elements finis
DESCRIPTION
présentation power pointTRANSCRIPT

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
Corso diASPETTI TEORICI ED APPLICATIVI DEL METODO DEGLI
ELEMENTI FINITI
da
Vin
ci”
ecca
nic
a PARTE IIRev: 03 del 15/03/2012
eon
ard
o d
gner
iaM
e
PRINCIPI DI MODELLAZIONE
gner
ia“L
ee
in
Inge
g
in In
geg
Mag
istr
ale
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/1VALUTAZIONE DELL ERRORE/1d
a V
inci
”ec
can
ica Il metodo EF fornisce soluzioni approssimate.
eon
ard
o d
gner
iaM
e
Se le f.ni di forma rispettano determinate condizioni, il metodo risulta convergente all’aumentare del n° di g d l
gner
ia“L
ee
in
Inge
g convergente all aumentare del n di g.d.l.
Ri l di i l i
in
Inge
gM
agis
tral
e Risulta di particolare interesse:• analizzare la velocità di convergenza• analizzare la possibilità di fornire stime “a posteriori” dell’errore associato ad
Dot
tora
to
alis
tica
/M a a a e a poss b tà d o e st e a poste o de e o e assoc ato ad
un determinato modello• stabilire come modificare un modello per ridurre l’errore entro limiti
bili i
cuol
a d
i D
dL
Sp
ecia prestabiliti
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/2Definizioni
( )uueU ˆ−=Errore sullo spostamentoValore esatto
da
Vin
ci”
ecca
nic
a
( )Uo e su o sposta e to
( )σσσ ˆ−=eErrore sulle tensioni
Energia associata all’errore:
eon
ard
o d
gner
iaM
e Energia associata all errore: ( ) ( )∫ =−−=
V
Ti dVe εεσσ ˆˆ
21
-per l’elemento i (ETABLE, Lab, SERR)
gner
ia“L
ee
in
Inge
g
( ) ( )∫ −−= −
V
T
V
dVD σσσσ ˆˆ21 1(dipende dal quadrato di eσ)
in
Inge
gM
agis
tral
e
- totale sul modello (*GET, Par, PRERR, 0, SERSM) ∑=i
iee
Dot
tora
to
alis
tica
/M
Norma energia percentuale associata all’errore (Percentage Error Energy Norm)(*GET Par PRERR 0 SEPC)
cuol
a d
i D
dL
Sp
ecia (*GET, Par, PRERR, 0, SEPC)
10021
⎟⎠⎞
⎜⎝⎛=
eE (proporzionale ad e )
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
100⎟⎠
⎜⎝ + eU
E (proporzionale ad eσ)

