openel for robot(japanese)
TRANSCRIPT

ロボットおよび制御システムの開発のロボットおよび制御システムの開発のロボットおよび制御システムの開発のロボットおよび制御システムの開発のための新規プラットフォームの提案ための新規プラットフォームの提案ための新規プラットフォームの提案ための新規プラットフォームの提案
2011年11月16日
技術本部
プラットフォーム研究会
© Japan Embedded Systems Technology Association 2011

1. プラットフォーム研究会の紹介・ 概要、沿革、事業計画、平成23年度の活動成果と予定
2. ロボット技術の動向・ 特定分野における標準化団体、RTミドルウェアの特徴、ROSの特徴
3. 新規プラットフォームの提案・ ロボット技術に関する現状の取り組み、動向、課題、仮説、新規プラットフォームの
提案、 OpenEL for Robotの概要、ロードマップ
■ 参考資料・ コンピュータ・通信分野における標準化団体
目次目次目次目次
© Japan Embedded Systems Technology Association 20112

1. 1. 1. 1. プラットフォームプラットフォームプラットフォームプラットフォーム研究会の紹介研究会の紹介研究会の紹介研究会の紹介
3

1.1 1.1 1.1 1.1 プラットフォーム研究会の概要プラットフォーム研究会の概要プラットフォーム研究会の概要プラットフォーム研究会の概要
4
ロボット
ロボット
ロボット
ロボットWGWGWGWG

■ 設立:2000年
■ 目的:プラットフォームの事例、特性等の評価、利活用の指針策定
■ 委員:計27名
研究会:27名
ロボットWG:9名
■ アドバイザー首都大学東京:武居直行
名古屋工業大学:佐野明人、坂口正道
(独)産業技術総合研究所:神徳徹雄
■ 産学官連携コーディネーター(地独)東京都立産業技術研究センター
■ 参加企業・団体(株)コア
(株)エヌデーデー
アップウィンドテクノロジー・インコーポレイテッド
(地独)東京都立産業技術研究センター
有限会社シンビー
図研エルミック株式会社
東芝システムテクノロジー株式会社
東海ソフト株式会社
株式会社ビッツ
株式会社ブライセン
株式会社パトリオット
株式会社フィット・デザイン・システム
株式会社YCC情報システム
株式会社セントラル情報センター
1.1 1.1 1.1 1.1 プラットフォーム研究会の概要プラットフォーム研究会の概要プラットフォーム研究会の概要プラットフォーム研究会の概要
5© Japan Embedded Systems Technology Association 2011

■ 2000年、JASA東京支部の有志により、Linux研究会が発足
・ 組込みLinuxに関する技術動向の調査を実施し、報告書を発行
・ 「エンベデッドシステム関連ソフトウェア技術動向調査Embedded Linuxにおける技術動向 -平成13年度動向調査報告書-」(平成14年3月)
■ 2002年10月、エンベデッドソフトプラットフォーム研究会に改名
・ 組込みシステムのプラットフォームに関する技術動向を調査し、報告書を発行
・ 「エンベデッドプラットホームにおける動向調査Embedded Platformにおける技術動向-平成14年度動向調査報告書-」(平成15年3月)
■ 2003年、プラットフォーム研究会に改名
■ 2006年4月、「図解 組込みシステム用語早わかり」(オーム社)を出版
■ 2007年、プラットフォームの技術動向を調査
・ 「Androidの及ぼす影響」を発行http://www.jasa.or.jp/top/intro/chart/pdf/android.pdf
■ 2008年、ビジネスモデルについて研究
■ 2009年、プラットフォームリーダーシップについて研究
■ 2010年、オープンイノベーションについて研究
■ 2011年、標準プラットフォームの提案に着手
1.2 1.2 1.2 1.2 プラットフォーム研究会の沿革プラットフォーム研究会の沿革プラットフォーム研究会の沿革プラットフォーム研究会の沿革
© Japan Embedded Systems Technology Association 20116

