introducciónintroduccióna la a la...
TRANSCRIPT

IntroducciónIntroducción a la a la RadionavegaciónRadionavegación
1
ContentsContents
� Mapas y modelos de Tierra
Proyecciones cartográficas y Sistemas de
2
� Proyecciones cartográficas y Sistemas deCoordenadas
� Introducción a la Navegación

MapasMapas y y modelosmodelos de Tierrade Tierra
� ¿Qué es un mapa? Es una representación de datosgeográficos. No tiene por qué tratarse estrictamente deuna proyección cartográfica bidimensional de la superficiede la Tierra. Puede tratarse de un mapa del metro deMadrid moderno, que no respeta distancias ni ángulos.
3
Madrid moderno, que no respeta distancias ni ángulos.
� ¿Qué son los datos geoespaciales? Se trata de datos coninformación espacial referida a un cierto sistema dereferencia definido de manera absoluta o relativa a lasuperficie de la Tierra, es decir, a un sistema decoordenadas terrestre.
MapasMapas y y modelosmodelos de Tierra: de Tierra: GeodesiaGeodesia vs. vs. GeografíaGeografía
� Geodesia: Es la ciencia que trata de la representación ymedición de la Tierra como cuerpo espacial. En Geodesiadecimos la forma de la Tierra es un Geoide (=objetogeométrico con forma de Tierra), no una esfera o unelipsoide. Incluye la medida del campo gravitatorio en 4-D,
4
elipsoide. Incluye la medida del campo gravitatorio en 4-D,del movimiento de las placas tectónicas, las mareas o elmovimiento de los polos.
� Geografía: Es la ciencia que trata la superficie de la Tierradesde un punto de vista descriptivo (aspecto, partes,nombres). A veces denominamos Geografía Física a launión de Biogeografía, climatología y meteorología,geodesia, geomorfología, glaciología, hidrología yoceanografía.

MapasMapas y y modelosmodelos de Tierra: de Tierra: ElipsoidesElipsoides, , GeoidesGeoides y y DatumsDatums
La Tierra es un cuerpo muy redondo, pero tienemás la forma de un “esferoide” oblato o elipsoideque la de una esfera de radio constante. Unesferoide es un cuerpo que se parece a una esferapor definición. Normalmente tomaremos una figurageométrica mejor definida que la denotada por el
5
geométrica mejor definida que la denotada por eltérmino esferoide, en concreto la de un elipsoide.La corrección de la forma “esferoidal” de la Tierracon la esfera más parecida es de un 0.3%, y esohace posible el uso del modelo de una esferaperfecta para generar mapas a escala pequeña(continental). Para mapas de resolución fina hacefalta, sin embargo, un modelo esferoidal. Este es elcaso de mapas en los que se utilizan datos desatélite de alta resolución como el IKONOS, enimágenes aéreas o en herramientas que utilicen
coordenadas tomadas de un GPS.
MapasMapas y y modelosmodelos de Tierra: de Tierra: ElipsoidesElipsoides, , GeoidesGeoides y y DatumsDatums
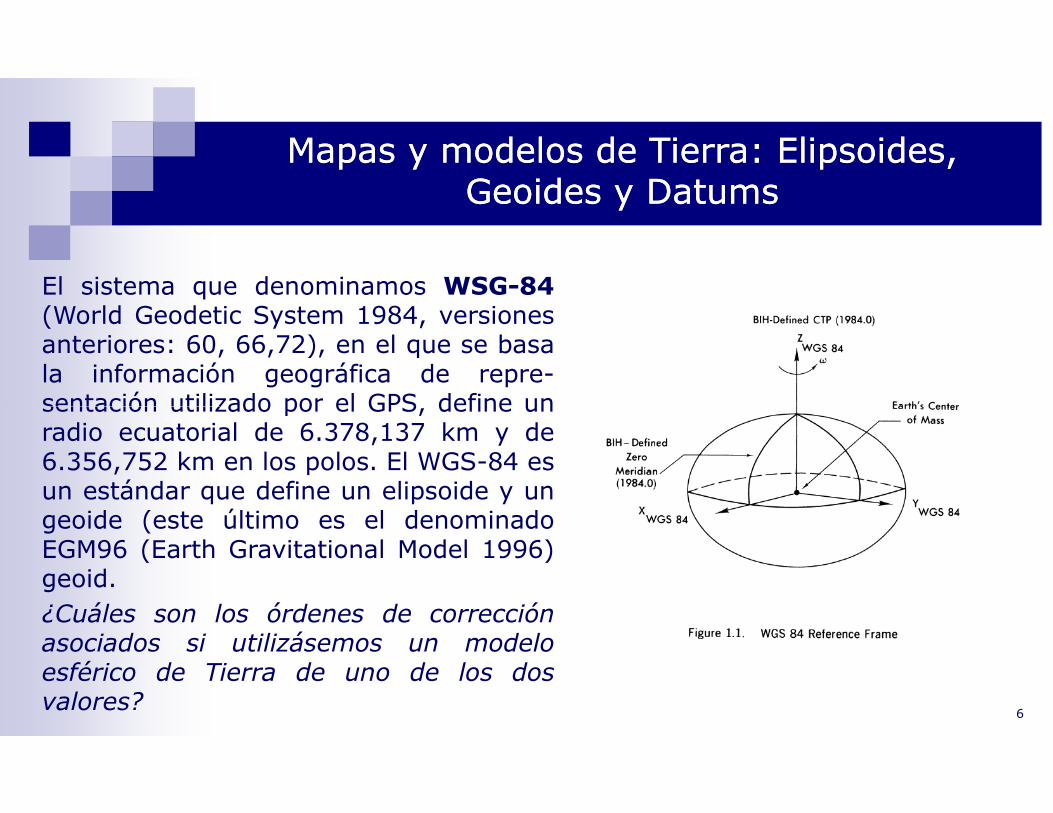
El sistema que denominamos WSG-84(World Geodetic System 1984, versionesanteriores: 60, 66,72), en el que se basala información geográfica de repre-sentación utilizado por el GPS, define un
6
sentación utilizado por el GPS, define unradio ecuatorial de 6.378,137 km y de6.356,752 km en los polos. El WGS-84 esun estándar que define un elipsoide y ungeoide (este último es el denominadoEGM96 (Earth Gravitational Model 1996)geoid.
¿Cuáles son los órdenes de correcciónasociados si utilizásemos un modeloesférico de Tierra de uno de los dosvalores?
