mekanİ - yıldız teknik Üniversitesihbayir/mekanik.pdf6 statİk bÖlÜm 1 gİrİŞ 1.1 mekaniğin...
TRANSCRIPT
MEKANİK
DERS NOTLARI
Yar. Doç. Dr. Hüseyin BAYIROĞLU

2
İçindekiler
STATİK 1
GİRİŞ 6
1.1 Mekaniğin tanımı 6 1.2 Temel ilkeler ve görüşler 6
2 VEKTÖRLERİN VE İŞLEMLERİNİN TANIMI
7 2.1 Vektörün tanımı 7 2.2 Vektörel işlemlerin tanımı 7 2.2.1 Vektörün bir sayı ile çarpımı 7 2.2.2 Vektörlerin toplamı 8 2.2.3 İki Vektörün birbiri ile skaler çarpımı 8 2.2.4 İki Vektörün birbiri ile vektörel çarpımı 8 2.2.5 Bir vektörün bir eksen üzerindeki izdüşümü 9
3 VEKTÖRLERİN ANALİTİK İNCELENMESİ
10 3.1 İki boyutlu vektörlerin kartezyen koordinatlarda gösterilişi 10 3.2 Üç boyutlu vektörlerin kartezyen koordinatlarda gösterilişi 12 3.3 Kartezyen koordinatlarda vektörel işlemler 14 3.3.1 Vektörün bir sayı ile çarpımı 14 3.3.2 Vektörlerin toplamı 15 3.3.3 İki vektörün skaler çarpımı 16 3.3.4 İki vektörün vektörel çarpımı 17 3.3.5 Üç vektörün karışık çarpımı 18 3.3.6 Bir vektörün bir eksen üzerindeki izdüşümü 19
4 KUVVET SİSTEMLERİ
20 4.1 Kuvvetin tanımı ve vektörle gösterilişi 20 4.2 Bir kuvvetin bir noktaya göre momenti 21 4.3 Bir kuvvetin bir eksene göre momenti 22 4.4 Bir kuvvet sisteminin bir noktaya göre momenti ve indirgeme elemanları (Bir kuvvet sisteminin statik eşdeğeri ) 23

3
4.5 Bir kuvvet sisteminin değişmezleri 25 4.6 Dejenere kuvvet sistemleri 27 4.6.1 Sıfıra eşdeğer kuvvet sistemi 27 4.6.2 Kuvvet çiftine (Tek bir momente) eşdeğer kuvvet sistemi 27 4.6.3 Bileşkeye eşdeğer kuvvet sistemi 27 4.6.4 Bileşkesi olan kuvvet sistemi 28 4.7 Merkezi eksen 28 4.7 Paralel bağlı kuvvet sistemi ve merkezi 30
5 KÜTLE MERKEZİ
32 5.1 Bir sürekli cismin kütle merkezi 32 5.2 Bileşik cismin kütle merkezi 39
6 STATİK
42 6.1 Giriş 42 6.2 İç kuvvetler ve kesit zorları 48 6.3 Statiğin temel ilkelerinin geçerli olduğu referans sistemleri 48 6.4 Bir maddesel noktanın kuvvetler etkisinde dengesi 49 6.5 Bir Rijid cismin kuvvetler etkisinde dengesi 49 6.6 Rijid cisim sisteminin kuvvetler etkisinde dengesi 49 6.7 Düzlemsel kuvvetler etkisindeki cisimlerin dengesi 49 6.8 Üç boyutlu kuvvetler etkisindeki bir rijid cismin dengesi ile ilgili uygulamalar 54
7 SÜRTÜNME
61 7.1 Sürtünme ve sürtünme katsayısı 61 7.2 Mesnetlerdeki sürtünmeler 63 7.3 Halat ve kayış kasnak sürtünmesi 66
DİNAMİK
GİRİŞ 69
8 VEKTÖREL ANALİZ
69 8.1 Vektör fonksiyonu 69

4
8.2 Vektör fonksiyonunun türevi 70 8.2.1 Türev Kuralları 70 8.3 Vektör fonksiyonunun integrali 72
9 EĞRİLERDE DİFERANSİYEL ÖZELLİKLER
73 9.1 Bir vektör fonksiyonunun hodografı 73 9.2 Bir vektörel fonksiyonun hodografı ( )P u vektörel fonksiyonunun türevi 74 9.3 Doğal koordinat sistemi 76 9.4 Doğal koordinat sisteminde T , N , B birim vektörleri ve eğrilik yarıçapı 76
10 MADDESEL NOKTANIN KİNEMATİĞİ
79 10.1 Kinematiğin temel kavramları 79 10.2 Maddesel noktanın hareketinin kartezyen koordinat sisteminde incelenmesi. 80 10.3 Maddesel noktanın hareketinin doğal koordinat sisteminde incelenmesi. 81 10.4 Maddesel noktanın hareketinin silindirik koordinat sisteminde incelenmesi. 83 10.5 Maddesel noktanın doğrusal hareketi 85 10.5.1 Sabit hızlı doğrusal hareket 86 10.5.2 Sabit ivmeli doğrusal hareket 86 10.5.3 ( )=a f t ivme zamanın fonksiyonu şeklinde verilmiş ise 87 10.5.4 ( )=a f s ivme konumun fonksiyonu şeklinde verilmiş ise 88 10.5.5 ( )=a f V ivme hızın fonksiyonu şeklinde verilmiş ise 89 10.5.6 = −a kV Bağıntısına uygun doğrusal hareket (geri tepmeyi azaltma) 90 10.5.7 = −a ks Bağıntısına uygun doğrusal hareket (Serbest titreşim hareketi) 90 10.5.8. Doğrusal harekette toplam yol 92 10.6 Maddesel noktanın çembersel hareketi 94 10.6.1 Çembersel harekette hız ve ivmenin kartezyen koordinatlardaki ifadeleri 96 10.7 Maddesel noktanın bağıl hareketi (öteleme hareketi yapan eksen sistemine göre) 99 10.8 Maddesel noktanın bağlı hareketi 103

5
11 RİJİD CİSMİN KİNEMATİĞİ
107 11.1 Rijid cismin hareketinde izdüşüm hızlar teoremi 107 11.2 Rijid cismin ötelenme hareketi 110 11.3 Rijid cismin sabit bir eksen etrafında dönme hareketi 113 11.4 Rijid cismin genel düzlemsel hareketi 118 11.5 Genel düzlemsel harekette ani dönme merkezi 122
12 KİNETİK
125 12.1 Kinetik ve Newton’un ikinci hareket kanunu 125 12.2 Maddesel noktanın kinetiği 125 12.3 Kütle merkezinin hareketi teoremi 126 12.4 Rijid cismin sabit bir eksen etrafında dönme hareketi ve atalet momentleri 128 12.5 Atalet momentleri 129 12.5.1 Atalet yarıçapı 129 12.5.2 Atalet momentleri ile ilgili teoremler 130 12.6 Rijid cismin sabit bir eksen etrafındaki dönme hareketi ile ilgili problemler 137 12.7 Rijid cismin genel düzlemsel hareketinin kinetiği 139
13 İŞ VE ENERJİ İLKESİ
144 13.1 Maddesel noktanın hareketinde iş ve enerji ilkesi 144 13.1.1 Mekanik enerjinin korunumu ve potansiyel enerji 146 13.2 Rijid cismin Sabit eksen etrafında dönmesinde kinetik enerji hesabı 148 13.3 Rijid cismin genel düzlemsel hareketinde kinetik enerji hesabı 150
EK A
Daha önceki senelerde sınavlarda sorulan Statik problemleri 152
EK B Daha önceki senelerde sınavlarda sorulan Dinamik problemleri 166

6
STATİK
BÖLÜM 1
GİRİŞ 1.1 Mekaniğin tanımı Cisimlerin Kuvvetler etkisinde dengesini ve hareketlerini inceleyen bilim dalına mekanik denir. Mekanik cisimlere maddesel nokta, rijid cisim, elastik cisim , plastik cisim ve akışkanlar ( sıvı ve gazlar) olmak üzere yaklaşır.Mekanik eğer sadece maddesel nokta ve rijid cisim modelini inceliyorsa bu bilim dalına mekanik veya mühendislik mekaniği denir. Bunun dışında incelediği cisim modeline uygun isimler verilir. Örneğin elastomekanik veya elastisite, plastisite , hidromekanik ,aerodinamik, elektromekanik gibi. Mekanik , Statik ve Dinamik olmak üzere iki bilim dalına ayrılır. Statik kuvvetler etkisinde cisimlerin denge koşullarını, Dinamik ise hareketlerini inceler. 1.2 Temel ilkeler ve görüşler Mekaniğin temel aldığı ilkeler Newton yasalarıdır. Bu yasalar cisimlere maddesel nokta modeli ile yaklaşıldığında kullanışlıdır. Diğer cisim modellerine matematiksel modellerle genişletilmesi gerekir. Benzer şekilde mekanikte kuvvetler maddesel nokta modelinde vektörlerle gösterilebilmesine karşı rijid cisim modelinde vektör ve etki doğrusu kavramları beraber kullanılmalıdır. Mühendislik mekaniği vektörler yardımı ile oluşturulduğu için vektörleri bize gerektiği kadar ayrıntılı bir şekilde ele almamız gerekir.

7
BÖLÜM 2
VEKTÖRLERİN VE TEMEL İŞLEMLERİNİN TANIMI
2.1 Vektörlerin tanımı Doğrultu , yön ve modülü ile tanımlanan büyüklüklere vektörler denir. Bir vektör Koyulaştırılmış harfler ile veya üzerine ok işareti çizilen harflerle belirtilir. Vektörler aşağıdaki gibi yönlendirilmiş doğru parçası ile gösterilebilir. V Bir referans sistemine göre çizilen bu doğru parçasının doğrultusu vektörün doğrultusunu , yönü vektörün yönünü ve uzunluğu vektörün modülünü gösterir. Bir vektörün modülü | V | ile gösterilir. Sıfır vektör : modülü sıfır olup doğrultu ve yönü belirsiz olan vektörlere sıfır vektörü denir ve 0 ile gösterilir.
V− vektörü : V vektörü ile aynı doğrultu ve modülde fakat ters yöndeki vektöre V− vektörü denir. Birim vektör: Modülünün sayısal değeri 1 olan vektöre birim vektör denir. 2.2 Vektörel işlemlerin tanımı Vektörler üzerine inşa edilen temel işlemler : Vektörün bir reel sayı ile çarpımı , vektörlerin toplanması , skaler ve vektörel çarpımı gibi işlemlerdir. 2.2.1 Vektörün bir sayı ile çarpımı Çarpılan vektörle aynı doğrultuda bir vektördür. Eğer çarpım katsayısı pozitif ise yönde aynıdır. Modül ise çarpım katsayısı ile vektörün modülünün çarpımı kadardır. | Vk | = | k | | V | Bir vektörün birim vektörü : Vektörü modülüne bölerek elde edilir.

8
Bir eksenin birim vektörü : Eksen doğrultusunda ve yönündeki herhangibir vektörü modülüne bölerek bulunur. 2.2.2 Vektörlerin toplamı Başlangıçları aynı noktaya getirilen iki vektörün toplamı bu vektörler üzerine kurulan paralel kenarın köşegeni üzerindeki aşağıda gösterilen vektöre eşittir. A BAC += B
2.2.3 İki vektörün birbiri ile skaler çarpımı İki vektör arasındaki açı: Başlangıçları aynı noktaya getirilen iki vektör arasındaki 1800 den büyük olmayan açı iki vektör arasındaki açı olarak alınır . A θ B Skaler Çarpım sonucunda skaler elde edilir . θCosBABA ||||=•
2.2.4 İki vektörün birbiri ile vektörel çarpımı Vektörel çarpımın sonucu yine bir vektördür. nSinBABAC )||||( θ=∧= Burada Vektörel çarpım sonunda elde edilen vektör her iki vektöre dik doğrultuda ve θSinBA |||| modülünde bir vektördür. Yönü ise sağ el kuralı ile bulunabilir.
9
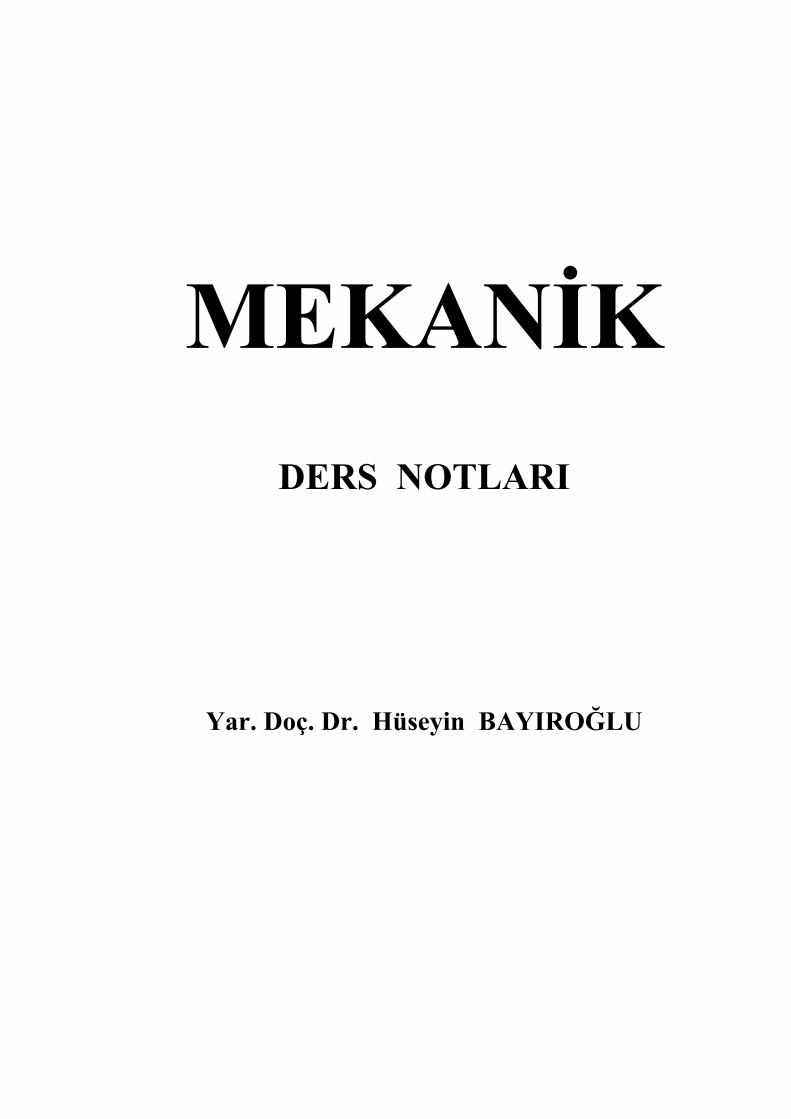
Sağ el kuralı ile elde edilen yön , baş parmak dışındaki sağ el parmakları birinci vektörü ikinci vektöre doğru döndürme yönünde tutulursa baş parmağın gösterdiği yöndür. BAC ∧= B n θ h A
θSinBA |||| ifadesinde | A | Sin hθ= olduğundan A ve B vektörlerinin birbiri ile vektörel çarpımının modülü bu vektörlerin başlangıçları aynı noktaya getirilirse üzerine kurulan paralelkenarın alanına eşit olduğu görülür.
2.2.5 Bir vektörün bir eksen üzerindeki izdüşümü V θ ΔV Δ θCosVV ||=Δ
ΔΔ •= UVV burada ΔU Δ ekseninin birim vektörüdür.

10
BÖLÜM 3
VEKTÖRLERİN ANALİTİK İNCELENMESİ
3.1 İki boyutlu vektörlerin kartezyen koordinatlarda gösterilişi y j V Vy β α i x Vx Düzlemde bir vektör jViVV yx += şeklinde x ve y ekseni doğrultusundaki vektörlerin toplamı cinsinden yazılabilir. Bu vektörün modülü ise aşağıdaki gibi pisagor teoremi yardımı ile bulunur. 22
yx VVV += Bir vektörün doğrultusunda ve yönündeki birim vektör ise vektör modülüne bölünerek elde edilir.
VVU V =)( , j
V
Vi
VVU yx
V +=)(

11
Aşağıdaki gibi birim vektörün katsayılarının vektörün eksenlerle yaptığı açıların kosinüslerine eşit olduğu gösterilebilir.
xx U
VVCos ==α , y
y UV
VCos ==β
Problem 3.1.1 Bir düzlemdeki yatay doğrultu ile 300 derecelik açı yapan ve modülü 80 birim olan vektörü ve birim vektörünü kartezyen koordinat sisteminde yazınız. Çözüm: y yV V j θ x
i xV jViVV yx += 80V birim= , 030θ = xV V Cosθ= , yV V Sinθ= 080 30xV Cos= , 69 28xV , birim= 080 30yV Sin= , 40yV birim= 69 28 40V , i j= +
jV
Vi
VVU yx
V +=)( , 69 28 4080 80(V),U i j= +
0 866 0 5(V)U , i , j= +

12
3.2 Üç boyutlu vektörlerin kartezyen koordinatlarda gösterilişi y j H F B A yV β V γ α xV i E x O zV k C D Z Üç boyutlu uzayda bir vektör kartezyen koordinat sisteminde kVjViVV zyx ++= şeklinde x ve y ekseni doğrultusundaki vektörlerin toplamı cinsinden yazılabilir. Bu vektörün modülü ise aşağıdaki gibi pisagor teoremi yardımı ile bulunur. 222
zyx VVVV ++= Bir vektörün doğrultusunda ve yönündeki birim vektör ise vektör modülüne bölünerek elde edilir.
VVU V =)( , k
VVj
V
Vi
VVU zyx
V ++=)(
Aşağıdaki gibi birim vektörün katsayılarının vektörün eksenlerle yaptığı açıların kosinüslerine eşit olduğu gösterilebilir.
xx U
VVCos ==α , y
y UV
VCos ==β , z
z UVVCos ==γ
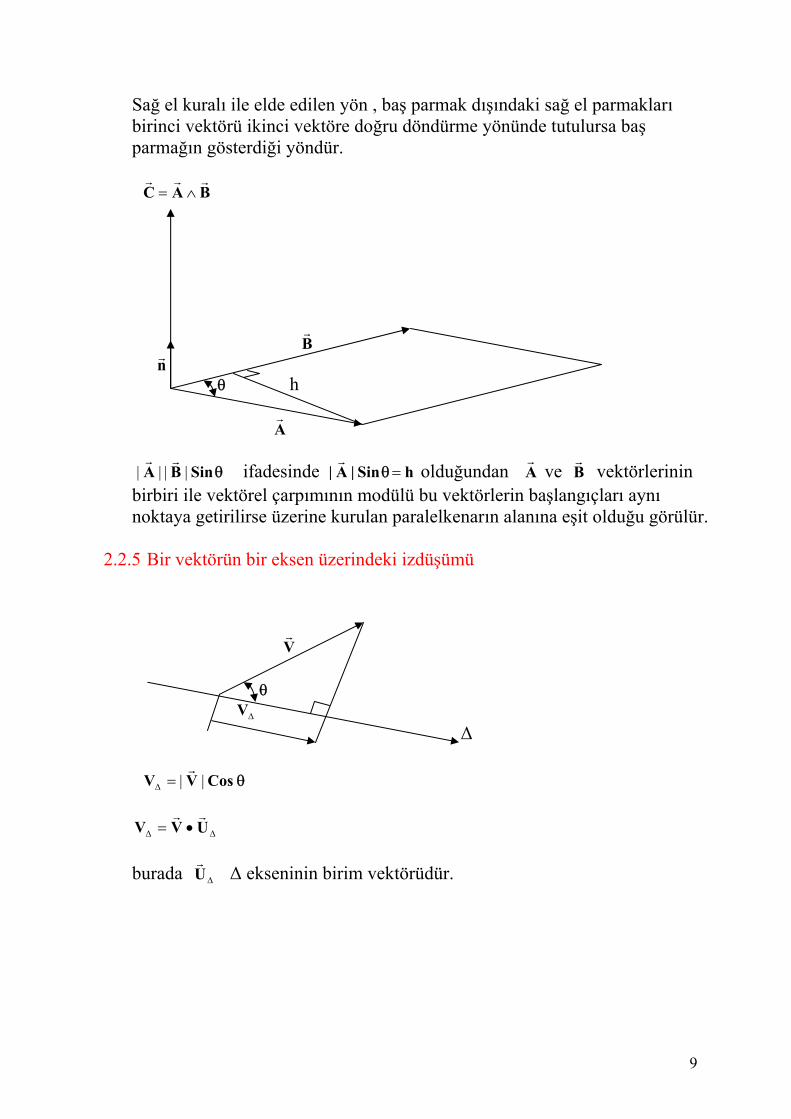
Problem 3.2.1 Bir V vektörünün başlangıcı kartezyen koordinat sisteminin başlangıç noktasına yerleştirildiğinde uç noktası A (60,30,20) koordinatlarında ise bu vektörün a) bu koordinat sistemindeki yazılışını b) modülünü c) birim vektörünü d) koordinat eksenleri ile yaptığı açıları bulunuz.
13
Çözüm: y H xV F B A ( 60 ; 30 ; 20 ) V yV β O α x γ z zV a) kVjViVV zyx ++= 60 30 20V i j k= + + b) 222
zyx VVVV ++= , 2 2 260 30 20V ( ) ( ) ( )= + +
70V = c)
VVU V =)( , 60 30 20
70(V)i j kU + +
=
6 3 27 7 7(V)U i j k= + +
d ) x
x UVV
Cos ==α , yy U
V
VCos ==β , z
z UVV
Cos ==γ
67
Cos α = , 37
Cos β = , 27
Cos γ =
031α = , 064 62,β = , 073 4,γ =

14
3.3 Kartezyen koordinatlarda vektörel işlemler 3.3.1 Vektörün bir sayı ile çarpımı Kartezyen koordinat sisteminde bir vektör
kVjViVV zyx ++= şeklinde yazılırsa bu vektörün bir λ sayısı ile çarpımı aşağıdaki şekilden görüldüğü gibi dikdörtgenler prizmasının bütün ölçüleri aynı λ sayısı ile çarpılarak elde edildiğinden
kVjViVV zyx λ+λ+λ=λ şeklinde yazılabilir. y λVz Vλ V λVy Vy Vz x Vx λVx z Bir vektörün bir sayı ile çarpımı vektörün doğrultusunu değiştirmez. Eğer çarpım katsayısı pozitif ise yönü de değişmez. Problem 3.3.1.1 Problem 3.2.1 de hesaplanan 60 30 20V i j k= + + vektörünün λ=2,5 ile çarpımından elde edilen Vλ vektörünün
a) ifadesini b) modülünü c) birim vektörünü hesaplayınız.
Çözüm: a) kVjViVV zyx λ+λ+λ=λ 2 5 60 2 5 30 2 5 20V , i , j , kλ = ∗ + ∗ + ∗ 150 75 50V i j kλ = + + b) 2 2 2150 75 50V ( ) ( ) ( )λ = + +
15
175Vλ = , 2 5 70 175V ,λ ∗ = ∗ = ⇒ V Vλ λ= ∗ c)
yx z( V)
VV VU i j k
V V Vλ
λλ λ
λ λ λ= + +
2 5 60 2 5 30 2 5 20
2 5 70 2 5 70 2 5 70( V), , ,U i j k, , ,λ∗ ∗ ∗
= + +∗ ∗ ∗
6 3 27 7 7( V)U i j kλ = + + ⇒ ( V) (V)U Uλ =
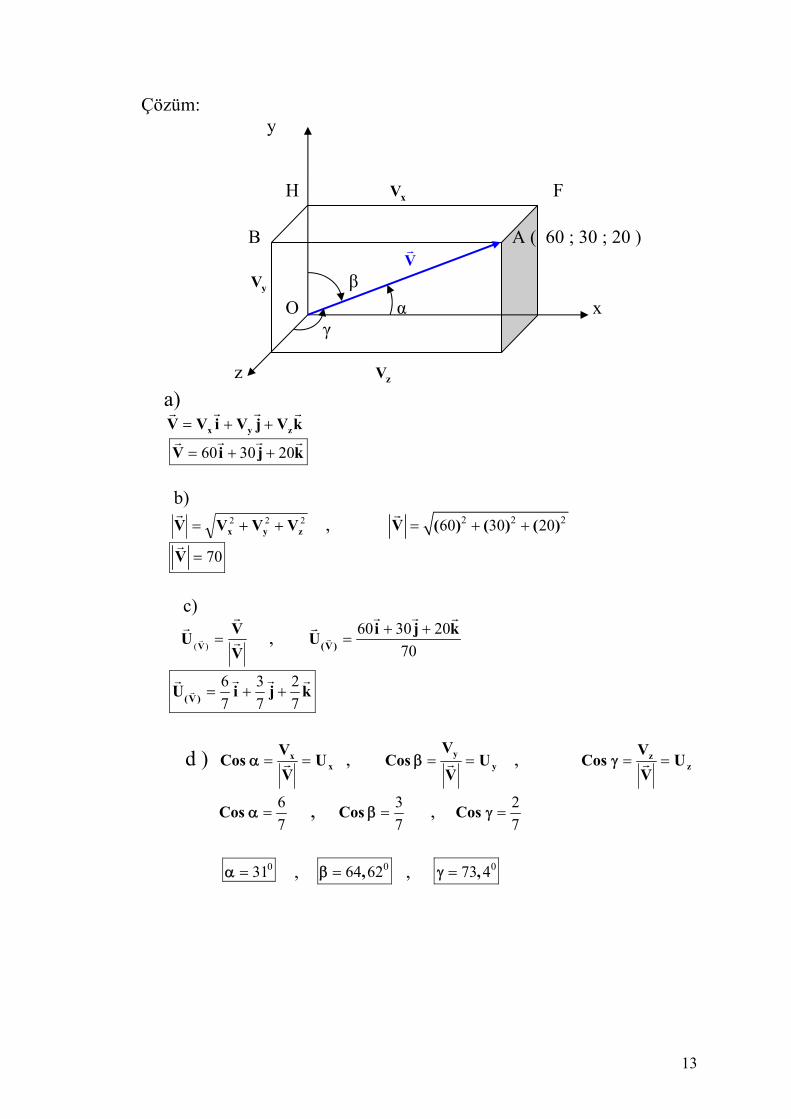
3.3.2 Vektörlerin toplamı Şekilde gösterildiği gibi İki boyutlu uzayda A ve B vektörünün toplamı olan C vektörünün koordinat eksenleri doğrultusundaki bileşenleri A ve B vektörlerinin aynı doğrultudaki bileşenleri toplanarak bulunur.
jAiAA yx += , jBiBB yx += jBAiBABA yyxx )()( +++=+
y E By D B Cy = Ay+By
A BAC += Ay x O Ax Bx Cx =Ax+Bx Şekildeki ODE üçgeninden OE kenarının uzunluğu OD ve DE kenarlarının uzunlukları toplamından büyük olamıyacağı bilindiğinden A B A B+ ≤ + eşitsizliği yazılabilir. Aynı işlemler üç boyutlu uzaya aşağıdaki gibi uygulanabilir.
kAjAiAA zyx ++= , kBjBiBB zyx ++= kBAjBAiBABA zzyyxx )()()( +++++=+

16
Problem 3.3.2.1 6 3 2A i j k= + + vektörü ile 12 3 4B i j k= + + vektörünün
a) modüllerini b) bu vektörlerin toplamını c) toplam vektörün modülünü hesaplayınız.
Çözüm: a) 2 2 26 3 2A = + + , 7A =
2 2 212 3 4B ( ) ( ) ( )= + + , 13B = b) 6 12 3 3 2 4A B ( )i ( ) j ( )k+ = + + + + + 18 6 6A B i j k+ = + + c) 2 2 218 6 6A B ( )+ = + +
19 9A B ,+ = 3.3.3 İki vektörün skaler çarpımı Aşağıda gösterildiği gibi A ve B vektörünün skaler çarpımı bu vektörlerin aynı doğrultudaki bileşenleri çarpımı toplanarak bulunur ve sonuç skalerdir.
kAjAiAA zyx ++= , kBjBiBB zyx ++=
zzyyxx BABABABA ++=• Skaler çarpımın tanımından skaler çarpımın mutlak değeri vektörlerin modülleri çarpımından büyük olamaz. Problem 3.3.3.1 6 3 2A i j k= + + vektörü ile 12 3 4B i j k= + + vektörünün
a) skaler çarpımını b) modülleri çarpımını hesaplayınız.
c) aralarındaki açıyı hesaplayınız. Çözüm: a) 6 12 3 3 2 4A B• = ∗ + ∗ + ∗ 89A B• = b) 7A = , 13B =
13 7A B = ∗ , 91A B =

17
c) skaler çarpımın tanımından
A B A B Cosθ• = ⇒ A BCosA B
θ•
=
8991
Cosθ = ⇒ 012 04,θ =
3.3.4 İki vektörün vektörel çarpımı Sağ kartezyen koordinat sisteminde koordinat eksenlerinin birim vektörlerinin vektörel çarpımı aşağıdaki gibi yazılır.
kji =∧ , kij =∧ , ikj =∧ , ijk −=∧ jik =∧ , jki −=∧
Sağ eksen sisteminde ifade edilen A ve B vektörünün vektörel çarpımı olan C vektörü aşağıda gösterilen determinantın açılımı yardımı ile hesaplanabilir.
kAjAiAA zyx ++= , kBjBiBB zyx ++= )()( kBjBiBkAjAiABA zyxzyx ++∧++=∧
+∧+∧+∧=∧ )]()[()]()[()]()[( kBiAjBiAiBiABA zxyxxx +∧+∧+∧+ )]()[()]()[()]()[( kBjAjBjAiBjA zyyyxy
z x z y z z[(A k) (B i )] [(A k) (B j)] [(A k) (B k)]+ ∧ + ∧ + ∧
zyx
zyx
BBBAAAkji
BA =∧
Problem 3.3.3.1 6 3 2A i j k= + + vektörü ile 12 3 4B i j k= + + vektörünün a) C A B= ∧ vektörel çarpımını b) C vektörel çarpım vektörü ile A vektörü arasındaki açıyı c) C vektörel çarpım vektörü ile B vektörü arasındaki açıyı hesaplayınız. Çözüm: a)
x y z
x y z
i j kC A B A A A
B B B
= ∧ = , 6 3 212 3 4
i j kC A B= ∧ =
3 4 2 3 2 12 6 4 6 3 3 12C A B ( )i ( ) j ( )k= ∧ = ∗ − ∗ + ∗ − ∗ + ∗ − ∗ 6 18C A B i k= ∧ = −

18
b) 6 18 6 3 2C A ( i k) ( i j k)• = − • + + 6 6 18 2 0C A• = ∗ − ∗ = olduğundan C vektörü A vektörüne diktir. c) 6 18 12 3 4C B ( i k) ( i j k)• = − • + + 6 12 18 4 0C B• = ∗ − ∗ = olduğundan C vektörü B vektörüne diktir. 3.3.5 Üç vektörün karışık çarpımı İki vektörün vektörel çarpımından elde edilen vektörün bir diğer vektörle skaler çarpımına bu üç vektörün karışık çarpımı denir.
kAjAiAA zyx ++= kBjBiBB zyx ++= kCjCiCC zyx ++=
zyx
zyx
zyx
CCCBBBAAA
CBA =∧• )(
Lineer cebirden bilindiği gibi bir Determinantta iki satırın yeri değişirse determinantın işareti değişir , satırların yeri iki veya ikinin katları sayısında değişirse determinantın değeri değişmez . Bu bilinen özellikten faydalanarak aşağıdaki eşitlikler yazılabilir.
)()()( BACACBCBA ∧•=∧•=∧•

19
3.3.6 Bir vektörün bir eksen üzerindeki izdüşümü V θ Δ VΔ
ΔΔ •= UVV kVjViVV zyx ++=
kUjUiUU zyx ++=Δ zzyyxx UVUVUVV ⋅+⋅+⋅=Δ
Problem 3.3.6.1 12 3 4V i j k= + + vektörünün kartezyen koordinat eksenleri ile pozitif bölgede eşit açılar yapan ve pozitif bölgeye doğru yönelmiş Δ eksenindeki izdüşümünü ve bu eksenle yaptığı açıyı hesaplayınız. Çözüm : ΔΔ •= UVV İzdüşüm alınacak eksenin birim vektörü bu eksen yönündeki bir vektörü modülüne bölerek elde edilir.
2 2 21 1 1
i j kUΔ+ +
=+ +
, 1 1 13 3 3
U i j kΔ = + +
1 1 112 3 43 3 3
V ( i j k) ( i j k)Δ = + + • + + , 1 1 112 3 43 3 3
VΔ = ∗ + ∗ + ∗
193
VΔ =
V V U V CosθΔ Δ= • = ⇒ VCos
Vθ Δ=
193 13
Cosθ =∗
⇒ 0 844Cos ,θ = ⇒ 032 45,θ =

20
BÖLÜM 4
KUVVET SİSTEMLERİ 4.1 Kuvvetin tanımı ve vektörle gösterilişi Bir cismin şeklini veya hızını değiştiren ve başka cisimler tarafından uygulanan fiziksel etkiye kuvvet denir. Kuvvet doğrultu yön ve bir şiddet içerdiğinden vektörle gösterilebilir. Yalnız aynı vektörle gösterilmesine rağmen kuvvet cismin farklı yerlerine uygulandığında fiziksel etkisi farklı olur. Bundan dolayı kuvvet özellikle rijid cisim mekaniğinde vektör ve etki doğrusu ile birlikte düşünülmelidir. Etki doğrusu F Kuvvet vektörü

21
4.2 Bir kuvvetin bir noktaya göre momenti OM o F h θ θ A
OM F h= ⋅
OM OA F= ∧
θ=∧ SinOAFFOA
hSinOA =θ Buradan OM F h= ⋅ olduğu görülür.
O x y z
x y z
i j kM A A A
F F F
=
O y z z y z x x z x y y xM (A F A F ) i (A F A F ) j (A F A F ) k= ⋅ − ⋅ + ⋅ − ⋅ + ⋅ −
Problem 4.2.1 A(3,8,1) ve B(7,–4,4) noktalarından geçen 130 N. şiddetinde olan ve A dan B ye doğru yönelmiş F kuvvetinin O(0,0,0) noktasına göre momentini bulunuz.
OM OA F= ∧ 3 8OA i j k= + + , ABF F U=
ABABUAB
= , AB OB OA= −

22
7 4 4 3 8AB ( i j k) ( i j k)= − + − + + , 4 12 3AB i j k= − +
2 2 2
4 12 3
4 12 3AB
i j kU( )
− +=
+ − + , 4 12 3
13 13 13ABU i j k= − +
40 120 30F i j k= − + 3 8 40 120 30OM ( i j k) ( i j k)= + + ∧ − +
3 8 140 120 30
O
i j kM =
− , 360 50 680OM i j k= − −
4.3 Bir kuvvetin bir eksene göre momenti Δ AM MΔ A F B
AM M UΔ Δ= • M U (AB F)Δ Δ= • ∧
zyx
zzyyxx
zyx
FFFABABAB
UUUM −−−=Δ

23
Problem 4.3.1 A(3,8,1) ve B(7,–4,4) noktalarından geçen ve 130 N. Şiddetinde olan F kuvvetinin O(0,0,0) ve C(2,6,3) noktalarından geçen Δ eksenine göre momentini bulunuz.(koordinatlar metre cinsindendir.)
OM M UΔ Δ= • Problem 4.2.1 den 360 50 680OM i j k= − − dır.
OCUOC
Δ = , 2 2 2
2 6 3
2 6 3
i j kUΔ+ +
=+ +
2 6 37 7 7
U i j kΔ = + +
2 6 3360 50 6807 7 7
M ( i j k) ( i j k)Δ = − − • + +
2 6 3360 50 6807 7 7
MΔ = ∗ − ∗ − ∗ , 16207
MΔ−
=
231 43M , Nm.Δ = − 4.4 Bir kuvvet sisteminin bir noktaya göre momenti ve indirgeme elemanları ( Bir kuvvet sisteminin statik eşdeğeri) Bir veya birden fazla sayıda kuvvetten oluşan sisteme kuvvet sistemi denir. d1 d2 di dn A1 Ai
nF 1F 2F iF An A2 OM R O Bu n sayıda kuvvetten oluşan kuvvet sisteminin bir uzayın o noktasına göre momentine bileşke moment denir ve bu bileşke moment her bir kuvvetin bu noktaya göre moment vektörlerinin toplamına eşittir.
1
n
O i ii
M OA F=
= ∧∑ Bu n sayıdaki kuvvetin vektörel toplamına geometrik toplam denir.
∑=
=n
iiFR
1

24
Elde edilen bileşke moment ve geometrik toplamın her ikisine birden bu vektör sisteminin indirgeme elemanları denir. Bir kuvvet sisteminde bir noktadaki indirgeme elemanlarından faydalanarak başka noktalardaki indirgeme elemanlarının bulunuşu:
1
n
Q i ii
M QA F=
= ∧∑
iiQA QO OA= +
1
n
Q i ii
M (QO OA ) F=
= + ∧∑
Q OM M QO R= + ∧ Problem 4.4.1 Bir kuvvet sistemi A1(5,–3,8) noktasından geçen 1 10 8 14F i j k= + − , A2( 10,8,9)) noktasından geçen 2 15 22 16F i j k= + + , A3(2,10,7) noktasından geçen 3 6 18 9F i j k= − + − ve A4(0,12,-4) noktasından geçen 4 3 20 8F i j k= − − kuvvetlerinden oluşmuştur. Bu kuvvet sisteminin
a) O(0,0,0) noktasındaki indirgeme elemanlarını b) Q(10,12,–6) noktasındaki indirgeme elemanlarını bulunuz.
Çözüm: a)
4
1i
iR F
=
= ∑ , 1 2 3 4R F F F F= + + +
10 8 14 15 22 16 6 18 9 3 20 8R ( i j k) ( i j k) ( i j k) ( i j k)= + − + + + + − + − + − − 10 15 6 3 8 22 18 20 14 16 9 8R ( )i ( ) j ( )k= + − + + + + − + − + − − 22 28 15R i j k= + −
4
1O i i
iM OA F
=
= ∧∑ , 1 2 3 41 2 3 4OM OA F OA F OA F OA F= ∧ + ∧ + ∧ + ∧
1 1 5 3 8 10 8 14OA F ( i j k) ( i j k)∧ = − + ∧ + −
1 1 5 3 8 22 150 7010 8 14
i j kOA F i j k∧ = − = − + +
−
2 2 10 8 9 70 25 10015 22 16
i j kOA F i j k
∧ = = − − +

25
3 3 2 10 7 216 24 966 18 9
i j kOA F i j k∧ = = − − +
− −
4 4 0 12 4 16 12 363 20 8
i j kOA F - i j k∧ = = − − −
− −
22 150 70 70 25 100 216 24 96 16 12 36OM ( i j k) ( i j k) ( i j k) ( i j k)= − + + + − − + + − − + + − − − 22 70 216 16 150 25 24 12 70 100 96 36OM ( )i ( ) j ( )k= − − − − + − − − + + + − 324 89 230OM i j k= − + + b)
∑=
=n
iiFR
1 , 22 28 15R i j k= + −
Q OM M QO R= + ∧ 10 12 6QO i j k= − − + 10 12 6 22 28 15QO R ( i j k) ( i j k)∧ = − − + ∧ + −
10 12 6 12 18 1622 28 15
i j kQO R i j k∧ = − − = − −
−
324 89 230 12 18 16QM ( i j k) ( i j k)= − + + + − − 312 71 214QM i j k= − + + 4.5 Bir kuvvet sisteminin değişmezleri a) Bir kuvvet sisteminde kuvvetlerin geometrik toplamı olan R noktadan noktaya değişmez. b) Bir kuvvet sisteminde bileşke momentin geometrik toplam üzerindeki izdüşümü noktadan noktaya değişmez. İspat:
RORQ URQOMUM •∧+=• )( 0)( =•∧ RURQO ( R ve RU aynı doğrultuda olduğundan )
RORQ UMUM •=• elde edilir. Yukarıdaki denklemin her iki tarafı R ile çarpılırsa
RMRM OQ •=• eşitliği elde edilir. Bu eşitlikten Bileşke moment ile geometrik toplamın skaler çarpımının noktadan noktaya değişmediği anlaşılır.

