modelado unidimensional de chorros capilares...
TRANSCRIPT

Escuela
Polit
écnic
a S
uperior
de L
inare
s
UNIVERSIDAD DE JAÉN Escuela Politécnica Superior de Linares
Trabajo Fin de Grado
______
MODELADO UNIDIMENSIONAL DE
CHORROS CAPILARES ESTIRADOS
POR GRAVEDAD
Alumna: Lidia Laguna Trujillo
Tutor: Mariano Rubio Rubio Depto.: Ingeniería Mecánica y Minera
Febrero, 2019


DEPARTAMENTO DE INGENIERÍA MECÁNICA Y MINERA
ESCUELA POLITÉCNICA SUPERIOR DE LINARES
MODELADO UNIDIMENSIONAL DE
CHORROS CAPILARES ESTIRADOS
POR GRAVEDAD
Grado en Ingeniería Mecánica
Autora
Lidia Laguna Trujillo
Tutor
Mariano Rubio Rubio
Linares, febrero de 2019


Si hay magia en el planeta,
está contenida en el agua.
Loran Eisely


I
Agradecimientos
Quisiera dar las gracias a una de las personas más importantes de mi vida, mi madre. Mi
madre es la tila para los interminables nervios de las épocas de exámenes, esa persona que
siempre me ha apoyado, la que ha creído en mí incluso cuando yo no lo hacía, esa persona a
la que debo todo y nunca espera nada a cambio.
A mi padre, que espero que desde algún rincón me esté viendo y esté muy orgulloso de
mí. Ojalá todo hubiera sido diferente, pero yo siempre te he tenido presente.
A mis hermanas que son las responsables de algunos descansos improvisados hablando
en la cocina de casa.
A mis hermanos, que quizás las circunstancias hacen que no nos veamos lo suficiente
pero que siempre han creído en mí.
A Manuel, pues lo que ha unido la ingeniería que no lo separe el hombre. Has sido un
apoyo fundamental para mí. Gracias por acompañarme al no saber volver a casa. Confío en
nuestro proyecto y espero que sea el primero de muchos.
A todos esos amigos que me llevo de la carrera y que guardaré con mucho cariño para
siempre, pues ellos son mis ‘compañeros de fatigas’, pero nunca nos han faltado unas risas.
Y por supuesto, a mi tutor Mariano, por su labor incansable y su infinita paciencia.
Gracias por apostar por mí. Cuando un profesor siente su profesión, hace a su alumno capaz
de conseguir hasta lo que creía imposible. Tú, Mariano, eres ese profesor y espero que todos
esos alumnos que se crucen en tu camino sepan apreciarlo.

II

III
Resumen
Los chorros están presentes en muy diversas situaciones, desde nanoescala hasta
estructuras a escala del universo. Por tanto, su presencia ha estado indudablemente ligada al
estudio de su comportamiento.
En el presente trabajo, se ha realizado un modelo unidimensional de un líquido
perfecto, aplicándose al caso de un chorro capilar estirado por gravedad, mediante la
simplificación de las Ecuaciones de Navier Stokes.
Para la resolución de las ecuaciones, se ha utilizado el método iterativo Newton-Raphson
y para la malla computacional se ha usado el método espectral de Chebyshev. Se han
implementado unos códigos en el software matemático Matlab® para facilitar el tratamiento
y cálculo de todo lo mencionado anteriormente. Finalmente, todos los resultados obtenidos
se han validado mediante la comparación con resultados experimentales.
Todo el estudio que en este trabajo se expone, puede ser utilizado para verificar la
concordancia de los resultados teóricos con los experimentales, así como para realizar
estudios relacionados con la estabilidad y el goteo del chorro, que tienen diversas
aplicaciones tanto en la ciencia básica como en la industria.

IV

V
Índice general
Índice general………………………………………………………………………………………V
Agradecimientos ................................................................................................................................ I
Resumen .......................................................................................................................................... III
1. INTRODUCCIÓN .................................................................................................................... 1
1.1. Introducción ...................................................................................................................... 1
1.2. Estado del arte .................................................................................................................. 2
1.3. Aspectos generales del trabajo ........................................................................................ 4
2. MODELO MATEMÁTICO .................................................................................................... 5
2.1. Definición del problema ................................................................................................... 5
2.2. Modelo unidimensional .................................................................................................... 5
2.3. Adimensionalización ........................................................................................................ 9
3. PROBLEMA ESTACIONARIO .......................................................................................... 13
3.1. Modelo unidimensional estacionario ............................................................................ 13
3.2. Método numérico............................................................................................................ 15
3.2.1. Método iterativo de Newton-Raphson ...................................................................... 15
3.2.2. Método espectral de Chebyshev ............................................................................... 16
3.2.3. Transformación de coordenadas o mapping ............................................................ 17
3.2.4. Proceso iterativo ...................................................................................................... 17
3.2.5. Métodos de resolución alternativos ......................................................................... 18
3.3. Resultados ....................................................................................................................... 20
3.3.1. Influencia de los parámetros numéricos y condiciones de contorno ....................... 20
3.3.1. Validación del modelo .............................................................................................. 23
3.3.2. Resultados obtenidos ................................................................................................ 24
4. PLANTEAMIENTO DEL PROBLEMA DE ESTABILIDAD LINEAL .......................... 29
5. CONCLUSIONES Y TRABAJO FUTURO ........................................................................ 31
APÉNDICE A. TRANSFORMACIÓN DE COORDENADAS ................................................. 33
APÉNDICE B. TÉRMINOS DE LA ECUACIÓN DE 𝑶(𝜺) ...................................................... 35
BIBLIOGRAFÍA ............................................................................................................................ 37

VI

1
1. INTRODUCCIÓN
1.1. Introducción
Un chorro es una porción de líquido o de gas que, con más o menos violencia, sale por
una parte estrecha, como un orificio, un tubo, un grifo… El modo en que el chorro sale por
esta estrechez, es decir, su comportamiento, dependerá de diversos factores, como son el
ambiente, el tamaño y forma del inyector, del tipo de fluido y propiedades de éste (densidad,
viscosidad y tensión superficial).
Los chorros se encuentran en procesos naturales, como una catarata o la lava de un volcán
(Javadi et al., 2013), como se muestra en la Figura 1.1 (a); También, forman parte de la
cotidianidad, como abrir el grifo de un lavabo, una fuente (Figura 1.1 (b)), en una pistola de
agua infantil o incluso en el aerosol que se utiliza a diario para perfumar miles de hogares.
Figura 1.1: Presencia de los chorros en la naturaleza y en la vida diaria, (a) Erupción de un
volcán (LaReserva.com, 2009); (b) Fuente de jardín (AquaBazar, 2014).
Pero sin duda alguna, para un ingeniero industrial, la presencia de chorros en la industria
debe ser su principal motivación. Así, tal y como se muestra en la Figura 1.2, los chorros
están presentes en la industria tanto en aspectos básicos como son la lubricación y limpieza
de superficies, hasta procesos que entrañan una mayor complejidad, como electrospinning
(Barrero & Loscertales, 2007; Loscertales et al., 2002; Riboux et al., 2011), el corte con
chorros de agua a elevada presión, procesos de inyección de plástico e incluso en soldaduras,
donde se debe pulverizar la cantidad exacta de gas protector. Siendo conocido el
(a) (b)

2
comportamiento y la estabilidad de los chorros, se pueden controlar estos procesos,
obteniéndose así una mayor optimización de procesos y recursos, mejorándose notablemente
los resultados obtenidos.
Figura 1.2: Presencia de los chorros en la industria, (a) Manguera de taladrina lubricando
una fresadora (Glenn McKechnie, 2005); (b) Limpieza de superficies abiertas en la industria
alimentaria (Betelgeux, 2017).
Por tanto, todas estas aplicaciones llevan a la necesidad de resolver cuestiones referidas
a la forma del choro, si se producirá la ruptura de éste y en caso de producirse cuánto tardará,
cómo afecta el medio exterior al chorro, como afectarán las propiedades del líquido a la
formación de gotas y el tamaño de éstas, entre muchas otras.
1.2. Estado del arte
El estudio del comportamiento de los chorros puede situarse en el siglo XVI, de manos
de Leonardo Da Vinci (1510) en el código Hammer, donde ya se realizan las primeras
descripciones y observaciones del movimiento del agua. Posteriormente, surgen diversas
figuras que intentan describir de forma matemática el comportamiento del fluido, como es
el caso de Evangelista Torricelli (1644), en el siglo XVII, con su conocido teorema de
Torricelli, en el que define el comportamiento de un flujo laminar, bajo la acción de la
gravedad, contenido en un recipiente, a través de un orificio. Pero no es hasta el siglo XIX,
cuando el ingeniero y matemático francés Claude-Louis Navier (1827) deduce las
ecuaciones que describen el comportamiento de ciertos fluidos. Más tarde, George Gabriel
Stokes (1845), a partir de otro modelo completa las ecuaciones. Por tanto, ambos dieron
(a) (b)

