práctica final electrónica industrial ii
TRANSCRIPT
Práctica Final
Electrónica Industrial
II
febrero 25
2013Presentado por: Alejandro Montoya Ricardo A. Buitrago Jader
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
PRACTICA FINAL INDUSTRIAL II
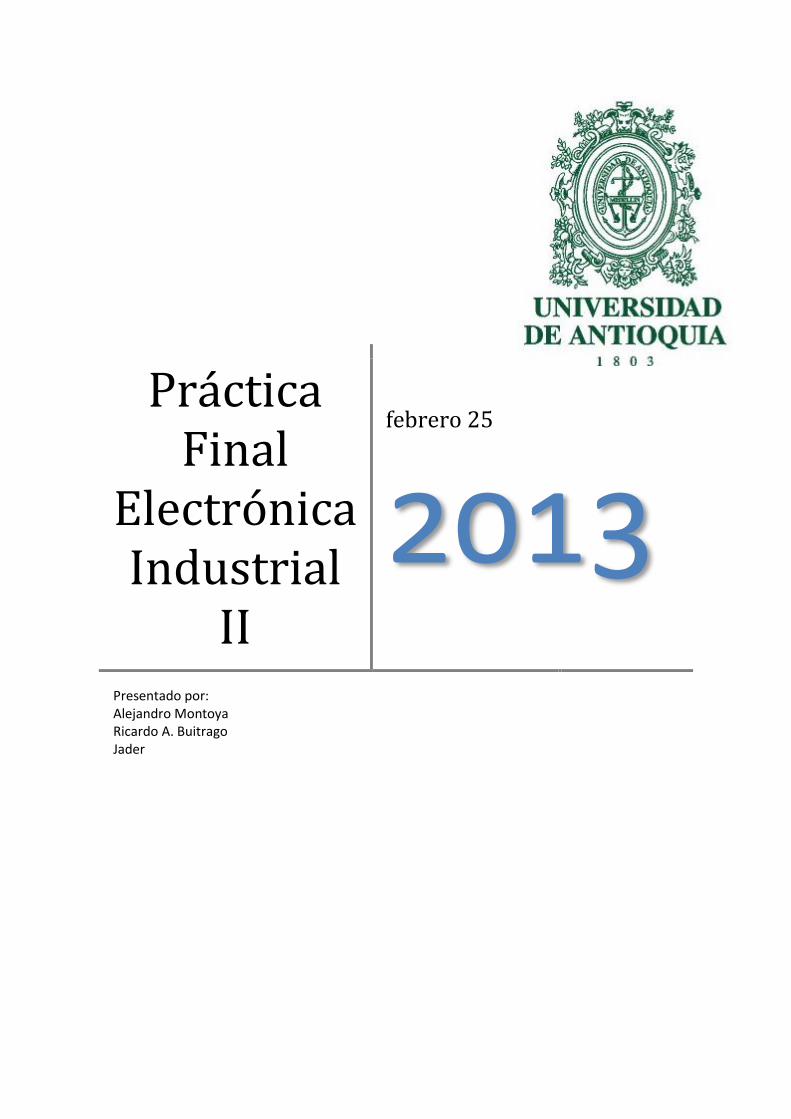
Controlar el motor 1LA7 de Siemens mediante el variador Danfos FC 300 conectado a
través de Ethernet al PLC Siemens 1200, con interfaz humana en touchscreen y
Labview para control de parámetros como velocidad, sentido de giro, start y stop.
Figura 1. Elementos a utilizar
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
Descripció n de elementós implicadós en el próyectó
A continuación se listan todos los componentes y/o elementos utilizados en el diseño de la
solución que cumple los requisitos pedidos en la práctica final de Industrial II.
