rational bases for system identification
TRANSCRIPT

Rational bases for system identification
Adhemar Bultheel, Patrick Van guchtDepartment Computer Science
Numerical Approximation and Linear Algebra Group (NALAG)
K.U.Leuven, Belgium
adhemar.bultheel.cs.kuleuven.ac.be
http://www.cs.kuleuven.ac.be/∼ade/
March 2001
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001
1/25
Systems
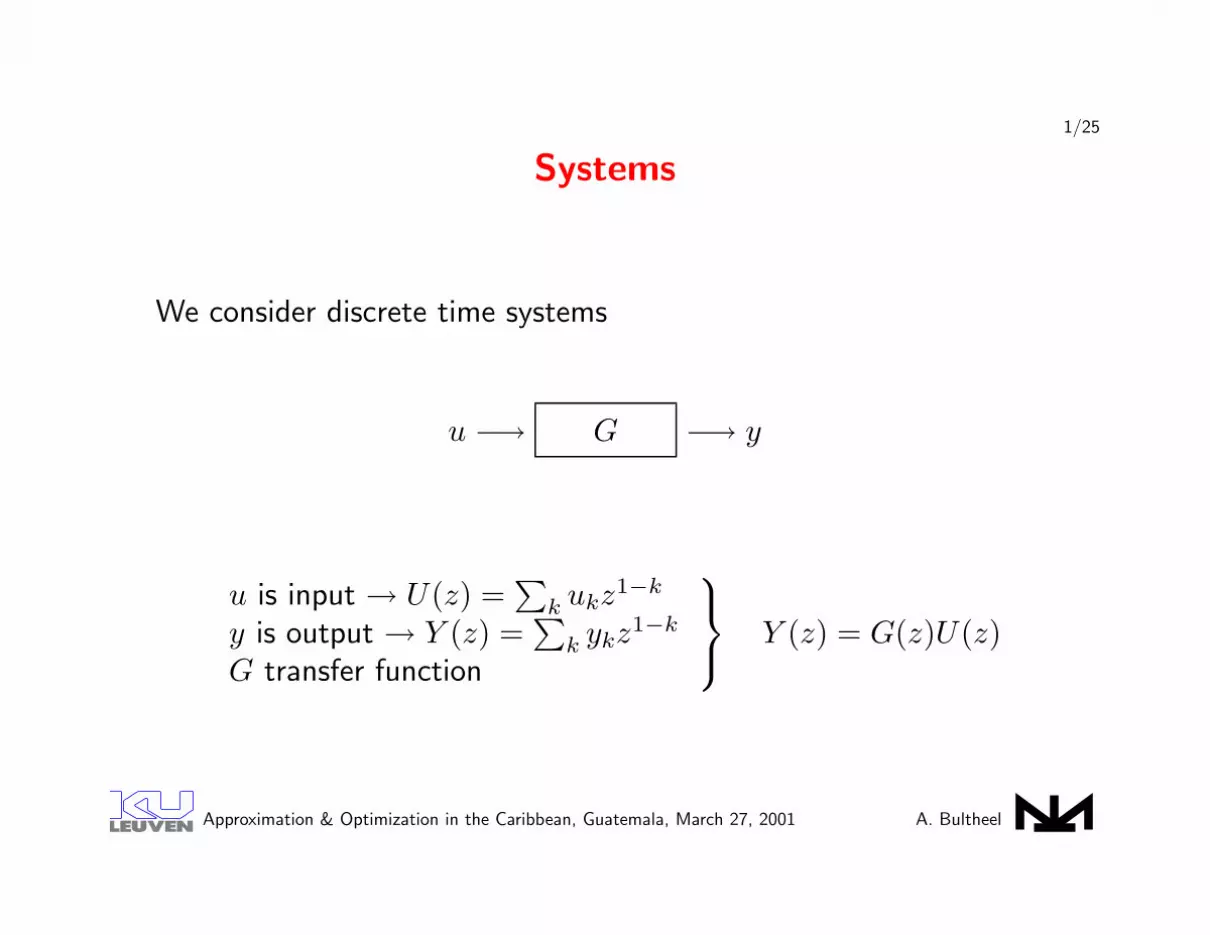
We consider discrete time systems
u −→ G −→ y
u is input → U(z) =∑k ukz
1−k
y is output → Y (z) =∑k ykz
1−k
G transfer function
Y (z) = G(z)U(z)
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

