koncepcja, realizacja i analiza aktuatora piezoelektrycznego do
TRANSCRIPT

Gdańsk 2015
INPT O U L O U S E
Autoreferat rozprawy doktorskiej
Koncepcja, realizacja i analiza aktuatora piezoelektrycznego
do sterowania położeniem fotela
w samochodzie osobowym
Autor:
mgr inż. Roland Ryndzionek
Promotorzy:
dr hab. inż. Mieczysław Ronkowski, prof. nadzw. PG
dr hab. inż. Jean-Francois Rouchon, prof. INPT
Kopromotorzy:
dr inż. Michał Michna
dr inż. Francois Pigache


Spis tres ci
1 Wprowadzenie ........................................................................................................................................ 1
1.1 Cel rozprawy doktorskiej ........................................................................................................... 2
1.2 Struktura rozprawy ...................................................................................................................... 3
2 Zjawisko piezoelektryczne, materiały i topologie silników piezoelektrycznych .......... 4
2.1 Zjawisko piezoelektryczne ......................................................................................................... 4
2.2 Materiały piezoelektryczne ....................................................................................................... 5
2.3 Wybrane topologie silników rezonansowych .................................................................... 7
3 Koncepcja nowego aktuatora piezoelektrycznego ..................................................................10
4 Model analityczny prototypu WAP ................................................................................................12
5 Symulacja MES prototypu WAP ......................................................................................................17
5.1 Symulacja płytki piezoelektrycznej ......................................................................................17
5.2 Symulacja pojedynczego aktuatora - przeciwmasy .......................................................18
6 Pomiary doświadczalne prototypu WAP ....................................................................................20
6.1 Pomiar częstotliwości rezonansowych oraz drgań stojana ........................................21
6.2 Pomiar charakterystyki mechanicznej prototypu WAP ...............................................24
7 Podsumowanie ......................................................................................................................................26
7.1 Wyniki badań i osiągnięcia rozprawy ..................................................................................26
7.2 Planowane prace badawcze ....................................................................................................27
8 Bibliografia ..............................................................................................................................................29


1
1 WPROWADZENIE
owoczesne systemy mechatroniczne/elektromechaniczne charakteryzują się coraz
większym poziomem integracji silników (aktuatorów) oraz sensorów z mechanizmem
sprzęgającym. Tendencja ta jest szczególnie zawansowana w dziedzinie silników
(aktuatórów), charakteryzujących się małymi wymiarami gabarytów - wymiarami na poziomie
centymetrów lub decymetrów.
Otwiera to możliwości projektowania nowej generacji urządzeń elektromechanicznych, które
są zdolne do sprostania wyzwaniom stawianym przez nowe technologie elektrotechniki - More
Open Electrical Technology (MOET)). W szczególności w takich dziedzinach, jak przemysł
samochodowy (zawansowane sterowanie silników spalinowych, zwiększony komfort jazdy),
inżynierii bio-medycznej (specjalne protezy, roboty medyczne), inteligentne domy, lotnictwo i
awionika (aktuatory do sterowania lotem, aktuatory do zarządzania źródłami energii) [18],
[20], [27], [28].
Osiągnięty ostatnio postęp w dziedzinie inżynierii materiałowej, dotyczący materiałów
pasywnych (kompozytowe materiały magnetyczne) lub materiałów
inteligentnych/elektroaktywnych (piezoelektrycznych, ceramiki elektrostrykcyjnej, stopów
magnetostrykcyjnych, stopów z pamięcią kształtu) szczególnie wspiera innowacyjne
rozwiązania w zakresie bardzo wysokiego poziomu integracji funkcjonalnej systemów
mechatronicznych/elektromechanicznych dedykowanych napędom specjalnym
Silniki (aktuatory) piezoelektryczne są stosunkowo nowe w porównaniu do klasycznych
silników o strukturze elektromagnetycznej. W porównaniu do silników elektromagnetycznych,
zakres ograniczeń natury fizycznej i natury technologicznej znaczący. W konsekwencji
konieczne są dalsze badania, celem zmniejszenia ograniczeń natury technologicznej.
Dotyczas uzyskane wyniki w dziedzinie budowy silników piezoelektrycznych (aktuatorów),
wskazują na ich potencjalnie duże możliwości w zastosowaniach specjalnych, szczególnie
zaawansowanych w zakresie wysokiego poziomu integracji funkcjonalnej. Maszyny te
charakteryzują się względnie wysokim stosunkiem momentu obrotowego do ich masy
(gęstości momentu). Na ogół, zakres gęstości momentu obrotowego jest od 10 do 100-krotnie
większy niż dla silników (aktuatorów) elektromagnetycznych o takich samych gabarytach lub
takiej samej masie.
Zastosowanie silników piezoelektrycznych zmniejsza liczbę przekładni mechanicznych, z
uwagi na możliwość ich bezpośredniego sprzęgania z wałem napędowym. W konsekwencji
możliwe jest uzyskanie zwiększonej wydajności całego układu elektromechanicznego. Z kolei
w układach, gdzie wymagany jest duży moment blokujący, wielokomórkowe (wielomodułowe)
silniki piezoelektryczne wydają się być szczególnie odpowiednie.
W rozprawie doktorskiej rozważono nową koncepcje wielokomórkowego silnika
piezoelektrycznego dedykowanego do sterowania położeniem fotela w samochodzie.
N

WPROWADZENIE
2
1.1 CEL ROZPRAWY DOKTORSKIEJ
Prace badawcze przedstawione w pracy doktorskiej wykonano w ramach Programu Unii
Europejskiej ERASMUS [42], oraz Projektu "Centrum Studiów Zaawansowanych (Advanced
PhD)" - rozwój interdyscyplinarnych studiów doktoranckich na Politechnice Gdańskiej w
obszarach kluczowych w kontekście celów Strategii Europa 2020” [43].
Prace badawcze zrealizowano w ramach współpracy między uczelnią INP – ENSEEIHT –
LAPLACE w Tuluzie (Francja) [40] oraz Politechniki Gdańskiej, Wydział Elektrotechniki i
Automatyki, Katedra Energoelektroniki i Maszyn Elektrycznych [30].
Laboratorium LAPLACE (Laboratory on Plasma and Conversion of Energy) jest
międzyuczelnianą jednostką badawczą, które bierze udział w zaawansowanych programach
badawczych w następujących dziedzinach: badania plazmy i jej zastosowania, rozwój nowych
materiałów oraz ich zastoswania w systemach elektromechanicznych, projektowanie i
optymalizacja układów energoelektronicznych. Jedną z grup badawczych w Laboratorium
LAPLACE jest grupa GREM3, która jest wiodącą jednostką badawczą na świecie w dziedzinie
zagadnień piezoelektryczności i stopów z pamięcią kształtu.
Pierwszy staż badawczy (12 miesięcy) w Laboratorium LAPLACE miał miejsce w 2011 r.
Pierwsza część obejmowała studia na kierunku "Transformation de l'Energie et Mécatronique
avancée", głównie obejmując energoelektronikę, automatykę i systemy mechatroniczne, i
zakończyła się obroną pracy dyplomowej na poziomie „Master International”. W ramach pracy
przeprowadzono badania silnika rezonansowego o ruchu modulowanym oraz hybrydowego
silnika piezoelektrycznego. Z kolei, w ramach drugiej części stażu realizowano projekt
badawczy "Moteur piézoélectrique multicellulaire".
Prace badawcze w ramach tego projektu kontynuowano w Katedrze Energoelektroniki i
Maszyn Elektrycznych. Prace badawcze zakończono w Laboratorium LAPLACE w ramach
programu Advanced PhD w czasie trzymiesięcznego stażu, począwszy od grudnia 2013 r.
Przedmiotem prac badawczych prowadzonych w Laboratorium LAPLACE była kontynuacja
projektu " Multicell piezoelectric motor", który obejmowały pomiary i analizę charakterystyk
zbudowanego prototypu wielokomórkowego silnika piezoelektrycznego.
Należy podkreślić, że prace badawcze w dziedzinie technologii piezoelektrycznej nie są
przeprowadzone w Polsce na szeroką skalę. Badania zrealizowane w ramach rozprawy
doktorskiej są pracami pionierskimi w Polsce, skupiającymi się na zastosowaniu zjawiska
piezoelektrycznego do projektowania budowy i produkcji silników piezoelektrycznych
(aktuatorów) o wielokomórkowej strukturze elektromechanicznej.
Teza rozprawy:
Koncepcja wielokomórkowego aktuatora piezoelektrycznego, o topologii bazującej
na kombinacji zasady działania silnika ultrasonicznego z falą biegnącą oraz
struktury elektromechanicznej silnika piezoelektrycznego o ruchu obrotowym
modulowanym, charakteryzuje się zarówno względnie wysoką prędkością
obrotową jak i dużym momentem blokującym.

