航带法空中三角测量 - read.pudn.comread.pudn.com/downloads159/ebook/714722/11.pdf ·...
TRANSCRIPT

航带法空中三角测量航带法空中三角测量
《摄影测量学》(上)第六章
武汉大学武汉大学遥感信息工程学院 摄影测量教研室

主要内容主要内容
一、基本思想与流程一、基本思想与流程
二、自由航带网的构建二、自由航带网的构建
三、单航带空中三角测量三、单航带空中三角测量
四、航带法区域网平差四、航带法区域网平差

一、基本思想与流程
把许多立体像对构成的单个模型连结把许多立体像对构成的单个模型连结
成一个航带模型,将航带模型视为单成一个航带模型,将航带模型视为单元模型进行解析处理,通过消除航带元模型进行解析处理,通过消除航带模型中累积的系统误差,将航带模型模型中累积的系统误差,将航带模型整体纳入到测图坐标系中,从而确定整体纳入到测图坐标系中,从而确定加密点的地面坐标加密点的地面坐标
主要思想

一、基本思想与流程
•• 像点坐标系统误差预改正像点坐标系统误差预改正
•• 立体像对相对定向立体像对相对定向
•• 模型连接构建自由航带网模型连接构建自由航带网
•• 航带网的概略绝对定向航带网的概略绝对定向
•• 航带模型非线性改正航带模型非线性改正
•• 加密点坐标计算加密点坐标计算
基本流程

二、构建自由航带网(1、带模型连接条件的连续法相对定向)
1
3
5
2
4
6
a1
3
5
2
4
6
b
X
YZ
si-1
si
si+1
ai
A(N1X1, N1Y1, N1Z1)
ai+1 (X2, Y2, Z2)Bx
BzByzyx BZN
ZBYN
YBXN
X−
=−
=− 11
2
11
2
11
2
0)()(0)()(
112112
112112
=−−−==−−−=
zyy
zxx
BZNYBYNZFBZNXBXNZF

二、构建自由航带网(1、带模型连接条件的连续法相对定向)
QBZYBNXN
ZYZN
ZYXv
PBBZXNYN
ZYXN
ZXZv
xxQ
xxP
−−+++−−=
−+−−−+−=
ν∆µ∆κ∆ω∆ϕ∆
λ∆ν∆κ∆ω∆ϕ∆
2
2222
2
22
222
22
2
2222
2
222
2
22
2
)(
)(
特别注意:
•模型中的定向点只建立VQ方程
•模型间的连接点需建立VQ,V P方程
•对于模型间的连接点建立误差方程时,常数项中的N1 X1, N1 Y1 , N1 Z1必须用前一模型中的N2 X2, N2 Y2 ,N2 Z2

连接点的模型坐标
zss
yss
xss
mBZZ
mBYYmBXX
+=
+=+=
12
12
12
摄站坐标
222
222
222
ZmNZZ
YmNYY
XmNXX
sp
sp
sp
+=
+=
+=
二、构建自由航带网(2、带模型连接条件的连续法相对定向)
非连接点的模型坐标
111
222111
111
)(21
ZmNZZ
YmNYYmNYY
XmNXX
sp
ssp
sp
+=
+++=
+=
2
222 Z
BZNN zaa −
=

二、构建自由航带网(2、连续法相对定向)
归化系数
az
ab BZZ −= 21
b
az
a
ZBZk
1
22
−=
1
3
5
2
4
6
a1
3
5
2
4
6
b
X
YZ
2a
s1
s2
s3
1b
aZ2
bZ1
)(31
642 kkkk ++=
的相对定向元素为模型aBaz

二、构建自由航带网(2、连续法相对定向)
模型坐标
zss
yss
xss
mBkZZ
mBkYY
mBkXX
+=
+=
+=
12
12
12
摄站坐标
111
222111
111
)(21
ZmNkZZ
YmNkYYmNkYY
XmNkXX
sp
ssp
sp
+=
+++=
+=

