drones for research - observing the world in 3d from a ... · pdf filedrones for research -...
TRANSCRIPT

Drones for research - Observing the
world in 3D from a LiDAR-UAV
Program lunch seminar:
Lammert Kooistra: The Unmanned Aerial Remote Sensing Facility
goes 3D: Unmanned Aerial Laser Scanning
Sander Mücher: From point clouds to 3D products: opportunities for
high-resolution LiDAR
Harm Bartholomeus: 3D analysis and visualization for forest research
Questions and discussion

The Unmanned Aerial Remote Sensing
Facility goes 3D:
Unmanned Aerial Laser Scanning
Lammert Kooistra1, Harm Bartholomeus1, Sander Mucher2,
Henk Kramer2, Jappe Franke2 and Benjamin Brede1
1: Laboratory of Geo-Information Science and Remote Sensing,
2: Wageningen Environmental Research

Drones in the news

Why UAVs in science?
Satellites
Airplanes
UAVs
In-situ
‘’Bridging
the gap’’

UAVs as flexible platforms
Your own flexible platform
• Autonomy
• Timing: fill data gaps ~ flying below the clouds
• Sensors: application specific + increasing nr. camera’s
• Coverage: increased spatial detail
Example Science fields:
• Plant phenotyping: high-throughput
• Precision agriculture: field -> zone -> plant
• Ecology/forestry: scaling from plot to landscape level
• Water: detailed spatial coverage + accessibility

RC Copters→UAVs→Drones
Radio controlled helicopters have been around for decades
● Hard to fly & prone to crash
Around 2005 the technology for full-electric drones starter to become available
● LiPo batteries, IMU, autopilot, GPS
Around 2007/2008 the technology was mature enough for dedicated remote sensing research
Around 2016 kids are capable and can afford to fly these (and shoot amazing photos & videos)
25k€ @ 2008
1000€ @ 2016

Professional UAVs today
Range:
Small consumer systems (~1000€, just photos)
Medium UAVs (5-15k€, a few kg of space for payload)
Professional ready-to-use mapping systems (25-350k€, ready sensors and processing chains)
Large scale system (”real airplanes”, €€€)

Beginning of Unmanned Aerial Remote
Sensing Facility (UARSF) of WUR
Our UAV activities started in 2012 with Interreg project ”Smart Inspectors”
GRS & Alterra acquired an Aerialtronics Altura AT8 octocopter
● ”Okkie”
● Own camera systems developed
Soil Physics and Land Management @ WUR acquired a Mavinci fixed wing
● RGB camera
www.wur.eu/uarsf

Objectives Research Facility:
● Platform for dedicated and high-quality experiments
● Calibration facilities and disseminating processing procedures to the UAV user community
● Test use in range of applications like habitat monitoring, precision agriculture and land degradation assessment
UARSF now
Our pilots
Our platforms
+ Operation Manual and Safety Management System
= Company exemption from the Dutch Aviation Authorities

Current operations NL
Applications:
Coastal monitoring
Habitat mapping
Musselbank mapping
Forest biomass and
phenology
Hail damage assessment
Precision agriculture
Agro experimental plots
Nr of flights:
2015: 250
2016: 290

