modélisation de l'entretien du paysage par des herbivores en moyenne montagne : une approche...
TRANSCRIPT

Ingé
nier
ies
– EA
T –
N°
21m
ars
2000
– p
63
à 75
63
Modélisation de l’entretiendu paysage par des herbivores
en moyenne montagne :une approche multi-agents
David Hill, Sébastien Mechoud, André Campos, P. Coquillard,
J. Gueugnot, Dominique Orth, Yves Michelin, Christophe Poix,Gérard L'Homme, Pascal Carrère, Michel Lafarge,
Pierre Loiseau, Didier Micol, Jean-Paul Brun, Francis Decuq,Bertrand Dumont, Michel Petit, Martine Teuma
L es types d'espaces envisagés dans le ca-dre de cet article sont des zones demoyenne altitude, à dynamique végétalede reconquête forestière rapide. Un cas
particulier sera traité : le site de Ternant dans lePuy de Dôme. La gestion de ces espaces constitueun enjeu paysager et écologique majeur pour lesannées à venir. Or, on assiste de plus en plus à undélaissement marqué des pâturages d'altitude demoyenne montagne par l'agriculture et l’élevage.Les éleveurs privilégient aujourd’hui des systèmesplus aisées à contrôler s'appuyant sur des terresplus faciles à exploiter au détriment des systèmesfourragers utilisant les prairies d'altitude. Dansces parcelles, l'abandon de l'utilisation des ressour-ces herbagères pour le pâturage d’herbivores est àl'origine d'un appauvrissement de la diversité éco-logique. La végétation est progressivement enva-hie par des espèces ligneuses et indésirables (ge-nêts, callune, ronces, etc.). Ces types de végéta-tion sont de plus de faible qualité fourragère etsont souvent plus pauvres sur le plan écologiqueque les pelouses d'altitude. L'installation progres-sive de ces landes hautes rend les parcelles diffici-les à pénétrer et très sensibles au feu. L’état finald’enforestation conduit à la fermeture du milieuet à une diminution de la biodiversité. A terme,cette évolution se traduit par le déplacement desactivités humaines hors de ces zones et par un dé-séquilibre au niveau du territoire national.
La gestion de la végétation et des paysages par lesherbivores, et leur impact sur l'entretien des mi-lieux ont déjà été étudiés pour certains milieux(pâturages d'altitude non colonisés par les ligneuxhauts, landes pures). La complexité de ces systè-mes écologiques est telle qu'elle nécessite une ap-proche pluridisciplinaire. Le projet de rechercheque nous présentons doit permettre :
– de construire un modèle de connaissance de l'en-vironnement étudié grâce aux données issues d'ex-périmentations pluridisciplinaires,
– de mettre en œuvre un programme de simula-tion de l'entretien du paysage qui se déduit dumodèle de connaissance précédent, afin qued’éventuelles prévisions puissent servir à l'opti-misation de l'utilisation des ressources naturelles,
– de visualiser de manière très réaliste les résultatsde simulation obtenus afin d'en observer les im-pacts sur le paysage.
Un programme de recherche pluridisciplinaire adonc été mis en place dès 1994 pour élaborer denouveaux modes de gestion qui concilient pro-duction et entretien de l'espace en condition desous chargement (peu d'animaux par hectare desurface). En confrontant les observations sur lesdynamiques végétales à l'analyse du mouvementdes animaux et de leur comportement dans lesdifférents types de végétation, on espère mieux
D. Hill, S. Mechoud,A. Campos :ISIMACampus des Cézeaux,B.P 125,63173 Aubière cedex
P. Coquillard,J. Gueugnot :LEVCUniversité d’Auvergne,B.P 38,63001 Clermont-Ferrandcedex
D. Orth, Y. Michelin,Ch. Poix,G. L'Homme :ENITAClermont-Ferrand,63370 Lempdes
P. Carrère,M. Lafarge,P. Loiseau :INRAUnité d’Agronomie,234 Av. du Brézet,63039 Clermont-Ferrandcedex
D. Micol, J.P. Brun,F. Decuq, B. Dumont,M. Petit :INRA,Centre de Theix,63122 St-Genès-Champanelle
M. Teuma :Parc Naturel Régionaldes Volcans d'Auvergne63970 Aydat

Ingénieries – EAT
n° 21 - mars 2000
64
D. Hill, S. Mechoud, A. Campos, P. Coquillard, J.Gueugnot, D. Orth,Y. Michelin, Ch. Poix, G. L'Homme, P. Carrère, M. Lafarge, P. Loiseau,
D. Micol, J.P. Brun, F. Decuq, B. Dumont, M. Petit, M. Teuma
comprendre les interactions herbe – animal à dif-férentes échelles, de la touffe d'herbe à l'assem-blage des faciès, afin de pouvoir produire desmodèles de simulation de ces évolutions. C’estdans cet objectif qu’un Groupement d'IntérêtScientifique (GIS) s’est formé autour du thème"Gestion de la végétation et Entretien des milieuxpar les Herbivores domestiques en moyenne mon-tagne : approche expérimentale et modélisation".Ce GIS est composé de laboratoires de I'INRA,du Laboratoire inter-universtaire d'Informatique,de l'Ecole Nationale d'Ingénieurs en Travaux Agri-coles (ENITA), du Laboratoire d'écologie végé-tale et cellulaire de l’Université d’Auvergne, et duParc Naturel Régional des Volcans d'Auvergne.Cet article focalisera sur un site géographiqueparticulier que nous allons présenter.
Le site étudié
L’expérimentation se déroule sur le site de Ternant,à proximité du Puy de Dôme. Par son altitudemoyenne (environ 1000 m), la nature de ses solset la diversité de sa végétation, elle est représenta-tive de la plupart des situations rencontrées enmoyenne montagne auvergnate. Cette ancienneestive ovine domine la ville de Clermont-Ferrand.Elle est gérée par un groupement d'estives et ac-cueille des génisses durant tout l'été.
Pour tester l'hypothèse de complémentarité del'action animale, l'estive a été divisée en deux(2 x 25 ha) : une moitié accueille un troupeaumono-spécifique constitué de bovins, et l'autremoitié un troupeau mixte constitué de bovins etde chevaux.
