mÁquinas y mecanismos c u a rta ed ic ió n
TRANSCRIPT

J
M Á Q U I N A S Y M E C A N I S M O S
C u a rta ed ic ión
David H. Myszka
A L W A Y S L E A R N I N G P E A R S O Nwww.FreeLibros.me

www.FreeLibros.me

MÁQUINAS Y MECANISMOS
Cuarta edición
David H. MyszkaJniversityofDayton
T ra d u c c ió n
Antonio Enríquez B ritoT raductor e s p e c ia lis ta e n in ge n ie ría m ecán ica
R e v is ió n té c n ic a
Sergio Saldaña Sánchez Ángel Hernández Fernández
Escuela S uperio r de Ingen ie ría M ecánica y E léctrica
U n idad P ro fes iona l Zaca tenco
h s t itu to P o lité cn ico N ac ion a l
México
Horacio Ahuett GarzaD epartam en to de Ingen ie ría M ecánica
In s titu to Tecno lógico y d e E s tu d io s S uperiores de M onterrey C am pus M onterrey
México
PEARSON
www.FreeLibros.me
____________ / f t i t» de caialogación bibbográlV:T~
MYS/KA, DAVID II.
Máquina* y n*Cuarta edición
PEARSON EDUCACIÓN. México. 2012
ISBN: 978407-32-1215-1 Arci! Ingeniería
Formato: 21 • 27 cm Páginas: 384
Authorized translation from ihc English language edition, entitled MACHINES & M ECIIAN ISM S: APPLIED KINEMATIC ANALY- SIS, 4 * Edilion. by David M yxka , p ib lish ed by Pearson Education. I n c . pub tsh in g as Prentice Hall. Copyright © 2012. AQ rights resened.ISBN 9780132157803
Traducción autorizada de la edición en idiom a inglés, titu lada M AC H IN ES& M EC H ANISM S: APPLIED KINEM AH C ANALYSIS. 4* edición por David Myszka. publicada p o r Pearson Education, I n c . publicada com o FYentice Hall. Copyright © 2012. Todos los derechos reservados.
Esta ed id ó n en español e s la ún ica autorizada.
Edición en españolDirección Educación Superior: Mario ContreíasEditor sponsor: Luis M. C ruz Castillo
luis.cnizepearson.com Editor de desarrollo: Felipe H ernández CarrascoSupervisor de producción: Enrique Trejo HernándezGerencia editorial
Educadón Superior Latinoamérica: Marisa de Anta
CUARTA EDICIÓN, 2012
D.R. © 2012 por Pearson Educación de México, S.A. de CV .A tlK om ulco 500-5o. piso Col. Industrial Atoto53519, Naucalpan de luárez, Estado de México
C ám ara Nacional de la Industria Editorial M exicana. Reg. núm . 1031.
Reservados todos los derechos. N i la totalidad n i parte de esta publicación pueden reproducirse, registrarse o transm itirse, por un sistem a de recuperación de inform ación, en ninguna form a n i por ningún m edio, sea electrónico, mecánico, fotoqulmico. m agnético o electroóptico, por fotocopia, grabación o cualquier o tro, sin perm iso previo p o r escrito del editor.
El préstam o, alquiler o cualquier o tra form a de cesión de uso de este ejem plar requerirá tam bién la autorización del ed ito r o d e : representantes.
ISBN: 978-607-32-1215-1ISBN e-book: 978407-32-1216-8ISBN e-chapten 978-607-32-1217-5
Impreso en M éxico. Printed in Mocito.1 2 3 4 5 6 7 8 9 0 - 15 14 13 12
PEARSONw w w .p e a rs o n e n e s p a fto l.c o m ISBN: 978-607-32-1215-1
www.FreeLibros.me

PREFACIO
B propósito d e este libro es ofrecer las técnicas necesarias p a ra estu d ia r el m ovim iento de las m áquinas. E l tex to se enfoca en la aplicación de teorías cinem áticas a m aqu inaria del m u n d o real. A dem ás, in te n ta c e rra r la b recha e n tre el e s tu d io teó rico de la c inem ática y la aplicación a m ecanism os prácticos. Los estudiantes q u e term inen u n c u rso basado en este libro serán capaces de determ inar las características del m ovim iento d e u n a m áquina. Los tem as q u e se presentan en esta o b ra son fundam entales en el proceso de diserto de m áquinas, en ta n to q u e deberían realizarse análisis co n b ase e n co n cep to s d e diserto para o p tim iz a r el m ovim iento de u n a m áquina.
Esta c u a r ta ed ic ión in c o rp o ra b u en a p a r te d e la retroali- m en tac ió n recibida de los profesores y estud ian tes q u e usaron las tr e s p r im e ra s ediciones. Entre las m ejoras q u e incluye esta edición destacan las siguientes: u n a sección in tro d u c to ria a los m ecan ism os de p ro p ó sito s especiales; a m p liac ió n de las d e scripciones de las p ro p ied ad es cinem áticas, p a ra defin irlas co n m ay o r precisión; iden tificación clara d e las can tidades vectoriales p o r m ed io d e n o tac ió n en negritas; gráficas d e tiem p o ; pre se n ta d ó n d e m éto d o s anahtico-sintéticos; tab las q u e describen el m ovim iento d e seguidores de levas, y u n a tabla están d ar q u e se u tiliza p a ra se leccionar el paso d e cadena . S e rev isa ro n los p rob lem as q u e aparecen a l final de cada cap itu lo y, adem ás, se incluyeron m uchos p ro b lem as nuevos.
Se espera q u e los estud ian tes q u e u tilicen este lib ro hayan cursado d ib u jo técnico, álgebra a nivel universitario y tr ig o n o m etría. Si b ien se m encionan conceptos de cálculo e lem en ta l n o se requiere q u e el es tud ian te haya cu rsado cálculo. A sim ism o, serán ú tile s lo s c o n o c im ie n to s de vectores, m ecán ica y so ftw are de aplicación co m o hojas d e cálculo. S in em bargo, estos conceptos tam bién se explican en el libro.
El en fo q u e al ap lica r desarro llos teóricos a p rob lem as p rácticos es consisten te co n la filosofía de p rog ram as de tecnología in g en ie ril. E ste l ib ro se o r ie n ta b ás icam en te a lo s p rog ram as relacionados co n m ecán ica y m anufactu ra , y p u ed e u tilizarse en p rogram as ta n to para licencia tu ra co m o p a ra capacitación.
Las siguientes so n a lgunas de las características distintivas de este libro:
1. Ilu strac iones y bocetos d e m áquinas q u e incluyen los m ecanism os q u e se estudian e n el texto.
2. El en fo q u e se cen tra en b aplicación de las teo rías cinem áticas a lo s m ecanism os com unes y prácticos.
3. En el análisis de lo s m ecanism os se em plean m étodos analíticos y técnicas gráficas.
4. C on frecuencia se u tilizan ejercicios en W órldng M odel*. u n paquete d e softw are d inám ico d isp o n ib le com ercial - m en te (véase la sección 2.3 d e la p ág ina 32 p a ra consu ltar m ay o r in form ación). En el lib ro se incluyen tu to ria les y p rob lem as q u e u tilizan este softw are.
5. A lo largo d e la o b ra se incluyen e ilu stran sugerencias p a ra im p lem en ta r las técn icas gráficas d e sistem as de diserto asistidos p o r co m p u tad o ra (cad).
6 . C ada cap itu lo term ina , al m enos, co n u n estud io de caso. C ad a u n o ilu stra u n m ecan ism o q u e se utiliza en equipo industria l, y desafia al es tu d ia n te a analizard fundam ento racional d e trás del diserto y a sugerir mejoras.
7 . Se p resen tan m étodos de análisis de fuerzas d e m ecanism os estáticos y dinám icos.
8 . D espués de cada concepto im p o rta n te se incluye u n p ro blem a de e jem plo q u e ilu s tra su aplicación.
9 . Los p rob lem as de e jem plo com ienzan c o n la in troducción de u n a m áqu ina real q u e depende del m ecan ism o q u e se analiza.
10. N um erosos p rob lem as q u e se p resen tan a l final d e los cap ítu los son consistentes co n el enfoque de aplicación del texto. Todos lo s concep tos in tro d u c id o s en el capitulo tienen al m en o s u n p rob lem a asociado, b m ayoría de los cuales in d u y e n b m áq u in a q u e depende del m ecan ism o que se analiza.
11. S iem pre q u e sea p e rtin en te , a l final d e lo s cap ítu los se in d u y en p ro b lem as q u e u tilizan los m étodos analíticos, y q u e son lo s m ás adecuados para d ispositivos program ables (calculadoras, hojas de cálculo, softw are de m atem áticas, etcétera).
In id a lm en te , desarro llé este lib ro de tex to después d e im partir el cu rso d e m ecanism os d u ra n te varios sem estres, lo que m e p e rm itió c o n s ta ta r q u e lo s e s tu d b n te s n o siem pre d istin- g u b n b s ap licac iones p rác ticas d e l m aterial. P ara ello , d esarrollé u n g ran énfasis en los p rob lem as d e e s tu d io d e caso y, de hecho, ¡ n id a l» cada d a s e ex p o n ien d o uno . L os e s tu d b n te s se referían a ello c o m o d "m ecanism o del d b “. C onsid ero q u e esto fu e u n a excelen te o p o rtu n id a d p a ra cen tra r b a te n c ió n en é fu n d o n am ien to de las m áquinas; adem ás d e q u e p ro m u ev e el d iá lo g o y c re a u n a c o m u n id a d de a p re n d iz a je e n el a u b de dases.
R>r ú ltim o, b finalidad d e cualqu ier libro de texto es guiar a lo s estud ian tes a través de u n a ex p e rien d a de aprendizaje de u n a m an era eficaz. Espero sinceram en te q u e este lib ro cum pla con su ¡n te n d ó n . D oy la b ienven ida a to e b s b s sugerencias y los com en ta rio s q u e se envíen a dm yszkaflhidayton.edu.
AGRADECIM IENTOS
Q uiero expresar m i g ra titu d a los revisores d e este lib ro p o r sus com en ta rio s y sugerenc ias: D ave Brock, K a b m a z o o Vallcy (b m m u n ity College; l a u r a Calswell, University o f C in d n n a ti; C harles D rake, E erris S tate University; L ubam bala K abengeb, Lhiversity o f N o rth C aro lina at C harlo tte ; S un g Kim , P iedm ont Technical C ollege; M ic h ae l). Rider, O h io N o rth e rn University; a n d C era ld W eism an, University o f V erm ont.
Itave Myszka
www.FreeLibros.me

C O N T E N ID O
1 I n tro d u c c ió n a lo s m e c a n is m o s y a la c in e m á t ic a 1
O b je tiv o s 1
1.1 In tro d u c c ió n 1
1.2 M á q u in as y m e c a n ism o s 1
1.3 C in e m á tic a 2
1.4 T e rm in o lo g ía de m e c a n ism o s 2
1.5 D iag ram as c in e m á tic o s 4
1.6 Invers ión c in e m á tic a 8
1.7 M ovilidad 8
1.7.1 E cu ac ió n d e G ru e b le r 8
1.7.2 A c tu a d o re se im p u lso re s 12
1.8 E slabones y u n io n e s u sad o s c o m ú n m e n te 14
1.8.1 M an ivela excén trica 14
1.8.2 U n ió n d e p e rn o e n u n a r a n u ra 14
1.8.3 U n ió n d e to rn illo 15
1.9 C aso s especia les de la ecuac ión de m o v ilid a d 16
1.9.1 U n io n es co in c id en tes 16
1.9.2 Excepciones d e la ecuac ión d e G ru e b le r 18
1.9.3 G ra d o s de lib e r ta d in ac tiv o s 18
1.10 E l m ecan ism o d e c u a tro b a r ra s 19
1.10.1 C r ite r io d e G ra sh o f 19
1.10.2 D o b le m an iv e la 20
1.10.3 M a n iv c la -b a la n d n 20
1.10.4 D o b le b a la n c ín 2 0
1.10.5 M ecan ism o de p u n to d e c a m b io 20
1.10.6 T rip le b a la n c ín 20
1.11 M ecan ism o d e m a n iv e la -c o rre d e ra 22
1.12 M ecanism os p a ra p ro p ó sito s especia les 22
1.12.1 M ecanism os d e lín ea re c ta 22
1.12.2 M ecanism os d e p a ra le lo g ra m o 22
1.12.3 M ecanism os d e r e to m o rá p id o 23
1.12.4 M ecan ism o de y u g o escocés 23
1.13 T écn icas de aná lis is de m e c a n is m o s 23
1.13.1 T écn icas trad ic io n a lesde re p re se n ta c ió n g rá fica 24
1.13.2 S istem as d e C A D 24
1.13.3 T écn icas a n a lítica s 24
1.13.4 M é to d o s p o r c o m p u ta d o ra 24
P ro b le m a s 25
E stud ios de caso 29
2 C o n s t r u c c ió n d e m o d e lo s d e m e c a n is m o s e n c o m p u ta d o r a u s a n d o e l s o f tw a re w o r k in g m o d el® 31
O b je tiv o s 31
2.1 In tro d u c c ió n 31
2 .2 S im u lac ió n p o r c o m p u ta d o ra de m ecan ism o s 31
2 .3 A d q u is ic ió n d e l so ftw are w o rk in g m o d e l 32
2.4 U so d e w o rk in g m o d e l p a ra m o d e la r u n m e c a n ism o d e c u a tro b a r ra s 32
2 .5 U so d e w o rk in g m o d e l p a ra m o d e la ru n m e c a n ism o d e m a n iv c la -c o n c d e ra 37
P rob lem as 41
E stu d io s de caso 42
3 V e c to re s 43
O b je tiv o s 43
3.1 In tro d u c c ió n 43
3.2 Escalares y v e c to re s 43
3 .3 A nálisis vectorial g ráfico 43
3.4 T écn icas d e d ib u jo re q u e rid a s para el análisis se c to ria l g rá fic o 44
3 .5 C o n o c im ie n to re q u e r id o d e c a d p a ra d análisis v e c to ria l g rá fic o 44
3 .6 C o n o c im ien to s d e tr ig o n o m e tr ía req u e rid o s pura el aná lis is vectorial 44
3.6.1 T rián g u lo re c tá n g u lo 44
3.6.2 T rián g u lo o b lic u o 46
3 .7 M a n e jo de vec to res 48
3 .8 S u m a gráfica de vec to res ( + > ) 48
3 .9 S u m a an a lítica d e se c to re s ( + > ) : m é to d o del tr iá n g u lo 50
3.10 C o m p o n e n te s d e u n v e c to r 52
3.11 S u m a a n a lític a d e vectores ( + > ) : m é to d o de c o m p o n e n te s 53
3.12 Resta o su s tra c c ió n vec to ria l ( - > ) 55
3.13 S u stra c c ió n gráfica d e vec to res ( - > ) 55
www.FreeLibros.me
C on ten id o
3.14 Resta vecto rial an a lítica ( - > ) : m é to d o del t r iá n g u lo 57
3.15 Resta vec to ria l an a lítica ( - > ) : m é to d o de c o m p o n e n te s 59
3 .16 E cuaciones v ec to ria les 60
3.17 A p licación d e ecu ac io n e s sec to ria le s 62
3.18 D e te rm in ac ió n g rá fica d e m ag n itu d es vecto ria les 63
3 .19 D e te rm in a c ió n an a lítica de las m ag n itu d es vecto ria les 66
P ro b le m a s 67
B tu d io s d e caso 71
4 A n á lis is d e p o s ic ió n y d e s p la z a m ie n to 72
O bjetivos 72
4.1 In tro d u c c ió n 72
4.2 P o sic ió n 72
4.2.1 P osic ión d e u n p u n to 72
4.2.2 P o sic ió n angu la r d e u n e s la b ó n 72
4.2.3 P osic ión d e u n m e c a n ism o 73
4.3 D esp lazam ien to 73
4.3.1 D esp lazam ien to lin ea l 73
4.3.2 D esp lazam ien to a n g u la r 73
4.4 Análisis d e d esp lazam ien to 74
4.5 D esp lazam ien to : análisis g rá fic o 74
4.5.1 D esp lazam ien to d e u n s im p le e s lab ó n im p u lsa d o 74
4.5.2 D esp lazam ien to d e lo s eslabones im p u lsa d o s 75
4.6 Posición: m é to d o an a lítico 7 9
4.6.1 E cuaciones de a n á lis is d e posic ión en fo rm a cerrada p a ra u n a m in iv e la -c o rred e ra e n línea 81
4.6.2 E cuaciones d e análisis d e posic ión en fo rm a c e r ra d a para u n a m an iv e la -co rred e ra d e sc e n tra d o 84
4.6.3 E cuaciones d e p o sic ió n p a ra u n m ecan ism o c e rra d o de c u a tro b a r ra s 87
4.6.4 C ircu ito s d e u n m e c a n ism o d e c u a tro b a r ra s 87
4.7 P osiciones lím ite : aná lis is g rá fic o 87
4.8 P osiciones lim ite : m é to d o an a lítico 91
4.9 A ng u lo de tra n sm is ió n 93
4.10 C id o co m p le to : a n á lis is g rá fic o de p o s ic ió n 94
4.11 C id o co m p le to : aná lis is de la p o s ic ió n %
4.12 D iag ram as de d e sp la z a m ie n to 98
4.13 C urv as d e l a c o p lad o r 101
P ro b le m a s 101
E stud ios de c a s o 108
5 D is e ñ o d e m e c a n is m o s 109
O b je tiv o s 109
5.1 In tro d u cc ió n 109
5 .2 R azó n d e t ie m p o 109
5.3 D iag ram as d e t ie m p o 110
5 .4 D ise ñ o d e m ecan ism o sd e m a n iv d a -c o rre d e ra 113
5.4.1 M e can ism o d e m an iv e la -co rred e ra e n lín ea 113
5.4.2 M e can ism o d e m an iv e la -co rred e ra d e s c e n tra d o 114
5 .5 D ise ñ o d e m ecan ism o s de m an iv e la -b a lan c ín 115
5.6 D ise ñ o de m ecan ism o s de m an ivela-cep illo 117
5.7 M e can ism o p a ra m o v er u n e s la b ó n e n tre dos p o sic io n e s 118
5.7.1 S íntesis d e d o s p osic iones c o n u n es lab ó n q u e p iv o ta 118
5 .7 .2 S íntesis d e d o s p osic iones c o n u n ac o p lad o r de u n m e c a n ism o d e c u a tro b a r ra s 1 18
5.8 M e can ism o p a ra m o v e r u n e s la b ó n e n tre tres p o sic io n e s 119
5.9 D efectos de c ircu ito y d e ra m ific a c ió n 119
P ro b le m a s 120
E stud ios de c a s o 121
6 A n á lis is d e v e lo c id a d 123
O b je tiv o s 123
6.1 In tro d u c c ió n 123
6 .2 V elocidad lin ea l 123
6.2.1 V elocidad lineal de p u n to s irc tilín c o s 123
6.2.2 V elocidad lineal d e u n p u n to c u a lq u ie ra 124
6.2.3 Perfil de velocidad d e l m o v im ie n to lin ea l 124
6 .3 V elocidad de u n e s la b ó n 125
6 .4 R elación e n tre las velocidades lineal y a n g u la r 126
6 .5 V elocidad re la tiv a 128
6 .6 Análisis g ráfico de velocidad : m é to d o d e velocidad re la tiv a 130
6.6.1 P u n to s so b re es lab o n es restr in g id o s a ro tac ió n p u ra o a tra slac ió n rec tilínea 130
www.FreeLibros.me

ri C on ten id o
6 .6 .2 P u n to s e n genera l so b re u n e s la b ó n f lo ta n te 132
6 .6 .3 P u n to s co in c id en tes so b re eslabones d ife ren tes 135
6.7 Im a g e n d e v e lo c id ad 137
6.8 E stu d io an a lítico d e velocidad : m é to d o de la ve locidad re la tiv a 137
6 .9 S o lu c io n es a lgeb ra icas p a ra m ecan ism o s c o m u n e s 142
6.9.1 M e can ism o d e m an iv e la - c o rre d e ra 142
6 .9 .2 M e can ism o d e c u a tro b a r ra s 142
6 .10 C e n tro d e ro tac ió n in s ta n tá n e o 142
6.11 L ocalización de c e n tro s in s ta n tá n e o s 142
6.11.1 C e n tro s p rin c ip a le s 143
6.11.2 T eo rem a d e K ennedy 144
6.11.3 D iag ram a d e cen tro s in s ta n tá n e o s 144
6 .12 Análisis g rá fic o de velocidad : m é to d o del c e n tro in s ta n tá n e o 149
6.13 M é to d o an a lítico p a ra velocidad: m é to d o del c e n tro in s ta n tá n e o 152
6 .14 C urv as d e v e lo c id ad 155
6.14.1 D iferencia les g rá fic a s 157
6.14.2 D iferencia les n u m éricas 159
P ro b le m a s 161
E studios de caso 168
7 A n á lis is d e a c e le ra c ió n 170
O b je tiv o s 170
7.1 In tro d u c c ió n 170
7.2 A celerac ión lin ea l 170
7.2.1 A celerac ión lineal d e p u n to s q u e se m u e v e n e n lín ea rec ta 170
7 .2 .2 A celerac ión rec tilínea c o n s ta n te 171
7 .2 .3 A celerac ión y el p e rfil de velocidad 171
7 .2 .4 A celerac ión lin ea l d e u n p u n to e n g en e ra l 173
7.3 A celerac ión d e u n e s la b ó n 173
7.3.1 A celerac ión a n g u la r 173
7 .3 .2 A celerac ión a n g u la r c o n s ta n te 173
7.4 A celerac ión n o rm a l y ta n g en c ia l 174
7.4.1 A celerac ión ta n g en c ia l 174
7 .4 .2 A celerac ión n o rm a l 175
7 .4 .3 A celerac ión to ta l 175
7 .5 M o v im ien to re la tiv o 177
7.5.1 A celerac ión relativa 177
7 .5 .2 C o m p o n e n te s de la ace lerac ión re la tiv a 179
7 .6 A nálisis de ace le rac ió n re la tiva : m é to d o g rá fic o 181
7 .7 A nálisis de ace le rac ió n re la tiva : m é to d o a n a lít ic o 188
7 .8 Soluciones a lgeb ra icas d e m ecan ism o s c o m u n e s 190
7.8.1 M e can ism o de m an iv e la - c o rre d e ra 190
7.8.2 M e can ism o de c u a tro b a r ra s 191
7 .9 A celerac ión de u n p u n to e n g en e ra l so b re u n e s la b ó n f lo ta n te 191
7.10 Im ag en d e ace le rac ió n 196
7.11 A celerac ión de C o rio lis 197
7.12 M e can ism o s eq u iv a len tes 201
7.13 C u rv a s de a c e le ra c ió n 202
7.13.1 D iferenciales g rá ficas 202
7.13.2 D iferenciales n u m é ric a s 204
P rob lem as 206
E stu d io s de caso 213
8 A n á lis is d e m e c a n is m o s a s is t id o p o r c o m p u ta d o r a 215
O b je tiv o s 215
8.1 In tro d u c c ió n 215
8.2 H o jas de cá lcu lo 215
8 .3 P ro g ram as d e c ó m p u to d esa rro llad o s p o r e l u su a rio 221
8 3 .1 M e can ism o de m an iv e la -co rred e ra d e s c e n tra d o 221
8.3.2 M e can ism o de c u a tro b a r ra s 221
P rob lem as 222
E stu d io d e c a s o 222
9 L ev as: d is e ñ o y a n á l is i s c in e m á t ic o 223
O b je tiv o s 223
9.1 In tro d u c c ió n 223
9.2 T ip o s de levas 223
9 .3 T ip o s d e se g u id o re s 224
9.3.1 M o v im ien to del se g u id o r 224
9.3.2 P osic ión del s e g u id o r 224
9.3.3 F o rm a d d se g u id o r 225
9.4 M o v im ien to p rescrito d e l s e g u id o r 225
9.5 E squem as d e m o v im ie n to del s e g u id o r 227
9.5.1 V elocidad c o n s ta n te 228
9.5.2 A celeración c o n s tan te 228
9.5.3 M o v im ien to a r m ó n ic o 228
9.5.4 M o v im ien to cic lo idal 230
9.5.5 E squem as de m o v im ie n to c o m b in a d o 236
www.FreeLibros.me

C on ten id o rli
9.6 D iseno g rá fic o d e l perfil d e u n a le ra de d isc o 237
9.6.1 S egu ido r de cun a e n linea 237
9.6.2 S egu ido r de ro d illo e n lín ea 2389.6.3 S egu ido r de rod illo d e s c e n tra d o 239
9.6.4 S egu ido r de tra slac ió n co n cara p la n a 240
9 .6 .5 S egu ido r de ro d illo c o n p iv o te 2419.7 Á ng u lo de p re s ió n 242
9.8 L im itac io n es de d ise ñ o 243
9.9 D iseño an a lítico del perfil d e u n a leva d e d isc o 243
9.9.1 S egu ido r de c u ñ a 244
9.9.2 S egu ido r de ro d illo e n lín ea 246
9.9.3 S egu ido r de rod illo d e s c e n tra d o 249
9.9.4 S egu ido r de ca ra p la n a co n tra s la c ió n 249
9.9.5 S egu ido r de ro d illo c o n p iv o te 250
9.10 L evas c ilin d ric a s 251
9.10.1 D iseno g ráfico d e l perfil d e u n a leva c ilin d rica 251
9.10.2 D iseño analítico d d perfil d e u n a leva c ilin d rica 25!
9.11 E l m ecan ism o de G in e b ra 252
P ro b le m a s 254
Is tu d io s d e caso 258
10 E n g ra n e s : a n á l is is c in e m á tic o y se le c c ió n 260
O b je tiv o s 260
10.1 In tro d u c c ió n 260
10.2 T ip o s d e e n g ra n e s 261
10.3 T e rm in o lo g ía d e u n e n g ra n e re c to 262
10.4 Perfiles d e d ie n te s d e in v o lu ta 264
10.5 E ngranes e s tá n d a r 266
10.6 R elaciones d e lo s en g ran es a c o p la d o s 268
10.6.1 D istancia e n tre c e n tro s 268
10.6.2 R azón de c o n ta c to 269
10.6.3 In te rfe ren c ia 270
10.6.4 R ebaje 271
10.6.5 H o lg u ra ( ju e g o ) 272
10.6.6 A ng u lo d e p re s ió n de o p e ra c ió n 273
10.7 C in em á tica de u n e n g ra n e re c to 273
10.8 S elección d e u n e n g ra n e re c to 275
10.8.1 Paso d ia m e tra l 276
10.8.2 Á ng u lo d e p re s ió n 276
10.8.3 N ú m e ro de d ie n te s 276
10.9 C inem ática de la c rem a lle ra y e l p iñ ó n 281
10.10 C inem ática de u n e n g ra n e helico idal 282
10.11 C in em á tica de en g ran es c ó n ic o s 285
10.12 C in e m á tic a d e u n e n g ra n e s in f in 286
10.13 T ren es de e n g ra n e s 288
10.14 E n g ran es locos 290
10.15 T ren es de e n g ra n e s p la n e ta r io s 290
10.15.1 A nálisis d e e n g ra n e s p lan e ta rio s p o r su p e rp o s ic ió n 291
10.15.2 A nálisis p o r ecu ac ió n d e eng ranes p lan e ta rio s 293
P ro b le m a s 295
E stud ios de c a s o 299
11 T r a n s m is io n e s d e c o r re a y d e c a d e n a 302
O b je tiv o s 302
11.1 In tro d u c c ió n 302
11.2 C o rre a s 302
11.3 G e o m e tr ía d e la tr a n s m is ió n d e c o r re a 304
11.4 C in e m á tic a de u n a tra n sm is ió n de c o r re a 305
11.5 C a d e n a s 308
11.5.1 T ip o s d e cad en as 308
11 .52 P a so de c ad en a 309
11 .53 C a d en as m u ltitra m o s 309
11.5.4 R uedas d e n ta d a s (c a ta r in a s) 310
11.6 G e o m e tr ía de u n a tra n sm is ió n d e c ad en a 310
11.7 C in e m á tic a de la tra n sm is ió n de c ad en a 311
P ro b le m a s 313
E stud ios de c a s o 315
12 M e c a n is m o s d e t o m i l l o 3 1 6
O b je tiv o s 316
12.1 In tro d u c c ió n 316
12.2 C arac te rís tica s de las c u e rd a s 316
123 F o rm a s d e c u e rd a 316
12.3.1 C u e rd as un ificad as 317
12 .32 C u e rd as m é tr ic a s 317
12 .33 C u e rd as cu a d ra d a s 317
12.3.4 C u e rd a s acm é 317
12.4 T orn illos d e b o la s 317
12.5 A vance 317
12.6 C in em á tica d e to m illo s 318
12.7 Fuerzas y to rq u e s e n e l to m illo 322
12.8 T om illo s d ife ren c ia le s 324
12.9 T orn illos d e ta la d ro 325
P ro b le m a s 325
E stud ios de c a s o 328
www.FreeLibros.me

tíü C on ten id o
13 A n á lis is d e fu e rz a s e s tá t ic a s 330
O b je tiv o s 330
13.1 In tro d u c c ió n 330
13.2 F u e r a s 330
13.3 M om en to s y to rq u e s 330
13.4 Leyes del m o v im ie n to 333
13.5 D iag ram as d e c u e rp o lib re 333
13.5.1 E la b o ra c ió n de u n d ia g ra m a d e cu erp o lib re 333
13.5.2 D e te rm in a c ió n d e las fuerzas de c o n ta c to 333
13.6 E q u ilib rio e s tá t ic o 335
13.7 Análisis d e u n e le m e n to co n dos f u e r a s 335
13.8 F u e r a de fricc ió n de d e s liz a m ie n to 341
P ro b le m a s 343
E stud io d e caso 345
14 A n á lis is d e fu e rz a s d in á m ic a s 346
O b je tiv o s 346
14.1 In tro d u c c ió n 346
14.2 M asa y p e s o 346
14.3 C e n tro de g ra v e d a d 347
14.4 M o m e n to d e in e rd a 348
14.4.1 M o m e n to de in e rd a d e fo rm as b ás icas 348
14.4.2 R ad io de g iro 350
14.4.3 T eo rem a d e lo s e jes p a ra le lo s 350
14.4.4 C u e rp o s co m p u e s to s 351
14.4.5 M o m e n to de in e rd a : d e te rm in a c ió n e x p e r im e n ta l 352
14.5 F u e r a inercial 352
14.6 T o rq u c in e rd a l 357
P rob lem as 363
E stu d io d e caso 366
R e sp u e s ta s a p ro b le m a s p a re s se le c c io n a d o s 367
R e fe ren c ia s 370
In d ic e a n a lí t ic o 371
www.FreeLibros.me

C A P I T U L O
U N O
IN T R O D U C C IÓ N A LOS M ECA N ISM O S Y A LA CIN EM Á TIC A
O B J E T I V O S
Al term inar de estudiar este capitulo, el alum no *era capaz de:
I . E sp ita r la nctrridad del anáR*i* cinemátia» de lo*
2. Definir lo» componentes báucos que integm n un
3 . Elaborar el diagrama tinem álito de la villa de una máquina completa.
i Calcular el número de grado* de libertad en un mecanismo.
5 . Identificar un mecanismo de cuatro barras y clasificarlo de acuerdo con su posible movimiento.
6 . Identificar un m etan iuno de manivela-corredera.
1.1 IN TR O D U C C IÓ N
Im agine q u e fo rm a p a rte d e u n equipo de diserto y desarro llo . El equipo e s responsable del diserto de u n sistem a d e lim piadores para el p a rab risas d e u n autom óvil. El vehículo en cuestión es u n m odelo d ep o rtiv o co n linca aerod inám ica y el p a rab risas in d in ad o . D esde luego, el objetivo d e este sistem a d e lim piadores es rem over el a g u a y el p o lv o del parabrisas, p a ra b r in d a r una v isión clara a l c o n d u c to r. G en era lm en te lo a n te r io r se realiza deslizando u n p a r de lim piadores a través d e l cristal.
U na d e las p rim eras tareas del diserto consiste en establecer los m ovim ientos adecuados de los lim piadores. Los m ovim ientos d eb en se r su fiden tes para garan tizar q u e se lim pien las partes criticas del parabrisas. Ix>s rangos d e visión d e diferentes co n ductores se d e te rm in an m edian te estud ios estadísticos exhaustivos. Esta in fo rm a d ó n establece las p au tas del m ovim iento re
querido d e lo s lim piadores. Se habrán d e to m a r decisiones im portantes sob re s i el m o v im ien to d e los lim piadores q u e m ejor se ajusta al vehículo es en tándem o en sen tido opuesto . O tras decisiones se refieren al tam añ o de lo s ángulos d e lim pieza del lado del c o n d u c to r y del lado del pasajero, así co m o la u b ic a d ó n de los pivotes, l a figura 1.1 m uestra d co ncep to d e diserto co n un p a tró n d e m ovim ientos opuestos de los lim piadores.
U na vez q u e se estab lece el m ov im ien to deseado, se debe configurar d ensam ble de lo s co m p o n en tes para m over los lim piadores d e acu erd o co n el p a tró n d eg id o . Las activ idades posteriores in d u y en d análisis de o tro s aspectos del m ovim iento co m o la s in c ro n izad ó n y la tendencia a azotarse d e lo s lim p iadores. Para ta l sistem a, al igual q u e en las m áquinas, la co m p ren sión y el aná lis is d e l m o v im ien to so n ind ispensab les p a ra un (iindonam ien to adecuado. Estos tip o s y análisis del m ovim iento form an la parte m edu lar de este libro.
O tra tarea im portante en el diserto d e m aquinaria es b determ inación del efecto de las foerzas q u e actúan sobre la m áqu ina Tales foerzas definen el tipo de la foen te de p o te n d a q u e se re- q jie rc para operar la m áq u in a Las foerzas tam bién establecen b resistencia requerida de lo s com ponentes. El sistem a de lim p iadores, p o r ejemplo, debe resistir b fr ix ió n q u e se crea cu an d o se lim pia la savia q u e cayó sob re el parabrisas, luego d e que el a u tomóvil se estacionara d e tu jo de u n á rb o l Este tip o de análisis de foerzas es u n tem a fundam enta! en b parte final del libro.
1.2 M ÁQUINASY M ECANISM OS
Las m áquinas s o n d ispositivos q u e se u tilizan al m odificar, transm itir y d ir ig ir fuerzas para llevar a cab o u n objetivo esped- fico U na sie rra de cadena es u n a m áqu ina c o n o d d a q u e dirige foerzas h a d a la cadena co n la fina lidad de c o rta r m adera . Un rrreanismo e s u n a p a rte m ecán ica de u n a m áquina, cuy a fo n d ó n
www.FreeLibros.me

2 CAPITULO UNO
■ ¿La p la ta fo rm a está a salvo d e la tendencia a volcarse?
■ ¿C uálesdeben ser el tam añ o de la sección transversal y el m aterial p a ra q u e n o fallen las p ie rn as d e soporte?
La m ayoría de los m ecanism os se m ueven de tal fo rm a que sus p artes se m uev en en p lan o s paralelos. E n el dispositivo de b f ig u ra 1.2, s e u tilizan d o s m ecan ism o s idén ticos e n lados opuestos d e la p la ta fo rm a para efectos d e estabilidad . Sin e m bargo. el m ovim iento d e estos m ecanism os se d a en u n p la n o e s tr ic ta m e n te vertical. P o r consig u ien te , estos m ecan ism o s se conocen c o m o mecanismos p lanos p o rq u e su m ovim iento se lim ita a u n espacio b id im ensional. La m ayoría de los m ecanism os com erciales so n p lan o s y son el tem a p rincipal del libro.
f ig u r a 1.2 P lataform a d e a ltu ra ajustable. (C ortesía de A dvance Lifts).
e s tra n sm itir m ovim iento y fuerza d e u n a fuen te de po tencia a u n a salida. Es el co razó n de la m áqu ina . En la s ie rra de cadena, el m ecan ism o to m a la po tencia d e u n p eq u eñ o m o to r y la su m in istra en el ex trem o de c o rte d e la cadena.
La figura 1.2 ilu stra u n a p la ta fo rm a de a ltu ra aju stab le que se im p u lsa co n c ilin d ro s h id ráu lico s. Si b ie n se p o d r ía llam ar m áqu ina al dispositivo com pleto , las p artes q u e tom an la p o te n c ia de lo s cilindros y elevan y b a ja n la p la tafo rm a so n las q u e in teg ran el mecanismo.
Se consideran co m o m ecan ism o las partes ríg idas q u e están configu radas y co nectadas de m o d o q u e p ro d u cen el m o v im ien to q u e se desea en la m áqu ina . El p ropósito del m ecanism o de la figura 12 es elevar la p la tafo rm a y cualqu ier o b je to q u e se encuen tre sob re ella. La síntesis e el proceso d e desarrollo de u n m ecan ism o p a ra sa tis facer los re q u e r im ie n to s de f u n c io n a m ie n to de la m áqu ina . E l análisis g> rantiza q u e el m ecan ism o se m overá d e ta l m odo q u e cu m p lirá co n los requerim ientos.
1.3 CINEM ÁTICA
La cinem ática tra ta co n la m anera en q u e se m uev en lo s c u e rpos. Es el estud io de la g eo m etría del m o v im ien to . El análisis c in e m á tic o im p lica la d e te rm in a c ió n de p o sic ió n , d esp lazam ien to , ro tación , rapidez, velocidad y aceleración de u n m ecanism o.
Para ilu s tra r la im p o rtan c ia d e este aná lis is , reg re se a la p la tafo rm a de elevación d e la fig u ra 1.2. El análisis cinem ático o frece in fo rm ac ió n so b re cu estio n es significativas del d iserto tales com o:
■ ¿Cuál es la im p o rtan c ia d e la lo n g itu d de las p ie rn as que « p o r t a n la plataform a?
■ ¿Es necesario q u e las p ie rn as de so p o rte estén cruzadas y conectadas en su p u n to m ed io , o serta m ejo r configurarlas p a ra q u e se c rucen m ás cerca d e la plataform a?
■ ¿A q u é distancia d eb en extenderse lo s cilindros p a ra elevar 8 in b plataform a?
A sim ism o, el análisis de las fuerzas d inám icas de la p lata fo rm a ayudaría a con testar o tra s preguntas im portan tes del d i serto:
■ ¿Q ué capacidad ( f u e r a m áxim a) se requiere e n el c ilindro hidráulico?
1.4 TERM IN O LO G ÍA DE MECANISMOSC om o se m encionó , lo s m ecanism os consisten en p artes conectadas co n el objetivo de tra n sm itir m ov im ien to y fuerza, desde u n a fuen te de p o ten c ia has ta u n a salida. U n eslabonamiento es u n m ecan ism o d o n d e se unen p a r te s ríg idas para fo rm ar u n a cadena. Una d e las p a r te s se d e n o m in a bancada, p o rq u e sirve co m o m a rc o de refe rencia p a ra el m o v im ien to de to d as las dem ás p artes . La b ancada n o rm a lm e n te e s u n a p a r te s in m o vim iento. En la fig u ra 1.3 se observa u n a p o p u la r m áqu ina de gula e líp tica para ejercicio , en la c u a l d o s es lab o n am ien to s p lanos están configurados para o p e ra r fu era de fase co n la finalidad de sim u lar el m ovim iento de cam inar, incluyendo el m o vim iento de los brazos. C o m o la base se apoya en el suelo y n o se m ueve d u ra n te la operación , se co n sid era q u e la base es la b an c a d a
Los eáabonesson las partes individuales del m ecanism o y se consideran cuerpos rígidos q u e están conectados co n o tro s es- b b o n e s para tran sm itir m ovim iento y fuerzas. T eóricam ente, u n cuerpo rígido verdadero n o se defo rm a du ran te el m ovim iento. A unque en realidad n o h ay u n cuerpo rígido, los eslabones d e los m ecan ism os se d ise ñ a n co n s id e ran d o u n a d e fo rm ac ió n m ín im a y se su p o n e n rígidos. El reposapiés y los m anubrios d e la m áqu ina para ejercicio co m p ren d en diferentes eslabones y, ju n to co n los eslabones, están in terconcctados para p ro d u c ir restricciones al m ovim iento.
R u tes elásticas, co m o los resortes, n o so n rígidas: p o r lo te n tó , n o se c o n s id e ra n eslabones. N o tien en efecto so b re la c inem ática del m ecan ism o y se su e len ig n o ra r en el análisis
fig u r a u M áquina de g u ia elíptica para ejercicio de en trenam ien to (fo to d e vvww.precor.com).
www.FreeLibros.me

