interactive compensatory fuzzy programming for decentralized multi-level linear programming (dmllp)...
TRANSCRIPT
Fuzzy Sets and Systems 157 (2006) 3072–3090www.elsevier.com/locate/fss
Interactive compensatory fuzzy programming for decentralizedmulti-level linear programming (DMLLP) problems
Fatma Tiryaki∗
Department of Mathematics, Faculty of Arts and Science, Yildiz Technical University, Davutpasa, Istanbul, Turkey
Received 19 June 2004; received in revised form 6 April 2006; accepted 15 April 2006Available online 9 May 2006
Abstract
This paper presents interactive compensatory fuzzy programming for decentralized multi-level linear programming (DMLLP)problems. By adjusting the cooperative decision making process between the different levels and also between the decision makersof the same level; our aim is to obtain a preferred compensatory compromise Pareto-optimal solution for DMLLP. For this, theweights of objectives at each level are assigned by the next upper level decision maker (DM) by using analytic hierarchy process(AHP) or any other weighting methods. The weight of any objective for whole system is equal to the product of the weights on thepath tying it to the top decision maker DM0. Using these weights, equivalence is established such that the satisfactory levels of allobjectives are proportional to their own weights. Werners’ compensatory “fuzzy and” operator is offered to solve DMLLP problem.The most important idea to be emphasized is that equivalence is established such that the satisfactory levels of all objectives areproportional to their own weights. Thanks to this equivalence, DMLLP problem has been transformed to the multi-objective linearprogramming (MOLP) problem at level 0, the equivalence is reflected to the compensatory model within the constraints, and theequivalence also enables all DMs to obtain proportional satisfactions with their weights as much as possible. So, in our compensatorymodel, a reduction on equivalent satisfactory level of one DM can be compensated for by an increase in the equivalent satisfactorylevel of another DM. Furthermore, being developed a finite interactive iterative procedure with maximum interaction step, a setof compensatory solutions which are also Pareto-optimal is obtained, depending on compensation parameter �. Giving a theorem,we will show that the solutions generated by Werners’ compensatory “fuzzy and” operator do guarantee Pareto-optimality for ourDMLLP problem. And comparing it with some other computational efficient compensatory fuzzy aggregation operators we willconclude that this operator is more appropriate for DMLLP. Illustrative numerical example is provided to demonstrate the feasibilityand efficiency of the proposed interactive fuzzy compensatory method for DMLLP.© 2006 Elsevier B.V. All rights reserved.
Keywords: Compensatory operators; Multi-level programming; Fuzzy mathematical programming; Fuzzy decision making
1. Introduction
Multiple level programming problems are frequently encountered hierarchical organizations of large companies orthe decentralized systems of nonprofit and government organizations. Multiple level programming techniques explicitlyassign each decision maker (DM) a unique objective, a set of decision variables, and a set of common constraints that
∗ Tel.: +90 212 449 17 85; fax: +90 212 449 15 14.E-mail address: [email protected].
0165-0114/$ - see front matter © 2006 Elsevier B.V. All rights reserved.doi:10.1016/j.fss.2006.04.001
F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3073
affect all DMs. These problems have two interpretations dependent on whether there is a cooperative relationshipamong DMs or not.
The Stackelberg solution has been usually employed as a solution concept to multi-level programming problems[4–6,2,3,7,8,27,32,34]. For example, in the bi-level programming problems, a decision maker at the upper level makesa decision subject to an optimization problem for a DM at the lower level. When the Stackelberg game [27]—a specialcase of a two-person, non-zero sum, non-cooperative game, with full information—is employed, it is assumed that thereis no communication between the two DMs, or they do not make any binding agreement even if such communicationexists. In the Stackelberg game, each DM completely knows objective functions and constraints of the two DMs,and the DM at the upper level (leader) first make a decision and then the DM at the lower level (follower) specifies adecision so as to optimize an objective function with full knowledge of the decision of the leader. But, it is known that theproblem for obtaining the Stackelberg solution is a non-convex programming problem with special, even if the objectivefunctions of both DMs and the common constraint functions are linear. And also, in general, the Stackelberg solutiondoes not satisfy Pareto optimality because of its non-cooperative nature. So, the multi-level programming problems aredifficult to solve and have been proved to be strongly NP- hard [26]. Some existing numerical techniques such as thevertex enumeration approach, the extreme point search approach, the procedure based on the Karush–Kuhn–Tuckercondition, the penalty function approach, and the descent methods are effective only for solving very simple problems[4–8,30,31,34].
However, concerning the hierarchical decision problem in the decentralized firm, it is quite natural that decisionmakers are regarded as to be cooperative rather than to be completely non-cooperative. To overcome the above mentioneddifficulties, in 1996, Lai [12] and Shih et al. [24] have proposed a new solution concept, which is different from theconcept of a Stackelberg solution, for problems such that decisions of DMs in all the levels are sequential and all theDMs essentially cooperate with each other. In their papers, they developed a fairly effective fuzzy approach by using theconcept of tolerance membership functions and multi-objective decision making. The idea is to use the basic fuzzinessand vagueness nature of such large hierarchy systems to make the complexity tractable. Generally, in their approaches,the upper level defines his or her tolerances by the use of membership function which constraints the lower level DMs’feasible space. The resulting iterative procedure, instead of the usually used extreme point search, relies on the change ofmembership functions which expresses the degree of satisfaction of the solutions to both the upper- and the lower-levelDMs. So, their approaches explore the inherent vagueness of the system and thus generate no significant additionalconstraints. In fact they significantly reduce the amount of computation required for large multiple level decentralizedprogramming problems. Unfortunately, there is a possibility that their method leads a final solution to an undesirableone because of inconsistency between the fuzzy goals of the objective function and the decision variables. To avoid suchproblems in the methods of Lai [12] and Shih et al. [24], by eliminating the fuzzy goals for decision variables, Sakawaet al. [21] have developed interactive fuzzy programming for two-level linear programming problems. Moreover, fromthe viewpoint of experts’ imprecise or fuzzy understanding of the nature of parameters in the problem formulationprocess [16], they have extended it to interactive fuzzy programming for two-level linear programming problems withfuzzy parameters [22]. These results have been extended to deal with two-level linear fractional programming problemsboth without and with fuzzy parameters [17,23]. Along these results, as additional results, extensions to multi-level0–1 programming problems, two-level nonconvex programming problems have been done through genetic algorithms[20,19]. Sakawa and Nishizaki [18] present an interactive fuzzy method, which consists of two phases, for decentralizedtwo-level linear programming problems. In his paper, Sinha [28] has suggested fuzzy mathematical programming whichis a supervised search procedure (supervised by the higher level decision maker). The higher level DM provides thepreferred values of decision variables under his control (to enable the lower level DM to search for his optimum in awider feasible space) and the bounds of his objective function (to direct the lower level DM to search for his solutionsin the right direction). Recently, Ahlatcioglu and Tiryaki [1] presented two interactive fuzzy programming approachesfor a decentralized two-level linear fractional programming (DTLLFP) problem with a single decision maker DM0 atthe upper level and multiple DMs at the lower level. In both their approaches, with the AHP method, DM0 assignsweights to objectives at the lower level. An equivalence is established such that the satisfactory levels of all objectivesare proportional to their own weights. Transformed main problems are constructed corresponding to DTLLFP problem.If the DM0 is not satisfied with this solution, a strongly efficient satisfactory solution can be reached by interactingwith him or her.
The fuzzy approaches mentioned above explore the inherent vagueness of the system and thus generates no significantadditional constraints. In fact they significantly reduce the amount of computation required for large multiple level
3074 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
decentralized programming problems. However, these fuzzy works used the non-compensatory max–min aggregationoperator, which is not the usual practice for solving real-world decision making problems. Managerial decisionsalmost always allow some compensation between different achievements so that a balance of the objectives can beobtained. Furthermore, in real world applications, the objectives of the DMs in the same level can be also different. So,Shih and Lee [25] have proposed compensatory fuzzy multiple level decision making. In their papers, compensatoryoperators are introduced for adjusting the decision making process between the different levels and also betweenthe decision makers of the same level. After a brief consideration of the bi-level and three level systems, the largedecentralized organizations with both equal and unequal goals are investigated, and the influences of compensation arecompared.
In this paper a DMLLP problem is studied and a compensatory fuzzy programming for this problem is proposed. Inour compensatory method, the direct weights of objectives at each level are assigned by the next upper level DM, by usingAHP or any other weighting methods. Then, the global weights of these objectives for the entire system are determinedby product of the direct weights on the path tying them to the top decision maker DM0. With these global weights,equivalence is formed among the satisfactory levels of the objectives. And a computationally efficient compensatoryfuzzy aggregation operator which is Werners’ compensatory “fuzzy and’’ is offered to solve DMLLP problem. Givinga theorem, we will show that the solutions generated by this compensatory operator do guarantee Pareto-optimal for ourDMLLP problem. For comparison purpose, we will also use some other computational efficient compensatory fuzzyoperators in literature and we will emphasize that Werners’ compensatory “fuzzy and’’ operator for DMLLP problemis more appropriate than the others. Because, by adjusting the decision making process between the different levels andalso between the decision makers of the same level, it efficiently generates a wider set of compensatory compromisesolutions which are also Pareto-optimal solutions for DMLLP, depending on the compensation parameter �.