Pour suivre et enregistrer les localisations des ani-maux dans le terrain, certains d’entre-eux (pho-tos 1 et 2) sont équipés d'un récepteur satelliteGPS (Global Positioning System). Le récepteur
enregistre la position de l'animal toutes les 5 se-condes. Pour déterminer l’activité de pâturage desanimaux, ils sont également équipés de colliersEthosys qui enregistrent toutes les 5 minutes lenombre de secondes où l'animal est actif, en par-ticulier son activité de pâturage. Les animaux ainsiéquipés sont peu nombreux (3 animaux par par-celle), et changent chaque jour, ce qui a constituéune contrainte pour l'établissement de statistiquesfiables. L’intérêt majeur des techniques présentéesconsiste à rapprocher les données de localisationet les données d'activité afin d’essayer de déter-miner les endroits où les animaux s'alimentent,ainsi que les temps passés aux différentes activités(repos, déplacement, etc.).
Les données récoltées sont stockées à l’INRA dansune base de données Un premier travail de fil-trage est alors nécessaire, les balises GPS pouvantparfois envoyer des localisations erronées. Lesdonnées de 1996 et 1997 ont un volume de plusde 300 méga-octets.
La modélisation du site et desherbivores
Objectifs et intérêt de la simulationL'intérêt pour les techniques de simulation estgrandissant, il se justifie essentiellement par lespossibilités de prédictions qui leur sont associées,parfois à tort car le plus grand gain que l’on puisseretirer d’un modèle reste l’augmentation des con-naissances des scientifiques qui ont collaboré à saconstruction. En effet, l'établissement d'un mo-dèle entraîne d'une part la formalisation et le par-tage des connaissances des différents experts in-tervenant dans un projet pluridisciplinaire, etd'autre part, il entraîne la formalisation de nou-velles connaissances ou de connaissances jus-qu'alors partielles. Cette dernière formalisation estperçue comme étant le résultat des diverses ques-tions posées par les spécialistes de la simulationafin de bâtir un modèle en adéquation avec lesobjectifs fixés.
Elaborer des modèles "prédictifs" reste toujoursun objectif, un des intérêts pratiques de la simu-lation résidant dans sa capacité d'aide à la déci-sion. Il est par contre essentiel de ne pas négligerla vérification et la validation des modèles, sinon,les utilisateurs de modèles instructifs mais fausse-ment prédictifs seraient alors déçus et refuseraient
Photos 1. et 2. –Garance etMarguerite, équipésde leur balise GPSet de leur collierETHOSYS. Ä
Modélisation de l’entretien du paysage par des herbivores en moyenne montagne ...
65
à l’avenir l’utilisation de techniques pourtant pro-metteuses.
L’objectif de la modélisation que nous présentonsest de simuler le fonctionnement de l’estive, afinde comprendre l’interaction entre l’évolution dela végétation et les déplacements et actions desanimaux en pâture. Cette compréhension permet-tra ensuite de connaître les possibilités d’évolu-tion de la végétation sur cette estive. Cela impli-que les sous-objectifs suivants :
– Comprendre les motivations des animaux (en-droits pâturés, trajets, lieux de repos, etc.) ;
– Comprendre les influences du comportementd’une espèce animale sur une autre ;
– Mesurer les variations d’embroussaillement dela parcelle en fonction des taux de chargement ;
– Comprendre l’évolution des jeunes repoussesd’arbres ;
– Mesurer l’offre fourragère (qualité et quantitéde l’herbe).
Dans la majorité des cas, il est extrêmement diffi-cile d'approcher le comportement de systèmesrégis par plus de deux processus interconnectésdans le cadre classique d'études réductionnistes(étude séparée de chacun des processus). Plusparticulièrement les phases transitoires (corres-pondant à la modification d'états stationnaires parperturbations, fonctionnement aux extrêmes, va-riations en continu des paramètres, etc.) échap-pent pour une large part à cette approche.
Bien que certains modèles mathématiques aientprouvé leur utilité (modèles à compartiments,chaînes de Markov,…) leur champs d'applicationreste limité. D'autres catégories de modèles, no-tamment ceux utilisant la technique dite de "si-mulation aléatoire à événements discrets" four-nissent depuis une dizaine d'années des aides im-portantes pour la compréhension des phénomè-nes biologiques et écologiques. Cette dernièretechnique étant "gourmande" en temps de cal-cul, en espace mémoire et en temps passé pour lamise au point, elle n'est utilisée que lorsque l'onne dispose pas d'outils mathématiques plus per-formants. Cette technique de simulation aléatoireà événements discrets est notamment indispensa-ble pour l'étude de processus transitoires se dé-roulant dans l'espace avec des interactions discrè-
tes à distance entre les processus. D'une manièregénérale, la simulation aléatoire à événements dis-crets présente les avantages suivants :
– Elle dispense d'une modélisation mathémati-que ardue et elle autorise, théoriquement, la si-mulation d'écosystèmes à très grand nombre d'ac-teurs aux comportements différents ;
– Elle permet de prendre en compte les aspectsspatiaux des écosystèmes ;
– Elle permet de gérer, pour chaque individu, tousles paramètres que les biologistes entendent inté-grer au modèle. Cette gestion des individus, etcorrélativement des variations physiologiques deceux-ci, permet, selon le libre choix de l'expéri-mentateur, d'affiner le modèle avec le degré definesse souhaitable pour approcher au mieux laréalité.
Pour développer le simulateur, nous avons retenuune approche visuelle interactive tout en faisantusage de techniques de développement de logi-ciel dites orientées-objets (Hill D.R.C., 1996).
