théorie du navire vol. ii (résistance et propulsion)
TRANSCRIPT

THEORIE DU NAVIRE
VOLUME II
RESISTANCE ET PROPULSIONDES NAVIRES
Prof. Dr. Ir. Yasar Argun ISIN

THEORIE DU NAVIRE
VOLUME II
RESISTANCE ET PROPULSION DES NAVIRES
Par Prof. Dr. Ir. Yasar Argun ISIN

Prof. Dr. Ir. Yasar Argun ISIN
ii
Préambule
Le présent livre sur la "Résistance et Propulsion" constitue le deuxième volume de la "Théorie du Navire" et il est essentiellement destiné aux personnes intéressées par la construction navale et tout spécialement d'architecture navale qui regroupe succinctement les différentes notions et les grands principes du domaine.
Il est rédigé de manière à servir comme manuel de cours pour des étudiants des
facultés des sciences appliquées et des instituts polytechniques des universités, et ainsi que des écoles techniques supérieures d'ingénieurs.
Certaines notions reprises dans les chapitres sur la Résistance et la Propulsion,
nécessitent de la part du lecteur des connaissances approfondies acquises au cours de sa formation antérieure, notamment, des notions d'hydrodynamique, de mécanique et ainsi que quelques connaissances sur les moteurs à combustion interne (Diesel).
La nomenclature et les conversions des unités reprises en fin de l'ouvrage peuvent être
d'une grande utilité au lecteur pour suivre avec facilité les notions exposées, et de même que la bibliographie présentée lui permettra de les compléter et les approfondir s'il en éprouve le besoin.
Pour une meilleure compréhension et une plus grande facilité de lecture, nous
suggérons au lecteur de se familiariser, avant tout, avec les notions et termes se trouvant dans les différents chapitres du premier volume "Statique et Dynamique du Navire".
Bonne lecture………..
Kinshasa, le 16.12.2010
Yasar Argun ISIN Docteur en Sciences Appliquées Ingénieur Civil des Constructions Navales Océanologue.

Prof. Dr. Ir. Yasar Argun ISIN
iii
Table des Matières Section 1 RESISTANCE Chapitre I - Résistance à l'avancement
• Analyse dimensionnelle et la résistance à l’avancement • Décomposition de la résistance à l’avancement • Méthodes de détermination de la résistance à l’avancement
• Les méthodes statistiques • La méthode des modèles • La méthode analytique
Chapitre II - Estimation de la résistance à l’avancement • Notion de couche limite • La résistance de frottement
• Formule de Schoenherr • Formule de Hughes • Formule de Prandtl-Schlichting • Formule ITTC 57
• Effet de forme • Détermination du coefficient d’effet de forme
• Méthode du double modèle • Méthode des petites vitesses • Méthode des modèles géométriquement semblables • Méthodes empiriques
• La résistance résiduaire • Conséquences pour le tracé des carènes
• Aux faibles nombres de Reech-Froude • Aux grands nombres de Reech-Froude
Chapitre III - Détermination de la résistance de vagues
• La résistance d'appendices • La résistance de l'air • La résistance additionnelle
Chapitre IV - Augmentation de la résistance en eau limitée • Résistance en profondeur limitée • Résistance en section limitée
Section 2 PROPULSION ET PROPULSEURS Chapitre I - Propulsion
• Production d'énergie • Combustion externe • Combustion interne
• Moteur diesel • Description du moteur diesel • Performances du moteur diesel
• Turbine à gaz • Transmission d'énergie
• Réduction mécanique • Transmission électrique

Prof. Dr. Ir. Yasar Argun ISIN
iv
Chapitre II - Propulseurs marins • Propulseurs types
• L'hélice à pas fixe • L'hélice à pas variable • Le propulseur à axe vertical • L'hydrojet
• Hélice marine • Définitions et caractéristiques de l'hélice marine • Action de l'hélice marine • Lois de comparaison des hélices marines • Cavitation
Chapitre III - Interactions entre la coque et l'hélice • Le coefficient de recul • Le coefficient de sillage • Le coefficient de succion • Les rendements ou facteurs de la propulsion • Les rendements ou facteurs du système moteur-transmission • Les rendements ou facteurs de l'hélice • Les rendements ou facteurs de coque-hélice
Chapitre IV - Conception et sélection des hélices • Considérations générales • Sélection des hélices (séries méthodiques) • Conception théorique des hélices (méthodes analytiques)
Chapitre V - Compatibilité moteur-hélice
Annexes
• Annexe I • Résistance et puissance des trains de barges (convoi) • Remorqueur et la poussée au point fixe • Résistance à l'avancement par les séries statistiques
• Annexe II • Séries statistiques des hélices Wageningen B-Troost • Familles d'hélices – Diagrammes et caractéristiques
• Série Troost B • Série Gawn-Burrill • Série Troost B Tuyère
• Caractéristiques de l'hélice pour la poussée au point fixe Bibliographie - Références Nomenclature - Unités

Théorie du Navire II – Resistance et Propulsion des Navires I. 1Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Section I. Résistance
Une des étapes importantes de la conception du navire est la détermination de lapuissance et le choix du système de propulsion, adéquates qui doivent répondre aux exigencesde l'exploitation du navire (vitesse, consommation, rayon d'action, endurance, etc.). Le choix dela puissance et ainsi que du système de propulsion est étroitement lié aux performances dunavire et dépend des caractéristiques physiques du navire, tout particulièrement de sa vitesse etde ses dimensions et de son déplacement en charge.
Le choix de la puissance du système propulsif est basé sur le souci de vaincre larésistance à l'avancement du navire dans les conditions d'exploitation projetées. Le navire doitêtre équipé d'un système de propulsion formé, en général, d'une source d'énergie fournie par lescombustibles (fuel, gaz, nucléaire) à travers des moteurs à combustion interne, turbines à vapeurou à gaz et de propulseurs (hélices, water jet, roues à aubes, etc.).
La détermination de la résistance à l'avancement du navire constitue l'étapepréliminaire de la détermination de la puissance et donc de la puissance nécessaire, donc duchoix du système de propulsion qui doit équiper le navire.

Théorie du Navire II – Resistance et Propulsion des Navires I. 2Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre I - Résistance à l'avancement
Il est connu des mécaniques des fluides que le déplacement des corps dans un fluidesubit de la part du fluide une certaine résistance qui est, d'une manière générale, fonction de lavitesse de déplacement du corps et des caractéristiques tant du corps (forme et dimensions) quedu fluide (poids spécifique et viscosité).
Le navire usuel est un corps flottant qui évolue dans l'interstice de deux fluides àsavoir l'eau et l'air. De ce fait, au cours de son déplacement, il subit la résistance de ces deuxfluides, l'une appelée résistance hydrodynamique due à la présence de l'eau et l'autre appeléerésistance aérodynamique due à la présence de l'air. Ainsi, dans son mouvement les œuvresvives (carène immergée) du navire subit une résistance de la part de l'eau, tandis que ses œuvresmortes (superstructures et parties émergées) subissent une résistance de la part de l'air.
L'ensemble de ces deux résistances, sans tenir compte d'une éventuelle résistance dueà l'existence simultanée des deux fluides, constitue la résistance à l'avancement du navire.
C'est l'hydrodynamique navale qui étudie les effets des phénomènes de l'eau sur lescorps flottants ou immergés, donc à fortiori, elle étudie la résistance à l'avancement du navire(coques) composée de forces provenant de plusieurs phénomènes que l'on distingue dans l'étudemais dont les interactions sont intimement mêlées.
L’hydrodynamique navale, science du mouvement des navires, est une scienceancienne. Au 18ème siècle, période où elle passa de l’empirisme à la modélisation, elle fut, avecla mécanique céleste, l’un des principaux moteurs du progrès scientifique. C’est à cette mêmeépoque que l’appellation hydrodynamique fit son apparition.
Pourtant, depuis la fin du siècle dernier, et pendant des décennies, l’hydrodynamiquenavale est restée une science essentiellement expérimentale, tant par la complexité que parl’imbrication des phénomènes physiques qui s’opposaient à l’établissement de solutionsanalytiques réellement utiles que par l’absence de théorie initiale.
Pour pouvoir optimiser l’ensemble complexe que constitue le navire, il est doncnécessaire de connaître avec une grande précision les actions qu’il subit de la part de l’eau.Naturellement cela est affaire d’espèce : le bâtiment idéal n’existe pas, chaque navire soulève uncertain nombre de problèmes spécifiques qui tiennent à ses dimensions, à son utilisation, à savitesse, au prix qu’on peut consentir pour le construire et pour l’entretenir. Mais avant mêmeces différences, ce qui frappe tout d’abord, c’est l’existence d’un comportement commun à tousles navires, quel que soit leur type : leur résistance à l’avancement procède des mêmes causes,leur comportement à la houle est similaire sinon identique…
Le navire comme entité est une réalité qu’il faut d’abord découvrir avant de se livrer àdes applications particulières; c’est là l’objet de la dynamique du navire.
En fait, l’hydrodynamique navale est l’application des éléments de la mécanique desfluides, réduite essentiellement aux liquides, autour d’un obstacle à l’écoulement, qui est lenavire, et traite des sujets suivants sans que cette liste soit exhaustive :
- la résistance à l’avancement du navire, des sous-marins, des plates-formesoff-shore ;
- la propulsion et ses différents modes ;- la théorie de l’hélice marine ;- la cavitation ;- la théorie de l’aile portante…. ;- la tenue à la mer des bâtiments de mer ;- la manoeuvrabilité ;- les bulbes, les appendices,…

Théorie du Navire II – Resistance et Propulsion des Navires I. 3Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Au cours des siècles, les connaissances théoriques sur les origines de la résistancefaisant alors à peu près complètement défaut, on entreprit des études expérimentales enremorquant sur des bassins existants des modèles réduits très schématiques. L'évolution, sanscesse croissante vers des navires plus performants, a conduit aux études et essais sur modèles envue de réduction de résistance à l’avancement.
Afin que les essais de modèles puissent entrer dans le domaine des applicationspratiques, la reconnaissance théorique et pratique des causes de la résistance à la marche n’étaitpas suffisante. Cela nécessitait d’expliciter leurs lois de similitude. (Voir les travaux de Reech etFroude).
Analyse dimensionnelle et la résistance à l’avancement
La résistance à l’avancement, plus connue sous le vocable de résistance totale,correspond à la résistance à l’avancement d’une carène nue (sans appendices). Elle dépendprincipalement des grandeurs comme: vitesse V, dimension L (longueur de l'aire de flottaison)et coefficient q de l'état de rugosité moyenne de la carène et des caractéristiques physiques dumilieu: l'accélération g de la pesanteur, les masses volumiques respectives et a de l'eau et del'air, les viscosités cinématiques respectives et a de l'eau et de l'air, la tension superficielle àl'interface air-eau, la pression atmosphérique pa et la pression pv de vapeur d'eau.
En utilisant l'analyse dimensionnelle, la résistance à l’avancement RT d'une carène, enfonction de ces paramètres, s'écrit:
),V,L,p,p,,,,,,gF(R vaaaT
Soit en prenant comme paramètres fondamentaux ρ, L, V on obtient:
)L/).(
V
p).(
V
p).(
L/
V).(
VL).().(
VL).(
gL
V(k
LV
R2
v2
a
a
a2
T
En faisant abstraction des paramètres comme pression et tension superficielle eau-air,du fait que:
- En l’absence de cavitation, les deux paramètres de pression qui interviennent sous forme d’unindice de cavitation (pa-pv)/(1/2.V2), ne jouent aucun rôle.
- Si le modèle n’est pas trop petit, le paramètre de similitude )L//V( dit "nombre deWeber" n’intervient pas car les vagues produites par la carène ont une longueur d’ondesuffisante (dans le cas d’une houle sinusoïdale, l’influence de la tension superficielle àl'interface air-eau est négligeable si la longueur d’onde est supérieure à 5 cm).
On obtient trois groupes de résistance, fonction de 5 paramètres, correspondant à unecause particulière de résistance à la marche:
- La gravité, reflétée par le paramètre de similitude )/Vr
F( gL dit "nombre de
Reech-Froude" responsable de la création d’un champ de vague par la carène qui nepeut être entretenu que par une dépense d’énergie;
- La viscosité de l’eau, reflétée par le paramètre de similitude (VL/) dit "nombre deReynolds" et la rugosité de la carène (/L), à l’origine du développement de la couchelimite le long de la carène, couche limite qui se traduit par l’existence de cisaillementde l’écoulement qui modifie le champ de pression ;
- La viscosité de l’air, qui a un effet analogue sur les œuvres mortes et reflétée par lenombre de Reynolds (VL/a), auquel doit être adjoint le rapport (a/) qui intervientuniquement parce que les forces aérodynamiques sont rapportées à de l'eau et non àa de l'air.
Note:

Théorie du Navire II – Resistance et Propulsion des Navires I. 4Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Pour une carène lisse évoluant dans une eau calme et en absence du vent, en considérant que larésistance de l'air (aérodynamique) est négligeable vis-à-vis de la résistance hydrodynamique, larésistance à l'avancement RT s'écrit:
)
L.V).(
L.g
V(k
2V.L.
R T
Par convention, on appelle coefficient de résistance, le nombre sans dimension:2
V.S..2/1
RC
TT
où, en général, S représente la surface mouillée de la carène. Lequel coefficient est parfoisexprimé par de (RT/Δ) où Δest le déplacement du navire. Le rapport (RT/Δ) est communémentappelé résistance spécifique (Δ=ρ.g.où est le volume de carène).
L.g
2V
.2
V.2
L.
R.
1000
)10/3
L.(.g.
RR TTT
Où on retrouve le coefficient de résistance sans dimension et le nombre de Froude au carré, etainsi que le coefficient de finesse de la carène (=1000./L3) qui est le même pour le modèle etle navire réel.
L'expression du coefficient de résistance est équivalente à: )eR,rF(FCT où apparaissent lesdeux paramètres de similitude essentiels précités de l'hydrodynamique, le nombre de Froude (Fr)qui, au sein du fluide marque l’influence respective des effets d’inertie et des effets de gravité etqui détermine les caractéristiques du champ de vagues de la carène et le nombre de Reynolds(Re) qui traduit classiquement le rapport des effets d’inertie et des effets visqueux dans lemouvement du fluide. Il caractérise la couche limite sur la carène et donc le frottement.
Décomposition de la résistance à l’avancement
La résistance à l'avancement de la carène nue et lisse, dans sa plus simple expression,se compose de trois composantes principales (Fig. I.1):
▫ RF "résistance de frottement" ou "résistance visqueuse", fonction de Re et de larugosité relative /L de la coque, due au mouvement de la coque dans un fluidevisqueux;
▫ RR "résistance résiduaire" composée de RW "résistance de vague", fonction de Fr,due à l'énergie que le navire doit fournir au système de vagues qu'il engendre sur lasurface de l'eau au cours de son mouvement et de RTB "résistance tourbillonnaire"due à la formation des tourbillons aux changements de forme de la carène;
▫ La somme des résistances RF (résistance de frottement ou résistance visqueuse) et RR
(résistance résiduaire), en eau calme et en absence des appendices, constitue la"résistance hydrodynamique " RH de la carène;
▫ RAir "résistance de l'air" ou "résistance aérodynamique" due au mouvement dunavire, plus précisément, de ses œuvres vives émergées et de ses superstructures, dansl'air.
Dans le cas de la carène de navire il y a lieu d'ajouter à ces trois composantesprincipales, deux autres composantes, notamment:
▫ RApp "résistance des appendices" due à la présence des appendices de la coque(gouvernail, ailerons stabilisateurs, quille antiroulis, etc.), qui engendrent tant de larésistance de frottement que de la résistance tourbillonnaire.
▫ RAdd "résistance additionnelle" due à l'état de mer (effets des vagues).

Théorie du Navire II – Resistance et Propulsion des Navires I. 5Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. I.1)
La résistance totale à l'avancement d'un navire est ainsi donnée par l'expression:
AddAppAirTBWFT RRRRRRR
Où encore, en y remplaçant RW + RTB = RR, on écrit:
AddAppAirRFT RRRRRR
La résistance à l'avancement en eau calme d'une coque nue (sans appendices) à unevitesse donné est définie en tant que la force nécessaire pour remorquer la coque à cette vitessedonnée, en absence de toute interférence du système de remorquage utilisé. En négligeant larésistance de l'air, elle est donnée par l'expression:
RFT RRR
Une décomposition complète de la résistance totale à l'avancement d'une coque nue estdonnée par le schéma de la figure I.2.
(Fig. I.2)

Théorie du Navire II – Resistance et Propulsion des Navires I. 6Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Méthodes de détermination de la résistance à l’avancement
Actuellement, il existe différentes méthodes pour déterminer la résistance àl’avancement de chaque projet de navire. Ces méthodes peuvent être en trois catégories:
▫Les méthodes statistiquesLes expériences menées depuis le 18ème siècle ont permis de conserver les résultats
des divers essais sous forme d’abaque, de série. Elles sont publiées pour différents nombres deFroude et correspondent à des formes à peu près semblables à celle de la coque projetée. Ellessont très utilisées au stade de l’avant-projet et en fonction des dimensions caractéristiques de lacarène projetée, permettent déjà d'avoir un ordre d’idée de la résistance à l’avancement de lacoque projetée. Le tableau de la Fig. I.3 donne un aperçu des séries existantes.
▫ La méthode des modèles (essais sur modèles réduits)La méthode des modèles, bien plus précise et propre à la coque projetée, est l’essai
en bassin des carènes. Le plan des formes étant dressé, au bassin d’essais des carènes onprocède à des divers types d’essais, qui peuvent aller de l’essai de traction en eau calme àl’essai de tenue à la mer en passant par l’essai des efforts hydrodynamiques sur les structures…
Les expériences menées sur la coque projetée supposent que le projet du navire soitbien avancé et qu’il soit prêt à être mis en construction. Elles interviennent uniquement pourapporter des confirmations aux hypothèses, aux calculs préliminaires et pour réaliser desmodifications finales suivant les résultats du bassin, c'est-à-dire optimiser le projet du navire(formes finales de la coque, puissance et système de propulsion à installer, etc.). Cette méthodedemeure encore aujourd’hui le moyen le plus fiable pour déterminer les performances d’unecarène.
▫ La méthode analytiqueLa méthode analytique de la détermination de la résistance à l’avancement est basée
sur le calcul hydrodynamique qui est lourd et complexe. Cette méthode fait largement appel àdes outils informatiques qui réduisent notablement le temps de calcul. Il s’agit de logicielsfonctionnant sur plusieurs processeurs afin de déterminer l’écoulement autour d’une carène.Cette méthode vient généralement se coupler à la précédente car souvent, afin de confirmer lesrésultats des calculs, ils sont confrontés à ceux des essais en réel.
Le calcul présente un avantage par rapport aux essais en bassin. Ils permettent demodifier, grâce aux programmes d’optimisation de performance, certaines parties de la carènesans trop s’éloigner du volume de départ (en fonction de tolérances fixées) et ainsi déterminerles formes de la carène dont la résistance est moindre. Il s’ensuit alors des essais en bassin de laforme retenue.
Chaque bassin d’essais possède sa propre base de données concernant les essaisdéjà réalisés et renvoie donc aux méthodes statistiques. (Annexe I)

Théorie du Navire II – Resistance et Propulsion des Navires I. 7Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. I.3)

Théorie du Navire II – Resistance et Propulsion des Navires I. 8Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre II - Estimation de la résistance à l’avancement
Notion de couche limite
Dans le cas où le fluide n’est pas très visqueux (nombre de Reynolds pas trop petit),la viscosité n’a d’effet que dans les régions où le gradient de vitesse est important. Or, étantdonné que le fluide adhère aux parois solides, c’est au voisinage de ces parois que le gradient devitesse est le plus important; c’est également là que naît et se développe la turbulence.
En schématisant, on peut donc distinguer dans le fluide deux régions :- à quelque distance des parois solides, le fluide se comporte comme un fluide
parfait;- au voisinage de parois, au contraire, dans une couche mince appelée couche
limite, les forces de viscosité et éventuellement de turbulence, ne peuvent pasêtre négligées.
La couche limite étant très mince, on peut calculer l’écoulement extérieur, supposéparfait, en admettant, en première approximation, que ses limitantes sont confondues avec lesparois solides (ou mieux, avec des parois fictives distantes des parois réelles d’une longueurégale à l'épaisseur de déplacement).
L’écoulement à l’intérieur de la couche limite peut être laminaire ou turbulent.
Sur la paroi, la vitesse est identiquement nulle, non seulement en moyenne mais àchaque instant. La turbulence, qui est une agitation du fluide, est donc forcément nulle sur laparoi. Par conséquent, l’écoulement, immédiatement au contact de la paroi, demeure laminairemême si la couche limite, dans son ensemble, est turbulente : la zone fluide correspondante estappelée sous-couche laminaire (ou film laminaire). Le développement de la couche limite et decelle laminaire le long d’une plaque plane est schématisé dans la figure I.4.
(Fig. I .4)
Dans le cas de l'écoulement laminaire, dans un fluide idéal (non visqueux) et enabsence de toutes perturbations, les lignes de courant sont uniformes, rectilignes et parallèles.Autour d'un corps bien profilé, l'écoulement laminaire est caractérisé par des lignes de courantuniformes et parallèles, qui près du corps suivent, sans enchevêtrement, son contour (Fig. I.5).
(Fig. I .5)

Théorie du Navire II – Resistance et Propulsion des Navires I. 9Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Par contre, dans le cas d'un fluide réel, l'écoulement autour du corps profilé changed'aspect et on observe une zone perturbée le long et à l'arrière du corps. Le long du corpsapparaît une zone dite couche limite où les lignes de courant ne sont plus uniformes etparallèles mais sont enchevêtrés les unes dans les autres et à l'arrière du corps on observe unezone de fortes perturbations appelée sillage avec décollage de la couche limite et l'apparitiondes tourbillons. On est, dès lors, en présence d'un écoulement turbulent autour du corps.
Au-delà de la couche limite, donc, de l'épaisseur de la couche limite, l'écoulementreste laminaire et se déroule comme si le contour du corps était remplacé par celui de la couchelimite (Fig. I.6).
(Fig. I .6)
Normalement si la carène du flotteur est bien profilée, comme c’est le cas pour unnavire ayant des lignes continues et bien profilées, la couche limite enveloppe complètement lacarène, son épaisseur variant de quelques centimètres à l’avant à quelques décimètres voire unmètre à l’arrière. A l’énergie absorbée par le travail des forces de viscosité dans cette couchelimite, correspond une force qui tend à s’opposer à la progression de la carène et qu’on appellegénéralement la résistance de frottement. La Fig. I.7 représente la couche limite et la répartitiondes vitesses autour d'un corps bien profilé.
(Fig. I .7)
Pour un écoulement réel autour d'une coque typique de navire on observe quatrezones d'écoulement: une zone d'écoulement laminaire à l'amont du corps, une zoned'écoulement turbulent autour du corps, une zone d'écoulement dit séparé (décollage de lacouche limite) et enfin une zone tourbillonnaire à l'arrière du corps (sillage). La figure I.8schématise l'écoulement réel autour d'un profil type bateau.
(Fig. I .8)

Théorie du Navire II – Resistance et Propulsion des Navires I. 10Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Le point de séparation, où le décollage de la couche limite s'opère, est un pointd’arrêt pour la ligne de courant infiniment proche de la paroi : en aval de ce point, il se produitun courant de retour ; mais comme à l’intérieur de la couche limite le courant est dans le sensnormal, cette ligne se replie rapidement sur elle-même pour former un remous tourbillonnaire.
La carène semble alors traîner derrière elle un gros sillage tourbillonnaire où cestourbillons s’agglomèrent souvent en vortex parfaitement visibles (Fig. I.9).
(Fig. I .9)
Bien entendu, ce sillage en remorquage ne doit pas être confondu avec le sillaged’un navire en autopropulsion où le brassage de l’eau par l’hélice provoque des remous visiblesà l’oeil.
La résistance de frottement (résistance visqueuse)
Les études expérimentales, similaires à celles de Reynolds, menées sur des corps(plaques minces verticales et sur des coques de navire) en déplacement uniforme dans un fluide(ou corps fixe dans un écoulement) mettent en évidence l'existence de deux régimes principauxd'écoulement autour d'un corps: écoulement laminaire (Re<5.105) et écoulement turbulent(Re>1.106).
Dans un écoulement uniforme et laminaire, pour une plaque mince, la résistance defrottement est donnée par la formule de Blassius:
2fF V.S..C.R 2/1 où 2/1).(C
L.V327,1f
Avec:RF : Résistance de frottement (Kgf);C f : Coefficient de la résistance de frottement;S : Aire de la surface mouillée (m2);V : Vitesse (m/s). : Masse volumique du fluide (Kgf.s2/m4) : Viscosité du fluide (m2/s);L : Longueur de la surface (m).
Pour déterminer la résistance de frottement des coques de navire, les premiersessais en bassin sont menés par W. Froude sur 4 séries de planches de 2, 8, 20 et 50 pieds delong, tirées verticalement à des différentes vitesses constantes dans un fluide au repos et lesrésultats sont exprimés par la formule empirique:
nF V.S.fR
Où:S : Aire de la surface mouillée (m2);V : Vitesse (m/s);n et f : Coefficients empiriques déterminés par les essais.