Introducc ió n a jo s m eca n ism o s y a la c in em ática___________ 3
cinem ático. Sum inistran fuerzas, p o r lo q u e se d eb en in c lu ir en la parte del análisis d e las fuerzas dinám icas.
Una im ió n e s u n a conex ión m óv il e n tre lo s eslabones q u e p e rm ite el m o v im ien to re la tiv o e n tre ellos. Las dos u n io n e s p r in c ip a le s , llam ad as ta m b ié n u n io n e s to ta le s , son la u n ió n de revoluta y la u n ió n p r ism á tic a La u n ió n d e r e v o lu ta , conocida tam b ién co m o u n ió n d e p e m o o d e b isagra , perm ite la ro tac ión p u ra e n tre lo s d o s eslabones q u e conecta . L a u n ió n d e corredera , conocida tam b ién co m o u n ió n d e p is tó n o p r is m á tic a , perm ite el deslizam iento lineal e n tre lo s eslabones q u e c o n e c ta L a figura1.4 m uestra las d o s juntas.
La figura 1 3 a m uestra u n a u n ió n de leva q u e perm ite tan to b ro tac ió n co m o el deslizam ien to e n tre lo s d o s eslabones q u e conecta. D ebido al m ovim iento com plejo q u e genera, a la conex ión de leva se le llam a m i ó n d e o rd e n s u p e r io r o m e d ia u n ión . U na co n ex ió n de eng ranes p erm ite asim ism o la ro tac ió n y el deslizam iento en tre los d o s engranes conform e sus d ientes se van aco p lan d o . E n la figura 1.5b se presen ta esta configuración . La conex ión d e engrane tam b ién es u n a u n ió n d e o rd en superior.
U n e s la b ó n s im p le es u n c u e rp o r íg id o q u e so lo tien e dos u n io n es q u e se conectan co n o tro s eslabones. La fig u ra 1.6a ilu stra u n e s lab ó n a m p ie . U na m a n iv e la es u n e s lab ó n a m p ie
Eslabón 2Eslabón I
E slabón 2Eslabón I
a ) P e m o b) Corredera
F IG U R A 1.4 U niones principales: a ) p e rn o y b ) corredera.
Esbbón 2
Ot U n ió n d e lev a b ) U n ión d e en gran e
f i g u r a 1 3 U niones d e o rd en su p e rio r: a ) u n ió n de leva y b ) u n ió n d e engrane.
a) E slab ón s im p le b ) E slabón com p lejo
f i g u r a i A Eslabones: a ) eslabón sim ple y b ) eslabón com plejo .
www.FreeLibros.me

4 CAPITULO UNO
q u e p u e d e g ira r co m p le tam en te a lred ed o r de u n c e n tro fijo. Un balancín es u n eslabón sim ple q u e o sc ila co n c ie rto ángulo, in v in ien d o s u dirección a de te rm in ad o s intervalos.
U n eslabón complejo es u n cu erp o rig ido q u e con tiene m ás d e d o s u n io n es . La fig u ra 1.6b m uestra u n eslabón com plejo . U n brazo de balancín es u n eslabón com plejo q u e co n tien e tres u n iones y p ivo ta cerca de su cen tro . U na m anivela de campana e s sim ilar a u n b razo de balancín , p ero está cu rv ad a en el cen tro . E l eslabón com plejo de la figura 1.6b es u n a m anivela de cam pana.
U n punto de interés es u n p u n to del e s lab ó n d o n d e el m ovim iento tien e u n interés especial. El extrem o del lim p iador del p arab risas, m encionado an te rio rm en te , se consid era ría un p u n to de in te rés . U na vez q u e se lleva a c a b o el análisis cinem ático , se d e te rm in an e l desplazam iento , la velocidad y la acelerac ión de ese p u n ta
H ú ltim o co m p o n en te genera l d e u n m ecan ism o es el ac- tuador, q u e es el co m p o n en te q u e im p u lsa e l m ecanism o. Los ac tu ad o res co m u n es in d u y en m o to re s (e léc trico s e h id rá u licos), m otores de gasolina, c ilin d ro s (h id ráu licas y neum áticos), m otores de to m illo s d e b o la s y solenoides. Las m áquinas q u e se o p e ra n m anualm ente u tilizan el m ov im ien to h u m a n a co m o el g iro de u n a m anivela, co m o actuador. Los ac tu ad o res se a n a lizarán en la sección 1.7.
Ixis eslabonam ientos p u ed en se r antenas abiertas o ornadas. C ad a eslabón en la cadena d n em ática c en ad a se conecta a d a s o m ás eslabones. La elevadora de la figura 12 y la m áqu ina de guía elíptica de la fig u ra 1J so n cadenas cerradas. U na cadena abierta tiene, p o r lo menos, u n eslabón q u e está conectado únicam ente a o tro eslabón. E slabonam ientos abiertos c o t í unes son los brazos m bóticos co m o el d e la figura 1.7, as i com o o tra s m áquinas “de carrera" com o las retroexcavadoras y las grúas. f i g u r a 1.7 Robot a r t ic u la d a (C o rtesía de M o to m a n Inc.).
1.5 DIAGRAMAS CIN EM Á TICO S
En el análisis del m ovim iento de u n a m áquina, con frecuencia se difkulta visualizar el m ovim ien tode los com ponentes en el d ibujo co m p le to de u n ensam ble. La figura 1.8 p resen ta u n a m áquina que se utiliza para m anejar partes e n u n a línea d e ensam ble. Un
m otor p roduce la fuerza giratoria q u e im pulsa u n m ecanism o que m ueve los b razo s d e lan te de u n lado a o tro d e m anera s in cronizada. C o m o se observa en la figura 1A u n a im agen com pleta d é la m áqu ina es m u y com pleja, p o r lo q u e resulta difícil concentrarse en el m ovim iento del m ecanism o en consideración.
fig u r a i .s C argador sincronizado de dos brazos. (C o rtesía d e PickO m atic Systems, Ferguson M achine C a ) .
www.FreeLibros.me
Introducc ió n a jo s m eca n ism o s y a la c in em ática___________5
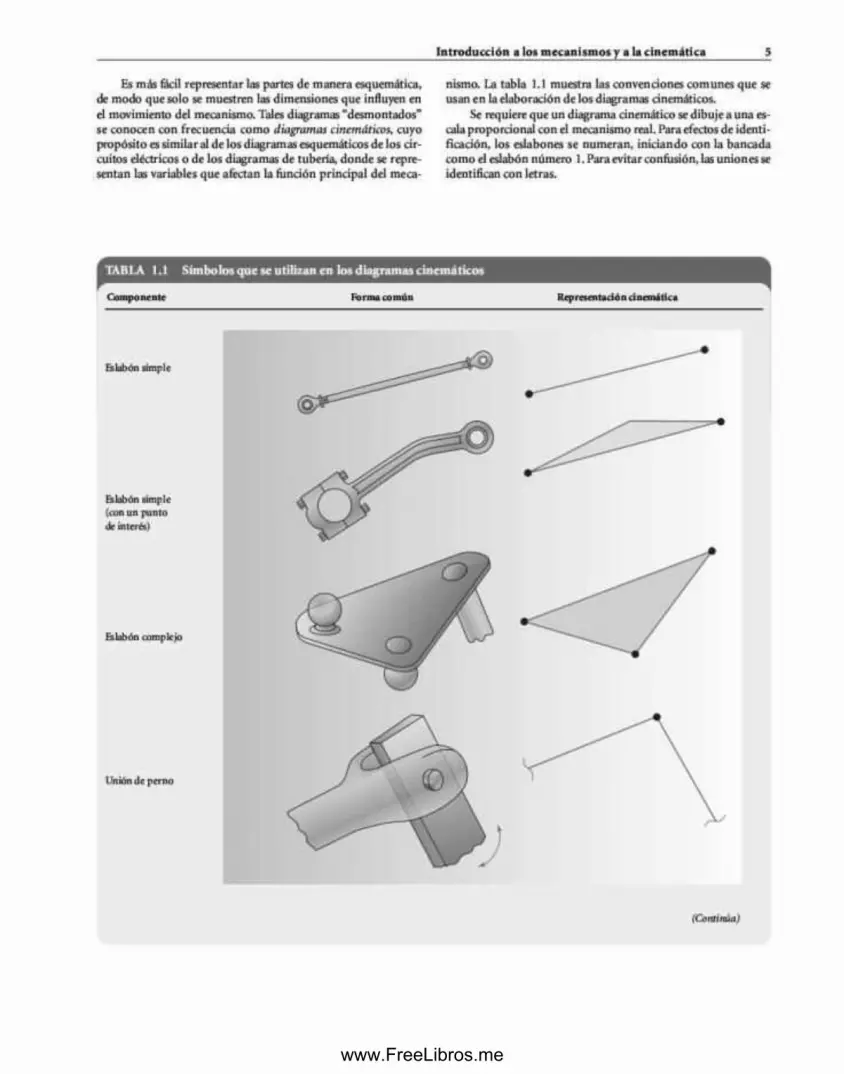
Es m ás f á á l represen tar las partes de m anera esquem ática, de m o d o q u e so lo se m uestren las d im ensiones q u e influyen en el m ovim iento del m ecanism o. Tales d iagram as “desm ontados" se co n o cen co n frecuencia co m o diagram as cinemáticos, cuyo p ropósito es sim ilar al de lo s d iagram as esquem áticos d e lo s circuitos eléctricos o de lo s d iagram as de tubería, d o n d e se rep re sen tan las variables q u e afectan la fu n d ó n p r in d p a l del m eca
n ism o L a tab la 1.1 m uestra las co n v e n d o n e s co m u n es q u e se usan e n la elaboración de lo s d iagram as d nem áticos .
Se requiere q u e u n diagram a d n e m á tic o se d ib u je a u n a escala p ro p o rd o n a l co n el m ecan ism o real. P ara efectos d e identi- fic a d ó n . lo s eslabones se n u m e ra n , in ic ian d o co n la b ancada c o m o el eslabón n ú m ero 1. Para ev ita r confusión , las u n io n es se identifican c o n letras.
TABI.A 1.1 S ím b o lo s q u e se u til iz a n e n lo s d ia g ra m a s c in e m á tic o s
R rproo iU dún dnonética
Eslabón simple
Eslabón simple (con un punió de interés)
Eslabón complejo
Union de perno
(Continúa)
www.FreeLibros.me

6 CAPITULO UNO
TABLA 1.1 (C o n tin u a c ió n )
Componente irme común R e p r e s e n t a d A n d n e m á t i c a
U n ión d e corredera
<s3 épU n ión d e leva
U n ió n d e e n g r a n o
PRO B LEM A D E E JE M PL O 1.1
la figura 1.9 es de una máquina q u e se usa para cortar y ajustar tableros de circuitos electrónicos impresos. Elabore un diagram a cinemático.
F IG U R A 1.9 P r e n s a d e c o r t e d e l p r o b l e m a d e e j e m p l o 1 . 1 .
S O L U C IÓ N : 1. Identifique la bancada
H p r im e r p a s o e n l a e la b o r a c ió n d e u n d ia g r a m a c in e m á t ic o e s d e c id ir la p a rte q u e s e d iser ta r á c o m o la b a n c a -
d i . E l m o v im ie n t o d e to d o s l o s d e m á s e s la b o n e s s e d e te r m in a r á e n r e la c ió n c o n la b a n c a d a . E n a lg u n o s c a s o s ,
b s e le c c ió n e s e v id e n t e p o r q u e la b a n c a d a e s tá f ir m e m e n t e s u je ta e n e l s u e lo .
& i e s te p r o b le m a , la b a s e g r a n d e a to r n il la d a a la m e s a s e d e s ig n a c o m o b a n c a d a . El m o v im ie n t o d e t o d o s lo s
demás eslabones se determ ina en relación co n esta base. La base se identifica co m o el eslabón 1.
www.FreeLibros.me
Introducc ió n a jo s m eca n ism o s y a la c in em ática___________7
2. Identifique todos los dem ás eslabones
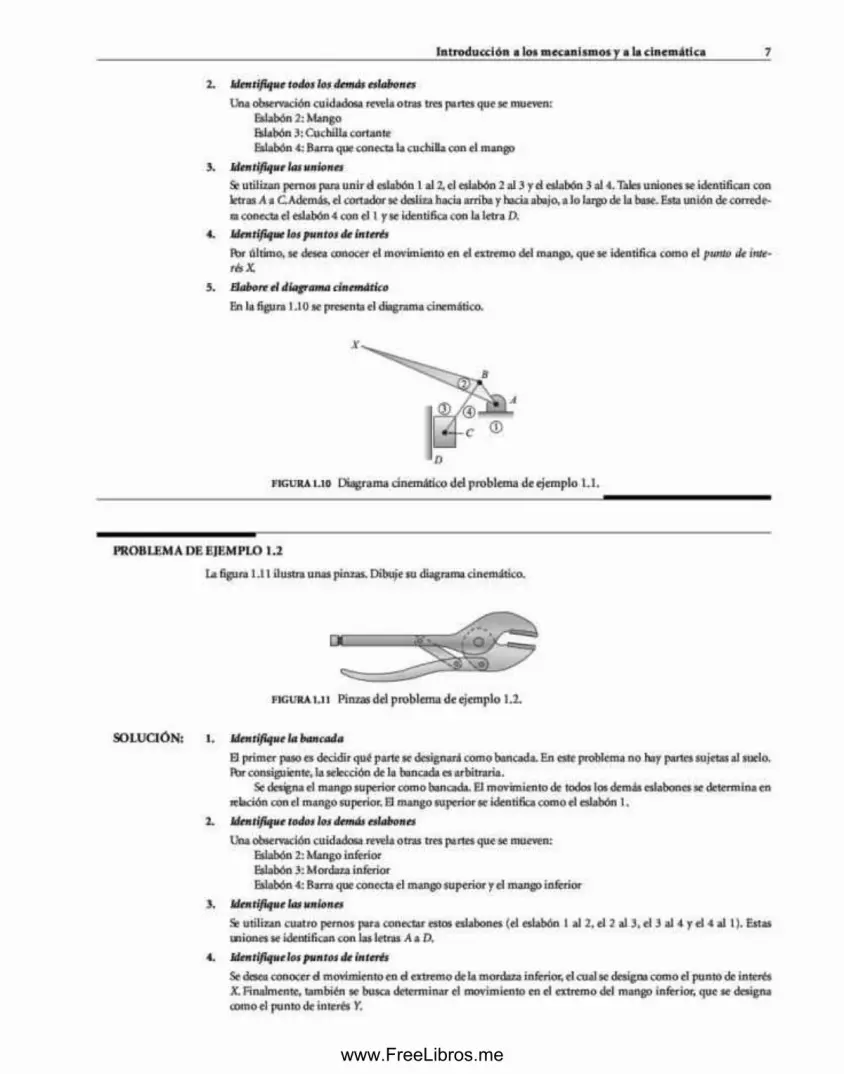
Una observación cuidadosa revela o irás tres partes que se mueven:Eslabón 2 : M angoEslabón 3 : Cuchilla córtam eEslabón 4: Barra que conecta la cuchilla con el mango
3. Identifique las uniones
Se utilizan pernos para u n ir d eslabón 1 al 2, el eslabón 2 al 3 y d eslabón 3 al 4 . Tales uniones se identifican con letras A a C . Además, el cortador se desliza hacia arriba y hacia abajo, a lo largo de la base. Esta unión de corredera conecta el eslabón 4 co n el 1 y se identifica con la letra D.
4 . Identifique los p un tos de interés
Ib r últim o, se desea oxnocer el m ovim iento en el ex trem o del mango, q u e se identifica co m o el punto de interés X.
5. Elabore el diagram a cinemático
En la figura 1.10 se presenta el diagrama cinemático.
FIG URA t . i o D ia g r a m a c in e m á t ic o d e l p r o b l e m a d e e j e m p l o 1 .1 .
PR O B LEM A D E E JE M PL O 1.2
l a figura 1.11 ilustra unas pinzas. Dibuje su diagrama cinem ática
F lG U R A i. i l P in z a s d e l p r o b l e m a d e e j e m p l o 1 .2 .
Identifique la bancada
H prim er paso es decidir q u é parte se designará co m o bancada. En este problem a n o hay partes sujetas al suelo. Ib r consiguiente, la selección de la bancada e s arbitraria.
Se designa el m ango superior com o bancada. El m ovim iento de todos los dem ás eslabones se determ ina en lehción con el m ango superior. El m ango superior se identifica com o el eslabón 1.
Identifique lodos los dem ás eslabones
Una observación cuidadosa revela o tras tres paites que se mueven:Eslabón 2: M ango inferior Eslabón 3: M ordaza inferiorEslabón 4: Barra que conecta el m ango superior y el m ango interior
Identifique las uniones
Se utilizan cuatro pernos para conectar estos eslabones (el eslabón I al 2 , el 2 a l 3 , el 3 al 4 y el 4 al I ). Estas uniones se identifican co n las letras A a D.
Identifique ¡os p un tos de interés
Se desea conocer d m ovim iento en d extrem o de la mordaza inferior, el cual se desigra com o el pun to de interés X. Finalmente, tam bién se busca determ inar el m ovim iento en el ex trem o del m ango inferior, que se designa como el pun to de interés Y.
S O L U C IÓ N : 1.
2.
3.
4.
www.FreeLibros.me

8 CAPITULO UNO
5 . biabare e l d¡agrama cinemático
0 diagram a cinem ático se observa en la figura 1.12.
f i g u r a 1.12 D iagram a cinem ático del p rob lem a d e e jem plo 1.2.
1.6 INVERSIÓN CINEM ÁTICAE l m o v im ie n to a b s o lu to se m ide c o n resp ec to a u n a b a n cad a estacionaria. El n v v im ie n to r e la t iv o de u n p u n to o u n eslabón se m ide co n respecto a o tro eslabón. C om o se ind icó en lo s ejem p los anteriores, el p r im e r paso en la e laboración de u n d iag ram a cinem ático consiste en la selección de u n a p a rte q u e sirv a com o bancada. En a lg u n o s casos, la selección de la b a n cad a es a r b i tra ria . co m o en las pinzas del p rob lem a d e e jem plo 1.2. C uando se seleccionan diferentes eslabones co m o bancada, n o se altera e l m o v im ie n to relativo de los eslabones; s in em bargo , e l m o v im iento abso lu to p u ed e s e r significativam ente d iferen te . E n las m áquinas sin u n eslabón fijo, p o r lo general el m ovim iento reía tivo es el resu ltado buscado en el análisis cinem ático.
E n el p rob lem a d e e jem p lo 1.2, u n resu ltad o im p o rtan te del aná lis is c in em ático es la d is tan c ia q u e se d e b e m o v er el m an g o p a ra a b r i r las m o rd azas. Se t r a ta d e u n a cu e s tió n de posición relativa de los eslabones: el m ango y la m ordaza. C om o e l m ovim iento relativo de lo s eslabones n o cam bia co n la selecc ió n d e u n a bancada, la selección d e u n eslabón co m o m arco de refe rencia co n frecuencia n o tien e im p o rtan c ia . El uso de e s labones alternos co m o eslabones fijos se conoce c o m o in versión á n e m d t ic a .
1.7 M OVILIDAD
U na p ro p ied ad im p o rta n te e n el análisis d e m ecan ism os e s el n ú m ero d e g rados d e lib ertad del e s lab o n am ien to El g ra d o de libertad es el n ú m ero de en tradas independientes requeridas para posicionar co n exactitud to d o s lo s eslabones d e u n m ecanism o co n respecto al su e lo Tam bién se puede d efin ir com o el núm ero de ac tuado res necesarios p a ra o p e ra r el m ecan ism o. U n mecanism o actuador p o d ría ser el m ovim iento m anual de u n eslabón hacia o t r a posición, la co n ex ió n d e u n m o to r al eje de u n eslabón o el em pu je d e l pistón de u n c ilind ro hidráulico.
El n ú m ero d e g rados de libertad d e u n m ecan ism o tam bién se cono ce c o m o m o v ilid a d , el cual se identifica con el sím bolo M.
C uando la configuración de u n m ecanism o está com pletam ente defin ida con el posic ionam iento de u n eslabón , el sistem a tiene u n grado de libertad . La m ayoría de los m ecanism os com erciales tienen u n grado d e lib erta d . En con traste , lo s b razo s robóticos suelen tener tres grados d e libertad o incluso más.
1.7.1 E c u a c ió n d e G r u e b le rl o s g ra d o s de lib ertad p a ra eslabonam ien tos p lanos conectados con un iones co m u n es se calcu lan co n la ec u a c ió n d e G ru eb ler .
M = g rados de lib ertad = 3 (n - 1) - 2j p - jt,
donde:
n = n ú m e ro total d e eslabones en el m ecanism o
= núm ero total de un iones p rincipales (un iones d e p e rn o s o d e correderas)
= n ú m ero to ta l de un iones d e o rd en su p e rio r (u n io n e s de levas o engranes)
C o m o ya se m encionó , la m ayoría de los eslabonam ientos usados en las m áquinas tienen u n g rad o d e libertad . En la figura 1.13a se presen ta u n eslabonam iento con u n g rad o de libertad.
Los eslabonam ien tos co n g rados d e lib ertad iguales a cero o negativos se conocen co m o m e c a n is m o s b lo q u e a d o s , lo s cuales son incapaces d e m overse y fo rm a r u n a e s tru c tu ra . U n a a r m a d u r a es u n a e s tru c tu ra fo rm a d a p o r eslabones sim ples, conectados p o r un iones d e perno , co n cero g ra d o s de libertad. En la figura 1.13b se ilu s tra u n m ecanism o b loqueado .
Los eslab o n am ien to s c o n m ú ltip les g ra d o s de libertad necesitan m ás de u n im pulsor p a ra o p e ra r co n precisión. Los m ecanism os com unes co n m últip les grados d e lib ertad so n cad en as cinem áticas a b ie r ta s q u e sirv en para o b te n e r c ie rto a lcance y p o sic io n a m ien to , ta l co m o los b razo s ro b ó tic o s y las re!roexcavadoras. En general, los eslab o n am ien to s co n m ú ltiples g ra d o s de lib ertad o frecen m ay o r cap ac id ad p a ra p o s ic ionar co n precisión u n eslabón. En la figura 1.13c se presenta u n m ecanism o co n m últip les g ra d o s de libertad .
a )U n g r a « lo d c l ib e r a d <M - I ) b) M eca n ism o bloqueado (W ” 0 ) c ) M ú ltip les grad os d e l ib c n a d < * / - 2)
FIG U R A 1 .13 M ecanism os y es tru c tu ras co n m ovilidad variable.
www.FreeLibros.me

In iroducc ió n a jo s m eca n ism o s y a la c in em ática___________9
PR O B LEM A D E E JE M PL O 1.3
U figura 1.14 m uestra u n a su je tadora de abrazadera. Elabore u n diagram a cinem ático, con la m ordaza de la abrazadera y el m ango com o p un tos de interés. Calcule tam bién los grados de libertad de la abrazadera.
f i g u r a i . u Su jetadora d e abrazadera del p rob lem a d e e jem plo 1.3.
S O L U C IÓ N : I . Identifique la bancada
El com ponente atornillado al banco o la mesa se designa com o la bancada. El m ovim iento de los dem ás eslabones se determ ina en relación co n tal bancada. La bancada se num era com o el eslabón 1.
2. Identifique los dem ás eslabones
Una observación cuidadosa re írla o tras tres partes que se mueven:Eslabón 2: M angoEslabón 3: Brazo q u e sirve com o abrazadera-mordaza Eslabón 4: Barra que conecta el brazo de la abrazadera y d m ango
3. Identifique las uniones
Se utilizan cuatro uniones de pernos para conectar los diferentes eslabones (el eslabón 1 al 2 . el 2 al 3. el 3 al 4 y d 4 al 1). Tales uniones se identifican con las letras A a D.
4 . Identifique los p un tos de interés
Se desea conocer el m ovim iento de la abrazadera-mordaza, la cual se designa com o el punto de interés X . Se desea conocer tam bién el m ovim iento del extrem o del mango, que se designa co m o el pun to de interés y.
5 . Elabore e l d¡agram a cinemático
En la figura 1.15 se detalla el diagram a cinemático.
X"
f i g u r a 1.15 D iagram a cinem ático del p ro b lem a de e jem plo 1 .3 .
6 . Calcule la m ovilidad
Con los cuatro eslabones y las cuatro uniones de perno,
n = 4 ,;p = 4 pernos. >h = 0
www.FreeLibros.me

10 CAPITULO UNO
M - 3(n - 1) - 2>p - Á “ 3(4 - 1) - 2(4) - 0 - 1
0 m econism o está restringido con u n grado de libertad. Al m overse u n so lo eslabón, el mango, se posicio- rtin correctam ente todos los dem ás eslabones en la sujetador a.
PRO B LEM A D E E JE M P L O 1.4
la figura 1.16 m uestra u n a trituradora de latas q u e se utiliza para reducir s u tamafto y b a li ta r su almacenamiento antes de reciclarse. Elabore un diagrama cinem ática co n el extrem o del mango com o punto de interés. Además, calcule los grados de libertad del dispositivo.
S O L U C IÓ N : I . Identifique la estructura
La parte de atrás d d dispositivo sirve co m o base y puede sujetarse a la pared. Este com ponm te se elige co m o la hincada. El m ovim iento de los dem ás eslabones se determ ina con respecto a la bancada. 1.a bancada se identifica to n e l núm ero 1.
2 . Identifique los dem ás eslabones
Una observación cuidadosa muestra u n m ecanism o plano co n o tras tres partes móviles:Eslabón 2: El m angoEslabón 3: Bloque usado com o superficie trituradora o aplastadora Eslabón 4: Barra que conecta el bloque aplastador y d m ango
3 . Identifique las uniones
Se utilizan tres uniones de perno para conectar estas partes diferentes. Un pem o u n e el m ango con la base. Esta u iió n se etiqueta com o A.Se usa un segundo pem o para conectar el eslabón 4 co n d mango. Esta u n ió n se identifica com o B. U n tercer pem o une el bloque triturador y d eslabón 4 . Esta unión se identifica com o C
El b loque triturador se desliza verticálm ente durante b operación, de m odo que u n a u n ió n de corredera conecta el triturador con la base. Esta unión se identifica com o D.
4 . Identifique los p un tos de interés
Se desea conocer el m ovim iento del extrem o del mango. Este se designa com o el p u n to de interés X.
5 . U abort e l diagram a cinemático
H diagram a cinem ático se presenta en la figura 1.17.
71
FIG U R A 1 .17 D iagram a cinem ático del p rob lem a d e e jem plo 1 .4 .
www.FreeLibros.me

In iroducc ió n a jo s m eca n ism o s y a la c in em ática__________ M
6 . Calcule la m ovilidad
Se determ inó q u e hay cuatro eslabones en este mecanismo. También existen tres uniones de perno y u n a unión de corredera. POr lo tanto.
n = 4. Jp = (3 pernos + 1 corredera) = 4 . ^ = 0
M = 3 (n - I) - 2 / p - = 3<4 - l) - 2(4) - 0 = I
B m ecanism o tritu rado r de latas está restringido por u n grado de libertad. C on el m ovim iento de u n solo eslabón. d mango, se pueden colocar con precisión los dem ás eslabones y aplastar u n a lata colocada debajo del bloque tritu rador. _______________________________
PR O B LEM A D E E JE M PL O 1.5
La figura 1.18 m uestra otro dispositivo que sirve para cortar material. Elabore u n diagram a cinemático, co n el extrem o del m ango y el extrem o de corte co m o puntos de interés. También calcule los grados de libertad de la prensa cortadora.
S O L U C IÓ N : I . Identifique ta bancada
La base está atornillada a una superficie de trabajo y se designa com o la bancada. E l m ovim iento de los dem ás es- bbon es se determ ina en relación co n esta bancada. A la bancada se le asigna el núm ero I .
2. Identifique los dem ás eslabones
Una observación cuidadosa revela o tras dos partes móviles:Islabón 2 : Engrane/mango Eslabón 3: Pálanca cortadora
3. Identifique las uniones
Se usan dos uniones de perno para conectar estas partes. U n perno conecta La palanca cortadora con La bancada. Esta unión se rotula com o A Se usa u n segundo perno para conectar el engrane/mango con la palm ea cortadora. Esta unión se identifica com o B.
H engrane/m ango tam bién se conecta a la bancada con u n a unión de engrane Esta unión de orden superior se identifica com o C
4 . Identifique los p un tos de interés
Se desea conocer el m ovim iento del extrem o del m ango y se designa co m o el pun to de interés X También se busca determ inar el m ovim iento de la superficie cortadora y se designa co m o el p u n to de interés Y.
5 . Elabore el diagram a cinemático
El diagrama cinem ático se presenta en la figura 1.19.
www.FreeLibros.me

12 CAPITULO UNO
fig u r a 1.19 D iagram a cinem ático del p rob lem a d e e jem plo 1.5.
C a lc u le l a m o v i l id a d
Rira calcular la movilidad, se identificaron tres eslabones en el mecanismo. Tam bién hay dos un iones de perno y u ia u n ió n de engrane, de m odo que.
n ■ 3 ,/p - (2 pernos) - 2 /h “ (1 u n ió n de engrane) “ 1
yM - 3 (n - 1) - 2>p - Á, - 3(3 - 1) - 2(2) - 1 - 1
H m ecanism o de la prensa de corte está restringido a u n grado de libertad. Con el m ovim iento de u n solo eslabón, el mango, los dem ás eslabones se posicionan co n precisión y se lleva el extremo de corte sobre la pieza de trabajo.
1.7 .2 A c tu a d o re s e im p u ls o re sPara o p era r u n m ecanism o, se requiere u n d ispositivo ac tuador o im p u lso r q u e p ro p o rc io n e el m ovim iento y la energía de e n trada . Para o p e ra r co n precisión u n m ecanism o, se necesita un im pulsor p o r cada grado d e libertad. Se utilizan m u ch o s actúa d o re s d iferen tes en las m áquinas y lo s m ecanism os, ta n to in d u stria les co m o com erciales. A lgunos de los m ás com unes son:
l o s m otores e léctricos d e c o r r ie n te a l te rn a b r in d a n el m ovim iento g iratorio c o n tin u o m enos costoso . S in em - bugo , están limitados a unas cuantas velocidades estándar, «fie son u n a f im d ó n de la frecuencia de b corriente eléctrica. En Estados U nidos la frecuencia de la corriente es de 60 H z, lo cual corresponde a velocidades d e 3600, 1800, 900,720 y 600 rp m . Los m otores monoÉfeicas se utilizan a i aplicaciones residenciales y están disponibles desde 1/50 basta 2 hp. Los m otores trifásicos son m ás eficientes, pero en bi mayoría d e los casos están H m itadosa aplicaciones in dustriales, p o rq u e requieren u n a potencia d e se rv id o de tres fiases. Están disponibles desde 1/4 hasta 500 hp.
L os m o to re s e léctricos d e c o rrie n te c o n tin u a tam bién p ro ducen m ovim iento giratorio . La veloddad y la dirección del m ovim iento se m odifican fikilm ente, p e ro requieren potencia d e u n generador o u n a batería. L os m otores de c o rr ie n te c o n tin u a p u ed en a lcan za r velocidades extrem adam ente g randes, has ta d e 30000 rp m . Estos m o tores se usan co n frecuencia en vehículos, dispositivos in- áám b rico s, o en ap licad o n es d o n d e se requiere con tro lar m ú ltip les v e lo d d ad es y d ire c d o n e s , co m o e n una m áqu ina de coser.
to rio co n tin u o y su veloddad se regula d en tro de u n intervalo ap ro x im ad o d e 1000 a 8000 rp m . S on im pulsores com unes y altam ente portátiles q u e se utilizan en aplica- d o n e s q u e requieren g ran potencia. C o m o d ep en d en del consum o de com bustible, los m otores de gasolina s irven para im pulsar m áquinas q u e operan en exteriores.
Los se rv o m o to res son m o to re s q u e se acoplan a u n contro b d o r para genera r u n m ovim iento p rogram ado o m a n tenerlo en u n a p o s id ó n fija. El c o n tro lad o r requiere se n sores so b re el eslabón q u e se desea mover, para b rin d ar inform ación d e retroalim entación acerca de su po sid ó n , v e lo d d a d y aceleración . Estos m o to re s tie n e n m e n o r ca p ad d a d de po tencia q u e las o tra s d a se s d e m o to re s y son significativam ente m ás costosos; n o obstan te , se u tilizan en m áquinas q u e requ ieren m ovim ientos guiados con precisión co m o los robots.
Los m o to re s de a i r e o h id rá u lic o s tam b ién producen m ovim iento g iratorio co n tin u o y son pareados a los m o tores eléctricos, p e ro tienen aplicadones m ás lim itadas. Lo an terio r se debe a la necesidad de u n a fuente hidráulica o de a ire co m p rim id o . Tales d ispositivos d e in d u e d ó n se usan principalm ente d e n tro de las m áquinas, co m o en el equipo de co n s tru c d ó n y los aviones, d o n d e se p u ed e obtener u n flu ido h idráulico d e a lta presión.
Los d l in d r o s h id ráu lico s o n eu m ático s son com ponen tes com unes p a ra im p u lsa r u n m ecanism o co n u n a carrera lin ea l lim ita d a . La fig u ra 1.20a m u e s tra u n c ilin d ro h id ráu lico . 1.a fig u ra 1.20b es la rep re sen tac ió n d n e - m ática c o m ú n del d lin d ro .
www.FreeLibros.me

In troducción a lo s i ¡ y a la c in em ática 13
Cilind Pintón Varilla l .'tó ó n d - p e r n o .
U n ió n * perno t lh n d r o )
E slabón I ( p iw W varilla)
FIGURA 1.20 C ilindro hidráulico.
El c ilin d ro c o n tie n e u n ensam ble d e p is tó n y u n a varilla q u e se desliza en relación co n el c ilindro . P ara efectos cinem áticos, son d o s eslabones (p is tó n /v a rilla y c ilin d ro ) conectados co n u n a u n ió n prism ática. El c ilind ro y el ex trem o de b v a r i lb su e len te n e r ad itam en to s para un iones d e perno .
Los ac tuad ores d e to rn illo tam bién producen carrera lineal lim itada. Estos actuadores consisten en u n m otor q u e ha:e g ira r u n to rn illo . Una tu e rca ap are jad a su m in is tra m o v im iento lineal. Los actuadores d e tom illo se p u ed en co n trolar con precisión y reem plazar d irectam ente a los cilindros. S in em bargo, son considerablem ente m ás costosos
q u e los cilindros, a u n c u a n d o haya fuen tes de a ire o hidráulicas disponibles. C o m o en los cilindros, en los actuadores d e to rn illo tam b ién existen ad itam en to s para un iones de p e rn o e n lo s dos extrem os. Por consiguiente, su diagram a cinem ático es idén tico al de b figura 120b.
Los m e c a n ism o s m an u a le s , u o p e rad o s m an u a lm en te , com prenden u n gran núm ero d e m áquinas o herram ientas m anuales. Los m ovim ientos que se esperan de los actuadores "hum anos" suelen ser bastante com plejos. S in e m bargo, s i los m ovim ientos q u e se esperan son repetitivos, se debería tener cu id ad o de posib les daflos p o r b tig a y deform ación.
PR O B LEM A D E E JE M PL O 1.6
l a figura 12 1 m uestra u n p ie de balancín estabilizador para u n cam ión. Habore u n diagram a cinem ático co n la parte inferior de la p ierna estabilizador» co m o u n punto de interés. También calcule el grado de libertad.
f i g u r a i J t B a la n c ín e s t a b i l i z a d o r d e l p r o b l e m a d e e j e m p l o 1 . 6 .
S O L U C IÓ N : 1. Id e n tif iq u e la b a n c a d a
Cuando se utiliza el bab n c ln estabilizador, el cam ión está detenido, de m odo q u e se designa el cam ión com o la hincada. El m ovim iento de los dem ás eslabones se determ ina en relación con el cam ión, l a bancada se identifica como el eslabón 1.
Id e n tif iq u e lo s d e m á s e s la b o n es
Una observación cuidadosa revela o tras tres partes móviles:Eslabón 2: Pie de b a lín d n estabilizador Eslabón 3: Cilindro Eslabón 4: Pistón/varilla
I d e n tif iq u e la s u n io n e s
Se usan tres uniones de perno pora conectar b s partes. Una conecta b p ierna estabilizadora con la bancada del camión, b cual se identifica como la unión A O tra conecta la p ierna estabilizadora co n b varilla del cilindro y se identifica com o la unión B. l a ú ltim a unión de perno conecta el c ilind ro con la bancada del cam ión y se identifica como b unión C
Hay u n a u n ió n de corredera e n el cilindro, b cual conecta el pistón/varilb co n el cilindro. Se identifica como b u n ió n D.
www.FreeLibros.me

14 CAPITULO UNO
4 . Identifique los p u n to s de interés
0 p ie estabilizadores parte del eslabón 2 , m ientras el p u n to de interés ubicado en la parte inferior del p ie se identifica com o el p u n to de interés X.
5 . Elabore el diagram a cinemático
0 diagram a cinem ático resultante se observa en la figura 12 2 .
f i g u r a 1.22 D iagram a cinem ático del p rob lem a d e e jem plo 1.6.
6 . Calcule la m ovilidad
Para calcular la m ovilidad, se sabe q u e e n tal m ecanism o hay cuatro eslabones, tres uniones de pem o y una u iió n de corredera. Por consiguiente,
n - 4 ,;p “ (3 pernos + 1 corredera) - 4 , - 0
M - 3 ( n - 1 ) - 2 > p - Á , - 3 ( 4 - 1) — 2 ( 4 ) - 0 - 1
B m eoinism o estabilizador está restringido por u n grado de libertad. C on el m ovim iento de u n solo es- bbón . el pistón, coloca en posiciones precisas los dem ás eslabones en el estabilizador y ubica al pie del balancín estabilizador en d suelo.
1.8 ESLABONES Y U N IO N ES USADOS COM ÚNM ENTE
1.8.1 M a n iv e la e x c é n tr ic a&t m uchos m ecanism os, la lon g itu d requerida de u n a manivela e s tan c o rta que n o e s factible a ju sta r al tam año adecuado lo s so portes co n d o s un iones de p e rn o . U na so luc ión frecuente c o n siste en disertar el eslabón co m o u n cigüeñal excéntrico, c o m o se ind ica en la fig u ra 1.23a. Este es el d iserto q u e se u tiliza e n la m ayoría d e m otores de gasolina y com presores.
El perno , sobre el ex trem o m óv il del eslabón, se alarga d e tal m anera q u e con tiene el eslabón c o m p le ta La circunferencia ex terio r del ló b u lo c ircu la r sob re el d güefla l se conv ierte e n una u n ió n de p e rn o m óv il, co m o se m uestra en la figura 1.23b. La u b icación deH os) so p o rte !s) fijo(s) está descen trado al ló b u lo e x cén tr ica Esta excentricidad d d dgüefla l, e, es la longitud efectiva del agüeita!. La fig u ra 1.23c m uestra u n m od elo cinem ático
de u n a m anivela excéntrica. La ventaja de la m anivela excéntrica es la g ra n su p e rfid e del á re a del p e rn o m óvil, b cual reduce el desgaste.
1.8 .2 U n ió n d e p e r n o e n u n a r a n u r aUna c o n e x ió n c o m ú n e n tre e sb b o n e s es la u n ió n d e p e rn o en u n a ra n u ra , co m o b q u e se ilu stra en la figura 1.24a. Se tra ta u n a u n ió n de o rd e n su p e rio r p o rq u e p erm ite q u e lo s dos es lib o n e s g iren y se deslicen e n tre si. Para sim plificar el análisis c in e m á tic a se u tiliz a n las u n io n es p rin c ip a le s p a ra m odelar esta u n ió n de o rd en superio r. La u n ió n de p e rn o en u n a ranura se vuelve u n a c o m b in a c ió n d e u n ió n d e p e rn o y u n ió n de corredera, c o m o en b figura 1.24b. O bserve q u e as i se agrega C iro e s la b ó n a l m ecan ism o . E n am b o s casos, e l m o v im ien to relativo e n tre los e sb b o n e s e s el m ism a No ob stan te , el uso de u n m od elo a n e m á tic o c o n las u n io n e s p r in d p a le s fac ilita el análisis.
FIG U R A 1 .23 M anivela excéntrica.
A) C igflc Aul excén tr ico
www.FreeLibros.me

In troducción a los ism o s y a !■ c in em ática 15
.1 ) U n ión r e a l d e perno e n una ranura b) M o d e lo d e p ern o e n una ranura
FIG URA i J 4 U n i ó n d e p e r n o e n u n a r a n u r a .
1.8.3 U n ió n d e to r n i l lo
Una u n ió n de to rn illo , co m o la m o strad a en la figura 1.25a, es o tra co n ex ió n c o m ú n e n tre eslabones. Los m ecan ism o s de tom illo se analizan co n detalle e n el cap itu lo 12. P or ah o ra , só lo se d irá q u e u n a u n ió n d e to rn illo perm ite d o s m ovim ientos relativos, a u n q u e depen d ien tes e n tre lo s eslabones q u e u n e . El giro especifico d e u n o d e lo s eslabones causará u n m ovim iento relativo d e traslac ión e n tre lo s d o s eslabones. P o r ejem plo, al g ira r el to m illo u n a revolución, la tu e rca se m ueve u n a d is ta n d a d e 0.1 in en las cuerdas del tom illo , d e m o d o q u e ún icam ente se in troduce u n m ov im ien to independiente.
/f) U n ió n r e a l d e to m illo A» T o m illo m o d elad o c o m o una corredera
FIG U R A I J 3 U nión de torn illo .
Un a c lu ad o r, t a l c o m o u n a m anivela, su e le p ro d u c ir u n g iro fuera del p lan o . U na p o rd ó n del giro generará b corresp o n d ien te traslación relativa e n tre lo s esb b o n es u n id o s p o r la unión de to rn illo . Esta t r a s b d ó n reb tiv a se utiliza c o m o “im p u lso r” en lo s análisis c inem áticos subsecuentes.
PRO B LEM A D E E JE M PL O 1.7
la figura 12 6 ilustra u n a mesa levadiza que se usa para ajustar la altu ra de trabajo de diferentes objetos. Elabore un diagrama cinemático y calcule los grados de libertad.
La u n ió n de to rn illo se m odela p o r lo genera l co m o una u n ió n de co rred era , co m o b q u e se ilu s tra en b figura 1.25b. D ebe q u e d a r d a r o q u e hay ro tac ió n fu era del p b n o ; s in e m bargo . ú n icam en te la t r a s b e ió n re b t iv a e n tre el to rn illo y b tuerca se considera en el análisis d n e m á tic o p lano.
FIG URA 1 J ó M esa levadiza del p ro b lem a de e jem plo 1 .7 .
S O L U C IÓ N : I . Identifique la bancada
l a placa de b base inferior descansa sobre una superficie fija, de m odo que b placa de la base se designa co m o la toncada. El soporte en b parte inferior derecha de la figura 12 6 está atornillado a la placa de la base. Asimismo, los dos soportes q u e sostienen el tom illo en la parte izquierda tam bién están atornillados a la base.
En el análisis d e b sección an terio r se v io q u e n o se considera b ro tac ión fuera del p lan o del tom illo . Solamente la traslación rebtiva de b tuerca se incluye en el m odelo cinem ático. Por lo tanto, el tom illo tam bién se considera parte de la bancada. B m ovim iento d e los dem ás esbbones se determ inará en relación con esta placa de base inferior, b cual se identifica con el eslabón 1.
www.FreeLibros.me