WPROWADZENIE
3
1.2 STRUKTURA ROZPRAWY
W celu systematycznego udowodnienia postawionej tezy, przyjęto poniższą strukturę pracy
doktorskiej.
Rozprawa doktorska zawiera siedem rozdziałów opisujących rozważania wstępne,
modelowanie, badania symulacyjne, realizację prototypu i badania doświadczalne
wielokomórkowego aktuatora piezoelektrycznego (j. pol. WAP, j. ang MPM).
Rozdział 2 obejmuje opisy zjawiska piezoelektrycznego, materiałów piezoelektrycznych,
dostępnych w literaturze konstrukcji silników piezoelektrycznych (aktuatorów).
Rozdział 3 obejmuje skrócony opis obecnie stosowanych serwonapędów do sterowania
położeniem fotela samochodowego, znanych struktur wielokomórkowych silników
piezoelektrycznych opisane. Ponadto obejmuje ogólne ogólny opis nowej koncepcji prototypu
WAP.
Rozdział 4 zawiera opis analitycznego podejścia do modelowania podstawowych struktur
silników piezoelektrycznych. Po pierwsze, wyjaśniono modelowanie struktury obwodu
rezonansowego za pomocą obwodu elektrycznego (Mason’a). Następnie opisano zasadę
działania, podstawowe zależności przetwornika Langevin’a oraz silnika rezonansowego o
ruchu modulowanym. Wreszcie, wykorzystując schemat zastępczy przetwornika Langevin'a,
opracowano i implementowano (w programie Matlab) model analityczny WAP. Opracowany
model WAP jest odpowiednio zmodyfikowaną wersją modelu analitycznego silnika
rezonansowego o ruchu modulowanym. Wstępne wymiary główne i podstawowe parametry
WAP wyznaczono za pomocą opracowanego modelu analitycznego.
W rozdziale 5 opisano weryfikację wymiarów i parametrów prototypu WAP. Weryfikacja
obejmuje opracowanie modelu wirtualnego (geometrycznego) w środowisku programu ANSYS
(metoda FEM/MES). Badania symulacyjne prototypu WAP w środowisku programu ANSYS
pozwoliły wyznaczyć częstotliwości rezonansowe i wartości naprężeń.
W rozdziale 6 opisano proces produkcji, montażu i eksperymentalnej weryfikacji prototyp
WAP.
W rozdziale 7 przedstawiono wnioski końcowe: wyniki badań, osiągnięcia rozprawy i zakres
planowych dalszych prace badawczych.
Do rozprawy dołączono pięć załączników.

4
2 ZJAWISKO PIEZOELEKTRYCZNE, MATERIAŁY I
TOPOLOGIE SILNIKÓW PIEZOELEKTRYCZNYCH
eorię piezoelektryczności w 1880 roku przedstawili bracia Curie, a Gabriel Jonas
Lippman opisując wzorami matematycznymi odwrotny efekt piezoelektryczny
potwierdził badania przeprowadzone przez braci Curie. W 1917 roku Paweł Langevin
zastosował materiały piezoelektryczne (kryształy kwarcu) do wykrywania łodzi podwodnych.
Obecnie zjawisko piezoelektryczności wykorzystuje się praktycznie w każdej dziedzinie
(czujniki, aktuatory, systemy asejsmiczne, zapalniki, mikrofony, napędy) [1], [6], [11].
Pierwotnie stosowane materiały, takie jak kwarc, turmalin, sól Rochelle, itp. wykazywały
znikome właściwości piezoelektryczne. Potrzeba materiałów o doskonalszych parametrach
doprowadziła do wynalezienia polikrystalicznych materiałów ceramicznych takich jak:
tytanian baru, czy cyrkonian-tytanian ołowiu (ang. PZT). Obecnie ceramika PZT stanowi
najczęściej stosowany materiał elektroaktywny siłowników piezoelektrycznych w
serwonapędach nowej generacji – tzw. napędach osobliwych [4], [33].
2.1 ZJAWISKO PIEZOELEKTRYCZNE
O prostym zjawisku piezoelektrycznym mówimy gdy pod wpływem działania naprężeń
mechanicznych na powierzchni kryształu indukują się ładunki elektryczne. Odwrotne zjawisko
piezoelektryczne występuje gdy pod wpływem pola elektrycznego w płytce piezoceramicznej
powstają naprężenia i odkształcenia mechaniczne (Rys. 2.1). Kierunek naprężeń
mechanicznych zależny jest od kierunku pola elektrycznego. Odkształcenia mechaniczne są
proporcjonalne do natężenia pola elektrycznego. Drgania mechaniczne płytki mają taką samą
częstotliwość jak przyłożone napięcie zmienne [3], [7], [13].
Rys. 2.1 Ilustracja: a) efektu piezoelektrycznego, b) odwrotnego efektu piezoelektrycznego
Zjawisko piezoelektryczne jako sprzężenie oddziaływań mechanicznych oraz elektrycznych
można opisać równaniami konstytutywnymi [10]:
𝑆𝑖𝑗 = 𝑠𝑖𝑗𝑘𝑙𝐸 𝑇𝑘𝑙 + 𝑑𝑘𝑖𝑗𝐸𝑘
𝐷𝑖 = 𝑑𝑖𝑘𝑙𝑇𝑘𝑙 + 𝜀 𝑖𝑘𝑇 𝐸𝑘
(2.1)
T

ZJAWISKO PIEZOELEKTRYCZNE, MATERIAŁY I TOPOLOGIE SILNIKÓW PIEZOELEKTRYCZNYCH
5
gdzie:
T – tensor naprężenie [N/m2]
S – tensor odkształcenie [m]
E – wektor pola elektrycznego [V/m]
D – wektor indukcji elektrycznej [C/m2]
d – stała piezoelektryczna (m/V lub C/N)
2.2 MATERIAŁY PIEZOELEKTRYCZNE
Z powodu anizotropowego charakteru ceramiki piezoelektrycznej właściwości PZT zależą od
kierunków wielkości elektrycznych i mechanicznych (Rys. 2.2). Stałe opisujące odwrotne
zjawisko piezoelektryczne posiadają dwa indeksy. Pierwszy odnosi się do przyczyny
odkształceń – wielkości elektrycznej; drugi do skutku, czyli wielkości mechanicznej. Indeksy te
pokazują również możliwe tryby pracy materiału piezoelektrycznego – odkształcenia
podłużne, poprzeczne, wyginające i ścinające. Rodzaj odkształcenia zależy m.in. od kształtu,
orientacji ciała względem osi kryształów piezoelektrycznych i lokalizacji elektrod [12], [15].
Z (3)
Y (2)
X (1)
6
54
Oś polaryzacji
Rys. 2.2 Prostokątny układ współrzędnych opisujący tryby pracy materiału piezoelektrycznego (oś Z – oś polaryzacji)
Zdolność przetwornika do konwersji energii cechuje współczynnik sprzężenia k [32].
Charakteryzuje jakość konwersji elektromechanicznej w materiale piezoelektrycznym, a zatem
zdolność przekształcania energii elektrycznej na energię mechaniczną:
𝑘 = √𝑊𝐸𝑀
2
𝑊𝐸 ∙ 𝑊𝑀 (2.2)
Gdzie:
WM – energia mechaniczna,
WE – energia elektryczna
WEM – energia elektromechaniczna
Kierunek odkształceń może być zrealizowany w różnych kierunkach, które można podzielić na
trzy główne typy [30]:

ZJAWISKO PIEZOELEKTRYCZNE, MATERIAŁY I TOPOLOGIE SILNIKÓW PIEZOELEKTRYCZNYCH
6
tryb podłużny (tryb 33) powoduje zmianę
długości wzdłuż osi 3, gdy pole elektryczne
przyłożone jest wzdłuż tej samej osi, za pomocą
elektrod umieszczonych na bokach prostopadle
do tej osi
3
2
1
E
P0
tryb poprzeczne (tryb 31 lub 32), także
prowadzi do zmiany długości wzdłuż osi 1, gdy
pole elektryczne przyłożone jest wzdłuż osi 3
3
2
1
E
P0
tryb ścinający (w trybie 15) prowadzi do
odkształcenia ścinającego wokół osi 2, gdy pole
elektryczne wzdłuż osi 1
3
2
1
5
E
P0
Poniżej zestawiono właściwości niektórych materiałów piezoelektrycznych. Tryb podłużny - k33 jest najbardziej odpowiedni w odniesieniu do generacji drgań (Tabela 2.1).
Tabela 2.1 Właściwości wybranych materiałów PZT [34], [35]
Model Typ
Współczynnik
sprzężenia
Temperatura
Curie
[°C]
Stała
piezoelektryczna
[10-12 C/N]
Dielectric
constants
(1 kHz)
k15 k33 k31 d33 ε33
PZT-4D Soft PZT 0.62 0.71 0.33 310 360 1280
PZT-8 Hard PZT 0.57 0.68 0.34 320 280 1000
P189 Traditional
Hard PZT 0.51 0.65 0.32 320 240 1150
P762 Traditional
Hard PZT 0.58 0.68 0.35 300 300 1300
P188 Traditional
Soft PZT 0.62 0.75 0.37 340 425 1850
Pz27 Traditional
Soft PZT 0.59 0.70 0.33 350 425 1800

ZJAWISKO PIEZOELEKTRYCZNE, MATERIAŁY I TOPOLOGIE SILNIKÓW PIEZOELEKTRYCZNYCH
7
2.3 WYBRANE TOPOLOGIE SILNIKÓW REZONANSOWYCH
Pierścieniowy silnik ultrasoniczny został zaprojektowany przez japońskiego badacza Toshiku
Sashidę w 1982 roku. Zasada działania opisywanego silnika opiera się na dwóch zjawiskach
(Rys. 2.3). Pierwsze z nich to generacja mechanicznych drgań w materiale piezoceramicznym
lub w przymocowanym do niego metalowym pierścieniu. Amplituda oscylacji jest bardzo mała
(ułamki µm). W celu zwiększenia wartości drgań wykorzystuje się rezonans ceramiki o
częstotliwościach w paśmie ultrasonicznym. Drugie ze zjawisk polega na wytworzeniu fali
biegnącej w pierścieniowym stojanie przez drgające elementy piezoceramiczne. Pierścień
zawierający płytki piezoceramiczne podzielony jest na dwie części zasilane różnymi sygnałami
elektrycznymi (w praktyce wykorzystuje się przekształtnik generujący dwu fazowe napięcie o
wysokiej częstotliwości) [14], [19], [26].
FN
FT
WIRNIK
PIERŚCIEŃ PIEZOELEKTRYCZNY
OBUDOWA
STOJAN
PIERŚCIEN PIEZOELEKTRYCZNY
SPRĘŻYNA
WAŁ
WIRNIK
Rys. 2.3 Zasada działania oraz budowa pierścieniowego silnika ultra sonicznego [36]
Obie połówki składają się z kilku płytek piezoceramicznych o różnej polaryzacji. Segmenty te
wytwarzają rozchodzące się w przeciwnych kierunkach fale, które po nałożeniu generują falę
rozprzestrzeniającą się w jednym kierunku. Siła napędzająca (styczna do grzbietu fali) jest
generowana jedynie w punktach styku wierzchołków fali z wirnikiem [2]. W celu zmiany
kierunku fali należy zmienić polaryzację napięcia zasilającego (Rys. 2.4)
Pz37
Low-
Acoustic
Impedance
Family
0.35 0.60 0.15 370 350 1150
Pz46 High Temp
PZT 0.03 0.09 0.02 650 18 120

ZJAWISKO PIEZOELEKTRYCZNE, MATERIAŁY I TOPOLOGIE SILNIKÓW PIEZOELEKTRYCZNYCH
8
-+
+
+
+
+
+
++
Faza 2Faza 1
λλ/4
3λ/4
-
---
-
-
-
+ - P
Rys. 2.4 Podział oraz kierunki polaryzacji pierścienia piezoelektrycznego w ultrasonicznym silniku
SHINSEI [17]
Stojan silnika ultrasonicznego (Rys. 2.4) składa się z elastycznego pierścienia, pierścienia
płytek piezoceramicznych oraz substancji sklejającej obie części. Cechą charakterystyczną
stojana jest powierzchnia w kształcie ‘grzebienia’. Taka konstrukcja pozwala na wzmocnienie
wibracji generowanych przez piezoceramikę (zęby grzebienia) oraz na oczyszczenie
powierzchni styku stojana z wirnikiem z pyłu powstałego w wyniku tarcia (rowki). Substancja
mocująca piezoceramikę do stojana powinna charakteryzować się wysoką wytrzymałością
mechaniczną, odpornością na wysoką temperaturę oraz odpowiednim czasem wiązania.
Ważnym aspektem pracy silnika ultrasonicznego jest efektywne przekazywanie energii drgań
z stojana do wirnika [9], [16].
Aby zapewnić lepsze warunki transmisji energii w niektórych przypadkach stosuje się cienki
pierścień między wirnikiem a stojanem. Podstawowe wymagania co do materiału pierścienia
zakładają: jednolity rozkład nacisku na powierzchnię kontaktową oraz wysoki współczynnik
tarcia.
Inną konstrukcją wykorzystującą zjawisko rezonansu jest silnik o ruchu obrotowym
modulowanym (SPMRO). Silnik składa się z 3 głównych części: płytek piezoceramicznych,
przeciwmasy (stojana) oraz wirnika, czyli dokładnie z tych samych elementów co przetwornik
Langevin’a (Rys. 2.5) [17].

ZJAWISKO PIEZOELEKTRYCZNE, MATERIAŁY I TOPOLOGIE SILNIKÓW PIEZOELEKTRYCZNYCH
9
a) b) c)
PRZECIWMASA
PŁYTKI PIEZOELEKTRYCZNE WIRNIK
Rys. 2.5 Struktury: a) przetwornik Langevin’a b) silnik ruchu obrotowym modulowanym c) prototyp silnika (Laboratorium LAPLACE w Tuluzie) [23]
Zasadą działania jest generacja drgań poprzez pierścieniowe piezoelektryczne elementy
usytuowane między przeciwmasami. Z reguły są to cztery płytki piezoelektryczne, zasilane
dwoma sygnałami napięciowymi przesuniętymi względem siebie o 90°. Dodatkowo, aby
powstała fala biegnąca ceramiki muszą być odpowiednio zorientowane Rys. 2.6) [25], [30].
a)
b)
c)
Sin(ωt)
Cos(ωt)
α β Fn
Sin(ωt)
Cos(ωt)
Rys. 2.6 Sposób ułożenia piezo ceramik w : a) przetwornik Langevin’a, b) silnik rezonansowy SPMRO, c)
zasada działania SPMRO
W przeciwieństwie do silnika pierścieniowego ultrasonicznego generowana jest tylko jedna
fala biegnąca – pojedynczy punkt styku pomiędzy wirnikiem a stojanem. Zaletą silnika o ruchu
obrotowym jest symetryczna budowa pozwalająca na użycie dwóch wirników. Dzięki temu jest
możliwość uzyskania większego momentu obrotowego [28], [29].
Faz
a A
Faza A
Faza A