■ 平成23年度は、下記の3つのテーマを設定し、次世代の共通基盤となる技術や考え方の探究を行う。
① プラットフォームによる日本の組込みソフトウェア産業の飛躍を考える— 「プラットフォーム・リーダーシップ」と「オープンイノベーション」の輪講での成果を「プラットフォーム・リーダーシップ」と「オープンイノベーション」の輪講での成果を「プラットフォーム・リーダーシップ」と「オープンイノベーション」の輪講での成果を「プラットフォーム・リーダーシップ」と「オープンイノベーション」の輪講での成果を
生かし、日本の組込みソフトウェア産業や情報通信産業を飛躍させるためのサー生かし、日本の組込みソフトウェア産業や情報通信産業を飛躍させるためのサー生かし、日本の組込みソフトウェア産業や情報通信産業を飛躍させるためのサー生かし、日本の組込みソフトウェア産業や情報通信産業を飛躍させるためのサービスプラットフォームについて検討し、まとまった時点でビスプラットフォームについて検討し、まとまった時点でビスプラットフォームについて検討し、まとまった時点でビスプラットフォームについて検討し、まとまった時点でJASAJASAJASAJASAホームページにて公ホームページにて公ホームページにて公ホームページにて公開する。開する。開する。開する。
② プラットフォームを選定し深堀を行う— 『『『『産業構造ビジョン産業構造ビジョン産業構造ビジョン産業構造ビジョン2010201020102010』』』』戦略戦略戦略戦略5555分野の先端分野から分野の先端分野から分野の先端分野から分野の先端分野からロボットロボットロボットロボットを取り上げ、具体的な技を取り上げ、具体的な技を取り上げ、具体的な技を取り上げ、具体的な技
術や戦略について深く調査し、術や戦略について深く調査し、術や戦略について深く調査し、術や戦略について深く調査し、 JASAJASAJASAJASAとしてリファレンスとなるプラットフォームを提案としてリファレンスとなるプラットフォームを提案としてリファレンスとなるプラットフォームを提案としてリファレンスとなるプラットフォームを提案するするするする
③ トレンドや最新技術の動向について情報を共有する— プラットフォームを基軸とした最新トレンド情報を調査して持ち寄り、会員同士で情報プラットフォームを基軸とした最新トレンド情報を調査して持ち寄り、会員同士で情報プラットフォームを基軸とした最新トレンド情報を調査して持ち寄り、会員同士で情報プラットフォームを基軸とした最新トレンド情報を調査して持ち寄り、会員同士で情報
共有するとともに、技術媒体等に投稿して一般公開も図る。共有するとともに、技術媒体等に投稿して一般公開も図る。共有するとともに、技術媒体等に投稿して一般公開も図る。共有するとともに、技術媒体等に投稿して一般公開も図る。
1.3 1.3 1.3 1.3 プラットフォーム研究会の事業計画プラットフォーム研究会の事業計画プラットフォーム研究会の事業計画プラットフォーム研究会の事業計画
© Japan Embedded Systems Technology Association 20117

■ 合宿を1回実施(2011/4/14-15:TJK箱根の森)
■ ロボットWGおよび研究会を6回実施
■ 第1回(2011年5月12日)・ ETロボコン2011に関する情報交換および計画策定、ロボット勉強会を実施、研究対
象分野の検討、成果発表会の発表資料の査読
■ 2011/5/26:JASA主催技術本部成果発表会にて発表・ 「オープンイノベーションの実現を支援するプラットフォームの考察」
■ 第2回(2011年6月23日)・ 「UTOSを用いたETロボコンの開発」セミナーを実施、モデリング手法に関する検討、
リアルタイムOS勉強会を実施、JASA会員の保有技術を活用する新規プラットフォームの検討
■ 第3回(2011年7月21日)・ ETロボコンのモデリングの検討、 「オブジェクト指向」勉強会を実施、各社保有技術
の調査、ロボット研究の動向調査
■ 第4回(2011年8月22日)・ ETロボコンのモデリングの検討、首都大学東京の武居准教授による「ロボット研究
紹介」を実施、発表資料の査読
1.4 1.4 1.4 1.4 平成平成平成平成23232323年度の活動成果と予定年度の活動成果と予定年度の活動成果と予定年度の活動成果と予定
8