16 CAPITULO UNO
2 . Identifique los dem ás eslabones
Una o b se ro c ió n cuidadosa revela o lras cinco parles móviles:Eslabón 2: ’RiercaEslabón 3: B ra/o de soporte q u e conecta la tuerca co n la mesaEslabón 4: Brazo de soporte q u e conecta el soporte fijo co n la ranura de la mesaEslabón 5: MesaEslabón 6: Eslabón extra utilizado para m odelar el perno e n la unión de ran u ra con las uniones de perno y La corredera por separado
3 . Identifique las uniones
Se usa una unión de corredera para m odelar el m ovim iento en tre el tom illo y la tuerca. Una unión de perno, designada com o p u n to A, conecta la tuerca con el brazo de soporte identificado com o eslabón 3. Una u n ió n de perno, designada com o pun to & conecta los dos brazos de soporte (eslabones 3 y 4). O tra unión de perno, design ó la com o p u n to C conecta el eslabón 3 con é eslabón 6. Una u n ió n de corredera une el eslabón 6 con la mesa (eslabón 5). U n perno, designado com o p u n to D. conecta la mesa con el brazo de soporte (eslabón 3). Por ú ltimo, u n a u n ió n de perno, designada com o punto E se em plea para conectar la base con el brazo de soporte (eslabón 4).
El dugram a cinem ático se presenta en la figura 12 7 .
5 . Calcule la m ovilidad
Para calcular la movilidad, se sabe que hay seis eslabones en el mecanismo. Tam bién hay cinco un iones de pem o y dos uniones de corredera. Por consiguiente,
n - 6 jp “ (5 pernos + 2 correderas) - 7 , /h “ 0
M « 3 (n — 1) - 2/p - ; h = 3(6 - 1) - 2(7) - 0 = 15 - 14 = 1
l a mesa levadiza tiene m ovim iento restringido con u n grado de libertad. Un eslabón móvil, el m ango que gira el tom illo , posicionari exactam ente todos los dem ás eslabones del dispositivo, elevando o bajando la mesa.
1.9 CASOS ESPECIALES DE LA ECUACIÓN DE M OVILIDAD
La m ovilidad es u n a p ro p ied ad extrem adam ente im p o rtan te de u n m ecanism o. Entre o tra s cuestiones, b r in d a in fo rm ació n acerc a d e l núm ero de ac tu ad o res requeridos p a ra o p e ra r u n mecan ism o. S in em bargo, para o b te n e r los resu ltados correctos, se d e b e te n e r m ucho c u id a d o a l u sa r la e c u a d ó n de G rueb ler. A con tinuación se p resen tan a lgunas condic iones especiales.
1.9 .1 U n io n e s c o in c id e n te sA lgunos m ecan ism os tien en tres e sb b o n e s co n ec tad o s a u n a so la u n ió n de perno , co m o se ind ica e n la fig u ra 1.28, lo cual cau sa a lg o de c o n fu sió n en el m o d e lad o a n e m á tic o . F ísicam ente, se utiliza u n perno p a ra conectar lo s tres eslabones. S in
a) l i e s eslabones guatonas ¿>) Dos eslabones giratoriosy uno de corredera
f i g u r a iM Tres eslabones conectados a u n a sola unión de perno .
em bargo, p o r defin ición , u n a u n ió n de p e rn o conecta d o s eslabones.
En el análisis cinem ático, esta configuración se deb e m ode- h r m atem áticam ente co m o d o s un iones separadas. U na u n ió n
www.FreeLibros.me

Introducc ió n a jo s m eca n ism o s y a la c in em ática__________ 17
conectará los eslabones p rim ero y segundo. Lo segunda unión co - u n ió n se tien e q u e m o d e la r co n d o s pern o s. Este escenario sen ec ta rá en to n ces el seg u n d o y el te rce r eslabones. P o r consi- ilustra en el p rob lem a d e e jem plo I &.guíente, cuando hay tres eslabones ju n to s en u n p e rn o co m ú n , la
PR O B LEM A D E E JE M PL O 1.8
l a figura 1 2 9 m uestra u n a prensa m ecánica q u e sirve para ejercer grandes fuerzas c insertar u n a parte pequeña en una m ás grande. C on el ex trem o del m ango com o p u n to de in terés, elabore u n d iag ram a cinem ático y calcule, además, los grados de libertad.
f ig u r a i . » P rensa m ecánica del p rob lem a de e jem plo 1.8.
S O L U C IÓ N : I . Identifique la bancada
l a base de la parte inferior para la prensa mecánica está colocada sobre un banco de trabajo y perm anece estacionaria d u ra n te la operación . Por lo ta n to , esta base d e la p a rte inferior se designa com o bancada. El m ovim iento de los demás eslabones se determ ina en relación con la base inferior. La bancada se identifica con d eslabón 1.
2. Identifique los dem ás eslabones
Una observación cuidadosa revela o tras cinco partes móviles:Eslabón 2: M angoEslabón 3: Brazo q u e conecta el m ango co n los o tros brazos Eslabón 4: Brazo q u e conecta la base con los o tros brazos Eslabón 5: Cabeza de la prensaEslabón 6: Brazo q u e conecta la cabeza con los otros brazos
3. Identifique las uniones
Se usan uniones de perno para conectar todas las partes. U na conecta el m ango con la base y se identifica com o unión A . O tra conecta el eslabón 3 con el m ango y se identifica com o u n ió n R O tra conecta el eslabón 4 con la base y se identifica com o u n ió n C O tra conecta el eslabón 6 co n la cabeza de la prensa y se identifica como unión D.
Se utiliza u n perno para conectar los tres brazos (eslabones 3 .4 y 6) jun tos. Com o tres eslabones separados están u n id o s en u n p u n to co m ú n , estos se d eb en m odelar com o d o s u n io n es separadas, identificadas com o E y F .
U ta u n ió n de corredera conecta la cabeza de la prensa con la base. Esta unión se identifica com o G.
4 . Identifiquelos p un tos de interés
Se desea conocer el m ovim iento en el extrem o d d m ango y se identifica com o el p u n to de interés X.
5 . I-labore el diagram a cinemático
B diagram a cinem ático se muestra en la figura I JO.
6 . Calcule la m ovilidad
Rúa calcular la movilidad, se sabe q u e hay seis eslabones en é mecanismo, se is uniones de perno y u n a unión de corredera. P or lo tanto.
n - 6 , Jp ~ (6 pernos + 1 corredera) — 7,ft, “ 0
www.FreeLibros.me

18 CAPITULO UNO
FIG U R A l J O D iagram a cinem ático del p rob lem a d e e jem plo 1.8.
r
M = 3 ( n - 1) - 2; p - ; h = 3 ( 6 - 1) - 2 ( 7 ) - 0 = 15 - 1 4 = 1
H m ecanism o de la prensa m ecánica está restringido por u n grado de libertad. Con tan so lo el m ovim iento de u n eslabón, el m ango, se posicionan con precisión todos los dem ás eslabones de la prensa, deslizando la cabeza de esta sobre la pieza de trabajo.
1.9 .2 E x c e p c io n e s d e la e c u a c ió n d e G r u e b le r
Es necesario m encionar o t r a s itu ac ió n d e m ov ilidad especial. C o m o la ecuación d e G rueb ler n o lo m a en cuen ta la geom etría d e lo s eslabones, en raras ocasiones e s to causa resultados e r ró neos. En la figura 1.31 se m uestra u n e jem plo de ello.
O bserve q u e el eslabonam iento tien e cinco eslabones y seis u n io n es d e perno . A l a p lic a r b ecu ac ió n de G ru eb le r , e l es- h b o n am ien to tien e cero g rados d e lib erta d . P o r supuesto , lo a n terio r sugiere q u e el m ecan ism o está b loqueado. S in em bargo, si todos los eslabones q u e p ivotan fueran del m ism o t am afio, y la d istanc ia e n tre las u n io n e s so b re la e s tru c tu ra y el a c o p lad o r fueran idénticos, este m ecan ism o se ría capaz de m overse co n u n
f i g u r a I .3 I M ecanism o q u e tran sg red e l a ecuación d e G ruebler.
g ra d o de libertad . El e s b b ó n cen tra l e s red u n d an te , m ien tras q u e c o m o su lon g itu d e s idéntica a la d e los o tro s d o s eslabones su je tos a la estru c tu ra , n o a lte ra la acción del eslabonam iento .
H ay v a rio s e jem plos d e m ecan ism o s q u e tra n sg re d e n la ecuac ión d e G rueb ler d eb id o a s u g eo m etría ú n ic a U n diseñad o r deberta estar consciente de q u e b ecuación d e m ovilidad , en ocasiones, provoca inconsistencias.
1 .9 .3 G r a d o s d e l ib e r t a d in a c tiv o sEn algunos m ecanism os, lo s eslabones p resen tan m ovim ientos q u e n o influyen e n la relación de e n tra d a y salida del m ecanism o . Estos grados de lib erta d inactivos m u estran u n a situación d o n d e la ecuac ión d e G ru eb le r d a resu ltad o s e rró n e o s . Un e jem plo es u n a leva co n u n segu ido r d e rod illo c o m o el q u e se presen ta e n la fig u ra 1.32. l a ecuac ión de G ru eb le r especifica d o s g rados de libertad (4 eslabones, 3 pern o s, 1 u n ió n de orden su p e rio r). C o n u n giro de b leva, el e sb b ó n d e p iv o te o sc ib , m ien tras el se g u id o r d e rod illo g ira a lrededor de su centro . Sin em bargo, ún icam en te el m ov im ien to del eslabón de pivote sirve c o m o sa lida del m ecanism o. El g iro del rodillo e s de u n g rad o de
Ib e rta d inactivo y n o b u sc a afectar el m ovim iento de salida del m ecanism o. Es u n a característica de diserto q u e reduce la fricción y el desgaste so b re b superficie de b leva. M ien tras q u e b ecuación de G ru eb le r especifica q u e u n m ecanism o d e leva con segu ido r d e ro d illo tien e u n a m ov ilidad de dos, el d iseñador genera lm en te está in te re sad o so lo en u n g ra d o de libertad . V irio s m ecanism os con tienen g rados de lib ertad inactiva.
www.FreeLibros.me

1.10 EL M ECANISM O D E CUATRO BARRAS
El e s lab o n am ien to m ás s im p le y m ás c o m ú n es el e s la b o n a m ie n to de c u a tro b a r ra s . Es u n a co m b in ac ió n de c u a tro e s labones, u n o designado c o m o la bancada y conectado p o r cua
tro u n io n e s d e p e rn o . C o m o se le e n c u e n tra co n m ucha f re cuencia. u n a revisión ad icional n o está de más.
La fig u ra 1.33a m uestra e l m ecan ism o de u n sis tem a de lim p iador p a ra el crista l trase ro de u n au tom óv il. El diagram a c in em ático se p re se n ta e n la fig u ra 1.33b. O b serv e q u e e s un
Introdu«xión a jo s m eca n ism o s y a la c in em ática__________ 19
FIGURA U 5 M ecanism o del lim p iad o r p a ra el crista l trasero .
m ecan ism o d e cuatro b a rra s , ya q u e se in teg ra co n c u a tro eslabones conectados p o r cuatro un iones d e p e rn o y u n eslabón está im ped ido p a ra m overse.
L a m ovilidad d e u n m ecan ism o d e cuatro b a r ra s e s com o sigue:
n = 4 , ; p = 4 p e rn o s , ;h = 0
Af = 3 (n - 1) - 2h - = 3 (4 - 1) - 2 (4) - 0 = 1
C om o el m ecanism o de cuatro b a rra s tiene u n g rad o de libertad , está restringido a u n so lo ac tuador o e s totalm ente o p erad o p o r este. El sistem a del lim p iad o r de la figura 1.33 es ac tivado p o r u n m o to r eléctrico d e c o rr ie n te continua.
tt>r supuestt». el e s lab ó n im p ed id o para m overse se elige com o la bancada. P or lo general, el eslab«Sn pivote conectado al im p u lso r o a la fuente d e po tencia se cono ce co m o eslabón de entrada. El o t r o eslabón pivote, su je to a la bancada, se designa com o el alabón de salida o seguidor. El acoplador o brazo conecta r"acopla" el m ovim iento del eslabón d e en trad a co n el del eslab ó n de salida.
1.10.1 C r i t e r io d e G ra s h o fLa siguiente n o m en cla tu ra se u tiliza para describ ir la longitud de los cuatro eslabones.
s * longitud del eslabón m ás co rto
/ = longitud del eslabón m ás largo
p = longitud de u n o d e los eslabones d e lon g itu d in term edia
q = longitud del o tro eslabón de lo n g itu d interm edia
0 teorem a de G ra sh o f establece q u e u n m ecan ism o d e cuatro burras tien e al m enos u n eslabón g ira to rio si:
s + l < p + q
A la inversa, lo s tr e s eslabones q u e n o están fijos so lam ente osc ilarán si:
s + / > / > + q
Los m ecanism os d e cuatro b a rra s caen en u n a d e las cinco categorías listadas en la tab la 1.2.
TABLA 1.2 C a teg o rías d e b s m e c a n is m o s d e c u a tro | b a r ra s |
rCato O lía lo . K libbn m itra rlo
1Categoría
1 « + K p + q Triple hulmán Doble manivela
2 » + l < p ♦ q lado Manivela-balancín
3 i + l < p * q Acoplador D o b le balancín
4 i + 1 - p + q Cualquiera Punió de cambio
5 s + l > p * q Gialquirra Triple taJanctn
www.FreeLibros.me

20 CAPITULO UNO
c ) D o b le b a la n c ín
i P u n o d e c a m b io
f i g u r a 1 3 4 C ategorías de m ecanism os d e cuatro barras.
e ) T r ip l e b a l a n c í n
M a n iv e I n -b n la n c ln
fl) D o b le m a n iv e l a
Las d iferen tes categorías se m uestran en la figura 1.34 y se describen e n las siguientes secciones.
1.10.2 D o b le m a n iv e laEn b figura 1.34a se ilu stra u n a d o b le m anivela o m anivela- m anivela C o m o se explica en los crite rio s del caso 1 d e la tabla1.2, tiene el eslabón m ás c o r to del m ecanism o d e cuatro barras configurado co m o la b a n cad a Si u n o de los eslabones p ivo te g ira con tinuam en te , el o tro eslabón pivote tam bién g irará c o n tinuam ente. de m o d o q u e los d o s eslabones pivote, 2 y 4. pueden g ira r u n a revolución com pleta . El m ecanism o d e do b le manivela tam bién se conoce co m o m ecanism o d e eslabón d e arrastre .
1.10 .3 M a n iv e la -b a la n c ín
En la figura 1.34b se ilu stra u n m ecan ism o d e m anivete-balan- d n . C o m o se especifica en lo s crite rio s del caso 2 de la tab la 1.2, tien e el e s lab ó n m ás c o r to d e l m ecan ism o d e c u a tro b a r ra s adyacente a la b ancada . Si este eslabón m ás c o r to g ira c o n tin u a m ente, el eslabón d e salida oscilará en tre u n o s lim ites. Así, el eslab ó n m ás co rto se cono ce co m o manivela, y el eslabón de salida se cono ce co m o h tla n d n . FJ sistem a del lim p iador de la figura1.33 se iden tifica co m o m ecan ism o d e m an ivela-balancín . C o n fo rm e u n m o to r hace g irar co n tin u am en te el eslabón de e n trada , e l eslabón de sa lida oscila o "se balancea". El b ra z o y la h o ja del lim p iad o r están su je to s firm em ente a l eslabón de salida y el lim p iad o r o só la sob re el parabrisas.
1.10 .4 D o b le b a la n c ín
En la figura 134c se presenta u n doble balancín o balancln-balan- d n . C o m o se especifica en lo s crite rio s del caso 3 de la tab la 1.2,
el e s lab ó n m ás c o r to , del m ecan ism o de c u a tro b a rra s , está opuesto al configurado co m o la bancada. En e s taco n fig u rad ó n , n in g ú n eslabón conectado a la b ancada p o d rá co m p le ta r una r rv o lu d ó n . P o r lo tan to , ta n to el eslabón de en trad a c o m o el de salida están restring idos a o s d la r e n tre d e r to s lim ites, p o r lo q u e se conocen co m o b a la n a n e s . N o obstan te , el a c o p lad o r si com pleta u n a revolución.
1.10.5 M e c a n is m o d e p u n to d e c a m b ioEn la figura 1 3 4 d se m uestra u n m ecanism o de p u n to d e cambio. C óm o se esped fica en los crite rio s del caso 4 de la tab la 1.2, la sum a de dos lad o s es la m ism a q u e la sum a de los o tros d a s . C on esta igualdad, el m ecanism o d e p u n to de cam bio se posiciona, de m o d o q u e to d o s lo s eslabones se vuelvan colineales. El tip o m is fa m ilia r del m ecan ism o d e p u n to d e cam b io es el eslab o n am ien to q u e fo rm a u n p a ra le lo g ra m o . La b a n cad a y el ¿cop iador son de la m ism a lo n g itu d , de m o d o q u e son los e s b b o n e s pivote. P or consiguiente, los c u a tro eslabones se trastea r á n en tre sí. E n te configuración colineal, e l m o v im ien to se vuelve in d e te rm in a d o . E l m o v im ie n to p u ed e p e rm an ecer en u n a configuración de paralelogram o o volverse u n a configurac ión c o n tra r ia a u n p a ra le lo g ra m o ( o d e m a rip o sa ) . P o r ta l razón, el p u n to de cam bio se cono ce co m o u n a configurac ión de singularidad.
1.10.6 T r ip le b a la n c ínEn te figura 1 J 4 e se m uestra u n m ecanism o d e tr ip le ba ten d n . S g u iendo lo s criterios del caso 5 de te tab la 1 3 , el tr ip le ba ten d n n o tiene eslabones q u e logren com pletar u n a revolución com pleta. de m o d o q u e lo s tres eslabones m óviles se balancean.
PRO B LEM A D E E JE M PL O 1.9
En la figura 13 5 se observa el ensam ble del tren de aterrizaje de u n avión pequeño. G asifique el m ovim iento d e este m rcanism o de cuatro barras con base en la configuración de los eslabones.
www.FreeLibros.me

SO L U C IÓ N :
Introducc ió n a jo s m eca n ism o s y a la c in em ática__________21
r?
fig u r a l J 5 Ensam ble del tre n de aterrizaje del p rob lem a d e e jem plo 1.9.
I . Identifique b s eslabona con base en la b n g itu d
En u n análisis centrado en el tren d e aterrizaje, el m ovim iento del ensam ble de la rueda se determ inarla en relación con el cuerpo del avión. Por lo tanto, d cuerpo de la aeroiuve se designa com o la bancada, l a figura I J 6 lu s tra el diagram a cinem ático d d ensam ble de la rueda, con la num eración e identificación de los eslabones, l a pu n ta de la rueda se designó co m o el p u n to de interés X.
(3)
fig u r a i J 6 D iagram a cinem ático del p ro b lem a de e jem plo 1.9.
las longitudes de los eslabones son:
í - 12 in ; l - 32 in ; p - 30 ¡n; q - 26 in
2. Compare criterios
0 eslabón m ás corto es el adyacente a la bancada. De acuerdo con el criterio de la tabla 12 , tal m ecanism o puede ser u n a manivcla-balancin, un pun to de cam bio o un balaixrín triple. Se deben repasarlos criterios de las d iferentes categorías de los mecanismos de cuatro barras.
3. Verifique los criterios de m annrla-balancin (caso 2)
lo s criterios son:
s + K p + q
(12 + 3 2 ) < ( 3 0 + 26)
44 < 5 6 -* {sl|
Com o los criterios de m anivcla-balandn son válidos, el ensam ble del tren de aterrizaje es u n m ecanism o de rmnivcla-bolandn.
www.FreeLibros.me

22 CAPITULO UNO
1.11 M ECANISM O D E MANIVELA- CORREDERA
O tr o m ecan ism o c o m ú n e s e l de m an ivela-co rredera , el cual consiste ta m b ié n en u n a com binación d e c u a tro e sb b o n es, con u n o d e s ig n a d o c o m o b b ancada . Este m ecan ism o , s in e m
bargo, está conectado p o r tres un iones d e p e rn o y u n a u n ió n de corredera.
En b fig u ra 1.37a se presen ta u n m ecan ism o q u e im pulsa u n a b o m b a d e agu a m anual. En la figura 1 3 7 b se m uestra el d b - g ram a cinem ático correspondien te.
f i g u r a l J 7 M ecanism o de b o m b eo de u n a b o m b a d e agu a m anual: a) m ecanism o y b) d iagram a c in e m á tic a
La m ovilidad del m ecan ism o m anivela-corredera se represen ta co m o sigue:
n = 4, Jp ■ (3 p e rn o s + 1 co rred era ) = 4 ,/h = 0
M - 3 (n - 1) - 2 j p - j h - 3(4 - 1) - 2 ( 4 ) - 0 - I .
C om o el m ecan ism o de m anivela-corredera tien e u n grado de libertad, está restringido p a ra o p e ra r com pletam ente co n un im pulsor. La b o m b a d e la figura 1.37 se activa en fo rm a m anual em p u jan d o el m an g o (eslabón 3).
E n g enera l, el e s b b ó n p iv o te co n ec tad o a b b ancada se conoce co m o m anivela. Este e sb b ó n n o siem pre log ra efectuar u n a revolución com pleta. El e sb b ó n q u e m ueve se conoce com o corredera. Este e sb b ó n e s el p istón-varilla d e la figura 1.37. El
¿so p lad o r o b ie b “acop la" el m o v im ien to de b m anivela y b corredera.
1.12 M ECA N ISM O S PARA PRO PÓ SITO S ESPECIALES
1.12.1 M e c a n is m o s d e l ín e a re c ta
lo s m ecanism os de linea recta hacen q u e u n p u n to tenga trayecto ria en linea recta sin q u e esté g u iad o p o r u n a superficie plana. Históricamente, las un iones prism áticas de calidad q u e perm iten d m ovim iento suave, re c ta sin cam bios bruscas, han s id o d ifid les de fabricar. Se h a n ideado d iversos m ecanism os q u e generan m ovim iento en linea rec ta (o casi en linca recta) co n uniones y actuad ores g iratorios. L a figura 138a presenta u n eslabonam iento de W att; b figura 138b, u n eslabonam iento d e Péaucellier-Lipkin.
a)
FIG U R A 1 .38 M e c a n is m o s d e l í n e a r e c ta .
1.12 .2 M e c a n is m o s d e p a ra le lo g ra m o
Los m ecanism os están fo rm ados c o n frecuencia p o r esb b o n es q u e in teg ran para le logram os p a ra m o v er u n o b je to s in alterar s u paso . D ich o s m ecan ism os crean m o v im ien to p a ra le lo para
ap licaciones c o m o las básculas, el t im ó n de p b n e a d o re s y las persianas p a ra v en tan as . En b fig u ra 1.39a se m u e s tra n dos tip o s d e es lab o n am ien to s de p a ra le lo g ra m o co n u n es lab o n a m ie n to d e tijera; b fig u ra 1.39b, u n e s b b o n a m ie n to del tra n sp o rta d o r d e u n a im p re n ta
www.FreeLibros.me

Introducc ió n a los m ecan ism o s y a la c in em ática__________23
FIG URA 1 3 9 M e c a n i s m o s d e p a r a le lo g r a m o .
1.12.3 M e c a n is m o s d e r e to r n o r á p id oL os m ecanism os de reto rno rápido tien en u n avance m ás rápido en u n a dirección q u e en la o tra , c u a n d o so n im p u b a d o s a velocidad constante c o n u n a c tu ad o r giratorio . Se u tilizan c o m ú n m en te e n m áqu inas-herram ien ta q u e requieren u n a carrera de
corte len to y u n a d e re to m o rápido. En la figura 1.40 se observan dos m ecanism os d iferen tes d e re to rn o ráp id o . La fig u ra 1.40a m uestra u n eslabonam iento de m anivela-corredera descentrado; y la fig u ra 1.40b, u n e s lab o n am ien to de m anivela-cep illo l i mador.
f i g u r a 1 .40 M ecanism os d e re to rn o r á p id o .
1. 12 .4 M e c a n is m o d e y u g o e sc o c é sU n m ecanism o de yugo escocés es u n m ecan ism o co m ú n q u e convierte el m ov im ien to d e ro tac ión e n u n m ov im ien to lineal deslizan te , o viceversa. C o m o se in d ica en la f ig u ra 1.41, el p e rn o de u n eslabón g ira to rio está insertado e n la ran u ra d e un
yugo corredizo. C o n respecto al m ov im ien to de e n tra d a o sa lid a , el yugo escocés es sim ilar a la m an ivela-co rredera , p e ro el m o v im ien to deslizan te lineal es u n a se n o id a l p u ra . En com - H iración co n b m an ivela-co rredera , e l yugo escocés tien e la ventaja de m en o r ta m a ñ o y m enos p artes m óviles, p e ro suele experim entar u n desgaste ráp id o en b r a n u ra
f i g u r a M I M ecanism o d e y ugo escocés.
1.13 TÉCN ICA S DE ANÁLISIS DE M ECANISM OS
La m ayoría d e lo s aná lis is de m ecan ism os im plica geom etría . C on frecu en c ia se u tilizan m éto d o s gráficos p a ra q u e el m ov im ien to de los m ecanism os se logre visualizar c o n claridad.
la s so luciones gráficas incluyen el d ib u jo d e lineas “a escala" en ángu los específicos. U n e jem p lo es el d ib u jo de u n d iag ram a c in e m á tic a L a so luc ión gráfica req u ie re la p reparación de un d ib u jo q u e m uestre to d o s lo s eslabones a escala p roporc ional c o n el m ecanism o real. L a o rien tac ió n de lo s eslabones tam bién se deb e m o s tra r co n los m ism os á n g u lo s del m ecan ism o real.
www.FreeLibros.me

24 CAPITULO UNO
El m é to d o g rá fic o tien e la v en ta ja d e fac ilita r b visuali- zación y b so lu c ió n d e l p rob lem a. S in em bargo , la ex ac titu d se ría difícil de lo g ra r en com paración co n los resultados de las técn icas analíticas . D u ra n te m u ch as décad as, el aná lis is de m ecan ism os se realizó u sa n d o básicam ente m éto d o s gráficos. A p e sa r de s u p o p u la r id a d , m uchas técnicas gráficas fueron desechadas p o r su b i t a de precisión. S in em bargo, e l desarrollo de sistem as de d iseño asistido p o r co m p u tad o ra (C A D ) p e rm itió q u e el enfoque gráfico se aplicara co n precisión. Este texto in ten ta ilu s tra r lo s m éto d o s m ás com unes q u e se u tilizan en el análisis práctico de m ecanism os. C ada u n o de estos m étodos se desc rib e b revem ente en las secciones siguientes.
1.13.1 T é c n ic a s t r a d ic io n a le s d e r e p r e s e n ta c ió n g rá f ic aD u ran te las últim as décadas, todos lo s análisis gráficos se realizab an u sa n d o técn icas de d ib u jo trad ic ionales. Se usaba equipo gráfico p a ra d ib u ja r las líneas a escala necesaria en ángu los específicos. El eq u ip o u tilizad o para efectuar ta les análisis incluía escuad ras, re g b s , com pases, t ra n sp o r ta d o re s y escalím etros. C o m o se m en c io n ó , este m é to d o e ra criticad o co n frecuencia p o r se r im p re c isa S in em bargo , co n a tención adecuada a lo s detalles. se logran o b te n e r so luc iones precisas.
La ráp ida adopción del software d e C A D en los ú ltim o s años fue lo q u e lim itó el uso de las técnicas gráficas tradicionales. Aun cu an d o en la in d u stria n o tienen g ran aplicación, m uchos creen que las técnicas gráficas tradicionales se p u ed en enseñar todavía a los estudiantes para ilu strar los conceptos subyacentes en el análisis gráfico d e mecanismos. D esde lu e g a tales conceptos son idén ticos a los q u e se u sa n en el aná lis is gráfico co n u n sistem a de CAD. M ediante las técnicas de d ib u jo tradicionales, el estudiante se concentra m ás en las teorías cinem áticas, en vez de “atorarse" ap rend iendo los com andos d e CAD.
1.13 .2 S is te m a s d e C A D
C o m o se m encionó , el análisis gráfico se realiza u sando p roced im ientos d e d ib u jo trad icionales o u n sistem a de CAD. co m o se hace n o rm alm en te en b in d u stria . Para el análisis d e m ecanis m os, es posib le u tilizar cualqu iera de lo s d iversos sis tem as de C A D disponib les com ercialm ente. El sistem a d e C A D b idim en- sional m ás co m ú n es AutoCAD. Si b ien los co m an d o s difieren en tre u n o y o tro sistemas, todos los sistem as de C A D tien en b capacidad de d ib u ja r co n a lta precisión las lineas c o n las lon g itu d es y lo s ángu los designados. Esta e s exactam en te b característica r e q u e r id a p o r el análisis g rá fic o d e m ecan ism os. A dem ás del a u m e n to e n la ex ac titu d , o t r a v en ta ja d e C A D es q u e las líneas n o necesitan estar a escala para ajustarse so b re una pieza d e papel d e d ib u jo . E n la com p u tad o ra , las líneas se trazan sob re u n papel “v irtua l” de tam añ o infinito.
A sim ism o, el m o d o de d ib u jo restring ido en sis tem as de m odelad o tr id im en sio n a l, c o m o Inventor. S o lidW orks y l’ro- Engineer, suelen ser ex trem adam ente ú tiles en el análisis cinem ático p lan o . Las restricciones grom étricas, com o b lo n g itu d , la perpendicularidad y el paralelism o, se d eb en cu m p lir al realizar e l análisis cinem ático. Tales restricciones se ejecutan de m anera au to m á tica en el m o d o d e d ib u jo de m odelad o en tres d im e n siones.
E ste te x to n o p re ten d e e s tu d ia r ex h au stiv am en te los c o m andos del sistem a especifico u tilizado p a ra d ib u ja r la s lineas, pero varios p rob lem as d e e jem plo se resuelven c o n u n sistem a
de CAD. La m eta principal d e este libro es in tro d u c ir y b r in d a r el en tendim iento de los concep tos del análisis de m ecanism os. Tal objetivo se p u ed e lo g ra r s in tom ar en cuenta el sistem a de CAD específico que se utilice. P or d io . el e s tu d b n te n o se deb e ría p re o cu p ar p o r el sistem a de CAD usado p a ra llevar a cab o d análisis gráfico. C o m o en este c a s a d es tud ian te n o se deb e p reo cu p ar si se usan gráficas m anu a les o d e co m p u tad o ra p a ra a p re n d e r d análisis de m ecanism os.
1.13.3 T é c n ic a s a n a l í t ic a sSe p u ed en u sa r tam b ién los m étodos analíticos para o b te n e r resu ltados exactos. Las técn icas a n a lítica s avanzadas invo lucran con frec u en cb funciones m atem áticas com plejas, la s cuales está n m ás allá del alcance d e este lib ro y del análisis ru tin a rio de m ecanism os. A s im ism a b im p o rta n c b d e lo s cálculos co n frec u e n c b e s difícil de visualizar.
Las técnicas analíticas inco rpo radas e n esta o b ra so n co n sis ten tes c o n las teo rías geom étricas, tr ig o n o m étrica s y del análisis gráfico d e m ecanism os q u e log ra so luc iones precisas, en tan to q u e las teorías gráficas p erm ite n q u e se visualicen las so lu ciones. Este m é to d o tien e b desventaja d e cálculos b b o r io so s pura lo s m ecanism os m ás com plejos. A un as í, u n a g ra n parte de este tex to está dedicada a las técnicas analíticas.
1.13 .4 M é to d o s p o r c o m p u ta d o r aC onform e se requieren so luc iones analíticas m ás precisas para varias posic iones d e u n m ecan ism o, d n ú m e ro d e cálculos se p o d ría volver inm anejable. En tales casos, se recom ienda el uso de u n a so lu c ió n p o r c o m p u ta d o ra , las cuales ta m b ié n so n valiosas cu an d o se deben a n a liz a r v a rias ite rac io n es e n el d iseño.
El m éto d o c o m p u ta d o n a l para d análisis d e m ecanism os tiene varias form as:
■ Las hojas de cálculo son m uy co m u n es en la so luc ión de p rob lem as ru tin a rio s de m ecanism os. U na característica im p o rtan te de las h o ja s de cálculo es q u e al cam biar los dalos q u e se in tro d u c en en u n a celda, lo s d em ás resultados se actualizan autom áticam ente. Esto p erm ite q u e las ite ra ciones en d d iseño se realicen co n facilidad. C o n fo rm e los p rob lem as se vuelven m ás com p le jo s, s u d e d ificultarse su m anejo co n u n a h o ja de c á lc u la N o ob stan te , a lo largo del tex to se usan h o ja s d e cálculo para resolver p roblem as.
■ Se d ispone de p ro g ra m a de análisis dinám ico comerciales, com o VVórking M odel, ADAM S (A utom atic I>ynamic Analysis o f M echanical System s) o D ynam ic Designer. Es posible c re a r m odelos d inám icos d e sistem as a p a r t ir d e los m en ú s d e lo s co m p o n en tes generales. Las versiones restring idas d e lo s sistem as de m odelad o en tr e s dim ensiones so n p rog ram as de análisis d inám ico . Hay paquetes com pletos d e softw are m ás adecuados cu an d o el análisis cinem ático y el dinám ico fo rm a n u n a p a rte significativa del tra bajo p o r realizar. El cap itu lo 2 está d ed icado a p rog ram as de análisis d in á m ic a
■ Es posib le c re a r programas de cómputo escritos por el usuario en lenguajes d e alto nivel co m o M a lb b , M athem atica, V isualBasico C + + . El lenguaje de p ro g ram ac ió n seleccionado deb e te n e r acceso d irec to a funciones tr ig o n o m étricas y a funciones trigonom étricas inversas. D eb ido al
www.FreeLibros.me

Introducc ió n a jo s m eca n ism o s y a la c in em ática__________25
tiem p o y al esfuerzo q u e se requieren p a ra desarro llar p ro gram as especiales, estos son m ás efectivos cu an d o se necesita resolver u n p rob lem a com plejo q u e n o se enfrenta co tid ianam ente. En el cap ítu lo 8 se incluyen algoritm os sim ples p a ra u n análisis cinem ático elem ental.
PROBLEMAS
P ro b le m a s d e e la b o ra c ió n de d iag ram as c in em á tico s
1-1 . En la figura P l . l se m uestra u n m ecanism o q u e sirve ju ra a b r ir la p u e r ta d e u n h o rn o de tra ta m ie n to té r mico. D ib u je el d ia g ra m a c inem ático del m ecanism o. 0 ex trem o del m ango se deb e d efin ir co m o u n p u n to d e interés.
f i g u r a Pi .4 Problem as 4 y 29.
1 - 5 . Hn la figura P l .5 se ilu stran u n p a r d e tenazas. D ib u je el d iag ram a cinem ático del mecanismo.
f i g u r a p i J Problem as 5 y 30.
1 -2 . En la fig u ra P1.2 se m uestra u n a c o rtad o ra d e pernos. D ibuje el d iag ram a c inem ático del m ecanism o, se lecc ionando el m ango in fe rio r co m o la bancada. Se deben iden tificar c o m o p u n to s de in te ré s el ex trem o del m ango su p e rio r y la su p e rfic ie c o r ta n te d e las m o r-
1 -6 . E n la figura P1.6 se presen ta o tra configuración de un p i r de tenazas. E labo re el d iag ram a c in em ático del m ecanism o.
f i g u r a P l J Problem as 2 y 27.
FIG U R A P I A P r o b l e m a s 6 y 3 1 .
1 - 7 . E n la figura P1.7 se ilu s tra el m ecanism o de u n a v en tana. D ib u je el d iag ram a c inem ático del m ecan ism o.
1-3 . En la figura P l .3 se ilu stra u n a silla plegable q u e se usa generalm ente en los estadios. Elabore el d iag ram a cinem ático del m ecan ism o p legad iza
f i g u r a P l .7 Problem as 7 y 32.
1 -8 . E n la figura P1.8 se m uestra o tro m ecan ism o de una v en tan a . D ibuje e l d iag ram a c in em ático del m eca- nism o.
1 - 4 . En la figura P1.4 se presen ta u n a b o m b a de pedal que se utiliza para in fla r neum áticos de bicicleta, juguetes, e tcé te ra D ibuje el d io r a m a cinem ático del m ecan ism o d e la b o m b a . El pedal se deb e iden tificar co m o un p u n to de interés.
f i g u r a p i . i P r o b le m a s I y 2 6 .
EstnicUira- ifc su jec ió n
www.FreeLibros.me
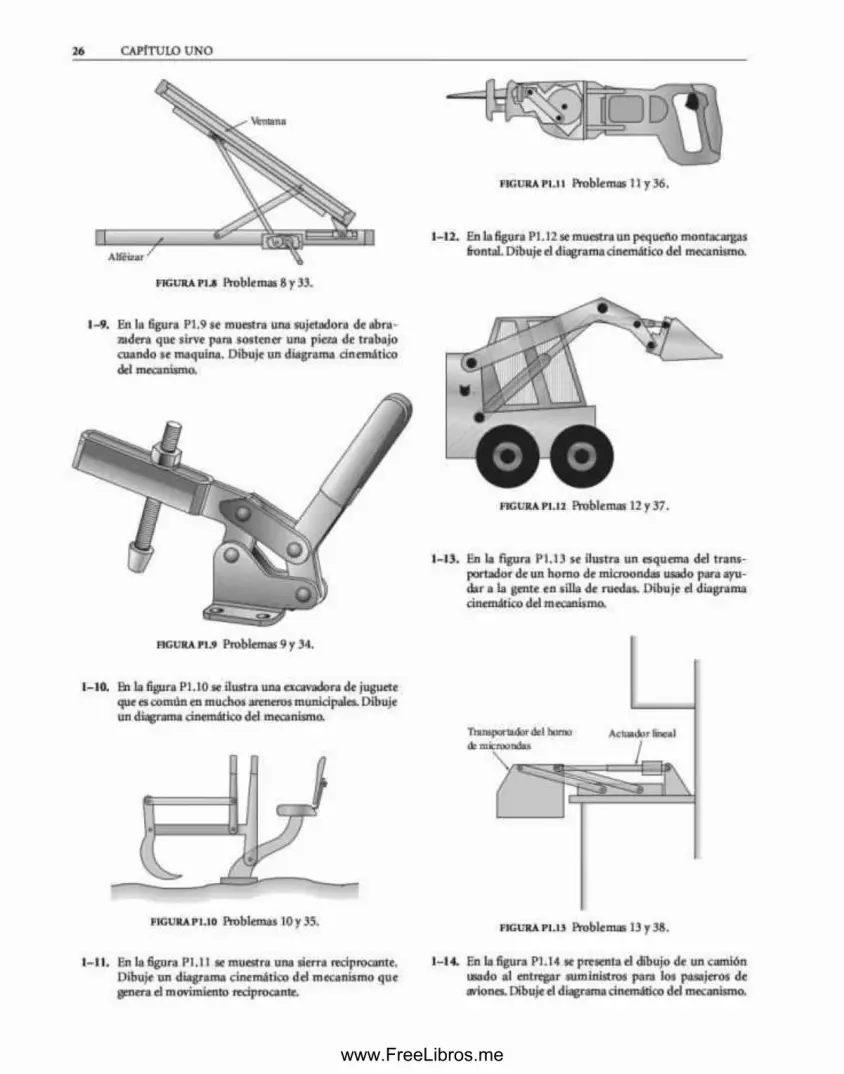
26 CAPITULO UNO
1-9 . En la figura P I .9 se m uestra u n a su je tad o ra de a b ra zadera q u e sirv e para so s te n e r u n a pieza de trab a jo c u a n d o se m aqu ina . D ibuje u n d iag ram a cinem ático del m ecanism o.
fig u r a Pi.9 P roblem as 9 y 34.
1—10. En la figura P1.10 se ilu stra u n a excavadora de juguete q u e es co m ú n en m uchos areneros m unicipales. D ibuje u n d iag ram a cinem ático del m ecanism o.
FIGURA PI.I i P roblem as 11 y 36.
1 -12 . En la fig u ra P1.12 se m uestra u n p eq u eñ o m ontacargas frontal. D ib u je el d iag ram a cinem ático del mecanismo.
f i g u r a p i . 12 Problem as 12 y 37.
1-13 . En b fig u ra P1.13 se i lu s tra u n esq u em a del tra n s p o rtad o r d e u n h o m o de m icroondas usado p a ra ayudar a la g e n te en s i lb d e ruedas. D ib u je el d b g ra m a cinem ático d e l m ecanism o.
1 -1 1 . En b figura P 1.11 se m uestra u n a sie rra reciprocante. 1 -1 4 . En la figura P l . 14 se p resen ta el d ib u jo de u n cam ión D ibuje u n d iag ram a c in em ático del m ecan ism o q u e iftado al en tregar su m in is tro s p a ra lo s pasa jeros dep m e ra el m ov im ien to reciprocante. ¡piones. D ibuje el d iag ram a cinem ático del mecanismo.
www.FreeLibros.me