3
lugar a un conjunto de ecuaciones en derivadas parciales no lineales, cuya solución analítica
solo es posible para flujos y situaciones muy concretas. De modo que se recurre al método
numérico para obtener una solución aproximada.
Pero el principal inconveniente que se encuentra en estas ecuaciones al completo y sin
imponer condiciones de contorno, es lo extremadamente complicado que resulta su estudio
numérico y analítico. Los únicos estudios con los que se cuentan de estiramientos
axisimétricos tienen en cuenta que el flujo sea ideal e irrotacional (Becker et al., 1991). Pero
incluso con estas premisas, la zona del cuello requiere de gran precisión y se vuelve también
muy complicada su resolución. Así que, en este trabajo se ha tomado como alternativa la
utilización de un modelo unidimensional mediante la expansión de la variable radial en una
serie de Taylor que permita obtener una solución lo más certera posible. Este tipo de modelos
han sido desarrollados por autores como Lee (1974), que conserva hasta el primer orden del
desarrollo de la Serie de Taylor y considera la viscosidad del líquido despreciable o Zhang
& Alexander (1990) para el caso de un fluido cuya viscosidad no sea despreciable.
Como ya se mencionaba anteriormente, otro aspecto fundamental, en el conocimiento del
comportamiento del chorro es la fractura de éste. Tanto es así, que, en el siglo XIX, uno de
los primeros en intentar definirla fueron Savart (1833) y Plateau (1873). Posteriormente,
Rayleigh (1892) entre otros, realizó un análisis de estabilidad donde para chorros cilíndricos
identificó una longitud de onda más inestable. Por ello, el chorro se descompondría en gotas
cuyo tamaño está relacionado con dicha longitud de onda. No obstante, este análisis no da
respuesta a las gotas satélite que se forman mucho más pequeñas o incluso de orden superior
(Chaudhary & Redekopp, 1980; Chaudhary & Maxworthy, 1980), pero si realizaba una
predicción cualitativa de este fenómeno tanto para un líquido viscoso como para un líquido
de viscosidad despreciable.
Aunque fue a principios y mediados del siglo XX, cuando autores como Bentley (1904)
desarrollaron en mayor profundidad la fractura de chorros y el comportamiento de aerosoles.
Finalmente, y dando un enfoque en lo referente a este trabajo, destacar la contribución al
estudio de los chorros estirados por gravedad a autores como Schulkes (1994; 1996), Le
Dizès (1997) o Clanet & Lasheras (1999), los cuales han definido la forma y la estabilidad
del chorro desde una perspectiva teórica y experimental.

4
1.3. Aspectos generales del trabajo
En este trabajo se ha llevado a cabo el modelado unidimensional de chorros capilares
estirados por gravedad. Se ha reproducido la obtención de las ecuaciones de Navier-Stokes
adecuadas a la definición del problema que se plantea. La discretización de las ecuaciones,
se ha realizado mediante el uso del método espectral de Chebyshev (Boyd, 2001), y, como
método resolutivo se ha utilizado un Newton-Raphson (Reddien, 2004). Todo se ha
implementado en el software matemático Matlab®. Obteniéndose, por tanto, resultados y
figuras que pueden ser contrastadas con experimentos previos a este trabajo.
Con este estudio, se intenta demostrar como el modelo unidimensional para el caso más
simple, que en este caso se corresponde con un líquido perfecto newtoniano, arroja
resultados bastante precisos y que pueden ser considerados válidos. Se ha aplicado este
modelo a diferentes tamaños de inyector, diversos caudales y diferentes líquidos,
comprobándose cómo se comporta un chorro al modificar estos parámetros. También, se ha
estudiado el comportamiento del chorro ante la presencia de las condiciones de contorno, así
como la forma que toma el perfil de velocidades.
Al final del trabajo, se ha realizado un planteamiento de la estabilidad lineal del problema,
pero no se ha resuelto, puesto que queda fuera de las competencias de un estudiante de
Grado. No obstante, sería muy interesante, en futuros estudios, resolver el análisis de
estabilidad, pues permite conocer el comportamiento del flujo en mayor profundidad y por
supuesto, aplicarlo a otro tipo de fluidos como podrían ser los no newtonianos, fluidos con
densidad variable, modificaciones en la forma del inyector etc.
5
2. MODELO MATEMÁTICO
2.1. Definición del problema
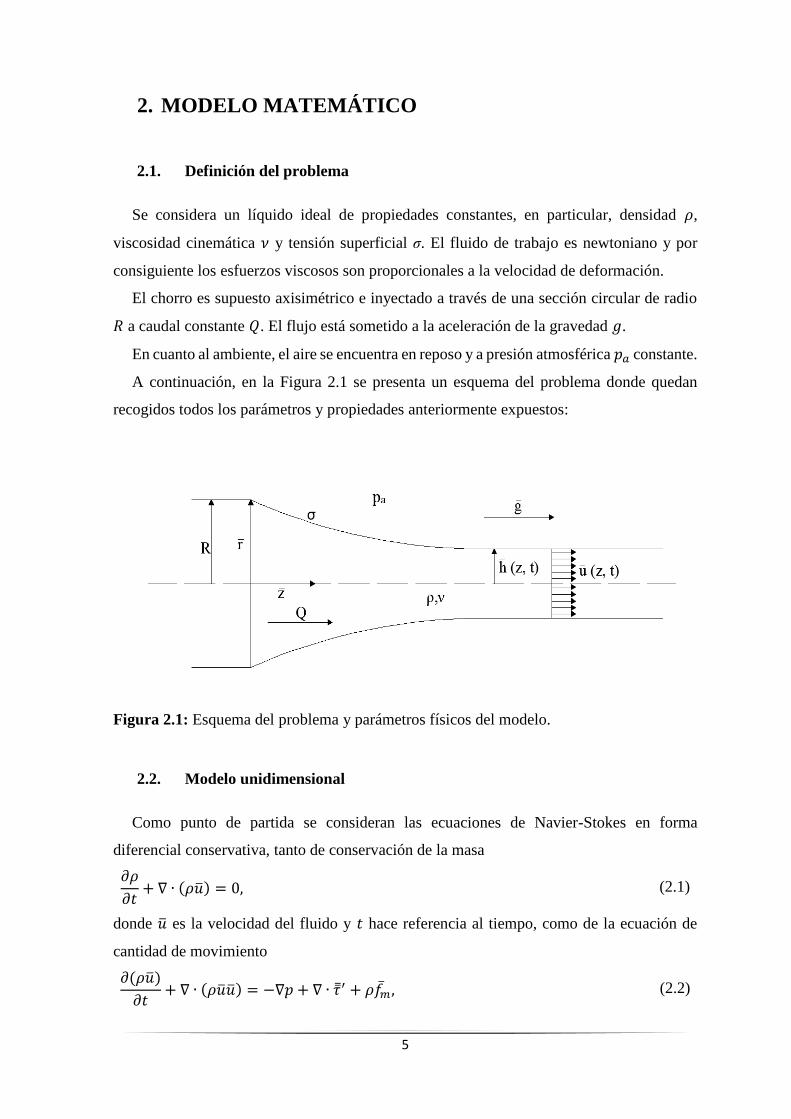
Se considera un líquido ideal de propiedades constantes, en particular, densidad 𝜌,
viscosidad cinemática 𝜈 y tensión superficial σ. El fluido de trabajo es newtoniano y por
consiguiente los esfuerzos viscosos son proporcionales a la velocidad de deformación.
El chorro es supuesto axisimétrico e inyectado a través de una sección circular de radio
𝑅 a caudal constante 𝑄. El flujo está sometido a la aceleración de la gravedad 𝑔.
En cuanto al ambiente, el aire se encuentra en reposo y a presión atmosférica 𝑝𝑎 constante.
A continuación, en la Figura 2.1 se presenta un esquema del problema donde quedan
recogidos todos los parámetros y propiedades anteriormente expuestos:
Figura 2.1: Esquema del problema y parámetros físicos del modelo.
2.2. Modelo unidimensional
Como punto de partida se consideran las ecuaciones de Navier-Stokes en forma
diferencial conservativa, tanto de conservación de la masa
𝜕𝜌
𝜕𝑡+ ∇ ∙ (𝜌�̅�) = 0, (2.1)
donde �̅� es la velocidad del fluido y 𝑡 hace referencia al tiempo, como de la ecuación de
cantidad de movimiento
∂(𝜌�̅�)
𝜕𝑡+ ∇ ∙ (𝜌�̅��̅�) = −∇𝑝 + ∇ ∙ 𝜏̿′ + 𝜌𝑓�̅� , (2.2)

