graphical system design for hil power electronics...
TRANSCRIPT

NI Arabia Academic Day 2013, May 16, Beirut
Graphical System Design
for HIL Power Electronics
Applications
Kamel Ben Saad Senior Lecturer
ENIT

NI Arabia Academic Day 2013, May 16, Beirut 2
Outline
Introduction
Hardware In the Loop (HIL) principles
HIL simulation of a DC-DC parallel converter control
Research works context
Studied parallel converter model
Sliding mode control design
HIL simulation approach implementation
Conclusion

NI Arabia Academic Day 2013, May 16, Beirut 3
Outline
Introduction
Hardware In the Loop (HIL) principles
HIL simulation of a DC-DC parallel converter control
Research works context
Studied parallel converter model
Sliding mode control design
HIL simulation approach implementation
Conclusion

NI Arabia Academic Day 2013, May 16, Beirut 4
Ecole Nationale d’Ingénieurs de Tunis
Founded in 1968
The oldest engineering school in Tunisia
1550 engineering students
300 teachers
Engineering teaching
More than 1000 Master and PhD students
10 Reseach Laboratories
08 Research Units
Research

NI Arabia Academic Day 2013, May 16, Beirut 5
Departement of Electrical Engineering
First year and Second year : Common studies
3 years studies : Electrical Engineering National Diploma
All 3rd year students (three options ) attend an obligatory Labview course
All students take the CLAD exam
2 years : 25 certified students (CLAD)
Electronics and Microelectronics
Automatic Control and Systems Design
Electrical Systems Third year: 3 options
12 Professors and 7 Senior lecturers
9 Associate Professors and 2 Assistants
About 90 graduated students each year
NI Arabia Academic Day 2013, May 16, Beirut 6
Laboratoire de Recherche en Automatique
90 researchers
10 Professors and Senior lecturers
20 Associate Professors and Assistants
60 PhD and Master students
3 Research Areas :
Control and complex systems: Control theory, Stability, Fuzzy logic, neural
networks, optimization algorithm…
Embeded systems and machines control: Embeded control laws, FPGA
implementation, Sensorless machine control, Embeded electrical networks…
Robotics, mecatronic and machines design: Robots modelling and Control,
Linear motors design, special motors design…

NI Arabia Academic Day 2013, May 16, Beirut 7
Outline
Introduction
Hardware In the Loop (HIL) principles
HIL simulation of a DC-DC parallel converter control
Research works context
Studied parallel converter model
Sliding mode control design
HIL simulation approach implementation
Conclusion

NI Arabia Academic Day 2013, May 16, Beirut 8
Automatic control researchers must prove the efficiency of the
designed control law
Sometimes it is impossible to have the controlled systems in
the laboratory (Controlled plant can be an aircraft, a nuclear
power plant, a satellite…)
Generally studied systems requires multidisciplinary
knowledge
How to validate quickly in practice a control law ?
How to insure the tests safely ?
NI Arabia Academic Day 2013, May 16, Beirut 9
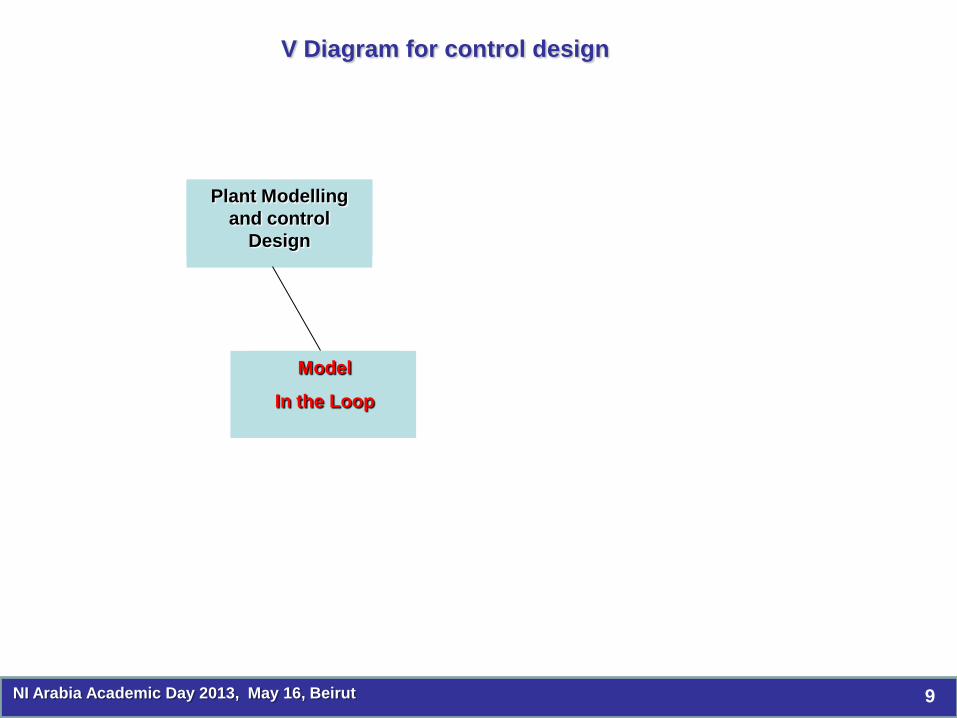
V Diagram for control design
Plant Modelling
and control
Design
Model
In the Loop