26
Problem 4.5.1 Problem 4.4.1 deki kuvvet sistemi için RMRM OQ •=• eşitliğini gerçekleyiniz. Çözüm: 22 28 15R i j k= + −
324 89 230OM i j k= − + + 312 71 214QM i j k= − + +
312 71 214 22 28 15QM R ( i j k) ( i j k)• = − + + • + − 312 22 71 28 214 15QM R ( )• = − ∗ + ∗ + ∗ − 8086QM R• = − 324 89 230 22 28 15OM R ( i j k) ( i j k)• = − + + • + −
324 22 89 28 230 15OM R ( )• = − ∗ + ∗ + ∗ − 8086OM R• = − ⇒ 8086Q OM R M R• = • = −

27
4.6 Dejenere kuvvet sistemleri Bileşke momentle geometrik toplamın birbiri ile skaler çarpımının sıfır olduğu kuvvet sistemlerine dejenere kuvvet sistemleri denir.
0=•RMO Bu eşitlik ile aşağıdaki durumlarda karşılaşılır. 4.6.1 ) 0=OM , 0=R (sıfıra eşdeğer kuvvet sistemi) 4.6.2 ) 0≠OM , 0=R (kuvvet çiftine eşdeğer kuvvet sitemi) 4.6.3 ) 0=OM , 0≠R (bileşkeye eşdeğer kuvvet sistemi) 4.6.4 ) 0≠OM , 0≠R (bileşkesi olan vektör sistemi) Düzlemsel , bir noktada kesişen ve paralel kuvvet sistemleri dejenere kuvvet sistemleridir. 4.6.1 Sıfıra eşdeğer kuvvet sistemi 0=OM 0=R Sıfıra eşdeğer kuvvet sisteminde 1) Kuvvet sistemi tek bir kuvvetten oluşmuşsa bu kuvvetin şiddeti sıfır olmalı. 2) Kuvvet sistemi iki kuvvetten oluşmuş ise bu kuvvetler aynı doğrultuda ters yönde ve eşit şiddette olmalıdır. 3) Kuvvet sistemi üç kuvvetten oluşmuş ve birbirine paralel değil ise bu kuvvet sisteminin geometrik toplamının sıfır olabilmesi için kuvvetlerin oluşturduğu poligon kapalı bir üçgen olmalıdır. Bu kuvvet sisteminde bileşke momentin sıfır olabilmesi için bu üç kuvvetin doğrultusu aynı yerde kesişmelidir. 4.6.2 Kuvvet çiftine eşdeğer kuvvet sitemi 0≠OM , 0=R Bir kuvvet sisteminde Geometrik toplam sıfır Bileşke moment sıfırdan farklı ise bu kuvvet sistemi tek bir momente eşdeğer olur. Bu moment vektörüne dik düzlemlerde alınan kuvvet çiftleri ile de bu kuvvet sistemi temsil edilebilir. Bir kuvvet sistemi tek bir momente eşdeğer ise bu noktadan noktaya değişmez.
Q OM M QO R= + ∧ ve 0=R olduğundan
Q OM M= olur. 4.6.3 Bileşkeye eşdeğer kuvvet sistemi 0=OM , 0≠R Eğer bir noktada bileşke moment sıfır ve geometrik toplam sıfırdan farklı ise bu geometrik toplam sanki sistem tek bir kuvvetten oluşmuş gibi bu sistemi temsil edebileceğinden bu geometrik toplama bu kuvvet sisteminin bileşkesi denir.

28
4.6.4 Bileşkesi olan kuvvet sistemi 0≠OM , 0≠R Eğer dejenere vektör sisteminde Bileşke moment ve geometrik toplamın her ikisi de sıfırdan farklı ise bu iki vektör birbirine dik olmalıdır. Bu vektör sisteminin bileşkesi bulunabilir.
4.7 Merkezi eksen Bileşke momentle geometrik toplamın aynı doğrultuda olduğu eksene merkezi eksen veya vida ekseni denir. R Vida ekseni Mλ λ(x,y,z) OM R O(0,0,0) RM Merkezi eksen üzerindeki bir nokta λ(x,y,z) ve O(0,0,0) noktasındaki bileşke moment O x y zM M i M j M k= + + ise Bileşke momentin geometrik toplam üzerindeki izdüşümü değişmiyeceğinden
R RM M Uλ = ⋅ yazılabilir. = •OR RM M U
RzzRyyRxxR UMUMUMM ++⋅=
R Rx R Ry R RzM M U i M U j M U kλ = ⋅ + ⋅ + ⋅ Bundan başka geçiş teoremi uygulanarak Mλ aşağıdaki gibi de yazılabilir.
OM M O Rλ λ= + ∧ OM M R Oλ λ− = ∧
x y z
i j kR O R R R
x y z
λ∧ =
y z z x x yR O (R z R y) i (R x R z) j (R y R x) kλ∧ = ⋅ − ⋅ + ⋅ − ⋅ + ⋅ − ⋅ xRxRzy MUMyRzR −⋅=⋅−⋅ yRyRxz MUMzRxR −⋅=⋅−⋅ zRzRyx MUMxRyR −⋅=⋅−⋅

29
Problem 4.7.1 Problem 4.4.1 verilen kuvvet sisteminin merkezi ekseninin denklemini bulunuz. merkezi eksenin yoz düzlemini kestiği noktanın koordinatlarını bulunuz. 22 28 15R i j k= + − , 324 89 230OM i j k= − + +
OM M R Oλ λ− = ∧ R RM M Uλ = ⋅ OR RM M U= •
RRUR
=
2 2 2
22 28 15
22 28 15R
i j kU( ) ( ) ( )
+ −=
+ + − , 22 28 15
1493Ri j kU + −
= ,
0 5694 0 7247 0 3882RU , i , j , k= + − 324 89 230 0 5694 0 7247 0 3882RM ( i j k) ( , i , j , k)= − + + • + −
209 273RM ,= − 209 273 0 5694 0 7247 0 3882M , ( , i , j , k)λ = − ⋅ + − 119 16 151 66 81 24M , i , j , kλ = − − +
119 16 151 66 81 24 324 89 230OM M ( , i , j , k) ( i j k)λ − = − − + − − + + 204 84 240 66 148 76OM M , i , j , kλ − = − −
22 28 15R O ( i j k) (x i y j z k)λ∧ = + − ∧ + +
22 28 15i j k
R Ox y z
λ∧ = −
28 15 15 22 22 28R O ( z y) i ( x z) j ( y x)kλ∧ = + + − − + − 28 15 15 22 22 28 204 84 240 66 148 76( z y) i ( x z) j ( y x)k , i , j , k+ + − − + − = − −
28 15 204 84z y ,+ = 15 22 240 66x z ,− − = −
22 28 148 76y x ,− = − Bu Lineer denklem sisteminin katsayılar matrisinin determinantı
0 15 2815 0 22 15 22 28 28 15 22 028 22 0
( ) ( ) ( )Δ = − − = ∗ − ∗ − + ∗ − ∗ =−
sıfır olduğundan bu denklem sistemi birbirinden bağımsız değildir. Bu denklem sisteminin katsayılar matrisinde sıfırdan farklı 2x2 lik determinant bulunduğundan bu denklemlerden ikisi birbirinden bağımsızdır.

30
Bu denklemlerin herhangi ikisi birbirinden bağımsız olduğundan bunlardan herhangi ikisi verilen kuvvet sisteminin merkezi ekseninin denklemi olarak alınabilir. 22 28 148 76
15 22 240 66y x ,
x z ,− = −
− − = −
Merkezi eksen üzerinde 0x = da 22 28 148 76y x ,− = − ⇒ 6 762y ,= −
15 22 240 66x z ,− − = − ⇒ 10 94z ,= 4.8 Paralel bağlı kuvvet sistemi ve merkezi y Ai ,mi A1 , m1 A3 ,m3 An , mn A2 , m2 G UmF ii = UmF nn =
UmF 11 = UmF 33 = UmF 22 = x o R z
1
n
O i ii
M OA F=
= ∧∑
1
n
O ii
M OG F=
= ∧∑
UmF ii ⋅=
1 10
n n
ii ii i
( m OG m OA ) U= =
⋅ − ⋅ ∧ =∑ ∑

31
1
1
n
iii
n
ii
m OAOG
m
=
=
⋅=∑
∑
OG i j kξ η ζ= + +
∑
∑
=
=
⋅=ξ n
ii
n
iii
m
xm
1
1 , ∑
∑
=
=
⋅=η n
ii
n
iii
m
ym
1
1 , ∑
∑
=
=
⋅=ζ n
ii
n
iii
m
zm
1
1
Problem 4.8.1 Paralel bağlı bir kuvvet sistemi A1(3,7,12) noktasındaki 8kg lık m1 kütlesi , A2(6,2,–8) noktasındaki 10kg lık m2 kütlesi ve A3(10,–4 ,–5) noktasındaki 3 kg lık m3 kütlesinden oluşmuştur. Bu kuvvet sisteminin merkezinin koordinatlarını hesaplayınız.( koordinatlar cm. cinsinden alınmıştır.)
3
1
1
i ii
n
ii
m x
mξ =
=
⋅=∑
∑ , 1 1 2 2 3 3
1 2 3
m x m x m xm m m
ξ+ +
=+ +
8 3 10 6 3 108 10 3
ξ∗ + ∗ + ∗
=+ +
, 5 43, cm.ξ =
3
1
1
i ii
n
ii
m y
mη =
=
⋅=∑
∑ , 1 1 2 2 3 3
1 2 3
m y m y m ym m m
η+ +
=+ +
8 7 10 2 3 48 10 3
( )η
∗ + ∗ + ∗ −=
+ + , 3 05, cm.η =
3
1
1
i ii
n
ii
m z
mζ =
=
⋅=∑
∑ , 1 1 2 2 3 3
1 2 3
m z m z m zm m m
ζ+ +
=+ +
8 12 10 8 3 58 10 3
( ) ( )ζ
∗ + ∗ − + ∗ −=
+ + , 0 048, cm.ζ =

32
BÖLÜM 5
KÜTLE MERKEZİ 5.1 Bir sürekli cismin kütle merkezi y A(x,y,z) dm G(ξ,η,ζ) V x O z
V
V
OA dmOG
dm=∫
∫
OG i j kξ η ζ= + +
V
V
x dm
dmξ =
∫
∫ , V
V
y dm
dmη =
∫
∫ , V
V
z dm
dmζ =
∫
∫

33
Problem 5.1.1 R yarıçaplı 2α tepe açılı çember parçası şeklindeki homojen cismin kütle merkezinin koordinatlarını bulunuz. Çözüm: y x R Cosθ= d R dθ= dm dρ= dm R dρ θ= dθ α θ G O x α OG x ekseni simetri ekseni olduğu için
0η = dır.
x dm
dmξ =
∫
∫ ,
xdm
dm
α
αα
α
ξ −
−
=∫
∫
R Cos R d
R d
α
αα
α
ρ θ θ
ξ
ρ θ
−
−
=∫
∫ ,
2R [Sin (Sin )]R[ ( )]
ρ α αξ
ρ α α−
=− −
22
2R Sin
Rρ α
ξρ α
= , RSinOG αξ
α= =

34
Problem 5.1.2 Şekilde gösterilen dörtte bir çember parçası şeklindeki homojen cismin kütle merkezinin koordinatlarını bulunuz. Çözüm : y y = x doğrusu G 4
π η 4
π
O ξ x Şekildeki dörtte bir çember parçası için y = x doğrusu simetri ekseni olduğundan
22
OGξ η= =
Problem 5.1.1 den RSinOG αα
= 4π
α =
44
RSin( )OG
/
π
π= , 2 2ROG
π=
2 2 22
R( )ξ ηπ
= = , 2Rξ η
π= =
Problem 5.1.3 Şekilde gösterilen yarım çember şeklindeki homojen cismin kütle merkezinin koordinatlarını bulunuz. Çözüm : y G
2π
2π
O x
35
y Ekseni simetri ekseni olduğu için 0ξ = dır. Problem 5.1.1 den RSinOG α
ηα
= =
22
RSin
/
π
ηπ
= , 2Rη
π=
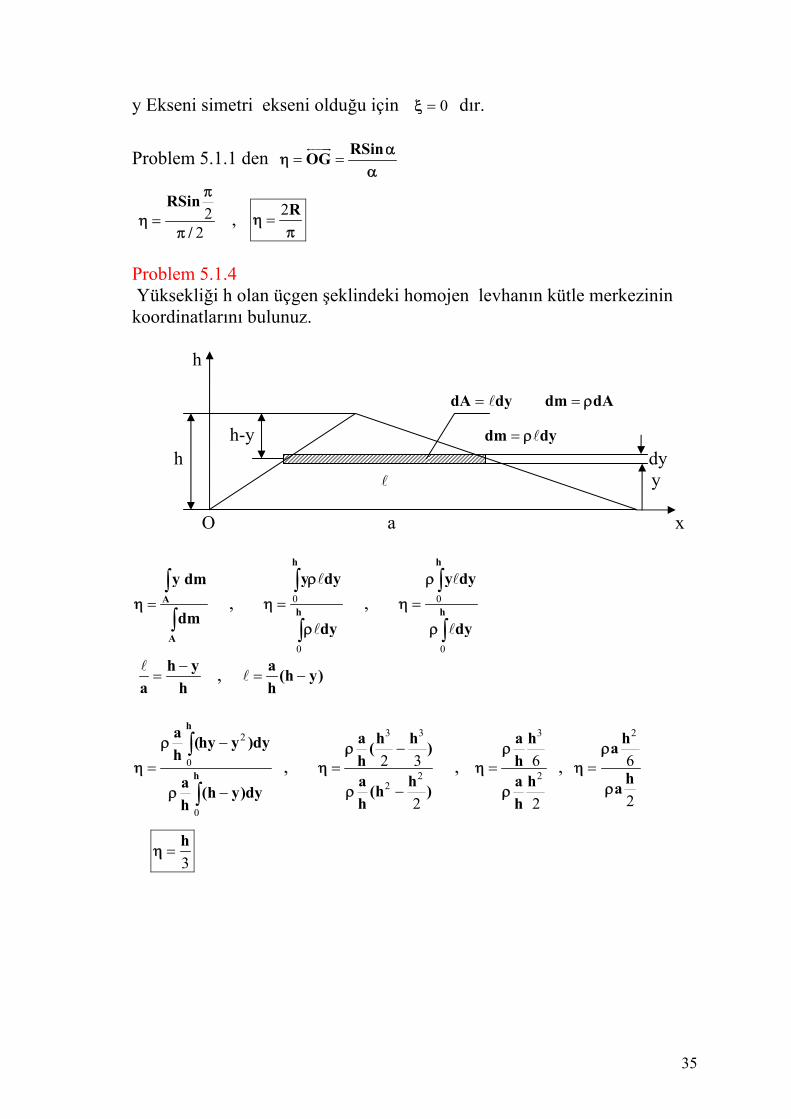
Problem 5.1.4 Yüksekliği h olan üçgen şeklindeki homojen levhanın kütle merkezinin koordinatlarını bulunuz. h dA dy= dm dAρ=
h-y dm dyρ= h dy y O a x
A
A
y dm
dmη =
∫
∫ , 0
0
h
h
y dy
dy
ρ
η
ρ
=∫
∫ , 0
0
h
h
y dy
dy
ρ
η
ρ
=∫
∫
h ya h
−= , a (h y)
h= −
2
0
0
h
h
a (hy y )dyh
a (h y)dyh
ρ
η
ρ
−
=
−
∫
∫ ,
3 3
22
2 3
2
a h h( )ha h(h )h
ρη
ρ
−=
− ,
3
26
2
a hha hh
ρη
ρ= ,
2
6
2
ha
ha
ρη
ρ=
3h
η =
36
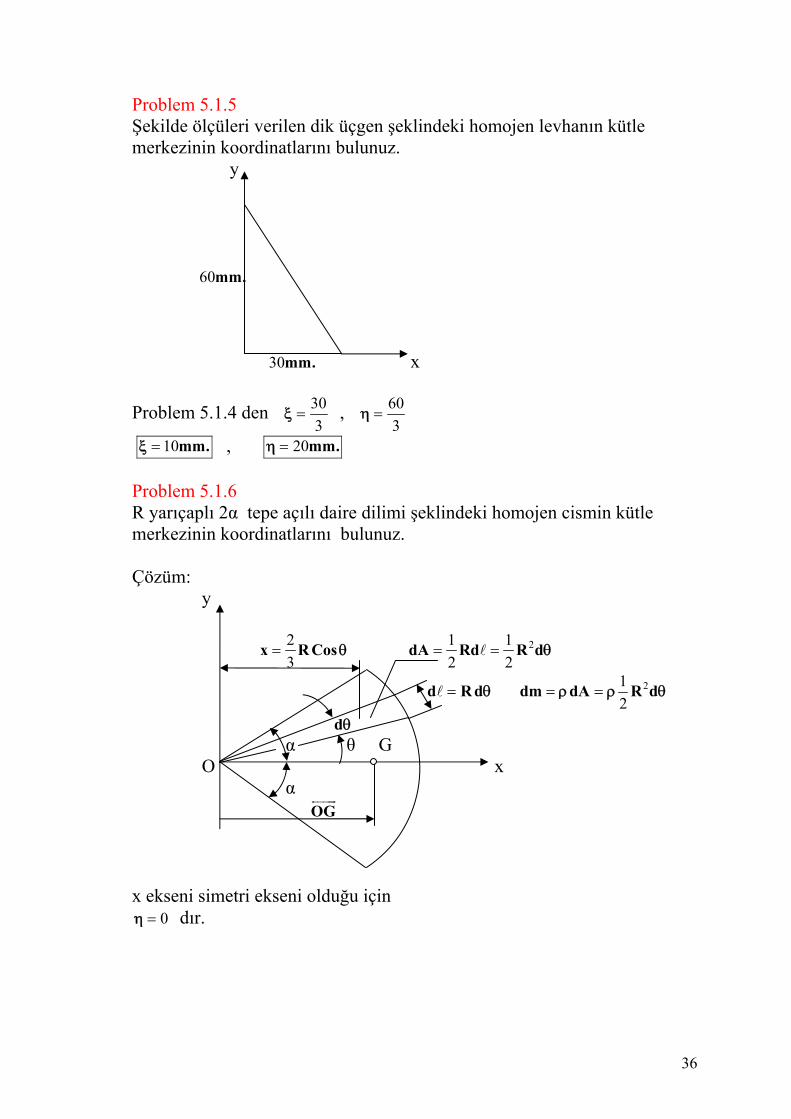
Problem 5.1.5 Şekilde ölçüleri verilen dik üçgen şeklindeki homojen levhanın kütle merkezinin koordinatlarını bulunuz. y 60mm. 30mm. x Problem 5.1.4 den 30
3ξ = , 60
3η =
10mm.ξ = , 20mm.η = Problem 5.1.6 R yarıçaplı 2α tepe açılı daire dilimi şeklindeki homojen cismin kütle merkezinin koordinatlarını bulunuz. Çözüm: y 2
3x R Cosθ= 21 1
2 2dA Rd R dθ= =
d R dθ= dm dAρ= 212
R dρ θ=
dθ α θ G O x α OG x ekseni simetri ekseni olduğu için
0η = dır.

37
A
A
x dm
dmξ =
∫
∫ ,
xdm
dm
α
αα
α
ξ −
−
=∫
∫
2
2
2 13 2
12
R Cos ( R d )
R d
α
αα
α
θ ρ θ
ξ
ρ θ
−
−
=∫
∫ ,
3
2
13
12
R Cos d
R d
α
αα
α
ρ θ θ
ξ
ρ θ
−
−
=∫
∫
3
2
13
12
R [Sin ( Sin )]
R [ ( )]
ρ α αξ
ρ α α
− −=
− − ,
3
2
23
R Sin
R
ρ αξ
ρ α=
23
R SinOG αξ
α= =
Problem 5.1.7 Şekilde gösterilen dörtte bir daire dilimi şeklindeki homojen cismin kütle merkezinin koordinatlarını bulunuz. Çözüm : y y = x doğrusu G 4
π η 4
π
O ξ x Şekildeki dörtte bir daire dilimi için y = x doğrusu simetri ekseni olduğundan
22
OGξ η= =
Problem 5.1.4 den 23
RSinOG αα
= 4π
α =
2 43 4
RSin( )OG
/
π
π= , 4 2
3ROGπ
=
2 4 22 3
R( )ξ ηπ
= = , 43R
ξ ηπ
= =

38
Problem 5.1.8 Şekilde gösterilen yarım daire dilimi şeklindeki homojen cismin kütle merkezinin koordinatlarını bulunuz. Çözüm : y G
2π
2π
O x y Ekseni simetri ekseni olduğu için 0ξ = dır. Problem 5.1.4 den 2
3RSinOG α
ηα
= =
22
3 2
RSin
/
π
ηπ
= , 43R
ηπ
=
Problem 5.1.9 Şekilde gösterilen R taban yarıçaplı yarım küre şeklindeki homojen cismin kütle merkezinin koordinatlarını gösteriniz. Çözüm:
z 2dm r dzρπ= m Vρ= r dz R z o y x yoz düzlemi simetri düzlemi olduğu için 0ξ = dır. xoz düzlemi simetri düzlemi olduğu için 0η = dır.

39
V
V
z dm
dmζ =
∫
∫ ,
2
0
2
0
R
R
z r dz
r dz
ρπ
ζ
ρπ
=∫
∫ ,
2
0
2
0
R
R
z r dz
r dz
ρπ
ζ
ρπ
=∫
∫
2 2 2r R z= − ,
2 3
0
2 2
0
R
R
(zR z )dz
(R z )dz
ρπ
ζ
ρπ
−
=
−
∫
∫ ,
4 4
33
2 4
3
R R( )
R(R )
ρπζ
ρπ
−=
−
4
3
423
R( )
( R )
ρπζ
ρπ= , 3
8Rζ =
5.2 Bileşik cismin kütle merkezi Bir bileşik cismin kütle merkezi bu cismi oluşturan cisimlerin kütle merkezleri bulunduktan sonra daha önceden çıkarılan paralel bağlı vektör sisteminin merkezine ait olan formüllerle hesaplanır.
1
1
n
iii
n
ii
m OAOG
m
=
=
⋅=∑
∑
OG i j kξ η ζ= + +
∑
∑
=
=
⋅=ξ n
ii
n
iii
m
xm
1
1 , ∑
∑
=
=
⋅=η n
ii
n
iii
m
ym
1
1 , ∑
∑
=
=
⋅=ζ n
ii
n
iii
m
zm
1
1
Eğer bileşik cismi oluşturan cisimlerin yoğunluğu aynı ise yukarıdaki denklemlerde i im Vρ= yazılabilir ve ρ lar toplam dışına alınıp kısaltılabileceğinden dolayı aşağıdaki eşitlikler elde edilir.
1
1
n
i ii
n
ii
V x
Vξ =
=
⋅=∑
∑ , 1
1
n
i ii
n
ii
V y
Vη =
=
⋅=∑
∑ , 1
1
n
i ii
n
ii
V z
Vζ =
=
⋅=∑
∑

40
3 2
4
1
65
Problem 5.2.1 Homojen fakat farklı kalınlıklardaki levhalardan şekildeki taralı alan gibi oluşturulmuş cismin kütle merkezinin koordinatlarını hesaplayınız. y ¼ daire dilimi kalınlık 1mm. kalınlık 2mm. 30 30 x 90 kalınlık 3mm. 90 z (Ölçüler mm. cinsindendir. )
3 343
= =Rz yπ
, 34 90 120
3∗
= =yπ π
, 2
3 4RA π
= , A3=2025π
x Y z A M=ρA mx my mz 1 30 30 0 4050 4050 121500 121500 0 2 10 10 0 -450 -450 -4500 -4500 0 3 0 120/π 120/π 2025π 4050π 0 486000 486000 4 0 15 22,5 -1350 -2700 0 -40500 -60750 5 45 0 45 8100 24300 1093500 0 10935006 10 0 15 -675 -2025 -20250 0 -30375 ∑ 16036,7 35898,45 1149750 562500 1488375
6
16
1
i ii
ii
m x
mξ =
=
⋅=∑
∑ , =
114975035898,45
ξ , 32 03= , mm.ξ
6
16
1
i ii
ii
m y
mη =
=
⋅=∑
∑ , 562500
35898,45η = , 15,67mm.η =
6
16
1
i ii
ii
m z
mζ =
=
⋅=∑
∑ , =
148837535898,45
ζ , = 41,46mm.ζ

41
Problem 5.2.2 Şekilde gösterilen içi dolu homojen cismin kütle merkezinin koordinatlarını hesaplayınız. y z x ( Ölçüler cm. cinsindendir. )
24423Rzπ
= + , 21642 47 093z , cm.π
= + = , 2
2 214RV π
= , 3
2 756 2375 04V , cmπ= =
3
13
1
i ii
ii
V x
Vξ =
=
⋅=∑
∑ , 259836 5
21653 04,
,ξ = , 12cm.ξ =
3
13
1
i ii
ii
V y
Vη =
=
⋅=∑
∑ , 220742
21653 04,η = , 10 2, cm.η =
3
13
1
i ii
ii
V z
Vζ =
=
⋅=∑
∑ , 545036
21653 04,ζ = , 25 17, cm.ζ =
x y z V Vx Vy Vz 1 12 10,5 21 21168 254016 222264 444528 2 12 10,5 47,093 2375,04 28500,5 24938 111848 3 12 14 6 -1890 -22680 -26460 -11340 ∑ 21653,04 259836,5 220742 545036
3
12

42
BÖLÜM 6
STATİK
6.1 Giriş Statik kuvvetler etkisinde cisimlerin denge koşullarını inceleyen bilim dalıdır. Bu tanımlamada adı geçen kuvvet , cisim ve denge terimlerini açıklayalım. Kuvvet: Ele alınan Cisme başka cisimler tarafından uygulanan ve cismin hareket veya denge durumları ile şeklini değiştiren etkiye kuvvet denir. Kuvvetler etkinin cinsine göre : Temas etkisi (yüzey kuvvetleri) ve uzaktan etki ( hacim kuvvetleri) olmak üzere ikiye ayrılır. Dengesi incelenen cisimle temasta olan mafsal,mesnet,kablo,çubuk gibi diğer cisimlerden gelen kuvvetler yüzey kuvvetleridir. Uzaktan etki kuvvetlerine örnek, ağırlık kuvvetleri, magnetik ve elektriksel alanlardan gelen kuvvetler verilebilir. Kuvvetler cisme etki bölgesine göre: İç kuvvet dış kuvvet şeklinde ikiye ayrılır. 1F 2F 3F 4F 1F 2F F 3F F− 4F Şekilde gösterilen 1F , 2F , 3F , 4F kuvvetleri dış kuvvetler, F ve F− kuvvetleri ise iç kuvvetlerdir. İç kuvvetler şekilde gösterildiği gibi cismin içinde varolduğu düşünülen bir kesitte oluşur.Bu hayali kesitle cisim iki parçaya ayrılır. Oluşan bu iki ayrı kesitteki iç kuvvetlerin etki tepki ilkesine göre şiddet ve doğrultuları aynı yönleri zıttır.

43
Kuvvetler cisme mesnetler ve diğer cisimlerden uygulanma durumuna göre : Bilinen kuvvetler (aktif kuvvetler) ve mesnet veya bağlardan geleceği düşünülen tepki kuvvetleri (reaktif kuvvetler) olmak üzere ikiye ayrılır. Aktif kuvvetler: Ağırlık kuvvetleri veya cismin zorlanma koşullarına göre bilinen dış kuvvetlerdir. Tepki kuvvetleri : mesnet,mafsal, kablo, çubuk gibi diğer cisimlerin uyguladıkları kuvvetlerdir. Bu tepki kuvvetlerinin tam zıttı dengesi incelenen cisim tarafından diğer cisimlere aynı şekilde etkir. Sürtünmesiz temaslarda tepki kuvveti temas yüzeyine diktir. İki boyutlu mesnet ve bağlar ile bunlardan cisme gelen tepki kuvvetleri: Yuvarlanan elemanlar kavisli yüzey sürtünmesiz kayma yüzeyine yüzey dik tepki kuvveti Çubuk doğrultusunda hareket edebilen tepki kuvveti hareket bilezik ve buna mafsallı diğer çubuk doğrultusuna dik Kanal doğrultusunda hareket kanal doğrultusuna dik tepki kuvveti

44
y Ry Rx x Sabit silindirik mafsallı Tepki kuvvetinin doğrultusu bilinmiyor. y Rx x Ry Pürüzlü yüzey Yüzey tepkisinin doğrultusu bilinmiyor y Rx x MO Ry Ankastre mesnet Bilinmeyen kuvvet ve şiddeti bilinmeyen moment

45
Üç boyutlu mesnet ve bağlar ile bunlardan cisme gelen tepki kuvvetleri: y x Ry z tek noktadan küreye temas temas yüzeyine dik tepki kuvveti y x Ry z Sürtünmesiz temas temas yüzeyine dik tepki kuvveti y x Rz Ry z Pürüzlü yüzeyde ray üzerinde iki doğrultuda bilinmiyen Yuvarlanan tekerlek yuvarlanan tekerlek tepki kuvveti

46
y Rx x Rz Ry z Pürüzlü yüzey küresel mafsal üç doğrultuda bilinmiyen tepki kuvvetleri Küresel mafsalın ayrıntılı şekli y My Ry x Rz Rx Mx Mz z ankastre mesnet üç doğrultuda bilinmiyen tepki kuvveti ve üç doğrultuda bilinmiyen tepki momenti

47
y Ry Rx Mx x Rz Z Üniversal kavrama üç doğrultuda bilinmiyen kuvvet ve bir doğrultuda bilinmiyen moment y My Ry Rz Mz x z İki doğrultuda bilinmiyen kuvvet ve . iki doğrultuda bilinmiyen moment Eksenel doğrultuda hareket edebilen silindirik mafsal

48
y My Ry Rz Rx x Mz z Üç doğrultuda bilinmiyen kuvvet ve İki doğrultuda bilinmiyen moment Eksenel doğrultuda hareket yeteneği olmayan silindirik mafsal Bunlardan başka ip kuvveti ip doğrultusundadır. Birde ağırlıksız olup uç noktalarından sürtünmesiz mafsallı ve uç noktaları dışında yük taşımıyan çubuklardan gelen tepki kuvvetleride çubuk doğrultusunda kabul edilir. 6.2 İç kuvvetler ve kesit zorları İç kuvvetlerin cismin bir kesiti içindeki bileşenlerine kesit zorları denir.
Kesite etki eden kuvvetin kesite dik bileşenine Normal kuvvet denir. Kesite etki eden kuvvetin kesit içindeki bileşenine Kesme kuvveti denir. Kesite etki eden momentin kesite dik bileşenine Burulma momenti denir. Kesite etki eden momentin kesit içindeki bileşenine Eğilme momenti denir.
6.3 Statiğin temel ilkelerinin geçerli olduğu referans sistemleri Orijininde güneş bulunan ve yıldızlara doğru yönelmiş koordinat sistemlerine Newton veya Galileo eksen sistemleri denir. Statiğin temel ilkeleri bu eksen sitemlerine göre geçerlidir. Bir Newton eksen sistemine göre sabit hızda öteleme hareketi yapan diğer eksen sistemleri de Newton eksen sistemidir. Herhangi bir cisim Newton eksen sistemine göre hareketsiz veya sabit hızda öteleme hareketi yapıyorsa bu cisim dengededir denir.

