tgrs2006v44n1p116 125
TRANSCRIPT
116 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
Dynamic Differential Evolution Strategyand Applications in Electromagnetic
Inverse Scattering ProblemsAnyong Qing, Senior Member, IEEE
Abstract—A novel evolution algorithm, the dynamic differentialevolution strategy, is developed to solve optimization problems.It inherits the genetic operators from the differential evolutionstrategy. However, it differs itself from the differential evolu-tion strategy by updating its population dynamically while thedifferential evolution strategy updates its population generationby generation. The dynamic updating of population leads to alarger virtual population size and quicker response to change ofpopulation status. Two trial functions have been minimized usingthe dynamic differential evolution strategy. Comparison with thedifferential evolution strategy has been carried out. It has beenobserved that the dynamic differential evolution strategy signifi-cantly outperforms the differential evolution strategy in efficiency,robustness, and memory requirement. It is then applied to solvea benchmark electromagnetic inverse scattering problem. Theoutstanding performance of the dynamic differential evolutionstrategy is further consolidated.
Index Terms—Dynamic differential evolution strategy, electro-magnetic inverse scattering.
I. INTRODUCTION
THE differential evolution strategy (DES) [1] is a verysimple but very powerful stochastic global optimizer. The
crucial idea behind DES is a scheme for generating trial param-eter vectors. It has been proven a very good global optimizerfor function optimization [1], [2] and has been applied to elec-tromagnetic inverse problems [2]–[4], composite materials [5],antennas [6], and a lot of other mathematical and engineeringfields.
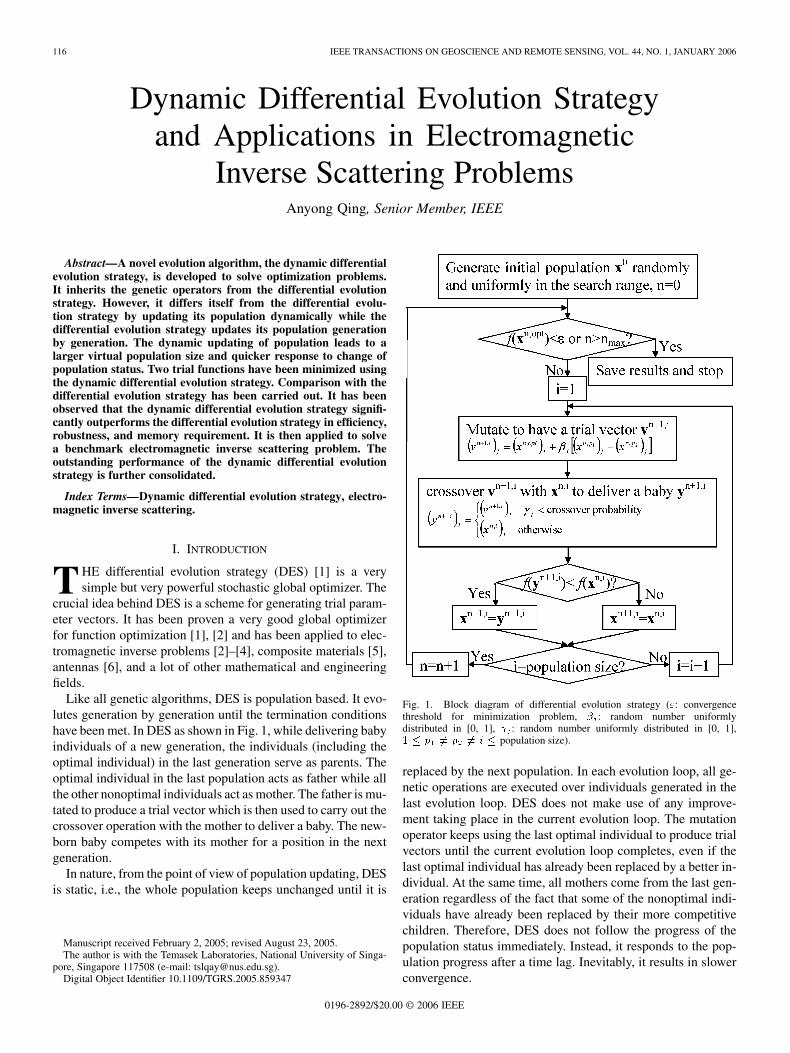
Like all genetic algorithms, DES is population based. It evo-lutes generation by generation until the termination conditionshave been met. In DES as shown in Fig. 1, while delivering babyindividuals of a new generation, the individuals (including theoptimal individual) in the last generation serve as parents. Theoptimal individual in the last population acts as father while allthe other nonoptimal individuals act as mother. The father is mu-tated to produce a trial vector which is then used to carry out thecrossover operation with the mother to deliver a baby. The new-born baby competes with its mother for a position in the nextgeneration.
In nature, from the point of view of population updating, DESis static, i.e., the whole population keeps unchanged until it is
Manuscript received February 2, 2005; revised August 23, 2005.The author is with the Temasek Laboratories, National University of Singa-
pore, Singapore 117508 (e-mail: [email protected]).Digital Object Identifier 10.1109/TGRS.2005.859347
Fig. 1. Block diagram of differential evolution strategy (": convergencethreshold for minimization problem, � : random number uniformlydistributed in [0, 1], : random number uniformly distributed in [0, 1],1 � p 6= p 6= i � population size).
replaced by the next population. In each evolution loop, all ge-netic operations are executed over individuals generated in thelast evolution loop. DES does not make use of any improve-ment taking place in the current evolution loop. The mutationoperator keeps using the last optimal individual to produce trialvectors until the current evolution loop completes, even if thelast optimal individual has already been replaced by a better in-dividual. At the same time, all mothers come from the last gen-eration regardless of the fact that some of the nonoptimal indi-viduals have already been replaced by their more competitivechildren. Therefore, DES does not follow the progress of thepopulation status immediately. Instead, it responds to the pop-ulation progress after a time lag. Inevitably, it results in slowerconvergence.
0196-2892/$20.00 © 2006 IEEE
QING: DYNAMIC DIFFERENTIAL EVOLUTION STRATEGY AND APPLICATIONS 117
The evolution mechanism of DES also implies extra memoryrequirement since the parent generation has to be saved whilegenerating a child population. In programming practice, mem-ories have to be allocated for the present population and its im-mediate parent population.
It is well known that the Seidel iterative method and the relax-ation method for linear equations might converge faster than or-dinary iterative method. The key leading to the success of thesemethods is the dynamic updating of the parameters.
It is noticed that DES does not depend on any populationquantities such as average objective function value. Therefore,all genetic operations are workable if one or more individualsin the population are changed. In addition, it does not affectthe workability of the algorithm to add better individuals intothe population, or to eliminate worse individuals from thepopulation.
