escuela tÉcnica superior de ingenieros …oa.upm.es/1297/1/rafael_navarro_sanjurjo.pdf · mente a...
TRANSCRIPT

ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS
MEDIDA LINEAL DE VARIABLES MECÁNICAS EN BANCOS DINAMOMETRICOS
DE CORRIENTE CONTINUA POR MEDIO DE PARÁMETROS ELÉCTRICOS NO
LINEALES
Rafael Sanjurjo Navarro.
UNIVERSIDAD POLITÉCNICA DE MADRID i E. T. S. í. AERONÁUTICOS
B I B L I O T E C A . ECWA ^i'íTí/! '5A . ? T T ¿ r .1 ?
*x:'j.v.f:.\ oi-5:?iru
fx
Tosis doctoral dirigida por el Dr« Ing° D.Ciriaco Viconto Ma-zariogos, catodrático do la E. T.S.I. Aoronáuticos.
-1971-
UNIVERSIDAD POLITÉCNICA DE MADRID*
ESCUELA TÉCNICA SIJPERÍOR DE INGEN!.r.«r-3 ' «Mi'MTiQ%
&.' 64o Jf
B l B L "•> r c . s~-- A

Es un placer para nosotros cumplir con el deber do mani
festar nuestro profundo agradecimiento a todas las personas que mas
o menos directamente han contribuido a que este trabajo esté concluí
do.
En primer lugar a nuestro Director de Tesis, el profesor
D. Ciríaco V, Mazariegos, sin cuyo aliento y ayuda no hubiéramos po
dido finalizar nuestra tarea.
Igualmente han sido inestimables la colaboración y conse
jos del profesor D, Julio G. Bernaldo de Quiros.
ÜTo podemos olvidar al limo, Sr. Director do la Escuela
D. Manuel. Avello Ugalde quo desde su puesto nos empuja constante
mente a continuar nuestra superación profesional.
Por ultimo, no por eso el menor, un agradecimiento sin
cero a todos los compañeros y amigos más íntimos, sin cuya ayuda
difícilmente hubiéramos realizado esta tesis.
Hemos de expresar también nuestro agradecimienta a a—
quellas personas que han hecho que este documento tenga la pre -
sentación adecuada. A los Sres. Mendoza y G*. Buil por la obten
ción y composición de fotografías respectivamente y a los Sres.
S. Valloz y S, Gómez por la mecanografía y delineación*
Madrid, Septiembre de 1971
Rafael Sanjurjo.

Í N D I C E
INTRODUCCIÓN,
CAPITULO 1 .- ECUACIONES GENERALES DE UNA MAQUINA DE CORRIENTE CONTINUA.
CAPITULO 2.- DISTRIBUCIÓN DEL FLUJO MAGNÉTICO EN EL ENTREHIERRO.
CAPITULO 3*- RELACIONES ENTRE EL PAR ELECTROMAGNÉTICO Y LAS CURVAS DE DISTRIBUCIÓN.
CAPITULO ¿U- CORRESPONDENCIA DINÁMICA DEL PAR ELECTROMAGNÉTICO 06H LA INTENSIDAD DEL INDUCIDO.
CAPITULO 5.- CORRECCIÓN PUNTO A PUNTO CON MATRIZ DE DIODOS,
CAPITULO 6.- CORRECCIÓN MEDIANTE LA INTRODUCCIÓN DE UNA DEPENDENCIA NO LINEAL DE LA EXCITACIÓN.
CAPITULO 7*- ADAPTACIÓN DE UNA DINAMO DE AVIÓN PARA UN BANCO DINAMO-ELÉCTRICO.
CAPITULO 8,- CONCLUSIONES,
BIBLIOGRAFÍA.
• —=ooOoo=—o

Un banco dinamomotrico es un freno de calibración de motores ,
en el que la potencia del objeto que se prueba se transforma en energia e-
lectrica mediante un generador de corriente continua, y se disipa en una
carga resistiva,
. Las variables, que interesa medir en un banco, son normalmen
te la velocidad, el par y a partir de ellas la potencia. También se miden
otras variables, según el tipo de motor, como presión de admisión, consu
mo, oto*
Una característica importante del bancos es que su funciona -
miento corresponde a las condicionas reales en cuanto a comportamiento -
dinámico. En este sentido es fundamental que el momonto de inercia y los
rozamientos de la dinamo utilizada; sean lo menor posible*
Las variables par motor y velocidad se pueden medir por vari
os procedimientos. Los bancos dinamometrieos ofrecen la peculiaridad do que
estas variables corresponden a variables eléctricas cuya medida facilita
considerablemente la calibración.
El par corresponde a la intensidad del inducido. Esta corres
pondencia es lineal cuando la máquina no está saturada. La velocidad co -
rresponde directamente a la tensión en barras del inducido cuando la ma -
quina está poco cargada y se puede despreciar la caida interna de tensión.
Pero sí corresponde siempre, esta última, a la frecuencia de "rizado" de
la tensión de salida.
Es por tanto necesario encontrar un generador de corriente -
continua cuyo sistema móvil tonga el menor momento de inercia posible.
Los generadores tradicionales tienen casi todos el mismo valor y demasia
do elevado para nuestros fines. Acudiendo como en otras ocasiones, a ma -
terial aeronáutico, se encontró que las dinamos de avión reunían unas —
condiciones excepcionales para esta aplicación. A una dinamo de avión se
le puede exigir mucho más de lo que correspondería a una dinamo del mis
mo tamaño del tipo convencional. Está proyectada para unas condiciones -
muy exigentes durante unos tiempos , que nosotros en su utilización no -
Alcanzaremos. Esta exigencia máxima en la dinamo de avión, dá lugar, a -
que también este trabajando al máximo el material ferromagnetico de que

está constituida. Esto es que esté sobresaturada. El tratamiento es enton
ces distinto del normal. El estudio de un generador se suele hacer dcspro-
diando la reacción del inducido porque no existe saturación, se trabaja en
zona lineal. Una primera parte de este trabajo es un estudió teórico do co
mo quedan afectadas las ecuaciones de una máquina en el caso de existir sa
turaciáoi. Pero sobre todo, como queda afectado el par electromagnético, que
es el que utilizaremos para medir la potencia a través de un multiplicador.
Para el desarrollo de los primeros capítulos se ha utilizado -
en la parte experimental una máquina universal de ensayos eléctricos. Con
ello es posible simular las condiciones de sobresaturación del generador -
de avión. Bastará aplicar una intensidad de excitación pequeña comparada -
con la de carga. 0 sea que el campo principal quede muy afectado con la -
reacción dol inducido. Con el uso de la maquina universal es posible rea -
lizar una serie de operaciones que eñ el caso de utilizar el generador de
avión, serian, o muy dificiles, o imposibles. Así se ha podido ver la dis
tribución de flujo magnético a lo largo del entrehierro tanto en vacío co
mo en carga. También se conoce en todo momento la velocidad a la que gira
la máquina gracias a un tacometro acoplado directamente al sistema. Un mué
lie tarado permite conocer el par mecánico para de esta manera compararlo
con el par electromagnético.
Después de describir dos procedimientos para poder medir las-
variables lineales mecánicas del motor a través de las variables no linea
les eléctricas, o linealizar esta correspondencia, se ha desarrollado un
banco experimental utilizando los conocimientos adquiridos a lo largo de
este estudio. Este montaje ha permitido comprobar la posibilidad de uti
lizar las dinamos de avión en régimen de sobrecarga para frenos dinamome
trieos de inercia reducida, Al final de la tesis se adjuntan los datos -
experimentales del banco construido.

CAPITULO 1
ECUACIONES GENERALES DE UNA MAQUINA DE CORRIENTE CONTINUA

Í N D I C E
1.1 FUERZA ELECTROMOTRIZ INDUCIDA
1.2 FLUJO MAGNÉTICO
1.3 PAR ELECTROMAGNÉTICO
1.4 PLANTEAMIENTO DE LAS ECUACIONES
=ooOoo=

1.2
1.1.- FUERZA ELECTROMOTRIZ INDUCIDA.
Para calcular la f.e.m. inducida en una máquina de
corriente continua es necesario saber cómo es la distribución
de la componente radial de la densidad de flujo magnético en
el entrehierro. Una representación sencilla puede ser la in
dicada en la figura 1.1.1, en donde en ordenadas se represen
ta el valor de B y en abscisas, las correspondientes posicio
nes angulares respecto de los polos.
Figura 1.1.1
Un conductor c que se mueva a velocidad v respec
to de los polos será generador de f.e.m, de valor e = B l v ,
donde 1 es la longitud del conductor en el sentido axial. -
Por tanto la variación de e con el tiempo tendrá la misma -
forma que B y podemos suponer que es la línea de puntos. El
colector de la máquina se encargará de que la ondulación ne-

1.3
gativa de © salga al exterior rectificada. Por tanto la oon
tribución en fuerza electromotriz de este conductor serían -
dos semiondulaciones sucesivas positivas.
Un ciclo completo en la variación de e sucede en
un tiempo T equivalente a un "ángulo eIdotrieo" de 27T radia
nes. Durante este intervalo el movimiento del conductor equi
vale a un ángulo real de — y - — radianes, siendo p el número
de polos. Si la velocidad de rotación es n en vueltas por -
2 segundo 7 l a duración de un c i c l o será T = segundos y en
p .n un tiempo t correspondiente a un ángulo © tendremos;
© 2 V
t T
Una primera aproximación que da r e su l t ados muy s a
t i s f a c t o r i o s es suponer que l a d i s t r i b u c i ó n de B es s i n u s o i
da l , es decirs
B = B^ sen ©
en donde © se expresa en grados e l é c t r i c o s .
Si suponemos que cada bobina t i ene z e s p i r a s (o sea
z conductores ac t ivos ) l a f . e .m . por bobina serás
e = 2z . Bja 1 v sen ©
En cua lqu ie r máquina podemos supeiretr una se r i e do
bobinas desplazadas un ángulo determinado y e l c o l e c t o r se -
encarga de que l a tens ión que aparezca en é l sea suma de l a
contr ibución de v a r i a s bobinas . Un aspecto de l a tensión r e -

1.4
sultánte sería el de la figura 1.1.2
e t
E wax E.
•*—i
min;
*-H
Figura 1.1.2
La tensión resultante entre escobillas no es por -
tanto constante y varía desde un valor mínimo 35^^ hasta un
valor máximo E m a x. Esta variación es precisamente la que nos
va a permitir medir por un procedimiento sencillo la veloci
dad de la máquina.
Aunque la distribución de B no sea sinusoidal, la
forma de £ = £ (t) será periódica, como se indica en la fi
gura. Un aumento de la velocidad traería consigo un aumento
de v y por tanto una disminución de T, o sea la escala de -
tiempos en los diagramas queda reducida, es decir la freouon
cia de la oscilación do £ aumenta y oste aumento es propor
cional a n . El procedimiento consistirá entonces en medir -
la frecuencia de las oscilaciones de 5 .
El valor medio de la fuerza electromotriz vendrá -
dado pors
1 med T

1.5
s u s t i t u y e n d o e l v a l o r de e se o b t i e n e
26 med
en donde:
, s i endo € - 2 z B ^ l v luego
4 z B Q l v 4 z B r a s l v « med = ^ - — = - —
Z = n2 de espiras por bobina.
S = n^ de bobinas por circuito de inducido.
ZS = n^ de espiras por circuito.
aZS = n^ total de espiras del inducido Z/2.
a = n2 de circuitos en paralelo o derivaciones.
Z = n2 total de conductores periféricos.
Por tanto: Z ZS =
2a
Si seguimos en l a h i p ó t e s i s de f l u j o s inuso ida lmon
t e d i s t r i b u i d o , e l v a l o r medio de l a dens idad de f l u j o d e n t r o
de un peso p o l a r e s
y e l f l u j o po r po lo
. 7TD <p = B ^ , . 1
med P
o s ea : p $
m 2 D 1

1.6
y cono; v = 7T~D . n
en donde n vendrá en r . p . s .
Obtenemos finalmentes
p ^ c = O z . n c ned rt ' a
que es la fórmula "básica de l a f .o .m. media de un devanado -
inducido de co r r i en t e continua„
Este resu l t ado depende solamente del va lo r del f l u
jo t o t a l por polo y os independiente de l a forma como se d i s
t r ibuya a lo l a rgo de un paso po la r . La fuerza e lec t romot r i z
media será l a misma s i l a d i s t r i b u c i ó n es como l a que hemos
dübujado o s inuso ida l , siempre que e l área encerrada por una
ondulación sea i gua l a l á rea encerrada bajo l a s inuso ida l —
equivalente 0
Este r e su l t ado nos hace ver que s i suponemos que ^
es constante l a velocidad de l a máquina de c o r r i e n t e cont inua
puede medirse a t r avés de £ -. Posteriormente veremos l a s me o.
dificultades que esto trae y cómo subsanarlas.
1.2.- FLUJO MAGNÉTICO.
El flujo magnético se consigue gracias al circuito
inductor que crea una f.m.m. , al hacer pasar una corriente If
por sus devanados. El flujo ^> seria proporcional a If si la
reluctancia del circuito magnético fuese constante. Esto es
casi cierto para valores pequeños de ^ en que la permeabili

1.7
dad es únicamente debida al entrehierro, pues la del hierro
es muy grande comparada con la del aire» Sin embargo, para -
valores grandes de <p empieza a tener importancia la reluctan
cia del hierro pues empieza a saturarse. En estas condiciones
la relación ya no es lineal. La variación de <p en función
de If se puede representar gráficamente mediante la conocida
curva de magnetización. El aspecto en todos los casos os el
de la siguiente figura 1,2.1
Figura 1.2.1
La ordenada en el origen se llama flujo residual y
es debido a que el hierro queda imanado permanentemente. En
general este valor es muy pequeño aunque es muy importante -
para generadores tipo shunt.
En el punto S el hierro empieza a estar saturado y
la curva se aparta de la-lineal!dad.
No existe una función analítica que responda a es
ta curva y por este motivo su determinación es exclusivamen
te experimental. Sin embargo ha habido intentos de a justar -

1
dicha curva a alguna expresión sencilla. La más conocida es
la ecuación de Froelich, que incluso utilizaremos más adelan
te. En dicha ecuación os necesario previamente conocer expe-
rimentalmente la forma de la curva a efectos de determinar -
los coeficientes característicos de cada máquina y cada velo
cidad. La expresión de dicha ecuación ess
a . Tf _ _ _ _ _ _ _
en donde a y b son l a s cons tan tes a c a l c u l a r .
A todo e s to hay que añad i r e l e fec to de h i s t e r e s i s
del m a t e r i a l , mediante e l cual l a curva de magnetización no
os l a misma s i se disminuye l a exc i t a c ión . Por l o t an to para
un va lo r dado de l a in t ens idad de e x c i t a c i ó n , puede e x i s t i r
mas de un va lo r para e l f l u j o . El v a l o r del f l u j o para una -
in tens idad determinada depende do s i se alcanzó dicho va lo r
aumentando o clisi-tinuyendo l a exc i t ao ión .
En l a p r á c t i c a , a e fec tos de c á l c u l o , se soluciona
obteniendo previamente e l c i r c u i t o completo de h i s t e r e s i s del
mate r ia l y trazando l a curva de magnetización como va lo r i n
termedio en t re e l de subida y bajada.
Todo e s to que hemos dicho has ta ahora r e fe ren te a l
f lu jo magnético es s in t e n e r en cuenta que e l inducido e s t á
recor r ido por una co r r i en t e que crea un campo perpendicular
a l p r i n c i p a l . Resultando a s í perturbado é s t e . A e fec tos de -
l a fuerza e lec t romot r iz l o que i n t e r e s a es e l va lor medio de

1.9
0 por polo, y si las escobillas están en el plano neutro -
del campo principal y el hierro no llega a saturarse, la in
fluencia de la corriente del inducido sobre el campo princi
pal es nula.
Sin embargo, en muchos casos, y concretamente en -
este trabajo, existe saturación del hierro y además de variar
la distribución de flujo, el valor medio de este disminuye -
aunque la intensidad de excitación permanezca constante. No
es posible evaluar teóricamente de manera fácil esta disminu
ción en el valor medio de W y os necesario otra vez recurrir
a la experimentación a efectos de tener en cuenta la influen
cia de esta perturbación que en muchos casos es muy importan
te. El flujo total no se puede obtener sumando los flujos del
campo principal y el del inducido, pues no es posible aplicar
la superposición por estar fuera de la zona lineal. La mejor
manera de obtener el flujo es a travos de medidas sobre la -
distribución de flujo en el entrehierro.
A la vista de todo esto se deduce que el valor me
dio del flujo por polo <p que entra en el cálculo de la fuer
za electromotriz inducida viene afectada por una serie de ~~
magnitudes de evaluación empírica. Esto impide plantear unas
ecuaciones generales para la máquina en cualquier punto de -
funcionamiento. Estas ecuaciones son fáciles de plantear en
el caso sencillo de linealidad entre el flujo y la intensidad
de excitación y despreciando la reacción del inducido.
Resumiremos entonces que el flujo en general será

1.10
una función de la intensidad de excitación y de la intensidad
por el inducido I . Punción esta que por supuesto no es l i —
neal, ni biunívoca. Es empírica y característica para cada -
náquina,
para desarrollo posterior la supondremos biunívoca respecto
de Lj>, estimando previamente el valor medio del flujo ascen
dente y descendente.
1.3.- PAR ELECTROMAGNÉTICO.
El moví.miento de los conductores del inducido en -
un campo magnético, hace que sobre ellos aparezca una fuerza
que se opone al movimiento del eje del generador. De la poten
cia de entrada al generador del motor primario una parte son
las pérdidas rotatorias y por cargas parásitas que son del -
orden del 3 al 15$ de las de entrada total y otra la potencia
electromagnética cuyo valor se trata de calcular en esto apar
tado.
La potencia electromagnética tiene por expresión?
P = £ I xm w xa
en donde £ es la f .e.m. ya oalculada e I a la intensidad por
e l inducido. Esta potencia es la resul tante del proceso de -
conversión de energía mecánica en e l éc t r i ca . Esta potencia -
es menor que la de entrada mecánica, en una cantidad igual a
l a s pérdidas ro t a to r i a s , y mayor que la potencia de salida -

1,11
del generador en una cantidad igual a las pérdidas en el co
bre .
La potencia electromagnética se puede poner en fun
ción de lo que se suele llamar "par electromagnético" y de -
la velocidad de la máquina de la siguiente formas
60 T — p m „ «„ * m
2 7T. n
en donde n es l a velocidad de l a máquina en r .p .m. y e l par
vendrá en Nw-m. s i se expresa l a potencia en wa t ios .
Teniendo en cuenta l a expresión a n t e r i o r de P n y -
que l a fuerza e lec t romot r i z es
€ =s kn <fi
tendremos? 60 - 60
Tm = . - £ - . T = k 4 i m 2T n a 27T a
El valor de k $ - c/n se obtiene experimentalmente de la our
va de magnetización de la máquina. Como ya vimos antoriormen
te ^ es función de la intensidad de excitación y de la in
tensidad por el inducido.
Para una intensidad de excitación constante y des
preciando la reacción del inducido el par se puede considerar
proporcional a I a y así es como ocurre en la mayoría de las
aplicaciones.
Sin embargo, si trabajamos con intensidades de in
ducido grandes como en el presento trabajo es importante la