So, this paper is organized as follows. Next section introduces the compensatory fuzzy aggregation operators. Section3 presents the DMLLP problem formulation and explains our methodology using Werners’ compensatory “fuzzy and’’operator, and also presents other DMLLP formulations corresponding to other compensatory operators. Section 4 givesan illustrative numerical example in order to demonstrate the feasibility and efficiency of the proposed method usingWerners’ compensatory “fuzzy and’’ operator and compare with other operators. Finally, Section 5 provides somegeneral conclusions.
2. Compensatory fuzzy aggregation operators
There are several fuzzy aggregation operators. The variety of operators for the aggregation of fuzzy sets might beconfusing and might make it difficult to decide which one to use in a specific model or situation. Zimmermann [37]proposed the following eight rules to justify a suitable operator for a particular fuzzy decision problem. Criteria forselecting appropriate aggregation operators are axiomatic strength, empirical fit, adaptability, numerical efficiency,compensation, range of compensation, aggregating behavior, required scale level of membership functions.
The most important aspect in the fuzzy approach is the compensatory or non-compensatory nature of the aggregateoperator. By compensation [37], in the context of aggregation operators for two fuzzy sets, it means that the following:given that the degree of membership to the aggregated fuzzy set is �agg(xk) = f (�
A(xk), �B
(xk)) = k f is compen-satory if �agg(xk) = k is obtainable for a different �
A(xk) by a change in �
B(xk). Several investigators [13,15,25,37]
have discussed this aspect.Using the linear membership function, Zimmermann proposed the “min’’ operator model to the MOLP [36]. It is
usually used due to its easy computation. Although the “min’’ operator method has been proven to have several niceproperties [15], the solution generated by min operator does not guarantee compensatory and Pareto-optimal [10,14,35].The biggest disadvantage of the aggregation operator “min’’ is that it is non-compensatory. In other words, the resultsobtained by the “min’’ operator represent the worst situation and cannot be compensated by other members which maybe very good. On the other hand, the decision modeled with maximum operator is called fully compensatory in thesense that it achieves the full satisfaction of a single goal.
As a result of experiment made by Zimmermann and Zysno [38], most of the decisions taken in the real world areneither non-compensatory (min operator) nor fully compensatory. So, these operators do not seem to be very suitablefor modeling the real world problems in many situations. To overcome this difficulty Zimmermann and Zysno [38]have suggested a class of hybrid operators called compensatory operator with the help of a suitable parameter ofcompensation �. They showed that the “�-operator (or “compensatory and’’ operator)’’ is more adequate in human

F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3075
decision making than operators “min’’, “product’’, “max’’, “weighted geometric mean’’. But it is a nonlinear operatorand increases the computational difficulties tremendously.
A computationally efficient compensatory operator is Luhandjula’s compensatory min-bounded sum operator: �D =� mini �i +(1−�) min[1,
∑i �i] is presented to solve MOLP problem [15]. Unfortunately, it is difficult to determine the
compensatory coefficient �. The solution generated by min-bounded sum operator is not necessarily efficient. However,it is an attractive one from the standpoint of computational efficiency. In order to overcome this drawback, Li [13]proposed a two-phase approach to overcome this difficulty. As a matter of fact, the first phase is to use Zimmermann’sapproach. If the possible solution is unique in phase one, it will be a Pareto-optimal solution. Otherwise, in phasetwo, a new program will be formulated to maximize the arithmetic mean value of all memberships restricted byoriginal constraints and constraints comes from phase one. Obviously, phase two yields an efficient solution becauseof full compensation of the “averaging’’ operator. Chen and Chou [9] proposed a fuzzy approach to integrate the minoperator, average operator and two-phase methods. Guu and Wu [11] proposed a similar two-phase model for fuzzylinear programming problem to improve the dominated solution yielded by min operator. To the case of FMOLP, Leeand Li [14] associated a two-phase approach with �-cut to treat the possibilistic distributions of fuzzy coefficients.Wu and Guu [35] proposed a simplified two-phase model for FMOLP to yield a fuzzy efficient solution betweennon-compensatory (“min’’ operator) and full compensatory (average operator).
In this paper, we will use Werners’ compensatory “fuzzy and’’ operator and show that the solutions generated bythis operator do guarantee Pareto-optimality for our DMLLP problem. And also we will compare this operator with thefollowing other computationally efficient compensatory fuzzy aggregation operators. Let us introduce these operators,where 0��i �1, i = 1, . . . , m, and the magnitude of � ∈ [0, 1] represent the grade of compensation.
Werners’ compensatory “fuzzy and’’ and “fuzzy or’’ operators: based on the �-operator, Werners [33] introducedthe compensatory “fuzzy and’’ and “fuzzy or’’ operators which are the convex combinations of min and arithmeticalmean, and max and arithmetical mean, respectively:
�and = � mini
(�i ) + (1 − �)
m
(∑i
�i
),
�or = � maxi
(�i ) + (1 − �)
m
(∑i
�i
).
Although these operators are not inductive and associative, they are commutative, idempotent, strictly monotonicincreasing (and decreasing, respectively) in each component, continuous and compensatory. Obviously, when � = 1,these equations reduce to �and = min and �or = max, respectively. The combination of these two operators forms thegeneralized “and’’ and “or’’ operators.
Modified Zimmermann’s convex combination of the min- and max-operators: this compensatory operator is modifiedby Lai and Hwang and a modified version of Zimmermann and Zysno’s �-operator [13]:
�D = � mini
�i + (1 − �)maxi
�i .
Lai and Hwang’s augmented max–min operator [13]:
�D = mini
(�i ) + �∑
i
wi�i ,
where � is a sufficiently small positive number, and wi is the relative importance of the objective i and∑
i wi = 1. Asseen, the augmented max–min operator is an extension of Zimmermann’s “min’’ operator.
3. Problem formulation
The DMLLP problem is as follows:
Level 0: maxx
z0(x) = c0x,
Level 1: maxx
zi(x) = cix, i = 1, 2, . . . , N(0),

3076 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
Level 2: maxx
zij (x) = cij x, j = 1, 2, . . . , N(i),
Level 3: maxx
zijk(x) = cijkx, k = 1, 2, . . . , N(i, j),
......
Level l: maxx
zijk...l(x) = cijk...lx, l = 1, 2, . . . , N(i, j, k, . . . , s),
s.t. x ∈ S = {x ∈ Rn|Ax = b, x�0}, (1)
where x is an n-dimensional decision variable vector; c• are n-dimensional constant row vectors. This (•) notationis used to avoid from repetitive usage of indices. b is an m-dimensional constant column vector; and A is an m × n
constant matrix with rank r. Also, S is assumed to be nonempty, convex and compact set in Rn. And,N(0): the number of objectives tied to z0, at the Level l,N(i): the number of objectives tied to zi , at the Level 2,N(i, j): the number of objectives tied to zij , at the Level 3,...
N(i, j, k, . . . , s): the number of objectives tied to zijk...s , at the Level l,and therefore the number of all objectives in the system is
1 + N(0) +∑
i
N(i) +∑i,j
N(i, j) + · · · +∑
i,j,k,...,s
N(i, j, k, . . . , s) = N.
In this section, paper, we will focus on Werners’ compensatory “fuzzy and’’ operator for DMLLP problem and showthat the solutions generated by this operator do guarantee Pareto-optimality for our DMLLP problem.
3.1. Constructing the membership functions of the DMs
For the sake of simplicity, in this paper we adopt a linear membership function, which characterizes the fuzzy goalof the DMi , i = 1, . . . , N in the problem. We can define the membership function �i (zi) of the DMi , i = 1, . . . , N as
�i (zi) =
⎧⎪⎪⎨⎪⎪⎩
0, zi < zmi ,
zi − zmi
z∗i − zm
i
, zmi �zi �z∗
i ,
1, z∗i < zi,
(2)
where max zi(x) = z∗i and min zi(x) = zm
i , i = 1, . . . , N denote the values of the objective function zi(x) such thatthe degrees of membership function are 1 and 0, respectively. The membership function is linear and strictly monotoneincreasing for zi in the interval [zm
i , z∗i ].
The direct weight of objective is assigned by its own next upper DM by using analytic hierarchy process or any otherweighting methods. We denote this weight as wd , and we know that wd > 0 and
∑wd = 1. The overall weight of any
objective for the whole system is equal to the product of the direct weights of objectives on the path tying it to the topdecision maker DM0. Namely, the overall weight of objective zijk...l for the system is
wijk...l = wd0 · wd
i · wdij · ·wd
ijk · . . . · wdijk...l , (3)
where wd0 = 1.
By constructing a proportional satisfaction balance among all objectives and their own importance weights [1], wewant to find compensatory and compromise Pareto-optimal solutions for DMLLP problem such that the satisfactorylevels of all objectives are proportional to their own weights. That is, the following equivalence:
�0(z0)
w0�
�i (zi)
wi
��ij (zij )
wij
��ijk(zijk)
wijk
� · · · ��ijk...l(zijk...l)
wijk...l
(4)
must be satisfied as much as possible, where �•(z•) is the membership function of objective zi, i = 1, . . . , N . Usingthese w• > 0 weights, equivalence (4) constitutes a satisfaction balance among all objectives and their importance
F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3077
weights. There is, of course, no guarantee that this equivalence will hold. Rather, this equivalence reflects the intent ofthe DMs. In this study, Werners’ compensatory “fuzzy and’’ operator will be offered to solve DMLLP problem. Here,the most important idea to be emphasized is that thanks to this equivalence, DMLLP problem has been transformed tothe MOLP problem at level 0, and so the definition of Pareto-optimality in multi-objective programming is also validfor DMLLP problem. This equivalence is reflected to the compensatory model within the constraints also enables allDMs to obtain proportional satisfactions with their weights as much as possible.
