topology-based denoising of chaos
TRANSCRIPT

PLEASE SCROLL DOWN FOR ARTICLE
This article was downloaded by: [Nath, Manju]On: 19 October 2009Access details: Access Details: [subscription number 916004326]Publisher Taylor & FrancisInforma Ltd Registered in England and Wales Registered Number: 1072954 Registered office: Mortimer House,37-41 Mortimer Street, London W1T 3JH, UK
Dynamical SystemsPublication details, including instructions for authors and subscription information:http://www.informaworld.com/smpp/title~content=t713414890
Topology-based denoising of chaosG. Manjunath a; S. Sivaji Ganesh bc; G. V. Anand d
a Systèmes Dynamiques INSA-DGEI, 31077 Toulouse, France b L'equipe d'analyse numérique, La MUSE,Université Jean Monnet, 42023 Saint-Etienne, France c Department of Mathematics, IIT Bombay, Mumbai400076, India d Department of Electrical Communication Engineering, Indian Institute of Science, Bangalore560012, India
First Published:December2009
To cite this Article Manjunath, G., Sivaji Ganesh, S. and Anand, G. V.(2009)'Topology-based denoising of chaos',DynamicalSystems,24:4,501 — 516To link to this Article: DOI: 10.1080/14689360903130521URL: http://dx.doi.org/10.1080/14689360903130521
Full terms and conditions of use: http://www.informaworld.com/terms-and-conditions-of-access.pdf
This article may be used for research, teaching and private study purposes. Any substantial orsystematic reproduction, re-distribution, re-selling, loan or sub-licensing, systematic supply ordistribution in any form to anyone is expressly forbidden.
The publisher does not give any warranty express or implied or make any representation that the contentswill be complete or accurate or up to date. The accuracy of any instructions, formulae and drug dosesshould be independently verified with primary sources. The publisher shall not be liable for any loss,actions, claims, proceedings, demand or costs or damages whatsoever or howsoever caused arising directlyor indirectly in connection with or arising out of the use of this material.

Dynamical SystemsVol. 24, No. 4, December 2009, 501–516
Topology-based denoising of chaos
G. Manjunatha*, S. Sivaji Ganeshbc and G.V. Anandd
aSystemes Dynamiques INSA-DGEI, 135 Avenue de Rangueil, 31077 Toulouse, France;bL’equipe d’analyse numerique, La MUSE, Universite Jean Monnet, 23 rue Paul Michelon,42023 Saint-Etienne, France; cDepartment of Mathematics, IIT Bombay, Mumbai 400076,India; dDepartment of Electrical Communication Engineering, Indian Institute of Science,
Bangalore 560012, India
(Received 16 August 2007; final version received 17 June 2009)
In this article, we propose a denoising algorithm to denoise a time seriesyi¼ xiþ ei, where {xi} is a time series obtained from a time-T map of a uniformlyhyperbolic or Anosov flow, and {ei} a uniformly bounded sequence ofindependent and identically distributed (i.i.d.) random variables. Making use ofobservations up to time n, we create an estimate of xi for i5n. We show undertypical limiting behaviours of the orbit and the recurrence properties of xi, theestimation error converges to zero as n tends to infinity with probability 1.
Keywords: hyperbolic flows; topological dynamics; denoising
AMS Subject Classifications: Primary 54H20; 37D05; 62M20; Secondary 37E35
1. Introduction
Chaotic dynamical systems arise in the studies of physical, chemical, mechanical,biological and electronic systems. Due to finite precision of the measuring device or anexternal interference, noise arises as an artefact in periodical measurements made fromcontinuous dynamical systems which are chaotic. ‘Denoising’ is then done to minimize the‘unwanted information’ or ‘artefacts’ from the observed data.
In a standard denoising problem involving chaotic systems, the observational noise ismodelled as an i.i.d. process. Representative work can be found in [1–6]. Previous resultson rigorous convergence (with number of observations) of the denoising error are due toLalley in [4], and the subsequent work by Lalley and Nobel in [7]. Hyperbolicdiffeomorphisms are denoised in [4] exploiting a notion of sensitive dependence on initialconditions (SDIC) called expansivity satisfied by these kind of maps. The results in [4]were slightly generalized in [7] to non-smooth maps which possess expansivity.
In this article, we observe that the algorithm in [4,7] fails to denoise non-expansivechaotic maps, in particular it fails for time-T maps of uniformly hyperbolic or Anosovflows. This drawback of algorithms in [4,7] has to be viewed in the context that hyperbolicsystems evolving in continuous time are more relevant to physical systems than discretetime. The objective of this article is to propose a modified algorithm to that in [4] todenoise typical orbits of time-T maps of Anosov flows.
Anosov flows (defined in Section 2) belong to the most well-studied class of flow andits theory in dynamical systems is classical. Anosov flows form an open subset in the
*Corresponding author. Email: [email protected]
ISSN 1468–9367 print/ISSN 1468–9375 online
! 2009 Taylor & FrancisDOI: 10.1080/14689360903130521http://www.informaworld.com
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

C1 topology of flows. The central example of Anosov flows is provided by a mechanicalsystem, namely free-particle motion (i.e. the geodesic flow) on a compact surface ofnegative curvature. In the context of denoising time-T maps in this article, it is noteworthythat time-T maps of hyperbolic flows are also examples of partially hyperbolic maps.
Roughly speaking, we consider the model for the observed data yi given by yi¼ xiþ ei,where xi is an orbit obtained from a time-T map of an Anosov flow, i.e. xi is a sequenceobtained by sampling a trajectory of an Anosov flow at equidistant time intervals oflength T, ei represents i.i.d. noise. Making use of observations up to time n, we create anestimate of xi for i5n. Making use of observations up to time n, we create an estimate of xifor i5n. We show under some limiting behaviours (called non-collapsibility) of the orbit(satisfied by typical orbits of time-Tmaps of Anosov flows) and recurrence properties of xithat the estimation error converges to zero as n tends to infinity with probability 1. This isthe main result of this article and is proved in Theorem 3.1. The proof of convergence inthis article differs mainly from that in [4,7] in the usage of a notion of non-collapsibility(defined in Section 2.1) and the local sensitivity property called intra-orbit separation(defined in Section 2.3). We state all our results in a general form since an assumption likenon-collapsibility is satisfied by systems other than time-T maps of Anosov flows [8].
This article is organized as follows. In Section 2, we obtain some topological propertiesof orbits of Anosov flows and local sensitivity properties of dense orbits of chaotic maps.We present our denoising algorithm in Section 3, discuss the inadequacy of Lalley’salgorithm to our problem, and give the proof of the convergence of our algorithm.
2. Background and preliminaries
A flow on a space X is a continuous map ’t :X#R!X such that ’tþs(x)¼ ’t(’s(x)) for allx2X and t, s2R.
Given a surjective map f :X!X, an orbit of x2X is a bi-infinite sequenceO(x)¼ {. . . , x$1, x0, x1, . . .} such that f (xn)¼ xnþ1 for n2Z. The set of all limit points ofthe forward orbit Oþ(x) :¼ {xn : n% 0} is represented by !(x, f ) and is referred to as the!-limit set of the point x or its orbit and for any given backward orbit, O$(x) :¼ {xn : n50}its limit set is referred to as its !-limit set. The n-fold composition of a map f with itself isdenoted by f n. All maps in this article are assumed to be continuous.
We begin by describing Anosov flows formally. We also bring out differences betweenAnosov flows and Anosov diffeomorphisms which are important in the context of thisarticle. SupposeM is a compact manifold, ’t :M!M is a flow. We say that ’t is uniformlyhyperbolic or an Anosov flow if for every x2M there is a D’t invariant splitting of thetangent space TxM¼Es(x)&E0(x)&Eu(x), where E0¼ span(’t) is the flow direction andthere are constants C40 and "2 (0, 1) such that for every t40 one has jD’t(v)j'C"tjvj forv2Es(x) and jD’$t(v)j'C"tjvj for v2Eu(x), j j is a Riemannian norm.
Next, suppose M is a compact manifold and f :M!M is a diffeomorphism. We saythat f is uniformly hyperbolic or an Anosov diffeomorphism if for every x2M there is a Dfinvariant splitting of the tangent space TxM¼Es(x)&Eu(x) and there are constants C40and "2 (0, 1) such that for every n2N one has jDf n(v)j'C"njvj for v2Es(x) andjDf$n(v)j'C"njvj for v2Eu(x).