Théorie du Navire II – Resistance et Propulsion des Navires I. 11Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Lesquels résultats sont standardisés par son fils R.E. Froude et l'expression de larésistance de frottement transcrite sous la forme:
825,1F V.S.fR
Où les valeurs du coefficient f sont données en fonction de la longueur L dans letableau de la figure I.10.
(Fig. I.10)
La formule de Froude-LeBesnerais, qui tient compte de la température du fluide,traduit, avec une plus grande précision, ces expériences et une meilleure corrélation d’ensembleentre le modèle et le réel.
825,1F V.S..(.(R )
)L68,2(
258,01392,0c15043,01 )t
Où:S : Aire de la surface mouillée (m2);V : Vitesse (m/s);L : Longueur de la surface (m);t : Température du fluide en °C.
Les formes bien remplies des navires de commerce actuels et les coques soudéesfont que la formule de Froude-LeBesnerais n’est plus adoptée. Elle mène à des résultatsnettement différents de la réalité.
Le coefficient de frottement Cf caractérise l’effet de la contrainte tangentielle(visqueuse) sur une plaque plane remorquée sans incidence dans un fluide au repos. Ondistingue alors le coefficient de frottement local, contrainte adimensionnée, qui résulte de lastructure de la couche limite au point considéré, et le coefficient de frottement global, qui estune valeur moyenne obtenue par intégration sur une plaque de longueur donnée.
Le but essentiel de l’étude de la couche limite est de déterminer le coefficient defrottement local ou moyen d’une plaque lisse ou rugueuse. Le cas de la plaque plane lisse estimportant car il est à la base de toutes les déterminations de résistances visqueuses des navires.Pour remplace la formule empirique de Froude, diverses formules de coefficient de frottementont été établies, notamment:
- Formule de Schoenherr, basée sur les travaux théoriques de Prandtl et Von Karman:
)C.R(logC
fe10f
242,0

Théorie du Navire II – Resistance et Propulsion des Navires I. 12Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
- Formule de Hughes:
2e10
f)R(log
C03,2
066,0
- Formule de Prandtl-Schlichting:
58,2e10
f)R(log
C455,0
La plus célèbre formule, car elle a un usage international, est la ligne de baseadoptée au congrès international des bassins de carènes (International Towing Tank ConferenceITTC) de 1957 et portant le nom de ligne ITTC 1957.
La formule adoptée par l'ITTC 1957 est donnée par l'expression:
2e10
2F
f)R(logV.S..
RC
2
075,0
2/1
Les figures I.11 et 12, donnent la variation du coefficient de frottement Cf enfonction du nombre de Reynolds
(Fig. I.11)
Les différentes formules du coefficient de frottement précitées, notamment cellesde Schoenherr et ITTC 1957 s'appliquent à des surfaces lisses. Dans la réalité les surfaces descoques ne sont pas lisses et présentent différentes aspérités, elles sont rugueuses. La rugositéentraîne une augmentation de frottement et des traînées se créent autour des aspérités. Pour tenircompte de ces effets, une correction ΔCf être appliquée au coefficient de frottement.
Pour les bâtiments de commerce, ΔCf varie de 0,0001à environ 0,0005 quand lalongueur varie entre 120 et 240 mètres. En général, pour une coque neuve on prend 0,0004comme la valeur standard de ΔCf.

Théorie du Navire II – Resistance et Propulsion des Navires I. 13Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. I.12)
Il faut aussi tenir compte des rugosités de structures qui sont dues au raccordementdes tôles les unes aux autres. Leur influence était importante quand les navires étaient rivés. Elleest beaucoup plus faible sur des coques soudées. Les salissures de la coque entraînent aussi uneaugmentation supplémentaire dont on doit en tenir compte dans le choix de la valeur du ΔCf.
Effet de forme
Toutes les carènes n’ont pas des formes identiques. Certains types de navires ontdes formes bien remplies (pétroliers, minéraliers, etc.). D’autres navires ont des formes plusprofilées (escorteurs, patrouilleurs, etc.). Assimiler une carène à une planche est une premièreapproximation qui peut convenir de façon acceptable à des navires dont les lignes d’eau sontassez tendues (c'est-à-dire les navires ayant des formes bien profilées) tandis que cetteapproximation rendrait mal compte de ce qui se passe autour des formes bien remplies.
L’effet de forme se manifeste donc de deux façons. Dans un premier temps, le longde la carène, les lignes de courant ne sont pas des droites. En l’absence de viscosité, la vitesserelative le long de la coque est différente de la vitesse d’avance du navire. Pour un navire auxformes pleines, dans sa partie centrale, le module de la vitesse relative est sensiblementsupérieur à celle du navire. Le champ de pression dans lequel se développe la couche limite estdonc non uniforme. Cela entraîne donc une modification du cisaillement à la paroi donc de larésultante des forces locales correspondantes.
De plus, la résistance de pression sur la carène est la cause directe de lamodification du champ de pression par la présence de la couche limite. En effet, même si l’onconsidère que la pression ne change pas à la traversée de la couche limite (ce qui ne se vérifiepas à l’extrême arrière), le champ de pression potentiel de référence n’est pas le même qu’enfluide parfait en raison des effets de second ordre (effet de déplacement de la surface du corps).
En fluide réel, on constate, à l’arrière de la carène, un défaut de remontée depression (effet de perte de charge) qui se traduit généralement par un effet de succion del’obstacle sur son sillage.

Théorie du Navire II – Resistance et Propulsion des Navires I. 14Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
En pratique, on admet que le coefficient de résistance de pression est proportionnelau coefficient de résistance de frottement, ce dernier caractérisant la perte de charge dans lesillage. Le coefficient de proportionnalité étant une caractéristique de l’écoulement potentiel, ilest donc indépendant du nombre de Reynolds et s’écrit: CVP = φ.CVF où CVP et CVF sont lescoefficients respectifs de pression visqueuse et de frottement visqueux.
La résistance de frottement est due à la sommation de la contrainte de frottementsur la surface de la carène (surface mouillée). Le mouvement ne se distingue du frottement surplaque plane que par les survitesses de l’écoulement potentiel. En pratique on retient que:
CVF = Cf. (1+φ')
où Cf représente le coefficient de traînée de frottement de la plaque plane équivalente, c'est-à-dire pour le même nombre de Reynolds que la carène (le coefficient de résistance de frottementest alors implicitement calculé avec, comme surface de référence, la surface mouillée S de lacarène). Le coefficient φ', caractéristique de l’écoulement potentiel, est indépendant du nombrede Reynolds. Par conséquent, il est possible de déduire le coefficient de résistance visqueused’une carène profilée de celui d’une plaque plane (ou planche équivalente) pour un mêmenombre de Reynolds d’après:
CV = CVP + CVF = φ.CVF + CVF CV = Cf. (φ. (1+φ') + (1+φ'))
Ou plus simplement:CV = Cf (1+k).
Avec le paramètre k , qui ne dépend que de la géométrie du flotteur, est appelé coefficientd’effet de forme.
A l’extérieur de la couche limite, les lignes de courant sont déplacéestransversalement d’une distance égale à δ1, épaisseur de déplacement de la couche limite. Pourle calcul des pressions le long de la carène, tout se passe alors comme si, le fluide étant parfait,la carène avait une épaisseur plus grande (Fig. I.13).
(Fig. I.13)
Cela entraîne une diminution de pression le long de la carène, comme l’épaisseurcroît le long d’une ligne de courant, l’effet est d’autant plus important qu’on se situe plus loinsur l’arrière. Au total, il existe une traînée de pression due à la viscosité qui vient s’ajouter à latraînée de frottement.
Détermination du coefficient d’effet de forme:
L’effet de forme d’une carène peut se déterminer globalement par quatre méthodesprincipales. Si on admet que ce coefficient ne subit aucun effet d’échelle, c'est-à-dire qu’il nedépend ni du nombre de Reynolds, ni de la rugosité de la carène, il devient possible dedéterminer l’effet de forme de la carène réelle.
• Méthode du double modèle: elle consiste tout simplement à remorquer, enimmersion profonde, un modèle résultant de l’assemblage du modèle de carène initiale et sonsymétrique par rapport à la flottaison : la résistance mesurée est égale à deux fois la résistancevisqueuse cherchée (à une certaine distance de la surface, il n’y a pas de résistance de vagues).Nécessitant la réalisation d’un modèle spécial, cette méthode est peu utilisée. Une varianteconsiste à passer le double modèle en soufflerie.

Théorie du Navire II – Resistance et Propulsion des Navires I. 15Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
• Méthode des petites vitesses: elle constitue la méthode expérimentale la plussimple et la plue répandue pour déterminer le coefficient d’effet de forme d’un navire. Cetteméthode utilise le fait que, lorsque la vitesse tend vers 0, la résistance de vagues tend vers 0beaucoup plus vite que la résistance visqueuse. En effectuant une simple comparaison avec lefrottement de la planche équivalente, on en déduit la valeur du coefficient d’effet de forme (Fig.I.14).
(Fig. I.14)
Il suffit alors de remorquer un modèle à des très petites vitesses et de porter lecoefficient de résistance hydrodynamique CHm du modèle fonction de Re. Par hypothèse, lecoefficient ainsi trouvé est indépendant du nombre de Reynolds et du nombre de Reech-Froude.Pour Re suffisamment petit CV/Cf doit être constant et égal à (1+k).
Assez souvent employé comme méthode, elle a l’avantage de dispenser d’essaisspéciaux au prix d’une précision limitée (mesure de grandeurs très petites, risque d’écoulementlaminaire).
• Méthode des modèles géométriquement semblables: appelée aussi méthode desGeosiums (pour géométriquement similaire) et employée de façon exceptionnelle, elle est baséesur des essais sur des modèles à échelles différentes où pour chacun de ces essais, le coefficientde résistance hydrodynamique CH est reporté en fonction de Re. Pour tous les points exécutés aumême nombre de Reech-Froude, le coefficient de résistance de vagues CW reste constant, ce quipermet, en joignant ces points, d'obtenir une courbe qui se traduit par translation de la courbe ducoefficient de résistance visqueuse CV (CH = CV + CW = CV + constante).
La pente de la tangente à cette courbe Fr (constante) est égale, à nombre deReynolds donné, au produit de (1+k) par la pente de la tangente à la courbe Cf. Ainsi on obtient(1+k).
Cette méthode permet ainsi de pallier les inconvénients de la méthode précédentemais elle nécessite la réalisation de plusieurs modèles si l’on veut balayer une grande gamme deRe.
• Méthodes empiriques: d’origines expérimentales, pour les formes simples, ontrouve également des formules empiriques permettant d’estimer le coefficient de forme,notamment les formules de Hoerner qui permettent d'estimer le coefficient de forme d’une ailesymétrique de faible allongement en fonction de l’épaisseur relative t/c où t et c représententrespectivement l'épaisseur et la corde de l'aile et de celui d'un corps à symétrie de en fonction dudiamètre relatif d/l au maître couple où d et l représentent respectivement le diamètre au maîtrecouple et la longueur du corps.

Théorie du Navire II – Resistance et Propulsion des Navires I. 16Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Il existe un certain nombre de formules applicables à différentes formesparticulières de navires, notamment la formule de Wanatabe:
TB.L
k3
Où:(Déplacement en m3), L (longueur en m), B (largeur au maître couple en m) et T(tirant d’eau en m) de la carène.
L’existence d’une résistance de remous est ignorée par les trois premièresméthodes proposées. Les deux premières méthodes supposent que cette résistance a uncoefficient proportionnel au coefficient de résistance de frottement Cf; quant à la troisième, ellesuppose que le coefficient de résistance de remous est composé d’un terme constant et d’unterme proportionnel à Cf. Il est essentiel de se rappeler que la connaissance du coefficient derésistance de vagues CV est nécessaire uniquement pour calculer la correction de frottementΔCV permettant de passer du modèle au réel et qu’une erreur sur CV ne conduit sur laconnaissance du coefficient de résistance hydrodynamique totale CH du navire qu’à une erreurcomprise entre 0,15et 0,25. Il n’est donc pas nécessaire de connaître CV avec une extrêmeprécision
La résistance résiduaire (résistance de vagues)
Un navire, se déplaçant à la surface de l’eau, déforme cette surface. Desondulations, dont l’apparence est analogue à la houle qui se propage à la surface de la mer sousl’action du vent, sont alors crées. Le navire crée donc un champ de vagues (Fig. I.12) ayant pourcaractéristiques les points suivants.
▫Le navire étant animé d’un mouvement uniforme depuis un temps assez long, le champ devagues parait fixe par rapport au navire, on parle alors de champ de "vaguesd’accompagnement".
▫Une partie de la surface libre au voisinage de la carène du navire et sur son arrière estintéressé par le champ de vagues. Dans le modèle théorique de Lord Kelvin, le champ devagues créé par le déplacement d'un point de pression, les vagues sont contenues dans unangle de demi-ouverture d’environ 20° (Fig. I.15).
▫En se plaçant dans la zone concernée par la déformation, on distingue aisément deuxsystèmes de vagues : un système de "vagues transversales" dont les crêtes (et les creux)sont très inclinées sur l’axe du navire et un système de "vagues divergentes" dont les lignesde crêtes paraissent issues du navire. Les lignes de crêtes de chacun des systèmes semblentse déduire les unes des autres par une similitude dont le centre serait situé sur l’axe dunavire. Les deux systèmes viennent se confondre sur les bords du champ de vagues. A cetendroit les dénivellations sont souvent les plus fortes.
(Fig. I.15)

Théorie du Navire II – Resistance et Propulsion des Navires I. 17Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
▫Pour les carènes comportant une partie cylindrique développée (pétroliers, minéraliers oupéniches), on constate que le champ de vagues apparaît comme la superposition de deuxchamps élémentaires, un créé par la partie avant de la carène, l’autre par la partie arrière.Quant aux carènes dont les formes sont plus complexes (la partie cylindrique est très petiteou même pratiquement difficile à mettre en évidence) la séparation en vagues de l’avant etvagues de l’arrière est beaucoup moins évidente.
(Fig. I.16)
▫Les dénivellations, le long de la carène, présentent aussi un aspect ondulatoire plus oumoins régulier. La distance entre deux ondulations successives augmente avec le nombre deReech-Froude. Sur l’avant, ces ondulations débutent toujours par une crête assez marquée(appelée vague d’étrave ou d’épaule). Pour des carènes dont les formes ne sont pas très bienprofilées, cette vague peut être amenée à déferler, se traduisant par une écume qui prendnaissance à l’avant et se prolonge vers l’arrière, le long de la carène. A ces dénivellations, lelong de la carène, on attribue la variation d’assiette du navire avec la vitesse. Notamment:
- Aux faibles nombres de Reech-Froude, les vagues sont pratiquement inexistantes.L’écoulement autour de la carène est à peu près le même partout. Cependant, lespressions étant dans l’ensemble plus faibles qu’au repos, du fait des survitesses, lenavire s'enfonce droit.
- Aux nombres de Reech-Froude élevés (de l’ordre de 0.6), la vague qui se développecomprend une demi ondulation seulement (crête à l’avant, creux à l’arrière) et donnel’impression que la flottaison augmente dans la partie avant et qu’elle diminue àl’arrière. L’assiette devenant positive, on dit que le navire déjauge. Le déjaugeage estun phénomène progressif se développant à partir d’un nombre de Reech-Froudecompris entre 0.4 et 0.5.
- Pour des valeurs de Reech-Froude supérieures à 1, la coque a tendance à sortir de l’eau,son poids étant équilibré par une sustentation dynamique: c’est le phénomèned’hydroplanage.
La mise en mouvement des particules d’eau par le passage du navire leur procureune énergie moyenne plus élevée qu’au repos. Cette énergie se décompose ainsi: énergiecinétique due à leur vitesse absolue, énergie potentielle due à leur changement de côte.L’origine de cette énergie provient des efforts qui se développent au contact de la carène, effortsde pression si l’on néglige, selon l’hypothèse de Froude, la viscosité de l’eau. Il est assez aisé decomprendre que, pour créer le champ de vagues qui l’accompagne, le navire dépense unecertaine énergie.
Cependant, la difficulté réside dans la compréhension de la nécessité de dépenserde l’énergie pour entretenir ce champ de vagues supposé établi, c'est-à-dire, pourquoi il existe,en mouvement uniforme, une résistance de vagues.

Théorie du Navire II – Resistance et Propulsion des Navires I. 18Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Le paradoxe d’Alembert montre que la traînée en régime uniforme d’un corpssolide dans un fluide parfait ayant un mouvement absolument irrotationnel est nulle si lemouvement est réversible, c'est-à-dire si on peut satisfaire aux conditions aux limites enchangeant en chaque point la vitesse relative V en -V. Le champ de vagues de la figure I.16illustre bien l’irréversibilité du mouvement autour d’une carène se déplaçant en surface etmontre l'existence d'une résistance de vagues même en cas de mouvement de translationuniforme.
S’agissant de vagues qui accompagnent le navire, la célérité c des houlesélémentaires, dont la superposition constitue le champ de vagues, est égale à la vitesse depropagation de leur énergie cinétique. Cette vitesse, étant naturellement inférieure à c (u = c/2),le navire doit donc combler, à chaque instant, le déficit énergétique correspondant à cettedifférence de vitesse (c-u) qui existe en permanence. D’où l’apparition d’une résistance devagues même en mouvement permanent établi depuis un temps infini. De plus, on remarquequ’il existe entre la célérité c d’une houle élémentaire et la vitesse V du navire la relation(c=V.cosθ) où θ étant l’inclinaison de la direction de propagation de la houle sur l’axe dunavire. Ce qui montre que la différence (c-u = c/2 = 1/2.V.cosθ) est d’autant plus grande que θest petit. On en déduit, par conséquent, que ce sont les vagues transversales qui contribuent leplus à la résistance de vagues (Fig. I.17).
(Fig. I.17)
Le calcul théorique de la résistance de vagues d’un navire est donné par laméthode des modèles. Cependant la connaissance des lois théoriques ou empiriques qui larégissent, permet de dessiner des formes de navires (outre les fonctions qu’il doit remplir)conduisant à la puissance propulsive installée, la plus petite possible.
Différents travaux de recherche ont permis de trouver une méthode directe quiconsiste en l’analyse de l’écoulement créé par le mouvement de la carène.
Cependant il faut garder à l’esprit que la résistance de vagues apparaît par unmécanisme qui consiste en la création de vagues, donc de transfert d’énergie à l’eau. Une partiede l'énergie est rayonnée sous forme de vagues allant jusqu'à l’infini aval, l’autre partie estdissipée par déferlement.
Il est possible de déterminer l'énergie rayonnée sous forme de vagues, en explorantle champ de vagues d’accompagnement assez loin sur l’arrière de la carène. On peut aussiprocéder à des mesures de pression en chaque point de la carène et obtenir la résistance depression (comprenant essentiellement la résistance de vagues mais aussi la résistance depression visqueuse) par intégration de forces correspondantes.
Cette méthode, longue et coûteuse, puise tout son intérêt dans le fait qu’elle permetde vérifier s’il y a un accord satisfaisant entre la résistance ainsi mesurée et celle qu’il estpossible d’estimer par la méthode classique.

Théorie du Navire II – Resistance et Propulsion des Navires I. 19Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
L'influence de l'énergie dissipée par déferlement sur la résistance est souventnégligée pour des navires ayant des formes effilées pour lesquels on admet que toute l’énergieproduite est dissipée sous forme de vagues vers l’infini arrière. Par contre, pour les navires, dontles formes avant sont très grosses, l'influence de l'énergie dissipée par déferlement est mise enévidence par exploration du sillage autour du flotteur dans un certain nombre de sectionstransversales: lorsqu’il y a déferlement, un sillage supplémentaire (perte de charge) prendnaissance sur l’avant et se prolonge vers l’arrière en abord de la carène.
Le fait qu’il se développe complètement dès l’étrave (alors que la couche limite sedéveloppe progressivement tout au long de la carène) et qu’il n’intéresse que les immersionstrès faibles (car il s’agit d’un phénomène de surface), permet de le distinguer du sillage dit"visqueux".
La viscosité ayant une influence quasi absente sur le déferlement, la résistance dedéferlement de vagues, comme celle de rayonnement des vagues, dépend du nombre de Reech-Froude. Son existence se traduit donc par des difficultés supplémentaires de similitude. Elle estintégralement incluse dans la détermination de la résistance de vagues obtenue par la méthodedes modèles.
(Fig. I.18)
Le système de vagues créé par le navire et l'accompagnant dans son mouvementvarie en fonction des formes de la carène et du nombre de Reech-Froude. Les courbes derésistance de vagues (résistance de rencontre) appelée aussi "wave making resistance"présentent selon le type du navire (formes de la carène) et pour différentes valeurs du nombrede Reech-Froude des "bosses" et des "creux" (Fig. I.18).
Ce phénomène est dû à l'interaction entre les vagues d'étrave et d'étambot(interférence). En effet, si on considère que le champ des vagues se compose seulement desvagues transversales (d'une importance particulière dans la résistance à l'avancement dunavire), du fait de la faible inclinaison de leur direction de propagation sur l’axe du navire (0), pour des navires ayant des carènes très peu profilées on s’explique aisément que ledéplacement de l’avant engendre une crête de vagues transversales tandis que celui de l’arrièreengendre un creux.

Théorie du Navire II – Resistance et Propulsion des Navires I. 20Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Lorsqu’une carène comporte une partie cylindrique suffisamment développée, lechamp de vagues produit par cette carène apparaît comme la superposition de deux systèmes, lepremier généré un peu en arrière de la perpendiculaire avant et commençant par une crête , lesecond généré un peu en avant de la perpendiculaire arrière et commençant par un creux et quiest moins perceptible que le premier car il se produit dans une zone perturbée par celui-ci.
La distance LCC entre ces points de génération des deux systèmes de vagues estpresque égale à la longueur L du navire (0,9 L) et compte tenu des propriétés de la houlerégulière, la longueur d’onde λdes systèmes de vagues de célérité V (vitesse du navire) a pourvaleur (λ = 2π.V2/g). La Fig. I.19 décrit pour des valeurs du nombre de Reech-Froude lesdifférents profils de vagues correspondant le long de la carène du navire.
(Fig. I.19)
Du fait que l'énergie contenue dans un champ de vagues de surface donnée estproportionnelle au carré de l'amplitude de la vague (distance entre le creux et la crête), larésistance de vagues sera donc d’autant plus grande que le creux des vagues d’accompagnementsera plus important à l’arrière du navire où ce creux résulte de la superposition des systèmes devagues transversales avant et arrière et inversement.
Comme les deux systèmes de vagues, supposés purement transversaux, ont unecélérité identique (c= V) et par conséquent une longueur d’onde identique (λ = 2π.V2/g). Lacourbe de résistance de rencontre en fonction de la vitesse donc du nombre de Reech-Froudeprésentera des creux et des bosses. Ainsi:
▫ Lorsque (L nλ), avec k un nombre entier (L multiple de λ), le système de vaguestransversales avant donne une crête au niveau de l'étrave, ce qui a tendance à annuler lepremier creux du système de vagues transversales arrière, et la résistance de vaguespasse par un minimum. Il apparaît donc des "creux" sur la courbe de la résistance derencontre pour les valeurs du nombre de Reech-Froude Fr = 1 / .n.2 où n=1, 2, 3, ….
▫ Dans le cas contraire, si (L (n+½).λ), le creux induit par le système de vaguestransversales avant au niveau de l'étrave renforce le premier creux du système devagues transversales arrière d’où accroissement de la résistance de vagues. Cela setraduit par l’apparition des "bosses" sur la courbe de la résistance de rencontre pour lesvaleurs du nombre de Reech-Froude Fr = 1 / ).1n2( où n=0, 1, 2, ….
La figure I.20 illustre la courbe de résistance de rencontre avec ou sans interaction dessystèmes de vagues d'étrave et d'étambot.

Théorie du Navire II – Resistance et Propulsion des Navires I. 21Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. I.20)
Remarque :La simplicité du raisonnement précédent illustre bien les variations de la courbe de
résistance de vagues mais ne représente pas de façon absolument correcte la réalité. L’analyse derésultats d’essais permet d’apporter les précisions suivantes.
• Sur des carènes présentant une partie cylindrique, la vitesse et les formes de l’avantdéterminent la dénivellation, sur l’avant de la partie cylindrique, de la surface libre le long de la coque.La longueur LC de la partie cylindrique de la carène influe donc sur la position des crêtes et des creux.Une augmentation de LC se traduit par un déplacement d’ensemble du système vers l’arrière.
• Les maximums de résistances se perçoivent pour des vitesses différentes de cellesdonnées précédemment, on constate que la résistance de vagues passe par une valeur maximale lorsquele rapport de la longueur d'ondeau coefficient prismatique CP est égal à 1/n avec n entier ≥1.
Soit: Fr = V/ L.g = n..2PC
Le produit (CP.L) peut être considéré comme la longueur effective de la carène du point de vue de larésistance de vague. La résistance de vague passe par un maximum quand cette longueur effective est unmultiple de la longueur d’onde λ.
• Pour les navires à vitesse élevée, il existe une 2ème bosse de la résistance de vagueapparaissant pour Fr = 1,5 .2PC . Elle se justifie par la formation de vagues divergentes que l’on nepeut plus négliger au nombre de Reech-Froude élevé.
• De plus le système de vagues de l’avant peut s’avérer plus complexe que celui qui aété supposé et être à l’origine d’interférence au sein même du système, ce qui modifiera les résultatsprécédents.
• Pour des vitesses données, la résistance de vagues varie aussi en fonction de lalongueur de la partie cylindrique.
Il convient de noter qu’en pratique, la distance LCC entre les points où les vagues d'étraveet d'étambot sont générées est plus petite que L et varie avec les formes de la carène et, également, avecla vitesse. Elle est souvent donnée par:
LCC = CP.L +.V2/2.g
Ainsi, un creux de la courbe de résistance de vagues correspond à:
LCC = CP.L + .V2/2.g = 2..n.V2/gSoit: L = 2..(n-¼).V2/CP.g

Théorie du Navire II – Resistance et Propulsion des Navires I. 22Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
A l’inverse, une bosse se présentera pour cette même courbe à:
LCC = CP.L + .V2/2.g = 2..(n+½).V2/gSoit: L = 2..(n+¼).V2/CP.g
Aux faibles vitesses, λest faible devant la longueur L de la carène de même que le creuxde ces vagues. Le phénomène d’interférence entre les systèmes de vagues transversales développés parl’avant et l’arrière ne devient sensible qu’au niveau de l’avant-dernier creux correspondant à n=2 et àFr = 0,478.
Lorsque la vitesse du navire croit au-delà de la valeur de la dernière bosse, le navireadopte une position particulière par rapport aux champs de vagues, l’avant se trouvant sur une crête et lereste de la carène sur une pente ascendante. On assiste au développement des vagues divergentes et àune variation d’assiette. On dit que le navire hydroplane.
Enfin, bien que l'influence de la viscosité sur la résistance de vague soit négligeable,pourtant elle existe, ainsi la figure I.21, illustre la comparaison entre la résistance de vagues obtenueexpérimentalement et celle correspondante obtenue avec et sans correction de viscosité.
En réalité, les variations de la courbe de résistance de vagues sont plus ou moinsprononcées selon le type de navire. On retiendra que, pour les navires bien dessinés, seules les dernièresbosses apparaissent tandis que ceux dont les formes sont très mal adaptées présentent des bosses et descreux très marqués.
(Fig. I.21)
Conséquences pour le tracé des carènes
La vitesse V et la longueur L étant en général fixées, le nombre de Reech-Froudeest souvent une donnée pour choisir les formes de la carène d’un navire les mieux adaptées à cenombre de Reech-Froude.
La résistance de vagues ne prend essentiellement de l’importance ainsi que lescreux et bosses de la courbe de résistance ne deviennent sensibles que pour de degrés de vitessedépassant Fr = 0,478.
▫Aux faibles nombres de Reech-Froude (cas de pétroliers, des minéraliers, des cargoslents), la longueur d’onde des vagues est très faible, les interactions entre vagues de l’étrave etvagues de l'étambot sont faibles. La résistance à l’avancement est due essentiellement aufrottement (60 à 90 %).