First of all, by using of the “min’’ fuzzy operator model proposed by Zimmermann [36], the following problem issolved for obtaining a solution which maximizes the least degree of equivalent satisfaction among all DMs
max min�•(z•)
w•s.t. x ∈ S.
By introducing the auxiliary variable �,
min�•(z•)
w•= � ⇒ �•(z•)
w•��,
this problem can be transformed into the following equivalent maximization problem:
max �
s.t.�•(z•)
w•��,
x ∈ S. (5)
Here, since the membership function �•(z•) is the strictly monotone increasing for objective z• in the closed interval[zm
i , z∗i ], from (5) we have
max �
s.t. z• ��−1• (w•�),
x ∈ S, (6)
where
�−1• (w•�) = inf{z•|�•(z•)�w•�}.So, this is “min’’ operator model for DMLLP, and the optimal objective value denotes to maximize the least equivalent
satisfaction level among all DMs simultaneously and can be interpreted as the “most basic equivalent satisfaction’’ thateach member in this decentralized multi-level system can attain. However, it is known that this is a non-compensatorymodel and does not guarantee to get Pareto-optimal solutions for DMLLP problem.
3.2. Werners’ compensatory “fuzzy and’’ operator for DMLLP problem
For every DM, after satisfying its most basic equivalent demand, to promote DMs’ equivalent satisfaction degree in(4) as high as possible we can make the following arrangement
�•(z•)w•
= � + �•.
This arrangement is introduced to the constraints with the following expressions:
(i) z• = �−1• (w•(� + �•)),(ii) w•(� + �•)�1.
In this case, as the objective function of our DMLLP model we can use compensatory “fuzzy and’’ operator �andinstead of “min’’ operator.

3078 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
3.2.1. Forming the compensatory fuzzy aggregation operator �and for DMLLP modelThe compensatory “fuzzy and’’ operator �and used in this investigation can be formed as in the following manner
for DMLLP problems:
�and = � min�•(z•)
w•+ 1 − �
N
⎛⎝�0(z0)
w0+
N(0)∑i
�i (zi)
wi
+N(i)∑i,j
�ij (zij )
wij
+N(i,j)∑i,j,k
�ijk(zijk)
wijk
+ · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l(zijk...l)
wijk...l
⎞⎠ ,
�and = �� + 1 − �
N
⎛⎝(� + �0) +
N(0)∑i
(� + �i )
+N(i)∑i,j
(� + �ij )+N(i,j)∑i,j,k
(� + �ijk) + · · · +N(i,j,k,...,s)∑
i,j,k,...,l
(� + �ijk...l)
⎞⎠
�and = �� + 1 − �
N
⎧⎨⎩⎛⎝1 + N(0) +
N(0)∑i
N(i) +N(i)∑i,j
N(i, j) + · · · +N(i,j,k,...,r)∑
i,j,k,...,s
N(i, j, k, . . . , s)
⎞⎠ �
+⎛⎝�0 +
N(0)∑i
�i+N(i)∑i,j
�ij+N(i,j)∑i,j,k
�ijk + · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l
⎞⎠⎫⎬⎭ ,
�and = � + 1 − �
N
⎛⎝�0 +
N(0)∑i
�i +N(i)∑i,j
�ij +N(i,j)∑i,j,k
�ijk + · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l
⎞⎠ ,
where the magnitude of � ∈ [0, 1] represents the grade of compensation. Obviously, when � = 1 and 0, �and =“min’’operator and �and =“average’’ operator, respectively.
Therefore, depending on the compensation parameter �, the following compensatory model is solved for obtainingcompromise Pareto-optimal solutions for DMLLP problem.
max �and = � + 1 − �
N
⎛⎝�0 +
N(0)∑i
�i +N(i)∑i,j
�ij +N(i,j)∑i,j,k
�ijk + · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l
⎞⎠
s.t.
Structural constraints:
Ax = b,
x�0. (7)
Membership constraints:
z0 ��−10 (w0(� + �0)),
zi ��−1i (wi(� + �i )), i = 1, . . . , N(0),
zij ��−1ij (wij (� + �ij )), j = 1, . . . , N(i),
zijk ��−1ijk(wijk(� + �ijk)), k = 1, . . . , N(i, j),
...
zijk...l ��−1ijk...l(wijk...l(� + �ijk...l)), l = 1, . . . , N(i, j, k, . . . , s),
w0(� + �0)�1,
wi(� + �i )�1, i = 1, . . . , N(0),

F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3079
wij (� + �ij )�1, j = 1, . . . , N(i),
wijk(� + �ijk)�1, k = 1, . . . , N(i, j),
...
wijk...l(� + �ijk...l)�1, l = 1, . . . , N(i, j, k, . . . , s),
�, �0, �i , �ij , �ijk, . . . , �ijk...l �0,
where � ∈ [0, 1].It is noted that in order to avoid some possible computational errors in solution process, we added the condition
(i) as inequality z• ��−1• (w•(� + �•)) to the formulated problem (7) as the same manner its usage in literature [forexample, 25]. So, our compensatory model generates Pareto-optimal solutions for DMLLP problems. We shall provethis assertion in the following theorem.
Theorem. If (x, �x) is an optimal solution of problem (7), then x is a Pareto-optimal (or efficient) solution for DMLLP,where �
x = (�x, �x0, �x
1, . . . , �xN).
Proof. Suppose, to the contrary, there exists a feasible solution (y, �y) such that y > x. That is, zi(y)�zi(x), i =1, . . . , N and zj (y) > zj (x), for some j .
This implies that there exist �xi and �y
i satisfying
wi�∗ �wi(�
∗ + �xi ) = zi(x) − zm
i
z∗i − zm
i
�zi(y) − zm
i
z∗i − zm
i
= wi(�∗ + �y
i ), ∀i
and
wj�∗ �wj(�
∗ + �xj ) = zj (x) − zm
j
z∗j − zm
j
<zj (y) − zm
j
z∗j − zm
j
= wj(�∗ + �y
j )
for some j .Therefore, it holds that �x
i ��yi , ∀i and �x
j < �yj for some j . This means �and(x, �x) < �and(y, �y), and this is
contradictory to the fact that (x, �x) is an optimal solution to problem (7). �
Now, we can give the definition of Pareto-optimal solution and compromise solution concepts for DMLLP problem.i is used the index of decision maker and also the index of his or her objective function. Using these w• weights,equivalence (4) is established such that the satisfactory levels of all objectives are proportional to their own weights.Thanks to equivalence (4), reflecting the weights among levels to the model, all objectives are transported to the toplevel, level 0. That is, at that level, DMLLP problem has been transformed to the MOLP problem at level 0. So, thedefinition of Pareto-optimality in multi-objective programming is valid for DMLLP problem.
Definition 1 (Pareto-optimal solution for DMLLP). The point x ∈ S is a Pareto-optimal (efficient or non-dominated)solution if and only if there does not exist another x ∈ S such that zi(x)�zi(x) for all i = 1, 2, . . . , N and zi(x) > zi(x)
for at least one i.
Definition 2 (Compromise solution for DMLLP). A feasible point x ∈ S is a compromise solution if and only if x ∈ E
and Z(x)�∧
x∈S Z(x), where Z(x) = (z1(x), z2(x), . . . , zN(x)) , ∧ stands for “min’’ operator, and E is the set ofPareto-optimal solutions.
Definition 3 (Compensatory compromise solution for DMLLP). A feasible point x ∈ S is a compromise solution ifand only if x ∈ E and Z(x)�
∧x∈S Z(x)+ I�•, where Z(x) = (z1(x), z2(x), . . . , zN(x)), ∧ stands for “min’’ operator,
�• �0, I is N -dimensional column vector whose • th element is 1 and all others are 0, and E is the set of Pareto-optimalsolutions.
According to Definition 2: (i) the solution to be a compromise solution should be efficient;

3080 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
(ii) the feasible solution vector x should have the minimum deviation from the ideal point than any other point in S.According to Definition 3, the compensatory compromise solution is the closest solution to the ideal one that maximizesthe underlying utility function, that is �and, of the decision maker.
In general, an optimal solution which simultaneously maximizes all the objective functions of the DMs in DMLLPdoes not always exist when the objective functions conflict with one another. When a certain Pareto-optimal solution isselected, any improvement of one objective function by changing decisions can be achieved only at the expense of atleast one of the other objective functions. Thus, the above Definition 1 is similar to the definition of Pareto-optimalityin multi-objective programming. When all the DMs make decisions cooperatively, it is not rational for the DMs tochoose a non-Pareto optimal solution because the objective function values of all the DMs with respect to a certainPareto-optimal solution are greater (desired) than the objective function values of the non-Pareto optimal solution.Aspect from Pareto optimality, the difference between DMLLP and multiple objective programming is whether eachof the multiple DMs has a single objective or a single DM has multiple objectives [18]. A preferred compensatorycompromise Pareto-optimal solution is a solution which is preferred by the all DMs to all other solutions, taking intoconsideration all criteria contained in the DMLLP problem.
