mobility limited flip-based sensor networks deployment reporter: po-chung shih computer science and...
TRANSCRIPT

Mobility Limited Flip-BasedSensor Networks Deployment
Reporter: Po-Chung Shih
Computer Science and Information Engineering DepartmentFu-Jen Catholic University
112/04/19

22
Outline Introduction Related work
Edmonds-Karp algorithm Assumption
SOLUTION Overview Mobility Model Constructing the Virtual Graph
Performance Conclusion

33
Introduction It is not practical to manually position
sensors in desired locations.
In this paper, we study deployment of sensor networks using mobile sensors.
Our problem is to determine a movement plan for the sensors in order to maximize the sensor network coverage and minimize the number of flips.

44
Introduction A certain number of flip-based sensors are
initially deployed in the sensor network that is clustered into multiple regions.
(a) movement plan (b) result

55
(a) A snapshot of the sensor network and the optimal movement plan.
(b) The resulting deployment.
Introduction

66
Outline Introduction Related work
Edmonds-Karp algorithm Assumption
SOLUTION Overview Mobility Model Constructing the Virtual Graph
Performance Conclusion

77
Edmonds-Karp algorithm Use BFS to find the augmenting path. The augmenting path is a shortest path from s to t in
the residual network. Running Time of Edmonds-Karp algorithm : O(VE2). Given a network of seven nodes, source A, sink G,
and capacities as shown below:
Related work
77

88
Assumption All the sensors are mobile.
Each sensor knows its position.
The sensor network is a square field. It is divided into two-dimensional regions, where each region is a square of size R.
{ } R, where and are sensing
and transmission ranges of the sensors. i.e., R =m*d
Sensors can flip only once to a new location.
Related work
5,
2trsen SS min senS trS
88

99
Outline Introduction Related work
Edmonds-Karp algorithm Assumption
SOLUTION Overview Mobility Model Constructing the Virtual Graph
Performance Conclusion

1010
SOLUTION Overview
Phase 1 :Each sensor in the network will first determine its position and the region it resides in.
Phase 2 :Sensors then forward their location information to the base-station (region-head).
Phase 3 :The base-station using the region information to determine the movement plan.
Phase 4 :The base-station will then forward the movement plan to corresponding sensors in the network.

1111
SOLUTION Mobility Model
First : The distance to which a sensor can flip is fixed and is equal to F.
Second : Sensors can flip to distances between 0 and F.
Parameters definition F : The maximum distance a sensor can flip. d : F is an integral multiple of the basic unit d. ( sensors can flip once to distances d, 2d, 3d, . . . nd from its
current location, where nd = F ).
C : C=n denotes the sensor has n choices for the flip distance ( between d and maximum distance F ).

1212
Parameters definition (Cont.) Hole : Region without any
sensor. Source : Region with at least
two sensors. Forwarder : Region with only
one sensor.
EX1 :F=d , C=1 , reachable regions of region 1 are regions 2 and 5.
EX2 :F=2d , C=1 , reachable regions of region 1 are regions 3 and 9.
EX3 :F=2d , C=n , reachable regions of region 1 are regions 2,3,5, and 9.
SOLUTION
1212

1313
SOLUTION Constructing the Virtual Graph for the Case
R = d , F = d , C = 1

1414
SOLUTION Constructing the Virtual Graph for the Case
R = d , F = d , C = 1
Case2 R = d , F = 2d , C = 1
Case3 R = d , F = 2d , C = n

1515
SOLUTION
1515
Constructing the Virtual Graph for the Case R = 2d , F = d , C = 1
1 2
3 4

1616
SOLUTION Theorem 1. Let be the minimum-cost
maximum-flow plan in GV . Its corresponding flip
plan will maximize coverage and minimize
the number of flips.
VWopt
SWopt
VWoptSWopt

1717
Outline Introduction Related work
Edmonds-Karp algorithm Assumption
SOLUTION Overview Mobility Model Constructing the Virtual Graph
Performance Conclusion

1818
Performance• Qi : The number of regions with at least one sensor at initial
deployment.
• Qo : The number of regions with at least one sensor after the movement plan determined by our solution is executed.
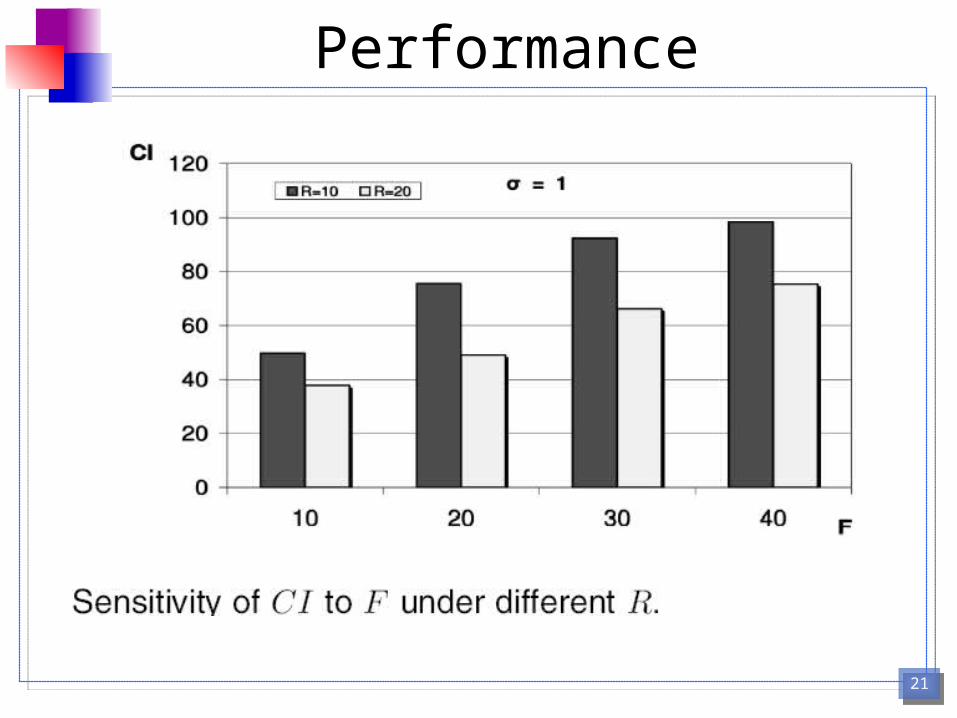
• CI = Qo – Qi (Coverage Improvement)
• FD=J/Qo – Qi (Denoting J as the optimal number of flips as determined by our solution).
• Network sizes : 300*300 units and 150*150 units.
• The region sizes are R = 10 and R = 20 units.
• The basic unit of flip distance d = 10 units. C=1 and C=n.
• The number of sensors deployed is equal to the number of regions.
• PN = P/Q (Denoting P as the total number of packets (or messages) sent and Q as the number of regions).
• : Different distributions in initial deployment.

1919
Performance

2020
Performance
2121
Performance

2222
Performance

2323
Performance

2424
Performance
2525
Outline Introduction Related work
Edmonds-Karp algorithm Assumption
SOLUTION Overview Mobility Model Constructing the Virtual Graph
Performance Conclusion

2626
Conclusion We proposed a minimum-cost maximum-
flow based solution to optimize coverage and the number of flips.

2727
Thanks for your attention