■ 第5回(2011年9月22日):・ 「ETロボコン」勉強会を実施、ETロボコンのモデリング例の発表、発表資料の査読
■ 2011年9月23,24日:ETロボコン東京地区大会に参加
■ 第6回(2011年10月13日):・ OpenEL for Robotの仕様検討、発表資料の査読
■ 2011年11月16日: ET2011にて成果発表
■ 第7回(2011年11月24日): ロボットWG、勉強会、提案作成、研究会
■ 第8回(2011年12月22日): ロボットWG、勉強会、提案作成、研究会
■ 第9回(2011年1月19日): ロボットWG、勉強会、提案作成、研究会
■ 第10回(2011年2月16日): ロボットWG、勉強会、提案作成、研究会
■ 第11回(2011年3月22日): ロボットWG、勉強会、提案作成、研究会
1.4 1.4 1.4 1.4 平成平成平成平成23232323年度の活動成果と予定年度の活動成果と予定年度の活動成果と予定年度の活動成果と予定
9

■ 新聞・雑誌等のメディアで研究発表を4回実施
・ CQ出版:Interface 2011年5,6,7,9月号— 技術者から見たビジネスとしての組み込み業界
� 第一回:オープン・イノベーションの意義は?
� 第二回:知財権がオープン・イノベーションを可能にする
� 第三回:知財戦略で勝つ差別化を
� 第四回:知財戦略と国際標準化の関係は?(最終回)
1.5.1.5.1.5.1.5.平成平成平成平成23232323年度の活動成果年度の活動成果年度の活動成果年度の活動成果
10

[[[[参考参考参考参考]]]]第第第第1111回ロボット回ロボット回ロボット回ロボットWG(2011/5/12)WG(2011/5/12)WG(2011/5/12)WG(2011/5/12)の様子の様子の様子の様子
© Japan Embedded Systems Technology Association 2011
■ 参加者数:8名(主査を含む5名が20代の技術者)
■ 実施項目・ ETロボコンの紹介と模擬コース上でのデモ走行を実施(年度前半はETロボコンを
題材に活動予定)
・ 二足歩行ロボットの紹介
■ 首都大学東京の武居直行准教授(研究分野:人間支援ロボティクス、触覚テクノロジー、柔軟メカトロニクス、水中ロボティクス)がアドバイザーに就任
11

2. 2. 2. 2. ロボット技術の動向ロボット技術の動向ロボット技術の動向ロボット技術の動向
12

■ 3GPP(The 3rd Generation Partnership Project)・ 第三世代携帯電話(3G)システムの仕様の検討・作成を行うプロジェクト
■ W3C(The World Wide Web Consortium)・ World Wide Webで使用される各種技術の標準化を推進する非営利団体
■ OMG(Object Management Group)・ 分散オブジェクト指向システムの標準化を推進する業界団体
■ (社)電波産業会(Association of Radio Industries and Businesses)
・ 日本の携帯電話やデジタル放送に関する標準規格策定を行っている業界団体
■ (社)情報通信技術委員会(The Telecommunication Technology Committee)
・ 情報通信ネットワークに係る日本国内標準を作成している業界団体
2.1 2.1 2.1 2.1 特定分野における標準化団体特定分野における標準化団体特定分野における標準化団体特定分野における標準化団体
13

■ The Khronos Group, Inc・ さまざまなプラットフォームやデバイス上で、ダイナミックなメディア・オーサリング/
プレイバックを可能とする、オープンな業界標準APIの策定を行う非営利団体
・ OpenGL, OpenCL, OpenGL ES, OpenGL SC, EGL, COLLADA, WebGL, OpenKODE, OpenVG, OpenMAX, OpenSL ES, OpenWF等の仕様を策定
■ T-Engineフォーラム・ 次世代組込みOSの仕様策定・研究・開発等
・ uCodeの仕様策定・研究・開発等
■ TOPPERSプロジェクト・ 次世代組込みOSの仕様策定・研究・開発等
■ Willow Garage社・ ROSROSROSROS((((Robot Operating SystemRobot Operating SystemRobot Operating SystemRobot Operating System))))
■ (独)産業技術総合研究所・ RTMRTMRTMRTM((((Robot Technology MiddlewareRobot Technology MiddlewareRobot Technology MiddlewareRobot Technology Middleware))))
2.1 2.1 2.1 2.1 特定分野における標準化団体特定分野における標準化団体特定分野における標準化団体特定分野における標準化団体
14