Accordingly, the evolution mechanism of DES is modifiedto update the population dynamically. A novel evolution algo-rithm, the dynamic differential evolution strategy (DDES), isconsequently developed. It inherits the genetic operators fromDES. However, its evolution mechanism is completely differentwith that of DES.
A trial function of unique minimum and a trial function ofmultiple minima have been minimized using DDES. Com-parison with DES has been carried out. It has been observedthat DDES significantly outperforms DES in efficiency, ro-bustness, and memory requirement. It is then applied to solvea benchmark electromagnetic inverse scattering problem. Theoutstanding performance of DDES is further consolidated.
II. DYNAMIC DIFFERENTIAL EVOLUTION STRATEGY
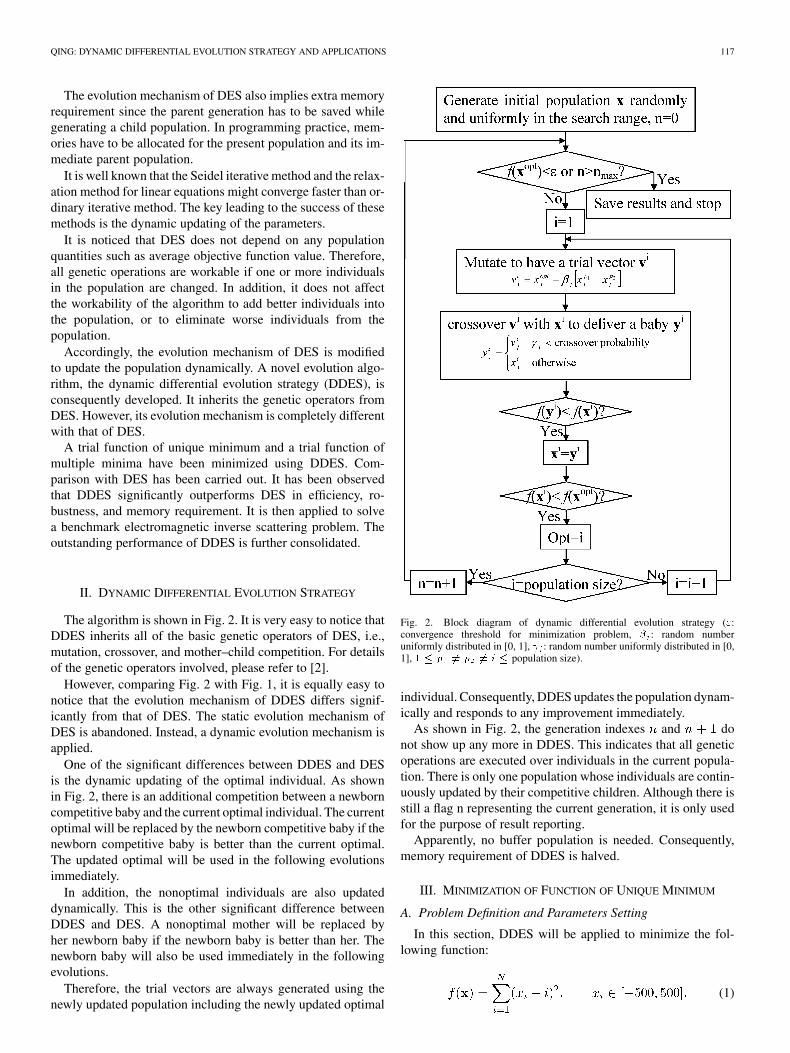
The algorithm is shown in Fig. 2. It is very easy to notice thatDDES inherits all of the basic genetic operators of DES, i.e.,mutation, crossover, and mother–child competition. For detailsof the genetic operators involved, please refer to [2].
However, comparing Fig. 2 with Fig. 1, it is equally easy tonotice that the evolution mechanism of DDES differs signif-icantly from that of DES. The static evolution mechanism ofDES is abandoned. Instead, a dynamic evolution mechanism isapplied.
One of the significant differences between DDES and DESis the dynamic updating of the optimal individual. As shownin Fig. 2, there is an additional competition between a newborncompetitive baby and the current optimal individual. The currentoptimal will be replaced by the newborn competitive baby if thenewborn competitive baby is better than the current optimal.The updated optimal will be used in the following evolutionsimmediately.
In addition, the nonoptimal individuals are also updateddynamically. This is the other significant difference betweenDDES and DES. A nonoptimal mother will be replaced byher newborn baby if the newborn baby is better than her. Thenewborn baby will also be used immediately in the followingevolutions.
Therefore, the trial vectors are always generated using thenewly updated population including the newly updated optimal
Fig. 2. Block diagram of dynamic differential evolution strategy (":convergence threshold for minimization problem, � : random numberuniformly distributed in [0, 1], : random number uniformly distributed in [0,1], 1 � p 6= p 6= i � population size).
individual. Consequently, DDES updates the population dynam-ically and responds to any improvement immediately.
As shown in Fig. 2, the generation indexes and donot show up any more in DDES. This indicates that all geneticoperations are executed over individuals in the current popula-tion. There is only one population whose individuals are contin-uously updated by their competitive children. Although there isstill a flag n representing the current generation, it is only usedfor the purpose of result reporting.
Apparently, no buffer population is needed. Consequently,memory requirement of DDES is halved.
III. MINIMIZATION OF FUNCTION OF UNIQUE MINIMUM
A. Problem Definition and Parameters Setting
In this section, DDES will be applied to minimize the fol-lowing function:
(1)
118 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
The unique global minimum of this function is. However, in our simulation, the search is regarded convergent
if . On the other hand, the search will beaborted if the number of objective function evaluations (NOFE)exceeds the allowed cap.
For the convenience of the following electromagnetic inversescattering problem, three cases of number of optimization pa-rameters are investigated first. The investigated number of opti-mization parameters is 8, 16, and 24. The number of optimiza-tion parameters matches that of the involved electromagneticinverse scattering problems of a single cylinder, parallel cylin-ders, and triple cylinders.
To demonstrate the superior ability of DDES in solving opti-mization problems involving very large number of optimizationparameters, two more cases are considered. The number of op-timization parameters is 50 and 100, respectively.
In each case, different sets of genetic parameters (populationsize, mutation intensity, and crossover probability) are tested.The mutation intensity and the crossover probability changefrom 0.05 to 1 at a step 0.05. For the first three cases consid-ered, the population size lies within 4 and 80 at a step of 4. Therange of population size is 5 to 100 at a step of 5 for the fourthcase. We can only try two population sizes 50 and 100 for thefifth case due to very limited computational resources.