6
donde 𝑝 es la presión en el interior, que puede expresarse como la suma de la presión
ambiente y la presión capilar; 𝜏̿ ′es el tensor de esfuerzos viscosos y 𝑓�̅�, las fuerzas másicas.
Desarrollando la ecuación de continuidad y considerando la simplificación de densidad
constante se obtiene
∇ ∙ �̅� = 0. (2.3)
Al considerarse un chorro axisimétrico y, por tanto, no depender éste de la componente
azimutal, se utiliza un sistema de coordenadas cilíndricas para simplificar las ecuaciones, de
forma que la ecuación de continuidad se puede expresar como
𝜕𝑢𝑟
𝜕𝑟+
𝜕𝑢𝑧
𝜕𝑧+
𝑢𝑟
𝑟= 0, (2.4)
donde 𝑢𝑟 hace referencia a la componente radial de la velocidad y 𝑢𝑧 a la componente axial
de la velocidad.
Si se desarrolla la ecuación de cantidad de movimiento, teniendo en cuenta que las
propiedades del fluido se consideran constantes y haciendo uso de la ecuación de continuidad
(2.3) se consigue
𝜌𝜕�̅�
𝜕𝑡+ ∇ ∙ ∇(𝜌�̅�) = −∇p + ρ𝜈∇2�̅� + 𝜌𝑓�̅�. (2.5)
Si se asume que las únicas fuerzas másicas que se aprecian son las correspondientes a la
gravedad, utilizando coordenadas cilíndricas nuevamente y separando por coordenadas, se
obtiene
𝜕𝑢𝑟
∂t+ 𝑢𝑟
𝜕𝑢𝑟
𝜕𝑟+ 𝑢𝑧
𝜕𝑢𝑟
𝜕𝑧= −
1
𝜌
𝜕𝑝
𝜕𝑟+ 𝜈 (
1
𝑟
𝜕𝑢𝑟
𝜕𝑟+
𝜕2𝑢𝑟
𝜕𝑟2−
𝑢𝑟
𝑟2+
𝜕2𝑢𝑟
𝜕𝑧2), (2.6)
para el caso de la coordenada radial, y
𝜕𝑢𝑧
𝜕𝑡+ 𝑢𝑟
𝜕𝑢𝑧
𝜕𝑟+ 𝑢𝑧
𝜕𝑢𝑧
𝜕𝑧= −
1
𝜌
𝜕𝑝
𝜕𝑧+ 𝜈 (
1
𝑟
𝜕𝑢𝑧
𝜕𝑟+
𝜕2𝑢𝑧
𝜕𝑧2+
𝜕2𝑢𝑧
𝜕𝑟2) + 𝑔, (2.7)
para la coordenada axial.
Por otro lado, es conocida la ley de Young-Laplace para el gradiente de presiones,
∆𝑝 = 𝜎 (1
𝑅1+
1
𝑅2), (2.8)
donde 𝑅1 y 𝑅2 son los radios de curvatura principales.
De forma que, el balance de fuerzas tangenciales es igual a
𝜈
1 +𝜕2ℎ𝜕𝑧2
[2𝜕𝑢𝑟
𝜕𝑟
𝜕ℎ
𝜕𝑧+ (
𝜕𝑢𝑧
𝜕𝑟+
𝜕𝑢𝑟
𝜕𝑧) (1 −
𝜕2ℎ
𝜕𝑧2) − 2
𝜕𝑢𝑧
𝜕𝑧
𝜕ℎ
𝜕𝑧] = 0|
𝑟=ℎ
, (2.9)

7
donde ℎ es el radio local del chorro en función del tiempo y la posición axial, es decir,
ℎ(𝑧, 𝑡).
Y el balance de fuerzas normales se corresponde con la expresión
𝑝
𝜌−
2𝜈
1 +𝜕2ℎ𝜕𝑧2
[𝜕𝑢𝑟
𝜕𝑟+
𝜕𝑢𝑧
𝜕𝑧
𝜕2ℎ
𝜕𝑧2− (
𝜕𝑢𝑧
𝜕𝑟+
𝜕𝑢𝑟
𝜕𝑧)𝜕ℎ
𝜕𝑧] =
𝜎
𝜌(
1
𝑅1+
1
𝑅2)|
𝑟=ℎ
. (2.10)
También, es necesario establecer la condición cinemática, en la que se impone que la
velocidad de contorno y de la superficie deben ser iguales,
𝜕ℎ
𝜕𝑡+ 𝑢𝑧
𝜕ℎ
𝜕𝑧= 𝑢𝑟|
𝑟=ℎ. (2.11)
Para posibilitar la resolución de las ecuaciones (2.4)-(2.7) se realiza el desarrollo en serie
de Taylor de la presión y de la componente axial de la velocidad, aprovechando la esbeltez
del chorro (𝑟 ≪ 𝑧),
𝑝(𝑧, 𝑟) = 𝑝0 + 𝑝2𝑟2 + ⋯, (2.12)
𝑢𝑧(𝑧, 𝑟) = 𝑢0 + 𝑢2𝑟2 + ⋯ (2.13)
El desarrollo en serie de Taylor de la componente radial de la velocidad se obtiene
introduciendo la ecuación (2.13) en la ecuación de continuidad (2.4) pues ésta debe
cumplirse, luego
𝑢𝑟(𝑧, 𝑟) = −1
2
𝜕𝑢0
𝜕𝑧𝑟 −
1
4
𝜕𝑢2
𝜕𝑧𝑟3 − ⋯ (2.14)
Introduciendo (2.12)-(2.14) en las ecuaciones (2.9) y (2.10), agrupando los términos en
función del orden de 𝑟 y estudiando aquellos de menor orden, que en este caso se
corresponde con los términos de 𝑂(𝑟0) se obtiene:
𝑝0
𝜌−
2𝜈
1 +𝜕2ℎ𝜕𝑧2
[−1
2
𝜕𝑢0
𝜕𝑧+
𝜕𝑢0
𝜕𝑧
𝜕2ℎ
𝜕𝑧2] =
𝜎
𝜌𝐶,
(2.15)
−𝜕𝑢0
𝜕𝑧
𝜕ℎ
𝜕𝑧+ 2𝑢2ℎ −
1
2
𝜕2𝑢0
𝜕𝑧2ℎ − 2
𝜕𝑢0
𝜕𝑧
𝜕ℎ
𝜕𝑧= 0. (2.16)
donde 𝐶 es la curvatura.
Las expresiones (2.15) y (2.16) pueden utilizarse para eliminar los términos de 𝑝0 y
𝑢2 que aparecen al sustituir (2.12)-(2.14) en las ecuaciones de cantidad de movimiento (2.6)-
(2.7) y retener los términos de orden 1.
En el caso de la coordenada radial la igualdad se satisface idénticamente para el orden 1,
quedando para la coordenada axial:

8
𝜕𝑢0
∂t= −𝑢0
𝜕𝑢0
𝜕𝑧−
𝜎
𝜌
𝜕𝐶
𝜕𝑧+ 3𝜈
𝜕𝜕𝑧
(ℎ2 𝜕𝑢0
𝜕𝑧)
ℎ2+ 𝑔. (2.17)
Introduciendo (2.13) y (2.14) en (2.4) para orden 𝑂(𝑟0) se obtiene:
𝜕ℎ
∂t= −𝑢0
𝜕ℎ
𝜕𝑧−
1
2
𝜕𝑢0
𝜕𝑧ℎ. (2.18)
Si se involucra la fórmula de la curvatura 𝐶 en la ecuación (2.17) y se realiza una
reorganización de los términos de la ecuación (2.18), finalmente se obtiene
𝜕ℎ2
𝜕𝑡+
𝜕(ℎ2𝑢)
𝜕𝑧= 0, (2.19)
para la ecuación de la conservación de la masa, y
𝜕𝑢
𝜕𝑡+ 𝑢
𝜕𝑢
𝜕𝑧= −
𝜎
𝜌
𝜕𝐶
𝜕𝑧+ 3𝜈
𝜕𝜕𝑧
(ℎ2 𝜕𝑢𝜕𝑧
)
ℎ2+ 𝑔, (2.20)
para la cantidad de movimiento, donde la curvatura puede expresarse como
𝐶 =1
ℎ [1 + (𝜕ℎ𝜕𝑧
)2
]
1 2⁄−
𝜕2ℎ𝜕𝑧2
[1 + (𝜕ℎ𝜕𝑧
)2
]
3 2⁄. (2.21)
Por último, es necesario establecer las condiciones de contorno. A la salida del inyector,
el radio del chorro será igual al del inyector
ℎ(0, 𝑡) = 𝑅 , (2.22)
y la velocidad en 𝑧 = 0 será la velocidad media del flujo a la salida del inyector, definida
como
𝑢(0, 𝑡) = 𝑈 =𝑄
𝜋𝑅2. (2.23)
El estudio del flujo se ha llevado a cabo a partir de las ecuaciones unidimensionales de
continuidad y cantidad de movimiento de primer orden, que fueron deducidas por Eggers &
Dupont (1994) y por García & Castellanos (1994). No obstante, en este documento, se ha
detallado cómo llegar a obtener dichas ecuaciones. Señalar, que sería posible, para obtener
unos resultados de mayor precisión, utilizar un modelo de mayor orden, como el caso del
modelo parabólico. No obstante, para el problema que aquí se describe, el modelo de primer
orden es suficientemente preciso, contando con la ventaja de una mayor facilidad, rapidez y
coste computacional.

