ii Índice -...
TRANSCRIPT

II Índice
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
I. FISIOLOGÍA ARTICULAR DEL HOMBRO ............................................................................ 1
A. INTRODUCCIÓN ................................................................................................................................................ 1
B. MOVIMIENTOS EN LA EXPLORACIÓN GLOBAL DEL HOMBRO .................................................... 2
1. Antepulsión ........................................................................................................................................... 2
2. Retropulsión ......................................................................................................................................... 3
3. Aducción ................................................................................................................................................ 3
4. Abducción .............................................................................................................................................. 3
5. Rotación interna ................................................................................................................................. 4
6. Rotación externa ................................................................................................................................. 4
7. Antepulsión horizontal .................................................................................................................... 4
8. Retropulsión horizontal .................................................................................................................. 5
9. Movimiento mano-cabeza (peinarse) ........................................................................................ 5
10. Movimiento mano espalda (ponerse un abrigo). .................................................................. 5
C. COMPLEJO ARTICULAR DEL HOMBRO ........................ ¡ERROR! MARCADOR NO DEFINIDO.
D. ARTICULACIÓN GLENOHUMERAL ........................................................................................................... 6
1. RECUERDO ANATÓMICO ................................................................................................................ 6
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ........................................................................... 8
E. ARTICULACIÓN SUBDELTOIDEA ............................................................................................................ 14
F. ARTICULACIÓN OMOTORÁCICA ............................................................................................................. 14
1. RECUERDO ANATÓMICO .............................................................................................................. 14
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 15
G. ARTICULACIÓN ESTERNOCOSTOCLAVICULAR ................................................................................ 18
1. RECUERDO ANATÓMICO .............................................................................................................. 18
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 18
H. ARTICULACIÓN ACROMIOCLAVICULAR .............................................................................................. 20
1. RECUERDO ANATÓMICO .............................................................................................................. 20
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 21
II. FISIOLOGÍA ARTICULAR DEL CODO ................................................................................ 23
A. INTRODUCCIÓN .............................................................................................................................................. 23
B. RECUERDO ANATÓMICO ............................................................................................................................ 23
1. Superficies articulares .................................................................................................................... 24
2. Medios de unión ................................................................................................................................ 25
C. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ...................................................................................... 26
1. Flexoextensión .................................................................................................................................. 26
2. Pronosupinación............................................................................................................................... 28
3. Factores de la coaptación articular ........................................................................................... 32
III. FISIOLOGÍA ARTICULAR DE LA MUÑECA ....................................................................... 34
A. INTRODUCCIÓN .............................................................................................................................................. 34

III Índice
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
B. RECUERDO ANATÓMICO ............................................................................................................................ 35
1. Articulación radiocarpiana ........................................................................................................... 35
2. Articulación mediocarpiana ......................................................................................................... 38
C. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ...................................................................................... 42
1. Flexión-extensión ............................................................................................................................. 44
2. Abducción o inclinación radial ................................................................................................... 44
3. Aducción o inclinación cubital .................................................................................................... 45
4. Circunducción .................................................................................................................................... 45
5. Estabilidad ligamentosa ................................................................................................................ 46
D. MÚSCULOS MOTORES .................................................................................................................................. 47
1. Músculos de la cara palmar .......................................................................................................... 48
2. Músculos de la cara dorsal ........................................................................................................... 48
3. Cara externa ....................................................................................................................................... 49
4. Cara interna ........................................................................................................................................ 50
IV. FISIOLOGÍA ARTICULAR DE LA MANO ........................................................................... 52
A. INTRODUCCIÓN .............................................................................................................................................. 52
B. ARQUITECTURA DE LA MANO ................................................................................................................. 53
1. Arcos transversales ......................................................................................................................... 53
2. Arcos longitudinales ....................................................................................................................... 54
3. Arcos oblicuos o diagonales ......................................................................................................... 54
C. ESTUDIO DE LA MANO ................................................................................................................................ 54
D. ARTICULACIONES CARPOMETACARPIANAS ..................................................................................... 55
1. RECUERDO ANATÓMICO .............................................................................................................. 55
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 56
E. ARTICULACIONES METACARPOFALÁNGICAS .................................................................................. 57
1. RECUERDO ANATÓMICO .............................................................................................................. 57
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 60
F. ARTICULACIONES INTERFALÁNGICAS ................................................................................................ 62
1. RECUERDO ANATÓMICO .............................................................................................................. 62
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 64
3. MÚSCULOS MOTORES DE LA MANO ........................................................................................ 66
V. EL PULGAR ............................................................................................................................... 73
A. INTRODUCCIÓN .............................................................................................................................................. 73
B. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA DE LA OPOSICIÓN ................................................ 74
1. Abducción–aducción ....................................................................................................................... 76
2. Anteposición-retroposición ......................................................................................................... 77
3. Flexión-extensión ............................................................................................................................. 77
4. Rotación longitudinal ..................................................................................................................... 78

IV Índice
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
C. ARTICULACIÓN TRAPECIOMETACARPIANA ..................................................................................... 79
1. RECUERDO ANATÓMICO .............................................................................................................. 79
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 81
D. ARTICULACIÓN METACARPOFALÁNGICA .......................................................................................... 82
1. RECUERDO ANATÓMICO .............................................................................................................. 82
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 84
E. ARTICULACIÓN INTERFALÁNGICA ....................................................................................................... 86
1. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA ......................................................................... 86
F. MÚSCULOS DEL PULGAR ............................................................................................................................ 86
1. MÚSCULOS EXTRÍNSECOS ........................................................................................................... 87
2. MÚSCULOS INTRÍNSECOS ............................................................................................................ 88

BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
BIOMECÁNICA.
MIEMBRO SUPERIOR
I. FISIOLOGÍA ARTICULAR DEL HOMBRO
A. INTRODUCCIÓN
La cintura escapular es una unidad funcional, formada por un anillo osteo-músculo-ligamentario (omóplato, esternón, clavícula, 1ª costilla, 1ª vértebra dorsal y musculatura de unión de omóplatos a raquis), constituido por cinco articulaciones que forman el complejo articular del hombro. Estas cinco articulaciones se clasifican en dos grupos:
Primer grupo: una articulación verdadera y principal, la glenohumeraly una articulación falsa y accesoria, la subdeltoidea.
Segundo grupo: una articulación falsa y principal, la escapulotorácica y dos articulaciones verdaderas y accesorias, la acromioclavicular y la esternoclavicular.
Posee tres grados de libertad, permitiéndole orientar el miembro superior en relación a los tres planos del espacio, junto con sus respectivos ejes principales:
Eje transversal, incluido en el plano frontal: permite los movimientos de flexoextensión realizados en el plano sagital.
Eje anteroposterior, incluido en el plano sagital: permite los movimientos de abducción (el miembro superior se aleja del plano de simetría del cuerpo) y aducción (el miembro superior se aproxima al plano de simetría) realizados en el plano frontal.
Eje vertical, dirige los movimientos de flexión y de extensión realizados en el plano horizontal, el brazo en abducción de 90º. Estos movimientos también se denominan flexoextensión horizontal
El eje longitudinal del húmero permite la rotación externa/interna del brazo y del miembro superior de dos formas distintas:
Rotación voluntaria (o también rotación adjunta de Mac Conaill) que utiliza el tercer grado de libertad y es posible solo en articulaciones de tres ejes. Se debe a la contracción de los músculos rotadores.
Rotación automática (o también rotación conjunta) que aparece sin ninguna acción voluntaria en las articulaciones de dos ejes. También en las articulaciones de tres ejes cuando se emplean como articulaciones de dos ejes. Se conoce como la paradoja de Codman.
Por ello, se considera como posición anatómica aquella en la que miembro superior se encuentra a lo largo del cuerpo, verticalmente, de forma que el eje longitudinal del húmero 4 coincide con el eje vertical 3. En la posición de abducción de 90°, el eje longitudinal 4 coincide con el eje transversal l. En la posición de flexión de 90°, coincide con el eje anteroposterior 2 (Fig. 1).
2 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 1. Ejes de movimiento.
B. MOVIMIENTOS EN LA EXPLORACIÓN GLOBAL DEL HOMBRO
1. Antepulsión
De 0° a 80°: el movimiento se realiza a nivel de la glenohumeral. Músculos motores:
Deltoides anterior.
Coracobraquial.
Haz clavicular del pectoral mayor.
De 80° a 120°: el movimiento se realiza a nivel de la acromioclavicular. Músculos motores:
Trapecio superior.
Trapecio inferior.
Serrato mayor.
De 120° a 180°: el movimiento se realiza a nivel de la esternocostoclavicular y omotorácica. Músculos motores:
Trapecio inferior.
Serrato mayor.
Musculatura del raquis.

3 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2. Retropulsión
De 0° a 35°: el movimiento se realiza a nivel de la escapulohumeral, siendo los músculos motores:
Redondo mayor.
Redondo menor.
Haz posterior del deltoides.
Dorsal ancho.
De 35° a 45°-60°: se realiza el movimiento nivel de la omotorácica, siendo los músculos motores:
Romboides
Trapecio medio.
Dorsal ancho.
3. Aducción
De 0° a 10°: el movimiento se realiza a nivel de la glenohumeral, siendo los músculos motores:
Dorsal ancho.
Porción larga del tríceps.
De 10° a 20° (asociado a antepulsión) o 30° (asociado a retropulsión): el movimiento se realiza a nivel de la omotorácica, siendo los músculos motores:
Romboides.
Redondo Mayor.
4. Abducción
De 0° a 80°: el movimiento se realiza a nivel de la glenohumeral, siendo los músculos motores:
Deltoides.
Supraespinoso.
De 80° a 120°: el movimiento se realiza a nivel de la acromioclavicular, siendo los músculos motores:
Deltoides medio.
Trapecio superior.
Trapecio inferior.
Serrato mayor.
De 120° a 180°: el movimiento se realiza a nivel de la esternocostoclavicular y omotorácica, siendo los músculos motores:
Deltoides medio.
Serrato mayor.
Trapecio superior.
4 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Trapecio inferior.
Musculatura del raquis.
De 0° a 10°: el movimiento se realiza a nivel de la glenohumeral, siendo los músculos motores:
Dorsal ancho.
Porción larga del tríceps.
De 10° a 20° (asociado a antepulsión) o 30° (asociado a retropulsión): el movimiento se realiza a nivel de la omotorácica, siendo los músculos motores:
Romboides.
Redondo Mayor.
5. Rotación interna
De 0° a 60°: el movimiento se realiza a nivel de la glenohumeral, siendo los músculos motores:
Dorsal ancho.
Redondo mayor.
Subescapular.
Pectoral mayor.
De 60° a 100°: el movimiento se realiza a nivel de la omotorácica, siendo los músculos motores:
Serrato mayor.
Pectoral menor.
6. Rotación externa
De 0° a 60°: el movimiento se realiza a nivel de la glenohumeral, siendo los músculos motores:
Infraespinoso.
Redondo menor.
De 60° a 80°: el movimiento se realiza a nivel omotorácica, siendo los músculos motores:
Romboides.
Trapecio.
7. Antepulsión horizontal
De 0° a 90°: el movimiento se realiza a nivel de la glenohumeral, siendo los músculos motores:
Pectoral mayor.
De 90° a 130°: el movimiento se realiza a nivel de la omotorácica, siendo los músculos motores:
Serrato mayor.

5 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Pectoral menor.
8. Retropulsión horizontal
De 0° a 10°: el movimiento se realiza a nivel de la glenohumeral, siendo los músculos motores:
Angular de la escápula.
Dorsal ancho.
De 10° a 40°: el movimiento se realiza a nivel de la omotorácica, siendo los músculos motores:
Romboides.
Trapecio medio.
9. Movimiento mano-cabeza (peinarse)
Este complejo movimiento necesita de la combinación de varias articulaciones, así como la asociación de varios movimientos:
Antepulsión y abducción de la articulación glenohumeral.
Elevación y retroposición del muñón del hombro.
Rotación posterior de la clavícula.
Báscula externa y abducción del omóplato.
Extensión del raquis torácico.
Rotación externa de húmero.
Valgo y flexión del codo.
10. Movimiento mano espalda (ponerse un abrigo).
Como el anterior, este movimiento complejo necesita de la combinación de varias articulaciones y la asociación de varios movimientos (Fig. 16):
Retropulsión y aducción de la glenohumeral.
Descenso y anteposición del muñón del hombro.
Rotación anterior de la clavícula.
Báscula interna y aducción del omóplato.
Flexión del raquis torácico.
Rotación interna del húmero.
Flexión y varo del codo.

6 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 2. Movimiento mano cabeza y mano espalda.
C. ARTICULACIÓN GLENOHUMERAL
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
1) Cabeza humeral
Es un tercio de esfera de 30 a 35 mm de radio. Presenta un desarrollo angular de 120° a 130°. Aplanada de adelante hacia atrás, se orienta hacia dentro, arriba y atrás. Su eje y el de la diáfisis forman un ángulo de 130°. Presentan un ángulo de declinación de 20° a 30°.
2) Cavidad glenoidea
Soportada por el cuello del omóplato. Tiene forma ovalada con eje mayor oblicuo hacia arriba y delante, con forma de pera. Se orienta hacia arriba, fuera y delante. Tiene un ángulo de 30° respecto al plano sagital. Los tubérculos supraglenoideo e infraglenoideo representan las inserciones de las cabezas largas del bíceps y tríceps braquial, respectivamente.
Al representar un tercio de la superficie de la cabeza humeral, contribuye a que las dos superficies sean poco congruentes y discordantes.

7 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
3) Rodete glenoideo
Aumenta la concordancia, pero poco la congruencia. Este anillo fibrocartilaginoso es triangular al corte, más ancho y más grueso hacia abajo, donde se adhiere a la glena humeral, que arriba. Presenta un borde craneal libre donde toma la configuración de un menisco.
Está reforzado craneal y caudalmente por los tendones del bíceps y el tríceps.
Medios de unión
1) Cápsula
Es una manga fibrosa, delgada y laxa. Su inserción craneal es sobre el perímetro de la glena, el rodete. Su inserción caudal es sobre el labio externo del cuello anatómico del húmero. Posteriormente, se aleja del cartílago articular (de 10 a 15 mm).
Presenta en su porción caudal un pliegue o receso inferior, que permite la abducción. En su porción anterior presenta otro receso que permite la rotación externa.
2) Ligamentos pasivos
Ligamento coracohumeral: o suspensor de la cabeza humeral, es muy sólido. Se inserta sobre el borde externo de la apófisis coracoides y se termina en dos haces sobre el troquín y sobre el troquíter. Estos dos haces están unidos por fibras del ligamento humeral transverso, que transforma la corredera bicipital en un túnel.
Ligamentos glenohumerales: refuerzan la cápsula, hay tres haces:
Haz superior: se inserta en el cuello anatómico del húmero, craneal al troquín.
Haz medio: se inserta sobre el borde anteroinferior del troquín.
Haz inferior: se inserta sobre el borde anterior del perímetro de la glena y en la parte anteroinferior del cuello anatómico.
Estos tres haces delimitan dos triángulos. Superior o foramen oval de Weitbrecht e inferior o espacio subcoracoideo de Rouviére.
3) Ligamentos activos
Manguito de los rotadores: es un conjunto muscular de 6 a 7 mm íntimamente unido a la cápsula. Los tendones de estos músculos se unen entre ellos. Son los responsables de proporcionar estabilidad activa a la articulación.
Coaptación transversa: son músculos estabilizadores de la cabeza en la glena.
– Ventral: subescapular, que se inserta en la fosa subescapular y sobre el troquín.
– Craneal: supraespinoso, que se inserta en la fosa supraespinosa y sobre el troquíter, muy adherido a la cápsula.
– Dorsal: infraespinoso, que se inserta en la fosa infraespinosa y sobre el troquíter.
8 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
– Dorsal y lateral: redondo menor, que se inserta en el borde lateral de la fosa infraespinosa y sobre el troquíter, caudal al anterior.
Coaptación vertical: son los músculos suspensores.
– Deltoides.
– Coracobraquial.
– Cabeza corta del bíceps.
– Cabeza larga del tríceps.
– Haz clavicular del pectoral mayor.
– Porción larga del bíceps: es el tendón suspensor de la cabeza humeral más importante. Impide la luxación de la cabeza hacia delante. En su porción inferior, el tendón está rodeado por una vaina sinovial que permite su deslizamiento.
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Es una articulación con tres planos de movimiento:
Sobre un plano sagital y eje transversal. Se realizan los movimientos de:
Extensión: de poca amplitud (45° a 50°).
Flexión: de gran amplitud (180°) (Fig. 3).
Ilustración 3. Movimientos de flexión y extensión.
Sobre un plano frontal y eje anteroposterior. Se realizan los movimientos de:
Abducción: se aleja el miembro superior del tronco. Su amplitud alcanza los 180°, con el brazo vertical por encima del tronco.
Aducción: a partir de la posición anatómica (máxima aducción), en el plano frontal, es mecánicamente imposibles debido a la presencia del tronco (Fig. 4). No es factible si no se asocia con una extensión, donde se produce una aducción muy leve o con una flexión, donde la aducción alcanza entre 30° y 45°.

9 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 4. Movimientos de Aducción y Abducción.
Sobre un plano horizontal y eje vertical: se realizan los movimientos de:
Rotación externa: su amplitud es de 80°, jamás alcanza los 90°. Funcionalmente, el sector comprendido entre la posición anatómica fisiológica (rotación interna 30°) y la posición anatómica clásica (rotación 0°) es el más importante.
Rotación interna: su amplitud es de 100° a 110°. Para alcanzarla, se requiere que el antebrazo pase por detrás del tronco, lo que asocia cierto grado de extensión de hombro. La libertad de este movimiento es indispensable para que la mano pueda alcanzar la espalda (Fig. 5).
Ilustración 5. Movimientos de rotación interna y externa.
Sobre su eje longitudinal, la rotación puede realizarse en cualquier posición del hombro. Se trata de la rotación voluntaria o adjunta de la articulación glenohumeral. Generalmente, esta rotación se mide en la posición anatómica del brazo, que pende verticalmente a lo largo del cuerpo.
Sobre un plano horizontal y eje vertical: exactamente, en torno a una sucesión de ejes verticales porque el movimiento se realiza junto con la articulación escapulotorácica. Se considera como posición anatómica el miembro superior en abducción de 90º en el plano frontal (Fig. 6). Se realiza el movimiento de:
Flexión horizontal: se asocia flexión y aducción. Tiene una amplitud de 140°.
Extensión horizontal: se asocia extensión y aducción. Su amplitud es de 30°-40°.

