funkcija prenosa linearnog sistema - telekomunikacije · nestacionarni sistemi, često nazivani i...
TRANSCRIPT

Funkcija prenosa linearnog sistema
Posmatra se kontinualni, linearni, stacionarni sistem sa jednim ulazom i jednim izlazom prikazan na slici 1.
y(t)Gu(t)
Slika 1 Definicija: Funkcija prenosa sistema se definiše kao odnos Laplasove transformacije izlazne (y(t)) i ulazne (u(t)) veličine, uz pretpostavku da su svi početni uslovi nulti i da je u(t)=y(t)≡0 ∀t<0. U opštem slučaju je sistem sa jednim ulazom i jednim izlazom opisan diferencijalnom jednačinom dnydtn
+ an-1dn-1ydtn-1 +...+ a2
d2ydt2
+ a1d1ydt1
+ a0y = bmdmudtm
+ bm-1dm-1udtm-1 +...+ b1
d1udt1
+ b0u.
(1) Ako se na jednačinu (1) primeni Laplasova transformacija, uz uvažavanje nultih početnih uslova, sledi snY + an-1sn-1Y +...+ a2s2Y + a1sY + a0Y = bmsmU + bm-1sm-1U +...+ b1sU + b0U,
(2) odnosno
Y(s)U(s) = G(s) =
bmsm + bm-1sm-1 +...+ b1s + b0sn + an-1sn-1 +...+ a2s2 + a1s + a0
Napomene i ograničenja Na ovakav način se funkcija prenosa može definisati samo za linearne stacionarne sisteme. Nestacionarni sistemi, često nazivani i vremenski promenljivi sistemi poseduju jedan ili više parametara koji su funkcije vremena (promenljivi parametri) i u tom slučaju je nemoguća primena Laplasove transformacije. Funkcija prenosa uzuma u obzir samo zavisnost ulaz-izlaz i ne pruža nikakvu informaciju o unutrašnjoj strukturi i ponašanju sistema. Primer 1. a) Odrediti prenosnu funkciju G(s)=U2(s)/U1(s), električnog kola sa slike. b) Odrediti odziv kola (u2(t)) na pobudu: b1) u1(t)=δ(t); b2) u1(t)=U h(t). Početni uslovi su nulti.
if
u1(t) u2(t)+
C
R
1

Rešenje
a) dt
)t(2duC)t(i = ;
dt)t(2duRC)t(2u)t(2u)t(Ri)t(1u +=+= /L ⇒ U1(s)=U2(s)(1+RCs)
1RCs1
)s(1U)s(2U)s(G
+==
b1) u1(t)=δ(t) ⇒ U1(s)=1.
RC1s
1RC11
1RCs1)s(2U
+⋅=⋅
+= /L-1 ⇒ )t(hRC
te
RC1)t(2u ⋅
−⋅= .
Odziv sistema je prikazan na slici.
u2(t)
RC1
τ=RC
t
b2) u1(t)=U h(t) ⇒ sU)s(1U = .
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+−=
⎟⎠⎞
⎜⎝⎛ +
⋅=⋅+
=
RC1s
1s1U
RC1ss
1RCU
sU
1RCs1)s(2U /L-1 ⇒ )t(hRC
te1U)t(2u ⋅
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −−= .
Odziv, za različite vremenske konstante τ1 i τ2 je prikazan na slici.
u2(t)
t
τ2=R2C2
τ1=R1C1U
τ1<τ2
2

Primer 2. a) Odrediti prenosnu funkciju G(s)=U2(s)/U1(s), električnog kola sa slike. b) Odrediti odziv kola (u2(t)) na pobudu u1(t)=sint. Početni uslovi su nulti.
u1(t)+ u2(t)
R C
RC
Rešenje a)
u1(t)+ u2(t)
R C
i(t) RC i(t)
uR(t)
uR(t)
uC(t)
uC(t)
u1(t)=uR(t)+uC(t); u1(t)=uR(t)-uC(t); uR(t)=Ri(t); ∫= dt)t(iC1)t(Cu .
∫+= dt)t(iC1)t(Ri)t(C1u /L ⇒ )s(I
Cs1RCs)s(1U ⋅
+=
∫−= dt)t(iC1)t(Ri)t(C1u /L ⇒ )s(I
Cs1RCs)s(1U ⋅
−=
RC1s
RC1s
1RCs1RCs
)s(1U)s(2U)s(G
+
−=
+−
==
b) u1(t)=sint ⇒ 12s
1)s(1U+
=
T=RC ⇒
T1s
T1s
)s(G+
−=
T1s
1
12T
T2
12s
1
12T
12T
12s
s
12T
T2
12s
1
T1s
T1s
)s(2U+
⋅+
−+
⋅+
−+
+⋅
+=
+⋅
+
−=
Tt
e12T
T2tsin12T
12Ttcos12T
T2)t(2u−
⋅+
−⋅+
−+⋅
+=
3
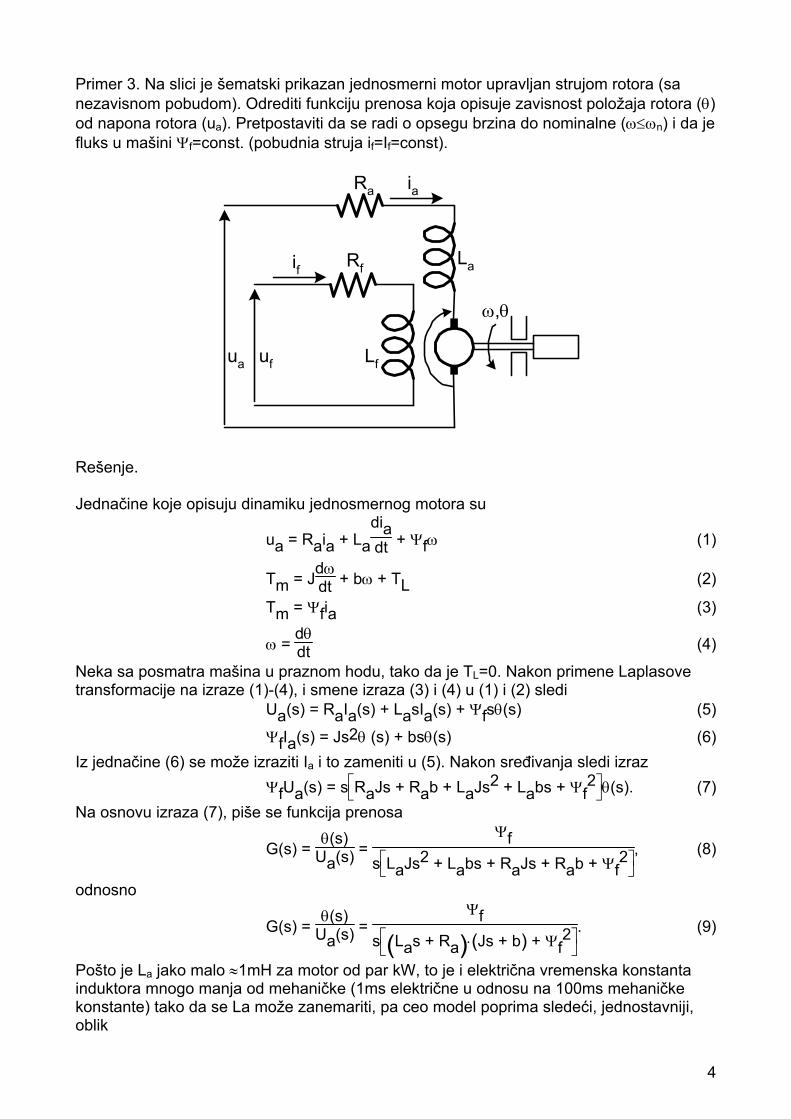
Primer 3. Na slici je šematski prikazan jednosmerni motor upravljan strujom rotora (sa nezavisnom pobudom). Odrediti funkciju prenosa koja opisuje zavisnost položaja rotora (θ) od napona rotora (ua). Pretpostaviti da se radi o opsegu brzina do nominalne (ω≤ωn) i da je fluks u mašini Ψf=const. (pobudnia struja if=If=const).
Rf
Lf
Ra
La
ia
if
ufua
ω,θ
Rešenje. Jednačine koje opisuju dinamiku jednosmernog motora su
ua = Raia + Ladiadt + Ψfω (1)
Tm = Jdωdt + bω + TL (2)
Tm = Ψfia (3)
ω = dθdt (4)
Neka sa posmatra mašina u praznom hodu, tako da je TL=0. Nakon primene Laplasove transformacije na izraze (1)-(4), i smene izraza (3) i (4) u (1) i (2) sledi
Ua(s) = RaIa(s) + LasIa(s) + Ψfsθ(s) (5)
ΨfIa(s) = Js2θ (s) + bsθ(s) (6) Iz jednačine (6) se može izraziti Ia i to zameniti u (5). Nakon sređivanja sledi izraz
ΨfUa(s) = s⎣⎡
⎦⎤RaJs + Rab + LaJs2 + Labs + Ψf
2 θ(s). (7) Na osnovu izraza (7), piše se funkcija prenosa
G(s) = θ(s)Ua(s) =
Ψfs⎣
⎡⎦⎤LaJs2 + Labs + RaJs + Rab + Ψf
2 , (8)
odnosno
G(s) = θ(s)Ua(s) =
Ψfs⎣
⎡⎦⎤( )Las + Ra ⋅( )Js + b + Ψf
2 . (9)
Pošto je La jako malo ≈1mH za motor od par kW, to je i električna vremenska konstanta induktora mnogo manja od mehaničke (1ms električne u odnosu na 100ms mehaničke konstante) tako da se La može zanemariti, pa ceo model poprima sledeći, jednostavniji, oblik
4