1.12
reacción del inducido, no solo porque varía la distribución
de flujo sino porque debido a la saturación el valor medio -
del flujo por polo (p disminuye y el par ya no es proporcio
nal a I aunque permanezca constante la intensidad de excita
ción.
En general por lo tanto el par electromagnético se
ras
Tn = T n (lfIa)
I n t e r e s a conocer e s t a func ión a e f e c t o s de poder -
conocer e l p a r s i n mas que h a c e r l a s medidas de I f e I a .
En r e a l i d a d e s t a e x p r e s i ó n se puede poner de l a s i
g u i e n t e formas
60 . Tm = - - ~ - k 9 tta1^ - J a
Un cálculo exacto de esta función no se puede hacer
debido a que el flujo está dado a través de la curva de mag
netización y como hemos dicho esta curva no es analítica. De
todas formas suponiendo la ecuación de Froelich se hace un -
desarrollo posteriormente.
Si mantenemos la intensidad de excitación constan
te, el par será función únicamente de I a y siempre podremos
poner un desarrollo como el siguientes
T n = A I a + B I a2 + C I a
3 +
en donde l o s c o e f i c i e n t e s A, B, C , . . . . son func ión de l a s oa

1.13
raoterísticas internas de la máquina y de la intensidad de -
excitación.
Una variación del par en función de la intensidad
por el inducido tendría en general la forma que se represen
ta en la figura 1,3.1.:
Figura 1.3.1
1.4.- PLANTEAMIENTO LE LAS ECUACIONES.
Todo lo anterior lo podemos recopilar en un siste
ma de ecuaciones que permitirán para cada caso obtener la so
lución del problema planteado.
Nos referiremos únicamente al caso de excitación -
independiente, ya que durante todo este trabajo se ha utili
zado este sistema de excitación.
El diagrama de conexión con excitación independien
te será el representado a continuación en la figura 1,4.1.:

WÍGP
Figura 1.4,1
En Ra incluímos la res is tencia en e l devanado del
inducido, la res is tencia de interpolos y devanados de compen
saeión, s i los hubiere y la res i s tenc ia de contacto de esco
b i l l a s .
Aplicando la segunda ley de Kirchhoff, obtenemos?
V. a « a - ^ a ^ (1)
Esta va a ser la primera ecuación que tendremos en cuenta, -
en el planteamiento general.
La segunda ecuación se puede obtener multiplicando
la anterior por I a y así:
que es sencillamente un balance de potencias, ya que de otra
forma será;
que nos dice que la potencia electromagnética producida por
la máquina (^aIa) se invierte en potencia al exterior (VaI )

1.15
y potencia consumida en el interior (FL I„ ). En las utiliza-oí ¿3,
ciones convencionales i n t e r e s a que e l término Va I sea nu-2
cho mas grande que í l^I . 0, en o t r a s p a l a b r a s , que l a per
dida en e l cobre en e l i n t e r i o r de l a máquina sea pequeña. -
Esto se puede conseguir haciendo que l a sea pequeño, pues R^
depende de l o s devanados y t i ene un va lo r para cada genera—
dor. Sin en-bargo en nues t ro caso , por l a s razones expl icadas p
a n t e r i ó r n e n t e , e l va lo r de I a será grande y e l término R a I a
será del mismo orden o inc luso mayor que Vn I . Desde e l pun
to de v i s t a de rendimiento como generador s e r á , por l o t a n t o ,
muy bajo; pero eso no os en r ea l i dad lo que nos i n t e r e s a en
e s t a ap l i cac ión . Lo que cuenta para noso t ros es l a potencia
t o t a l consumida, ya sea en e l i n t e r i o r o en e l e x t e r i o r del
generador. Pues e s t a potencia t o t a l consumida es función de
l a suministrada a l a máquina por e l motor a ensayar , y que -
es l a que nos i n t e r e s a .
Por desgracia e s t a potencia no es l a t o t a l suminis
t r ada , pues ex i s t en l a s pérd idas r o t a t o r i a s y a s í l a ecuación
general se r ías
P = p A ¿ I o r a a (2 )
La estimación de las pérdidas rotatorias tiene que
hacerse experimentalmente y depende de cada máquina particu
lar.
Una tercera ecuación podría ser la expresión del -
par electromagnético que hemos obtenido en el apartado ante-

1.16
nors 60
Tm = T ~ ' k f <IaIf).I 27T ' a
Análogamente a lo que ocurría con la potencia eloc
tronagnética, el par suministrado por el motor a ensayar no
es Tm sino que habrá que tenor en cuenta un par de rozamien
to debido a los cojinetes y demás elementos que se opongan -
al giro de la máquina,
60 Te r^-^lVf)'1
a (3)
El método t r a d i c i o n a l de medir Te es mediante un
dinamómetro acoplado a l a carcasa del generador. El método -
de medir Tm s e r í a bloqueando l a máquina y midiendo e l par -
del dinamómetro para d i f e r en t e s va lores de I a e 1f . La os
t imadón de Tp por t an to es experimental y será t an to más -
pequeño cuanto menor sea e l rozamiento. Se podrá desprec ia r
en l o s casos en que e l par suministrado por e l motor sea l o
suficientemente grande.
En nues t ro t r aba jo se t r a t a de medir TQ en función
de l a s va r i ab l e s I a , I f .
Una úl t ima ecuación a cons idera r os l a de l a f . e . n
deducida en e l primer apar tado de es te c a p í t u l o ,
£ a = k . n . < ¿ ( I a I f ) (4)
para cuya determinación, a s í como también para e l par e s ne-

1.17
cesar io e l conocimiento de l a función
(5) ¿= ¿da1** que puede c o n s t i t u i r nues t r a quinta ecuación y cuya determina
ción exacta os exclusivanente exper imenta l , cono ya henos i n
dicado anter iormente .
Gon e s t a s cinco ecuaciones veamos s i es pos ib le de
terminar l a s c a r a c t e r í s t i c a s del motor que se t r a t a do ensa
yar , en función c l a ro e s t á de l a s magnitudes e l é c t r i c a s medi
ble s .
Las cinco ecuaciones son l a s s i g u i e n t e s ;
P e « P r + «a Xa <2 )
T a - T r + ^ - . k ^ ( I a I f ) . I a (3)
fia = k . n . 4 > ( l a I f ) (4)
4> = <f>(Ia*f> (5)
en rea l idad se pueden r educ i r a t r e s , s in mas que cons idera r
que l a (5) se puedo determinar experinentalmente y sus t i tuyen
do l a (4) en (1) y en (2 ) . Así tendremos%
Va = k . n (¡> - Í L ^
PG = P r + k . n <£ I a
60 i *e = T r + -2~7f , k ' T - 1
a

1.18
Y se quedarían reducidas a dos s i tenemos en cuenta que P y
TQ es tán re lac ionadas por
P e = 27Tn
60 . %
Por l o t an to de l a primera tenemos?
ecuación que permite obtener l a velocidad de l a máquina l o —
yendo Va e I a , pues previamente se conocerá R^ y k (p .
La úl t ima ecuación directamente nos dará e l par su
minis t rado a l generador s i se conoce previamente T r y k ^ ,
midiendo entonces I a ,
Con es to entonces vemos l a s pos ib i l i dades de medir
l a s c a r a c t e r í s t i c a s fundamentales del motor a ensayar a t r a
vos de l a s magnitudes e l é c t r i c a s V„ o I . *a
=oo0oo=

CAPITULO 2
DISTRIBUCIÓN DEL FLUJO MAGNÉTICO EN EL ENTREHIERRO

2.1
Í N D I C E
2 . 1 CURVA DE MAGNETIZACIÓN. PERDIDAS MAGNÉTICAS.
2 . 2 DISTRIBUCIÓN TEÓRICA DEL FLUJO Y EXCITACIÓN NE
CESARIA.
2 . 3 MEDIDAS EXPERIMENTALES DE LA DISTRIBUCIÓN DE ELUJO.
=ooOoo=

2.2
2 . 1 . - CURVA DE MAGNETIZACIÓN. PERDIDAS MAGNÉTICAS.
La f.m.m. que produce e l f l u j o ú t i l , también produ
ce e l f l u j o de p é r d i d a s . E s t e f l u j o de p é r d i d a s o de d i s p e r
s ión e s e l que no produce f . e . m . , pero s i n embargo aumenta -
l a dens idad de f l u j o en l o s n ú c l e o s p o l a r e s y en l a c u l a t a -
h a s t a v a l o r e s s u p e r i o r e s a l o s que c o r r e s p o n d e r í a n s i s ó l o -
e x i s t i e s e f l u j o ú t i l . Así podemos poner e l f l u j o en e l n ú c l e o
p o l a r como;
en donde <£ r e p r e s e n t a e l f l u j o ú t i l y £ p l a suma de t o d a s
l a s p é r d i d a s . Podemos d e f i n i r un " f a c t o r de p é r d i d a " ( J>) s i
l a e x p r e s i ó n a n t e r i o r l a e s c r i b i m o s de l a s i g u i e n t e formas
0 s e a , que e l " f a c t o r de p é r d i d a " e s l a r e l a c i ó n e n t r e e l f l u
jo t o t a l y e l ú t i l . Es t e v a l o r s u e l e o s c i l a r e n t r e 1*15 Qn -
máquinas g randes y 1*25 en pequeñas . E s t e f a c t o r v a r í a con -
l a s c o n d i c i o n e s de c a r g a de l a máquina y hemos de p r o c u r a r -
mantener lo l o más próximo a l a u n i d a d . Cuanto mayor e s l a i n
t e n s i d a d de ca rga mayor ha de s e r e l f l u j o ú t i l p a r a da r l a
p o t e n c i a a p r o p i a d a . Pero e s t e f l u j o no aumenta p r o p o r c i o n a l -
mente a l a i n t e n s i d a d de e x c i t a c i ó n sobre todo s i es tamos o e r
ca de l a s a t u r a c i ó n . Sin embargo e l f l u j o de p é r d i d a s s í a u
menta p roporc iona lmen te a l a e x c i t a c i ó n po r d i s t r i b u i r s e fun

2.3
damentalmente en e l a i r e . De aquí que e l f a c t o r de pérdida -
sea mayor cuanto más cargada e s t é l a máquina y más próximos
estemos de l a sa turaoión .
La curva de magnetización de una máquina de eo r r i en
te continua se obtiene manteniendo l a velocidad constante y
anotando l a f .e .m. inducida en e l r o t o r para d i f e r en t e s valo
r e s de l a in tens idad de e x c i t a c i ó n .
En gene ra l , e l aspecto de l a curva obtenida es e l
representado en l a f igura 2 . 1 . 1 . :
1/%/A-V/Polo
Figura 2 .1 .1
El hecho de que la curva ascendente no coincida oon
la descendente se debe a la histeresis del hierro del ciecui
to magnético. Las ordenadas en el origen son debidas al mag
netismo residual.
Se suele tomar como curva de magnetismo una línea
equidistante entre las de subida y bajada.
Los valores experimentales obtenidos con nuestra -

2.4
máquina se han anotado en la tabla 2-1 y se han representado
en la figura 2.1.2. , teniendo en cuenta únicamente el valor
intermedio.
TABLA 2-1
£ a
Volt
1600
r . p . m
1800
r . p . m
2000
r . p . m
2200
r . p . m
2400
r . p . m
2600
r . p . m
0 A !
3 ' 4
3*4
3 ' 8
TT 4 ' 2
4 ' 2
4 ' 6
4 ' 6
4» 9
5 ' 0
4 f 4
5 ' 4
1'0 A
23 ! 5
27 f 0
27
30
29
34
32
3 6 ' 5
36»0
40
36
41
2 ' 0 A
4 6 ' 0
50
5 1 ' 5
55fO
57
6 1 ' 5
63
66» 5
68
73
72
77
2 ' 5 A
5 7 ' 0
6 0 ' 0
64
65 '5
7 0 ' 0
7 4 ' 0
77
80«5
85
88
~~87~~
93
3 ' 0 A
66
68 '5
74
77»8
83*5
8 6 ' 0
91
84
98
102
105
109
3 ' 5 A
7 5 ' 5
77 «0
84
""""87"""
9 3 ' 0
9 6 ' 0
102
105
112
116
118
122
4 ' 0 A
83 - ~ 8 ™
9 2 ! 0
95
102 '5
105 '0
113
115
123
126
132
135
5 f 0 A ¡ 1
94
93«5
105
108
117 ! 0
119 '0
127
130
140
141
149
152
6»0 A
102
115
126
138
150
162
La curva de magnetización es importante por depen
der de ella las características de funcionamiento de la máqui
na. Además por no responder a una ecuación analítica es neoe
sario conocer su forma por procedimientos experimentales.
La curva de magnetización se puede obtener como su
ma de las excitaciones parciales requeridas en cada parte del

£a
60
50
40
30
20
10
oo
90
80
70
60
50
40
30
20
10
_ i • i
*>^ ^^
1
n=2.6Q0 r.p.m-
n=2.40O r.p-m.
n= 2.200 r.p.m.
r» = 2 .000 r.pJTt
n = 1.800 r.p.m.
n = "1.600 r. p.m.
If(A)
CURVA DE MAGNETIZACIÓN
F I S - 2 - 1 - 2 ,

2.5
oircuito magnético. La figura 2.1.3 pono de manifiesto dicha
suma.
Curva de magnetización
A-V
Figura 2.1.3
1.- Línea del núcleo del inducido, 2.- Línea de la culata. 3.- Línea del núcleo polar. 4.- Línea debida a los dientes. 5.- Línea del entrehierro.
Para un valor de <p se sumarán los A-V de cada par
te para obtener el total.
A causa de la gran permeabilidad de las partes del
circuito que contienen hierro, cuando ^ es pequeño la mayor
parte de la excitación se consume para dar flujo en el entre
hierro. La curva de magnetización es tangente a la del entre
hierro y coincide con ella para valores anteriores a la satu
ración. Se puede decir con bastante aproximación que el entre
hierro consume entre el 70 y el 85/¿ de la excitación total.-
Es importante según esto conocer la excitación que consume -

el entrehierro y tener en cuenta el efecto de saturación prin
cipalmente en los dientes del inducido.
La curva de saturación, como antes hemos menciona
do, es puramente empírica, sin que exista ecuación teórica -
alguna que pueda expresarla; sin embargo, puede asimilarse a
parte de una hipérbola, en una determinada región, represen
tada por la ecuación de Froelich
/ Q¿. AV é =
jS ± AV
en donde Q¿ y y3 son l a s cons tan tes que hay que eva luar y que
dependen de l a s c a r a c t e r í s t i c a s de cada máquina.
La evaluación de <^ y fl se consigue escr ib iendo -
l a ecuación a n t e r i o r de l a forma s iguientes
AV B 4- AV = CC ( - - r - )
t do donde una represen tac ión tomando en ordenadas AV/ ^ y en
—1 absc isas AV, nos dará una r e c t a , de l a que c¿ es l a pendien
"te y J3 /c¿ es l a ordenada en e l or igen.
En l a p r ác t i c a lo que se mide es l a f .e .m inducida
en e l r o t o r ( 6 ) y la i n t ens idad de exc i t ac ión 1^ y l a ecua a x —•
ción de Proelich toma la formas
a . I f
e = a b+If
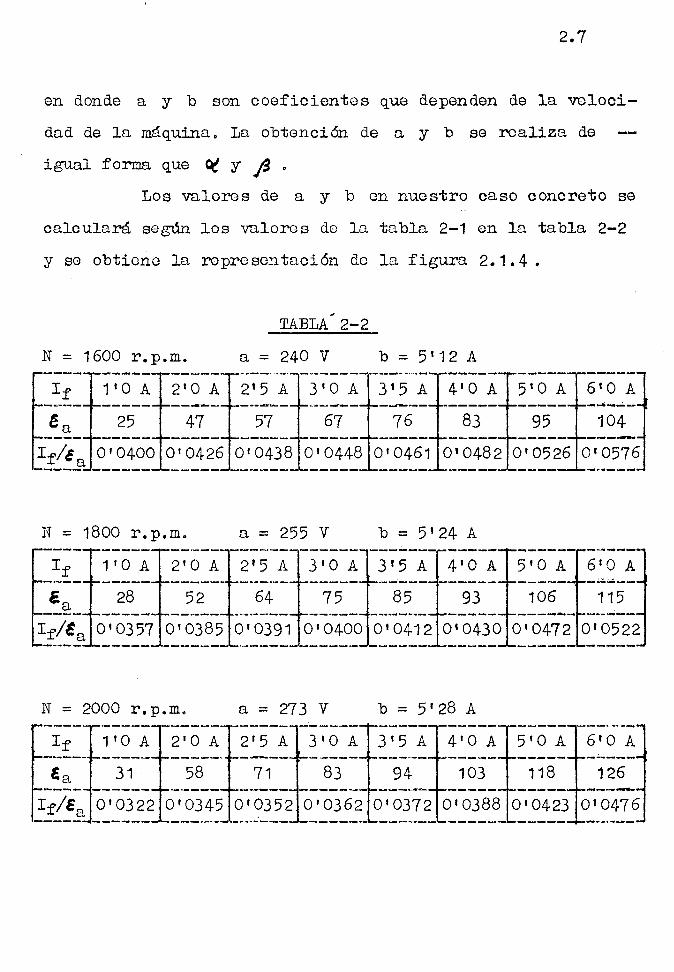
2.7
en donde a y b son c o e f i c i e n t e s que dependen de l a v e l o c i
dad de l a máquina. La ob tenc ión de a y b se r e a l i z a de —
i g u a l forma que Q¿ y /3 .
Los v a l o r e s de a y b en n u e s t r o caso c o n c r e t o se
c a l c u l a r á según l o s v a l o r e s de l a t a b l a 2-1 en l a t a b l a 2-2
y se o b t i e n e l a r e p r e s e n t a c i ó n de l a f i g u r a 2 . 1 . 4 .
TABLA"2-2
N = 1600 r . p _
V*a
1*0 A ;
25
0*0400
.m.
2*0 A
47
0*0426
a = 240 V
2*5 A
57
0*0438
3*0 A
61
0•0448
b = 5*
3 ' 5 A
16
0'0461
12 A
4 ' 0 A
0*0482
5 ' 0 A
95
0*0526
6 ! 0 A
104
0*0576
N = 1800 r . p
_ií_. B ^a Vén
1*0 A
28
0*0357
.m.
2 ' 0 A ; -
52
0 '0385
a = 255 V
2 '5 A
64
0*0391
3*0 A
75
0*0400
b = 5*
3*5 A
85
0*0412
24 A
4 ! 0 A
93
0 '0430
5*0 A !
106
0*0472
6*0 A Ü Ü ,
115
0*0522
N = 2000 r . p
; i
«a
Tf/7;
1'0 A :
31
0*0322
.m.
2»0 A - - - - - - -
0*0345
a = 273 V
2*5 A _____ _en¡m
71
0*0352
3*0 A l— ;
83
0*0362
b = 5*
3*5 A
94
0*0372
28 A
4 ' 0 A
103
0*0388
5*0 A
118
0*0423
6*0 A ~ 126
0*0476

2.8
H = 2200 r . p
x f
* a
VCa
1'0 A
.m.
2 ' 0 A ;
34
0*0294
64
0*0312
a = 287 V
2*5 A — — .
78
0*0320
3 ' 0 A _ „ „ _ _ _ _ _ « ,
93
0*0323
"b = 6*32 A
3 l 5 A mmm MÉM
104
0*0336
4 ' 0 A — .
114
0*0350
5*0 A «.
128
0*0390
6*0 A .. 138
0*0435
N = 2400 r . p
Va
1*0 A ! -
36
0*0277
.m.
2*0 A
69
0*0290
a = 318 V
2 f 5 A
86
0*0291
3 ' 0 A
100
0*0300
b = 6* 36 A
3*5 A 4 ' 0 A 5 '0 A
113 125 141
0*0310 0*0320 0*0355
6*0 A
150
0*0400
N = 2600 r . p . m . a = 336 V b = 6*41 A
« a
V a
1 f0 A •
39
0*0256
2 ' 0 A
74
0*0270
2*5 A
90
0*0278
3 ' 0 A
107
0*0280
3*5 A
120
0*0292
4 f 0 A
134
0*0298
5 ! 0 A
151
0*0331
6*0 A
162
0*037
se rán
Las e c u a c i o n e s c o r r e s p o n d i e n t e s a cada v e l o c i d a d -
N = 1600 ¿ = 240 I f
5 * 1 2 4- I f
N » 1800 255 I f
5*24 4 - I f
N = 2000 <£ = JI1 H 5 ' 28 4- I f

If /tQ ( A/V}
0,050 -
0.040
0,030
0.0 20
O.010 •
n * 1.600
4> n = 1.800
n= 2.000
n = 2 . 2 0 0
n - 2 . 4 0 0
n = 2.600
6 I f ( A )
F I 6 - 2 - 1 - 4 .