For the convenience of the following description, we call thesimulation of each set of genetic parameters a trial. Each trialcontains 100 searches to eliminate the randomness of the statis-tical results. In each trial, the number of convergent searches,the minimum, maximum, and average NOFE of all convergentsearches is recorded. For each population size, the number of allconvergent searches, the number of full-success trials, and theminimum, maximum, and average NOFE of the best (in termsof average NOFE) full-success trial among all full-success trialsare counted.
For comparison, the above function is also minimized usingDES.
B. Eight-Parameter Function Minimization
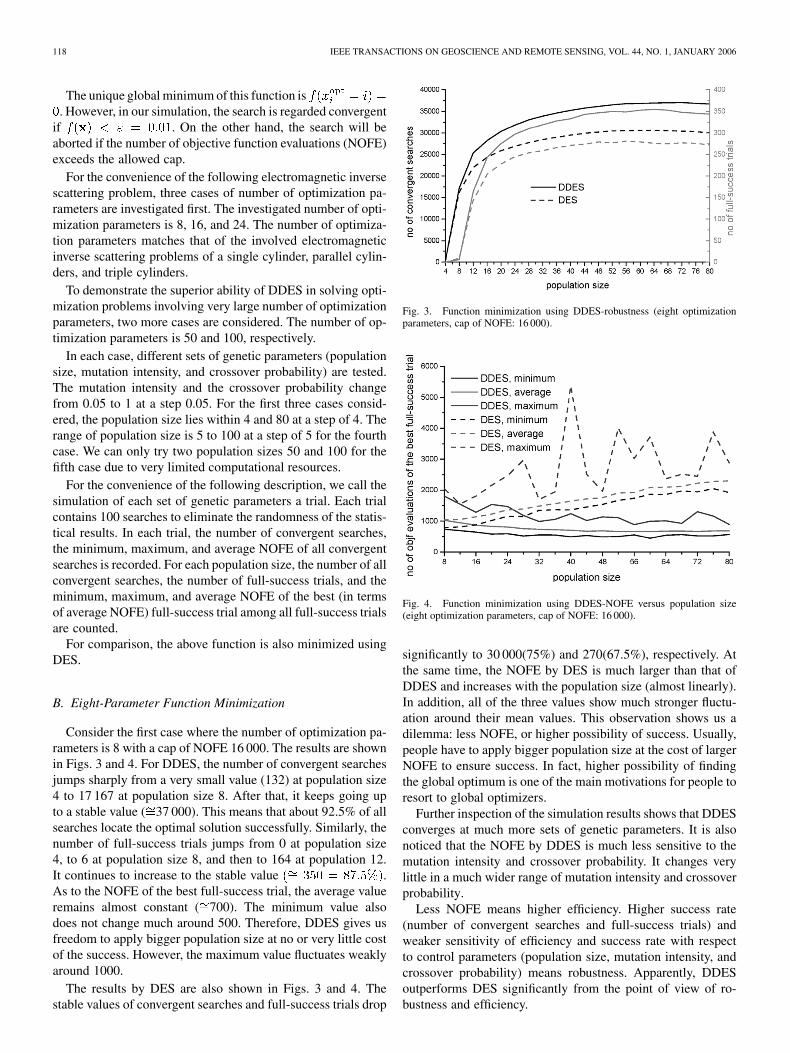
Consider the first case where the number of optimization pa-rameters is 8 with a cap of NOFE 16 000. The results are shownin Figs. 3 and 4. For DDES, the number of convergent searchesjumps sharply from a very small value (132) at population size4 to 17 167 at population size 8. After that, it keeps going upto a stable value ( 37 000). This means that about 92.5% of allsearches locate the optimal solution successfully. Similarly, thenumber of full-success trials jumps from 0 at population size4, to 6 at population size 8, and then to 164 at population 12.It continues to increase to the stable value .As to the NOFE of the best full-success trial, the average valueremains almost constant ( 700). The minimum value alsodoes not change much around 500. Therefore, DDES gives usfreedom to apply bigger population size at no or very little costof the success. However, the maximum value fluctuates weaklyaround 1000.
The results by DES are also shown in Figs. 3 and 4. Thestable values of convergent searches and full-success trials drop
Fig. 3. Function minimization using DDES-robustness (eight optimizationparameters, cap of NOFE: 16 000).
Fig. 4. Function minimization using DDES-NOFE versus population size(eight optimization parameters, cap of NOFE: 16 000).
significantly to 30 000(75%) and 270(67.5%), respectively. Atthe same time, the NOFE by DES is much larger than that ofDDES and increases with the population size (almost linearly).In addition, all of the three values show much stronger fluctu-ation around their mean values. This observation shows us adilemma: less NOFE, or higher possibility of success. Usually,people have to apply bigger population size at the cost of largerNOFE to ensure success. In fact, higher possibility of findingthe global optimum is one of the main motivations for people toresort to global optimizers.
Further inspection of the simulation results shows that DDESconverges at much more sets of genetic parameters. It is alsonoticed that the NOFE by DDES is much less sensitive to themutation intensity and crossover probability. It changes verylittle in a much wider range of mutation intensity and crossoverprobability.
Less NOFE means higher efficiency. Higher success rate(number of convergent searches and full-success trials) andweaker sensitivity of efficiency and success rate with respectto control parameters (population size, mutation intensity, andcrossover probability) means robustness. Apparently, DDESoutperforms DES significantly from the point of view of ro-bustness and efficiency.
QING: DYNAMIC DIFFERENTIAL EVOLUTION STRATEGY AND APPLICATIONS 119
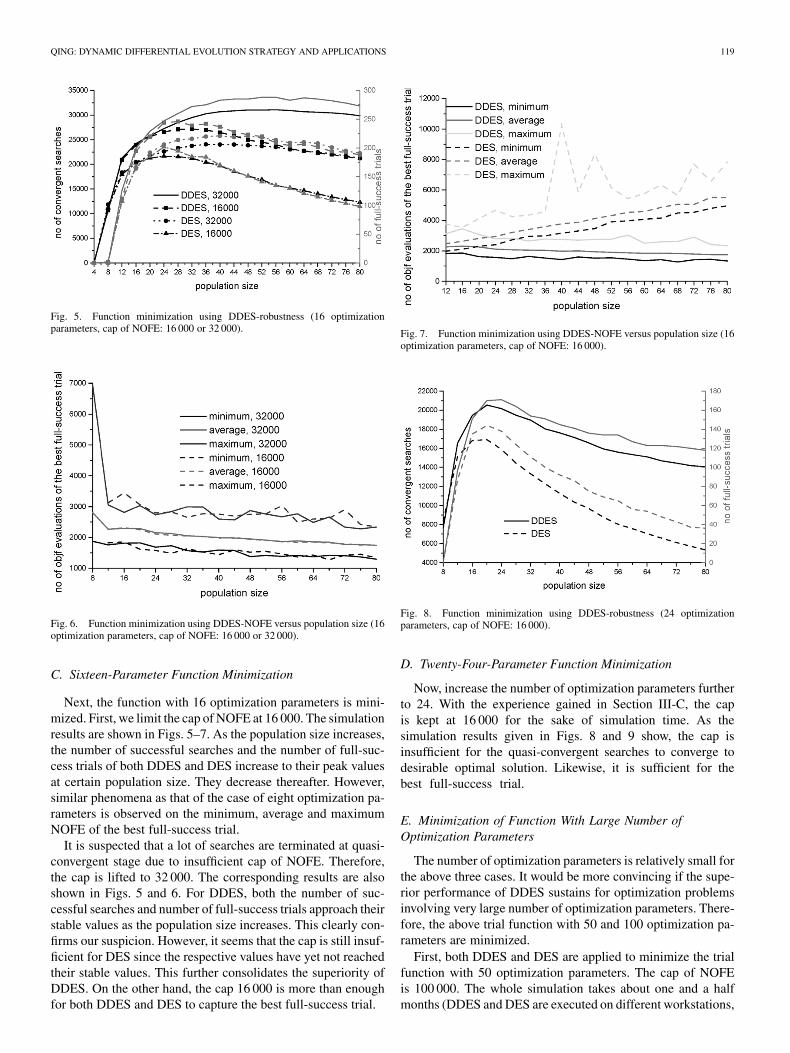
Fig. 5. Function minimization using DDES-robustness (16 optimizationparameters, cap of NOFE: 16 000 or 32 000).
