size n×n) is:
5 Copyright © 2017 ASME

2 3 4 5 6 7 8 9
Number of Sensors
0
0.2
0.4
0.6
0.8
1
1.2
(D
ete
rmin
ant of O
bs. G
ram
ian)
1/n
(Determinant of Obs. Gramian)1/n
Vs No. of sensors
(a) Determinant of Wo,linear
1 2 3 4 5 6 7 8 9
Number of Sensors
0
5
10
15
20
25
30
35
40
45
50
Logarith
m(
Conditio
n N
um
ber)
Logarithm of condition no. Vs No. of sensors
(b) Condition number of Wo,linear
1 2 3 4 5 6 7 8 9
Number of sensors
0
10
20
30
40
50
60
70
Tra
ce o
f O
bserv
abili
ty g
ram
mia
n
Trace of Observability gramian Vs No. of sensors
(c) Trace of of Wo,,linear
FIGURE 7: Enumeration of all possible solutions for reduced order model using the information based performance metrics.
C =
r1 0 0 . . . 00 r2 0 . . . 0...
......
. . ....
0 0 0 . . . rn
Using the trace metric defined above, we can formulate the sen-sor placement problem as the following binary integer program:
minimize:r
-tr(Wo,linear)
=−tr(∫ t1
t0eAT (t−t0)CTCeA(t−t0)dt
)subject to:
n
∑i=1
ri ≤ k
ri ∈ 0,1
(12)
Note that due to monotonicity, the inequality constraint on rivalues is always active, and this inequality constraint is there-fore satisfied with equality. This formulation is mathematicallyequivalent to one requiring an exact number of sensors k.
4.4 Continuous Relaxation
In the discrete optimization approach, solution difficulty in-creases rapidly as system size (n) increases. As with enumera-tion, it is impractical for scaling up to larger system design prob-lems. Here we present a novel sensor placement strategy basedon a continuous relaxation of the binary variables. Such a relax-ation enables use of highly efficient gradient-based optimizationalgorithms [46]. Here we allow ri to take on any value between 0and 1. Because a fractional sensor does not make physical sense,we can use a creative formulation to penalize ri values toward 0or 1. While fractional values are allowed, at convergence each riis approximately binary.
This solution strategy is analogous to established methodsfor structural topology optimization where a structural design do-main is discretized into pixels (2D) or voxels (3D). Continuousdesign variables 0 ≤ xi ≤ 1 represents material density for each
element. One of the most well-known gradient-based topologyoptimization methods is the Solid Isotropic Material with Penal-ization (SIMP) approach [47]. SIMP utilizes a particular type ofpenalty on xi values to bias them toward 0,1 values. Our con-tinuous relaxation of the sensor placement problem, inspired bySIMP, is:
minimize:r
f (rp1 ,r
p2 , .....,r
pn )
subject to:n
∑i=1
ri ≤ k
0≤ ri ≤ 1
(13)
A finite penalty exponent value p (generally chosen between 2and 9) can result in a solution that coincides approximately withdiscrete solution. Larger penalty values improve binary preci-sion, but this also increases nonlinearity and solution difficulty.This can be ameliorated through a change of variables. Defineti such that ti = rp
i , and ri = t1/pi . A mathematically equivalent
problem can be defined in terms of ti:minimize:
tf (t1, t2, ....., tn)
subject to:n
∑i=1
t1/pi ≤ k
0≤ ti ≤ 1.
(14)
Due to the change of variables, this problem can be solved moreeasily for large p values.