It is important to note that given a T, the map ’T obtained from an Anosov flow ’t isnot an Anosov diffeomorphism: indeed, although we can decompose the tangent bundleTM¼Es&E0&Eu into three D’T-invariant subbundles, since ’T is an isometry along the
502 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

direction E0, ’T cannot be Anosov due to the presence of this ‘neutral’ (or central)direction. Henceforth, given a flow ’t, we adopt the notation that the symbol with a capitalsuperscript, for instance, ’T always denotes a map for some fixed T40.
As one may expect, there are other ‘dynamical’ differences between Anosovdiffeomorphisms and Anosov flows. One of the differences that is of relevance to us isin the nature of the SDIC. To illustrate the difference, we use the following setting.
Let ’t :X!X be a flow on a compact metric space. Given x2X and #40, to collectthe set of all points whose trajectories remain #-close to the trajectory {’t(x)} we define theset: NONSEP’(x, #)¼ {y2X : d(’t(x),’t(y))' # for all t2R}. Denote the complement ofNONSEP’(x, #) in X by SEP’(x, #). For an invertible self-map f on X, we make analogousdefinition of sets NONSEPf (x, #) and SEPf (x, #) by the iterates of the map f (Appendix).
We recall that an invertible map F :X!X on a metric space (X, d ) is said to beexpansive if there exists a $40 such that for every x2X we have NONSEPF (x, $) isa singleton and hence is the set {x}.
It is well known that Anosov diffeomorphisms are expansive maps. Expansivity notionfor maps does not have a straightforward extension to flows: for every flow ’t on acompact space and every $40, there always exists an x such that NONSEP’(x, $) is not asingleton (this follows by the continuity of the flow see (e.g. [9])). However, Anosov flowsdo exhibit expansiveness for points on different trajectories in the following sense.
Definition 2.1 (flow expansive e.g. [10,11]): A flow ’t on a metric space X is flowexpansive provided given any %40, there exists an $40 so that if x1, x22X satisfyd(’t(x1),’
&(t)(x2))' $ for all t for some continuous real valued map & with limt!(1&(t)¼(1, it follows that x2¼ ’s(x1) for some jsj' %. A real number $40 is called a flow-expansive constant if d(’t(x1),’
&(t)(x2))' $ for all t then x2¼ ’s(x1) for some s.
Owing to the above definition, for an Anosov flow there exists a $40 such that for anydistinct pair (x1, x2), x22NONSEP’(x1, $) implies x2¼’s(x1).
2.1. Non-collapsibility
We recall the following notion of distality (cf [12]) in topological dynamics: given acontinuous flow ’t on a compact space define a pair of points (x1, x2) to be forward distalif lim inft!1 d ð’tðx1Þ, ’tðx2ÞÞ40 or backward distal if lim inft!$1 d ð’tðx1Þ, ’tðx2ÞÞ40. Weobtain milder forms of these notions using time averages (and extend them to maps):
Definition 2.2: Let 05'' 1. (i) Given a flow ’t on a compact metric space, define a pairof points (x, z) to be a '-forward distal pair if lim inft!1 1
t'
Ð t0 dð’
rðxÞ, ’rðzÞÞdr40 and'-backward distal pair if lim inft!$1 1
t'
Ð t0dð’
rðxÞ, ’rðzÞÞdr40. (ii) Given a map f :X!X anddenoting (xiþ1, ziþ1)¼ ( f (xi), f (zi)), the pair (x0, z0) is said to be a '-forward distal pair iflim infn!1 1
n'P
0'i'n dð f iðx0Þ, f ið y0ÞÞ40 and '-backward distal pair if lim infn!$1 1n'P
$n'i'0 dð f iðx0Þ, f iðz0ÞÞ4 0.
Denote the diagonal of X#X by D :¼ {(x, y)2X#X : x¼ y}. Let f :X!X be asurjective map. If (x, z) is not a '-forward distal pair (under f ) then the orbit {(xi, zi)},loosely speaking, spends most of the time very close to the diagonal D. Hence such orbitsare not typical for a chaotic map f considering that a generic pair of points (x, z) havedense orbits in X#X (this is when f is weak mixing which means topological transitivity off# f; generic points of transitive maps have dense orbits). Given a #40, for any x, we are
Dynamical Systems 503
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

interested in finding those z such that ( f# f )n(x, z) for all n is trapped in the set{(x, y) : d(x, y)' #} also form a '-forward distal pair (or '-backward distal pair). When thishappens we give a special name to such x.
Definition 2.3: Let f :X!X be surjective, and x2X. An x2X is said to be #-non-collapsible if
(i) the set NONSEPf (x, #) has no element other than x, or(ii) if z2X is any element common to the two sets !(x, f ) and NONSEPf (x, #), and
z 6¼ x, then for some '2 (3/4, 1], the pair (x, z) is either a '-forward distal pair ora '-backward distal pair or both.
Clearly if x is a #-non-collapsible point, then every point on its orbit is also #-non-collapsible. This follows on noting that if (x, z) is a '-forward or '-backward distal pair,then so is the pair ( f (x), f (z)).
2.2. Time-T maps of Anosov flows and non-collapsibility
Recall that our interest is in denoising time-T maps of Anosov flows. Our aim now is toconnect the notion of non-collapsibility to time-T maps of Anosov flows. We show thatthere exists a #40 such that all typical points (x, z) such that z2NONSEPf (x, #) are #-non-collapsible whenever f is a time-T map of a Anosov flow.
For instance, it is obvious that if (x, z) is '1-forward distal pair, then it is a '2-forwarddistal pair for all '25'1. The next result shows that a pair of distinct points on a typicaltrajectory of a hyperbolic flow form a 1-forward or 1-backward distal pair. Here typicaltrajectories exist in abundance because of ergodic properties of Anosov flows (e.g. [10]).From now on, we denote the limit set of {’t(x) : t% 0} by !(x, ’) and the limit set of{’t(x) : t' 0} by !(x, ’). Also ( denotes the characteristic function, i.e. (A(x)¼ 1 if x2Aand 0 otherwise.
Proposition 2.1: Consider a hyperbolic flow ’t on a compact metric space X. Let {’t(x)} bea trajectory such that one of its limit sets is non-trivial in the sense that either !(x, ’) or!(x, ’) have a non-empty interior. Let x have a typical trajectory in the sense that eitherlim)!1
1)
Ð )0(Uð’
tðxÞÞdt40 for every non-empty open set U+!(x, ’) or lim)!11)
Ð 0$)(U#
ð’tðxÞÞdt40 for every non-empty open set U+ !(x, ’). Whenever z¼ ’s(x) ( for some s2R)and z 6¼ x then (x, z) is either a 1-forward distal pair or a 1-backward distal pair or both.
In proving Proposition 2.1 we use the following elementary property ofcontinuous maps.
Lemma 2.1: Let f be a continuous map on a compact metric space X and let P0 be thecollection of all fixed points of f. Suppose that X nP0 is non-empty. Then for every r40 thereexists an %(r)40 such that d(x,P0)4r implies d(x, f (x))4%.
Proof of Proposition 2.1: If (x, z) is a forward distal pair, then it follows that (x, z) isa 1-forward distal pair. So, we assume (x, z) is not a forward distal pair.
Consider the case where!(x, ’) is non-trivial. LetP(s) be the collection of periodic pointsof ’t whose periods have an integer multiple equal to s, i.e. if p is a period of a point in P(s),9 a k2N so that pk¼ s. We recall that there are finite number of periodic points for everygiven period for a hyperbolic flow on a compact space, and hence P(s) is finite. Choose *(r),a cover of P(s) containing balls of identical radius r40. Let r be sufficiently small enough so
504 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

that !(x, ’)n*(r) contains an open set U. We next consider the map ’s. By Lemma 2.1,corresponding to a r40 there exists an % such that if d(y,P0)4r then d(y,’s(y))4%. Thus’t(x)2U) d(’t(x),P0)4r) d(’t(x), ’tþs(x))4%. Hence lim)!1
1)
Ð )0(Uð’
tðxÞÞdt4 0implies lim inf)!1 1
)
Ð )0dð’
tðxÞ,’tðzÞÞdt40. Thus (x, z) is a 1-forward distal pair. By a similarproof if !(x, ’) is non-trivial, then (x, z) is a 1-backward distal pair. œ
The following arguments leads us to non-collapsibility of a pair of points (x, z) underthe map ’T, whenever z =2 {’t(x) : t2R}.