二、构建自由航带网(3、单独法相对定向)
a
s
s
sba
ZYX
ZYX
ZYX
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
2
2
2
12
Rλ 1
3
5
2
4
6
a1
3
5
2
4
6
b
XYZ
2a
s1
s2
s3
1b
XYZ已知值
ba
ZYX
ZYX
12⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡Rλ

二、构建自由航带网(3、单独法相对定向)
模型坐标
zss
yss
xss
mBZZ
mBYYmBXX
+=
+=+=
12
12
12
摄站坐标
新
新
新
mZZZ
mYYY
mXXX
sp
sp
sp
+=
+=
+=
1
1
1a
s
s
sbb
ZYX
ZYX
ZYX
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡+
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
2
2
2
Rλ
新
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
00B
BBB
z
y
x
Rλ

获取控制点的地面摄影测量坐标 Xtp , Ytp , Ztp
三、自由航带网的概略绝对定向
计算重心化坐标
求相似变换参数
计算各模型点的地面摄影测量坐标

四、航带网的误差传播
独立累积性误差:不随模型个数的增加而增大其影响
偶然误差
非独立累积性误差:随模型个数的增加而增大其影响
[ ] nn δδδδ +++= L21
[ ] nn nn δδδδ ++−+= L21 )1(
系统误差

四、航带网的误差传播
S0 S1 S2 S3
0 1 2 3
dbz1
0’
S’1
1’
S’2
2’
S’3
3’X
Z
321 ZZZ ∆∆∆ == 321 XXX ∆∆∆ <<
3X∆3Z∆

五、航带模型非线性改正
1、二次多项式
XYCXCYCXCCZ
XYBXBYBXBBY
XYAXAYAXAAX
42
3210
42
3210
42
3210
++++=
++++=
++++=
∆
∆
∆
ZZZ
YYY
XXX
tp
tp
tp
∆
∆
∆
+=
+=
+=
用一个多项式曲面拟合航带网复杂的变形曲面,使该曲面经过航带网已知点时,所求得坐标变形值与它们实际的变形值相等或使其残差的平方和为最小
用一个多项式曲面拟合航带网复杂的变形曲面,使该曲面经过航带网已知点时,所求得坐标变形值与它们实际的变形值相等或使其残差的平方和为最小

五、航带模型非线性改正
2、二次正形变换多项式
8869776786
65345453
412321
2010
333333222222
AbbaaAbbaaAbbaAbaa
AbaAbaAbAa
−==−=−====−=−==−===−=
−=−=====
XY
YX
YY
XX
∂′∂
−=∂
′∂∂′∂
=∂
′∂ ,
用一个二次正形变换多项式曲面拟合航带网的变形曲面,使该曲面经过航带网已知点时,所求得坐标变形值与它们实际的变形值相等或使其残差的平方和为最小,并且由多项式曲面上一点变换到航带网无变形曲面上相应点时应保持该点处在极小范围内相应线段的夹角不变(保角变换)
用一个二次正形变换多项式曲面拟合航带网的变形曲面,使该曲面经过航带网已知点时,所求得坐标变形值与它们实际的变形值相等或使其残差的平方和为最小,并且由多项式曲面上一点变换到航带网无变形曲面上相应点时应保持该点处在极小范围内相应线段的夹角不变(保角变换)
39
28
27
36
254
23210
39
28
27
36
254
23210
YbXYbYXbXbYbXYbXbYbXbbY
YaXYaYXaXaYaXYaXaYaXaaX
+++++++++=′
+++++++++=′
)3()3(2)(
)3()3(2)(32
723
8522
6342
328
2376
225431
YYXAXYXAXYAYXAYAXAAY
YYXAXYXAXYAYXAYAXAAX
−+−++−+++=′
−−−+−−+−+=′

五、航带模型非线性改正
2、二次正形变换多项式
YXCXCYCXCCZ 42
3210 ++++=∆
YXAXAYAXAAY
YXAXAYAXAAX
52
6342
62
5431
2
2
++++=
−+−+=
∆
∆
YYYY
XXXX
YYXXYYXX
tp
tp
tptp
∆
∆
=-,则第二式两边-
=-,则第一式两边-
====令 ,,, ′′