4.5 Linear Integer Program Reformulation
The continuous relaxation strategy reduced computationalexpense significantly. We observed, however, an important op-portunity for even greater efficiency improvements. It is possibleto manipulate the trace of the observability Gramian in a way thatenables formulation as a linear program (LP), a convex optimiza-tion problem that can be solved efficiency for very large systems(thousands of states). Instead taking the integral over time from
6 Copyright © 2017 ASME

t0 to t1, the trace of the observability Gramian derivative, whichis a linear function, can be calculated using a finite differencemethod. The gradient can then be used directly in the solution ofthe corresponding LP. The procedure for obtaining the trace ofobservability Gramian derivative is detailed in Algorithm 1. TheLP is:
minimize:r
− f d (15a)
subject to:ns
∑i=1
(ri)≤ ns (15b)
ri ∈ 0,1 (15c)
ALGORITHM 1: Calculation of derivative of trace of ob-servability gramian matrix
Input : A,B – system dynamics matrix(A) and input matrix(B)h – step-size for forward differencing
Output: fd – derivative of trace Observability Gramian1 ns← length(A) /* store total number of states */
2 fd← zero /* Initialize Observability derivative */
3 C← zeros(ns,ns) /* Initialize an output matrix */
4 ss← ss(A,B,C, []) /* Calculate state space form */
5 for k← ns to do /* going from 1 to entire length of A */
6 f d1(k)← trace(ObsGram(ss(t0)) /* calculating the
trace of obs. Gram. Wo at instant to */
7 f d2(k)← trace(ObsGram(ss(t0 +h)) /* calculating the
trace of obs. Gram. Wo at instant t0 +h */
8 end9 f d ← ( f d2 - f d1)/h /* forward difference method */
4.6 Zone-Based Sensor Placement
In this strategy we modify our optimization formulation toensure a specified number of sensors are used to monitor regionsnear critical locations. This can help bias placement near crit-ical states. It can be thought of as a hybrid between intuitionand information-based design. It is informed by designer speci-fications for critical locations. Suppose the designer specifies jspecific states as critical locations: S1,S2, . . . ,S j, and the de-signer wants to allocate a minimum of k sensors from the m totalavailable sensors to monitor these critical states. The rest may beplaced elsewhere. The new formulation is:
minimize:r
-tr(Wo,linear)
=−tr(∫ t1
t0eAT (t−t0)CTCeA(t−t0)dt
)subject to:
m
∑i=1
ri = m, i ∈ 1,2, ...m
rS1 + rS2 + rS3 + ...+ rS j = k
ri ∈ 0,1
(16)
5 Physics Based Error Metrics
The above formulations focused on information-based met-rics for assessing sensor placement quality. This is an indirectmeasurement of how well the sensor placement actually per-forms at predicting temperature distribution accurately, with em-phasis on accurate prediction in regions more likely to experiencethermal failure. Here we introduce a metric that assesses this di-rectly. Temperature estimates from the observer are comparedagainst predictions from a finite element model (assumed to bea benchmark truth model). A simple unweighted temperatureestimation error metric is:∣∣∣∣∣nely
∑j=1
nelx
∑i=1
(T (Ω)− T (tsteady))
∣∣∣∣∣where T (Ω) is the spatial temperature distribution predicted byFEA, and T (tsteady) is the spatial temperature distribution esti-mated by the observer at steady state. This result depends onloading conditions, sensor placement, and observer design. Thenumber of finite elements in x and y directions are nelx andnely, respectively. Reduced error corresponds to improved sen-sor placement. The next step in accuracy is to weight elementsbased on propensity for failure, reflecting spatially dependent ac-curacy requirements:∣∣∣∣∣ (∑
nelyj=1 ∑
nelxi=1 wi j(T (Ω)− T (tsteady))
(∑nelyj=1 ∑
nelxi=1 wi j)
∣∣∣∣∣ .The wi j term refers to an element of the weighting matrixW , which emphasizes critical regions that contain sensitivecomponents on the board compared to the rest of the boardspace are. This ensures that the optimal placement of sensors isaccurate with respect to temperature prediction needs for failureprediction. A next step for future work is to incorporate moredetailed failure and reliability models for components into theoptimization formulation.
6 Results and DiscussionStates where sensors should be located for the reduced or-
der model are given in Table 3, and the corresponding physi-cal locations are illustrated in Fig. 4. An initial comparison ismade between the binary integer program, continuous placementtechnique, and linear program in terms of efficiency. The timerequired by each method using trace as the performance metrichas been assessed for both the reduced- and full-order models(Table 4). The simulations have been performed using an Inteli5-4570 x64 processor with four physical cores running in par-allel. The computational efficiency increases when switching tothe linear integer programming/sorting algorithm. A study hasbeen performed to investigate the efficiency of the linear programin placing sensors for high-resolution state space systems. Figure8 shows Pareto frontiers for optimal sensor placement that quan-tify the tradeoff between the observability metric and the numberof sensors (analogous to cost). State space models of several dif-
7 Copyright © 2017 ASME

TABLE 3: Optimal sensor locations for reduced order model.
