using the reversible jump mcmc procedure for identifying and estimating univariate tar models
TRANSCRIPT

USING THE RJMCMC PROCEDURE FOR IDENTIFYING AND ESTIMATING TAR MODELS
Fabio H. Nieto
Universidad Nacional de Colombia
Hanwen Zhang
Universidad Santo Tomás
Wen Li
Singapore Clinical Research Institute
Reporte Interno de Investigación No. 13
Departamento de Estadística
Facultad de Ciencias
Universidad Nacional de Colombia
Bogotá, COLOMBIA

Using the RJMCMC procedure for identifying and
estimating univariate TAR models∗
Fabio H. Nieto†
Universidad Nacional de Colombia
Hanwen Zhang
Universidad Santo Tomas
Wen Li
Singapore Clinical Research Institute
June 14, 2010
Abstract
One way that has been used for identifying and estimating threshold autoregres-
sive (TAR) models for nonlinear time series follows the MCMC approach via the
Gibbs sampler. This route has major computational difficulties, specifically, in get-
ting convergence to the parameter distributions. In this paper, a new procedure for
identifying a TAR model and for estimating its parameters is developed, following
∗This research was sponsored by DIB, the investigation division of Universidad Nacional de
Colombia at Bogota, under contract COL0022265-2007†Corresponding author: [email protected]
1

the RJMCMC sampler. It is found that the proposed procedure conveys a Markov
chain with convergence properties.
Keywords: Bayesian model choice; Nonlinear time series; Regime-switching
models; RJMCMC sampler; Threshold autoregressive (TAR) models
1 Introduction
Nieto (2005) developed a procedure for identifying univariate TAR models, which
are nonlinear, based on that of Carlin and Chib (1995) for Bayesian model choice.
As quoted by those authors, the so-called link distributions are crucial for obtaining
efficient mixing in the Gibbs sampler defined in their paper. This aspect was noted by
Nieto (2005) and he found major difficulties in implementing the method in practice,
especially, because of the very small values of the model likelihood function, a fact
which signals that the likelihood present in the data is not being extracted optimally.
In order to have an alternative to Nieto’s (2005) approach, we present in this pa-
per a procedure based on Green’s (1995) RJMCMC (Reversible Jump Markov Chain
Montecarlo) sampler. There are some papers that are close to our problem, as, for
example, Campbell’s (2004) and Vermaak , et al. (2004). The first one is developed
in the context of the so-called SETAR (selfexciting threshold autoregressive) models,
where the number of regimes is assumed to be known a priori and the focus is ba-
sically in estimating the autoregressive orders. In the second, linear autoregressive
processes are considered and the interest is to estimate the unknown model order. For
choosing another type of time series models, Vrontos et al. (2000) used the RJMCMC
procedure for making full Bayesian inference of GARCH and EGARCH models.
Our main concern in this paper is to identify (estimate) the so-called structural
parameters, i.e. the number of regimes and the autoregressive orders in each regime,
2

and, simultaneously, to estimate the nonstructural parameters of the TAR model.
Working on this goal, we found a crucial complexity in the design of the sampler,
which is implied for jumps in both the number of regimes and the autoregressive
orders in the regimes, a situation not studied up to now. To deal with this problem,
we give an initial solution to it by means of a 2-step procedure, which consists in,
first, to identify the number of regimes and, then, conditional on this parameter,
to estimate the remaining model parameters. In Section 2 we present a very brief
summary of the TAR model specification and include the basic methodological steps
of the RJMCMC sampler. The algorithm developed for the TAR model is presented
in Section 3 and in Section 4, we include a procedure for checking convergence of the
proposed sampler, via an exploratory-data-analysis strategy. Some applications (to
simulated and real data) are included in Section 5. Finally, the main conclusions and
recommendations for future research are given in Section 6.
2 Theoretical background
2.1 TAR models
Let {Xt} and {Zt} be stochastic processes defined on the same probability space and
related by the equation (TAR model)
Xt = a(j)0 +
∑kj
i=1 a(j)i Xt−i + h(j)εt , (1)
if Zt ∈ Bj = (rj−1, rj], for some j, j = 1, ..., l, where r0 = −∞, rl = ∞, and l is
a positive integer number. Here, a(j)i and h(j); j = 1, ..., l; i = 0, 1, ..., kj; are real
numbers and {εt} is a Gaussian zero-mean white noise process with variance 1. The
real numbers rj, j = 1, ..., l−1, are called the threshold values of the process {Zt} and
they define l regimes for it given by the set family {Bj : j = 1, .., l}. Additionally, the
3

nonnegative integer numbers k1, ..., kl denote, respectively, the autoregressive orders
of {Xt} in each regime. We shall use the symbol TAR(l; k1, ..., kl) to denote this
model and call l; r1, ..., rl−1; and k1, ..., kl the model structural parameters.
This kind of models was introduced by Tong(1978) and Tong and Lim (1980),
specifically, in which case the threshold variable is the lagged variable Xt−d, where d
is some positive integer. In this case, the model is known as the self-exciting TAR
(SETAR) model and, at present, there is a lot of literature about the topic of analyzing
these models, under the frequent assumption that we know the number l of regimes
and the autoregressive orders k1, ..., kl.
Under the scope of open-loop systems (Tong, 1990), we also assume that {Zt} is
exogenous in the sense that there is no feedback of {Xt} towards it and that {Zt} is
a homogeneous pth order Markov chain with initial distribution F0(z, θz) and kernel
distribution Fp(zt|zt−1, ..., zt−p,θz), where θz is a parameter vector in an appropriate
numerical space. Furthermore, we assume that these distributions have densities in
the Lebesgue-measure sense. Let f0(z, θz) and fp(zt|zt−1, ..., zt−p,θz) be, respectively,
the initial and kernel density functions of the distributions above. In what follows,
we assume that the p-dimensional Markov chain {Zt} has an invariant or stationary
distribution fp(z, θz).
Nieto (2005) developed the methodolgy for analyzing (identifying, estimating, and
verifying) the TAR model, in the pressence of missing data; then, Nieto (2008) devel-
oped a procedure for forecasting variable X with the TAR model, in the pressence of
missing data, too. Of course, if the time series are complete, Nieto’s methods are also
applicable with minor modifications. Tsay (1999) developed the multivariate version
of the TAR model for complete time series, with the threshold variable Zt−d, where
d > 1, while in Nieto’s (2005) model d = 0 is allowed. As noted above, previously to
these approaches, Tong (1990) considered a very similar version of this model that
called open-loop models and, under this concept, what the TAR model means is that
4

the nonlinear dynamical behavior of variable X is explained by the exogenous vari-
able Z, according to its values in the sets of a partition of its sample space. The TAR
model can explain certain stylized facts of financial and hidrological/meteorological
time series like, for example, the presence of extreme-values clusters. Also, the model
can explain the regime-switching characteristic of Markov chains, with the advantage
that the state space can be general, i.e., not necessarily discrete.
2.2 The RJMCMC procedure
The material we are going to include here is referred to Chen et al.’s (2000) book.
For a more specific presentation the reader can consult Green’s (1995) paper.
Suppose that we have a countable collection of candidate models {Mk|k ∈ M},where M ⊆ N, the set of natural numbers. Model Mk is parameterized by the
unknown vector θ(k) of dimension pk, which may vary from model to model. Under
model Mk, the posterior distribution of θ(k) takes the form
π(θ(k)|D,Mk) ∝ π∗(θ(k)|D,Mk)p(k)/p(Mk|D) ,
with π∗(θ(k)|D,Mk) = L(θ(k),Mk|D)π(θ(k)|Mk), where D denotes the data set,
L(θ(k),Mk|D) is the likelihood function, π(θ(k)|Mk) is the prior distribution for the
parameter vector under model Mk, and p(k) is a prior distribution for k (or Mk).
Notice that π∗(θ(k)|D,Mk) is the unnormalized posterior density, given Mk. Then,
the joint distribution of (k, θ(k)) given the data D, the distribution of interest, is given
by
π(k, θ(k)|D) = π(θ(k)|D,Mk)p(Mk|D) ∝ π∗(θ(k)|D,Mk)p(k) .
The idea is to obtain joint samples for the model number k and the parameter vec-
tor θ(k) from this joint posterior distribution. The main property of the RJMCMC
algorithm is that the underlying Markov chain is designed in a such way that it can
5