MapasMapas y y modelosmodelos de Tierra: de Tierra: ElipsoidesElipsoides, , GeoidesGeoides y y DatumsDatums
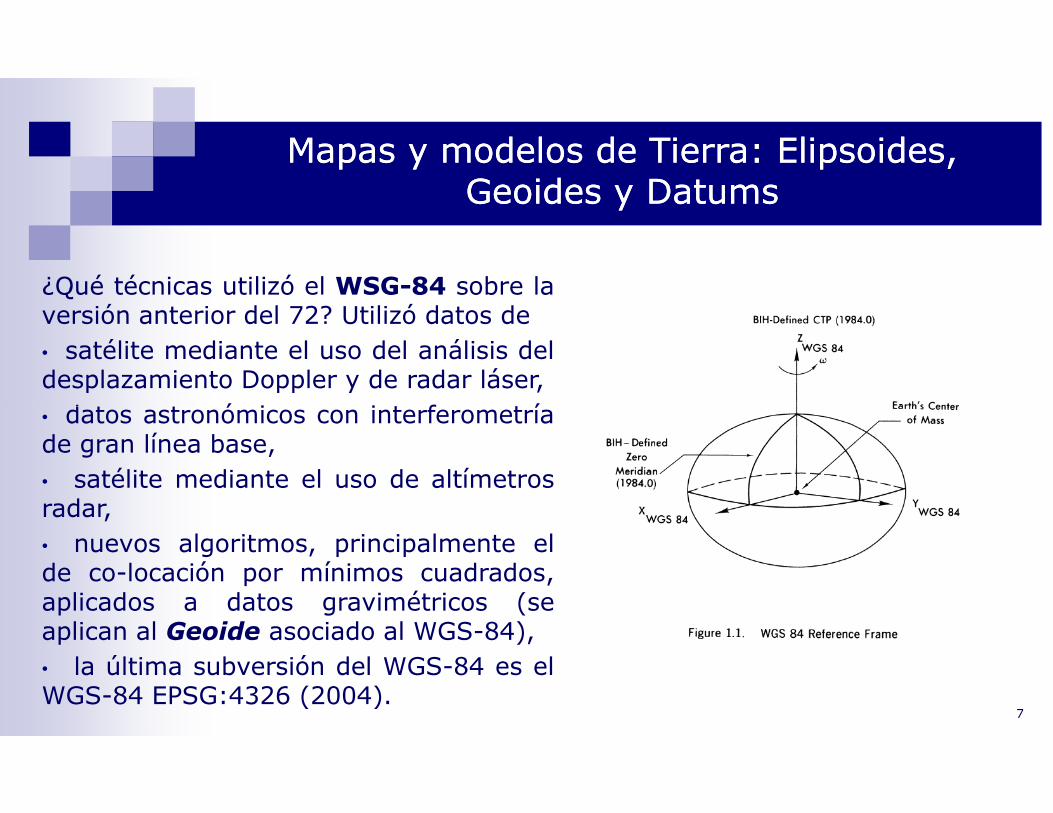
¿Qué técnicas utilizó el WSG-84 sobre laversión anterior del 72? Utilizó datos de
• satélite mediante el uso del análisis deldesplazamiento Doppler y de radar láser,
• datos astronómicos con interferometría
7
• datos astronómicos con interferometríade gran línea base,
• satélite mediante el uso de altímetrosradar,
• nuevos algoritmos, principalmente elde co-locación por mínimos cuadrados,aplicados a datos gravimétricos (seaplican al Geoide asociado al WGS-84),
• la última subversión del WGS-84 es elWGS-84 EPSG:4326 (2004).

MapasMapas y y modelosmodelos de Tierra: de Tierra: ElipsoidesElipsoides, , GeoidesGeoides y y DatumsDatums
El Geoide, por definición, es una aproximaciónempírica a la figura de la Tierra 3-D, sustraído elrelieve topográfico. ¿Cómo se puede sustraer latopografía? Se acude para ello a un conceptogravitacional: geoide es la superficie equipotencialdonde la gravedad tiene el valor del nivel del mar
8
donde la gravedad tiene el valor del nivel del marmedio. Tiene la forma que hemos mencionadoantes, la de un esferoide oblato, aunque arribaaludíamos a esta forma refiriéndonos a su formageométrica y aquí nos referimos a la forma de lasuperficie matemática equipotencial. La diferenciaentre el geoide y el elipsoide más parecido es deunos +/- 100 m. La forma del geoide es importante
para el cálculo de las órbitas satelitales.
Las desviaciones del geoideWGS-84 (EGM96) geoiddel elipsoide del WGS-84 (entre -105 y +85 m).
MapasMapas y y modelosmodelos de Tierra: de Tierra: ElipsoidesElipsoides, , GeoidesGeoides y y DatumsDatums
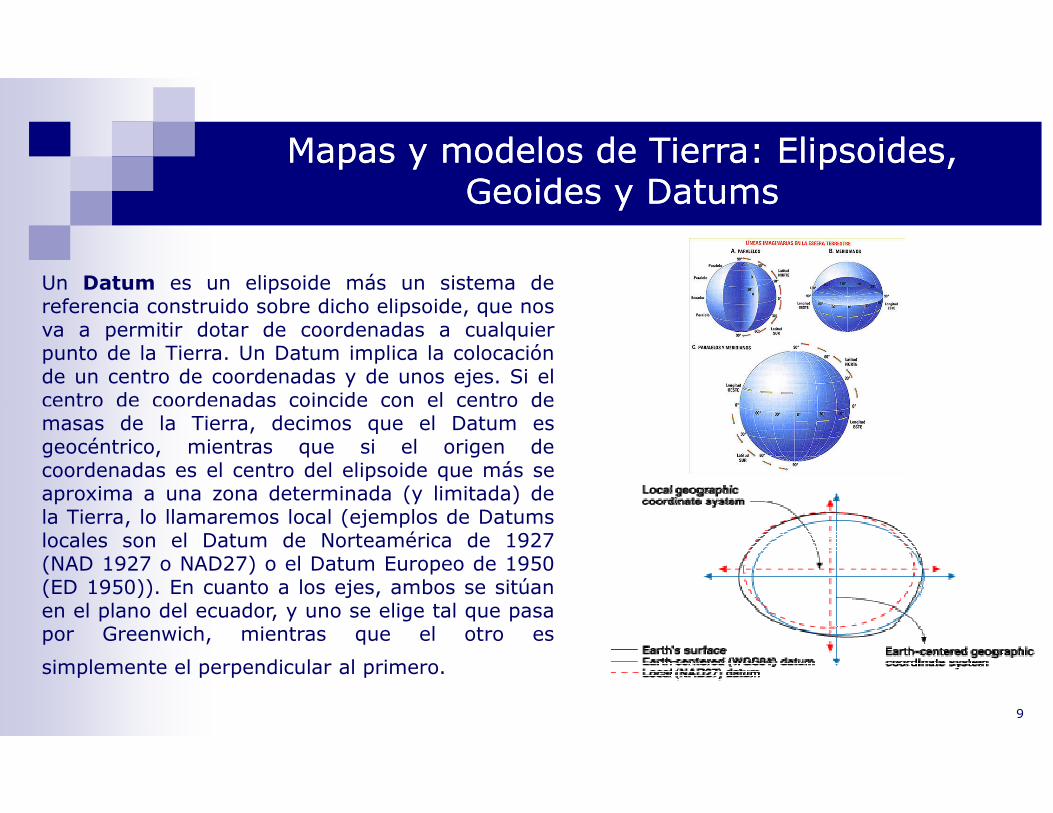
Un Datum es un elipsoide más un sistema dereferencia construido sobre dicho elipsoide, que nosva a permitir dotar de coordenadas a cualquierpunto de la Tierra. Un Datum implica la colocaciónde un centro de coordenadas y de unos ejes. Si elcentro de coordenadas coincide con el centro de
9
centro de coordenadas coincide con el centro demasas de la Tierra, decimos que el Datum esgeocéntrico, mientras que si el origen decoordenadas es el centro del elipsoide que más seaproxima a una zona determinada (y limitada) dela Tierra, lo llamaremos local (ejemplos de Datumslocales son el Datum de Norteamérica de 1927(NAD 1927 o NAD27) o el Datum Europeo de 1950(ED 1950)). En cuanto a los ejes, ambos se sitúanen el plano del ecuador, y uno se elige tal que pasapor Greenwich, mientras que el otro es
simplemente el perpendicular al primero.
