escuela politÉcnica nacional facultad de ingenierÍ...
TRANSCRIPT

ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
TESIS DE GRADO
"OPERACIÓN ASIMÉTRICA DE LA MAQUINA TRIFÁSICA DE INDUCCIÓN"
TESIS PREVIA A LA OBTENCIÓN DEL TITULO DE INGENIERO
EN ELECTRÓNICA Y CONTROL
NELSON RUBÉN RONCE CARRERA
QUITO, JULIO DE 1985
í» E;P3¡ ;£ ] . C¡\;
002762

CERTIFICO QUE EL PRESENTE TRABAJO HA
SIDO REALIZADO EN SU TOTALIDAD POR
EL SEÑOR NELSON RUBÉN PONCE CARRERA,
DIRECTOR

D E D I C A T O R I A
A MI ESPOSA E HIJA,
A MIS PADRES Y HERMANOS

A G R A D E C I M I E N T O
AL SEÑOR ING, MILTON TOAPANTA POR SU VALIOSA COLABORACIÓNEN EL DESARROLLO DEL PRESENTE TRABAJO,
RUBÉN PONCE CARRERA

Í N D I C E
Pac
INTRODUCCIÓN
CAPITULO I: LA MAQUINA DE INDUCCIÓN
1.1 Consideraciones básicas para el análisis 1
1.2 Representación matemática de la máquina de inducción.. 2
1.2.1 Ecuaciones de voltaje 3
1.2.2 Ecuaciones de la máquina referidas al estator 6
1.2.3 Ecuación del torque electromagnético 7
1.3 Transformaciones de las ecuaciones de la máquina de va^
Hables de fase (a, b, c) a un sistema de ejes arbitra^
rios de referencia (q, d, o) 9
1.3.1 Ecuaciones de las concatenaciones de flujo en varia -
bles q, d, o 13
1.3.2 Ecuaciones de voltaje en variables q, d, o 16
1.3.3 Ecuaciones del torque electromagnético 21
1.3.4 Ecuaciones del torque electromecánico 21
1.4 Estado Estable 22
1.4.1 Ecuaciones de Voltaje en Estado Estable 29
1.5 Ecuaciones del Modelo Matemático 31
1.5.1 Ecuaciones diferenciales de la Máquina de Inducción .. 31
1.5.2 Ecuaciones de la máquina en Por Unidad 35
1.6 Saturación del núcleo 39
1.6.1 Curva de Magnetización 39
1.6.2 Ecuaciones de la máquina con saturación incluida 40

Pag.
CAPITULO II: OPERACIÓN ASIMÉTRICA, FALLAS Y FUNCIONAMIENTO
DE LA MAQUINA DE INDUCCIÓN CON ALIMENTACIÓN
MONOFÁSICA
2.1 Operación Asimétrica 45 x
2.1.1 Voltajes desbalanceados 46
2.1.2 Resistencias Rotóricas Desiguales 47
2.1.3 Voltajes Desbalanceados y Resistencia Rotóricas D£
si guales 48
2.2 Fallas 49^
2.3 Funcionamiento de la Máquina Trifásica con alimenta^
ción monofásica 50
CAPITULO III: PRUEBAS DE LABORATORIO
3.1 Pruebas de laboratorio para obtener los oscilogra -
mas de corriente, voltaje y velocidad durante los
transitorios 55 x
3.1.1 Arranque con voltajes desbalanceados 57 x
3.1.2 Arranque con resistencias rotóricas desiguales 60
3.1.3 Arranque con resistencias rotóricas desiguales y
voltajes desbalanceados 64
3.1.4 Falla Fase-Tierra 67 /
3.1.5 Falla de Dos Fases a Tierra 69^
3.1.6 Falla trifásica cuando existen resistencias rotóri-
cas iguales 71
3.1.7 Arranque con alimentación monofásica usando un con-
densador convertidor de fase 75 /
Pac
CAPITULO IV: SIMULACIÓN MATEMÁTICA
4.1 Ecuaciones para operación asimétrica 80
4.1.1 Voltajes balanceados 81
4.1.2 Voltajes desbalanceados 83
4.1.3 Resistencias rotóricas desiguales 86
4.1.4 Voltajes desbalanceados y resistencias rotóricas desj_
guales . * 89
4.1.5 Fallas 89
4.1.6 Alimentación monofásica 94
4.2 Condiciones iniciales 97
4.3 Descripción del método de solución 98
CAPITULO V: RESULTADOS OBTENIDOS Y COMPARACIONES
5.1 Resultados obtenidos en la simulación y comparaciones
con 1 os resultados experimental es 104
5.1.1 Estado Estable 105
5.1.2 Arranque con alimentación trifásica balanceada 121
5.1.3 Arranque con voltajes desbalanceados 130
5.1.4 Arranque con resistencias rotóricas desiguales 145
5.1.5 Arranque con voltajes y resistencias rotóricas desba^
lanceadas 157
5.1.6 Falla Fase-Tierra 171
5.1.7 Falla de dos Fases Tierra 184
5.1.8 Falla trifásica • 202
5.1.9 Arranque con Alimentación Monofásica 214
5.2 Conclusiones y recomendaciones 227

IV
Pag.
5.2.1 Conclusiones 227
5.2.2 Recomendaciones 229-*
5.3 Restricciones 231^
/ANEXO 1: PARÁMETROS DE LA MAQUINA DE INDUCCIÓN.
/ ANEXO 2: CALCULO DEL CONDENSADOR ÓPTIMO PARA ALIMENTACIÓN MO
NOFASICA.
^ANEXO 3: EQUIPO UTILIZADO.
i ANEXO 4: MANUAL DE USO DE LOS PROGRAMAS.
* ANEXO 5: LISTADO DE PROGRAMAS.
** ANEXO 6: DIAGRAMAS. DE FLUJO.
B I B L I O G R A F Í A

I N T R O D U C C I Ó N
Las máquinas de inducción son muy utilizadas en muchos sectores; gracias
a las innumerables ventajas que brindan, en múltiples aspectos, tienen (±
na gran acogida en la industria por ejemplo, en diversos tipos de maquj[
narias, e inclusive en múltiples aparatos domésticos. Es por esta razón
que se hace necesario su estudio en todas las formas de funcionamiento
que pueda tener, ya que siendo su utilización tan común, en la práctica
pueden ocurrir innumerables formas de funcionamiento, ya sea normal como
anormal.
El comportamiento transitorio de la máquina de inducción es importante
para muchos casos, como pueden ser: para diseñar protecciones, para e¿
coger elementos electrónicos de control, actualmente muy usados para el
control de estas máquinas, para estudiar la influencia que tiene sobre £
tros equipos conectados a la misma línea, especialmente los equipos elec_
irónicos tienen muchos problemas debido a los fuertes transitorios que £
curren en las máquinas de inducción.
En el presente trabajo se estudian muchos casos que ocasionalmente pue-
den suceder, ya sean balanceados o no. Así, se considera casos de arrar^
que y de estado estable en condiciones simétricas y asimétricas. Las cor^
diciones asimétricas escogidas son las más comunes: voltajes aplicados
desbalanceados, resistencias rotóricas desiguales y la combinación de los
dos anteriores. Otro caso muy común de asimetría es la desconexión y re_
conexión de fases, que no se considera ya que han sido tratadas amplia-
mente en la Ref. 4. Se consideran también algunos tipos de fallas: Fa-
se-Tierra, 2 Fases-Tierra, Falla Trifásica.
Además se presenta la simulación de la máquina trifásica alimentada con
voltaje monofásico. Este tipo de funcionamiento se presenta como altejr
nativa al uso de máquinas monofásicas, para zonas que carecen de alimejx
tación trifásica, ya que los motores trifásicos son en todo sentido su^
periores a los monofásicos.
El modelo desarrollado consiste de un programa digital que resuelve las
ecuaciones diferenciales que describen el funcionamiento de la máqui-
na de inducción; los parámetros de la máquina y los voltajes aplicados
constituyen las variables de entrada, obteniéndose como variables de sa
lida corrientes, torque y velocidad, estos resultados son almacenados
para luego ser graficados, y estos gráficos se comparan con las fotogra_
fías obtenidas de las pruebas de laboratorio. De esta manera, el pro-
grama ha sido desarrollado con la teoría de ejes arbitrarios de referer^
cia q d O, y se obtienen como resultados las variables en todas las fa
ses y también en los ejes q y d, de forma que se tiene graficadas todas
las variables de la máquina a la vez, pudiéndose analizar en muy buena
forma los transitorios obtenidos. Además, en la mayoría de los ejem-
plos realizados, la simulación abarca todo el período transitorio, pu-
diéndose verificar a cabalidad la validez del modelo en todos los casos.
Adicional mente en el modelo se ha introducido el fenómeno de la satura_
ción y también se ha desarrollado un subprograma que permite calcular
los condensadores adecuados para alimentación monofásica.

C A P I T U L O I
LA MAQUINA DE INDUCCIÓN
1.1 CONSIDERACIONES BÁSICAS PARA EL ANÁLISIS (i, 3, 4, s)
La máquina de inducción simétrica está definida como una máquina polifá_
sica con las siguientes características ideales:
1) Entrehierro uniforme.
2) Circuito magnético lineal.
3) Devanados del estator idénticos, distribuidos de forma que produz_
can una onda de f.m.m. sinusoidal en el espacio.
4) Bobinas o barras del rotor dispuestas de forma que produzcan una 0£
da de f.m.m. en el rotor sinusoidal y que tenga el mismo número de
polos que la del estator.
Los fenómenos que introducen no linealidades y que han sido desprecia-
dos en el desarrollo del modelo son:
1) Circuito magnético no lineal: se desprecia el efecto de saturación,
histéresis y corrientes de Eddy.
2) Cambios en las resistencias debido a variaciones de temperatura y
frecuencia.

3) Se desprecia el contenido de armónicos de la onda de f.m.m.
1.2 REPRESENTACIÓN MATEMÁTICA DE LA MAQUINA DE INDUCCIÓN (i, 3, •», s)
En el presente desarrollo se representa, por facilidad, una máquina trj_
fásica de 2 polos. Los devanados del estator se hallan simétricamente
desfasados 120° eléctricos entre sí, y de igual manera los devanados o
barras del rotor, Fig. 1.1. (El desplazamiento angular entre los ejes
del estator y rotor es 6r; los subíndices a, b y c representan las fa_
ses de la máquina y los subíndices s y r, estator y rotor respectivamen_
te).eje bs
e je bras'
ESTATOR ROTOR
Sentido de rotación (Wr)
eje ar
eje as
as
eje es eje cr
FIG. 1.1 Máquina Simétrica Trifásica de Dos Polos

Los devanados del estator son idénticos: tienen igual número de vueltas
Ns, igual resistencia rs, igual inductancia de dispersión Lis e igual
inductancia propia Ls. En igual forma, los devanados equivalentes de
rotor son idénticos, tienen igual: número de vueltas Nr, resistencia
rr, inductancia de dispersión Llr e inductancia propia Lr.
1.2.1 Ecuaciones de voltaje
Para cada una de las fases la ecuación de voltaje es:
v = r . i + p . X (1.1)
donde: v = voltaje por fase
r = resistencia total por fase de cada bobina
i = corriente por fase
p = operador -$p
X = concatenaciones de flujo totales de una bobina
Expresando en forma matricial, para los devanados del estator y del ro
tor los voltajes fase-neutro son:
vabcs
|vabcr
rs
0
. _j— .
0
rr
\bcs
nabcr
+ n-r p
Xabcs
Xabcr
(1.2)
y cada submatriz es:

- 4 -
vabcss
rs =
1abcs=
Xabcs
vas
vbs
vcs
*
rs 0 0
0 rs 0
0 0 rs
ias
ibs
ics
sXGS
•>
5
vabcr
1al
=
>> =
)Cr=
Aabcr
var
vbr
vcr
rr 0 0
0 rr 0
0 0 rr
iar
ibr
icr
el y*
cr
(1.3)
Las concatenaciones de flujo se definen de la siguiente forma:
A = L . i (1.4)
donde L es la inductancia de la bobina.
Desarrollando para expresar en forma matricial se obtiene:

donde:
siendo
Aabcs
Aabcr
LS
LSRT
LSR
LR
''abes
nabcr
4 •
LR =
Lss 0 0
0 Lss 0
0 0 Lss
Lrr 0 0
0 Lrr 0
0 0 Lrr
Lss = Ls - Lsm
rr r rm
(1.5)
(1.6)
-sm
•rm
Inductancia propia de un devanado del es-
tator.
inductancia propia de un devanado del ro
tor.
inductancia mutua entre fases del estator,
inductancia mutua entre fases del rotor.
La submatriz de inductancias mutuas entre devanados del rotor y estator
[LSR] tiene la siguiente forma:

= L sr
- 6 -
COS 0r
COS (9 - Ip)I O
cos(0 + -o-)í O
eos (0 + S4 cos(9 - lí-)i O 1 3
cos 0 cos(0 + -ó-)i i O
cos (er - -y-) cos er
(1.7)
L = amplitud del acoplamiento mutuo entre los devanados del esta—srtor y del rotor.
9 = desplazamiento angular entre ejes del estator y del rotor.
La inductancia mutua entre cualquier devanado del estator con otro del
rotor varía con el coseno del ángulo 0r, entre sus ejes-
1.2.2 Ecuaciones de la Máquina referidas al estator
Las ecuaciones de la máquina son referidas al estator debido a que la
medición de los parámetros de ésta, se los jiace con respecto a los deva^
nados del estator.
Para referir las ecuaciones del rotor al estator, se multiplica por la
relación de espiras, en forma similar a lo que se hace en un transforma_
dor.
Así se tiene: r r -
N[vabcr]
(1.8)

[L'rl
s
= Ñ [Xabcr]
* ) CL]
(Los apostrofes indican que las cantidades afectadas están referidas al
estator).
Y aplicando esta transformación a la ecuación (1.2) se obtiene:
[rs] + P[LS]
P[LMS]
p[LMS]Ciabcs]
(1.9)
en donde:
^[LNr L LSR (1.10)
1.2.3 Ecuación del torque electromagnético
La ecuación del torque electromagnético se obtiene a partir de la enejr
gía instantánea almacenada en el campo magnético:
W = [i]T [L] [i] (1-11)
en donde:
[i] = ; [i]T - [1abcs]' ]abcrj (1.12)

[L]
[Le]
(1.13)
De la definición de torque electromagnético:
TQ -Te = — .2
(1.14)
y siendo P = número de polos de la máquina
se obtiene, reemplazando a la ecuación (1.11) en (1.14):
Te = L. (L) . [i]T86, [i] (1.15)
Una vez desarrollada esta ecuación se llega a:
Te ' - ( ) Lms 7 71'ar' 7
7 7 1 sen T
bs
siendo:
Lms N Lsr (1.17)

1.3 TRANSFORMACIÓN DE LAS ECUACIONES DE LA MAQUINA DE VARIABLES DE FA
SE (a. b. c) A UN SISTEMA DE EJES ARBITRARIOS DE REFERENCIA (q.
d. o) (i, 3, <», s)
Como se puede observar en las ecuaciones desarrolladas anterioremente ,
existen algunos coeficientes que son variables en el tiempo; éstos son,
las inductancias mutuas entre estator y rotor, que dependen de la posi^
ción angular del rotor (6r), lo cual complica mucho el análisis. Para
solucionar esta dificultad se refiere todas las variables al sistema de
ejes arbitrarios de referencia, que gira a una velocidad arbitraria w,
mientras que los ejes del estator están fijos y los del rotor giran a
una velocidad w .
Las ecuaciones de transfonnación son expresiones que se obtienen a pa£
tir de las relaciones trigonométricas existentes entre los grupos de e_
jes de estator y rotor con el grupo de ejes ortogonales del sistema de
referencia arbitrario. Esto se puede observar en la fig. 1.2.
eje d
FIG. 1.2 Ejes de una Máquina Simétrica Trifásica de Dos Polos,

- 10 -
Las ecuaciones generalizadas para la transformación son las siguientes:
qs faccos e + f. eos (e - — ) + f eos (e + —)as 05 .3 es .3
'ds2
3fae sen 9 + fhc sen (e - — ) + f csen (e + —)as DS 3 cs 3
os fas + fbs + fes
2_
3 fás cos 3 + fbr cos (B " T> + fcr cos (B + TJ
fdr f ar sen 3 + f br sen (3 - ) f'cr.sen(3
for f + f' + far br cr (1.18)
en donde: f = es una variable que puede representar voltajes,
corrientes o concatenaciones de flujo.
6 = es el ángulo de desplazamiento del sistema de
referencia arbitrario.
además: = / u.dt +o
9rCt) = / wr dt + e (o)o
y 3 - e - ev (1.19)

- 11 -
Se puede notar también que las ecuaciones están afectadas por el factor2y . que ha sido introducido para mantener invariante la potencia,ya que
la transformación se hace de un sistema trifásico Ca, b, c) a un siste-
ma bifásico (q, d). (e). Las variables f y f' se introducen des-
pués ya que, en general, se necesitan 3 variables para ser consistente
la transformación.
El eje cero tiene la particularidad de que las variables referidas a és
te no se ven influenciadas por la velocidad a la que gira el sistema ar^
bitrario de referencia; esto se debe a que las variables en este eje no
están asociadas a la transformación. Y, lo más importante es que las
variables del eje O no están relacionadas con los de los ejes q y d, y
sólo se presentan en el lugar donde son originadas.
Las variables en eje O aparecen, de acuerdo a su definición, cuando,
existen condiciones desbalanceadas o asimétricas y no influirán en los
demás ejes o en otros lugares; así, cuando aparecen desbalances en el
rotor, sólo habrán variables de eje O en el rotor, y de manera similar
si esto ocurre en el estator, y no influirán en absoluto a las varia_
bles de los ejes q y d. C5)-
Además, es importante notar que para el caso de sistemas que tienen cp_
nexión de 3 alambres, esto es, sin conexión del neutro, las componentes
de eje O desaparecen, incluso para sistemas desbalanceados. Ca)-
Expresando en forma matricial, las ecuaciones de transformación serán;

- 12 -
qdos
f 'qdor
Ts1
0
0
Tr
fabcs
abcr
(1.20)
en donde:
¡eos e cos(e - ^4 cos(e + 4J4
sen 9 sen(0 - 4J4 sen(9 + %
2
12
i2
O«T
eos 3 cos(3 - -y)
12"
cosía +
sen 3 sen (3 - -^4 sen (3 +
12"
(1.21)
(1.22)
Para obtener las variables originales se tiene las ecuaciones de la
transformación inversa, y son de la siguiente forma:
fabcs 1
lfábcrl
Ts|- 0
1
0 1 |Tr -1
qdos
1 f qdor
en donde:

- 13 -
-i
eos
eos (9
-i
eos 3
eos
sen 9
eos (9 - -) sen(e - )
sen(9
sen g
sen(B + )
eos (3 - 4f) sen(e - 4f) 1o O
(1.24)
(1.25)
1.3.1 Ecuaciones de las concatenaciones de flujo en variables q d o
Si a las ecuaciones de las concatenaciones de flujo (1.5), expresadas
en forma matricial , se las refiere al estator, y aplicando la transfor-
mación directa a ejes q d o, se obtiene lo siguiente,
definiendo:

- 14 -
[i] -
[L] =
[T] -
[iabcs]
[LSR]T|[L'r]
[0]
[0] CTr]
[iqdo]
[T]-1
(1.26)
[Ts]-1
CO]
[0]
[Tr]-1
(los subíndices q d o indican que las variables han sido referidas al
sistema de ejes arbitrarios de referencia).
Si la ecuación (1.5) se la escribe de la siguiente forma, que represen-
tan valores en variables a b e ,
[X] = [L] [i] (1-27)
luego aplicando la transformación directa:
[T] [X] = [T] [L] [i] (1.28)
y a continuación utilizando el artificio matemático de multiplicar el-i
2do. miembro de la ecuación por [T] [T]" resulta,

- 15 -
-i[T] [X] = [T] [L] [IIP [T] [i] (1.29)
que luego de realizar operaciones se obtiene el siguiente resultado, ya
en variables q d o,
(1.30)
donde: [Xqdo] = [T] [X] (1.31)
[iqdo] = [T] [i] (1.32)
[LqdQ] = [T] [L] [T]-i
(1.33)
Desarrollando la ecuación (1.33):
[Ts] [Ls]
[Tr] [LMS]T
para finalmente obtener:
C»V '
Lcc 0ss
0 Lccss
0 0
M 0
0 M
0 0
[I,]" [Ts][LMS][Trr>
0 M 0 0
D O M O
LCC 0 0 0ss
0 L' 0 0rr
0 0 L1 0rr
0 0 0 L'rr
(1.34)
(1.35)

- 16 -
en donde:
M - ms
Nsy como se había definido L = TT- L ; entonces M representa la in-r
ductancia de magnetización de la máquina.
Se puede así, descomponer las inductancias L y L' en sus componen-
tes de dispersión y de magnetización:
Lss ' hs +
L'rr = L'lr+
M (1.36)
Como se puede observar, el transformar las ecuaciones de la máquina al
sistema de ejes de referencia arbitrario, ec. (1.35), se ha conseguido
eliminar la dependencia que tenían las inductancias mutuas entre rotor
y estator, de la posición del rotor, y por lo tanto del tiempo; nótese
además que las inductancias propias no cambian de forma ni de valor.
1.3.2 Ecuaciones de voltaje en variables q d o
Partiendo de las ecuaciones de voltaje, expresadas en forma matricial,
ec. (1.2), y siguiendo un procedimiento similar al aplicado a las ecua_
ciones de concatenaciones de flujo se tiene:
definiendo:
[R]
[rs]
[0]
[0]

- 17 -
[v] =[vqdo] =
[vqdos]
(1.37)
la ecuación (1.2) será
[v] = [R] [i] + p[X]
[T] [v] = [T][R][i] + [T] p[X]
(1.38)
(1.39)
CT] [v] = 1 [T][i] + [T] píCT]'1 [T] [X]} (1.40)
en variables q d o se obtiene:
[vqdQ] - [T] [R] [I]'1 [iqd(J] + [T] PÍET]-1^]} (1.41)
además [T] [R] [I]'1 = [R] (1.42)
1-1y como [T]~ y [ ado] son funciones del tiempo, el operador p les a-
fecta a ambas matrices; entonces se tiene:
[vqdo] = [R][1qdo] + [T] 1 p[Aqdo] (1.43)
considerando que [XqdQ] = [Lqdo][iqdo] y que [H] = [T] püT]'1 se llega
a:
[vqdo] = {[R] + [H] [Lqdo] + [Lqdo] p} [iqdo] (1.44)

- 18 -
desarrollando:
[H] = [T] p[T]-1
0
-pe
0
0
0
0
pe
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
-pe0
0
0
0
pe0
0
0
0
0
0
0
0
(1.45)
Reemplazando los distintos resultados, obtenidos anteriormente, en la
ecuación (1.44), se llega a las ecuaciones generales de voltaje en el
sistema de ejes arbitrarios de referencia que describen el comportamie£
to de la máquina:
Vvds
vos
Vqr
vdr
vor
(rs+Lss p) i_sspe o Mp Mpe o
-Lsspe (VLss p) ° ~Mpe MP o0 0 rs 0 0 0
T
MP MPe o (r;+L;.r P) L^PB o
-Mpe Mp o -L;r pe (r;+i;rP) o
0 0 0 ° ° rr
V
1-ds
V
V
1dr
ior
(1.46)
Expresando las ecuaciones de voltaje en función de las concatenaciones
de flujo totales, [ec. (1.46)], se obtiene:

- 19 -
V =
vds =
vos =
V =
vdr -
rs
rs
rs
rr
rr
Íqs +
1ds +
V +
Íqr +
n'dr +
P XqS +
P x d s -
p Xos
PXqr +
P X d r -
Xds
Xqs
Xdr
Xqrv' = r' i' + p X'or r or K or
Las concatenaciones de flujo totales son:
Xqs
Xds =X =os
Xir 'X ' =xdr
L i Hss qs
Lss 1ds H
L iss os
rr qrL ' i ' H
H M i 'qr
f M 1¿r
^ M 1 q s
1- M i ds\ - I ' -i 'or " Lrr no
y reemplazando los valores de las ec. (1.36) se llega a:
Xqs ' hs 1qs
Xds = hs S
Xqr = Hr iqr + M
Xdr = Hr idr + M
or ~ rr nor
De las ecuaciones de voltaje (1.47) se puede obtener los circuitos
val entes que se indican en la figura 1.3.
(1.49)

- 20 -
Los términos X pe, Adsp6, X' pB; rPB representan los voltajes de
velocidad, ya que p6 = to y es la velocidad de giro del sistema de e-
jes arbitrarios, y p6 = u - cor y es la velocidad relativa entre el
sistema de ejes arbitrarios y el rotor.
Los términos p X , p Xds> p X' , p X'HK, representan los voltajes dedrtransformación, (e)
iqs
Vqs
rs Lis Xdspe A'drp|3 L'lr r'r
M
¡qr T
V'qr
E J E q
ids
Vds
rs Lis L'lr r'r
M
¡'dr
V'dr
EJE d
IOS
Vos
rs Lss L'rr rr'-W—1/VV
or
Vor
E J E o
FIG. 1.3 Circuitos Equivalentes por Fase de una Máquina Simétrica
Trifásica de 2 Polos Referida a un Sistema de Ejes Arbitrarios.
- 21 -
Se puede observar tanto en las ecuaciones de voltaje, como en el circuj_
to equivalente, el desacoplamiento existente entre las variables del e-
je O con las de los ejes q y d, y además entre rotor y estator. En cam
bio, en los ejes q y d si existe acoplamiento, además del existente en^
tre rotor y estator.
1.3.3 Ecuaciones del Torque Electromagnético
Aplicando las ecuaciones de transformación a la ecuación (1.16) se ob^
tiene, en variables q d o:
Te = 1 ( ) N < (1.50)
y en función de Tas concatenaciones de flujo:
Te - ( )() 1 - X (1.51)
en donde m = número de fases.
1.3.4 Ecuación del Torque Electromecánico
La ecuación (1.52) define el comportamiento electromecánico del motor
de inducción:
Te = J p wr + D u>r + Tm (1-52)
donde: Te = torque electromagnético
J p oí = torque de aceleración
- 22 -
D co = torque de amortiguamiento
T = torque de carga
además, J = momento de inercia del motor
y D = coeficiente angular de fricción
viscosa.
1-.4 ESTADO ESTABLE (3, •», s)
La máquina de inducción en estado estable opera bajo condiciones
ceadas. Así, las corrientes del estator producen un campo magnético que
gira en el entrehierro a la velocidad sincrónica co ; el rotor gira a
la velocidad 10 (distinta de co ), induciéndose corrientes que producen
un campo magnético que gira a la velocidad (cog - u ) con respecto al rp_
tor. Además, debido a condiciones balanceadas, todas las variables apa^
recen como cantidades sinusoidales. De esta forma, las variables del
estator serán sinusoides de frecuencia co y las variables del ro-etor, sinusoides de frecuencia (co - u ). Al transformar estas varia -
bles al sistema de ejes arbitrarios de referencia, que gira a la veloci^
dad co con respecto al estator y a la velocidad (co - co ) con respecto
al rotor, las variables del estator tendrán la frecuencia (co - tu), y
los del rotor la frecuencia (co - co ) - (u - co ) = co - co.
Se tiene asf, que en estado estable tanto las variables del estator co^
mo las del rotor, referidas al sistema de ejes arbitrarios de referen-
cia, son sinusoides de frecuencia (co - co) para todos los sistemas de
referencia, excepto para el caso en que gira a la velocidad sincrónica
u>e, en este caso todas las variables aparecen como cantidades constan-
tes.

- 23 -
Seguidamente se procede a demostrarlo:
fas = Fscos9e
fbs = Fs cos (ee * T1)fcs = Fs cos (ee < 2
f¿r = F¿ cos (6e - er)
f¿r = F; eos (ee - er - ) (1.54)
fcr - F; eos (ee - er +
donde: FS = amplitud máxima de las variables fabcs
F' = amplitud máxima de las variables fáfacr
Los demás términos ya han sido definidos ante_
nórmente.
Se podría agregar para este caso,
er = ur.t (1.55)
•9 = co . t
Utilizando los valores de las ecuaciones (1.53) y (1.54) en las ecuaci^o
nes de transformación (1.18) se llega a las siguientes expresiones:
fqs " Fs cos <ee - 6)f . = -Fp sen (9 - 9)ds s e (1.56)fqr = F; cos (9e - e)
fdr = -Fr sen * Q)

- 24 -
Las relaciones obtenidas anteriormente son verdaderas para cualquier sis^
tema de referencia, y de éstas se usarán algunos casos particulares como
son los siguientes:
1) El sistema de referencia fijo en estator: u = O y 9 = 0
fqsS = Fs cos 9e = Fs COS V
fdss = -Fs sen 9e = -Fs sen vt
f - s = F; eos e = F; eos u t\ I I C I C -
fdrS = -F; sen 6e = -F; sen u>et (1.57)
el superíndice "s" indica que el sistema de referencia está fijo en el
estator, "r" indicaría fijo en el rotor y "e" que está girando a l a ve^
locidad sincrónica oí .
2) El sistema de referencia fijo en el rotor: w = wr y 9 = 9
= Fs cos (6e - 9r> = Fs cos (we '
sen Q - e = -F sen
fq/ = Fr cos (9e ' 9r) = Fr cos(ü)e r
fd/ = -F^ sen (ee - er) = -F'r sen(o)e -
3) El sistema de referencia gira a la velocidad sincrónica w : w
y 9 = 9e

- 25 -
f e = Fqs s
f e = OTds U
f 6 = F'qr r
fdr6 - O (1.59)
Así, se comprueba lo afirmado anteriormente: cuando el sistema de ejes
arbitrarios está fijo en el estator o en el rotor, las variables q d o
son sinusoides de frecuencia u o (w - u ) respectivamente, y cuando
el sistema está girando a la velocidad sincrónica, las variables q d o
son cantidades constantes.
Debido a que en estado estable tanto corrientes como voltajes son cantj
dades sinusoides, se representa a estas variables como fasores en lugar
de dar sus valores instantáneos. (3, s)
jee jeAsí: f = RJFC e e] = RQ[Fac e e]as e s J e1- as
je (o)en donde Fa. = Fr e , pudiéndose escoger, por facilidad, 9 (o)=0,as s e
yf = voltaje, corriente o concatenaciones de flujo
F = fasor
F = magnitud del fasor
R = parte real
de esta forma, para cada una de las fases se tendrá: —i r> • r¿ ¡ -•• T r? íhüim líí
- 26 -
' - R [ F ebs Ke L hbs e
fcs ' Re t Fcs
je
fbr
of , = Re [ F' e e ] (1.60)Tcr Sr
En la máquina simétrica trifásica, los devanados tanto del estator como
del rotor se encuentran desfasados 120 grados eléctricos entre sí, por
lo que se puede tener las siguientes relaciones:
Fbs
Fcs ' a Fas
Fbr
rcr ' a Far
en donde: • 211J 3
a = e
. 2ir"J T
a2 = e

- 27 -
(se ha tomado como referencia la fase "a" y una secuencia de fases "abe",
de acuerdo con la figura 1.1).
Aplicando las ecuaciones de transformación (1.18):
qs23
16J
j(e + 4)cs
ds2_3 fasRee
ioJ\~ O ~ O/
fcs Re
f = -qr 3 R fbrj(3 - 4L)
fTdr ar Re e + f b r R e e +fcrRee
(1.62)
Se reemplaza las ecuaciones (1.61) en (1.60) y luego en (1.62), para
tener:
fqs = Re Fas ej(ee-e)
fds = Re Fas ej(ee-e)

- 28 -
= RFar e
j(e -e)
fdr ' Re' Far eJO -e)
Cl-63)
Como se demostró anteriormente, las variables de rotor y estator en el
sistema arbitrario de referencia son sinusoides de frecuencia (w - u},
por lo tanto se pueden expresar en forma fasorial de la siguiente forma,
excepto para frecuencia sincrónica.
fqs = Rej(e -e)
ds Fds ej(e -e)
j(e -e)
fdrj(e -e)
F' P e"> 6 (1.64)
En base a las ecuaciones (1.63) y (1.64) se puede obtener los siguien-
tes resultados:
F . = Fqs
ds
as
j Fas
(1.65)
Fdr

- 29 -
1.4.1 Ecuaciones de voltaje en Estado Estable (3, "»)
Las ecuaciones de voltaje en estado estable constituyen un caso partiqj[
lar de la transformación a coordenadas q d o. Para obtener estas ecua_
cienes se parte de las ecuaciones de voltaje (1.461, se toman únicamen^
te las ecuaciones del eje q y se sigue el siguiente proceso:
1.- Se reemplazan los valores obtenidos en (1-65).
2.- El operador p es reemplazado por j(ue -ul.
3.- Se sustituyen: p6 por o> y p$ por (co - <o ).
4.- Se fija el sistema de ejes arbitrarios en el estator, por
lo tanto w = 0.
5.- Se considera las ecuaciones (1.361.
AsT, las ecuaciones que rigen el comportamiento de la máquina de induc-
ción en estado estable son las siguientes:
Vas ' <>•, + J "U1 'as + i *» "« + '¡r»
V
en las anteriores ecuaciones V . V' , I e I' son fasores;rt nt^ rt N n Y^
p rs = _5 L es ei deslizamiento; ademas,

- 30 -
x, = oj L, es la reactancia de dispersión por fase de estator.
= oog L.J es la reactancia de dispersión, por fase, de rotor.
x = u M es la reactancia mutua entre rotor y estator.
A partir de las ecuaciones (1-66) se obtiene el circuito equivalente del
motor de inducción para estado estable, circuito que es muy utilizado
en el estudio de la máquina de inducción. A continuación se muestra el
citado circuito equivalente para la condición más usual, con el rotor
cortocircuitado, es decir, V' = Oar
Vos
is lr• ivv m
los•"• í>
¿ x m vj
'08
,s
i1,ar
V ar = O
FIG. 1.4 Circuitos Equivalentes por Fase de una Máquina Trifásicade Inducción para Estado Estable.

- 31 -
1.5 ECUACIONES DEL MODELO.MATEMÁTICO (i, 3, •», 5)
1.5.1 Ecuaciones diferenciales de la Máquina de Inducción
En el presente trabajo se considera una máquina trifásica sin conexión
del neutro, por lo que se anulan los componentes del eje cero, de esta
forma, en adelante sólo se considerarán en el análisis las variables de
los ejes q y d.
Partiendo de las ecuaciones (1.47) y (1.49); se multiplica las ecuacip_
nes (1.49) por w , donde esta variable representa la velocidad angular
eléctrica correspondiente a la frecuencia nominal de la red de alimenta^
cidn, esto es:
u = 2 fl. f |rad/seg| U. 67)
donde: f = frecuencia nominal de la red de alimentación.
Se obtiene:
Donde:
rqs
''ds
V>dr
= X, 1ls 1qs + xm (l'qs +
= Xls xm (ids + idr)
x í r i q r + x m ( 1 q r + 1 q s )
= x.: ir dr (idr (1.68)
ij; representa concatenaciones de flujo por segundo y
x representa reactancia; así,

- 32 -
*qs = "e V
xls = ueL ls
xm = we M
xír - «eHr
similares definiciones se dan para ip. , \¡>* , i .
La ventaja de utilizar estas variables ip se verá en el desarrollo
terior del modelo.
Ahora, definiendo:
= Xm (iqs
que representan las concatenaciones de flujo mutuo en ejes q y d respejc
tivamente, se simplifican las ecuaciones (1.68),
= XlS 1qs
= xls 1ds
= Ir qr vmq
= xír ^dr + ^md (1.71)
en base a estas ecuaciones (1.71) se puede obtener:

- 33
qs x.
1ds
1dr = r" (^dr " d)
y reemplazando (1.72) en (1.70) se llega a:
= xmq
en donde
xmq md•*• + •*• + •}•
xm xls T
Seguidamente, a las ecuaciones de voltaje (1.47), se las multiplica por
o) y a la vez se reemplaza: p6 = w y pg = oj - u , y dejando en fun-
ción de las concatenaciones de flujo por segundo se llega a:
rs"e vqs ? we '
vds = we ' 3 (^ds -'*md) + p ^ds ' *qs '

- 34 -
Vvqr = '
vdr
De estas últimas ecuaciones se puede obtener las ecuaciones finales del
modelo:
y.
» 1 = ü) [V1 - ( - - ) ijjj +qr e L qr v ü) ' ^dr
,» r
= ü) [vi, + ( - - ) üí' + — r!- ( j - l^L )] (1.e L dr v cúg ' ^qr 3cT, wmd ^dr'J VA.
Realizando un proceso similar para la ecuación (1.51), se obtiene la e
cuación final del torque electromagnético:
Te = ' ' 'En la ecuación del torque electromecánico (1.52), se hace una pequeña a
proximación, se desprecia el torque de amortiguamiento, ya que el coefi^
ciente angular de fricción viscosa es muy pequeño; asi la ecuación que_
da de la siguiente forma
Te = J p o)r + Tm (1.78)
Como puede verse, en las ecuaciones (1.76), (1.77) y (1.78), que descri^

- 35 -
ben el funcionamiento eléctrico y mecánico de la máquina, el desarrollo
realizado es generalizado, pudiendo referirse los sistemas de ecuacio^
nes a cualquier sistema de referencia: sistema fijo en el estator, en
el rotor y girando a co ; todo depende de las necesidades que se tenga.
Ahora se puede ver claramente las razones por las cuales se tomó a las
variables ij; como variables de estado, ya que la forma obtenida para
las ecuaciones (1.76) es fácilmente representada en un computador digi^
tal.
1.5.2 Ecuaciones de la Máquina en Por Unidad
Las ventajas que se obtienen al trabajar en el sistema normalizado deno^
minado "sistema por unidad", hacen necesaria la transformación a este
sistema, en donde los parámetros y variables de la máquina se expresan
como fracciones de valores nominales, previamente seleccionados, y son
además términos adimensionales.
Así, luego de realizar las transformaciones al sistema por unidad, las
ecuaciones se reducen, se facilita el proceso para introducir la satura^
ción, y, además se obtiene los resultados en p.u., lo que significa una
fácil y rápida interpretación.
Para realizar la transformación es necesario seleccionar los valores ba^
se de Potencia, Voltaje y Frecuencia; general mente son los datos de placa
de la máquina. Así, se toma los siguientes valores base:

- 36 -
SB = potencia aparente en VA por fase
Vg = voltaje base en V por fase
fD = frecuencia base en Hz, es la frecuenciaD
a la cual están definidos los parámetros
De estos valores se definen los demás términos base:
SBID = TT=- es la corriente base en A (1.79)B VB
VZr, = -r=- es la impedancia base en ohmios (1.80)B IB
2lífBWB = p/2 es la velocidad angular
base en rad/seg. (1-81)
(P = número de polos)
ZRLD = — es la inductancia base en Henrios (1.82)u
XB = Lg Ig son las concatenaciones de flujo
base (1.83),
y multiplicando ambos miembros por w .
U = X . I (1.84)
y como Xg = Lg Ig ~ Zg (1.85)
se puede decir que ^B = VB (1.86)
Para transformar una cantidad al sistema p.u. se aplica la siguiente d£

- 37 -
finición:
Valor realValor p.u. = (1.87)
Valor base
Aplicando la ecuación (1.87) a las ecuaciones (1.76) se obtiene las e-
cuaciones diferenciales de la máquina en p.u.; sin embargo, la forma de
estas ecuaciones no se altera, y se puede trabajar directamente con tp_
dos los términos en p.u.
En el sistema por unidad se toma el mismo valor instantáneo base tanto
para el sistema arbitrario q d o como para el sistema a b e . (s)
Se tiene además que el torque base tiene la siguiente forma:
VB 'BTB = en [Nw.m] (1.88)
Entonces, expresando la ecuación (1.77) en p.u. se obtendrán:
Te = jdr
La unidad de torque, en el sistema p.u., es definida como el torque pro
ducido por una unidad de potencia a la velocidad nominal co , y
10 = — . -5- w es la velocidad sincrónica, ("O (1.90)
El momento de inercia de la máquina, en el sistema p.u., se expresa por

- 38 -
la constante de inercia H y definida por la siguiente expresión:
Energía almacenada a w en KW.segH = § (1.91)
Potencia aparente nominal en KVA
y en fórmula:
5.48 J . n 2H = ?- 10 [seg.] (1.92)
Sn
donde: J = momento de inercia de la máquina en Kg-m2
n = velocidad sincrónica de la máquina en rpm
S = potencia aparente nominal de la máquina en KVA
La constante de inercia tiene como unidad segundos, en el sistema p.u.;
la unidad de energía es igual a la unidad de potencia en un segundo,por
lo tanto, la constante de inercia es numéricamente igual a la energíaal_
macenada en p.u. (10)
Si se acelera la máquina uniformemente desde el reposo hasta la veloci/
dad sincrónica u>s, en un segundo, el torque sería igual a J ws. La enejr
gía almacenada es producida por la potencia debido a este torque a laCOc
velocidad media -£- , y es igual a J u)s/2 y por lo tanto,
H = \ u)s (3, •*, s) (1.93)
despejando J y reemplazando en la ecuación (1.78) se obtiene:
p u)r = ¿f (Te - Tm) (1.94)

- 39 -
que es la ecuación diferencial de la velocidad.
Las ecuaciones (1.19), (1.76, (1.89) y (1.94), en p.u., son las que se
utilizan para el análisis transitorio de la máquina de inducción, ya
que describen el comportamiento de la máquina en función del tiempo.
1.6 SATURACIÓN DEL NÚCLEO (s, ?, 11)
En las máquinas eléctricas el torque electromagnético y el voltaje indi¿
cido dependen del flujo concatenado por sus devanados; este flujo, ade^
más depende de las características del hierro y del entrehierro. Así,
la saturación del núcleo ferromagnético puede influir sustancialmente
en el comportamiento de la máquina, sobretodo en condiciones críticas
de funcionamiento como son: arranque, fallas, desbalances de estator
y/o de rotor, etc.
1.6.1 Curva de Magnetización (?)
La curva de magnetización describe la relación entre el voltaje inducj^
do y la corriente de magnetización; esta relación depende de las carac-
terísticas del circuito magnético.
E'nd * /Línea del entrehierro
-orocterístico del vacío
-exc.
FIG. 1.5 Curva de Magnetización.

- 40 -
Como puede observarse en la Fig. 1.5, la curva tiene una región lineal,
en la que el voltaje inducido varía en forma directa con la corriente
de magnetización, esto para valores pequeños de corriente de magnetiza^
ción. En cambio, para valores altos de corriente de magnetización se
pierde la lineal i dad, denominándose a esta parte de la curva región de
saturación, en la cual para grandes incrementos de la corriente de ma£
netización se tiene pequeños incrementos de voltaje inducido.
El fenómeno de saturación se introduce al modelo matemático en forma sim
pie, sin considerar las alteraciones que producen las ranuras y canales
de ventilación, y se desprecia las armónicas generadas.
1.6.2 Ecuaciones de la Máquina con la Saturación Incluida (s, n)
La saturación es introducida al modelo matemático mediante la corrección
de concatenaciones de flujo de magnetización, ya que en éstos es donde
se refleja directamente la saturación. Así, los flujos mutuos son co-
rregidos cuando éstos, por cualquier razón, han alcanzado la región de
saturación, aunque ésto por lo general no sucede en condiciones norma-
les de trabajo.
Si se multiplica la corriente de excitación (I exc.) por x se obtiene
como resulta'do las concatenaciones de flujo mutuo ( m)> ya que según
las ecuaciones (1.70), en general se tiene
y como I exc = i$ + i¿ (1.96)

- 41 -
entonces en el eje de las abscisas se ti ene
= xm r exc' (1.97)
En el eje de las ordenadas se tiene el voltaje inducido (E ind.)> que
para condiciones de circuito abierto cumple la siguiente igualdad:
E ind = (1.98)
al multiplicar ambos miembros por oo se obtiene
E ind = —dt rm (1.99)
y luego despejando se llega a
E ind-dt (1.100)
De esta forma, en ambos ejes se tendrá ^ y la curva de la Fig. 1.5
se transforma en la siguiente curva:
m
Recta del entrehierro
Tmc
FIG. 1.6 Recta del Entrehierro a 45C

- 42 -
Se observa que la pendiente de la curva en la región lineal es 1. Ade_
más, aparece una nueva variable \¡>*, concatenaciones de flujo mutuo en
las condiciones de saturación, que se diferencia de \¡> en un valor Ax.
Se define también fy , concatenaciones de flujo mutuo crítico, al vaFTIC ~~~
lor de ip en el que termina la región lineal.
Se puede definir entonces,
recordando que
i|>_ = xm exc.
Estas relaciones pueden ser también definidas de la siguiente forma:
' Ax
dondeAx =
si
si
que es la definición a usarse ya que la función Ax = \¡i - fy* puede
obtenerse gráficamente de la Fig. 1.6, obteniéndose el siguiente gráfi-
co:

- 43 -
•"X A
FI6. 1.7 Ax en Función de
Hay que anotar que las definiciones y el gráfico de Ax = f( *m) deben
utilizarse considerando los valores absolutos de las variables.
La corrección de las concatenaciones de flujo mutuas consiste en reem-
plazar los valores de fy por ty* anteriormente definidas.
Así, la ec. (1.70) se transforma en:
Xm (1qs
= xm (1ds + V - Ax(1.104)
De forma similar, en la ec. (1.72):
qs
ds
lls
1
mq

- 44 -
' = -4- (ií> * - *qr * qr mq
1dr = -«Sd*
y al reemplazar la ec. (1.105) en (1.104) se obtiene:
Ax
Entonces, la saturación se introduce al modelo matemático lineal, reem
plazando en las ecuaciones (1.76) y (1.72) los valores ip y \¡> . por
^ma y índ resPectl'vanie|rlte» esto Para cualquier valor de if>* ya que
al encontrar la función Ax = f (ip*) se consideró ya si se está o noUl
trabajando en la región de saturación, es decir, si * es o no mayor
que fy .
Como puede verse, el utilizar las concatenaciones de flujo como varia^
bles de estado ha facilitado el proceso para introducir la saturación.