2.9
287 If N = 2200 &
6'32 + If
* 318 If
N = 2400 C = 6«36 4-If
336 If N = 2600 £ = — - - * — —
6» 41 +I f

2.10
2.2.- DISTRIBUCIÓN TEÓRICA DEL FLUJO Y EXCITACIÓN NECESARIA.
En primer lugar hemos de considerar que el dentado
del inducido produce una ondulación en la distribución del -
flujo. Cambia por lo tanto la longitud efectiva del entrehie
rro. La sección efectiva debe entonces corregirse y conside
rar que es;
Ag = *• !•
en donde b1 es e l arco polar corregido y 1' es la longitud
axial corregida, y dependen de la forma en que se distribuye
la densidad de flujo en e l entrehie rro a lo largo de l a s u
perficie del inducido.
La distribución que se obtiene si suponemos que e l
inducido es l i s o es la siguientes
Figura 2.2.1
La anchura corregida del arco polar se obtiene a l
considerar que e l área limitada por la curva, dividida por ~
C da la densidad media de flujo en e l ent rehierro , o seas
e l arco polar corregido debe cumplir que

2.11
o seas
-°max
por t an to b ' depende de l a forma de l a curva de d i s t r i b u c i ó n
del f lu jo en e l e n t r e h i e r r o .
Trataremos ahora de eva luar l a anchura corregida -
del e n t r e h i e r r o . Las ranuras del inducido hacen que l a r e luc
t anc ia sea grande en dichas regiones y por t a n t o e l f lu jo se
r í a menor. Sin embargo en l a s extremidades es menor l a re luc
tanc ia y por t an to e l f l u jo mas grande. El r e su l t ado es una
forma ondulada en l a d i s t r i b u c i ó n del f l u j o . Esto se traduce
en una disminución en e l f l u jo t o t a l respec to del caso en —
que e l inducido fuese l i s o , para una misma exc i t ac ión . 0 tam
bión que se n e c e s i t a más exc i t ac ión para conseguir un f l u jo
determinado.
El efec to de l a s ranuras os aumentar e l e n t r e h i e r r o
desde ¿a £ , t a l que i
S = 1% S
donde ICQ > 1 es e l f a c t o r de corrección n e c e s a r i o . Según l a
fórmula de P.W. Cár te r e l v a l o r de ko^ viene dado pors
t
en donde t es e l paso del d iente y b s l a anchura de l a r a -

2.12
nura y (jr un coef ic ien te que viene dado pors
t— 2 ^ 2 I b s É b a
CT = ~ ~ { are t g —- -¿.- ln (1 + — * - )
una vez calculado el valor de G* la expresión anterior nos -
permite calcular el factor kCl y por tanto S .
También tendremos que tener en cuenta la longitud
corregida del inducido. Los canales de ventilación en el in
ducido provocan unas depresiones parecidas a los dientes y -
la distribución axial del flujo presenta esa ondulación.
El flujo viene dado por?
donde 1" es menor que 1 y se puede también calcular median
te la fórmula de F.W. Cárter
t -(Tbv
*v
en donde b v es e l ancho del canal de ven t i l ac ión y t y l a -
d i s t anc ia en t re dos cana les consecut ivos .
También ex i s to una longi tud equivalente a l suponer
l a extensión de f lu jo e x i s t e n t e en los l a t e r a l e s . E l ino remen
to de longi tud se puedo suponer;
1"' = 2 á ,
Por l o t an to la longi tud corregida del inducido se
ras
2.13
tv - CTTov
Según todos los cálculos anteriores el flujo <p
por polo lo podemos calcular sin mas que determinar bf y 1'
pues
suponiendo una distribución rectangular de altura B m a x .
La excitación necesaria se obtendrá multiplicando
el flujo por la reluctancia del entrehierro
(f.m.m) = 4) . — . -i-- = iü«- . S' Gh A V1' /*> en donde ÉL es la permeabilidad del a i r e .
Pasemos ahora a ca lcular l a excitación necesaria -
para los dientes. Si los dientes no están muy saturados su -
reluotancia es menor que la do las ranuras y casi todo e l f lu
jo va por e l l o s . Sin embargo en nuestro estudio sí van a e s
t a r saturados y por tanto es necesario tener en cuenta la re
luctancia de l a s ranuras.
Tenemos dos ecuaciones para este casos
' r H e n t f í ñ T dientes » ranuras
$ dientes _ ., _. T~ " S* ™ ranuras

2.14
en donde / ¿ es l a permeabilidad r e l a t i v a y K l a r e l a c i ó n -
entre secciones t r a n s v e r s a l e s de l o s c i r c u i t o s en e l h i e r r o
y en e l a i r e , respect ivamente .
Con e s t a s dos ecuaciones podemos e s c r i b i r ?
A^ntoBíJ^uxe^ = $ ^ .It/tl^ = -im
pel ien tes ^ d i e n t e s ^ K B t
Conocido e l va lo r de K se pueden c a l c u l a r va lo res
simultáneos de B^ y B'+ , s in mas que dar va lo res a B-fc y -
deducir l o s correspondientes va lo res de J9& mediante l a c u r
va BH del ma t e r i a l del núc leo .
Otra forma para encont ra r l a r e l ac ión en t re B^ y
B1. que nos será ú t i l poster iormente os l a que se obtiene a
p a r t i r de l a ecuación a n t e r i o r ,
1 / ¿ 0 H B t = B t 4 ~~77Z~ B t = B t
o bien B' t = B t 4- H tgO¿
en donde t g Q£ = / ¿ / K que es constante para un va lo r dado do
K. Supongamos que l a curva BH del ma te r i a l del núcleo t i ene
l a forma de l a f igura 2 .2 .2 .
La cant idad que hay que añadi r a B^ para conseguir
B1^ os H t g t £ que se obtiene gráf icamente, como se ind ica -
en l a f igura c i t a d a .
De todos l o s d ien tes del inducido, l o s s i tuados ba
jo l a par te c e n t r a l de l a pioza po la r , son l o s que más f l u jo

2.15
conducen. Por tanto la excitación necesaria ]3ara los dientes
vendrá dado por la que se obtenga atendiendo a dichos dien—
tos.
Si es B m a x el valor máximo del campo en el centro
del polo, el flujo sobre el diente central serás
^max • "k • -*-'
siendo t la anchura del diente y 1' la longitud corregida
del inducido. Dividiendo esta expresión por la sección trans
versal del diente nos dará el valor de Bl^ de donde podemos
obtener 33 como hemos indicado antes.
La densidad de flujo en los dientes aumenta desde
la extremidad hasta la base, a causa de la concentración pri
ginada por la costumbre de utilizar ranuras de caras parale
las. Si se supone quo el flujo que entra en la extremidad del
diente permanece constante a travos do toda su longitud Lj. ,

e l inc remento de l a dens idad de f l u j o h a c i a l a base ex ige un
aumento c o r r e c t i v o en e l -
número de amper i v u e l t a s p o r
un idad de l o n g i t u d , a c a u
sa d e l aumento de s a t u r a —
c i ó n . E s t e e f e c t o se ve en
l a p r e s e n t e f i g u r a 2 . 2 . 3 . ,
donde l a s o rdenadas de l a
cu rva C se ob t i enen de l a
cu rva BH d e l m a t e r i a l d e l
d i e n t e . La ordenada media
de l a cu rva C e s , según l a
r e g l a de Simpsons
l t
F i g u r a 2 . 2 . 3 a+ =
at-j + 4 a t 2 + a t 3
'm
y l a e x c i t a c i ó n n e c e s a r i a pa r a l o s d i e n t e s e s ;
(AT). at™ • H TE
2.3.- MEDIDAS EXPERIMENTALES DE LA DISTRIBUCIÓN DE FLUJO.
En primer lugar indicaremos cómo es posible en una
máquina convencional determinar experimentalmente la distri
bución de flujo. Puesto que la fuerza electromotriz instantá
nea en un conductor del inducido es proporcional a la compo
nente radial de la densidad de flujo en el entrehierro en el

2.17
punto ocupado por el conductor, la medida de esta f.e.m. en
una serie de puntos comprendidos en un paso polar proporcio
nará los datos para el cálculo de la distribución de flujo.
Consideremos por ejemplo el caso de un devanado son
cilio que tiene bobinas de paso completo, tal como la PQ de
la siguiente figura 2.3.1.:
r:t;i
' 'AL VOLTÍMETRO ts Figura 2.3.1
La fuerza electromotriz será proporcional a B que
es el campo en la posición en la que se encuentran los conduc
tores activos. Bastará tomar la lectura del voltímetro para
diferentes posiciones de las escobillas e para dibujar por
puntos la distribución de flujo.
Se pueden obtener también los mismos resultados por
medio de una tira de papel fuerte que se arrolla sobre el co
loctor, y perforada con agujeros separados la misma distancia
que las delgas y mediante unas puntas de contacto apropiadas
y conectadas a un voltímetro se puede dibujar punto a punto
la distribución.
Este método no sirve para caso de devanado fraccio
nario, pues el flujo no será el mismo en un conductor activo

2.18
que en otro para una misma bobina.
El método utilizado por nosotros es muy sencillo y
gracias a la "máquina universal" usada como simuladora de las
condiciones que nos interesa, ya está montado el sistema que
añora indicaremos.
Existe una bobina "exploradora5' acoplada al rotor
y cuyos torminales salen al exterior mediante unos anillos -
rozantes. Dicha bobina recorre todo el entrehierro y así la
f.e.m, inducida sobre ella es proporcional al campo B en cada
punto. La señal proporcionada por dicha bobina, se lleva di
rectamente al osciloscopio el cual nos da la forma de la dis
tribución de flujo a lo largo de todo el entrehierro.
So han hecho una serie de determinaciones de la for
ma de distribución para diferentes intensidades de excitación
y diferentes velocidades.
Las distribuciones de flujo- que se presentan aquí
se han obtenido fotografiando la traza del osciloscopio. El
"cliché" utilizado es de 36x24 mm. y una vez revelado se ha
obtenido un negativo del mismo que ha permitido ampliar la -
figura al tamaño que se presenta.
Se han escogido los valores suficientes para dar -
una idea más significativa de la influencia de los parámetros.
Se han tomado sois intensidades diferentes de exci
tación, 1 A, 2 A, 3 A, 4 A, 5 A y 6 A, y tres velocidades dis
tintass 2000 r.p.m. , 2200 r.p.m. 9 y 2400 r.p.m.

2.19
DISTRIBUCIÓN DE FLUJO MAGNÉTICO EN VACIO CON 1 AMP. DE EXCITACIÓN
A DIFERENTES VELOCIDADES
1
1
• -
: :
***
I .
a«2.000 r.p.a.
" • I I I
l'll nrfl
*•
;
n-2.200 r*p«n«
n«2.400 r«p«a#

DISTRIBÜCIOIÍ DE FLUJO MAGENETICO EN VACIO CON 2 AMP# DE EXCITACIÓN
A DIFERENTES VELOCIDADES
« i
/ - /
/ "
. -
X.
'.
\
'"\
n-2.000 r.p.m.
* • f
mJ
i
,
rw
i
^
•
.\s -¡¿¡•1
n«2«200 r#p*s«
n-2.400 r.p.a*

2.21
DISTRIBUCIÓN DE FLUJO MáGKIETICO EN VACIO COK 3 AKP. DE EXCITACIÓN
A DIFERENTES VELOCIDADES
n=*2.000 r.p.m.
n«2.200 r.p.«.
a-2.400 r.p.m.

2.22
DISTRIBUCIÓN DE FLUJO MAGNÉTICO EN VACIO CON 4 AMP# DE EXCITACIÓN
A DIFERENTES VELOCIDADES
1
t
.... .... É 11 • ' l i l f
. M
i t i l )
A ' w
a*2.000 r.p.n.
n*2.200 r.p.n.
,J 7 ~ J
r
- •
P*fl r\fl 1 X
.....
i i :
(""
....
n=2.400 r.p.m.

2.23
DISTRIBUCIÓN DE FLUJO MAGNÉTICO EN VACIO CON 5 AMP* DE EXCITACIÓN
A DIFERENTES VELOCIDADES
»»2#000 r«p«B«
'
!„. , ,
r—r~
*J¡
.
$ \
...... .
J 1
1
n n
W%
_
< l l l
"W>\
n»2#200 r#p#m.
n»2#400 r,p.a.

2,24
'RIBUCIOH DE FLUJO KAGKETICO m VACIO CON 6 AMP. DE EXCITACIÓN
A DIFERENTES VELOCIDADES
ii»2.00G xyp.nu
n*2.200 r>p#M»
J \
-J
V\ t«r\
,.
*+ \ m i
>
; . j " . .
W
-
,*rt
' 'i 1
\ -1
i
n»2,400 r # p . * .

CAPITULO 3
RELACIONES ENTRE EL PAR ELECTROMAGNÉTICO Y LAS
CURVAS LE DISTRIBUCIÓN

3-1
Í N D I C E
3.1 REACCIÓN DEL INDUCIDO
3.2 DEVANADOS DE COMPENSACIÓN
3.3 CARACTERÍSTICA DE UN GENERADOR CON EXCITACIÓN
INDEPENDIENTE
3.4 DISTRIBUCIONES DE FLUJO CON CARGA
3.5 INTEGRACIÓN DE LA CURVA DE DISTRIBUCIÓN
=ooOoo=

3.2
3.1.- REACCIÓN DEL INDUCIDO.
3«1#.3#- Efecto de la corriente del inducido.
La corriente que se induce en el rotor creará un -
campo magnético. Si suponemos que las escobillas conmutan ~
cuando las bobinas individuales del inducido pasan la línea
neutra geométrica, obtenemos una distribución simétrica de -
corrientes en el inducido cuyas líneas de campo magnético se
indican en la figura 3.1.1.1
Línea neutra geométrica
Figura 3.1.1.1
El campo es como creado por una bobina cuya eje fue
se la línea neutra geométrica. Por esta razón el campo del -
inducido se llama campo transversal.
Un razonamiento elemental sobre el efecto del indu
cido es suponer que no hay saturación en los circuitos magné
ticos tanto del campo principal como del transversal» Esto -

3.3
quiere dec i r que una f .m.m. dada produce un f lu jo p roporc io
n a l , de t a l forma, que s i d ive r sas fuerzas magnetornotrices -
actúan simultáneamente sobre un c i r c u i t o dado, se puede con
s ide ra r que cada una de e l l a s produce un f lu jo proporcional
independiente de l a s demás y, por t a n t o , l o s f l u jo s componen
t e s pueden sumarse y a s í h a l l a r e l f l u jo r e s u l t a n t e . Este pro
cedimiento se conoce como "método de superposición de f l u j o s " .
Este método apl icado a nues t ro caso nos ind ica que en l a s sa
l i d a s de l o s polos e l campo t o t a l es mayor con c o r r i e n t e en
e l inducido que s in e l l a y menor en l a s en t r adas .
Sin embargo, l a h i p ó t e s i s de que hemos pa r t ido de
no sa tu rac ión , no es c i e r t a en l a mayoría de l o s ca sos , y por
tanto no se puede ap laca r e l p r i nc ip io de superposic ión. El
procedimiento cor rec to c o n s i s t i r á en sumar l a s fuerzas mague
tomotrices independientes y deducir entonces e l f lu jo en c a
da punto oomo va lo r único y t o t a l .
3 .1 .2* - Dis t r ibuc ión del campo del inducido en e l e n t r e h i e r r o .
Supondremos que e l campo p r i n c i p a l no e s t á a c t i v a
do. Para c a l c u l a r l a f .m.m. tomaremos un tubo elemental oomo
e l indicado en l a f igura 3 . 1 . 2 . 1 .
El f l u jo del campo t r a n s v e r s a l será e l coiriente en
t r e l a f .m.m. que actúa sobre e l tubo indicado y l a r e luc t an
c i a . La f.m.m. se debe a l a c o r r i e n t e I del inducido. E l -a
número de conductores del inducido es Z y por unidad de Ion
gi tud serán Z/3TD luego en 2x habrá Z/^D . 2x . Si supone-

