icmla 2015 - car following markov regime classification and calibration
TRANSCRIPT

Car Following Markov Regime Classification and Calibration
Eng.Ahmed Bayoumy Zaky Prof.Waild Gomaa Dr. Mohamed A. Khamis
Department of Computer Science and Engineering Cyber-Physical Systems Lab
12/15/2015
Agenda
• Introduction
• Problem Statement
• Previous Approaches
• Proposed System
• Experiment and Results
• Conclusion
12/15/2015
Motivation
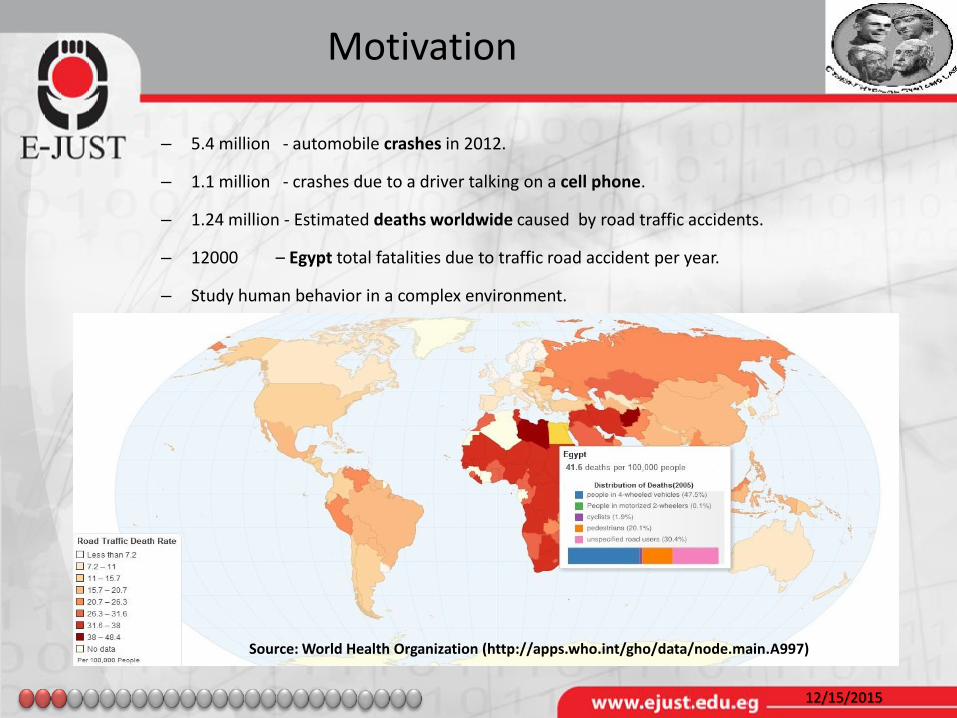
– 5.4 million - automobile crashes in 2012.
– 1.1 million - crashes due to a driver talking on a cell phone.
– 1.24 million - Estimated deaths worldwide caused by road traffic accidents.
– 12000 – Egypt total fatalities due to traffic road accident per year.
– Study human behavior in a complex environment.
12/15/2015
Source: World Health Organization (http://apps.who.int/gho/data/node.main.A997)
Problem Statement
12/15/2015
• How we can model driver behavior during different driving tasks and situations ?
• Are regime switching models suitable for this task ?
• What is the important features we will have by using such models ?

Multitasking is a myth
• The stochastic nature of the driving environment.
• National safety council states that – Multitasking is a myth. – The brain handles tasks sequentially.
By switching between one task and another.
• The driver usually switches between different driving behaviors as car following, lane changing, mobile communication, sign reading…….
12/15/2015
Car Following Behavior
12/15/2015
• Describes the longitudinal relation between a following vehicle with a
leader and how follower behavior is constrained by the leader.
• Models such as – Intelligent Driver Model (IDM), velocity difference , Gipps
• Car following parameters – Observed parameters such as acceleration, velocity and position.
– Non-observed parameters, which are calibrated by driving data sets or assumed while
simulating the behavior.
• Classified into five regimes: – Acceleration
– Stable Following
– Free Flow
– Approaching
– Braking
• Model parameters can be used in classifying the driving situation and
driver characteristics
Classification Approaches
• Car Following Models – driver behavior is simulated by an equation (IDM)
or multiple equation (Gipps)
– Models face the problems of • Calibration the parameters
• Sensitivity to the parameters
– Machine learning approaches Such as: • Supervised Fuzzy inference approach
• Fuzzy clustering algorithm with time continuity
• Neural networks as back-propagation, fuzzy ARTMAP and Radial Basis Function Networks (RBFNs)
12/15/2015
Proposed Model
Previous approaches disregard the
switching process dynamics between
different driving regimes.
Proposed model able to:
• Classify car following regimes.
• Classify normal car following driving behavior, rare events, and short time events.
