hØgskolen i bergen avdeling …home.hib.no/eksamensoppgaver/ai/2007h/tom007 regulering...teikn eit...
TRANSCRIPT
HØGSKOLEN I BERGENAvdeling for ingeniørutdanning
EKSAMEN I TOM007 Regulering, modellering og analyseKLASSE : OSHMAM, OSHMPR
DATO : 20. DESEMBER 2007
TALET pA OPPGAVERTALET pA SIDERVEDLEGG
HJELPEMIDDEL
TID
MÅLFORM
SENSORFAGLÆRAR
MERKNADER
: 4: 4 (med forsida): l side
: Kalkulator.Skrive- og teiknesakerLogaritmepapirLærebok, eigne notat og utdelte notat
: 3 timer (kl. 0900 - 1200)
: Nynorsk
: Finn Conrad
: Oppgåvene tel likt
Postboks 7030, 5020 Bergen. Tlf. 55 58 75 DO, Fax 55 58 77 90Besøksadr.: Nygårdsgt. 112. Bergen
- l -
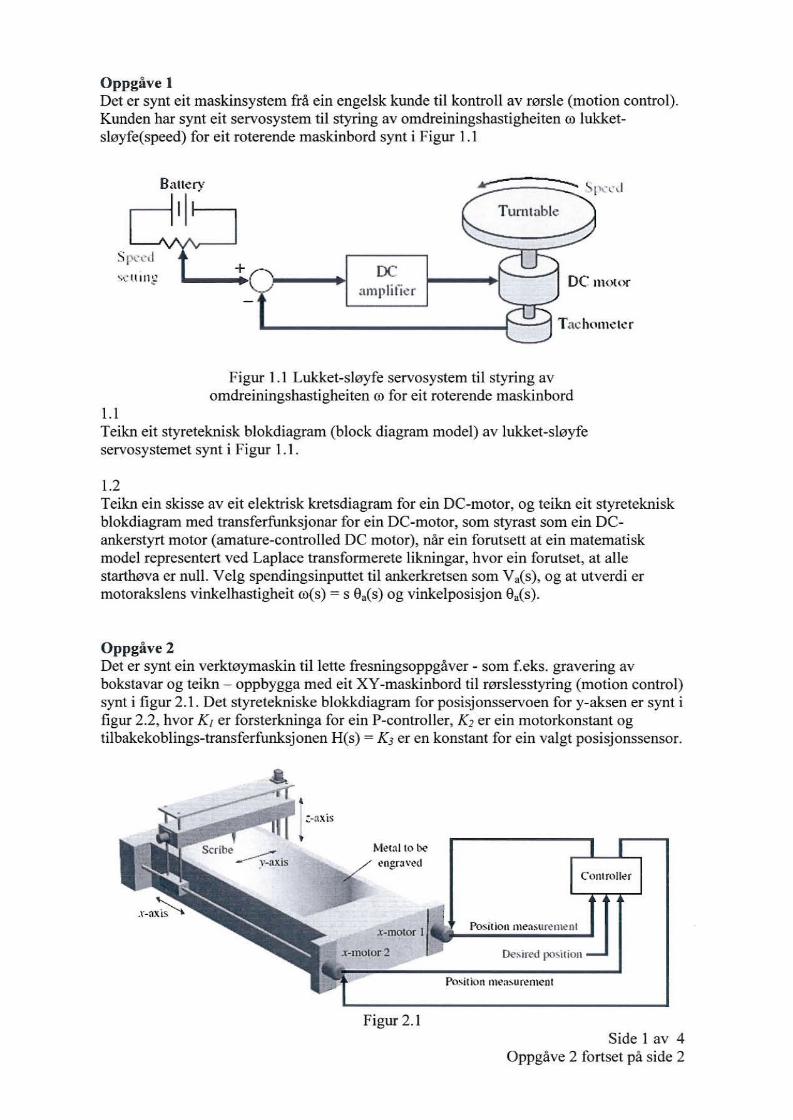
Oppgåve IDet er synt eit maskinsystem frå ein engelsk kunde til kontroll av rørsle (motion control).Kunden har synt elt servosystem til styring av omdrein ingshastig heiten 00 lukketsløyfe(speed) for eit rote rende maskinbord synt i Figur 1.1
Battc ry
.---1 111-----1
+ IX:~ull J1li li.:r
Tur ntablc
1---....r~=--1 De m O(t)f
L--------------t~jTacbu mctcr
Figur 1.1 Lukket-sløyfe servosystem til styring avomdreiningshastigheiten ro for eit roterende maskinbord
l.1Teikn eit styreteknisk blokdiagram (block diagram model) av lukket-sløyfeservosystemet synt i Figur 1.1.