10 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 6. Movimientos de flexión y extensión horizontal.
Sobre un plano horizontal, junto con la articulación escapulotorácica, se realizan los movimientos de retroposición del hombro y anteposición del hombro (Fig. 7).
Ilustración 7. Movimientos de anteposición y retroposición.
Uniendo los tres ejes, se realiza el movimiento de circunducción. Se combinan los movimientos elementales. Cuando esta circunducción alcanza su máxima amplitud, el brazo describe en el espacio un cono irregular, el cono de circunducción. Su cúspide se sitúa en el centro teórico de hombro, su lado es igual a la longitud del miembro superior, pero su base, lejos de representar un cono regular, está deformada debido al tronco.
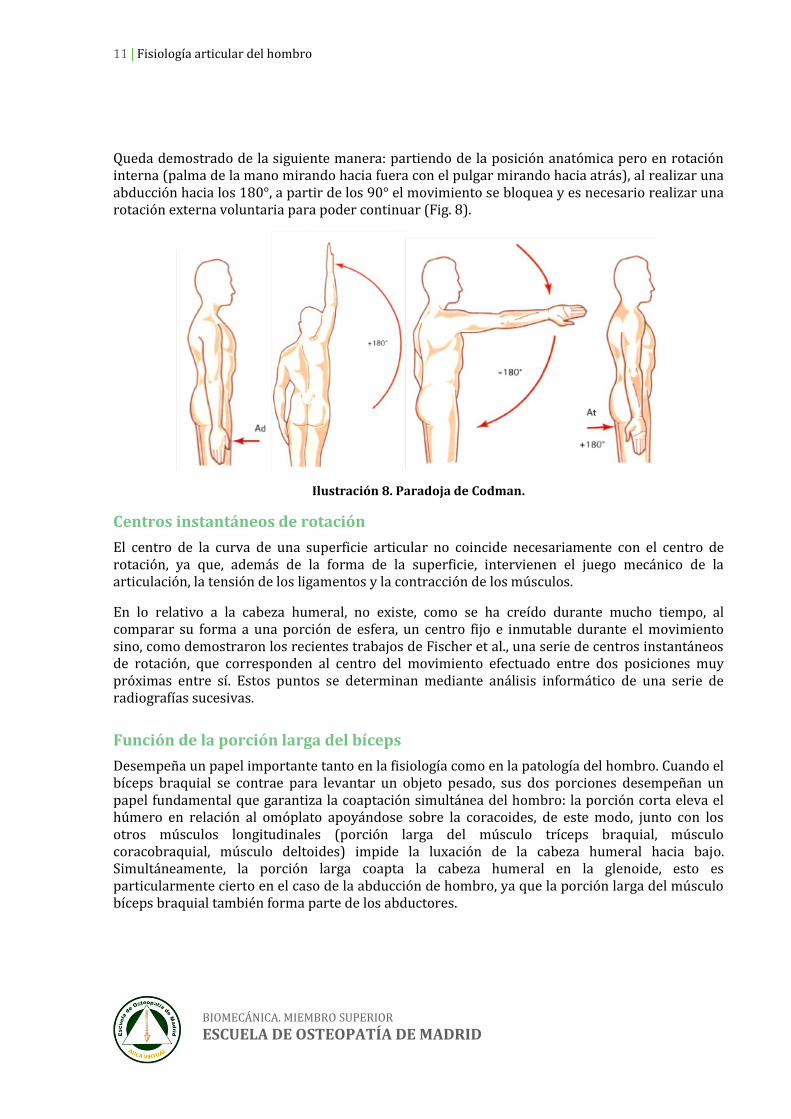
La “paradoja” de Codman
Partiendo de la posición anatómica, el miembro superior vertical a lo largo del cuerpo, la palma de la mano mirando hacia dentro, el pulgar dirigido hacia delante, se realiza un movimiento de abducción de más de 180° en el plano frontal. Desde esta posición vertical, con la palma de la mano mirando hacia fuera, el miembro superior realiza una flexión de menos de 180° en el plano sagital. De este modo, vuelve a la posición inicial a lo largo del cuerpo con la palma de la mano mirando hacia fuera y el pulgar dirigido hacia atrás.
En este doble movimiento de abducción seguido de una extensión se ha producido automáticamente una rotación interna de 180°, un movimiento sucesivo en torno a dos ejes del hombro de manera totalmente mecánica. Esto es lo que Mac Conaill denominó rotación conjunta.
Si se utiliza el tercer eje, realizando de manera voluntaria una rotación inversa de 180°, esta vez, la mano volvería a la posición de partida. Esto es lo que Mac Conaill denominó rotación adjunta, solo posible en articulaciones con tres grados de libertad.
11 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Queda demostrado de la siguiente manera: partiendo de la posición anatómica pero en rotación interna (palma de la mano mirando hacia fuera con el pulgar mirando hacia atrás), al realizar una abducción hacia los 180°, a partir de los 90° el movimiento se bloquea y es necesario realizar una rotación externa voluntaria para poder continuar (Fig. 8).
Ilustración 8. Paradoja de Codman.
Centros instantáneos de rotación
El centro de la curva de una superficie articular no coincide necesariamente con el centro de rotación, ya que, además de la forma de la superficie, intervienen el juego mecánico de la articulación, la tensión de los ligamentos y la contracción de los músculos.
En lo relativo a la cabeza humeral, no existe, como se ha creído durante mucho tiempo, al comparar su forma a una porción de esfera, un centro fijo e inmutable durante el movimiento sino, como demostraron los recientes trabajos de Fischer et al., una serie de centros instantáneos de rotación, que corresponden al centro del movimiento efectuado entre dos posiciones muy próximas entre sí. Estos puntos se determinan mediante análisis informático de una serie de radiografías sucesivas.
Función de la porción larga del bíceps
Desempeña un papel importante tanto en la fisiología como en la patología del hombro. Cuando el bíceps braquial se contrae para levantar un objeto pesado, sus dos porciones desempeñan un papel fundamental que garantiza la coaptación simultánea del hombro: la porción corta eleva el húmero en relación al omóplato apoyándose sobre la coracoides, de este modo, junto con los otros músculos longitudinales (porción larga del músculo tríceps braquial, músculo coracobraquial, músculo deltoides) impide la luxación de la cabeza humeral hacia bajo. Simultáneamente, la porción larga coapta la cabeza humeral en la glenoide, esto es particularmente cierto en el caso de la abducción de hombro, ya que la porción larga del músculo bíceps braquial también forma parte de los abductores.

12 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Papel asociado del deltoides-supraespinoso
El deltoides es un músculo con forma de abanico. Se inserta sobre el tercio externo de la clavícula, borde superior y externo del acromion, espina del omóplato hasta la uve deltoidea. Presenta tres haces: haz posterior, medio y anterior1.
Para comenzar la abducción, el deltoides necesita un músculo que inicie el movimiento. Se asume que es el supraespinoso, al que se le conoce como estárter de la abducción. Esta hipótesis de funcionamiento cambia al observar una electromiografía de una parálisis del supraespinoso, ya que pone de manifiesto que deltoides y supraespinoso son capaces de realizar solos la abducción.
Esto se comprueba en los siguientes supuestos:
En una parálisis del deltoides, el supraespinoso realiza el movimiento.
Una parálisis o rotura del supraespinoso no impide la abducción.
Si todos los músculos del manguito de los rotadores estuvieran rotos y el deltoides intacto, la abducción sería imposible. Esto es debido a que el supraespinoso interviene en sinergia con el resto de los músculos del manguito rotadores para fijar el centro articular durante la abducción.
Comportamiento de los ligamentos glenohumeral y coracohumeral
El sistema ligamentoso de la articulación del hombro es lo suficientemente laxo para permitir su amplia movilidad. Por lo tanto, por sí solo, no es capaz de garantizar su coaptación. Teniendo en cuenta el movimiento del hombro, el comportamiento de éstos será diferente. Se resume así:
Flexión: tensión predominante del fascículo troquiteriano del ligamento coracohumeral.
Extensión: tensión predominante del fascículo troquiniano del ligamento coracohumeral.
Aducción: tensión del fascículo superior glenohumeral y el ligamento coracohumeral, con distensióndel fascículo glenohumeral medio e inferior.
Abducción: tensión del fascículo glenohumeral medio e inferior con distensión del fascículo superior y el ligamento coracohumeral.
Rotación interna: se distienden los ligamentos glenohumeral y coracohumeral.
Rotación externa: se tensan los ligamentos glenohumeral y coracohumeral.
Coaptación muscular del hombro
Debido a su laxitud capsulo-ligamentosa, la verdadera estabilización de esta articulación viene asegurada por la musculatura periarticular y tejido conectivo, actuando los músculos como ligamentos activos.
1 Entre 1911 y 1917, Fick y Stasser dividieron el deltoides en siete porciones con diferentes funciones. Las fibras 5 hacen abducción en cualquier posición. Las fibras 2 y 4 hacen abducción en función del eje. Las fibras 1, 5,6 y 7, abducción en la posición de referencia. Durante la abducción, describieron un orden de intervención de los distintos haces: al inicio fibras 3, después fibras 2 y 4, a continuación fibras 1 y 5, luego 6 y 7, con un máximo de actividad a 90° de abducción.
13 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Músculos estabilizadores transversales (función de coaptación):
Supraespinoso.
Infraespinoso.
Redondo menor.
Supraescapular.
Músculos estabilizadores longitudinales (impiden el descenso de la cabeza humeral):
Porción larga y corta del Bíceps.
Coracobraquial.
Porción larga del Tríceps.
Deltoides.
Fascículo clavicular del Pectoral Mayor.
Músculos motores
Músculos flexores:
Deltoides anterior.
Coracobraquial.
Haz clavicular del pectoral mayor.
Porción larga del bíceps.
Músculos extensores:
Redondo mayor.
Redondo menor.
Dorsal ancho.
Fascículo posterior del Deltoides.
Porción larga del Tríceps.
Músculos aductores:
Pectoral Mayor.
Dorsal ancho.
Redondo mayor.
Músculos abductores:
Supraespinoso.
Deltoides.
Músculos rotadores internos:
Subescapular.
Pectoral Mayor.
Redondo mayor.
Dorsal ancho.

14 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Músculos rotadores externos:
Infraespinoso.
Redondo menor.
Músculos de la antepulsión horizontal:
Pectoral mayor.
Deltoides anterior.
Coracobraquial.
Subescapular.
Músculos de la retropulsión horizontal:
Deltoides posterior.
Supraespinoso.
Redondo menor.
Redondo mayor.
D. ARTICULACIÓN SUBDELTOIDEA
También denominada articulación suprahumeral o subacromial, no es verdadera sino una articulación funcional. Relaciona la cabeza del húmero con el arco acromiocoracoideo suprayacente. Su relación es sumamente importante en el movimiento normal de la cintura escapular y en ella se asientan numerosos estados patológicos.
Puede ser considerada como una articulación protectora entre la cabeza del húmero y el arco acromiocoracoideo (ligamento acromiocoracoideo). Impide los traumatismos dirigidos desde arriba hacia la articulación glenohumeral o hacia la cabeza del húmero y previene la luxación superior de la misma.
E. ARTICULACIÓN OMOTORÁCICA
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
1) Cara anterior del omóplato
Tapizada por el subescapular.

15 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2) Caras externa y posterior del tórax
De la segunda hasta la séptima costillas.
Entre estas dos superficies, se distingue un músculo que desempeña el papel de “menisco”, el serrato anterior. Ambas superficies de deslizamiento están rodeadas por la aponeurosis de los músculos, hay tejido celular entre los dos. Se distinguen dos espacios:
Espacio interserratotoracico (el mayor).
Espacio interserratoescapular.
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Se considera un plano de deslizamiento o sisarcosis. Analíticamente pueden distinguirse tres tipos de movimientos del omóplato y, por lo tanto, de la cintura escapular: movimientos laterales, movimientos verticales y movimientos de rotación denominados de campanilla. En realidad, estos tres tipos de movimiento están siempre asociados entre sí en diversos grados.
Movimiento de desplazamiento lateral del omóplato: entre ambas posiciones extremas, el plano del omóplato forma un ángulo de 30°-45° (Fig. 9):
Al desplazarse hacia dentro, tiende a orientarse en un plano frontal (derecha).
Al desplazarse hacia fuera, tiende a orientarse en un plano sagital (izquierda).
Ilustración 9. Movimientos de desplazamiento lateral del omóplato.
Movimiento de traslación lateral del omóplato: amplitud total entre ambas posiciones extremas de 15 cm(Fig. 10):
Aducción (flecha azul).
Abducción (flecha roja).

16 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 10. Movimiento de traslación lateral del omóplato.
Movimiento de traslación vertical del omóplato: amplitud total entre ambas posiciones extremas de 10 a 12 cm (Fig. 11):
Elevación (flecha roja).
Descenso (flecha azul).
Ilustración 11. Movimiento de traslación vertical del omóplato.
Movimiento de campanilla o báscula del omóplato: amplitud total entre ambas posiciones extremas de 60° (Fig. 12):
Báscula interna, el ángulo inferior se desplaza hacia dentro, el ángulo supero-externo se desplaza hacia abajo (flecha azul).
Báscula externa, el ángulo inferior se desplaza hacia fuera, el ángulo supero-externo se desplaza hacia arriba (flecha roja).
Ilustración 12. Movimiento de campanilla o báscula del omóplato.
17 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
PARA SABER MÁS
Movimientos reales de la Articulación Omotorácica
Actualmente, se sabe que durante los movimientos del miembro superior, los movimientos elementales de la escapulotorácica, se combinan en grados variables.
Músculos motores
Esquemáticamente, se desarrolla de la siguiente manera:
Aducción:
Romboides.
Trapecio medio.
Abducción:
Serrato mayor.
Pectoral menor.
Elevación:
Trapecio superior.
Angular.
Romboides.
Descenso:
Pectoral menor.
Dorsal ancho.
Serrato mayor (fibras inferiores).
Trapecio inferior.
Subclavio.
Báscula interna:
Angular.
Trapecio inferior.
Pectoral menor
Romboides (parte inferior)
Subclavio.
Báscula externa:
Trapecio superior.
Serrato mayor.
Redondo mayor.
18 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
F. ARTICULACIÓN ESTERNOCOSTOCLAVICULAR
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
En el manubrio esternal, la escotadura esternal está prolongada hacia caudal por el borde superior del primer cartílago costal. Presentan una curvatura doble: una cóncava en el plano frontal del borde interno de la clavícula y otra convexa en el plano sagital de la superficie esternocostal. Entre estas 2 superficies articulares hay un fibrocartílago, a veces perforado en su centro. Tiene la forma de silla de montar.
Medios de unión
1) Cápsula articular
Se inserta sobre el perímetro de la articulación, sobre el menisco y los ligamentos.
2) Ligamentos
La cápsula está reforzada por tres ligamentos esternoclaviculares; anterior, superior y posterior. Entre las 2 clavículas y el borde craneal del manubrio se localiza el ligamento interclavicular. Y, por último, el ligamento costoclavicular.
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
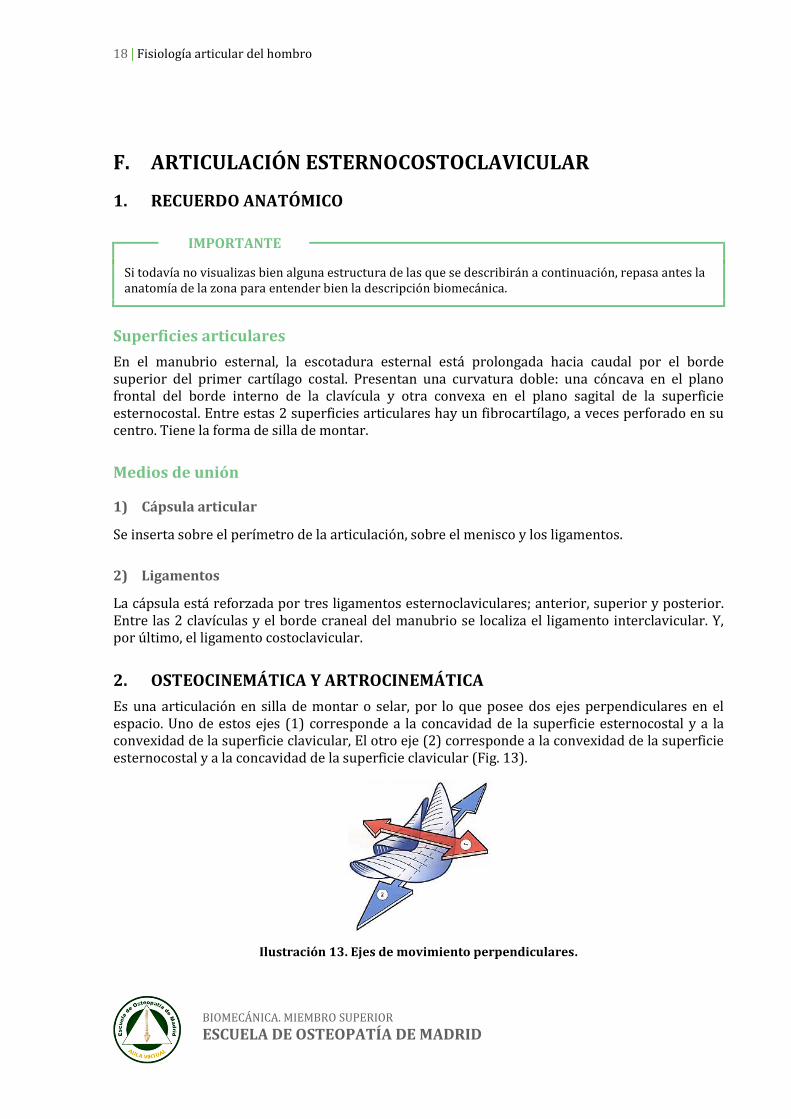
Es una articulación en silla de montar o selar, por lo que posee dos ejes perpendiculares en el espacio. Uno de estos ejes (1) corresponde a la concavidad de la superficie esternocostal y a la convexidad de la superficie clavicular, El otro eje (2) corresponde a la convexidad de la superficie esternocostal y a la concavidad de la superficie clavicular (Fig. 13).
Ilustración 13. Ejes de movimiento perpendiculares.

19 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Los dos ejes de ambas superficies se corresponden con exactitud, al igual que las curvas. Con frecuencia, estas dos superficies articulares no tienen los mismos radios de curva, facilitando la concordancia la existencia de un fibrocartílago (3). Subdivide la articulación en dos cavidades secundarias, que pueden comunicarse o no entre sí, si el fibrocartílago está perforado o no en su parte central.
Esta articulación posee dos grados de libertad, pero mediante la combinación de los dos movimientos básicos, también pueden efectuarse movimientos sobre el eje longitudinal, o rotación conjunta. En el caso de la clavícula, también existen movimientos pasivos de rotación longitudinal (Fig. 14).
En el plano horizontal alrededor de un eje vertical (Y´), oblicuo hacia abajo y afuera (pasando por la parte media del ligamento costoclavicular). Desde el punto de vista estrictamente mecánico, el verdadero eje Y’ de este movimiento es paralelo al eje Y, pero situado dentro de la articulación:
Anteposición: desplazamiento anterior de la extremidad interna de la clavícula, limitado por la tensión de los ligamentos costoclavicular y esterno-costo-clavicular anterior (1).
Retroposición: desplazamiento posterior de la extremidad interna de la clavícula, limitado por la tensión de los ligamentos costo clavicular y esterno-costo-clavicular posterior (2). Siendo la anteposición de la porción externa de la clavícula de 10 cm. y la retroposición de la porción interna de la clavícula de 3 cm.
En el plano frontal alrededor de un eje antero-posterior, oblicuo hacia delante y afuera (X):
Ascenso: la porción externa de la clavícula desciende, su porción interna se desliza hacia arriba y hacia adelante. El movimiento está limitado por la tensión del ligamento costoclavicular y por el tono del músculo subclavio (2). El descenso de la extremidad externa de la clavícula es de 3 cm.
Descenso: la porción externa asciende, su porción interna se desliza abajo y atrás. El movimiento está limitado por la tensión del ligamento superior (4) y por el contacto de la clavícula con la cara superior de la primera costilla. El ascenso de la extremidad externa de la clavícula es de 10 cm.
Movimiento automático: rotación longitudinal de la clavícula Como en todas las articulaciones de dos grados de libertad, la articulación esternocostoclavicular produce una rotación conjunta durante la rotación en torno a dos ejes. Esta rotación longitudinal de la clavícula nunca aparece aislada fuera de un movimiento de elevación-retroposición o descenso-anteposición.
Rotación anterior.
Rotación posterior.

20 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 14. Ejes, movimientos, amplitudes articulares y sistema ligamentario.
G. ARTICULACIÓN ACROMIOCLAVICULAR
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
1) Clavícula
Extremidad externa de la clavícula, superficie elíptica con un eje mayor oblicuo hacia delante y adentro, mira hacia abajo, hacia delante y fuera.
2) Acromion
Tallado en detrimento del borde interno, elíptico, mira hacia arriba y en dentro. Estas dos superficies articulares son planas, cubiertas de cartílago articular.
La clavícula se coloca sobre el acromion. Se observa un menisco que ocupa la parte superior de la interlínea articular.
Medios de unión
1) Cápsula
Se inserta sobre el perímetro de las superficies articulares.
21 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2) Ligamentos
Ligamento acromioclavicular superior e inferior que refuerzan la cápsula.
Ligamentos coracoclaviculares:
Ligamento trapezoide: se inserta sobre la cara inferior de la clavícula y la apófisis coracoides del omóplato.
Ligamento conoide: se inserta sobre el tubérculo conoide de la clavícula y sobre la apófisis coracoides, con forma de abanico situado en un plano frontal.
Ligamento coracoclavicular interno: oblicuo hacia arriba y adentro, se inserta sobre la cara inferior de la clavícula, en la corredera de subclavio.
Ligamento acromiocoracoideo: se inserta sobre la cumbre del acromion y el borde externo de la base de la apófisis coracoides. Forma la bóveda acromiocoracoidea.
La cara superior está en contacto con el deltoides. La cara interna está separada de la articulación por la bolsa serosa subacromiodeltoidea. Inferior a la bóveda acromioclavicular se distingue el músculo supraespinoso.
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Al igual que la esternocostoclavicular, esta articulación está muy solicitada en los movimientos de flexoextensión del complejo articular del hombro debido a la báscula del omóplato. Esto somete a la clavícula a una torsión que, normalmente, se agota en estas dos articulaciones. Por ejemplo, para una amplitud de 180° entre la extensión y la flexión, las articulaciones deben absorber 60° para el juego mecánico, existiendo una diferencia de 30° debida a la rotación conjunta en la articulación esternocostoclavicular.
Por ser una artrodia, realiza movimientos de deslizamiento, acompañados por la rotación automática que realiza la clavícula por su forma de “S”.
Esta articulación se mueve en tres direcciones (estudiadas en el apartado anterior):
Antepulsión-retropulsión.
Elevación-descenso.
Rotación longitudinal pasiva.
Comportamiento de los ligamentos coracoclaviculares.
Cuando se abre el ángulo formado por la clavícula y el omóplato, el ligamento conoide (7) se tensa y limita el movimiento (Fig. 15).