• Extract different driving regimes’ characteristics such as:
• Expected duration
• Probability of moving from the regime to another
• Generate the regime switching process dynamics.
12/15/2015
Regime Switching Models I
• Regime switching models:
– Innovative time series analysis tools.
– Used to classify and predict behaviors based on statistical relations between different time series variables.
– Used in different fields and models such as economics, traffic modeling and speech recognition.
– Main frameworks are used for regime switching:
• Threshold models
• Smooth transition models
• Markov switching models
12/15/2015
Regime Switching Models II
• Markov switching models
– The most general and the most used models.
– Generalization of Hidden Markov Model (HMM)
– Modeling the stochastic behavior of a time series into two or more states or regimes.
– Use stochastic models to represent each regime and a Markov process for switching between regimes.
12/15/2015
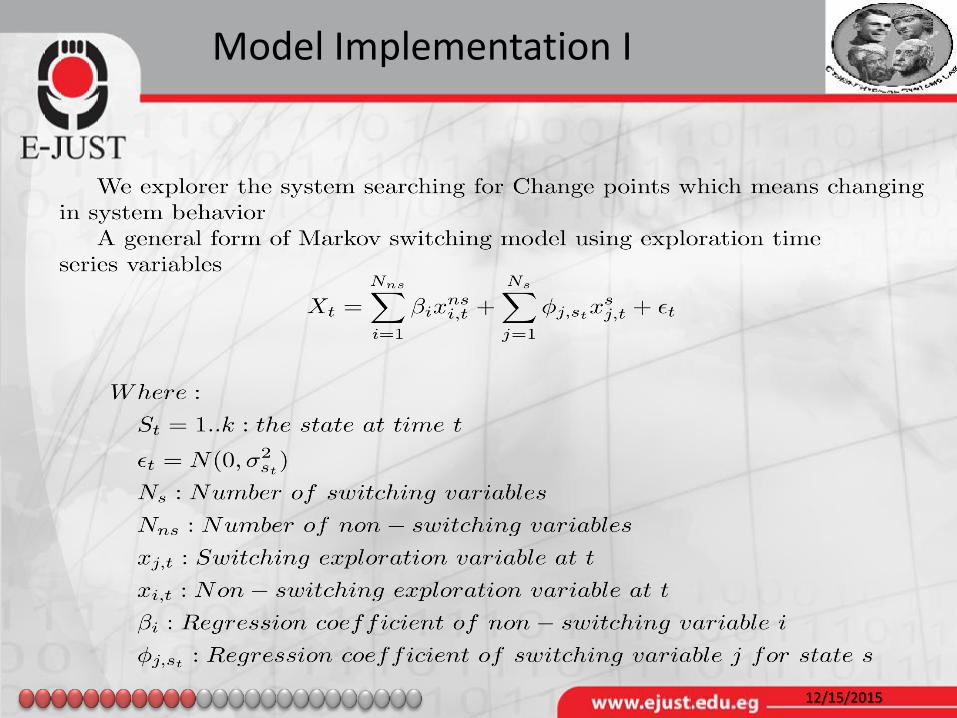
Model Implementation I
12/15/2015
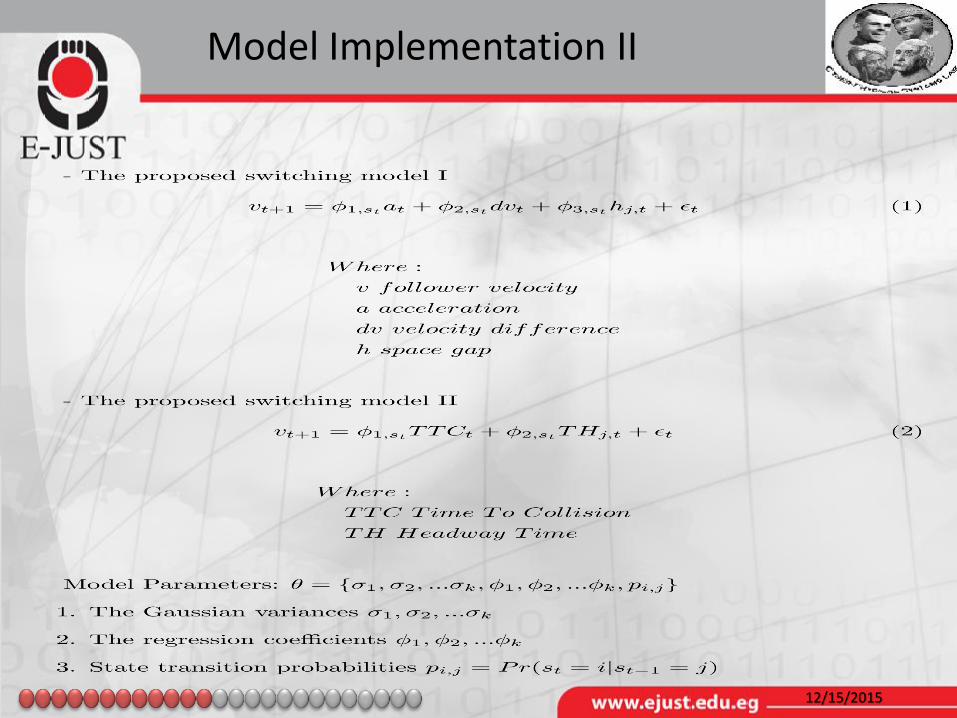
Model Implementation II
12/15/2015
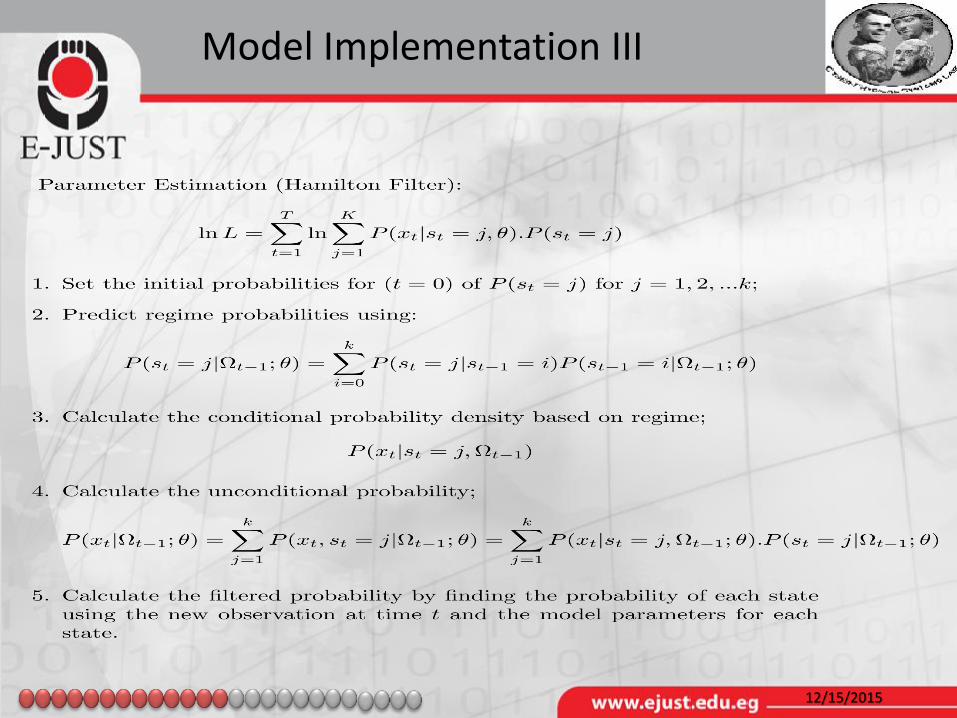
Model Implementation III
12/15/2015
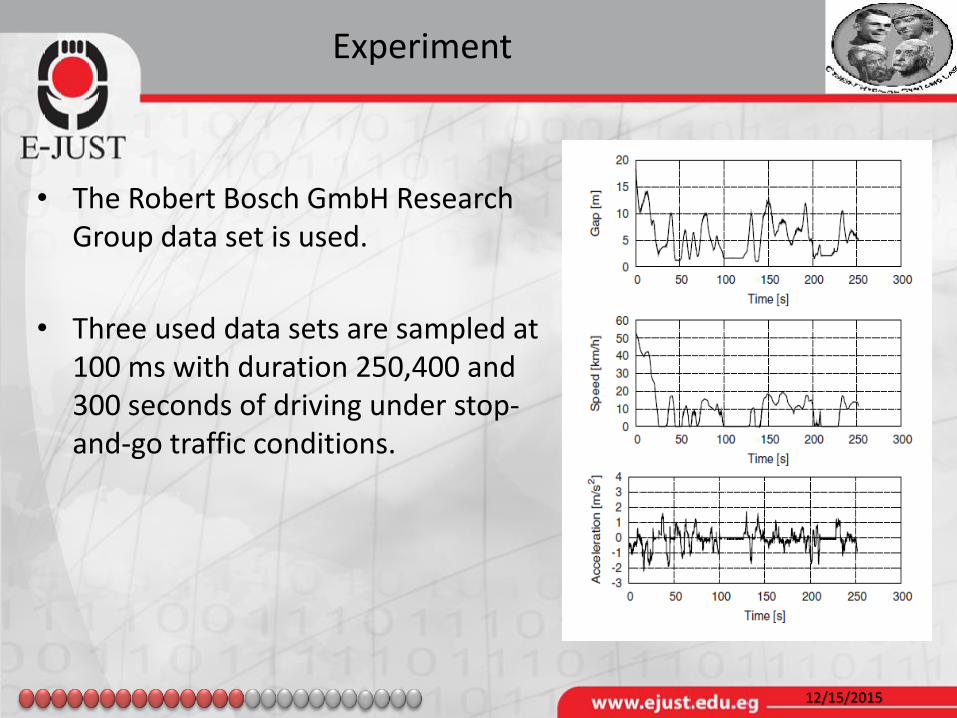
Experiment
• The Robert Bosch GmbH Research Group data set is used.