In troducción a los m ec a n ism o s y a la c in em ática 27
1-18 . En la figura P l . 1 8 se presen ta el d iag ram a d e u n trasca- bo. D ib u je el d iag ram a cinem ático del mecanismo.
1 - 1 5 . En la figura P I.1 5 se m uestra el esquem a d e u n d ispositivo p a ra m o v er p aq u e tes de u n b a n c o de ensam ble a u n a linea tra n sp o r ta d o ra . D ib u je el d iag ram a c in e m ático del m ecanism o.
1 - 1 6 . En la figura P1.16 se ilu stra el esquem a d e u n a p la ta form a lev ad iza . D ib u je el d ia g ra m a c inem ático del mecanismo.
f i g u r a P l . 16 Problem as 1 6 y 4 1 .
1 - 1 7 . En la fig u ra P 1.17 se m u e s tra el esq u em a de u n a p la tafo rm a lev ad iza . D ibuje el d ia g ra m a c inem ático del mecanismo.
f i g u r a P l.1 8 Problem as 18y 43.
1 - 1 9 . En la figura P l . 19 se m uestra el esquem a de u n m o n tacargas f ro n ta l. D ib u je el d iag ram a c in em ático del m ecanism o.
En la fig u ra P I .2 0 se ilu s tra el esquem a de u n a p la ta fo rm a de a l tu r a a ju s ta b lc q u e sirv e p a ra c a rg a r y descargar cam iones d e c a rg a D ibuje el d iag ram a cinem ático d e l m ecanism o.
f i g u r a P l JO Problem as 20 y 45.
1-21 . E n la figura P1.2I s e m uestra el esquem a de u n tra n s p o r ta d o r de e lectrodom ésticos para cocina . D ibuje el d iag ram a cinem ático d e l m ecanism o.
www.FreeLibros.me

28 CAPITULO UNO
f ig u r a Pi.21 Problem as 21 y 46.
1 -22 . En la fig u ra P 1 .2 2 se m u e s tra e l esq u em a de u n e le vador p a ra la ventana d e u n autom óvil. D ib u je el d ia g ram a c inem ático del m ecanism o.
f i g u r a P 1.22 Problem as 22 y 47.
1 -23 . En la figura P 1.23 se m uestra el esquem a de u n d ispositivo para c e rra r las so lapas superio res d e cajas. D ibuje el d iag ram a cinem ático del m ecanism o.
1 -24 . E n la figura P1.24 se m uestra el esq u em a d e u n a m áqu in a d e coser. D ibuje el d iag ram a cinem ático del m ecanism o.
1-25 . En la fig u ra P1.25 se m uestra el esquem a de u n co m p o nen te del d ispositivo de p ruebas de desgaste. D ibuje el diagram a cinem ático del m ecanism o.
f ig u r a P U 3 Problem as 23 y '18. FIGURA p u s f to b lc m a s 25 y 50.
www.FreeLibros.me
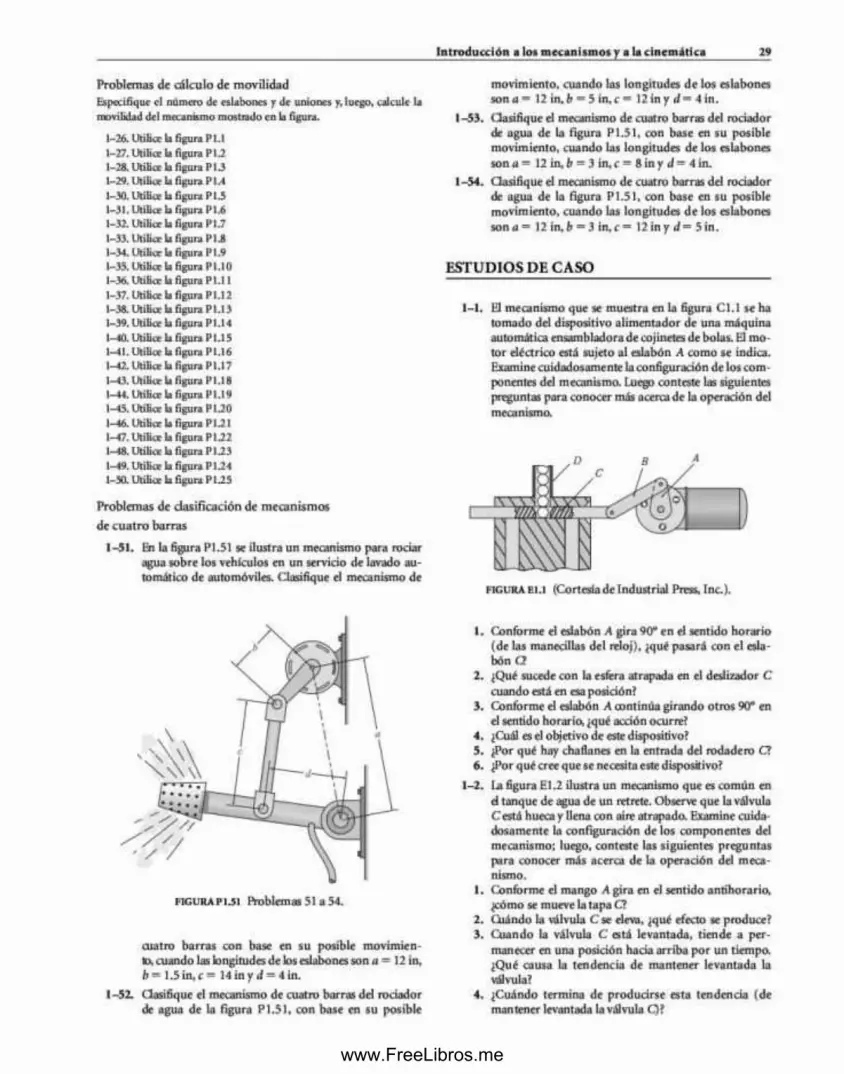
In iroducc ió n a jo s m eca n ism o s y a la c in em ática__________29
P ro b le m a s d e c á lc u lo de m ov ilidadEspecifique el número de eslabones y de uniones y. luego, calcule la movilidad del mecanismo mostrado en la figura.
1- 26. Utilice 1-27. Utilice 1-28. Utilice 1-29. Utilice 1-30. Utilice 1-31. Utilice 1-32. Utilice 1-33. Utilice 1-34. Utilice 1-35. Utilice 1-36. Utilice 1-37. Utilice 1-38. Utilice 1-39. Utilice 1-40. Utilice 1-41. Utilice 1-42. Utilice 1-43. Utilice 1-44. Utilice 1-45. Utilice 1-46. Utilice 1-47. Utilice 1-48. Utilice 1-49. Utilice 1-50. Utilice
b figura P l.l b figura PI.2 b figura P 1 J b figura P1.4 b figura P13 b figura P 1.6 b figura PI.7 b figura P 1.8 b figura PI.9 b figura P l .10 b f ig u ra P I .i l b figura P l . l2 b figura P l . l3 b figura P1.14 b figura P l . l5 b figura P l . l6 b figura PI.17 b figura PI.18 b figura P l . l9 b figura PU O b figura P 1.21 b figura PI.22 b figura P 1.23 b figura P 1.24 b figura P1.25
P ro b le m a s de c la s ificac ió n de m ecan ism o s
de c u a t r o b a r ra s
1 -51 . En la figura P I.51 se ilu stra u n m ecanism o para rociar agu a so b re lo s vehículos en u n servicio de lavado au to m ático de autom óviles. Clasifique el m ecan ism o de
m o v im ien to , c u a n d o las lo n g itu d e s d e lo s eslabones s o n a - 12 in ,b ■ 5 ¡n ,c ■ 1 2 in y d " 4 in .
1 -5 3 . G as ifiq u e el m ecanism o d e cuatro b a rra s del rociador de a g u a de la fig u ra P 1 .5 1 , co n b ase en su posib le m o v im ien to , c u a n d o las lo n g itu d es d e lo s eslabones so n a = 12 in , b = 3 in , c = 8 in y d = 4 in.
1 -5 4 . C lasifique el m ecanism o d e cuatro b a rra s del rociador de a g u a de la fig u ra P 1 .5 I , c o n b ase en su posib le m o v im ien to , c u a n d o las lo n g itu d e s d e lo s eslabones son a = 12 in , b = 3 in , c = 12 in y d = 5 in .
ESTUDIOS DE CASO
1-1 . E l m ecan ism o q u e se m uestra e n la figura C l . l se ha to m a d o del d ispositivo a lim e n ta d o r de u n a m áqu ina autom ática cnsam b lad o ra de cojinetes de bo las. El m o to r e léc trico está su je to a l e s lab ó n A co m o s e indica. Exam ine cu idadosam ente la configuración d e lo s c o m ponentes del m ecan ism o. Luego conteste las siguientes preguntas para con o cer m ás acerca de la operac ió n del m ecanism o.
f i g u r a p i j i P ro b le m a s51 a 54.
c u a tro b a r ra s co n base en su posib le m ov im ien to, cu an d o las longitudes d e los eslabones son a = 12 in, b = 1 .5 in , c = 14 in y d = 4 in.
1-52. G asifique el m ecanism o de c u a tro b a rra s del rociador de agu a d e b fig u ra P1.51, co n b a s e en su posib le
1. C onfo rm e el eslabón A g ira 90° e n el se n tid o h o rario (d e las m an ec ilb s d e l re lo j), ¿qu é p a sa rá co n e l e sb - b ó n a
2 . ¿Q ué sucede co n b estera a trap ad a en el deslizador C cu an d o está e n esa posición?
3 . C onfo rm e el eslabón A con tinúa g ira n d o o tro s 90* en el sen tido h o ra rio , ¿qué acción ocurre?
4 . ¿Cuál e s el o b je tivo d e este dispositivo?5 . ¿Por q u é hay chaflanes en la en trad a del ro d a d e ro C?6 . ¿Por q u é cree q u e se necesita este dispositivo?
1 -2 . La figura E l.2 ilu stra u n m ecanism o q u e es c o m ú n en d ta n q u e d e agua d e u n retrete. O bserve q u e la válvula C e s tá hueca y llen a co n aire a trap ad o . Exam ine cu idad o sa m en te b con fig u rac ió n de los co m p o n en tes del m ecan ism o; luego, con teste las s ig u ien tes p regun tas p a ra con o cer m ás acerca de b o p e rac ió n del m eca nism o.
1. C onfo rm e el m an g o A g ira en el se n tid o an tih o ra rio , ¿cóm o se m ueve la ta p a C?
2 . C uándo b válvula C se eleva, ¿qué efecto se produce?3 . C u a n d o b v á lv u b C está lev an tad a , tien d e a p er
m anecer en u n a posic ión hacia a r r ib a p o r u n tiem po. ¿Q ué cau sa b te n d e n c b de m an ten e r le v a n ta d a b válvub?
4 . ¿C u án d o te rm in a de p ro d u c irse e s ta te n d e n c b (de m an ten e r levantada la v á lv u b Q ?
www.FreeLibros.me

30 CAPITULO UNO
A
FIGURA B U (C o rtesfad e Industria l Press, Inc.).
5. ¿Q ué efecto h a rá q u e se m ueva el flo tad o r D?6. C onfo rm e el flo tad o r D se m ueve en se n tid o a n tih o
rario , ¿qué pasa c o n el eslabón P7. ¿Qué co n tro la el eslabón P.8. ¿Cuál e s la operac ió n co m p le ta de este m ecanism o?9. ¿Por q u é se necesitan e s te m ecan ism o y e l a lm ace
nam ien to de agu a en el tanque?
1-3. l a figura E l.3 m uestra u n m ecanism o q u e gu la las va rillas nuevas de acero hacia u n d ispositivo q u e las e n ro lla en carretes. Las varillas están calientes cu an d o se Éibrican, p o r lo q u e se u tiliz a agua para ayudar al p ro ceso de enfriam iento . Las varillas p u ed en te n e r varios m iles d e pies de lo n g itu d , y se deslizan a u n a rap idez de has ta 25 m illas p o r h o ra a través del canal S.
U na vez q u e el carrete está lleno , se rem ueve c o n la varilla en red ad a . P ara o b te n e r a lta eficiencia, las varillas se siguen m uy d e cerca unas co n o tra s . Resulta im posib le rem over el carrete en
u n intervalo de tiem po corto; p o r lo tan to , es deseable usar dos carretes a lte rn ad am en te . Este m ecan ism o se ha d isenado p a ra a lim en tar las varillas a lo s carretes.
Los c u b o s Bi y B¡ tien en o rific io s e n el fondo. El flujo de agua del sum in istro e s m ay o r q u e el w lu m e n de a g u a q u e se escapa p o r lo s o rific io s . E xam ine cu id ad o sam en te la co n fig u ración de los co m p o n en tes del m ecanism o; luego, con teste las siguientes p reg u n ta s p a ra o b te n e r m ayor co n o c im ien to acerca de la operac ió n del m ecanism o.
1 . En la configurac ión m ostrada, ¿qu é sucede co n el nivel de agu a en el cu b o B¡1
2 . En la configurac ión m ostrada, ¿qué sucede co n el nivel de agu a en el cubo
3 . ¿Qué p a sa rla co n d b ra z o b a la n c ín C s i e l c u b o Bj se forzara hacia arriba?
4 . ¿Qué pasarla co n el b razo balancín R s i el cu b o B> se forzara hacia arriba?
5 . ¿Qué co n tro la el b razo balancín R?6 . ¿C óm o es d m ovim iento c o n tin u o d e este dispositivo?7 . ¿C óm o p e rm ite este d ispositivo q u e se u se n d o s ca
rre tes separados en la situación descrita?8 . ¿P or q u é su p o n e q u e se u tiliza a g u a c o m o fu e n te de
energía para la operac ió n de este m ecanism o?
www.FreeLibros.me

C A P I T U L O
D O S
C O N STR U C C IÓ N DE M O D ELO S DE M ECA N ISM O S EN C O M PU TA D O R A U SA N D O EL SOFTW ARE W O R K IN G MODEL®
O B J E T I V O S
Al te r m in a r d e e s tu d ia r e s te c a p itu lo , e l a lu m n o se rá c a p a z d r :
1. Entender el uso del software comercial para el análisis de mecanismos.
2 . Utilizar Worfciog Model* para construir modelos cinemáticos
3. Usar Working Modcl* para anim ar el movimiento de mecanismos.
4 . Utilizar Working Modcl* para determ inar los valores cinemáticos de un mecanismo.
2.1 IN TR O D U C C IÓ N
El rá p id o d e sa rro llo d e las c o m p u ta d o ra s y del so ftw are ha m odificado la fo rm a en q u e se realizan m uchas tareas de ingen iería . Para el estud io de los m ecanism os se h a n desarro llado p aq u e tes de so ftw are q u e p e rm ite n a u n d ise ñ a d o r co n s tru ir m o d elo s v irtua les de u n m ecan ism o. L os m odelos v irtuales m u estran al d ise ñ ad o r la sim ulación total de u n a m áqu ina . La sim ulación facilita a los ingenieros crear y p ro b a r p ro to tip o s del p roducto en su s com pu tadoras de escritorio . Los e rro re s de d ise ñ o se aíslan y e lim in an ráp idam ente, reduciendo asi lo s gastos en la e laboración de u n p ro to tip o y acelerando, a la vez, el de lo de desarro llo del producto .
L os p aq u e tes d e softw are resuelven ecuaciones cinem áticas y d inám icas, d e te rm in a n lo s valo res d e l m o v im ie n to y d e las fuerzas e n e l m ecan ism o d u ra n te la o p e ra c ió n . A dem ás del análisis n u m érico , el so ftw are a n im a u n m o d e lo en c o m p u ta d o ra del m ecan ism o, lo cual p erm ite v isualizar el d ise ñ o en acción.
E ste cap itu lo s irv e fu n d a m e n ta lm e n te c o m o g u la en la sim ulación d e m áquinas y m ecanism os co n el softw are W orking Model®. A un cu an d o los valores cinem áticos generados d u ra n te el análisis qu izá n o se en tiendan p o r com pleto , la visualización del m ecan ism o su d e ser m uy en tendible. El m aterial p resentado en varios d e lo s cap ítu los sigu ien tes p e rm itirá al lecto r entender las so luciones num éricas d d softw are d inám ico. El d o m in io de este tip o d e softw are de análisis de m ecanism os, ju n to c o n u n conocim iento só lid o d d análisis cinem ático y d inám ico, ofrece u n a base só lid a para el d iseño de m áquinas.
2.2 SIM ULACIÓN PO R CO M PU TA D O RA DE M ECANISM OS
A dem ás de W ork ing M odel* tam b ién están d ispon ib les o tro s p ro g ram as de análisis d in ám ico , co m o ADAM S* (A utom atic Dynam ic Analysis o f M echanical System s), D y n am ic D csigner", LMS VirtuaLLab y A nalytix* .Todos perm iten la creación de un m ecanism o, a tra v é s d e m e n ú s o iconos, de lo s co m p o n en tes generales. L os com ponen tes generales incluyen aquellos q u e se p resen taron e n d cap itu lo 1, c o m o eslabones sim ples y co m p le jas, un iones d e pernos, un iones d e co rred era y un iones de e n g ranes. E l m ecan ism o se o p e ra s d e c d o n a n d o d e l m e n ú los com ponen tes d d actuador, tales c o m o m otores o cilindros.
En el d iseño de m áquinas, u n a de las causas d e la adopción jjm eralizada del m odelad o trid im ensional es q u e p rep ara el escenario p a ra m uchos usos auxiliares: los p lanos d e e jecu d ó n se p u ed en crear m ás o m en o s au to m áticam en te , se gen eran presentaciones q u e se asem ejan estrecham en te a la m áqu ina real y los p ro to tip o s se e labo ran co n fadlidad. M uchos p ro d u c to s que fu n c io n an c o n d so ftw are de m odelad o tr id im en s io n a l están d isponib les p a ra analizar la in teg ridad e s tru c tu ra l de lo s c o m ponen tes de la m áqu ina . A sim ism o, d estud io d d m ovim iento y las fuerzas e n m ecan ism o s y ensam bles m óviles se está v o lviendo casi u n efecto colateral del m odelad o trid im ensional. La figura 2.1 ilu stra el d ise ñ o d e u n m od elo trid im ensional a n a lizado co n D y n am ic D esigner d e n tro del A utodesk Inventor* Environm ent.
S n im p o rta r el softw are que se u tilice, la estrateg ia general jxira realizar el análisis d in ám ico se resum e co m o sigue:
1 . D efinir u n c o n ju n to d e c u e rp o s ríg idos (tam años, pesos y propiedades incrdales), los cuales se construyen c o n d paquete de d iseño d e m o d d ad o trid im ensional.
2 . D eterm inar las restricciones sob re los cuerpos rígidos (conectando lo s c u e rp o s rígidos co n uniones).
3 . Especificar d m ovim iento de en trad a (defin ir las propiedades d d m o to r im pulsor, c ilindro , etcétera) o las fuerzas de en trada .
4 . C o rre r el análisis.
5 . Repasar d m ovim iento de lo s eslabones y las fuerzas en d m ecanism o.
D esde luego, lo s co m an d o s esped ficos v a ria rá n e n tre los diferentes paquetes. Las se cd o n es siguientes del cap itu lo se e n fo can en los detalles del análisis de m ecanism os co n W orking M o d d 2 D * .C o m o co n cualqu ier softw are, el co n o c im ien to se adquiere p racticando y ejecutando o tro s análisis, adem ás de los ejem plos, d e m o d o q u e se in v ita al lec to r a exp lo ra r el softw are ‘In v en tan d o ’’diversas m áquinas v irtua les.
www.FreeLibros.me

32 CAPITULO DOS
f i g u r a 2.1 A n á l i s i s d i n á m i c o d e u n m o d e l o t r i d i m e n s i o n a l .
2.3 A D Q U ISIC IÓ N DEL SOFTWARE W ORKING M ODEL
W orking M odel 2D fu e c reado p o r D esign S im u b tio n T echno log ies, q u e ta m b ié n lo d is tr ib u y e . Se p u e d e n c o m p ra r en linea copias del softw are, co n descuen tos significativos p a ra estu d ian te s , en el s i t io h ttp : / /w w w .w o rk in g m o d e l.c o n i o en h ttp ://w w w .d c s ig n s im u la tio n .c o m . H ay u n a versión descar- g ib lc d e dem ostración gratis de W orking M odel 2D, b cual fa- d l i ta a lo s e s tu d b n te s b creación de "p ro to tip o s v irtua les" to ta lm en te funcionales d e d isertos de m ecanism os com plejos. Sin em bargo , a lg u n as funcionalidades están desactivadas; las m ás notab les so n las funciones Save y P rin t. Ib e ra d e ello, esta v ers ió n o fre c e u n a excelen te in tro d u c c ió n a la co n s tru cc ió n de m odelos d e m ecanism os p o r co m p u tad o ra . P ara m ay o r inform ac ió n c o n ta c te a D esign S im u b tio n T echnologies, In c ., en 43311 Joy R oad, *237, C a n tó n , MI 48187, (714) 446-6935.
C o n fo rm e s e a c tu a liz a W ork ing M odel 2D, los m en ú s e iconos se vuelven ligeram ente d iferen tes de los q u e se m uestran en los ejem plos d e este texto. N o obstan te , c o n u n poco d e in tu ición, el es tud ian te p u ed e adap ta rse y realizar co n éx ito b s im u lación d e m ecanism os.
2.4 USO DE W O RKING M O D EL PARA M ODELAR UN M ECANISM O DE CUATRO BARRAS
C o m o se m en c io n ó . W orking M odel e s u n softw are p o p u la r de sim u lación de m ov im ien to d isp o n ib le c o m e rd a lm e n te . E n una c o m p u ta d o ra personal, crea ráp id am en te u n m od elo q u e r e presen ta u n sistem a m ecán ico y aplica u n análisis d inám ico . En esta sección se utiliza W orking M o d d p a ra co n s tru ir e l m odelo de u n m e c a n ism o de c u a tro b a r ra s y c o r re r u n a sim u lación [ref. 16). Se in tenta q u e fun ja co m o gu ia , e s decir, deberfo fu n c io n a r en b realidad co m o lo hace W orking M odel. Se invita al lecto r a p ra c tic a r co n e l so ftw are rea lizan d o aná lis is a d icionales.
Paso 1: A b rir W ork ing M odel1. Haga clic so b re el ¡cono del softw are W orking M odel para
iniciar el program a.
2 . C re e u n nuevo docu m en to de W orking M odel seleccio- o in d o "N ew " d e l m en ú “File*.Wbrking M odel despliega u n a interfase del usuario.Aparecen las barras de herram ientas q u e sirven para crear eslabones, uniones y acatadores de mecanismos a los lados de la pantalla . En la p a n e inferior estdn los controles que r u tiliza n para correr y observar las simulaciones.
3 . Especifique las un idades q u e se em plearán en la s im u lación. Seleccione “N um bers an d U n its" en el m enú “Vicw-. C am bie “U nit System " a inglés (libras).Las unidades para mediciones lineales serán pulgadas (in), los ángulos se medirán en grados (deg) y las fuerzas se especificarán en libras (Ib).
Paso 2: C re a r lo s eslabonesEste p a so d a c o m o resu ltad o los tres e sb b o n e s m óviles en el m ecanism o de cuatro barras. El fondo d e b pan ta lla sirve co m o é cuarto e sb b ó n , el fijo.
1 . C onstruya el m ecanism o creando los tres e sb b o n e s q u e no están fijos. Haga d o b le clic en la h e rra m ien ta rectán- g i lo q u e está en la b a rra d e herram ien tas.Se resalta la herramienta indicando q u e se puede usar vanas
2 . C o n b herram ien ta rectángulo , bosque je tr e s cuerpos co m o se ind ica en la fig u ra 2.2.lo s rectángulos se dibujan posiáonando el ratón en la primera esquina, dando clic u n a vez y moviendo luego el ratón a la esquina opuesta, donde se da o tro d ic . Los rectángulos se definen param étricam ente, en tanto q u e su tim arlo exacto se especifica más adelante.
3 . A bra b ventana de “ P roperties" y b ven tana “G eom etry" en el m en ú “ Window".
www.FreeLibros.me

C on stru cción d e m o d e lo s d e m eca n ism o s e n com p u ta d o ra u f a d o e l w f t w i r f W o rk ln g M odcl*__________33
V/oikiriQ Modcl 2D - (tu toría! l | J f l J x J£d» WorM ytow Qfrcd Q tfn» M— w tfn d o » - I g l _xj
p ]g ig ] í m m i »j? iA i^ i^ i R u n » | lo p l i | ñps(*t |
o a 0« 5 500 •> y'O 750 «i
< I H I P í ( i » h l J
J
•w
•C"
*
o
& E»
•V Ht-
F —
FIGURA 2.2 ’ftes eslabones g radeados c o n la h e rra m ie n ta rectángulo.
Esto despliega información acerca de los eslabones y perm ite ed ita r la in form ación
U se la ven tana “P roperties" para cam biar el c e n tro del eslab ó n h o rizon ta l a x = 0 ,y = 0,</> = 0. l a ubicación del rectángulo deberla cam biar de acuerdo con los datos introducidos.
Utilice la v en tan a "G eom etry" p a ra cam b iar el an ch o del rectángulo h o rizo n ta l a 8 .5 in y la a ltu ra a 0 .5 in. Cambiará la fo rm a del rectángulo.
D e la m ism a m anera, use las ven tanas “P roperties" y “G eom etry" p a ra u b ica re ! cen tro del eslabón vertical g ran d e en x = - 5 , y = - 3 y q u e tenga u n an ch o d e 0.5 y u n a a ltu ra d e 3 . G am bie tam b ién el eslabón vertical peq u eñ o p a ra cen trarlo en x = 5, y = - 3 , co n u n an ch o de 0 .5 y u n a a ltu ra de 1.5.Otra vez, la fo rm a y la ubicación del rectángulo deberían cam biar de acuerdo con los datos q u e se introdujeron
Q c r re las ven tanas de "Properties" y "G eom etry".Se p u ed e u sa r el ico n o zo o m (lu p a) para v er adecuadam en te los eslabones.
P aso 3: U b icar lo s p u n to s d e in te ré s sobre lo s eslabonesEste paso en señ a el uso de la h e rra m ien ta “O b ject Snap" para ubicar los p un tos de interés co n precisión. L a opción de “O bject Snap" resalta las posiciones q u e se utilizan com únm en te , com o d centro de u n lado, p o r ejem plo, co n u n a “ X t C u a n d o se ubica un p u n to co n “O bject Snap", la posición del p u n to se d efine au to m áticam en te co n ecuaciones param étricas. Estas ecuaciones g ira n tiz a n q u e el p u n to m an ten g a su p o sic ió n relativa au n después de m odificar el tam año del eslabón o de efectuar o tros
1. Haga doble clic e n la h erram ien ta pun to . El ico n o es un círculo pequeño .La herramienta pun to se resalta, lo cual indica q u e se puede usar varias veces, sin necesidad de seleccionarla cada v a que se bosqueje u n nuevo punto.
2 . M ueva el c u rso r sob re u n o de lo s eslabones.Cbserve q u e aparece una “X ’ cerca deI apuntador arando se centra en u n lado, u n a esquina o el centro de u n rectángulo. A esta fu n á o n a lid a d se le llam a “O bject Snap" y resalta las fortes q u e se u sa n com únm ente en u n eslabón.
3 . C oloque el c u rso r sob re la p a rte su p e rio r de u n o d e los eslabones verticales. C u a n d o aparezca u n a “ X" cerca del ^ u n t a d o r (figura 2 .3 ), haga clic en el b o tó n del ra tó n .
4 . C oloque lo s p u n to s adicionales, co m o se ind ica en b figura 2.3.Asegúrese de q u e cada uno de estos puntos se ubique en un “p u n to de ajuste" con la evidencia de la “X q u e debe aparecer en el apuntador.
5 . Seleccione la h erram ien ta apuntador. El ico n o es u n a flecha q u e a p u n ta h a d a a rrib a a la izquierda.
6 . H iga do b le d ic sob re u n o de los p u n to s q u e se establede- ron en lo s pasos 3 y 4 p a ra a b r ir b ventana “Properties".
7 . Observe que lus p u n to s “se ajustaron" a la m itad del ancho del cu erp o desde los tres bordes. Lo anterior dará co m o resultado u n a longitud efectiva en el eslabón de 8 .0 ,2 5 y 1.0 in.
Paso 4: U n ir los p u n to s p a ra c re a r u n io n es d e p e rn o
Este p a s o u n e los p u n to s p a ra c re a r un iones d e p e rn o . Una u n ió n d e p e rn o a c tú a co m o u n a b isa g ra e n t r e dos cuerpos. S m artE d ito r ev ita b ro tu ra de las u n io n es d u ra n te u n a ope- ra d ó n de arrastre.
www.FreeLibros.me

34 CAPITULO DOS
king Modrl 2 0 - | l uton.il l | . J Q J x J• y E fe E<K We*Vj y f e w Qt**c» Q efe ie M e a m e S a o * 'i¿rticm kjHp - I f f l x |
i » | s t » p l i | Kfsi-I
O□iaa T\Jninvg’lSplit j
Fñ
a II 1
1 N
j* l© l. 10 01
I 0 Í Zy fa x M 3 1 h r
J/A
f ig u r a 2 J Ubicación d e puntos.
1. Seleccione la h e rra m ie n ta an d a .
2. H aga d ic en el eslabón h o rizon ta l p a ra a n d a rlo (su jetado). Se u tiliza u n a a n d a para indicar a S m a n E d ito rq u e este cuerpo no se debe m over durante la construcción del meca - rnsrno. Después de q u e se hayan creado las uniones de pemo, hene que borrarse el anda.
i . S e l e c c i o n e la h e r r a m i e n t a a p u n t a d o r .
4. C on la h erram ien ta a p u n ta d o r activada, hag a d ic y a r ra s tre el a p u n ta d o r so b re e l fo n d o de la pan talla , p a r a sd e c -
d o n a r u n c u a d r o q u e r o d e e l o s d o s p u n t o s d e la
i z q u ie r d a , c o m o s e i n d ic a e n l a f ig u r a 2 .4 . S u e l t e e l b o t ó n
d e l r a tó n ; a h o r a l o s d o s p u n t o s d e b e n q u e d a r r e s a l t a d o s
( o s c u r e d d o s ) .
Este método de sdecáón de objetos se conoce como “selección por cuadros" Cualquier objeto q u e esté completamente contenido dentro del cuadro se resalta cuando se suelta e l ratón.
5 . H a g a d i c s o b r e d b o t ó n “ |o i n " d e l a b a r r a d e h e r r a m i e n t a s , f u s io n a n d o l o s d o s p u n t o s e n u n a u n i ó n d e p e r n o .
^o«kir*o Model 2D - | l ulon.il 1|F fe £ d * W crtl v * w Q tffC i £>e*ne M e a ;u e S e to » W r d > . H dp
^ □ J X J
P T o l A | g | g | R u n M p n lR p s c t
- i
i o ■MV
* «PO
É CM*v HFF —
FIG U R A 2 .4 S e l e c c i ó n d e d o s p u n t o s p a r a c o n e c t a r l o s c o n u n a u n i ó n d e p e r n o .
www.FreeLibros.me

C on stru cción d e m o d e lo s d e m eca n ism o s e n com p utad ora usan d o e l so ftw are W o rk in g M odel*__________35
Sm artEditor crea una u n ió n de perno entre los dos puntos seleccionados, m oviendo a ese lugar el eslabón q u e no está andado. El eslabón q u e se movió qu izá pierda su verticalidad. Este se fija en u n momento.
6. Realice los pasos 4 y 5 para los dos p u n to s de la derecha y, luegoy cree o t r a u n ió n d e perno .O tra vez, el eslabón horizontal permanece en la posición original y Sm artEditor m ueve el eslabón vertical para crear la unión de perno.
7. Seleccione el eslabón vertica l de la izqu ierda haciendo clic sob re él c o n la h e rra m ien ta apun tador.Aparecen cuatro cuadros negros alrededor del eslabón, lo cual significa q u e fu e seleccionado. Estos cuadros se lam an palancas y se pueden arrastrar para modificar el tam año de u n objeto.
8. In troduzca u n “0 " e n el c a m p o (d e ro tac ió n ) <f>, usando la b a rra de coordenadas de la p a rte in fe rio r d e la pan talla .Los campos de coordenadas de la parte inferior de la p a n talla son útiles para obtener inform ación acerca de los objetos en W orking ModeL Estos campos tam bién sirven para editar inform ación de los objetos. A l m odificar la rotación a 0a se a justa la barra de regreso a su posición vertical original.
9. Si e s necesario , efectúe los pasos 7 y 8 p a ra el eslabón v ertical del lado d e re c h a
10. Seleccione el a n d a u tilizada p a ra m a n te n e r fijo el eslabón ho rizon ta l d u ra n te la co n s tru c d ó n . y p resio n e la teda “delete" p a ra elim inarlo.El ancla ya n o es necesaria, p o r lo q u e debería borrarse.
11. Seleccione la h e rra m ien ta “P in lo in t” y fo rm e u n a unión de p e r n a u sando el p u n to a ju s ta d a en el ex trem o in fer io r del eslabón vertical de la izquierda, co m o se indica en la figura 2.5. La h erram ien ta "P in Jo in t" hace q u e d o s eslabones aparezcan u n id o s p o r u n d reulo .La herram ienta “P in Joint" es sim ilar a la herramienta punto u tilizada para crear las dos ú ltim as uniones de perno. La opción de unión crea autom áticam ente dos puntos, los sujeta a los cuerpos debajo del cursor (o el cuerpo y el fo n d o
kmq Model 2 0 - (Tutoría! t]
de la pantalla , como en este caso), y crea u n a unión perfectamente consistente en u n solo paso. Estas uniones de perno conectan e l rectángulo con el fo n d o de la pantalla.
12. Haga doble d ic e n la ju n ta d e p e rn o p a ra a b r ir la ventana “P roponies" y verifique q u e d p e rn o se haya colocado a la m itad d d an ch o del cu erp o desde su b o rd e inferior. Lo an- terio r d a co m o resu ltado u n a lon g itu d efectiva d d eslabón de 2 .5 in .
Paso 5: A gregar u n m o to r al e s lab o n am ien toEste paso agrega el m o to r a u n o de los eslabones, ac tivando dmecanismo.
1. Haga d ic so b re la h erram ien ta m o to r en la b a rra de h e rra m ientas. Esta h e rra m ien ta aparece c o m o u n d re u lo con un p u n to en su cen tro , el cual descansa so b re u n a base.Se sombrea la herram ienta motor, lo cual indica q u e fu e sebee ionada E l cursor se parece ahora a u n pequeño motor.
2 . C oloque d cu rso r sobre d “p u n to ajustado” e n el ex trem o in ferior d d eslabón vertical d e la derecha. Haga d ic en el ratón. Aparece u n m otor en d eslabonamiento de cuatro barras, como se m uestra en la figura 2.5 . Tal com o en la unión de perno, el m otor tien e dos p un tos de sujeción. E l motor conecta autom áticam ente los dos cuerpos de la parte superior. S i solo u n cuerpo estuviera debajo del motor, u n ir ía el cuerpo con el fo n d o de la pantalla . Entonces, el m otor aplicaría u n torque entre los dos cuerpos ii los cuales está unido.
3. Haga doble d ic sob re el m o to r para a b r i r la ven tana de “P roperties" y verifique q u e el p e rn o se colocó a la m itad d d an ch o d d cu erp o desde d b o rd e inferior. Esto d a com o resultado u n a lon g itu d efectiva del eslabón d e 1.0 in.
4 . Especifique la v e lo d d ad d d m o to r a 360 deg /s. E sto esigual a 60 rp m .
5 . Haga d ic sob re " Run" en la b a rra d e herram ien tas.B mecanismo de cuatro barras com ienza a arrancar len tam ente a través de su rango de m ovim iento.
* ] £ * E<* W«ld v*w Qb*c» Brfro B « w Scnp» w r r t* . H*>
□ i g i f l _ m m m u f v ^ ] A i g | g i Run » | Stop II | Resol |
O □o Oo & ♦ l f i P
*v
J
Hh
x 3000 V-1250
J
fig u r a r s fo co rp o rad ó n d é la u n ió n d d p e rn o final y d d m o to r al eslabonam iento .
www.FreeLibros.me

36 CAPITULO DOS
6 . Haga d ic sob re “Reset" en la b a rra de herram ien tas. l a simulación se restaurará desde 0
7 . Haga do b le d ic sob re el m o to r para a b r ir la ventana “Properties".lo anterior tam bién se logra a l seleccionar el m o to r y elegir "Properties" en el m enú "W indow " para abrir la ventana "Properties".
8. Increm en te la v e lo d d ad del m o to r a 600 deg/s tecleando este va lo r en la ven tana “ Properties".la s usuarios pueden definir u n m otor para aplicar cierto torque para moverlo a una posición de g iro determinada, o bien, ptira que gire a u n a velocidad o u n a aceleración específicas. Los motores tienen sistemas de control integrados que calculan autom áticam ente el torque necesario para la rotación, la velocidad y la aceleración definidas.
9 . Haga d ic en “R un" so b re la b a rra d e herram ientas.0 eslabón de cuatro barras com ienza a moverse n u eva m ente, esta vez a u n a velocidad mucho m ayor
P aso 6: K cd im ensionar lo s eslabones
Este paso utiliza la b a rra de coordenadas de la p a rte in fe rio r de la pan talla , p a ra ajustar el tam añ o y el ángulo de los eslabones. Esta sección destaca las capacidades p aram étricas de W orking ModeL O bserve q u e cu an d o se red im ensiona u n eslabón, todos los p u n to s p erm anecen en su s posic iones respectivas y todas las u n io n es q u e d a n in ta c ta s . C o m o fu e ro n ub icados u tilizan d o "O bject Snap". d ich o s p u n to s se p o sia o n a ro n co n ecuaciones y se a ju s ta n au to m áticam en te d u ra n te lo s cam bios en el diseno.
1. Si n o se h a se lecdonado, haga d ic en la h erram ien ta apuntador.
2. H aga u n d ic en el eslabón vertical del lado izquierdo para sdeccionarlo .
3. In tro d u zca u n n ú m ero ligeram ente m ayor en el cuadro “h " (a ltu ra) del eslabón se lecdonado en la b a rra d e c o o rdenadas, e n la p a rte inferior d e la pantalla.
0 eslabón se redimensiona sobre la pantalla. O bserve cómo SmartEditor autom áticam ente redimensiorui, reposiciona y reconstruye d m odelo con base en las ecuaciones param étri- ats introducidas en cada ubicación de u n a unión.
4 . A sim ism o, red im ensione lo s o tro s eslabones y m ueva la p o s ia ó n d e las u n iones. Vigile q u e S m artE d ito r reconstru y a el m odelo.Se pueden im estigar configuraciones diferentes de u n m odelo usando las capacidades param étricas de Working ModeL
Paso 7 : M ed ir la posición do u n p u n to
2 .
3.
4.
5 .
6 .
Haga d ic sob re “ Reset" e n la b a rra d e herram ientas. l a sim ulación se detiene y se restaura a p artir de 0.
Selecdone la h erram ien ta p u n to en la b a r ra de h e rra m ien tas. Aparece co m o u n d re u lo h u eco pequerto.
C oloque e l c u rso r so b re el eslabón h o rizo n ta l del m ecanism o de cuatro b a rra s y presione el b o tó n del ratón .Un p u n to se coloca en la barra. Se tra ta so lo de u n p u n to y rv su jeta la barra a l fondo de la pantalla. Ú nicam ente es “u n p u n to de interés".
S el p u n to n o se h a se lecdonado (o sc u re d d o ) todavía, se se lecd o n a haciendo d ic sob re 0 .
C ree u n a nueva unidad de m ed ida para m ed ir la posición d e este p u n to se le c d o n a n d o “ PUsition" del m en ú “Measure". Aparece la nueva un idad de m edida. Se da de baja la posiaón en metros para desplegar información digital (numérica). Es posible cambiar el m etro digital de u n a gráfica, haáendo che teta vez sobre la flecha de la esquina superior izquierda.
H aga clic sob re “ R un" en la b a rra de herram ien tas.L a sim ulación comienza inm ediatam ente a correr y la inform ación de m edición aparece en e l contador, como se indica en la figura 2.6. Los datos del contador se pueden “exportar" a u n archivo ASC II, q u e se copia en u n portapapeles y se
WoikirM) Model 2D - lu to n a i 1feJE fe E * WolVJ v«w Qtwcl Define MM:u e Seo» U<*> * i f f j x j
- 6 500 y-3500l - 7 / = l 3 C i n u J
J
*5 *óe>1*5 •c-
PPr.& tx*v HhF —
i r 1
f i g u r a lA U na sim ulación q u e co rre co n u n a u n id ad de m edida.
www.FreeLibros.me