22 Fisiología articular del hombro
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 15. Acción del ligamento conoide.
Cuando se cierra el ángulo formado por la clavícula y el omóplato, el ligamento trapezoide (8) se tensa y limita el movimiento (Fig. 16).
Ilustración 16. Acción de ligamento trapezoide.
Durante el movimiento de rotación axial, en la articulación acromioclavicular se puede constatar la tensión de los ligamentos conoide (7) y trapezoide (8). La amplitud de esta rotación, 30°, se añade a la rotación de 30° de la articulación esternocostoclavicular para posibilitar los 60° de amplitud de los movimientos de campanilla del omóplato.
23 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
II. FISIOLOGÍA ARTICULAR DEL CODO
A. INTRODUCCIÓN
Es la articulación intermedia del miembro superior. Realiza la unión mecánica entre el brazo y el antebrazo. Posibilita acercar o alejar la mano a la boca, por lo que es indispensable para los procesos de alimentación, entre otros.
Anatómicamente, el codo solo contiene una articulación. Sin embargo, la fisiología permite distinguir dos funciones distintas (Fig. 17):
Flexoextensión, que precisa de las articulaciones:
Humerocubital.
Humerorradial.
Pronosupinación: que precisa de las articulaciones:
Humerorradial.
Radiocubital superior.
Radiocubital inferior.
Ilustración 17. Movimientos del codo.
B. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
24 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
1. Superficies articulares
Constituido por tres huesos, la extremidad inferior del húmero, la extremidad superior del radio y del cúbito. Están reunidos por una única cavidad articular, con una cápsula articular y una membrana sinovial común.
Anatómicamente existe una única articulación, fisiológicamente existen tres:
Articulación humerocubital (flexión-extensión).
Articulación humerorradial (flexión-extensión y pronosupinación).
Articulación radiocubital superior (pronosupinaciónjunto con la radiocubital inferior).
Húmero
La paleta humeral soporta entre sus dos ramas el eje de las superficies articulares. Están reforzadas lateralmente por el epicóndilo y la epitróclea.
En la parte posterior presenta una fosa olecraniana. En la región anterior, una fosacoronoidea y otra radial. Alojan el olécranon en extensión, el cúbito y el radio en la flexión. Esto otorga mayor grado de movilidad.
El plano de la extremidad inferior tieneun ángulo de 45° con el plano frontal. Esto corresponde a la orientación de la cavidad sigmoidea mayor. Permite aumentar el espacio para el tejido blando de la zona y facilita la flexión de 180° y 0° de extensión. Además, existe un valgo fisiológico de unos 10°.
Se distingue, de lateral a medial:
Cóndilo humeral: esférico, convexo y elipsoidal, su radio crece de proximal a distal. Está presente en la cara anterior y presenta un desarrollo angular de 180°. Está coronado por la fosa radial.
Tróclea o capítulo humeral: es una polea similar aun diábolo, cuyo eje mayor es transverso. Se observan dos superficies convexas, la superficie interna es más ancha, larga, sobresaliente y desciende distalmente respecto a la externa.
Ambas superficies están separadas por una garganta. En la región posterior es oblicua hacia arriba y hacia fuera. En su región anterior es vertical, a veces oblicua hacia arriba y hacia fuera, raramente oblicua hacia arriba y hacia dentro. Dependiendo de esta orientación, la resultante del movimiento podrá variar ligeramente. Está coronada anteriormente por la fosa coronoidea.
Radio
Cúpula radial: es una superficie ovalada, cóncava hacia arriba, con un eje mayor oblicuo hacia delante y hacia dentro. Presenta un desarrollo angular de 40° en el plano sagital. Se articula con el cóndilo humeral.
Contorno: superficie cilíndrica, convexa en un plano horizontal y ligeramente convexa en un plano vertical. Tiene un desarrollo angular de 360° Se articula con la cavidad sigmoidea menor y la cara interna del ligamento anular.

25 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Cúbito
Cavidad sigmoidea mayor: formada por la cara superior del olécranon y por la apófisis coronoides. Presenta dos vertientes cóncavas que responden a las superficies convexas de la tróclea. Están separadas por una cresta sagital que ocupa de la base del pico olecraniano hacia el pico coronoideo. El desarrollo angular de la cresta es de 190°.
Cavidad sigmoidea menor: sobre la cara externa de la apófisis coronoides, es cóncava hacia fuera, de arriba hacia abajo. Se describe como una porción de cilindro hueco. Presenta un desarrollo angular de 40° anterior a posterior. Se articula con el contorno de la cabeza radial.
Ligamento anular: se inserta sobre los bordes anterior y posterior de la cavidad sigmoidea menor. La cavidad sigmoidea menor y el ligamento anular forman un anillo osteofibroso en el que gira la cabeza radial.
2. Medios de unión
Cápsula
Es fina y laxa anterior y posteriormente (fondos de saco), está muy reforzada lateralmente. Se inserta sobre el perímetro de las superficies articulares, excepto en las fosas radial y coronoidea. Los picos son intraarticulares.
Ligamentos
Los ligamentos laterales son muy potentes.
Ligamento anterior y posterior: refuerzos de la cápsula articular.
Ligamento lateral interno: desde la epitróclea al cúbito en 3 haces:
Haz posterior: se inserta sobre la cara interna del olécranon y a lo largo de su borde anterior
Haz medio: se inserta sobre el tubérculo coronoideo y sobre el borde interno.
Haz anterior: se inserta sobre el borde anterior de la apófisis coronoides y envía fibras sobre el ligamento anular.
Ligamento lateral externo: presenta tres haces que van del epicóndilo:
Haz posterior: se inserta sobre la cara externa del olécranon y a lo largo del borde externo.
Haz medio: se inserta sobre el borde posterior de la cavidad sigmoidea menor, la cabeza radial y se confunde con la terminación del ligamento anular.
Haz anterior: se inserta sobre el borde anterior de la cavidad sigmoidea menor.
Ligamento cuadrado: es una lámina cuadrilátera que se inserta sobre la cara interna del cuello del radio. Presenta fibras humerocubitales en el centro, las anteriores y posteriores son comunes con el ligamento anular.
Membrana interósea: el radio y el cúbito están unidos entre ellos gracias a esta estructura. Es muy potente en su porción anterior. En general, sus fibras son oblicuas hacia abajo y hacia dentro.

26 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Cuerda de Weitbrecht: se inserta debajo de la tuberosidad bicipital y de la apófisis coronoides. Es oblicua en el sentido opuesto a la membrana interósea.
C. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
1. Flexoextensión
Se toma como referencia la posición anatómica en un plano sagital, ya que en ella los ejes del humero y del antebrazo están alineados (no ocurre en el plano frontal).
El movimiento de flexoextensión se desarrolla mecánicamente en la articulación humerocubital, ya que es una tróclea con un grado de libertad. La articulación humerorradial sigue el movimiento, porque es una articulación de tipo condílea
Flexión: se realiza en un plano sagital, alrededor de un eje transversal. Teniendo una amplitud de 140° si se desarrolla de manera activa y de 150° a 160° si se desarrolla de manera pasiva.
Extensión: se realiza en un plano sagital, alrededor de un eje transversal. Sin embargo, no existe una verdadera extensión, aunque podemos decir que fisiológicamente existe una extensión de 5° a 10°, más allá sería un recurvatum (Fig. 18).
Ilustración 18. Movimiento de flexoextensión.
Limitaciones de la flexoextensión
Limitación de la flexión:
Flexión activa:
– Contacto de las masas musculares del compartimento anterior del brazo y del antebrazo, endurecidas por la contracción.
– Impacto óseo.
– Tensión capsular posterior.
Flexión pasiva:
– Las masas musculares sin contraer pueden aplastarse una contra otra de modo que la flexión pasiva sobrepasa los límites de la flexión activa.

27 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
– Impacto de la cabeza radial contra la fosita supracondílea y de la apófisis coronoide contra la fosita supratroclear.
– Tensión de la parte posterior de la cápsula.
– Tensión pasiva del tríceps braquial.
Ilustración 19. Límites de la flexión activa y pasiva.
Limitación de la extensión. Se debe a tres factores:
El impacto del pico olecraneano en el fondo de la fosita olecraneana.
La puesta en tensión de la parte anterior de la cápsula articular.
La resistencia que oponen los músculos flexores.
Si la extensión prosigue, uno de los citados frenos se rompe.
Ilustración 20. Límites de la extensión.
Músculos motores de la flexoextensión
Músculos motores de la flexión: su acción se efectúa según el esquema de las palancas de tercer orden, por lo que la amplitud y la rapidez de los movimientos se efectúan a expensas de su potencia. Son esencialmente tres:

28 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Braquial anterior: se inserta sobre la mitad inferior de la cara externa del húmero y sobre la cara anterior de la apófisis coronoides del cúbito. Su eficacia es máxima a 110° de flexión con pronación.
Braquiorradial (Supinador largo): se inserta sobre el borde externo del húmero y sobre la estiloides radial. Interviene en los movimientos con mucharesistencia y rápidos. Posee un componente radial coaptador. Su brazo de palanca es máximo a 110° en pronosupinación neutra.
Bíceps braquial: presenta una porción larga que se origina en el tubérculo supraglenoideo y una porción corta que se origina en la apófisis coracoides. Se insertan sobre la tuberosidad bicipital del radio en un único tendón común. Su máxima eficacia está en torno a los 95°, aunque depende de la posición del hombro.
Accesoriamente colaboran:
Extensor radial largo del carpo (primer radial externo).
Pronador redondo.
Músculos motores de la extensión.
Tríceps braquial: la porción larga se origina del tubérculo infraglenoideo. Los vastos externo e interno se originan en la cara posterior del húmero por alrededor del surco del nervio radial. Se insertan en un tendón común en la cara superior del olécranon. Su eficacia depende de la posición del hombro y del grado de flexión del codo.
Ancóneo: se inserta sobre la cara posterior del epicóndilo y sobre la cara posterior del cúbito. Bloquea la extensión, tiene un papel de estabilización articular con el pronador redondo.
Accesoriamente colaboran:
Extensor cubital del carpo (Cubital posterior).
Extensor común de los dedos.
2. Pronosupinación
Solo puede analizarse con el codo flexionado 90° y pegado al cuerpo. Si el codo está extendido, el antebrazo se encuentra en la prolongación del brazo y a la rotación longitudinal del antebrazo se añade la rotación del brazo en torno a su eje longitudinal debido a los movimientos de rotación externa-interna del hombro.
Este movimiento necesita la intervención de dos articulaciones mecánicamente unidas:
La articulación radiocubital proximal, que pertenece anatómicamente a la articulación del codo.
La articulación radiocubital distal, que difiere anatómicamente de la articulación radiocarpiana.
Esta rotación longitudinal del antebrazo introduce un tercer grado de libertad en el complejo articular de la muñeca. Permite que la mano se sitúe en cualquier ángulo para poder agarrar o sostener un objeto (Fig. 21).

29 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
La posición de supinación (flecha roja) se realiza cuando la palma de la mano se dirige hacia arriba con el pulgar hacia fuera, siendo su amplitud de 90°.
Como la posición habitual del miembro superior es a lo largo del cuerpo con el codo flexionado, no existe otra posibilidad de realizar la supinación más que por rotación sobre el eje longitudinal del antebrazo en las articulaciones radiocubitales.
La posición de pronación (flecha azul) se realiza cuando la palma de la mano se dirige hacia abajo y el pulgar hacia dentro, siendo su amplitud de 85º.
La acción de los músculos pronadores puros puede amplificarse con relativa facilidad o bien puede compensarse con una abducción de hombro.
Ilustración 21. Movimiento de pronosupinación.
Eje de la pronosupinación
No existe una, sino varias pronosupinaciones. La más habitual es la que se efectúa sobre un eje que pasa por el radio y en torno al cual giranlos dos huesos. El eje de pronosupinación es un eje sin materializar, variable y evolutivo.
Existen dos factores a tener en cuenta:
La existencia de una pareja funcional entre la articulación radiocubital distal y la articulación radiocubital proximal, debido a su unión mecánica. Por lo que una no puede funcionar sin la otra.
Ambas articulaciones radiocubitales son coaxiales, por lo que su funcionamiento normal necesita que el eje de una sea la prolongación del eje de la otra sobre una misma recta XX’. Pasa por el centro de las cabezas cubital y radial.
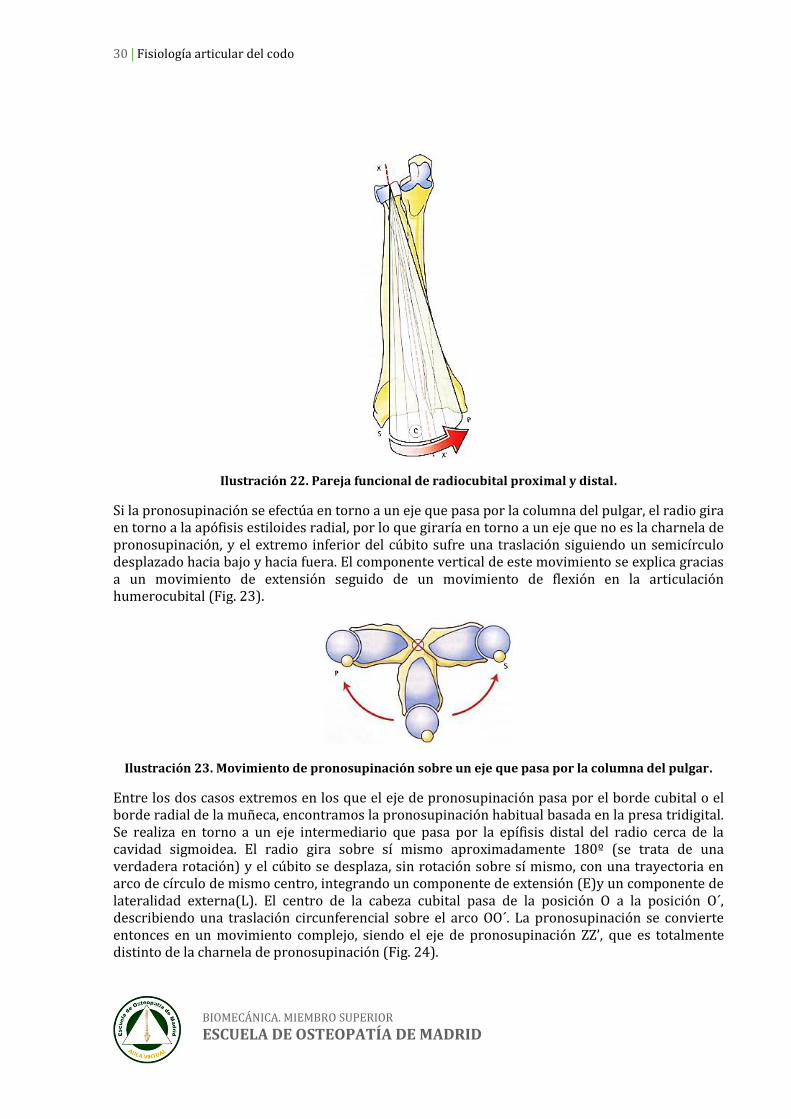
Durante el movimiento del radio en relación al cúbito en torno al eje XX’, común a las dos articulaciones radiocubitales, el radio se desplaza sobre un segmento de superficie cónica, de base inferior y cuyo vértice se sitúa en la articulación humerorradial. Así pues, suponiendo la cabeza cubital fija, la pronosupinación se efectúa por rotación de la epífisis radial distal en torno al eje de la articulación radiocubital distal, que también es el de la articulación radiocubital proximal. Esta situación es la única en la que el eje de pronosupinación se confunde con la charnela de la pronosupinación (Fig. 22).
Cuando existe cualquier tipo de fractura mal reducida en uno o en los dos huesos del antebrazo sus ejes ya no están alineados, esa pérdida de coaxialidad repercute sobre la pronosupinación.
30 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 22. Pareja funcional de radiocubital proximal y distal.
Si la pronosupinación se efectúa en torno a un eje que pasa por la columna del pulgar, el radio gira en torno a la apófisis estiloides radial, por lo que giraría en torno a un eje que no es la charnela de pronosupinación, y el extremo inferior del cúbito sufre una traslación siguiendo un semicírculo desplazado hacia bajo y hacia fuera. El componente vertical de este movimiento se explica gracias a un movimiento de extensión seguido de un movimiento de flexión en la articulación humerocubital (Fig. 23).
Ilustración 23. Movimiento de pronosupinación sobre un eje que pasa por la columna del pulgar.
Entre los dos casos extremos en los que el eje de pronosupinación pasa por el borde cubital o el borde radial de la muñeca, encontramos la pronosupinación habitual basada en la presa tridigital. Se realiza en torno a un eje intermediario que pasa por la epífisis distal del radio cerca de la cavidad sigmoidea. El radio gira sobre sí mismo aproximadamente 180º (se trata de una verdadera rotación) y el cúbito se desplaza, sin rotación sobre sí mismo, con una trayectoria en arco de círculo de mismo centro, integrando un componente de extensión (E)y un componente de lateralidad externa(L). El centro de la cabeza cubital pasa de la posición O a la posición O´, describiendo una traslación circunferencial sobre el arco OO´. La pronosupinación se convierte entonces en un movimiento complejo, siendo el eje de pronosupinación ZZ’, que es totalmente distinto de la charnela de pronosupinación (Fig. 24).

31 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 24. Movimiento de pronosupinación en torno a un eje intermedio.
Dbjay propone una explicación más mecánica: la rotación externa asociada al húmero sobre su eje longitudinal provocaría el desplazamiento externo de la cabeza cubital mientras que el radio gira sobre sí mismo en torno a un centro de rotación localizado en plena apófisis radial (Fig. 25).
Ilustración 25. Movimiento de pronosupinación según Dbjay.

32 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Músculos motores de la pronosupinación2
Músculos motores de la supinación.
Supinador (corto).
Bíceps braquial.
Músculos motores de la pronación.
Pronador cuadrado.
Pronador redondo.
3. Factores de la coaptación articular
Coaptación longitudinal: impide que la articulación del codo en extensión se disloque, bien cuando se ejerce una fuerza en tracción, bien cuando se ejerce una fuerza en compresión.
Resistencia a la tracción longitudinal, garantizando la coaptación gracias a:
– Los ligamentos:
• Ligamento lateral externo.
• Ligamento lateral interno.
– Los músculos:
• Del brazo: tríceps braquial, bíceps braquial, coracobraquial.
• Del antebrazo: braquiorradial (supinador largo), epicondíleos, epitrocleares.
En extensión máxima, el pico del olécranon se engancha en la fosita olecraniana, proporcionando a la articulación humerocubital una cierta resistencia mecánica en sentido longitudinal.
Sin embargo, la articulación radiohumeral está mal dispuesta para resistir las fuerzas de tracción, ya que la cabeza radial se luxa hacia bajo en relación al ligamento anular del radio, siendo la membrana interósea el único elemento que impide el descenso del radio en relación al cúbito.
Resistencia a la compresión: mecánicamente solo intervienen elementos óseos:
– En el radio, la cabeza radial transmite las fuerzas de presión, siendo esta la que se fractura.
– En el cúbito, la apófisis coronoide transmite las presiones. Su fractura permite la luxación posterior del cúbito.
Coaptación en flexión: son distintos los elementos que la garantizan para el cúbito y el radio:
Cúbito:
2 Recordatorio de los músculos motores de la pronosupinación: - Los músculos supinadores son más potentes que los pronadores. - A pesar de su nombre, el músculo supinador largo no es supinador, sino flexor de codo. Siendo supinador a partir de la pronación completa. Paradójicamente, a partir de la supinación completa, es pronador hasta la posición cero. Es más correcto denominarlo según su nomenclatura internacional: braquiorradial.

33 Fisiología articular del codo
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
– Músculo bíceps.
– Músculo braquial anterior.
Radio:
– Ligamento anular del carpo.
Sin embargo, cabe destacar que debido a la acción de tracción del bíceps, el radio tiende a luxarse hacia arriba.

34 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
III. FISIOLOGÍA ARTICULAR DE LA MUÑECA
A. INTRODUCCIÓN
Puede considerarse como un complejo articular porque son varias las articulaciones implicadas. Se consideran dos líneas articulares (Fig. 26):
Una línea proximal (1) o articulación radiocarpiana, constituida por las extremidades distales del radio, cúbito y la primera fila del carpo (escafoides, semilunar, piramidal y pisiforme).
Una línea distal (2) o articulación mediocarpiana, constituida por la primera fila del carpo y la segunda fila (trapecio, trapezoide, hueso grande y hueso ganchoso).
Ilustración 26.
En la mano existen tres radios o columnas (Fig. 27):
Radio externo: Formado por el pulgar e índice, los dos primeros metacarpianos, trapecio, trapezoide, una parte del hueso grande y escafoides.
Radio medio: Que incluye al dedo medio, tercer metacarpiano, hueso grande y semilunar.
Radio interno: Formado por el meñique y anular, los dos últimos metacarpianos, piramidal, hueso ganchoso y pisiforme.

35 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 27.
B. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Debido a que la estiloides cubital es proximal respecto a la radial, aumenta la posibilidad de luxación. La contención está asegurada por dos factores:
El contacto de la apófisis estiloides del radio con los huesos del carpo.
La tensión del ligamento que, tanto en la cara anterior como en la posterior, se extiende desde la escotadura del radio al piramidal. Forman una mortaja donde quedan limitados el hueso semilunar, trapecio y escafoides.
Los ligamentos oblicuos que se extienden desde el radio al piramidal, tanto en la cara anterior como en la posterior, tienen una gran importancia en el mantenimiento de la continuidad articular, evitando que se produzcan luxaciones a nivel de la articulación radiocarpiana.
1. Articulación radiocarpiana
Si se considera la superficie articular proximal de los huesos de la primera fila del carpo como un bloque, estos definen la forma convexa de un cóndilo, por lo que podemos considerar a la articulación radiocarpiana funcionalmente como una articulación condílea (Fig. 28).