49
6.4 Bir maddesel noktanın kuvvetler etkisinde dengesi Bir maddesel noktaya etki eden bütün kuvvetler aynı noktada kesişeceğinden dolayı bu kuvvetlerin geometrik toplamının sıfır olması denge için gerek ve yeter koşuldur.
0=R ∑ ∑ ∑++= kFjFiFR zyx
∑ = 0xF , ∑ = 0yF , ∑ = 0zF 6.5 Bir rijid cismin kuvvetler etkisinde dengesi Bir rijid cisme etki eden kuvvvet sisteminin sıfıra eşdeğer olması bu cismin dengesi için gerek ve yeter koşuldur. 0=R , ∑ = 0OM ∑ = 0xF , ∑ = 0yF , ∑ = 0zF ∑ = 0xM , ∑ = 0yM , ∑ = 0zM Böylece en genel durumda üç boyutlu kuvvetler etkisindeki bir cismin dengesinde denklem sayısı altı olur. Bu denklemlerden altı bilinmiyen çözülebilir. Üç boyutlu kuvvetler etkisinde dengesi incelenen cisimde bilinmiyen sayısı altıdan fazla ise böyle sistemlere hiperstatik sistemler denir. 6.6 Rijid cisim sisteminin kuvvetler etkisinde dengesi Bir rijid cisim sistemine etki eden kuvvet sisteminin sıfıra eşdeğer olması denge için gerekli fakat yeterli koşul değildir. Bundan dolayı rijid cisim siteminin elemanlarına ayrılarak incelenmesi gerekir.Her bir eleman için sıfıra eşdeğerlik koşulu ve birleşme noktalarında etki tepki ilkesi gözönüne alınarak çözüme gidilir. 6.7 Düzlemsel kuvvetler etkisinde cisimlerin dengesi Eğer cisme etki eden dış kuvvetler ve mesnetlerden gelen tepkiler aynı düzlem içinde ise incelenen problem düzlem statik problemidir. Aynı düzlemde bulunan kuvvetlerin momenti bu düzleme dik olacağından dolayı bu durumda 0=R , ∑ = 0OM sıfıra eşdeğerlik koşulu aşağıdaki gibi yazılabilir. ∑ = 0xF , ∑ = 0yF , ∑ = 0zM Böylece düzlemsel kuvvetler etkisindeki bir cismin dengesinde denklem sayısı üçe inmiş olur. Bu denklemlerden üç bilinmiyen çözülebilir. Düzlemsel kuvvetler etkisinde dengesi incelenen cisimde bilinmiyen sayısı üçten fazla ise böyle sistemlere hiperstatik sistemler denir.

50
Problem 6.7.1 1000 kg kütleli bir sabit vinç 2400 kg kütleli bir cismi kaldırmakta kullanılıyor. Vinç A da sabit B de kayıcı mafsal ile mesnetlenmiştir. Vincin kütle merkezi G dir. A ve B mesnetlerindeki tepkileri bulunuz. A G 2400kg 1,5m B 2m 4m Çözüm: y Ay
R
2400g Ax
R A
1000g 1,5m B x
R B x
2m 4m B deki mesnet kayıcı mafsal olduğu için y ekseni doğrultusunda kuvvet taşıyamaz. Bundan dolayı B mesneti sadece x ekseni doğrultusunda tepki kuvveti uygulayabilir. 0B y
R = 0xFΣ = ⇒ 0A Bx x
R R+ =
0yFΣ = ⇒ 1000 2400 0AyR g g− − =
0AMΣ = ⇒ 1,5 1000 2 2400 6 0BxR g g∗ − ∗ − ∗ =

51
Bu eşitliklerden 107, 256Bx
R kN=
107, 256A Bx xR R kN= − = −
33,354AyR kN=
( ) ( )2 2107, 256 33,354AR = − + 112,32AR kN= Problem 6.7.2 Hareketli bir kol C ye bağlanmış bir kablo ve A ile B deki sürtünmesiz tekerlekler yardımıyla dengede tutuluyor. Şekildeki yükleme halinde kablodaki kuvveti ve A ile B deki tepkileri hesaplayınız. 475mm 75mm 50mm 600N
B C 90mm A
Çözüm:
475mm 75mm 50mm 600N CS BR B C 90mm A AR A ve B mesnetlerinde sürtünme olmadığı için buradaki tepkiler yatay doğrultudadır.

52
0xFΣ = ⇒ 0B AR R− = 0yFΣ = ⇒ 600 0CS − = 0CMΣ = ⇒ 90 600 600 0AR ∗ − ∗ = Bu üç denklemden
4000AR Newton= , 4000B AR R Newton= = 600CS N=
bulunur. Problem 6.7.3 Yay katsayısı k olan AC iç yayı θ = 600 iken doğal uzunluğundadır. a) Sistemin denge durumunda θ, W , a ve k arasındaki bağıntıyı bulunuz. b) Denge durumunda W=80N , a =300 mm ve θ =250 olduğu bilindiğine
göre yay katsayısı k yı hesaplayınız. W B C A θ
a Çözüm: W B N C F A θ
a
53
a) 0xFΣ = ⇒ cos 0F Nθ − = 0yFΣ = ⇒ sin 0F Wθ − =
Bu iki denklemden sinWFθ
=
eşitliği bulunur. Ayrıca F yay kuvveti F k s= ∗Δ denklemi ile hesaplanır. Yaydaki kısalma 0cos60 cos
a asθ
Δ = − , 1(2 )cos
s aθ
Δ = −
1(2 )cos
F kaθ
= −
1(2 )cos sin
Wkaθ θ
− = , 2sin tan Wka
θ θ− =
b) ( )2sin tan
Wka θ θ
=−
, ( )0 0
80300 2sin 25 tan 25
k =−
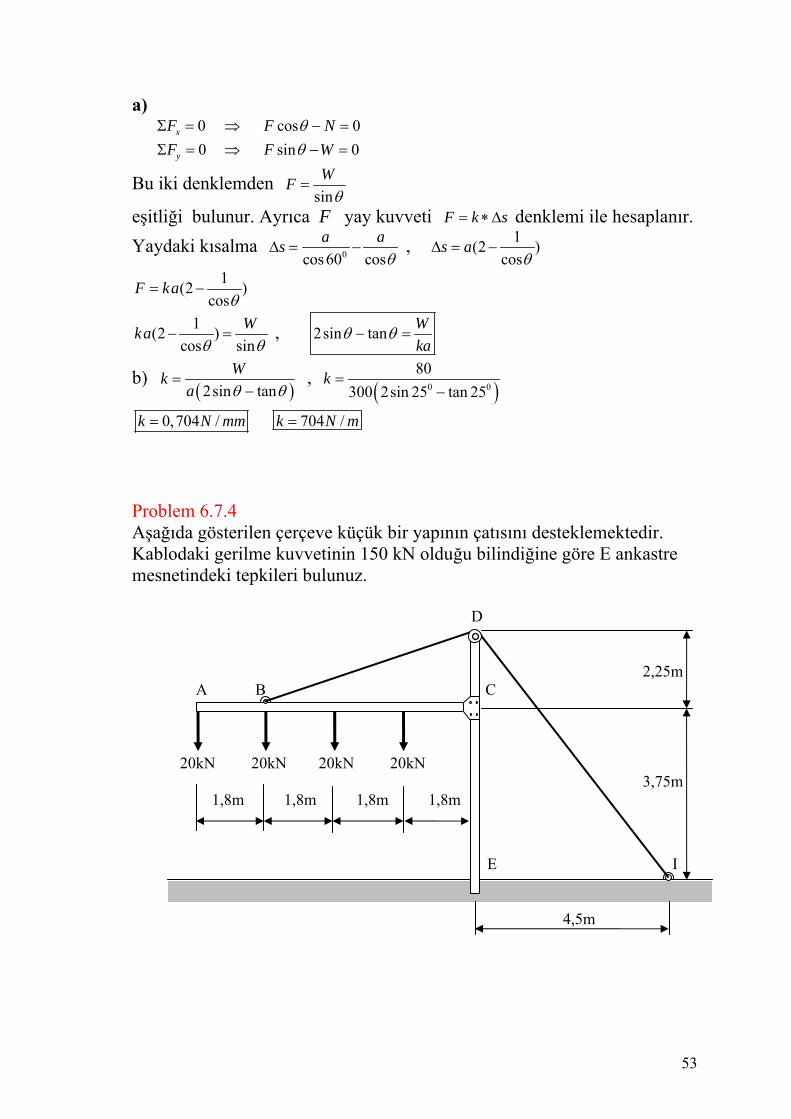
0,704 /k N mm= 704 /k N m= Problem 6.7.4 Aşağıda gösterilen çerçeve küçük bir yapının çatısını desteklemektedir. Kablodaki gerilme kuvvetinin 150 kN olduğu bilindiğine göre E ankastre mesnetindeki tepkileri bulunuz. D 2,25m A B C 20kN 20kN 20kN 20kN 3,75m 1,8m 1,8m 1,8m 1,8m
E I 4,5m

54
Çözüm: y D A B C 6m 20kN 20kN 20kN 20kN 1,8m 1,8m 1,8m 1,8m
ExR E θ I x
EM θ Ey
R 4,5m
150kN 0xFΣ = ⇒ 150cos 0E x
R + θ =
0yFΣ = ⇒ 20 4 150sin 0EyR − ∗ − θ =
0EMΣ = ⇒ 20 (1,8 2 1,8 3 1,8 4 1,8) 4,5 150 sin 0EM + ∗ + ∗ + ∗ + ∗ − ∗ ∗ θ =
cos EIDI
θ = , sin DEDI
θ = , 2 24,5 6DI = + , 7,5DI m=
4,5cos7,5
θ = , cos 0,6θ =
6sin7,5
θ = , sin 0,8θ =
150 0,6E xR = − ∗ , 90E x
R kN= −
20 4 150 0,8EyR = ∗ + ∗ , 200Ey
R kN= ( ) ( )2 290 200ER = − + 219,4ER kN=
20 (1,8 2 1,8 3 1,8 4 1,8) 4,5 150 0,8 0EM = − ∗ + ∗ + ∗ + ∗ + ∗ ∗ =
180 .EM kNm= 6.8 Üç boyutlu kuvvetler etkisindeki bir rijid cismin dengesi ile ilgili uygulamalar Eğer cisme etki eden dış kuvvetler ve mesnetlerden gelen tepkiler aynı düzlem içinde değil ise incelenen problem uzay statik problemidir. 0=R , ∑ = 0OM sıfıra eşdeğerlik koşulu aşağıdaki gibi yazılabilir.

55
0F =∑ ∑ = 0xF , ∑ = 0yF , ∑ = 0zF ∑ = 0xM , ∑ = 0yM , ∑ = 0zM Problem 6.8.1 120kg kütleli ve 1.5m x 2.4m boyutlarındaki dikdörtgen şeklindeki bir reklam panosu A da küresel mafsal E ile B de birer kablo yardımı ile şekildeki gibi tesbit edilmiştir. Kablolardaki kuvvetleri ve A mafsalındaki tepki kuvvetini bulunuz. y 2,4m 0,6m D 1,2m C 0,9m A z E 1,8m B
0,6m x 1,5m Çözüm: y 2,4m 0,6m D 1,2m C Ay
R
0,9m AyR A BDS
AzR ECS E
z 1,8m B
G x
1,2m W=120g 1,2m

56
sıfıra eşdeğerlik koşulu 0F =∑ ⇒ 0EC BD AS S R W+ + + =
0AM =∑ ⇒ 0EC BDAE S AB S AG W∧ + ∧ + ∧ =
EC EC ECS S U= , ECECUEC
= , ( )2 2 2
(0 1,8) (0,9 0) (0,6 0)
1,8 0,9 0,6EC
i j kU − + − + −=
− + +
1,8 0,9 0,62,1EC
i j kU − + += , 6 3 2
7 7 7ECU i j k= − + + , 6 3 27 7 7EC EC EC ECS S i S j S k= − + +
BD BD BDS S U= , BDBDUBD
= , ( )2 2 2
(0 2,4) (1,2 0) ( 2,4 0)
2,4 1,2 2,4BD
i j kU − + − + − −=
− + +
2, 4 1, 2 2, 43,6BD
i j kU − + −= , 2 1 2
3 3 3BDU i j k= − + −
2 1 23 3 3BD BD BD BDS S i S j S k= − + − , A x y zR R i R j R k= + + , 120W g j= −
1,8AE i= , 2, 4AB i= , 1, 2 0,75AG i j= − 0AM =∑ ⇒ 0EC BDAE S AB S AG W∧ + ∧ + ∧ = 6 3 2 2 1 21,8 ( ) 2,4 ( )7 7 7 3 3 3
(1,2 0,75 ) ( 120 ) 0
EC EC EC BD BD BDi S i S j S k i S i S j S k
i j g j
∧ − + + + ∧ − + − +
+ − ∧ − =
3 2 1 21,8 1,8 2,4 2,4 1,2 120 07 7 3 3EC EC BD BDS k S j S k S j gk∗ − ∗ + ∗ + ∗ − ∗ =
4,8 3,6 2,4 5,4( ) ( 144 ) 03 7 3 7A BD EC BD ECM S S j S S g k= − + + − =∑
4,8 3,6 03 7
2,4 5,4 144 03 7
BD EC
BD EC
S S
S S g
− =
+ − = ⇒
4,8 3,6 03 7
4,8 10,8 2883 7
BD EC
BD EC
S S
S S g
− =
+ =⇒ 14,4 288
7 ECS g=
140ECS g= , 45BDS g= , 1373,4ECS N= , 441,45BDS N= 6 3 2 2 1 2( ) ( )7 7 7 3 3 3
( ) ( 120 ) 0
EC EC EC BD BD BD
x y z
F S i S j S k S i S j S k
R i R j R k g j
= − + + + − + − +
+ + + + − =
∑
6 2 3 1 2 2( ) ( 120 ) ( ) 07 3 7 3 7 3EC BD x EC BD y EC BD zF S S R i S S R g j S S R k= − − + + + + − + − + =∑
6 2 07 3EC BD xS S R− − + = ⇒ 6 2140 45 0
7 3 xg g R− − + = ⇒ 150xR g=
3 1 120 07 3EC BD yS S R g+ + − = ⇒ 3 1140 45 120 0
7 3 yg g R g+ + − = ⇒ 45yR g=
2 2 07 3EC BD zS S R− + = ⇒ 2 2140 45 0
7 3 zg g R− + = ⇒ 10zR g= −
1471,5xR N= 441,45yR N= 98,1zR N= −

57
Problem 6.8.2 450 N luk bir yük şekildeki gibi bükülmüş bir rijid borunun C köşesine uygulanmıştır. Boru A da zemine ve D de düşey duvara küresel mafsal ile E de ise EG kablosu yardımı ile tesbit edilmiştir. a) EG kablosundaki gerilme kuvvetinin minumum olması için kablonun karşı duvara bağlandığı G noktası nerde olmalıdır. b) Bu durumdaki minumum kablo kuvvetinin şiddetini bulunuz. y G D E C
2m 2m 4m P x 2m A
4m z Çözüm: y G ( x,y) Dz
R
EGS DxR
D B E C Dy
R
2m 2m 4m P
0 x 2m Ax
R A
A 4m Az
R AyR
z

58
EGS kablo kuvvetinin minumum olması için kablonun doğrultusu aynı kuvvetle AD eksenine göre en büyük momenti verecek şekilde olmalı yani AD ekseni ile E noktasının oluşturduğu düzleme dik olmalıdır. ED AD EGλ∧ = olmalı
( 2) ( 4) 2EG x i y j k= − + − − , 2 2ED i k= − , 4 4 2AD i j k= + −
2 0 24 4 2
i j kED AD∧ = −
− , 8 4 8ED AD i j k∧ = − +
8 4 8 ( 2) ( 4) 2i j k x i y j kλ λ λ− + = − + − − ( 2) 8( 4) 42 8
xy
λλλ
− =− = −
− = ⇒
44 8 84 16 4
xy
λ = −− + =− + = −
⇒ 05
xy==
0ADMΣ = ⇒ ( ) ( ) 0EG AD ADDE S U DC P U∧ • + ∧ • =
2 2DE i k= − + , 2DC k= , 450P j= − , EG EG EGS S U=
EGEGUEG
= , 2 2 2
2 2
( 2) 1 ( 2)EG
i j kU − + −=
− + + − , 2 1 2
3 3 3EGU i j k= − + −
2 1 23 3 3EG EG EG EGS S i S j S k= − + −
ADADUAD
= , 2 2 2
4 4 2
4 4 ( 2)AD
i j kU + −=
+ + − , 2 2 1
3 3 3ADU i j k= + −
2 1 2( 2 2 ) ( )3 3 3EG EG EG EGDE S i k S i S j S k∧ = − + ∧ − + −
2 0 22 1 23 3 3
EG
EG EG EG
i j kDE S
S S S
∧ = −
− −
, 2 8 23 3 3EG EG EG EGDE S S i S j S k∧ = − − −
2 450DC P k j∧ = ∧ − , 900DC P i∧ =
2 8 2 2 2 1( ) ( ) [( 900) )] ( ) 03 3 3 3 3 3EG AD AD EG EG EGDE S U DC P U S i S j S k i j k∧ • + ∧ • = − + − − • + − =
4 16 2600 09 9 9EG EG EGS S S− + − + =
2 600 0EGS− + = ⇒ 300EGS N=

59
Problem 6.8.3 A da ankastre mesnetli ABCDE cismi şekildeki gibi yüklenmiştir. a) A ankastre mesnetindeki tepkileri hesaplayınız. b) A ya çok yakın x eksenine dik kesitteki kesit zorlarını bulunuz. E F2 = 200N 20cm y F1 = 200N D A B x
20cm 40cm C F3 = 350N z F4 = 250N Çözüm: E F2 = 200N 20cm y F1 =200N D AR
AM A B x
20cm 40cm C F3 =350N z F4 =250N a) sıfıra eşdeğerlik koşulu
0F =∑ ⇒ 1 2 3 4 0AR F F F F+ + + + = 0AM =∑ ⇒ 1 2 3 4 0AM AD F AE F AC F AC F+ ∧ + ∧ + ∧ + ∧ =
1F ve 2F kuvvet çifti olduğundan geometrik toplamı sıfır bileşke momenti ise 200 20 j∗ dır.
3 350F i= , 4 250F j= − , 40 20AC i k= + 350 250 0AF R i j= + − =∑ ⇒ 350 250AR i j= − +
(40 20 ) (350 250 ) 0A AM M i k i j= + + ∧ − =∑ , 5000 11000 10000AM i j k= − − +

60
b) A da ki x eksenine dik kesitteki normal kuvvet AR kuvvetinin kesite dik bileşenidir. normal kuvvet = 350N− ( Bu kuvvet cismi çekmeye çalıştığından pozitif alınmalıdır.) A da ki x eksenine dik kesitteki kesme kuvveti AR kuvvetinin kesit içindeki bileşenidir. kesme kuvveti = 250N. 250N A da ki x eksenine dik kesitteki burulma momenti AM momentinin kesite dik bileşenidir. burulma momenti = 5000Ncm− A da ki x eksenine dik kesitteki eğilme momenti AM momentinin kesite içindeki bileşenidir. eğilme momenti = 7000 10000j k− +
eğilme momenti = 2 27000 10000 12206,6Ncm+ =

61
BÖLÜM 7
SÜRTÜNME
7.1 Sürtünme ve sürtünme katsayısı W f θ R θ N W P f R θ N Yukardaki şekillerde gösterildiği gibi eğim açısı θ olan bir eğik düzlem üzerine bırakılan bir cismin θ nın belli değerlerine kadar dengede kaldığı bilinir. Aynı şekilde yatay düzlem üzerine bırakılan bir cisme yatay doğrultuda bir P kuvveti uygulanırsa P nin belli değerlerine kadar cismin dengede kaldığı bilinir. Bütün bunların nedeni temas eden yüzeyler doğrultusunda tepki kuvvetlerinin oluşmasıdır. Bu kuvvetlere sürtünme kuvvetleri denir.
θ= tanNf Sürtünme kuvvetinin maksimum değeri birbirlerine temasta olan cisimlerin cinslerine ve temas yüzeylerinin özelliklerine bağlıdır. dengede kalmak şartıyla θ nın en büyük değerinin tanjantına sürtünme katsayısı denir ve μ ile gösterilir. μ=tan θmaks. , Nfmaks μ=.

62
Problem 7.1.1 θ = 600 eğim açılı eğik düzlem ile üzerindeki W = 100 N. ağırlığındaki cismin sürtünme katsayısı 0.4μ = dır. P kuvvetinin hangi değerleri arasında cisim eğik düzlem üzerinde hareketsiz kalır. Bu sınır değerlerdeki sürtünme kuvvetinin değerleri nedir. W P θ Çözüm: Cismin aşağı doğru kaymaması için gerekli olan en küçük P kuvveti min .P dır.Bu durumda sürtünme kuvvetinin yönü yukarı doğrudur. x W θ y
min .P f N θ x ekseni eğik düzlem doğrultusunda ve y ekseni buna dik doğrultuda alınıp bu düzlemde denge denklemleri aşağıdaki gibi yazılabilir.
0xF =∑ ⇒ min sin 0P f W+ − θ = (1)
0yF =∑ ⇒ cos 0N W− θ = ⇒ 100cos6N 0= 0 , 50N Newton= f Nμ= ⇒ 0, 4 50f = ∗ , 20f Newton=
min sinP f W= − + θ , min 50 3 20P = − , min 66,6P Newton=

63
Cisim yukarı doğru çıkma meyilinde ve hareketsiz durumda en büyük P kuvveti m .aksP dır. Bu durumda sürtünme kuvveti aşağı doğrudur. x W θ y
m .aksP f N θ Bu durumda sürtünme kuvvetinin yönü değiştiğinden sadece birinci denklem değişir. 0xF =∑ ⇒ m . sin 0aksP f W− − θ = ⇒ m . sinaksP f W= + θ m . 50 3 20aksP = + , m . 106,6aksP Newton= , 66,6 106,6Newton P Newton≤ ≤ 7.2 mesnetlerdeki sürtünmeler Mesnetlerde temas yüzeyi belli ise sürtünme kuvveti bu yüzeye teğettir. Eğer mesnet mafsal şeklinde ve temas yüzeyi bilinmiyorsa ise sürtünme momenti göz önüne alınarak işlem yapılabilir. Problem 7.2.1 Şekilde görülen hareketli konsol 10 cm. çapındaki bir borunun üzerinde istenilen bir yüksekliğe konulabilmektedir. Konsolla boru arasındaki sürtünme katsayısı 0,25μ = olduğuna göre , konsolun ağırlığını ihmal ederek W yükünün taşınabileceği en küçük x uzaklığını bulunuz. x W 20 cm. 10 cm.

64
Çözüm y x W Af x A AN 20 cm. Bf BN 10 cm. B
A Af Nμ= , B Bf Nμ= , 0, 25A Af N= , 0, 25B Bf N= 0xF =∑ ⇒ 0B AN N− = ⇒ B AN N=
0yF =∑ ⇒ 0A Bf f W+ − = ⇒ A Bf f W+ = ⇒ 2A B
Wf f= =
2B AN N W= = 0BM =∑ ⇒ 20 10 ( 5) 0A AN f x W− − − =
20 10 5 0A AN f W x W− − + = ⇒ 20 10 5A AN f Wx
W− +
=
20 2 10 5
2WW W
xW
∗ − ∗ += , 40 5 5W W Wx
W− +
= , 40 .x cm=
Problem 7.2.2 Şekildeki mekanizmada Bilezik ve çubuk arasındaki sürtünme katsayısı 0, 4μ = , θ = 600 ve P = 200 N. olduğu bilindiğine göre mekanizma kranka uygulanan M momentinin hangi değerlerinde dengededir. P
C
A M 100 mm. θ B 100 mm.

65
Çözüm: y f P
N C
yAR
A xAR CS x
M 100 mm. CS
θ B 100 mm. C Bileziğinin yukarı doğru kayma başlangıcında dengesi için : f Nμ= , 0, 4f N= ∗ 0xF =∑ ⇒ cos 0CS Nθ − = ⇒ cosCN S= θ , 0, 4 cosCf S= θ
0yF =∑ ⇒ sin 0CS f Pθ − − = ⇒ sin 0,4 cos 0C CS S Pθ − θ − =
(sin 0,4cosCS Pθ − θ) = ⇒ sin 0,4cosC
PS =θ − θ
, 0
200sin 60 0,4cosCS 0=
− 60
300,289 .CS N= AB çubuğunun dengesi için :
0AM =∑ ⇒ . 100 cosmaks CM S− θ = 0 ⇒ . 100 cosmaks CM S= θ
100 300,289cosmaksM 0= ∗ 60 , . 15014,5 .maksM Nmm=
C Bileziğinin aşağı doğru kayma başlangıcında dengesi için : Bu durumun yukarıdaki şekilden farkı sürtünme kuvvetinin yönü yukarı doğrudur.
0yF =∑ ⇒ sin 0CS f Pθ + − = , sin 0,4 cos 0C CS S Pθ + θ − =
(sin 0,4cosCS Pθ + θ) = ⇒ sin 0,4cosC
PS =θ + θ
, 0
200sin 60 0,4cosCS 0=
+ 60
187,613 .CS N= min . 100 cosCM S= θ , min . 100 187,613cosM 0= ∗ 60 ,
min . 9380,6 .M Nmm= 9,38 . 15,01 .Nm M Nm≤ ≤
66
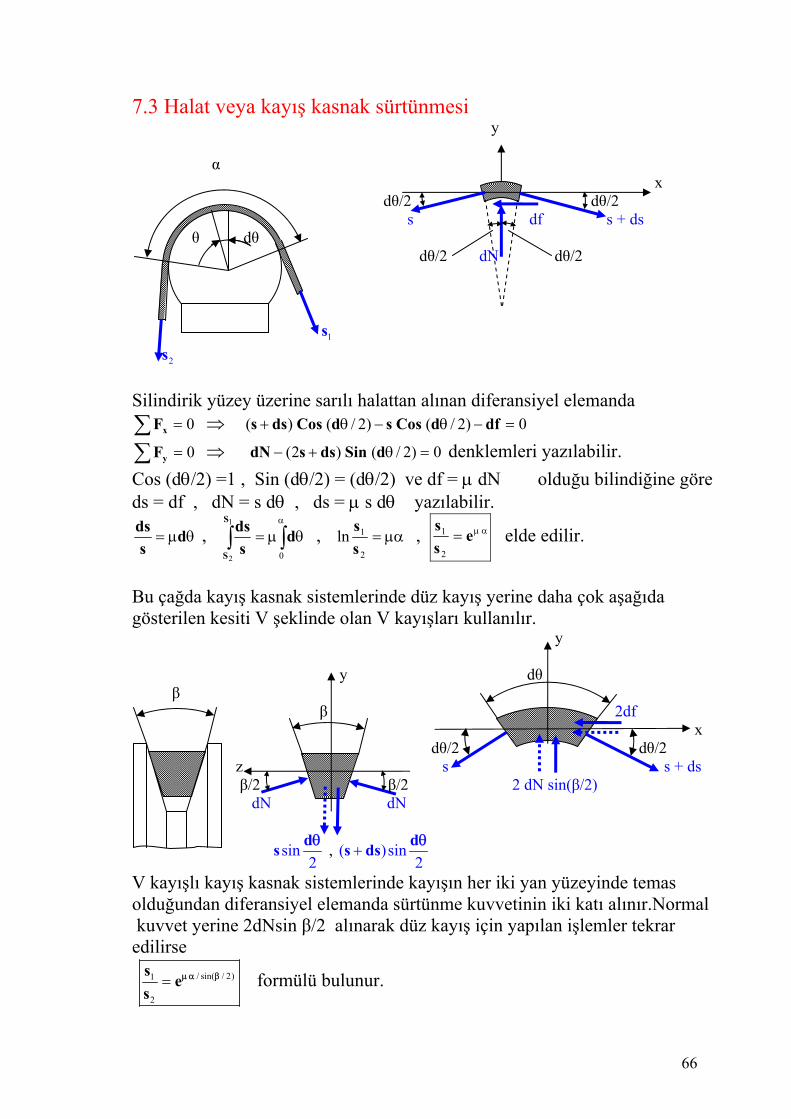
7.3 Halat veya kayış kasnak sürtünmesi y α x dθ/2 dθ/2 s df s + ds θ dθ dθ/2 dN dθ/2 1s
2s Silindirik yüzey üzerine sarılı halattan alınan diferansiyel elemanda ∑ = 0xF ⇒ 0)2/()2/()( =−θ−θ+ dfdCossdCosdss
∑ = 0yF ⇒ 0)2/()2( =θ+− dSindssdN denklemleri yazılabilir. Cos (dθ/2) =1 , Sin (dθ/2) = (dθ/2) ve df = μ dN olduğu bilindiğine göre ds = df , dN = s dθ , ds = μ s dθ yazılabilir.
θμ= ds
ds , ∫∫α
θμ=0
1
2
ds
dsS
S
, μα=2
1lnss , αμ= e
ss
2
1 elde edilir.
Bu çağda kayış kasnak sistemlerinde düz kayış yerine daha çok aşağıda gösterilen kesiti V şeklinde olan V kayışları kullanılır. y y dθ β β 2df x dθ/2 dθ/2 z s s + ds β/2 β/2 2 dN sin(β/2) dN dN
sin2
ds θ , ( )sin2
ds ds θ+
V kayışlı kayış kasnak sistemlerinde kayışın her iki yan yüzeyinde temas olduğundan diferansiyel elemanda sürtünme kuvvetinin iki katı alınır.Normal kuvvet yerine 2dNsin β/2 alınarak düz kayış için yapılan işlemler tekrar edilirse
/ sin( / 2)1
2
se
sμα β= formülü bulunur.

67
Problem 7.3.1 Bir gemiyi rıhtımda durdurmak için kullanılan halatın halka şeklinde oluşturulmuş kısmı iskele babasına takılır.Halatın diğer ucuna gemideki babanın etrafına 4 kere sarıldıktan sonra kuvvet uygulanır. Halata geminin uyguladığı kuvvet 20kN dır. görevlinin uyguladığı kuvvet 40N olduğuna göre halat ile baba denilen silindirik cismin yanal yüzeyi arasındaki sürtünme katsayısını bulunuz.
40 N. 20kN. Çözüm: 2 40 .S N= 1 20 .S kN=
1
2
SS
eμ α= , 1 20 . 20000 .S kN N= = , 4 2α = ∗ π , 8α = π
82000040
e μπ= , 8500 e μπ= ⇒ 8ln 500 ln e μπ= ⇒ ln 500 8 μ= π
ln 5008
μ =π
, 0, 247μ =
68
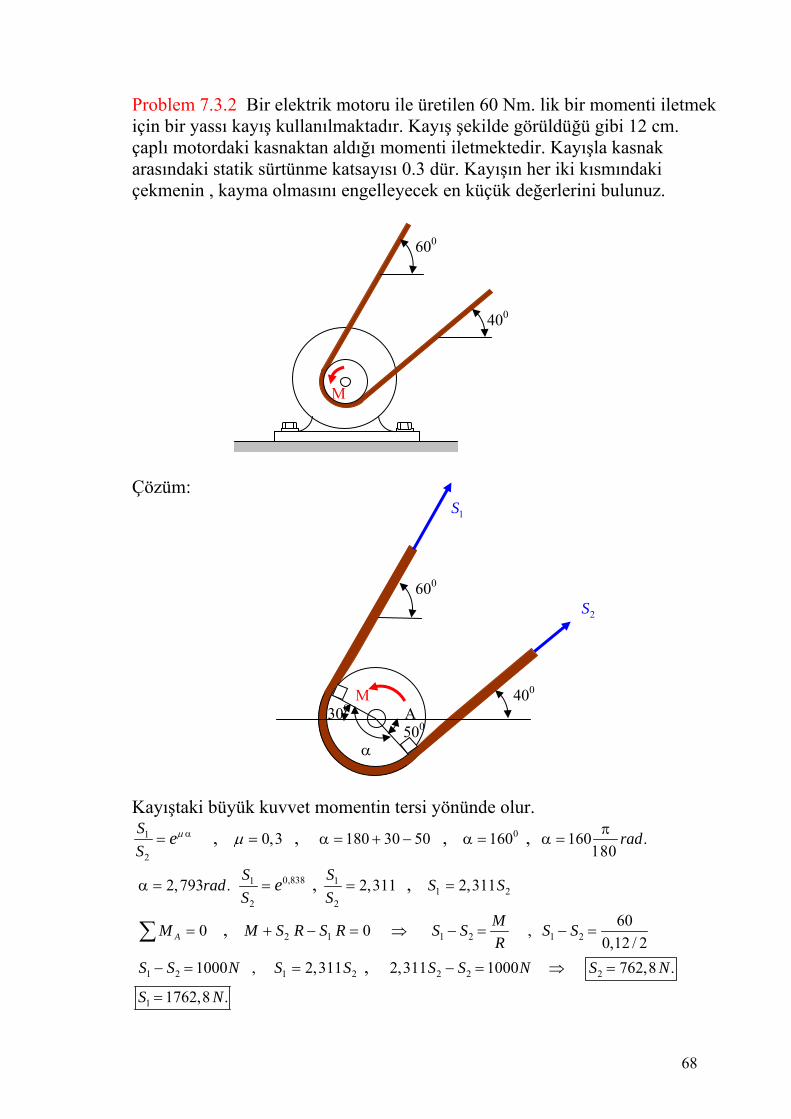
Problem 7.3.2 Bir elektrik motoru ile üretilen 60 Nm. lik bir momenti iletmek için bir yassı kayış kullanılmaktadır. Kayış şekilde görüldüğü gibi 12 cm. çaplı motordaki kasnaktan aldığı momenti iletmektedir. Kayışla kasnak arasındaki statik sürtünme katsayısı 0.3 dür. Kayışın her iki kısmındaki çekmenin , kayma olmasını engelleyecek en küçük değerlerini bulunuz.
600 400
M Çözüm: 1S
600 2S
M 400 300 A 500 α Kayıştaki büyük kuvvet momentin tersi yönünde olur.
1
2
SS
eμ α= , 0,3μ = , 180 30 50α = + − , 0160α = , 160 .radπα =
180
2,793 .radα = 0,8381
2
SS
e= , 1
2
2,311SS
= , 1 22,311S S=
0AM =∑ , 2 1 0M S R S R+ − = ⇒ 1 2MS SR
− = , 1 260
0,12 / 2S S− =
1 2 1000S S N− = , 1 22,311S S= , 2 22,311 1000S S N− = ⇒ 2 762,8 .S N=
1 1762,8 .S N=