Fig. 6. Function minimization using DDES-NOFE versus population size (16optimization parameters, cap of NOFE: 16 000 or 32 000).
C. Sixteen-Parameter Function Minimization
Next, the function with 16 optimization parameters is mini-mized. First, we limit the cap of NOFE at 16 000. The simulationresults are shown in Figs. 5–7. As the population size increases,the number of successful searches and the number of full-suc-cess trials of both DDES and DES increase to their peak valuesat certain population size. They decrease thereafter. However,similar phenomena as that of the case of eight optimization pa-rameters is observed on the minimum, average and maximumNOFE of the best full-success trial.
It is suspected that a lot of searches are terminated at quasi-convergent stage due to insufficient cap of NOFE. Therefore,the cap is lifted to 32 000. The corresponding results are alsoshown in Figs. 5 and 6. For DDES, both the number of suc-cessful searches and number of full-success trials approach theirstable values as the population size increases. This clearly con-firms our suspicion. However, it seems that the cap is still insuf-ficient for DES since the respective values have yet not reachedtheir stable values. This further consolidates the superiority ofDDES. On the other hand, the cap 16 000 is more than enoughfor both DDES and DES to capture the best full-success trial.
Fig. 7. Function minimization using DDES-NOFE versus population size (16optimization parameters, cap of NOFE: 16 000).
Fig. 8. Function minimization using DDES-robustness (24 optimizationparameters, cap of NOFE: 16 000).
D. Twenty-Four-Parameter Function Minimization
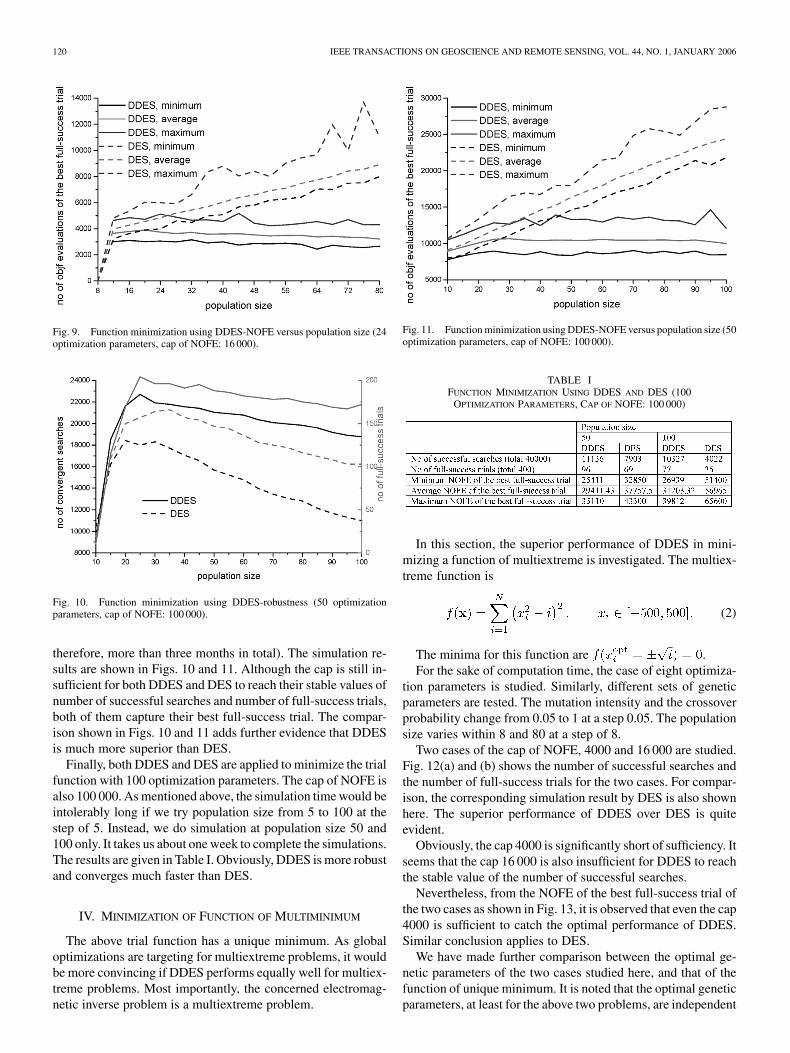
Now, increase the number of optimization parameters furtherto 24. With the experience gained in Section III-C, the capis kept at 16 000 for the sake of simulation time. As thesimulation results given in Figs. 8 and 9 show, the cap isinsufficient for the quasi-convergent searches to converge todesirable optimal solution. Likewise, it is sufficient for thebest full-success trial.
E. Minimization of Function With Large Number ofOptimization Parameters
The number of optimization parameters is relatively small forthe above three cases. It would be more convincing if the supe-rior performance of DDES sustains for optimization problemsinvolving very large number of optimization parameters. There-fore, the above trial function with 50 and 100 optimization pa-rameters are minimized.
First, both DDES and DES are applied to minimize the trialfunction with 50 optimization parameters. The cap of NOFEis 100 000. The whole simulation takes about one and a halfmonths (DDES and DES are executed on different workstations,
120 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
Fig. 9. Function minimization using DDES-NOFE versus population size (24optimization parameters, cap of NOFE: 16 000).