jump between models with parameter spaces of different dimensions, while retaining
a detailed balance that ensures the correct limiting distribution, provided the chain
is irreducible and aperiodic.
Remark. Strictly speaking, k must be seen as a realization of a discrete random
variable K, whose sample space is M .
The algorithm
Let us assume that the current state of the chain is (k, θ(k)), then:
Step 1. Propose a new model Mk∗ with probability j(k∗|k) (this means, given k,
one needs to put a probability distribution for choosing moves among the models).
Step 2. Generate u, of certain dimension, from a specified proposal density qk(u|θ(k), k, k∗).
Step 3. Set (θ(k∗),u∗) = gk,k∗(θ(k),u), where gk,k∗ is a bijective transformation
between Euclidian subspaces of dimension pk + dim(u) = pk∗ + dim(u∗) (thus, one
needs some kind of dimension matching and for that purpose one uses the proposal
distribution qk(·|·)).Step 4. Let rn = p(k∗)π∗(θ(k∗)|D,Mk∗)j(k
∗|k)qk∗(u∗|θ(k∗), k∗, k),
rd = p(k)π∗(θ(k)|D,Mk)j(k|k∗)q(u|θ(k), k, k∗), and J be the Jacobian of the trans-
formation gk,k∗ . Then, accept the proposed move to (k∗,θ(k∗)) with probability
α = min{1, rnJ/rd}.As quoted by Green (1995), the probability distribution for doing the moves among
models, the q distributions, function g, etc., depends strongly on the data at hand.
The idea is to assure that the chain thus defined is aperiodic and irreducible and this
is our goal in the next section.
6

3 Identifying and estimating the TAR model
Following Green’s (1995) example about estimating a step function in a multidimen-
sional change-point problem, our initial interest is on the posterior distribution of the
random vector (l,kl, θl), where l = 2, ..., l0, for some known l0, kl = (k1l, ..., kll), and
θl = (θ1l, ..., θll), with θjl = (a(j)0 , a
(j)1 , ..., a
(j)kj
, h(j)), for j = 1, ..., l. Notice that that
vector has dimension k1 + ... + kl + 2l; hence, if l or kjl changes, for some j = 1, ..., l,
the vector dimension changes. Also, note that the vector itself changes if θl changes,
equivalently, if θjl changes for some j, j = 1, ..., l.
In this paper, we consider a modification of the usual RJMCMC sampler, which
consists in a 2-step approach. In the first step, we design an RJMCMC sampler for
the whole parameter vector (l,kl,θl) and, in the second, we fix the estimated value
for l, l say, and re-estimate the remaining parameters (kl,θ l) via a simplification of
the previous sampler. This 2-step proposal was motivated for the fact that there is
a double nested movement among models, i.e., first a move for l and, then, a move
for kl, a problem does not considered up to now, in the authors knowledge. This
can cause a very low mixing for kl. Consequently, an important problem for future
research is to design an RJMCMC sampler for all the parameter vector, as one would
desire at first.
Thinking in the RJMCMC sampler for (l,kl, θl), we consider three types of tran-
sitions in the underlying Markov chain to be developed. These are: (i) a change in
the number of regimes l (R), (ii) a change in some autoregressive order kj, j = 1, ..., l,
(O), and (iii) a change in the total nonstructural parameter vector θl (V).
When transition R happens, we also need to consider intrinsic changes in autore-
gressive (AR) orders and, consequently, in θl. Following Green’s (1995) paper, the
changes in the number of regimes is circumscribed to the so-called birth and death
moves, that is, a birth happens if the number of regimes moves from l to l + 1 and
7

a death, if there is a move from l + 1 to l. For doing these moves, a subprobability
distribution is needed, which is obtained as follows.
Let bl = Pr(Birth) = c minl{1, p(l+1)/p(l)} and dl+1 = Pr(Death) = c minl{1, p(l)/p(l+
1)}, where p(·) denotes a prior distribution for L and c is a constant such that
bl + dl ≤ 0.9 for all l = 2, · · · , l0. For the boundaries, we put d2 = bl0 = 0. From
the perspective of being at the (i − 1)th iteration, the above definitions give condi-
tional probabilities for the move types, the conditioning being at the value of L at
the (i − 1)th iteration, l(i−1) say. Now, c is such that c maxl{b′l + d′l} ≤ 0.9, where
b′l = min{1, p(l + 1)/p(l)} and d′l = min{1, p(l − 1)/p(l)}. In this way,
c ≤ 0.9
maxl{b′l + d′l}.
Notice that given p(·) and the heuristic value 0.9, the upper bound above for c is
computable.
Because of the birth/death moves described above for the number of regimes, it
is convenient to say that R splits into the moves B (birth) and D (death), that is,
R=(B,D), and thus the full set of transitions for the TAR model is (B,D,O,V). To
choose among these transitions, we design a probability distribution ql = (bl, dl, ol, vl),
where ol = P (O|l) and vl = P (V |l), and bl + dl + ol + vl = 1. We can put ol = vl.
Now, we describe the mathematical form of each one of the move (jump) ratios,
which act as weights of the posterior ratios (=likelihood ratio × prior ratio) in the
computation of the acceptance probabilities. We keep in mind that the chain is going
to move from the (i− 1)th iteration to the ith one. First, we assume that move B is
chosen, then, as indicated previously, we also need to consider changes in AR orders.
To do that, and following Campbell’s (2004) paper, we choose at random one of the
l(i) regimes via the probability mass function (uniform distribution) [l(i)]−1 defined
on the set {1, · · · , l(i)}. Then, we do an intrinsic death/birth move for changing
the AR order k(i−m)j corresponding to the selected regime j, where m denotes the
8

minimum value in the set {1, .., i − 1} for which l(i−m) = l(i). We denote here these
intrinsic birth and death probabilities as bk and dk, respectively, where the constant c
described previously can be taken now to be the same. However, in this autoregressive
setting, we need to consider a remain move with probability 1− bk − dk. After this,
if the intrinsic move is a birth, we update the corresponding nonstructural parameter
vector using a proposal density q(·|θ(i−m)j ) as given by Campbell (2004), where the
superscript (i−m) has the same meaning as before. At contrary, this density is taken
to be 1. Below, we present explicitly the way in which q is computed.
In summary, the move and proposal ratios become:
(1) For transition B there are three possibilities:
(i) A birth for AR order, then the ratio is
(bl/dl+1)× (bk/dk+1)× (1/q) .
(ii) A death in an AR order,
(bl/dl+1)× (dk/bk−1) .
(iii) A remain in an AR order, then simply bl/dl+1 is the move ratio.
2. For D, we also have the same three possibilities as for B, then the ratios
are similar, the only difference being in replacing dl/bl−1 for bl/dl+1 in the above
expressions.
3. For transition O, we proceed exactly as in Campbell’s (2004) paper, that is to
say, we have three possibilities:
(i) A birth in the AR order, then the ratio is (bk/dk+1)× (1/q).
(ii) A death in the AR order, the ratio is dk/bk−1.
(iii) Remain move, then, trivially the ratio is 1.
4. If transition V is chosen, trivially, the jump ratio is 1.
9
We remark here that in the case of jump ratios equal to 1 for moves in the
AR orders, we can do Gibbs sampling for updating the non structural parameters
in the selected regime, using Nieto’s (2005, Section 3.2) results. For the purpose
of computing the posterior ratio, in the case of a death in the chosen AR order, we
simply delete the last AR coefficient in the corresponding non structural parameter, as
Campbell (2004) did in his procedure. Of course, another alternative to this updating
of non structural parameters might be to use a single-site Metropolis-Hastings random
walk algorithm, as Campbell (2004) did.
It is important to note here that intrinsic estimates for the autoregressive or-
ders and the nonstructural parameters are obtained, in a manner similar to that of
estimating statistical model parameters using, for example, the Akaike Information
Criterium (AIC) for identifying a model. Now, once l has been estimated, we sim-
plify the procedure above deleting steps 1 and 2, in order to estimate the remaining
TAR model parameters. Nieto (2005) proposed a 3-step procedure in which in the
second stage, vector kl was fixed. From our proposed strategy, the second step is
unnecessary.
We now describe how it is q computed when needed. Following Campbell’s (2004,
pp. 472) paper, in the case of an AR order birth, from k to k + 1 say, we propose
to use a univariate normal distribution from which the AR coefficient a(j)k+1 is drawn,
corresponding to the chosen regime j in the model with l(i) regimes. The proposed
mean of q is
ak+1 =T∑
t=k+2
xt−k−1et/
T∑
t=k+2
x2t−k−1 ,
where et = xt −∑k
s=1 a(i−m)s xt−s; t = k + 2, · · · , T ; with the superscript (i − m)
meaning the same as before. The proposed variance is Var(ak+1|x, z, l(i),kl(i)) + ε for
10