- 45 -
C A P I T U L O \ /
OPERACIÓN ASIMÉTRICA. FALLAS Y FUNCIONAMIENTO DE LA MAQUINA
DE INDUCCIÓN CON ALIMENTACIÓN MONOFÁSICA
En el presente capítulo se trata de dar una idea general de los diferen^
tes tipos de operación desbalanceada que se pueden presentar más comúji
mente en la máquina de inducción.
El análisis que se hace es simple, y en forma cualitativa se describe
el funcionamiento que tiene la máquina en los diversos casos planteados.
Asi, se tiene: operación asimétrica, considerándose la operación de la
máquina con voltajes desbalanceados aplicados al estator; resistencias
rotóricas desiguales, y la combinación de los 2 casos anteriores. Se
trata, también, varios tipos de fallas: fase-tierra, 2 fases-tierra y
falla trifásica. Por último, se considera el funcionamiento de la má-
quina trifásica con alimentación monofásica usando un condensador con-
vertidor de fase.
Otro caso muy común es la operación de la máquina cuando se produce la
desconexión y posterior reconexión de fases, pero este caso no se consi_
dera porque ya fue tratado ampliamente en la Ref. 4.
2.1 OPERACIÓN ASIMÉTRICA
Dentro de este grupo se considera los casos en los cuales se tiene des^
balances en el estator y/o en el rotor, pero que no llegan a constituir

- 46 -
condiciones de falla.
2.1.1 Voltajes Desbalanceados (i, e, m)
Por lo general las máquinas de inducción funcionan bajo condiciones ba_
lanceadas, pero temporalmente pueden ocurrir diferentes tipos de asime
trias o desbalances. Así, muy fácilmente, los voltajes del estator pue^
den ser desbalanceados, debido a perturbaciones en el sistema, hecho
que es muy común en nuestro medio.
Describiendo en forma cualitativa: el tener voltajes desbalanceados en
el estator ocasiona una disminución del torque y un mayor calentamiento
de la máquina. En la práctica se tiene una pequeña disminución del to£
que, pero si el desbalance se mantiene por largo tiempo, el calentamiejí
to que sufre la máquina es muy alto, esto debido a que las pérdidas en
el cobre de los devanados se incrementa grandemente; se tiene por lo
tanto, una menor potencia mecánica y consecuentemente un bajo rendimiento.
El procedimiento comúnmente usado para analizar los casos desbalancea_
dos es descomponer las cantidades en sus componentes simétricos: comp£
nentes de secuencia positiva y negativa, analizar independientemente
los circuitos de cada una de las secuencias, ya que no interaccionan er
tre sí, y finalmente superponer los resultados parciales.
Así, al aplicar voltajes desbalanceados al estator, se tendrá voltajes
de secuencias positiva y negativa aplicados al estator. Los voltajes
de secuencia negativa producen un torque y una potencia mecánica negáti_
vos, ocasionando una disminución en los respectivos valores finales.

- 47 -
Las corrientes de secuencia positiva y negativa desarrollan torques pul_
santes y por lo tanto vibración de la máquina; además, debido a los ci_
clos de flujo positivo y negativo que se producen, la saturación tiene
un notable efecto en los resultados.
2.1.2 Resistencias Rotóricas Desiguales C1» 8» ^•«•» as)
En múltiples ocasiones es necesario utilizar resistencias en el circuj_
to del rotor; esto es posible únicamente cuando se trata de un motor
con rotor bobinado.
Al conectar resistencias en el circuito del rotor se tiene los siguiein_
tes efectos: incremento del torque de arranque, limitación de la co_
rriente de arranque, disminución de la velocidad.
De esta forma, se usará resistencias rotóricas cuando se desee tener un
alto torque de arranque, sin incrementar la corriente, ya sea para ven^
cer la inercia de la máquina y de su carga conectada al eje o solamente
de la máquina. En otros casos es aconsejable reducir la corriente de a_
rranque para evitar depresiones de voltaje en la línea, ya que pueden
estar conectados otros equipos al mismo alimentador y se altera su fur\_
cionamiento, esto sucede con motores grandes, que tienen muy altas cp_
. rrientes de arranque. Se usa también las resistencias rotóricas como
medio de control de la velocidad, pudiendo variarse en un gran margen,
bajo la velocidad sincrónica.
Hay que anotar que todas las ventajas y facilidades antarto^
res se obtienen a costa de la eficiencia de la máquina, ya que una pajr

- 48 -
te de la potencia de entrada se consume en las resistencias externas cg_
nectadas con el rotor.
Los casos de desbalance en el circuito del rotor son muy comunes, y
den producirse por mal funcionamientos en el circuito externo, en los a
nillos rozantes, o por la conexión de resistencias desiguales. De esta
forma, se producirán corrientes desbalanceadas en el rotor, de frecuen-
cia igual al deslizamiento por la frecuencia de la red.
Las corrientes desbalanceadas se pueden descomponer en sus componentes
de secuencia positiva y negativa, que originarán campos magnéticos gira_
torios en sentidos contrarios. Estos últimos provocarán la inducción
de voltajes de secuencia positiva y negativa en el estator, de forma que
el desbalance se refleja también en el estator.
Los desbalances existentes provocarán, como en el caso anterior, dismi_
nución del torque, de la potencia mecánica, calentamiento de los devana^
dos y por tanto una menor eficiencia.
2.1.3 Voltajes Des balanceados y Resistencias Rotóricas Desiguales
Este caso es poco común, y no es más que la combinación de los dos ante_
riores, razón por la cual se tendrá un incremento notable del desbalar^
ce, acentuándose aún más los efectos desfavorables de estos tipos de p_
peración asimétrica de la máquina de inducción.
Se debe considerar también los efectos particulares que tiene cada uno
de los casos que conforman el presente tipo de operación desbalanceada,

- 49 -
por ejemplo: disminución de la corriente de arranque,vibración de la
máquina, etc.
2.2 FALLAS (7, ie)
Las fallas que pueden producirse en sistemas eléctricos son generalmen-
te cortocircuitos de fases o apertura y posterior reconexión de fases .
Se va a comentar brevemente los diversos tipos de cortocircuitos que
pueden producirse, ya que los casos de apertura de fases ya han sido
tratados ampliamente en la Ref. # 4.
Los cortocircuitos pueden ser: simétricos o asimétricos.
La mayor parte de las fallas constituyen el tipo asimétrico, y se consi
deran en el presente trabajo los cortocircuitos de una fase a tierra y
de 2 fases a tierra. Cualquier tipo de falla asimétrica origina co-
rrientes desbalanceadas, esto se puede descomponer en los componentes
de secuencia positiva y negativa y se tendrá un análisis similar a los
casos anteriormente tratados.
Los cortocircuitos simétricos no son muy comunes, pero es necesario ana_
Tizarlos porque producen las peores condiciones de trabajo durante la
falla, siendo muy conveniente conocer los límites del funcionamiento a_
normal.
Los tres tipos de cortocircuitos mencionados tienen un comportamiento
similar, ya que en el fondo es la respuesta de un sistema R-L en serie.
Asf, los transitorios que se producen luego de una de estas fallas tie_

- 50 -
nen la forma de la Fig. 2.1, en la que se puede distinguir una componen^
te de alterna, que varia sinusoidalmente con el tiempo, y una componen^
te continua que tiene una variación exponencial con el tiempo.
componente DC
FIG. 2.1 Corriente Transitoria de Cortocircuito.
La amplitud máxima de la corriente transitoria, el valor máximo de la
componente continua, el valor de estado permanente, el tiempo de atenua^
ción hasta el valor permanente de falla, etc., son diferentes para cada
tipo de falla, y más aún, lo son para cada instante de falla. Pero siem
pre el comportamiento es similar aunque los valores instantáneos sean
distintos.
Los componentes eléctricos de estado transitorio del estator se atenúan
más rápidamente que los del rotor, y estos dos lo hacen mucho más vio-
lentamente que los componentes mecánicos, razón por la cual generalmen-
te se asume una velocidad constante durante las fallas.
2.3 FUNCIONAMIENTO DE LA MAQUINA TRIFÁSICA CON ALIMENTACIÓN MONOFÁSICA
La máquina trifásica de inducción para su funcionamiento necesita tener

- 51 -
aplicado al estator un sistema de tres voltajes desfasados, que pueden
o no ser balanceados. Esto se puede conseguir en base a una fuente mp_
nofásica utilizando un condensador convertidor de fase, conectados cp_
mo se indica en la Fig. 2.2
(o) (b)
Fig. 2.2 Conexiones del Estator para Operación con Alimentación
Monofásica, (a) Conexión en Delta, (b) Conexión en
estrella.
En cualquiera de las dos formas de conexión, el motor se encuentra ope_
rando con conexiones asimétricas en los devanados, por lo tanto su estu^
dio es posible hacerlo mediante componentes simétricos.
Debido a la aparición de componentes de secuencia negativa se tendrá sj_
muarés efectos a los ya mencionados para los casos desbalanceados ante_
nórmente tratados.
Para la operación satisfactoria del motor de inducción alimentado con
una sola fase, es necesario escoger los condensadores que se usarán, en
el arranque y en estado estable, de tal forma que el efecto de las co-
- 52 -
rr i entes de secuencia negativa sea reducido al mínimo, para disminuir e_
fectos perjudiciales como son vibración, ruido, calentamiento, etc. Pa_
ra escoger los condensadores existen varios criterios: mínimo desbalan
ce, mínimo voltaje de secuencia negativa o voltaje de secuencia negati^
vo igual a cero.
En el Anexo # 2 se ha desarrollado el análisis para el criterio de ^
mo desbalance. De los resultados obtenidos se concluye que lo ideal se_
ría un condensador de variación continua, calibrado para cada valor de
deslizamiento, es decir, para cada valor de deslizamiento existe un co£
densador que produce el mínimo desbalance. Ahora bien, esto no es posj_
ble, razón por la cual, se puede usar un condensador para el arranque y
otro para estado estable, dando muy buenos resultados. La conmutación
de los condensadores debe hacerse cuando la velocidad sea alrededor del
80% de la velocidad nominal,
Se ha demostrado además, que escogiendo adecuadamente los condensadores A
de arranque y de estado estable, se puede tener un comportamiento trar^ \i torio y de estado estable muy similar al que se tendría con alimenta_
ción trifásica balanceada.
De esta manera, el motor trifásico de inducción puede ser alimentado de
una línea monofásica. Esto trae innumerables ventajas, por ejemplo, en
electrificación rural: generalmente en zonas alejadas y de difícil a£
ceso se tiene alimentación monofásica, entonces los usuarios deberán es_
coger entre motores monofásicos o motores trifásicos que usen un condejr•-«
sador convertidor de fase; si escogen el último tienen la ventaja que
cuando la demanda de la zona se amplíe, y se instale la red trifásica

- 53 -
podrán usar sus equipos sin ninguna modificación. Además, de estudios
realizados acerca del motor de inducción trifásico funcionando con a1i_
mentación monofásica, se ha llegado a la conclusión de que con una ade^
cuada selección de los condensadores de arranque y de estado estable,se
puede tener una potencia desarrollada del 70% de la potencia nominal.
Ahora bien, un motor monofásico puede desarrollar también el 70% de la
potencia que desarrollará un motor trifásico de las mismas dimensiones,
con la desventaja que el motor monofásico es más caro que el trifásico,
su construcción es más compleja y en todo sentido es mejor usar un mo-
tor trifásico que uno monofásico.
Otro ejemplo que se podrá dar de las ventajas de la conexión monofásica
es un conjunto de bombas de irrigación portátiles, que funcionan con mp_
tores trifásicos, entonces, independientemente del tipo de red existen-
te: trifásica o monofásica, podrán operar sin ningún problema en cuaj_
quiera de los casos.

- 54 -
C A P I T U L O III
PRUEBAS DE LABORATORIO
En el presente capítulo se describen los experimentos realizados y se
incluyen las fotografías obtenidas de los fenómenos transitorios analj^
zados; éstos últimos se utilizarán para verificar la validez del modelo
desarrollado.
Para las distintas pruebas se utilizó el motor de inducción localizado
en la Mesa N2 11 del Laboratorio de Máquinas Eléctricas de la Facultad
de Ingeniería Eléctrica de la Escuela Politécnica Nacional; este motor
tiene las siguientes características:
- Datos de placa: 2, CV
220/380 V
7/4.04 A
A/Y
4 polos
60 Hz
- Rotor intercambiable: - bobinado
- jaula de ardilla
En todos los experimentos se utilizó la conexión delta en el estator,se
utilizó también el rotor bobinado para poder conectar resistencias al
circuito del rotor, y no se conectó carga mecánica al eje de la máquina.
En el Anexo I 1 se encuentran las mediciones efectuadas para determinar

- 55 -
los parámetros de la máquina. Los valores finales, una vez realizados
los cálculos, son los siguientes:
r$ = 1.5 n
r¿ = 4.922 n
x.| = 5.81 n
x.js = 5.81 íl
xm = 104.785 ÍJ
H = 0.2235 seg.
Además, la velocidad en casi todas las pruebas se mantiene en un valor
aproximadamente constante de n = 1.770 r.p.m.
3.1 PRUEBAS DE LABORATORIO PARA OBTENER LOS OSCILOGRAMAS DE CORRIENTE,
VOLTAJE Y VELOCIDAD DURANTE LOS TRANSITORIOS
En los distintos experimentos realizados se obtuvieron los ^
logramas de los transitorios de voltaje, corriente y velocidad; no se
obtuvieron de otras variables como el torque, por ejemplo, por no tener
los instrumentos adecuados. Además, no se obtuvieron los oscilogramas
de las corrientes en las tres fases simultáneamente, por la limitación
de equipo.
La primera prueba realizada fue el arranque de la máquina con alimenta_
ción trifásica balanceada. Esta prueba se realizó para téneT^como
cia los transitorios que se producen en operación simétrica.
Los diagramas de control y de fuerza se indican a continuación.

- 56 -
señal deX
a—UMA
"o
C«Sm 1
g • t
Yu
X*TACOMETRO
señal develocidad
(a) (b)
FIG. 3.1 Circuitos de Control (a) y de Fuerza (b) para
Arranque en Condiciones Balanceadas.
Los voltajes aplicados fueron: Vab = Vbc = Vca = 208 V y los devanados
del rotor se cortocircuitaron.
De esta prueba se obtuvo la Fotografía #1, en la que se hallan el vol_
taje de línea y la corriente de línea, sensada a través de una resis^
teñe i a _de _L_Í2._ .ESCALAS
'ab
'La
.Vi: 500 V/div
H: 50 ms/div
V2: 20 A/div
FOTOGRAFÍA # 1
Arranque en condiciones balanceadas. Voltaje y corriente de línea.

- 57 -
Como puede observarse en la fotografía # 1, el voltaje es aplicado a
los terminales de la máquina con un ángulo de 0°, para la función cos£
no, dando una corriente de arranque cuya amplitud máxima es 40 A pico ,
o sea alrededor de 5.7 veces la corriente nominal, y una corriente en
estado estable de 4 A pico. La máquina tiene un tiempo de aceleración
de 0.4 seg., ya que la corriente y la velocidad se estabilizan al mi^
mo tiempo (3).
A continuación se presentan los experimentos y los resultados obtenidos
para los distintos casos considerados.
3.1.1 Arranque con Voltajes Desbalanceados
Para analizar los transitorios correspondientes a voltajes desbalancea_
dos se realiza un arranque con voltajes desbalanceados aplicados al e¿
tator, como ya se mencionó conectado en delta. Los devanados del rotor
se cortocircuitaron.
Para lograr los voltajes desbalanceados se insertan resistencias
bles en serie con el estator. El circuito de fuerza utilizado se en-
cuentra en la Fig. 3.2 y se utiliza el mismo circuito de control de la
Fig. 3.1 (a).
Se obtuvieron los siguientes voltajes desbalanceados, en estado estable:
Vab = 197 V' Vbc = 205 V' Vca = 198 V'

- 58 -
señal de corrienjte
común
TACÓME TRO
señal de voltaje
señal de velocidad
FIG. 3.2 Circuito de Fuerza para Arranque con Voltajes
Desbalanceados.
La señal de velocidad se obtiene de un tacómetro acoplado al eje de la
máquina; esta señal es rectificada y filtrada para luego ingresar al os
ciloscopio.
En esta prueba se obtuvieron dos fotografías: la primera contiene el
voltaje y corriente de línea y la segunda contiene el transitorio de la
velocidad.^ .!
ESCALAS
'ab
'La
Vi: 500 V/div
H: 0.1 s/div
V2: 10 A/div
FOTOGRAFÍA # 2
Arranque con Voltajes Desbalanceados.Voltaje y Corriente de línea.
- 59 -
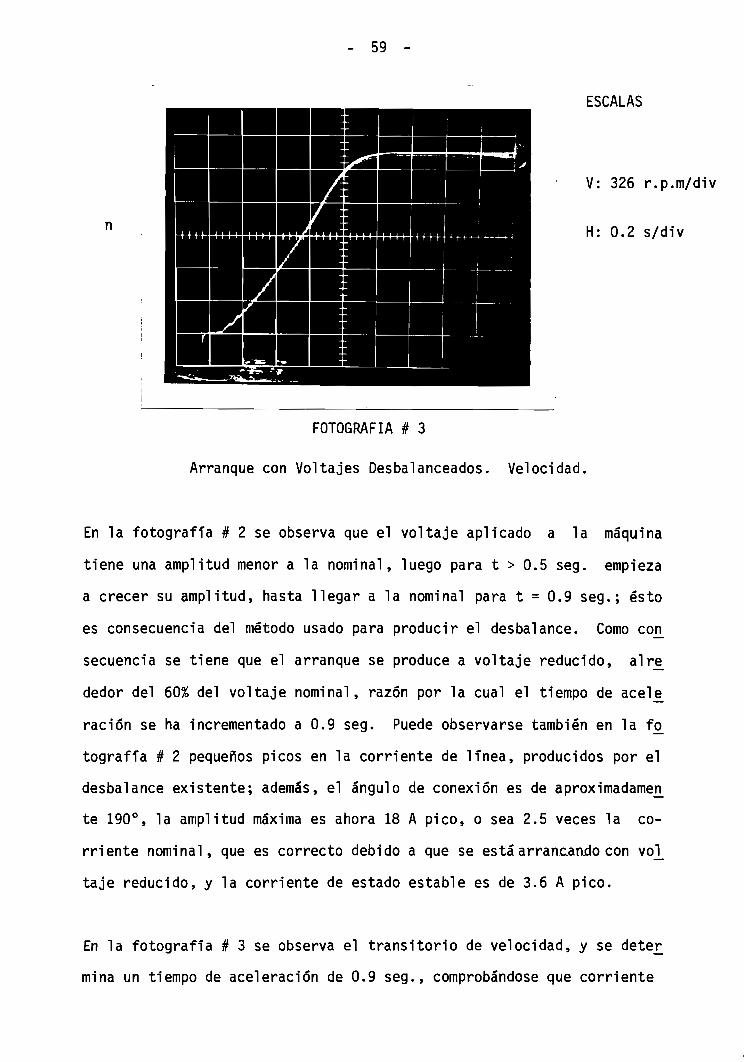
ESCALAS
V: 326 r.p.m/div
H: 0.2 s/div
FOTOGRAFÍA # 3
Arranque con Voltajes Desbalanceados. Velocidad.
En la fotografía # 2 se observa que el voltaje aplicado a la máquina
tiene una amplitud menor a la nominal, luego para t > 0.5 seg. empieza
a crecer su amplitud, hasta llegar a la nominal para t = 0.9 seg.; ésto
es consecuencia del método usado para producir el desbalance. Como cojí
secuencia se tiene que el arranque se produce a voltaje reducido, alre_
dedor del 60% del voltaje nominal, razón por la cual el tiempo de acele_
ración se ha incrementado a 0.9 seg. Puede observarse también en la fo
tografía # 2 pequeños picos en la corriente de linea, producidos por el
desbalance existente; además, el ángulo de conexión es de aproximadamer^
te 190°, la amplitud máxima es ahora 18 A pico, o sea 2.5 veces la co-
rriente nominal, que es correcto debido a que se está arrancando con voj
taje reducido, y la corriente de estado estable es de 3.6 A pico.
En la fotografía # 3 se observa el transitorio de velocidad, y se deter^
mina un tiempo de aceleración de 0.9 seg., comprobándose que corriente

- 60 -
y velocidad se estabilizan.al mismo tiempo. Además, se notó que la ve^
locidad era oscilante aunque esto no pudo fotografiarse.
3.1.2 Arranque con resistencias rotóricas desiguales
Esta prueba se realiza aplicando voltajes balanceados al estator y c£
nectando resistencias desiguales al circuito del rotor, conectado en es
trella.
El circuito de control y el circuito de fuerza del estator son los mis^
mos de la Fig. 3.1 (a y b), mientras que el circuito del rotor se pone
a continuación:
señal decorriente de rotor
comuí
FIG. 3.3 Arranque con Resistencias Rotóricas Desiguales.
Circuito de Rotor.
Donde R , R^, R son las resistencias externas conectadas al rotor y
sus valores son:

- 61 -
R = i.o nel
Rb = 0.5 Í2
R = 0.5 ííC
El voltaje de línea aplicado es de 205 V, para todas las líneas.
De esta prueba se obtuvieron fotografías del voltaje de línea, la co-
rriente de línea, velocidad y.la corriente de fase del rotor, medida a
través de la resistencia RC-
'ab
'La
ESCALAS
Vi: 500 V/div
H: 50 ms/div
V2: 20 A/div
FOTOGRAFÍA # 4
Arranque con resistencias rotóricas desiguales. Voltaje
y corriente de línea.

- 62 -
ESCALAS
V: 326 r.p.m./div
H: 0.1 s/div
FOTOGRAFÍA # 5
Arranque con Resistencias Rotóricas Desiguales. Velocidad.
'ab
cr
ESCALAS
Vi: 500 V/div
H: 50 ms/div
V2: 20 A/div
FOTOGRAFÍA # 6
Arranque con Resistencia Rotóricas Desiguales.
Voltaje de línea y corriente de fase del rotor.

- 63 -
Es necesario anotar que las fotografías 4 y 5 fueron simultáneamente tp_
madas, mientras que la # 6 no lo fue; esta última se efectuó en otro
instante, pero como se obtuvo un similar ángulo de conexión, puede asu-
mirse que las tres son simultáneas.
En la fotografía # 4 se observa que el ángulo de conexión es aproximada^
mente -60°, al igual que en la fotografía #6. Se obtiene una corrien-
te máxima de 38 A pico, aproximadamente 5.5 veces la corriente nominal,
mientras que la corriente en estado estable es 4.8 A pico; se observa a_
demás pequeños picos de corriente durante la aceleración, producto del
desbalance. El tiempo de aceleración es aproximadamente 0.45 seg., es_
to se observa tanto en la fotografía # 4 como en la # 5.
Así, se observa que el pico máximo de corriente ha disminuido con rela_
ción al caso balanceado (Fotografía # 1), la corriente en estado esta -
ble ha aumentado y el tiempo de aceleración ha aumentado. Todo esto
concuerda con la teoría, ya que, sin importar el desbalance, al inse_r
tar resistencias rotóricas debíam producirse esas variaciones.
En la fotografía # 6 se observa la corriente de rotor en la fase "c", y
se puede decir que la amplitud máxima es de 48 A pico, el tiempo de ace_
leración también es 0.45 seg. y es el tiempo en el cual se estabiliza
la corriente. Hay que notar también que la señal de corriente del ro-
tor tiene una frecuencia variable; ésta va disminuyendo conforme acele-
ra la máquina ya que la frecuencia de los componentes del rotor es T_
gual al deslizamiento por la frecuencia de los componentes del estator,
y como en el arranque el deslizamiento es decreciente, se tendrá que la
frecuencia de la corriente del rotor lo es también.

- 64 -
Debido al desbalance existente, se puede ver picos que sobresalen de la
envolvente promedio, tanto en la corriente del estator como del rotorjes^
tos picos desaparecen al llegar al estado estable, pero en la corrien-
te del rotor se mantienen oscilaciones, de pequeña magnitud y de mayor
frecuencia que la del estator, sobre la componente fundamental.
3.1.3 Arranque con resistencias rotóricas desiguales y voltajes desba-
lanceados
En esta prueba se combinan las condiciones desbalanceadas de los dos ex^
perimentos anteriores. De esta forma, el diagrama de fuerza del circuj_
to del estator es el mismo de la Fig. 3.2, el circuito del rotor es el
de la Fig. 3.3 y el circuito de control el de la Fig. 3.1 (a).
Los voltajes desbalanceados en estado estable para esta prueba fueron
Vac = 199 V, V. w = 207 V y V_. = 194 V; las resistencias rotóricas:35 DV Ca
Ra = 1 fl, RK = 0.5 Q y R^ = 0.5 fl.u. U C
Las fotografías tomadas corresponden a voltaje y corriente de línea, ve_
locidad y corriente de fase del rotor.
En la fotografía # 7 puede observarse el voltaje aplicado al estator,
éste tiene el comportamiento descrito ya en la sección 3.1.1, para
t < 0.3 seg. la amplitud es el 60% de la nominal, empieza a aumentar en
t = 0.3 seg. y llega al valor nominal para t = 0.7 seg. Como consecuejí
cia la máquina se arranca con voltaje reducido, ocasionando un tiempo de
aceleración de alrededor de 0.8 seg., valor que se puede comprobar en
la fotografía # 8.

- 65 -
'ab
'La
ESCALAS
Vi: 500 V/div
H: 0.1 s/div
V2: 10 A/div
FOTOGRAFÍA # 7
Arranque: voltajes y resistencias rotóricas desbalanceados.
Voltaje y corriente de línea.
ESCALAS
V: 326 r.p.m./div
H: 0.2 s/div
FOTOGRAFÍA # 8
Arranque: Voltajes y Resistencias Rotóricas
Desbalanceadas. Velocidad.
- 66 -
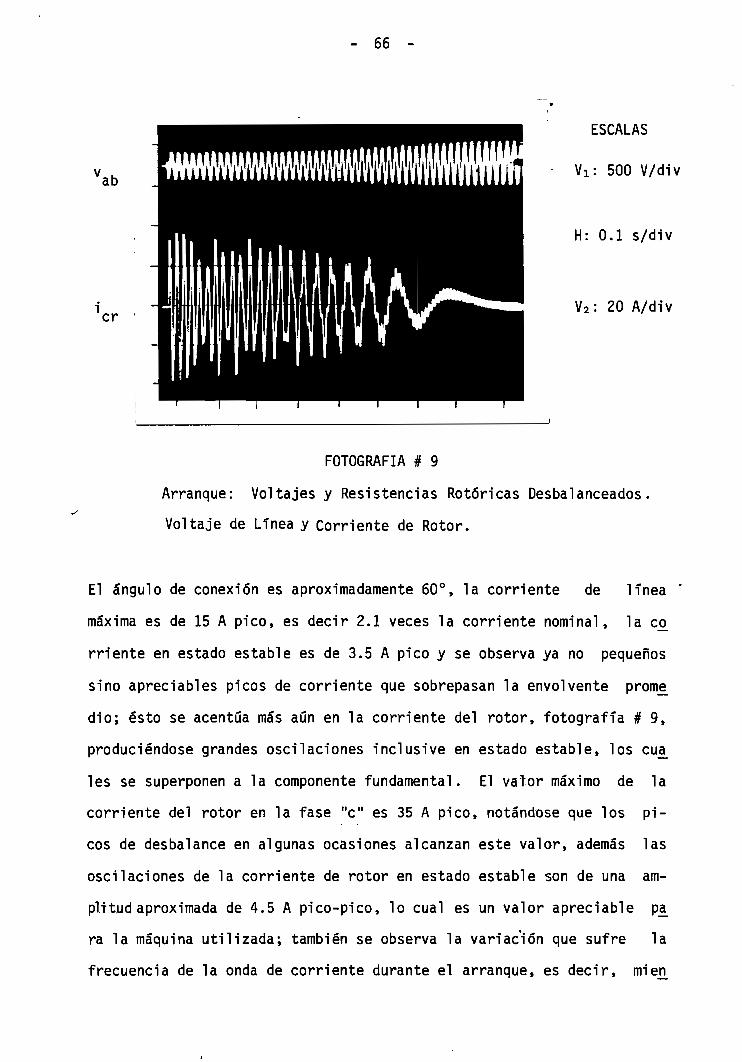
'ab
cr
ESCALAS
Vi: 500 V/div
H: 0.1 s/div
V2: 20 A/div
FOTOGRAFÍA # 9
Arranque: Voltajes y Resistencias Rotóricas Desbalanceados
Voltaje de Linea y Corriente de Rotor.
El ángulo de conexión es aproximadamente 60°, la corriente de linea
máxima es de 15 A pico, es decir 2.1 veces la corriente nominal, la co
rriente en estado estable es de 3.5 A pico y se observa ya no pequeños
sino apreciables picos de corriente que sobrepasan la envolvente pronie_
dio; ésto se acentúa más aún en la corriente del rotor, fotografía # 9,
produciéndose grandes oscilaciones inclusive en estado estable, los cua_
les se superponen a la componente fundamental. El vaíor máximo de la
corriente del rotor en la fase "c" es 35 A pico, notándose que los pi-
cos de desbalance en algunas ocasiones alcanzan este valor, además las
oscilaciones de la corriente de rotor en estado estable son de una am-
plitud aproximada de 4.5 A pico-pico, lo cual es un valor apreciable pa^
ra la máquina utilizada; también se observa la variación que sufre la
frecuencia de la onda de corriente durante el arranque, es decir, mi en

- 67 -
tras disminuye el deslizamiento.
Hay que anotar además, que se observó una oscilación en la velocidad en
estado estable pero esto no pudo fotografiarse ni medirse.
Por (31 timo, es necesario indicar que las fotografías 7 y 8 son simultá-•
neas mientras que la # 9 no lo es, pero se considera que si lo es debi^
do a que el ángulo de conexión es muy similar.
3.1.4 Falla fase-tierra
Esta prueba fue realizada partiendo del estado estable balanceado; se a
rrancó la máquina con voltajes balanceados y una vez estabilizado su
funcionamiento se produjo la falla. Esto mediante los circuitos de cor[
trol y de fuerza de la Fig. 3.4 que están diseñados de forma que, prime
ramente se desconecta la fase "a" y luego se la conecta a tierra,
tando así un cortocircuito en la alimentación.
D| F^
l c
1=
1
i
corrienteC2
» i > £ Q*^
• <f o — «r*
1 * r-*c, 1 c.
2
C2 id
1
común *-1A
A/VA ,
setfol «_
^ d?. ,voltaje
>
>
TACOMETRO
serial de velocidad
(a) (b)
FIG. 3.4 Circuitos de Control (a) y de Fuerza (b) para producir
Falla de una Fase a Tierra.

- 68 -
Los voltajes aplicados son : Vab = Vbv = Vca = 208 V; los devanados del
rotor se cortocircuitan.
En esta prueba se tomaron fotografías del voltaje y corriente de línea,
no se tomó de la velocidad debido a que no se aprecia su variación du-
rante el instante de falla.
'ab '
'La
FOTOGRAFÍA # 10
Falla Fase-Tierra
Voltaje y Corriente de Línea
ESCALAS
Vi: 500 V/div
A: 50 ms/div
V2: 10 A/div
En la fotografía # 10 se observa el voltaje de línea y la corriente de
línea. El ángulo al cual se produce la falla es aproximadamente -60°,
observándose que luego de ésta el voltaje decrece al 60% de un valor n<o
minal, igual comportamiento tiene el voltaje V _ _ , mientras que el voltaCa —
je Vbc se mantiene constante; desafortunadamente no es posible medir en
las tres fases a la vez.

- 69 -
La corriente en la línea "a" tiene un brusco incremento en el instante
de falla, alcanzando un valor de 30 A pico, o sea 4.3 veces la corrí ein_
te nominal, luego de lo cual tiene una rápida estabilización, unos tres
ciclos más o menos, para llegar a un valor de estado estable de 10 A pi_
co.
Como ya se indicó, la velocidad no tuvo una variación notable, pero se
midió el valor de 1.730 r.p.m. para estado estable durante la falla. A_
demás se notó una oscilación que no se pudo cuantificar.
3.1.5 Falla de dos Fases a Tierra
Como en el caso anterior, en esta prueba se parte del estado estable ba^
lanceado, luego de lo cual se produce la falla. Con el mismo criterio
de la prueba anterior se diseñaron los circuitos de control y de fuer-
za. Es así, que se usa el mismo circuito de control de la Fig. 3.4 (a),
mientras que el circuito de fuerza se encuentra en la Fig. 3.5
señal
B
de co. *—rriente
Í ^__1 —
c»
c2
~wm
—\— i
i AA/U 1 /IVV * \/
/U
•1
ymn
• efiaU-
' — \\' \
de voltaje
W/ff/ff/ señal de velocidad
FIG. 3.5 Circuito de Fuerza para Producir Falla de Dos Fases a Tierra.

- 70 -
Los voltajes aplicados son: V b = Vbc = Vca = 208 V y los devanados
del rotor se cortocircuitan.
Se tomaron fotografías de voltaje y corriente de línea, y además de la
velocidad, que esta vez si fue sensible su variación.
'ab
'La
FOTOGRAFÍA # 11
Falla de dos fases a tierra.
Voltaje y corriente de línea.
ESCALAS
Vi: 500 V/div
H: 50 ms/div
V2: 20 A/div
En la fotografía # 11 se observa el voltaje y la corriente de línea; se
puede decir que el ángulo de falla es 120°, tras lo cual el voltaje vab
debería ser cero, cosa que no ocurre debido a que existen pequeños voj
tajes inducidos. En las otras fases se tendrá en cambio- voltajes redu^
cidos, aproximadamente el 60% del valor nominal.
La corriente de la línea "a", que es la fotografiada tiene un pico máxi-

- 71 -
mo de 34 A aproximadamente, o sea 4.9 veces la corriente nominal; se es_
tabiliza rápidamente, también lo hace en unos 3 ciclos, y llega a un
valor permanente de 11 A pico aproximadamente.
ESCALAS
V: 326 r.p.m./div
• H: 0.2 s/div
FOTOGRAFÍA # 12
Falla de Dos Fases Tierra
Velocidad
En la fotografía # 12 se puede ver la variación que sufre la velocidad
al producirse la falla; su valor decrece hasta aproximadamente 1.580
r.p.m.,notándose oscilación como en varios casos anteriores.
3.1.6 Falla Trifásica cuando existen Resistencias Rotóricas Iguales
En forma similar a las dos pruebas anteriores, esta prueba se realizó
asf: se arrancó a la máquina con voltajes y resistencias rotóricas ba^
lanceadas, una vez alcanzado el estado estable se produjo la falla. Los

- 72 -
circuitos de control y de fuerza utilizados se ponen a continuación:
c señal decorriente*"
TACOMETRO
(a)señal de velocidad
(b)
FIG. 3.6 Circuitos de Control (a) y de Fuerza (b) para produ
cir Falla Trifásica.
Los voltajes aplicados son V . = V. = V = 208 V.3D DC ca
El circuito de rotor está en la Fig. 3.3 y para este caso los valores
de las resistencias rotóricas son: Ra = R. = R = 0.5 fi.d D C
Se obtuvieron fotografías de voltaje y corriente de línea, velocidad y
corriente de fase del rotor.
En la fotografía # 13 se tiene el voltaje y la corriente de línea; se
observa que la falla no se produce instantáneamente, sino que existe un
pequeño tiempo en el cual las 3 fases están desconectadas, para luego
cortocircuitarse; esto se produce por la forma de conexión del circuito

- 73 -
'ab
'La
FOTOGRAFÍA # 13
.Falla Trifásica: Resistencias Rotóricas Iguales
Voltaje y Corriente de Línea
ESCALAS
Vi: 500 V/div
H: 20 ms/div
V2: 10 A/div
ESCALAS
V: 360 r.p.m./div
H: 0.1 s/div
FOTOGRAFÍA # 14
Falla Trifásica: Resistencias Rotóricas Iguales
Velocidad

- 74 -
de fuerza. [Fig. 3.6 (b)]. Se puede decir que el ángulo de falla es
aproximadamente -65°, tras lo cual viene un pequeño período de desco-
nexión y luego se produce el cortocircuito, ocasionando un voltaje de
línea igual a cero. La corriente de línea alcanza un valor máximo de
17 A pico, estabilizándose rápidamente en un valor igual a cero; en el
transitorio de la corriente se observa más claramente el pequeño inte£
val o de desconexión de las fases. Además, se puede ver una corriente
de 4 A pico en estado estable.
ESCALAS
vab UiKfJ^^^^^^^^^^^^^S Vi: 50° V/d1v
H: 20 ms/div
icr -K^Mti^^^^^^MHHi V , : 1 0 A / d i v
FOTOGRAFÍA # 15
Falla Trifásica: Resistencias Rotóricas Iguales
Voltaje de línea y corriente de Fase del Rotor.
En la fotografía # 14 se tiene el transitorio de la velocidad durante
la falla. En el intervalo muestreado se observa un decrecimiento pro-
gresivo; partiendo de la velocidad de 1.770 r.p.m. en estado estable.se
llega al valor de 1.580 r.p.m. para un tiempo t = 0.9 seg. Posterior -

- 75 -
mente la máquina llegará a detenerse.
En la fotografía # 15 se tiene el voltaje de línea y la corriente en la
fase "c" del rotor; al igual que en la fotografía # 14 se observa el iji
tervalo de desconexión y luego se tiene el cortocircuito. La corriente
del rotor tiene un valor máximo de 21 A pico y se estabiliza rápidamen-
te en un valor cero.
Al igual que en casos anteriores, se ha asumido que las fotografías 13,
14 y 15 son simultáneas, aunque la # 15 en realidad no lo sea.
3.1.7 Arranque con alimentación Monofásica Usando un Condensador Con-
vertidor de Fase
Esta prueba se efectuó de la siguiente manera: se conecta alimentación
monofásica a las dos fases del estator y entre las otras dos se conectó
un banco de condensadores que actuarán como convertidor de fase; hay que
anotar, además que se realiza la conmutación del condensador de arran-
que al de estado estable una vez que la máquina ha alcanzado una veloci^
dad cercana a la nominal. Los circuitos de control y de fuerza utiliza^
dos se indican en la figura 3.7.
De acuerdo con la teoría desarrollada en el Capítulo II, la conmutación
del condensador de arranque al condensador de estado estable debe hacer^
se cuando la velocidad alcance un valor igual al 80% del valor nominal,
debiéndose usar un interruptor centrífugo para el efecto. En la prácti_
ca en lugar del citado interruptor se usó un relé de tiempo, calibrado
para que produzca la conmutación aproximadamente en ese valor de veloci_

- 76 -
dad.
El voltaje aplicado fue 2 08 V, los condensadores de arranque Ci=287 yF
y de estado estable €2 = 20 yF, y los devanados del rotor cortocircuito
dos.
Con el circuito de la Fig. 3.7 (b) se obtuvieron fotografías de voltaje
aplicado, corriente de línea y de velocidad.
'ab
FOTOGRAFÍA # 16
Arranque: Alimentación Monofásica
Voltaje y Corriente de Línea
ESCALAS
Vi: 500 V/div
H: 0.1 s/div
V2: 20 A/div
En la fotografía # 16 se observa los transitorios de voltaje aplicado y
de corriente de línea. Se puede decir que el ángulo de conexión es ce£
cano a 0°, observándose además una disminución del voltaje aplicado, d£
bido a la caída en la resistencia de 1 Sí utilizada para tomar la señal

- 77 -
de corriente; por lo tanto en realidad se tiene el 93% del voltaje nomj_
nal entre t = 0yt = 0.6 seg., tiempo al cual la amplitud empieza a
crecer hasta llegar al valor nominal en t = 0.67 seg.
ESCALAS
V: 326 r.p.m./div
H: 0.2 s/div
FOTOGRAFÍA # 17
Arranque: Alimentación Monofásica
Velocidad
En lo que respecta al transitorio de corriente puede decirse que tiene
una forma muy parecida al que se obtiene con alimentación trifásica ba^
lanceada, existiendo diferencias en cuaqto a magnitudes se refiere. Así,
la corriente máxima es de aproximadamente 46 A pico, 6.6 veces la nomi^
nal, mientras que el tiempo de aceleración es de 0.7 seg más o menos,
valor que puede verificarse en la fotografía # 17. La corriente en es-
tado estable alcanza un valor de 6 A pico más o menos, que es mayor al
valor obtenido para alimentación trifásica balanceada.
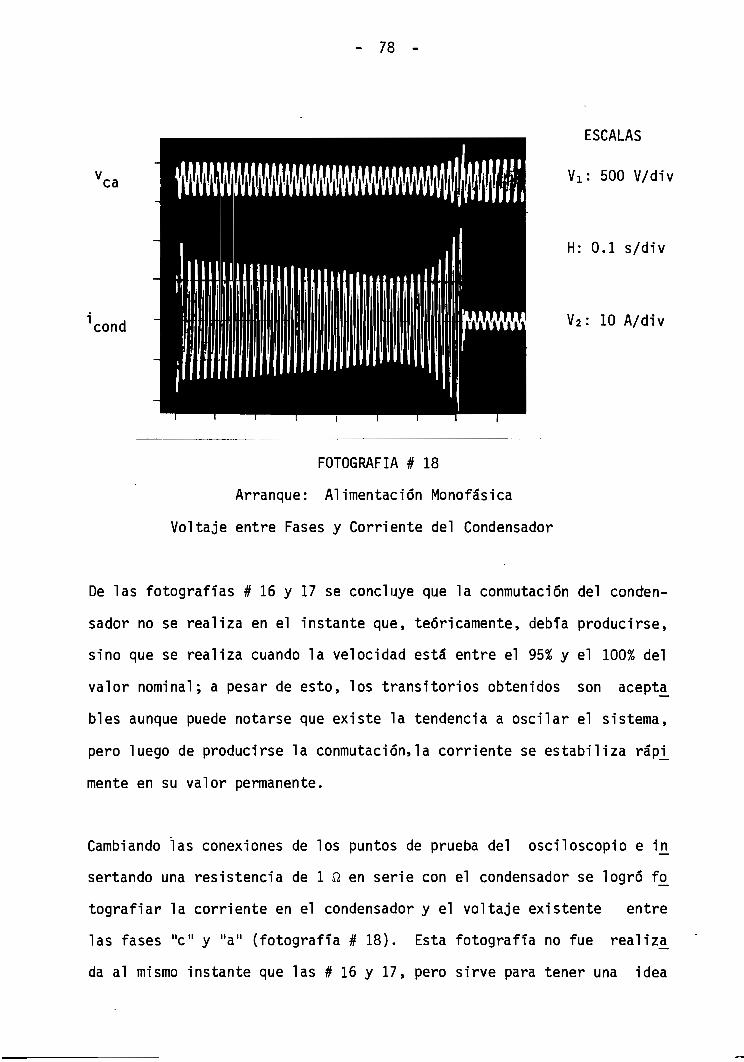
- 78 -
ca
cond
ESCALAS
Vi: 500 V/div
H: 0.1 s/div
V2: 10 A/div
FOTOGRAFÍA # 18
Arranque: Alimentación Monofásica
Voltaje entre Fases y Corriente del Condensador
De las fotografías # 16 y 17 se concluye que la conmutación del conden-
sador no se realiza en el instante que, teóricamente, debía producirse,
sino que se realiza cuando la velocidad está entre el 95% y el 100% del
valor nominal; a pesar de esto, los transitorios obtenidos son acepta_
bles aunque puede notarse que existe la tendencia a oscilar el sistema,
pero luego de producirse la conmutación,la corriente se estabiliza rápj_
mente en su valor permanente.
Cambiando las conexiones de los puntos de prueba del osciloscopio e ™
sertando una resistencia de 1 ñ en serie con el condensador se logró fo
tografiar la corriente en el condensador y el voltaje existente entre
las fases "c" y "a" (fotografía #18). Esta fotografía no fue realiza^
da al mismo instante que las # 16 y 17, pero sirve para tener una idea

- 79 -
del comportamiento en las otras fases de la máquina.
En la fotografía # 18 se puede observar que el voltaje v^_ para t = Oca
es cero, y con el tiempo varía en forma sinusoidal, variando su ampli-
tud entre el 70% y el 60% del valor nominal. Se nota que empieza a cre_
cer violentamente, cuando el sistema tiende a oscilar, más, luego de la
conmutación se estabiliza en un valor cercano al 90% del valor nominal.
El transitorio de corriente en el condensador tiene un valor máximo de
20 A pico para los primeros ciclos, luego empieza a disminuir, pero c£
mo la conmutación no se realiza en el instante adecuado (wr = 0.8 o>s) ,
la corriente empieza a crecer violentamente, alcanzando picos de 25A,
para estabilizarse luego de la conmutación en un valor de 2.5 A pico .
En el transitorio de la corriente en el condensador se observa más fá-
cilmente la tendencia a oscilar que se produce cuando no se conmuta a
tiempo de condensadores.
C|
bol
cl
(a)
señal de conten»!te'
TACO ME TRO
señal de velocidad
FI6. 3.7 Circuitos de Control (a) y de Fuerza (b) para arranque
con alimentación monofásica.

- 80 -
C A P I T U L O I V
SIMULACIÓN MATEMÁTICA
Una vez desarrolladas las ecuaciones generales de la máquina de indu£
ción, incluida la saturación, ec. (1-19). (1.76), (1.89) y (1.94), las
mismas que rigen su comportamiento eléctrico y mecánico, corresponde
ahora, desarrollar las ecuaciones que'representen el funcionamiento de
la máquina bajo condiciones especiales como son: voltajes aplicados
desbalanceados, resistencias rotóricas desiguales, fallas de 1 y 2 fa^
ses a tierra, falla trifásica y alimentación monofásica usando un con-
densador como convertidor de fase.
4.1 ECUACIONES PARA OPERACIÓN ASIMÉTRICA O)
Los distintos casos considerados serán simulados exteriormente, tomando
como variables de entrada los voltajes aplicados de Terse, y como varia-
bles de salida se tiene voltajes, corrientes, torque y velocidad. Se
brinda además, la facilidad de programar la ecuación del torque de ca_r
ga en función de la velocidad. Enfocado así el problema, desde el exte^
rior, la simulación de los distintos casos está dada por la adecuada re^
presentación de los voltajes de estator como de rotor, variables que de^
berán ser referidas al sistema de ejes q d o.
Hay que recordar que debido al tipo de conexión utilizado, sin neutro ,
no existen componentes de secuencia cero, situación ya explicada en el
Capítulo I.