(P1) Suppose that lim inf)!1 1)
Ð )0dð’
tðxÞ, ’tðzÞÞdt40, then by definition of lim inf itfollows that lim infn!1 1
n
Pni¼0 dð’iTðxÞ, ’iTðzÞÞdt40, where ’T is the time-T map of
the flow ’t. Hence, if (x, z) is a 1-forward or backward distal pair under the flow ’t,then (x, z) is also a 1-forward or backward distal pair under the time-T map ’T.
(P2) Next, we recall a property of Anosov flows on a compact manifold which statesthat a map is expanding either in the forward or backward direction: given anAnosov flow ’t, with a flow-expansivity constant $ and a time-T map ’T there existsan "(T )41 such that z =2 {’t(x) : t2R}, and if d(x, z)5$, then either d(’T(x),’T(z))4"d(x, z) or d(’$T(x),’$T(z))4"d(x, z) (in fact " increases with T and T canbe increased to make "¼ 2 [9, Lemma 3.3 and Theorem 3.4]. Hence there alwaysexists an integer n such that d(’nT(x), ’nT(z))4$. Thus z =2NONSEP’T (x, $). ThereforeNONSEP’T (x, $)+ {’t(x) : t2R}. Hence we can draw the following conclusion using(P1) and Proposition 2.1: suppose ’t(x) is a typical trajectory in the sense ofProposition 2.1, then z2NONSEP’T (x, $) implies that (x, z) is a 1-forward or1-backward distal pair. Hence (x, z) is $-non-collapsible.
2.3. Intra-orbit separation
It is known that the time-T maps of Anosov flows are examples of strongly partiallyhyperbolic diffeomorphisms and these are topologically transitive (e.g. [10]). We recall thata map f :X!X is said to be topologically transitive (transitive in brief) if for any twonon-empty open subsets U,V of X, there exists an integer n% 0 such that f n(U) has at leastone element in common with V. The set of points having a dense orbit for a topologicallytransitive map on a compact space is residual in the space. All dense orbits which exhibitSDIC satisfy the intra-orbit separation property (for a proof see Proposition A.2) below:
Definition 2.4 (cf [13]): Let f :X!X be any map on a metric space (X, d ) and # be apositive real number. An orbit Oþ(x) of f is said to be a separating orbit with an instabilityconstant + if for every pair of distinct points xl, xj2Oþ(x), there exists an integer n% 0 suchthat d( f n(xl), f
n(xj))4+.
Inference. We draw inferences from the different results of this section. Since dense orbitsare generic behaviours of orbits of time-T maps, they are also separating orbits byProposition A.2. We use the notion of a separating orbit as a fundamental hypothesis inour denoising problem in Section 3. Further, for a separating orbit of the map ’T with aninstability constant + any real number in the interval (0, +) is also an instability constant.Furthermore, NONSEP’T (x, $1)+NONSEP’T (x, $2) whenever $14$2. Hence we can choose#'min($, +) ($ is the flow-expansive constant) so that NONSEP’T (x, #)+ {’t(x) : t2R andt 6¼ nT for every integer n}. Also, by (P2) above it follows that for every #' $, x is a#-non-collapsible point. Hence the hypothesis of a #-non-collapsible point and that of
Dynamical Systems 505
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

a separating orbit with an instability constant # is a feature of generic points of time-Tmaps of Anosov flows. We use these hypotheses in denoising problems without furthercomment in the remainder of this article.
3. Denoising
We assume the underlying space of our dynamical system is a subset of Euclidean space sincephysical examples of dynamical systems are found on Euclidean subspaces. This is relevantin the context of Anosov flows since by Nash’s embedding theorem every n-dimensionalRiemannian manifold can be isometrically embedded in some Euclidean space Rd. Furtherthe notion of expansiveness is carried over to all equivalent metrics, hence we assume thatsubsets of Rd are endowed with the subspace topology induced from the standard topology(induced by the Euclidean norm) of Rd. In the sequel j j denotes the Euclidean norm.
In what is to follow, we use the following model:O(x)¼ {. . . , x$2, x$1,x0, x1, x2, . . .} isa separating orbit of a continuous surjective map on a compact subspace K of Rd with aninstability constant #. Let yi be Rd-valued random variables given by
yi ¼ xi þ ei, i 2 Z, ð1Þ
where {ei} is a sequence of independent random variables on a probability space (!,B,P)having zero mean and identical variance. We assume that jeij5C where C ' #
4 for all i.Note that for each !2!, we get a time series {yi(!)}.
In the sequel, we adopt the following notations: if r is a positive real number, the symbolbrc denotes the largest integer less than or equal to r. For convenience we use the notation j jto denote the cardinality of a set in its argument in addition to representing the Euclideannorm. The inner product between two vectors u, v in Rd is denoted by u , v.
The reader should note that the algorithm is stated for orbits of non-invertible maps as well.
Denoising Algorithm
. Let k2N and k5n. For each l¼ 0, . . . , n$ k define the index set
Anðl, kÞ :¼nj : 0 ' j ' n$ k, max
i :jij'kj yjþi $ ylþij ' # $ 2C
o: ð2Þ
. For each j2An(l, k), define a sum of squares in a left window by
zj ðn, l, kÞ :¼X
$k'i'kj yjþi $ ylþij2: ð3Þ
. Fix !2 (0, 1) and let M ¼ minðbn!2 c, bjAnðl, kÞj
log jAnðl, kÞjcÞ:. Let j15j25, , ,5jM be a labelling of elements of An(l, k) satisfying:
zj1ðn, l, kÞ ' zj2ðn, l, kÞ ' , , , ' zjM ðn, l, kÞ:
. Define the set Bn(l, k) :¼ { j1, j2, . . . , jM}.
. If Bn(l, k) is non-empty then define the estimate of xl as
xl,n,k :¼ 1
jBnðl, kÞjX
j2Bnðl,kÞyj: ð4Þ
506 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

3.1. The motivation for extension of Lalley’s algorithm
In Lalley’s algorithm [4,7], the estimate of xl denoted by xl,n,k is defined to be xl,n,k :¼1
jAnðl, kÞjP
j2Anðl,kÞ yj, where xi is generated by an expansive map with an expansivity #. Bywriting yj¼xjþ ej in this estimate and using triangle inequality, we can easily arrive at
jxl $ xl,n,kj 'P
j2Anðl,kÞ jxl $ xj jjAnðl, kÞj
þjP
j2Anðl,kÞ ej jjAnðl, kÞj
: ð5Þ
(Pt1) When some recurrence properties on the point xl are assumed it is ensured that forevery given k, jAn(l, k)j tends to infinity as n increases (Lemma 3.1). When such agrowth of jAn(l, k)j occurs, Lalley shows by delicate arguments employing the lawof large numbers (e.g. [14]) that the second summation from the left in (5) for everygiven k tends to zero as n tends to infinity – a variant of this result is proven inLemma 3.5.
(Pt2) If j2An(l, k) then by triangle inequality we obtain d(xjþi, xlþi)' # for jij' k sincejeij5C. Hence s#(xl, xj) :¼min(jnj :¼ d( f n(xl), f
n(xj))4#)4k. Note henceforth, thatk!1 only if n!1, and hence whenever we refer to the limit k!1, it isimplicitly assumed that n!1. Thus s#(xl, xj)4k whenever j2An(l, k). Hence ifjn,k2An(l, k) then the limit set of the double-indexed sequence {xjn,k} as k!1belongs to NONSEPf (xl, #) (by Proposition A.1). Since for an expansive map,NONSEPf (xl, #)¼ {xl}, as k!1 we see that the LHS of (5) converges to zero. This isthe basis for convergence of Lalley’s algorithm for denoising expansive maps.
(Pt3) For non-expansive maps, since NONSEPf (xl, #) is not necessarily the set {xl}, theconvergence of the algorithm cannot be guaranteed. Using the non-collapsiblecondition and suitably changing Lalley’s approach we can achieve the convergenceof denoising error as explained next.
(Pt4) Suppose that mn,k2An(l, k) and jn,k2An(l, k) are such that xmn,k! z 6¼ xl and
xjn,k!xl as k!1. The convergence of the denoising error in (5) can be got if weomit indices of the type mn,k from An(l, k) while averaging – to do this we definea new index set Bn(l, k) as explained next.