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/3
Le funzioni di forma forniscono una rappresentazione polinomiale della funzione di spostamento nelle vicinanze di un nodo, simile a quella ottenibile
da
Vin
ci”
ecca
nic
a
p , qattraverso una serie di Taylor:
( ) ( ) ( ) ( ) ( )22
22
+∂
+∂
+∂
+∂
+= yyuxxuyyuxxuyxuu
eon
ard
o d
gner
iaM
e ( ) ( ) ( ) ( ) ( ) ..., 22 +−∂
+−∂
+−∂
+−∂
+= iiiiii yyy
xxx
yyy
xxx
yxuu
gner
ia“L
ee
in
Inge
g
Il dominio di validità di tale sviluppo corrisponde alle dimensioni “h” degli elementi, pertanto:
in
Inge
gM
agis
tral
e
( ) hyyxx ii ≅−− ,max
Dot
tora
to
alis
tica
/M
i
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/4
L’errore connesso con tale approssimazione sarà un infinitesimo dell’ordine del primo termine non incluso nello sviluppo, vale a dire:
da
Vin
ci”
ecca
nic
a
p pp ,
( )10 +≅ pU he
d li i l tili t l il d f i i di f
eon
ard
o d
gner
iaM
e
Quello sulle tensioni, proporzionali alla
p = grado polinomiale utilizzata per lo sviluppo = grado funzioni di forma
gner
ia“L
ee
in
Inge
g derivata m-esima degli spostamenti, sarà invece : ( )mphe −+≅ 10σ
in
Inge
gM
agis
tral
e
Energia associata all’errore ( ))1(20 mpi he −+≅
Dot
tora
to
alis
tica
/M
i Norma percentuale dell’energia associata ll’
( )i
( )
cuol
a d
i D
dL
Sp
ecia all’errore ( )mphE −+≅ 10
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/5
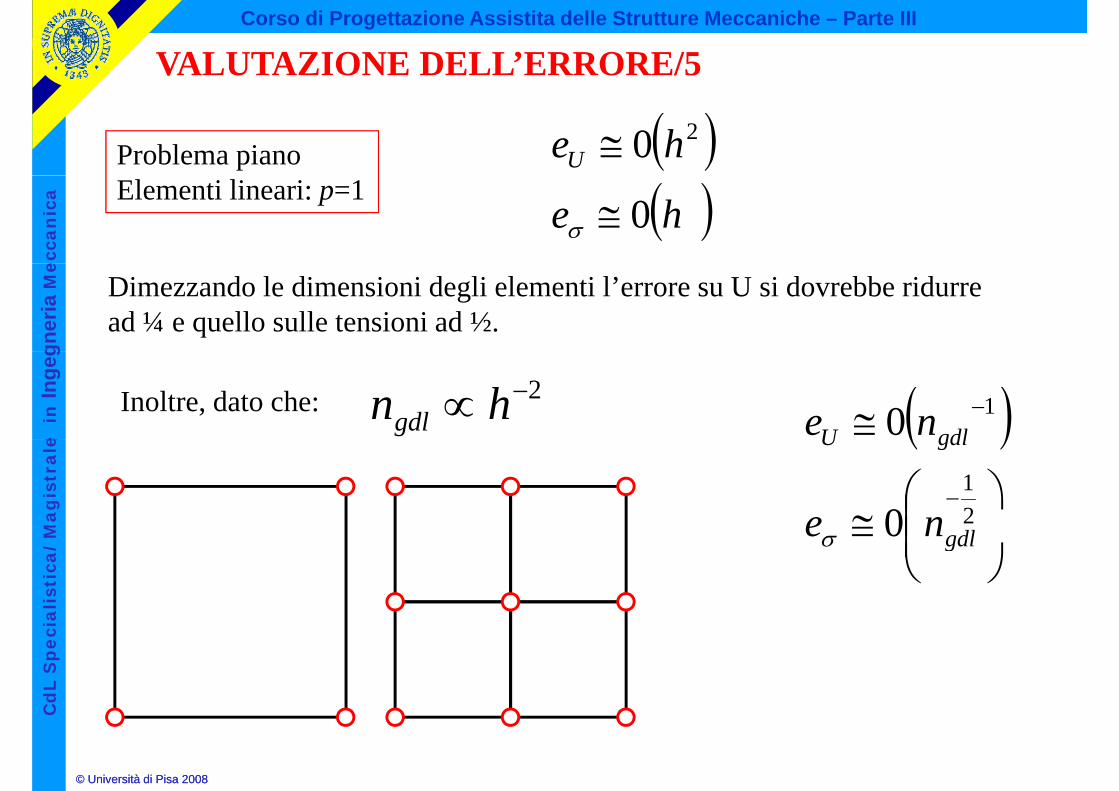
Problema piano ( )20 heU ≅
da
Vin
ci”
ecca
nic
a Elementi lineari: p=1 ( )he 0≅σ
eon
ard
o d
gner
iaM
e
Dimezzando le dimensioni degli elementi l’errore su U si dovrebbe ridurre ad ¼ e quello sulle tensioni ad ½.
gner
ia“L
ee
in
Inge
g
Inoltre, dato che: 2−∝ hngdl ( )10 −≅ gdlU ne
in
Inge
gM
agis
tral
e
( )gdlU
⎟⎟⎞
⎜⎜⎛
≅−
21
0 ne
Dot
tora
to
alis
tica
/M ⎟⎟
⎠⎜⎜⎝
≅ 0 gdlneσ
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/6
Problema piano ( )30 heU ≅
da
Vin
ci”
ecca
nic
a
Problema pianoElementi quadratici: p=2
( )0 heU ≅
( )20 he ≅σ
eon
ard
o d
gner
iaM
e
Dimezzando le dimensioni degli elementi l’errore su U si dovrebbe ridurre ad 1/8 e quello sulle tensioni ad 1/4.
gner
ia“L
ee
in
Inge
g q
2h ⎞⎛ 3
in
Inge
gM
agis
tral
e Inoltre, dato che: 2−∝ hngdl ⎟⎠⎞
⎜⎝⎛≅ −
23
0 gdlU ne
Dot
tora
to
alis
tica
/M
( )10 −≅ gdlneσ
cuol
a d
i D
dL
Sp
ecia
( )gdlσ
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/7
( )20 he ≅
da
Vin
ci”
ecca
nic
a
( )0 heU ≅
( )he 0≅σ
Problema 3DElementi lineari: p=1
eon
ard
o d
gner
iaM
e
( )Dimezzando le dimensioni degli elementi l’errore su U si dovrebbe ridurre ad 1/4 e quello sulle tensioni ad 1/2
gner
ia“L
ee
in
Inge
g ad 1/4 e quello sulle tensioni ad 1/2.
3 ⎞⎛
in
Inge
gM
agis
tral
e
Inoltre, dato che: 3−∝ hngdl ⎟⎠⎞
⎜⎝⎛≅ −
32
0 gdlU ne
Dot
tora
to
alis
tica
/M ⎠⎝
⎟⎟⎞
⎜⎜⎛
≅−
31
0 dlne
cuol
a d
i D
dL
Sp
ecia ⎟⎟
⎠⎜⎜⎝
≅ 0 gdlneσ
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/8
La convergenza sugli spostamenti è generalmente più rapida di quella sulle tensioni:
da
Vin
ci”
ecca
nic
a
( )20 heU ≅ ( )he 0≅σ
eon
ard
o d
gner
iaM
e
( )U ( )σ
gner
ia“L
ee
in
Inge
g
La convergenza in funzione del numero di gdl è più rapida in problemi 2D che in problemi 3D:
in
Inge
gM
agis
tral
e
⎟⎞
⎜⎛ −
1
⎟⎞
⎜⎛ −
1
Dot
tora
to
alis
tica
/M
⎟⎟⎠
⎞⎜⎜⎝
⎛≅ 30 gdlneσ3D:⎟⎟
⎠
⎞⎜⎜⎝
⎛≅ 20 gdlneσ2D:
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/8d
a V
inci
”ec
can
ica
eon
ard
o d
gner
iaM
e
1Fn. di forma: grado 1
gner
ia“L
ee
in
Inge
g
eU = 0(h2) UySx
in
Inge
gM
agis
tral
e
eσ = 0(h)F/
teor
ico Sx
Dot
tora
to
alis
tica
/M E
Studio di convergenza(applicabile a qualsiasi
cuol
a d
i D
dL
Sp
ecia
0.110 100 1000 10000 100000
( pp qgrandezza)
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
10 100 1000 10000 100000
n° g.d.l.

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/9Errore sugli spostamenti
10
da
Vin
ci”
ecca
nic
a
Tasso di convergenza previsto
eon
ard
o d
gner
iaM
e 1
U
gner
ia“L
ee
in
Inge
g
0.1e UUy
in
Inge
gM
agis
tral
e
0 01
Dot
tora
to
alis
tica
/M 0.01
cuol
a d
i D
dL
Sp
ecia
0.00110 100 1000 10000 100000
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
n° g.d.l.

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
VALUTAZIONE DELL’ERRORE/10Errore sulle tensioni
10
da
Vin
ci”
ecca
nic
a
Tasso di convergenza previsto
eon
ard
o d
gner
iaM
e
1
g p
gner
ia“L
ee
in
Inge
g
e
Sx
in
Inge
gM
agis
tral
e
0.1
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
0.0110 100 1000 10000 100000S
c
© Università di Pisa 2008
C
© Università di Pisa 2008
10 100 1000 10000 100000
n° g.d.l.

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
STIMA “A POSTERIORI” ERRORE TENSIONI/1STIMA A POSTERIORI ERRORE TENSIONI/1
Tecniche di varia natura che tentano di stimare “a posteriori” l’errore associato
da
Vin
ci”
ecca
nic
a con i risultati di un dato modello.
Non consentono ovviamente una valutazione esatta dell’errore ma si
eon
ard
o d
gner
iaM
e Non consentono ovviamente una valutazione esatta dell errore, ma si propongono di fornirne una maggiorazione e di rappresentarne la distribuzione nel modello, in modo da guidare il suo eventuale affinamento.
gner
ia“L
ee
in
Inge
g
Nel seguito verrà presentata la tecnica di stima utilizzata da ANSYS, che si basa sulla proposta di Zienchievich
in
Inge
gM
agis
tral
e sulla proposta di Zienchievich.
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
STIMA “A POSTERIORI” ERRORE TENSIONI/2Ogni elemento che converge in un nodo fornisce una diversa stima di tensione.
STIMA A POSTERIORI ERRORE TENSIONI/2d
a V
inci
”ec
can
ica
Esattoσ
Si assume quindi generalmente il
eon
ard
o d
gner
iaM
e EFseguente valore per la i-esima componente di tensione nel nodo:
gner
ia“L
ee
in
Inge
g
x
comp. i-esima, stimata nel nodo n
in
Inge
gM
agis
tral
e x
1
Dot
tora
to
alis
tica
/M ∑=
e
eni
e
ni N
,1 σσ
cuol
a d
i D
dL
Sp
ecia
comp. i-esima, calcolata nel nodo n dall’elemento eN° di elementi
l dSc
© Università di Pisa 2008
C
© Università di Pisa 2008
nel nodo n