• Three used data sets are sampled at 100 ms with duration 250,400 and 300 seconds of driving under stop-and-go traffic conditions.
12/15/2015
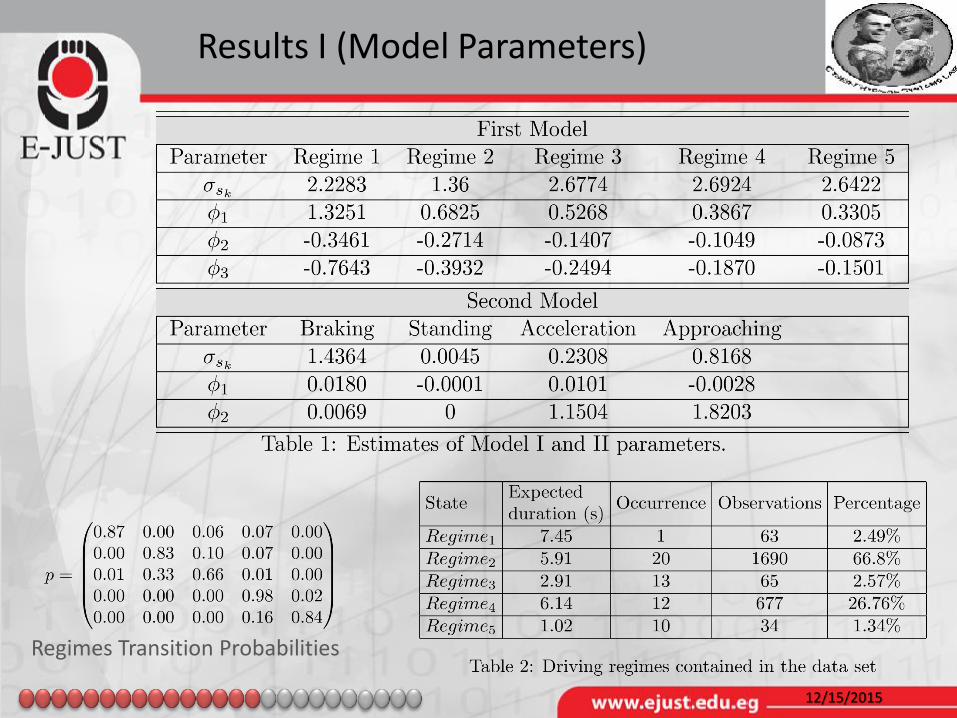
Results I (Model Parameters)
12/15/2015
Regimes Transition Probabilities
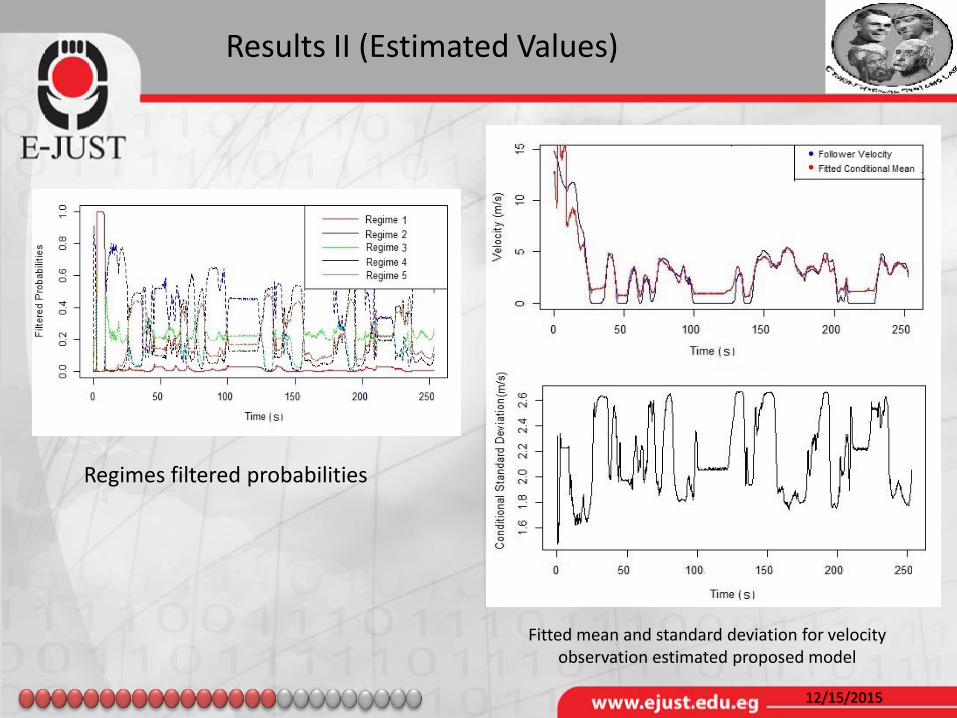
Results II (Estimated Values)
12/15/2015
Fitted mean and standard deviation for velocity observation estimated proposed model
Regimes filtered probabilities
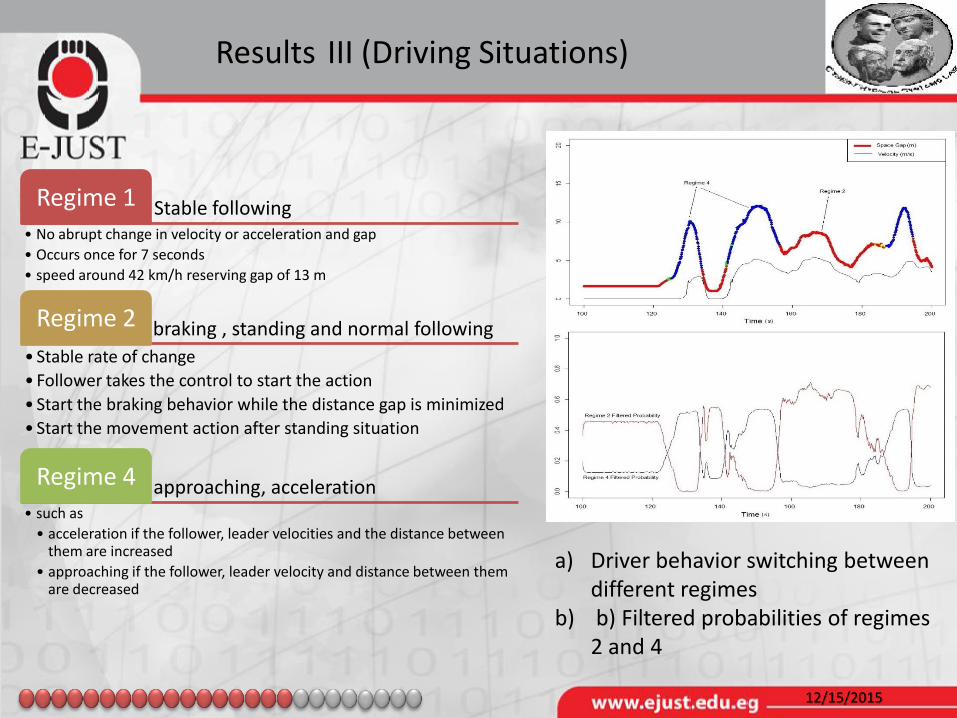
Results III (Driving Situations)
12/15/2015
a) Driver behavior switching between different regimes
b) b) Filtered probabilities of regimes 2 and 4
Stable following Regime 1