- 81 -
Como primer caso se realiza el desarrollo de las ecuaciones de voltaje
para cuando los voltajes aplicados son balanceados.
4.1.1 Voltajes Balanceados (i)
En condiciones balanceadas los voltajes instantáneos aplicados por fase
(vac> vhc> v^«-) son conocidos, ya sea para la conexión del estator enao DS CS
delta como en estrella. Además, la forma de los voltajes aplicados, re_
feridos al sistema de ejes q d o, está determinada por la referencia es_
cogida, éstos deben ser adecuadamente desarrollados. Los sistemas de
referencia considerados son:
a) Sistemas fijo en estator, w = O
b) Sistema fijo en rotor, to = uy
c) Sistema girando a la velocidad sincrónica, to = o>
Aplicando las ecuaciones de transformación Cl.181 a los voltajes aplica_
dos se tiene:
o«
vas cos e + vbs Ccos e ' T } + vcsCcos e + T1
'ds vas sen 8 + vbs(sen 9 - -y-1 + vcstsen e + -yl C4.1).
Se escoge, por facilidad, el sistema de ejes fijos en estator, o sea,
oí = O y por tanto 6 = 0; luego de simplificar se obtiene:
s = ( . v vqs v as bs

- 82 -
vdsS = — (-vbs + vcs) (4.2)/T
De esta forma se ha obtenido los voltajes en ejes q d o para el caso de
referencia estatórica, y en base a éstos se puede fácilmente obtener
los voltajes para los casos de referencia rotórica y referencia sincr£
nica. Así, utilizando relaciones trigonométricas en la Fig. 1.2 se ll£
ga a los siguientes resultados:
cos 9r - vds sen 9r
cos 9r
C°S 9e - Vds sen 9e
sen 6e + vds cos 9e
Resumiendo: para cualquier sistema de referencia y para cualquier co-
nexión del estator, se calcula los voltajes v s y v . s mediante las
ec. (4.2), y luego, de acuerdo al sistema de referencia escogido se cal_
cula los correspondientes voltajes aplicados mediante las ec. (4.3) o
(4.4).
Para condiciones balanceadas es posible realizar algunas simplificacio-
nes en las ec. (4.2), (4.3) y (4.4), pero éstas no se hacen en la pre-
sente modelación ya que se quiere generalizar para cualquier tipo de
voltajes aplicados.

- 83 -
Es necesario indicar que en el programa digital desarrollado, se tiene
que las corrientes calculadas son las de línea para la conexión delta y
las de fase para la conexión estrella; en igual forma los voltajes para
conexión delta será los de fase y para conexión estrella, los de. línea.
4.1.2 Voltajes Desbalanceados CJ)
En este caso debe considerarse los dos tipos de conexión en el estator:
en delta o en estrella.
12 Si el estator está conectado en delta, se tiene como datos los
jes de alimentación de línea, Fig. 4.1, que serán igual a los volta^
jes aplicados de fase.
"e l
FIG. 4.1 Estator Conectado en Delta.
Así, vas = vab
'bs = vbeV = Ves ca
(4.5}

- 84 -
Una vez conocidos estos voltajes, se transforma al sistema de ejes
q d o aplicando las ec. (4.2) y luego las ec. (4.3) o (4.4) de a-
cuerdo a la referencia escogida.
2- Cuando el estator está conectado en estrella se necesitan conocer
los voltajes fase-neutro de alimentación (ega, egb, egc), Fig. 2.2,
de donde se puede obtener los voltajes de fase aplicados.
íes
go
i os
FIG. 4.2 Estator Conectado en Estrella.
Así,
v = e - vas ga ng
vbs = egb - vngv = e - ves ge ng (4.6)
reemplazando en las ec. (4.2) se obtiene, sin importar la forma de los
voltajes de alimentación:
qs
'ds
2_
3
1
2 "ge'
(4.7)

- 85 -
y, como en el caso anterior, dependiendo del sistema de referencia escp_
gido, se aplica las ec. (4.3) o (4.4).
Una vez hecho el desarrollo general, conviene describir el procedimiento
usado para la simulación de los voltajes aplicados en los ejemplos rea_
Tizados. Así, para los ejemplos en los cuales se tiene alimentación trj_
fásica desbalanceada se sigue el proceso:
1) Se calcula los fasores de voltaje, en base a los datos obtenidos
' vbc en estac'0 estable.
2) Debido a la forma de conexión de las resistencias usadas para prodi[
cir los voltajes desbalanceados, se tiene una amplitud variable con
el tiempo para los voltajes aplicados, de acuerdo al siguiente
fico:
-v.
-v.
FIG. 4.3 Voltajes Aplicados Desbalanceados (Envolvente).
Se define una variable KO, función del tiempo, Fig. 4.4, que multiplica
rá al módulo de los voltajes aplicados, para obtener las envolventes fp_
tografiadas.
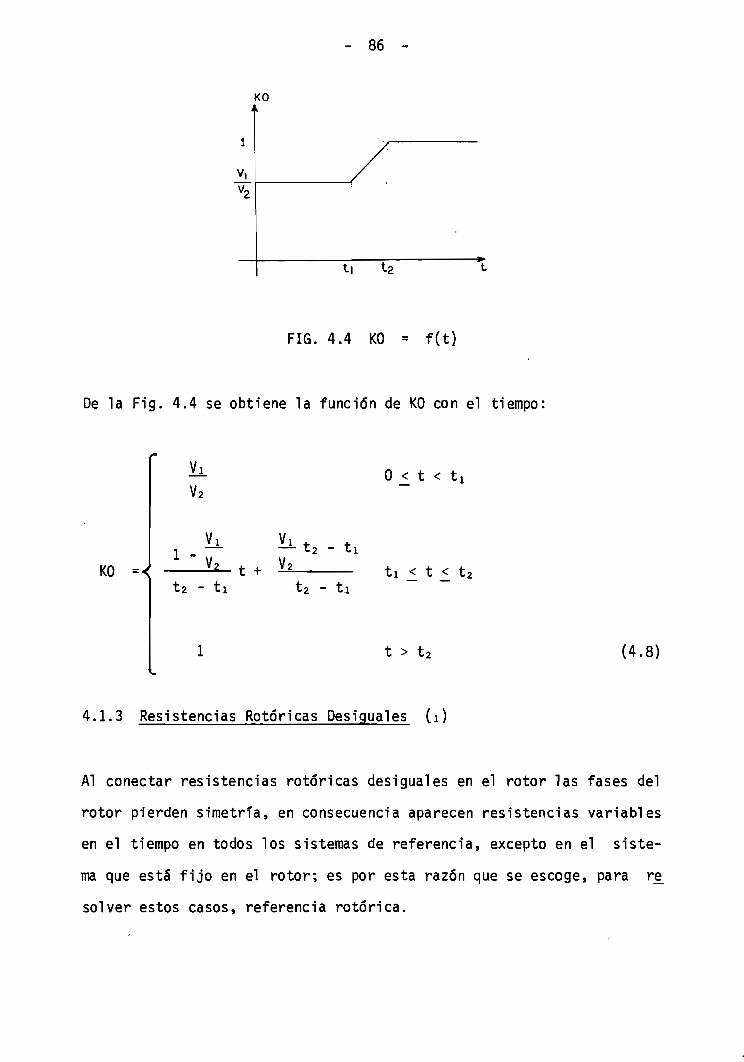
- 86 -
KO
ti t2
FIG. 4.4 KO = f(t)
De la Fig. 4.4 se obtiene la función de KO con el tiempo:
KO =<
V2O < t < ti
1 -Ju- t2 - ti
- ti t2 -
ti < t < tj
t > t2
4.1.3 Resistencias Rotóricas Desiguales (i)
(4.8)
Al conectar resistencias rotóricas desiguales en el rotor las fases del
rotor pierden simetría, en consecuencia aparecen resistencias variables
en el tiempo en todos los sistemas de referencia, excepto en el siste-
ma que está fijo en el rotor; es por esta razón que se escoge, para re_
solver estos casos, referencia rotórica.

- 87 -
br
icr
or
FIG. 4.5 Circuito del Rotor.
En la Fig. 4.5 se presenta el circuito del rotor para el caso considera^
do, y de ésta se pueden obtener los voltajes de fase aplicados al rotor:
v' = v' - i' R'ar pm ar a
\ ' = u' _ i ' O'vbr vpm V Rb
v' = v' - i' R'cr pm cr c (4.9)
Aplicando a las ec. (4.9) las ecuaciones de transformación (1.18) y to
mando como ya se había dicho, w = u y 9 = 0 , se obtiene:
v' ' Jár Ra Rb + '¿r
'di 4 Ii br
I DI
cr Rc (4.10)
Para las corrientes se aplica las ecuaciones de transformación inversa
(1.23):

- 88 -
,, _ 1 i, r /3" ..rV ~ ' 9 V " , V
i ' - H ' + i ' ^ (&. 1 "Hncr nar nbr; I4.li;
Reemplazando las ec. (4.11) en las ec. (4.10) se llega a los siguientes
resultados:
Rb + R¿) 1Í - (Rb - RC> 1d
•dr - - T (Rb - Rc> V - \Rb + R¿> 1¿ O-"'
Es conveniente anotar que los valores de las resistencias rotóricas me_
di das deben ser referidas al estator mediante la relación de espiras; a
sí:
Ra -
Rb
R' = a2 Rr (4.13)C C
donde "a" es la relación de espiras, calculada en el Anexo # 1, miejí
tras que R3, RK y R,, son los valores medidos de resistencia, en p.u.d U C

- 89 -
4.1.4 Voltajes Desbalanceados y Resistencias Rotóricas Desiguales (i)
A pesar que este caso muy rara vez ocurre, es simulado fácilmente debj_
do a la generalidad de la modelación.
Para esto se fija el sistema de ejes en el rotor, w = u y 9 = 9 .
A continuación se calcula los voltajes aplicados al estator, mediante
el procedimiento descrito en la sección 4.1.2, tomando en cuenta el sis^
tema con referencia rotórica. Luego se calcula los voltajes aplicados
al rotor, a través de las ec. (4.12) y tomando en cuenta las ecuaciones
(4.13).
Se observa que este caso es la combinación de los 2 anteriores, por lo
tanto es necesario tener en cuenta las consideraciones hechas en cada
caso.
4.1.5 Fallas
'~ Dentro de este caso se va a tomar las dos
mas de conexión del estator: delta y estrella
a) Para conexión delta en estator, basándose en la Fig. 4.6:

- 90 -
Tierra
FIG. 4.6 Falla Fase-Tierra
Estator Conectado en Delta
Se asume que en la fase "a" se produce la falla y que la máquina está
conectada a una barra infinita. De esta manera, los voltajes aplicados
a las fases "a" y "c" seránahora los voltajes de fase, mientras que el
voltaje de la fase "b" se mantiene como el voltaje de línea. Esto se iji
dica en el siguiente diagrama fasorial:
co
o —» N
FI6. 4.7 Diagrama Fasorial de Voktajes Aplicados Durante
Falla Fase-Tierra (Conexión Delta).
V =» «K» V. representan los voltajes aplicados antes de la fallaa U C
V', V.1, V' representan los voltajes aplicados luego de la fallau iJ v*

- 91 -
Entonces:., _ vabab rr 30C
VVbc
Vca
= Vbe
ca/T
-30C (4.14)
En el modelo implementado se puede escoger el instante al que se prod£
ce la falla: ya sea directamente, ingresando ese valor de tiempo o en
forma indirecta, ingresando el valor del ángulo al cual se produce la
falla; en este último caso se dibujan 2 ciclos de estado estable pre-
vios a la falla.
b) Para la conexión estrella en el estator se toma la Fig. 4.8.
go
Tierra
FIG. 4.8 Falla Fase-Tierra.
Estator Conectado en Estrella.
Se considera igualmente que en la fase "a" se produce la falla y que la

- 92 -
máquina está conectada a una barra infinita. De esta forma, los volta^
jes en cada fase serán:
v = - vas ng
vbs = e g b- v ng
vcs = egc * vng
Así, se puede proporcionar como datos, al modelo, los siguientes valo
res:
egb = egb
egc - egc
en donde e,,,, e., enf, son los voltajes fase neutro de alimentación anga go ge —tes de la falla y respectivamente e' , e'K, e' luego de la falla.ga gu ge
2) Falla_de_2 Fases-Jierra.- Se considera igualmente las 2 formas de
conexión del estator.
a) Conexión en delta: se asume que la falla se produce en las fa_
ses "a" y "b". Tomando como referencia la Fig. 4.6, se puede
ver que los voltajes aplicados a las fases "b" y "c" serán aho
ra los voltajes de fase, mientras que el voltaje aplicado a la

- 93 -
fase "a" será igual a cero. Esto se muestra en el siguiente diagrama
fasorial.
o,b —fc N
V'ab--0
FIG. 4.9 Diagrama Fasorial de Voltajes Aplicados Durante Falla
2 Fases-Tierra (Conexión Delta).
Entonces:
Vvbc
Vca /T
30C
-30C (4.17)
b) Conexión en estrella: se asume que las fallas se producen en las
fases "a" y "b". Tomando como referencia la Fig. 4.8, se tiene que
los voltajes de fase aplicados son:
v = - vas ng
vbs = * vng
v = e ves ge ng (4.18)

- 94 -
Entonces se puede proporcionar al modelo los siguientes datos:
'ge (4.19)
£alla_Trifásica.- ^ste caso es fácilmente simulado ya que sin im-
portar el tipo de conexión del estator todos los
voltajes aplicados son cero. Entonces para el modelo se tiene:
vas = vbs = vcs (4.20)
4.1.6 Alimentación Monofásica
Para este caso, alimentación monofásica usando un condensador converti-
dor de fase, se considera la conexión delta en estator; así, en la Fig.
4.10 se observa la conexión implementada y en base a esta figura se rea-
liza el desarrollo matemático.
FI6. 4.10 Alimentación Monofásica (Estator en Delta)

- 95 -
En donde V es el voltaje monofásico aplicado y x es la reactancia del
condensador usado.
Aplicando las leyes de Kirchhoff en la Fig. 4.10 se obtiene:
v - vas = o
^ _,v + _§ _ ?_ (ivcs u
V + V. + V = O (4 21)as bs es vt.£i/
Despejando se llega a:
Vas
vbs " " vas " vcs
(4.22)
Ahora bien, por las ec. de transformación inversa (1.23) se sabe que;
ibs - iqs eos (6 - ) + ids sen (0 -
ics = iqs eos (6 + ) + ids sen (e +
valores que son reemplazados en la ec. (4.22):

- 96 -
wexc
(4.23)
Escogiendo el sistema de ejes en estator, w = 0y9 = 0, se llega a:
uexces (4.24)
.- sAdemás, reemplazando ij por su valor en concatenaciones de flujo, ec,
(1.105), se obtiene la ecuación diferencial:
p vcs - /rco. x
(4.25)
Esta ecuación se agrega al grupo de ecuaciones diferenciales planteadas
en el Capitulo I, ec. (1.76), y su resolución dará el voltaje aplicado
a la fase "c" en cada paso de integración.
Una vez determinados los voltajes de fase aplicados, se sigue el mismo
procedimiento usado para el caso de voltajes desbalanceados, con el
tema de ejes q d o fijo en estator.
En el programa digital se obtiene como variables de salida los mismos
en todos los casos, pero ahora las corrientes del estator cumplen las sj[
guientes relaciones:

- 97 -
W(l) = corriente de la línea "a" de estator.
W(2) = corriente de la línea "b" del estator y es a la
vez la corriente total del circuito.
W(3) = corriente de la línea "c" del estator y es a la
vez la corriente del condensador,
además, W(4) = v,0 es también el voltaje aplicado.aS
y W(6) = v es el voltaje en los terminales del condensador.C5
Hay que anotar además, que para el correcto funcionamiento del modelo ,
en el programa se cambia el valor del condensador usado en el arranque
por uno de menor valor para el estado estable, variando x cuando la ve_
locidad sea cercana a la nominal; según el Anexo # 2, al 80% del valor
nominal.
4.2 CONDICIONES INICIALES
El programa desarrollado contempla 2 casos: arranque y estado estable,
y para cada caso se necesita, para iniciar el proceso de integración.de^
terminar las condiciones iniciales de las variables de estado, o sea de
las concatenaciones de flujo.
Para el caso de arranque se asume que todas las variables de estado,las
concatenaciones de flujo, son cero para t = O, sin importar si el siste^
ma es o no balanceado.
Para sistemas balanceados las condiciones iniciales se obtienen resol-
viendo el circuito equivalente y asumiendo que el tiempo t = O Tosejes
del estator y del rotor coinciden. Así, tomando el circuito equivalen-
te de la máquina de inducción para estado estable, Fig. 1.4, se puede
resolver fasorialmentey encontrar las corrientes.de la siguiente manera:

98
Z2Z3
I- = (4.26)~P Z2 + Z3
en donde: Zi = r + j x-|g
r1
Z2 = + J xi
Z3 = J xm (4.27)
Determinados I e I' se procede a calcular los fasores I , I .as ar qs osI' e I'., mediante las ec. (1.65). Luego se halla los valores ins-
tantáneos para t = O y se puede encontrar las concatenaciones de flujo
usando las ec. (1.70) y (1.71).
Debido a que el modelo implementado tiene ajustes para introducir la sa
turación, y como el circuito equivalente es un modelo lineal, los ajus_
tes se realizarán en forma iterativa hasta adquirir el punto de funci£
namiento real. Esto es lo que se denomina la saturación inicial; el
proceso seguido es así:
1) Se calcula IOH(S r) de^ circuito equivalente.
2) Se halla q y ^md, ec. (1.70).
3) Se introduce la saturación, ec. (1.106).
4) Se calcula ^qd(s>r)> ec. (1.71).

99-
5) Se calcula las corrientes iqcj(s r\> ec. (1.105).
6) Se compara si los flujos mutuos actuales son iguales a los anteri£
res, si es así se sale del lazo, si no lo es se regresa al paso 2.
Igual procedimiento se usa para calcular las condiciones iniciales
do se han conectado resistencias rotóricas iguales, pero con una peque-
ña modificación: se reemplaza
rrZ2 = R1 +-£• + j x^r (4.28)
donde R' es el valor de la resistencia rotórica de c/fase, referida al
estator.
Para condiciones desbalanceadas se toma las condiciones iniciales de un
archivo creado para el efecto; ya que los ejemplos realizados general-
mente constan de arranque, los valores finales son almacenados en el a£
chivo que servirá de condiciones iniciales para el estado estable. Así,
una vez realizado el arranque, los datos finales servirán para simular
el estado estable y cualquiera de las otras opciones del programa gen£
ral.
4.3 DESCRIPCIÓN DEL MÉTODO DE SOLUCIÓN
El método usado resuelve el sistema de ecuaciones diferenciales que ri
gen el comportamiento eléctrico y mecánico de la máquina de inducción.
Para esto se utiliza el método numérico de integración Runge-Kutta de
42 Orden; este método ha sido utilizado anteriormente en numerosos tra_
bajos de simulación de máquinas eléctricas, dando buenos resultados; _a

- 100 -
demás con el algoritmo que se describe a continuación se puede utilizar
eficientemente la memoria y el tiempo de ejecución del programa. (11,13)
Así, dado un sistema de ecuaciones diferenciales de la forma:
y = f (t; y) (4.29)
la solución será:
- (ki + 2k2 + 2k3
en donde:
KI = f (t.', y.)
k2 = f (t,. +|h; y. + £
+ £h; y. + £h k2)k3 = f (
k4 = f (t{ + h; yi + h k3) (4.30)
siendo "y" las variables de estado, "t" el tiempo y "h" el paso de inte_
g rae ion.
Paralelamente con el método numérico de integración hay que determinar
el paso de integración adecuado. En el presente trabajo se toma el va^
lor de h = 0.001 seg. que es conveniente por las siguientes razones: se
obtiene una resolución y apreciación adecuada de los transitorios, dado
que la frecuencia de la red tiene un período de 16.66 m seg; además, el

- 101 -
tiempo de ejecución de los programas es adecuado.
Los resultados obtenidos con este valor de "h" son satisfactorios y no
existe variación con aquellos en los que se usó un valor menor de "h".
Se probó con h = 0.0005 seg. y = 0.0002 seg.. Excepto para alimentación
monofásica, en donde se usa h = 0.0005 seg., siendo necesario un menor
valor.
El procedimiento seguido comienza con el ingreso de datos y la selec-
ción de funcionamiento; además en la sección 4.1 se desarrollan ya las
ecuaciones que representan los casos considerados, que como se dijo és-
tos son simulados con la adecuada modelación de los voltajes aplicados,
tanto al estator como al rotor; debiéndose considerar además, las res-
pectivas condiciones iniciales. Luego se ingresa al proceso de integra^
ción y los resultados obtenidos se almacenan en un archivo; a continua -
ción se chequea si el tiempo de estudio ha concluido, si es así, se pro
cede a realizar los gráficos, y si no lo es se continúa con la integra-
ción.
Adicionalmente, se ha realizado un programa que permite calcular los
densadores óptimos para el funcionamiento de la máquina trifásica con a
limentación monofásica, en base a los parámetros eléctrocs de la máqui-
na.
4.4 DIAGRAMAS DE BLOQUES DEL PROGRAMA
El programa desarrollado cumple las siguientes funciones, con la secuen^
cia indicada en el siguiente diagrama de bloques:

- 102 -
C INICIO
INGRESO DE DATOS
/SELECCIÓN DE TIPODE FUNCIONAMIENTO/
CALCULO DE CONDICIONES INICIALES
SELECCIÓN DE TI-PO DE FALLA
ALMACENAMIENTO DEVALORES INICIALES
CALCULO DE VOI,TAJES APLICADOS
INTEGRACIÓN NUMÉRICA(MÉTODO DE RUNGE-KUTTA
DE 4to. ORDEN
INTRODUCCIÓN DELA SATURACIÓN
CALCULO DE VARIABLESDE SALIDA
ALMACENAMIENTO DERESULTADOS
T + H
.si
GRÁFICOS
(FIN)FIG. 4.12 Diagrama de Bloques del Programa
La explicación completa de la estructura del programa y de las diferentessubrutinas se encuentra en el manual de uso del programa.

- 103 -
C A P I T U L O V
RESULTADOS OBTENIDOS Y COMPARACIONES
En el presente capítulo se presentan los resultados obtenidos en la simu_
lación digital, éstos se comparan con los que fueron obtenidos en las
pruebas de laboratorio (Cap. III) y de esta forma se prueba la validez
del modelo.
De las fotografías tomadas en el laboratorio, se obtienen los datos que
se ingresan al programa digital; éstos son, por ejemplo, amplitud del
voltaje aplicado, ángulos de conexión, etc.
Los parámetros de la máquina de inducción utilizada se calculan detalla-
damente en el Anexo # 1 y sus valores finales son, en p.u.:
x]s = 0.1067
x = 0.1067
xm =- 1.9242
rs = 0.0276
r¿ = 0.0904
H = 0.2235
Los valores base son: fg = 60 Hz
VB = 220 V
IB = 4.04 A
SB = 888.8 VA
TB = 7.073 Nw.m
- 104 -
y la relación de espiras es:
a = 2.74
Además, de los datos de la curva de saturación se ha obtenido y la
función Ax = f(tó)> dando los siguientes resultados:
ty = 0.95
Ax = -5.43 + 5.72 ty*m
Dentro de este capítulo se incluyen además, los gráficos de las señales
de voltaje, corriente, torque y velocidad en estado estable balanceado ,
para los tres sistemas de referencia más comunes: a) sistema fijo en
estator, b) fijo en rotor, c) girando a la velocidad sincrónica. Esto se
hace con el fin de comprobar el modelo y también para darle un sentido
didáctico a los ejemplos realizados.
5.1 Resultados Obteriidois en la Simulación Y Comparaciones con los Resul
tadós Experimentales
Como primer caso se realiza la simulación del estado estable en condicio^
nes balanceadas, utilizando los 3 sistemas de referencia más comunes;lue_
go se simula el arranque de la máquina en vacío, con alimentación trifá-
sica balanceada, y a continuación se simulan todos los casos desbalancea_
dos: arranque con voltaje desbalanceado, arranque con resistencias rotó_
ricas desiguales, arranque con voltajes y resistencias rotóricas desba -
lanceadas, fallas de una y dos fases a tierra, falla trifásica y por új_
timo el arranque de la máquina trifásica con alimentación monofásica.

- 105 -
5.1.1 Estado Estable
Para los fines demostrativos del presente ejemplo, se considera como da_
to un deslizamiento del 10%, valor muy alto, pero esto se hace para po-
der observar más fácilmente el comportamiento de las variables cuando se
tiene referencia rotórica.
De este ejemplo se grafican voltaje y corriente de línea (estator en del_
ta), corriente del rotor, torque y velocidad, éstos deberán ser los mi\s_
mos para cualquier sistema de referencia escogido. Se obtienen también,
para cada uno de los sistemas de referencia, voltajes y corrientes en e_
jes q d, tanto para estator como para rotor.
En la siguiente página se encuentra la hoja de datos con los que se rea_
lizó el presente ejemplo. Los valores de corriente son el resultado del
circuito equivalente, incluida la saturación inicial.
Y a continuación se hallan los resultados obtenidos.

- 106 -
íf.y¿ fíí PAR A HE', i 'RUS DE LA f'í A O. (. :• "i. N A '•(•'$#•, v s 1 o í • c? s e n :•-•*;..; ¡ )
R £ A C 7 A N C I. A D E!... E 8 í A T G R * X ( 1 ) -" O * L O 6 7F<E! A C "F ri M ü .:'. A D E i... 'R O I ÜR R £ F E RID A A i... E S T A T Ü R í X ( 2 ):::: O * Í 067R E H C T A N C I. !••'', i'"i Ü"!' U A 5 X '•! 3 ) '"•'• i. -.- 9 7 4 '2.H E S IS T E N C IA D ¡i L. E 8 T A "I" U R i R ( 1 .):::: 0 * 0 2 7 6R E! S i S "i" E! N C I H D E. i... R O T Ü R R E! F' E. RID A A i... E Si T A T u R i R '. 2 ) -:: O •> O 9 O 4C O N S T A N"!" E D E IN E R CIA i H1 = ü , 2 2 3 SF R E L ü E H CIA D E i... A R E D l F i;:- ó O
# !••' A R A H E "!' F;; ü 8 D E L A C i. J R 'v A D ti! 3 A 'F U R A C !i! O Ni ¥D x v s * !- iíi ( ;;; .3 1 )
ÜÜN CATEN ACIONES DE FLUJO tfU'Fbu C R I T I C O * Y6- 0,95FüN i'Ü Dti! CORTE CON EL EJE VEüRT I CAL JF:' E N D ü! i::! N "F E D E L.. A E E C T A ¿
'&'$•*• INTERCALO DE SOLUCIÓN AXJJÍten sea í- .'
"F .i! E ivi ¡"' i!) ü! N J! C ü! A L 5 T .!. == Oí J! E H i:; ü !••' I N A i., í T 2 :n: O > 1 5;••' A S Ü D E I ¡M "¡" E G R A C ü! ü N S H ::: 1*0 E ~ 3
TeJsc* 1050 sea» - Lona* Aren* 33400 b y t s •;;;
'#• ALIMENTACIÓN TRIFÁSICA */' O L í A ...i !::! S LÍ E L I N E! A A F:' L I C A D ü S l'. 8 E C ij E! N C !!! A F-: O 8 1 "." I v A í O I ? O 2 i V 3 í
rí (!) D U I... U ( p .- ij « ) A N C Ü i... (!) D E i'.! E! 8 F A S A J E ( r ;s o'/ J. 09 ( 1 ) ":: 1 Qé ( i ) --0'•.} 7 '' í •'' ' ;;- 1 FJ ••'". (' '.••' ) ~- — "•' .074- '. \:;? "'':
V ü i... ';" A J E S LÍ i::! i... !!! N E A B ¡-¡ L A N C E! f*. D O S
Ü C N E X i Ü ¡v T ü! !-' ü O E! !... i A E! N E! 8 T A 'F (!) R
SISTEHA BALANCE! A DO

CONTINUACIÓN , • > *
- 107 -
yf.$ '& CON DICIO N ES i NICIAI... E S D E E 8 T A D O E S T A B L. ti! # * '#;?: SISTEMA BALANCEADO *
D E S i.. IZ A MI E N T O l S - O , :!.TIEMPO? T= O
MAGNITUD ÁNGULOC O R RIE N T E D E! E S T A T O R i 1 s ~- i ,149 91 O 81367 A 7 = - O * 6 2 5 6 5 2 O 8 4',.CORRIENTE DE ROTOR 5 Ir- 0,995343092)85 AB::::~3 * 3484S404ÍC O R RIE N T E S E N E J E S ¿s ? d ( s ? r ) l0,93210 0,67342 -0,97412 •-0,20443
TORQUE MECÁNICO T8~ i 0*895000995097
* EC, DEL TORQUE U'8> EN PUNCIÓN DE LA VELOC, (W6> *.090 T8-0*8956
NOMBRE DEL ARCHIVO DE D A T O S J i»ESTABLE/WCERÜ

ZTS '9IJ
Momia -jai -Twun oonsa
t ' T ' 9 '9Id
«J1TÍ33 'ju 'anorisa oousa
- 80T -

- 109 -
ESTADO ESTABLE- RET. ESTATOR
í
a.B3 a.n «.iz Í.1S
TJEMTO
FIG. 5.1.3
ESTAM ESTABLE- RET. ESTATOR
a.aa a.i
Tietro
a.iz
FIG. ¡3.1.4

- 110 -
CSTAOO ESTABLC. KT. ESTATOR
P "
a.ea a.n a. ir a.ic
TO9W
FI6. 5.1.5
ESTACO ESTJBLC- KCT. EST1TOR
w Va ¿M
a8 -
a.B0 a. i
fiara
FI6. 5.1.6

8T9 -9IJ
si-e
'Oá -musa oonsa
-LTS '9IJ
oaorj.
ara iré
-jan -aniTisa oorisa
- TU -

- 112 -
EST400 ESTABLE. KCT. ESTATOR
a.ie
TIEMPO
FIG. 5.1.9
ESTADO ESTABLE. KCT. ESTATOR
B.IC
FIG. 5.1.10

-•J
-I .
5
o • oí
-1
-I.3
Jy
-'
tf.u
.l
. i
• 1
.5
I 1
.5
2
I ü f
O • en r I
1 1 1
co

- 114 -
truno CSTJBLC. «r. ROTOR
«.JO «.M «.
Tmro
«.» «.JC
FIG. 5.1.13
era» CCUOLC. j«r. HOTOR
4
t.BI «.M
Tmro
tt.lí «.]«
FIG. 5.1.14

- 115 -
cruce CEUOLC. JCT. KOTOR
Tmro
FI6. 5.1.15
Troro
FIG. 5.1.16

- 116 -
csuoo esTtaJC' tar. ROTOR
«.13
FIG. 5.1.17
«-IS
Tmro CM«}
FIG. 5.1.18
- 117 -
esuao CSUOLC. JKT.
3
í .
i
i
«.as «.ai
Tan
FIG. 5.1.19
esnoo ECUBU. Kcr.
i «JN «.ii «.i*
TJOTO i
FIG. 5.1.20
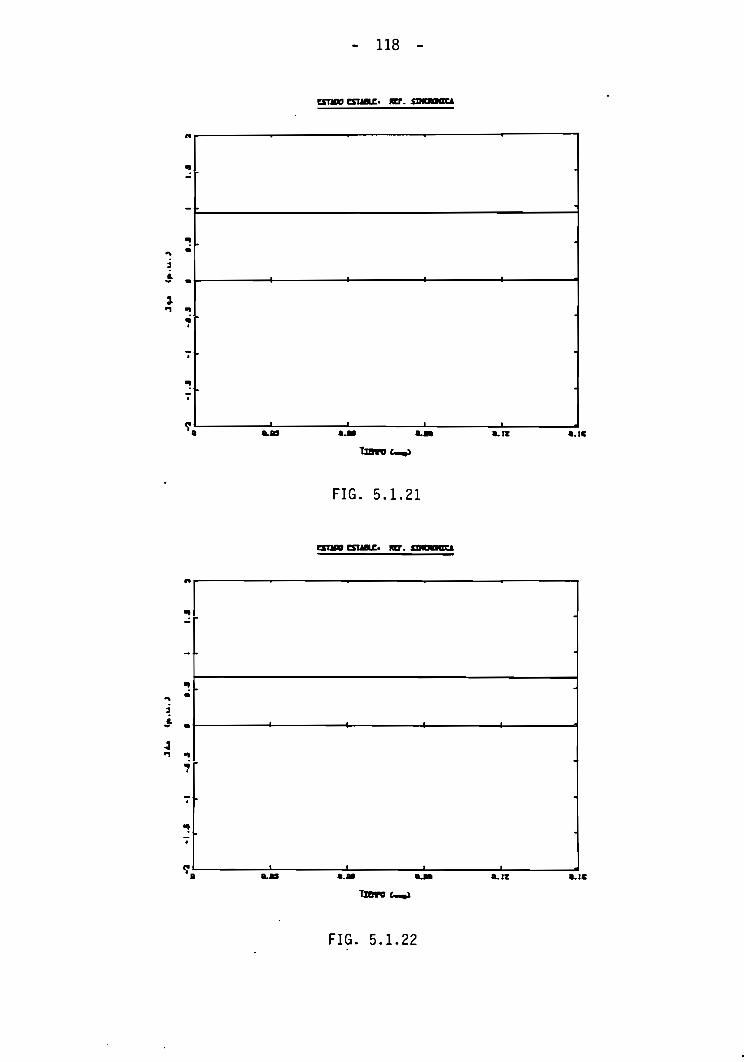
- 118 -
omoo esuo£> ta. ÜNCMKCÍ
3
i m
Ii •»
«.as ».«• a.M «.« a.is
tioro
FIG. 5.1.21
3
a t «.»Tmro
FIG. 5.1.22

-i
-i ,j
-i
-j.j
i
i.j
i i.j
a
O
f 5 f- Ü
-a
>i.
« -i
-4
.J
i
i.j
i i.J
a
en en INJ
r *•

- 120 -
En las figuras 5.1.1 y 5.1.2 se encuentran, respectivamente, los gráfi-
cos del voltaje y de la corriente de línea del estator. Estas señales
son sinusoides y tienen la frecuencia de la red; el voltaje tiene una
magnitud de 1 p.u. mientras que la corriente llega a 2 p.u., esto es oca^
sionado por el excesivo deslizamiento asumido (10%). En la figura 5.1.3
se halla la corriente de fase del rotor, ésta es sinusoide y su magnitud
es de 1 p.u., su frecuencia es menor que la de la red, aproximadamente
1/10 (teóricamente frotor = s. festator).
Los tres gráficos anteriores corresponden a la fase "a"; las señales de
las otras fases se encuentran desfasadas 120° con respecto a la primera.
Las figuras 5.1.4, 5.1.5 y 5.1.6 contienen, respectivamente, la veloci -
dad, el torque electromagnético y el torque de carga. Todas estas varia^
bles tienen un valor constante: la velocidad se mantiene en 0.9 p.u.
(s = 10%), el torque electromagnético y el torque de carga son iguales y
valen 0.9 p.u. aproximadamente, verificándose que existe equilibrio mecá^
nico.
Todas las variables anteriores [Fig. 5.1.1 a Fig. 5.1.6] son las mismas
para cualquier sistema de referencia escogido. En el presente ejemplo
las diferentes variables han sido obtenidas tomando el sistema de refe-
rencia fijo en el estator.
En el Capítulo I se demostró que las variables en ejes q y d tienen una
frecuencia igual a (oo -u), excepto para la referencia sincrónica, para
la cual todas las variables son cantidades constantes. Esto se comprue-
ba en las Fig. 5.1.7 hasta la Fig. 5.1.24..
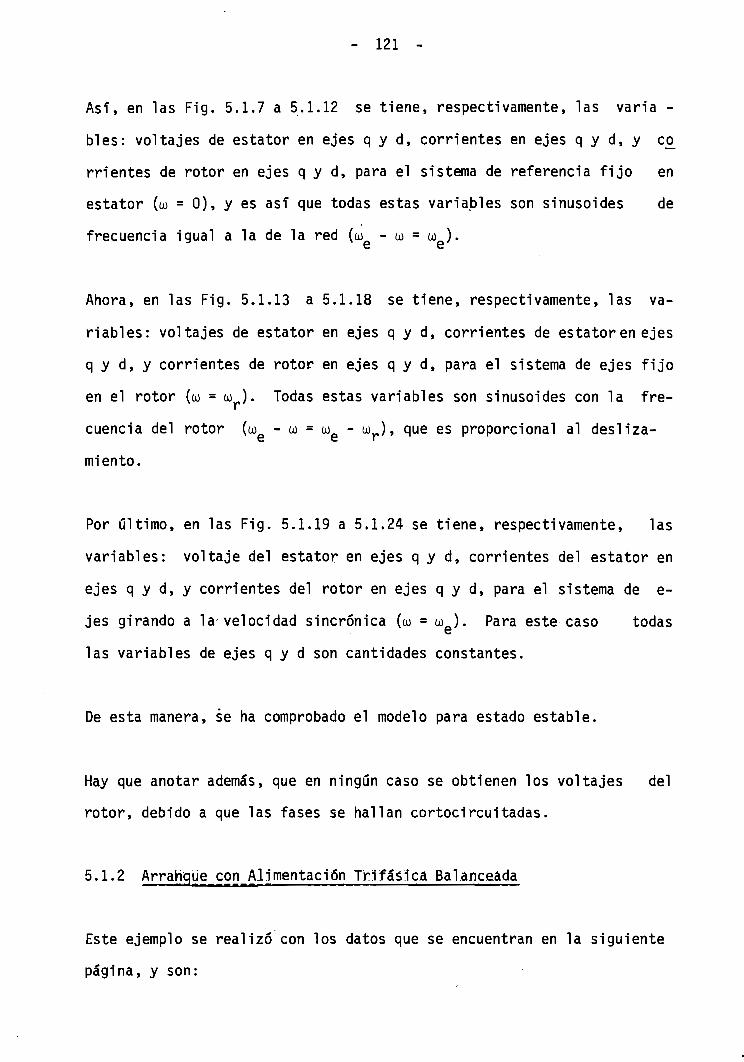
- 121 -
Así, en las Fig. 5.1.7 a 5.1.12 se tiene, respectivamente, las varia -
bles: voltajes de estator en ejes q y d, corrientes en ejes q y d, y c£
rrientes de rotor en ejes q y d, para el sistema de referencia fijo en
estator (w = 0), y es asf que todas estas variables son sinusoides de
frecuencia igual a la de la red (co - u = w ).
Ahora, en las Fig. 5.1.13 a 5.1.18 se tiene, respectivamente, las va-
riables: voltajes de estator en ejes q y d, corrientes de estator en ejes
q y d, y corrientes de rotor en ejes q y d, para el sistema de ejes fijo
en el rotor (w = u> ). Todas estas variables son sinusoides con la fre-
cuencia del rotor (w - w = w - u ), que es proporcional al desliza-C C I
miento.
Por último, en las Fig. 5.1.19 a 5.1.24 se tiene, respectivamente, las
variables: voltaje del estator en ejes q y d, corrientes del estator en
ejes q y d, y corrientes del rotor en ejes q y d, para el sistema de e-
jes girando a la velocidad sincrónica (co = oí ). Para este caso todas
las variables de ejes q y d son cantidades constantes.
De esta manera, se ha comprobado el modelo para estado estable.
Hay que anotar además, que en ningún caso se obtienen los voltajes del
rotor, debido a que las fases se hallan cortocircuitadas.
5.1.2 Arrahqüe^cún^AIi mentación Trifásica Balanceada
Este ejemplo se realizó con los datos que se encuentran en la siguiente
página, y son:

- 122 -
voltaje aplicado: 208 V = 0.95 p.u.
ángulo de conexión: 0° = O rad.
ecuación del torque mecánico: Tm = 0.147 p.u.,
se asume un valor constante, ya que no se conoce con precisión esta e-
cuación, y el valor de 0.147 p.u. es el valor que debe tener el torque
electromagnético para un deslizamiento, en estado estable, del 1,66%, y
para que se cumpla el equilibrio mecánico Tm = Te.
A continuación se presentan los gráficos obtenidos.