Number of sensors State Locations Trace of Obs. Gramian
1 1 10.014
2 1,2 20.029
3 1,2,6 27.177
4 1,2,6,7 34.072
5 1,2,5,6,7 40.966
6 1,2,3,5,6,7 47.793
7 1,2,3,5,6,7,9 54.607
8 1,2,3,5,6,7,8,9 61.188
9 1,2,3,4,5,6,7,8,9 67.768
TABLE 4: Time comparison between enumeration, discrete, con-tinuous and linear programming based placement schemes.
Method Reduced order (9 states) Full order (39 states)
Combinatorial approach 450 sec 2.4 hrs
Discrete optimization 220 sec 0.7 hrs
Continuous method (SIMP) 10-11 sec 17-18 sec
Linear/Sorting program 0.4 to 0.45 sec 0.7-0.8 sec
TABLE 5: Computational time to generate Pareto fronts as afunction of model order.
Number of states 10 50 100 300 500 1000
Time (sec) 0.7 1.2 7.5 9.7 69.5 1352.5
ferent sizes were used in this study, and Table 5 lists computationtime as a function of model order.
While the linear program/sorting approach is highly effi-cient, it can only produce results that optimize the trace of theobservability Gramian. This level of efficiency was achieved bycapitalizing on problem structure to produce a linear program.If other objective functions need to be used, the continuous re-laxation strategy appears to be the most effective approach. Itis applicable to a very general set of objective functions, and ismore efficient than previous integer programming approaches,but computational expense increases faster with model order thanwith the linear program.
1 2 3 4 5 6 7 8 9 10
number of sensors
-300
-250
-200
-150
-100
-50
-tra
ce(W
o)
Pareto front (10 states)
(a) Pareto (10 states)
0 5 10 15 20 25 30 35 40 45 50
number of sensors
-14
-12
-10
-8
-6
-4
-2
0
-tra
ce
(Wo
)
×104 Pareto front (50 states)
(b) Pareto (50 states)
0 10 20 30 40 50 60 70 80 90 100
number of sensors
-350
-300
-250
-200
-150
-100
-50
0
-tra
ce(W
o)
Pareto front (100 states)
(c) Pareto (100 states)
0 50 100 150 200 250 300
number of sensors
-18
-16
-14
-12
-10
-8
-6
-4
-2
0
-tra
ce
(Wo
)
×104 Pareto front (300 states)
(d) Pareto (300 states)
0 50 100 150 200 250 300 350 400 450 500
number of sensors
-2.5
-2
-1.5
-1
-0.5
0
-tra
ce
(Wo
)
×105 Pareto front (500 states)
(e) Pareto (500 states)
0 100 200 300 400 500 600 700 800 900 1000
number of sensors
-9000
-8000
-7000
-6000
-5000
-4000
-3000
-2000
-1000
0
-tra
ce(W
o)
Pareto front (1000 states)
(f) Pareto (1000 states)
FIGURE 8: Pareto fronts for optimal sensor placement using lin-ear program for random state space models of various sizes.
TABLE 6: Physics-based temperature error metric for various in-put voltages for 5 sensors.
Input Voltage level (in Volts) 100 200 300 400
Simplified error (C) per element 1.2 2.1 1.5 2.5
Weighted error (C) per element 1.2 0.8 1.3 1.15
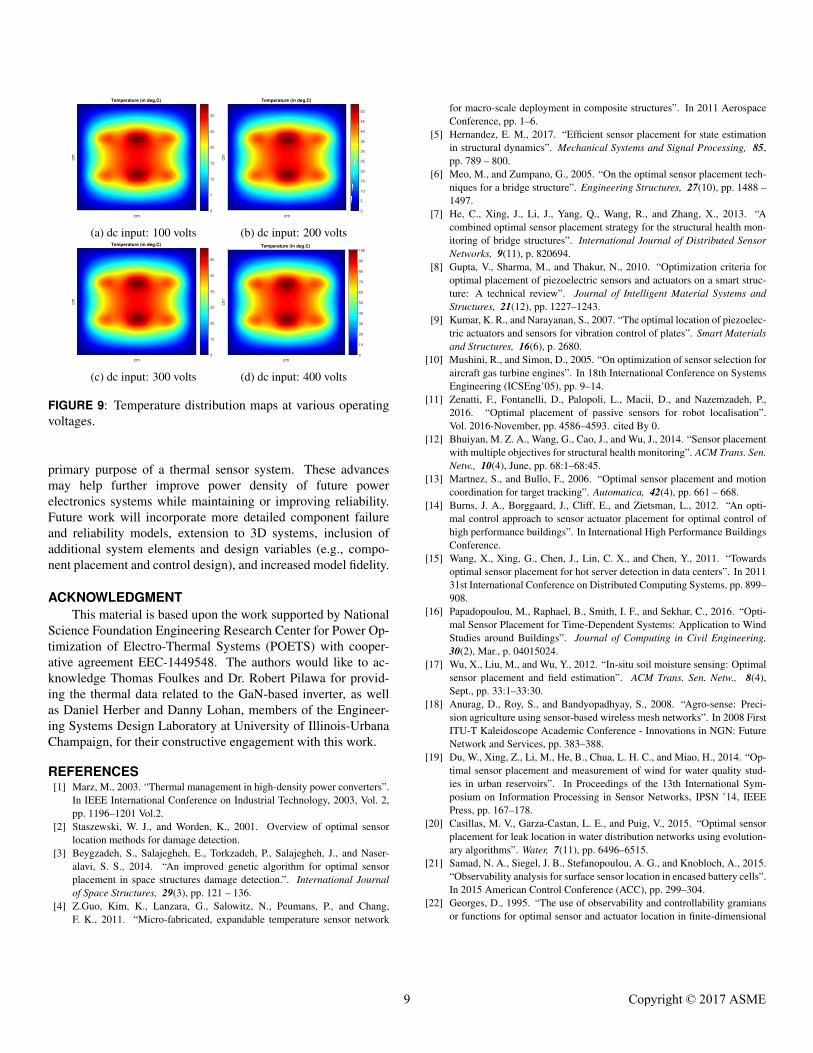