some ε > 0 (small according to Campbell, 2004); where
Var(ak+1|x, z, l(i),kl(i)) =T∑
t=k+2
e2t /[(T − k − 1)
T∑
t=k+2
x2t−k−1] .
That is, we seek to set the proposal variance to be a little more than the marginal
posterior variance.
It is important to note that the numerator (denominator) in the product likelihood ratio×prior ratio is giving in general, for a fixed value of l, by
L(y|l,kl, θl)π(l,kl,θl) = L(y|l,kl,θl)π(l)π(kl|l)π(θl|l,kl)
= L(y|l,kl,θl)π(l)l∏
j=1
π(kjl|l)l∏
j=1
π(θjl|l,kl)
where L(·| · · · ) denotes the likelihood function for the whole parameter vector, which
is based on all the sample (given by Nieto (2005)), π(l) is the unconditional prior for
l and π(·|·) denotes appropriate conditional priors. The priors for the nonstructural
parameters are obtained from Nieto’s (2005) paper and for the number of regimes
and autoregressive orders, from truncated Poisson distributions as will be shown in
the examples below.
4 Convergence diagnostics
Following Castelloe and Zimmerman (2002), we implement a procedure for checking
the convergence of our proposed RJMCMC sampler. As the parameter of interest,
we choose λ =∑l
j=1 pj[h(j)]2, where pj = P(Zt ∈ Bj). The reason for that is the
following: Nieto (2008) found that the conditional distribution of Xt given xt−1, ..., x1
and zt is Gaussian with mean a(j)0 +
∑kj
i=1 a(j)i xt−i and standard deviation h(j) if zt ∈ Bj,
for some j = 1, ..., l. We denote its density as fj(xt|xt−1, ..., x1, zt). Also, he showed
that the conditional distribution of Xt given xt−1, ..., x1 is a mixture distribution with
11

density function
f(xt|xt−1, ..., x1) =l∑
j=1
pjfj(xt|xt−1, ..., x1, zt ∈ Bj) . (2)
Here, we remark importantly that one of the two types of conditioning considered
above, depends on xt−1, ..., x1 and zt ∈ Bj and, the other one depends on xt−1, ..., x1
only. We shall call regime-based conditioning to the first one and conditioning to the
second. From expression (2) and following Nieto’s (2008) TAR-model characteristics,
we found that the conditional variance of Xt, σ2t|t−1 say, is given by
σ2t|t−1 =
l∑j=1
pj[h(j)]2 +
l∑j=1
pjµ2j,t − [
l∑j=1
pjµj,t]2 , (3)
where µj,t = a(j)0 +
∑kj
i=1 a(j)i xt−i. We can note that
∑lj=1 pj[h
(j)]2 is something like
a ”communality” in the conditional variances above because it does not depend on
neither t nor xt−1, ..., x1. Moreover, this quantity is a weighted average of the regime-
based conditional variances of the process Xt. Notice that {σ2t|t−1 : t = 2, ...} defines
the conditional variance function of process {Xt}, a key element in the GARCH-model
family.
Defined in that way the so-called interest parameter, we run C ≥ 2 parallel chains
of length 2T each and discard the first T iterations. Let M be the number of distinct
models, λrcm be the value of λ for the r-th occurrence of model m in chain c and Rcm
the number of times model m occurred in chain c. Then, the convergence diagnostic
is based on the following estimates of variation (note that the subscripts on the left-
hand side are parts of the names, and do not correspond to values of indices on the
right-hand side):
V (λ) =1
CT − 1
C∑c=1
M∑m=1
Rcm∑r=1
(λrcm − λ)2 (4)
Wc(λ) =1
C(T − 1)
C∑c=1
M∑m=1
Rcm∑r=1
(λrcm − λc·)2 (5)
12

Wm(λ =1
CT −M
C∑c=1
M∑m=1
Rcm∑r=1
(λrcm − λ·m)2 (6)
WmWc(λ) =1
C(T −M)
C∑c=1
M∑m=1
Rcm∑r=1
(λrcm − λ·cm)2 (7)
These quantities may be interpreted as total variation (V ), variation within chains
(Wc), variation within models (Wm), and variation due to interaction between models
and chains (WmWc). Based on a strict two-way ANOVA with interactions and un-
balanced data, Castelloe and Zimmerman (2002) found some properties for the ratios
E(V )E(Wc)
and E(Wm)E(WmWc)
, when there is almost convergence of the RJMCMC sampler. In
practice, they suggest the use of the ratios VWc
and Wm
WmWc, because it may help to
narrow down the cause of any violations of convergence. More precisely, define the
following potential scale reduction factors for a general parameter, say θ:
PSRF1(θ) =V (θ)
Wc(θ)(8)
and
PSRF2(θ) =Wm(θ)
WmWc(θ). (9)
Then, implement the following procedure as a convergence assessment technique:
1. For simulating each chain use over-dispersed values.
2. Choose a base batch sise b (Brooks and Gelman, 1998) recommend, for example,
b ≈ T/20).
3. Plot PSRF(q)1 (θ) v.s. q and PSRF
(q)2 (θ) v.s. q.
4. Plot the numerator and denominator of PSRF(q)1 (θ) together v.s. q.
5. Plot the numerator and denominator of PSRF(q)2 (θ) together v.s. q.
6. Determine q0 such that for q ≥ q0 the plots in step 3 have settled close to 1,
and the the plots in step 4 have settled approximately to a common value, and the
plots in step 5 have settled approximately to a common value.
13
7. Discard the first q0b sweeps from each chain, and then pool the remaining ones
together to use for inference.
5 Some examples
The RJMCMC-sampler based procedure for analyzing TAR models presented in Sec-
tion 3, was designed for obtaining draws of the whole parameter vector (l,kl, θl),
by means of a 2-step approach. We present now four examples for illustrating the
adequacy and implementation of our proposed method. In order to check the con-
vergence of the sampler, using the procedure proposed in Section 4, we run in each
example below, three parallel chains. It seems that this number of chains is enough
for our simulated and empirical data.
Another issue of main concern that we have found when running our proposed
sampler, has to dealt with the choice of parameter ε (see on pp. 9). Contrary to
Campbell’s (2004) suggestion of a very small value, we have found for the TAR
models considered in the examples, that this value depends on the entertained model
for fitting the time series. Our recommendation goes on the line of letting the data to
speak by themselves and to check the adequacy of its value via a quick convergence
and a satisfactory mixing of the chains.
5.1 Two simulations
Here we consider two simulated models. The first one is a TAR(2; 1, 1) model given
by
Xt =
−0.5 + 0.6Xt−1 + εt , Zt ≤ 0
0.9− 0.7Xt−1 + 2.0εt , Zt > 0 ,
where {Zt} is an AR(1) process given by the model Zt = 0.5Zt−1 + at, with {at}a Gaussian zero-mean white noise process with variance σ2
a = 1. The length of
14