G(s) = θ(s)Ua(s) =
Ψfs⎣
⎡⎦⎤Ra⋅( )Js + b + Ψf
2 . (10)
Jednačina (10) se može, deljenjem brojioca i imenioca sa (Rab+Ψf2), transformisati u oblik
G(s) = θ(s)Ua(s) =
ΨfRab+Ψf
2
s⎣⎢⎢⎡
⎦⎥⎥⎤RaJ
Rab+Ψf2s + 1
. (11)
Ako se uvedu oznake K = Ψf
Rab+Ψf2 i T =
RaJ
Rab+Ψf2, tada se izraz (11) može napisati u
obliku
G(s) = θ(s)Ua(s) = K
s[ ]Ts + 1 (12)
Na osnovu jednačine (12) direktno se može napisati funkcija prenosa koja opisuje zavisnost brzine motora (ω) od napona rotora (ua)
G(s) = ω(s)Ua(s) = K
Ts + 1. (13)
Primer 4. Za električno kolo na slici odrediti funkciju prenosa G(s) = U2(s)U1(s)
u1(t)+
C
R
C
R
u2(t)C
R
Rešenje:
u3(t)
z1
u4(t)u1(t)
+
C
R
C
R
u2(t)C
R
z2
Impedanse z1(s) i z2(s) se izračunavaju na sledeći način
z2(s) = ⎝⎜⎛
⎠⎟⎞R + 1
Cs || 1Cs = RCs+1
Cs(RCs + 2) (1)
z1(s) = ( )R + z2(s) || 1Cs = (RCs)2 + 3RCs +1
Cs((RCs)2 + 4RCs + 3). (2)
Prema pravilu naponskog razdelnika pišu se sledeće jednačine
U4(s) = z1(s)
R + z1(s) U1(s) (3)
5

U3(s) = z2(s)
R + z2(s) U4(s) (4)
U2(s) =
1Cs
R + 1Cs
U3(s) = 11 + RCs U3(s) (5)
Smenom izraza (3) u (4), a zatim (4) u (5) dobija se
U2(s) = 11 + RCs
z2(s)R + z2(s)
z1(s)R + z1(s) U1(s). (6)
Konačno je funkcija prenosa
G(s) = U2(s)U1(s) = 1
(RCs)3 + 5(RCs)2 + 6RCs + 1. (7)
Primer 5. Za električno kolo na slici odrediti funkciju prenosa G(s) = U2(s)U1(s)
u1(t)+
C
R
CR
u2(t)
Rešenje: G(s) = U2(s)U1(s) = 1 + RCs
(RCs)2 + 3RCs + 1
Primer 6. Za električno kolo na slici odrediti
u2(t)+
CL
LC
a) funkciju prenosa G(s) = U2(s)U1(s), usvojiti oznaku T=LC.
b) odziv u2(t) za pobudni signal u1(t)=cos(ωt). Rešenje:
a) G(s) = U2(s)U1(s) = 1 - Ts2
1 + Ts2.
6

b) Odziv sistema u kompleksnom domenu je U2(s)=G(s)U1(s). Slika pobudnog signala u
kompleksnom domenu je U1(s) = ss2+ω2. Sada je izraz za odziv
U2(s) = 1 - Ts2
1 + Ts2 ss2 + ω2.
Nakon faktorizacije prethodnog izraza sledi
U2(s) = - 21 - Tω2 ⋅ s
s2 + 1T + 1 + Tω2
1 - Tω2 ⋅ ss2 + ω2,
pa je odziv u2(t)
u2(t) = - 21 - Tω2 ⋅ cos
⎝⎜⎛
⎠⎟⎞t
T + 1 + Tω2
1 - Tω2 ⋅ cos(ωt).
Primer 7. Za električno kolo na slici odrediti
u1(t)+
C
R
R
u2(t)
C
L
L
a) funkciju prenosa G(s) = U2(s)U1(s),
b) ako je R=0, odziv u2(t) za pobudni signal u1(t)=h(t). Rešenje:
a) G(s) = U2(s)U1(s) = RCs + 1
LCs2 + 2RCs + 1.
b) R=0 ⇒ G(s) = U2(s)U1(s) = 1
LCs2 + 1 ⇒ u2(t) =
⎣⎢⎡
⎦⎥⎤1 - cos
⎝⎜⎛
⎠⎟⎞t
LC h(t)
Primer 8. Za električno kolo na slici odrediti funkciju prenosa G(s) = U2(s)U1(s)
7