CO
•P
O
ill il '01 t. Q
LÜ ü_ CO UJ
<i
..j
íx¡
X
i.i! 2
' Lü
• -;
-~i
Iti
<X
.£
•—Ijj
C:
ü..
Q -
V L
ü LÜ
in2:
CJ
~i
O
:—-i
!
_ ,j
.-"•••
CJ i
••
- Z
i -i
<r -
x "X
:—•
-••
~>
-
_i
U
•íT i
iij d :Xi
-X-

- 125 -
«.4 «.JE «.£
FIG. 5.2.1
>nmioue.
«.i a.is a.s
FIG. 5.2.2

- 126 -
«.i «.te i.í «.« «.i ». 4 ».4£ ».S
FIG. 5.2.3
FIG. 5.2.4
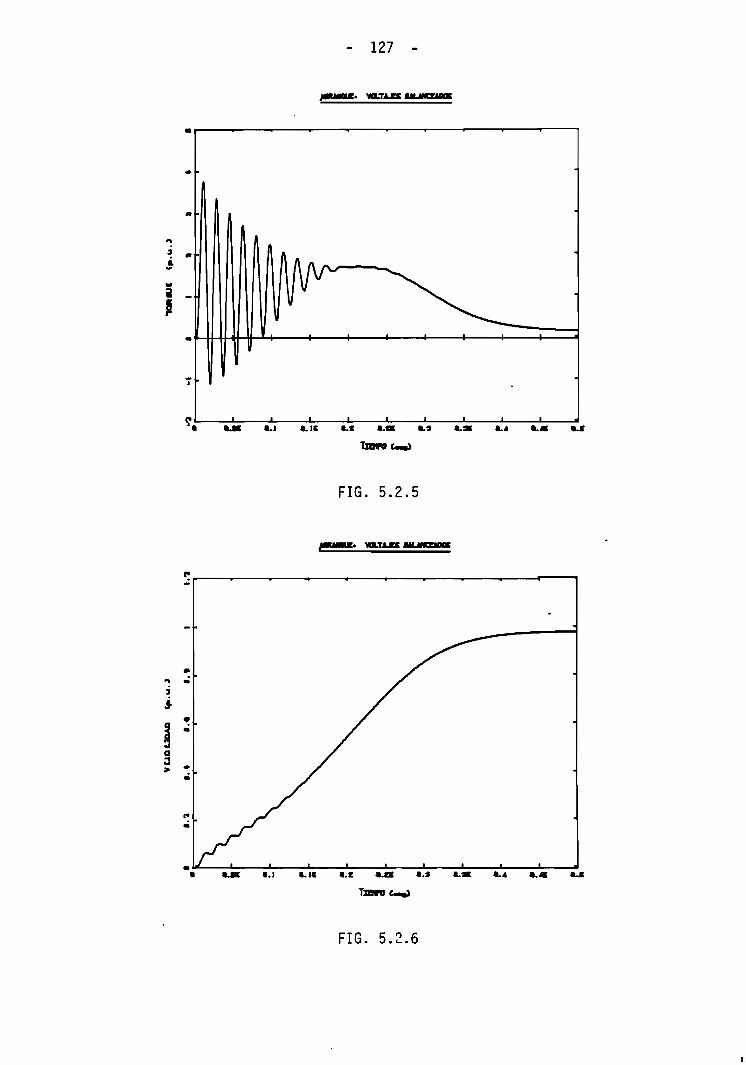
- 127 -
3*
1.1C •.< «.
Tmv«.3 «.31 «.4
FIG. 5.2.5
3
í
«.i ».t a.cc
Tmra
FIG. 5.2.6

IA»
a
CT5
• en ro Óo
f fe
£T3
Oí
• roro oo

- 129 -
Los gráficos 5.2.1 y 5.2.2 corresponden al voltaje y corriente de línea,
éstos pueden ser comparados fácilmente con la Fotografía # 1. El volta-
je tiene un valor de 0.95 p.u., equivalente a 208 V, y un ángulo de co-
nexión de 0°. La corriente de línea tiene un valor máximo de aproximada^
mente 7.5 p.u., equivalente a 43 A pico, mientras que la corriente en es
tado estable es de 0.75 p.u., o sea,4.3 A pico. El tiempo de aceleración
es de aproximadamente 0.4 seg.
Como puede observarse, todos estos valores son muy similares a los hall¿
dos en la Fotografía # 1: Imax = 40 A pico, ¡estable = 4 A pico y ta =
0.4 seg., pudiendo decirse, sin mucho error, que son respectivamente i-
guales, debido a la pobre apreciación que se tiene. Además, observando
detenidamente la Fotografía # 1 y la Fig. 5.2.2 se puede concluir que
las envolventes son los mismas.
De esta manera se ha comprobado la validez del modelo para el arranque
en condiciones balanceadas.
Ahora, en la Fig. 5.2.3 se tiene la corriente del rotor: su frecuencia
es decreciente, y como ya se dijo anteriormente, depende del deslizamien^
to; alcanza un valor máximo de 4.2 p.u., equivalente a 65 A pico; no se
puede determinar el valor de estado estable, pero puede decirse que es
muy pequeño.
Las figuras 5.2.4, 5.2.5 y 5.2.6 corresponden, respectivamente, a los
gráficos: torque-velocidad; torque-tiempo y velocidad-tiempo. Las foj
mas de estas variables son las mismas que se hallan en textos, con la dj_
ferencia que en éstos se toma el valor del torque promedio. Se observa

- 130 -
que el torque tiene un comportamiento oscilatorio en los primeros ciclos,
pero con un valor promedio mayor que cero, razón por la cual la máquina
arranca sola. El valor máximo es de -1.1 p.u. y el valor máximo es de
3.7 p.u., pudiendo decirse que el valor promedio de torque en el arran-
que es de 1.3 p.u., mientras que el torque promedio máximo es de 1.7 p.u.
y ocurre cuando co = 0.6 p.u., o sea s = 0.4. Luego el torque disminuye
a medida que alcanza la velocidad nominal, estabilizándose en un valor
igual a 0.147 p.u., que es el valor del torque de carga, para mantener
el equilibrio mecánico. La velocidad es creciente y presenta pequeñas
oscilaciones en los primeros cicloes, como consecuencia del torque ini -
cial que es también oscilante; alcanza su valor de estado estable,
ce = 0.9833 (s = 1.66%), en un tiempo aproximado de 0.4 seg. Torque y
velocidad alcanza sus valores permanentes de estado estable al mismo ti em
po.
El presente ejemplo fue realizado con referencia sincrónica. En las Fig.
5.2.7 y 5.2.8 se encuentran las corrientes en ejes q y d del estator, y
se observa la forma especial que tienen, llegando a ser valores constan-
tes para el estado estable.
5.1.3 Arranque con Voltajes Desbalanceados
Los datos para este ejemplo son los siguientes:
Vab = 197 eos ü)fit
V. = 205 eos (co . - 2.1092)DC 6 u
V a = 198 eos U t + 2.0503)t,a e L

- 131 -
Estos valores han sido calculados en base a los voltajes de estado esta_
ble, medidos en las pruebas de laboratorio, y luego aplicando la teoría
de fasores. El ángulo de conexión para la fase "a" es aproximadamente
190°, o sea 3.3 rad. Además, la envolvente tiene la siguiente forma:
(tomado de la Fotografía # 2, por lo que en realidad corresponde al vo]_
taje Vab, pero se asume que en las otras fases es similar).
V(pu)>,
0,9-
0,57.
0,5 0,9-*»t (seg)
Como en el ejemplo anterior, la ecuación del torque mecánico es:
Tm = 0.147 p.u,
Se obtuvieron los siguientes gráficos:

, I UNAL - 132 -
ü P E ;••; A C Iü N AS I M£ '•' "RI LA DE LA MAQUINA"f RI i:: A SIC A D E! IN D U C C IÜ N F E C H A J 03 - AIJ G — 3 5 l 3 » 3 4 ; 2 9
CASO SIMULADO* ARRANQUE - VOLTAJES DE3BALANCEADOS
••%%:% PAR AME TROS DE i... A MAQUINA :*#$(valores en ;- > LI ¡ )
R E A C 7 A N C 1 A D E i... E S "f A T O R i X (. 1 ) = O * 10 ó 7l:;: E A C T A N CIA D E L R O T O R R E F E RID A AI... E S í A T O R * X ( 2 ) ~ ü » 10 6 7::;; E A ü T A N C L A M U T U A ¿ X ( 3 ) ~ 1 » 9242R E £ IB T E N CIA D E L £ S T A T ü R ; R ( i ) - O » O 2 7 6RESISTENCIA DEL ROTOR REFERIDA Ai... ESTATOR; R ( 2 >::~ 0*0904CONSTANTE DE INERCIAS Hl» O«2235FRECUENCIA DE LA RED; Fl- 60
* PARÁMETROS DE LA CURO A DE SATURACIÓN:; *Dx vs » Fm •: sst)
C ü N C A T E N A CI ü N E 3 D E F i... U J O M U "f U ü C RI T IC O í Y ó -- O > 9 5P U N T O D E C ü R T E CON E L E J E v E R FIC A L ? S 3 ~ •••• 5-43:::' £ N DIE N T E D E L A 'R E C T A 5 S 4 = 5 * 7 2
:<<*.* INTERVALO DE SOLUCIÓN :***(e n s e si * )
TIE f! i::' O INICIA L 'í T1 :=: OTIEMPO FINAL» T2-" 1P A S O D E 1N T E G R A CIÜ N 5 l-i = 1 * O E - 3
!::'3so;; 1000 •••• Ts?Jec» 7000 se?£» ••- Lona» Aren» 217000 bytes
* ALIMENTACIÓN TRIFÁSICA *V O L. T A .j E S D E LIN E A A P LIC A D O S ;( S E C U E N CIA P O SI TIV A I V1 ? U 2 ? V 3 )
MODULO (•;-• •, u » ) ÁNGULO DE DESFASAJE (rad*;1
vi v9( :i. )--O» 3955 QéU. >~0v 2 V 9 i 2 ):-: O * 9 318 Q ó ( 2 ):;:: - 2 > 10 9 2V3 V9(3J~0»9 Q6(3)--2,0503
'•& V O!._ "i" A j E S D E L IN E A D E S B A L A N C E A D 0 S $
* C O N E X IU N T i!!:' C D E L. T A EN E S T A T O R *
$ DATOS DE LA ENVOLVENTE 5

- 133 -
C Ü N D1C I u NE S .:'. NIC .i'. A L. E! S ¡:;' A R A E! 1... A R R A N U U £ 8 Ü N C i R ü
A N G U L Ü D E C O N E! X i O N P A R A E i... A R R A N Q U E! ¿ A 6:::: 3 * 3
;¡< EC •:• DEL. fURQUE (Í8) EN FUNCIÓN DE i...A vELDC* (W. O V O T 8 - O ', í 4 7
NühBRE DEL ARCHIvU DE DATOS DE CONDICIÜNES FINALES
DE ESTADO ESTABLE RARA SISTEMA DE 8B AL ANCLAD O í QCONDFIH/v'OLDSB
NOMBRE DEL ARCHIVO DE DATOS? GíARRANQÜE/VÜLDSB

n
IC£
J
}C
M •
ro•
LO
t-
i-
»-
f •-.
r-tv
*)
«r
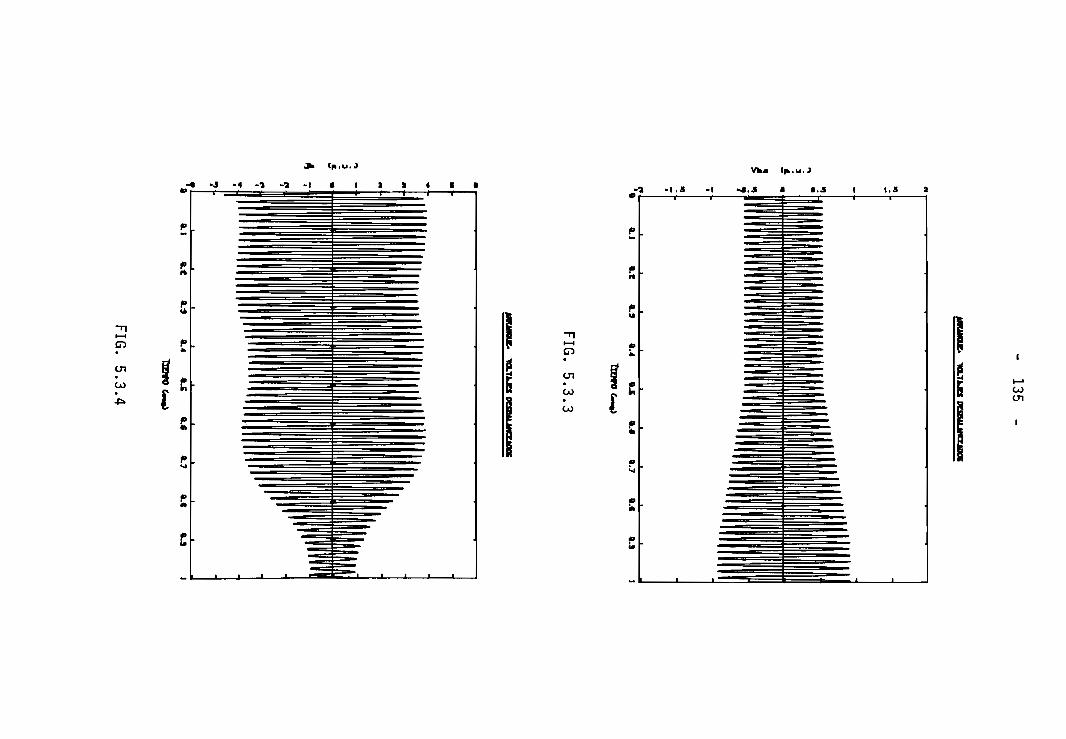
tn rooo
•oo
•LD
CJJ
3
1oo LO
•
CD

- 136 -
FIG. 5.3.5
¿MUMBUC. VOLTAJES I
FIG. 5.3.6

- 137 -
VOLTmS PCflUUUCCAD
«.a i
FIG. 5.3.7
JMUMUt. VOLTAJES 1
• a. I ».» 1.9 a.i i.c a.c ».7 a.c a.i
FIG. 5.3.8

ore's '9U
fe g
Li
t
i sxriim
I S'í »•• £'« 9'í 3'B Vt C'B >'• l'í í
Noreao sarmm -rarntif

-4
- 6ET -

- 140 -
VOLTAJS PBML
a a.t a.z «.3 a.c a.f a.7 a.c a.a i
FI6.-5.3.13
pff|j|| ^Mff *PQR
FIG. 5.3.14

- 141 -
VOLTAJES PTSP41 i4!ÉrrftP
I «.1 9.t 9.3 «.4 «.E 1.6 (.7 a.C t.9
FIG. 5.3.15
VOLTAJE I
_J I I i I I
a. l a.c ».c a. e •.? ».c
TIENTO
FIG. 5.3.16

- 142 -
En las Fig. 5.3.1 y 5.3.2 se encuentran el voltaje y la corriente de
la línea "a". El voltaje aplicado tiene la forma y magnitud deseadas ,
ya que es simulada en base a la Fotografía # 2, y es una variable de ejx
trada; el ángulo de conexión es de 190° aproximadamente, para la fase
"a", mientras que en las otras fases serán diferentes. La corriente de
línea tiene un valor máximo de 3.9 p.u., equivalente a 22 A pico, mien-
tras que la corriente en estado estable es de 0.6 p.u., que equivale a
3.4 A pico. El tiempo de aceleración es de 0.5 seg. aproximadamente.
»
Como puede notarse, todos estos valores son muy parecidos a los determi_
nados en la Fotografía # 2: Imax = 18 A pico, lestable = 3.6 A pico y
ta = 0.95 seg., existiendo pequeñas diferencias, que son causadas por
la pobre apreciación que se tiene; pero para los fines de la simulación
puede decirse que son resultados válidos.
Se observa además, que los envolventes del voltaje y de la corriente de
la Fotografía # 2 son un poco distintos a los envolventes respectivos
de las Fig. 5.3.1 y 5.3.2, esto se debe a que se ha asumido que el volta^
je aplicado no sufre ninguna disminución durante el transitorio, pero es
to si sucede en la realidad, ya que la máquina no está conectada a una
barra infinita, y el voltaje si tiene pequeñas depresiones que nosealcan^
zan a notar.
Para este caso debalanceado es práctico observar las corrientes y volta-
jes en las otras dos fases, ya que existe asimetría. Así, en las Fig.
5.3.3 y 5.3.4 se hallan el voltaje y la corriente de la línea "b", y pa^
ra la línea "c" en las Fig. 5.3.5 y 5.3.6. De estas figuras, se puede
decir que los voltajes si son simulados adecuadamente, por las mismas ra^

- 143 -
zones expuestas anteriormente para la línea "a". Se observa que las co^
rrientes tienen el mismo comportamiento que la de la línea "a", pero
son diferentes en magnitud. En la línea "b" la corriente llega a 4.5
p.u. (26 A pico), mientras que en la "c" alcanza a 5 p.u. (28.5 A pico).
De esta manera se verifica que el valor máximo de la corriente de arran_
que depende del ángulo de conexión (Ref. 3), ya que en cada línea se tije
ne distinto ángulo de conexión. Para estado estable, la corriente en
la fase "b" es de 0.9 p.u. (5.1 A pico), y en la fase "c" es de 0.95 p.u.
(5.4 A pico). Para este caso las corrientes de arranque, son menores
que para alimentación trifásica balanceada, debido a que se arranca con
voltaje reducido; en cambio los de estado estable son mayores, por el
desbalance existente.
Se observa que las corrientes se estabilizan en su valor permanente en
0.95 seg. Hay que notar además, que los desbalances ocurren tanto en
estado transitorio como en estado estable.
En las Fig. 5.3.7, 5.3.8 y 5.3.9 se encuentran las corrientes del rotor
de las tres fases: se observan que tienen el comportamiento ya descrito:
frecuencia variable y dependiente del deslizamiento. La forma de las c£
rrientes es similar, se diferencian en amplitud y en fase, pero en gene^
ral se puede decir que su valor está alrededor de 2.1 p.u. (33 A pico) ,
llegando a un máximo en la fase "b", de 2.5 p.u. (39 A pico). Se puede
observar, también, que existen pequeños picos sobre la envolvente pronre
dio, consecuencia del desbalance, y, además, se mantiene una pequeña os
cilación sobre la componente fundamental, en estado estable, de aproxima^
damente 0.15 p.u. (2.3 A pico) y del doble de frecuencia de la red. Así
mismo, estas corrientes adquieren su valor permanente en 0.95 seg. más o
- 144 -
menos.
En las Fig. 5.3.10, 5.3.11, 5.3.12 y 5.3.13 se tienen el voltaje y la
corriente de estator en ejes q, y las corrientes de rotor de ejes q y
d . Debido a que este ejemplo fue realizado con referencia estatórica,
todas estas variables tienen la frecuencia del estator, o sea de la red.
Se observa que tanto la corriente como el voltaje del estator en ejes
q y d tienen una forma muy parecida a Tos valores de fase; en cambio,
las corrrientes del rotor en ejes q y d son diferentes a las de fase,
siendo más notorio en estado estable, ya que estas corrientes en ejes
q y d tienen la frecuencia del estator y una amplitud constante, mien-
tras que en valores de fase su frecuencia es la correspondiente al des^
lizamiento, presentándose además una oscilación sobre la componente fun
damental, ocasionada por el desbalance. En ejesqydnose presenta esta
oscilación.
En las Fig. 5.3.14, 5.3.15 y 5.3.16 se encuentran las variables mecáni-
cas. De estos gráficos se puede concluir lo siguiente: el torque pronie_
dio de arranque es más o menos 0.45 p.u., este valor es mucho menor que
el obtenido con alimentación trifásica balanceada, y es correcto debi-
do a que se arranca a tensión reducida. El torque promedio máximo es
cercano a 1 p.u. y ocurre con un deslizamiento de 0.25 (co = 0.75 p.u.),
esta disminución del torque máximo es ocasionada por las condiciones
desbalanceadas. Es importante notar que las oscilaciones del torque son
permanentes, manteniéndose inclusive en estado estable, donde alcanzan
un valor permanente de 0.16 p.u., pero el valor promedio es igual al va_
lor del torque de carga, manteniéndose el equilibrio mecánico. La curva
de la velocidad presenta oscilaciones en los primeros instantes, pudién-

- 145 -
dose notar inclusive muy pequeñas oscilaciones durante todo el período
de aceleración, esto también puede verse en la Fotografía #3. La velo-
cidad alcanza su valor permanente, n> = 0.9833 p.u. en un tiempo aproxi-
mado de 0.95 seg., sin notarse oscilaciones en adelante.
De lo anteriormente comentado puede concluirse que no solamente se tie-
nen los mismos resultados en la simulación que en el laboratorio, sino
que todos los resultados de la simulación concuerdan con el conocimiento
teórico.
5.1.4 Arranque con Resistencias Rotoricas_Desiguales
Los datos para este ejemplo son:
Vaplicado: 205 V = °'932 p*u* (voltajes balanceados)
ángulo de conexión: - 60° = - 1.05 rad.
Resistencias rotóricas: a: 1 fi = 0.1379 p.u.
b: 0.5 Sí = 0.069 p.u.
c: 0.5 Sí = 0.069 p.u.
Tm = 0.147 p.u.
Los resultados obtenidos son:
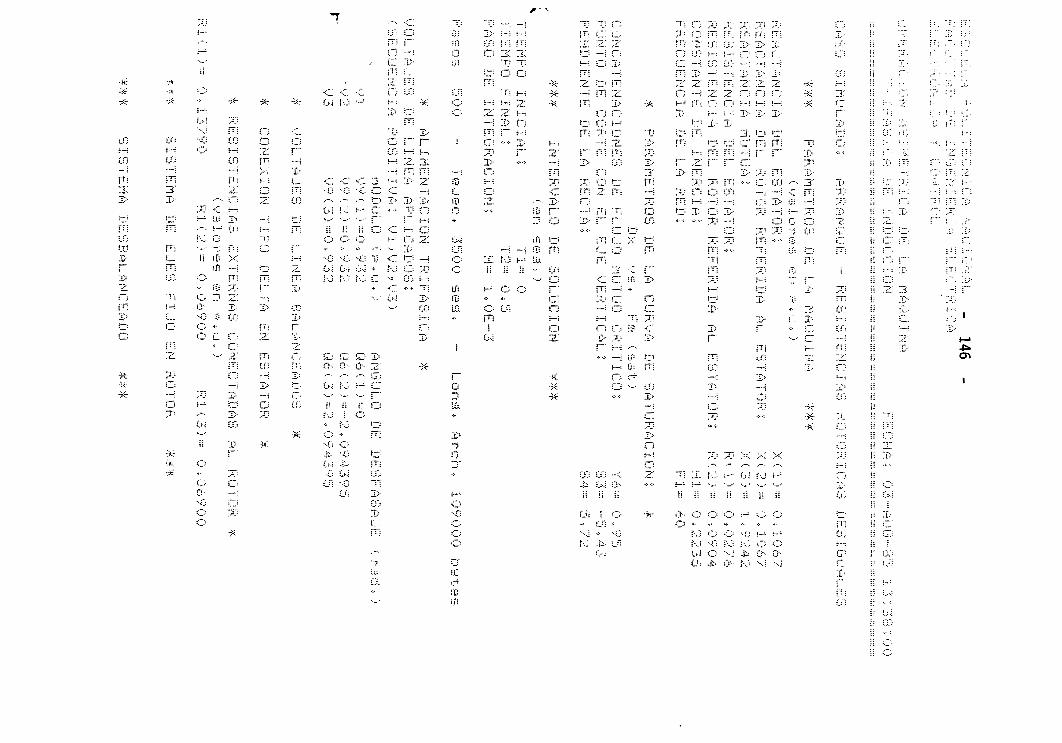
;i ..-T
-
CN
* K
_
_
_'
>:i
:-—
-: •>
: :*";
*
'• -•
' •-
• "
-
;._
; :._
.:
:..,.:
--.¡J
-g
. .;--.
j |y
-¡
;i_
ti.
<E
U
i
Ui
~>
CO
•M-
?'T .W-
•K-
.2!
o r_¡
L-'
._!
T-! •:•
£-
..-y t- íi L_ o : — f
!;••:
"•
Lü;o
r>
Xí
].,
., oí
o o
rn
u»
<r
LOLí
_ 0' •
ü~
':':":
:'-
t'¡
•";•
•
Lü
"i"
i'";J
Q
C?. -í'
o
;>•Lü
~-
Ó
-W
-•-
I CM
"
O
1 :N
O
i!
!!
!!
-fi
í •-•
. ..-
.. .-•-
•. ; "
i;3
r-
í •'•:
: ?
«
Ci
:'r¡
••-•
• •-•
- •-•
• :;J_
*:•
:z. •
•* --o
5;
LÜ
-;T
:'7
"
ü
J'!T
'.7!
"ji-
í Q
_
!J"!
LÜ *
» >
*
-r
'-..•
:V|
:"~'
•••x U"í
!S,'
•í'""
: t :
: :
::':
: .
;— •
:~¡
O
í--:"
--'.
-.
^
•Í.
—
í :—
• :>
"'
.--~'
:~:
••:-
.- .
;-
;•::
:.-r
:"~
:""
•""
* :"í
'r
J
;i ij
;""
--i
a¡i:!
••'.
í~ .
:"1
i-T-i :I!
'~?
y-i
ir
;'-!
-:X •
•-••:l
':- |:r
! ;5
:; ^'
¿'¿
'''*'_
Lü
S I
^ í?
ÍT
j _=
E?
H ~
\ -^
;í
*•: "
"' «
h-
i-
ül u
b S
S '
~' u
jí;
^? "
--1
;•-C
i C
¡ ':r
;,
: ¡:
: L
Ü U
' =
—'
••-~
--.••
. .
U.!
ü"!
<I
U!
-X-
'E íí
-H
:s: L
LÍ i-
*-
•-
,-,,
'U
! Q
2:
*
:jj
s- •¥•

3-'. o
Z--
.£l.
O f-i
LO
i; ¡-i o

00
LO
i -
f • i -
e,-
evj
<d- •
ID CU

- 149 -
as. im. ursiaiurs
I.E
FIG. 5.4.3
«es. IPT. prcrauírt
i.c
FIG. 5.4.4
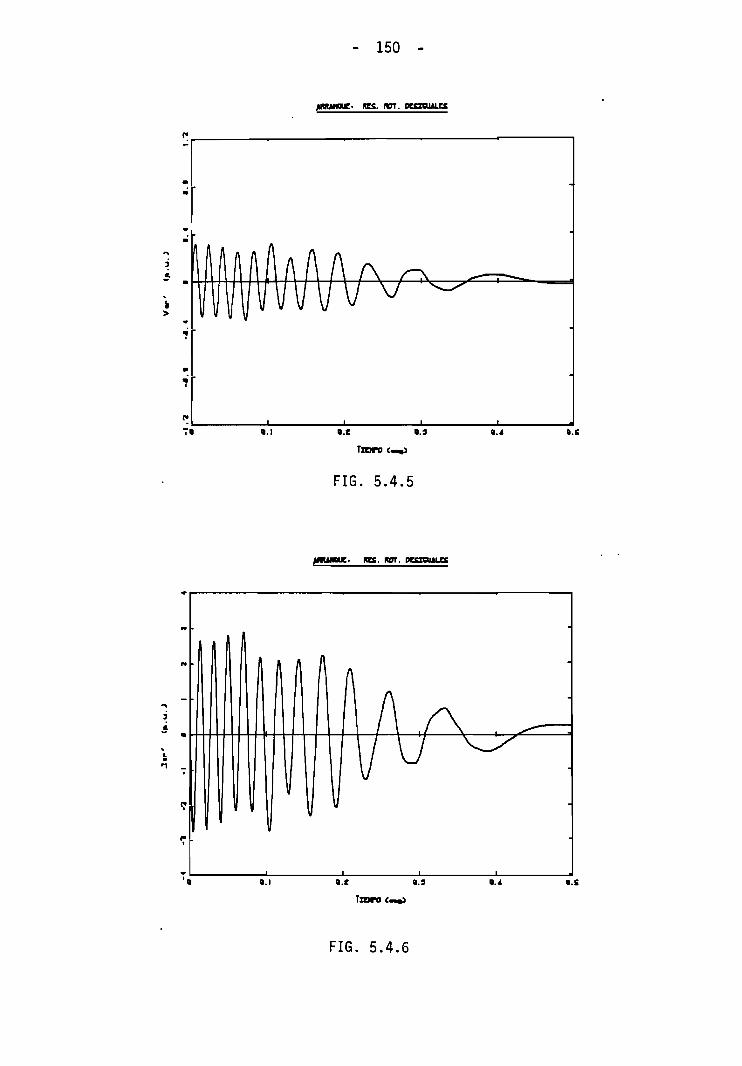
- 150 -
AMUHOUC. nes. ror.
•.i a.t a.a
TlCNTO i
FIG. 5.4.5
t.4 I.E
>HUHOUE. Ktt.
«.3
FI6. 5.4.6

8'fr 'S '
sairaxsaa -101 -san •anmrarf
'9IJ
sairreisx -101 -san •ammorf
- T9T -

OT' f r ' 9 '9IJ
6' f r 'S *
9-1
srmosia -JAI •san
- 291 -
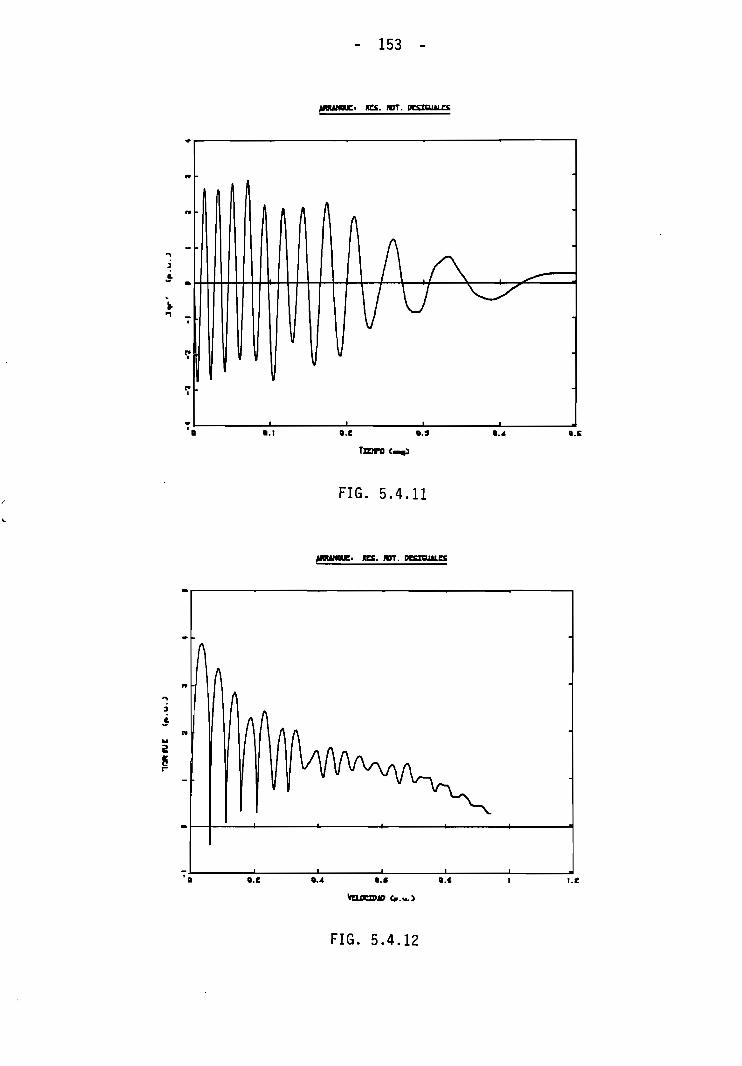
Z T ' f r ' S '9IJ
snraxsM 'iai 'san
T T ' f r ' S -9IJ
saimaxsao '101 'san
- £91 -

uni g
co «—I •
"tf-
un•
CD
i 8LO
M á
CI
*•••
L't

- 155 -
En la Fig. 5.4.1 se encuentran el voltaje aplicado a la fase "a", se ob-
serva que el ángulo de conexión y la magnitud (datos), son los mismos de
la Fotografía # 4.
En la Fig. 5.4.2 se tiene el gráfico de la corriente de la línea "a", pre_
senta un valor máximo de 7 p.u., o sea, 40 A pico, y un valor de estado
estable igual a 0.85 p.u., o sea, 4.8 A pico, el tiempo al cual se esta-
biliza la corriente es de aproximadamente 0.45 seg. Como puede verse,
estos valores son muy parecidos a los determinados en la Fotografía # 4:
Imáx = 38 A pico, lestable = 4.8 A pico y ta = 0.45 seg., además, compa-
rando las formas de onda puede decirse que son muy parecidas, aunque no
son exactamente iguales; ambas presentan similares picos sobre la envol-
vente promedio. La corriente de arranque ha disminuido con relación a
la obtenida en el arranque balanceado, en cambio, la de estado estable
aumentó, esto sucede por la conexión de resistencias en el rotor, y por
el desbalance existente.
En las Fig. 5.4.3 y 5.4.4 se hallan las corrientes de las líneas "b" y
"c", y puede verse que tienen un comportamiento muy parecido al de la
línea "a", pero se diferencian en magnitud y en fase. Así, en las líneas
"b" y "c" alcanza un valor máximo de 6.0 p.u. (34 A pico) y en estado e¿
table se mantienen iguales a la línea "a", se estabilizan, igualmente,
en 0.45 seg.
En las Fig. 5.4.5 y 5.4.6 se encuentran el voltaje y la corriente de la
fase "a" del rotor. Como puede verse, tienen la misma forma, pero están
invertidos, esto es por la convención de signos adoptada, lo que es no_r
mal ya que el voltaje aplicado a las fases del rotor es igual a la co-
- 156 -
rriente de fase multiplicada por la resistencia externa conectada a esa
fase. En las Fig. 5.4.7 y 5.4.8 se hallan las corrientes de las fases
"b" y "c" del rotor; estas 4 últimas variables tienen la forma ya descrj_
ta anteriormente para las corrientes del rotor, notándose además que los
desbalances se presentan en forma de picos que sobresalen de la envolver^
te promedio. La corriente de la fase "c" del rotor tiene un valor máxj_
mo de 3 p.u. (46 A pico), muy aproximado al valor de 48 A pico que fue
medido en la Fotografía # 6; el valor de estado estable no es posible d£
terminarlo, y, en forma aproximada, puede decirse que la Fig. 5.4.1 es
la misma que la Fotografía # 6. Las corrientes de las fases "a" y "b"
alcanzan también valores máximos de 3 p.u., siendo un poco distintos en-
tre sí debido a los desbalances existentes. Hay que anotar además, que
tanto en la Fotografía # 6 como en la Fig. 5.4.8 se observan pequeñas os^
cilaciones sobre la componente fundamental, durante la aceleración, pero
se atenúan casi totalmente en estado estable.
Para los casos en que existen resistencias en el circuito de rotor, se
toma referencia rotórica, por facilidad de los cálculos en el programa .
En las Fig. 5.4.9, 5.4.10 y 5.411 puede observarse al comportamiento de
las variables de ejes q y d para referencia rotórica. Se observa tam -
bien que los picos de corriente debidos al desbalance, en este caso si
se reflejan en los ejes q y d.
En la Fig. 5.4.12, 5.4.13 y 5.4.14 están las variables mecánicas, pudiejí
do notarse lo siguiente: el torque máximo es 3.9 p.u. y el máximo es
-0.4 p.u., entonces en el arranque el torque promedio será alrededor de
1.75 p.u., que es mayor al obtenido con alimentación balanceada y sin re
sistencias en el rotor; además éste es el valor del torque máximo, por

- 157 -
lo tanto en este caso el arranque se produce con torque máximo. Las o¿
cilaciones del torque se mantienen durante todo el período de acelera -
ción, llegando a amortiguarse en estado estable. Para estado estable el
torque adquiere un valor igual al torque de carga, o sea, 0.147 p.u. La
velocidad es oscilante en los primeros instantes, pero luego se amorti -
guan esas oscilaciones, llegando a valores muy pequeños durante la acele_
ración, y a desaparecer en estado estable, este comportamiento puede o]>
servarse también en la Fotografía #5. El tiempo de aceleración se com
prueba que es de 0.45 seg., con lo que se tiene una total concordancia
con los resultados experimentales.
Nuevamente vale comentar, que no sólo se ha demostrado la igualdad entre
los resultados experimentales y los de simulación, sino que adicionalmer^
te existe una total consistencia de los resultados con los conocimientos
teóricos.
5.1.5 Arranque con Voltajes y Resistencia ^Rotóricas Désbalanceádas
Los datos para este ejemplo son:
Vab = 199 eos o>et
Vbc = 207 cos(ü)fit - 2.1459)
V,,. = 194 eos(or . + 2.0324)ca et
las envolventes de los voltajes aplicados son de la siguiente forma: (Fp_
tografía #7)

* £ >|; O u y3 3 N y"] y H S 3 C!
y G .i. o y w 3 G P i d s3 P 3 3 u y w 3 .i. s i ? * * $
(s.!) T y o o /••' 9 A * o :-. ( £ ) i y o 0 ¿ '£. "i'' o :::' '. T ) T y( * n <.-i ¡..i s 5 3 .i ü T ir A )
* y G .i.. u y '"' y s y Q y i 3 3 N G 3 s y ¡v y 3 i x 3 s y 13 N 3 .¡.. 31 s 3 3 *
' ' O :~Z1. 00 A E ' A — T i OS 06 " O ~£A ü£'e>£' : '0 : ~ T A( '•• s a s i.¡ 3 j f, '- i"í<• ~: u e f¡ >i 3 i N 3 A "I u A N 3 y "1 3 G 8 (3 j.. y n *
* y (3 i y .i. S 3 N 3 y.! "] 3 G U.:! I i. W GIX 3 N G 3 &
* tí G G y 33 N y "i y y 3 3 u y 3 N i""; 3 u s ;;:i r y j.. 3 3 A $
FcEA < ; > < £ < 9(3é£r*I > c - - - ~ : í e'. 90
C.= ( T )9t)3a rr
8 T 8 6 '' '•.) ~: í £ ) 6 A E AA O p - 6 ' A ~ (c ) 6 A í:A
( £' A ¿ c A ': T A í y A1.1.1S G d y I ü N 3 P 3 3 S )í s (3 G y 31 "i y y y 31 N i "i 3 u 3 3 f y .i. "i G \
3 0 ' T -H í ¡vGI3yy33.LMI 3iA nSvíd
-Ti n y 131 N I n,::!W3i.!( *!sas Lie) ^
*:*x NGTGÍl'lGtí 3G 0~iyAy3iNI ¥¿* J\ y i. 3 3 y y "i 3 ¡7 3 i. N 31 G N 3 d
i"iy3IJ.y3A 3P3 "¡3 NG3 3i.yG3 3u D.LNnd.... ... í o G i .i. T y 3 G n i n w o p n ~i .-i 3 G s 3 N (313 y N 3.).. y 3 N o 3
* t Nni3yyG.i. y 3 3 u yAy¡i3 y "i 3G tíoyj..3wyyyd
A 9 =:: T ••! í l'I 3 N y "1 "-'4 l'iv -• r -•• t. -i í o. 3 y y "i 3 G y 13 w 3 n 3 3 y d9 £ c £ • o = i: H i y 13 y 3 N :c 3 G 31 N y. i. s N G 3fr060*o -- í c) y íynj..y.ití3 "iy yGiy333y yo.LGy "13G yT3N3.itíití3y9 /.. c o ' A == •' i > y s y G .í. y.).. s 3 "i 31:1 y 13 N 3.1. s i s 3. y~ í y n i n w y T 3 H y i ri y 3 y
¡ y ..¡. 3 3 n y y G i y 3 .-i 3 y y G .1. Q y "i 3 G y j 3 N y i. 3;:;: 3 yf y n i y i 3 3 '"¡ 3 o: y 13 H y. •.. 3 y 3 y
( '• r¡ > tí LIS SSJOTSA )i»i ¡vi j f i n y i,..! y ~¡ 3 TI 3 n y .i 3 u¡ y y y y i. * *
:;. y 3 T ;•:! 3 i O y 3 y 13 N 3 i 31 tí 3 y Á S 3 P
. T ~ ( f? ' ) x¿ 9 O T ' O ~: ( ó '•' X ;: y ñ i H i s ;-j n i;/ y () J ( Q .„,> •[• , y
~'y.i. n o A
•; ;::¡ fT 3 Q ;,.¡ j 31J y vj y,
j f;i ¡T y "; r u¡ T 3 n 9 y:
N G T 3 3 n Q T ;-i Qy w T n n y w y l 3 ¡ i y' • i y i ••> w T "-• *•"'
"if'¡ y i ?-.! i") ."1 .; '.::• 3- I ''•' ÍJ •'•• .1. '. i3 ""''.
y 3 T y .i. 3 3 "i 3 y ü y 3 T N 3 9 N T '::í G o y .¡. ""•"'; ri y._ oc T - "i y ?''-! 013 y N y 31N 3 3 .i. I "'i G d y'"' 3 P' 3 S'.

- 159 -
ü Ü i--! D ¿ CI ü N!::. 8 X ¡'i L CIA L. E 8 F' A R A E!... A R R A N Q U £ 8 O N C E R Ü *
A N G U L.. ü .0 E C Ü N £ XIÜ N i-:' A R A £ i... A R R A N Q U E J A 6::;: 1 * O '5
* EC< DEL TUR QUE n'8> EN F UNCÍ UN DE: L.A y EL u u* cw6> *O 9 O f 8:::: O •> 1 4 7
N O h 'i:f R E: £1 £!... A R C HI V Ü D £ D A T Ü 8 D E C O N DIC i ü N £ 3 !;;' I N A i... £ 3
.ü E £ 8 7 A D Ü £ S í A B L E F' A R A 818 T E M A j? £ 3 B A L A N C ti: A D U ¿ i? C Ü N D FI N / y Y R R D S J
NÜriBRE DEL. ARCHIVO DE DATOS; BARRAN QUE/v1 YRRD8.B

- 160 -
AHUMBUC. VOLT. T Kf. RPT.
FIG. 5 . 5 . 1
VOLT. T Hit. ROÍ.
• 9.1 Q.t 9.3 9.1 B.C
Tiero
I.C 9.7 9.1 9.*
FI6. 5.5.2

- 161 -
VOLT. T «S. HOT.
a.i a.t ».s a.4 a.E a.c a.7 a.c a.i
FIG. 5.5.3
^MUMUC. VOLT. T KCS. ROT. PCOtLM
7 a.c a. i
FIG. 5.5.4

- 162 -
JIOUMUE. VOLT. T RES. IWT. PTflMUimi
».z «.a 1.4 t.s
Tmra
».t «.7 a.c «.i
FIG. 5.5.5
jKMMUUE. VOLT. T RCS. ROT.
FIG. 5.5.6

£TJ
en • en 00í
-«.4
(.4
Ci
en • tn
s -4 8(T
iLO

OI 'S '9 '9IJ
»•• »•• £-e §•« I-B r-i e-e >•• ce •
fc
-utr •» i TIM
c'B re
-mi -san x UIM

- 165 -
VOLT. T RES. ROT. PCgfl
a. i ».t «.3 1.4 ».s ».t ».7 ».c B.S
FIG. 5.5.11
VO.T. T m. KBT.
FIG. 5.5.12

- 166 -
VOLT. T Ht«. IttJT. PCg*
I
»
FI6. 5.5.13
VOLT. T ftt. iwr. DÉBIL.
FIG. 5.5.14

- 167 -
¿NUMUC. VOLT. T RES. KOI. KBil
•.i a.í 1.3 «.4 a.s >.« a.7 a.c «.a
FIG. 5.5.15
VOLT. T RES. IWT. PCOULUKZÍODC
a. i a.c o. 3 •.i a.c
TJDTO
a.* a.7 a.c a.s
FIG. 5.5.16

- 168 -V(pu)
0,905-
0,543
el ángulo de conexión es 60° = 1.05 rad.
Las resistencias rotóricas son:
a: 1 Si = 0.1379 p.u.
b: 0.5 Sí = 0.069 p.u.
c: 0.5 SI = 0.069 p.u.
Tm = 0'.147 p.u.
Los resultados se muestra a continuación:

- 169 -
En las Fig. 5.5.1 y 5.5.2 se encuentran el voltaje y la corriente de la
línea "a". Se observa que el voltaje es correctamente simulado, de a_
cuerdo a la Fotografía #7. La corriente de línea máxima es 3.2 p.u.
(18 A pico), mientras que en estado estable es 0.75 p.u. (4.3A pico). El
tiempo de aceleración es de 0.85 seg. En la Fotografía # 7 se encontró
los siguientes valores: Imax = 15 A pico, ¡estable = 3.5 A pico y Ta =
0.8 seg., así puede verse que existe una buena aproximación en los resuj_
tados de la simulación. En este ejemplo también puede verse que las e£
volventes de voltaje y corriente no son exactamente iguales a los de la
Fotografía # 7, debido a que el voltaje aplicado tiene pequeñas depre -
siones ocasionadas por la forma de conexión del circuito de fuerza de la
Fig. 3.2. Puede notarse también, la existencia de picos de corriente s£
bre la envolvente promedio, ocasionados por las condiciones desbalancea-
das, que en este caso son más críticos que en los dos anteriores.
En las Fig. 5.5.3 y 5.5.4 se hallan el voltaje y la corriente de la lí-
nea "b", y en las Fig. 5.5.5 y 5.5.6 para la línea "c". De estas figu-
ras se puede decir que los voltajes si están bien simulados, y que las
corrientes tienen similar comportamiento que en la línea "a", lógicamen-
te teniendo diferentes magnitudes y fases. Así, en la línea "b" la c£
rriente máxima es 3.9 p.u. (22.2 A pico) y en la línea "c" es 3.5 p.u.
(20 A pico). Todas estas corrientes máximas de arranque son menores a
la obtenida en el arranque balanceado, debido a que en el presente caso
se arranca con voltaje reducido. En estado estable la corriente de la
línea "b" es 1.1 p.u. (6.3 A pico) y en la línea "c" es 0.87 p.u. (5.0 A
pico). Se puede decir que en estado estable es más fácil determinar el
desbalance y que en general, las corrientes de estado estable en condi-
ciones desbalanceadas aumentan con relación al caso balanceado. Las co

- 170 -
rrientes se estabilizan en. un tiempo aproximado de 0.85 seg.
En las figuras 5.5.7 y 5.5.8 se tienen los gráficos del voltaje y de la
corriente de la fase "a" del rotor, los dos tienen la misma forma y e_s
tan invertidos, ya explicado en 5.1.4.
En la Fig. 5.5.9 y 5.5.10 se muestran las corrientes de las fases "b" y
"c" del rotor, y puede decirse que estos, junto con las 2 anteriores,ti(í
nen una forma muy similar, que es común a todas las corrientes del rp_
tor. Se observa que nuevamente los desbalances se presentan en forma de
picos que sobresalen de la envolvente promedio. En la fase "c" se tiene
un valor máximo de corriente de 1.8 p.u., o sea 28 A pico, que es un poco
menor que el valor medido en la Fotografía # 9, que es 35 A pico, pero
puede decirse que en su forma y mangitud son muy parecidos. El desbalají
ce existente se refleja en estado estable en forma de oscilaciones sobre
la componente fundamental, cuyo valor es para la fase "c" de 0.25 p.u.,
o sea de 3.9 A pico-pico, que es muy parecido al valor determinado de la
Fotografía # 9 que es 4.5 A pico. Para las fase "a" y "b" los valores
máximos son 1.6 p.u. (25 A pico) y 1.9 p.u. (29.7 A pico), en cambio las
oscilaciones de estado estable son de un valor más o menos igual al de
la fase "c1" Las corrientes del rotor también se puede decir que se es
tabiTizan en 0.85 seg.
En el presente caso también se toma referencia rotórica, debido a que
existen resistencias en el circuito del rotor. De esta manera, el com-
portamiento de las variables en ejes q y d para referencia rotórica se
observa en las Fig. 5.5.11, 5.5.12 y 5.5.13, notándose que los desbalan-
ces se reflejan en estas variables.
- 171
Las Fig. 5.14, 5.15 y 5.16 corresponden a las variables mecánicas, de ma_
ñera similar a los casos anteriores, estas variables presentan las si
guientes características: el torque promedio de arranque está alrededor
de 0.6 p.u., menor que en el arranque balanceado, pero mayor que en el
caso de voltajes desbalanceados, ya que ahora existen resistencias rot(5
ricas. El torque promedio máximo es 0.75 p.u., menor que en todos los
casos, debido a que en este caso existe mayor desbalance que en cualquie^
ra de los otros; ocurre con u = 0.55 p.u. (s = 0.45). Las oscilaciones
del torque, además, se mantienen durante la aceleración y permanecen en
estado estable con un valor de 0.23 p.u., mayor al valor que se tenía pa_
ra voltajes desbalanceados, ya que ahora el desbalance es mayor también.
El valor promedio, en estado estable es de 0.147 p.u., o sea igual al to£
que de carga. La curva de velocidad es creciente y presente oscilacio -
nes pequeñas en los primeros instantes, para luego amortiguarse, aunque
no desaparecen, durante todo el período de aceleración. Se puede decir
que la velocidad alcanza su valor permanente en un tiempo de 0.9 seg.,
un poco mayor al estimado para las corrientes.
Como puede verse, los resultados obtenidos son una combinación de los
dos casos anteriores, y todos ellos concuerdan con la teoría; y aquellos
que puedieran ser comparados con los resultados de los experimentos, han
dado la validez de la modelación.
5.1.6 Falla Fase-Tierra
Todos los ejemplos en los cuales se producen fallas, tienen el siguiente
proceso: se considera la máquina trabajando en estado estable, con un
cierto deslizamiento dado; luego se escoge el tipo de falla y se pide al

- 172 -
programa que ésta se produzca en cierto tiempo dado, mediante el ingreso
del ángulo al cual se produce la falla. El programa trabaja de la si-
guiente manera: primero considera más o menos 2 ciclos de estado estable
antes de producir la falla. De esta manera, en los resultados se obtie^
nen las señales antes y después de la falla, pudiendo compararse fácil -
mente los dos estados de funcionamiento.
Para el ejemplo de falla de una fase a tierra se tiene los siguientes da^
tos:
Vaplicado: 208 V = 0.95 p.u. (voltajes balanceados)
Deslizamiento: 1,66%, s = 0.0166
Tm = 0.147 p.u.
ángulo de falla: -60° = -1.05 rad.
A continuación se presentan los resultados obtenidos:

- 173 -i-!' C; f"; i i p : e, ,::M", j J T i" ¡" i\ J ¡"; /;, i\)¿|¡": T Í"¡NA j
F A C!. J i... í A I i D E i N iv i:¡! NIER IA E. L. E C T R.[ C AE L E Ü''!" R O N L C A Y C Ü N"!" R Ü i...
ü t:: h:. R A L i. O N A S i H E"!" RIC A P E L A H A Q Ü IN A7 R I i;:' AS ILA D E 1ND U C C10 N
C A S Ü 31 n U i... A D ü I F A L L A F A S E - TIE R R A
*¥# PARAhETRÜS DE LA MAQUINA ;##*( vslc res i7?n :••' * u •> )
R E. A C T A N CIA D £ L E! S T A T ü R ¡ X ( i. ) = O * 10 é 7R E! A C T A N L 1A D E L. R Ü "f O R R E F E R1D A A L E S "!" A "f Ü R í X ( 2 ):::: ü * 106 7REAC i 'ANUÍA i-iüTüAS X (. 3 ) ~ 1,9242R E S13 "f E N C1A D E L E S T A T Ü R ; R ( 1 ) - O * O 2 7 6R E SIS T E! N CIA D E L R U T O R R E F E RID A A L E S T A T ü R í R í 2 ) - 0*0904CONSTANTE DE INERCIAí Hl- 0,2235FRECUENCIA DE L.A REDJ Fl~ ó O
* PARÁMETROS DE LA CURYA DE SATURACIÓNí *Dx vs* Fin (sstj
CüNC ATEN ACIONES DE FLI..UÜ ilUTUO CRÍTICOSF LINT O DE CORTE CON EL EJE MERTICALíF E N DIE N T E D E L A R E C T A ¿
**:*: INTERCALO DE SOLUCIÓN :***(en sos i )
TIEMPO INICIAL; TI" OTI E! H P ü F IN AL; T 2:~ O * 2P A S Ü D E IN T E ü R A CIU N S H •- 1 , O E - 3
Pi=.sos 200 -- TeJec» 1400 sesíi - Lona* Arch* 44200 bytes
:* ALIMENTACIÓN TRIFÁSICA *VOLTAJES DE LINEA APLICADOS?(SECUENCIA POSI TIUAi yi?V2?U3)
M O D U L Ü ( P « u » ) A N G U L Ü D E D E! S F A S A J E í r 3 d •> )- y'I l/9 ( 1 ) :~0 4 95 Qé < 1 ) ~0¡v2 y9(2)~0-í95 U6( 2 )~-2} 094395M3 V9(3):~();. 95 Qó ( 3 ) -~:2 * 094395
:* VOLTAJES DE LINEA BALANCEADOS *
:•<< CONEXIÓN TIPO DE:...'ÍA EN ESTATOR *
#*# SISTEMA DE EJES FIJO EN ESTATOR :***
SISTEMA BALANCEADO

¿bl '•• 0 = 8i 0601(9ív i) " G u T::! ó W'"i 30 NGIGNlG-í N3 <8i) 3 O O y G1 '"'3Ü !'G3 $
C O < T •- t.r vr H * H "]"] H :.j 3 Q H "1H 9 N W* y y y;:; T J ...":! o y .j y "1 "¡ H -| *
£ ,í. C 8 Z L '£. 8 T ¿ t7 T - O í ~- 8. i.. O OIN W : j "3 W 3 f"! 11 >í O.!..C c- b- y '¡: * i'1? — S v A O fr * f> A O "-v v T * O
<: ( u * B ) p ¿ a S 3 f' 3 N 3 S 3.).. N 31 •::' >:í u Gr O 6 O T c 6 6 £ t- 9'[ • O ":; ••' T !: y 0.1. O W 3 Q 3 .i. N'::! T >:¡ 'S O J
' i £.'I-6 ¿ 6 3 E r !'I - ~: ¿'•"•• ¿698tr89/c¡9ér ( 'O ::::-;>I ?yDJ . y.l.S3 3 u 3 i. N 3 T y y ü G0"'!fi9Ny üfllí N9WH
O ~: j. í ÍJ'"1 w'"i T J.9910*0 ~-S í OiN3IUiyZT'1830
X U!lW3-'irJy'"tyH b'W3.i..SIS *';¿: x-. ;¿ "•! '"i H H i. 8 3 G O '•? .i. 8":' 3 Ü 8 3 1 y T G T N T 8 3 *•> G I G T ¡1N O G & '4í

'f S '9IJ
IMOZL-9BVJ TTIfJ
acá
- szi -

en • tn cr> •p»
-7
-I.J
£75
• tn CT>
• coC
Tl
I

- 177 -
rjtu-
FI6. 5.6.5
riz-ncnu
FIG. 5.6.6

8'9'9 '9IJ
-rmrj
Z ' 9 ' 9 "9IJ
c»—j
ara SÜ'B
V V U Y

o • en o»en • C
T>
• vo
1-
1-
11
11
1*
1
10

Z I ' 9 ' 9 '9IJ
OJU3II
ara
T T ' 9 ' 9 '9IJ
- 08! -

- 181 -
3
i
ad
rise-rtoau
FIG. 5.6.13
MILI. riCE-TIORá
1.1
Tioro
FIG. 5.6.14

- 182 -
En las Fig. 5.6.1 y 5.6.2 se encuentran los gráficos del voltaje y de
la corriente de la línea "a". Se observa que el ángulo de falla es a-
proximadamente el mismo de la Fotografía # 10, luego del cual el voltaje
decrece violentamente al 60% del valor de estado estable, por lo tanto
puede decirse que el gráfico de la Fig. 5.6.1 si representa al voltaje
apropiado V b (Fotografía # 10). La corriente de falla en la línea "a"
tiene un valor máximo de 5.6 p.u., o sea 32 A pico, que es muy parecido
al obtenido en la Fotografía i 10, de 30 A pico; luego de unos pocos cj_
clos, aproximadamente 4, la corriente se estabiliza en su valor permanej^
te de falla que es 1,7 p.u,, o sea 9.7 A pico, muy cercano a los 10 A pj_
co, medidos en la Fotografía # 10. Comparando la figura 5.6.2 con la
Fotografía # 10 puede decirse que son prácticamente los mismos, con la
única diferencia que en el modelo existe un amortiguamiento más lento.
En las Fig. 5.6.3 y 5'.6.4 se encuentran el voltaje y la corriente de la
línea "b". El voltaje es de amplitud constante y no sufre ninguna alte
ración, esto es lo que se esperaba teóricamente. En cambio, la corrien-
te si se ve afectada, llegando a un máximo de 5.5 p.u. (31 A pico) y en
estado permanente a 3.2 p.u. (18 A pico); se estabiliza en unos 3 ciclos
más o menos.
En las Fig. 5.6.5 y 5.6.6 se tienen los gráficos del voltaje y de la cp_
rriente de la línea "c", el valor máximo es 3.5 p.u.(20 A picol y en e£
tado permanente es 2.7 p.u. (15 A pico), además se estabiliza en unos 7
ciclos.
Como puede notarse, esta falla asimétrica se refleja en distinta forma
en cada una de las líneas, tanto en estado transitorio como en estado

- 183 -
permanente. Las corrientes iniciales de falla son distintas ya que ca-
da línea tiene distinto ángulo de falla, esto ocasiona que los tiempos
de estabilización de las corrientes de falla también sean diferentes.
En las Fig. 5.6.7, 5.6.8 y 5.6.9 se hallan respectivamente las corrien -
tes de las fases "a", "b" y "c" del rotor, y se puede decir que las tres
presentan un comportamiento similar: en el período anterior a la falla
sus valores parecen ser constantes, pero en realidad son sinusoides de
frecuencia muy baja ya que el deslizamiento es 1,66%, y no es posible
distinguirlo en ese pequeño período. Luego de la falla se presentan co^
rrientes transitorias de diferente forma y valor en cada fase, llegando
a 3 p.u. (47 A pico) en la fase "a" y a 3.5 p.u. C55 A picol en las fa-
ses "b" y "c". Por último, luego de algunos ciclos se alcanza el valor
permanente de falla, y está compuesta de una señal oscilatoria, de fre-
cuencia igual a dos veces la de la red, que se superpone a la componente
fundamental del rotor en cada fase. El valor de estas oscilaciones es
alrededor de 2.5 p.u. C39 A pico) para las tres fases.
Este ejemplo fue realizado con referencia estatórica, y en las Figuras
5.6.10, 5.6.11 y 5.6.12 se hallan las variables de ejes q y d, notándose
que en estos ejes también se reflejan los desbalances existentes, pero
hay que destacar que la frecuencia de todas estas variables es la de la
red.
En las Fig. 5.6.13 y 5.6.14 se encuentran los gráficos del torque y la
velocidad, respectivamente. Puede verse que el torque tiene un valor
constante en estado estable, y en el instante de falla sufre una violen^
ta variación, llegando a valer -2.4 p.u., para luego de pocos ciclos es_

- 184 -
tabiTizarse en un valor oscilante, de amplitud 1.5 p.u., sobre el valor
del torque de carga, razón por la cual la máquina continua girando. Co-
mo puede verse en la Fig. 5.6.14, la máquina se frena en el momento de
la falla, por causa del torque negativo producido; luego la máquina cojí
tinua frenándose, hasta llegar a un valor de 0.97 p.u. en t = 0.2 seg. ,
que equivale a 1746 r.p.m., pero se observa que todavía está disminu -
yendo la velocidad, y seguramente se estabilizará en un valor cercano al
medido en el laboratorio, 1730 r.p.m. Además, en el laboratorio se notó
oscilación en la velocidad, pero ahora puede explicarse por qué el tor -
que es oscilante,
5.1.7 Falla de Dos Fases-Tierra
Para este ejemplo se tiene los siguientes datos:
V aplicado: 208 V = 0.95 p.u. (voltajes balanceados}.
Deslizamiento: 1.66% , s = 0.0166
Tm = 0.147 p.u.
Ángulo de falla: 120° = 2.095 rad.
Los resultados se presentan a continuación:

- 185 -
F A C U L. T A D I1 E IN G E NIE RIA E L E C T RIC AELECTRÓNICA Y CONTROL
OPERACIÓN ASIMÉTRICA DE LA MAQUINATRIFÁSICA DE INDUCCIÓN FECHA; 03-AUG-85 13545j01
CASO SIMULADO: FALLA 2 FASES ••••'!' I ERRA
PARÁMETROS DE LA MAQUINA' **:*(valores e n P •> u *)
R E A C: T A N CIA D E L. E S T A T O R 3REACTANCIA DEL. ROTOR REFERIDA AL ESTATOR;REACTANCIA MUTUA»R E SIS T E N CIA D E L E S T A T O R íRESISTENCIA DEL ROTOR REFERIDA AL ESTATOR ICONSTANTE DE INERCIA;FRECUENCIA DE LA RED;
X' 2>- O, 1067X' 3)- 1 * 9242
1 ) - Oí 02762)= 0*0904Hl-~ 0,2235Fl- 60
* PARÁMETROS DE LA CURVA DE SATURACIÓN;Dx vs* Fm (sst)
CONCATENACIONES DE FLUJO MUTUO CRI TICU iPUNTO DE CORTE CON EL EJE VER TICAL iPENDIENTE DE LA RECTA*
0,95Y 6 =33 =S4= 5,72
*#* INTERVALO DE SOLUCIÓN(en sea *)
TIEMPO INICIALí Tl= OTIEMPO FINAL: 12= 0,2PASO DE INTEGRACIÓN 2 H= 1.ÜE--3
I"' 3 S O 2 200 TeJec» 1400 Lona* Aren» 44200 bytes
r
* ALIMENTACIÓN TRIFÁSICA *VOLTAJES DE LINEA APLICADOS?(SECUENCIA POSITIVAS VI?V2?V3)
MODULO ( P * U » > ÁNGULO DE DESFASAJE (rao»)VI V9(l)~0»95 QéCL)-"0V2 V9(2)-0.95 Q6(2)~--2» 094395V3 V9(3)=0*95 Q6(3)=2*094395
* VOLTAJES DE LINEA BALANCEADOS *
* CONEXIÓN TIPO DELTA EN ESTATOR •¥•
*:** SISTEMA DE EJES FIJO EN ESTATOR ***
SISTEMA BALANCEADO

u
/ b- l •' O ::- Q j 060"
*• C 9 Í 5 ! ) ! 3G"13A y "I Bu N G I ü N n - í H3 (81) 3 f't O ¿1 Ll 1 "13 U "33 *
E ¿. c 8 c ¿. £. 8 'f ¿. t? T. ' O i ~ 8 i O '31N W 3 3 W '3 \~\ y u. i,9 £ fr 9 T * O ~ 8 E 6 9 i/ * O A O 791 ! O
í ( a <• s > p ¿ ü 3 3 f" 3 ¡\ 3 3 3 j.. -v 3 T y y Q ;;¡T ••- 9 /. u i.: O 9 9 '!' '' Y. •- "•"• 8 ¡:í F O 6 O J ?'. A A •? -ir 91 !' O = J.'[ í ;••! H j íl ;••! '::i Tí "n ¡ H "5 T ;••-( ;-.| r; :"tT ;í £ T 6 ¿ c 8 £' ¿ !' T •-::: ¿. y / ¿ 9 91? 8 9 / C 9 6 í/ (" O ~: s I í >! G i '•? i 8 3 3 u 3 .i. N 31 i'::! y •'.') 3
G "1 f í G N v;1 ' 11 f'l.;.. T N 9 y vJO - i- ; O .-i W 31 .i.
* 3!Ib3;j!4W"ly;-:. M W 31.818 ** ;¿: ;¿ 3 "i ;:¡ + j 3 3 Q i j' >•;•'..!.. 9 3 3 fí 8 3'"! y I '''.'• T W I 8 3 i'-J G18 T u. N G 8 í. * &
- 981 -

- 187 -
t nfls-txnu
1.1
Tioro
FIG. 5.7.1
MIL», c
w
FIG. 5.7.2

Jh
(p
.u.J
-14
00
£75
• tn
CT) en
00 00

- 189 -
IMLU. £ WEE-HEMU
FIG. 5.7.5
riu-i. e
FIG. 5.7.6
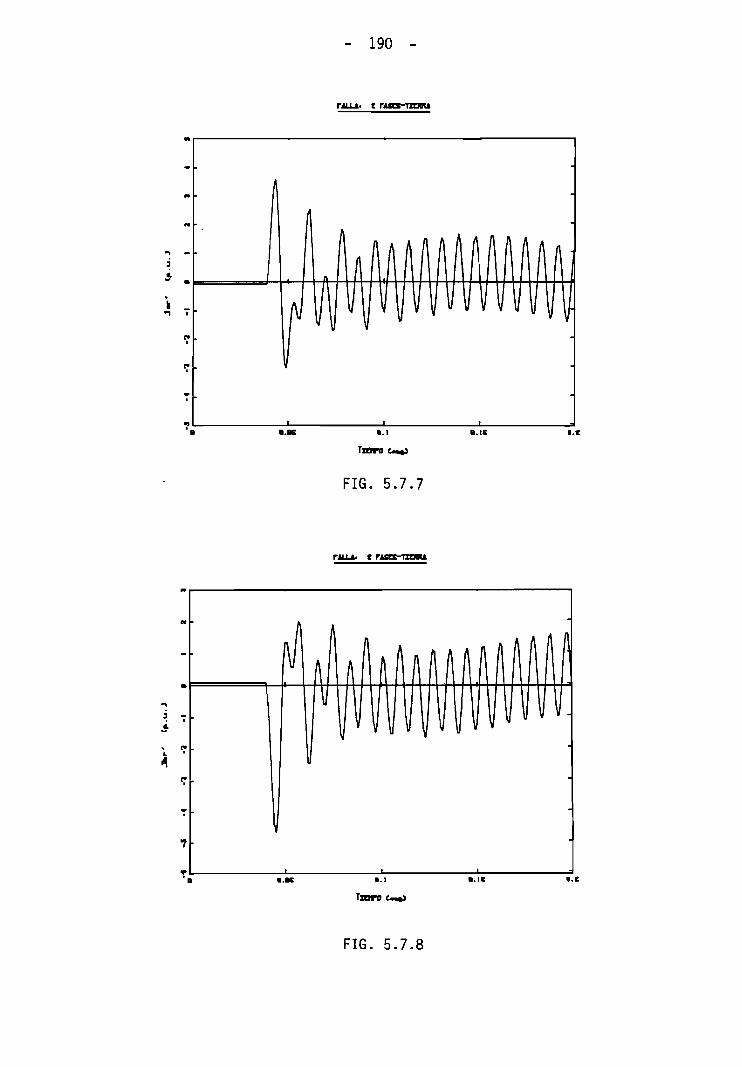
8'Z'S '9Id
L ' L ' B "9IJ
MOX.Iri SB'S
A A
V V U
- 061 -

- 191 -
t nco-ranu
Tnaro
FIG. 5.7.9
rm¿. c rutE-nenu
Iroro
FIG. 5.7.10

Z l ' L ' B *9IJ
IITS '
<t
jc
- Z6I -

OJUXCí
fc
mou-aasu J •TTITJ
errs '
nnou-sasu z •TTITJ
- £61 -

- 194 -
En las Fig. 5.7.1 y 5.7.2 se hallan el voltaje y la corriente de la lí-
nea "a", que como pueden observarse y compararse con la Fotografía # 11,
se concluye que son muy parecidas, tanto en forma como en magnitud. Así,
el voltaje tiene un mismo ángulo de falla, luego de lo cual debe ser ce^
ro. La corriente alcanza un valor máximo de 6.3 p.u., o sea 36 A pico;
en la Fotografía # 11 se midió 34 A pico. En estado permanente la co-
rriente vale 1.8 p.u. (10.3 A pico), en la Fotografía se midió 11 A pico;
además se estabiliza en unos 4 ciclos aproximadamente. Se nota que, en
general, todos los valores son casi iguales.
En las Fig. 5.7.3 y 5.7.4 se encuentran los gráficos de voltajey corrier^
te de la línea "b", y en las Fig. 5.7.5 y 5.7.6 loas correspondientes a
la línea "c". Los voltajes V^ y V disminuyen al 60% del valor de es
tado estable, lo que concuerda con la teoría. La corriente de la línea
"b" llega a 8 p.u. (45.6 A pico) y en estado permanente es de 2.6 p.u.
(15 A pico). En la línea "c" la corriente máxima es 3.5 p.u. (20 A pi-
co) y en estado permanente vale 3 p.u. (17 A pico). Estas dos corrien -
tes también se estabilizan en pocos ciclos: 4 para la primera y 7 para
la segunda. Puede notarse, nuevamente, que esta falla asimétrica se re
fleja en diferente forma en las 3 fases en las 3 líneas.
La Fig. 5.7.7, 5.7.8 y 5.7.9 corresponde a las corrientes de las fases
"a", "b" y "c" del rotor. Las formas de estas corrientes ya fueron des_
critas en el caso anterior, restando determinar los valores máximos; así,
en la fase "b" es de 3.6 p.u. (56 A pico), en la "b" es 4.6 p.u. (72 A
pico) y en la "c" es 4.4 p.u. (69 A pico). En estado permanente estas
corrientes presentan oscilación sobre la componente fundamental de doble
frecuencia que la red, y sus valores son: 1.5 p.u. (23 A pico), 1.3 p.u.

- 195 -
(20 A pico) y 1.2 p.u. (18.7 A pico), para las fases "a", "b" y "c"
pectivamente.
Este ejemplo también fue simulado tomando referencia estatórica. En las
Fig. 5.7.10, 5.711 y 5.7.12 puede observarse algunas de las variables de
ejes q y d, notándose igualmente que los desbalances se reflejan en es^
tos ejes, pero la frecuencia de estas componentes es la misma de la red.
En las Fig. 5.7.13 y 5.7.14 se encuentran torque y velocidad. Se obser-
va que al producirse la falla, se desarrolla un torque negativo de amplj_
tud igual a 3.3 p.u., ocasionando una disminución de la velocidad. Luego
el torque es oscilante con amplitud de 0.7 p.u. y un valor promedio de
cero, razón por la que la máquina tiene una desaceleración permanente.
' Para t = 0.2 la velocidad llega a 0.94 p.u o sea 1700 r.p.m. aproximada-
mente.
Puede concluirse, de los resultados obtenidos anterioremente, que la fa
lia de 2 Fases-Tierra es mucho más drástica que la de 1 Fase-Tierra.
*~ Para demostrar totalmente el modelo, se ha realizado un ejemplo demostra^
tivo de una falla de 2 Fases-Tierra para la conexión estrella en el esta_
tor. De esta manera, los datos son los siguientes:
V aplicado: 220 V - 1 p.u. (voltajes balanceados)
Deslizamiento: 1,66% = 0.0166
Tm = 0.163 p.u.
Ángulo de Falla = 0° = O rad.
Los resultados se presentan a continuación:

UN AL- 196 -
$$$ PARÁMETROS DE LA MAÜUÍHA ###( v 31 o T • e-? s t; i"; ;•••• .-. !.j i .)
R E A C í A N CIA O E i... E S T A ; O R ¡ X \ ) := O •> i O 6 7R .E A C f A N C1A í j £ í... R Ü T Ü R R E F E RID A A L E S 'i A l" i j R I X ( 2 ):::: O * 1 O ó 7R E. A ü T A N CIA H U í U A I X ¡, 3 )~ 1 » '"-•' "•••' 4 ••;5: E 31S "f' E N C1A D E i... E S T A ¡' ü R í R ( 1 ) ~ 0*02 / óR E SI S í E N CiA i"! E í... R Ü í U R R £ F' E R í I' A A L E i:; ¡"A í Ü R í R • 2 );::: O > O 9 O 4CONSTANTE DE INERCIAS Hl~ 0,2235;• RE CU ENCÍA DE LA REIJÍ !•• i :::: .--.i)
* PARÁMETROS DE LA CURVA DE ÜATURACIÓN? *
C U N C A T E N A CIO N £ S D E F L. U... J Ü M U T U U C R1 T1C U ?PUNTO DE CORTE CON EL. EJE VER TI CAL 5RENDIENTE DE LA RECTA;
*:** INTERVALO DE SOLUCIÓN **:*:( en se¿3 . )
TIEMPO INICIALl Tl~ OTIEMPO FINAL. ¡ 1"2~ Q>2F'Abü DE INTE CRAC ION; |-l~ 1, O E -3
* A LIM E N T A CIÜ N T RIF A SIC A #VOLTAJES DE LINEA APLICADOS;•; S £ C U E N C1A P O S1 T IVA' V1 ? V 2 ? V 3 >
M U D U L. O ( P » u .. ) A N G U!... O D E D E S F A S A J EVI V9CÍ. )~1 Qé(l).-0V2 V9(2)--l QA ( 2 ) ~~2 •> 094395V 3 V 9 ( 3 ) •-• í 0.6 ( 3 ) -- 2 •-, 094395
••¥• VOLTAJES DE LINEA BALANCEADOS *
r % CU N E XIO N F I r' O E S I R £ L L A E N £ S T A í Ü R :•*
SI 3 T E M A DE E -.¡ E S í;:' I j Ü E N R Ü T Ü R
SISTEMA BALANCEAiJÜ
•£:' 3;
C:
10

- 198 -
rjLU. 2 ttSCS-UEHU CtSTREUJü
«.JE t.l
tmro
•.u
FIG. 5.7.15
MLLA. z rtses-Tmu
FIG. 5.7.16

- 199 -
TALLA* 2 rASCS-UDVU CtSTOCLLJO
FIG. 5.7.17
t riscs-uaM ctswouki
FI6. 5.7.18

£TJ
• en ro oí
-í.
*•!.
«
-I
-«.*
•••
t.»
en UD
ro o o

- 201 -
znss-mu asnou»
FIG. 5.7.21
r*Lu. znua-Tiaiu asnaui
*.K 1.1
TJBfO
(LIS «.í
FIG. 5.7.22

- 202 -
En las Fig. 5.7.15 y 5.7.16 se encuentran el voltaje y la corriente de
la línea "a", sólo que ahora el voltaje es V , y la corriente de línea
es igual a la corriente de la fase. En forma similar se tiene para las
fases "b", Fig. 5.7.17 y 5.7.18, y "c", Fig. 5.7.19 y 5.7.20. Observa^
do estos gráficos y comparándolos respectivamente con los de las Fig.
5.7.1 a 5.7.6 se concluye que tienen el mismo comportamiento, que ya
fue descrito para la conexión delta del estator, pero se diferencian en
sus magnitudes y en los ángulos, ya que se trata de otras condiciones de
funcionamiento.
De igual manera, comparando las Fig. 5.7.21 y 5.7.22 con las Fig. 5.7.13
y 5.7.14, respectivamente, se observa un comportamiento idéntico, tanto
en el torque como en la velocidad, existiendo diferencia ya sea en magn^
tudes o en instantes en que se produce la falla, etc., pero no en el com
portamiento en sí.
De esta forma, se puede concluir que el modelo es válido ya sea para c£
nexión delta o estrella en el estator.
5.1.8 Falla Trifásica
Este caso fue simulado con la conexión de resistencias en el circuito de
rotor. Así, los datos son los siguientes:
V aplicado: 208 V = 0.95 p.u.
Deslizamiento: 1,66%, s = 0.0166
Tm = 0.084 p.u.
Resistencias rotóricas: a: 0.5 íí = 0.069 p.u.

- 203 -
b: 0.5 n = 0.069 p.u.
c: 0.5 ü = 0.069 p.u.
Ángulo de falla: - 65° = - 1.135 rad.
Los resultados obtenidos se presentan a continuación:

- 204 -
CASO SI HULADO ¿ FALLA IR i FÁSICA U UN RESISTENCIAS ROTÓRICAS
F'ARAMETROS DE LA MAQUINA '&'&'%.'. '•-,' a 1. '.'.: r s s s? TI :•'••• i ¡ .1 - )
R i :. A C T A N C I A D E i... £ S T A T Ü R íR i ;: A C T A N C I A D E i.. R Ü T O R R E F E R 1 D A A L. E S "i A T Ü R t X < 2 > = O , I O 6 7REACTANCIA MUTUA í X(3>~ 1*9232t''- L" S Í. ?"> ! Ü" N ü .1 H PE. í.. !".'"> 1 H ! ÜR * R í 1 ) •'— í") T O V 7 A
R E SIS T E N CIA D E!... R Ü1 U R. R E F E RID A A L E S T A T O R ¡ K ( 2 ) ~ 0,09 O 4C O N S "f A N T E D E IN E R CIA í H1 -~ 0,2235F R E C U E N CIA D E L A R E I1 'i F' 1 = 6 O
* PARÁMETROS DE LA CURVA DE SATURACIÓN? '•¥•Dx vs -> FiTt ( sst)
CONCATENACIONES DE FLUJO MUTUO CRÍTICOSPUNTO DE CORTE CON EL EJE VER TI CAL. 3PENDIENTE DE LA RECTA i
### INTERVALO DE SÜLUCION ***(en s e sí, )
"!" IE M R Ü I NICIA i... i T1 '•'•'• OTIEMPO FINAL; 12= 0,2F' A S U D E IN T E G R A ÜIÜ N i H:~ i , O E - 3
í £• •..] 6? C '. 1400 S tí £; L o n á , A r e h •> 44200 b ü t e s
* ALIMENTACIÓN TRIFÁSICA *VOLTAJES DE LINEA APLICADOS;( S E C ü E N C I A F1 0 S I T I y A S V 1 ? V 2 ? V 3 )
M O D U L. Ü ( P > u , ;• A N O U L. O D E D E S F' A S A J E ( r s d ,VI V9 <!;>:»0,95 Qéíl >~0V2 V9 ( 2 ; "::0 , 95 U6 ( 2 ; ~:-2 , 094395V3 V9(3):-0,95 Qó ( 3 ) :--2 , 094395
:* VOLTAJES DE LINEA BALANCEADOS *
* CONEXIÓN TIPO DELTA EN ESTATOR *
¿ R E S I S "f E N C I A S E X "l" E R N A S C O N E C T A D A S A L.. R Ü "!" í .) R.(val o reí;; # n r- , u * )
R.L ( 1 ) = 0,06900 Rl (2>= 0,06900 Rl(3>:= 0,06900
#:## SISTEMA DE EJES FIJO EN ROTOR ***
SISTEMA BALANCEADO

- 206 -
í>
«.ac «.i
Tinto
FIG. 5.8.1
FALLA. TRIFÁSICA
r
«.e
FIG. 5.8.2

- 207 -
riiu.
«.iUon
FIG. 5.8.3
rjiu<
«.i
Turo
«,15 «.e
FI6. 5.8.4

- 208 -
«.e
FI6. 5.8.5
FIG. 5.8.6

- 209 -
inuau
> i*
«.K «.I
TJOK
FIG. 5.8.7
r3
¿
«.ac •.i
TJDW
«.e
FIG. 5.8.8

- 210 -
uouau
3
i
FIG. 5.8.9
«.e
FIG. 5.8.10

- 211 -
«.e
FIG. 5.8.11
r
FI6. 5.8.12

- 212 -
rmi>
a¿
w
3
i
O
d
FIG. 5.8.12
«.K «.K «.eTxoro («•>
FI6. 5.8.13

- 213 -
En las Fig. 5.8.1 y 5.8.2 se grafican el voltaje y la corriente de la 1_T
nea "a", mientras que en las Fig. 5.8.3 y 5.8.4 para la línea "c". Se
observa que los voltajes se hacen cero luego de la falla para cada línea,
esto ocasiona diferentes magnitudes de las corrientes de falla. En la
línea "a" es de 3.2 p.u. (18 A pico) y en la "c" es de 2.4 p.u. (13.7 A
pico). Estos valores se atenúan lentamente, para llegar a cero en algún
instante, pero esto no se consigue observar. El valor obtenido en la Fo^
tografía # 13, para la corriente de la línea "a" es de 17 A pico; y com
parando con la Fig. 5.8.2 se observa que son muy parecidas, pero en rea_
lidad en la prueba hecha en el laboratorio primero se hizo una deseo -
nexión de las tres líneas para luego cortocircuitarlas, esta es la razón
por la que se tiene una notable diferencia en el tiempo de estabiliza-
ción de la corriente de falla.
En la Fig. 5.8.5 y 5.8.6 se hallan las corrientes del rotor en las fa-
ses "a" y "c" respectivamente; las dos corrientes tienen la misma forma,
pero sus magnitudes son diferentes, en la fase "c" el máximo es 2.2 p.u.
(34.5 A pico), mientras que en la "c" es 2.5 p.u. (39 A pico). Las dos
corrientes se atenúan lentamente, más lentamente que las corrientes de
estator. Comparando la Fotografía # 15 con la Fig. 5.8.6 se puede con-
cluir que su forma es parecida, aunque sus valores no lo sean (21 A pico
se midió como corriente de falla), de igual manera, la corriente fotogra_
fiada se estabiliza más rápidamente que la simulada. Estas discrepan-
cias existentes puede explicarse fácilmente, ya que el modelo no se cojí
sidera el período de desconexión previo a la falla.
Este ejemplo fue resuelto con referencia rotórica, así, en las Fig. 5.8.7
a 5.8.12 se encuentran las variables de ejes q y d para referencia rotó-
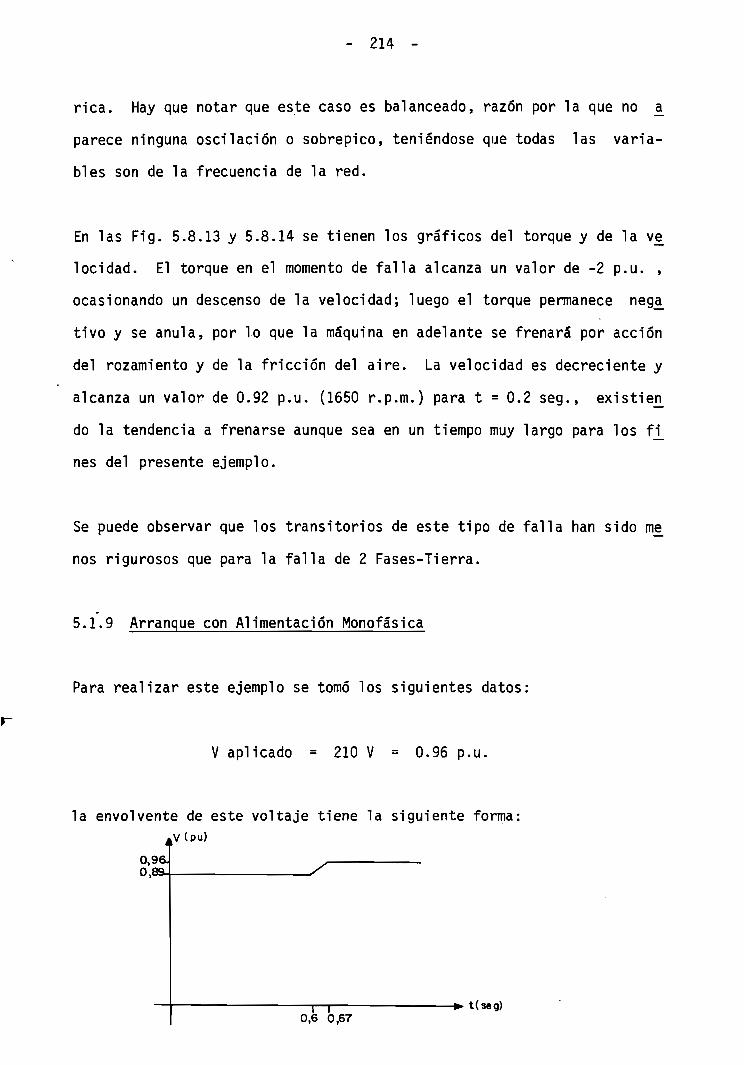
- 214 -
rica. Hay que notar que este caso es balanceado, razón por la que no a
parece ninguna oscilación o sobrepico, teniéndose que todas las varia-
bles son de la frecuencia de la red.
En las Fig. 5.8.13 y 5.8.14 se tienen los gráficos del torque y de la vei
locidad. El torque en el momento de falla alcanza un valor de -2 p.u. ,
ocasionando un descenso de la velocidad; luego el torque permanece nega^
tivo y se anula, por lo que la máquina en adelante se frenará por acción
del rozamiento y de la fricción del aire. La velocidad es decreciente y
alcanza un valor de 0.92 p.u. (1650 r.p.m.) para t = 0.2 seg., existier^
do la tendencia a frenarse aunque sea en un tiempo muy largo para los fi_
nes del presente ejemplo.
Se puede observar que los transitorios de este tipo de falla han sido me_
nos rigurosos que para la falla de 2 Fases-Tierra.
5.1.9 Arranque con Alimentación Monofásica
Para realizar este ejemplo se tomó los siguientes datos:
V aplicado = 210 V = 0.96 p.u.
la envolvente de este voltaje tiene la siguiente forma:
0,8a
0,6 0,67t(seg)

- 215 -
el ángulo de conexión es 0° = O rad.
Los condensadores de arranque y estado estable son:
C arranque = 287 yF o 0.17 p.u.
C estable = 20 yF o 2.435 p.u.
Hay que agregar que la conmutación de condensadores se hace cuando la ve_
locidad ha alcanzado el 95% de la velocidad nominal.
Es necesario recalcar que los valores de los condensadores usados no son
los óptimos, éstos son calculados en el Anexo # 2 y son:
Xc arranque = 0.137 p.u. y Xc estable = 1.37 p.u.
Además Tm = 0.147 p.u.
Los resultados obtenidos son:

- 216 -
* # #• I-' A R A n E "¡' R Ü 8 D E L A n A il;! ü IN A( v ;:•> i o r ¡i? •- t? n :-"• -¡ i..i -> )
R E A C"!" A N CIA 'D E i... £ 3 ' • ' A f ü R ~ X ( i ) ~ O •-, 10 ó 7R E A C"!" A N C; I H D E L R O F U R R E F E R i .ü A A!... £ S T A T C R * X ( 2. > •'•- 0 •> i ü 6 7R i::! A C"!" A N C IA :vi ü T U A * X í 3):::: 1 > 9 2 4 2R E SI •::•v i::' N C I A D E L. El 8 T A T Ü R 5 R í '.I. ):::: ü •> 0276RE113 1113TENÜ i A DEL ROTOR KEFERIDA AL E S T A T O R S R ( 2 )::- O- , 09 ü 4C O N 3 T A N "f ¡::1 IJ E 31N E R CIA i h J. ~~ O •> 2 2 3 5F R E C U Él N C lil A D E L.. A R E D í r i:;:: ó O
•& PARAME"!"RUS DE LA CURMA DE SATURAC.i lUN i $D x v s * ;•" ¡TI ( s a t- >
C O N C A T E N A C111D N El S D E F L. U j Ü M U T U Ü C RI "f 1!1 C Ü xPUNTO DE CORTE. CON El... E,JE VERTICAL, iR£NDlíl!l:.NíE ¿li E LA RECIA ¿
;-K '•{< & IN T Eli R O A i... Ü D lili S O L U CIÜ N '%i (••/ i"! s e s > )
TI lili H P O 111NI C: Jl A i...! T 3.;:;: OTIEMPO FINAL: T2~- 0*75P A 3 O D E i N T til G R A CIÜ N I H:::: 5 :• O El - 4
!•'•' S 8 Q 3 1 5 O () •"• T '•:? J £? C •; J. 0500 S £? Si i
:* Ai... I MENTA CIO N MONOFÁSICA *
y O i... T A J E A ¡::' L. 310 A D O ( e n v- .> u •> ) í V 9 = 0,96R E A C T A N C I A C A P A C jlTO!"< DE A R R A N Q * (en P •> u * ) í X í 7 ) ~ 0,17R Eli A C T A N C 31A C A P , D E ¡1:18 T •> E 8"!' A S > (o? ri P «i . . ¡» ) ; X ( 8 j = 2 * 4 3 S
•sí 'v O ¡...TAJES DE LINEA DE3.B ALANCEADO 3 *
:i< CU HE XI UN i'IPO DELTA EN ESTATOR í
T 10 A '!" O 3 D E L. A E N V O í... v Eli N T E i
V 2 ~ O ••: 9 ó O O TI:::: O <- 6 3 O O
SISTEMA HE EJES FIJO EN ESTATOR
- 217 -
U Ü N D i C I Ü H E S IN I C IA i... E S P A K A E i... A R K A N Q U E S Ü N C E R Ü »
ÁNGULO DE CONEXIÓN PARA EL. ARRANQUE í A6= O
* EC, DEL T URQUE ¡. T8> EN FUNCIÓN DE LA VELÜC-, (Wó)'.' 9 O T 8::;: O - J. 4 7
NOMBRE DEL ARCHIVO DE DATOS DE CONDICIONES F'INALES
DE ESTADO ESTABLE PARA SISTEhA DESBALANCEADO¿ Í»CFIN/ALMÜNF5
NOMBRE DEL. ARCHIUO DE DATOS S l*ARRANQUE/ALMONF5

o en • 10 ro
en • UD
ro i—•
oo

- 219 -
ANUIOUC.
1.7
FIG. 5.9.3
jMJUHOUE.
FI6. 5.9.4

9*6 '9 '
Msaiuounr •xmmirf
9 '6 'S '9U
£•»
msTjoiM «ncaruaunr
- ozz -

8'6 'S *9IJ
ontrartM
•i
i,
ntsMOHnf mnruBunr •raimf
L'6'9 *9Id
T3ESTJDMM Nooruaunr
- izz -

- 222 -
JMUHBUE. JLPPCTJOaH tOBrtsm
FIG. 5.9.9
a «.i a.z 4.4 «.4 ».s a.« «.7
Tmro
FIG. 5.9.10

- 223 -
En la Fig. 5.9.1 se encuentra el voltaje aplicado, se puede decir que el
ángulo de conexión es 0° y que tiene la misma envolvente de la Fotogra-
fía #16. En la Fig. 5.9.2 se presenta la corriente de la línea "a" del
estator; esta corriente alcanza un valor máximo de 7 p.u., o sea de 40 A
pico, y un valor en estado estable de 1 p.u., o sea 5.7 A pico. Para es
te caso el tiempo de aceleración es de 0.55 seg. En cambio, los valores
obtenidos de la Fotografía # 16 son: Imax = 46 A pico, ¡estable = 6 A
pico y ta = 0.7 seg., de esta forma, se puede observar que se tiene una
buena aproximación entre los respectivos valores. Comparando la forma
de onda de la corriente de la Fotografía # 16 con la Fig. 5.9.2 se obse£
va que tienen el mismo comportamiento, con ciertas diferencias; en ambos
se nota la envolvente decreciente, hasta llegar a un mínimo, en t = 0.6
para la fotografía y en t = 0.4 para el dibujo, luego de lo cual comiejí
za a crecer bruscamente ya que existe la tendencia a oscilar el sistema
debido a la tardía conmutación de los condensadores, pero después de la
conmutación se llega al valor permanente de estado estable; hay que ano-
tar también que durante la conmutación se producen picos que desaparecen
inmediatamente. Las diferencias que se encontraton son principalmente
en el tiempo de aceleración y en el tiempo al que se produce la conmuta-
ción, pudiendo decirse que el modelo presenta una respuesta mecánica más
rápida. Esto tiene su explicación: el paso de integración usado es
H = 0.0005 seg., lo que no es la mejor solución, ocasionando errores,que
por cierto no son mayores, y para efectos de comprobación del modelo puei
de darse como adecuado. Ahora bien, utilizando un menor paso de integra_
ción se tendrá una respuesta mucho más aproximada, pero a costa del tiern
po de ejecución, que se haría excesivamente grande, así como la cantidad
de datos a almacenarse. Además, hay que mencionar que la conmutación de
los condensadores no se realiza exactamente en el mismo instante en los

- 224 -
dos resultados obtenidos. De todas formas, pese a las diferencias exis^
tentes, que no son mayores, puede verse la total concordancia de los re
sultados.
En la Fig. 5.9.3 y 5.9.4 se hallan las corrientes de las líneas "a" y
"c" del estator. La corriente de la línea "b" es también la corriente
que entrega el alimentador y como puede verse tiene un valor aproximado
a 5 p.u. (28.5 A pico) en los primeros instantes, para luego crecerbru£
camente a valores de 9 p.u. (51 A pico), ocasionado por la tardía connu¿
tación de condensadores, y luego de ésta decrece al valor de estado es
table que es aproximadamente 1 p.u. (5.7 A pico). La corriente de la
línea "c" es también la corriente que pasa por el condensador y puede
ser comparada su forma con la Fotografía # 18; en los primeros instan -
tes presenta un valor aproximado de 4.5 p.u., más o menos 25 A pico, lueí
go disminuye de valor hasta 3.7 p.u. (21 A pico), posteriormente empie-
za a crecer, llegando a 9 p.u. (51 A pico), por la conmutación tardía
de los condensadores, y luego de ésta se estabiliza en un valor aproxi-
mado de 0.35 p.u. o sea 2.0 A pico. Comparando estos valores con los
obtenidos en la Fotografía # 18 puede verse que son un poco distintos,
debido a que la fotografía no es correspondiente a la simulación hecha,
ya que se realizó en otras condiciones de funcionamiento y en otro ins-
tante, así, en el modelo no se considera la resistencia de 1 ñ puesta en
serie con el condensador para tomar la señal de corriente, el ángulo de
conexión será distinto, y el instante de la conmutación de los condensa^
dores también, notándose mayor oscilación en los resultados de la simu
lación por cuanto en ésta se realiza más tardíamente la conmutación. Pe^
se a todas estas diferencias puede decirse con toda certeza que la se-
ñal de corriente de la Fotografía # 18 y la de la Fig. 5.9.4 tienen i-
déntico comportamiento.

- 225 -
En las Fig. 5.9.5 y 5.9.6 seobserva los voltajes Vca y Vbc aplicados al
estator. El voltaje V , es también el voltaje en los terminales del conca —densador, y puede verse que tiene idéntica forma que la señal fotogra -
fiada en el laboratorio, Fotografía # 18, su amplitud varía entre el
80% y el 55% del valor nominal, y además crece violentamente cuando el
sistema empieza a oscilar, para luego de la conmutación estabilizarse
en un valor cercano al 90% del nominal. El voltaje V. tiene un compo£
tamiento muy similar al v , pero sus magnitudes son algo distintas, pue_
de observarse que este voltaje crece hasta valores superiores a 2 p.u.
cuando existe oscilación, pero luego de la conmutación se estabiliza en
un valor de 0.85 p.u. aproximadamente.
En la Fig. 5.9.7 se halla la corriente de rotor de la fase "a", puede
observarse que su forma es similar a las obtenidas en otros casos desba_
lanceados, la corriente en el arranque alcanza 3.8. p.u. (59 A pico),n£
tándose además que en el pequeño período en que oscila el sistema se pre
sentan también oscilaciones en la corriente del rotor, de frecuencia d£
ble a la de la red y de considerable amplitud, 5 p.u. (78 A pico),y lue_
go de la conmutación las oscilaciones se mantienen, sobre la componente
fundamental de la corriente del rotor, pero ya con una pequeña amplitud,
0,45 p.u. (7 A pico-pico).
En las Fig. 5.9.8, 5.9.9 y 5.9.10 se hallan las variables mecánicas.
Se puede observar que el torque tiene ahora una forma muy distinta a los
casos anteriores, ya que en los primeros instantes es constante y luego
presenta un carácter oscilatorio, por cuanto todo el sistema tiende a
oscilar, pero luego de la conmutación las oscilaciones se reducen not£
blemente y dan un valor promedio igual al valor de torque de carga. El
- 226 -
torque de arranque es ahora de 1 p.u., menor que para el caso de alimen^
tación trifásica balanceada; el torque máximo es aproximadamente 1.4 p.u.
y ocurre para oo = 0.7 p.u. (s = 0.3). Las oscilaciones de torque lljí
gan a 5.5 p.u. en el período en el que oscila el sistema, y luego en es^
tado estable se amortiguan a 0.4 p.u. La velocidad tiene un comporta -
miento creciente, ya no se notan como en otros casos desbalanceados, p£
quenas oscilaciones en los primeros instantes, sino que éstas aparecen
luego, aumentando considerablemente en el período que oscila el sistema,
para desaparecer luego de la conmutación, y alcanzar un valor de estado
estable que es 0.9833 p.u. (1770 r.p.m.). En la Fig. 5.9.10 se nota
claramente que la conmutación de condensadores se realiza en el 95% de
la velocidad nominal. Las oscilaciones de la velocidad son consecuen-
cia de las elevadas oscilaciones del torque.
Hay que anotar que a pesar de no haber usado los valores óptimos de con_
densadores, los resultados obtenidos son bastante buenos, tanto en la
parte experimental como en la simulación.
En las figuras anteriores se ha visto el comportamiento transitorio de
la máquina trifásica con alimentación monofásica, usando un condensador
convertidor de fase, y puede decirse que son similares los transitorios
eléctricos con respecto a los obtenidos con alimentación trifásica ba-
lanceada, pasando por alto el período de oscilación, ya que puede evi-
tarse conmutando los condensadores a tiempo. En cambio, los transito -
ríos mecánicos son distintos, presentando una respuesta más lenta que
con alimentación trifásica balanceada.