10
3 KONCEPCJA NOWEGO AKTUATORA
PIEZOELEKTRYCZNEGO
oncepcja badanego prototyp WAP charakteryzuje się połączeniem zalet zarówno
ultrasonicznego silnika piezoelektrycznego z falą biegnącą, jak i silnika
piezoelektrycznego o modulowanym ruchu obrotowym (Rys. 3.1). Kombinacja
struktur tych dwóch silników pozwoliła uzyskać:
wymagane wartości zarówno momentu obrotowego, jak i prędkości obrotowej w
układzie sterowania położeniem fotela w pojazdach samochodowych;
zintegrowany układ przeniesienia napędu (uproszczona konstrukcja mechaniczna
i bezgłośna praca),
wyższe częstotliwości rezonansowe na poszczególnych komórkach – cicha praca
pomimo zwiększenia wymiarów,
symetryczna budowa pozwalająca na użycie dwóch wirników,
moment blokujący bez dodatkowego zużycia energii elektrycznej,
budowę pozwalająca na użycie silnika w niesprzyjających warunkach.
Przed rozpoczęciem projektowania przyjęto kilka wstępnych założeń takich jak:
częstotliwość rezonansowa poszczególnych komórek powinna być wyższa niż 20 kHz,
średnica oraz długość maszyny możliwie jak najmniejsze,
zastosowanie trzech aktuatorów rezonansowych w jednej strukturze,
możliwie prosta budowa.
Z zasady działania WAP wynika, że pracuje on przy częstotliwościach rezonansowych powyżej
20 kHz - zapewnia to spełnienie warunku bezgłośnej pracy (niesłyszalnej dla człowieka) w
układzie sterowania położeniem fotela w pojazdach samochodowych.
Rys. 3.1 Przykład obecnie stosowanych serwonapędów do regulacji siedzenia samochodu [37]
K

KONCEPCJA NOWEGO AKTUATORA PIEZOELEKTRYCZNEGO
11
Należy podkreślić, że WAP może być bezpośrednio sprzęgnięty z wałkiem napędowym w
układzie sterowania położeniem fotela w pojazdach samochodowych. Zatem umożliwia to
zmniejszenie liczby przekładni mechanicznych jakie stosuje się w klasycznych rozwiązaniach
takiego napędu. Zastosowanie silnika WAP pozwala również na uzyskanie momentu
blokującego bez konieczności zasilania układu. Koszt wykonania WAP zależy od
zastosowanych materiałów i technologii wykonania elementów silnika (druk 3D, obrabiarka
CNC).

12
4 MODEL ANALITYCZNY PROTOTYPU WAP
odel analityczny WAP opracowano na bazie modelu przetwornika Langevina oraz
zmodyfikowanego modelu silnika piezoelektrycznego o modulowanym ruchu
obrotowym (SPMRO) [30]. W równaniach modelu WAP uwzględniono zmianę
struktury SPMRO i następnie, celem wykonania obliczeń, model implementowano w
środowisku programu Matlab [4], [5], [8]. Głównym celem obliczeń było wyznaczenie
charakterystyki mechanicznej WAP a następnie jej porównanie z wynikami badań
doświadczalnych prototypu WAP.
-a
-b b
a
S2
S1 S3
Strefa pobudzająca
Strefa hamująca
V
-a -b b a
z
x
Strefa pobudzająca
Strefa kontaktu
Strefa
hamująca
Strefa
hamująca
Rys. 4.1 Strefa kontaktu pomiędzy stojanem a wirnikiem WAP
Prędkość obrotowa wirnika silnika jest wypadkową prędkości wszystkich punktów w strefie
kontaktu pomiędzy stojanem a wirnikiem (rys. 3). Obszar pomiędzy punktami <–b, b> jest
częścią strefy kontaktu (S2), która pobudza ruch wirnika (strefa napędowa). Obszary S1 i S3
odpowiednio pomiędzy punktami <-a, -b) oraz (b, a> hamują ruch wirnika (strefa blokująca).
Punkt pracy silnika znajduje się na charakterystyce mechanicznej (rys. 4). Punkt „d” odpowiada
prędkości biegu jałowego (S1+S2+S3=0). Pomiędzy punktami „c” i „d” wraz ze wzrostem
obciążenia powiększa się strefa napędowa S2 - moment rośnie. W punkcie „c” silnik osiąga
moment maksymalny, gdyż strefa napędowa obejmuje całą strefę kontaktu (S1=S3=0). W
dalszej części charakterystyki moment pozostaje stały – strefa napędowa nie może być większa
niż strefa kontaktu [22].
W przypadku, gdy strefa napędowa jest mniejsza niż blokująca (b<a), wartość momentu silnika
może być obliczona wg wzoru:
𝑇 = 2𝜇𝑟 (∫ 𝑝(𝑥)𝑙𝑐𝑑𝑥 − ∫ 𝑝(𝑥)𝑙𝑐𝑑𝑥
𝑎
𝑏
𝑏
0
) (4.1)
Przy czym maksymalną wartość momentu silnika wyznacza się z zależności [5]:
M

MODEL ANALITYCZNY PROTOTYPU WAP
13
𝑇𝑚𝑎𝑥 =𝜋
2 𝜇 𝑎 𝑙𝑐 𝑟 𝑃𝑟 (4.2)
gdzie: p(x) – rozkład siły nacisku opisany jest zależnością:
𝑝 = 𝑃𝑟 ( 1 − (𝑥
𝑎)
2
)
1
2
(4.3)
przy czym:
μ – współczynnik tarcia,
x – położenie na obwodzie zewnętrznym stojana,
A – całkowita powierzchnia styku między stojanem a wirnikiem,
r – promień powierzchni styku stojana z wirnikiem,
P0 – maksymalna siła w miejscu kontaktu.
Równanie (4.2) można przekształcić do prostszej postaci:
𝑇𝑚𝑎𝑥 = 𝜇 𝑟 𝐹𝑁 (4.4)
gdzie: Fn – siła nacisku na wirnik.
W WAP zastosowano dwa wirniki, zatem wzór na maksymalny moment obrotowy przyjmuje
postać:
𝑇𝑚𝑎𝑥 = 2 𝜇 𝑟 𝐹𝑁 (4.5)
Maksymalna prędkość w punkcie „a”=„b” została wyznaczona wg wzoru:
𝛺 = 𝑈0 𝜔 cos (
𝑎𝑟)
𝑟
(4.6)
gdzie: U0 – amplituda drgań stojana.
c
d
Tmax
TPunkt b poza strefą
kontaktu S2 = Tmax
b < a a < b
S1 + S2 + S3 = 0
𝛺 b = a
Rys. 4.2 Charakterystyka mechaniczna WAP: zależność momentu obrotowego od prędkości obrotowej

MODEL ANALITYCZNY PROTOTYPU WAP
14
Na podstawie zależności (4.1) - (4.6) wyznaczono charakterystykę mechaniczną prototypu WAP. Dla
badanego prototypu WAP najważniejszymi parametrami charakterystyki mechanicznej są: moment
blokujący równy 0,6 Nm i prędkość biegu jałowego równa 40 obr/min.
Moment/prędkość
Prędkość [obr/min]
0.8
0.6
0.4
0.2Mo
men
t [N
m]
0 5 10 15 20 25 30 35 40
Rys. 4.3 Charakterystyka mechaniczna prototypu WAP: zależność momentu obrotowego od prędkości obrotowej
Rozkład naprężeń
Położenie [mm]
Naprężenia [
Mp
a]
6
5
4
3
2
1
0-25 -20 -15 -15 -5 0 15 20 25105
Rys. 4.4 Charakterystyka mechaniczna prototypu WAP: zależność momentu obrotowego od prędkości obrotowej
Dodatkowo dla prototypu WAP przeprowadzono analizę wpływu zmiany współczynnika tarcia
oraz powierzchni styku na prędkość obrotową i moment blokujący (Rys. 4.5).