69
DİNAMİK
GİRİŞ
Mekaniğin ikinci kısmı olan dinamik kuvvetler etkisinde cisimlerin hareketini inceleyen bilim dalıdır. Mekanikçiler Dinamiği kinematik ve kinetik adı altında iki ana bölüme ayırırlar. Kinematik hareketi doğuran nedenleri göz önüne almadan sadece hareketin geometrisini göz önüne alan bilim dalıdır. Kinetik ise hareketi oluşturan nedenlerle birlikte incelemektir. Kinetik kinematiği de içerdiğinden bazı yazarlar kinetiğe dinamik diyorlar. Genellikle Dinamik ilk önce kinematik veya kinematik için gerekli matematik bilgileri ile başlar. Burada da ilk iki bölüm kinematik için gerekli matematik konularını içeriyor.
BÖLÜM 8
VEKTÖREL ANALİZ
8.1 Vektör fonksiyonu Statikte görülen eş zamanlı vektörlerden farklı olarak dinamikte zamanla veya başka bir değişkene göre değişebilen vektörlerle de çalışılır. Bir u reel sayısının tanımlı olduğu bölgedeki her değerine bir )(uP vektörü karşılık geliyorsa P vektörüne u değişkenine bağlı vektörel fonksiyon denir. Benzer şekilde birden fazla sayıdaki u , v , w gibi değişkenlere veya r gibi vektörlere bağlı vektörel fonksiyonlar tanımlanabilir.
)(uPP = ),,( wvuPP =
)(rPP = Problem 8.1.1 ( ) 10 8 3P u Cos u i Sin u j uk= + + şeklinde verilen vektör fonksiyonunu
3
u π= için hesaplayınız.
3
u π= için ( ) 10 8 3
3 3 3 3P Cos i Sin j kπ π π π
= + +
( ) 5 4 33
= + +P i j kπ π
70
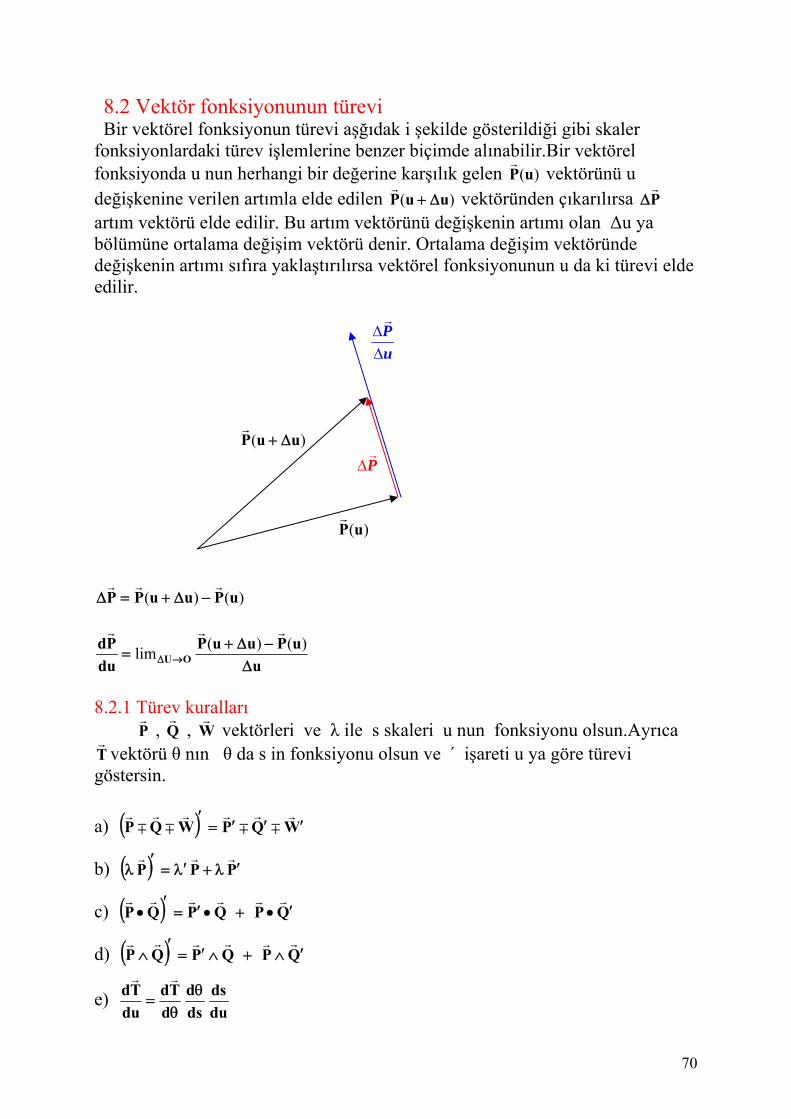
8.2 Vektör fonksiyonunun türevi Bir vektörel fonksiyonun türevi aşğıdak i şekilde gösterildiği gibi skaler fonksiyonlardaki türev işlemlerine benzer biçimde alınabilir.Bir vektörel fonksiyonda u nun herhangi bir değerine karşılık gelen )(uP vektörünü u değişkenine verilen artımla elde edilen )( uuP Δ+ vektöründen çıkarılırsa PΔ artım vektörü elde edilir. Bu artım vektörünü değişkenin artımı olan Δu ya bölümüne ortalama değişim vektörü denir. Ortalama değişim vektöründe değişkenin artımı sıfıra yaklaştırılırsa vektörel fonksiyonunun u da ki türevi elde edilir.
Pu
ΔΔ
)( uuP Δ+ PΔ )(uP
)()( uPuuPP −Δ+=Δ
uuPuuP
duPd
OU Δ−Δ+
= →Δ)()(lim
8.2.1 Türev kuralları P , Q , W vektörleri ve λ ile s skaleri u nun fonksiyonu olsun.Ayrıca T vektörü θ nın θ da s in fonksiyonu olsun ve işareti u ya göre türevi göstersin. a) ( ) WQPWQP ′′′=
′∓∓∓∓
b) ( ) PPP ′λ+λ′=′
λ
c) ( ) QPQPQP ′•+•′=′
•
d) ( ) QPQPQP ′∧+∧′=′
∧
e) duds
dsd
dTd
duTd θ
θ=

71
Problem 8.2.1 ( ) 10 8 3P u Cos u i Sin u j uk= + + şeklinde verilen vektör
fonksiyonunun u ya göre birinci ve ikinci türevini 3
u π= için hesaplayınız.
Çözüm :
( ) 10 8 3dP u Sin u i Cos u j kdu
= − + + , 2
2
( ) 10 8d P u Cos u i Sin u jdu
= − −
için ( )
3 5 3 4 3dP
i j kdu
π
= − + + , 2
2
( )3 5 4 3
d Pi j
du
π
= − −
Problem 8.2.2 Modülü sabit olarak değişen vektörün türevinin kendisine dik bir vektör olduğunu gösteriniz. Çözüm: ( )P u sabit= olarak verilmiştir. Bir vektörün modülü vektörün kendisi ile skaler çarpımının karekökü alınarak bulunabileceğinden. ( ) ( )P u P u sabit• = yazılabilir. Bu eşitliğin her iki tarafının u ya göre türevi
alınırsa ( ) 0dPP udu
• = elde edilir.
Böylece skaler çarpımın sıfır olmasından ( )P u ile dPdu
türev vektörünün
birbirine dik olduğu ispatlanmış olur. Problem 8.2.3 Bir düzleme paralel olarak değişen bir birim vektörün bu düzlem içindeki sabit bir doğrultuyla yaptığı açıya göre türevi aynı düzlemde bulunan kendisine pozitif yönde dik bir birim vektördür. Çözüm: Birim vektörün paralel olduğu düzlemi xy düzlemi bu düzlemdeki sabit bir doğrultu x ekseni ile gösterilsin Bu düzlemde x ekseni ile θ açısı yapan birim vektör e ise buna pozitif yönde dik vektör ile θ ya göre türevi alınan vektörün aynı vektör olduğu görülür. y de
dθ
θ e θ x e Cos i Sin jθ θ= +
72
de Sin i Cos jd
θ θθ= − +
e birim vektörüne aynı düzleme paralel olmak koşulu ile ve pozitif yönde dik vektör ( )k e k Cos i Sin jθ θ∧ = ∧ + Buradaki vektörel çarpma işlemi yapılırsa
dek edθ
∧ =
bulunur. 8.3 Vektörel fonksiyonun integrali
)(ux , )(uy , )(uz , u nun belirli bir aralığında sürekli fonksiyonlar olmak üzere kuzjuyiuxuP )()()()( ++=
u ya bağlı vektörel fonksiyonunu göz önüne alalınırsa aşağıdaki integrale
∫ ∫∫∫ ++= kduuzjduuyiduuxduuP )()()()(
)(uP vektörel fonksiyonunun belirsiz integrali denir.
)()( uQduduP = eşitliğini sağlayan bir )(uQ vektörel fonksiyonu varsa
CuQduuQdudduuP +==∫ ∫ )()()(
olur. Burada C vektörü u skalerine bağlı olmayan sabit bir vektördür.
Bu durumda u = a ve u = b sınırları arasındaki belirli integral
)()()()()( aQbQCuQduuQdudduuP
b
a
b
a
b
a
−=+==∫ ∫
şeklinde yazılabilir.

73
BÖLÜM 9
EĞRİLERDE DİFERANSİYEL ÖZELLİKLER 9.1 Bir vektör fonksiyonunun hodografı u ya bağlı değerler alan )(uP vektörel fonksiyonunun başlangıçları aynı noktaya getirilirse uç noktalarının çizdiği eğriye bu vektörel fonksiyonun hodografı denir. y Hodograf )(uP
o x z
74
9.2 Bir vektörel fonksiyonun hodografı üzerinde ( )P u vektörel fonksiyonunun türevi
y
Pu
ΔΔ
dPdu
Δs T PΔ s (+) o1 o x z
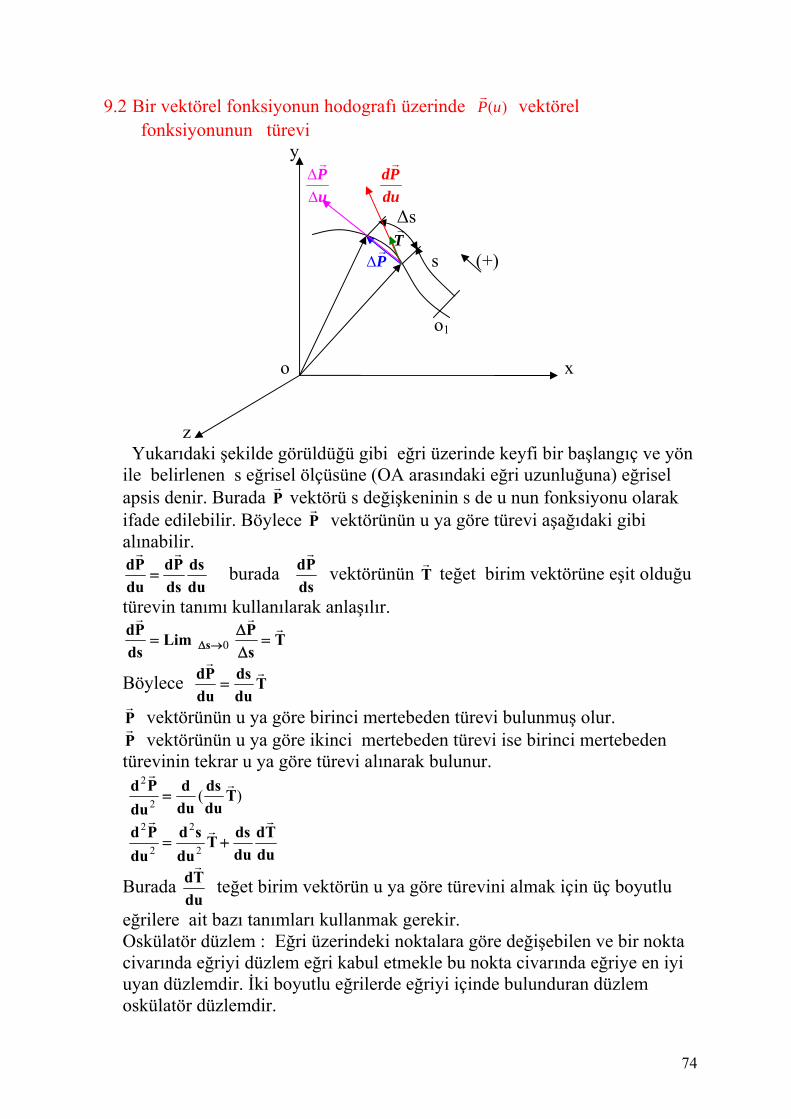
Yukarıdaki şekilde görüldüğü gibi eğri üzerinde keyfi bir başlangıç ve yön ile belirlenen s eğrisel ölçüsüne (OA arasındaki eğri uzunluğuna) eğrisel apsis denir. Burada P vektörü s değişkeninin s de u nun fonksiyonu olarak ifade edilebilir. Böylece P vektörünün u ya göre türevi aşağıdaki gibi alınabilir.
duds
dsPd
duPd= burada
dsPd vektörünün T teğet birim vektörüne eşit olduğu
türevin tanımı kullanılarak anlaşılır.
TsPLim
dsPd
s =ΔΔ
= →Δ 0
Böylece Tduds
duPd=
P vektörünün u ya göre birinci mertebeden türevi bulunmuş olur. P vektörünün u ya göre ikinci mertebeden türevi ise birinci mertebeden türevinin tekrar u ya göre türevi alınarak bulunur.
)(2
2T
duds
dud
duPd=
du
TddudsT
dusd
duPd
+= 2
2
2
2
Burada du
Td teğet birim vektörün u ya göre türevini almak için üç boyutlu
eğrilere ait bazı tanımları kullanmak gerekir. Oskülatör düzlem : Eğri üzerindeki noktalara göre değişebilen ve bir nokta civarında eğriyi düzlem eğri kabul etmekle bu nokta civarında eğriye en iyi uyan düzlemdir. İki boyutlu eğrilerde eğriyi içinde bulunduran düzlem oskülatör düzlemdir.

75
Asal normal birim vektörü : Teğete oskülatör düzlemde dik olan ve eğrilik merkezine doğru yönelmiş olan birim vektöre denir. Üç boyutlu eğrilerde eğrilik yarıçapı , asal normal birim vektörü gibi tanımları yapabilmek için bir nokta civarında eğriyi düzlem eğrisi ve R yarıçaplı çember parçası olarak kabul etmek gerekir. Bir A noktası civarında aşağıdaki şekilde gösterildiği gibi oskülatör düzlemde bulunan ds yay uzunluğunda, dθ merkez açısında ve R yarıçapında bir çember parçası kabul edilebilir. dθ T ds T R dθ burada ds = R dθ Burada görüldüğü gibi T birim vektörünü θ nın θ yı s in fonksiyonu olarak düşünülüp zincir kuralından faydalanılırsa aşağıdaki eşitlik yazılabilir.
duds
dsd
dTd
duTd θ
θ= burada
θdTd işlemini yapabilmek için sabit bir düzleme
paralel olarak değişen T birim vektörünün bu düzlemde bulunan sabit bir doğrultuyla yaptığı θ açısına göre türevi göz önüne alınabilir. y
dTdθ
θ
T θ x
jSiniCosT θ+θ=
jCosiSindTd
θ+θ−=θ
Buradan T birim vektörünün θ ya göre türevinin aynı düzlemde kendisine pozitif yönde dik bir vektör olduğu anlaşılır. Bu vektöre N asal normal birim vektörü denir.

76
NdTd=
θ Bu denklem teğet birim vektörün u ya göre türevi ifadesinde yerine
yazılırsa duds
RddN
duTd
θθ
=
Tduds
RduTd 1= Teğet birim vektörün u ya göre türevi bulunur. Bu eşitlikler
ile 2
2
duPd ikinci türev ifadesine gidilirse
( ) NRdudsT
dusd
duPd 2
2
2
2
2 /+=
P vektörünün u ya göre türevi teğet ve asal normal birim vektörleri doğrultusunda bulunur.
9.3 Doğal koordinat sistemi Bu elde edilen T ve N birim vektörleri ile birde bunlara sağ el kuralına göre dik üçüncü bir birim vektör tanımlanırsa
NTB ∧= bir koordinat sistemi tanımlanmış olur. Buradaki B birim vektörüne binormal birim vektörü denir. Bu T , N ve B birim vektörlerinin belirlediği koordinat sistemine doğal koordinat denir. T ve N birim vektörlerinin belirlediği düzleme oskülatör düzlem N ve B birim vektörlerinin belirlediği düzleme normal düzlem T ve B birim vektörlerinin belirlediği düzleme rektifiyen düzlem denir. Bu üç koordinat düzlemine birlikte Frenet üç yüzlüsü de denir.
9.4 Doğal koordinat sisteminde T , N , B birim vektörleri ve R eğrilik yarıçapı
Bir )(uPP = vektörel fonksiyonunda elde edilen Tduds
duPd= denkleminden
duPd
duds
= ve
duPddu
PdT = elde edilir.
N birim vektörü ise 1dT dsNdu R du
= formülünden elde edilir.
dTRduN
dPdu
=

77
R eğrilik yarıçapı ise P vektörünün u ya göre 1. ve 2. mertebeden türevleri birbiri ile vektörel çarpılarak elde edilir.
( )Rdu
ds
duPd
duPd
32
=∧
Bu denklemin her iki tarafının modülü alınır ve du
Pdduds
= eşitliği göz
önüne alınırsa R eğrilik yarıçapı aşağıdaki gibi yazılabilir.
2
2
3
duPd
duPd
duPd
R∧
=
Problem 9.4.1
y = f(x) kartezyen denklemiyle verilen bir düzlem eğride eğrilik yarıçapını veren formülü yazınız. Çözüm:
jxfixP )(+= jxfidxPd )(′+= jxf
dxPd )(2
2′′= ve [ ]2)(1 xf
dxPd ′+=
)(2
2xf
dxPd
dxPd ′′=∧
denklemleri ile R eğrilik yarıçapını veren formül
[ ]( ) 2/32
)()(1
xfxfR
′′′+
=
şeklinde elde edilir.
Problem 9.4.2 ( ) 10 8 3P u Cos u i Sin u j uk= + + şeklinde vektör fonksiyonu ile verilen
eğrinin 3
u π= deki eğrilik yarıçapını ve teğet birim vektörünü bulunuz.
(Burada uzunluklar metre açılar radyan cinsindendir.) Çözüm :
2
2
3
duPd
duPd
duPd
R∧
=
( ) 10 8 3dP u Sin u i Cos u j kdu
= − + +

78
2
2
( ) 10 8d P u Cos u i Sin u jdu
= − −
2
2
( ) ( ) 10 8 310 8 0
i j kdP u d P u Sinu Cos u
du duCos u Sinu
∧ = −− −
2
2
( ) ( ) 24 30 80dP u d P u Sinu i Cos u j kdu du
∧ = − + 2
2 22
( ) ( ) 576 900 6400dP u d P u Sin u Cos udu du
∧ = + +
2 2( ) 100 64 9dP u Sin u Cos udu
= + + , 3
2 2 3 / 2( ) (100 64 9)dP u Sin u Cos udu
= + +
3
2 2 3 / 2
2 2 2
2
( )(100 64 9)
( ) ( ) 576 900 6400
dP udu Sin u Cos uR
dP u d P u Sin u Cos udu du
+ += =
+ +∧
2 2
( )10 8 3
( ) 100 64 9
dP uSin u i Cos u j kduT
dP u Sin u Cos udu
− + += =
+ + , 2 2 1/ 2
10 8 3(100 64 9)
Sin u i Cos u j kTSin u Cos u
− + +=
+ +
3u π= için
2 2 1/ 2
10 8 33 3( )
3 (100 64 9)3 3
Sin i Cos j kT
Sin Cos
π ππ
π π
− + +=
+ +
1/ 2
5 3 4 3 3 2 3( )3003 2 5 10( 16 9)
4
i j kT i j kπ − + += = − + +
+ +
2 2 3 / 2
2 2
(100 64 9)3 3
576 900 64003 3
Sin CosR
Sin Cos
π π
π π
+ +=
+ + ,
3 / 2300( 16 9)4
432 225 6400
+ +=
+ +R
11.9=R m

79
BÖLÜM 10 MADDESEL NOKTANIN KİNEMATİĞİ
10.1 Kinematiğin temel kavramları Yer vektörü : Bir maddesel noktanın bir mukayese cismine (koordinat sistemine) göre bulunduğu yere orijinden uzanan vektör. Hız vektörü : Yer vektörünün zamana göre türevi İvme vektörü: Hız vektörünün zamana göre türevi veya yer vektörünün zamana göre ikinci türevi Aşısal hız: Aynı düzlemde hareket eden noktayı sabit bir noktaya bağlayan doğrunun aynı düzlemdeki sabit bir doğru ile yaptığı açının zamana göre türevi Açısal ivme: Açısal hızın zamana göre türevi
y p r x z r (Yer vektörü )
dtrdV = ( Hız Vektörü )
dtVda = ( İvme vektörü )
y P θ x )(tθ=θ (Zamanı fonksiyonu olan aynı düzlemdeki açı )
dtdθ
=ω ( Açısal hız ) , dtdω
=α (Açısal ivme )

80
10.2 Maddesel noktanın hareketinin kartezyen koordinat sisteminde incelenmesi
y ),,( zyxA r y z Bir maddesel noktanın hareketinde koordinatları
)(txx = , )(tyy = , )(tzz =
şeklinde ise yer , hız ve ivme vektörleri aşağıdaki gibi hesaplanır.
ktzjtyitxr )()()( ++=
ktzjtyitxV )()()( ++=
ktzjtyitxa )()()( ++= Burada değişkenlerin üzerindeki noktalar zamana göre türevi göstermektedir. Problem 10.2.1 Bir maddesel nokta bir eğri üzerinde 10x Cos t= , 8y Sin t= , 3z t=
bağıntılarına göre hareket etmektedir. 6
t π= için maddesel noktanın yer, hız ve
ivme vektörlerini bulunuz. Çözüm:
10 8 3r Cos t i Sin t j t k= + + , 10 8 3V Sin t i Cos t j k= − + + 10 8a Cos t i Sin t j= − −
6t π= için 10 8 3
6 6 6r Cos i Sin j kπ π π= + + , 5 3 4
2= + +r i j kπ
10 8 36 6
V Sin i Cos j kπ π= − + + , 5 4 3 3= − + +V i j k
10 86 6
a Cos i Sin jπ π= − − , 5 3 4= − −a i j
81
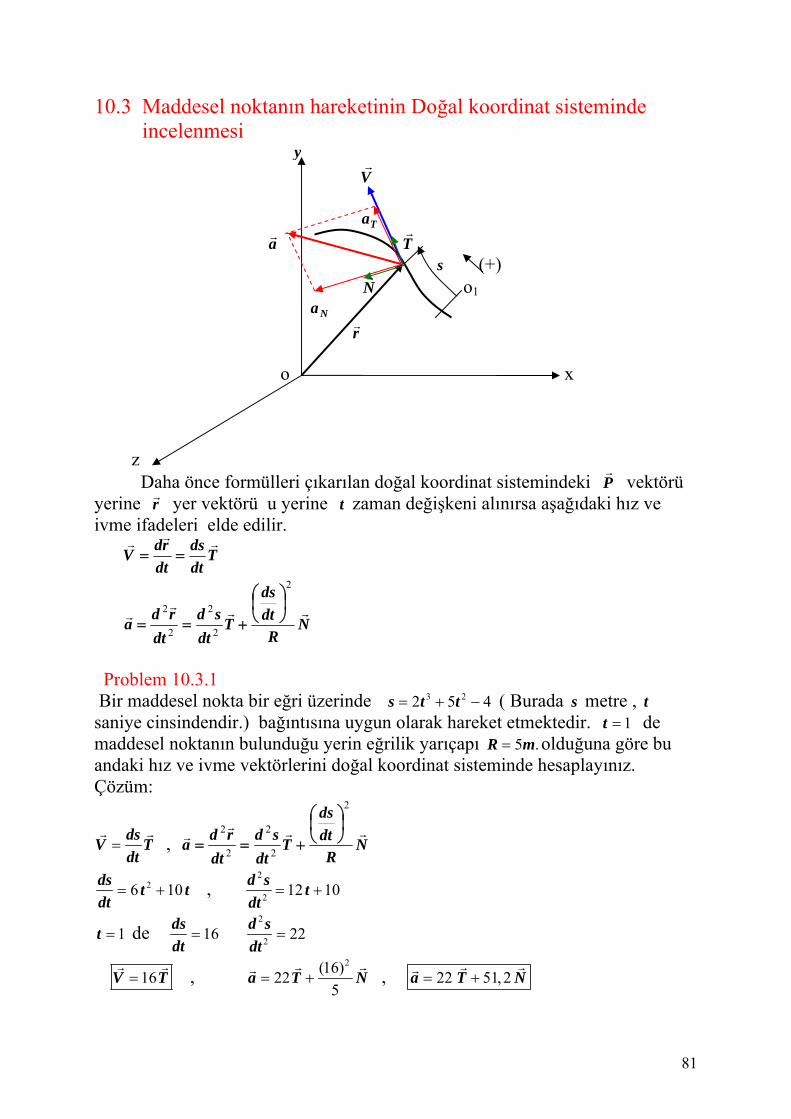
10.3 Maddesel noktanın hareketinin Doğal koordinat sisteminde incelenmesi
y V Ta a T s (+) N o1 Na r
o x z Daha önce formülleri çıkarılan doğal koordinat sistemindeki P vektörü yerine r yer vektörü u yerine t zaman değişkeni alınırsa aşağıdaki hız ve ivme ifadeleri elde edilir. T
dtds
dtrdV ==
NR
dtds
Tdt
sddt
rda
2
2
2
2
2 ⎟⎠⎞
⎜⎝⎛
+==
Problem 10.3.1 Bir maddesel nokta bir eğri üzerinde 3 22 5 4s t t= + − ( Burada s metre , t saniye cinsindendir.) bağıntısına uygun olarak hareket etmektedir. 1t = de maddesel noktanın bulunduğu yerin eğrilik yarıçapı 5 .R m= olduğuna göre bu andaki hız ve ivme vektörlerini doğal koordinat sisteminde hesaplayınız. Çözüm:
dsV Tdt
= , NR
dtds
Tdt
sddt
rda
2
2
2
2
2 ⎟⎠⎞
⎜⎝⎛
+==
26 10= +ds t tdt
, 2
2 12 10= +d s tdt
1t = de 16=dsdt
2
2 22=d sdt
16=V T , 2(16)22
5= +a T N , 22 51,2= +a T N

82
Problem 10.3.2 Bir maddesel nokta bir eğri üzerinde hareket ederken bir t anında hız ve ivme vektörlerinin kartezyen koordinatlardaki bileşenleri
6 2 3V i j k= − + , 3 4a i j= + olduğuna göre bu an için hız ve ivme vektörlerinin doğal koordinat sistemindeki ifadelerini ve eğri üzerinde bulunduğu noktanın eğrilik yarıçapını bulunuz. Çözüm: V Ta θ A a Na 2 2 26 ( 2) 3V = + − + , 7 /V m s= , 7=V T
V a V a Cosθ• = , 2 23 4a = + , 25 /a m s=
V aCosV a
θ •= , 6*3 2* 4
7 *5Cosθ −
= , 1035
Cosθ = ⇒ 73,4 oθ =
21, 43 /= =Ta a Cos m sθ , 24,79 /= =Na a Sin m sθ 1,43 4,79= +a T N
2
NVaR
= ⇒ 2
N
VRa
= , 494,79
=R , 10,23=R m

83
10.4 Maddesel noktanın hareketinin silindirik koordinat sisteminde incelenmesi z k ρ θe ),,( zA θρ ρe r o y ρ θ k 1A θe x ρe Yukarıdaki şekilden r vektörü
AAOAr 11 += şeklinde yazılabilir. Bu eşitlik silindirik koordinatların birim vektörleri cinsinden yazılırsa kzer +ρ= ρ elde edilir. Yer vektörünün zamana göre türevlerinden hız ve ivme vektörleri bulunur.
kdtdz
dted
edtd
dtrdV +ρ+
ρ== ρ
ρ
Burada ρe birim vektörü θ nın fonksiyonu olduğundan zincir kuralı uygulanıp
dtd
ded
dted θ
θ= ρρ eşitliği yazılabilir.
Burada θρ
ded
bir düzleme paralel olarak değişen bir birim vektör dür. Bu
vektörün bu düzlem içindeki sabit bir doğrultu ile yaptığı açıya göre türevi kendisine pozitif yönde dik bir birim vektör olan θe vektörüdür. Böylece elde edilen θρ θ= ee denklemi ile hız denklemine gidilirse silindirik koordinatlardaki hız vektörü kzeeV +θρ+ρ= θρ şeklinde elde edilir. Bu elde edilen hız vektörünün zamana göre türevi alınırsa ivme vektörü bulunur.

84
kzeeeeedtVda +θρ+θρ+θρ+ρ+ρ== θθθρρ
Burada ρe gibi θe da θ nın fonksiyonudur. Bundan dolayı
dtd
ded
dted
e θθ
== θθθ eşitliği yazılabilir.
Burada θθ
ded bir düzleme paralel olarak değişen bir birim vektördür. Bu birim
vektörün bu düzlem içindeki sabit bir doğrultu ile yaptığı açıya göre türevi kendisine pozitif yönde dik bir birim vektör olan ρ− e vektörüdür. Böylece elde edilen ρθ θ−= ee ve θρ θ= ee eşitliği ivme denklemine gidilirse
( ) ( ) kzeea +θρ+θρ+θρ−ρ= θρ 22 silindirik koordinatlardaki ivme denklemi elde edilir. Problem 10.4.1 Bir maddesel nokta bir eğri üzerinde 20 10
6Cos tπρ = + , 3
3tπθ = , 10
4z Sin tπ=
Bağıntılarına uygun olarak hareket etmektedir. 1t = için yer ,hız ve ivme vektörlerini silindirik koordinatlarda hesaplayınız.
kzeeV +θρ+ρ= θρ ( ) ( ) kzeea +θρ+θρ+θρ−ρ= θρ 22
53 6
Sin tπ πρ = − , 25
18 6Cos tπ πρ = −
2tθ π= , 2 tθ π= 52 4
z Cos tπ π= ,
258 4
z Sin tπ π= −
1t = de 20 5 3ρ = + , 56πρ = − ,
25 336πρ = −
3πθ = , θ π= , 2θ π=
5 2z = , 5 24
z π= ,
25 216
z π= −
(20 5 3) 5 2= + +r e kρ , 5 5(20 5 3) 26 4
= − + + +V e e kρ θπ ππ
2 225 5 5[ 3 (20 5 3) ] [(20 5 3) 2 2( ) ] 2
36 6 16a e e kρ θ
π π ππ π π= − − + + + + − −
22 2185 5 5[ (20 3) ] [(40 10 3) ( ) ] 2
36 3 16= − + + + + − −a e e kρ θ
ππ π π

85
10.5 Maddesel noktanın doğrusal hareketi Maddesel noktanın yörüngesi bir koordinat sistemine göre doğru şeklinde ise maddesel noktanın bu koordinat sistemine göre yaptığı harekete doğrusal hareket denir. y
ΔU Δ
s A
o1 r x o z Maddesel noktanın yörüngesi olan bu doğru üzerinde keyfi bir başlangıç noktası ve yön seçilebilir. Buradaki s A da bulunan maddesel noktanı doğru üzerindeki başlangıç noktasına göre alınan ölçüdür. Burada maddesel noktanın konumunu gösteren r yer vektörü
1 1r OO O A= + şeklinde yazılabilir. 1O A s UΔ= olduğundan 1r OO s UΔ= + olur.
Hız vektörü Δ= UdtdsV
İvme vektörü Δ= Udt
sda 2
2
Bu elde edilen hız ve ivme vektörleri aynı doğrultuda olduğundan önce şiddetleri hesaplanıp sonra vektör formuna kolayca getirilir. Doğrusal hareketi için aşağıdaki skaler denklemler kullanılır.
dtdsV = ,
dtdVa = , 2
2
dtsda =
ve ayrıca dtdsV = den çekilen
Vdsdt = eşitliği
dtdVa = denklemine
yerleştirilirse
dsVdVa =
denklemi elde edilir. Bu elde edilen 4 adet denklemden doğrusal harekete ait problemler çözülmeye çalışılır.

86
10.5.1 Sabit hızlı doğrusal hareket
Bir doğrusal hareketteki hız V sabit ise aşağıdaki işlemler yapılabilir.
dtdVa = den
0=a bulunur. Ve
dtdsV = den Vdtds = yazılıp V sabit olduğu için kolayca integre ederek
∫∫ =ts
S
dtVds00
⇒ tVss += 0
sabit hızlı doğrusal harekete ait konum zaman bağıntısı bulunur. Problem 10.5.1.1 Bir maddesel nokta bir doğru üzerinde 6 /V m s= sabit hızı ile hareket ettiğine göre 0t = da 8s m= olduğuna göre 5 inci saniyedeki konumunu bulunuz. Çözüm: 0s s V t= + konum zaman denkleminden
5t = deki konum t yerine 5 yazarak bulunur. 8 6 *5s = + , 38 .=s m
10.5.2 Sabit ivmeli doğrusal hareket
Bir doğrusal hareketteki ivme a sabit ise aşağıdaki işlemler yapılabilir.
dtdVa = den dtadV = yazıp integre ederek
∫∫ =tV
V
dtadV00
⇒ taVV += 0
hız zaman bağıntısı elde edilir.
dtdsV = den dttaVds )( 0 += yazıp integre ederek
∫ ∫ +=S
S
t
dttaVds0 0
0 )( ⇒ 200 2
1 tatVss ++=
konum-zaman bağıntısı elde edilir. Ayrıca
dsVdVa = bağıntısından yazılan dVV
ads 1
= bağıntısı integre edilirse
∫∫ =V
V
S
S
dVVa
ds00
1 ⇒ )(21 2
02
0 VVa
ss −+=
konum-hız bağıntısı elde edilir.

87
Problem 10.5.2.1 Bir maddesel nokta bir doğru üzerinde 23 /a m s= sabit ivmesi ile hareket ettiğine göre 0t = da konumu 8s m= ve hızı 4 /V m s= olduğuna göre 5 inci saniyedeki konumunu bulunuz. Çözüm: 2
00 21 tatVss ++= konum zaman denkleminden
7 .t s= deki konum t yerine 7 yazarak bulunur. 218 4*7 3*7
2s = + + , 109,5 .=s m
10.5.3 )(tfa = İvme zamanın fonksiyonu şeklinde verilmiş ise
dtdVa = den elde edilen dtadV = denklemde a yerine )(tf yazıp
integre edilirse
dttfdV )(= ⇒ dttfdVtV
V
)(00
∫∫ =
∫+=t
dttfVV0
0 )(
hız –zaman bağıntısı elde edilir. Bu bağıntıdaki V hızı yerine dtds yazıp
düzenlendikten sonra integre edilirse
∫+=t
dttfVdtds
00 )( ⇒ dtdttfVds
ttS
S
])([0
000
∫∫∫ +=
dtdttfVsstt
])([0
00
0 ∫∫ ++=
konum-zaman bağıntısı elde edilir. Burada 0s ve 0V Başlangıç değerleridir.
Problem 10.5.3.1 Bir maddesel nokta bir doğru 2 3a t= + ivme zaman bağıntısı ile hareket ediyor. 0t = da konum 4 .s m= ve hız 10 / .V m s= − olduğuna göre
6t = daki konumu ve hızı hesaplayınız. Çözüm: dVa
dt= den dV a dt= yazılabilir. Burada a yerine 2 3t + yazıp integre edilirse
(2 3)O
V t
V O
dV t dt= +∫ ∫ ⇒ 2 3OV V t t= + +
denklemi elde edilir. Bu denklemde OV yerine –10 konursa 2 3 10V t t= + − Hız-zaman denklemi elde edilir.Burada t yerine 6 yazılırsa 29 /=V m s bulunur.