C on stru cción d e m o d e lo s d e m eca n ism o s e n com p utad ora lita n d o e l so ftw are W o rk in g M odel*__________37
f W o r lin q M o d e l 2 0 ( l u t o n a l l |
£te £dr WcrtJ View Qbfect fcelne M eaiue Scrpl Wmdow
p | f i g | H | s i t i a l a | t | P T o | A | g | g | R un
^ J S J X J
t i*»I S io i» i i R e s e l I
7 1
J
» 3 250
u n ein yi-7 750
K i i i n r a ‘ J 2 Í
1 t s • w
•c -
Q P
r . *ñ E»«
■V H h
F —
z l
fig u r a 2.7 T razado d e la tray ec to ria de u n p u n to .
transfiere a u n program a de hoja de cálculo para u n análisis adicio iu l. En este caso, la hoja de cálculo recibirla cuatro colum nas de información: tiem po, X , Y y rotación.Aparecerá u n a f i la porcada paso de integración calculado.
7. M odifiq uc la sim ulación y vuélvala a correr.La integración perfecta de Working Model, entre la edición y el procesamiento del sistema dinámico, permite a l usuario investi- g ir rápidamente muchas configuraciones de simulaciones d iferentes, Por ejemplo, la modificaáón de la masa de la barra horizontal, usando la ventana “Properties"y corriendo de nuevo la simulación. Es posible modificar las ubicaciones de los pernos y rd im ensiorar los eslabones para, luego, m edirlas velocidades y las fuerzas. Este mecanismo de cuatro barras puede incluso i m angarse con gravedad cero, desactivando b opción de gravedad q u e se encuentra debajo del m enú "World".
Paso 8: T razar la tra y e c to r ia de u n p u n to de in te résEste p a so c re a u n tr a z o del m o v im ie n to d e u n p u n to se leccionado.
1. Seleccionar to d o s los ob jetos u sa n d o el m éto d o de selección d e la ventana descrito anteriorm ente.Todos los elem entos aparecen en color negro.
2. Seleccione la opción “Appearance" en el m enú de “Windovv".
3. En la ven tana “Appearance", desactive “Track C e n te r o f Mass" “Track C onnect" y “T rack Outline".Estas funciones se desactivan haciendo clic sobre la marca de verificación adecuada.
4. H aga clic sob re el fondo d e la pantalla para deseleccionar todos los objetos.
5. Elija so lam en te el p u n to de interés creado en el paso 7.Tan solo este p u n to debería aparecer en color negro.
6 . Seleccione la opción “A ppearance" en el m enú “Window".
7 . E n la ven tana “Appearance", active “Track Connect". Asegúrese de q u e só lo se seleccione u n p u n taEsM func ió n se activa haciendo clic sobre la marca de verificación adecuada.
C o rra la sim ulación. La pantalla se deb e parecer a b figura 2.7.
Paso 9: P ra c tic a r lo q u e se haya a p re n d id oEsta d em o strac ió n ind ica có m o c re a r y co rre r u n a s im u b c ió n sim p le en W o rk in g M odel. Se inv ita a l es tu d ia n te a p rac tica r con la s im u b c ió n o a c re a r u n m ecan ism o n u e v a W ork ing M odel tien e u n a gam a increíb le de funciones, q u e p erm ite n el desarrollo d e m o d elo s p a ra ana liza r los d ispositivos m ecánicos más com plejos.
2.5 USO DE W O R K IN G M ODELPARA M ODELAR UN M ECANISM O DE MANIVELA-CORREDERA
Esta sección sirve c o m o g u b para crear u n m ecanism o de manivela-corredera. Se deberla aplicar d u ra n te el u so real de W orking M odel. N uevam ente se in v ita al es tud ian te a p rac tica r con d softw are realizando o tro s análisis.
Paso 1: A b rir W ork ing M odel com o e n el paso 1 d e la sección a n te r io r
Paso 2: C re a r lo s eslabonesEste p a so c re a lo s tres e s b b o n e s m óviles d e l m ecan ism o de m anivela-corredera. O tr a vez, el fo n d o d e b p a n ta lb sirve com o d cuarto eslabón f ija
www.FreeLibros.me
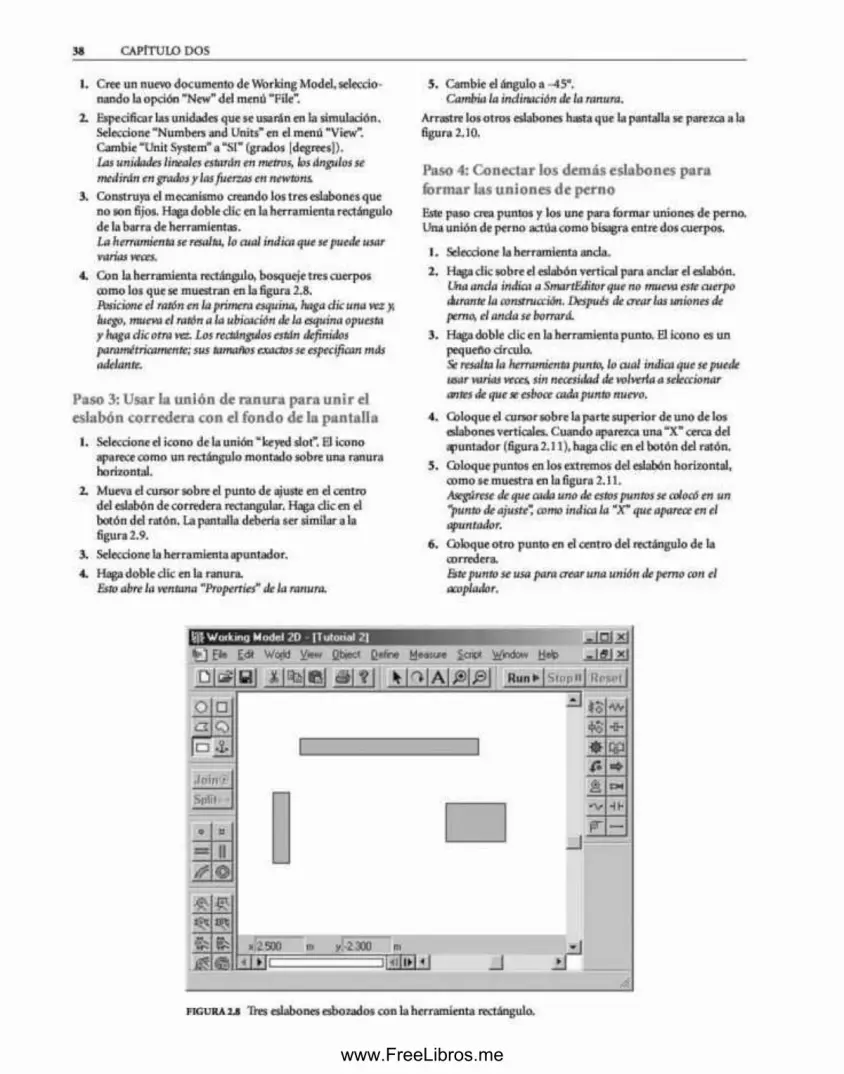
38 CAPITULO DOS
1. C ree u n nuevo d o c u m en to de W brking M odel, seleccion an d o la opción “New" del m en ú “File".
2. Especificar las un idades q u e se u sa rán en la sim ulación. Seleccione “N u m b ers an d U nits” en el m en ú “View”. C am bie “U nit System " a “SI" (g rad o s |degrces)).L is unidades lineales estarán en metros, los ángulos se m edirán en grados y las fuerzas en new tons
3. C onstruya el m ecan ism o creando lo s tr e s eslabones q u e n o son fijos. Haga do b le clic en la h e rra m ien ta rectángulo de la b a rra de herram ien tas.La herramienta se resalta, lo cual ind ita q u e se puede usar varias veces.
4. C on la h erram ien ta rectángulo, bosque je tres cuerpos com o lo s q u e se m u estran en la figura 2 .8 .Posicione el ratón en la primera esquina, haga clic una vez y, luego, m ueva e l ratón a la ubicación de la esquina opuesta y haga clic o tra tez. Los rectángulos están definidos paramétrícamentc; su s tamaños exactos se especifican más adelante.
F aso 3: U sar la u n ió n de ra n u ra p a ra u n i r el eslabón c o rre d e ra con el fo n d o d e la p an ta lla
1. Seleccione el icono d e la u n ió n “keyed slot”. El icono aparece c o m o u n rectángulo m o n ta d o sob re u n a ran u ra horizontal.
2. M ueva el c u rso r sob re el p u n to de ajuste en el cen tro del eslabón d e c o rre d e ra rectangular. H aga clic en el b o tó n del ra tó n . L a pan ta lla debería s e r sim ilar a la figura 2.9.
3. Seleccione la h e rra m ien ta apuntador.
4. Haga d o b le clic en la ranura .Esto abre la tentaría "Properties" de la ranura.
5 . C am bie el án g u lo a -45°.C am bia la inclinación de la ranura.
A rrastre lo s o tro s eslabones has ta q u e la pan ta lla se parezca a la fig u ra 2. 10.
Paso 4: C o n ec ta r los d em ás es lab o n es p a ra fo rm a r las u n io n e s d e p e rn oEste p a so crea p u n to s y los u n e para fo rm ar un iones de perno. Una u n ió n d e p e rn o ac tú a c o m o b isagra e n tre d o s cuerpos.
1. Seleccione la h erram ien ta ancla.
2. Haga clic so b re el eslabón vertical p a ra a n d a r el eslabón. Una ancla indica a Sm artkditor q u e no m ueva este cuerpo á ira n te la construcción. Después de crear las uniones de pem o, e l a n d a se borrará.
3. Haga do b le d ic e n la h erram ien ta p u n to . El ico n o e s un pequeflo circulo.Se resalta la herramienta punto, lo cual indita q u e se puede usar ta ñ a s veces, sin necesidad de volvería a seleccionar antes de q u e se esboce cada p u n to nuevo.
4 . (b lo q u e el cu rso r so b re la p a rte su p e rio r de u n o d e los esb b o n es verticales. C u a n d o aparezca u n a “X ” cerca del ap u n ta d o r (figura 2 . 1 1), hag a d ic en el b o tó n del ra tó n .
5 . (b lo q u e p u n to s en los ex trem os del eslabón horizontal, co m o se m uestra e n la figura 2.11.Asegúrese de q u e cada u n o de estos p un tos se colocó en u n "punto de ajuste", como indica la “X " q u e a p a re a en el apuntador.
6 . (b lo q u e o tro p u n to en el cen tro del rectángulo de la corredera.Este p u n to se usa para crear u n a u n ió n de pem o con el acoplador.
m i M i f f i j q i * ]f e ] Fíe Z<* WorW V*w Q t* d £>***» S eo* « M o w ü«*> .1 3 1 *1
D Í t f X W l B i a i l R un » |s tn p ii| Rrspt|
FIG U R A 2A Tres e s la b o n e s e s b o z a d o s c o n l a h e r r a m i e n t a r e c t á n g u lo .
www.FreeLibros.me

C on stru cción d e m o d e lo s d e m eca n ism o s e n com p utad ora lita n d o e l so ftw are W o rk in g M odel*__________39
/ockinq Model 2 0 - ( lu to n a l 2 | J f l j x ]£ * » L < ü W c-W y « w Q b te c t f e e t r * M « w r e S c 'C * b * b - I 6 > l x |
p j g | y j j y a . p i a l U A J o l A ] . g j g ]
□ a l o
Join'»>
Sjiül
I
R u n ^ l S i o n n l R e se t
l =
*1.2700
I E J ^v 2 300
J
J
1 * o • w
•¡■s Hr-
* Q P
r .
& c**
• V H h
F —
FIGURA 2.9 U bicación del p u n to y la ranura .
( lu lo n a l 2 |
J o ln ©
1 5 •Ve
* 5 -c -
♦
O
ñ t »
• V H H
F —
f i g u r a 2.10 I h i ó n d e c o r r e d e r a .
7. Seleccione la h e rra m ien ta apuntador.
8. C on la herram ienta apun tador seleccionada, haga clic sobre u n p u n to q u e se conectará co n u n a unión d e perno . Luego, m anten iendo op rim ida b te c b fhift, haga clic en el segundo pun to , lo cual form ará u n a u n ió n de perno . O bserve que los dos p un tos ah o ra d eb en estar resaltados (oscurecidos).
9 . H aga d ic en el botón “Jo in" de la b a rra d e herram ien tas, fusionando lo s d o s p u n to s en u n a u n ió n de perno.Sm artEditor crea u n a u n ió n de perno entre los dos puntos elegidos a l m o ie r el eslabón sin anclaje a su lugar. E l eslabón q u e se m ueve qu izá >u n o sea vertical. Este permanecerá fijo en u n m om ento.
www.FreeLibros.me

4 0 CAPITULO DOS
f c j E t e £ < * W o r id V « w Q b r C Q e h rw B w w e S o * > * M o fe _ \ 9 \ X |
D l t f l H l n T O l A l ^ l ^ l R un» | s iii[iii| )ii-;<-i |
Jo¡n@
O □a Qa ■s.
f i g u r a 2. 1 1 C olocación de p u n io s so b re los d em ás eslabones.
10. Ejecute los p a so s8 y 9 p a ra lo s o tro s d o s p u n to s q u e crearán o t r a u n ió n d e p e rn o . La pan ta lla d eberá s e r com o la figura 2. 12.
O tra vez, d eslabón sertical permanece en su posición original y Sm artE ditor m ueve el eslabón vertical para crear la unión de perno.
11. H ^ a clic en el eslabón vertical.Aparecen cuatro cuadros negros alrededor del eslabón, lo cual indica que fu e seleccionado.
12. Seleccione la o p c ió n "M ove to f ro n t" en el m en ú "Object" Esto coloca e l eslabón vertical enfrente del eslabón de conex ió n , haciendo visible el anda .
f i g u r a 2.12 A dición de las u n io n e s d e p e rn o y el m o to ra ! eslabonam iento.
www.FreeLibros.me

C on stru cción d e m od elo» d e m ecan ism o» e n com p u ta d o ra u sa n d o e l so ftw are W o rk ln g M odel*__________41
13. Seleccione el ancla , la cual se u sa para m an ten e r el eslabón vertical fijo d u ra n te la construcción y, luego, presione la tecla “delete" p a ra b o rra rlo . t i a n d a ya n o se necesita, por b q u e se debe elim inar.
Paso 5: A gregar un m o to r a l e s labonam ien toEste paso agrega el m o to r a u n o de los eslabones p a ra im pulsar el eslabonam iento.
1. Haga clic sob re la h erram ien ta m o to r e n la b a rra de herram ien tas . Esta o p c ió n aparece c o m o u n circulo, co n un p u n to en el centro , q u e descansa so b re u n a base.La herram ienta m otarse oscurece, lo cual indica q u e fu e seleccionado, t i cursor debería verse ahora com o un pequeño motor.
2. C oloque el c u rso r en el “p u n to de ajuste" del eslabón vertical. Haga d ic e n el ra tó n .Aparece u n m o ta re n el eslabonamiento de m anivela- corredera, com o se m uestra en la figura 2.12. C om o en la u n ió n de pem o , u n m o to r tiene dos p un tos de sujeción, t i m o to r conecta au tom áticam ente los dos cuerpos superiores. S i tan solo perm anece u n cuerpo debajo del motor, el m otor unirá el cuerpo con el fo n d o de la pantalla . Luego, d m o to r aplica u n torque entre los dos cuerpos a los cuales está sujeto.
3. H aga d ic e n “ R un" de b b a rra de herram ien tas.B eslabonam iento de m arínela - corredera com ienza a arrancar lentam ente a través de su rango de movimiento.
4. H aga d ic en “ Reset" d e b b a rra d e herram ientas.La sim ulación se restaura a p artir de 0.
5. H aga d o b le clic so b re el m o to r p a ra a b r ir la ven tana “Properties".Lo anterior tam bién se hace sdeccionando el m otor y dig iendo ‘ Properties" del m e n ú de "W indow " para abrir la ventana "Properties".
6. Increm ente b v e lo d d ad del m o to r a -3 0 0 deg/s tecleando este va lo r en b ventana “Properties".Los usuarios suelen definir u n m otor para aplicar u n torque, hacer u n m ovim iento de giro tletenninado, o girar a una vdocidad o u n a aceleración específicas. Los motores tienen integrados sistemas de control de rotación, vdocidad y acderación, q u e calculan autom áticam ente el torque necesario. En este demo, se usa la velocidad del motor.
7. Haga d ic en “ R un" de b b a rra de herram ien tas.B eslabonam iento de manivela-corredera comienza, una vez más, a moverse, esta vez a una velocidad mucho mayor.
P aso 6: P ra c tic a r lo q u e se ap re n d ióSe in v ita al e s tud ian te a p rac tica r co n esta s im u la d ó n o a crear u n m ecanism o nuevo . W brking M odel tien e u n a gam a increíble de fu n d o n a lid a d e s q u e p e rm ite b creación de m o d elo s para analizar lo s d ispositivos m ecánicos m ás com plejos.
PROBLEMAS
Use el softw are W ork ing M odel p a ra g e n e ra r el m od e lo de un m ecanism o d e cuatro b a rra s . Use los valores siguientes:
2 -1 . b ancada = 9 in ; m anivela = 1 in ; acop lad o r = 10 in;seguidor = 3 5 in ; v e lo d d ad de b m an iveb = 200 rad/s
2- 2 . buncad a = 100 m m ; m an iv eb = 12 m m ; acop lador = 93 m m ; segu ido r = 24 m m ; v e lo d d a d d e b m an iveb = 3 0 rad /s
2 -3 . bancada = 2 ft; m an iv eb = 0.5 ft; acop lad o r = 2 1 ft; seguidor “ 0.75 ft; v e lo d d ad d e la m an iv eb = 25 rp m
U se el softw are W ork ing M odel pora g e n e ra r el m o d e lo de un m ecan ism o d e m anivela-corredera. Utilice los valores siguientes:
2 -4 . descentrado = 0 in; m anivela = 1.45 in ; acop lad o r =4.5 in ; v e lo d d ad d e la m an iv eb = 200 rad/s
2 -5 . descen trado = 0 m m ; m an iv eb = 95 m m ; acop lador = 350 m m ; velocidad de b m an iv eb = 200 rad/s
2 -6 . descentrado = 5 0 m m ; m anivela = 95 m m ; acop lador = 350 m m ; v e lo d d a d d e b m an iv eb = 200 rad/s
2 -7 . L a figura P2.7 ilu s tra u n m ecan ism o q u e o p e ra el tren de a te rriza je de u n av ió n pequeño . Use el softw are W brking M odel p a ra generar u n m odelo de este m ecanism o. El m o to r o p e ra en el sentido h o ra rio a u n a velo d d a d constante de 20 rpm .
9 * ■
f i g u r a P 2 .7 Problem a 7.
2 -6 . l a fig u ra P 2 .8 m uestra u n m ecan ism o q u e o p e ra un caballito de en tre ten im ien to para n iñ o s q u e fu n d o n a con m onedas. U tilice el softw are W orking M odel para
www.FreeLibros.me

4 2 CAPITULO DOS
genera r u n m od elo d e este es labonam ien to . El m o to r op era en sen tido a n tih o ra rio a u n a velocidad constante de 6 0 rp m .
2-9 . La fig u ra P2.9 p resen ta u n m ecanism o d e transferencia q u e lev an ta p aq u e tes de u n a b an d a tra n sp o r ta d o ra a o tra . Use el softw are W ork ing M odcl p a ra g e n e ra r un m odelo d e este m ecanism o. El m o to r o p e ra en sen tido a u ih o ra r io a u n a velocidad constan te de 20 rpm .
f i g u r a P 2 .9 P rob lem a 9.
2 -10 . La figura P 2 .I0 m uestra o t r o m ecanism o de transferen- d a q u e em p u ja paquetes d e u n a b an d a transpo rtado ra a o tra . Use el softw are W orking M odel para genera r un m od elo d e este m ecanism o. El m o to r o p e ra en el sentido h o rario a u n a velocidad constante d e 4 0 rpm .
u n m od elo de este es labonam ien to . El c ilin d ro se ex tiende a u n a velocidad c o n s tan te de 1 ft/m in .
2- 12. l a figura 1*2.12 m uestra u n m ecan ism o q u e aplica ró tu lo s a lo s p aq u e tes . Use el so ftw are W o rk in g M odel para genera r u n m od elo d e este es lab o n am ien to . El m o to r op era en se n tid o a n tih o ra r io a u n a velocidad constante d e 300 rpm .
ESTUDIOS D E CASO
fig u r a P2.I0 Problem a 10.
2 -11 . La figura P2.11 ilu stra o tro m ecanism o d e tran sfe ren cia q u e baja p aq u e tes d e u n a b a n d a tra n sp o r ta d o ra a a r a . U tilice el softw are W orking M odel p a ra generar
f i g u r a P 2. l i P roblem a 11.
2 -1 . En la fig u ra E2.1 s e p resen ta la v is ta su p e rio r d e u n m ecanism o en u n a operac ió n de m aquinado . Exam ine cu idadosam ente la configuración de sus com ponentes; luego, co n te s te las sigu ien tes p reg u n tas para o b te n e r m ayor conocim ien to acerca d e la operac ió n del mecanism o.
FIGURA E2.I M ecanism o del e s tu d io de caso 2.1.
1. C onform e gira el m ango A, al m o v er la varilla roscada B a la izquierda, describa el m ovim iento d e la m ordaza C
2. C onform e g ira el m ango A, al m over la varilla roscada B a la izquierda, describe e l m ovim iento d e la m ordaza D.
3. ¿Cuál e s el objetivo d e este m ecanism o?4 . ¿Q ué acción p ro v o carla q u e el eslabón D se m oviera
hacia arriba?5 . ¿Cuál e s el objetivo del resorte G?6 . Analice el m otivo para la ex trañ a form a de lo s eslabones
E y R7 . ¿Q ué n o m b re p o n d ría a este dispositivo?8 . D escriba las causas del uso de u n extrem o redondo de
la varilla roscada B.
www.FreeLibros.me

C A P I T U L O
T R E S
VECTORES
O B JE T IV O SAl te r m in a r d e e s tu d ia r e s t e c a p itu lo , e l a lu m n os e r á c a p a z d e :
1. Diferenciar entre una cantidad m a la r y un vector.
2. Aplicar los principios trigonométricos adecuados a un triángulo rectángulo.
3. Aplicar los principios trigonométricos adecuados a un triángulo general.
4. Determinar la resultan 1c de do» vectores, con e l uso tan to del método gráfico como del método analítico.
5. Separar cantidades vectoriales en sus componentes en las d r e n iones verticales y horizontales.
6. Restar dos vectores, con el u w tanto del método gráfico como del método analítico.
7 . Utilizar ecuaciones vectoriales.
8 . Emplear una ecuación vectorial para determ inar la magnitud de dos vectores.
d e m ag n itu d « c a la r . E jem plos ad ic ionales d e can tid ad es e s calares son los siguientes: u n a tab la tien e 8 ft de largo, u n a clase d u ra 5 0 m in u to s y la te m p e ra tu ra es de 78"F ( la lo n g itu d , el tiem p o y la tem p era tu ra so n cantidades escalares).
En con traste , u n vector n o se define p o r com pleto ta n solo c o n la m agn itu d . T am b ié n h ay q u e in d ica r la d irecc ió n de la can tidad . A firm ar q u e u n a p e lo ta d e g o lf v ia jó 200 y a rd as no describe cabalm ente su trayectoria. Al n o ex p resa r la dirección del recorrido se o cu lta el hecho de q u e la p e lo ta cayó en u n lago. ft>r consigu ien te , s e deb e in c lu ir la d irecc ió n p a ra describ ir com pletam ente tal can tidad . E jem plos de vectores defin idos en form a adecuada son “el p a q u e te q u e s e jala h ac ia la derecha con u n a fuerza de 5 Ib" o bien, “el tre n q u e viaja hacia el n o r te a una velocidad de 50 m ph". El desplazam iento , la f i le n a y la velocid ad son can tidades vectoriales.
Los vec to res se d ife re n c ia n de las can tidades escalares p arq u e se den o tan co n negritas ( r ) . La notación co m ú n q u e se utiliza para represen tar g ráficam ente u n v ecto r es u n segm ento lineal co n u n a p u n ta d e flecha en u n e x tre m a En el m éto d o del análisis g rá fica la lon g itu d del segm ento lineal se traza en p ro porción a la m agnitud d e la cantidad que describe d vector. L a d i rección se define con la p u n ta d e flecha y la inclinación de la linea c o n respecto a u n eje d e referencia. La dirección siem p re se m ide d e la raíz, a la p u n ta d d vector. L a figura 3.1 m uestra u n vecto r d e velocidad co m p le tam en te definido.
3.1 IN TR O D U C C IÓ NEl análisis d e m ecanism os im plica d uso de cantidades vectoriales. Las p rin c ip a le s características del fu n c io n am ien to de u n m ecan ism o so n d esp lazam ien to velocidad, aceleración y fu erza. q u e son vectores. A ntes d e tra b a ja r co n m ecanism os, se r e q u iere u n a in trod u cc ió n In tegra a los vectores y a la aplicación de lo s m ism os. En este ca p itu lo se p re se n ta n las técn icas de so luc ión , ta n to g ráfica c o m o analítica . Los estu d ian te s q u e ya to m a ro n u n c u rso d e m ecán ica p u ed en o m itir este cap itu lo o usarlo c o m o referencia para repasar el m anejo de vectores.
B cab:0 10 2 0 3 0
nph I— 1 unidad—H
FIGURA J .l Un v ecto r de velocidad d e 45 m ph.
3.2 ESCALARES Y VECTORESEn d aná lis is de m ecanism os se d eb en d istin g u ir dos tip o s de can tid ad es . U n escalar es u n a c a n tid a d q u e e s tá cabalm en te defin ida cu an d o se cono ce ún icam ente su m a g n itu d P o r ejem p lo al d e c ir“u n a docen a de rosquillas", u n o describe la can tidad de estas q u e h ay en u n a caja. C o m o el n ú m ero “ 12" establece correctam ente d núm ero d e rosquillas en la caja, la can tidad es
3.3 ANÁLISIS V ECTO RIA L GRÁFICOLa m ayoría del trab a jo in v o lu crad o en el e s tu d io d e m ecan ismos y el análisis d e vectores tiene q u e ver co n la geom etría. En estos aná lis is se em plean frecuen tem ente m étodos gráficos, ya q u e d e esta m anera se visualiza co n claridad el m ovim iento de un m ecanism o. En lo s m ecanism os m ás com plejos, lo s cálculos analíticos co n vectores tam bién se vuelven m ás laboriosos.
www.FreeLibros.me

44 CAPITULO TRES
El m éto d o de análisis gráfico im plica el d ib u jo de líneas a escala en á n g u lo s específicos. Para o b te n e r resu ltados consisten tes co n las técn icas analíticas, la exactitud hab rá de se r el o b je tiv o p r in c ip a l. D u ra n te m uchas décadas, la ex ac titu d en el análisis d e m ecanism os se ob ten ía concen tran d o la a tención en la precisión y en el eq u ip o d e d ib u jo adecuado. A un siendo p o pulares, s e d esdeñaron m uchas técn icas gráficas p o r im precisas. S in em bargo, el desarrollo del d iseño asistido p o r com p u tad o ra ( c a d ) , c o n su s construcciones geom étricas exactas, ha p e rm itido q u e las técnicas gráficas se ap liquen co n precisión.
3.4 TÉCN ICA S DE D IBUJO REQUERIDAS PARA EL ANÁLISIS VECTORIAL GRÁFICO
Los m étodos gráficos d e análisis vectorial y de m ecanism os son idén ticos, ya sea q u e se utilice equipo d e d ib u jo o u n softw are de cad . A un cu an d o qu izá sea obso le ta en el análisis industria l, la representación gráfica se usa co n éxito p a ra ap ren d er y en tender las técnicas.
( b a n d o se tra b a ja co n e q u ip o de d ib u jo , se requ ieren líneas delgadas y arcos finos p a ra o b te n e r resultados exactos. Se n ecesita u n tra z o preciso p a ra d e te rm in a r co n ex ac titu d los p un tos de intersección. P or lo ta n to , se deb e te n e r cu id ad o de m an ten e r en b u en estado el eq u ip o d e d ibujo .
La m ed ic ión exacta es t a n im p o rtan te c o m o la calidad de las líneas. L a lon g itu d d e las líneas deb e d ib u ja rse a u n a escala precisa, en ta n to q u e las m ed ic iones lineales d eb e rían ser tan exactas co m o sea posible. P o r ello, se recom ienda u tilizar u n es cabm etro c o n las pulgadas (in ) d iv id idas en 30 partes. Las m ediciones angulares tienen q u e se r igualm ente precisas.
P or ú ltim o, la elección acertad a d e la escala de d ib u jo es tam b ién u n fa c to r m uy im p o rta n te . En g enera l, c u a n to m ás g ran d e sea la construcción m ás exactos serán los resultados d e la m edición . Una precisión d e 0 .05 in causa m enos e r ro r cuando la línea es d e 10 in d e largo q u e cu an d o es d e 1 in . El tam año del d ib u jo está lim itado p o r el h ech o d e q u e las construcciones m uy g randes requieren eq u ip o especial. S in em bargo, hay q u e inten ta r crear d ibu jos tan grandes co m o sea posible.
Se deb e co n su lta r u n te x to de d ib u jo p a ra los detalles de b s técn icas generales d e d ib u jo y de las co n s tru cc io n es g eo m étricas.
■ D ib u ja r líneas co n u n a lo n g itu d específica y u n ángulo determ inado;
■ In serta r lineas, perpend icu lares a las líneas existentes;
■ P ro longa r líneas existentes has ta la intersección co n o tra linea;
■ R ecortar lineas en la intersección co n o t r a linea;
■ D ib u ja r arcos co n cen tro en u n p u n to específico y u n radio determ inado;
■ U bicar la in tersección de d o s arcos;
■ M edir la lo n g itu d de las líneas existentes;
■ M e d ir e l á n g u l o i n c l u i d o e n t r e d o s l ín e a s .
Desde luego, las habilidades ad ic ionales facilitan u n an á lisis m ás eficiente. N o ob stan te , la fam iliaridad co n lo s com andos de c a d que realizan las acciones m encionadas es suficiente para b g r a r co n precisión el análisis vectorial.
3.6 C O N O C IM IE N T O S DETR IG O N O M ETR ÍA REQUERIDOS PARA EL ANÁLISIS VECTORIAL
En el caso analítico de vectores se requieren conocim ien tos básicos de tr ig o n o m etría . Tal d iscip lina estu d ia las p rop iedades de b s triángulos. El p rim e r tipo d e triángu lo q u e se es tud ia rá e s el triángulo rectángulo.
3.6.1 T r iá n g u lo re c tá n g u loAl efectuar u n aná lis is vectorial, d uso de las funciones tr ig o n o m étric a s básicas es de vital im p o rtan c ia . Las funciones tr igonom étricas básicas se ap lican so lam en te para los tr ián g u lo s rectángulos. l a figura 3 2 m uestra u n triángu lo rectángulo con sus b d o s iden tificados co m o a, b y c, y sus á n g u lo s interiores, com o A , H y (.'.Observe que el ángulo C es u n ángulo recto de 90*. Ifor tal razón, d triángu lo se conoce com o triángulo rec tángula
Las rd a d o n e s trigonom étricas básicas son:
ca te to o p u e s to ase n o / . A = s e n / . A = —— = - (3.1)
h ip o te n u sa c
c a te to a d y a c e n te b .c o se n o Z A = e o s / . A = — —------------------- = - (3.2)
h ip o te n u sa c
3 5 C O N O C IM IE N T O REQ U ERID O D E c a d PARA EL ANÁLISIS VECTORIAL GRÁFICO
C o m o vim os, lo s m étodos g rá fico s de análisis de m ecanism os y de vec to res s o n id é n tic o s , ya sea q u e s e utilice e q u ip o de d ib u jo o u n so ftw are de c a d . E ste ú ltim o o fre c e m ay o r p re cisión. P or fo rtu n a , ta n so lo se requiere u n n iv d b ásico de h a b ilidades d d c a d p ir a rea liza r ad e c u a d a m e n te u n a n á lis is vectoria l g ráfico com pleto , d e m o d o q u e e s p refe rib le el u so de un s is te m a de c a d , pues n o n e c e s ita u n a g ran in v e rs ió n e n la "curva d e aprendizaje".
C om o ya se m encionó, d m éto d o gráfico de análisis vectorial im p lica d d ib u jo d e líneas c o n longitudes precisas y a án g u los específicos. La siguiente lis ta describe las destrezas en d c a d
q u e se requ ieren para d análisis vectorial. El usuario d eb e ría ser capaz de:
a t e t o o p u e s to ata n g e n te z l A = t a n Z A = ;----------- = - (3.3)
a t e t o a d y a c e n te b
Tales definiciones se ap lican al án g u lo B de igual m anera:
s e n / . B = - c
e o s L S s “
bt a n Z B = -
FIG U R A 3 J Triángulo rectángulo.
www.FreeLibros.me

V ectores 45
El teo rem a de P itágo ras establece la relación e n tre lo s tres Finalm ente, la su m a de todos los ángu los d e u n triángu lolados d e u n triángulo rectángulo. Para el tr iá n g u lo d e la figura es igual a 180°. Si se sabe q u e el án g u lo C e s de 90°, la su m a de3.2, se d efine co m o los o tro s d o s ángu los es
a 2 + b* = ? (3 .4 ) L A + L B = 90" (3 3 )
PR O B LEM A D E E JE M PL O 3 . 1
La figura 3 J ilustra una pala cargadora con el cilindro B C en posición vertical l-’tilice trigonometría para determ inar la longitud requerida del cilindro para o rien tar el brazo A B en la configuración mostrada.
FIGURA i 3 Pala cargadora del p ro b lem a de e jem plo 3.1.
S O L U C IÓ N : 1. Determine la lon g itu d BC
Concéntrese en el triángulo form ado por los puntos A , B y C de la figura 3 J . El b d o BC del triángulo se calcula con h ecuación (3.1).
s c n ¿ A ■
sen 35* -
cateto opuesto
hipotenusa
BC<% in)
ai despejar
BC = (96 in ) sen 35* = 5506 in
2. Determine la lon g itu d AC
Aun cuando n o se requiere, observe que la distancia en tre A y C se calcula de m anera parecida con h ecuación (3 2 ) , de m odo que
cateto adyacentec o s ¿ A
eos 35*
hipotenusa
AC
(96 in)
despejando:
A C = (96 in ) eos 35° = 78.64 in
PRO B LEM A D E E JE M PL O 3.2
l a figura 3.4 presenta u n cam ión rem olcador con el brazo de la g rú a de 8 ft, inclinado u n ángulo d e 25*. Utilice trigonom etría para determ inar la distancia horizontal que cubre el brazo de la grúa.
S O L U C IÓ N : I . D eterm ine la proyección horizon ta l del brazo de la grúa
La proyección horizontal del brazo se determ ina con la ecuación (32):
proyección horizontal
C“ ' ' (8 ft)proyección horizontal = (8 ft)cos 25* = 7 2 5 ft
www.FreeLibros.me

4 6 CAPITULO TRES
FIG U R A 3.4 C am ió n de arra stre d d p ro b lem a de e jem plo 3 .2 .
2 . Determ ine la proyección horizontal del cam ión y el brazo
La distancia horizontal d d extrem o frontal d d cam ión al ex trem o del brazo es
6 ft * 7 2 5 ft - 1325 ft
3 . Determine la saliente del brazo
Corno la longitud total del cam ión es de 11 ft. la distancia horizontal q u e se extiende el brazo d d cam ión es
1325 ft - 11 ft » 225 ft
3 .6 .2 T r iá n g u lo o b lic u oEl análisis p revio se lim itó a los tr ián g u lo s rectángulos. S in e m bargo. en el e s tu d io d e lo s m ecanism os tam b ién es im p o rtan te e l en fo q u e de tr ián g u lo s e n genera l (o b lic u o s) . La fig u ra 3.5 m uestra u n triángu lo cualquiera. D e nuevo , a, b y c den o tan la longitud d e lo s lados y L A , L B y L C representan lo s ángulos interiores.
P ira este caso g enera l, n o so n ap licab les las funciones tr ig o n o m étrica s básicas d escritas en la sección an te rio r. Para ana liza r u n triángu lo general, hay q u e to m a r en cu en ta la ley de los senos y la ley de los cosenos.
l a ley de los senos se expresa com o
(3.6)se n Z .A s e n ¿ f i s e n Z C
La ley de b s cosenos se expresa com o
c2 = ¿ + b1 - 2 a b e o s L C (3 .7 )
P or o tro lado, la su m a d e to d o s los ángu los in terio res de un triángulo cualqu iera es de 180®. E n té rm in o s d e la figura 3.4 , la ecuac ión seria
L A + L B + L C - 180° (3.8)
Los p ro b lem as q u e im plican la so luc ión d e u n tr iá n g u lo cualquiera caen en u n o d e c u a tro casos:
Caso 1: C uando se conocen u n lado (a ) y dos á n g u lo s (L A y L B).
Para resolver u n p rob lem a d e esta Indole, se utiliza la ecuación (3 .8 ) para calcular el tercer ángulo:
L C = 180° - L A - L B
Se rep lan tea la ley d e los sen o s p a ra ca lcu la r lo s lados restantes.
í s e n ¿ B )
“Yk ^ Z í j/ s e n L C \
C “{ s e n L A J
Caso 2: C u a n d o se co n o cen d o s lad o s ( a y b) y el án g u lo o p u es to a u n ó de los lados ( L A ) .
Para resolver u n p rob lem a del caso 2 , se u tiliza la ley d e los senos para calcular el seg u n d o ángu lo . La ecuación (3 .6 ) se rep lan tea com o
L B = s e n 1 j ̂ se n Z . A jC on la ecuación (3.8) se calcula el tercer ángulo:
L C = 180“ - L A - L B
Se utiliza la ley de los cosenos p a ra calcular el tercer lado. La ecuac ión (3.7) se replantea com o:
c = V i o * + b 2 - l a b c o s ¿ C |FIG U R A 3 5 U n triángu lo oblicuo.
www.FreeLibros.me

V ectores 47
C a so 3: C u a n d o se c o n o c e n d o s lad o s ( a y b ) y e l á n g u lo in c lu id o {LC ).
Para resolver u n p rob lem a del caso 3. se utiliza la ley d e los cosenos p a ra calcular el tercer lado:
c = Z ¿ + b* — 2 a b c o s L C
C o n la ley de los sen o s se ca lcu la e l se g u n d o á n g u lo . La ecuación (3.6) se rep lan tea com o
L A = s e n 14 ( “ J s e n ¿ c j
Se usa la ecuac ión (3 .8 ) p a ra calcular el tercer ángulo:
L B = 180° - L A - L C
C aso 4 : C u a n d o se conocen los tres lados.
Para resolver u n p ro b lem a d e l caso 4, se u tiliza la ley de los cosenos p a ra ca lcu la r u n án g u lo . La ecu ac ió n (3 .7 ) se rep lan tea co m o
L Cl a b
C o n la ley de lo s sen o s se ca lcu la u n segundo á n g u lo La ecuación (3 .6 ) se rep lan tea com o
L A = s e n ( - l s c n Z C !
C o n la ecuación (3 .8 ) se calcula el tercer ángulo:
L B = 180° - L A - L C
U na vez q u e se fam iliarice co n la so lu c ió n d e p ro b lem as q je im plican tr ián g u lo s generales, ya n o será necesaria la iden tificación d e lo s casos específicos.
PR O B LEM A D E E JE M PL O 3.3
l a figura 3.6 muestra u n a pala carpidora. Use trigonom etría pura determ inar la longitud requerida del cilindro con la finalidad de orientar el brazo A B cn la configuración m ostrada.
FIGURA 3.6 Pala cargadora del p rob lem a de e jem plo 3.3.
S O L U C IÓ N : I . Determine la lon g itu d BC
Si se exam ina el triángulo creado por los puntos A , B y C .e s evidente que se tra ta de u n problem a del caso 3. El tercer lado se calcula con la ley de los cosenos:
B C = Z A C 1 + A B 1 - 2 (AC )(AB) cosL BAC
- V (7 8 in )2 + (96 in)J - 2(78 in )(96in) eos 25*
- 41.55 in
Com o n o se requirió d cálculo d e los otros ángulos, el procedim iento descrito pura lo s problem as del caso 3 quedará inconcluso.
PRO B LEM A D E E JE M PL O 3 .4
l a figura 3.7 muestra d mecanismo im pulsor del sistem a de un m otor de gasolina. Use trigonom etría pura determ i- r a r el ángulo de la m annela que se indica en la figura.
S O L U C IÓ N : 1. Determine e l ángulo BAC
Al exam inar el trüngu lo form ado px»r los puntos A ,B y C es evidente q u e se tra ta de u n problem a del caso 4 . El ángulo BAC se calcula redefiniendo las variables en la ley de los cosenos:
- J A C J + A B 1 - BC¡ \C“ ( 2 (AC){AB) J
www.FreeLibros.me