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
STIMA “A POSTERIORI” ERRORE TENSIONI/3
A d h t l l di t i t i ò
STIMA A POSTERIORI ERRORE TENSIONI/3d
a V
inci
”ec
can
ica Assumendo che tale valore mediato sia accurato, si può porre:
( ) ( )ni
eni
ni
eni
eni σσσσσ −≅−=Δ ,,, ˆ
eon
ard
o d
gner
iaM
e
( ) ( )iiiii
Errore sulla i esima
gner
ia“L
ee
in
Inge
g Errore sulla i-esima componente dell’elemento e nel nodo n
Valore mediato (noto)
in
Inge
gM
agis
tral
e
Valore esatto (non noto)
Dot
tora
to
alis
tica
/M
Nota: il valore trovato è in generale diverso da e ma tende chiaramente a zero
cuol
a d
i D
dL
Sp
ecia Nota: il valore trovato è in generale diverso da eσ, ma tende chiaramente a zero
contemporaneamente ad esso
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
STIMA “A POSTERIORI” ERRORE TENSIONI/4STIMA A POSTERIORI ERRORE TENSIONI/4d
a V
inci
”ec
can
ica L’uso di una stima di errore specifica dell’elemento, del nodo e della componente
risulta troppo complesso da gestire in pratica
eon
ard
o d
gner
iaM
e
Si cerca un valore medio rappresentativo dell’errore associabile al nodo
gner
ia“L
ee
in
Inge
g
Si stima in primo luogo un valore massimo dell’errore per ogni elemento, l t t id d t tti i di l ti
in
Inge
gM
agis
tral
e valutato considerando tutti i nodi e le componenti
{ }
Dot
tora
to
alis
tica
/M { }.,..,1;,..,1;, compninodinnMax en
ie °=°=Δ=Δ σσ
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
Parametro SDSG nel comando PLESOL

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
STIMA “A POSTERIORI” ERRORE TENSIONI/5
Si stima quindi l’errore medio nel nodo, come media quadratica tra tutti gli elementi che convergono nel nodo:
STIMA A POSTERIORI ERRORE TENSIONI/5d
a V
inci
”ec
can
ica
elementi che convergono nel nodo:
( )e∑ Δ2
σ
eon
ard
o d
gner
iaM
e ( )en
N
∑ Δ=Δ
σσ
gner
ia“L
ee
in
Inge
g
eNI limiti massimo e minimo di tensione su ogni nodo sono dati da:
in
Inge
gM
agis
tral
e
nni
ni σσσ Δ+=max, SMXB
In ANSYS
Dot
tora
to
alis
tica
/M
nni
ni
ii
σσσ Δ−=min,In ANSYS
SMNB(Valori massimi nel modello,
cuol
a d
i D
dL
Sp
ecia
(visualizzati solo con /GRAPHICS, FULL)
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
STIMA “A POSTERIORI” ERRORE TENSIONI/6
SMXB, SMNB SDSG
STIMA A POSTERIORI ERRORE TENSIONI/6d
a V
inci
”ec
can
ica
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/1OTTIMIZZAZIONE DEL MODELLO/1
E’ possibile utilizzare gli stimatori di errore per affinare il modello,
da
Vin
ci”
ecca
nic
a migliorandone la “mesh” al fine di ridurre l’errore stesso.
E’ possibile procedere in maniera automatica (“mesh adptivity”) con la “mesh”
eon
ard
o d
gner
iaM
e E possibile procedere in maniera automatica ( mesh adptivity ), con la mesh che si “adatta” automaticamente al livello di errore voluto.
gner
ia“L
ee
in
Inge
g
Il raggiungimento di un tale obbiettivo richiede la capacita’ di rispondere ai seguenti principali quesiti:• in che modo e’ preferibile modificare il modello per raggiungere il livello di
in
Inge
gM
agis
tral
e • in che modo e preferibile modificare il modello per raggiungere il livello di errore desiderato?• quando si può ritenere che tale livello sia stato raggiunto?
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/2
L’analisi della dipendenza della “error energy” dai parametri del modello:
OTTIMIZZAZIONE DEL MODELLO/2d
a V
inci
”ec
can
ica ( )mp
e he −+≅ 10
eon
ard
o d
gner
iaM
e
indica che si puo’ ridurre l’errore attraverso due tecniche principali:
t fi il ti di l t ( i di l f di f i di )
gner
ia“L
ee
in
Inge
g • mantenere fisso il tipo di elemento (e quindi la f.ne di forma e quindi p) e ridurre progressivamente le dimensioni h degli elementi utilizzati (“h-convergence”)
in
Inge
gM
agis
tral
e g )
• mantenere fisse le dimensioni e la disposizione degli elementi ed aumentare i t i d l f i i di f tili t (“ ”)
Dot
tora
to
alis
tica
/M progressivamente p, variando le funzioni di forma utilizzate (“p-converegence”)
Nota: sono possibili anche approcci misti (“hp-convergence”)
cuol
a d
i D
dL
Sp
ecia
p pp ( p g )
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/3 - “h-convergence”È stato dimostrato che un modello nel quale l’energia legata all’errore
( ) ( )∫ T ˆˆ1
da
Vin
ci”
ecca
nic
a
è costante per tutti gli elementi è il modello ottimale per il numero di
( ) ( )∫ −−=V
Ti dVe εεσσ ˆˆ
21
eon
ard
o d
gner
iaM
e è costante per tutti gli elementi è il modello ottimale per il numero di g.d.l. a disposizione (“error equilibration”).
l l di i di i di li l i i i
gner
ia“L
ee
in
Inge
g Il valore di ei può quindi indicare su quali elementi è opportuno intervenire, riducendone le dimensioni, al fine di ridurre l’errore nella maniera più efficace.
in
Inge
gM
agis
tral
e
Il raggiungimento della convergenza (in ANSYS) può poi essere controllato
efficace.
Dot
tora
to
alis
tica
/M Il raggiungimento della convergenza (in ANSYS) può poi essere controllato
dalla condizione:tol
UeE ≤⋅= 100)( 2/1
cuol
a d
i D
dL
Sp
ecia eU +
)(
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/4 - “h-convergence”Il processo di “h-convergence” si svolge in maniera iterativa.
da
Vin
ci”
ecca
nic
a Calcolo di ei per gli elementi
S l i l ti
eon
ard
o d
gner
iaM
e Selezione elementi con eipiù elevata
gner
ia“L
ee
in
Inge
g
Ulteriore suddivisione degli elementi selezionati
in
Inge
gM
agis
tral
e
Soluzione col nuovo “mesh”
Dot
tora
to
alis
tica
/M
Calcolo E
cuol
a d
i D
dL
Sp
ecia
E<tol?si
no
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
FINE