36 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 28.
Superficies articulares
Son el cóndilo carpiano y la glenoide antebraquial, formada por las superficies distales del radio y del ligamento triangular.
1) Cóndilo carpiano
En una visión anterior del carpo se aprecia el cóndilo carpiano formado por la yuxtaposición de la cara superior de los tres huesos de la hilera superior; que son, de radial a cubital:
El escafoides (1).
El semilunar (2).
El piramidal (3)
Se encuentran unidos ente si por los ligamentos escafolunar (el) y piramidolunar (pi). Las caras superiores del escafoides, semilunar y piramidal están recubiertas de cartílago, al igual que los ligamentos que unen estos tres huesos entre sí, formando la superficie articular continua del cóndilo carpiano.
Ilustración 29.
37 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2) Glena antebraquial
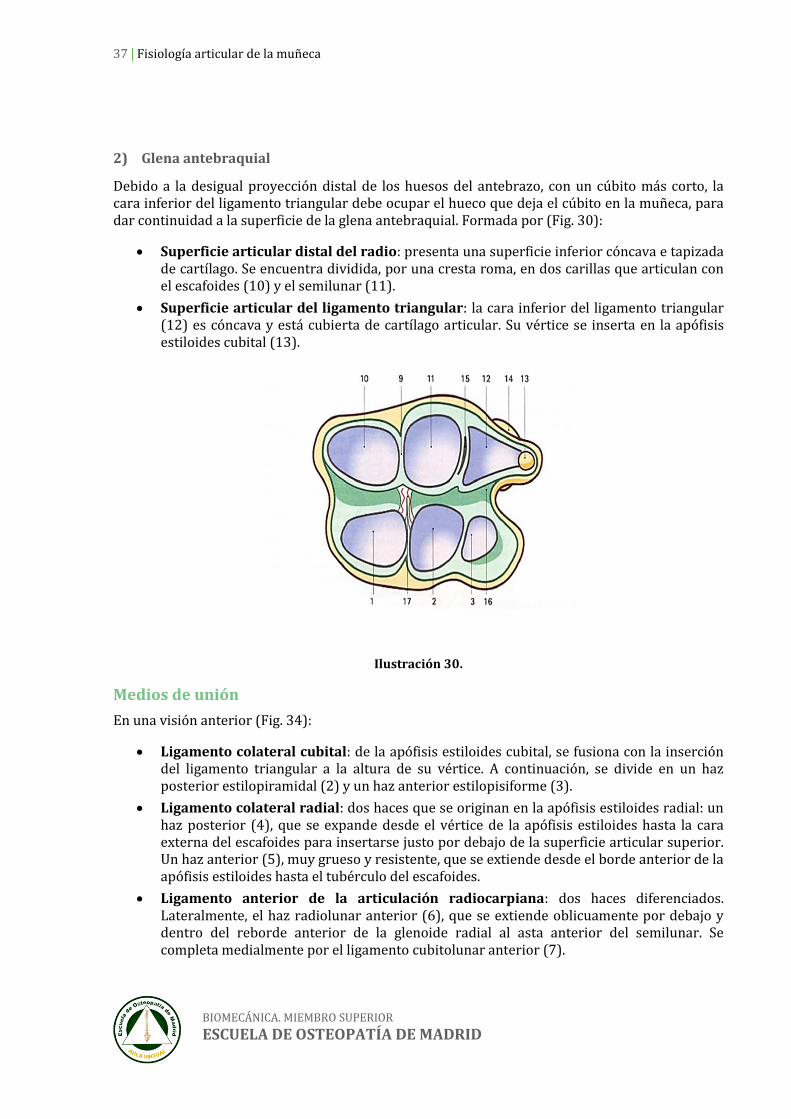
Debido a la desigual proyección distal de los huesos del antebrazo, con un cúbito más corto, la cara inferior del ligamento triangular debe ocupar el hueco que deja el cúbito en la muñeca, para dar continuidad a la superficie de la glena antebraquial. Formada por (Fig. 30):
Superficie articular distal del radio: presenta una superficie inferior cóncava e tapizada de cartílago. Se encuentra dividida, por una cresta roma, en dos carillas que articulan con el escafoides (10) y el semilunar (11).
Superficie articular del ligamento triangular: la cara inferior del ligamento triangular (12) es cóncava y está cubierta de cartílago articular. Su vértice se inserta en la apófisis estiloides cubital (13).
Ilustración 30.
Medios de unión
En una visión anterior (Fig. 34):
Ligamento colateral cubital: de la apófisis estiloides cubital, se fusiona con la inserción del ligamento triangular a la altura de su vértice. A continuación, se divide en un haz posterior estilopiramidal (2) y un haz anterior estilopisiforme (3).
Ligamento colateral radial: dos haces que se originan en la apófisis estiloides radial: un haz posterior (4), que se expande desde el vértice de la apófisis estiloides hasta la cara externa del escafoides para insertarse justo por debajo de la superficie articular superior. Un haz anterior (5), muy grueso y resistente, que se extiende desde el borde anterior de la apófisis estiloides hasta el tubérculo del escafoides.
Ligamento anterior de la articulación radiocarpiana: dos haces diferenciados. Lateralmente, el haz radiolunar anterior (6), que se extiende oblicuamente por debajo y dentro del reborde anterior de la glenoide radial al asta anterior del semilunar. Se completa medialmente por el ligamento cubitolunar anterior (7).
38 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Por dentro, el haz radiopiramidal anterior (8), sus inserciones superiores ocupan la mitad interna del borde anterior de la glenoide y todo el borde anterior de la cavidad sigmoidea del radio, donde se entrecruza con las inserciones radiales del Iigamentoanterior (9) de la articulación radiocubitaldistal. Este ligamento, de forma triangular, fuerte y resistente, se dirige hacia bajo y hacia dentro para insertarse en la cara anterior del piramidal, por fuera de su carilla articular junto con el pisiforme; constituye la parte anterior de la “tira del piramidal”.
En una visión posterior:
Ligamento lateral externo (4) e interno (2), cuyas inserciones están imbricadas con el vértice del ligamento triangular (1).
Ligamento radiocarpiano dorsal: constituido por dos hacesoblicuos hacia bajo y hacia dentro:
El haz radiolunar dorsal (20) o freno posterior del semilunar.
El haz radiopiramidal dorsal (21), cuyas inserciones son más o menos simétricas a las de su homólogo anterior, incluida su unión con la terminación del ligamento posterior de la articulación radiocubital distal (22) sobre el borde posterior de la cavidad sigmoidea del radio.
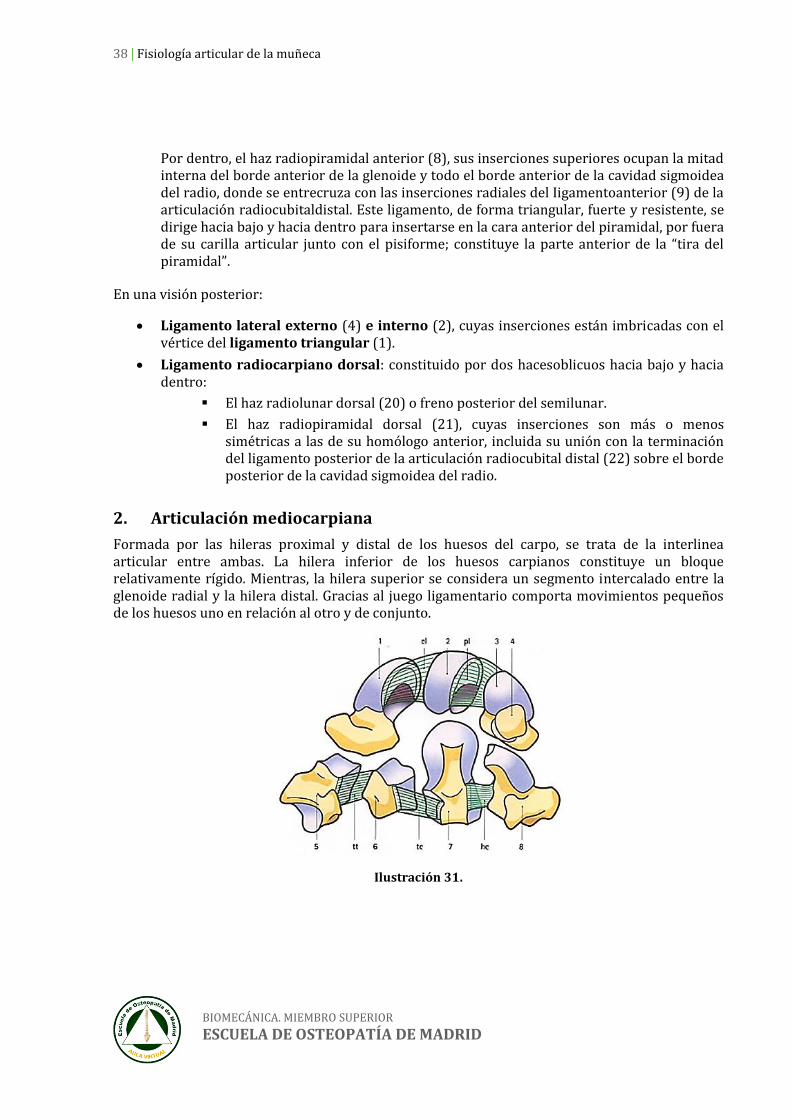
2. Articulación mediocarpiana
Formada por las hileras proximal y distal de los huesos del carpo, se trata de la interlinea articular entre ambas. La hilera inferior de los huesos carpianos constituye un bloque relativamente rígido. Mientras, la hilera superior se considera un segmento intercalado entre la glenoide radial y la hilera distal. Gracias al juego ligamentario comporta movimientos pequeños de los huesos uno en relación al otro y de conjunto.
Ilustración 31.

39 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Superficies articulares
1) Superficie articular proximal
Compuesta por las superficies articulares distales de los huesos escafoides, semilunar y piramidal.
Escafoides: posee dos superficies articulares inferiores claramente diferenciadas, situadas a modo de “V”. A un lado, una carilla para articular con el hueso grande y, al otro lado, otras dos para articular con los huesos trapecio y trapezoide. Estas dos últimas, ligeramente convexas entre sí. La carilla interna para articular con el hueso grande es acentuadamente cóncava.
Ilustración 32. Las superficies articulares mediocarpianas del escafoides: (A) para articular con el trapezoide y (B) para articular con el trapecio, son ligeramente convexas entre sí. La superficie (C)
cóncava, articula con el hueso grande.
Semilunar: posee una carilla inferior cóncava hacia abajo que se articula con la cabeza del hueso grande.
Piramidal: con una carilla cóncava hacia abajo y hacia fuera, que se articula con la cara superior del hueso ganchoso.
El pisiforme, articulado sobre la cara anterior del piramidal, no participa en la constitución de la interlíneamediocarpiana.
2) Superficie articular distal
Está constituida, de radial a cubital, por las carillas superiores de los huesos trapecio, trapezoide, grande y ganchoso (Fig. 33).
Trapecio y trapezoide: sus carillas superiores se articulan con las carillas inferiores del escafoides.
El hueso grande: su cabeza se articula con las superficies del escafoides y semilunar.
El hueso ganchoso: mediante su cara superior, cuya mayor parte se articula con el piramidal y una pequeña carilla (10) que contacta con el semilunar.
40 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
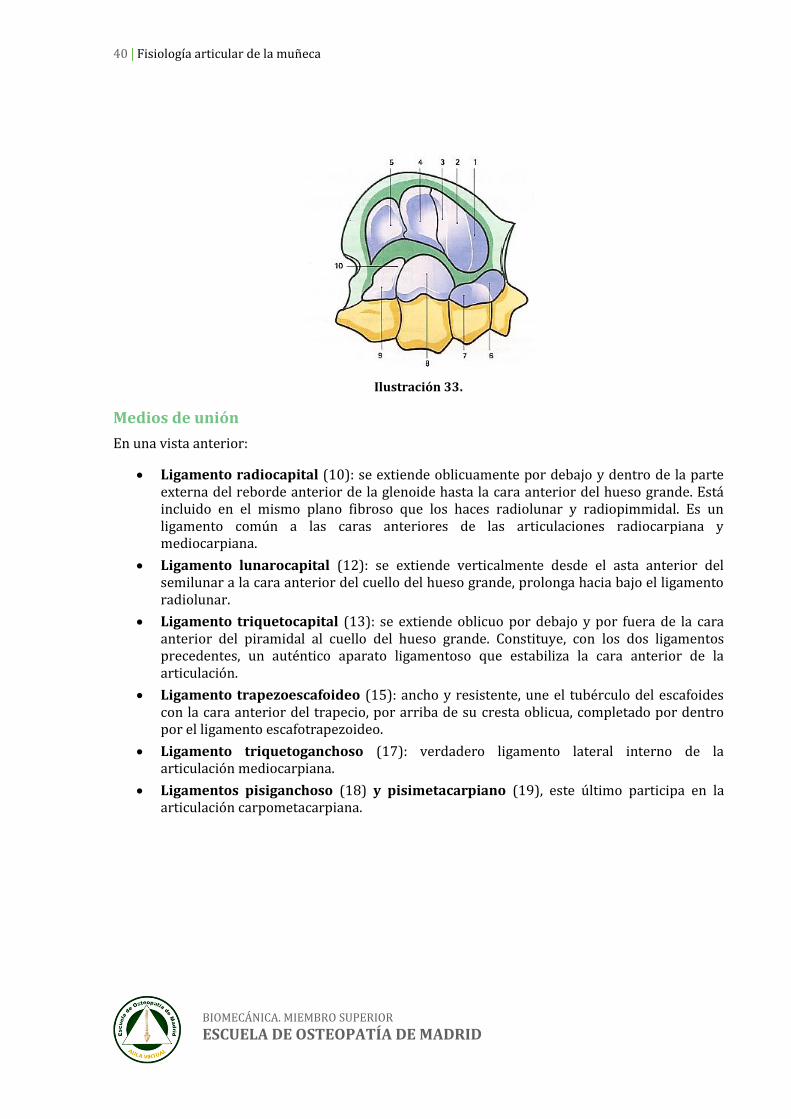
Ilustración 33.
Medios de unión
En una vista anterior:
Ligamento radiocapital (10): se extiende oblicuamente por debajo y dentro de la parte externa del reborde anterior de la glenoide hasta la cara anterior del hueso grande. Está incluido en el mismo plano fibroso que los haces radiolunar y radiopimmidal. Es un ligamento común a las caras anteriores de las articulaciones radiocarpiana y mediocarpiana.
Ligamento lunarocapital (12): se extiende verticalmente desde el asta anterior del semilunar a la cara anterior del cuello del hueso grande, prolonga hacia bajo el ligamento radiolunar.
Ligamento triquetocapital (13): se extiende oblicuo por debajo y por fuera de la cara anterior del piramidal al cuello del hueso grande. Constituye, con los dos ligamentos precedentes, un auténtico aparato ligamentoso que estabiliza la cara anterior de la articulación.
Ligamento trapezoescafoideo (15): ancho y resistente, une el tubérculo del escafoides con la cara anterior del trapecio, por arriba de su cresta oblicua, completado por dentro por el ligamento escafotrapezoideo.
Ligamento triquetoganchoso (17): verdadero ligamento lateral interno de la articulación mediocarpiana.
Ligamentos pisiganchoso (18) y pisimetacarpiano (19), este último participa en la articulación carpometacarpiana.

41 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 34. Vista anterior de los ligamentos de la cara palmar de la muñeca.
En una visión posterior:
Las dos cinchas transversales posteriores del carpo:
La cintilla de la primera hilera (23), se extiende transversalmente desde la cara posterior del piramidal hasta la del escafoides, insertándose en el asta posterior del lunar. Envía una expansión al ligamento lateral externo y una expansión al ligamento radiopiramidal posterior.
La cintilla de la segunda hilera (26) se extiende oblicua por fuera y ligeramente por debajo de la cara posterior del piramidal a la del trapezoide y la del trapecio, pasando por detrás del hueso grande.
Ligamento triquetoganchoso (30): su porción posterior se inserta en la cara posterior del piramidal. De esta forma desempeña, para la parte posterior del carpo, el papel de sujeción ligamentosa atribuido al cuello del hueso grande en su cara anterior.
Ligamento dorsal escafo-trapezo-trapezoide (29).

42 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 35. Ligamentos de la muñeca, cara dorsal.
C. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
La muñeca, en su conjunto, puede ser considerada como una articulación condílea con dos ejes de movimiento:
Transversal, mediante el cual se producen los movimientos de flexo-extensión.
Antero-posterior, mediante el cual se producen los movimientos de abducción-aducción.
La utilización combinada de estos dos ejes permite los movimientos de circunducción. Los dos ejes pasan por la cabeza del hueso grande, que representa el punto o centro geométrico de todos los desplazamientos que existen en esa articulación. Su capacidad de movimiento se añade a la pronosupinación y flexo-extensión de codo, para dar más posibilidades de uso a la mano (Fig. 36).
Ilustración 36.
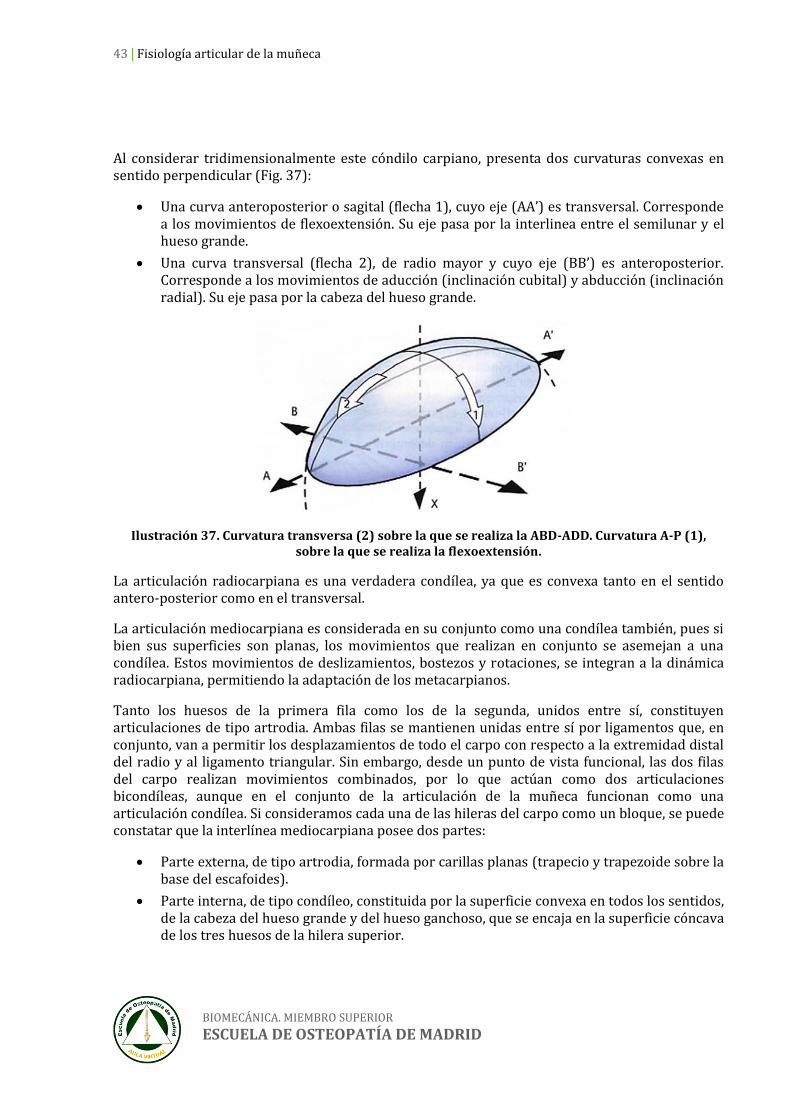
43 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Al considerar tridimensionalmente este cóndilo carpiano, presenta dos curvaturas convexas en sentido perpendicular (Fig. 37):
Una curva anteroposterior o sagital (flecha 1), cuyo eje (AA’) es transversal. Corresponde a los movimientos de flexoextensión. Su eje pasa por la interlinea entre el semilunar y el hueso grande.
Una curva transversal (flecha 2), de radio mayor y cuyo eje (BB’) es anteroposterior. Corresponde a los movimientos de aducción (inclinación cubital) y abducción (inclinación radial). Su eje pasa por la cabeza del hueso grande.
Ilustración 37. Curvatura transversa (2) sobre la que se realiza la ABD-ADD. Curvatura A-P (1), sobre la que se realiza la flexoextensión.
La articulación radiocarpiana es una verdadera condílea, ya que es convexa tanto en el sentido antero-posterior como en el transversal.
La articulación mediocarpiana es considerada en su conjunto como una condílea también, pues si bien sus superficies son planas, los movimientos que realizan en conjunto se asemejan a una condílea. Estos movimientos de deslizamientos, bostezos y rotaciones, se integran a la dinámica radiocarpiana, permitiendo la adaptación de los metacarpianos.
Tanto los huesos de la primera fila como los de la segunda, unidos entre sí, constituyen articulaciones de tipo artrodia. Ambas filas se mantienen unidas entre sí por ligamentos que, en conjunto, van a permitir los desplazamientos de todo el carpo con respecto a la extremidad distal del radio y al ligamento triangular. Sin embargo, desde un punto de vista funcional, las dos filas del carpo realizan movimientos combinados, por lo que actúan como dos articulaciones bicondíleas, aunque en el conjunto de la articulación de la muñeca funcionan como una articulación condílea. Si consideramos cada una de las hileras del carpo como un bloque, se puede constatar que la interlínea mediocarpiana posee dos partes:
Parte externa, de tipo artrodia, formada por carillas planas (trapecio y trapezoide sobre la base del escafoides).
Parte interna, de tipo condíleo, constituida por la superficie convexa en todos los sentidos, de la cabeza del hueso grande y del hueso ganchoso, que se encaja en la superficie cóncava de los tres huesos de la hilera superior.

