introduction to inertial navigation and pointing · pdf fileintroduction to inertial...
TRANSCRIPT

Introduction to Inertial Navigation and Pointing Control
Zhang Liu
Guidance Navigation Control Engineer
Northrop Grumman, San Diego, CA
December 15, 2011

Outline
• Inertial Navigation System (INS)
• INS/GPS Integration
• Pointing Control System
2
Navigation System
• Navigation: estimate the position, velocity, and orientation of a platform
• Inertial Navigation: use inertial sensors for navigation
– Based on inertial principles (acceleration and angular velocity)
– Measurements are always in the inertial frame
• Most common inertial sensors
– Accelerometers
– Gyros
• Applications
– Manned and unmanned aircrafts, spacecrafts, ships, submarines, and land vehicles
– Short-term motion compensation: EO/IR (stable attitude), SAR (precise velocity)
– Precise pointing: laser designator/director, ground-based RADAR, telescope
– Relative positioning: aerial refueling, aircraft carrier landing
3

Common Sensor Error Terms
• Use weight scale as an example to explain common sensor error terms
– Weight = Spring Constant * Distance Deflection
– Ex: 100 lb = 100 * 1 cm 200 lb = 100 * 2 cm
• Bias Error – An added constant, independent of input
– Weight = Spring Constant * Distance Deflection + Bias
– Ex: 102 lb = 100 * 1 cm + 2 202 lb = 100 * 2 cm + 2
• Scale Factor Error – proportional to input
– Sprint constant is the scale factor in our example
– Ex: 103 lb = 101 * 1 cm + 2 204 lb = 101 * 2 cm + 2
• Noise – fast changing random effect
– Zero-mean random variable, certain probability distribution
– Random Walk: phenomena when integrating noise over time
• Linearity Error – input-output nonlinearity
– Ideally, input-output plot is a straight line
• Misalignment – Difference between actual sensing axis and perceived sensing axis 4
0 100 200 300-15
-10
-5
0
5
10
15
Noise
Random Walk
0 20 40 60 80 1000
20
40
60
80
100

Accelerometers
• Measure specific force
– Specific force = acceleration - gravity
• Error sources: bias, scale factor, misalignment, linearity, random walk
• Bias is typically the dominant error source
– Navigation grade accelerometers have accuracy of 50 micro-g
– Simple 1-D model with a constant unknown bias term (No other aiding)
• Velocity can be obtained by integrating the acceleration
• Position can be obtain by integrating the velocity
5
atruemeas baa
tbvvavv atrue
t
measest 00
0
2
000
02
1tbtvppvpp atrue
t
estest
Unbounded Drift Error

Accelerometer Technology Application
6
Figure: Schmidt (2011)

• Measure angular velocity
• Error sources: bias, scale factor, misalignment, linearity, random walk
• Bias is typically the dominant error source
– Navigation grade gyros have accuracy of 0.01 °/hr
– Simple 1-D model with a constant unknown bias term (No other aiding)
• Attitude (Orientation) can be obtained by integrating the angular velocity
Gryos
7
gtruemeas b
tbgtrue
t
measest 00
0
Mechanical Gyros Maintain angular momentum
Ring Laser or Fiber Optic Gyros Sagnac Effect: Light Interference Pattern
MEMS Gyros Coriolis Effect
Unbounded Drift Error

Gyro Technology Application
8
Earth Rate 1 nmi/hr Free Inertial Drift
Figure: Schmidt (2011)

Inertial Measurement Unit (IMU)
• Typically an IMU has 3 accelerometers and 3 gyros (x, y, z)
• Strapdown IMU – All inertial sensors are rigidly attached to the platform (no mechanical movement)
– Almost all IMUs on the market today are strapdown systems
– Example:
Honeywell HG1700 AG58 (Tactical Grade)
• Gyros accuracy: 1 deg/hr
• Accelerometers accuracy: 1 mg
• Gimballed IMU – Gyros and accelerometers are isolated from movement by means of gimbals
– Big, heavy, and very expensive to make and maintain
– Only used when the highest possible accuracy is required
– Example:
SPIRE System
9

