kryteria obiektywnej oceny prognozwanych stanów osi ... · czynnikiem intensywności naprężeń...
TRANSCRIPT

POJAZDY SZYNOWE NR 1/2011
dr inż. Marek Sobaś Instytut Pojazdów Szynowych „TABOR”
Kryteria obiektywnej oceny prognozwanych stanów
osi zestawów kołowych pojazdów trakcyjnych
W artykule przedstawiono kryteria obiektywnej oceny prognozowanych stanów osi zestawów kołowych trakcyjnych oraz tocznych. Jednym z kryteriów jest obserwacja propagacji pęknięcia w ustalonych okresach kontrolnych. Przedstawiono rolę badań ultradźwiękowych w całej meto-dyce prognozowania stanu osi zestawu kołowego. Przedstawiono stano-wisko, dotyczące ograniczenia wieku eksploatacji osi zestawów koło-wych jako środka zwiększającego niezawodność i bezpieczeństwo. Arty-kuł został opracowany w ramach projektu badawczo-rozwojowego Nr R 10 004806/2009 pt. „Mikroprocesorowy system diagnostyczny głównych systemów trakcyjnego pojazdu szynowego uwzględniający ocenę bieżącą i prognozowanie stanów”, finansowanego z budżetu Ministerstwa Na-uki i Szkolnictwa Wyższego.
1. Wstęp
Oś zestawu kołowego jest jednym z newralgicz-nych elementów pojazdu szynowego, decydującym o bezpieczeństwie eksploatacyjnym pojazdu szynowego. Osie zestawów kołowych mają 150 letnią historię i są przedmiotem stałego rozwoju konstruktorów, inżynie-rów zajmujących się obliczeniami wytrzymałościo-wymi oraz fachowców zajmujących się inżynierią materiałową. Element ten jest uznawany jako najbar-dziej obciążony w eksploatowanym pojeździe kolejo-wym. Problematyka wytrzymałości zmęczeniowej osi zestawu kołowego została poruszona w opracowaniu OR-9666 [13]. Pomimo, że istnieje poważny postęp w zakresie metod obliczeniowych, które są przedstawio-ne w normach europejskich PN-EN 13104:2009 (osie napędne) [10] oraz PN-EN 13103:2009 (osie toczne) [9] oraz znaczący postęp technologiczny wytwarzania osi i ich odbiorów, które są przedstawione w normie PN-EN 13261:2009 [11] elementy te są narażone na pękniecie zmęczeniowe, co jest niejednokrotnie przy-czyną poważnych katastrof kolejowych, powodują-cych znaczne straty materialne oraz wypadki śmiertel-ne. Po ostatniej katastrofie kolejowej w Viareggio we Włoszech pojawiają się głosy o ustanowienie maksy-malnego wieku osi zestawów kołowych, po upływie którego oś należy wycofać z eksploatacji i złomować. Pogląd ten jest kompletnie błędny i nie jest uzasadnio-ny z technicznego punktu widzenia, gdyż:
• oś jest zaprojektowana na zmęczenie wysoko-cykliczne, co oznacza że oś może pracować z nieograniczoną wytrzymałością zmęczenio- wą; jak wynika z obecnych doświadczeń eksploatacyjnych podczas 30 letniej eksplo-
atacji osie mogą być poddawane 109 cykli obciążeń
• o faktycznej wytrzymałości osi decyduje jej stan techniczny, a więc „bezwadliwość” w zakresie określonym przez PN-EN 13261:2009 [11]
• oś nowa jest w takim samym stopniu narażona na pęknięcia zmęczeniowe jak oś eksploatowana, co automatycznie podważa sens określania maksymalnego wieku eksplo-atacji osi.
Jak wykazuje praktyka eksploatacyjna wypadki kole-jowe były spowodowane również pęknięciem osi w stanie nowym. Wynika to głównie z istnienia w każ-dym materiale defektów struktury krystalicznej jak dyslokacje, które są odpowiedzialne za odkształcenia plastyczne materiałów oraz mikropękniecia i inne nieciągłości materiałów, które są miejscem inicjacji pęknięcia zmęczeniowego. Pęknięcia powstają w ma-teriale już na etapie jego wytwarzania. Miejscami po-wstawania pęknięć są wszelkie nieciągłości struktury materiałowej. Na tej podstawie można wyciągnąć wniosek, że jednym z ważnych sposobów zapobiega-nia zniszczenia konstrukcji poprzez pękanie zmęcze-niowe jest między innymi jest prawidłowe posługiwa-nie się metodami badań nieniszczących, których sto-sowanie pozwala na bezpieczną eksploatację. Sku-teczność badań nieniszczących jest związana między innymi na precyzyjnym określeniu okresów kontrol-nych osi zestawów kołowych. 2.Ustalenie okresów kontrolnych osi zestawów
kołowych na podstawie symulacji komputerowej
1

POJAZDY SZYNOWE NR 1/2011
2.1.Podstawy zagadnienia
Podstawą do opracowania zagadnienia związa-nego z ustaleniem okresów kontrolnych dla metod badań nieniszczących osi zestawów kołowych były poważne szkody, jakie spowodowała katastrofa kole-jowa, związana uszkodzeniem osi zestawu kołowego dalekobieżnego zespołu trakcyjnego przystosowanego do wysokich prędkości ICE, która miała miejsce na moście „Hohenzollernbrücke” w Kolonii (9.07.2008) [4]. Zdarzenie to zainspirowało do ustalenia kryteriów dla okresów kontrolnych dla badań osi zestawów ko-łowych. Jeśli weźmie się pod uwagę czas od początku eksploatacji dla osi nie wykazującej wad, to wówczas żywotność do pojawienia się pęknięcia (rysy) jest zasadniczą częścią całkowitej żywotności osi zestawu kołowego. Ta pierwsza faza eksploatacji osi zestawu kołowego może ulec skróceniu poprzez występowanie małych błędów, które pojawiły się na etapie wytwa-rzania i nie zostały wykryte lub powstały wskutek uszkodzeń podczas eksploatacji wywołanymi przez korozję lub uderzenia mechaniczne, które przyczynia-ją się do powstawania pęknięć zmęczeniowych. Jed-nak takie zjawiska nie mogą być przeszkodą do usta-lenia okresów między-naprawczych. Istotny problem techniczny stanowi to, jakie pęknięcia lub rysy (wy-miary i ich lokalizacja) mogą być pewnie wykryte za pomocą badań nieniszczących. 2.2.Przyczyny propagacji pęknięć
Przy pęknięciu zmęczeniowym każdego ele-mentu konstrukcyjnego całkowita wytrzymałość zmę-czeniowa składa się z dwóch części:
⇒ żywotności, wynikającej z inicjacji pęknięcia zmęczeniowego
⇒ żywotności, wynikającej z propagacji (rozwoju) pęknięcia zmęczeniowego.
Przy okresowo zmiennych obciążeniach osi jako ele-mentu konstrukcyjnego w otoczeniu pęknięcia (rysy) zmęczeniowego powstaje pole naprężeń σy(x,t), które może być scharakteryzowane przez czasowo zmienną intensywność naprężeń K(t), co jest pokazane na rys.1. Cykliczna intensywność zmiany naprężeń ∆K jest decydującym parametrem dla propagacji pęknięcia przy obciążeniu zmęczeniowym.
Legenda: a) część konstrukcyjna z pęknięciem (rysą) o długości „a” przy
czasowo zmiennym obciążeniu, określonej przy pomocy współrzędnych biegunowych „r” i „φ” na wierzchołku rysy i naprężeniem σy(x,t) w otoczeniu rysy
b) obciążenie części σ(t) z amplitudą σa względnie ∆σ lub σMAX i σMIN
c) współczynnik intensywności naprężeń K(t) z cykliczną inten-sywnością naprężeń ∆K jak również maksymalnym współ-czynnikiem intensywności KMAX i minimalnym współczynni-kiem intensywności naprężeń KMIN
Rys.1. Związek pomiędzy obciążeniem części i cyklicznym czynnikiem intensywności naprężeń ∆K
Pomiędzy cykliczną rozpiętością naprężeń ∆σ i aktu-alną długością pęknięcia (rysy) jak również współ-czynnikiem geometrycznym Ya(a) i współczynnikiem intensywności naprężeń ∆K obowiązuje zależność:
( ) ( )aYaaYaK a ⋅⋅=⋅⋅⋅∆=∆ πσπσ 2 (1)
Wpływ na propagację pęknięć zmęczeniowych ma również współczynnik asymetrii cyklu R dla obciążeń okresowo zmiennych, który definiuje się zależnością:
MAX
MINRσσ
= (2)
gdzie: σMIN - minimalne naprężenia podczas cyklu zmę-
czeniowego σMAX - maksymalne naprężenia podczas cyklu
zmęczeniowego. Przy procesie propagacji pęknięcia zwiększa się dłu-gość rysy wraz ze zwiększającą się ilością cykli, przez co zwiększa się również cykliczny współczynnik in-tensywności naprężeń. Prędkość powstawania pęknię-cia (rysy) jest zależna od materiału i musi być ustalona na drodze eksperymentalnej. Wraz ze wzrostem rysy na próbkach normalnych otrzymuje się tzw. krzywą prędkości powstawania rysy, która się zbliża asympto-tycznie do dwóch granic, które są przedstawione na rys.2.
2

POJAZDY SZYNOWE NR 1/2011
Legenda: I zakres- małej prędkości pękania od 0÷10-5 mm/cykl II zakres-średniej prędkości pękania od 10-5 ÷10-3 mm/cykl III zakres- dużej prędkości pękania od 10-3 mm/cykl.
Rys.2. Przedstawienie zależności pomiędzy prędkością powstawa-nia pęknięcia i cyklicznym współczynnikiem intensywności naprę-
żeń ∆K za pomocą krzywej da/dN
Prędkość propagacji pęknięcia (rysy) można wyzna-czyć z zależności:
)( KfdNda ∆= (3)
gdzie: da - przyrost długości pęknięcia zmęczeniowego dN - przyrost ilości cykli obciążeń zmęczeniowych. Dolna granica wartości pulsującej przedstawia cy-kliczną intensywność naprężeń ∆Kth. Jeśli cykliczna intensywność ∆K znajduje się poniżej wartości tętnią-cej to pękniecie (rysa zmęczeniowa), z punktu widze-nia klasycznej teorii mechaniki pękania nie jest zdolne do propagacji. Druga granica przedstawia obciążenie pęknięcia, od którego propagacja pęknięcia (rysy) nie jest już stabilna. Warunkiem, który obowiązuje jest to, że KMAX osiągnie wartość KC względnie:
( ) CC KRKK ⋅−=∆=∆ 1 (4) gdzie: KC - wielkość krytyczna współczynnika intensywności naprężeń w przypadku, kiedy pęknięcie osiągnie dłu-gość krytyczną lKR i wystąpi naprężenie krytyczne σkr; współczynnik ten nazywany jest odpornością na pę-kanie. Przebieg krzywej propagacji pęknięcia jest zależny od następujących czynników:
⇒ współczynnika asymetrii cyklu R ⇒ materiału osi ⇒ temperatury ⇒ mediów, znajdujących się w otoczeniu.
Wpływ tych czynników jest różny na zakresy oddzia-ływania tzn. na zakres 1 z małą prędkością propaga-cji, na zakres 2 ze średnią prędkością propagacji oraz na zakres 3 z dużą prędkością propagacji pęknięcia. Ww. przedziały mają charakter umowny. Przykładowo wzrost współczynnika asymetrii cyklu R wywołuje większą prędkość propagacji pęknięcia da/dN w 1 i 3 zakresie aniżeli w zakresie 2. Aby można było prze-prowadzić prognozowanie żywotności konieczny jest opis krzywej prędkości propagacji wg następującej zależności:
( )RKfdNda ,∆= (5)
W tym przypadku występuje wiele koncepcji propaga-cji pęknięć. Tzw. prawo Parisa opisuje tylko i wyłącz-nie średni zakres (zakres 2), gdzie prędkość propagacji pęknięcia zmęczeniowego można ustalić tylko i wy-łącznie w średnim zakresie krzywej
prędkości propagacji pęknięcia zmęczeniowego. Ww. prędkość propagacji można wyznaczyć ze wzoru P.Parisa:
PmP KC
dNda ⋅= (6)
Zarówno CP jak również mP są współczynnikami do-świadczalnymi, zależnymi od rodzaju materiału, z którego zbudowany jest element konstrukcyjny. Po-nieważ prawa tego nie można zastosować dla dolnego zakresu prędkości propagacji pęknięcia zmęczeniowe-go, nie można go również stosować do prognozowania żywotności, ponieważ ogólnie biorąc prowadzi to do bardzo zachowawczych obliczeń żywotności. Wzór Parisa uznaje się za pierwszą zależność, w której uwzględniono wielkości z mechaniki pękania. W prze-ciwieństwie do prawa Parisa wzór wg Formana-Mettu opisuje krzywą propagacji pęknięcia w zależności od współczynnika asymetrii cyklu zmęczeniowego R:
( )( )
−
∆∆
−
∆⋅
−−=
C
MAX
pth
n
FM
KK
KK
KR
CdNda FM
1
1
11 γ
(7)
Parametry ∆KTh (zakres progowego współczynnika intensywności naprężeń), KC, CFM, nFM, p oraz q są zależne od gatunku materiału i można je ustalić na drodze doświadczalnej krzywej da/dN. Za wielkość Kth należy uważać taką wielkość KMAX, dla której pęk-nięcie nie rozwija się w okresie odpowiadającym 106
cykli, a której zwiększenie o 3% powoduje rozwój pęknięcia z prędkością nie większą od 3·10-7 mm/cykl. Szczątkową (resztkową) wytrzymałość zmęczeniową elementu konstrukcyjnego aż do pęknięcia, można ustalić wychodząc z głębokości początkowej pęknięcia aA poprzez całkowanie równania propagacji prędkości tworzenia się rysy. Przekształcając równanie (5) otrzymuje się zależność:
( )RKfdadN
,∆= (8)
Stąd można wyliczyć resztkową (szczątkową) wy-trzymałość zmęczeniową NB aż do wystąpienia pęk-nięcia (krytyczna głębokość pęknięcia aC):
( )∫ ∆=
C
A
a
aB RKf
daN,
(9)
2.3. Analityczne i numeryczne badania propagacji pęknięć zmęczeniowych
Do obliczeń wstępnych propagacji części i konstrukcji są do dyspozycji programy obliczeniowe, które zawie-rają rozwiązania analityczne dla określonych przypad-ków tworzenia się rys zmęczeniowych. Z drugiej stro-ny występują programy za pomocą których można symulować metodą numeryczną propagację pęknięcia.
3

POJAZDY SZYNOWE NR 1/2011
Dla prac studialnych nad parametrami propagacji rysy w częściach konstrukcyjnych z relatywnie prostą geometrią szczególnie przydatne są programy Nasgro oraz Esacrack. Program Nasgro, który wcześniej był opracowany przez NASA (ang. „National Aeronautics und Space Administration”) posiada duże zastosowa-nie dla pojazdów lotniczych i kosmicznych. Nie mniej jednak można go stosować w wielu innych dziedzi-nach techniki. Główny moduł Nasfla umożliwia mię-dzy innymi badania propagacji pęknięcia w elemen-tach i konstrukcjach przy cyklicznym obciążeniu. Struktura tego programu jest przedstawiona w tabeli 1.
NASGRO
Badania propagacji pęknięć zmęczeniowych Obliczenie krytycznej
długości pęknięcia
NASMAT
Bank danych dotyczących
materiału NASFLA
Obliczenie współczyn-nika intensywności na-
prężeń
Istotne moduły programu Nasgro do badań propagacji pęknię-cia w elementach konstrukcyjnych Tabela 1
Program składa się z biblioteki konfiguracji geome-trycznych i pęknięć (rys) zmęczeniowych z odpo-wiednimi rozwiązaniami współczynników intensyw-ności wzrostu naprężeń. Konstruując na tych konfigu-racjach pęknięć (rys) można przeprowadzić symulację propagacji dla stałych i zmiennych amplitud obciąże-nia. Ponieważ program Nasgro sprawdził się w zasto-sowaniach praktycznych, można go zastosować w propagacji pęknięć zmęczeniowych zestawów koło-wych.
na powierzchni o głębokości „a” oraz długości „2c” (rys.3).
2.4. Czynniki wpływające na propagację uszkodzeń w osiach zestawów kołowych
Aby przeprowadzić symulację propagacji pęk-nięć w osiach zestawów kołowych, stosuje się wyżej omówiony program Nasgro. Za pomocą obliczeń wa-riacyjnych powinno się pokazać jakie poszczególne czynniki działają na propagację pęknięcia zmęczenio-wego:
• wielkość zespołu (kombinacji) obciążeń • naprężenia montażowe (naprężenia średnie) • dane materiałowe z uwagi na mechanikę
pękania • głębokość / długość wykrytego pęknięcia
zmęczeniowego • efekty sekwencyjne.
Symulacje propagacji pęknięcia dla osi zestawów ko-łowych dostarczają wytycznych dla ustalenia okresów kontrolnych za pomocą badań nieniszczących. Do symulacji dla osi zespołów trakcyjnych ICE przysto-sowanych do wysokich prędkości stosuje się model SC05 wg programu SC05. Model składa się z osi drą-żonej z półeliptycznym pęknięciem, znajdującym się
Legenda: a) naprężenie maksymalne: σ0=σm+σa b) naprężenie średnie: σm Rys.3. Model pęknięcia SC05 wg programu Nasgro
Niniejszy model przedstawia rzeczywiste pęknięcie, który występuje w osi zestawu kołowego w pobliżu miejsca na osadzenie. W tym modelu pęknięcia jest możliwe, aby dokonać superpozycji stałego napręże-nia i naprężenia zginającego. W obliczeniach osi ze-stawów kołowych naprężenie zginające odpowiada kombinacji amplitud w płaszczyźnie pęknięcia. Na-prężnie o wartości stałej przedstawia naprężenie nor-malne, które występuje w pobliżu osadzania koła (podpiaścia) i jest ono wywołane przez siły montażu koła na osi zestawu kołowego. Dla obliczeń propaga-cji pęknięcia wielkościami zmiennymi są amplituda naprężenia, naprężnie średnie i geometria początko-wego pęknięcia. Górną wartość naprężenia σ0 można wyznaczyć z zależności:
am σσσ +=0 (10)
gdzie: σm - naprężenie średnie σa - amplituda naprężenia. Kumulacja naprężeń dla badanych osi zestawów ko-łowych jest przedstawiona na rys. 4.
Rys.4. Kumulacja obciążeń dla badanych osi zestawów kołowych
4

POJAZDY SZYNOWE NR 1/2011
Za pomocą programu Nasgro można obliczyć kształt pęknięcia dla każdego cyklu. Kształt pęknięcia półe-liptycznego o głębokości „a” oraz długości pęknięcia „2c” jest punktem wyjścia dla propagacji pęknięcia. Symulację przeprowadza się tak długo, aż współczyn-nik intensywności naprężeń KMAX osiągnie wartość KC. Z otrzymanych wartości można wyznaczyć głębo-kość pęknięcia w zależności od przebiegu kilometro-wego, co jest pokazane na rys. 5, 6 i 7.
Rys.5. Zależność głębokości pęknięcia od przebiegu pojazdu w kilometrach; wpływ wielkości wytężenia materiału na propagację pęknięć w osiach zespołów trakcyjnych ICE a) zespół amplitud wyprowadzony z jazd próbnych b) zespół amplitud zwiększony o 10% c) zespół amplitud zmniejszony o 10
Rys.6. Zależność głębokości pękania od przebiegu pojazdu w kilometrach; wpływ średniego naprężenia na przebieg osi zestawu kołowego z pęknięciem a) zespół amplitud wyznaczony z jazd próbnych b) zespół z naprężeniem średnim 20,5 MPa c) zespół z naprężeniem średnim 30,5 MPa
Rys.7. Wpływ głębokości początkowej pęknięcia na przebieg osi zestawu kołowego; a) głębokość pęknięcia początkowego aA=2,0 mm b) głębokość pęknięcia początkowego aA=2,5 mm c) głębo-kość pęknięcia początkowego aA=1,5 mm
Badania symulacyjne dostarczają wytycznych do usta-lenia okresów kontrolnych dla badań nieniszczących osi zestawów kołowych. Należy zwrócić przy tym uwagę, że symulacje komputerowe można przeprowa-dzać dla osi zestawów kołowych przy uwzględnieniu wszystkich czynników. Jak wykazały przeprowadzone prace studialne znaczący wpływ na przebieg osi mają już małe zmiany tych czynników. 3. Ustalenie okresów kontrolnych osi zestawów
kołowych na przykładzie zespołów trakcyjnych metra
3.1. Uwagi ogólne Zagadnienie wytrzymałości zestawów kołowych
uznano jako bardzo ważne z punktu widzenia dyspo-zycyjności i bezpieczeństwa eksploatacyjnego pojaz-dów trakcyjnych metra firmy Hamburger Hochbahn AG. Częstotliwość kontroli stanu osi zestawów koło-wych podczas eksploatacji jest wprawdzie zdefinio-wana przez producenta w instrukcji obsługi i konser-wacji, ale ostatecznie przyjęto założenie że to użyt-kownik musi opracować program kontroli stanu osi zestawów kołowych, gdyż zna rzeczywiste warunki eksploatacji i dysponuje odpowiednim doświadcze-niem. Jako bazę do późniejszych rozważań na ww. temat przyjęto badania ultradźwiękowe. Czynniki wpływające na ograniczenie wytrzymałości zmęcze-niowej można podzielić na trzy grupy:
• błędy powstające na etapie produkcji (kon-strukcja, produkcja i obróbka wykańczająca)
• błędy eksploatacyjne (nieodpowiednia eksploa-tacja, błędy popełnione podczas procesów kontrolno-naprawczych)
• nadzwyczajne wydarzenia podczas eksploatacji (obciążenia nadzwyczajne, działanie czynników obcych, wypadki kolejowe).
Opracowując nowe instrukcje kontroli należy wziąć pod uwagę, aby wykryć lub uniknąć występowania ww. błędów, które w istotny sposób zmniejszają wy-trzymałość zmęczeniową osi. Jako granicę żywotności osi zestawu kołowego uznaje się wystąpienie przeło-mu zmęczeniowego lub wystąpienie pęknięcia. Aby uniknąć pęknięć osi zestawu kołowego bierze się z podstawę koncepcję „safe-life”, natomiast w celu uniknięcia przełomów zmęczeniowych bierze się za podstawę koncepcję „fail–safe”. Dotychczasowa eks-ploatacja zestawów kołowych bazowała na koncepcji „safe-life” i wychodziła z metody projektowania po-legającej na przyjęciu kryterium bezpieczeństwa jakim jest granica wytrzymałości zmęczeniowej. Wadą ta-kiego projektowania osi zestawów kołowych jest to, ze nie jest określona żadna wartość graniczna, przy której oś może być jeszcze eksploatowana. Osie ze-stawów kołowych pojazdów kolejowych, które są eksploatowane w warunkach ruchu miejskiego osiąga-ją 2×109 cykli i znajdują się w warunkach wysoko-cyklicznej wytrzymałości zmęczeniowej (ang.
5