1.2Teikn ein skisse av eit elektrisk kretsdiagram for ein De-motor, og teikn eit styretekniskblokdi agram med transferfunksjonar for ein De -motor, som styrast som ein DCankerstyrt motor (amature-controlled De motor), når ein forutsett at ein matemati skmedet representert ved Laplace transfo rmerete Iikningar, hvor ein forutset , at allestarthøva er null . Velg spendingsinputtet til ankerkretsen som Va(s), og at utverdi ermotorakslens vinkelhastigheit oo(s) = s 9a(s) og vinkelposisjon 9a(s).
Oppgåve2Det er synt ein verktøymaskin til lette fresn ingsoppgåver - som f.eks. gravering avbokstavar og teikn - oppbygga med eit XY-maskinbord til rørslesstyring (motion control)synt i figur 2.1. Det styretekniske blokkdiagram for posisjonsservoen for y-aksen er synt ifigur 2.2, hvor Kl er forsterkninga for ein Pccontroller, K2 er ein motorkonstant ogtilbakekob lings-transferfu nksjonen H(s) = KJ er en konstant for ein valgt posisjonssensor.
M~I:l I IObc
ComrcHer
Po--ilion mcascrcmcnt
Figur 2. 1Side 1 av 4
Oppg åve 2 fortset på side 2

p . .ostttonR(s) + E(s) .s: -.& sY(s) l Y(s)
-- l +s 5 +s S
K,
Figur 2.2 Styresystem, som er ein posisjonsservo for y-aksa2.1Utled åpen-sløyfe transferfunksjonen Gopen(s) og lukket-sløyfe transferfunksjo na Gclosed(S)for blokdiagrammet synt i figur 2.2
2.2Forklar kort kva eit styresysterns type er? Angi og forklår kva det synte styresystemstype N ;= ? for sty resystemet synt i figur 2.2. Forklar kva ein tidsko nsta nt r er. og utl ed ogangi tallverdieme og fysiske enhe tar for dei to tidskonstantane 't I og r i , som inngår i densamla feed-forward transferfunksjona G( s).
2.JUtled og angi ein formel for å reikna den stasjonære feil (steady-state error) e(co) ;= ess, Slepog e(co) ;= ess. ramp . Utled korleis desse kan reiknast for dei ta llverdiar som er gitt i figur2.2.
2.4Utled den karak teristiske likning for styresystemet synt i figur 1.2. Utled og berekn forkva verdiar av Kl ,forsterkninga ein P-contro llar, styresyste met synt i figur 2.2 er stabiltfor tilfelle t. K2 = 2 og K3= 6 . Forklår for kva verdiar av Kl systemet blir ustabil t . Hint:Routh-Hurwitz stabilitets kriterium.
OppgåveJDet er synt eit maski nsystem til rørsleskontroll (motion control ). som har tresammenkopla masser MI,M2. Ml. som røyrast translatorisk langs den same akse pårullefør ingar. Ein forenkl a matematisk model kan formuleres ved å anta ko nsentreraparametre (lumped- parameters) som synt i Figur 3.1.
Position Pcsiticn
/ Yl y,f- . bl I--> ~b,
FDrive ----3-- -----or--Ml
---wNv-M, M,
kl
Figur J. l
Dei tre massane kan røyrast som eit system med tre frihetsgradar beskrevet ved de i trepos itionane y" Y2 og Yl' Den drivande krafta er FD og belastningskrafta er F3 som virkerpå henholdsvis MI and Ml.
Side 2 av 4Op pgåve 3 fortset på side 3
Dei synte tre fjærane er lineære med dei respektive fjærs tivheter kl , k2 og k3, dei tre syntelineære demparane har dei respektive dempningskoeffisientane b l, b2 og bj. På grunn avrulleføringane kan all frik sjon neglisjerast ved modelleringen.
3. 1Definer dei fysiske lovane, som kan nyttast, og udlei fra desse dei matemati skelikningane som beskri var rørslane for dei tre massane.