IMU Performance and Application
10
Strategic Grade/High
Performance
Navigation
Grade/Medium
Performance Inertial AHRS Grade Tactical Grade Flight Control
Performance < 1.0 nmph CEP
< 1.0 mil pointing 2 - 5 mil heading
Bias deg/hr 0.001 - 0.005 0.003 - 0.01 0.05 - 3.0 5 - 50 100
Scale Factor ppm 1 - 10 10 - 30 100 - 500 500 - 1500 2000
Angle Random
Walk deg/√Hz 0.00001 - 0.0005 0.001 - 0.002 0.005 - 0.05 0.1 - 0.5 1.0
Bias μg 0.1 - 10 20 - 50 100 - 500 500 - 1,000 1,500
Scale Factor ppm 0.1 - 10 40 - 150 300 - 900 1,000 - 3,000 5000
Angle Random
Walk μg/√Hz 2 - 5 5 - 20 25 - 40 50 - 75 100
Stabilization Inertial Navigation
Attitude & Heading
Reference
Missile Midcourse
guidance Rate monitoring
Pointing & Slewing Air Gimbal Stabilization Munitions guidance
Orbit Correction Land Sensor Pointing
Marine SAR Velocity Ref
Strategic Plaform
Navigation Pointing
GY
RO
Acc
el
Inertial Sensor Performance Across Applications
Ap
pli
cati
on
s

Inertial Navigation System (INS)
• An INS consists of a IMU and a system processor
• The system processor computes the solution (position, velocity, attitude)
– Due to errors in gyros and accelerometers, the solution has unbounded drift error
• Strap-down INS integration equations
11
e
nn
Ce
nn
Up
n
C
n
e
n vMvuFZn
)(
3-axis Gyros
n
b
e
i
nn
e
nb
i
bn
b
n
b CCCdt
d )(
e
nC
l
nn
e
nn
e
ne
i
nb
i
bn
b
n
e
n gvfCvdt
d
)2( 3-axis
Accelerometers
b
i
b f
n
bC
dt )(
n
e
nv
dt )(
n
bC
n
e
nv
dt )(
e
n
n
e
ne
n CCdt
d][
e
i
eTe
n
e
i
n C
)(
n
e
n
e
i
n
b
i
b
dt )(n
e
nr

INS Aidings
• Inertial sensors can accurately capture high-frequency dynamics
• To limit drift error in the integrated solution, an INS requires aiding
12
Aiding System Measurement
GPS Pseudo range, delta pseudo range
Star tracker Attitude orientation
Receive signal strength Attitude orientation
Image Correlation (EO/IR) Attitude orientation
Multi-antenna GPS Attitude orientation
Barometer Altitude
Magnetometer / Compass Heading
Doppler radar velocity
Underwater pressure sensor Depth
Underwater transponder Range from known position
Outline
• Inertial Navigation System (INS)
• INS/GPS Integration
• Pointing Control System
13

One Dimensional Example (Part 1) -- A car with one accelerometer driving on a perfectly straight road
-- GPS aiding, naïve open loop design
14
True
Acceleration
+
+
Noise
σ = 0.001 m/s^2
Bias
0.01 m/s^2
100 Hz
Integrate
11 z
Ts
Accel-only
Velocity
Integrate
11 z
Ts
Accel-only
Position
True
Velocity
Bias
3 m
Noise
σ = 0.1 m/s
1 Hz
+
+
Linear Extrapolation 100 Hz
True
Position
+
+ 1 Hz
Integrate
11 z
Ts
Hybrid
Velocity Integrate
11 z
Ts
Hybrid
Position
GPS-only
Position
Reset Initial
Condition Reset Initial
Condition
100
1i
sT Sum
Over 1s
11 zDiff
Over 1s
−
+ Accel Bias
Estimate Moving Average