the simulated time series was 100. Fixing the known parameters for process {Zt}and the threshold r1 = 0, we used our proposed RJMCMC sampler for identifying
and estimating the simulated model, using the following prior distributions: for the
number of regimes L we used a truncated Poisson distribution on the set {2, 3, 4} with
parameter 3. For any given number of regimes, we also chose a truncated Poisson
distribution for the autoregressive orders on the set {0, 1, 2, 3} with parameter 1.
And, giving the corresponding number of regimes and autoregressive orders, we took,
for the nonstructural parameters, the multivariate normal and inverse-Gamma priors
suggested by Nieto (2005). The main results were the following.
We run a chain with 5000 iterations and left the first 2500 as the burn in period.
To check the chain convergence, we used the procedure described in the last section for
the last 2500 draws and the obtained results are presented in Figure 1 and Figure 2.
As we can see there, the convergence of the chain is guaranteed. With this sample size,
we found the posterior distribution for the number of regimes L, which is presented
in Table 1. Clearly, we observe that l = 2 regimes is the mode of the distribution.
As for the autoregressive orders, we run a chain with 5000 iterations with fixed
value L = 2 in order to estimate both the autoregressive orders and the nonstruc-
tural parameters. As we can see in Figure 3 and Figure 4, the chain convergence is
accomplished. In Table 2 we can see the corresponding posterior distributions, which
signal that k1 = k2 = 1. To study the sensitivity of the sampler to prior distributions,
we used different priors for the autoregressive orders and looked at the posterior dis-
tributions for L and the nonstructural parameters. We tried the values 3, 4, ..., 14
for the maximum order of these parameters and, for example, for 8 as the maximum
value, we chose a truncated Poisson distribution with parameters 4, 5 and 6. We
found that the method is robust against changes in the prior distribution for the au-
toregressive orders since the sampler always identified the correct value of L = 2 and
no drastic changes were detected in the posteriors for the nonstructural parameters.
15
5 10 15 20
1.00
01.
015
PSRF1
batch number
PSFR
1
5 10 15 20
0.99
50.
998
PSRF2
batch number
PSFR
2
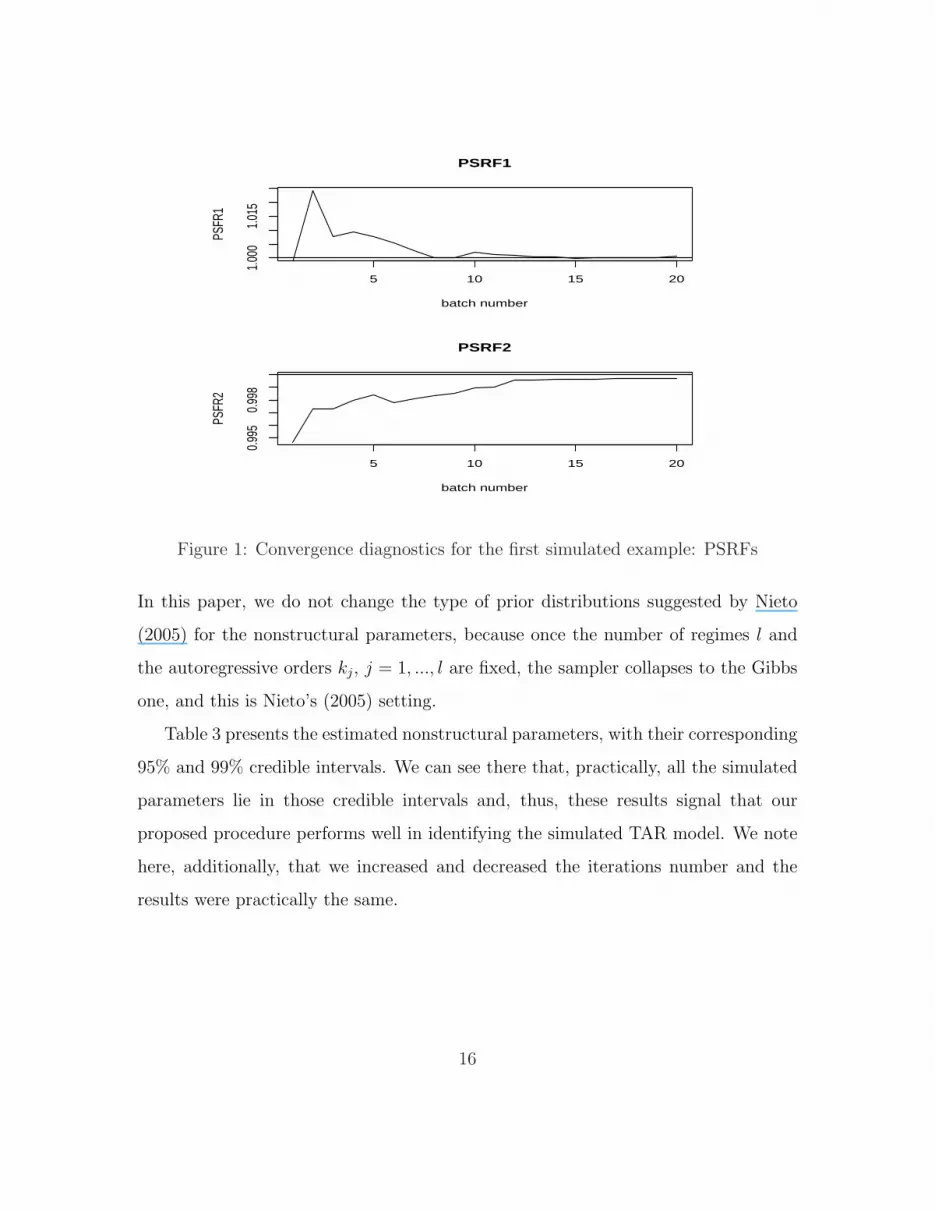
Figure 1: Convergence diagnostics for the first simulated example: PSRFs
In this paper, we do not change the type of prior distributions suggested by Nieto
(2005) for the nonstructural parameters, because once the number of regimes l and
the autoregressive orders kj, j = 1, ..., l are fixed, the sampler collapses to the Gibbs
one, and this is Nieto’s (2005) setting.
Table 3 presents the estimated nonstructural parameters, with their corresponding
95% and 99% credible intervals. We can see there that, practically, all the simulated
parameters lie in those credible intervals and, thus, these results signal that our
proposed procedure performs well in identifying the simulated TAR model. We note
here, additionally, that we increased and decreased the iterations number and the
results were practically the same.
16

5 10 15 20
0.11
50.
130
PSRF1
batch number
VWc
5 10 15 20
0.11
50.
130
PSRF2
batch number
WmWcWm
Figure 2: Convergence diagnostics for the first simulated example: comparison of
numerators and denominators
17

5 10 15 20
1.00
01.
020
PSRF1
batch number
PSFR
1
5 10 15 20
0.96
0.98
1.00
PSRF2
batch number
PSFR
2
Figure 3: Convergence diagnostics for the first simulated example with fixed L:
PSRFs
18

5 10 15 20
0.10
50.
120
0.13
5
PSRF1
batch number
VWc
5 10 15 20
0.10
50.
120
PSRF2
batch number
WmWcWm
Figure 4: Convergence diagnostics for the first simulated example with fixed L: nu-
merators and denominators
19

Number of regimes l Posterior probability
2 0.9988
3 0.0012
4 0.000
Table 1. Posterior probabilities for the number of regimes in the first simulated example
Regime
Autoregressive order k 1 2
0 0.000 0.0696
1 0.5956 0.4792
2 0.3056 0.2656
3 0.0988 0.1856
Table 2. Posterior probabilities for the autoregressive orders in the first simulated example
Regimej
Parameter 1 2
-0.49 0.59
a(j)0 95% (-0.78, -0.22) 95% (0.13, 1.05)
99% (-0.93, -0.1) 99% (-0.02, 1.28)
0.49 -0.46
a(j)1 95% (0.37, 0.63) 95% (-0.75, -0.2)
99% (0.33, 0.68) 99% (-0.83, -0.07)
1.07 1.81
h(j) 95% (0.92, 1.25) 95% (1.48, 2.18)
99% (0.88, 1.38) 99% (1.44, 2.3)
Table 3. Nonstructural parameter estimates for the model in the first simulated example.
95% and 99% mean credible sets at those levels.
20

0 20 40 60 80 100
−30
020
Index
cum
0 20 40 60 80 100
0.0
0.4
0.8
Index
cum
q
Figure 5: CUSUM and CUSUMSQ charts for the first simulated example
In order to check slightly the goodness-of-fit property of the proposed estimation
procedure, we examined the CUSUM and CUSUMSQ charts of the standardized
model residuals, as suggested by Nieto (2005). These charts are plotted in Figure 5,
and as we can see there, they signal an adequate fitting of the model.
Next, we simulated a TAR(3;2,1,1) model given by
Xt =
−0.5 + 0.6Xt−1 − 0.7Xt−2 + εt , Zt ≤ −1.0
0.9 + 0.2Xt−1 + 2.0εt , −1.0 < Zt ≤ 1.0
−1.0− 0.7Xt−1 + 3.0εt , 1.0 < Zt ,
where process {Zt} was simulated as before, with white noise process {at} having
variance σ2a = 1. The sample size was 100 and we also fix the parameters of process
{Zt} at their simulated values and the thresholds r1 = −1.0 and r2 = 1.0. The whole
set of prior distributions considered here was similar to that of the first example.
The posterior distribution for L is presented in Table 4, where we observe that the
21