- 227 -
5.2 CONCLUSIONES Y RECOMENDACIONES
5.2.1 Conclusiones
De los numerosos ejemplos realizados, tanto en el laboratorio como en el
computador, se pueden efectuar las siguientes conclusiones:
1.- El modelo ha sido comprobado en su totalidad, ya que en todos los
casos analizados han sido verificados los resultados de la modela-
ción, con las fotografías obtenidas de las pruebas de laboratorio,y
comprenden el transitorio completo. Además, debido a la generali-
dad de la modelación, se obtienen las variables en las tres fases
simultáneamente, lo cual no es muy fácil realizarlo en el laborato-
rio.
2.- Para estado estable se ha comprobado que las variables en ejes q y
d tienen una frecuencia(u)e-a)) en cualquier sistema de referencia,
excepto para referencia sincrónica, en tal caso todas las varia -
bles son cantidades constantes.
3.- En los ejemplos realizados no solamente se verificó su validez, sj_
no que además se obtuvo una total consistencia con la teoría, bre_
vemente expuesta en el Capítulo II. Así, en condiciones desbalan-
ceadas: existe una mayor corriente por los devanados, que se ex-
plica por la existencia de componentes de secuencia positiva y ne_
gativa, consecuentemente se tiene un menor rendimiento. Se tiene
también un torque oscilante, de frecuencia doble de la red, debido
a la interacción entre los campos magnéticos giratorios positivo y

- 228 -
negativo, además, cuanto mayor desabalance existe, las oscilaciones
son de mayor amplitud; estas oscilaciones de doble frecuencia apare_
cen también en el rotor.
4.- Se comprobó que el conector resistencias rotóricas, independiente -
mente de las condiciones desbalanceadas, aumentó el torque de arrají
que, a pesar que los desba.lances provocan una disminución del tor-
que. Además, el torque máximo.se mantiene, pero cambia el valor
del deslizamiento al cual se produce éste. De forma similar, al te_
ner voltaje reducido se redujo también el torque.
5.- Los desbalances, cualquiera que sea su origen, se reflejan tanto en
rotor como en estator. Además, para referencia estatórica los des^
balances se reflejan en ejes q y d, en amplitud únicamente, en cam
bio para referencia rotórica aparecen oscilaciones de doble frecuejí
cia que la red.
6.- Para los casos de fallas se notó lo siguiente:
- Los transitorios eléctricos se estabilizan mucho más rápidamente
que los transitorios mecánicos, y es por esta razón que se acos-
tumbra considerar constante la velocidad.
- Los picos máximos de corriente dependen del ángulo de falla, y
son diferentes para cada una de las fases. Esto ocurre también
en el arranque.
- A mayor pico de corriente de falla se tiene un menor tiempo de
estabilización.

- 229 -
- Se producen corrientes oscilatorias muy altas en rotor y torques
negativos también elevados, para todos los casos de falla.
7.- Los transitorios obtenidos para alimentación monofásica son muy pa^
recidos a los que se obtuvo con alimentación trifásica balanceada ,
debiendo realizarse la conmutación de condensadores en una veloci-
dad aproximada al 80% de la nominal, ya que de otra forma se produ-
cirán corrientes y torque oscilatorios muy altos, que pueden dañar
la máquina. La corriente de estado estable es mayor que para el ca
so de alimentación trifásica balanceada. Consecuentemente se ten-
drá un menor rendimiento.
8.- Es conveniente usar un paso de integración de 0.001 seg. para todos
los casos planteados, excepto para el caso de alimentación monofás^
ca, ya que el uso de condensadores implica mayores frecuencias de
oscilación que la de la red. Se ha usado 0.0005 seg., pero es co£
veniente reducirlo para tener mejores resultados.
9.- Los múltiples errores obtenidos se deben a fenómenos no considera-
dos, como son: histéresis, ranuras, canales de ventilación; tam-
bién se deben a inexactitud en los cálculos de los parámetros de la
máquina, y sobre todo a la pobre apreciación que se puede tener ya
sea de los gráficos o de las fotografías.
5.2.2 Recomendaciones
El programa ha sido desarrollado en un computador Tektronix 4051, por lo
tanto utiliza el lenguaje BASIC, de forma que es muy fácil adaptarlo a

- 230 -
cualquier computador personal; por lo tanto se recomienda utilizar un com
putador más moderno para disminuir el tiempo de ejecución de los progra^
mas, ya que el mencionado computador es extremadamente lento. Utilizan-
do otro computador, más rápido, podrían hacerse los ejemplos de alimenta^
ción monofásica con un menor paso de integración y obtener resultados
más exactos.
Realizar la simulación de la máquina trifásica de inducción con alimen-
tación monofásica y conexión estrella en el estator.
Completar el presente modelo con otros casos importantes como son desco-
nexión y reconexión de fases, así como alimentación de frecuencia varia-
ble y alimentación de voltajes- no >siiuisoi dales para que este modelo comple^
to sea utilizado en un computador personal, por las facilidades que éste
presenta.
Utilizando el presente modelo hacer un estudio estadístico de las varia_
ciones que pueden tener los parámetros de la máquina y como afectan es-
tas variaciones al comportamiento transitorio de la misma; pudiendo in-
cluirse también los errores en la determinación de los parámetros de la
máquina.
También se puede hacer un estudio, usando el presente modelo, del compo_r
tamiento de la máquina en condiciones balanceadas o desbalanceadas, con
diferentes tipos de carga acoplada al eje, dado que se brinda la posibi-
lidad de programar la ecuación del torque mecánico. Esto sería muy intjí
resanto sobre todo para el caso de alimentación monofásica.

- 231 -
5.3 RESTRICCIONES
El programa desarrollado sirve para calcular las variables de estado
transitorio, de la máquina trifásica de inducción durante operación si-
métrica o asimétrica y también en ciertas condiciones de falla. Para re
solver esos casos se usa el sistema de ejes arbitrarios de referencia q
d o. Las restricciones del programa son:
1.- Limitación del número de pasos de integración, ya que el computador
usado (Tektronix 4051) es muy lento, cada paso se ejecuta en 7 seg.
y además en cada paso se almacenan datos que ocupan aproximadamente
220 bytes, y cada diskette tiene una capacidad máxima de 630 kbytes.
2.- En los casos que existen resistencias rotóricas, se fija el sistema
de referencia en el rotor, y para alimentación monofásica en esta-
tor.
3.- Cuando existen resistencias rotóricas estas se conectan en Y, en £
tro caso las bobinas de rotor está cortocircuitadas.
4.- Para alimentación monofásica sólo se considera la conexión delta en
el estator.
5.- Todos los datos de entrada y salida están dados en p.u. , y los
los en radianes.

- Al-1 -
A N E X O # 1
PARÁMETROS DE LA MAQUINA DE INDUCCIÓN (*>. 5, *, 9. i*»)
Los parámetros del circuito equivalente de la máquina de inducción son
calculados en base a los datos obtenidos de las pruebas de vacío y del
rotor bloqueado; además se midieron: la resistencia por fase del esta^
tor, la relación de espiras y la constante de inercia; además se reali-
zaron mediciones para trazar la curva de magnetización.
La resistencia por fase del estator se midió aplicando un voltaje contí_
nuo a una fase del estator y se tomaron valores de voltaje y de corríen_
te. Así:
VDC ' 7'5V
Í = 5 A
de donde se obtiene un valor de resistencia por fase del estator de;
rg = 1.5 tt.
De la prueba de vacío se obtuvo los siguientes datos:
VL = 220 V
IL = 3.4 A
PT = 210 W
n = 1770 r.p.m.
Así mismo, de la prueba de rotor bloqueado:

- Al-2 -
VL = 52.5 V
IL = 7A
PT = 290 W
n = O r.p.m.
Con estos datos se obtuvo los siguientes resultados por fase:
r¿ = 4.922 «
xls = xl's = 5.81 Í2
xm = 104.785 n
Para determinar la relación de espiras se deja el rotor en circuito a-
bierto y se aplica al estator el voltaje trifásico nominal a la frecuen_
cia nominal. Se mide el voltaje inducido en cada fase del rotor, y la
relación de espiras es:
Via = — (Al.l)
V2
donde: Vi es el voltaje aplicado por fase del estator.
y V2 es el voltaje inducido en cada fase del rotor, (i1*)
En el laboratorio se conectó el estator en delta, mientras que el rotor
lo está en estrella. Se aplicó al estator el voltaje nominal,V =220V,
y se midió el voltaje inducido entre fases del rotor, V = 139 V. De e
ta manera, se tendrán las siguientes relaciones:
Vi = Vs = 220 V

- Al-3 -
Vr 139
/3~ /3~
Vi 220Por lo tanto: a = — = = 2.74
Vz 139//T
Para calcular la constante de inercia primeramente se calculó el momento
de inercia, para lo que se usó el método electromecánico (<*)• Así:
J p u>r + A cor2 = O (Al-2)
siendo J el momento de inercia, p wr la pendiente de la parte lineal de
la curva de desaceleración y A tor2 la fuerza de rozamiento y fricción
del aire.
Despejando de la ec. Al. 2:
A o) 2J = -- — [m2Kg] (Al. 3)
Para determinar estos últimos valores se realizan las pruebas de vacío
desacoplado y de desaceleración. La prueba de vacio desacoplado dio los
siguientes resultados:

- Al-4 -
VL
[V]
220
200
180
160
140
120
100
80
ll[A]
3.4
2.85
2.6
2.3
2.0
1.75
1.55
1.5
Wi
[W]
485
395
335
270
220
175
145
130
W2
[W]
275
205
158
113
71
38
15
5
PFe+Prot
[W]
193
178
167
149
143
133
127
122
TABLA Al-1
Datos de la Prueba de Vacío Desacoplado
Con los datos de la Tabla Al-1 se realizó el gráfico de la Fig. Al-1 :
Fe + Prot Vs ' VL' extrapolar esta curva y determinar el punto de
corte con el eje Y, se tendrá que este valor corresponde a las pérdidas
rotacionales ya que en este caso las pérdidas en el hierro son cero.
Del gráfico de la Fig. Al-1 se obtiene el valor P . = 115 W.i U t
Ahora, rot [m2 Kg/seg2] (Al.4)
donde oí = 185.35 rad/seg.
entonces = 0.62045 [m2 Kg/seg2]

- Al-5 -
20 40 160 180 200 220
FIG. Al-1
Curva Extrapolada para Obtener las Pérdidas Rotacionales.
La prueba de desaceleración dio como resultado la Fotografía de la Fig,
Al-2.
Escalas
V: 30.9 rad/seg/div
H: 2 seg/div,
FIG. Al-2
Curva de Desaceleración.

- Al-6 -
Se obtuvo los siguientes datos, que son 2 puntos de la región lineal:
ti = 4 seg. y o)i = 154.5 rad/seg.
t2 = 10 seg. y o)2 = 43,26 rad/seg.
la pendiente de la región lineal es:
0)2 ~
t2 -
(Al.5)
entonces:
pu>r = - 18.54 [rad/seg2]
Ahora, de la definición del momento de inercia ec. Al-3 se obtiene:
J = 0.03347 [m2 Kg]
Finalmente, la constante de inercia se obtiene de la siguiente ecuación:
5.48 J o) 2 10"6H = ^ [seg]
Sn
donde: J: momento de inercia en Kg . m2
o) : velocidad sincrónica en r.p.m.
Sn: potencia aparente nominal en KVA
siendo S = 2.667 KVA, se obtiene el valor:
H = 0.2235 seg.
(Al.6)
Para la determinación de.la curva de magnetización se usa un procedimien

- Al-7 -
to similar al usado para medir la relación de espiras. Se toma como da-
tos la corriente de línea del estator y el voltaje inducido entre fases
del rotor, para diferentes valores de la primera. Debido a que el mode_
lo es por fase, hay que transformar los valores medidos a valores de fa_
se, de la siguiente manera:
If =
Vf = Vff
/r (Al.7)
Seguidamente se calcula el voltaje de fase del rotor referido al estator,
que se consigue multiplicando al voltaje de fase por la relación de espi_
ras.
Vf = a Vf (Al.8)
Estos resultados se encuentran en la Tabla Al-2.

- Al-8 -
[íh0.2
0.3
0.40.5
0.6
0.81.0
1.2
1.41.6
1.82.02.4
2.83.43.8
4.6
5.46.2
7.08.0
9.0
10.0
tvf]11
15.520.526
31
4151
58.566
75.585
93.5110
125140152
160
172180
186
196203
207
If[ A ]
0.1160.1730.2310.2890.3470.4620.5770.6930.8080.9241.041.161.391.621.962.192.663.123.584.044.625.2
5.8
Vf[ V ]
6.358.95
11.8415.017.923.729.533.838.143.649.154.063.572.280.887.892.499.3
103.9107.4113.2117.2119.5
Vf[V ]
17.424.532.541.149.165.080.892.6
104.4119.5134.5148.0174
198
221.4240.6253.2272284.7294.3310.2321
327.5
TABLA Al-2
Curva de Magnetización
Ahora, en base a la Tabla Al-2 se calculan las concatenaciones de flujo:
sin saturación y con saturación, de la siguiente forma:
= If • x m
- K . Vf
(Al.9)
(Al.10)

- Al-9 -
siendo x = 104.785 íí y K = 0.81, que es tomado de la región lineal, en
la cual se cumple que tim = i|>*.
Por último se determina Ax mediante la ec. Al.11:
Ax = ti -ti*m m (Al-11)
y se presentan los resultados en p.u.
Todos estos valores mencionados se presentan en la Tabla A2-3.
*m
[V]
12.118.224.230.336.348.460.572.684.796.8
108.9121.0145.2169.4205.7229.9278.3326.7375.1423.5484.0544.5605.0
*Í[V]
14.119.926.333.339.852.765.575.084.696.8
108.9120140.9160.4179.3194.9205.1220.3230.6238.4251.3260265.3
Ax
[V]
-_
----_
-_
-1.04.39.0
26.435.073.2
106.4144.5185.1232.7284.5339.7
ti*^m[p.u.]
0.0640.0910.1190.1520.1810.2390.2980.3410.3850.440.4950.5450.6410.7290.8150.8860.9321.0011.0481.0841.1421.1821.206
Ax
[p.u.]
_
_
_
._
_
.
—_
_
0.0045450.01950.0410.120".1590.3330.4840.6570.8411.0581.293
.1.544
TABLA Al-3
Datos de la Curva de Magnetización.
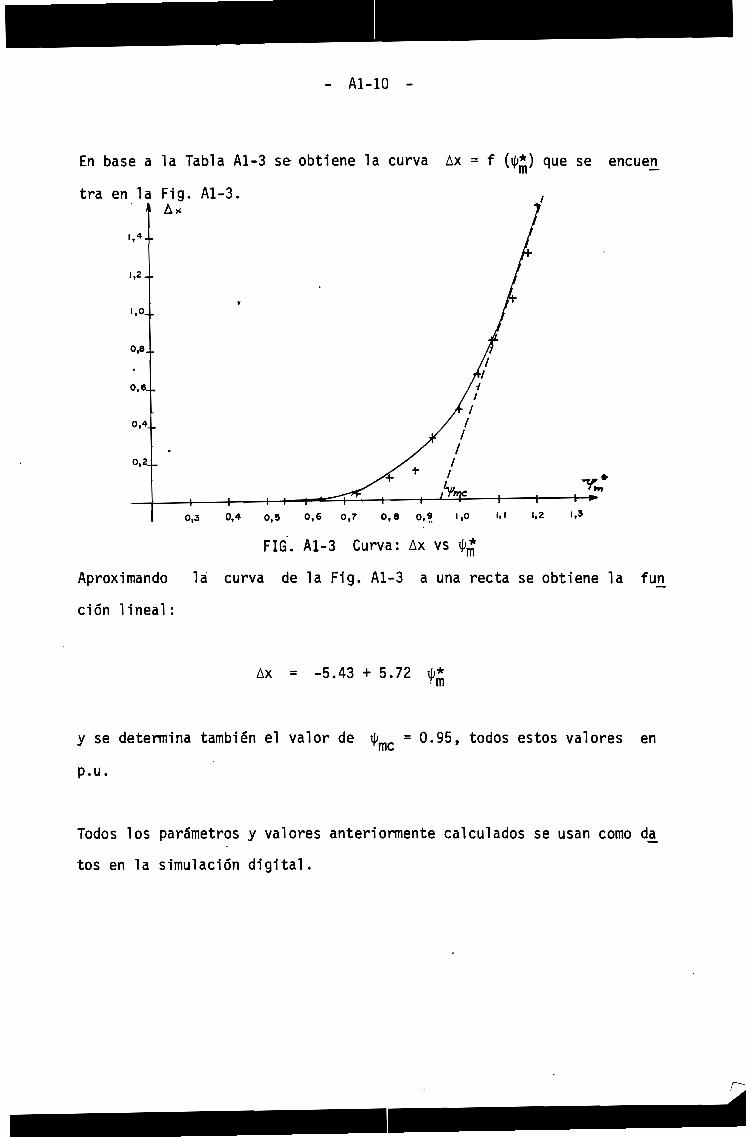
- Al-10 -
En base a la Tabla Al-3 se obtiene la curva Ax =
tra en la Fig. Al-3.A*
1,4..
que se encuer^
0,8..
0,6..
0,4. .
0,2..
1 1 1—i—r—'0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 I, I 1,2 ',3
FIG. Al-3 Curva: Ax vs \¡>*
Aproximando la curva de la Fig. Al-3 a una recta se obtiene la fun
ción lineal:
Ax = -5.43 + 5.72
y se determina también el valor de \¡>mc = 0.95, todos estos valores en
p.u.
Todos los parámetros y valores anteriormente calculados se usan como
tos en la simulación digital.

- A2-1 -
A N E X O # 2
CALCULO DEL CONDENSADOR ÓPTIMO PARA ALIMENTACIÓN MONOFÁSICA
El presente desarrollo matemático es tomado de la referencia bibliográfj_
ca # 2, pero se indican únicamente los puntos de interés para la presen-
te modelación.
Como ya se mencionó en el Capítulo II es necesario escoger adecuadamente
los condensadores para reducir al mínimo los componentes de secuencia n£
gativa. Así, definiendo como factor de desbalance a la relación entre
el módulo del voltaje de secuencia negativa y el módulo del voltaje de
secuencia positiva, se tendrá que minimizar este factor para tener el nrí
nimo desbalance. Entonces,
U = (A2.1)
donde: U: factor de desbalance.
V2: voltaje de secuencia negativa.
Vi: voltaje de secuencia positiva.
Recordando algunos conceptos como son: el circuito equivalente de la má_
quina de inducción para estado estable es el siguiente, para secuencia
positiva.

- A2-2 -
rs «"ir
FIG. A2-1 Circuito Equivalente de Estado Estable para
Secuencia Positiva.
Para secuencia negativa se tiene el misino circuito equivalente, pero cam
biando S por (2-S).
De esta forma, para un deslizamiento dado, se pueden encontrar las impe-
dancias de secuencia positiva y negativa.
Los voltajes de secuencia están definidos de la siguiente forma:
Vi
V2
Vo
= —3
1 a a2
1 a2 a
1 1 1
Vas
Vbs
Vcs
(A2.2)
donde: Vi, V2 y V0 son los fasores de secuencia +, - y 0.
var.» Vh_ y V^_ son los fasores de voltaje del estator, enaS D5 CS
estado estable.
. 21T
De igual forma se cumple para las corriente. Además la relación entre

- A2-3 -
el voltaje con su correspondiente corriente está dada por:
Vi = Zi Ii
V2 = Z2 I2 (A2-3)
Donde Zj y Z2 son las impedancias de secuencia (+) y (-), calculadas
del circuito equivalente para la respectiva secuencia.
Las admitancias de secuencia (+) y (-) serán:
Yi = 1/Zi
Y2 = 1/Z2 (A2-4)
Para el caso del estator conectado en delta se tiene el siguiente diagra^
ma de conexión:
V: voltaje aplicado
FIG. A2-2
Alimentación Monofásica: Estator en Delta.
De la Fig. A2-2 se obtienen las siguientes relaciones:

- A2-4 -
vas - v = o
Vcs - J xc «'es
as bs cs (A2-5)
Utilizando adecuadamente las ec. A2-2, A2-3, A2-4 y A2-5 se llega a las
siguientes ecuaciones para los voltajes de secuencia:
Vi =V(a2 -V3 Xc Y2)
3~ j - /TXC (Yi + Y2)(A2-6)
-V(a
Y2)
Ahora, reemplazando en la ec. A2-1 se obtiene:
(A2-7)
U =
simplificando: U =
|a2 - /3~ Xr Y2\f
1 + 3XC2 Yi2 - Xc Y! Ki
1 + 3XC2 Y22 + Xc Y2 K2
1/2
(A2-8)
(A2-9)
donde: KI = /3~ eos <j>i + 3 sen <j>i
K.Z = T/3 eos <í>2 - 3 sen <í>2 (A2-10)
siendo 4>i y <j>2 los argumentos de las impedancia Zi y Z2.
Para el mínimo desbalance:

- A2-5 -
3U= O (A2-11)
llegándose a la ecuación Ci Xc2 + C2 XG + C3 = O (A2-12)
donde Ci = 3Yj. Y2 (YiK2 + Y2Ki)
C2 = 6ÍY!2 - Y22)
C3 = - (YiKo. + Y2K2) (A2-13)
Para una velocidad dada, primero se calculan las impedancias de secuen -
cia y luego se resuelve la ec. A2-12, obteniéndose el valor de X para
tener mínimo desbalance a esa velocidad.
Usando este procedimiento se elaboró un subprograma que calcula los
res de X óptimo para diferentes valores de velocidad.
Ingresando a este subprograma los parámetros de la máquina considerada,
se obtuvo el siguiente resultado, graficado en la Fig. A2-3.
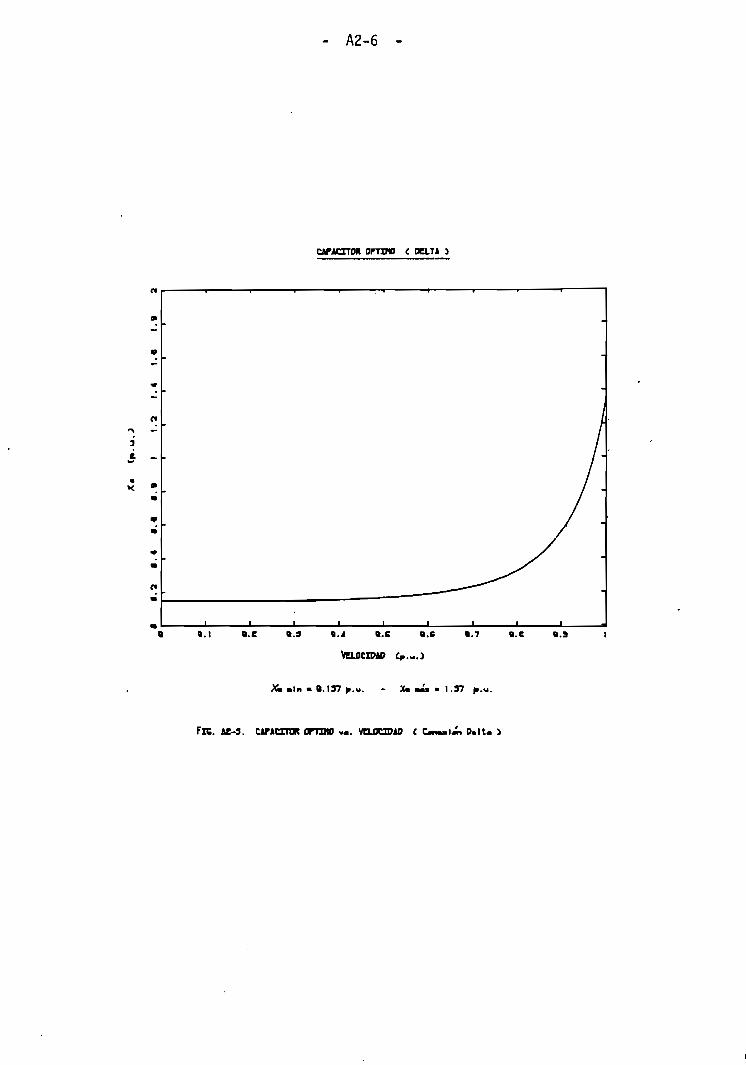
- A2-6 -
CtneXTM ÓPTIMO C DELTA }
I I I
a 9.1 9.e 9.3 .Á a.c a. e •.? a.c a. a
VELOCIDAD cp.-.o
.tn . B.I37 p.u. - Xmm¿**\.J7 p.u.
Fie. Ar-3. urtcrraR arruto v«. VELOCIDÍO c c««.iJi, o.it.

- A2-7 -
Del gráfico de la Fig. A2-3 puede decirse que para tener mínimo desbalan^
ce todo el tiempo, es necesario un condensador variable, ajustado adecúa^
damente para cada valor de velocidad. Observando detenidamente esta cu_r
va, puede decirse que un mismo valor de condensador puede usarse para ve^
locidades comprendidas entre O y el 80% de la nominal, luego se necesita,
para valores mayores de velocidad, un mayor valor de X que dependerá
de la velocidad requerida. Por lo tanto se puede trabajar perfectamente
con 2 condensadores: uno que sirva para el arranque (bajas velocidades)
y otro para estado estable (velocidades cercanas a la nominal); hay que
recordar que la máquina de inducción trabaja con velocidades muy cerca-
nas a la nominal
Para la máquina usada en las pruebas se obtiene los siguientes valores
de condensadores para funcionamiento óptimo:
X (Arranque) = 0.137 p.u. o 355 yFcXc (estable) = 1.37 p.u. o 35.6 yF

- A3-1 -
A N E X O # 3
EQUIPO UTILIZADO
Motor de Inducción:
Marca: CETEL BRUXELLES
Voltaje: 220>380 V Corriente: 7/4.04 A
Conexión: A/Y Frecuencia: 60 Hz
Velocidad: 1800 r.p.m. Fases: 3
Potencia: 2 C.V. / Rotor: Bobinado
Banco Trifásico de Condensadores:
Marca: CETEL BRUXELLES
Voltaje: 220/380 V Corriente: 5.8/3.35 A
Conexión: A/Y Frecuencia: 60 Hz
Capacidad total: 117 yF
1 Banco de Condensadores: Voltaje: 220 V Capacidad: 50 yF
2 Bancos de Condensadores: Voltaje: 220 V Capacidad: 60 yF
2 Bancos de Condensadores: Voltaje: 150 V Capacidad: 40 yF
1 Autotransformador trifásico: V-¡n 240 V V0ut 0-280V 22A
1 Equipo de Control: 2 Contactores Principales
2 Pulsantes
1 Selector
1 Relé de Tiempo
2 Resistencias 10 Í2; 5A (Desbalance de Voltajes)
3 Resistencias 3.3 íí; 9A (Rotor)
1 Resistencia 3.3 S2; 9A (Señal de corriente)
1 Resistencia 570 Í2; 0.9 A (Señal de velocidad)
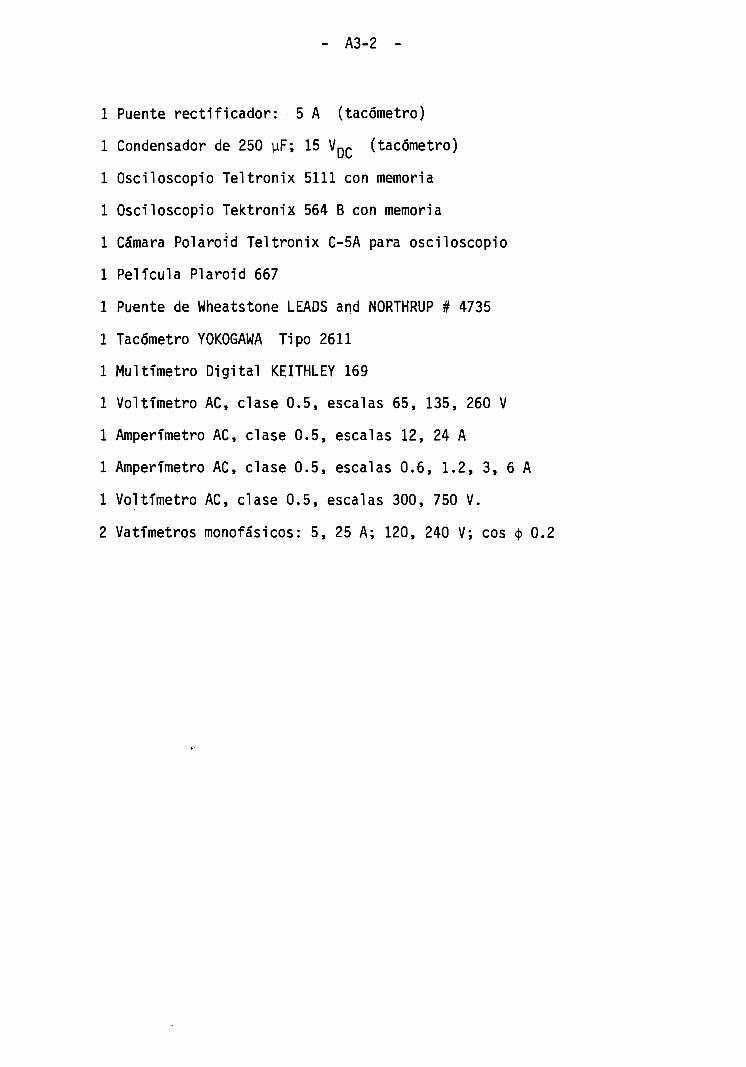
- A3-2 -
1 Puente rectificador: 5 A (tacómetro)
1 Condensador de 250 yF; 15 VD~ (tacómetro)
1 Osciloscopio Teltronix 5111 con memoria
1 Osciloscopio Tektronix 564 B con memoria
1 Cámara Polaroid Teltronix C-5A para Osciloscopio
1 Película Plaroid 667
1 Puente de Wheatstone LEAOS and NORTHRUP # 4735
1 Tacómetro YOKOGAWA Tipo 2611
1 Multímetro Digital KEITHLEY 169
1 Voltímetro AC, clase 0.5, escalas 65, 135, 260 V
1 Amperímetro AC, clase 0.5, escalas 12, 24 A
1 Amperímetro AC, clase 0.5, escalas 0.6, 1.2, 3, 6 A
1 Voltímetro AC, clase 0.5, escalas 300, 750 V.
2 Vatímetros monofásicos: 5, 25 A; 120, 240 V; eos $ 0.2

- A4-1 -
A N E X O # 4
MANUAL DE USO DE LOS PROGRAMAS
1.- OBJETIVO: El programa desanzolado tiene por objeto resover las £
cuaciones que rigen el comportamiento transitorio de la
máquina de inducción en diferentes condiciones simétricas o asimétricas,
pudiéndose estudiar el comportamiento de la máquina sin necesidad de s£
meterla a condiciones drásticas de trabajo.
2.- MÉTODO DE SOLUCIÓN: Por mayor facilidad se ha representado las e
cuaciones de la máquina en el sistema de coojr
denadas arbitrarias de referencia. Como se trata de un sistema de ecu¿
ciones diferenciales, el método usado es el de integración numérica de
Runge-Kutta de 42 Orden. Así, se resuelve las ecuaciones diferenciales
en eje q d O y luego se transforman esos resultados a variables de fase.
Los distintos casos considerados son simulados mediante la adecuada re-
presentación de los voltajes aplicados.
3.- DESCRIPCIÓN DE LOS PROGRAMAS: Los programas han sido desarrolla -
dos en lenguaje BASIC, utilizando
el mi ni computador Tektronix 4051, y los resultados se grafican en el
grafizador Tektronix 4662 anexo al primero.
El programa digital consta de un programa maestro que maneja a varios
subprogramas que cumplen las distintas funciones: a) ingreso de datos
y selección de opciones de funcionamiento, b) integración numérica, c)
gráficos y d) cálculo de los condensadores óptimos para el funcionamien

- A4-2 -
to con alimentación monofásica.
diferentes programas están grabados en disco con las siguientes iden^Los
ti f i cae iones:
Programa maestro: ®NRPC/MAESTRO
Ingreso de datos y selección de opciones de funcionamiento: /ÜNRPC/INGDAT
Integración Numérica: (Ó) NRPC/INTNUM
Gráficos: tá) NRPC/GRAFICO
Capacitor Óptimo: íQ) NRPC/CAPOPTI
Programa Maestro.- Como ya se dijo tiene por objeto comandar a todos los
subprogramas. Se hace necesario este programa por la
limitada capacidad de memoria del computador usado, 32 Kbytes, entonces
el programa maestro cargará en la memoria únicamente el subprograma de i£
mediata ocupación, y luego lo borrará. De esta manera, se tendrá la s
guiente biblioteca de programas.
MAESTRO
NRPC / M A E S T R O
INGRESO DE DA.TOS Y OPCIÓN DE
FUNCIONAMIENTO<3> NRPC/INGDAT
INTEGRACIÓN NU-
MÉRICA
fS>NRPC/INTWUM
GRÁFICOS
<S)NR PC/GRÁFICO
CAPACITOR OP_
T IMO
<S) NRPC/CAPOPTI
FIG. A4-1»
Biblioteca de Programas

- A4-3 -
Ingreso de Datos.- En este programa se realiza el ingreso de datos, la
escritura de los mismos y la selección de las opci^o
nes de funcionamiento.
Detallando funciones:
- ingreso de parámetros de la máquina,
- del intervalo de solución,
- selección de condiciones de funcionamiento: alimentación trifásica
o monofásica
con o sin resitencias
en el rotor.
- ingreso de X o de resistencia rotórica,
- selección de conexión en estator Delta
Estrella
- forma de la envolvente del Vaplicado>
- selección del sistema de referencia - estator
- rotor
- girando a w
- selección de estado de funcionamiento Estado Estable
Arranque
- selección de Fallas Fase-Tierra
2 Fases-Tierra
3 Fases
Funcionamiento normal
- cálculo de condiciones iniciales para comenzar la integración
Arranque
Estado EstableSistema Balanceado (Circuito equivalente)
Sistema Desbalanceado (Archivo de Datos)

- A4-4 -
- saturación inicial.
Integración Numérica.- Este subprograma tiene como función realizar la
integración numérica de las ec. diferenciales
en variables q d o, luego las transforma a valores de fase y almacena
los resultados finales.
En este programa también se calculan los voltajes aplicados en cada paso
de integración, se calcula voltajes y corrientes en ejes q d o y luego
se transforman a variables de fase. Además se calculan torque y veloci-
dad. Dentro de este subprograma se encuentra la subrutina que sirve pa_
ra introducir la saturación.
Gráficos.- La función de este subprograma es realizar los gráficos de
los datos que fueron calculados y almacenados en archivos,en
el proceso de integración.
Los gráficos se realizan, como ya se dijo, en el grafizador anexo al com
putador o en la pantalla del mismo, y pueden ser: voltajes y corrientes
de las 3 fases tanto del estator como del rotor; voltajes y corrientes
en ejes q d o tanto para estator como para el rotor, además las curvas
del torque y velocidad en función del tiempo y la curva torque vs. velo-
cidad.
Capacitor Óptimo.- Este subprograma calcula los valores de los condensé^
dores apropiados para tener el mínimo desbalance de
secuencia, cuando la máquina trifásica trabaja con alimentación monofásj^
ca. Los resultados se guardan en archivos y luego se grafican, usando

- A4-5 -
el mismo programa anterior pero con algunas modificaciones.
4.- NOMENCLATURA: Las variables de entrada son:
X(D = x]s
X(2) = xlr
X(3) - xm
R(D = rs
R(2) = r;
Hl = Constante de inercia.
Fl = Frecuencia de la red.
53 = Punto de corte con el eje vertical de Ax =
54 = Pendiente de la recta Ax = f(üj*)mTI = Tiempo inicial
T2 = Tiempo final
H = Paso de integración
V9 = Voltajes aplicados
Q6 = Ángulos de desfasaje de los voltajes aplicados
X(7) = Reactancia del condensador de arranque
X(8) = Reactancia del condensador de estado estable
Ul, Jl = ler. punto de la envolvente del voltaje aplicado.
U2, J2 = 2do. punto de la envolvente del voltaje aplicado.
W6 = Velocidad angular del rotor
W7 = Velocidad angular eléctrica
W8 = Velocidad angular del sistema de referencia
S = Deslizamiento
D6 = Desplazamiento angular del rotor
T = Ti empo

- A4-6 -
Y9 = Concatenaciones de flujo mutuo crítico
KO = Factor que modifica la envolvente del voltaje aplicado.
N = Número de ecuaciones diferenciales.
NI = Número de variables de salida.
H6 = Unidad de impresión de resultados.
T7 = Tiempo de falla.
A4 = Ángulo de falla.
A6 = Ángulo de conexión en el arranque.
T8 = Torque mecánico.
D$ = Nombre del archivo de condiciones finales.
0$ = Nombre del archivo de datos.
Las variables de salida se encuentran en un vector W y son respectivamejí
te:
W (1, 2, 3) = Corrientes a b c del estator.
W (4, 5, 6) = Voltajes a b c del estator.
W (7, 8, 9) = Corrientes a b c del rotor referidas al estator.
W (10,11,12) = Voltajes a b c del rotor referidos al estator.
W (13) = Torque electromagnético.
W (14) = Velocidad.
W (15, 16) = Corrientes q d del estator.
W (17, 18) = Corrientes q d del rotor referidas al estator.
W (19, 20) = Voltajes q d del estator.
W (21,22) = Voltajes q d del rotor referidas al estator.
W (23) = Torque mecánico
RO = Número de puntos para el gráfico.
Wl = Vector que contiene los valores mínimos de todas

- A4-7 -
las variables
W2 = Vector que contiene los valores máximos de todas
las variables.
T = Ti empo
TI = Tiempo mínimo
T2 = Tiempo máximo
U3 = Unidad para gráficos de resultados.
Otras Variables:
Y = Concatenaciones de flujo
. D = Derivadas de las concatenaciones de flujo
Y7 = Concatenaciones de flujo mutuo en eje q
Y8 = Concatenaciones de flujo mutuo en eje d
W4 = Corrientes en ejes q d, tanto de estator como de rotor
H7 = Unidad donde está el disco de datos
H8 = Unidad donde está el disco de programas
Indicadores:
M7 1 alimentación trifásica
2 alimentación monofásica
M6 1 estator conectado en Delta
2 estator conectado en Estrella
19 1 sin resistencias rotóricas
2 con resistencias rotóricas

- A4-8 -
18 1 Sistema de referencia fijo en estator
2 Sistema de referencia fijo en rotor
3 Sistema de referencia girando a la velocidad sincrónica
E5 1 Arranque
2 Estado estable
17 1 Falla fase-tierra
2 Falla 2 fases-ti erra
3 Falla trifásica
5.- FORMA DE PROPORCIONAR LOS DATOS AL PROGRAMA: Debido a que el pro-
grama está desarroll£
do en BASIC, no se tiene ninguna modalidad especial para el ingreso de
datos, respectando por supuesto los protocolos de este lenguaje.
El programa es de tipo interactivo, por lo tanto, el usuario deberá, pn>
porcionar los datos cuando se indique en la pantalla. Todos los datos
deben estar en p.u. , y los ángulos en radianes.
6.- FORMA DE UTILIZAR EL PROGRAMA:
6.1.- Encienda el equipo, de acuerdo a los procedimientos establecidos
para el efecto.
6.2.- Coloque el disco en cualquiera de las unidades.
6.3.- Cargue el disco en el sistema con las siguientes instrucciones:
a) CALL "UNIT", U presione RETURN
b) CALL "MOUNT", U, X$ presione RETURN

- A4-9 -
Siendo U el número de Ta unidad donde colocó el disco.
6.4.- Cargue a la memoria del computado el program maestro, mediante la
instrucción:
OLD "0NRPC/MAESTRO" presione RETURN
6.5.- Ejecute el programa con la instrucción:
RUN presione RETURN
6.6.- Siga las instrucciones que aparecen en la pantalla.
6.7.- Para obtener los datos en papel deberá encender previamente el im
presor.
6.8.- Para realizar los gráficos en papel, deberá encender el grafiza-
dor, colocar papel y pluma, luego debe fijar los límites del tamaño del
gráfico con las teclas SET, y por último debe efectuar las operaciones
que se indique en la pantalla.
7.- RESTRICCIONES: El programa presenta las siguientes restricciones:
- limitado número de pasos de integración, ya que en cada paso se demo-
ra 7 seg., y además almacena datos que ocupan 220 bytes aproximadame£
te (capacidad del disco es 630 kbytes).
- para alimentación monofásica se fija el sistema de referencia en el
estator.

- A4-10 -
- cuando existen resistencias rotóricas se fija el sistema en rotor.
- para alimentación monofásica el estator se conecta en delta.
- todos los datos de entrada y salida están en p.u.
- todos los ángulos están en radianes.
8.- EJEMPLO: Se modela una falla Fase-Tierra, utilizando el modelo no
saturado. El proceso seguido es así:
- de acuerdo a las instrucciones dadas en el numeral 6, se carga el prp_
grama maestro.
- se escoge el programa de ingreso de datos, tecla 2.
- se ingresan los parámetros de la máquina (en p.u.) y los datos de la
curva de saturación (en p.u.), para el modelo no saturado se hacen ce_
ro estos valores.
- se ingresa el intervalo de solución (en seg.).
- se escoge como condiciones de funcionamiento, alimentación trifásica
(opción 1).
- se ingresan los voltajes aplicados, módulos en p.u. y ángulos en rad.
- se ensoge el tipo de conexión delta en estator(opción 1).
- se responde que la envolvente del voltaje aplicado no es de la forma
indicada en la pantalla.
- se responde que no existen resistencias rotóricas.
- se escoge el sistema de referencia girando a la velocidad sincrónica
o) (opción 3).
- se parte de estado estable por lo que se escoge la opción 2.
- se ingresa el valor del deslizamiento.
- se obtienen los valores del estado estable y debe decidirse si el tojr
que es el adecuado o no, se contesta "si".

- A4-11 -
se responde que si existe pertubación.
se selecciona la falla Fase-Tierra (opción 1).
se selecciona el ingreso del ángulo de falla como dato (opción 2).
se ingresa el valor del ángulo de falla (en rad.).
una vez concluido el ingreso de datos se presiona la tecla 3, para
continuar con la integración numérica.
se escoge la unidad donde se encuentra el disco de datos.
se programa la línea 1090 que es la ecuación del torque mecánico en
función de la velocidad. Para continuar se debe presionar la tecla
9.
se ingresa el nombre del archivo en el que se almacenarán los datos.
una vez concluido el proceso de integración y almacenamiento se pre^
siona la tecla 4 para realizar los gráficos.
se presiona la techa 20 para ingresar el nombre del archivo de datos.
se ingresa la unidad donde está el disco de datos.
se ingresa el nombre del archivo de datos.
se selecciona la curva requerida, para este ejemplo se ha tomado la
opción 1.
se ingresa los límites del gráfico, la separación entre marcas en los
ejes, el título del gráfico, la variable en el eje vertical.
se desea gráfico en papel?, se responde "si" y aparece la leyenda "A-
LISTE EL GRAFIZADOR"; es necesario prenderlo, luego fijar los lími -
tes del gráfico con las teclas SET, poner pluma y papel.
se presiona la tecTa "RETURN" para ejecutar el gráfico. Una vez co£
cluido el gráfico se ingresa, si se desea, leyendas, o si se quiere tarn
bien puede repetirse el gráfico. Para realizar otro gráfico se prie
siona la tecla 10.

