force feedback using electromagnetic controller in robotic system presented by: ajay mudunuri hasan...
TRANSCRIPT

Force Feedback Using Electromagnetic Controller in
Robotic System
Presented By:
Ajay MudunuriHasan Aatif
Rohini Hiremath
ECE 7995 Dr. Abhilash Pandya
Wayne State University, Detroit, MI 48201

Summary Introduction
BackgroundProject Aims
MethodControlling the Robotic Gripper using Hand
MotionsDelivery of Force Feedback
Problem and Solution Future Work Conclusion

Introduction
Background The current robotic surgical systems lack tactile or
haptic feedback. The present systems to deliver force feedback include
‘Visual’ or ‘Auditory’ aids. These systems divert the attention of the surgeon
during the surgery. This may lead to surgical errors, which might cause an
irreversible injury to the patient. Need for a system which can deliver the feedback
without diverting the attention. Feedback using Vibrators at the surgeon’s hand(Data
Glove). This might lead to more surgical error due to tremor.

Project Aims
To develop a mechanism to deliver force feedback through the sense of touch.Develop a system which can control a gripper
using the basic hand motion (Open & Close).Detect the force applied by the gripper.Deliver it back to the user using electromagnets.
Integrate the above so that the operator controls the gripper using his hand and gets the feedback to his hand.

Method

Method: Controlling the Gripper using Hand Motions A bend sensor is attached to the operators hand. Resistance of the bend sensor changes depending on the
position of the operator’s hand. This way, we can identify the position of the operator’s
hand.
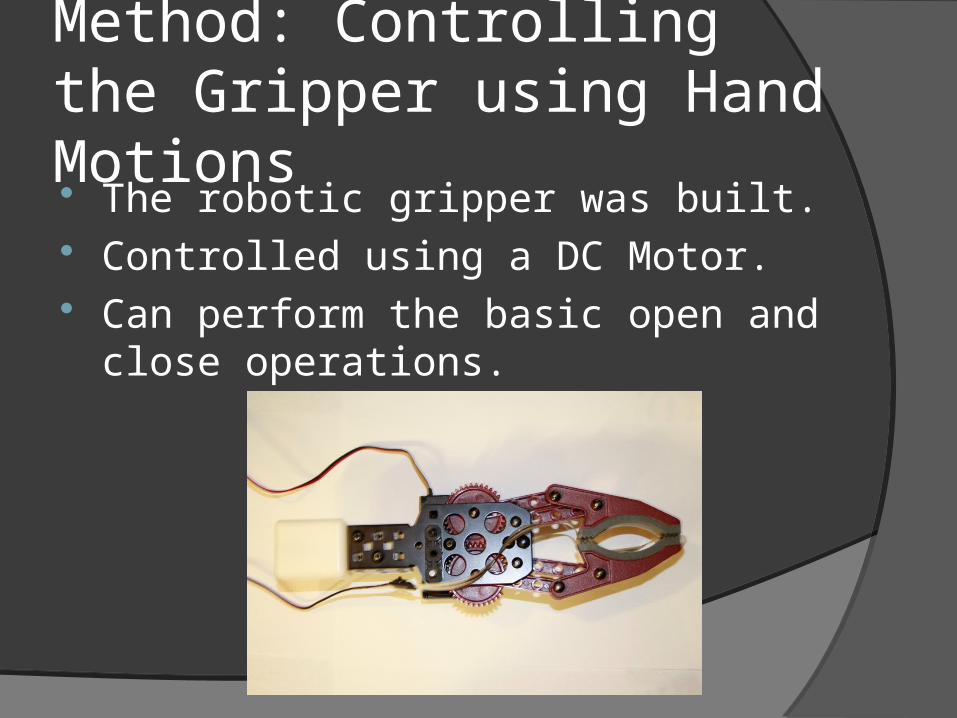
Method: Controlling the Gripper using Hand Motions The robotic gripper was built. Controlled using a DC Motor. Can perform the basic open and close
operations.