5 10 15 20
1.00
1.10
1.20
PSRF1
batch number
PSFR
1
5 10 15 20
0.99
20.
996
1.00
0
PSRF2
batch number
PSFR
2
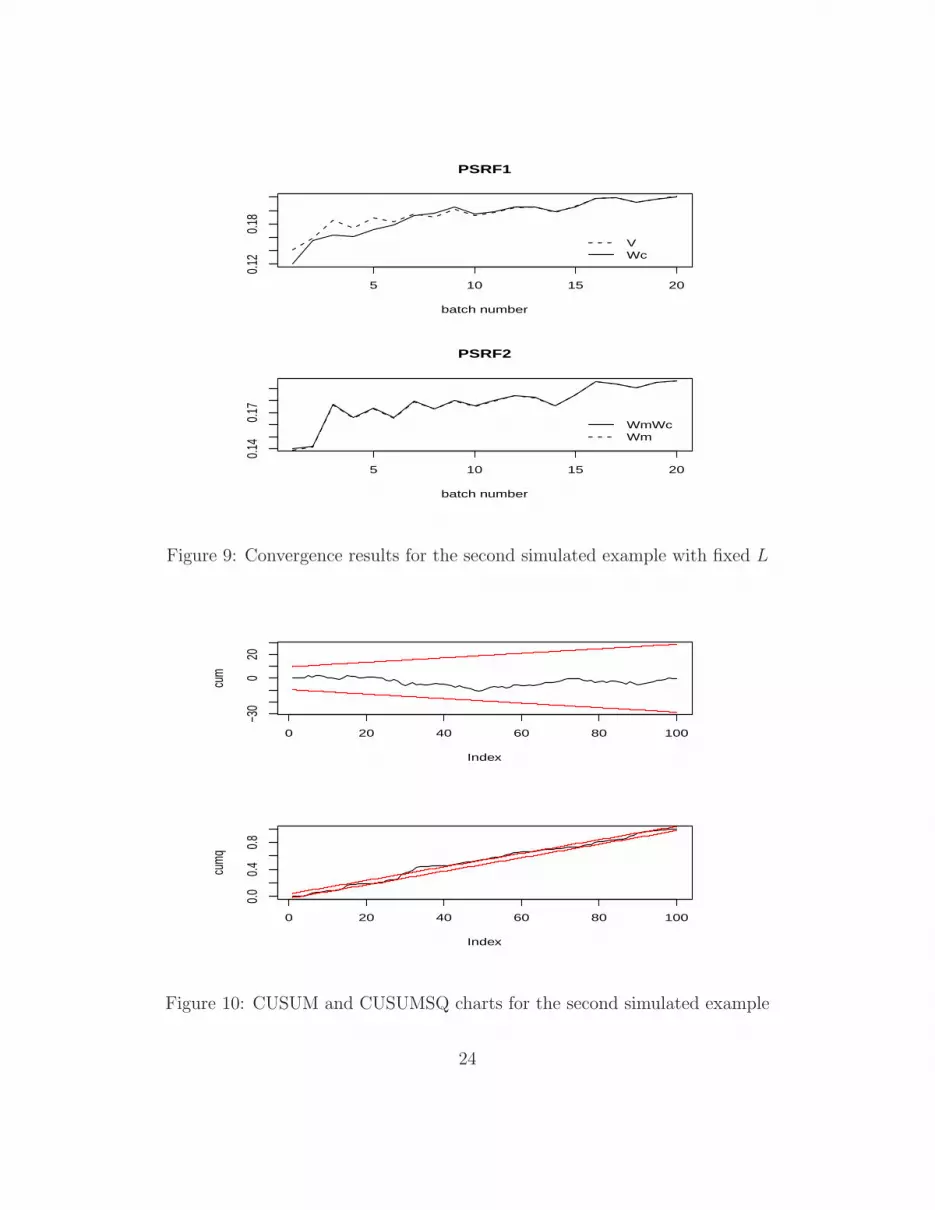
Figure 6: Convergence results for the second simulated example
distribution mode is l = 3. The chains convergence can be assessed in Figures 6 and 7.
Fixing l, there is also convergence of the chains as can be noted in Figures 8 and 9. The
posterior distributions for the autoregressive orders and the nonstructural parameters
are presented in Table 5. As we can see there, the identified autoregressive orders
were k1 = 2, k2 = 1 and k3 = 1 after using kmax = 3. The estimated nonstructural
parameters are presented in Table 6 with their 95% and 99% credible intervals and
we observe that all of the simulated values lie in their corresponding 95% and 99%
credible intervals. In Figure 10, we present the CUSUM and CUSUMSQ functions,
observing that only the last one has segments that, slightly, does not lie in the 95%
band. Overall, we have a good fitting of the TAR model to the simulated data.
22

5 10 15 20
0.14
0.20
PSRF1
batch number
VWc
5 10 15 20
−0.4
0.2
PSRF2
batch number
WmWcWm
Figure 7: Convergence results for the second simulated example
5 10 15 20
1.00
1.10
PSRF1
batch number
PSFR
1
5 10 15 20
0.990
0.996
PSRF2
batch number
PSFR
2
Figure 8: Convergence results for the second simulated example with fixed L
23
5 10 15 20
0.12
0.18
PSRF1
batch number
VWc
5 10 15 20
0.14
0.17
PSRF2
batch number
WmWcWm
Figure 9: Convergence results for the second simulated example with fixed L
0 20 40 60 80 100
−30
020
Index
cum
0 20 40 60 80 100
0.0
0.4
0.8
Index
cum
q
Figure 10: CUSUM and CUSUMSQ charts for the second simulated example
24

Number of regimes l Posterior probability
2 0.004
3 0.9544
4 0.0416
Table 4. Posterior probabilities for the number of regimes in the second simulated model
Regime
Autoregressive order k 1 2 3
0 0 0.0436 0.018
1 0 0.584 0.5464
2 0.5884 0.2684 0.3112
3 0.4116 0.104 0.1244
Table 5. Posterior probabilities for the autoregressive orders in the second simulated example
25

Regimej
Parameter 1 2 3
-0.41 0.62 -1.19
a(j)0 95% (-0.71, -0.05) 95% (0.1, 1.21) 95% (-2.01, -0.35)
99% (-0.82, 0.09) 99% (-0.01, 1.46) 99% (-2.36, 0.03)
0.60 0.37 -0.63
a(j)1 95% (0.45, 0.75) 95% (0.17, 0.58) 95% (-1.02, -0.25)
99% (0.33, 0.82) 99% (0.08, 0.64) 99% (-1.1, 0.01)
-0.72
a(j)2 95% (-0.85, -0.59)
99% (-0.92, -0.48)
1.17 1.92 2.66
h(j) 95% (0.95, 1.46) 95% (1.55, 2.39) 95% (2.12, 3.49)
99% (0.84, 1.68) 99% (1.5, 2.54) 99% (1.98, 4.00)
Table 6. Nonstructural parameter estimates in the second simulated example.
95% and 99% mean credible sets at those levels
5.2 An application in the hidrology/meteorology field
Nieto (2005) presented a real-data application for illustrating his methodology. The
time series considered were the daily rainfall (in mm.), as the threshold variable, and a
daily river flow (in m3/s), as the response variable, in a certain Colombian geograph-
ical region. The rainfall was measured at the San Rafael Lagoon’s meteorological
station, with an altitude of 3420 meters and geographical coordinates 2.23 north (lat-
itude) and 76.23 west (longitude). The flow corresponds to Bedon river, a small one
in hydrological terms, and was measured at the San Rafael Lagoon’s hydrological
station, with an altitude of 3300 meters and coordinates 2.19 north and 76.15 west.
26

These stations are located close to the earth equator and in a very dry geographi-
cal zone. This last characteristic permits to control for hydrological/meteorological
factors, which may distort the kind of dynamical relationship explained by the TAR
model. The data set corresponds to the sample period from January 1, 1992, up to
November 30, 2000 (3256 data), and it was assembled by IDEAM, the official Colom-
bian agency for hydrological and meteorological studies. In Figure 11 one can see
the two time series, where it can be noted the dynamical relationship between the
two variables, in the sense that the more the precipitation the more the river flow.
Additionally, one can see certain stable path in both variables although there are
bursts of large values. This fact is a major characteristic to be taken into account for
explaining the river flow dynamical behavior in terms of precipitation.
Here, we apply our proposed procedure to those real-data time series. We used,
as prior distributions for our interest parameter vector, analogous distributions to
those in the simulated examples above. For the number of regimes the parameter of
the truncated Poisson distribution was 3 and we put l0 = 4. For the autoregressive
orders we used truncated Poisson distributions with parameter 2 and put kmax = 3.
It is important to remark here that we obtained as thresholds the following potential
values: 6.0 mm for l = 2; 6.0 mm and 10.3 mm for l = 3; and 6.0 mm, 10.3 mm and
17.18mm for l = 4. These values were computed via the minimum NAIC criterion
(Tong, 1990), in the following way: we fixed a value for l and then we chose the
thresholds values for which the NAIC is minimum among the empirical quantiles of
the rainfall variable. In Table 7 we present the posterior distribution for the number
of regimes, finding that its mode is l = 4, contrary to Nieto’s (2005) result that
was l = 2. This finding is in accordance with the known fact that in that Colombian
geographical zone, there are two periods of rains and two periods of dry meteorological
conditions, which alternate trough the whole year in this way: first dry season from
middle December to middle March; first rain season from middle March to middle
27