Mótór 1la7 siemens
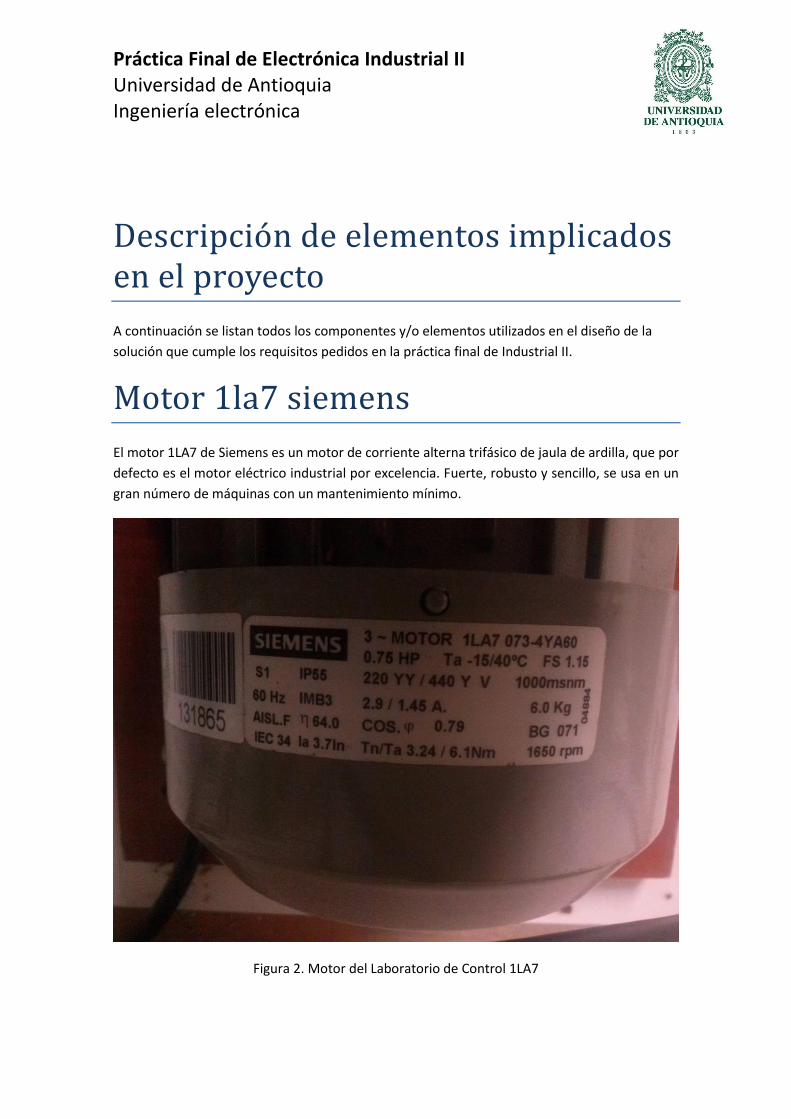
El motor 1LA7 de Siemens es un motor de corriente alterna trifásico de jaula de ardilla, que por
defecto es el motor eléctrico industrial por excelencia. Fuerte, robusto y sencillo, se usa en un
gran número de máquinas con un mantenimiento mínimo.