3.4
7TD P
Figura 3 .1 .2 .1
mos que son a c i r c u i t o s der ivados , l a in t ens idad a conside
r a r será I 0 / a , entonces; a
a. F.m.m. = . 2x . = 2 q x amperivuel tas
*D a
Z I siendo q = -^-zr— . Según e s t o l a f.m.m. t o t a l var ía l i n e a l
yf . D . a
mente desde e l centro hac ia l o s extremos p o l a r e s , en donde -
x=7TD/2p , luego tendremos?
F.m.m. = 2 . Z . I a 7TT> Z. I a TT.D.a 2p p . a
Podemos suponer entonces que la mitad actúa en cada extremo
como se indica en la figura.
Veamos ahora la reluctancia. Para la mayor parte -
de la pieza polar, la reluctancia es debida únicamente al en
trehierro si el material está sin saturar. La reluctancia se
rá entonces%

"SSífe ! ^ ' G ^ *'* % V--"
en donde ¿ es l a longi tud corregida del e n t r e h i e r r o . Según
es to l a densidad de f l u jo será i
2 qx
s* JL. Área dx
q x
7%mS
qx
que es una función lineal de x . Por tanto el campo B se -
puode representar por la misma línea que expresa la variación
de la f.m.m. del inducido» Pero esto no es válido para la zo
na interpolar, ya que la reluctancia aumenta mucho y por tan
to el flujo disminuye. La densidad de campo transversal que
da reducida en los extremos polares de salida a valores infe
riores a los que daría la linealidad. Una forma aproximada -
de distribución se ve en la figura 3,1.2.2
Figura 3.1.2.2

3.6
según esto se tiende a saturar los extremos polares y dientes
adyacentes, reduciéndose la intensidad de campo transversal
en esa zona por no ser la curva lineal como se indica en la
figura 3,1.2.3
Figura 3.1.2.3
3.1.3.- Distribución del campo resultante.
Hemos visto hasta ahora los efectos separados de -
la distribución de flujo del campo principal y de la reacción
del inducido. Veremos ahora cómo es el campo resultánte. Ad
mitamos en principio la superposición y bastará entonces su
mar los flujos independientes del campo principal y de la —
reacción del inducido. En la figura 3.1.3.1 la curva R repre
senta dicha suma.
La curva F representa la distribución de flujo de
bida al campo principal, que es simétrica respecto del centro
de la cara polar. La curva C representa la reacción del in
ducido cuando no hay saturación y por tanto es simétrica tara
bien respecto del centro de la cara polar. La suma de ambas

3.7
C N
Figura 3.1.3.1
(R) tendrá el mismo valor medio que la curva F, pues el valor
medio de C es cero. Todo esto si no hay saturación, claro os
tá.
En nuestra aplicación no podemos hacer esta hipóte
sis pues la máquina está muy sobrecargada y la intensidad por
el inducido es grande y dará lugar a que haya saturación. El
valor medio de C no es cero y por tanto el valor medio de F
no coincide con el de R. En general el de R disminuye respec:
to del de F. Esto va a traer una serie de consecuencias cuya
consideración va a ser muy importante.
3.1.4.- Efecto desmagnetizante.
Vamos a indicar en este apartado cómo se puede te
ner en cuenta la reducción ocasionada en el flujo por causa
de la saturación, fundamentalmente en extremos polares y dien
tes adyacentes del inducido.
Una línea de campo magnotico del inducido tiene en

3.8
su circuito un doble entrehierro y dos conjuntos de dientes,
además de los caminos de reluctancia despreciable a travos -
de las piezas polares y del núcleo del inducido. La f.m.m. -
que actúa sobre cada extremo polar es igual as
</•' i (A-V)
2pa a
donde iff es la razón del arco polar al paso polar y vale al
rededor de 0*7.
Supongamos que sea M la curva de magnetización to
tal de la máquina. En el eje vertical se representa el flujo
por polo, cuando no hay intensidad por el inducido y el eje
horizontal la f .m.m. total por polo. Supongamos que la curva
H es la que representa la f .m.m. en el entrehierro y dientes
adyacentes para un flujo <p dado. La separación horizontal -
entre ambos será la f.m.m. en el núcleo polar, inducido y cu
lata.
_ * f I i * (AV)01 (AV)Q (AV)0 (AV)e2 A-V
Figura 3.1.4*1

3.9
Supongamos que en vacío l a máquina es t a l que l a -
exci tac ión del campo es (AV) y corresponde un f l u jo (p . La
f .e .m. de l a máquina será entoncess
£ = kn á>a O ~°
La d i s t r i buc ión de f l u jo a l o la rgo del arco po l a r
puede suponerse constante y l a representaremos por l a r e c t a
ABC, t a l que AB = BC . Para e l f lu jo (po, (AV)Q es l a f •num
en un solo en t roh i e r ro y d i en te s adyacentes . Esta exc i t ac ión
será más grande en un extremo y precisamente en una can t idad
BC igua l a
Z I
2 p a a
y mas pequeña en e l o t ro extremo en una cant idad AB. La d i s
t r ibuc ión de f l u jo a lo l a rgo del e n t r e c i e r r o puede suponer
se que var ía como l a s ordenadas de l a curva H en t re l o s pun
tos DBE. El va lo r medio del f l u jo en e s t a d i s t r i buc ión p e r t u r
bada no es <|> sino más pequeño, puesto que e l área BCE es
más pequeña que e l área ABD y es precisamente en esa propor
ción en l a que disminuye e l f l u jo t o t a l a l o la rgo del arco
polar .
Si e l f lu jo o r i g i n a l s in d i s t o r s i ó n es <jb , r e p r e
sentado por l a ordenada de l a curva M para l a exc i t ac ión —
(AV) , dicho f lu jo queda reducido por e l e fec to de l a magne
t i zac ión t r a n s v e r s a l a <> - 4 (j[), estando e s t a cant idad r e
presentada por e l punto E en l a curva M. El r e su l t ado f i n a l

3.10
es que la excitación del campo (AV) ha quedado reducida en
la cantidad & (AV) 9 que es entonces la f.m.m. "desmagnetizan
te" debida a la reacción del inducido.
3.2,- DEVANADOS DE COMPENSACIÓN.
Un método de subsanar en parte el efecto producido
por el campo transversal creado por el inducido es el de dis
poner de devanados de compensación. Salvo que el inducido es
té saturado se puede suponer que el campo transversal es pro
porcional a la corriente inducida, por tanto un devanado que
tuviese las vueltas adecuadas y estuviese colocado de tal —-
forma que su f.m.m. se oponga a la f.m.m, del inducido sería
la solución de la distorsión del campo principal. El devana
do de compensación estaría encajado en ranuras practicadas -
en las piezas polares y se conecta en serie con el devanado
del inducido. El número de conductores de compensación por -
polo Zc, debe proporcionar la misma f.m.m. que la de los con
ductores del inducido dentro de la extensión de la pieza po
lar; de lo que se deduce que si el número total de conducto
res del inducido es Z y la razón del arco al paso polar es -
(¿/ tendremos\
- ^ • K i . p.a
o bien 0>z
zc = a.p

3.11
La presencia de ranuras en l a s p iezas po lares de -
una máquina compensada exige l a u t i l i z a c i ó n de un arco po la r
mayor y e s to l i m i t a l a forma del po¡ho a u x i l i a r de conmutación
aumentando considerablemente e l f lu jo de pé rd idas . El e fec to
de e s t a s ranuras es aumentar e l e n t r e h i e r r o y l a exc i tac ión
necesar ia para l o s d ien tes de l a s p iezas p o l a r e s .
Como en nues t ro caso l a máquina e s t a r á de por s í -
muy saturada no u t i l i za remos polos de compensación sino que
variaremos adecuadamente l a in tens idad de exc i t ac ión del cara
po p r i n c i p a l que nos pe rmi t i r á hacer una corrección mucho más
perfecta que la que se l o g r a r í a con l o s devanados de compen
sación.
3 . 3 . - CARACTERÍSTICA DE UN GENERADOR CON EXCITACIÓN INDEPEN
DIENTE.
3 - 3 . 1 . - C a r a c t e r í s t i c a e x t e r i o r .
La exc i tac ión independiente es ú t i l para poder r e
gular e l f lu jo del campo p r i n c i p a l independientemente de l a
carga suministrada por e l inducido. Exis ten d iversas v a r i a n
t e s que pueden i n c l u i r exc i t ac ión a u x i l i a r en s e r i e , a s í co
mo devanados de compensación y conmutación.
La fuerza e lec t romot r i z desar ro l lada en e l i n d u c i
do, vimos que eras
B <£ Z . n a
es proporcional al flujo ó y a la velocidad n . El flujo -

3.12
por polo <p es función de la excitación
$ = F (Nf I.p)
y entonces £ = k . P (Nf If) . n
A una velocidad constante l a función de & f ren te
a N^If t i ene l a misma forma que l a curva de magnetización
resiouí Nf l f Nflfl
Figura 3 .3 .1 .1
La fuerza e lec t romot r iz es entonces prácticamente
proporcional a l a exc i t ac ión has ta que empieza l a sa turac ión,
Para o t r a s velocidades quedarán disminuidas l a s or
denadas en l a proporción en que var íe l a velocidad.
Pasemos ahora a ver l o que ocu r r i r á a l ca rgar e l -
generador. Para c a l c u l a r l a r e l ac ión en t re l a in tens idad ex
t e r i o r y la tens ión en bornes procederemos gráficamente de -
l a s igu ien te forma.
Por comodidad dibujaremos e l e je de absc i sas de l a
curva de magnetización hac ia l a i zqu ie rda ( f igura 3 .3 .1*2) .
Supongamos que e l generador funcione a velocidad ~
constante y l a curva correspondiente a esa velocidad es l a -

3.13
V
O' o
Figura 3.3c1.2
I a
indicada en la figura 3.3.1.2. Si la excitación es 0'P0 la -
f.e.m. en circuito abierto será F0G-0. La tensión en bornes -
de la máquina será 0P Q .
Vamos a distinguir dos casos para este estudio:
a) Que el generador no tenga polos áe conmutación
y devanado de compensación, teniendo las escObi
lias ligeramente adelantadas con respecto a la
línea neutra»
b) Que tenga polos de conmutación y devanado de com
pensación y que el desplazamiento de escobillas
sea nulo.
En el primer caso los amperivueltas desmagnetizan
tes debidos al desplazamiento de las escobillas son proporcio
nales a la corriente del inducido I_. El efecto desmagnetizan
te del campo transversal aumenta con el incremento de corrien
te en el inducido 9 pero no de forma proporcional a causa de
la saturación. En el caso de despreciarse este último efecto

3.14
desmagnetizante, l a t o t a l i d a d de l o s amperivuel tas puede con
s idera rse proporcional a la c o r r i e n t e del inducido I =0A =
= 0" A"
Figura 3.3.1.3
La recta PQQ es tal que MQ = I . tgt£ = (AV)D y así
la excitación quedará reducida a O'P y la f.e.m. será PG = OK.
La tensión en bornes será OK disminuida en la caída a través
de la resistencia del inducido en IaRa? que puede hacerse —
gráficamente mediante la recta OS inc-",.lnada un ángulo J3 tal
ques
tg/3 = Ra
Se obtiene el punto de la curva P trazando una paralela a OS
por K .
Se pueden obtener estos puntos como el P' y así la
curva final que presenta una ligera curvatura dada por la —
forma de de la curva de magnetización.
Si no hubiésemos despreciado el efecto del campo ~
transversal, el punto P estaría más bajo.

3.15
En el segundo caso no existe acción desmagnetizan
te, la f.e.m. del inducido permanecerá en FQG0 = 0 P0 y sólo
habrá que tener en cuenta la caída ohmioa del inducido, del
devanado de conmutación y de las bobinas de compensación y -
la característica exterior será una reota inclinada.
3.3.2.- Característica en carga.
La curva que pretendemos encontrar es la que mues
tra la relación entre la excitación y la tensión en bornes V,
cuando tanto la velocidad como la corriente de carga I se man
tengan constantes. Si la corriente de carga es nula, la carao
terística en carga se convertirá en la característica en va
cío QH.
IaRai
Figura 3.3.2.1
Supongamos que la excitación es If amperios y la in
tensidad exterior se ajusta a Ia. Los ariperi vueltas desmagne
tizantes (AV)^ = FG reducen la excitación a OG, por lo que GH
será la f.e.m. del inducido. Quitándole a GH la caída ohmioa

3,16
IRa = HK , la tensión en bornes será GK = FP y por tanto P es
el punto de la característica en carga correspondiente a la
intensidad I a supuesta. Así se obtiene la curva F0 P .
En todos los triángulos.
•tgfi •a *a
(AV) D
e s t a fórmula pe rmi te e l c á l c u l o e x p e r i m e n t a l de l o s amper i—
v u e l t a s d e s m a g n e t i z a n t e s . En e f e c t o , supongamos que e l i n d u
c ido e s t á en c o r t o c i r c u i t o ( V = 0 ) . Se puede medi r l a i n t e n s i
dad I en func ión de 1^ ba jo e s t a s c o n d i c i o n e s . Sea I f = OF0<
Trazando OM = I a R a ? u n a paralela al eje horizon
tal cortará en Q a la curva de vacío, bajando hasta S obten
dremos s
F. oS (AV)D = F (Ia)
La familia de curvas que se obtiene será la de la
figura 3.3.2.2
Figura 3.3.2.2

3.17
y de ella podemos obtener para cada tensión entre bornes la
curva siguientes
U fI f
(NfIf)o--
Figura 3.3.2.3
que es lo que se llama característica del inducido. Así, si
el campo excitado independientemente suministra la excitación
constante (N^I«) para producir la tenwión deseada V en v a
cío, la excitación adicional indicada con (AV) será la nece
saria para mantener la tensión constante cuando la corriente
de carga sea I, siendo suministrada esta excitación adicional
por el arrollamiento en serie.
3.4.- DISTRIBUCIONES DE FLUJO EN GARBA,
Se trata de ver en este apartado la influencia de
la reacción del inducido sobre la distribución de flujo a lo
largo del entrehierro. Se ha utilizado el mismo procedimien
to experimental que en el apartado 2.3. Incluso se han toma
do los mismos valores para la intensidad de excitación y ve
locidad de la máquina, haciéndose tres ensayos para tres va
lores diferentes de la intensidad por el inducido.

3.18
Se observan variaciones considerables de la distri
bución de flujo, cuando el campo principal no es "fuerte'1 -
comparado con el del inducido. Cuando ocurre al contrario ape¡
ñas se tiene influencia la reacción del inducido.
Las curvas se han obtenido por el mismo procedimien
to que las del capítulo 2. En todas ellas la base de tiempos
es 2 m. s/cm. y el eje vertical corresponde a O'5 volt/cm.
Do la observación de las curvas de distribución se
deduce lo que ya se había indicado anteriormente. Para valo
res pequeños de la excitación, la perturbación ocasionada en
la distribución es importante. Incluso hay casos en que el -
flujo cambia de sentido. Cuando el campo principal es fuerte
la perturbación es menor y tanto mas grande cuanto mayor es
la intensidad por el inducido. La influencia de la diferente
velocidad se acusa únicamente en la frecuencia (e#e horizon
tal) de la distribución.

3.19
DISTRIBUCIÓN DE FLUJO KAGSETICO CON DIFERENTES CAEGAS PAHA 1 AMP.
DE EXCITACIÓN T A 2 . 0 0 0 R.P#M»
-J
"1
fc [
tjr**
\
*' :
'
•
&
,.-'.
s v tf*
X m 1 Aro<
ri 17* * • * * * !>»»• >>»> **«•*
• «*M
£ ¿ j
^ í M I m 2 ATOI
I m 4 Aro, a

3.20
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 2 AMP,
DE EXCITACIÓN T A 2*000 R¿P.M.
1 ""
1
i
«A. ~w<
J ,
\ ¡ l '"\ ¿>C
T
I a» 1 Amp. a
W"
'
l /7 JT"
•
•
I
*%!*
'
o
:
CL*n
• ;
; ;
k
• . . .
,*?
\k ^ \. . ' A
. ••*,
[A
I • 2 A»p< a
I • 4 Avpi a

DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 3 AHP<
DE EXCITACIÓN Y A 2 . 0 0 0 R.PJK.
,' ;
u n •>»
I • 1 Asp«
^ *
1
i±__
;flfW *4** «4t4 >»»» > m
J U I M«l I H I »W> II I»
L ;_L_J¿k
I « 2 Aam*
4 TKJZ*¿~ WM» * *% MM¿ ***» fe«f»
<HM« • # * * *•*•>
y i
* t ~
* I » 4 A»p»

3*22
DISTBH3UCI0J? BE FLUJO WaGHEKECO CON DIFERENTES CARGAS PAHA 4 AMP.
, DE EXCITACIÓN Y A 2.000 B.P.M.
I m 1 Anpi a
* • * * * •
*f M i h i n , * * » *
^ 0 3 ? 1 - 2 Asp. a
I » 4 A»p# a

3.23
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CAHGAS PARA 5 ¿MP.
DE EXCITACIÓN Y A 2.000 R.P.M*
Mi \tOt üafi I0IL
••** V***
•Wi* I • 1 Anrps
w J Krf
— i
ya
•
'
J*M
~ .
Vn
+ — -
I •
" \ l
',: '
•
'
V i i
tUj jWÍ«
•
~ I » 2 i*p.
^!?£|fc . • : • >
I •* 4 A*p# a

3,24
BISTRIBÜCIOJSÍ DE FLUJO MAGNÉTICO CON DIFERENTES CABGAS PAHA 6 AMP.
DE EXCITACIÓN Y A 2.000 B.PJ4#
,
i 5*
h J
~í
fW» *t*# **J*.
t u i1
j
|
* \ j : „ 1 . .
I f t l
*^l
V i
: •
• * f c * \ l
\ \ **«
i
I • 1 Amp,
—-"• •
V )v
•b \*fi &\ I a * 2 Amp.
- t f ^ ^ ^ í y ^
31
—:
- MMII «
I » 4 Amp.

3.25
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 1 AMP,
DE EXCITACIÓN Y A 2.200 R.P.M.
J
yr'
i
I I
SCa V ""
wTr 7ñ
I B 1 Amp. a
„ • / y
^ s*.
0
^ \ ta»
*
í •""
wAl V "
>H I « 2 Amp. a
s? A>
iy* m i
^ ?'*
i
\A
!_,...
K iV irfíT
A
^
i
^ V
F I « 4 Amp.