MODEL ANALITYCZNY PROTOTYPU WAP
15
μ = 0.29μ = 0.25
μ = 0.21
Speed [rpm]
To
rqu
e [N
m]
Torque/speed curveMoment/prędkość
Prędkość [obr/min]5 10 15 20 25 30 35 40
0.8
0.6
0.4
0.2
0
Mo
men
t [N
m]
Rys. 4.5 Charakterystyka mechaniczna prototypu WAP: wyznaczona dla różnych wartości współczynnika
tarcia (kolory: niebieski μ=0,29; czerwony μ=0,25; żółty μ=0,21)
Wzrost wartości współczynnika tarcia powoduje zwiększenie maksymalnego moment
obrotowego (Rys. 4.5) WAP. Zmianę wartości współczynnika tarcia uzyskuje się przez
wykonanie wirnika innego materiału (stal, aluminium, brąz) lub zastosowania nakładki
polimerowej na wirnik. Zmniejszenie wartości współczynnika tarcia można uzyskać przez
odpowiednie smarowanie powierzchni styku.
Rys. 4.6 Charakterystyka mechaniczna prototypu WAP: wyznaczona dla różnych wartości powierzchni styku stojan-wirnik

MODEL ANALITYCZNY PROTOTYPU WAP
16
Zmiana powierzchni styku pozwala odpowiednio ukształtować charakterystykę mechaniczną
WAP (Rys. 4.6). Zwiększając powierzchnię styku zwiększa się zakres prędkości obrotowych.
Niestety zwiększają się również opory tarcia, co powoduje zmniejszenie prędkości
maksymalnej. Odpowiedni dobór powierzchni styku zależy od kształtu struktury aktuatora i
oczekiwanych wartości momentu. Przy czym, analizę należy przeprowadzić na etapie
projektowania WAP.

17
5 SYMULACJA MES PROTOTYPU WAP
odel wirtualny (Rys. 5.1) został zaprojektowany w programie Autodesk Inventor, a
następnie przy pomocy metody elementów skończonych w środowisku Autodesk
Multiphisics zbadano częstotliwości rezonansowe [38].
Rys. 5.1 Model wirtualny prototypu wielokomórkowego silnika piezoelektrycznego
5.1 SYMULACJA PŁYTKI PIEZOELEKTRYCZNEJ
Pierwszym krokiem do analizy MES była symulacja płytki piezoceramicznej, aby określić
kierunki odkształceń. Została zrealizowana symulacja statyczna z wykorzystaniem modułu
„electrical” w programie Autodesk Multiphysics.
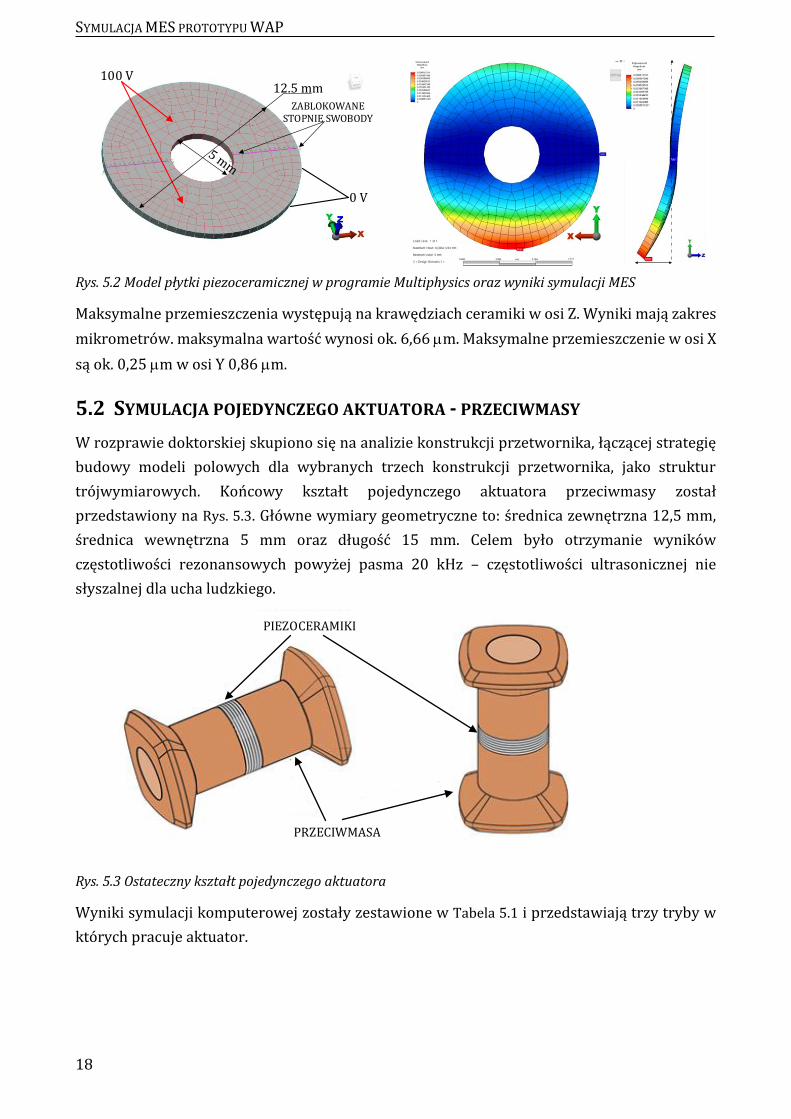
Pierwszym krokiem było zdefiniowanie geometrii. Zostały utworzone dwa pierścienie: średnia
zewnętrzna 12,5 mm, średnica wewnętrzna 5 mm i grubość 1 mm. Następnie, został
zdefiniowany rodzaj materiału - PZT 189 oraz określenie macierzy: [e] jako stałą
piezoelektryczną, [c] jako gęstość oraz sztywność materiału piezoelektrycznego. Aby
zasymulować polaryzację dodatnią i ujemną materiału, współczynnik piezoelektryczny e33
posiada wartość dodatnią lub ujemną. Odpowiedni materiał te został przypisane do konkretnej
połówki.
M
SYMULACJA MES PROTOTYPU WAP
18
100 V
0 V
ZABLOKOWANE STOPNIE SWOBODY
12.5 mm
Rys. 5.2 Model płytki piezoceramicznej w programie Multiphysics oraz wyniki symulacji MES
Maksymalne przemieszczenia występują na krawędziach ceramiki w osi Z. Wyniki mają zakres
mikrometrów. maksymalna wartość wynosi ok. 6,66 m. Maksymalne przemieszczenie w osi X
są ok. 0,25 m w osi Y 0,86 m.
5.2 SYMULACJA POJEDYNCZEGO AKTUATORA - PRZECIWMASY
W rozprawie doktorskiej skupiono się na analizie konstrukcji przetwornika, łączącej strategię
budowy modeli polowych dla wybranych trzech konstrukcji przetwornika, jako struktur
trójwymiarowych. Końcowy kształt pojedynczego aktuatora przeciwmasy został
przedstawiony na Rys. 5.3. Główne wymiary geometryczne to: średnica zewnętrzna 12,5 mm,
średnica wewnętrzna 5 mm oraz długość 15 mm. Celem było otrzymanie wyników
częstotliwości rezonansowych powyżej pasma 20 kHz – częstotliwości ultrasonicznej nie
słyszalnej dla ucha ludzkiego.
PIEZOCERAMIKI
PRZECIWMASA
Rys. 5.3 Ostateczny kształt pojedynczego aktuatora
Wyniki symulacji komputerowej zostały zestawione w Tabela 5.1 i przedstawiają trzy tryby w
których pracuje aktuator.