• No abrupt change in velocity or acceleration and gap
• Occurs once for 7 seconds
• speed around 42 km/h reserving gap of 13 m
braking , standing and normal following Regime 2
• Stable rate of change
• Follower takes the control to start the action
• Start the braking behavior while the distance gap is minimized
• Start the movement action after standing situation
approaching, acceleration Regime 4
• such as
• acceleration if the follower, leader velocities and the distance between them are increased
• approaching if the follower, leader velocity and distance between them are decreased
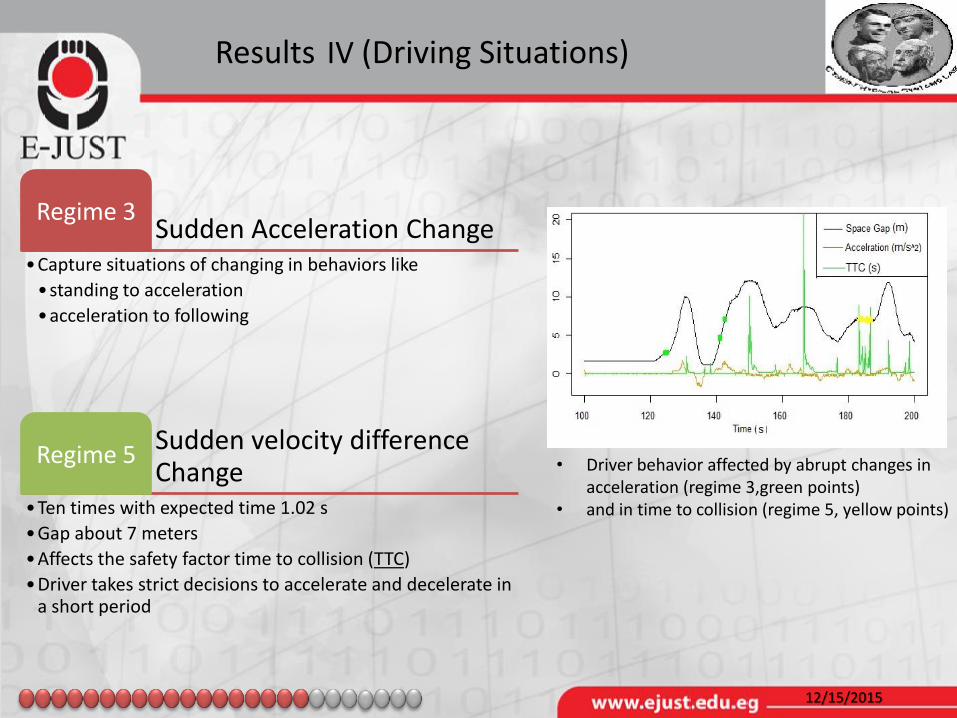
Results IV (Driving Situations)
12/15/2015