MapasMapas y y modelosmodelos de Tierra: de Tierra: ElipsoidesElipsoides, , GeoidesGeoides y y DatumsDatums
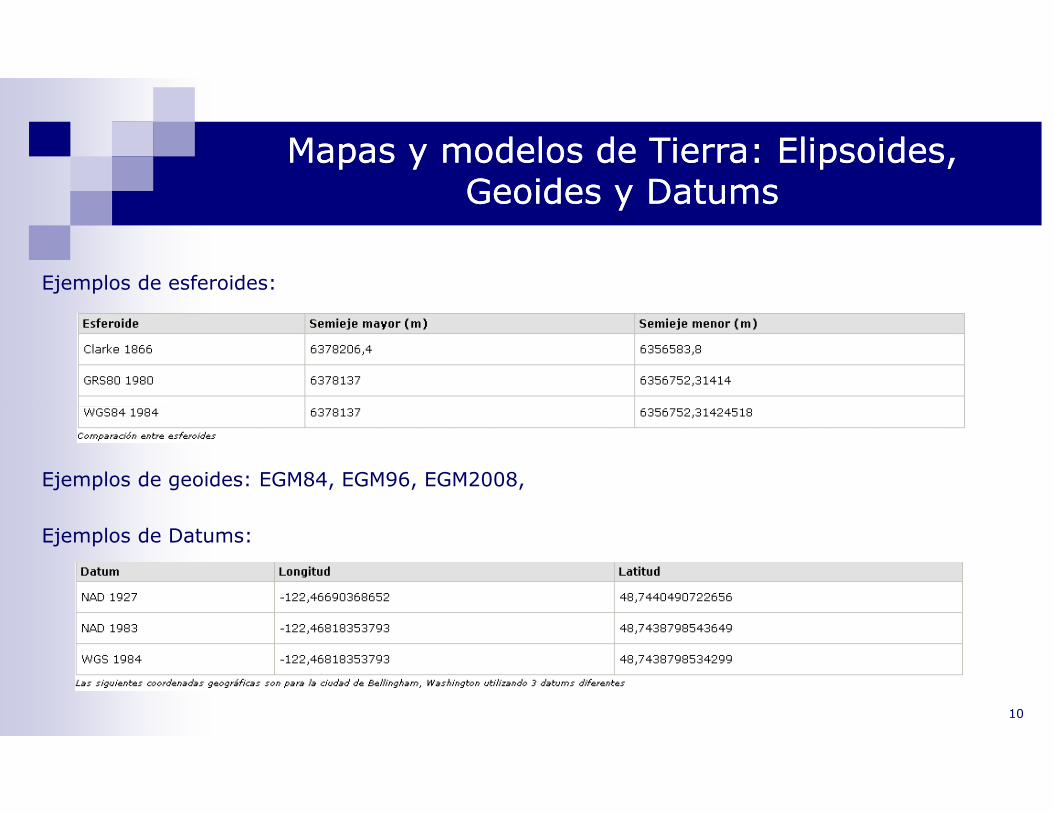
Ejemplos de esferoides:
10
Ejemplos de geoides: EGM84, EGM96, EGM2008,
Ejemplos de Datums:
MapasMapas y y modelosmodelos de Tierra: de Tierra: LatitudLatitud y y longitudlongitud
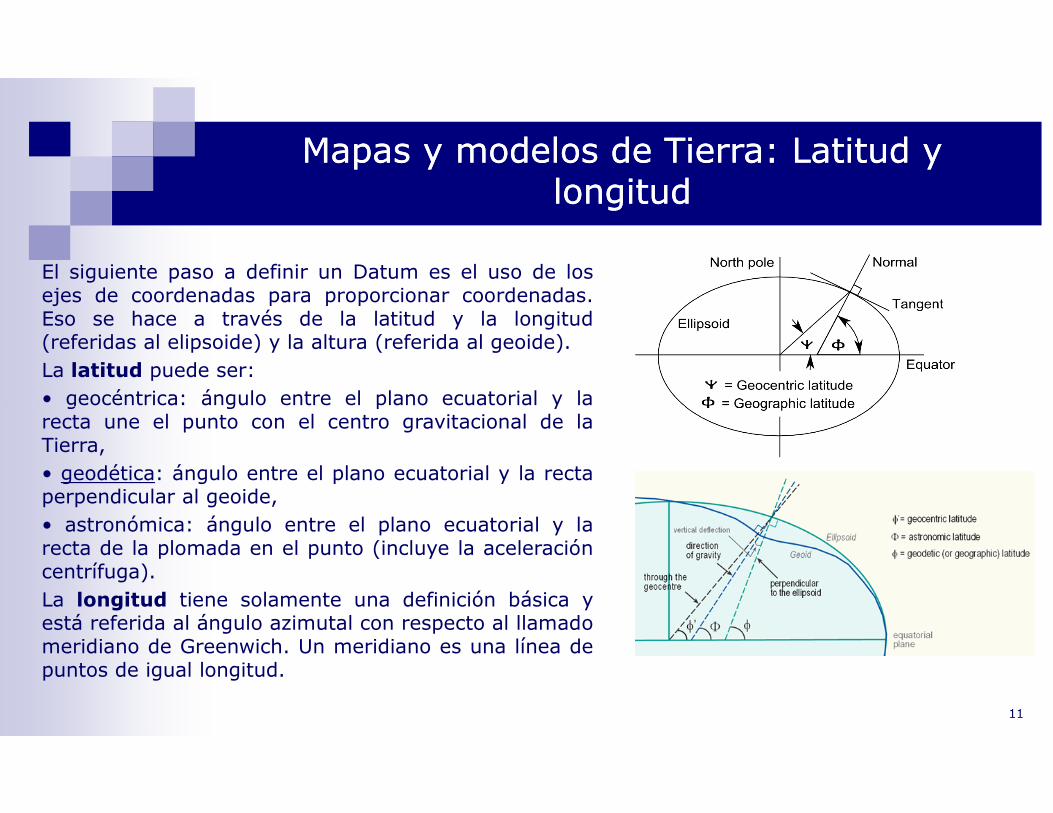
El siguiente paso a definir un Datum es el uso de losejes de coordenadas para proporcionar coordenadas.Eso se hace a través de la latitud y la longitud(referidas al elipsoide) y la altura (referida al geoide).
La latitud puede ser:
• geocéntrica: ángulo entre el plano ecuatorial y la
11
• geocéntrica: ángulo entre el plano ecuatorial y larecta une el punto con el centro gravitacional de laTierra,
• geodética: ángulo entre el plano ecuatorial y la rectaperpendicular al geoide,
• astronómica: ángulo entre el plano ecuatorial y larecta de la plomada en el punto (incluye la aceleracióncentrífuga).
La longitud tiene solamente una definición básica yestá referida al ángulo azimutal con respecto al llamadomeridiano de Greenwich. Un meridiano es una línea depuntos de igual longitud.

Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
¿Qué es una proyección cartográfica?
El punto importante ahora es que, siendo la Tierra uncuerpo tridimensional, no es trivial cuál es la mejormanera de representarlo sobre una superficiebidimensional. La transformación de 3D a 2D es lo que
12
bidimensional. La transformación de 3D a 2D es lo quellamamos matemáticamente proyección, que en nuestrocontexto será cartográfica. En lo que sigue se describenlas propiedades básicas de las proyecciones cartográficas ycómo se construyen. En concreto, pondremos énfasis en laproyección más común: la proyección denominadaTransversal Universal de Mercator (UniversalTransverse Mercator o UTM).
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
Propiedades cuantitativas de las proyecciones cartográficas:1. Forma (o conformalidad). Se refiere a la capacidad de una
proyección de reproducir o preservar la forma. Por ejemplo, que untriángulo equilátero sobre un esfera al proyectarse sobre un plano deacuerdo a una determinada transformación de 3D a 2D siga siendo un
13
acuerdo a una determinada transformación de 3D a 2D siga siendo untriángulo equilátero daría a dicha transformación la propiedad de serconforme. Se puede dar una definición precisa de proyección conformediciendo que es una transformación que conserva los ángulos. Es decir,que si estamos en un barco y medimos sobre nuestro mapa quehemos de tomar un rumbo a 160º al oeste de la línea de observaciónsobre un faro, efectivamente son 160º medidos en realidad sobre lacubierta del barco. No todas las proyecciones son conformes, y de ahíque la de Mercator, usada desde antiguo, fuese tan ventajosa en lanavegación marítima. Otro nombre para este tipo de proyección esortomórfica.
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
Propiedades cuantitativas de las proyecciones cartográficas:2. Distancia (o equidistancia). Un mapa es equidistante si conserva
distancias desde un punto concreto del mapa. Así, si sobre el mapauna distancia parece el doble que otra, efectivamente es así sobre unmapa equidistante. Hay que hacer énfasis en que esta definición
14
mapa equidistante. Hay que hacer énfasis en que esta definiciónsolamente se aplica desde un punto del mapa, generalmente el centro.No es posible matemáticamente generar una proyección que conservela distancia en todas las direcciones para todos los puntos del mapa.Esto implica que ningún mapa es fiel en su escala, aunque para mapasde zonas pequeñas el error es pequeño también. También se denominaequidistante, alternativamente, a un mapa que sitúe todos losparalelos 3D de la Tierra como líneas equidistantes.