Présentation des choix de modélisa-tion
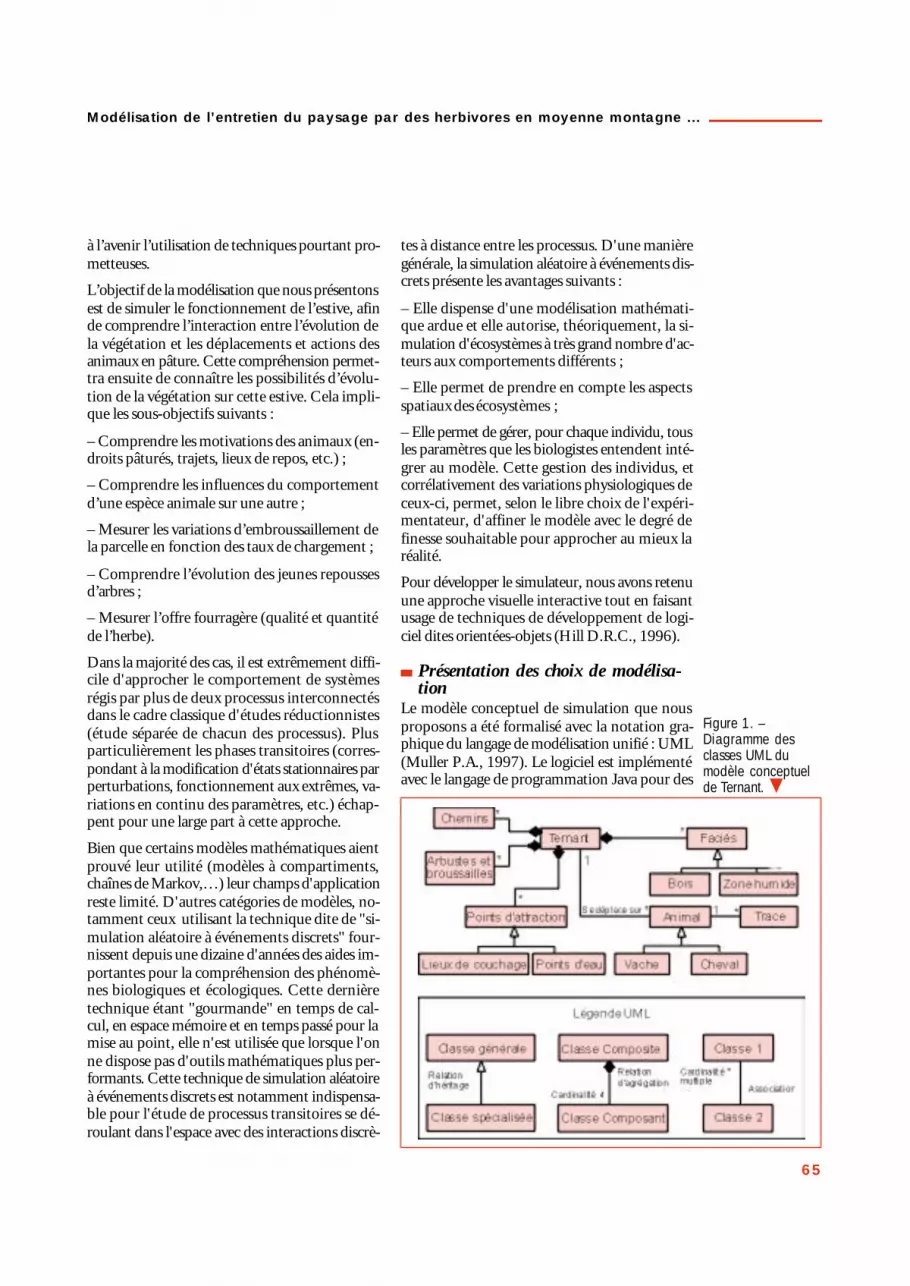
Le modèle conceptuel de simulation que nousproposons a été formalisé avec la notation gra-phique du langage de modélisation unifié : UML(Muller P.A., 1997). Le logiciel est implémentéavec le langage de programmation Java pour des
Figure 1. –Diagramme desclasses UML dumodèle conceptuelde Ternant. Ä

Ingénieries – EAT
n° 21 - mars 2000
66
D. Hill, S. Mechoud, A. Campos, P. Coquillard, J.Gueugnot, D. Orth,Y. Michelin, Ch. Poix, G. L'Homme, P. Carrère, M. Lafarge, P. Loiseau,
D. Micol, J.P. Brun, F. Decuq, B. Dumont, M. Petit, M. Teuma
raisons de portabilité. La deuxième raison duchoix de Java réside dans sa capacité d’interfaçageavec le World Wide Web pour limiter les problè-mes d’installation, de mise à jour du logiciel etenfin, faciliter la diffusion à d’autres utilisateurs(Campos A. et Hill D.R.C. 1998 ; Fishwick P. etal. 1998).
Le schéma conceptuel de la figure 1 est volontai-rement épuré, pour mieux souligner les grandeslignes de la simulation à venir. On distingue déjàle terrain de Ternant, constitué de différents fa-ciès de végétation, de chemins et d’arbustes etbroussailles (genêts, ronces, etc.). Ce terrain com-porte des points d’attraction que sont les lieux decouchage des animaux et les abreuvoirs (BaileyD. W. et al., 1998). On trouve ensuite des ani-maux (vaches ou chevaux) qui pâturent sur ce ter-rain, se servant de ses différents composants (che-mins, faciès, etc.) comme points de repère.
Les zones boisées (faciès "Bois") et les jeunes ar-bustes ont été volontairement séparés dans lemodèle conceptuel. Une zone boisée est une zonedont on ne cherche pas à dénombrer les indivi-dus, alors que les arbustes sont identifiés. On peutdonc suivre l’évolution de chaque arbuste en fonc-tion de son environnement, alors que ce type derésultat est moins intéressant dans le cas de zonesboisées, que l’on ne fera pas évoluer dans le mo-dèle.
Les faciès de végétation et les chemins du terrainont été cartographiés et simplifiés (figure 2). Onne retrouve donc que 8 faciès de végétation (horszones boisées). Chaque faciès peut être composéde différentes espèces végétales, mais pour desraisons de simplification, on notera l’espèce do-
minante. La figure 2 est une vue de ces faciès, surlaquelle on a rapporté les clôtures du terrain, ainsique les chemins.
Pour répondre aux différents besoins exprimés, lemodèle doit pouvoir fonctionner suivant diffé-rentes échelles :
– 3 pas de temps (instantané, intra-annuel, inter-annuel) ;
– 3 échelles d’espaces (cellule, faciès, assemblagede faciès) ;
– 3 niveaux d’individus (animal, groupe d’ani-maux d’une espèce, troupeau).
Pour respecter ces 3 échelles, le logiciel de simu-lation fonctionne suivant 2 modes différents.Même si chaque mode utilise un ensemble dedonnées et des paramètres communs, ils se spé-cialisent tous en utilisant des paramètres et desfonctionnements spécifiques et en proposant desrésultats propres.
Ces modes sont les suivants :1er mode : étudier les trajets GPS et activitésETHOSYS à des fins de compréhension et d’ana-lyse. Ce mode permet de déterminer les lieux depassages des animaux, les lieux de pâture favoris,l’enchaînement et les temps consacrés aux diffé-rentes activités. Il permet donc d’affiner les règlescomportementales utilisées dans le 2ème mode defonctionnement.
2ème mode : simuler le "fonctionnement" d’ani-maux isolés ou en groupe, en semi temps-réel. Cemode fournit les données comportementales destroupeaux, d’inter-actions entre les groupes d’ani-maux.
Figure 2. – Lesfaciès de végétationet les chemins surl’estive de Ternant. ©

Modélisation de l’entretien du paysage par des herbivores en moyenne montagne ...
67
Les différentes utilisations dumodèle de simulation
Simulation par traces : Analyses desdonnées GPS et ETHOSYS
Le but de ce premier module du simulateur estd’analyser et de comprendre les données relevéessur le terrain, afin de pouvoir alimenter les autresmodes de fonctionnement avec des données decomportement et de déplacement cohérentes.
