importance of voluntary behavior, attention control to attain cognitive behavior
DESCRIPTION
Workshop of DC-Tales (Santorini), June. 3. Importance of Voluntary behavior, attention control To attain cognitive behavior - Toward future cognitive humanoid robot. Takamasa Koshizen Honda Research Institute Japan Inc. Content. Part 1: Humanoid robot - Asimo - PowerPoint PPT PresentationTRANSCRIPT
Importance of Voluntary behavior, attention controlTo attain cognitive behavior
- Toward future cognitive humanoid robot
Takamasa KoshizenHonda Research Institute Japan Inc.
Workshop of DC-Tales (Santorini), June. 3
Content
Part 1: Humanoid robot - Asimo
Part 2: Basic concept model
Part 3: Application concept model
Cf. We will have brief demo (video) of our robot
Humanoid robot
Brain-like technology represented as attention and cross-modal integration allows the humanoid robot to obtain social cognitive aspects of human-like behavior
-Highly kinematic behavior
-Multimodal communication
- Social Cognitive feature

PFC-ACC Interaction
PFC-ACC interaction playing a key role in cognitive control by monitoring for occurrence of response conflict.
ACC response conflictsituations across mutiplemodalities.
Voluntary BehavioralSelection Based onReward (Shima et al, 2000)

Prefrontal cortex
- Prefrontal cortex (PFC), neocortex region - most elaborated in primates, animals for taking diverse and flexible
- PFC is NOT critical for performing simple, automaticbehavior to an unexpected sound or movement
