simulation and optimization of cologne's tram schedule
TRANSCRIPT
Simulation and optimization of Cologne's tram schedule TN-1
Simulation and optimization of Cologne's tram schedule
Oliver Ullrich, Sebastian Franz, Ewald Speckenmeyer, University of Cologne, Germany
Daniel Lückerath, University of Cologne, Cologne University of Applied Science, Germany
{ullrich|lueckerath|franz|speckenmeyer}@informatik.uni-koeln.de
In many tram networks multiple lines share tracks and stations, thus requiring robust schedules which pre-
vent inevitable delays from spreading through the network. Feasible schedules also have to fulfill various
planning requirements originating from political and economical reasons.
In this article we present a tool set designed to generate schedules optimized for robustness, which also satis-
fy given sets of planning requirements. These tools allow us to compare time tables with respect to their ap-
plicability and evaluate them prior to their implementation in the field.
This paper begins with a description of the tool set focusing on optimization and simulation modules. These
software utilities are then employed to generate schedules for our hometown Cologne's tram network, and to
subsequently compare them for their applicability.
1 Introduction
In many tram networks, several lines share resources
like platforms and tracks. This results in very dense
schedules, with vehicles leaving platforms every
minute at peak times. In order to prevent inevitable
local delays from spreading through the network, a
feasible schedule has to be robust.
Many additional planning requirements of real world
tram schedules originate from political, economical
and feasibility reasons. Thus it is not sufficient to
exclusively consider general criteria like robustness
or operational costs when generating time tables.
Typical requirements include fixed start times at
certain stations, e.g. interfaces to national railway
systems, core lines to relieve high passenger load, e.g.
for lines which traverse city centers, warranted con-
nections at certain stations, and safety distances to be
complied with at bidirectional tracks.
In this paper we present an introduction to our project
to generate and evaluate robust time tables which also
satisfy given sets of planning requirements. We de-
scribe a tool chain which enables us to generate opti-
mized schedules, compare their feasibility and evalu-
ate them prior to application to real world networks.
This paper continues with a description of the current
state of the project, focusing on our approaches on
optimization and simulation (Section 2). We then
present some experimental results obtained by apply-
ing the described software to our hometown Co-
logne's tram network (Section 3). The paper closes
with a short summary of lessons learned and some
thoughts on further research (Section 4).
2 Simulating and optimizing tram
schedules
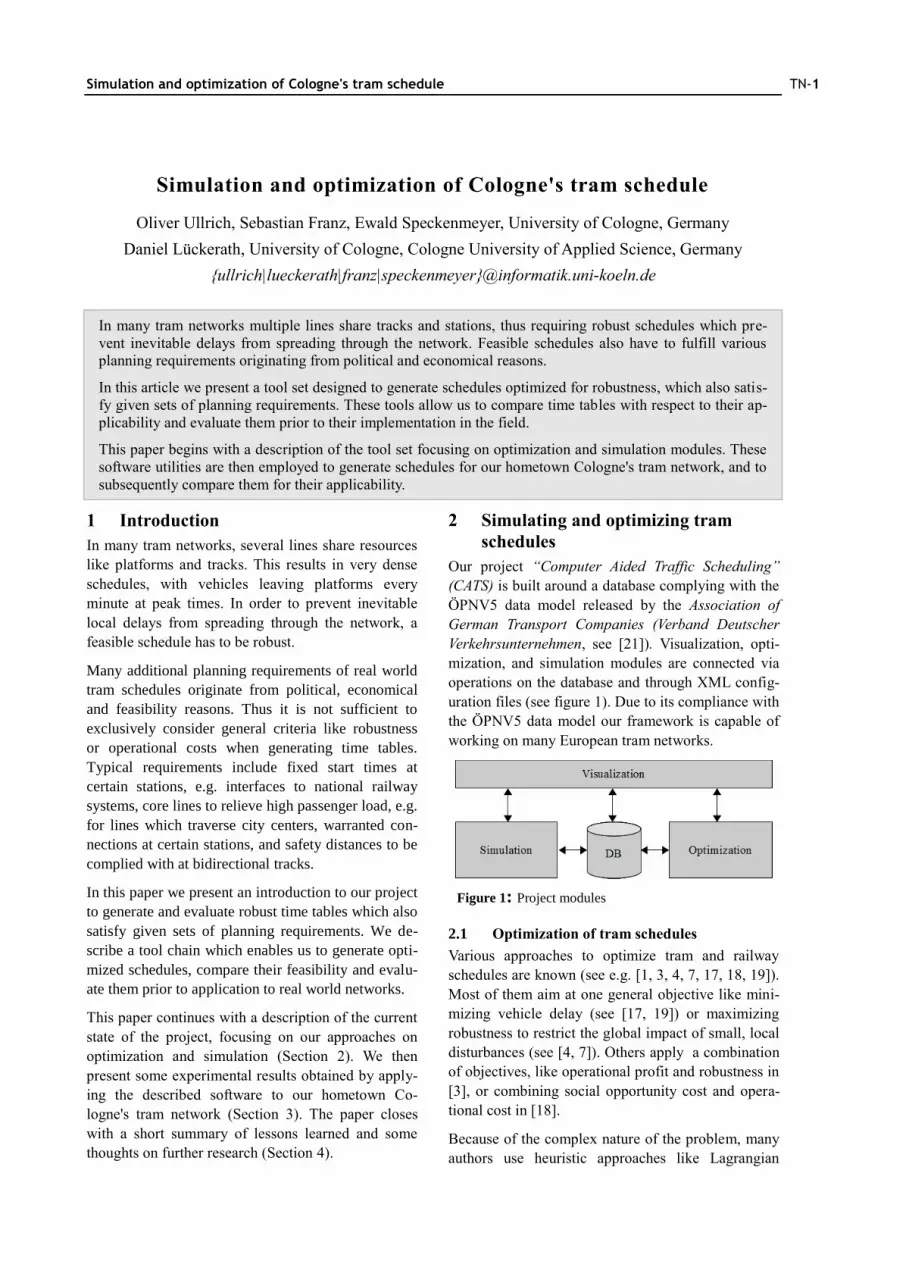
Our project “Computer Aided Traffic Scheduling”
(CATS) is built around a database complying with the
ÖPNV5 data model released by the Association of
German Transport Companies (Verband Deutscher
Verkehrsunternehmen, see [21]). Visualization, opti-
mization, and simulation modules are connected via
operations on the database and through XML config-
uration files (see figure 1). Due to its compliance with
the ÖPNV5 data model our framework is capable of
working on many European tram networks.
Figure 1: Project modules
2.1 Optimization of tram schedules
Various approaches to optimize tram and railway
schedules are known (see e.g. [1, 3, 4, 7, 17, 18, 19]).
Most of them aim at one general objective like mini-
mizing vehicle delay (see [17, 19]) or maximizing
robustness to restrict the global impact of small, local
disturbances (see [4, 7]). Others apply a combination
of objectives, like operational profit and robustness in
[3], or combining social opportunity cost and opera-
tional cost in [18].