9
2.3. Adimensionalización
Para que los resultados obtenidos sean útiles para diversos fluidos y no solo para un caso
particular, es posible adimensionalizar las ecuaciones (2.19)-(2.20) y (2.22)-(2.23). Se debe
elegir una escala característica lo más conveniente posible.
Podría inicialmente haberse elegido el radio del inyector como longitud característica y
la velocidad a la salida del inyector como escala de velocidad, es decir, 𝑧𝑐 = 𝑅 y 𝑢𝑐 = 𝑈
respectivamente. Aplicándose el teorema 𝜋 de Vaschy-Buckingham, considerando ℎ =
𝑓(𝑈, 𝑅, 𝜎, 𝜌, 𝑔, 𝜈) y eligiendo 3 parámetros independientes como podrían ser 𝑈, 𝑅 y 𝜌, se
obtienen 5 grupos adimensionales,
∏ =ℎ
𝑅ℎ, (2.24)
∏ =𝑢
𝑈𝑢, (2.25)
∏ =𝑔
𝑈2𝑅−1𝑔
, (2.26)
∏ =𝜎
𝜌𝑈2𝑅𝜎, (2.27)
∏ =𝜈
𝑅𝑈𝜈. (2.28)
De este modo, gracias a los dos primeros grupos adimensionales, las condiciones de
contorno aplicadas a este problema, serían igual a la unidad con independencia del valor que
tomen los parámetros anteriormente mencionados. Los grupos (2.26)-(2.28) establecerían al
número de Froude, 𝐹𝑟 = 𝑈2 𝑔𝑅⁄ , número de Weber, 𝑊𝑒 = 𝜌𝑈2𝑅 𝜎⁄ , y el número de
Reynolds, 𝑅𝑒 = 𝑅𝑈 𝜈⁄ , como los parámetros adimensionales que gobernarían el problema.
A priori, puede parecer una buena elección, pero de acuerdo a la física del problema se
demuestra que es mucho más acertado establecer otro tipo de escala.
Así, se han utilizado los siguientes parámetros característicos: la longitud capilar,
𝑧𝑐 = (𝜎
𝜌𝑔)1 2⁄
, (2.29)
la velocidad de caída libre asociada a la longitud capilar,
𝑢𝑐 = (𝜎𝑔
𝜌)1 4⁄
= √𝑔𝑧𝑐 , (2.30)
y el tiempo característico obtenido a partir de los otros dos parámetros anteriores,

10
𝑡𝑐 =𝑧𝑐
𝑢𝑐= (
𝜎
𝜌𝑔3)1 4⁄
. (2.31)
Por tanto, para efectuar la adimensionalización, se introducirán las siguientes variables
adimensionales,
ℎ∗ =ℎ
𝑧𝑐,
(2.32)
𝑧∗ =𝑧
𝑧𝑐, (2.33)
𝑡∗ =𝑡
𝑡𝑐,
(2.34)
𝑢∗ =𝑢
𝑢𝑐, (2.35)
obtenidas a partir de los parámetros característicos, en las ecuaciones (2.19)-(2.20) y (2.22)-
(2.23).
Así, la ecuación de continuidad (2.19) puede escribirse como
𝜕(ℎ∗𝑧𝑐)2
𝜕(𝑡∗𝑡𝑐)+
𝜕[(ℎ∗𝑧𝑐)2𝑢∗𝑢𝑐]
𝜕(𝑧∗𝑧𝑐)= 0, (2.36)
y sustituyendo en la ecuación (2.36) el valor de los parámetros característicos queda
𝜎𝜌𝑔 𝜕ℎ∗2
(𝜎
𝜌𝑔3)1 4⁄
𝜕𝑡∗
+
𝜎𝜌𝑔 (
𝜎𝑔𝜌 )
1 4⁄
𝜕(ℎ∗2𝑢∗)
(𝜎𝜌𝑔)
1 2⁄
𝜕𝑧∗
= 0. (2.37)
Por último, simplificando los términos se obtiene la ecuación de continuidad en forma
adimensional,
𝜕ℎ∗2
𝜕𝑡∗+
𝜕(ℎ∗2𝑢∗)
𝜕𝑧∗= 0. (2.38)
Al igual que en la ecuación de conservación de la masa, se introducen los parámetros
característicos en la ecuación de cantidad de movimiento (2.20), obteniéndose la expresión
𝑢𝑐
𝑡𝑐
𝜕𝑢∗
𝜕𝑡∗+
𝑢𝑐2𝑢∗
𝑧𝑐
𝜕𝑢∗
𝜕𝑧∗= −
𝜎
𝜌
1
𝑧𝑐2
𝜕𝐶∗
𝜕𝑧∗+
3𝜈𝑢𝑐
𝑧𝑐2ℎ∗2
𝜕
𝜕𝑧∗(ℎ∗2
𝜕𝑢∗
𝜕𝑧∗) + 𝑔 , (2.39)
donde 𝐶∗tiene la misma expresión que en el caso dimensional pero definida para ℎ∗.
Y siguiendo el mismo procedimiento que en la ecuación de continuidad se obtiene,

11
(𝜎𝑔𝜌 )
1 4⁄
(𝜎
𝜌𝑔3)1 4⁄
𝜕𝑢∗
𝜕𝑡∗+
(𝜎𝑔𝜌 )
1 2⁄
(𝜎𝜌𝑔)
1 2⁄𝑢∗
𝜕𝑢∗
𝜕𝑧∗
= −𝜎
𝜌
𝜌𝑔
𝜎
𝜕𝐶∗
𝜕𝑧∗+
(𝜎𝑔𝜌 )
1 4⁄
𝜎𝜌𝑔
3𝜈
ℎ∗2
𝜕
𝜕𝑧∗(ℎ∗2
𝜕𝑢∗
𝜕𝑧∗) + 𝑔 .
(2.40)
Nuevamente, simplificando la expresión (2.40) se consigue la ecuación de cantidad de
movimiento adimensionalizada
𝜕𝑢∗
𝜕𝑡∗+ 𝑢∗
𝜕𝑢∗
𝜕𝑧∗= −
𝜕𝐶∗
𝜕𝑧∗+
3Г
ℎ∗2
𝜕
𝜕𝑧∗(ℎ∗2
𝜕𝑢∗
𝜕𝑧∗) + 1, (2.41)
donde Г es el número de Kapitza, definido como
Г = 𝜈 (𝜌3𝑔
𝜎3)
1 4⁄
, (2.42)
que depende únicamente de las propiedades del líquido y la aceleración de la gravedad.
Las condiciones de contorno, también son adimensionalizadas, obteniéndose
ℎ(0, 𝑡) = ℎ∗(0, 𝑡)𝑧𝑐 = 𝑅 → ℎ∗(0, 𝑡) =𝑅
𝑧𝑐= 𝐵𝑜1 2⁄ ,
(2.43)
𝑢(0, 𝑡) = 𝑢∗(0, 𝑡)𝑢𝑐 = 𝑈 → 𝑢∗(0, 𝑡) =𝑈
𝑢𝑐= 𝐵𝑜−1 4⁄ 𝑊𝑒1 2⁄ . (2.44)
En las dos expresiones anteriores aparecen dos grupos adimensionales, el número de
Bond y el número de Weber. El número de Bond
𝐵𝑜 =𝜌𝑔𝑅2
𝜎, (2.45)
relaciona las fuerzas gravitacionales con las fuerzas de tensión superficial; y el número de
Weber, definido anteriormente como
𝑊𝑒 =𝜌𝑈2𝑅
𝜎, (2.46)
representa la importancia relativa de la inercia frente a la tensión superficial.
En este capítulo se ha utilizado para adimensionalizar tanto el radio del inyector, como la
componente axial del chorro, un mismo parámetro característico, la longitud capilar, tanto
por simplicidad, como porque es de interés en este trabajo valores bajos del número de
Weber, siendo 𝜕ℎ 𝜕𝑧 ~ 𝑂(1)⁄ .
Por tanto, el modelo de forma adimensional viene dado por las ecuaciones (2.38) y (2.41)
junto con las condiciones de contorno (2.43) y (2.44). Así, el radio del chorro y la velocidad

12
local adimensionales dependen sólo del valor de los tres parámetros anteriormente
mencionados: Bo, We y Г.

13
3. PROBLEMA ESTACIONARIO
3.1. Modelo unidimensional estacionario
Las incógnitas del problema 𝑢 y ℎ son funciones dependientes de la componente axial,
radial y el tiempo, es decir, 𝑢(𝑧, 𝑟, 𝑡) y ℎ(𝑧, 𝑟, 𝑡). Pero en el epígrafe anterior, cuando se
realizaron los desarrollos de Taylor correspondientes, se tuvo en cuenta la esbeltez del
chorro, de forma que las variaciones en la componente radial son despreciables frente a las
que se producen en la componente axial. Por tanto, se asumía que las variables ahora
dependían exclusivamente de 𝑧 y 𝑡, luego 𝑢(𝑧, 𝑡) y ℎ(𝑧, 𝑡).
Para el caso estacionario, las variables dependientes del problema (radio y velocidad del
chorro) eliminan la dependencia ligada a la variación temporal, por tanto, se vuelven
variables dependientes únicamente de la componente axial. Así, se cumple que ∂() 𝜕𝑡⁄ =
0, ℎ(𝑧, 𝑡) = ℎ0(𝑧) y 𝑢(𝑧, 𝑡) = 𝑢0(𝑧).
Teniendo en cuenta esto, la ecuación de continuidad (2.38) queda de la forma
d(ℎ02𝑢0)
d𝑧= 0, (3.1)
donde por simplicidad, a partir de ahora, en el trabajo se eliminarán los asteriscos de la
notación y la derivada parcial se convierte en una total, pues se tienen funciones de una sola
variable.
Si se integra la ecuación (3.1) se obtiene
ℎ02𝑢0 = 𝐾, (3.2)
e introduciendo las expresiones (2.43)-(2.44) en la ecuación (3.2) se tiene
𝐾 = 𝐵𝑜3 4⁄ 𝑊𝑒1 2⁄ . (3.3)
Se observa que el parámetro K es adimensional, pero puede relacionarse con el valor del
caudal si se tienen en cuenta las expresiones (2.45)-(2.46), la ecuación de continuidad y el
área del inyector, que es circular. Por tanto,
𝐾 = (𝜌𝑔𝑅2
𝜎)
3 4⁄
(𝜌𝑈2𝑅
𝜎)
1 2⁄
=𝑄
𝜋
𝜌5 4⁄ 𝑔3 4⁄
𝜎5 4⁄. (3.4)
La ecuación de cantidad de movimiento (2.41) para el caso estacionario toma la forma
𝑢0
d𝑢0
d𝑧= −
d𝐶0
d𝑧+ 1 +
3Г
ℎ02
d
d𝑧(ℎ0
2d𝑢0
d𝑧), (3.5)
donde 𝐶0 hace referencia a la curvatura para el caso estacionario,

