irobot create introduction assembled from various online resources mainly slides and pictures from...
TRANSCRIPT

iRobot CreateiRobot Create
IntroductionIntroduction
Assembled from various online resourcesAssembled from various online resourcesmainly slides and pictures frommainly slides and pictures fromRob Kremer and Jamie Snape

23-04-19 2
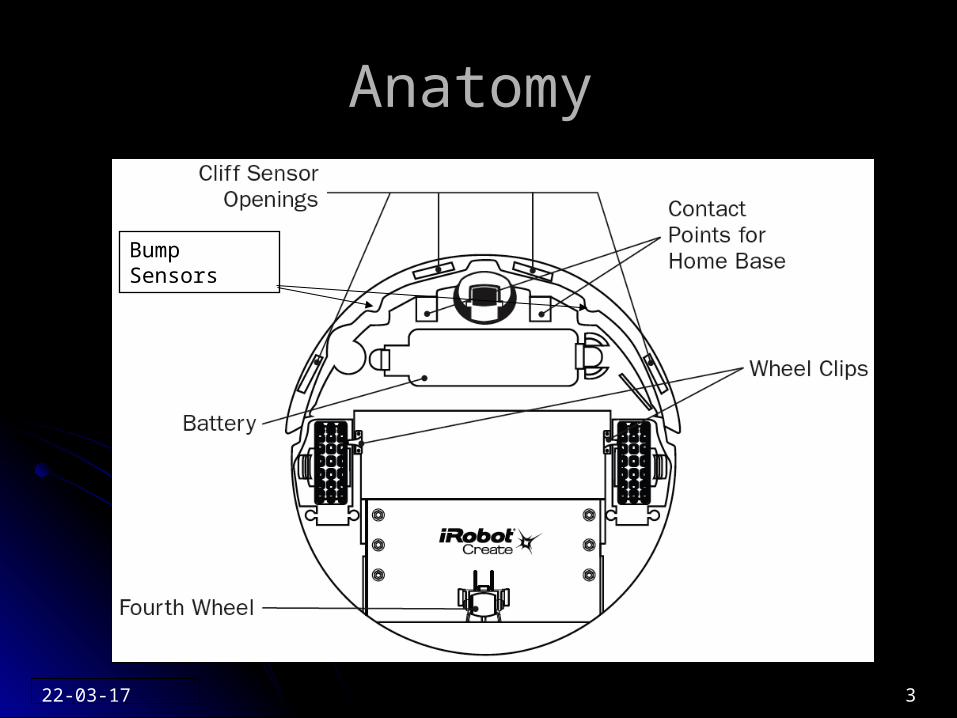
AnatomyAnatomy
23-04-19 3
AnatomyAnatomy
Bump Sensors
23-04-19 4
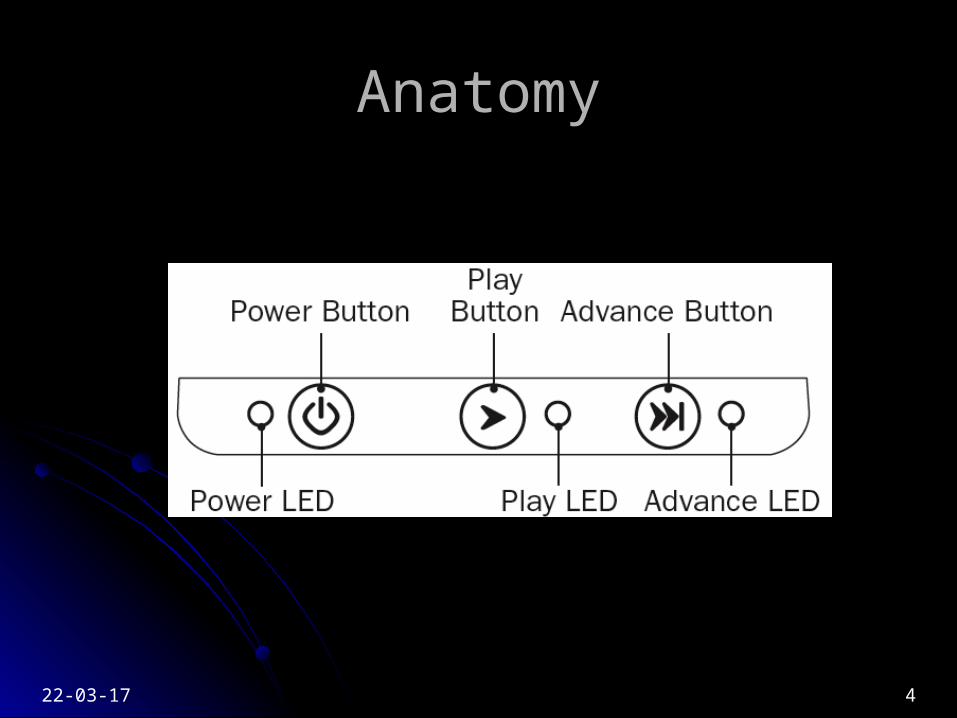
AnatomyAnatomy