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/5 - “h-convergence”INIZIALE FINALE
da
Vin
ci”
ecca
nic
aeo
nar
do
dgn
eria
Me
gner
ia“L
ee
in
Inge
g
in In
geg
Mag
istr
ale
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/6 - “h-convergence”
TENSIONI
OTTIMIZZAZIONE DEL MODELLO/6 h convergenced
a V
inci
”ec
can
ica INIZIALE FINALE
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/7 - “h-convergence”Energia legata all’errore negli elementi (SERR)
OTTIMIZZAZIONE DEL MODELLO/7 h convergenced
a V
inci
”ec
can
ica
INIZIALE FINALE
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/8 - “p-convergence”OTTIMIZZAZIONE DEL MODELLO/8 p convergenced
a V
inci
”ec
can
ica
In questo caso il “mesh” viene mantenuto fisso, variando individualmente le funzioni di forma degli elementi fino a raggiungere gradi molto elevati (8-9)
eon
ard
o d
gner
iaM
e funzioni di forma degli elementi, fino a raggiungere gradi molto elevati (8 9).
gner
ia“L
ee
in
Inge
g
In ANSYS il parametro utilizzato per guidare la convergenza e’ una qualunque grandezza in output associabile ad un nodo (una tensione uno
in
Inge
gM
agis
tral
e qualunque grandezza in output associabile ad un nodo (una tensione, uno spostamento, etc.).
Dot
tora
to
alis
tica
/M
Il programma controlla la convergenza analizzandone la variazione percentuale al variare del grado delle f.ni di forma.
cuol
a d
i D
dL
Sp
ecia percentuale al variare del grado delle f.ni di forma.
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/9 - “p-convergence”
MODELLO TENSIONE
OTTIMIZZAZIONE DEL MODELLO/9 p convergenced
a V
inci
”ec
can
ica
MODELLO TENSIONE
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/10 - “p-convergence”
ANDAMENTO DEL PARAMETRO DI CONVERGENZA
OTTIMIZZAZIONE DEL MODELLO/10 p convergenced
a V
inci
”ec
can
ica
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/11 - “p-convergence”
GRADO DELLE F.NI DI FORMA
OTTIMIZZAZIONE DEL MODELLO/11 p convergenced
a V
inci
”ec
can
ica
nce”
eon
ard
o d
gner
iaM
e
verg
en
gner
ia“L
ee
in
Inge
g
“h-c
onv
in
Inge
gM
agis
tral
e
dello
“
Dot
tora
to
alis
tica
/M
Mod
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/12OTTIMIZZAZIONE DEL MODELLO/12d
a V
inci
”ec
can
ica
400
a]
eon
ard
o d
gner
iaM
e
350
cola
ta [M
Pa
I risultati ottenuti non sono del tutto indipendenti
gner
ia“L
ee
in
Inge
g
300
assi
ma
calc
"p-convergence" (8-nodi)
dall’infittimento iniziale del “mesh”, in particolare per la tecnica “p-convergence”
in
Inge
gM
agis
tral
e
250
ensi
one
ma p-convergence (8-nodi)
"h-convergence" (8 nodi)
"h " (4 di)
tecnica p-convergence
Dot
tora
to
alis
tica
/M
2000246810
Te "h-convergence" (4 nodi)
cuol
a d
i D
dL
Sp
ecia 0246810
Infittimento iniziale modello (Smrtsize)
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
OTTIMIZZAZIONE DEL MODELLO/13OTTIMIZZAZIONE DEL MODELLO/13
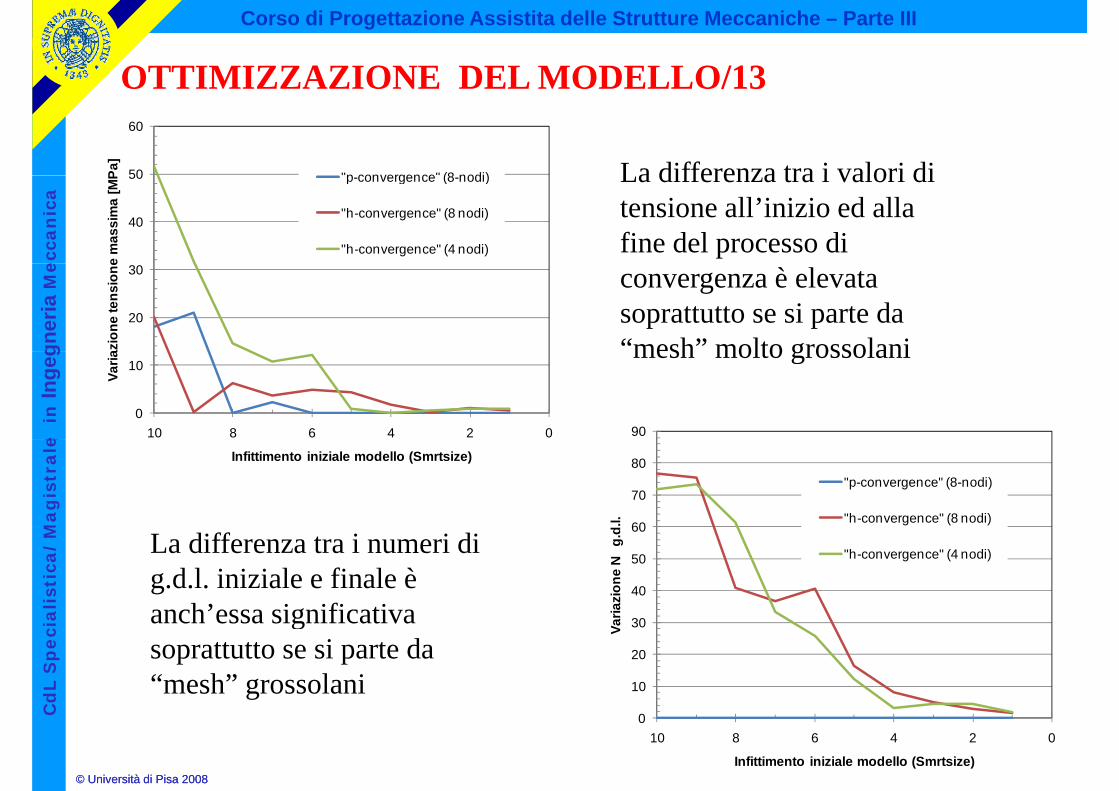
La differenza tra i valori di50
60Pa
]
"p convergence" (8 nodi)
da
Vin
ci”
ecca
nic
a
La differenza tra i valori di tensione all’inizio ed alla fine del processo di
40
50
e m
assi
ma
[MP p-convergence (8-nodi)
"h-convergence" (8 nodi)
"h-convergence" (4 nodi)
eon
ard
o d
gner
iaM
e convergenza è elevata soprattutto se si parte da “mesh” molto grossolani
20
30
azio
ne te
nsio
ne
gner
ia“L
ee
in
Inge
g mesh molto grossolani
0
10
0246810
Varia
90
in
Inge
gM
agis
tral
e
Infittimento iniziale modello (Smrtsize)
60
70
80
.l.
"p-convergence" (8-nodi)
"h-convergence" (8 nodi)
Dot
tora
to
alis
tica
/M
40
50
60
riazi
one
Ng.
d
"h-convergence" (4 nodi)La differenza tra i numeri di g.d.l. iniziale e finale è anch’essa significativa
cuol
a d
i D
dL
Sp
ecia
10
20
30Varanch essa significativa
soprattutto se si parte da “mesh” grossolani
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
00246810
Infittimento iniziale modello (Smrtsize)