3.2.2. A finite interactive iterative procedure for DMLLPTherefore, this compensatory approach generates a set of compensatory compromise Pareto-optimal solutions by
forming equivalent satisfactory levels between non-compensatory min operator and full compensatory average operator.To obtain a set of compromise compensatory Pareto optimal solution for this DMLLP, these solutions and the valuesof all membership functions are offered to the all decision makers. If all DMs are satisfied with the satisfactions of theobjectives pertaining to own lower levels, obtained solution set is a compensatory compromise Pareto-optimal solutionset for DMLLP, go to negotiation step to choose a preferred compensatory compromise Pareto-optimal solution fromthis set. If at least one DM is not satisfied with the proposed solutions set, then they revise the importance weights oftheir own lower level objectives in favor of the objectives they do not satisfy. With these revisions, the compensatorymodel (7) is solved again, and then obtained new solutions set are offered to all DMs. This process is repeated as thesame manner. If DMs do act rational behaviors in decision process it is expected that these importance weights approacha limit or a balance weights in a few iterations, interaction process is completed automatically. But in real-life, DMsmay make conflict decisions and give up rational thinking. In this case, to obtain a finite interactive iterative procedure,we must determine maximum interaction step m. After m iteration, if a compensatory compromise solutions set is notreached yet by DMs, then a balance weight wd• is calculated by taking average (arithmetic or geometric) of importanceweights assigned until m iteration, such that
wd• = 1
m
m∑k=1
wd,k• or wd• =[
m∏k=1
wd,k•
]1/m
,
where wd,k• is the direct importance weight of •th DM assigned by the next own upper level DM at iteration k. Andthen, using balance weights, the compensatory model (7) is solved again. Therefore, our compensatory model proposesthis solutions set as a compensatory compromise Pareto-optimal solutions set. Negotiation step: to choose a preferredcompensatory compromise Pareto-optimal solution from this set, a negotiation phase is started among all DMs. Ifnegotiation is successful, a preferred solution is obtained. Otherwise, the top decision maker DM0 who has beeninvested with full authority does the last selection. So this puts an end to the interaction process.
3.3. DMLLP problem formulations using some other compensatory fuzzy aggregation operators
For comparison purpose, we will give the following DMLLP problem formulations using some other computationalefficient compensatory operators.
3.3.1. Werners’ compensatory “fuzzy or’’ operator for DMLLP problemLet
max�•(z•)
w•= � ⇒ �i (zi)
wi
��,

F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3081
for at least one i ∈ {1, . . . , N} and �i (zi)/wi = � − �i �0, ∀i. Werners’ �or operator for DMLLP problem is
�or = � max�•(z•)
w•+ 1 − �
N
⎛⎝�0(z0)
w0+
N(0)∑i
�i (zi)
wi
+N(i)∑i,j
�ij (zij )
wij
+N(i,j)∑i,j,k
�ijk(zijk)
wijk
+ · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l(zijk...l)
wijk...l
⎞⎠
and then
�or = � − 1 − �
N
⎛⎝�0 +
N(0)∑i
�i +N(i)∑i,j
�ij +N(i,j)∑i,j,k
�ijk + · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l
⎞⎠ .
Using this operator, our DMLLP problem becomes
max �or = � − 1 − �
N
⎛⎝�0 +
N(0)∑i
�i +N(i)∑i,j
�ij +N(i,j)∑i,j,k
�ijk + · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l
⎞⎠
s.t. �•(z•) = (� − �•)w•, ∀i ∈ {1, . . . , N}�•(z•)��w•, for at least one i ∈ {1, . . . , N}x ∈ S, 0�wi�i �wi��1, ∀i
or
max �or = � − 1 − �
N
⎛⎝�0 +
N(0)∑i
�i +N(i)∑i,j
�ij +N(i,j)∑i,j,k
�ijk + · · · +N(i,j,k,...,s)∑
i,j,k,...,l
�ijk...l
⎞⎠
s.t. �•(z•)�(� − �•)w•, ∀i ∈ {1, . . . , N}w•(� − �•)�1, ∀i ∈ {1, . . . , N}�•(z•) + Mr• ��w•, ∀i ∈ {1, . . . , N}N∑
i=1
ri �N − 1,
x ∈ S, 0�wi�i �wi��1, ∀i,
ri ∈ {0, 1}, (8)
where M is a very large real number. The inequalities �•(z•)�(� − �•)w• in (8) are replaced by the equalities�•(z•) = (� − �•)w• in order to avoid some possible computational errors.
3.3.2. Modified Zimmermann’s convex combination of the min- and max-operators for DMLLP problemWith modified Zimmermann’s convex combination of the min- and max-operators
�D = � min�•(z•)
w•+ (1 − �) max
�•(z•)w•
,
our DMLLP problem becomes
maxx∈S
{� min
�•(z•)w•
+ (1 − �) max�•(z•)
w•
},
or
max {��1 + (1 − �)�2}s.t. �•(z•)��1w•,
�•(z•)��2w•, for at least one i ∈ {1, . . . , N}x ∈ S, and w•�1, w•�2 ∈ [0, 1]

3082 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
or
max {��1 + (1 − �)�2}s.t. �•(z•)��1w•,
�•(z•) + Mr• ��2w•, ∀i ∈ {1, . . . , N},N∑
i=1
ri �N − 1,
x ∈ S and w•�1, w•�2 ∈ [0, 1],ri ∈ {0, 1}, (9)
where M is a very large real number.
3.3.3. Lai and Hwang’s augmented max–min operator for DMLLP problemThe modified Lai and Hwang’s augmented max–min operator for DMLLP must be
�D = mini
(�i
wi
)+ �
∑i
�i .
Using min �•(z•)/w• = �, our DMLLP problem becomes
max
{�D = � + �
N∑i=1
�i (zi)
}
s.t. �•(z•)��w•,x ∈ S. (10)
3.3.4. A hybrid approach of Werners’ and Lai–Hwang’s operators for DMLLP problemIf we use min �•(z•)/w• = � ⇒ �•(z•)/w• = � + �• by Werners’ sense and combine it with Lai and Hwang’s
augmented max–min operator, our DMLLP problem will become
max
{(1 + �)� + �
N∑i=1
�i
}
s.t. �•(z•)�(� + �•)w•,(� + �•)w• �1,
x ∈ S. (11)
4. An illustrative example
In this section, an example will be used to show that compensatory approaches given above for DMLLP generatecompensatory compromise Pareto-optimal solutions depending on compensation parameters of operators, and also wewill show that Werners’s compensatory “fuzzy and’’ �and operator among them generates a wider set of compromisePareto-optimal solutions to the DMs than the others.
Consider the following DMLLP:
Level 0: max z1 = x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 + x9 + x10
Level 1: max z2 = x2 + x5 + x6
max z3 = x3 + x7 + x8
max z4 = x4 + x9 + x10
F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3083
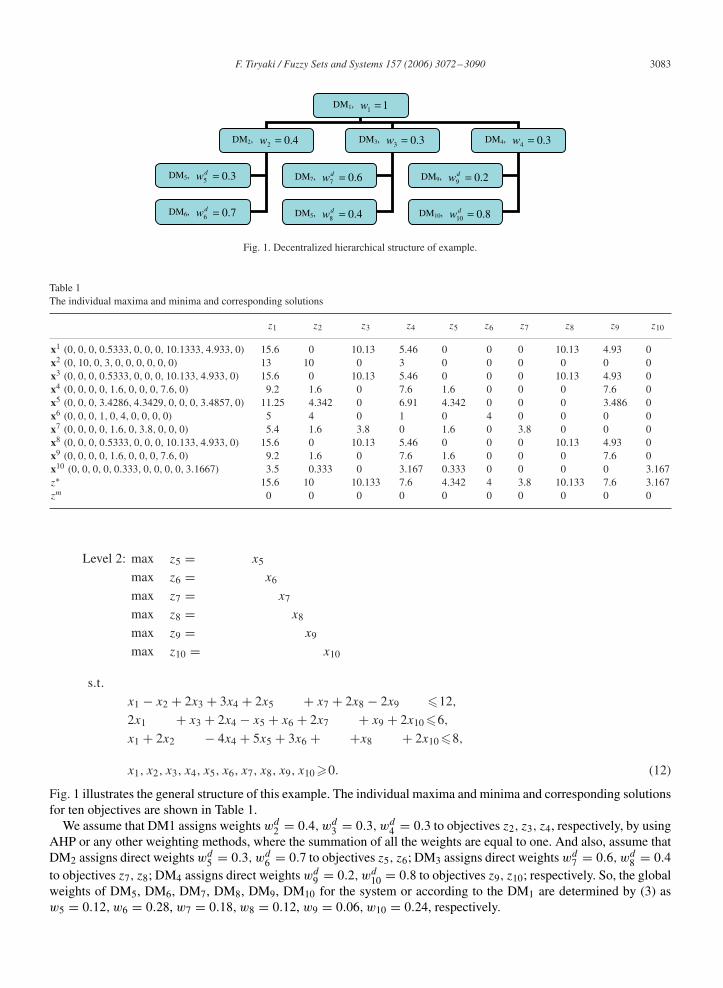
Fig. 1. Decentralized hierarchical structure of example.