(Pt5) Expanding 1k
P$k'i'k j yjn, kþi $ ylþij2 ¼ 1
k
P$k'i'k jxjn, kþi $ xlþij2þ 1
k
P$k'i'k -k,
where each *k involves at least one element belonging to the sequence {ei}. Thelimit of the second term as k increases is assured by some delicate applications oflaw of large numbers. Moreover, the limit is a function of variance and mean of therandom variables and notably does not depend on which sequence mn,k or jn,k ischosen from An(l, k) (see Step (i) of Lemma 3.4).
(Pt6) The key to convergence of the algorithm is in recognizing the dichotomy betweenthe asymptotic behaviours (as k!1) of 1
k
P$k'i'k jxjn, kþi $ xlþij2 and 1
k
P$k'i'k
jxmn, kþi $ xlþij2. By definition of jn,k it follows thatP$k'i'k
1k
P$k'i'k
jxjn, kþi $ xlþij2 tends to 0 as k!1, whereas by comparison, thanks to the non-collapsible condition, it can be shown that 1
k
P$k'i'k jxmn, kþi$ xlþij2 asymptotically
is a positive value. In view of (Pt5), for large n and k, the quantityP$k'i'k
jyjn,kþi$ ylþij2 will be smaller thanP$k'i'kjyjn,kþi$ ylþij2. The value
P$k'i'k
jyjn,kþi$ ylþij2 is indeed the one in (3) to determine indices of Bn(l, k) from An(l, k).The end effect is that as k increases, we tend to pick indices jn,k rather than mn,k
from An(l, k) while determining Bn(l, k). Since we use Bn(l, k) in determining ourestimate in (4), the denoising error can be expected to tend to zero as k!1.
Dynamical Systems 507
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

Let O(x)¼ {. . . , x$1, x0, x1, x2, . . .} be an orbit of a surjective map. The point x is said to be!-moderately recurrent if for any neighbourhood U of any xi2O(x),lim infn!1 1
n!Pn$1
i¼0 (Uð f iðxÞÞ4 1: This recurrence condition is mild since typical orbitsaccording to Birkhoff ’s ergodic theorem satisfy this property when the maps are ergodicwith respect to an invariant measure having full support.
Theorem 3.1: Let f be a surjective map on a compact subset of Rd. Let O(x)¼{. . . ,x$1, x0, x1,x2, . . .} be a non-periodic separating orbit with an instability constant #.Suppose that {ei} are i.i.d. random variables taking values in Rd defined on a probabilityspace (!,B,P) such that jeij5C5#/4 8i2Z, and have zero mean and identical variance.Let !2 (0, 1), yi and ei be as in Equation (1) and xl,n,k as in Equation (4). If xl2Oþ(x)is !-moderately recurrent and #-non-collapsible, then
limk!1
lim supn!1
jxl $ xl,n,kj ¼ 0 with probability 1:
3.2. Proof of Theorem 3.1
We define random sets Qn(l, k)+An(l, k) and En(l, k), Fn(l, k) subsets of Bn(l, k) by
Lemma 3.1: Let xl2Oþ(x) be an !-moderately recurrent point with !40 and "2 (0,!).We show that jQn(l, k)j4n! and jBn(l, k)j4n" for n sufficiently large independent of !2!.
Proof: There exists a neighbourhood Uk containing xl such that if xj2Uk thenjxl $ xj j ' #$4C
k . Also, by an application of triangle inequality, if jxl$ xjj' #$ 4C itfollows that j2An(l, k). Hence for each k40, if xj2Uk, j2Qn(l, k). By definition of
!-moderately recurrence, for n-sufficiently large, jQn(l, k)j4n!. From the definition of
Bn(l, k), we had jBnðl, kÞj ¼ minðbn!=2c, b jAnðl, kÞjlog jAnðl, kÞjcÞ. For any given %40, we have
bn!2 c4n!$% for sufficiently large n. We already have jAn(l, k)j4n! for n sufficiently large
since Qn(l, k)+An(l, k). Hence b jAnðl, kÞjlog jAnðl, kÞjc4 n!$% for n sufficiently large. Hence
jBn(l, k)j4min(n!$%, n!$%) for n sufficiently large. œ
Lemma 3.2: With the hypothesis on xl as in the statement of Theorem 3.1, let xl2Oþ(x).Then there exists a double sequence j 0n,k dependent on !2! such that: (i) For every fixed k,j 0n, k 2Qn(l, k)nBn(l, k) for sufficiently large n. (ii) For every fixed k, limn!1 j 0n,k¼1. (iii) Forevery fixed k, limn!1 jxl $ xj 0
n,kj ¼ 0.
Proof: Proof of (i). Fix !2!. By (i) of Lemma 3.1, nk :¼min{n : jQn(l, k)j4n!} is welldefined. Note that nk is non-decreasing in k and limk!1 nk ¼1. We now choose asequence (ki, nki) such that k1¼ 1, ki!1, nki!1 as i!1 and nki5nkiþ1. For each i,
Qnðl, kÞ :¼"j : j 2 Anðl, kÞ and jxlþi $ xjþij '
# $ 4C
kfor all$k ' i ' k
#: ð6Þ
Enðl, kÞ :¼$j : j 2 Bnðl, kÞ and jxj $ xlj ' # $ 4C
%: ð7Þ
Fnðl, kÞ :¼ Bnðl, kÞ n Enðl, kÞ: ð8Þ
508 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

define the set Si :¼Qnki(l, ki)nBn(l, k). By the choice of nki, the set Si has at least n!
2 þ 1elements since jBnðl, kÞj'bn
!
2 c.We now define the double-indexed sequence j 0n,k by defining the sequence { j 0n,k}n2N for
every fixed k. Let ki 0 be the smallest integer with the property ki 0% k. For k5n5nki 0, definej 0n,k to be any arbitrary admissible index, i.e. any index having values in 0, 1, . . . , n$ k (it doesnotmatter the way these indices are defined as our results are of asymptotic nature).We nowproceed to define j 0n,k for n2 [nki 0, nki 0þ1) by choosing an index from Si. Since Si 0 has at leastn!
2 þ1 elements and Bn(l, k) always has at most bn!/2c elements, we define j 0n,k to be anyelement belonging to the set Si 0nBn(l, k). SinceQn(l, k)+Qnþ1(l, k), we have j
0n,k 2Qn(l, k). In
a similar way by considering an appropriate index in the set Si 0þ1, we define j 0n,k forn2 [nki 0þ1, nki 0þ2) and so on. This completes the definition of j 0n,k for all admissible values of kand n. By this construction, the sequence j 0n,k satisfies (i) of the statement of the lemma.
Proof of (ii). In view of the construction of the sequence j 0n,k described above, it is enoughto prove that limi!1ti is infinity whenever ti2Si. Let {ti} be any such sequence. We provethat lim infi!1 ti is infinity. If it were finite, then it would follow that there exists an index,say i0, that belongs to Qnki(l, ki) for infinitely many i. Recalling the definition of the setQnki(l, ki), we obtain jxl$xti0 j¼ 0, a contradiction to the fact that Oþ(x) is not a periodicorbit. This proves (ii).
Proof of (iii). The assertion (iii) is a consequence of the definition of the indices { j 0n,k} andthe fact that Si.Qnki(l, ki) for every i. œ
Lemma 3.3: Given xl, suppose jn,k2An(l, k). Let L be an infinite subset of natural numbers,and for each k2L associate a sequence of natural numbers Fk. Assume that limk2L limn2Fk
xjn,k¼ v0 6¼ xl. For k2L, denote Gk :¼ lim infn2Fk
P$k'i'kjxjn,kþi$ xlþij2. If xl is #-non-
collapsible, then lim infk2LGk
k" 40 for some "2 (1/2, 1].