Dans ce premier module, l’utilisateur peut "re-lire" l’intégralité des trajets d’animaux, simulés ourelevés par GPS et les dérouler de façon graphi-que en les superposant sur des cartes de représen-tation du terrain d’étude. Les cartes peuvent re-présenter la végétation du terrain, sa topographieou seulement les contours et chemins.
Cette relecture des trajets autorise un certain de-gré de validation des simulations en permettantd’essayer de comprendre le comportement desanimaux, leurs lieux de fréquentation et donc dedéterminer leurs motivations. La technique reposealors simplement sur ce que l’on appelle, en mo-délisation et en physique quantique, la simula-tion à base de traces. Le simulateur se comportealors comme un magnétophone qui permet à l’uti-lisateur de visualiser l’évolution d’un trajet, de l’ac-célérer, de le ralentir et de le reproduire autantque nécessaire.
L’utilisateur peut également demander la super-position de l’ensemble des traces pour établir unecarte de fréquentation du site. Cette superposi-tion peut se faire avec des critères plus restrictifspour obtenir des cartes plus spécialisées (restric-tion sur la période, l’espèce étudiée, …). Le pro-gramme d’analyse permet également de différen-cier les traces de simple déplacement de celles depâturage, afin d’établir une carte de consomma-tion. Les cartes obtenues permettent en outre demettre en évidence :– les trajets effectués et les points de passage fré-quents,– les zones de fort pâturage,– les zones évitées,– les zones d’attraction (lieux de couchage, abreu-voirs, etc.),– les faciès de végétation préférés, en fonction dela période de l’année et de l’espèce étudiée,– (vache, cheval ou vache "influencée" par la pré-sence de chevaux).
La carte présentée figure 3 est issue du cumul destraces relevées par GPS en 1997 pour la parcellesud. Sur ce type de carte, il est possible de distin-guer plusieurs zones de forte fréquentation, ainsique d’autres zones qui semblent être évitées. Onnote également que les animaux suivent souventles mêmes trajets que l’on découvre concordantsavec les chemins de l’estive. La comparaison d'unecarte topographique avec la carte de fréquenta-tion (figure 3) nous apporte des éléments supplé-mentaires. On note en effet que les zones de reliefsont plutôt contournées que gravies, et que leszones les plus fréquentées sont les zones de plusbasse altitude. L'analyse des relevés confirme etaffine la connaissance des experts. D'une manièregénérale, les informations mesurées concrètementsur le terrain sont interprétées pour en extrairedes modèles de règles de déplacement, de com-portement et de défoliation corrects.
La carte de consommation (fig. 4) a été établie à
§ Figure 3. – Cartede fréquentationissue des donnéesGPS de 1997.
§ Figure 4. – Cartede consommation devégétaux en 1997.

Ingénieries – EAT
n° 21 - mars 2000
68
D. Hill, S. Mechoud, A. Campos, P. Coquillard, J.Gueugnot, D. Orth,Y. Michelin, Ch. Poix, G. L'Homme, P. Carrère, M. Lafarge, P. Loiseau,
D. Micol, J.P. Brun, F. Decuq, B. Dumont, M. Petit, M. Teuma
partir de relevés effectués sur le terrain. Les zonesrouges représentent les mises en défends.
Les 5 niveaux de relevés (de la couleur la plus som-bre à la couleur la plus claire) correspondent aux :– Traces de passages rapides (prélèvement < 20%)– Prélèvements faibles (de 20 à 40%)– Prélèvements moyens (de 40 à 55%)– Prélèvements importants ( de 55 à 70%)– Prélèvements très importants (de 70 à 80%)
Cette carte de consommation nous apporte cer-taines confirmations du comportement et du dé-placement des animaux. On remarque nettementque les zones les plus pâturées sont situées en bas-ses altitudes et sur les trajets de pâturage qui sui-vent les chemins de l’estive. La zone de plus forteactivité est évidemment celle des points d’eau. Cetype de constats semble trivial pour des experts,mais ils serviront efficacement quand il s'agira devalider le modèle informatique.
Une autre motivation importante des animaux estla qualité de l’herbe proposée. Cette qualité estquantifiée par une valeur pastorale (VP) calculéepour chaque faciès de végétation ; une valeur éle-vée indique une meilleure qualité. La VP sera con-sidérée constante au cours du cycle annuel pourdes raisons de simplificité.
Les taux d’abroutissement du tableau 1 indiquentla consommation des faciès végétaux par les ani-
maux. Les chiffres varient beaucoup d’une annéeà l’autre, car le chargement animal sur l’estive aété plus fort en 1997, ce qui entraîne des diffé-rences dans la sélection des espèces pâturées (OrthD. et al. 1998). On remarque cependant sur lacarte de fréquentation et la carte de consomma-tion, que les zones les plus pâturées correspon-dent aux faciès de plus forte valeur pastorale.
Il manque certaines informations complémentai-res pour expliquer l’absence de fréquentation dezones à priori attrayantes pour les animaux. Cer-taines de ces zones ont été envahies par des ge-nêts, dont nous ne possédons actuellement pasde cartographie précise, mais seulement des posi-tions approximatives. Certains de ces genêts, deplus de 2 mètres de haut, constituent une bar-rière physique qui expliquerait l’abandon de ceszones par les animaux.
Nous pouvons encore extraire de ces tracesd’autres informations indispensables à la modéli-sation correcte des déplacements des animaux. Al’aide d’un programme d’analyse, on peut déter-miner les vitesses minimum, maximum etmoyenne des animaux en fonction de leur espèce,de leur environnement (une vache est elle au con-tact de chevaux ?) et de leur activité (pâturage,déplacement, etc.). On déterminera également desprobabilités de changement de direction en fonc-tion des mêmes critères.
Tableau 1. – Valeurs pastorales et taux d’abroutissement (%) des faciès végétaux en 1996 et 1997(Orth D. et al., 1998) Ä
TauxVa- d'abroutissement
leurs VACHES MIXTE
Faciès de végétation pasto- Juillet Aout Juillet Aout
rales 1996 1997 1996 1997 1996 1997 1996 1997
Pelouse à Holcus lanatus 51 29 50 39 7 32 42 42 57Pelouse à Agrostis tenuis 34 13 33 20 55 18 34 24 46Pelouse à Festuca rubras 34 - - - - 13 35 24 40Zone humide 26 24 75 32 58 - - - -Pelouse à Deschampsia flexuosa 23 - - - - 15 25 15 32Zone à ronciers 19 20 34 19 47 - 48 - 49Lande à Calluna vulgaris 11 8 25 15 36 7 24 7 29Pelouse à Brachypodium pinnatum 5 7 39 21 48 15 29 18 36

Modélisation de l’entretien du paysage par des herbivores en moyenne montagne ...