3、误差方程式的建立(以X坐标为例)
1),(42
3210 =−−++++=− pXXYXAXAYAXAAv tpX
五、航带法解析空中三角测量
lAxV −=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
nnnnn YXXYX
YXXYX
2
112111
1
1MMMMMA
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
nx
x
v
vM
1
V
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
−=
ntp
tp
XX
XX
n
M11
l
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
4
0
A
AMx

五、航带法解析空中三角测量
待定点地面坐标计算
YXCXCYCXCCZZZZZZ
YXBXBYBXBBYYYYYY
YXAXAYAXAAXXXXXX
tpgtpgtp
tpgtpgtp
tpgtpgtp
42
3210
42
3210
42
3210
++++++=++=
++++++=++=
++++++=++=
∆
∆
∆
将上述坐标反变换到地面坐标
tpt
tp
tp
t
t
ZZ
YX
baab
YX
λ
∆∆
λ∆∆
1
12
=
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡

六、航带法区域网平差
1. 按照单航带法构成自由航带网
2. 利用本航带的控制点及与上一航带的公共点进行三维空间相似变换,将整区各航线纳入统一的坐标系中
3. 同时解求各航带非线性变形改正参数
4. 计算各加密点坐标
1. 按照单航带法构成自由航带网
2. 利用本航带的控制点及与上一航带的公共点进行三维空间相似变换,将整区各航线纳入统一的坐标系中
3. 同时解求各航带非线性变形改正参数
4. 计算各加密点坐标
1、基本思想
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
1,2,…,20 待定点名A,B,…,O 像片名
高程控制点 平高控制点
×
×
×
×
×
×
×
×
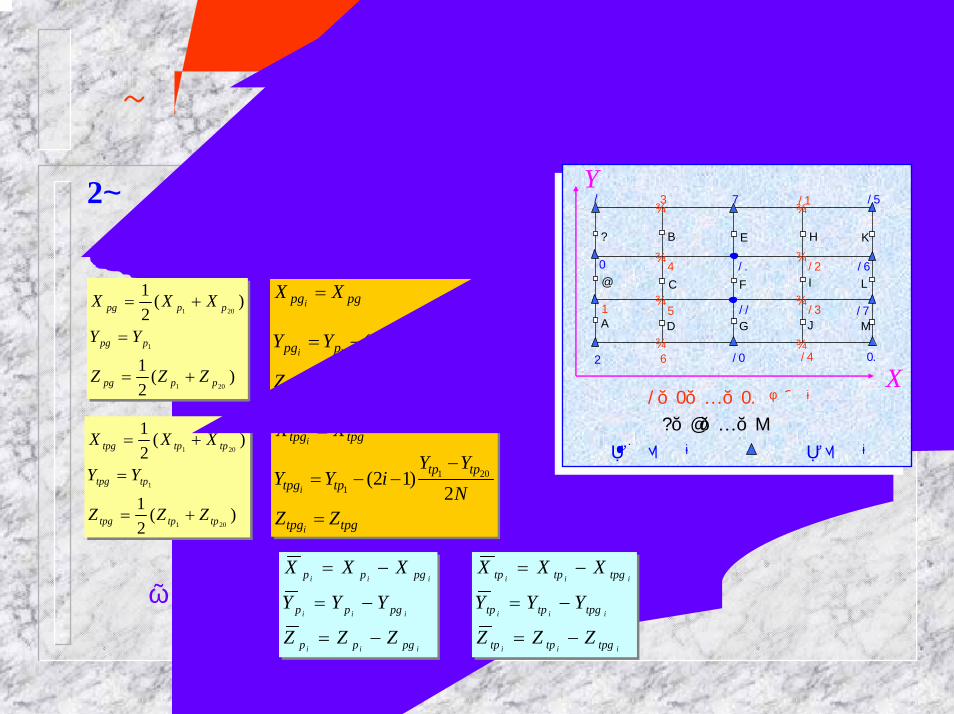
六、航带法区域网平差
2、重心化坐标计算
区域重心坐标
)(21
)(21
201
1
201
pppg
ppg
pppg
ZZZ
YY
XXX
+=
=
+=
)(21
)(21
201
1
201
tptptpg
tptpg
tptptpg
ZZZ
YY
XXX
+=
=
+=
航线重心坐标
pgpg
ppppg
pgpg
ZZNYY
iYY
XX
i
i
i
=
−−−=
=
2)12( 201
1
tpgtpg
tptptptpg
tpgtpg
ZZNYY
iYY
XX
i
i
i
=
−−−=
=
2)12( 201
1
重心化坐标
iii
iii
iii
pgpp
pgpp
pgpp
ZZZ
YYY
XXX
−=
−=
−=
iii
iii
iii
tpgtptp
tpgtptp
tpgtptp
ZZZ
YYY
XXX
−=
−=
−=
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
1,2,…,20 待定点名A,B,…,O 像片名
高程控制点 平高控制点
×
×
×
×
×
×
×
×
X
Y

