master–slave synchronization of lorenz systems using a single controller
TRANSCRIPT
Chaos, Solitons and Fractals 41 (2009) 2575–2580
Contents lists available at ScienceDirect
Chaos, Solitons and Fractals
journal homepage: www.elsevier .com/locate /chaos
Master–slave synchronization of Lorenz systems using a single controller
Servilia Oancea a, Florin Grosu b, Anca Lazar c, Ioan Grosu c,*
a Department of Biophysics, University ‘‘I.Ionescu de la Brad”, Iasi, Romaniab Faculty of Medicine, ‘‘L. Blaga” University, Sibiu, Romaniac Faculty of Bioengineering, University of Medicine and Pharmacy, Iasi, Romania
a r t i c l e i n f o
Article history:Accepted 22 September 2008
Communicated by Prof. L. Marek-Crnjac
0960-0779/$ - see front matter � 2008 Elsevier Ltddoi:10.1016/j.chaos.2008.09.038
* Corresponding author.E-mail address: [email protected] (I. Grosu).
a b s t r a c t
A single controller for synchronization of two Lorenz systems is obtained by using Lyapu-nov function. Numerical results are given for the all three cases with one controller in eachequation. Controller contains two or three variables of the master system.
� 2008 Elsevier Ltd. All rights reserved.
1. Introduction
Synchronization of nonlinear systems is a challenging task for several points of view. One of them is to understand whythe synchronization occurs in different branches of physics, chemistry and biology [4,13,17,19]. Another one is to design thecoupling in order to obtain synchronization. This can be done by (i) using a variable of the driver (master) in the receiver(slave) [7,16] or by (ii) using a suitable feedback coupling between the driver(master) and the receiver (slave). The controlengineering community use synchronization for designing an observer [14]. After the paper by Pecora and Carroll [16] manyresults have been reported, mainly by proposing a feasible simple coupling term and numerically obtaining the proper valuesof the coupling parameters. A general rigurous method has been proposed by Brown and Rulkov [1].
Another general method [5] is based on Open-Plus-Closed-Loop (OPCL) strategy [8]. It has been used for synchronizationof two Chua circuits [9], for the synchronization of two FitzHugh–Nagumo oscillators [3] for the synchronization of theSprott’s chaotic systems [10,15] and for the parameter estimation from chaotic time series [6]. Recently, other new and gen-eral methods have been published [11,12,20–22].
It is desirable that the coupling term to be as simple as possible.Let us consider a master system
dX=dt ¼ FðXÞ X 2 Rn ð1Þ
and the slave
dx=dt ¼ FðxÞ ð2Þ
The simplest coupling is an additive term Kj(xi � Xi) in the equation ‘‘j” of the slave system.Several numerical results have been reported but no general startegy. The next one is Ki(Xi)(xi � Xi) one variable gain term
in equation ‘‘i”. Sometimes this is possible when the nonlinearity is simple [13]. In general OPCL strategy [5,11] offers a cou-pling term that is more or less complicated depending on the structure of the system. For some systems the OPCL synchro-nization offers a single controller but this is possible when the nonlinearity is present in one term and a single variable isinvolved in it [8].
Lorenz system contains two nonlinear terms with all three variables in them. This is why OPCL synchronization for Lorenzsystems [5] is obtained with four terms in two equations that looks as complicated. A robust synchronization for Lorenz andRossler systems was proposed in [18].
. All rights reserved.
2576 S. Oancea et al. / Chaos, Solitons and Fractals 41 (2009) 2575–2580
Synchronization by using a single controller was proposed in [2] by taking into account the dimensions of the attractor inphase space. Here, we try to find single controller couplings for the Lorenz system by using only the Lyapunov function andassuring a negative value of its time derivative.
The rest of the paper is organized as follows: Section 2 contains the detailed calculations for the Lyapunov function andthe single controller and numerical results. The final remarks and conclusions are presented in Section 3.