■ RTミドルウェアがOMGで承認・ RTコンポーネントのオブジェクトモデル仕様が、2007年9月にOMG Robotic
Technology Component Specificationとして正式にOMGの標準規格となった
・ OpenRTM-aistはこのOMG RTC Specificationに準拠したソフトウエア
■ 「ロボットの世界的リーダー目指す米国」( ウォール・ストリート・ジャーナル日本版2010年11月5日)・ http://jp.wsj.com/IT/node_144601#
・ 米航空宇宙局(NASA)による「Robonaut 2」(R2)
・ 米行政予算管理局(OMB)と米科学技術政策室(OSTP)は、2012年度にオバマ政権が重点的に予算を振り向ける戦略的研究開発分野の一つとして「ロボット」を特定
・ 米政府による「RTD2(Robotics Technology Development and Deployment)」計画
・ 米国立衛生研究所(NIH)、米科学財団(NSF)、国防省傘下の国防高等研究計画局(DARPA)、国土安全保障省(DHS)、農務省(USDA)の5省庁が連携
・ 「From Internet to Robotics(インターネットからロボットへ)」
2.2 2.2 2.2 2.2 ロボット技術に関する動向ロボット技術に関する動向ロボット技術に関する動向ロボット技術に関する動向
15

■ 「日本の組み込み技術を世界一にするために」(日経エレクトロニクス2011年6月13日号)・ 欧州と米国で組み込みソフトウェア技術に関連する国家プロジェクトが進行中
・ 2004年、EUがARTEMIS(Advanced Research & Technology for Embedded Intelligence and Systems)プロジェクトを開始
・ 2006年、米NSF(National Science Foundation)がCPS(Cyber Physical Systems)プロジェクトを開始
・ 日本はどうすべきか?
■ 【ET West】トヨタ自動車、自動車やサービス・ロボットの安全規格をOMGで提言へ(Tech On、2011年6月17日)・ 自動車やサービス・ロボットなど消費者が直接接触するタイプの機械製品の安全規
格について、ソフトウエア関連の標準化団体であるOMGでの標準化を目指すことを明らかに
・ 標準化活動の開始を呼びかけ
2.2 2.2 2.2 2.2 ロボット技術に関する動向ロボット技術に関する動向ロボット技術に関する動向ロボット技術に関する動向
16