SYMULACJA MES PROTOTYPU WAP
19
Tabela 5.1 Częstotliwości rezonansowe wyznaczone przy pomocy programu Autodesk Inventor
Nr Aluminium
1. 25 615.32 Hz
2. 25 636.73 Hz
3. 25 675.23 Hz
Rys. 5.4 Odkształcenia zachodzące w strukturze aktuatora
Dodatkowo, została zrealizowana analiza naprężeń mechanicznych. Zasymulowano sytuację
nacisku wirnika z siłą 120 N na powierzchnię stojana. Największe naprężenia powstały w
punktach styku aktuatorów z wirnikiem.
Rys. 5.5 Symulacja naprężeń zrealizowana w programie Autodesk Multiphisics
Podsumowując, symulacja statyczna oraz analiza naprężeń dały dobre wyniki. Częstotliwości
rezonansowe znajdują się w paśmie ultrasoniczny, czyli są niesłyszalne dla ucha ludzkiego.
Użycie aluminium, pozwoliło zredukować straty mechaniczne w porównaniu do stali. Inną
ważną zaletą aluminium jest mniejszy ciężar. Gęstość wynosi 2,71 g/cm3, objętość jednego
elementu przeciwmasy to 13 887 cm3, natomiast masa elementu to 38 g.
Jak wspomniano, silnika jest symetrycznej budowy i składa się z dwóch przeciwmas, płytek
piezoceramicznych, dwóch wirników, dwóch tarcz przeniesienia napędu oraz sprężyn.
Symetryczna budowa gwarantuje stabilną konstrukcje i pozwala uzyskać lepsze właściwości
mechaniczne.

20
6 POMIARY DOŚWIADCZALNE PROTOTYPU WAP
o zakończeniu analizy i weryfikacji wyników symulacji, został zbudowany model
rzeczywisty. Do wykonania przeciwmasy (Rys. 6.1) z uwagi na jej skompilowany kształt
wykorzystano drukarkę 3D zamiast klasycznej maszyny CNC [39]. Materiał z jakiego
została wykonana to aluminium. Do budowy wirnika użyto stali, natomiast obudowa z
materiału nylatron GS 66.
Podczas czynności montażowych prototypu, należało szczególną uwagę poświęcić
poprawnemu zorientowaniu piezoceramik. Ważne jest aby w każdym aktuatorze zachować
takie samo położenie.
Rys. 6.1 Widok przeciwmasy wyprodukowanej w technologii druku 3D
STOJAN
WIRNIK
SPRĘŻYNY
OBUDOWA
ROTOR
WAŁ
TARCZA
ŁOŻYSKO
Rys. 6.2 Podzespoły prototypu WAP
P

POMIARY DOŚWIADCZALNE PROTOTYPU WAP
21
Rys. 6.3 Stojan prototypu WAP: dwie przeciwmasy, płytki piezoceramiczne wraz z elektrodami
6.1 POMIAR CZĘSTOTLIWOŚCI REZONANSOWYCH ORAZ DRGAŃ STOJANA
Pierwszym etapem badań prototypem silnika były pomiary częstotliwości rezonansowych oraz
drgań.
Do pomiaru wykorzystany został analizator impedancji Agilent Technologies 4294A Precision
Impedance Analyzer [44]. Mierząc minimalną wartość impedancji, otrzymane zostały
częstotliwości rezonansowe. Pomiary zostały wykonane dla dwóch faz każdego aktuatora.
Celem było otrzymanie jak najbardziej zbliżonych do siebie wartości zarówno na każdej fazie
jak i na każdym aktuatorze [23], [24]. Ostatecznie, otrzymane częstotliwości rezonansowe
oscylowały w okolicy 22 kHz. Wyniki pomiarów zostały przedstawione poniżej (Rys. 6.4 - Rys.
6.6).
Jak wynika z pomiarów, częstotliwości rezonansowe nie są identyczne. Różnica jednak jest
niewielka i wynosi około 200 Hz i jest jak najbardziej akceptowalna. Problem ten wynika z
niedokładności w ułożeniu piezoceramik oraz ze zbyt małej siły docisku na trzecim aktuatorze.

POMIARY DOŚWIADCZALNE PROTOTYPU WAP
22
Rys. 6.4 Pomiar częstotliwości rezonansowej dla pierwszego aktuatora
Rys. 6.5 Pomiar częstotliwości rezonansowej dla drugiego aktuatora

POMIARY DOŚWIADCZALNE PROTOTYPU WAP
23
Rys. 6.6 Pomiar częstotliwości rezonansowej dla trzeciego aktuatora
Oprócz częstotliwości rezonansowych za pomocą wibrometru laserowego zostały pomierzone
drgania i odkształcenia zachodzące w przeciwmasie (Rys. 6.7). Pomiarów dokonano w dwóch
punktach - pierwszy w miejscu bezpośredniego styku stojana z wirnikiem (punkt A), drugi na
powierzchni wokół aktuatora (punkt B).
PUNKT A
PUNKT B
Rys. 6.7 Pomiary drgań pojedynczego aktuatora
Wyniki pomiarów zostały zaprezentowane na Rys. 6.8. W pierwszym punkcie pomiarowym
amplituda drgań wyniosła 1,1 um natomiast w drugim punkcie pomiarowym 0,65 um. Kształt
otrzymanych przebiegów czasowych jest sinusoidalny. Wyniki otrzymano zasilając silnik
napięciem o wartość 100 V.

POMIARY DOŚWIADCZALNE PROTOTYPU WAP
24
Rys. 6.8 Pomiar odkształceń w pierwszym oraz drugim punkcie pomiarowym
6.2 POMIAR CHARAKTERYSTYKI MECHANICZNEJ PROTOTYPU WAP
Do wykonania pomiarów charakterystyki mechanicznej prototypu WAP użyto stanowiska
laboratoryjnego wyposażonego w system dSPACE (Rys. 6.9), umożliwiający przeprowadzenie
symulacji w trybie Hardware-In-the-Loop.
Rys. 6.9 Stanowisko dSPACE w laboratorium LAPLACE w Tuluzie zastosowane do badania prototypu WAP
Panel użytkownika systemu dSPACE daje możliwość sterowania napięciem wyjściowym
układu zasilania WAP w zakresie od 0 do 1000V oraz częstotliwości rzędu 50kHz. Podczas
pomiarów parametrów mechanicznych prototypu amplituda napięcia zasilającego wynosiła
400V i częstotliwość w okolicach 22 kHz. Wyniki pomiarów charakterystyki mechanicznej

POMIARY DOŚWIADCZALNE PROTOTYPU WAP
25
prototypu WAP przedstawiono na Rys. 6.10. Dla porównania, na tym samym rysunku
wykreślono charakterystykę mechaniczną badanego silnika wyznaczoną omawianą wcześniej
metodą analityczną.
W wyniku optymalizacji struktury mechanicznej prototypu WAP i doboru odpowiedniej siły
dociskającej otrzymano następujące wyniki pomiarów: wartość prędkości maksymalnej w
zakresie od 46 do 48 obr/min; wartość momentu blokującego 0,4 Nm [21].
Rys. 6.10 Charakterystyki mechaniczne prototypu WAP- moment/prędkość: metoda analityczna (kolor niebieski) i metoda doświadczalna (kolor zielony)