u1(t)+
C
R
C
Ru2(t)
Rešenje: G(s) = U2(s)U1(s) = (Ts)2 + 2Ts + 1
(Ts)2 + 3Ts + 1; T=RC.
Primer 9. Za električno kolo na slici odrediti funkciju prenosa G(s) = U2(s)U1(s)
u1(t)+ u2(t)
C1
C2
R2
R1
Rešenje: G(s) = U2(s)U1(s) =
1 - T1T2s2
(T1s + 1) (T2s + 1); T1=R1C1, T2=R2C2.
Algebra funkcije prenosa
Sistem automatskog upravljanja se često predstavlja na način prikazan na slici 1
y(t)Gu(t)
Slika 1 Ovakav način predstavljanja sistema se naziva blok dijagram. Matematički model sistema gde je veza između pojedinih komponenti prikazana blok dijagramima se naziva strukturni blok dijagram. Strukturni blok dijagram jednog sistema je prikazan na slici 2. Ovakav način predstavljanja modela sistema je zgodan jer ukazuje na unutrašnju strukturu sistema i međusobne veze između pojedinih promenljivih veličina. Ipak, za detaljniju analizu ponašanja sistema potrebna je funkcija prenosa koja se sa strukturnog blok dijagrama najčešće ne može direktno očitati. Radi određivanja funkcije prenosa na osnovu strukturnog blok dijagrama (SBD) sistema potrebno je uprostiti SBD do nivoa prikazanog na slici 1. U cilju simplifikacije SBD primenjuje se skup pravila - algebra funkcije prenosa. Neka od pravila algebre funkcije prenosa su prikazana u tabeli 1.
8

G1 G2
H1
U(s) Y(s)G3 G4
H2
H3
+ + +
+-
-
Slika 2.
Tabela 1. Pravila algebre funkcije prenosa
Elementi vezani na red
G1 G2 Gn...U(s) Y(s)
G1G2...Gn
Y(s)U(s)
Elementi vezani u pralelu
G1
G2 ±
Gn
...±
±
...
U(s) Y(s)
±G1±G2±...±Gn
Y(s)U(s)
Svođenje povratne sprege na jedan blok H
G±
U(s) Y(s)
GH1Gm
Y(s)U(s)
Premeštanje bloka H iz povratne grane H
±
U1(s) Y(s)G1 G2
U2(s)
+
HG1
±
+ G2H
U2(s)
Y(s)U1(s)
Premeštanje diskriminatora ispred bloka G1 H
±
U1(s) Y(s)G1 G2
U2(s)
+
1G
H
G1G2
±
+
U2(s)
Y(s)U1(s)
Premeštanje diskriminatora iza bloka G2
H±
U1(s) Y(s)G1 G2
U2(s)
+
G1G2
±
+
U2(s)
Y(s)U1(s)
G2H
9

Premeštanje bloka H iz direktne grane H
Y1(s)U(s)G1 G2
Y2(s)
G1H
Y2(s)
U(s) Y1(s)
HG2
Premeštanje tačke račvanja (čvora) ispred bloka G1 H
Y1(s)U(s)G1 G2
Y2(s)
G1H
G1G2
Y1(s)
Y2(s)
U(s)
Premeštanje tačke račvanja (čvora) iza bloka G2 H
Y1(s)U(s)G1 G2
Y2(s)
2G
H
G1G2U(s) Y1(s)
Y2(s)
Deljenje diskriminatora na dva dela x1
x2
x3
x3
++
x1
x2x3
x3
++
x2+
+
Ako se posmatra sistem sa povratnom spregom (slika 3) na njemu se mogu definisati dve karakteristične funkcije prenosa sistema.
H
G±
U(s) Y(s)
Slika 3.
Funkcija prenosa sistema sa zatvorenom povratnom spregom Ws(s) = G1mGH naziva se
funkcija spregnutog prenosa (funkcija prenosa zatvorenog kola), dok se funkcija prenosa sistema sa otvorenom povratnom spregom W(s) = GH naziva funkcija povratnog prenosa (funkcija prenosa otvorenog kola).
Primer 1. Primenom algebre funkcije prenosa odrediti funkciju prenosa G(s) = Y(s)U(s) sistema
sa slike 1.
10
G1 G2
H1
U(s) Y(s)G3 G4
H2
H3
+ + +
+-
-
Slika 1.
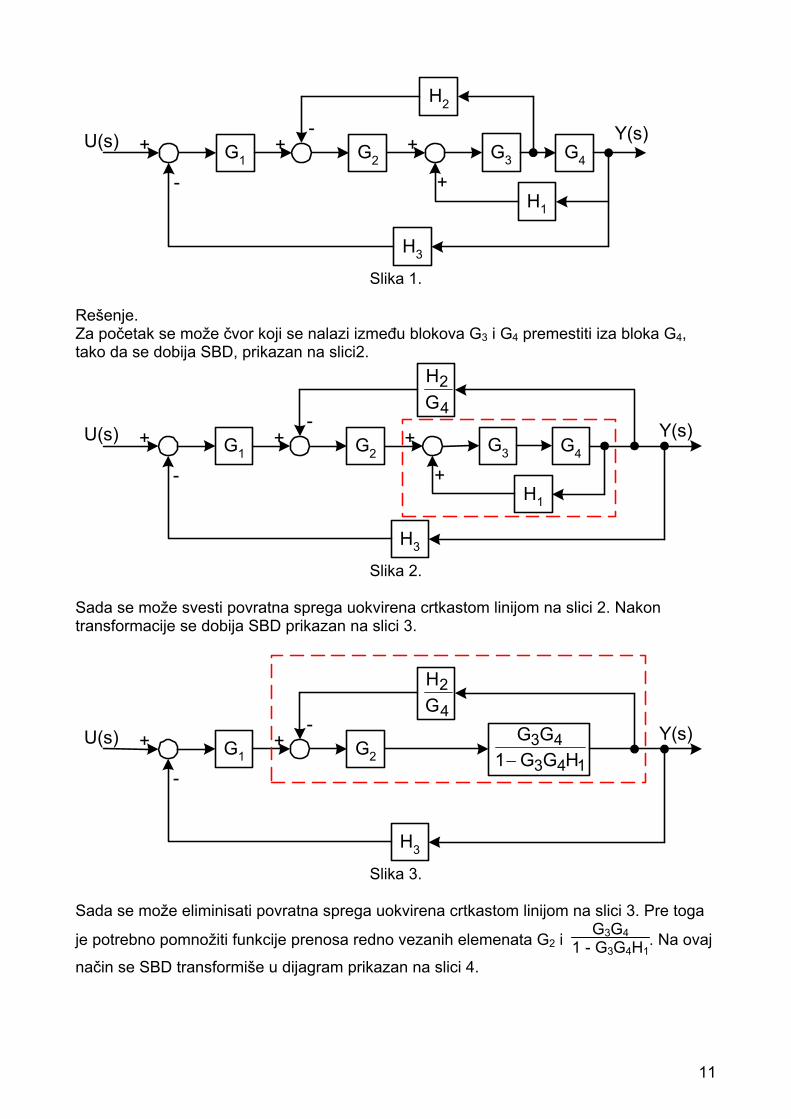
Rešenje. Za početak se može čvor koji se nalazi između blokova G3 i G4 premestiti iza bloka G4, tako da se dobija SBD, prikazan na slici2.
4
2GH
G1 G2U(s) Y(s)
H3
+ + +
-
-
H1
G3 G4
+
Slika 2.
Sada se može svesti povratna sprega uokvirena crtkastom linijom na slici 2. Nakon transformacije se dobija SBD prikazan na slici 3.
4
2GH
G1 G2U(s) Y(s)
H3
+ +
-
-
14343
HGG1GG
−
Slika 3.
Sada se može eliminisati povratna sprega uokvirena crtkastom linijom na slici 3. Pre toga
je potrebno pomnožiti funkcije prenosa redno vezanih elemenata G2 i G3G4
1 - G3G4H1. Na ovaj
način se SBD transformiše u dijagram prikazan na slici 4.
11

