linear image processing
TRANSCRIPT

Linear Image Processing
Chapter # 24
Avinash Rohra 2K12/ELE/108
Presentation of Digital Signal Processing
Linear Image Processing
Linear image processing is based on the same two techniques as
conventional Digital Signal Processing.
1. Convolution
2. Fourier Analysis
Linear filtering can improve images in many ways: sharpening the
edges of objects, reducing random noise, correcting for unequal
illumination, deconvolution to correct for blur and motion, etc.
These procedures are carried out by convolving the original image
with an appropriate filter kernel, producing the filtered image.
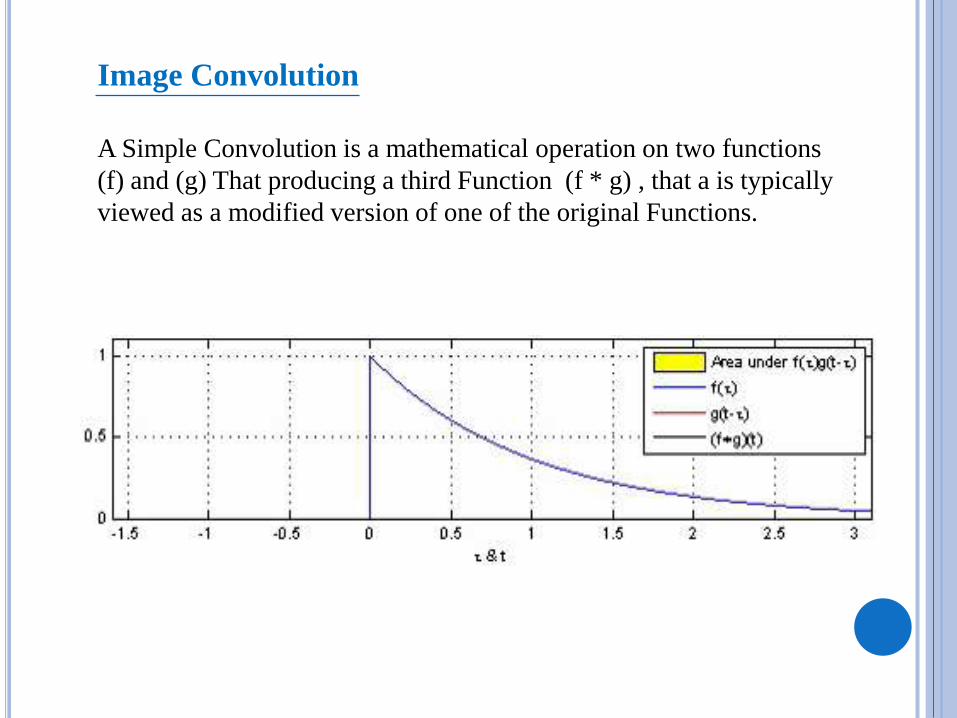
Image Convolution
A Simple Convolution is a mathematical operation on two functions
(f) and (g) That producing a third Function (f * g) , that a is typically
viewed as a modified version of one of the original Functions.

Image convolution works in the same way as one-dimensional
convolution. For instance, images can be viewed as a summation of
impulses, i.e., scaled and shifted delta functions.
One Dimensional Convolution

linear systems are characterized by how they respond to impulses; that is, by
their impulse responses.
The output image from a system is equal to the input image convolved with
the system's impulse response.
The two-dimensional delta function is an image composed of all zeros, except
for a single pixel at: row = 0, column = 0, which has a value of one.
Delta Function
One Dimensional Picture
0 0 0
0 1 0
0 0 0

Assume that the row and column indexes can have both positive and
negative values, such that the one is centered in a vast sea of zeros. When
the delta function is passed through a linear system, the single nonzero
point will be changed into some other two-dimensional pattern.
Delta Function After Passing Through a Linear System
0 0 0
0 1 0
0 0 0
0 0 0
0 1 0
0 0 -1
-1/8 -1/8 -1/8
-1/8 1 -1/8
-1/8 -1/8 -1/8
Delta Function Shift and Subtract Edge Detection

Humans and other animals use vision to identify nearby objects,
such as enemies, food, and mates.
Same here the Picture has it’s own brightness and colors to easily
view by a human
image that slowly changes from dark to light, producing a
blurry and poorly defined edge.