Table 1The individual maxima and minima and corresponding solutions
z1 z2 z3 z4 z5 z6 z7 z8 z9 z10
x1 (0, 0, 0, 0.5333, 0, 0, 0, 10.1333, 4.933, 0) 15.6 0 10.13 5.46 0 0 0 10.13 4.93 0x2 (0, 10, 0, 3, 0, 0, 0, 0, 0, 0) 13 10 0 3 0 0 0 0 0 0x3 (0, 0, 0, 0.5333, 0, 0, 0, 10.133, 4.933, 0) 15.6 0 10.13 5.46 0 0 0 10.13 4.93 0x4 (0, 0, 0, 0, 1.6, 0, 0, 0, 7.6, 0) 9.2 1.6 0 7.6 1.6 0 0 0 7.6 0x5 (0, 0, 0, 3.4286, 4.3429, 0, 0, 0, 3.4857, 0) 11.25 4.342 0 6.91 4.342 0 0 0 3.486 0x6 (0, 0, 0, 1, 0, 4, 0, 0, 0, 0) 5 4 0 1 0 4 0 0 0 0x7 (0, 0, 0, 0, 1.6, 0, 3.8, 0, 0, 0) 5.4 1.6 3.8 0 1.6 0 3.8 0 0 0x8 (0, 0, 0, 0.5333, 0, 0, 0, 10.133, 4.933, 0) 15.6 0 10.13 5.46 0 0 0 10.13 4.93 0x9 (0, 0, 0, 0, 1.6, 0, 0, 0, 7.6, 0) 9.2 1.6 0 7.6 1.6 0 0 0 7.6 0x10 (0, 0, 0, 0, 0.333, 0, 0, 0, 0, 3.1667) 3.5 0.333 0 3.167 0.333 0 0 0 0 3.167z∗ 15.6 10 10.133 7.6 4.342 4 3.8 10.133 7.6 3.167zm 0 0 0 0 0 0 0 0 0 0
Level 2: max z5 = x5
max z6 = x6
max z7 = x7
max z8 = x8
max z9 = x9
max z10 = x10
s.t.
x1 − x2 + 2x3 + 3x4 + 2x5 + x7 + 2x8 − 2x9 �12,
2x1 + x3 + 2x4 − x5 + x6 + 2x7 + x9 + 2x10 �6,
x1 + 2x2 − 4x4 + 5x5 + 3x6 + +x8 + 2x10 �8,
x1, x2, x3, x4, x5, x6, x7, x8, x9, x10 �0. (12)
Fig. 1 illustrates the general structure of this example. The individual maxima and minima and corresponding solutionsfor ten objectives are shown in Table 1.
We assume that DM1 assigns weights wd2 = 0.4, wd
3 = 0.3, wd4 = 0.3 to objectives z2, z3, z4, respectively, by using
AHP or any other weighting methods, where the summation of all the weights are equal to one. And also, assume thatDM2 assigns direct weights wd
5 = 0.3, wd6 = 0.7 to objectives z5, z6; DM3 assigns direct weights wd
7 = 0.6, wd8 = 0.4
to objectives z7, z8; DM4 assigns direct weights wd9 = 0.2, wd
10 = 0.8 to objectives z9, z10; respectively. So, the globalweights of DM5, DM6, DM7, DM8, DM9, DM10 for the system or according to the DM1 are determined by (3) asw5 = 0.12, w6 = 0.28, w7 = 0.18, w8 = 0.12, w9 = 0.06, w10 = 0.24, respectively.
3084 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
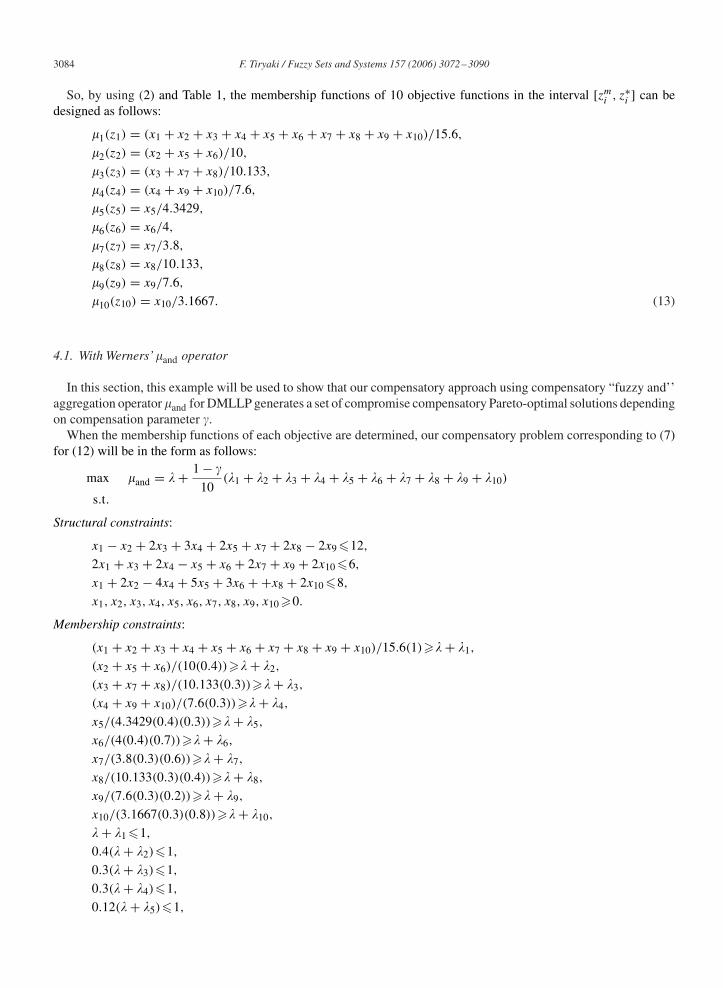
So, by using (2) and Table 1, the membership functions of 10 objective functions in the interval [zmi , z∗
i ] can bedesigned as follows:
�1(z1) = (x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 + x9 + x10)/15.6,
�2(z2) = (x2 + x5 + x6)/10,
�3(z3) = (x3 + x7 + x8)/10.133,
�4(z4) = (x4 + x9 + x10)/7.6,
�5(z5) = x5/4.3429,
�6(z6) = x6/4,
�7(z7) = x7/3.8,
�8(z8) = x8/10.133,
�9(z9) = x9/7.6,
�10(z10) = x10/3.1667. (13)
4.1. With Werners’�and operator
In this section, this example will be used to show that our compensatory approach using compensatory “fuzzy and’’aggregation operator �and for DMLLP generates a set of compromise compensatory Pareto-optimal solutions dependingon compensation parameter �.
When the membership functions of each objective are determined, our compensatory problem corresponding to (7)for (12) will be in the form as follows:
max �and = � + 1 − �
10(�1 + �2 + �3 + �4 + �5 + �6 + �7 + �8 + �9 + �10)
s.t.
Structural constraints:
x1 − x2 + 2x3 + 3x4 + 2x5 + x7 + 2x8 − 2x9 �12,
2x1 + x3 + 2x4 − x5 + x6 + 2x7 + x9 + 2x10 �6,
x1 + 2x2 − 4x4 + 5x5 + 3x6 + +x8 + 2x10 �8,
x1, x2, x3, x4, x5, x6, x7, x8, x9, x10 �0.