OverviewOverview
Based on Based on RoombaRoomba robotic vacuum cleaner robotic vacuum cleaner
Programmable with open interface of over Programmable with open interface of over 100 commands100 commands
32 internal and external sensors including 32 internal and external sensors including bumpers and infraredbumpers and infrared
Expansion port to add microcontroller, Expansion port to add microcontroller, Bluetooth, and/or additional sensorsBluetooth, and/or additional sensors

Programming (Bluetooth)Programming (Bluetooth)
Send Send Open Interface Open Interface commands via a virtual commands via a virtual serial port: 57600 baud, 8 data bits, 1 stop bitserial port: 57600 baud, 8 data bits, 1 stop bit
Linux stty –F /dev/ttyUSB0 57600 cs8 -cstopbLinux stty –F /dev/ttyUSB0 57600 cs8 -cstopb
Receive sensor data back as packetsReceive sensor data back as packets
Using any scripting language (Perl, Python, etc.)Using any scripting language (Perl, Python, etc.)
Drive Drive CreateCreate forward (OI script): forward (OI script):128 131128 131 (Start in safe mode)(Start in safe mode)
137 0 100 128 0137 0 100 128 0 (Drive forward 100 mm/s)(Drive forward 100 mm/s)

23-04-19 7
ModesModes OFFOFF
Unresponsive (except START (128))Unresponsive (except START (128)) Can chargeCan charge
PASSIVEPASSIVE Sensor status commandsSensor status commands No Actuator commandsNo Actuator commands Can chargeCan charge
SAFE SAFE may be recommended may be recommended Sensor status commandsSensor status commands Actuator commandsActuator commands
But reverts to PASSIVE if moving But reverts to PASSIVE if moving forwardforward and any cliff sensor is activated; any wheel and any cliff sensor is activated; any wheel drop sensor is activated; or the charger is plugged indrop sensor is activated; or the charger is plugged in
No ChargingNo Charging FULLFULL
Sensor status commandsSensor status commands Actuator commandsActuator commands No ChargingNo Charging

23-04-19 8
ModesModes
OFF
FULLSAFE
PASSIVE
START (128)
FULL (132)
SAFE (131)
FULL (132)
SAFE (131)
START (128)START (128)

23-04-19 9
Modes: WAITModes: WAIT
A 5th Mode: WAITA 5th Mode: WAIT When in WAIT mode the robot does not respond to When in WAIT mode the robot does not respond to ANYANY
input.input. Goes into WAIT mode for 3 commands (see Goes into WAIT mode for 3 commands (see WAIT slideWAIT slide):):
WAIT-DISTANCEWAIT-DISTANCE WAIT-ANGLEWAIT-ANGLE WAIT-TIMEWAIT-TIME WAIT-EVENTWAIT-EVENT
If the robot is prevented, for some reason, from traveling If the robot is prevented, for some reason, from traveling the distance or the angle, it won’t respond to anything (try the distance or the angle, it won’t respond to anything (try the undocumented command 7).the undocumented command 7).
Use Use onlyonly in scripts, in scripts, NOT RECOMMENDEDNOT RECOMMENDED