The physics-based error metric (both simple and weighted)has been used to study the sensor placement at various inputs(voltage levels from 100 Volts to 400 Volts), with five sen-sors used in the tests. Table 6 lists the error levels at eachof the different voltage levels. The steady state temperatureestimated from the observer design has been computed atvoltage levels of 100, 200, 300 and 400 volts. State zones4 and 8 in the reduced-order model have been identified ascritical regions to illustrate the performance metric. It can be ob-served in Table 6 that the error is reduced when using this metric.
7 Conclusion and Future WorkSeveral design strategies have been explored for temperature
sensor placement in HPDE systems. Both RC and FEA modelswere utilized to model the planar system. Optimal solutions havebeen obtained using metrics based on observability Gramians.A novel relaxation strategy for sensor placement, inspired bySIMP, has been introduced and shown to improve computationalefficiency significantly. A reformulation resulted in an LP, whichreduced computational expense even further. These new meth-ods will make possible the solution of very large-scale sensorplacement problems. Additional physics-based performancemetrics have been introduced that are more aligned with the
8 Copyright © 2017 ASME
Temperature (in deg.C)
cm
cm
0
5
10
15
20
25
30
(a) dc input: 100 volts
Temperature (in deg.C)
cm
cm
0
5
10
15
20
25
30
35
40
45
50
(b) dc input: 200 voltsTemperature (in deg.C)
cm
cm
0
10
20
30
40
50
60
(c) dc input: 300 volts
Temperature (in deg.C)
cm
cm
0
10
20
30
40
50
60
70
80
90
100
(d) dc input: 400 volts
FIGURE 9: Temperature distribution maps at various operatingvoltages.
primary purpose of a thermal sensor system. These advancesmay help further improve power density of future powerelectronics systems while maintaining or improving reliability.Future work will incorporate more detailed component failureand reliability models, extension to 3D systems, inclusion ofadditional system elements and design variables (e.g., compo-nent placement and control design), and increased model fidelity.
ACKNOWLEDGMENTThis material is based upon the work supported by National
Science Foundation Engineering Research Center for Power Op-timization of Electro-Thermal Systems (POETS) with cooper-ative agreement EEC-1449548. The authors would like to ac-knowledge Thomas Foulkes and Dr. Robert Pilawa for provid-ing the thermal data related to the GaN-based inverter, as wellas Daniel Herber and Danny Lohan, members of the Engineer-ing Systems Design Laboratory at University of Illinois-UrbanaChampaign, for their constructive engagement with this work.
REFERENCES[1] Marz, M., 2003. “Thermal management in high-density power converters”.
In IEEE International Conference on Industrial Technology, 2003, Vol. 2,pp. 1196–1201 Vol.2.