NI Arabia Academic Day 2013, May 16, Beirut 10
+
-
Simulated
control
plant
simulation
Model In the Loop
The controller and the Model are simulated
Allows the developement of the control
algorithm

NI Arabia Academic Day 2013, May 16, Beirut 11
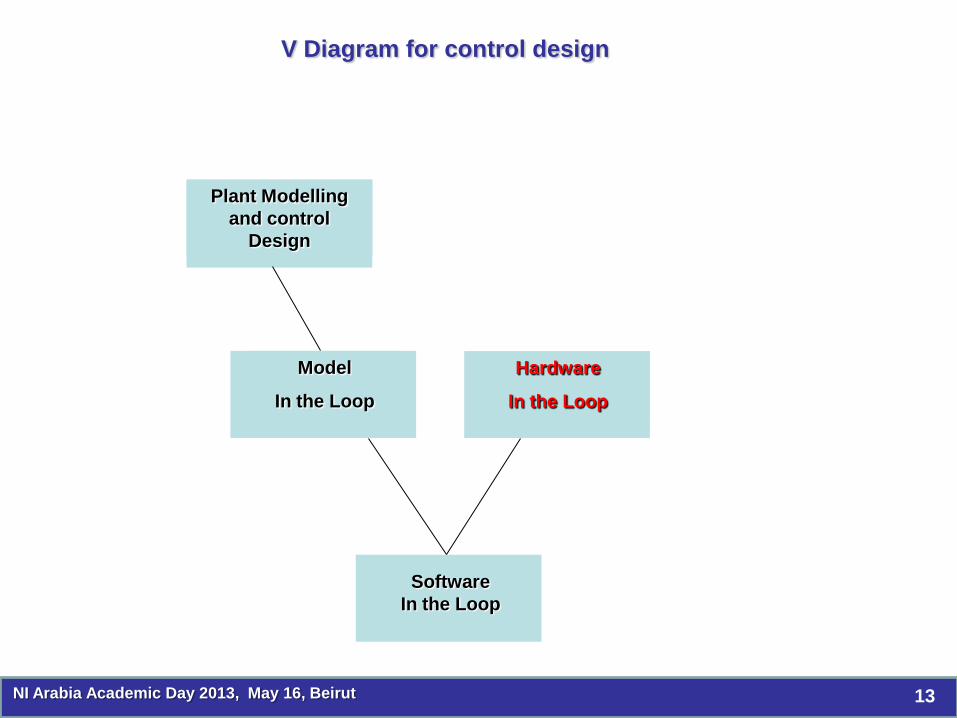
V Diagram for control design
Plant Modelling
and control
Design
Model In the
Loop (MIL)
Software
In the Loop

NI Arabia Academic Day 2013, May 16, Beirut 12
Software In the Loop
+
-
Controller
Executable
code
Simulated
Plant
The control law is developed using a compiled
programming language (ex: C language )
Allows the controller program test
NI Arabia Academic Day 2013, May 16, Beirut 13
V Diagram for control design
Plant Modelling
and control
Design
Model
In the Loop
Software
In the Loop
Hardware
In the Loop

NI Arabia Academic Day 2013, May 16, Beirut 14
Used for the developments and the tests of complex embedded systems
Require a real control component in the loop
Hardware In the Loop
+
-
Real time
controller
Real time
plant
simulation

NI Arabia Academic Day 2013, May 16, Beirut 15
V Diagram for control design
Plant Modelling
and control
Design
Model In the
Loop (MIL)
Software In the
Loop (SIL)
Control
validation
Hardware In the
Loop (HIL)
Design Test

NI Arabia Academic Day 2013, May 16, Beirut 16
HIL simulation
Reduces development cycle
Increases efficiency
Improves reliability and safety
Prevents costly and dangerous failures
Allows the design and the tests of the control law without the presence of
the real plant

NI Arabia Academic Day 2013, May 16, Beirut 17
Outline
Introduction
Hardware In the Loop (HIL) principles
HIL simulation of a DC-DC parallel converter control
Research works context
Studied parallel converter model
Sliding mode control design
HIL simulation approach implementation
Conclusion

NI Arabia Academic Day 2013, May 16, Beirut 18
Embedded electrical car network (prevision for 2030)
Embedded electrical network
Goal
Design of closed loop control insuring the stability and the robustness of an
embedded electrical network power converters
Alternator
Loads
Loads
Regulator
Regulator
42 V DC Bus
14V DC Bus Battery
Battery
DC/DC
Converter
AC/DC
Converter
Engine