Programming (Microprocessor)Programming (Microprocessor)
Command Module Command Module plugs into expansion portplugs into expansion port
8-bit RISC microprocessor (~18 MHz)8-bit RISC microprocessor (~18 MHz)
Upload C programs that send Upload C programs that send Open InterfaceOpen Interface commands and read sensor datacommands and read sensor data
Open source toolkit (Windows/Mac compatible)Open source toolkit (Windows/Mac compatible)
Four extra expansion ports to add custom Four extra expansion ports to add custom hardware (sensors, LCD display, etc.)hardware (sensors, LCD display, etc.)

Programming (Microprocessor)Programming (Microprocessor)
Drive Drive CreateCreate with specified velocity and radius (C function): with specified velocity and radius (C function):
void drive(int16_t velocity, int16_t radius) void drive(int16_t velocity, int16_t radius) { { byteTx(CmdDrive);byteTx(CmdDrive);
byteTx((uint8_t)((velocity >> 8) & byteTx((uint8_t)((velocity >> 8) & 0x00FF));0x00FF));
byteTx((uint8_t)(velocity & 0x00FF));byteTx((uint8_t)(velocity & 0x00FF));byteTx((uint8_t)((radius >> 8) & byteTx((uint8_t)((radius >> 8) &
0x00FF));0x00FF));byteTx((uint8_t)(radius & 0x00FF));byteTx((uint8_t)(radius & 0x00FF));
}}
23-04-19 12
Actuators: DriveActuators: Drive
DRIVE (137 DRIVE (137 <velocity<velocityhighhigh> <velocity> <velocitylowlow> <radius> <radiushighhigh> <radius> <radiuslowlow>>)) 2 short (16 bit) parameters2 short (16 bit) parameters Each represented by 2 bytes, high byte first (so a total of 5 bytes Each represented by 2 bytes, high byte first (so a total of 5 bytes
for this command)for this command)
Parameter 1: Parameter 1: velocityvelocity in mm/sec in mm/sec -500 to +500 (-ve means “backwards”)-500 to +500 (-ve means “backwards”)
Parameter 2: Parameter 2: curve radiuscurve radius in mm in mm -2000 to +2000 where -ve means clockwise and +ve means -2000 to +2000 where -ve means clockwise and +ve means
counterclockwisecounterclockwise 32768 means “go straight”32768 means “go straight” -1 and +1 mean spin in place clockwise, counterclockwise -1 and +1 mean spin in place clockwise, counterclockwise
respectivelyrespectively

23-04-19 13
Actuators: LEDsActuators: LEDs
LEDs (LEDs (139 <Adv&Play> <powerColor> <powerInten>139 <Adv&Play> <powerColor> <powerInten>))Adv&Play:Adv&Play:
Bit 1 (=2): Play LED Bit 1 (=2): Play LED Bit 3 (=8): Advance LEDBit 3 (=8): Advance LED
PowerColor (0-255):PowerColor (0-255):0=green; 255=red0=green; 255=red
PowerIntensity (0-255)PowerIntensity (0-255)0=off; 255=full intensity0=off; 255=full intensity

23-04-19 14
Actuators: Send IRActuators: Send IR
SEND-IR (151 <IRbyte>)SEND-IR (151 <IRbyte>)Sends a byte using an add-on circuit and a Sends a byte using an add-on circuit and a
IR LEDIR LEDCan be received by the omnidirectional IR Can be received by the omnidirectional IR
receiver at the front of the robotreceiver at the front of the robotCould be use to transmit short-distance Could be use to transmit short-distance
identifiers for each robotidentifiers for each robot
23-04-19 15
Actuators: SongsActuators: Songs
Load a songLoad a song 140 <song#> <length> {<note> <duration>}*140 <song#> <length> {<note> <duration>}*
<song#>: 0-15<song#>: 0-15 <length>: number of notes (1/2 of bytes) (up to 16 notes)<length>: number of notes (1/2 of bytes) (up to 16 notes) <note>: see table in OI Manual<note>: see table in OI Manual <duration>: in 1/64 second ([email protected] … <duration>: in 1/64 second ([email protected] …
[email protected])[email protected])
Play a songPlay a song 141 <song#>141 <song#> Doesn’t work if a song is already playingDoesn’t work if a song is already playing

