molecular dynamics – numerics
TRANSCRIPT
Scientific Computing II
Molecular Dynamics – Numerics
Michael Bader – SCCSTechnical University of Munich
Summer 2017
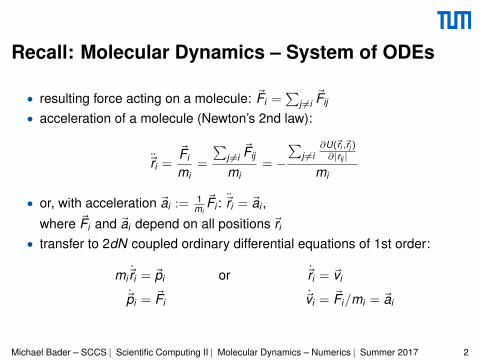
Recall: Molecular Dynamics – System of ODEs
• resulting force acting on a molecule: ~Fi =∑
j 6=i~Fij
• acceleration of a molecule (Newton’s 2nd law):
~ri =~Fi
mi=
∑j 6=i~Fij
mi= −
∑j 6=i
∂U(~ri ,~rj )∂|rij |
mi
• or, with acceleration ~ai := 1mi~Fi : ~ri = ~ai ,
where ~Fi and ~ai depend on all positions ~ri
• transfer to 2dN coupled ordinary differential equations of 1st order:
mi~ri = ~pi or ~ri = ~vi
~pi = ~Fi ~vi = ~Fi/mi = ~ai
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 2
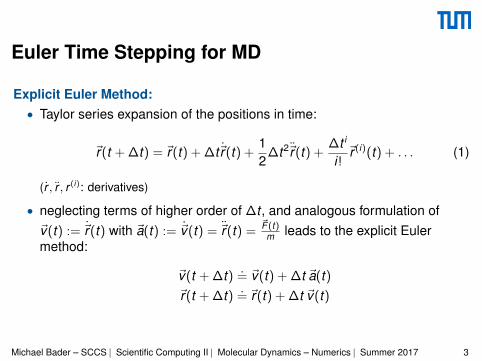
Euler Time Stepping for MD
Explicit Euler Method:• Taylor series expansion of the positions in time:
~r(t + ∆t) = ~r(t) + ∆t~r(t) +12
∆t2~r(t) +∆t i
i!~r (i)(t) + . . . (1)
(r , r , r (i): derivatives)
• neglecting terms of higher order of ∆t , and analogous formulation of~v(t) := ~r(t) with ~a(t) := ~v(t) = ~r(t) =
~F (t)m leads to the explicit Euler
method:
~v(t + ∆t) .= ~v(t) + ∆t ~a(t)
~r(t + ∆t) .= ~r(t) + ∆t ~v(t)
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 3
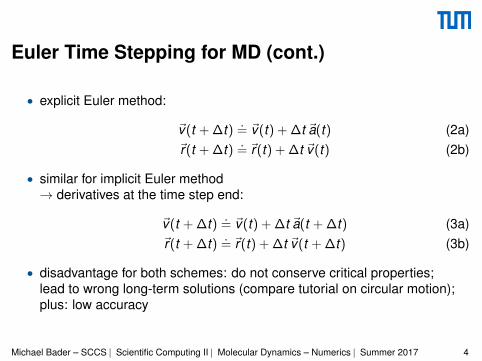
Euler Time Stepping for MD (cont.)