14
𝐶0 =1
ℎ0 [1 + (𝜕ℎ0
𝜕𝑧)2
]
1 2⁄−
𝜕2ℎ0
𝜕𝑧2
[1 + (𝜕ℎ0
𝜕𝑧)2
]
3 2⁄. (3.6)
Despejando 𝑢0 de la expresión (3.2), es decir, 𝑢0 = 𝐾/ℎ02, e introduciéndolo en la
ecuación (3.5), se puede expresar la ecuación de cantidad de movimiento sólo en función de
ℎ0 y sus derivadas de primer y segundo orden
𝐾
ℎ02
d
d𝑧(
𝐾
ℎ02) = −
d𝐶0
d𝑧+ 1 +
3Г
ℎ02
d
d𝑧[ℎ0
2d
d𝑧(
𝐾
ℎ02)]. (3.7)
Multiplicando ambos términos por ℎ02, simplificando y reorganizando términos se puede
expresar como
−2𝐾2
ℎ03
dℎ0
d𝑧= −ℎ0
2d𝐶0
d𝑧+ ℎ0
2 + 6𝐾Г
[ (
dℎ0
d𝑧)
2
ℎ02 −
d2ℎ0
d𝑧2
ℎ0
] . (3.8)
donde el gradiente de presión viene dado por
−ℎ02d𝐶0
d𝑧= −ℎ0
2
[
−
dℎ0
d𝑧
ℎ02 [1 + (
dℎ0
d𝑧)2
]
1 2⁄−
dℎ0
d𝑧d2ℎ0
d𝑧2
ℎ0 [1 + (dℎ0
d𝑧)2
]
3 2⁄
+3ℎ0
2 dℎ0
d𝑧(d2ℎ0
d𝑧2 )2
[1 + (dℎ0
d𝑧)
2
]
5 2⁄−
d3ℎ0
d𝑧3
[1 + (dℎ0
d𝑧)2
]
3 2⁄
]
,
(3.9)
que agrupando términos queda como
−ℎ02d𝐶0
d𝑧=
dℎ0
d𝑧
[1 + (dℎ0
d𝑧)2
]
1 2⁄−
3ℎ02 dℎ0
d𝑧(d2ℎ0
d𝑧2 )2
[1 + (dℎ0
d𝑧)
2
]
5 2⁄+
ℎ0dℎ0
d𝑧d2ℎ0
d𝑧2 + ℎ02 d3ℎ0
d𝑧3
[1 + (dℎ0
d𝑧)2
]
3 2⁄. (3.10)
La ecuación (3.8) es una ecuación en derivadas parciales que puede resolverse para
calcular el radio del chorro, y cuando ya es conocido éste, con la expresión (3.2), se obtiene
el valor de la velocidad.
El problema de la ecuación diferencial del modelo que se está tratando, reside en su
difícil resolución de forma analítica, por lo que se recurre a métodos numéricos.

15
3.2. Método numérico
3.2.1. Método iterativo de Newton-Raphson
La ecuación (3.8) se resolverá mediante la implementación del método iterativo Newton-
Raphson.
El método Newton-Raphson es uno de los más utilizados para el cálculo de raíces de una
función 𝑓(𝑥) = 0. De forma genérica, se puede definir como un algoritmo que permite
encontrar soluciones de ecuaciones no lineales. Este método es cuadráticamente convergente
a medida que se obtienen resultados próximos a la solución. No obstante, para favorecer la
convergencia, se parte de un valor inicial 𝑥0 que se supone una conjetura inicial para la raíz.
Una vez establecido este valor, se realiza una expansión en serie de Taylor en el punto
(𝑥 − 𝑥0) quedando
𝑓(𝑥) = 𝑓(𝑥0) +d𝑓(𝑥0)
d𝑥(𝑥 − 𝑥0) +
1
2!
d2𝑓(𝑥0)
d𝑥2(𝑥 − 𝑥0)
2 + ⋯ = 0. (3.11)
Si el valor inicial que se ha supuesto realmente es cercano a la solución, (𝑥 − 𝑥0) tiene
un valor pequeño, por lo que sólo los primeros términos de la serie son necesarios para
obtener el resultado, por lo que, truncando la serie en el segundo término, se obtiene una
nueva aproximación de la solución:
𝑥1 = 𝑥0 −𝑓(𝑥0)
(d𝑓(𝑥0)
d𝑥).
(3.12)
Este nuevo valor, 𝑥1, puede utilizarse para obtener una nueva aproximación, y de forma
sucesiva, se obtiene una expresión genérica
𝑥𝑖+1 = 𝑥𝑖 −𝑓(𝑥𝑖)
(d𝑓(𝑥𝑖)
d𝑥) ,
(3.13)
donde 𝑖 indica el número de iteraciones.
Gráficamente, este método se corresponde con la Figura 3.1.

16
Figura 3.1: Representación gráfica del método iterativo de Newton-Raphson.
El problema que atañe a este trabajo no posee una solución de un único valor, sino 𝑁
soluciones, que vienen a representar el número de nodos objeto de estudio. Sin embargo, el
proceso iterativo es muy similar al de una sola variable.
Considerando un sistema de 𝑁 ecuaciones como el siguiente:
𝑓(𝑥) = 0 ↔ {
𝑓1(𝑥1, 𝑥2, … , 𝑥𝑁) = 0𝑓2(𝑥1, 𝑥2, … , 𝑥𝑁) = 0
……………𝑓𝑁(𝑥1, 𝑥2, … , 𝑥𝑁) = 0
} , (3.14)
y siguiendo el mismo procedimiento, que el mostrado anteriormente, se obtiene una solución
genérica del sistema lineal igual a
𝑓(𝑥𝑖) + [𝐽(𝑥𝑖)](𝑥 − 𝑥𝑖) = 0, (3.15)
donde 𝐽 indica la matriz Jacobiana.
El algoritmo empleado, resulta de ordenar los términos de forma que
𝑥𝑖+1 = 𝑥𝑖 − [𝐽(𝑥𝑖)]−1𝑓(𝑥𝑖). (3.16)
En este problema, el sistema que se debe de resolver está constituido por N ecuaciones
y N incógnitas ℎ0 para 𝑁 nodos, dando como solución un vector.
3.2.2. Método espectral de Chebyshev
Existen diferentes métodos numéricos para obtener soluciones de ecuaciones
diferenciales. Los más conocidos son los Métodos de diferencias finitas, Métodos de

17
elementos finitos y los Métodos espectrales. Se ha seleccionado un método espectral, puesto
que mientras las diferencias finitas proporcionan soluciones en puntos de la malla
computacional o los elementos finitos proporcionan soluciones polinomiales en ciertas
regiones, los métodos espectrales proporcionan soluciones sobre todo el dominio.
El método espectral de Chebyshev será el elegido para la resolución del sistema, pues es
uno de los más usados. A partir de los polinomios de Chebyshev de primera especie, se
obtienen los nodos que se utilizarán para definir y obtener la forma del chorro, ya que éstos
son las raíces solución de los polinomios.
Las raíces solución o nodos, de forma genérica toman la forma
𝑥𝑚 = cos (𝜋(2𝑚 + 1)
2𝑁) . (3.17)
𝑥𝑚 hace referencia a la posición del eje de abscisas del nodo 𝑚 en las coordenadas de
Chebyshev, 𝑚 valor comprendido entre [0, 𝑁] y 𝑁 es el número de nodos.
Los nodos obtenidos de la resolución de los polinomios de Chebyshev son funciones
coseno, permitiendo muchas posibilidades matemáticas compatibles con el sistema de
Fourier, lo que hace a este método mucho más manejable. Pero el regirse por una función
coseno tiene también aspectos negativos, como es el caso del dominio. El dominio de este
método no se corresponde con el dominio del problema que se está tratando, aunque esto se
resolverá a continuación mediante una transformación de coordenadas.
3.2.3. Transformación de coordenadas o mapping
Ya en la expresión (3.17) al tratarse de una función coseno se especifica que el método
de Chebyshev tiene un dominio de [−1,1], por lo que hay que extrapolar los resultados
obtenidos al dominio del problema que se está tratando, que para un chorro suele ser [0, 𝐿],
donde 𝐿 es la longitud total del chorro.
Este proceso de transformación de coordenadas, si se desea consultar, está expresado al
detalle en el apéndice A.
3.2.4. Proceso iterativo
Como se ha mencionado con anterioridad, tras realizar la discretización de Chebyshev y
modificarse ésta al dominio que atañe al problema, se aplicará el método iterativo de