Figura 2. Motor del Laboratorio de Control 1LA7
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
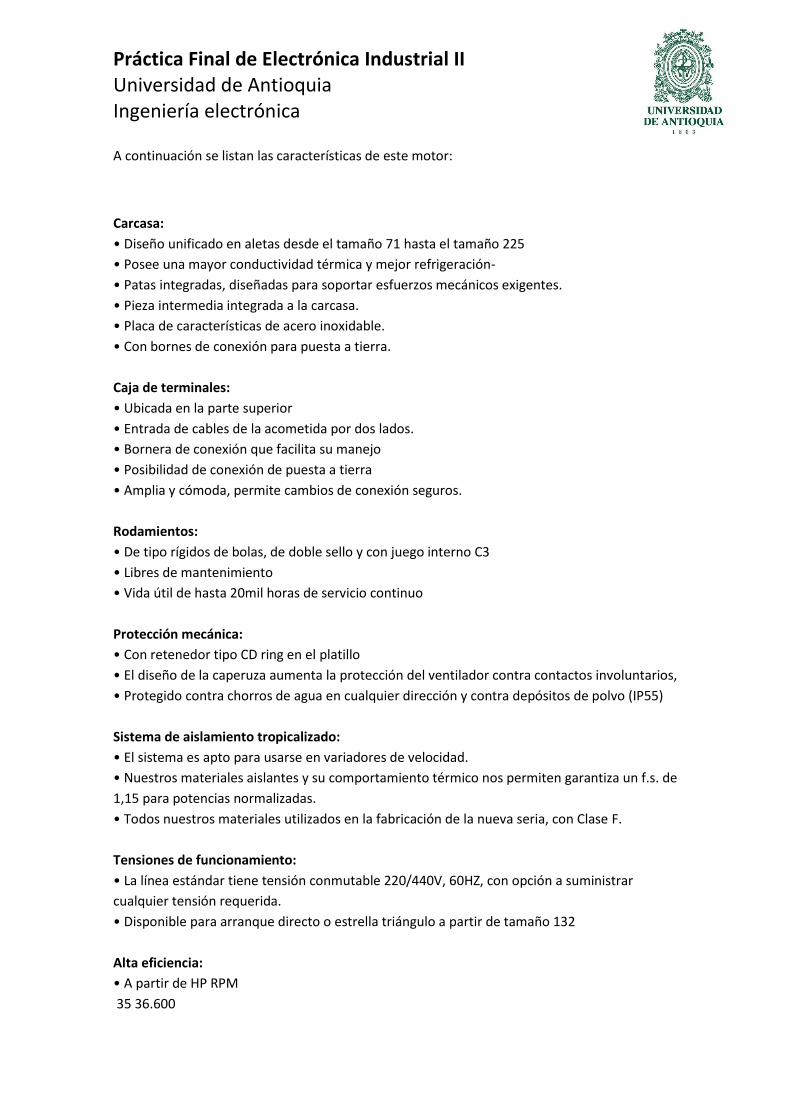
A continuación se listan las características de este motor:
Carcasa:
• Diseño unificado en aletas desde el tamaño 71 hasta el tamaño 225
• Posee una mayor conductividad térmica y mejor refrigeración-
• Patas integradas, diseñadas para soportar esfuerzos mecánicos exigentes.
• Pieza intermedia integrada a la carcasa.
• Placa de características de acero inoxidable.
• Con bornes de conexión para puesta a tierra.
Caja de terminales:
• Ubicada en la parte superior
• Entrada de cables de la acometida por dos lados.
• Bornera de conexión que facilita su manejo
• Posibilidad de conexión de puesta a tierra
• Amplia y cómoda, permite cambios de conexión seguros.
Rodamientos:
• De tipo rígidos de bolas, de doble sello y con juego interno C3
• Libres de mantenimiento
• Vida útil de hasta 20mil horas de servicio continuo
Protección mecánica:
• Con retenedor tipo CD ring en el platillo
• El diseño de la caperuza aumenta la protección del ventilador contra contactos involuntarios,
• Protegido contra chorros de agua en cualquier dirección y contra depósitos de polvo (IP55)
Sistema de aislamiento tropicalizado:
• El sistema es apto para usarse en variadores de velocidad.
• Nuestros materiales aislantes y su comportamiento térmico nos permiten garantiza un f.s. de
1,15 para potencias normalizadas.
• Todos nuestros materiales utilizados en la fabricación de la nueva seria, con Clase F.
Tensiones de funcionamiento:
• La línea estándar tiene tensión conmutable 220/440V, 60HZ, con opción a suministrar
cualquier tensión requerida.