- By contrast, PFC is important when the ‘top-down’ processing is needed - when behavior must be induced byinternal states or intentions.
Rainer G. and Miller, E.K, 1999
Statistical Nature !!
Preparationof ForcomingActions!Pochon et al.,2001

Basic model concept
Hikosaka et al., 1998

Learning scheme
Learning schemes to combinetwo different criteria, dedicatedfrom subcortical and neocorticalregion in the brain
Learning schemes are
1. Reinforcement learning
2. Supervised learning
3. Statistical learning
How it could be mergedthe different criteria bythe learning scheme?
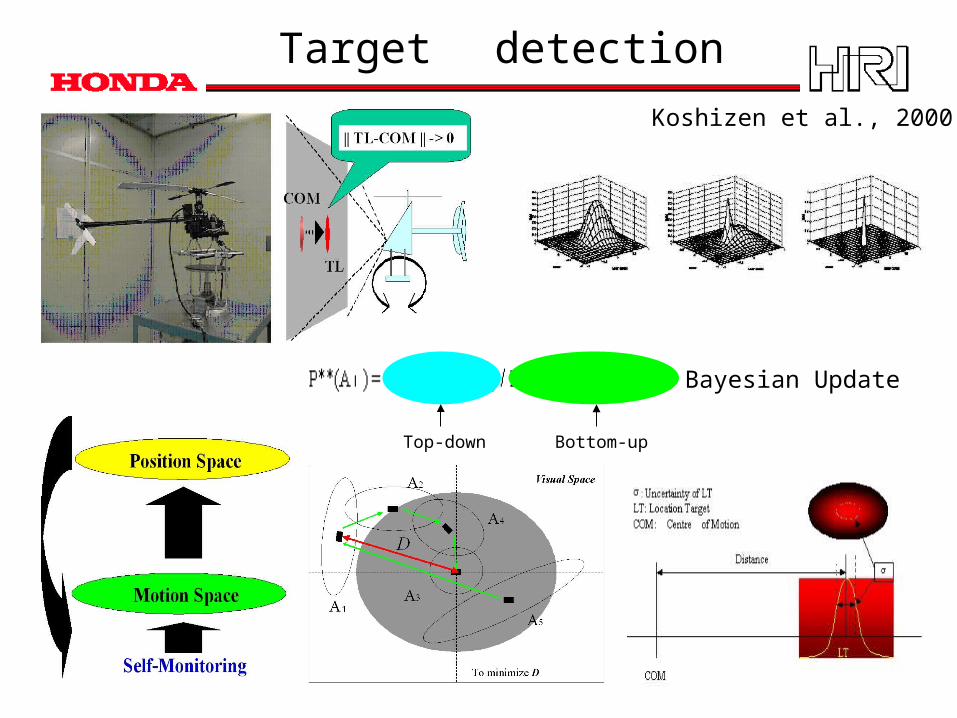
Target detection
Bottom-upTop-down
Bayesian Update
Koshizen et al., 2000
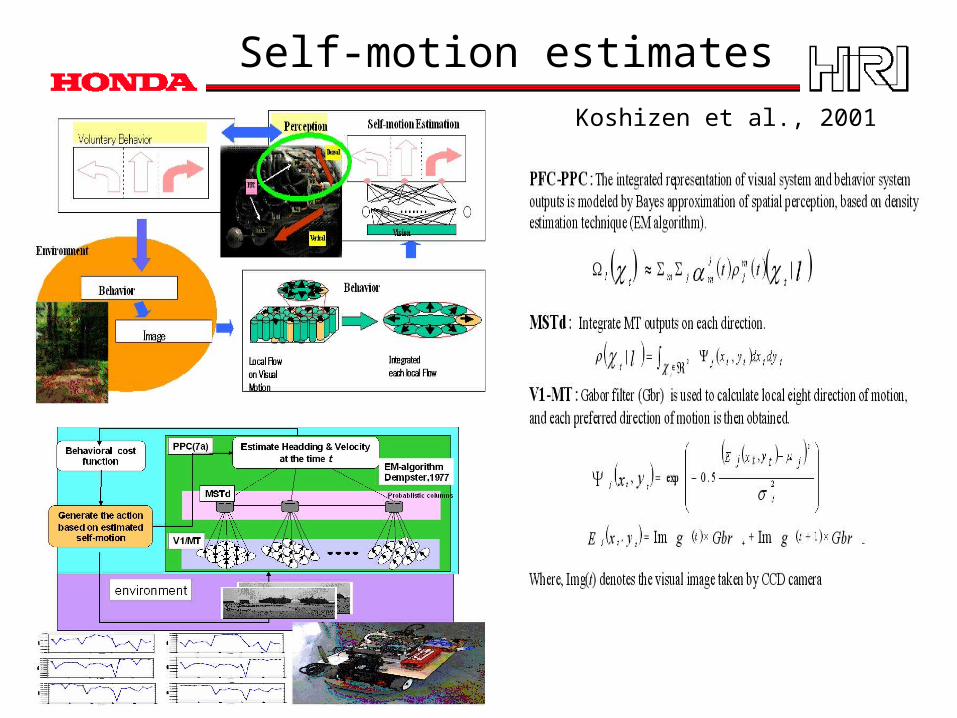
Self-motion estimatesKoshizen et al., 2001

Cross Supramodality
w1
1
ε大ε小
Hardware design to rewiring mechanism for cross-modal integration
=∫ w・ ρds
Koshizen et al., 2002

Critical Period and Rewiring
Critical period for establishing the binocular system is not only the matter of binding visual form and motion to form representation of a visible object, but also the matter of semantic understanding of object.
How brain distinguish between the resemble objects that end up classified into otherwise different groups?
Proposed cross-modal rewiring system provides the hypothetical computation that each heterosensory modality is intrinsically bound, and the rewiring (inhibitory) network yields thus the functional meaning of their sensory inputs by calculating. The two-typed supramodality such as motion and form.