Théorie du Navire II – Resistance et Propulsion des Navires I. 23Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Pour Fr < 0,28, on enregistre au minimum deux crêtes le long de la carène, defaible amplitude l’énergie des vagues étant proportionnelle au carré du creux de ces vagues,l’énergie produite par la propulsion servira à vaincre la friction. On peut alors adopter lesformes qui conduiront à un coût de construction le moins élevé, c'est-à-dire des formes pleinescomportant une partie cylindrique développée.
Cependant, tant que Fr < 0,4, il faudrait autant que possible tracer une carène àsurface minimum pour un volume maximum (la sphère étant la forme la plus performante) soitune surface de flottaison maximum. Il faudra veiller aussi à ne pas avoir une vague avant tropimportante, ou tout au moins à éviter son déferlement, ce qui conduit à une longueur de la partieavant suffisante, voire à l’adoption d’un bulbe et ne pas provoquer un décollement del’écoulement à l’arrière, ce qui conduit à une longueur suffisante à la sortie arrière.
Par conséquent, le choix d’un coefficient global de finesse (ψ = L/⅓)relativement faible (inférieur à 4) traduira l’intérêt de la réduction de la surface mouillée. Lecoefficient prismatique pourra être relativement élevé (0,65 à 0,85) alors que le coefficient deremplissage du maître couple CM sera souvent supérieur à 0,95. Ainsi, le bloc coefficient CB
sera toujours supérieur à 0,6 et pourra même dépasser 0,8 pour les navires à faible degré devitesse. D’une façon générale, on trouve la relation:
CB≈1,06 - 0,25. V/L½ avec V (nœuds) et L (m).
▫Lorsque le nombre de Reech-Froude augmente, les interactions entre les vagues del’avant et les vagues de l’arrière prennent une importance croissante, en même temps l’écartentre vitesse favorable et vitesse défavorable augmente. Au-delà de Fr = 0,478, il faudra tenircompte de la résistance de vagues, c'est-à-dire, d’une part choisir la longueur de la carène poursituer le point de fonctionnement près d’un creux ou au minimum, loin d’une bosse de la courbede résistance et, d’autre part, adopter un tracé de carène permettant de réduire l’importance desvagues d’accompagnement, caractérisé notamment par un coefficient prismatique CP nedépassant pas 0.6.
C’est pour les navires rapides et très rapides, pour lesquels la résistance de vaguesreprésente au moins la moitié de la résistance totale, que l’incidence de cette résistance devagues a, précisément, le plus de répercussion pour le tracé des formes. Deux catégories denavires sont à considérer dans la classe des navires rapides 0,3 < Fr < 0,45:
- Les navires, en principe grands (grands paquebots, porte-avions, etc.), pourlesquelles une vitesse élevée, de l’ordre de 30 noeuds. La longueur est alors choisie enconséquence. Le coefficient global de finesse de ce type de navire est de l’ordre de 8 et le bloccoefficient CB de l’ordre de 0.5, tandis que le coefficient prismatique CP reste voisin de 0.6. Uneétude approfondie du dessin de la carène occupera une place importante dans la phase deconception;
- Les navires à déplacement limité, ou relativement limité (chalutier, remorqueuret transbordeur) dont la vitesse, qui est une spécification qui succède aux caractéristiques de lacarène, ne reste pas néanmoins une donnée d’exploitation importante. La longueur sera alorsfonction du déplacement, pour finir par aboutir à une finesse de l’ordre de 6, la vitesse setrouvera généralement choisie en conséquence afin que Fr ne dépasse pas 0,7.
Les formes des navires modérément rapides résultent bien évidemment deconsidérations qui tiennent compte, à la fois, de la résistance de frottement et de la résistance devagues. On trouvera souvent un bulbe à l’avant de ce type de navire.
L’origine du bulbe provient de l’étude des formes de carènes pour réduire larésistance à l'avancement. Un bulbe ne trouvera son efficacité que s’il est tracé de telle sorte queson système de vague propre vient atténuer le creux des vagues induites par l’étrave du navire.Suite à son interaction, la résistance s’en trouvera considérablement diminuée (environ 20% dela résistance totale pour une même carène sans bulbe).

Théorie du Navire II – Resistance et Propulsion des Navires I. 24Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Le volume de carène sur l’avant s’en trouve augmenté. Cela permet, de plus,d’accepter une flottaison légèrement creuse à l’avant, et par conséquent d’atténuer les vaguesdivergentes de l’avant.
Outre son action sur la résistance de vagues, le bulbe améliore aussi la résistancede frottement, grâce à son action sur l’écoulement à proximité de la région avant du navire.
Le rendement propulsif se trouve amélioré par réduction des effets de succion etaccroissement du sillage. Sur les navires de charges importantes à faible nombre de Reech-Froude, on enregistre des gains de puissance à pleine charge de l’ordre de 5%, mais pouvantaller jusqu’à dépasser 20% pour ces mêmes navires sur ballast ou à demi-charge, avecgénéralement, le bulbe partiellement émergé.

Théorie du Navire II – Resistance et Propulsion des Navires I. 25Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre III - Détermination de la résistance de vagues
D'une manière générale, la résistance de vague étant obtenue de façonexpérimentale, on fait alors appel à des tables des prévisions fondées sur la récapitulation desrésultats expérimentaux pour une famille de carènes données.
Ainsi pour une carène type qui ressemble à peu près à celle du projet, le projeteurpeut se référer à ces compilations, au moins à des fins de première estimation. La résistancerésiduaire y est souvent exprimée en fonction de F, L/B, B/T, CB ou CP de manière à utiliser lescaractéristiques de son navire comme entrée.
Ces tables existent sous divers noms et concernent divers types de navires. Une despremières est celle de l’Amiral Taylor (Taylor’s Standard Series de 1908). D’autres séries plusspécifiques basées sur les méthodes statistiques et correspondant à des différents types de naviresont établies et utilisées couramment en stade d'avant projet de navire. Certaines de cesméthodes statistiques ont été présentées précédemment dans la figure I.3.
Des méthodes de calcul approché, basé sur la formulation statistique de ces séries,sont utilisées fréquemment et ainsi que des programmes informatiques, fondés sur le mêmeprincipe, qui utilisent un procédé itératif, donc plus souple et plus fiable, basé sur l’utilisation derésultats divers. Néanmoins, la détermination de la résistance de vague, à travers la résistance àl'avancement, nécessite des essais en bassin de carène, la méthode la plus utilisée et qui est deloin la plus rigoureuse.
La détermination de la résistance à l’avancement ne pouvant respecter à la fois lasimilitude de Reech-Froude et la similitude de Reynolds, les essais sont réalisés en similitude deReech-Froude.
En effet, d'une part, il est pratiquement impossible de réaliser sur un modèle unnombre de Reynolds égal à celui du réel, car cela conduirait à une vitesse trop grande ou àl’essai d’un modèle de la taille du navire réel (un modèle à l’échelle 1/25, nécessiterait unevitesse 25 fois celui du navire réel), tandis qu’en similitude de Reech-Froude les vitessesd’essais sont acceptables (pour l'échelle 1/25 le rapport des vitesses sera 1/5) et d'autre part, onsait calculer, avec une assez bonne précision, la traînée d’un corps solide se déplaçant dans unfluide visqueux sans surface libre alors qu’on ne sait pas encore bien calculer la résistance devagues d’une carène de formes habituelles.
L’exploitation des mesures en bassin repose sur l’hypothèse de Froude(Résistance de la carène nue = Résistance hydrodynamique + Résistance aérodynamique desoeuvres mortes):
RT = RH + RAir
et la résistance hydrodynamique RH se déduit, dès lors, de l’expression précédente:
RH = RT - RAir = RF + RW - RAir
Au cours des essais en bassin de carène la résistance de l'air sur les œuvres mortes(coque émergée) du modèle étant négligeable, la résistance hydrodynamique RHM du modèleest mesurée à des différentes vitesses de remorquage VM, et pour chacune de ces mêmesvitesses, la résistance de frottement RFM est calculée par l'expression précédemment établie dela résistance de frottement, mais écrite pour le modèle. A chaque vitesse, de la différence entrela résistance hydrodynamique RHM mesurée et celle de frottement RFM calculée on déduite larésistance de vague (ou résiduaire) du modèle. On a ainsi:
RRM = RWM = RHM - RFM

Théorie du Navire II – Resistance et Propulsion des Navires I. 26Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
La résistance de frottement du modèle est calculée par l'expression:2
fmFM MMM V.S..C.R 2/1
Où Cfm est le coefficient de frottement ITTC 57 pour la coque lisse et SM, VM et Rem sontrespectivement la surface mouillée, la vitesse et le nombre de Reynolds à la vitesse considéréedu modèle, tandis que M est la masse volumique du fluide utilisé pendant les essais.
En conséquence de la similitude de Reech-Froude exprimée par:
M
M
R
R
L.g
V
L.g
V
Où VR, LR et VM, LM sont respectivement les vitesses et les longueurs de flottaison de la coqueréelle et du modèle correspondant à une échelle donnée, la résistance de vague (résiduaire) RW
ou RR réelle, pour chaque vitesse réelle correspondante à celle du modèle, se déduit par larelation:
RR = RRM. (/ M). (/ M)
Où etM sont les déplacements de la coque réelle et du modèle (m3) et (/M) la correction dela masse spécifique du fluide.
Tandis que la résistance de frottement RF de la coque réelle (carène), pour lamême vitesse réelle se calcule par l'expression de la résistance de frottement en y introduisant lecoefficient de frottement ITTC 57 avec sa correction de rugosité (ΔCf), la surface mouillée S, lavitesse V de la coque réelle, et la masse volumique de l'eau de mer, donc par:
2ffF V.S.).CC.(R 2/1
La résistance d'appendices
L'étude de la détermination de la résistance à l’avancement des coques, décritejusqu’ici, concerne essentiellement des carènes dites nues, ou lisses, c'est-à-dire sans aspéritéset accessoires dans le bordé de coque.
Les catégories d’appendices qui peuvent exister en relief sous la coque peuventse résumer, d'une manière non exhaustive, en :
- appendices de direction: gouvernail, safran, quille, quille d’échouage, propulseurd’étrave, etc.;
- appendices de confort: quille anti-roulis, ailerons stabilisateurs, T-foils, flaps, etc.;- appendices de propulsion: ligne d’arbre, chaises support d’arbre, orifices d’aspiration
d’hydrojet, etc.;- appendices de fonctionnalité: prises d’eau, ouvertures des propulseurs latéraux, etc.
L’addition des résistances, provoquées par tous ces appendices, est prise, une parune, en considération dans la détermination de la résistance totale d’un navire. Pour l'ensemble,elle peut atteindre 10 à 30 % de la résistance de la carène nue ou 10 à 20 %, de la résistancetotale du navire. Par conséquent, il est nécessaire de la déterminer avec précision.
Ces appendices sont généralement entièrement immergés et l’accroissementenregistré de la résistance à l'avancement provient de la résistance de frottement dans leurcouche limite et surtout de leur éventuel sillage tourbillonnaire. Les essais en similitude à Fr
constant d’un petit modèle de la carène, ne sont pas susceptibles de fournir des indicationscomplètes sur la résistance d’appendices qui relève, au contraire, d’une similitude à Re constantet de ce fait, il est parfois nécessaire de recourir à des essais en tunnel hydrodynamique et leplus souvent à des corrections par le calcul de la résistance à l'avancement de la carène nue.

Théorie du Navire II – Resistance et Propulsion des Navires I. 27Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
La résistance à l’avancement propre à chacun des appendices, selon leurs formes,peut, dans un écoulement non perturbé par la présence de la carène, s'exprimer par l'expression:
2V.ApS)..k1.(fC..21AppR
Où:RApp : Résistance à l’avancement de l’appendice;SAp : Surface mouillée;VAp : Vitesse d'avancement de l'appendice (parfois inférieure à la vitesse du navire si appendice
entièrement dans la couche limite);C f : Coefficient hydrodynamique de l'appendice calculé à partir du nombre de Reynolds;(1+k) : Facteur de forme exprimé par rapport à la planche équivalente, en prenant compte les
problèmes visqueux, la variation des pressions dynamiques, etc. Quelques valeurs usuellessont données dans le tableau de la figure I.22.
(Fig. I.22)
Note: En cas d'interactions entre ces appendices, RApp est augmentée de la résistance due à cesinteractions. La détermination de la résistance d’appendice n’est pas toujours effectuée en bassin. Onpeut alors l’estimer sur les quelques bases suivantes en pourcentage de la carène nue:
- gouvernail (un ou deux au total): 3 à 5 % ;- quilles de roulis, suivant la qualité du tracé: 2 à 4 % ;- arbres et supports (navires à deux hélices): 4 à 6% ;- ouverture de propulseur d’étrave: 3 à 4 %.
La résistance de l'air (résistance aérodynamique)
L'air comme l'eau est un fluide et oppose une résistance au déplacement descorps. Dans le cas des navires les parties hors de l'eau (superstructures et parties émergées dela coque) subissent une résistance engendrée par l'air en cours de leur déplacement.
Dans le cas du déplacement en milieu calme, c'est à dire en absence du vent, cetterésistance, du fait de la très faible densité de l'air, est presque négligeable. Elle est en faitengendrée que par le déplacement des structures émergées à la vitesse du navire dans l'air aurepos. Dès lors, on l'appelle la résistance de l'air.
Par contre, au cours de son déplacement, si le navire subit l'action des vents, larésistance de l'air, appelée dès lors la résistance du vent, devient significative et la vitesserelative de l'air à considérer pour la déterminer est la résultante de celles du vent et du navire(formule de Hughes ci-dessous).
L’effet de la viscosité cinématique de l'air étant uniquement concentré dans lecoefficient de résistance aérodynamique Ca la résistance aérodynamique des superstructurespeut se déterminer indépendamment de celle de la coque émergée. Afin de mieux cerner larésistance aérodynamique, il est possible de procéder à des essais en soufflerie.
La résistance aérodynamique d’un navire se déplaçant dans un milieuparfaitement calme, donc en absence du vent, est donnée par l'expression:

Théorie du Navire II – Resistance et Propulsion des Navires I. 28Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
RAir = ½. a. Ca. SP. V2
où SP est la projection sur un plan transversal du contour englobant toutes les composantes dela structure du navire situées au dessus de l’eau, Ca le coefficient de résistance aérodynamique,a la masse volumique de l'air et V la vitesse du navire.
Du fait des formes différentes que prennent les superstructures et la proue dunavire, afin d'appliquer des coefficients de résistance aérodynamique différents pour chacune,l'aire projetée du contour global SP se décompose en SPS pour les superstructures et SPC pour lacoque. Dès lors, d'une manière plus générale, en absence du vent et dans un milieu parfaitementcalme, l'expression de la résistance aérodynamique s'écrit:
RAir = ½. a. (CaS.SPS + CaC. SPC) .V2
Avec:- SPC, l'aire qui correspond à la surface du maître couple des oeuvres mortes de la coque et par
conséquent du fait du profilage de la coque son coefficient de traînée a une valeur inférieure à 1(environ 0,6).
- SPS l'aire projetée des superstructures dont les arêtes sont généralement vives, la structure del’écoulement est essentiellement fixe par les effets de la viscosité, le nombre de Reynolds Re ,sous réserve qu’il ne soit pas trop faible, n’intervient pas. Pour Re suffisamment grand lecoefficient de résistance aérodynamique est constant et peut dépasser 1.
L’ordre de grandeur de la résistance aérodynamique n’étant que de 2 à 3 % de larésistance totale, la précision de la connaissance de cette résistance, en général, a peud’importance.
Pour évaluer la résistance du vent, l’expression précédente ne peut être appliquéeen remplaçant la vitesse du navire par la vitesse relative de l’air. En effet l’air étant aussi fluide,il apparaît alors au niveau de la mer une couche limite dans laquelle la vitesse absolue est trèsfaible. Cela a pour conséquence de réduire la traînée aérodynamique.
En présence du vent, la résistance aérodynamique et ainsi que la résultante de laforce du vent sont obtenues par l'application de la formule de Hughes (Fig. I.23).
(Fig. I.23)
Ainsi pour un navire de longueur L soumis à l'action du vent de vitesse relative Vfaisant un angle par rapport à l'axe longitudinal du navire, l'expression de la résistanceaérodynamique est donnée par:
))cos(cosAsinA
(V.C..21R2
T2
L2aaAir
Avec: AT = ATS + 0,3. ATC et- AL : Aire projetée de la section longitudinale émergée du navire (m2);- AT : Aire totale projetée de la section transversale émergée du navire (m2);- ATS : Aire projetée de la section transversale des superstructures du navire (m2);- ATC : Aire totale projetée de la section transversale émergée de la coque du navire (m2);- a : Masse volumique de l'air (Kgf.m-4 .s2) 0,123;

Théorie du Navire II – Resistance et Propulsion des Navires I. 29Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
- V : Vitesse relative du vent m/s);- : Angle de la direction du vent relatif par rapport à l'axe longitudinal et mesuré à partir de
l'avant du navire (°);- : Direction de la force résultante relative à l'axe longitudinal du navire (°).
La valeur de aC.a.21k peut être prise raisonnablement égale à 0,00408 entenant compte que Ca/2 varie de 0,5 à 0,65 avec une valeur moyenne 0,6.
La distance de l'étrave au point d'application de la résultante de la force du vent,sous forme de pourcentage de la longueur du navire et pour l'angle variant de 20° à 160°, estdonnée par l'expression: a/L = 0,291 + 0,0023. °
Généralement la direction de la résultante de la force du vent n'est pas la mêmeque celle du vent et change suivant l'angle donné par l'expression:
° = {1 - 0,15. (1 - °/90) – (1 - °/90)3}. 90
Dès lors, la résistance frontale est exprimée par: RAF = RAir cos
La résistance additionnelle (due à l'état de mer)
En général l'état de la mer influence directement la résistance à l'avancement dunavire et induit à puissance égale une réduction importante de sa vitesse. Pendant sonfonctionnement le navire n'évolue que rarement dans un milieu non perturbé et plus souventdoit affronter et vaincre les aléas d'une mer agitée par le vent et les vagues que ce derniergénère.
Si on considère que les vagues, que le navire rencontre pendant son évolution, nedéferlent pas sur la structure avant et n'engendrent pas des effets de choque sur la coque, uneexpression de la résistance additionnelle que cause les vagues peut être établie.
Ainsi, les formules, basées sur des expériences effectuées dans des bassins decarène, conduisent, pour une première approximation, à des résultats suffisamment concordantsavec les mesures faites en vraie grandeur sur des navires (pertes de vitesse pour puissanceconstante). Notamment, la formule de résistance additionnelle due aux vagues frontales, ci-dessous, établie par le bassin de carène expérimental de Stevens Institute:
)wicos1.(2)wVV(H.B
2
1WR
Avec:- B : Largeur du navire;- H : Hauteur des vagues;- V : Vitesse du navire;
- Vw : Vitesse des vagues définie par: .2/.gwV oùest la longueur d'onde des vagues;- iw : Angle de divergence de la ligne de flottaison à l'étrave avec l'axe longitudinale du navire.

Théorie du Navire II – Resistance et Propulsion des Navires I. 30Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre IV - Augmentation de la résistance en eau limitée
La profondeur de l'eau et la section de la voie d'eau ont une grande influence surla résistance à l'avancement de l'eau, cette influence augmente avec la diminution de laprofondeur d'eau h. L'augmentation de la résistance est autant plus grande dans une sectionlimitée (navigation dans les canaux et fleuves) que le rapport de la section du maître couple dunavire à la section de la voie navigable SN /SC est grand (Fig. I.24).
(Fig. I.24)
▫ Résistance en profondeur limitéeLa diminution de la profondeur h de l'eau, même en section illimitée (SN /SC >>),
entraîne une augmentation sensible de la résistance à l'avancement.
Pour des valeurs du rapport profondeur - tirant d'eau du navire h/T inférieures à0,4 l'augmentation de la résistance est très significative. La plupart des chenaux (ou canaux) denavigation ont pour le rapport h/T des valeurs inférieures à 1,5.
L'augmentation de la résistance est due aux plusieurs facteurs, notamment:
- L'écoulement entre la quille et le fond de la voie navigable étant limitéeentraîne une augmentation de vitesse ΔV (équation de continuité) et cettevitesse supérieure à celle V du navire entraîne à son tour une augmentation dela résistance de frottement (résistance visqueuse) tout au long du fond de lacarène du navire.
- Le mouvement rapide de l'eau sous la carène diminue la pression sous lacoque (équation de Bernoulli) et entraîne l'enfoncement de celle-ci(phénomène de squat), donc augmentation de la surface mouillée de la coqueet par conséquent de celle de la résistance de frottement. Pour des valeurs deFrh inférieures ou égales à 0,4, l'expression simplifiée ci-dessous de Norrbinpermet d'évaluer le squat maximum ZM(m) en fonction de la vitesse V et descaractéristiques B, T, L et CB du navire et de Frh.
2rhF..
LT.B
.BC15,2ZM
- Pour une même vitesse du navire, les vagues produites par le déplacement dunavire deviennent plus larges que celles produites en profondeur illimitée. Dèslors, l'énergie nécessaire pour les produire augmente (la résistance de vaguesaugmente en profondeur limitée). En fait, en profondeur limitée la bossecaractéristique de la courbe de résistance se produit à une plus petite vitesseque celle d'en cas de profondeur illimitée.
La résistance de vagues est régie par le nombre de Reech-Froude écrite pour lavitesse V du navire et la profondeur h de l'eau dans laquelle les vagues sontgénérées:
h.g/VFrh

Théorie du Navire II – Resistance et Propulsion des Navires I. 31Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
Plus la vitesse du navire augmente plus les effets de la profondeur deviennentimportants jusqu'à l'apparition de l'écoulement critique où Frh atteint la valeur de 1. En général,pour Frh>1, les effets précités deviennent très importants et les navires limitent leur vitesse afinque les valeurs de Frh restent inférieures à 0,6.
▫ Résistance en section limitéeCes mêmes facteurs se trouvent amplifiées en cas de navigation en section
limitée. La résistance de frottement (au fond et le long de la carène) et celle des vaguesaugmentent. Le phénomène bien connu de succion entre deux navires qui se croisent dans unesection limitée et/ou celui entre le navire et les berges du canal ou du fleuve, apparaît.
Le coefficient de blocage BCN = SC /SN, dans un chenal de navigation, varie de 2-3(chenal à section très limitée) à 20 (chenal ouvert à profondeur limitée) et le nombre de Reech-Froude critique du chenal Frh atteint les valeurs de 0,2 et 0,7 pour les valeurs respectives de 2 et20 du coefficient de blocage BCN du chenal. La figure I.25 illustre la variation de la vitesselimite du navire dans un chenal en fonction de Frh et BCN.
(Fig. I.25)
Dans une section limitée, pour une valeur limite FhL de Reech-Froude définie parle coefficient de blocage BCN, le squat limite ZL peut être obtenu par l'expression:
h.F).F.( 2hh L
3/1LL 15,0Z
D'une manière pratique, pour une même puissance la vitesse en eau profonde V∞
du navire se réduit d'une quantité δV dans l'eau en profondeur limitée. Cette réduction estdonnée par (δV = V∞- Vh) où Vh est la vitesse en profondeur limitée h. Dès lors:
h.gVh δV = V∞- h.g
La variation en pourcentage (100. δV/ V∞) en fonction de la profondeur h et de lasection du maître couple AM de la carène du navire est illustrée à la figure I.26.
De même qu'en section limitée la réduction de la vitesse peut être déterminée dela Fig. I.27 en fonction de la profondeur h de l'eau, du rayon hydraulique Rh du canal, de lasection du maître couple AM et la vitesse en eau profonde V∞du navire.

Théorie du Navire II – Resistance et Propulsion des Navires I. 32Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. I.26)
(Fig. I.27)
Une fois que la résistance totale à l'avancement du navire est obtenue par l'applicationdes méthodes et de modes de calcul précités, la puissance nécessaire à vaincre cette résistance,appelée "puissance effective", est déterminée, pour chaque vitesse et la résistance totalecorrespondante, par l'expression:
EHP (ou PE) = RT.V / 75Où
EHP ou PE est la puissance effective exprimée en CV.RT est la résistance totale exprimée en Kg.V est la vitesse exprimée en m/s.
La puissance effective permet par la suite la détermination des caractéristiques dupropulseur (hélice ou autre) et ainsi que le choix de la source d'énergie (moteurs, turbines, etc.)qui assurera la vitesse de service projetée du navire dans des conditions exigées par leconcepteur ou par l'armateur. La figure I.28 illustre les courbes de la puissance effective EHPen fonction de L/V pour différents types de coques.