23-04-19 16
Inputs: SensorsInputs: Sensors
Read SensorsRead Sensors 142 <packetID>142 <packetID>
Packets 0-6 are “packet groups” (eg: 0 is sensors 7-26, Packets 0-6 are “packet groups” (eg: 0 is sensors 7-26, which is 26 bytes [some are two-byte returns])which is 26 bytes [some are two-byte returns])
Packets 7-42 are individual sensorsPackets 7-42 are individual sensors Either numerical values (1 or 2 bytes) or bitmapsEither numerical values (1 or 2 bytes) or bitmaps See OI ManualSee OI Manual
Also a commands for:Also a commands for: reading a list of sensors (149)reading a list of sensors (149) requesting a continuous stream of packet data (148)requesting a continuous stream of packet data (148) pausing/resuming a stream (150)pausing/resuming a stream (150)

23-04-19 17
Sensor Groups PacketsSensor Groups Packets

23-04-19 18
Sensor Single PacketsSensor Single Packets

23-04-19 19
ScriptsScripts
Load a scriptLoad a script 152 <length> <opcode>*152 <length> <opcode>*
<length>: number of bytes in script (up to 100)<length>: number of bytes in script (up to 100) <opcode>: OI commands<opcode>: OI commands
Play a scriptPlay a script 143143 No flow control except for WAIT commands (next slide)No flow control except for WAIT commands (next slide) Infinite cycle if script ends with 143Infinite cycle if script ends with 143
Show scriptShow script 154154 Returns the current scriptReturns the current script

23-04-19 20
Scripts: WaitScripts: Wait Wait timeWait time
155 <time>155 <time> <time> in 1/10 sec (resolution of 15ms)<time> in 1/10 sec (resolution of 15ms)
Wait DistanceWait Distance 156 <dist156 <disthighhigh> <dist> <distlowlow>>
<dist> distance in mm. +ve=forward, -ve=back<dist> distance in mm. +ve=forward, -ve=back Works for passively rotating the wheelsWorks for passively rotating the wheels
Wait AngleWait Angle 157 <angle157 <anglehighhigh> <angle> <anglelowlow>>
<angle> angle in deg. +ve=counterclockwise, -ve=clockwise<angle> angle in deg. +ve=counterclockwise, -ve=clockwise
Wait EventWait Event 158 <event#>158 <event#>
<event#>: eg: 1=wheel drop (see table in OI Manual, p.16)<event#>: eg: 1=wheel drop (see table in OI Manual, p.16) Use -ve for inverse of event (eg: -1 wheel drop stops)Use -ve for inverse of event (eg: -1 wheel drop stops)

23-04-19 21
Tasks: measuringTasks: measuring
You can track the distance traveled by using You can track the distance traveled by using sensor 19 (distance)sensor 19 (distance)
Angle with sensor 20 (angle)Angle with sensor 20 (angle) Note: reading these sensors causes them to be Note: reading these sensors causes them to be
resetreset Distance (angles) increment for forward Distance (angles) increment for forward
(counterclockwise) and decrement for backward (counterclockwise) and decrement for backward (clockwise)(clockwise)
Class iRobotCreate’s regular sensor reading Class iRobotCreate’s regular sensor reading keeps an accumulator for distance and anglekeeps an accumulator for distance and angle