July; second dry period from middle July to middle September and second rain season
from middle September to Middle December. Thus, there are four regimes of rains
in that geographical zone.
For this data set, we needed to set ε = 10, a very large quantity when it is
compared with the respective values for the simulated examples. And even so, we
must signal remarkably that with this large value, the posterior distribution for the
autoregressive orders in some regimes are almost degenerate (exactly degenerate in
the first regime). This fact signals some dependence of this parameter on the data set
at hand. In Table 8, we show the posterior distributions for the autoregressive orders
in each regime. Table 9 includes the estimates for the nonstructural parameters. In
this way, the fitted model is given by
Xt =
1.36 + 0.74Xt−1 − 0.27Xt−2 + 0.12Xt−3 + 1.3εt , Zt ≤ 6.0
1.89 + 0.76Xt−1 − 0.34Xt−2 + 0.13Xt−3 + 1.64εt , 6.0 < Zt ≤ 10.3
2.08 + 0.80Xt−1 − 0.31Xt−2 + 2.15εt , 10.3 < Zt ≤ 17.18
2.89 + 0.64Xt−1 − 0.41Xt−2 + 0.26Xt−3 + 3.17εt , 17.18 < Zt.
It is interesting to note that in each regime, (i) the flow river has an autoregressive
dynamic up to lag 3 and (ii) the numeric signs of the coefficients of lagged values of
the flow river are the same and, quantitatively, very close for the first two lags. In
approximate terms, this fact signals that the autoregressive dynamics of the flow river
is the same through the different regimes for the precipitation variable. This empirical
characteristic was also detected by Nieto’s (2005) TAR(2;1,1) model. Thus, at a first
sight, one might say that the influence of the regimes on the actual value of the flow
river is trough the model intercepts and the regime-based variability. However, model
interpretations other than the previous ones will be explained in more detail in the
next paragraph.
Using Nieto’s (2008) TAR model characteristics, we can derive from the fitted
28

model above the following important facts. First, working with the distribution of
Xt, the contribution of each regime to the mean of X at time t, which is computed as
µj,t,1 = [a(j)0 +h(j)]/φj(1), j = 1, ..., l0, is 6.49 m3/sec., 8 m3/sec., 10 m3/sec., and 10.90
m3/sec., for the first, second, and third regime, respectively. This is in agreement with
the fact that the more the precipitation the more the river flow. The same observation
holds for the regime-conditional variability of the river flow variable as measured by
1.32, 1.642, 2.152 and 3.172. Here, we note that the autoregressive polynomials in each
regime have their roots outside the unit circle. Notice also that these contributions
do not depend on t. Second, we also found that E(Xt|xt−1, ..., x1) = 1.67+0.75xt−1−0.3xt−2 + 0.12xt−3, where we have used p1 = 0.61, p2 = 0.20, p3 = 0.12 and p4 = 0.08
and that, in general,
E(Xt|xt−1, ..., x1) =4∑
j=1
pja(j)0 + (
4∑j=1
pja(j)1 )xt−1 + (
4∑j=1
pja(j)2 )xt−2 + (
4∑j=1
pja(j)3 )xt−3 .
The figures p1, p2, p3 and p4 indicate that it is more possible to have low-intensity
rainfall than either medium- or high-intensity rainfall, a result that agrees strongly
with the fact that the Colombian geographical region for which the analysis is per-
formed is very dry in the whole solar year. Third, the marginal mean of the river
flow is 7.63 m3/sec. for any day t, indicating that the mean function of the stochastic
process {Xt} is constant in the analyzed sample period, an empirical characteristic
observed in the data.
To check the convergence of the chain we look at Figures 12, 13, 14 and 15. In
Figure 16 we can observe the CUSUM and CUSUMSQ charts for the standarized
residuals, and they signal a reasonable model adequacy.
29

Time
Z
1992 1994 1996 1998 2000
020
4060
Time
X
1992 1994 1996 1998 2000
05
1015
20
Figure 11: (a) Precipitation. (b) Flow.
5 10 15 20
1.0
1.4
1.8
PSRF1
Q.cuenta
V/W
c
5 10 15 20
0.99
20.
996
1.00
0
PSRF2
Q.cuenta
Wm
/Wm
Wc
Figure 12: Convergence results for the hydrological/meteorological time series
30

5 10 15 20
0.00
20.
005
PSRF1
batch number
VWc
5 10 15 20
0.00
20.
004
PSRF2
batch number
WmWcWm
Figure 13: Convergence results for the hydrological/meteorological time series
Number of regimes l Posterior probability
2 0.000
3 0.0036
4 0.9964
Table 7. Posterior probabilities for the number of regimes in the precipitation/flow example
Regime
Autoregressive order k 1 2 3 4
0 0 0 0 0
1 0 0 0 0
2 0 0.106 0.5087 0.4207
3 1 0.894 0.4913 0.5793
Table 8. Posterior probabilities for the autoregressive orders in the hydrological/meteorological example
31

5 10 15 20
1.00
1.03
1.06
PSRF1
Q.cuenta
V/W
c
5 10 15 20
−1.5
0.0
1.0
PSRF2
Q.cuenta
Wm
/Wm
Wc
Figure 14: Convergence results for the hydrological/meteorological time series with
fixed L
32

5 10 15 20
0.00
400.
0055
PSRF1
batch number
VWc
5 10 15 20
−0.0
30.
00
PSRF2
batch number
WmWcWm
Figure 15: Convergence results for the hydrological/meteorological time series with
fixed L
33

0 500 1000 1500 2000 2500 3000
−150
010
0
Index
cum
0 500 1000 1500 2000 2500 3000
0.0
0.4
0.8
Index
cum
q
Figure 16: CUSUM and CUSUMSQ charts for the residuals of the hydrologi-
cal/meteorological TAR model
34

Regimej
Parameter 1 2 3 4
1.36 1.89 2.08 2.89
a(j)0 95% (1.24, 1.45) 95% (1.66, 2.14) 95% (1.69, 2.6) 95% (1.95, 3.68)
0.74 0.76 0.8 0.64
a(j)1 95% (0.71, 0.77) 95% (0.71, 0.82) 95% (0.72, 0.87) 95% (0.48, 0.78)
-0.27 -0.34 -0.31 -0.41
a(j)2 95% (-0.3, -0.24) 95% (-0.41, -0.24) 95% (-0.42, -0.17) 95% (-0.64, -0.23)
0.12 0.13 0.26
a(j)3 95% (0.09, 0.14) 95% (0.07,0.17) 95% (0.15, 0.41)
1.3 1.64 2.15 3.17
h(j) 95% (1.27, 1.33) 95% (1.59, 1.71) 95% (2.01, 2.25) 95% (2.94, 3.4)
Table 9. Nonstructural parameter estimates for the hidrological/meteorological time series.
95% mean credible sets at those levels.
5.3 An application in economy
Now, we apply our proposed procedure to a USA quarterly macroeconomic data set
in the sample period 1970:01-2004:02. These time series correspond to the seasonally-
adjusted Gross Domestic Product (GDP) growth rate as the output variable and the
spread between Three Years Constant Maturity Yield (R1) and 3 Months Treasury
Bill Discount Yield (R2) as the input variable. More exactly, we define the following
variables
Xt = [ln(GDPt)− ln(GDPT−4)]× 100%
and
Zt = R1t −R2t.
35