Applications which we can use in Cameras :
Pillbox :
• Pillbox has a circular top and straight Sides
• pillbox is the point Spread function of an out-of-focus lens

For example, if the lens of a camera is not properly focused, each point
in the image will be projected to a circular spot on the image sensor
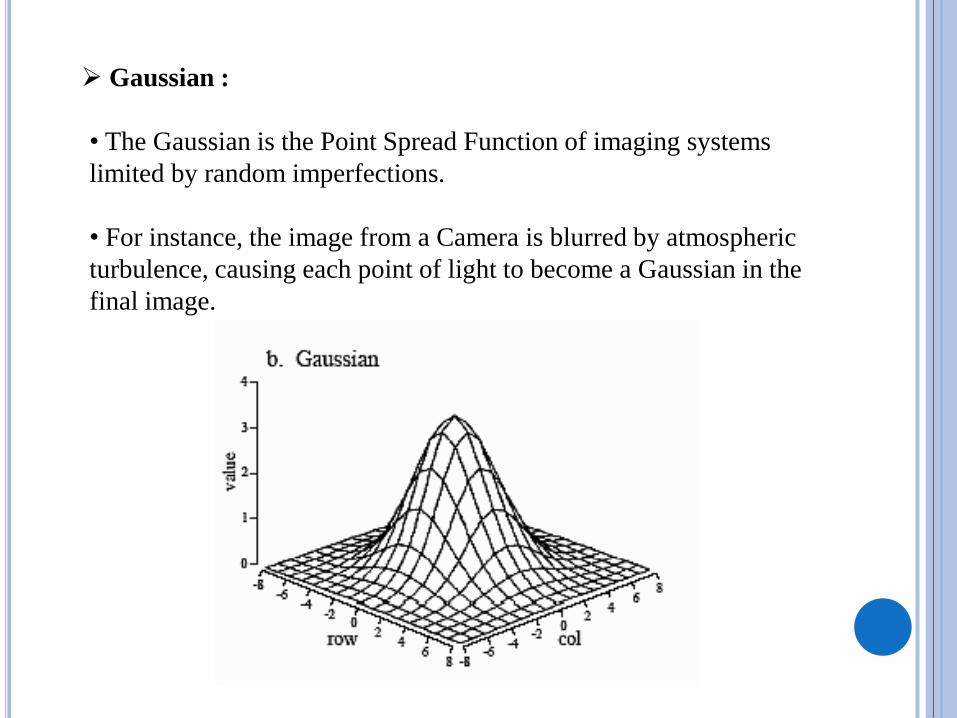
• The Gaussian is the Point Spread Function of imaging systems
limited by random imperfections.
• For instance, the image from a Camera is blurred by atmospheric
turbulence, causing each point of light to become a Gaussian in the
final image.
Gaussian :
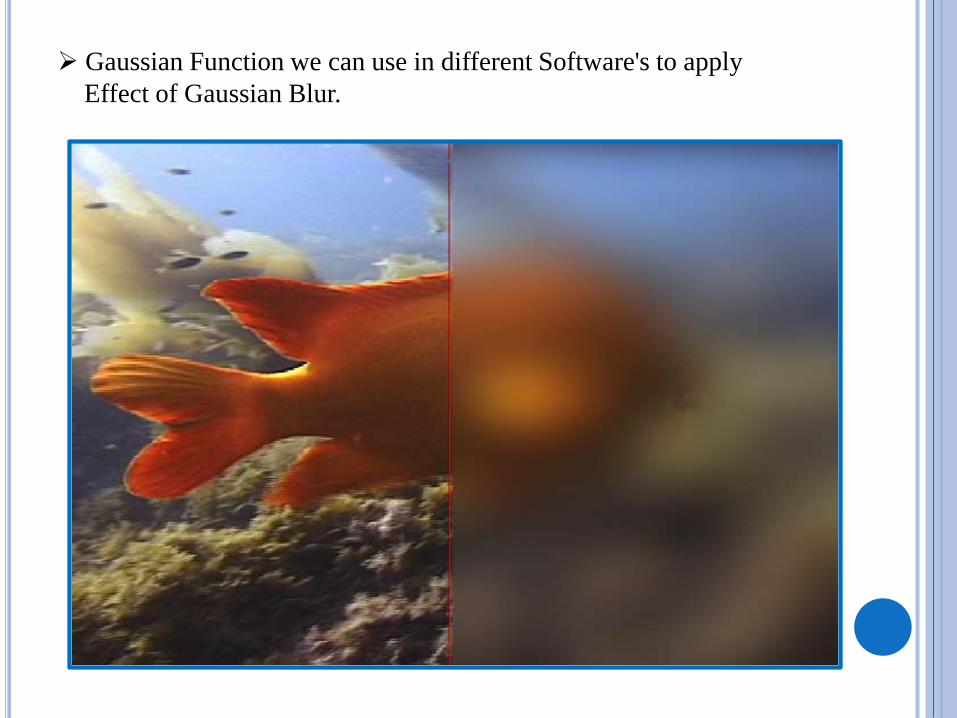
Gaussian Function we can use in different Software's to apply
Effect of Gaussian Blur.