- A4-12 -
En las siguientes páginas se encuentran las hojas de datos y los gráfi-
cos obtenidos para el presente ejemplo. Los gráficos de las Fig. A4 - 2
y A4-3 representan las corrientes de las líneas "a" y "b" del estator.
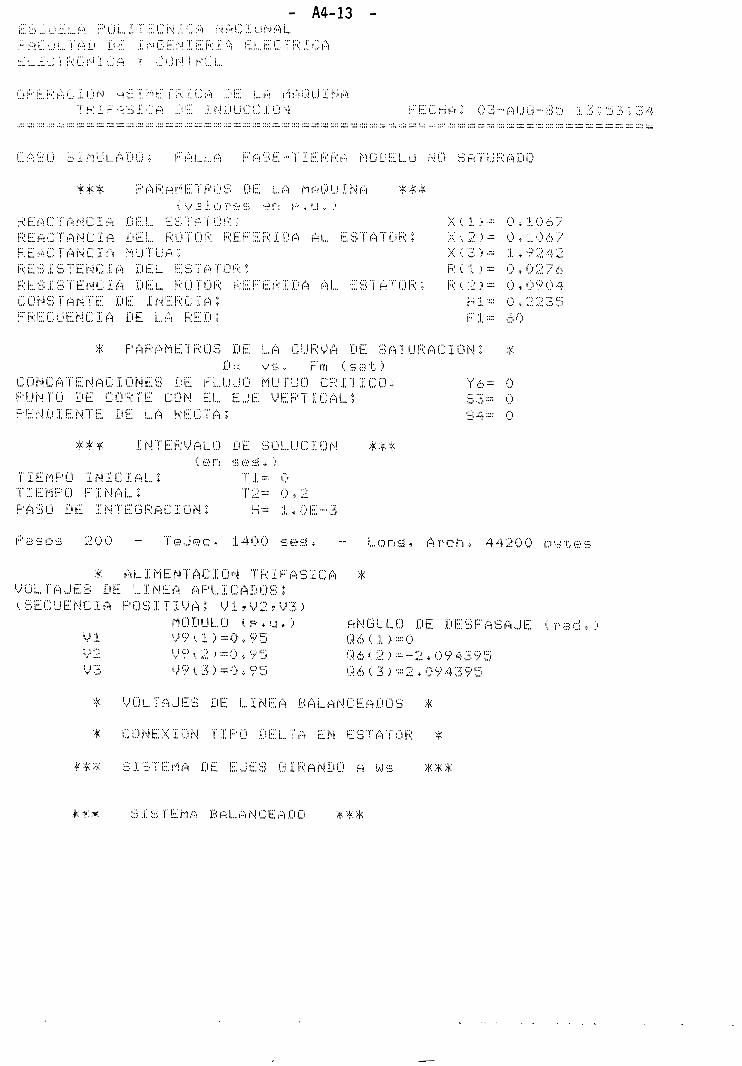
- A4-13 -:. ;::• C U E:... A R Ü i... 1"!" E C NI C A N A C I Ü N A i...ALÜL.TAD DE Ir'GENIERI A ELÉCTRICA
i!... E C "i i:< C i'1' I C A Y C (.' N "í R L i...
C A 3 Ü 81 n ü i... A i) L;; í::' A L L. A F H S E -1' IE R R H h O D E L.. U N O S A T U R A D O
:* *: & r' A R H r: E T R L' S DE I... A M A13 ü .í N A '£ # $( v a I o í' e s # n J;/ •> '..i - '.'
R E A C T' A N C; IA D E!... E S "i' A "i" C R iR E A C T A N CIA D E!... R Ü T O R R E E E R1D A A L E S T A T C} R 5REACTANCIA MUTUA;RESISTENCIA DEL ESTATOR!R E S1S' l" E N CIA D E i. R Ü T Ü R R E F E RIP A A L.. E S T A T Ü R í R ( 2 "> ~ O ,090 4CONSTANTE DE INERCIAS Hl- 0,2235F R E C U E N CIA D E í... A R E D ; F1 = 60
* F1 A R A h E "i R Ü 3 D E L. A C Ü R V A D £ S A T U R A CIO N ¿ *Dx vs» Fifi (sst)
C Ü N C A T E N A CIO N E S D E F i... Ü J O H U T U Ü C RIT IC O íRUNTO DE CORTE CON EL. EJE VERTICAL lF E N D l E N T E D E L. A R E C T A S
**'* INTERVALO DE S Ü L U CIÜ N ##*( e n s e s « )
TIEHPÜ INICIAL; T1-- OTIE n F ü F' IN A i.. * T 2 - O •> 2F1 A 3 O D E IN T £ G R. A CIO N ¿ H = i * O E - 3
Rasos 200 - IeJec« 1400 sea, - Lona* Arch* 44200 bb'
* ALIMENTACIÓN TRIFÁSICA *VOLTAJES DE LINEA AFLICADOS?(SECUENCIA POSITIVA? VI ? V2 ? V3 .»
MODULO Í P * U » > ÁNGULO DE DEBFASAJE ^rVI V 9(1 )=0»95 Q6ÍD--ÜV2 V': 2 >:-"0.>95 Qó < 2.>~--2* 094395V3 V9 ( 3 ) :=:0 i 95 U6 ( 3 ) -2 * 094395
* VOLTAJES DE LINEA BALANCEADOS *
* C O N E! XIÜ N í I F' O D E L T A E N E S T ATO R #
*## SISTEMA DE EJES GIRANDO A UJs #*#
SISTEMA BHl...ANCEí-iDÜ ***

o
-F* l

- A4-15 -
MLU. nsE-nenu CON «miucxoo
FIG. A4-2
risc-Tirwu con «jnuucino
FIG. A4-3

A N E X ü * 5 i:;' A G ->
i'!-! EN 1000
1F 32-2 THEN 1000::i 1-••••• 2
16 IF S2 = 3 Í'HEN 1000
1 H GO ¡Ü 57020 IF 82 = 4 THEN 100021 SI ==422 GO TU 57024 GÜ TU 129028 li" M7-1 THEN 268029 GO "i" O 21óO
36 GÜ TU 1:1. i O40 GÜ "í Ü 119044 Gü TO 109048 GÜ TO 2350S2 bu TO 120080 Gü TU 10601 00 RE MÜ. 10 R E M ***** F1 R O G R A M A h A E 8 T R Ü I & N R P C / M A E 8 T R O *****120 REM130 REM ESCUELA POLITÉCNICA NACIONAL140 REM FACULTAD DE INGENIERÍA ELÉCTRICA150 REH ELECTRÓNICA Y CONTROL160 REh170 REM OPERACIÓN ASIMÉTRICA DE LA MAQUINA180 REM TRIFÁSICA DE INDUCCIÓN
200 REM210 REM TESIS DE GRADO220 REM230 REM NELSÜN RUBÉN PUNCE CARRERA240 REM250 REM JULIO - 1985260 R E M270 REM ************** $************** ***>?:***;?:******280 REM290 REM ***** CARGA DE DISCO DE PROGRAMAS *****300 IF H8O--1 THEN 3603:1.0 PPINT "i ..... Jü UNIDnli DONDE ESTA EL DISCO DE PROGRAMAS'; u f320 INPUT H8330 IF HS-O ÜR H8-.1. OR H8 = 2 THEN 350340 GÜ "*'ü 310350 CALI... "UNIT" ?H83 6 O R E M

ywyd9Gdd 33 n: yo y y 3 *##*:*: w?>! oocKiy'i I. 3;-:! 0¿
,-ÍH* n ' I NO» ~!"-iy.;:i o?$XÍ ; / :HS aiNnow,: TÍ y 3 o e
oís o .i. 09 ot-os s N3H1 £=:¿H yo I"¿W dO 0"=¿i- .HI 0£
¿H if'ldN >' O?í i, i so .i. y a 3a no si a ~¡3 y.¡.s3 3 a NO a awainn 3pri,. iNiyd oí
***** SOI yn 3 u 03Sia 3 U y9My3 *.##**: W ":!>:! 00O O O T G .1. ü 9 (J í"
000 T í $X ai'.'dddy O P-'A.yow 3W:~r OE*
0000 T " T O O T ~¡ .].. 3 "I 3 i'í O .":',' ':T 3 -• 7. S 0 1 !
r ..i.. X 3 r- ' O O ':•íx a >?•;!>: CAÍ
13 DI T-~r dO/-1 OH:;099 3d0133>:! 0¿.!~
,, I .i. d n d y 3 /- 3 3 N o d í) ,, y i y a 09 c» 1 .1. d O d W 3 / 3 d >:i N (!j ., '; „ O D J d H í:i 9 / 3 ,d d H e) „ ¿ r. W O N 1 N T / 3 d >:l N PJ „ ¿ » .1. y Ü 9 N T / 3 d d N # „ ^ .í. W G: O 9 í
*.*.**:*QN3 0£C
„ f u p T o ~: o & u o T ;) o e T e 3 1 9 p p p „ .1. j\ I >:! ,::; Q'?&,, f S O 3 T ..). ¥ J B F; •-, O T !"i O '[ 5;í •") ) ,, .!. f\ T ó:! ,:j C í /•;
., ( si? o T ÍH í? ,.|. o u o a¡ ( ¡¿i i: •[ y ) n W I J. d G d 0 1 1 3 11 d W 3 <' .......... ..... S y '"' 3 3 1 ,• j N T c! ,-:• O O í~l«S03Idl?:::i9 -:- ................ F y "13 3. i ,, JJJ'dd OÓF"
ü ''' 3 1 >:i 3 H i"1 N N G 1 3 ';' d 9 3 1 r ' I < .............. í l"'J "1 3 3 .1. » .i.. N I d d O 8 ivi¡ S G ..L v' C? !::í U G 9 3 >.} 9 N T <' .......... - c y "] 3 3 i „ i N I >:¡ d O ¿. t:/
nSywyyGüdd BU 33.1 a NI < ....... - ..... T y 333 i PPP,, iNidd 09t>-„ :::: ::= :- ~:: ~: ::= :::: :::: -.:: := r.-. -• -•. , \_ f-.í I % ,::! O f:?, V
<k H '; :, ': y H 3 3 .-: „ ; E N ü T 3 3 n U N I 3 f¡ y 3 1 S # d I M .i -. .'. M v ^ .;': '•• X fr,. y N T n ri y w y "i "-i n y 3 T v¡ ¡ '-i i,.' T y \ n T '~\ ,..j '::¡ ..-¡ r¡ p „ ] ¡\ T ;u ...| i" ?; f/
n '"! O í:i 1 ¡v O 3 ..'•• W 3 TN('?d.í. 3 3 "13 ¡. j i ^ ' - d ' : - 1 O T ;•••i: W .:i¡ I d i. 3 3 "1 3 y I d 3 ".' ¡ -1 3 9 N I 3 il i.7 W . i "1 n 9 W :-i ^ .i. r-' 'i X ¿ O í) *-•-
, "'i y M n j 3 y K¡ y 3 T iv 3 3 j I "i f ~\: y "" 3 f"¡ 3 .;;; ;::; "] „ .i KJ ;;; y ,::i o ¿ <:;
•;t H •• r- !:? w I .i i. '"i '"! l"! 3 CE B ?'$ * t*. * * :-•; y u' y .'•' n i'» '••! .-' 3 n 3 "~ T TÍ ?v 'f x * >^ :. U; • - ( T ¿ v '
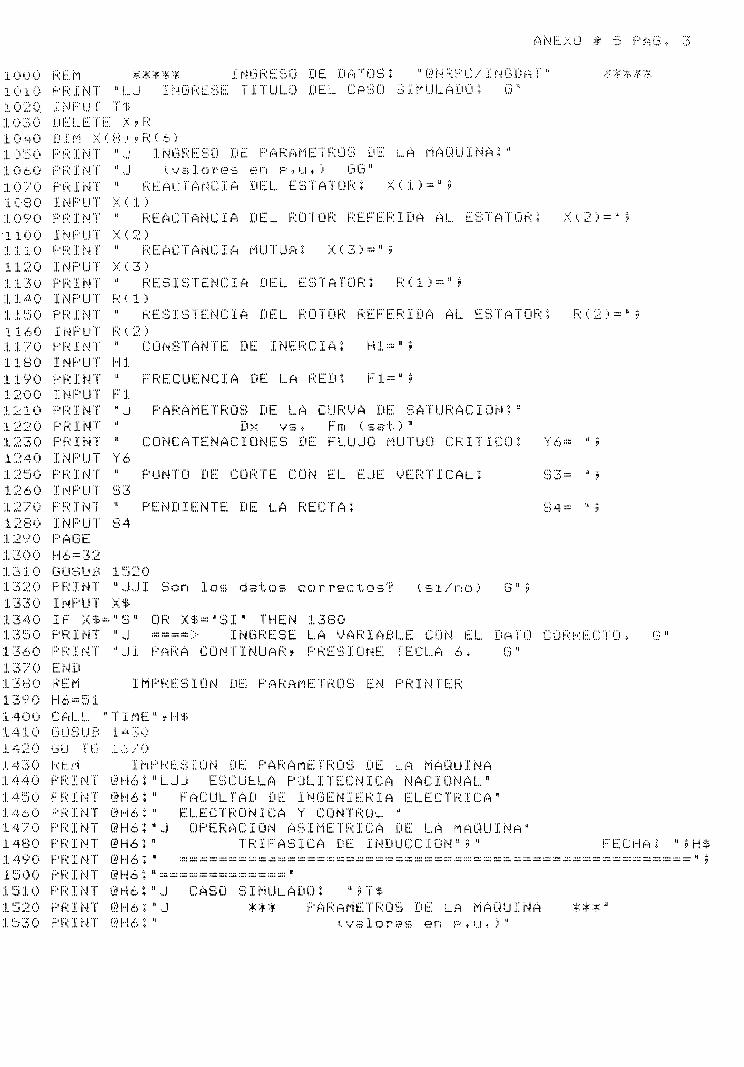
1000 REM #:*;?:#* INGRESO D£ DATOS i " iíNRPC/'INGDA T "IOlO PRINT "! J INGRESE TITULO DEL. CASO SIMULADO; G"1020 INPUf T*1030 DELETE X ? R10 4 O DI í'i X ( 9 .' y R C 6 )1050 PRINT "J INGRESO DE PARÁMETROS DE LA MAQUINA;"1 060 P R1N T " J iva], o res e n P .> u • ) G G "10 7 O P R1N T " R E A C T A N CIA D E L E S T A T O R ; X ( 1 ) ~ " Ü1080 INPUT X C I i1090 PRINT " REACTANCIA DEL ROTOR REFERIDA Al... ESTATOR;"1100 INPUT X ( 2 ')1110 P RIN T " R E A C T A N CIA h U T U A ; X ( 3 ) = " ?1120 INPUT XC3)1130 PRIN T " R E SIS TE N CIA D E L E S T A T O R i R í1) = "?114() INPUT R('l )1150 PRINT " RESISTENCIA DEL ROTOR REFERIDA AL ESTATOR;1.160 INPUT R(2>:l. :l. 7 O !;-' R i N T ;1 CON S T A N T E D E IN E R CIA J HI ~" ?1180 INPUT Hl1190 PRINT " FRECUENCIA DE LA REDI Fl = '?1200 INPUT Fl1210 PRINT "J PARAhETRÜS DE LA CURVA DE SATURACIÓN:'1220 PRINT " Dx vs« Fm (sat)"1230 PRINT " CONCATENACIONES DE FLUJO MUTUO CRITICO;1240 INPUT Y61250 PRINT " PUNTO DE CORTE CON EL EJE VERTICAL;1260 INPUT S31270 PRINT " PENDIENTE DE LA RECTA;12SO INPUT S41290 PAGE1300 Hé=321310 GOSUB 15201320 PRINT "JJI Son los datos correctos? (si/no) G"?1330 INPUT X$1340 1F X*=:"S" OR X*="SI" THEN 13801350 PRINT UJ ==••==> INGRESE LA VARIABLE CON EL. DATO CORRECTO, G"1360 PRINT "Jl PARA CONTINUAR? PRESIONE TECLA 6> G"1370 END1380 REM IMPRESIÓN DE PARÁMETROS EN PRÍNTER1390 Hó=511400 CAL!... "TIME" ?!••!*•1410 ÜüSUB 14301420 GÜ Tu 16/0.1.430 REM IMPRESIÓN DE PARÁMETROS DE LA MAQUINA1440 PRINT G?H6;"LJJ ESCUELA POLITÉCNICA NACIONAL"1450 PRINT @HóÍu FACULTAD DE INGENIERÍA ELÉCTRICA"1460 PRINT ü?H6J" ELECTRÓNICA Y CONTROL "1470 PRINT @HóJ"J OPERACIÓN ASIMÉTRICA DE LA MAQUINA"1480 PRINT ü?H6;" TRIFÁSICA DE INDUCCIÓN"?" FECHA? "ÍH$
J !::i í') O P RIN T íi? H ó '- " ~ — ~ — ~:- =: ~ ~:-:-::::: -:"¡.510 PRINT íi?H6,"J CASO SIMULADO; " »T t1.520 PRINT (¡?H6;"J **:* PARÁMETROS DE LA MAQUINA1.530 PRINT Í ÍH6¿" (valores en P + u* > "

ANEXO :!i: 5 PAG
!::' i-; I tí H ó i " R E. A C T A N C i A D E L. E S "f A I" ü R I9 R i í* H 6 í " R E A C T A N CIA D E!... R ü T Ü R R E i:;' E F;; ID A A L. E 3 T A T Ü R ;i •• R .i. í¿ H ó;i! R E;: A c T A N c ]: A ¡-i u r u A ;):- R L 3. H6 ; " R E 8I8 T E N C I A ü E!... E S T A T O R iPRI í¿'H6i" RESISTENCIA DEL. ROTOR REFERIDA Al... ESTATOR 3 R(2>~ " ? R (2)PRI N i •rfí-iií1' CU Ni ¡"ANTE U E INERCIA i H1-- "?H1
i 600 P R J. ••>."!" íi? !-i ó i " F R E C Ü E N CIA D E i... A R E D ? F1 - * ; F11 610 !••' R1 N T & H 6 í " J * P A R A M E T R Ü S D E L A C U R v1 A D E S A T U R A C I O N ? * :1
1620 í:;' R1N í $ M ó í " D x v s •> f m ( 3 s t-) ":i. 630 P RIN T tí H 6 i " C Ü N C A T E N A CIÜ N E S D E F L. U J Ü M U "f' U O C RIT IC O * Y 6 -- " t Y 6Ió40 PRI NT tí'Hó*" PUNTO DE CORTE CON EL. EJE VERTICAL; 33- " U S 3
PRI NT ¿'Fió:" PENDIENTE DE LA RECTA? ' 34- "?S40 RETORN
1670 REM1680 PRINT "LJÜ #*# INTERVALO DE SOLUCIÓN #*#"1690 PRINT " (en sea»)"1700 TI-"O1 710 F1 RIN T " J TIE M P Ü INICIA L i T1 = " í T11720 PRINT ",J TIEMPO FINAL; T2~"?1730 INPÜT T21740 PRINT "J PASO DE INTEGRACIÓN! H= u ?1750 INPUT H1760 PRINT "JJI Existen "?T2/H?" PSSOS de in te sí ración * G"1770 PRINT :'JI T ejecución -" ? 7*T2/H ? " ses.>"1780 PRINT "JI. Lonsiituci del archivo de dstos •- " P T2/H*2ló+1000 ? " batáis"1790 í::' RI NT "JJI S o n los datos corre c t o s'!' ( s i / r ¡ o ;• G " ?1300 INPUT X$1810 Ir X*-nS" ÜR X£~"SI" THEN 18301820 GO TU 16801830 PAGE1340 REh IMPRESIÓN DE DATOS EN EL PRÍNTER13 5 O F' R1N T í» H 6 J " J * * * IN T E ROA L U D E 3 Ü L U CIÜ N * * * "1860 PRINT @H6J" (en sesS»)11
1870 PRINT í»H6i" TIEMPO INICIAL; Tl= "ÍT118 8 O R RIN T W !••! 6 í " TI E M P Ü FIN A L í T 2 == " ? í 21.890 PRINT iíH6i" PASO DE INTEGRACIÓN! H= " í HL900 PRI @H6¿"J Pssos "n'2/H?" •••• "?"TeJec., "n'2/H*7?" sea, - Lon'S1.93.0 PRINT (íH63"a, Aren, " • 2Í6*T2/Hi-1000 Ü " bytes"L 9 2 O R E n¡.730 P6-2&PI/3L940 W7--2;í<Pl*Pl1.950 H2~H/(2*H1)1960 REh SELECCIÓN DE CONDICIONES DE FUNCIONAMIENTO.970 PRINT "JJ *## CONDICIONES DE FUNCIÓNAMIENTO *##".930 PRINT "JJ ALIMENTACIÓN TRIFÁSICA 1".990 PRINT "JJ ALIMENTACIÓN MONOFÁSICA ••••- 2"ÍOOO PRINT "JJI Seleccione opción; Ü " »2010 INPUT M7Í020 IF M7--1 THEN 2560Í030 IF M7-2 THEN 2050Í040 00 ÍÜ 1960'.050 PRINT "JJ :* ALIMENTACIÓN MONOFÁSICA *: O 6 O i::' RIN T " J J M OI... T A J E A F' L. 1C A D Ü I ( v s I o T- en P * u * ) ":070 DE LE TE V9

ANEXO * 5 PAG, 5
2 O S O F' K1N ¡' :' J J i V 9 -:- " ?2090 1NPUT 09210 O M '£ ™-" I'i E S B AI... A N C E A D Ü S "2 í i O N $• =»" D £ S B A!... A N C E A D Ü "2Í2Q PRINT "J REACTANCIA DEL CAPACITOR DE ARRANQUE (en P -, u., ) S2130 i'NPUT ';<('//2140 PRINT ",J REACTANCIA CAPACITOR DE EST* ESTABLE (en p * u * > J21 ti O 1NPUT X(«).;! 60 PAGEi:l?0 H6--32í 18 O Q Ü S U B 2 2 9 O¡190 PRINT "JJI Son los datos correctos? (si/no) tí" 5¡200 INPUT X$210 1F X$~"b" ÜR X-3>=4SI" THEN 2250220 PRINT "J :--= = =:> INGRESE LA VARIABLE CON EL DATO CORRECTO, G"230 PRINT "JI PARA CONTINUAR? PRESIONE TECLA 7* G"240 END250 REM IMPRESIÓN DE DATOS EN EL PRÍNTER2óO Hó~51270 GOSUB 2290280 GQ TO 2340¿90 PRINT (ÍHÓJ"J * ALIMENTACIÓN MONOFÁSICA *500 PRINT Í»H6Í"J VOLTAJE APLICADO (sn p^u.J? 09- "sgy510 PRI (»Hóí" REACTANCIA CAPACITOR DE ARRANQ* (en p*u*)2 X(7)~520 PRI ¡»Hóí" REACTANCIA CAP, DE E3T» ESTAB* (en p . u * ) .? X(8)~ i! ? X ( S)530 RETURN>4ü Mo-1^50 j:8--l;60 19 = 170 GOSüB 2480SO Gü TU 300090 REM SELECCIÓN DE TIPO DE CONEXIÓN DEL ESTATOR00 PRINT "J,J * TIPO DE CONEXIÓN DEL ESTATOR *"10 PRINT "J DELTA - (1)"20 P RIN T " J E S T R E L L A ~- - ( 2 ) "30 PRINT "JJI SELECCIONE OPCIÓN! G"?ÍO INPUT he,!¡0 PAGE}0 1P M6~l ÜR M6-2 THEN 2480'O GO Tu 2400JO PR1NT ü?HÓÍ"J * VOLTAJES DE LINEA "?H$S" *K> GÜ TU Mó ÜF 2500? 2530'O PRINT "J :* CONEXIÓN TIPO DELTA EN ESTATOR *"O PRINT íi?Hóí"J * CONEXIÓN ÍIPÜ DELTA EN ESTATOR *"O GÜ TO 2550O PRIN'Í "J * CONEXIÓN TIPO ESTRELLA EN ESTATOR #"O PRINT 0?HóJ"J * CONEXIÓN TIPO ESTRELLA EN ESTATOR :*"O RETURN0 PRINT "LJJ * ALIMENTACIÓN TRIFÁSICA #"O PRINT "J VOLTAJES DE LINEA APLICADOS; ":> PRINT "J (SECUENCIA POSITIVAS V1?V2?V3)"J PRINT "JI MODULO < > * u « > " í " ÁNGULO DE DESFASAJE írsd».)":> HELETE V9?Q6) DIM V9(3)? Qó(3)
ANEXO * 5 PAG, 6
2 6 2 O i- U K .!. ~ !i. i LJ ó
2630 PRI ¡\''!" " J v ü p I ? i! I V9 ( " 5 I ? " ) ~ " ?2640 INPUT VV(I>2 6 5O P R I N '!" " K 11 Q 6 ( " 5 .i. ? " ) ~:" ?2 6 6 O .1. NP I .JI O 6(1)2670 :vEXT I2 6 8 O P A U E2 6 V O H 6:-: 3 22 /' O O G O 3 LJ B 2 7 8 O2710 PRINT "ÜJ Son ios datos correctos? (si 7no) G"?2720 INPUT X*2730 IF X$»"8" OR X*-"3IH THEN 28702740 PRI NT "I INGRESE LÜS DA I 08 CORRECTOS, GG"2750 PR IN T " I F:' A R A C O N TIN U A R •> T E C L A 7 > "2700 END2770 REM IMPRESIÓN DE DATOS EN EL. PR ÍNTER2780 PRINT @Hí>S"J * ALIMENTACIÓN TRIFÁSICA *"2790 PRINT WHéí" MULTAJES DE LINEA APLICADOS? "2800 PRINT liMÓÍ" (SECUENCIA POSITIVA i MI?02?03> "2810 PRINT (?H6Í USING 2820 i2820 i HAÜEJ.8X" MODULO < P » u *)" SX " ÁNGULO DE DESFASAJE (rao»)"2830 POR J>.í. "TU 32840 PR .i. NT Ü?H6 5 " V " ? I v " V9 ( " ? I • " ) = " y 09 ( I ) ? " Qó ( " ? 1 ? " ) = a 5 Qó ( 1 )2850 NEX'T I2860 RETURN2870 H6--512880 GOSUB 27802890 IF ABS( 09 ( 1 )-09(2) )< = ! *OE™3 AND ABS ( 09 ( 1 )-09 ( 3 ) )<-! •> OE-3 THEN 29302900 M* ~"D ES BALANCEAD O S"2910 N$=--"DE;:>BALANCEADÜ"2920 GÜ ÍO 29902930 IF ABS i. U6 ( 1 ) ) < = :L . ÜE-3 AND ABS ( Q6 ( 2 ) +P6 ; <~1 •> OE-3 THEN 29502940 GÜ TU 29002950 IF ABS(Q6(3}"P6.K:=Í *OE-3 THEN 29702960 00 TO 29002970 M $ -~" B A L A N C E A D 0 S "2980 N$-"BALANCEADO"2990 GOSUB 24003000 REM ENM ULMÉN TE DEL MOL/TAJE APLICADO3 010 P AGEti>02ü VIEWPÜR'T 40? 100? 65? 1003030 WINDÜuJ 0?8?0?63040 A X13 9 •! 9 ? O ? O3050 MUOE 0?33060 DRAW 3 ;> 33070 DRAW 5?53060 DRAW 7?53 O c;' O M 0 O E 8 ? - O -, 2 23100 PRINT ">"3110 MUME -O*08 y 63120 PRINT '3130 í-HJVE ~l*B*á3140 PRINT " M ( p « u » ) "3150 MÜME 7*3p-Üíó

ANEXO * 5 PAÜ* 7
PRINT "T (sea.>"fiÜVE -O ,6? 2, 75PRINT "VI"fíOVE O?5DRAtJ O.15?5hÜVE -••0»6?4*75PRINT "V2¡1HOVE 3*0ÜRAW 3?0,25MOVE 2»8?-0.7PRÍNT "TI"MUVE 5?ODRAW 5fO,25HÜVE 4,8?-O»7PRINT "T2"PRINT "JJG ES LA ENVOLVENTE DEL VOLTAJE DE ESA FORMA? (S./N) aíJNPUT X$IP Xifr-'S" OR X*~*Sla THEN 3350GO TU 3530PRINT "j INGRESE LOS VALORES: vi? V2? TI y T2"PRINT "J Vl^u ?INPUT Ul
INPUT U2PRINT "KII Tl="íINPUT JlPRINT "KIII T2="?INPUT J2PRINT *JG SUN LOS DATOS CORRECTOS? (S/N) "?INPUT X*IF X*='S" ÜR X$=aSI" THEN 348000 TU 3350REM ENVOLVENTE SI ES DE ESA FORMAPRINT @HÓÍ"J * DATOS DE LA ENVOLVENTES "PRINT eHóí" (V en p,u« a T en sesí+>°PRINT @Hó: USING 3520ÍUlfU2»JlíJ2IMAÜE2X " Vi~ " 2D . 4DÓX ' V2= " 2D * 4DÓX " T1 = " 2D , 4D5X !1 T2= " 2D « 4DREM ENVOLVENTE NO ES DE ESA FORMAU 1 = 1U2=lJl=0J2=lGO CU M7 OF 3590F4100PAÜEPRI "JJJ ESTÁN CONECTADAS RESISTENCIAS EXTERNAS AL ROTOR? (si/no>INPUT X*IF X*="S1" OR X*='S' THEN 3640GO TO 3980DELETE RlíR2DIfi Rl (3) fR2(3)19 = 2PRINT "JJ * RESISTENCIAS EXTERNAS CONECTADAS AL ROTOR *"PRINT " VALORES DE LAS RESISTENCIAS <en p , u , > ? uPOR J==l TU 3
ANEXO :i|: 5 PmG» 8
3700 PK j!NT a J Rl ( '' ? J? * ) = " ?ó 7 Í O I N P U T R1 ( J :•3720 NEX'I ....:3 7 3 O i-' A G E;'•': 7 4 >") ]••< r:,::: 3 2
3750 GOSUB 38203760 P R 'J! NT' " J J 1 S o n 1 o s d s t o s c o r r e c t o s ? ( s i 7 n o ) G " ?3770 INPUT X*3 7 8 O !i! F X $:~ " S " Ü R X f = " SI " T H E N 38703790 PRINT "J = ===.> ING REü SE LA VARIABLE CON EL. DATO CORRECTO- G"3800 PRINT "Jl PARA CONTINUAR? PRESIONE TECLA 8+ Gl!
3810 END3820 PRI i?h63"J $ RESISTENCIAS EX'TERNAS CONECTADAS AL ROTOR *3830 PRINT ;!?H6i" (valares en P * u * ) *3840 PRINT @Hó. USING 3850 i Rl3850 1MAGE 2X"R1(1> = " 2D->5D5X"R1(2) = "2D >5D5X"RK 3) = "2D «5D3 8 6 O R E ! U R N3870 H6-513880 GÜSUB 38203890 IF Rl ( 1 ) --R1 ( 2 ) AND Rl ( 1 "¡ -Rl ( 3 ) AND N* = B BALANCEADO " "í HEN 39203900 N $ -- '•" D i:!! S B A i... A N C E A D U "3910 GÜ TO 39303920 N*-"BALANCEADO"3 9 3 O .1! 8: - 23940 R2 < '!. ) = ( 4*R1 ( 1 ) f Rl ( 2 ) f Rl ( 3 ) ') 763950 R2(2)=0 * 5*(Rl(2 >-Rl(3 >)7SQR(3)3960 R2 ( 3 ) =0 « 3# < Rl ( 2 > +R:I. ( 3 ) )3970 Gü TU 41403980 19=13990 REM SELECCIÓN DE REFERENCIA DEL SISTEMA DE EJES4000 PRINT "JJ SELECCIONE REFERENCIA DEL. SISTEMA DE EJES"4010 PRINT "J SISTEMA DE EJES FIJO EN ESTATOR (1)"4020 PRINT "J SISTEMA DE EJES FIJO EN ROTOR (2)"4030 PRINT "J SISTEMA DE EJES GIRANDO A Ws (3)"4040 PRINT "JJ1 Seleccione opciónt G"?4050 INPUT 184060 IF 18=1 THEN 41004070 IF 18=2 THEN 41404080 IF .18 = 3 THEN 41704090 GÜ TU 39904100 W8--04110 PRINT ü?H6í"J ### SISTEMA DE EJES FIJO EN ESTATOR *'*:=?:"4120 PRINT "J :*'** SISTEMA DE EJES FIJO EN ESTATOR :*'*;-K"4130 60 Tu 42004140 PRI Ni' lüH6*"J #** SISTEMA DE EJES FIJO EN ROTOR :«**"4150 PRINT "J ### SISTEMA DE EJES FIJO EN ROTOR :*::**"4160 GÜ TO 42004170 W8--W74180 PRINT Í:?H6Í"J *** SISTEMA DE EJES GIRANDO A ws ;?:**¡14190 PRINT "J ##* SISTEMA DE EJES GIRANDO A Ws :*:£*"4200 IF M7=l THEN 42304210 N-54220 GÜ "TO 42404230 N=4

,i.l '.' -i.i '.' > i'-.l '! :::: '.-''.-;.
i ' ,¡ lu I i i L ' i; ' • '</ " uj- » ' I » ' i • i-
' . I I .1 •• „> i I I j I „ Ij I I J! J „ |,j I ' I i ' • I ' ' ' ' « I I ' '
1 ' r I ' I ' i . i ' ' * '- ¡ ' >• i ' < ' ' ' i' I I h J I i " • ' I ' ^ {• j I I- ¡T|l ' " ' ' •
1 I J I- 1 1 I . 1 1 1 1 II- i > l 11 I I I j 1 , 1 í I- I I 1 1
I i 1 1 i ! I 1 1 ) i 11| I I 'i 'L L 1 'I 'u1' 1 t h' i L1 '
1 ' ' f , " ' ' i i " 1 - i. ' m i l - i j i '- » i I ' l > 1 ' l i i" l I I- i - M - - s i '
' ^ ' ' I- ! ' I ' ' M i -1-. 1 r-i - 1 j .j i | -. i i i ¡ i i ,<j _. í i i j i 11 i i f ' '_,
¡ . '. ! ' L' - L Ul- I - i t 1 i 1 l
4 6 6 O U U i U 4 i 3'.)4370 IF E5-2 FUEN 44004 3 8 O G O S U B 4 8 8 O4 3 9 O 3 (j T (j 4 41044OO GG8UB 51204410 Ir h*~"DE8BAL..ANCEADÜS" THEN 48204420 P R1N T " J J E X18 r E F;' E R T U R B A CIO N ? ( s i / n o ) u
4430 INPÜT X$4440 IF X*--nS'j:" ÜR X$==US" THEN 44604450 GO TU 48204460 REH SELECCIÓN DE PERTURBACIÓN4470 PRINT "LJJ SELECCIÓN DE PERTURBACIÓN"4 4 8 o P RIN T " ü F A L L.. A F A 8 E - TIE R R A ( 1 ) "4490 P RIN T " J F A!... i... A 2 F A S E S - TIE R R A ( 2 ) !l
4500 PRINT "j FALLA TRIFÁSICA (3)"4510 PRINT "JJI Seleccione opción I G"?4520 INPUT 174530 IF I7--1 OR 17 = 2 OR 17 = 3 THEN 45504540 GO TU 44704550 i-' RIN í " J J D A T Ü 8 S TIE M P O D E F A I... L A ( 1 ) "4560 PRINT "J ÁNGULO DE.FALLA (2)"4570 PRINT "JJI Seleccione opción; G"?4580 INPUT F74590 GO TO F7 OF 4600?46304óOO P R .i! N T " J J TIE h F1 Ü D E F A L L.. A I T 7 =• " ?4610 INPUT 174620 00 TO 46604630 PRINT "J ÁNGULO DE FALLA; A4="?4,6 40 INPUT A 44650 ! 7--1/30Í-A4/ ( 120*P 1 )4660 PRINT "JJ Es correcto el dato? (si/no) (4-6 7 O INPUT X'*4680 IF X$--"S" OR X$="SI" THEN 47004690 GÜ TO 45504700 Hó=51:I710 GO TO 17 ÜF 4720 ? 4740 ? 4760;i720 PRINT (í'!-!óí"J :* FALLA FASE-TI ERRA *"4730 GO Tu 47704740 P RIN T (» H 6 í " J * F A L. i... A 2 F A S E-S •••• T IE R R A * "4750 GÜ TO 47704760 P RIN T íi? H 6 I " J # F" A L i... A T RIF A S1C A * "V7 7 O G Ü T O F 7 Ü F 4 7 8 O ? 4 8 O O

ANEXO 4- 5 ! : : 'Aüv 10
4 7::::- o !.•••• i"; ¡; i\ i' [¡; i-;,;}; •' '¡" I i;;; >i p n O £ F:' A i... L. A •, "í 7;-~: ;' ? 'i 74 7 y () H {j T ij 4 H 1 O
4 8 O O !;:' R.!' N 7 (:•' H 6 ; l! A N G 'J 1... O D E ¡;:' A i...:... A '; A 4;-: l! ? A 44 8.1 O ••'•> U T O 4 o 3 7
..M o :: ;•;, f ¡:;; _;; jy y •> ^_ j _, i~¡ \-- T ¡\ í¡ P T Kj G f'.; £ S Q H P }J A "i" U 8 ¡ "
4840 r'RINT :l J'3 !::'ARA CON"i"j7NUAR CÜN í NT E:! Gf^ ACIÓN NUHI£R]!CA í TECLA 3» "'4350 Pi-;:lNT " JG PARA REGRESAR A!... PROGRAMA HAESTROJ TECLA 1* "--¡860 END4 í;í 7 O R E: M4880 KEf'i C AI... C U i... O DE CONDICIONES INICIALES PARA EL. ARRANQUE4890 Y-O4 9 O O í 7 — O•:í- V 1 O Y 8 — O4 ';•' 20 W ó -•• O4 93 O Ú6»::04V40 D9-DÓ4930 W9-W64? 6 O ÍB — í)4970 T~TJ.4980 PRINT " I j CONDICIONES INICIALES PARA EL ARRANQUE SON CERO* "4990 PRINT "J ÁNGULO DE CONEXIÓN PARA EL ARRANQUE; A6-;'i5 O O O IN P U T A 65010 i-í6==3250:¿C GUSOB 51005 O 3 O R RIN T u J J E s c orre c t o e i d s t o ? ( s I /'no) G " ?5040 INPUT X* • '5050 IP X í-::::" S a O R X $ - " SI ¡! T H EN 50705060 GO TO 49905070 H6--515 O 8 O Fl R .i! N T (:> !••! ó 5 " L J J C O N T IN U A CIO N , , , J J "5090 PRINT @H6Í"J CONDICIONES INICIALES PARA EL ARRANQUE SON CERO.»5 :i. O O P RIN T G? H 6 J " J A N G U L O D E C O N E XIÓN P A R A E L A R R A N Q U E í A ó - " ? A ó 5 " J "5110 RETURN5120 REH CALCULO DE CONDICIONES PARA ESTADO ESTABLE5130 1F N * - " B A L. A N C E A D O " T H E N 51 5 O5 14 O G O T Ü 5 8 ó O5150 PRINT "J DE Si.. IZAí'ilENTOi S~ " ?5.1.60 INPUT S!.Vi':vO RAÜE¿;1.80 W6-¡.-B51 9 O u!c;:::: W 6.'.;.:.'. O '• .J A ó ~; O
':i:.:. I O f ••- í 15220 DELETE II?I2523o DIH II(4)?12(6)5240 IF I9--Í THEN 52605250 R(2)™R(2)TR1(1)5260 R ( 4 ) -- R ( 2 ) / S5270 R(5 >-R< i > #Rí4)-X(1)* X(2)-X(1>* X(3)-X(2 > * X(3)5280 X(5)-X(2)+X(3)5290 X ( ó > ~ X ( 2 ) S R ( 1 > T X ( .i. ) * R ( 4 ) T R í I i '* X ( 3 ) ~'¡-R ( 4 .'' * X ( 3 )530o 11 ( 1 ) == O 9 ( 1 ) >K S Q R ( í R ( 4 ) * R ( 4 ) -f X ( 5 ) * X ( 5 ) ) 7 ( R ( 5 ) & R ( 5 ) -f X ( 6 ) * X (.6 ) ) )5310 K7-ATN ( X ( 5 ) 7R «. ¿- > )

ANEXO * 5 PAG, 1
5 5 2 O
'5 3 4 OS 3 SO!,~f .-, A O
•5 3 7 O5380!:;! 3 v oI54OO5410342054305440•.'j 4 3 O5460
T p ¡v (.4 ) ';.••• O T H EN 5340K7::::K7-í-t;'T
¡\6-~ATNi. X(3) /R (5) )1F:' R < 5 ) >0 THEN 5370K 6:::: K 6 -f P T.A7-K7--K6i I ( 2 ) -11 í 1 ) *X ( 3 ) / SQR ( R ( 4 ) *R ( 4 ) -K< ( 5 ) *X ( 5 ) )A3--A7-PI/2--K7í J 6 -:: Oíi 9 = Jj 6A '3~ O
W 4 ( 2 >:~ ]W 4 ( 3 ) -- J
T1 '-. I ) * C U S ( A 7 i- P1 / 2 )j. C 2 i'ttÜÜSÍ A8>
5 4 7 O5480549000
5540555055óO55705580'¿590560056105620563056405650566056705 ó 8 O
1.04 ( 4) = 11 (2>*COS( A8+PI/2) ., :-REH SATURACIÓN INICIALY7=:< W4( 1 )-í-U4f 3.) í*X(3 .) - v^^ -¡ -.i'-j¿ >"-Y8»~ ( W4 ( 2 ) +W4< 4 ) ) #X ( 3 ) *- *••".' -- '>A' • -'''• •'""GOSUB 6130Y ( 1 )-X( 1 ) *W4( 1 ) -í-Y7 - -, • / : . , ' , .Y (2>:~X< 1 )*W4(2)+Y8Y(3)~X(2)*W4(3)+Y7y ( 4 > -.-. x f 2 ) * W 4 ( 4 ) -}• Y 8W4< 1 > = C Y( 1 >--Y7)/X( 1 ) •* "''-W4(2)-( Y(2)-Y8)/X( 1 ) - • ' •W4(3>=:( Y (3>-Y7)/X(2) ''• , -.I.J4 i 4 ) :.: i -( ( 4 ) -. Y8 ) /A ( 2 )
IF A.BS(. ABS(Y7j-S7 )<-! ,OE-3 AND ABS ( ABS ( Y8 ) -38 )<~1 •> OE-3 THEN 56ÍOGÜ TU 5470
4>-Y( 4)#W4(3) 'V • ••'
GGtJÜSUB 3700PRÍNT "JJ EL UALÜR DEL T URQUE ES CORRECTO? (s:i./no)INPUT X$IF X$="S' ÜR X$=US1" THEN 5830PRINÍ "jj CAMBIE ADECUADAMENTE EL VALOR DEL. DESLIZAMIENTO» GGUGO TU 5150REM¡::' R 1N' í ii> 1.6 í " L J J C O N TIN U A C ION , t * J ...J"P R1 N T G? 1... 6 i " J * * * C O N DICIO N E S INI CIA i... E S D E E S T A D O E S "i" A B L E * *PRÜNT 9Lo*" * SISTEMA BALANCEADO *"PRPR
IN T íi> L 6 j " D E S L.. 1Z A M1 E N T O II:NT i.<?L6»" TIEMPO i
!-' R1N T í? L.. 6 x •'
S- B í ST=: i! i T
MAGN1'
5850
PR1NT G?l...ó¿" CORRIENTE DE ESTATOR? Is- " ? 1PRINT SL.6Í" CORRIENTE DE ROTOR; ir- " í 'P R I N T (•? i... 6 i '4 C U R RI E! N T E S E N EJES « ? d ( s ? r >PRINT i»L.6i US1NG 5800 5 W4IhAGE 2X2D., 5D8X2D.5D8X2D , SD8X2D * 5DPP1NT (?L6¿" TORQUE MECÁNICO T8= Í "?T3RETURNL.Ó-HÓGC'SiJB 5700RETURN
UD1 i 1 ) »
A N G u L O "
A 8::-" ? A 8
ó 5
o o
o o
o £
~ 9-.
:í %
;:-: *
: y -t
*M
t_: ^
,.., ^
: .
..
.••
— •
~ -
~
:
co
ü ¡~
: r¡-
: '|, ;.;
'"!
;' ;
. ;
cei"
;-..
rb i- O
rn CT5 :z — £ ''••
.j
O- 10 ••_-;
X •— -i-
X ••-•
•
H-
a> i. .:
h-i
0 .¿!
rn ó
ce 2
: z:
r-.-
¡T|
CO
CO
*
—!
rn
~ H
••!i
II t?
i-;
r~
P
j>
"~
X CC:
I> I>
CO ir;
.~:

ANEXO * 5 P A G * 13
1000 REM ;?;#:**.£ INTEGRACIÓN NUMÉRICA; " 12NRPC/I NTNUiV' x*.:^*^i 010 G Ü S ü B SÍ O O1020 REH PRÜGRAi"¡At:j:üN DE LAS ECUACIONES DEL JORQUE MECÁNICO1030 PRINT "LJJ PROGRAME LAS ECUACIONES DEL. JORQUE MECÁNICO ¡.": S > "1040 PR1HJ "J EN PUNCIÓN DE L.A VE LOO.!. DAD í Wó) , GG JJJ"1050 LIST 1OvO1060 PRINJ "JJ PARA CONTINUAR PRESIONE i'ECLA 9 •> Í3G"1070 E N Di OSO REM SUBRUTINA DE EVALUACIÓN DEL. JORQUE MECÁNICOi o y ü í 3 ™ O -:• 1 "v /1100 REJURNlllí) PRINJ "J * E U* DEL JORQUE <T8> EN PUNCIÓN DE i...A VELÜC, (Wó> *"1 i 2 O i;:' R I 2 H ó ; " J * E C > D E L J O R Q U E ( J 8 ) E N F U N C 10 N ¿JE LA U E!... O C * ( W 6 ) # "1130 SAOE ií?Hó :i 10901140 LIST 1090I IbO REH CALCULO DE COEFICIENTES PARA ECUACIONES DIFERENCIALES1100 DEÍ...ETE C;'V?B1 170 D1 M U í 10 > •V ( 4 ) ? B ( 2 )1180 C(2)-R( 1 J/XU. )1190 C(4)=RÍ2>/Xí2)1200 X ( 4 ) -1 / (1 /X ( 1 > +1 /X ( 2 ) +1 /X ( 3 ) )1210 C (7)--X ( 4)/X(3)1220 REM CALCULO DE VALORES INICIALES DE CORRIENTE,VOLTAJE Y JORQUE1230 Dó~D6-W7*Ulé*H/21240 GOSUB 27901250 D9--D9--Wó;KW7*H1260 GOSUB 226O1270 REH ARCHIVO DE DATOS PARA CONDICIONES FINALES12SO IF N*-aBALANCEADO" THEN 14201290 PRINT "JJ NOMBRE DEL ARCHIVO DE DATOS DE CONDICIONES FINALES"1300 PRINT "J DE ESTADO ESTABLE PARA SISTEMA DESBALANCEADO i " ?1310 1NPUT D$1320 C A í... L ;1 F IL E " 7 H 7 ? D $ > X *1330 IF X*--° " THEN 13901340 PRINT "J YA EXISTE ARCHIVOS "?D$1350 PRINT "J DESEA DESTRUIR SU CONTENIDO? (si/no); GGG"?1360 INPUT X$-1370 IF X*~"NG" OR X$=°N" THEN 129013SO KIL.L D$1390 CRÉATE D*?:LOOO?01400 PRINT íí'H6;"J NOMBRE DEL ARCHIVO DE DATOS DE CONDICIONES FINALES"1 410 P RIN J @ H ó ? " J D E E 8 T A D O E S T A B L. E P A R A SIS T E M A D E S B A L. A N C E A D OS " ? D *1420 REM ALMACENAMIENTO DE VALORES .[NICÍALES1430 P A Ü E1440 PRINT "JJ NOMBRE DEL ARCHIVO DE DATOS; GOG"¡¡1450 INPUT O*1 4 6 O C A L L !1 FIL E" ? H 7 ? Ü * ? X *1470 IF X*="" THEN 15301480 PRINT "J YA EXISTE EL ARCHIVO: "?0$1490 PRINJ "J DESEA DESTRUIR SU CONTENIDO? (SI o NO); GÜG"Ü1500 INPUT X*1510 IF X$="NQ° OR X$~"N" THEN 14401520 KILL OS15 3 O C; R E A T E O * ? ( T 2 •••• T 1 ) / H #210 + 10005- O1540 PAGE