One Dimensional Example (Part 2) -- A car with one accelerometer driving on a perfectly straight road
-- GPS aiding, naïve open loop design using two 1st order filters
15
0 20 40 60-10
-5
0
5
10
Time (s)
True Acceleration (m/s 2)
0 20 40 600
20
40
60
80
100
120
Time (s)
True Velocity (m/s)
0 20 40 600
500
1000
1500
2000
2500
3000
Time (s)
True Position (m)
0 20 40 60-5
0
5
10
15
20
Time (s)
Standalone Position Error (m)
0 20 40 602.7
2.8
2.9
3
3.1
3.2
Time (s)
Hybrid Position Error (m)
0 20 40 60-0.4
-0.2
0
0.2
0.4
0.6
Time (s)
Accel Bias Estimate (m/s 2)
Accel only
GPS only
Before Moving Average
After Moving Average
True Value
Approach of INS/GPS Integration
• Navigation solution is computed via:
– Attitude determination by 3-axis attitude propagation using
• Body to Inertial frame rate / delta angles measured by Gyros
• Inertial to Navigation frame delta angles derived from
– Velocity of the vehicle
– Earth rotation rate
– Velocity and Position Determination
• Position is integration of velocity
• Velocity is integration of acceleration / delta velocity measured by Accelerometers
• Navigation solution is corrected by the Kalman Filter integrated with the GPS receiver (aiding), resulting in a “tightly coupled” GPS/INS implementation, which computes:
– Attitude, Position, and Velocity corrections
– Gyro Bias, Scale Factor, and Misalignment estimates
– Accelerometer Bias, Scale Factor, and Misalignment estimates
– GPS receiver clock Bias and Drift estimates
16

Tightly-Coupled INS/GPS Architecture
17
IMU (Gyro & Accels)
Delta Angle (rate) & Delta Velocity
(accel) Correction by estimated bias,
Scale factor & misalignments
Attitude Velocity & Position
Correction
Predicted Pseudo Range Computation
Position
Predicted Delta Range
Computation
Velocity
-
-
Multiply By
Kalman Filter Gains
Kalman Filter Covariance
Propagation Gain Computation
& Covariance Update
Non-Linear Navigation Integration
Pseudo Range Residual
Delta Range Residual
Estimated Gyro & Accelerometer Bias, Scale factor & Misalignment
Position Velocity & Attitude Corrections
Clock Rate correction
Clock bias correction
Compute A-matrix
GPS Receiver
Pseudo Range
Compute H-matrix
Delta Range
Delta Velocity Delta Angle
Position Velocity & Attitude
Angular Rate Linear Acceleration

INS/GPS Kalman Filter: States
18
gpsr
acc
gyro
n
e
n
n
n
x
x
x
r
v
X
ˆ
32 states # Total
(1x1) drift,clock receiver GPS :
(1x1) ,clock bias receiver GPS : ] ,[
)1(3 ignment,ity misalorthogonal- nonaccel. :
(3x1) , factorsscaled accel. :
(3x1) frame, body , ter biasaccelerome : ],,[
1)(3 gnment,ity misaliorthogonal- nongyro :
1)(3 ent, misalignml rotationagyro :
1),(3 factors,scaled gyro :
(3x1), frame body bias,gyro : ],,,[
1)(3 frm.on navigati:error position
1)(3 frm.n navigatio,],,[ :error velocity
1)(3 framen navigatioerror, attitude
b
m
m
ˆ
r
rrr
T
gpsr
a
a
aaaa
bT
acc
g
g
g
b
ggg
bT
gyro
n
T
DEN
n
n
n
t
tttx
S
bSbx
S
bSbx
r
vvvv
g
g
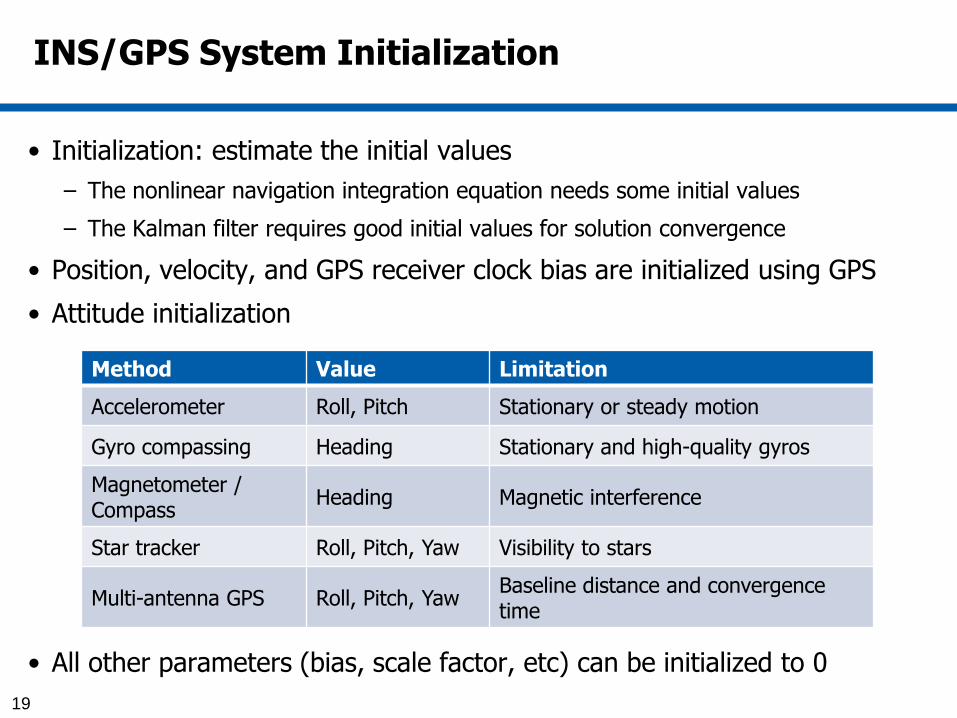
INS/GPS System Initialization
19
• Initialization: estimate the initial values
– The nonlinear navigation integration equation needs some initial values
– The Kalman filter requires good initial values for solution convergence
• Position, velocity, and GPS receiver clock bias are initialized using GPS
• Attitude initialization
• All other parameters (bias, scale factor, etc) can be initialized to 0
Method Value Limitation
Accelerometer Roll, Pitch Stationary or steady motion
Gyro compassing Heading Stationary and high-quality gyros
Magnetometer / Compass
Heading Magnetic interference
Star tracker Roll, Pitch, Yaw Visibility to stars
Multi-antenna GPS Roll, Pitch, Yaw Baseline distance and convergence time
Outline
• Inertial Navigation System (INS)
• INS/GPS Integration
• Pointing Control System
20