3.2Grei ut ein matematisk modell representert ved Laplace transformerte ligninger, idet detforutsettes at starthøva alle er nulL
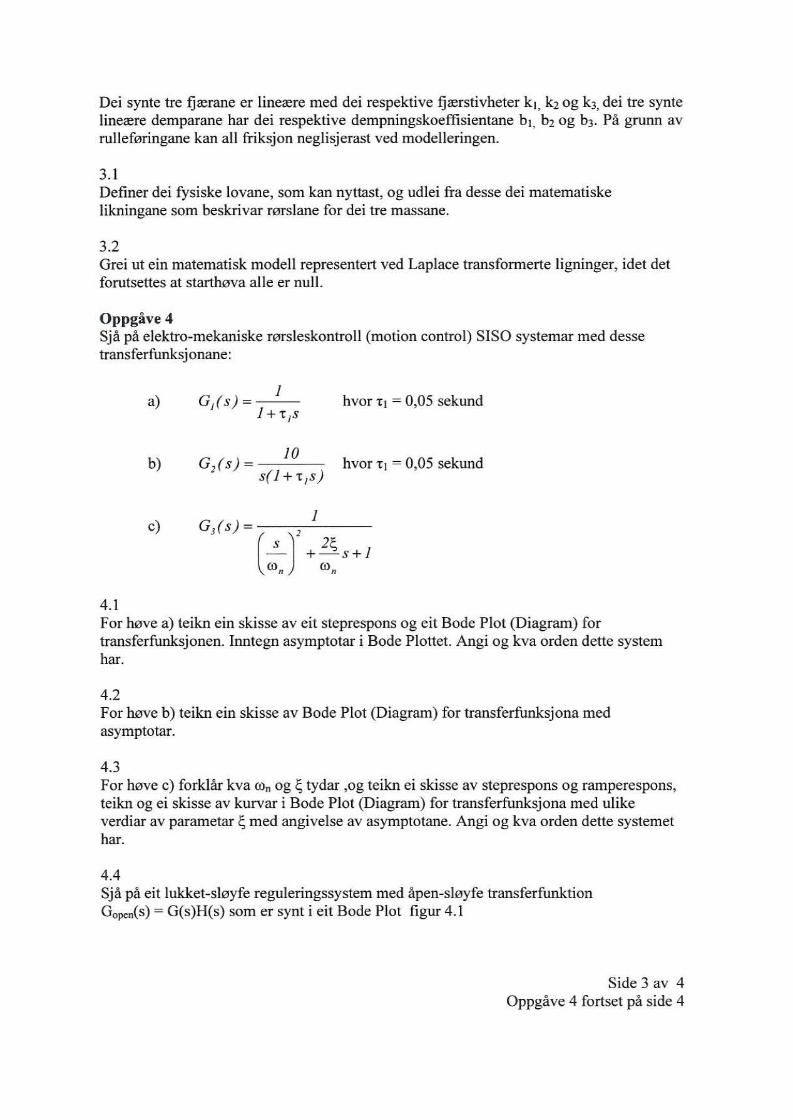
Oppgåve4Sjå på elektro-mekaniske rørsleskontroll (mo tion control) SISD systemar med dessetransferfunksjonane :
a)
b)
c)
10G, ( s ) ~ hvor r i ~ 0,05 sekund
s(l +<,s )
1GJ s ) = ..,--,.",----- - -
(_s ) + _2~ s+ 1ro" ro"
4.1For høve a) teikn ein skisse av eit steprespons og eit Bode Plot (Diagram) fortransferfunksjonen. Inntegn asymptotar i Bode Plottet. Angi og kva orden dette systemhar.
4.2For høve b) teikn ein skisse av Bode Plot (Diagram) for transferfunksjona medasymptotar .
4.3For høve c) forklår kva ron og ~ tydar .og te ikn ei skisse av steprespons og ramperespons,teikn og ei skisse av kurvar i Bode Plot (Diagram) for transferfunk sjona med ulikeverdiar av parametar ~ med ang ivelse av asymptotane. Angi og kva orden dette systemethar .