3.36
DISTRIBUCIÓN DE FLUJO MAGÍIETICO CON DIFERENTES CARGAS PAEA 2 AMP.
DE EXCITACIÓN Y A 2.200 R.P.M.
m tf*
ñt i
yfa
•
•
'
•
'
k Ufcjfci
\ • i . ti ^/w Ai/i
I = 1 Aanp, a
fjf-I I »
(.
A *
...j
I ;
'
*"*
™V
~~f~ |
W¿
i • i
„,,< , , „ . . .
\i • * * * * •
— f
i_
m¡
I » 2 Ampt

3.27
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 3 AMP.
DE EXCITACIÓN Y A 2 . 2 0 0 R . P . M .
* ' ' }
'%*
r*
T r
W»v *«A ¡ " V i l , l
;
;
:
n U ,IV* \¿f*
""
A*-\
1 * 1 AlBp<
•
'"> '? *
~1
Í M
*
i
i*, vT, A * i
:
•
.'
'.
.• • v K'$ V"-
\ * • • % *
1
i A
fc/"" ^
I » 2 Arap»
j f i »\
«*« ¡rf
;*\ W»'
"5 V r - A — '
1 * 4 Amp,

3.28
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 4 AMP,
DE EXCITACIÓN Y A 2 . 2 0 0 R . P . M .
M i /
r// ,
,*V1 i ' l i l i
•
*A& fl%v^ ' i
; v
V
;
"
VS"*
"S \¿4 w\
1™
1 * 1 Amp.
4 V ! í C * *
T¡" ss*^
2 Anp,
Hif MI»
I*
£* ¿ * I ^ F
T—r
ICTr
X VA
,**
I - 4 A»p.

3.29
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 5 AMP,
DE EXCITACIÓN Y A 2.200 R.P.M.
f f
w
•
/ V
i
WA«J V*< /V
:
r—1
* \. O*""
*,
V W«V Afl^V
1 - 1 a
3 r ^ l f W A i ^ ^ .
i r + *
&+•
5 W * ^
2 Amp<
•rf /» i ^:
M U ^»l
irw;
^ 5 Ü
I » 4 A«p.

DISTRIBUCIÓN DE FLUJO MAGNÉTICO CGBT DIFERENTES CARGAS PARA 6 AMP,
DE EXCITACIÓN Y A 2,200 R.PJ».
„/ /
w
j**f •
Wv* V*
'
t
h " V [
; \ tá\ W ....
*> i \
^H *ttn
[ * 1 JüBPt
Y*
/ \ w * ^ i V ;
te*!^
1 - 2 Aap.
ft~
¿Jet. '¡T**»"
:; wvc k ? . - * ** -
Jw W f v ^
I • 4 Aap.

3.31
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 1 AMP#
DE EXCITACIÓN Y A 2.400 R.P.M.
«¿*
í i
+ C3¡m^t
I » 1 Amp.
¿ / r^
'
i
%
i ' • "
f* k wv-
j
Wii .'""
\ V
/ ^ «•i i*
I » 2 Amp.
dtf 1
~f
ta r'to "
• .
>
/ *r s i
.
0\>
....... . ' _ : - v
*•
- • • '
\.
!?>
t
"n V ft
bi i ¿ V I a
a4 Aap.

3,32
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFEHENTES CASCAS PARA 2 AMP.
DE EXCITACIÓN Y A 2.400 H.PJK.
y *'<r
C
"t v
wW5 AA "X
i
í :
. v :
:
.WWP**
^p r -i !
1
\
h
[ » 1 A»p4
7 / - 1
:- ~
j (
(y
i—
• I l f
Mi
I,...
• • • .
K . ti» m : *N 1 | t ¡
11
\f / * V
...... i.
Ift » 2 Aap,
I • 4 A»p*

3,33
DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 3 AMP#
DE EXCITACIÓN Y A 2.400 R.P.M*
I a * 1 Amp.
2 Anrp,
* 4**. * M * •**• ****¥!*.'
I I I f
P •»<>i«ii u n
Ift « 4 Aap#

DISTEIBIJCION DE FLUJO MAGNÉTICO COR DIFERENTES CARGAS PARA 4 AHP.
DE EXCITáCIOK Y A 2.400 R.P*!!*
I « 1 Aatp»
1 = 2 üwp. si
I » 4 Amp#

DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 5 AMP.
DE EXCITACIÓN T A 2.400 R.PJK.
I « 1 Anp*
ñu
1
t*fi *ty.
J.
n • 'T'";
V • " ' • ;
¡
•
1
•
tu -T35C
l
.. ,,
A
wt
•
I I
í*^ rth>*
I *» 2 Affip»
7 5¡j«¿!5í
tff
V*~: »*«í
^5 • ^
Ia - 4 A*p«

DISTRIBUCIÓN DE FLUJO MAGNÉTICO CON DIFERENTES CARGAS PARA 6 AMP#
DE EXCITACIÓN Y A 2,400 R.P«M#
r-Mj*w»i V
rrrn I"
T U i
!OTl I « 1
I * 2 Amp.
Y^^m
T
n V* :'
ll«l < n t Í5 EL
4VÍ^
I * 4 Amp, a

3-37
3.5.- INTEGRACIÓN DE LA CURVA DE DISTRIBUCIÓN.
Lo que verdaderamente interesa, a efectos de la f.
e.m. y por tanto del par electromagnético, es el valor medio
del flujo por polo. Se trata entonces ahora de proceder a una
integración de las curvas que hemos obtenido anteriormente.
Un primer procedimiento sería medir el área encerra
da por la curva sin mas que contar los cuadrados que contie
ne. Es un método aproximado pero daría bastante exactitud. -
Tiene un inconveniente y es no conocer los límites de integra
ción, tienen que ser desde un extremo polar a otro, y eso en
las curvas no queda de manifiesto.
Otro procedimiento sería de tipo electrónico, uti
lizando cualquiera de los procedimientos tradicionales que -
se emplean en electrónica para la integración de una curva.-
Tiene sin embargo el inconveniente de no conocer tampoco los
límites de la integración.
El método utilizado para realizar la integración -
es de tipo mecánico. El fundamento es muy simple y nos ha da
do un resultado satisfactorio. La señal generada en la bobi
na exploradora es rectificada, mediante unos anillos deslizan
tes que están en correspondencia con los entrepolos y por lo
tanto se extienden a lo largo de la longitud de estos, dejan
do pasar la señal rectificada únicamente en dicha longitud.-
Un esquema simplificado sería el representado en -
la siguiente figura 3.5.1.:

3.38
Bot>. explor.
j Aff/* Amplifi
cador
7777 Figura 3.5.1
La señal generada en l a espira exploradora del r o
tor í>asa a través de un amplificador con control de amplif i-
cacióh. A la salida de áste e l procedimiento mecánico hace -
una integración de fase. Este sistema está constituido por -
t r e s an i l los que tienen la part icular idad de que e l central
conecta cada media vuelta a los dos l a t e r a l e s altemativamen
t e .
El desarrollo l a t e r a l se indica en la figuras
JSL
Figura 3.5.2
Para conseguir que la impedancia que "ve" el ampli
ficador sea siempre la misma, se han conectado dos instrumen
tos de corriente continua como se ha indicado en la figura.
Las medidas se han realizado a 2000 r.p.m. y los -

3.39
datos obtenidos se lian dispuesto en la siguiente tabla.
.
I a = OA
I a = 1 A
I a = 2 A
x a = 3A
I a = 4A
I a = 5 A
I a = 6A
I e = 1A
80
80
79
76
66
58
42
I e = 2A
150
150
150
144
140
134
116
I e = 3 A
213
213
212
208
206
198
192
I e = 4 A
264
264
264
262
260
252
244
I e = 5A
292
292
292
290
288
280
276
I e = 6A
314
314
314
312
310
302
300
Los valores indicados en la tabla son en realidad
proporcionales a los flujos y para obtener estos, bastaría -
multiplicarlos por un factor característico de la máquina.
También so incluye un gráfico en el que se pone de
manifiesto más claramente la reacción del inducido sobre el
flujo. En el eje vertical se representa (h y en el hori2ontal
la intensidad por el inducido, tomando como parámetro la in
tensidad de excitación.
=oo0oo=-

300 -
o*;n .
150
1 nn «
50
>
I f r 6 A.
l f r S A .
I f = U A.
I f = 3 A i
$ = 2 A.
lf=1A.
l a
F IG- 3 - 5 - 3 ,

CAPITULO 4
CORRESPONDENCIA DINÁMICA DEL PAR ELECTROMAGNÉTICO
CON LA INTENSIDAD DEL INDUCIDO

4.1
Í N D I C E
4 . 1 DEDUCCIÓN TEÓRICA DEL PAR ELECTROMAGNÉTICO
4 . 2 DESCRIPCIÓN DEL SISTEMA DE MEDIDA
4 . 3 PAR ELECTROMAGNÉTICO Y PAR DE ENTRADA
4 . 4 CURVAS PARAMETRICAS DEL PAR
= 0 0 0 0 0 =

4.2
4.1.- DEDUCCIÓN TEÓRICA DEL PAR ELECTROMAGNÉTICO.
En el apartado 1.3 habíamos indicado que el par
electromagnético se podía poner como:
6 0 JL TTT, = k • 9 ' Xa.
donde 0 es una función de I a e 1^ . 0 sea
<¿ = ¿ ( I „ I J a *e
esta expresión es precisamente la que vamos a calcular ahora«
Supondremos que las escobillas no están decaladas,
esto es, están situadas en la línea neutra geométrica. Tene
mos únicamente come reacción del inducido la componente trans
versal al campo principal. Esta componente cambia la distri
bución de flujo en el entrehierro, aumentando en un extremo
polar y disminuyendo en el otro. Esto ya lo indicamos en el
apartado 3.1.4. Ya vimos que si hay saturación el valor medio
a lo largo del polo disminuye.
La evaluación que vamos a realizar aquí de este tór
mino se hará teniendo en cuenta la curva de magnetización a
travos de la ecuación de Froelich, que ya hemos nombrado an
teriormente.
Nos referiremos en este desarrolla a la figura del
apartado 3.1.4 .
La disminución de flujo medio sobre y se puede

4.3
h a c e r comparando e l á r e a l i m i t a d a por l a curva. DBE y e l á r e a
bajo l a r e c t a ABC, a s í :
A » Área ABC - Área DBE . Aq> = . <p
Área ABC °
E l á r e a l i m i t a d a por l a curva DBE se o b t i e n e a t r a
vos de l a ecuac ión de F r o e l i c h que pondremos de l a s i g u i e n t e
formas
0¿ A V
fi 4- AV
en donde Q¿ y / 3 son c o n s t a n t e s c a r a c t e r í s t i c a s de l a máqui
n a .
La curva c o r r e s p o n d i e n t e a l e n t r e h i e r r o se o b t i e n e
a p l i c a n d o e l t a n t o por c i e n t o c o r r e s p o n d i e n t e a l a de magne
t i z a c i ó n . Llamaremos r a l t a n t o p o r uno y a s í s
AVe = r A V
y la ecuación para el entrehierro será:
* A V Q
r J3 4- A V. e
E l á r e a ba jo ABC s e r á s e n c i l l a m e n t e s
(J/Z fz ( A V Q 2 - A V e 1 ) . < ¿ = ( A V e ¿ - - i - A V e + I a ) . (f>Q
u 2 p a 2 p a
Área ABC = I Q <P pa a °

4.4
Para e l á r e a "bajo DBE e s n e c e s a r i o h a c e r l a s i g u i e n
t e in tegra l .»
y dx = / — , dAV^ =
AVe1 j A V e 1 J e e
= «¿ A V e 2 - A V e 1 - r / t o
r _ ^ + A V e 1 -
que una vez operado se o b t i e n e
Área DBE = 0¿
U/Z r ft 4- r AV ¿ - - T _
VZ ' ° 2 p a a
1 - r / } l n • pa a ' tf'Z
p y S + P A V 0 - ^ - - I a 2 p a
La r educc ión de f l u j o s e r á en tonces s
fz u/z 1rIa$0-«
pa
l(//z - . 1_ - r / ? i n
pa a
d<¿ =
r ^ ^ r A V 0 + - a
2 p a
r # + r AV„ I 7 ° 2 p a a
-I tf/Z
pa Xa <¿o
que una vez s i m p l i f i c a d o :
¿ó = A> - ty x o
t*Z
r /? 2 p a 1 l n ~
<pZ - <^z *- I Q r fí 4- r AVn 1 J
a o ~ a pa 2 p a

4.5
quedando entonces el flujo por polo a un valor ó dado por ' o
o sea ; &Z
vfi J ° 2 p a a
— I r ^ + r A V I pa a ° 2 p a a
e s t a es l a e x p r e s i ó n d e l f l u j o en func ión de I ~ , I _ pues e a
A Vo = N e • *e
La e x p r e s i ó n d e l p a r e l e c t r o m a g n é t i c o s e r á e s t o l a
s i g u i e n t e ;
^Z r fi + r O f t 4- I n
60 60 r y 3 e e 2 p a a
T = k t £ l - - ko¿ l a m 2 7T a 2 3T (¡/Z (f/Z
I a r ^ * r * e I e - — - I &
pa 2 p a
que para f a c i l i d a d de comprensión se puede e s c r i b i r de l a s i
g u i e n t e formas
a 4- b I Q 4- c I a Tm = K1 I a ~K2 ^ —'T"vT""T"T""
a 4- b I e 4- c I a
en donde se observa que hay un t é rmino l i n e a l a f e c t a d o de un
l o g a r i t m o . Cuando I sea muy pequeño comparado con I o me
j o r e l t é rmino c I sea pequeño comparado con e l t é rmino —•
b I G , e l segundo t é rmino se a n u l a y e l p a r e s l i n e a l con I .

4.6
A medida que I a aumenta el valor del logaritmo es mayor y -
tanto mas se apartará de la linealidad la expresión de T .
Analicemos un poco en detalle el término corrector
logarítmico. Para facilidad de desarrollo expresaremos?
+ b = h I. *e
•a o = x
y a s í tendremos
h + x r —-= K2 L1 A T = K2 2JI = K0 I l n (h + x) - l n (h
h - x - ] o b ien
4 T = KQ- l n 14- - l n 1
si desarrollamos en serie los logaritmos, teniendo en cuenta
que esto sólo es válido si
I x /h | <. 1 ó sea c I a < a 4- b I (
tendremos:
"" x 1 x 3 1 x 5 ( ) + ( ) + ( ) 4 . . . . .
h 3 h 5 h
y volviendo a l a s v a r i a b l e s ~L e I

4.7
AT = 2K2 I n 1 I„ 3 1 I f i 5
ja + b l e 3 a 4- h l e 5 a 4- b l e
para una in tens idad de exc i t ac ión cons tan te , e l primer térmi
no co r rec to r es l i n e a l y se consigue a tenuar lo con e l l lama
do "devanado de compensación" ya que se hace pasar l a i n t e n
sidad del inducido por dicho devanado y l a f.m.m. será propor
c ional a I . Sin embargo s i l a in tens idad de l inducido es
grande respecto de I e , no solo aparece e l primer sumando sino
que in te rv ienen e l de t e r c e r orden y has ta e l de quin to . Es
entonces necesar io hacer o t ro t i po de corrección más p r e c i s a ,
4 . 2 . - DESCRIPCIÓN DEL SISTEMA DE MEDIDA.
El sistema u t i l i z a d o para todos e s t o s ensayos ha -
sido una Máquina Universal de Ensayos E l é c t r i c o s . Consiste -
en un motor de c o r r i e n t e continua de cuat ro po los , que ac túa
como elemento que comunica l a energía mecánica necesa r i a a l
generador. El generador e s t á acoplado a l motor directamente
y es e l r e su l t ado de una se r i e de conexiones en una máquina
en l a cual se pueden simular todos l o s t i p o s de máquinas ele*c
t r i c a s r o t a t o r i a s . El motor e s t á suspendido mediante dos co
j i n e t e s que permiten e l balanceo del e s t a t o r . De e s t a manera
a t ravos de un muelle previamente tarado es posible medir e l
par mecánico que suminis t ra e l motor en cada momento.
El esquema del d i s p o s i t i v o es e l representado en -
l a s iguiente f igura 4 . 2 . 1 . :

4.8
Tac6metro
Figura 4.2.1
Acoplado directamente al motor existe un generador
tacomótrico que permite conocer la velocidad a la que gira -
el rotor de ambas máquinas.
Mediante un pequeño vastago se puede bloquear el -
estator y el rotor del motor. De esta manera si se hace fun
cionar el generador como motor de corriente continua, el par
generado es precisamente la indicación del medidor de par. -
Es posible hacer este bloqueo en diferentes posiciones rela
tivas del estator y del rotor, de tal manera que se puede es
timar un valor medio del par estático.
El circuito eléctrico utilizado es el que hemos re
presentado en la siguiente figura 4.2.2.
Con este circuito se puede obtener el par de entra
da a la dinamo que es el de salida del motor.
Para la medida del par estático se conectará única
mente la dinamo a una fuente de alimentación regulable a tra
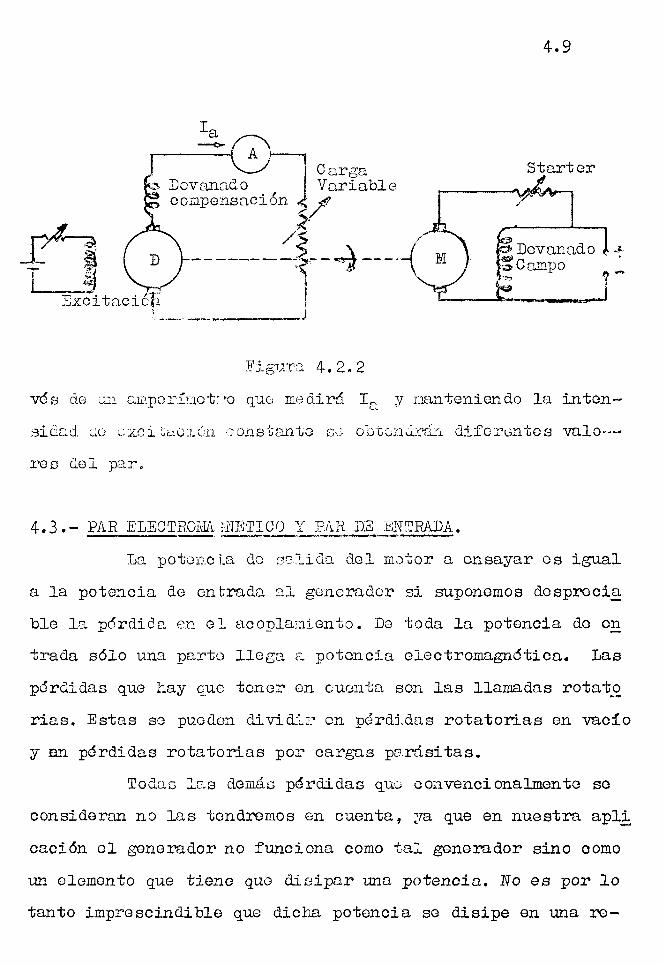
4.9
•a
J?*"S
A V
Devanado compensación <
Carga Variable
* • /
Exci tac ió f í J
S t a r t e r
Devanado f J-Í » Campo
F i g u r a 4 . 2 . 2
vds de un amperímetro que medi rá I a y manteniendo l a i n t e n
s idad do excicciOióii c o n s t a n t e ce obtendrán d i f e r e n t e s v a l o
r e s d e l pa r o
4 . 3 . - PAR ELECTROMAGNÉTICO Y PAR DE ENTRADA.
La p o t e n c i a de s a l i d a d e l motor a e n s a y a r e s i g u a l
a l a p o t e n c i a de e n t r a d a a l gene rado r s i suponemos d e s p r e c i a
b l e l a p d r d i d a en e l a c o p l a m i e n t o . De t oda l a p o t e n c i a de en
t r a d a só lo una p a r t o l l e g a a p o t e n c i a e l e c t r o m a g n é t i c a . Las
p é r d i d a s que hay que t e n e r en c u e n t a son l a s l l amadas r o t a t o
r i a s . E s t a s se pueden d i v i d i r en p é r d i d a s r o t a t o r i a s en v a c í o
y en p é r d i d a s r o t a t o r i a s por c a r g a s p a r á s i t a s .
Todas l a s demás p d r d i d a s que convencíonalmente so
cons ide ran no l a s tendremos en cuen ta 9 ira que en n u e s t r a a p l i
cac ión e l gene rado r no f unc iona como t a l gene rado r s i no como
un elemento que t i e n e que d i s i p a r una p o t e n c i a . No e s por lo
t a n t o i m p r e s c i n d i b l e que d icha p o t e n c i a se d i s i p e en una r e -

4.10
sistencia externa o en el devanado del inducido. Lo importan
te es poder medirla, ya que de su conocimiento obtendremos -
la potencia suministrada por el motor a ensayar.
Mediremos la potencia electromagnética, que es la
de entrada menos las pérdidas rotatorias. Por tanto la poten
cia de entrada a la dinamo, que es la de salida del motor me
nos la de acoplamiento, es igual a la electromagnética menos
las rotatorias. 0 seas
WM0T0R = WELECTROMAG + WAC0PLAM * WR0TAT0RIAS
Todo este razonamiento que se ha hecho con las po
tencias sirve para el par. Recordemos pues que el procedimien
to para medir la potencia será multiplicar el par por la ve
locidad, y así;
PM0T0R = PELECTROMAG + PPERDIDAS
El par de pérdidas se puede estimar experimentaimen
te, sin más que realizar unas medidas del par estático y del
par cuando la máquina está girando, para diferentes valores
de la intensidad del inducido.
En nuestro ensayo particular el par de pérdidas —
permanece casi constante y el valor oscila entre O160 Nw-m.
a 1000 r.p.m. y O165 Nw-m. a 2500 r.p.m. Respecto del par má
ximo que se obtiene éste representa un 10/o aproximadamente.
En la utilización particular de los bancos que es
tamos estudiando, estas pérdidas se consideran despreciables.