Fig. 10. Function minimization using DDES-robustness (50 optimizationparameters, cap of NOFE: 100 000).
therefore, more than three months in total). The simulation re-sults are shown in Figs. 10 and 11. Although the cap is still in-sufficient for both DDES and DES to reach their stable values ofnumber of successful searches and number of full-success trials,both of them capture their best full-success trial. The compar-ison shown in Figs. 10 and 11 adds further evidence that DDESis much more superior than DES.
Finally, both DDES and DES are applied to minimize the trialfunction with 100 optimization parameters. The cap of NOFE isalso 100 000. As mentioned above, the simulation time would beintolerably long if we try population size from 5 to 100 at thestep of 5. Instead, we do simulation at population size 50 and100 only. It takes us about one week to complete the simulations.The results are given in Table I. Obviously, DDES is more robustand converges much faster than DES.
IV. MINIMIZATION OF FUNCTION OF MULTIMINIMUM
The above trial function has a unique minimum. As globaloptimizations are targeting for multiextreme problems, it wouldbe more convincing if DDES performs equally well for multiex-treme problems. Most importantly, the concerned electromag-netic inverse problem is a multiextreme problem.
Fig. 11. Function minimization using DDES-NOFE versus population size (50optimization parameters, cap of NOFE: 100 000).
TABLE IFUNCTION MINIMIZATION USING DDES AND DES (100
OPTIMIZATION PARAMETERS, CAP OF NOFE: 100 000)
In this section, the superior performance of DDES in mini-mizing a function of multiextreme is investigated. The multiex-treme function is
(2)
The minima for this function are .For the sake of computation time, the case of eight optimiza-
tion parameters is studied. Similarly, different sets of geneticparameters are tested. The mutation intensity and the crossoverprobability change from 0.05 to 1 at a step 0.05. The populationsize varies within 8 and 80 at a step of 8.
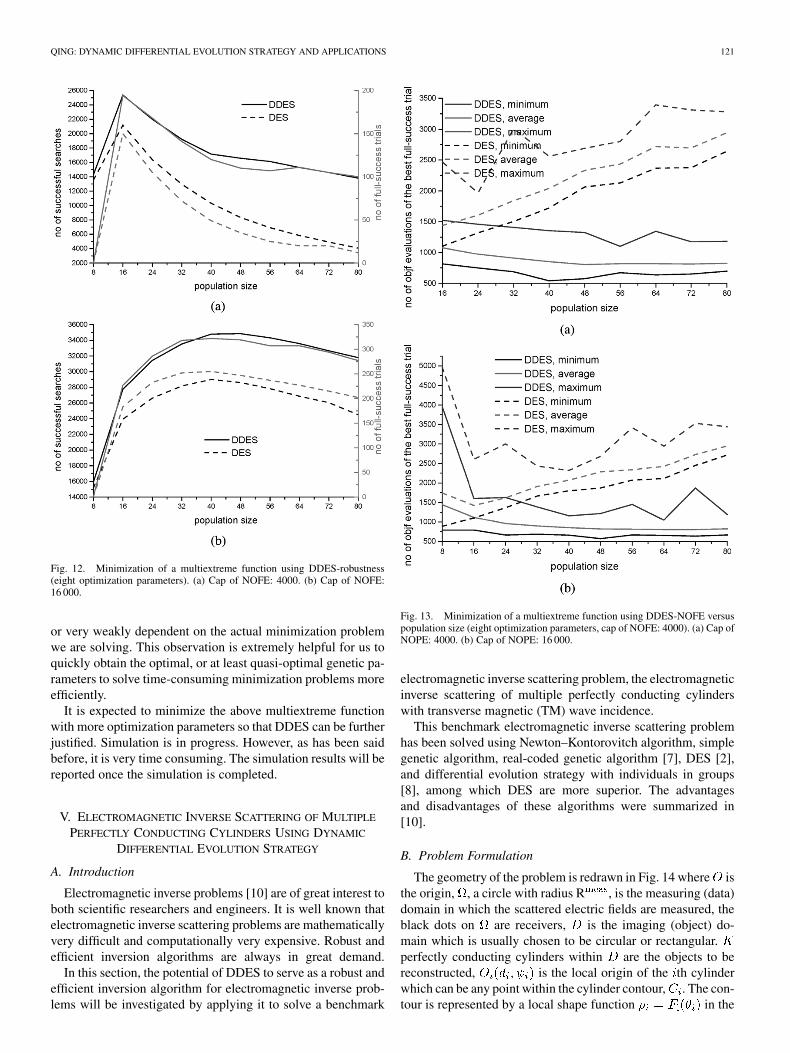
Two cases of the cap of NOFE, 4000 and 16 000 are studied.Fig. 12(a) and (b) shows the number of successful searches andthe number of full-success trials for the two cases. For compar-ison, the corresponding simulation result by DES is also shownhere. The superior performance of DDES over DES is quiteevident.
Obviously, the cap 4000 is significantly short of sufficiency. Itseems that the cap 16 000 is also insufficient for DDES to reachthe stable value of the number of successful searches.
Nevertheless, from the NOFE of the best full-success trial ofthe two cases as shown in Fig. 13, it is observed that even the cap4000 is sufficient to catch the optimal performance of DDES.Similar conclusion applies to DES.
We have made further comparison between the optimal ge-netic parameters of the two cases studied here, and that of thefunction of unique minimum. It is noted that the optimal geneticparameters, at least for the above two problems, are independent
QING: DYNAMIC DIFFERENTIAL EVOLUTION STRATEGY AND APPLICATIONS 121
Fig. 12. Minimization of a multiextreme function using DDES-robustness(eight optimization parameters). (a) Cap of NOFE: 4000. (b) Cap of NOFE:16 000.
or very weakly dependent on the actual minimization problemwe are solving. This observation is extremely helpful for us toquickly obtain the optimal, or at least quasi-optimal genetic pa-rameters to solve time-consuming minimization problems moreefficiently.
It is expected to minimize the above multiextreme functionwith more optimization parameters so that DDES can be furtherjustified. Simulation is in progress. However, as has been saidbefore, it is very time consuming. The simulation results will bereported once the simulation is completed.
V. ELECTROMAGNETIC INVERSE SCATTERING OF MULTIPLE
PERFECTLY CONDUCTING CYLINDERS USING DYNAMIC
DIFFERENTIAL EVOLUTION STRATEGY
A. Introduction
Electromagnetic inverse problems [10] are of great interest toboth scientific researchers and engineers. It is well known thatelectromagnetic inverse scattering problems are mathematicallyvery difficult and computationally very expensive. Robust andefficient inversion algorithms are always in great demand.
