meccanica razionale e statica - unisalento.it
TRANSCRIPT

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaNovedrate, 15 giugno 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Calcolo dell’energia cinetica in un atto di moto rigido piano (con dimostrazione).
. Principio dei lavori virtuali.
Esercizi
Esercizio 1. Il sistema di figura e posto in un piano verticale si compone di un’asta AB di lunghezza `e massa m e di una lamina quadrata CDEF di lato a e massa m. L’asta e incernierata nel suo estremoA ad un punto fisso; la lamina quadrata e appoggiata senza attrito sull’asta ed e posta ad una distanzas dal punto A. Sull’estremo B dell’asta agisce una forza incognita F , diretta come in figura.
. Determinare il valore di F necessario a mantenere in equilibrio il sistema con l’asta orizzontale;
. in tale configurazione calcolare le reazioni vincolari in A.
m, `
s
A BC D
EF
G
m, a
F
Esercizio 2. Il sistema di figura e posto in un piano orizzontale (si trascurino quindi le forze peso) esi compone di un’asta AB di lunghezza ` e massa m e di un punto materiale C di massa m. L’asta eincernierata nel suo estremo A ad un punto fisso; il punto scorre senza attrito lungo l’asta. Sull’estremoB dell’asta agisce una forza incognita F , diretta come in figura e che si mantiene durante il moto sempreortogonale all’asta. Scegliendo come coordinate libere l’angolo ϑ che l’asta AB forma con la direzioneorizzontale e la distanza s tra il punto C ed A, si chiede di:
. scrivere la velocita del punto C;
. calcolare l’energia cinetica del sistema;
. calcolare la componente generalizzata della sollecitazione attiva;
. determinare, in funzione di s e s, il valore di F che mantiene l’asta in rotazione uniforme ϑ = ω0
(costante);
. in tali condizioni trovare il moto del punto materiale.
m, `
ϑ
s
x
y
m,C
A
B
F

Soluzioni
Esercizio 1.
. Il bilancio dei momenti del sistema rispetto ad A e
M(sist.)Az = F`−mg `
2−mg(s+
a
2) = 0 ⇒ F = mg
`+ 2s+ a
2`.
. Sia ΦA = HA i + VA j la reazione vincolare che la cerniera esercita sull’asta nel punto A.
R(sist.)x = HA = 0
R(sist.)y = VA − 2mg + F = 0
Esercizio 2.
. Sia er un versore diretto lungo l’asta e sia eϑ un versore ortogonale all’asta, nella direzione delle ϑpositive.
(C −A) = s er ⇒ vC = s er + sϑ eϑ ⇒ v2C = s2 + s2ϑ2 .
.
T =1
2I(asta)Az ϑ2 +
1
2mv2C =
1
6m`2ϑ2 +
1
2m(s2 + s2ϑ2
). L’unica forza attiva e F (la forza peso non conta: il sistema e posto in un piano orizzontale).
δL(att) = F · δB = F`δϑ
[teoria: δL(att) = Qsδs+Qϑδϑ]⇒
Qs = 0
Qϑ = F`.
. Calcoliamo i termini delle equazioni di Lagrange
d
dt
∂T
∂s= ms
∂T
∂s= msϑ2
d
dt
∂T
∂ϑ=
d
dt
(1
3m`2ϑ+ms2ϑ
)=
1
3m`2ϑ+ 2mssϑ+ms2ϑ
∂T
∂ϑ= 0 .
Le equazioni di Lagrange sono quindi:
ms−msϑ2 = 0 (1)
1
3m`2ϑ+ 2mssϑ+ms2ϑ = F` (2)
Valutando la (2) per il moto assegnato ϑ = ω0, ϑ = 0, otteniamo il valore richiesto di F , in funzionedi s e s
F =2mω0
`ss . (3)
. L’andamento di s in funzione del tempo si ricava dalla (1):
s− ω20s = 0 ⇒ s(t) = Aeω0t +Be−ω0t ,
dove A e B sono costanti arbitrarie che si possono determinare imponendo le condizioni iniziali(non specificate nel testo). In conclusione, il punto C sfugge lungo l’asta con legge esponenziale.

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
Novedrate, 20 luglio 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica.
. Formula fondamentale dell’atto di moto rigido.
Esercizi
Esercizio 1. Nel riferimento ortogonale (O;x; y) di figura, l’asta AB, omogenea, di lunghezza ` emassa m, ha gli estremi A e B scorrevoli rispettivamente lungo gli assi verticale y e orizzontale x. Un filoinestensibile di massa trascurabile e legato ad un estremo al punto B dell’asta, passa su un piolo fisso Cposto sull’asse y ed e collegato ad O mediante una molla di costante elastica k. Tutti i vincoli sono lisci.Si assuma come coordinata libera del sistema l’angolo antiorario ϑ di figura, che l’asta forma con l’assey. Sia s la coordinata che identifica l’allungamento della molla.
. Scrivere il legame cinematico tra s e ϑ, sapendo che la molla ha allungamento nullo (s = 0) quandol’asta e verticale (ϑ = 0).
. Determinare k perche la configurazione con ϑ = π/3 sia di equilibrio.
. In tali condizioni, studiare la stabilita della posizione di equilibrio ϑ = π/3.
`,m
x
y
k
O
A
B
C
ϑ
s
Esercizio 2. Si consideri il sistema dell’esercizio precedente e si ponga k = mg` . Si assuma che il filo
rimanga sempre teso durante il moto del sistema. All’istante t = 0, l’asta e in posizione verticale (ϑ = 0)e ha velocita angolare ω = ω0 k (ω0 ≥ 0).Si chiede di:
. scrivere l’energia cinetica del sistema e l’energia meccanica totale;
. determinare l’estremo inferiore dei valori di ω0 tale per cui l’asta raggiunge la configurazioneorizzontale ϑ = π/2;
. scrivere l’equazione di moto;
. calcolare la reazione che l’asse verticale esercita sull’asta nel punto A.

Soluzioni
Esercizio 1.
. L’ordinata del punto A e yA = ` cosϑ. La condizione di inestensibilita del filo impone che siayA = −s. Il legame cercato e quindi
s = `ϑ sinϑ , (1)
che, integrato, fornisces = C − ` cosϑ , (2)
dove C e una costante arbitraria. Questa si puo determinare sfruttando la condizione indicatanel testo: a ϑ = 0 (asta verticale) corrisponde un’elongazione nulla della molla e quindi s = 0.Sostituendo in (2) si ricava C = ` e quindi il legame finito tra le coordinate e
s = `(1− cosϑ) . (3)
. Applichiamo il Teorema di stazionarieta del potenziale:
U(ϑ) = −1
2ks2 −mgyG = −1
2k`2(1− cosϑ)2 −mg `
2cosϑ , (4)
dove abbiamo indicato con G il baricentro dell’asta AB.Calcoliamo la derivata del potenziale
U ′(ϑ) =`
2sinϑ
(mg − 2k`(1− cosϑ)
). (5)
Se, come richiesto nel testo, ϑ = π/3 e posizione di equilibrio, deve essere U ′(π/3) = 0. Questacondizione determina il valore cercato di k (si ricorda che cosπ/3 = 1/2)
mg − 2k`(1− cosϑ)∣∣∣ϑ=π/3
= mg − k` = 0 ⇒ k =mg
`. (6)
. Sostituendo il valore trovato di k nella derivata prima del potenziale, si trova
U ′(ϑ) =1
2mg` sinϑ(2 cosϑ− 1) ,
quindi la derivata seconda del potenziale e
U ′′(ϑ) = mg`(cos2 ϑ− sin2 ϑ− 2 cosϑ) .
Sostituendo ϑ = π/3 si verifica che U ′′(π/3) = − 34mg` < 0. La configurazione quindi corrisponde
ad un massimo del potenziale (ovvero un minimo dell’energia potenziale) ed e di equilibrio stabile.
Esercizio 2.
. Detto H il centro di istantanea rotazione dell’asta AB (che si trova all’intersezione della rettaverticale condotta per B con la retta orizzontale condotta per A), l’energia cinetica e
T =1
2IHzϑ
2 =1
2
( 1
12m`2 +m
`2
4
)ϑ2 =
1
6m`2ϑ2 ,
dove, per calcolare il momento d’inerzia IHz abbiamo applicato il Teorema di Huygens-Steiner.L’energia meccanica totale e (con k = mg/`)
E = T − U (4)=
1
6m`2ϑ2 +
1
2mg`[(1− cosϑ)2 + cosϑ] . (7)
. Le condizioni all’istante t = 0 permettono di calcolare il valore (costante) dell’energia meccanica.Sostituendo quindi ϑ = 0 e ϑ = ω0 nella (7), si ricava il valore di E:
E =1
6m`2ω2
0 +1
2mg` ,
la conservazione dell’energia meccanica e espressa quindi dal seguente integrale primo
1
6m`2ϑ2 +
1
2mg`[(1− cosϑ)2 + cosϑ] =
1
6m`2ω2
0 +1
2mg` . (8)

La minima velocita angolare ω0 e quella necessaria a far arrivare l’asta in configurazione orizzontale,con velocita nulla (ϑ = 0). Valutando quindi la (8) nella configurazione di asta orizzontale (ϑ = π/2)e con ϑ = 0, si trova
1
6m`2ω2
0 = 0 ⇒ ω0 = 0 .
Quindi l’energia potenziale iniziale, puramente gravitazionale (la molla ha estensione nulla) e esat-tamente quella necessaria per arrivare ad una configurazione con l’asta orizzontale, in cui l’energiapotenziale e puramente elastica. Si noti che la configurazione ϑ = 0 e di equilibrio instabile, ipotizzi-amo quindi di imporre inizialmente una piccola (“infinitesima”) velocita angolare per non ricaderenella soluzione banale ϑ = 0, ϑ = 0.
. L’equazione di moto si ricava semplicemente scrivendo il Teorema dell’energia cinetica. Per far cio,basta derivare la conservazione dell’energia meccanica (7):
dT
dt− dU
dt=dT
dt− dU
dϑϑ = 0 .
Sfruttando l’espressione della U ′(ϑ) trovata prima, si ottiene dopo qualche passaggio:
ϑ+3g
2`sinϑ(1− 2 cosϑ) = 0 .
. La reazione vincolare in A e solo orizzontale: ΦA = HA i. Scriviamo la prima equazione cardinaleper l’asta, proietta lungo l’asse x: Qx = HA. Per calcolare la quantita di moto, scriviamo la velocitadel baricentro dell’asta:
(G−O) =`
2(sinϑ i + cosϑ j) ⇒ vG =
`
2ϑ(cosϑ i− sinϑ j) .
Allora,
Qx = m`
2ϑ cosϑ ⇒ HA = m
`
2(ϑ cosϑ− ϑ2 sinϑ) .

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
Roma, 29 luglio 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica.
. Formula fondamentale dell’atto di moto rigido.
Esercizi
Esercizio 1. Nel riferimento ortogonale (O;x; y) di figura, l’asta AB, omogenea, di lunghezza ` e massam, ha gli estremi A e B scorrevoli rispettivamente lungo gli assi verticale y e orizzontale x. L’estremo Adell’asta e collegato, mediante una molla di costante elastica k, ad un punto fisso C, posto sull’asse y aduna distanza ` da O . Tutti i vincoli sono lisci.Si assuma come coordinata libera del sistema l’angolo antiorario ϑ di figura, che l’asta forma con l’assey. Sia s la coordinata che identifica l’allungamento della molla.
. Scrivere il legame cinematico tra s e ϑ.
. Determinare k perche la configurazione con ϑ = π/3 sia di equilibrio.
. In tali condizioni, studiare la stabilita della posizione di equilibrio ϑ = π/3.
`,m
x
y
k
O
A
B
C
ϑ
s
`
Esercizio 2. Si consideri il sistema dell’esercizio precedente e si ponga k = 2mg/`. All’istante t = 0,l’asta e in posizione verticale (ϑ = 0) e ha velocita angolare ω = ω0 k (ω0 ≥ 0).Si chiede di:
. scrivere l’energia cinetica del sistema e l’energia meccanica totale;
. determinare il minimo valore di ω0 tale per cui l’asta raggiunge la configurazione orizzontaleϑ = π/2;
. scrivere il valore dell’accelerazione angolare (ovvero di ϑ) quando l’asta passa dalla posizioneϑ = π/4;
. calcolare la reazione che l’asse verticale esercita sull’asta nel punto A.