• explicit Euler method:
~v(t + ∆t) .= ~v(t) + ∆t ~a(t) (2a)
~r(t + ∆t) .= ~r(t) + ∆t ~v(t) (2b)
• similar for implicit Euler method→ derivatives at the time step end:
~v(t + ∆t) .= ~v(t) + ∆t ~a(t + ∆t) (3a)
~r(t + ∆t) .= ~r(t) + ∆t ~v(t + ∆t) (3b)
• disadvantage for both schemes: do not conserve critical properties;lead to wrong long-term solutions (compare tutorial on circular motion);plus: low accuracy
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 4
Classical Stormer Verlet Method
• the Taylor series expansion in (1) can also be performed for −∆t :
~r(t −∆t) = ~r(t)−∆t~r(t) +12
∆t2~r(t) +(−∆t)i
i!~r (i)(t) + . . . (4)
• from (1) and (4) the classical Verlet algorithm can be derived:
~r(t + ∆t) = 2~r(t)−~r(t −∆t) + ∆t2~r(t) +O(∆t4)
≈ 2~r(t)−~r(t −∆t) + ∆t2~a(t)(5)
note: direct calculation of ~r(t + ∆t) from ~r(t) and ~F (t)• velocity can be estimated via
~v(t) = ~r(t) .=~r(t + ∆t)−~r(t −∆t)
2∆t(6)
• disadvantage: needs to store two previous time steps
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 5
Crank Nicolson Method
• explicit approximation (7a) for half step [t , t + ∆t2 ] inserted into implicit
approximation (7b) for half step [t + ∆t2 , t + ∆t ]
~v(t +∆t2
) = ~v(t) +∆t2~a(t) (7a)
~v(t + ∆t) = ~v(t +∆t2
) +∆t2~a(t + ∆t) (7b)
• leads to Crank-Nicolson scheme for v :
~v(t + ∆t) = ~v(t) +∆t2(~a(t) + ~a(t + ∆t)
)(8)
• key disadvantage: implicit scheme, as ~a(t + ∆t) depends on ~r(t + ∆t);needs to solve non-linear system of equations
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 6
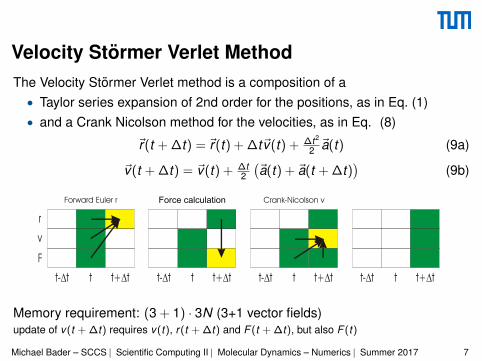
Velocity Stormer Verlet MethodThe Velocity Stormer Verlet method is a composition of a• Taylor series expansion of 2nd order for the positions, as in Eq. (1)• and a Crank Nicolson method for the velocities, as in Eq. (8)
~r(t + ∆t) = ~r(t) + ∆t~v(t) + ∆t2
2~a(t) (9a)
~v(t + ∆t) = ~v(t) + ∆t2
(~a(t) + ~a(t + ∆t)
)(9b)
tt-Dt t+Dt tt-Dt t+Dt tt-Dt t+Dt
r
v
F
tt-Dt t+Dt
Forward Euler r Force calculation Crank-Nicolson v
Memory requirement: (3 + 1) · 3N (3+1 vector fields)update of v(t + ∆t) requires v(t), r(t + ∆t) and F (t + ∆t), but also F (t)
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 7
Velocity Stormer Verlet – Implementation
• reformulate equation for positions ~r :
~r(t + ∆t) = ~r(t) + ∆t~v(t) +∆t2
2~a(t)
= ~r(t) + ∆t(~v(t) +
