machine consciousness and cognitive robotics two research agendas or one? murray shanahan imperial...
TRANSCRIPT

Machine Consciousness and Cognitive Robotics
Two Research Agendas or One?
Murray ShanahanImperial College London
Dept. Electrical Engineering

2
Overview
ConsciousnessCognitive Robotics
Motivation and methodologyLudwig: a humanoid robotPerception as abduction
Philosophical Implications

3
Expect Changing of HatsEngineer Philosopher

4
As a Philosopher…

5
“Consciousness”The word “consciousness” seems to conflate several concepts. To be conscious is
To be aware of the physical and social worldTo be aware of the selfTo have an inner world & an internal monologueTo offer an emotional response to life
If we have a theory that accounts for these things, will the philosophical puzzle that it is “like something” to be a conscious creature disappear?Such an account will at the same time be an explanation of how the brain generates intelligent behaviourThe engineer’s considerations may be pertinent

6
A Blueprint for the Human Mind
Action
EmotionWORLD
Imagination
Perception

7
The Imagination is the KeyThe Imagination is a multi-media, virtual reality “theatre”, where stories about the body and the self are played out. These stories
are influenced by the present situation according to Perception,elicit a secondary response from Emotion,and thereby influence the decisions taken by Action
The Imagination rehearses trajectories through an abstraction of sensory-motor space.The inner loop of the Imagination mirrors the outer Action-World-Perception loopThe stories include visual images, sounds and plenty of conversation (the inner monologue)

8
Seeing AsPerceiving an object (or situation or event) entails seeing it as a member of one or more categories
Seeing a collection of edges and surfaces as a rock or a deer
To see X as a Y is to see X as a potential participant in a whole repertoire of little stories in the Imagination involving Ys
Hunting a deer, cooking its meat, using its antlers
The power of the human imagination lies in its talent for projecting things onto novel categories
Seeing a horse as a means of transportSeeing a rock as a hammer

9
Little Spatial and Social Stories
All these stories are grounded in small infantile sensory-motor episodes (cf: Lakoff)
Putting things in containers / taking things out of containersFollowing a pathGiving things to others / taking things from others
Abstract concepts built on these concrete foundationsFor example, experiences relating to containment ground
Bank accountsVariables in programming languages
Abstract concept of Self built around core representation of the body

10
By the Way…A full theory of mind also needs to account for “altered states of consciousness”, such as those experienced during
DreamsHallucinationsMeditation

11
As an Engineer…

12
What Do I Want to Do?Build an artefact that has as near to human-level intelligence as possibleDo so in a principled way, by uncovering the fundamental laws that govern the design of such artefactsIf the results impact on psychology and/or philosophy, so much the betterBut ultimately the project will stand or fall as an engineering exerciseAlbeit engineering with a “philosophical edge”

13
Motivating Conjecture 1Abstract Concepts are Grounded in
Sensory-Motor Interaction with a World of Spatio-Temporally Located Objects
Consider the order in which locomotion, communication, manipulation, and language appear in evolutionary historyConsider their order of appearance in child developmentClassical AI hasn’t delivered using top-down methodologySymbols have to be grounded to have meaning“The core of our conceptual systems is directly grounded in perception, body movement, and experience” (G.Lakoff)

14
Motivating Conjecture 2The Ability to Handle Uncertainty and Incompleteness Is Central to Human-
Level CognitionUncertainty is an unavoidable consequence of the limitations of any sensorIncompleteness is an inevitable consequence of having a point-of-view, which is in turn a consequence of having a spatial location
Can’t see back and front of an object at the same timeIn cluttered environment, occlusion is the normMost of the world is too distant to be known

15
Motivating Conjecture 3Perception, Action and Cognition Form an
Inseparable TrinityCognition is constrained by need for reactivity
Perception is intractable without help of cognition
Behaviour-based approaches are limited by lack of cognition
Evolutionary pressure behind development of cognition was the benefit of a better closed-loop control system
Fragmentation of AI spawned irreconcilable sub-disciplines that lost sight of the big challenge