Because of the complex nature of the problem, many
authors use heuristic approaches like Lagrangian
TN-2 Simulation and optimization of Cologne's tram schedule
heuristics (see [3]) or simulated annealing (see [18]).
Others, like Bampas et al. in [1] introduce exact algo-
rithms for restricted subclasses, like chain and spider
networks.
In our project, we combine heuristics and exact
methods to generate optimal synchronized time tables
for tram networks, targeting maximal robustness and
adherence to transport planning requirements at the
same time.
We use the scheduled time offset between two con-
secutive lines departing from a platform as an indica-
tor for robustness. In an assumed tact interval of ten
minutes, two lines could be scheduled with equidis-
tant offsets of five minutes, which means that one or
both involved vehicles could be late for more than
four minutes without consequences for the following
tram. Under an extremely unequal split of the availa-
ble time span into a nine minute offset followed by a
one minute offset, the first tram could have a delay of
more than eight minutes without consequences to the
following vehicle. On the other hand, would the se-
cond vehicle be even slightly late, the delay would
spread to the follow-up tram. Since we are assuming
typically small delays, we see an equidistant distribu-
tion as very robust, the occurrence of very small off-
sets as not robust.
So, to calculate the robustness of a time table 𝜆 we
examine at each platform h of the network the sched-
uled time offset 𝛿 𝜆 ℎ between any trip
𝑓and its predecessor 𝑝𝑟𝑒𝑑 𝑓 , i.e. the time elapsed
between the departures of 𝑝𝑟𝑒𝑑 𝑓 and 𝑓 at the ex-
amined platform.
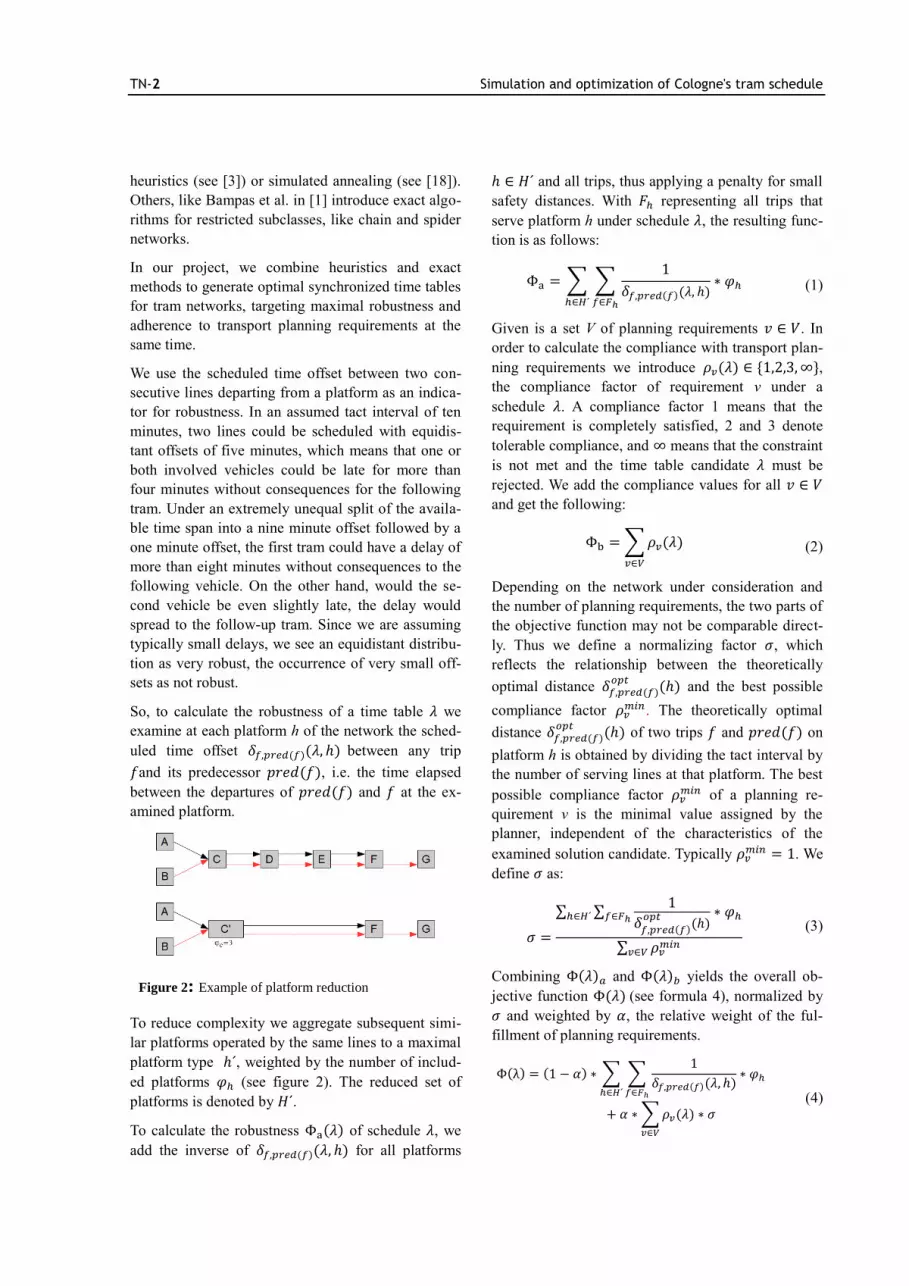
Figure 2: Example of platform reduction
To reduce complexity we aggregate subsequent simi-
lar platforms operated by the same lines to a maximal
platform type ℎ´, weighted by the number of includ-
ed platforms 𝜑 (see figure 2). The reduced set of
platforms is denoted by 𝐻´.
To calculate the robustness Φ 𝜆 of schedule 𝜆, we
add the inverse of 𝛿 𝜆 ℎ for all platforms
ℎ ∈ 𝐻´ and all trips, thus applying a penalty for small
safety distances. With 𝐹 representing all trips that
serve platform h under schedule 𝜆, the resulting func-
tion is as follows:
Φ = ∑ ∑1
𝛿 𝜆 ℎ ∗ 𝜑
∈ ∈ ´
(1)
Given is a set V of planning requirements 𝑣 ∈ 𝑉. In
order to calculate the compliance with transport plan-
ning requirements we introduce 𝜌 𝜆 ∈ {1 2 3 ∞},
the compliance factor of requirement v under a
schedule 𝜆. A compliance factor 1 means that the
requirement is completely satisfied, 2 and 3 denote
tolerable compliance, and ∞ means that the constraint
is not met and the time table candidate 𝜆 must be
rejected. We add the compliance values for all 𝑣 ∈ 𝑉
and get the following:
Φ = ∑𝜌 𝜆
∈
(2)
Depending on the network under consideration and
the number of planning requirements, the two parts of
the objective function may not be comparable direct-
ly. Thus we define a normalizing factor 𝜎, which
reflects the relationship between the theoretically
optimal distance 𝛿
ℎ and the best possible
compliance factor 𝜌 . The theoretically optimal
distance 𝛿
ℎ of two trips 𝑓 and 𝑝𝑟𝑒𝑑 𝑓 on
platform h is obtained by dividing the tact interval by
the number of serving lines at that platform. The best
possible compliance factor 𝜌 of a planning re-
quirement v is the minimal value assigned by the
planner, independent of the characteristics of the
examined solution candidate. Typically 𝜌 = 1. We
define 𝜎 as:
𝜎 =
∑ ∑1
𝛿
ℎ ∗ 𝜑 ∈ ∈ ´
∑ 𝜌
∈
(3)
Combining Φ 𝜆 and Φ 𝜆 yields the overall ob-
jective function Φ 𝜆 (see formula 4), normalized by
𝜎 and weighted by 𝛼, the relative weight of the ful-
fillment of planning requirements.