POJAZDY SZYNOWE NR 1/2011
„high-cycle-fatique”), która nie została jeszcze dokładnie zbadana. Jak wynika z praktyki eksploatacyjnej osie zestawów kołowych mogą być eksploatowane przez bardzo długi czas, wynikający z przebiegu pojazdu szynowego. Jeśli określi się graniczny przebieg w kilometrach, to ryzyko eksploatacyjne jest bardzo małe, ponieważ okresy kontrolne stanu osi zestawów kołowych ograniczają się do potwierdzenia prawidłowości przyjętych obciążeń podczas projektowania. Największe ryzyko eksploatacyjne występuje wtedy, gdy zostanie osiągnięta faza eksploatacji, kiedy należy się liczyć z wystąpieniem pęknięć zmęczeniowych. W tym przypadku należy skorzystać z koncepcji „ fail-safe”, która uwzględnia nałożenie się wielu niekorzystnych zdarzeń. W takiej fazie eksploatacji należałoby zabezpieczyć przebieg eksploatacyjny po wystąpieniu pęknięcia. Kontrole, które obecnie muszą wynikać z propagacji pęknięcia, służą wykryciu rysy. Pomiędzy dwoma ekstremami występuje faza przejściowa, w której nie można z całkowitą pewnością wykluczyć powstania pojedynczych pęknięć, ale zasadniczo nie są one oczekiwane. Prawdopodobieństwo wystąpienia pojedynczych pęknięć zmęczeniowych jest wyraźnie małe. W takiej fazie eksploatacyjnej okresy kontrolne wynikają z propagacji pęknięć. Biorąc pod uwagę koncepcję bezpieczeństwa, należy wyjść z nałożenia się wielu niekorzystnych zdarzeń. Tak więc należy wyjść z założenia, że występują trzy zadania przy określaniu koncepcji okresów kontrolnych stanów osi zestawów kołowych:
• określenie granicznych przebiegów na bazie doświadczeń eksploatacyjnych przy uwzględ-nieniu koncepcji bezpieczeństwa wynikającej z granicy zmęczenia i niezawodności eksplo-atacji
• określenie szczątkowego (resztkowego) prze-biegu po przyjęciu pęknięcia, biorąc pod uwagę aspekt mechaniki pękania w zakresie liniowym, jeśli chodzi o mechanikę pękania
• opracowanie zabiegów technicznych dla przej-ściowej fazy eksploatacyjnej.
Rys.8. Zespół trakcyjny typu DT3 metra Hamburger Hochbahn AG [2]
Rys.9. Zespół trakcyjny typu DT4 metra Hamburger Hochbahn AG [2]
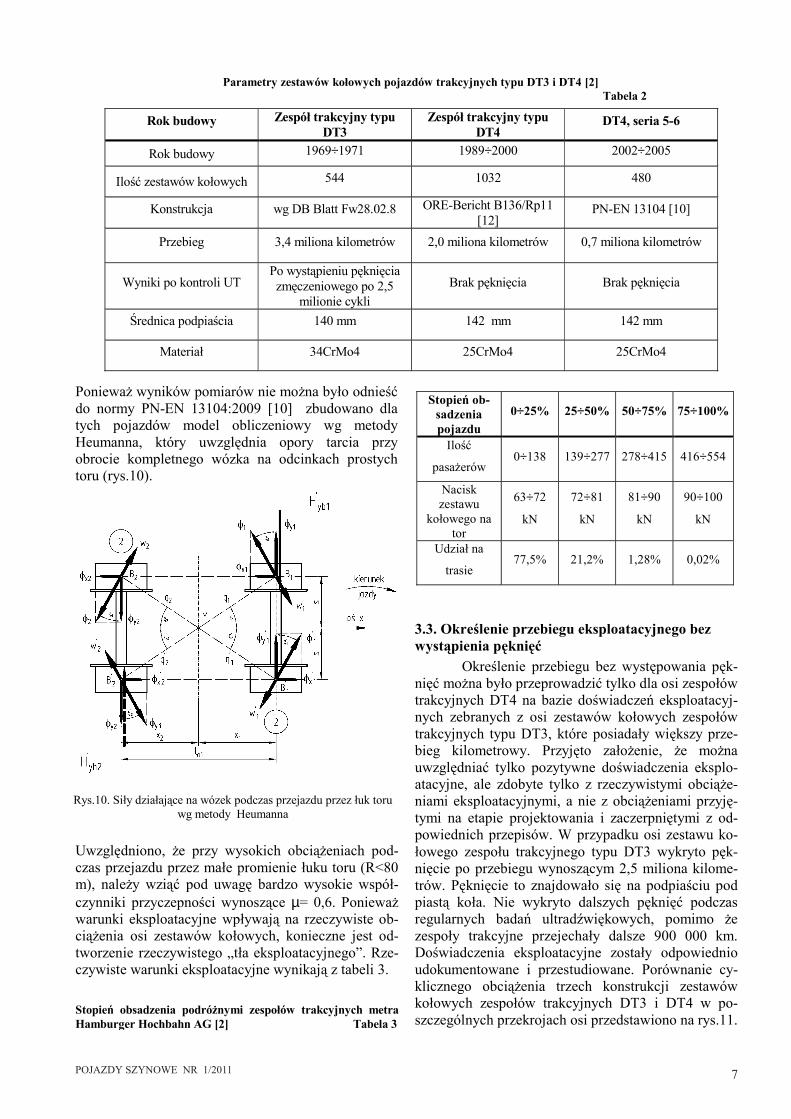
3.2. Obciążenia osi zestawów kołowych pojazdów trakcyjnych metra W celu zagwarantowania większej wiarygod-ności jeśli chodzi o wytrzymałość zmęczeniową jest konieczne, aby ustalić rzeczywiste obciążenia działa-jące na oś zestawu kołowego. Obciążenia te wyzna-czono dla starych osi zestawów kołowych pojazdów trakcyjnych typu DT3 metra (rys.8) oraz nowych osi zestawów kołowych dla pojazdów trakcyjnych typu DT4 (rys.9). Odpowiednie dane dotyczące zestawów kołowych są przedstawione w tabeli 2. Na całej sieci Hamburger Hochbahn zostały pomie-rzone obciążenia eksploatacyjne dla osi tocznych oraz napędnych dla trzech pojazdów trakcyjnych. Jak wy-kazały przeprowadzone pomiary wysokość obciążenia zależy znacząco od następujących warunków eksplo-atacyjnych:
• stopnia obsadzenia przez podróżnych, przy czym główne oddziaływanie skierowane jest na obciążenie statyczne koła
• usytuowania osi zestawu kołowego w wózku (zestaw kołowy nabiegający lub swobodny)
• przejazd przez łuk toru (ekstremalny przypadek eksploatacyjny z uwagi na obciążenia)
• zastosowanie rozruchu i hamowania jako dodatkowej superpozycji obciążeń.
Wartości pomiarowe, wynikające z jazdy w łuku zo-stały przeanalizowane bardzo dokładnie. Przeanalizo-wano łącznie 2000 jazd przez łuk, które wywołują wysokie obciążenia podczas przejazdu dla osi tocz-nych i napędnych w przypadku zestawu kołowego nabiegającego. Poza tym stwierdzono:
• bardzo wyraźną zależność obciążenia osi od promienia łuku toru
• bardzo mały wpływ zarówno niezrównowa-żonego przyspieszenia poprzecznego jak rów-nież błędów ułożenia toru w ramach tole-rancji eksploatacyjnych
• bardzo mały poziom obciążenia spowo-dowany momentem skręcającym.
6
POJAZDY SZYNOWE NR 1/2011
Rok budowy Zespół trakcyjny typu DT3
Zespół trakcyjny typu DT4
DT4, seria 5-6
Rok budowy 1969÷1971 1989÷2000 2002÷2005
Ilość zestawów kołowych 544 1032 480
Konstrukcja wg DB Blatt Fw28.02.8 ORE-Bericht B136/Rp11 [12]
PN-EN 13104 [10]
Przebieg 3,4 miliona kilometrów 2,0 miliona kilometrów 0,7 miliona kilometrów
Wyniki po kontroli UT Po wystąpieniu pęknięcia zmęczeniowego po 2,5
milionie cykli Brak pęknięcia Brak pęknięcia
Średnica podpiaścia 140 mm 142 mm 142 mm
Materiał 34CrMo4 25CrMo4 25CrMo4
Parametry zestawów kołowych pojazdów trakcyjnych typu DT3 i DT4 [2] Tabela 2
Ponieważ wyników pomiarów nie można było odnieść do normy PN-EN 13104:2009 [10] zbudowano dla tych pojazdów model obliczeniowy wg metody Heumanna, który uwzględnia opory tarcia przy obrocie kompletnego wózka na odcinkach prostych toru (rys.10).
Rys.10. Siły działające na wózek podczas przejazdu przez łuk toru wg metody Heumanna
Uwzględniono, że przy wysokich obciążeniach pod-czas przejazdu przez małe promienie łuku toru (R<80 m), należy wziąć pod uwagę bardzo wysokie współ-czynniki przyczepności wynoszące µ= 0,6. Ponieważ warunki eksploatacyjne wpływają na rzeczywiste ob-ciążenia osi zestawów kołowych, konieczne jest od-tworzenie rzeczywistego „tła eksploatacyjnego”. Rze-czywiste warunki eksploatacyjne wynikają z tabeli 3.
Stopień obsadzenia podróżnymi zespołów trakcyjnych metra Hamburger Hochbahn AG [2] Tabela 3
Stopień ob-sadzenia pojazdu
0÷25% 25÷50% 50÷75% 75÷100%
Ilość
pasażerów 0÷138 139÷277 278÷415 416÷554
Nacisk zestawu
kołowego na tor
63÷72
kN
72÷81
kN
81÷90
kN
90÷100
kN
Udział na
trasie 77,5% 21,2% 1,28% 0,02%
3.3. Określenie przebiegu eksploatacyjnego bez wystąpienia pęknięć Określenie przebiegu bez występowania pęk-nięć można było przeprowadzić tylko dla osi zespołów trakcyjnych DT4 na bazie doświadczeń eksploatacyj-nych zebranych z osi zestawów kołowych zespołów trakcyjnych typu DT3, które posiadały większy prze-bieg kilometrowy. Przyjęto założenie, że można uwzględniać tylko pozytywne doświadczenia eksplo-atacyjne, ale zdobyte tylko z rzeczywistymi obciąże-niami eksploatacyjnymi, a nie z obciążeniami przyję-tymi na etapie projektowania i zaczerpniętymi z od-powiednich przepisów. W przypadku osi zestawu ko-łowego zespołu trakcyjnego typu DT3 wykryto pęk-nięcie po przebiegu wynoszącym 2,5 miliona kilome-trów. Pęknięcie to znajdowało się na podpiaściu pod piastą koła. Nie wykryto dalszych pęknięć podczas regularnych badań ultradźwiękowych, pomimo że zespoły trakcyjne przejechały dalsze 900 000 km. Doświadczenia eksploatacyjne zostały odpowiednio udokumentowane i przestudiowane. Porównanie cy-klicznego obciążenia trzech konstrukcji zestawów kołowych zespołów trakcyjnych DT3 i DT4 w po-szczególnych przekrojach osi przedstawiono na rys.11.
7

POJAZDY SZYNOWE NR 1/2011
Rys.11. Porównanie względnych obciążeń osi zestawów kołowych w poszczególnych prze krojach dla zespołów trakcyjnych typu DT3, DT4.1-4 oraz DT4.5-6 [2]
Jak wynika z porównania graficznego najbardziej wy-tężonym fragmentem osi zestawu kołowego jest we-wnętrzna krawędź osadzenia (podpiaścia) koła i moż-na go uznać jako „miejsce krytyczne”. Przyjmując wytężenie materiału w tym miejscu dla osi zestawu kołowego 100%, okazuje się, że miejsce to jest obcią-żone 85% dla osi zestawu kołowego zespołu trakcyj-nego typu DT4.1-4 oraz 67% dla osi zestawu kołowe-go zespołu trakcyjnego typu DT4.5-6. Koncepcja za-pewnienia bezpieczeństwa eksploatacyjnego polega na określeniu sumy uszkodzeń D, którą można ustalić z hipotezy kumulacji uszkodzeń na podstawie krzywej Wöhlera. Korzystne jest to, że można włączyć wszyst-kie działające obciążenia zewnętrzne do „działania powodującego uszkodzenia”. Wadą jest duży wpływ przebiegu krzywej Wöhlera danego elementu kon-strukcyjnego na wybór hipotezy kumulacji uszkodzeń, co powoduje że obliczenie wytrzymałości eksploata-cyjnej bez przeprowadzenia równoległych badań nie może dostarczyć absolutnie pewnych wyników. Bar-dzo przydatne są obliczenia wytrzymałości eksploata-cyjnej za pomocą fikcyjnych krzywych Wöhlera do oceny rzeczywistych warunków eksploatacyjnych. Na bazie zaproponowanej metody do ustalenia ekwiwa-lentnej amplitudy wywołującej uszkodzenia należy określić sumę uszkodzeń dla poszczególnych osi ze-stawów kołowych, wskutek czego można porównać wzajemnie przebiegi eksploatacyjne bez pęknięcia. Obliczenia cyklicznych naprężeń wykazały, że we-wnętrzna krawędź podpiaścia (osadzenia) koła jest
najbardziej wytężonym przekrojem osi. Określenie sumy uszkodzeń odbyło się na bazie mieszanego ze-społu obciążeń, stosownie do różnych przebiegów eksploatacyjnych pojazdów. Aby określić sumę uszkodzeń wyznacza się fikcyjną krzywą Wöhlera za pomocą dwóch różnych metod. Obydwie metody od-powiadają modyfikacji hipotezy uszkodzeń wg Minera zgodnie ze wzorem:
k
i
DDi nn
=
σσ
(11)
Obydwie metody 1 i 2 różnią się wzajemnie parame-trami, co jest przedstawione w tabeli 4.
Parametry fikcyjnych krzywych Wöhlera wg metody 1 i 2 Tabela 4
Określenie Metoda 1 Metoda 2
Punkt załamania krzywej Wöhlera
106 107
Współczynnik pochylenia krzywej Wöhlera przed punktem załamania k=k1
7 5
Współczynnik pochylenia krzywej Wöhlera przed punktem załamania k=k2
k2=2k1-1 k2=2k1-2
Suma uszkodzeń do określenia naprężenia na
punkcie załamania D krzywej Wöhlera
0,3 0,5
8
POJAZDY SZYNOWE NR 1/2011
Sumę uszkodzeń tworzy się z udziałów uszkodzeń „n” klas naprężeń wg następującej zależności:
∑=
=n
iiDD
1
(12)
Doświadczenia eksploatacyjne wykazały, że nie po-wstało żadne pęknięcie osi zestawu kołowego napęd-nego zespołu trakcyjnego typu DT3 po osiągnięciu przebiegu wynoszącego 2,5 miliona kilometrów. W wyniku obliczeń granicy zmęczenia dla osadzenia koła dla zespołów trakcyjnych typu DT4.1-4 oraz DT4.5-6 okazało się, że jest ona odpowiednio o 26% oraz 18% większa niż dla zespołu trakcyjnego DT3, co wykazu-ją następujące zależności:
σD· (DT4.1-4)=1,26·σD (DT3) (13) σD· (DT4.5-6)=1,18·σD DT3) (14)
Sumę uszkodzeń D dla poszczególnych osi zestawów kołowych przedstawiono w tabeli 5.
Suma uszkodzeń D dla poszczególnych osi zestawów kołowych zespołów trakcyjnych DT3 i DT4 Hamburger Hochbahn AG wg [2] Tabela 5
Suma uszkodzeń Metoda 1 Metoda 2
Zespół trakcyjny typu DT3 0,03 0,5
Zespół trakcyjny typu DT4.1-4 0,05 0,18
Zespół trakcyjny typu DT4.5-6 0,002 0,027
3.4. Podsumowanie wyników przeprowadzonych badań oraz analiz
Tak więc przedsiębiorstwo Hamburger Hochbahn AG dysponuje 35-cio letnimi doświadczeniami w za-kresie eksploatacji osi zestawów kołowych zespołu trakcyjnego typu DT3. Doświadczenia te odnoszą się do przebiegu wynoszącego maksymalnie 3 400 000 km. Po przebiegu 2 500 000 kilometrów wykryto pęk-nięcie w jednej osi zestawu kołowego. W wyniku przeprowadzonej kontroli za pomocą badań ultradź-więkowych okazało się, że pozostałe 543 zespołów trakcyjnych typu DT3 osie nie wykazały żadnych pęk-nięć. Biorąc pod uwagę, że sieć kolejowa metra jest zamknięta, sposób eksploatacji w przedsiębiorstwie przewozowym, jak również baza danych jest określo-na przez pomiary, obciążenia są wyznaczane wystar-czająco dokładnie. Dane te mogę służyć jako baza referencyjna. Poprzez obliczenia z uwzględnieniem obciążeń, przyjętych z rzeczywistej eksploatacji moż-na udowodnić na podstawie koncepcji bezpieczeństwa opartej o kryteria wytrzymałości zmęczeniowej oraz eksploatacyjnej można udowodnić, że zarówno względne cykliczne obciążenia jak również względne kumulacje uszkodzeń dla osi zestawów kołowych zespołu trakcyjnego typu DT4 wypadają korzystniej aniżeli dla zespołu trakcyjnego typu DT3. Można stwierdzić, że dla osi zestawów kołowych zespołów
trakcyjnych typu DT4 występuje duży zapas bezpieczeństwa, który gwarantuje przebieg wynoszący 2 500 000 kilometrów bez wystąpienia pęknięcia, pod warunkiem że nie ma oddziaływań żadnych nadzwyczajnych obciążeń.
4. Znaczenie badań nieniszczących
4.1. Uwagi ogólne Aby zapewnić prawidłowy przebieg procesu
prognozowania stanu osi zestawów kołowych pojaz-dów trakcyjnych konieczne jest prawidłowe prze-prowadzenie badań nieniszczących. One umożliwia-ją rozstrzygnięcie, czy badana część konstrukcyjna lub badany podzespół w zależności od ustalonych przepi-sów naprawczych może być dalej eksploatowana lub wymontowana względnie naprawiana. Z przeprowa-dzonej analizy wynika, że badania nieniszczące muszą być wykonane w sposób niezawodny, gwarantujący odpowiedni poziom jakości. Badania nieniszczące można zaliczyć do procesów specjalnych tj. procesów, które z uwagi na ich dużą subiektywność ocen, powodują że ich wiarygodność zależy od wielu różnorodnych czynników i działań, wymagających odpowiednich kwalifikacji oraz prze-prowadzenia walidacji/kwalifikacji ich zdolności do określonego celu oraz potwierdzenia określonych kompetencji. Do takich czynników i działań można zaliczyć te przedstawione poniżej i które można połą-czyć w tzw. łańcuch zapewnienia jakości jaki powi-nien być zastosowany celem spełnienia i akceptacji określonych wymagań oraz potwierdzenia określonych kompetencji: 1. Badania naukowe i rozwój badań nieniszczących 2. Normalizacja w dziedzinie badań nieniszczących • normy wyboru i badań • specyfikacje techniczne • przepisy techniczne 3. Procedury/instrukcje badawcze badań nieniszczą-
cych • walidacja i kwalifikacja procedur/ instrukcji
badawczych • niepewność pomiaru /badania 4. Wyposażenie pomiarowe i badawcze ( WP i B) • wzorcowania/ kontrola/ charakterystyka/nadzór
nad WP i B • walidacja i kwalifikacja WP i B • szkolenia w zakresie wykorzystania WP i B 5. Personel przeprowadzający badania nieniszczące • szkolenie i certyfikacja personelu badań
nieniszczących • certyfikacja personelu badań nieniszczących • upoważnienie i nadzór nad personelem • czynnik ludzki- cechy i czynniki psychofizyczne 6. Środowisko przeprowadzenia badań 7. Audity
9

POJAZDY SZYNOWE NR 1/2011
Spełnianie przedstawionych zależności może być uzyskane w przypadku, jeżeli:
• każdy z wymienionych elementów będzie oddziaływał w sposób skuteczny na inne
• pod warunkiem spełnienia odpowiednich wymagań i kryteriów akceptacji lub kwalifi-kacji (np. spełnienia odpowiednich wymagań, kryteriów akceptacji lub kwalifikacji metody)
• sam element będzie „mocny” np. stanem do-tyczących swego udokumentowania (nor-mami, specyfikacjami lub wytycznymi) lub zapewnieniem odpowiednich instrukcji sto-sowania lub określonych uznanych zasad kwalifikacji personelu przeprowadzającego odpowiednie badania.
Zasadniczym warunkiem zapewnienia jakości badań nieniszczących jest ustanowienie odpowiedniego sys-temu zarządzania jakością w celu sterowania wszyst-kimi działaniami, które dotyczą jakości świadczonych usług badawczych. System jakości producenta, jed-nostki badawczej lub laboratorium badawczego pro-wadzącego badania nieniszczące powinien uwzględ-niać w „jednolity i uporządkowany sposób”, a przede wszystkim w skuteczny sposób przedstawione wyżej elementy łańcucha zapewnienia jakości w celu wyka-zania, że wszystkie zostały przewidziane i istnieją między nimi zależności i relacje.
4.2. Status badań nieniszczących zgodnie z kartą UIC 960 [8]
Zgodnie z kartą UIC 960 [8] przez badania nieniszczące definiuje się jako metody, które przepro-wadza się bez uszkodzenia części pojazdu lub podze-społów i które służą wykryciu możliwych pęknięć (rys) lub innych uszkodzeń spowodowanych w eks-ploatacji podczas napraw. W zapewnieniu prawidłowej jakości badań nienisz-czących istotnym czynnikiem jest kwalifikacja i certy-fikacja personelu do badań, co jest szczegółowo przedstawione w karcie UIC 960 [8]. Zgodnie z ni-niejszą kartą:
• kwalifikacja pracownika polega na uznaniu jego zawodowej wiedzy, jego zdolności, doświadczenia i przydatności fizycznej, wskutek czego jest w stanie, aby wykonać powierzone mu zadania w zakresie badań nieniszczących. W przypadku certyfikacji chodzi o metodę, w wyniku której niezależna instytucja udziela pisemnego zapewnienia co do tego, że sprawdzający metodami nie-niszczącymi posiada niezbędne kompe-tencje w zgodności z ustalonymi warunkami ramo-wymi w normie europejskiej EN 473 [5]. Powyższa norma zawiera przepisy na temat udzielania certyfikatu dla kwalifikowanych pracowników.
• autoryzacja badawcza polega na uznaniu kompetencji i wystawieniu wykwalifikowa-nemu pracownikowi zgodnie z EN 473 [5] pisemnej autoryzacji badawczej przez prze-łożonych przy uwzględnieniu szczególnych wiadomości i przydatności do pracy jak również znajomości przepisów bezpieczeń-stwa i higieny pracy, które należy prze-strzegać.
• niezależna instytucja certyfikująca administruje metodami certyfikacji personelu do badań nieniszczących w zgodności z normą europejską EN 473 [5] i wymaganiami normy europejskiej EN 45013 [6]. W większości krajów Unii Europejskiej działają niezależne instytucje, które są akredytowane przez instancje krajowe.
• autoryzowana instytucja certyfikująca jest całkowicie niezależna i jest autoryzowana przez niezależną instytucję, aby przygotować i przeprowadzać badania kwalifikacyjne personelu do badań nieniszczących. W przy-padku kwalifikacji i certyfikacji przedsta-wionej w niniejszej karcie chodzi o Komitet Certyfikacyjny Kolejnictwa do Napraw, który był autoryzowany przez niezależną, krajową instytucję do przeprowadzenia certyfikacji w zakresie napraw krajowych.
• centrum badawcze jest dopuszczone bezpośrednio przez niezależną instytucję lub przez autoryzowaną instytucję, w której odbywają się badania kwalifikacyjne. W tym przypadku chodzi o centrum, które dysponuje odpowiednimi kompetencjami, urządzeniami i pomieszczeniami do badań w jednym z obszarów zastosowań napraw kolejowych:
1. zestawy kołowe (koła, pełne osie i osie drążone, układy biegowe)
2. wózki i połączenia (ramy wózków, wahacze, prowadniki, pojedyncze części jak również części usprę-żynowania urządzenia cięgłowo-zderznego).
Wykaz instytucji certyfikujących oraz instytucji akredytujących jest przedstawiony w tabeli 6.
a. ZFP: badania nieniszczące Instytucje certyfikujące DGZfP-DPZ- Niemieckie Towarzystwo dla Badań Nieniszczących-Ośrodek Certyfikujący Personel BANT- Belgijskie Stowarzyszenie Badań Nieniszczą-cych COFREND- Francuskie Stowarzyszenie Badań Nie-niszczących PCN- Ośrodek Certyfikacji Personelu dla Badań Nie-niszczących CIC-PND- Włoski Ośrodek Badań Nieniszczących
10

POJAZDY SZYNOWE NR 1/2011
Akredytacja Kraj Unii Europejskiej
Instytucja certyfikująca
personel dla ZFPa Data Krajowa instytucja
Autoryzowana instytucja kolejowa
lub równorzędna
Niemcy DGZfP 1.3.1994 TGA DGZfP(DGZ)
Belgia BANT (procedura w toku) BELCERT (procedura w toku)
Francja CONFRED (procedura w toku) BELCERT (procedura w toku)
Wielka Brytania PCN 04.1993 NACCB Railways Sektor
Włochy CIC-PND 25.01.1994 SINCERT CIC-PND
Holandia SKO 25.06.95 Road Voor de
certificate
Zintegrowany Sektor kolejowy w zakresie
przedsiębiorstwa
Wykaz instytucji certyfikujących oraz akredytujących zgodnie z załącznikiem A karty UIC 960 [8] Tabela 6
SKO- Szwajcarska Organizacja Kadrowa Instytucje akredytujące TGA- Stowarzyszenie d.s. Akredytacji Sp. z o.o. BELCERT- Belgijskie Stowarzyszenie Akredytacji COFRAC- Francuski Komitet Akredytacji dla Certy-fikowanych Pojazdów NACCB- Rada Narodowa Akredytacji dla Certyfiko-wanych Pojazdów SICERT- Narodowy Urząd ds. Akredytacji dla Certy-fikowanych Pojazdów Karta UIC 960 [8] uwzględnia trzy stopnie kwalifika-cji dla pracowników, wykonujących badania nienisz-czące:
• pracownik stopnia 1, który posiada kwalifikacje do przeprowadzenia badań nieniszczących według pisemnych wska-zówek, w których jest ustalony sposób postępowania dla badań oraz regulacje, które należy przeprowadzić jak również kryteria klasyfikacyjne wyrażone w sposób jak przy podaniu danych o nieregularnościach zastosowanej metody
• pracownik stopnia 2, który jest wykwa-lifikowany do przeprowadzenia badań i kontroli tych prac, które zostały powierzone pracownikowi stopnia 1 i któremu on świadczy pomoc w problemach interpre-tacyjnych otrzymanych wyników badań; pracownik ten musi posiadać kwalifikacje do przygotowania i opracowania pisemnych instrukcji w zależności od poleceń, które zostały mu wydane
• pracownik stopnia 3, który jest wykwalifikowany do określenia metody i do ustalenia metod zastosowania jak również metod badawczych, które należy zastosować w zależności od przepisów naprawczych i rzeczywistych warunków pracy; pracownik musi dalej wykazywać zdolności do weryfikacji przygotowanych instrukcji przez pracowników stopnia 2 i do kontroli ich
właściwego zastosowania. Pracownik stop-nia 3 może być powołany do kontroli badań kwalifikacyjnych w centrum badawczym.
Badania kwalifikacyjne odbywają się w centrum badawczym, które może być dopuszczone przez nieza-leżną instytucję certyfikującą lub autoryzowany komi-tet sektora kolejowego. Badania kwalifikacyjne są prowadzone przez pracowników stopnia 3, którzy są wyznaczani przez ww. instytucje. Badania te przepro-wadza się zgodnie z przepisami normy europejskiej EN 473 [5] wg sporządzonego na piśmie porządku metodologicznego, który został dopuszczony przez ww. wymienioną niezależną instytucję. Kandydaci do kwalifikowania muszą być przeszko-leni w zasadniczych podstawach stosowanych metod pomiarowych jak również metod zastosowania w od-powiednim zakresie częściowym przy wprowadzeniu do techniki kolejowej, przy czym czas szkolenia pozo-stawia się do uznania przedsiębiorstwu kolejowemu. Dla pracowników stopnia 1 i 2 wymagane czasy szko-lenia dla różnych metod badawczych są przedstawione w tabeli 7. Dla pracowników stopnia 3, którzy dysponują facho-wą wiedzą naukową i inżynierską ustala się dodatko-we wykształcenie do przeprowadzenia badań nienisz-czących i wytycznych normy europejskiej EN-473 [5]. Badania kwalifikacyjne dla pracowników stopnia 1 i 2 składają się z trzech części:
• ogólnej ankiety do podstawowych zasad odpowiedniej metody badawczej
• specjalnej ankiety do metody badawczej oraz odpowiednio zastosowanych zakresów częściowych kolejnictwa
• praktycznej kontroli o wybranej metodzie badawczej, która jest reprezentatywna dla metod i badań, które są rzeczywiście praktykowane w odpowiednim zakresie częściowym kolejnictwa i odbywa się na podstawie bezbłędnych, wzorcowanych części lub podzespołów.
11