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONESINGOLARITA DELLO STATO DI TENSIONE
Se lo stato di tensione del modello presenta dei punti di singolarità (valori tendenti a ± ∞) il valore calcolato tramite gli EF nei punti stessi mostra un andamento
da
Vin
ci”
ecca
nic
a
a ± ∞), il valore calcolato tramite gli EF nei punti stessi mostra un andamento sempre crescente (divergente) con l’affinamento del “mesh”. Non è quindi possibile alcuno studio di convergenza.
eon
ard
o d
gner
iaM
e
Le singolarità possono avere un’origine fisica (es. l’apice di una
14
16
18
20
[MPa
]
gner
ia“L
ee
in
Inge
g
frattura) o dipendere dalla struttura del modello, vale a dire dal modo di rappresentare:
8
10
12
one
calc
olat
a
in
Inge
gM
agis
tral
e rappresentare:• carichi• vincoli
0
2
4
6
Tens
io Andamento tipico della tensione calcolata in un punto di singolarità al variare dell'infittimento
locale del mesh
Dot
tora
to
alis
tica
/M • dettagli geometrici
Il modello può essere corretto anche se contiene una singolarità (dipende dalle sue
00 2 4 6 8 10 12
Dimensioni elementi [mm]
cuol
a d
i D
dL
Sp
ecia Il modello può essere corretto anche se contiene una singolarità (dipende dalle sue
finalità), in quanto la conoscenza delle tensioni nell’intorno di quest’ultima può non essere essenziale
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/2Schematizzazione di particolari geometrici
Una rappresentazione approssimata dei dettagli geometrici del corpo in
SINGOLARITA DELLO STATO DI TENSIONE/2d
a V
inci
”ec
can
ica Una rappresentazione approssimata dei dettagli geometrici del corpo, in
particolare la sostituzione di raggi di raccordo con spigoli vivi, può provocare singolarità nello stato di tensione presente nel modello
eon
ard
o d
gner
iaM
e
g p
gner
ia“L
ee
in
Inge
g
in In
geg
Mag
istr
ale
Dot
tora
to
alis
tica
/M
σL di i è di
cuol
a d
i D
dL
Sp
ecia Lo stato di tensione è divergente e non
rappresentativo del corpo reale in tutto un intorno dello spigolo
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
gdl
intorno dello spigolo

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/3Schematizzazione di particolari geometriciSINGOLARITA DELLO STATO DI TENSIONE/3
da
Vin
ci”
ecca
nic
a Soluzioni possibili Creazione di un modello contenente il raggio di
eon
ard
o d
gner
iaM
e raccordo
gner
ia“L
ee
in
Inge
g
σ
in
Inge
gM
agis
tral
e
Stato di tensione effettivo
Dot
tora
to
alis
tica
/M gdl
cuol
a d
i D
dL
Sp
ecia
Pb. Spesso il raggio di raccordo non è noto con sufficiente precisione o varia d ( ld )S
c
© Università di Pisa 2008
C
© Università di Pisa 2008
da punto a punto (es. saldature)

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/4Schematizzazione carichi
SINGOLARITA DELLO STATO DI TENSIONE/4d
a V
inci
”ec
can
ica Il modo di rappresentare i carichi può influenzare sensibilmente le informazioni
ottenibili dal modello, in particolare per quanto concerne le zone in prossimità del p nto di applica ione
eon
ard
o d
gner
iaM
e punto di applicazione.Gli effetti di una determinata schematizzazione dipendono anche fortemente dal tipo di elemento utilizzato (trave, shell, solido).
gner
ia“L
ee
in
Inge
g p ( , , )
Nel caso di elementi trave non si riscontrano singolarità dello stato di tensione, l i l h ti i d i i hi ( t ti di t ib iti)
in
Inge
gM
agis
tral
e qualunque sia la schematizzazione dei carichi (concentrati o distribuiti). L’andamento delle tensioni è quello dato dalle teoria delle travi, che garantisce semplicemente l’equilibrio complessivo della sezione.
Dot
tora
to
alis
tica
/M
p q p
cuol
a d
i D
dL
Sp
ecia
xσx
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008 y