In this section, the potential of DDES to serve as a robust andefficient inversion algorithm for electromagnetic inverse prob-lems will be investigated by applying it to solve a benchmark
Fig. 13. Minimization of a multiextreme function using DDES-NOFE versuspopulation size (eight optimization parameters, cap of NOFE: 4000). (a) Cap ofNOPE: 4000. (b) Cap of NOPE: 16 000.
electromagnetic inverse scattering problem, the electromagneticinverse scattering of multiple perfectly conducting cylinderswith transverse magnetic (TM) wave incidence.
This benchmark electromagnetic inverse scattering problemhas been solved using Newton–Kontorovitch algorithm, simplegenetic algorithm, real-coded genetic algorithm [7], DES [2],and differential evolution strategy with individuals in groups[8], among which DES are more superior. The advantagesand disadvantages of these algorithms were summarized in[10].
B. Problem Formulation
The geometry of the problem is redrawn in Fig. 14 where isthe origin, , a circle with radius R , is the measuring (data)domain in which the scattered electric fields are measured, theblack dots on are receivers, is the imaging (object) do-main which is usually chosen to be circular or rectangular.perfectly conducting cylinders within are the objects to bereconstructed, is the local origin of the th cylinderwhich can be any point within the cylinder contour, . The con-tour is represented by a local shape function in the

122 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
Fig. 14. Geometry of the electromagnetic inverse problem.
local polar coordinate system. In our practice, it is approximatedby a closed cubic B-spline local shape function [11], , of
control points, , .The inverse problem is to locate the unknown cylinders and
reconstruct the cylinder contours, given the scattered electricfields measured on , . In practice, ismeasured at a finite number of frequency point and a finitenumber of incident angles for the incident plane waves bya finite number of receivers . Accordingly, becomesan -dimensional vector.
The object and data equations of the electromagnetic inverseproblem are
(3)
(4)
where (time factorassumed and suppressed) is the incident field, is theangular frequency, , is the wavenumberin free space, is the light speed, is theincident wave unit vector and is the incident angle. , and
are the unit vectors in the , , and directions respectively,, is the induced surface electric cur-
rent on the surface of the th cylinder, is the Hankel’sfunction of second kind of zeroth order,is the scattered electric field.
This benchmark electromagnetic inverse problem is mathe-matically defined as
Fig. 15. Intersection of cylinders.
(5)
where is the vector of optimization param-eters, is the subvector containing the geometrical parame-ters of cylinder , , isan -dimensional vector containing the scatteredelectric fields simulated with the latest reconstruction results ofcylinder locations and local shape functions , is the in-tensity of penalty imposed on infeasible reconstruction resultswith intersecting cylinders as shown in Fig. 15
The first term of the objective function is the relative recon-struction error which gives a measurement on how close the re-construction results approach the true profile, while the secondterm is an artificial penalty applied only in the case of inter-secting cylinders.
C. Settings of Parameters
For the convenience of comparison, the settings of parametersin [2] are followed here unless specified otherwise. Therefore,the frequency of the incident field is 300 MHz, or equivalently,
1 m. It illuminates the unknown object from eight differentangles, i.e., , . . Thirty-tworeceivers located uniformly on are used for each illumina-tion to record the scattered fields. No noise is included in thesynthetic data. The number of control points for each closedcubic B-spline local shape function is 6. The search range ofcontrol points is [0, 1] . The local origins are searched in a
QING: DYNAMIC DIFFERENTIAL EVOLUTION STRATEGY AND APPLICATIONS 123
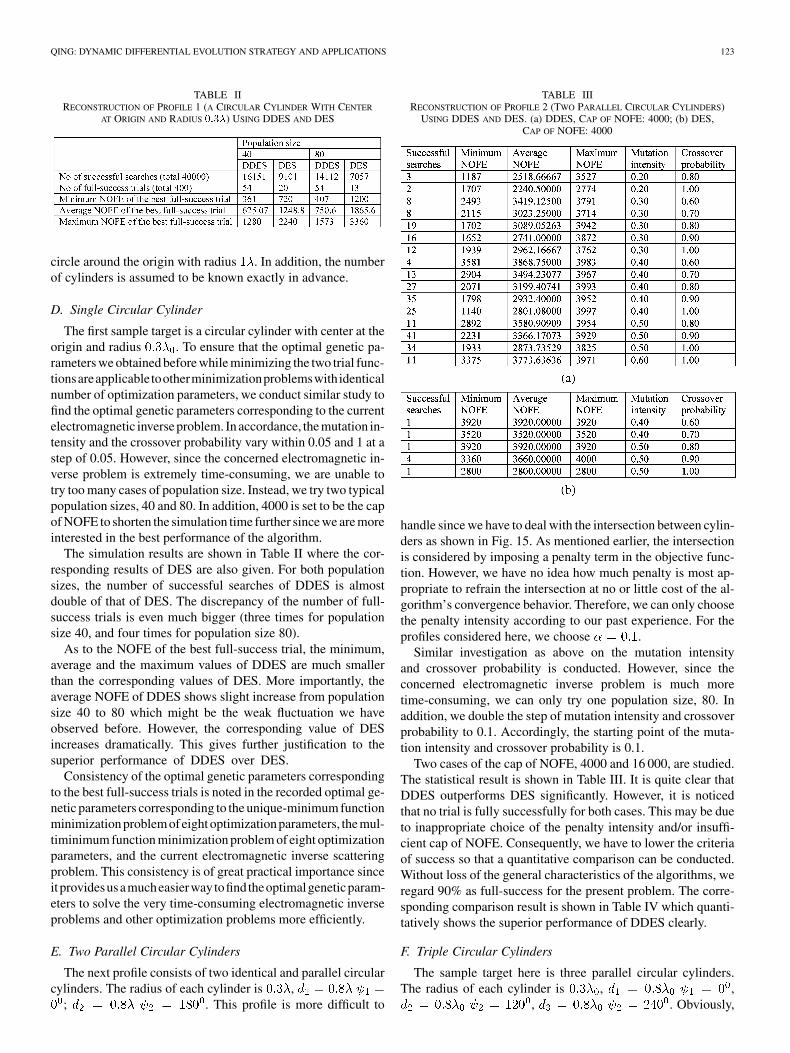
TABLE IIRECONSTRUCTION OF PROFILE 1 (A CIRCULAR CYLINDER WITH CENTER
AT ORIGIN AND RADIUS 0:3�) USING DDES AND DES
circle around the origin with radius . In addition, the numberof cylinders is assumed to be known exactly in advance.
D. Single Circular Cylinder
The first sample target is a circular cylinder with center at theorigin and radius . To ensure that the optimal genetic pa-rameters we obtained before while minimizing the two trial func-tionsareapplicabletootherminimizationproblemswithidenticalnumber of optimization parameters, we conduct similar study tofind the optimal genetic parameters corresponding to the currentelectromagnetic inverse problem. In accordance, the mutation in-tensity and the crossover probability vary within 0.05 and 1 at astep of 0.05. However, since the concerned electromagnetic in-verse problem is extremely time-consuming, we are unable totry too many cases of population size. Instead, we try two typicalpopulation sizes, 40 and 80. In addition, 4000 is set to be the capof NOFE to shorten the simulation time further since we are moreinterested in the best performance of the algorithm.