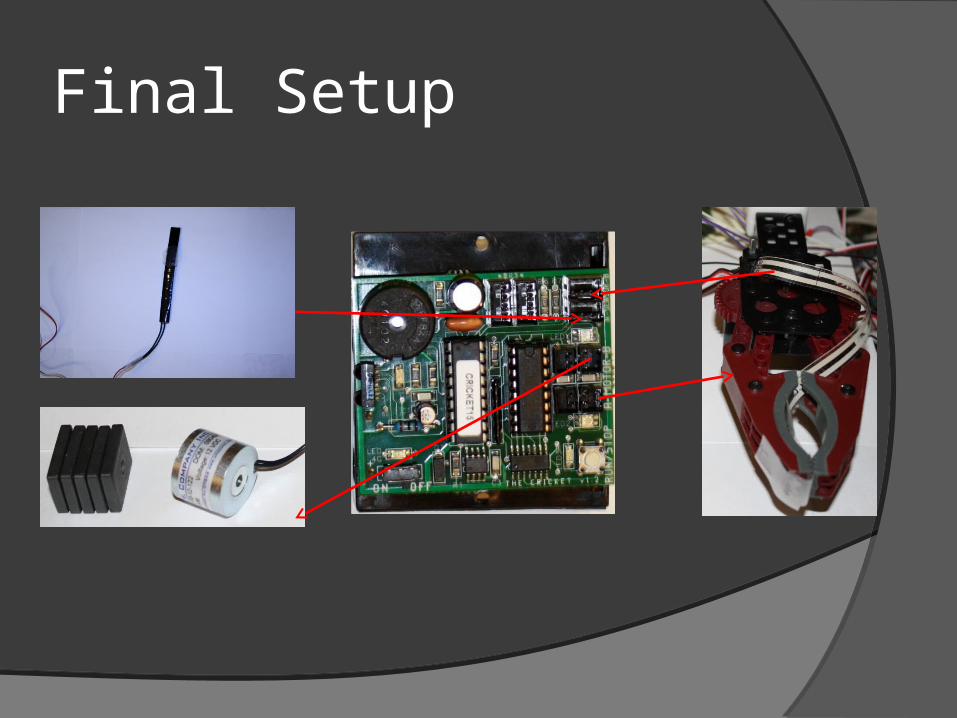
Method: Controlling the Gripper using Hand Motions The Bend Sensor and the Gripper are interfaced using ‘Handy
Cricket’. Cricket runs on PIC16C715 Microcontroller. Can handle both analog and digital sensor. Can drive two motors. Programmed using ‘Cricket Logo’.

Method: Controlling the Gripper using Hand Motions
The Handy Cricket is programmed to continuously read the bend sensor data.
If the present reading is lesser than the previous, the gripper is closed.
If the present reading is greater than the previous, the gripper is opened.
This way, the gripper can be controlled using the hand motions of the operator.

Method: Delivery of Force Feedback
A Force sensor is placed between the gripper’s tips.
The resistance of the force sensor is maximum when there is no force applied on it.
When the gripper holds a hard object, the resistance of the sensor reduces.

Method: Delivery of Force Feedback
The force detected by the sensor is delivered to the user through an electromagnet.
Electromagnet is placed at one of the fingers of the operator.
On the other side of the same finger, a piece of metal/bar magnet is placed.

Method: Delivery of Force Feedback The force sensor is connected to the handy
cricket, which is programmed to read the data from the force sensor.
When the value of the sensor is below a certain value (200 in this case) the electromagnet is turned on.
This results in the metal getting attracted by the electromagnet and pressing the operator’s finger.
Thus force feedback is delivered in form of sense of touch(Pinch).
Final Setup

Problems
The proposed mechanism was to deliver the force feedback through repulsion created between electromagnet and magnet
But:Most of the available electromagnets
were designed to attract only.The available repelling electromagnet
was very weak.

Solution

Future Work
Use repelling electromagnets, which can repel a magnet at a distance of about 3 inches
Improve the force sensor to detect a large range of forces
Deliver different levels of feedback, so that the user can identify different materials.
Conclusion
The force feedback using electromagnets is a reasonable solution.
This method of haptic feedback can easily be adopted in present day tele-robotic systems with no major design changes
Video

Questions
Thank you for your time and patience.
May we answer some Questions Now?