2. A single controller for synchronization of the Lorenz systems
We consider the master Lorenz system:
dX1=dt ¼ sð�X1 þ X2ÞdX2=dt ¼ rX1 � X2 � X1X3
dX3=dt ¼ X1X2 � bX3
ð3Þ
with (s, r, b) values that assures the chaotic behavior and the slave system:
dx1=dt ¼ sð�x1 þ x2Þ þ u1
dx2=dt ¼ rx1 � x2 � x1x3 þ u2
dx3=dt ¼ x1x2 � bx3 þ u3
ð4Þ
where u = (u1, u2, u3)T is a controller in all three equations.For the error vector e = x � X we have:
de1=dt ¼ sð�e1 þ e2Þ þ u1
de2=dt ¼ re1 � e2 � e1e3 � e1X3 � e3X1 þ u2
de3=dt ¼ e1e2 þ e1X2 þ e2X1 � be3 þ u3
ð5Þ
The Lyapunov function:
L ¼ ðe21 þ e2
1 þ e23Þ=2 ð6Þ
has the derivative:
dL=dt ¼ e1½sð�e1 þ e2Þ þ u1� þ e2½re1 � e2 � e1e3 � e1X3 � e3X1 þ u2� þ e3½ðe1e2 þ e1ÞX2 þ e2X1 � be3 þ u3� ð7Þ
A trivial choice of u = (u1, u2, u3)T is:
u1 ¼ �p21e1 � sð�e1 þ e2Þ
u2 ¼ �p22e2 � ½re1 � e2 � e1e3 � e1X3 � e3X1�
u3 ¼ �p23e3 � ½e1e2 þ e1X2 þ e2X1 � be3�
ð8Þ
In this case (7) becomes:
dL=dt ¼ �p21e2
1 � p22e2
2 � p23e2
3 < 0 ð9Þ
The advantage of the above coupling is that the synchronization is achieved from any initial conditions of the driver (master)and receiver (slave). The OPCL synchronization can be obtained just for kx(0)-X(0)k small enough [5,11]. In the following wefind just one controller in the three cases.
(1) u2 = 0, u3 = 0; (2) u1 = 0, u3 = 0; (3) u1 = 0, u2 = 0
2.1. Case u2 = 0 and u3 = 0
In this case (7) can be written:
dL=dt ¼ �se21 � e2
2 þ ðr þ sÞe1e2 � be23 þ p1e1e2 ð10Þ
if we choose
u1 ¼ e2X3 � e3X2 þ p1e2 ð11Þ
or
dL=dt ¼ �se21 � e2
2 þ ðr þ sÞe1e2 � be23 þ p01e2
1 ð12Þ
if we choose
u01 ¼ e2X3 � e3X2 þ p01e1 ð13Þ
S. Oancea et al. / Chaos, Solitons and Fractals 41 (2009) 2575–2580 2577
Now we need to determine p1 in order that (10) to be negative (case 2.1.1 below) and p01 in order that (12) is negative (case2.1.2 below).