The simulation results are shown in Table II where the cor-responding results of DES are also given. For both populationsizes, the number of successful searches of DDES is almostdouble of that of DES. The discrepancy of the number of full-success trials is even much bigger (three times for populationsize 40, and four times for population size 80).
As to the NOFE of the best full-success trial, the minimum,average and the maximum values of DDES are much smallerthan the corresponding values of DES. More importantly, theaverage NOFE of DDES shows slight increase from populationsize 40 to 80 which might be the weak fluctuation we haveobserved before. However, the corresponding value of DESincreases dramatically. This gives further justification to thesuperior performance of DDES over DES.
Consistency of the optimal genetic parameters correspondingto the best full-success trials is noted in the recorded optimal ge-netic parameters corresponding to the unique-minimum functionminimization problem ofeight optimizationparameters, the mul-timinimum function minimization problem of eight optimizationparameters, and the current electromagnetic inverse scatteringproblem. This consistency is of great practical importance sinceitprovidesusamucheasierway tofindtheoptimalgeneticparam-eters to solve the very time-consuming electromagnetic inverseproblems and other optimization problems more efficiently.
E. Two Parallel Circular Cylinders
The next profile consists of two identical and parallel circularcylinders. The radius of each cylinder is ,
; . This profile is more difficult to
TABLE IIIRECONSTRUCTION OF PROFILE 2 (TWO PARALLEL CIRCULAR CYLINDERS)
USING DDES AND DES. (a) DDES, CAP OF NOFE: 4000; (b) DES,CAP OF NOFE: 4000
handle since we have to deal with the intersection between cylin-ders as shown in Fig. 15. As mentioned earlier, the intersectionis considered by imposing a penalty term in the objective func-tion. However, we have no idea how much penalty is most ap-propriate to refrain the intersection at no or little cost of the al-gorithm’s convergence behavior. Therefore, we can only choosethe penalty intensity according to our past experience. For theprofiles considered here, we choose .
Similar investigation as above on the mutation intensityand crossover probability is conducted. However, since theconcerned electromagnetic inverse problem is much moretime-consuming, we can only try one population size, 80. Inaddition, we double the step of mutation intensity and crossoverprobability to 0.1. Accordingly, the starting point of the muta-tion intensity and crossover probability is 0.1.
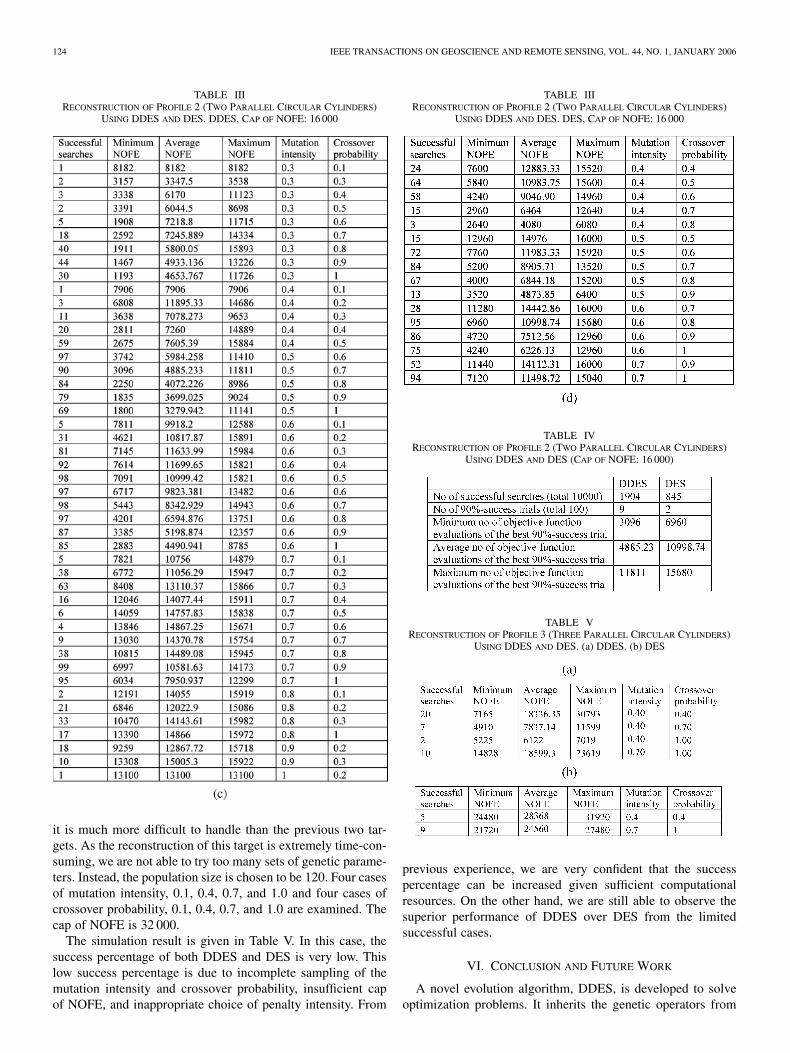
Two cases of the cap of NOFE, 4000 and 16 000, are studied.The statistical result is shown in Table III. It is quite clear thatDDES outperforms DES significantly. However, it is noticedthat no trial is fully successfully for both cases. This may be dueto inappropriate choice of the penalty intensity and/or insuffi-cient cap of NOFE. Consequently, we have to lower the criteriaof success so that a quantitative comparison can be conducted.Without loss of the general characteristics of the algorithms, weregard 90% as full-success for the present problem. The corre-sponding comparison result is shown in Table IV which quanti-tatively shows the superior performance of DDES clearly.
F. Triple Circular Cylinders
The sample target here is three parallel circular cylinders.The radius of each cylinder is , ,
, . Obviously,
124 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 44, NO. 1, JANUARY 2006
TABLE IIIRECONSTRUCTION OF PROFILE 2 (TWO PARALLEL CIRCULAR CYLINDERS)
USING DDES AND DES. DDES, CAP OF NOFE: 16 000
it is much more difficult to handle than the previous two tar-gets. As the reconstruction of this target is extremely time-con-suming, we are not able to try too many sets of genetic parame-ters. Instead, the population size is chosen to be 120. Four casesof mutation intensity, 0.1, 0.4, 0.7, and 1.0 and four cases ofcrossover probability, 0.1, 0.4, 0.7, and 1.0 are examined. Thecap of NOFE is 32 000.