Soluzioni
Esercizio 1.
. Il legame tra cercato es+ ` cosϑ = ` ⇒ s = `(1− cosϑ) . (1)
Questa relazione puo essere derivata per trovare il legame tra s e ϑ:
s = `ϑ sinϑ . (2)
. Applichiamo il Teorema di stazionarieta del potenziale:
U(ϑ) = −1
2ks2 −mgyG = −1
2k`2(1− cosϑ)2 −mg `
2cosϑ , (3)
dove abbiamo indicato con G il baricentro dell’asta AB.Calcoliamo la derivata del potenziale
U ′(ϑ) =`
2sinϑ
(mg − 2k`(1− cosϑ)
). (4)
Se, come richiesto nel testo, ϑ = π/3 e posizione di equilibrio, deve essere U ′(π/3) = 0. Questacondizione determina il valore cercato di k (si ricorda che cosπ/3 = 1/2)
mg − 2k`(1− cosϑ)∣∣∣ϑ=π/3
= mg − k` = 0 ⇒ k =mg
`. (5)
. Sostituendo il valore trovato di k nella derivata prima del potenziale, si trova
U ′(ϑ) =1
2mg` sinϑ(2 cosϑ− 1) ,
quindi la derivata seconda del potenziale e
U ′′(ϑ) = mg`(cos2 ϑ− sin2 ϑ− 2 cosϑ) .
Sostituendo ϑ = π/3 si verifica che U ′′(π/3) = − 34mg` < 0. La configurazione quindi corrisponde
ad un massimo del potenziale (ovvero un minimo dell’energia potenziale) ed e di equilibrio stabile.
Esercizio 2.
. Detto H il centro di istantanea rotazione dell’asta AB (che si trova all’intersezione della rettaverticale condotta per B con la retta orizzontale condotta per A), l’energia cinetica e
T =1
2IHzϑ
2 =1
2
( 1
12m`2 +m
`2
4
)ϑ2 =
1
6m`2ϑ2 ,
dove, per calcolare il momento d’inerzia IHz abbiamo applicato il Teorema di Huygens-Steiner.L’energia meccanica totale e (con k = 2mg/`)
E = T − U (3)=
1
6m`2ϑ2 +
1
2mg`[2(1− cosϑ)2 + cosϑ] . (6)
. Le condizioni all’istante t = 0 permettono di calcolare il valore (costante) dell’energia meccanica.Sostituendo quindi ϑ = 0 e ϑ = ω0 nella (6), si ricava il valore di E:
E =1
6m`2ω2
0 +1
2mg` ,
la conservazione dell’energia meccanica e espressa quindi dal seguente integrale primo
1
6m`2ϑ2 +
1
2mg`[2(1− cosϑ)2 + cosϑ] =
1
6m`2ω2
0 +1
2mg` . (7)
La minima velocita angolare ω0 e quella necessaria a far arrivare l’asta in configurazione orizzontale,con velocita nulla (ϑ = 0). Valutando quindi la (7) nella configurazione di asta orizzontale (ϑ = π/2)e con ϑ = 0, si trova (ω0 ≥ 0 per ipotesi)
mg` =1
6m`2ω2
0 +1
2mg` ⇒ ω0 =
√3g/` .

. L’equazione di moto si ricava semplicemente scrivendo il Teorema dell’energia cinetica. Per far cio,basta derivare la conservazione dell’energia meccanica (6):
dT
dt− dU
dt=dT
dt− dU
dϑϑ = 0 .
Sfruttando l’espressione della U ′(ϑ) data dalla (4), si ottiene, dopo la sostituzione k = 2mg/` equalche passaggio:
ϑ+3g
2`sinϑ(3− 4 cosϑ) = 0 .
Valutando questa espressione in ϑ = π/4 si ricava
ϑ = −3g
4`(3√
2− 4) ≈ −0.18 g/` .
. La reazione vincolare in A e solo orizzontale: ΦA = HA i. Scriviamo la prima equazione cardinaleper l’asta, proietta lungo l’asse x: Qx = HA. Per calcolare la quantita di moto, scriviamo la velocitadel baricentro dell’asta:
(G−O) =`
2(sinϑ i + cosϑ j) ⇒ vG =
`
2ϑ(cosϑ i− sinϑ j) .
Allora,
Qx = m`
2ϑ cosϑ ⇒ HA = m
`
2(ϑ cosϑ− ϑ2 sinϑ) .
Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
Novedrate, 21 settembre 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali d’inerzia.
. Equazioni di Lagrange. Caso non conservativo.
Esercizi
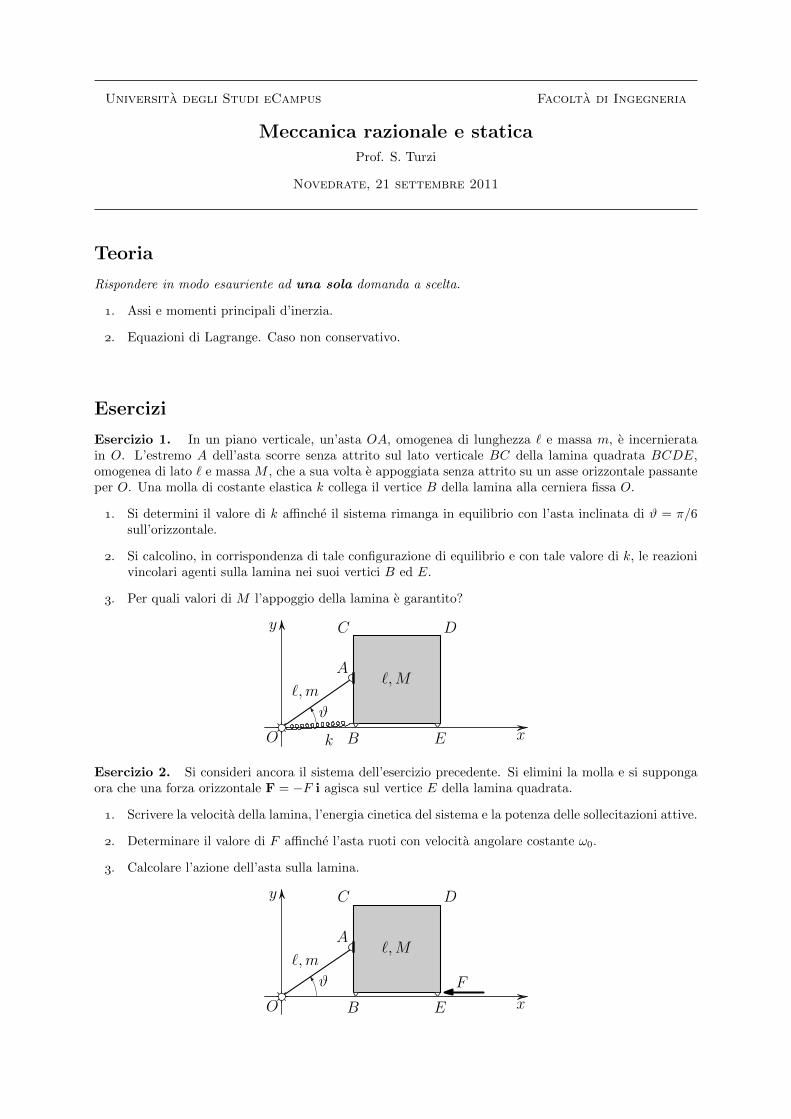
Esercizio 1. In un piano verticale, un’asta OA, omogenea di lunghezza ` e massa m, e incernieratain O. L’estremo A dell’asta scorre senza attrito sul lato verticale BC della lamina quadrata BCDE,omogenea di lato ` e massa M , che a sua volta e appoggiata senza attrito su un asse orizzontale passanteper O. Una molla di costante elastica k collega il vertice B della lamina alla cerniera fissa O.
. Si determini il valore di k affinche il sistema rimanga in equilibrio con l’asta inclinata di ϑ = π/6sull’orizzontale.
. Si calcolino, in corrispondenza di tale configurazione di equilibrio e con tale valore di k, le reazionivincolari agenti sulla lamina nei suoi vertici B ed E.
. Per quali valori di M l’appoggio della lamina e garantito?
`,m
ϑ
x
y
kO
A
B
C D
E
`,M
Esercizio 2. Si consideri ancora il sistema dell’esercizio precedente. Si elimini la molla e si suppongaora che una forza orizzontale F = −F i agisca sul vertice E della lamina quadrata.
. Scrivere la velocita della lamina, l’energia cinetica del sistema e la potenza delle sollecitazioni attive.
. Determinare il valore di F affinche l’asta ruoti con velocita angolare costante ω0.
. Calcolare l’azione dell’asta sulla lamina.
`,m
ϑ
x
y
O
A
B
C D
E
`,M
F

Soluzioni
Esercizio 1.
. Il potenziale del sistema e
U(ϑ) = −mg `2
sinϑ− 1
2k`2 cos2 ϑ .
Per il teorema di stazionarieta del potenziale, se ϑ = π/6 e posizione di equilibrio deve essereU ′(π/6) = 0:
U ′(ϑ) =`
2cosϑ
(2k` sin2 ϑ−mg
)⇒ U ′(π/6) =
√3
4`(k`−mg
)= 0 .
Ricaviamo quindi il valore di k cercato
k =mg
`(1)
. Siano ΦB = VB j e ΦE = VE j le reazioni richieste. Determiniamo le incognite verticali VB e VEutilizzando le seguenti equazioni cardinali della statica, scritte per la sola lamina quadrata:
M(lamina)Az = 0 e R(lamina)
y = 0 .
Si ottiene: −Fel` sinϑ−Mg `
2 + VE` = 0 ,
VB + VE −Mg = 0 .(2)
Tenendo conto che
Fel = k` cosϑ(1)=
√3
2mg ,
si ricava infine
VE =1
2Mg +
√3
4mg e VB =
1
2Mg −
√3
4mg .
. L’appoggio e garantito fintanto che VB ≥ 0 e VE ≥ 0. Dall’espressione di VB si ottiene quindi
M ≥√
3
2m.
Esercizio 2.
. (B −O) = ` cosϑ i ⇒ vB = −`ϑ sinϑ i.L’energia cinetica e
T =1
2I(asta)Oz ϑ2 +
1
2Mv2B =
1
6m`2ϑ2 +
1
2M`2ϑ2 sin2 ϑ . (3)
Il baricentro dell’asta ha velocita
vG =`
2ϑn ,
essendo n un versore ortogonale all’asta: n = − sinϑ i + cosϑ j.Le sollecitazioni attive sono il peso dell’asta e la forza F. La loro potenza e:
Π = −mg j · `2ϑn + F · vB = −mg `
2ϑ cosϑ+ F`ϑ sinϑ (4)
. Utilizziamo il Teorema dell’energia cinetica T = Π e sostituiamo poi le condizioni indicate nel testo,ϑ = 0, ϑ = ω0,
T =`2
3ϑ[3M sinϑ cosϑ ϑ2 +
(m+ 3M sin2 ϑ
)ϑ]ϑ=0, ϑ=ω0
= M`2ω30 sinϑ cosϑ .
Uguagliando questa espressione con la potenza Π, si trova:
F = M`ω20 cosϑ+
1
2mg
cosϑ
sinϑ.

. Sia ΦA = HA i l’azione che l’asta esercita sulla lamina quadrata nel punto A. Scriviamo la pri-ma equazione cardinale della dinamica per la sola lamina, proiettata lungo l’asse orizzontale. Laderivata della quantita di moto e
Q(lamina) =d
dt
(MvB
)= −M`ϑ sinϑ i−M`ϑ2 cosϑ i
∣∣∣ϑ=0, ϑ=ω0
= −M`ω20 cosϑ i .
La prima equazione cardinale quindi fornisce
HA − F = Q(lamina)x ⇒ HA = F −M`ω2
0 cosϑ =1
2mg
cosϑ
sinϑ.

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
Novedrate, 28 ottobre 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali d’inerzia.
. Equazioni di Lagrange. Caso non conservativo.
Esercizi
Esercizio 1. Il sistema articolato di figura e composto da tre aste di ugual lunghezza, `, incernierate agliestremi ed e posto in un piano verticale. L’asta BC ha massa m mentre le aste AC e AB sono di massatrascurabile. Una molla di costante elastica k collega la cerniera in B con un punto D, posto sulla verticale perB e alla stessa quota di A. Una forza incognita F = −F j agisce sulla cerniera C.
. Determinare F in modo tale che il sistema sia in equilibrio con ϑ = π/3.
. Si calcolino, in corrispondenza di tale configurazione di equilibrio, le reazioni vincolari a terra in A.
. Determinare le reazioni vincolari che l’asta BC esercita sulla cerniera in C.
m, `
ϑ
x
y` ` k
A
BC
F
Esercizio 2. Il sistema biella-manovella di figura e posto in un piano verticale si compone di due aste AB eBC di lunghezza ` e massa m, vincolate in B da una cerniera. L’estremo A di AC e vincolato a terra medianteuna cerniera, mentre l’estremo C di BC e libero di scorrere lungo una guida orizzontale. Una molla di costanteelastica k collega il carrello C con un punto fisso D posto sulla guida orizzontale a distanza 2` da A.
. Scrivere il legame tra la coordinata ϑ e l’elongazione della molla s.
. Determinare le coordinate del centro di istantanea rotazione dell’asta BC.
. All’istante iniziale t = 0, il sistema e in quiete con ϑ = π/2. Determinare la velocita angolare dell’astaAB quando ϑ = 0.
. Calcolare, in funzione di ϑ, ϑ e ϑ, le reazioni vincolari in A.
m, ` m, `
ϑ s
2`
x
y
kA
B
C D