44 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
La cabeza del hueso grande forma un pivote central sobre el que el hueso semilunar puede bascular lateral y anteroposteriormente.
Ilustración 38. Deslizamiento del semilunar en forma de pivote sobre la cabeza del hueso grande.
La amplitud de los movimientos se mide a partir de la posición anatómica, muñeca alineada, cara dorsal de la mano en la prolongación de la cara posterior del antebrazo. El eje de la mano, representado por el tercer metacarpiano y el tercer dedo, se localiza en la prolongación del eje del antebrazo.
1. Flexión-extensión
Flexión activa: la amplitud es de 85°.
Extensión activa: la amplitud es de 85°.
Como en el caso de los movimientos laterales, la amplitud de los movimientos depende del grado de distensión de los ligamentos del carpo: la flexoextensión es máxima cuando la mano no está ni en abducción ni en aducción.
Durante el movimiento de flexión, la primera fila del carpo se desliza posteriormente; mientras que durante la extensión lo hace hacia delante. La limitación está a cargo de la tensión ligamentaria posterior y anterior respectivamente.
En pronación, la flexión pasiva alcanza los 100°, mientras que la extensión pasiva alcanza fácilmente los 95° tanto en pronación como en supinación.
2. Abducción o inclinación radial
No sobrepasa los 15°, debido a la apófisis estiloides radial, que llega más distal que la homónima cubital.
En los movimientos de abducción y aducción, los desplazamientos son la consecuencia de una adaptación, de la primera y segunda fila del carpo, a la morfología que presenta la extremidad del radio y cúbito.
Cuando se efectúan movimientos de inclinación cubital, la fila proximal del carpo se desvía radialmente. En el movimiento de inclinación radial sucede lo contrario: la primera fila del carpo tiende a escaparse hacia dentro.
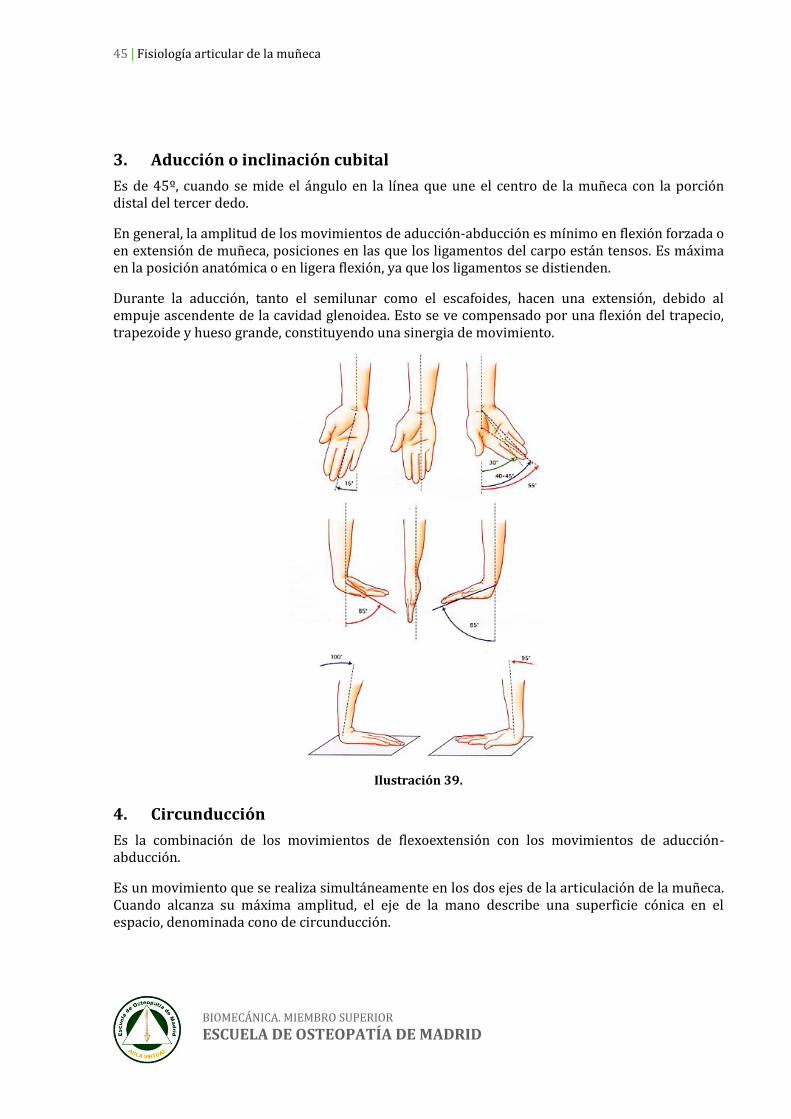
45 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
3. Aducción o inclinación cubital
Es de 45º, cuando se mide el ángulo en la línea que une el centro de la muñeca con la porción distal del tercer dedo.
En general, la amplitud de los movimientos de aducción-abducción es mínimo en flexión forzada o en extensión de muñeca, posiciones en las que los ligamentos del carpo están tensos. Es máxima en la posición anatómica o en ligera flexión, ya que los ligamentos se distienden.
Durante la aducción, tanto el semilunar como el escafoides, hacen una extensión, debido al empuje ascendente de la cavidad glenoidea. Esto se ve compensado por una flexión del trapecio, trapezoide y hueso grande, constituyendo una sinergia de movimiento.
Ilustración 39.
4. Circunducción
Es la combinación de los movimientos de flexoextensión con los movimientos de aducción-abducción.
Es un movimiento que se realiza simultáneamente en los dos ejes de la articulación de la muñeca. Cuando alcanza su máxima amplitud, el eje de la mano describe una superficie cónica en el espacio, denominada cono de circunducción.
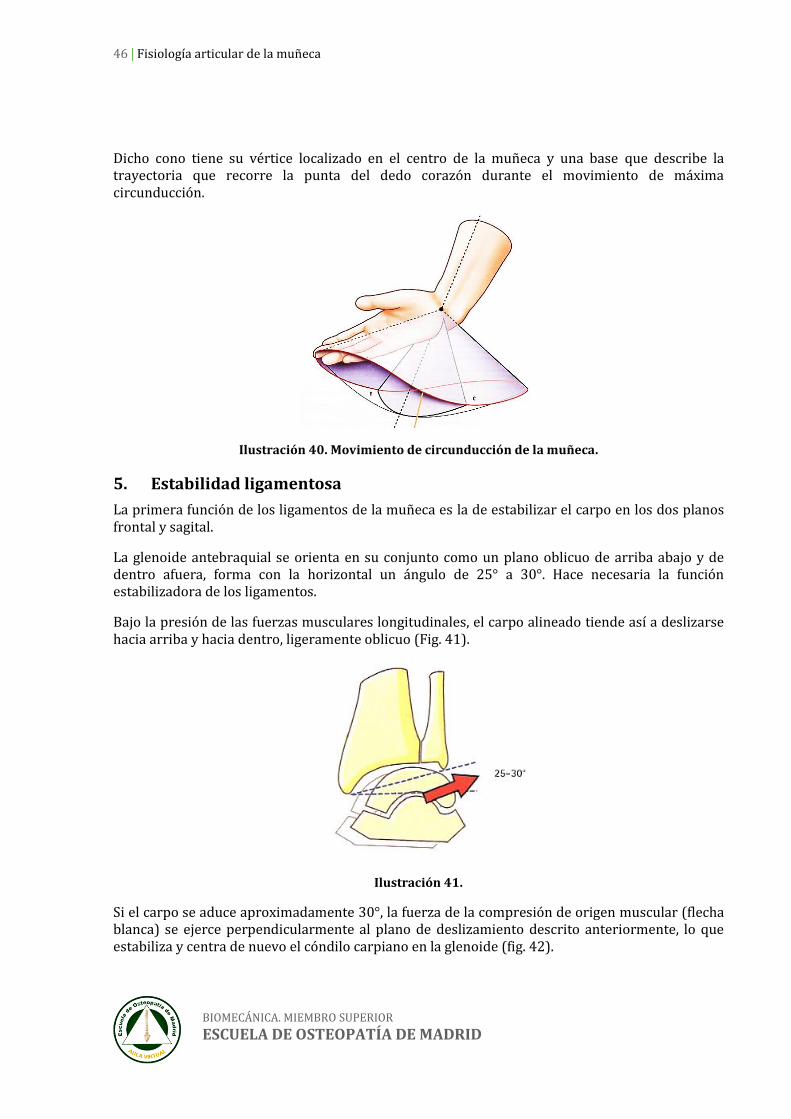
46 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Dicho cono tiene su vértice localizado en el centro de la muñeca y una base que describe la trayectoria que recorre la punta del dedo corazón durante el movimiento de máxima circunducción.
Ilustración 40. Movimiento de circunducción de la muñeca.
5. Estabilidad ligamentosa
La primera función de los ligamentos de la muñeca es la de estabilizar el carpo en los dos planos frontal y sagital.
La glenoide antebraquial se orienta en su conjunto como un plano oblicuo de arriba abajo y de dentro afuera, forma con la horizontal un ángulo de 25° a 30°. Hace necesaria la función estabilizadora de los ligamentos.
Bajo la presión de las fuerzas musculares longitudinales, el carpo alineado tiende así a deslizarse hacia arriba y hacia dentro, ligeramente oblicuo (Fig. 41).
Ilustración 41.
Si el carpo se aduce aproximadamente 30°, la fuerza de la compresión de origen muscular (flecha blanca) se ejerce perpendicularmente al plano de deslizamiento descrito anteriormente, lo que estabiliza y centra de nuevo el cóndilo carpiano en la glenoide (fig. 42).

47 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 42.
Por el contrario, cuando se abduce el carpo, por escaso que sea, la compresión de origen muscular acentúa la inestabilidad y acarrea una tendencia al desplazamiento del cóndilo carpiano hacia arriba y hacia dentro (flecha roja, fig. 43).
Ilustración 43.
D. MÚSCULOS MOTORES
El conjunto de tendones de los músculos de la muñeca y de los músculos extrínsecos de los dedos conforman una “jaula” estabilizadora de la integridad morfológica de la muñeca. Los elementos musculares que intervienen son los que se insertan en la articulación de la muñeca o que pasan por ella para dirigirse a otras estructuras.
En la cara anterior están todos los músculos flexores. En la cara dorsal se encuentran los extensores y los músculos correspondientes al pulgar.

48 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
1. Músculos de la cara palmar
Flexor radial del carpo (1): pasa bajo el ligamento anular anterior del carpo, se inserta en la cara anterior de la base del segundo metacarpiano, y de manera accesoria, en el trapecio y base del tercer metacarpiano.
Palmar largo (2): mezcla sus fibras verticales con las fibras transversales del ligamento anular anterior del carpo y envía cuatro cintillas pretendinosas que se insertan en la cara profunda de la dermis de la palma de la mano.
Ambos músculos flexionan y abducen la muñeca.
Flexor cubital del carpo (3): tras pasar delante de la apófisis estiloides cubital, se inserta en el polo superior del pisiforme y, de manera accesoria, en el ligamento anular, hueso ganchoso y el cuarto y quinto metacarpianos.
Ilustración 44. Visión de los músculos motores de la cara palmar de la muñeca.
2. Músculos de la cara dorsal
Extensor cubital del carpo (4): tras pasar por detrás de la apófisis estiloides cubital, se inserta en la cara posterior del quinto metacarpiano.
Extensores radiales corto (5) y largo (6) del carpo: tras haber recorrido la parte superior de la tabaquera anatómica, se insertan, el largo en la base del segundo metacarpiano y el corto en la base del tercer metacarpiano.
Ambos son extensores y abductores de la muñeca.
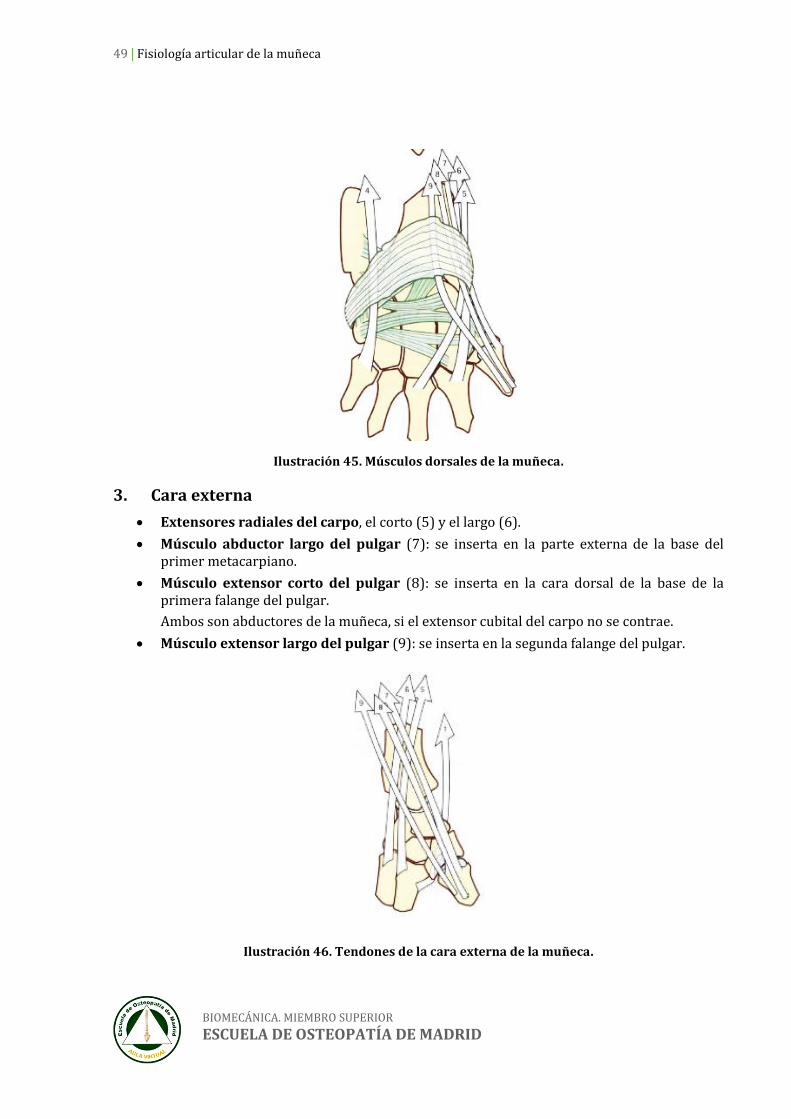
49 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 45. Músculos dorsales de la muñeca.
3. Cara externa
Extensores radiales del carpo, el corto (5) y el largo (6).
Músculo abductor largo del pulgar (7): se inserta en la parte externa de la base del primer metacarpiano.
Músculo extensor corto del pulgar (8): se inserta en la cara dorsal de la base de la primera falange del pulgar.
Ambos son abductores de la muñeca, si el extensor cubital del carpo no se contrae.
Músculo extensor largo del pulgar (9): se inserta en la segunda falange del pulgar.
Ilustración 46. Tendones de la cara externa de la muñeca.

50 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
4. Cara interna
Músculo flexor cubital del carpo (3): su eficacia sobre el carpo aumenta gracias al brazo de palanca que constituye el pisiforme.
Es flexor de la muñeca y del quinto meta sobre el carpo mediante sus expansiones. También realiza la aducción de la mano.
Músculo extensor cubital del carpo (4): extiende simultáneamente la muñeca y aduce la mano
Ambos tendones delimitan la apófisis estiloides cubital.
Ilustración 47. Tendones de la cara interna de la muñeca.
Resumen de la disposición de los tendones de la muñeca según figura 48:
Flexor cubital del carpo.
Flexor radial del carpo.
Palmar largo.
Extensor radial largo del carpo.
Extensor radial corto del carpo.
Extensor cubital del carpo.
Flexor profundo de los dedos.
Extensor común de los dedos.
Abductor largo del pulgar.
Extensor corto del pulgar.
Extensor largo del pulgar.
Flexor superficial de los dedos.
Flexor largo del pulgar.
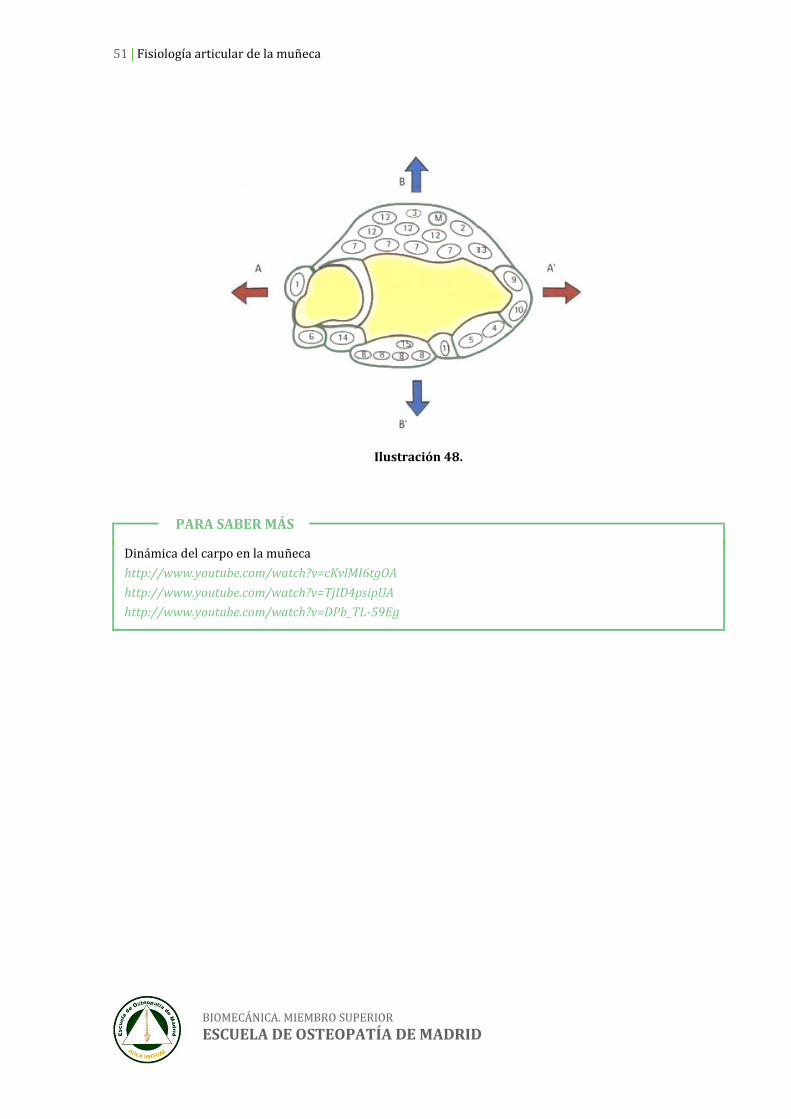
51 Fisiología articular de la muñeca
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 48.
PARA SABER MÁS
Dinámica del carpo en la muñeca
http://www.youtube.com/watch?v=cKvlMI6tgOA
http://www.youtube.com/watch?v=TjID4psipUA
http://www.youtube.com/watch?v=DPb_TL-59Eg

52 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
IV. FISIOLOGÍA ARTICULAR DE LA MANO
A. INTRODUCCIÓN
Es el segmento distal del miembro superior. Es un segmento poliarticular que presenta veinticuatro articulaciones y treinta y cuatro músculos movilizadores.
Es capaz de realizar innumerables acciones por la capacidad de prensión. Está presente en numerosas extremidades en el reino animal, aunque en el caso de la mano humana alcanza un alto grado de refinamiento y versatilidad. Reside en la extraordinaria capacidad del pulgar humano para oponerse a los demás dedos.
El miembro superior es el vector y sostén logístico de la mano. Sin ella, el miembro superior limita claramente su funcionalidad.
Ilustración 49. Movimiento de oposición del pulgar.
Desde un punto de vista neurofisiológico, la mano es un eficaz órgano efector, que adapta su forma y posición a las necesidades del individuo, así como un potente órgano sensitivo, que recoge datos para realizar un feedback de la propia acción.
A nivel motor, en la circunvolución frontal ascendente (áreas 4 y 6 de Brodman) existe una representación de los músculos en función de su importancia (homúnculo de Penfield). Es voluntario: existe una somatotopía cortical de la mano. Se distinguen cuatro funciones motrices:
Alimentación: tomar los alimentos y poder llevarlos a la boca, algo simple pero fundamental para la supervivencia y el buen estado de salud.
Cuidado personal: higiene y reconocimiento del propio cuerpo.
Trabajo: realización de innumerables tareas, desde la realización de herramientas y armas de defensa o caza, hasta su utilización.
Relación con el mundo exterior: emociones, mímica y expresión corporal.