POJAZDY SZYNOWE NR 1/2011
Minimalne czasy szkolenia dla pracowników stopnia 1 i 2 w godzinach wg karty UIC 960 [8] Tabela 7
Stopień 2 szkolenia Metoda badań nieniszczących
Stopień 1 szkolenia Jako dołączenie do szkolenia stopnia 1
Bezpośrednie przystąpienie do
szkolenia badań ultradźwiękowych
(UT) 80 80 160
badań magnetycznych (MT)
24 24 48
badań prądami wirowymi (ET)
40 14 80
badań penetracyjnych (PT)
16 24 40
badań optycznych (VT) czas zastrzeżony czas zastrzeżony
5. Wnioski Na podstawie przeprowadzonych analiz moż-na stwierdzić, że dla osi zestawów kołowych tocznych oraz trakcyjnych można prognozować ich stan tech-niczny. Do tego celu służą postawy teoretyczne, do której można zaliczyć mechanikę pękania oraz metody doświadczalne. Z opisanych metod teoretyczno-doświadczalnych wynika, że określanie wieku zesta-wów kołowych jako kryterium kwalifikacji jest po-zbawione sensu technicznego. Bardziej obiecujące są techniki prognozowania oparte na ustaleniu rzeczywi-stej granicy zmęczenia opartej o realne siły występują-ce w eksploatacji [1]. Jednym z kryteriów kwalifikacji osi może być przebieg kilometrowy, który w przypad-ku pojazdów trakcyjnych musi być powiązany z rze-czywistym zespołem obciążeń, działającym na oś ze-stawu kołowego. Stąd wynika konieczność „rejestracji rzeczywistego widma obciążeń”, o które powinien zabiegać właściciel pojazdu oraz infrastruktury. Jed-nym z istotnych parametrów decydującym o kwalifi-kacji osi zestawów kołowych do eksploatacji jest sto-sowanie badań nieniszczących. Ważna jest częstotli-wość wykonywanych badań kontrolnych, aby można było zawczasu wykryć pęknięcie zmęczeniowe w osi zestawu kołowego. Poważnym wsparciem dla zwięk-szenia żywotności osi zestawów kołowych jest norma europejska PN-EN 13261:2009 [11]. Przepisy tej nor-my w zakresie wytwarzania, procesów kontrolnych i odbiorczych stanowią istotny postęp w stosunku do dotychczas obowiązującej karty UIC 811-1 [7]. Pod-niesienie jakości wyprodukowanych zestawów koło-wych, a w szczególności poprawienie zabezpieczenia przed korozją przez zastosowanie odpowiedniej jako-ści powłok malarskich przyczynia się niewątpliwie do zwiększenia żywotności osi zestawów kołowych [3]. Zgodnie z obecnymi oczekiwaniami ze strony użyt-kowników taboru kolejowego producent powłok ma-larskich powinien udzielić gwarancji na okres 5 do 8-miu lat. Wynika to z dotychczasowych negatywnych doświadczeń z eksploatacji, gdzie stwierdzono że sku-teczność powłoki malarskiej jest szacowana na okres co najwyżej 2 do 3 lat.
Literatura [1] Hasslinger H.: Lastannahmen für Radsatzwellen–
Bestandsanalyse. Eisenbahntechnische Rundsachau. Nr 12, 12.2009.
[2] Liedgens K.: Inspektionskonzept für Radsatzwellen bei der Hamburger Hochbahn. Eisenbahningenieur. Nr 3/2010.
[3] Murawa F., Winkler M..: Randschichtbehandelte Radsatzwellen. Eisenbahningenieur Nr.7 /2007.
[4] Richard A., Sander M., Wirxel M., Lebehahn J.: Er-mittlung von Inspektionsinterwallen mittels Riss-wachstumsuntersuchungen. Eisenbahningenieur. Lu-ty 2010.
[5] EN 473: Kwalifikacja i certyfikacja personelu do badań nieniszczących. Ogólne zasady. Marzec 1993.
[6] EN 45013: Ogólne wymagania dotyczące opinii i akredytacji placówek certyfikujących (ISO/IEC Tom 61:1996).1998.
[7] Karta UIC 811-1: Warunki techniczne na dostawę osi zestawów kołowych dla pojazdów trakcyjnych i wa-gonów
[8] Karta UIC 960: Kwalifikacja i certyfikacja personelu odpowiedzialnego za prowadzenie badań nieniszczą-cych elementów zespołów pojazdów szynowych w procesie ich utrzymania.2-gie wydanie z grudnia 2001.
[9] PN-EN 13103:2009: Kolejnictwo. Zestawy kołowe i wózki. Osie zestawów kołowych tocznych. Zasady konstrukcji.
[10] PN-EN 13104:2009: Kolejnictwo. Zestawy kołowe i wózki. Osie zestawów kołowych napędnych. Zasady konstrukcji.
[11] PN-EN 13261:2009: Kolejnictwo. Zestawy kołowe i wózki. Osie. Wymagania dotyczące wyrobu.
[12] Raport ORE/ERRI B136/Rp.11/D. Zestawy kołowe z nasadzanymi łożyskami tocznymi. Konstrukcja, utrzymanie i standaryzacja. Obliczenie osi zestawów kołowych dla wagonów towarowych i osobowych. Utrecht, kwiecień 1979.
[13] OR-9666: „Diagnostyka układów biegowych pojaz-dów tocznych i trakcyjnych.” Wrzesień 2010.
12

POJAZDY SZYNOWE NR 1/2011
dr inż. Stanisław Bocian Instytut Pojazdów Szynowych „TABOR”
Złożoność półgrupy charakterystycznej iloczynu prostego automatów asynchronicznych silnie spójnych i ustalonych analogów
ich rozszerzeń dla każdego słowa z języka ( ) ++ ∪=∑ 10 σσ
Niniejsza publikacja kontynuuje cykl artykułów [6,7,8,9,12,14,15,16,17] dotyczący złożoności obliczeniowej półgrupy charakterystycznej automatów asynchronicz-nych silnie spójnych i ustalonych analogów ich rozszerzeń. W projektowaniu ste-rowania pojazdów szynowych wykorzystuje się coraz częściej mikrosystemy cyfro-we dorealizowania sterowania inteligentnego, rozproszonego. W mikrosystemach cyfrowych tworzenie oprogramowania możliwe jest z wykorzystaniem maszyny sta-nowej (automatu),któryumożliwia tworzenie oprogramowania w oparciu o sporzą-dzony wcześniej graf automatu. Umożliwia to analizę pracy mikrosystemu cyfro-wego w pojazdach szynowych i oszacowanie złożoności obliczeniowej pólgrup cha-rakterystycznych automatów. Ma to istotny wpływ na złożoność czasową obliczeń, jak również wielkości pamięci, potrzebnej do rozwiązania problemu. Artykuł powstał w wyniku realizacji projektu badawczego MN i SzW nr N N509 398236 „Mikrosystemy cyfrowe do inteligentnego, rozproszonego i współbieżnego sterowania pojazdami szynowymi.”
1. Wstęp Maszyna o skończonej liczbie stanów FSM (Finite State Machine – Skończona Maszyna Stanowa, lub automat cyfrowy) jest jednym z modeli opisują-cym zachowanie systemów sterowania, w którym chwilowe działanie systemu jest w sposób naturalny reprezentowane w formie stanów i przejść między nimi. W teorii automatów rozważa się pewne abstrak-cyjne modele układów cyfrowych, to znaczy elemen-tów i układów pracujących w dyskretnych chwilach czasu, przy czym sygnały mają skończoną liczbę war-tości. Teoria automatów będąca teoretycznym rozwi-nięciem układów logicznych – jest skutecznym narzę-dziem, umożliwiającym formalne projektowanie zło-żonych układów cyfrowych z zastosowaniem standar-towych układów elementarnych. Rozwój teorii automatów był stymulowany przez dwie uzupełniające się tendencje: a.) konstruowanie modeli bliżej związanych ze
współczesnym sprzętem i oprogramowaniem, b.) znajdowanie poprawnych narzędzi matematycz-
nych (języka matematycznego), przy pomocy którego można wyrazić procesy obliczeniowe o dużej różnorodności.
Algebraiczna teoria automatów jest z jednej strony teoretycznym uogólnieniem teorii układów logicznych, z drugiej strony może być traktowana jako dział algebry.
Z postaci abstrakcyjnej, w procesie syntezy, można je przekształcić w schemat logiczny, wzrastające co do
wielkości i złożoności problemy w informatyce, opro-gramowanie lub ich kombinację. Tym samym uczy teoria automatów jak koncepcyjnie i obliczeniowo rozważać wzrastające co do wielkości i złożoności problemy w informatyce.
Rozwój teorii automatów związany jest ze wzro-stem znaczenia techniki komputerowej w różnych gałęziach przemysłu, jak również z doskonaleniem metod analizy i syntezy cyfrowych układów sterowa-nia z uwzględnieniem skali scalania i złożoności funk-cjonalnej podzespołów cyfrowych. Ten ostatni czynnik miał szczególny wpływ na rozwój teorii automatów zmien-nych w czasie, bowiem automat zmienny w czasie jest adekwatnym modelem dla wielu procesów technicz-nych i obliczeniowych czasu rzeczywistego. Dlatego też interesujące są takie realizacje automatu, które z jednej strony symulują pracę kilku automatów za po-mocą jednego automatu zmiennego w czasie, a z dru-giej strony są niezależne od aktualnego stanu techno-logii bądź uwzględniają jej najnowsze trendy. W zakresie teorii automatów zmiennych w czasie pojawiło się szereg opracowań [19,20,21, 22,25,27,28,29,30]. Wyniki dotyczące spójności i silnej spójności [5,26,29,30], rozszerzeń automatów [5,27,29,30] oraz funkcji zachowujących operacje [5,18,21,22,28,29,30], miały istotny wpływ na poszu-kiwanie złożoności półgrup charakterystycznych au-tomatów, które stosunkowo prosto opisują niektóre
13

POJAZDY SZYNOWE NR 1/2011
własności automatów. Problemy półgrup charaktery-stycznych automatów przedstawiono w pracach [22,27,28,29,30]. W pracach [28,29,30] opisano bada-nie właściwości półgrupy charakterystycznej automatu silnie spójnego, a także półgrupy charakterystycznej ustalonego analogu różnych sum okresowych związa-nych z izomorfizmami stanowymi.
Algebraiczna teoria automatów jest dynamicznie rozwijającą się teorią, która z jednej strony jest teore-tycznym uogólnieniem teorii układów logicznych, z drugiej strony może być traktowana jako dział algebry [1,3,19,22,24,30]. Pojęcia z algebry w postaci sforma-lizowanej są analizowane i przekształcane do postaci dogodnych do optymalizacji. Od wielu lat jesteśmy świadkami intensywne-go rozwoju teorii automatów, szczególnie algebraicz-nej teorii automatów rozwijanej na gruncie teorii pół-grup [4,27,28,29,30]. Definicja relacji równoważności Myhilla na zbiorze stanów automatu oraz półgrup charakterystycznych automatu pozwoliły wydobyć zeń możliwości obliczeniowe. Dekompozycja półgrup pozwala wprowadzić pojęcie automatów niereduko-walnych, z których można złożyć wszystkie pozostałe automaty. Półgrupa charakterystyczna jest szczególnie istotnym pojęciem w teorii automatów; jest nośnikiem ważnych informacji i określa zdolność do przetwarza-nia informacji. Ma to bezpośrednio ważkie konse-kwencje praktyczne w sferze projektowania optymal-nych układów logicznych.
Dla badań złożoności półgrupy charakterystycznej automatów ważne są następujące motywacje:
a) w ogólnym przypadku półgrupa charaktery-styczna posiada nn elementów, dlatego inte-resujące jest pokazanie klasy automatów, któ-re posiadają wielomianową zależność liczby elementów półgrupy charakterystycznej od liczby stanów
b) półgrupa charakterystyczna, zgodnie z [28,29,30], ingeruje w algorytm obliczeniowy uogólnionych homomorfizmów automatów, zatem wyznaczanie złożoności półgrupy cha-rakterystycznej pozwala na oszacowanie zło-żoności uogólnionych homomorfizmów au-tomatów
c) algorytm obliczeniowy uogólnionych homo-morfizmów automatów stanowi rozwiązanie problemu wyznaczania automatu, który „ma możliwość” drugiego automatu.
W publikacjach [6,7,8] przedstawiono między innymi wyniki na złożoność półgrup charakterystycznych iloczynu prostego automatu DFASC2 (deterministic finite asynchronous strongly connected) i EXT DFASC2 (deterministic finite asynchronous strongly connected extensions) dla słowa z alfabetu dwulitero-wego. Dla tej klasy automatów przeprowadzono uproszczony dowód na złożoność półgrupy charakte-
rystycznej iloczynu prostego automatu dla słów
011100 ; σσσσ == xx . W celu przeprowadzenia dowodu tw.3 na zło-żoność półgrup charakterystycznych iloczynu prostego automatów z klasy EXT DFASC2 dla każdego słowa z
języka ( ) ++ ∪=∑ 10 σσ , należy przeprowadzić pe-łen dowód, na złożoność półgrup charakterystycznych iloczynu prostego automatu z klasy EXT DFASC2 dla słowa 011100 , σσσσ == xx . W pracach [14,16] przeprowadzono dowody na złożo-ność półgrup charakterystycznych iloczynu prostego automatu z klasy DFASC2 i EXT DFASC2 dla słowa z alfabetu dwuliterowego.
W pracy przeprowadzono także dowód na zło-żoność półgrup charakterystycznych automatu z klasy EXT DFASC2 dla każdego słowa z języka
( ) ++ ∪=∑ 10 σσ (tw. 3) Ze względu na zrozumienie dowodu tw. 3 przedstawiono także dowody tw. 1 [14] i tw. 2 [16]. Przedstawiono także dowody na izomor-fizm półgrup charakterystycznych sumy prostej i ilo-czynu prostego automatów asynchronicznych silnie spójnych i ustalonych analogów ich rozszerzeń [15].
2. Rozważania wprowadzające Relację YXR ×⊆ nazywamy funkcją, gdy dla
każdego Xa ∈ istnieje dokładnie jeden element Yb ∈ taki że bRa . Zbiór X jest nazywany zbio-
rem określoności, a zbiór Y zbiorem wartości funkcji. Funkcja f jest 11÷ (różnowartościowa, jednoznacz-na), gdy 21 aa ≠ implikuje, że ( )( )21) afaf ≠ .
Funkcja jest „na ”, gdy ( ){ }XaafbbY ∈== ,: . Grupoidem nazywamy
parę uporządkowaną ( )o,S gdzie: S niepusty zbiór, ( )o operacja binarna na zbiorze stanów S. Operacją binarną na zbiorze S nazywamy przekształcenie nie-pustego podzbioru zbioru ( )SS × w zbiór S. Binarną operacją ( )o na zbiorze S nazywamy łączną (asocja-tywną), jeśli ( ) ( )cbacba oooo = dla wszystkich
Scba ∈,, . Półgrupą nazywamy taki grupoid ( )o,S , w którym operacja ( )o jest asocjatywna. Niech Σ będzie dowolnym zbiorem niepustym. Zbiór Σ będziemy nazywali alfabetem, a jego elementy literami. Słowem x w alfabecie Σ nazywamy dowolny ciąg liter alfabe-tu, napisanych obok siebie, a długością słowa (ozna-czoną przez x ) nazywamy liczbę tych liter σ. Skończonym automatem zdeterminowanym bez wyjść nazywamy uporządkowaną trójkę ( )MS ,,Σ , gdzie:
14

POJAZDY SZYNOWE NR 1/2011
S–skończony, niepusty zbiór stanów, Σ–skończony, niepusty zbiór wejść, SSM →Σ×: : jest funkcją przejść. Symbolem +∑ oznaczać będziemy przeli-czalny nieskończony zbiór ciągów o skończonej dłu-gości, utworzony z elementów zbioru Σ. Zbiór +∑ razem z operacją konkatenacji (operacja połączenia dwóch słów, polegającą na napisaniu ich obok siebie w celu otrzymania nowego słowa), tworzy półgrupę wolną zwaną półgrupą wejściową. Symbolem ∗∑ oznaczać będziemy monoid wejściowy, czyli
λ∪Σ=Σ +∗ , gdzie λ jest ciągiem pustym. Funkcję M rozszerzamy do obszaru określoności
+Σ×S w podany poniżej sposób: niech: ( )xsM , będzie zdefiniowane, wtedy:
( ) ( )( )σσ ,,,, xsMMxsM = dla każdego Σ∈Σ∈∈ + σ,, xSs .
Na zbiorze ∗∑ zdefiniujemy relację: xRy wtedy i tylko wtedy, gdy
( ) ( )yxMxsMSs ,, =∀ ∈ . R jest relacją równoważności (relacja Myhilla).
Klasę równoważności zawierającą element ∗Σ∈x oznaczać będziemy x , a zbiór wszystkich klas
równoważności oznaczać będziemy I . Zbiór I łącz-nie z operacją ( )o , gdzie xyyx =o tworzy półgrupę (odpowiednio monoid), zwaną półgrupą charaktery-styczną (odpowiednio monoidem charakterystycz-nym). Półgrupę charakterystyczną automatu A ozna-czać będziemy )(AI . Dla automatu ( )MSA ,,Σ= definiujemy automat charakterystyczny ( )( )MAISA ,,= , gdzie funkcja przejść M jest zdefiniowana następująco:
( ) ( )xsMxsM ,, = . Składnikiem autonomicznym automatu
),,( MSA ∑= nazywamy automat { } ),,( xx MxSA =
gdzie xMix ∗∑∈ jest ograniczeniem
{ }xSdoM × .
Dla każdego ∗Σ∈x definiujemy przekształcenie fx zbioru S w siebie, gdzie :
( ) ( )xsMsfx ,= , dla każdego Ss ∈ . Przekształcenie fx jest implikowane przez x. Zbiór przekształceń zbioru S w siebie implikowanych przez wszystkie elementy z Σ będziemy oznaczać symbolem JJ . ze względu na operację superpozycji, jest zbiorem gene-ratorów pewnej półgrupy. Półgrupa F jest antyizomorficzna z I ponieważ:
( ) ,,: xfxFI =→ ϕϕ
gdzie IxIx ∈∈ , przy czym:
(i) ( ) ( ) ( ) ( ) ( )xyfffxyyx xyxy ϕϕϕϕ ====o (brak zachowania operacji)
(ii) ( ) ( ) ( )
( ) yxxRyxsM
xsMffyx Ssyx
=⇒⇒=
=∀⇒=⇒= ∈
,
,ϕϕ,
a zatem φ jest, „ 11÷ ” (iii) ( ) ( ) ( ) xxx fxfxfx 111 −−− =⇒=⇒= ϕϕϕϕϕ , a zatem φ jest „na”. Automat można zatem zdefiniować jako parę ( )JS , , a automat charakterystyczny automatu ( )JS , jako parę ( )FS , .
Automat ( )MSA ,,Σ= jest silnie spójny wtedy i tylko wtedy, jeśli dla każdej pary ( )21, ss sta-nów automatu A istnieje element x z półgrupy wej-ściowej taki, że
( ) 21, sxsM = . Automat ( )MSA ,,Σ= będziemy nazywać asyn-chronicznym wtedy i tylko wtedy gdy, dla każdego
Σ∈∈ σiSs zachodzi ( ) ( )σσσ ,, sMsM = .
Automat ( )MSA ,,Σ= jest zupełny, jeśli jego funkcja przejścia jest zupełna. Automat ( )MSA ,,Σ= jest w pełni określony, jeśli jego funkcja przejść jest w pełni określona.
Niech ( ) ( )MSBiMSA BBAA ,,,, Σ=Σ= będą
automatami deterministycznymi. Funkcję BAf →: jest rozumiana jako funkcja przekształcająca
SwS BA . Funkcja
BAf →: nazywamy homomorfizmem (zachowuje operacje), jeżeli:
( )( ) ( )( )σσ ,, sfBMsMf A = , dla każdego.
Σ∈∈ σiSs
Jeżeli BAf →: jest „ 11÷ ” i „na” oraz zachowuje operacje, to f nazywamy izomorfizmem. Homomorfizmem uogólnionym automatu
BwA nazywamy parę przekształceń ( )21, ff ta-
kich, że: ∗∗ ∑→∑→ BwABwA fSSf :,...,: 21 , oraz
))(),(()),(( 211 xfsfMxsMf BA = dla każdego ∗∑∈∈ AA xSs , .
15

POJAZDY SZYNOWE NR 1/2011
Niech 2≥q i ( )000 ,, MSA ∑= będzie automa-tem oraz niech,
( ) ( ),,,...,,, 111111 −−− ∑=∑= qqq MSAMSA będą obrazami izomorficznymi związanymi z izomorfi-zmami stanowymi
)(),...,( 121101 −−− →∈→∈ qqq AAIzgAAIzg . Rozszerzeniem q automatu A0 związanym z izomorfi-zmami stanowymi 110 ,...,, −qggg nazywamy trójkę
uporządkowaną ( ) ( ) ( )( )MSAext AextAextq
qq ,, ∑= gdzie:
( ) ( ) ( )
( )1,1,0,
110
,...,,
;,...,,
−
−
=
==
qqqq
qAextqAext
MMM
MSSSS qq
1,...,1,0;: −=→ qiSSg ii
{ } { }in
iiin sssSsssS 110110 ,...,,;,...,, −− ==
natomiast ( ) 1,...,1,0; −== njsgs jii
j
Ustalonym analogiem rozszerzeni ),,( MSAextq ∑= automatu ( )MSA ,,∑=
związanego z izomorfizmami 110 ,...,, −qggg jest trój-ka uporządkowana
( )( ) ( ) ( )( )∗∗∗∑= MSAext AextAext
qqq ,, gdzie:
( )
( ) ( ) ∗∗∗
−=
∗
→Σ×
=
SSMa
SS
AextextAext
iqi
Aext
qqq
q
:
;10U
;
jest funkcją przejść zdefiniowaną dla dowolnych iSs ∈ , jak następuje ( ) ( ) ),(, , σσ sMsM iqAextq =∗ .
Iloczyn prosty automatów
( )MSBiMSA BBAA ,,,, ∑=∑= jest trójką
uporządkowaną ( ) ( )( )MSBA BABA ×× ∑=× ,, , gdzie ( ) SSS BABA ×=× ; ( ) ( ) ( )SSM BABABA ××× ∑→×: , a funkcja przejść jest zdefiniowana jak następuje
( ) ( )( ) ( ) ( )( )σσσ ,,,,, sMsMssM BBAABABA =× . Dla wszystkich przedstawionych rozważań
{ }10 ,σσ=∑ ,
wprowadzamy 011100 , σσσσ == xix , dla których
( ) ( )101010
, σσσσ ffffff xx == . Dla dowolnego ∗∑∈x zdefiniujemy przekształcenie
SSf wx →: określone jak następuje:
),()( xsMsfxSs =∀ ∈ gdzie: dla σ'xx = mamy
))(()()( '' sffsfsf xxxSs σσ ==∀ ∈ .
3. Złożoność półgrupy charakterystycznej iloczynu prostego automatów asynchronicznych silnie spójnych i ustalonych analogów ich rozszerzeń
3.1. Złożoność półgrupy charakterystycznej iloczy-nu prostego automatów z klasy DFASC2 [14]
Twierdzenie 1.
Niech ( ) ( )( )MSBA BABA ×× ∑=× ,, będzie iloczynem prostym automatów ( )MSA AA ,,∑= i
( )MSB BB ,,∑= z klasy DFASC2; wtedy półgrupa charakterystyczna ( )BAI × iloczynu prostego auto-matów BA× ma własność:
( )( ) [ ]nmBAIcard ,2=× (1) gdzie: card (AS) = m > 2; card BS = n > 2; m, n liczby naturalne m > n; card Σ= 2; x0 = σ0 σ1; x1 = σ1 σ0; [m, n] – najmniejsza wspólna wielokrotność liczb m, n, patrz [13].
( )n
dmk 0
0−
= , gdzie: d0 – reszta z dzielenia liczb m,
n; b0 = n – d0.
Dowód. Na rys.1. przedstawiono automaty A i B z klasy DFASC2. Zbiory stanów automatów A i B są następujące: { }1210 ,,...,, −−= m
Am
AAAA ssssS ;
{ }1210 ,,...,, −−= nB
nBBBB ssssS
Wiadomo, że iloczyn prosty zbiorów stanów automa-tów A i B wynosi:
Rys. 1. Automaty A i B z klasy DFASC2
16

POJAZDY SZYNOWE NR 1/2011
( ) =×=× SSS BABA
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
1112111021
2221201112
111001020100
,,,,...,,,,,,
,,,...,,,,,...,,,,
,..,,,,,,,,,...,,,,
nB
mA
nB
mA
nBA
nBA
nB
mA
nB
mA
nBA
nBAB
mAB
mA
BABABm
ABm
ABABA
ssssssssss
ssssssssss
ssssssssssss
Po przekształceniu zbioru uporządkowanych par stanów automatów A i B pod wpływem lite-
ry 0σ otrzymujemy:( )
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
=
−−−−−−−−
−−−−−−
−−
×
1111111111
1111111111
111111111111
,,,,...,,,,,,
,,,...,,,,,...,,,,
,..,,,,,,,,,...,,,,
0
nB
mA
nB
mA
nBA
nBA
nB
mA
nB
mA
nBA
nBAB
mAB
mA
BABABm
ABm
ABABA
BA
ssssssssss
ssssssssss
ssssssssssss
fσ
Pod wpływem słowa x0 otrzymujemy przekształcenie:
( )
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
=×
0000020200
0002022020
222220202222
,,,,...,,,,,,
,,,...,,,,,...,,,,
,..,,,,,,,,,...,,,,
0
ssssssssss
ssssssssss
ssssssssssss
fBABABABABA
BABABABABA
BABABABABABA
xBA
( ) ( )010 x
BAx
BA ff ×× =σ
Po 2n
– krotnej konkatenacji słowa 0x otrzymujemy:
( ) =×
20
n
x
BA f
−−
−−−
−−−−−
−−
−−−
−−−−−
−−
−−−−
−−
−−−−
22
22
22
22
22
22
02
02
00
02
02
00
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
nB
kdm
An
B
kdm
An
B
kdm
An
B
kdm
A
nB
kdm
An
B
kdm
An
B
kdm
An
B
kdm
A
B
kdm
AB
kdm
AB
kdm
AB
kdm
A
B
kdm
AB
kdm
AB
kdm
AB
kdm
A
ssssssss
ssssssss
ssssssss
ssssssss
gdzie: d0 =m – k0 n ; b0 =n – d0 .
Po 20nk – krotnej konkatenacji słowa 0x otrzymujemy:
( )
( ) ( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
=
−−−−−−−−−−
−−−−−−−−−−
−−−−−−
−−−−−−
×
222222
222222
020200
020200
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,,...,,,,
0000
0000
0000
0000
200
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
Bdm
ABdm
ABdm
ABdm
A
Bdm
ABdm
ABdm
ABdm
A
x
BA
ssssssss
ssssssss
ssssssss
ssssssss
f nk
Po nk0 – krotnej konkatenacji słowa 0x otrzymujemy:
17