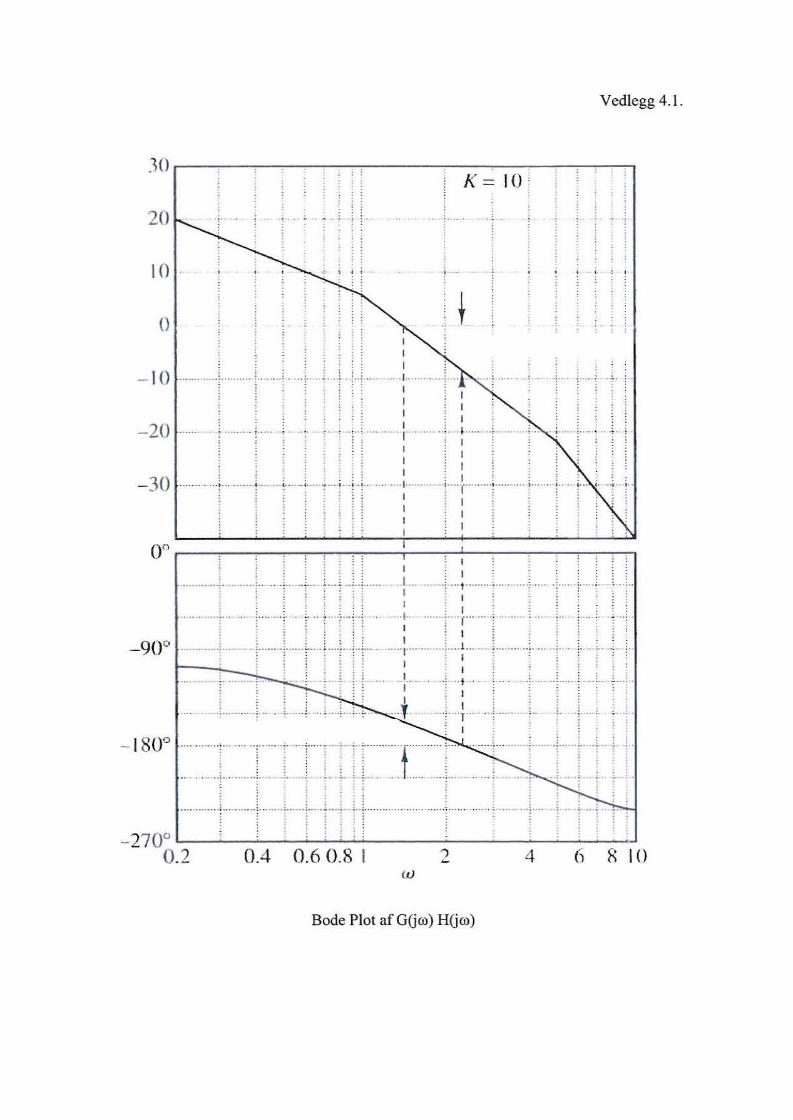
4.4Sjå på eit lukket-sløyfe reguleringssystem med åpen-sløyfe trans ferfunk tionO, ,,,.(s) ~ O(s)H(s) som er synt i eit Bode Plot figur 4.1
Side 3 av 4Oppgåve 4 fortset på side 4
}.: = 10.11 ", - - - - - - - - - - ,-----,--,---- - -,
20
lO
o l- 10
- 20
-JO
,,•,,,,,
,,,,,••,•, .,t
O'~==========t========:=;
- 90 '"
- I X'" t
fl X 10
Figur 4.1 Apen-sløyfe Bode Plot af Go,,"(s) ~ GUm) HUm)
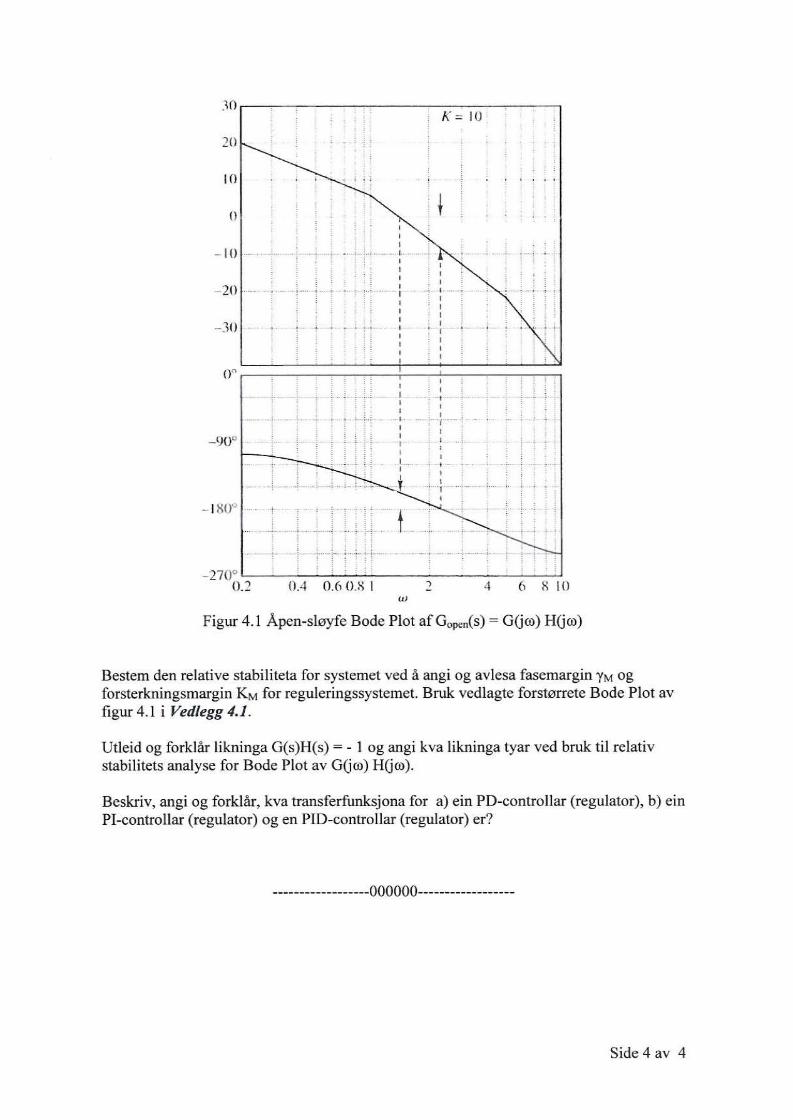
Bestem den relative stabiliteta for systemet ved å angi og avlesa fasemargin YMogforsterkningsmarg in KM for reguleringssystemet. Bruk vedlagte forstørrete Bode Plot avfigur 4.1 i Vedlegg 4.1.
Utleid og forklår likoinga G(s)H(s) ~ - I og angi kva likoinga tyar ved bruk til relativstabilitets analyse for Bode Plot av G(im) HUm).
Beskriv, angi og forklår, kva transferfunksjona for a) ein PD-controllar (regulator), b) einPl-controllar (regulator) og en PID-controllar (regulator) er?
------------------000000------------------