4.11
La razón de esta suposición es que nuestra máquina está muy
sobrecargada y no trabaja en condiciones nominales y por tan
to esa pérdida que antes era del 10$ de la nominal, ahora -
pasa a ser el 1 % de la potencia de utilización. Supondremos
entonces, de ahora en adelante, que la potencia que suminis
tra el motor es la potencia electromagnética del generador.
4.4.- CURVAS PARAMETRICAS DEL PAR.
Se trata en este apartado de medir expe rimentalmen
te las curvas del par electromagnético para cada intensidad
de excitación e intensidad por el inducido. Es necesario tam
bien poder evaluar las pérdidas rotatorias a fin de conocer
el par mecánico en el eje.
Se han hecho en primer lugar unas medidas estáticas
del par electromagnético. Para ello se ha bloqueado el rotor
adecuadamente y se ha hecho pasar la intensidad por el indu
cido como si estuviese girando, obteniéndose así el par está
tico para cada valor de la intensidad de excitación y del in
ducido. Se ha procurado tomar diferentes medidas para distin
tas posiciones de las escobillas sobre el colector. El par -
se ha medido con un dinamómetro previamente tarado y sujeto
a la carcasa de la dinamo.
Los valores obtenidos en este ensayo se han recogí
do en la siguiente tabla y se han representado en el gráfico
adjunto.
El esquema eléctrico del montaje es el representa-
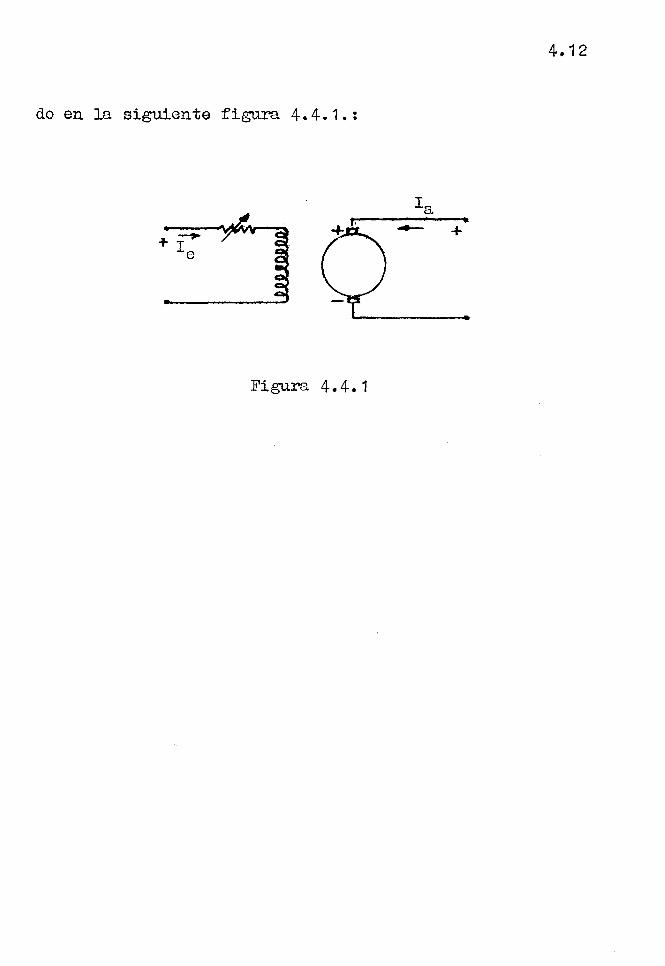
4.12
do en la siguiente figura 4 . 4 . 1 . •
»• ' - — y w v — 3 -a
Figura 4.4.1

PAR ESTÁTICO (Nw-m¡
If B 3.5 A-
3 4 5 6 7 8 9 10 11
I N T E N S I D A D POR EL INDUCIDO (Amperios)
FIG.- 4 - 4 - 2

TABLA DEL PAR ESTÁTICO
I n t e n s i d a
- d
d e
e . X
i t a c
' i ó 11
•
•
2*0
2*1
2*2
2*3
2*4
2*5
2*6
2 ' 7
~2~8
2*9
3*0
3»1
3*2
3 ' 3
3 ' 4
3 ' 5
3*6
3*7
3*T 3 ' 9
4»0
In t e
3 A
0»650
0*700
0*750
0*800
0*850
0*875
0*925
vooo 1*050
1 «200
1 ! 1 5 0
1 ' 2 0 0
1*250
1*300
1»350
1*400
1 f 4 5 0
1 ' 475
1*500
1 ! 5 5 0
1 ' 600
3I1£
0
0
—
2
2
s i d a d
l- A
850
925
000
075
125
175
250
3 25
400
475
525
575
3 25
' 7 0 0
7 5 0
' 8 0 0
' 8 5 0
' 9 0 0
975
' 0 5 0
•125
p o r e l
5 A ^ !
1*100
1»075
1*250
3 ' 5 0 0
1*425
1*500
1 f 5 7 5
1 '675
1*750
1*850
1 * 925
1»975
2 ' 0 5 0
2*125
2*200
1*125
2*350
2* §00
2*475
2*550
2*650
ind-uc i
6 A
1*300
1 1 425
1 f 5 2 5
1*650
1*700
1*800
1*900
2*000
2*100
2*200
2*300
2*375
2*450
2*550
2*650
2*300
2*825
2*900
2*975
3 ' 0 7 5
3 M 7 5
do
7 A i — — — — — — —
1*500
1*650
1*750
1 f 8 7 5
1»975
2*075
2*175
2*300
2*400
2*525
2*625
2*750
2*875
2«950
3 ' 0 7 5
3*175
3 ' 275
3» 375
3 ! 4 7 5
3 ' 600
3*700

v—
•é •rl O n 4 tí •H
n o o
— ¿
o o H R <1 R CO W « <í R
R
3 R F4
1
1 o 1 ' d 1 «H 1 ü • 2 i 13
15 1 H 1 O • 1 U 1 o 1 ft
! nd 1 d ! «d 1 -H 1 CQ • tí 1 <D 1 - P 1 tí 1 H
i
<J
CM T—•
I 1 \< 1 r -
1-1 1 \<
!? i i
i i i < i 1 (T> I 1 1 1 1 < 1 i co i 1
T i m 1 <M 1 v -
1 (M 1 1 l m ! c-1 o I CM
1 1 i o i o 1 O !
1 CM I 1 1 O 1 m l co 1 T-1 1 1 O ! O ? t> 1 T -1 1 1 O
1 CM 1 i 1 | L.
•
i n CM CM
CM
' o o CM
CM
m CM T—
CM
O O O
CM
! m CM
! CO
T—
I T~
| CM
1 1 i i n i I c- I 1 CT) i
1 CM 1
1 ! i • i 1 i n l 1 CM i 1 fO !
1 CM 1
1 1 ! 1 1 o I l m J I CM i
1 CM 1
i 1 [ 1 l m l 1 CM 1 1 T - 1
1 CM 1
i 1 i 1 1 O 1 I i n 9 1 cr\ 1
1 T - 1 3 1 1 1 1 CM 1
1 CM | 1 I
i n CM i n
CM
O i n «3-
CM
O O ^ CM
i n CM CM
CM
i n h -o CM
rO
CM
o m KO
1 CM
! i n í h -1 i n
! CM
1 O 1 o 1 i n
1 CM
1 I ñ i r~ l m 1 CM
1 O 1 O 1 CM
l CM
1 l' ! ^ 1 CM
H
r i i i
i l i i i i i
i 1
i n h -C-
CM
i n CM t -
CM
O m KO
CM
O o m CM
o o rO
CM
i n
CM
tí-p
T 1 o ! O 1 <J\
I CM
j i 1 o l i n ! 00
1 CM
1 ! 1 m 1 h -
IET ¡ CM
I 1 l m 1 CM í VD
1 CM i
1 I m ! CM 1 ^ h
1 CM
2 1 1 ^ D
1 CM
I
o tí
1 1 i n 1 CM
1 o 1 r o ,| ..,-„ i i i n 'i i > 1 cr\ ! CM
i f-! O I O ! (T>
1 CM
J. . 1 1 O l m i i >
! CM 1 i i m 1 CM
l m 1 CM
í " " f t> I CM 1 .
r "' l i n I C-i t -
1 rn l i i i n 1 CM J T—
! rn j 1 1 m S CM 1 O
1 rn 1 i I i n i r-1 00
1 CM 1 1 I m í h -} KO
I CM
1 i
! 00
1 CM
1
T~ 1 O 1 O 1 rn
1 rn 1 1 1 O i i n 1 CM
l rn 1 1 1 O I m ¡1 T-
1 rn 1 3 1 O 1 O 1 O
3 r o | i 1 m
i£ 3 CM 1 3 1 <T\
1 CM
1
03 -H ' d cü n3
i 1 O i m i ^ -
1 rn j
r 1 o ! O ! « * •
! rn ! i
i m
!t3 ! rr) i 1 1 O ! O i v -
1 r o \ í 1 O ! O i CT»
1 CM 1 I 1 O
1 rr) 1
13 0
T — l i n l h -l i n
1 rn \ i l O 1 O i m
! rn 1 1 ! O S O ! <d-
1 rn \ i ! i r \ 1 CM 1 CM
1 rr) l 1 1 O 1 O I O
3 rn i ! 1 v~
1 rr) 1
O
r—* I o I o i c*-1 rn
1 i r \ 1 CM I vo ,' rn
1 ' I m 1 CM I m ! rn 1 1 1 O 1 i n 1 rr)
1 rr)
i m ! CM ;! T—
1 rn }
r „ 1 CM
1 rr) 1
r o i n oo rn
f !
m tr-o rn
O i n KO
rr)
i n t --vh
rr)
O i n
1 CM
rn
rn
1 rn
. . L . . |
o o O 1
^ h 1
i n CM <JS
rn
O o 1 <JS
1 rn
i a 1 o 1 ^o
i rn
1 m 1 o 1 rn
l rn
1 -=3-
1 rn
' m CM T -
<tf-
o i n o -d-
o o CT\
rn
i n CM t >
rn
i n t>-^h
rn
i n
rn
X O -H -P tó O -H * o
1 O I i n 1 CM
1 ^ h
l í 1 O l m 1 T~*
! ^h
1 I i n 1 CM 1 O
1 ^ d -
1 O I m l 00
I m
1 O ! o } vo
i m
i o 1 rn
tí
I ' i 1 o 1 o 1 ^ j - 1
1 ^J-
1 i n 1 t > I CM
! < ^ -
1 O i m ! ^ i ^f-
1 m 1 t -! G\
1 rn
1 O 1 O { t> 1 rn
\ ^~ 1 rn
' i n CM i n
'si-
O O ^h
«=^-
O O rn
<-
o O v -
<^
m CM
1 00
m
00
m
' ' ' •
i n l > \£>
^h
o i n i n
«=3-
i n CM < -•^h
t n CM CM
<-
i n C-CPk
rn
CT\
rn
r LT\ l > C-
^h !
O 1 O 1 t -
! ^ i -
! O I i n l i n
1 ^h
1 O I m 1 rn
i «d-
3 m 5 C-! O
i ^ 1 O
1 ^h

CAPITULO 5
CORRECCIÓN PUNTO A PUNTO CON MATRIZ DE DIODOS

Í N D I C E
5.1 FUNDAMENTO TEÓRICO
5.2 CALIBRACIÓN Y AJUSTE DE LA LINEALIDAD
—=ooOoo=—

5.2
5.1.- FUNDAMENTO TEÓRICO.
Esta corrección consiste en obtener una señal pro
porcional al par electromagnético a través de la intensidad
que pasa por el inducido. La ventaja a obtener con dicha sa
lida es múltiple. En primer lugar permite registrar el valor
del par en función del tiempo. Otra utilidad podría ser la -
posibilidad de ser la entrada a un multiplicador que diese -
la potencia del sistema a medir. Una última aplicación es la
conexión a un voltímetro de cuadro móvil graduado previamen
te en unidades de par mecánico y que permitiese así visuali
zar dicha magnitud.
Para este tipo de corrección es necesario mantener
constante la intensidad de excitación. Por tanto se conecta
rá el devanado del campo principal a una fuente independien
te y estabilizada.
El punto de partida de nuestra manipulación será -
la curva que da el par electromagnético en función de la in
tensidad que pasa por el devanado del inducido.
En el capítulo anterior obtuvimos dicha curva, para
la máquina que ha servido de base a nuestros experimentos. -
Dicha curva se reproduce en la figura 5.1.1.
En primer lugar so obtendrá una tensión proporcio
nal a la intensidad que circula por el inducido, intercalan
do un "shunt" del tipo de los usados en los amperímetros, y
la tensión entre sus extremos será la que utilicemos para la

5.3
INTENSIDAD
Figura 5.1.1
corrección. La figura siguiente, la 5.1.2, representa la mis
ma curva de la figura anterior en la que se ha cambiado la -
escala horizontal en correspondencia oon ol shunt utilizado.
¿PAR
V1 V2 V3 4 TENSIÓN (SHUNT)
Figura 5.1.2
Gráficamente se dividirá entonces la curva en tra
mos rectos tal como se indica. Siendo V-j, V^J V-J y V/ las ten
siones principio y fin de cada tramo recto. A cada una de las
tensiones corresponde un par P-, Pp, P3 y P¿, &e tal manera
que podíamos establecer una relación entre tensiones si se -
relaciona de manera proporcional el par con unas tensiones V1.

5.4
Tendríamos entonces el siguiente gráfico (figura 5.1*3)
P1 P2P3P4
Figura 5.1.3
Esta correspondencia en principio puede ser arbitra
ria y luego veremos en la aplicación práctica cómo se deter
mina.
Como consecuencia de dicna correspondencia tendre
mos entre V y V1 la siguiente relación (figura 5.1.4);
Figura 5.1.4
Si conseguimos un dispositivo tal que la entrada -
sea V y la salida V1, esta última será proporcional al par -
igual que aquella lo es a la intensidad por el inducido.
El sistema está esencialmente constituido por un -

5.5
div isor de tensión con una s e r i e do diodos Zener cuyas t e n s i o
nes son función precisamente de V , VV>? " 3 7 VA» El esquema
se r í a e l s igu ien te ( f igura 5.1.5)s
| ^
ENTRADA (V)
R
R 0
/7Z77?
^ SALIDA * * - ( V i )
Figura 5 .1 .5
En l a p r á c t i c a se podrán s u s t i t u i r l o s diodos Zener
por fuentes cons tan tes de baja impedancia s i a s í se desea y
entonces e l esquema es e l de l a f igura 5 .1 .6
\ \ \
-fea-ENTRADA (V)
T W
R R1 í Rr
77777
SALIDA
!RQ
77777
Figura 5.1.6
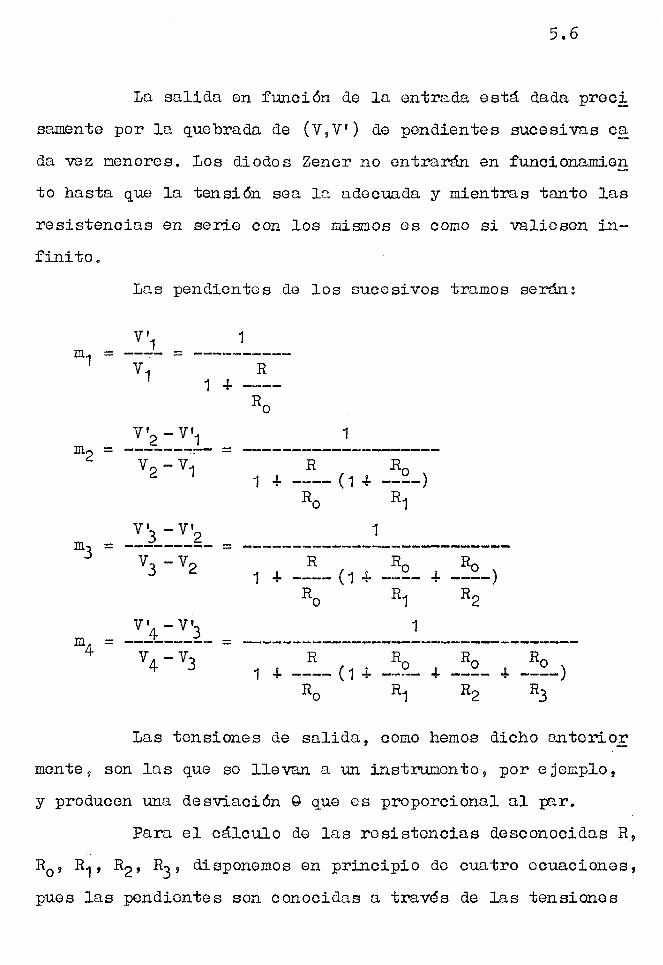
5.6
La sa l ida en función de l a entrada e s t á dada p rec i
sámente por l a quebrada de (V,Vf) de pendientes sucesivas ca
da vez menores. Los diodos Zener no en t ra rán en funcionamien
to has ta que l a tensión sea l a adecuada y mientras tan to l a s
r e s i s t e n c i a s en s e r i e con los mismos es como s i va l iesen i n
f i n i t o .
Las pendientes de l o s sucesivos tramos serán i
m-, = 1
nu =
m.» — m3 "
V '1
^ 1
V 2 - 7^
v2-v-i
V ' 3 - T 2 v3-v2
4-
1
R —~,
Ro
1 +
1 4-
1
R E 0
R0 R1
1
( 1 + _„2_ + __2_) RQ R1 R2
v -v3 1 4 V.-V, R R0 R0 R0
R-. R-j Rp R-D
Las tensiones de salida, como hemos dicho anterior
mente, son las que se llevan a un instrumento, por ejemplo,
y producen una desviación © que es proporcional al par.
Para el cálculo de las resistencias desconocidas R,
RQ, R-, R2, R3, disponemos en principio de cuatro ecuaciones,
pues las pendientes son conocidas a través de las tensiones