2.1.1. Case 2.1.1 The case dL/dt < 0 in Eq. (10) is negativeFrom (10) we have:
Fig. 1.(3)).
dL=dt ¼ �se21 � e2
2 þ ðr þ sþ p1Þe1e2 � be23 < 0 ð14Þ
when
ðr þ sþ p1Þ2 � 4s < 0 ð15Þ
or
�2ffiffi
sp� ðr þ sÞ < p1 < 2
ffiffi
sp� ðr þ sÞ ð16Þ
We can see that p1 = �(r + s) is a good numerical value. For r = 30 and s = 10, b = 8/3 p1 = �40 the slave system becomes:
dx1=dt ¼ �10x1 þ 10x2 þ u1
dx2=dt ¼ 30x1 � x2 � x1x3
dx3=dt ¼ x1x2 � 8=3x3
u1 ¼ e2X3 � e3X2 � 40ðx2 � X2Þ
ð17Þ
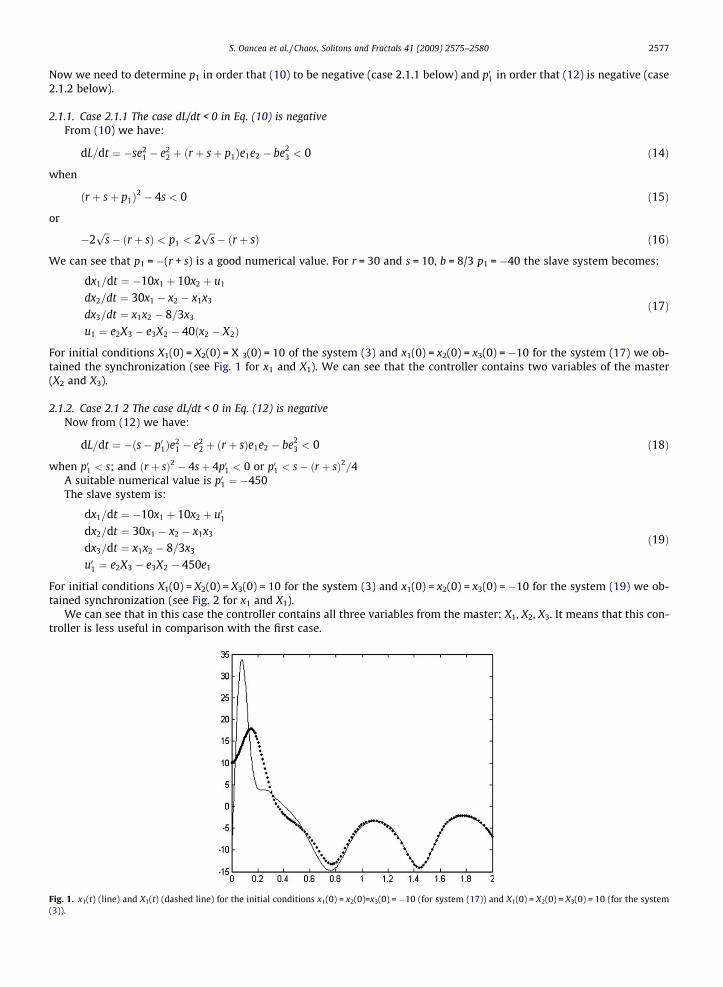
For initial conditions X1(0) = X2(0) = X 3(0) = 10 of the system (3) and x1(0) = x2(0) = x3(0) = �10 for the system (17) we ob-tained the synchronization (see Fig. 1 for x1 and X1). We can see that the controller contains two variables of the master(X2 and X3).
2.1.2. Case 2.1 2 The case dL/dt < 0 in Eq. (12) is negativeNow from (12) we have:
dL=dt ¼ �ðs� p01Þe21 � e2
2 þ ðr þ sÞe1e2 � be23 < 0 ð18Þ
when p01 < s; and ðr þ sÞ2 � 4sþ 4p01 < 0 or p01 < s� ðr þ sÞ2=4A suitable numerical value is p01 ¼ �450The slave system is:
dx1=dt ¼ �10x1 þ 10x2 þ u01dx2=dt ¼ 30x1 � x2 � x1x3
dx3=dt ¼ x1x2 � 8=3x3
u01 ¼ e2X3 � e3X2 � 450e1
ð19Þ
For initial conditions X1(0) = X2(0) = X3(0) = 10 for the system (3) and x1(0) = x2(0) = x3(0) = �10 for the system (19) we ob-tained synchronization (see Fig. 2 for x1 and X1).
We can see that in this case the controller contains all three variables from the master: X1, X2, X3. It means that this con-troller is less useful in comparison with the first case.
x1(t) (line) and X1(t) (dashed line) for the initial conditions x1(0) = x2(0)=x3(0) = �10 (for system (17)) and X1(0) = X2(0) = X3(0) = 10 (for the system
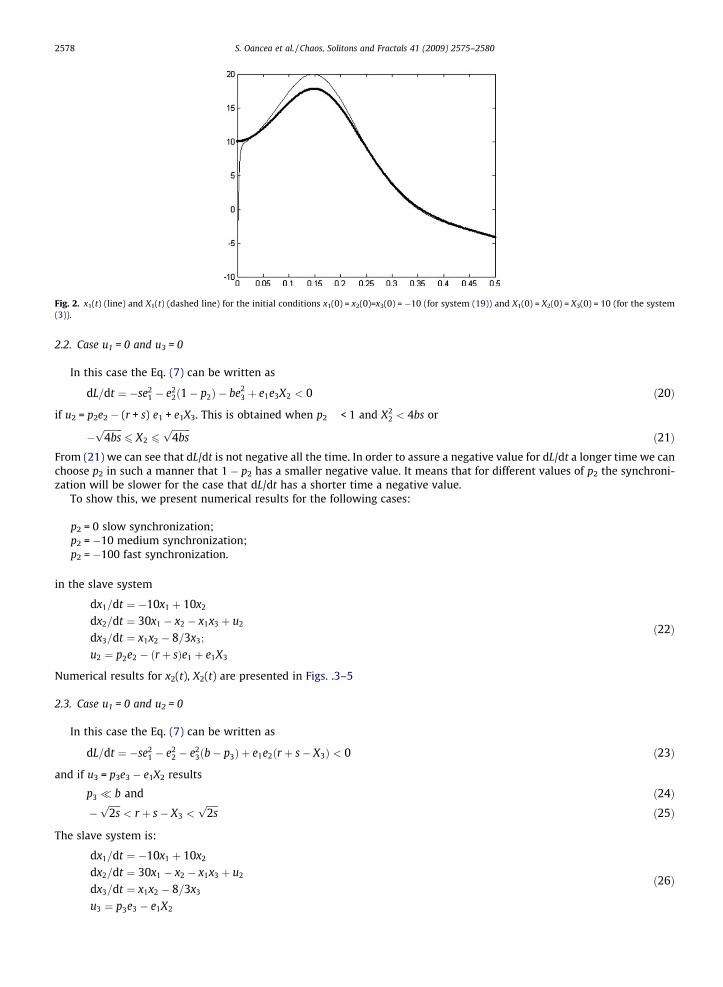
Fig. 2. x1(t) (line) and X1(t) (dashed line) for the initial conditions x1(0) = x2(0)=x3(0) = �10 (for system (19)) and X1(0) = X2(0) = X3(0) = 10 (for the system(3)).