G1U(s) Y(s)
H3
+
- 232143432
HGGHGG1GGG
+−
Slika 4.
Sada se množe funkcije prenosa redno vezanih elemenata G1 i G2G3G4
1 - G3G4H1 + G2G3H2.
Nakon toga se povratna sprega sa slike 4 svodi na jedan blok, prikazan na slici 5.
343212321434321
HGGGGHGGHGG1GGGG++−
Y(s)U(s)
Slika 5.
Tako da je funkcija prenosa sistema
G(s) = Y(s)U(s) = G1G2G3G4
1 - G3G4H1 + G2G3H2 + G1G2G3G4H3
Primer 2. Primenom algebre funkcije prenosa odrediti funkciju prenosa G(s) = Y(s)U(s) sistema
sa slike 1.
GU(s) Y(s)
H
+ +
++
- -
Slika 1.
Rešenje Za početak je zgodno transformisati SBD tako da se čvor kod izlaza Y(s) podeli na dva dela, tako da je uokvirena povratna sprega jasno uočljiva (slika 2). Sada se povratna sprega može uprostiti i dobija se SBD prikazan na slici 3.
GU(s) Y(s)
H
+ +
++
- -
Slika 2.
Sada se blok 1/2 može premestiti iza čvora (prikazano strelicom na slici 3), i SBD transformisati u oblik prikazan na slici 4.
12

GU(s) Y(s)
H
+
++
-21
Slika 3.
Sada se paralelna veza dve grane (uokvireno, slika 4), svodi na jednu i dobija se SBD prikazan na slici 5.
GU(s) Y(s)
H
+
++
-
21
21
Slika 4.
Sledeći korak je svođenje povratne sprege (uokvireno na slici 5) na jednu direktnu granu i SBD transformiše u oblik prikazan na slici 6.
GU(s) Y(s)
H
+
-
23
21
Slika 5. Poslednji korak je množenje funkcija prenosa redno vezanih elemenata prikazanih na slici 6 i formiranje traženog blok dijagrama sa funkcijom prenosa sistema, prikazanog na slici 7.
U(s) Y(s)GH32
G2+ 2
1
Slika 6.
Y(s)GH32
G+
U(s)
Slika 7.
Primer 2. Primenom algebre funkcije prenosa odrediti funkciju prenosa G(s) = Y(s)U(s) sistema
sa slike 1.
13

G1 G2U(s) Y(s)
G3
H2
+ +-
G4
H1
+
+
+-
Slika 1.
Rešenje
G1 G2U(s) Y(s)
G3
H2
+ +-
G4
H1
+
+
+
H1
+
-
122
HG1G
+G1
U(s) Y(s)G3
H2
+ +-
G4
+
+
+
H1
14

122
HG1G
+U(s) Y(s)
G3
H2
+
+
-
G4
+ +
+
G1H1
G1+
121122
HGGHG1G
−+U(s) Y(s)
G3
H2
+-
G4
+ +
+G1
U(s) Y(s)+
G4
+
+G1 23212112
32HGGHGGHG1
GG+−+
23212112
243214214214321HGGHGGHG1
HGGGHGGHGGGGGGG+−+
++−+ Y(s)U(s)
Graf toka signala
Transformacija i redukcija modela SAU predstavljenih preko SBD je nekada veoma komplikovana i teška (sistemi složenije strukture). Alternativnu metodu je ponudio Mason i ona se bazira na predstavi sistema preko linijskih segmenata i teoriji grafova. Metoda se zove graf toka signala, i pruža mogućnost određivanja odnosa između promenljivih veličina u sistemu bez transformacija grafa toka signala (redukcije grafa, transformacije i ostalih operacija neophodnih u slučaju SBD). Šta je graf toka signala (GTS)? GTS je dijagram koji se sastoji od čvorova međusobno povezanih granama (linijama) i predstavlja grafičku reprezentaciju seta (skupa) linearnih relacija. Jedan GTS i njegov ekvivalentni blok dijagram su prikazani na slici 1.
15