23-04-19 22
Tasks: Following a wallTasks: Following a wall
You can track along a wall using the wall sensor You can track along a wall using the wall sensor (sensor 8)(sensor 8)
Use Drive straight (137 <velocity> 32687) when Use Drive straight (137 <velocity> 32687) when the wall is there; or a wide right curve (137 the wall is there; or a wide right curve (137 <velocity> -2000) when the wall goes away<velocity> -2000) when the wall goes away
You should expect the occasional right-bumpYou should expect the occasional right-bump If you get a left-bump, you’ve If you get a left-bump, you’ve probablyprobably hit a hit a
cornercorner
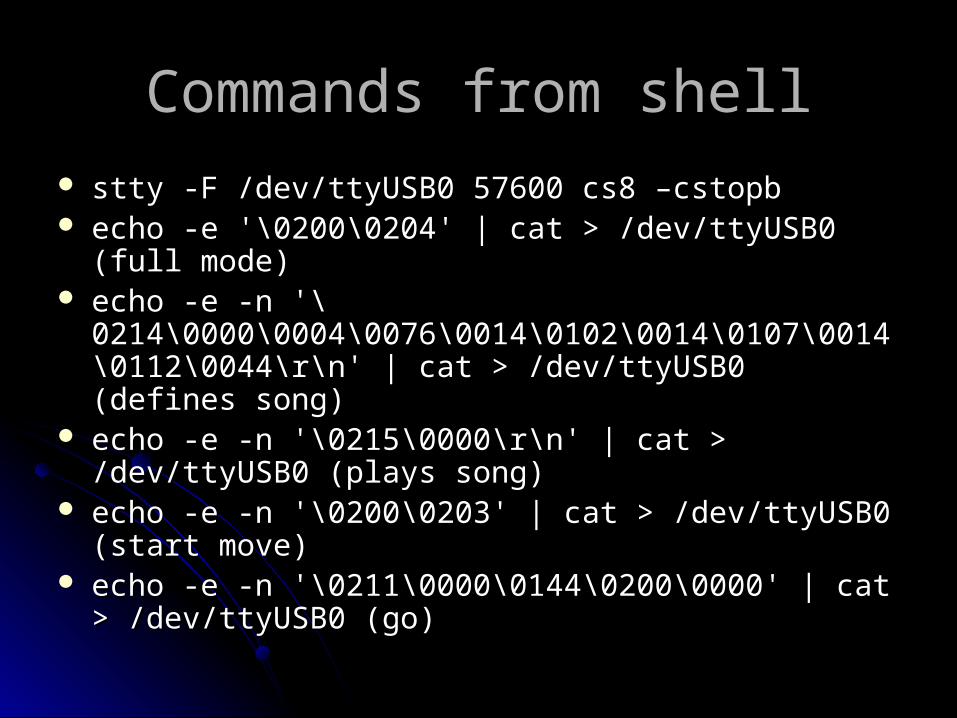
Commands from shellCommands from shell stty -F /dev/ttyUSB0 57600 cs8 –cstopbstty -F /dev/ttyUSB0 57600 cs8 –cstopb echo -e '\0200\0204' | cat > /dev/ttyUSB0 (full mode)echo -e '\0200\0204' | cat > /dev/ttyUSB0 (full mode) echo -e -n '\echo -e -n '\
0214\0000\0004\0076\0014\0102\0014\0107\0014\0112\0214\0000\0004\0076\0014\0102\0014\0107\0014\0112\0044\r\n' | cat > /dev/ttyUSB0 (defines song)0044\r\n' | cat > /dev/ttyUSB0 (defines song)
echo -e -n '\0215\0000\r\n' | cat > /dev/ttyUSB0 (plays echo -e -n '\0215\0000\r\n' | cat > /dev/ttyUSB0 (plays song) song)
echo -e -n '\0200\0203' | cat > /dev/ttyUSB0 (start move)echo -e -n '\0200\0203' | cat > /dev/ttyUSB0 (start move) echo -e -n '\0211\0000\0144\0200\0000' | cat > echo -e -n '\0211\0000\0144\0200\0000' | cat >
/dev/ttyUSB0 (go)/dev/ttyUSB0 (go)

Further ReadingFurther Reading
iRobot iRobot CreateCreate
http://www.irobot.com/sp.cfm?pageid=305http://www.irobot.com/sp.cfm?pageid=305
Manuals and downloadsManuals and downloads
http://www.irobot.com/sp.cfm?pageid=294http://www.irobot.com/sp.cfm?pageid=294