Feedback Control
• Example
– Consumer: temperature control (oven, A/C), cruise control, hard disk arm control
– Defense: missile guidance, flight control, attitude control, pointing control
• Why do we need feedback?
– To deal with Uncertainty
• Approximate model of the system dynamics
• Unknown disturbance and noise
21
Desired Output
Controller System
Actual Output
+ −
Feedback loop
Disturbance
Noise
Measured Output
Sensor

Control Methods
• Classic Control
– Deal with single-input single-output (SISO) system
– Based on transfer function (zeros/poles) or impulse response model
– PID control, Lead-Lag compensator
• PID is by far the most widely known and used control technique in practice
– For many multi-input multi-output (MIMO) systems in practice, can decouple to multiple SISO systems
• Moderm Control
– Based on state-space model that naturally includes MIMO case
– Linear Quadratic Regulator (LQR)
– LQG, H∞ and robust control
• Nonlinear Control
– Bang-Bang Control (on/off)
– Lyapunov function, Pontryagin's minimum principle
• Others
– Adaptive Control, Model Predictive Control
– Distributed Control, Cooperative Control, Hybrid Control
– …
22
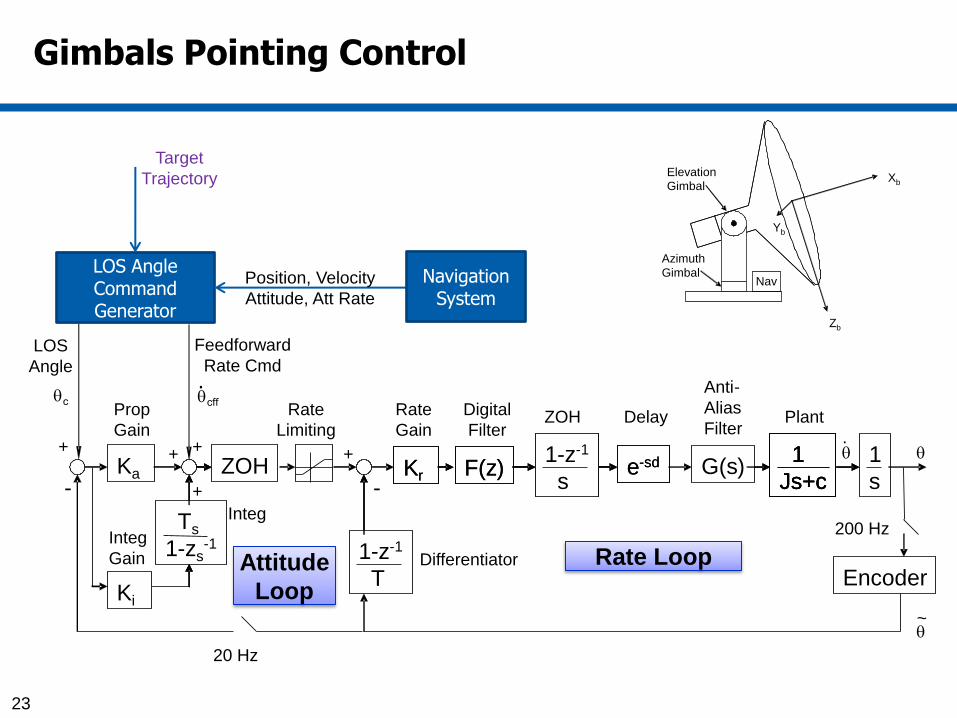
Gimbals Pointing Control
23
Rate Loop
K r F(z ) e - sd 1 - z - 1
s
1
Js+c
1
s
Encoder 1 - z - 1
T
G(s )
Differentiator
Digital
Filter ZOH Delay
Anti -
Alias
Filter Rate
Gain Plant
.
200 Hz
~
K a
Prop
Gain
K i
ZOH
T s
1 - z s - 1
c
20 Hz
cff .
- -
+ + + +
+
Integ
Integ
Gain
Rate
Limiting
K r F(z ) e - sd 1 - z - 1
s
1 - z - 1
s
1
Js+c
1
Js+c
Attitude
Loop
LOS Angle Command Generator
LOS
Angle
Feedforward
Rate Cmd
Target
Trajectory
Position, Velocity
Attitude, Att Rate
Navigation System
X b
Y b
Z b
Elevation Gimbal
Azimuth
Gimbal Nav