18
Newton- Raphson para resolver la ecuación (3.8), de modo que el proceso iterativo responde
a la ecuación
𝑦𝑖+1 = 𝑦𝑖 + α(𝐽−1 ∧ 𝐹(𝑦𝑖)), (3.18)
donde 𝑦 es el vector de la incógnita ℎ0, 𝛼 es un factor de relajación que se introduce para
favorecer la convergencia (𝛼 < 1), 𝐹(𝑦𝑖) es el residuo y 𝐽 hace referencia a la matriz
jacobiana definida como
𝐽 =
[ d𝑓1(1)
dℎ0(1)⋯
d𝑓1(1)
dℎ0(𝑛)⋮ ⋱ ⋮
d𝑓1(𝑛)
dℎ0(1)…
d𝑓1(𝑛)
dℎ0(𝑛)]
. (3.19)
En la expresión (3.19), 𝑛 se corresponde con el número de nodos de Chebyshev.
3.2.5. Métodos de resolución alternativos
Aunque todo el proceso de resolución numérica se ha llevado a cabo mediante el uso de
una discretización espectral de Chevishev, y usando el método iterativo de Newton-Raphson,
podrían haberse utilizado métodos diferentes y que al igual que los empleados habrían
arrojado buenos resultados.
Por un lado, para la discretización del dominio podría haberse utilizado el método de
diferencias finitas, que aproxima las derivadas en un punto por combinaciones lineales del
valor de la incógnita y puntos cercanos a él. Se suele llevar a cabo en una malla estructurada,
en la cual los nodos se encuentran equidistantes. En este método, las derivadas parciales son
sustituidas por diferencias algebraicas, lo que lo convierte en un método de fácil
implementación. Para el cálculo de las derivadas se suelen utilizar desarrollos en Series de
Taylor o Polinomios de Interpolación.
Por otro lado, como método de resolución alternativo podría haberse utilizado el método
shooting o disparo. Este método permite resolver problemas de condición de contorno al
reducirlo a la solución de un problema de valor inicial. Para ello, se supone un valor inicial
de partida, de modo que para el problema que se está tratando, si se tiene una función 𝑓(𝑧)
y es conocido su valor para 𝑧 = 0 y 𝑧 = 𝐿, se estima un valor 𝛽 tal que 𝑓′(0) = 𝛽. De modo
que con las dos condiciones en 𝑧 = 0 se resuelve el problema, obteniéndose unas
condiciones de contorno para los valores que se acaban de calcular, y si se comprueba que
se cumple para 𝑧 = 𝐿, es decir, que los resultados obtenidos para la posición L y los
resultados reales coinciden, la solución de la ecuación es válida. No se conoce el valor real

19
para la posición 𝐿, pero puede asumirse que el chorro posee un perfil constante, de modo
que dℎ0
d𝑧= 0. En caso de que no coincidan los valores reales con los obtenidos, se vuelve a
realizar este proceso para una estimación de 𝛽 distinta.
Figura 3.2: Esquema genérico de una malla computacional.
Aunque como se observa, utilizar estos métodos es viable, no es lo más aconsejable en
este proyecto, pues, aunque las diferencias finitas no presentan mucha complejidad
computacional, tienen un mal comportamiento en mallas no estructuradas o en presencia de
condiciones de contorno tipo Neumann. Chebyshev, por su lado, proporciona información
en todo el dominio de la malla y no solo en los nodos equidistantes, además de que se puede
usar la misma malla para calcular el flujo y posteriormente la estabilidad, evitando la
interpolación, así que para posibles utilidades futuras de este proyecto es mejor decantarse
por este método. También, el método de disparo permite la convergencia a pesar de partir de
unas condiciones iniciales no necesariamente muy próximas a la solución, aunque por su
convergencia cuadrática, en este caso, es más interesante la implementación del método
iterativo de Newton-Raphson.

20
3.3. Resultados
3.3.1. Influencia de los parámetros numéricos y condiciones de contorno
Para la resolución del método numérico, que se ha desarrollado en el apartado anterior,
se ha implementado un código en el software Matlab®.
Se ha comprobado la influencia de los parámetros numéricos referentes a la longitud del
dominio computacional 𝐿, número de nodos 𝑁 y el parámetro de la transformación 𝑏,
tomando los números de Bond, Weber y Kapitza un valor de Bo = 5.53,We =
1.85 × 10−3y Г = 1.11.
En la Figura 3.3, se muestra el comportamiento del perfil del chorro para diferentes
longitudes del dominio computacional. A continuación, en las Figuras 3.4 y 3.5 se ha
representado el perfil del chorro cambiando, tanto el número de nodos, como el parámetro
𝑏.
Figura 3.3: Variación del perfil del chorro para diferentes longitudes del dominio
computacional con unos valores de Bo = 5.53,We = 1.85 × 10−3y Г = 1.11.

21
Figura 3.4: Variación del perfil del chorro para distinto número de nodos con unos
valores de Bo = 5.53,We = 1.85 × 10−3y Г = 1.11.
Figura 3.5: Variación del perfil del chorro para distinto valores del parámetro de la
transformación 𝑏 con Bo = 5.53,We = 1.85 × 10−3y Г = 1.11.

22
Se demuestra que estos parámetros no tienen influencia en el chorro, de modo que
independientemente de los valores que tomen, siempre se obtendrá el mismo perfil del
chorro. No obstante, para afianzar la idea se ha representado la Figura 3.6, donde se
representa el perfil de velocidad del chorro para distintas longitudes del dominio
computacional, pudiéndose sentenciar así, que estos parámetros no influyen en el chorro.
Figura 3.6: Variación del perfil de velocidad para diferentes longitudes del dominio
computacional con unos valores de Bo = 5.53,We = 1.85 × 10−3y Г = 1.11.
Por otra parte, es necesario conocer la influencia de las condiciones de contorno impuestas,
de modo que posteriormente se pueda realizar una correcta validación de los resultados
obtenidos.
Si se impone un máximo en la velocidad, debido a la presencia de una pared o de la tensión
superficial, la aceleración toma un valor de cero en dicho punto. No obstante, imponer una
condición de contorno de este tipo, posee en la mayor parte del flujo una baja influencia.
Esta situación queda representada en la Figura 3.7.

23
Figura 3.7: Comparativa de la aceleración de un chorro en caída libre (puntos) frente a
la imposición de un máximo en la velocidad (cuadros). Aquí Bo = 5.53,We =
1.85 × 10−3y Г = 1.11.
3.3.1. Validación del modelo
Para validar el modelo obtenido, se ha realizado una comparación entre los resultados
obtenidos numéricamente y experimentos.
Figura 3.8: Comparativa de las soluciones obtenidas en estado estacionario con
fotografías obtenidas en ensayos para (a) Bo = 0.71,We = 2.62 × 10−2 y Г = 1.94; (b)
Bo = 1.81,We = 6.06 × 10−3y Г = 0.56; (c) Bo = 5.53,We = 1.85 × 10−3 y Г = 1.11.
(a)
(b)
(c)

24
Las imágenes de la Figura 3.8, proceden de experimentos con aceites de silicona
polidimetilsiloxano (PDMS), cuyas propiedades se muestran en la Tabla 3.1. En ellas, se ha
realizado la superposición de los resultados obtenidos sobre el chorro real, demostrándose
como los perfiles calculados se ajustan a la perfección a los reales, para diferentes líquidos,
caudales y tamaños de inyector.
Г 𝜌 (kg m−3) 𝜈 (mm2 s−1) 𝜎 (mN m−3)
0.56 965 100 20.9
1.11 970 200 21.1
1.94 970 350 21.1
Tabla 3.1: Propiedades de los aceites de silicona a 25ºC con sus correspondientes
números de Kapitza.
3.3.2. Resultados obtenidos
Si se observa en la Figura 3.9 el comportamiento del flujo a la salida del inyector, se
aprecia como su velocidad es muy próxima a cero en el inicio, por lo que puede aproximarse
a condiciones fluidostáticas. Esto se debe a que los esfuerzos gravitatorios y de tensión
superficial se encuentran en equilibrio. Pero a medida que el chorro avanza en la componente
axial, se acelera y la acción gravitatoria se vuelve predominante frente a la tensión
superficial.
En la Figura 3.10 se muestra de forma clara lo expuesto anteriormente. Pues la
aceleración no es más que la derivada del perfil de velocidades. Al estudiarse el
comportamiento del chorro con valores bajos de Weber, aparece un pico máximo de
aceleración próximo al inyector, en el cual se produce un estrechamiento del chorro, y a
partir de éste decae hasta aproximarse a cero. Como se comentaba anteriormente, al inicio,
los efectos de la viscosidad y de la gravedad poseen una gran influencia, pero a partir de
producirse el estrechamiento en el perfil, se produce una relajación viscosa, favoreciendo la
aparición de gotas, hecho que ya había sido constatado por Eggers & Villermaux (2008); y
la acción de la gravedad se vuelve predominante, tendiendo la aceleración a un valor
constante.
En cuanto a la ecuación de continuidad, se comprueba en la Figura 3.11 que se cumple.

25
Figura 3.9: Evolución del perfil de velocidades en la coordenada axial para el caso Bo =
0.71,We = 2.62 × 10−2y Г = 1.94.
Figura 3.10: Variación del perfil de aceleración en la componente axial para un Bo =
1.81,We = 6.06 × 10−3y Г = 0.56.

26
Figura 3.11: Representación del caudal adimensional para (a) Bo = 0.71,We =
2.62 × 10−2y Г = 1.94; (b) Bo = 1.81,We = 6.06 × 10−3y Г = 0.56; (c) Bo =
5.53,We = 1.85 × 10−3y Г = 1.11.
Al cumplirse la ecuación de continuidad, también cumple la ecuación (3.3), de ahí, que se
hayan obtenidos gráficas paralelas y sin pendiente.
Para diferentes valores del número de Weber se ha representado el comportamiento del
perfil del chorro en la Figura 3.12. El We, como se mencionó anteriormente, es una medida
indirecta del caudal del chorro. Así, a mayor número de Weber, el perfil del chorro tiene una
mayor sección, para un mismo valor de la coordenada axial.
Al acelerarse el chorro, y, por tanto, aumentar su velocidad, disminuye la sección. Se
aprecia como el chorro parte de una sección de radio 𝑅 que es máxima, y decrece
monótonamente. Aguas abajo, se produce la ruptura del chorro y se forman gotas.
También, se contempla que a la salida del inyector el radio del chorro está relacionado
con el número de Bond de la siguiente forma, tal que ℎ = √𝐵𝑜.