• Disponible para arranque directo o estrella triángulo a partir de tamaño 132
Alta eficiencia:
• A partir de HP RPM
35 36.600
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
30 1.800
25 1.200
PLC 1200 SIEMENS
Los PLCs son utilizados en muchas industrias y máquinas. A diferencia de las
computadoras de propósito general, el PLC está diseñado para múltiples señales de
entrada y de salida, rangos de temperatura ampliados, inmunidad al ruido eléctrico y
resistencia a la vibración y al impacto. Los programas para el control de
funcionamiento de la máquina se suelen almacenar en baterías copia de seguridad o
en memorias no volátiles. Un PLC es un ejemplo de un sistema de tiempo real duro
donde los resultados de salida deben ser producidos en respuesta a las condiciones de
entrada dentro de un tiempo limitado, que de lo contrario no producirá el resultado
deseado.
En nuestro caso el PLC S7-1200 está disponible con una gama de entradas y salidas, el
CPU1211C viene con 10 entradas y salidas integrales, cuenta con 14 entradas y salidas
integradas y la CPU1212CCPU1214C tiene 24 entradas y salidas integrales. Todas las
versiones tienen la opción de una alimentación de 24 V DC o 264 V AC 85 .. lo que son
ideales para cualquier aplicación. El S7-1200 puede también ser adquirido en un S7-
1200 Starter Kit que contiene un S7-1200 CPU 1212C AC / DC / relé (6ES7212-1BD30-
0XB0), Step 7 Basic V10.5 CD, Digital Input Simulador SIM 1274 (6ES7274-1XH30-0XA0
6ES7274-1XF30-0XA0), SIMATIC Industrial Ethernet TP Cord, SIMATIC S7-1200 CD
Colección de documentación y material informativo de todos los contenidos de su
propia bolsa de transporte. A continuación se muestra una imagen del PLC

Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
Figura 3. PLC 1200 SIEMENS
Variadór Danfós FC 300
El variador Danfos FC 300 es Un variador de frecuencia (siglas VFD, del inglés: Variable
Frequency Drive o bien AFD Adjustable Frequency Drive) para el control de la
velocidad rotacional de un motor de corriente alterna (AC)
por medio del control de la frecuencia de alimentación
suministrada al motor. Un variador de frecuencia es un
caso especial de un variador de velocidad.
En nuestro caso, el laboratorio está dotado de un Danfos
FC300, el cual como lo indica el mismo manual del
fabricante, el VLT AutomationDrive FC 300 responde a un
concepto simple de convertidor que controla todo tipo de
operaciones, desde aplicaciones estándar hasta servo
motores, en cualquier línea de producción. Las versiones
estándar cubren un amplio espectro de funciones, como
funcionalidad de PLC, ajuste automático del motor y
autoevaluación de rendimiento. Fig.4 Danfos FC300
Labview

Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
Para la interfaz Maquina-hombre, utilizamos el programa LabVIEW, el cual es una
plataforma y entorno de desarrollo, que sirve para diseñar sistemas, con un lenguaje
de programación visual gráfico. Recomendado para sistemas hardware y software de
pruebas, control y diseño, simulado o real y embebido, pues acelera la productividad.
El lenguaje que usa se llama lenguaje G, donde la G simboliza que es lenguaje Gráfico.
Figura 5. Logo de labview
PROYECTO PLANTEADO
A partir de la documentación del FC 300, se realizó el estudio de las tramas necesarias
para encender el motor, parar el motor y modificar la velocidad del motor.
Por ejemplo, las siguientes tramas para dar start al motor es en hexadecimal:
02 06 01 04 7F 20 00 5E ARRANCADA 50%
02 06 01 04 03 00 00 02 PARADA
02 06 01 04 7F 40 00 3E ARRANCADA 100%
02 06 01 04 0B 00 00 0A FRENADO CC
Estas tramas funcionan en sentido horario, si se desea realizar una inversión de giro, podemos
obtener las tramas de la siguiente manera:
02 06 01 04 7F E0 00 9E CAMBIO SENTIDO DE GIRO 50%
PARA -50%
2 0 0 0
0010 0000 0000 0000
1101 1111 1111 1111 complemento 1
+ 1 complemento2
1110 0000 0000 0000
E 0 0 0
02 06 01 04 7F C0 00 BE CAMBIO SENTIDO DE GIRO 100%
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
PARA -100%
4 0 0 0
0100 0000 0000 0000
1011 1111 1111 1111 complemento 1
+ 1 complemento2
1100 0000 0000 0000
C 0 0 0
Con estas tramas claras, e identificando la variación necesaria en cada una de ella, se
procedió a realizar la programación del PLC, mediante el uso del programa VIA Step 7
con lenguaje KOP.