88
dsVdt
= den ds V dt= yazılabilir. Burada V yerine 2 3 10t t+ − yazıp integre
edilirse
2
0
( 3 10)O
S t
S
ds t t dt= + −∫ ∫
3 20
1 3 103 2
s s t t t= + + −
denklemi elde edilir. Burada 0s yerine 4 yazılırsa
3 21 3 10 43 2
s t t t= + − +
konum-zaman denklemi elde edilir. Burada t yerine 6 yazılırsa
70=s m
bulunur.
10.5.4 )(sfa = İvme konumun fonksiyonu şeklinde verilmiş ise
a yerine ds
VdV veya 2
2
dtsd yazıp denklem düzenlendikten sonra integre
ederek hız-konum veya konum-zaman denklemleri bulunur.
Problem 10.5.4.1 Bir maddesel nokta bir doğru 1/ 212a s= ivme -konum bağıntısı ile hareket ediyor. 0t = da konum 0s = ve hız 0V = olduğuna göre
2t = deki konumu hızı ve ivmeyi hesaplayınız. Çözüm: a yerine
dsVdV yazıp elde edilen
1/ 212VdV sds
= denklemi 1/ 212V dV s ds= şeklinde düzenlenip integre edilirse
1/ 2
0 0
12V s
V dV s ds=∫ ∫ ⇒ 2 3/ 21 1122 3/ 2
V s= ⇒ 3/ 44V s= denklemi elde edilir.
Bu denklemde V yerine dsdt
yazıp elde edilen 3 / 44=ds sdt

89
denklemi 3/ 44ds dts
= şeklinde yazılıp integre edilirse
3 / 4
0 0
14
s t
s ds dt− =∫ ∫ ⇒ 1/ 4s t= ⇒ 4s t= , 34V t= , 212a t=
2t = de 16 .s m= , 32 /V m s= , 248 /a m s=
10.5.5 )(Vfa = İvme hızın fonksiyonu şeklinde verilmiş ise
a yerine dtdV veya
dsVdV yazılırsa aşağıdaki denklemler elde edilir.
)(VfdtdV
= ⇒ )(Vf
dVdt =
)(Vfds
VdV= ⇒
)(VfVdVds =
Bu son eşitlikler integre edilirse hız-zaman ve konum-hız denklemleri bulunur.
Problem 10.5.5.1 Bir maddesel nokta bir doğru 20,2a V= − ivme –hız bağıntısı ile hareket ediyor. 0t = da konum 0s = ve hız 20 /V m s= olduğuna göre
2t = deki konumu hızı ve ivmeyi hesaplayınız.
Çözüm: a yerine dV
dt yazarak elde edilen
20,2dV Vdt
= − denklemi 25 dVdtV
= − şeklinde düzenlenip integre edilirse
20 20
5t V dVdt
V= −∫ ∫ ⇒ 5 1
4t
V= − ⇒ 5 1
4t
V= + ⇒ 5
14
Vt
=+
201 4
Vt
=+
denklemi elde edilir. Bu denklemde V yerine dsdt
yazarak
201 4
dsdt t
=+
elde edilen denklem 201 4
ds dtt
=+
şeklinde düzenlenip integre
edilirse 0 0
201 4
S t
ds dtt
=+∫ ∫ ⇒ 5 (1 4 )s Ln t= + konum-zaman bağıntısı elde edilir.
2t = de 11=s m , 2,22 /=V m s , 20.2= −a V , ( )20.2 2,22= −a
20,988 /= −a m s

90
10.5.6 kVa −= Bağıntısına uygun doğrusal hareket (geri tepmeyi azaltma)
Burada k pozitif reel sayı
dsVdVa = de a yerine kV− yazılıp
dsVdVkV =− elde edilen denklem
kdsdV −= şeklinde düzenlendikten sonra integre edilirse
∫∫ −=S
S
V
V
dskVd00
⇒ )( 00 sskVV −−=
hız-konum bağıntısı elde edilir. Elde edilen bağıntıda V yerine dtds yazılırsa
00 ksksVdtds
+−= bağıntısı elde edilir. Eğer hız-konum bağıntısında 00 =s
alınabilirse ksVdtds
−= 0 şekline gelen denklem dtksV
ds=
−0 şeklinde
düzenlenip integre edilirse
∫∫ =−
tS
dtksV
ds
00 0 ⇒ t
VksV
k=
−−
0
0ln1 ⇒ kteVksV −=− 00
)1(0 ktek
Vs −−= konum-zaman bağıntısı elde edilir.
10.5.7 ksa −= Bağıntısına uygun doğrusal hareket (serbest titreşim hareketi)
Burada k pozitif reel sayı
ksa −= denkleminde a yerine 2
2
dtsd yazılırsa
02
2=+ sk
dtsd ikinci mertebeden sabit katsayılı lineer diferansiyel denklemi
elde edilir. Bu denklemin çözüm fonksiyonu olarak tSinBtCosAs ω+ω=
önerilirse diferansiyel denklemi sağladığı görülür. Burada k=ω dır. A ve B
sabitleri ise başlangıç koşulları aşağıdaki denklemlerde yerine konarak bulunur.
tSinBtCosAs ω+ω= , tCosBtSinAV ωω+ωω−=
kullanılarak bulunur. Eğer 0=t daki s ve V biliniyorsa aşağıdaki denklemler yazılabilir.
tACoss ω=0 , tCosBV ωω=0 bunlardan 0sA = ve ω
= 0VB
Böylece tSinV
tCosss ωω
+ω= 00 Denklemi elde edilir.
tSinBtCosAs ω+ω= denklemi )( φ−ω= tCosCs şeklinde yazılabilir.

91
0.5 1 1.5 2 2.5 3
-10
-5
5
10
0.5 1 1.5 2 2.5 3
-10
-5
5
10
0.5 1 1.5 2 2.5 3
-10
-5
5
10
Burada 22 BAC += ABArc tan=φ dır. Eğer fonksiyonun s-t grafiği çizilirse
buradaki eğri tCos ω eğrisinden Cos )( φ−ωt fonksiyonunun argümanı olan
)( φ−ωt yi sıfır yapan ωφ
=t kadar geriden başlar .
tBSintACos ω+ω
tACos ω
tBSin ω
t
)( φ−ωtCosC
t
ωφ
=t
Yukarıdaki grafikler 10=A , 6=B , 66,116)10( 22 =+=C
.54,0106tan RadArc ==φ , 3=ω ve 18,0=
ωφ için çizilmiştir.
s
s φ tω
t t
ωφ

92
Problem 10.5.7.1 Bir maddesel nokta bir doğru 2
36a sπ= − ivme –konum
bağıntısı ile hareket ediyor. 0t = da konum 10s = ve hız 4 /V m s= olduğuna göre
2t = deki konumu hızı ve ivmeyi hesaplayınız. Çözüm:
2
36a sπ= − denkleminde a yerine
2
2d sdt
yazılırsa
2 2
2 036
d s sdt
π+ =
ikinci mertebeden sabit katsayılı diferansiyel denklem elde edilir. Bu denklemin genel çözümü
6 6s A Cos t B Sin tπ π= + şeklindedir. Buradan
6 6 6 6V A Sin t B Cos tπ π π π= − + Hız-zaman bağıntısı elde edilir.
0t = daki konum 10s = ve hız 4 /V m s= denklemlerde yerine konursa
10A = ve 24Bπ
= elde edilir. Bu bulunan değerler konum-zaman ve hız-
zaman denklemlerinde yerine konursa 2410
6 6s Cos t Sin tπ π
π= +
24106 6 6 6
V Sin t Cos tπ π π ππ
= − + , 5 43 6 6
V Sin t Cos tπ π π= − +
denklemleri elde edilir. Burada t yerine 2 yazılırsa 2t = deki konum ve hız değerleri elde edilir.
24103 3
s Cos Sinπ ππ
= + , 125 3sπ
= + , 11,62 .=s m
5 43 3 3
V Sin Cosπ π π= − + , 35 2
3 2V π= − + , 6,53 / .V m s=
10.5.8 Doğrusal harekette toplam yol Maddesel nokta bir doğru üzerinde hareket ederken yön değiştirebilir. Bundan dolayı toplam yolu bulurken yön değiştirdiği noktalar arasındaki yollar toplanmalıdır. Yön değiştirdiği noktalardaki zamanlar hızı sıfır yapan zaman değerleridir.Bu elde edilen zamanlar ve istenen zaman noktası arasındaki konum farklarının mutlak değerleri toplandığında toplam yol bulunur. Aşağıdaki şekilde gösterildiği gibi bir maddesel noktanın 4tt = zamanına kadar aldığı toplam yolu inceleyelim. Maddesel nokta 0=t da
0s konumundan harekete başlar. Hız denklemini sıfır yapan zaman değerleri 1t , 2t ve 3t ise maddesel nokta 0=t dan 1tt = e , 1tt = den

93
2tt = ye, 2tt = den 3tt = e kadar ve 3tt = den sonra aynı yönde hareket edeceğinden bu aralıklardaki konum farklarının mutlak değerleri toplanarak toplam yol bulunur.
12 ss −
01 ss − 23 ss − 34 ss −
1s 0s 0 3s 2s 4s
4tt = kadar alınan Toplam Yol = 01 ss − + 12 ss − + 23 ss − + 34 ss −
Burada zamanı gösteren alt indisleri birlikte s konumları maddesel noktanın
doğru üzerinde indisin belirttiği zamandaki konumunu göstermektedir.
Problem 10.5.8.1
Bir maddesel nokta bir doğru üzerinde 3 24 12 273
s t t t= − + konum –zaman
bağıntısına göre hareket ediyor. İlk 4 saniye içinde maddesel noktanın aldığı toplam yolu bulunuz. Çözüm: Maddesel noktanın 4. saniyeye kadar aynı yönde gittiği zaman dilimlerindeki konum farklarının mutlak değerleri toplanırsa toplam yol bulunur. Yön değiştirdiği zamanlar hızı sıfır yapan değerleridir.
24 24 27V t t= − + denklemini sıfır yapan zaman değerleri
2
1,224 ( 24) 4*4*27
2*4t
± − −= , 1,2
24 128
t ±=
1 1,5t = , 2 4,5t = olarak bulunur.
4 1,5 0 4 1,5. tTopYol s s s s= = − + −
0 0s = , 3 21,5
41,5 12*1,5 27*1,5 18 .3
s m= − + = , 3 24,5
4 4,5 12*4,5 27*4,5 1,33 .3
s m= − + =
4. 18 0 1,33 18tTopYol = = − + − , 4. 34,67 .= =tTopYol m

94
10.6 Maddesel noktanın çembersel hareketi Maddesel noktanın bir koordinat sistemine göre yörüngesi çember veya çember parçası şeklinde ise bu tür harekete çembersel hareket denir. y V Ta a P R θ θ s o x Hız ve ivme vektörlerinin doğal koordinat sistemindeki ifadeleri çembersel harekette açısal hız ve açısal ivme cinsinden yazılabilir.
dtdθ
=ω , dtdω
=α
s çember yayı uzunluğunu gösterdiğinden θ= Rs yazılabilir. Bu bağıntının her iki tarafının t ye göre 1. ve 2. türevleri alınırsa
ω= Rdtds , α= R
dtsd2
2
denklemleri elde edilir. Bu denklemler doğal koordinat sistemine ait
TdtdsV = , N
Rdtds
Tdt
sda
2
2
2 ⎟⎠⎞
⎜⎝⎛
+=
denklemlerinde yerine konursa TRV ω= , NRTRa 2ω+α= Çembersel harekete ait hız ve ivme vektörlerinin doğal koordinat sistemindeki ifadeleri elde edilir. Buradaki açısal hız ω ve açısal ivme α nın değerleri
dtdθ
=ω , dtdω
=α , 2
2
dtd θ
=α , θωω
=αdd
denklemlerinden elde edilir. Bu denklemler doğrusal harekete ait diferansiyel denklemlerle aynı formdadır. Bundan dolayı çözüm yöntemleri de aynıdır.

95
Problem 10.6.1 Bir maddesel nokta 12 .R cm= yarıçaplı çember üzerinde saat akrebinin tersi yönünde hareket ederken bir t anında açısal hızı 6 / .Rad sω = ve açısal ivmesi 22 /Rad sα = olduğuna göre bu an için hız ve ivme vektörlerini doğal koordinat sisteminde bulunuz. Çözüm: TRV ω= Şeklindeki çembersel hareketteki hız vektörünün doğal koordinat sistemindeki formülünde verilenler yerine konursa
12*6V T= , 72=V T hız vektörünün doğal koordinat sistemindeki ifadesi elde edilir. Aynı şekilde ivme vektörünün doğal koordinat sistemindeki formülü olan
NRTRa 2ω+α= denkleminde verilenler yerine konursa
212*2 12*6a T N= + , 24 432= +a T N ivme vektörünün doğal koordinat sistemindeki ifadesi bulunur. Problem 10.6.2 Basit bir sarkacın hareketi kα θ= − şeklinde veriliyor. 0t = da 0θ θ= ve 0ω ω= olduğuna göre açı θ , açısal hız ω ve açısal ivme α nın zamana bağlı ifadelerini bulunuz. Çözüm:
α yerine 2
2ddtθ yazılırsa
2
2 0d kdtθ θ+ =
ikinci mertebeden sabit katsayılı diferansiyel denklem elde edilir. Bu denklemin genel çözümü
ACos t B Sin tθ = Ω + Ω şeklindedir. Burada 2k = Ω dir. A ve B sabitleri ise başlangıç şartlarından bulunur.
ACos t B Sin tθ = Ω + Ω denkleminde θ yerine 0θ , t yerine sıfır yazılırsa
0 Aθ = bulunur. A Sin t B Cos tω = − Ω Ω + Ω Ω
denkleminde ω yerine 0ω , t yerine sıfır yazılırsa Bω = Ω elde edilir. Buradan
B ω=Ω
bulunur. Bu bulunan A ve B değerleri açı-zaman bağıntısında
yerine yazılırsa
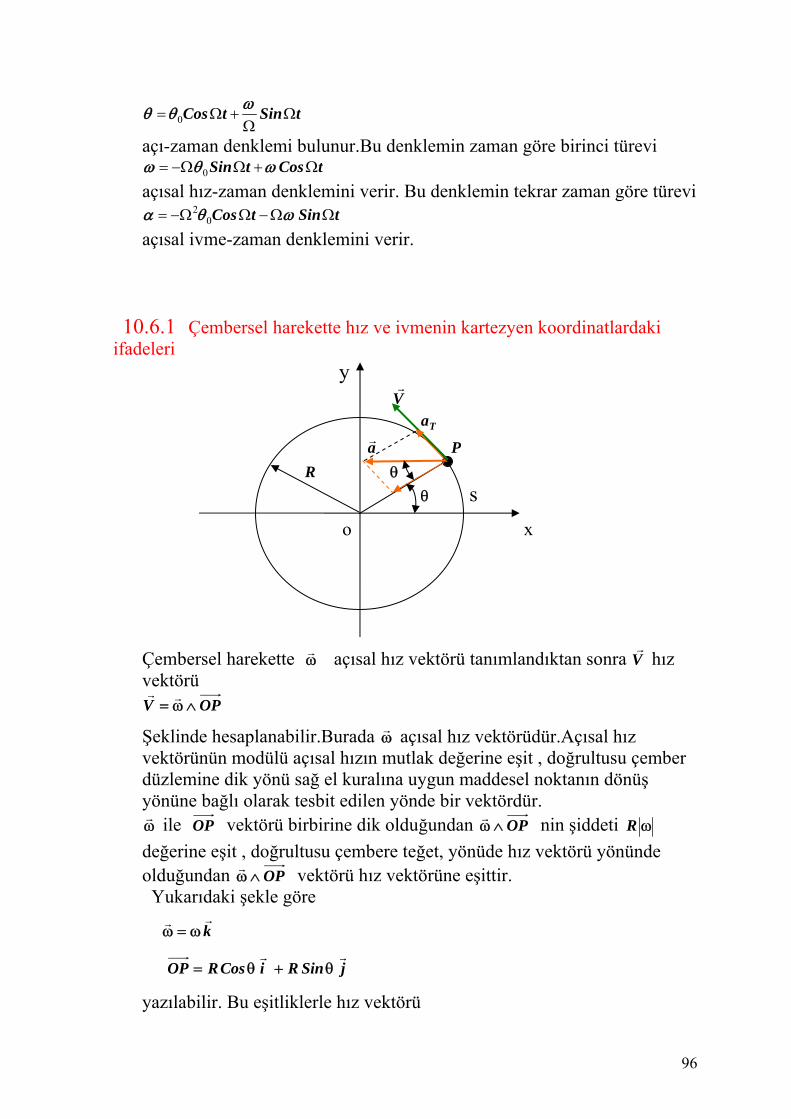
96
0Cos t Sin tωθ θ= Ω + ΩΩ
açı-zaman denklemi bulunur.Bu denklemin zaman göre birinci türevi 0Sin t Cos tω θ ω= −Ω Ω + Ω
açısal hız-zaman denklemini verir. Bu denklemin tekrar zaman göre türevi 2
0Cos t Sin tα θ ω= −Ω Ω −Ω Ω açısal ivme-zaman denklemini verir.
10.6.1 Çembersel harekette hız ve ivmenin kartezyen koordinatlardaki ifadeleri
y V Ta a P R θ θ s o x Çembersel harekette ω açısal hız vektörü tanımlandıktan sonra V hız vektörü
OPV ∧ω=
Şeklinde hesaplanabilir.Burada ω açısal hız vektörüdür.Açısal hız vektörünün modülü açısal hızın mutlak değerine eşit , doğrultusu çember düzlemine dik yönü sağ el kuralına uygun maddesel noktanın dönüş yönüne bağlı olarak tesbit edilen yönde bir vektördür. ω ile OP vektörü birbirine dik olduğundan OP∧ω nin şiddeti ωR değerine eşit , doğrultusu çembere teğet, yönüde hız vektörü yönünde olduğundan OP∧ω vektörü hız vektörüne eşittir. Yukarıdaki şekle göre
kω=ω
jSinRiCosROP θ+θ=
yazılabilir. Bu eşitliklerle hız vektörü

97
jCosRiSinRV θω+θω−= şeklinde kartezyen koordinat sisteminde yazılabilir. Bu hız vektörünün OPV ∧ω= şeklindeki denkleminin zamana göre türevi alınırsa ivme vektörü bulunur.
VOPa ∧ω+∧α= Burada α vektörü
dtdω
=α dir.
Yukarıdaki şekilde α yerine kα=α alınıp ivme vektöründe yerine yazılıp gerekli işlemler yapılırsa
VkOPka ∧ω+∧α= )()( jCosRiSinRkjSinRiCosRka θω+θω−∧ω+θ+θ∧α=
jSinRCosRiCosRSinRa )()( 22 θω−θα+θω+θα−= ivme vektörünün kartezyen koordinatlardaki ifadesi bulunur. Problem 10.6.1.1 Bir maddesel nokta 14 .R cm= yarıçaplı bir çember üzerinde 3
24tπθ =
bağıntısına uygun olarak hareket etmektedir. Çember şekilde gösterildiği gibi yz düzlemindedir. θ açısı da şekilde gösterildiği gibi alınıyor. 2t = için maddesel noktanın yer hız ve ivme vektörlerini kartezyen koordinatlarda hesaplayınız. y R A θ C zC O x yC z Burada 14 .R cm= 20 .yC cm= 18 .zC cm= 3
24tπθ = dır.
Çözüm: r OC CA= +
20 18OC j k= + , CA RCos j RSin kθ θ= +
2t = de 3πθ = , 7 7 3CA j k= + , 27 (18 7 3)r j k= + +

98
27 30,12= +r j k Hız vektörü kartezyen koordinatlarda V CAω= ∧ formülü ile hesaplanabilir.Burada d i
dtθω = ( Çünkü x ekseni çember
düzlemine diktir ve maddesel nokta çember etrafında y den z ye doğru dönüyor.) 2
8=
d tdtθ π
2t = için 2
=ddtθ π değeri V CAω= ∧ denkleminde yerine yazılırsa
(7 7 3)2
= ∧ +V i j kπ , 7 732 2
= − +V j kπ π , 19 11= − +V j k
2t = deki hız ifadesi hesaplanmış olur. İvme vektörü kartezyen koordinatlarda a CA Vα ω= ∧ + ∧
formülü ile hesaplanabilir.Burada 2
2d idtθα = ( Çünkü açısal ivme vektörü
doğrultu değiştirmiyor.)
2
2 4=
d tdtθ π
2t = için 2
2 2=
ddtθ π değeri ve diğer elde edilenlerle birlikte
a CA Vα ω= ∧ + ∧ denklemine gidilirse 7 7(7 7 3 ) ( 3 )
2 2 2 2= ∧ + + ∧ − +a i j k i j kπ π π π
(7 7 3) (7 7 3 )2 4
= − + + −a j kπ ππ π
53,6 24,4= − −a j k

99
10.7 Maddesel noktanın bağıl hareketi (öteleme hareketi yapan eksen sistemine göre ) İki maddesel noktanın birbirine göre bağıl yer hız ve ivme vektörleri aşağıdaki şekilden elde edilebilir. Bu maddesel noktalardan birisi öteleme hareketi yapan eksen sisteminin orijini alınırsa aşağıdaki şekil çizilebilir. y yP1 2P
12 / PPr
1P xP1 zP1 1Pr
2Pr
o x z Yukarıdaki şekilden yer vektörleri arasında
2121 / PPPP rrr =+ bağıntısı yazılabilir. Buradan P2 noktasının P1 noktasına veya öteleme hareketi yapan eksen sistemine göre
12 / PPr bağıl yer vektörü çekilip zamana göre birinci ve ikinci türevi alınırsa bağıl hız ve bağıl ivme vektörleri elde edilir.
1212 / PPPP rrr −=
1212 / PPPP VVV −=
1212 / PPPP aaa −=
Problem 10.7.1 Şekilde gösterildiği gibi 1P maddesel noktası d1 doğrusu üzerinde
10 812
s Sin tπ= + konum-zaman bağıntısına göre 2P maddesel noktası ise xy
düzleminde bulunan 12 .R cm= yarıçaplı bir çember üzerinde 3
24tπθ = açı-zaman
bağıntısına göre hareket etmektedir. 2t = için 2P maddesel noktasının 1P maddesel noktasına göre bağıl yer , hız , ivme vektörlerini ve aralarındaki uzaklığı bulunuz.

100
y 20cm.
10cm. 2P d1 θ
1P C
s 15cm.
O x A
z
Çözüm:
1212 / PPPP rrr −=
2 2 2Pr OP OC CP= = + , 20 15OC i j= +
2
(20 12 ) (15 12 )Pr Cos i Sin jθ θ= + + +
1 1Pr OA AP= + , 1
10Pr s j k= +
2 1/ (20 12 ) (15 12 ) 10P Pr Cos i Sin s j kθ θ= + + + − −
2t = de 32 .24 3
Radπ πθ = = , 10 8 2 14 .12
s Sin cmπ= + =
2 1/ (20 12 ) (15 12 14) 10
3 3P Pr Cos i Sin j kπ π= + + + − −
2 1/ (20 6) (15 6 3 14) 10P Pr i j k= + + + − −
2 1/ 26 (1 6 3) 10P Pr i j k= + + − ,
2 1/ 26 11,39 10= + −P Pr i j k
2 1/ 12 (12 )P PV Sin i Cos V jω θ ω θ= − + −
2
8tπω = , 2
3 12V Cos tπ π=
2t = de / .2
Rad sπω = , 3 / .3
V cm sπ=
2 1/
312 (12 )2 3 2 3 3P PV Sin i Cos jπ π π π π= − + −
2 1/
3 1 312 (12 )2 2 2 2 3P PV i jπ π π= − + − ,
2 1/33 3 (3 )
3P PV i jπ π= − + −
2 1/ 16,32 7,61= − +P PV i j
2 1
2 2/ (12 12 ) (12 12 )P Pa Sin Cos i Cos Sin a jα θ ω θ α θ ω θ= − + + − −

101
4
tπα = , 2
18 12V Sin tπ π= −
2t = de 2/2
Rad sπα = , 2
2/36
a cm sπ= −
2 1
2 2 2
/ (12 12 ) (12 12 )2 3 4 3 2 3 4 3 36P Pa Sin Cos i Cos Sin jπ π π π π π π π π
= − + + − +
2 1
2 2 2
/3 1 1 3(12 12 ) (12 12 )
2 2 4 2 2 2 4 2 36P Pa i jπ π π π π= − + + − +
2 1
22 2
/3 3(3 3 ) (3 3 )2 2 36P Pa i jππ π π π= − + + − +
2 1/
3 3(3 3 ) (3 3 )2 2 36P Pa i jππ π π π= − + + − + ,
2 1/ 31,13 14,57= − + −P Pa i j
Problem 10.7.2 Şekilde gösterildiği gibi 1P maddesel noktası xy düzleminde bulunan ve
merkezi x ekseni üzerinde 8 .R cm= yarıçaplı bir çember üzerinde 6
tπθ =
bağıntısına göre hareket etmektedir. 2P maddesel noktası ise 1 2 5P P L R= = sabit olmak üzere Z ekseni üzerinde hareket ediyor. 1t = için 2P maddesel noktasının hız ve ivmesini bulunuz. z 2P 5L R= y z P1 R θ 3R C x Çözüm:
2Pr z k= , 2PV z k= ,
2Pa z k= , 2 1/ 5P Pr L R= =
1212 / PPPP rrr −=
1
(3 )Pr R RCos i RSin jθ θ= + +
2 1/ (3 )P Pr R RCos i RSin j z kθ θ= − + − +

102
2 1
22 2 2 2 2 2 2 2 225 9 6P PL r R R R Cos R Cos R Sin zθ θ θ−= = = + + + +
2 2 215 6z R R Cosθ= − ⇒ 15 6z R Cosθ= − , 1/ 2(15 6 )z R Cosθ= −
1/ 21 (15 6 ) ( 6 )2
z R Cos Sinθ θ θ−= − − −
1/ 23 (15 6 )z R Sin Cosθ θ θ −= − , 315 6
R SinzCos
θ θθ
=−
1/ 2 2 1/ 2 3 / 233 (15 6 ) 3 (15 6 ) 3 ( )(15 6 ) (6 )2
z R Sin Cos R Cos Cos R Sin Cos Sinθ θ θ θ θ θ θ θ θ θ θ− − −= − + − + − −
2 2 23 ( ) 2715 6 (15 6 ) 15 6
R Sin Cos R SinzCos Cos Cos
θ θ θ θ θ θθ θ θ
+= −
− − −
6
tπθ = , 6πθ = , 0θ =
1t = de .6
Radπθ =
36 6
15 66
R Sinz
Cos
π π
π=
−
2
15 3 3z π=
− 2 / .z cm s=
22=PV k
2 223 ( ) 27
36 6 36 6
15 6 (15 6 ) 15 66 6 6
R Cos R Sinz
Cos Cos Cos
π π π π
π π π= −
− − −
2 23 3
3 15 3 3 2(15 3 3) 15 3 3z π π= −
− − −
21,34 /z cm s= 2
1,34=Pa k

103
10.8 Maddesel noktaların bağlı hareketi Bir maddesel noktanın hareketi diğer maddesel noktaların hareketine bağlı olarak veriliyorsa bu tür harekete bağlı hareket denir. Bir maddesel noktalar sistemi düşünüldüğünde bu sistemin konumunu belirten değişkenlere genelleştirilmiş koordinatlar denir. Genelleştirilmiş koordinatların birbirinden bağımsız sayısına sistemin serbestlik derecesi denir. Bir maddesel noktalar sistemindeki her bir bağıntı serbestlik derecesini bir azaltır. Aşağıdaki bir makara sistemindeki maddesel nokta kabul edilen kütleler düşey doğrultuda hareket ediyorlar.Sistemin konumu 3 tane değişkenle gösterilebilir. Bu makaralardan dolandırılan ve cisimleri birbirine bağlı olarak hareket etmesini sağlayan ipin boyunun değişmediği kabul edilirse
ek olarak bir bağıntı gelir. Böylece sistemin serbestlik derecesi 2 olur.
As Cs
Bs
C
A
B
İpin toplam uzunluğunun değişmediği kabul edilirse 2 2A B Cs s s+ + = sabit yazılabilir. Bu eşitliğin her iki tarafının zamana göre türevleri alınırsa 2 2 0A B CV V V+ + = hızlar arasındaki bağıntı bulunur. Tekrar türev alınırsa 2 2 0A B Ca a a+ + = ivmeler arasındaki bağıntı bulunur. Bu problemden ayrı olarak maddesel noktalar sisteminde maddesel noktalar arasındaki uzaklıklar değişmiyorsa bu sistem rijid cisim modelini oluşturur. Bu modelde serbestlik derecesi 6 dır.
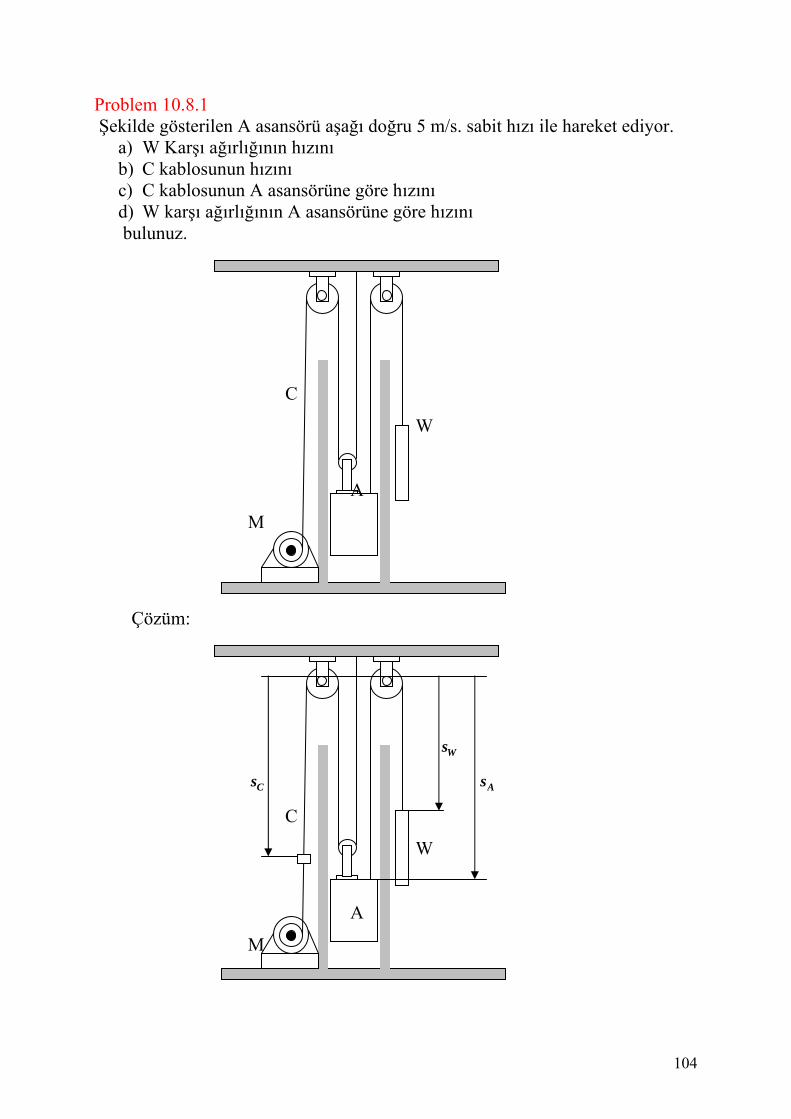
104
Problem 10.8.1 Şekilde gösterilen A asansörü aşağı doğru 5 m/s. sabit hızı ile hareket ediyor.
a) W Karşı ağırlığının hızını b) C kablosunun hızını c) C kablosunun A asansörüne göre hızını d) W karşı ağırlığının A asansörüne göre hızını bulunuz.
C
W
A
M
Çözüm:
Ws
Cs As
C
W
A
M

105
a) A Ws s sabit+ =
0A WV V+ =
W AV V= −
5 / .WV m s= −
b) 2C As s sabit+ =
2 0C AV V+ =
10 /CV m s= −
c) /C A C AV V V= −
/ 15 /C AV m s= −
d) /W A W AV V V= −
/ 5 5W AV = − −
/ 10 /W AV m s= −
Problem 10.8.2
Şekilde gösterilen B bloğu sağa doğru 450 / .BV mm s= sabit hızı ile hareket ediyor.
a) A bloğunun hızını b) Kablonun D kısmının hızını c) A nın B ye göre hızını d) Kablonun C kısmının hızını D kısmına göre bulunuz. C
A D B 450 /B sV mm= E

106
Çözüm:
0 → (+) AS BS
C D 450 /B sV mm= A E B
a)
3 2B As s sabit− =
3 2 0B AV V− =
32A BV V=
3 4502AV =
675 /AV mm s=
b)
2 B Ds s sabit− =
2 0B DV V− =
2D BV V=
2* 450DV =
900 / .DV mm s=
c)
/A B A BV V V= −
/ 675 450A BV = −
/ 225 / .A BV mm s=
d)
/C D C DV V V= −
450 / .C BV V mm s= =
/ 450 900C DV = −
/ 450 / .C DV mm s= −

107
BÖLÜM 11
RİJİD CİSMİN KİNEMATİĞİ 11.1 Rijid cismin hareketinde izdüşüm hızlar teoremi Rijid cismin hareketinde aynı doğru üzerinde bulunan noktaların hızlarının bu doğru üzerindeki izdüşümleri birbirine eşittir. Bu teoremin ispatı aşağıdaki şekilde yapılabilir. y ΔV AV Δ B A ΔV BV Br Ar
o x z Rijid cisim üzerindeki herhangi iki nokta arasındaki uzaklık değişmediğinden
AB = sabit
yazılabilir. Bir vektörün modülü vektörü kendisiyle skaler çarpıp karekökünü alarak da bulunur. Bir vektör sabit ise modülünün karesi de sabittir.