16
Two Design PrinciplesIntelligent behaviour will result from correct reasoning with
correct representation
Adaptive behaviour is the product of closed-loop control
These align with the approaches of classical AI and biologically-inspired robotics (cybernetics)To reconcile these insights, explicit representation and reasoning are inserted in a fast feedback loop
Use of explicit reasoning must not entail the deployment of computationally unbounded processesUse of explicit representation must not entail the construction of a complete and accurate model of the world

17
Methodological ConclusionIf we want to engineer an artefact with human-level cognitive skills, central topics include
Representing and reasoning about shape and spaceDealing with incompleteness and uncertainty
So let’s build a robot that perceives, reasons about, and acts upon objects having a variety of different shapes in a messy environmentThe architecture should integrate explicit representation and explicit reasoning with closed-loop control

18
The Present ChallengeBuild a humanoid robotFill its workspace with everyday objectsProgram it to attend to interesting objects given visual cuesMake it construct representations of objects from their appearanceLet it nudge interesting objectsMake the quality of its representations improve with the resulting new information

19
Ah! Ludwig
“What am I supposed to do with these things? All I know about is first-order predicate calculus!”
20
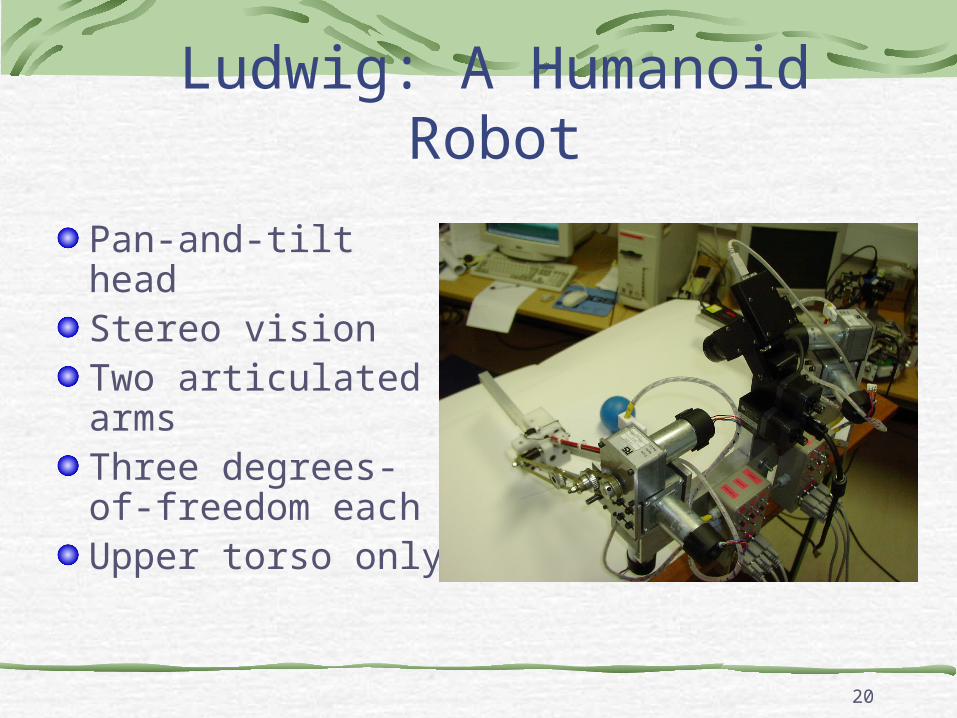
Ludwig: A Humanoid Robot
Pan-and-tilt headStereo visionTwo articulated armsThree degrees-of-freedom eachUpper torso only

21
LUDWIG Nudging a Ball
QuickTime™ and a decompressor
are needed to see this picture.
QuickTime™ and a decompressor
are needed to see this picture.
This is a simple demonstration of the basic mechanical, electrical, and control system working together