Side 4 av 4
Vedlegg 4.1.
," '1
o
I' t '
I...1
II
- 1 "I,1o
III
• •• 0. 0 • • • ~ • • • • • • •• • • • • • • • •
III
. . .. •. j •• . :,,o
K JO
l
,,I,.,IIIIIII,I,,o
I
,. 1...,
I. . .j.
oI
·· ···1,.',
I:. .:.' ''-.. ,
... ,
...,.
.,. ....~• • • • 0 " 0 • • •• • • • • • • • ;.
.10
20
lO
O
- lO . ........
- 20
- 30 .
- 900
1-; lO4..,cv
0.6 0.8 I(J.4_270° L----'_ -'--'-_ -'---'--' -'-_-'-__-'-~_:_J
0.2
Bode Plo' afGOm) HOm)
00.
""
T
l
- ~
m
- w
O'
- ~
- ~
~
. ~
o
-- -- ~
- ~
I ..
,. ..
I
---J----,
..~'-, .
1- ~" : -
- I •.
--- 1-- +::-
·1
i:,_ ..I" · ::::
I'" -- 1 --
1-
I
, I
+- - L ~' l -
- I
--i:::r: .l." ..~....._ . i
I:: ,,::' ,:d:. I I
1 -;-
h~~ ~..::r·-: :l"-I
r-
.. .\"0" +
, -
.. •... _.
. _1:E ..
,--
I '~ : . ,
; ..L ..
I .. I .'
_ . I • _
-~~ •• j-._- ...._.~ . _ -
I .
-- j -- -
•. C =....
,.::
·l
_ .. ~~.-
I l l·I
, .
' i...t:-:"
!: ~::
..--L": :
. II
- -i ....
.:1" ..... r=:-
,-
,..
····1' -· -' 1- ';.. i
- I '"
-r-r-
.--.o. :.j~>.t
I
j:. . .
,! .
I···1 ··
et:
," 1 .i
_•.••1
I
o>
w -
~ .