• Driver behavior affected by abrupt changes in acceleration (regime 3,green points)
• and in time to collision (regime 5, yellow points)
Sudden Acceleration Change Regime 3
•Capture situations of changing in behaviors like
•standing to acceleration
•acceleration to following
Sudden velocity difference Change
Regime 5
•Ten times with expected time 1.02 s
•Gap about 7 meters
•Affects the safety factor time to collision (TTC)
•Driver takes strict decisions to accelerate and decelerate in a short period
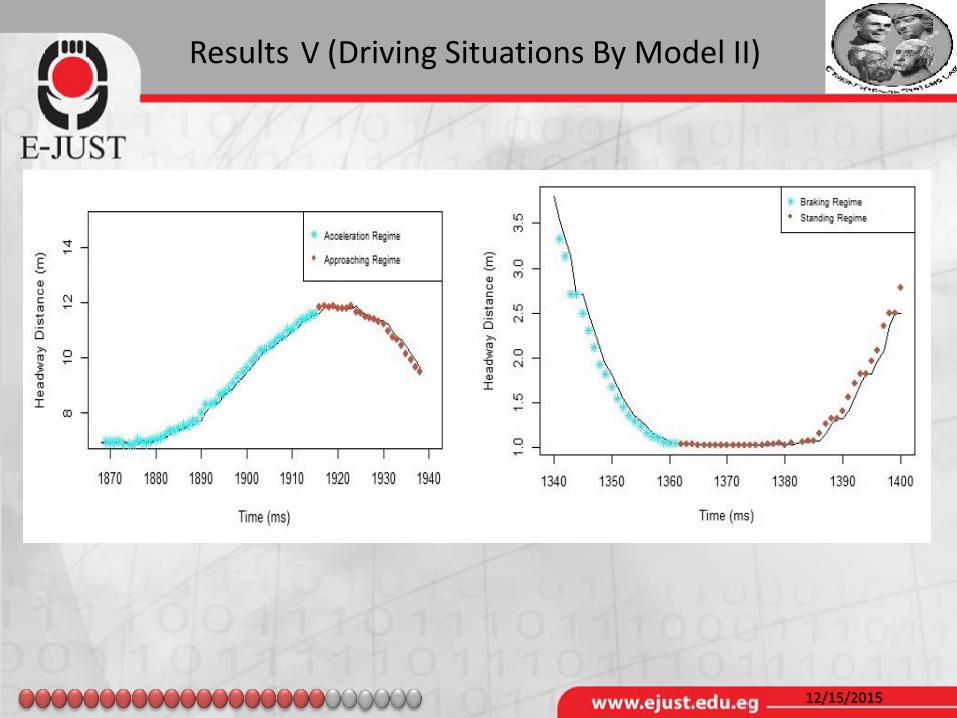
Results V (Driving Situations By Model II)
12/15/2015
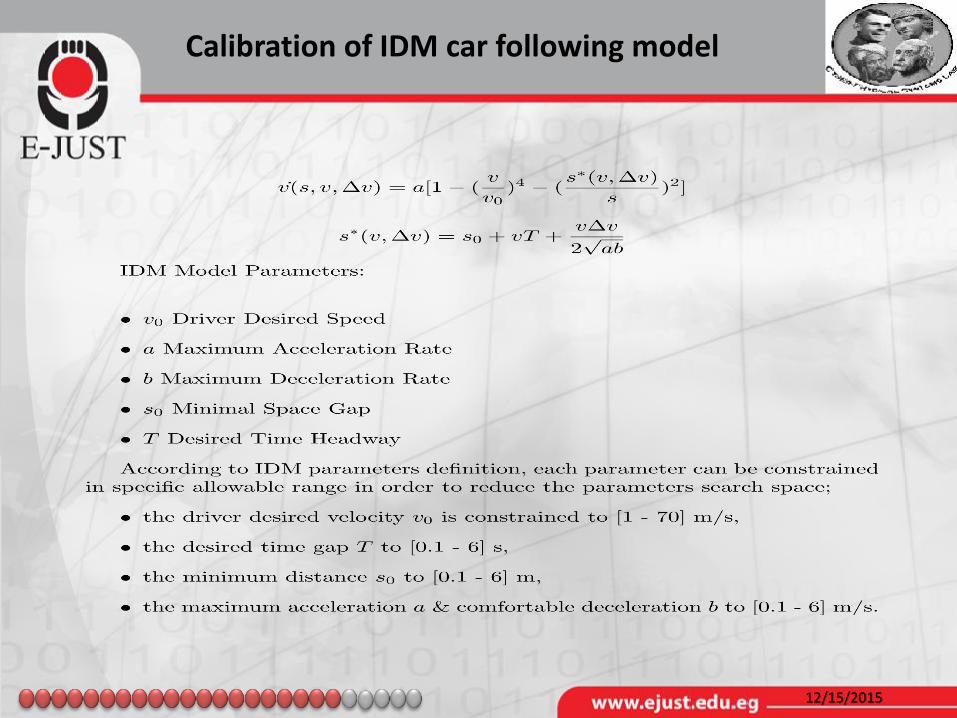
Calibration of IDM car following model
12/15/2015
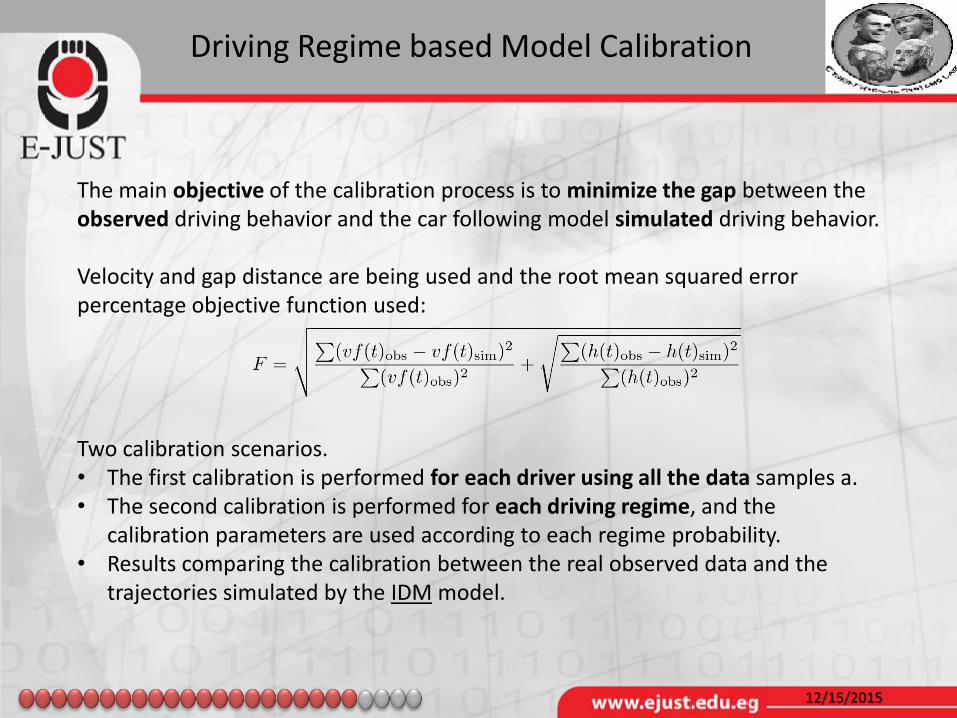
Driving Regime based Model Calibration
12/15/2015
The main objective of the calibration process is to minimize the gap between the observed driving behavior and the car following model simulated driving behavior. Velocity and gap distance are being used and the root mean squared error percentage objective function used: Two calibration scenarios. • The first calibration is performed for each driver using all the data samples a. • The second calibration is performed for each driving regime, and the
calibration parameters are used according to each regime probability. • Results comparing the calibration between the real observed data and the
trajectories simulated by the IDM model.