4 8 CAPITULO TRES
fig u r a 3.7 M ecanism o del m o to r de gasolina del p rob lem a de e jem plo 3.4.
2 . Determine e l ángulo de la manivela
H ángulo BAC está definido en tre el lado AC. (el lado vertical) y la p ierna AB. C om o el ángulo de la manivela se define a partir del eje horizontal, se determ ina de la siguiente m anera:
Angulo de la manivela = 90" - 67 J ° = 22.7*
3 . Determine lo i dem ás ángulos interiores
Aun cuando n o se solicitó en « t e problema, el ángulo ACB se determ ina mediante
L ACB - sen ■' j ( 4 ? ) se n /. BAC
fttr últim o, se calcula el ángulo ABC:
L A B C = 180* - 67J * - 10.6* = 102.1*
3.7 M ANEJO D E VECTORESEn el análisis de m ecanism os, la s can tidades v e c to ria l» (com o el desplazam iento o la velocidad) se em plean de d ife re n te m ane ras . A l ig u a l q u e las m a g n i tu d e « c a l a r e , los v e c to ro se su m a n y se r e t a n . S in em bargo, a diferencia d e las m a g n itu d e « c a l a r e , n o so n s im p le o p e r a d o n e algebraicas. Puesto q u e al d efin ir d v ecto r tam b ién se requiere, se d e b e considerar la d ire c c ió n , adem ás d e las o p e r a d o n e m atem áticas. La su m a y la resta d e vectores se estu d ian p o r separado en las siguientes secdones.
La su m a de vectores « igual a la d e te rm in a d ó n del efecto co m b in ad o , o neto, de dos c a n t id a d » q u e a c tú a n ju n ta s . P or e jem p lo , a l ju g a r u n a ro n d a de golf, el p rim e r t iro v iaja 200 yardas, p e ro se d e v ía a la derecha. Luego, u n se g u n d o t iro recorre 120 yardas y q u e d a a la izquierda del h o y a Un tercer t i ro d e 70 y a rd as co loca a l golfista so b re el green. C u a n d o este golfista ve la h o ja de resultados, se d a cu en ta q u e el hoyo está ro tu la d o co n u n a d istan c ia de 310 yardas; n o ob stan te , la pelo ta viajó 390 yardas ( 2 0 0 + 120 + 7 0 yardas).
C o m o se h a señalado constan tem ente, la d irección d e un vector o tan im p o rtan te c o m o su m agn itu d . E n la su m a de vecto res, 1 + 1 n o siem p re « igual a 2; e t o dep en d e d e la dirección d e los vectores individuales.
3.8 SUMA GRÁFICA D E VECTORES ( + »
l a sum a gráfica o u n a operac ió n q u e d e te rm in a el efecto neto de lo s vectores. El m éto d o gráfico de la su m a de vectores incluye el d ib u jo a « c a l a d e lo s v e c to r e y su o r ie n ta c ió n correc ta . Luego, esos v e c to ro se reu b ican co n se rv a n d o ta n to la escala ro m o la o rien tac ió n . La co la del p rim e r v ecto r se to m a co m o el o rigen (p u n to O). El seg u n d o v ecto r se reub ica d e m o d o q u e su cola q u ed e en la p u n ta del p rim e r vecto r. El p roceso s e rep ite pora to d o s lo s vectores restantes. 1.a técn ica se cono ce co m o el m éto d o d e pu n ta con cola en la su m a de vectores. Este n o m b re se explica p o r si m ism o cu an d o se observa u n po lígono de vect o r o com pleto . La p u n ta de u n v ecto r se co n ec ta c o n la c o la del siguiente.
H efecto com b in ad o o u n v ecto r q u e se ex tiende desde la ro la del p rim e r vector de la se rie has ta la pu n ta del ú ltim o vec lo r de la serie. Se tien e u n a expresión m atem ática q u e rep re sen ta el efecto com b in ad o de los vectores:
R = A + > B + > C + > D + > . . .
www.FreeLibros.me

El v ecto r R e s la no tac ión c o m ú n q u e se u tiliza p a ra representar la resultan te de u n a serie d e vectores. Resultante es el té rm in o q u e describ e el efecto c o m b in a d o de los vecto res. O bserve asim ism o q u e el sim bolo + > sirv e p a ra iden tificar la su m a de vectores y p a ra diferenciarla d e la su m a algebraica [re£ 5 |.
N ote q u e los vectores cum plen c o n la ley co n m u ta tiv a de la sum a, es decir, el o rd e n e n q u e se sum an los vectores n o altera el resultado. P o r lo tan to .
R = (A + > B + > C ) = ( C + > B + > A ) =
( B + > A + > C ) = . . .
El proceso de com binar los vectores se p u ed e llevar a cab o gráfi • com ente co n técnicas de d fcu jo m anuales o u n softw are d e c a d .
Ind ep en d ien tem en te d e l m é to d o q u e se u tilice, los conceptos subyacentes son id én tk o s. L os p ro b lem as d e e jem plo siguientes ilustran tal c o n c e p ta
PRO B LEM A D E EJEM PLO 3.5
Determine gráficamente e l efecto com binado de los vectores de velocidad A y B, q u e se m uestran en la figura 3.8.
Exah:0 25 50
FIGURA 3* Vectores del p rob lem a de ejem plo 3.5.
S O L U C IÓ N : I . Construya los diagram as d e actores
Para determ inar la resultante, los vectores se deben colocar de tal m anera q u e la cola de B se ubique en la pu n ta de A. Para verificar la ley conmutativa, los vectores se dibujaron de nuevo, de m odo q u e la cola de A se localice en b pu n ta de B. La resultante es el vector dibujado de la co la del prim er vector, el origen, a la pu n ta d d segundo vector. En la figura 3.9 se presentan los dos diagramas.
2. M ida la resultante
l a longitud del vector R es de 66 in/s. Para definir completamente el vector R tam bién se requiere la dirección. El ángulo de la horizontal al vector R e¡ de 57°. P or lo tanto, la m anera correcta de presentar la solución es:
figura 3.9 Efecto com binado d e lo s vectores A y B del problema de ejemplo 3.5.
www.FreeLibros.me

50 CAPITULO TRES
PRO B LEM A DE E JE M PL O 3 .6
O te rm in e gráficam ente el efecto com binado de los vectores de fuerza A, B , C y D que se m uestran en la figura 3.10.
Ejrala
f i g u r a 3.10 Víctores del problem a de ejem plo 36.
SO L U C IÓ N : 1. Construya diagram as de los vectores
Para determ inar b resultante, se deben colocar Ico vectores de m anera q u e la cola de B se ubique en la punta de A. Luego la cola de C * coloca sobre la punta de B. Finalmente, la cola de D se coloca sobre la pu n ta de C . De n ieva cuenta, el orden de los vectores n o es im portante, y se utiliza cualquier com binación. C om o ilustración, se usa o tra com binación arbitraria en este ejem plo, l a resultante es el vector dibujado de la co la del prim er vector, en el origen, a la punta del cuarto vector. En la figura 3.11 se dustran los diagram as de los vectores.
2. M ida la resultante
l a longitud m edida del vector R es de 521 in/s. Para definir com pletam ente el vector R tam bién se necesita la d irección. El ángulo m edido de la horizontal al vector R es de 68*. Por consiguiente, la m anera correcta d e presentir la solución es la siguiente:
R - 521 in /s Á "
fig u r a x i l Efecto com b in ad o de los vectores A , B, C y D del p rob lem a d e e jem plo 3.6.
3.9 SUM A ANALÍTICA DE VECTORES (+ > ): M ÉTODO DEL TRIÁNGULO
Se u tilizan d o s m étodos analíticos para determ inar el efecto neto de los vectores. El p rim e r m éto d o es m ejo r cu an d o tan so lo se req u iere la resultante de d o s vectores. G im o co n el m étodo gráfico,
los d o s vec to res q u e se v an a c o m b in a r se co locan p u n ta ron-cola. La resultante se ob tiene conectando la co la del p rim er vector co n la p u n ta del segundo vector, d e m o d o q u e la resultan te fo rm a el tercer lado de u n triángulo . G eneralm ente, este es i»i tr iángu lo oblicuo, p o r lo q u e se ap lican las leyes descritas en b sección 3 .6 2 . La longitud del tercer lado y su ángulo d e referencia se d e te rm in a n ap lican d o las ley es d e los sen o s y los
www.FreeLibros.me

V ectores 51
cosenos, co n la finalidad d e d efin ir com pletam ente el vector re- representan co n negritas (D ), en tan to q u e la m agnitud del vec-su ltante. Este m étodo se ilustra m ediante u n problem a d e ejcm - » r se represen ta co n cursivas norm ales (D ).p í a Para d istin g u ir co n claridad las cantidades, los vectores se
PR O B LEM A D E E JE M PL O 3.7
D e te r m in e a n a l ít ic a m e n t e la r e s u lt a n t e d e l o s d o s v e c to r e s d e a c e le r a c ió n q u e s e m u e s tr a n e n la f ig u r a 3 .1 2 .
FIG U R A 3.12 Vectores del p rob lem a d e e jem plo 3.7.
S O L U C IÓ N : I . Elabore u n diagrama tre to r io l simple
lo s vectores se colocan punta-con-cob, co m o se indica en la figura 3.13. Observe q u e tan solo se requiere un ¿ag ram a sim ple porque la resultante se determ ina analíticamente.
R - A • > ■
fig u r a 3.13 Efecto com b in ad o de lo s vectores A y B del p rob lem a d e e jem plo 3.7.
2. D etermine u n ángulo interno
El ángulo en tre A y la horizontal es de 20°. Si se revisa la figura 3.13, se advierte q u e el ángulo en tre los vectores A y B es:
0 - 20° ♦ 75* - 95°
De m odo que el problem a para determ inar la resultante de los dos vectores es en realidad el caso de un triángulo general, como el q u e se describe en la sección 3 (caso 3).
3. D eterm ine la m agnitud de la resultante
Al aplicar el procedim iento m ostrado para u n problem a del caso 3, se utiliza la ley de los cosenos para calcular la m ign itud de la resultante:
R = V A 3 + B2 - 2ABcos6
= V W / s V + (2 3 f t/sV - 2(46ft/sI)(23ft/s, )|cos95*| = 53.19 ft/s2
4. Determ ine la dirección de la m agnitud
S e usa la ley de los senos para calcular el ángulo en tre los vectores A y R:
'‘ “ “ " { ( I M
I (53.19ft/s2) sen 95* J
5. Especifique co m p le ta m en te la resu ltan te
S ángulo a partir de la horizontal es de 20* + 25-5* = 455 \ l a resultante se escribe correctam ente como:
R - 53.19 f t/s2 4 5 , 5 \
o bien.
R = 5 3 .1 9 f t /s 2 / 1 3 4 .5 *
www.FreeLibros.me

52 CAPITULO TRES
3.10 C O M PO N EN TES DE UN VECTOR
E l seg u n d o m é to d o p a ra d e te rm in a r a n a lític a m e n te la re su ltante de vecto res es más adecuado para lo s problem as d o n d e se c o m b in an m ás de d o s vectores. Este m é to d o im plica la sepa- r a d ó n de los vectores en co m p o n en tes perpendiculares.
La descom posición de u n vector es lo inverso de la com bi- n a d ó n d e vectores. U n vector indiv idual se p u ed e descom poner en d o s vectores separad o s, a lo la rg o d e d ire c d o n e s co n v en ientes. Las dos com ponen tes vectoriales tienen el m ism o efecto q u e el v ecto r o rig inal.
B i la mayoría de las aplicaciones se recom ienda concentrarse en u n co n ju n to de vectores orientados vertical y horizontalm ente, de m odo q u e un problem a típico im plica determ inar las com ponentes horizontal y vertical d e u n vector. El problem a se resuelve co n el m étodo d e punta-con-cola , au n q u e invertido. Para explicar d m étodo, e n la figura 3.14 se ilu stra u n vector cualquiera A.
f i g u r a 3 .1 4 C o m ponen tes d e u n vector.
Se d ibujan d o s vectores co n la p u n ta de u n o en la co la del o tro , u n o a lo largo de la vertical y el o t r o a lo largo d e la h o rizo n tal. q u e tienen el efecto neto del o rig ina l La cola del vector h o r izontal se coloca en b cola del original y la p u n ta del vector vertical se coloca en b pu n ta del vector originaL En b figura 13.4b se m uestra esta descom posición del vector en su s com ponentes h o rizontal A* y vertical A ,. Recuerde q u e el orden d e la su m a de los
vectores n o es im portan te . P o r consiguiente , es irrelevante si se d b u ja n p rim e ro el v ecto r h o rizon ta l o el vertical. En b figura 3.14c se ilustran b s com ponentes d e u n vector general en el orden o p u es to
O bserve q u e b m agnitud d e b s co m p o n en tes se c a lc u b determ inando lo s b d o s d e lo s tr iá n g u lo s m ostrad o s en b figura3 .1 4 . Estos tr ián g u lo s siem pre son triángulos rectángulos, p o r lo q u e se p u ed en u sa r lo s m étodos descritos en b sección 3.3 . Las d irecciones de b s com ponen tes se to m a n d e los d iag ram as de vectores de b s figuras 3 .14b o 3.14c. La n o ta d ó n estándar c o n i s te en definir co m o positivos los vectores horizon tales dirigidos h a d a la derecha. D e la m ism a form a, to d o s lo s vectores verticales ¿ r íg id o s h a d a a rrib a se tom an c o m o positivos. Entonces, la di- tección d e b s com ponen tes se d e te rm in a a p a r t ir del signo algebraico asociado c o n la com ponente.
Un m éto d o a lte rn a tiv o para d e te rm in a r b s com ponen tes rectangulares de u n v ecto r e s iden tifica r el ángulo del v ecto r con el eje positivo de b s x en u n sistem a co n v en d o n a l de coordenadas cartesianas. Este ángulo se d e n o ta c o m o 0 . L a m agnitud de b s d o s co m p o n en tes s e c a lc u b u sa n d o re b e lo n e s t r ig o nom étricas básicas com o
A», = A e o s 6,
A v = A s e n 0 ,
(3.9)
(3.10)
la im p o rtan c ia d e este m étodo rad ica en el hecho de que b s d irecciones de b s co m p o n en tes so n ev iden tes e n el signo q u e re su lta de la fu n c ió n tr ig o n o m é tr ic a ; es d e c ir , u n vecto r q u e a p u n ta h a d a el seg u n d o cu ad ran te de u n sistem a co n vencional de co o rd en ad as cartesianas tien e u n á n g u lo 0„ en tre 90“ y 180*. El coseno d e u n á n g u lo co m o este d a co m o resul- t id o u n v a lo r negativo; y el seno, u n valo r p o s it iv a Las ecua- d o n e s (3.9) y (3 .10) im plican q u e b co m p o n en te h o rizo n ta l es negativa (es d e c ir , h ac ia b izq u ie rd a e n u n s is te m a c o n v e n cional de co o rd en ad as cartesian as), m ien tra s la co m p o n en te vertical es positiva (es d e d r , h a d a a rrib a en u n sistem a co n v en d o n a l de co o rdenadas ca rtesb n a s).
PR O B LEM A D E E JE M PL O 3.8
E n l a f ig u r a 3 .1 5 s e p r e s e n ta u n a t u e r z a F, d e 3 .5 k N . D e t e r m in e la s c o m p o n e n t e s h o r iz o n ta l y v e r t ic a l d e e s ta fu e r z a
a » n e l m é t o d o a n a l ít ic o d e l tr iá n g u lo .
FIG U R A 3 .1 5 V e c to r d e t u e r z a d e l p r o b le m a de e j e m p l o 3 .8 .
S O L U C IÓ N : 1. D ibuje las componentes del vector
l a com ponente horizontal del vector se dibuja a partir de la cola del vector F . L i com ponente vertical del vector se dibuja a partir del vector horizontal a la p u n ta del vector de tuerza original. En b figura 3.16 se m uestran b s dos com ponentes.
FIG URA 3 .1 6 Com ponentes de b fuerza del problem a d e ejem plo 3 .8 .
www.FreeLibros.me

V ectores 53
2. L ie e l m étodo del triángulo
Trabajando con el triángulo rectángulo, se escribe una expresión para am bas com ponentes con el uso de Junciones trigonométricas:
JC T 3 5 » - catel° °P uesl° _ F, hipotenusa 3 3 kN
cateto adyacente F»eos 35° = ------------ - —
hipotenusa 3 3 kN
Ambas expresiones se despejan en térm inos de la m agnitud de las com ponentes deseadas:
F„ = (3 3 kN) eos 35° = 1 8 7 kN —
= - 2 3 7 kN
F„ - ( 3 3 k N )sen 35* - 1 0 0 kN ¿
- - 2 0 0 kN
3. L ie el m étodo del ángulo con e l eje x
Se obtiene u n a solución alternativa usando las ecuaciones (3.9) y (3.10). El ángulo 9 , del eje x positivo al vector F es de 215*. Las componentes se calculan co m o sigue:
F * - F e o s» , - (3 3 kN) e o s 215’ - - 2 3 7 kN
= 2 3 7 kN —
F, = F se n 9 , = ( 3 3 kN) sen 215* = - 2 0 kN
= 2.0 kN ]
3.11 SUMA ANALITICA DEVECTORES (+ > ): M ÉTO D O DE C O M PO N EN TES
Las co m p o n en tes de u n co n ju n to de vectores sirven para determ in a r el efecto n e to d e los vectores. C o m o se m e n c io n ó , este m éto d o es m ejo r cu an d o se necesita c o m b in a r m ás d e d o s vecto res, adem ás de q u e im plica la descom posición de c a d a vector in d iv id u a l en su s co m p o n en tes h o rizo n ta le s y vertica les. En general, se usa la convención del signo algebraico para las com ponentes, c o m o ya s e describió.
Luego se su m a n to d as las co m p o n en tes horizon tales para ob ten er u n a com po n en te ú n ica , la cual representa el efecto h o r izo n ta l n e to del c o n ju n to d e vectores. Es im p o rta n te destacar q u e las m agnitudes de las co m p o n en tes se p u e d e n su m a r s in d i ficultad p o rq u e todas tien en la m ism a d irección. Estas c o m p o n en tes se t r a ta n co m o m ag n itu d es escalares. Se u sa u n signo positivo o u n o negativo para d e n o ta r el se n tid o d e la c o m p o n en te . Este concepto se resum e e n la siguiente ecuación:
Rh = Ah + Bh + Ch + O* + . . .
De igual m anera , se su m a n to d as las co m p o n en tes verti- en u n a sola co m p o n e n te vectorial, la c u a l represen ta el vertical n e to del co n ju n to d e vectores:
R r = A , + B y - r C y + D v + . . . (3 .12)
A hora se sum an vectorialm ente las d o s co m p o n en tes ne tas para o b te n e r la resultante. la s (unciones trigonom étricas se u t i lizan p a ra o b te n e r las ecuaciones siguientes:
R = V R ¿ + R 2,
‘- “ " ( I )
(3 .13)
(3.14)
(3 .11 )
La resu ltan te e s el efecto com b in ad o de la serie com pleta de vectores. El p roced im ien to a n te r io r se ap lica m ás eficientem ente cuando lo s cálculos se o rgan izan en u n a tab la , co m o se m uestra en el p rob lem a de e jem plo siguiente.
PRO B LEM A D E E JE M PL O 3 .9
Tres fuerzas actúan sobre un gancho, com o se indica en la figura 3.17. Determ ine el efecto neto de tales tuerzas con el m étodo analítico de com ponentes.
S O L U C IÓ N : 1. Use el m étodo del ángulo con e l eje x para determ inar las com ponentes de la resultante
Se determ inan las com ponentes horizontal y vertical de cada tuerza por trigonom etría, las cuales se ilustran en la figura 3.18. También se m uestran los vectores reorganizados del m odo punta-con-cok . Las com ponentes están organizadas en la tab la 3.1.
www.FreeLibros.me

54 CAPITULO TRES
C - 501b
fig u r a 3.17 F u m a s del p rob lem a d e e jem plo 3.9.
FIGURA 3.18 C o m ponen tes de los vectores en el problem a de e jem plo 3.9.
r^ 'lA B LA 3.1 C o m p o n e n te s d e lo s v e c to re s p a r a e l p r o b le m a d e e je m p lo 3 .9 |
Ángulo de Componente h(l>) Componente» (Ib)Vector referencia 0, n , - f co* o . 1, “ F k»i 0,
A 0* A* - (30)cos <r - + 30 t> A , - (30)sen 0° - 0
B 45* ^ - (20)<« 45* - +14.14 Ib B, - (20)tcn 45* - +14.14 Ib
C 120* q , - (50)coa 120* - - 2 5 Ib C , - (50)sen 120* - +43JO feR* - 19.14 R , - 57.44
Observe e n la figura 3.18 que la su m a de las m agnitudes de las com ponentes horizontales sigue la trayectoria de la "distancia” total navegada por los sectores en la dirección horizontal. Lo m o m o es válido para la sum a de las m agnitudes de las com ponentes verticales. Esta es la lógica detrás del mM odo de com ponentes en la com binación de vectores. En este problema, las sum as de las com ponentes individuales horizontal y vertical nos dan hs com ponentes de la resultante com o sigue:
R#, = 19.14 Ib
y
R , = 57.44 Ib
2. Com bine las com ponentes de la resultante
l a resultante es la su m a vectorial de los dos vectores perpendiculares, com o se m uestra en la figura 3.19.
fig u r a 3 1 9 Vector resultante del p rob lem a de e jem plo 3.9.
l a m agnitud de la resultante se obtiene con la ecuación (2.13):
R = V R l 4- Rj__________14 fc)2 + (57.44Ib)2 - 60341b
C = 501b
www.FreeLibros.me

V ectores 55
Se calcula el ángulo de la resultante:
— ' O — •
Por lo tanto, la resultante de las tres tuertas se define formalmente com o
R - 6 0 5 4 Ib / ^ l ó *
3.12 RESTA O SUSTRACCIÓN VECTORIAL ( -> )
E n a lgunos casos, se desea con o cer la d ife ren c ia e n t r e can tidades vectoriales. En tales situaciones, d e b e n restarse lo s vecto re s . El s ím b o lo - > rep resen ta la sustracción de vectores, la cual es la d ife ren c ia de la resta algebraica [ref. 5 ) . L a resta de vectores se rea liza d e m an e ra sim ilar a la sum a. D e h ech o , la resta su m a el v e c to r negativo u o p u e s to del v e c to r q u e se va a restar. E l negativo de u n v ecto r tie n e la m ism a m ag n itu d , p ero en dirección co n tra ria . L a figura 3 .20 ilustra el v ecto r A y su negativo - > A.
Ya sea q u e se use el m éto d o gráfico o el analítico, hab rá q u e d ib u ja r u n d iag ram a de los vectores para e n ten d e r el p roced im iento. C onsidere u n p rob lem a d o n d e el v ecto r B se deb e restar del vector A , c o m o se ind ica en la figura 3.21a.
b) e)
f ig u r a j j i Resta de vectores.
Esta sustracción se efectúa d ib u jan d o p rim e ro el negativo del v e c to r B, - > B . Lo a n te r io r se i lu s tra en la fig u ra 3.21b. Luego, el v ecto r - > B se su m a al vector A, co m o se in d ica en la figura 3 .21c. La resta se establece m atem áticam ente co m o
I = A - > B = A - > ( - > B )
O bserve q u e la expresión es idéntica a la resta de cantidades esca lares co n los m éto d o s algebraicos básicos. A sim ism o, se d e signa c o m o I el resultado de la resta vectorial. La no tac ión R se reserva n o rm a lm e n te para rep resen ta r el resu ltado de u n a sum a d e vectores.
La figura 3.2 Id ind ica q u e se o b tien e el m ism o resu ltado de la resta vectorial co lo can d o el v ecto r B sob re el v ecto r A. pero co n o rien tac ió n o p u esta d e p u n ta a co la . Este m éto d o suele ser el preferido, después d e a d q u irir d e r ta confianza, ya q u e e lim ina la necesidad d e v o lv er a d ib u ja r el vector negativo. D e m aner a g enera l, lo s vecto res se su m a n c o n el fo rm a to p u n ta -co n - co la . m ien tra s q u e se restan c o n el fo rm ato p u n ta -c o n -p u n ta Se revisará este concepto co n m ás detalle, co n fo rm e los m étodos individuales d e so lu d ó n se revisen en los sigu ien tes problem as d e ejem plo.
3.13 SUSTRACCIÓN GRÁFICA DE VECTORES ( -> )
C o m o se vio. la resta de vectores se parece m u ch o a la su m a de vectores. Para resta r vectores g ráficam ente, se reubican p a ra fo rm a r d iagram as vectoriales de p u n ta -c o n -p u n ta El v ecto r q u e se restará deb e tra tarse del m o d o q u e se ind icó en la se cd ó n 3.12.
D e n u ev a cu en ta , e l proceso de resta de vectores p u ed e realizarse gráficam ente co n técnicas d e d ib u jo m anual, o b ien , con u n so f tw a re de c a d . In d ep en d ien tem en te d e l m é to d o q u e se utilice, lo s concep tos subyacentes son idén ticos. Los detalles del p roceso s e m u estran en los ejem plos siguientes.
PRO B LEM A D E E JE M PL O 3 .1 0
l>Hermine gráficamente el resultado de la resta del vector de velocidad B del vector A: J = A - > B.el cual se m uestra e n la figura 3.22.
0 2 0 40A - 3 2 in& / I— I— I— I— I
- B - 5 6 I n f c
figura J.22 Vectores del problema de ejem plo 3.10.
www.FreeLibros.me

56 CAPITULO TRES
SO L U C IÓ N : 1. Construya r í diagram a vectorial
Para obtener el resultado, los vectores se ubican en la form a punta-con-cola, pero con el vector B ju n t a n d o had a el vector A. D e nueva cuenta, esto ocurre porque el vector B * está restando (lo opuesto a la a im a). En la figura 3 2 3 se presenta el diagram a vectorial.
® 26 j
II W. «V»*» * IMR' - - a
.1 = A
.1 = 5 6 . 8
B m tr/w nM r f— « fJ »1R40W
FIGURA 3.23 J = A - > B d d p rob lem a de e jem plo 3.10.
2. M ida e l resultado
La resu ltan te se ex tiende de la co la de A. el o rigen, a la c o la de B. La lon g itu d m ed ida del v ecto r J e s de 56.8 in /s .
También se requiere la dirección para definir com pletam ente el vector | . El ángulo de la horizontal al vector i es de 99°. Por lo tanto, la m anera correcta de presentar la solución es com o sigue:
I = 566 in /s Á \ °
o bien,
I = 5 6 6 in /s 9 9 * \
PRO B LEM A D E E JE M PL O 3 .1 1
Determ ine gráficamente el resultado de I « A - > B - > C -f > D de lo s vectores d e fuerza q u e se ilustran en la figura 324 .
A = 2 0 0 Ib
3 0 0 1 b
C -1 7 8 1 b
0 100 2 0 0 I 1----- 1-----1-----1
figura 3.24 Vectores del problem a de ejem plo 3 .1 1.
www.FreeLibros.me

V ectores 57
S O L U C IÓ N : I . Construya el diagram a v tttoria l
P ú a determ inar el resu ltado de I = A —> B —> C + > D . los vectores d eb en reubicaree pun ta-con-co la o p in ta-con-pun ta . dependiendo de si se sum an o se restan. Es necesario q u e el vector B se dibuje apun tando had a e l sector A . porque B se está restando. Algo parecido sucede co n el vector C. Luego, la cola del sector D se coloca sobre la cola de C , porque D se va a sum ar a la serie de vectores previam ente ensamblados. El diagram a de la solución sectorial se m uestra en la figura 325 .
FIGURA 325 Resultado del p rob lem a de e jem plo 3.11.
En el polígono sectorial de la figura 3 2 5 , se observa que los vectores B y C aparecen colocados hacia atrás, lo cual ocurre en b resta de vectores.
2. M ida el m u lta d o
La longitud del sector I e s de 365 Ib. El ángulo de la horizontal al vector I e s de 81*. P or lo tanto, la m anera correcta de presentar la solución es com o sigue:
I = 365 Ib Al°
3.14 RESTA VECTORIALANALÍTICA ( -> ) : M ÉTO D O DEL TRIÁNGULO
C o m o en la su m a analítica de vectores, el m étodo del triángulo se adap ta m ejo r cu an d o se m anejan solam ente dos sectores. Se deberla traza r u n d iag ram a vectorial u sando la lógica q u e se des
crib ió en la sección an te rio r. Luego se usan las leyes del tr iá n - 31I0 p a ra d e te rm in ar el resu ltado de la resta d e vectores. Este m éto d o genera l se ilu s tra a través del s igu ien te p rob lem a de ejem plo.
www.FreeLibros.me

58 CAPITULO TRES
PRO B LEM A D E E JE M PL O 3.12
O te rm in e analíticam ente el resultado de la operación co n vectores J • A - > B q u e se m uestra en la figura 3.26.
FIG U R A 3 .2 6 Vectores d e l p rob lem a de e jem plo 3.12.
S O L U C IÓ N : I . Dibuje u n diagram a vectorial sim ple
Se colocan los vectores en u n polígono vectorial, com o se indica e n la figura 3.27. Nuevamente, el vector B se coloca apuntando lu c ia el vector A porque se va a restar. Observe tam bién q u e se requiere tan solo u n diagrama am p ie porque la resultante se determ ina analíticamente.
F IG U R A i J 7 Resultado del p rob lem a d e e jem plo 3.12.
D eterm ine u n ángulo in terior
Como el ángulo entre A y la horizontal es de 15a. el ángulo en tre A y la vertical es de 75°. Observe que el ángulo entre la vertical y A es el m o m o q u e el ángulo identificado com o 6-, por lo tanto, H = 75".
H problem a para determ inar la resultante de A - > B es en realidad el caso de u n triángulo general, como el descrito en la sección 3.62 (caso 3).
Determ ine la m agnitud de la resultante
Al aplicar el procedim iento definido para el problem a del caso 3, se usa la ley de los cosenos para c a k u h r la m agnitud de la resultante:
1 = Va' + # - 2ABcose- \ / ( 1 5 fty»2)2 ♦ (1 0 ft/s2)2 - 2(15 ft/s2)(10 (t/s2) eos 75* - 15.73 ft/s2
4 . D eterm ine la directión de la resultante
Se utiliza la ley de los senos para calcular el ángulo entre los vectores A y J:
sen
5 . Especifique com pletam ente el resultado
Al exam inar la figura 3 2 7 , se observa que el ángulo q u e hace ) con la horizontal es de 37.9* - 15® - 22.9®. La solución se escribe correctam ente como
I - 15.73 ft/s2 2 2 .9 /
www.FreeLibros.me

V ectores 59
3.15 RESTA VECTORIAL ANALÍTICA (-> ) : M ÉTODO D E C O M PO N EN TES
Para d e te rm in a r el resu ltad o analítico de la resta de u n a serie de vectores es m ejo r u tilizar el m éto d o d e com ponen tes, lo cual se h a c e de la m ism a fo rm a q u e en la su m a d e vecto res. C onsidere d p rob lem a genera l de la resta de vectores defin ido p o r la siguiente ecuación:
I = A + > B - > C + > D + > . . .
Se d e te rm in a n las co m p o n en tes h o r iz o n ta l y vertica l d e cada v ecto r (c o m o en la sección 3.10). T am bién se requ iere aplicar u n a convención de s ig n o s p a ra d e n o ta r d sen tido de las c o m p o nentes. La convención q u e se u tiliza en la sección 3.1 0 designaba las co m p o n en tes q u e apun tab an hacia a rrib a o hacia la derecha co n u n signo algebraico positiv a
Puesto q u e se t r a ta d e m ag n itu d es escalares, la s c o m p o nentes individuales se com b in an algebraicam ente al sum arse o restarse. Para el problem a general defin ido aquí, las com ponentes vertical y horizontal d e la resultante se escriben c o m a
Ih - A* + Bf, - Q , + Df, + ...7V = A v + B r - C v + D v + . . .
O bserve q u e las co m p o n en tes d e C se restan de to d as las dem ás co m p o n en tes , lo c u a l es c o n s is ten te co n la re s ta deseada del vector. E ntonces, co n las ecuaciones (3 .13 ) y (3 .14 ), se c o m b in an v ec to ria lm en te las d o s co m p o n en te s re su ltan te s e n u n a sola resultante, q u e es resu ltad o de la m an ip u lac ió n vecto rial d e la se rie d e vec to res co m p le ta . D e n u ev a cuen ta , e l p ro ced im ien to se p u ed e aplicar m ás eficientem ente cu an d o lo s cálculos se o rgan izan en u n a tab la .
PRO B LEM A D E E JE M PL O 3 .1 3
Determine analíticam ente el resultado de J = A —> B + > C + > D para los vectores de velocidad m ostrados en la figura 328 .
A = 6 ffs
C - 8 ft/s
íFIGURA 328 Fuerzas del p rob lem a de e jem plo 3.13.
S O L U C IÓ N : I . Elabore u n diagrama vectorial ¡a trillo
la s com ponentes horizontal y vertical de cada velocidad se determ inan aplicando las ecuaciones trigonom étricas (3.9) y (3.10), q u e son las q u e se m uestran en la figura 329 . Tam bién se m uestran todos los vectores reubica- dos en u n a sola serie: punta-con-cola para la sum a y cola-con -punta para la resta.
FIGURA 329 Resultado del p rob lem a d e e jem plo 3.13.
l i e e l m étodo del ángulo con e l efe x para determ inar las componentes
Los valores de las com ponentes se listan en la tabla 3 2 .
F T A B L A 3.2 V alores d e lo s c o m p o n e n te s p a r a e l p r o b le m a d e c jm p lo 3 .1 3 1r -------------------
Angulo de Componente h (ft/s) Componente v(ft/a)Vector referencia 0, Vfc - V CO40, V ,m V m n í,
A 300* *3.00 -5.19B 195* - U 3 9 - 3 .1 !c «5* +5.66 ♦ 536D 330* ♦8.66 -5 .0 0
www.FreeLibros.me

6 0 CAPITULO TRES
3 . Determ ine las com ponentes de la solución
l a m anipulación algebraica de las com pooentes vertical y horizontal proporciona las com ponentes de la resultante:
K = A h ~ B* + Q + D*
= (+ 3 .0 ) - ( — 1139) + (+ 5 3 6 ) + (+ 8 3 6 ) = + 28.91 ft/s
l r m A . - B , + C y + D ,
- ( -5 .1 9 ) - ( -3 .1 1 ) ♦ ( + 536) + ( - 5 0 0 ) - - 1 .4 2 f t/s
4 . C om bine las componentes de la solución
La m agn itud y la dirección de la resu ltan te se d e te rm in an sum ando vcctorialm cnte las com ponentes (figura 3 3 0 ).
j — -r
fig u r a X30 Vector resu ltan te del p rob lem a de e jem plo 3.13.
l a m agnitud de la solución se determ ina con la ecuación (3.13):
______________- V (28.91 f t/s )J + ( -1 .4 2 ft/s)* - 28.94 f t/s
B ángulo de la solución se calcula a partir de la fondón tangente:
' * ' " “ - ‘( s S T K í ) * - 2'8'
Por lo tanto, la solución se establece form alm ente como
I = 28.94 f t /s \? .S r
3.16 ECUACIONES VECTORIALES
C o m o se v io en la s e c d ó n 3.8, las o p e ra d o n e s vecto ria les se p u ed en ex p resa r en fo rm a de e c u a a o n e s . La expresión para resta r d o s vecto res, I ■ A - > B, es en realidad u n a ecuación vectorial. Las ecuaciones vectoriales se u tilizan d e fo rm a sim ilar a las ecuaciones algebraicas. Los té rm in o s se p o d rían in te rcam biar d e lado d e la igualdad m odificando su s signos. P o r ejem plo, la ecuación
A + > B —> C = D
se replantea com o:
A + > B = C + > D
Se h a visto la im p o rtan c ia de las ecuaciones vectoriales c o n las operaciones de su m a y resta d e vectores. En la su m a vectorial, los vectores se ubican punta-con-co la , en ta n to q u e la resultante es u n v ecto r q u e se ex tiende d esd e el o rig en del p rim e r vector has ta la p u n ta del v ecto r final. I d fig u ra 3 .31a ilu s tra el d ia g ram a vectorial d e lo siguiente:
R = A + > B + > C
a) b) dA «->■*>C ’ ■ ■ ♦ > € - ■ - > A A * > C - - > B * > «
figura 331 Ecuadones vectoriales.
www.FreeLibros.me

V ectores 61
La ecuación se replantea com o:
B + > C = R —> A
El d iag ram a vec to ria l m o strad o en la figura 3.31b ilu s tra esta form a d e la ecuación. O bserve q u e co m o el vector A se resta del vector R. el vector A debe apun ta r h a d a R. Recuerde q u e este es el m étodo opuesto al de punta-con-coia . ya q u e la resta es opuesta a la sum a.
O bserve q u e co m o el d iag ram a form a u n po lígono cerrado, b m agn itud y la d ire c d ó n de to d o s lo s vectores se m antienen iguales. Esto valida q u e las ecuaciones vectoriales se u tilicen sin
a lte ra r su significado. La e c u a d ó n p u ed e rep lan tearse u n a ve? m ás c o m o (figura 3 J le):
- > B + > R = A + > C
C o m o se ilu s tró en la fig u ra 3 .31 , u n a ecuac ión vectorial se pu ed e rep lan tear de varias m an eras diferentes. Si bien lo s polí- g o n o s vectoriales creados p o r las ecuadones tienen fo rm as distin tas, los vectores ind iv iduales p erm anecen s in m od ificad ó n . C o n este p r in d p io , es posib le escrib ir u n a e c u a d ó n vecto rial para describ ir u n d iag ram a vectorial.
PRO B LEM A DF. E JE M PL O 3 .1 4
Escriba una e c u a d ó n vectorial para el arreglo de los vectores m ostrado en la figura 3 J 2 .
fig u r a 3 J2 D iagram a vectorial del p rob lem a de e jem plo 3.14.
S O L U C IÓ N : 1. B criba u n a ecuación para seguirlas dos trayectorias d e O, a P,
Utilice el pun to O] com o el origen de la ecu ad ó n vectorial y siga las trayectorias a l pun to P |¡
La trayectoria superior establece: A + > B + > C + > D
La trayectoria inferior establece: E + > F
G im o in ician y term inan en u n pun to co m ú n , am bas trayectorias deben ser vectorialmente iguales. Por consiguiente, la ecuación se escribe como:
0 , P , ■ A + > B ♦ > C + > D ■ E f > F
2. B criba u n a ecuación para seguir las dos trayectorias d e O ¡ a P,
Se puede escribir o tra ecuadón usando el p u n to 0> como el origen y siguiendo las trayectorias al pun to P,:
La trayectoria superior establece: C + > D
La trayectoria inferior establece: - > B - > A + > E + > F
de m odo q u e b ecu ad ó n se escribe co m o sigue:
O jP , - C + > D - - > A - > B » E + > F
Observe q u e estas son dos formas de la m ism a ecuación.
www.FreeLibros.me

6 2 CAPITULO TRES
PRO B LEM A DE E JE M PL O 3.15
Escríba u n a ecuación vectorial para el arreglo de vectores m ostrado en la figura 3 5 3 . Luego, replantee la ecuación para elim inar los termino» negativos y elabore el diagram a vectorial correspondiente.
fig u r a X » D iagram a vectorial del problem a de e jem p lo 3.15.
S O L U C IÓ N : I . B e riba u n a ecuación para te p iir la id o s trayectorias d e O a P
Utilice el p u n to O como el origen de la ecuación vectorial y sigi las trayectorias al p u n to P.
La trayectoria superio r establece: A - > B + > C - > D
La trayectoria inferior establece: - > E + > F
Por lo tanto, se escribe una ecuación como
O P = A —> B + > C - > D = - > E + > P
2. Replantee la ecuación
Para elim inar los térm inos negativos, los vectores B, D y E se deben trasladar a su s respectivos lados opuestos de h ecuación. Esto genera la siguiente ecuación:
A + > C + > E ■ H f > » + > F
Observe que el orden de la sum a n o tiene im portancia. En la figura 3 5 4 se m uestra un nuevo arreglo de los vectores.
Es necesario adquirir fam iliaridad co n Las ecuaciones vectoriales conform e se usan extensivamente en el análisis de mecanismos. Por ejem plo, la obtención de k» aceleración en mecanismos simples implica ecuaciones vectoriales con seis o m ás vectores.
fig u r a 354 D iagram a rep lanteado del p rob lem a d e e jem plo 3.15.
3.17 APLICACIÓN DE ECUACIONES VECTORIALES
C a d a v ecto r de u n a ecu ac ió n represen ta d o s can tidades: una m agnitud y u n a d irección. P o r consiguiente, u n a ecuación vectoria l tien e realm ente d o s restricciones: la com binación d e las m ag n itu d es vectoriales y las d irecciones deb e se r equivalente. R>r ello , u n a ecuación vectorial se u tiliza para resolver d o s in
cógnitas. En lo s p rob lem as de su m a y resta estud iados an terio rm ente, se de term inaban la m agn itud y la dirección d e la resultante.
U na situación co m ú n en el análisis d e m ecanism os im plica d e te rm in ar la m agn itud de d o s vectores cu an d o se conoce la d irección de to d o s lo s vectores. C o m o e n la su m a de vectores, este problem a ta m b ié n co n tien e d o s incógnitas, d e m o d o q u e una ecuación vectorial e s suficiente para efectuar el análisis.
www.FreeLibros.me