53 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
A nivel sensorial, la mano es un órgano sensitivo excepcional. Permite el desarrollo del sentido del tacto, adquiriendo multitud de sensaciones. Adquiere información sobre el volumen y la profundidad del espacio que nos rodea, en un proceso de feedback constante con el sentido de la vista, que obtiene sus primeras nociones de estas variables espaciales por la palpación.
Los receptores exteroceptivos (táctiles) presentes en la mano son numerosos:
Receptores de Meisner: tacto epicrítico (dermis).
Discos de Merckel: tacto epicrítico (dermis).
Corpúsculos de Pacini: sensibles a las presiones (hipodermis).
Corpúsculos de Krause: sensibles al frío (dermis).
Corpúsculos de Ruffini: sensibles al calor (dermis).
Terminaciones nerviosas libres: sensibles al dolor (epidermis).
B. ARQUITECTURA DE LA MANO
La mano puede adaptar su forma global para agarrar o contactar con casi cualquier superficie. Si se pretende agarrar un objeto voluminoso, la mano puede ahuecarse. Se forman entonces tres arcos orientados en las tres direcciones del espacio.
1. Arcos transversales
De concavidad anterior y con un gran eje longitudinal. Cada arco carpiano se continua distalmente con su arco metacarpiano, en el cual se alinean las cabezas de los metas. El eje longitudinal del conducto carpiano pasa por el semilunar, el hueso grande y el tercer metacarpiano.
Arco carpiano
Es un canal por el ligamento anular. Corresponde a la concavidad del macizo carpiano.
Presenta dos márgenes:
Margen interno constituido por el pisiforme y la apófisis unciforme.
Margen externo constituido por el tubérculo del trapecio y el escafoides.
Arco metacarpiano
Hacia abajo, constituido por los cuatro metacarpianos internos. Es bastante móvil, para adaptarse adecuadamente a la movilidad articular entre el carpo y la base de los cuatro últimos metacarpianos.
Para el segundo, tercero y cuarto dedos, las articulaciones son artrodias (flexión-extensión). La articulación entre la base del quinto metacarpiano y el hueso ganchoso es la articulación más móvil, permite movimientos de flexión-extensión, aducción-supinación en flexión, abducción-pronación en extensión.

54 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2. Arcos longitudinales
Poseen una concavidad anterior y un gran eje transverso. Son los arcos carpometacarpofalángicos, de disposición radiada desde el macizo carpiano hasta la punta de los dedos. Formados en cada dedo por el metacarpo y las falanges correspondientes. El punto clave de la bóveda de los arcos longitudinales se encuentra en la articulación metacarpofalángica.
Se distinguen cuatro arcos carpometacarpofalangicos que provocan una apertura o un cierre del puño. De estos, los más importantes son:
El arco del segundo dedo (índice), oponente más frecuente del pulgar en la acción de pinza.
El arco del tercer dedo, que prolonga el eje del conducto carpiano.
Ilustración 50. Los arcos trasversales, longitudinales y oblicuos permiten ahuecar la mano para adaptarla a objetos voluminosos.
3. Arcos oblicuos o diagonales
Es el eje de la oposición a los otros dedos (pulgar). Los más importantes son el que reúne y opone el pulgar con el índice y entre el pulgar y el meñique.
C. ESTUDIO DE LA MANO
Todos los dedos se construyen, excepto el pulgar, sobre el mismo esquema, son eslabones articulares digitales de cuatro piezas óseas:
Metacarpiano.
Primera falange.
Segunda falange.
Tercera falange.
55 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Para el estudio de la movilidad se consideran cuatro articulaciones, del segundo al quinto dedos de la mano:
Carpometacarpiana.
Metacarpofalángica.
Interfalángica proximal, entre la primera y la segunda falange.
Interfalángica distal, entre la segunda y la tercera falange.
D. ARTICULACIONES CARPOMETACARPIANAS
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Son los puntos de articulación entre los huesos de la fila distal del carpo y la base de los cuatro metacarpianos. Forman junto con la fila distal de los huesos del carpo, una articulación común que presenta una línea articular regular.
En conjunto, son articulaciones sinoviales planas, de tipo artrodia. La única excepción son:
La unión del ganchoso con el quinto metacarpiano. Es una artrodia cortada en oblicuo, es decir, biselada. Esto obliga al quinto dedo a hacer flexión con aproximación y supinación asociadas.
El primer dedo, en el que la unión trapezometacarpiana es una articulación de encaje recíproco.
La articulación carpometacarpiana es muy estable y proporciona una base firme entre las articulaciones de la muñeca y de la mano
Superficies articulares
La base del segundo metacarpiano se ajusta en el receso formando por el lado medial el trapecio, la superficie distal del trapezoide y la esquina anterolateral del hueso grande.
La base del tercer metacarpiano se articula únicamente con la superficie distal del hueso grande.
La base del cuarto metacarpiano se articula sobre todo por la superficie distal anterolateral del hueso ganchoso pero también llega a alcanzar la esquina anteromedial del hueso grande.
La base del quinto metacarpiano se apoya en la porción anteromedial de la superficie distal del ganchoso.

56 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Medios de unión
1) Cápsula
Una cápsula fibrosa rodea la articulación común. Es posible identificar distintos espacios capsulares. La membrana sinovial recubre la cápsula y todas las superficies no articulares y se inserta en los bordes no articulares. La cavidad articular se extiende proximalmente entre los huesos del cuerpo y suele comunicarse con la articulación metacarpiana.
En sentido distal, el espacio articular se extiende entre los cuatro metacarpianos mediales.
2) Ligamentos
Los ligamentos carpometacarpianos dorsales y palmares son engrosamientos de la cápsula articular.
Ligamentos carpometacarpianos dorsales: presentan una serie de bandas fibrosas que se extiende desde la fila distal desde los huesos del carpo hasta la base metacarpiano. Por lo general, cada metacarpiano recibe dos bandas. Aquellas que llegan hasta el segundo metacarpiano, van del trapecio al trapezoide. Las que llegan al tercer metacarpiano van desde el trapecio hasta el hueso grande y las que llegan al cuarto metacarpiano van del hueso grande al ganchoso. La base del quinto metacarpiano recibe sólo una única banda que surge del ganchoso.
Ligamentos carpometacarpianos palmares: la suposición de las bandas fibrosas que los constituyen es parecida a los ligamentos dorsales, excepto porque la base del tercer metacarpiano recibe tres bandas que surgen de los huesos trapezoide, grande y ganchoso.
Ligamento interóseo: suele haber un ligamento interóseo corto que discurre desde los ángulos inferiores adyacente de los husos grandes y ganchosos hasta la base del tercer o cuarto metacarpiano o de ambos. En ocasiones el ligamento divide el espacio articular en los compartimientos medial y lateral.
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Existe escaso movimiento de las articulaciones carpometacarpianas de los dedos, lo cual genera una base sólida para las articulaciones distales, mucho más móviles.
Las articulaciones carpometacarpianas presentan deslizamientos en dos ejes.
Un eje transversal a través de los huesos carpianos, para el movimiento de flexión extensión
Un eje sagital a través de los huesos carpianos, para el movimiento de inclinación lateral.
Se puede producir un ligero grado de deslizamiento anteroposterior entre la base del metacarpiano y el hueso carpiano adyacente, si se aplica la presión adecuada.

57 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
E. ARTICULACIONES METACARPOFALÁNGICAS
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
1) Cabeza del metacarpiano
Es una porción de elipsoide convexa en ambos sentidos, más extensa y ancha por delante que por detrás. Presenta asimetría en el plano sagital porque es más plana del lado cubital que del radial. Su desarrollo angular es de 180°.
Ilustración 51. Eje transverso sobre el que se articula la flexoextensión en la cabeza de los metas.
2) Base de la primera falange
Posee una superficie excavada llamada cavidad glenoidea, cóncava en ambos sentidos y de menor superficie que la cabeza del metacarpo.
Es una porción elipsoide cóncava que está más desarrollada en sentido frontal que anteroposterior. Presenta un desarrollo angular de 30°.
Muestra una buena congruencia en el plano frontal y una débil congruencia en el plano sagital, lo que provoca que sea una articulación inestable.
3) Fibrocartílago glenoideo
Llamado placa cartilaginosa, anexada a la cavidad glenoidea y fijado en la cara palmar de la base de la primera falange Está aplicado contra la parte anterior de la cabeza del metacarpiano.
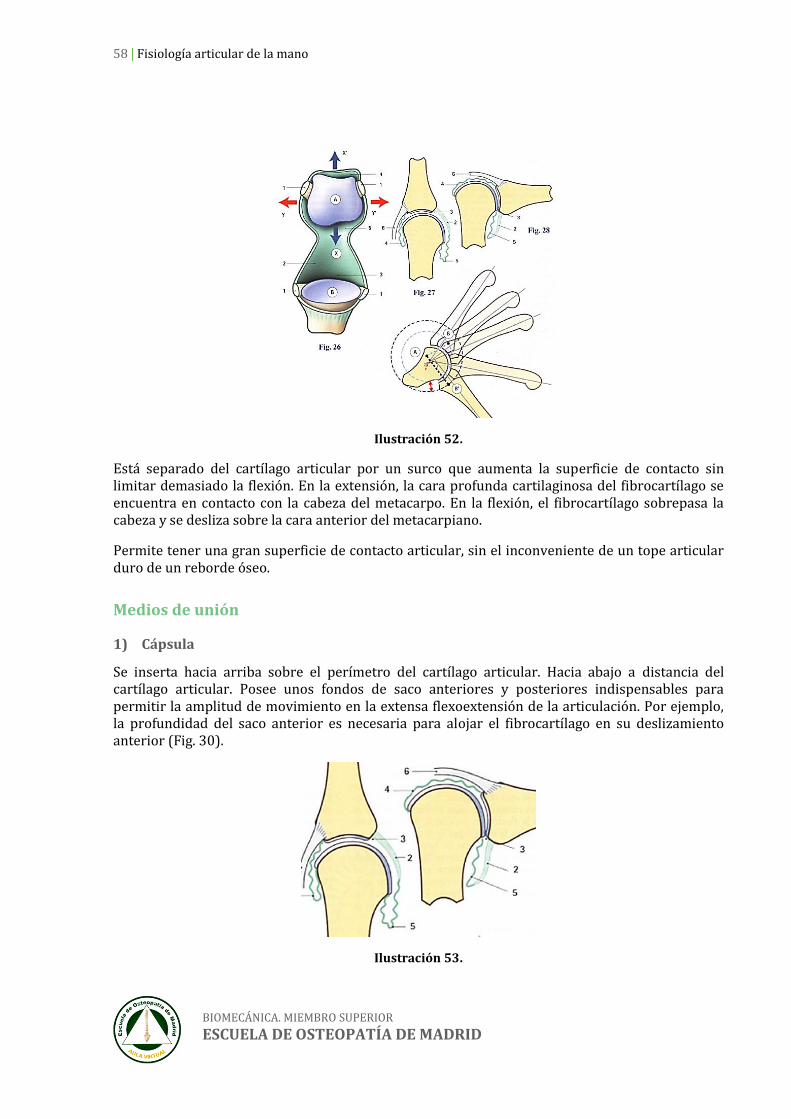
58 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 52.
Está separado del cartílago articular por un surco que aumenta la superficie de contacto sin limitar demasiado la flexión. En la extensión, la cara profunda cartilaginosa del fibrocartílago se encuentra en contacto con la cabeza del metacarpo. En la flexión, el fibrocartílago sobrepasa la cabeza y se desliza sobre la cara anterior del metacarpiano.
Permite tener una gran superficie de contacto articular, sin el inconveniente de un tope articular duro de un reborde óseo.
Medios de unión
1) Cápsula
Se inserta hacia arriba sobre el perímetro del cartílago articular. Hacia abajo a distancia del cartílago articular. Posee unos fondos de saco anteriores y posteriores indispensables para permitir la amplitud de movimiento en la extensa flexoextensión de la articulación. Por ejemplo, la profundidad del saco anterior es necesaria para alojar el fibrocartílago en su deslizamiento anterior (Fig. 30).
Ilustración 53.

59 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2) Ligamentos
Ligamentos laterales: el ligamento lateral externo es más largo que el ligamento lateral interno. Están constituidos cada uno de dos haces gruesos y muy resistentes que nacen del tubérculo lateral de la cabeza de metacarpiano:
Haz metacarpofalangico, que finaliza sobre el tubérculo lateral de la primera falange.
Haz metacarpoglenoideo, que finaliza sobre el fibrocartílago glenoideo.
Los haces metacarpofalángicos están relajados en extensión y se tensan en flexión.
Ilustración 54. Imagen de los ligamentos laterales de la articulación metacarpofalángica.
Ligamento transverso intermetacarpiano palmar: extendido del segundo hasta el quinto metacarpiano, une los cuatro fibrocartílagos glenoideos de las cuatro metacarpofalángicas de los dedos.
Ilustración 55. Ligamento transverso intermetacarpiano (4).

60 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Es la articulación más importante de cada dedo. Representan un cóndilo, con dos grados de libertad de movimiento3:
Flexión y extensión, en el plano sagital, respecto de un eje transversal.
Inclinación lateral en el plano frontal, respecto de un eje anteroposterior.
Flexión
La posición de referencia es la alineación del metacarpiano y de la primera falange. Es el movimiento que lleva la primera falange hacia delante del plano frontal.
La flexión de las metacarpofalángicas se acompaña de una ligera inclinación cubital. Es debido a la asimetría de longitud de los ligamentos laterales y a la asimetría de las cabezas de los metacarpianos.
1) Amplitud
Las amplitudes van aumentando del índice al quinto dedo.
90° para el 2º dedo.
100° para el 3º dedo.
110° para el 4º dedo.
120° para el 5º dedo.
2) Límites
Tensión del tendón extensor y de la cápsula posterior.
Tensión de los ligamentos laterales, garantizan la estabilidad de la articulación.
La flexión aislada de una metacarpofalángica está limitada por el ligamento transverso intermetacarpiano y por el ligamento palmar interdigital (piel entre los dedos).
Extensión
1) Amplitud
Activo: 20° a 30°.
Pasivo: 60° a 100°.
La amplitud de la extensión tanto activa como pasiva varía mucho entre distintos individuos, de ahí que las horquillas de movilidad sean tan amplias.
3 Para Rouviére y Castaing es una enartrosis.

61 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2) Límites
Tensión de los tendones flexores, y de la cápsula anterior.
Tensión de los ligamentos glenoideos.
En la extensión de la articulación metacarpofalángica, los ligamentos laterales están distendidos y equilibrados, lo que permite los movimientos de lateralidad, mientras que el otro se distiende.
3) Músculos motores
Los músculos interóseos son los motores de estos movimientos.
Ilustración 56. Movimiento lateral en el plano frontal a partir de la posición de extensión. Un ligamento lateral se distiende mientras el otro se tensa.
Abducción-aducción
Se articula en torno a un eje anteroposterior que pasa por el centro de la cabeza del metacarpiano. Se refiere al eje de la mano, el tercer metacarpiano: la abducción separa los dedos del quinto dedo, que está fijo. La aducción es el movimiento que acerca los dedos al quinto dedo.
El movimiento de separación de los dedos es posible únicamente en extensión, debido a la insuficiencia activa funcional de los interóseos y pasivamente debido a la tensión del ligamento lateral interno y el ligamento lateral externo.
1) Amplitud
20° a 30°.
2) Límites
Tensión de los interóseos opuestos.
Tensión de los ligamentos laterales opuestos.
Rotación axial de la primera falange
Es imposible activamente, pero posible pasivamente (45° y 22° de cada lado). Permite los movimientos de rotación.

62 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 57. Flexión, extensión y ABD-ADD activas, extensión pasiva de las art. metacarpofalángicas.
F. ARTICULACIONES INTERFALÁNGICAS
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
1) Cabeza de la falange proximal
Tiene la forma de una pequeña polea con una garganta anteroposterior que separa a dos cóndilos pequeños. Tiene mayor superficie en la cara palmar. Presenta un desarrollo angular de 180°.

63 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 58. Cabeza de la falange proximal.
2) Base de la falange distal
Tiene una superficie con una cresta media que separa las dos cavidades glenoideas que se corresponden con las prominencias de la tróclea de la cabeza de la falange proximal. De esta forma, la cresta que sobresale de la superficie articular de la base se encaja en el surco en forma de polea de la cabeza. Presenta un desarrollo angular de 90°.
Al igual que la articulación metacarpofalángica, posee un fibrocartílago glenoideo que permite aumentar la amplitud articular, sin topes óseos prominentes. Durante la flexión este fibrocartílago se desliza sobre la cara anterior de la falange proximal.
Ilustración 59. Articulación interfalángica. Cresta de la base (B). Encaja a modo de troclea en el surco de la cabeza(A)
Medios de unión
1) Cápsula
La cápsula, los ligamentos y la membrana sinovial poseen las mismas características que las articulaciones metacarpofalángicas proximales.

64 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2) Ligamentos laterales
Ligamento lateral externo y ligamento lateral interno siempre están bajo tensión en flexión y en extensión, más que en el caso de las metacarpofalángicas. Durante la flexión, por lo tanto, estos ligamentos no permitirán los movimientos de lateralidad.
En la extensión máxima también aportan estabilidad a la articulación mediante su puesta en tensión. Solo durante la semiflexión se distienden.
Ilustración 60. La tensión de los ligamentos laterales durante la flexión estabiliza la articulación.
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Estas articulaciones son de tipo troclear, con un solo grado de libertad de. La tróclea interfalángica permitirá de manera activa los movimientos de flexión y extensión en un eje oblicuo hacia abajo y hacia fuera. Esta oblicuidad aumenta progresivamente del tercer al quinto dedo.
La flexión de las interfalángicas se acompaña de una ligera desviación radial. De forma pasiva, las interfalángicas pueden ser movilizadas en deslizamiento lateral (mínimo) y rotación axial.
Flexión
Es el movimiento que lleva a la falange distal hacia delante del plano frontal.
1) Amplitud
En las articulaciones interfalángicas proximales sobrepasa los 90°. Como en el caso de las articulaciones metacarpofalángicas, aumenta progresivamente del segundo al quinto dedo, para alcanzar los 135° en el quinto dedo (meñique).
En las articulaciones interfalángicas distales es ligeramente inferior a 90°. Como en el caso anterior, aumenta del segundo al quinto dedo, para alcanzar los 90° en el dedo meñique.

65 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
ARTICULACIONES 2º DEDO 3 Y 4º DEDOS 5º DEDO
IF proximal activo IF proximal pasivo
120º 130º
150º 140º
120º 130º
IF distal activo IF distal pasivo
70-80º 80-90º
70-80º 80-90º
70-80º 80-90º
Cuando se hace una doble flexión de las interfalángicas, la amplitud entre primera falange y tercera falange es de 190°.
En la flexión de los dedos, sus ejes convergen en un punto situado en la parte inferior del conducto del pulso de la arteria radial. Para que esto ocurra, es necesario que los tres últimos dedos se flexionen, no como el dedo índice en el plano sagital, sino en una dirección más oblicua cuanto más interno sea el dedo. Gracias a esta flexión oblicua los dedos más internos pueden oponerse al dedo pulgar del mismo modo que lo hace el dedo índice (Fig. 39).
Ilustración 1. El cuarto y quinto dedo tienen una dirección oblicua que está representada en la imagen por las flechas hacia la estrella.
2) Límites
Tensión de los tendones extensores y parte posterior de la cápsula.
Tensión de los ligamentos laterales.
Existen factores de limitación suplementarios: los contactos de las masas musculares y la yema de la interfalángica distal sobre rodete digitopalmar.
Extensión
1) Amplitud
En las articulaciones interfalángicas proximales, no existe la extensión pasiva ni activa más allá de cero grados.