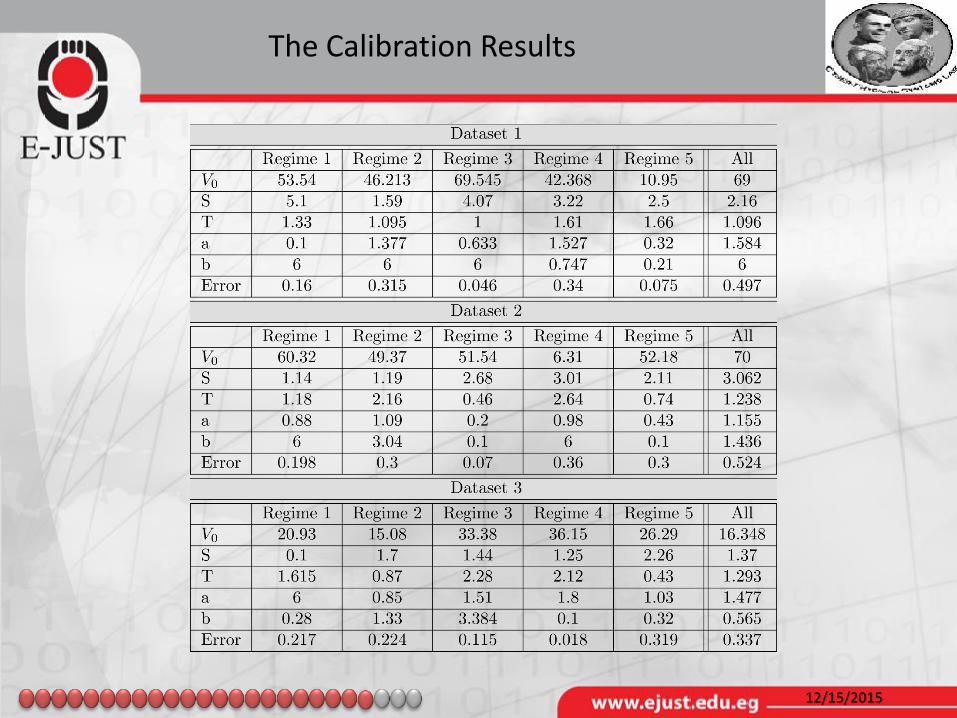
The Calibration Results
12/15/2015
The Calibration Results
12/15/2015
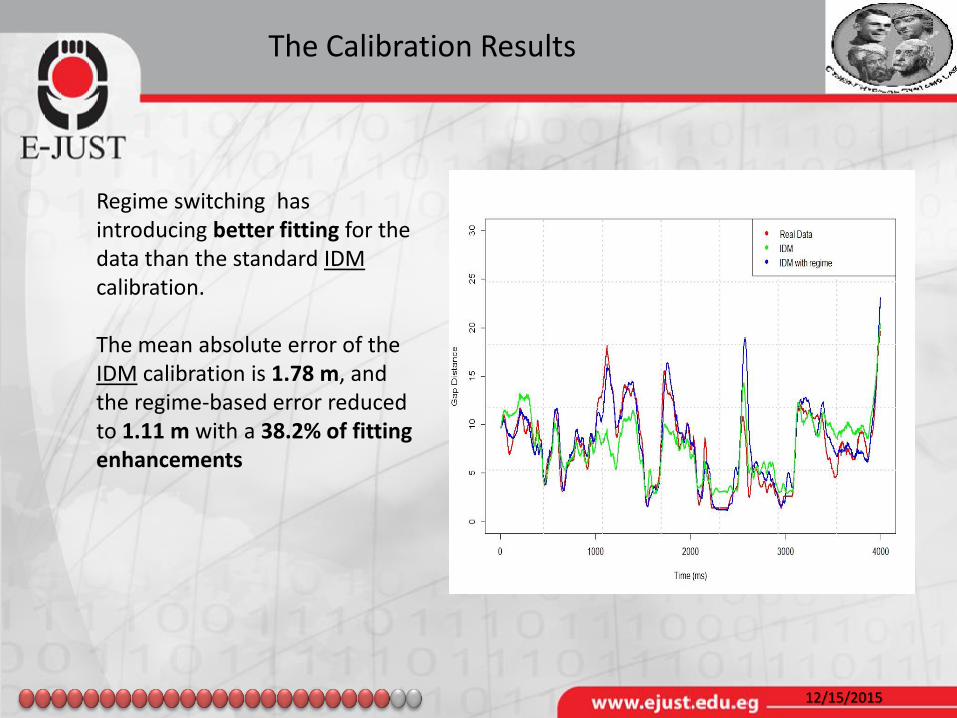
Regime switching has introducing better fitting for the data than the standard IDM calibration. The mean absolute error of the IDM calibration is 1.78 m, and the regime-based error reduced to 1.11 m with a 38.2% of fitting enhancements
Conclusion
12/15/2015
•The model assumed an automated procedure to distinguish car following regimes based on trajectory data using Markov regime switching. •Model able to capture and classify driver behavior patterns in real naturalistic driving situations. •Results presented show that the model is able to
•Moving from continuous lower-level modeling of driver behavior (i.e. microscopic modeling) towards discrete event upper level modeling •Classify normal car following behavior, rare events, short events •Able to determine the switching dynamics between different regimes. •Enhance Models calibration process
•The model can help in •crash predication. •Driver assisted. •Assessment systems.
Your Questions & Comments Are Always Welcome Contact : Ahmed Bayoumy zaky [email protected]
12/15/2015