microsimulation for the management of vehicles fleet in restricted area
TRANSCRIPT

Micro-simulation for the management of vehicles fleet in restricted area
Elvezia M. Cepolina
University of Pisa – Department of Civil Engineering Via Diotisalvi 2 - 56126 Pisa, Italy
Tel: +39050550421, Fax +39050552573 Email: [email protected]
Keywords Multi-Agent System, Object-Oriented Simulation, Vehicles behaviour, Garbage Collection Management
Abstract The paper introduces the use of microscopic simulation for managing a fleet of vehicles operating in a restricted area. The simulator developed is an object oriented tool which is able to virtually reproduce the real traffic conditions of restricted urban network. It’s based on a multi agent traffic flow model where each agent has to perform a specific task within a strategic predefined plan. The simulator is applied to the selected garbage collection in an area of the old historical city centre of Genoa. The specific characteristics of the area with very narrow streets and quite severe slopes constitute a interesting case of study either for the dynamic of the vehicles motion and for the diversification of the vehicles operating the service, in terms of physical dimensions, loading capacity and autonomy (also more autonomous electrical vehicles may be considered). A fleet management strategies consist of the allocation of each vehicle to a specific type of garbage, a specific set of collections points and a specific route. The target is testing different management strategies without having to implement them on the real traffic network The test of a fleet management strategy is based on the global system condition after the simulation period as well as on each vehicle performances. Information about the more inefficient vehicles constitutes a worth input for improving the management strategy.
1. Introduction The garbage collection organisation is a quite complex problem which could be decomposed in the following sub-problems: 1. determination of a set of collection points (stops)
for each type of garbage, 2. assignment of garbage produced by the activities to
these collection points, 3. determination of a route servicing each set of stops,
4. dynamic assignment of the more suitable vehicle to each route.
For each type of garbage, the position of the specific rubbish bins depends on the distribution on the area of those activities which produce the selected typology of garbage and on the space availability. The number of bins depends on their own capacity and the amount of garbage produced. Each set of collection points have to be connected by a route and served by a vehicle with a given capacity, autonomy and physical dimensions. As for the routing aspect, many algorithms have been derived from the standard Vehicle Routing Problem (VRP) [Chr95] which is aimed to the definition of the minimum cost paths which pass through all the clients distributed on the network. Among these algorithms, it’s interesting a variation [CGM01] which introduces a new constraint represented by the limited autonomy of electrical vehicles used to serve the stops. As for the vehicle assignment to each route, the diversity of the vehicles’ characteristics, in terms of loading capacity, autonomy and physical dimensions, have to be taken into account. The problem is therefore rich of constraints (route-vehicle capacity, vehicle dimensions, vehicle autonomy, collection points capacity, length of each route, distance of the collection points from the activities dislocated on the area) and characterised by a strong dependence among the variables: stops locations, routes, vehicles. The overall problem, as it has been specified, is very close to the school bus routing