69
Simulation multi-agentsDans le deuxième module, nous avons retenul’idée d’une simulation basée sur des agents. Danscette approche, les vaches et les chevaux sont con-sidérés comme des agents. Avec cette techniqueissue de l’Intelligence Artificielle Distribuée et desmodèles individus-centrés (Huston M. et al.1988 ; De Angelis D. et Gross L.J., 1992 ;Breckling B. et Müller F. 1994), il est possible dereprésenter des phénomènes environnementauxcomme la conséquence d’interactions d’agentsagissant en parallèle, chaque agent étant un objetactif (éventuellement réactif), autonome et inté-grant un comportement social. Le lecteur inté-ressé par ces techniques pourra se reporter utile-ment à l'ouvrage de référence en langue française(Ferber J., 1995 ).
Chaque agent simulera le comportement d’unevache ou d’un cheval. Le nombre de ces agentsest paramétrable, et, à partir de 2 agents, le pro-gramme simule le comportement grégaire desanimaux. Chaque agent stimule les autres etinteragit avec eux. Les agents agissent égalementsur le terrain dans lequel ils évoluent, broutant etpiétinant la végétation. De ce fait, déplacer desentités virtuelles, changer leur comportement etmodifier leur état peut être facilement effectué,toutes les données de simulation et les règles decomportement étant stockées dans des entités sé-parées. En plus des propriétés classiques desagents, telles que l’autonomie, le comportementsocial et la réactivité, certaines recherches consi-dèrent qu’un agent doit être implémenté en utili-sant une caractéristique propre à un être vivant :l’incertitude de son comportement et de sa per-ception. Dans notre cas, nous utilisons la logiquefloue suivant la technique décrite dans (CamposA. et Hill D.R.C., 1998).
Pour piloter ce mode de simulation, de nouveauxcomposants logiciels sont rajoutés dans le pan-neau de contrôle du logiciel (Figure 5). On peutmodifier le nombre d’animaux en fonction de l’espèce au sein du troupeau. Deux boutons sontactivables : l'un permet l’enregistrement des tra-ces générées, et l'autre, le bouton Analyse, lance laprocédure de construction de la carte de fréquen-tation, en fonction des simulations déjà exécu-tées.
La figure 6 montre une simulation multi-agentsen cours d’exécution. Les 2 premières icônes enhaut de la fenêtre permettent l’accès au 2 modes
de fonctionnement actuellement implémentés(Simulation multi-agents et Suivi de traces GPS).Une portion du terrain peut être agrandie poursuivre le détail d’une trace. On peut égalementagir sur la vitesse d’exécution, suspendre et repren-dre la simulation et sur les traces laissées par lesanimaux (trace complète visible, ou seulementanimal visible). On peut également visualiserl’heure, le temps dans le simulateur ne s’écoulantévidemment pas à la même vitesse que pour nous.La simulation en cours sur cette figure porte sur2 vaches, avec les faciès de végétation en fondd’écran, afin de visualiser les trajets d’un faciès àl’autre entre les repas.
L'intérêt principal du développement d'un mo-dèle multi-agents réside dans la possibilité pour
Figure 5. – Zoom sur le panneau de contrôle de la simulation multi-agents. Ä
Figure 6. – Simulation multi-agents en cours d'exécution. (En réalité, ils'agit d'un affichage vidéo couleur). Ä
enregistrement des traces

Ingénieries – EAT
n° 21 - mars 2000
70
D. Hill, S. Mechoud, A. Campos, P. Coquillard, J.Gueugnot, D. Orth,Y. Michelin, Ch. Poix, G. L'Homme, P. Carrère, M. Lafarge, P. Loiseau,
D. Micol, J.P. Brun, F. Decuq, B. Dumont, M. Petit, M. Teuma
les experts éthologues de tester leurs hypothèsesthéoriques. Ces hypothèses traduites par les in-formaticiens régissent le fonctionnement de la si-mulation, il est ainsi possible de calibrer et de va-lider partiellement la connaissance des experts encomparant le modèle avec la réalité observée carl'expérimentation prend en compte les donnéesdu terrain.
Nous l'avons déjà souligné, le principal intérêtd'une simulation est d'améliorer la connaissancedes experts des différents domaines. L'élaborationet la spécification de règles de comportement pourles animaux sont parmi les principaux résultatsou retombées directes de la modélisation. Ces rè-gles de comportement de la simulation multi-agents sont issues d'une part de réunions de tra-vail avec des éthologues de l’INRA et des spécia-listes de la végétation de l’ENITA et du LEVC,de l'ouvrage suivant : (Arnold G.W. et DudzinskiM.L., 1978) et d'autre part de l’analyse des tracesGPS et ETHOSYS (cf. "Simulation par traces").Elles peuvent également être parfois le fruit dusimple bon sens. Il existe 3 grandes classes de rè-gles : la dynamique de la végétation (croissance etsénescence, etc.), les règles de déplacement des ani-maux (Bailey D. W. et al., 1998) et les règles deconsommation des animaux. Ces deux dernièresclasses sont étroitement liées, l’animal se dépla-çant principalement pour se nourrir. De même,la croissance de la végétation sera fortement liée àla pression de pâture et au piétinement lié à laprésence d’animaux. Dans ce mode de fonction-nement, on ne prendra pas en compte les règlesde croissance de la végétation, le pas de temps del’étude étant trop faible pour mesurer une varia-tion significative.
L’influence du climat (température, vent, pluie)n’est pas encore introduite dans le modèle. Il estcependant reconnu qu’elle influence fortement lecomportement des animaux (Arnold G.W. etDudzinski M.L. 1978). Par exemple, en cas detempératures élevées, les animaux auront tendanceà se déplacer du coté de l’estive susceptible de re-cevoir un peu de vent. Cette amélioration est pré-vue dans une version ultérieure du logiciel de si-mulation.
Il est souvent intéressant de faire varier certainsparamètres du modèle entre 2 expériences, pourmesurer ou vérifier leur influence dans l’expé-rience. Pour des raisons de commodité, ces para-
mètres sont actuellement regroupés dans une ta-ble de la base de données. Les principaux para-mètres sont :
– le nombre de vaches par parcelle,
– le nombre de chevaux par parcelle,
– les distances, par espèce, minimum et maximumà partir de laquelle un animal ressent le besoin des’éloigner ou de se rapprocher d’un de ses congé-nères.