■ 世界中で数々のプロジェクトが同時進行
■ (独)産業技術総合研究所によるRTM(Robot Technology Middleware)http://www.openrtm.org/
■ 米国Willow Garage社によるROS(Robot Operating System)http://www.willowgarage.com/pages/software/ros-platform
■ Player http://playerstage.sourceforge.net/
■ YARP http://eris.liralab.it/yarp/
■ Orocos http://www.orocos.org/
■ Carmen http://carmen.sourceforge.net/
■ Orca http://orca-robotics.sourceforge.net/
■ MOOS http://www.robots.ox.ac.uk/~mobile/MOOS/wiki/pmwiki.php
■ Microsoft Robotics Developer Studio http://msdn.microsoft.com/en-us/robotics/default.aspx
2.3 2.3 2.3 2.3 ロボット技術における現状の取り組みロボット技術における現状の取り組みロボット技術における現状の取り組みロボット技術における現状の取り組み
17
注目!
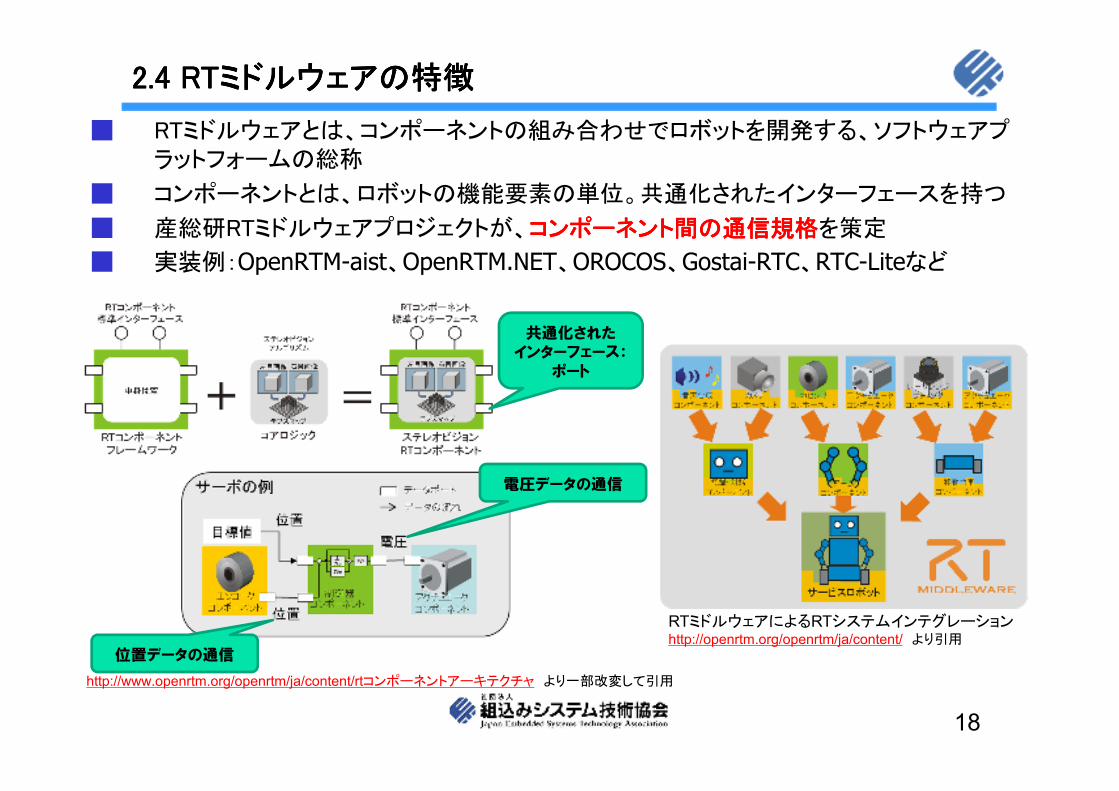
■ RTミドルウェアとは、コンポーネントの組み合わせでロボットを開発する、ソフトウェアプラットフォームの総称
■ コンポーネントとは、ロボットの機能要素の単位。共通化されたインターフェースを持つ
■ 産総研RTミドルウェアプロジェクトが、コンポーネント間の通信規格コンポーネント間の通信規格コンポーネント間の通信規格コンポーネント間の通信規格を策定
■ 実装例:OpenRTM-aist、OpenRTM.NET、OROCOS、Gostai-RTC、RTC-Liteなど
2.4 RT2.4 RT2.4 RT2.4 RTミドルウェアの特徴ミドルウェアの特徴ミドルウェアの特徴ミドルウェアの特徴
18
RTミドルウェアによるRTシステムインテグレーションhttp://openrtm.org/openrtm/ja/content/ より引用
http://www.openrtm.org/openrtm/ja/content/rtコンポーネントアーキテクチャ より一部改変して引用
共通化されたインターフェース:
ポート
位置データの通信
電圧データの通信

■ ROSとは、Nodeの組み合わせでロボットを開発するためのミドルウェア実装の名称
■ よく使われる組込み関数、ノード間の通信、パッケージ管理などの機能を提供する
■ RTMのような、ノード同士の接続はおこなわないおこなわないおこなわないおこなわない
■ NodeはServiceやTopicを提供する。各Nodeは必要に応じてTopicをSubscribeする。
■ 米国 Willow Garage 社が、主に研究・開発・管理
2.5 ROS2.5 ROS2.5 ROS2.5 ROSの特徴の特徴の特徴の特徴
19
ROSカメラ画像
Topic
カメラNode 車輪Node 脚Node
Publish Subscribe Subscribe
ドアサービスNode
ドア開閉Service
Node
Request
Reply