which is traditionally approached with clustering algorithms [CFR85]. The problem here is to define a set of routes, served each one by only one vehicle, and a set of bus stops in such a way to collect all the students distributed in the area and to bring them to school. When the problem is faced with analytical techniques (for instance, districting algorithms and routing methods) it’s important the priority of the underlying goals and the order in solving the specific sub-problems. Approaches which guarantee a solution with the minimum number of routes are different from approaches aimed to minimise the total mileage covered
by vehicles and different again from approaches aimed to minimise the time required to complete the service. Some authors [DFF80] proposed methods which operate first the stops definition (independently of the routes to be generated and their capacity) then the relative demand assignment to the stops and finally the routing. Other authors (Chapleau, Ferland and Rousseau) proposed instead a method which takes into account the interaction between the selection of stops and routing: it evaluates first the minimum number of routes (cluster) on the base of vehicle capacity and secondly, for each cluster, stops are selected and route generated. The resulting plans are therefore different. The garbage collection plans could be formulated and solved in different ways depending also on the dimension and complexity of the specific studied case. Sometimes is enough the skill of the planner for selecting a proper plan or a limited set of potential plans, sometimes mathematical algorithms are required to individualise the best plan according to “a priori” choices. The proposed simulator finds its application field when a pick among many optional plans is needed or when an already selected plan has to be verified according to different criteria from the ones which forced its definition. Since the author believes that the validity of a plan depends on too many parameters which are difficult to synthesise and “prioritise” in an optimisation problem and that information related to the more “weak” vehicles are particularly useful for improving the plan, a microscopic simulator has been studied. It allows to analyse the plan’s effects on the overall area (air pollution) as well as each vehicle’s effectiveness. In fact the microscopic approach permits to detail the specific behaviour of individual vehicles and to follow each of them. This aspect is fundamental since the characteristics of the vehicles composing the fleet are different in terms of physical dimensions, loading capacity and autonomy. The plan modifications should be oriented to improve the performances of the vehicles which have difficulties in completing the specific task assigned to them. This paper presents this microsimulator. The high technical detail level, improved by the link to the vehicles dynamical behaviour computed by some Simulink modules purposely set up, together with the high interactivity make this simulator particularly useful to the traffic engineers in the planning phase and in the on-line management of the fleet. The garbage collection process is modelled as multi-agent system which is built up of individual interacting autonomous agents. These agents are the fleet vehicles. According to various authors [JSW98], vehicles in the simulation model have the proprieties that characterise agents [FrG97]: vehicles are situated in a particular environment, which they can sense using sensors and