Φ = 1 𝛼 ∗ ∑ ∑1
𝛿 𝜆 ℎ ∗ 𝜑
∈ ∈ ´
𝛼 ∗ ∑𝜌 𝜆 ∗ 𝜎
∈
(4)

Simulation and optimization of Cologne's tram schedule TN-3
We identify seven types of transport planning con-
straints: Interval constraints, start time constraints,
core line constraints, bidirectional track constraints,
turning point constraints, warranted connection con-
straints and follow-up connection constraints.
Upon closer inspection it becomes clear that interval
and start time constraints are fundamental and all
other constraint types can be expressed using these
two. E.g. a bidirectional track constraint can be ex-
pressed by two interval constraints covering opposing
platforms. Subsequently only interval and start time
constraints are considered in the remainder of this
paper.
A valid solution also has to adhere to some more
restrictions. The first restriction requires each start
time 𝜇 to be inside the tact interval, with 𝑡
being the duration of the interval (see formula 5).
∀𝜇 ∈ 𝜆: 0 ≤ 𝜇 < 𝑡 (5)
Another restriction requires an offset of at least one
minute between two departures f and pred(f) at each
platform ℎ ∈ 𝐻 (see formula 6). This means that no
platform can be blocked by more than one train at any
point of time, the schedule has to be free of collisions.
∀ℎ ∈ 𝐻: ∀𝑓 ∈ 𝐹: 𝛿 𝜆 ℎ > 0 (6)
To accelerate the computational process the imple-
mented branch-and-bound solver starts with an initial
solution computed by a genetic algorithm. The genet-
ic algorithm encodes a time table as one individual,
consisting of the first trip start time of each line, i.e.
the offset in minutes from the start of the operational
day. All other trips follow by the global tact interval.
The application generates a start population using
random start time values, testing validity against
planning constraints and collisions on network nodes.
To reduce computational complexity we apply simple
deterministic tournament selection and two-point-
crossover (as described in [5]). After evaluation of
several mutation methods, including random, mini-
mal, and maximum enhancement mutation we choose
a minimal random mutation method that only allows
start times to be altered by one minute. We utilize a
steady state replacement method, also described in
[5]. At the end of each run a hill climbing algorithm is
applied to the best individual to further improve its
fitness.
As described above we use the best individual en-
countered by the genetic algorithm to provide the
branch-and-bound solver with an initial upper bound,
thus avoiding a cold start. Each inner node of the
search tree represents a partial solution of the prob-
lem. The root of the tree corresponds to a solution in
which no line's start time is fixed. With each level of
the tree admissible start times for an additional line
are set. For a more detailed discussion of the branch-
and-bound method, see e.g. [8].
In order to cut branches off the tree as soon as possi-
ble, the objective function of the branch-and-bound
algorithm is modified. The set of lines 𝐿 is divided
into subset �̂� of lines that are already fixed and subset
�̃� of lines that are not yet fixed. Accordingly the set of
platforms 𝐻 is divided into �̂� and 𝐻. �̂� includes all
platforms which are exclusively served by lines al-
ready fixed, while platforms in �̃� are also (or exclu-
sively) served by lines that are not yet fixed. The set
of transport planning constraints 𝑉 is divided into sets
�̂� and �̃�. Set �̂� includes all constraints which are
dependent on already set lines, correspondingly con-
straints in �̃� are dependent on lines not yet set. The
modified objective function Φ´ 𝜆 is shown below
(formulas 7 to 9).
Φ´ = 1 α ∗ Φ´ α ∗ Φ´ ∗ 𝜎 (7)
Φ´ =
(
∑ ∑1
𝛿𝑓 𝑝𝑟𝑒𝑑 𝑓 𝜆 ℎ ∗ 𝜑
ℎ
𝑓∈𝐹ℎℎ∈�̂�
∑ ∑1
�̃�𝑓 𝑝𝑟𝑒𝑑 𝑓 𝜆 ℎ ∗ 𝜑
ℎ
𝑓∈𝐹ℎℎ∈�̃� )
(8)
Φ´ = ∑𝜌 𝜆
∈ ̂
∑𝜌 𝜆
∈ ̃
(9)
Here 𝛿 𝜆 ℎ represents the theoretically best
safety distance value under consideration of lines
already fixed. Again, 𝜌 denotes the optimal com-
pliance factor for constraint v. These values are ap-
plied in order to find a lower bound for solution can-
didates in the current branch of the search tree.
For further implementation details, see [6].
2.2 Simulation of tram schedules
Most rail-bound traffic simulations are designed for
long distance train or railway networks, see e.g. [14,
16]. While those systems feature similarities to tram
networks, e.g. passenger exchange or maneuvering
capabilities, they differ greatly in important aspects.
Tram networks are often mixed, i.e. trams travel on
underground tracks as well as on street level, and are
TN-4 Simulation and optimization of Cologne's tram schedule
thus subject to individual traffic and corresponding
traffic regulation strategies. Subsequently, tram be-
havior is a mixture between train and car behavior,
e.g. line-of-sight operating/driving. Therefore a sim-
ple adaption of railway simulation methodologies is
not feasible.
Bearing the similarities with individual traffic in mind
Joisten (see [9]) implemented an adapted Nagel/
Schreckenberg model (see [15]) for tram simulation,
which suffered from the setbacks of the high aggrega-
tion inherent to cellular automatons (see [11]). There-
fore Lückemeyer developed an event based simula-
tion model which avoids some of those setbacks as
described in [10, 11]. To further eliminate inaccura-
cies we apply an updated model, which is described
in detail in the accompanying article “Modeling time
table based tram traffic” (see [13]).
Our application is based upon a model-based parallel-
ization framework (described in [20]), which exploits
the embedded model's intrinsic parallelism. The
mixed tram network is modeled as a directed graph
with platforms, tracks and track switches represented
by nodes. Connections between nodes are represented
as edges. Figure 3 shows part of an example network,
which is mapped on the graph depicted in figure 4,
where squares represent platforms, rectangles tracks
and triangles track switches. The dark rectangles
around platforms indicate that these platforms form a
station.