Soluzioni
Esercizio 1.
. Scriviamo la seconda equazione cardinale risp. ad A, per tutto il sistema:
MA = F`/2− Fel`/2 = 0 ⇒ F = Fel = k` sinϑ = k
√3
2` .
. Detta ΦA = HA i + VA j la reazione che la terra esercita sulla cerniera in A, si ha
Rx = HA = 0 ⇒ HA = 0
Ry = VA −mg − F − Fel = 0 ⇒ VA = mg + k√
3 `
. Isoliamo l’asta AC (inclusa cerniera in C) dal resto del sistema. Nella figura seguente sono evidenziate leforze agenti su ciascun sotto-sistema.
m, `
` `
BC
F
HC
VC
HC
VC
H ′A
V ′A
H ′A
V ′A
Felmg
HA
VA
Usiamo l’equazione del momento per l’asta BC, rispetto a B, per trovare VC e l’equazione del momentoper l’asta AC, rispetto ad A, per trovare HC :
M(BC)B = mg
`
2− VC` = 0 ⇒ VC =
1
2mg
M(AC)A = VC
`
2+ F
`
2−HC
√3
2` = 0 ⇒ HC =
1
2√
3mg +
1
2k` .
Esercizio 2.
. 2` cosϑ+ s = 2` ⇒ s = 2`(1− cosϑ)
. Il centro di istantanea rotazione si trova, per il Teorema di Chasles, all’intersezione tra la retta verticalepassante per C e la retta che congiunge A con B (retta su cui giace l’asta AB). Le sue coordinate sonoquindi (2` cosϑ, 2` sinϑ).
. Applichiamo la conservazione dell’energia meccanica. Sia G il baricentro dell’asta BC:
(G−O) =3
2` cosϑ i +
1
2` sinϑ j ⇒ vG = −3
2`ϑ sinϑ i +
1
2`ϑ cosϑ j ,
Quindi,
v2G = `2ϑ2(1
4+ 2 sin2 ϑ
). (1)
L’energia cinetica e
T =1
2I(AB)Az ϑ2 +
1
2mv2G +
1
2I(BC)Gz ϑ2 =
1
2
(1
3m`2
)ϑ2 +
1
2m`2ϑ2
(1
4+ 2 sin2 ϑ
)+
1
2
( 1
12m`2
)ϑ2
=1
3m`2ϑ2
(1 + 3 sin2 ϑ
)Il potenziale delle forze attive e:
U = −2mg`
2sinϑ− 1
2ks2 = −mg` sinϑ− 2k`2(1− cosϑ)2 . (2)

Si arriva quindi al seguente integrale primo:
T − U =1
3m`2ϑ2
(1 + 3 sin2 ϑ
)+mg` sinϑ+ 2k`2(1− cosϑ)2 = E = cost. (3)
Valutando l’energia meccanica (3) all’istante t = 0 (ϑ = π/2, ϑ = 0) e uguagliandola al valore della (3)nella configurazione finale (ϑ = 0, ϑ = ωf ), si ottiene:
mg`+ 2k`2 =1
3m`2ω2
f ⇒ ωf = −√
3g
`+
6k
m.
. Sia ΦA = HA i+VA j la reazione vincolare in A. Si puo calcolare la componente HA ricorrendo alla primaequazione cardinale, in direzione x, scritta per tutto il sistema:
Q(sist.)x = HA + Fel .
Poiche
Q(sist.)x = Q(AB)
x +Q(BC)x = −m`
2ϑ sinϑ−m3
2`ϑ sinϑ = −2m`ϑ sinϑ ,
eFel = ks = 2k`(1− cosϑ) ,
si ottiene infineHA = −2m`ϑ sinϑ− 2m`ϑ2 cosϑ− 2k`(1− cosϑ) .
Per ricavare la reazione verticale scriviamo la seconda equazione cardinale, per la sola asta AB, con poloin B:
Γ(AB)B = M
(AB)B − B ×Q(AB) .
Osservando che la velocita diB e sempre parallela alla velocita del baricentro diAB (e quindi B ×Q(AB) = 0),la precedente equazione si semplifica in:
Γ(AB)B = M
(AB)B .
Non rimane che calcolare i vari termini. Sia D il baricentro di AB,
Γ(AB)B = m(D −B)× vD + I
(AB)Dz ϑk = −m`
2
`
2ϑk +
1
12m`2ϑk = −1
6m`2ϑk ,
M(AB)B = mg
`
2cosϑk− VA` cosϑk +HA` sinϑk .
Ricaviamo quindi
VA =1
2mg +HA tanϑ+
1
6 cosϑm`ϑ .
Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
13 dicembre 2011
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Trasporto del momento d’inerzia per assi paralleli (Teorema di Huygens-Steiner)
. Principio dei lavori virtuali
Esercizi
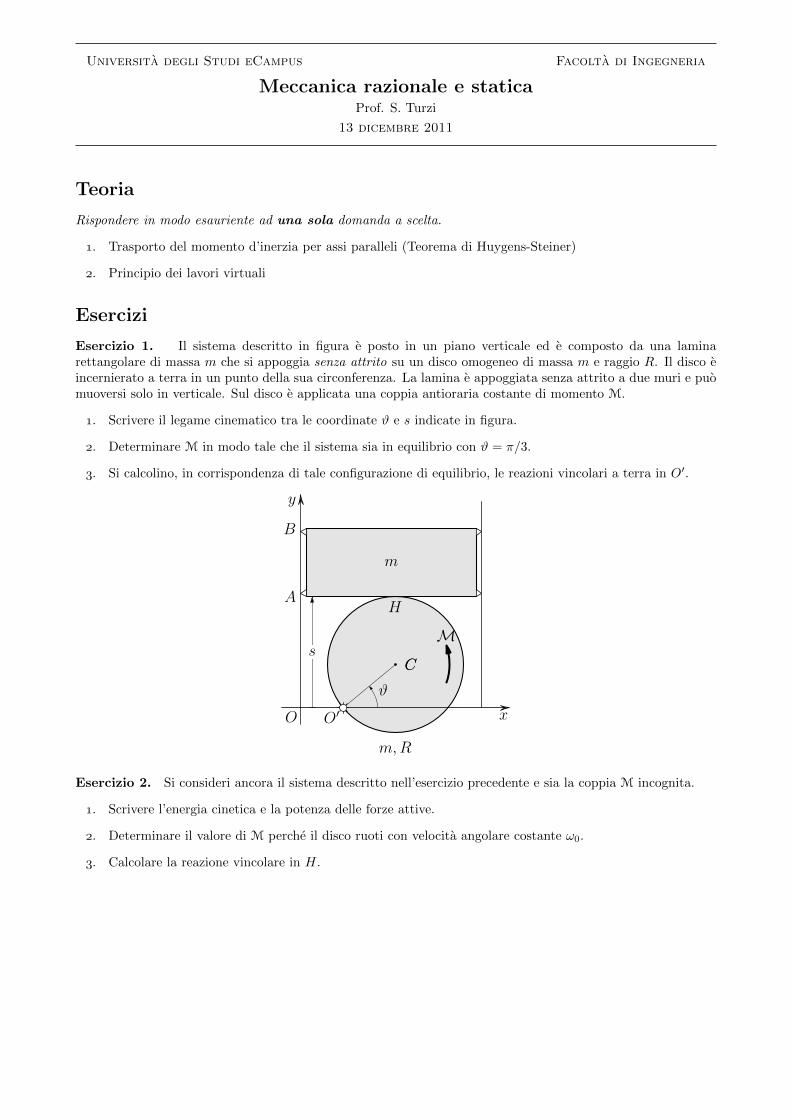
Esercizio 1. Il sistema descritto in figura e posto in un piano verticale ed e composto da una laminarettangolare di massa m che si appoggia senza attrito su un disco omogeneo di massa m e raggio R. Il disco eincernierato a terra in un punto della sua circonferenza. La lamina e appoggiata senza attrito a due muri e puomuoversi solo in verticale. Sul disco e applicata una coppia antioraria costante di momento M.
. Scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura.
. Determinare M in modo tale che il sistema sia in equilibrio con ϑ = π/3.
. Si calcolino, in corrispondenza di tale configurazione di equilibrio, le reazioni vincolari a terra in O′.
ϑ
s
x
y
O O′
C
HA
B
m
m,R
C
M
Esercizio 2. Si consideri ancora il sistema descritto nell’esercizio precedente e sia la coppia M incognita.
. Scrivere l’energia cinetica e la potenza delle forze attive.
. Determinare il valore di M perche il disco ruoti con velocita angolare costante ω0.
. Calcolare la reazione vincolare in H.

Soluzioni
Esercizio 1.
. s = R+R sinϑ ⇒ s = Rϑ cosϑ.
.
ϑ
x
y
M
VO′HO′
Φ
ΦHA
HB
HA′
HB′
mg
mg Evidenziamo in figura le forze agenti sui singoli corpirigidi. La prima equazione cardinale scritta per lasola lamina rettangolare fornisce la reazione internaΦ:
R(l)y = 0 ⇒ Φ = mg .
La seconda equazione cardinale (risp. ad O′), scrit-ta per il solo disco, permette di calcolare la coppiaincognita M:
M(d)O′ = 0 ⇒ M− ΦR cosϑ−mgR cosϑ = 0 ,
da cui, sostituendo la configurazione di equilibrioϑ = π/3 si ottiene:
M = 2mgR cosϑ = mgR .
In alternativa questo punto poteva essere risolto tramite il Teorema di stazionarieta del potenziale (chi-amiamo G il baricentro della lamina rettangolare e b la sua altezza):
U = Mϑ−mgyC −mgyG = Mϑ−mgR sinϑ−mg(R+R sinϑ+ b/2)(a meno di costanti)
= Mϑ− 2mgR sinϑ .
Il valore di M all’equilibrio si ricava quindi imponendo la stazionarieta del potenziale:
∂U
∂ϑ= M− 2mgR cosϑ = 0 ⇒ M = 2mgR cosϑ = mgR .
. Basta a questo punto scrivere la prima equazione cardinale per il solo disco:R
(d)x = 0
R(d)y = 0
⇒HO′ = 0
VO′ −mg − Φ = 0⇒
HO′ = 0
VO′ = 2mg.
Esercizio 2.
.
T =1
2mv2G︸ ︷︷ ︸
lamina
+1
2I(d)O′zϑ
2︸ ︷︷ ︸disco
=1
2ms2 +
1
2
3
2mR2ϑ2 =
1
2mR2ϑ2 cos2 ϑ+
3
4mR2ϑ2
Π = Mϑ−mgyC −mgs = Mϑ− 2mgRϑ cosϑ .
. Applichiamo il Teorema dell’energia cinetica T = Π. Calcoliamo la derivata dell’energia cinetica
T = mR2ϑϑ cos2 ϑ−mR2ϑ3 cosϑ sinϑ+3
2mR2ϑϑ .
Valutando questa espressione nel moto assegnato (ϑ = ω0t, ϑ = ω0 e ϑ = 0), si ottiene:
T∣∣∣ϑ=0
= −mR2ω30 cos(ω0t) sin(ω0t)
Dall’equazione T = Π si ricava quindi il valore di M:
−mR2ω30 cos(ω0t) sin(ω0t) = Mω0 − 2mgRω0 cos(ω0t)
⇒ M = 2mgR cos(ω0t)−mR2ω20 cos(ω0t) sin(ω0t) .

. Possiamo calcolare la reazione Φ tramite la prima equazione cardinale della dinamica, scritta per la sola
lamina rettangolare e proiettata in direzione y: Q(l)y = R
(l)y .
La componente y della quantita di moto della lamina e
Q(l)y = ms = mRϑ cosϑ ,
quindi
Q(l)y = mRϑ cosϑ−mRϑ2 sinϑ
(ϑ=0)= −mRω2
0 sin(ω0t) .
La prima equazione cardinale fornisce quindi
−mRω20 sin(ω0t) = Φ−mg ⇒ Φ = mg −mRω2
0 sin(ω0t) .

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
I sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Trasporto del momento d’inerzia per assi paralleli (Teorema di Huygens-Steiner)
. Principio dei lavori virtuali
Esercizi
Esercizio 1. Il sistema di figura e posto in un piano verticale e si compone di un’asta omogenea di lunghezzal, massa m e di un disco con centro C di raggio R e massa m. L’asta e vincolata a scorrere senza attritoin direzione verticale tramite un manicotto (posto a distanza d > R dall’asse delle y) ed il suo estremo B eincernierato alla circonferenza del disco. Il disco e libero di strisciare senza attrito sulla guida orizzontale. Unamolla di costante elastica k collega un punto A della circonferenza con un punto A′ posto sull’asse delle y allastessa altezza di A. L’angolo ACB e di 90. Sia H il punto di contatto tra disco e guida. Si chiede di:
. calcolare le coordinate xC e yB in funzione dell’angolo ϑ;
. scrivere il potenziale delle forze attive;
. determinare il valore di k perche il sistema stia in equilibrio con ϑ = π/2;
. calcolare in tale situazione la reazione vincolare che la guida orizzontale esercita sul disco in H.
y
xO
B
C
H
AA′
k
ϑϑ
B
m,R
yBxC
d m
Esercizio 2. Si consideri il sistema descritto nel precedente esercizio.Si chiede di:
. calcolare l’energia cinetica e la potenza delle forze attive;
. scrivere l’equazione di moto;
. determinare, in funzione di ϑ, ϑ e ϑ, la componente verticale della reazione che l’asta esercita sul disco inB.

Soluzioni
Esercizio 1.
. I legami cinematici tra le coordinate sono:xC = d−R sinϑ
yB = R+R cosϑ⇒
xC = −Rϑ cosϑ
yB = −Rϑ sinϑ. (1)
. Notiamo che xA = d−R sinϑ−R cosϑ. Il potenziale allora e
U(ϑ) = −mgyB︸ ︷︷ ︸peso asta
−1
2kx2A︸ ︷︷ ︸
molla
= −mgR(1 + cosϑ)− 1
2k(d−R sinϑ−R cosϑ)2 .
. Per trovare il valore di k che garantisce l’equilibrio per ϑ = π/2, imponiamo che si annulli la derivataprima di U :
U ′(ϑ) = mgR sinϑ− kR(sinϑ− cosϑ)(d−R sinϑ−R cosϑ) (2)
U ′(π/2) = mgR− kR(d−R) = 0 , (3)
da cui ricaviamok =
mg
d−R . (4)
.C
VH
mg VB
HB
Fel
Chiamiamo Φ = VH j la reazione (puramente verticale, in assenzadi attrito) che la guida orizzontale esercita sul disco nel punto dicontatto H. Scriviamo il bilancio dei momenti, per il solo disco,con polo in B nella configurazione di equilibrio (ϑ = π/2):
M(disco)B = mgR− VHR+ FelR = 0 ,
Poiche poi Fel = kxA = k(d−R), si ottiene
mgR−VHR+kR(d−R) = 0 ⇒ VH = mg+k(d−R)(4)= 2mg .
Esercizio 2.
. L’energia cinetica e:
T =1
2mv2C +
1
2ICzϑ
2︸ ︷︷ ︸disco
+1
2my2B︸ ︷︷ ︸asta
(1)=
1
2mR2ϑ2 cos2 ϑ+
1
4mR2ϑ2 +
1
2mR2ϑ2 sin2 ϑ =
3
4mR2ϑ2
. L’equazione di moto si ricava agevolmente dal Teorema dell’energia cinetica. Poiche gia conosciamo ilpotenziale, il modo piu comodo per calcolare la potenza delle forze attive e derivare il potenziale rispettoal tempo:
Π =dU
dt= U ′(ϑ)ϑ
(2)= mgRϑ sinϑ− kRϑ(sinϑ− cosϑ)(d−R sinϑ−R cosϑ) .
Otteniamo quindi la seguente equazione di moto (T = Π)
3
2mR2ϑϑ = mgRϑ sinϑ− kRϑ(sinϑ− cosϑ)(d−R sinϑ−R cosϑ)
Semplificando otteniamo
ϑ =2g
3Rsinϑ− 2k
3m(sinϑ− cosϑ)
( dR− sinϑ− cosϑ
).