5.7
V y V .
La última condición se obtiene haciendo que la im-
pedancia de salida no sea excesiva. De esa manera se puede fi
jar el valor de R, que sustituido en la primera ecuación da
el valor de R~. Con estos dos valores se entra en la segunda
ecuación y se obtiene el de R- y así sucesivamente el de R2
y H 3 .
Si llamamos R-D a l a impedancia de s a l i d a , t e n d r e
mos; RR
R s = o R
R + R, R 1 ±
R-
y t en iendo en c u e n t a l a p r imera de l a s e c u a c i o n e s a n t e r i o r e s
R s = m1 R
R s
Utilizando nuevamente la primera ecuación se obtiene
Conocidos R y RQ podemos entrar en la segunda y obtener R-j
R 1 =
Ro
1 - m 2 R0
nu R
Análogamente utilizando la tercera, se obtienes

R2 =
m3
Ro
R " 1 " ~l¡
y teniendo en cuenta la última
5.8
R3 = 1 - m 4
• " • " •
n 4
_Ro_
R
Ro
- 1 -. _*2_ _ _ _ _ _ _ _ ' ~R¡"
5 . 2 . - CALIBRACIÓN Y AJUSTE DE LA LINEALILAL.
Pa ra l a r e a l i z a c i ó n p r á c t i c a de e s t a c a l i b r a c i ó n -
hemos tomado l a curva d e l P a r - I n t e n s i d a d de 3 Amp. de e x c i t a
c ión en e l campo p r i n c i p a l . La curva se p r e s e n t a en e l g r á f i
co ad jun to ( f i g u r a 5 . 2 . 1 ) .
Se ha d i v i d i d o l a cu rva en c u a t r o t ramos r e c t i l í
n e o s . Para más aproximación se p o d r í a d i v i d i r en mas i n t e r v a
l o s . Sin embargo, e s t a s u b d i v i s i ó n ha dado r e s u l t a d o s muy sa
t i s f a c t o r i o s .
La t r a n s f o r m a c i ó n de l a i n t e n s i d a d en t e n s i ó n se -
ha hecho a t r a v é s de un " shun t " de 60 mV/25 A. y l a s t e n s i o
n e s de p r i n c i p i o a f i n sons
9 ' 6 mV. 15 '1 mV, 20«9 mV. 28» 8 mV.
Estas tensiones son muy bajas para aplicar al sis
tema corrector y ha sido necesario utilizar un amplificador
previo que ha elevado estos valores a voltios en vez de mili

CURVA PAR-INTENSIDAD (3A.Excitación)
PAR(Nw-n)
- •
-
íí-. I » i i
i t
! • 1 i i ,,
.
t I Q (Inducido)
2 3 4 9 6 7 0 9 10 11 12 Amp,
x + V(Tensión Shunt).
9.6 mV. 15.1mV. 20.9 mV. 28.$ mV. 60mV/25A
F I G . - 5 - 2 - 1 .

5.9
voltios. El amplificador es de relación ajustable y se ha to
mado tal que las tensiones sons
5!0 V. 7'9 V. 10!9 V. 15'0 V.
Las t ens iones V se han tomado de t a l forma que l a
pendiente m- sea precisamente 0 !75 y a s í se ha obtenido l a
gráf ica Pa r -V de l a f i g u r a .
Según esa g rá f ica se puede e s t a b l e c e r l a correspon
dencia de V a V y a s í obtenemoss
V = 5'00 7*90 10*90 15 !00 v o l t i o s
V» = 3"75 5'85 7'60 9 f55 v o l t i o s
Con e s to s va lo res se han calculado l a s pendientes ,
obteniéndose?
3 !75 m - _ o»750
1 5
5 f 8 5 - 3 f 7 5 nu = —. = 0 r725
7 » 9 0 - 5 « 0 0
7 t 6 0 - 5 " 8 5 m = _= , = o «583
J l 0 , 9 0 - 7 , 9 0
9 f55 - 7 f 6 0 m¿ = — = 0»474
* 15"00-10«90
La tensión de entrada l a hemos e legido de t a l f o r
ma que l a s t ens iones Zener sean acep t ab l e s , de ahí e l v a l o r

V (Volt ios)
10 h
9
e
?
6
5
3 -
1 -
—
— — —
-
'
= i
1 1 1 i 1 \
J... ...
yf
I
\ i_
:jf,
í
l ._ PAR ÍNw-m).
10
9 -
8
7 h
6
5
3
2
1 h
V» (Voltios)
3 4
F I G . - 5 - 2 - 2 .
RELACIÓN SALIDA/ENTRADA DEL CORRECTOR.
V (Voltios;
6 7 8 9
F I G . - 5 - 2 - 3 .
10 n 12 13 H 15

5.10
de 5 voltios para el primer diodo.
Tenemos ahora que fijar el valor de R . Para ello s
necesitamos conocer l a impedancia del instrumento colocado a
l a s a l i d a . Es un instrumento de 20000 -A/Y. qme se ha coloca
do en l a esca la de 10 V. , por t an to su impedancia es 200 K
Será entonces su f i c i en te con que tomásemos un va lo r no supe
r i o r a 2 K A . Se ha puesto 1 KJ?. . De e s t a manera obtendre
mos lo s va lores de l a s r e s i s t e n c i a s .
Como Rg = 1 TLIL y ni-j = 0 '75
R = 1*33 K i l
sust i tuyendo en l a s expresiones ca lcu ladas en e l apartado an
t e r i o r , se obtienes
R0 = 3'99 K jTL
R1 = 23 ' 5 K IL
R2 = 3 ' 67 K JX
R3 = 3 '36 KJÍL
—=oo0oo=

CAPITULO 6
CORRECCIÓN MEDIANTE LA INTRODUCCIÓN DE UNA DEPENDENCIA
NO LINEAL DE LA EXCITACIÓN

6.1
Í N D I C E
6.1 INTRODUCCIÓN
6.2 MÉTODO UTILIZADO
6.3 APLICACIÓN PRACTICA
6.4 APROXIMACIÓN DE PRIMER GRADO
6.5 APROXIMACIÓN FUNCIONAL
=ooOoo=

6 .2
6 . 1 , - INTRODUCCIÓN.
En o l c ap í t u lo a n t e r i o r se h izo l a medida de l a i n
tensidad por e l inducido ( i ) considerando l a in t ens idad do a
excitación constante, obteniéndose así una correspondencia -
fiable entre la intensidad y el par, pero no lineal.
Veremos ahora un método de obtener una corresponden
oia lineal entre la intensidad por el inducido y el par, va
riando la intensidad do la excitación.
En efecto, el par electromagnético es función de -
ambas intensidades, os decir,
T = f (la,le)
En principio se puede obtener cualquier curva de -
correspondencia entre I e I&. Si, por ejemplo, se quiere ob
tener la correspondencia
T = F (Ia)
bas tará e l iminar I Q en t re ambas ecuaciones , despejando I 0
do l a primera ecuación, o seas
f d a , i G ) = p ( i a )
de donde se obt iene;
que nos da l a curva de correspondencia en t re I e I a , noce
sa r i a y su f i c i en te para que e l par sea precisamente e l desea

6.3
do.
En e l caso par t icu la r de que F sea l i nea l bastará
aplicar l as consideraciones anter iores a la ecuación
I = k l a
A primera vista pudiera plantearse la pregunta de
que" ventaja tiene hacer E lineal, si de todas formas es noce
sario utilizar un mátodo de corrección análogo a los descri
tos en el capítulo anterior. Sin embargo la corrección que -
se realiza en este apartado tiene la ventaja, sobre la correo
ción directa de la curva, de que la salida linealizada del -
sistema, es la medida a través de un "shunt", de muy baja im
pedancia y la máquina queda incluida en la cadena de medida,
6,2.- MÉTODO UTILIZADO.
El método fundamental consiste en variar la inten
sidad de excitación para dada valor de la intensidad por el
inducido, de tal forma que el par sea proporcional a esta úl
tima intensidad.
Se necesita por tanto conocer la curva del par en
función de la intensidad por el inducido tomando como parame
tro la intensidad de excitación. Estas curvas fueron obteni
das en el capítulo 4. Sobre dichas curvas se trazará una re£
ta que irá cortando a las diferentes curvas de Ie = cte., de
duciéndose entonces gráficamente los valores que hemos de dar
a la intensidad de excitación para conseguir que el par varíe

6.4
linealmente.
Una vez conocida la función que relaciona la inten
sidad de excitación con la intensidad por el inducido para -
mantener el par lineal, la corrección se realizará atendien
do al siguiente diagrama de bloques
S
al instrum.
Se observa en las curvas para par lineal que hasta
un cierto valor de la intensidad I el valor de I permanece
constante y no es necesario efectuar ninguna corrección. Una
forma, por tanto, de hacer que el par sea proporcional a I a
es mantener dicha intensidad lo más pequeña posible frente a
IQ# Esto se hace en la mayor parte de las aplicaciones y ros
ponde a tomar un campo principal fuerte. Matemáticamente es
te efecto se refleja en que la curva IQ=G(la) es una recta
horizontal. El error de esta aproximación viene precisamente
dado por la separación de la curva respecto de la horizontal.
Sin embargo lo que interesa es lo que ocurrirá pa
ra valores grandes de I a comparados con Ie . La máquina, -
como ya hemos dicho en varias ocasiones, estará saturada. Nos
salimos por tanto de la zona rectilínea y es necesario aumon
OBJETO A
MEDIR
INDUCIDO DE LA DINAMO
SHUNT
DEVANADO DE LA
EXCITACIÓN!
SISTEMA CORRECTOH

6.5
t a r e l va lor de 1^ cuando se aumenta I_ s i deseamos mante-
ner e l par l i n e a l . Cuanto mayor es e l va lor de I Q t an to más
tarde se abandona l a l í nea r e c t a , pero más bruscamente se con
s igue, es dec i r , mayor es l a pendiente de subida.
Una segunda a p r o p i a c i ó n c o n s i s t i r í a en mantener -
constante I has t a un c i e r t o va lo r de I , a p a r t i r del —
cual se aumentaría I e proporcionalmente a I . 0 seas
en donde IQ y m son cons tan tes que se pueden obtener g r á
ficamente de l a función I = G-(i ) . Pues e s t o equivale a sus v> cL mmm
tituir dicha curva por la quebrada que se dibuja en el gráfi
co del apartado 6.4? donde se ha hecho ya un cálculo práoti-
co.
Como se aprecia, esta aproximación puede ser váli
da hasta valores de I al¿rc mayores, pero tiene el inconve
niente de perder exactitud en la zona de máxima curvatura.
Una aproximación mejor será la dada por un término
cuadrático, de tal forma que IG permanezca constante hasta
un valor determinado de I igual que antes, y a partir de -
él la aproximación seas
en donde I Q 1, b y a so determinarían gráficamente de la -
función I Q=G(l a). Esta es la que llamaremos aproximación -
parabólica, que según se aprecia en la figura del apartado -

6.6
6.5 será suficiente para la mayoría do los casos prácticos.
Naturalmente podría hacerse una aproximación do —
grado superior, pero la complicación to*cnica que esto supone
no compensa en general con el resultado obtenido.
También podría acudirse a aproximaciones no polinó
micas del tipo descrito en el capítulo anterior. Con ellas -
se puede obtener teóricamente tanta aproximación como so de
see.
En general, acudiremos en la práctica a un disposi
tivo electrónico que realice o bien la corrección lineal o -
bien la funcional (parabólica), do tal manera que obtengamos
como resultado final la variación proporcional del par con -
6.3.- APLICACIÓN PRACTICA.
Para la realización práctica ha sido necesario de
ducir, como se ha indicado anteriormente, la función IQ = G-(la).
Se han trazado cuatro rectas correspondientes a 2'0 A, 2*5 A,
3f0 A y 3'5 A.
Los resultados obtenidos son los siguientes;
I e = 2 A
I e (A)
l a (A)
•
2 '1 !
9 ' 3
2 ' 2
10*6
2 ' 3
11 ' 4

I. Excitación
INTENSIDAD POR EL INDUCIDO CAmp.)
F I G . - 6 - 3 - 1 .

4.
3.5
2.5
2.
| le Intensidad de Excitación (Amp.).
. — i 1_
I e = G Í I a )
CURVAS PARA
L. .. _i i „ .
PAR LINEAL
i . i i . i , ,. la
8 10 11 12
INTENSIOAO POR EL INDUCIDO
F I 6 . - 6 - 3 - 2
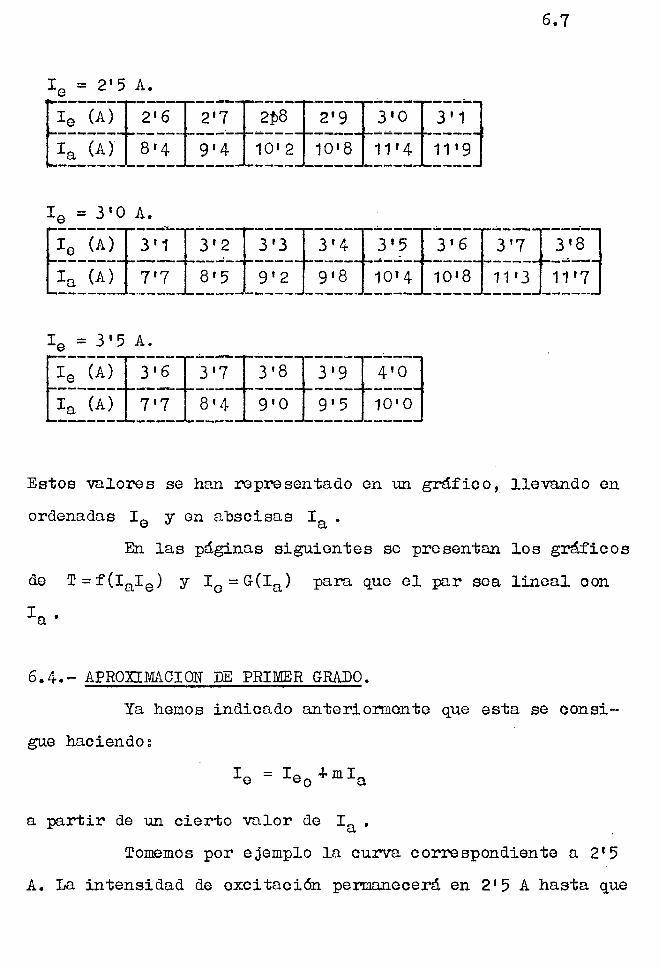
6.7
i 0 00 I a (A)
A.
2'6
8»4
i ir i • " * *
2 !7
9 '4
2í>8 2 » 9 T 3 , 0
10«2 10 f8 11 «4
3 '1
11 «9
I e = 3»0
I e (A)
I a (A)
A.
3 '1
7 f7
3*2
8 '5
3 '3
9 f 2
3 f 4 3*5 3 ' 6
9 '8 10*4 10'8
3»7 3 ! 8 - - • - • -
11«3 11«7
Ie = 3'5 A.
Ie ^
I a (A)
3»6~
7 '7
3»7
8»4
3 '8
9 '0
3*9
9 '5
4 ' 0
10»0
Estos valores se han representado en un gráfico, llevando en
ordenadas Ie y en abscisas I a .
En las páginas siguientes se presentan los gráficos
de T = f(laIe) y IG = G(Ia) para que el par sea lineal oon
Ia-
6.4.- APROXEMACION DE PRIMER GRADO.
Ya hemos indicado anteriormente que esta se consi
gue haciendo i
a partir de un cierto valor de I a .
Tomemos por ejemplo la curva correspondiente a 2*5
A. La intensidad de excitación permanecerá en 2*5 A hasta que

I =7 A, A p a r t i r de es te va lo r l a var iac ión será l a s iguien a
te; I G = 2 + 0*0714 I a
que para I a = 7 A vale aproximadamente I G = 2 '5 A, La l í n e a
quebrada que se obtiene es l a indicada en l a s igu ien te figu-
7 9
Figura 6.4.1
En donde se observa que e l e r r o r empieza a s e r oon
s iderable a p a r t i r de l o s 9 A. Siendo por t an to poco lo con
seguido .
Veamos ahora cómo es posible conseguir prácticamen
t e e s t a aproximación. Es necesa r io disponer de un a r ro l lamien
to en e l e s t a t o r t a l que l a fuerza maguetomotriz de él se su
me a l a de l a exc i t ac ión .
Si es NG e l número de e s p i r a s del campo p r i n c i p a l ,

6.9
l a exc i tac ión necesa r i a a p a r t i r de 7 A serás
(AV)Q = 2NQ 4- 0 ' 0714N G I a
Ahora b ien , s i disponemos de o t ro devanado como se
ha indicado anter iormente con Nx v u e l t a s , conseguiremos l a
quebrada de l a s igu ien te manera. Hasta l o s 7 A únicamente fun
oionará e l devanado Ne con 2 '5 A cons t an t e s . A p a r t i r de eso
va lo r e n t r a r á en funcionamiento e l devanado a u x i l i a r Nx que
producirá una exc i t ac ión de
N x ( l a - 7 )
y como l a necesa r i a en e s t e caso es
NQ . 0*0714 ( I a - 7 )
igualando obtendremos que
Nx = 0*0714- Ne
si es Ne = 1000 vueltas, N x = 72 vueltas.
En algunos casos podría ser útil esta corrección -
si se dispone de un devanado adecuado en la máquina. Pero —
siempre oon la salvedad de aumentar relativamente poco el -
margen de linealidad del par.
6.5.- APROXIMACIÓN FUNCIONAL.
En este apartado realizaremos la aproximación para
bólica, que es bastante buena y sólo necesita un devanado, -

6.10
e l de exc i t ac ión .
La var iac ión de l a in tens idad debe hacerse s iguien
do una ecuación cono ya indicamos en e l apartado 6.3 # Pode
mos e s c r i b i r l a ecuación de l a forma s iguientes
I e = I 0 l x K ( l a ~ I a i ) 2
vál ido para I a > I a .
Los c o e f i c i e n t e s se pueden obtener a p a r t i r de l a
curva que se ha deducido expe rimen ta lmente .
Es por t an to necesa r io un d i s p o s i t i v o e l e c t r ó n i c o
que mantenga constante l a exc i t ac ión has ta que l a in tens idad
por e l inducido sea I a . , a p a r t i r do cuyo va lo r va r í a de l a
forma indicada de in tens idad de exc i t ac ión .
Un diagrama de dicha corrección s e r í a e l esquemati
zado en l a f igura 6.5.1 .
La señal que proporciona e l shunt es una tens ión -
proporcional a I a . Sea VQ1 l a tens ión correspondiente a -
l a in tens idad I a - . La s a l i da del sistema co r r ec to r es una
tensión que, ap l icada a l devanado de exc i t a c ión , produce una
co r r i en te I Q . Llamaremos VG a un va lo r genérico de dicha
t ens ión .
La ecuación que hemos puesto a l p r i n c i p i o en i n t en
s idades , queda según e s to en tens iones de l a forma s igu ien te
VG = VQ1 + K ( V a - V a i ) 2
El cá lculo numérico de dicha expresión se hace oo-

6.11
Devanado de
Excitado
SISTEMA CORRECTOR
ELECTRÓNICO
CARGA
VARIABLE
SALIDA DEL SISTEMA
INSTRUMENTO DE MEDIDA
//////
Figura 6.5.1
nociendo la curva (le,Ia) y las resistencias del shunt y del
devanado de excitación.
Si es la curva 2*5 la que tomamos y es la RQ =100
Jl , tendremos que YQ. = 250 voltios.
Si el shunt es el de 60 mV/25 A., la tensión Va-
correspondiente a Ia = 7 A es Vai = 16!8 mV.
La constante K se obtiene haciendo que la parábola
pase por el punto
Ia = 11'5 A.
IG = 3 A.