Théorie du Navire II – Resistance et Propulsion des Navires I. 33Section I – Résistance
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. I.28)

Théorie du Navire II – Resistance et Propulsion des Navires II. 1 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Section II. Propulsion et Propulseurs
Chapitre I - Propulsion
La propulsion marine désigne l'ensemble des systèmes qui permettent aux navires de
se déplacer. Elle peut être effectuée à l'aide de voiles, par la force humaine (aviron) ou en utilisant un moteur entraînant un propulseur.
Un système de propulsion doit répondre à plusieurs objectifs : ▫ Assurer une efficacité maximum, pour consommer le moins possible de
carburant tout en fournissant une vitesse optimale. ▫ Permettre une capacité d'opération sécuritaire dans des conditions diverses :
vitesse de croisière, vitesse lente, mauvaises conditions météorologiques, à pleine charge ou sur ballast...
▫ Permettre, dans certains cas, une bonne manœuvrabilité à basse vitesse en orientant le sens de déplacement, si le propulseur est fixe, c'est le gouvernail seul qui assure ce rôle et son efficacité dépend fortement de la vitesse du navire.
Le poids et le volume jouent un rôle important, dans certains navires un minimum est
recherché notamment pour de unités comme petites embarcations et remorqueurs. Pour des unités navales comme frégates, patrouilleurs, et ainsi que des navires où le volume utile est prépondérant, le volume du système de propulsion devient un critère de choix. (Fig. II.1)
(Fig. II.1)
Avec l'introduction de la machine à vapeur, au début du 19ème siècle, utilisant l'énergie
fournie par la combustion du charbon et actionnant une roue à aubes, le système de propulsion le plus usuel utilisé actuellement est la propulsion mécanique actionnant un propulseur grâce à un moteur.

Théorie du Navire II – Resistance et Propulsion des Navires II. 2 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Dans tout système de propulsion mécanique, on distingue trois fonctions principales, à savoir: la production d'énergie assurée par un moteur; le propulseur qui transmet l'énergie à l'eau et permet d'avancer; et la transmission d'énergie entre le moteur et le propulseur.
§ Production d'énergie
Les moteurs chargés de transformer le combustible en énergie mécanique et/ou électrique se définissent en fonction du principe de combustion qu'ils utilisent. Ainsi ils sont à combustion externe (chaudières et machines ou turbines à vapeur) ou à combustion interne (moteurs Diesel, moteurs à essence et turbines à gaz).
§ Combustion externe
C'est le système qui fut utilisé le premier historiquement, se caractérise par sa division en deux parties : la chaudière qui produit de l'énergie en chauffant de l'eau en vapeur grâce au combustible et le moteur qui transforme cette énergie calorique en travail mécanique.
Les chaudières sont constituées d'un corps étanche, parcouru par des tubes de chauffe
où circule le liquide à chauffer, qui entoure un foyer où a lieu la combustion. Actuellement du fait de leur rendement inférieur, elles sont surtout utilisées comme générateurs de vapeur dans les réacteurs nucléaires (propulsion nucléaire) car leur fonction de production de vapeur présente dans, ce cas, l'avantage d'utiliser un carburant quasiment inépuisable.
Le moteur peut être une machine à vapeur ou une turbine à vapeur. Avec une
machine à vapeur, la détente de la vapeur est utilisée dans des cylindres, en poussant un piston ce mouvement rectiligne était alors transformé en une rotation par l'intermédiaire d'une bielle, qui agissait sur un arbre.
Depuis le début du 20ème siècle, la turbine permet une utilisation plus souple et
efficace de la vapeur, en ayant l'avantage de créer directement un mouvement circulaire, supprimant beaucoup de pertes par frottement mécanique et permettant d'atteindre plus facilement des vitesses de rotation supérieures. Actuellement, l'usage des turbines a remplacé totalement les machines à vapeur à piston.
Les systèmes à combustion externe permettent d'atteindre de grandes puissances
(70 MW) avec des carburants de basse qualité, mais avec une grande consommation (380 Kg/MW/h) et une faible efficacité thermique. Ils sont aussi très longs à mettre en route, environ quatre heures et demandent beaucoup d'espace. Ils sont encore typiquement utilisés pour des applications spécialisées, notamment, sur les unités militaires en utilisant l'énergie nucléaire pour une meilleure autonomie, et sur les transporteurs de gaz liquéfié où il est possible de réutiliser le gaz des soutes.
§ Combustion interne
Les moteurs à explosions ont atteint aujourd'hui des puissances acceptables pour leur utilisation navale. Sauf pour les plus petits bateaux, ils sont de type Diesel. Ils permettent des rendements importants, et par là une consommation moindre, mais nécessitent des carburants moins grossiers, faisant appel au raffinage des produits pétroliers.
◊ Moteur diesel
Un moteur diesel est un moteur à combustion interne dont l'allumage n'est pas commandé, mais spontané, par phénomène d'autoallumage et n'a donc pas besoin de bougies d'allumage.
Les moteurs diesel marins fonctionnent au fuel lourd. Ils peuvent aussi bien être à
deux temps qu'à quatre temps, à refroidissement par air ou par liquide, avec disposition des cylindres en ligne, en V, W ou X et ainsi que à démarrage hydraulique, électrique ou à air comprimé.

Théorie du Navire II – Resistance et Propulsion des Navires II. 3 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Leur rotation peut être réversible ou non et en fonction de leur vitesse de rotation ils peuvent être lents, semi rapides ou rapides. De même qu’ils peuvent être à l'aspiration naturelle ou suralimentés (turbo).
En application navale on les classe, le plus souvent, selon leurs vitesses de rotation qui
sont très différentes d'un moteur à un autre. En effet plus le moteur est gros, plus le diamètre du piston est grand, et plus le moteur est lent. En fonction de la vitesse de rotation de l'arbre on a, d'une manière générale, trois classes de moteurs:
• moteur lent : entre 100 et 514 tr/min • moteur semi rapide : entre 700 et 1200 tr/min • moteur rapide : entre 1800 et 4000 tr/min.
ú Description du moteur diesel Le moteur est constitué de pistons coulissant dans des cylindres fermés par une
culasse reliant le cylindre aux collecteurs d'admission et d'échappement et munie de soupapes commandées par un arbre à cames.
Le fonctionnement se fait par l'auto combustion d'un mélange air et fuel qui,
comprimé dans 1/20 du volume du cylindre (environ 65 bar), voit sa température portée à environ 450 °C. Sitôt comprimé, le mélange s'enflamme seul (sans bougie) presque immédiatement. En brûlant, il augmente fortement la température et la pression, repoussant le piston qui fournit un travail sur une bielle, laquelle entraîne la rotation du vilebrequin (ou arbre manivelle faisant office d'axe moteur).
La course, le piston se déplace dans le cylindre entre le point mort haut (PMH), sa
position de départ en tête du cylindre, et le point mort bas (PMB), sa position le plus bas au fond du cylindre. La distance entre ces deux points morts constitue la course du piston (stroke), elle est numériquement égale à deux fois le rayon du maneton (la pièce excentrique du vilebrequin où s'attache la bielle), si l'excentricité du maneton par rapport à l'axe principal du vilebrequin est e, la course est donnée par: c = 2.e.
La cylindrée (déplacement) d'un moteur à combustion interne est le volume balayé
par un piston entre le point mort haut et le point mort bas, donc pour un aller-retour. Pour un diamètre D et le nombre N de cylindres, connaissant la course c, la cylindrée CV totale du moteur, souvent exprimée en (cm3) est donnée par l'expression:
Cylindrée (CV) = ¼. N. π. D2.c = ½. N. π. e. D2
Le taux de compression du moteur est le rapport du volume du cylindre quand le piston est au point mort bas à celui quand le cylindre est au point mort haut. Ce rapport doit être suffisamment grand de manière que la température de l'air en fin de compression puisse enflammer le fuel injecté. Cela est possible qu'aux taux de compression d'environ 10 à 20, permettant d'obtenir une température de 450 à 500 ˚C.
La pression moyenne effective au frein (BMEP) est utilisée comme indicateur de
charge du moteur et elle est exprimée en bar par:
BMEP = 220,725.(nC /CV). (BHP/rpm)
Où BHP : Puissance au frein (CV); rpm : Nombre de rotations par minute, soit 60.rps (rotations par seconde); CV : Cylindrée (déplacement) en litres; nC : Nombre de courses par cycle (l pour moteur à deux temps et 4 pour moteur à
quatre temps). Le couple (Q) à l'arbre de sortie moteur en (Kgf x m) est exprimé par la relation:
Q = (75/2.π). (BHP/rps)

Théorie du Navire II – Resistance et Propulsion des Navires II. 4 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Pour un moteur donné le couple Q et la pression moyenne effective au frein BMEP sont directement proportionnels et on a:
Q = 3,245 (CV/ nC). BMEP
La vitesse du piston est la vitesse moyenne du piston pendant sa course c et elle est généralement exprimée en (m/s) et déterminée par la relation:
VP = c. rps/500
Le poids (W) du moteur en (Kg) peut approximativement estimé à travers sa cylindrée CV en litres par l'expression:
W = k.CV
Où k est un constant qui varie de 80 à 110 Kg/litre selon que le moteur est léger ou normal.
Tous les moteurs ne sont pas définis sur une même base de cadence. Les machines à
vapeur sont définies en termes de IHP (puissance indiquée en cheval vapeur), les moteurs à combustion interne en IHP ou en BHP (puissance en cheval vapeur au frein) et les turbines en SHP (puissance en cheval vapeur à l'arbre de sortie).
La puissance indiquée IHP est mesurée dans les cylindres et donnée par l'expression:
IHP = 0,272. MEP. CV. rps/ nC
Où MEP : Pression effective moyenne mesurée en bar dans un cylindre; CV : Cylindrée (déplacement) en litres; rps : Nombre de rotations par seconde; nC : Nombre de courses par cycle (l pour moteur à deux temps et 4 pour moteur à
quatre temps).
La puissance au frein (BHP) est la puissance mesurée à l'accouplement de l'arbre moteur avec le frein mécanique, hydraulique ou électrique. Elle est déterminée par le test de SHP et calculée par la formule:
BHP = 2.π . Q. n/75
Où n est le nombre de rotations par seconde (rps).
La puissance à l'arbre (SHP) est la puissance transmise à l'hélice par l'intermédiaire de l'arbre de transmission. Pour un arbre rigide et cylindrique elle est donnée par l'expression:
S6
4S
L.10.97,6n..G.d
SHPθ
=
Où
dS : Diamètre en (mm) de l'arbre; LS : Longueur en (mm) de l'arbre où θ est mesuré; n : Nombre de rotations par seconde (rps); θ : Angle de torsion mesuré en degré sur l'arbre de transmission; G : Module d'élasticité au cisaillement (Kgf/mm2) du matériel de l'arbre.
En posant k = Q.LS/θ représentant le constant de calibration, on obtient:
)L.(
75n..2.kSHP
S
θπ=

Théorie du Navire II – Resistance et Propulsion des Navires II. 5 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Entre l'accouplement sortie arbre et l'arbre de transmission et la presse étoupe il existe des pertes dues aux différents coussinets des supports de l'arbre de transmission. Ces pertes sont de l'ordre de 2 à 3%. La puissance délivrée à l'hélice DHP est ainsi inférieure à celle mesurée sur l'arbre de transmission SHP. Le rapport DHP/SHP appelé le coefficient du rendement de transmission de l'arbre est généralement pris égal à 0,98 pour la machinerie installée à l'arrière un navire et 0,97 pour celle installée au milieu. Les différents coefficients de rendement peuvent être schématisés tels que présentés dans la figure II.2.
(Fig. II.2)
Dès lors, on définit successivement les différents coefficients ou rendements:
- Le coefficient du réducteur/inverseur:
BHPSHP
.Réd =η
- Le coefficient de l'arbre de transmission:
SHPDHP
.Arb =η
Le coefficient de l'arbre de transmission ηArb inclut en fait ceux des coussinets des supports ηC et de la presse étoupe ηPe, par conséquent, on écrit:
ηArb. = ηC x ηPe.
- Le coefficient de transmission globale:
BHPDHP
S =η
Ce coefficient de transmission globale ηS n'étant que le produit des coefficients du réducteur/inverseur ηRéd et de l'arbre de transmission ηArb, il s'écrit:
ηS = ηRéd x ηArb = ηRéd x ηC x ηPe
ú Performances du moteur diesel La puissance, le rendement et la consommation des moteurs diesel varient selon qu'ils
sont à deux ou à quatre temps et influencent leurs performances. La sélection des moteurs diesels, pour des applications particulières comme la
propulsion marine, est basée sur les caractéristiques de leurs performances notamment le couple Q, la puissance BHP, la consommation spécifique en fuel et leurs vitesses de rotations rpm.
A vitesse constante, la consommation de fuel varie linéairement en fonction de la
charge, mais pour des charges importantes la relation devient no linéaire. (Fig. II.3)

Théorie du Navire II – Resistance et Propulsion des Navires II. 6 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. II.3)
Les moteurs diesel sont des moteurs à couple constant, la figure II.4 illustre les caractéristiques du couple moteur Q et de la puissance BHP en fonction de la cadence (régime) et des différentes alimentations.
La cadence (ou régime) d'un moteur est définie en pourcentage sous forme de
puissance ou de vitesse nominale par rapport à la puissance ou la vitesse maximale. Ainsi, la puissance nominale d'un moteur est sa capacité de développer une puissance pour un taux (régime ou cadence) de sa vitesse de rotations, sous des conditions spécifiées, cycle d'utilisation et durée de vie, fonctions de ses performances, son endurance et de ses tests environnementaux.
(Fig. II.4)
Les courbes de puissance des moteurs diesel, en fonction de la vitesse de rotation et à
alimentation constante, sont linéaires.

Théorie du Navire II – Resistance et Propulsion des Navires II. 7 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Le cycle du moteur diesel
- Le moteur diesel deux-temps C'est l'application la plus courante sur les navires marchands à partir de 100 m de
long. Ces moteurs peuvent fournir une grande puissance (80MW), ont la meilleure efficacité et tournent entre 100 et 514 rpm (rotations par minute), permettant un entraînement direct du propulseur. Ils peuvent aussi utiliser des carburants de basse qualité, et consomment relativement peu (170 Kg/MW/h). En revanche, ils occupent une place importante, leur rapport poids/puissance est approximativement de 30 à 45 Kg/kW et nécessitent un long temps de démarrage, environ deux heures.
- Le moteur diesel quatre-temps
Le cycle Diesel à quatre temps comporte: 1. admission d'air par l'ouverture de la soupape d'admission et la descente du
piston ; 2. compression de l'air, la soupape d'admission étant fermée, grâce à la remontée
du piston; 3. injection : peu avant le point mort haut on introduit, par un injecteur, le
carburant qui se mêle à l'air comprimé. La combustion rapide qui s'ensuit constitue le temps moteur, les gaz chauds repoussent le piston, libérant une partie de leur énergie. Celle-ci peut être mesurée par la courbe de puissance moteur;
4. échappement des gaz brûlés par l'ouverture de la soupape d'échappement, poussés par la remontée du piston.
Le moteur à quatre temps tourne à vitesse intermédiaire (700 à 1200 rpm) ou élevée
(1800 à 4000 rpm) et nécessite donc un réducteur. Il offre une plus grande flexibilité mais est moins efficace qu'un moteur deux-temps et consomme plus (220 Kg/MW/h). Sa taille plus petite permet l'implantation de plusieurs moteurs, utile pour assurer une certaine redondance et mieux gérer les pannes. Ces moteurs sont aussi utilisés pour la génération d'électricité sur la plupart des navires (groupe électrogène). La puissance maximale par moteur est de l'ordre de 28 MW. Le rapport poids/puissance d'un diesel semi rapide est de 12 à 18 Kg/kW, et de 2,5 à 4 Kg/kW pour un diesel rapide.
La figure II.5 illustre les courbes typiques de consommation spécifique de fuel des
moteurs diesel en fonction de la puissance (BHP) et les pourcentages de cadence et de révolutions par minute (rpm).
(Fig. II.5)
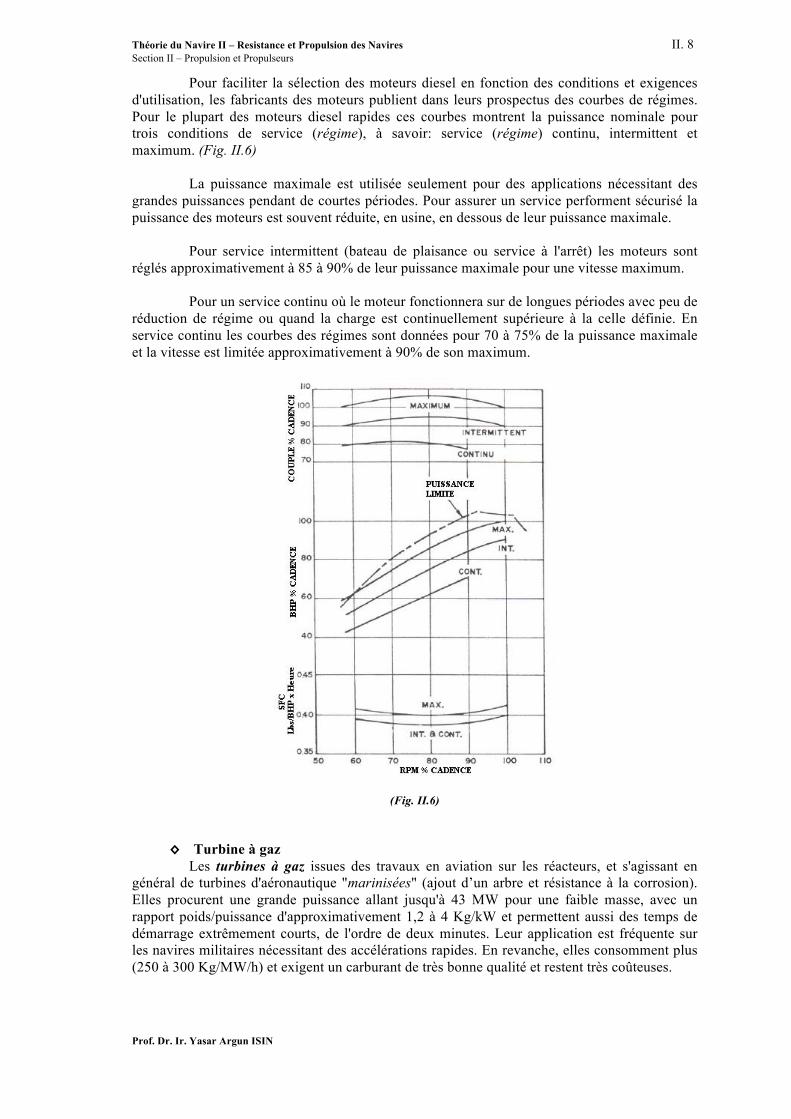
Théorie du Navire II – Resistance et Propulsion des Navires II. 8 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Pour faciliter la sélection des moteurs diesel en fonction des conditions et exigences d'utilisation, les fabricants des moteurs publient dans leurs prospectus des courbes de régimes. Pour le plupart des moteurs diesel rapides ces courbes montrent la puissance nominale pour trois conditions de service (régime), à savoir: service (régime) continu, intermittent et maximum. (Fig. II.6)
La puissance maximale est utilisée seulement pour des applications nécessitant des
grandes puissances pendant de courtes périodes. Pour assurer un service performent sécurisé la puissance des moteurs est souvent réduite, en usine, en dessous de leur puissance maximale.
Pour service intermittent (bateau de plaisance ou service à l'arrêt) les moteurs sont
réglés approximativement à 85 à 90% de leur puissance maximale pour une vitesse maximum. Pour un service continu où le moteur fonctionnera sur de longues périodes avec peu de
réduction de régime ou quand la charge est continuellement supérieure à la celle définie. En service continu les courbes des régimes sont données pour 70 à 75% de la puissance maximale et la vitesse est limitée approximativement à 90% de son maximum.
(Fig. II.6)
◊ Turbine à gaz Les turbines à gaz issues des travaux en aviation sur les réacteurs, et s'agissant en
général de turbines d'aéronautique "marinisées" (ajout d’un arbre et résistance à la corrosion). Elles procurent une grande puissance allant jusqu'à 43 MW pour une faible masse, avec un rapport poids/puissance d'approximativement 1,2 à 4 Kg/kW et permettent aussi des temps de démarrage extrêmement courts, de l'ordre de deux minutes. Leur application est fréquente sur les navires militaires nécessitant des accélérations rapides. En revanche, elles consomment plus (250 à 300 Kg/MW/h) et exigent un carburant de très bonne qualité et restent très coûteuses.

Théorie du Navire II – Resistance et Propulsion des Navires II. 9 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Transmission d'énergie La méthode la plus simple pour transmettre l'énergie créée aux propulseurs serait
d'accoupler l'arbre moteur directement à l'arbre d'hélice ou de roue, système simple mais qui limite toute souplesse et les performances du système de propulsion.
Actuellement, la transmission de l'énergie mécanique crée aux propulseurs se fait soit
par un système de transmission appelé réducteur, soit par transmission électrique.
▫ Réduction mécanique Les moteurs peuvent fournir des vitesses de rotation trop grandes pour un
fonctionnement optimal du propulseur, il est alors nécessaire de réduire mécaniquement, celles-ci grâce à un jeu d'engrenages, où le rapport entre le nombre de dents détermine la différence de vitesse des deux arbres. De façon plus évoluée une boîte de vitesse peut-être utilisée pour réduire la vitesse de rotation de l'hélice, et pour contrôler plus finement les changements de vitesse.
Cela permet aussi à plusieurs moteurs d'entraîner un seul arbre, ou inversement,
autorisant alors de mixer différents types de moteurs pour utiliser aux mieux leurs avantages. C'est ainsi que les turbines à gaz sont en général intégrées avec des moteurs diesel suivant différentes combinaisons:
- CODAG, pour Combinaison Diesel - Turbine à gaz La vitesse de croisière est assurée par les moteurs diesels, plus économiques, tandis
que des turbines à gaz permettent d'obtenir une puissance additionnelle pour les accélérations : utilisé sur les navires de guerre.
- COGOG, pour Combinaison des Turbines à gaz La vitesse de croisière est assurée par des turbines à gaz de grande puissance; en cas
de sprint, c'est une autre turbine qui est utilisée à la place. Il existe sur le même modèle des configurations CODOG ou COGAG, plus rares
cependant.
▫ Transmission électrique Dans ce cas, les moteurs agissent comme générateurs d'électricité, et les arbres
d'hélice sont entraînés par des moteurs électriques. Cette configuration permet de placer les moteurs diesel à d'autres endroits du navire, notamment, pour minimiser le bruit, équilibrer le navire, mieux protéger la machine, etc.; les moteurs électriques supportent mieux les variations brusques de vitesse, comme sur les brise-glaces.
La propulsion électrique permet aussi, grâce à l'emploi d'accumulateurs, d'utiliser la
puissance de façon différée, comme c'est le cas sur les sous-marins à propulsion diesel-électrique, la propulsion électrique étant utilisée en plongée quand les diesels ne peuvent fonctionner sans apport d'oxygène.
Le schéma de la figure II.7 donne les différents systèmes de propulsion sous formes
de combinaisons entre les types de production d'énergie, de transmission et d'hélice.

Théorie du Navire II – Resistance et Propulsion des Navires II. 10 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. II.7)

Théorie du Navire II – Resistance et Propulsion des Navires II. 11 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre II - Propulseurs marins Les propulseurs, quelque soient leurs types et leurs principes de fonctionnement,
constituent l'élément vital d'un navire. Ils transforment l'énergie produite par le système de production (moteurs, turbines, etc.) en une poussée dans le fluide qu'y permet, par réaction, l'avancement du corps. La poussée exercée (ou créée) par le propulseur dépend du type de propulseur et ainsi que de son principe de fonctionnement (rotation ou translation) de même que des caractéristiques physiques (dimension et forme) du propulseur et ceux du fluide.
§ Propulseurs types
Dans le cas de propulsion humaine, le propulseur le plus simple est la rame, ayant le plus souvent la forme d'une pelle. L'action de la rame consiste en un va-et-vient régulier de translations, en alternant une phase de poussée pelle dans l'eau et une phase de retour hors de l'eau. L'action de la pelle dans l'eau peut être de deux sortes selon la forme de la pelle et son mouvement dans l'eau. Notamment, la méthode dite la godille où la pelle avec des mouvements répétés de part et d'autre de la coque agit comme une hélice, avec un angle d'incidence important mais en maintenant un écoulement laminaire; et dans d'autres méthodes comme avirons et pagaies où la pelle agit sur les côtés de la coque et pousse l'eau directement vers l'arrière de celle-ci, le plus souvent avec un écoulement turbulent.
Dans le cas de propulsion vélique (vent), le propulseur est constitué des voiles qui,
fixées sur des mâts verticaux solidaires à la coque, récupèrent la force du vent (la résultante de la pression de l'air) et à travers les mâts transmettent à la coque qui se déplace, dès lors, dans l'eau par réaction.
Dans le cas de propulsion mécanique, un des premiers systèmes historiquement
utilisé est la roue à aube qui n'est en fait qu'une variante de la mécanisation du système à rames où les pelles sont remplacées par des aubes distribuées et fixées autour d'une roue tournant autour d'un axe horizontal à la surface de l'eau et entraînée par un système de propulsion mécanique (moteurs, machines à vapeur).
Ce type de propulseur utilisé jadis dans la navigation fluviale à faible profondeur,
présentant un faible rendement est remplacé de nos jours par les systèmes à hélices. Son développement récent permet néanmoins sa grande utilisation dans le cadre de transformation de l'énergie hydraulique (roues hydrauliques).
Le système actuellement le plus employé est l'hélice et ses variantes. La figure II.8
illustre quelques hélices typiques et des pales et sections des pales. Dans sa forme la plus simple et la plus courante, on trouve:
ú L’hélice à pas fixe: qui tourne autour d'un axe horizontal et est placée en général à
l'arrière du navire. Ses pales ont un pas fixe (inclinaison fixe) et leur nombre peut varier de 2 à 3 sur des petites embarcations, de 4 à 5 sur la plupart des navires de commerce ou de 7 ou 8 sur navires spéciaux ou militaires.
ú L’hélice à pas variable, où le pas peut être ajusté afin d'assurer une efficacité
optimale pour plusieurs vitesses et éviter les renversements de marche du moteur, le pas de l'hélice réglant la marche avant et la marche arrière. Ce système, qui présente l'inconvénient d'être assez complexe est utilisé sur les remorqueurs, les chalutiers et les cargos pour améliorer leurs performances en traction.