[2] Staszewski, W. J., and Worden, K., 2001. Overview of optimal sensorlocation methods for damage detection.
[3] Beygzadeh, S., Salajegheh, E., Torkzadeh, P., Salajegheh, J., and Naser-alavi, S. S., 2014. “An improved genetic algorithm for optimal sensorplacement in space structures damage detection.”. International Journalof Space Structures, 29(3), pp. 121 – 136.
[4] Z.Guo, Kim, K., Lanzara, G., Salowitz, N., Peumans, P., and Chang,F. K., 2011. “Micro-fabricated, expandable temperature sensor network
for macro-scale deployment in composite structures”. In 2011 AerospaceConference, pp. 1–6.
[5] Hernandez, E. M., 2017. “Efficient sensor placement for state estimationin structural dynamics”. Mechanical Systems and Signal Processing, 85,pp. 789 – 800.
[6] Meo, M., and Zumpano, G., 2005. “On the optimal sensor placement tech-niques for a bridge structure”. Engineering Structures, 27(10), pp. 1488 –1497.
[7] He, C., Xing, J., Li, J., Yang, Q., Wang, R., and Zhang, X., 2013. “Acombined optimal sensor placement strategy for the structural health mon-itoring of bridge structures”. International Journal of Distributed SensorNetworks, 9(11), p. 820694.
[8] Gupta, V., Sharma, M., and Thakur, N., 2010. “Optimization criteria foroptimal placement of piezoelectric sensors and actuators on a smart struc-ture: A technical review”. Journal of Intelligent Material Systems andStructures, 21(12), pp. 1227–1243.
[9] Kumar, K. R., and Narayanan, S., 2007. “The optimal location of piezoelec-tric actuators and sensors for vibration control of plates”. Smart Materialsand Structures, 16(6), p. 2680.
[10] Mushini, R., and Simon, D., 2005. “On optimization of sensor selection foraircraft gas turbine engines”. In 18th International Conference on SystemsEngineering (ICSEng’05), pp. 9–14.
[11] Zenatti, F., Fontanelli, D., Palopoli, L., Macii, D., and Nazemzadeh, P.,2016. “Optimal placement of passive sensors for robot localisation”.Vol. 2016-November, pp. 4586–4593. cited By 0.
[12] Bhuiyan, M. Z. A., Wang, G., Cao, J., and Wu, J., 2014. “Sensor placementwith multiple objectives for structural health monitoring”. ACM Trans. Sen.Netw., 10(4), June, pp. 68:1–68:45.
[13] Martnez, S., and Bullo, F., 2006. “Optimal sensor placement and motioncoordination for target tracking”. Automatica, 42(4), pp. 661 – 668.
[14] Burns, J. A., Borggaard, J., Cliff, E., and Zietsman, L., 2012. “An opti-mal control approach to sensor actuator placement for optimal control ofhigh performance buildings”. In International High Performance BuildingsConference.
[15] Wang, X., Xing, G., Chen, J., Lin, C. X., and Chen, Y., 2011. “Towardsoptimal sensor placement for hot server detection in data centers”. In 201131st International Conference on Distributed Computing Systems, pp. 899–908.
[16] Papadopoulou, M., Raphael, B., Smith, I. F., and Sekhar, C., 2016. “Opti-mal Sensor Placement for Time-Dependent Systems: Application to WindStudies around Buildings”. Journal of Computing in Civil Engineering,30(2), Mar., p. 04015024.
[17] Wu, X., Liu, M., and Wu, Y., 2012. “In-situ soil moisture sensing: Optimalsensor placement and field estimation”. ACM Trans. Sen. Netw., 8(4),Sept., pp. 33:1–33:30.
[18] Anurag, D., Roy, S., and Bandyopadhyay, S., 2008. “Agro-sense: Preci-sion agriculture using sensor-based wireless mesh networks”. In 2008 FirstITU-T Kaleidoscope Academic Conference - Innovations in NGN: FutureNetwork and Services, pp. 383–388.
[19] Du, W., Xing, Z., Li, M., He, B., Chua, L. H. C., and Miao, H., 2014. “Op-timal sensor placement and measurement of wind for water quality stud-ies in urban reservoirs”. In Proceedings of the 13th International Sym-posium on Information Processing in Sensor Networks, IPSN ’14, IEEEPress, pp. 167–178.