POJAZDY SZYNOWE NR 1/2011
( )
( ) ( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
=
−−−−−−−−−−
−−−−−−−−−−
−−−−−−
−−−−−−
×
222222
222222
020200
020200
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,,...,,,,
1111
1111
1111
1111
00
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
Bdm
ABdm
ABdm
ABdm
A
Bdm
ABdm
ABdm
ABdm
A
xBA
ssssssss
ssssssss
ssssssss
ssssssss
f nk
gdzie: zgodnie ze sposobem wyznaczania [m, n] mamy: d1 = m – b0 – k0n; b1 = n1 – d1
Po [ ]
2,
2nmwm = – krotnej konkatenacji słowa 0x otrzymujemy:
( )[ ]
( ) ( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
=
−−−−−−−−−−
−−−−−−−−−−
−−−−−−
−−−−−−
×
222222
222222
020200
020200
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,,...,,,,
2,
0
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
nB
dmA
Bdm
ABdm
ABdm
ABdm
A
Bdm
ABdm
ABdm
ABdm
A
x
BA
ssssssss
ssssssss
ssssssss
ssssssss
f
wwww
wwww
wwww
wwww
nm
gdzie: zgodnie ze sposobem wyznaczania [m, n] mamy:
[ ] pmwnmnkbmd ww ===−−= −− ,;0021
Stąd:
( )[ ]
( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
=
−−−−−−−−
−−−−−−
−−
×
2222202022
2220200202
000002020000
,,,...,,,,
,,...,,,,...,,,
,...,,,,,,...,,,
2,
0
nB
mA
nB
mA
nBA
nBA
nB
mA
nB
mA
nBA
nBAB
mAB
mA
BABABm
ABm
ABABA
x
BA
ssssssssssssssssssssssssssssssss
f nm
Po [ ]
02,
0 σnm
x – krotnej konkatenacji otrzymujemy:
( )[ ]
( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
=
−−−−−−−−
−−−−−−
−−
×
1111111111
1111111111
111111111111
,,,...,,,,
,,...,,,,...,,,
,...,,,,,,...,,,
02,
0
nB
mA
nB
mA
nBA
nBA
nB
mA
nB
mA
nBA
nBAB
mAB
mA
BABABm
ABm
ABABA
x
BA
ssssssssssssssssssssssssssssssss
f nm
σ
( )[ ]
( )0
02,
0
σσ
ff BA
x
BAnm
×× =
Identyczną liczbę przekształceń uzyskujemy rozpoczynając przekształcenie zbioru uporządkowanych
par stanów automatów A i B pod wpływem [ ]
2,nm
krotnej konkatenacji słowa 011 σσ=x . Zatem
otrzymujemy wzór (1). C.B.D.O.
3.2. Złożoność półgrupy charakterystycznej iloczynu prostego automatów z klasy EXT DFASC2 [16] Twierdzenie 2. Niech ( ) ( ) ( )( )MSBAext BAextBAext
qqq ×× ∑=× ,, będzie rozszerzeniem stanowym związanym
z izomorfizmami g0, g1,..., gq-1 iloczynu prostego ( )MSBA BABA ×× ∑=× ,, automatów ( )MSA AA ,,∑= i ( )MSB BB ,,∑= z klasy DFASC2 ; wtedy półgrupa charakterystyczna
( )( )∗× BAextI q ustalonego analogu rozszerzenia ma własność:
( ) ( )( ) [ ] qqnmBAextIcard q ×=× ∗ ,,2 (2) gdzie: card (AS) = m > 2; card (BS) = n >2; m, n liczby naturalne m > n; card Σ= 2; x0 = σ0 σ1; x1 = σ1 σ0; [m, n] – najmniejsza wspólna wielokrotność liczb m, n, patrz [13].
18

POJAZDY SZYNOWE NR 1/2011
Dowód. Uwzględniając rys.2 otrzymujemy następujące uporządkowane pary stanów:
( ) =× SBAextq
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
01
01
02
01
01
01
00
01
01
02
02
02
01
02
00
02
01
01
02
01
01
01
00
01
01
00
02
00
01
00
00
00
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssssssssssssssss
.
.
. ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−
−−−−−−
−−−
−−−−−
11
11
12
11
11
11
10
11
11
12
12
12
11
12
10
12
11
11
12
11
11
11
10
11
11
10
12
10
11
10
10
10
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
qn
Bqm
Aqn
Bqm
AqBqm
AqBqm
Aqn
Bqm
A
qn
Bqm
AqBqm
AqBqm
Aqn
BqAqn
BqA
qBqAqBqAqn
BqAqn
BqAqBqAqBqA
ssssssssssssssssssss
ssssssssssss
Po przekształceniu pod wpływem 0σ uporządkowanych par stanów rozszerzenia stanowego iloczynu prostego A i B otrzymujemy
( ) =×0σf
BAextq
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssssssssssssssss
.
.
. ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−
−−
01
01
01
01
01
01
01
01
01
01
02
01
01
01
00
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssss
ssssssssssss
Po q – krotnej konkatenacji 0σ otrzymujemy: ( ) =×
qq fBAext
0σ
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssss
ssssssssssss
.
.
. ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−−−
−−−−
−−−
−−−−−
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
,,,,...,,,,,,,,
,...,,,,,...,,,,,...,,
,,,,,,,...,,,,
qn
Bqm
Aqn
Bqm
AqBqm
AqBqm
Aqn
Bqm
Aqn
Bqm
A
qBqm
AqBqm
Aqn
BqAqn
BqAqBqA
qBqAqn
BqAqn
BqAqBqAqBqA
ssssssssssssssssssssss
ssssssssss
Po (q+1) – krotnej konkatenacji litery 0σ otrzymujemy: ( ) ( )
010
σσff BAextBAext q
qq ×× =+
19
POJAZDY SZYNOWE NR 1/2011
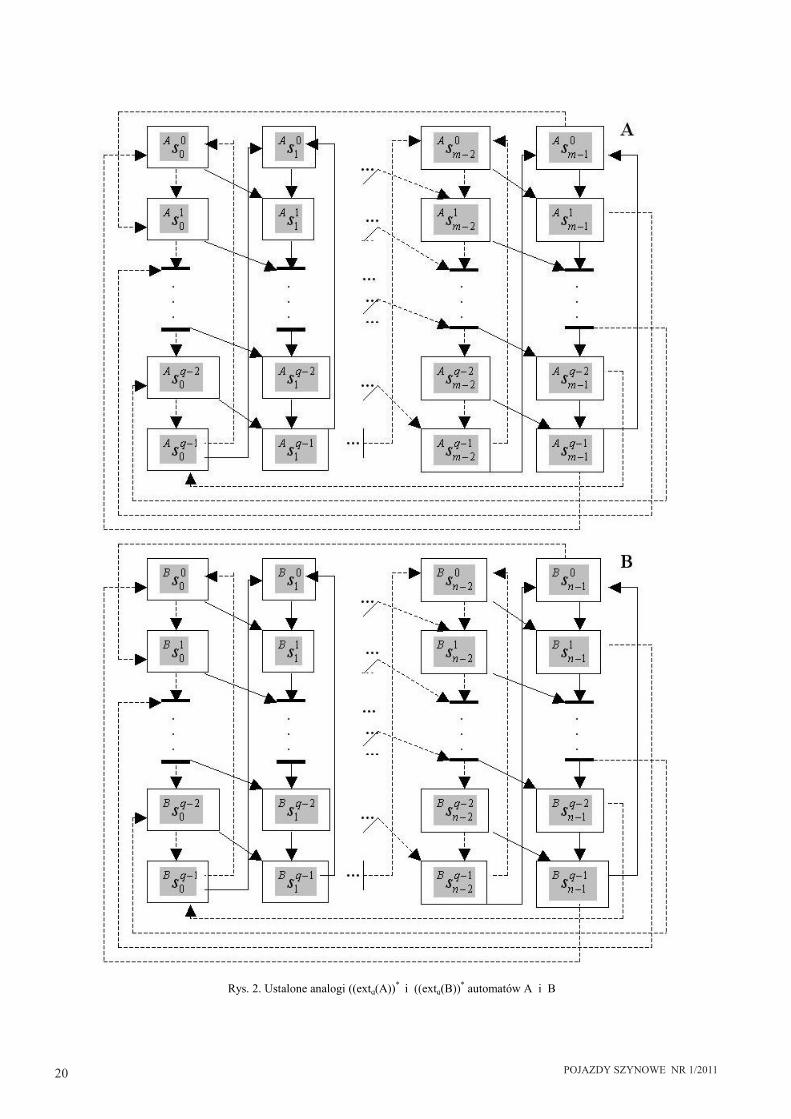
Rys. 2. Ustalone analogi ((extq(A))* i ((extq(B))* automatów A i B
20

POJAZDY SZYNOWE NR 1/2011
Z kolei pod wpływem słowa 100 σσ=x otrzymujemy: ( ) =×
0xBAext fq
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
20
20
20
20
22
20
22
20
20
20
20
20
22
20
22
20
20
22
20
22
22
22
22
22
20
22
20
22
22
22
22
22
,,,,...,,,,,,,,,...,,,,
,...,,,,,...,,,,,,,,,...,,,,
ssssssssssssssssssssssssssssssss
BABABABABABABABA
BABABABABABABABA
.
.
. ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
10
10
10
10
12
10
12
10
10
10
10
10
12
10
12
10
10
12
10
12
12
12
12
12
10
12
10
12
12
12
12
12
,,,,...,,,,,,,,,...,,,,
,...,,,,,...,,,,,,,,,...,,,,
ssssssssssssssssssssssssssssssss
BABABABABABABABA
BABABABABABABABA
Po 2n
– krotnej konkatenacji słowa 0x otrzymujemy: ( ) =×
20
nq
x
BAext f
−
−
−−
−
−
−
−
−
−
−
−
−−
−
−
−
−
−
−
−
−−
−
−
−
−
−−
−
−
−
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
ssssssss
ssssssss
ssssssss
ssssssss
oooo
oooo
oooo
oooo
22
22
02
02
22
22
02
02
2200
2200
,,,,...,,,,
,,,,,...,,,,
,...,,,,,...,,,,
,,,,,...,,,,
0000
0000
0000
0000
.
.
.
−−
−
−
−−−
−
−
−−−
−
−−−
−
−
−−
−
−
−−−
−
−
−−−
−
−−−
−
−
−−
−
−−−
−
−−−
−−−
−
−−
−
−−−
−
−−−
−−−
−
12
1
2
12
1
2
10
1
2
10
1
2
12
1
2
12
1
2
10
1
2
10
1
2
12
112
110
110
1
12
112
110
110
1
,,,,...,,,,
,,,,,...,,,,
,...,,,,,...,,,,
,,,,,...,,,,
0000
0000
0000
0000
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
nn
Bn
kdm
Ann
Bn
kdm
AnBn
kdm
AnBn
kdm
A
ssssssss
ssssssss
ssssssss
ssssssss
oooo
oooo
oooo
oooo
gdzie: zgodnie ze sposobem wyznaczania [m, n] mamy: d0 = m – k0 n ; b0 = n – d0
Po 20nk – krotnej konkatenacji słowa ox otrzymujemy:
21

POJAZDY SZYNOWE NR 1/2011
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )
−−−−−−−−−−
−−−−−−−−−
−−−−−−
−−−−−−
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
oooooooo
oooooooo
oooooooo
oooooooo
ssssssss
ssssssss
ssssssss
ssssssss
22220202
2220202
2200
2200
,,,,...,,,
,,,,,...,,,,
,...,,,,,...,,,,
,,,,...,,,,
0000
0000
0000
0000
.
.
. ( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )
−−
−−−
−−
−−−
−−−−
−−−−
−−
−−
−−
−−−
−−−−
−−−−
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
12
12
12
12
10
12
10
12
12
112
12
10
12
10
12
12
112
110
110
1
12
112
110
110
1
,,,,...,,,
,,,,,...,,,,
,...,,,,,...,,,,
,,,,...,,,,
0000
0000
0000
0000
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
oooooooo
oooooooo
oooooooo
oooooooo
ssssssss
ssssssss
ssssssss
ssssssss
Po k0 n – krotnej konkatenacji słowa x0 otrzymujemy: ( ) =×
nkq
xBAext f 0
0
( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )
−−−−−−−−−−
−−−−−−−−−
−−−−−−
−−−−−−
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
oooooooo
oooooooo
oooooooo
oooooooo
ssssssss
ssssssss
ssssssss
ssssssss
22
22
22
22
20
22
20
22
22
222
22
20
22
20
22
22
222
220
220
2
22
222
220
220
2
,,,,...,,,
,,,,,...,,,,
,...,,,,,...,,,,
,,,,...,,,,
1111
1111
1111
1111
.
.
. ( ) ( ) ( ) ( )( ) ( ) ( ) ( )( ) ( ) ( ) ( )( )( ) ( ) ( )
−−
−−−
−−
−−−
−−−−
−−−−
−−
−−
−−
−−−
−−−−
−−−−
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
122
122
122
122
120
122
120
122
122
12122
122
120
122
120
122
122
12122
12120
12120
12
122
12122
12120
12120
12
,,,,...,,,
,,,,,...,,,,
,...,,,,,...,,,,
,,,,...,,,,
1111
1111
1111
1111
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
nkn
Bnkdm
Ankn
Bnkdm
AnkBnkdm
AnkBnkdm
A
oooooooo
oooooooo
oooooooo
oooooooo
ssssssss
ssssssss
ssssssss
ssssssss
gdzie: zgodnie ze sposobem wyznaczania [m, n] mamy: d1 = m – b0 – k0 n ; b1 = n – d1
Po[ ]
2,
2nwwm = – krotnej konkatenacji słowa x0 otrzymujemy, że:
dw-1 = m – bw-2 – k0 n = 0 i wtedy mamy następujące przekształcenie: ( )
[ ]
( )( ) ( )( )( )( )( )( ) ( )( ) ( )
( )( )( ) ( )( )
=
−−−−−−−−
−−−−−−
−−
×
wmn
Bwmm
Awmn
Bwmm
AwmBwmm
AwmBwmm
Awmn
Bwmm
A
wmn
Bwmm
AwmBwmm
AwmBwmm
Awmn
BwmAwmn
BwmA
wmBwmAwmBwmAwmn
BwmAwmn
BwmAwmBwmAwmBwmA
x
BAext
ssssssssssssssssssss
ssssssssssss
f nmq
2,22
,20
,20
,22
,2
2,20
,20
,22
,02
,0
0,
00,
02,
02,
00,
00,
0
,,,...,,,,
,,...,,,,...,,,,...,
,,,,,...,,,
2,
0
.
.
.
22

POJAZDY SZYNOWE NR 1/2011
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−−−−−
−−
−−−
−−−−−
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
wmn
Bwmm
Awmn
Bwmm
AwmBwmm
AwmBwmm
A
wmn
Bwmm
Awmn
Bwmm
AwmBwmm
AwmBwmm
A
wmn
BwmAwmn
BwmAwmBwmAwmBwmA
wmn
BwmAwmn
BwmAwmBwmAwmBwmA
ssssssssssssssssssssssssssssssss
Po [ ]
2,
20nmwmi =σ – krotnej konkatenacji słowa 0x otrzymujemy:
( )[ ]
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
=
+−
+−
+−
+−
++−
++−
+−
+−
+−
+−
++−
++−
+−
++−
+++++
+−
++−
+++++
×
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
11
,11
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
2,
00
wmn
Bwmm
Awmn
Bwmm
AwmBwmm
AwmBwmm
A
wmn
Bwmm
Awmn
Bwmm
AwmBwmm
AwmBwmm
A
wmn
BwmAwmn
BwmAwmBwmAwmBwmA
wmn
BwmAwmn
BwmAwmBwmAwmBwmA
x
BAext
ssssssssssssssssssssssssssssssss
f nmq
σ
.
.
. ( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
−−−−−−
−−−−−−−−
−−
wmn
Bwmm
Awmn
Bwmm
AwmBwmm
AwmBwmm
A
wmn
Bwmm
Awmn
Bwmm
AwmBwmm
AwmBwmm
Awmn
BwmAwmn
BwmA
wmBwmAwmBwmAwmn
BwmAwmn
BwmAwmBwmAwmBwmA
ssssssssssssssssssss
ssssssssssss
1,
11,
11,
11,
1
1,
11,
11,
11,
11,
11,
1
1,
11,
11,
11,
11,
11,
1
,,...,,,
,,,...,,,,...,,,
,...,,,,,,...,,,
Po [ ]
221
0wmwmiq =+σ – krotnej konkatenacji słowa 0x otrzymujemy:
( )[ ]
( )[ ]
2,
002,
01
0
nmq
nmq
q
x
BAext
x
BAext ffσσ
×× =+
Dla przekształcenia ( )
200
wmq
x
BAext fσ
× pod wpływem q – krotnego działania litery 0σ otrzymujemy po-
nownie przekształcenie ( )
200
wmq
x
BAext fσ
× .
W dalszych rozważaniach będziemy analizować przekształcenie ( )
20
wmq
x
BAext f× . Rozważania dla prze-
kształceń ( ) ( )
200
200
,..., wmq
qwm
q
x
BAext
x
BAext ffσσ
××
są analogiczne. Z przytoczonych powyżej rozważań opartych na sposobie wyznaczania najmniejszej wspólnej wielokrotności dwóch liczb oraz uwzględniając definicję rozszerzenia stanowego automatu z klasy EXT DFASC2 wynika, że liczba dotychczas wygenerowanych przekształceń wynosi [ ]nmq , . Niech [m, n] = m w = p. Z przytoczonych rozważań opartych na sposobie wyznaczania najmniejszej wspólnej wielokrotności dwóch liczb [13] oraz uwzględniając definicje rozszerzenia automatu asynchronicznego silnie spójnego wynika, że liczba dotychczas wygenerowanych przekształceń
wynosi p . Wtedy po 2p
– krotnej konkatenacji słowa otrzymujemy:
23

POJAZDY SZYNOWE NR 1/2011
( ) =×
20
pq
x
BAext f
−
−
−
−
−
−
−
−
−−
−
−−
−
−
−
−
−
−
−
−
−
−−
−
−
−−
−
−
−
−−
−
−−−−−
−
−
−−
−
−−−−−
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
22220202
22220
1
202
20200000
20200000
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
kdq
nBk
dq
mAk
dq
nBk
dq
mAk
dqBk
dq
mAk
dqBk
dq
mA
kdq
nBk
dq
mAk
dq
nBk
dq
mAk
dqBk
dq
mAk
dqBk
dq
mA
kdq
nBk
dqAk
dq
nBk
dqAk
dqBk
dqAk
dqBk
dqA
kdq
nBk
dqAk
dq
nBk
dqAk
dqBk
dqAk
dqBk
dqA
oooooooooooooooo
oooooooooooooooo
oooooooooooooooo
oooooooooooooooo
ssssssss
ssssssss
ssssssss
ssssssss
. . .
−−
−
−−
−
−−
−
−−
−
−−
−−
−
−−
−−
−
−−
−
−−
−
−−
−
−−
−
−−
−−
−
−−
−−
−
−−
−
−−
−−
−
−−
−−
−−
−−
−−
−−
−
−−
−−
−
−−
−−
−−
−−
−−
1
2
1
2
1
2
1
2
1
0
1
2
1
0
1
2
1
2
1
2
11
2
1
2
1
0
1
2
1
0
1
2
1
2
1
0
1
2
1
0
1
0
1
0
1
0
1
0
1
2
1
0
1
2
1
0
1
0
1
0
1
0
1
0
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
1
,
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
kdq
nBk
dq
mAk
dq
nBk
dq
mAk
dqBk
dq
mAk
dqBk
dq
mA
kdq
nBk
dq
mAk
dq
nBk
dq
mAk
dqBk
dq
mAk
dqBk
dq
mA
kdq
nBk
dqAk
dq
nBk
dqAk
dqBk
dqAk
dqBk
dqA
kdq
nBk
dqAk
dq
nBk
dqAk
dqBk
dqAk
dqBk
dqA
oooooooooooooooo
oooooooooooooooo
oooooooooooooooo
oooooooooooooooo
ssssssss
ssssssss
ssssssss
ssssssss
gdzie: zgodnie ze sposobem wyznaczania najmniejszej wspólnej wielokrotności, dla trzech liczb [m, n, q] = [[m, n],q] = [p, q], gdzie p = [m, n], patrz[13]: k1 - całkowita wielokrotność liczby p w q; q > p d0,0 = q – k1p, b0,0 = p – d0,0 , d1,1 = q – b0,0 – k1p, b1,1 = p – d1,1 . . . dt-2,t-2 = q – bt-3,t-3 – k1p bt-2,t-2 = p – dt-2,t-2 dt-1,t-1 = q – bt-2,t-2 – k1p = 0 [m, n, q] = [p, q] =[[m, n], q] = q t W przypadku gdy dx < 0; gdzie 0 < x < t–1, to w miejsce bx wpisujemy bezwzględna wartość liczby dx i obliczenia kontynuujemy dalej. Gdy p > q to d0,0 = p – k1 q , b0 = q – d0,0 i dalej postępujemy analogicznie. Dowód przeprowadzamy zakładając, że pq > .
Po 21pk – krotnej konkatenacji słowa 0x otrzymujemy:
24

POJAZDY SZYNOWE NR 1/2011
( )
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
=
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−−−−−
−−
−−−
−−−−−
×
0,00,00,00,00,00,00,00,0
0,00,00,00,00,00,00,00,0
0,00,00,00,00,00,00,00,0
0,00,00,00,00,00,00,00,0
210
22220202
22220202
20200000
20200000
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
x
BAext
ssssssss
ssssssss
ssssssss
ssssssss
f pk
q
.
.
. ( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
−−−
−−−
−−−
−−−
−−−−−
−−−−−
−−−
−−−
−−−
−−−
−−−−−
−−−−−
−−−
−−−−−
−−−−−−−−−−
−−−
−−−−−
−−−−−−−−−−
12
12
12
12
10
12
10
12
12
12
12
12
10
12
10
12
12
10
12
10
10
10
10
10
12
10
12
10
10
10
10
10
0,00,00,00,00,00,00,00,0
0,00,00,00,00,00,00,00,0
0,00,00,00,00,00,00,00,0
0,00,00,00,00,00,00,00,0
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
ssssssss
ssssssss
ssssssss
ssssssss
Po k1 p – krotnej konkatenacji słowa otrzymujemy:
( )
( )( ) ( )( )( )( ) ( )( )
( )( ) ( )( )( )( ) ( )( )
=
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−−−−−
−−
−−−
−−−−−
×
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
210
22220202
22220202
20200000
20200000
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
x
BAext
ssssssss
ssssssss
ssssssss
ssssssss
f pk
q
.
.
. ( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
−−−
−−−
−−−
−−−
−−−−−
−−−−
−−−
−−−
−−−
−−−
−−−−−
−−−−−
−−−
−−−−−
−−−−−−−−−−
−−−
−−−−−
−−−−−−−−−−
12
12
12
12
10
120
12
12
12
12
12
10
12
10
12
12
10
12
10
10
10
10
10
12
10
12
10
10
10
10
10
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
BdqqAdqn
BdqAdqBdqAdqBdqA
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
ssssssss
ssssssss
ssssssss
ssssssss
gdzie: zgodnie ze sposobem wyznaczania [m, n, q]: d1,1 = q – b0,0 – k1 p ; b1,1 = p – d1,1
Po 2qt - krotnej konkatenacji słowa 0x otrzymujemy:
( )
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
=
−−−−−−−−−−−−−−−−
−−−−−−−−−−−−−−−−
−−−−−−−−−−−−−−−−
−−−−−−−−−−−−−−−−
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−−−−−
−−
−−−
−−−−−
×
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
20
22220202
22220202
20200000
20200000
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
tttttttttttttttt
tttttttttttttttt
tttttttttttttttt
tttttttttttttttt
qtq
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
BdqAdqqn
BdqAdqBdqAdqBdqA
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
x
BAext
ssssssss
ssssssss
ssssssss
ssssssss
f
.
.
.
25

POJAZDY SZYNOWE NR 1/2011
( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )( )( ) ( )( )
−−−
−−−
−−−
−−−
−−−−−
−−−−
−−−
−−−
−−−
−−−
−−−−−
−−−−−
−−−
−−−−−
−−−−−−−−−−
−−−
−−−−−
−−−−−−−−−−
12
12
12
12
10
120
12
12
12
12
12
10
12
10
12
12
10
12
10
10
10
10
10
12
10
12
10
10
10
10
10
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
1,11,11,11,11,11,11,11,1
,,,...,,,
,,,...,,,
,...,,,,...,,,
,,,...,,,
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
Bdqm
Adqn
Bdqm
AdqBdqm
AdqBdqm
A
dqn
BdqqAdqn
BdqAdqBdqAdqBdqA
dqn
BdqAdqn
BdqAdqBdqAdqBdqA
ssssssss
ssssssss
ssssssss
ssssssss
gdzie: zgodnie ze sposobem wyznaczania [m, n, q]: dt-1,t-1 = q – bt-2,t-2 – k1 p = 0. Dla dt-1,t-1 = 0 możemy napisać przekształcenie ( )
20
qtq
x
BAext f× w następującej postaci:
( ) =×
20
qtq
x
BAext f
( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
−−−−−−−−
−−−−−−
−−
02
02
02
02
00
02
00
02
02
02
02
02
00
02
00
02
02
00
02
00
00
00
00
00
02
00
02
00
00
00
00
00
,,,...,,,,
,,...,,,,...,,,
,...,,,,,,...,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssssssssssssssss
.
.
. ( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−
−−−−−−
−−−
−−−−−
12
12
12
12
10
12
10
12
12
12
12
12
10
12
10
12
12
10
12
10
10
10
10
10
12
10
12
10
10
10
10
10
,,,...,,,
,,,...,,,,...,,,
,...,,,,,,...,,,
qn
Bqm
Aqn
Bqm
AqBqm
AqBqm
A
qn
Bqm
Aqn
Bqm
AqBqm
AqBqm
Aqn
BqAqn
BqA
qBqAqBqAqn
BqAqn
BqAqBqAqBqA
ssssssssssssssssssss
ssssssssssss
Po 20qtiσ - krotnej konkatenacji słowa x0 otrzymujemy
( ) =×
200
qtq
x
BAext fσ
( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
−−−−−−
−−−−−−−−
−−
11
11
11
11
11
11
10
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
,,,...,,,
,,,...,,,,...,,,
,...,,,,,,...,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssss
ssssssssssss
.
.
. ( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
−−−−−−
−−−−−−−−
−−
01
01
01
01
01
011
00
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
,,,...,,,
,,,...,,,,...,,,
,...,,,,,,...,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssss
ssssssssssss
Po 20qtqσ - krotnej konkatenacji słowa 0x otrzymujemy:
( ) =×
200
qtq
q
x
BAext fσ
( )( ) ( )( )( )( )( )( ) ( )( ) ( )( )( )( ) ( )( )
−−−−−−
−−−−−−−−
−−
01
01
01
01
01
01
00
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
,,,...,,,
,,,...,,,,...,,,
,...,,,,,,...,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssss
ssssssssssss
.
.
.
26

POJAZDY SZYNOWE NR 1/2011
( )( ) ( )( )( )( ) ( )( ) ( )( )( )( )( )( ) ( )( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−−−
−−−−
−−−
−−−−−
11
11
11
11
11
11
10
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
,
,,...,,,,,
,...,,,,...,,,,...,,
,,,,...,,,
qn
Bqm
A
qn
Bqm
AqBqm
AqBqm
Aqn
Bqm
Aqn
Bqm
A
qBqm
AqBqm
Aqn
BqAqn
BqAqBqA
qBqAqn
BqAqn
BqAqBqAqBqA
ssssssssssss
ssssssssssssssssssss
Po 2
10
qtiq+σ - krotnej konkatenacji słowa 0x otrzymujemy:
( ) ( ) ( )0
200
20
10
σσσ
fff BAext
x
BAext
x
BAext qqt
qqt
q
q ××× ==+
Z przedstawionych powyżej rozważań opartych na sposobie wyznaczania najmniejszej wspólnej wie-lokrotności wynika, że liczba dotychczas wygenerowanych przekształceń wynosi [m, n, q]. Dla pozostałych przekształceń otrzymujemy:
( ) ( )00
200
σσσ
ff BAext
x
BAext qqt
q ×× =
.
.
. ( ) ( )
102
00
+×× = q
qqt
q
q ff BAext
x
BAextσ
σ
Stąd liczba wykonanych przekształceń jest równa q[m, n, q]. Identyczną liczbę przekształceń uzyskamy rozpoczynając przekształcenie zbioru uporządkowanych par stanów rozszerzenia stanowego iloczynu prostego automatów A i B pod wpływem litery σ1 zatem otrzymujemy wzór (2). C.B.D.O.
3.3. Złożoność połgrupy charakterystycznej iloczynu prostego automatów z klasy EXT DFASC2 dla każdego słowa z języka ( )++ ∪=Σ 10 σσ Twierdzenie 3. Niech ( ) ( ) ( )( )MSBAext BAextBAext
qqq ×× ∑=× ,, będzie rozszerzeniem stanowym związanym z izo-
morfizmami g0,g1,...,gq-1 iloczynu prostego ( )MSBA BABA ×× ∑=× , automatów ( )MSA BA ,,∑= i ( )MSB BB ,,∑= z DFASC2 takim, że:
card(AS) = m >2, card(BS) = n >2, 2)( =∑card ; q – stopień rozszerzenia; wtedy dla każdego słowa z
języka ( ) ++ ∪=∑ 10 σσ półgrupa charakterystyczna ( ) )( )∗× BAextI q ustalonego analogu roz-szerzenia ma własność:
) )((( ) [ ] qqnmBAextIcard q ×=× ∗ ,,2 (3)
Dowód.
Rozważmy język ( ) ++ ∪=∑ 10 σσ .
Niech +∑∈'0x słowa rozpoczynające się od litery 0σ
+∑∈'1x słowa rozpoczynające się do litery 1σ
( ) ( ) ,...2,1,...,,,;,...,,...,,..., 0101110100 '' ===++ pwlkxx pwlkpwlk σσσσσσσσ
Wtedy uwzględniając rys.2 otrzymujemy następujące uporządkowane pary stanów:
( ) =× SBAextq
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
01
01
02
01
01
01
00
01
01
02
02
02
01
02
00
02
01
01
02
01
01
01
00
01
01
00
02
00
01
00
00
00
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssssssssssssssss
27