V ectores 63
3.18 D ETERM INACIÓN GRÁFICA DE M AGNITUDES VECTORIALES
E n prob lem as d o n d e hay q u e d e te rm in a r la m ag n itu d de dos vectores, la ecuación se deberia p lan tear de m o d o q u e u n o de los vectores desconocidos sea el ú ltim o té rm in o e n cada lado de la ecuac ión . P ara ilu s tra r este p u n to , co n sid ere el caso en q u e se d eb en calcular las m ag n itu d es d e lo s vectores A y B. La ecuac ión vectorial es la siguiente:
A + > B + > C = D + > E
la cual se replantea co m o
C + > B = D + > E - > A
O bserve q u e lo s vectores A y B, co n m agnitudes desconocidas, son lo s ú ltim os té rm in o s en am b o s lados d e la ecuación.
Para resolver g ráficam ente este p rob lem a, se sa b e q u e los vectores en cada lado d e la ecuación se colocan punta-con-cola (o pun ta-con-pun ta. si lo s vectores se restan) partiendo de u n orí y n com ún. Desde luego, am bos lados d e la ecuación d eb en term inar en el m ism o p u n ta f t » lo ta n ta Hay q u e insertar las lineas en la d irección adecuada en el polígono vectorial. La intersección d e las d a s lineas representa la igualdad de la ecuación que rige y resuelve el problem a. Las lineas se m iden co n la escala correspond ien te p a ra d e te rm in ar las m agnitudes d e los vectores desconocidos. Tam bién se descubre el sen tido del vector desconocido.
Este p roceso p a ra d e te rm in ar las m agnitudes vectoriales se p u ed e realizar de m anera gráfica: para e l l a habrá q u e u sa r técn ic a s m anu a les de d ib u jo o u n so ftw are de CAD. In d ep en d ien te m e n te del m éto d o q u e se u tilice, la estrateg ia subyacen te e s idéntica. La estrategia de solución se explica m ediante problem as d e e je m p la
PRO B LEM A D E E JE M PL O 3 .1 6
Se escribe u n a ecuación vectorial como
SO L U C IÓ N :
A + > B + > C = D + > E
Se conocen las direcciones de los vectores A. B, C . D y E. asi co m o las m agnitudes de los vectores B . C y D (figura 3.35). Determine gráficamente las m agnitudes de los vectores A y E.
I - 100 Inés2
D * 150 Inte*
C - 124 InA7 \
E r a l a :
0 50 100I- ♦ ■> -I
Irv's*
f i g u r a 3J 5 Vectores del p ro b lem a d e e jem plo 3.16.
1. Reptanter las ecuaciones vectoriales
Primero, la ecuación se replantea de m odo que las m agnitudes desconocidas aparezcan com o el ú ltim o térm ino en cada lado de la ecuación:
B +-> C + > A = D +-> E
2. Coloque en el diagram a todos los sectores com pletam ente conocidos
Usando el p u n to O como origen com ún, se d ibujan los vectores B y C com o punta-con-cola. Com o se encuentra del o tro lado de la ecuación, el vector D se deberia d ibu jar a partir del o rigen (figura 3.36a).
Dirección A- A
FIG URA 3.36 Diagramas vectoriales del problem a d e ejem plo 3.16.
www.FreeLibros.me
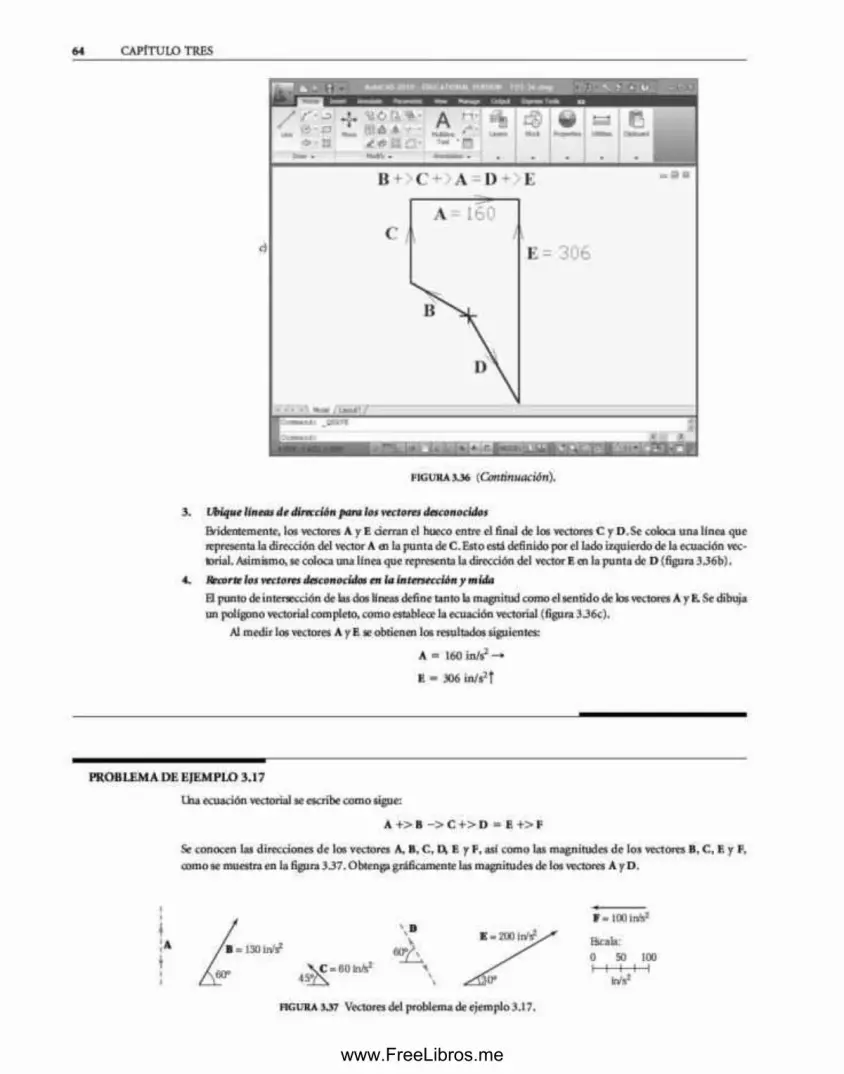
64 CAPITULO TRES
f i g u r a 3 J6 {Continuación).
3 . Ubique lineas de dirección para los vectores desconocidos
B identem ente , los vectores A y E cierran el hueco en tre el final de los vectores C y D . Se coloca u n a linea que representa la dirección del vector A a i la p u n ta de C . E sto está definido por el lado izquierdo de la ecuación sectorial. Asimismo, se coloca u n a linca q u e representa la dirección del vector E en la p u n ta de D (figura 3 3 6 b ).
4 . Brearte los vectores desconocidos en la intersección y mida
0 punto de interjección de las dos lineas define tanto h m agnitud com o el sen tido de los vectores A y F- Se dibuja un polígono vectorial completo, co m o establece la ecuación vectorial (figura 3 J 6 c).
Al m edir los vectores A y E se obtienen los resultados siguientes:
A * 160 in/s2 -*
E - 306 in/s2?
PR O B LEM A D E E JE M PL O 3.17
Lha ecuación vectorial se escribe com o sigue:
A + > B - > C +•> D ■ E + > F
Se conocen las d irecciones de los vectores A, B , C . D, F. y F. asi com o las m agnitudes de los vectores B, C , F. y F, com o se m uestra en la figura 3 3 7 . O btenga gráficamente las m agnitudes de los vectores A y D.
F -1 0 0 in*2
Bcab:0 50 100F > ■* ♦ 1
Ws2
FIGURA J J 7 V e c to r e s d e l p r o b le m a d e e j e m p l o 3 .1 7 .
www.FreeLibros.me

V ectores 65
S O L U C IÓ N : I . Krplantee la ecuación vectorial
Se replantea prim ero la ecuación, de m odo q u e las m agnitudes desconocidas aparezcan como el ú ltim o térm ino en cada u n o de los lados de la ecuación:
B - > C + > A - E + > P - > D
2. Coloque lo t vectores com pletam ente conocidos en e l diagrama
Usando el pun to O como origen co m ú n , se d ibujan punta-con-punta los vectores B y C ( porque C se resta]. Com o se encuen tran del otro lado de la ecuación, los vectores E y F se colocan punta-con-cola partiendo del o rigen (figura 338a).
a) «
fig u r a 335 D iagram as vectoriales del p ro b lem a d e e jem plo 3.17.
3. Coloque las lineas direcáonales de los vectores desconocidos
Com o en d ejem plo del problem a 3.16, los vectores A y D «bben cerrar el hueco entre los extrem os de los vectores C y F . Se coloca u n a línea q u e representa la dirección del vector A en la p u n ta de C . Lo an terio r está definido por d lado izquierdo de la ecuación vectorial De igual m anera, se coloca u n a línea q u e representa la d irección del vector D en la p u n ta de F (figura 3 3 8 b ).
4 . Recorte los vectores desconocidos en la intersección y m ida
0 p u n to de intersección de las dos lineas define tan to ki m agnitud co m o el sentido de los vectores A y D . Se elige d sen tido de D en u n a dirección que sea consistente con su resta del lado derecho de la ecuación. Se dibuja el polígono vectorial com pleto, com o lo determ ina la ecuación vectorial (figura 338c).
Al m edir los vectores A y D se obtienen los siguientes resultados:
A = 30 in/s2 1
0 - 6 8 in/»2 6 p \
www.FreeLibros.me

6 6 CAPITULO TRES
3.19 D ETERM IN A CIÓ N ANALÍTICA D E LAS M AGNITUDES VECTORIALES
Tam bién se utiliza u n m éto d o analítico p a ra determ inar la m agn itu d de dos vectores e n u n a ecuación. E n tales casos, se deben d e te rm in a r las com ponen tes vertical y h o rizon ta l d e to d o s los vectores, co m o se ind ica en la sección 3.10. Las com ponentes de los vectores desconocidos se p u ed en escribir en térm inos d e in cógn itas. C o m o en los m étodos d e com ponen tes an terio res, se deb e adop ta r u n a convención de signos algebraicos al calcular las com ponentes, d e m o d o q u e , en este pun to , se adquiere u n se n tido arb itrario de los vectores desconocidos.
Las co m p o n en tes ho rizo n ta les de lo s vectores se tien en que apegar a la e c u a d ó n vec to ria l o rig in a l. D e l m ism o m odo, las com ponentes verticales se deberían apegar a la ecu ad ó n vectorial. Asi, se fo rm an dos ecuaciones algebraicas y se tienen que d e te rm in a r dos m ag n itu d es d esconocidas. A l reso lver las dos ecuaciones sim u ltán eas se o b tie n e n lo s resu ltad o s deseados. C u a n d o u n a d e las m ag n itu d es d e te rm in ad as tien e u n signo negativo , in d ica q u e e l se n tid o su p u e sto del v ecto r fu e in c o rrecto. Ifor lo tan to , la m agn itud calculada y el sen tido opuesto definen com pletam ente el v ecto r desconoddo .
Este m étodo se ilu s tra en el siguiente p ro b lem a de ejemplo.
PRO B LEM A D E E JE M PL O 3.18
Lha ecuación vectorial es com o sigue:
A + > B —> C + > D = E + > F
Se conocen h s direcciones de los vectores A, B, C , Dk E y F, así como las magnitudes de los vectores B, C . E y F , co m o se muestra en la figura 3 3 9 . Determine analíticam ente las m agnitudes de los vectores A y D.
I
f ig u r a 3.39 Vectores del problem a de e jem plo 3.18.
S O L U C IÓ N : I . Utilice el método del ángulo con el eje x para determ inar las componentes vectoriales
Las com ponentes horizontal y vertical de cada foerza se determ inan co n trigonom etría. Para los vectores desconocidos. se supone el sentido, m ientras las com ponentes se determ inan en cuan to a las incógnitas. Para este ejemplo, suponga q u e el vector A apun ta hacia arriba y el vector D hacia abajo a la derecha. Las com ponentes se h d u y e n en la tabla 3 3 .
[ t a b l a 3 .3 C o m p o n e n te s v e c to r ia le s d e l p r o b le m a d e e je m p lo 3 .18r
Angulo de Componente Alta'»1) Componente r(ln/*, >Vector referencia 0, *, = a c o te . a , - a sene.
A W 0 +A
B 60* •*0X1 +112.6c 133* - 4 2 . 4 + 4 2 .4
D 300* + 3 0 0 D - . 8 6 6 D
E 30* + 1733 +100P 180* - to o 0
2 . i l i l ic e las ecuaciones vectoriales para ob tener las m agnitudes desconocidas
Se usan las com ponentes para generar las ecuaciones algebraicas que se deducen de la ecuación vectorial o riginal.
A + > B - > C + > l> = E + > F
com ponentes horizontales:
+ B k - Q i + D i, - E » + Fi
(0) + (+ 65.0) - ( -4 2 .4 ) + (+ 0 3 0 0 D ) = (+173.2) + (-100X1)
www.FreeLibros.me

V ectores 67
A , ♦ Br - Cr + D , - E , * F,
(+ A ) + (+112.6) - (42.4) + (-0 .8 6 6 D ) = ( + 100.0) + (0)
En este caso, b ecuación de la com ponente horizontal se despeja para obtener D. En general, am bas ecuaciones están acopladas y necesitan resolverse simultáneamente. En este ejemplo, b ecuación de la com ponente horizontal se despejó para obtener lo siguiente:
D = -6 8 .4 in/s2
Se sustituye este valor de D e n la ecuación de la com ponente vertical para obtener
A - -2 9 .4 in /s2
3. Especificar com pletam ente los sectores calculados
C om o am bos valores son negativos, las direcciones originales supuestas de los vectores desconocidos fueron incorrectas. P or lo tanto, los resultados correctos son
A - 29.4 in/»2!
D - 68.4 in/s2 60 \
P R O B L E M A S
A un cu an d o las técn icas m anuales de d ib u jo en los p rob lem as q u e requ ieren so luc ión gráfica so n d idácticas, se recom ienda am pliam en te el uso d e u n paquete de c a d .
T ra b a jo c o n t r iá n g u lo s
3 -1 . D eterm ine analíticam ente el ángulo 0 de la figura P3.1.
f i g u r a P3.5 Problem a 5.
FIGURA P3.I P roblem as 1 y 2.
3 -2 . D eterm ine analíticam ente la lon g itu d del lado A de la figura P3.I.
3 -3 . D eterm ine a n a lític a m e n te la lon g itu d del lado X de b figura P3.3.
3-4 . C alcule el ángulo 9 y la h ip o ten u sa R d é la figura P3.3.
3-5 . C alcu le el án g u lo 9 y la h ip o te n u sa R de to d o s los triángulos d e la figura P3.5.
3 -6 . D e te rm in e e l á n g u lo p y la lo n g itu d s de lo s d o s es- b b o n e s d e so p o rte idénticos d e la figura P3.6, cuando X ” 150 m m y y “ 275 m m .
fig u r a P3.3 Problemas 3 y 4.
3 -7 . D eterm ine la d istanc ia x y la lo n g itu d » d e lo s d o s eslabones de so p o rte idénticos de la figura P3.6. cuando P = 35° y y = 16 in.
www.FreeLibros.me

6 8 CAPITULO TRES
3 -8 . I \u a el anaquel plegadizo de la figura P3.6, co n p = 35" y * = 10 in . d e te rm in e las d istancias * y y.
3-9 . U na m arquesina q u e tie n e u n m o n ta je d e 8 p o r 12 se inclina h a d a a r r ib a 8 in verticales, p o r cada 12 in de d is ta n d a h o rizo n ta l. D eterm ine el ángulo co n la hori- ron ta l de esta m arquesina.
3 -1 0 . to ra la ven tana g ira to ria d e la figura P 3 .10, de term ine Li lo n g itu d í de los d o s eslabones d e soporte idénticos, cu an d o x = 850 m m , d = 500 m m y p = 35".
f i g u r a p j . 10 Problem as 1 0 y 1 1 .
3 -1 1 . Para la ven tana g ira to ria d e la figura P 3 .10, de term ine el án g u lo p cu an d o x ■ 2 4 in , d - 16 in y s - 7 in.
3 -1 2 . Si la a ltu ra h del cam ión m ostrado en la figura P3.12es de 52 in , d e te rm in e la lon g itu d necesaria de la ram pa p i r a m an ten e r u n ángulo P = 30°.
f i g u r a P J .1 2 P r o b le m a s 1 2 y 1 3 .
3 -1 3 . Para la ra m p a m o stra d a e n la figura P3.12, de term ine el á n g u lo p q u e fo rm a co n el suelo . La a l tu r a del cam ión es d e 1.5 m , en ta n to q u e la ram pa m ide 4 m de b rgo .
3 -1 4 . La lo n g itu d d e la escalera m o strad a en b fig u ra P3.14 es de 12 ft y el án g u lo p q u e hace co n el suelo es d e 70°. D eterm ine b d is ta n d a vertica l sob re b p ared , d o n d e descansa la escalera
f ig u r a P3.U Problem as 14 y 15.
3 -1 5 . P ira b escalera m o strad a e n la fig u ra P3.14, de term ine el ángulo q u e fo rm a co n el suelo. La escalera tien e 7 m de b rg o y descansa sob re el suelo a 2 m de b pared.
3 -1 6 . Para b tra n sp o rta d o ra a g r íc o b m o strad a en la figura P 3 .16, d e te rm in e la lon g itu d requerid a d e la varilla de « p o r te . El án g u lo P es igual a 28" y las distancias son x = 20 ft y d = 16 ft. D eterm ine tam b ién b a ltu ra vertical del ex trem o de b tran sp o rtad o ra si L = 2 5 ft.
3 -1 7 . P ira b tra n sp o r ta d o ra a g r ic o b m o strad a en b figura P3 .16, d e te rm in e el án g u lo P si se requ iere u n a altu ra vertical de 8 m en e l ex trem o d e la tra n sp o r ta d o ra y x ■ 8 m , á « 10 m y L ■ 13 m.
3 -1 8. D eterm ine la a ltu ra vertical del cesto d e b figura P 3 .18 cuando a = 24 in , i» = 36 in , c = 30 in , d = 60 in , e = 6 ft y / = 10 ft.
f i g u r a P 3 .I 8 Problemas 18 y 19.
www.FreeLibros.me

3-19 . Para el m ontacargas descrito en el p ro b lem a 3 -18 , d e te rm in e la a ltu ra vertical del cesto cu an d o el c ilind ro hidráulico se a c o r ta a 5 0 in.
S u m a g rá f ic a d e v e c to re s
3 -20 . to ra lo s vectores m o strad o s en la figura P3.20, determ ine g ráficam ente la resu ltan te R = A 4 > B.
A = 50
fócala:0H —H -
y
B - 75
50
tó- V, D - 4 0
C = 100
F IG U R A 1*3.24 Problem as 2 4 .3 0 ,4 6 .4 7 ,5 4 , 5 5 .
fócab;0 5 10l - f -4 -4 - 1
= 15
\30'A - 10
FIG U R A P 3 .2 0 Problem as 2 0 . 2 6 , 3 2 , 3 3 . 3 8 , 3 9 .
3 -2 1 . to ra lo s vectores m o strad o s en la figura P3.21, d e te rm ine g ráficam ente la resu ltan te R = A 4 > B.
fócala:0 1 2I--------1------ 1
3 -2 5 . Para los vectores m ostrados en la figura P3.25, determ ine g ráficam ente la resultante R = A + > B + > C + > D + > E s
A - 40
fócala:0 301 1 * 1 C = 30
f ig u r a P3J5 Problem as 2 5 .3 1 ,4 8 ,4 9 ,5 6 ,5 7 .
B - 3
J 0 ^
FIG U R A P 3 .21 Problem as 2 1 , 2 7 , 3 4 . 3 5 . 4 0 . 4 1 .
3 -2 2 . to ra lo s vectores m o strad o s en la fig u ra P3.22, determ ine g ráficam ente la resu ltan te R = A + > B .
A =150
Escala:0 50 100
1-150
f i g u r a P J .2 2 Problem as 2 2 ,2 8 ,3 6 , 3 7 , 4 2 ,4 3 .
S u m a v e c to r ia l a n a l í t ic a
3 -2 6 . to ra los vectores m o strad o s en la figura P3.20, d e te rm in e analíticam ente la resultante R = A + > B .
3 -2 7 . to r a los vectores m o strad o s en la figura P3.21, d e te rm ine analíticam ente la resu ltan te R = A + > B.
3 -2 8 . to r a lo s vectores m o strad o s en la figura P3.22, d e te rm in e analíticam ente la resu ltan te R = A + > B .
3 -2 9 . P ú a los vectores m ostrados en la figura P32 3 , determ ine analíticam ente la resultante R = A + > B + > C
3 -30 . to r a los vectores m o strad o s en la figura P3.24, d e te rm in e analíticam en te la resu ltan te R = A + > B 4 > C 4 > D .
3 -3 1 . to r a lo s vectores m o strad o s en la figura P3.25. d e te r m in e analíticam ente la resu ltan te R = A 4 > B 4 > C 4 > D + > E.
3 -2 3 . to ra lo s vectores m o strad o s en la figura P3.23, determ ine g ráficam ente la resultante R = A 4 > B 4 > C.
fócala:0 5 101 I ♦ > 1
FIG URA P 3 .2 S Problem as 2 3 ,2 9 , 4 4 . 45 .52 ,53 .
3-24. Para lo s vectores m ostrados en la figura P3.24, determ ine gráficamente la resultante R = A 4 > B 4 > C 4 > D.
R e s ta g r á f ic a d e v e c to re s
3 -3 2 . to ra lo s vectores m o strad o s en m ine gráficam en te el v ecto r J =
3 -3 3 . to ra los vectores m o strad o s en m in e g ráficam ente el v ecto r K
3 -3 4 . to r a lo s vectores m o strad o s en m in e g ráficam ente el v ecto r J -
3 -3 5 . to r a lo s vectores m o strad o s en m ine g ráficam ente el v ecto r K
3 -3 6 . Para lo s vectores m o strad o s en m ine g ráficam ente el v ecto r J =
3 -3 7 . to ra los vectores m o strad o s e m in e g ráficam ente el v ecto r K
la figura P3.20, deter • A - > B.
la figura P3.20, d e te r - = B - > A.
la figura P3.21, d e te r- : A —> B.
la figura P3.21, d e te r- = B - > A .
la figura P3.22, deter = A —> B .
i la figura P3.22, d e te r- = B - > A.
www.FreeLibros.me

7 0 CAPITULO TRES
R e sta v e c to r ia l a n a l í t ic a
3 -3 8 . P ira lo s vectores m o strad o s en la figura P3.20, d e te rm in e analíticam ente el v ecto r J = A - > B .
3 -39 . R ira lo s vectores m o strad o s en la figura P3.20, d e te rm ine analíticam ente el v e c to r K = B - > A .
3 -40 . Para lo s vectores m o strad o s en la fig u ra P3.21, d e te rm in e analíticam ente el v e c to r J = A - > B .
3 -4 1 . R ira lo s vectores m o strad o s en la fig u ra P3.21, d e te rm ine analíticam ente el v ecto r K = B - > A .
3 -42 . R ira lo s vectores m o strad o s en la fig u ra P3.22, d e te rm ine analíticam ente el v ecto r J = A - > B .
3 -4 3 . f t r a lo s vectores m o strad o s en la fig u ra P3.22, d e te rm ine analíticam ente d v e c to r K = B - > A .
E c u a c io n e s v e c to r ia le s g e n e ra le s (g rá f ic a s )
3 -44 . Para lo s vectores m o strad o s en b fig u ra P3.23. d e te rm in e g ráficam ente el v ecto r J = C + > A - > B .
3 -45 . R ira los vectores m o strad o s en la fig u ra P3.23. d e te rm ine g ráficam ente el v ecto r K = B - > A - > C.
3 -4 6 . Para los vectores m ostrados en b figura P 3 2 4 , determ ine g ráficam ente el v e c to r I = C + > A - > B + > D .
3 -4 7 . fó ra lo s vectores m o strad o s en b fig u ra P3.24, d e te rm ine g ráficam ente el vector K = B - > D + > A - > C .
3 -48 . P ú a los vectores m ostrados en b figura P 3 2 5 . determ ine gráficamente el vector J = C + > A - > B + > D - > E
3 -49 . R ira lo s vectores m o strad o s en b fig u ra P3.25, d e te rm ine g rá ficam en te d v e c to r K = B - > D + > A - > C + > E
3 -5 0 . C on el d iag ram a vectorial de b figura P3.50a ) Genere u n a ecuación q u e describa d d iag ram a vec
torial.f») Replantee las ecuaciones para elim inar los té rm in o s
negativos.c) D ib u je b u rdam en te los vectores y reorganícelos de
acu erd o c o n la ecuación ob ten ida e n el inciso b ).
3 -5 1 . C on el d iag ram a vectorial de b figura P3.51:a ) G enere u n a ecuación q u e describa d d iag ram a vec
torial.b) Replantee las ecuaciones para elim inar los té rm in o s
negativos.c) D ib u je b u rdam en te los vectores y reorganícelos de
acu erd o co n b ecuación g enerada e n el inciso b).
P ira lo s vectores m o strad o s en b figura P3.23, d e te rm in e analíticam ente d v e c to r ) = C + > A - > B .
3 -52 .
3 -5 3 . Ib ra los vectores m ostrad o s en b figura P3.23, determ ine analíticam ente d v ecto r K = B - > A - > C .
3 -5 4 . Para lo s vectores m ostrados en b figura P 3 2 4 , determ ine analíticam en ted vector J = C + > A - > B + > D.
3 -5 5 . Para lo s vectores m ostrados en b figura P 3 2 4 . determ ine analíticamente d vector K = B - > D + > A - > C.
3 -5 6 . Para lo s vectores m o strad o s e n b fig u ra P3.25, dete rm in e a n a lític a m e n te d v e c to r J = C + > A - > B + > D - > E.
3-57. Ifcra los vectores m ostrad o s en b figura P3.25. determ in e an a líticam en te d v e c to r K = B - > ü + > A - > C + > E
S o lu c io n e s d e m a g n i tu d e s v e c to r ia le s (g rá f ic a s )3 -5 8 . Se escribe u n a ecuación vectorial co m o A ♦ > B *•> C -
D ♦ > E. Las d irecciones y m agnitudes de lo s vectores A B y D se m u estran en la figura P3.58. D eterm ine gráficam ente (u sa n d o técn icas m anuales de d ib u jo o el c a d ) las m agnitudes d e lo s vectores C y E.
3-59.
f ig u r a P338 Problem as 58 y 61.
Se escribe u n a ecuac ión vectorial c o m o A ♦ > B + > C - > D = E - > F . Las d irecciones y m ag n itu d es de los vectores A, B. C y E se m u e s tra n en la figura P3.59. D eterm ine g ráficam ente ( usando técn icas m anuales de d ib u jo o d cad) la s m agnitudes d e lo s vectores D y F.
K - 75
J í 30-
I------H
FIGURA P.V59 Problem as 6 0 y 63.
www.FreeLibros.me

V ectores 71
3-60 . Una ecuac ión vecto rial se escrib e co m o A - > B - > C + > D = - > E + > F . Las d irecciones y m agnitudes d e los vectores A . D . E y F se ilu s tra n en la fig u ra P3.60. D eterm ine g ráficam ente (u sando técnicas m anuales de d b u jo o el cad) la s m agnitudes de los vectores B y C.
t / F - 3 0 •<45° *
F. *45
I 1------ 1
fig u r a p 3.60 Problem as 6 0 y 63.
S o lu c io n e s d e m a g n i tu d e s v e c to r ia le s (a n a lí t ic a s )
3 -6 1 . D eterm ine an a líticam en te lo s vectores C y E del pro M em a 3-58.
3 -6 2 . D eterm ine analíticam ente los vectores D y F del p ro b le m a 3-59.
3 -63 . D eterm ine analíticam en te lo s vectores B y C del p ro- M em a3-60.
7. ¿En q u é d irecc ió n se d e b e aplicar la fuerza so b re la placa A p a ra q u e ac tú e el resorte C?
8. M encione m á q u in a s d ife ren tes de las su m a d o ras q u e p o d rían u sa r este dispositivo.
9. ¿Cuál e s la fo n d ó n del p e rn o D?
3 -2 . Una m áq u in a a u to m á tic a q u e p ro d u c e a la m b re de acero o cas io n a lm en te se a ta s c a cu an d o la m ate ria p r im a está so b re d im e n s io n a d a . P ara p re v e n ir d a n o s severos a la m áq u in a , fu e n ecesario q u e el o p e ra d o r co rtara la co rrien te inm ediatam ente después d e q u e se l a s c ó la m áquina. S in em bargo, el o p erad o r n o puede m a n te n e r u n a v ig ila n d a estrecha so b re la m áq u in a p i r a ev ita r el daño . P or consiguiente, se su g ie re el s iguiente m ecan ism o para resolver el prob lem a.
La fig u ra C 3 2 m uestra q u e el engrane C im pulsa u n en- ¿yane a c o p lad o ( n o m o strad o ) q u e o p e ra la m áqu ina p roducto ra d e alam bre. La flecha m o triz A tiene u n c o llarín R e í cual está acu n ad o a e l la El engrane C tien e un cun a ajustada so b re la flech a D os pern o s, G y E, sujetan respectivam ente lo s eslabones F y /Ja l engrane G Se usa u n pem o adicional sob re el eng ran e C fu ra sostener el ex trem o del re so r te H . E xam ine cu id ad o sam en te la c o n fig u ra d ó n d e lo s c o m p o n e n te s del m ecan ism o. Luego con teste las siguientes p regun tas p a ra aprender m ás acerca d e la operación del m ecanism o.
I . C onform e la flecha A g ira e n el se n tid o h o rario , ¿cóm o se m ueve el co lla rín R
E S T U D I O S D E C A S O
3 -1 . La fig u ra C3.1 m u e s tra d o s d e varias tec la s d e u n a sum adora q u e foe p o p u la r hace varios altos. Tam bién se p resen tan las term inales de las teclas 1 y 2 para ilu st ra r su co n fig u rac ió n . E x am in e cu id ad o sam en te la con fig u rac ió n d e las co m p o n en tes del m ecan ism o, lu eg o , conteste las siguientes p regun tas p a ra aprender más so b re la operac ió n del m ecanism o.
FIGURA CJ.I (C ortesía d e Industria l Press).
1. C onfo rm e se p resiona la te d a 2, ¿qu é pasa co n la placa oscilan te A?
2. ¿Cuál es el objetivo del resorte C?3 . ¿Cuál es el objetivo del resorte B?4. C onfo rm e se p resiona el b o tó n 2, ¿qu é su ced e co n el
b o tó n 1 ?3 . ¿Cuál es el objetivo de este dispositivo?6. C o m o la fuerza e s u n vecto r, su d irecc ió n e s im p o r
tante. ¿En q u é d ire c d ó n se deb e aplicar la fuerza sobre d b o tó n 1 para q u e ac tú e el reso rte B?
f i g u r a CJ.2 (C ortesía de Industria l Press).
2. Si el engrane C n o está fijo al co llarín R ¿cóm o p u ed e el m ovim iento en el se n tid o h o ra rio de la flecha h a c e r g ira r el engrane?
3. ¿Q ué su ced e co n e l m o v im ien to del e n g ra n e C si se f ile n a el eslabón D hacia arriba?
4. ¿Qué a c d ó n p ro v o ca rla q u e el e s lab ó n D se m oviera h a d a arriba?
5. ¿Qué resistencia necesitarla el eslabón D p a ra moverse h a d a arriba?
6. ¿C uál es el objetivo d e este dispositivo?7. ¿C óm o llam arla usted a este dispositivo?8. ¿De q u é m anera ayuda este dispositivo a la m áquina, des
c rita aquí, que p roduce autom áticam ente el alambre?9. ¿Se deberla “re in id a r" este dispositivo alguna vez? ¿Por
q u é y có m o se realizarla?10. C o m o la fuerza es u n vector, su d ire c d ó n es im p o r
ta n te . ¿En q u é d irección se d eb en ap lica r las fuerzas p a ra q u e actúe el resorte H?
11. M e n d o n e o tra s m áq u in as d iferen tes de la p ro d u c to ra d e alam bre , en las cuales se p o d ría u sa r este dispositivo.
www.FreeLibros.me

C A P I T U L O
C U A T R O
ANÁLISIS DE P O S IC IÓ N Y DESPLAZA M IENTO
O B J E T I V O S
A l t e r m in a r d e e s tu d ia r e s te c a p i tu lo , e l a lu m n o
s e r á c a p a z de:
1 . D e f in ir U p o s i c i ó n y c l d e s p la z a m ie n to d e u n p u n to .
2 . D e te r m in a r g r á fic a y a n a l ít ic a m e n te la p o s i c i ó n d e to d o s
lo s e s la b o n e s d e u n m e c a n is m o , c o n fo r m e s e d e s p la z a n lo s e s la b o n e s im p u ls o r e s .
3 . D e te r m in a r g r á fic a y a n a l ít ic a m e n t e la s p o s i c io n e s l im ite
1 D e te r m in a r g r á fic a y a n a l ít ic a m e n t e la p o s ic ió n d e to d o s io s e s la b o n e s e n u n c i d o c o m p le t o d d m o v im ie n t o d e l
5 . E la b o ra r u n d ia g r a m a d e d e s p la z a m ie n to d e v a r io s p u n to s d e l m e c a n i s m o ,e n fu n c ió n d d m o v im ie n t o
d e o t r o s p u n to s .
4.1 IN TR O D U C C IÓ NEn m uchos mecanismos, el p ropósito del análisis es determ inar únicam ente la ubicación de to d as los eslabones conform e el (los) eslabón (es) im p u lso re s ) del m ecanism o se m ueve (n ) hacia o tra posición . C onsidere la su je tadora p a ra m aquinado q u e se m ués tra en la figura 4.1. Si la sujetadora se integra a u n a m áqu ina , resu lta esencial en tender el m ovim iento de varios d e su s eslabones. U na o p c ió n se ria investigar el m o v im ien to q u e se requ iere del m ango p a ra c e rra r la m ordaza. Este es u n m ovim iento repetitivo q u e se requiere de los o peradores de la m áquina. En el uso de la su je ta d o ra se d eb en considerar el acceso, el esfuerzo necesario para o p era r y o tro s “ factores hum anos” El análisis d e la posición im plica co n frecuencia el reposicionam iento de los e s la b o n a de u n m ecan ism o en dos configuraciones alternativas.
O tra o p c ió n d e investigación seria co m p ren d er la trayecto ria d e lo s d ife ren tes co m p o n en tes d u ra n te e l p roceso de sujeción. Se d eb en g aran tiza r las to lerancias adecuadas con lo s com ponentes d e o t r a m áqu ina . El análisis de posic ión se repite p o r b general e n varios intervalos d e l m ov im ien to del mecanismo, con la finalidad d e te rm in a r la ub icación de todos lo s eslabones en varias fases del c iclo operativo . El enfoque de este cap ítu lo se cen tra e n esos tip o s d e aná lis is d e posic ión y desplazam iento.
4 2 PO SICIÓ NLa posic ión se refiere a la ub icación d e u n o b je ta En las secciones siguientes s e es tud ia rá la posic ión d e p u n to s y eslabones.
4.2 .1 P o s ic ió n d e u n p u n toLa posición de u n p u n to so b re u n m ecan ism o es la ubicación espacial d e ese p u n to , q u e se d efine co n u n vector de posición, R. el cual se extiende de u n origen d e referencia a la ubicación del p u n to . L a fig u ra 4.2 ilu s tra u n v ecto r de posic ión . Rp> q u e establece la posic ión en u n p lan o del p u n to P. Al igual q u e todos los vectores, la posic ión de u n p u n to en u n p lan o se especifica con la d istanc ia desde el o rig en (m ag n itu d vectorial) y el ángulo a p a r t ir de u n e je d e referencia (o rien tac ión ).
I b a a lte rn a tiv a p rác tica q u e se u tiliza p a ra iden tifica r la posición d e u n p u n to es usar las co m p o n en tes rectangulares del vector de posición en u n sistem a de co ordenadas de referencia. O b serv e q u e la posic ión d e l p u n to P en la fig u ra 4.2 está defin ida respectivam ente p o r su s co m p o n en tes x . y , R 'r y R 'p.
4 .2 .2 P o s ic ió n a n g u la r d e u n e s la b ó nLa posic ión a n g u la r de u n eslabón ta m b ié n es u n a m agn itud im p o rta n te . La posición angular, 0, se d efine c o m o el án g u lo q u e fo rm a u n a lín ea en tre d o s p u n to s del eslabón c o n u n eje de
F IG U R A 4.1 S ije tado ra para m aquinado . (C o rtesía de C a rr Lañe Mfg).
www.FreeLibros.me

f i g u r a 4 J V ector de posic ión d c i p u n to P.
referencia. E n la figura 4.2 , la línea M N q u ed a sob re el eslabón4. L a posic ión a n g u la r del e s lab ó n 4 se d e n o ta co n 0A, q u e es el án g u lo en tre el eje x y la línea M N . P o r consistencia, la posic ión angular se define co m o positiva si el án g u lo se m id e e n sentido an tih o ra rio , desde el eje de referencia, y negativa, s i se m ide en el sen tido h o rario .
4 .2 .3 P o s ic ió n d e u n m e c a n is m oH p ro p ó s ito fundam ental del análisis d e u n m ecan ism o e s e s tu d iar su m ovim iento. El m ovim iento o cu rre cu an d o se m od ifican la posic ión de los eslabones y lo s p u n to s de referencia del m ecan ism o. C o n fo rm e se a lte ra la posic ión de lo s eslabones, el m ecan ism o se fuerza a to m a r u n a configurac ión d iferente, en ta n to q u e el m ovim iento avanza.
R ecuerde q u e en el cap ítu lo 1 v im os q u e u n a p ro p ied ad im p o rta n te de u n m ecan ism o es la m ovilidad (grados d e lib e rtad ). P i r a eslabonam ien tos c o n u n g ra d o d e lib e rta d , la posición de u n eslabón o u n p u n to p u ed e d e te rm in ar c o n precisión la posic ión d e todos lo s dem ás eslabones o pun to s. D el m ism o m o d o , e n los es lab o n am ien to s c o n d o s g ra d o s de lib e r ta d la posic ión de d o s eslabones determ ina co n exactitud la posición de los d em ás eslabones.
I\>r lo ta n to , la posic ión de todos los p u n to s y eslabones de u n m ecan ism o n o es a rb itra ria n i independien te . Los p a rám etro s in d ep en d ien te s son las p osic iones d e c ie r to s eslabones o p u n to s “im pulsores". El objetivo p rincipal del a n á lis is de posic ión es d e te rm in a r las posic iones resu ltan tes d e los p u n to s de u n m ecan ism o, en fu n c ió n de la p o sic ió n d e esos eslabones o p u n to s "im pulsores".
4.3 DESPLAZAM IENTO
B desp lazam ien to es el p ro d u c to final del m ovim iento. Se tra ta de u n vector q u e represen ta la d istanc ia e n tre la posic ión inicial y la p o sic ió n f in a l de u n p u n to o u n e s lab ó n . C o n s id e re dos tip o s de desplazam iento: lineal y angular.
4.3 .1 D e s p la z a m ie n to lin e a lEl ¿aplazam iento linea l A R. e s la distancia lineal recta en tre la posición inicial y la posic ión final d e u n p u n to d u ra n te u n in te rvalo d e tiem po . La figura 4 J ilu stra el p u n to P d e u n m ecanism o q u e se desplaza a la p o sic ió n P .
B desplazam iento lineal del p u n to P se d e n o ta co n AR/>y se calcula co m o la d iferenc ia vectorial e n tre la posic ión inicial y la posic ión final. D ado en fo rm a d e ecuación:
A R p = R p ' —> R P (4.1)
Cfoserve q u e el desplazam iento lineal n o es la d istanc ia v iajada p o r el p u n to d u ra n te el m ovim iento.
l a m agn itud del v ecto r de desp lazam ien to es la distancia en tre la posic ión inicial y la posic ión final d u ra n te u n in tervalo . Esta m ag n itu d tiene un idades lineales (pulgadas, p ies, m ilím etros, etcétera). La d irección se iden tifica co n el án g u lo en tre un eje de referencia y la linca q u e conecta las d o s p o sic iones. El se n tid o d e l v e c to r va d e la p o s ic ió n in ic ia l h ac ia la p o sic ió n
4 .3 .2 D e s p la z a m ie n to a n g u la rB daplazam iento angular, 1 0 , e s la d is tan c ia a n g u la r en tre dos configuraciones de u n eslabón giratorio . Es la diferencia e n tre la p osic ión angu la r inicial y la posic ión angular final del eslabón, co m o en la fig u ra 4.4 . Si b ien posee m agn itud y dirección (en el sen tido h o rario o a n tih o ra rio ) , el desplazam iento angu la r técnicam en te n o e s u n vector, p u es to q u e n o cu m p le co n las leyes conm utativa y asociativa de la su m a de vectores.
B desplazam iento an g u lar d e u n eslabón, p o r ejem plo el eslab ó n 3, se representa co n A0 , y se calcula co n la ecuac ión (4.2).
A 0 , = 0 y - (4.2)
La m agn itud del desplazam iento angular es el án g u lo en tre b configuración inicial y la configuración final del eslabón d u ran te u n in tervalo . Esta m agn itud se especifica e n un idades de giro (p o r ejem plo, grados, rad ian es y revoluciones), y el sen tido f o r a ñ o o an tih o ra rio especifica la dirección.
FIG URA a a D esplazam iento angular.
f i g u r a o V ector d e desp lazam ien to del p u n to P.
www.FreeLibros.me
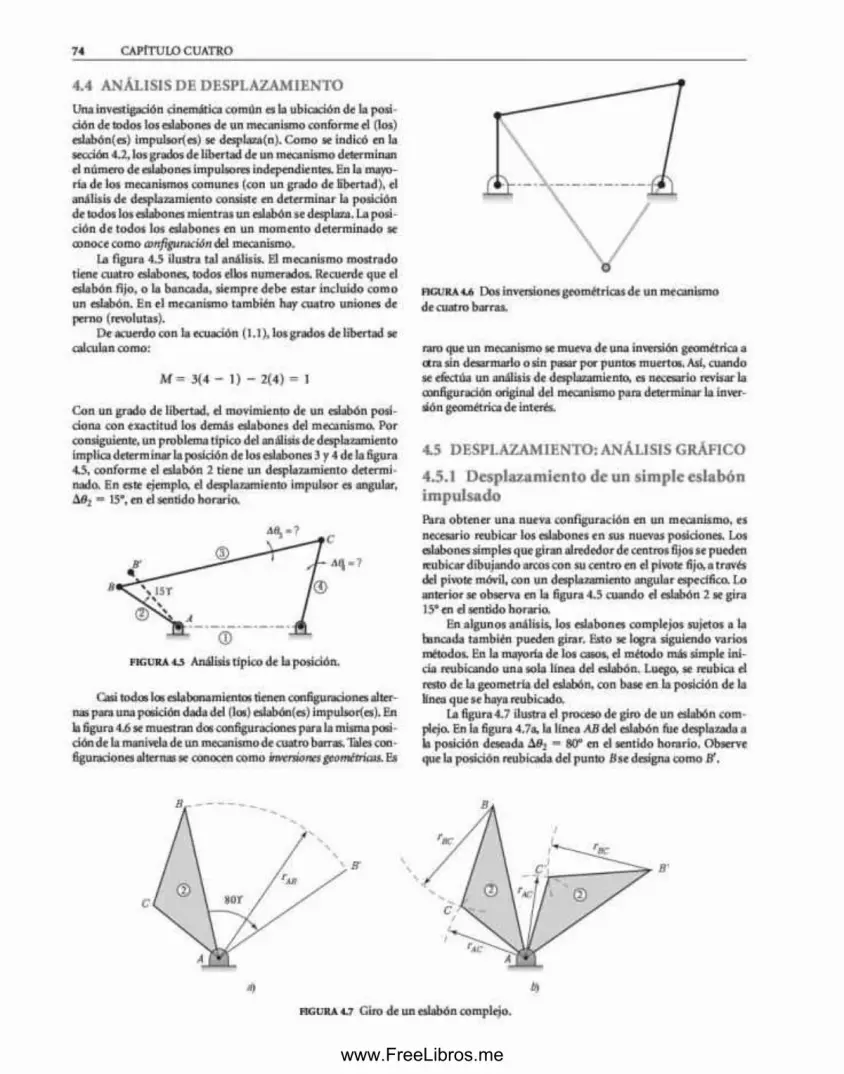
7 4 CAPITULO CUATRO
4.4 ANÁLISIS DE DESPLAZAM IENTOU na investigación cinem ática co m ú n es la ubicación de la p o s ic ió n d e todos los eslabones d e u n m ecanism o co n fo rm e el (los) eslabón)es) im pulsor)es) se d e sp la z a n ) . C o m o se ind icó en la sección 4.2 , lo s g rados de lib ertad de u n m ecanism o determ inan el núm ero d e eslabones im pulsores independientes. En la mayor ía de los m ecanism os com unes (co n u n g rad o de libertad ), el aná lis is de desp lazam ien to consiste e n d e te rm in a r la posición d e todos lo s eslabones m ien tra s u n eslabón se desplaza. La p o s ic ió n d e to d o s lo s eslabones en u n m o m e n to d e te rm in a d o se cono ce co m o a>nfignnu:¡ón del m ecanism o.
La fig u ra 4.5 ilu stra ta l análisis. El m ecan ism o m o strad o tiene cuatro eslabones, to d o s ellos num erados. Recuerde q u e el e s lab ó n fijo , o la b an cad a , siem p re d e b e e s ta r inc lu ido co m o u n eslabón . E n el m ecan ism o tam b ién hay c u a tro un iones de perno (revolutas).
D e acuerdo co n la ecuación (1. 1), lo s g ra d o s de lib ertad se calcu lan com o:
M = 3(4 - 1 ) - 2 (4 ) = 1
C o n u n g ra d o d e libertad , el m ov im ien to de u n eslabón posi- d o n a c o n e x a c titu d los d em ás eslabones del m ecan ism o. P or consiguiente , u n p rob lem a típ ico del análisis d e desplazam iento im plica d e te rm in ar la p o sid ó n de los eslabones 3 y 4 de la figura 4.5, c o n fo rm e el e s lab ó n 2 tien e u n desp lazam ien to d e te rm inado . E n este ejem plo, el desp lazam ien to im pulsor es angular,
■ 15®, en el sen tido h o ra r ia
Casi todos los eslabonam ientos tienen configuradones alternas para u n a posid ó n dad a del (los) eslabón(es) im p u lso re s ) . En la figura 4 6 se m uestran dos configuradones p a ra la m ism a pori a t o de la manivela de u n m ecanism o d e c u a tro barras. Tales co n figuradones alternas se conocen c o m o inversiones geométricas. Es
FIGURA 4.6 Dos inversiones g eom étricas d e u n m ecanism o d e cuatro barras.
ra ro q u e u n m ecanism o se m ueva d e u n a inversión geom étrica a c íra sin desarm arlo o s in pasar p o r p un tos m uertos. Así. cuando se efectúa u n análisis d e d esp lazarm en ta es necesario revisar la configuradón original del m ecanism o p a ra determ inar la inversión geom étrica d e interés.
4.5 DESPLAZAM IENTO: ANÁLISIS GRÁFICO
4.5.1 D e s p la z a m ie n to d e u n s im p le e s la b ó n im p u ls a d oR ira o b te n e r u n a n u ev a c o n fig u rac ió n en u n m ecan ism o , es necesario reubicar lo s eslabones e n su s nuevas p o sid o n es. Los eslabones sim ples q u e g iran a lrededor d e cen tro s fijos se pueden reubicar d ib u jan d o arcos co n su cen tro en el pivote f i j a a través del pivote m óvil, co n u n desp lazam ien to a n g u la r e sp e d fic a Lo an te rio r se observa en la figura 4 .5 cu an d o el eslabón 2 se gira 15® en d sen tido horario .
En a lg u n o s análisis, lo s eslabones com p le jo s su je tos a la h in cad a ta m b ié n p u ed en g ira r. E sto se logra sigu iendo varios m étodos. En la m ayoría de los casos, el m étodo m ás sim ple in icia reub icando u n a so la línea del eslabón . L u e g a se reubica el resto d e la geom etría del eslabón, co n base en la p o s id ó n d e la Hnea q u e se haya reubicado.
La figura 4.7 ilu stra el proceso de g iro de u n eslabón c o m plejo. En la figura 4 .7a, la línea AB del eslabón fue desp lazada a b p o s id ó n deseada ABj = 80® en el se n tid o h o ra rio . O bserve q u e la posic ión reubicada del p u n to B se designa co m o f f .
f i g u r a 4 .7 Giro d e u n eslabón complejo.
www.FreeLibros.me