are able to affect using effectors; they are autonomous intending that they are able to act without any human intervention or intervention from other agents. The vehicles have moreover control over their own internal state and the action they take. Vehicles are responsive (i.e. respond in a timely fashion to changes in the environment) and pro-active (i.e. exhibit goal directed behaviour) [JeW95]. It’s from the specific behaviour of each of these agents that the overall behaviour of the global system outcomes. Therefore the knowledge about the system is not limited to the criteria “a priori” judged more important but it concerns all the aspects that are considered to have some influence for the system evaluation. The structure and the characteristics of the developed micro-simulator are summarised in Section 2. In Section 3 an application of the multi-agent simulator to the selected garbage collection in the historical city centre of Genoa is presented. Finally, concluding remarks are summarised in Section 4.
2. The simulation environment The simulator is object oriented, specifically suitable for modelling multi-agent systems, flexible and applicable to new scenarios. The simulator environment is written in MODSIM III language and a description of the simulation environment structure was provided in [Cep99], [Cep98]. However a synthetic description of its characteristics and of the capabilities has been hereinafter reported. All the entities able to change their status or to perform activities are called objects. The objects are characterised by the status variables and by methods. Among these objects, the ones able to do mental or physical activities are called agents. They interact by means of the actions accomplished by the methods that activate events and change the status. Each object is associated with a graphic icon: the objects may be static (streets, rubbish bins) or dynamic (vehicles, pedestrians, and likes), according to weather their presence is fix or mobile in the space. The area under scrutiny is modelled by squared cells which could be permanently or temporally occupied. The system elements present in the area are: entrance and exit doors, the street network, rubbish bins and vehicles. Interactions among vehicles are explicitly modelled.
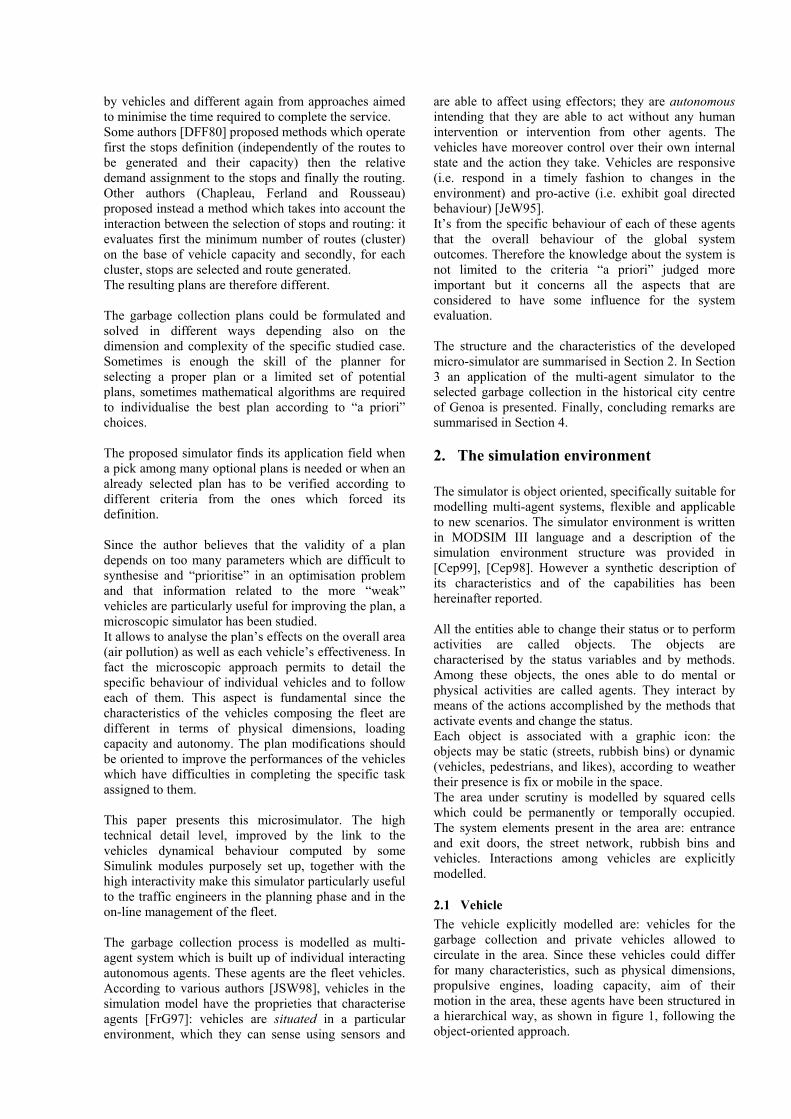
2.1 Vehicle The vehicle explicitly modelled are: vehicles for the garbage collection and private vehicles allowed to circulate in the area. Since these vehicles could differ for many characteristics, such as physical dimensions, propulsive engines, loading capacity, aim of their motion in the area, these agents have been structured in a hierarchical way, as shown in figure 1, following the object-oriented approach.
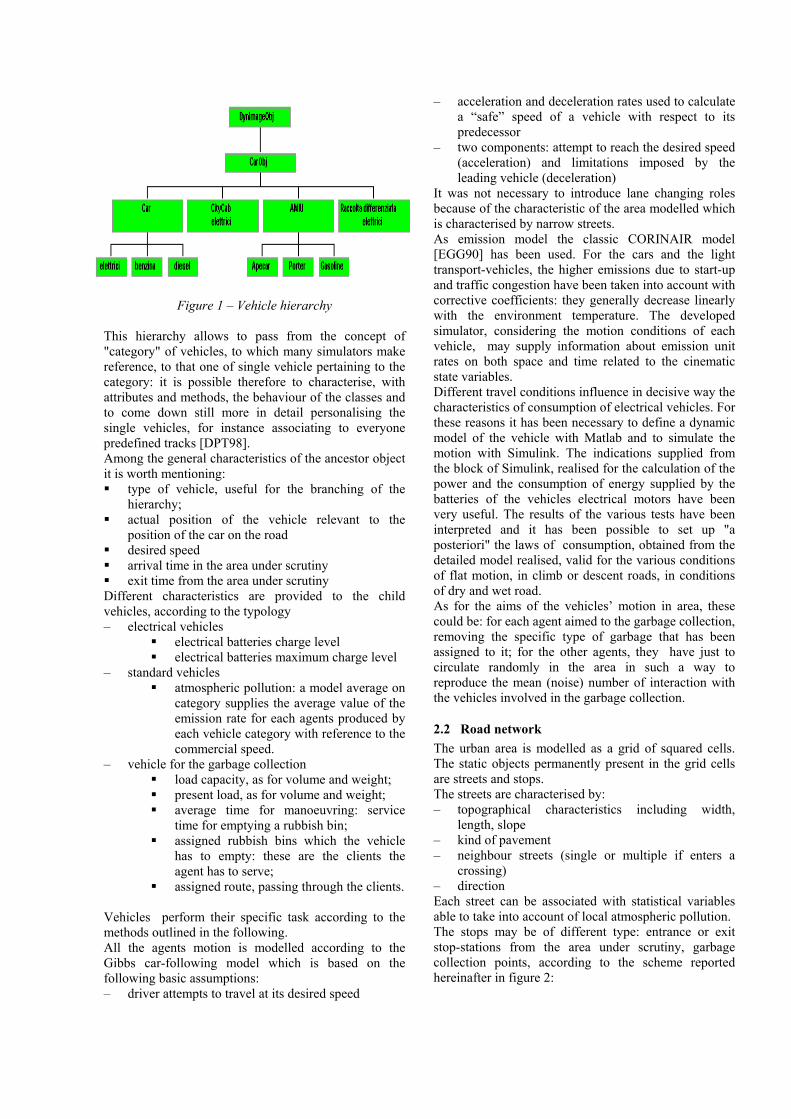
Figure 1 – Vehicle hierarchy
This hierarchy allows to pass from the concept of "category" of vehicles, to which many simulators make reference, to that one of single vehicle pertaining to the category: it is possible therefore to characterise, with attributes and methods, the behaviour of the classes and to come down still more in detail personalising the single vehicles, for instance associating to everyone predefined tracks [DPT98]. Among the general characteristics of the ancestor object it is worth mentioning: type of vehicle, useful for the branching of the
hierarchy; actual position of the vehicle relevant to the
position of the car on the road desired speed arrival time in the area under scrutiny exit time from the area under scrutiny
Different characteristics are provided to the child vehicles, according to the typology – electrical vehicles
electrical batteries charge level electrical batteries maximum charge level
– standard vehicles atmospheric pollution: a model average on
category supplies the average value of the emission rate for each agents produced by each vehicle category with reference to the commercial speed.