Théorie du Navire II – Resistance et Propulsion des Navires II. 12 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. II.8)
Afin d'accélérer le flux d'eau à travers l'hélice et d'améliorer ainsi la poussée, il est courant d'adjoindre une tuyère à l'hélice (Fig. II.9) qui peut être fixe ou orientable (Kort nozzle).
(Fig. II.9)
Au point de vue de leurs dispositions sur la carène, les hélices peuvent être présentes
sous forme simple (hélice unique) ou jumelée (minimum deux). Quand elles sont jumelées les hélices sont placées symétriquement à l'arrière de part et d'autre de l'axe longitudinal du navire. Ce système améliore la manœuvrabilité et la flexibilité du navire. Les configurations à trois ou quatre hélices sont utilisées, notamment, sur les grands navires militaires (porte-avions et croiseurs) et les navires de croisière.
Pour un meilleur rendement, une autre variante de disposition consiste à placer
plusieurs hélices, l'une derrière l'autre, sur un même axe et chacune tournant dans le sens opposé de celle qui la précède. C'est le cas des hélices contre rotatives, où l'hélice arrière réutilisant l'énergie de rotation induite par l'hélice avant. De même que, les hélices à pales inclinées (skewed) et celles dites supercavitantes et superventilées, se trouvent actuellement être utilisées pour des applications marines spécifiques.
Les hélices à pales inclinées sont utilisées afin de se mettre à l'abri des phénomènes de
cavitation, de bruit et de vibrations (applications militaires), tandis que les hélices supercavitantes sont conçues pour fonctionner en pleine cavitation avec un meilleur rendement. Quant aux hélices superventilées, elles sont conçues pour des vitesses très élevées de 35 à 50 nœuds en immersion total, voir jusqu'à 100 nœuds en immersion partielle, pour obtenir, tout en cavitant, un meilleur rendement. Les hélices supercavitantes en pleine cavitation ont leurs cavités remplies de vapeur d'eau et d'une faible quantité de gaz dissout dans l'eau, tandis que les hélices superventilées, ont leurs cavités qui se remplissent de l'air et du gaz et non de vapeur d'eau.
Pour assister et faciliter les manœuvres des navires surtout dans la navigation fluviale
et dans les approches portuaires, on peut placer des hélices transversalement à l'axe de la carène (propulseurs transversaux), c'est le cas des propulseurs d'étrave. Ces hélices agissant dans le sens transversal peuvent être entraînés par des sources d'énergie mécanique souvent indépendantes de celle de la propulsion principale; par un moteur diesel, par un système hydraulique ou par un système électrique.

Théorie du Navire II – Resistance et Propulsion des Navires II. 13 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Parmi d'autres systèmes de propulseurs principaux citons:
ú Le propulseur à axe vertical (Voith-Schneider) constitué de pales verticales orientables agissant comme des foils, disposées sur un plateau tournant sous la carène selon un axe vertical à celle-ci (Fig. II.10). La capacité d'ajuster très rapidement la direction du flux d'eau rend ce système complexe particulièrement intéressant pour les remorqueurs.
(Fig. II.10)
ú Les hydrojets constitués d'un système de pompe qui aspire l'eau sous la carène et l'expulsent à très haute vitesse derrière le navire, au-dessus ou au-dessous de l'eau. La direction du jet pouvant être facilement contrôlée le système remplace le gouvernail. Ce système, ayant un très bon rendement à haute vitesse, est employé sur les yachts rapides, les ferrys à grande vitesse (NGV), les hydroptères à vocation militaire ainsi que sur les scooters de mer ou (jet ski). (Fig. II.11).
(Fig. II.11)
§ Hélice marine
Comme on a stipulé précédemment, l'hélice est le propulseur le plus couramment utilisé dans le domaine de propulsion des navires. Géométriquement, elle est définie par une courbe gauche dont la tangente en chaque point fait un angle constant avec une direction donnée, elle est en fait une partie de la surface hélicoïdale qui tournant dans l'eau transfert l'eau du devant vers l'arrière (poussée) et ainsi par réaction permet au navire de l'avancer vers l'avant.
Pour une même direction de poussée, les hélices peuvent être conçues pour tourner
soit à droite (right-handed) dans le sens de rotation des aiguilles d'une montre soit à gauche (left-handed), donc dans le sens contraire. Dans le cas des hélices jumelées, donc disposées de part et d'autre de l'axe longitudinal du navire, sur une vue vers l'avant à l'arrière du navire, on sera devant des hélices à rotations externes et internes selon que celles-ci tournent vers l'extérieur (outward turning) soit vers l'intérieur (inward turning).
Ainsi, le système d'hélice, formée de plusieurs pales disposées régulièrement autour d'un axe en rotation, décrit des hélices dans un fluide en avançant perpendiculairement à la rotation, grâce aux pales, orientées suivant un certain angle ou pas, qui prennent appui sur le fluide.
ú Définitions et caractéristiques de l'hélice marine
D'une manière succincte, les différentes caractéristiques et les paramètres qui permettent de définir l'hélice sont illustrés dans la figure II.12:

Théorie du Navire II – Resistance et Propulsion des Navires II. 14 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. II.12)
Où:
- Le diamètre (D) (m) de l'hélice; - Le nombre (z) de pales; - Les différents coefficients des pales, notamment, les rapports tmax/D et tm/D de
l'épaisseur maximum tmax et moyenne tm des pales au diamètre D de l'hélice, les rapports bmax/D et bm/D de largeur maximum bmax et moyenne bm des pales au diamètre D de l'hélice, qui caractérisent les paramètres intervenant dans les calculs et choix des hélices.
- Le pas (P), qui caractérise la propulsion de l'eau à chaque tour d'hélice sans compter le recul (Fig. II.13 et 14);
Le pas peut être constant ou variable sur la longueur de la pale. Dans le cas où le pas est constant, la valeur du pas donnée par l'expression p=2.π .r. tgθ restant constant sur toute la longueur de la pale l'angle θ varie en fonction du rayon r de la pale. Dans le cas où le pas est variable sur la longueur de la pale, le pas a une valeur différente pour chaque rayon évoluant du moyeu à la pointe de l'hélice et du bord d'attaque au bord due fuite de la pale. Dans ce cas la valeur nominale du pas de l'hélice est mesurée à 0,7r de la pale. Il existe aussi, mais rarement utilisées, des hélices où l'angle θ reste constant sur tout le rayon de la pale, donc des pas différents à chaque point du rayon de la pale. Les hélices à pales fixes ont des pales fixées une fois pour toute sur le moyeu et restent fixes tout au long de leur fonctionnement. Ces hélices peuvent avoir des pales à pas constant ou variable. Les hélices à pales orientables ont par contre des pales qui peuvent être réglées (pivotées sur le moyeu) pendant qu'elles tournent ce qui permet d'ajuster à tout moment de leur fonctionnement la poussée donc le rendement de l'hélice.

Théorie du Navire II – Resistance et Propulsion des Navires II. 15 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. II.13)
(Fig. II.14) - L'angle d'inclinaison (θ) des pales défini par tg(θ) = P/2.π.r (Fig. II.15); - Les différentes surfaces des pales A0, AD, AP, AE (Fig. II.16) et les rapports AD/A0,
AP/A0, AE/A0 et AP/AD où A0 est la surface du disque et AD, AP et AE représentent respectivement les surfaces développée, projetée et expansée des pales. Ils interviennent dans les calculs des hélices et déterminent l'efficacité de la propulsion, sachant que l'augmentation de la surface des pales contribue à l'accroissement de la dépression d'aspiration, car la dépression est limitée par la pression atmosphérique et pour des raisons de cavitation elle ne peut pas être inférieure en surface à la pression d'évaporation de l'eau (< 1 Kg/cm²).
(Fig. II.15)

Théorie du Navire II – Resistance et Propulsion des Navires II. 16 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
A0 = π.D2/4 étant la surface du disque de l'hélice, la connaissance de la valeur d'une des surfaces AE, AP et AD permet de déterminer les deux autres par l'intermédiaire des formules approximatives de Taylor, notamment, le rapport important AE/AP, utilisé dans les calculs de cavitation de l'hélice:
AP/AD = 1,067 – 0,229.P/D } ⇒ AE/AP AE/AD = 0,34. (2,75 + AD/z)
(Fig. II.16)
- La vitesse d'avance VA est la vitesse de l'eau à l'entrée de l'hélice. Le navire se déplaçant à une vitesse V du fait de l'effet de la viscosité l'écoulement est freiné autours de la coque (frottements) et une traînée turbulente apparaît à l'étambot. La vitesse de l'écoulement V (du navire) à travers l'hélice subit une diminution VS à l'amont de celle-ci. L'eau derrière l'étambot, en général, se déplace dans la direction du mouvement du navire. Dès lors la vitesse d'avance se définit par la relation (Fig. II.17):
VA = V - VS
(Fig. II.17)
- Le recul (s) ou slip, qui caractérise le rapport du pas réel au pas théorique de
construction et traduit le fait qu'à chaque tour d'hélice la masse d'eau qui traverse l'hélice est déplacée d'une longueur inférieure (pas réel) à celle correspondante à son pas théorique de construction. Car, pour des raisons de frottements (salissures, viscosité) et d'inertie, une partie de l'eau qui se met aussi à tourner avec l'hélice, n'est pas directement affectée par les pales (Fig. II.18).
(Fig. II.18)

Théorie du Navire II – Resistance et Propulsion des Navires II. 17 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Les reculs apparents sA et réel sR sont définis par les expressions:
Vn.PAs −= et n.P
V1 A
Rs −=
ú Action de l'hélice marine
Plusieurs théories existent pour déterminer l'action de l'hélice marine, notamment; la ou les théories de quantité de mouvement, développées en y introduisant l'impulsion, l'élément de pale et la théorie de circulation.
Les théories dites quantité de mouvement, considérant l'hélice, dans un fluide idéal
donc sans frottements, comme un disque pouvant conférer, au fluide passant à travers celui-ci une augmentation soudaine de pression ou d'accélération, sont basées sur des principes fondamentaux corrects mais ne donnant aucune indication sur la forme de l'hélice qui doit produire la poussée requise.
De la configuration de la figure II.19, où T, VA et PI représentent respectivement la
poussée, la vitesse de l'écoulement non perturbée et la pression avant et après la section du disque, et en considérant les facteurs vitesses a et b à l'entrée et sortie du disque, la théorie de quantité de mouvement, dans sa forme la plus simple, en faisant abstraction des vitesses de rotation du fluide engendrées par le mouvement du disque, permet d'obtenir l'expression du rendement idéal ηi du disque.
(Fig. II.19)
Le rendement idéal du disque est exprimé par la relation:
ηi = 1 / (1+a)
En terme du recul s = b. VA/VA et en tenant compte que b = 2.a, l'expression du rendement idéal et de la poussée s'écrivent:
)s/(22i +=η et s)./s.( 212A0 V.A.T +ρ=
Ou encore, en y introduisant le coefficient de la poussée CT défini par l'expression:
2A0
TV.A..
TC
2
1ρ
=
les expressions du recul s et du rendement idéal ηi s'écrivent:

Théorie du Navire II – Resistance et Propulsion des Navires II. 18 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
)1C1( Ts −+= et )C11/(2 Ti ++=η
L'introduction dans la théorie de quantité de mouvement des accélérations rotationnelles (théorie d'impulsion) et ainsi que l'introduction de la théorie d'élément de pale (strip theory) qui considère que l'hélice est formée de plusieurs pales séparées et que à leur tours, elles sont divisibles en plusieurs tranches allant du bord d'attaque au bord de fuite de la pale considérée, ont permis d'améliorer la conception des hélices.
Notamment, la théorie de circulation, basée sur le principe Kutta-Joukowski et
développée par Helmbold, a rendu possible d'aboutir à une approche réaliste entre la théorie et la pratique et permet actuellement une conception (construction) détaillée des hélices.
Dans le cadre de la théorie d'élément de pale, la force appliquée par le fluide sur
chaque tranche d'une pale est évaluée par la connaissance de la vitesse relative de l'élément par rapport à l'eau et de sa géométrie.
Les forces élémentaires sont dès lors exprimées sous forme de dT (poussée
élémentaire) dans la direction de l'écoulement et dQ (couple élémentaire) dans le plan de rotation de l'hélice. L'intégration des courbes de dT et dQ le long de la pale (du moyeu à la pointe de la pale) permet, dès lors, d'obtenir la poussée T et le couple Q de l'hélice (Fig. II.20).
(Fig. II.20)
Le rendement de l'hélice est, dès lors, défini par l'expression:
Q.n..2V.T A
0 π=η
Les formes et les sections des pales varient d'une manière significative selon les types de navire pour lesquels on conçoit les hélices. La figure II.21 illustre les forces qu'exercent sur la section de pale au cours de sa rotation dans un écoulement uniforme.
(Fig. II.21)
ú Lois de comparaison des hélices marines (lois des similitudes)
Comme dans le cas de la résistance à l'avancement des navires, une grande partie des connaissances sur les performances des hélices est obtenue à travers des essais sur modèles en eau libre (en absence de la carène). Pendant ces essais on enregistre la poussée T et le couple Q

Théorie du Navire II – Resistance et Propulsion des Navires II. 19 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
de l'hélice en fonction de sa vitesse de rotations n et la vitesse d'avancement VA (vitesse de l'eau à l'amont de l'hélice).
En considérant que la poussée T de l'hélice dépendrait des paramètres comme; la masse volumique ρ , la viscosité ν , la pression p et la vitesse d'avancement VA de l'eau, de la vitesse de rotation n et du diamètre D de l'hélice, et de l'accélération gravitationnelle g, par le biais de l'analyse dimensionnelle on peut définir l'expression adimensionnelle de la poussée T.
}D.V
,V.p,
VD.n,
VD.g{F.V.D.T
A2AA
2A
2A
2 ν
ρρ=
ou encore le coefficient CT de la poussée:
}D.V
,V.p,
VD.n,
VD.g{F
V.D..
TCA
2AA
2A2
A2
T
2
1ν
ρ=
ρ=
Ainsi, cette expression traduit l'égalité des coefficients de la poussée CT et des valeurs
des paramètres sans dimensions pour des hélices géométriquement similaires mais de dimensions différentes, et ainsi que de la similarité des écoulements.
Le terme ν / (VA .D), traduisant l'expression du nombre de Reynolds écrite pour une
hélice de diamètre D et dans un écoulement de vitesse VA et de viscosité ν , ne peut pas être respecté si les vitesses d'avancement VA du réel et du modèle suivent la loi de Froude. De ce fait, dans une première phase, la résistance de frottement de la pale représentant une très faible partie de la force totale, l'effet de viscosité est négligée. Néanmoins, afin de réduire cet effet sur la traînée de la section de pale au minimum, les essais sur l'hélice modèle sont conduits en écoulement turbulent.
En gardant cette réserve dans l'esprit, et aussi longtemps que les relations g. D/VA
2 et n. D/VA sont identiques pour l'hélice réelle et son modèle, on aura T proportionnelle à D2. VA
2. Dès lors, en posant comme échelle linéaire λ traduisant, pour une dimension
caractéristique comme le diamètre D de l'hélice, le rapport du diamètre réelle Dr et de celle du modèle Dm, et en on déduit les relations suivantes:
Dr/Dm = λ VAr/VAm = λ½
Tr/Tm = (Dr/Dm).( VAr/VAm)2 = λ3
(nrDr/VAr) = (nmDm/VAm) ⇒ nr/nm = λ -½
PTr/PTm = (Tr .VAr )/(Tm.VAm) = λ3,5
Qr/Qm = ( PTr/PTm).( nm/nr) = λ4
Où PT et Q sont respectivement la puissance de la poussée et le couple définis par:
PT = T. VA et Q = PT/n.
En exprimant les résultats des essais sous forme de:
2A
2
2
1TV.D..
TCρ
= et 2A
3
2
1QV.D..
QCρ
=
Sur base de J = VA/n.D, les coefficients CT et CQ seront directement applicables à l'hélice réelle. De même que, J ou VA/n.D étant les mêmes pour l'hélice réelle ou son modèle, on peut remplacer VA par n.D et obtenir de nouveaux coefficients adimensionnels dans n'importe quel système d'unités connu. On a ainsi:
- Le ratio d'avance : J = VA/n.D - Le coefficient de la poussée: KT = T / (ρ .n2.D4)

Théorie du Navire II – Resistance et Propulsion des Navires II. 20 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
- Le coefficient du couple: KQ = Q / (ρ .n2.D5) - Le rendement en eau libre de l'hélice: η0 = (J / 2.π). (KT / KQ)
Où KT, KQ et η0 sont des fonctions de J (Fig. II.22).
(Fig. II.22)
ú Cavitation
La cavitation est le phénomène qui apparaît sur des hélices lourdement chargée tournant au-delà d'une certaine vitesse de révolutions. Elle entraîne une perturbation progressive de l'écoulement et par conséquent, une perte de poussée empêchant le navire d'atteindre la vitesse requise. Elle manifeste par des sifflements, vibrations et ainsi que par l'apparition des érosions sur des pales, des supports et des gouvernails.
Eliminer ou empêcher la cavitation est une des préoccupations majeures et on doit en
tenir compte pendant la conception spécifique ou le choix de l'hélice. Pour mieux comprendre le phénomène, on considère une section de pale ayant un petit angle d'attaque α et placée dans un écoulement permanent bidimensionnel de fluide non visqueux (Fig. II.23).
(Fig. II.23)
La ligne horizontale du diagramme représente la pression statique sur le dos du profil (extrados). Si la réduction de pression sur extrados devient égale à la pression statique en point situé sur la largeur de la pale, toute tendance à réduire la pression, au-delà de cette valeur en ce point, entraîne une perturbation et apparition des bulles (ou cavités) remplies d'air ou de vapeur d'eau. Ces bulles engendrées le long de la pale se déplaçant vers le bord de fuite atteignent les régions de haute pression et explosent en générant des forces locales suffisamment importantes pour causer des dommages mécaniques ou d'érosions sur la pale.
D'où, nécessité d'avoir, pour des raisons quantitatives, des critères établissant les
conditions de cavitation des hélices. Ainsi, de la figure II.16, en appliquant l'équation de Bernoulli entre les sections A et B, on obtient successivement:
p1 + ½ ρ V12 = p0 + ½ ρ V0
2 ⇒ δp = p1 - p0 = ½ ρ (V02 - V1
2)

Théorie du Navire II – Resistance et Propulsion des Navires II. 21 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
En posant q = ½.ρ . V02 représentant la pression de stagnation aux environ du point de
stagnation S (où la vitesse V1 = 0) situé sur le bord d'attaque, en un point sur l'extrados la pression p1 sera nulle si δp = - p0, or comme l'eau ne peut supporter la tension, en ce point l'écoulement sera perturbé avec l'apparition des bulles (ou cavités) qui engendreront la cavitation. En pratique cette situation n'apparaît que quand la pression p1 atteint la pression d'évaporation de l'eau pV et non quand elle tend vers zéro.
Ainsi, quand la pression p1 atteint la pression de vapeur d'eau pV, l'eau bout et forme
des bulles, dès lors, cette condition se traduit en écrivant:
pV = p0 + δp ou δp = -(p0 - pV)
Dès lors, en divisant par la pression de stagnation q = ½.ρ . V02, on obtient l'expression
qui définit la condition d'apparition de la cavitation:
q)pp(
qp V0 −≥δ
−
Le rapport (p0 - pV)/q est appelé le nombre de cavitation et symbolisé par σ. Ce nombre, traduisant la similarité dynamique entre le modèle et le prototype de l'hélice, permet d'établir, à travers des essais sur modèles d'hélice et tout en respectant la similitude de Froude, les caractéristiques de cavitation des hélices et de tracer des diagrammes et abaques de cavitation pour des familles d'hélice.
En général les hélices sont conçues, dans une première phase, en utilisant les abaques
ou diagrammes obtenus à travers des essais méthodiques de séries d'hélice. Même en cas de conception purement analytique, il est nécessaire de commencer en choisissant quelques diamètres d'hélices déterminées par les ces diagrammes ou abaques. Dès lors, certains critères généraux sont nécessaires pour le choix des hélices sans ou avec faible cavitation, notamment le critère du choix de la surface des pales.
Plusieurs types de diagrammes de cavitation spécifiques pour des familles d'hélice
existent et permettent de déterminer les différentes caractéristiques que l'hélice doit posséder pour les conditions d'utilisations projetées afin de se prémunir de la cavitation.
Un des diagrammes plus utilisé est celui établi par Burrill (Fig. II.24) sous forme de
courbes, fonctions de τC le coefficient de charge moyenne sur les pales et le nombre de cavitation σ calculé en utilisant la vitesse relative VR à 0,7 du rayon et la pression pA à l'axe de l'hélice. On a ainsi:
2R
VAR7,0
V..)h.g.pp(
2/1 ρ
ρ+−=σ
Où la vitesse relative VR à 0,7 du rayon est donnée par l'expression:
22A
2R )D.n..7,0(VV π+=
Avec VA la vitesse d'avance (m/s), D le diamètre (m), n le nombre de rotations par seconde de l'hélice et h l'hauteur de l'eau au-dessus de l'axe de l'hélice (m).
Le coefficient de charge moyenne τC sur la pale est donné par l'expression:
2R
PC
V..A/T
2/1 ρ=τ
Où T est la poussée (Kgf) et AP la surface projetée de la pale (m2).

Théorie du Navire II – Resistance et Propulsion des Navires II. 22 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Avec la valeur limite du rapport T/AP obtenue par les diagrammes ont peut, d'une manière raisonnable, éviter la cavitation sérieuse au dos de l'hélice (back cavitation). La surface projetée AP des pales peut être déduite de la formule approximative de Taylor établie comme fonction du pas p et du diamètre D de l'hélice. De même que pour une première approximation la surface totale expansée AE des pales peut être obtenue par la formule de Keller:
Dp229,0067,1
AA
D
P −= et kD).pp(T).z3,03,1(
AA
2V00
E +−
+=
Où A0 est la surface du disque, z le nombre de pales de l'hélice et k un constant variant de 0 à 0,20 respectivement pour un navire à l'arrière droite et pour navire mono hélice de grande puissance.
Pendant la conception ou la construction détaillée des hélices, les critères de cavitation
doivent, d'une manière adéquate et pour chaque rayon, inclure la distribution de la pression, l'angle d'attaque et le nombre de cavitation. Les critères des diagrammes de Burrill et de la formule de Keller ne reflétant pas l'influence du sillage ou la géométrie des pales de l'hélice, notamment, le pas, la cambrure et la distribution des épaisseurs, doivent être utilisés avec prudence seulement pour des estimations préliminaires.
(Fig. II.24)

Théorie du Navire II – Resistance et Propulsion des Navires II. 23 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre III - Interactions entre la coque et l'hélice
Jusqu'à présent, l'hélice a été considérée fonctionnant dans un milieu non perturbé, donc en eau libre et calme. Or derrière le navire, l'hélice fonctionne dans un courant fortement perturbé par la coque et ses accessoires (gouvernail, l'arbre, les supports, etc.) et en général, du fait de sillage, autour de l'étambot l'eau est entraînée dans le sens du mouvement du navire et l'hélice avance dans l'eau avec une vitesse relative VA, qu'on a définie précédemment comme vitesse d'avance, inférieure à celle V du navire.
De ce fait, les relations, qu'on a établies entre la poussée, le couple et la vitesse de
révolutions de l'hélice en eau libre et non perturbée, n'étant plus applicables dans des conditions réelles de fonctionnement de l'hélice, nécessitent d'envisager des rendements différents selon que l'hélice est en eau libre ou non.
On définit ainsi les différents facteurs intervenant entre la coque et l'hélice:
§ Le coefficient de recul Précédemment, le recul réel sR a été défini en fonction de la vitesse d'avance VA qui
elle-même dépend du phénomène de sillage qu'on vient de décrire. Le recul réel tient, donc, compte des effets positifs ou négatifs du sillage à l'étambot, contrairement au recul apparent sA formulé en fonction de la vitesse du navire V qui en est indépendant.
Le coefficient du recul réel est le seul guide des performances du navire et requiert la
connaissance du coefficient de sillage w.
§ Le coefficient de sillage (de remous) Comme on a vu précédemment dans le cadre des définitions et les caractéristiques de
l'hélice marine, la différence entre la vitesse V du navire et la vitesse d'avance VA étant VS la vitesse de sillage, le coefficient de sillage w est défini par la relation:
VVV
VV
w AS −== ⇒ )w1.(VVA −=
Où, l'expression (1-w) représente le facteur de déduction de sillage et w le coefficient de sillage.
Le sillage est dû principalement aux effets de la viscosité, la forme de la coque et le profil de vagues engendrées par celle-ci. Les causes d'apparition du sillage peuvent, notamment, être résumées en trois points:
◦ La traînée visqueuse (frottements) de la coque engendre autour de celle-ci un courant d'accompagnement qui augmente la vitesse et la masse d'eau entraînée derrière l'étambot et y produit dans la direction du mouvement de la coque une vitesse relative considérable par rapport à l'écoulement enveloppe;
◦ Les lignes de courant passant autour de la coque et se convergeant vers l'étambot, y engendrent une augmentation de pression. Par conséquent, l'écoulement est freiné par frottement autour de la coque, la vitesse relative de l'eau y devient inférieure à celle du navire et un sillage positif (dans la direction du mouvement de la coque) y apparaît,
◦ Le mouvement de la coque engendre des vagues de surfaces. Les particules d'eau dans leurs mouvements orbitaux ont, aux creux des vagues, des vitesses dans le sens de celle de l'écoulement (de l'avant vers l'arrière du navire) et aux crêtes, dans le sens contraire. Ces vitesses orbitales, selon la présence d'un creux ou d'une crête dans le champ de l'hélice, créent respectivement une augmentation positive (dans le sens de l'écoulement) ou négative (dans le sens contraire à l'écoulement) du sillage.
En général, le sillage, à l'exception des navires à grandes vitesses, est positif dans la majorité des cas. De même qu'il a d'autres effets significatifs sur le comportement des navires, principalement dans le domaine des vibrations de la coque induites par les hélices.