Hensch et al., 1998
A particular class of inhibitoryconnection emerged withinNeocortex during the crericalperiod, to bring visual sensitivity
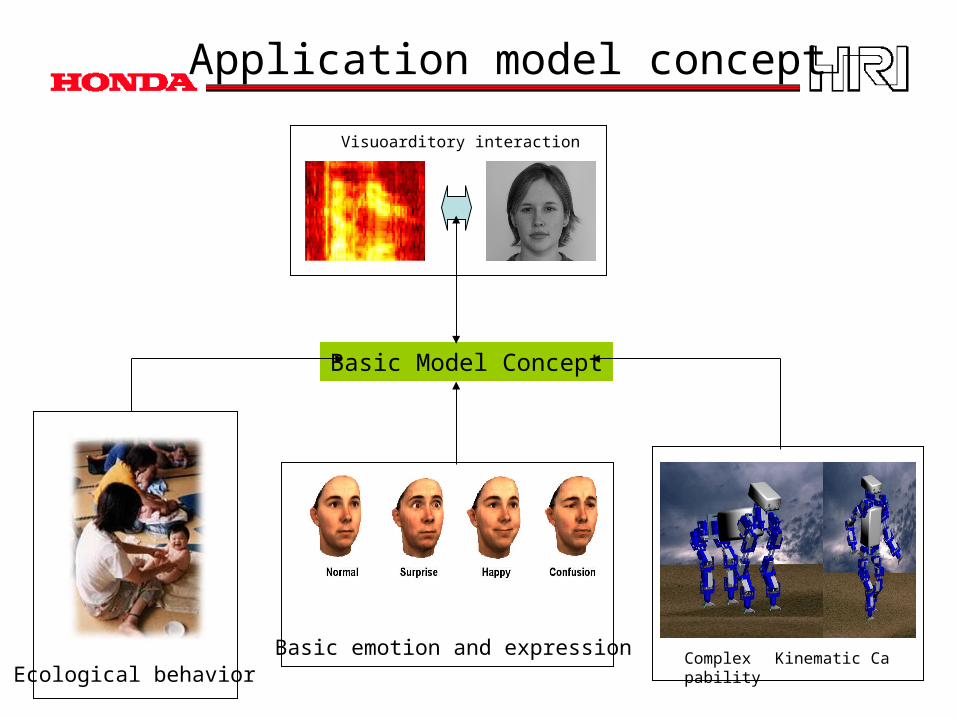
Application model concept
Ecological behaviorComplex Kinematic Capability
Basic emotion and expression
Visuoarditory interaction
Basic Model Concept
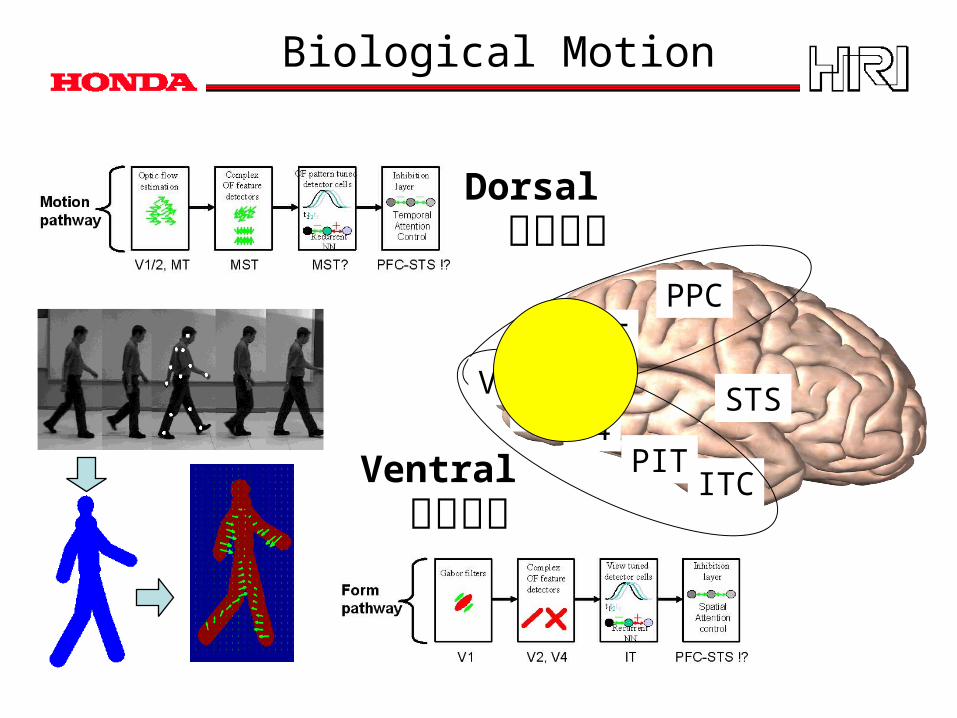
Biological Motion
動態視覚Dorsal
形態視覚
MTPPC
V1
PITV4
V2
ITCVentral
STS
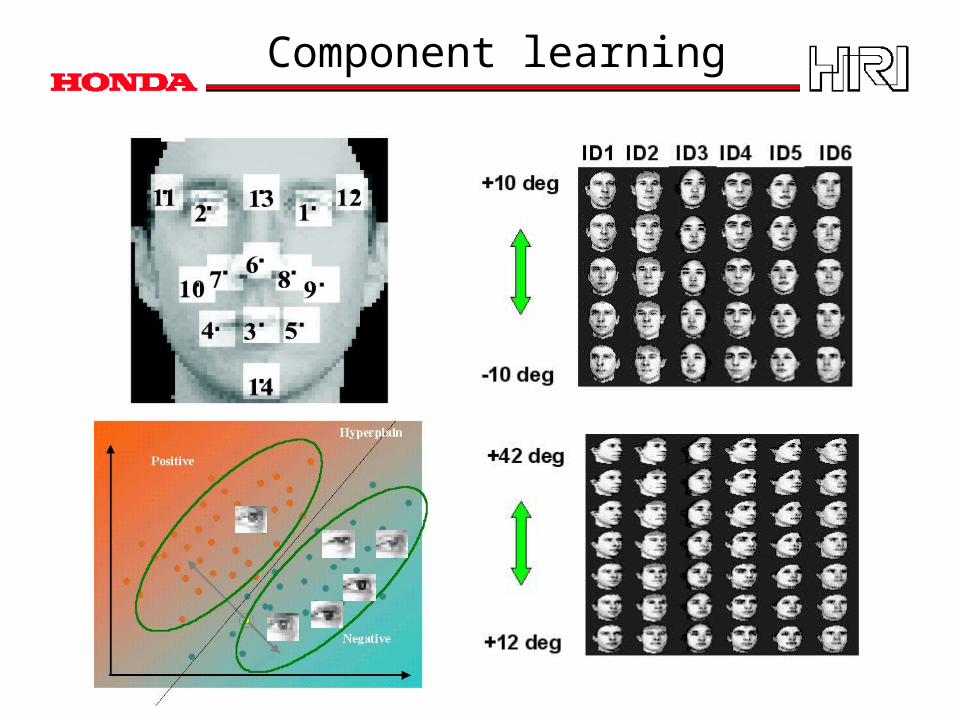