六、航带法区域网平差
3、误差方程式的建立(以X坐标为例)
控制点:
1),(42
3210 =−−++++=− pXXYXAXAYAXAAv tpX
公共点:
21),(
)(
)(
1
42
3210
42
3210
=−−+′
−′′′+′′+′′+′′+′
−++++=′−−
+pXXXX
YXAXAYAXAA
YXAXAYAXAAvv
ii tpgtpg
XX

六、航带法区域网平差
误差方程矩阵形式
EPlaAV =−=− 控控控控 iiiii ,
[ ] EPlaa
AAV21, 1,1,
111, =−⎥
⎦
⎤⎢⎣
⎡=− +++ iiii
i
iiiii
+上+下
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
1,2,…,20 待定点名A,B,…,O 像片名
高程控制点 平高控制点
×
×
×
×
×
×
×
×

六、航带法区域网平差
总误差方程
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
控
控
控
控
上下
控
上下
控
控
控
控
1
23
1
12
1
3
2
1
3
32
2
21
1
3
23
2
12
1
000
00000
lllll
aaa
AAA
AAA
A
VVVVV
误差方程数
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
168
148
16
必要观测数 45/33
多余观测数 17/29
观测值数 62
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
A
B
C
D
E
F
G
H
I
J
K
L
M
N
O
1,2,…,20 待定点名A,B,…,O 像片名
高程控制点 平高控制点
×
×
×
×
×
×
×
×

六、航带法区域网平差
法方程
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
−
+−
+
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
+−
−+
+
−
−+
23T23
T3
23T212
T22
T2
12T11
T1
3
2
1
3T3
3T3
2T3
3T2
2T2
2T2
2T2
1T2
2T1
1T1
1T1
21
21
21
21
212
10
21
2121
21
021
21
lAlA
lAlAlA
lAlA
aaa
AA
AAAA
AA
AA
AA
AA
AA
AAAA
AA
上控控
下上控控
下控控
上上
控控
下上
上下
下下
上上
控控
下上
上下
下下
控控
航带中参与平差点的自身法化阵之和,控制点系数为1,连接点系数为1/k
航带间连接点的互法化阵,系数为-1/k

六、航带法区域网平差
法方程
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
3
2
1
3
2
1
3332
232221
1211
0
0
LLL
aaa
NNNNN
NN
法方程的消元
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′′=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′′
3
2
1
3
2
1
33
2322
1211
000
0
LLL
aaa
NNN
NN
12-111
T122222 NNNNN −=′
23-1
22T233333 NNNNN ′−=′
1-111
T1222 LNNLL −=′
2-1
22T2333 LNNLL ′′−=′
消元通式:
)1,,2,1(
1-,
T1,11
1,-1,
T1,1,11,1
−=
′′−=′
′−=′
+++
++++++
niiiiiiii
iiiiiiiiii
LL
LNNLL
NNNNN