22
A View of Robot PerceptionThe role of robot perception is to transform raw sensor data into a “correct” representation of the external worldThe idea of correctness makes sense if the representations are symbolic and have a compositional semanticsTo engineer our robot in a principled way, we need a formal account of how this is doneThis account will explain how symbols and sentences denote, how they are grounded, how they refer, how they acquire intentionalityFinally we need an implementation that conforms to the theory

23
Perception as Abduction
describes impact of world on sensors describes object shapes & locations
Must be consistent & comprise abducible formulaeNeed method for handling multiple s
describes data from cameras, sonar, etc
€
∧|=Background
theoryObjects
in the world
Sensor data

24
The Character of comprises first-order predicate calculus formulae describing
Generic laws about actions and changeExpressed in a formalism for describing actions, such as the event calculusMust incorporate a solution to the frame problem
Generic laws about spatial occupancy, solidity, persistence, occlusion, etcThe effects of specific actions
If you move forwards your location changes in a certain wayIf you rotate an object, its aspect changes in a certain way

25
Desiderata for a Full Theory of Perception
An agent’s perceptual system should be tuned to those aspects of the world that are pertinent to its needs (J. von Uexküll’s Umwelten)To perceive something should be to perceive its use (J. J. Gibson’s affordances)Perception should be active: gathering new sensor data facilitates the interpretation of old sensor dataAn attention mechanism should be used to manage the volume of sensor data while ensuring its utilityThe flow of information between perception and cognition should be bidirectional

26
The Visual ImaginationSymbolic, sentence-like representations are only half the story
Good for abstractionGood for handling incompleteness and uncertainty
Topographic, image-like representations offer complementary features
Spatial properties come for free (shape, orientation, etc)Animation can be used to simulate effects of action and change
Combining symbolic and topographic representationsPixel arraysAnimatedMultiple levels of granularityRegions of array labelled with abductively determined categories

27
As a Philosopher…

28
Engineering with a Philosophical Edge
“Much of what we think will of course prove to be mistaken; that is one advantage of real
experiments over thought experiments.”(Dennett on the Cog project)

29
Philosophical ParallelsThe Philosopher and the Engineer
Intentionality
Propositional attitudes
Kantian idealism
Consciousness

30
IntentionalityThe Philosopher
“How is intentionality possible? How is it that states
of mind can be about the world? How are symbols
grounded?”
The Engineer
“A clear and well-defined causal story can be told about how sentences in
Ludwig’s memory come to be there. The story starts with the state of the world, moves on to how this causes
electrical signals in the robot’s sensors, and concludes with computational processes that transform these into
representations. The abductive account spells out exactly the sense in which the
resulting representations are correct.”

31
Propositional AttitudesThe Philosopher
“What are propositional attitiudes? What are beliefs, desires, and intentions, and what part do they play in a
(functionalist) theory of mind?”
The Engineer
“A precise causal story can be told about how representations in Ludwig’s memory arrive there, interact with each other, and issue in robot actions. The
story involves well-defined computational processes of sensor data
assimilation and planning through logical inference.
(You don’t seriously think the human mind is like this do you?)”

32
Kantian IdealismThe Philosopher
“The natural world as we know it ... is thoroughly conditioned by [certain]
features: our experience is essentially experience of a
spatio-temporal world of law-governed objects conceived of as distinct from our temporally
successive experiences of them” (Strawson on Kant)
The Engineer
“Ludwig’s background theory must contain axioms about time, action, change, space, and shape,
and the hypotheses that explain sensor data are
therefore constrained to be expressed in those terms.”

33
ConsciousnessThe Philosopher
“But what is the nature of consciousness? How does it
arise in physical matter?”
The Engineer
“What? Hmmm, well, let me take a step back…”
34
Conclusion
Machine consciousness and cognitive robotics: two research agendas or one?
Two agendas with a very large area of overlap

35
And Finally ...
The Philosopher
“Where’s the nearest pub?”
The Engineer
“Where’s the nearest pub?”