RTRTRTRTミドルウェアミドルウェアミドルウェアミドルウェア ROSROSROSROS
名称の範囲オブジェクトの通信規格(OMGが管理)の総称
実装されたミドルウェアの名称
目的 分散システム開発支援、コードの再利用促進
機能の単位 コンポーネント ノード
対応OSLinux、FreeBSD、Windows、 Mac OS X、TOPPERS ASP
Linux
対応言語 C++、Java、Python C++、Java、Python
開発ツール GUIツールが主 CUIツールが主
システムインテグレーション方法 コンポーネント上のポートの接続TopicのPublishとSubscribe,ServiceのRequestとReply
2.6 RT2.6 RT2.6 RT2.6 RTミドルウェアとミドルウェアとミドルウェアとミドルウェアとROSROSROSROS
20

RTRTRTRTミドルウェアミドルウェアミドルウェアミドルウェア ROSROSROSROS
課題
世界標準としての普及ノードの状態管理は実装依存、言語毎にコーディングスタイルが異なる
開発環境によって開発言語が制約を受ける場合がある開発言語によって開発環境が制約を受ける場合がある同じ種類・用途のセンサーでもチャンネル数などが統一されていないアクチュエーター(モーターなど)も同様A/D、D/Aのビット数もハードウェアに依存し、標準化されていない
→→→→非競争領域で苦労することが多い非競争領域で苦労することが多い非競争領域で苦労することが多い非競争領域で苦労することが多い
2.6 RT2.6 RT2.6 RT2.6 RTミドルウェアとミドルウェアとミドルウェアとミドルウェアとROSROSROSROS
21

3. 3. 3. 3. 新規新規新規新規プラットフォームの提案プラットフォームの提案プラットフォームの提案プラットフォームの提案
22

■ Open GLでは、glxxx()のようなインターフェースを定義し、描画処理におけるクロスアーキテクチャおよびクロスプラットフォームへの対応を実現
■ グラフィックスプロセッサ、OS、言語の違いを吸収
■ 組み込み用途には、サブセット版のOpen GL ES(Embedded Systems)を策定
■ ゲームアプリケーションの例・ Open GL ESを利用するアプリケーションはクロスプラットフォームで動作可能
3.1 Khronos Group3.1 Khronos Group3.1 Khronos Group3.1 Khronos GroupによるによるによるによるOpenGL(Graphics Libraries)OpenGL(Graphics Libraries)OpenGL(Graphics Libraries)OpenGL(Graphics Libraries)の例の例の例の例
23
PSP PS3 PC3DS Android iPhone
Open GL ES
Game
Open GL ES
Game
Open GL ES
Game
Open GL
Game
Open GL ES
Game
Open GL ES
Game互換互換互換 互換 互換

3.2 3.2 3.2 3.2 仮説仮説仮説仮説
24
OpenELOpenELOpenELOpenEL(Embedded (Embedded (Embedded (Embedded Libraries)Libraries)Libraries)Libraries)for Robotfor Robotfor Robotfor Robot
で解決!
多種多様なハードウェア(センサー、モーター等)に近い
共通レイヤーがあったら
ソフトウェア部品の組み合わせ時に問題が発生しないように、
実装するための仕様が定義できたら
OpenGLのような使いやすさがあったら
異なるハードウェア上のLEDを点灯させたり、モー
ターを動作させるだけで、何日も費やすこともあったのが解決!
デバイスドライバをはじめ既存のソフトウェアを異なるシステムに移植するにはかなりの工数が必要だったのが短期間で可能に!
A社のモーター
Open EL
プログラム(モーター制御、
制御アルゴリズム、アプリケーション等)
互換互換互換互換
B社のモーター
Open EL
プログラム(モーター制御、
制御アルゴリズム、アプリケーション等)
C社のセンサー
Open EL
プログラム(センサー制御、
解析アルゴリズム、アプリケーション等)
互換互換互換互換
D社のセンサー
Open EL
プログラム(センサー制御、
解析アルゴリズム、アプリケーション等)
異なるメーカーのモーターでも異なるメーカーのモーターでも異なるメーカーのモーターでも異なるメーカーのモーターでも制御方法の違い等を吸収制御方法の違い等を吸収制御方法の違い等を吸収制御方法の違い等を吸収
異なるメーカーのセンサーでも入力や異なるメーカーのセンサーでも入力や異なるメーカーのセンサーでも入力や異なるメーカーのセンサーでも入力や入力値の解析方法の違い等を吸収入力値の解析方法の違い等を吸収入力値の解析方法の違い等を吸収入力値の解析方法の違い等を吸収