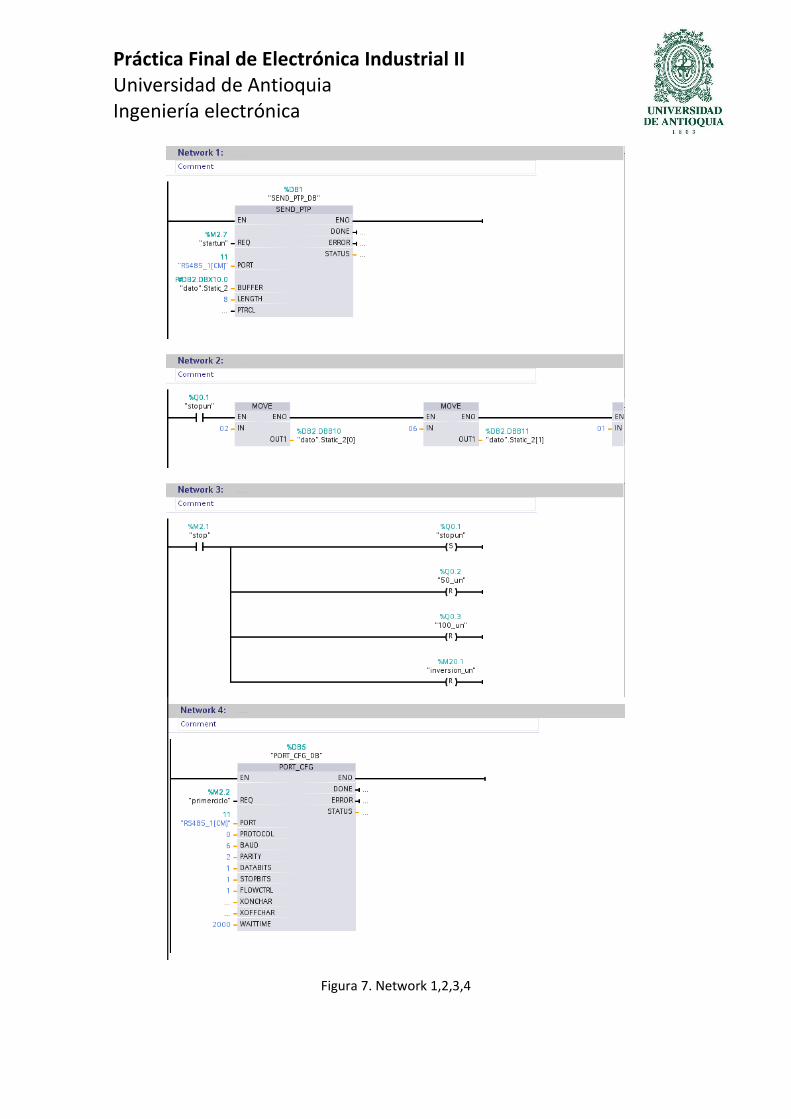
En este programa se generaron los TAGS, con marcas y arreglos necesarios para
habilitar su comunicación con el computador (Interfaz gráfica y el Variador).
Mediante el uso de variables tipo array y los bloques MOVE, se cambia en el PLC la
cadena de 8 bytes que se enviará al danfos, teniendo presente que el ultimo byte es el
cheksum, el cual es el producto de las operaciones xor que aparecen en el network 2
de la figura 5. Este byte de cheksum permite verificar la validez de la trama, y
comprobar que no se produjeron errores en la transmisión, de modo que el sistema se
valla a comportar de forma inesperada.