Proof: Given v0, let {vi} be any sequence that vi¼ f (vi$1) for every integer i. Since xl is#-non-collapsible, liminfk2L 1
k'Pjij'k jxlþi$ vij40 for some '2 (3/4, 1]. This implies at least
one of the following is true: liminfk2L 1k'P
05i'k jxlþi$ vij40 or liminfk2L 1k'P$k'i50
jxlþi$ vij40. Without loss of generality, let liminfk2L 1k'P
05i'k jxlþi$ vij¼ ,40. By
Cauchy–Schwartz inequality ðPk
i¼1 aibiÞ2' ð
Pki¼1 a
2i ÞðPk
i¼1b2i Þ. Taking ai¼ jxlþi$ vij and
bi¼ 1, we get ð 1k'P
1'i'k jxlþi$ vijÞ2' 1k2'$1
P1'i'k jxlþi$ vij2. Since '2 (3/4, 1], 2'$12ð12 ,1/,
liminfk2L 1k2'$1
P1'i'k jxlþi$ vij2% ,240. Thus for "2 (3/4, 2'$ 1), we have, liminfk2L 1
k"P1'i'k jxlþi$ vij2¼1.Let lim infk2L ai,k¼ bi, where {ai,k} is a bounded double sequence of numbers. A simple
consequence of lim infk2L 1k2"P
1'i'k bi ¼1 is that lim infk2L 1k2"P
1'i'k ai,k40. Lettingai,k¼ lim infn2Fk
jxjn,kþi$ xlþij2, and noting that bi¼P
1'i'k jvi$ xlþij2, the lemmafollows. œ
Lemma 3.4: With the hypothesis as in the statement of Theorem 3.1 consider any sequence{ jn, k}n,k with jn,k2Bn(l, k). For every k, let limn!1 jn,k¼1. Then
limk!1
lim supn!1
jxl $ xjn, k j ¼ 0 with probability 1: ð9Þ
Proof: Step (i). Fix any a2 (1/2, 1). Define three families of random variables indexedby natural numbers r, m and k as follows:
$g1ðr,m, kÞ ¼ ðkþ 1Þ$a
P$k'i'k erþi , emþi
where m 6¼ r%,$g2ðr,m, kÞ ¼ ðkþ 1Þ$a
P$k'i'k xrþi , emþi,
%and
$g3ðr,m, kÞ ¼ ðkþ 1Þ$aP
$k'i'k erþi , emþi where m ¼ r%. Consider the first collection of random variables
Dynamical Systems 509
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

g1(r,m, k). The collection is countable since it can be enumerated by having an injectivemap from the elements of the collection intoN2¼N#N. Since {(erþi)(emþi)}i'0 is a sequenceof independent bounded random variables for any r 6¼m, by Lemma A.1 (notations hereshould not be confused with those in Lemma A.1), with probability 1, the sequence ofrandom variables supr,m jg1(r,m, k)j! 0 as k!1. This is because by independence,E(er , em)¼E(er) ,E(em)¼ 0 when r 6¼m and the supremum can be taken since the upperbound on the probability of {jg1(r,m, k)j4%} is not dependent on r and m by Lemma A.1.Similarly, supr,mjg2(rk, mk, k)j! 0 with probability 1. With regard to the last collectionof random variables, consider the collection of random variables of the form{g3(r,m, k)$ g3(s, t, k)}. This collection is countable since it can be enumerated by havingan injective map from the collection intoN5. Thus, we can find a single set belonging to B onwhich, with probability 1 the sequences of the type supr,m jg1(r,m, k)j, supr,m jg2(r,m, k)j andsupr,m,s,t jg3(r,m, k)$ g3(s, t, k)j converge to 0 as k!1. Denote this set as U2B.
Step (ii). The hypothesis jn,k2Bn(l, k) means that for each !2! there is a sequencejn,k2Bn(l, k)(!). Note that as before we do not show explicitly the dependence of jn,k on !.To prove (9) is equivalent to showing that
lim supk!1
lim supn!1
jxl $ xjn, k j ¼ 0 with probability 1: ð10Þ
Suppose, if possible, that the equality in (10) does not hold with probability 1, i.e. thereexists a set G+U with P(G)40 on which lim supk!1 lim supn!1 jxl$ xjn,kj40. Using thefact that lim sup of a sequence is a limit point of the sequence, for each !2G we get aninfinite subset of natural numbers L and sequence of infinite subsets of natural numbers Fr
indexed by r2L such that
lim supk!1
lim supn!1
jxl $ xjn, k j ¼ limk2L
limn2Fk
jxl $ xjn, k j:
Further, the sets Fk and L can be chosen such that the following limits exist:qk :¼ limn2Fk
xjn, k and q :¼ limk2L qk: Thus, by our assumption, we have limk2L limn2Fk
jxl$ xjn,kj 6¼ 0 on G.By Proposition A.1, regardless of !2G the limit of the sequence {xjn,k}k2L where n2Fk
belongs to the set NONSEPf (xl)n{xl}. Owing to xl being a non-collapsible point, from
Lemma 3.3 we can fix a '2 (1/2, 1) (not dependent on !) for which lim infk2Llim infn2Fk wjn, k
k' 4 0, where wjn, k :¼P$k'i'k jxjn, kþi $ xlþij2. For this ', let
lim infk2Llim infn2Fk wjn, k
k' ¼ %.Step (iii). Now let zjn, k :¼
P$k'i'k j yjn, kþi $ ylþij2, wjn, k :¼
P$k'i'k jxjn, kþi $ xlþij2, and
ujn, k :¼P$k'i'k jejn, kþi $ elþij2 þ
P$k'i'k 2ðxjn, kþi $ xlþiÞ , ðejn, kþi $ elþiÞ. Also let zj 0
n,k, wj 0
n,k
and uj 0n,k
be the analogous expressions for xj 0n,k
where j 0n,k is as in Lemma 3.2. Note that foreach k, jn,k2Bn(l,k) and j 0n,k =2Bn(l, k) when n is sufficiently large. Hence by the definition ofBn(l, k) for any given !2G, for each k, we get the inequality zjn,k(!)' zj 0
n,k(!) when n(!) is
sufficiently large.
Step (iv). Claim: limk!1 lim infn!1ðujn,k $ uj 0
n,kÞ
ðkþ1Þ' ¼ 0 with probability 1.After expanding (ujn,k $ uj 0
n,k) we get subsequences obtained from the algebraic sum of
continuous functions of the form g1(rk, mk, k), g2(rk, mk, k) and g3(rk, mk, k)$ g3(sk, tk, k).Since, suprk,mk
jg1(rk,mk, k)j, suprk,mkjg2(rk,mk, k)j and suprk,mk,sk,tkjg3(rk,mk, k)$ g3(sk, tk, k)j
converge as k!1 with probability 1, we get limk!1 lim infn!1ðujn, k$uj 0n,k
Þ
ðkþ1Þ' ¼ 0 with
probability 1.
510 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

Step (v). Fix !2G such that limk!1 lim infn!1ðujn, k$uj 0n,k
Þ
ðkþ1Þ' ¼ 0. By expanding zjn,k and Zj 0n,k,
we get the expression,zjn, k$zj 0n,kðkþ1Þ' ¼
ðwjn, k$wj 0
n,kÞ
ðkþ1Þ' þðujn, k$uj 0n,k
Þ
ðkþ1Þ' :
From Lemma 3.2 we had lim infn!1 xj 0n,k¼xl for a given k. This implies for a given k,
lim infn!1wj 0n,k¼ 0. Thus we can write lim infn2Fk
zjn, k$zj 0n,kðkþ1Þ' % lim infn2Fk
wjn, k
ðkþ1Þ'þlim infn2Fk
ðujn, k$uj 0n,kÞ
ðkþ1Þ' :Owing to the claim in Step (iv), we can find k sufficiently large for which j lim infn2Fkðujn, k$uj 0n,k
Þ
ðkþ1Þ' j5%=2 and using the non-collapsible condition, we get lim infn2Fk
wjn, k
ðkþ1Þ' 4%=2 for k
sufficiently large. This implies for k sufficiently large, lim infn2Fk
zjn, k$zj 0n,kðkþ1Þ' 4 0. This means
for all k sufficiently large in L, except for a finite set of n2Fk, we have zjn,k(!)4zj 0n,k(!) with
k2L and n2Fk sufficiently large, j 0n,k 2Bn(l, k). This would then contradict the assumptionthat for a given k, j 0n,k =2Bn(l, k) for all n sufficiently large when !2G made in Step (iii) ofthis lemma. œ
The next result is about the convergence of the average random variables ei wheni2En(l, k) by an application of the law of large numbers in a rather subtle way. Our aim
here is to show that for a given k, P$limn!1
jP
j2En ðl,kÞej j
jEnðl, kÞj 6¼ 0%¼ 0 when the cardinality of
En(l, k) increases at a sufficiently good rate as n increases. Though {ei} is a sequence ofindependent random variables, the choice of ! will determine the indices in En(l, k) and oneindex in En(l, k) can influence the presence of the other index in En(l, k). Hence even whenjEn(l, k)j!1 as n!1, a direct application of the law of large numbers (Theorem A.1) isnot possible. However, with some delicacy we can still apply the law of large numbersusing conditional probability (e.g. [14]) in the following result. We have liberally borrowedideas from Lalley’s result [4, Lemma 4] in the following result whose proof is found inAppendix.