These variables were also used by Harvey (1997) in another econometric context. The
input variable Z and output X are not contemporary, because the non-linearity test
of Tsay (1998) shows strong non-linearity in X, with a delay d = 5 for the variable Z;
hence, we set Zt = Zt−5 in order to use our proposed methodology. In Figure 17 we
display the two X and Z variables and we can see there that, approximately, the more
the values of Z the less the values of X and viceversa and that the important fact of
extreme-values clusters in variable X, explained by a TAR model, is not so evident in
this case. However, given the strong nonlinearity of variable X, which is explained by
Z, it seems plausible to fit of a TAR model to these real-data time series. An exploring
fit indicated that the TAR model cannot explain the actual conditional variability of
X (i.e. σ2t|t−1); hence, we adjusted the original x-data with a GARCH(1,1) model in
order to help the TAR model to explain the remaining conditional heteroscedasticity.
This kind of transformation, previous to the TAR model fitting, was also used by
Nieto (2005) in the application of his methodology to the hidrological/meteorological
field.
The prior distributions used in this application are similar to the former applica-
tions, although the prior for (h−2t )(j) is Gam(0.3, 1.5), j = 1, 2. For the number of
regimes, the parameter of the truncated Poisson distribution was 3 and we put l0 = 4
[following Hoyos’s (2006) work]. For the autoregressive orders, we used truncated
Poisson distributions with parameter 2 and put kmax = 3. We obtained as thresholds
(numerical values in parenthesis) the quantiles 0.11 (0.16) for l = 2; 0.11 (0.16), 0.68
(1.6) for l = 3; and 0.11 (0.16), 0.40 (1.03) and 0.68 (1.6) for l = 4. The threshold
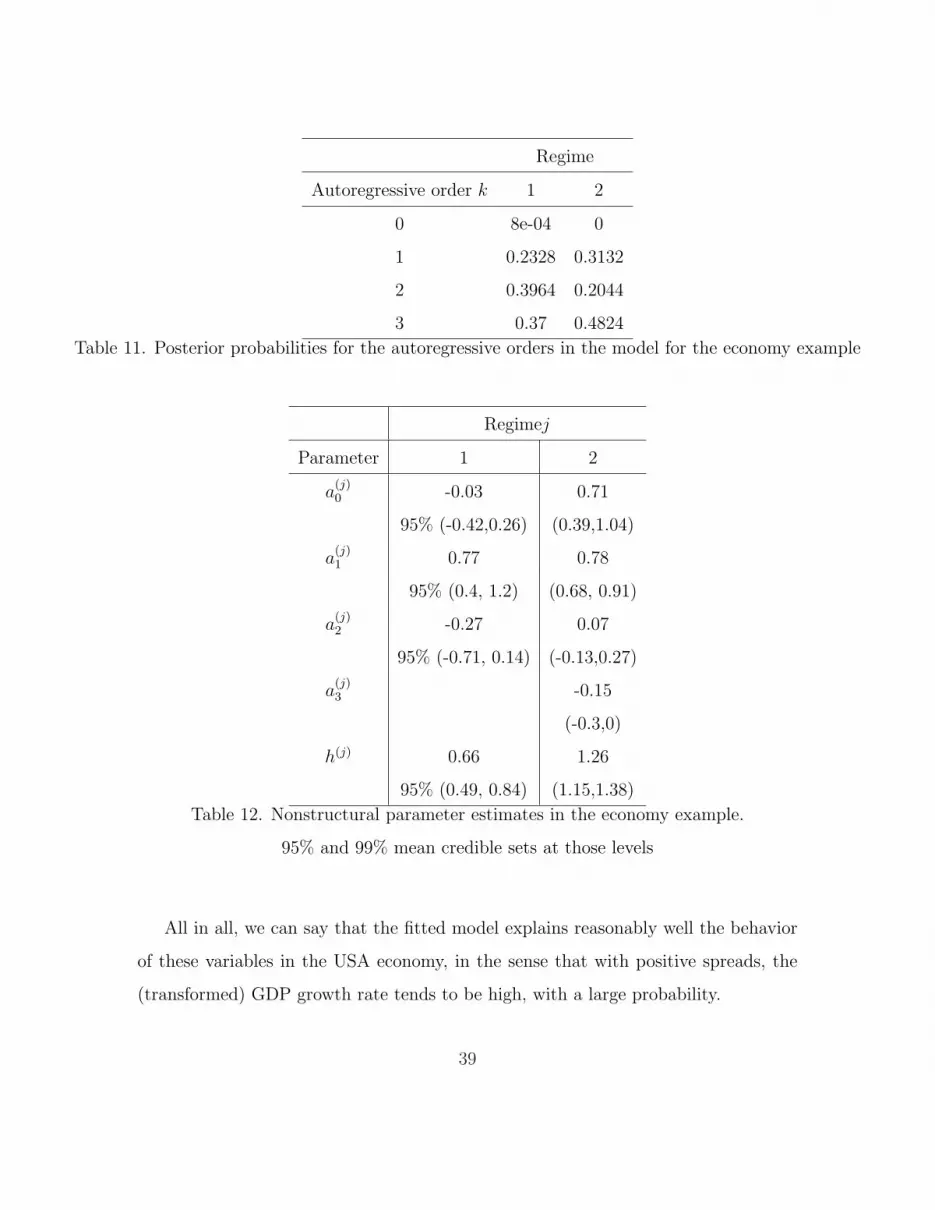
values were computed as in Example 3. The posterior distribution for the number
of regimes is presented in Table 10, the posterior distributions for the autoregressive
orders in Table 11, and the nonstructural parameter estimates are presented in Table
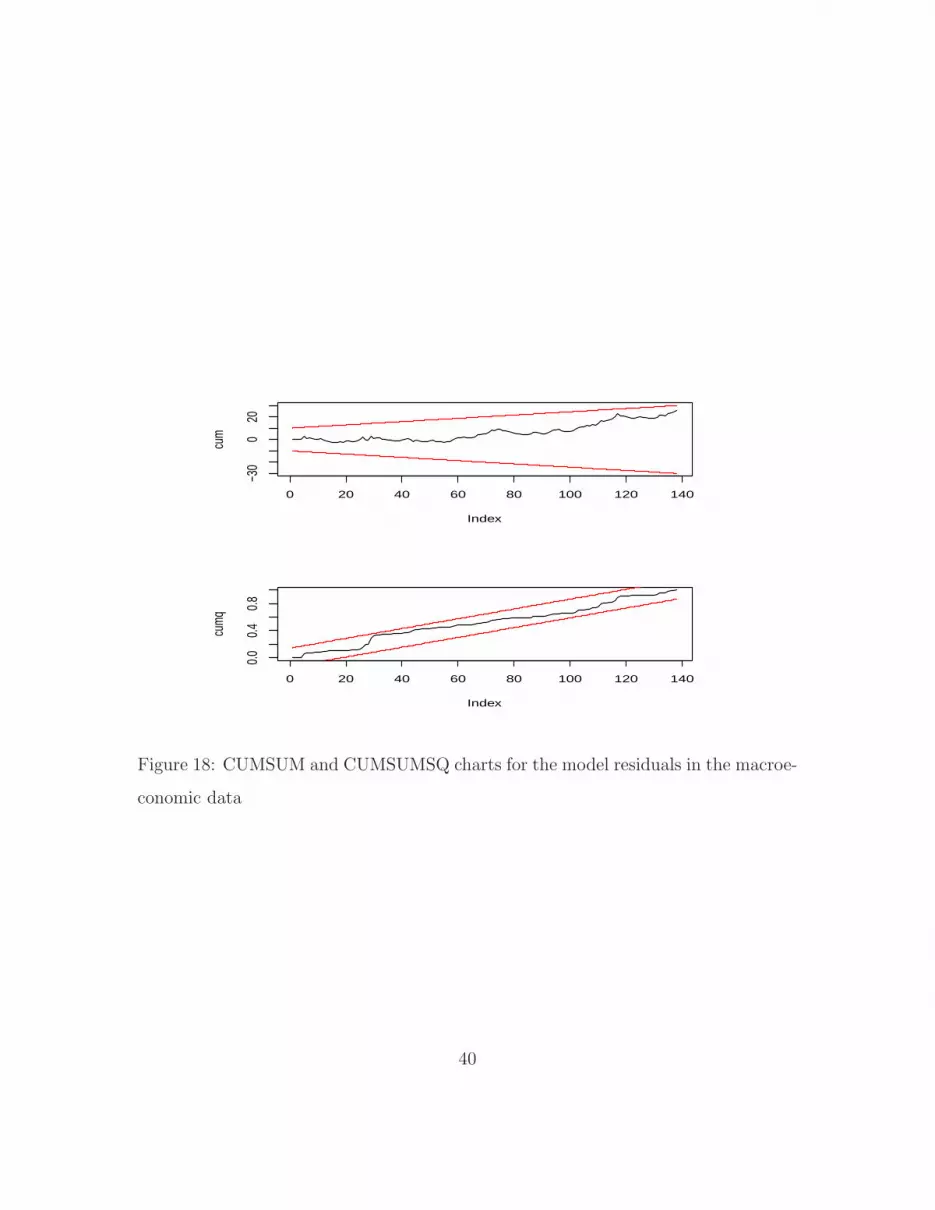
12. A rough verification of the model specification is presented in Figure 18, using
the CUSUM and CUSUMSQ charts for the standardized residuals. We observe there
36
that these charts signal an adequate fit of the model. To check the convergence of
the underlying Markov chain, we used the procedure suggested in Section 4 and the
graphs of the interest statistics are presented in Figure 19, 20, 21 and 22. We can see
there that the convergence of the chains are guaranteed.
According to the parameter estimates, we have obtained the TAR(2;2,3) model
given by
Xt =
−0.03∗ + 0.77Xt−1 − 0.27∗Xt−2 + 0.66εt , Zt ≤ 0.16
0.71 + 0.78Xt−1 + 0.07∗Xt−2 − 0.15Xt−3 + 1.26εt , 0.16 < Zt ,
where the symbol ∗ means that the parameter is not significant at the 5% level, in the
sense that its corresponding 95% credible interval contains the zero number. By no
means, we are implementing a classical statistical test. If desired, these parameters
could be restricted to be zero in another fit of the model. For now, we can see that
the estimated threshold is close to zero and, in this case, we can say that if the spread
is negative, the regime-based conditional variability is small and the autoregressive
response of the (seasonally-adjusted) GDP growth rate depends directly on the last
two quarters, practically without intercept. On the other hand, in the ”positive-
spread” regime, the regime-based conditional variability of the GDP growth rate is
large and the dynamic response of the interest variable depends on an intercept. More
implications of the presence or not of this parameter will be obtained below.
Since the autoregressive polynomial in each regime has its roots outside the unit
circle, we can compute the means in each regime, which are independent of t, ob-
taining 0.66% and 14.07% for the first and second regime, respectively. This can be
interpreted in the sense that if the spread is almost negative, the (transformed) GDP
growth rate is low, whereas if the spread is practically positive, the growth rate is high.
In this example, p1 = 0.12 and p2 = 0.88, indicating that is more probable to have
positive spreads, at least in the sample period analyzed. With these values, we found
37