Figure 3: Part of a tram network
The distributions for the duration of passenger ex-
change are specific to platform and tram type with the
combined duration of opening and closing the vehicle
doors as minimum value.
Vehicles encapsulate most of the simulation dynam-
ics, which are based upon the event based simulation
approach (as described in [2]). Thus trams change
their state at events of certain types, like stopping or
accelerating, which happen at discrete points in time.
These state changes may trigger a change in the over-
all system state and generate follow-up events, which
are administrated in a priority queue.
Main tram attributes are specified by the type of tram,
which holds functions for the maneuvering capabili-
ties, e.g. acceleration and braking.
Figure 4: Example graph
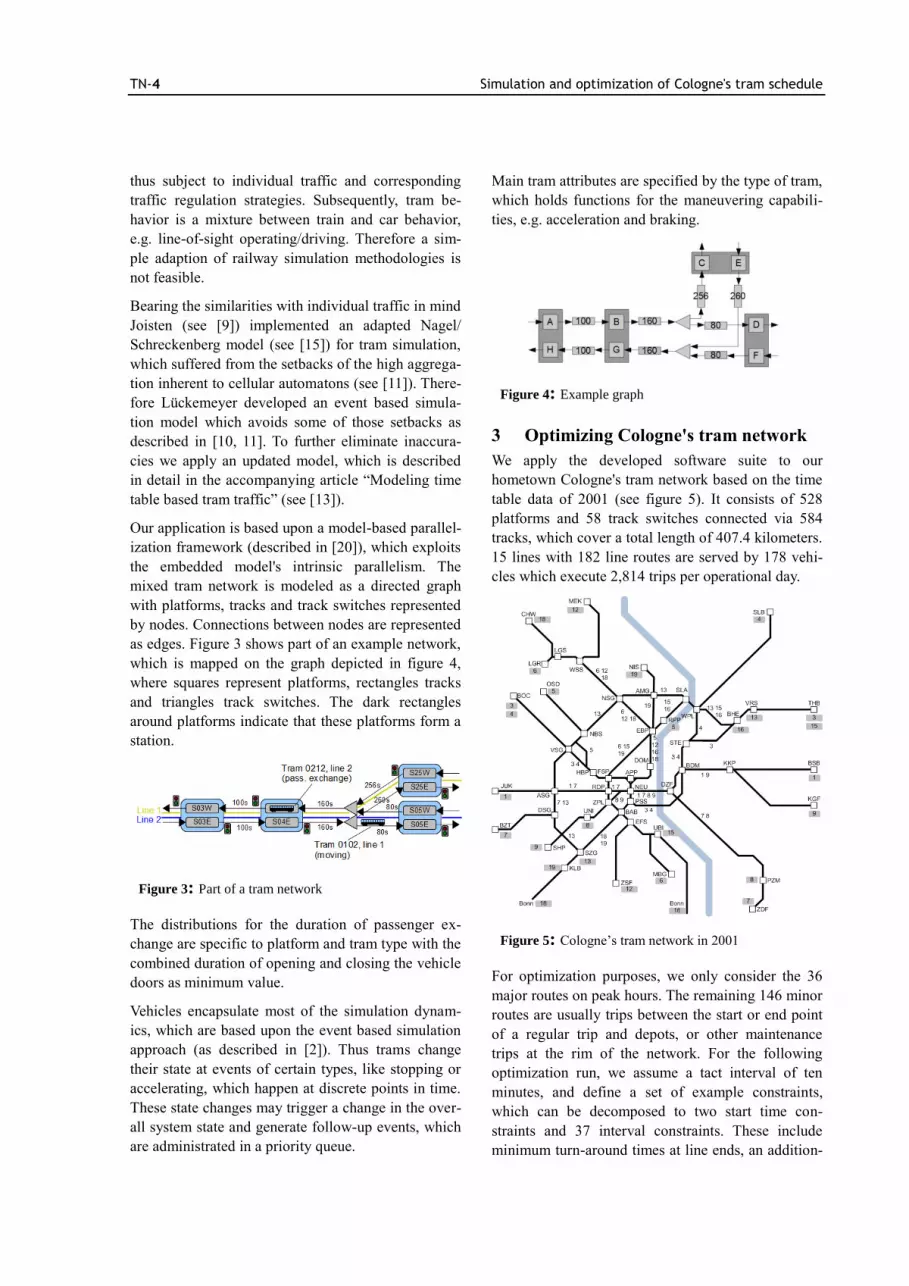
3 Optimizing Cologne's tram network
We apply the developed software suite to our
hometown Cologne's tram network based on the time
table data of 2001 (see figure 5). It consists of 528
platforms and 58 track switches connected via 584
tracks, which cover a total length of 407.4 kilometers.
15 lines with 182 line routes are served by 178 vehi-
cles which execute 2,814 trips per operational day.
Figure 5: Cologne’s tram network in 2001
For optimization purposes, we only consider the 36
major routes on peak hours. The remaining 146 minor
routes are usually trips between the start or end point
of a regular trip and depots, or other maintenance
trips at the rim of the network. For the following
optimization run, we assume a tact interval of ten
minutes, and define a set of example constraints,
which can be decomposed to two start time con-
straints and 37 interval constraints. These include
minimum turn-around times at line ends, an addition-
Simulation and optimization of Cologne's tram schedule TN-5
al core line 1A to satisfy high demand for line 1 in
Cologne's town center, guaranteed connections be-
tween certain lines, and fixed start times at the Bonn
national railway hub.
A more detailed description of the conducted experi-
ments can be found in [20].
3.1 Comparing tram schedules
From the genetic algorithm's initial pool of valid
solution candidates we randomly pick a schedule A
with an objective function value of 214.714 (see table
1). After a 8.5 hours run, the optimizer yields a pool
of 60 best solutions with objective function values of
180.696, from which schedule B (again, see table 1)
is randomly selected.
To begin with a more general view, we pick ten more
schedules each out of both solution pools and execute
ten simulations runs for each of those 20 schedules.
The runs under the initial schedules yield an average
delay of departures of 18.9 seconds. Under the best
schedules the average delay is 15.4 seconds, which
means a reduction of 18.6 percent or 3.5 seconds.
The frequency distribution of occurring delays was
also collected (see figure 6).