六、航带法区域网平差
法方程的解
31
333 LNa ′′= −
)( 32321
222 aNLNa −′′= −
)( 212211
111 aNLNa −= −
回代通式:
)1,2,,1()( 11,
1-
-1
LL−=
−′′=
′′=
++
niiiiiiii
nnnn
aNLNa
LNa
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′′=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
′′
3
2
1
3
2
1
33
2322
1211
000
0
LLL
aaa
NNN
NN

六、航带法区域网平差
待定点地面坐标计算
iitpgiitpgtp
iitpgiitpgtp
iitpgiitpgtp
YXCXCYCXCCZZZZZZ
YXBXBYBXBBYYYYYY
YXAXAYAXAAXXXXXX
iii
iii
iii
)(
)(
)(
42
3210
42
3210
42
3210
++++++=++=
++++++=++=
++++++=++=
∆
∆
∆
将上述坐标反变换到地面坐标
tpt
tp
tp
t
t
ZZ
YX
baab
YX
λ
∆∆
λ∆∆
1
12
=
⎥⎦
⎤⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡−
=⎥⎦
⎤⎢⎣
⎡

DGPS/IMU 辅助光束法平差系统WuCAPS(Wuhan Combined Bundle Adjustment for DGPS/IMU data and photogrammetric observations)
DGPS/IMU 辅助光束法平差系统WuCAPS(Wuhan Combined Bundle Adjustment for DGPS/IMU data and photogrammetric observations)
用于摄影测量与遥感高精度点位测定软件包
以共线条件方程为出发点,容当代的基于统计理论的误差随机模型和理论上最为严密的自检校光束法区域网平差函数模型于一体,发展了自己的一整套算法并予以实现
自1985年开始研制,至今已完成了MS-DOS和Windows 两个版本
目前,该系统正在测绘生产单位、科研部门和学校教学实践中广泛使用

WuCAPS界面

WuCAPS功能模块WuCAPS功能模块
WuCAPS主要功能WuCAPS主要功能
可用于航带法区域网平差
可用于带可选附加参数的自检校光束法区域网平差
可进行地面测量数据与摄影测量观测值的联合平差
GPS辅助光束法区域网平差POS辅助光束法区域网平差可自动剔除观测值的粗差
可补偿观测值的系统误差
可评价各种未知数的理论精度
可估计各类观测值的验后方差
可绘制测区像片覆盖图
可绘制测区点位分布图和已知点残差图
可实现加密分区的半自动接边

WuC
APS
WuC
APS
平差主系统框图
平差主系统框图
WuC
APS
WuC
APS
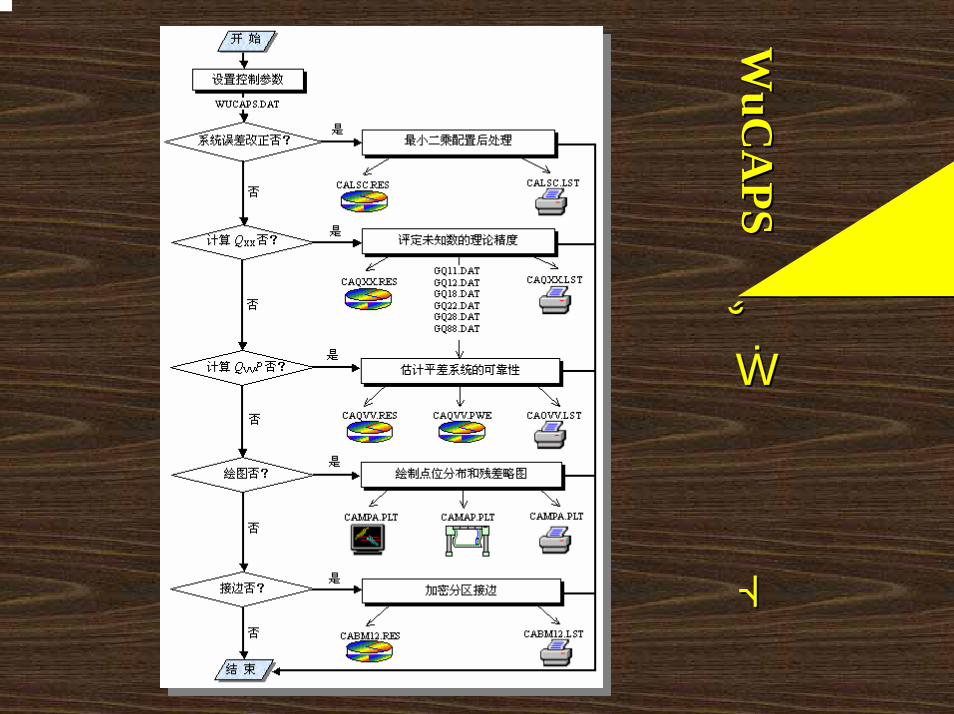
质量分析子系统框图
质量分析子系统框图