G1(s)x1(s) x2(s) ⇔ G
x1(t) x2(t)
Slika 1. X2(s) = G(s)X1(s) Karakteristične veličine za čvor su promenljive a za granu pojačanje odnosno funkcija prenosa. Osnovni elemenat GTS jeste grana a njena ulazna i izlazna tačka zovu se čvorovi. Pojačanje (prenos) grane je ekvivalent bloka iz SBD. Pri formiranju i analiziranju GTS postoje sledeća pravila:
U jednom čvoru se može susticati proizvoljan broj grana isto kao što iz jednog čvora može izlaziti proizvoljan broj grana;
Zbir signala sa krajnjih tačaka svih grana koje se sustiču u čvoru čini promenljivu čvora (signal čvora);
Promenljiva čvora se ravnomerno prosleđuje kroz sve grane koje iz tog čvora izlaze;
Signal se kroz granu prostire isključivo u smeru označenom strelicom. Prethodna pravila su ilustrovana grafom na slici 2.
G1(s)U1(s)
Y1(s)
U2(s)
U3(s)
G2(s)
G3(s) Y2(s)
X(s)
Slika 2
X(s) = G1(s)U1(s) + G2(s)U2(s) + G3(s)U3(s); Y1(s) = X(s)H1(s); Y2(s) = X(s)H2(s). Graf toka signala može da ima i složeniju strukturu. Jedan takav primer je prikazan na slici 3. Na ovom primeru će biti definisani pojmovi otvorene (direktne) putanje i zatvorena putanja (petlje). Direktna ili otvorena putanja je skup grana koje međusobno spajaju dva čvora i pri tome grane kroz svaku tačku prolaze samo jedanput (nadalje će biti interesantne samo putanje koje spajaju ulazni čvor grafa sa izlaznim, odnosno direktne putanje koje vode od ulaza do izlaza iz sistema). Na primeru sa slike 3 su putanje 1234567 (oznake čvorova) i 134567. Niz grana 123434567 nije putanja jer dva pita prolazi kroz granu 34.
1 2 3 4 5 6 7YU
Slika 3.
Petlja (zatvorena putanja) je zatvoren put koji polazi i završava se u istom čvoru i pri tome sve grane iz petlje kroz svaku tačku prolaze samo jednom. U primeru na slici 3 petlje su:
16

121, 234562, 343, 565. Nisu petlje: 1231 (kroz granu 13 se ide u suprotnom smeru), 23434562 (kroz granu 34 se prolazi dva puta). Dve putanje (otvorene ili zatvorene) se ne dodiruju ako nemaju zajedničkih čvorova ili grana. U primeru sa slike tri sledeće putanje se ne dodiruju međusobno: 121 i 343; 121 i 565; 343 i 565. Dodiruju se: 1234567 i 121; 1234567 i 343; 1234567 i 565; 1234567 i 234562; 134567 i 121; 134567 i 343; 134567 i 565; 134567 i 234562; 1234567 i 134567; 121 i 234562; 343 i 234562; 565 i 234562. Na osnovu prethodno uvedenih pojmova otvorene i zatvorene putanje te njihovog međusobnog odnosa (dodiruju se ili ne) moguće je definisati Mason-ovo pravilo (ili obrazac) pomoću koga se određuje funkcija prenosa grafa toka signala. Definicija: Funkcija prenosa grafa toka signala se određuje na osnovu obrasca
G(s) = Y(s)U(s) =
∑i=1
nPi∆i
∆
gde je: Pi - prenos (pojačanje) i-te direktne (otvorene) putanje; ∆ - determinanta grafa; ∆i - ∆ primenjeno na zatvorene putanje koje ne dodiruju i-tu direktnu putanju; n - broj direktnih putanja u grafu. Determinanta grafa ∆ se određuje na osnovu izraza
D = 1 - (-1)k+1
∑k
∑j
Pkj = 1 - ∑j
P1j + ∑j
P2j - ∑j
P3j + ∑j
P4j - +...
gde je:
∑j
P1j - zbir pojačanja (prenosa, funkcija prenosa) svih zatvorenih putanja (petlji) grafa;
∑j
Pkj - zbir proizvoda pojačanja po "k" zatvorenih putanja koje se međusobno ne dodiruju.
Primer 1. Posmatra se graf toka signala prikazan na slici. Odrediti funkciju prenosa sistema od čvora 1 do čvora 8.
1 2 3 4 5 6 7YU
8Y
Rešenje: Direktne putanje su: P1 = 12345678 i P2 = 145678. Zatvorene putanje su: P11 = 232; P12 = 565; P13 = 787; P14 = 345673. Proizvodi po dve zatvorene putanje koje se međusobno ne dodiruju: P21 = P11P12; P22 = P11P13; P23 = P12P13; Proizvodi po tre zatvorene putanje koje se međusobno ne dodiruju: P31 = P11P12P13;
17
Proizvoda po četiri zatvorene putanje koje se međusobno ne dodiruju nema, jer P14 dodiruje bar jednu od ostale tri putanje (u stvari dodiruje sve tri). Naravno nema ni proizvoda po pet, šest itd. zatvorenih putanja koje se međusobno ne dodiruju. Determinanta grafa je prema definiciji ∆ = 1 - (P11 + P12 + P13 + P14) + (P21 + P22 + P23) - P31. ∆i se dobija na osnovu ∆ tako što se iz ∆ izbace sve petlje koje dodiruju i-tu direktnu putanju (izbacuju se i svi proizvodi gde te petlje učestvuju kao činioci), tako da je ∆1 = 1 ∆2 = 1 - P11. Funkcija prenosa grafa od čvora 1 do čvora 8 je
G(s) = P1∆1 + P2∆2∆ = P1 + P2 - P2P11
1 - P11 - P12 - P13 - P14 + P21 + P22 + P23 - P31
# Čest je slučaj da je model sistema prikazan pomoću SBD a da je potrebno primeniti Mason-ov obrazac radi određivanja funkcije prenosa. Tada se SBD transformiše u GTS jednostavnom primenom sledećih pravila:
Diskriminatori i čvorovi strukturnog blok dijagrama postaju čvorovi grafa toka signala;
Blokovi strukturnog blok dijagrama postaju grane grafa toka signala, a funkcije prenosa blokova postaju pojačanja grana;
Smer toka signala se pri transformaciji ne menja; Pošto se signali u čvoru GTS po definiciji sabiraju, predznak grane sa kojim ona
ulazi u diskriminator strukturnog blok dijagrama se pridružujr funkciji prenosa, odnosno pojačanju odgovarajuće grane.
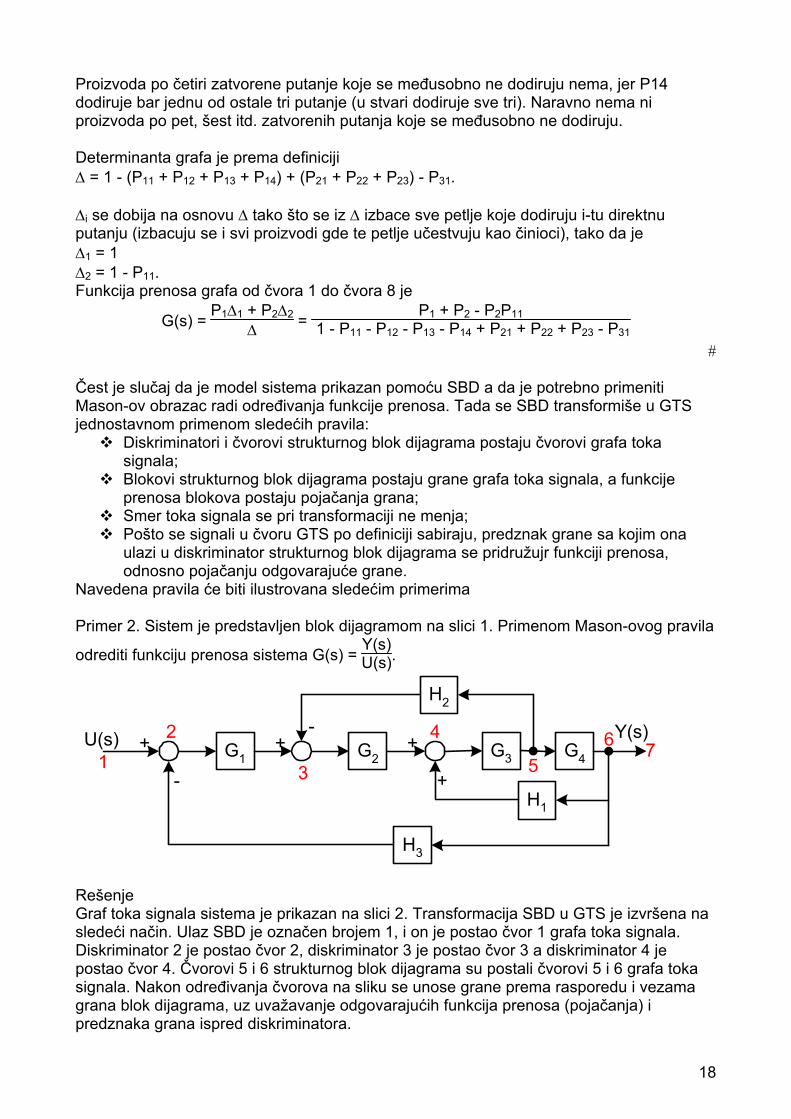
Navedena pravila će biti ilustrovana sledećim primerima Primer 2. Sistem je predstavljen blok dijagramom na slici 1. Primenom Mason-ovog pravila
odrediti funkciju prenosa sistema G(s) = Y(s)U(s).
G1 G2
H1
U(s) Y(s)G3 G4
H2
H3
+ + +
+-
-2
3
4
56 71
Rešenje Graf toka signala sistema je prikazan na slici 2. Transformacija SBD u GTS je izvršena na sledeći način. Ulaz SBD je označen brojem 1, i on je postao čvor 1 grafa toka signala. Diskriminator 2 je postao čvor 2, diskriminator 3 je postao čvor 3 a diskriminator 4 je postao čvor 4. Čvorovi 5 i 6 strukturnog blok dijagrama su postali čvorovi 5 i 6 grafa toka signala. Nakon određivanja čvorova na sliku se unose grane prema rasporedu i vezama grana blok dijagrama, uz uvažavanje odgovarajućih funkcija prenosa (pojačanja) i predznaka grana ispred diskriminatora.
18