La comunicación utilizada entre el PLC y el variador, fue el protocolo PTP, punto a
punto, el cual fue a su vez interceptado con un conversor bidireccional rs485-rs232,
con el objetivo de poder viualizar las tramas enviadas en el programa DockLight.
Las redes punto a punto son aquellas que responden a un tipo de arquitectura de red
en las que cada canal de datos se usa para comunicar únicamente dos nodos, en
contraposición a las redes multipunto, en las cuales cada canal de datos se puede usar
para comunicarse con diversos modos.
En una red punto a punto, los dispositivos en red actúan como socios iguales, o pares
entre sí. Como pares, cada dispositivo puede tomar el rol de esclavo o la función de
maestro.
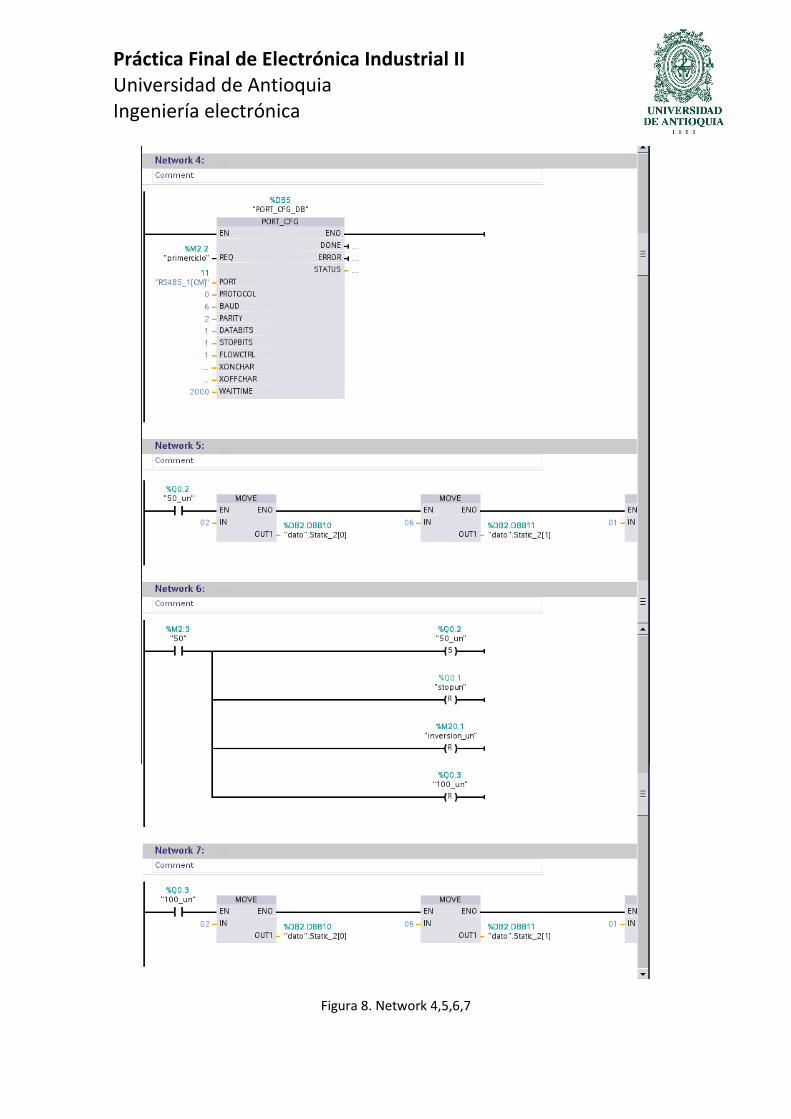
Es importante mencionar que para que el bloque PTP del PLC funcione, se debe
configurar muy bien el bloque PORT_CFG, porque a pesar que en el programa se
visualicen las tramas, si la paridad, la velocidad y demás parámetros no se definen
correctamente, el variador no las tomará.