.::;':?U' '•'..' O :X03
3 •' n U H I íl 3 y H "1 '"• 'y 3 O í.. O 3v. x " , . n i ; " 3 ? i Q w 3 d G o ••• c 3
.'"! n S G "1 3 '":• 9 .i. N! 3 '! i*' W i\ 3 b> W "1 b |- 3y o í !X 3
C'd * 3r1 •' T F' ( ' j ' ; ! i ': ' '-f ' i ? T :l:: '-i ' TÍ"Í!VÍ •")•;•'''">!••"
j 3.!.;:;'-:' J. ,::i T O O O 3' J "1 P; £• 3 y 3 ¡™ 9 .:.. W 3 'i '••••''"' i'--.''::-.~ '"-' H '"i í:-í '"•' 3 3 O ó ¿ T
'i? !::! y G "' '•"• ( ¡ l"1 |V U 
GGG
R E ¡'i A L. ñ A C ; E M A H I E N ' ! Ü D £ v A !... Ü R E 3f-i; O :::: ¡V i| ) -{• '¡
w i;;; I "¡ E :ü- 1 i T y '/JF'ÜR .>:I TQ NIlo i ''. ,J ) ": W 1 í -J t M i N W ( -J >W2 ( J ) -W2 •:. ,J ) MAX W ¡' J )NEXT J
RE'ÍÜRN
R E M C A i... Ü U L ü D E C Ü R R i E N T E S («do)H 2 :::: H / ( 2 * H 1 )G O 8 U B 359OW 4 < 1 > - < Y < I > - - Y 7 > / X Ü 1 )UÍ4 '. 2 ) •-•• < Y ( 2 ) -Y8 > /)< < 1 )y 4 ( 3 > .:: ( y ( 3 > ..- Y 7 ) .•'" X < 2 )U) 4 ( 4 ) — ( Y ( 4 ) - Y 3 ) / X i. 2 )l'-i ( i 3 ) :~ Y C 3 ) ••¥• w 4 ( 4 ) — Y ( 4 ) $ U 4 (. 3 )REn INTEGRACIÓN DE LA ^ ELUCIDAD ANGULAR DEL RÜTÜRW6~W9-f- (. tí ( 1 3 ) -T8 ) *H2W9-W6REh INTEGRACIÓN DEL. DESPLAZAMIENTO ANGULAR DEL ROTORD6::-D9-1-W6#UJ7*HD 9 "- D 6U1' 14>::-~'/JóG O S U B J. 090
IF M7--1 THEN 2450REM . CÜNfiüT ACIÓN DEL CONDES ADOR USADO EL ALIÍ-i» hüNOF >IF' W ó - = > ü * S - THEN 2440Gü Tu 2450X ( 7 ) ~X ( Q ">D7::::ivi8* íIF I8-J. UR 1 8-3 THEN 2480D7--D6REM TFíANSFORHACIOH INUERSA A U A LUFRES IJE F-'ASEW ( 1 ) ™¡,ü4 '•. J. > *COS ( D7 ) T W4 ( 2 ) >K5 1 N ( D7 )W ( 2 .) ~U¡4 ( 1 ) *CÜS ( D7--PÓ ) +U4 ( 2 > *SIN ( D7--PÓ )w >; 3 ) :- W 4 ( i ) * C O 8 ( D 7 1 r' 6 ) T i.O 4 ( 2 ) * S .i: N ( 1 J 7 ••!• F' ó )i/j ( 4 > :::: U ( j. ) >K C Ü S ( D 7 .'' "í' '-,' ( 2 ) ':'Í SS 1 N ( !j 7 )
w < 5 ) •=- W ( : . > í: C y 3 •.. Ii 7 - i-1 o "> T V < 2 ) * S I N ( D 7 - P 6 >
W •: 7 > -=-W4 3 ) *C08 ( D7-D6 ) -H.J4 ( 4 ) *SI N ( D7-D6 )W ( 3 > -::: W 4 C 3 ) * C O S '.. D 7 - .D 6 ••- P 6 > -r w 4 ( 4 ) * SIN (J) 7 -1¡ ó -1"16 )W ( 9 ) --:W4 ( 3 ) *COS ( D7-D6-v-Pó > rW4 ( 4 .) *SIN ( D7--DÓ + P6 )W ( 10 ) "M < 3 ) *CÜS < D7-D6 > -f M ( 4 ) *S1N ( D7-D6 )W t! 1 i ) ~ V1 ( 3 ) * C O S ( D 7 - D 6 •••• P ó > i- y ( 4 ) * SIN ( D 7 - D ó - F' 6 )W < 12 ) --V •: 3 '} *CÜ8 ( D7-DÓTF'ó ) iU ( 4 > ;<SIN ( D7-DóiF'6 )W U. 5 ) - W 4 ( 1 )W < 1 ó ) -:-: W 4 ( 2 )U) ( 17 ) ~W4 ( 3 )W ( 18 ') - W 4 ( 4 >

23uO '4 '. 1 7 ' ••••••••••••.> ;. 1 ,'
:• i: •••• O i;;, i- r: H 6 - 1 ( E1 E i... > A > y2/00 GG "i"O rio ÜF 2710 •• 27302710 -i v 3 ) ~W '-. 3 > -UJ í 2 :•
2740 GO "!"ü 27802 7 3 O' Ui ( 4 ):::: l-j '' 5 ) ™ W ( 4 )2 7 3 •.> u) ( 5 ) ~: W C 3 ) - U ( 5 )2 7 7 O vj ( .:>) -~ •- W ( 4 ) -• w ( S )2780 RE7URN27-70 REM CALCULO DE OÜLTAJES APLICAD US SEGÚN FUNCIÓN AHÍ?2 8 O O A 3>::- y 7 •? I T A 6
2 S i O D 6 '•'•- D 6 -f W 7 •>: W 6 # H 7 22820 REh CALCULO DE KO2830 KO--IJ1/U22 8 4 O i F T < J J. T i-iE N 2£59 O
2 3 8 O K O:::: < ( .!. -• UI / U 2 ) * T i- ( U17 U 2 '¥ ..i 2 - J1 ) ) 7 t. J 2 - J i >2870 GG 10 2890
2 3 9 O i F M 7' — 1 "f H E N 2 9 S O2 9 O O R E ri A L .i f'i E N T A CIO N fi Ü N O F' ü y ;¡; f; ,;¡2 9 i O •-..)1:;:: U y * C O S ( A 3 ) * K O2920 V3-Y (.5)2930 i,J2:~-yi-V32 9 4 ü O ü í ü 3 J. 8 O2950 IF T7>T THEN 30802960 00 TU he UF 2970:'30802 9 7 O G O '!" Ü 17 O F 2 9 9 O ? 3 O 4 O ? 314 O2980 REH FALLA F A SE-T'I ERRA ; ESTATOR EN DELTA2990 Vi-M9 ( i ;¡ 7SQR ( 3 > íCOS ( A3rQé í. 1 ) +PI/6 )3 O O O O 2::;: M 9 « 2 > C O S ( A 3 T Q 6 <. 2 ) »3 O 1 O '-/ 3 -:: U V i/ 3 j ./ 'jj Q R ( 3 ) X (J i j H ( A 3 f U Ó ( 3 .¡ - P I 7 Ó f
3 O 2 O O ü T Ü 3 i 8 O3 O 3 O R E f; • F' A I... |... A 2 !::' A 8 E 8 •••• TIE R R A J E 8 T A T O R E N D E í... T A
3 O 5 O ' / 2 -:: O 9 í 2 '! 7 8 Q R (. 8 ) * C O 8 i. A 31Q 6 ( 2 > f '••'•' 1 / 6 )3 O 8 O V 3::;: O 9 í 3 ;> 7 8 Q R ( 3 ) ¥ C Ü 8 ( A 3 -}• Q ó « 3 ) -• F11 / ó )3 O 7 O G Ü T ü 3 J. 8 C1
8 O 6 O V1:;:: v 9 >:. 1 ) V C O 8 <-. A 3 i-. .J 8 '• I '? :• ¥ K O3 O:-;' O (/ 2 •'•"• V 9 ( 2 > * C ü 3 :, A 3 f U 6 í. 2 > > * K O3 .!. C' O ••-.' 8 -:: O 9 í 3 .' ¥ i j Ü 8 ( A 3 ->• G ó ( 3 '> ) * K O,í.:!. 10 IF :'7>'í 'T H F" N 3180.:: .i...;.'.) G O i ü .i! 7 .J (•• 31 ó (j ? 3 J. ü O ? 314 O3130 REH FALLAS PARA EL ESTATOR EN ESTRELLA
'"<, \ U''"':-O
3 1 7 O R E. h O O L. T A J E S D E E 8 T A T O R E N E J E 8 o; y o3 J. 8 O v '. 1 :• -:; 2 * ( 01 - O -i 5 * O 2 •••• 0*5* v 3 ) / 33190 V ( 2 ) - ('•- 3 - '•••} 2 ) / 8 Q R ( '3 >

r/.¡
Lü Lü fí'.'
c¡
í.r¡ •:*
.z: Lü
O
X.
x
i"0
f-0
;•- >
• 3
3
i—
'"•i"
!£3
3Ü
*:-
-o:0-
i O
ÜJ
¡M •
:í-i¿
?0
i
f-i r
ou.
-•
Lü :
:•-
Ü
K-
>-
<j- i
r-^
O
U
:V
O
1 •rr
O .-2; SO
Oj íl
¡ •
03
?x
* *
r-jr i -T-
i"'"--, 3
o o
o i
r;ii
ÍO
i!
•O ?
r-i
i O
:_:
U-;-
~|~
r\ i
*-1"!
3 3
ii i!
r-= r
\ r-o
i 03 rx X
rx
::¡ :-:-
LÜ
-o

¡ o'¡o KJ:;;H REA!... IZ.AÜ IüH DE GKAFMÜÜ3 ÜT I LI ZANÍ.'Ü ARLr!¿'--- 'Ü L;E D A T O S
• i - i
1 1 ' "i DE D A T u S í
I l i l i
'i , .-ui
L' I l I i • , . » i ' . l J . | "i |-
iM > i i' \ i ' i-" 1- - i - IZARSE *##•"I | | 11, |, i - I | MI | - í , | i p.; J ( 3 ;• b :•• i_ )
I V i " ' I U ." I ' l ' l i| ( 3 ? b y C >
l l_ I l| (• | i J ( I I ' , i l|i ( 3 y b ? C ) —
1 I i i i.l . L I I U I 'Jl- ( 3 » b ? C ) -
i ' > i ' ' i M | iu ' i ¡ '.L I •iini-uirM ' ICO II i" i ' ! ) i I I ¡ Un U*
i l M i '_i|. i j .nJ'¡ _ i - « -, ' i- bs to r í -i. - i l ' l . t u r ?
i i ' l ' i ' i i , i - i' • M ' ts tor íI-1 R 1 -.' T " J r o t c? T- j ( 21 ? 2 2 > "
' ! ' ' ' M i i i l L ' I L Ul I I I H I ( 2 4 . ' "
i I ' i .' i i 11 ' i 1 1 i'i i-iLLlERDÜ AL. NUHERO C O R R E S P O N DI r. H"!";:;'i . I j i • i
i l " i ¡«, • , l H i ii
l . l l | I I t ' ' •
I ' | ¡ .. • ' I I - . '
I I I I I | U ' ., |, , |'l I
63"
l >i ¡l i '
1 I , II ! I | j
I I 1| I i f '
TIEMPO r;¡3x '', '' ? T2I- U ¡"I t- O :::- l~ ~í " 3 S i i-S T é T Í C Q ) "
i. D A T O ¡ í i c r xS : •• i02 ( NO1)
i i i
I L .Ü" i

15 9 O IN P U T X 't-i ó ü O 1F' X í- ~ " S1 " OR X $;:::" 3 '' T H t. N 1650lo 10 U3:;::32
•¡_ /., •;;:• A •••( •.:> -;,'. .; ::;; * 2 v 3 2 8
.i. ó 3 O T •?:::: O * 8 >¡í 3 v O 7 2
:!. 640 GQ TU 1700i. ¿30 Ü3~:l166o F'RiNT !i.jj ALISTE; ÜRAFIZHDÜR,16/0 INPÜ'! Xí>X A ;"•>;") X v"»O -; 8 -K i v 7 V 2
i <"; 9 O Y 9:::: O * 9 í 2 > 8161700 PRlHÍ ¡ííU3? 17 J X 9 ? Y91710 A5-" ' ;G2~G1 ;/hltl1 7 2 O H 6:;;: ( G 4 •- G 3 ) / iv¡ 2 -f 11730 PAG E1 7 •••:• O G 0 i '•• ü B 2 ó 8 O1 7 5 O íi O O E t? U 3 » 81 ? 6 31760 FGR J-=l TO A517 7 O Ü R A W ÍS U 3 i G1 + í J •-1 ) * H1 ? G 31780 8CAL..E 1 ? 11790 RDRAW G?U3 t O ? 11 3 O O Y $ -- 8"!" R ( G J. -f ( J -1 ) $ n 1 )
' 1810 Y$--REPÍ " " y 1 'f 1 )1820 RtíOOE GHJ3 'í -LEN ( Y$ ) /2'*X9 ? -1 > 5*Y918 3 O F' R J N T (S U 3 ; Y * ?18 4 O ÜÜ 8 U B 268018 5 O h O U E lí U 3 ':•, G1 -f ( J •••• 1 ':• * H1 ? G 31860 NEXT J.!. 8 7 O r¡ Ü O E $ U 3 ¿ G1 ? G 31 3 8 O F G R ...J;:: 1 7 Ü A 61 8 9 O D F: A W IS ü 3 ; G:!. ? G 31 ( J •••• 1 ) * ñ 2
-1 7 O O SCftl.. E 1 :-• 1
J. 910 R fi R A W ü? U 3 S i :» O.1 9 2 O IF A B 8 ( G 3 •{• ( J - i ) * M 2 ) > 1 * O E ••- 4 T H E N19 3 O Y * ~ S T R C O )
f 19^0 Gü Tu 196019'':': O Y í-:::: 3' i" R ( G 3 -i- ( J - J. ) í ivi 2 )•i O ¡'..i'l y'•;'.:.:~ f'.1 >" p f " " u '¡ , '! \ •:> 7 () ¡V M ¡j y [: y y 3 j ._ y O v .... ¡__ £ j\ ( y $ ) / v ;*: X 9
19 9 O F' RIN T t? U 3 ? Y í> 52 Ouü I-1 R .¡: i'-JT !¡?ü3 :» 25 i O
. 2010 GÜSÜB 2680.• .7 O 2 O íi O O E § i J 3 ¿ G1 r- G 3 -f (...J -1 ) * M 22O30 NEX'F J20-40 AX I8 ü?U3 '! MI ? H2 ? G2 ? G420SO AX13 G?Ü3 i h 1 ? M2 ? O ? O2 060 A 9;;;; i... E ¡'4 ( A *•)2 O 7 O ]••} G '-..•' E C'? ü 3 i ( G11G 2 ) / 2 ? G 4
' U !: : N !:;' A R A C O

ANEXO * 5 PAG, 20
2080 8 Ü A!... E 1 •-• 12 O 9 O R h O V E ¡r? Ü 3 ¿ — A 9 / 2 '& X 9 y 3 :* Y 921 O O PRINT 'Su5;Á*?2 ''. :¡ O K i'i O v E 9 U 3 * O :•• - O - 7 * Y 92120 FÜR -J-:i. Tu A92 lo O PRÍN ¡' WÜ3; "•-il í
2:!.50 üUSUB 2ó802 :!. 6 O h Ü V E:! 'í1 U 3 ¿ < G 1 i G 2 ) /' 2 ? Ü 3:,;:!. 7 O 3 CAL E i ? i2180 RñOOE ííu3;-LENi. R!i>)/2¥X9?-3*Y92:1.90 PRINT y Ü 3 í R $ 52200 GübUfci 26802210 Hü'v'E li?U35Gl ? (G3 + G4)/222 2 c) SC A i... E 1 ? 12230 RhOVE (i? U 3 5 --3 * 2#Y9 ? --LEN ( S$) 72*X92 2 4 O P RIN T GMJ 3 ? 2 5 í 9 O2250 PRINT ü?U3';S$f2260 PRINT i»U3f25íÜ2270 GÜ8UB 26802280 ÍF P7=0 THEN 23702290 Ü f •' E N O $ ? 1 ? " ¡;<" ? X $2300 REAü #1 iX(1 ) ?X(2)?X(3)?R(1) ?R(2) ?W l ? W 2 y R O f M * ? X I ? W ó2310 hÜOE ü?U3;W6?Xl2320 FÜR J'~2 Tu RO2330 READ 4=1 í XI? 1062340 IJRAW iíU3ÍWófXl23!50 NEXT J'2360 GÜ TO 24602370 Ü P E N Ü $ í 1 ? " R '; ? X $2380 READ *i IN1?T1? T2 ? W1? W2 ? RO2390 READ #1 í T f U I2400 1F N0~24 Í'HEN 29102410 HÜVE ÜRJ3TÍ'? UJ(Nü)2420 POR J™;2 iu RO2430 READ *iri'?W2-440 DRnW ¡íU35T?W(NO)24:50 NEXT ,1:.;:••*6O GLOSE -2470 HOME ü?U3¿2480 PRINT "DESEA LEYENDAS? (si/no)G "?2490 INPUT X*2500 IF X!lí:~'iSi" GR X$::::US" THEN 25702510 PRINT "DESEA REPETIR EL GRÁFICO? (si/no,1 G "?2520 INPí.;¡ Xí-2 5 3 O IF X $ - " S 1 " O R X $ - " S " T H EN 15802540 PRINT "OTRO ARCHIVO — TECLA 20"¿550 PRINT "GTRO GRÁFICO TECLA 10°2560 END2570 PRINT "TITULO DE LA LEYENDAS G " i2580 INPUT L$'¿590 hüVE @U3* (G1-K32) /2?G3?6ü'.; SCAL.E i, i•610 RMÜVE (¿Ü3S-L.ENCL$)72*X9?-6*Y9

AN EX O f 5 P A G * 21
2620 PRINT (i?U3ILíi>?2030 GÜSÜB 208026<íü HUME li?U3:;2650 PRINT2660 PRINT2 6 7 O tí U "f U 25102680 REM *.*# SUBRUTINA DE WINDÜW Y VIEWPORT2090 IF U3-32 THEN 27202700 MIEUPQRT 10 ? 140 ;> 15 ? 902710 Gü ÍO 27302 7: O '•••} 1E W P O R T 1O t 12 O ? 2 O ? ? O2730 !/i:i>DüW GlyG2?G3?G42740 RETURN2750 R*="VELOCIDAD (p,u.)";.:: 7 ó O l:;' RIN T " L JI C U R U A * 2 4 ( T O R Q U E - V E L O CID A D ') ".¿ / / Ú r"' K j, N ! .1. "* *"'"" " ~" — — — • — —• — — — •— — — •— — —
2780 PR1 NT " J VELÜCI DAD n< i n- " i W1 ( 14 ) ? " VELOC1 DAD max- " ? W2 ( 1 4 )ÍÍ790 PFÜNT "J (existen "?F<0?" puntos í^ars el tráfico)11
ÍBOO PRINT "J TORQUE min= u5Wl(13)?a TORQUE msx= 'ÍW2Í13)Í810 PRINT 'JJI ** INGRESE LIMITES DEL GRÁFICO A REALIZARSE #*"!820 PRINT !IJ VELOCIDAD ( min »tnsx > ; G " íÍU30 INPUT G1?G2!840 PRINT "J TORQUE (min?msx)3 G°?'850 INPUT G3íG4Í860 PRINT "Jl ** INGRESE SEPARACIÓN ENTRE MARCAS ##"Í870 PRINT "J EN EL EJE DE VELOCIDAD! G"?!880 INPUT MI:890 PRINT "J EN EL EJE TORQUE: G"í900 GO TU 1530910 MOME eU3ÍW(14)»W(13)920 POR J=2 TO RO930 READ #1ÍT»U940 DRAW S'U3ÍW(14> ?W(13)950 NEXT J900 GO TO 2460
'; l ) ".-' i ! i--' ..• .'.'-'. i' )
1030 PR.LN"' "LJJ '--''-i GGRAHA F'AF-'A CALCULAR EL ü-A P A CI T D R OPí j.'v'G"¡ ("i .a o i-' H; £ j--..j T •'. j p ;•::> P f.) A LI H E N T A CIO N H ü N Ü i" A S •. L- A "1 O S O F;'R .i N"!' " J J í E C L A .1. i C: A i... C ü I... ti & "1 O f.) O P RI N T " ...J : E C i... A 12 - G R A r i C Ü S ":!. O '.;'' O P R l N T ' JI E s t:- o J B o P t; i c n •> "J.080 END:!. 090 REH INGRESO DE DATOS1 10 O C? O 3 U B 3 O Oj. :!. 10 ¡"' A G E1 J. 2 O D E i.. E T E X r R ? Y r F:'1:!. 3 O D I' H X ( 6 ) ¡> R í 6 ,' ? Y''.' 2 ) ? F' ( 5 )L14 O i:;' R i N T " J F. N G R E 8 Ü D E P A R A H E í' R U 3 D E L A H A U UIH A i "j. J. 5 O P R I. N "f " J ( v s lores e r< P •> L; -> ) G G "I. J. 6 O P RI N "f " R E ACTA N C IA I1 E L. E 8"' A í' ü R :¡ X < 1 ) :::;: i¡i. i 70 IN P U í X ( 1 ). 18 ü F1 RIN' l" " R E A C T A N CIA D E1... R Ü T Ü R R E F E R ID A A L E S 7 A í' G R :: X ( 2 )"~".190 IN F' U T X ( 2 )2 O O P RIN T " R ti! A C T A N CIA H U T U A ; X ( 3 > -~" ?21 O 1 N P U T X ( 3 ')220 ;•"• !: : 1 >--\ " F<! E 813 I' E N CIA D E!... E 3 T H í G R :; R •'. j. .• ~ :¡ 5230 I N F1 ü T R ( 1 )240 l:;' R1N T " R E 31 8 T E N CIA D EI... P. Ü T U F;: F;.: E P E RID A A i... E 3 "¡' A "¡' O R i R ( 2 > ••-250 INPüT R(2j260 H6-322 7 O G Ü 8 U B 1 3 8 O280 PRI NT "JJI ESTÁN CORRECTOS LOS DA VOS i' Csi/no'> GG!:?690 1NPUT X$300 IF x*~"S" OR x$-"s:i:" ÍHEN 1340310 PRINl' "J -:•-- = > INGRESE LA VARIABLE CON EL DATO CORRECTO320 P RIN T " JI F' A R A CON TIN Ü A R ? !::' R E SIO N E T E C!... A i 3 , G "330 END340 REH IMPRESIÓN DE PARÁMETROS EN F'RÍNTERi 5 O H ó ~ SI$60 0080B 1380570 GO i 'G 1.470¡80 REil IMPRESIÓN DE PARAnETROS DE LA h AQUÍ NA'•90 PRI NT ü?Hó ¿ " L.JJ :*** PARÁMETROS DE LA MAQUINA x^x•00 F'Rl'NT i?Hó i " (valores en •;•'•• •> u * ) °10 PRI ü:'F-l6í" REACTANCIA DEL ESTAÍ'ORí x ( J.r20 PRI lÜ'Hói" REACTANCIA DEL ROTOR REFERIDA AL ESTA TUR: X •: 230 PRI ii'HóJ" REACTANCIA HUTUA* x. •: ;;;4 O F' RI L'? H 6 ; " R E S IS T E N CIA D E L E Si T A ! ü R S :••: ( i.ÜO PRI &H6Í'1 RESISTENCIA DEL RÜ'Í'ÜR RE:;:'ERIDA AL. ESTATOR i60 RETURN7 O R E H E 8 T ATO F;; C Ü N E C T A D O E N D E L í A30 PRI NT í;'H¿Í"J * CONEXIÓN DELTA EN ESTATOR * JJ"

ftNEXÜ * 5 PAG: 23
1500 REn ALHACENAn JEHTÜ DE DATOS1 5 1 0 i "' A G E1520 PRj.NT " JJ NOMBRE DEL ARCHIVO DE DATOS; GGG
1 5 4 O C A i... L. " F I L t:! ;l » i-i 7 ? O ':i> r X *1 '550 1F X^;:";l" THt.N 16101 500 P S i N '!" " ...I Y A E X 1 8 T E E L A K C H I O Ü í " ? O *15/O PRINT ".J DESEA DES i RU IR SU CONTEN I DÜ? <SI o NÜ):; G8G'1?1580 1NPUT X*1 5 9 O I F X * - " N ü " Ü R X $ - " N " ' T H E H ¡5201600 KILL O*1 6 :l. O C R 1::. A i E Ü •!> i¡ 2 5 O O ? O
1620 PAGE:!. ó 3 O P R 1 N T & H ó i " J N U f i B R E D E I... A R C H I O O D E D A I" Ü Sí " ? O f1640 W:i. :~1 t OE+3001650 W2~~WJ.:l. ó 6 O R O :-: O1670 UPEN ü$s j. . "U" ? X*1680 CAL!... "REWXND" ? 11690 10 R '.i! TE *1 S X (. 1 ) * X ( 2 ) ? X ( 3 ) • R í :!. ) r R ( 2 ) ? Wl - W2 ? RO ? Mt1700 W 6 ;-: O1710 1F Uó>l THEN 22601720 REM SE CALCULA LA IMF'EDAMCI A Y LA ADMITANCIA DE SEC» ( -i- )1 730 R ( 4 ) = R ( 2 ) / '•. 1 - W 6 )1740 GÜSUB 17601750 GÜ Vü 18001760 R ( 5 ) ~R ( 1 ) *R ( 4 ) --X < 1 ) *X ( 2 ) -X ( 1 ) *X ( 3 '.> --X ( 2 ') *X ( 3 )1770 X ( 5 ) ~ X ( 2 ) i X ( 3 )'1 780 X >; 6 ) -X ( 2 ) *R ( 1 ) t-X C 1 ) *R ( 4 ) +R '! i ) *X ( 3 ) 1-R ( 4 > *X ( 3 )17 90 RETURN1 SOO Y ( 1 ) "SQR í í. R ( 4 ) *R ( 4 ) +X ( 5 ) *X C 5 ) ) / ( R ( 5 ) *R ( 5 ) iX ( 6 ) *'X ( 6 ) ) :>1310 K7--ATN < X '•. 5 ) /R ( 4 ) )1 Ü 2 O I F R í 4 ) > O T H E N 1 8 4 O1830 K7-K7 + PJ:1 84o K5--ATN ( X ( 6 ) /R ( 5 ) )1 8 5 O .i! F R í. 5 ) .: • O 1" H E N i 8 7 ü'.L 8 6 O ¡\ ;;:: K 5 •;• r-' ii 8 7 O K 7 ••- \\ •••• K 51 8 8 O K E! M S E C A I... C U i... A L. A I H F' E D A N C 1 A Y i... A A D h I T A N C 1 A D E 8 E L > '. - )1 890 R ( 4 ) ==R (2)7(1 tW6 )1900 GOSUB 17601 9 1 0 Y ( 2 ) ::;:SQR ( ( K ( 4 ) $R ( 4 ) i X ( 5 ) *X ( 5 ) ) / ( R ( 5 ) *R í 5 ) -<• X ( o ) ¥• X • 6 '> ) ,'1 9 2 O i\ :::; A "! N ( X ( 5 ) / R ( 4 .) ':1930 IF R(4):>0 THEN 19501940 Kü-KB-í-PI1950 K6--ATN ( X ( 6 ) / R •; 5 ) )1 9 6 O I F R C 5 ) > O T H E N 1 9 3 O1 9 7 O !\ ;::; K 6 T !'•' 11 9 8 O K 8 ~ K 8 -• K 61990 K7--K7

•\i iv { .-. '. ':->:' i i'—. f ;'. '-•'. '.• — -.//;••. • pt i '•.''., ,-•; ••
< ' "1 ;::: '••'. X V f" '1 ) ,:s Y ( V ^ ';->¿ ( '¡' f ': ¡ ".•:•:. p. ,.•' -;•• ; ( V 'i ^K ':' ; .'
t " '*.• ' :::; .—,'•>:' '' ;" ; ¡ j X •' <' ; ? • • • • ';' f. v--' .f "'£' ';' *, k - ' !<
ÍV £• tvi !•••'!" !''.'Í" ."i! t í" i '-..-: ¡" | ?"t i" ; j l !••(! ! j 1 i »'••'
í j:-: C 2 '--I1' C 2 •- 4';? 1^ 1 -t' C- 3;;p i;t-~>0 T !••! I::! N 21 70
i--' i-i1 ! ••-.) ¡ '' i i i * r': t . ' : ' ' \" ! ¡"'í¡';{¡'l j i" l''-'''j-- :\ i i I"' ¡i.'¡ ' " i - '-l,: ! ¡ .,
-•' RI W"!" " J i:;' A K A í''i;:! í' R Ü S N U £ U í--í D i:: T u V.i :••' i;' :-:¡ i.í:;:'!:;: IN "¡" '¡í r-i (i > '' ,„ I¡ J! S C R I n IN A N í E:! M E N Ü R H C;--; r";; IN ¡' ¿'H6> ' J F'A i:;; A r: Ei. T ;••.; ü S NO SON Dí-iTDSPKINT Cl ? C 2 : > C 3 ' D ? W6
X'!.::;:O v iiv .'X ( • • • • ''.'• 2 -''• ::SQR ( D ) ) / C1KEH 3£' MÍ... h A C E N A LOS REBULTADOSW R I '!" E -íi: I "i X J. ? U; 6R O:::: R O + 1.Ui 'i. •- w 1. ',". I N X iU -::: '••. h X
C A L i... " R. E W I N D " ? iR t. A D :¡!: 1 ¿ X ( :!. ) ? X ( 2 ) * X ( 3 ) :> R i i ) ? R •! 2 )Ui R .i! 'T E:! :ii: '.\. 'í W 1 ? w 2 ? R OGLU3E¡••' ''v.!. i1-! ! '' j. j F I • \ j E A L. H A G E N A f 1 ü! E N T G •, ";-; H:.!! N' i" ' ' , j b i:;: A F I L; G S T E G L A 1 2 ''PRIi'TÍ ;l J F'B.ÜGRAHA h';:'E3 Í'RG TüüCLA 1•••' '••; J! N T " J!!! !::! s e o J s o P c:- i o n * "ENÍJK¡.:.M GRÁFICO DE Xc v s » U óIF r7-I VHEN 2^40
1 H í...:.. " >..!!":.;. 't '' v ri LÍ
J :-HEnGRYi:-! i':' ;••''::! r¡ }j '' '•£ N i:;.: i" I. j /'' G i:;; A F .[ G G •' ? ó O .: ()

_ ' ' I '' ' '1il" Hl _ I I t - ' ! ' i I i í
] (. .i ' ' 1 1 . I , 1i ' i ' i i 1 1 i , ;"('E ARCHIVO! ''?0$i;",j REPITA*
, i i | l ! | ¿ 1 1
i U H „ ' i • „> ' 1 1 'i- j * i • - • • "'; < l) ? R < 2 ; p w :i. ;• W2 p fío ? h$
-•-,_'70 CLüSE2380 GÜ31JK 13802590 !:;' RIN T & H 6 í " * C C N E XIO N " ? H $ ? " E N E S I' A T i J R * n
2600 F'RINT "ÜJI F'AríA CONTINUAR:' F'RES I ONE i:;: E TL.i R < ••'. •, 6G"2610 INF'UT X*2620 i;;; % ••••" •-) E!... O CID A D i P , u - > "2 630 P RIN T " L J1 L U R M A l C A P A CIT O R O F' T I h O ' ••• s * U E i... O CID A D "•""i / /i ,-••. ¡;j i", i' ;-. ¡ "i" u T .„ „. „_ . „ ,.., „. _, .. . u.-.-.'. '...• ••? '-..•' ! i \. rí I .j. "
2650 F'RINT "J VELOCIDAD mi ni il ? O ? 1! I VELOCIDAD ^ax? " 5 12óóO F'RINT "J (existen " > R ü ? " puntos psrs e i ¿sraf'i co)"2670 F'RINT "J Xc miní a ? W l 5 " I Xc mex; a - W 22680 PRINT "JJI ** INGRESE LIMITES DEL GRÁFICO A REALIZARSE2690 F'RINT "J VELOCIDAD ( min ? iii3X ) I G " ?2700 INPÜT GlíG22 7 J. O P R i N T " J DA T (J S í X c ( m i n ? m 3 x > í G " 52720 INPOT G3?G42730 PRINT "Ji ** INGRESE SEPARACIÓN ENTRE MARCAS ##"2740 PRINT "J EN EL EJE DE VELOCIDAD? G"?2750 INF'UT Mi2760 PRINT ",J EN EL EJE Xc; Gil •>2770 INF'UT M23000 REM PROGRAMA DE GRÁFICOS

- A6-1 -
A N E X O # 6
DIAGRAMAS DE FLUJO
PROGRAMA MAESTRO
* TECLA 1
TECLA 1
PROGRAMA MAESTRO
( INICIO
SELECCIÓN DE
PROGRAMAS
TECLA 2INTEGRACIÓN
MERICANÚ
TECLA 5CALCULO DEL COI*DENSADOR ÓPTIMO
TECLA 2INGRESO DE DATOS YSELECCIÓN DE TIPODE FUNCIONAMIENTO
TECLA 4
GRÁFICOS
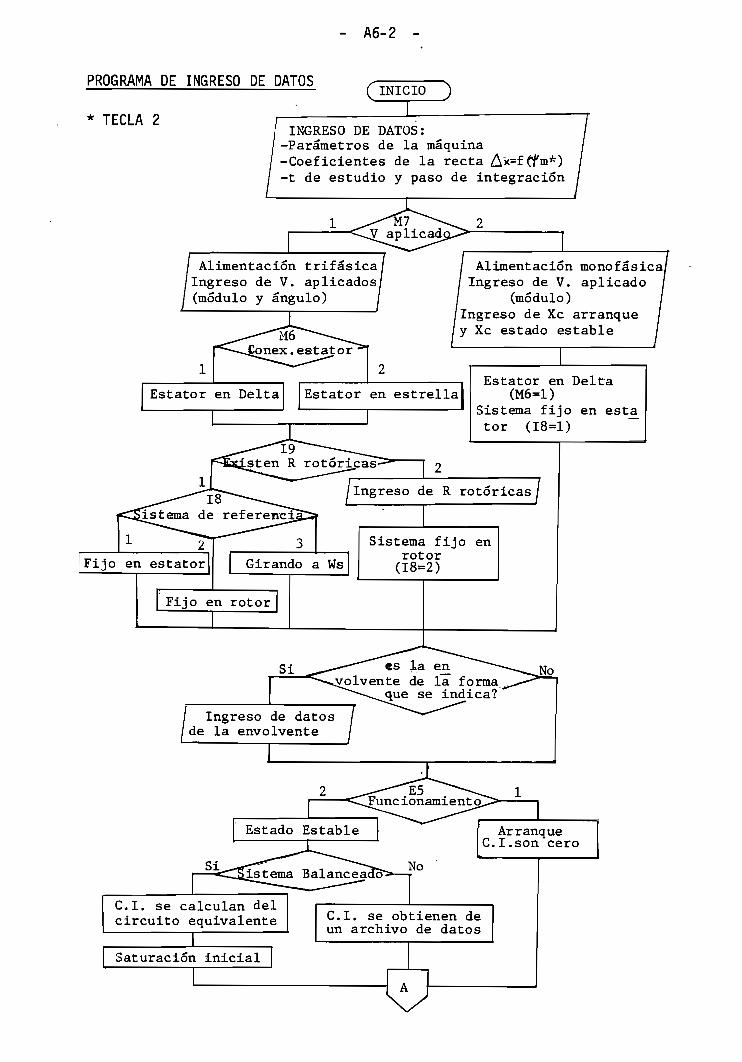
- A6-2 -
PROGRAMA DE INGRESO DE DATOS
* TECLA 2
(INICIO )
I
INGRESO DE DATOS:-Parámetros de la máquina-Coeficientes de la recta A*=f (fm*)-t de estudio y paso de integración
(Alimentación trifásica]Ingreso de V. aplicados](módulo y ángulo)
Estator en Delta Estator en estrella
Alimentación monofásica/Ingreso de V. aplicado
(módulo)Ingreso de Xc arranquey Xc estado estable
Estator en Delta(M6=l)
Sistema fijo en estjitor (18=1) ~
/Ingreso de R rotóricas/
2.stator
| Fijo e
Gira
n rotor
Sistema fijo enrotor(18=2)
es la enyolvente de la forma
que se indica?
Ingreso de datosde la envolvente
E5Fuñe ionamient
Estado Estable ArranqueC.I.son cero
istema Balanceado
C.I.. se calculan delcircuito equivalente C.I. se obtienen de
un archivo de datos
Saturación inicial

- A6-3 -
Ingreso de ángulo o/tiempo de falla
I
Integración Numérica: TECLA 3Programa Maestro: TECLA 1

- A6-4 -
PROGRAMA DE INTEGRACIÓN NUMÉRICA
* TECLA 3(INICIO)
/Programación de ec. del torque mecánico /
Cálculo de voltajes, co£ficientes y valores iniciales
\I Ingreso de nombre de archivo de datos /
Almacenara. de datos iniciales
Cálculo de Vqd(s.r) y coef. de ec.dif
ICálculo de Derivadas
Fj = Yj (concatenaciones de flujo)
Zj = Dj (Derivadas)Yj = Fj + 0.5hDj
t=t+0.5h
[Cálculo de Vqd(s,r) y coéf. de ec.dif
Cálculo de derivadas
Zj = Zj + 2DjYj = Fj +
Cálculo de coef. de ec.diferenciales
Cálculo de Derivadas
Zj = Zj + 2DJYj = Fj + hDj
t = t+0.5h|
Cálculo de Vqd(s,r) y coef.ec.dif.
I Cálculo de derivadas
Yj=FJ+h(Zj+Dj)
Método de Integragración de Runge-Kutta 4- Orden

- A6-5 -
Cálculo de valores finales
Almacenamiento de valores finales
No Si
Actualización de valores mínimos y máximos
Gráficos : TECLA 4Programa Maestro; TECLAJ
SUBRUTINAS:
¡Subrutina de Voltajes Aplicados
Cálculo de KO |
Cálculo de V estator según ti-po de funcionamiento o falla
(eii ejes atic)
Transformación de V apli-cados a ejes qd
Cálculo de V rotor
Cálculo de velocidad y coefde ecuaciones diferenciales
RETURN
Subrutina de Valores Finales
Cálculo de iqd
Saturación
Integración de Wr,•9-r y -9-
Transformación a valores de fase
Cálculo de:iqd(s.r), Vqd(s,r),iabc(s,r), Vabc(s,r)Te, Wr, Tm
( RETURN )

- A6-6 -
Subrutina de Evaluaciónde Derivadas
Dj = f(v,Yi,t)
( "RETURN j
Subrutina de saturación
Cálculo de Y7 y Y8
Si No
[D7=S3+S4]Y7|
Y7-Y7-C(7).D7.SGN(Y7)|
D7=S3+S4|Y8|
Y8=Y8-C(7).D7.SGN(Y8T
(RETURN
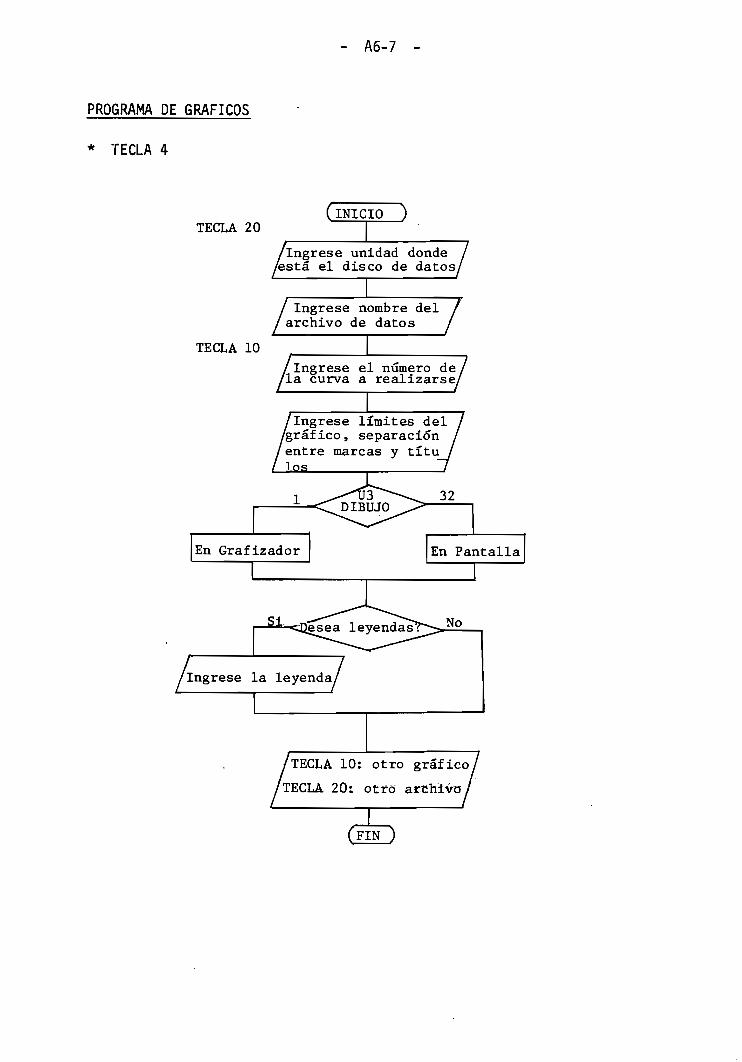
- A6-7 -
PROGRAMA DE GRÁFICOS
* TECLA 4
TECLA 20(INICIO )
Ingrese unidad donde'está el disco de datos
j Ingrese nombre delarchivo de datos 7
TECLA 10
, Ingrese el número dela curva a realizarse/
Ingrese límites del/gráfico, separaciónentre marcas y títu_los
Ingrese la leyenda
'TECLA 10: otro gráfico,
'TECLA 20: otro archivo,

- A6-8 -
PROGRAMA PARA CALCULAR EL CONDENSADOR ÓPTIMO
* TECLA 5
INICIO
INGRESO DE DATOS(Parámetros de la M.I.V
Almacenamiento dé datos
Cálculo de impedanciay admitancia de secuencía (+)
Cálculo de impedanciay admitancia de secuencía (-•)
Cálculo de coeficientesKl, K2, Cl, C2, C3
TECLA 11
Se resuelve la ecuación
Alamacenam. de resultado
Wr=Wr+0.01
GRÁFICOXc vs. Wr
TECLA 12

B I B L I O G R A F Í A
1.- KRAUSE P.C. and THOMAS C.H., "Simulation of Symetrical Induction
Machinary", IEEE Trans. Power Apparatus and Systems, Vol. PAS-84,
pp. 1038-1053, Nov. 1965.
2.- MURTHY SS an BERG G.J., SINGH B., JHA C.S., SINGH P, "Transíent
Analysis of a three phase induction motor with single phase supply",
IEEE Trans. Power Apparatus and Systems, Vol. PAS-102, N2 1, Jan
1983, pp. 28-37.
3.- TOAPANTA MILTON, "Estado Transitorio del Motor de Inducción", EPN,
Quito, 1977.
4.- BONILLA ÁNGEL, "Transitorios en la Reconexión de Motores de Induc-
ción", EPN, Quito 1981.
5.- MANCERO FERNANDO. "Conportamiento Dinámico de Motores de Inducción
con Capacitores Serie y Paralelo", EPN, Quito 1983.
6.- THALER G. y WILCOX M., "Máquinas Eléctricas", Ed. Limusa, México,
1974.
7.- FITZGERALD A.E., KINGSLEY, KUSKO, "Electric Machinery" Ed. McGraw-
Hill Book Comapny, 3ra. Ed., Tokyo 1971.
8.- VICKERS H., "The Induction Motor", Ed. PITMAN, 2da. Ed. Gran Breta.
na, 1953.

9.- ALMEIDA JULIO, "Métodos para Determinar los Parámetros del Circuj_
to Equivalente de la Máquina de Inducción", EPN, Quito, 1980.
10.- KRAUSE P.C., "Simulation of Unsymetrical 2-Phase Induction Machi_
nes", IEEE, Trans. Power Apparatus and Systems, Vol. PAS-84, No.
11, pp. 1025-1037, Nov. 1965.
11.- POVEDA MENTOR, "Apuntes de Dinámica de Máquinas Eléctricas", EPN
1984.
12.- TOAPANTA MILTON, "Apuntes de Máquinas Eléctricas III", EPN 1984.
13.- CARNAHAN, LUTHER y WILKES, "Applied Numerical Methods", John Wi-
ley Sons, N.Y. 1969.
14.- GOURISHANKAR V., LAMBERT R., "Conversión de Energía Electromecáni-
ca", International Textbook Company, México 1969.
15.- Kosow I.L., "Máquinas Eléctricas y Transformadores, Ed. Revertí
Barcelona, 1980.
16.- STEVENSON W, "Análisis de Sistemas Eléctricos de Potencia", McGraw-
Hill, Bogotá 1975.