Il est prévu de pouvoir regrouper et stocker cesparamètres sous un même numéro de versiond’expérience, afin de pouvoir refaire différentessimulations avec le même contexte, et ce pourcomparer les résultats obtenus par les différentesréplications.
Les principaux résultats générés par chaque simu-lation sont sous forme de traces identiques auxtraces GPS et sont conservés dans une table nom-mée "Résultats" de la base de données relation-nelle gérée pour ce projet. Ces données pourrontensuite être traitées de la même manière que lestraces relevées par le GPS, et servir, en les cumu-lant sur une période donnée, à constituer des car-tes de fréquentation et de consommation utilespour la validation du modèle. En effet, ces cartescalculées permettent, par comparaison avec cellesdéjà existantes ou obtenues dans le 1er module dusimulateur, de vérifier la cohérence de fonction-nement de ce mode de simulation. On repéreraaisément les similitudes (fréquentation des zones,chemins suivis, pression de pâture, prise encompte du relief, etc.), ou absence de similitudesdans le cas de règles inadaptées ou trop incom-plètes, entre les cartes issues des données réelles etles cartes obtenues par simulation. Les résultatsobtenus par ce module peuvent donc subir unevalidation visuelle relativement complète.
Vérification et validation du mo-dèle
Avant même de coder dans un langage de pro-grammation le modèle conceptuel quenous avions présenté, il est essentiel d’essayer devalider les choix effectués lors de sa conceptionauprès des experts du domaine. Dans notre con-texte, ceci ne peut se faire qu’avec une collabora-tion pluridisciplinaire. Lorsque le modèle concep-tuel est codé dans un langage de programmation,

Modélisation de l’entretien du paysage par des herbivores en moyenne montagne ...
71
il faut ensuite vérifier ce code avant de pouvoirpasser à la nouvelle étape de validation des résul-tats du modèle.
Il nous semble important, dès lors que le simula-teur est fonctionnel et que la possibilité d'afficherles premiers résultats de simulation est acquise,d'aborder la phase de vérification interne de l'en-semble des modules intervenant (simulateur etmodules périphériques réalisés). Il s'agit d'unephase cruciale, car elle concerne la vérification dela cohérence interne du logiciel. Il y a bien peu dechances de réaliser un programme complexe deplusieurs milliers de lignes sans qu'il n'y subsistequelques erreurs de programmation, de logique,ou des incohérences avec le système réel. C'estune phase longue et difficile. Le programme doitêtre relu en détail par plusieurs personnes et ana-lysé si possible en liaison avec l'expert du domaine,qui devrait, autant que faire se peut, être capablede lire et d'effectuer une analyse critique du si-mulateur. Insistons sur le fait suivant, qui peutparaître anodin, mais que l'expérience révèle cru-cial : dans tous les cas il est souhaitable quel'écologue possède de sérieuses connaissances enprogrammation, et que l'informaticien fasse l'ef-fort de bien s'imprégner du domaine de l'écolo-gie et de l'écosystème à l'étude. Il ressort de cesquelques remarques que tout travail de simula-tion ambitieux en écologie est le fruit d'un travaild'équipe.
S'étant assuré d’un minimum de cohérence in-terne du logiciel, on peut alors aborder la phasesuivante qui consiste en la vérification de la fiabi-lité du programme. Cela revient à pousser de fa-çon combinatoire les différentes variables d'en-trée (variables de forçage) dans leurs valeurs ex-trêmes. Aucun comportement aberrant ne doitapparaître. Bien entendu, cette phase est à mêmede filtrer à nouveau des erreurs ayant survécu à laphase précédente (divisions par zéro pouvant sou-dainement apparaître, débordements en virguleflottante (overflow), etc.), mais aussi de produiredes résultats inacceptables en raison même deleur incohérence. Là encore l'intervention del'écologue est importante pour l'examen de cesrésultats.
La fiabilité logicielle acquise, il faut encore exa-miner la robustesse du modèle. Ceci signifie, qu'engénéral, il n'est pas bon signe pour un modèled'être très sensible à d'infimes variations des va-
riables de forçage. Les variables doivent pouvoirêtre modifiées sensiblement sans que le compor-tement global du système en soit affecté qualita-tivement. De brusques variations correspondantà des seuils critiques sont normales ; encore faut-il que l'examen du système réel lui-même puisseen apporter des éléments d'explication. En cas dedoute, il faudra réexaminer l'ensemble du mo-dèle au point de vue technique (programmation).
La phase suivante, dite de calibration, consiste àexaminer le comportement du modèle et à véri-fier que le modèle en simulation se comporte dela manière qui est attendue. Les premiers essais sedéroulent, généralement, au moyen de valeurs deparamétrage soit tirées de la littérature soit esti-mées par les experts du domaine en attendant quela phase d'échantillonnage en cours soit complè-tement terminée. Ces valeurs provisoires permet-tent d'explorer le comportement du modèle. Lesrésultats fournis par la simulation ne doivent pasdifférer de façon trop importante du système réel.Les comportements des deux systèmes doiventprésenter de fortes analogies. De très fortes diver-gences peuvent mener à une remise en cause pro-fonde du modèle : des facteurs importants peu-vent avoir été négligés, des approximations et dessimplifications abusivement opérées. Cette remiseen cause, accompagnée d'un remaniement pro-fond allant de l'analyse du domaine (interventionde l'expert) aux sous-modèles (équations etautres), devra être suivie à nouveau des phases devérification et d'examen de la robustesse du logi-ciel. Les modifications devront aboutir à un mo-dèle se comportant de façon acceptable et explica-ble. Il est à noter qu’un modèle calibré, même aumoyen d’un jeu de données de qualité, ne consti-tue pas un modèle validé.