Lemma 3.5: For any given k and ) 2 (0, 1),
Pnlimn!1
jP
j2Enðl,kÞ ej jjEnðl, kÞj
6¼ 0
&&&&&jEnðl, kÞj % n)o¼ 0: ð11Þ
Proof of Theorem 3.1: Using triangle inequality in (4) and keeping in mindBn(l, k)¼En(l, k)[Fn(l, k), we can arrive at
jxl $ xl,n,kj 'P
j2Bnðl,kÞ jxl $ xj jjBnðl, kÞj
þjP
j2Enðl,kÞ ej jjBnðl, kÞj
þjP
j2Fnðl,kÞ ej jjBnðl, kÞj
: ð12Þ
To prove the theorem we consider the convergence of each term separately in theRHS of (12).
Since xl is !-moderately recurrent we have jBn(l, k)j!1 as n!1 for every k. As aconsequence, there exists a sequence of natural numbers rn,k satisfying the following threeproperties:
(i) rn,k5max{ j : j2Bn(l, k)},(ii) limn!1rn,k¼1 for each k.
(iii) For every k, #f j : j2Bnðl, kÞ and j'rn,kgjBnðl, kÞj ! 0 as n!1.
Dynamical Systems 511
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009
Now define tn,k :¼ any indexm2Bnðl,kÞ such that jxl$xmj¼maxð j2Bnðl,kÞ and j4rn,kÞjxl$xj j.
The first term on the RHS of (12) can be written as
Pj2Bnðl,kÞ jxl $ xj jjBnðl, kÞj
¼P
j2Bnðl,kÞ and j'rn,k jxl $ xj jjBnðl, kÞj
þP
j2Bnðl,kÞ and j4rn,kjxl $ xj j
jBnðl, kÞj,
'P
j2Bnðl,kÞ and j'rn,k jxl $ xj jjBnðl, kÞj
þ maxj2Bnðl,kÞ and j4rn,k
jxl $ xj j,
'P
j2Bnðl,kÞ and j'rn,k jxl $ xj jjBnðl, kÞj
þ jxl $ xtn, k j: ð13Þ
By property (iii) of rn,k, we have limn!1
Pj2Bn ðl,kÞ and j'rn,k
jxl$xj j
jBnðl, kÞj ¼ 0: Since limn!1 rn,k¼1,we have limn!1 tn,k¼1 for each k and hence tn,k satisfies the hypothesis of a sequence inBn(l, k) in Lemma 3.4. From Lemma 3.4 we have limk!1 lim supn!1 jxl$xtn,kj¼ 0 withprobability 1. Using these facts in (13),
limk!1
lim supn!1
Pj2Bnðl,kÞ jxl $ xj jjBnðl, kÞj
¼ 0 with probability 1: ð14Þ
The limits in (14) imply that for every %40, limk!1 lim supn!1
Pj2Bn ðl,kÞ
I$jxl$xj j'%
%
jBnðl, kÞj ¼ 1 and
limk!1 lim supn!1
Pj2Bn ðl,kÞ
I$jxl$xj j4 %
%
jBnðl, kÞj ¼ 0 with probability 1. Let %¼ #$ 4C and inter-
preting the limits we infer: there exists a K and N(k), such that for all k4K and n4N(k),&&&P
j2Bn ðl,kÞI$jxl$xj j'%
%
jBnðl, kÞj $ 1&&&5%. Since here
Pj2Bn(l,k) I{jxl$ xjj' %}¼ jEn(l, k)j, we can make
jEn(l, k)j approach jBn(l, k)j for large n and k as follows: from Lemma 3.1 we know that for
any given k and "2 (0,!), jBn(l, k)j4n" for n sufficiently large. Hence for all k4K, and
given any ) 2 (0, !), for all n sufficiently large, jEn(l, k)j4n). Now, using Lemma 3.5, we get
for all k4K, limn!1
&&Pj2En ðl,kÞ
ej
&&jBnðl, kÞj ¼ 0 with probability 1.
As already mentioned, limits in (14) imply that for any %40, limk!1 lim supn!1Pj2Bn ðl,kÞ
Ifjxl$xj j4 %gjBnðl, kÞj ¼ 0 with probability 1. Taking %¼ #$ 4C and since jeij is uniformly
bounded it follows that limk!1 lim supn!1
&&Pj2Fn ðl,kÞ
ej
&&jBnðl, kÞj ¼ 0 with probability 1: œ
Remark 3.1: Consider a model where yi¼xiþ si were to be considered where si is suchthat si¼ 0 for all negative i and si! 0 as i!1. This model is motivated by experimentalresults in the literature where xi is the ocean ambient noise and the ocean clutter which arefound to be chaotic (e.g. [8,15,16]), and si is a signal generated by the presence of movingtarget in the ocean. To denoise si the above denoising algorithm can be used (by replacingsi with ei) to obtain estimates of xi (equivalently that of si). Like the law of large numbersof ei the time averages of si converge to zero and hence it is not difficult to see that thealgorithm converges.
512 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009
3.3. Numerical results
For our simulations we obtain an orbit xi from the frictionless dynamics of the triple linkagemechanical system of Thurston and Weeks [17,18] which is proved to be Anosov on eachpositive energy level for an open set of parameter values in [17]. Mathematically speaking, ageodesic flow on a surface with negative curvature can be obtained from the system (see [17]for details). Solving the differential equations governing the motion of triple linkage systemnumerically yields a trajectory of a Anosov flow. We obtain an orbit xi from the time-1 mapof such a trajectory. To employ the data in our simulations we estimate an instabilityconstant of this orbit by estimating inf0'i'n supxj
d( f i(xj), xj)) (also see Proposition A.2).The estimated quantity of the instability constant # (in the Euclidean metric) from our xi isfound to be 0.93. Often, in a practical scenario only a noisy version of xi is available, i.e.yi¼ xiþ ei is available. An algorithm in [8] is presented for the estimation of an instabilityconstant of xi when yi alone is given along with C, where jeij5C.
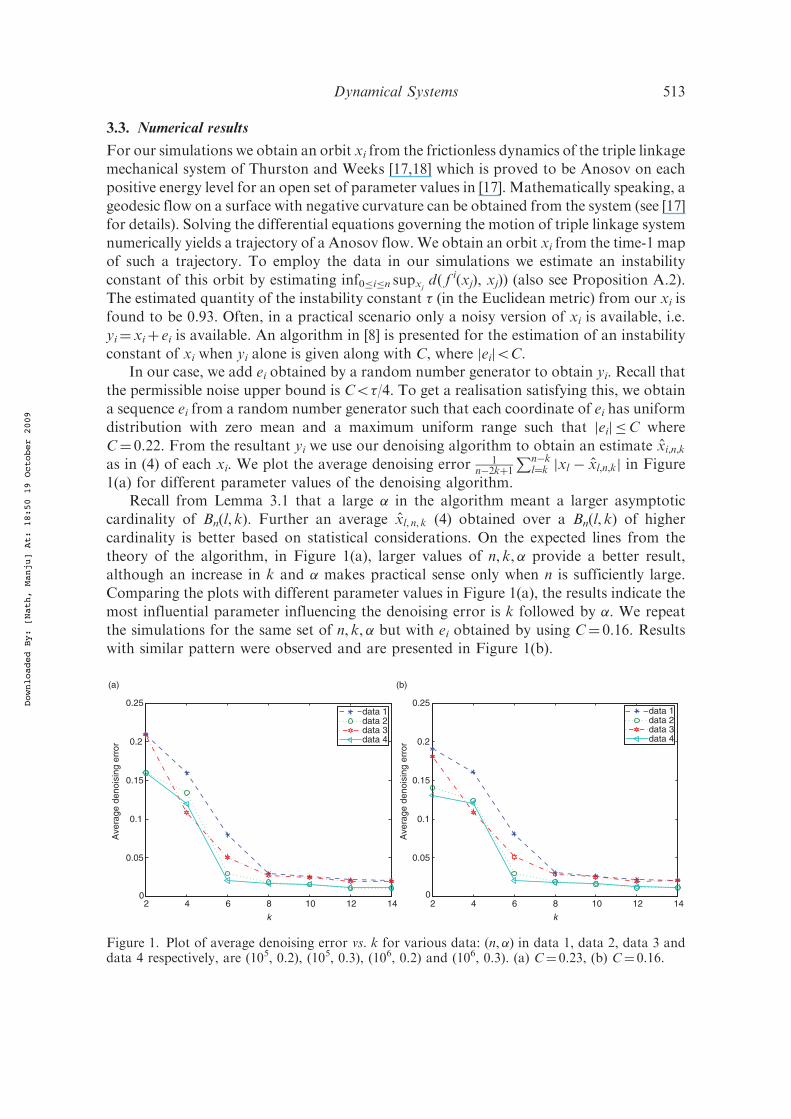
In our case, we add ei obtained by a random number generator to obtain yi. Recall thatthe permissible noise upper bound is C5#/4. To get a realisation satisfying this, we obtaina sequence ei from a random number generator such that each coordinate of ei has uniformdistribution with zero mean and a maximum uniform range such that jeij'C whereC¼ 0.22. From the resultant yi we use our denoising algorithm to obtain an estimate xi,n,kas in (4) of each xi. We plot the average denoising error 1
n$2kþ1Pn$k
l¼k jxl $ xl,n,kj in Figure1(a) for different parameter values of the denoising algorithm.