1 2 3 4 5 6 7G1 G2 G3 G4
-H2
-H3
H1
Y(s)11U(s)
Slika 2.
Direktna putanja je: P1 = G1G2G3G4 (1234567). Zatvorene putanje su: P11 = -G2G3H2 (3453); P12 = G3G4H1 (4564); P13 = - G1G2G3G4H3 (234562). Proizvodi po dve zatvorene putanje koje se međusobno ne dodiruju ne postoji jer se sve putanje međusobno dodiruju. Determinanta grafa je ∆ = 1 - (-G2G3H2 + G3G4H1 - G1G2G3G4H3) = 1 + G2G3H2 - G3G4H1 + G1G2G3G4H3 i ∆1 = 1. Funkcija prenosa sistema je je
G(s) = P1∆1∆ = G1G2G3G4
1 + G2G3H2 - G3G4H1 + G1G2G3G4H3
# Karakteristična jednačina sistema je ∆=0, a karakteristični polinom sistema je brojilac
determinante grafa toka signala. ∆ = F(s)L(s) = 0 ⇒ F(s) = 0 ⇒ F(s) je karakteristični polinom
sistema. Primer 3. Sistem je predstavljen blok dijagramom na slici 1. Primenom Mason-ovog pravila
odrediti funkciju spregnutog prenosa sistema Ws(s) = Y(s)U(s).
Y(s)GU(s)
H
+
++
- -
+1
2 4 5
63
78 Rešenje
1 2 4 5 6G 1 1 1
-H
Y(s)1U(s)3
78
-111
1
P1 = G (123456). P11 = -GH (2382); P12 = -GH (2345782); P13 = -1 (4574); P21 = P11P13 = GH.
19

∆ = 1 - (-GH - GH - 1) + GH = 2 + 3GH i ∆1 = 1. Funkcija spregnutog prenosa sistema je
Ws(s) = = G 2+3GH
Primer 4. Sistem je predstavljen blok dijagramom na slici 1. Primenom Mason-ovog pravila
odrediti funkciju spregnutog prenosa sistema Ws(s) = Y(s)U(s).
G1 G2U(s) Y(s)
G3
H2
+ +-
G4
H1
+
+
+-12 4 5
6 8
73
Rešenje
1 2 4 5 6G1 G2 G3
G4
-H2
1
Y(s)11U(s)-H 8
1
H1
173
P1 = G1G2G3 (12345678), P2 = G4 (1278). P11 = -G2H1 (454); P12 = G1G2H1 (3453); P13 = -G2G3H2 (4564). Sve direktne putanje se međusobno dodiruju; ∆ = 1 - (-G2H1 + G1G2H1 - G2G3H2) = 1 + G2H1 - G1G2H1 + G2G3H2; i ∆1 = 1 i ∆2=∆. Funkcija
spregnutog prenosa sistema je Ws(s) = = G2G3G3 + G4 + G2G4H1 - G1G2G4H1 + G2G3G4H21 + G2H1 - G1G2H1 + G2G3H2
.
Primer 5. Sistem automatskog upravljanja je prikazan blok dijagramom na slici 1.:
2
K+-
1s
1s
1s
U(s) Y(s)--
+ +
++
++
Slika 1.
Primenom Mejsonovog pravila odrediti prenosnu funkciju sistema )s(U)s(Y)s(sW = . (K≥0)
Rešenje
20

1. a) Graf toka signala sistema je prikazan na slici 2.
U(s)1s
K
-2
1s 1-1
Y(s)1
1s
11
-1
1 2 3 4
5 6
Slika 2.
Direktne putanje su: 2s
11P = (1234); 2s
K2P = (12564); 2s
13P = (12364).
Zatvorene putanje su: s1
11P −= (232); 2s
112P −= (12341); 2s
K13P −= (125641);
2s
114P −= (123641);
s2
15P −= (565).
Proizvodi po dve zatvorene putanje koje se ne dodiruju: 2s
215P11P21P == ;
3s
215P12P22P == .
Determinanta grafa je:
∆=1-(P11+P12+P13+P14+P15)+P21+P22= 3s
12s
2s2
2s
12s
K2s
1s11 +++++++
3s
2s)4K(2s33s ++++=∆ ;
s211 +=∆ ; ∆2=1; ∆3=1.
Funkcija spregnutog prenosa sistema je:
3s
2s)4K(2s33s
2s
12s
Ks212s
1
33P22P11P)s(sW++++
++⎟⎠⎞
⎜⎝⎛ +
=∆
∆+∆+∆=
2s)4K(2s33s
2s)2K()s(sW++++
++=
21