27
Figura 3.12: Perfil del chorro a Bo = 5.53, Г = 1.11 y a cuatro números de We
diferentes: We = 0.1 línea a trazos, We = 0.01 línea sólida, We = 0.005 línea a puntos y
We = 0.002 línea a trazo y punto.

28

29
4. PLANTEAMIENTO DEL PROBLEMA DE
ESTABILIDAD LINEAL
Considerando pequeñas perturbaciones sobre las soluciones estacionarias, se puede
realizar un planteamiento de la estabilidad lineal del modelo tal y como se muestra a
continuación:
ℎ(𝑧, 𝑡) = ℎ0 + 𝜀ℎ𝜀(𝑧, 𝑡), (4.1)
𝑢(𝑧, 𝑡) = 𝑢0 + 𝜀𝑢𝜀(𝑧, 𝑡). (4.2)
El subíndice 0 ayuda a identificar las soluciones estacionarias obtenidas anteriormente
en este documento, mientras que el subíndice 𝜀 viene a reflejar una parte no estacionaria que
está acompañada de la constante 𝜀 ≪ 1 que hace referencia a las pequeñas perturbaciones
consideradas.
Introduciendo las expresiones (4.1) y (4.2) en las ecuaciones de continuidad (2.38) y
cantidad de movimiento (2.41), toman la forma
𝜕(ℎ0 + 𝜀ℎ𝜀)
𝜕𝑡+ (𝑢0 + 𝜀𝑢𝜀)
𝜕(ℎ0 + 𝜀ℎ𝜀)
𝜕𝑧+
1
2(ℎ0 + 𝜀ℎ𝜀)
𝜕(𝑢0 + 𝜀𝑢𝜀)
𝜕𝑧= 0,
(4.3)
𝜕(𝑢0 + 𝜀𝑢𝜀)
𝜕𝑡+ (𝑢0 + 𝜀𝑢𝜀)
𝜕(𝑢0 + 𝜀𝑢𝜀)
𝜕𝑧
= −𝜕𝐶
𝜕𝑧+ 1 +
3Г
(ℎ0 + 𝜀ℎ𝜀)2
𝜕
𝜕𝑧[(ℎ0 + 𝜀ℎ𝜀)
2𝜕(𝑢0 + 𝜀𝑢𝜀)
𝜕𝑧],
(4.4)
donde la curvatura,
𝐶 =1
(ℎ0 + 𝜀ℎ𝜀) [1 + (∂(ℎ0 + 𝜀ℎ𝜀)
𝜕𝑧)2
]
1 2⁄−
𝜕2(ℎ0 + 𝜀ℎ𝜀)𝜕𝑧2
[1 + (𝜕(ℎ0 + 𝜀ℎ𝜀)
𝜕𝑧)2
]
3 2⁄. (4.5)
Reteniendo los términos de orden 𝑂(ε), puesto que como ya se mencionaba
anteriormente, se suponen perturbaciones pequeñas, las ecuaciones pueden escribirse
𝜕ℎ𝜀
𝜕𝑡+ 𝑢0
𝜕ℎ𝜀
𝜕𝑧+ 𝑢𝜀
𝜕ℎ0
𝜕𝑧+
ℎ0
2
𝜕𝑢𝜀
𝜕𝑧+
ℎ𝜀
2
𝜕𝑢0
𝜕𝑧= 0, (4.6)
𝜕𝑢𝜀
𝜕𝑡+ 𝑢0
𝜕𝑢𝜀
𝜕𝑧+ 𝑢𝜀
𝜕𝑢0
𝜕𝑧= 𝐹 + ГG,
(4.7)

30
donde F y G se corresponden con el gradiente de presión y las contribuciones viscosas
respectivamente. En el apéndice B, pueden ser consultadas las expresiones completas de
estos términos.
Se busca una solución periódica de la forma
ℎ𝜀 = ℎ1(𝑧)e𝜔𝑡, (4.8)
𝑢𝜀 = 𝑢1(𝑧)e𝜔𝑡. (4.9)
𝜔 ∈ ℂ , hace referencia a la frecuencia de oscilación de las perturbaciones, y ℎ1, 𝑢1 son
autofunciones dependientes sólo del espacio (componente axial).
Sustituyendo las expresiones (4.8)-(4.9) en las ecuaciones (4.6)-(4.7) y expresándolo
matricialmente queda
𝑀 (𝑧,𝜕
𝜕𝑧,𝜕2
𝜕𝑧2,𝜕3
𝜕𝑧3) [
ℎ1
𝑢1] = 𝜔 [
ℎ1
𝑢1], (4.10)
siendo 𝑀 un operador diferencial lineal en forma matricial.
También, se puede reescribir la ecuación (4.10) como el siguiente problema de
autovalores
(𝑀ℎ
𝑐 𝑀𝑢𝑐
𝑀ℎ𝑐𝑚 𝑀𝑢
𝑐𝑚) [ℎ1
𝑢1] = 𝜔 [
ℎ1
𝑢1], (4.11)
en el que el subíndice 𝑐 indica los términos asociados a la ecuación de conservación de la
masa y el subíndice 𝑐𝑚 expresa aquellos referidos a la ecuación de cantidad de movimiento.
En este sistema, 𝜔 referencia el autovalor, mientras que ℎ1 y 𝑢1 son las autovectores.
No se ha llevado a cabo la resolución de la expresión (4.11) pues supera las competencias
establecidas para este proyecto, pero se plantea con la intención de posibilitar trabajos
posteriores.
Por último, es destacable tener una interpretación del número complejo 𝜔 que podría
escribirse como
𝜔 = 𝜔𝑟 + 𝑖𝜔𝑖, (4.12)
teniendo en cuenta que 𝜔𝑟 = Re(𝜔) y 𝜔𝑖 = Im(𝜔). Luego, 𝜔𝑟 indica la proporción en la
que crecen las perturbaciones, mientras que 𝜔𝑖 representa la frecuencia de oscilación. Si
𝜔𝑟 > 0 el flujo será inestable, pues las perturbaciones se amplifican cada vez más en el
tiempo. Por el contrario, si 𝜔𝑟 < 0, las perturbaciones tienden a amortiguarse, y, por tanto,
el chorro será estable.

31
5. CONCLUSIONES Y TRABAJO FUTURO
En este proyecto se ha realizado el modelo unidimensional de un chorro axisimétrico
para el caso de un fluido newtoniano. Debido a la complejidad de las ecuaciones de Navier-
Stokes, base fundamental en la que se ha apoyado este texto, se ha recurrido al método
numérico para facilitar tanto la implementación del método, como su resolución. Para poder
obtener unas ecuaciones más genéricas, aplicables a más situaciones, se han
adimensionalizado las ecuaciones obtenidas para el caso estacionario.
El modelo implementado, básicamente, proporciona información sobre el radio y el
perfil de velocidades del chorro. Para ello, se ha analizado la influencia de los parámetros
numéricos y condiciones de contorno que se han aplicado al problema, observándose como
a penas poseen influencia sobre los resultados obtenidos; se ha contrastado la veracidad de
los resultados, con independencia del líquido, caudal o tamaño del inyector, por medio de la
utilización de imágenes experimentales; y, finalmente se ha arrojado información bastante
esclarecedora acerca del comportamiento del chorro.
Así, se ha comprobado como al inicio, próximo al inyector, los esfuerzos gravitatorios y
de tensión superficial se encuentran en equilibrio, y conforme se avanza en la coordenada
axial, se produce una relajación viscosa y predomina la acción de la gravedad. También, se
observa como la aceleración en un chorro semi infinito es constante, dato que era de esperar,
pues es un líquido en caída libre.
Todo el trabajo se ha llevado a cabo con un modelo unidimensional, pues son las
ecuaciones más simples que incorporan los principales mecanismos físicos relacionados con
el comportamiento del chorro; como son inercia, tensión superficial, fuerzas viscosas y
gravitacionales. No obstante, a pesar de la simplicidad del modelo, los resultados obtenidos,
que han sido comparados con experimentos, son válidos y bastante precisos.
Con respecto a los trabajos futuros, sería interesante realizar la implementación de otros
modelos y comparar los resultados obtenidos, tiempo y coste computacional; llevar a cabo
más experimentos pensados para este fin; y, utilizar como base este modelo para renovarlo
dando una mayor descripción de los parámetros involucrados en el problema.
Particularmente, lo más interesante es la implementación del análisis de estabilidad, que se
ha enunciado en este trabajo, puesto que la ruptura de chorros es uno de los aspectos más
utilizados en la industria.