6.12
que cor responden de l a s t e n s i o n e s
Va = 27*6 mV.
Ve = 300 V.
y a s í
K = 4 ' 6 3 . 106 volt""1
En primer lugar es necesario amplificar la señal -
para hacerla comparable con la tensión de una fuente de refe
rencia Vai. Recuérdese que en cualquier tipo de comparador,
las caídas de tensión de los dioáos son del orden de 0'1 a -
0f6 V. que deben ser despreciables frente a las señales. Por
consiguiente, las señales deben ser del orden de 50 a 100 V.
A partir del valor de referencia se debe hacer la corrección
parabólica. Se utiliza un amplificador diferencial, cuya sa
lida es nula si la tensión de shunt es inferior a 16f8 mV. y
la tensión entonces que se aplica a la excitación es solamon
te 250 V. (V01). Si la tensión de shunt supera el valor indi
cado, el amplificador diferencial da una salida que es (Va -
-V a ), que una vez cambiada de signo se introduce en un ele
mentó cuadrático, se multiplica por la constante E, previa—
mente obtenida y sumada con la YQ constante dan la salida
para la excitación.
El diagrama detallado se indica en la siguiente fi
gura 6.5.2 .
=oo0oo=

O ^ r - W V -
>
-P) jl—I
< O 3 o < ce < GL
z g o o tu ce ce o o
UJ
o < Uf
I m
i
UJ

CAPITULO 7
ADAPTACIÓN DE UNA DINAMO DE AVIÓN PARA
UN BANCO DINAMOELECTRICO

7.1
Se t r a t a en e s t e c ap í t u lo de d e s c r i b i r una a p l i c a
ción p r ác t i c a completa en l a que se ha r ea l i zado l a adapta—
ción de una dinamo de avión para l a medida dinamoeléctr ica -
de motores de explosión. El conjunto do todos lo s elementos
necesar ios const i tuyo un banco de pruebas para motores poquo
ños que permite l a medida e l d c t r i c a d i r e c t a del par , r .p .m,
y potencia .
La dinamo de avión reúne una s e r i e de c a r á c t e r ! s t i
cas que l a pone en primer luga r para su u t i l i z a c i ó n en e s t o s
bancos, f ren te a cua lqu ie r generador de continua convencional.
La dinamo u t i l i z a d a es de 12 kw a una tens ión nomi
n a l de 30 v o l t i o s . El margen de velocidades es de 2800 a —
12000 r .p .m. La r e f r ige rac ión debe se r forzada con a i r e a r a
zón de 4 n v m i n . , neces i tándose una presión de 152*4 nm. de
agua.
El esquema de l a dinamo es e l de l a f iguras
Devanado de Exc i t .
• * B U )
A
D C
• * E ( - )
Figura 7.1

7.2
El terminal A es e l "borne + del devanado de exci ta
ción. El D es e l que se u t i l i z a ouando son dos dinamos l a s -
que funcionan en paralólo y se llama conductor de equi l ibr io
o de compensación. El terminal B es e l + del inducido y e l E
e l negativo que salo a t ravés de los devanados de compensa—
ción.
El montaje realizado es con excitación independien
te y por lo tanto es necesario disponer de otro conductor (C)
directamente de la escobil la negativa, Los bornes de la exoi
taoión independientes son entonces e l A y D y los del induci
do de B y 0.
Los valores de l a s res i s tenc ias de los devanados -
de excitación e inducido, incluidas escobi l las , sons
Rf = 2 f 4 . a (frío) 2*6 JL (caliente)
i^ = 0*35 (frío) 0 ' 46A (caliente)
Es necesario conocer, para r ea l i za r la adaptación
correspondiente, la curva de magnetización, Haoiendo g i r a r -
l a dinamo a d i s t in ta s velocidades y variando la intensidad -
de excitación se obtienen diferentes f ,e.m. en e l inducido.-
Los resultados obtenidos se presentan en e l gráfico 7.2 •
Siguiendo la l ínea marcada por los capítulos an te
r io res , e l ensayo siguiente es la medida del par es tá t ico pa
ra diferentes intensidades por e l inducido, manteniendo oons
tante la intensidad de excitación. Debido a la a l t a i n t e n s i
dad por e l inducido (200 Amp) es necesario u t i l i z a r cuatro -

CURVAS MAGNETIZACIÓN DINAMO AVIÓN
38
36 h
34
32
30
26
26
24
22
20
18
16
14
12
10
6
6
4
2
Voltios
*
-
••
(
•
J.
m/
I.„
i
.
^ F » 1«
..,.. ,l ... L J
.
... ... L
^ * n =
-
-
_ i _
2.200
n s f .740
If(Amperios
10 11 12 13 14
FIG. - 7 -2 .

7-3
fuentes de alimentación en paralelo, cada una de 50 Ampores.
La salida de dichas fuentes está regulada por un autotransfor
mador on el primario. Bloqueando el rotor de la dinamo oon -
un dinamómetro, se mide el par electromagnético. El montaje
mecánico se consigue fácilmente sujetando entre puntos el in
ducido en un torno. El par so mide a travos de un brazo fijo
en el estator y con un dinamómetro (5 Kg.). Los resultados -
obtenidos se presentan en la página siguiente (figura 7.3).
Con estos resultados se hacen todas las correccio
nes pertinentes que se han indicado detalladamente a lo lar
go de este trabajo. Se utilizó para la corrección del par una
matriz de diodos, pues era necesario tener una señal para el
multiplicador a efecto de tener también la potencia consumida
por la dinamo como señal eléctrica para registrar o mandar a
un instrumento.
Se presenta también el esquema eléctrico del banco
dinamoeléctrico. La dinamo sirve de arrancador para el motor
do explosión. El primer contactor pone en marcha los ventila
dores de la dinamo, del motor y de la carga. También queda -
conectada la excitación independiente de la dinamo. Un según
do contactor hace funcionar la dinamo como motor de corrien
te continua y pone en marcha el motor a ensayar. Una vez es
té en marcha, la dinamo actúa como tal y la potencia eléctri
ca se disipa en una carga ohmica, que se ha calculado de tal
forma que se obtienen todas las potencias posibles desde un
mínimo a un máximo en saltos preestablecidos. Los diferentes

PAR Kg
* I.
mkg-
1.75 5
1.40 *
1.05 3
0.7 2
0.35 1
"
•
^ ^ i — • • • - —
PRUEBAS ESTÁTICAS DINAMO AVIÓN
^ / \ „ x ^ j -^^*^
v ^ ^ ^ * ^ J
1
+>^ ^
.
^ ^ 0 ^ 0 I » ^ ^ ^ ^
•
-¿*-~——" *
I tx= 10 A.
l U x s * A -
, I^„ = fi A .
K - K ^ex= * A.
p i _ _ _ . . ,
Intensidad inc
10 50 Amp. 100 Amp.
F I G - 7 - 3
1 50 Amp.. 200 Amp.

7.4
valores se consiguen actuando sobre los "interruptores do -
carga",
Los instrumentos indicados en el esquema permiten
una medida directa de las variables especificadas. También -
existe una salida para un registrador en cada una de las va
riables.
Finalmente se presenta un dibujo de cómo es la ban
cada metálica donde están montadas la dinamo y el posible mo
tor a ensayar.
—=oo0oo=

BANCADA METÁLICA
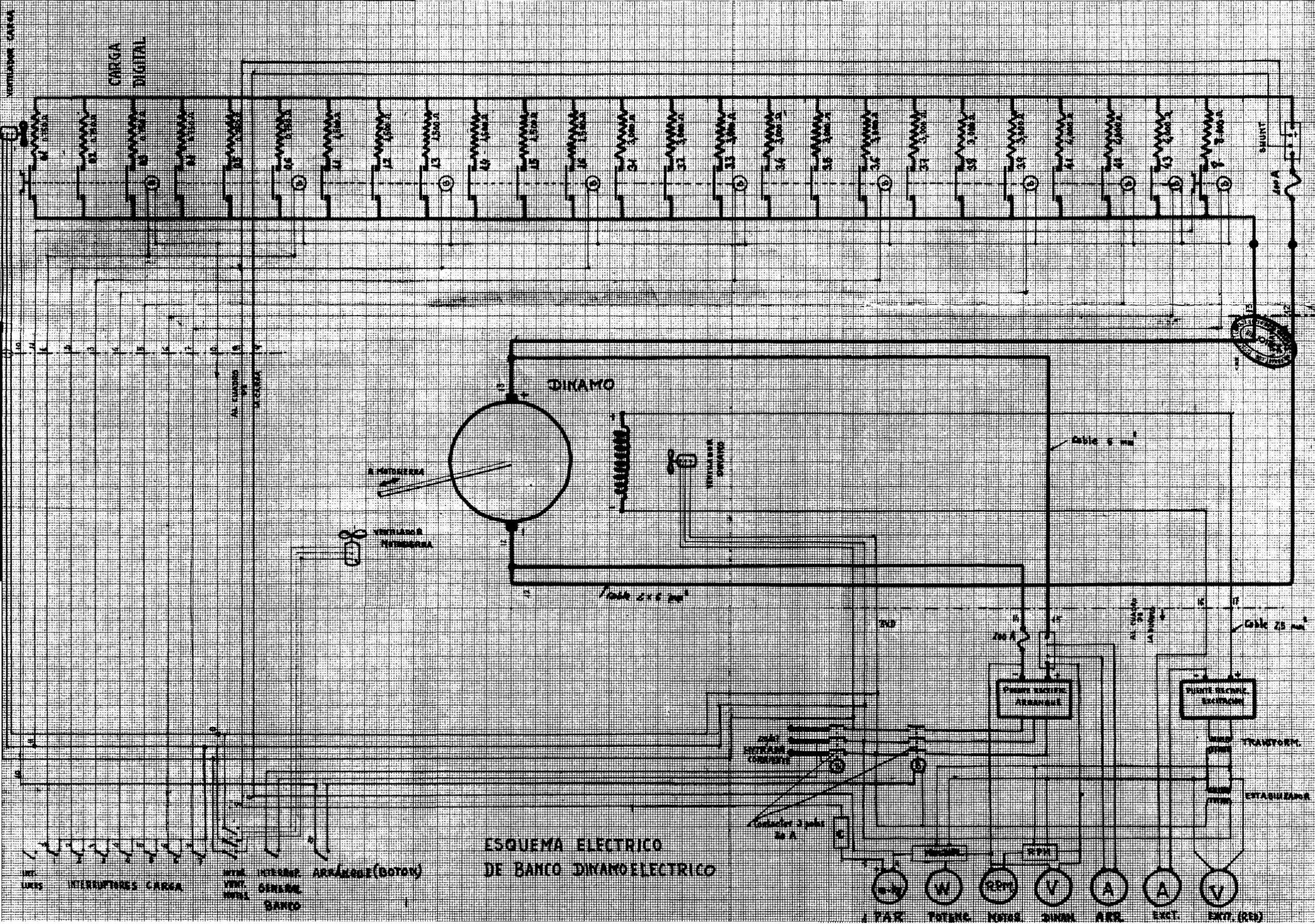

=_CAPITULOi=8^
CONCLUSIONES.

Hagamos en primer lugar un resumen de lo que se ha tratado en
esto trabajo.
En primer lugar se han planteado las ecuaciones generales pa
ra una maquina de corriente continua, haciendo incapié* en la perturbación
ocasionada por la reacción del inducido (Cap%l),
Posteriormente se ha estudiado la distribución de flujo magno
tico en el entrehierro, deduciéndose una expresión teórica para el mismo-
y realizando unas medidas experimentales sobre dicha distribución en dife
rentes condiciones (Cap.2)
En el Capitulo 3 se ha estudiado la relación entre la distri
bución de flujo y el par electromagnético, observando gráficamente la in
fluencia de la corriente que atravieíaa el inducido* También se ha calcula
do el valor medio del flujo por polo do forma experimental, con el fin de
conocer el par electromagnético con precisión.
La correspondencia dinámica entre el par y la intensidad del
inducido se.estudió en el Capitulo 4 obteniéndose las curvas parametri -
cas del par, que son la base de partida para los Capitulos 5 y 6,
En dichos Capitulos 5 y 6 se han tratado dos procedimientos
para poder medir las variables mecánicas del motor mediante las caracte
rísticas eléctricas de la dinamo.
En el Capitulo 7 so ha realizado la aplicación practica final,
consistente en la adaptación de una dinamo de avión a un banco de pruebas.
Las conclusiones mas importantes que se deducen de este traba
jo son las siguientes:
a),-El conocimiento de la forma de la distribución del flujo -
magnético en el entrehierro, sirve para el proyecto de maquinas electri -
cas sometidas a las condiciones de este trabajo,
b),-Es conveniente utilizar dinamos sobrecargadas, con venti
lación forzada, en estos bancos dinamomótricos con el fin de obtener una
buena respuesta dinámica del sistema,
c).—Existen dos procedimientoas fundamentales de obtener una
medida directa lineal del par y r,p,m. El primero de estos es intercalar
un circuito computador en la cadena de medida (Cap.5),

d)#-Se obtiene una corrección lineal introduciendo una reali -
mentación a través de la excitación (Cap.6), siendo este el segundo proce
dimiento anunciado en el apartado anterior.
e)«—Las dinamos de avión, con una ligera adaptación, sirven -
perfectamenté.para la construcción de bancos dinamomótricos de estas ce -
racteristicas, para ensayar motores de cualquier tipo.

BIBLIOGRAFÍA

Adkins B. Teoría General dá las máquinas eléctricas,Urmo. Bilbao 1967
Alastrue A, La electricidad en los aviones B. Aviador, Madrid, 1961•
Avery J.H. Laboratory Physics.
Bardell B.R. Materiales Magnéticos en la Industria Eléctrica, Urmo. Bilbao 1970.
Carpontor W.H. Solution of Problems in electrical power tochnology. Pitman, London 1968*
Dawos Ch.L. Tratado de Electricidad. Corriente Continua. Gustavo Gili Barcelona 1966.
Daish C.B. Experimental Pisodos.
Fitzgerald A.E. Fundamentos de Ingeniería Eléctrica Castillo, Madrid 1965.
Fouilló" A. Electrotecnia para ingenieros. Aguilar. Madrid 197(3
Gray A. Electrotecnia .Aguilar. Madrid, 1954.
Grmz-alez B. de Q, J. Electrónica E.T.S.I.A. Madrid, 1965
Gille,J.C, Servosistemas. Teoria y Cálculo. Paraninfo, Madrid, 1967
Hindmarsh, J. Electrical Machines and their applications Pergamon Press Oxford, 1970.
Hsu, J.C, Modern Control Principies and applications Mc.Graw Hill, NewjYork, 1968.
Knowlton, A.E. Manual Standard del Ingeniero Electricista. Labor , Barcelona, 1962.
Kaufman,R.H. D~C, Power Systems for Aircraft. J. Wiley, New York — 1952.
Langsdorf, A.S. Principios de las Maquinas de Corriente Continua, Castillo, Madrid, 1964.
Lister E.C. Maquinas y Circuitos Eléctricos, Castillo, Madrid 1967
Lafosse, M. Manual Practico de Medidas Eléctricas y de Ensayo de -Maquinas, Urmo, Bilbao, 1965» '
Moeller, F. Maquinas de Corriente Continua, Maquinas de Corriente Alterna, Labor, Barcelona, 1961.
Mallik, U. G. Solution of Problems in Electrical Power. Pitman, -London, 1968.
Price, L.W. Electronic Laboratory Techniques, Churchil, London -- 1969.
Roberjot P« Electrotechnique Appllquée. Dunod, Paris, 1968.
Rudolf, F.- Compendio de Electrotecnia Practica,
ítyder, J.D. Electrónica, Aguilar, Madrid, 19$2
Raven F.H. Automatic Control Engineering Me. Graw Hill, New York, 71961.
Skroder C E . Circuit Analysis by Laboratory Methods, Prentice Hall, New York, 1955.

Shepherd, J. Higher Electrical Engineering, Pitman Londres 1970.-
Spreadbury, F.G. Electricity in Aircraft, Constable Londres 195§»
Spreadbury, F.G. Aircraft Electrical Enginnering Pitman Londres, 1947.
Sisklnd, Ch. S. Sistemas Industriales de Regulación Eléctrica. Labor, Barcelona, 1968,
Still, A. Elements of Electrical Machine Design. MovíG.Hill, New York 1954".
Thurin J. Funcionamiento y Empleo de las Maquinas Eléctricas, Paraninfo, Madrid, 1966.
Zeffert, H. Principies and Practice of Aircraft Electrical Engineering. Mewres, Londres 1960.
.—*oo0oo=-