Membership constraints:
(x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 + x9 + x10)/15.6(1)�� + �1,
(x2 + x5 + x6)/(10(0.4))�� + �2,
(x3 + x7 + x8)/(10.133(0.3))�� + �3,
(x4 + x9 + x10)/(7.6(0.3))�� + �4,
x5/(4.3429(0.4)(0.3))�� + �5,
x6/(4(0.4)(0.7))�� + �6,
x7/(3.8(0.3)(0.6))�� + �7,
x8/(10.133(0.3)(0.4))�� + �8,
x9/(7.6(0.3)(0.2))�� + �9,
x10/(3.1667(0.3)(0.8))�� + �10,
� + �1 �1,
0.4(� + �2)�1,
0.3(� + �3)�1,
0.3(� + �4)�1,
0.12(� + �5)�1,
F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3085
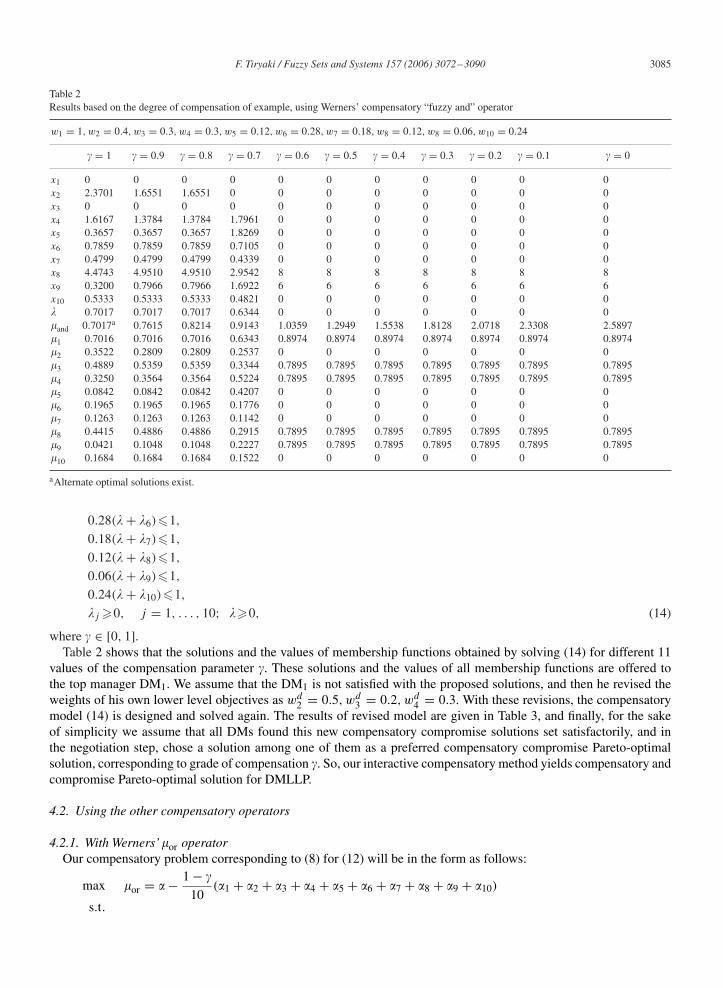
Table 2Results based on the degree of compensation of example, using Werners’ compensatory “fuzzy and” operator
w1 = 1, w2 = 0.4, w3 = 0.3, w4 = 0.3, w5 = 0.12, w6 = 0.28, w7 = 0.18, w8 = 0.12, w8 = 0.06, w10 = 0.24
� = 1 � = 0.9 � = 0.8 � = 0.7 � = 0.6 � = 0.5 � = 0.4 � = 0.3 � = 0.2 � = 0.1 � = 0
x1 0 0 0 0 0 0 0 0 0 0 0x2 2.3701 1.6551 1.6551 0 0 0 0 0 0 0 0x3 0 0 0 0 0 0 0 0 0 0 0x4 1.6167 1.3784 1.3784 1.7961 0 0 0 0 0 0 0x5 0.3657 0.3657 0.3657 1.8269 0 0 0 0 0 0 0x6 0.7859 0.7859 0.7859 0.7105 0 0 0 0 0 0 0x7 0.4799 0.4799 0.4799 0.4339 0 0 0 0 0 0 0x8 4.4743 4.9510 4.9510 2.9542 8 8 8 8 8 8 8x9 0.3200 0.7966 0.7966 1.6922 6 6 6 6 6 6 6x10 0.5333 0.5333 0.5333 0.4821 0 0 0 0 0 0 0� 0.7017 0.7017 0.7017 0.6344 0 0 0 0 0 0 0�and 0.7017a 0.7615 0.8214 0.9143 1.0359 1.2949 1.5538 1.8128 2.0718 2.3308 2.5897�1 0.7016 0.7016 0.7016 0.6343 0.8974 0.8974 0.8974 0.8974 0.8974 0.8974 0.8974�2 0.3522 0.2809 0.2809 0.2537 0 0 0 0 0 0 0�3 0.4889 0.5359 0.5359 0.3344 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895�4 0.3250 0.3564 0.3564 0.5224 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895�5 0.0842 0.0842 0.0842 0.4207 0 0 0 0 0 0 0�6 0.1965 0.1965 0.1965 0.1776 0 0 0 0 0 0 0�7 0.1263 0.1263 0.1263 0.1142 0 0 0 0 0 0 0�8 0.4415 0.4886 0.4886 0.2915 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895�9 0.0421 0.1048 0.1048 0.2227 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895 0.7895�10 0.1684 0.1684 0.1684 0.1522 0 0 0 0 0 0 0
aAlternate optimal solutions exist.
0.28(� + �6)�1,
0.18(� + �7)�1,
0.12(� + �8)�1,
0.06(� + �9)�1,
0.24(� + �10)�1,
�j �0, j = 1, . . . , 10; ��0, (14)
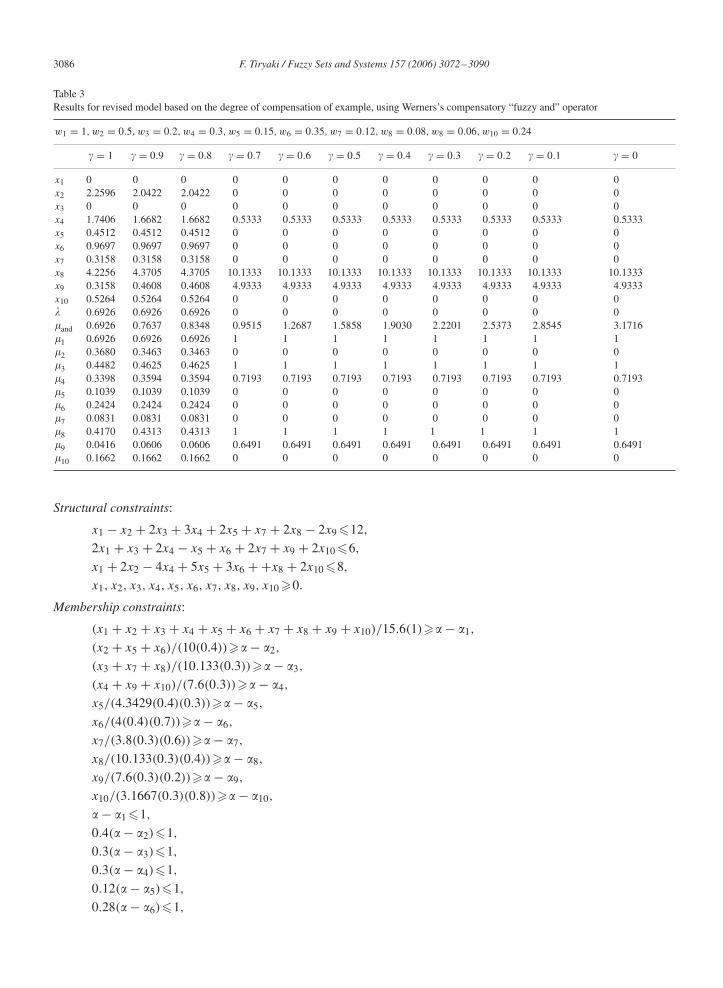
where � ∈ [0, 1].Table 2 shows that the solutions and the values of membership functions obtained by solving (14) for different 11
values of the compensation parameter �. These solutions and the values of all membership functions are offered tothe top manager DM1. We assume that the DM1 is not satisfied with the proposed solutions, and then he revised theweights of his own lower level objectives as wd
2 = 0.5, wd3 = 0.2, wd
4 = 0.3. With these revisions, the compensatorymodel (14) is designed and solved again. The results of revised model are given in Table 3, and finally, for the sakeof simplicity we assume that all DMs found this new compensatory compromise solutions set satisfactorily, and inthe negotiation step, chose a solution among one of them as a preferred compensatory compromise Pareto-optimalsolution, corresponding to grade of compensation �. So, our interactive compensatory method yields compensatory andcompromise Pareto-optimal solution for DMLLP.
4.2. Using the other compensatory operators
4.2.1. With Werners’�or operatorOur compensatory problem corresponding to (8) for (12) will be in the form as follows:
max �or = � − 1 − �
10(�1 + �2 + �3 + �4 + �5 + �6 + �7 + �8 + �9 + �10)
s.t.
3086 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
Table 3Results for revised model based on the degree of compensation of example, using Werners’s compensatory “fuzzy and” operator
w1 = 1, w2 = 0.5, w3 = 0.2, w4 = 0.3, w5 = 0.15, w6 = 0.35, w7 = 0.12, w8 = 0.08, w8 = 0.06, w10 = 0.24
� = 1 � = 0.9 � = 0.8 � = 0.7 � = 0.6 � = 0.5 � = 0.4 � = 0.3 � = 0.2 � = 0.1 � = 0
x1 0 0 0 0 0 0 0 0 0 0 0x2 2.2596 2.0422 2.0422 0 0 0 0 0 0 0 0x3 0 0 0 0 0 0 0 0 0 0 0x4 1.7406 1.6682 1.6682 0.5333 0.5333 0.5333 0.5333 0.5333 0.5333 0.5333 0.5333x5 0.4512 0.4512 0.4512 0 0 0 0 0 0 0 0x6 0.9697 0.9697 0.9697 0 0 0 0 0 0 0 0x7 0.3158 0.3158 0.3158 0 0 0 0 0 0 0 0x8 4.2256 4.3705 4.3705 10.1333 10.1333 10.1333 10.1333 10.1333 10.1333 10.1333 10.1333x9 0.3158 0.4608 0.4608 4.9333 4.9333 4.9333 4.9333 4.9333 4.9333 4.9333 4.9333x10 0.5264 0.5264 0.5264 0 0 0 0 0 0 0 0� 0.6926 0.6926 0.6926 0 0 0 0 0 0 0 0�and 0.6926 0.7637 0.8348 0.9515 1.2687 1.5858 1.9030 2.2201 2.5373 2.8545 3.1716�1 0.6926 0.6926 0.6926 1 1 1 1 1 1 1 1�2 0.3680 0.3463 0.3463 0 0 0 0 0 0 0 0�3 0.4482 0.4625 0.4625 1 1 1 1 1 1 1 1�4 0.3398 0.3594 0.3594 0.7193 0.7193 0.7193 0.7193 0.7193 0.7193 0.7193 0.7193�5 0.1039 0.1039 0.1039 0 0 0 0 0 0 0 0�6 0.2424 0.2424 0.2424 0 0 0 0 0 0 0 0�7 0.0831 0.0831 0.0831 0 0 0 0 0 0 0 0�8 0.4170 0.4313 0.4313 1 1 1 1 1 1 1 1�9 0.0416 0.0606 0.0606 0.6491 0.6491 0.6491 0.6491 0.6491 0.6491 0.6491 0.6491�10 0.1662 0.1662 0.1662 0 0 0 0 0 0 0 0
Structural constraints:
x1 − x2 + 2x3 + 3x4 + 2x5 + x7 + 2x8 − 2x9 �12,
2x1 + x3 + 2x4 − x5 + x6 + 2x7 + x9 + 2x10 �6,
x1 + 2x2 − 4x4 + 5x5 + 3x6 + +x8 + 2x10 �8,
x1, x2, x3, x4, x5, x6, x7, x8, x9, x10 �0.