Figure 6: Frequency of all delays
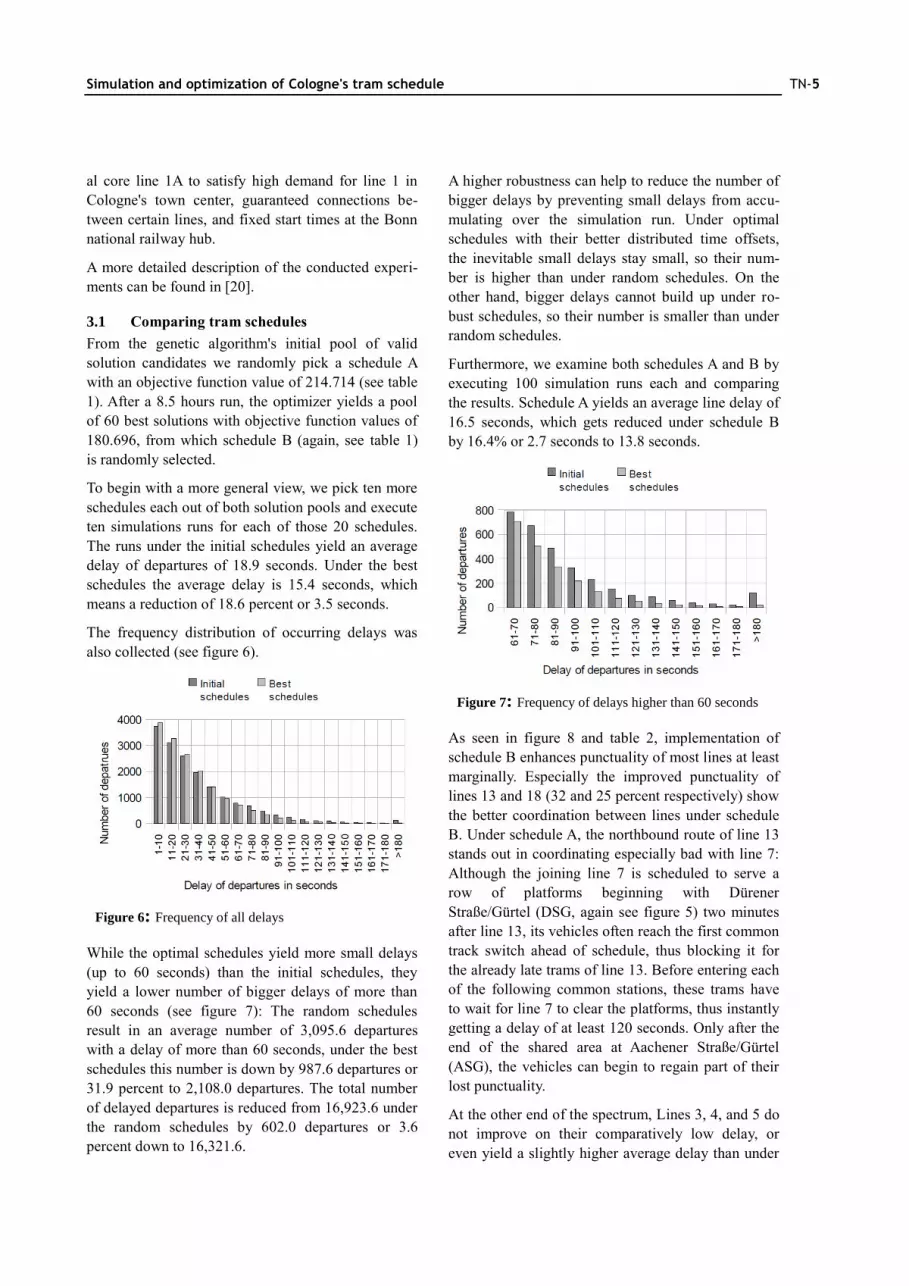
While the optimal schedules yield more small delays
(up to 60 seconds) than the initial schedules, they
yield a lower number of bigger delays of more than
60 seconds (see figure 7): The random schedules
result in an average number of 3,095.6 departures
with a delay of more than 60 seconds, under the best
schedules this number is down by 987.6 departures or
31.9 percent to 2,108.0 departures. The total number
of delayed departures is reduced from 16,923.6 under
the random schedules by 602.0 departures or 3.6
percent down to 16,321.6.
A higher robustness can help to reduce the number of
bigger delays by preventing small delays from accu-
mulating over the simulation run. Under optimal
schedules with their better distributed time offsets,
the inevitable small delays stay small, so their num-
ber is higher than under random schedules. On the
other hand, bigger delays cannot build up under ro-
bust schedules, so their number is smaller than under
random schedules.
Furthermore, we examine both schedules A and B by
executing 100 simulation runs each and comparing
the results. Schedule A yields an average line delay of
16.5 seconds, which gets reduced under schedule B
by 16.4% or 2.7 seconds to 13.8 seconds.
Figure 7: Frequency of delays higher than 60 seconds
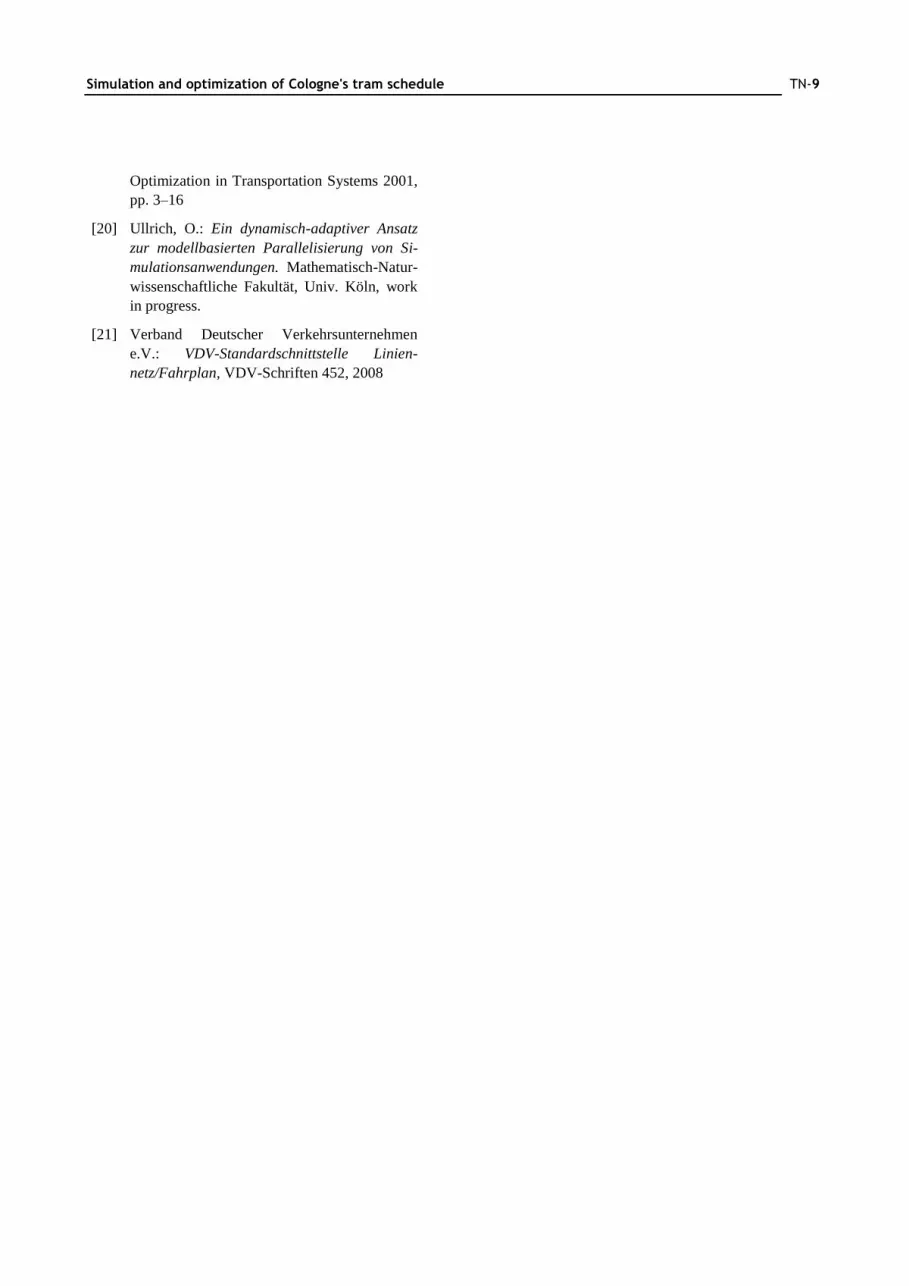
As seen in figure 8 and table 2, implementation of
schedule B enhances punctuality of most lines at least
marginally. Especially the improved punctuality of
lines 13 and 18 (32 and 25 percent respectively) show
the better coordination between lines under schedule
B. Under schedule A, the northbound route of line 13
stands out in coordinating especially bad with line 7:
Although the joining line 7 is scheduled to serve a
row of platforms beginning with Dürener
Straße/Gürtel (DSG, again see figure 5) two minutes
after line 13, its vehicles often reach the first common