Photogrammetric
processing
Structure from Motion
Requires just a normal camera
Software detects features from overlapping photos
The 3D positions of the features are triangulated producing 3D model of the target
The photos are projected on the model producing orthophoto/orthomosaic
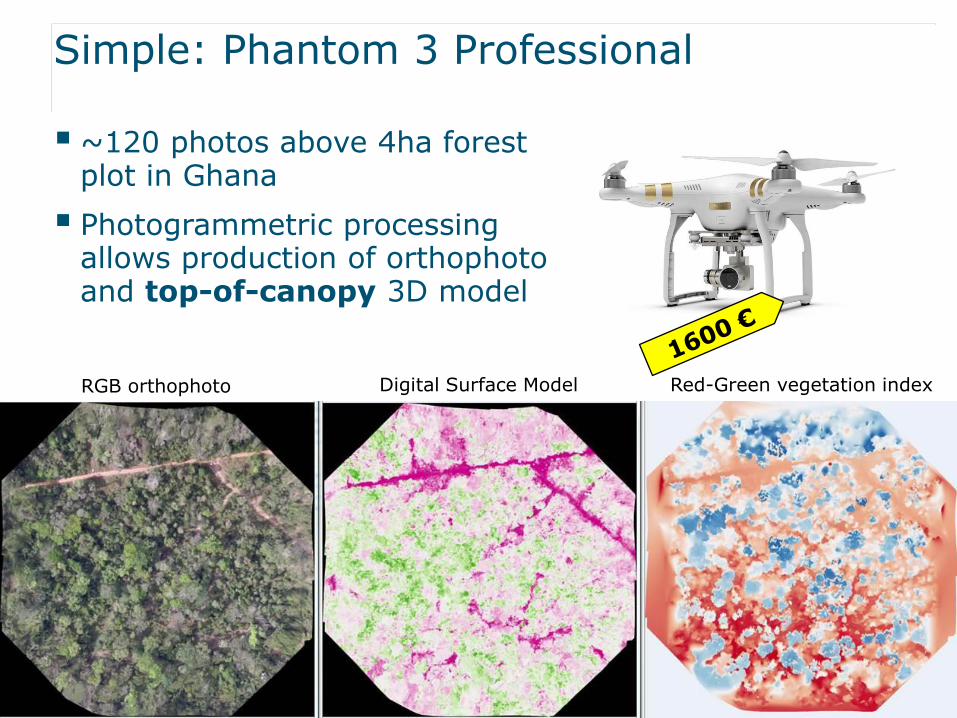
Simple: Phantom 3 Professional
~120 photos above 4ha forest plot in Ghana
Photogrammetric processing allows production of orthophoto and top-of-canopy 3D model
RGB orthophoto Digital Surface Model Red-Green vegetation index
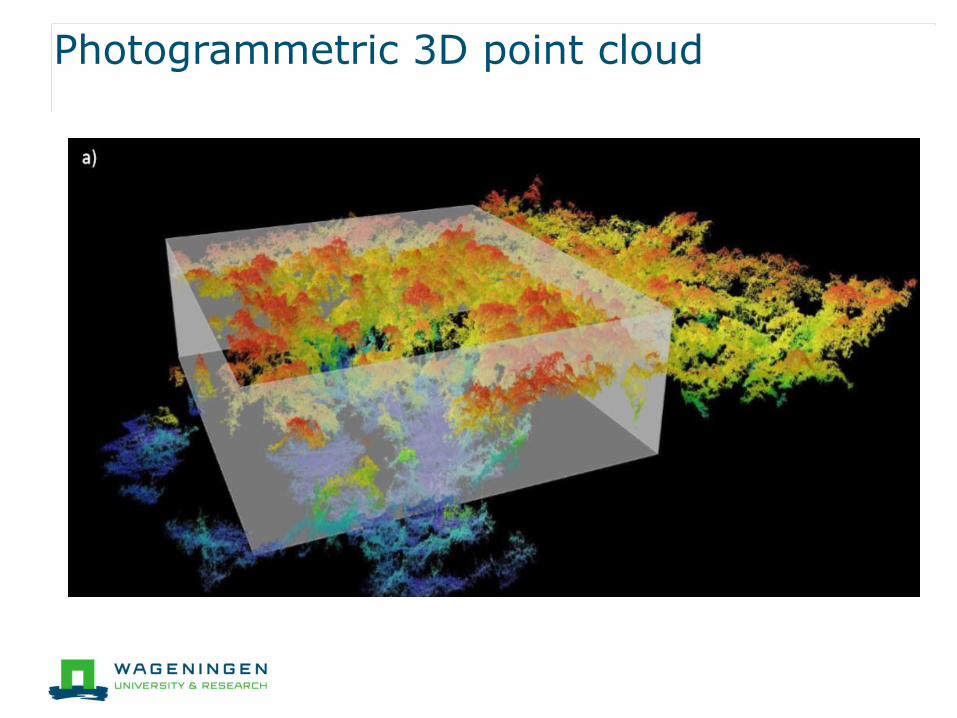
Photogrammetric 3D point cloud

Laser Scanning principle
WUR terrestrial Laser Scanning Research: www.lidar.wur.nl
Terrestrial Laser Scanning (TLS)
Point cloud: x, y, z coordinate very high frequent laser transmitter/ receiver
Airborne Laser Scanning (ALS)

Comparison UAV-SfM and TLS
UAV-SfM:
Approximation
Surface smoothed
Relative height
TLS:
Complete point cloud
Digital Terrain Model
Absolute height
vs.
source: MSc thesis Sabina Rosca:2015 Guyana study

Unmanned Aerial Laser Scanning
Advantages
● Complete 3D structure (incl. terrain model)
● Absolute height and other parameters
Disadvantages
● TLS: intensive fieldwork: large nr of scan positions
● ALS: relative expensive and inflexible
Solution: combine UAV and Laser Scanning technology
● Business proposal written for Shared Facilities WUR November 2015
● Focus applications: phenotyping, habitat structure mapping, forest monitoring
● Approved January 2016

ULS: Riegl RiCopter
Full system: UAV + Laser Scanning + software
High quality and accuracy: within 1 cm x, y, z
Long flying time: 30 minutes

RiCopter team and operations
Ricopter team
Pilots: Jappe Franke, Henk Kramer and Harm Bartholomeus
Operators: Sander Mücher, Benjamin Brede, Lammert Kooistra
Operations
Shared facility: outside and inside WUR users (incl. companies)
Projects research focus: feasibility, method development, validation
Intake, feasibility and planning: contact Lammert or Sander
Start operations: from January 2017
Operating area: focus Netherlands, opportunities Germany

Ricopter costs
Based on intake: decision Go-No Go
Legal limitations operating area
Research component
Costs (part of intake)
RiCopter system: tariffs for half day or whole day
Personal (hourly rate):
● flight operation: minimal pilot and operator
● flight-preparation
● post-processing: product level
Contact: Lammert Kooistra or Sander Mücher

RiCopter demonstration
Start demonstration
Drones for research - Observing the
world in 3D from a LiDAR-UAV
Program lunch seminar:
Lammert Kooistra: The Unmanned Aerial Remote Sensing Facility
goes 3D: Unmanned Aerial Laser Scanning
Sander Mücher: From point clouds to 3D products: opportunities for
high-resolution LiDAR
Harm Bartholomeus: 3D analysis and visualization for forest research
Questions and discussion