Théorie du Navire II – Resistance et Propulsion des Navires II. 24 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
§ Le coefficient de succion Quand on remorque la coque, à l'étambot une zone de haute pression apparaît. La
résultante de sa composante dans la direction du mouvement de la coque, réduit la résistance totale à l'avancement de la coque. En cas de mouvement de la coque par sa propre hélice, dans une partie de cette zone de haute pression, la pression se réduit par l'action de l'hélice qui accélère le flux du courant y entrant. La résultante diminue et par conséquent, la résistance à l'avancement et ainsi que la poussée nécessaire pour propulser la coque, augmentent.
Pour une vitesse donnée de la coque, la relation entre sa résistance total à l'avancement
RT et la poussée T de l'hélice est exprimée par:
T).t1(RT −=
Où, l'expression (1-t) représente le facteur de déduction de la poussée et t le coefficient de succion.
§ Les rendements ou facteurs de la propulsion
En suivant le schéma de la figure II.25, on définit les différents rendements ou facteurs intervenant entre la puissance fourni par le moteur (mesurée au frein) BHP et la puissance de la poussée THP de l'hélice, voir à la puissance effective EHP nécessaire pour vaincre la résistance totale à l'avancement du navire.
(Fig. II.25)
Afin de définir les rendements ou facteurs de la propulsion on procède à leur
classement sous rubriques moteur-transmission, hélice et coque-hélice et à une subdivision spécifique dans chaque rubrique. Ces différentes décompositions sont d'une grande utilité tant pour la compréhension que pour l'estimation de chaque rendement et facteur pendant l'étude préliminaire. On a ainsi:
o Les rendements ou facteurs du système moteur-transmission
Comme on a vu au cours de l'étude du moteur, les différents facteurs du système moteur-transmission (organes de transmission) peuvent pour rappel se résumer comme suit:
- Le coefficient du réducteur/inverseur:
BHPSHP
.Réd =η
- Le coefficient de l'arbre de transmission:
SHPDHP
.Arb =η
Le coefficient de l'arbre de transmission ηArb inclut en fait ceux des coussinets des supports ηC et de la presse étoupe ηPe, par conséquent, on écrit:
ηArb. = ηC x ηPe.
- Le coefficient de transmission globale:
BHPDHP
S =η

Théorie du Navire II – Resistance et Propulsion des Navires II. 25 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Ce coefficient de transmission globale ηS n'étant que le produit des coefficients du réducteur/inverseur ηRéd et de l'arbre de transmission ηArb, il s'écrit:
ηS = ηRéd x ηArb = ηRéd x ηC x ηPe o Les rendements ou facteurs de l'hélice
Les rendements ou facteurs de l'hélice varient selon qu'elle fonctionne en eau libre et non perturbée ou derrière la coque dans un milieu perturbé par la présence de la coque et de ses appendices comme les supports et le gouvernail.
- Le rendement relatif de rotation
Dans un écoulement uniforme en eau libre (non perturbée) de vitesse VA, l'hélice a un rendement rotatif, appelé le rendement en eau libre η0 donné par l'expression:
0
A0 Q.n..2
V.Tπ
=η
Où, Q0 représente le couple de l'hélice en eau libre mesuré pendant que l'hélice développe une poussée T en fonction de la vitesse d'avance VA et la vitesse de rotations n.
Or, derrière la coque, pour une même vitesse effective d'avance VA, pour une même poussée T et pour la même vitesse de rotations n, l'hélice développera un couple Q différent de Q0 et, dès lors, le rendement de l'hélice derrière la coque ηB s'écrit:
Q.n..2V.T A
B π=η
Ainsi, le rapport de ces deux expressions, appelé le rendement relatif de rotation s'exprime par:
0
BR η
η=η ⇒
QQ0
R =η
La différence entre les deux couples précités est due à l'hétérogénéité du sillage et au fait que la turbulence dans l'eau derrière la coque est plus importante que celle en eau libre. Néanmoins, la valeur du rendement relatif de rotation, en général, tourne autour de l'unité. Elle varie e 0,95 à 1,0 pour la plupart des navires à deux hélices et de 1,0 à 1,1 pour ceux de mono hélice.
o Les rendements ou facteurs de coque-hélice
L'interaction entre la coque et l'hélice est définie à travers les différents rendements ou facteurs intervenant dans la liaison coque-hélice et des ses conséquences
- Le rendement de la coque
Comme on a indiqué au cours de l'étude de la résistance à l'avancement du navire, le travail effectué pendant le déplacement d'un navire est égal au produit de sa résistance total à l'avancement RT et sa vitesse V, ou la puissance effective EHP. Le travail effectué par l'hélice en délivrant la poussée T à une vitesse d'avance VA est proportionnel au produit T.VA ou la puissance de la poussée THP. Le rapport du travail fait par le navire à celui fourni par l'hélice est appelé le rendement de la coque ηH. On définit ainsi:
A
TH
V.TV.R
THPEHP
==η
Ou encore, en utilisant les définitions des facteurs de déduction de sillage et de la poussée:
)w1()t1(
H −
−=η

Théorie du Navire II – Resistance et Propulsion des Navires II. 26 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Pour la plupart des navires ηH est plus grand que l'unité. Cela pourrait paraître contradictoire, mais il s'explique par le fait que l'hélice utilise l'énergie incluse dans le sillage (remous) à cause de la vitesse dans la direction du mouvement du navire.
- Le rendement propulsif global
Le rapport de la puissance effective EHP à la puissance délivrée DHP par le moteur à l'hélice à travers la ligne de transmission (réducteur-inverseur, supports et presse étoupe) définit le rendement quasi propulsif ηQP:
DHPEHP
QP =η
En définissant le rapport de la puissance de la poussée THP à la puissance délivrée DHP comme rendement global de l'hélice ηHélice, on écrit:
DHPTHP
Hélice =η et DHPTHP.
THPEHP
QP =η ⇒ HéliceHQP .ηη=η
Ou encore, pour l'hélice derrière la coque:
0RHQP .. ηηη=η
Dès lors, le rendement global de la propulsion ηP, exprimant le rapport de la puissance effective EHP à la puissance au frein BHP (2.π.n.Q) du moteur, s'écrit:
BHPEHP
P =η ⇒ SQPP .ηη=η
Avec: ηQP : Rendement quasi propulsif (EHP/DHP); ηHélice : Rendement global de l'hélice (THP/DHP); ηH : Rendement de la coque (1-t)/(1-w); ηR : Rendement relatif de rotation de l'hélice défini par (Q0/Q) le rapport des couples de l'hélice
en eau libre et derrière la coque; η0 : Rendement en eau libre de l'hélice (T.VA/2.π.n.Q0); ηS : Coefficient de transmission globale (BHP/DHP).
La valeur du rendement global de la propulsion varie généralement de 0,5 à 0,75.

Théorie du Navire II – Resistance et Propulsion des Navires II. 27 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre IV - Conception et sélection des hélices Une fois, la résistance totale à l'avancement est déterminée pour des différentes
vitesses requises du navire, afin de définir la puissance des moteurs à installer, on procède d'abord à la conception ou à la sélection des hélices qui répondront plus efficacement possible aux conditions de services requises pour le navire, donc qui fourniront avec un meilleur rendement la poussée nécessaire pour vaincre la résistance totale à l'avancement du navire pour une vitesse de service définie.
Les hélices sont conçues par les calculs purement théoriques ou sélectionnées à travers
les séries méthodiques obtenues par des essais expérimentaux sur modèles. Le calcul des hélices étant une méthode assez compliquée et fastidieuse, en général, pour des raisons pratiques, on recourt plutôt à la sélection des hélices à travers les séries méthodiques.
§ Considérations générales
Le choix ou la conception d'une hélice doit tenir compte d'un certain nombre de considérations, notamment:
- Rendement et le diamètre de l'hélice
Le rendement étant une fonction du diamètre de l'hélice, usuellement il augmente quand le diamètre augmente. Mais le diamètre maximum est limité par la géométrie de l'étambot. Un autre facteur de limitation est imposé par les forces d'excitation non permanentes sur la coque et induites par l'hélice. Ces forces diminuent quand la clairance coque-hélice augmente.
De même qu'un un grand diamètre change la distribution radiale du sillage (remous)
dans lequel l'hélice opère. Ce qui pourrait entraîner des effets destructifs si les pales de l'hélice s'étendent dans la zone d'écoulement non uniforme (zones hautement turbulentes).
- Nombre de révolutions (vitesse de rotations)
La plupart du temps la vitesse de rotations n choisie dans une première phase, peut ne pas être celle du choix ou de la conception finale. En général, une réduction de la vitesse de rotations pourrait s'avérer bénéfique.
- Nombre de pales
Le nombre de pales z affecte, avec prédominance, le niveau des forces instables sur l'hélice. La considération principale sur le choix du nombre de pales réside dans la prémunition contre la résonance de la coque.
- Surface expansée AE des pales
Comme nous avons vu au cours de l'étude du phénomène de cavitation des hélices, la surface expansée AE des pales est généralement choisie pour éliminer les risques de l'apparition de cavitation. Les développements récents ont conduit à des formes spéciales de pales qui permettent aux hélices de fonctionner à l'abri du phénomène de cavitation.
Parmi ces hélices, citons les hélices à pales fortement inclinées (skewed) qui
présentent un certain nombre d'avantages comme: la diminution des forces et des moments instables aux coussinets, des forces instables de pression, tous induits par l'hélice et ainsi que la diminution de la susceptibilité à la cavitation dans le sillage (Fig. II.26).
(Fig. II.26)

Théorie du Navire II – Resistance et Propulsion des Navires II. 28 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Néanmoins ces hélices ont quelques désavantages, notamment, la baisse de rendement en marche arrière, les difficultés de fabrication et des problèmes liés à la résistance structurelle pour la marche arrière et pour des hélices très inclinées. La construction de ce type d'hélices nécessite des études analytiques détaillées et requiert la connaissance approfondie et précise du sillage dans lequel elles vont opérer.
§ Sélection des hélices (séries méthodiques)
Les essais sur modèles sont menés sur des familles d'hélices afin d'obtenir pour une famille d'hélice donnée les diagrammes composés de courbes de poussée, du couple et du rendement en eau libre en fonction du rapport du pas au diamètre de l'hélice.
Pour obtenir ces diagrammes on construit des modèles d'hélice pour différent rapport
du pas au diamètre sur base d'une hélice de la famille (hélice parent) ayant les paramètres caractéristiques définis, comme la surface et le nombre de pales, le tracé des formes, la section et l'épaisseur des pales. Les diagrammes, dès lors sont obtenus en menant des essais sur modèles en eau libre dans une fourchette de recule définie. Ces diagrammes permettent, dès lors, le choix d'une hélice qui convient mieux aux conditions requises, notamment, la poussée nécessaire pour une a vitesse de service donnée du navire.
Des essais additionnels peuvent aussi être menés pour déterminer les influences
d'autres paramètres spécifiques ou des changements des paramètres de l'hélice parent sur les performances de la famille d'hélices utilisée.
De nombreuses séries méthodiques d'hélices existent et sont d'une utilité très
appréciable dans le domaine de la détermination et du choix de la propulsion. Chacune d'elles est spécifique à une famille d'hélices définie par la forme et les caractéristiques précitées et se présente sous des formes qui leur sont propres (Annexe II).
Une des séries la plus extensible et utilisée est celle mise au point par le Bassin de
Carènes National du Pays-Bas (NSMB) appelée couramment Séries B de Wageningen, ci-joint en Annexe II.
Les caractéristiques en eau libres sont données sous formes de diagrammes en termes de coefficients de la poussée KT = T / (ρ .n2.D4) et du couple KQ = Q / (ρ .n2.D5), et du facteur de rendement en eau libre de l'hélice η0 = (J / 2.π). (KT / KQ), en fonction du coefficient de la vitesse d'avance J = VA/n.D pour les différentes valeurs de P/D (rapport pas-diamètre). Chaque diagramme est présenté pour certaines valeurs de z et AE/A0.
Pour la sélection d'hélice on possède deux équations (KT et KQ) et six inconnus de
base: T (ou RT), VA (ou V), P, D, n et Q. La connaissance des quatre de ces inconnus permet de résoudre le problème du choix.
Ainsi, si on a déjà déterminé la résistance RT pour une vitesse de service V par une
des méthodes de calcul de la résistance à l'avancement, et choisit le type de moteur et la vitesse de révolutions n, dès lors, se donnant un diamètre D compatible avec la configuration de l'étambot, on cherche le pas P et la puissance délivrée DHP.
Cela suppose qu'on aurait déjà estimé t et w. Par conséquent ayant déterminé T, VA, n
et D, on calcule les valeurs de KT et de J par leur expression respective connue qui définissent un point du diagramme KT - J et la courbe de P/D passant par ce point donne le pas P et la valeur correspondante du coefficient KQ donc du couple Q de l'hélice en eau libre. Dès lors, la puissance délivrée est déterminée par:
R
0Q.n..2DHPη
π=

Théorie du Navire II – Resistance et Propulsion des Navires II. 29 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Par contre, si on ne connaît que trois des paramètres et une relation entre deux des autres inconnus, notamment, RT ou EHP en fonction de V, on sera devant un problème d'optimalisation du facteur rendement η0 de l'hélice.
Pendant l'étude préliminaire on rencontre principalement deux types d'optimalisation,
notamment:
- Vitesse de rotations optimale Connaissant V, EHP ou RT et D (diamètre maximal compatible avec la configuration
de l'étambot), on cherchera les pas P et la vitesse de rotations n de l'hélice pour maximiser le facteur de rendement η0 de l'hélice en eau libre.
Pour cela, on estime t et w et on calcule T et VA et on détermine le rapport KT/J2
donnée par l'expression:
122A
2T C
D.V.T
JK
=ρ
=
L'intersection de la courbe KT = C1.J2 tracée sur le diagramme KT - J, avec une des courbes du diagramme, permet de détermine la valeur recherchée de η0. L'exécution de cette procédure pour toutes les courbes du diagramme KT - J permet, dès lors, d'obtenir la courbe η0-J, dont le maximum correspond à l'hélice optimale.
Dans le cas où on ne connaît que DHP au lieu de EHP on obtient:
53R
52QD.n...2
.DHPD.n.
QKρπ
η=
ρ= ⇒ te
22A
R3Q C
D.V...2.DHP
J
K=
ρπ
η=
Où le rapport KQ/J3 est une constante et ne dépend pas de n. En le portant sur le diagramme on construit, dès lors, la courbe η0-J, et on détermine l'hélice optimale.
- Diamètre optimal
Si on doit déterminer le diamètre D et le pas P pour un facteur de rendement η0 optimal de l'hélice, dans le cas où EHP, V et n sont donnés et que le type du moteur et du réducteur/inverseur à installer est connu mais la puissance du moteur est à déterminer. Le rapport KT/J4 étant connu sous forme de:
12A
2
4T C
V.n.T
JK
=ρ
=
On procède d'une manière similaire au cas d'optimalisation de la vitesse de rotations. On porte la courbe KT = C1.J4 sur le diagramme KT - J et on détermine l'hélice optimale par le biais de la courbe η0-J.
Dans le cas où DHP est donné à la place de EHP, on porte le rapport KQ/J5 sur le
diagramme et d'une manière similaire on détermine l'hélice optimale. Cette procédure est aussi applicable analytiquement étant donné que les courbes KT et
KQ sont aussi disponibles pour les hélices de séries B de Wageningen sous une forme polynômiale (fonction de J, P/D, AE/A0 et z) établie pour un nombre de Reynolds Re=2.106, avec possibilité de correction pour d'autre valeurs de Re.
En phase finale de l'étude, le moteur de propulsion à installer étant défini, les
caractéristiques de l'hélice doivent correspondre au plus près possible à celles du moteur.

Théorie du Navire II – Resistance et Propulsion des Navires II. 30 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
§ Conception théorique des hélices (méthodes analytiques) L'utilisation des méthodes de conception (design) des hélices par des théories
rationnelles permet au concepteur ou au constructeur la possibilité de définir, en fonction de la poussée et le diamètre imposés, les caractéristiques de l'hélice étudiée, notamment: le nombre de pales, les dimensions du moyeu, la charge radiale et en large de la pale, la forme, l'inclinaison latérale (skew) et transversale (rake) et les dimensions de la pale et ainsi que l'adaptation du sillage.
Tous ces éléments, à l'exception des dimensions du moyeu, peuvent jouer un rôle très
réducteur des phénomènes de vibration du navire et de cavitation de l'hélice. La détermination de la résistance structurelle des pales ne peut se faire qu'à travers la méthode théorique.
La conception théorique de l'hélice se fait par la théorie de circulation basée sur le
principe de ligne et surface de portance (Kutta-Joukowski). Les fabricants d'hélices possèdent des programmes informatiques qui leur permettent,
en partant des exigences formulées par le chantier naval sur les caractéristiques de l'hélice (poussée, diamètre et rendement), de concevoir des hélices qui répondent tant aux conditions de service qu'à celles de cavitation et de résistance.
Le schéma de la figure II.27 présente, sans entrer dans le détail des calculs, les
différentes étapes du processus des calculs théoriques par la méthode de circulation.
(Fig. II.27)
Les deux premières étapes concernent les données disponibles, les contraintes de
conception, la sélection des paramètres et les estimations préliminaires, afin d'assurer la compatibilité de l'hélice avec le moteur installé et la transmission au point de vue de rendement et des vibrations.
L'étape (III) concerne l'utilisation du programme dit ligne de portance ou de ligne
portante qui permet le calcul la distribution radiale optimale de la portance sur la longueur de la pale de l'hélice, de l'angle du pas hydrodynamique, la vitesse d'entrée à chaque section de la pale, la poussée total produite, la puissance absorbée et le facteur rendement de l'hélice. La théorie de ligne portante ne peut prendre en compte que les effets dans le sens radial et non ceux dans le sens de la corde de la pale.
Les hypothèses et assomptions formulées dans le cadre de la théorie de ligne portante
peuvent se résumer par:

Théorie du Navire II – Resistance et Propulsion des Navires II. 31 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
- Le fluide est considéré non visqueux et incompressible, mais au cours des calculs une correction est introduite pour la traînée visqueuse de la pale en utilisant une sorte de théorie de sections élémentaires (théorie des tranches ou strip theory);
- La vitesse de l'écoulement libre est axisymétrique et permanente; - Chaque pale est représentée par une ligne portante et la circulation varie le long du
rayon. De la théorie des vortex, les tourbillons libres sont concentrés sur la ligne portante et se décrochent d'elle. Sans le système des coordonnées tournant avec l'hélice, ils forment une surface hélicoïdale derrière l'hélice;
- Dans la direction de l'écoulement, chaque tourbillon libre a un pas constant, mais dans la direction radiale la variation du pas est permise, donc les effets de la force centrifuges sur le profil tourbillonnaire sont négligés;
- La vitesse radiale induite au moyeu est assumée négligeable, donc l'effet du moyeu sur le pas des couches de tourbillons décrochés est ignoré;
Les résultats obtenus par la théorie de ligne portante permettent une analyse détaillée
de la cavitation et de la résistance structurelle. Les estimations préliminaires des épaisseurs faites à l'étape (II) peuvent être vérifiées
et si nécessaire, modifiées pendant l'étape (IV). Il se peut que la distribution optimale de la charge déterminée au cours de l'étape (III) s'avère discordante. Dans ce cas, l'extrémité de la pale devant être sans charge, on reprend le processus pour développer une distribution non optimale.
L'étape (V) concerne la sélection des inclinaisons axiale (rake) et transversale (skew)
des pales de l'hélice. Ces inclinaisons revêtent une grande importance pour subjuguer les vibrations de la coque dues aux forces d'excitation induites par l'hélice. Ces vibrations résultent de l'action des forces instables de pression sur la coque et de celles des coussinets de l'arbre et des supports engendrées par la charge variable sur l'hélice.
L'inclinaison axiale (rake) des pales est utilisée pour augmenter la distance entre
l'hélice et la coque (clairance). Tandis que l'inclinaison transversale (skew) est utilisée pour permettre une entrée graduelle des pales dans la zone de fort sillage. Ainsi, ensembles elles réduisent les forces d'excitation de l'hélice.
La théorie de ligne portante ne pouvant traiter les effets de corde des pales qui
nécessitent, pour obtenir l'angle d'attaque et la cambrure des pales relativement larges des hélices marines, l'utilisation des sections bidimensionnelles, pour déterminer les effets de corde on utilise, dès lors, la théorie dite surface de portance ou de surface portante.
L'étape (VI) permet d'apporter les corrections de surface portante pour la distribution
des angles d'attaque et des cambrures sur les pales qui varient pour chaque section élémentaire (tranches). Les assomptions faites pour la ligne portante restent applicables pour la surface portante avec la seule différence qu'en appliquant le principe de la surface portante, on considère que l'ensemble des tourbillons est distribué sur la surface de la pale et non concentré à la ligne portante. De même que, dans ce cas, il est permit d'avoir une épaisseur pour la pale.
La théorie de surface portante permet de déterminer la charge et la distribution de la
vitesse sur l'entièreté de la pale de l'hélice. Pendant l'étape (VII) cela est utilisé pour un contrôle final de la cavitation et à travers un programme d'éléments finis, pour l'analyse détaillée de la résistance structurelle de l'hélice.

Théorie du Navire II – Resistance et Propulsion des Navires II. 32 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
Chapitre V - Compatibilité moteur-hélice Quand on a déjà établit la courbe de la puissance de la poussée THP de l'hélice en
fonction de la vitesse V du navire, en passant par la puissance effective EHP et des facteurs de sillage w et de succion t de la coque, on peut procéder à la sélection du moteur à installer.
La puissance du moteur est déterminée en fonction de la vitesse de service ou de
pointe du navire. Le plus souvent le choix doit se porter sur la puissance continue du moteur pour la vitesse de service du navire. Le cas de fonctionnement intermittent est à considérer notamment en cas d'exigence d'une vitesse de pointe.
Pendant la majorité du temps, le navire fonctionne à son déplacement maximal et de
temps en temps à des déplacements intermédiaires. Le moteur, dans les deux cas, doit assurer la puissance nécessaire pour assurer au navire une vitesse de service acceptable, donc le moteur doit pouvoir fonctionner tantôt en régime intermittent, tantôt en régime continu.
Dans les deux cas la puissance délivrée par le moteur (différente pour chaque cas) doit
répondre à la demande de l'hélice pour assurer la vitesse de service imposée. Ces différentes puissances seront délivrées par le moteur en fonction de son régime (cadence).
Le moteur (ou les moteurs) est sélectionné en fonction de leurs puissances en service
intermittent ou continu donc en régime intermittent ou continu de manière à assurer la puissance nécessaire pour atteindre la vitesse de service.
Afin de définir les différentes zones de fonctionnement, on réunit les courbes de
puissance du navire (en charge intermédiaire ou en pleine charge), avec celles (intermittente ou continue) du (des) moteurs (Fig. II.28).
(Fig. II.28)
La région de faible charge est à exclure pour le système moteur-hélice. Le choix doit
s'opérer dans la région où le moteur pourrait délivrer, en régime intermittent, 100% de sa puissance à un taux de vitesse de rotations du moteur ou de l'hélice de 100% et respectivement, en régime continu, 90% de sa puissance à un taux de vitesse de rotations de 90%.
En régime continu, le taux de puissance moteur varie entre 15 et 80% pour un taux de
vitesse de 30 et 90%. La région délimitée entre la courbe de régime (cadence) continu et la courbe délimitée par les taux de puissance de 20 à 45% à des taux de vitesse respectifs de 35 à 90%, constitue la zone préférable pour le choix du moteur.

Théorie du Navire II – Resistance et Propulsion des Navires II. 33 Section II – Propulsion et Propulseurs
Prof. Dr. Ir. Yasar Argun ISIN
En régime intermittent, le taux de puissance du moteur varie entre 20 et 100% et le taux de la vitesse respectivement entre 30 et 100%.
La courbe (A) de la figure V.1 est tracée sur base de la variation proportionnelle de la
puissance au cube de la vitesse (Puissance ÷ V3), on y observe qu'en régime intermittent dans la zone préférable de fonctionnement la vitesse baisse jusqu'à 70% et de 70 à 55% dans la zone acceptable.
En cas de sélection du moteur avec réducteur les conditions de charge extrême
(Courbes A' et A") doivent être prises en considération. La figure II.29 illustre les régimes du moteur sur base du couple et la vitesse en y
incluant les courbes de consommation.
(Fig. II.29)

Théorie du Navire II A. 1Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Annexes

Théorie du Navire II A. 2Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Annexe I
Résistance et puissance des trains de barges (convoi)
En transport fluvial, lacustre et côtier, on a souvent recours à des barges autopropulsées,tractées ou poussées et dans les configurations de voies navigables convenables sans grandesrestrictions sur le rayon de courbure des voies à des convois poussés ou des trains de barges tractés.
Dans le cas des convois ou des trains de barges, la résistance à l'avancement et par conséquentla puissance nécessaire pour tracter ou pousser dépend de plusieurs facteurs, notamment de laconfiguration des formations (convoi, train), leurs dimensions, leurs formes tant de l'étrave quel'étambot des unités (Fig. A1.1) qui les composent, leur nombre et ainsi que des spécificités(dimensions) de la voie d'eau comme la profondeur d'eau, la section, le coefficient de blocage, etc.
(Fig. A.1.1)
Ces différents types de barges sont souvent définies en fonction de la forme de leur étambot(avec ou sans encoche), de leur étrave (en cuillère, en pelle tronquée ou non, cylindrique ou formenavire), de l'inclinaison AV de l'étrave, AR de l'étambot et ainsi que de leurs rapports comme B/L,T/L, B/T et de leur bloc coefficient CB.