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
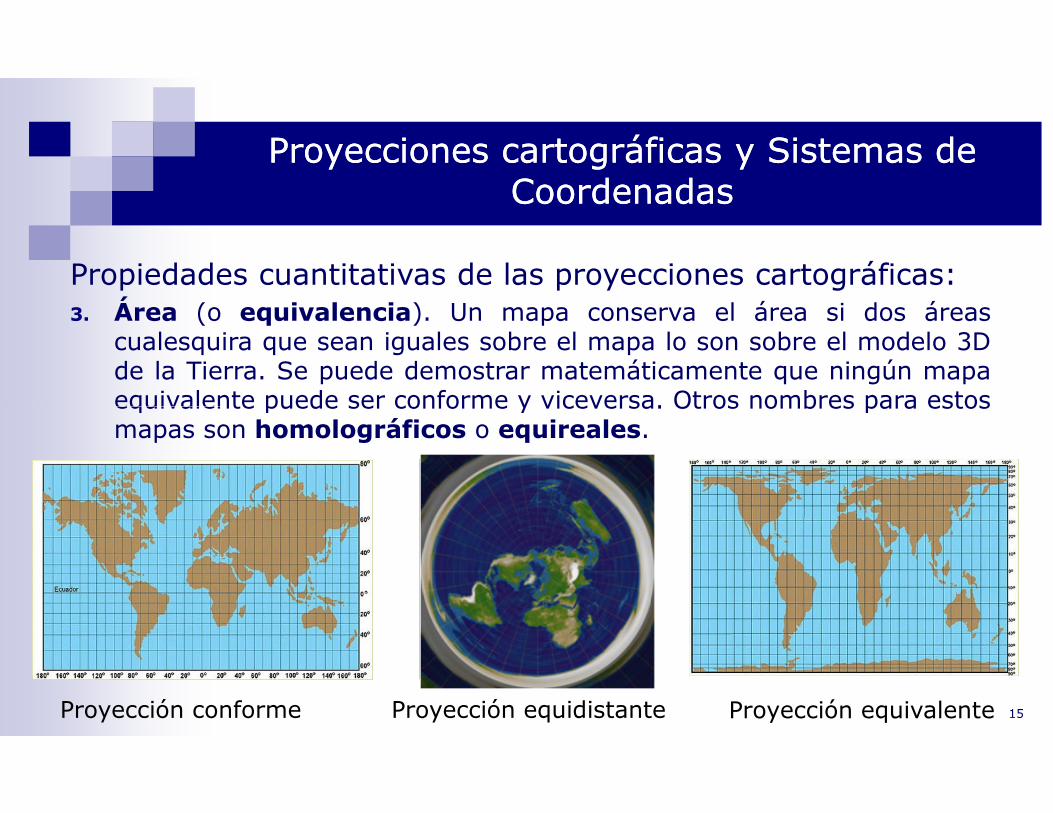
Propiedades cuantitativas de las proyecciones cartográficas:3. Área (o equivalencia). Un mapa conserva el área si dos áreas
cualesquira que sean iguales sobre el mapa lo son sobre el modelo 3Dde la Tierra. Se puede demostrar matemáticamente que ningún mapaequivalente puede ser conforme y viceversa. Otros nombres para estos
15
equivalente puede ser conforme y viceversa. Otros nombres para estosmapas son homolográficos o equireales.
Proyección conforme Proyección equivalenteProyección equidistante
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
Las tres familias principales de proyecciones. Vamos a considerartres familias de proyecciones, pese a que existen más. En concreto, seránlas cilíndricas, las cónicas y las planares o azimutales
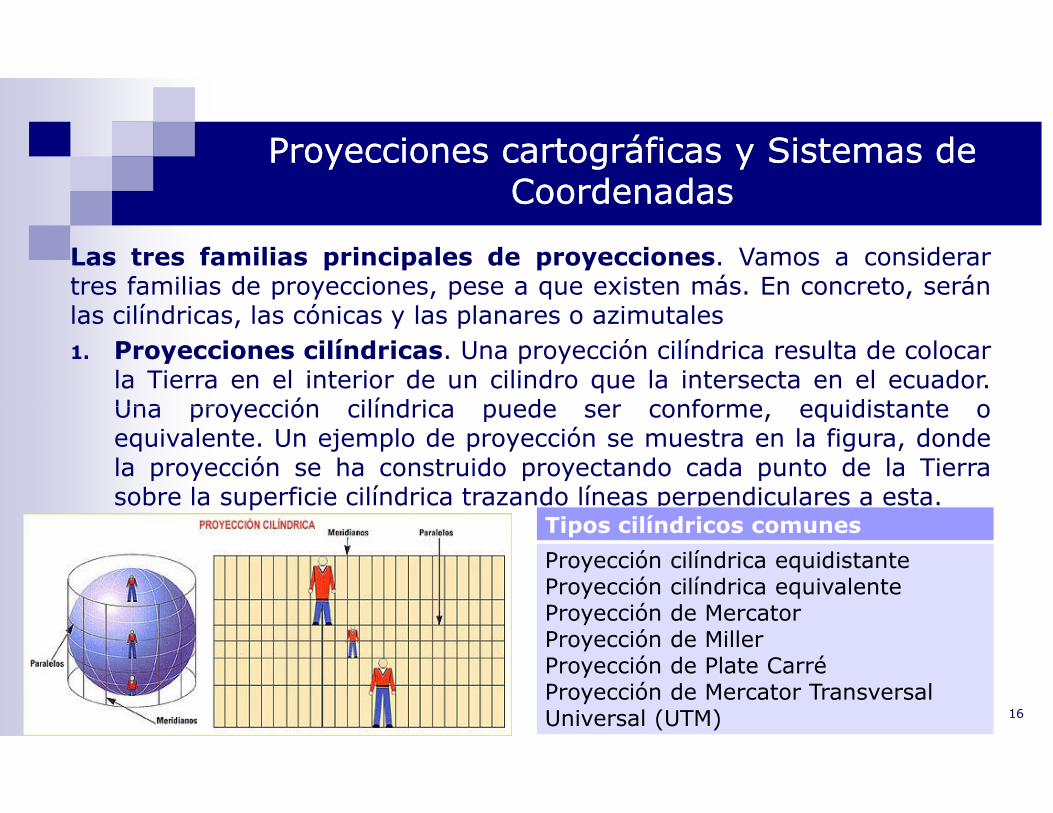
1. Proyecciones cilíndricas. Una proyección cilíndrica resulta de colocarla Tierra en el interior de un cilindro que la intersecta en el ecuador.Una proyección cilíndrica puede ser conforme, equidistante o
16
Una proyección cilíndrica puede ser conforme, equidistante oequivalente. Un ejemplo de proyección se muestra en la figura, dondela proyección se ha construido proyectando cada punto de la Tierrasobre la superficie cilíndrica trazando líneas perpendiculares a esta.