Membership constraints:
(x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 + x9 + x10)/15.6(1)�� − �1,
(x2 + x5 + x6)/(10(0.4))�� − �2,
(x3 + x7 + x8)/(10.133(0.3))�� − �3,
(x4 + x9 + x10)/(7.6(0.3))�� − �4,
x5/(4.3429(0.4)(0.3))�� − �5,
x6/(4(0.4)(0.7))�� − �6,
x7/(3.8(0.3)(0.6))�� − �7,
x8/(10.133(0.3)(0.4))�� − �8,
x9/(7.6(0.3)(0.2))�� − �9,
x10/(3.1667(0.3)(0.8))�� − �10,
� − �1 �1,
0.4(� − �2)�1,
0.3(� − �3)�1,
0.3(� − �4)�1,
0.12(� − �5)�1,
0.28(� − �6)�1,
F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3087
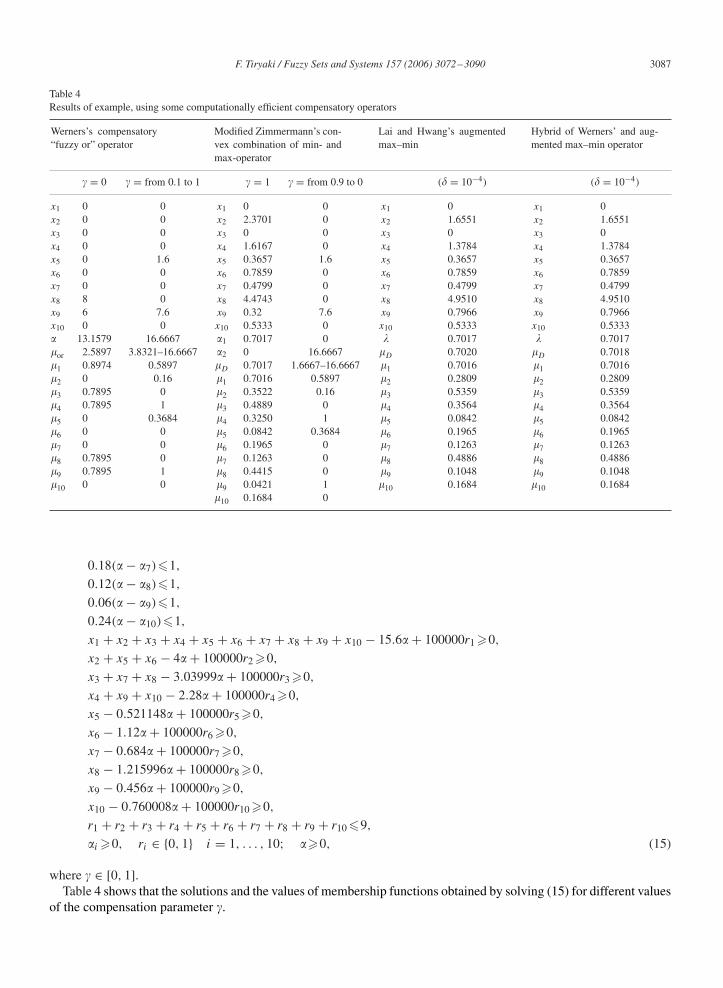
Table 4Results of example, using some computationally efficient compensatory operators
Werners’s compensatory“fuzzy or” operator
Modified Zimmermann’s con-vex combination of min- andmax-operator
Lai and Hwang’s augmentedmax–min
Hybrid of Werners’ and aug-mented max–min operator
� = 0 � = from 0.1 to 1 � = 1 � = from 0.9 to 0 (� = 10−4) (� = 10−4)
x1 0 0 x1 0 0 x1 0 x1 0x2 0 0 x2 2.3701 0 x2 1.6551 x2 1.6551x3 0 0 x3 0 0 x3 0 x3 0x4 0 0 x4 1.6167 0 x4 1.3784 x4 1.3784x5 0 1.6 x5 0.3657 1.6 x5 0.3657 x5 0.3657x6 0 0 x6 0.7859 0 x6 0.7859 x6 0.7859x7 0 0 x7 0.4799 0 x7 0.4799 x7 0.4799x8 8 0 x8 4.4743 0 x8 4.9510 x8 4.9510x9 6 7.6 x9 0.32 7.6 x9 0.7966 x9 0.7966x10 0 0 x10 0.5333 0 x10 0.5333 x10 0.5333� 13.1579 16.6667 �1 0.7017 0 � 0.7017 � 0.7017�or 2.5897 3.8321–16.6667 �2 0 16.6667 �D 0.7020 �D 0.7018�1 0.8974 0.5897 �D 0.7017 1.6667–16.6667 �1 0.7016 �1 0.7016�2 0 0.16 �1 0.7016 0.5897 �2 0.2809 �2 0.2809�3 0.7895 0 �2 0.3522 0.16 �3 0.5359 �3 0.5359�4 0.7895 1 �3 0.4889 0 �4 0.3564 �4 0.3564�5 0 0.3684 �4 0.3250 1 �5 0.0842 �5 0.0842�6 0 0 �5 0.0842 0.3684 �6 0.1965 �6 0.1965�7 0 0 �6 0.1965 0 �7 0.1263 �7 0.1263�8 0.7895 0 �7 0.1263 0 �8 0.4886 �8 0.4886�9 0.7895 1 �8 0.4415 0 �9 0.1048 �9 0.1048�10 0 0 �9 0.0421 1 �10 0.1684 �10 0.1684
�10 0.1684 0
0.18(� − �7)�1,
0.12(� − �8)�1,
0.06(� − �9)�1,
0.24(� − �10)�1,
x1 + x2 + x3 + x4 + x5 + x6 + x7 + x8 + x9 + x10 − 15.6� + 100000r1 �0,
x2 + x5 + x6 − 4� + 100000r2 �0,
x3 + x7 + x8 − 3.03999� + 100000r3 �0,
x4 + x9 + x10 − 2.28� + 100000r4 �0,
x5 − 0.521148� + 100000r5 �0,
x6 − 1.12� + 100000r6 �0,
x7 − 0.684� + 100000r7 �0,
x8 − 1.215996� + 100000r8 �0,
x9 − 0.456� + 100000r9 �0,
x10 − 0.760008� + 100000r10 �0,
r1 + r2 + r3 + r4 + r5 + r6 + r7 + r8 + r9 + r10 �9,
�i �0, ri ∈ {0, 1} i = 1, . . . , 10; ��0, (15)
where � ∈ [0, 1].Table 4 shows that the solutions and the values of membership functions obtained by solving (15) for different values
of the compensation parameter �.
3088 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
With modified Zimmermann’s convex combination of the min- and max-operators, with Lai and Hwang’s augmentedmax–min operator, and with the hybrid of Werners’ and augmented max–min operators: the results of our compensatoryproblems corresponding to (9), (10) and (11), respectively, for (12) are also presented in Table 4.
5. Results and comparisons
In this paper, we constructed equivalence in (4) such that the satisfactory levels of the objectives are proportionalto their weights. In our approach, equivalence is formed by desiring that the satisfactory levels of all objectives inthe system are proportional to their own weights. Thanks to this equivalence, the weights of objectives are reflectedto the model within the constraints. The equivalence relation (4) may not be provided exactly by generated solutionbecause the correlation among the objectives and the weights assigned to objectives may not be compatible [29, pp.198–199]; however our model tries to find solutions satisfying (4) so far as it is possible. Generated solutions arePareto-optimal. To adjust the cooperative decision making process between the different levels and also between thedecisions makers of the same level, we gave an interactive compensatory method using Werners’ “fuzzy and’’ operatorto solve DMLLP problems. For comparison purpose, we compared this operator with some other computationallyefficient compensatory fuzzy aggregation operators. Among several various operators, we selected and used Werners’�and operator as a suitable one for DMLLP, basing on Zimmermann’s eight rules to justify a suitable operator [37]. Thesereasons can be given such as: adaptability: this operator is dependent on the context and the semantic interpretation,that is it models a group decision; Numerical efficiency: this operator is computationally efficient; Compensation: thisoperator has compensation if a change in a member of �and can be counteracted by a change in an another member ofit; range of resulting membership: the larger the range of resulting membership the better the operator, for example,in Werners’ �and operator, �and = 0.7017 for � = 1 (it means “min’’ operator), �and = 2.5897 for � = 0 (it means“average’’ operator). Although modified Zimmermann’s approach gives the larger the range of resulting membership,that is, �D ∈ [0.7017, 16.6667] but it does not guarantee to get Pareto-optimal solution. Although using Werners’�or operator, the range of resulting membership is �D ∈ [2.5897, 16.6667], but while this operator satisfies the fullsatisfaction of at least one member, some other members’ satisfactions may be zero. Whereas Werners’ �and operatordoes also guarantee the least degree of equivalent satisfactions among all DMs. For this reason, �or operator is notappropriate for DMLLP problem. Lai and Hwang’s augmented max–min operator generates a unique Pareto-optimalsolution near to the “min’’ operator because � is sufficiently small positive number, whereas Werners’ �and operator hasmore Pareto-optimal solution variety dependent on �. And the hybrid of Werners’ and augmented max–min operatorsalso generates a unique Pareto-optimal solution similar to augmented max–min operators’ one. Therefore, �and operatorenables us to choose a compromise solution in a wider set. The compromise solution is both compensatory and Pareto-optimal. Using �and operator, our method achieves the compromise solution for DMLLP in an only one-phase insteadof afore mentioned two-phase approaches. And we also gave a theorem that the compensatory solution generated bythis operator does guarantee Pareto-optimality for our DMLLP problem.