Time
Z
1970 1975 1980 1985 1990 1995 2000 2005
−11
3
Time
X
1970 1975 1980 1985 1990 1995 2000 2005
−22
6
Figure 17: The USA macroeconomic time series.
that E(Xt) = 12.46% for all quarter t, signaling a stable marginal mean function
for GDP growth rate process. Note that this value is close to the ”positive-spread”
conditional mean, which is a relative high growth rate (in economy terms).
Number of regimes l Posterior probability
2 0.9964
3 0.0036
4 0
Table 10. Posterior probabilities for the number of regimes in the economy time series
38
Regime
Autoregressive order k 1 2
0 8e-04 0
1 0.2328 0.3132
2 0.3964 0.2044
3 0.37 0.4824
Table 11. Posterior probabilities for the autoregressive orders in the model for the economy example
Regimej
Parameter 1 2
a(j)0 -0.03 0.71
95% (-0.42,0.26) (0.39,1.04)
a(j)1 0.77 0.78
95% (0.4, 1.2) (0.68, 0.91)
a(j)2 -0.27 0.07
95% (-0.71, 0.14) (-0.13,0.27)
a(j)3 -0.15
(-0.3,0)
h(j) 0.66 1.26
95% (0.49, 0.84) (1.15,1.38)
Table 12. Nonstructural parameter estimates in the economy example.
95% and 99% mean credible sets at those levels
All in all, we can say that the fitted model explains reasonably well the behavior
of these variables in the USA economy, in the sense that with positive spreads, the
(transformed) GDP growth rate tends to be high, with a large probability.
39
0 20 40 60 80 100 120 140
−30
020
Index
cum
0 20 40 60 80 100 120 140
0.0
0.4
0.8
Index
cum
q
Figure 18: CUMSUM and CUMSUMSQ charts for the model residuals in the macroe-
conomic data
40

5 10 15 20
1.00
1.04
1.08
PSRF1
batch number
PSFR
1
5 10 15 20
−0.5
0.5
PSRF2
batch number
PSFR
2
Figure 19: Convergence plots for the Markov chain in the macroeconomic data
5 10 15 20
0.01
300.
0155
PSRF1
batch number
VWc
5 10 15 20
−0.0
40.
02
PSRF2
batch number
WmWcWm
Figure 20: Convergence plots for the Markov chain in the macroeconomic data
41

5 10 15 20
1.00
01.
010
1.02
0
PSRF1
batch number
PSFR
1
5 10 15 20
0.96
0.98
1.00
PSRF2
batch number
PSFR
2
e
Figure 21: Convergence plots for the Markov chain in the macroeconomic data with
fixed L
42

5 10 15 20
0.01
40.
018
PSRF1
batch number
VWc
5 10 15 20
0.01
40.
020
PSRF2
batch number
WmWcWm
Figure 22: Convergence plots for the Markov chain in the macroeconomic data with
fixed L
43

6 Conclusions
An RJMCMC-sampler based method has been developed for identifying and estimat-
ing a TAR model (except the thresholds), which constitutes an alternative to the
Gibbs-sampling based approach of Nieto (2005), avoiding to use the so-called link-
ing priors. Basically, the new procedure consists of two steps: in the first one, the
number of regimes is identified, using a sampler that takes into account the varying
dimension of the whole parameter space, when the chain moves from one state to
another. In the second, the identified number of regimes is fixed and, conditional
on it, the remaining model parameters are estimated, including the autoregressive
orders. The new 2-step sampler reaches quickly the stationary distribution of the
underlying Markov chain and offers adequate mixing for the number-of-regimes and
the nonstructural-parameters chains. This is verified via a variance-decomposition
heuristic tool, in the lines of the exploratory-data-analysis philosophy. Additionally,
the proposed method improves the previous 3-step Gibbs-sampling based method, in
the sense of (i) using only two steps and (ii) producing a better mixing for the number
of regimes.
It is important to remark here that, strictly speaking, the varying dimension of
the whole parameter space is due to a nested movement, i.e., first, the underlying
chain moves for changing the number of regimes and, then, it moves intrinsically for
changing the autoregressive order in a previously chosen regime. This nested move-
ment causes some degree of complexity for designing a global RJMCMC sampler, in
the sense of avoiding the 2-step procedure developed in this paper. This complexity
is reflected, at least, in a poor mixing for the autoregressive orders. In this last situa-
tion, additional research must be conducted for finding the sources of this low mixing
of the chain. Also, the design of an analytical procedure for checking the conver-
gence of the underlying chain, should be investigated in the future. Nevertheless, the
44

results obtained in the simulated examples and in the real-data applications, where
we obtained coherent interpretations of the fitted models, led one to claim that this
proposed sampler is very adequate for analyzing a TAR model.
References
Brooks, S.P. and Giudici, P. (2000). Markov Chain Monte Carlo Convergence As-
sessment via Two-Way Analysis of Variance, Journal of Computational and Graphical
Statistics, 9(2), 266-285.
Brooks, S.P. and Gelman, A. (1998). General Methods for Monitoring Convergence
of Iterative Simulations, 7(4), 434-455.
Campbell, E.P. (2004). Bayesian Selection of Threshold Autoregressive Models, Jour-
nal of Time Series Analysis, 25, 467-482.
Carlin, B.P. and Chib, S. (1995). Bayesian Model Choice via Markov Chain Monte-
carlo Methods, Journal of the Royal Statistical Society Series B, 57, 473-484.
Castelloe, J.M. and Zimmerman, D.L. (2002). Convergence Assesment for Reversible
Jump MCMC Samplers, Mimeo SAS Institute Inc..
Chen, M., Shao, Q., and Ibrahim, J.G. (2000). Monte carlo Methods in Bayesian
Computation, Springer-Verlag: New York.
Gelman, A. and Rubin, D.B. (1992). Inference from Iterative Simulation Using Mul-
tiple Sequences, Statistical Science, 7(4), 457-511.
Green, P.J. (1995). Reversible Jump Markov Chain Monte Carlo Computation and
45

Bayesian Model Determination, Biometrika, 82, 711-732.
Hoyos, N.M. (2006). Una aplicacion del modelo no lineal TAR en economıa, Master
in Statistics’s dissertation, Universidad Nacional de Colombia, Bogota.
Nieto, F.H. (2005). Modeling bivariate threshold autoregressive processes in the
pressence of missing data, Communications in Statistics: Theory and Methods, 34,
905-930.
Nieto, F.H. (2008). Forecasting with univariate TAR models, Statistical Methodology,
5, 263-276.
Vermaak, J., Andrieu, C., Doucet, A., and Godsill, S.J. (2004). Reversible jump
Markov chain Montecarlo strategies for Bayesian model selection in autoregressive
processes, Journal of Time Series Analysis, 25, 785-809.
Vrontos, I.D., Dellaportas, P. and Politis, D.N. (2000). Full Bayesian inference for
GARCH and EGARCH models, Journal of Business & Economic Statistics, 18, 187-
198.
46