POJAZDY SZYNOWE NR 1/2011
.
.
. ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−
−−−−−−
−−−
−−−−−
11
11
12
11
11
11
10
11
11
12
12
12
11
12
10
12
11
11
12
11
11
11
10
11
11
10
12
10
11
10
10
10
,,,,...,,,,
,,,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
qn
Bqm
Aqn
Bqm
AqBqm
AqBqm
A
qn
Bqm
Aqn
Bqm
AqBqm
AqBqm
Aqn
BqAqn
BqA
qBqAqBqAqn
BqAqn
BqAqBqAqBqA
ssssssssssssssssssss
ssssssssssss
( ) =×0σf
BAextq
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssssssssssssssss
.
.
. ( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssss
ssssssssssss
Po q – krotnej konkatenacji 0σ otrzymujemy: ( ) =×
qq fBAext
0σ
( ) ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )
−−−−−−−−
−−−−−−
−−
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
01
,,,,...,,,,,,
,,,...,,,,,...,,,,
,...,,,,,,,,,...,,,,
nB
mA
nB
mAB
mAB
mA
nB
mA
nB
mAB
mAB
mA
nBA
nBA
BABAn
BAn
BABABA
ssssssssssssssssssss
ssssssssssss
.
.
. ( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( )( ) ( ) ( ) ( ) ( ) ( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−−−
−−−−
−−−
−−−−−
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
11
,,,,...,,,,,,,,
,...,,,,,...,,,,,...,,
,,,,,,,...,,,,
qn
Bqm
Aqn
Bqm
AqBqm
AqBqm
Aqn
Bqm
Aqn
Bqm
A
qBqm
AqBqm
Aqn
BqAqn
BqAqBqA
qBqAqn
BqAqn
BqAqBqAqBqA
ssssssssssssssssssssss
ssssssssss
q – przekształceń. Po (q+1) – krotnej konkatenacji litery σ0 otrzymujemy
( ) ( )01
0σσ
ff BAextBAext qq
q ×× =+ .
Dla przekształcenia ( )0σf
BAextq × pod wpływem q – krotnego działania litery 0σ otrzymujemy ponow-
nie przekształcenia ( )0σf
BAextq × . W dalszych rozważaniach będziemy
analizować przekształcenia ( )0σf
BAextq × . Rozważania dla przekształceń ( ) ( )q
qq ff BAextBAext
000,...,
σσσ×× są
analogiczne. ( ) =×
kq fBAext
0σ
28

POJAZDY SZYNOWE NR 1/2011
( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )
−−−−−−
−−−−−−
−−
−−
qkn
Bqkm
Aqkn
Bqkm
AqkBqkm
AqkBqkm
A
qkn
Bqkm
Aqkn
Bqkm
AqkBqkm
AqkBqkm
A
qkn
BqkAqkn
BqkAqkBqkAqkBqkA
qkn
BqkAqkn
BqkAqBqkAqkBqkA
ssssssssssssssssssssssss
ssssssss
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
,,,,...,,,,
,,,,,...,,,,
,...,,,,,...,,,,
,,,,,...,,,,
.
.
. ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
−−
−−
−−
−−
−−−
−−−
−−
−−
−−
−−
−−−
−−−
−−
−−−
−
−−−−−−
−
−−
−−−−−
qkn
Bqkm
A
qkn
Bqkm
AqkBqkm
AqkBqkm
A
qkn
Bqkm
Aqkn
Bqkm
AqkBqkm
A
qkBqkm
Aqkn
BqkAqkn
BqkA
qkBqkAqkBqkAqkn
BqkA
qkn
BqkAqkBqkAqkBqkA
ssssssssssssssssssss
ssssssssssss
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
( ) =+
×1
0k
q fBAextσ
( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
+−
+−
+−
+−
++−
++−
+−
+−
+−
+−
++−
++−
+−
++−
+
+++++−
+
+−
+++++
qkn
Bqkm
A
qkn
Bqkm
AqkBqkm
AqkBqkm
A
qkn
Bqkm
Aqkn
Bqkm
AqkBqkm
A
qkBqkm
Aqkn
BqkAqkn
BqkA
qkBqkAqkBqkAqkn
BqkA
qkn
BqkAqkBqkAqkBqkA
ssssssssssssssssssss
ssssssssssss
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
mod11
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
.
.
. ( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )
( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( ) ( ) ( )( )
−−−−−−
−−−−−−
−−
−−
qkn
Bqkm
Aqkn
Bqkm
AqkBqkm
AqkBqkm
A
qkn
Bqkm
Aqkn
Bqkm
AqkBqkm
AqkBqkm
A
qkn
BqkAqkn
BqkAqkBqkAqkBqkA
qkn
BqkAqkn
BqkAqBqkAqkBqkA
ssssssssssssssss
ssssssssssssssss
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
mod1
,,,,...,,,,
,,,,,...,,,,,...,
,,,,...,,,
,,,,,...,,,,
( ) ( )
kq
qkq ff BAextBAext
00 σσ×× =+
q – przekształceń Dla lk
10σσ otrzymujemy następujące przekształcenia:
( ) =×lk
q fBAext
10 σσ ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
++
++++++
++++++
++++++
++++++
++++++
qlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
ssssssssssssssssssss
ssssssssssss
mod0
mod0
mod0
mod0
mod2
mod0
mod2
mod0
mod0
mod0
mod0
mod0
mod2
mod0
mod2
mod0
mod0
mod2
mod0
mod2
mod2
mod2
mod2
mod2
mod0
mod2
mod0
mod2
mod2
mod2
mod2
mod2
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
.
29

POJAZDY SZYNOWE NR 1/2011
.
.
. ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
+−+−
+−+−+−+−+−+−
+−+−+−+−+−+−
+−+−+−+−+−+−
+−+−+−+−+−+−
+−+−+−+−+−+−
qlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
ssssssssssssssssssss
ssssssssssss
mod10
mod10
mod10
mod10
mod12
mod10
mod12
mod10
mod10
mod10
mod10
mod10
mod12
mod10
mod12
mod10
mod10
mod12
mod10
mod12
mod12
mod12
mod12
mod12
mod10
mod12
mod10
mod12
mod12
mod12
mod12
mod12
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
( ) =+×
lkq fBAext
11
0 σσ ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
++++
++++++++++++
++++++++++++
++++++++++++
++++++++++++
++++++++++++
qlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
ssssssssssssssssssss
ssssssssssss
mod10
mod10
mod10
mod10
mod12
mod10
mod12
mod10
mod10
mod10
mod10
mod10
mod12
mod10
mod12
mod10
mod10
mod12
mod10
mod12
mod12
mod12
mod12
mod12
mod10
mod12
mod10
mod12
mod12
mod12
mod12
mod12
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
++
++++++
++++++
++++++
++++++
++++++
qlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
qlkBqlkAqlkBqlkAqlkBqlkA
ssssssssssssssssssss
ssssssssssss
mod0
mod0
mod0
mod0
mod2
mod0
mod2
mod0
mod0
mod0
mod0
mod0
mod2
mod0
mod2
mod0
mod0
mod2
mod0
mod2
mod2
mod2
mod2
mod2
mod0
mod2
mod0
mod2
mod2
mod2
mod2
mod2
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
.
.
. ( ) ( )
lkq
lqkq ff BAextBAext
1010 σσσσ×× =+
( ) ( )lk
qlk
q ff BAextBAext
11
01
10 σσσσ ++×× =
.
.
. ( ) ( ) ( ) ( ) ( )
[ ]2,
010101010
nmq
qlqkq
lkq
lqkq
qlkq
x
BAextBAextBAextBAextBAext fffff ××××× ==== ++++ σσσσσσσσ
q – przekształceń Dla wlk
010 σσσ otrzymujemy następujące przekształcenia:
( ) =×wlk
q fBAext
010 σσσ
30

POJAZDY SZYNOWE NR 1/2011
( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
++++
++++++++++++
++++++++++++
++++++++++++
++++++++++++
++++++++++++
qwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
ssssssssssssssssssss
ssssssssssss
mod1
mod1
mod1
mod1
mod3
mod1
mod3
mod1
mod1
mod1
mod1
mod1
mod3
mod1
mod3
mod1
mod1
mod3
mod1
mod3
mod3
mod3
mod3
mod3
mod1
mod3
mod1
mod3
mod3
mod3
mod3
mod3
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
.
.
.
. ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( )( ) ( )( )( ) ( )( )
++−++−
++−++−++−++−++−++−
++−++−++−++−++−++−
++−++−++−++−++−++−
++−++−++−++−++−++−
++−++−++−++−++−++−
qwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
ssssssss
ssssssssssss
ssssssssssss
mod11
mod11
mod11
mod11
mod13
mod11
mod13
mod11
mod11
mod11
mod11
mod11
mod13
mod11
mod13
mod11
mod11
mod13
mod11
mod13
mod13
mod13
mod13
mod13
mod11
mod13
mod11
mod13
mod13
mod13
mod13
mod13
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
Dla wlk01
10 σσσ + otrzymujemy następujące przekształcenia:
( ) =+×
wlkq fBAext
011
0 σσσ ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
++++++
++++++++++++++++++
++++++++++++++++++
++++++++++++++++++
++++++++++++++++++
++++++++++++++++++
qwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
ssssssssssssssssssss
ssssssssssss
mod11
mod11
mod11
mod11
mod13
mod11
mod13
mod11
mod11
mod11
mod11
mod11
mod13
mod11
mod13
mod11
mod11
mod13
mod11
mod13
mod13
mod13
mod13
mod13
mod11
mod13
mod11
mod13
mod13
mod13
mod13
mod13
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
.
.
. ( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( ) ( ) ( )( )( ) ( )( )
++++
++++++++++++
++++++++++++
++++++++++++
++++++++++++
++++++++++++
qwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
qwlkBqwlkAqwlkBqwlkAqwlkBqwlkA
ssssssssssssssssssss
ssssssssssss
mod1
mod1
mod1
mod1
mod3
mod1
mod3
mod1
mod1
mod1
mod1
mod1
mod3
mod1
mod3
mod1
mod1
mod3
mod1
mod3
mod3
mod3
mod3
mod3
mod1
mod3
mod1
mod3
mod3
mod3
mod3
mod3
,
,,,...,,,,
,,,,,...,,
,,,...,,,,
,...,,,,,,
,,,...,,,,
( ) ( )wlk
qwlqk
q ff BAextBAext
010010 σσσσσσ×× =+
.
.
. ( ) ( ) ( )
wlkq
wlqkq
wqlkq fff BAextBAextBAext
010010010 σσσσσσσσσ××× == ++
( ) ( ) ( )wlk
qwlk
qwlk
q fff BAextBAextBAext
01
10011
01
010 σσσσσσσσσ +++××× ==
31

POJAZDY SZYNOWE NR 1/2011
.
.
. ( ) ( ) ( ) ( ) ==== ××××
+++ wlkq
wqlkq
wlqkq
qwlkq ffff BAextBAextBAextBAext
010010010010 σσσσσσσσσσσσ
( ) ( ) ( ) ( ) ( )[ ]
2,,
0010010010010
qnmq
qwqlqkq
qwqlkq
wqlqkq
qwlqkq
x
BAextBAextBAextBAextBAext fffff ××××× ==== +++++++++ σσσσσσσσσσσσ
q – przekształceń . . .
Dla pwlk1010 ,...,σσσσ otrzymujemy następujące przekształcenia:.
( ) =×pwlk
q fBAext
1010 ,...,σσσσ
( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )
+++−
+++−
+++−
+++−
++++++−
++++++−
+++−
+++−
+++−
+++−
++++++−
++++++−
+++−
++++++−
+++
++++++++++++
+++−
++++++−
+++
++++++++++++
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkAqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkBqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
ssssssssssssssssssssssssssssssss
mod,...,2
mod,...,2
mod,...,2
mod,...,2
mod,...,0
mod,...,2
mod,...,0
mod,...,2
mod,...,2
mod,...,2
mod,...,2
mod,...,2
mod,...,0
mod,...,2
mod,...,0
mod,...,2
mod,...,2
mod,...,0
mod,...,2
mod,...,0
mod,...,0
mod,...,0
mod,...,0
mod,...,0
mod,...,2
mod,...,0
mod,...,2
mod,...,0
mod,...,0
mod,...,0
mod,...,0
mod,...,0
,,,
,...,,,,
,,,
,...,,,,
,...,,,,
,...,,,,
,,,,
,...,,,,
.
.
. ( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )
+++−−
+++−−
+++−−
+++−−
+++−+++−−
+++−+++−−
+++−−
+++−−
+++−−
+++−−
+++−+++−−
+++−+++−−
+++−−
+++−+++−−
+++−
+++−+++−+++−+++−
+++−−
+++−+++−−
+++−
+++−+++−+++−+++−
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkAqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkBqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
ssssssssssssssssssssssssssssssss
mod,...,12
mod,...,12
mod,...,12
mod,...,12
mod,...,10
mod,...,12
mod,...,10
mod,...,12
mod,...,12
mod,...,12
mod,...,12
mod,...,12
mod,...,10
mod,...,12
mod,...,10
mod,...,12
mod,...,12
mod,...,10
mod,...,12
mod,...,10
mod,...,10
mod,...,10
mod,...,10
mod,...,10
mod,...,12
mod,...,10
mod,...,12
mod,...,10
mod,...,10
mod,...,10
mod,...,10
mod,...,10
,,,
,...,,,,
,,,
,...,,,,
,...,,,,
,...,,,,
,,,,
,...,,,,
Dla słowa 01010 ,..., σσσσσ pwlk otrzymujemy przekształcenie, które już poprzednio zostało wygenero-wane.
( ) =+×
pwlkq fBAext
1011
0 ,...,σσσσ
( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )
++++−
++++−
++++−
++++−
++++++++−
++++++++−
++++−
++++−
++++−
++++−
++++++++−
++++++++−
++++−
++++++++−
++++
++++++++++++++++
++++−
++++++++−
++++
++++++++++++++++
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkAqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkBqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
ssssssssssssssssssssssssssssssss
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
mod,...,11
,,,
,...,,,,
,,,
,...,,,,
,...,,,,
,...,,,,
,,,,,...,,,,
32

POJAZDY SZYNOWE NR 1/2011
.
.
.
( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )( ) ( )( ) ( ) ( )( )
+++−
+++−
+++−
+++−
++++++−
++++++−
+++−
+++−
+++−
+++−
++++++−
++++++−
+++−
++++++−
+++
++++++++++++
+++−
++++++−
+++
++++++++++++
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkAqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
Bqpwlkm
Aqpwlkn
Bqpwlkm
A
qpwlkBqpwlkm
AqpwlkBqpwlkm
A
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
qpwlkn
BqpwlkAqpwlkn
BqpwlkA
qpwlkBqpwlkAqpwlkBqpwlkA
ssssssssssssssssssssssssssssssss
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
mod,...,1
,,,
,...,,,,
,,,
,...,,,,
,...,,,,,...,,,,
,,,,
,...,,,,
pwlk
qpwlqk
q ff BAextBAext
10101010 ...)(
...)(
σσσσσσσσ×× =+
pwlkq
pwlkq ff BAextBAext
1011
0101
10 ...)(
...)(
σσσσσσσσ ++×× =
.
.
. pwlk
qpqwlk
qpwlqk
qpwqlk
q ffff BAextBAextBAextBAext
1010101010101010 ...)(
...)(
...)(
...)(
σσσσσσσσσσσσσσσσ×××× === +++
pwlkq
pwlkq
pwlkq
pwlkq ffff BAextBAextBAextBAext
1010101
101011
011
010 ...)(
...)(
...)(
...)(
σσσσσσσσσσσσσσσσ×××× === +++
. . .
qpwlkq
pqwlkq
pwqlkq
pwlqkq ffff BAextBAextBAextBAext
++++×××× ====
1010101010101010 ...)(
...)(
...)(
...)( ...
σσσσσσσσσσσσσσσσ
. . .
110101
101010
110101
10 ...
)(...
)(...
)(...
)( ... ++++×××× ==== pwlk
qpwlk
qpwlk
qpwlk
q ffff BAextBAextBAextBAextσσσσσσσσσσσσσσσσ
.
.
. ===== ++++
××× ......101010101010 ...
)(...
)(...
)(qpqwlk
qpwqlk
qpwlqk
q fff BAextBAextBAextσσσσσσσσσσσσ
===== ++++++××× ......
101010101010 ...)(
...)(
...)(
qpqwlqkq
pwqlqkq
qpwlkq fff BAextBAextBAext
σσσσσσσσσσσσ
===== ++++++××× ......
101010101010 ...)(
...)(
...)(
qpwqlkq
pqwqlkq
qpwlqkq fff BAextBAextBAext
σσσσσσσσσσσσ
====== ++++++++
××× .........101010101010 ...
)(
...
)(
...)(
qpwqlqkq
pqwqlqkq
qpqwlkq fff BAextBAextBAext
σσσσσσσσσσσσ
===== ++++++++++
×××qpqwqlqk
qqpqwlqk
qqpqwqlk
q fff BAextBAextBAext
101010101010 ...
)(
...
)(
...
)( ......σσσσσσσσσσσσ
[ ]2
,,
0
)(qnm
q
x
BAext f×
33

POJAZDY SZYNOWE NR 1/2011
Jak wynika z powyższych rozważań dla każdego słowa ( ) += pwlkx 10100
,...,' σσσσ możemy wygenero-wać tylko następujące przekształcenia: [m, n, q]- przekształceń
[ ]
[ ]
[ ]
×××
×××
×××
2,,
00100
2,,
020
120
20
2,,
00100
)()()(
)()()(
)()()(
...
.
.
.
...
...
qnmq
q
qnmqqq
qnmqqq
x
BAextBAextBAext
x
BAextBAextBAext
x
BAextBAextBAext
fff
fff
fff
σσσσ
σσσσ
σσσσ
q - przekształceń
Liczba przekształceń wynosi [ ] qqnm ×,, .
Analogicznie dla słowa, ( ) += pwlkx 01011
,...,' σσσσ możemy wygenerować tylko następujące prze-kształcenia [m, n, q]- przekształceń
[ ]
[ ]
[ ]
×××
×××
×××
2,,
11011
2,,
121
021
21
2,,
11
011
)()()(
)()()(
)()()(
...
.
.
.
...
...
qnmq
q
qnmqqq
qnmqqq
x
BAextBAextBAext
x
BAextBAextBAext
x
BAextBAextBAext
fff
fff
fff
σσσσ
σσσσ
σσσσ
q - przekształceń
Liczba tych przekształceń wynosi również [ ] qqnm ×,, . A zatem otrzymujemy 2 [ ] qqnm ×,, różnych
przekształceń. Wynika stąd, że dla każdego słowa ) )((( ) [ ] qqnmBAextIcard q ×=× ∗ ,,2 . Zatem otrzymujemy wzór 3. C.B.D.O.
4. Izomorfizm półgrupy charakterystycznej sumy prostej i iloczynu prostego automatów asyn-chronicznych silnie spójnych i ustalonych analogów ich rozszerzeń.
4.1. Izomorfizm półgrupy charakterystycznej sumy prostej i iloczynu prostego automatów asyn-chronicznych silnie spójnych z klasy DFASC2 [15]
Twierdzenie 4. Niech ( )MSA AA ,,Σ= i ( )MSB BB ,,Σ= będą automatami z klasyDFASC2 takimi, że
( )Scard A > 2 i ( )Scard B > 2 oraz { }10 ,σσ=Σ ; wtedy półgrupa charakterystyczna ( )BAI ∪ sumy prostej automatów A i B jest izomorficzna z półgrupą charakterystyczną ( )BAI × iloczynu prostego automatów A i B; gdzie: card (AS) = m > 2; card (BS) = n >2, m, n liczby naturalne m > n; card Σ= 2; x0 = σ0 σ1; x1 = σ1 σ0; [m, n] – najmniejsza wspólna wielokrotność liczb m, n, patrz [13].
34

POJAZDY SZYNOWE NR 1/2011
Dowód. Wiadomo z [8] jak również z rozważań wprowadzających niniejszej pracy że: na zbiorze ∗∑ zdefiniujemy relację:
x R y wtedy i tylko wtedy, gdy Ss∈∀ M ( s , x ) = M ( s , y ). Relacja R jest relacją równoważności (relacja Myhilla). Klasę równoważności zawierającą element x ∈ ∗∑ oznaczać będziemy x , a zbiór wszystkich klas równoważności oznaczać będziemy I . Zbiór I łącznie z operacją ( o ) , gdzie x o y = xy tworzy półgrupę (odpowiednio monoid), zwaną półgrupa charakterystyczną (odpowiednio monoidem charakterystycznym). Półgrupę charakterystyczną automatu A oznaczać będziemy )(AI . W twierdzeniach 1 i 2 [14] wykazano równoliczność rozważanych półgrup charakterystycznych dla sumy prostej i iloczynu prostego automatów
Teraz dowodzimy własność izomorfizmów: niech ( ) ( ) ( )BAIBAI ×→∪:ϕ niech ( ) xx =ϕ (def.1) Z rozważań wprowadzających [8] wynika że ( ) xfx =ϕ (def.2)
( )xsMf xSs ,=∀ ∈ , gdzie x jest dowolnym reprezentantem klasy x (def.3)
Aby wykazać, że ϕ jest izomorfizmem półgrupy charakterystycznej, należy sprawdzić: (i) ( ) ( ) ( ) ( )2121212121 xxxxxxxxxx ϕϕϕϕ ooo ==== (zachowana operacja)
(ii) ( ) ( ) ( ) ( ) ( ) ( ) ⇒=⇔=⇒= ∪∪××2121
2.21 xBA
xBA
xBA
xBA ffffdefzxx ϕϕ
( ) ( ) 212121 ,,3. xxxxxsMxsMdefz Ss BA =⇒≡⇔=∀ ∪∈
a zatem ϕ jest „ 11÷ ” (iii) ( ) xx =ϕ jest oczywiście „na”.
Na podstawie twierdzenia 1 i 2 [14] wykazano równoliczność ( taki sam zbiór przekształceń) odpowiednich półgrup charakterystycznych dla sumy prostej i iloczynu prostego automatów DFSC2. C.B.D.O.
4.2. Izomorfizm półgrupy charakterystycznej sumy prostej i iloczynu prostego automatów asyn-chronicznych silnie spójnych z klasy EXT DFASC2 [15]
Twierdzenie 5. Niech ( ) ( ) ( )( )MSBAext BAextBAext
qqq ∪∪ Σ=∪ ,, i ( ) ( ) ( )( )MSBAext BAextBAext
qqq ×× Σ=× ,, będą rozsze-
rzeniami związanymi z izomorfizmami g0, g1 ... gq-1 sumy prostej ( ) ( )( )MSBA BABA ∪∪ Σ=∪ ,, i iloczynu prostego ( ) ( )( )MSBA BABA ×× Σ=× ,, automatów ( )MSA AA ,,Σ= i ( )MSB BB ,,Σ= z klasy DFSC2 takimi, że ( ) 2>Scard A i ( ) 2>Scard B oraz { }10 ,σσ=Σ ; wtedy półgrupa charak-
terystyczna ( )( )( )∗∪ BAextI q ustalonego analogu rozszerzenia sumy prostej automatów A i B jest
izomorficzna z półgrupą charakterystyczną ( )( )( )∗× BAextI q ustalonego analogu rozszerzenia iloczy-nu prostego automatów A i B. Dowód. W twierdzeniu 1 [16] i twierdzeniu 2 [17] i wykazano równoliczność odpowiednich półgrup charakte-rystycznych ustalonych analogów rozszerzenia dla sumy prostej i iloczynu prostego automatów: niech ( )( ) ( )( )∗∗ ×→∪ BAextIBAextI qq:ϕ
niech ( ) xx =ϕ (def.1)
Z rozważań wprowadzających [3] wynika że ( ) ( )x
Aext fx q=ϕ (def.2)
( )( ) ( )xsMf xAext
Ssq
qext ,∗∗
∈=∀
∗
∗ (def.3)
35