2/25
Frequency Domain Identification
Estimate G as G such that we minimize (L2(T)-norm)
‖Y − Y ‖ = ‖GU − GU‖ = ‖(G− G)U‖ = ‖G− G‖w
min1
2π
∫ +π
−π|G(z)− G(z)|2w(z)dω, z = eiω, w(z) = |U(z)|2
♣ ♣ ♣Measurements G(zj)Nj=1, zj ∈ T, with variance σjNj=1.
min ‖G− G‖w = min
N∑j=1
|G(zj)− G(zj)|2
σ2j
1/2
, wj = σ−2j ,
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

3/25
Frequency Domain Identification(2)
or
‖Y − Y ‖ = ‖(G− G)U‖ = ‖G− G‖w
=
N∑j=1
|G(zj)− G(zj)|2wj
1/2
, wj = |U(zj)|2/σ2j
or
‖G− G‖ =∥∥∥∥YU − BA
∥∥∥∥=
∥∥∥∥Y A−BUAU
∥∥∥∥ = ‖Y A−BU‖w, w = 1/|AU |2
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

4/25
Linear/Nonlinear problem
Since the approximant G is a rational function, we have a mixedlinear/nonlinear approximation problem.
G(z) =B(z)A(z)
, A,B ∈ Πn
linear B(z) =n∑k=0
bkz−k
nonlinear A(z) =n∑k=0
akz−k =
n∏k=1
(1− αk/z).
Given an estimate for A,finding B is a weighted but linear least squares problem.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

5/25
Nonlinear problem
Given a stable and efficient method to solve the linear parameters λ asa function of the nonlinear parameters ν, we can consider the problem ofminimizing a cost function C(ν) = K(ν, λ(ν)).
Need system stability. If ν = α (system poles), then need |αk| < 1. Sohave to solve a constrained nonlinear weighted least squares problem in C.
Solve nonlinear problem with standard routine.How to solve the linear problem?
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

6/25
Orthogonal Rational Functions
G(z) =n∑k=0
λkφk(z),
with for given αk
φk(z) ∈ Lk =
pk(z)∏k
j=1(1− αj/z): pk ∈ Πk
orthogonal basis functions with respect to an appropriate inner product.The inner product can be discrete or continuous, but is in general withrespect to a weight (measure) on T.
〈f, g〉µ =∫
T
f(z)g(z)dµ(z) or 〈f, g〉w =N∑j=1
f(zj)g(zj)wj.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

7/25
ORF recurrence
Forward recursion[φn(z)φ∗n(z)
]= en
z − αn−1
z − αn
[1 LnLn 1
] [ζn−1(z) 0
0 1
] [φn−1(z)φ∗n−1(z)
]
Ln = −
⟨φk,
1−αn−1zz−αn φn−1
⟩⟨φk,
z−αn−1z−αn φ
∗n−1
⟩ , en =(
1− |αn|2
1− |αn−1|21
1− |Ln|2
)1/2
ζk(z) =1− αkzz − αk
, Bn = ζ1 · · · ζn, φ∗n(z) = Bn(z)φn(1/z).
Backward recursion = Nevanlinna-Pick algorithm
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