2578 S. Oancea et al. / Chaos, Solitons and Fractals 41 (2009) 2575–2580
2.2. Case u1 = 0 and u3 = 0
In this case the Eq. (7) can be written as
dL=dt ¼ �se21 � e2
2ð1� p2Þ � be23 þ e1e3X2 < 0 ð20Þ
if u2 = p2e2 � (r + s) e1 + e1X3. This is obtained when p2 < 1 and X22 < 4bs or
�ffiffiffiffiffiffiffiffi
4bsp
6 X2 6ffiffiffiffiffiffiffiffi
4bsp
ð21Þ
From (21) we can see that dL/dt is not negative all the time. In order to assure a negative value for dL/dt a longer time we canchoose p2 in such a manner that 1 � p2 has a smaller negative value. It means that for different values of p2 the synchroni-zation will be slower for the case that dL/dt has a shorter time a negative value.To show this, we present numerical results for the following cases:
p2 = 0 slow synchronization;p2 = �10 medium synchronization;p2 = �100 fast synchronization.
in the slave system
dx1=dt ¼ �10x1 þ 10x2
dx2=dt ¼ 30x1 � x2 � x1x3 þ u2
dx3=dt ¼ x1x2 � 8=3x3;
u2 ¼ p2e2 � ðr þ sÞe1 þ e1X3
ð22Þ
Numerical results for x2(t), X2(t) are presented in Figs. .3–5
2.3. Case u1 = 0 and u2 = 0
In this case the Eq. (7) can be written as
dL=dt ¼ �se21 � e2