Recall from Lemma 3.1 that a large ! in the algorithm meant a larger asymptoticcardinality of Bn(l, k). Further an average xl, n, k (4) obtained over a Bn(l, k) of highercardinality is better based on statistical considerations. On the expected lines from thetheory of the algorithm, in Figure 1(a), larger values of n, k,! provide a better result,although an increase in k and ! makes practical sense only when n is sufficiently large.Comparing the plots with different parameter values in Figure 1(a), the results indicate themost influential parameter influencing the denoising error is k followed by !. We repeatthe simulations for the same set of n, k,! but with ei obtained by using C¼ 0.16. Resultswith similar pattern were observed and are presented in Figure 1(b).
2 4 6 8 10 12 140
0.05
0.1
0.15
0.2
0.25
k
Ave
rage
den
oisi
ng e
rror
data 1data 2data 3data 4
(a)
2 4 6 8 10 12 140
0.05
0.1
0.15
0.2
0.25
k
Ave
rage
den
oisi
ng e
rror
data 1data 2data 3data 4
(b)
Figure 1. Plot of average denoising error vs. k for various data: (n, !) in data 1, data 2, data 3 anddata 4 respectively, are (105, 0.2), (105, 0.3), (106, 0.2) and (106, 0.3). (a) C¼ 0.23, (b) C¼ 0.16.
Dynamical Systems 513
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009
4. Conclusions
We have developed the notions of non-collapsibility and local sensitivity properties toprove the convergence of a denoising algorithm of time-T maps of Anosov flows. Theresults are a non-trivial extension of convergence results of Lalley obtained for Anosovdiffeomorphisms.
Acknowledgements
The authors gratefully acknowledge suggestions of an anonymous referee on condensing the originalmanuscript and improving the exposition in this article.
References
[1] M. Davies, Noise reduction schemes for chaotic time series, Phys. D 79 (1994), pp. 174–192.[2] J.D. Farmer and J.J. Sidorowich, Predicting chaotic time series, Phys. Rev. Lett. 59(8) (1987),
pp. 845–848.[3] E. Kostelich and T. Schrieber, Noise reduction schemes for chaotic time-series data: A survey of
common methods, Phys. Rev. E 48 (1993), pp. 1752–1763.[4] S.P. Lalley, Beneath the Noise, Chaos, Ann. Stat. 27 (1999), pp. 461–479.[5] D. Nychka, S. Ellner, A.R. Gallant, and D. McCaffrey, Finding chaos in noisy systems,
J. R. Stat. Soc. B 54 (1992), pp. 399–426.[6] T. Sauer, A noise reduction method for signals from nonlinear systems, Phys. D 58 (1992),
pp. 193–201.[7] S.P. Lalley and A.B. Nobel, Denoising deterministic time series, Dynam. PDE 3 (2006),
pp. 259–279.[8] G. Manjunath, Two signal estimation problems in the presence of chaos, Ph.D. diss., ECE
Department, Indian Institute of Science, July 2005.[9] V. Norton and T. O’Brien, Anosov flows and expansiveness, Proc. Am. Math. Soc. 40(2) (1973),
pp. 625–628.[10] B. Hasselblatt, A. Katok, and B. Fiedler, Handbook of Dynamical systems, Vol. 1A, Elsevier,
Amsterdam, 1995.[11] C. Robinson, Dynamical Systems – Stability, Symbolic Dynamics and Chaos, CRC Press, Boca
Raton, 1995.[12] K. Petersen, Ergodic Theory, Cambridge University Press, Cambridge, England, 1983.[13] G. Manjunath, S. Sivaji Ganesh, and G.V. Anand, Intra-orbit separation of dense orbits of
chaotic maps of an interval, Aequationes Math. 72 (2006), pp. 89–99.[14] Y.S. Chow and H. Teicher, Probability Theory, Springer-Verlag, New York, 1988.[15] S. Haykin and X.B. Li, Detection of signals in chaos, Proc. IEEE 83(1) (1995), pp. 95–122.[16] T.W. Frison, H.D.I Abarnanel, J. Cembrola, and B. Neales, Chaos in ocean ambient noise,
J. Acoust. Soc. Am. 99 (1996), pp. 1527–1539.[17] T.J. Hunt and R.S. MacKay, Anosov parameter values for the triple linkage and a physical system
with a uniformly chaotic attractor, Nonlinearity 16 (2003), pp. 1499–1510.[18] W.P. Thurston and J.R. Weeks, The mathematics of three-dimensional manifolds, Sci. Am. 251
(1984), pp. 94–106.[19] R.L. Devaney, An Introduction to Chaotic Dynamical Systems, 2nd ed., Addison-Wesley,
Redwood City, 1989.[20] E. Glasner and B. Weiss, Sensitive dependence on initial conditions, Nonlinearity 6 (1993),
pp. 1067–1075.
514 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

Appendix: Definitions and proofs
Notations (in particular applicable for non-invertible maps): Given f :X!X, denoteNONSEPf (x, #)¼ {y2X : d( f n(x), f n( y))' # for all integers n} and SEP(x, #) its complement in X.For non-invertible maps, only non-negative integers are considered in these definitions.
Proposition A.1: Let (X, d ) be a compact metric space and f :X!X a continuous map. Let {xm} and{ym} be two sequences in X such that xm! x and ym! y as m!1 and xm2SEPf (ym, #) for every m.Denote s#(xm, ym) :min(jnj : d( f n(xm), f n(xm)) if f is invertible and otherwise s#(xm, ym) :min(n : d( f n(xm), f
n(xm)). If s#(xm, ym)!1 as m!1, then x2NONSEPf (y, #).
Proof: We prove that if x2SEPf (y, #), then the sequence of natural numbers {s#(xm, ym)} isbounded. By definition of x2SEPf (y, #), there exists a integer n such that d( f n(x), f n(y))4#. Let %40be such that d( f n(x), f n(y))¼ 2%þ #. By the uniform continuity of the map f n, there exists $n(%)40such that for all u, v2X, d(u, v)5$n, we have d( f n(u), f n(v))5%. By triangle inequality, we have
dð f nðxÞ, f nð yÞÞ ' dð f nðxÞ, f nðwÞÞ þ dð f nðwÞ, f nðzÞÞ þ dð f nðzÞ, f nð yÞÞ:
Thus it follows that d( f n(w), f n(z))4# for all w and z satisfying d(w, x)5$n and d(z, y)5$n,respectively. Hence s#(w, z)' n. Since xm!x and ym! y as m!1, it follows that there exists m0
such that s#(xm, ym)' n for m%m0. Let N1 be the maximum of the numbers s#(xm, ym), m¼1, 2, . . . ,m0. Then we have, s#(xm, ym)'max{n,N1}. œ
A map f :X!X is said to exhibit SDIC (e.g. [19]) or sensitivity (in brief ) if there exists aconstant $40 such that for every x2X and for any neighbourhood U of x there exists a y2U and an% 0 such that d( f n(x), f n( y))4$. Further, a map f :X!X is said to be uniformly rigid [20] if thesequence of maps f, f 2, . . . has identity map as a limit point in the uniform topology. In other words,infn%0 supx d( f n(x), x)¼ 0 . It is a result in [20] that on an infinite compact metric space if f istransitive and uniformly rigid then f cannot exhibit SDIC. Hence all such transitive maps whichexhibit SDIC (a feature of chaos) is not uniformly rigid. A consequence of this for the dense orbits ofsuch maps is the following.