108
AB AB• = sabit Her iki tarfın zamana göre türevi alınırsa
0d AB ABdt
• =
elde edilir. Burada d ABdt
yerine AB VV − yazılırsa
( ) 0B AV V AB− • =
A BV AB V AB• = • bağıntısı bulunur. Bu bağıntının her iki tarfı AB vektörünün modülüne bölünürse
ABBABA UVUV •=•
izdüşüm hızlar teoremi ispatlanmış olur.
Problem 11.1.1: Bir rijid cismin koordinatları (1,1,0) olan A noktasının hız vektörü
3 7 8AV i j k= + − ve koordinatları (3,4,6) olan B noktasının hız vektörünün doğrultusunun x eksenine paralel olduğu bilindiğine göre şiddetini bulunuz. (Burada uzunluklar metre zaman saniye cinsindendir.) Çözüm: İzdüşüm hızlar teoreminden A BV AB V AB• = • yazılabilir. AB OB OA= − 2 3 6AB i j k= + + B BV V i= 3* 2 7 *3 8* 6AV AB• = + − 21 /AV AB m s• = − 2 * 21 /B BV AB V m s• = = −
21 /2BV m s= −
10,5 / .BV m s= −

109
Problem 11.1.2: Şekilde gösterilen AB cisminin A ucu y ekseni üzerinde AV hız şiddeti ile aşağı doğru hareket ederken B ucu x ekseni üzerinde hareket ediyor. B ucunun hızının şiddetini A ucunun hızının şiddetine ve θ açısına bağlı olarak bulunuz. y AV Sinθ A θ AV θ B BV x θ BV Cosθ Çözüm: İzdüşüm hızlar teoremine göre A noktasının hızının AB doğrultusu üzerindeki izdüşümü B noktasının hızının AB doğrultusu üzerindeki izdüşümüne eşittir.
A BV Sin V Cosθ θ= ⇒ B AV V tgθ=
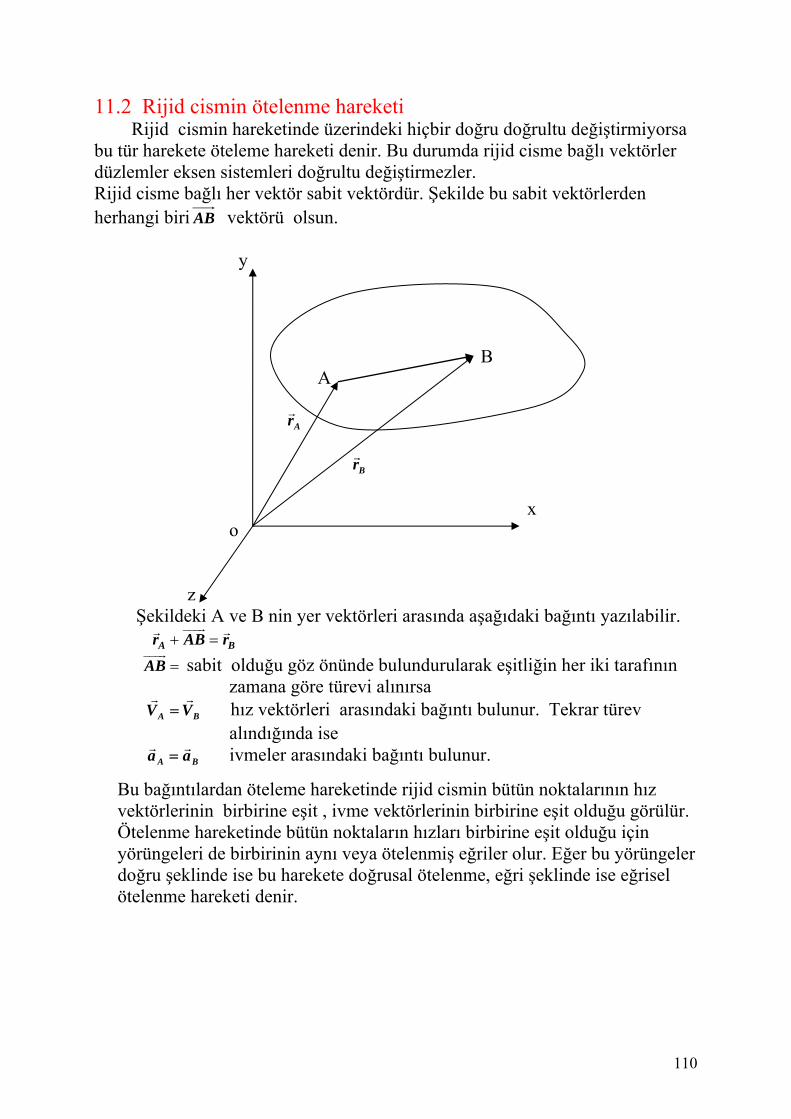
110
11.2 Rijid cismin ötelenme hareketi Rijid cismin hareketinde üzerindeki hiçbir doğru doğrultu değiştirmiyorsa bu tür harekete öteleme hareketi denir. Bu durumda rijid cisme bağlı vektörler düzlemler eksen sistemleri doğrultu değiştirmezler. Rijid cisme bağlı her vektör sabit vektördür. Şekilde bu sabit vektörlerden herhangi biri AB vektörü olsun. y
B A Ar Br x o z Şekildeki A ve B nin yer vektörleri arasında aşağıdaki bağıntı yazılabilir. A Br AB r+ = AB = sabit olduğu göz önünde bulundurularak eşitliğin her iki tarafının zamana göre türevi alınırsa BA VV = hız vektörleri arasındaki bağıntı bulunur. Tekrar türev alındığında ise BA aa = ivmeler arasındaki bağıntı bulunur.
Bu bağıntılardan öteleme hareketinde rijid cismin bütün noktalarının hız vektörlerinin birbirine eşit , ivme vektörlerinin birbirine eşit olduğu görülür. Ötelenme hareketinde bütün noktaların hızları birbirine eşit olduğu için yörüngeleri de birbirinin aynı veya ötelenmiş eğriler olur. Eğer bu yörüngeler doğru şeklinde ise bu harekete doğrusal ötelenme, eğri şeklinde ise eğrisel ötelenme hareketi denir.
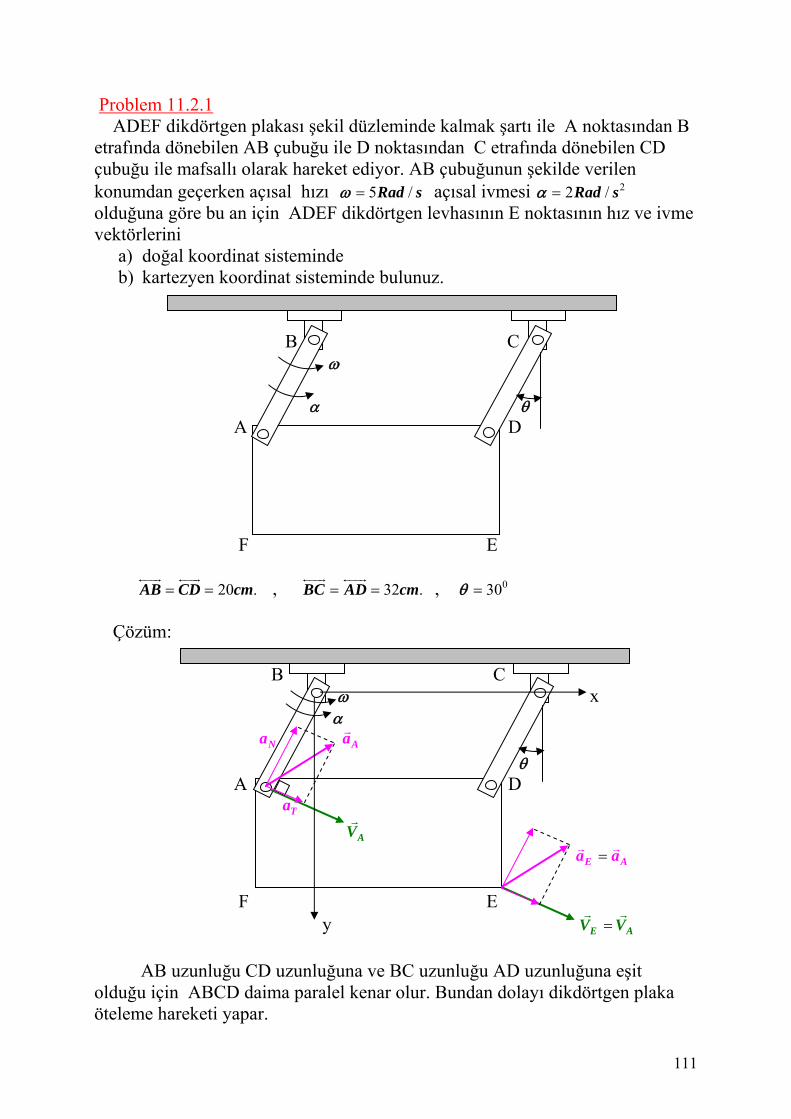
111
Problem 11.2.1 ADEF dikdörtgen plakası şekil düzleminde kalmak şartı ile A noktasından B etrafında dönebilen AB çubuğu ile D noktasından C etrafında dönebilen CD çubuğu ile mafsallı olarak hareket ediyor. AB çubuğunun şekilde verilen konumdan geçerken açısal hızı 5 /Rad sω = açısal ivmesi 22 /Rad sα = olduğuna göre bu an için ADEF dikdörtgen levhasının E noktasının hız ve ivme vektörlerini
a) doğal koordinat sisteminde b) kartezyen koordinat sisteminde bulunuz.
B C ω α θ A D
F E 20 .AB CD cm= = , 32 .BC AD cm= = , 030θ = Çözüm: B C ω x α Na Aa θ A D Ta AV E Aa a= F E y E AV V= AB uzunluğu CD uzunluğuna ve BC uzunluğu AD uzunluğuna eşit olduğu için ABCD daima paralel kenar olur. Bundan dolayı dikdörtgen plaka öteleme hareketi yapar.

112
Öteleme hareketi yapan cisimlerin bütün noktalarının hızları ve ivmeleri birbirinin aynı olduğundan E noktasının hızı ve ivmesi A noktasının hızı ve ivmesine eşit olur. a) Doğal koordinat sisteminde hız ve ivme vektörleri AV AB Tω= ⋅ , 20 5AV T= ∗ , 100AV T= 2
Aa AB T AB Nα ω= ⋅ + ⋅ , 220 2 20 5Aa T N= ∗ + ∗ , 40 500Aa T N= + 100E AV V T= =
40 500E Aa a T N= = + b) Kartezyen koordinat sisteminde hız ve ivme vektörleri AV BAω= ∧ 5kω = − BA BA Sin i BA Cos jθ θ= − ∗ + ∗ , 0 020 30 20 30BA Sin i Cos j= − ∗ + ∗ 10 10 3BA i j= − + 5 ( 10 10 3 )AV k i j= − ∧ − + , 50 3 50AV i j= − A Aa BA Vα ω= ∧ + ∧ , 2 ( 10 10 3 ) 5 (50 3 50 )Aa k i j k i j= − ∧ − + − ∧ − (20 3 250) (20 250 3)Aa i j= + + −
50 3 50E AV V i j= = −
(20 3 250) (20 250 3)E Aa a i j= = + + −

113
11.3 Rijid cismin sabit bir eksen etrafında dönme hareketi Rijid cismin üzerindeki noktaların sabit bir eksene ve bu eksen üzerindeki bir noktaya uzaklıkları hareket boyunca değişmiyorsa rijid cismin bu hareketine sabit bir eksen etrafında dönme hareketi denir. Δ
B DV C r D θ ω A
ω α Yukarıdaki şekilde bir rijid cisim A ve B noktalarından geçen Δ ekseni etrafında ω açısal hızı ve α açısal ivmesi ile dönüyor. Cismin üzerindeki bütün noktaların yörüngeleri Δ eksenine dik düzlemlerdeki çemberlerdir. Burada D noktası C merkezli r yarıçaplı Δ eksenine dik düzlemde bir çember çizer. Çembersel harekette bir noktanın hız vektörünün doğrultusu çembere teğet ,yönü hareket yönünde , şiddeti ise açısal hız ile yarıçapın çarpımına eşittir.
TrV ω= İvme vektörü ise
NrTra 2ω+α= şeklindedir. Sabit bir eksen etrafında dönme hareketinde V hız vektörünün
DV ADω= ∧ şeklinde yazılabileceği aşağıda gibi gösterilebilir. Burada ω açısal hız vektörüdür. Açısal hız vektörü aşısal hız şiddetinde dönme ekseni doğrultusunda ve sağ el kuralı ile cismin dönme yönünü belirten yönde bir vektördür.
DV AD AD Sinω ω θ= ∧ =
Burad AD Sin rθ = olduğundan ω= rV hızın şiddetini veren denklemi sağlanmış olur.

114
Vektörel çarpımın doğrultusu çarpımdaki her iki vektöre de dik olacağından ω açısal hız vektörü ile AD vektörüne dik doğrultu teğet doğrultusunda olur. Yönü ise sağ el kuralı ile bulunur. Bu elde edilen doğrultu ve yön hız vektörünün doğrultu ve yönü ile aynı olur. Böylece sabit bir eksen etrafında dönme hareketindeki hız vektörünün hesabında DV ADω= ∧ ifadesi kullanılabilr. Bu eşitliğin her iki tarafının zamana göre türevi alınırsa ivme vektörü formülü elde edilir. D Da AD Vα ω= ∧ + ∧
Burada dtdω
=α dır.
Problem 11.3.1
Dikdörtgenler prizması şeklindeki cisim bir t anında açısal hızı pozitif yönde 7 /Rad sω = ve açısal ivmesi 22 /Rad sα = dir. Ayrıca aynı anda kenarları
koordinat eksenlerine çakışacak konumdan geçmektedir. B noktasının hız ve ivme vektörlerini cisim a) x ekseni etrafında dönerken b) y ekseni etrafında dönerken c) z ekseni etrafında dönerken d) OA ekseni etrafında dönerken hesaplayınız.
y C B 20cm. D A
30cm. O H x E 60cm. F
Z
Çözüm:
a) cisim x ekseni etrafında pozitif yönde ( y den z ye doğru) dönüyor.
BV HB Tω= ∗ , 30 7BV T= ∗ , 210BV T=
BV HBω= ∧ , 7 iω = , 30HB j= , 7 30BV i j= ∧
210BV k=
2Ba HB T HB Nα ω= ∗ + ∗ , 230 2 30 7Ba T N= ∗ + ∗
60 1470Ba T N= +

115
B Ba HB Vα ω= ∧ + ∧ , 2 30 7 210Ba i j i k= ∧ + ∧
1470 60Ba j k= − +
b) cisim y ekseni etrafında pozitif yönde (z den x e doğru) dönüyor.
BV CB Tω= ∗ , 60 7BV T= ∗ , 420BV T=
260 2 60 7Ba T N= ∗ + ∗ , 120 2940Ba T N= +
BV CBω= ∧ , 7 jω = , 7 60BV j i= ∧
420BV k= −
B Ba CB Vα ω= ∧ + ∧ , 2 60 7 420Ba j i j k= ∧ + ∧ −
2940 120Ba i k= − −
c) Cisim z ekseni etrafında pozitif yönde (x den y ye doğru) dönüyor.
BV OB Tω= ∗ , 2 230 60OB = + , 2 230 60OB = + , 10 45OB =
70 45BV T= , 469,57BV T=
210 45 2 10 45 7Ba T N= ∗ + ∗ , 20 45 490 45Ba T N= +
134,16 3287,02Ba T N= + , 23289,8 /Ba cm s=
BV OBω= ∧ , 7 kω = , 60 30OB i j= +
7 (60 30 )BV k i j= ∧ +
210 420BV i j= − +
B Ba OB Vα ω= ∧ + ∧ , 2 (60 30 ) 7 ( 210 420 )Ba k i j k i j= ∧ + + ∧ − +
120 60 1470 2940Ba j i j i= − − −
3000 1350Ba i j= − −
d) Cisim OA ekseni etrafında pozitif yönde (O dan bakıldığında saat
ibrelerinin tersi yönünde) dönüyor.
BV ABω= ∧

116
OAUω ω= , ( ) ( ) ( )2 2 2
60 30 20
60 30 20OA
i j kOAUOA
+ += =
+ +
6 3 27 7 7OAU i j k= + + , 6 3 2i j kω = + + , 20AB k= −
(6 3 2 ) 20BV i j k k= + + ∧ −
60 120BV i j= − +
B Ba AB Vα ω= ∧ + ∧ , OAUα α= , 12 6 47 7 7
i j kα = + +
12 6 4( ) 20 6 3 27 7 7
60 120 0B
i j ka i j k k= + + ∧ − +
−
120 240( 240) ( 120) 9007 7Ba i j k= − − + − +
257,14 85,71 900Ba i j k= − − +
Problem 11.3.2
Bir rijid cisim A(5,6,2) ve B(7,3,8) noktalarından geçen ve A dan B ye doğru yönelmiş Δ ekseni etrafında pozitif yönde dönüyor. Cismin bir t anındaki açısal hızı 14 /Rad sω = ve açısal ivmesi 27 /Rad sα = dir. Bu anda C noktası (10,8,6) koordinatlarından geçtiğine göre C noktasının a) bu andaki hız ve ivme vektörlerini b) dönme eksenine olan uzaklığını bulunuz.
Çözüm: CV ACω= ∧ , C Ca AC Vα ω= ∧ + ∧
Uω ω Δ= , Uα α Δ= , ABUAB
Δ = , 2 2 2
(7 5) (3 6) (8 2)
(7 5) (3 6) (8 2)
i j kUΔ− + − + −
=− + − + −
2 3 67 7 7
U i j kΔ = − + , 4 6 12i j kω = − + , 2 3 6i j kα = − +
(10 5) (8 6) (6 2)AC i j k= − + − + − , 5 2 4AC i j k= + +

117
a)
4 6 125 2 4
C
i j kV ACω= ∧ = −
( 6 4 12 2) (12 5 4 4) (4 2 6 5)CV i j k= − ∗ − ∗ + ∗ − ∗ + ∗ + ∗ 48 44 38= − + +CV i j k
b) C Ca AC Vα ω= ∧ + ∧ , 2 3 6 4 6 125 2 4 48 44 38
C
i j k i j ka = − + −
−
( 3 4 6 2 6 38 12 44) (6 5 2 4 48 12 4 38)
(2 2 3 5 4 44 6 48)Ca i j
k
= − ∗ − ∗ − ∗ − ∗ + ∗ − ∗ − ∗ − ∗ +
+ ∗ + ∗ + ∗ − ∗
780 706 93= − − −Ca i j k
c)
C CV R ω= ⇒ CC
VR
ω=
48 44 38CV i j k= − + + , 75,39 /CV cm s=
75,3914CR =
5,39=CR cm

118
11.4 Rijid cismin genel düzlemsel hareketi Rijid cisim üzerindeki bütün noktaların yörüngeleri düzlemsel eğriler ise rijid cismin bu tür hareketine genel düzlemsel hareket denir. Düzlemsel eğriler çizen bu noktalar aynı düzlemde veya birbirine paralel düzlemlerde bulunur.Genel düzlemsel hareket için yapılan bu tanımdan sabit bir eksen etrafındaki hareketin de bir düzlemsel hareket olduğu anlaşılır. Bu paralel düzlemlerden birinde elde edilen hız ve ivmeler bu düzleme çıkılan dik doğru üzerindeki her noktada aynıdır.yörüngeler ise aynı yörüngenin bu noktaya ötelenmiş halidir. Bundan dolayı genel düzlemsel hareket yapan bir rijid cisim üzerindeki yörüngelere paralel düzlemlerden birini ana levha olarak adlandırıp bunun üzerinde inceleme yapmak yeterli olur.
y
ABr / B A Ar Br x o z
Şekildeki oAB vektör üçgeninden A ve B nin yer vektörleri arasında aşağıdaki bağıntı yazılabilir. /B A B Ar r r= + Bu yer vektörleri arasındaki bağıntının zaman göre türevinden hız vektörleri arasındaki bağıntı elde edilir. /B A B AV V V= + Bu eşitliğin zamana göre türevi alınırsa ivmeler arasındaki bağıntı elde edilir. /B A B Aa a a= + Buradaki denklemlerin sol tarafındaki ikinci terimler B nin A daki ötelenme hareketi yapan eksen sistemine göre hareketini göstermektedir. Burada B ile A arasındaki uzaklık değişmediğinden ve B düzlemsel bir yörüngeye sahip olduğundan B nin A daki eksen sistemine göre yörüngesi çember olur.

119
Çembersel harekette sabit eksen etrafında dönme hareketine ait aşağıdaki denklemler yazılabilir. /B AV ABω= ∧ / /B A B Aa AB Vα ω= ∧ + ∧
Problem 11.4.1
Şekilde gösterilen sistemde OA kolu O silindirik mafsalı etrafında AB kolu ise A silindirik mafsalı etrafında dönme hareketi yapmaktadır. Sistem bir t anında verilen konumdan geçerken OA kolunun açısal hızı 8 /OA Rad sω = ,açısal ivmesi 23 /OA Rad sα = AB kolunun açısal hızı ise 6 /AB Rad sω = ,açısal ivmesi
22 /AB Rad sα = olduğuna göre bu an için B noktasının hız ve ivme vektörlerini bulunuz. y B ABω
A ϕ
OAω
O θ x
26 .OA cm= 20 .AB cm=
Sistem verilen konumdan geçerken bilinen değerler 060θ = , 045ϕ = , 8 /OA Rad sω = 23 /OA Rad sα = , 6 /AB Rad sω = , 22 /AB Rad sα =
Çözüm:
/B A B AV V V= + , A OAV OAω= ∧ , /B A ABV ABω= ∧ 8OA kω = , 3OA kα = , 6AB kω = , 2AB kα = ( )OA OA Cos i Sin jθ θ= + , 13 13 3OA i j= + ( )AB AB Cos i Sin jϕ ϕ= + , 10 2 10 2AB i j= + 8 (13 13 3 )AV k i j= ∧ + , 104 3 104AV i j= − +

120
/ 6 (10 2 10 2 )B AV k i j= ∧ + , / 60 2 60 2B AV i j= − +
(104 3 60 2) (104 60 2)BV i j= − + + + , 265 188,9= − +BV i j
/B A B Aa a a= + , A OA OA Aa OA Vα ω= ∧ + ∧ , / /B A AB AB B Aa AB Vα ω= ∧ + ∧
3 (13 13 3 ) 8 ( 104 3 104 )Aa k i j k i j= ∧ + + ∧ − +
(39 3 832) (39 832 3)Aa i j= − + + −
/ 2 (10 2 10 2 ) 6 ( 60 2 60 2 )B Aa k i j k i j= ∧ + + ∧ − +
/ (20 2 360 2 ) (20 2 360 2 )B Aa i j= − + + − , / 380 2 340 2B Aa i j= − −
(39 3 380 2 832) (39 832 3 340 2)Ba i j= − + + + − −
1436,95 1882,9= − −Ba i j
Problem 11.4.2
Aşağıdaki şekilde kaymadan yuvarlanma hareketi yapan bir disk gösterilmektedir. Diskin çevresindeki A , B , C , D ve I noktalarının hız ve ivme vektörlerini bulunuz. C 2C GV V=
y /D GV DV B GV
θ /B G B GV V V= + D GV G GV A GV
I /A GV AV x
/I GV 0IV = GV
Çözüm:
Yukarıdaki şekilde gösterildiği gibi bütün noktaların hız vektörünü kütle merkezinin hız vektörü ile bu noktaların kütle merkezine göre hız vektörlerinin toplamından elde edilir. İvme vektörleri de aynı şekilde kütle merkezinin ivmesi ile bu noktaların kütle merkezine göre ivmelerinin toplamından elde edilir. A noktasının hız ve ivme vektörü: /A G A GV V V= + GV R iω= , /A GV R jω= − AV R i R jω ω= −

121
/A G A Ga a a= + , Ga R iα= 2
/A Ga R T R Nα ω= + , 2/A Ga R i R jω α= − −
2( )Aa R i R jα ω α= − − B noktasının hız ve ivme vektörü: /B G B GV V V= + GV R iω= , / ( )B GV k RCos i RSin jω θ θ= − ∧ + /B GV R Sin i R Cos jω θ ω θ= − (1 )BV R Sin i R Cos jω θ ω θ= + − /B G B Ga a a= + / ( ) ( )B Ga k RCos i RSin j k R Sin i R Cos jα θ θ ω ω θ ω θ= − ∧ + − ∧ − 2 2
/ ( ) ( )B Ga R Sin R Cos i R Cos R Sin jα θ ω θ α θ ω θ= − − + 2 2( ) ( )Ba R R Sin R Cos i R Cos R Sin jα α θ ω θ α θ ω θ= + − − + C noktasının hız ve ivme vektörü: /C G C GV V V= + , GV R iω= , /C GV R iω= 2CV R iω= /C G C Ga a a= + Ga R iα= 2
/C Ga R T R Nα ω= + 2
/C Ga R i R jα ω= − 22Ca R i R jα ω= − D noktasının hız ve ivme vektörü: /D G D GV V V= + , GV R iω= , /D GV R jω= DV R i R jω ω= + /D G D Ga a a= + , Ga R iα= 2
/D Ga R T R Nα ω= + , 2/D Ga R i R jω α= +
2( )Da R i R jα ω α= + + I noktasının hız ve ivme vektörü: /I G I GV V V= + GV R iω= , /I GV R iω= − 0IV = /I G I Ga a a= + , Ga R iα= 2
/I Ga R T R Nα ω= + , 2/I Ga R i R jα ω= − +
2Ia R jω=

122
11.5 Genel düzlemsel harekette ani dönme merkezi Genle düzlemsel hareketteki BABA VVV =+ / eşitliği göz önüne alınırsa Herhangi bir noktanın hız vektörü hız vektörü bilinen bir noktanın hız vektörüne bu noktayı baz alarak elde edilen bağıl hız vektörü eklenerek bulunur. Bu söylenen bağıntıdan genel düzlemsel harekette hızı sıfır olan
Bir noktayı bulmak mümkün olur. Hızın sıfır olan nokta bulunduktan sonra diğer noktaların bu nokta etrafında çembersel hareket yaptığı düşünülerek hızları hesaplanır. CV C AV AV
ω I A AIV / Şekilde görüldüğü gibi A noktasının hızına çıkılan dikme üzerinde hızı sıfır olan noktayı bulmak mümkündür. Eğer AAI VV =/ olacak şekilde bir I noktası bulunursa bu noktanın hızı sıfır olur. Hızı sıfır olan noktayı bulduktan sonra başka bir C noktasının hızının doğrultusu IC doğrusuna dik çıkarak, yönü ω nın gösterdiği yönde , şiddeti ise IC doğrusunun uzunluğu ile ω açısal hız vektörünün çarpımından şekildeki gibi kolaylıkla bulunur. CV IC ω= ⋅ Problem 11.5.1: Şekilde gösterilen L uzunluğundaki AB cisminin A ucu y ekseni üzerinde AV hızı ile aşağı doğru hareket ederken B ucu x ekseni üzerinde hareket ediyor. B ucunun hızını ve C merkezinin hızını A ucunun hızına ve θ açısına bağlı olarak bulunuz. y A AV C θ B x

123
Çözüm: y I A ω AV C CV θ B BV x AV IA ω= ∗ ⇒ AV
IAω =
BV IB ω= ∗ , CV IC ω= ∗
B AIBV VIA
= ∗ , C AICV VIA
= ∗
AB L= , IA LCosθ= , IB L Sinθ= , 2LIC =
B AL SinV VLCos
θθ
= ∗ , 2C A
L
V VLCosθ
= ∗
B AV V tgθ=
2
= AC
VV
Cosθ
Problem 11.5.2: Şekildeki krank biyel mekanizmasında AB=10cm. uzunluğundaki krankı A etrafında saat ibreleri yönünde 5 / .Rad sω = sabit açısal hızı ile dönüyor. 030θ = için BC=30cm. uzunluğundaki biyelinin açısal hızını ve C pistonunun hızını bulunuz. B C A θ x
ABω

124
Çözüm : I BCω B
C A θ ϕ CV x
ABω BV
B AB BCV AB IBω ω= ∗ = ∗ ⇒ BC ABABIB
ω ω=
C BCV IC ω= ∗ , C ABABV ICIB
ω= ∗
10 5BV = ∗ , 50 /BV cm s= Sinüs teoreminden
0(180 )Sin Sin Sin
AB BC ACϕ θ θ ϕ− −= = ⇒ ABSin Sin
BCϕ θ=
AC ABCos BC Cosθ ϕ= +
21Cos Sinϕ ϕ= − , 2 21 ( )ABCos SinBC
ϕ θ= −
2 21 ( )ABAC ABCos BC SinBC
θ θ= + −
0 2 2 01010 30 30 1 ( ) 3030
AC Cos Sin= + −
37,815 .AC cm=
ACIACosθ
= , 037,815
30IA
Cos= , 43,665 .IA cm=
IC IA Sinθ= , 043,665 30IC Sin= ∗ 21,833 .IC cm= IB IA AB= − , 43,665 10IB = − , 33,665 .IB cm=
BC ABABIB
ω ω= , 10 533,665BCω = , 1, 485 /BC Rad sω =
C BCV IC ω= ∗ , 21,833 1,485CV = ∗ 32,42 /CV cm s=
125
BÖLÜM 12
KİNETİK
12.1 Kinetik ve Newtonun ikinci hareket kanunu
Kinetik hareketi oluşturan kuvvet moment gibi nedenleri de göz önüne alarak hareketin incelenmesidir. Kinetikte temel yasa Newtonun ikinci hareket kanunudur. Bir parçacığın lineer momentumunun zamanla değişimi üzerine etkiyen kuvvetlerin bileşkesi ile orantılıdır ve bu bileşkenin yönündedir. Parçacığın lineer momentumu hızı ile orantılı olup hız yönündedir ve bu orantı katsayısı kütle adını alır. Parçacığın hızı V kütlesi m ile gösterilirse Lineer momentumu VmP = olarak tanımlanır. Bu tanımla ikinci hareket yasası
)( Vmdtd
dtPdF ==
şeklini alır. Newton mekaniği yani klasik mekanik çerçevesinde m kütlesinin yalnız cismin iç özelliklerine bağlı olduğu zaman ve yerle değişmediği varsayılır. Dolayısıyla ikinci yasa amF = şeklinde yazılabilir.
12.2 Maddesel noktanın kinetiği Newtonun ikinci hareket kanunu olan amF = denkleminin kartezyen koordinatlardaki bileşenleri xx amF = , yy amF = , zz amF =
doğal koordinatlardaki bileşenleri TT amF = , NN amF =
şeklinde yazılabilir.

126
12.3 Kütle merkezinin hareketi teoremi Aşağıdaki şekilde gösterildiği gibi maddesel noktalardan oluştuğu düşünülen sistem veya rijid cismin hareketinde her bir maddesel nokta için yazılan amF = denklemi alt alta yazılıp toplanırsa 3a y 2a 3m iF im ia 2m nm na 2F ),,( ζηξG nF 1a 1m
o x z 111 amF = 222 amF = 333 amF = ………. iii amF = ………. nnn amF =
∑ ∑= =
=n
i
n
iiii amF
1 1
denklemi elde edilir. Burada G maddesel noktalar sisteminin kütle merkezidir. Kütle merkezinin yer vektörü
1
1
n
i ii
n
ii
m OAOG
m
=
=
=∑
∑ şeklinde yazılabilir. Bu vektörün zamana göre ikinci
türevi alınırsa kütle merkezinin ivme vektörü bulunur.
∑
∑
=
== n
ii
n
iii
G
m
ama
1
1

127
Bu ivme vektörü ifadesinden. ∑=
=n
iimm
1
olmak üzere
∑=
=n
iiiG amam
1
yazılabilir.
∑ ∑= =
=n
i
n
iiii amF
1 1
ifadesindeki ∑=
n
iii am
1
yerine Gam yazılırsa
∑ = GamF
şeklindeki kütle merkezinin hareketi teoremi olarak bilinen denklem elde edilir. Bu denkleme göre maddesel noktalar sisteminin veya rijid cismin kütle merkezi bütün kuvvetler ona uygulanmış ve toplam kütle orada yoğunlaşmış bir maddesel nokta gibi hareket eder.

128
12.4 Rijid cismin sabit bir eksen etrafında dönme hareketi ve atalet momentleri
Δ B α ΔM r Ta
Na dm NdF TdF A V Şekilde gösterilen V hacim bölgesini kapsayan ve Δ Ekseni etrafında ΔM dış momenti etkisinde dönen cismin üzerindeki bir dm diferansiyel kütlesi ve bu kütle için kinetik denklemi yazıp cismin tüm V hacmi içinde integre edilirse rijid cismin sabit eksen etrafında dönme hareketine ait kinetik denklemi bulunur. Maddesel noktanın hareketi verilen amF = denkleminin doğal koordinatlardaki ifadesi TT amF = , NN amF = Bu denklemler rijid cismin bir diferansiyel kütlesine uygulanırsa dmadF TT = , dmadF NN = Şekilde gösterildiği gibi sabit bir eksen etrafında dönen cismin bütün noktaları çembersel hareket yapar. Bundan dolayı cisim üzerindeki bir diferansiyel kütle için yazılan denklemlerden ikincisinin dönme hareketine bir etkisi olmaz. Birinci denklemdeki Ta ivmenin teğetsel bileşeni yerine α= raT yazılarak elde edilen dmrdFT α= denkleminin her iki tarafı diferansiyel kütlenin yörüngesinin yarıçapı olan r ile çarpılıp integre edilirse sabit eksen etrafında dönme hareketine ait kinetik denklemi elde edilir. dmrrdFr
V
T
V
α= ∫∫

129
Burada T
V
dFrM ∫=Δ olduğu bilindiğine göre yukarıdaki denklem
∫α=Δ
V
dmrM 2
şeklinde yazılabilir.Buradaki ∫V
dmr 2 büyüklüne cismin Δ eksenine göre
atalet momenti denir ∫=Δ
V
dmrI 2
Böylece sabit bir eksen etrafında dönme hareketine ait moment ve açısal ivme arasındaki bağıntıyı veren kinetik denklemi aşağıdaki gibi yazılabilir. M I αΔ Δ= 12.5 Atalet momentleri
Sabit bir eksen etrafında dönme veya genel düzlemsel hareketin kinetiğinde rijid cismin sabit bir eksene göre atalet momentinin bilinmesi gerekir. Bu işlem noktaya ve düzleme göre atalet momentleri tanımlayıp daha kolay yapılabilir.
dm p Ar pr A dr V d ∫=
V
AA dmrI 2 A noktasına göre atalet momenti
∫=V
dd dmrI 2 d doğrusuna göre atalet momenti
∫=V
PP dmrI 2 P düzlemine göre atalet momenti
12.5.1 Atalet yarıçapı Bir noktaya veya eksene göre atalet momenti I olan m kütleli bir cismin tüm kütlesi bu noktaya veya eksene eşit uzaklıktaki bir bölgede toplanmış farz edilirse bu uzaklığa atalet yarıçapı denir ve k ile gösterilir.
2I m k= ∗

130
12.5.2 Atalet momenti ile ilgili teoremler 1 ) Bir rijid cismin birbirine dik üç düzleme göre atalet momentlerinin toplamı bunların ara kesiti olan noktaya göre atalet momentine eşittir.
2) Bir rijid cismin birbirine dik iki düzleme göre atalet momenlerinin toplamı bunların ara kesiti olan doğruya göre atalet momentine eşittir. 3) İki boyutlu bir rijid cismin şekil düzleminde bulunan birbirine dik iki doğruya göre atalet momentlerinin toplamı bunların arakesiti olan noktaya göre atalet momentine eşittir.
4) Bir rijid cismin herhangi bir doğruya göre atalet momenti bu doğruya paralel olup kütle merkezinden geçen doğruya göre atalet momenti ile
cismin kütlesini bu doğrular arasındaki uzaklıkla çarpılarak elde edilen sayının toplamına eşittir. Bu teoreme paralel eksenler teoremi denir.
5) İki boyutlu cisimlerde Şekil düzlemine dik eksenle bu eksenin şekil düzlemindeki izdüşümü olan noktaya göre atalet momenti birbirine eşittir.Bu son teoreme göre iki boyutlu cisimlerde şekil düzleminde bulunan bir noktaya göre atalet momentinin kütle merkezine göre atalet momenti ile bu noktalar arasındaki uzaklık karesinin kütle ile çarpımının toplamına eşitliği şeklinde paralel eksenler teoremine benzer teorem yazılabilir.
Bu teoremlerin ispatı aşağıdaki şekilde yapılabilir. y yG d z x A dm G y o x V z ∫ ++=
V
O dmzyxI )( 222
∫=V
yoz dmxI 2 , ∫=V
xoz dmyI 2 , ∫=V
xoy dmzI 2
Bu denklemlerden xoyxozyozo IIII ++= elde edilir. Bu eşitlik birinci teoremin ispatıdır.

131
Ayrıca ∫ +=V
x dmzyI )( 22 olduğundan
xoyxozx III += yazılabileceğinden ikinci teorem ispatlanmış olur. Paralel eksenler teoremini ispatlamak için ∫ +=
V
y dmzxI )( 22
∫ +=V
GAGAY dmzxIG
)( 2/
2/
GAG xxx /+= , GAG zzz /+= 2
//22
//222 22 GAGAGGGAGAGG zzzzxxxxzx +++++=+
222 dzx GG =+ ∫∫ ∫ +++=
V
GAG
V V
GAGAy dmxxmdddmzxI /22
/2
/ 2)(
kütle merkezi formülünden 0/ =∫V
GA dmx olduğundan
2dmIIGYy +=
yazılarak paralel eksenler teoremi ispatlanmış olur. Üçüncü teorem ikinci teoremin iki boyuta indirgenmiş halidir. Bu teoremin ispatı için aşağıdaki şekil göz önüne alınır. y x ),( yxA dm r y x o ∫=
S
x dmyI 2 , ∫=S
y dmxI 2
∫ +=S
O dmyxI )( 22
Bu atalet momenti ifadelerinden yxO III += yazılarak üçüncü teorem ispatlanmış olur.

132
Problem 12.5.1 Kütlesi m olan L uzunluğundaki homojen , doğrusal ve sabit kesitli çubuğun ucuna ve merkezine göre atalet momentini bulunuz. Çözüm: y L dm A G x
x dx 2
AI x dm= ∫ , dm dxρ= , m Lρ=
2L
AO
I x dxρ= ∫ , 3
3ALI ρ=
Atalet momentini cismin kütlesi cinsinden bulmak için sonucu 1mLρ= ile
çarpmak gerekir. 3
3AL mI
Lρ
ρ=
2
3ALI m=
paralel eksenler teoremine göre 2( )
2A GLI I m= + , 2( )
2G ALI I m= − ,
2 2
3 4GL LI m m= −
2
12GLI m=
Problem 12.5.2 Kütlesi m olan L uzunluğundaki homojen , doğrusal ve sabit kesitli Prizmatik cismin taban düzlemine göre atalet momentini bulunuz. Çözüm: y L dx
x x A taban düzlemi V O dm
z

133
Çözüm: 2
AV
I x dm= ∫ , dm dVρ=
eğer A taban düzleminin alanı S ise m S Lρ= , dm S dLρ= dır.
2L
AO
I x S dLρ= ∫ , 3
3ALI Sρ=
Atalet momentini cismin kütlesi cinsinden bulmak için sonucu 1mSLρ
=
ile çarpmak gerekir. 3
3AL mI S
SLρ
ρ=
2
3ALI m=
Problem 12.5.3 R yarıçaplı ve m kütleli homojen çember şeklindeki cismin atalet momentini a) merkezine , b) çapına , c) teğet doğrusuna , d) çember üzerindeki bir noktaya göre bulunuz. d doğrusu y R A noktası O x Çözüm:
a) Çember şeklindeki cismin üzerindeki bütün noktaların O noktasına uzaklığı R olduğundan
2OI m R=
olur. b) Atalet momenti ile ilgili teoremlerden üçüncüsünden O x yI I I= + yazılabilir. Ayrıca tüm çap doğrularına göre kütle dağılımı çember şeklindeki cisimde aynı olduğundan x yI I= yazılabilir. Böylece çember şeklindeki cismin çapına göre
atalet momenti 212x yI I m R= =

134
Paralel eksenler teoremine göre 2d yI I m R= + olduğundan
232dI m R=
c) Atalet momenti ile ilgili beşinci teorem göz önüne alınırsa O ve A noktası
arasında paralel eksenler teoremi yazılabilir. 2
A OI I m R= + 22AI m R=
Problem 12.5.4 R yarıçaplı ve m kütleli homojen daire şeklindeki levhanın atalet momentini a) merkezine , b) çapına göre bulunuz. Çözüm: y dm dAρ= R
r dr x O 2m Rρπ= , 2dA r drπ= , 2dm r drρ π= a)
2
0
R
OI r dm= ∫ , 2
0
( 2 )R
OI r r drρ π= ∫ , 3
0
2R
OI r drρ π= ∫
4
24O
RI ρ π=
Atalet momentini cismin kütlesi cinsinden bulmak için sonucu
2 1mRρπ
= ile çarpmak gerekir. 4
224O
R mIR
ρ πρπ
=
212OI m R=
b) Atalet momenti ile ilgili teoremlerden üçüncüsünden O x yI I I= + yazılabilir. Ayrıca tüm çap doğrularına göre kütle dağılımı dairesel levha için aynı olduğundan x yI I= yazılabilir. Böylece dairesel levhanın çapına göre atalet momenti
214x yI I m R= = formunda elde edilir.