– vehicle for the garbage collection load capacity, as for volume and weight; present load, as for volume and weight; average time for manoeuvring: service
time for emptying a rubbish bin; assigned rubbish bins which the vehicle
has to empty: these are the clients the agent has to serve;
assigned route, passing through the clients. Vehicles perform their specific task according to the methods outlined in the following. All the agents motion is modelled according to the Gibbs car-following model which is based on the following basic assumptions: – driver attempts to travel at its desired speed
– acceleration and deceleration rates used to calculate a “safe” speed of a vehicle with respect to its predecessor
– two components: attempt to reach the desired speed (acceleration) and limitations imposed by the leading vehicle (deceleration)
It was not necessary to introduce lane changing roles because of the characteristic of the area modelled which is characterised by narrow streets. As emission model the classic CORINAIR model [EGG90] has been used. For the cars and the light transport-vehicles, the higher emissions due to start-up and traffic congestion have been taken into account with corrective coefficients: they generally decrease linearly with the environment temperature. The developed simulator, considering the motion conditions of each vehicle, may supply information about emission unit rates on both space and time related to the cinematic state variables. Different travel conditions influence in decisive way the characteristics of consumption of electrical vehicles. For these reasons it has been necessary to define a dynamic model of the vehicle with Matlab and to simulate the motion with Simulink. The indications supplied from the block of Simulink, realised for the calculation of the power and the consumption of energy supplied by the batteries of the vehicles electrical motors have been very useful. The results of the various tests have been interpreted and it has been possible to set up "a posteriori" the laws of consumption, obtained from the detailed model realised, valid for the various conditions of flat motion, in climb or descent roads, in conditions of dry and wet road. As for the aims of the vehicles’ motion in area, these could be: for each agent aimed to the garbage collection, removing the specific type of garbage that has been assigned to it; for the other agents, they have just to circulate randomly in the area in such a way to reproduce the mean (noise) number of interaction with the vehicles involved in the garbage collection.
2.2 Road network The urban area is modelled as a grid of squared cells. The static objects permanently present in the grid cells are streets and stops. The streets are characterised by: – topographical characteristics including width,
length, slope – kind of pavement – neighbour streets (single or multiple if enters a
crossing) – direction Each street can be associated with statistical variables able to take into account of local atmospheric pollution. The stops may be of different type: entrance or exit stop-stations from the area under scrutiny, garbage collection points, according to the scheme reported hereinafter in figure 2:
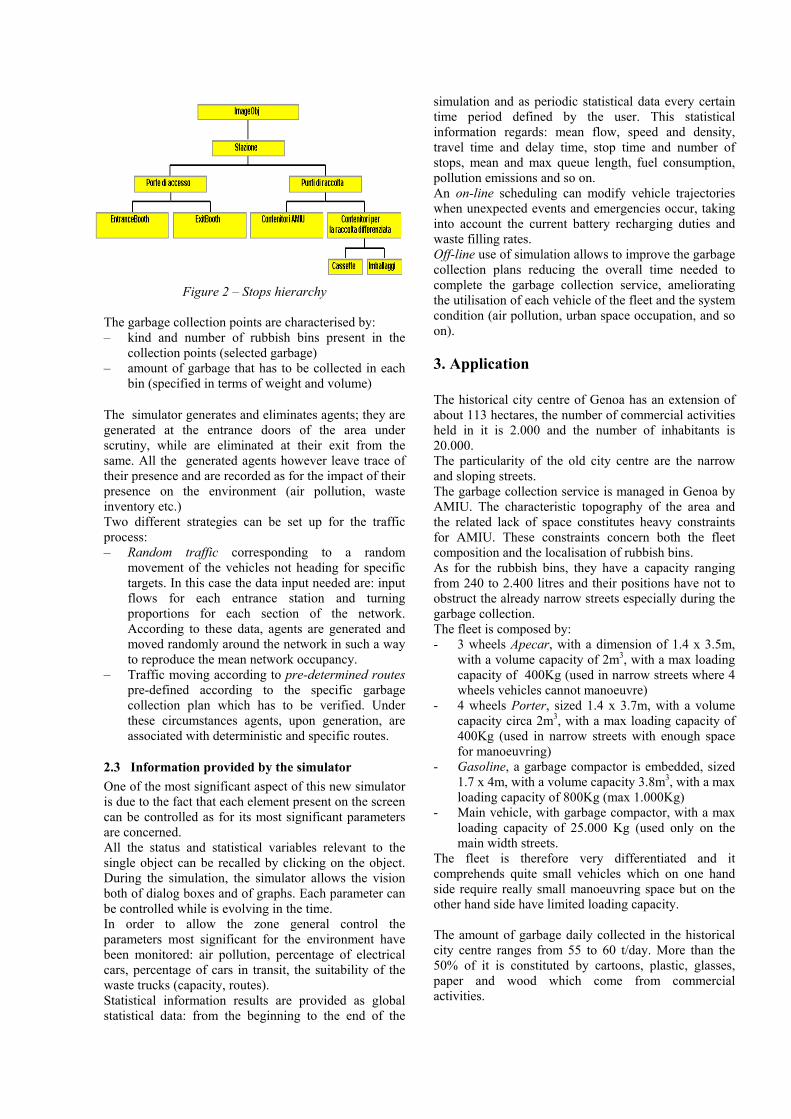
Figure 2 – Stops hierarchy
The garbage collection points are characterised by: – kind and number of rubbish bins present in the
collection points (selected garbage) – amount of garbage that has to be collected in each
bin (specified in terms of weight and volume) The simulator generates and eliminates agents; they are generated at the entrance doors of the area under scrutiny, while are eliminated at their exit from the same. All the generated agents however leave trace of their presence and are recorded as for the impact of their presence on the environment (air pollution, waste inventory etc.) Two different strategies can be set up for the traffic process: – Random traffic corresponding to a random
movement of the vehicles not heading for specific targets. In this case the data input needed are: input flows for each entrance station and turning proportions for each section of the network. According to these data, agents are generated and moved randomly around the network in such a way to reproduce the mean network occupancy.
– Traffic moving according to pre-determined routes pre-defined according to the specific garbage collection plan which has to be verified. Under these circumstances agents, upon generation, are associated with deterministic and specific routes.
2.3 Information provided by the simulator One of the most significant aspect of this new simulator is due to the fact that each element present on the screen can be controlled as for its most significant parameters are concerned. All the status and statistical variables relevant to the single object can be recalled by clicking on the object. During the simulation, the simulator allows the vision both of dialog boxes and of graphs. Each parameter can be controlled while is evolving in the time. In order to allow the zone general control the parameters most significant for the environment have been monitored: air pollution, percentage of electrical cars, percentage of cars in transit, the suitability of the waste trucks (capacity, routes). Statistical information results are provided as global statistical data: from the beginning to the end of the
simulation and as periodic statistical data every certain time period defined by the user. This statistical information regards: mean flow, speed and density, travel time and delay time, stop time and number of stops, mean and max queue length, fuel consumption, pollution emissions and so on. An on-line scheduling can modify vehicle trajectories when unexpected events and emergencies occur, taking into account the current battery recharging duties and waste filling rates. Off-line use of simulation allows to improve the garbage collection plans reducing the overall time needed to complete the garbage collection service, ameliorating the utilisation of each vehicle of the fleet and the system condition (air pollution, urban space occupation, and so on).