∆t2~a(t)
)contains half an Euler time step for ~v
• similar for the velocities ~v :
~v(t + ∆t) = ~v(t) +∆t2(~a(t) + ~a(t + ∆t)
)=
(~v(t) +
∆t2~a(t)
)+
∆t2~a(t + ∆t)
reuses the result of the half Euler time step for ~v
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 8
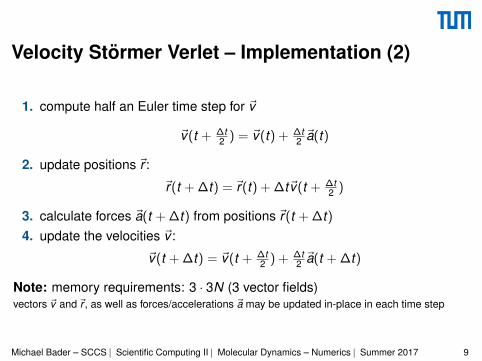
Velocity Stormer Verlet – Implementation (2)
1. compute half an Euler time step for ~v
~v(t + ∆t2 ) = ~v(t) + ∆t
2~a(t)
2. update positions ~r :
~r(t + ∆t) = ~r(t) + ∆t~v(t + ∆t2 )
3. calculate forces ~a(t + ∆t) from positions ~r(t + ∆t)4. update the velocities ~v :
~v(t + ∆t) = ~v(t + ∆t2 ) + ∆t
2~a(t + ∆t)
Note: memory requirements: 3 · 3N (3 vector fields)vectors ~v and~r , as well as forces/accelerations ~a may be updated in-place in each time step
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 9
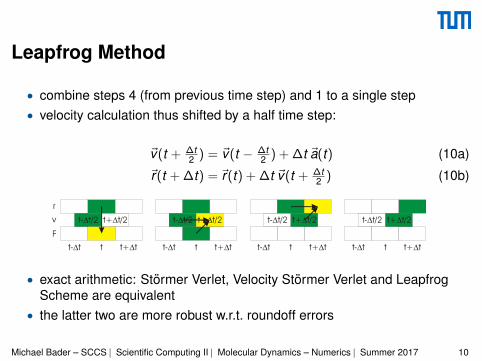
Leapfrog Method
• combine steps 4 (from previous time step) and 1 to a single step• velocity calculation thus shifted by a half time step:
~v(t + ∆t2 ) = ~v(t − ∆t
2 ) + ∆t ~a(t) (10a)~r(t + ∆t) = ~r(t) + ∆t ~v(t + ∆t
2 ) (10b)
tt-Dt t+Dt tt-Dt t+Dt tt-Dt t+Dt
r
v
F
t-Dt/2 t+Dt/2t-Dt/2 t+Dt/2 t-Dt/2 t+Dt/2 t-Dt/2 t+Dt/2
tt-Dt t+Dt
• exact arithmetic: Stormer Verlet, Velocity Stormer Verlet and LeapfrogScheme are equivalent
• the latter two are more robust w.r.t. roundoff errors
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 10
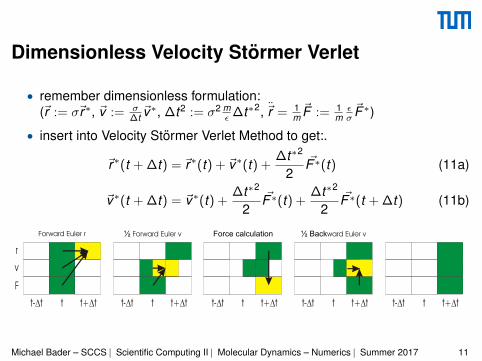
Dimensionless Velocity Stormer Verlet
• remember dimensionless formulation:(~r := σ~r∗, ~v := σ
∆t~v∗, ∆t2 := σ2 m
ε ∆t∗2, ~r = 1m~F := 1
mεσ~F ∗)
• insert into Velocity Stormer Verlet Method to get:.
~r∗(t + ∆t) = ~r∗(t) + ~v∗(t) +∆t∗2
2~F ∗(t) (11a)
~v∗(t + ∆t) = ~v∗(t) +∆t∗2
2~F ∗(t) +
∆t∗2
2~F ∗(t + ∆t) (11b)
tt-Dt t+Dt tt-Dt t+Dt tt-Dt t+Dt
r
v
F
tt-Dt t+Dttt-Dt t+Dt
Forward Euler r ½ Forward Euler v Force calculation ½ Backward Euler v
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 11
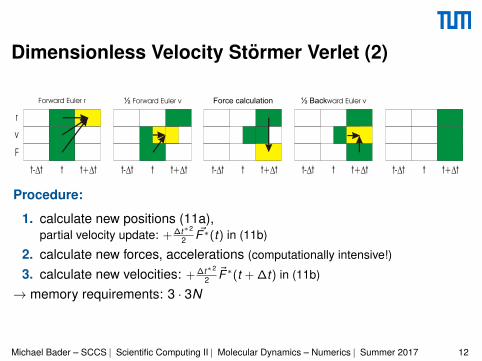
Dimensionless Velocity Stormer Verlet (2)
tt-Dt t+Dt tt-Dt t+Dt tt-Dt t+Dt
r
v
F
tt-Dt t+Dttt-Dt t+Dt
Forward Euler r ½ Forward Euler v Force calculation ½ Backward Euler v
Procedure:
1. calculate new positions (11a),partial velocity update: + ∆t∗2
2~F∗(t) in (11b)
2. calculate new forces, accelerations (computationally intensive!)