135
Problem 12.5.5 Silindir şeklindeki homojen dolu cismin taban düzlemindeki bir çapına göre atalet momentini bulunuz. y L z R O x Çözüm: Atalet momentleri ile ilgili ikinci teoreme göre
x xoy xozI I I= + yazılabilir. Aynı şekilde
z xoz yozI I I= + ve xoz yozI I= olduğundan 2z
xozI
I = yazılabilir.
zI dairesel levhanın merkezine göre atalet momenti gibi 21
2zI m R= olduğundan
214xozI m R= olur.
213xoyI m L= eşitliği prizmatik ve sabit kesitli cisimlerin taban düzlemine göre
atalet momenti olduğundan
2 21 13 4xI m L m R= + , 2 21 1( )
3 4xI m L R= + eşitliği bulunur.

136
Problem 12.5.6 R Yarıçaplı ve m kütleli homojen dolu kürenin kütle merkezinden geçen bir çapına göre atalet momentini bulunuz. Çözüm: z 2dm r dzρπ= r dz R z o y x m Vρ=
0
2R
m dm= ∫ , 2
0
2R
m r dzρ π= ∫ , 2 2 2r R z= −
2 2
0
2 ( )R
m R z dzρπ= −∫ , 3
32 ( )3
Rm Rρπ= − , 343
m Rρπ=
Atalet momenti ile ilgili teoremlerden ikincisine göre
x xoy xozI I I= + yazılabilir. Kürenin bütün çapsal düzlemleri küreyi iki eşit parçaya böldüğünden xoy xozI I= ve 2x xoyI I= yazılabilir.
2
0
2R
xoyI z dm= ∫ , 2 2
0
2R
xoyI z r dzρπ= ∫ , 2 2
0
2R
xoyI z r dzρπ= ∫
2 2 2
0
2 ( )R
xoyI z R z dzρπ= −∫ , 2 2 4
0
2 ( )R
xoyI z R z dzρπ= −∫
5 5
2 ( )3 5xoy
R RI ρπ= − , 5415xoyI Rρπ=
Atalet momentini cismin kütlesi cinsinden bulmak için sonucu 3
3 14
mRρπ
= ile çarpmak gerekir
53
4 315 4xoy
mI RR
ρπρπ
= , 215xoyI mR= , 22
5xI mR=

137
12.6 Rijid cismin sabit bir eksen etrafındaki dönme hareketi ile ilgili problemler
Δ B α r ΔM dm V A α= ΔΔ IM Burada MΔ , Δ eksenine göre cisme uygulanan toplam dış momenti IΔ , cismin Δ eksenine göre atalet momentini ∫=Δ
V
dmrI 2
α ise cismin açısal ivmesini göstermektedir. Rijid cismin sabit eksen etrafında dönme hareketinde cisme etki eden dış aktif kuvvetler ile mafsal tepkileri arasındaki bağıntı kütle merkezinin hareketi teoreminden elde edilebilir. GF m a=∑ Burada Ga cismin kütle merkezinin ivmesidir.

138
Problem 12.6.1 Homojen L uzunluğunda ve m kütlesindeki sabit kesitli doğrusal çubuk A ucundan kendisine dik silindirik mafsalla bağlıdır. Çubuk yatay konumdan ilk hızsız harekete bırakılıyor. Çubuğun a) yatayla θ açısı yaptığı andaki açısal ivmesini b) yeni harekete bırakıldığı andaki mafsal tepkisini bulunuz. Çözüm: y
2L mg
2L
A G B x θ α a)
α= ΔΔ IM ⇒ MI
α Δ
Δ
=
2LM mg CosθΔ = , 21
3I mLΔ =
2
213
Lmg Cos
mL
θα = , 3
2g CosL
α θ=
b) GF m a=∑ Çubuk harekete yeni bırakıldığı anda açısal hızı sıfır olduğundan kütle merkezinin ivmesinin yatay bileşeni sıfırdır.
2GLa jα= −
0θ = da 32
gL
α = , 34Gga j= −
GF m a=∑ denkleminden toplam kuvvetle ivme aynı yönde olması gerekir. Cisme yatay doğrultuda başka aktif kuvvet etkimediğinden mafsal tepkisi de düşey doğrultuda olmalıdır.
A GR mg j m a− = , 3( )4AgR mg j m j− = − 1
4AR mg j=

139
12.7 Rijid cismin genel düzlemsel hareketinin kinetiği y
Aa dm GAr / A G dF Gr Ar o x S Maddesel noktanın hareketi için geçerli olan amF = denklemi Rijid cismin bir diferansiyel kütlesine uygulanırsa AdF a dm= yazılabilir. Bu denklemin her iki tarafı diferansiyel kütlenin yer vektörü ile soldan vektörel çarpılır ve cismin tüm kütlesi boyunca integre edilirse rijid cisme uygulanan moment ve cismin açısal hareketleri ile ilgili denklemler elde edilir. GAGA aaa /+= / /A G A G Ar dF r a dm∧ = ∧
/ / /( )∧ = ∧ +∫ ∫A G A G G A GS S
r dF r a a dm
/= ∧∫z A GS
M k r dF
/ / /( ) )= ∧ + ∧∫ ∫z A G G A G A GS S
M k r dm a r a dm
sağ taraftaki birinci integral kütle merkezinin formülünden dolayı sıfır olur. İkinci integral için )]([)(/ jyixkkjyixka GA +∧ω∧ω++∧α= )(/ iyjxkjxiya GA ω−ω∧ω+α+α−= jyixjxiya GA
22/ ω−ω−α+α−=
)()( 22// jyixjxiyjyixar GAGA ω−ω−α+α−∧+=∧
kxykykxykxar GAGA2222
// ω+α+ω−α=∧ kyxar GAGA α+=∧ )( 22
//

140
2 2( )= +∑ ∫GS
M k x y k dmα
burada 2 2( )= +∫GS
I x y dm dır.
Böylece genel düzlemsel harekette moment ve açısal ivme arasındaki =∑ G GM I α bağıntısı elde edilir.
Problem 12.7.1 60 .R cm= Yarıçaplı 10 .m kg= kütleli homojen dairesel levha kaymadan yuvarlanma hareketi yapmaktadır. Levhanın merkezinin ivmesinin 25 /m s olması için merkezine uygulanan yatay doğrultudaki F kuvvetini ve gerekli olan en düşük sürtünme katsayısını bulunuz. Çözüm: y mg Ga α G F
x o f N G GM I α=∑ , GF m a=∑
Ga Rα= ⇒ GaR
α =
212GI mR= , GM f R=∑
212
GG
aM f R mR
R= =∑ ⇒ 1
2 Gf ma= ⇒ 25f Newton=
GF f ma− = ⇒ 32 GF ma= ⇒ 75F Newton=
f Nμ= ⇒ fN
μ =
0yF =∑ ⇒ 0N mg− = ⇒ 98,1= =N mg Newton
2598,1
=μ , 0, 255=μ

141
Problem 12.7.2
60 .R cm= Yarıçaplı 10 .m kg= kütleli homojen dairesel levha kaymadan yuvarlanma hareketi yapmaktadır. Levhanın merkezinin ivmesinin 25 /m s olması için merkezine uygulanan Momentin şiddetini ve gerekli olan en düşük sürtünme katsayısını bulunuz. Çözüm: y mg GM Ga α G
x o f N G GM I α=∑ , GF m a=∑
Ga Rα= ⇒ GaR
α =
212GI mR= , G GM M f R= −∑
212
GG G
aM M f R mR
R= − =∑ ⇒ 1
2G GM mRa f R= +
Gf ma= ⇒ 50f Newton=
110 0,6 5 50 0.62GM = ∗ ∗ + ∗ , 45 .GM Nm=
f Nμ= ⇒ fN
μ =
0yF =∑ ⇒ 0N mg− = ⇒ 98,1= =N mg Newton 50
98,1=μ , 0,51=μ

142
Problem 12.7.3 1,2 m. Uzunluğunda ve m=25 kg kütleli bir çubuk A ucu yatay doğru üzerinde B ucu 045 eğimli doğru üzerinde olmak üzere sürtünmesiz olarak hareket ediyor. Eğer çubuk ilk hızsız olarak harekete bırakılırsa ve bu anda 030θ = ise bu an için a) Çubuğun açısal ivmesini b) A ve B noktalarındaki tepki kuvvetlerini hesaplayınız. B 1,2 m. G 450 θ A Çözüm: Ba B mg BR 150 G A 450 300 Aa AR G GM I α=∑ ⇒ 0 0 2130 15
2 2 12A BL LR Cos R Cos mL α− =
GF m a=∑ ⇒ Xx GF m a=∑ ,
Yy GF m a=∑
Xx GF m a=∑ ⇒ 045XB GR Cos m a=
Yy GF m a=∑ ⇒ 045
YA B GR R Sin mg m a+ − =

143
Kinematik inceleme:
/B A B Aa a a= + , 2 22 2B B Ba a i a j= −
A Aa a i= , / /B A B Aa AB Vα ω= ∧ + ∧ hareketi yeni başladığı için 0ω = dır.
0 0/ ( 30 30 )B Aa k LCos i LSin jα= ∧ − + , /
1 32 2B Aa L i L jα α= − −
2 2 1 3( )2 2 2 2B B B Aa a i a j a i L i L jα α= − = + − −
2 2 1 3( )2 2 2 2B B Aa i a j a L i L jα α− = − −
1 22 2
3 22 2
A B
B
a L a
L a
α
α
− =
− = −
⇒
3 12
32
A
B
a L
a L
α
α
+=
=
/G A G Aa a a= + , X YG G Ga a i a j= +
/ /G A G Aa AG Vα ω= ∧ + ∧
3 12Aa L iα+
=
0 0/ ( 30 30 )
2 2G AL La k Cos i Sin jα= ∧ − + /
34 4G ALa i L jα α= − −
3 1 3( ) ( )2 4 4X YG G G
La a i a j L i i L jα α α+= + = + − −
2 3 1 34 4X YG Ga i a j L i L jα α+
+ = −
2 3 14XGa Lα+
= , 34YGa Lα= − , 1,339
XGa α= , 0,520YGa α= −
045XB GR Cos m a= ⇒ 1,894BR mα=
0 0 2130 152 2 12A BL LR Cos R Cos mL α− = ⇒ 2,3434AR mα=
22,3434 1,894 0,5202
m m mg mα α α+ − = −
9,8122,3434 1,894 0,520
2
α =+ +
, 2,33 /Rad sα =
23,12 /
XGa m s= , 21, 21 /YGa m s= −
136,5AR N= , 110,3BR N=

144
BÖLÜM 13
İŞ VE ENERJİ İLKESİ 13.1 Maddesel noktanın hareketinde iş ve enerji ilkesi Bir maddesel noktaya etki eden kuvvetin maddesel noktanın yer değiştirmesinde yaptığı işi bulabilmek için aşağıdaki şekil çizilebilir. y NF F (1) m TF rd ds r rdr + (2)
o x z Burada m kütlesi rd kadar yer değiştirme yaptığında etki eden F kuvvetinin yaptığı iş rdFd •=τ dır. M kütlesi (1) konumundan (2) konumuna geldiğinde etki eden F kuvvetinin
yaptığı iş ise ∫ •=τ →
)2(
)1(
)2()1( rdF
şeklinde integral ile hesaplanır. Burada NFTFF NT += Tdsrd = şeklinde
yazılabileceğinden bir F kuvvetin işi ∫ ⋅=τ →
)2(
)1(
)2()1( dsFT
şeklinde de hesaplanabilir. Bir maddesel noktanın hareketinin teğet doğrultusundaki denklemi TT amF =
Burada Ta yerine ds
VdV yazarak
ds
VdVmFT = , VdVdsFT =
elde edilen denklemin her iki tarafı (1) konumundan (2) konumuna integre

145
edilirse VdVmdsFT ∫∫ =)2(
)1(
)2(
)1(
Burada dsFT∫=τ →
)2(
)1(
)2()1(
Olduğundan 21
22)2()1( 2
121 mVmV −=τ →
denklemi elde edilir. Elde edilen 212
mV ifadesine V hızındaki m kütleli
maddesel noktanın kinetik enerjisi denir ve T ile gösterilir. 2
21 mVT =
Bu şekilde bulunan (1) (2) 2 1τ → = −T T
denklemine iş ve enerji ilkesi denir. Bir maddesel noktanın (1) konumundan (2) konumuna hareketinde maddesel noktaya etki eden kuvvetlerin yaptığı işler toplamı maddesel noktanın bu konumlar arasındaki kinetik enerji farkına eşittir. Kinetik enerji maddesel noktanın hareket ettiği yola bağlı değildir. Sadece son ve ilk konumdaki hızlara bağlıdır. Etki eden kuvvetlerin yaptığı işler ise mekanik enerjinin korunmadığı durumlarda yola bağlıdır. Problem 13.1.1 θ eğim açılı eğik düzlem üzerinde bırakılan bloğun s kadar yol aldıktan sonraki hızını bulunuz. Çözüm : mg (1) θ s N h (2) f θ 12)2()1( TT −=τ → , (1) (2) ( )m g Sin s f sτ θ→ = − , 1 0T =
22
12
T mV= , 21( )2
m g Sin s f s mVθ − = , 2( )fV g Sin sm
θ= −

146
13.1.1 Mekanik enerjinin korunumu ve potansiyel enerji: Bir kuvvet alanı UF −∇= şeklinde yazılabiliyorsa buradaki kuvvete korunumlu kuvvet U ya ise potansiyel enerji denir. Kartezyen koordinat sisteminde k
zUj
yUi
xUU
∂∂
+∂∂
+∂∂
=∇
kdzjdyidxrd ++=
ile ∫ •=τ →
)2(
)1(
)2()1( rdF denklemine gidilirse
)()2(
)1(
)2()1( dzzUdy
yUdx
xU
∂∂
+∂∂
+∂∂
−=τ ∫→
∫−=τ →
)2(
)1(
)2()1( dU
21)2()1( UU −=τ →
korunumlu kuvvetlerde bir kuvvetin işinin Potansiyel enerji farkının negatifi ile yapılabileceği görülür. Bu elde edilen denklem iş ve enerji denkleminde bir kuvvetin işi yerine yazılırsa 1221 TTUU −=− veya 2211 TUTU +=+
mekanik enerjinin korunum denklemi elde edilir.

147
Problem 13.1.1.1 θ eğim açılı eğik düzlem üzerinde bırakılan bloğun durana kadar aldığı s yolunu bulunuz. Cisim ilk harekete bırakıldığında yay katsayısı k olan yay doğal uzunluğundadır. Çözüm : mg k (1) θ s N h (2) θ 1 2 2 1U U T T− = − , 2
1 212
U U mgh ks− = − , h s Sinθ= , 1 0T =
22
12
T mV= , 2 21 12 2
m g s Sin k s mVθ − =
durduğu anda hızı sıfırdır. 21 02
m g s Sin k sθ − = ⇒ 2m gs Sink
θ=

148
13.2 Rijid cismin sabit bir eksen etrafında dönmesinde kinetik enerji hesabı Δ B ω V r dm A V Rijid cisme ait bir diferansiyel kütlenin kinetik enerjisi dmVdT 2
21
=
Sabit bir eksen etrafında dönme hareketinde ω= rV olduğundan dmrdT 22
21
ω=
yazılabilir. Bu diferansiyel kinetik enerjinin cismin tüm V hacmi üzerinde integrali alınarak toplam kinetik enerji bulunur. dmrT
V
22
21
ω= ∫
integral içindeki sabitler dışarı alınarak elde edilen ∫ω=
V
dmrT 22
21
denkleminde ∫=Δ
V
dmrI 2
ifadesi Δ eksenine göre cismin atalet momenti olduğundan sabit bir eksen etrafında dönme hareketinde rijid cismin kinetik enerjisi 2
21
ω= ΔIT
şeklinde hesaplanır.

149
Problem 13.2.1 Uzunluğu L ve kütlesi m olan AB çubuğu A ucundan silindirik mafsallı olarak düşey düzlemde hareket edebilmektedir. AB çubuğu yatay konumda ilk hızsız harekete bırakılıyor. Yatayla θ açısı yaptığı andaki açısal hızını bulunuz. Çözüm: mg A L/2 L/2 B θ mg 1 2 2 1U U T T− = − 1 2 2
LU U m g Sinθ− =
1 0T = , 22
12 AT I ω=
212 2 ALm g Sin Iθ ω=
213AI mL=
2 21 12 2 3Lm g Sin mLθ ω= ⇒ 3g Sin
Lω θ=

150
13.3 Rijid cismin genel düzlemsel hareketinde kinetik enerji hesabı y A GAr / dm G Gr Ar S o x dmVdT A
2
21
=
AAA VVV •=2
GAGA VVV /+=
)()( //2
GAGGAGA VVVVV +•+=
dmVVVVT GAGGA
S
G )2(21
/2
/2 •++= ∫
Burada 0/ =• ∫S
GAG dmVV ve 22/
2/ ω= GAGA rV olduğundan toplam kinetik enerji
∫ω+=S
GAG dmrmVT 2/
22
21
21
şeklinde yazılabilir. Burada G
S
GA Idmr =∫ 2/ cismin kütle merkezinden geçen
ve hareket düzlemine dik eksene göre atalet momentini gösterdiğinden genel
düzlemsel harekette kinetik enerji
22
21
21
ω+= GG ImVT
formülü ile hesaplanır.

151
Problem 13.3.1 R yarıçapılı ve m kütleli bir disk θ eğim açılı eğik düzlem üzerinde kaymadan yuvarlanma hareketi yapmaktadır. Disk eğik düzlem üzerinde ilk hızsız harekete bırakıldığında diskin n sayıda tam devir yaptığı andaki açısal hızı ne olur ? Çözüm: mg s R G mg h f N θ 1 2 2 1U U T T− = − Kaymadan yuvarlanmada sürtünme kuvveti iş yapmaz . Çünkü kayma olayındaki gibi sürekli aynı bölgede temas yoktur. Normal kuvvet harakete dik olduğu için iş yapmaz. 1 2U U mgh− = , h s Sinθ= , 2s n Rπ= ∗ , 2s n Rπ= 1 2 2U U mgn R Sinπ θ− = , 1 0T =
2 22
1 12 2G GT mV I ω= +
Kaymadan yuvarlanma hareketinde GV Rω= dır.
212GI mR=
2 2 22
1 1 1( )2 2 2
T m R mRω ω= + , 2 22
34
T mR ω=
2 2324
mgn R Sin mRπ θ ω= ⇒ 83gn Sin
Rπω θ=

152
EK A Daha önceki senelerde sınavlarda sorulan Statik problemleri
Problem 1 ) Şekildeki gibi homojen plakalardan oluşturulmuş cismin kütle merkezinin koordinatlarını bulunuz. y 3 1m 1,5m 1 2 4 1m x 3m 2,4m ¼ daire z Çözüm:
543Rx =π
, 54x =π
2
5 4RA π
= , 5 4A 9π
=
AxA
ξ = ∑∑
, 11,47513,969
ξ = , 0,821 .mξ =
AyA
η = ∑∑
, 6,9313,969
η = , 0, 496 .mη =
AzA
ζ = ∑∑
, 14,213,969
ζ = , 1,017 .mζ =
x y z A Ax Ay Az 1 1 0,8 0 3,6 3,6 2,88 0 2 0,75 0,5 0 -1,5 -1,125 -0,75 0 3 0 1,2 0,5 2,4 0 2,88 1,2 4 0 0,8 1,667 2,4 0 1,92 4 5 4/π 0 4/π 9π/4 9 0 9 ∑ 13,969 11,475 6,93 14,2

153
Problem 2 ) O da küresel mafsallı 6m uzunluğundaki OA kolu A ucunda F = 10 kN şiddetinde bir yük taşımaktadır. O daki tepki kuvveti ile AB ve AC iplerindeki kuvvetleri hesaplayınız. y 3m C α = β = 450
3m β F = 10 kN B α O x 4m z Çözüm: y 3m C (0,4,-3) ACS A(3 2 , 3 2 , 0)
3m ABS β F = 10 kN (0, 4, 3)B α O x 4m OR z
0F =∑ , 0AM =∑ ( denge şartı )
0F =∑ ⇒ 0AB AC OS S R F+ + + =
0AM =∑ ⇒ O O OAR R U= , 2 22 2OAU i j= +
AB AB ABS S U= , AC AC ACS S U= , ABABUAB
= , ACACUAC
=
AB OB OA= − , ( 3 2 ) (4 3 2 ) (3 0)AB i j k= − + − + − , 2 2 2(3 2 ) (4 3 2 ) 3AB = + − +
5, 2018 .AB m= , 0,8156 0,0466 0,5767ABU i j k= − − +
0,8156 0,0466 0,5767AB AB AB ABS S i S j S k= − − +
0,8156 0,0466 0,5767AC AC AC ACS S i S j S k= − − −
0,7071 0,7071O O OR R i R j= +
10F j= − 0xF =∑ ⇒ 0,8156 0,8156 0,7071 0AB AC OS S R− − + = 6,5 .AB ACS S kN= =
0yF =∑ ⇒ 0,0466 0,0466 0,7071 10AC AC OS S R− − + = ⇒ 15 .OR kN=
0zF =∑ ⇒ 0,5767 0,5767 0AB ABS S− =

154
Problem 3 ) Şekilde ölçüleri verilen homojen dolu cismin kütle merkezinin koordinatlarını hesaplayınız. y 1 9 20 9
2 ?ξ = , ?η = , ?ζ = 15 3 10 4 x 50 5 10r = 6 R=19 z ( Ölçüler mm dir. ) Çözüm: 25mmζ = ( 25z = simetri düzlemi olduğu için )
543
Ryπ
= − , 54 193
yπ∗
= − , 5763
yπ
= −
2
5 2RA π
= , 2
5192
A π= , 5 180,5A π=
643
ryπ
= − , 64 103
yπ∗
= − , 6403
yπ
= −
2
5 2rA π
= − , 2
5102
A π ∗= − , 5 50A π= −
A xA
ξ = ∑∑
, 23274,6
1225ξ = , 19mmξ = ( 19x = simetri düzlemidir. )
A yA
η = ∑∑
, 52691225
η = , 4,3mmη =
x Y A Ax Ay 1 32 15 67,5 2160 1012,5 2 19 17,5 300 5700 5250 3 6 15 67,5 405 1012,5 4 19 5 380 7220 1900 5 19 76
3π−
180,5 π 10774,1 -4572,67
6 19 403π
− -50 π -2984,5 666,67
∑ 1225 23274,6 5269

155
Problem 4 ) Uzunluğu L ve ağırlığı W olan homojen bir çubuk şekilde görüldüğü gibi Düşey düzlemde tutturulmuştur. Sürtünme kuvvetlerini ihmal ederek A ,B ,C noktalarından gelen tepki kuvvetlerini bulunuz. Not : BC arası a uzunluğundadır.
C α B
A Çözüm: y W α BR α C
B α CR O A x AR
0xF =∑ ⇒ sin sin 0B CR Rα α− = ⇒ B CR R=
0yF =∑ ⇒ cos cos 0A B AR R R Wα α− + − = ⇒ AR W=
0AM =∑ ⇒ cos 02BLR a W α− = ⇒ cos
2B CWLR R
aα= =

156
Problem 5 ) İki çubuk T şeklinde bir levye oluşturmak için birleştirilmiştir.D de sürtünmesiz duvara dayanmış A ve B de ise rulmanlı yataklar ile mesnetlenmiştir. CD nin ortası E ye
600P N= şiddetinde bir düşey yük uygulandığına göre D noktasına duvardan gelen tepki kuvvetini bulunuz. y
100
DR D
P 300 E B
A C z 150 160 (Ölçüler mm dir.) 90 240 90 x Çözüm :
0F =∑ ⇒ 0A B DR R R P+ + + =
0ABM =∑ ⇒ ( ) 0D ABAD R AE P U∧ − ∧ • =
D DR R i= , 600P j= − , 150 300 300AD i j k= − + − , AE AC CE= +
90 120AC i k= − , 0,5CE CD= ∗ , 0,5 ( 240 300 180 )CE i j k= ∗ − + −
120 150 90CE i j k= − + − , 30 150 210AE i j k= − + −
ABABUAB
= , 2 2
180 240180 240
ABi kU −
=+
, 180 240
300ABi kU −
= , 0,6 0,8ABU i k= −
( 150 300 300 ) ( 30 150 210 ) 600D DAD R AE P i j k R i i j k j∧ − ∧ = − + − ∧ + − + − ∧ −
126000 300 ( 300 18000)D D DAD R AE P i R j R k∧ − ∧ = − − + − +
( ) 75600 14400 240 0D AB DAD R AE P U R∧ − ∧ • = − − + = ⇒ 375DR N=
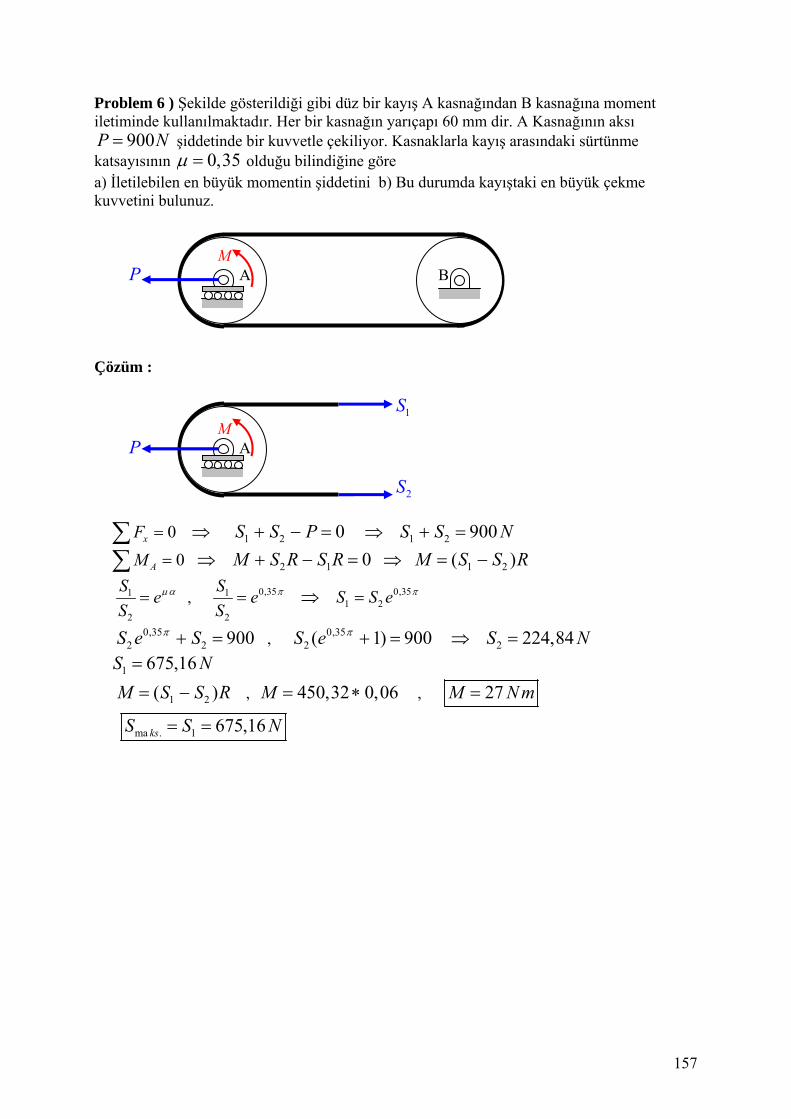
157
Problem 6 ) Şekilde gösterildiği gibi düz bir kayış A kasnağından B kasnağına moment iletiminde kullanılmaktadır. Her bir kasnağın yarıçapı 60 mm dir. A Kasnağının aksı
900P N= şiddetinde bir kuvvetle çekiliyor. Kasnaklarla kayış arasındaki sürtünme katsayısının 0,35μ = olduğu bilindiğine göre a) İletilebilen en büyük momentin şiddetini b) Bu durumda kayıştaki en büyük çekme kuvvetini bulunuz. M P A B Çözüm : 1S M P A 2S 0xF =∑ ⇒ 1 2 0S S P+ − = ⇒ 1 2 900S S N+ =
0AM =∑ ⇒ 2 1 0M S R S R+ − = ⇒ 1 2( )M S S R= −
1
2
S eS
μα= , 0,351
2
S eS
π= ⇒ 0,351 2S S e π=
0,352 2 900S e Sπ + = , 0,35
2 ( 1) 900S e π + = ⇒ 2 224,84S N= 1 675,16S N=
1 2( )M S S R= − , 450,32 0,06M = ∗ , 27M Nm=
ma . 1 675,16ksS S N= =

158
Problem 7 ) 1000 N ağırlığındaki bir beton blok şekilde gösterilen mekanizma ile kaldırılmaktadır. Beton bloğun kaymadan taşınabilmesi için blok ile F ve G tutma çeneleri arasındaki sürtünme katsayısı en az ne olmalıdır.
1000 N
12 6 6 12
A B 10 C D 14 E 48 F 1000 N G
42 ( Ölçüler cm dir ) 1000 N 12 12 A B
15,62 10 2 212 10 15,62AC BD cm= = + =
ACS C D BDS
0xF =∑ ⇒ 12 12 0
15,62 15,62BD ACS S− = ⇒ AC BDS S=
0yF =∑ ⇒ 10 101000 0
15,62 15,62BD ACS S− − = ⇒ 781AC BDS S N= =
12 781 N
15,62 10 C 14
18 E 1000 N
48 f f N
21 G
1000 500
2f N= = , f Nμ= ⇒
fNμ
= , 500Nμ
=

159
0EM =∑ ⇒ 10 1248 21 18 14 0
15,62 15,62AC ACN f S S− − − =
500 10 1248 21* 500 18 781 14 781 0
15,62 15,62μ− − ∗ − ∗ = ⇒
500μ
= 581,25
0,86μ =

160
Problem 8 ) A kayıt bandı , 20Br mm= yarıçaplı ve 0,3M Nm= şiddetindeki moment etkisinde olan B makarasından geçtikten sonra serbest dönen bir C makarasının altından geçiyor. Bant ile makara arasındaki sürtünme katsayısı 0,4μ = olduğuna göre bantın kaymadan hareket edebilmesi için P kuvvetinin minumum değerini bulunuz.
M B A C P S Çözüm: M B A P S
S eP
μα= ⇒ 0,4S Pe π=
0BM =∑ ⇒ 0B BM P r S r+ ∗ − ∗ = ⇒ ( ) BM S P r= −
0,40,3 ( 1)0,02P e π= − 0,4
0,30,02( 1)
Pe π=
−
5,97P N=

161
Problem 9 ) Yatay düzlemde bulunan W ağırlığındaki A ve B cismi , birbirine C noktasından mafsallı olan AC ve BC çubuklarına mafsallıdır. Sistemin dengede kalması şertı ile çubukların birleşme noktası olan C ye uygulanacak en büyük P kuvvetinin şiddetini W ağırlığına bağlı olarak 080θ = için bulunuz. ( W ağırlıkları ile yatay düzlem arasındaki sürtünme katsayısı 0,3μ = dır. ) P θ C W W 030 060 A B Çözüm : P θ C SCA 300 SCB
600 0xF =∑ ⇒ 0 0cos30 cos60 cos 0CA CBS S P θ− + =
0yF =∑ ⇒ 0sin30 sin 60 sin 0CA CBS S P θ+ − =
3 1 cos2 2
1 3 sin2 2
CA CB
CA CB
S S P
S S P
θ
θ
− = −
+ =
⇒ 0,3420,9397
CA
CB
S PS P
=
=
W CAS 030 0xF =∑ ⇒ 0cos30 0CAf S− = ⇒ 0,2962f P=
A 0yF =∑ ⇒ 0sin30 0CAN W S− − = f N f Nμ= , 0,3f N= 0,292 0,3 0,3 0,342 0,5P W P= + ∗ ∗ ⇒ 1,225P W= 060 CBS W 0xF =∑ ⇒ 0cos60 0CBS f− = ⇒ 0,46985f P=
0yF =∑ ⇒ 0sin 60 0CBN W S− − = B f 0,3f N= N

162
30,49685 0,3 0,9397 0,3
2P W P= + ∗ ∗ ⇒ 1,3292P W=
P kuvveti 1,225W dan büyük olduğunda denge bozulacağından doğru cevap
1,225P W= olmalıdır.