3. Application The historical city centre of Genoa has an extension of about 113 hectares, the number of commercial activities held in it is 2.000 and the number of inhabitants is 20.000. The particularity of the old city centre are the narrow and sloping streets. The garbage collection service is managed in Genoa by AMIU. The characteristic topography of the area and the related lack of space constitutes heavy constraints for AMIU. These constraints concern both the fleet composition and the localisation of rubbish bins. As for the rubbish bins, they have a capacity ranging from 240 to 2.400 litres and their positions have not to obstruct the already narrow streets especially during the garbage collection. The fleet is composed by: - 3 wheels Apecar, with a dimension of 1.4 x 3.5m,
with a volume capacity of 2m3, with a max loading capacity of 400Kg (used in narrow streets where 4 wheels vehicles cannot manoeuvre)
- 4 wheels Porter, sized 1.4 x 3.7m, with a volume capacity circa 2m3, with a max loading capacity of 400Kg (used in narrow streets with enough space for manoeuvring)
- Gasoline, a garbage compactor is embedded, sized 1.7 x 4m, with a volume capacity 3.8m3, with a max loading capacity of 800Kg (max 1.000Kg)
- Main vehicle, with garbage compactor, with a max loading capacity of 25.000 Kg (used only on the main width streets.
The fleet is therefore very differentiated and it comprehends quite small vehicles which on one hand side require really small manoeuvring space but on the other hand side have limited loading capacity. The amount of garbage daily collected in the historical city centre ranges from 55 to 60 t/day. More than the 50% of it is constituted by cartoons, plastic, glasses, paper and wood which come from commercial activities.
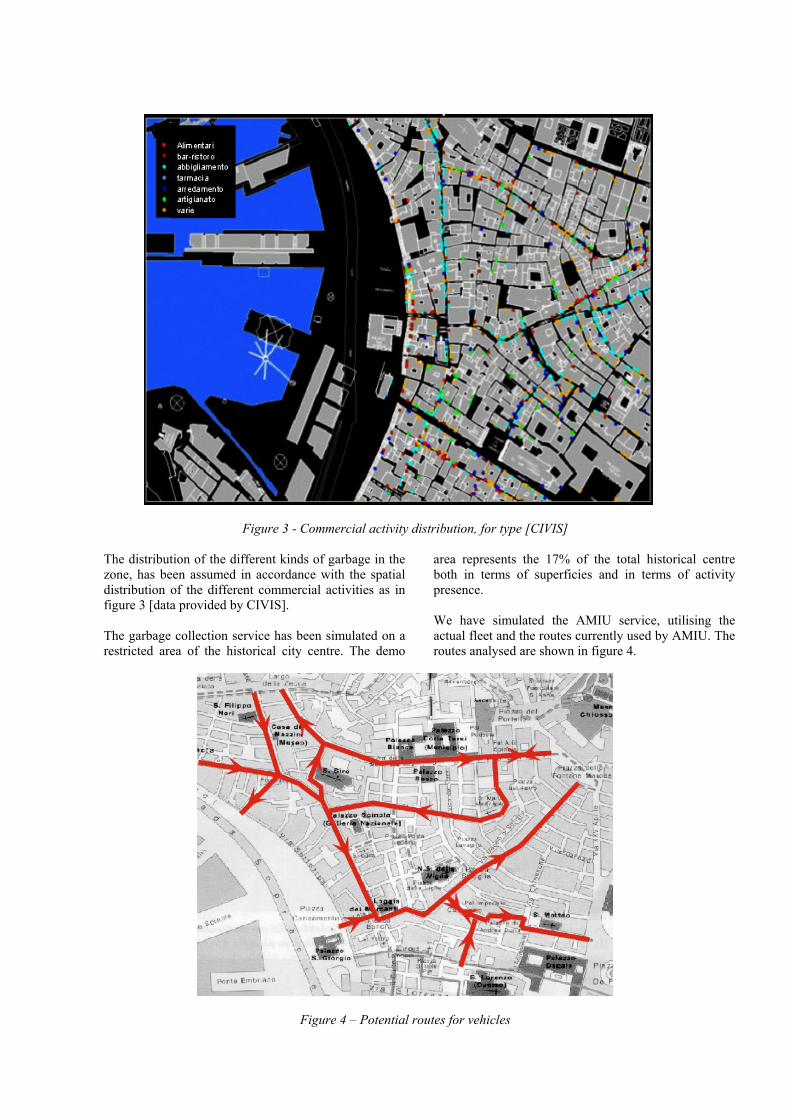
Figure 3 - Commercial activity distribution, for type [CIVIS]
The distribution of the different kinds of garbage in the zone, has been assumed in accordance with the spatial distribution of the different commercial activities as in figure 3 [data provided by CIVIS]. The garbage collection service has been simulated on a restricted area of the historical city centre. The demo
area represents the 17% of the total historical centre both in terms of superficies and in terms of activity presence.