POJAZDY SZYNOWE NR 1/2011
gdzie:
x jest dowolnym reprezentantem z klasy x , a ( )( ) ∗∗
xAext fq jest przekształceniem ustalonego analogu
rozszerzenia stanowego automatu A związanego z izomorfizmami stanowymi 110 ,...,, −qggg . Aby wykazać, że ϕ jest izomorfizmem półgrup charakterystycznych należy udowodnić, że: (i) ( ) ( ) ( ) ( )2121212121 xxxxxxxxxx ϕϕϕϕ ooo ==== (zachowana operacja)
(ii) ( ) ( ) ( ) ( ) ( ) ( ) ⇒=⇔=⇒= ∪∪××2121
2.21 xBAext
xBAext
xBAext
xBAext ffffdefzxx qqqqϕϕ
( )( ) ( )( )
( ) ( ) ( )2121
21 ,,3.21
xxxx
xsMxsMffdefzSsx
BAextx
BAextBAqext
=⇒≡⇔
⇔=∀⇒= ∗∗∈
∗∪∗∪∗∪
∗∗
a zatem ϕ jest „ 11÷ ” (iii) ( ) xx =ϕ jest oczywiście „na”.
Na podstawie twierdzenia 1 [16] i twierdzenia 2 [17] wykazano równoliczność ( taki sam zbiór przekształceń) dla odpowiednich półgrup charakterystycznych iloczynu prostego i sumy prostej auto-matów z klasy EXT DFASC2.
C.B.D.O. 4.3. Izomorfizm półgrupy charakterystycznej sumy prostej i iloczynu prostego automatów asyn-
chronicznych silnie spójnych z klasy EXT DFASC2 dla każdego słowa z języka ( )++ ∪=Σ 10 σσ
Twierdzenie 6. Niech ( ) ( ) ( )( )MSBAext BAextBAext
qqq ∪∪ Σ=∪ ,, i ( ) ( ) ( )( )MSBAext BAextBAext
qqq ×× Σ=× ,, będą roz-
szerzeniami związanymi z izomorfizmami g0, g1 ... gq-1 sumy prostej ( ) ( )( )MSBA BABA ∪∪ Σ=∪ ,, i iloczynu prostego ( ) ( )( )MSBA BABA ×× Σ=× ,, automatów ( )MSA AA ,,Σ= i ( )MSB BB ,,Σ= z
klasy DFSC2 takimi, że ( ) 2>Scard A i ( ) 2>Scard B oraz ( ) ++ ∪=∑ 10 σσ ; wtedy półgrupa
charakterystyczna ( )( )( )∗∪ BAextI q ustalonego analogu rozszerzenia sumy prostej automatów A i
B jest izomorficzna z półgrupą charakterystyczną ( )( )( )∗× BAextI q ustalonego analogu rozszerzenia iloczynu prostego automatów A i B. Dowód. W pracy [17] twierdzenie 3 przedstawiono złożoność półgrupy charakterystycznej sumy prostej auto-matów asynchronicznych silnie spójnych i ustalonych analogów ich rozszerzeń dla każdego słowa z
języka ( ) ++ ∪=∑ 10 σσ . W pracy twierdzenie 3.3. przedstawiono złożoność półgrupy charaktery-stycznej iloczynu prostego automatów asynchronicznych silnie spójnych i ustalonych analogów ich
rozszerzeń dla każdego słowa z języka ( ) ++ ∪=∑ 10 σσ . Dowód na izomorfizm tych półgrup jest analogiczny jak dowód z twierdzenia 4.2.
5. Wnioski Definicje relacji równoważności Myhilla na zbiorze stanów automatu oraz półgrupy
charakterystycznej automatu pozwoliły wydobyć zeń możliwości obliczeniowe . Tak więc na automat spojrzeć można zarówno pod kątem widzenia systemu algebraicznego o charakterze strukturalno językowym, jak i modelu obliczeń. Wziąwszy pod uwagę iż półgrupa charakterystyczna określa zdolność do przetwarzania in-formacji, zaś sumę prostą i iloczyn prosty można uważać za realizację – odpowiednio sekwencyjnych i równoległych obliczeń uzyskane rezultaty oznaczają iż owa zdolność nie zależy od realizacji se-kwencyjnej lub równoległej (taka sama liczba klas abstrakcji odpowiednich półgrup charakterystycz-nych)
Dalsze prace powinny być kontynuowane przy wyznaczaniu złożoności półgrup charaktery-stycznych automatów asynchronicznych spójnych. Szczegółowe rozpatrywanie klas automatów asyn-chronicznych silnie spójnych i spójnych wynika z powszechnego stosowania tych klas automatów w realizacjach technicznych cyfrowych układów sterujących. Wykorzystując teorię automatów możemy
36

POJAZDY SZYNOWE NR 1/2011
oszacować lub obliczyć złożoność półgrup charakterystycznych automatów. Ma to istotny wpływ na oszacowanie złożoności programów i czasu wizualizacje stanów automatów. Wykorzystując narzędzia programistyczne PsoC Expres mikrosystemu cyfrowego możemy przedstawić model sterowania pojazdu szynowego w postaci grafu automatu (maszyny stanowej) i realizować program w oparciu o sporządzony wcześniej graf automatu. Umożliwia to analizę graficzną zjawisk podczas symulacji sterowania pojazdem szynowym. Mikrosystemy cyfrowe stosowane są obecnie do sterowania hamulców (tablic pneumatycznych) w lokomotywach i jednostkach elektrycznych.
Literatura [1] Arbib M.A.: Algebraic theory of machines languages and semigroups, Acadimic Press, New York and Lon-
don 1968. [2] Aho A.V., Hopcrofy I.E., Ullman I.D.:Projektowanie i analiza algorytmów komputerowych,PWN,Warszawa
1983. [3] Barnes B.: On the groups of automorhism of strongly connected automata, Math.Syst. Theory 4, 4 (1970). [4] Beatty I. C.;On some properties of semigroup of a machine which are preserved under state minimization,
Information and Control 11, 3 (1970). [5] Beyga L.: On periodic sums of automata associated with isomorphism, Foundations of Control Enginiering
1,3 (1976). [6] Bocian S.: Złożoność półgrupy charakterystycznej automatów asynchronicznych i ich rozszerzeń, Prace
Instytutu Podstaw Informatyki Polskiej Akademii Nauk nr 552, Warszawa, 1984. [7] Bocian S., Mikołajczak.: Computational aspect of assigning characteristic semigroup asychronous auto-
mata and their extensions, Colloqia Mathematica Societatis Janos Bolyai nr 44,Amsterdam, New York, Bu-dapest, 1985.
[8] Bocian S.: Rozprawa doktorska , Politechnika Poznańska, 1986. [9] Bocian S.: The complexity of semigroup characterization of asynchronous strongly connection automa-
tion and their extensions, Computational topology and geometry and computation in teaching mathematic, Universal de Sevilla,1987.
[10] Bocian S.: A new method of calculating the smallest common multiple, Computational topology and geome-try and computation in teaching mathematic, Universal de Sevilla,1987.
[11] Bocian S.: Nowy sposób wyznaczania najmniejszej wspólnej wielokrotności liczb naturalnych, jako model matematyczny automatu w technice komputerowej, Pojazdy szynowe 1/2002. [12] Bocian S.: Złożoność pólgrupy charakterystycznej automatów asynchronicznych silnie spójnych ustalonych
analogów ich rozszerzeń związanych z izomorfizmami, TRANSCOMP - XIII INTERNATIONAL CONFE-RENCE COMPUTER SYSTEMS AIDED SCIENCES, INDUSTRY AND TRANSPORT(Logistyka 6/2009), Zakopane 2009.
[13] Bocian S.: Nowy sposób wyznaczania najmniejszej wspólnej wielokrotności liczb naturalnych, OR – 9834 (praca nie publikowana).
[14] Bocian S: Złożoność półgrupy charakterystycznej sumy prostej i iloczynu prostego automatów asynchro-nicznych silnie spójnych, TRANSCOMP - XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCES, INDUSTRY AND TRANSPORT(Logistyka 6/2010), Zakopane 2010.
[15] Bocian S: Izomorfizm półgrupy charakterystycznej sumy prostej i iloczynu prostego automatów asynchro-nicznych silnie spójnych i ustalonych analogów ich rozszerzeń TRANSCOMP - XIV INTERNATIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCES, INDUSTRY AND TRANSPORT(Logistyka 6/2010), Zakopane 2010.
[16] Bocian S: Złożoność półgrupy charakterystycznej iloczynu prostego automatów asynchronicznych silnie spójnych ustalonych analogów rozszerzeń związanych z izomorfizmami, TRANSCOMP - XIV INTERNA-TIONAL CONFERENCE COMPUTER SYSTEMS AIDED SCIENCES, INDUSTRY AND TRANS-PORT(Logistyka6/2010), Zakopane 2010.
[17] Bocian S.: Złożoność półgrupy charakterystycznej sumy prostej automatów asynchronicznych silnie spój-
nych i ustalonych analogów ich rozszerzeń dla każdego słowa z języka ( ) ++ ∪=∑ 10 σσ , Pojazdy Szy-nowe Nr 4/2010.
[18] Fleck A.C.: Isomorphism groups of automata, J. Assoc. Comp. Mach. 9, 4 (1962). [19] Gecseg F.,Peak J.: Algebraic theory of automata, Akademia Kiado, Budapest, 1972. [20] Grzymała-Busse J.W.: On the periodic reprezentation and reducibility of periodic automata, J.Assoc.
Comput. Mach. 16, 3(1969). [21] Grzymała-Busse J.W.: On the endomorphisms of finite automata, Mach. Syst. Theory 4, 4 (1970).
37

POJAZDY SZYNOWE NR 1/2011
[22] Grzymała-Busse J.W.: Podautomaty automatów skończonych związane ze zmianączsu pracy, Politechnika Poznańska, Rozprawy nr.46, Poznań, 1972. [23] Kerntopf P.: Podstawowe pojęcia matematyczne w teorii automatów, PWN, Warszawa 1967. [24] Mikołajczak B., Miądowicz Z.: On the automorphisms group of strongly related automata and structural properties of finite automata and extensions, Foundations of Control Engineering,1,2 (1976). [25] Mikołajczak B.: On the structure of cyclic automata and their generalized periodic sums, Technical
Report, Computer Science Department, Cornell University, 1977. [26] Mikołajczak B.: On the structure of cyclic automata and their generalized periodic sums, Foundations of
Control Engineering, 3,1 (1978). [27] Mikołajczak B.: Uogólnione przekształcenia okresowe automatów skończonych, Politechnika Poznańska,
Rozprawy nr.98, Poznań 1979. [28] Mikołajczak B.: Algebraiczna i strukturalna teoria automatów, PWN Warszawa - Łódź, 1985. [29] Mikołajczak B.: Przekształcenia i złożoność obliczeniowa problemów w teorii automatów, PWN Warszawa
– Poznań, 1988. [30] Oehmke R.H.: The semigroup of a strongly connected automaton, Math. Systems Theory, 15 (178).
38

POJAZDY SZYNOWE NR 1/2011
dr inż. Tomasz Kądziołka Instytut Techniczny, Państwowej Wyższej Szkoły Zawodowej w Nowym Sączu dr inż. Sławomir Kowalski mgr inż. Dariusz Smolarski Politechnika Krakowska
Analiza porównawcza wrażliwości dźwigniowych hamulców kolejowych
W artykule przedstawiono analizę porównawczą badania wrażliwości dźwigniowych hamulców kolejowych. Porównania dokonano badając wrażliwość szczękowych hamul-ców kolejowych z hamulcami tarczowymi, które stosowane są w nowoczesnych szybko-bieżnych wagonach kolejowych.
Oznaczenia
Xi, Yi – współrzędne i – tej par kinematycznej, SAE – człon o zmiennym wymiarze (np. siłownik
pneumatyczny), Fci – funkcja celu i – tego członu, µ – wskaźnik wrażliwości mechanizmu.
1. Wstęp
W obecnym czasie, gdzie prędkość pociągów cią-gle wzrasta zachodzi potrzeba zastosowania odpo-wiednich układów hamulcowych, które umożliwią zatrzymanie pociągu w pożądanym czasie. Hamulce szczękowo – bębnowe z racji swej skomplikowanej budowy nie spełniają kryteriów dostosowania do zwiększającej się prędkości pociągów. Dlatego chcąc spełnić wymogi bezpieczeństwa we współczesnych pociągach zastosowano hamulec tarczowy, który przez zastosowanie mniejszej ilości dźwigni mógł spełnić zadane wielkości.
W pracy został porównany klasyczny hamulec szczękowy z hamulcem tarczowym. Została zbadana wrażliwość kinematyczna obu rozwiązań. Poprzez analizę badań zostały opracowane wnioski, które dały jasny obraz dotyczący bezpieczeństwa podróżujących pociągami.
2. Przegląd rozwiązań tarczowych hamulców wa-gonowych
W pojazdach kolejowych stosowane są dwa rodza-je hamulców tarczowych:
- z tarczami umieszczonymi na osiach zestawów kołowych (rys 1, rys 2).- rozwiązanie to jest eksplo-atowane najczęściej w wózkach tocznych i umożliwia zastosowanie do trzech zespołów hamulcowych na jednej osi,
- z tarczami (pierścieniami ciernymi) umiesz-czonymi na kołach pojazdu (rys 3, rys 4)- rozwiąza-nie to najczęściej stosowane jest w pojazdach trakcyj-nych, gdzie nie ma miejsca na zastosowanie wcześniej
opisanego typu z powodu lokalizacji między kołami zespołów napędowych. Warunkiem stosowania pier-ścieni ciernych na kołach jest zastosowanie kół mono-blokowych. Pierścienie cierne w omawianym typie montowane są z obu stron tarcz kół jezdnych [5].
Rys 1. Trzy zespoły hamul-ców tarczowych na osi (RABe 514) [5]
Rys 3. Zespól hamulca z pier-ścieniami cier-nymi na kole EN81 [5]
Rys 2. Dwa zes-poły hamulców tarczowych na osi (wagon pasa-żerski) [5]
39

POJAZDY SZYNOWE NR 1/2011
Rys 4. Pierścień cierny zewnę-trzny na kole – Bombardier TRAXX [5]
Tarcze hamulcowe wykonane są z żeliwa lub staliwa [5]. Podczas hamowania na styku trących o siebie elementów ciernych powstaje wysoka temperatura (zmiana energii kinetycznej na cieplną) dochodząca nawet do 250 0C. W celu zapewnienia możliwe naj-lepszego chłodzenia, tarcze posiadają specjalne układ otworów / żeber pełniących rolę radiatorów - zwięk-szenie powierzchni oddającej ciepło (rys 5). Okładzi-ny cierne montowane w obsadach szczęk wykonywa-ne są z tworzyw organicznych lub niekiedy ze spie-ków i również w nich występują specjalne nacięcia (rowki) poprawiające chłodzenie. Tarcze (pierścienie cierne) montowane na tarczach kół jezdnych mają mniej skuteczne chłodzenie, gdyż powstające ciepło jest oddawane częściowo na koło jezdne, a częściowo przez wewnętrzne użebrowanie pierścienia ciernego stykającego się z tarczą koła. Stopień rozgrzewania się elementów trących o siebie jest zależny od siły doci-sku oraz prędkości jazdy.
Rys. 5. Użebro-wanie tarczy ha-mulcowej dla celów chłodze-nia [5]
3. Analiza kinematyczna kolejowych hamulców tarczowych
W celu dokonania analizy kinematycznej tarczo-wych hamulców kolejowych, został sporządzony ich schemat kinematyczny (rys. 6) i strukturalny (rys. 7).
Rys. 6. Schemat kinematyczny tarczowego hamulca kole-jowego
Rys. 7. Schemat strukturalny tar-czowego hamul-ca kolejowego
3.1. Ruchliwość mechanizmu
Ruchliwość mechanizmu [4] wyznaczono zgodnie ze wzorem:
4523' ppnW r −−= (1)
gdzie: nr – ilość członów ruchomych, p5 – ilość par kinematycznych klasy piątej (jeden sto-pień ruchliwości), p4 – ilość par kinematycznych klasy czwartej (dwa stopnie ruchliwości). W badanym mechanizmie: nr = 11, p5 = 15, p4 = 0. Stąd ruchliwość mechanizmu W’ = 3. Mechanizm posiada więc trzy stopnie swobody.
40

POJAZDY SZYNOWE NR 1/2011
Ponieważ układ mechaniczny hamulca tarczowego jest tak skonstruowany, że ma możliwość samoczyn-nego dopasowania się do tarczy hamulcowej, ruchli-wość hamulca należy obliczyć zakładając że szczęka stykająca się z tarczą hamulcową tworzy parę kinema-tyczną. Wówczas: nr = 11, p5 = 16, p4 = 0. Stąd ruchliwość mechanizmu W’ = 1. Mechanizm posiada więc jeden stopień ruchliwości.
3.2. Analiza kinematyczna tarczowego hamulca kolejowego
Badany mechanizm klasy III składa się z zespołu kinematycznego klasy III szeregu 3. Poniżej przed-stawiono sposób wyznaczenia położenia członów i współrzędnych par kinematycznych. Obliczeń doko-nano przyjmując założenie, że podczas wysuwu si-łownika para kinematyczna A pozostaje nieruchoma tym samym tylko jedna szczęka zaczyna zbliżać się do tarczy hamulcowej (pierwsza faza ruchu). Po zetknię-ciu szczęki 10 z tarczą hamulcową para kinematyczna E (rys. 7) pozostaje nieruchoma a ruch przejmuje dźwignia 4 napędzająca szczękę 6 (druga faza ruchu).
( )( )
⋅+=⋅+=
31
31
sincos
αα
AEAE
AEAE
SYYSXX
, (2)
gdzie: XA1, YA1 – współrzędne pary kinematycznej A pod-czas pierwszej fazy ruchu,
( ) ( )( ) ( )
⇒=−⋅+⋅+
=−⋅+⋅+109
0109
0109 ,0sinsin
0coscosαα
αααα
YllYXllX
MOEME
MOEME
(3)
( )( )
+⋅+=+⋅+=
EEFEF
EEFEF
lYYlXX
99
99
sincos
κακα
, (4)
( ) ( )( ) ( )
⇒=−⋅++⋅+
=−⋅++⋅+87
788
788 ,0sinsin
0coscosαα
ακαακα
HGHFFGF
HGHFFGF
YllYXllX ,
(5)
( )( )
+⋅+=+⋅+=
FFGFG
FFGFG
lYYlXX
88
88
sincos
κακα
, (6)
( )( )
⋅+=⋅+=
12
12
sincos
αα
AEEA
AEEA
SYYSXX
, (7)
gdzie: XA2, YA2 – współrzędne pary kinematycznej A pod-czas drugiej fazy ruchu,
( ) ( )( ) ( )
⇒=−⋅+⋅+
=−⋅+⋅+54
5422
5422 ,0sinsin
0coscosαα
αααα
LJLJAA
LJLJAA
YllYXllX ,(8)
( )( )
−⋅+=−⋅+=
AAIAI
AAIAI
lYYlXX
442
442
sincos
κακα
, (9)
( )( )
⋅+=⋅+=
42
42
sincos
αα
AJAJ
AJAJ
lYYlXX
. (10)
W celu określenia drogi jaką musi pokonać szczęka by mogła zetknąć się z tarczą hamulcową wyznaczono tak zwaną funkcję celu (11):
( ) ( ) 022 →−+−−= MJMJc YYXXbF (11)
gdzie: b – grubość tarczy hamulcowej.
Po podstawieniu wymiarów członów i określeniu współrzędnych par kinematycznych przyostojowych i przy założeniu, że kąt α1 = α3 + 1800
(rys. 7) sporzą-dzono wykres funkcji celu w postaci:
Rys. 8. Wykres funkcji celu
3.3. Wrażliwość kinematyczna
Ze względu na luz, jaki występuje między sworz-niem a panewką, sworzeń może zajmować różne po-łożenia w otworze [3]. Odległość między osiami sworzni więc zwiększa się lub zmniejsza. Wyznaczo-no funkcję celu odpowiadające granicznym położe-niom sworznia w panewce. Tworzą one wstęgę funk-cji celu, wewnątrz której przebiega funkcja celu od-powiadająca rzeczywistemu położeniu sworznia. Na rys. 9 przedstawiono wstęgę funkcji celu, wewnątrz której linią kreskową zaznaczono funkcję celu odpo-wiadającą nominalnym wymiarom mechanizmu.
41

POJAZDY SZYNOWE NR 1/2011
Rys. 9. Wstęga funkcji celu dla pasowania H8/e8
Wyznaczono wskaźnik wrażliwości mechanizmu [1,3] zgodnie z wzorem
AESL
∆−=1µ (12)
gdzie: µ - wskaźnik wrażliwości mechanizmu, L – odległość między punktami przecięcia osi odcię-tych przez graniczne funkcje celu wstęgi, ∆SAE – zakres ruchu członu napędowego do chwili zetknięcia się klocków z tarczą hamulcową (funkcja celu przecina oś odciętych).
Dla rozpatrywanego rodzaju pasowań H8/e8 otrzymano L = 0,1 mm, ∆SAE = 7 mm. Stąd wrażli-wość mechanizmu µ = 0,986 (µ = 98,6 %).
4. Analiza wrażliwości szczękowo – kołowego ha-mulca kolejowego
Badanie wrażliwości szczękowo – kołowego ha-mulca kolejowego zostały opisane w [3]. Dlatego w niniejszym artykule zostanie zaprezentowany tylko szkic obliczeń.
Przeprowadzając analizę kinematyczną zauważo-no, że mechanizm hamulca składa się czterech analo-gicznych zespołów (rys. 10) dlatego badania przepro-wadzono dla jednego (rys. 11).
Rys. 10. Schemat kinematyczny mechanizmu uruchamiania ha-mulców kolejowych
Rys. 11. Schemat kinematyczny mechanizmu hamulca kolejowego
Po wyznaczeniu współrzędnych par kinematycz-nych i określeniu położenia członów, przyjmując pa-sowanie H8/e8, postępując w sposób analogiczny jak w rozdziale 3.3 otrzymano wstęgę funkcji celu (rys. 12).
Rys. 12. Wstęga funkcji celu dla pasowania H8/e8
Analizując rys. 12 i znając zakres ruchu członu na-pędowego (w badanym przypadku ∆α1 = 0,032 rad, L = 0,0021 rad), określono wrażliwość hamulców kole-jowych µ = 0,934 (µ = 93,4 %).
5. Podsumowanie i wnioski końcowe
Porównując wyniki otrzymane w rozdziale 3.3 z wynikami z rozdziału 4, stwierdzić można, że wrażli-wość kinematyczna tarczowego hamulca wagonowego wynosi 98,6 %, natomiast wrażliwość hamulca szczę-kowo – kołowego równa się 93,4 % [3].
Analiza ta jasno stwierdza przydatność w/w ha-mulców. Przez zmniejszenie ilości dźwigni i łączą-cych je par kinematycznych (sworzeń – panewka) zwiększono wrażliwość kinematyczną o 5,2 % tym samym została zwiększona sprawność kinematyczna hamulca. Niestety pociągło to za sobą zwiększenie ilości siłowników pneumatycznych co spowodowało zmniejszenie niezawodności układu.
L i t e r a t u r a [1] K ą d z i o ł k a T., Wpływ struktury i dokładności wy-
konania członów na wrażliwość wag uchylnych, roz-prawa doktorska, Akademia Techniczno - Humani-styczna, Bielsko – Biała 2006.
[2] M ł y n a r s k i T., Uogólniona metoda analityczna analizy kinematycznej mechanizmów płaskich, Mono-grafia 168, Politechnika Krakowska, Kraków 1994.
[3] M ł y n a r s k i T., Kądziołka T., Romaniak K., Badanie wrażliwości kinematyczne układów hamulcowych wa-gonów kolejowych, Zeszyty Naukowe Politechniki Ślą-skiej, Seria Transport, Wydawnictwo Politechniki Ślą-skiej, Gliwice 1999.
[4] M o r e c k i A., Knapczyk J., Kędzior K., Teoria me-chanizmów i manipulatorów, Wydawnictwo WNT, War-szawa 2002.
[5] Górowski M., Transport szynowy niezależna strona informacyjna,http://www.transportszynowy.pl/kol-hamulcetarczowe.php
42

POJAZDY SZYNOWE NR 1/2011
mgr. inż. Rafał Cichy Instytut Pojazdów Szynowych „TABOR” prof.dr hab. inż. Franciszek Tomaszewski Politechnika Poznańska
W opracowaniu zaprezentowano przepisy jakie spełniać powinny pojazdy porusza-jące się po torach kolejowych w Polsce. Zaprezentowano również systemy przewo-zu naczep na tle zintegrowanych jednostek ładunkowych.
Możliwości rozwoju taboru bimodalnego w aspekcie ograniczeń skrajni kolejowych
1. Wstęp
Globalizacja w dziedzinie gospodarczej powoduje dynamiczny rozwój transportu. Materiały potrzebne do wytworzenia produktów, miejsca ich wytworzenia, odbiorca końcowy (klient) usytuowane bywają w od-ległych miejscach kraju, a nawet świata, co powoduje konieczność transportu surowców i wyrobów na zna-czące odległości. Dziś największym udziałowcem w transporcie jest transport samochodowy, za pomocą którego dokonuje się 84% przewozów [1]. Jednocze-śnie coraz częściej zwraca się uwagę na niekorzystne aspekty związane ze skutkami dynamicznego rozwoju transportu takie jak: zmiany klimatu, zanieczyszczenie powietrza, wypadki, hałas itp. W wielu miastach nie są spełnione normy dotyczące czystości powietrza, a emisja gazów cieplarnianych już dawno przekroczyła normy zawarte w protokóle z Kioto. W ramach proto-kołu z Kioto Polska zmniejszyła emisję gazów cie-plarnianych o 29% zamiast wymaganych 6% dzięki czemu otrzymała możliwość sprzedaży 500 mln. ton CO2 , które są warte ok. 2 mld. euro [2]. Transport generuje 21% gazów cieplarnianych. Dane te wskazu-ją, że poza zyskami społecznymi jak zmniejszenie liczby wypadków, zyskami ekonomicznymi szczegól-nie w przypadkach obliczania kosztów zewnętrznych opisanych szerzej w [3] istnieje możliwość osiągania znaczących dochodów w przypadku ograniczenia emisji gazów cieplarnianych.
Powszechnie stosowane zaczynają być używane rozwiązania ograniczające możliwości emisji gazów cieplarnianych, do których możemy zaliczyć:
- zakaz poruszania się w miastach pojazdów bez odpowiednich atestów,
- konieczność stosowania katalizatorów i filtrów przeciwpyłowych,
- ograniczenie poruszania samochodów cięża-rowych na terenie krajów,
- subwencje na zakup taboru intermodalnego, - subwencje do przewozów intermodalnych, - tworzenie centrów logistycznych w celu uła-
twienia kontaktu między przewoźnikami,
- zwolnienia z ograniczeń dotyczących porusza-nia się pojazdów intermodalnych w dni gdzie obowiązują one dla pojazdów samochodowych . Transport intermodalny jest jednym z elementów
mogących w znacznym stopniu przyczynić się do ograniczenia:
- zmian klimatu, - zmian krajobrazu, - wypadków, - emisji hałasu, - zanieczyszczenia powietrza, - zużycia energii.
2. Przepisy definiujące skrajnie taboru kolejowego na terenie Polski
Dla taboru poruszającego się po liniach kolejo-wych na terenie polski konieczne jest spełnienie prze-pisów Kodeksu UIC 505-1 [4]. Kodeks ten nakazuje stosowanie jej przepisów dla wszystkich budowanych rodzajów pojazdów (pojazdy trakcyjne, wagony oso-bowe, wagony bagażowe i wagony towarowe). Można tam jednocześnie znaleźć zapis: „do pewnych kombi-nacji wagon – ładunek (kontenery i pojemniki wy-mienne), patrz karta UIC 506” [5]. Kodeks ten określa zarysy odniesienia skrajni GA, GB, GC które posiada-ją większe wymiary w górnym zakresie w porównaniu do zarysu ustalonego w kodeksie UIC 505-1 (rys.1). Stosowanie skrajni wg Kodeksu UIC 506 podczas budowy pojazdu wiąże się z określonymi ogranicze-niami. Ładunki i pojazdy mogą poruszać się jako przesyłki regularne tylko na sprawdzonych i dopusz-czonych trasach. Skrajnia wg zarysów odniesienia GA, GB, GC ma zastosowanie:
Skrajnia GA – jest długoterminowo realizowana na wszystkich trasach kolei,
43