3 3 Edge Modification
3×3 operations is an image acquired by an airport x-ray baggage
scanner. When this image is convolved with a 3×3 delta function
(a one surrounded by 8 zeros), the image remains unchanged.
0 0 0
0 1 0
0 0 0

3 3 Edge Modification
The image convolved with a 3×3 kernel consisting of a one, a negative
one, and 7 zeros. This is called the shift and subtract operation, because
a shifted version of the image (corresponding to the -1) is subtracted from
the original image (corresponding to the 1).
0 0 0
0 1 0
0 0 0
0 0 0
0 1 0
0 0 -1

This processing produces the optical illusion that some objects are closer
or farther away than the background, making a 3D or embossed effect.
3 3 Edge Modification
Edge detection PSF, and the resulting image. Every edge in the original
image is transformed into narrow dark and light bands that run parallel to the
original edge. Thresholding this image can isolate either the dark or light
band, providing a simple algorithm for detecting the edges in an image..
-1/8 -1/8 -1/8
-1/8 1 -1/8
-1/8 -1/8 -1/8

Edge enhancement this is sometimes called a sharpening operation ,the
objects have good contrast (an appropriate level of darkness and
lightness) but very blurry edges. The objects have absolutely no contrast,
but very sharp edges.
3 3 Edge Modification
Convolution By Separable
• This is a technique for fast convolution, as long as the PSF is separable.
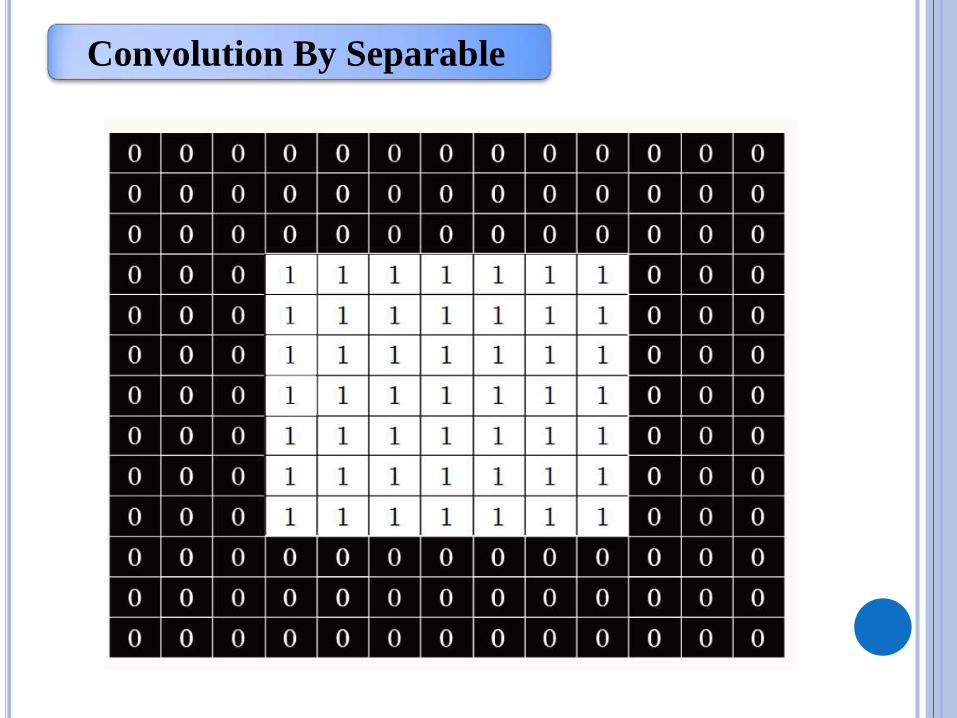
• A Point Spread Function is said to be separable if it can be broken into
two one-dimensional signals: a vertical and a horizontal projection.
x[r,c] = vert [r] horz [c]
• where x[r,c] is the two-dimensional image, and vert[r] & horz[c] are the
one-dimensional projections.
• Obviously, most images do not satisfy this requirement. For example, the
pillbox is not separable. There are however an infinite number of
separable images.