8/25
Inner product evaluation
If data are available in z = zjNj=1 ⊂ T with corresponding weights
w = wjNj=1 then choose the discrete inner product.
For a continuous inner product, choose points on the circle, e.g.equidistant zj = exp2ijπ/N, j = 1, . . . , N and evaluate weightwj = w(zj) and use discrete inner product.
For example w(z) = |U(z)|2, and zj equidistant on T, then given timedomain data uk, this can be computed very efficiently by FFT.
We can evaluate the moments cl in |U(z)|2 =∑l∈Z
clzl by convolution
and use a Nevanlinna-Pick type algorithm on the PR function Ω(z) =c0/2 +
∑∞l=1 clz
l. (approximately)
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

9/25
The linear least squares problem
So we can compute
Φ(α) = Φ(z; α) = [φ0(z) | φ1(z) | · · · | φn(z)] ∈ CN×n+1
W1/2 = diag(w)1/2, λ = λknk=0, G = G(z)
Setting Gn =∑nk=0 λkφk, solve in least squares sense
W1/2Φ(α)λ(α) = W1/2G
by orthogonality however, λ(α) = Φ(α)HWG.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

10/25
Related work
Work by Ninnes, Van den Hof, Hueberger, Bokor, and others:
Use ORF with respect to Lebesgue measure. These have explicitexpressions
φn(z) =
√1− |αn|2 zz − αn
Bn−1(z)
but that does not help for the condition number of ΦHWΦ in the linearleast squares problem.
And/or use a finite number of αk that are cyclically repeated.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

11/25
Nonlinear problem
K(α) =∑j
|G(zj)−n∑k=0
λk(α)φk(zj; α)|2wj ⇒ minα⊂D
K(α)
= ‖(I−Φ(α)Φ(α)HW)G‖2w
constraint: set αj = rjeiωj with −1 ≤ rj ≤ 1, j = 1, . . . , n.
αj can be forced to be real or complex conjugate.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

12/25
Robot arm
100 data points, 200 Hz, condensed in the beginning, order [6/6]
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.810
−4
10−2
100
102
frequency response fct
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.810
−10
10−5
100
105
variance
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.810
−4
10−2
100
102
relative error
poles
0.0665± 0.0690i0.8770± 0.4765i0.9733± 0.2266i
zeros
1.9350, − 0.86491.0164± 0.1056i0.6905± 0.1238i
−1 −0.5 0 0.5 1 1.5 2−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

13/25
Band pass filter
50 data points, 20 kHz, in lower half, order [6/6]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.60
0.5
1
1.5frequency response fct
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.610
−12
10−11
10−10
10−9
variance
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.610
−2
100
102
104 relative error
poles zeros
0.0487 - 0.4006i 9.67660.0487 + 0.4006i 1.47420.6070 - 0.4944i 1.09550.6070 + 0.4944i 0.90320.7356 - 0.3739i -0.65070.7356 + 0.3739i 0.4337
−1 −0.5 0 0.5 1 1.5 2
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

14/25
Band pass filter
50 data points, 20 kHz, in lower half, order [22/22]
0 0.5 1 1.5 210
−12
10−11
10−10
10−9 variance
0 0.5 1 1.5 20
0.5
1
1.5frequency response fct
0 0.5 1 1.5 2−4
−2
0
2
4frequency response fct
0 0.5 1 1.5 210
−10
10−5
100
relative error
−1 −0.5 0 0.5 1 1.5
−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

15/25
Electrical Machine
110 data points, 4 kHz, condensed in the beginning, order [5/5]
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.410
−2
10−1
100
frequency response fct
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.410
−12
10−10
10−8
10−6 variance
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.410
−4
10−3
10−2
10−1
relative error
poles zeros0.1875 0.54610.3886 0.92390.9609 0.96560.9966 0.99690.9970 0.9990
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 1−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

16/25
Sensitivity, Electrical Machine
−1 −0.8 −0.6 −0.4 −0.2 0 0.2 0.4 0.6 0.8 110
−3
10−2
relative error, variable parameters 5
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