[20] Casillas, M. V., Garza-Castan, L. E., and Puig, V., 2015. “Optimal sensorplacement for leak location in water distribution networks using evolution-ary algorithms”. Water, 7(11), pp. 6496–6515.
[21] Samad, N. A., Siegel, J. B., Stefanopoulou, A. G., and Knobloch, A., 2015.“Observability analysis for surface sensor location in encased battery cells”.In 2015 American Control Conference (ACC), pp. 299–304.
[22] Georges, D., 1995. “The use of observability and controllability gramiansor functions for optimal sensor and actuator location in finite-dimensional
9 Copyright © 2017 ASME

systems”. In Proceedings of 1995 34th IEEE Conference on Decision andControl, Vol. 4, pp. 3319–3324 vol.4.
[23] van den Berg, F., Hoefsloot, H., Boelens, H., and Smilde, A., 2000. “Se-lection of optimal sensor position in a tubular reactor using robust degreeof observability criteria”. Chemical Engineering Science, 55(4), pp. 827 –837.
[24] Wilson, J., and Guhe, S., 2005. “Observability matrix condition number indesign of measurement strategies”. In European Symposium on Computer-Aided Process Engineering-15, 38th European Symposium of the WorkingParty on Computer Aided Process Engineering, L. Puigjaner and A. Espua,eds., Vol. 20 of Computer Aided Chemical Engineering. Elsevier, pp. 397 –402.
[25] Sumana, C., and Venkateswarlu, C., 2009. “Optimal selection of sensorsfor state estimation in a reactive distillation process”. Journal of ProcessControl, 19(6), pp. 1024 – 1035.
[26] Zhang, Y., and Srivastava, A., 2011. “Accurate temperature estimationusing noisy thermal sensors for gaussian and non-gaussian cases”. IEEETransactions on Very Large Scale Integration (VLSI) Systems, 19(9), Sept,pp. 1617–1626.
[27] Nowroz, A. N., Cochran, R., and Reda, S., 2010. “Thermal monitoring ofreal processors: Techniques for sensor allocation and full characterization”.In Design Automation Conference, pp. 56–61.
[28] Li, X., Rong, M., Liu, T., and Zhou, L., 2013. “Research of thermal sensorallocation and placement based on dual clustering for microprocessors”.SpringerPlus, 2(1), p. 253.
[29] Lee, K.-J., Skadron, K., and Huang, W., 2005. “Analytical model for sen-sor placement on microprocessors”. In 2005 International Conference onComputer Design, pp. 24–27.
[30] Memik, S. O., Mukherjee, R., Ni, M., and Long, J., 2008. “Optimiz-ing thermal sensor allocation for microprocessors”. IEEE Transactions onComputer-Aided Design of Integrated Circuits and Systems, 27(3), March,pp. 516–527.
[31] Li, X., Jiang, W., and Zhou, W., 2016. “Optimising thermal sensor place-ment and thermal maps reconstruction for microprocessors using simulatedannealing algorithm based on pca”. IET Circuits, Devices Systems, 10(6),pp. 463–472.
[32] Zanini, F., Atienza, D., and Micheli, G. D., 2013. “A combined sensorplacement and convex optimization approach for thermal management in3d-mpsoc with liquid cooling”. Integration, the VLSI Journal, 46(1),pp. 33 – 43. Thermal- and Power-Aware Design of 2D/3D ICs.
[33] Wang, H., Tan, S. X. D., Swarup, S., and Liu, X. X., 2013. “A power-driventhermal sensor placement algorithm for dynamic thermal management”. In2013 Design, Automation Test in Europe Conference Exhibition (DATE),pp. 1215–1220.
[34] Zhou, H., Li, X., Cher, C. Y., Kursun, E., Qian, H., and Yao, S. C., 2012.“An information-theoretic framework for optimal temperature sensor al-location and full-chip thermal monitoring”. In DAC Design AutomationConference 2012, pp. 642–647.
[35] Liu, J., and Terzis, A., 2011. “Sensing data centres for energy efficiency”.Philosophical Transactions of the Royal Society of London A: Mathemati-cal, Physical and Engineering Sciences, 370(1958), pp. 136–157.
[36] Sarma, S., Dutt, N., Gupta, P., Venkatasubramanian, N., and Nicolau,A., 2015. “Cyberphysical-system-on-chip (cpsoc): A self-aware mpsocparadigm with cross-layer virtual sensing and actuation”. In 2015 Design,Automation Test in Europe Conference Exhibition (DATE), pp. 625–628.