.
C
mg
VB
HB
Φ
Per determinare la VB e comodo considerare le forze agenti sull’astaanziche quelle agenti sul disco. Questo metodo e lecito in quanto,per il principio di azione e reazione, la forza reattiva che l’astaesercita sul disco e uguale in modulo e direzione, ma opposta inverso, a quella che il disco esercita sull’asta.Scriviamo allora la prima equazione cardinale per la sola asta, indirezione verticale. Abbiamo
myB = −mg − VB .
Sfruttando poi la relazione cinematica (1) ricaviamo
yB = −Rϑ sinϑ−Rϑ2 cosϑ ,
e quindiVB = mRϑ sinϑ+mRϑ2 cosϑ−mg .

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
II sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali di inerzia.
. Stabilita. Teorema di Dirichlet-Lagrange per sistemi ad 1 g.d.l.
Esercizi
Esercizio 1. Il sistema disegnato in figura e posto in un piano verticale. Le aste OA e AB sono omogenee, dimassa m e lunghezza `. L’estremo O e vincolato a terra mediante una cerniera, e l’estremo B di AB scorre lungouna guida orizzontale. Il carrello in B e legato ad un contrappeso P , di massa M , mediante un filo inestensibiledi massa trascurabile che si avvolge su di un piolo fisso C posto sulla guida orizzontale a distanza h da O. Inassenza di attrito, si chiede di:
. scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura;
. utilizzare il Principio dei Lavori Virtuali (PLV) per determinare la configurazione di equilibrio del sistema(con ϑ ∈ [0, π/2]);
. in tale configurazione, calcolare la forza scambiata tra le aste nella cerniera A e le reazioni vincolari aterra in O e in B.
y
xO
A
B C
P,M
CC
m, ` m, `
ϑ
s
h
Esercizio 2. Si consideri il sistema descritto nel precedente esercizio. All’istante t = 0 il sistema si trova inquiete con ϑ = π/2.Si chiede di:
. scrivere l’energia cinetica, T , e il potenziale, U , del sistema;
. determinare la velocita angolare dell’asta OA quando questa passa dalla posizione orizzontale ϑ = 0 ediscutere la limitazione su M tale per cui la soluzione ha significato;
. calcolare, in funzione di ϑ, ϑ e ϑ la tensione del filo durante il moto.

Soluzioni
Esercizio 1.
. Indicando con L la lunghezza (costante) del filo, si trova:
(h− 2` cosϑ) + s = L ⇒ s = −2`ϑ sinϑ . (1)
. Il lavoro virtuale eδL = mgδyG1
+mgδyG2+Mgδs ,
dove il segno positivo e dovuto al fatto che abbiamo scelto l’asse y rivolto verso il basso e abbiamo indicatocon G1 e G2 i baricentri rispettivamente delle aste OA e AB.I vettori posizione dei baricentri delle aste sono
(G1 −O) = `2 cosϑ i + `
2 sinϑ j
(G2 −O) = 3`2 cosϑ i + `
2 sinϑ j(2)
Quindi
δyG1= δyG2
=`
2cosϑ δϑ .
Dal legame (1) ricaviamo poi cheδs = −2`δϑ sinϑ .
In conclusione quindi il lavoro virtuale risulta
δL = (mg` cosϑ− 2Mg` sinϑ)δϑ .
Ponendo δL = 0, ∀ϑ si ricava che ϑ = ϑ? di equilibrio deve soddisfare
tanϑ? =m
2M.
. Scomponiamo il sistema e introduciamo le reazioni vincolari come indicato nelle figura seguente
Per trovare HA e VA scriviamo l’equazione dei momenti per le aste OA (risp. ad O) e AB (risp. a B)M
(OA)O = mg `
2 cosϑ− VA` cosϑ−HA` sinϑ = 0
M(AB)B = −mg `
2 cosϑ− VA` cosϑ+HA` sinϑ = 0⇒
HA = 1
2mgcosϑsinϑ
VA = 0.
Ricordando poi che all’equilibrio tanϑ = m/2M , si ricava
HA =1
2mg
2M
m= Mg , VA = 0 .
Le reazioni a terra si ricavano semplicemente scrivendo la prima equazione cardinale per le singole aste:R
(AB)y = −VB +mg + VA = 0
R(OA)x = HA −HO = 0
R(OA)y = mg − VO − VA = 0
⇒
VB = mg
HO = Mg
VO = mg
.

Esercizio 2.
. Le coordinate e la velocita del baricentro dell’asta AB sono
(G2 −O) =3
2` cosϑ i +
1
2` sinϑ j ,
vG2 = −3
2`ϑ sinϑ i +
1
2`ϑ cosϑ j
v2G2= `2ϑ2
(9
4sin2 ϑ+
1
4cos2 ϑ
)= `2ϑ2
(1
4+ 2 sin2 ϑ
)L’energia cinetica quindi e:
T =1
2I(OA)Oz ϑ2︸ ︷︷ ︸
asta OA
+1
2mv2G2
+1
2IG2zϑ
2︸ ︷︷ ︸asta AB
+1
2Mv2P︸ ︷︷ ︸
punto P
=1
2
1
3m`2ϑ2 +
1
2m`2ϑ2
(1
4+ 2 sin2 ϑ
)+
1
2
1
12m`2ϑ2 +
1
2Ms2
=1
3m`2ϑ2 + (m+ 2M)`2ϑ2 sin2 ϑ
Il potenziale e
U = mg(yG1+ yG2
) +Mgs(1)+(2)
= mg` sinϑ+Mg[L− (h− 2` cosϑ)] .
Trascurando i termini costanti possiamo usare:
U = mg` sinϑ+ 2Mg` cosϑ .
. Sfruttiamo la conservazione dell’energia meccanica: T − U = E = cost. Dalle condizioni iniziali (a t = 0si ha quiete con ϑ = π/2) ricaviamo il valore della costante E:
E = −mg` .
L’integrale primo dell’energia risulta
1
3m`2ϑ2 + (m+ 2M)`2ϑ2 sin2 ϑ−mg` sinϑ− 2Mg` cosϑ = −mg` . (3)
Imponendo il passaggio dalla configurazione finale, ϑ = 0, possiamo ricavare l’incognita, ovvero la velocitaangolare ϑ. Poiche quando ϑ = 0 si ha sinϑ = 0 e cosϑ = 1, dalla (3) si ottiene
1
3m`2ϑ2 − 2Mg` = −mg` ⇒ ϑ = −
√3g
`
2M −mm
.
Poiche la velocita angolare puo assumere solo valori reali, la soluzione ha senso solamente quando il terminesotto radice e maggiore o uguale a zero, ovvero per
M ≥ m
2.
Per valori di M < m/2 l’asta non raggiunge la posizione orizzontale; per M = m/2 l’asta OA raggiungela posizione ϑ = 0 con velocita angolare nulla e poi inverte il moto.
. Per calcolare la tensione del filo si puo scrivere l’equazione fondamentale della dinamica per il punto P :
Ms = Mg − T .
Da (1) ricaviamo ches = −2`ϑ sinϑ− 2`ϑ2 cosϑ ,
e la tensione risulta quindi essere:
T = Mg + 2M`ϑ sinϑ+ 2M`ϑ2 cosϑ .

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
III sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Assi e momenti principali di inerzia.
. Stabilita. Teorema di Dirichlet-Lagrange per sistemi ad 1 g.d.l.
Esercizi
Esercizio 1. Il sistema disegnato in figura e posto in un piano verticale. Le aste OA e AB sono omogenee, dimassa m e lunghezza `. L’estremo O e vincolato a terra mediante una cerniera, e l’estremo B di AB scorre lungouna guida orizzontale. Il carrello in B e legato ad un contrappeso P , di massa m, mediante un filo inestensibiledi massa trascurabile che si avvolge sulla cerniera in A. Una coppia C di modulo costante e verso antiorarioagisce sull’asta OA. In assenza di attrito, si chiede di:
. scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura;
. utilizzare il Principio dei Lavori Virtuali (PLV) per determinare il valore di C in modo tale che il sistemasia in equilibrio con ϑ = π/3;
. in tale configurazione, calcolare le reazioni vincolari a terra in O e in B.
y
xO
A
B
P,m
m, ` m, `
ϑ
s
C
Esercizio 2. Il sistema disegnato in figura e posto in un piano verticale si compone di un disco omogeneodi raggio R, massa m e centro C; di un’asta omogenea di lunghezza ` e massa m e di un punto materiale P dimassa m. Il disco rotola senza strisciare su una guida orizzontale. L’asta appoggia senza strisciare sul disco esenza attrito su un piolo fisso A posto a distanza 2R dalla guida orizzontale. Un filo inestensibile e di massatrascurabile collega il centro del disco con il punto P e si avvolge senza attrito su un secondo piolo fisso D postoad altezza R dalla guida. Scegliendo possibilmente la coordinata x indicata in figura come coordinata libera, sichiede di:
. scrivere i legami cinematici tra le coordinate x, ϑ e s indicate in figura;
. calcolare la funzione di Lagrange, L , del sistema;
. determinare il moto del sistema sapendo che a t = 0 il sistema e in quiete con x(0) = R;
. calcolare il valore della componente orizzontale della reazione vincolare fra disco e asta.
y
xO
A
B
C
H
D
P,m
m, `
ϑ
s
x

Soluzioni
Esercizio 1.
. Indicando con L la lunghezza (costante) del filo, si trova:
L = BA+AP = `+ (s− ` sinϑ) ⇒ s = `ϑ cosϑ . (1)
. Il lavoro virtuale eδL = mgδyG1 +mgδyG2 +mgδs− Cδϑ ,
dove il contributo delle forze peso ha segno positivo poiche l’asse y e stato scelto verso il basso. Abbiamoindicato con G1 e G2 i baricentri rispettivamente delle aste OA e AB.I vettori posizione dei baricentri delle aste sono
(G1 −O) = `2 cosϑ i + `
2 sinϑ j
(G2 −O) = 3`2 cosϑ i + `
2 sinϑ j(2)
Quindi
δyG1= δyG2
=`
2cosϑ δϑ .
Dal legame (1) ricaviamo poi cheδs = `δϑ cosϑ .
In conclusione quindi il lavoro virtuale risulta
δL = (2mg` cosϑ− C)δϑ .
Ponendo δL = 0, ∀ϑ e imponendo che ϑ = π/3 sia equilibrio, si ricava
C = mg` . (3)
. Sia ΦO = HO i− VO j la reazione nella cerniera in O e sia ΦB = −VB j la reazione a terra nel carrello B.Per trovare HO, VO e VB non e necessario scomporre il sistema, basta scrivere le equazioni cardinali perl’intero sistema
MO = mg `2 cosϑ+mg` cosϑ+mg 3
2` cosϑ− C − VB2` cosϑ = 0
Rx = HO = 0
Ry = 3mg − VO − VB = 0
(3),(ϑ=π3 )
=⇒
VB = 1
2mg
HO = 0
VO = 52mg
.
Esercizio 2.
. Poiche il disco rotola senza strisciare sulla guida orizzontale, le velocita di B e di C sono:
vB = 2Rϑ i , vC = Rϑ i .
Siccome l’asta non scivola sul disco, deve essere vB = x i. Confrontando le due espressioni di vB , otteniamoil legame tra x e ϑ
x = 2Rϑ ⇒ ϑ =x
2R. (4)
Per ricavare la dipendenza di s da x, imponiamo l’inestensibilita del filo: vP · (−j) = vC · i. Sapendo chevP = −s j, ricaviamo
s = Rϑ(4)=
1
2x . (5)
. L’energia cinetica e:
T =1
2I(d)Hzϑ
2︸ ︷︷ ︸disco
+1
2mx2︸ ︷︷ ︸asta
+1
2ms2︸ ︷︷ ︸
punto P
=3
4mR2ϑ2 +
1
2mx2 +
1
2ms2
(4),(5)=
3
4mR2
(x
2R
)2
+1
2mx2 +
1
2m
(1
2x
)2
=13
16mx2 .
L’unica forza attiva e la forza peso del punto P . Il potenziale quindi e
U = −mgyP = −mg(R− s) .