Théorie du Navire II A. 3Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Les sociétés d'exploitation et des bassins de carènes ont leur propre banque de données sur lestypes de barges, pousseurs et remorqueurs sous forme d'analyse statistique ou des résultats des étudestant mathématiques que expérimentales sur modèles réduits.
Comme on a déjà vu précédemment, la résistance à l'avancement des barges, aussi, peut êtresubdivisée comme dans le cas de celle des navires en deux composantes: résistance de frottement RF
et résistance résiduaire RR, et on peut écrire:
RT = RF + RR
Dès lors, la résistance de frottement se calcule en fonction de la vitesse V de traction ou depoussage, par l'expression:
2f
2
1F V.S.C.R
Où le coefficient de la résistance de frottement Cf est déduite de la formule de l'ITTC 1957 enfonction du nombre de Reynolds pour la vitesse et longueur de chaque unité et avec une éventuellecorrection Cf. Il est donné par l'expression:
2e10
f)R(log
C2
075,0
En cas d'absence de données précises sur la surface mouillée S, celle-ci peut être estimée en(m2) ou en (ft2) par la formule de Fisher & Serafini en fonction de la longueur L, la largeur B et letirant d'eau T de l'unité:
S = 0,9206 L.B + 1,669 L.T en (ft2 ou m2)
La résistance résiduaire Rr des barges peuvent être estimée des diagrammes (Fig. A.1.2-5)établis par le Laboratoire d' Hydrodynamique Navale de l'Université de Michigan sur base des essaissur 112 modèles réduits de barges côtières en fonction de la longueur de l'encoche de l'étambot et duFroude ration V/L1/2. Ces diagrammes permettent, pour une estimation préliminaire, de déterminer larésistance résiduaire par unité de déplacement Rr/Δen (lb/tonne), pour une vitesse et longueur de labarge donnée.
(Fig. A.1.2)
La résistance résiduaire estimée de la barge est, dès lors, obtenue par:
RR = (Rr/Δ) x Δ
RT = RF + RR RT = RF + RR = (Rr/Δ) x Δ
De même que la puissance effective en est déduite par l'expression:
EHP (CV) = RT (Kgf). V (m/s) / 75

Théorie du Navire II A. 4Annexes
Prof. Dr. Ir. Yasar Argun ISIN
(Fig. A.1.3-4)
(Fig. A.1.5)
Les études de modèles mathématiques sur des trains de barges tractés ont conduit à desexpressions paramétriques permettant la prédiction de la résistance totale de traction. Une de cesexpressions usuelles exprimées en fonction des paramètres des unités constituant le train de barges estdonnée par:
RT = 0,07289 ea . V2. Tb. L0, 38. B1, 19
Avec a = 1,46 / (h-T) et b = 0,6 + 50 / (lC – b)

Théorie du Navire II A. 5Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Et où les différents termes sont:RT Résistance totale à l'avancement en (lb);h Profondeur de l'eau en (ft);T Tirant d'eau de la barge (ft);V Vitesse de poussée ou traction (mph);lC Largeur du chenal (ft);B Largeur hors tout du convoi (ft);L Longueur hors tout du convoi (ft);e Base du logarithme naturel.
Pour des trains de barges, en combinant les résultats empiriques et théoriques, Bronzini aétabli une formule estimative de la résistance de traction donnée par les expressions suivantes:
RT = rt. V2 = TF et rt = ka. ri
Aveckf = (nv. kv + np. kp) / (nv + np)
r = 0,0118. B. T2/5. {L + 70,5. (l -L/328). (CB/(1-CB))1/2}. kC
où,kC = 2,42 CB
2 – 3,43 CB + 1,34
et:RT Résistance totale à l'avancement en (lb);rt Résistance totale spécifique de traction du convoi (lb);r Résistance spécifique de chacune des unités barge ou remorqueur (lb. s2. ft-2);r i Résistance spécifique de chacune des barges (lb. s2. ft-2);ka Coefficient d'attache;kv Coefficient d'attache de barge vide;kp Coefficient d'attache de barge pleine;nv Nombre de barges vides;ne Nombre de barges pleines;kC Coefficient de résistance à l 'avancement de chacune des unités;TF Force de poussée du remorqueur (lb. s2 . ft-2);V Vitesse de traction en eau calme (ft/s);B Largeur de chacune des unités (ft);L Longueur de chacune des unités (ft);CB Bloc coefficient de chacune des unités.
La variation du coefficient d'attache ka, en fonction du nombre de barges du convoi et deceux de barges vides et pleines, est donnée par les courbes de la figure (A.1.6).
(Fig. A.1.6)
La formule de Bronzini ne prend pas en considération les paramètres (caractéristiques) de lavoie navigable, notamment, de la profondeur de l'eau et la largeur du chenal de navigation. Cesparamètres influençant la vitesse du convoi n'y sont pas introduits directement.

Théorie du Navire II A. 6Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Afin de tenir compte des conditions de navigation en section limitée on apporte une correctionsur la vitesse et qui tient notamment compte de la profondeur h de l'eau et du tirant d'eau T desbarges. Cette correction est donnée par l'expression de la vitesse Vh du convoi en profondeur etsection limitée en fonction d'un facteur correctif Kh et la vitesse V en profondeur et section illimitéedu convoi:
Vh = Kh. V
Avec Kh défini par l'expression:
Kh = {1 + 0,0697 T. (V/h)2}-1/2
La poussée effective PE du remorqueur est une fonction de sa puissance PR et de sa vitesse V.Afin de procéder à une estimation préliminaire, plusieurs formules empiriques de la puissance ont étéétablies, notamment:
PE = -0, 0039. PR + (30, 82 + 0, 38. h). PR – (172, 05. V – 1, 14). V
Où:PE Poussée effective (lbf);PR Puissance du remorqueur (hp);V Vitesse de traction en eau calme (mph);h Profondeur d'eau de la voie navigable (ft).
Cette équation est basée sur les données typiques de puissance des remorqueurs à propulsiondiesel et la force de poussée ou de traction du remorqueur FP est donnée par l'expression, qui nedépend pas directement de la vitesse du remorqueur, en fonction de la puissance PR du remorqueur :
FP (lbf) = 26,4 x PR (hp)
La vitesse V de traction peut être estimée, à travers l'équation de Bronzini & Howe, parl'expression:
V = (FP / rt) 1/2 = (26,4. PR / ka. ri) 1/2
Au cours de l'étude préliminaire, pour des remorqueurs ou pousseurs conventionnels poussantun convoi de barges à des vitesses situées entre 9 et 14 km/h, les valeurs moyennes des facteurs depropulsion généralement utilisées sont:
(1-w) 0,7 ; (1-t) 0,8 ; R 1 et QP 0,3
Remorqueur et la poussée au point fixe
Les remorqueurs ou pousseurs, sont destinés à pousser ou à tracter des navires tant dans lesports qu'à haute mer. De ce fait, leur conception nécessite une grande attention sur la puissance deleur système de propulsion, notamment le choix des moteurs et des hélices doit répondre auxperformances exigées pour des conditions de service assez variées. Ainsi, la vitesse de service libre(sans traction ou poussage), la poussée à une vitesse intermédiaire (en poussage ou traction) et lapoussée au point fixe ou la poussée statique constituent leurs caractéristiques spécifiques.
Leur résistance propre à l'avancement se détermine par les mêmes méthodes utilisées dans lecas des navires. La puissance à installer et ainsi que les propulseurs doivent permettre pour unevitesse de traction ou de poussage donnée à vaincre non seulement la résistance propre mais aussicelle des unités tractées ou poussées.
De ce fait, la puissance et le propulseur sont, en bonne pratique, déterminés de manière àconférer aux remorqueurs ou pousseurs, une bonne performance tant en service libre qu'en service encharge.

Théorie du Navire II A. 7Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Pour la traction ou poussage, la puissance se détermine en tenant compte de la résistancetotale de l'ensemble des unités donc de la résistance propre du remorqueur (pousseur) et de celle desunités à tracter ou à pousser. Ainsi, la performance de la traction ou du poussage est représentée par lerendement défini par l'expression:
T = FT. V / 75.DHP
Où:T Rendement de traction;FT Force de traction (Kgf);V Vitesse (m/s);DHP Puissance délivrée (CV).
Le rendement de traction (poussage) augmente jusqu'à environ 11 Km/h et puis décroîtrapidement. En général, la vitesse de traction varie de 7,5 à 15 Km/h.
Pour une estimation préliminaire, un remorqueur (pousseur) bien conçu développe unepoussée au point fixe d'environ 15 Kgf par DHP (CV) installé. Quand la force et la vitesse de tractionnécessaire sont connues, la puissance délivrée peut être estimée par l'expression:
DHP (CV) = V (m/s). FT (Kgf) / 90
Dès lors, la puissance au frein BHP du moteur s'obtient par la relation:
BHP (CV) = k. {DHPC + DHPR} (CV)
Où:DHPC Puissance nécessaire pour la traction;DHPR Puissance propre nécessaire au remorqueur;k Constant (égal à 1,10 pour moteur diesel à transmission directe ou avec réducteur, et 1,25 pour
combinaison diesel-électrique).
La poussée au point fixe PF développée par la propulsion et la vitesse de rotation RPMF del'hélice, peuvent aussi être estimées par l'intermédiaire des expressions:
D.RPMT.BHP.716
P PCF et
C5F T.D.RPM
BHP.55,6.60RPM
Où:BHP Puissance au frein (CV);RPM Rotations par minute;RPMF Rotations par minute au point fixe;PF Poussée au point fixe (Kgf);D Diamètre de l'hélice (m);TPC Constant poussée - couple;TC Constant du couple;
Les courbes des figures (A1.7-8) établies pour une hélice de différents EAR ayant des sectionsde pales du type airfoil au moyeu et à dos circulaire au-delà de 0,5 R jusqu'à la pointe, permettent enfonction de P/D et de nombre de pales Z, les constants TPC et TC nécessaires à l'estimation de PF etRPMF.
Au cours des études les spécifications usuelles des remorqueurs ou pousseurs requièrent lapoussée et la vitesse ensembles, si on ne considère que l'une ou l'autre seulement, la puissancemaximum ne pourrait pas être développée par la propulsion pour d'autres valeurs limites du recul(slip), sauf dans le cas des hélices à pas orientable ou de transmission électrique.
A couple constant, une hélice conçue pour vitesse en service libre maximale, au point fixe,elle absorbera 80% de la puissance quand l'hélice est libre, et 85% quand celle-ci est placée dans unetuyère. Dans ce cadre, pour d'autres vitesses, une interpolation linéaire est souvent suffisante.

Théorie du Navire II A. 8Annexes
Prof. Dr. Ir. Yasar Argun ISIN
A vitesse de rotations constante, une hélice conçue pour la poussée au point fixe, à vitesse enservice libre (sans poussage ou traction) absorbera 50 à 55% de la puissance quand elle est libre, etenviron 65% quand elle est placée dans une tuyère. Pour une estimation préliminaire, pour d'autresvitesses l'interpolation linéaire reste utilisable.
(Fig. A.1.7-8)
Méthode dite "Poussée au point fixe"La plupart du temps les remorqueurs ou pousseurs sont conçus sur base de la poussée au point
fixe exigée. La propulsion est déterminée de manière à développer une puissance suffisante pour lapoussée requise avec une vitesse en service libre de service convenable étant donné que tous lesremorqueurs fonctionnent en service intermittent et nécessitent une poussée au point fixe et unevitesse en service libre, à l'exception de ceux de port qui en majeur partie opèrent au point fixe(assistance aux navires pendant leurs manœuvres dans le port).
Dans ce cadre, l'étude de conception est menée en tenant compte de quatre points ci-dessous:- Choix des dimensions principales;- Estimation de la poussée au point fixe;- Estimation de la vitesse en service libre (sans poussage ou traction);- Estimation des performances à la traction ou au poussage.
- Choix des dimensions principalesLe choix des dimensions principales de l'hélice constitue l'étape la plus importante dans le
processus des calculs. On peut, sur base des expériences, résumer les différentes valeurs à considérerau cours du processus, notamment:
◦ Diamètre de l'hélice: Pour un meilleur rendement de la propulsion, on prendra dans la mesure dupossible, le diamètre maximum compatible avec la configuration de l'étambot (tirant d'eauarrière). En bonne pratique, le diamètre maximum est de l'ordre de 85% du tirant arrière pour unehélice libre et de 70% pour une hélice à tuyère.
◦ RPM et P/D: La vitesse de rotations RPM doit être, dans la mesure du possible, maintenue demanière à garder le P/D dans la fourchette de 0,60 à 1,25. Pour la poussée au point fixe, lemeilleur rapport P/D se situe aux environs de 0,6.

Théorie du Navire II A. 9Annexes
Prof. Dr. Ir. Yasar Argun ISIN
◦ Aire des pales: Le rapport AE/A0 minimum à considérer, pour une meilleure performance detraction ou de poussage, se situe autour de 0,5. Ce qui permet, en marche arrière, une meilleurepoussée au point fixe. Un rapport AE/A0 de 0,55 constitue dans la plupart des applications unebonne moyenne. L'aire des pales doit être distribuée sur le rayon de manière à avoir une assezlarge surface à la pointe. Pour une estimation préliminaire, l'expression ci-dessous, tirée desabaques de cavitation de Burrill, peut être utilisée pour définir le rapport AE/A0:
72,0eintPo
3/2P
0
E
V
)A/DHP(.C
A
A
Où:VPointe Vitesse en (m/s) à la pointe de la pale. VPointe = 60..RPM.D;C Constant variant de 0,15 à 2 avec une valeur moyenne usuelle de 0,175.
◦ Nombre de pales: En général, les hélices utilisées ont des nombres de pales différents selon laconfiguration. Ainsi, pour une configuration mono hélice, on a souvent une hélice à 3 pales etpour celle de deux hélices celles-ci ont 3 ou 4 pales. Dans ce dernier cas une hélice à 3 pales estlégèrement mieux performante que celle à 4 pales.
- Estimation de la poussée au point fixeLa poussée au point fixe est conditionnée par une vitesse d'avance VA nulle de l'hélice, donc
par la valeur nulle du facteur J = VA/n.D.
En cas de fonctionnement au point fixe, le coefficient de sillage w est zéro et le coefficient desuccion t varie entre 0,2 et 0,3. Le rendement relatif de rotation R de l'hélice, en pratique n'ayant pasd'influence significative, varie généralement autour de 1.
Pour un moteur et hélice donnés la poussée ou la force de traction au point fixe TPf (Kgf) et lavitesse de rotations n (tours/s) de l'hélice, peuvent facilement être déduites des expressions:
)KK
.(DQ
TQ
TPf et 3/1
Q5
}KD...2
DHP.75.{n
Où, Q (Kgf.m) est donné par l’expression standard:
n..2DHP.75
Q
La puissance délivrée DHP dans ces expressions correspond à la puissance maximumdélivrée par le moteur en plein régime. Le couple Q et les facteurs KT et KQ sont calculés pour lavitesse d'avance nulle (J=0) en utilisant soit les abaques (K-J) soit leurs expressions polynomialesétablies pour les hélices de la série B-Troost. Pour une estimation rapide des différents paramètresentrant dans le calcul de la poussée au point fixe peuvent être déterminées des abaques présentés à ceteffet à l'Annexe 2.
Le bollard du remorqueur doit être dimensionné pour cette valeur de TPf et avec une marge de10%. Sans oublier que du fait du facteur de déduction de succion (1-t), la force de traction au bollardTB sera inférieure à la poussée développée au point fixe TPf d'environ 2 à 3%. Ainsi:
PfPfB T.97,0)t1.(TT
Cette force de traction pour des vitesses de rotations différentes de celle correspondante auxconditions fixées pour la poussée au point fixe projetée peut être déduite de la loi des hélices quistipule: "A recul (slip) constant, la puissance varie comme la vitesse de rotations au cube, lecouple, la poussée et ainsi que la force de traction varient comme la vitesse de rotations au carré".

Théorie du Navire II A. 10Annexes
Prof. Dr. Ir. Yasar Argun ISIN
- Estimation de la vitesse en service libreLa vitesse en service libre du remorqueur ou du pousseur dépend de plusieurs facteurs
notamment de la résistance à l'avancement de la coque et des caractéristiques du moteur et deshélices. Elle se calcule par les mêmes méthodes expliquées dans le cadre des navires.
Il est à signaler que la puissance développée par le moteur est largement contrôlée par l'hélice.A une quelconque combinaison de la vitesse d'avance et de la vitesse de rotations, la puissanceabsorbée par l'hélice est une fonction unique des dimensions de l'hélice. De ce fait, une hélice, conçuepour fonctionner au point fixe avec une vitesse d'avance élevée mais à une vitesse de rotationsconstante, n'absorbera qu'une fraction de la puissance que le moteur est capable de développée. Cettefraction est une fonction de la vitesse d'avance.
A vitesse de rotations RPM constante, la puissance varie comme KQ et elle est calculée pourchaque vitesse du remorqueur par une simple relation, notamment:
DHPV=V / DHPV=0 = KQ(J=J) / KQ(J=0)
et à couple Q constant, comme dans le cas des moteurs à transmission directe ou par inverseurréducteur, la puissance absorbée varie comme la vitesse de rotations et exprimée, pour chacune desvitesse de rotations, par les relations:
DHP0 / DHPi = RPM0 / RPMi
Pour estimer la vitesse du remorqueur à d'autres vitesses de rotations, on applique la loi deshélices précitée, tout en notant que la coque n'obéit pas à cette loi. Ainsi, les vitesses calculées, pourdes vitesses de rotations constantes, varieront dans une même proportion que celle des vitesses derotations (V0 /Vi = RPM0 /RPMi) et chaque puissance dans le rapport de celui des vitesses de rotationsau cube correspondantes (DHP0 /DHPi = RPM0
3/RPMi3).
Une fois que la puissance effective de la coque est déterminée, les valeurs de KQ et de 0 del'hélice sont relevées des abaques version K-J de l'Annexe 2, pour les différentes valeurs de Jcalculées pour différentes vitesses de la coque en tenant compte pour chacune de ces vitesses ducoefficient de sillage correspondant afin d'en déduire la vitesse d'avance correspondante.
Ainsi, pour chaque vitesse de rotations et pour des différentes vitesses de la coque, on traceles courbes de puissance délivrée DHP du moteur et celles de puissance de poussée THP de l'hélice.Les différentes courbes THP de l'hélice coupent en plusieurs points la courbe de la puissanceeffective EHP obtenue pour différentes vitesses de la coque. Ces points correspondent à des vitessesqu'atteindrait la coque pour ces vitesses de rotations considérées.
Dès lors, les points d'intersection des différentes courbes version DHP-RPM avec lesverticales menées des points précédemment obtenues sur la courbe EHP, définissent la courbeversion DHP-V qui définit la variation de la DHP en fonction de la vitesse en service libre V.
- Estimation des performances à la tractionLa force de traction disponible TD est la différence entre la poussée TP délivrée par l'hélice et
la résistance à l'avancement RRem propre du remorqueur ou du pousseur.
mRePD R)t1.(TT
En supposant que les coefficients de sillage w et de succion t varient linéairement entre lavitesse au point fixe et en service libre, et que la résistance à l'avancement RRem du remorqueur ou dupousseur est connue à travers les méthodes usuelles, le seul paramètre restant à déterminer sera TP, lapoussée délivrée par l'hélice. Cette poussée se calcule en utilisant les abaques K-J pour desdifférentes vitesses de traction (vitesses du remorqueur ou du pousseur), donc, à travers lesdifférentes valeurs de J, en déterminant les différentes valeurs de KT et KQ correspondantes.

Théorie du Navire II A. 11Annexes
Prof. Dr. Ir. Yasar Argun ISIN
La puissance délivrée DHP (CV) de l'hélice en fonction de n (tours/s) et du diamètre D (m) sedéduit dés lors de l'expression:
75Q.n..2
DHP
où 52Q D.n..KQ
De même que la poussée TP (Kgf) développée par l'hélice s'obtient par l'expression:
42TP D.n..KT
Dès lors, le rendement de traction T se détermine en fonction de la vitesse de traction VT
(vitesses du remorqueur ou du pousseur) par l'expression:
DHP.75
V.T TDT
La figure (A.1.9) illustre le tracé des courbes de performance d'un remorqueur (pousseur)conçu pour une poussée requise au point fixe.
(Fig. A.1.9)
Résistance à l'avancement par les séries statistiques
Navires de petite tailleLe terme "navire ou bateau de petite taille" est un concept relatif qui, en fait, dépende del'appréciation des dimensions d'un navire par son concepteur. Pour un ingénieur naval qui s'occupedes super-tankers cela pourrait signifier des navires allant jusqu'à 3.000 Dwt, par contre pour celuiqui conçoit des yachts cela signifierait des voiliers du type Dinghy de classe olympique (L=3.66m).
Un navire dit de petite dimension, est un navire commercial ou militaire dont la longueur à laflottaison en charge ne dépasse pas les 80 m.
Les méthodes de calcul, présentées dans ce qui suit, sont basées sur des séries statistiques (analysede régression). Elles permettent d'estimer, avec certaines restrictions sur les dimensions etcoefficients de formes du navire, la résistance à l'avancement, la résistance totale RT ou résiduaireRR du navire considéré.

Théorie du Navire II A. 12Annexes
Prof. Dr. Ir. Yasar Argun ISIN
o Série SSPA Navires Cargo
Dans le respect des variations des paramètres, repris dans le Tableau 1 ci-dessous; la résistancetotal RT peut être estimée, au cours d'une étude préliminaire, par les expressions tirées de l'analysestatistique de la série SSPA pour les navires cargo.
Paramètres de la série SSPA navires cargo
(Tableau 1.)
Le coefficient de la résistance résiduaire CR, pour le coefficient de régression Ai variant de 1 à 15,est donné par l'expression:
Où: B = CB ; C = L/1/3 ; D = BWL/T - 2,4 ; E = LCB - LCBS ; F = (LCB) 2 - (LCBS)2 ; G = BWL/T;
Et LCBS, la position standard de LCB (position longitudinale du centre de flottaison par rapport aumaître couple exprimée en pourcentage de LPP/L et considérée positive vers l'avant du navire) .
LCBS = 8,499945 - 40,999807. B + 39,999832. B2 pour CB = 0,525 à 0,625LCBS = 27,093853 - 102,000307. B + 90,000227. B2 pour CB = 0,625 à 0,725
Le coefficient SM de la surface mouillée S, en fonction des paramètres de régression C, B,G et pourdes valeurs de CB , est donné par les expressions:
SM = 3,85945 + 0,515. C - 1,05. B - 0,018. G pour CB = 0,525 à 0,625SM = 3,85945 + 0,550. C - 1,05. B - 0,018. G pour CB = 0,625 à 0,725
Les coefficients de sillage w et celui de succion t sont donnés, en fonction du diamètre D del'hélice et des coefficients de régression B, C et du LPP, par les expressions:
w = - 0,86873 + 3,61147. B - 1,41418. B2 + 0,0237. C2 - 0,00255. C3 - 0,42933. B. C + 0,03342. B. C2 + 0,12 - 3. D/LPPt = 0,70878 – 0,12897. C + 0,00694. C2 – 0,08 + 2. D/Lpp
Le coefficient de friction CF est calculé par la formule de l'ITTC 1957 donnée par l'expression:
CF = 0,075 / (log10 RN – 2) 2 + CF avec RN = V. LWL/et CF = 0,4 10-3
Dès lors la résistance totale RT en Kgf est donnée par l'expression:
RT = ½. CT. . S. V2 avec CT = CR + CF et S = SM. 1/3 (m2)R = 1,01
Les valeurs des différents coefficients de régression Ai, en fonction de Frl et CB, sont données dansle Tableau 2 ci-dessous.

Théorie du Navire II A. 13Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Coefficients Ai de la série SSPA navires cargo
(Tableau 2.)
o Série NPL Navire côtier
Dans le respect des variations des paramètres, repris dans le Tableau 1 ci-dessous; la résistancetotal RT peut être estimée, au cours d'une étude préliminaire, par les expressions tirées de l'analysestatistique de la série NPL pour les navires cargo.
Paramètres de la série NPL navires côtiers
(Tableau 1.)