[37] Li, X., Rong, M., Wang, R., Liu, T., and Zhou, L., 2013. “Reducing thenumber of sensors under hot spot temperature error bound for microproces-sors based on dual clustering”. IET Circuits, Devices Systems, 7(4), July,pp. 211–220.
[38] Li, Q., Cui, T., Weng, Y., Negi, R., Franchetti, F., and Ilic, M. D., 2013.“An information-theoretic approach to pmu placement in electric powersystems”. IEEE Transactions on Smart Grid, 4(1), March, pp. 446–456.
[39] Lei, Y., Barth, C., Qin, S., Liu, W. C., Moon, I., Stillwell, A., Chou, D.,Foulkes, T., Ye, Z., Liao, Z., and Pilawa-Podgurski, R., 2017. “A 2 kw,single-phase, 7-level flying capacitor multilevel inverter with an active en-ergy buffer”. IEEE Transactions on Power Electronics, PP(99), pp. 1–7.
[40] Zhang, Y., and Srivastava, A., 2010. “Adaptive and autonomous thermaltracking for high performance computing systems”. In Proceedings of the47th Design Automation Conference, DAC ’10, ACM, pp. 68–73.
[41] Skadron, K., Abdelzaher, T., and Stan, M. R., 2002. “Control-theoretictechniques and thermal-rc modeling for accurate and localized dynamicthermal management”. In Proceedings of the 8th International Symposiumon High-Performance Computer Architecture, HPCA ’02, IEEE ComputerSociety, pp. 17–.
[42] Tannous, P. J., Peddada, S. R. T., Allison, J. T., Foulkes, T., Pilawa, R. P.,and Alleyne, A. G., 2017. “Dynamic temperature estimation of power elec-tronics systems”. In American Control Conference.
[43] Amy, R. A., Aglietti, G. S., and Richardson, G., 2010. “Accuracy of sim-plified printed circuit board finite element models”. Microelectronics Reli-ability, 50(1), pp. 86 – 97.
[44] Mller, P., and Weber, H., 1972. “Analysis and optimization of certain qual-ities of controllability and observability for linear dynamical systems”. Au-tomatica, 8(3), pp. 237 – 246.
[45] Singh, A. K., and Hahn, J., 2005. “Determining Optimal Sensor Locationsfor State and Parameter Estimation for Stable Nonlinear Systems”. Indus-trial & Engineering Chemistry Research, 44(15), pp. 5645–5659.
[46] Joshi, S., and Boyd, S., 2009. “Sensor selection via convex optimization”.Trans. Sig. Proc., 57(2), Feb., pp. 451–462.
[47] Rietz, A., 2001. “Sufficiency of a finite exponent in simp (power law)methods”. Structural and Multidisciplinary Optimization, 21(2), pp. 159–163.
APPENDIXThe system dynamics matrix A, input matrix B, and heat
generation vector u for the reduced order model used in this arti-cle are provided below. Please note that these are representativematrices to aid understanding of the material presented in this ar-ticle. More detailed estimation-related information can be foundin Ref. [42].
A=
−0.28 0.22 0.01 0.00 0.00 0.01 0.02 0.01 0.010.22 −0.28 0.01 0.01 0.02 0.01 0.00 0.00 0.010.25 0.21 −0.94 0.00 0.00 0.39 0.00 0.00 0.000.00 0.33 0.00 −0.81 0.00 0.39 0.00 0.00 0.000.00 0.46 0.00 0.00 −0.94 0.39 0.00 0.00 0.000.03 0.03 0.07 0.07 0.07 −0.50 0.07 0.07 0.070.46 0.22 0.01 0.00 0.00 0.39 −0.94 0.00 0.000.33 0.22 0.01 0.00 0.00 0.39 0.00 −0.81 0.000.21 0.25 0.00 0.00 0.00 0.39 0.00 0.00 −0.94
B =
0 0 0 0 0 00 0 0 0 0 0
12.5 0 0 0 0 00 12.5 0 0 0 00 0 12.5 0 0 00 0 0 0 0 00 0 0 12.5 0 00 0 0 0 12.5 00 0 0 0 0 12.5
u =
[1.20 1.50 1.40 0.16 0.25 0.16
]
10 Copyright © 2017 ASME