POJAZDY SZYNOWE NR 1/2011
Rys. 1. Skrajnie wg UIC 505-1, oraz skrajnie powiększone GA, GB, GC wg UIC 506
Skrajnia GB – obejmuje skrajnię GA i jest przewi-dziana w ramach krótko- i długoterminowego plano-wania na możliwie wielu trasach, aby otrzymać roz-ciągniętą i powiązaną sieć kolejową,
Skrajnia GC – która obejmuje skrajnię GA i GB i jest do wprowadzenia na nowych trasach i dla dużych budowli (np. tunel) na ustalonych w sposób szczegól-ny trasach.
Skrajnie GA, GB, GC wg [6] będą stosowane do ściśle wytyczonych tras, natomiast skrajnie G2, 3.3, GB-M6, GB1, GB2 itd. mogą być stosowane gdy istnieje wcześniejsze porozumienie między zaintere-sowanymi zarządcami infrastruktury. Umową taką może być umowa europejska o ważnych międzynaro-dowych liniach transportu kombinowanego i obiek-tach towarzyszących.
Dodatkowo kodeks UIC 506 podaje, że ładunki i pojazdy szynowe według rozszerzonych skrajni GA, GB, GC mogą się poruszać jako przesyłki regularne na sprawdzonych i dopuszczonych trasach, oraz okre-śla ładunki wzorcowe, dla krórych zostały określone skrajnie:
Skrajnia GA: - Kontenery o szerokości 8’ (2,438 m) i wy-
sokości 8’6 ½” (2,604 m), załadowane na wagonach towarowych o wysokości podło-gi a≤ 1,246 m, (dokładność centrowania ± 10 mm, rozstaw czopów skrętu a ≤ 16 m),
- Kontenery o szerokości 8’ (2,468 m) i wysokości 9’6” (2,896 m), załadowane na wagony towarowe o wysokości podłogi a≤ 0,954 m (dokładność centrowania ± 10 mm, rozstaw czopów skrętu a≤ 16 m),
- Zbiornik wymienne o szerokości 2,50 m i wysokości 2,60 m, załadowanego na wagony towarowe o wysokości podłogi a ≤ 1,246 m, (dokładność centrowania ± 10 mm, rozstaw czopów skrętu a ≤ 12,50 m),
- Specjalne naczepy wymienne o szerokości 2,50 m dla szynowego ruchu ulicznego, załadowane na wagonach kieszeniowych lub wagonach typu „kangur”, którego wysokość naroży nie przekracza wysokości 3,85 m ponad główkę szyny (dokładność centrowania ± 10 mm, rozstaw czopów skrętu a ≤ 12,50 m).
Skrajnia GB - Kontenery o szerokości 8’ (2,438 m) i wy-
sokości 9’6” (2,896 m), załadowane na wa-gony towarowe o wysokości podłogi 1,18 m (dokładność centrowania ± 10 mm, rozstaw czopów skrętu a ≤ 16 m),
Skrajnia GC - Kontenery o szerokości 8’ (2,438 m) i wy-
sokości 9’6” (2,896 m), na wszystkich normalnych platformach (rozstaw czopów skrętu a ≤ 16 m),
- Samochody ciężarowe i naczepy wymienne o wymiarach dopuszczonych do ruchu dro-gowego o szerokości 2,50 m i wysokości 4,00 m, załadowane na specjalne wagony towarowe, i o wysokości podłogi ≤ 0,65 m (dokładność centrowania ± 100 mm, roz-staw czopów skrętu a≤ 12,50 m).
44

POJAZDY SZYNOWE NR 1/2011
Jak widać przewozy naczep siodłowych są uwzględnione z dużymi ograniczeniami. Dla skrajni GA zalecana jest naczepa o wysokości 3,85 m, a do-piero dla skrajni GC (przyszłościowej) zaleca się jako ładunek wzorcowy naczepę siodłową o wysokości 4.0 m co jest standardem dla obecnie powszechnie produ-kowanych naczep [7,8]. W literaturze [9] zaczyna już być podawana wielkość standardowa naczepy 4,1 m, która może sprawić, że naczepy nie będą mogły być przewożone za pomocą transportu kombinowanego. Dodatkowo można zauważyć, że podawana w przepi-sie szerokość naczep wynosi 2,5 m, natomiast wiel-kość standardowa naczep to 2,55 m. Wielkość ta rów-nież wpływa na możliwości projektowe wysokości przestrzeni ładunkowej, gdyż analizując kształt skrajni w jej górnym zarysie dochodzimy do wniosku, że im bliżej pionowej osi symetrii pojazdu tym jest możliwa większa wysokość przestrzeni ładunkowej.
Kiedy w latach 60-tych ubiegłego stulecia nastąpił rozwój transportu kontenerowego, a kontenery prze-wożono przy użyciu dostępnych wówczas standardo-wych platform kolejowych, okazało się, że dopusz-czona górna przestrzeń skrajni kolejowej jest niewy-starczająca. Rozwijane później inne systemy transpor-tu intermodalnego również wymagały powiększonego zarysu górnej strefy skrajni kolejowej. Aby umożliwić w Europie rozwój transportu intermodalnego, zawarto w 1991 roku w Genewie porozumienie (Europejska Umowa o ważniejszych międzynarodowych liniach transportu kombinowanego i obiektach towarzyszą-cych, skrót „AGTC”), na mocy którego zobowiązano kraje członkowskie Europejskiej Komisji Ekonomicz-nej Narodów Zjednoczonych do wypełnienia warun-ków umowy.
W załączniku III umowy podzielono linie kolejowe na dwie kategorie; istniejące linie i linie nowobudo-wane. Równocześnie zalecono aby dla linii nowo bu-dowanych stosować skrajnię „C”, która określa naj-większy dopuszczony w części górnej gabaryt taboru, a dla linii istniejących, modernizowanych stosować co najmniej skrajnię „B”. Kontury zarysu skrajni na li-niach kolejowych przewidzianych do transportu in-termodalnego określają przepisy karty UIC 506.
3. Systemy przewozu naczep na tle zintegrowa-nych jednostek ładunkowych
Pod pojęciem zintegrowanych jednostek ładunko-wych rozumiemy najczęściej [9, 10] kontener, nadwo-zie wymienne i naczepa drogowa.
Poniżej przedstawiono gabaryty najbardziej popu-larnych, zalecane w normach, zintegrowanych jedno-stek ładunkowych (tabela 1).
Typ Długość [mm]
Szerokość [mm]
Wysokość [mm]
Kontenery** 20’ 6058 2438 2591 40’ 12192 2438 2591 45’ 13716 2438 2896
Nadwozia wymienne** (20)* 6050 (21) 6250 (26) 8150 (30) 9125 31 9300 42 12500
(44) 13 100 (45) 13 716
2440 - 2500 2675
Naczepa samochodowa ** 13 900 2550 2730
TABELA 1
* Pozycje typu w na- wiasach nie są zalecane ** Gabaryty zewnętrzne
Jak widać z przytoczonych przykładów najwięk-szymi gabarytami charakteryzują się naczepy samo-chodowe.
Z pośród trzech najbardziej znanych zintegrowa-nych jednostek ładunkowych, dwie tj.: kontenery i nadwozia wymienne przystosowane są do transportu na różnych środkach transportu. Świadczy o tym mię-dzy innymi ich budowa, która umożliwia przeładunek, wielopoziomowe składowanie, wysoka standaryzacja oraz jednolite dostosowanie urządzeń magazynowych i przeładunkowych. Również ich gabaryty pozwalają na transport różnymi gałęziami transportu, bez zbęd-nej integracji w szlaki przewozowe (skrajnia). Nacze-pa drogowa natomiast przystosowana jest głównie do transportu drogowego. W związku z tym jej gabaryty i budowa ograniczone są głównie poprzez infrastruktu-rę drogową (tj. naciski na oś, skrajnię drogową). Dąży się przy tym do maksymalizacji przestrzeni ładunko-wej. Generuje to problemy przy próbach dostosowania naczep do transportu za pomocą innych środków transportu w szczególności kolei. Transport kombi-nowany oparty na naczepach samochodowych cechu-je się tym, iż przystosowuje transport typowo drogo-wy do poruszania się po trasach kolejowych. Wymaga to dwojaki sposób podejścia do problemu przystoso-wania taboru do przewozów intermodalnych naczep:
Nie integrowanie w budowę naczep, a dostosowa-nie wagonów do transportu pojazdów (systemy ru-chomej drogi, wagonów koszowych, modalor),
Ingerencja w budowę naczepy i dostosowanie wa-gonów lub samych wózków to ich transportu (wagony kieszeniowe, które nie są przystosowane do przeła-dunku pionowego, systemy bimodalne).
45
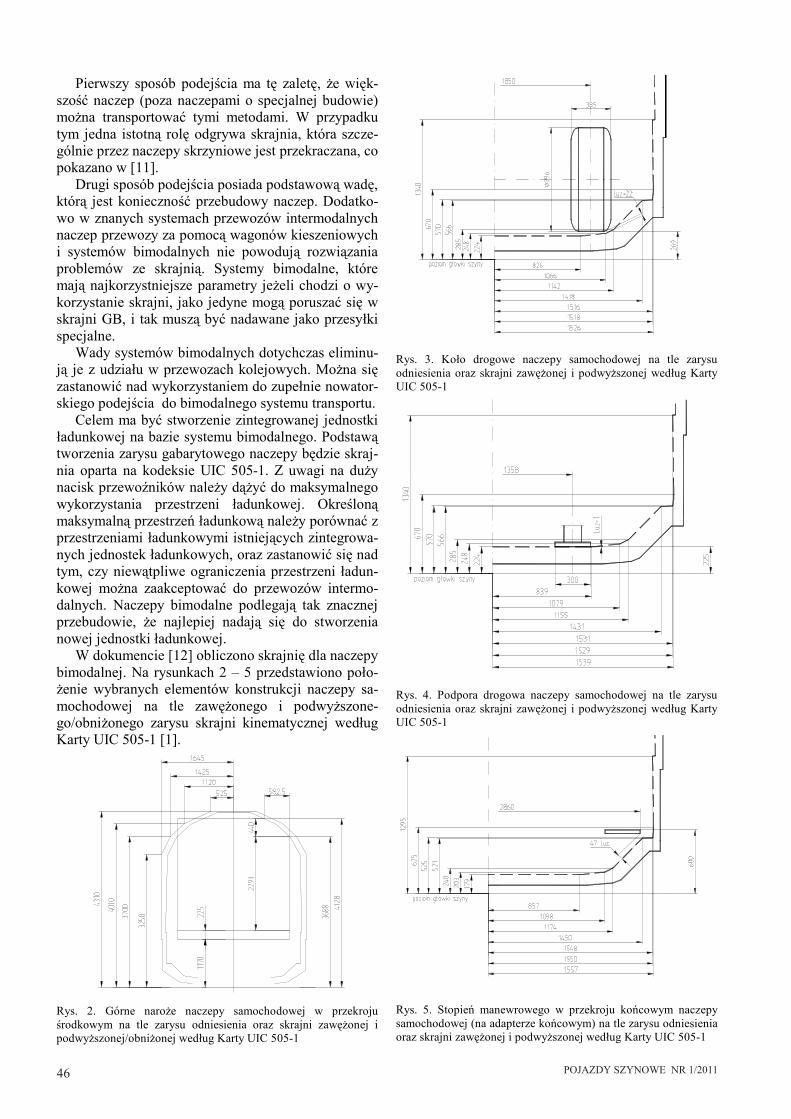
POJAZDY SZYNOWE NR 1/2011
Pierwszy sposób podejścia ma tę zaletę, że więk-szość naczep (poza naczepami o specjalnej budowie) można transportować tymi metodami. W przypadku tym jedna istotną rolę odgrywa skrajnia, która szcze-gólnie przez naczepy skrzyniowe jest przekraczana, co pokazano w [11].
Drugi sposób podejścia posiada podstawową wadę, którą jest konieczność przebudowy naczep. Dodatko-wo w znanych systemach przewozów intermodalnych naczep przewozy za pomocą wagonów kieszeniowych i systemów bimodalnych nie powodują rozwiązania problemów ze skrajnią. Systemy bimodalne, które mają najkorzystniejsze parametry jeżeli chodzi o wy-korzystanie skrajni, jako jedyne mogą poruszać się w skrajni GB, i tak muszą być nadawane jako przesyłki specjalne.
Wady systemów bimodalnych dotychczas eliminu-ją je z udziału w przewozach kolejowych. Można się zastanowić nad wykorzystaniem do zupełnie nowator-skiego podejścia do bimodalnego systemu transportu.
Celem ma być stworzenie zintegrowanej jednostki ładunkowej na bazie systemu bimodalnego. Podstawą tworzenia zarysu gabarytowego naczepy będzie skraj-nia oparta na kodeksie UIC 505-1. Z uwagi na duży nacisk przewoźników należy dążyć do maksymalnego wykorzystania przestrzeni ładunkowej. Określoną maksymalną przestrzeń ładunkową należy porównać z przestrzeniami ładunkowymi istniejących zintegrowa-nych jednostek ładunkowych, oraz zastanowić się nad tym, czy niewątpliwe ograniczenia przestrzeni ładun-kowej można zaakceptować do przewozów intermo-dalnych. Naczepy bimodalne podlegają tak znacznej przebudowie, że najlepiej nadają się do stworzenia nowej jednostki ładunkowej.
W dokumencie [12] obliczono skrajnię dla naczepy bimodalnej. Na rysunkach 2 – 5 przedstawiono poło-żenie wybranych elementów konstrukcji naczepy sa-mochodowej na tle zawężonego i podwyższone-go/obniżonego zarysu skrajni kinematycznej według Karty UIC 505-1 [1].
Rys. 2. Górne naroże naczepy samochodowej w przekroju środkowym na tle zarysu odniesienia oraz skrajni zawężonej i podwyższonej/obniżonej według Karty UIC 505-1
Rys. 3. Koło drogowe naczepy samochodowej na tle zarysu odniesienia oraz skrajni zawężonej i podwyższonej według Karty UIC 505-1
Rys. 4. Podpora drogowa naczepy samochodowej na tle zarysu odniesienia oraz skrajni zawężonej i podwyższonej według Karty UIC 505-1
Rys. 5. Stopień manewrowego w przekroju końcowym naczepy samochodowej (na adapterze końcowym) na tle zarysu odniesienia oraz skrajni zawężonej i podwyższonej według Karty UIC 505-1
46

POJAZDY SZYNOWE NR 1/2011
Jak można zauważyć istotny problem stanowi skrajnia w przestrzeni górnej. Wysokość jej ograni-czenia w części górnej wynosi 440 mm. Istotne więc staje się poszukanie możliwości wyznaczenia opty-malnych gabarytów naczep, poprzez analizę konstruk-cji naczepy i kolejowego układu biegowego, metod pomiarów, selekcjonowania transportowanych ładun-ków itp. Zagadnienia te są obecnie przedmiotem prac badawczych w Instytucie Pojazdów Szynowych.
5. Podsumowanie
Stworzenie systemu transportu bimodalnego użyt-kowanego w bez konieczności specjalnego dostoso-wania trasy przejazdu wymaga stworzenia jednostki o gabarytach mieszczących się w skrajni wg kodeksu 505-1. Zastosowanie do tego celu naczep jest dosko-nałym uzupełnieniem istniejących zintegrowanych jednostek ładunkowych. Pozytywne cechy transportu bimodalnego, jak duża mobilność podczas załadunku i rozładunku [13], brak konieczności używania specja-listycznego sprzętu przeładunkowego czy brak ko-nieczności wielkich przestrzeni magazynowych itp. spowoduje zainteresowanie systemami przewoźni-ków. Cechy te w powiązaniu z omawianymi wcze-śniej pozytywnymi aspektami użytkowania nowocze-snych gałęzi transportu może stanowić istotny impuls do ich rozwoju.
L i t e r a t u r a [1] What the admission of Mega – Trucks would really
mean for Europe. Facts and arguments. Publikacja in-formacyjna UIC, CER, EIM, UNIFE, ERFA. Paryż, czerwiec 2007.
[2] Kozmala M.; Ochrona klimatu poległa w walce ze wzrostem PKB, www.rp.pl/ekonomia.
[3] Medwid M., Cichy R.: Analiza porównawcza wybra-nych systemów transportu intermodalnego, Pojazdy Szynowe 1/2009.
[4] Karta UIC 505-1. Pojazdy kolejowe. Skrajnia pojaz-dów. Wydanie 9 z 11. 2003r.
[5] Karta UIC 506. Reguły dotyczące zastosowania skrajni powiększonych GA, GB, GC. Wydanie z 01.01.1987r.
[6 ]Decyzja komisji z dnia 28lipca 2006 r. dotycząca technicznej specyfikacji dla interoperacyjności odno-szącej się do podsystemu „tabor kolejowy – wagony towarowe” transeuropejskiego systemu kolei konwen-cjonalnych.
[7] Materiały firmy ZREMB. [8] Materiały firmy Wielton. [9] Jakubowski L.: Technologia prac ładunkowych. Ofi-
cyna Wydawnicza Politechniki Warszawskiej, War-szawa 2003.
[10] Kwaśniowski S., Nowakowski T., Zając M.: Transport intermodalny w sieciach logistycznych, Wrocław 2008.
[11] Medwid M., Cichy R.: Systemy transportu intermo-dalnego na tle wymagań skrajni kolejowej, XVIII Kon-ferencja Naukowa Pojazdy Szynowe - Katowice Ustroń 2008, materiały konferencyjne.
[12] Obliczenia skrajni pociągu bimodalnego – archiwum IPS.
[13] Medwid M., Cichy R.: Koncepcja wykorzystania techniki bimodalnej transportu do budowy autostrad. Pojazdy Szynowe 3/2009.
47

POJAZDY SZYNOWE NR 1/2011
mgr inż. Marcin Dębiński mgr inż. Krystian Kiercz dr inż. Sławomir Kowalski NEWAG S.A. Nowy Sącz dr inż. Tomasz Kądziołka Państwowa Wyższa Szkoła Zawodowa w Nowym Sączu
Przegląd rozwiązań konstrukcyjnych wybranych elektrycznych zespołów trakcyjnych
W artykule przedstawiono przegląd rozwiązań konstrukcyjnych współczesnych elek-trycznych zespołów trakcyjnych na przykładzie wybranych jednostek, które w ostatnich latach zmodernizowano lub wyprodukowano w NEWAG S.A. Nowy Sącz
1. Wprowadzenie
Elektryczne zespoły trakcyjne serii EN i WE są przeznaczone do obsługi lokalnego ruchu pasażer-skiego. Wszystkie wagony w tych pojazdach są sprzę-gnięte w sposób zapewniający trwałe połączenie w czasie eksploatacji, jednocześnie zapewniając przej-ście pomiędzy poszczególnymi wagonami. W skład elektrycznego zespołu trakcyjnego wchodzą wagony silnikowe oraz wagony doczepne, które na czas re-montów i przeglądów mogą być rozłączane. Pociągi mogą poruszać się w trakcji wielokrotnej dzięki zasto-sowaniu automatycznych sprzęgów samoczynnych Scharfenberga. Kabina sterownicza niezależnie od konfiguracji członów znajduje się po obu końcach pojazdu. Jednostki serii EN i WE pokryte zostały far-bami o zwiększonej trwałości i odpornymi na działa-nie czynników atmosferycznych oraz powłokami an-tygraffiti. Wygląd zewnętrzny i kolorystyka każdora-zowo jest dopasowywana do potrzeb klienta jednocze-śnie nadając pojazdom nowoczesny i estetyczny wy-gląd. Dla podniesienia komfortu jazdy, elektryczne zespoły trakcyjne wyposażono w nowoczesne układy
Rys 1. Podział elektrycznych zespołów trakcyjnych
biegowe. Na rysunku 1 przedstawiono podział elektrycznych zespołów trakcyjnych na trzyczłonowe i czteroczłonowe, które wyprodukowano lub zmo-dernizowano w ostatnich latach w NEWAG S.A. Nowy Sącz. Natomiast podstawowe dane techniczne tych zespołów przedstawiono w tabeli 1.
2. Opis pojazdów
Zespół trakcyjny typu 14 WE – SKM
Elektryczny zespół trakcyjny 14WE (rys. 2.) jest naj-bardziej zaawansowaną modernizacją jednostek typu EN57. Z pierwotnej konstrukcji pozostała jedynie ostoja i elementy ramy, które dla potrzeb modernizacji zregenerowano. Pojazdowi nadano nowoczesny i ae-rodynamiczny wygląd.
Rys. 2 Widok 14WE-SKMWA
Układ wagonów w jednostce jest oparty na syste-mie 410B-309B-410B (Wagon sterowniczy – wagon silnikowy – wagon sterowniczy). Podczas moderniza-cji zmniejszono liczbę miejsc siedzących na rzecz
48

POJAZDY SZYNOWE NR 1/2011
Dane 14WE SKMWA
EN61 Papieski
EN57 AKM
EN71 SKMT
19WE SKMWA
Rok produkcji 2005 2005/2006 2008/2009 2009 2009/2010 Długość (ze sprzę-gami) 68 400 mm 68 400 mm 64770 mm 86 840 mm 86 500 mm
Masa pojazdu próżnego 125 t 125 t 126t ±3% 170 t 190 t ±3%
Maksymalna masa brutto pojazdu 165 t 165 t 165 t 182 t 260 t
Liczba drzwi wej-ściowych 12 12 12 16 20
Szerokość przej-ścia w części pasa-żerskiej
820 mm 820 mm 820 mm 820 mm 800 mm
Wysokość podłogi od główki szyny 1 157 mm 1 157 mm 1 157 mm 1 157 mm 1 150 mm
Układ miejsc 2+2 Autobus i 2 + 2 2 + 2 Metro i
2 + 2 Metro i
2+2
Liczba miejsc siedzące/stojące 184/225 181/283 190/210 234/288 182/374
Liczba miejsc dla osób niepełno-spraw.
2 miejsca 8 miejsc 2 miejsca 2 miejsca 2 miejsca
Winda dla niepeł-nospraw. TAK TAK TAK brak TAK
Maksymalna pręd-kość eksploatacyj-na
110 km/h 110 km/h 120 km/h 120 km/h 160 km/h
Łączna moc ciągła silników trakcyj-nych
608 kW 740 kW 1000 kW 2000 kW 2240 kW
Przyśpieszenie rozruchu około: 0,5 m/s
2 0,5 m/s
2 0,8 m/s2 0,8 m/s2 ok. 1 m/s2
toczny 36AN 36AN 36AN 36AN 70RSTa ypw
ózka
napędny 23MN 23MN 23MN 23MN 70RSNa
Układ osi 2’2’ + Bo’Bo’ + 2’2’
2’2’ + Bo’Bo’ + 2’2’
2’2’ + Bo’Bo’ + 2’2’
2’2’+ Bo’Bo’+ Bo’Bo’+ 2’2’
Bo’Bo’+ 2’2’ + Bo’Bo’
Dane techniczne elektrycznych zespołów trakcyjnych Tabela 1
miejsc stojących, co jest bardziej praktyczne w przewozach aglomeracyjnych. Fotele dwumiejsco-we zamontowano w układzie rzędowym lub naprze-ciwległym (rys. 3). Wnętrze pojazdu w pełni przysto-sowano do przewozów osób niepełnosprawnych na wózkach inwalidzkich. Wydzielono również miejsce dla osób z większym bagażem i rowerzystów. W po-jeździe zamontowano podnośniki umożliwiające wsiadanie osobom niepełnosprawnym do jednostki.
W celu zwiększenia bezpieczeństwa podróżnych w zespole trakcyjnym dotychczas stosowane lusterka zewnętrzne umożliwiające obserwację otoczenia ze-wnętrznego pojazdu zastąpiono zestawem kamer ze-wnętrznych zamontowanych na zewnątrz pojazdu.
W każdym wagonie rozrządczym, na zewnątrz po obydwu stronach kabiny maszynisty zamontowane i okablowane zostały dwie kamery zewnętrzne, herme-tyczne. Kamery te współpracują z monitorem 14” umieszczonym na pulpicie. W kabinie maszynisty dokonano modernizacji pulpitu (rys. 3) dostosowując go do obecnie istniejących stan-dardów ergonomii i wyposażenia.
Pojazd wyposażono w zmodernizowane wózki 23MN z silnikami LKF450 o mocy 185 kW i wózki 36AN.
49

POJAZDY SZYNOWE NR 1/2011
Rys. 3 Wnętrze 14WE – SKMWA Zespół trakcyjny typu EN61 – „Papieski”
Elektryczny zespół trakcyjny EN61 – „Papieski” (rys. 4) został zaprojektowany przez krakowską firmę EC Engineering i wykonany przez nowosądecką firmę Newag jako podziękowanie polskich kolejarzy za pontyfikat Jana Pawła II. W dniu 28 maja 2006 roku pociąg poświęcił podczas wizyty w Polsce Papież Benedykt XIV.
Rys. 4 Widok EN61 Pociąg Papieski"
Pociąg papieski został zbudowany na podstawie elektrycznego zespołu trakcyjnego 14WE. Różnica pomiędzy pojazdami występuje jedynie w kolorystyce i wyposażeniu przedziału pasażerskiego. Wnętrze pojazdu zaopatrzono w jedną toaletę w członie roz-rządczym A. Toaleta jest wyposażona w system zam-
knięty firmy SEMCO, który współpracuje ze zbiorni-kami umieszczonymi za jej tylną ścianą. Konstrukcja oraz wyposażenie umożliwia korzystanie z toalety osobom niepełnosprawnym.
Kanapy, siedzenia odchylne, fotele dwumiejscowe (rys. 5) usytuowane w układzie rzędowym lub naprze-ciwległym (2+2) są wykonane z materiału zapewnia-jącego odpowiedni komfort i trwałość.
Rys. 5 Wnętrze EN61 „Pociąg Papieski”
W członie rozrządczym C wydzielono przedział „studio”, w którym zamontowano urządzenia do ob-sługi systemu multimedialnego. Przedział „studio” wyposażono m.in. w monitory 17” LCD, odtwarzacze DVD, wielokanałowy system audio z indywidualnymi panelami odsłuchowymi dla każdego pasażera pozwa-lający na odsłuch prezentacji multimedialnych w róż-nych językach, kamery kolorowe obserwujące obraz z czoła pociągu. W przedziale tym można oglądać emi-towane materiały filmowe i zdjęcia dotyczące życia Jana Pawła II.
Kolorystyka zewnętrzna pojazdu została wykonana w barwach papieskich, tj. w kolorach: złotym i bia-łym, oraz wykonano napis TOTUS TUUS.
W elektrycznym zespole trakcyjnym EN61 jak i w 14WE zmodernizowano układ cięgłowo-zderzny. W pojazdach zastosowano sprzęgi czołowe typu Schar-fenberga, które umożliwiają automatyczne połączenie
50