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/5
N l di l ti “ h ll” lidi i i t i l ità ll t t di
Schematizzazione carichi
da
Vin
ci”
ecca
nic
a Nel caso di elementi “shell” o solidi si riscontrano singolarità nello stato di tensione in presenza di carichi concentrati.
eon
ard
o d
gner
iaM
e P
gner
ia“L
ee
in
Inge
g
in In
geg
Mag
istr
ale
Infittendo progressivamente si osserva infatti come le dimensioni (h) degli elementi cui è applicato il carico
Dot
tora
to
alis
tica
/M dimensioni (h) degli elementi cui è applicato il carico
tendano a zero.
cuol
a d
i D
dL
Sp
ecia
∞→≈Pσ
Pertanto, le tensioni medie al loro interno:
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
∞→≈h
σ
Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/6Schematizzazione carichi
da
Vin
ci”
ecca
nic
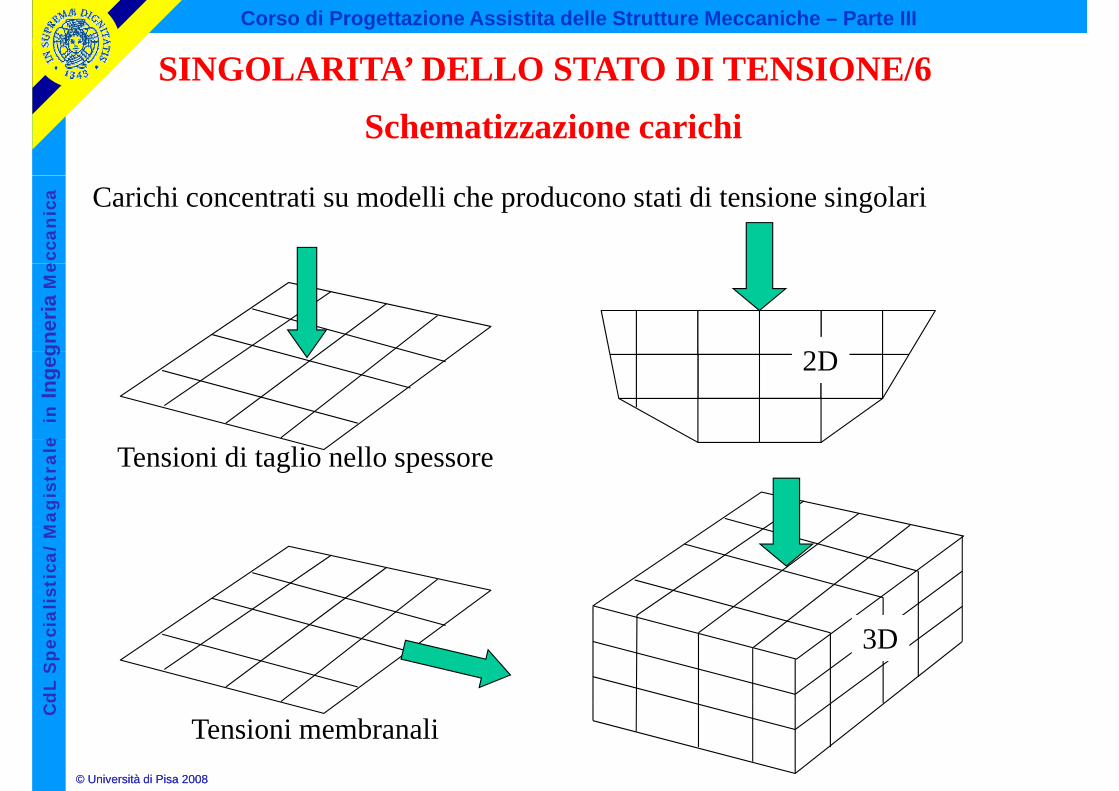
a Carichi concentrati su modelli che producono stati di tensione singolari
eon
ard
o d
gner
iaM
e
2D
gner
ia“L
ee
in
Inge
g 2D
in
Inge
gM
agis
tral
e
Tensioni di taglio nello spessore
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
3D
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
Tensioni membranali

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/7Schematizzazione carichi
da
Vin
ci”
ecca
nic
a Carichi distribuiti su di una linea: producono tensioni non singolari su di un modello a “shell” e singolari su di un modello solido.
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
e L
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia σ→∞ l’area attraverso cui
passa il carico può essere ridotta a zero
σ finita: l’area attraverso cui passa il carico è 2 s L
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
ridotta a zero

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/8Schematizzazione carichi
da
Vin
ci”
ecca
nic
a Un carico distribuito su di una superficie non produce singolarità
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
e
p
Dot
tora
to
alis
tica
/M p
cuol
a d
i D
dL
Sp
ecia
finitohhp→≈σ
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
h

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/9Schematizzazione vincoli
da
Vin
ci”
ecca
nic
a
Se il vincolo trasferisce al modello una forza/momento, può produrre singolarità nello stato di tensione, analoghe a quelle viste per i carichi.
eon
ard
o d
gner
iaM
e
g q p
Esempi di vincoli “concentrati” in un solo nodo
gner
ia“L
ee
in
Inge
g
in In
geg
Mag
istr
ale
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
∞→≈hPσ
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
h

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SINGOLARITA’ DELLO STATO DI TENSIONE/10Schematizzazione vincoli
da
Vin
ci”
ecca
nic
a
Vincoli distribuiti su superfici non producono singolarità
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
DEFINIZIONE DI CARICHI E VINCOLI SUL MODELLODEFINIZIONE DI CARICHI E VINCOLI SUL MODELLO
Carichi e vincoli applicati ad una struttura /componente
da
Vin
ci”
ecca
nic
a
Carichi Vincoli
eon
ard
o d
gner
iaM
e
A li i t ti
gner
ia“L
ee
in
Inge
g Analisi statica
in
Inge
gM
agis
tral
e
Reazioni vincolari
Dot
tora
to
alis
tica
/M
Sistema completo
cuol
a d
i D
dL
Sp
ecia Sistema completo
(auto-equilibrato) di forze applicateS
c
© Università di Pisa 2008
C
© Università di Pisa 2008
di forze applicate
Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
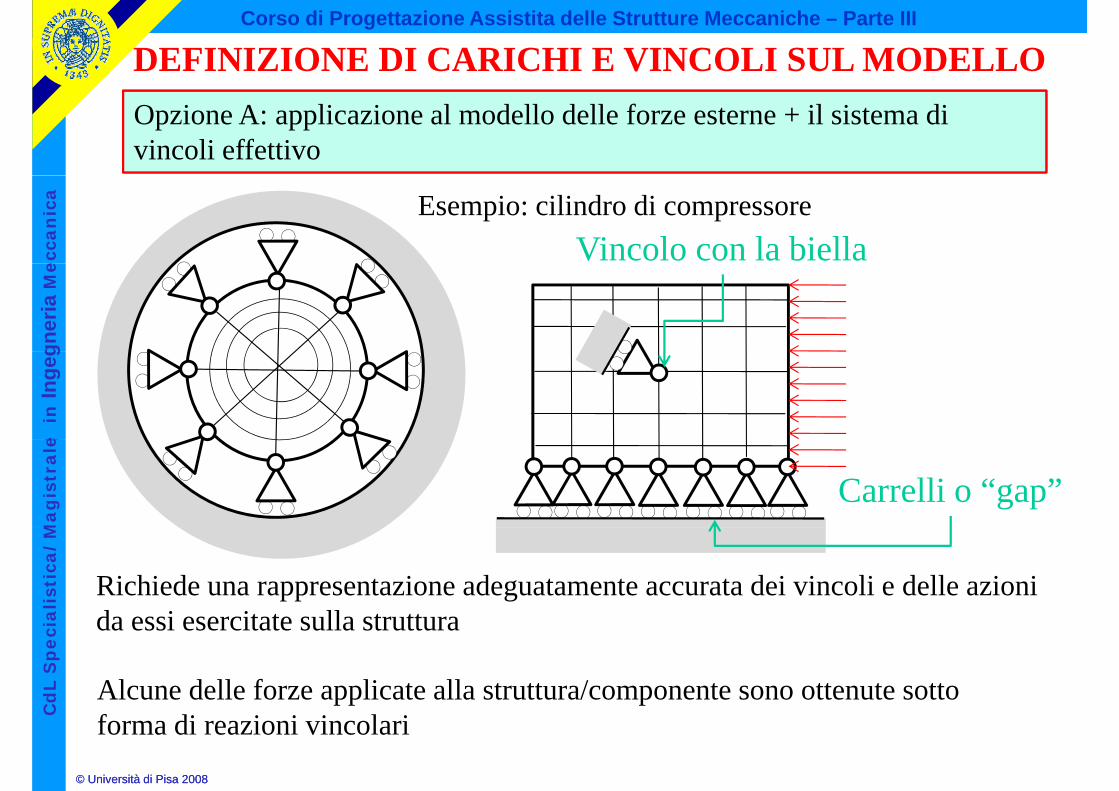
DEFINIZIONE DI CARICHI E VINCOLI SUL MODELLOOpzione A: applicazione al modello delle forze esterne + il sistema di vincoli effettivo
da
Vin
ci”
ecca
nic
a Esempio: cilindro di compressoreVincolo con la biella
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
e
Carrelli o “gap”
Dot
tora
to
alis
tica
/M
Richiede una rappresentazione adeguatamente accurata dei vincoli e delle azioni d i it t ll t tt
cuol
a d
i D
dL
Sp
ecia
Alcune delle forze applicate alla struttura/componente sono ottenute sotto
da essi esercitate sulla struttura
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
pp pforma di reazioni vincolari