3. calculate new velocities: + ∆t∗2
2~F∗(t + ∆t) in (11b)
→ memory requirements: 3 · 3N
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 12
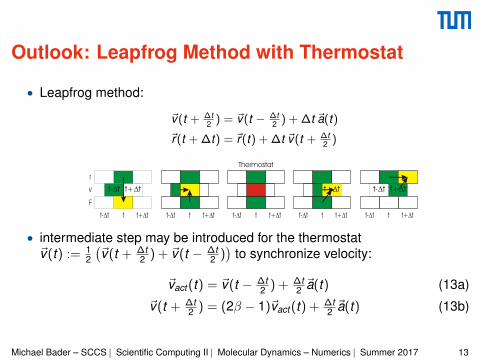
Outlook: Leapfrog Method with Thermostat
• Leapfrog method:
~v(t + ∆t2 ) = ~v(t − ∆t
2 ) + ∆t ~a(t)
~r(t + ∆t) = ~r(t) + ∆t ~v(t + ∆t2 )
t-Dt t+Dt t+Dt t-Dt t+Dt
r
v
F
tt-Dt t+Dt tt-Dt t+Dt tt-Dt t+Dt tt-Dt t+Dt tt-Dt t+Dt
Thermostat
• intermediate step may be introduced for the thermostat~v(t) := 1
2
(~v(t + ∆t
2 ) + ~v(t − ∆t2 ))
to synchronize velocity:
~vact (t) = ~v(t − ∆t2 ) + ∆t
2~a(t) (13a)
~v(t + ∆t2 ) = (2β − 1)~vact (t) + ∆t
2~a(t) (13b)
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 13
Evaluation of Time Integration Methods
• accuracy (not of great importance for exact particle positions)• stability• conservation→ of phase space density (symplectic)→ of energy→ of momentum
(especially with PBC→ Periodic Boundary Conditions)
• reversibility of time• use of resources:
– computational effort (number of force evaluations)– maximum time step size– memory usage
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 14
Reversibility of Time
• time reversal for a closed system means• a turnaround of the velocities and also momentums;
positions at the inversion point stay constant• traverse of a trajectory back in the direction of the origin
• demand for symmetry for time integration methods+ satisfied by Verlet method, e.g.− not satisfied by, e.g., Euler method, Predictor Corrector methods
(also not by standard Runge-Kutta methods)• contradiction with
• the H-theorem (increase of entropy, irreversible processes)?(Loschmidt’s paradox)
• the second theorem of thermodynamics?• reversibility in theory only for a very short time
• Lyapunov instability⇒ Kolmogorov entropy
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 15
Lyapunov Instability
• Basic question: how does a model behave with slightly disturbed initialcondition?
• Example of a simple system:• stable case:
jumping ball on a plane with slightly disturbed initial horizontalvelocity⇒ linear increase of the disturbance
• instable case:jumping ball on a sphere with slightly disturbed initial horizontalvelocity⇒ exponential increase of the disturbance (Lyapunovexponent)
• for the instable case, small disturbances result in large changes:chaotic behaviour (butterfly leading to a hurricane?)
• non-linear differential equations are often dynamically instable
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 16
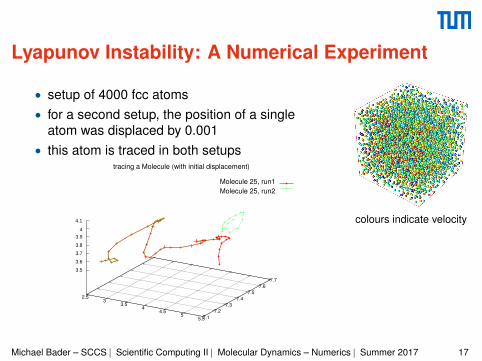
Lyapunov Instability: A Numerical Experiment
• setup of 4000 fcc atoms• for a second setup, the position of a single
atom was displaced by 0.001• this atom is traced in both setups
colours indicate velocity
2.5 3
3.5 4
4.5 5
5.5 7.1 7.2
7.3 7.4
7.5 7.6
7.7
3.5
3.6
3.7
3.8
3.9 4
tracing a Molecule (with initial displacement)
Molecule 25, run1Molecule 25, run2
4.1
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 17
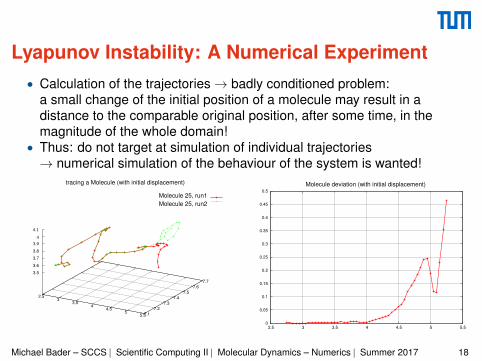
Lyapunov Instability: A Numerical Experiment• Calculation of the trajectories→ badly conditioned problem:
a small change of the initial position of a molecule may result in adistance to the comparable original position, after some time, in themagnitude of the whole domain!
• Thus: do not target at simulation of individual trajectories→ numerical simulation of the behaviour of the system is wanted!
2.5 3
3.5 4
4.5 5
5.5 7.1 7.2
7.3 7.4
7.5 7.6
7.7
3.5
3.6
3.7
3.8
3.9 4
tracing a Molecule (with initial displacement)
Molecule 25, run1Molecule 25, run2
4.1
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
0.5
2.5 3 3.5 4 4.5 5 5.5
Molecule deviation (with initial displacement)
Michael Bader – SCCS | Scientific Computing II | Molecular Dynamics – Numerics | Summer 2017 18