Laser Pointing
• Laser pointing requires very accurate pointing (< 0.005°)
– Laser has a much narrower beam width than RF
– Ex: Inter-satellite communication, directed energy weapon
• Coarse Pointing - Gimbals
– Use conventional electrical motors
– Sufficient for acquisition and tracking
– Control bandwidth: 5 – 50 Hz
• Fine Pointing - Mirrors
– Use piezoelectric or ultrasonic motor
– Use 4-quadrants detector to provide feedback
– Very high resolution (arc-sec)
– Can achieve control bandwidth > 1000 Hz
24
Guelman 2004

• Mechanical misalignment
– Design online / offline calibration methods to estimate the misalignment and lever arm between the navigation system and payload pointing system
– Ex 1: Use received signal strength in communication pointing
– Ex 2: Use image correlation in camera (EO/IR) pointing
– Ex 3: Install low quality IMU on the payload pointing system (Transfer Align, Velocity Matching)
• Better model of unknown disturbance
– Ex 1: Periodic vibration
– Ex 2: Reaction wheel in spacecraft
– Ex 2: Time-correlated (Non-white)
• Compensate delay by extrapolation
– Accurate data time tag
– Linear or quadratic extrapolation
25
Time
Att
itude
extrapolation
hold
n+1(actual)
n
n-1
Extrapolation error
Hold error
0 100 200 300 400 500 600-0.6
-0.4
-0.2
0
0.2
0.4
Yaw
(deg)
Time (sec)
0 100 200 300 400 500 600-0.4
-0.2
0
0.2
0.4
Pitch (
deg)
without extrapolation
with extrapolation
0 100 200 300 400 500 600-0.2
-0.1
0
0.1
0.2
Roll
(deg)
Errors due to a 1 Sample Delay w/ & w/o Extrapolation, File:car test 1 20041128 5
Example
Example
Model Fidelity
Encoder outputs on the Gimbals match IMU outputs after misalignment calibration

Conclusion
26
Thank you for your interest
• This brief presentation covers some basic principles in the inertial navigation system and the pointing control system.
• Further references – Inertial Navigation
• D. Titterton and J. Weston, Strapdown Inertial Navigation Technology
• J. Farrell, Aided Navigation
– Automatic Control
• D.G. Luenberger, Introduction to Dynamic Systems
• Anderson and Moore, Linear Optimal Control
• S. Sastry, Nonlinear systems: Analysis, Stability, and Control