Proposition A.2: Let f be a not uniformly rigid continuous self-map of a compact metric space (X, d )without isolated points and having a dense orbit. Let xj and xl be any two distinct points on the denseorbit. Then there exists a +( f )40 such that lim supn!1 d( f n(xj), f
n(xl))4+( f ). In particular, thereexists an n(xj, xl)% 0 such that d( f n(xj), f
n(xl))4+( f ).
Proof: Let xj and xl lie on a dense orbit. Without loss of generality let l4j. Define i :¼ l$ j.Owing to the map not exhibiting uniform rigidity, we can choose +( f ) such thatðinfn supx dð f nðxÞ, xÞÞÞ4+ð f Þ40. It follows from the compactness of X that the supremum in thepreceding inequality is achieved for every given n. Hence for every integer i40, there exists a pointpi2X such that d( pi, f
i( pi))% infnsupxd( fn(x),x)). Since x0 is a transitive point, given any i, there
exists a subsequence$f nm ðxj Þ
%1m¼1 which converges to pi as m!1. Clearly, by continuity of f,
we have
limm!1
f nm ðxl Þ ¼ limm!1
f nm ð f iðxj ÞÞ ¼ limm!1
f ið f nm ðxj ÞÞ ¼ f ið piÞ:
As a consequence, we have limm!1d( fnm(xl), f
i( f nm(xj)))¼ d( pi, fi( pi)). Since d( pi, f
i( pi))% infnsupxd( f
n(x), x))4+( f ), by the definition of limits, there exists a natural number M such thatd( f nm(xl), f
nm(xj))4+ for all m%M. This implies that lim supn!1 d( f n(xj), fn(xl))4+. œ
Definition A.1 [14]: Let {gi} be a sequence of real random variables defined on the same probabilityspace (!, B, P). Write Sn ¼
Pni¼1 gi. The sequence {gi} is said obey the strong law of large numbers if
there exists a sequence of real constants {an} such that limn!1ðSn
n $ anÞ ¼ 0 with probability 1.
Theorem A.1 [14]: Let {gi} be a sequence of independent real random variables defined on the sameprobability space (!,B,P). Write &2i for the variance of gi. Suppose that the series
P1i¼1 &
2i =i
2 isconvergent, then {gi} obeys the strong law of large numbers with an ¼ EðSnÞ=n ¼ ð1=nÞ
Pni¼1 Eð giÞ.
Theorem A.2 (McDiarmid): Let g1, . . . , gn be a sequence of independent random variables takingvalues in a set A+Rd and let h :An!Rd be any function. Represent !j
1 to denote the vector
Dynamical Systems 515
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009

(!1, . . . ,!j). For m¼ 1, . . . , n define vi ¼ sup jhð!n1Þ $ hð!i$1
1 , r,!niþ1Þj, where the supremum is over all
numbers !1, . . . ,!n, r2A. Then for every )40,
Pðfhð gn1Þ $ Eðhð gn1ÞÞ4 )gÞ ' exp
'$2)2Pni¼1 vi
2
(:
The following result is a straightforward application of Theorem A.2.
Lemma A.1: Let {gi} be a sequence of independent zero mean uniformly bounded real randomvariables defined on the same probability space (!, B, P). Write Sn ¼
Pni¼1 gi. If v is such that jgij5v
and '2 (1/2, 1), then for every )40,
(i)
P"jSnjn'
4 )
#' 2 exp
'$2)2nð2'$1Þ
4v2
(:
(ii) A consequence of (i) is limn!1Sn
n' ¼ 0 with probability 1.
Proof of Lemma 3.5: Fix k. With the notation that a0 b mod m meaning that ða$bÞm is an integer, wepartition the set En(l, k) by defining the following subsets: E-nðl, kÞ :¼
$j : j2Enðl, kÞ and jl$ j j'2k
%
and Einðl, kÞ :¼
$j : j2Enðl, kÞ n E-nðl, kÞ and j 0 imod 2kþ 1 where i2 ½1, 2kþ 1/
%: It can be easily
verified that En(l, k) is the union of the mutually disjoint sets E-nðl, kÞ [ ð[2kþ1i¼1 Einðl, kÞÞ:
To make use of a probability inequality like the McDiarmid’s inequality (Theorem A.2) we have
to arrive at a bound on the conditional probability P$ jP
j2Ein ðl,kÞej j
jEinðl, kÞj
% %jEinðl, kÞ
%and to do so there are
a few technicalities to be verified. We need to verify that an index in Einðl, kÞ does not influence the
presence or absence of another index in Einðl, kÞ and also that the values of ej and el do not influence
whether j2Einðl, kÞ or not. We now verify them. Consider the events j12Ei
nðl, kÞ and j22Einðl, kÞ, i.e.
respectively, the sets$! : j12Ei
nðl, kÞð!Þ%and
$! : j22Ei
nðl, kÞð!Þ%. If j1 6¼ j2, clearly these two events
are independent since when j1 and j2 are distinct indices belonging to the same set Einðl, kÞ, then
j j1$ j2j% 2kþ 1. Now, to apply the probability inequality it remains to be verified that the event
j2Einðl, kÞ is not dependent on the value of ej and el. It is to be noted that by definition of En(l, k)
given that j2An(l, k), since each jejj is bounded by C, the value of ej does not influence whether it
belongs to Einðl, kÞ or not. An index j2Ei
nðl, kÞ is not influenced by the values of ej and el for the
following reasons: (i) since Einðl, kÞ \ E-nðl, kÞ ¼ ;, j2Ei
nðl, kÞ ensures j j$ lj42k (ii) j j$ lj42k ensures
that ej and el do not influence whether j belongs to An(l, k) as well.Fix 05"5). Before we apply a probability inequality, define two index sets I1 and I2 as follows:
I1 consists of the special index * and the union of all those i2 [1, 2kþ 1] such that jEinðl, kÞj ' n"; I2
consists of those indices in i2 [1, 2kþ 1] such that jEinðl, kÞj4 n".
From the above definitions, we have jP
i2I1P
j2Einðl,kÞ ejj ' ð2kþ 1ÞðC Þn" þ ð4kþ 1ÞC: Let %40.
Since )4", for n sufficiently large, we have from the preceding inequalityjP
i2I1
Pj2Ein ðl,kÞ
ejj
n) 5 %.
Applying McDiarmid’s inequality to the functionjP
j2Ein ðl,kÞej j
jEinðl, kÞj
for i2I2 we have
P(jP
j2Einðl,kÞ ej j
jEinðl, kÞj
% %
&&&&&Einðl, kÞ
)
' 2 exp
'$2%2
jEinðl, kÞjð 4C2
jEinðl, kÞj2Þ
(' 2 exp
)$2%2 n"
4C2
*: ðA:1Þ
By definition of I1 and I2, we had
Pj2En ðl,kÞ
ej
jEnðl, kÞj ¼P
i2I1
Pj2Ein ðl,kÞ
ej
jEnðl, kÞj þP
i2I2
Pj2Ein ðl,kÞ
ej
jEnðl, kÞj : In view ofjP
i2I1
Pj2Ein ðl,kÞ
ejj
n) 5 %, for n sufficiently large, we have$ jP
j2En ðl,kÞej j
jEnðl, kÞj 4 2%%+S
i2I2$ jP
j2Ein ðl,kÞej j
jEnðl, kÞj 4 %%:
Using (A.1), we have P$ jP
j2En ðl,kÞej j
jEnðl, kÞj 4 2%&& jEnðl, kÞj % n)
%'P
i2I 2 P$ jP
j2Ein ðl,kÞej j
jEinðl, kÞj
% %jEinðl, kÞ
%'
ð2kþ 1Þ2 expð$2t2 n"4C2 Þ. Since the seriesP
n 2 exp+ $2t2 n"
4C2
,converges for all "40, the desired result
follows from the Borel–Cantelli lemma (e.g. [14]). œ
516 G. Manjunath et al.
Downloaded By: [Nath, Manju] At: 18:50 19 October 2009