163
Problem 10 ) Homojen telden şekildeki gibi bükülmüş cismin gösterilen konumda dengede kalabilmesi için θ açısı kaç derece olmalıdır. B θ r A r C Çözüm : W2 B W1 G2 θ θ A O G1 C 0AM =∑ ⇒ 1 21 2( ) cos 0W OG OA W AG θ− − =
12 rOGπ
= , cosOA r θ= , 2 cos2rAG θ=
1W rπ ρ= , 2W rρ=
2( cos ) cos 02
r rr r rπ ρ θ ρ θπ
− − =
2
2 22 cos cos 02rr rρ πρ θ ρ θ− − =
12 cos cos 02
π θ θ− − = ⇒ 1(cos ) ( ) 22
θ π∗ + = ⇒ cos 0,5492θ =
056,69θ =

164
Problem 11 ) Homojen levhadan şekildeki gibi kesilerek oluşturulmuş cismin a) kütle merkezinin koordinatlarını b) A ucundan şekildeki gibi asıldığında denge durumundaki θ açısını bulunuz.
4 cm A
1,5 cm r = 1 cm
1,5 cm A θ 2cm 11 cm Çözüm: y 1
2
4 cm 3 A 1,5 cm r = 1 cm
1,5 cm 11-Gx x 2cm 4 11 cm θ G Gy x y A Ax Ay 4 4 43
3π∗
+ 24 8
2π π∗
= 32π 12824
3π +
4 1,5 3 8 24∗ = 96 36 8+1=9 1 3*3/2 40,5 4,5 2 1,5 π− 2π− 1,5π− ∑ 7 28,5π + 30 136,5π + 22,5 83,1667π +
x
AxG
A= ∑∑
, 30 136,57 28,5xG ππ+
=+
, 4,57xG cm= , y
AyG
A= ∑∑
, 22,5 83,16677 28,5yG ππ+
=+
3,047yG cm= , tan11
y
x
GG
θ =−
, 3,047tan11 4,57
θ =−
⇒ 025,36θ =
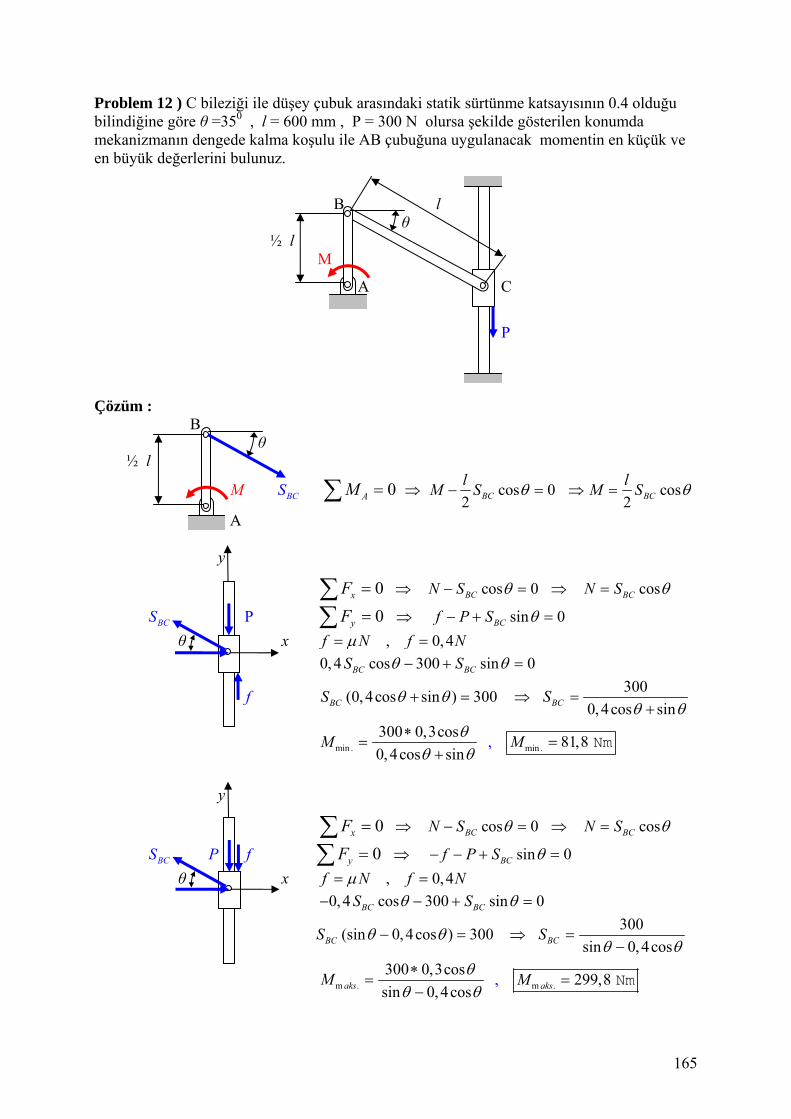
165
Problem 12 ) C bileziği ile düşey çubuk arasındaki statik sürtünme katsayısının 0.4 olduğu bilindiğine göre θ =350 , l = 600 mm , P = 300 N olursa şekilde gösterilen konumda mekanizmanın dengede kalma koşulu ile AB çubuğuna uygulanacak momentin en küçük ve en büyük değerlerini bulunuz.
B l θ ½ l M
A C
P Çözüm : B θ ½ l
M BCS 0AM =∑ ⇒ cos 02 BClM S θ− = ⇒ cos
2 BClM S θ=
A y
0xF =∑ ⇒ cos 0BCN S θ− = ⇒ cosBCN S θ=
BCS P 0yF =∑ ⇒ sin 0BCf P S θ− + = θ x f Nμ= , 0, 4f N= 0, 4 cos 300 sin 0BC BCS Sθ θ− + =
f (0, 4cos sin ) 300BCS θ θ+ = ⇒ 3000,4cos sinBCS
θ θ=
+
min .300 0,3cos0,4cos sin
M θθ θ
∗=
+ , min . 81,8M = Nm
y
0xF =∑ ⇒ cos 0BCN S θ− = ⇒ cosBCN S θ=
BCS P f 0yF =∑ ⇒ sin 0BCf P S θ− − + = θ x f Nμ= , 0, 4f N= 0, 4 cos 300 sin 0BC BCS Sθ θ− − + =
(sin 0,4cos ) 300BCS θ θ− = ⇒ 300sin 0,4cosBCS
θ θ=
−
m .300 0,3cossin 0,4cosaksM θ
θ θ∗
=−
, m . 299,8aksM = Nm

166
EK B Daha önceki senelerde sınavlarda sorulan Dinamik problemleri
Problem 1 ) Bir maddesel nokta bir doğru üzerinde 20,2a V= − ivme –hız bağıntısı ile hareket ediyor. 0t = da konum 0s = ve hız 20 /V m s= olduğuna göre
2t = deki konumu hızı ve ivmeyi hesaplayınız. Çözüm:
20.2dV Vdt
= − ⇒ 20 20
5t V dVdt
V= −∫ ∫ ⇒ 20
1 1 15( ) 5( )20
VtV V
= = −
5 520
tV
= − ⇒ 5 14
tV
= + ⇒ 1154
V
t=
+ ⇒ 5
14
Vt
=+
ds Vdt
= ⇒ 514
dsdt t
=+
⇒ 0 0
51/ 4
S t
ds dtt
=+∫ ∫ ⇒
05ln( 1/ 4) ts t= +
5[ ln( 1/ 4) ln(1/ 4)]s t= + − ⇒ 5ln(4 1)s t= + , 204 1
Vt
=+
2t = de 5ln 9s = , 10,99s m= , 209
V = , 2, 22V m= , 20, 2(2,22)a = −
20,99 /a m s= −

167
Problem 2 ) Şekilde gösterildiği gibi 1P maddesel noktası d1 doğrusu üzerinde
10 812
s Sin tπ= + konum-zaman bağıntısına göre 2P maddesel noktası ise xy düzleminde
bulunan 12 .R cm= yarıçaplı bir çember üzerinde 2
27tπθ = açı-zaman
bağıntısına göre hareket etmektedir. 3t = için 2P maddesel noktasının 1P maddesel noktasına göre bağıl yer , hız , ivme vektörlerini ve aralarındaki uzaklığı bulunuz. y 20cm.
2P
θ
C
10cm. 16cm. O A x
B d1 1P s z Çözüm:
2 1 2 1/P P P Pr r r= − , 2 2Pr OC CP= + , 20 16OC i j= + , 2 cos sinCP R i R j= θ + θ
2(20 12cos ) (16 12sinPr i j= + θ + + θ)
1P ABr OA sU= + , ABABUAB
=
2 2
20 10
20 10AB
i kU − +=
+ , 2 1
5 5ABU i k= − + , 1
2 1(20 )5 5Pr s i s k= − +
2 1/
2 1(12cos ) (16 12sin5 5P Pr s i j s k= θ+ + + θ) − , 3t = de
3π
θ = , 10 4 2s = +
2 1/2 1(6 (10 4 2) (16 6 3 (10 4 2)5 5P Pr i j k= + + + + ) − + ,
2 1/ 20 26, 4 7P Pr i j k= + −
2 1/2 1( 12 sin ) 12 cos5 5P PV V i j V k= − θ θ+ + θ θ) − , 2
27tπ
θ = , cos3 12
V t2π π=
3t = de 9
2πθ = , 2
3V π
= , 2 1/
3 2 1 1( 12 2) 12 29 2 3 9 2 35 5P PV i j k2π π 2π π
= − + + ) −
2 1/ 5,93 4,19 0,66P PV i j k= − + −
2 1/2 1( 12 sin cos ) (12 cos 12 sin5 5P Pa a i j a k2 2= − θ θ −12θ θ+ + θ θ − θ θ) −
272π
θ = , sin18 12
a t2π π
= − , 3t = de 272π
θ = , 236
a2π
=
2 1/3 1 2 1 3 1( 12 2) (12 12 2
27 2 81 2 36 27 2 81 2 365 5P Pa i j k2 22 22π 4π π 2π 4π π
= − −12 + + − ) −
2 1/ 5,7 3,7 0,17P Pa i j k= − + − + , 2 1
2 2 21 2 / 20 26, 4 7P PP P r= = + + , 1 2 33,85P P cm=

168
Problem 3 ) Şekildeki mekanizmada dairesel levhanın merkezinin hızı sola doğru 2 /CV cm s= (sabit) olduğuna göre AB çubuğunun verilen konum için
a) açısal hızını b) açısal ivmesini bulunuz 10 .R cm=
B 24 .AB cm= C 46 .BC cm= R θ 060θ = için A a) ?ABω = b) ?ABα = Çözüm:
I y
BCω B BCω BV ϕ BV R C D θ A x a)
C BCV IC= ω , IC IE R= − , tanIE AE= θ , cos cosAE BC AB= ϕ + θ , cos CDBC
ϕ =
2 2CD BC BD= − , sinBD AB R= θ − , 10,785BD cm= , 44,718CD cm= ,
56,718AE cm= , 98,238IE cm= , 88,238IC cm= , cosAEIA =
θ , 113,436IA cm=
89,436IB cm= , 013,659ϕ = , CBC
VIC
ω = , 288,238BCω = , 0,0227 /BC rad sω =
B BCV IB= ω , 2,027 /BV cm s= , 0,0845 /AB rad sω = b) /B C B Ca a a= + , 0Ca = ( C nin hareketi doğrusal hızının şiddeti sabit old.)
B Ba k AB VΑΒ ΑΒ= α ∧ + ω ∧ , / /B C C C B Ca CB VΒ Β= α ∧ + ω ∧
sin cosB B BV V i V j= θ − θ , 1,76 1,01BV i j= − , 2CV i= , /B C B CV V V= −
/ 0, 24 1,01B CV i j= − − , cos sinAB AB i AB j= θ + θ , 12 12 3AB i j= +
cos sinCB BC i BC j= ϕ + ϕ , 46cos 46sinCB i j0 0= 13,659 + 13,659 44,7 10,86CB i j= +

169
(12 12 3 ) 0,0845 (1,76 1,01 )Ba k i j k i jΑΒ= α ∧ + − ∧ −
( 12 3 0,085) (12 0,149)Ba i jΑΒ ΑΒ= − α − + α −
/ (44,7 10,86 ) 0,0227 ( 0, 24 1,01 )B C Ca k i j k i jΒ= α ∧ + + ∧ − − / ( 10,86 0,023) (44,7 0,00545)B C C Ca i jΒ Β= − α + + α −
( 12 3 0,085) (12 0,149) ( 10,86 0,023) (44,7 0,00545)B C Ca i j i jΑΒ ΑΒ Β Β= − α − + α − = − α + + α −
12 3 0,085 10,86 0,023
3 (12 0,149) 3 (44,7 0,00545)C
C
ΑΒ Β
ΑΒ Β
− α − = − α +
+ α − = α − 20,00804 /AB rad sα = −
66,56 0,3566CΒα = − ⇒ 20,00544 /C rad sΒα = −

170
Problem 4 ) D diski ve ona mafsallı çubuktan oluşan mekanizmada şekilde gösterildiği anda D diskinin açısal hızı 6 / .D rad sω = ve açısal ivmesi 22 /D rad sα = dır. Şekilde gösterildiği anda a) AB çubuğunun açısal hızını b) AB çubuğunun açısal ivmesini c) AB çubuğunun orta noktası G nin ivmesini hesaplayınız. Dω 40cm. D B 100cm. G 300 A Çözüm: y Dω 40cm. D B I G Dω
BV 300 A AV x a)
B DV R= ω , 40 6BV = ∗ , 240 /BV cm s= , B ABV IB= ω ⇒ BAB
VIB
ω = , 24050 3ABω =
8 35ABω = , 2,77 /AB rad sω = , A ABV IA= ω , 850 3
5AV = , 80 3 /AV cm s=
b) /B A B Aa a a= + , B D D Ba k DB k V= −α ∧ − ω ∧ , 2 40 6 ( 240 )Ba k i k j= − ∧ − ∧ −
1440 80Ba i j= − − , A Aa a i= , / /B A B Aa k AB k VΑΒ ΑΒ= α ∧ + ω ∧ , /B A B AV V V= −
/ 80 3 240B AV i j= − − , 50 3 50AB i j= − + ,
/ ( 50 3 50 ) 3 ( 80 3 240 )B Aa k i j k i jΑΒ8
= α ∧ − + + ∧ − −5
/ ( 50 384 3) ( 50 3 384)B Aa i jΑΒ ΑΒ= − α + + − α −
1440 80 [( 50 384 3) ( 50 3 384) ]B Aa i j a i i jΑΒ ΑΒ= − − = + − α + + − α −
1440 80 ( 50 384 3) ( 50 3 384)Ai j a i jΑΒ ΑΒ− − = − α + + + − α −
50 384 3 1440
50 3 384 80AaΑΒ
ΑΒ
− α + + = −
− α − = − ⇒ 80 384
50 3AB−
α = , 2
2
3,51 /
1929,6 /AB
A
rad s
a cm s
α = −
= −
c) /G A G Aa a a= + , 1929,6Aa i= − , / /G A G Aa k AG k VΑΒ ΑΒ= α ∧ + ω ∧

171
/G AV k AGΑΒ= ω ∧ , 12
AG AB= , 1 ( 50 3 50 )2
AG i j= − + , 25 3 25AG i j= − +
/ 3 ( 25 3 25 )G AV k i j8= ∧ − +
5 , / 40 3 120G AV i j= − −
/ ( 25 3 25 ) 3 ( 40 3 120 )G Aa k i j k i j8= −3,51 ∧ − + + ∧ − −
5
/ 420,3 40G Aa i j= − , 1929,6 (420,3 40 )Ga i i j= − + −
1509,3 40Ga i j= − − , 21509,8 /Ga cm s=

172
Problem 5 ) 6kg Kütleli ve 20 .cm= kenar uzunluklu kare şeklindeki homojen malzemeden yapılan aşağıdaki cisim A köşesi etrafında ilk hızsız harekete bırakılıyor. Cismin AB köşegeninin yatayla θ açısı yaptığı anda A mesnetindeki tepki kuvvetini hesaplayınız. 20 .cm=
6 .m kg= A B θ = 300 θ Çözüm: mg (1) mg B x θ h GF m a=∑ (2)
G Ga AG V= α ∧ + ω ∧ y
GV AG= ω ∧ , 2 cos sinAG AG i AG j= θ + θ , 2
ABAG = , 2AB = l , 22
AG = l
0 02
2 2cos30 sin 302 2
AG i j= +l l , 26 2
4 4AG i j= +l l
A AM I= α∑ ⇒ A
A
MI
α = ∑ , cosAM mg AG= θ∑ , 64AM mg=∑ l
2( )A GI I m AG= + , 2 21 112 12GI m m= +l l , 21
6GI m= l , 2 21 2( )6 2AI m m= +l l
2 21 26 4AI m m= +l l , 22
3AI m= l , 2
6423
mg
mα =
l
l , 3 6
8g
α =l
, 3 6 9,818 0,2
α =
245,06 /rad sα = , ( ) ( ) 1 21 2 T T→τ + = , 1 0T = ( ilk hızlar sıfır olduğundan )
( ) ( )1 2 sinmg AG→τ = θ , ( ) ( )1 22
4mg→τ = l , 2
12 AT I 2= ω , 2
21 22 3
T m 2= ωl
22
26
T m 2= ωl , 22 24 6
mg m 2= ωl l ⇒ 3 24
gω =
l , 3 2 9,81
4 0, 2ω =
∗ ,
7, 213 /rad sω = , 6 2( )4 4GV k i j= 7,213 ∧ +l l , 0,51 0,883GV i j= − +
6 2( 0,2 0,2 ) ( 0,51 0,883 )4 4Ga k i j k i j= 45,06 ∧ + + 7,213 ∧ − +
9,555 1,84Ga i j= − +
xx GF m a=∑ ⇒ 6 ( 9,555)xAR = ∗ − ⇒ 57,3 .
xAR N= −
yy GF m a=∑ ⇒ 6 1,84
yAR m g+ = ∗ ⇒ 47,82 .yAR N= − 74,6 .AR N=

173
Problem 6 ) A otomobili otobanda doğrusal bir yolda hareket ederken B otomobilide R = 150 m. Yarıçaplı bir çıkışta hareket ediyor. A nın hızı 1 m/s2 oranında artarken B nin hızı 0.9 m/s2 oranında azalıyor. Şekilde gösterilen konum için a ) A nın Bye göre hızını VA/B , b) A nın B ye göre ivmesini aA/B hesaplayınız.
y A VA = 75 km / h B 300 VB = 40 km / h R= 150m 0 x
Çözüm : a) /A B A BV V V= −
75AV i= , 0 040cos30 40sin 30BV i j= − , 20 3 20BV i j= −
/ (75 20 3 ) 20A BV i j= − + , / 40,36 20A BV i j= + , / 45,04 /A BV km h=
020arctan 26,3640,36
θ = =
b) /A B A Ba a a= − Aa i=
( ) ( )B B T B Na a T a N= + , 2( ) 0,9 /B Ta m s= − , 2
( ) BB N
Va
R=
40 100040 / /60 60BV km h m s∗
= =∗
, 11,11 /BV m s= , 2(11,11)( )
150B Na =
2( ) 0,823 /B Na m s= , 0,9 0,823Ba T N= − + 0 0 0 00,9 (cos30 sin 30 ) 0,823( sin 30 cos30 )Ba i j i j= − + + − −
(0, 45 3 0, 4115) (0, 45 0, 4115 3 )Ba i j= − + + − 1,191 0,2627Ba i j= − −
/ 2,191 0,2627A Ba i j= − , 2/ 2, 206 /A Ba m s= , 00, 2627arctan 6,84
2,191ϕ = =

174
Problem 7 ) Şekildeki Krank-Biyel mekanizmasında AB krankı saat ibrelerinin tersi yönünde 5 /AB rad sω = ( sabit ) açısal hızı ile döndüğüne göre Şekilde gösterilen konum için C pistonunun a) hızını b ) ivmesini bulunuz. y 10 cm
ABω 30 cm
A B 10 cm C x Çözüm :
a) y BV
ABω BCω I
A B 10 cm CV C x B ABV ABω= , 5 10BV = ∗ , 50 /BV cm s=
B BCV IBω= ⇒ BBC
VIB
ω = , 2 230 10IB = − , 10 8IB cm= , 5 /8BC rad sω =
C BCV ICω= , 50 /8CV cm s= , 17,68 /CV cm s=
b) /C B C Ba a a= + , B AB AB Ba k AB k Vα ω= ∧ + ∧ , ABω sabit olduğundan 0ABα = dır.
50BV j= , 5 50Ba k j= ∧ , 250Ba i= − , / /C B BC BC C Ba k BC Vα ω= ∧ + ∧
58BC kω = − , /C B C BV V V= − , 17,68CV i= − , / 17,68 50C BV i j= − −
10 8 10BC i j= − , /5(10 8 10 ) ( 17,68 50 )8C B BCa k i j k i jα= ∧ − − ∧ − −
/250 250(10 ) (10 8 )
8 8C B BC BCa i jα α= − + + , C Ca a i=
250 250(10 250) (10 8 )8 8C C BC BCa a i i jα α= = − − + +
25010 2508
25010 8 08
BC C
BC
aα
α
− − =
+ = ⇒
2
2
25 1,105 /8 8
349, 4 /
BC
C
rad s
a cm s
α = − = −
= −

175
Problem 8 ) Verilen mekanizmadaki doğrusal hareket yapan A bileziğinin Şekilde gösterildiği anda hızı sağa doğru VA = 2.5 m /s , ivmesi aA = 1.5 m /s2 olduğuna göre BC krankının açısal hızını ve açısal ivmesini 030θ = için bulunuz.
y
C 1,25 m 3 m B 21,5 /Aa m s=
θ A 2,5 /AV m s= x I sonsuzda Ani dönme merkezi I sonsuzda olduğundan 0ABω = ve A BV V= dir.
B BCV BCω= ⇒ BBC
VBC
ω = , 2,51,25BCω = , 2 /BC rad sω =
/1,5A B A Ba i a a= = +
B BC BC Ba k CB k Vα ω= ∧ + ∧ , / /A B AB AB A Ba k BA k Vα ω= ∧ + ∧
1, 25CB j= − , 2,5BV i= , 3 332 2
BA i j= −
( 1, 25) 2 2,5B BCa k j k iα= ∧ − + ∧ , 1, 25 5B BCa i jα= +
/3 3( 3 )2 2A B ABa k i jα= ∧ − , /
3 3 32 2A B AB ABa i jα α= +
3 31,5 (1,25 ) ( 3 5)2 2A BC AB ABa i i jα α α= = + + +
31,25 1,52
3 3 5 02
BC AB
AB
α α
α
+ =
+ = ⇒
2
2
1,92 /
3,51 /AB
BC
rad s
rad s
α
α
= −
=
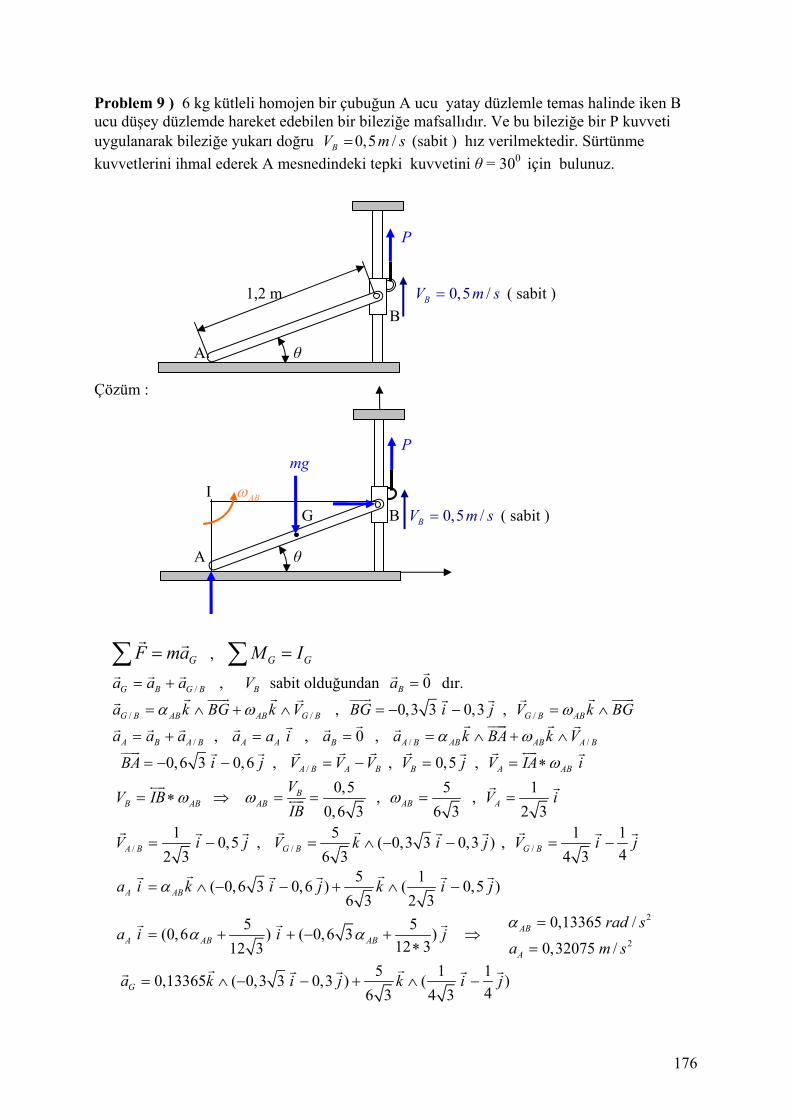
176
Problem 9 ) 6 kg kütleli homojen bir çubuğun A ucu yatay düzlemle temas halinde iken B ucu düşey düzlemde hareket edebilen bir bileziğe mafsallıdır. Ve bu bileziğe bir P kuvveti uygulanarak bileziğe yukarı doğru 0,5 /BV m s= (sabit ) hız verilmektedir. Sürtünme kuvvetlerini ihmal ederek A mesnedindeki tepki kuvvetini θ = 300 için bulunuz. P 1,2 m 0,5 /BV m s= ( sabit ) B A θ Çözüm : P mg
I ABω G B 0,5 /BV m s= ( sabit ) A θ GF ma=∑ , G GM I=∑
/G B G Ba a a= + , BV sabit olduğundan 0Ba = dır.
/ /G B AB AB G Ba k BG k Vα ω= ∧ + ∧ , 0,3 3 0,3BG i j= − − , /G B ABV k BGω= ∧
/A B A Ba a a= + , A Aa a i= , 0Ba = , / /A B AB AB A Ba k BA k Vα ω= ∧ + ∧
0,6 3 0,6BA i j= − − , /A B A BV V V= − , 0,5BV j= , A ABV IA iω= ∗
B ABV IB ω= ∗ ⇒ 0,50,6 3
BAB
VIB
ω = = , 56 3ABω = , 1
2 3AV i=
/1 0,5
2 3A BV i j= − , /5 ( 0,3 3 0,3 )
6 3G BV k i j= ∧ − − , /1 1
44 3G BV i j= −
5 1( 0,6 3 0,6 ) ( 0,5 )6 3 2 3A ABa i k i j k i jα= ∧ − − + ∧ −
5 5(0,6 ) ( 0,6 3 )12 312 3A AB ABa i i jα α= + + − +
∗ ⇒
2
2
0,13365 /
0,32075 /AB
A
rad s
a m s
α =
=
5 1 10,13365 ( 0,3 3 0,3 ) ( )46 3 4 3Ga k i j k i j= ∧ − − + ∧ −

177
110,160375 3,22 10Ga i j−= − ∗ , 0,160375Ga i=
x xF ma=∑ ⇒ 6 0,160375N = ∗ , 0,96N Newton=
y yF ma=∑ ⇒ 0AP R mg+ − = , 6 9,81AP R+ = ∗ , 58,86AP R Newton+ =
G GM I=∑ ⇒ 20,6 3 0,6 0,6 3 12 2 2 12A ABP N R m L α− ∗ − = ∗ ∗
20,6 3 0,6 0,6 3 10,96 6 1,2 0,133652 2 2 12AP R− ∗ − = ∗ ∗
20,384225
0,6 358,86
A
A
P R
P R
− = ∗
+ = ⇒ 29,06AR Newton=
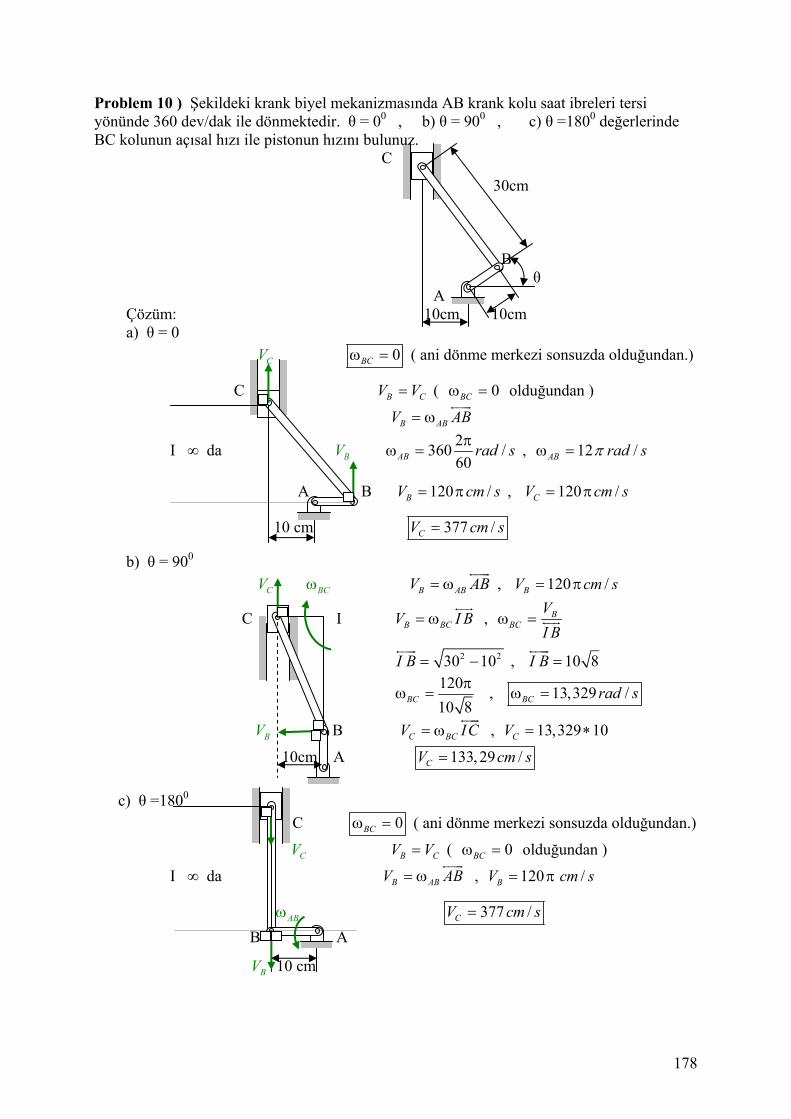
178
Problem 10 ) Şekildeki krank biyel mekanizmasında AB krank kolu saat ibreleri tersi yönünde 360 dev/dak ile dönmektedir. θ = 00 , b) θ = 900 , c) θ =1800 değerlerinde BC kolunun açısal hızı ile pistonun hızını bulunuz.
C
30cm B θ A Çözüm: 10cm 10cm a) θ = 0 CV 0BCω = ( ani dönme merkezi sonsuzda olduğundan.)
C B CV V= ( 0BCω = olduğundan )
B ABV AB= ω
I ∞ da BV 2360 /60AB rad sπ
ω = , 12 /AB rad sπω =
A B 120 /BV cm s= π , 120 /CV cm s= π
10 cm 377 /CV cm s=
b) θ = 900 CV BCω B ABV AB= ω , 120 /BV cm s= π
C I B BCV I B= ω , BBC
VI B
ω =
2 230 10I B = − , 10 8I B =
12010 8BC
πω = , 13,329 /BC rad sω =
BV B C BCV IC= ω , 13,329 10CV = ∗
10cm A 133,29 /CV cm s= c) θ =1800 C 0BCω = ( ani dönme merkezi sonsuzda olduğundan.)
CV B CV V= ( 0BCω = olduğundan )
I ∞ da B ABV AB= ω , 120 /BV cm s= π
ABω 377 /CV cm s= B A
BV 10 cm

179
Problem 11 ) Kütleleri m = 10 kg ve boyları 2 .m=l olan iki ince çubuk şekilde görüldüğü gibi birbirine C noktasında mafsalla bağlanmış olup B noktası zemin üzerinde serbestçe kayabilmektedir. Sistem θ = 600 de ilk hızsız olarak harekete bırakılıyor. θ = 300 de çubukların açısal hızları ile B noktasının hızını bulunuz. C θ A B
Çözüm: C y I mg mg
mg C mg
G1 G2 h θ h1 CV A B h2 A θ
2GV BV
B x
( ) ( ) 1 21 2 T T→τ + = , 1 0T = ( ilk hızı sıfır olduğundan ) , ( ) ( )1 2 2mgh→τ =
1 2h h h= − , 0 0sin 60 sin 302 2
h = −l l , 0 0(sin 60 sin 30 )h = − , 0,366 .h m=
( ) ( )1 2 2 10 9,81 0,366→τ = ∗ ∗ ∗ , ( ) ( )1 2 71,81 .Nm→τ = , 2 2
2 22
1 1 12 2 2A AC G G BCT I mV I 2= ω + + ω
2 2G BCV IG= ω , C ACV AC= ω C BCV IC= ω ⇒ BC AC
ACIC
ω = ω , IC IA AC= − ,
cosABIA =
θ , 2 cosAB = θl , 2IA = l , 4 .IA m= , 2 .IC m= , 2
2BC ACω = ω ⇒ BC ACω = ω
2 2 2IG IG IB BG= = + , IB IB j= − , sinIB IA= θ , 04sin 30IB = , 2IB j= −
2 cos sin2 2
BG i j= − θ + θl l 2 cos sinBG i j0 0= − 30 + 30 , 2
3 12 2
BG i j= − +
2 23 3
2 2IG IG i j= = − − , 2
3 94 4
IG = + , 2 3 .IG m= , 2
3G ACV = ω
2 2 2 2 22
1 1 1 1 132 2 2 12AC AC ACT m m m= ω + ∗ ω + ω
3l l , 2 2 2
240 30 406 2 24AC AC ACT = ω + ω + ω
22
140 71,816 ACT = ω = ⇒ 71,81* 6
140ACω = , 1,754 /AC AB rad sω = ω = , B BCV IB= ω
1,754 2BV = ∗ , 3,51 /BV rad s=

180
Problem 12 ) BHDF İstavrozu AB ve DE çubukları ile bağlanmıştır. AB Çubuğu 4 /AB rad sω = sabit açısal hızı ile saat ibreleri yönünde dönüyor. Şekilde gösterildiği anda
istavrozun a) açısal hızını b) açısal ivmesini c) G merkez noktasının ivmesini bulunuz. 150 150 150 150
A F E 200
ABω G B D H ( Ölçüler mm cinsindendir.) Çözüm : 150 150 150 150
x A F DV E 200 ABω B G EDω D BV BHDFω H y I a) B ABV ABω= , 2 2150 200AB = + , 250AB mm= , 1000 /BV mm s=
B BHDFV IBω= ⇒ BBHDF
VIB
ω = , IB IA= ⇒ 4 /BHDF AB rad sω ω= =
1000 /D BV V mm s= = , 4 /BD rad sω = b) /G B G Ba a a= + , /G D G Da a a= +
B AB AB Ba k AB k Vα ω= ∧ + ∧ , B ABV k ABω= ∧ , ABω sabit olduğundan 0ABα = dır.
150 200AB i j= + , 4 (150 200 )BV k i j= ∧ + , 800 600BV i j= − +
4 ( 800 600 )Ba k i j= ∧ − + , 2400 3200Ba i j= − −
/ /4G B BHDF G Ba k BG k Vα= ∧ − ∧ , / 4 150G BV k i= − ∧ , / 600G BV j= −
/ 150 4 600G B BHDFa k i k jα= ∧ − ∧ − , / 2400 150G B BHDFa i jα= − +
4D ED Da k ED k Vα= ∧ + ∧ , 4 ( 150 200 )DV k i j= ∧ − + , 800 600DV i j= − −
( 150 200 ) 4 ( 800 600 )D EDa k i j k i jα= ∧ − + + ∧ − − ( 200 2400) ( 150 3200)D ED EDa i jα α= − + + − −
/ /4G D BHDF G Da k DG k Vα= ∧ − ∧ , / 4G DV k DG= − ∧ , 150DG i= −
/ 4 150G DV k i= − ∧ − , / 600G DV j=

181
/ ( 150) 4 600G D BHDFa k i k jα= ∧ − − ∧ , / 2400 150G D BHDFa i jα= −
( 2400 3200 ) ( 2400 150 )
[( 200 2400) ( 150 3200) ] (2400 150 )G BHDF
ED ED BHDF
a i j i j
i j i j
α
α α α
= − − + − + =
− + + − − + −
4800 (150 3200)
(4800 200 ) ( 150 3200 150 )G BHDF
ED ED BHDF
a i j
i j
α
α α α
= − + − =
− + − − − ⇒
4800 200 4800
150 3200 150 150 3200ED
ED BHDF BHDF
αα α α− = −
− − − = − ⇒
2
2
48 /
24 /ED
BHDF
rad s
rad s
α
α
=
=
c) 4800 (150 3200)G BHDFa i jα= − + − 4800 400Ga i j= − + , 24816,6 /Ga mm s= , 24,8 /Ga m s=

182
Problem 13 ) 12 kg kütleli AB çubuğunun uçları şekildeki kanallar doğrultusunda hareket etmektedir. Düşey kanalda hareket eden A ucuna katsayısı k = 120 N/m olan bir yay bağlıdır. Bu yay 0θ = da doğal uzunluğundadır. Eğer çubuk 0θ = da ilk hızsız harekete bırakılırsa 030θ = de A ucunun hızını bulunuz. B θ A 750 mm Çözüm: AV B θ G ABω A I BV 1 2 1 2T Tτ → + =
( )21 2
0,75 1sin2 2
m g k yτ θ→ = − Δ , 750siny θΔ =
1 0T = , 2 22
1 12 2G GT mV I ω= + , 21 0,75
12GI m= ∗
GV IGω= , 0,752
IG = , 0,375 /GV m sω=
2
2 2 22
1 0,75 1 112 12 0,752 4 2 12
T ω ω= + ∗ , 2 22 2 0,75T ω= ∗
2
1 20,75 1 1 112 120 0,75
2 2 2 2gτ →
⎛ ⎞= − ⎜ ⎟⎝ ⎠
, 21 2 3 0,75 15 0,75gτ → = ∗ − ∗
1 2 13,635 kgmτ → = , 2 21 2 13,635 2 0,75τ ω→ = = ∗ ⇒ 12,12ω = , 3, 481 /rad sω =
AV IAω= , 0,75 cosIA θ= ∗ , 30,752
IA = ∗ , 30,75 12,122AV = ∗ ∗
2, 26 /AV m s=