Component learning

Growing component
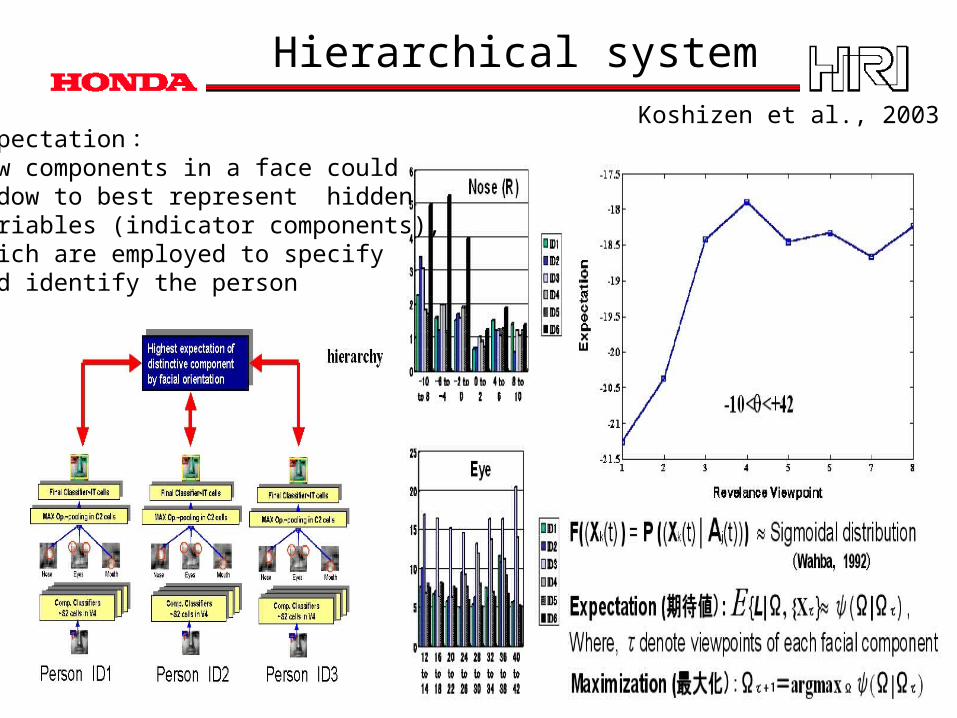
Hierarchical system
Expectation:Few components in a face couldendow to best represent hiddenvariables (indicator components),which are employed to specify and identify the person
Koshizen et al., 2003
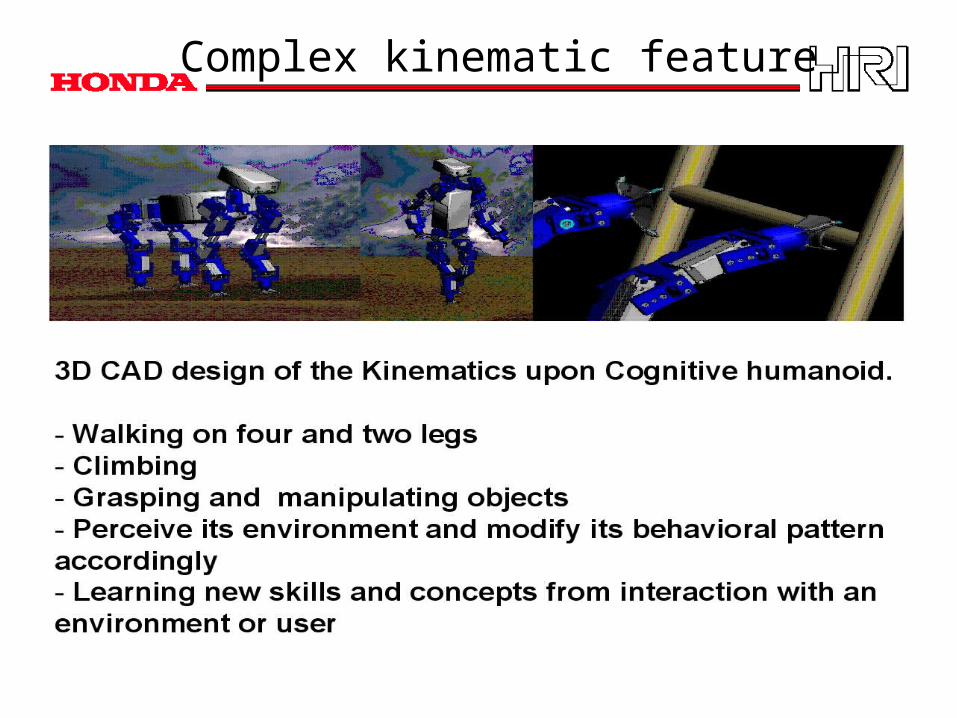
Complex kinematic feature
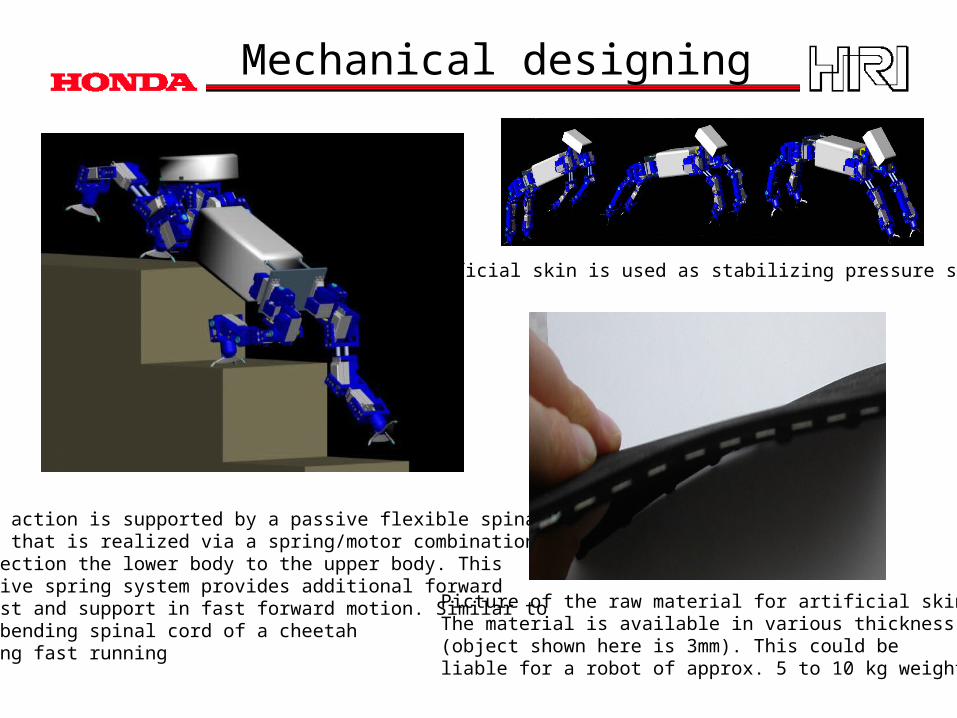
Mechanical designing
This action is supported by a passive flexible spinal cord that is realized via a spring/motor combination connection the lower body to the upper body. This passive spring system provides additional forward thrust and support in fast forward motion. Similar to the bending spinal cord of a cheetah during fast running
Picture of the raw material for artificial skin. The material is available in various thickness (object shown here is 3mm). This could be liable for a robot of approx. 5 to 10 kg weight.