航带法区域网平差实例
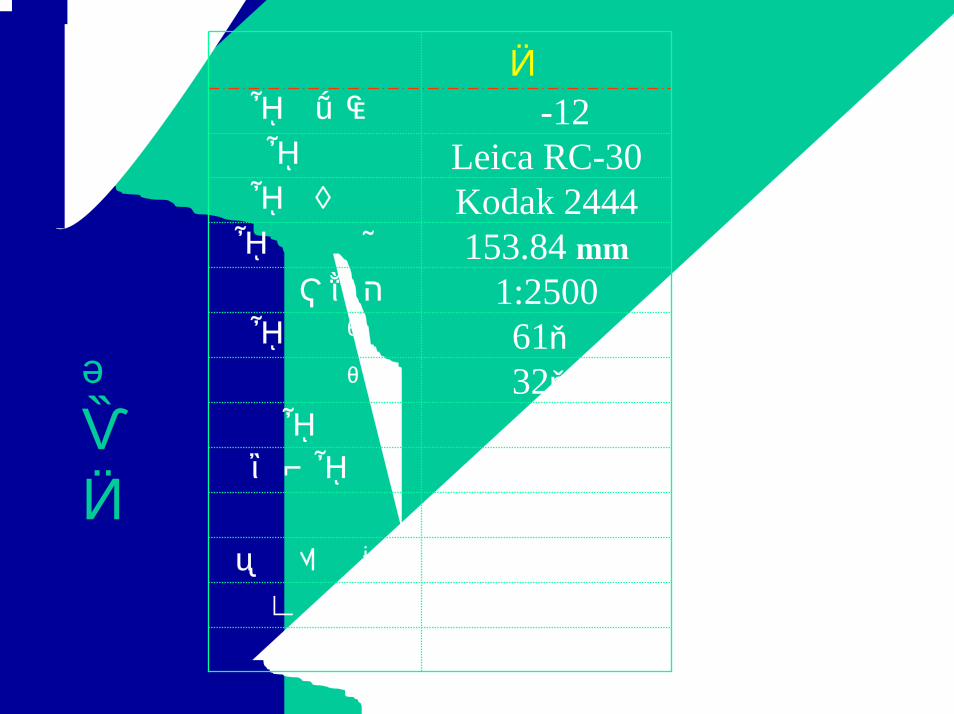
区域网基本参数
项目 参数航摄飞机 运-12 航摄仪 Leica RC-30 航摄胶片 Kodak 2444 航摄仪主距 153.84 mm摄影比例尺 1:2500 航向重叠 61%旁向重叠 32%航线 9条构架航线 2条像片 255张
地面控制点 72个加密点 3632个区域范围 4km×5km

平差计算实例
解析内定向
解析相对定向
单航带空中三角测量
自由航带网概略绝对定向
航带法区域网平差 WuCAPSWuCAPS

参考书李德仁,郑肇葆 编著,《解析摄影测量学》,测绘出版社
参 考 书
李德仁,郑肇葆 编著,《解析摄影测量学》,测绘出版社
本讲参考资料
教材
张剑清,潘励,王树根 编著,《摄影测量学》,武汉大学出版社
作业:
PP.75,第9、10题