Tipos cilíndricos comunes
Proyección cilíndrica equidistanteProyección cilíndrica equivalenteProyección de MercatorProyección de MillerProyección de Plate CarréProyección de Mercator Transversal Universal (UTM)
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
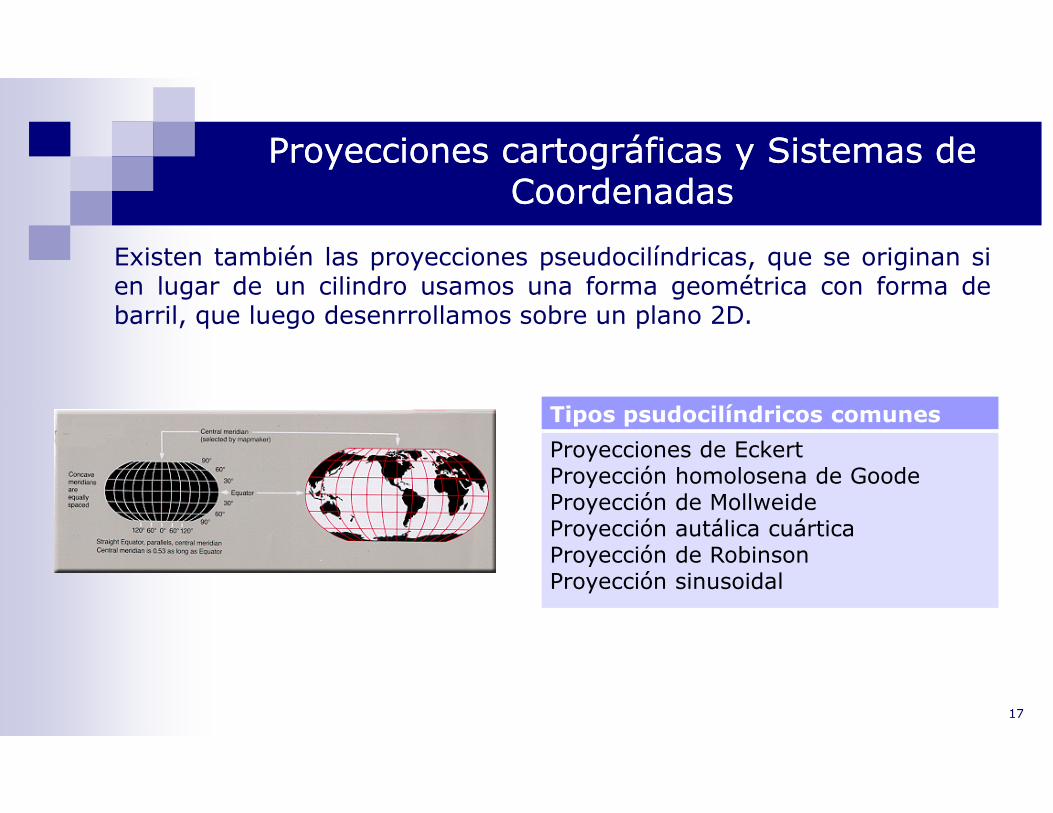
Existen también las proyecciones pseudocilíndricas, que se originan sien lugar de un cilindro usamos una forma geométrica con forma debarril, que luego desenrrollamos sobre un plano 2D.
Tipos psudocilíndricos comunes
17
Tipos psudocilíndricos comunes
Proyecciones de EckertProyección homolosena de GoodeProyección de MollweideProyección autálica cuárticaProyección de RobinsonProyección sinusoidal

Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
Las tres familias principales de proyecciones. Vamos a considerartres familias de proyecciones, pese a que existen más. En concreto, seránlas cilíndricas, las cónicas y las planares o azimutales
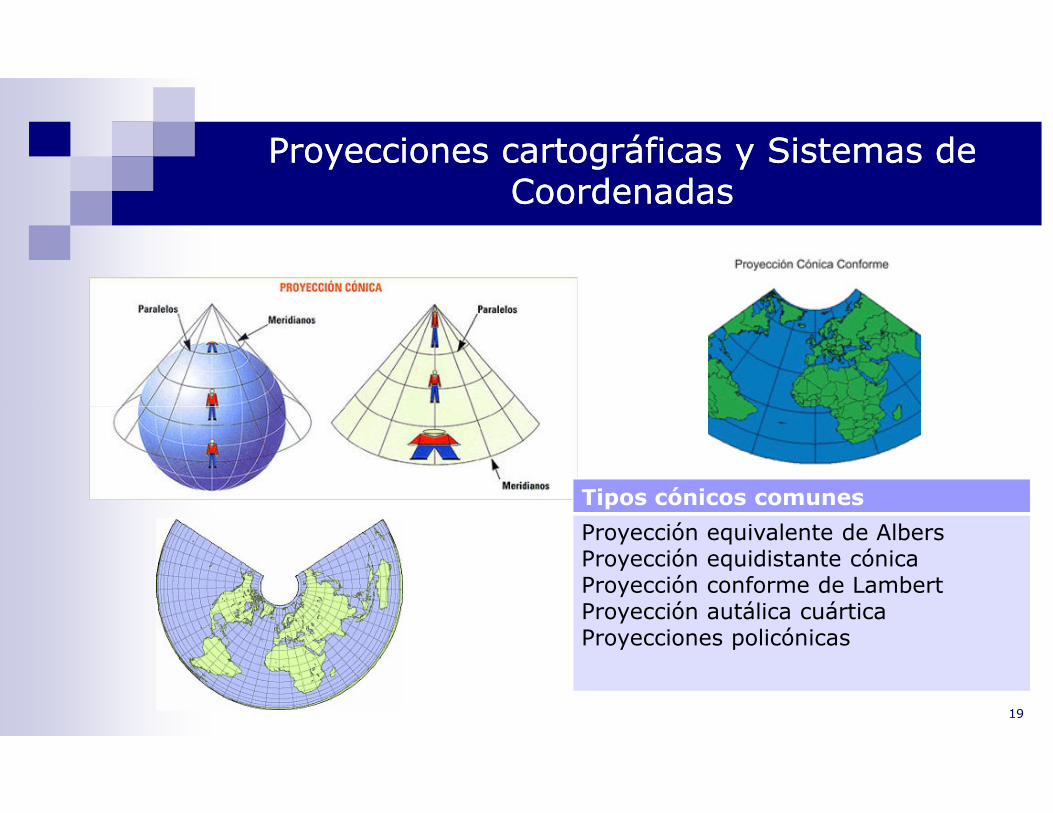
2. Proyecciones cónicas. Se derivan de la proyección del globoterrestre sobre un cono colocado sobre el mismo. Hay varios aspectosposibles en la elección de la proyección: el llamado aspecto normal
18
posibles en la elección de la proyección: el llamado aspecto normalcorresponde a elegir el vértice del cono sobre el eje polar de la Tierra.Si el cono toca la Tierra solamente en un paralelo, decimos que laproyección cónica es tangente y si lo hace en dos paralelos decimosque es secante. Se puede elaborar un mapa del mundo con layuxtaposición de varias proyecciones cónicas (construcción policónica).Las proyecciones cónicas implican menor distorsión que las cilíndricasen las zonas de latitudes altas y medias.
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
19
Tipos cónicos comunes
Proyección equivalente de AlbersProyección equidistante cónicaProyección conforme de LambertProyección autálica cuárticaProyecciones policónicas

Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
Las tres familias principales de proyecciones. Vamos a considerartres familias de proyecciones, pese a que existen más. En concreto, seránlas cilíndricas, las cónicas y las planares o azimutales
3. Proyecciones planares o azimutales. En lugar de colocar uncilindro o un cono, se coloca directamente un plano. Un ejemplo essituar un plano tangente a la Tierra en el polo y proyectar todo el
20
situar un plano tangente a la Tierra en el polo y proyectar todo elhemisferio correspondiente según las líneas que se originan en el poloopuesto. La mayoría de las proyecciones azimutales no son adecuadaspara generar un mapa de todo el mundo.
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de CoordenadasCoordenadas
Tipos planos comunes
Proyección gnomónica
21
Proyección gnomónicaProyección equidistante azimutalProyección azimutal equivalente de LambertProyección ortográficaProyecciones estereográficaProyección estereográfica polar universal

Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de Coordenadas: El sistema UTMCoordenadas: El sistema UTM
Proyección de Mercator (s. XVI)
Gerardus Mercator (GerhardKremer en su nombre flamenco)propuso en el siglo XVI la
22
propuso en el siglo XVI laproyección que lleva su nombre,que es una proyección cilíndricaconforme. Mercator se basó enuna construcción puramentegeométrica, pero hoy día lapodemos crear mediante el usode geometría diferencial.