26
7 PODSUMOWANIE
łówny cel rozprawy był następujący: opracowanie nowej koncepcji, modelowanie,
badania symulacyjne, realizacja prototypu i badania doświadczalne
wielokomórkowego aktuatora piezoelektrycznego (j. pol. WAP, j. ang MPM).
Prace badawcze zrealizowano w ramach współpracy między uczelnią INP – ENSEEIHT –
LAPLACE w Tuluzie (Francja) oraz Politechniki Gdańskiej, Wydział Elektrotechniki i
Automatyki, Katedra Energoelektroniki i Maszyn Elektrycznych.
7.1 WYNIKI BADAŃ I OSIĄGNIĘCIA ROZPRAWY
W rozprawie rozważania obejmujące zjawisko piezoelektryczne, materiały piezoelektryczne,
struktury silników/aktuatorów piezoelektrycznych przedstawiono w aspekcie celów
rozprawy. W szczególności rozważano struktury silników wielokomórkowych w kontekście ich
zastosowań do sterowania położenia fotela samochodowego.
Opracowano nową koncepcję silnika piezoelektrycznego, nazwanego "wielokomórkowy
aktuator piezoelektryczny" (WAP). Koncepcja bazuje na kombinacji zasady działania silnika
ultrasonicznego z falą biegnącą (silnika Shinsei) oraz struktury elektromechanicznej silnika
piezoelektrycznego o ruchu obrotowym modulowanym. Struktura każdego silnika o ruchu
obrotowym modulowanym jest rozważana jako niezależna i zdefiniowana jako pojedyncza
komórka.
Z założenia opracowana koncepcja WAP jest dedykowana do sterowania położenia fotela
samochodu/samolotu. Zastosowanie WAP zapewni zmniejszeni liczby przekładni (w
szczególnym przypadku ich eliminację), ze względu na bezpośrednie połączenie aktuatora z
wałem napędowym systemu pozycjonowania, tzn. . struktura systemu pozycjonowania będzie
miała charakter zintegrowany. Struktura zintegrowana zapewni uzyskanie następujących
korzyści: zwiększenie wydajność systemu pozycjonowania, niski poziom hałasu, niski koszt
produkcji, a także niższe zanieczyszczenie środowiska.
Wykorzystując schemat zastępczy przetwornika Langevin'a, opracowano i implementowano
(w programie Matlab) model analityczny WAP. Opracowany model WAP jest odpowiednio
zmodyfikowaną wersją modelu analitycznego silnika rezonansowego o ruchu modulowanym.
Wstępne wymiary główne i podstawowe parametry prototypu WAP (częstotliwość
rezonansowa, prędkość obrotowa, moment blokowania, przemieszczenia) wyznaczono za
pomocą opracowanego modelu analitycznego.
Wstępne wymiary i parametry prototypu WAP zweryfikowano za pomocą opracowanego w
środowisku programu Autodesk Multiphysics (metoda FEM/MES) modelu wirtualnego
(geometrycznego). Badania symulacyjne modelu wirtualnego prototypu WAP w środowisku
programu Autodesk Multiphysics pozwoliły wyznaczyć wartości częstotliwości
rezonansowych i naprężeń mechanicznych. Ich wartości są następujące:
G

PODSUMOWANIE
27
częstotliwość rezonansowa – 25,6 kHz,
naprężenia mechaniczne – 9 N/mm2.
Z porównania wyników obliczeń częstotliwości rezonansowych prototypu WAP wyznaczonych
metodą analityczną (26,2 kHz) i metodą symulacyjną (25,6 kHz), wynika, że opracowany model
analityczny WAP można uznać za relatywnie bardzo dokładny.
Wykonano model materialny prototypu WAP. Przeciwmasa i obudowa WAP wykonano w
technologii druku 3D, stosując jako materiały odpowiednio aluminium i nylatron. Pozostałe
elementy prototypu zostały wykonano ze stali, stosując frezarkę numeryczną.
Wyniki badań doświadczalnych prototypowy WAP są następujące:
częstotliwość rezonansowa – 22 kHz,
drgania w punkcie styku stojana z wirnikiem – 1,1 um,
prędkość obrotowa – 46-48 obr/min,
moment blokujący – 0,4 Nm.
Z porównania wyników obliczeń prędkości obrotowej i momentu blokującego prototypu WAP,
wyznaczonych metodą analityczną (40 obr/min i 0,6 Nm) i metodą doświadczalną (wyniki
powyżej), można wnioskować, że są do zaakceptowania.
Główne osiągnięcia pracy doktorskiej:
opracowanie nowej koncepcji WAP,
opracowanie modelu analitycznego WAP do wyznaczenia jego wstępnych wymiarów
głównych i parametrów podstawowych,
opracowanie modelu wirtualnego (geometrycznego) WAP w środowisku programu
ANSYS (metoda FEM/MES) do wyznaczenia wartości częstotliwości rezonansowych i
naprężeń mechanicznych,
budowa prototypu WAP z zastosowaniem technologii obrabiarek sterowanych
numerycznie i technologii druku 3D,
badania doświadczalne z zastosowaniem stanowiska laboratoryjnego dSpace, celem
weryfikacji prototypu WAP,
zdefiniowanie przyszłych prac badawczych w celu optymalizacji prototypu WAP.
7.2 PLANOWANE PRACE BADAWCZE
Należy podkreślić, że w porównaniu do silników elektromagnetycznych, zakres między
ograniczeniami natury fizycznej i natury technologicznej dla silników piezoelektrycznych jest
znaczący. W konsekwencji konieczne są dalsze badania, w szczególności celem zmniejszenia
ograniczeń natury technologicznej.
Dalsze prace nad rozwojem modelu analitycznego do optymalizacji WAP. Planowane jest
wykorzystanie podejścia Eulera-Lagrange'a w celu zwiększenia dokładności modelu
analitycznego WAP.
Optymalizacja zrealizowanego prototypu WAP pod kątem zmniejszenia kosztów produkcji jego
elementów. Planuję się wykorzystać frezarkę numeryczną (zamiast technologii druku 3D).
Zastosowanie takiej technologii poprawi właściwości przeciwmasy, ze względu na możliwość
zwiększenia jej wytrzymałości. Ponadto, wykonanie wirnik w dwóch wariantach. Pierwszy

PODSUMOWANIE
28
wariant zakłada wykonanie w technologii druku 3D z nylatronu, natomiast drugi wariant
wykonanie z aluminium przy pomocy frezarki sterowanej numerycznie. Zastosowanie różnych
materiałów o innym współczynniku tarcia pozwoli uzyskać lepsze parametry mechaniczne.
Kolejnym zagadnieniem, które należy rozważyć to zagadanie kontaktu (styku) stojan/wirnik.
Powiększenie powierzchni kontaktu powinno poprawić parametry mechaniczne.
Zastosowanie oleju lub polimeru na powierzchni styku wirnik/stojan, przyczyni się do
uzyskania lepszych parametrów mechanicznych, a w szczególności wyższą prędkość obrotową.
W warstwie wokół pojedynczego aktuatora powstają pęknięcia, spowodowane drganiami
zachodzącymi w przeciwmasie. Podczas zasilana elementów z ceramiki piezoelektrycznej
wiruje wał, powodując wibracje działające na przecimasę, której efektem jest niewielka
degradacja materiału. Jednym ze sposobów wyeliminowania tego problemu byłoby
powiększenie średnicy przeciwmasy WAP.