An illustrative example is given to show that compensatory approaches given above for DMLLP generate compen-satory compromise Pareto-optimal solutions depending on compensation parameters of operators. To investigate theeffect of different degrees of compensation, 11 cases with different values of compensations were solved. As we seethat, Werners’ compensatory “fuzzy and’’ �and operator among the other compensatory operators generates a wider setof compensatory Pareto-optimal solutions to the DMs than the others. In Tables 2 and 3, we can see that four and threedifferent compensatory compromise Pareto-optimal solutions are obtained, respectively. These solutions are offered tothe DMs to choose one of among them as a preferred compensatory compromise solution.
For our obtained compensatory compromise Pareto-optimal solutions, the satisfactory levels of the objectives areproportional to their own weights. Thanks to equivalence (4), the importance weights of objectives are reflected tothe model within the constraints. Whereas in Shih [25], these weights are used in the objective function �and of hiscompensatory problem, and also the weights pertaining to lower level objectives can be greater than the ones pertainingto upper level objectives. For example, in Shih [25, p. 85], while the coefficient of �1 is 1, whereas the coefficient of�3 is 3(0.59) = 1.77. Therefore, the satisfactory levels of the objectives corresponding to obtained solutions are notproportional to their weights.
Besides, in Shih et al. [24,25] and Sinha [28], it is also used membership functions for the upper level decisionvariables and allowed some tolerances in favor of lower level DMs. Sakawa et al. [17–23] pointed out that there isa possibility that Shih et al.’s methods lead a final solution to an undesirable one because of inconsistency between
F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090 3089
the fuzzy goals of the objective function and the decision variables. Because of additional constraints, the feasibleregion gets narrower or even may be vanish. By following Sakawa et al., and also, thinking that for DMs it is moreimportant the satisfactory levels of the objectives than those of decision variables, we did not use additional restrictionsvia membership functions for decision variables as in Sakawa et al. [17–23].
Moreover, our method has an interactive nature. If DMs is not satisfied proposed solutions, a new compensatorycompromise Pareto-optimal solution can be produced by revising their weights assigned to their own lower levelobjectives.
Acknowledgements
The author is very indebted to the anonymous referees for their critical suggestions for improvements.
References
[1] M. Ahlatcioglu, F. Tiryaki, Interactive fuzzy programming for decentralized two-level linear fractional programming (DTLLFP) problems,Omega, accepted 2005, available online at www.sciencedirect.com
[2] J. Bard, J. Moore, The mixed integer linear bilevel programming problem, Oper. Res. 38 (1990) 911–921.[3] J. Bard, J. Moore, An algorithm for the discrete bilevel programming problem, Naval Res. Logist. 39 (1992) 419–435.[4] J.F. Bard, Coordination of a multidivisional organization through two levels of management, Omega 11 (1983) 457–468.[5] J.F. Bard, An efficient point algorithm for a linear two-stage optimization problem, Oper. Res. 38 (1983) 556–560.[6] J.F. Bard, J.E. Falk, An explicit solution to the multi-level programming problem, Comput. Oper. Res. 9 (1982) 77–100.[7] W.F. Bialas, M.H. Karvan, Two-level linear programming, Manage. Sci. 30 (1984) 1004–1020.[8] R.M. Burton, The multilevel approach to organizational issues of the firm-a critical review, Omega 5 (1977) 395–414.[9] H.K. Chen, H.W. Chou, Solving multiobjective linear programming problems—a generic approach, Fuzzy Sets and Systems 82 (1996) 35–38.
[10] S.M. Guu, Y.K. Wu, Weighted coefficients in two-phase approach for solving the multiple objective programming problems, Fuzzy Sets andSystems 85 (1997) 45–48.
[11] S.M. Guu, Y.K. Wu, Two-phase approach for solving the fuzzy linear programming problems, Fuzzy Sets and Systems 107 (1999) 191–195.[12] Y.J. Lai, Hierarchical optimization: a satisfactory solution, Fuzzy Sets and Systems 77 (3) (1996) 321–335.[13] Y.J. Lai, C.L. Hwang, Fuzzy Multiple Objective Decision Making: Methods and Applications, Springer, Berlin, Heidelberg, New York, 1996
(second corrected printing).[14] E.S. Lee, R.J. Li, Fuzzy multiple objective programming and compromise programming with Pareto optimum, Fuzzy Sets and Systems 53
(1993) 275–288.[15] M.K. Luhandjula, Compensatory operator in fuzzy linear programming with multiple objective, Fuzzy Sets and Systems 8 (1982) 245–252.[16] M. Sakawa, Fuzzy Sets and Interactive Multiobjective Optimization, Plenum Press, New York, 1993.[17] M. Sakawa, I. Nishizaki, Interactive fuzzy programming for two-level linear fractional programming problems, Fuzzy Sets and Systems 119
(2001) 31–40.[18] M. Sakawa, I. Nishizaki, Interactive fuzzy programming for decentralized two-level linear programming problems, Fuzzy Sets and Systems
125 (2002) 301–315.[19] M. Sakawa, I. Nishizaki, Interactive fuzzy programming for two-level nonconvex programming problems with fuzzy parameters through genetic
algorithms, Fuzzy Sets and Systems 127 (2002) 185–197.[20] M. Sakawa, I. Nishizaki, M. Hitaka, Interactive fuzzy programming for multi-level 0-1 programming problems with fuzzy parameters through
genetic algorithms, Fuzzy Sets and Systems 117 (2001) 95–111.[21] M. Sakawa, I. Nishizaki, Y. Uemuro, Interactive fuzzy programming for multi-level linear programming problems, Comput. Math. Appl. 36
(1998) 71–86.[22] M. Sakawa, I. Nishizaki, Y. Uemuro, Interactive fuzzy programming for multi-level linear programming problems with fuzzy parameters, Fuzzy
Sets and Systems 109 (2000) 3–19.[23] M. Sakawa, I. Nishizaki, Y. Uemuro, Interactive fuzzy programming for two-level linear fractional programming problems with fuzzy parameters,
Fuzzy Sets and Systems 115 (2000) 93–103.[24] H.S. Shih, Y.J. Lai, E.S. Lee, Fuzzy approach for multi-level mathematical programming problems, Comput. Oper. Res. 23 (1) (1996) 73–91.[25] H.S. Shih, E.S. Lee, Compensatory fuzzy multiple level decision making, Fuzzy Sets and Systems 114 (2000) 71–87.[26] K. Shimizu, Y. Ishizuka, J.F. Bard, Nondifferentiable and Two-level Mathematical Programming, Kluwer Academic Publishers, Boston, London,
Dordrecht, 1997.[27] M. Simaarn, J.B. Cruz, On the stackelberg strategy in nonzero-sum games, J. Optim. Theory Appl. 11 (1973) 533–555.[28] S. Sinha, Fuzzy programming approach to multi-level programming problems, Fuzzy Sets and Systems 136 (2003) 189–202.[29] R.E. Steuer, Multiple Criteria Optimization: Theory, Computation, and Application, Wiley, New York, 1986.[30] G. Ünlü, A linear bilevel programming algorithm based on bicriteria programming, Comput. Oper. Res. 14 (1987) 173–179.[31] U.P. Wen, W.F. Bialas, The hybrid algorithm for solving the three-level linear programming problem, Comput. Oper. Res. 13 (1986) 367–377.[32] W.P. Wen, Y.H. Yang, Algorithms for solving the mixed integer two-level linear programming problem, Comput. Oper. Res. 17 (1990) 133–
142.
3090 F. Tiryaki / Fuzzy Sets and Systems 157 (2006) 3072 –3090
[33] B.M. Werners, Aggregation models in mathematical programming, in: G. Mitra (Ed.), Mathematical Models for Decision Support, Springer,Berlin, 1988, pp. 295–305.
[34] D.J. White, G. Anandalingam, A penalty function approach for solving bi-level linear programs, J. Global Optim. 3 (1993) 397–419.[35] Y.K. Wu, S.M. Guu, A compromise model for solving fuzzy multiple objective problems, Journal of the Chinese Institute of Industrial Engineers
18 (5) (2001) 87–93.[36] H.-J. Zimmermann, Fuzzy programming and linear programming with several objective functions, Fuzzy Sets and Systems 1 (1978) 45–55.[37] H.-J. Zimmermann, Fuzzy Set Theory and its Applications, Second, Revised ed., Kluwer Academic Publishers, Boston, Dordrecht, London,
1991 1993 (sixth printing).[38] H.J. Zimmermann, P. Zysno, Latent connectives in human decision making, Fuzzy Sets and Systems 4 (1) (1980) 37–51.