66 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
En las distales, la extensión activa puede aparecer desde 0° a 5° y la extensión pasiva puede ser bastante acentuada, en torno a unos 30°. Podría llegar hasta los 60° en un paciente laxo.
Ilustración 63.
2) Límites
Tensión de la cápsula anterior, del fibrocartílago y de las vainas fibrosas de los flexores.
Fibrocartílago glenoideo y la cápsula.
En función de una determinada laxitud, aparecen movimientos menores de lateralidad y rotación (Fig. 41), aunque estas articulaciones están fuertemente estabilizadas por la tensión de los ligamentos laterales tanto en flexión como en extensión.
Ilustración 64.
3. MÚSCULOS MOTORES DE LA MANO
Existe un sistema muscular muy complejo para poder tener fuerza y precisión en los movimientos. Se distinguen dos sistemas:
Músculos extrínsecos: son los músculos largos, cuyo vientre muscular está situado en el antebrazo y llegan a la mano en forma de tendones.
Músculos intrínsecos: son los músculos cortos de la mano. Permiten la delicadeza, la precisión, la coordinación de los movimientos.
El conjunto de estos dos sistemas consigue un desacoplamiento mecánico de las metacarpofalángicas y un ajuste de las interfalángicas.
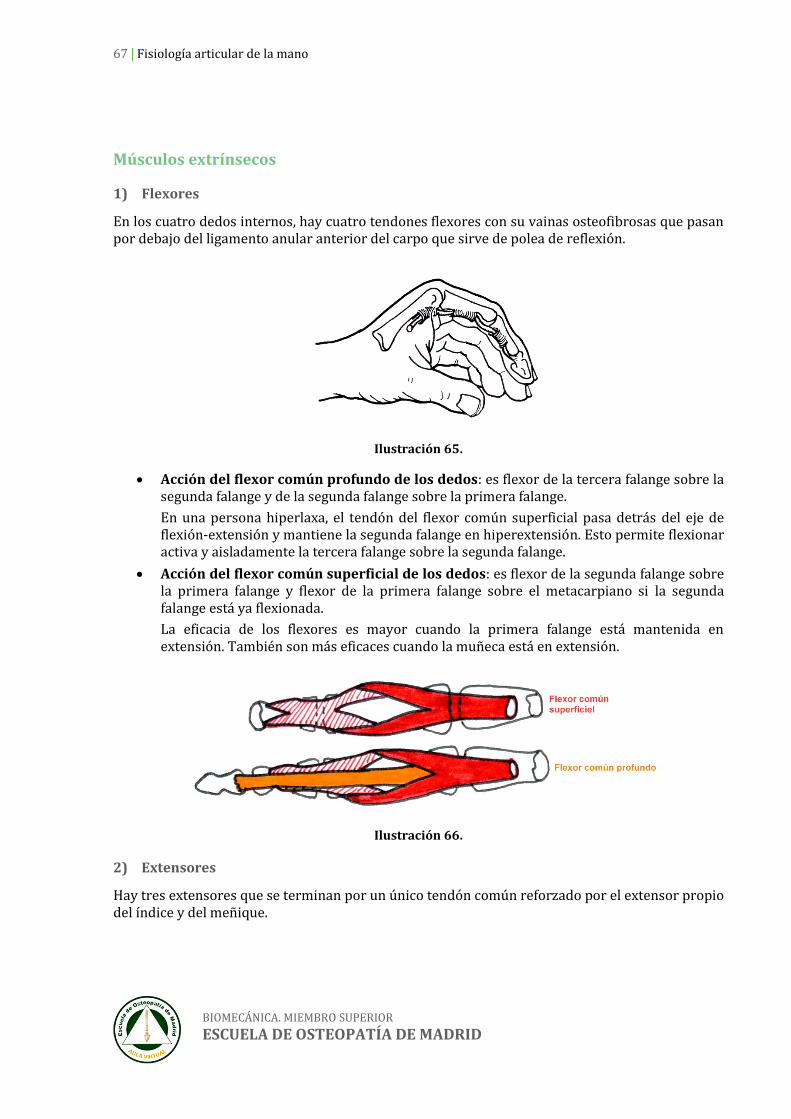
67 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Músculos extrínsecos
1) Flexores
En los cuatro dedos internos, hay cuatro tendones flexores con su vainas osteofibrosas que pasan por debajo del ligamento anular anterior del carpo que sirve de polea de reflexión.
Ilustración 65.
Acción del flexor común profundo de los dedos: es flexor de la tercera falange sobre la segunda falange y de la segunda falange sobre la primera falange.
En una persona hiperlaxa, el tendón del flexor común superficial pasa detrás del eje de flexión-extensión y mantiene la segunda falange en hiperextensión. Esto permite flexionar activa y aisladamente la tercera falange sobre la segunda falange.
Acción del flexor común superficial de los dedos: es flexor de la segunda falange sobre la primera falange y flexor de la primera falange sobre el metacarpiano si la segunda falange está ya flexionada.
La eficacia de los flexores es mayor cuando la primera falange está mantenida en extensión. También son más eficaces cuando la muñeca está en extensión.
Ilustración 66.
2) Extensores
Hay tres extensores que se terminan por un único tendón común reforzado por el extensor propio del índice y del meñique.
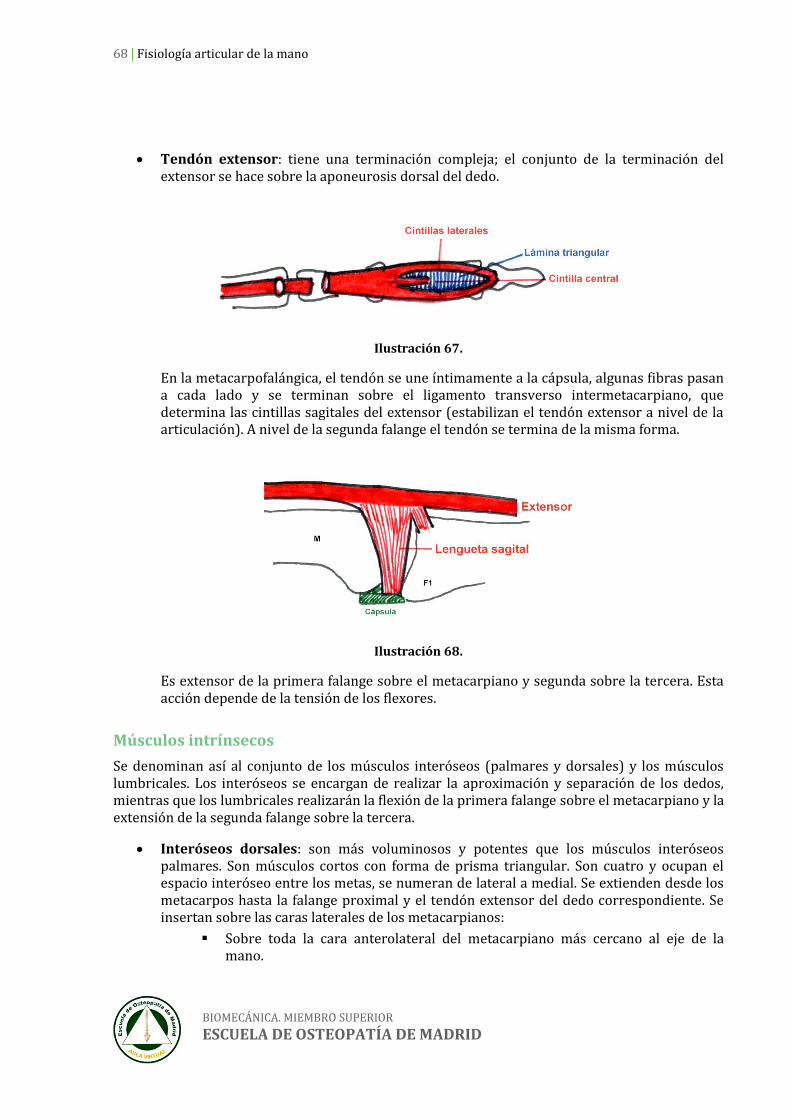
68 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Tendón extensor: tiene una terminación compleja; el conjunto de la terminación del extensor se hace sobre la aponeurosis dorsal del dedo.
Ilustración 67.
En la metacarpofalángica, el tendón se une íntimamente a la cápsula, algunas fibras pasan a cada lado y se terminan sobre el ligamento transverso intermetacarpiano, que determina las cintillas sagitales del extensor (estabilizan el tendón extensor a nivel de la articulación). A nivel de la segunda falange el tendón se termina de la misma forma.
Ilustración 68.
Es extensor de la primera falange sobre el metacarpiano y segunda sobre la tercera. Esta acción depende de la tensión de los flexores.
Músculos intrínsecos
Se denominan así al conjunto de los músculos interóseos (palmares y dorsales) y los músculos lumbricales. Los interóseos se encargan de realizar la aproximación y separación de los dedos, mientras que los lumbricales realizarán la flexión de la primera falange sobre el metacarpiano y la extensión de la segunda falange sobre la tercera.
Interóseos dorsales: son más voluminosos y potentes que los músculos interóseos palmares. Son músculos cortos con forma de prisma triangular. Son cuatro y ocupan el espacio interóseo entre los metas, se numeran de lateral a medial. Se extienden desde los metacarpos hasta la falange proximal y el tendón extensor del dedo correspondiente. Se insertan sobre las caras laterales de los metacarpianos:
Sobre toda la cara anterolateral del metacarpiano más cercano al eje de la mano.

69 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Sobre la vertiente posterior metacarpiano más alejado del eje de la mano.
Los dos haces se reúnen y forman un músculo peniforme que se termina sobre el tubérculo lateral de la base de la primera falange que corresponde a su inserción más ancha. A partir allí el tendón de inserción envía expansiones:
Primera expansión sobre el tendón extensor.
Segunda expansión sobre las cintillas mediana y laterales del extensor.
Interóseos palmares: se insertan sobre la cara anterolateral del metacarpiano más distante del eje de la mano. Un único haz semipeniforme termina como los interóseos dorsales.
Ilustración 69.
Acción de los interóseos palmares y dorsales: en el plano frontal, los palmares aproximan y los dorsales separan los dedos.
Ilustración 70.
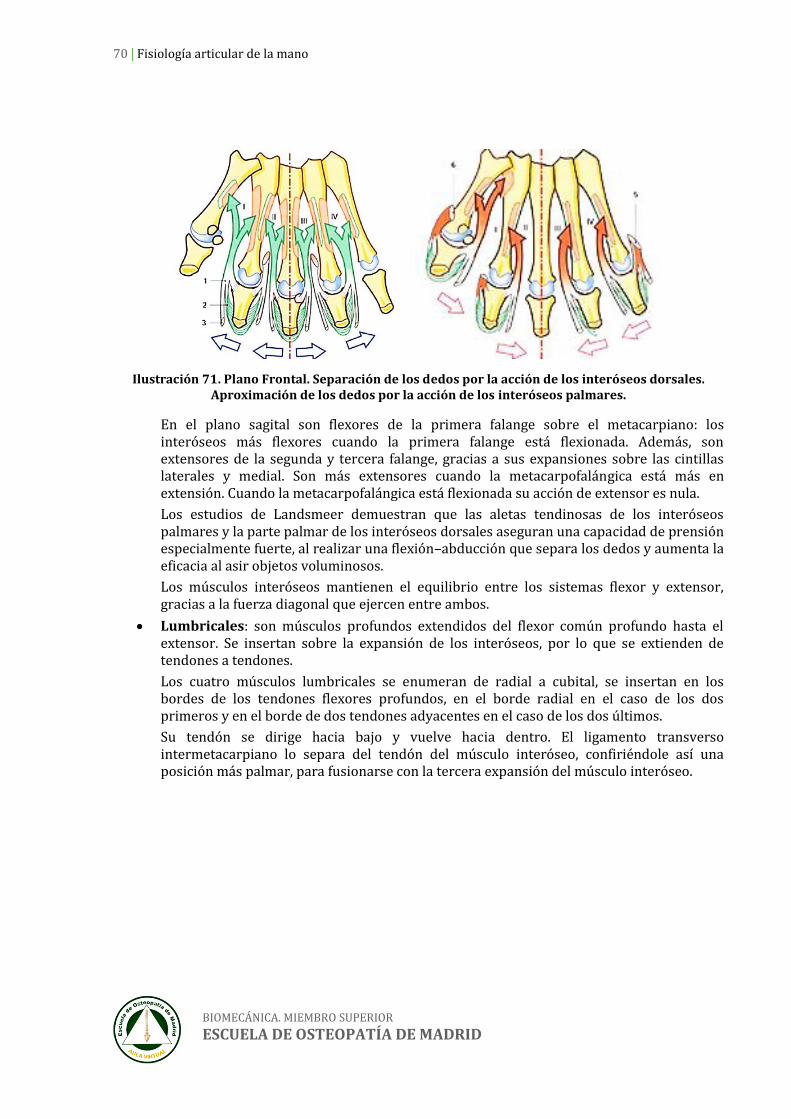
70 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 71. Plano Frontal. Separación de los dedos por la acción de los interóseos dorsales. Aproximación de los dedos por la acción de los interóseos palmares.
En el plano sagital son flexores de la primera falange sobre el metacarpiano: los interóseos más flexores cuando la primera falange está flexionada. Además, son extensores de la segunda y tercera falange, gracias a sus expansiones sobre las cintillas laterales y medial. Son más extensores cuando la metacarpofalángica está más en extensión. Cuando la metacarpofalángica está flexionada su acción de extensor es nula.
Los estudios de Landsmeer demuestran que las aletas tendinosas de los interóseos palmares y la parte palmar de los interóseos dorsales aseguran una capacidad de prensión especialmente fuerte, al realizar una flexión–abducción que separa los dedos y aumenta la eficacia al asir objetos voluminosos.
Los músculos interóseos mantienen el equilibrio entre los sistemas flexor y extensor, gracias a la fuerza diagonal que ejercen entre ambos.
Lumbricales: son músculos profundos extendidos del flexor común profundo hasta el extensor. Se insertan sobre la expansión de los interóseos, por lo que se extienden de tendones a tendones.
Los cuatro músculos lumbricales se enumeran de radial a cubital, se insertan en los bordes de los tendones flexores profundos, en el borde radial en el caso de los dos primeros y en el borde de dos tendones adyacentes en el caso de los dos últimos.
Su tendón se dirige hacia bajo y vuelve hacia dentro. El ligamento transverso intermetacarpiano lo separa del tendón del músculo interóseo, confiriéndole así una posición más palmar, para fusionarse con la tercera expansión del músculo interóseo.
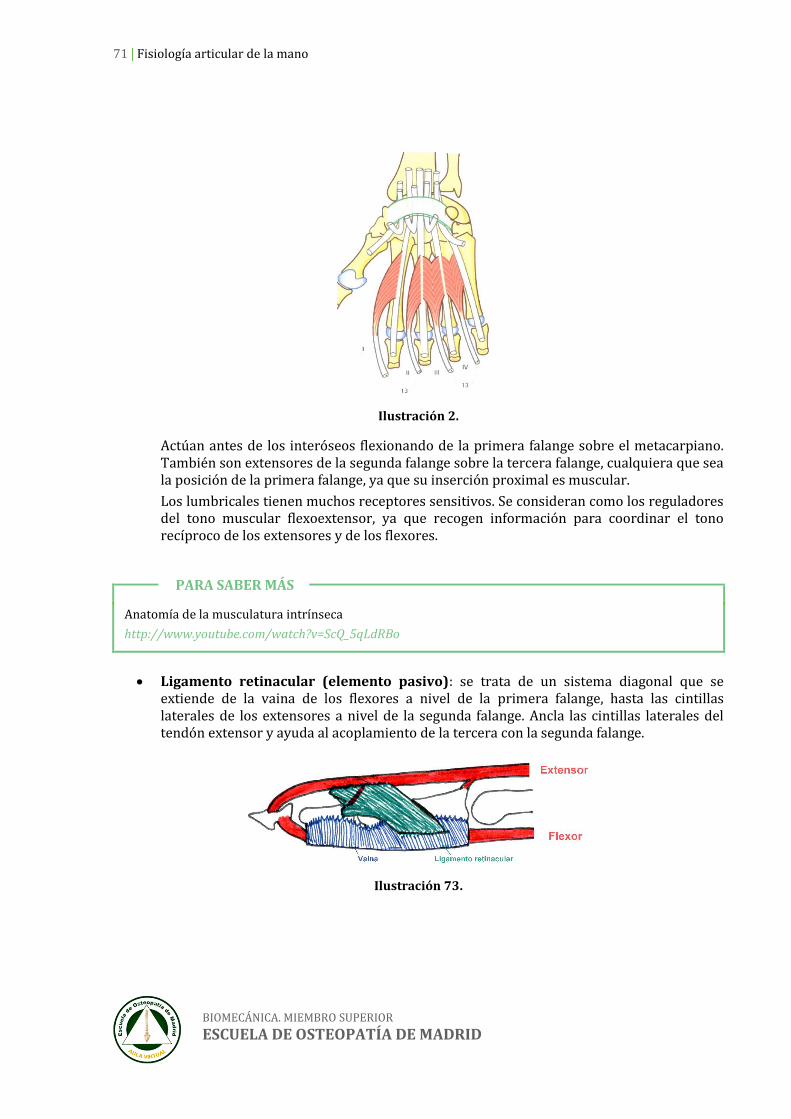
71 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 2.
Actúan antes de los interóseos flexionando de la primera falange sobre el metacarpiano. También son extensores de la segunda falange sobre la tercera falange, cualquiera que sea la posición de la primera falange, ya que su inserción proximal es muscular.
Los lumbricales tienen muchos receptores sensitivos. Se consideran como los reguladores del tono muscular flexoextensor, ya que recogen información para coordinar el tono recíproco de los extensores y de los flexores.
PARA SABER MÁS
Anatomía de la musculatura intrínseca
http://www.youtube.com/watch?v=ScQ_5qLdRBo
Ligamento retinacular (elemento pasivo): se trata de un sistema diagonal que se extiende de la vaina de los flexores a nivel de la primera falange, hasta las cintillas laterales de los extensores a nivel de la segunda falange. Ancla las cintillas laterales del tendón extensor y ayuda al acoplamiento de la tercera con la segunda falange.
Ilustración 73.

72 Fisiología articular de la mano
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Resumen de las acciones sinérgicas
Extensión de la primera, segunda y tercera falange (abrir la mano a partir de la posición de puño cerrado): extensor común, interóseos, lumbricales y acción pasiva del ligamento retinacular.
Extensión de la primera falange, flexión de la segunda y tercera falange: extensor común, flexor común profundo, flexor común superficial y acción pasiva del ligamento retinacular.
Extensión de la primera falange, flexión de la segunda falange, extensión de la tercera falange: extensor común y flexor común superficial.
Flexión de la primera falange, extensión de la segunda y tercera falange: interóseos y lumbricales. Los flexores y extensores están relajados.
Flexión de la primera y segunda falange, extensión de la tercera falange: interóseos, lumbricales y flexor común superficial.
Flexión de la primera, segunda y tercera falange (cerrar el puño): lumbricales, flexor común superficial, flexor común profundo y acción del ligamento retinacular.

73 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
V. EL PULGAR
A. INTRODUCCIÓN
En la mano humana es indispensable para realizar las pinzas digitales finas con cada uno de los restantes dedos y en particular con el dedo índice. También para la constitución de una presa con los otros cuatro dedos para agarrar objetos. Sin el pulgar, la mano pierde la mayor parte de sus posibilidades.
Ilustración 74.
La capacidad mecánica del pulgar se debe sobre todo a estos dos factores:
Su localización anterior respecto de la palma y de los otros dedos, que le permite el movimiento de oposición.
La gran flexibilidad funcional que le proporciona la organización tan peculiar de su columna articular y de sus músculos.
El primer radio de la mano está compuesto por la columna osteoarticular del pulgar, formada por cinco piezas óseas (Fig. 52):
El escafoides.
El trapecio (considerado por algunos embriólogos como el equivalente funcional al metacarpo).
El primer metacarpiano.
La primera falange.
La segunda falange.

74 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 75.
La menor longitud en relación a los otros dedos se debe a su articulación con el carpo en un punto mucho más proximal que en el resto de los otros dedos. Su columna solo alcanza la parte media de la primera falange del dedo índice.
La posición neutra del pulgar es la de reposo muscular. Forma un ángulo de 30° en el plano frontal, entre el primer y segundo dedo. 40° en el plano sagital, entre los metacarpianos. En esta posición hay una relajación ligamentosa y máxima congruencia articular
En posición anatómica, la columna del pulgar o primer radio, no se encuentra situada en el plano frontal que define el tercer metacarpiano, sino que se posiciona anteriormente a éste, debido a la bóveda de la mano formada por los arcos transversos carpianos.
Las articulaciones de la columna del pulgar son cuatro:
La articulación trapezoescafoidea, de tipo artrodia.
La articulación trapezometacarpiana, de tipo silla de montar, encaje recíproco o selar, con dos grados de libertad.
La articulación metacarpofalángica, de tipo condílea, con dos grados de libertad.
La articulación interfalángica, de tipo tróclea, con un único grado de libertad.
B. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA DE LA OPOSICIÓN
Salvo los movimientos de abducción y aducción cuyo plano es frontal, los movimientos del primer radio de la mano que componen la oposición se efectúan en planos oblicuos en relación a los tres planos de referencia de la anatomía clásica.
Es la capacidad del pulgar para colocarse enfrentado a los pulpejos de los otros cuatro dedos para realizar la pinza pulgodigital.

75 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Gracias a esta capacidad la mano adquiere una gran capacidad funcional, ya que sin perder la capacidad de garra de fuerza, adquiere la capacidad de realizar pinzas de precisión.
Teniendo que cuenta que con el pulgar en posición anatómica, el pulpejo se orienta hacia la línea media del cuerpo y que al final de la oposición, frente al quinto dedo, el pulpejo se orienta hacia atrás, se evidencia la necesidad de un grado de movilidad adicional para poder efectuar pinzas interdigitales finas: rotación longitudinal o pronosupinación. Permite oponer de manera paralela los pulpejos de los dedos de la pinza.
En dicha rotación automática, la principal articulación es la trapezometacarpiana, pero también intervienen coordinadamente las articulaciones metacarpofalángica e interfalángica en mucha menor medida.
Ilustración 76. La pronación automática del metacarpiano y las falanges orientan el pulgar en posición opuesta a cada dedo del segundo al quinto.
Ilustración 77. Conforme el pulgar va oponiéndose, el meta y las dos falanges se pronan para orientar el pulpejo hacia los otros dedos.