Convolution By Separable
Convolution By Separable

Convolution By Separable
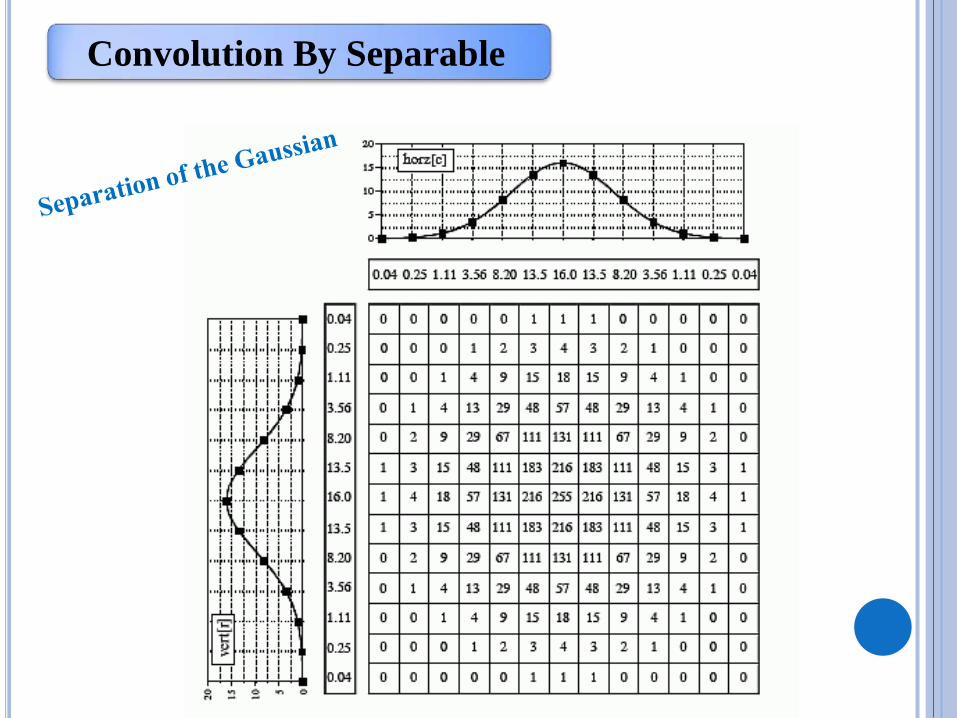
• An Infinite number of separable Point spread function (PSF) can be
generated by defining arbitrary projections and then calculating the two
dimensional function
Convolution By Separable

That’s it