Trascurando i termini costanti possiamo usare U = mgs. Integrando la relazione (5) e trascurando lacostante di integrazione, possiamo scrivere il potenziale in funzione della coordinata x:
U =1
2mgx .
La lagrangiana e
L = T + U =13
16mx2 +
1
2mgx . (6)
. L’equazione di moto si ricava dall’equazione di Lagrange
d
dt
∂L
∂x− ∂L
∂x= 0 ⇒ 13
8mx− 1
2mg = 0 ,
che, semplificata, diventa
x =4
13g . (7)
L’integrazione dell’equazione di moto e
x(t) =2
13gt2 +At+B .
Imponendo le condizioni iniziali x(0) = R, x(0) = 0, si trova
x(t) =2
13gt2 +R .
. indichiamo con ΦB = HB i + VB j le reazioni che il disco esercita sull’asta in B a con ΦA = VA j lareazione che il piolo A esercita sull’asta. La prima equazione cardinale scritta per la sola asta e proiettatain direzione x, fornisce la reazione vincolare richiesta, HB .
Q(a)x = mx
R(a)x = HB
⇒ HB = mx(7)=
4
13mg .

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
III sessione 2012, compito B
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Atto di moto rigido piano. Teorema di Eulero e Teorema di Chasles.
. Spostamenti virtuali. Vincoli ideali.
Esercizi
Esercizio 1. Il sistema disegnato in figura e posto in un piano verticale. L’asta AB ha massa m e lunghezza`√
2; le aste BC e CD hanno massa m e lunghezza `. L’estremo A di AB e incernierato a terra; l’asta CD evincolata a rimanere ortogonale ad una guida orizzontale mediante un pattino (ovvero trasla lungo l’asse x, manon puo ne ruotare ne traslare in verticale). Una forza incognita F = −F i, applicata nel punto medio dell’astaCD, mantiene il sistema in equilibrio con ϑ = π/4.In assenza di attrito, si chiede di:
. calcolare, nella configurazione di figura, le coordinate del centro di istantanea rotazione dell’asta BC;
. determinare la forza F e le reazioni vincolari a terra in A e in D.
y
A
B C
D
m, `
m, `
m, `√2
x
ϑ
F
Esercizio 2. Il sistema disegnato in figura e posto in un piano verticale. Si compone di una lamina quadrataCDEF omogenea di lato ` e massa m; di un’asta omogenea AB di lunghezza ` e massa m. Il lato CD dellalamina si appoggia su una guida orizzontale, scelta come asse x. Gli estremi dell’asta scorrono senza attrito suilati CD e CF della lamina, come indicato in figura. Una forza orizzontale incognita, F = F i, e applicata sullato DE.Utilizzando le coordinate libere s e ϑ e in assenza di attrito, si chiede di:
. scrivere le velocita dei punti A, B e del baricentro G dell’asta, in funzione delle coordinate libere;
. calcolare l’energia cinetica del sistema e le componenti generalizzate delle sollecitazioni attive;
. determinare F in modo tale che l’asta ruoti con velocita angolare costante ω0;
. calcolare in tale situazione le reazioni vincolari agenti sull’asta in A e in B.
y
xO
A
B
G
C D
EF
m, `
m, `
ϑsF

Soluzioni
Esercizio 1.
. Il CIR dell’asta BC si trova mediante il Teorema di Chasles. Poiche vB ⊥ AB e vC ⊥ CD, il CIR e ilpunto di intersezione tra il prolungamento di AB con il prolungamento di CD. Nella configurazione difigura il CIR ha coordinate date da
CIR ≡ (2`, 2`) .
. Isoliamo l’asta CD e evidenziamo le forze agenti sui singoli sotto-sistemi:
A
B
CC
D
F
mg
mg
mg
VC
HC
VC
HC
VA
HA
VD
MD
Abbiamo complessivamente 7 incognite: HA, VA, HC , VC , VD, MD e F . Serviranno quindi 7 equazioniindipendenti per risolvere il problema. L’obiettivo e scrivere delle equazioni semplici (non esiste ovviamenteun unico modo per fare cio). Le reazioni HC e VC si possono calcolare semplicemente scrivendo la secondaequazione cardinale per l’asta BC (polo in B) e per il sotto-sistema ABC (polo in A)
M(BC)B = −mg `
2 + VC` = 0
M(ABC)A = −mg `
2 −mg 32`+ VC2`−HC` = 0
⇒VC = 1
2mg
HC = −mg .
A questo punto, le tre equazioni cardinali per la sola asta CD permettono di trovare VD, MD e F :R
(CD)x = −HC − F = 0
R(CD)y = VD −mg − VC = 0
M(CD)C = MD − F `
2 = 0
⇒
F = mg
VD = 32mg
MD = F `2 = 1
2mg`
.
Per calcolare HA e VA usiamo la prima equazione cardinale per tutto il sistemaR
(sist.)x = HA − F = 0
R(sist.)y = VA − 3mg + VD = 0
⇒HA = mg
VA = 32mg
.
Esercizio 2.
. I vettori posizione dei punti A, B e G sono:
(A−O) = (s+ ` cosϑ) i , (B −O) = s i + ` sinϑ j , (G−O) =(s+
`
2cosϑ
)i +
`
2sinϑ j .
Derivando troviamo le velocita dei punti
vA = (s− `ϑ sinϑ) i , vB = s i + `ϑ cosϑ j , vG =(s− `
2ϑ sinϑ
)i +
`
2ϑ cosϑ j . (1)
. Calcoliamo preliminarmente la v2G:
v2G(1)=(s− `
2ϑ sinϑ
)2+( `
2ϑ cosϑ
)2= s2 +
`2
4ϑ2 − `ϑs sinϑ (2)
L’energia cinetica e:
T =1
2ms2︸ ︷︷ ︸
lamina
+1
2mv2G +
1
2I(asta)Gz ϑ2︸ ︷︷ ︸
asta
=1
2ms2 +
1
2m(s2 +
`2
4ϑ2 − `ϑs sinϑ
)+
1
2
1
12m`2ϑ2
= ms2 +1
6m`2ϑ2 − 1
2m`ϑs sinϑ . (3)

Per calcolare le componenti generalizzate delle sollecitazioni attive, che indichiamo con Qs e Qϑ, sfruttiamola relazione (nota dalla teoria)
δL(att) =∑k
Qkδqk = Qsδs+Qϑδϑ ,
dove δL(att) e il lavoro virtuale delle forze attive.Nel nostro caso, le forze attive sono la F e la forza peso dell’asta, che, per i conti che seguono, possiamoschematizzare come una forza concentrata −mg j applicata nel baricentro G. Poiche
yG =`
2sinϑ ⇒ δyG =
`
2cosϑ δϑ ,
otteniamo
δL(att) = F · δD + (−mg j) · δG = Fδs−mg δyG = Fδs−mg `2
cosϑ δϑ ⇒Qs = F
Qϑ = −mg `2 cosϑ
.
. Scriviamo le equazioni di Lagrange in forma non conservativa
d
dt
∂T
∂s− ∂T
∂s= Qs ,
d
dt
∂T
∂ϑ− ∂T
∂ϑ= Qϑ .
Sviluppiamo i conti per i termini cinetici
d
dt
∂T
∂s=
d
dt
(2ms− 1
2m`ϑ sinϑ
)= 2ms− 1
2m`ϑ sinϑ− 1
2m`ϑ2 cosϑ
∂T
∂s= 0
d
dt
∂T
∂ϑ=
d
dt
(1
3m`2ϑ− 1
2m`s sinϑ
)=
1
3m`2ϑ− 1
2m`s sinϑ− 1
2m`sϑ cosϑ
∂T
∂ϑ= −1
2m`sϑ cosϑ .
Le equazioni di moto sono
2ms− 1
2m`ϑ sinϑ− 1
2m`ϑ2 cosϑ = F (4)
1
3m`2ϑ− 1
2m`s sinϑ = −mg `
2cosϑ (5)
Sostituiamo il moto imposto, ovvero sostituiamo ϑ = ω0 e ϑ = 0 nelle equazioni di moto
2ms− 1
2m`ω2
0 cosω0t = F
1
2m`s sinω0t = mg
`
2cosω0t .
Ricavando s dalla seconda e sostituendo nella prima, otteniamo il valore di F
F = 2mgcosω0t
sinω0t− 1
2m`ω2
0 cosω0t (6)
s = gcosω0t
sinω0t. (7)
. Indichiamo con ΦA = VA j e ΦB = HB i le reazioni che la lamina esercita sull’asta, rispettivamente in Ae in B. Usiamo la prima equazione cardinale scritta per la sola asta
R(e) = −mg j + VA j +HB i ,
Q(asta) = mvG(1)= m
(s− `
2ϑ sinϑ
)i +m
`
2ϑ cosϑ j ,
Q(asta)∣∣∣
ϑ=0ϑ=ω0
= m(s− `
2ω20 cosω0t
)i−m`
2ω20 sinω0t j
(7)= m
(g
cosω0t
sinω0t− `
2ω20 cosω0t
)i−m`
2ω20 sinω0t j
VA = mg −m`
2ω20 sinω0t , HB = m
(g
cosω0t
sinω0t− `
2ω20 cosω0t
).

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
IV sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Atto di moto rigido piano. Teorema di Eulero e Teorema di Chasles.
. Spostamenti virtuali. Vincoli ideali.
Esercizi
Esercizio 1. Il sistema disegnato in figura e posto in un piano verticale. Si compone di un’asta OH omogeneadi massa m e lunghezza 2` e di una lamina ABCD omogenea quadrata di massa m e lato `. L’asta e incernierataa terra nell’estremo O e passa per il baricentro G della lamina scorrendo in una cerniera fissa in G sui cui e statapraticata una scannellatura. Il lato AB della lamina e vincolato a scorrere in verticale, mediante due appoggi inA e in B. Sull’estremo H dell’asta e applicata una forza verticale F = F j, che mantiene il sistema in equilibriocon ϑ = π/3.In assenza di attrito, si chiede di:
. scrivere il legame cinematico tra le coordinate ϑ e s indicate in figura;
. calcolare la forza F ;
. determinare le reazioni vincolari a terra in A e in B e la reazione che l’asta esercita sulla lamina in G.
y
O
H
A
B C
D
Gm, `
x
ϑ
m, 2`
s
`/2
F
Esercizio 2. Si consideri ancora il sistema descritto nell’esercizio precedente. All’istante t = 0 la forza Fviene posta istantaneamente a zero e il sistema abbandona la configurazione di equilibrio, partendo dalla quietee procedendo in caduta libera.In assenza di attrito, si chiede di:
. scrivere l’energia cinetica e il potenziale del sistema;
. determinare la velocita angolare dell’asta quando passa dalla configurazione orizzontale ϑ = 0;
. calcolare, in funzione di ϑ, ϑ e ϑ, la reazione vincolare che l’asta esercita sulla lamina quadrata.

Soluzioni
Esercizio 1.
. Il baricentro G della lamina si mantiene ad una distanza fissa e pari a `/2 dall’asse delle y, si ha quindixG = `/2. Poiche vale xG = OG cosϑ, il segmento OG e
OG =`
2
1
cosϑ.
In conclusione il vettore posizione di G e
(G−O) =`
2i +
`
2tanϑ j .
Ricaviamo quindi
s = yA = yG +`
2=`
2(1 + tanϑ) ⇒ s =
`ϑ
2 cos2 ϑ. (1)
Ricordiamo che
d
dxtanx =
d
dx
sinx
cosx=
cosx
cosx− sinx(− sinx)
cos2 x=
sin2 x+ cos2 x
cos2 x=
1
cos2 x.
. Per trovare F possiamo altrettanto bene applicare il teorema di stazionarieta del potenziale o le equazionicardinali. Scegliamo di scrivere le equazioni cardinali.Isoliamo l’asta OH e evidenziamo le forze agenti sui singoli sotto-sistemi:
π/3
π/3 m, 2`
F
VO
HO
mg
mg
HA
HB
Φ
Φ
Si osservi che: (1) la reazione Φ e ortogonale all’asta in quanto la cerniera passante posta in G e privadi attrito; (2) Φ e mg sono applicate entrambe nel baricentro dell’asta. Cio e dovuto al fatto che stiamovalutando le forze nella configurazione di equilibrio ϑ = π/3, ma non e vero in generale. Per dimostrarlo,calcoliamo
OG =`
2
1
cosϑ
∣∣∣ϑ=π/3
= ` ,
in quanto cos π3 = 12 .
Calcoliamo Φ scrivendo la prima equazione cardinale, in direzione y, per la sola lamina quadrata
R(lamina)y = Φ cosϑ−mg = 0 ⇒ Φ = 2mg .
La seconda equazione cardinale (polo in O) per la sola asta ora fornisce F :
M(OH)O = F2` cosϑ−mg` cosϑ− Φ` = 0 ⇒ F =
1
2mg + Φ =
5
2mg .
. Le reazioni HA e HB si possono ricavare daR
(lamina)x = HA +HB − Φ sinϑ = 0
M(lamina)G = HB
`2 −HA
`2 = 0
⇒ HA = HB =Φ
2sinϑ = mg
√3
2.