track switch ahead of schedule, thus blocking it for
the already late trams of line 13. Before entering each
of the following common stations, these trams have
to wait for line 7 to clear the platforms, thus instantly
getting a delay of at least 120 seconds. Only after the
end of the shared area at Aachener Straße/Gürtel
(ASG), the vehicles can begin to regain part of their
lost punctuality.
At the other end of the spectrum, Lines 3, 4, and 5 do
not improve on their comparatively low delay, or
even yield a slightly higher average delay than under

TN-6 Simulation and optimization of Cologne's tram schedule
schedule A. All three lines are laid out comparatively
well in the random schedule A. The westward branch
of line 5 is scheduled with an exceptionally high
clearance in some areas of the town center, rendering
it insusceptible to delays of preceding trains (see
figure 9).
Line
A – Initial schedule B – Best schedule
For-
ward
Back-
ward
For-
ward
Back-
ward
1 1 7 7 6
1A 6 4 1 0
3 3 3 4 0
4 7 0 6 7
5 5 2 9 6
6 1 7 7 6
7 0 9 7 0
8 6 7 1 7
9 5 4 3 7
12 6 7 4 2
13 7 6 0 4
15 4 6 6 9
16 6 0 3 5
18 9 7 6 5
19 9 0 7 9
Table 1: Comparing schedules: Lines
A closer view on the behavior of line 5 (though under
a different schedule) is presented in the accompany-
ing paper “Modeling time table based tram traffic”
(see [13]).
Figure 8: Average delay of lines
Figure 9: Scheduled departures at platform EPB-2
under schedule A and schedule B
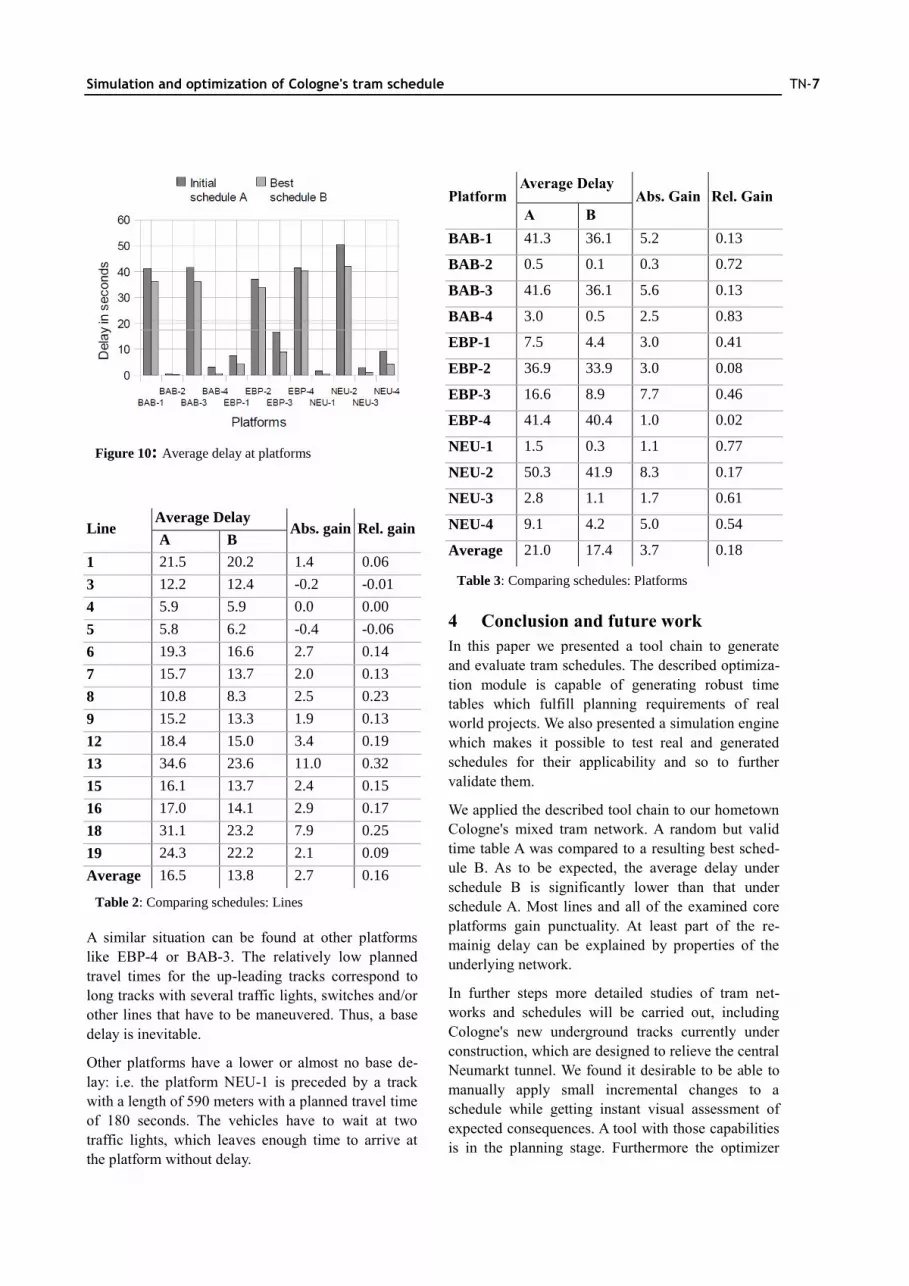
Simulation data collected at the important hubs Bar-
barossaplatz (BAB-1 to BAB-4), Ebertplatz (EBP-1
to EBP-4), and Neumarkt (NEU-1 to NEU-4) is pre-
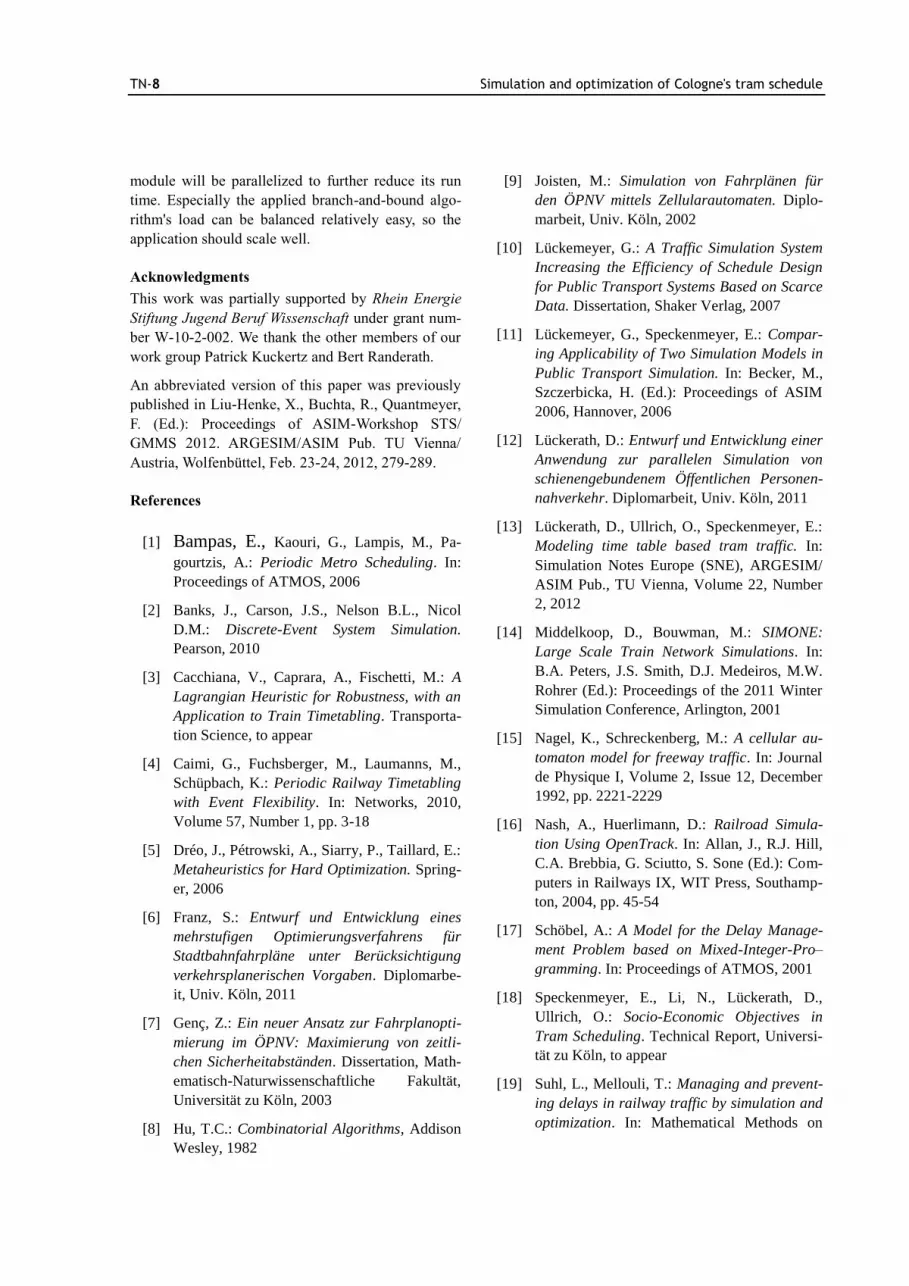
sented in figure 10 and table 3. Under schedule B,
delay was reduced significantly at each of those plat-
forms, on average by 3.7 seconds or 17.6 percent. The
increase in punctuality can be explained by the better
reliability of the frequenting lines under the opti-
mized schedule.