artificial skin is used as stabilizing pressure sensor

Conclusion
-A-priori knowledge or selection criteria – voluntary behaviorThe approach of a purely AI system or a purely ANN system in practice leads to non-satisfactory results. A hybrid construction of both criteria and flexibility
-Multimodal interaction makes easier to sophisticate the knowledge and selection criteria Interaction/learning/evolvement of the system will lead to bettercriteria settings. For the system as well as creation of new criteria which in turn excelled the behavioral mechanism (In this sense, attention considers the predominant role of attention as shaping behavior motor output).
-Cognitive function may be attained by extremely complex kinematics capabilitiessuch as grasping for objects, bending down and up, sitting down on objects. Suchcomplex kinematic feature provides frequent interaction among polymodal stimuli.Attention will need to be mediated for segregating the important/non-important
-Statistical Nature of prefrontal cortex could be mechanism for making the selections, as suggested the paper by Miller et al. (1999)
-Expectation is one of candidates for the criteria of top-down attention control
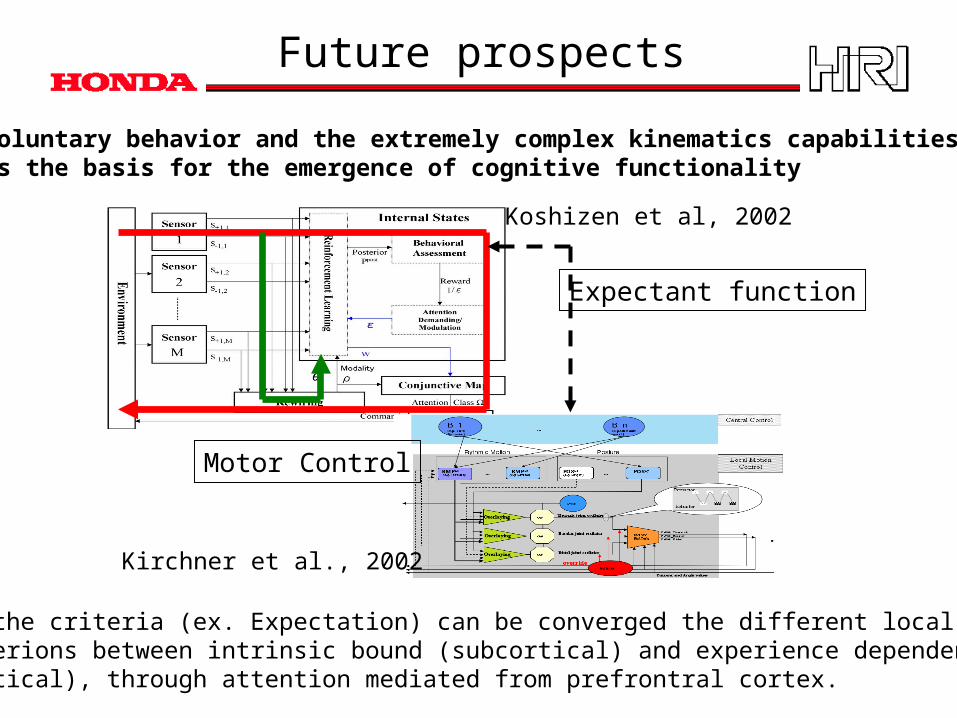
Future prospects
Voluntary behavior and the extremely complex kinematics capabilitiesis the basis for the emergence of cognitive functionality
Motor Control
Expectant function
How the criteria (ex. Expectation) can be converged the different local criterions between intrinsic bound (subcortical) and experience dependency(cortical), through attention mediated from prefrontral cortex.
Koshizen et al, 2002
Kirchner et al., 2002