Esercizio 2.
. L’energia cinetica e:
T =1
2ms2︸ ︷︷ ︸
lamina
+1
2I(asta)Oz ϑ2︸ ︷︷ ︸asta
(1)=
1
2m
`2ϑ2
4 cos4 ϑ+
1
2
(1
3m(2`)2
)ϑ2 =
1
8m`2
ϑ2
cos4 ϑ+
2
3m`2ϑ2 . (2)
Sia K il baricentro dell’asta. Il potenziale e determinato solo dalle forze peso (per ipotesi e F = 0) e vale
U = −mgyG −mgyK = −mg `2
tanϑ−mg` sinϑ (3)
. Sfruttiamo la conservazione dell’energia meccanica: T −U = E =costante. All’istante t = 0 si ha ϑ = π/3e ϑ = 0, quindi
E = (T − U)ϑ=0,ϑ=π/3
(2)+(3)= mg
`
2
√3 +mg`
√3
2= mg`
√3 .
In ogni istante il sistema conserva questo valore dell’energia meccanica. In particolare, quando l’asta eorizzontale (ϑ = 0) sara
mg`√
3 = (T − U)ϑ=0 =1
8m`2ϑ2 +
2
3m`2ϑ2 =
19
24m`2ϑ2 ,
da cui si ricava
ϑ = −
√24√
3
19
g
`,
dove il segno meno e stato scelto perche, come specificato nel testo, l’asta sta cadendo (e quindi ϑ decresce).
. Con riferimento alla figura precedente, calcoliamo la Φ usando la prima equazione cardinale della dinamica,scritta per la sola lamina e proiettata in direzione y.
R(lamina)y = −mg + Φ cosϑ ,
Q(lamina)y = ms
(1)=
m`ϑ
2 cos2 ϑ
Q(lamina)y =
m`ϑ
2 cos2 ϑ+m`ϑ
2(−2)
− sinϑ
cos3 ϑϑ =
m`ϑ
2 cos2 ϑ+m`ϑ2 sinϑ
cos3 ϑ
R(lamina)y = Q(lamina)
y ⇒ Φ =mg
cosϑ+
m`ϑ
2 cos3 ϑ+m`ϑ2 sinϑ
cos4 ϑ
Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
V sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica.
. Potenza in un atto di moto rigido. Potenza delle forze interne per un corpo rigido.
Esercizi
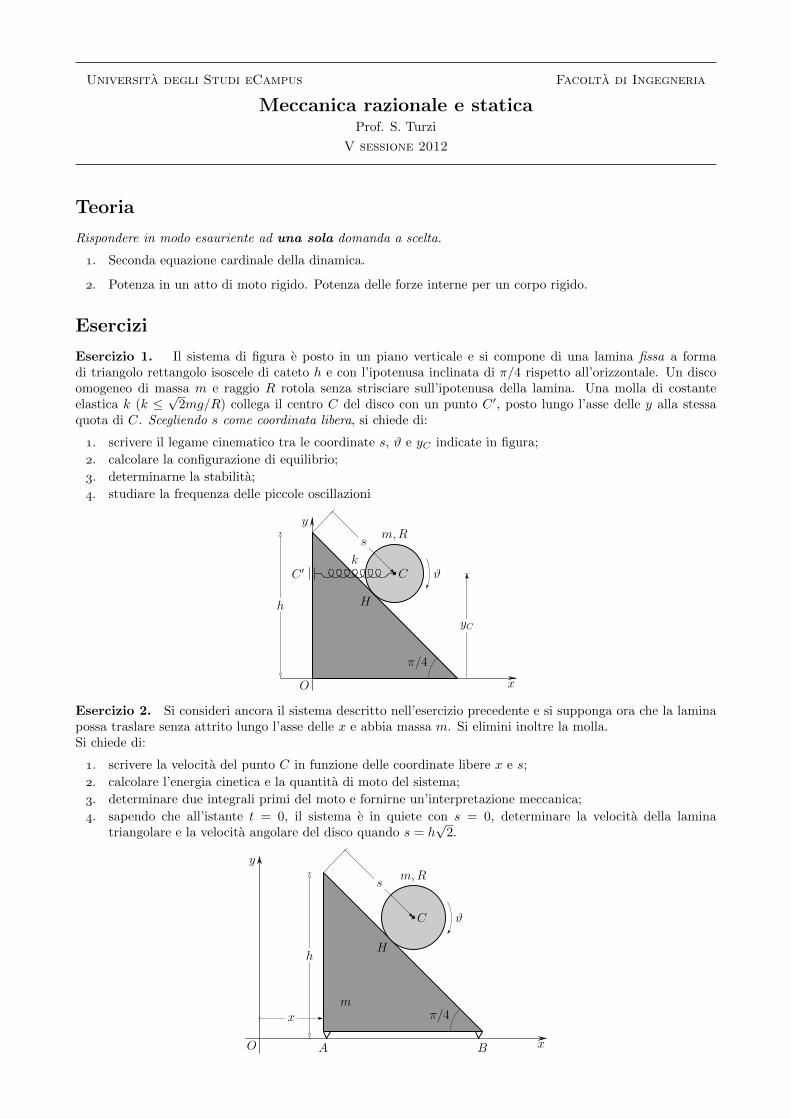
Esercizio 1. Il sistema di figura e posto in un piano verticale e si compone di una lamina fissa a formadi triangolo rettangolo isoscele di cateto h e con l’ipotenusa inclinata di π/4 rispetto all’orizzontale. Un discoomogeneo di massa m e raggio R rotola senza strisciare sull’ipotenusa della lamina. Una molla di costanteelastica k (k ≤
√2mg/R) collega il centro C del disco con un punto C ′, posto lungo l’asse delle y alla stessa
quota di C. Scegliendo s come coordinata libera, si chiede di:
. scrivere il legame cinematico tra le coordinate s, ϑ e yC indicate in figura;
. calcolare la configurazione di equilibrio;
. determinarne la stabilita;
. studiare la frequenza delle piccole oscillazioni
y
O
C
H
m,R
C ′
x
kϑ
s
π/4
yC
h
Esercizio 2. Si consideri ancora il sistema descritto nell’esercizio precedente e si supponga ora che la laminapossa traslare senza attrito lungo l’asse delle x e abbia massa m. Si elimini inoltre la molla.Si chiede di:
. scrivere la velocita del punto C in funzione delle coordinate libere x e s;
. calcolare l’energia cinetica e la quantita di moto del sistema;
. determinare due integrali primi del moto e fornirne un’interpretazione meccanica;
. sapendo che all’istante t = 0, il sistema e in quiete con s = 0, determinare la velocita della laminatriangolare e la velocita angolare del disco quando s = h
√2.
y
O
C
H
A B
m,R
m
x
ϑ
π/4
s
x
h
Soluzioni
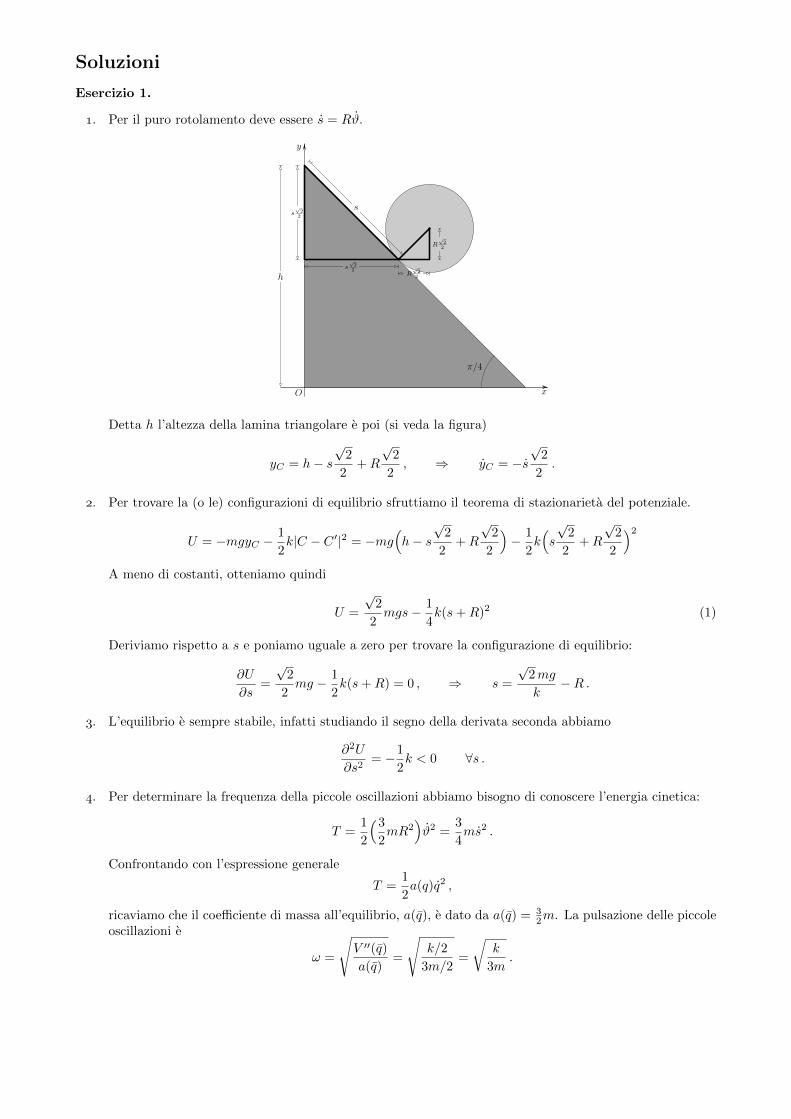
Esercizio 1.
. Per il puro rotolamento deve essere s = Rϑ.
y
O x
s
π/4
hs√2
2R
√22
s√2
2
R√22
Detta h l’altezza della lamina triangolare e poi (si veda la figura)
yC = h− s√
2
2+R
√2
2, ⇒ yC = −s
√2
2.
. Per trovare la (o le) configurazioni di equilibrio sfruttiamo il teorema di stazionarieta del potenziale.
U = −mgyC −1
2k|C − C ′|2 = −mg
(h− s
√2
2+R
√2
2
)− 1
2k(s
√2
2+R
√2
2
)2A meno di costanti, otteniamo quindi
U =
√2
2mgs− 1
4k(s+R)2 (1)
Deriviamo rispetto a s e poniamo uguale a zero per trovare la configurazione di equilibrio:
∂U
∂s=
√2
2mg − 1
2k(s+R) = 0 , ⇒ s =
√2mg
k−R .
. L’equilibrio e sempre stabile, infatti studiando il segno della derivata seconda abbiamo
∂2U
∂s2= −1
2k < 0 ∀s .
. Per determinare la frequenza della piccole oscillazioni abbiamo bisogno di conoscere l’energia cinetica:
T =1
2
(3
2mR2
)ϑ2 =
3
4ms2 .
Confrontando con l’espressione generale
T =1
2a(q)q2 ,
ricaviamo che il coefficiente di massa all’equilibrio, a(q), e dato da a(q) = 32m. La pulsazione delle piccole
oscillazioni e
ω =
√V ′′(q)
a(q)=
√k/2
3m/2=
√k
3m.

Esercizio 2.
. Osserviamo preliminarmente che il legame tra s e ϑ e ancora: s = Rϑ.Le coordinate del punto C sono:
xC = x+ s√22 +R
√22
yC = h− s√22 +R
√22
. (2)
Derivando, ricaviamo la velocita vC
vC =(x+ s
√2
2
)i− s
√2
2j (3)
v2C = x2 + s2 +√
2 xs . (4)
. L’energia cinetica e:
T =1
2mx2︸ ︷︷ ︸
lamina
+1
2mv2C +
1
2I(disco)Cz ϑ2︸ ︷︷ ︸
disco
=1
2mx2 +
1
2m(x2 + s2 +
√2 xs) +
1
2
(1
2mR2
) s2R2
= mx2 +3
4ms2 +
√2
2mxs . (5)
La quantita di moto del sistema e
Q = mx i +mvC = m(
2x+ s
√2
2
)i−ms
√2
2j (6)
. Poiche le reazioni vincolari esterne, in A e in B, sono verticali, la prima equazione cardinale, proiettatain direzione x, consente di affermare che si conserva la componente x della quantita di moto. Il primointegrale primo e quindi:
Qx = 2mx+
√2
2ms = cost. (7)
La seconda quantita conservata e l’energia meccanica del sistema:
E = T − U = mx2 +3
4ms2 +
√2
2mxs−
√2
2mgs = cost. (8)
. Calcoliamo le quantita conservate (7), (8) sfruttando la conoscenza della condizioni iniziali. Sappiamoinfatti che a t = 0 il sistema e in quiete (x = 0, s = 0) con x = 0 e s = 0:
Qx
∣∣∣t=0
= 0 E∣∣∣t=0
= 0 . (9)
I due integrali primi si posso quindi riscrivere nella seguente forma
4x+√
2s = 0
x2 +3
4s2 +
√2
2xs−
√2
2gs = 0
Il testo chiede di calcolare x e s all’istante finale, quando s = h√
2. Ponendo quest’ultimo valore negliintegrali primi sopra individuati, ricaviamo
x = −√gh
5, s =
√8gh
5,
da cui otteniamo immediatamente la velocita angolare del disco
ϑ =s
R=
√8gh
5R2.