The high base levels of delay at some platforms (like
NEU-2, EBP-4, and BAB-1) is obviously independ-
ent of the applied schedule and has therefore to be
based on the properties of the surrounding parts of the
network.
For instance, the track leading up to NEU-2 has a
planned travel time of 120 seconds, including passen-
ger exchange on the platform. It is 880 meters long
and because of crossing streets and pedestrian cross-
ings divided by six traffic lights. Because of the ap-
plied global phase length of 30 seconds a tram has to
wait at each of these lights for 7.5 seconds on aver-
age, accumulating to 45 seconds of standing time.
Only 75 seconds of scheduled time remain for the
actual traversing of the track, including accelerating
and braking in front of traffic lights three times on
average, and the passenger exchange. This is obvious-
ly not enough, resulting in the observed base delay.
Simulation and optimization of Cologne's tram schedule TN-7
Figure 10: Average delay at platforms
Line Average Delay
Abs. gain Rel. gain A B
1 21.5 20.2 1.4 0.06
3 12.2 12.4 -0.2 -0.01
4 5.9 5.9 0.0 0.00
5 5.8 6.2 -0.4 -0.06
6 19.3 16.6 2.7 0.14
7 15.7 13.7 2.0 0.13
8 10.8 8.3 2.5 0.23
9 15.2 13.3 1.9 0.13
12 18.4 15.0 3.4 0.19
13 34.6 23.6 11.0 0.32
15 16.1 13.7 2.4 0.15
16 17.0 14.1 2.9 0.17
18 31.1 23.2 7.9 0.25
19 24.3 22.2 2.1 0.09
Average 16.5 13.8 2.7 0.16
Table 2: Comparing schedules: Lines
A similar situation can be found at other platforms
like EBP-4 or BAB-3. The relatively low planned
travel times for the up-leading tracks correspond to
long tracks with several traffic lights, switches and/or
other lines that have to be maneuvered. Thus, a base
delay is inevitable.
Other platforms have a lower or almost no base de-
lay: i.e. the platform NEU-1 is preceded by a track
with a length of 590 meters with a planned travel time
of 180 seconds. The vehicles have to wait at two
traffic lights, which leaves enough time to arrive at
the platform without delay.