The simulation result is given in Table V. In this case, thesuccess percentage of both DDES and DES is very low. Thislow success percentage is due to incomplete sampling of themutation intensity and crossover probability, insufficient capof NOFE, and inappropriate choice of penalty intensity. From
TABLE IIIRECONSTRUCTION OF PROFILE 2 (TWO PARALLEL CIRCULAR CYLINDERS)
USING DDES AND DES. DES, CAP OF NOFE: 16 000
TABLE IVRECONSTRUCTION OF PROFILE 2 (TWO PARALLEL CIRCULAR CYLINDERS)
USING DDES AND DES (CAP OF NOFE: 16 000)
TABLE VRECONSTRUCTION OF PROFILE 3 (THREE PARALLEL CIRCULAR CYLINDERS)
USING DDES AND DES. (a) DDES. (b) DES
previous experience, we are very confident that the successpercentage can be increased given sufficient computationalresources. On the other hand, we are still able to observe thesuperior performance of DDES over DES from the limitedsuccessful cases.
VI. CONCLUSION AND FUTURE WORK
A novel evolution algorithm, DDES, is developed to solveoptimization problems. It inherits the genetic operators from

QING: DYNAMIC DIFFERENTIAL EVOLUTION STRATEGY AND APPLICATIONS 125
DES. However, it differs itself from DES by updating its popula-tion dynamically while DES updates its population generationby generation. The dynamic updating of population leads to alarger virtual population size and quicker response to change ofoptimal search direction. DDES has been applied to minimize atrial function of unique minimum, to minimize a trial functionof multiminimum, and to solve a benchmark electromagneticinverse scattering problem. Comparison with DES has been car-ried out. It has been observed that DDES significantly outper-forms DES in efficiency, robustness, and memory requirement.
As noted in our simulation, there seems to be consistency ofoptimal genetic parameters for different optimization problemswith the same number of optimization parameters. We will con-duct further investigation to consolidate this observation and re-port any interesting findings.
While applying DDES to solve the benchmark electromag-netic inverse scattering problem, it is noticed that the cylinderintersection has to be properly considered. However, our cur-rent approach to deal with the cylinder intersection depends onour past experience on choosing the penalty intensity. Our em-pirical experience is seriously insufficient for us to deal withthe cylinder intersection most appropriately. We are now tryingto develop an algorithm which handles the intersection moreefficiently.
REFERENCES
[1] R. Storn and K. Price, “Differential evolution—A simple and efficientadaptive scheme for global optimization over continuous spaces,” Univ.California, Berkeley, Int. Comput. Sci. Inst., Berkeley, TR-95-012,Mar. 1995. [Online]. Available: ftp://ftp.icsi.berkeley.edu/pub/techre-ports/1995/tr-95-012.pdf.
[2] A. Qing, “Electromagnetic inverse scattering of multiple two-di-mensional perfectly conducting objects by the differential evolutionstrategy,” IEEE Trans. Antennas Propagat., vol. 51, no. 6, pp.1251–1262, Jun. 2003.
[3] K. A. Michalski, “Electromagnetic imaging of circular-cylindrical con-ductors and tunnels using a differential evolution algorithm,” Microw.Opt. Technol. Lett., vol. 27, no. 5, pp. 330–334, Dec. 2000.
[4] , “Electromagnetic imaging of elliptical-cylindrical conductors andtunnels using a differential evolution algorithm,” Microw. Opt. Technol.Lett., vol. 28, no. 3, pp. 164–169, Feb. 2001.
[5] A. Qing, X. Xu, and Y. B. Gan, “Anisotropy of composite materials withinclusion with orientation preference,” IEEE Trans. Antennas Propagat.,vol. 53, no. 2, pp. 737–744, Feb. 2005.
[6] S. Yang, Y. B. Gan, and A. Qing, “Sideband suppression in time mod-ulated linear arrays by the differential evolution algorithm,” IEEE An-tennas Wireless Propagat. Lett., vol. 1, no. 9, pp. 173–175, Sep. 2002.
[7] A. Qing, C. K. Lee, and L. Jen, “Electromagnetic inverse scattering oftwo-dimensional perfectly conducting objects by real-coded genetic al-gorithm,” IEEE Trans. Geosci. Remote Sens., vol. 39, no. 3, pp. 665–676,Mar. 2001.
[8] A. Qing, “Electromagnetic inverse scattering of multiple perfectly con-ducting cylinders by differential evolution strategy with individuals ingroups (GDES),” IEEE Trans. Antennas. Propagat., vol. 52, no. 5, pp.1223–1229, May 2004.
[9] , “Microwave imaging of parallel perfectly conducting cylinderswith transverse electric scattering data,” J. Electromagn. Waves Appl.,vol. 15, no. 5, pp. 665–685, 2001.
[10] A. Qing and Y. B. Gan, “Electromagnetic inverse problems,” in Ency-clopedia of RF and Microwave Engineering, K. Chang, Ed. New York:Wiley, 2006, vol. 2, pp. 1200–1216.
[11] A. Qing, “Microwave imaging of parallel perfectly conducting cylinderswith transverse electric scattering data,” J. Electromagn. Waves Appl.,vol. 15, no. 5, pp. 665–685, 2001.
Anyong Qing (S’97–M’00–SM’05) was born inHu’nan province, China, on May 27, 1972. Hereceived the B.E. degree from Tsinghua University,Beijing, China, the M.E. degree from the BeijingBroadcasting Institute, Beijing, and the Ph.D. degreefrom Southwest Jiaotong University, Hebie, China,in 1993, 1995, and 1997, all in electromagnetictheory and microwave technology.
He was a Postdoctoral Fellow in the Departmentof Communication Engineering, Shanghai Univer-sity, during September 1997 and June 1998 and
a Research Fellow in the School of Electrical and Electronic Engineering,Nanyang Technological University, Singapore. He was a member of scientificstaff in the Electromagnetic Theory Group at the Department of ElectricalEngineering, University of Kassel, Germany, during July 2000 and May 2001.He joined VS Electronics Pte Ltd., Singapore as a RF Design Engineer in June2001 and was jointly with Sumitomo Electric Industries Ltd., Itami, Japan.He is currently a Research Scientist in the Temasek Laboratories, NationalUniversity of Singapore. His research interests include composite materials,electromagnetic, acoustic, and elastic waves scattering and propagation,electromagnetic/acoustic inverse scattering, frequency selective surfaces, andgenetic algorithms. He is a reviewer for the IEICE Transactions on Electronics,Inverse Problems, and the Journal of Electromagnetic Waves and Applications.
Dr. Qing serves as reviewer for IEEE TRANSACTIONS ON ANTENNAS AND
PROPAGATION, IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING,and the IEEE ANTENNAS AND WIRELESS PROPAGATION LETTERS. He is amember of the Chinese Institute of Electronics.