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
VI sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Equazioni di Lagrange. Caso non conservativo.
. Stabilita. Teorema di Dirichlet-Lagrange per sistemi ad 1 g.d.l.
Esercizi
Esercizio 1. Il sistema di figura e posto in un piano verticale ed e costituito da un’asta AB di massa m elunghezza 3R e da un disco omogeneo di centro C, massa M e raggio R. Il disco rotola senza strisciare su unaguida orizzontale. L’estremo A dell’asta e vincolato tramite un carrello all’asse delle y e l’estremo B dell’astae incernierato ad un punto della circonferenza del disco. Il sistema e tenuto in equilibrio con ϑ = π/6 da unacoppia concentrata C = −C k applicata sull’asta. In assenza di attrito, si chiede di:
. determinare l’angolo α che il raggio CB forma con l’orizzontale;
. calcolare il valore di C all’equilibrio (ϑ = π/6);
. determinare le reazioni vincolari in A e in B.
y
m, 3R
A
B
C
H
M,R
ϑ
α
x
C
Esercizio 2. Il sistema di figura e posto in un piano verticale ed e costituito da un’asta AB di massa m elunghezza R e da un disco omogeneo di centro O, massa m e raggio R. Il disco ruota senza attrito attorno alproprio centro. L’asta e vincolata nel suo estremo A a scorrere lungo l’asse orizzontale mediante un carrelloliscio. L’estremo B dell’asta e vincolato mediante cerniera ad un punto della circonferenza del disco. Una forzaincognita F(t) = −F (t) i e applicata sul carrello in A. In assenza di attrito, si chiede di:
. scrivere la velocita del punto A in funzione delle coordinata libera ϑ e trovare le coordinate del centro diistantanea rotazione dell’asta AB;
. calcolare l’energia cinetica del sistema;
. determinare la forza F (t) perche il disco ruoti con velocita angolare costante;
. in tale situazione, calcolare le reazioni vincolari interne in B.
m,R
O
B
A
m,R
ϑx
y
F

Soluzioni
Esercizio 1.
. Con riferimento alla figura seguente, notiamo che yB = 3R sinϑ =3
2R.
3R
A
B
CB′
R
π/6
α
32R
R
Ma e anche yB = R+R sinα, da cui si ricava
sinα =1
2⇒ α =
π
6.
. Evidenziamo le forze agenti sui singoli sotto-sistemi.
C
ϑ
αCHB
VB
HB
VB
mgMg
HA HH
VH
Il valore di C si ricava scrivendo la seconda equazione cardinale della statica per tutto il sistema, con poloin H:
MH = −C +mg(3R
2cos π6 +R cos π6
)= 0 , ⇒ C =
5√
3
4mgR .
Si ricorda che: (1) HA, HH e VH non compaiono nell’equazione perche hanno braccio nullo e (2) VB e HB
non compaiono perche forze interne al sistema.
. E sufficiente scrivere le tre equazioni cardinali per la sola astaR
(asta)x = HA +HB = 0
R(asta)y = VB −mg = 0
M(asta)(B) = mg 3R
2
√32 +HA3R 1
2 − C = 0
La soluzione del precedente sistema di equazioni e:
VB = mg , HB = −mg√3, HA =
mg√3.
Esercizio 2.
. Il triangolo OBA e isoscele, quindi il raggio OB forma un angolo ϑ con l’asse delle x.
xA = 2R cosϑ ⇒ vA = xA i = −2Rϑ sinϑ i .
Per il Teorema di Chasles, il centro di istantanea rotazione dell’asta AB si trova nel punto di intersezionedella retta verticale condotta per A e il prolungamento del raggio OB. Detto H il CIR e dunque
H ≡ (2R cosϑ, 2R sinϑ) .

. Sia G il baricentro dell’asta AB:
(G−O) = (G−A) + (A−O) = −R2
cosϑ i +R
2sinϑ j + 2R cosϑ i =
3
2R cosϑ i +
R
2sinϑ j .
vG = −3
2Rϑ sinϑ i +
R
2ϑ cosϑ j
Per calcolare l’energia cinetica dell’asta AB e conveniente usare il Teorema di Konig:
T =1
2I(d)Oz ϑ
2︸ ︷︷ ︸disco
+1
2mv2G +
1
2I(a)Gz ϑ
2︸ ︷︷ ︸asta
=1
2
(1
2mR2
)ϑ2 +
1
2mR2ϑ2
(9
4sin2 ϑ+
1
4cos2 ϑ
)+
1
2
( 1
12mR2
)ϑ2
=5
12mR2ϑ2 +mR2ϑ2 sin2 ϑ .
. Per determinare la forza F (t) usiamo il Teorema dell’energia cinetica T = Π.
T =5
6mR2ϑϑ+ 2mR2ϑϑ sin2 ϑ+ 2mR2ϑ3 sinϑ cosϑ .
Poiche il moto imposto e tale da far ruotare il disco con velocita angolare costante (ϑ = ω0); si ha ϑ = 0e quindi
T∣∣∣ϑ=0
= 2mR2ω30 sinϑ cosϑ .
La potenza delle forze attive e
Π = −F i · vA −mg j · vG = 2FRϑ sinϑ−mgR2ϑ cosϑ .
L’equazione di moto e
T = Π ⇒ 2mR2ω30 sinϑ cosϑ = 2FRω0 sinϑ−mgR
2ω0 cosϑ ,
da cui si ricava
F =1
4mg
cosϑ
sinϑ+mRω2
0 cosϑ .
. Evidenziamo le forze agenti sui singoli corpi rigidi:
ϑ F
VA
VB
HB
VB
HB
mg
mg
VO
HO
La reazione HB si calcola scrivendo la prima equazione cardinale, proiettata in direzione x, per la solaasta:
R(asta)x = −F −HB , Q(asta)
x = mvGx = −3
2Rϑ sinϑ
Q(asta)x = −3
2Rϑ sinϑ− 3
2Rϑ2 cosϑ , Q(asta)
x
∣∣∣ϑ=0
= −3
2Rω2
0 cosϑ
La reazione vincolare HB e allora
Q(asta)x = R(asta)
x ⇒ HB =3
2Rω2
0 cosϑ− F =1
2mRω2
0 cosϑ− 1
4mg
cosϑ
sinϑ.
Per calcolare VB ricorriamo alla seconda equazione cardinale per il disco, scritta rispetto al polo O:
M(disco)Oz = −HBR sinϑ− VBR cosϑ , Γ(disco) = I
(disco)Oz ϑk =
1
2mR2ϑk
Γ(disco) =1
2mR2ϑk , Γ(disco)
∣∣∣ϑ=0
= 0 .
Ricaviamo quindi
Γ(disco) = M(disco)Oz ⇒ VB = −HB tanϑ =
1
4mg − 1
2mRω2
0 sinϑ .

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
VII sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Seconda equazione cardinale della dinamica. Dimostrazione ed esempi.
. Analisi dell’atto di moto rigido. Teorema di Mozzi.
Esercizi
Esercizio 1.
P,m
A
BC
DE
H
M,R
r
ϑ
ϕ
s
x
y
k
Il sistema di figura e posto in un piano verticale ed e costituitoda un punto materiale P di massa m che puo muoversi lungola direzione verticale, da un disco omogeneo di raggio r e massatrascurabile che puo ruotare attorno al suo centro e da un disco diraggio R e massa M che rotola senza strisciare lungo una pareteverticale. Sul punto P e fissato l’estremo di un filo inestensibilee di massa trascurabile che si avvolge senza strisciare sui duedischi. Una molla di costante elastica k collega il centro B deldisco di raggio R con un punto fisso. I tratti liberi del filo e dellamolla sono verticali.Si chiede di:
. scrivere il legame cinematico tra le coordinate s, ϑ e ϕintrodotte in figura e scrivere la velocita del punto P infunzione di s e s;
. utilizzando il Principio dei Lavori Virtuali, determinare lalunghezza della molla all’equilibrio;
. in tale situazione, calcolare le reazioni vincolari in H e latensione del filo lungo il tratto CD.
Esercizio 2.
x
m, `
m, `
O
A
B
C
P,m
ϑ
s
y
Il sistema di figura e posto in un piano orizzontale ed e cos-tituito da due aste uguali, OC e AB, omogenee di massa m elunghezza ` e da un punto materiale P di massa m. L’asta OCrimane ortogonale ad AB ed e saldata nel suo estremo C al pun-to di mezzo dell’asta AB, in modo da formare una ‘figura a T’.L’estremo O e vincolato a terra mediante una cerniera e il puntoP si muove senza attrito sull’asta AB. Una molla di costanteelastica k collega il punto P con l’asta OC. In assenza di attrito,si chiede di:
. determinare i gradi di liberta del sistema e scrivere la veloc-ita del punto P in funzione delle coordinate ϑ e s indicatein figura;
. calcolare la funzione di Lagrange, L , del sistema;
. individuare due integrali primi del moto e fornirneun’interpretazione meccanica;
. sapendo che a t = 0 il sistema e in quiete con s = `/2,calcolare la velocita angolare di OC quando s = 0.

Soluzioni
Esercizio 1.
. Essendo H il centro di istantanea rotazione del disco di raggio R, si ha vB = Rϑ j = s j; la velocitaangolare del disco e quindi
ϑ =s
R. (1)
Per inestensibilita del filo, vale vC = vD da cui ricaviamo,
vC = 2Rϑ j = vD = rϕ j ⇒ ϕ =2R
rϑ =
2
rs . (2)
La velocita di P e
vP = −rϕ j(2)= −2s j . (3)
. Le informazioni ottenute al punto precedente per le velocita tornano utili per calcolare gli spostamentivirtuali, infatti
δyB = Rδϑ(1)= δs , δyP
(3)= −2 δs . (4)
Il PLV richiede quindi che sia
δL = mg δyP +Mg δyB − ks δyB(4)= (M − 2m)g δs− ks δs = 0 , ∀δs .
La lunghezza della molla all’equilibrio e quindi
s =(M − 2m)g
k. (5)
. Per il calcolo delle reazioni vincolari basta isolare il disco di raggio R e imporre l’equilibrio mediante leequazioni cardinali. Indichiamo con ΦH = HH i + VH j la reazione che il piano verticale esercita sul discodi raggio R in H e con T = −T j la forza che il filo esercita sul disco in C. Le equazioni cardinali fornisconoil seguente sistema
R(disco)x = HH = 0
R(disco)y = VH +Mg − Fel − T = VH +Mg − ks− T = 0
M(disco)H = T 2R+ FelR−MgR = (2T + ks−Mg)R = 0 ,
che ha come soluzione (tenendo conto della (5))
HH = 0 , T = mg , VH = −mg .
Esercizio 2.
. Il sistema ha due gradi di liberta, siano s e ϑ le coordinate libere. Introduciamo un sistema di versorimobile, solidale con l’asta a T. Piu precisamente sia:
• il versore t diretto come (B −A);
• il versore n diretto come (C −O).
Il vettore posizione del punto P e (P −O) = `n + s t. Osservando poi che
n = ϑ t , t = −ϑn , (6)
si ricava la velocita di P :
vP =d
dt(P −O) = ` n + s t + s t
(6)= (s+ `ϑ) t− sϑn . (7)
. L’energia cinetica e:
T =1
2I(OC)Oz ϑ2︸ ︷︷ ︸OC
+1
2mv2C +
1
2I(AB)Cz ϑ2︸ ︷︷ ︸
AB
+1
2mv2P︸ ︷︷ ︸
punto P
(7)=
1
2
(1
3m`2
)ϑ2︸ ︷︷ ︸
OC
+1
2m`2ϑ2 +
1
2
( 1
12m`2
)ϑ2︸ ︷︷ ︸
AB
+1
2m[(s+ `ϑ)2 + s2ϑ2
]︸ ︷︷ ︸
punto P
=17
24m`2ϑ2 +
1
2m[(s+ `ϑ)2 + s2ϑ2
],

dove per calcolare il contributo dell’asta AB abbiamo usato il Teorema di Konig.Poiche il sistema si muove in un piano orizzontale, l’unica forza attiva e la forza elastica e il potenziale esemplicemente dato da
U = −1
2ks2 .
La funzione di Lagrange e
L = T + U =17
24m`2ϑ2 +
1
2m[(s+ `ϑ)2 + s2ϑ2
]− 1
2ks2 .
. Un integrale primo e fornito dall’energia meccanica totale
E = T − U =17
24m`2ϑ2 +
1
2m[(s+ `ϑ)2 + s2ϑ2
]+
1
2ks2 = cost.
Un secondo integrale primo si ricava osservando che la lagrangiana non dipende esplicitamente da ϑ equindi si conserva il momento cinetico pϑ
pϑ :=∂L
∂ϑ=
17
12m`2ϑ+m`(s+ `ϑ) +ms2ϑ = cost.
Dal punto di vista fisico questo integrale primo rappresenta la conservazione del momento angolare di tuttoil sistema, rispetto al polo O. Cio si verifica facilmente osservando che il momento delle forze rispetto adO di tutto il sistema e nullo e applicando quindi la seconda equazione cardinale.
. Ricaviamo i valori delle costanti del moto, sfruttando le informazioni contenute nel testo a t = 0: s = `/2e quiete:
E∣∣∣t=0
=1
8k`2 , pϑ
∣∣∣t=0
= 0 .
Gli integrali primi sono quindi
17
24m`2ϑ2 +
1
2m[(s+ `ϑ)2 + s2ϑ2
]+
1
2ks2 =
1
8k`2 , (8)
17
12m`2ϑ+m`(s+ `ϑ) +ms2ϑ = 0 . (9)
Nella situazione di interesse, quando s = 0, ricaviamo dalla (9) che
s = −29
12`ϑ ,
che sostituita nella (8) fornisce un’equazione nella sola ϑ
493
288m`2ϑ2 =
1
8k`2 ,
da cui ricaviamo
ϑ =
√36 k
493m.