■ 低いレイヤーで標準化することにより、ロジックの互換を実現
■ 組み合わせ時の動作を保証
3.3.1 Open EL3.3.1 Open EL3.3.1 Open EL3.3.1 Open ELととととRTMRTMRTMRTMとの関係およびとの関係およびとの関係およびとの関係およびOpen ELOpen ELOpen ELOpen EL導入のメリット導入のメリット導入のメリット導入のメリット
25
B社のモーター
RTコンポーネントフレームワーク
Open EL
プログラム(モーター制御、
制御アルゴリズム、アプリケーション等)
A社のモーター
RTコンポーネントフレームワーク
Open EL
プログラム(モーター制御、
制御アルゴリズム、アプリケーション等)
互換互換互換互換
C社のセンサー
RTコンポーネントフレームワーク
Open EL
プログラム(センサー制御、
解析アルゴリズム、アプリケーション等)
C社のセンサー
RTコンポーネントフレームワーク
Open EL
プログラム(センサー制御、
解析アルゴリズム、アプリケーション等)
互換互換互換互換
B社のモーター
RTコンポーネントフレームワーク
Open EL
プログラム(モーター制御、
制御アルゴリズム、アプリケーション等)
A社のモーター
RTコンポーネントフレームワーク
Open EL
プログラム(モーター制御、
制御アルゴリズム、アプリケーション等)
C社のセンサー
RTコンポーネントフレームワーク
Open EL
プログラム(センサー制御、
解析アルゴリズム、アプリケーション等)
C社のセンサー
RTコンポーネントフレームワーク
Open EL
プログラム(センサー制御、
解析アルゴリズム、アプリケーション等)
RTコンポーネントの組み合わせ時の動作を保証!コンポーネントの組み合わせ時の動作を保証!コンポーネントの組み合わせ時の動作を保証!コンポーネントの組み合わせ時の動作を保証!

■ elLedOn(0xF)・・・4つのLEDを点灯
■ elLedOff(0x8)・・・1つのLEDを消灯
■ elLedBlink(0x1, 2000)・・・一番端のLEDを2秒間隔で点滅
■ elMotorPowerOn・・・電源ON
■ elMotorPowerOff・・・電源OFF
■ elMotorSetSpeed(240)・・・回転速度の設定
■ elMotorSetDirection()・・・回転方向の指定
■ elMotorRotate()・・・指定した方向、角度だけ回転
3.3.2 API3.3.2 API3.3.2 API3.3.2 APIの例(の例(の例(の例(CCCC言語の場合)言語の場合)言語の場合)言語の場合)
26

#include<openel.hopenel.hopenel.hopenel.h>
int main(void)
{
while(1) {
elLedOn(0x1);
sleep(1);
elLedOff(0x1);
sleep(1);
}
return 0;
}
3.3.3 3.3.3 3.3.3 3.3.3 コードの例(コードの例(コードの例(コードの例(CCCC言語の場合)言語の場合)言語の場合)言語の場合)
27

3.4 OpenEL for Robot3.4 OpenEL for Robot3.4 OpenEL for Robot3.4 OpenEL for Robotのビジョンのビジョンのビジョンのビジョン
ビジョン
制御システムのソフトウェアの実装仕様を
標準化
移植作業工数の削減
→コスト削減
再利用性の向上
→品質向上
組込みソフトウェア産業の
活性化
すり合わせ型から組み合わ
せ型へ
→生産性向上
28