17/25
Polynomial method
min∥∥∥∥YU − BA
∥∥∥∥2
= min ‖Y A− UB‖2|AU |−2
The weight depends on the solution.
Estimate A so that we have an estimate for the weight 1/|AU |,
Set w = [Y/AU − U/AU ], P = [A B]T ⇒
minN∑j=1
P (zj)HWjP (zj), Wj = w(zj)Hw(zj)
need orthogonal block polynomials φk and write P =∑nk=0 φkλk,
φk ∈ Π2×2k , λk ∈ C
2×1. Constraint: P “monic”.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

18/25
Monic solution
Φ = [φ0(z) . . . φn(z)] ∈ C2N×2(n+1), W = diag(Wj) ∈ C
2N×2N
min λHΦHWΦλ, Φλ monic
orthogonal polynomial ΦHWΦ = I ⇒ P = φnλn.
Szego-type recurrence
φnσn = zφn−1 + φ∗n−1γn
φ∗nσHn = zφn−1γ
Hn + φ∗n−1
σn, γn ∈ C2×2 (block Schur parameters)
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

19/25
Hessenberg matrix
w1 z1w2 z2
. . .wN zN
unitary
similarity⇒
transf.
BlockUpper
Hessenberg
× × × × × × × ×× × × × × × ×× × × × × ×× × × × ×× × × ×× × ×
|
× × × × × × × × ×× × × × × × × ×× × × × × × ×× × × × × ×× × × × ×× × × ×× × ×
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

20/25
Efficient algorithm
Store the block upper Hessenberg matrix in factored form H = G1G2 · · ·Gm
Gk =
I2(k−1)
−γk σkσk γk
I...
Chasing the elements to block upper Hessenberg form by similaritytransformations percolating through the product requires operations on3× 3 or 5× 5 blocks ⇒ fast algorithm.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

21/25
Nonlinear problem
Once P = [A B]T has been found, use A to modify the weight w = 1/|AU |and reiterate.
or
Use nonlinear method to improve the estimate∑nk=0 φkλk. Weight depends
on A ⇒ loss of orthogonality, but condition number of Jacobian increasesonly slightly.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

22/25
CD’s radial servo system
sampling frequency 9.7 kHz, order [5/5]
Relative Freq
0.1 0.2 0.30-60
-40
-20
0
20
40M
agni
tude
FR
F (d
B)
error
frf
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

23/25
Conclusion
• Rational approximation in weighted discrete least squares sense.
• Linear and nonlinear parameters. Solve for linear in terms of nonlinear.Use orthogonal basis to minimize the condition number.
• Either direct orthogonal rational basis or linearized vector polynomial asa combination of orthogonal block polynomials.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

24/25
References ORF
[1] A. Bultheel, P. Gonzalez-Vera, E. Hendriksen, and O. Njastad.Orthogonal rational functions. Cambridge University Press, 1999.
[2] P. Van gucht, A. Bultheel. Using orthogonal rational functions for systemidentification, Report TW314, Dept. Computer Science, K.U.Leuven,September 2000.
[3] P. Van gucht, A. Bultheel. Matlab routines for system identificationusing orthogonal rational functions.http://www.cs.kuleuven.ac.be/˜nalag/research/software/ORF/ORFidentification.html.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel

25/25
References OPV
[1] A. Bultheel, M. Van Barel, Y. Rolain. Robust rational approximationfor identification, 2001, Submitted
[2] M. Van Barel, A. Bultheel, Discrete linearized least squaresapproximation on the unit circle, J. Comput. Appl. Math. 50 (1994)965-972.
[3] A. Bultheel, M. Van Barel. Vector orthogonal polynomials and leastsquares approximation, SIAM J. Matrix Anal. Appl. 16 (1995) 863-885.
[4] M. Van Barel, A. Bultheel, Orthogonal polynomial vectors and leastsquares approximation for a discrete inner product, Electron. Trans.Numer. Anal. 3 (1995) 1-23.
Approximation & Optimization in the Caribbean, Guatemala, March 27, 2001 A. Bultheel