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de Coordenadas: El sistema UTMCoordenadas: El sistema UTM
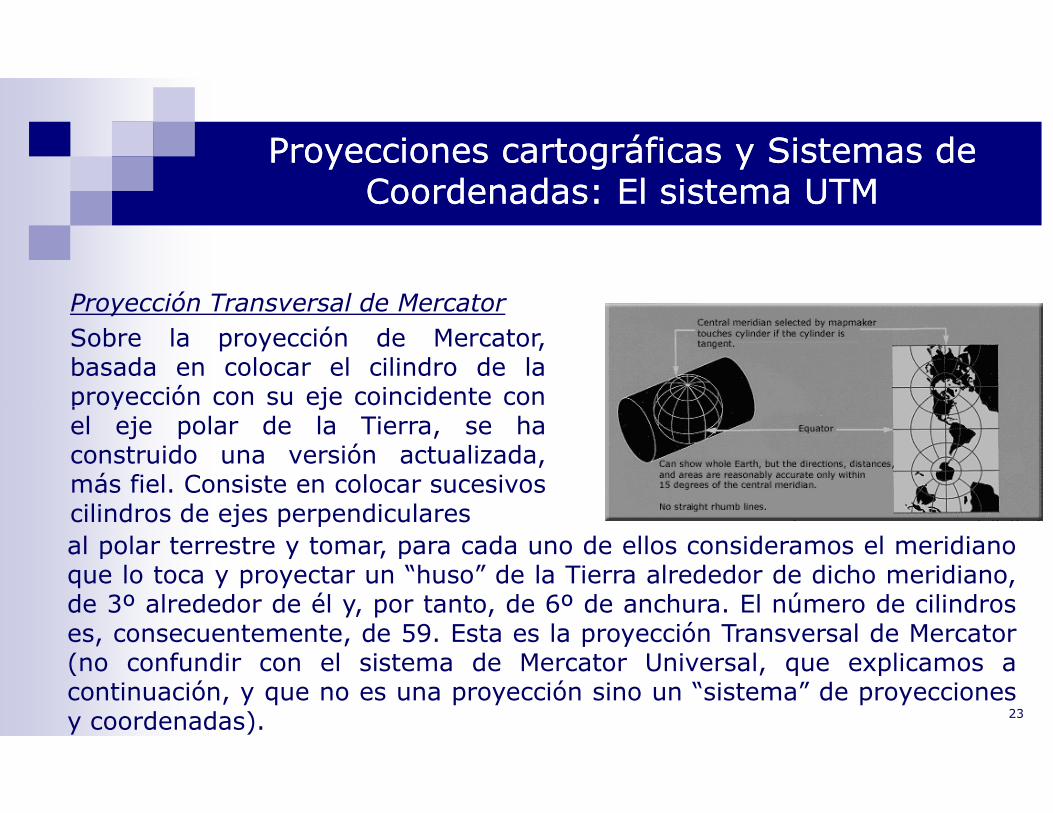
Proyección Transversal de Mercator
Sobre la proyección de Mercator,basada en colocar el cilindro de laproyección con su eje coincidente con
23
proyección con su eje coincidente conel eje polar de la Tierra, se haconstruido una versión actualizada,más fiel. Consiste en colocar sucesivoscilindros de ejes perpendiculares
al polar terrestre y tomar, para cada uno de ellos consideramos el meridianoque lo toca y proyectar un “huso” de la Tierra alrededor de dicho meridiano,de 3º alrededor de él y, por tanto, de 6º de anchura. El número de cilindroses, consecuentemente, de 59. Esta es la proyección Transversal de Mercator(no confundir con el sistema de Mercator Universal, que explicamos acontinuación, y que no es una proyección sino un “sistema” de proyeccionesy coordenadas).
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de Coordenadas: El sistema UTMCoordenadas: El sistema UTM
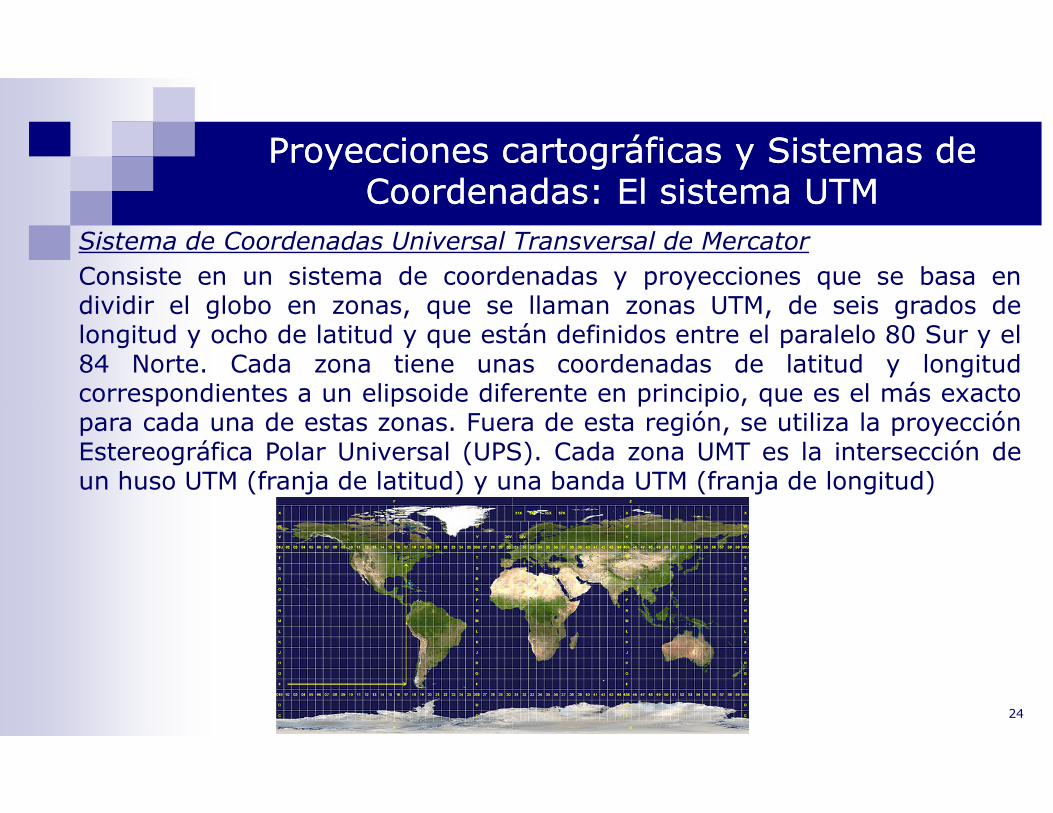
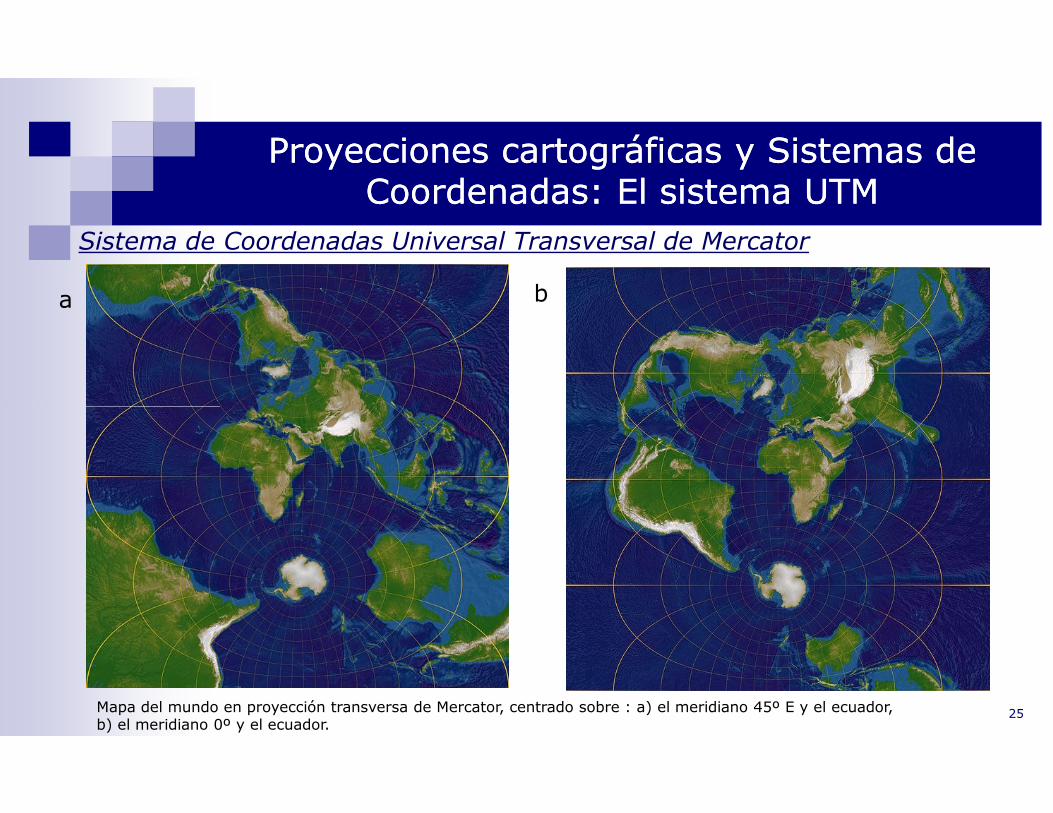
Sistema de Coordenadas Universal Transversal de Mercator
Consiste en un sistema de coordenadas y proyecciones que se basa endividir el globo en zonas, que se llaman zonas UTM, de seis grados delongitud y ocho de latitud y que están definidos entre el paralelo 80 Sur y el84 Norte. Cada zona tiene unas coordenadas de latitud y longitudcorrespondientes a un elipsoide diferente en principio, que es el más exactopara cada una de estas zonas. Fuera de esta región, se utiliza la proyección
24
para cada una de estas zonas. Fuera de esta región, se utiliza la proyecciónEstereográfica Polar Universal (UPS). Cada zona UMT es la intersección deun huso UTM (franja de latitud) y una banda UTM (franja de longitud)
Proyecciones cartográficas y Sistemas de Proyecciones cartográficas y Sistemas de Coordenadas: El sistema UTMCoordenadas: El sistema UTM
Sistema de Coordenadas Universal Transversal de Mercator
a b
25Mapa del mundo en proyección transversa de Mercator, centrado sobre : a) el meridiano 45º E y el ecuador, b) el meridiano 0º y el ecuador.