■ OpenEL for Robotは、センサー入力やモーターへの出力等、機器制御のためのAPIを標準化し、ソフトウェアの移植性、再利用性、生産性を向上するための仕組みである。
3.5 OpenEL for Robot3.5 OpenEL for Robot3.5 OpenEL for Robot3.5 OpenEL for Robotの概要の概要の概要の概要
Hardware
OS
RTミドルウェア
RTコンポーネントOpenELレイヤーにより、使用するデバイスに変更が生じても上位レイヤーは設計変更不要!
OpenEL通信
ミドルウェアOpenELのレイヤーでセンサーやモーターなどのデバイスの違いを吸収
elMotorPowerOn(), elMotorSetAngle(),
elMotorPowerOff(), elMotorSetSpeed() 等のAPI
デバイスベンダーまたは受託会社が実装
センサーA センサーB モーターA モーターB
29

3.6 OpenEL for Robot3.6 OpenEL for Robot3.6 OpenEL for Robot3.6 OpenEL for Robotのロードマップのロードマップのロードマップのロードマップ
30
OpenEL for Robot 0.1
ETロボコンの走行体NXTに対応
OpenEL for Robot 1.0
産業用ロボット、各種制御システムに対応
OpenEL for xxx
自動車、家電等各種産業機器に対応
2011/11 2012/3 2013/3 2014/3
(社)ロボット学会や(社)ロボット工業会と協業
自動車業界や電機メーカーと協業
製品安全、モデルベース開発、形式手法等JASAの複数の委員会が連携
(独)産業技術研究所、(地独)東京都立産業技術研究センター、首都大学東京、名古屋工業大学等と協業
新規委員の募集
大学・研究機関、JASA会員間で評価
デバイスベンダー、ロボットメーカー等で評価
自動車業界、電機メーカー等で評価

■ 国際的な団体・ ISO(International Organization for Standardization:国際標準化機構)
・ IEC(International EEEElectrotechnical CCCCommission:国際電気会議)
・ ITU(International Telecommunication Union:国際電気通信機構)
・ IEEE(The Institute of Electrical and Electronics Engineers, Inc:電気電子学会)
■ 各地域の団体・ CEN(European Committee for Standardization:欧州標準化委員会)
・ Ecma International(元欧州電子計算機工業会)
・ ETSI(European Telecommunications Standards Institute:欧州電気通信標準化機構)
■ 各国内の団体・ ANSI(American National Standards Institute:米国規格協会)
・ NIST(National Institute of Standards and Technology:米国国立標準技術研究所)
・ CEA(Consumer Electronics Association:全米家電教会)
・ DIN(Deutsches Institut für Normung:ドイツ規格協会)
・ BSI(British Standards Institution:英国規格協会)
・ JSA(Japanese Standards Association:日本規格協会)
参考資料:コンピュータ・通信分野における標準化団体参考資料:コンピュータ・通信分野における標準化団体参考資料:コンピュータ・通信分野における標準化団体参考資料:コンピュータ・通信分野における標準化団体
31

ご清聴ありがとうございました。ご清聴ありがとうございました。ご清聴ありがとうございました。ご清聴ありがとうございました。
JASAJASAJASAJASAへのご入会、プラットフォーム研究会およびロボットへのご入会、プラットフォーム研究会およびロボットへのご入会、プラットフォーム研究会およびロボットへのご入会、プラットフォーム研究会およびロボットWGWGWGWGへのご参加、へのご参加、へのご参加、へのご参加、OpenEL for RobotOpenEL for RobotOpenEL for RobotOpenEL for Robotに関するお問い合わせに関するお問い合わせに関するお問い合わせに関するお問い合わせは、下記までお願いいたします。は、下記までお願いいたします。は、下記までお願いいたします。は、下記までお願いいたします。
(社)組込みシステム技術協会 本部事務局
〒103-0007 東京都中央区日本橋浜町1-8-12
東京実業厚生年金会館8F
TEL : 03-5821-7973 FAX : 03-5821-0444
E-mail : [email protected]
32