76 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Por tanto, el movimiento de oposición del pulgar es la suma de los siguientes componentes elementales:
Antepulsión del primer metacarpiano y, de forma accesoria, de la primera falange.
Aducción del primer metacarpiano e inclinación lateral de la primera falange sobre el metacarpiano hacia su borde radial. Estas acciones aumentan conforme el pulgar se opone a un dedo más proximal.
Rotación longitudinal del metacarpiano y de la primera falange en sentido de la pronación.
Pronación de la falange distal asociado a la flexión.
La suma de estos grados de libertad articular permiten a la columna del pulgar realizar movimientos complejos de:
Abducción-aducción.
Flexión-extensión.
Anteposición-retroposición.
Pronación-supinación.
1. Abducción–aducción
Se realizan en el plano frontal, paralelo a la palma de la mano. La abducción es la separación en el plano frontal del primer metacarpiano respecto al segundo. La aducción es la aproximación del primer metacarpiano al segundo.
Amplitud
Activo en abducción: 35°-50°.
Ilustración 78.
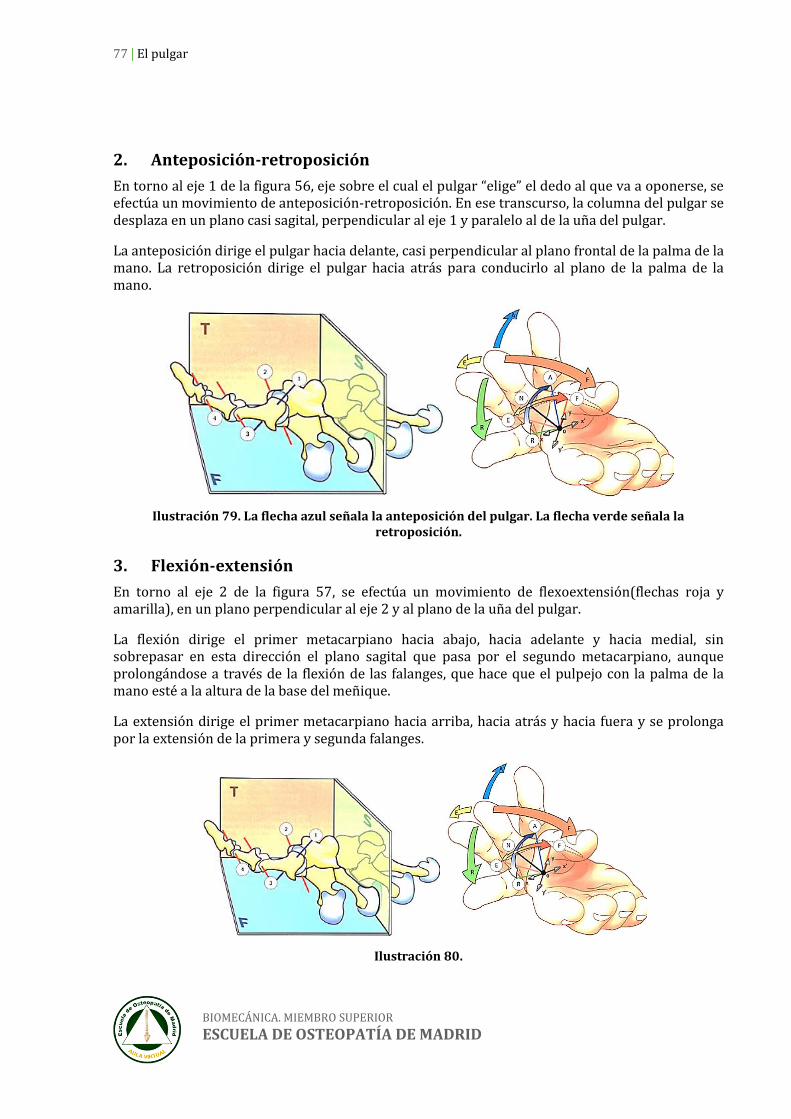
77 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2. Anteposición-retroposición
En torno al eje 1 de la figura 56, eje sobre el cual el pulgar “elige” el dedo al que va a oponerse, se efectúa un movimiento de anteposición-retroposición. En ese transcurso, la columna del pulgar se desplaza en un plano casi sagital, perpendicular al eje 1 y paralelo al de la uña del pulgar.
La anteposición dirige el pulgar hacia delante, casi perpendicular al plano frontal de la palma de la mano. La retroposición dirige el pulgar hacia atrás para conducirlo al plano de la palma de la mano.
Ilustración 79. La flecha azul señala la anteposición del pulgar. La flecha verde señala la retroposición.
3. Flexión-extensión
En torno al eje 2 de la figura 57, se efectúa un movimiento de flexoextensión(flechas roja y amarilla), en un plano perpendicular al eje 2 y al plano de la uña del pulgar.
La flexión dirige el primer metacarpiano hacia abajo, hacia adelante y hacia medial, sin sobrepasar en esta dirección el plano sagital que pasa por el segundo metacarpiano, aunque prolongándose a través de la flexión de las falanges, que hace que el pulpejo con la palma de la mano esté a la altura de la base del meñique.
La extensión dirige el primer metacarpiano hacia arriba, hacia atrás y hacia fuera y se prolonga por la extensión de la primera y segunda falanges.
Ilustración 80.

78 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
4. Rotación longitudinal
Formada por la suma de las rotaciones longitudinales del meta sobre el trapecio, de la primera falange sobre el meta y de la segunda falange sobre la primera.
La articulación fundamental en este movimiento es la trapeciometacarpiana. Al analizar esta rotación, se encuentra:
Rotación axial automática: debida a la composición del movimiento en torno a los dos ejes de la articulación trapezometacarpiana, por la acción de los músculos tenares externos. Fundamental en el mecanismo de la oposición.
Rotación axial activa, debida a un movimiento de pronación en la articulación metacarpofalángica, gracias al músculo flexor corto del pulgar y músculo abductor corto del pulgar.
Rotación axial activa en la pronación de la articulación interfalángica.
Rotación axial pasiva: por la laxitud ligamentosa. Constituye un factor adicional pero no esencial. Puede apreciarse de forma empírica haciendo girar pasivamente la segunda falange del pulgar. Varía de 60° a 80°.
Ilustración 81. El pulgar prona sobre su eje longitudinal para oponer su pulpejo paralelo al del dedo correspondiente. Dicha rotación máxima se produce en la oposición al quinto dedo.
PARA SABER MÁS
Oposición del pulgar
https://www.youtube.com/watch?v=auWA5o6YT20

79 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
C. ARTICULACIÓN TRAPECIOMETACARPIANA
Es la más proximal de la columna del pulgar y la principal responsable de la capacidad de oposición del pulgar, ya que con su deslizamiento permite anteponer el pulgar a los otros cuatro dedos.
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
Ambas superficies son en forma de silla de montar, cóncavas en un sentido y convexas en el contrario.
Carilla articular del trapecio: en un plano frontal al propio hueso es cóncava.
Carilla de la base del metacarpiano: en un plano frontal es convexa.
En ese encaje, la cresta convexa de la base del metacarpiano desliza por el valle cóncavo de la carilla distal del trapecio. Ese recorrido define el deslizamiento del pulgar en la oposición.
Ilustración 82. Articulación trapeciometacarpiana, con dos superficies en silla de montar encaradas con una rotación de 90°, realizan un encaje recíproco de sus superficies.
En un plano sagital, el perfil de la carilla trapezoidal es convexo y el de la base del metacarpiano es cóncavo. Este encaje reciproco permite el deslizamiento de la columna del pulgar en la abducción.
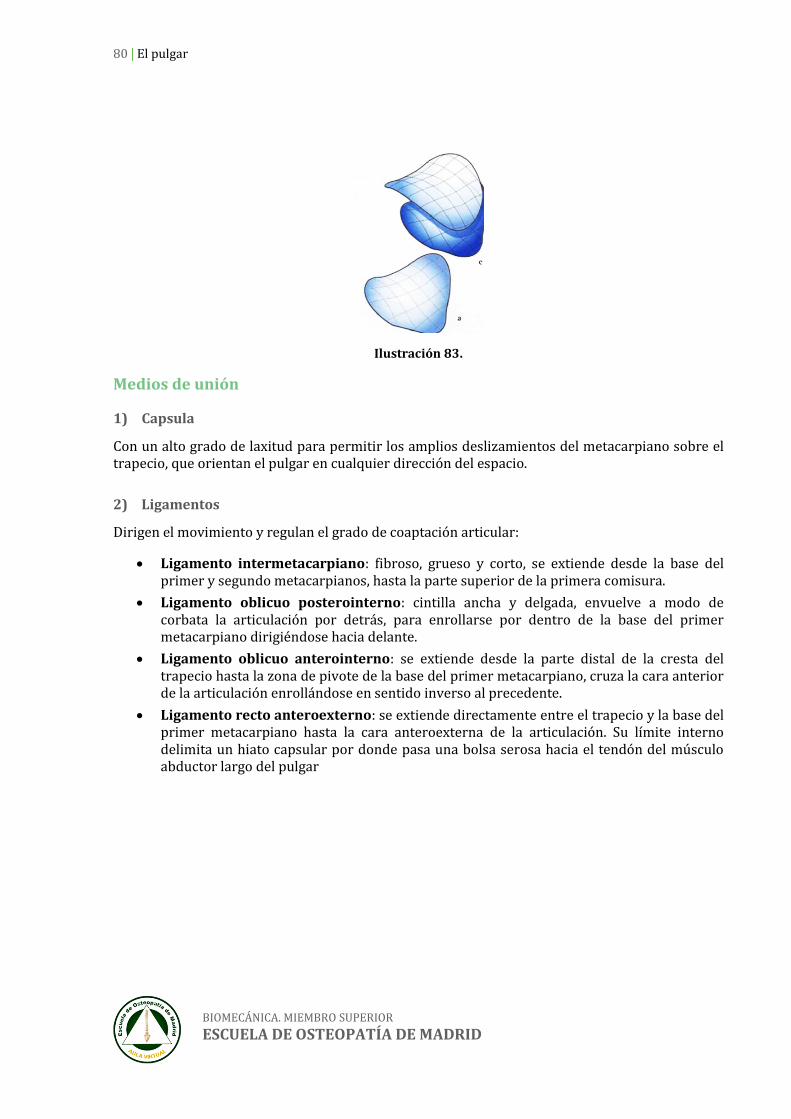
80 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 83.
Medios de unión
1) Capsula
Con un alto grado de laxitud para permitir los amplios deslizamientos del metacarpiano sobre el trapecio, que orientan el pulgar en cualquier dirección del espacio.
2) Ligamentos
Dirigen el movimiento y regulan el grado de coaptación articular:
Ligamento intermetacarpiano: fibroso, grueso y corto, se extiende desde la base del primer y segundo metacarpianos, hasta la parte superior de la primera comisura.
Ligamento oblicuo posterointerno: cintilla ancha y delgada, envuelve a modo de corbata la articulación por detrás, para enrollarse por dentro de la base del primer metacarpiano dirigiéndose hacia delante.
Ligamento oblicuo anterointerno: se extiende desde la parte distal de la cresta del trapecio hasta la zona de pivote de la base del primer metacarpiano, cruza la cara anterior de la articulación enrollándose en sentido inverso al precedente.
Ligamento recto anteroexterno: se extiende directamente entre el trapecio y la base del primer metacarpiano hasta la cara anteroexterna de la articulación. Su límite interno delimita un hiato capsular por donde pasa una bolsa serosa hacia el tendón del músculo abductor largo del pulgar

81 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 84. Ligamentos de la articulación trapeciometacarpiana. 1 Lig. recto anteroexterno. 2 Lig. oblicuo anterointerno. 3 Lig. oblicuo posterointerno. 4 Lig. intermetacarpiano.
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
El modelo mecánico de la articulación es de dos ejes perpendiculares y concurrentes a modo de cardan. Estos dos ejes permiten movimientos en dos planos perpendiculares (AB y CD).
Ilustración 85.
Las superficies en silla de montar A y B situadas una sobre otra permiten los dos grados de libertad. Dichos movimientos son:
Anteposición-retroposición.
Flexión-extensión.
El estudio de la mecánica del cardán muestra que las articulaciones de dos ejes poseen una tercera posibilidad adicional, la rotación automática del segmento móvil sobre su eje longitudinal, en este caso el primer metacarpiano.

82 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 86.
D. ARTICULACIÓN METACARPOFALÁNGICA
1. RECUERDO ANATÓMICO
IMPORTANTE
Si todavía no visualizas bien alguna estructura de las que se describirán a continuación, repasa antes la anatomía de la zona para entender bien la descripción biomecánica.
Superficies articulares
Carilla articular de la cabeza del primer metacarpiano: es una superficie convexa en ambos sentidos, de mayor diámetro anteroposterior que lateral.
Carilla articular de la base de la primera falange: presenta una superficie cartilaginosa cóncava en los dos sentidos. En su borde anterior se inserta el fibrocartílago glenoideo que contiene, próximos a su borde inferior, los dos sesamoideos, interno y externo, propios de la articulación.

83 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 87.
Medios de unión
1) Cápsula
Caracterizada por el engrosamiento que constituyen los ligamentos metacarpoglenoideos interno y externo. Posee dos fondos de saco anterior y posterior.
2) Ligamentos
Los ligamentos laterales, el interno más corto y que se tensa antes que el externo.
Ligamentos metacarpo glenoideos interno y externo.
Ligamento intersesamoideo, en forma de X.
Ilustración 88.

84 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
2. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Es una articulación de tipo condílea. Por lo que cuenta con dos grados de libertad.
Flexión–extensión
Lateralidad.
Como en el caso de la articulación trapeciometacarpiana, existe un tercer grado de movilidad adicional, indispensable para el movimiento de oposición del pulgar, que es la rotación sobre el eje longitudinal de la articulación.
Ilustración 89. Eje Ff, flexoextensión pura), eje F3: flexión inclinación cubital (supinación), eje F2: flexión, inclinación radial (pronación).
Flexión-extensión: sobre un eje transversal, por acción equilibrada de los sesamoideos externos e internos hasta la semiflexión.
Flexión-inclinación cubital-supinación: sobre un eje oblicuo y evolutivo, por una rotación cónica debida a la acción predominante de los sesamoideos internos.
Flexión-inclinación radial-pronación: sobre otro eje oblicuo perpendicular al anterior y también evolutivo, de oblicuidad más acentuada. También en este caso se trata de una rotación cónica y el movimiento se debe a la acción predominante de los sesamoideos externos.
Ambos movimientos complejos son indispensables para la destreza de la pinza fina entre el pulgar y los otros dedos.
La máxima flexión siempre conduce a la inclinación medial-pronación debido a la forma asimétrica de la cabeza metacarpiana y a la tensión desigual de los ligamentos laterales, lo que dirige el sentido del movimiento global de oposición de la columna del pulgar.

85 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 90.
Tensión del sistema ligamentario de la metacarpofalángica
Extensión: los ligamentos laterales están distendidos, pero el sistema palmar y de los ligamentos metacarpoglenoideos está tenso, lo que impide la rotación longitudinal y la lateralidad.
Semiflexión: los ligamentos laterales están distendidos, el externo más que el interno. El sistema de palmar se distiende por la báscula de los huesos sesamoideos bajo la cabeza metacarpiana. Se trata de la posición de máxima movilidad en la que los movimientos de lateralidad y rotación longitudinal son factibles bajo la acción de los sesamoideos. La contracción de los músculos internos determina una inclinación cubital y una ligera supinación y la de los músculos externos una inclinación radial y una pronación.
Máxima flexión: el sistema palmar se distiende pero los ligamentos laterales se tensan al máximo. Produce un desplazamiento de la base falángica en inclinación radial y pronación.
La articulación está bloqueada por la tensión de los ligamentos laterales y el fondo de saco dorsal en una posición de oposición máxima por la acción de los músculos tenares externos.
Ilustración 91.

86 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
E. ARTICULACIÓN INTERFALÁNGICA
Articulación de tipo troclear, con un único eje de movilidad transversal que atraviesa el centro de la curvatura de los cóndilos de la base de la primera falange.
Este eje permite un solo grado de movilidad en flexoextensión, no obstante, la adaptación de la articulación al movimiento de oposición del pulgar, ha generado un movimiento de “pronación” de la falange distal, asociado a la flexión.
Ilustración 92.
1. OSTEOCINEMÁTICA Y ARTROCINEMÁTICA
Flexión: activa de 75° a 80°. La flexión pasiva alcanza los 90°.
Extensión: activa de 5° a 10°. La pasiva puede ser muy pronunciada, 30°.
“Pronación–supinación” asociada: a medida que se flexiona, la segunda falange rota longitudinalmente de forma automática en el sentido de la pronación, para acomodarse a la oposición y enfrentar el pulpejo del pulgar al del dedo a oponer. Esta pronación es de 5° a 10°, según Kapandji.
Ilustración 93. Pronación supinación asociada de la falange distal.
F. MÚSCULOS DEL PULGAR
El pulgar posee nueve músculos motores. Tal variedad de estructuras musculares diferenciadas garantiza tanto la motricidad de agarre como la de pinza.

87 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
1. MÚSCULOS EXTRÍNSECOS
Son cuatro y se localizan en el antebrazo. Tres son extensores y abductores y se utilizan para relajar la presa, el último es flexor y su potencia se utiliza para el bloqueo de las presas de fuerza:
Músculo abductor largo del pulgar (1): aplanado y fusiforme. Desplaza el primer metacarpiano hacia fuera y hacia delante. Su acción antepulsora de acentúa cuando la muñeca está en ligera flexión.
Este componente anterior se debe a que su tendón ocupa a posición más ventralrespecto al resto de los tendones de la tabaquera anatómica.
Músculo extensor corto del pulgar (2): extiende la primera falange sobre el metacarpiano y desplaza el primer metacarpiano hacia fuera. Se trata pues del verdadero abductor del pulgar, lo que corresponde a una extensión o retroposición de la articulación trapezometacarpiana.
Para que esta abducción se lleve a cabo de manera aislada, es necesario estabilizar la muñeca mediante la contracción sinérgica del músculo flexor cubital del carpo y, sobre todo, del extensor cubital del carpo.
Músculo extensor largo del pulgar (3): extiende la segunda falange sobre la primera y la primera falange sobre el metacarpiano. Desplaza el metacarpiano hacia dentro y hacia atrás, por lo que cierra el primer espacio interóseo, de modo que es aductor del primer metacarpiano. Es retropulsor del primer metacarpiano gracias a su reflexión sobre el tubérculo de Lister.
Es un antagonista de la oposición: contribuye a disminuir el arco palmar.
Estos tres músculos conforman con sus tendones distales la delimitación del espacio de la tabaquera anatómica.
Músculo flexor largo del pulgar (4): es flexor de la segunda falange sobre la primera y, de manera accesoria, flexiona la primera falange sobre el metacarpiano. Para poder realizar la flexión de la segunda falange de manera aislada, el músculo extensor corlo del pulgar, debe impedir la flexión de la primera.

88 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
Ilustración 94. Abductor largo (1), extensor corto (2), extensor largo (3) del pulgar.
2. MÚSCULOS INTRÍNSECOS
Localizados en la eminencia tenar y el primer espacio interóseo, son cinco. Participan en la realización de distintas presas y, en particular, en la oposición. Su potencia es limitada ya que se trata más bien de músculos de precisión.
Grupo externo
Contiene tres músculos, inervados por el nervio mediano. Son, de profundo a superficial:
Músculo flexor corto del pulgar (5): es flexor y aductor de la primera falange sobre el metacarpiano. Colabora con el resto de músculos tenares implicados en la oposición.
Músculo oponente del pulgar (6): posee tres acciones simétricas a las del músculo oponente del dedo meñique:
Antepulsión del primer metacarpiano sobre el carpo.
Aducción, aproximando el primer metacarpiano al segundo en las posiciones extremas.
Rotación longitudinal en sentido de la pronación.
Músculo abductor corto del pulgar (7):
Separa el primer metacarpiano del segundo al final de la oposición.
Desplaza el primer metacarpiano hacia delante y hacia dentro en el transcurso del mayor recorrido de la oposición, durante la máxima separación del segundo
Flexiona la primera falange sobre el metacarpiano, imprimiéndole:
– Inclinación radial.
– Rotación longitudinal en el sentido de la pronación.

89 El pulgar
BIOMECÁNICA. MIEMBRO SUPERIOR
ESCUELA DE OSTEOPATÍA DE MADRID
– Extiende la segunda falange sobre la primera mediante su expansión al músculo extensor largo del pulgar.
Los músculos flexor corto y abductor corto del pulgar forman los músculos sesamoideos externos.
Grupo interno
Contiene dos músculos inervados por el nervio cubital que se insertan en el borde interno de la articulación metacarpofalángica:
Músculo aductor del pulgar (8): posee un haz oblicuo y un haz transverso, extiende su acción sobre las tres piezas óseas del pulgar:
Sobre el primer metacarpiano, lo desplaza hacia una posición de equilibrio ligeramente por fuera y delante del segundo metacarpiano. Según Duchenne, el sentido del movimiento depende de la posición de partida del metacarpiano:
Es aductor si el metacarpiano parte de una posición de máxima abducción.
Se convierte en abductor si el metacarpiano está, en el punto de partida, en máxima aducción.
Se convierte en antepulsor, si el metacarpiano está en máxima retropulsión, bajo influencia del músculo extensor largo del pulgar.
Se convierte en retropulsor, si el metacarpiano está colocado previamente en anteposición por el músculo abductor corto del pulgar.
Primer interóseo palmar (9): es aductor (aproximación del primer metacarpiano al eje de la mano), flexor de la primera falange y extensor de la segunda por expansión lateral.
Ilustración 95.