A continuación se presenta la figura 7,8 y 9 donde se pueden apreciar pantallazos del
PLC
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
Figura 7. Network 1,2,3,4
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
Figura 8. Network 4,5,6,7
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
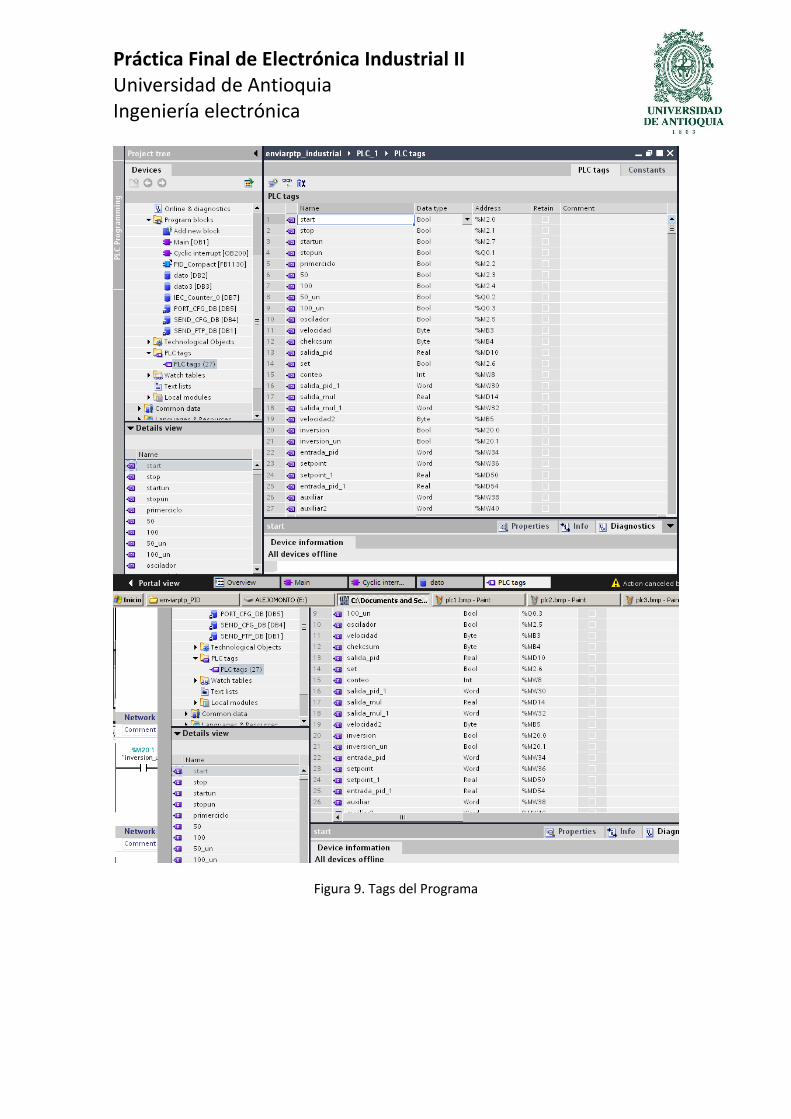
Figura 9. Tags del Programa
Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
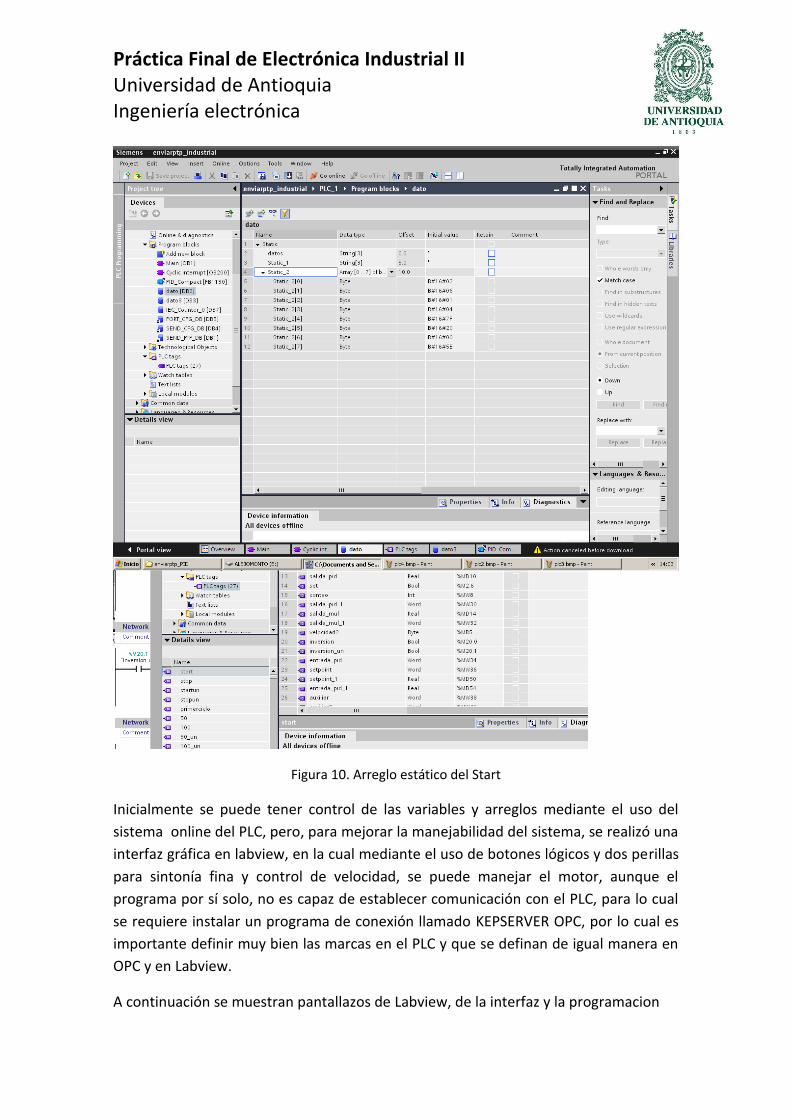
Figura 10. Arreglo estático del Start
Inicialmente se puede tener control de las variables y arreglos mediante el uso del
sistema online del PLC, pero, para mejorar la manejabilidad del sistema, se realizó una
interfaz gráfica en labview, en la cual mediante el uso de botones lógicos y dos perillas
para sintonía fina y control de velocidad, se puede manejar el motor, aunque el
programa por sí solo, no es capaz de establecer comunicación con el PLC, para lo cual
se requiere instalar un programa de conexión llamado KEPSERVER OPC, por lo cual es
importante definir muy bien las marcas en el PLC y que se definan de igual manera en
OPC y en Labview.
A continuación se muestran pantallazos de Labview, de la interfaz y la programacion

Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
Figura 11. Interfaz de labview
Figura 12. Variables de Labview
KEPSERVER es una solución flexible y escalable para conectar, administrar, supervisar y
controlar diversos dispositivos de automatización y aplicaciones de software.
Comunicaciones se gestiona a través de una plataforma robusta que soporta una gran
variedad de estándares abiertos como OPC, los protocolos de comunicación decoro, la
API y las interfaces de diversos sistemas de automatización. Ese programa permite
mejorar las operaciones y la toma de decisiones en todos los niveles de una
organización.
Aquí se puede apreciar que la conexión entre el PLC y Labview, depende de las
variables, START, VARIACION, PRIMERCICLO, INVERSION, STOP, 100, y bajo y alto,

Práctica Final de Electrónica Industrial II Universidad de Antioquia Ingeniería electrónica
donde las dos últimas se los primeros cuatro bits y los últimos cuatro bitas de la
cadena de 8 bytes que manipula la velocidad del motor mediante el danfos,
permitiendo así tener una sintonía fina de velocidad y una velocidad de cambio más
general