NI Arabia Academic Day 2013, May 16, Beirut 19
Outline
Introduction
Hardware In the Loop (HIL) principles
HIL simulation of a DC parallel converter control
Research works context
Studied parallel converter model
Sliding mode control design
HIL simulation approach implementation
Conclusion

NI Arabia Academic Day 2013, May 16, Beirut 20
DC-DC converter
Cell 1
DC-DC converter
Cell 2
DC-DC converter
Cell N
Load
First Voltage level
Second voltage
level
Input Voltage
Parallel DC-DC converter
Buck parallel DC DC converter General structure
of the studied parallel converter

NI Arabia Academic Day 2013, May 16, Beirut 21
eq
1
1
2
2
3
3
1 2 3
L1 L 0 1 in
1
L2 L 0 2 in
2
L3 L 0 3 in
3
0L L L 0
eq eq
di 1( r i v d v )
dt L
di 1( r i v d v )
dt L
di 1( r i v d v )
dt L
dv 1 1( i i i ) v
dt C RC
Studied parallel converter modelling
Structure of the parallel converter Mathematical model of the parallel converter

NI Arabia Academic Day 2013, May 16, Beirut 22
Outline
Introduction
Hardware In the Loop (HIL) principles
HIL simulation of a DC-DC parallel converter control
Research works context
Studied parallel converter model
Sliding Mode Control design
HIL simulation approach implementation
Conclusion

NI Arabia Academic Day 2013, May 16, Beirut 23
Switching Surface
e
e
Sliding mode control
Nonlinear control
Derived from variable structure control theory
Robust control

NI Arabia Academic Day 2013, May 16, Beirut 24
1 1 1 1 111 01 2 3
1 1 1
2 2 2 2 222 01 2 3
2 2 2
3 3 333 1 2
3 3
( )
( )
( )
eq eq
L L Leqin eq eq eq eq
eq eq
L L Leqin eq eq eq eq
eq
L Leqin eq eq eq
k rC L k RC LLd i i i v
k v L C C C RC L
k r C L k RC LLd i i i v
k v C L C C RC L
k r C LLd i i
k v C C L C
3 3
033
eq
L
eq
k RC Li v
RC L
1 1 01
2 2 2 0
3 3 3 0
L
L
L
S k i v
S k i v
S k i v
j j jeq nd d d j=1,2,3
Equivalent control Nonlinear control
Determination of the equivalent control
Sliding Mode Control design
jj v j iS e k e
i ref Lj je I i
0v refe V v
Sliding surfaces
Control
Si=Si=0
Determination of the nonlinear control
Lyapunov stability theorem
and j=1,2,3

NI Arabia Academic Day 2013, May 16, Beirut 25
Outline
Introduction (ENIT, Electrical Departement and LARA
laboratory)
HIL simulation approach
Research works context
HIL simulation approach
Studied parallel converter model
Sliding mode control design
HIL simulation approach implementation
Conclusion

NI Arabia Academic Day 2013, May 16, Beirut 26
Simulink model
.dll file
Labview control program
NI USB 6009
cRIO 9076
NI 9263 (AO) NI 9202 (AI)
Ethernet

NI Arabia Academic Day 2013, May 16, Beirut 27
Simulink Model

NI Arabia Academic Day 2013, May 16, Beirut 28
Simulink (.mdl file)
Simulation Interface Toolkit =
VeriStand implementation steps
Deployment Targets
configuration
Adding the Model
Mapping
Deployement
Workspace screen
configuration

NI Arabia Academic Day 2013, May 16, Beirut 29
Veristand Project

NI Arabia Academic Day 2013, May 16, Beirut 30
USB 6009
Deployment Targets configuration

NI Arabia Academic Day 2013, May 16, Beirut 31
Adding the Model
Simulink .dll file

NI Arabia Academic Day 2013, May 16, Beirut 32
Mapping

NI Arabia Academic Day 2013, May 16, Beirut 33
Workspace screen configuration

NI Arabia Academic Day 2013, May 16, Beirut 34
cRIO Labview Program
FPGA mode
Script node for the sliding surfaces calculation

NI Arabia Academic Day 2013, May 16, Beirut 35
Results
Output voltage
Inductance currents
Control signal

NI Arabia Academic Day 2013, May 16, Beirut 36
Conclusion
VeriStand : Easy and fast configuration and implementation
The Implemented Labview control program works properly
cRIO programmed in FPGA mode is adequate for power converters
The same HIL simulation approach was applied for the case of a Romotly
Operated underwater Vehicule
Simulation is limited to 1 kHz USB 6009 will be replaced by a sRIO
to perform a real time simulation of the plant model

NI Arabia Academic Day 2013, May 16, Beirut 37
Thank you