Funkcija prenosa multivarijabilnih sistema
Posmatra se sistem sa p ulaza i r izlaza, prikazan na slici 1.
Sistem
u1(t)
u2(t)
up(t)
y1(t)
y2(t)
yr(t)
... ...
Slika 1.
Po pretpostavci je ovaj sistem linearan (klasa sistema koja se proučava u okviru ovog kursa), tako da se pri određivanju njegovog odziva može primeniti teorema superpozicije. To znači da je odziv linearnog sistema na složenu pobudu (u obliku sume prostih pobuda) jednak sumi odziva na svaku prostu pobudu pojedinačno i da se za neki i-ti izlaz važi
Yi(s)= Gi1(s)U1(s) + Gi2(s)U2(s) + ... + Gip(s)Up(s), (1)
gde je Gij(s) = ⎪⎪⎪⎪
Yi(s)Uj(s) Uk=0;∀k≠j
. Sada se mogu napisati izrazi za sve izlaze Yi(s), i=1:r, što
u matričnom obliku izgleda
⎣⎢⎢⎢⎢⎢⎡
⎦⎥⎥⎥⎥⎥⎤Y1(s)
Y2(s)
.
.
.
Yr(s)
=
⎣⎢⎢⎢⎢⎢⎡
⎦⎥⎥⎥⎥⎥⎤G11(s) G12(s) ... G1p(s)
G21(s) G22(s) ... G2p(s)
. . . .
. . . .
. . . .
Gr1(s) Gr2(s) ... Grp(s)
⋅
⎣⎢⎢⎢⎢⎢⎡
⎦⎥⎥⎥⎥⎥⎤U1(s)
U2(s)
.
.
.
Up(s)
, (2)
odnosno Y(s) = G(s)U(s), (3)
gde matrica G(s) predstavlja funkciju prenosa multivarijabilnog sistema, odnosno G(s) je matrica funkcija prenosa multivarijabilnog sistema. Matrica G(s) je dimenzija rxp, odnosno ima onoliko vrsta koliko sistem ima izlaza, broj kolona je jednak broju ulaza u sistem. Svaki multivarijabilni sistem poseduje jedan jedini jedinstveni karakteristični polinom. Ako imenioci svih funkcija prenosa matrice G(s) nisu jednaki, tada je karakteristični polinom sistema njihov najmanji zajednički sadržalac. Primer 1. Odrediti matricu funkcija prenosa multivarijabilnog sistema prikazanog na slici 1. a) primenom algebre funkcije prenosa; b) primenom grafa toka signala.
22

U1(s) +
G4
G1
G2
G3
+-
-
U2(s)
Y1(s)
Y2(s)
Slika 1. Rešenje Prema definiciji matrica funkcija prenosa će biti u obliku
⎣⎢⎡
⎦⎥⎤Y1(s)
Y2(s) =
⎣⎢⎡
⎦⎥⎤W11(s) W12(s)
W21(s) W22(s) ⋅
⎣⎢⎡
⎦⎥⎤U1(s)
U2(s)
a) Funkcije W11 i W12 se određuju uz zanemarivanje izlaza Y2, tako da je odgovarajući blok dijagram prikazan na slici 2.
U1(s) +
G4
G1
G2
G3
+-
-
U2(s)
Y1(s)
Slika 2.
SBD sa slike 2 se može jednostavnije nacrtati, što je prikazano na slici 3.
U1(s) + G1
G2G3G4
+
--
U2(s)
Y1(s)
Slika 3.
Pri određivanju W11, smatra se da je U2=0. Odgovarajući blok dijagram je prikazan na slici 4.
23

U1(s) + G1
G2G3G4
+Y1(s)
⇒U1(s) Y1(s)
4G3G2G1G11G
−
Slika 4.
Funkcija prenosa je W11 = G1
1 - G1G2G3G4.
Pri određivanju W12, smatra se da je U1=0. Odgovarajući blok dijagram je prikazan na slici 5.
U2(s) +
-Y1(s)
G2
-G1G3G4
⇒U2(s) Y1(s)
4G3G2G1G14G3G1G
−
−
Slika 5.
Funkcija prenosa je W12 = -G1G3G4
1 - G1G2G3G4.
Funkcije W21 i W22 se određuju uz zanemarivanje izlaza Y1, tako da je odgovarajući blok dijagram prikazan na slici 6.
U1(s) +
G4
G1
G2
G3
+-
-
U2(s) Y2(s)
Slika 6. SBD sa slike 6 se može jednostavnije nacrtati, što je prikazano na slici 7.
U2(s) + G4
G3G1G2
+
--
U1(s)
Y2(s)
Slika 7.
Pri određivanju W21, smatra se da je U2=0. Odgovarajući blok dijagram je prikazan na slici 8.
24

U1(s) +
-Y2(s)
G3
-G1G2G4
⇒U1(s) Y2(s)
4G3G2G1G14G2G1G
−
−
Slika 8.
Funkcija prenosa je W21 = -G1G2G4
1 - G1G2G3G4.
Pri određivanju W22, smatra se da je U1=0. Odgovarajući blok dijagram je prikazan na slici 9.
+ G4
G1G2G3
+Y2(sU2(s)
⇒ U2(s) Y2(s4G3G2G1G1
4G−
Slika 9.
Funkcija prenosa je W22 = G4
1 - G1G2G3G4.
Funkcija prenosa sistema u matričnom obliku je
⎣⎢⎡
⎦⎥⎤Y1(s)
Y2(s) =
1 1 - G1G2G3G4
⋅ ⎣⎢⎡
⎦⎥⎤G1(s) -G1(s)G3(s)G4(s)
-G1(s)G2(s)G4(s) G4(s) ⋅
⎣⎢⎡
⎦⎥⎤U1(s)
U2(s)
b) Graf toka signala sistema je prikazan na slici 10.
1 2 4G1
-G2 -G3
1(s)1U1(s) 1 Y3
5 6 8G41 1U2(s) Y2(s)
7 Slika 10.
Pri određivanju funkcije prenosa multivarijabilnog sistema prvo se određuju sve direktne pitanje od svih ulaza do svih izlaza U1→Y1: P1 = G1; U1→Y2: P2 = -G1G2G4; U2→Y1: P3 = -G1G3G4; U2→Y2: P4 = G4; Zatvorene putanje su jedinstvene za ceo sistem. U ovom slučaju postoji jedna zatvorena putanja P11 = G1G2G3G4, tako da je determinanta grafa ∆ = 1 - G1G2G3G4. Sada se mogu odrediti ∆i, i oni su ∆1 = ∆2 = ∆3 = ∆4 = 1.
25