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
DEFINIZIONE DI CARICHI E VINCOLI SUL MODELLODEFINIZIONE DI CARICHI E VINCOLI SUL MODELLO
Opzione B: applicazione al modello del sistema di forze completo (auto-equilibrato) + un sistema di vincoli isostatico
da
Vin
ci”
ecca
nic
a
equilibrato) + un sistema di vincoli isostatico
Se i vincoli costituiscono un sistema
eon
ard
o d
gner
iaM
e
isostatico le reazioni vincolari risultano identicamente nulle (carichi esterni auto-
ilib ti)
gner
ia“L
ee
in
Inge
g equilibrati)
in
Inge
gM
agis
tral
e La effettiva posizione dei vincoli è inifluente
Dot
tora
to
alis
tica
/M
I vincoli sono necessari per evitare singolarità della matrice di rigidezza d ll
cuol
a d
i D
dL
Sp
ecia della struttura
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
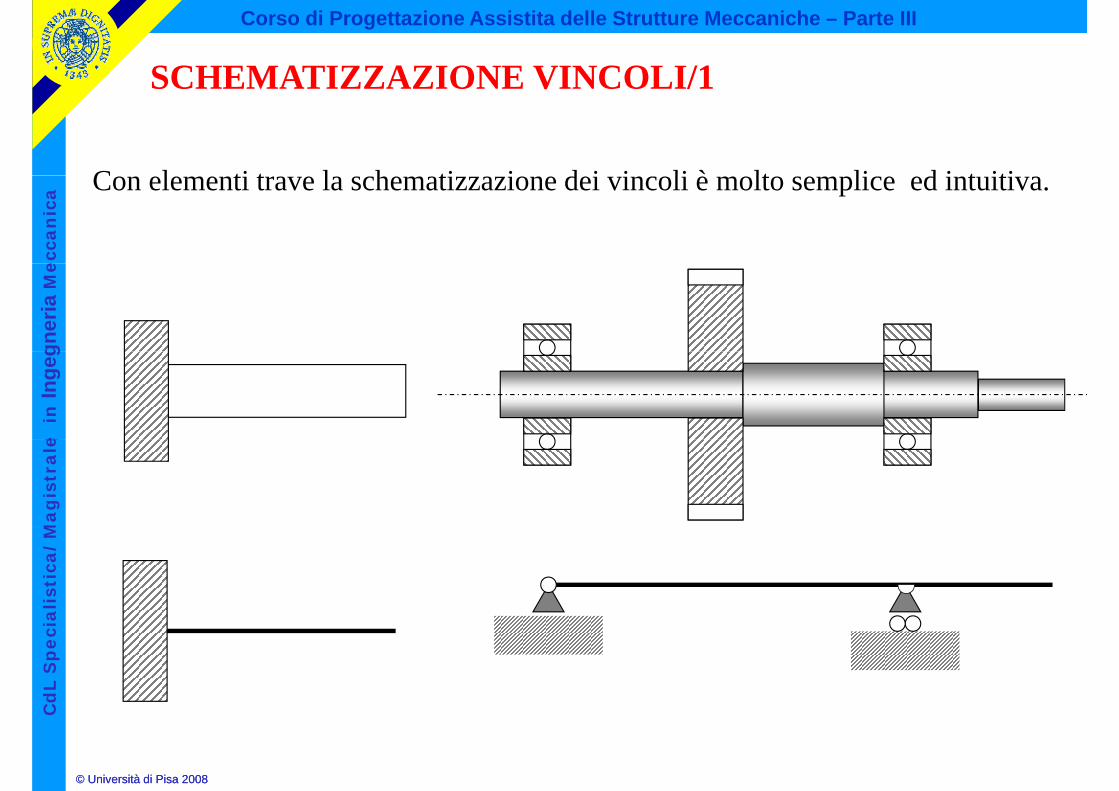
SCHEMATIZZAZIONE VINCOLI/1
C l ti t l h ti i d i i li è lt li d i t iti
SCHEMATIZZAZIONE VINCOLI/1d
a V
inci
”ec
can
ica Con elementi trave la schematizzazione dei vincoli è molto semplice ed intuitiva.
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SCHEMATIZZAZIONE VINCOLI/2 E i l i tiIn modelli fatti con elementi “shell” o solidi si pone spesso il problema di “t d ” i li t i i t i i i i i i di i li d li
SCHEMATIZZAZIONE VINCOLI/2 – Equivalenza cinematicad
a V
inci
”ec
can
ica “tradurre” vincoli esterni come incastri o cerniere in insiemi di vincoli nodali
applicati a superfici o linee.Esempio: trave a mensola
eon
ard
o d
gner
iaM
e Esempio: trave a mensolaCome rappresentare l’incastro?
gner
ia“L
ee
in
Inge
g
y
in
Inge
gM
agis
tral
e
x
Dot
tora
to
alis
tica
/M x
cuol
a d
i D
dL
Sp
ecia
Il vincolo lungo “x” di tutti i nodi impedisce anche la rotazioneSc
© Università di Pisa 2008
C
© Università di Pisa 2008
Il vincolo lungo x di tutti i nodi, impedisce anche la rotazione

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SCHEMATIZZAZIONE VINCOLI/4 E i l i tiSCHEMATIZZAZIONE VINCOLI/4 – Equivalenza cinematica
1 solo nodo vincolato lungo “Y”
da
Vin
ci”
ecca
nic
a
g
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
Singolarità tensioni
in
Inge
gM
agis
tral
e
Tutti i nodi vincolati lungo “Y”
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
Tensioni da contrazionedi Poisson impeditaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008
di Poisson impedita