2 � e23ðb� p3Þ þ e1e2ðr þ s� X3Þ < 0 ð23Þ
and if u3 = p3e3 � e1X2 results
p3 � b and ð24Þ�
ffiffiffiffiffi
2sp
< r þ s� X3 <ffiffiffiffiffi
2sp
ð25Þ
The slave system is:
dx1=dt ¼ �10x1 þ 10x2
dx2=dt ¼ 30x1 � x2 � x1x3 þ u2
dx3=dt ¼ x1x2 � 8=3x3
u3 ¼ p3e3 � e1X2
ð26Þ
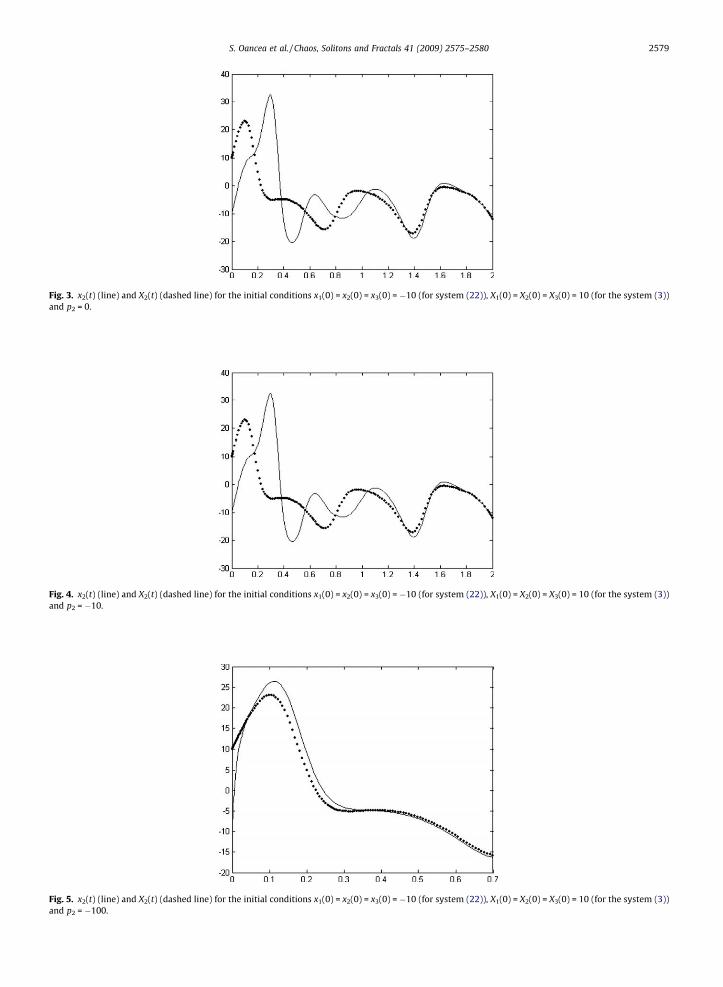
Fig. 3. x2(t) (line) and X2(t) (dashed line) for the initial conditions x1(0) = x2(0) = x3(0) = �10 (for system (22)), X1(0) = X2(0) = X3(0) = 10 (for the system (3))and p2 = 0.
Fig. 4. x2(t) (line) and X2(t) (dashed line) for the initial conditions x1(0) = x2(0) = x3(0) = �10 (for system (22)), X1(0) = X2(0) = X3(0) = 10 (for the system (3))and p2 = �10.
Fig. 5. x2(t) (line) and X2(t) (dashed line) for the initial conditions x1(0) = x2(0) = x3(0) = �10 (for system (22)), X1(0) = X2(0) = X3(0) = 10 (for the system (3))and p2 = �100.
S. Oancea et al. / Chaos, Solitons and Fractals 41 (2009) 2575–2580 2579
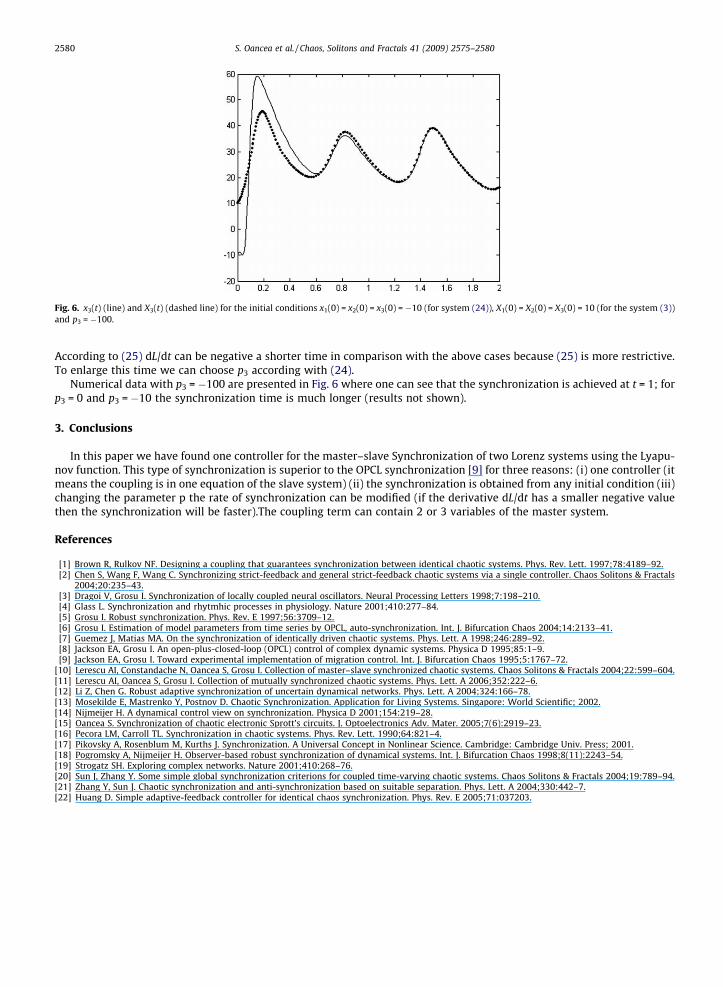
Fig. 6. x3(t) (line) and X3(t) (dashed line) for the initial conditions x1(0) = x2(0) = x3(0) = �10 (for system (24)), X1(0) = X2(0) = X3(0) = 10 (for the system (3))and p3 = �100.