Théorie du Navire II A. 14Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Où LP est la longueur des sections parallèles, LE celle d'entrée de la coque, LEWL celle d'entrée dela ligne de flottaison en charge, LPWL celle de la ligne de flottaison parallèle en charge et iE demi-angle d'entrée à la flottaison.
Le coefficient de la résistance totale CT, pour les coefficients de régression bi et di est donné parl'expression:
avec
Où LCBo est la position longitudinale optimum de LCB (par rapport à la perpendiculaire arrière),en pourcentage de LPP/L, correspondant à un CT mesuré pour un Frl particulier.
Le coefficient SM de la surface mouillée S, du rayon métacentrique (BM. T/B2) et celui de lahauteur du centre de flottaison (KB/T), en fonction des paramètres LPP, B, T et CB sont donnés parles expressions:
Dès lors la résistance totale RT en long tons, en fonction de Froude ratio Frl, de la longueur entreperpendiculaires LPP en pieds, le déplacement en long tons et la vitesse V en nœuds, est donnéepar les expressions:
RT = ½. CT. . S. V2 avec S = SM. 1/3 (feet2) ou RT = CT. /LPP. V2
Les différents coefficients de régression bi en fonction de (A = 2. F rl – 1), sont définies par lesexpressions ci-dessous et les valeurs de Cte, bi et di données dans le Tableau 2.
Cte = 3,599 - 11,775. A + 13,902. A2;b1 = - 0,241 + 4,794. A - 4,690. A2
b2 = 0,003 + 2,209. A - 1,565. A2;b3 = 2,333 - 21,59. A + 55,69. A2 - 38,5. A3
b4 = - 256.734 + 3.736.791. A - 22.931.378. A2 + 76.963.906. A3 - 152.652.438. A4
+ 179.001.731. A5 – 114.943.985. A6 + 31.194.178. A7
Coefficients pour la série NPL navires côtiers
(Tableau 2.)
o Série NSMB Navire côtier
Les coefficients du modèle mathématique sont calculés pour des navires comme trawler etremorqueurs sur base des données statistiques des essais en bassin de carènes de NSMB. Larésistance totale RT est, dès lors, en fonction des nombres de Reynolds Re et de Froude Fr, donnéepar l'expression:

Théorie du Navire II A. 15Annexes
Prof. Dr. Ir. Yasar Argun ISIN
RT/= C1 . e-k/9 + C2. e-k + C3. e-k. sin (k/m) + C4. e-k. cos (k/m) + CF. . S. V2/2.Où
k = m. Fr-2 ; m = 0,14347. CP
-2,1976 et CF = 0,075 / (log10 Re - 2)2 + CF
Le domaine de validité des paramètres de la série NSMB pour les calculs d'estimation de larésistance sont:
8 m LD 80 m 0,5 CP 0,725 0,73 CM 0,973,0 LD/B 6,2 1,9 B/T 4,0 - 8 lcb 2,8
10° iE 45°
Les expressions des coefficients Ci sont définis par:
Ci = di, 0 + di, 1. lcb + di, 2. lcb2 + di, 3. CP + di, 4. CP
2 + di, 5. (LD/B) + d i, 6. (LD/B) 2 + di, 7. CWL
+ d i, 8. CWL2 + di, 9. (B/T) + di, 6. (B/T) 2 + di, 11. CM. 10 -3
Aveclcb = {(1/2 LD – LCB)/LD}. 100 % ; LD = 1/2. (LPP + LWL) ; CWL = iE. LD/B ; et
Re = V. LD/et Fr = V / (g. LD) 1/2
Avec le déplacement (Kg), la surface mouillée S (m2), la vitesse V (m/s) et le demi-angled'entrée à la flottaison iE (°) et la position longitudinale du centre de flottaison par rapport à laperpendiculaire arrière LCB.
Les coefficients Ci sont donnés dans le Tableau 1 ci-dessous.
(Tableau 1.)
Pour un navire à une hélice, les coefficients de sillage w, de succion t et du rendement rotatif R
sont donnés, en fonction de CP, Fr, lcb, LD et le diamètre D de l'hélice, par les expressions:
(t, w, R) = ei, 0 + ei, 1. CP + ei, 2. CP2 + ei, 3. CP. Fr + ei, 4. CP. Fr
2 + ei, 5. CP. lcb
+ ei, 6. CP. LD/D + ei, 7. CP. LD/DAvec
t = e1, 0 + e1, 1 . CP + ……………..w = e2, 0 + e2, 1 . CP + ……………..R = e3, 0 + e3, 1 . CP + ……………..
Et les valeurs des coefficients ei, k sont données dansle Tableau 2.
(Tableau 2.)
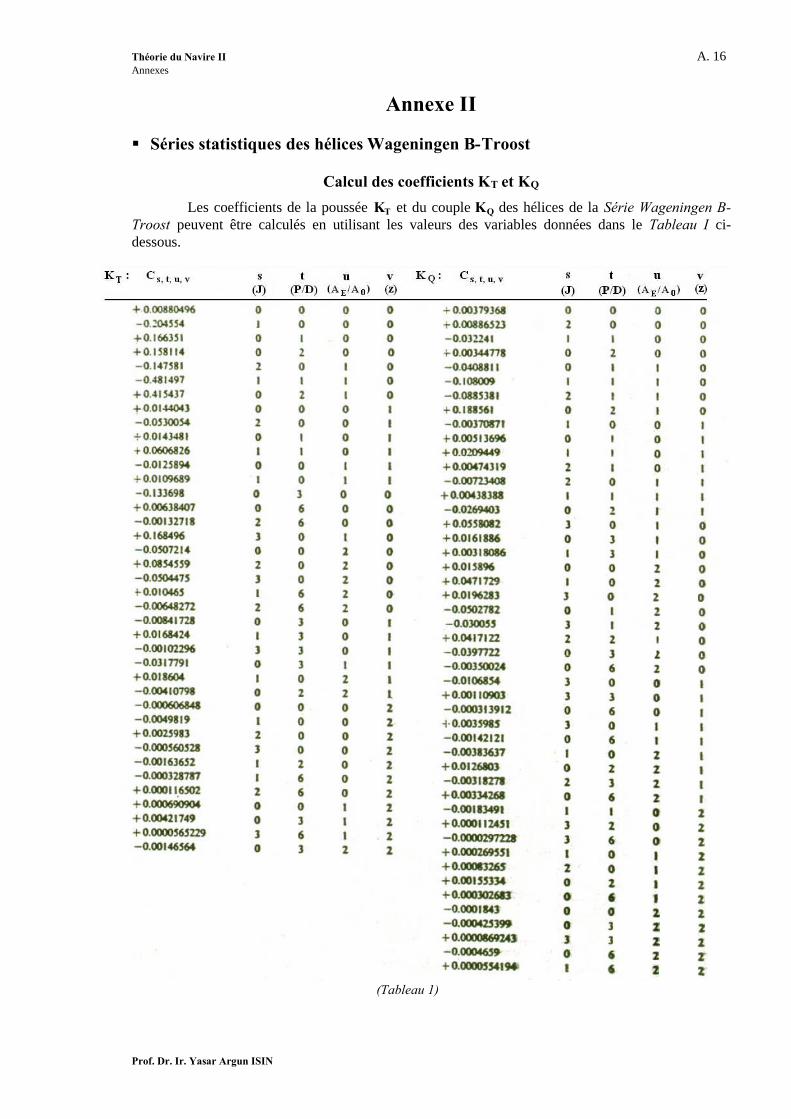
Théorie du Navire II A. 16Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Annexe II
Séries statistiques des hélices Wageningen B-Troost
Calcul des coefficients KT et KQ
Les coefficients de la poussée KT et du couple KQ des hélices de la Série Wageningen B-Troost peuvent être calculés en utilisant les valeurs des variables données dans le Tableau I ci-dessous.
(Tableau 1)

Théorie du Navire II A. 17Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Les corrections sur KT et KQ polynômes, pour des nombres de Reynolds Rn supérieurs à 2. 106, sontdonnées sous forme de KT etKQ dans le Tableau 2.
(Tableau 2)
Dans ces séries la forme des polynômes est définie par les expressions:
KT = ∑s, t, u, v {Cs, t, u, v. J s. (P/D) t. (AE) u. (z) v} + KT
KQ = ∑s, t, u, v {Cs, t, u, v. J s. (P/D) t. (AE) u. (z) v} + KQ
AvecKT = T / (.n2.D4) (coefficient de la poussée)KQ = Q / (.n2.D5) (coefficient du couple)D = (diamètre de l'hélice)z = (nombre de pales de l'hélice)P/D = (ratio du pas au diamètre de l'hélice)AE = (surface expansée de l'hélice)A0 = (surface du disque de l'hélice)VA = (vitesse d'avance)n = (nombre de rotations par seconde rps de l'hélice)J = VA/n. D (ratio d'avance)η0 = (J / 2.π). (KT / KQ) (rendement en eau libre de l'hélice)Ci = (Cte)

Théorie du Navire II A. 18Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Familles d'hélices – Diagrammes et caractéristiques
Série Troost B

Théorie du Navire II A. 19Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 20Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 21Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 22Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 23Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 24Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Série Gawn – Burrill

Théorie du Navire II A. 25Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 26Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 27Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Série Troost B (en tuyère)

Théorie du Navire II A. 28Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 29Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 30Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 31Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 32Annexes
Prof. Dr. Ir. Yasar Argun ISIN
Caractéristiques de l'hélice pour la poussée au point fixe
Les équations caractéristiques régissant le calcul des hélices au point fixe sont:
J = VA/n.D = 0 DHP = 2..n.Q/75KT = T / (.n2.D4) KQ = Q / (.n2.D5)
η0 = (J / 2.π). (KT / KQ)
Les diagrammes qui permettent de faire une détermination rapide et estimative descaractéristiques des hélices sont obtenus à travers les relations:
- La poussée au point fixe T
3/2T )D.DHP.(CT où )K/K.().2/.75(C 3/2
QT3/22/1
T
- La vitesse de rotations n (tours/s)2/52
N T/DHP.Cn où )K/K).(.2/C.75(C QT2/3
TN
- La surface minimum des pales (sans cavitation)
72,0eintPo
3/2P
0
E
V
)A/DHP(.C
AA
etDp
229,0067,1AA
pE
P
Avec, VPointe = (.n.D) et A0 = .D2/4
et
768,0EAR
0
E0 )T/DHP.(C
AA
EAR où )C/C.()p/C.(655,0C 432,0N
848,1T
4,0EAR

Théorie du Navire II A. 33Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II A. 34Annexes
Prof. Dr. Ir. Yasar Argun ISIN

Théorie du Navire II – Resistance et Propulsion B-R. 1Bibliographie - Références
Prof. Dr. Ir. Yasar Argun ISIN
Bibliographie - Références
◦ Basic Ship Theory, K.J. RAWSON, E.C. TUPPER, Longmans Ed. 1968.◦ Basic Naval Architecture, K.C. BARNABY, Hutchinson Ed. 1969.◦ Naval Architecture for Marine Engineers, W. MINCKLE, Newness Butterworth's Ed. 1978.◦ Introduction to Naval Architecture, E.C. TUPPER, Elsevier Ed. 2004.◦ Resistance and Propulsion, Dr. F.H. TODD, Principles of Naval Architecture, SNAME 1967.◦ Propulsion and Propellers, Karl E. SCHOENHERR, Principles of Naval Architecture, Vol.2, SNAME 1947.◦ Hydrodynamics in ship design, H.E. SAUNDERS, Vol. 2. SNAME◦ Marine diesel engines, C.C. POUNDER, Newness Butterworth's Ed. 1978.◦ Marine Engineering, J.R. KANE, L.WECHSLER, SNAME 1971.◦ Caldwell's screw tug design, J.N. WOOD, Hutchinson Ed. 1969.◦ Modern Tug Design, D.A. ARGYRIADIS, SNAME 1957.◦ Powering of ships, Dr Ir Y.Argun ISIN (note book) Liege University, 1983◦ Inland vessel's powering, Dr Ir Y.Argun ISIN (note book) Liege University, 1985◦ Eléments d'Architecture Navale, Dr Ir Y. Argun ISIN (note book), UNIKIN 2005.◦ Practical Bollard-Pull Estimation, Dr Ir Y.Argun ISIN, SNAME Marine Technology, Vol.24, No. 3, July 1987.◦ A Power Prediction Method for Motor Boats, G. Van OORTMERSEN. NSHB Publication.◦ The SSPA Cargo Liner Series, Regression Analysis of the Resistance and Propulsive Coefficients, A.S. SABIT.◦ Regression Analysis of Ship Data, A.C. FAIRLIE-CLARKE.◦ Computer-Aided Propeller Prelirninary Design Using the TI-Series, M.S. TRIANTAFYLLON. SNAME M.T. 1979/4.◦ River Towboat Hull and Propulsion, B. CHRISTOPOULOS and R. LATORRE. SNAME M.T. 1983/3.◦ Recent Developments in Barge Design, Towing and Pushing, R. LATORRE and ASHCROFT. SNAME M.T. 1981/1.◦ The design of marine screw propellers, T.P. O'BRIEN - Hutchinson 1962.◦ The design of propellers, J.G. HILL. SHAME 1949. Trans.◦ A propeller design method, M.K. ECKARDT and W.B. MORGAN. SNAME. 1955. Trans.◦ On the theory of screw propellers, R. YAMAZAKI. 4th ONR Symposium. 1969.◦ The use of theory in propeller design, G. G. Cox and W.B. MORGAN. SNAME M. T. Oct. 1972.◦ Design Considerations for Propellers in Cavitating Environment, D.L. BLOWNT and D.L. FOX. SNAME M.T. 1978/2.◦ The induced efficiency of optimum propellers having a finite number of blades, K.N. KRAMER, NACA.
Technical memorandum No: 884.1939.◦ Further Computer-Analysed Data of the Wageningen B-Screw Series, M.W.C. OOSTERVELD and P. Van
OOSSANEN. N.S.M.B. Publication.◦ High speed propellers, hydrodynamics and design, C.F.L. KRUPPA. University of Michigan 1967.◦ Ducted propeller applications for modern ships, L. MEYERHOFF, J.G. HILL, S. MEYERHOFF - SNAME 1972.◦ Recent research on propellers in Nozzles, Dr. Ir. J.D. VAN MANENI. S.P. Vol. 4 N°36, 1957.◦ Supercavitating and superventileted propellers, R.A. BARR, SNAME 1970.◦ Highly skewed propellers, R.A. CUMMING, W.B. MORGAN - R.J. BOSWELL, SNAME 1972.◦ A design theory for subcavitating propellers, J.E. KERWIN and R. LEOPOLD. SHAME 1964. Trans.◦ On the vortex theory of screw propellers, S. GOLDSTREIN. RINA. 1929. Trans.◦ Moderately loaded propellers with a finite number of blades and an arbitrary distribution of circulation,
H.W. LERBS. SNAME. 1952. Trans.◦ Propeller design and analysis by lifting-surface theory, P.T. MURRAY. ISP. 1967.◦ Propeller lifting-surface corrections, W.B. MORGAN, V. SILOVIC and S.B. DENNY. SNAME 1968 Trans.◦ A lifting-surface propeller design method for high speed computers, D.M. NELSON. NAVWEPS Report 8442,
Notes TP 3399, 1964.
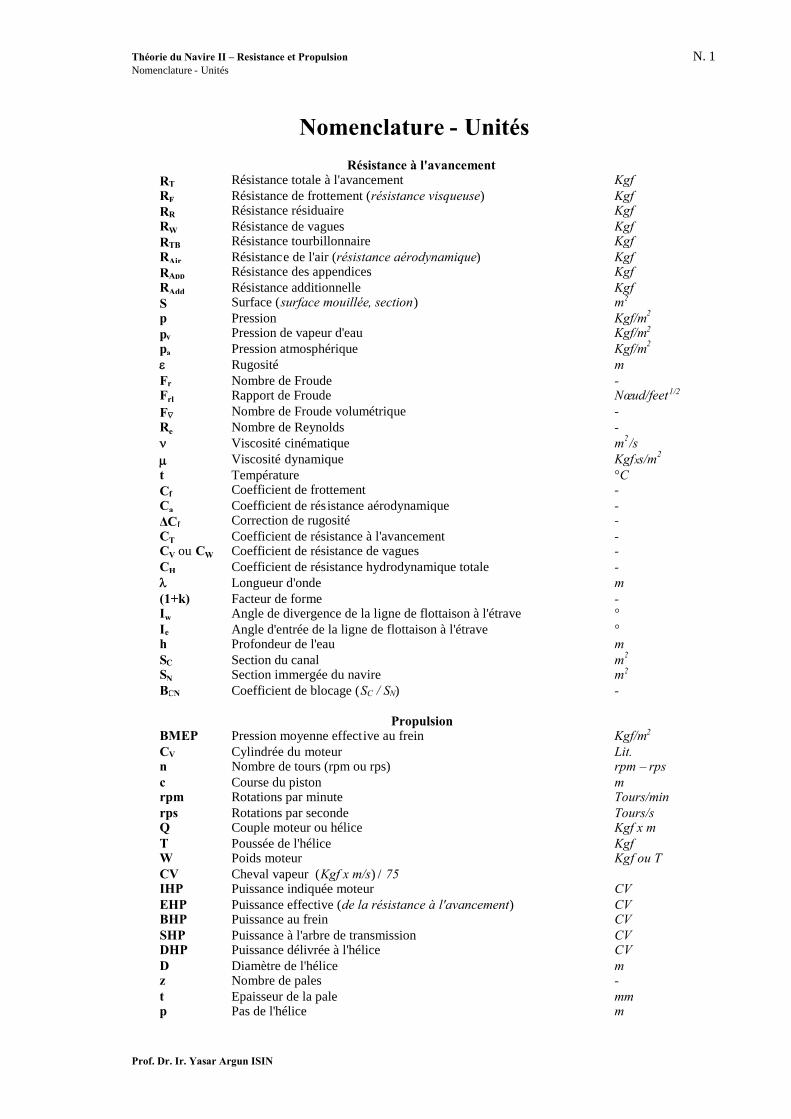
Théorie du Navire II – Resistance et Propulsion N. 1Nomenclature - Unités
Prof. Dr. Ir. Yasar Argun ISIN
Nomenclature - UnitésRésistance à l'avancement
RT Résistance totale à l'avancement KgfRF Résistance de frottement (résistance visqueuse) KgfRR Résistance résiduaire KgfRW Résistance de vagues KgfRTB Résistance tourbillonnaire KgfRAir Résistance de l'air (résistance aérodynamique) KgfRApp Résistance des appendices KgfRAdd Résistance additionnelle KgfS Surface (surface mouillée, section) m2
p Pression Kgf/m2
pv Pression de vapeur d'eau Kgf/m2
pa Pression atmosphérique Kgf/m2
Rugosité mFr Nombre de Froude -Frl Rapport de Froude Nœud/feet1/2
F Nombre de Froude volumétrique -Re Nombre de Reynolds - Viscosité cinématique m2/s Viscosité dynamique Kgfxs/m2
t Température °CCf Coefficient de frottement -Ca Coefficient de résistance aérodynamique -ΔCf Correction de rugosité -CT Coefficient de résistance à l'avancement -CV ou CW Coefficient de résistance de vagues -CH Coefficient de résistance hydrodynamique totale - Longueur d'onde m(1+k) Facteur de forme -Iw Angle de divergence de la ligne de flottaison à l'étrave °Ie Angle d'entrée de la ligne de flottaison à l'étrave °h Profondeur de l'eau mSC Section du canal m2
SN Section immergée du navire m2
BCN Coefficient de blocage (SC / SN) -
PropulsionBMEP Pression moyenne effective au frein Kgf/m2
CV Cylindrée du moteur Lit.n Nombre de tours (rpm ou rps) rpm – rpsc Course du piston mrpm Rotations par minute Tours/minrps Rotations par seconde Tours/sQ Couple moteur ou hélice Kgf x mT Poussée de l'hélice KgfW Poids moteur Kgf ou TCV Cheval vapeur (Kgf x m/s) / 75IHP Puissance indiquée moteur CVEHP Puissance effective (de la résistance à l'avancement) CVBHP Puissance au frein CVSHP Puissance à l'arbre de transmission CVDHP Puissance délivrée à l'hélice CVD Diamètre de l'hélice mz Nombre de pales -t Epaisseur de la pale mmp Pas de l'hélice m

Théorie du Navire II – Resistance et Propulsion N. 2Nomenclature - Unités
Prof. Dr. Ir. Yasar Argun ISIN
Angle d'attaque du profil (foil) °A0 Surface du disque de l'hélice m2
AE Surface expansée des pales m2
AD Surface développée des pales m2
AP Surface projetée des pales m2
VA Vitesse d'avance m/ss Recul (slip) -sR Recul réel -sA Recul apparent -CT Coefficient de la poussée -CQ Coefficient du couple -KT Coefficient de la poussée de l'hélice -KQ Coefficient du couple de l'hélice -J Ratio d'avance de l'hélice -C Coefficient de charge de la pale -w Coefficient de sillage (remous) -t Coefficient de succion -Réd Coefficient du réducteur/inverseur -Arb Coefficient de l'arbre de transmission -S Coefficient de transmission globale -i Rendement idéal de l'hélice -0 Rendement en eau libre de l'hélice -B Rendement de l'hélice derrière la coque -R Rendement relatif de rotation de l'hélice (B /0) -H Rendement de la coque (1-t) / (1-w) -QP Rendement quasi propulsif (H x R x 0) ou (H x Hélice) -Hélice Rendement global de l'hélice -P Rendement global de la propulsion (QP x S)

Théorie du Navire II – Resistance et Propulsion N. 3Nomenclature - Unités
Prof. Dr. Ir. Yasar Argun ISIN
Conversion des unités usuelles
Unité Métrique Anglaise Conversion
Longueurm ft (12 in) 1 m = 3,2808 ft 1 ft = 0,3048 m
In 1 m = 39,3696 in 1 in = 0,02540 mKm mile marin 1 Km = 0,5399 mile 1 mile = 1,852 Km
1 mile = 6076,0416 ft 1 ft = 1,645 10-4 mile
MasseKg lb (pound) 1 Kg = 2,2045 lb 1 lb = 0,4536 Kg
TempsHeure H H 1 H = 60 m 1 m = 1/60. HMinute m m 1 H = 3 600 s 1 s = 1/3600 HSeconde s s 1 m = 60 s 1 s =1/60 m
Vitessem/s ft/s 1 m/s = 3,2808 ft/s 1 ft/s = 0,3048 m/s
in/s 1 m/s = 39,3696 in/s 1 in/s = 0,02540 m/sNoeuds Knot 1 nœud = 1 kn 1 kn = 1 noeudKm/h 1 nœud = 1,852 Km/h 1 Km/h = 0,5399 kn (nœud)
1 nœud = 0,5144 m/s 1 m/s = 1,9438 noeuds1 kn = 1,6877 ft/s 1 ft/s = 0,5925 kn1 kn = 20,2524 in/s 1 in/s = 4,9377 10-2 kn
AccélérationGravité g m/s2 ft/s2 g = 9,8065 m/s2 1 m/s2 = 0,102 g
g = 32,1731 ft/s2 1 ft/s2 = 0,0311 g1 m/s2 = 3,2808 ft/s2 1 ft/s2 = 0,3048 m/s2
ForceKgf lbf 1 Kgf = 2,2045 lbf 1 lbf = 0,4536 KgfNewton (N) N 1 Kgf = 9.8065 N 1 N = 0,1019 KgfTonne Tons (long ton) 1 N = 0,2248 lbf 1 lbf = 4,4484 N
Ton (short ton) 1 tons = 2240 lbf 1 lbf = 4,4637 10-4 tons1 ton = 2000 lbf 1 lbf = 5.10-4 ton1 tons = 1,016 t 1 t = 0,9842 tons1 ton = 0,9072 t 1 t = 1,1023 ton
Moment/couple/TravailKgf x m lbf x ft 1 Kgf x m = 7,2335 lbf x ft 1 lbf x ft = 0,1383 Kgf x mN x m 1 Kgf x m = 9,8065 N x m 1 N x m = 0,1019 Kgf x m
1 N x m = 0,7376 lbf x ft 1 lbf x ft = 1,3557 N x m
PuissanceKgf x m/s lbf x ft/s 1 Kgf x m/s = 7,2335 lbf x ft/s 1 lbf x ft/s = 0,1383 Kgf x m/sWatt lbf x ft/s 1 Kgf x m/s = 9,8065 W 1 W = 0,102 Kgf x m/sCV HP 1 W = 0,7376 lbf x ft/s 1 lbf x ft/s = 1,3557 W
1 CV = 735,499 W 1 W = 1,3596 10-3 CV1 HP = 745,6999 W 1 W = 1,341 10-3 HP1 CV = 75 Kgf x m/s 1 Kgf x m/s = 1,333 10-2 CV1 HP = 550 lbf x ft/s 1 lbf x ft/s = 1,8181 10-3 HP1 CV = 0,9863 HP 1 HP = 1,0138 CV
PressionKgf / m2 psi (lb/in2) 1 Pa = 6894,757 psi 1 psi = 1,4503 10-4 PaPascal (Pa) 1 Pa = 1 N/m2 1 N/m2 = 1 Pa
1 Pa = 0,1019 Kgf / m2 1 Kgf / m2 = 9,8065 Pa1 Kgf / m2 = 6,7661 104 psi 1 psi = 1,4779 10-5 Kgf / m2
Densité

Théorie du Navire II – Resistance et Propulsion N. 4Nomenclature - Unités
Prof. Dr. Ir. Yasar Argun ISIN
Kgf/m3 lbf/ft3 1 Kgf/m3 = 0,01284 lbf/ft3 1 lbf/ft3 = 77,85 Kgf/m3
Kgf x s2/m4 lbf x s2/ft4 1 Kgf x s2/m4 = 3,915 10-3 lbf x s2/ft4 1 lbf x s2/ft4 = 255,414 Kgf x s2/m4
ViscositéDynamique Kgf x s/m2 lbf x s/ft2 1 Kgf x s/m2 = 4,2141 10 -2 lbf x s2/ft2 1 lbf x s/ft2 =23,73 Kgf x s/m2
Cinématique m2/s ft2/s 1 m2/s = 10,7636 ft2/s 1 ft2/s = 0,0929 m2/s
OscillationsPériode T s sFréquence ω Rad/s Rad/s ω = 2.π / T T = 2.π /ω
f Hz Hz f = 1 / T T = 1 /fs-1 s-1 1 Hz = 1 s- 1 1 s- 1 = 1 Hz
Coefficient k Raideur 1 Kgf/m = 0,6719 lbf/ft 1 lbf/ft = 1,4882 Kgf/mKgf/m lbf/ft ou lbf/in 1 Kgf/m = 0,05599 lbf/in 1 lbf/in = 17,8587 Kgf/m
FroudeFRatio ou Frl (m/s)/m1/2 kn/ft1/2 (m/s)/m1/2 = 1,0731 kn/ft1/2 kn/ft1/2 = 0,9318 (m/s)/m1/2
Fr V/(gL)1/2 V/(gL)1/2 Fr = 0,3192 (m/s)/m1/2 (m/s)/m1/2 = 3,132 Fr
Fr = 0,3426 kn/ft1/2 kn/ft1/2 = 2,9186 Fr