29
8 BIBLIOGRAFIA
[1] Han A. Adriaens, Willem L. De Koning, and Reinder Banning, "Modeling piezoelectric
actuators," IEEE/ASME Transactions on Mechatronics, vol. 5, no. 4, pp. 331-341, 2000.
[2] Yoseph Bar-Cohen, X. Bao, and Willem. Grandia, "Rotary ultrasonic motors actuated by
traveling flexural waves," Proc. of SPIE's 6th Annual International Symposium on Smart
Structures and Materials, Newport, 1999.
[3] Robert H. Bishop, The Mechatronics Handbook. Austin: The University of Texas, 2002.
[4] Mark Budinger, "Contribution à la conception et la modélisation d’actionneurs
piézoélectriques cylindriques à deux degrés de liberté de type rotation et translation,"
INPT - ENSEEIHT - LEEI, Toulouse, Thesis 2003.
[5] Mark Budinger, Jean-Francois Rouchon, and Bertrand Nogarede, "Analytical Modeling for the Design of a Piezoelectric Rotating-Mode Motor," IEEE/ASME Transactions On Mechatronics, vol. Vol. 9, no. 1, March 2004.
[6] Jacques Curie and Pierre Curie, Contractions et dilatations produites par des tensions dans
les cristaux hémièdres à faces inclinées., vol. 93, 1881.
[7] Mirosław Dąbrowski, "Evolution of the theory and applications of ultrasonic motors,"
Prace Instytut Elektrotechniki, no. 12, pp. 33-45, 2001.
[8] Lauric Garbuio and Jean-Francois Rouchon, "Electroactive lubrication: application to the
friction reduction in a thermal engine," Proc. JFT05, Tarbes, 2005.
[9] Hiroshi Hirata and Sadayuki Ueha, "Design of a traveling wave type ultrasonic motor,"
IEEE Transactions On Ultrasonics, Ferroelectrics, And Frequency Control, vol. 42, no. 2,
pp. 225-231, 1995.
[10] "IEEE Standard on Piezoelectricity," An American National Standard. New York, USA:
The Institute of Electrical and Electronics Engineers, 1987.
[11] J.P. Joule, "On the effects of magnetism upon the dimensions of iron and steel bars," The
London, Edinburgh and Dublin philosophical magazine and journal of science., pp. 225-
241, 1847.
[12] Marek Krawczuk, Magdalena Palacz, and Żak Arkadiusz, Materiały o sterowanych
właściwościach fizycznych i ich zastosowania. Gdańsk: Wydawnictwo Politechniki
Gdańskiej, 2009.
[13] Gabriel Lippmann, Principe de la conservation de l'électricité. 1881.
[14] Xiao-long Lu, Jun-hui Hu, and Chun-sheng Zhao, "A novel rotary piezoelectric motor for
aerospace application," Proc. Acoustic Waves and Device Applications Symposium,
Shanghai, pp. 41-44, 2012.
[15] S.O. Reza Moheimani and Andrew J. Fleming, Piezoelectric Transducer for Vibration
Control and Damping. Springer, 2006.

BIBLIOGRAFIA
30
[16] Takeshi Morita, Minoru Kurosawa, and Toshiro Higuchi, "An ultrasonic micromotor
using a bending cylndrical transducer based on PZT thin film," Sensors and Actuators
A50, pp. 75-80, 1995.
[17] Bertrand Nogarede, "Moteurs piézoélectriques," Techniques de l’Ingenieur (D3 765), pp.
1-20, 1996.
[18] Bertrand Nogarede and Dominique Harribey, "De la piézoélectricité aux actionneurs
électromécaniques du futur.," INP-Enseeiht-LAPLACE, Le groupe de Recherché en
Electrodynamique, 2005.
[19] Bertrand Nogarede, Carol Henaux, and Jean-Francois Rouchon, "Actionneurs
électromécaniques pour la robotique et le positionnement," Techniques de l’Ingenieur
(D53 41), pp. 1-20, 2009.
[20] Bertrand Nogarede, Jean-Francois Rouchon, and Alexis Renotte, "Electroactive
materials: towards novel actuation concepts," Recent Developments of Electrical Drives,
Springer, pp. 435-442, 2004.
[21] Roland Ryndzionek, Michał Michna , Mieczysław Ronkowski, and Jean-Francois
Rouchon, " Wybrane wyniki badań prototypu wielokomórkowego silnika
piezoelektrycznego," Maszyny Elektryczny: Zeszyty Problemowe, vol. II, no. 108, pp. 143-
148, Czerwiec 2015.
[22] Roland Ryndzionek, Mieczysław Ronkowski, Michał Michna, Łukasz Sienkiewicz, and
Jean-Francois Rouchon, "Design, modelling and analysis of a new type of piezoelectric
motor. Multicell piezoelectric motor," Proc. IECON 2013 - 39th Annual Conference of the
IEEE, Industrial Electronics Society, Vienna, 2013, pp. 3910-3915.
[23] Roland Ryndzionek, Mieczysław Ronkowski, Michał Michna, and Jean-Francois
Rouchon, "Analytical Modelling of the Multicell Piezoelectric Motor Based on Three
Resonance Actuators," Proc. IECON 2014 - 40th Annual Conference of the IEEE, Industrial
Electronics Society, Dallas, 2014.
[24] Roland Ryndzionek, Mieczysław Ronkowski, and Jean-Francois Rouchon, "Koncepcja,
realizacja i analiza nowego typu silnika piezoelektrycznego o strukturze
wielokomórkowej," Maszyny Elektryczny: Zeszyty Problemowe, vol. II, no. 100, pp. 77-82,
Maj 2013.
[25] Wolfgang Schinkoethe and Bastian Keller, "Multi-degree-of-freedom ultrasonic motors
using rotation-symmetric piezoelectric vault geometries," Proc. Innovative Small Drives
and Micro-Motor Systems, Nuremberg, Germany, pp. 51-56, 2013.
[26] Yun-Jui Shieh, Yung Ting, Bing-Kuan Hou, and Chin-Chih Yeh, "High Speed Piezoelectric
Motor," Proc. International Symp Piezoresponse Force Microscopy and Nanoscale
Phenomena in Polar Materials, Aveiro, pp. 1-3, 2012.
[27] K. Spanner, "Survey of the various operating principles of ultrasonic piezomotors," Proc.
Actuator 2006, 10th International Conference on New Actuators, Bremen, pp. 414-421,
2006.
BIBLIOGRAFIA
31
[28] Wojciech Szlabowicz, Jean-Francois Rouchon, and Bertrand Nogarede, "Design and
realization of a rotating-mode piezoelectric motor for aeronautic applications.," Proc.
10th International Conference on New Actuators, Bremen, Germany, 2006.
[29] Wojciech Szłabowicz, "Alimentation et Commande d'un moteur piézoélectrique à onde
progressive avec contrôle du couple de freinage," Proc. Conférence JCGE, Montpellier,
2005.
[30] Wojciech Szłabowicz, "Contribution au dimensionnement et a la réealisation
d’actionneur piézoeléctrique a rotation de mode fort coupe pour applications
aéronautiques," INP-ENSEEIHT-LEEI, Toulouse, Thesis 2006.
[31] K. Uchino, "Piezoelectric actuator renaissance," Proc. Actuator 2014, the 14th
International Conference on New Actuators, Bremen, pp. 37-48, 2014.
[32] Antonio Arnau Vives, Piezoelectric Transducers and Applications. Springer, 2008.
[33] Wolfram Wersing, Walter Heywang, and Karl Lubitz, Piezoelectricity: Evolution and
Future of a Technology.: Springer Series in Materials Science, 2008.
Strony internetowe:
[34] Sinocera: www.sinocera.net, 2014.
[35] Ferroperm Piezoceramics:
http://app04.swwwing.net/files/files/Material%20Properties%202011.pdf, 2014.
[36] Shinsei Motors: www.shinsei-motor.com/English/techno/ultrasonic_motor.html, 2014.
[37] Mustang World: www.mustangworld.com/ourpics/fcar/samajmseats.htm, 2014.
[38] Autodesk | 3D Design, Engineering & Entertainment Software: www.autodesk.com,
2014.
[39] INITIAL - Development and Production Centre: www.initial.fr, 2014.
[40] LAPLACE - Laboratoire Plasma et Conversion d’Energie: www.laplace.univ-tlse.fr, 2014.
[41] Research Unit Department of Power Electronics and Electrical Machines, Gdansk
University of Technology, Faculty of Electrical and Control Enginiering :
http://eia.pg.edu.pl/kelime, 2014.
[42] Erasmus Gdansk Uniwersity of Technology : http://pg.edu.pl/international/o-
programie, 2014
[43] Advanced PhD - The Center for Advanced Studies - the development of interdisciplinary
doctoral studies at the Gdansk University of Technology in the key areas of the Europe
2020 Strategy - http://advancedphd.pg.gda.pl/en, 2014
[44] KEYSIGHT Technologies: www.keysight.com/en/pd-1000000858%3Aepsg%3Apro-
pn-4294A/precision-impedance-analyzer-40-hz-to-110-mhz?cc=PL&lc=eng, 2014.