POJAZDY SZYNOWE NR 1/2011
dwóch pojazdów bez dodatkowej obsługi. Pociąg papieski wyposażono w taki sam układ jezdny jak EZT 14WE.
Zespoły trakcyjne typu: EN57 – AKM i EN – 71 SKM
Przy okazji napraw głównych elektrycznych zespo-łów trakcyjnych EN-57 i EN-71 dokonano moderni-zacji niektórych elementów pojazdów. Zakres moder-nizacji obejmował m.in.: zastąpienie przetwornicy wirującej przetwornicą statyczną, zabudowę nowego wyłącznika szybkiego, montaż stojaków na rowery, zastosowanie silników asynchronicznych do napędu, zabudowę systemu monitoringu, modernizację czoła (rys. 6) i kabiny maszynisty.
Konstrukcja kabiny maszynisty została zmieniona poprzez wykonanie nowego szkieletu stalowego wkomponowanego w pozostałą część jednostki. Na szkielet, stosując klejenie, nałożono samonośne czoło z laminatu poliestrowo – szklanego. W czole wklejo-no szybę panoramiczną.
W modernizowanych pojazdach zrezygnowano z drzwi zewnętrznych do przedziałów dla podróżnych z większym bagażem ręcznym, natomiast zabudowano nowe drzwi zewnętrzne bezpośrednio do kabin ma-szynisty. Powierzchnię zewnętrzną jednostek, oraz drzwi wejściowe pomalowano w ustalonej z użytkow-nikami kolorystyce farbami poliuretanowymi chemo-utwardzalnymi, oraz farbami proszkowymi.
a)
b)
Rys 6 Widok a) EN57 – AKM, b) EN71 - SKM
W modernizowanych elektrycznych zespołach trak-cyjnych zlikwidowano ściany i drzwi przedziałowe. W to miejsce zamontowano „wiatrochrony” wykonane w dolnej części z blach nierdzewnych, w górnej część ze szkła bezpiecznego a na ściance wiatrochronu zamon-towano uchwyty dla stojących pasażerów.
a)
b)
Rys. 7 Wnętrze po-jazdów a) EN57 – AKM, b) EN 71 - SKM
Pozostałe wyłożenie wnętrza (rys. 7), jak ściany boczne i sufit wykonano z paneli z niepalnych żywic poliestrowo szklanych. Niezbędne listwy wykończe-niowe wykonano z tworzyw sztucznych niepalnych lub profili stalowych. Izolację termiczną i dźwiękochłonną wagonów stanowi w ścianach bocz-nych i suficie mata z wełny mineralnej o grubości 50 i 30 mm pokryta jednostronnie folią aluminiową, a w podłodze wagonów płyty styropianowe o grubości 30 mm. Całość podłogi wyłożono w systemie wannowym wykładziną podłogową o grubości 3 mm trudnoście-ralną, ułatwiając czyszczenie i mycie wagonu.
W pojazdach przewidziano przedziały służbowe, które dostosowano do przewozu osób na wózkach inwalidzkich. Przedziały te zostały dodatkowo wypo-sażone w specjalne stojaki do przewożenia rowerów w pozycji pionowej. Ponadto w wagonie rozrządczym EZT EN71-SKM wydzielono przedział drugiej klasy z siedzeniami w układzie „metro”.
Napęd elektrycznych zespołów trakcyjnych jest re-alizowany przez asynchroniczne silniki trakcyjne 2xANT-500-3000-UF. Napęd ten składa się z dwóch
51

POJAZDY SZYNOWE NR 1/2011
falowników napięcia ANT500-3000, silników napę-dowych M1, M2, M3, M4 z czujnikami prędkości oraz temperatury, układu łagodnego włączenia falow-ników oraz dławików sieciowych EN57, zabudowa-nych w rozdzielni wysokiego napięcia RWN EN57. Obwód wysokiego napięcia składa się ponadto z dwóch pantografów, jednego odłącznika trakcyjnego, jednego wyłącznika szybkiego i zespołu uziemiaczy.
W EZT EN57 – KM zamontowano system pomia-ru potoków pasażerskich, który jest przeznaczony do rejestrowania strumienia pasażerów korzystających z pojazdów. Zapewnia on rejestrację stopnia zapełnienia i liczby pasażerów w rozbiciu na wsiadających i wysiadających - w korelacji z poszczególnymi przy-stankami i kursami. Zebrane przez niego dane umoż-liwiają prowadzenie obliczeń i zaawansowanych ana-liz statystycznych, które ułatwiają optymalizację funkcjonowania całej sieci komunikacyjnej oraz po-szczególnych kursów i linii. Część pomiarowa pod-systemu składa się z sensorów (aktywnych czujników ruchu w podczerwieni) typu IRS-320, modułów wejść cyfrowych typu INP-450 oraz koncentratorów TSL-998/IBIS.
Na czole EZT-ów oraz w wnękach bocznych zain-stalowanych po bokach wagonu silnikowego zostały zabudowane tablice świetlne serii ETLP12420007 informujące o kierunku jazdy. Ponadto wykonano instalację rozgłoszeniową przeznaczoną do nadawania i odtwarzania komunikatów.
W celu zwiększenia bezpieczeństwa podróżnym podczas jazdy, w elektrycznych jednostkach trakcyj-nych zainstalowano system monitoringu, który jest przeznaczony do obserwacji i rejestracji zdarzeń we wszystkich wagonach. Realizowany jest przez ukryte kamery. Obraz z kamer wyświetla się na 2 monitorach 17’’ LCD umieszczonych po jednym w każdej z dwóch kabin maszynisty.
EN57 – AKM i EN71 – SKM wyposażono w zmo-dernizowane wózki napędne 23MN z silnikiem asyn-chronicznym LK 450X6 o mocy znamionowej 250 kW i sprawności przekraczającej 94% oraz wózki toczne 36AN.
Ze względu na trakcję wielokrotną wykonano modernizację sprzęgów czołowych typu ZEa, w firmie Dellner Couplers, zgodnie z dokumentacją moderni-zacji sprzęgów zatwierdzoną przez Urząd Transportu Kolejowego. Sprzęgi te umożliwiają automatyczne połączenie dwóch pojazdów bez dodatkowej obsługi. Rozłączanie jest realizowane przyciskiem z kabiny maszynisty lub manualnie. Sprzęg pozwala na po-chłonięcie energii zderzenia oraz absorbuje szarpnię-cia pomiędzy pojazdami.
Połączenie dwóch członów jest zrealizowane przez dotychczas stosowane sprzęgi stałe ZEk. Ze względu na konstrukcję i budowę pojazdu, do prze-prowadzenia połączeń elektrycznych pomiędzy po-szczególnymi członami, zastosowano wiązki kablowe
zakończone wtykami oraz gniazdami hermetycznymi Hartinga.
Zespół trakcyjny typu 19WE - SKM
Elektryczny zespół trakcyjny 19WE w odróżnieniu od wcześniej opisanych konstrukcji jest pojazdem całkowicie nowym zarówno pod względem konstruk-cyjnym jak i wykonania. Podstawowym układem wa-gonów jest układ s'+d+d+s' (wagon silnikowy + wa-gon doczepny + wagon doczepny + wagon silnikowy). Na rysunku 8 pokazano ogólny widok elektrycznego zespołu trakcyjnego 19WE.
Rys. 8. Widok zewnętrzny EZT 19WE
Konstrukcja pudła EZT 19WE jest konstrukcją spawaną, składaną z elementów łączonych systemem interlock. Wszystkie elementy użyte do budowy po-jazdu spełniają wymogi norm w zakresie bezpieczeń-stwa przeciwpożarowego oraz nie zawierają azbestu. Konstrukcja pudła jest konstrukcją samonośną prze-noszącą obciążenia bez trwałych odkształceń, wyko-naną ze stali niskostopowych o podwyższonych para-metrach wytrzymałościowych i podwyższonej odpor-ności na korozję. Pudło pojazdu zabezpieczono anty-korozyjnie, dźwiękochłonnie i w sposób tłumiący drgania. Ściany wyłożono izolacją typu moniflex, natomiast podłogę wełną mineralną.
W pojeździe zastosowano nowy zespół drzwi bocznych odskokowo-przesuwnych firmy Ultimate o prześwicie 1300 mm ze stałymi oknami. Drzwi posia-dają napęd główny ruchu drzwi odskok + przesunięcie realizowany przy zastosowaniu silników elektrycz-nych krokowych. Po wejściu pasażera drzwi zamykają się automatycznie po czasie 3 sekund. Jeżeli w prze-strzeni drzwiowej w momencie zamykania pojawi się pasażer, jego obecność sygnalizowana jest do układu sterowania przez zespół fotokomórek umieszczonych w obrębie drzwi co powoduje ponowne ich otwarcie. Wszystkie drzwi pojazdu są automatycznie zamykane w ruchu pojazdu po przekroczeniu przez pojazd pręd-kości 5km/h. Podczas ruchu pojazdu drzwi są bloko-wane i nie ma możliwości ich otwarcia lub wystero-wania.
52

POJAZDY SZYNOWE NR 1/2011
Kabinę maszynisty (rys. 9) wykonano w taki sposób, żeby spełniała wymagania bezpieczeństwa pracy i ergonomii określone w normie PN-90/K-11001. Natężenie oświetlenia w kabinie maszynisty posiada regulację w zakresie 0-150 lx.
Rys. 9 Wnętrze 19WE – SKMWA
W celu uzyskania jak największej przestrzeni pa-sażerskiej w pojeździe zamontowano fotele w ukła-dzie „metro” (rys. 9). Ponadto w wagonie pierwszym i ostatnim oprócz układu foteli „metro” zamontowano po dwa rzędy foteli w układzie rzędowym, naprzeciw-ległym.
W wagonie silnikowym, wydzielono dwa miejsca dla osób niepełnosprawnych korzystających z wóz-ków inwalidzkich. W miejscach tych zamontowano fotele odchylne jednoosobowe i zaczepy mocujące wózek inwalidzki. Ponadto w wagonie tym zamonto-wano dwa podnośniki dla niepełnosprawnych.
Wnętrze elektrycznego zespołu trakcyjnego 19WE jest w pełni klimatyzowane. Funkcja wentylacji i schładzania powietrza jest realizowana przez nieza-leżne układy, po jednym na każdy z członów pojazdu. Agregaty wentylacyjne zlokalizowano w centralnej części dachu każdego z członów. Nominalna wydaj-ność chłodnicza pojedynczej centrali wynosi QCHVAC=35kW, nominalny przepływ powietrza cyrku-lacyjnego wynosi VNHVAC=3800m3/h.
Pojazd posiada system informacji audio-wizualnej. W tym celu zastosowano tablice informacyjne nowej generacji typu ETLZ-U. Wszystkie informacje wy-świetlane na tablicach są dosyłane szyną transmisji RS485.
W skład systemu informacji głosowej wchodzą: urządzenie głośnomówiące GRG-4500M1, wzmac-niacz linii WL-100, transformatory głośnikowe i mi-krofon. Dodatkowo zamontowano ekrany LCD, na których mogą być wyświetlane różne ogłoszenia a nawet reklamy.
Elektryczne zespoły trakcyjne wyposażono w sys-tem rejestracji drogi, prędkości i parametrów po-jazdu. Jego zadaniem jest zbieranie i rejestracja in-formacji o stanie i pracy pojazdu oraz jego podzespo-łów oraz wyświetlanie maszyniście podstawowych parametrów jazdy na wyświetlaczu ATM-PW3.
Ze względu na trakcję wielokrotną zastosowano sprzęgi czołowe firmy Voith. Sprzęgi te umożliwiają automatyczne połączenie dwóch pojazdów bez dodat-kowej obsługi. Rozłączanie jest realizowane przyci-skiem z kabiny maszynisty lub manualnie. Sprzęg pozwala na pochłonięcie energii zderzenia oraz absor-buje szarpnięcia pomiędzy pojazdami. Połączenie dwóch członów jest zrealizowane przez sprzęg półsta-ły produkcji firmy Voith. Połówki tego sprzęgu są połączone sprzęgłem łubkowym.
Jednostki wyposażono w wózki napędne typu 70RSNa z silnikami asynchronicznymi typu ANT300-3000 o mocy znamionowej 300 kW , oraz w wózki toczne typu 70RSTa. Szczegółową budowę tych wóz-ków przedstawiono w rozdziale 3.
3.Opis wózków
Wózki typu: 23MN i 36AN Wózki typu 5B i 6B zastosowane w elektrycznych zespołach trakcyjnych EN57 i EN71, w trakcie na-prawy uległy modernizacji zgodnie z dokumentacją konstrukcyjną nr RL – 4780 i RL – 4781 wykonaną przez Instytut Pojazdów Szynowych w Poznaniu. Modernizacja ta polega na zmianie sposobu uspręży-nowania zestawów kołowych z podwójnego na usprę-żynowanie z zastosowaniem sprężyn gumowo-metalowych stożkowych (rys. 10).
Rys. 10. Usprężynowanie I-go stopnia elektrycznego zespołu trakcyjnego EN57
stożkowa sprężyna gumowo – metalowa
Automatycznie zmianie uległo prowadzenie zestawów kołowych poprzez zastosowanie nowego typu oprawy łożysk specjalnie wykonanej dla ww. modernizacji. Modernizacja ta znacznie poprawia
53

POJAZDY SZYNOWE NR 1/2011
spokojność biegu pojazdu, a zatem i komfort podró-żowania. Ponadto dla tłumienia drgań poprzecznych i pionowych, wózki są zaopatrzone w amortyzatory hydrauliczne pionowe i poziome. Zarówno wózki napędne i toczne posiadają nowy typ oprawy dla ło-żysk NJ + NJP 130 x 240 x 80 mm, uwzględniający zmiany usprężynowania I stopnia.
Wózki typu: 70RSNa i 70RSTa
Wózki 70RSNa i 70RSTa (rys.11) zamontowano w elektrycznych zespołach trakcyjnych 19WE. Rama wózka, stanowiąca przestrzenną konstrukcję spawaną, składa się z dwóch ostojnic, połączonych kształtową poprzecznicą tak, aby uzyskać w miejscu połączenia jak najmniejszy teoretyczny współczynnik koncen-tracji naprężeń.
Rys.10. Wózek 70RSTa
Zestaw kołowy jest prowadzony w ramie wózka za pomocą jednostronnego wahacza połączonego z ramą przegubem gumowo-metalowym, składającym się ze sworznia amortyzującego i pierścieni amortyzujących. Usprężynowanie I-go stopnia składa się z czterech kompletów współśrodkowych podwójnych sprężyn śrubowych. Sprężyny każdego kompletu spoczywają na wahaczach w prowadzeniach i są naciskane ramą wózka przez podkładkę gumową i prowadzenie. Jako usprężynowanie II-go stopnia zastosowano w wózku dwie sprężyny pneumatyczne firmy PHOENIX typu SEK 680-12.
4. Zakończenie
Przedstawione w niniejszym artykule przykłady rozwiązań konstrukcyjnych elektrycznych zespołów trakcyjnych pokazują, że użytkownicy taboru szyno-wego chętniej poddają modernizacji posiadany tabor niż kupują nowy. Fakt ten jest uzasadniony, gdyż koszt modernizacji równy jest ok. 50% wartości kup-na nowego pojazdu. Decyzja o modernizacji taboru wynika także ze względu na krótszy czas i mniejszy koszt przeprowadzania badań potrzebnych do dopusz-czenia do eksploatacji. Ponadto zmodernizowane po-jazdy spełniają wszelkie wymagania techniczne sta-wiane nowobudowanym pojazdom szynowym, co można zauważyć porównując zmodernizowane elek-tryczne zespoły trakcyjne EN57 i EN71 z nowobudo-wanym pojazdem 19WE.
L i t e r a t u r a [1] „DTR EZT EN71 z napędem asynchronicznym”, Nowy
Sącz 2009. [2] „DTR EZT EN57 z napędem asynchronicznym”, Nowy
Sącz 2009. [3] „DTR EZT typu 19WE”, Nowy Sącz 2009.
54

POJAZDY SZYNOWE NR 1/2011
mgr inż. Jarosław Czerwiński. mgr inż. Jan Świątczak Instytut Pojazdów Szynowych „TABOR”
Ogniotrwałe drzwi rozsuwane na ścianie czołowej wagonów osobowych
W artykule przedstawiono przebieg procesu projektowania ogniotrwałych drzwi wagonu osobowego. Opisano wykonane badania i uzyskane wyniki. Artykuł powstał w wyniku realizacji projektu celowego nr ROW-11-453/2008 „Ogniotrwałe drzwi rozsuwane na ścianie czołowej wagonów pasażerskich”.
1. Wprowadzenie
Konstrukcja końca wagonu osobowego powinna powstrzymywać rozprzestrzenianie się ognia, dymu i promieniowania ciepła tak, aby nie nastąpił pożar ko-lejnego pojazdu. Odporność ogniową bada się działa-jąc termicznie na ścianę zgodnie ze standardową krzywą temperatury i czasu przedstawioną na rys.1.
Dla wymiernego określenia odporności ogniowej ocenia się zdolność do powstrzy-mywania ognia (szczelność) oraz przenoszenia ciepła (izolacyjność). Kryteriami stanu granicznego szczelności ogniowej są:
− płomień trwający dłużej niż 10 sekund na po-wierzchni nie nagrzewanej
− powstanie szczeliny o grubości 25 lub 6 mm i 150 mm długości
− zapalenie próbnika z waty − uszkodzenie zamka lub zawiasów. Kryteriami stanu granicznego izolacyjności są
przyrosty temperatury na nie nagrzewanej powierzchni drzwi:
− średnia 140oC − maksymalna 180oC. Wymagania takie zawarte w karcie UIC 564-2 [2]
muszą spełniać również drzwi zabudowane w ścianach czołowych wagonów. Pozostałe wymagania konstruk-cyjne drzwi zawiera karta UIC 560 [1], a wytrzymało-ściowe karta UIC 566 [3].
Z wymienionymi kartami jest zgodna obowiązująca norma PN-K-88208 [5].
Celem realizowanego projektu było opracowanie dokumentacji, wykonania modelu drzwi oraz wykona-nie badań. Założono uzyskanie co najmniej 10 minu-towej odporności ogniowej.
Standardowa krzywa nagrzewania
0
100200
300
400
500600
700
800900
1000
0 10 20 30 40 50 60 70
Czas [min]
Tem
pera
tura
[o C
]
Rys. 1. Standardowa krzywa nagrzewania
2. Realizacja projektu
Na wstępie projektu dokonano przeglądu dostęp-nych i powszechnie stosowanych materiałów charakte-ryzujących się odpornością na działanie wysokich temperatur. W wyniku weryfikacji dla warunków wy-stępujących w wagonach, wytypowano do izolacji drzwi wełnę mineralną, płyty „chłodzące” i uszczelki
pęczniejące. Duży gradient temperatur wymagał opra-cowania konstrukcji drzwi bez mostków cieplnych i z minimalnymi odkształceniami termicznymi. Opracowano wstępny model drzwi oparty na stalo-wym szkielecie z profili cienkościennych wypełnio-nym wełną mineralną oraz przyklejonym poszyciem z blachy stalowej i płyt Polstop „PAX”. W płytach tych pod wpływem wysokiej temperatury zachodzi reakcja chemiczna w wyniku której następuje schłodzenie powierzchni poszycia. Wykonane analizy wytrzymało-ści drzwi na obciążenie próbne [7] oraz odporność termiczną [8] potwierdziły prawidłowość przyjętej konstrukcji skrzydła drzwi. Z uwagi na złożoność zachodzących procesów podczas oddziaływania ter-micznego, niepełne dane techniczne zastosowanych materiałów, badania modelowe zostały uproszczone, a konstrukcję zweryfikowano poddając próbie rzeczywi-stą próbkę wycinka drzwi. Próbki drzwi do badań zo-stały wykonane przez Fabrykę Urządzeń Technicz-nych ALCON w Żmigrodzie. Materiały izolacyjne zostały dostarczone przez firmy Branddex oraz Roc-kwoll. Badania wykonano w firmie Branddex w Stargardzie Szczecińskim. Zabudowę próbki w piecu przedstawio-no na rys.2
Czas trwania próby wyniósł 35 minut. Zmierzono przyrosty temperatury w piecu i na powierzchni nie ogrzewanej strony próbki. Wyniki próby przedsta-wiono na rys.3. Szczelność i izolacyjność termiczna została zachowana.
55

POJAZDY SZYNOWE NR 1/2011
Rys. 2. Przekrój przez próbkę nr 1
0255075
100125150175
0 5 10 15 20 25 30 35 40
Czas [min]
Tem
pera
tura
[°C]
Rys. 3. Próba 1. Różnica temperaturna nie nagrzewanej powierzchni próbki nr 1
Celem drugiej próby było zweryfikowanie popraw-ności dwóch koncepcji konstrukcyjnych. Pierwsza dotyczyła sposobu osadzenia, zamknięcia oraz uszczelnienia szyby ognioodpornej. Druga dotyczyła uszczelnienia miejsca styku obu płatów.
Do przeprowadzenia drugiej próby skonstruowano próbkę składającą się z jednego kompletnego skrzydła drzwi oraz wycinka konstrukcji skrzydła drugiego (rys.4).
Rys. 4. Próbka nr 2
Próbka nr 2 zachowała odporność ogniową przez 35 minut Stan próbki po badaniach pokazano na rys.5.
Strona nie nagrzewana Strona nagrzewana
Rys. 5. Próbka nr 2 po badaniach
Wyniki przeprowadzonych badań dały podstawę do zaprojektowania kompletnych skrzydeł drzwi typu 100ZW przygotowanych do zabudowy w ścianie czo-łowej wagonu pasażerskiego osobowego typu Z1.
Zaprojektowane drzwi rozsuwane typu 100ZW składają się z dwóch skrzydeł drzwiowych (rys.6) których konstrukcja jest niemal identyczna. Jedno ze skrzydeł wyposażono w gniazdo blokady, a drugie w zamek drzwiowy typu 101ZW.
Rys. 6. Ognioodporne drzwi rozsuwane typu 100ZW
Konstrukcję drzwi stanowią: stalowy szkielet, izo-lacja, poszycia, ognioodporna szyba, uszczelki boczne i prowadnik drzwi.
Stalowy szkielet składa się z: ramy, wzmocnienia i obejmy okna. Rama szkieletu została wykonana w dwóch profili bocznych, górnego oraz dolnego. Profile boczne zostały zaprojektowane tak, aby umożliwić montaż uszczelek bocznych w tych profilach. Profil górny wyposażono w pręty gwintowane, na których skrzydła podwieszane są do mechanizmu otwierania i zamykania drzwi. Profil dolny przystosowano do mon-tażu prowadnika drzwi.
56

POJAZDY SZYNOWE NR 1/2011
Ramę szkieletu wzmocniono dodatkowymi profi-lami, które oprócz głównej funkcji jaką jest zapewnie-nie nośności całej konstrukcji drzwi, stanowią dodat-kowo oparcie dla izolacji i obejmy okna.
Izolacja drzwi została wykonana z wełny minimal-nej i poszyć. Wełna mineralna osadzona jest w szkie-lecie drzwi i zamykana od zewnątrz poszyciami. Po-szycia zbudowane są z blachy stalowej i płyty Palstop „PAX”.
Drzwi wyposażono także w ognioodporną szybę „Promaglass 30”. Osadzona jest ona w obejmie okna i zamknięta od zewnątrz specjalnymi profilami. Do bocznych profili zamontowano uszczelki wykonane z silikonu uniepalnionego, a w dolnym profilu zabudo-wano prowadnik drzwi wykonany z tworzywa sztucz-nego.
Drzwi zostały wyposażone także w szereg uszcze-lek pęczniejących. Celem ich jest wypełnienie wszel-kich szczelin powstałych w konstrukcji samych drzwi jak i między drzwiami a ścianą czołową, przez które możliwe jest przedostanie się ognia. Szczeliny takie istnieją przede wszystkim w węzłach takich jak: styk obu skrzydeł drzwiowych, boczne górne i dolne kra-wędzie skrzydeł drzwiowych oraz miejsce osadzenia szyby i zamka drzwiowego.
Przekrój poziomy przez skrzydło drzwi przedsta-wiono na rys.7, natomiast przekrój pionowy na rys.8.
Rys. 7. Przekrój poziomy przez skrzydło drzwi
Rys. 8. Przekrój poziomy przez skrzydło drzwi
Na podstawie przygotowanej dokumentacji wyko-nano model drzwi w rzeczywistej skali. Drzwi zabu-dowano w przygotowanym do prób wycinku ściany czołowej wagonu typu Z1. Drzwi do prób nie zostały wyposażone w mechanizm zamykający.
Badanie odporności ogniowej drzwi odbyło się w Centrum Techniki Okrętowej w Gdańsku. Metodyka i warunki badania były zgodne z normą PN-EN 1363-1 [3] oraz PN-EN 1634-1 [5].
Podczas próby w 10 minucie nastąpiło rozsunięcie skrzydeł drzwi i utrata szczelności ogniowej pomiędzy płatami drzwi. Izolacyjność termiczna drzwi została zachowana.
Do kolejnej próby drzwi wyposażono w układ sy-mulacyjny docisk skrzydeł drzwi przez mechanizm otwierania i zamykania. Zabudowane drzwi do próby pokazano na rys.9. Na rys.10 przedstawiono przyrost temperatury na nie nagrzewanej powierzchni drzwi. Izolacyjność termiczna drzwi została zachowana. Szczelność ogniowa została utracona w 14 minucie
próby. Zostało przekroczone kryterium płomienia trwającego dłużej niż 10s. Utrata szczelności spowo-dowana była przepaleniem uszczelki z silikonu na styku skrzydeł drzwi. Na rys.11 pokazano nagrzewaną stronę drzwi bez-pośrednio po odsunięciu od pieca.
Rys. 9. Drzwi zabudowane w piecu przed próbą
Rys. 10. Przyrost temperatury na nie nagrzewanej powierzchni drzwi 100ZW
57

POJAZDY SZYNOWE NR 1/2011
Rys. 10. Drzwi 100ZW po próbie
4. Podsumowanie
Zaprezentowane drzwi typu 100ZW zapewniają kilkunastominutowe powstrzymanie ognia płonącego wewnątrz wagonu osobowego. IPS „Tabor” prowadzi dalsze prace konstrukcyjne, którym celem jest uzyska-nie dłuższego czasu odporności ogniowej drzwi.
Efekt wprowadzonych zmian konstrukcyjnych - geometria i materiał uszczelnienia, zostanie sprawdzo-ny w kolejnych badaniach.
L i t e r a t u r a
[1] K a r t a U I C 5 6 0 Drzwi, pomosty wejściowe, okna, stopnie, uchwyty i poręcze wagonów osobowych i wa-gonów bagażowych.
[2] K a r t a U I C 5 6 4 - 2 Przepisy o zapobieganiu przeciw pożarowym i zwalczaniu ognia w pojazdach szynowych do komunikacji międzynarodowej, w których przewozi się pasażerów lub przyłączanych wagonach typu pasażerskiego.
[3] K a r t a U I C 5 6 6 Obciążenia pudeł wagonów pasażerskich i ich części dobudowanych.
[4] P N - E N 1 3 6 3 - 1 Badania odporności ogniowej. Część 1: Wymagania ogólne.
[5] P N - E N 1 6 3 4 Badania odporności ogniowej i dymoszczelności zespołów drzwiowych żaluzjowych i otwieranych okien oraz elementów budowlanych – cześć 1. Badania odporności ogniowej drzwi, żaluzji i otwieranych drzwi.
[6] P N - K - 8 8 2 0 8 Wagony osobowe. Drzwi czołowe rozsuwane. Wymagania i metody badań.
[7] O R - 9 6 5 1 Sprawozdanie z analizy wytrzymałości drzwi czołowych rozsuwanych.
[8] O R - 9 6 5 5 Sprawozdanie z analizy termicznej w strukturze drzwi czołowych rozsuwanych.
58