2580 S. Oancea et al. / Chaos, Solitons and Fractals 41 (2009) 2575–2580
According to (25) dL/dt can be negative a shorter time in comparison with the above cases because (25) is more restrictive.To enlarge this time we can choose p3 according with (24).
Numerical data with p3 = �100 are presented in Fig. 6 where one can see that the synchronization is achieved at t = 1; forp3 = 0 and p3 = �10 the synchronization time is much longer (results not shown).
3. Conclusions
In this paper we have found one controller for the master–slave Synchronization of two Lorenz systems using the Lyapu-nov function. This type of synchronization is superior to the OPCL synchronization [9] for three reasons: (i) one controller (itmeans the coupling is in one equation of the slave system) (ii) the synchronization is obtained from any initial condition (iii)changing the parameter p the rate of synchronization can be modified (if the derivative dL/dt has a smaller negative valuethen the synchronization will be faster).The coupling term can contain 2 or 3 variables of the master system.
References
[1] Brown R, Rulkov NF. Designing a coupling that guarantees synchronization between identical chaotic systems. Phys. Rev. Lett. 1997;78:4189–92.[2] Chen S, Wang F, Wang C. Synchronizing strict-feedback and general strict-feedback chaotic systems via a single controller. Chaos Solitons & Fractals
2004;20:235–43.[3] Dragoi V, Grosu I. Synchronization of locally coupled neural oscillators. Neural Processing Letters 1998;7:198–210.[4] Glass L. Synchronization and rhytmhic processes in physiology. Nature 2001;410:277–84.[5] Grosu I. Robust synchronization. Phys. Rev. E 1997;56:3709–12.[6] Grosu I. Estimation of model parameters from time series by OPCL, auto-synchronization. Int. J. Bifurcation Chaos 2004;14:2133–41.[7] Guemez J, Matias MA. On the synchronization of identically driven chaotic systems. Phys. Lett. A 1998;246:289–92.[8] Jackson EA, Grosu I. An open-plus-closed-loop (OPCL) control of complex dynamic systems. Physica D 1995;85:1–9.[9] Jackson EA, Grosu I. Toward experimental implementation of migration control. Int. J. Bifurcation Chaos 1995;5:1767–72.
[10] Lerescu AI, Constandache N, Oancea S, Grosu I. Collection of master–slave synchronized chaotic systems. Chaos Solitons & Fractals 2004;22:599–604.[11] Lerescu AI, Oancea S, Grosu I. Collection of mutually synchronized chaotic systems. Phys. Lett. A 2006;352:222–6.[12] Li Z, Chen G. Robust adaptive synchronization of uncertain dynamical networks. Phys. Lett. A 2004;324:166–78.[13] Mosekilde E, Mastrenko Y, Postnov D. Chaotic Synchronization. Application for Living Systems. Singapore: World Scientific; 2002.[14] Nijmeijer H. A dynamical control view on synchronization. Physica D 2001;154:219–28.[15] Oancea S. Synchronization of chaotic electronic Sprott’s circuits. J. Optoelectronics Adv. Mater. 2005;7(6):2919–23.[16] Pecora LM, Carroll TL. Synchronization in chaotic systems. Phys. Rev. Lett. 1990;64:821–4.[17] Pikovsky A, Rosenblum M, Kurths J. Synchronization. A Universal Concept in Nonlinear Science. Cambridge: Cambridge Univ. Press; 2001.[18] Pogromsky A, Nijmeijer H. Observer-based robust synchronization of dynamical systems. Int. J. Bifurcation Chaos 1998;8(11):2243–54.[19] Strogatz SH. Exploring complex networks. Nature 2001;410:268–76.[20] Sun J, Zhang Y. Some simple global synchronization criterions for coupled time-varying chaotic systems. Chaos Solitons & Fractals 2004;19:789–94.[21] Zhang Y, Sun J. Chaotic synchronization and anti-synchronization based on suitable separation. Phys. Lett. A 2004;330:442–7.[22] Huang D. Simple adaptive-feedback controller for identical chaos synchronization. Phys. Rev. E 2005;71:037203.