Nous arrivons enfin à la validation, les experts enmodélisation savent très bien qu’il est impossiblede valider un modèle dans l’absolu (Balci O. etWithner R.B., 1989). Ceci dit, un modèle doitêtre capable de reproduire au mieux la réalité.L'entrée des données initiales, puis la mise enœuvre des simulations, doivent fournir des résul-tats en adéquation avec les mesures effectuées surle système réel. Si ce n'est pas le cas, le modèle estdit non valide, ce qui ne signifie pas qu'il soit nonexploitable. Il faut alors réexaminer les équationset les données, procéder éventuellement à un sup-plément d'échantillonnage de l'écosystème, réexa-

Ingénieries – EAT
n° 21 - mars 2000
72
D. Hill, S. Mechoud, A. Campos, P. Coquillard, J.Gueugnot, D. Orth,Y. Michelin, Ch. Poix, G. L'Homme, P. Carrère, M. Lafarge, P. Loiseau,
D. Micol, J.P. Brun, F. Decuq, B. Dumont, M. Petit, M. Teuma
miner la calibration des sous-modèles, etc. Lestechniques statistiques (analyse de variance et derégression, tests divers...) sont là pour estimer laperformance en matière de reproduction des ré-sultats obtenus sur le système réel. Dans les mo-dèles stochastiques et plus encore à événementsdiscrets, s'adressant à des systèmes dans lesquelsles individus se reproduisent lentement, la vali-dation devient très difficile et parfois même ob-jectivement impossible de façon directe. Elle nepeut être réalisée que par l'expert du domaine qui,en s'appuyant sur son expérience passée, et enraisonnant sur des situations analogues (stationsou populations) à celle du système modélisé,pourra effectuer un diagnostic. Un ensemble detechniques de validation pour la modélisationd’écosystèmes est présentée dans (Hill D.R.C.1995). Certains types de résultats spatiaux et sto-chastiques seront validés par des méthodes parti-culières qui ne sont développées que depuis peu.C’est le cas par exemple de la position ou la ré-partition des individus dans l'espace qui doit fairel’objet d’une analyse spectrale (Coquillard P. etHill D.R.C., 1997).
Parmi les techniques de vérification et de valida-tion, l’utilisation de simulations interactives etmême le rendu réaliste peuvent être envisagés.Grâce aux collaborations établies, un des objec-tifs initiaux concernant la visualisation réaliste desrésultats a pu être partiellement atteint. La visua-lisation précise a permis de vérifier les modèles,les échelles et la cohérence des systèmes de coor-données. Le modèle numérique du terrain deTernant réalisé par l’ENITA a pu être visualiséavec des résolutions satisfaisantes (nécessitant ce-pendant 800 Mo de mémoire vive pour un mo-dèle 3D avec un maillage tous les 4m2. Le calculd’une image réaliste sur le terrain de Ternant avecdes modèles numériques de vaches et de chevauxnécessite une heure de calcul sur les machines lesplus puissantes de l’ISIMA (Silicon Octane et ser-veur IBM G40 avec 1Go de RAM) (Figures 7 à 8).Pour réaliser une animation d’une minute, plusde 1500 heures de calcul sont nécessaires. Les as-pects de rendu réaliste concernent essentiellementla communication avec des décideurs non scien-tifiques et l’aspect paysager ; les experts préfèrentsouvent des simulations interactives et des résul-tats statistiques plus exploitables pour une ana-lyse scientifique.
Conclusion
Dans cet article, nous nous sommes efforcés dedécrire la conception et la réalisation d'un logi-ciel de simulation de l'entretien du paysage pardes herbivores. La simulation utilise une appro-che dite multi-agents et l'expérimentation prenden compte des données réelles de terrain. Nousavons tout d'abord insisté sur la difficulté de lacollecte et du tri des données servant de base auxrègles de comportement de nos agents. Si l'onsouhaite obtenir un comportement des agentssemblable à celui de leurs modèles réels, cette étapereste fondamentale. Elle implique un travaild'équipe et des réunions de travail fréquentes. Surce projet ambitieux, la complexité du système éco-logique en présence a impliqué la participationde beaucoup de personnes de métiers différents(éthologues, agronomes, informaticiens, etc.). Cespersonnes travaillant toutes sur des sites différentsavec des activités et des centres d'intérêts diffé-rents, les réunions de travail ne pouvaient êtreemployées uniquement que pour les aspects mo-délisation et validation du logiciel de simulation.
Figure 8. – Exemples d’images d’animaux calculées, sur une synthèse duterrain. Ä
Figure 7. – Maillage d’une vache en 3D. Ä

Modélisation de l’entretien du paysage par des herbivores en moyenne montagne ...
73
Il en résulte que le modèle proposé ne peut pasactuellement répondre à tous les besoins, notam-ment parce qu'ils ont été relativement ardus àspécifier. Toujours en raison de la diversité desintervenants, les sous-objectifs du modèle diver-gent entre les différentes disciplines, entraînantun surcoût d'efforts que ce soit pour les tentati-ves de validation des résultats préliminaires oupour la valorisation de ces résultats. Malgré lesproblèmes liés à cette collaboration d'envergure,nous présentons un logiciel permettant à la foisde visualiser et comprendre les données initiales,et également de simuler le comportement indivi-duel et grégaire des animaux grâce à une appro-che multi-agents.
Nous devons également préciser les limites denotre démarche. Dans la pratique, peu d'animauxont été suivis par les systèmes GPS et ETHOSYS.Cette technique demande en effet une logistiquetrès lourde pour un suivi complet du troupeau.Les données issues d'un tel suivi seraient égale-ment bien trop volumineuses pour être traitées,stockées et analysées aisément. Rappelons que lesdonnées GPS et ETHOSYS occupent aujourd'hui300 Mo pour une saison de pâturage. Il ressortdonc que les données utilisées pour l'étude ducomportement animal, même si elles permettentd'avoir une base de renseignement solide, ne re-présentent pas la totalité de la réalité. De même,certaines parties du développement ont subi deslimitations liées aux contraintes informatiques.Notamment, le développement a été initialisé enlangage de programmation Java, avec l'idée depermettre l'exécution du simulateur à travers leWorld Wide Web. Nous nous sommes alors heur-tés à deux sortes de problèmes : les volumes àtransmettre (cartes, données GPS, écriture destraces générées, etc.) à travers le réseau sont tropimportants pour permettre une exécution à dis-tance. Le deuxième problème porte sur le langage
Java lui même. Java est un langage semi-interprété,qui nécessite de s'exécuter dans une JVM(Java Virtual Machine). Or, nous atteignonsaujourd'hui les limites de la gestion mémoire dela JVM actuelle, car nous sommes obligés de stoc-ker différentes cartes qui comportent chacune1 million de points. Sur ce point, un gros travaild'optimisation du volume de ces cartes a été en-trepris.