CuestionesCuestiones: El : El meridianomeridiano de Greenwichde Greenwich
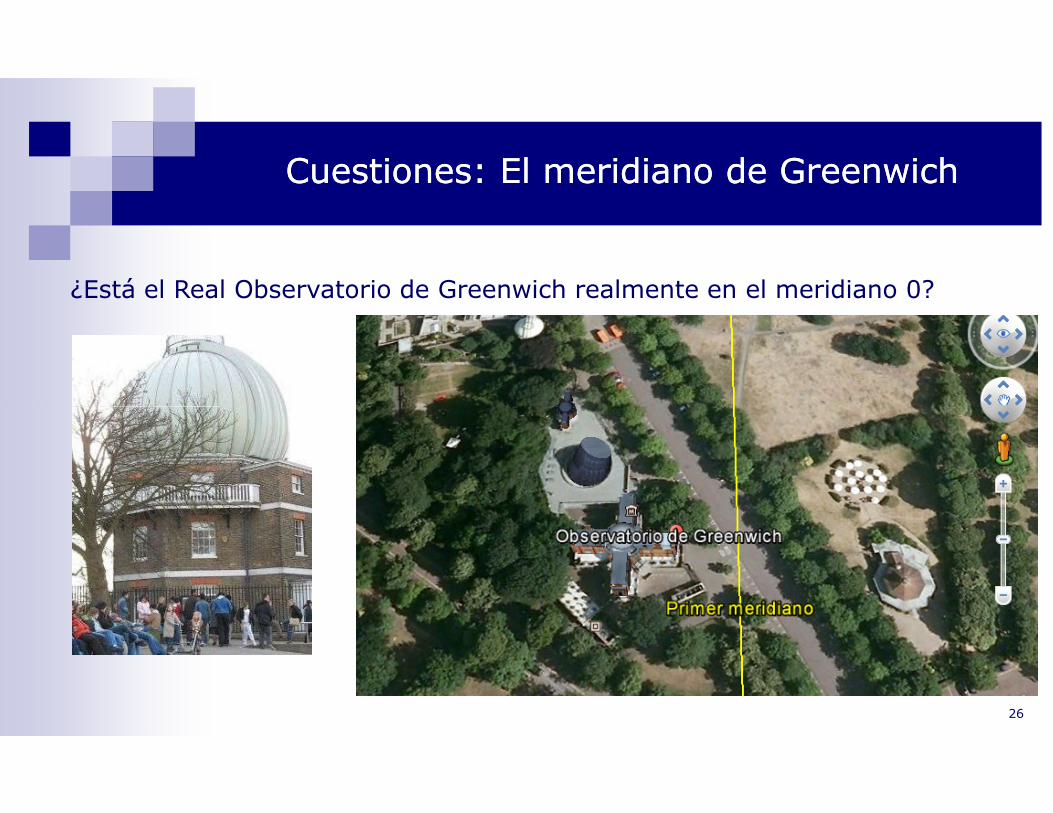
¿Está el Real Observatorio de Greenwich realmente en el meridiano 0?
26
CuestionesCuestiones: El : El meridianomeridiano de Greenwichde Greenwich
27
CuestionesCuestiones: El : El meridianomeridiano de Greenwichde Greenwich
¿Está el Real Observatorio de Greenwich realmente en el meridiano 0?
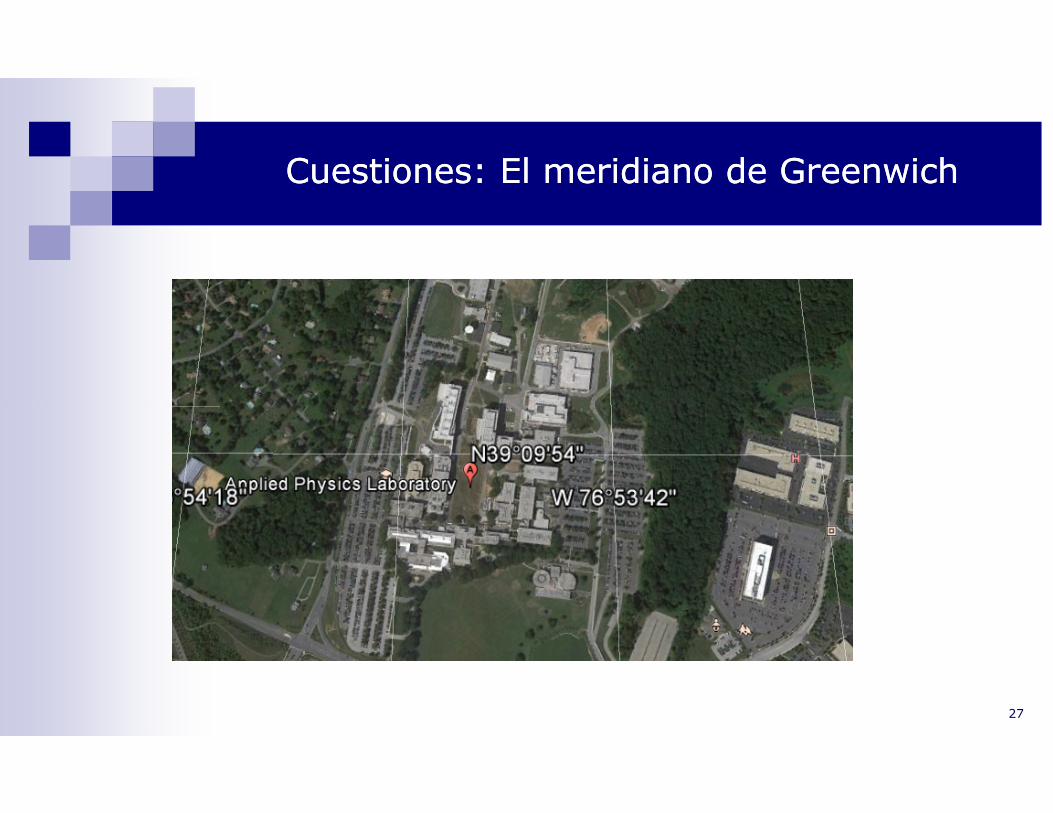
El Real Observatorio se construyó en 1675 y casi desde el principio setomó como referencia para conocer la longitud de los otros puntos dela Tierra. En 1927 el US Coast and Geodetic Survey estableció elDatum en uso en EE.UU. denominado NAD 27. En la década de 1950
28
Datum en uso en EE.UU. denominado NAD 27. En la década de 1950se tomaron las medidas más precisas hasta esa fecha de la cartografíade EE.UU. con el apoyo de los datos del satélite Transit, y se usaroncomo referencia la posición y las coordenadas del Applied PhysicsLaboratory de la Johns Hopkins University en Maryland. Sin embargo,ese valor no era correcto si tomamos como correcto el medido para elsistema que usa el sistema GPS o Google Earth en el moderno WGS84. Sin embargo, ese valor se ha tomado como referencia.