Platform Average Delay
Abs. Gain Rel. Gain
A B
BAB-1 41.3 36.1 5.2 0.13
BAB-2 0.5 0.1 0.3 0.72
BAB-3 41.6 36.1 5.6 0.13
BAB-4 3.0 0.5 2.5 0.83
EBP-1 7.5 4.4 3.0 0.41
EBP-2 36.9 33.9 3.0 0.08
EBP-3 16.6 8.9 7.7 0.46
EBP-4 41.4 40.4 1.0 0.02
NEU-1 1.5 0.3 1.1 0.77
NEU-2 50.3 41.9 8.3 0.17
NEU-3 2.8 1.1 1.7 0.61
NEU-4 9.1 4.2 5.0 0.54
Average 21.0 17.4 3.7 0.18
Table 3: Comparing schedules: Platforms
4 Conclusion and future work
In this paper we presented a tool chain to generate
and evaluate tram schedules. The described optimiza-
tion module is capable of generating robust time
tables which fulfill planning requirements of real
world projects. We also presented a simulation engine
which makes it possible to test real and generated
schedules for their applicability and so to further
validate them.
We applied the described tool chain to our hometown
Cologne's mixed tram network. A random but valid
time table A was compared to a resulting best sched-
ule B. As to be expected, the average delay under
schedule B is significantly lower than that under
schedule A. Most lines and all of the examined core
platforms gain punctuality. At least part of the re-
mainig delay can be explained by properties of the
underlying network.
In further steps more detailed studies of tram net-
works and schedules will be carried out, including
Cologne's new underground tracks currently under
construction, which are designed to relieve the central
Neumarkt tunnel. We found it desirable to be able to
manually apply small incremental changes to a
schedule while getting instant visual assessment of
expected consequences. A tool with those capabilities
is in the planning stage. Furthermore the optimizer
TN-8 Simulation and optimization of Cologne's tram schedule
module will be parallelized to further reduce its run
time. Especially the applied branch-and-bound algo-
rithm's load can be balanced relatively easy, so the
application should scale well.
Acknowledgments
This work was partially supported by Rhein Energie
Stiftung Jugend Beruf Wissenschaft under grant num-
ber W-10-2-002. We thank the other members of our
work group Patrick Kuckertz and Bert Randerath.
An abbreviated version of this paper was previously
published in Liu-Henke, X., Buchta, R., Quantmeyer,
F. (Ed.): Proceedings of ASIM-Workshop STS/
GMMS 2012. ARGESIM/ASIM Pub. TU Vienna/
Austria, Wolfenbüttel, Feb. 23-24, 2012, 279-289.
References
[1] Bampas, E., Kaouri, G., Lampis, M., Pa-
gourtzis, A.: Periodic Metro Scheduling. In:
Proceedings of ATMOS, 2006
[2] Banks, J., Carson, J.S., Nelson B.L., Nicol
D.M.: Discrete-Event System Simulation.
Pearson, 2010
[3] Cacchiana, V., Caprara, A., Fischetti, M.: A
Lagrangian Heuristic for Robustness, with an
Application to Train Timetabling. Transporta-
tion Science, to appear
[4] Caimi, G., Fuchsberger, M., Laumanns, M.,
Schüpbach, K.: Periodic Railway Timetabling
with Event Flexibility. In: Networks, 2010,
Volume 57, Number 1, pp. 3-18
[5] Dréo, J., Pétrowski, A., Siarry, P., Taillard, E.:
Metaheuristics for Hard Optimization. Spring-
er, 2006
[6] Franz, S.: Entwurf und Entwicklung eines
mehrstufigen Optimierungsverfahrens für
Stadtbahnfahrpläne unter Berücksichtigung
verkehrsplanerischen Vorgaben. Diplomarbe-
it, Univ. Köln, 2011
[7] Genç, Z.: Ein neuer Ansatz zur Fahrplanopti-
mierung im ÖPNV: Maximierung von zeitli-
chen Sicherheitabständen. Dissertation, Math-
ematisch-Naturwissenschaftliche Fakultät,
Universität zu Köln, 2003
[8] Hu, T.C.: Combinatorial Algorithms, Addison
Wesley, 1982
[9] Joisten, M.: Simulation von Fahrplänen für
den ÖPNV mittels Zellularautomaten. Diplo-
marbeit, Univ. Köln, 2002
[10] Lückemeyer, G.: A Traffic Simulation System
Increasing the Efficiency of Schedule Design
for Public Transport Systems Based on Scarce
Data. Dissertation, Shaker Verlag, 2007
[11] Lückemeyer, G., Speckenmeyer, E.: Compar-
ing Applicability of Two Simulation Models in
Public Transport Simulation. In: Becker, M.,
Szczerbicka, H. (Ed.): Proceedings of ASIM
2006, Hannover, 2006
[12] Lückerath, D.: Entwurf und Entwicklung einer
Anwendung zur parallelen Simulation von
schienengebundenem Öffentlichen Personen-
nahverkehr. Diplomarbeit, Univ. Köln, 2011
[13] Lückerath, D., Ullrich, O., Speckenmeyer, E.:
Modeling time table based tram traffic. In:
Simulation Notes Europe (SNE), ARGESIM/
ASIM Pub., TU Vienna, Volume 22, Number
2, 2012
[14] Middelkoop, D., Bouwman, M.: SIMONE:
Large Scale Train Network Simulations. In:
B.A. Peters, J.S. Smith, D.J. Medeiros, M.W.
Rohrer (Ed.): Proceedings of the 2011 Winter
Simulation Conference, Arlington, 2001
[15] Nagel, K., Schreckenberg, M.: A cellular au-
tomaton model for freeway traffic. In: Journal
de Physique I, Volume 2, Issue 12, December
1992, pp. 2221-2229
[16] Nash, A., Huerlimann, D.: Railroad Simula-
tion Using OpenTrack. In: Allan, J., R.J. Hill,
C.A. Brebbia, G. Sciutto, S. Sone (Ed.): Com-
puters in Railways IX, WIT Press, Southamp-
ton, 2004, pp. 45-54
[17] Schöbel, A.: A Model for the Delay Manage-
ment Problem based on Mixed-Integer-Pro–
gramming. In: Proceedings of ATMOS, 2001
[18] Speckenmeyer, E., Li, N., Lückerath, D.,
Ullrich, O.: Socio-Economic Objectives in
Tram Scheduling. Technical Report, Universi-
tät zu Köln, to appear
[19] Suhl, L., Mellouli, T.: Managing and prevent-
ing delays in railway traffic by simulation and
optimization. In: Mathematical Methods on
Simulation and optimization of Cologne's tram schedule TN-9
Optimization in Transportation Systems 2001,
pp. 3–16
[20] Ullrich, O.: Ein dynamisch-adaptiver Ansatz
zur modellbasierten Parallelisierung von Si-
mulationsanwendungen. Mathematisch-Natur-
wissenschaftliche Fakultät, Univ. Köln, work
in progress.
[21] Verband Deutscher Verkehrsunternehmen
e.V.: VDV-Standardschnittstelle Linien-
netz/Fahrplan, VDV-Schriften 452, 2008