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SCHEMATIZZAZIONE VINCOLI/5 E i l i ti
E’ necessario garantire che l’insieme dei vincoli che si impongono sia
SCHEMATIZZAZIONE VINCOLI/5 – Equivalenza cinematicad
a V
inci
”ec
can
ica
g p gcinematicamente corretto, cioè conservi i g.d.l. richiesti per la struttura.
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
y
in
Inge
gM
agis
tral
e
Un vincolo in direzione radiale su tutti i nodi della zona di
y
Dot
tora
to
alis
tica
/M su tutt od de a o a d
appoggio del cuscinetto impedisce anche la rotazione
“ ” d “ ”
x
cuol
a d
i D
dL
Sp
ecia attorno a “y” ed a “z”
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SCHEMATIZZAZIONE VINCOLI/6 E i l i ti
Soluzioni cinematicamente corrette
SCHEMATIZZAZIONE VINCOLI/6 – Equivalenza cinematicad
a V
inci
”ec
can
ica
Vincolare solo un nodo, in posi ione corrispondente al
y
eon
ard
o d
gner
iaM
e posizione corrispondente al centro di rotazione del cuscinetto.
x
gner
ia“L
ee
in
Inge
g
Pb: tensioni singolari
in
Inge
gM
agis
tral
e
Vincolare in dire ione radialey
Dot
tora
to
alis
tica
/M Vincolare in direzione radiale
tutti i nodi esterni che giacciono sul piano medio del cuscinetto.x
cuol
a d
i D
dL
Sp
ecia
p
Pb: tensioni singolari
x
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SCHEMATIZZAZIONE VINCOLI/7 E i l i tiSCHEMATIZZAZIONE VINCOLI/7 – Equivalenza cinematicad
a V
inci
”ec
can
ica
Vincolare in direzione “y” e “z” un nodo non appartenente all’albero, ma posizionato in corrispondenza del centro di rotazione del cuscinetto
eon
ard
o d
gner
iaM
e posizionato in corrispondenza del centro di rotazione del cuscinetto.
N d ll’ lb
gner
ia“L
ee
in
Inge
g
y Nodo appartenente all’albero
in
Inge
gM
agis
tral
e
xNodo non appartenente
Dot
tora
to
alis
tica
/M all’albero
cuol
a d
i D
dL
Sp
ecia
Connettere poi tale nodo a quelli della superficie di appoggio del cuscinetto
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008
p q p pp ggtramite elementi “asta”.

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SIMMETRIE GEOMETRICHE/1
L’uso di considerazioni di simmetria consente di ridurre le dimensioni del modello.
SIMMETRIE GEOMETRICHE/1d
a V
inci
”ec
can
ica I più comuni tipi di simmetria sono:
α
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
M Simmetria speculare o di riflessione
Simmetria polare o di rotazione
cuol
a d
i D
dL
Sp
ecia Nota: la simmetria deve valere per :
• geometria• vincoliS
c
© Università di Pisa 2008
C
© Università di Pisa 2008
vincoli • proprietà materiale• carichi

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SIMMETRIE GEOMETRICHE/2Sfruttando la simmetria si può includere nel modello solo una parte della struttura, sostituendo la parte mancante con opportuni vincoli sul piano di divisione.
SIMMETRIE GEOMETRICHE/2d
a V
inci
”ec
can
ica
sostituendo la parte mancante con opportuni vincoli sul piano di divisione.
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SIMMETRIE GEOMETRICHE/3Una condizione di carico qualsiasi può essere scissa in una componente simmetrica ed in una antisimmetrica.
da
Vin
ci”
ecca
nic
a F
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
in
Inge
gM
agis
tral
e
F/2 F/2 F/2 F/2
Dot
tora
to
alis
tica
/M
cuol
a d
i D
dL
Sp
ecia
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SIMMETRIE GEOMETRICHE/4 S l
La struttura viene tagliata in corrispondenza del piano di simmetria
SIMMETRIE GEOMETRICHE/4 - Speculared
a V
inci
”ec
can
ica
g p p
eon
ard
o d
gner
iaM
e
Piano di simmetria
gner
ia“L
ee
in
Inge
g
XYPiano di simmetria
in
Inge
gM
agis
tral
e
Z VINCOLI SUI NODI
Dot
tora
to
alis
tica
/M Carichi
simmetriciU =0
Carichiantisimm.U =0
cuol
a d
i D
dL
Sp
ecia Uz=0
ROTx=0ROTy=0
Uy=0Ux=0ROTz=0
Sc
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SIMMETRIE GEOMETRICHE/5 R t i
Il corpo viene tagliato con due piani passanti per l’asse di simmetria che
SIMMETRIE GEOMETRICHE/5 - Rotazioned
a V
inci
”ec
can
ica
Il corpo viene tagliato con due piani passanti per l asse di simmetria, che delimitano la porzione “ciclica” della struttura
eon
ard
o d
gner
iaM
egn
eria
“Le
e i
n In
geg
α
in
Inge
gM
agis
tral
eD
otto
rato
al
isti
ca/
Mcu
ola
di
Dd
LS
pec
iaS
c
© Università di Pisa 2008
C
© Università di Pisa 2008

Aspetti teorici ed applicativi del MEF– Parte IICorso di Progettazione Assistita delle Strutture Meccaniche – Parte III
SIMMETRIE GEOMETRICHE/6 - RotazioneSui due piani di sezione è necessario individuare coppie di nodi corrispondenti (il mesh sulle due facce deve essere lo stesso)
SIMMETRIE GEOMETRICHE/6 Rotazioned
a V
inci
”ec
can
ica
mesh sulle due facce deve essere lo stesso)
Piano di sezione 2Piano di sezione 1
eon
ard
o d
gner
iaM
e
Nodi 1 e 2 sono corrispondenti (si sovrappongono
Nodo 2a o d se o e
gner
ia“L
ee
in
Inge
g
e met
ria
(si sovrappongonoin seguito ad una rotazione αattorno all’asse di simmetria)
Nodo 1
in
Inge
gM
agis
tral
e
Ass
esi
mm Nodo 1α
Dot
tora
to
alis
tica
/M
RZ UR,1=UR,2
U U
ROTR,1=ROTR,2
cuol
a d
i D
dL
Sp
ecia θ Uθ,1=Uθ,2
UZ 1=UZ 2
ROTθ,1=ROTθ,2
ROT =ROTSc
© Università di Pisa 2008
C
© Università di Pisa 2008
UZ,1 UZ,2 ROTZ,1=ROTZ,2
Condizioni da imporre con CE o CP