We have simulated the AMIU service, utilising the actual fleet and the routes currently used by AMIU. The routes analysed are shown in figure 4.
Figure 4 – Potential routes for vehicles

A different scenario was simulated. The idea, studied in CIVIS but not yet applied, is to match the garbage collection service with the goods delivery system. In this way additional vehicles which will be used to deliver goods on the first way, could help in removing part of the garbage (specifically the empty packages) on the return way. CIVIS defined the characteristics of these electrical vehicles on the base of the goods demand. The use of the microsimulation tool allowed to analyse the efficiency of the electrical vehicles on the base of different tasks (i.e. to collect different kinds of selected garbage) and different routes associated to them. The great detail level of the simulation evidenced the bottleneck of the system from different points of view (loading capacity, energy autonomy, overall time required by the service) in each simulation experiment. From the analysis of critical points, ideas for improving the fleet performance raised and new simulation experiments were performed. Different routes were associated to the vehicles and different circulation directions were defined for the streets in such a way to reduce the overall time needed for the completing the garbage collection, to increase the use of completely the vehicles’ loading capabilities and to reduce the air pollution in the area. Since an important aspect is to reduce the passages on streets already cleaned (served), the colour of the rubbish bins changes as soon as the point is served and the bin becomes empty.
Figure 5 – Icons associated to the fleet vehicles and to the selected rubbish bins
The analysis of the obtained results allowed to confirm the microsimulation model usefulness and flexibility as for its applications to different scenarios.
4. Conclusion A multi-agent, object-oriented simulator suitable for modelling the garbage collection process in restricted traffic area has been described. An application of the simulator to the garbage collection service in the historical city centre of Genoa has been proposed. Two different scenarios have been analysed: the first one concerns the current strategies adopted for the garbage collection, the second one analyses how this service could be matched and improved combining it with a good delivery system that has been already planned but not yet applied in the area. The proposed tool is simple and robust and it satisfies the requirements of the local services administration department. The tool requires as input the garbage collection plan that need to be verified. The simulator provides the monitoring of all the main variables of both the system and each vehicle: it allows to monitor the traffic multivariable process on virtual base. The main characteristics of the approach followed is the possibility to evaluate the worth of plans which aren’t optimum from any point of view but which result suitable as good compromise for different criteria. Synthesis capabilities are however essential to judge the plans analysed. Even if it is possible to model not only the garbage collection fleet but also the traffic flows, the main downfall of the simulator is that the interactions of the vehicles for the garbage collection with the other flows have been neglected. This depends on a problem in integrating two different methods for the vehicles generation: random generation and predefined-route generation. Both of them have been implemented independently but their synchronous use is not possible till now. However this failure in the modelling has not big consequence on the system analysis since the garbage collection is effectuated in time periods when the interactions with pedestrian and vehicular flows are minimum. The agents have limited sensor, autonomy and decision making capacity. Despite that such simulator resulted worth for testing off-line and on-line fleet management plans. Further improvements could be gained by increasing the autonomy of the agents and their initiative and communication in such a way to lead the simulator towards a real time use.