32

33
APÉNDICE A. TRANSFORMACIÓN DE COORDENADAS
Para poder considerar el dominio del chorro que se está tratando, [0, 𝐿], es necesario
transformar el dominio de Chebyshev. Así, se establece una función matemática en la que,
a cada elemento del primer conjunto, en este caso, el procedente del dominio [−1,1], se le
asigne un elemento del segundo conjunto, es decir, del dominio [0, 𝐿], de modo que la
función elegida, al igual que en Rubio-Rubio (2013), es
𝑧 =𝑏𝐿(1 + 𝑦)
2𝑏 + 𝐿(1 − y) , (A.1)
donde 𝑧 representa la coordenada espacial en el dominio del problema, 𝑏 es un parámetro
que establece la separación existente entre cada uno de los nodos de Chebyshev e 𝑦
referencia la coordenada espacial en el dominio de Chebyshev.
Aplicando la regla de la cadena, se pueden obtener las derivadas con respecto a 𝑧 de los
diferentes parámetros,
𝜕
𝜕𝑧=
𝜕𝑦
𝜕𝑧𝐷1, (A.2)
𝜕2
𝜕𝑧2=
𝜕2𝑦
𝜕𝑧2𝐷1 + (
𝜕𝑦
𝜕𝑧)2
𝐷2, (A.3)
𝜕3
𝜕𝑧3=
𝜕3𝑦
𝜕𝑧3𝐷1 + 3
𝜕2𝑦
𝜕𝑧2
𝜕𝑦
𝜕𝑧𝐷2 + (
𝜕𝑦
𝜕𝑧)3
𝐷3, (A.4)
siendo 𝐷1, 𝐷2 y 𝐷3 las matrices de derivación de Chebyshev de primer, segundo y tercer
orden.
También, las derivadas de la expresión utilizada para la transformación de coordenadas
(A.1) se calculan fácilmente con el uso de la regla de la cadena, de modo que
𝜕𝑦
𝜕𝑧=
2𝑏(𝑏 + 𝐿)
𝐿(𝑏 + 𝑧)2 , (A.5)
𝜕2𝑦
𝜕𝑧2=
−4𝑏(𝑏 + 𝐿)
𝐿(𝑏 + 𝑧)3 ,
(A.6)
𝜕3𝑦
𝜕𝑧3=
12𝑏(𝑏 + 𝐿)
𝐿(𝑏 + 𝑧)4.
(A.7)

34

35
APÉNDICE B. TÉRMINOS DE LA ECUACIÓN DE 𝑶(𝜺)
La componente axial del gradiente de presión se puede expresar como:
𝐹 =𝐴1
𝐷1 2⁄+
𝐴2
𝐷3 2⁄+
𝐴3
𝐷5 2⁄+
𝐴4
𝐷7 2⁄, (B.1)
donde 𝐷 se corresponde con la siguiente expresión,
𝐷 = 1 + (dℎ0
d𝑧)
2
. (B.2)
También, las funciones 𝐴𝑖 se han definido como
𝐴1 = −1
ℎ02
𝜕ℎ𝜀
𝜕𝑧+
2
ℎ03
dℎ0
d𝑧ℎ𝜀 , (B.3)
𝐴2 = −𝜕3ℎ𝜀
𝜕𝑧3−
1
ℎ0
dℎ0
d𝑧
𝜕2ℎ𝜀
𝜕𝑧2+ [
1
ℎ02 (
dℎ0
d𝑧)2
−1
ℎ0
d2ℎ0
d𝑧2]𝜕ℎ𝜀
𝜕𝑧+
1
ℎ02
d2ℎ0
d𝑧2
dℎ0
d𝑧ℎ𝜀 ,
(B.4)
𝐴3 = 6d2ℎ0
d𝑧2
dℎ0
d𝑧
𝜕2ℎ𝜀
𝜕𝑧2+ 3 [
1
ℎ0
d2ℎ0
d𝑧2(dℎ0
d𝑧)2
+ (d2ℎ0
d𝑧2)
2
+d3ℎ0
d𝑧3
dℎ0
d𝑧]𝜕ℎ𝜀
𝜕𝑧,
(B.5)
𝐴4 = −15(d2ℎ0
d𝑧2)
2
(dℎ0
d𝑧)
2 𝜕ℎ𝜀
𝜕𝑧.
(B.6)
A su vez, los términos viscosos G se definen como
G = 3𝜕2𝑢𝜀
𝜕𝑧2+
6
ℎ0(𝜕ℎ𝜀
𝜕𝑧
d𝑢0
d𝑧+
dℎ0
d𝑧
𝜕𝑢𝜀
𝜕𝑧−
2
ℎ0
dℎ0
d𝑧
d𝑢0
d𝑧ℎ𝜀) (B.7)

36

37
BIBLIOGRAFÍA
Barrero, A. & Loscertales, I. G. 2007 Micro- and Nanoparticles via Capillary Flows.
Annual Review of Fluid Mechanics 39, 89-106.
Becker, E., Hiller, W. J. & Kowalewski, T.A. 1991 Experimental and theoretical
investigation of large-amplitude oscillations of liquid droplets. Journal of Fluid Mechanics
231, 189-210.
Bentley, W. 1904 Studies of raindrops and raindrop phenomena. Monthly Weather
Review 32, 450-456.
Boyd, J. P. 2001 Chebyshev and Fourier spectral methods. Dover Publications, Mineola
(New York).
Castañeda, B. V. 2009 Los once volcanes más importantes del mundo. LaReserva.com.
Obtenido en enero, 2019.
Chaudhary, K. C. & Maxworthy, T. 1980a The nonlinear capillary instability of a liquid
jet. Part 2. Experiments on jet behaviour before droplet formation. Journal of Fluid
Mechanics 96, 275.
Chaudhary, K. C. & Maxworthy, T. 1980b The nonlinear capillary instability of a liquid
jet. Part 3. Experiments on satellite drop formation and control. Journal of Fluid Mechanics
96, 287.
Chaudhary, K. C. & Redekopp, L. G. 1980 The nonlinear capillary instability of a liquid
jet. Part 1. Theory. Journal of Fluid Mechanics 96, 257.
Clanet, C. & Lasheras, J. C. 1999 Transition from dripping to jetting. Journal of Fluid
Mechanics 383, 307-326.
Da Vinci, L. 1510 Codex Leicester. Italia.

38
Eggers, J. & Dupont, F. T. 1994 Drop formation in a one-dimensional approximation of
the Navier-Stokes equation. Journal of Fluid Mechanics 262, 205-222.
Eggers, J. & Villermaux, E. 2008 Physics of liquid jets. Reports on Progress in Physics
71, 036601.
García, F. J. & Castellanos, A. 1994 One-dimensional models for slender axisymmetric
viscous liquid jets. Physics of Fluids 6, 2676–2689.
Javadi, A., Eggers, J., Bonn, D., Habibi, M. & Ribe, N. M. 2013 Delayed Capillary
Breakup of Falling Viscous Jets. Physical Review Letters 110, 144501.
Le Dizès, S. 1997 Global modes in falling capillary jets. European Journal of Mechanics
– B/Fluids 16, 761-778.
Lee, H. C. 1974 Drop formation in a liquid jet. IBM Journal of Research and
Development 18, 364-369.
Loscertales, I. G., Barrero, A., Guerrero, I., Cortijo, R., Márquez, M. & Gañán-Calvo,
A. M. 2002 Micro/Nano Encapsulation via Electrified Coaxial Liquid Jets. Science 295,
1695-1698.
McKechnie, G. 2005 Kühlschmiermittel beim Fräsen. Wikipedia. Obtenido en enero,
2019.
Navier, C. L. M. H. 1827 Mémoire sur les lois de l’equilibre et du mouvement des corps
solides élastiques. F. Didot. Paris.
Orihuel, E. 2017 La energía mecánica en la limpieza de superficies con agua a presión:
un modelo simplificado. Betelgeux. Obtenido en enero, 2019.
Pastor, M. J. 2014 Boquillas para fuentes de jardín. AquaBazar. Obtenido en enero, 2019.

39
Plateau, J. 1873 Statique expérimentale et théorique des liquides soumis aux seules
forces moléculaires, volume 2. Gauthier-Villars, Paris.
Rayleigh, W. S. 1892 On the instability of a cylinder of viscous liquid under capillary
forcé. The London, Edinburgh, and Dublin Philosophical Magazine and Journal of Science
34, 145-154.
Reddien, G. W. 2004 Newton-Raphson Methods. Jhon Wiley Sons, Inc., Estados Unidos.
Riboux, G., Marín, A. G., Loscertales, A. G. & Barrero, A. 2011 Whipping instability
characterization o fan electrified visco-capillary jet. Journal of Fluid Mechanics 671, 226-
253.
Rubio-Rubio, M., Sevilla, A. & Gordillo, J. M. 2013 On the thinnest steady threads
obtained by gravitational stretching of capillary jets. Journal of Fluid Mechanics 729, 471-
483.
Savart, F. 1833 Mémoire sur la constitution des veines liquides lancées par des orifices
circulaires en mince paroi. Annales de Chimie et Physique 53, 337-386.
Schulkes, R. M. S. M. 1994 The evolution and bifurcation of a pendant drop. Journal of
Fluid Mechanics 278, 83-100.
Schulkes, R. M. S. M. 1996 The contraction of liquid filaments. Journal of Fluid
Mechanics 309,277-300.
Stokes, G. G. 1845 III. on the aberration of light. The London, Edinburgh, and Dublin
Philosophical Magazine and Journal of Science 27, 9–15.
Toricelli, E. 1644 Opera Geométrica. Italia.
Zhang, Y. & Alexander, J. I. D. 1990 Sensitivity of liquid bridges subject to axial residual
acceleration. Physics of Fluids A: Fluid Dynamics 2, 1966–1974.