Les évolutions futures pourraient concerner prin-cipalement la conception et le développementd'une simulation gérant le comportement globaldu troupeau. En effet, l’analyse des traces laisséespar un ensemble d’individus pâturant ensembledans la même simulation multi-agents permet dedéduire des règles de déplacement d’un troupeauen fonction des ses paramètres (nombre d’indivi-dus, espèce, etc.), des règles de pâturage (pressionde pâture moyenne par individu), ainsi que lesinter-actions éventuelles liées à la présence d’untroupeau d’espèces différentes. L’action du trou-peau sur la pâture est donc établie à partir de rè-gles générales de déplacement et de statistiquesde prélèvement ou de destruction de végétauxdans la parcelle. L’intérêt de cette nouvelle appro-che réside dans sa plus grande rapidité d’exécu-tion, et donc dans sa capacité à dérouler la simu-lation sur un plus grand pas de temps (sur plu-sieurs mois, voir plusieurs années), ce qui a l’avan-tage de permettre l’intégration de l’évolution dela végétation. Une autre évolution d'envergurepourrait concerner la prise en compte du climatdans la détermination du comportement des ani-maux et des troupeaux. Enfin, pour permettre unevisualisation réaliste de la simulation et des résul-tats, nous envisageons également un portage desvisualisations en 3 dimensions qui utiliserait leVRML afin de diffuser les résultats sur leWorld-Wide Web. r

Ingénieries – EAT
n° 21 - mars 2000
74
D. Hill, S. Mechoud, A. Campos, P. Coquillard, J.Gueugnot, D. Orth,Y. Michelin, Ch. Poix, G. L'Homme, P. Carrère, M. Lafarge, P. Loiseau,
D. Micol, J.P. Brun, F. Decuq, B. Dumont, M. Petit, M. Teuma
RésuméL'abandon de l'utilisation des ressources herbagères par l’activité pastorale entraîne un appauvrissement dela diversité écologique et spécifique. A terme, cette évolution se traduit par le déplacement des activitéshumaines hors de ces zones et à un déséquilibre au niveau du territoire national. Un programme derecherche pluridisciplinaire, dans le cadre d'un Groupement d'intérêt Scientifique, a été mis en place dès1994 pour élaborer de nouveaux modes de gestion qui concilient production agricole et entretien del'espace en condition de sous chargement (peu d'animaux par unité de surface). Cet article s'inscrit dansune démarche d'acquisition de méthodes afin d'expérimenter des techniques de gestion de pâturage mixtebovins et chevaux selon une hypothèse de complémentarité entre ces deux espèces. La partie informatiqueprésentée vise à simuler les dynamiques animales, végétales et paysagères futures et, à terme, proposer desprotocoles de gestion aptes à répondre à ces nouvelles demandes. L'objectif de la modélisation que nousprésentons est de simuler le fonctionnement de l'estive, afin de comprendre l'interaction entre l'évolution dela végétation, les déplacements et les actions des animaux en pâture. Un des modes de simulation utilise unsystème multi-agents. Le modèle conceptuel de la simulation est en cours de validation, il a été formaliséavec la notation graphique du langage de modélisation unifié (UML) et la version actuelle du logiciel estimplémentée avec le langage de programmation Java. Pour suivre et enregistrer les localisations des ani-maux sur le terrain, ceux-ci sont équipés d'un récepteur satellite GPS (Global Positioning System). L'activitéde pâturage des animaux est enregistrée par des colliers Ethosys.
AbstractThe surrender of herbaceous resources by the grazing activity results in an impoverishment of both ecologicaland specific diversity. On the long term, this trend imposes the localization of human activities far from thesezones and a national imbalance. A multidisciplinary research program was set up in 1994 with the aim ofelaborating new ways of management, which would contribute to maintain both the productivity and theopened landscapes within the condition of low grazing pressure. This paper exposes the methods weelaborated in order to test several management techniques of grasslands by mean of cattle and horseswithin the hypothesis of complementarity between these two species. The computer science part of thispaper presents the results of simulations of future dynamic behaviors of the animals, vegetation and landscape,in order to propound some management protocols. The simulator is based on a multi-agent system. Theconceptual model, formalized with Unified Modeling Language graphical notation is actually in validationphase and the implementation of the software was done in the Java programming language. The followingof the animals in the field was done by means of GPS equipments and the animal activity was recorded byEthosys equipments.

Modélisation de l’entretien du paysage par des herbivores en moyenne montagne ...
75
Bibliographie
ARNOLD, G.W., DUDZINSKI, M.L., 1978. Ethology of free-ranging domestic animals, Elsevier.
BAILEY, D.W., DUMONT, B., WALLIS DE VRIES, M.F., 1998. Utilization of heterogeneous grasslands by domesticherbivores, theory to management. Ann. Zootech., 47, p. 312-333.
BALCI, O., WITHNER, R.B., 1989. Guidelines for selecting and using simulation model verification techniques.Winter Simulation Conference. p. 559-568.
BRECKLING, B., MÜLLER, F., 1994. Current trends in ecological modelling and the 8th ISEM conference on thestate-of-the-art, Ecological Modelling, vol. 75, p. 667-675.
CAMPOS, A., HILL, D.R.C., 1998. Web-based Simulation of Agent Behaviors, SCS Western MultiConference onComputer Simulation, 1st. International Conference on Web-Based Modeling & Simulation, San Diego CA, to bepublished.
COQUILLARD, P., ET HILL, D.R.C., 1997. Modélisation et Simulation d’Ecosystèmes, Masson, Paris, p. 275.
DE ANGELIS, D., GROSS, L. J., (EDS.), 1992. Individual-based models and approches in ecology : populations,communities, and ecosystems, Chapman and Hall, New York.
FERBER, J., 1995. Les Systèmes Multi-Agents - vers une intelligence collective, InterEditions, Paris.
FISHWICK, P., HILL, D.R.C., SMITH, R., EDITORS, 1998. "International Conference on Web-based Modelingand Simulation", SCS/ACM San Diego, Jan 11-14, p. 203.
HILL, D.R.C., 1995. Verification and Validation of Ecosystem Simulation Models, In proceedings of the SummerSimulation Conference, July 24-26, Ottawa, Canada, p. 176-182.
HILL, D.R.C., 1996. Object-Oriented Analysis and Simulation, Addison-Wesley.
HILL, D.R.C., 1997. Introduction à la Simulation par Objets, L'objet / Hermes, Vol. 3, N° 1. p. 53-63.
HUSTON, M., DE ANGELIS, D., POST, W., 1998. New Computer Models Unify Ecological Theory. ComputerSimulation shows that many ecological patterns can be explained by interactions among individual organisms,BioScience vol. 38, no. 10, p. 682-691.
MULLER, P.A., 1997. Modélisation objet avec UML, Eyrolles.
ORTH, D., CARRÈRE, P., LEFÈVRE, A., DUQUET, P., MICHELIN, Y., JOSIEN, E., L’HOMME, G., 1998.L'adjonction de chevaux aux bovins en conditions de sous-chargement modifie-t-elle l'utilisation de la ressource herba-gère ?, Fourrage, 153 : p. 125-138