CuestionesCuestiones: : ConformidadConformidad y y EquivalenciaEquivalencia
a) ¿Puede un mapa ser simultáneamente conforme y equivalente?
b) ¿Cómo podemos derivar la fórmula de proyección
29
b) ¿Cómo podemos derivar la fórmula de proyección
que nos permita crear un mapa conforme?
1
2
( , )
( , )
latitud
= longitud
x f
y f
= Φ Γ
= Φ Γ
Φ =
Λ
:
1ln tan
cos 2 4
Pista
πΦ = +
Φ ∫
Introducción a la NavegaciónIntroducción a la Navegación
La navegación es el proceso de planear, registrar y controlar elmovimiento de una nave o un vehículo en su trayecto de un lugar aotro. La maneras básicas de realizarlo son las siguientes:
• Cálculo de la posición y ruta utilizando referencias fijas sobre la Tierra.
30
• Cálculo de la posición y ruta utilizando referencias astronómicas (estrellas,sol, luna, etc.)
• Cálculo de la posición y ruta utilizando la tecnología (navegadoresinerciales, radioguías, sistemas de navegación por satélite)
• Cálculo de la posición y ruta basándose en el conocimiento de la posiciónanterior (dead reckoning)
Además, en el cálculo de la posición y la ruta, puede haber otros factoresque se deban tener en cuenta además de los puramente geométricos, comopor ejemplo las condiciones meteorológicas o el tráfico.

Introducción a la NavegaciónIntroducción a la Navegación
Formato de RutaUna ruta incluye normalmente puntos de ruta o waypoints, que son puntosde la ruta donde típicamente varía el curso o la velocidad de la misma. Lasrutas estarán así formadas por segmentos que conectan dichos
31
waypoints y que llamamos mangas o legs.
Introducción a la NavegaciónIntroducción a la Navegación
Fijar la posiciónEl cálculo de la posición al que estamos aludiendo se llevó a cabohistóricamente de una manera visual, que hoy día se llama piloting.
Normalmente la posición se fija determinando la intersección de lo que se
32
Normalmente la posición se fija determinando la intersección de lo que sellaman LOPs (Lines Of Position). Estas LOPs pueden ser rectas, por ejemplo,si lo que sabemos es que nuestra referencia se encuentra en unadeterminada dirección o circunferencias si se encuentra a una determinadadistancia. Cuando efectuamos una medida con respecto a esa referencia,tendremos un cierto desconocimiento de nuestra posición: si sabemos queestamos a 5 km de la referencia, sabremos que estamos en cualquier puntode la circunferencia de radio 5 km alrededor de ese punto. Necesitaremospor tanto varias medidas para, mediante la intersección de las LOPs,calcular nuestra posición.
Introducción a la NavegaciónIntroducción a la Navegación
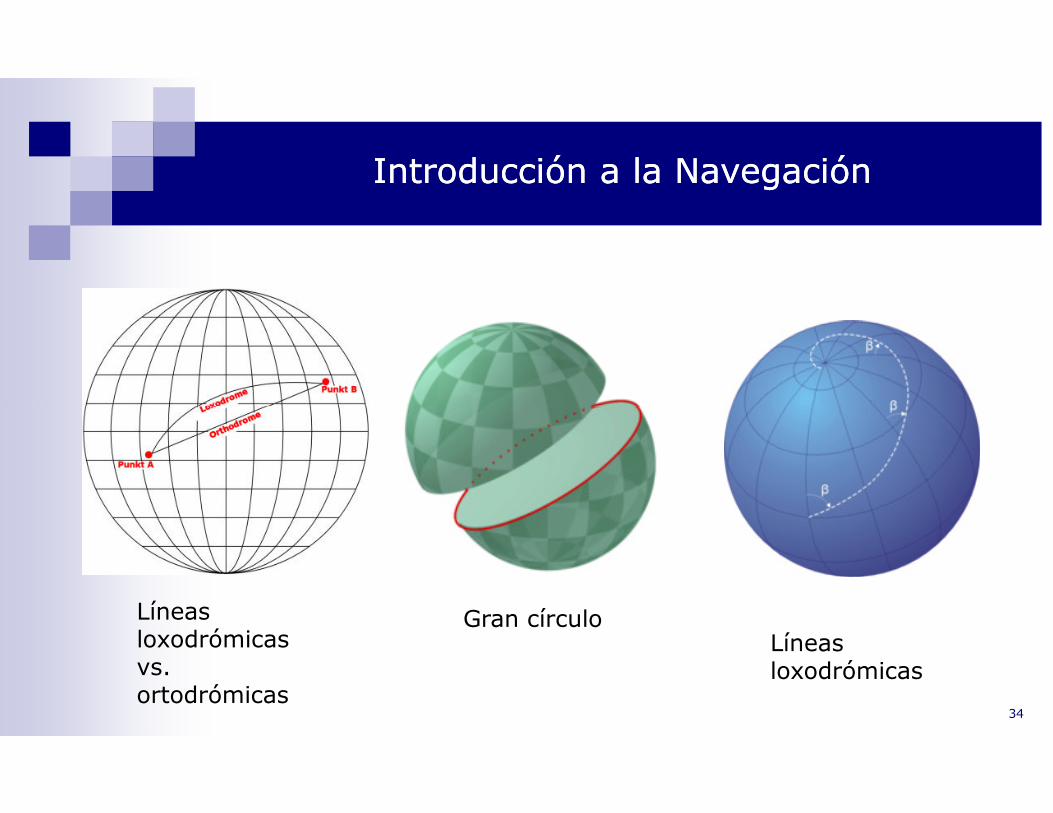
Cálculo del camino más cortoSi suponemos un modelo de Tierra esférico, denominamos gran círculo a lacircunferencia sobre la misma que une dos puntos por la vía más corta. Sonun ejemplo de las llamadas líneas geodésicas, es decir, las líneas
33
que, contenidas sobre una superficie cualquiera -no necesariamente unasuperficie esférica-, unen puntos sobre la misma por el camino más corto.Estas líneas sobre un gran círculo, llamadas líneas ortodrómicas, secontraponen a las llamadas líneas loxodrómicas, que son aquellas queforman un ángulo fijo con los meridianos y que son sobre las quenormalmente han navegado los barcos tradicionalmente, porquecorresponden a medidas definidas de la brújula y que se pueden seguirsobre un mapa, en concreto sobre un mapa que sea una proyección deMercator.
Introducción a la NavegaciónIntroducción a la Navegación
34
Líneas loxodrómicas vs. ortodrómicas
Gran círculoLíneas loxodrómicas

Introducción a la NavegaciónIntroducción a la Navegación
Dead ReckoningProviene de la expresión inglesa deduced reckoning y consiste en unmétodo de navegación que se basa en partir de una posición conocida ymoverse sin utilizar referencias externas sino el conocimiento de lavelocidad, el tiempo transcurrido y la dirección absoluta (con respecto al
35
velocidad, el tiempo transcurrido y la dirección absoluta (con respecto alNorte, por ejemplo; esta sería la única referencia externa).
Es el tipo de navegación llevada a cabo con a ayuda de sensores inerciales.