Elementi matrice funkcija prenosa sistema su
W11(s) = ⎪⎪⎪⎪
Y1(s)U1(s) U2=0
= P1∆1
∆ = G1
1 - G1G2G3G4)
W12(s) = ⎪⎪⎪⎪
Y1(s)U2(s) U1=0
= P3∆3
∆ = -G1G3G4
1 - G1G2G3G4)
W21(s) = ⎪⎪⎪⎪
Y2(s)U1(s) U2=0
= P2∆2
∆ = -G1G2G4
1 - G1G2G3G4)
W22(s) = ⎪⎪⎪⎪
Y2(s)U2(s) U1=0
= P4∆4
∆ = G4
1 - G1G2G3G4)
Matrica funkcija prenosa je identična rešenju zadatka pod a), što se i očekivalo. Primer 2. Odrediti funkciju prenosa u matričnom obliku za sistem sa tri ulaza i jednim izlazom prikazan na slici 1.
U1(s) +
H2
G1 G2
H1+
+
U2(s)
Y(s)
U3(s)+
++
Slika 1.
Rešenje
W11(s) = ⎪⎪⎪Y(s)
U1(s) U2=U3=0 =
G1G21 - G1G2H1H2
)
W12(s) = ⎪⎪⎪Y(s)
U2(s) U1=U3=0 =
G21 - G1G2H1H2
)
W13(s) = ⎪⎪⎪Y(s)
U3(s) U1=U2=0 =
G1G2H11 - G1G2H1H2
)
Y(s) = [ ]W11(s) W12(s) W13(s) ⋅
⎣⎢⎢⎡
⎦⎥⎥⎤U1(s)
U2(s)
U3(s)
26

Primer 3. Sistem je predstavljen grafom toka signala prikazanim na slici 1.
s1
U1(s)
U2(s)
s1
Y1(s)
Y2(s)
1 1
1 4
121
5
-2
-3
-p
s1
1
Slika 1. Primenom Mason-ovog pravila odrediti funkciju prenosa u matričnom obliku. Rešenje.
⎣⎢⎢⎡
⎦⎥⎥⎤Y1(s)
Y2(s) =
⎣⎢⎢⎡
⎦⎥⎥⎤W11(s) W12(s)
W21(s) W22(s) ⋅
⎣⎢⎢⎡
⎦⎥⎥⎤U1(s)
U2(s) =
1s3 - 3s2 - 7s - 15
⋅ ⎣⎢⎢⎡
⎦⎥⎥⎤s-5 s2 + (2 - p)s + 3
4s - 20 6s2 + (12 - 4p)s + 18
⋅ ⎣⎢⎢⎡
⎦⎥⎥⎤U1(s)
U2(s)
Primer 4. Sistem je predstavljen grafom toka signala prikazanim na slici 1.
G1
-H2
G8
Y1(s)1U1(s) 1
G21U2(s) Y2(s)
G7
G5 G61
1
-1 -1
-H
1
G3 G4
1
Slika 1.
Primenom Mason-ovog pravila odrediti funkciju prenosa u matričnom obliku. Rešenje.
⎣⎢⎢⎡
⎦⎥⎥⎤Y1(s)
Y2(s) =
1∆ ⋅
⎣⎢⎢⎡
⎦⎥⎥⎤G1G3G4(1+G2G5G6H1)-G2G4G7 -G1G3G4(1+G2G5G6H1)+G2G4G7
-G2G5G6(1+G1G3G4H2)+G1G6G8 G2G5G6(1+G1G3G4H2)-G1G6G8
⋅ ⎣⎢⎢⎡
⎦⎥⎥⎤U1(s)
U2(s)
∆ = 1+G1G3G4H2+ G2G5G6H1+ G1G2G4G6H1H2(G3G5-G7G8)
27

Analiza sistema automatskog upravljanja primenom računara
Računarski model SAU u matematičkoj formi pogodnoj da tačno opiše ponašanje sistema se koristi da bi se ispitale osobine i projektovalo upravljanje sistemom bez njegove fizičke realizacije. Simulacija ponašanja sistema pomoću računara služi da se ispita rad sistema u različitim uslovima i za različite pobudne signale. Izvršene simulacije mogu da budu različitog kvaliteta (tačnosti). To pre svega zavisi od usvojenog modela sistema. U ranim fazama projektovanja, kad se bira strategija upravljanja i ocenjuju neke globalne karakteristike sistema nisu potrebni detaljni modeli. Tada se koriste i odgovarajući programski paketi koji su laki za korišćenje, omogućuju dobru vizualizaciju dobijenih rezultata, jednostavno formiranje modela i vršenje simulacija. U ovoj fazi procesorska brzina nije od velikog značaja. U ovoj fazi se vrše simulacije niske tačnosti jer su usvojene mnoge pretpostavke, redukcije i uprošćenja (linearizacija, na primer). U kasnijim fazama projektovanja se vrše takozvani numerički eksperimenti, kada se model sistema i uslovi pod kojima on radi formiraju puno realističnije. Tada se formira detaljan model sistema uz uvažavanje svih njegovih specifičnosti. Takvi modeli se obično sastoje od velikog broja diferencijalnih jednačina (često su to parcijalne, nelinearne DJ) tako da je za vršenje simulacija na takvim modelima procesorska brzina (snaga računara) od prvenstvenog značaja. U ovoj fazi se vrše simulacije visoke tačnosti. Uobičajeni alati za formiranje ovih simulacionih modela su FORTRAN, C, C++, ADA i slični programski jezici. Pod pretpostavkom da je moguće formirati matematički model sistema proizvoljne tačnosti prednosti računarske simulacije su sledeće:
1. Performanse sistema se mogu razmatrati za prouzvoljne uslove rada; 2. Rezultati dobijeni u realnom sistemu se mogu ekstrapolirati simulacionim modelom
u cilju vršenja predikcije ponašanja sistema; 3. Moguće je ispitivanje ponašanja sistema u cilju utvrđivanja njegove koncepcije; 4. Testiranja sistema se mogu obaviti u mnogo kraćem roku; 5. Simulacije koštaju znatno manje nego eksperiment na živom sistemu; 6. Moguće su studije hipotetičkih situacija, praktično neostvarivih u realnom svetu; 7. Računarsko modelovanje i simulacija su često jedina izvodljiva i sigurna tehnika za
analizu i procenu ponašanja sistema. Analiza i projektovanje SAU primenom računarskih simulacija je prikazana na slici 1.
28

Fizički sistem Matematičkimodel
Odziv modela
Očekivani odzivfizičkog sistema
Pretpostavkemodelovanja
Matematičkaanaliza
Računarskasimulacija
PredikcijaUsložnjavanjestrukturesistema
Modifikacijaparametara
sistema
Slika 1. Analiza i projektovanje SAU primenom računarskih simulacija.
29

30

31

32