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
VIII sessione 2012
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Riduzione di sistemi di forze, sistemi equivalenti di forze.
. Piccole oscillazioni attorno ad una configurazione di equilibrio stabile.
Esercizi
Esercizio 1. Il sistema di figura e posto in un piano verticale e viene studiato in un riferimento cartesianoortogonale (O;x, y). E costituito da un’asta omogenea AB di massa m e lunghezza 4R e da un disco omogeneodi centro G, massa m e raggio R. L’asta AB e scorrevole senza attrito sull’asse x e il disco rotola senza strisciaresull’asta AB. Il centro G e vincolato a rimanere fisso, ad una distanza d dall’asse delle y. Una molla di costanteelastica k collega l’estremo A dell’asta con l’origine degli assi. Una coppia antioraria C = C k e applicata aldisco. Si chiede di:
. scrivere il legame tra C e x all’equilibrio;
. calcolare le reazioni vincolari sull’asta in A e in B e la reazione vincolare esercitata sul disco in G;
. detto µ il coefficiente di attrito tra il disco e l’asta, determinare il massimo valore di C affinche il disconon scivoli.
y
xO A B
H
G
m, 4R
m,R
x
d
ϑ
C
Esercizio 2. Il sistema di figura e posto in un piano verticale e viene studiato in un riferimento cartesianoortogonale (O;x, y). E costituito da due aste AB e CD e da un disco di raggio R; disco e aste sono omogenee,di ugual massa m. L’asta AB e scorrevole sull’asse x, con l’estremo A collegato ad O mediante una molla dicostante elastica k, l’asta CD si appoggia al disco e ad un piolo fisso e liscio posto ad altezza 2R dal suolo.Il vincolo tra il disco e le aste e di puro rotolamento. Assumendo come coordinate libere le coordinate x e sindicate in figura, si chiede di:
. calcolare la velocita del centro G e la velocita angolare del disco;
. scrivere la funzione di Lagrange, L , del sistema;
. determinare il moto del sistema a partire da una condizione iniziale di quiete con x(0) = x0 e s(0) = s0;
. calcolare le componenti orizzontali delle forze tra disco e aste durante il moto.
y
xO A B
C D
E
G
m
m
m,Rs
x

Soluzioni
Esercizio 1.
. Il problema si risolve ugualmente bene utilizzando le equazioni cardinali, il PLV o il Teorema di staziona-rieta del potenziale. Scegliamo di usare le equazioni cardinali. A tal fine, risulta comodo evidenziare leforze che agiscono su ciascun sottosistema.
d− x
C
mg
mgVA VB
kx
VH
VH
HH
HH
HG
Il seguente sistema di due equazioni cardinali fornisce il legame tra C e xM
(disco)G = C −HHR = 0
R(AB)x = HH − kx = 0
⇒C = kxR
HH = kx.
Per illustrare un metodo alternativo, risolviamo il primo punto anche con il Teorema di stazionarieta delpotenziale. Il potenziale e
U = Cϑ− 1
2kx2 . (1)
Poiche il sistema e ad 1 g.d.l. dobbiamo trovare il legame cinematico tra x e ϑ. La velocita del puntodi contatto H, in virtu del puro rotolamento, e vH = x i. Per la formula fondamentale dell’atto di motorigido abbiamo
vG = vH + ϑk× (G−H) = x i +Rϑk× j = (x−Rϑ) i .
Poiche il centro G e fisso, deve essere vG = 0; ricaviamo quindi
x = Rϑ , x = Rϑ+K ,
essendo K una costante di integrazione. Sostituendo nell’espressione del potenziale (1) e trascurando itermini costanti, si ottiene
U = C xR− 1
2kx2 .
Derivando il potenziale e ponendo a zero la derivata si ottiene infine il legame tra C e x all’equilibrio:
U ′(x) =CR− kx = 0 , ⇒ C = kxR .
. A differenza del punto precedente, per calcolare VA e VB dobbiamo conoscere dove il disco si appoggiasull’asta AB. Poiche il centro e fisso a distanza d dall’asse y, si ricava HA = d− x. L’equilibrio verticaledel disco fornisce immediatamente VH = mg, per cui abbiamo
R
(AB)y = VA + VB − VH −mg = VA + VB − 2mg = 0
M(AB)A = VB4R− VH(d− x)−mg2R = VB4R−mg(2R+ d− x) = 0
⇒
VA = mg
6R− d+ x
4R
VB = mg2R+ d− x
4R.
Per calcolare HG possiamo scrivere la prima equazione cardinale per il solo disco, in direzione x: HG =HH = kx.

. Basta richiedere che sia soddisfatta la relazione di Coulomb-Morin per l’attrito statico:
|HH | ≤ µ|VH | .
Nel caso specifico si ha kx ≤ µmg. Sfruttando il risultato precedente kx = C/R, si ottiene infine
C ≤ µmgR .
Esercizio 2.
. Il sistema ha due gradi di liberta, il testo suggerisce di usare le coordinate libere x e s. Il vettoreposizione del punto G e (G − O) = (x + s) i, la velocita e quindi vG = (x + s) i. Poiche e anchevG = vH + ω × (G−H) = x i +Rω i, si ricava che la velocita angolare del disco e
ω = − sR
k .
Analogamente, indicando con K il punto di contatto del disco con l’asta CD, si trova
vK = x i + ω × (K −H) = (x+ 2s) i .
. L’energia cinetica e:
T =1
2mx2︸ ︷︷ ︸AB
+1
2m(x+ 2s)2︸ ︷︷ ︸
CD
+1
2mv2G +
1
2I(disco)Gz ω2︸ ︷︷ ︸
disco
=1
2mx2 +
1
2m(x+ 2s)2 +
1
2m(x+ s)2 +
1
2
(1
2mR2
)( sR
)2
=3
2mx2 +
11
4ms2 + 3mxs .
Il potenziale e: U = − 12kx
2.Infine, la funzione di Lagrange e
L = T + U =3
2mx2 +
11
4ms2 + 3mxs− 1
2kx2 .
. Per trovare il moto scriviamo le equazioni di Lagrange.
d
dt
(∂L
∂x
)=
d
dt
(3mx+ 3ms
)= 3mx+ 3ms
∂L
∂x= −kx
d
dt
(∂L
∂s
)=
d
dt
(11
2ms+ 3mx
)=
11
2ms+ 3mx
∂L
∂s= 0 .
Arriviamo quindi alle seguenti equazioni di moto
3x+ 3s+k
mx = 0 , 11s+ 6x = 0 . (2)
Ricavando s dalla seconda e sostituendo nella prima si ricava un’equazione nella sola x che puo esseresemplificata nell’equazione seguente (oscillatore armonico)
x+ Ω2x = 0 , Ω2 =11k
15m. (3)
La soluzione, con le condizioni iniziali x(0) = h e x(0) = 0, e x(t) = h cos Ωt. L’andamento di s(t) si ricavadalla seconda delle (2)
11s+ 6x = 0 ⇒ s(t) = − 6
11x(t) +At+B ,
essendo A e B costanti di integrazione da determinarsi mediante le condizioni iniziali s(0) = a, s(0) = 0.Si arriva infine a
s(t) = a+6h
11(1− cos Ωt) .

. Dette ΦH = −HH i−VH j e ΦK = HK i +VK j le reazioni vincolari che agiscono rispettivamente sull’astaAB e sull’asta CD nei punti di contatto con il disco, il quesito si risolve facilmente scrivendo la primaequazione cardinale della dinamica per AB e per CD, proiettate in direzione x:
Q(AB)x = R
(AB)x
Q(CD)x = R
(CD)x
⇒mx = −kx−HH
m(x+ 2s) = HK .(4)
Semplificando e tenendo conto dei legami tra x, s con x, che si ricavano dalle equazioni (2)–(3), si ottieneinfine
HH = − 4
15kx , HK =
1
15kx .

Universita degli Studi eCampus Facolta di Ingegneria
Meccanica razionale e staticaProf. S. Turzi
VIII sessione 2012, compito B
Teoria
Rispondere in modo esauriente ad una sola domanda a scelta.
. Riduzione di sistemi di forze, sistemi equivalenti di forze.
. Piccole oscillazioni attorno ad una configurazione di equilibrio stabile.
Esercizi
Esercizio 1. Il sistema di figura e posto in un piano verticale e viene studiato in un riferimento cartesianoortogonale (O;x, y). E costituito da un’asta omogenea AB di massa m e lunghezza 4R e da un disco omogeneodi centro G, massa m e raggio R. L’asta AB e scorrevole senza attrito sull’asse x e il disco rotola senza strisciaresull’asta AB. Il centro G e vincolato a rimanere fisso, ad una distanza d dall’asse delle y. Una molla di costanteelastica k collega l’estremo A dell’asta con l’origine degli assi. Una coppia antioraria C = C k e applicata aldisco. Si chiede di:
. scrivere il legame tra C e x all’equilibrio;
. calcolare le reazioni vincolari sull’asta in A e in B e la reazione vincolare esercitata sul disco in G;
. detto µ il coefficiente di attrito tra il disco e l’asta, determinare il massimo valore di C affinche il disconon scivoli.
y
xO A B
H
G
m, 4R
m,R
x
d
ϑ
C
Esercizio 2. Il sistema di figura e posto in un piano verticale e viene studiato in un riferimento cartesianoortogonale (O;x, y). E costituito da un’asta omogenea AB di massa m e da un disco omogeneo di raggio Re massa m. L’asta si appoggia in K al disco e ad un piolo fisso D posto ad altezza 2R dal suolo. Il discorotola senza strisciare su una guida fissa, scelta come asse delle x. Il vincolo tra il disco e l’asta AB e di purorotolamento, mentre il piolo D e liscio. L’estremo A dell’asta e collegato mediante una molla di costante elasticak ad un punto A′ posto sull’asse delle y alla stessa quota di A. Assumendo x come coordinata libera (indicatain figura), si chiede di:
. esprimere il legame cinematico tra le coordinate x e ϑ ;
. scrivere la funzione di Lagrange, L , del sistema;
. determinare il moto del sistema a partire da una condizione iniziale di quiete con x(0) = x0;
. calcolare la componente orizzontale della forza tra il disco e l’asta durante il moto.
y
xO
AA′
B
C
H
KD
m
m,R
x
ϑ

Soluzioni
Esercizio 1.
. Il problema si risolve ugualmente bene utilizzando le equazioni cardinali, il PLV o il Teorema di staziona-rieta del potenziale. Scegliamo di usare le equazioni cardinali. A tal fine, risulta comodo evidenziare leforze che agiscono su ciascun sottosistema.
d− x
C
mg
mgVA VB
kx
VH
VH
HH
HH
HG
Il seguente sistema di due equazioni cardinali fornisce il legame tra C e xM
(disco)G = C −HHR = 0
R(AB)x = HH − kx = 0
⇒C = kxR
HH = kx.
Per illustrare un metodo alternativo, risolviamo il primo punto anche con il Teorema di stazionarieta delpotenziale. Il potenziale e
U = Cϑ− 1
2kx2 . (1)
Poiche il sistema e ad 1 g.d.l. dobbiamo trovare il legame cinematico tra x e ϑ. La velocita del puntodi contatto H, in virtu del puro rotolamento, e vH = x i. Per la formula fondamentale dell’atto di motorigido abbiamo
vG = vH + ϑk× (G−H) = x i +Rϑk× j = (x−Rϑ) i .
Poiche il centro G e fisso, deve essere vG = 0; ricaviamo quindi
x = Rϑ , x = Rϑ+K ,
essendo K una costante di integrazione. Sostituendo nell’espressione del potenziale (1) e trascurando itermini costanti, si ottiene
U = C xR− 1
2kx2 .
Derivando il potenziale e ponendo a zero la derivata si ottiene infine il legame tra C e x all’equilibrio:
U ′(x) =CR− kx = 0 , ⇒ C = kxR .
. A differenza del punto precedente, per calcolare VA e VB dobbiamo conoscere dove il disco si appoggiasull’asta AB. Poiche il centro e fisso a distanza d dall’asse y, si ricava HA = d− x. L’equilibrio verticaledel disco fornisce immediatamente VH = mg, per cui abbiamo
R
(AB)y = VA + VB − VH −mg = VA + VB − 2mg = 0
M(AB)A = VB4R− VH(d− x)−mg2R = VB4R−mg(2R+ d− x) = 0
⇒
VA = mg
6R− d+ x
4R
VB = mg2R+ d− x
4R.
Per calcolare HG possiamo scrivere la prima equazione cardinale per il solo disco, in direzione x: HG =HH = kx.

. Basta richiedere che sia soddisfatta la relazione di Coulomb-Morin per l’attrito statico:
|HH | ≤ µ|VH | .
Nel caso specifico si ha kx ≤ µmg. Sfruttando il risultato precedente kx = C/R, si ottiene infine
C ≤ µmgR .
Esercizio 2.
. La velocita del punto K del disco e vK = 2Rϑ i (formula fondamentale dell’atto di moto rigido applicataal disco). Per puro rotolamento deve anche essere vK = x i. Si ricava quindi
x = 2Rϑ . (2)
. L’energia cinetica e:
T =1
2mx2︸ ︷︷ ︸AB
+1
2I(disco)Hz ω2︸ ︷︷ ︸disco
(2)=
1
2mx2 +
1
2
(1
2mR2 +mR2
)( x
2R
)2=
11
16mx2 .
Il potenziale e: U = − 12kx
2.
Infine, la funzione di Lagrange e L = T + U =11
16mx2 − 1
2kx2.
. Per trovare il moto scriviamo le equazioni di Lagrange. Si trova
d
dt
(∂L
∂x
)=
11
8mx ,
∂L
∂x= −kx;
semplificando arriviamo alla seguente equazione di moto
x+ Ω2x = 0 , Ω2 =8k
11m, (3)
la cui soluzione, con le condizioni iniziali x(0) = x0, x(0) = 0, e x(t) = x0 cos Ωt.
. Detta ΦK = HK i + VK j la reazione vincolare che agisce sull’asta AB nel punto di contatto con il disco,il quesito si risolve facilmente scrivendo la prima equazione cardinale della dinamica per AB, proiettatein direzione x:
Q(AB)x = R(AB)
x ⇒ mx = −kx+HK . (4)
Semplificando e tenendo conto del legame tra x e x, che si ricava dall’equazione di moto (3), si ottiene
HK = kx− 8k
11x =
3
11kx .