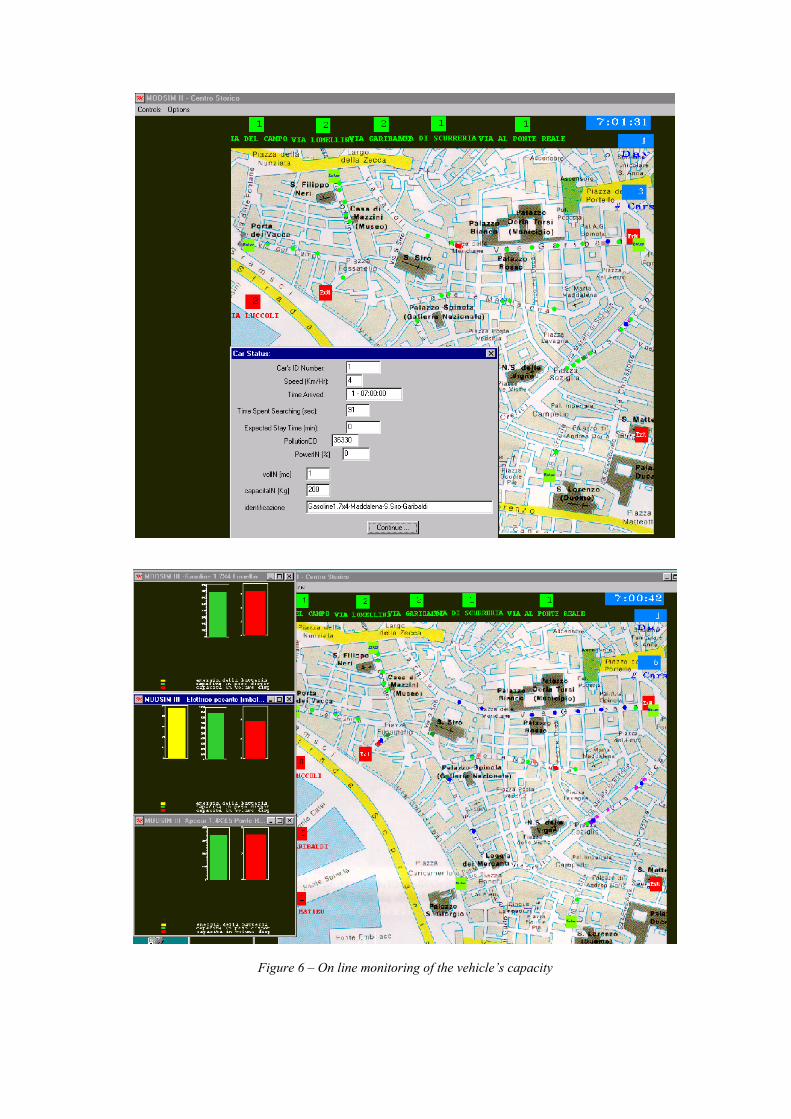
Figure 6 – On line monitoring of the vehicle’s capacity
Acknowledgement The Directorate for Mobility, Transport and Parking of the Municipality of Genoa and CIVIS European Project are gratefully acknowledged.
References [Cep98] Cepolina E.M. "Study of transport systems in
restricted traffic zones" Genoa University Faculty of Engineering, 1998.
[Cep99] Cepolina E.M. “OO environment for urban traffic microsimulation”, The International Workshop on Harbour, Maritime & Logistics Modelling and Simulation HMS99, 1999, Genoa, Italy, pp. 335-340.
[CFR85]Chapleau, Ferland, Rousseau, “Clustering for routing in densely populated areas”, European Journal of Operational Reasearch 20 (1985), 48-57, Elsevier Science Publishets B.V.
[CGM01]Carnevali C., Genova R., Mazzucchelli M., Sasso A. “Metodologie per la pianificazione di reti di TPL con veicoli elettrici a batteria”, Nuove tecnologie e metodologie per la trazione elettrica – Torino; 2 Aprile 2001.
[Chr95] Christofides N. (1995) Vehicle routing in “The travelling salesman Problem”, Lawler, Lenstra, Rinnooy Kan and Shmoys (eds.), Wiley, New York, pp. 431-448.
[CIVIS]http://www.comune.genova.it/ambiente/civis/startpage.htm
[DFF80] Dulac G., Ferland J.A., Forges P.A. “School bus routes generator in urban surroundings”, Compute and Operation Research 7 (1980) 199-213.
[DPT98]Dellaert F., Pomerleau D., Thorpe C., 1998 "Model–Based Car Tracking with a Road-Follower" In Proceedings of the international Conference on Robotics & Automation (Leuven, Belgium, May 1998), IEEE, pp 1889-189.
[EGG90] Eggleston H.S., Gaudioso D., Gorrisen N., Journard R., Rijkeboer R.C., Samaras Z., Zierock K.H., 1991 "CORINAIR Working Group on Emission Factors for calculating 1990 Emissions from Road traffic" In Commission of the European Communities, DG XI, Brusseles.
[FrG97] Franklin F. and Graesser A. 1997 „Is it an agent, or just a program?“ In Intelligent Agents III (LNAI Vol. 1193), J.P.Muller; M.Wooldridge; and N. Jennings, eds, 21-36.
[JeW95] Jennings and Wooldridge 1995 “Intelligent Agents: Theory and practice”. In The Knowledge Engineering Review, Volume 10, No2, 115-152.
[JSW98]Jenning N., Sycara K. and Wooldridge M. 1998 “A Roadmap of Agent Research and Development” In Autonomous Agents and Multiagent Systems, Vol.1, 7-38.