A n á lisis d e p o sic ió n y d esp lazam ien to__________75
El p a so s ig u ien te e s d e te rm in a r la p o s ic ió n del p u n to re u b icad o C, q u e se designa co m o C '. C o m o el eslabón com plejo es rigjdo y n o cam b ia d e fo rm a d u ra n te el m ovim ien to , las long itudes d e las lineas A C y B C n o se m odifican. ft>r lo ta n to , el p u n to C se localiza m id ien d o las long itudes de A C y BC, así m m o d ib u ja n d o arcos a p a rtir de los p un tos A y B re s p e c tiv a m en te (figura <l.7b).
H ay u n segundo m éto d o basado e n u n sistem a de cad. Las líneas q u e fo rm an el eslabón se dup lican y g ira n p a ra g e n e ra r el eslabón reub icado . T odos lo s sistem as de c a d incluyen u n co m an d o q u e g ira co n facilidad y cop ia en tid ad es geom étricas. El com ando sirve p a ra g irar to d as las lineas d e u n eslabón , a lreded o r de u n p u n to especifico, a u n desplazam iento angu la r determ in ad o . Es conven ien te m o stra r el eslabón g ira d o en o tro color y co locarlo en u n p lan o diferente.
4 .5 .2 D e s p la z a m ie n to d e lo s e s la b o n e s im p u ls a d o sU na vez reposicionado el eslabón im pulsor, se deb e determ inar la posición d e lo s dem ás eslabones. Para hacerlo , se tien en q u e co n s tru ir las trayectorias posib les de todos lo s eslabones conectad o s a la bancada. Para los eslabones q u e están ap e rn ad o s a la bancada, todos los p u n to s sob re el eslabón ta n so lo pueden g ir a r en relación co n la bancada. P o r ende, las trayectorias p ro b a bles de estos p un tos son arcos circulares co n cen tro en el perno q u e conecta el eslabón c o n la bancada.
La fig u ra 4.8 p resen ta u n d ia g ra m a c in em ático de u n m ecanism o. Los eslabones 2 , 4 y 6 están su je to s a la b ancada . C om o lo s p u n to s B, C y E están ub icados respectivam ente sobre los eslabones 2 ,4 y 6 , es posible co n s tru ir fácilm ente su s trayecto ria s restringidas. La tray ec to ria restrin g id a del p u n to B es u n arco c irc u la r co n c e n tro e n el p u n to A , q u e es e l p e rn o q u e conecta el eslabón 2 co n la bancada. Las trayectorias restringidas d e C y E se d e te rm in an d e m o d o sim ilar.
l a tray ec to ria re s tr in g id a de u n p u n to so b re u n eslabón q u e está co n ec tad o a la b ancada co n u n a u n ió n d e corredera, tam b ién se d e te rm in a fácilm ente. Todos lo s p u n to s so b re el eslabón se m ueven en u n a lin ea recta paralela a la dirección de la superficie d e deslizam iento.
D espués de q u e se hayan constru ido todas las trayectorias restringidas d e los eslabones u n idos a la b ancada , se de term inan las posiciones de los eslabones conectados. Es u n proceso lógico que se d eriva del h ech o de q u e to d o s lo s eslabones son rígidos. Rigidez significa q u e los eslabones n o cam bian de lon g itu d ni de fo rm a d u ra n te el m ovim ien to .
Hn la fig u ra 4.5 , se desean conocer las posic iones d e lo s eslabones 3 y 4 , u n a vez q u e el eslabón 2 g ira 15® en el se n tid o h o
rario . C o n el uso d e lo s p roced im ien tos descritos en la sección 4 5 .1, b fig u ra 4.9 m uestra el eslabón 2 reub icado en su p o s ic ión d e s p b z a d a , b c u a l d e fin e la p o s ic ió n del p u n to B’. T am bién se constru y ó b trayectoria restring ida del p u n to C y se ilustra e n b fig u ra 4.9.
ft>r su rigidez, b lo n g itu d d d eslabón 3 n o cam b ia du ran te d m ovim iento. A un cu an d o d eslabón 2 se h a reposicionado , no m odifica b lon g itu d e n tre lo s p u n to s B y C ( rg¿). Luego de resu m ir lo s hechos de este análisis de desplazam iento , se sabe lo sgu ien te :
1. El p u n to B se h a m ovido a B’.
2 . El p u n to C siem p re perm anece sob re su trayectoria restring ida (lo n g itu d r<j) desde D ) y
3 . La lo n g itu d e n tre B y C perm anece constan te (C 'd e b e • a u n a lo n g itu d r ^ á e B 1).
P artiendo de estos hechos, se construye la nueva posición d d e sb b ó n 3. Se m ide b lo n g itu d de la línea B C .C o m o el pun to f lse m ovió a B’, se construye u n arco de lon g itu d rK ; co n centro en B'. Al extender este arco , se d e te rm in a la trayectoria posible del p u n to C \ S in e m b a rg o , el p u n to C ta m b ié n d e b e p erm anecer so b re su tray ec to ria restringida, co m o se ind ica en b figura 4.9 . P o r lo tan to , el p u n to C ' se deb e localizar e n b in tersección d e lo s d o s arcos. Este p roceso se ilu s tra e n b figura 4.10. O bserve q u e lo s á reo s tam b ién se in tersecarán e n u n segundo punto , el cual está a u n a d is ta n d a consid erab le d e C y rep re senta u n a segunda inversión geom étrica del eslabonam iento . El e sb b o n a m ie n to deb e desarm arse y a rm a rs e p a ra o b te n e r esa co n fig u rad ó n alternativa, de m o d o q u e se p u ed e ig n o rar la in- te rsecdón .
Es posible que los d o s arcos n o se intersequen en absoluto. Los casos d o n d e b trayectoria restring ida y b trayectoria posible no se intersecan ind ican que la longitud de los eslabones individuales ev ita q u e el e sb b ó n im p u lso r a lcance el desplazam iento especificado.
fig u r a 4A Trayectorias restringidas de puntos sobre un esb b ó n sujeto a la bancada.
Ihiyerirria lesningkfa * 1 p u n to C
FIGURA 4 .9 C o n s tru c d ó n de b trayectoria restring ida de C.
www.FreeLibros.me

7 6 CAPITULO CUATRO
^ Thiyec loria pmiblc de C
La imereccción «presenta b ¿7 y S localización precisa de C
Trayectoria restringida del punto C
La segunda intersección / / representa ooa inversión - yoraítrica
FIGURA 4.10 U bicación de la posic ión de C \
U na v « q u e se localiza C , se d ibu jan las posic iones d e los eslabones 3 y 4. D e este m o d o , se d e te rm in a la configurac ión del m ecan ism o , e n ta n to q u e el e s lab ó n im p u lso r fu e reposi- d o n ad o .
Esta se cd ó n presenta la lóg ica d e trás del análisis gráfico de posición, e s d ed r, la u b icad ó n d e u n p u n to desplazado a la in te rsección d e la trayectoria restringida y la trayectoria posible. Esta lógica sim p lem en te se repite conform e lo s m ecanism os se vuel
ven m ás com plejos. La so lu c ió n real se o b tien e u sa n d o ya sea técnicas de d ib u jo m anuales (con u n tra n sp o rta d o r y u n c o m pás) o u n sistem a de c a d (co n los co m an d o s roíate y copy). La b g ic a es idéntica: s in em bargo, l a so lu d ó n de c a d no está sujeta a las lim ita d o n es d e exactitud en el d ib u ja Independientem ente del m étodo q u e se utilice, los concep tos subyacentes del análisis gráfico d e p o s id ó n se ilu s tra n y am p lían en lo s siguientes p ro blem as de e je m p la
PRO B LEM A D E E JE M PL O 4.1
La figura 4 .1 1 m uestra u n diagram a cinem ático de u n m ecanism o im pulsado p o r el m ovim iento del eslabón 2 . Reposicione gráficamente los eslabones del mecanismo, conform e el eslabón 2 se desplaza 30° en sentido antihorario. O te rm in e el desplazamiento angular resultante del eslabón 4 y el desplazamiento lineal del pun to E.
SO L U C IÓ N : 1. Calcule la m ovilidad
ftira verificar q u e el m ecanism o se posiciona únicam ente por u n eslabón m óv il se calcula su movilidad. Están identificados sris eslabones. Observe que tres de los eslabones están conectados en d p u n to C Recuerde del cap itulo 1 q u e esta configuración se debe tom ar en cuenta com o dos uniones de perno. Por consiguiente, se trata de seis uniones de perno. Una unión de corredera conecta los eslabones 1 y 6. N o hay uniones de engrane n i de leva:
n ■ 6 j p ■ (6 pernos + I corredera) ■ 7j¡, ■ 0
Y
M - 3 < n - l ) - 2 ; , - / f c = 3(6 - 1) - 2(7) - 0 = 1 5 - 14=1
Con un grado de libertad, el m ovim iento de u n so lo eslabón posiciona los dem ás eslabones del mecanismo.
www.FreeLibros.me

A n álisis d e p o sic ió n y d esp lazam ien to__________77
2. Reposicióne el eslabón im pulsor
H eslabón 2. se gira 30° en sentido antihorario, estableciendo asi k posición d d ponto B \ Estose m uestra en la figura 4.12a
f i g u r a 4 .1 2 C onstrucciones de desplazam iento del p rob lem a d e e jem plo 4 . 1.
3. Determine las trayectorias de todos los eslabones conectados directam ente a la bancada
Rira reposicionar el mecanismo, se dibujan las trayectorias restringidas de todos los puntos sobre los eslabones que están conectados a la bancada (B. C y E). l o an terio r tam bién se m uestra en la figura 4.12a.
4. Determ ine la posición exacta del p u n to C
Ftor ser rígido, la form a del eslabón 3 n o cam bia, en tan to q u e la distancia en tre los p un tos B y C ( r»r) permanece constante. Com o el pun to B se m ovió a B 'sc traza u n arco de longitud ra e con centro en B '. Este arco representa
www.FreeLibros.me

7 8 CAPITULO CUATRO
b trayectoria posible del pun to C '. La intersección del arco con la trayectoria restringida de C da como resultado la posición de C '. Esto se observa en la figura 4.12 b.
5 . Determ ine la p o tld ó n exacta del p u n to £ ’
Se utiliza la m ism a lógica para ubicar b posición del pun to £ '. l a form a del esbbón 5 no puede cambiar, pero la dutancia en tre los puntos C y £ (fes) se mantiene constante. Com o el punto C se m ovió a C‘. se dibuja un arco de longitud r r r con centro en C . Este arco representa b trayectoria posible del p u n to £ '. La intersección del arco con b trayectoria restringida de E d a com o resultado b posición E ’(figura 4.12b).
6 . M ida e l desplazam iento del eslabón 4 y del p u n to £ '
R»r últim o, al obtener la posición de C 'y £', se dibujan los eslabones 3 a 6 , lo cual se m uestra en la figura 4.12c 0 desplazamiento del eslabón 4 es la distancia angular entre la posición nueva y la original, q u e se m id ió como
A0 « = 26°. en sen tido antihorario
El desplazamiento del p u n to £ es la distancia lineal en tre la posición nueva y la posición original del punto £ La distancia entre E y E ’sc m ide y se ajusta para la escala de dibujo.
A H ,- .9 5 4 4 in —
PR O B LEM A D E E JE M PL O 4.2
O tando se requieren grandes fuerzas de corte, se usan con frecuencia unas tijeras de palanca de hojalatero com o las m ostradas en b figura 4.13, en vez de las tijeras norm ales de hojalatera C on el uso del m ango superior com o bancada, irposicione gráficamente las com ponentes de las tijeras cuando la m ordaza se abre 15*. Determ ine el desplazamiento resultante del m ango inferior.
FIG URA 4 .1 3 T i j e r a s d e c o r t e d e h o j a la t e r o d e l p r o b l e m a d e e j e m p l o 4 .2 .
S O L U C IÓ N : I . IH buje el diagrama cinemático y calcule la m ovilidad
H diagrama cinem ático de las tijeras se presenta en la figura4.14a. 0 mango superior se diseñó com o la bancada, mientras los puntos de interés se identificaron en la punta de b m ordaza de corte superior (X) y en el extremo del m ango inferior ( Y). Observe que este es e l conocido m ecanism o de cuatro barras con u n grado de libertad. Moviendo u n sedo esbb ó n , por ejem plo b m ordaza, se posidonan los dem ás eslabones del mecanismo.
2. Rrposieione e l eslabón im pulsor
Para reposkionar el mecanismo, b m ordaza de corte superior, el esbbón 2, se g ira 15° en sentido antihorario. Este m ovim iento corresponde a la posición abierta de b s tijeras. El p u n to de interés. X, tam bién g ira jun to co n el eslabón 2.
3 . Determ ine la posición precisa del pun to C
Como este es u n m ecanism o de cuatro barras, la posición del p u n to C 'sc u b e a en la intersección de su trayecto- ñ a restringida con s u trayectoria posible. La figura 4.14b presenta las construcciones necesarias para determ inar b posición de C ‘.
4 . Determine la posición exacta del p u n to Y*
finalm ente, se debe determ inar b ubicación del pun to de interés Y. El eslabón 4 es rígido, por ello su form a no se altera. Com o el lado C ' D ya está ubicado, el p u n to V"se encuen tra con facilidad.
Igual que e n el procedim iento descrito en b figura 4.7b, b longitud del lado D Y no cam bia. Entonces, b trayectoria del p u n to Y se construye a partir del p u n to D. Tam poco cambia la longitud del lado CY. No obstante, d p u n to C sc re ubicó en C ’.O tra trayectoria posible de Y*se construye desde C . La intersección de las dos trayectorias proporciona la ubicación final de Y’.Tal construcción se m uestra en la figura 4.14c.
www.FreeLibros.me

f i g u r a 4 .1 4 C onstrucciones para el p rob lem a de e jem plo 4.2.
5 . M ida el desplazam iento del eslabón 4
Se m ide el desplazamiento requerido del m ango inferior para abrir 15* la m ordaza. D e la figura 4.14c, el m ango inferior, el eslabón 4, se debe desplazan
1&4 - 35°, en sentido antihorario
4.6 PO SIC IÓ N : M ÉTODO ANALÍTICO
H ablando en g en e ra l lo s m étodos analíticas se utilizan en el análi- á s de posición para ob ten er resultadas c a í u n alto grado d e exactitud. El p rec io de esta exactitud es q u e tales m étodos usualm ente son m u y laboriosos. Por consiguiente, se h an desarrollado m éto
dos q u e usan u n a notación com pleja e im plican m atem áticas de orden superior para d análisis de posición ( re fs .4 ,9 ,11, 12|.
En escenarios de d iseño , d o n d e d aná lis is c in em ático no es u n a ta rea d ia ria , se ria d ifíc il e n te n d e r e im p lem en ta r esos m étodos com plejos. El m éto d o m ás sencillo de análisis d e p o s ición u tiliza las leyes trigonom étricas d é lo s triángulos. En h o n o r a la verdad , esta técn ica de “fuerza b ru ta " n o e s eficiente para
www.FreeLibros.me

8 0 CAPITULO CUATRO
q u ien es realizan investigaciones cinem áticas. S in em bargo, para el ingeniero de d iseno típ ico la sencillez com pensa co n m u c h o las ineficiendas. P o r lo ta n to , el m é to d o del t r iá n g u lo de análisis d e posición es el q u e se usará en este texto.
E n g enera l, e s te m é to d o im plica la in se rc ió n de líneas d e referencia d e n tro del m ecanism o y el análisis de los triángulos resultantes. Después, se u sa n las leyes de los tr ián g u lo s general y rectángulo, co n la finalidad d e d e te rm in ar las long itudes d e los lados y la m agnitud d e lo s ángu los in terio res. C onfo rm e se d e term inan los detalles d e la geom etría d e los tr ián g u lo s , se orga niza esta in form ación para ana liza r el m ecanism o c o m p le ta
El g ran beneficio del m éto d o analítico es su capacidad para m odificar las d im ensiones y recalcular ráp idam ente la so lución. D u ran te las fases del d iseno se evalúan m uchas configuraciones y d im ensiones de la m áquina. T ratándose del análisis g rá fic a el análisis se d e b e rep e tir com pletam ente co n cada evaluación. En lo s m éto d o s analíticos, especialm ente c u a n d o se im plcm entan en hojas d e cálculo u o tra s herram ien tas d e c ó m p u ta las so lu ciones se actualizan ráp idam ente.
E l m éto d o an a lítico del a n á lis is de posic ión se entenderá co n m ás claridad c o n los siguientes ejemplos:
PR O B LEM A DE E JE M PL O 4.3
la figura 4.15 m uestra u n a sujetadora q u e sirve para sostener con seguridad piezas de trabajo. Determ ine analíticamente el desplazam iento de b superficie de sujeción, conform e el m ango g ira 15o hacia abajo.
FIG U R A 4 .15 S u j e ta d o r a del p ro b lem a de e jem plo 4 .3 .
SO L U C IÓ N : 1. liab o rr u n diagrama cinemático
En b figura 4,16a se ilustra el diagrama dnem átk o . El extrem o del mango se identificó com o el punto de interés X
f i g u r a 4 .1 6 M ecanismo d e l problema de ejem plo 4.3.
www.FreeLibros.me

A n á lisis d e p o sic ió n y d esp lazam ien to__________81
2. Analice la geometría de la configuración original
« t e mecanismo de manivela-corredera se form a de m odo natural u n triángulo en tre los puntos A. B y C. Este triángulo se ilustra en la figura 4.16b.
Antes de observar la configuración desplazada del mecanismo, se deben determ inar todas las p rop iedad» de la configuración original. El ángulo interior en la u n ió n C, ¿ BCA.se determ ina aplicando la ley de los senos.
(3.6):
sen ¿ .B A C se n ¿ B C A
(B C (AB)
¿ B C A = sen’ 38.68*
Ahora, el ángulo interior en la unión B , ¿-ABC se caku la porque la su m a d e todos los ángulos interiores de cualquier triángulo es de 180*:
¿ A B C - I 8 l f - Í 3 0 * + 3 8 .6 8 " ) - 1 1 1 .3 2 o
La longitud del lado A C representa la posición original d e la corredera y se de term ina con la ley de los cosenos, ecuación (3 7 ):
AC - V a B2 ♦ BC2 - 2 (A B )(B C )cds¿A B C
= V ( 5 0 m ui)1 + (40 m rn)1 - 2(50 nun )(4 0 m m )|c o s 111 J2°J
- 7452 mm
3 . Analice la geometría de la configuración desplazada
l a configuración desplazada se m uestra en la figura 4.16c cuando el m ango gira 15” hacia abajo. Observe que « te desplazamiento genera un ángulo interior en la unión A. ¿ C 'A B igual a 15°. Se utiliza la ley de los senos para calcular d ángulo interior de la unión C '. ¿ B C A :
L B C A = s e n - 'l | |sen L C A B '50 m m .
• ' I ' — ------ |s e n 15"4 0 m m
18.88"
De nuevo, el ángulo in terio ren la unión B', ¿ A B C ,s e calcula porque la sum a de todos los ángulos interiores de u n triángulo suman 180".
L A B ’C = 1 8 0 ° - (1 5 °+ 18.88") = 146.12°
la longitud del lado AC' representa la posición desplazada de la corredera. C om o antes, se determ ina con la ley de los cosenos:
A C = V A B '2 + B C 1 - 2(AB’) ( B C ) c o s ¿ A B C ’
- V ( 5 0 m m ) 2 + (40 m m )2 - 2(50 m m )(40 mm)cos< 146.12") - 86.14 mm
- 86.14 mm
4 . Calcule el desplazam iento deseado
El desplazamiento de! p u n to C durante este m ovim iento so caku la com o la diferencia de los lados A C 'y AC del triángulo:
ARc - A C - AC - 86.14 - 7 4 5 2 = 11.62 m m « -
4.6 .1 E c u a c io n e s d e a n á l is i s d e p o s ic ió n en f o r m a c e r r a d a p a r a u n a m a n iv e la - c o r r e d e ra e n l ín e a
El m ecan ism o d e su jeción del p rob lem a d e e jem plo 4.3 e s u n m ecan ism o d e m anivela-corredera. Se conoce específicam ente co m o m ecan ism o de m an iv e la -co rred era en linea, p o rq u e b trayectoria restring ida d e b u n ió n de p e rn o d e b co rred era se ex tiende p o r el cen tro de ro tac ió n d e la m anivela. La figura 4.17 iu s t r a b con fig u rac ió n b ásica de u n m ecan ism o de manivela to rced e ra e n linea.
www.FreeLibros.me

8 2 CAPITULO CUATRO
C om o este es u n m ecanism o m u y com ún, se pueden g eneralizar los resu ltados del p rob lem a a n te r io r [ref. 12). El análisis típico im plica la ubicación de la posición de los eslabones, dadas sus longitudes (L j y L j) y el ángulo de la manivela (0 j) . Específicam ente, se d eb en determ inar la posición de la co rred era ( ¿ 4) y las ángulos d e las un iones in terio res (0 , y y).
Las ecuaciones q u e se u sa ro n en el p rob lem a de e jem plo 4.3 se resum en en té rm in o s de L ,, L ¡ y
= se n 1¿2— s e n 0 2
. U(4.3)
y = 180’ - (0 2 + 0j ) ( 4 .4 )
= V¡¿ + L ¡ - 2 (¿2) (L 3) c o s y (4.5)
Tales ecuaciones sirven usar para d e te rm in ar la posic ión de los eslabones en u n a configurac ión cualqu iera del m ecan ism o de m anivela-corredera en línea.
PRO B LEM A D E E JE M PL O 4.4
la figura 1.8 m uestra el concepto de u n a bom ba m anual que se utiliza para increm entar k presión d d aceite en una Inea hidráulica. Determ ine analitkam ente el desplazamiento del pistón, confórm e el m ango gira 15* en sen tido antihorario.
FIG U R A 4 .1 8 B om ba m anual del p rob lem a de e jem plo 4.4.
S O L U C IÓ N : I . D ibuje el diagrama cinemático
0 diagrama cinemático está dado en la figura 4.19a. El extrem o del mango se identifcó com o el pun to de interés X.
f i g u r a 4 .19 Diagram as del m ecanism o del p ro b lem a de e jem plo 4 .4 .
2 . Analice la geom etría de la configuración original
contraste con el problem a anterior, este m ecanism o es u n mecanismo de manivela-corredera descentrado. En o te tipo de mecanismos com í ene en focarse en dos triángulos rectángulos, los cuales se m uestran en la figura 4.19b. Observe que se indica el ángulo de 10* y su com plem ento de 80*.
www.FreeLibros.me

A n álisis d e p o sic i6 n y desp la za m ie n to________ 83
Antes de observar la configuración desplazada d d m ecanism o, es necesario determ inar to d as las propiedades de la configuración original. Concentrándonos en el triángulo rectángulo inferior, los lados A D y fíD se determ inan co n las siguientes funciones trigonométricas:
ADeos A B AD = —
AB
A D = (AB) eos ¿ R 4 D = (5 in) (eos W ) - 0B 7in
BDsen ¿B A D - —
A B
BD = (A B ) sen ¿ .B A D = (5 in) |s cn 8 0 ° | = 4.92 in
Al concentrase en el triángulo superior, la longitud del lado CE se calcula sum ando la distancia del descentrad o y b longitud del lado A D desde el triángulo in fe rio r
CE = descentrado + A D = I B + 0 8 7 = 187 in
Se usa el teorem a de Pitágoras, ecuación (3.4), para determ inar el lado BE
BE - V B C 2 - CE3
= V W - I W ) 2 = 3 8 4 in
La posición original del pistón, el p u n to G s c calcula sum ando BD y BE:
Lc = BD + BE - 4.92 + 3 8 4 - 8.46 in
Aun cuando n o se solicita en este problema, norm alm ente se desea conocer el ángulo que define la orientación del eslabón 3. El ángulo Z.BCE * calcula con la función del coseno inverso:
' ( ! )L B C E = <os- l ( ^ ) = e o s 1 = 62.13-
3. Analice la geometría d e la configuración desplazada
En la figura 4.19c se muestra b configuración desplazada co n el m ango g irado 15* hacia abajo. O bserve q u e este desplazamiento genera u n ángulo en la u n ió n A de 25* y su com plem ento, de 65*. tam bién se ilustra en la figura. Centrándose e n e l triángulo rectángulo interior, los lados A D ' y B D '» determ inan aplicando las siguientes fundones trigonométricas:
A D ' - ( A B ')co s¿ B 'A D 1 - (5 in) (eos 65*) - 2.11 in
B 'D ' - (A B ')se n Z B 'A D ' - (5 m ) (sen 651 - 4 8 3 in
Al centrarse en el triángulo superior, b longitud del lado C 'E ' se calcula sum ando la distancia del descentrad o (A R y la longitud del lado A D 'del triángulo inferior:
C E ' - AF + AD '
- IX) + 111 - 3.11 in
Ahora se determ ina el lado B E \
B ’E ’ - V ( B ’C ')1 - (C E ')1 - V ( 4 in)J - (3.11 in)1 “ 282 in
La posición desplazada del pistón se calcula su m a n d o B'D ' y B E \
l ¿ - B 'D ’ + B 'E ' - 4 8 3 + 2 8 2 - 7X>5 in
4 . Calcule el desplazam iento m u lta n te
El desplazamiento del pistón, el p u n to C, durante este m ovim iento se calcula restando la longitud L'c de Lf<
A R c - 8.46 - 7X)5 - 1.41 in i
www.FreeLibros.me

8 4 CAPITULO CUATRO
4 .6 .2 E c u a c io n e s d e a n á l is is d e p o s ic ió n en f o r m a c e r r a d a p a r a u n a m a n iv e la - c o r r e d e ra d e s c e n tr a d o0 m ecanism o del problem a de ejem plo 4.4 e s u n m ecanism o de m anivela-corredera descentrado, ya q u e la trayectoria restringida d e la u n ió n d e p e m o en la corredera n o se extiende a través del m ism o nivel del cen tro de ro tación d e la m anivela. La figura 4 2 0 ilustra la configurac ión básica d e u n m ecan ism o d e manivela- corredera descentrado.
típ ico im plica b localización d e la posición de los eslabones, dadas las longitudes ( t j , Lj y £*) y el ángulo de la manivela (0? X Específicam ente, h ay q u e determ inar la posición de la corredera ( U ) y los ángulos interiores (8¡ y y ) d e las uniones.
Las ecuaciones generales son
9, = s e n " '¿ i + L j se n 0,
L>
L+ = L ¡ e o s 0 2 + ¿ 3 COS 8 )
y = 180° - (A, + 0 S)
(4.6)
(4.7)
(4.8)
f i g u r a 4.20 M ecanism o de m anivela-corredera descentrado.
Chorno este tam bién es un m ecanism o com ún, se pueden generalizar los resultados del problem a anterior (ref. 12). Un análisis
Estas ecuaciones se u tilizan p a ra determ inar la posic ión de los es lab o n es en u n a con fig u rac ió n cu a lq u ie ra d e u n m eca n ism o. R ecuerde, s in em bargo, q u e estas ecuaciones únicam ente son aplicables a u n m ecan ism o d e m anivela-corredera descentra d o . Las ecuaciones tam b ién ap lican c u a n d o b d istanc ia del d escen trado está en d irección o p u esta a la dirección m ostrada e n la figura 4.20. E n tales casos, L\ en la ecuac ión (4 .6 ) se deb e rla su s titu ir p o r u n valo r negativo.
PR O B LEM A D E E JE M PL O 4.5
La figura 4.21 p resen ta u n a su je tadora q u e sirve p a ra asegurar u n a pieza de trabajo d u ra n te u n a operac ió n de rm quinado. Determ ine analíticam ente el ángulo que se debe desplazar el m ango para levantar d brazo de b sujetadora 30* en el sentido horario.
S O L U C IÓ N : I . D ibuje u n diagram a cinemático
□ dh g ram a cinem ático de la sujetadora se observa en la figura 4 2 2 a . El extrem o del m ango está defin ido como d p u n to de interés X La nariz de la sujetadora lú e identificada com o el p u n to de interés Y,
2. Analice la geom etría de la configuración original
Este es u n mecanismo com ún de cuatro barras. Para u n análisis m is minucioso de la geometría, la figura 422b detalla la cadena cinem ática ABCD.Se crea u n a diagonal para conectar B y D .con lo q u e form an dos triángulos.
Antes de analizar la configuración desplazada del mecanismo, se deben determ inar todas las propiedades de b configuración original. Observe que el triángulo inferior, ABD.es u n triángulo rectángulo. Se calcula la longitud BD usando el teorem a de Pitágoras presentado en la ecuación (3.4).
BD = V l A B )1 + (A D ) 2 - V ( 1 2 ) 2 + (25)2 = 27.73 m m
lo s ángulos interiores, ¿ ABD y ZBDA.se calculan a partir de las fundones trigonométricas básicas siguientes:
, ( 25 m m \L A BD - sen 1 — — ------- - 64.4»
V.27.73 m m /
L BDA = eos 1 ( m m ^ _ 25 \ 27.73 m m /
www.FreeLibros.me

A n álisis d e posic ió n y d esp lazam ien to
a) Diagrama cinemático
b) Configuración original
C¡ Configuración desplazad)
ó . i r
/ % . i r
- 9 o rT í -
15
133 r
d) Ángulo interór en B
f i g u r a 4 J 2 M ecanism o del p ro b lem a d e e jem plo 4 .5 .
Centrándose en el triángulo de la parte superior, el ángulo interior ¿B C D se calcula aplicando la ley de los cosenos, q u e se presentó en la ecuación (3.7):
CD> - BD1 \L B C D = eosi BC* +
V 2 ( B O ( C D ) )
/ ( 2 0 m m )J + (15 m m )2 - (27.73 m m )2'
= f~ l ----------------------------------------------2(20 m m ) (15 mm)
H ángulo interior Z.CBD se determ ina aplicando la ley de los senos:
, - t
* 1 0 3 .9 *
¿C B D sen ¿B C Dm
31 .7 *
www.FreeLibros.me

8 6 CAPITULO CUATRO
"it se puede calcular d ángulo in terio r ¿ B D C porque la sum a de los ángulos interiores de cualquier trián- p ilo es igual a 180", de m o d o que
¿ BDC - 180" - (103.9" + 31.7") - 44.4"
Se determ inan ah o ra todos los ángulos del mecanismo: de la u n ió n B (entre los eslabones 2 y 3 ) y de la unión D (entre los eslabones l y 4).
En la unión B:
¿-ABC = ¿ ABD + ¿ C B D ■ 6 4 .4 "+ 31.7®= 96.1®
En la unión D:
L C D A - ¿ BD C + ¿ B D A = 44.4" + 25.6" = 70.G"
3. Analice la geom etría de la configuración desplazada
En h figura 4 22c se muestra b configuración desplazada con la nariz de la sujetadora, el eslabón 2. girado 30" en el sentido horario. Observe que esto luce que el ángulo interior d e la unión A, ¿ DAB"sea igual a 60*. Asimismo, el triángulo inferior d e a de ser un triángulo rectángulo.
l a longitud de la diagonal B 'D se calcula usando el triángulo inferior. A ABD, y la ley de los cosenos:
B’D = V ( 1 2 m m )! + (25 m m )2 - 2(12 m m )(2 5 m m )co $ 6 0 " = 2 1 6 6 m m
B ángulo interior Z-AB'D también se calcula aplicando la ley de los cosenos:
2 (A B ')(B 'D )
_,[‘(12)2 ♦ (21.66)* - (25)?
[ 2(12X21.66)91J "
Todos los ángulos interiores de u n triángulo deben sum ar 180". Por lo tanto, el ángulo ¿B 'D A se calcula fácilmente:
¿ B 'D A - 1 8 0 " - U D A B ' + ¿ A B 'D )
* 180*- (60° + 91J " ) - 28.7"
Enfocándose en el triángulo de la parte superior, el ángulo in terio r ¿ B 'C D se calcula aplicando la ley de los cosenos:
¿ B 'C 'D = eos '( B 'Q 2 + (C 'P )2 - (B 'P )2 1
2 ( B 'C ) (C 'D ) J(20 m m )2 + (15 m m )2 - (21.66 m m )2
2(20 m m )(15 mm)
H ángulo interior ¿ C B V se determ ina aplicando la ley de los senos:
t e n - » - ' [ ( £ 2 ) - * « ■ » ]
»° = 42.0°
74.9°
15 m m \2 1 6 6 m m / ’
« n “M I t t ” — Iscn 74.9°
B ángulo interior final / B'D C ' del triángulo superior se calcula de la siguiente m anera:
¿ B ’D C - 180" - ( 6 C 'B 'D + ¿ B 'C 'D ) - 1 8 0 " - (42B "+ 74.9") - 63.1"
Se determ inan ahora todos los ángulos del m ecanism o: de la unión B‘ (entre los eslabones 2 y 3 ) y de b unión D (entre los eskbones 1 y 4) de b siguiente manera:
En la unión B':
¿ A B 'C = ¿ A B ’D + ¿ .C 'B 'D = 91J " + 42.0" = 133.3"
En la unión D:
¿LC'DA - ¿ B 'D C + ¿ B 'D A - 6 3 . 1 " + 2 8 .7 " - 916"
www.FreeLibros.me

A n álisis d e p o sic ió n y d esp lazam ien to__________87
4 . Calcule e l desp la za m ien to resu ltan te
H ¿ap lazam ien to angular del m a n g le ! eslabón 3, se determ ina enfocándose en la unión f t com o se indica en la figura 422d . En b configuración original, d ángulo del eslabón 3 arriba de la horizontal se expresa como
L A B C - 9 0 ° = 96.1° - 903)° = 6.1®
&i la configuración ¿ap lazad a , el ángulo del a la b ó n 3 a rriba de la horizontal se expresa com o
L A B 'C - 120" = 133J® - 1203)" - 133®
R m ím enle, el ¿ap lazam ien to angular del a la b ó n 3 se calcula con
- 133" - 6.1® - 72®, en sentido antihorario
4 .6 .3 E c u a c io n e s d e p o s ic ió n p a r a un m e c a n is m o c e r r a d o d e c u a t r o b a r r a sEl m ecan ism o de c u a tro b a rra s a o t r o es lab o n am ien to m uy com ún. La fig u ra 4 2 3 m uestra u n m ecan ism o d e cuatro barras general.
siones geom étricas. T a la regiones se conocen c o m o circuitos de otsamble. U n m ecan ism o está im posib ilitado para m overse de un circuito de ensam ble a o tro s in desarm arse. El m ecanism o q u e se lu s t r a en la figura 4 2 3 op era en el p rim e r circu ito (figura 4.24a),
Ciicuito 1
Las cc u a c io n a especificas q u e se u sa ron en el p ro b lem a de e jem plo 4.5 se pueden gen era liza r [ref. 12). Un análisis típico im plica el cá lcu lo de los á n g u lo s in t e r io r a (0 * 0 4 y y ) d e las u n iones, si se co n o cen lo s e s la b o n a (L t, ¡4 , L j y U ) a cierto án gulo de la m anivela (02) . E spedficam ente, se deben determ inar lo s ángu los in terio res (0 *. 0 * y y ) d e las u n io n a .
B D = + I ¿ - 2 (1 , ) ( W c o s ( 0 2)
( I 3)2 + ( ¡ m )2 - (BD )'- 1
7 C0S 2 ( L ¡ H U ) \
(4.9)
(4 .10 )
= 2 ta n - I
0 4 = 2 ta n -1
- ¿ 2 s e n 02 + U s e n y 1
¿ j + L j - L¡ eos 0 j - £4 c ° s y \
¿2 s e n 02 — ¿3 s e n y 1
L¡ eos d } + L , - L¡ - L} e o s y \
(4 .11 )
(4 .12 )
Se tienen q u e a p lic a r estas e c u a c io n a para d e te rm in a r la p o s id ó n d e lo s e s la b o n a en u n a configurac ión cu a lq u ie ra de u n m ecan ism o . Las e c u a d o n a so n a p l ic a b la a cualqu ier m ecan ism o d e c u a tro b a rra s ensam blado, c o m o se ind ica en la figura 4.23.
4 .6 .4 C ir c u i to s d e u n m e c a n is m o d e c u a t r o b a r r a s
E n lo s m ecanism os de c u a tro b a r ra s d as ificad o s c o m o de m anivela-bulandn (com o el d o c r i to en la sección 1.10), hay dos reg iones de posib le m ov im ien to c o r re sp o n d ie n te a d o s inver-
D a c o n c c ta n d o físicam ente la u n ió n C, lo s a l a b o n a se pueden reo rien ta r y ensam blar de nuevo co n la co n fig u rad ó n m o strad a e n la fig u ra 4.24b. C uando o p e ra a t e m ecanism o, se m ueve de a c u e rd o co n el s e g u n d o d rc u ito . A un c u a n d o el m o v im ie n to del m ecan ism o parece s e r d ife ren te , en relación c o n la o p e ra d ó n del d rcu ito , n o cam bia el m ov im ien to relativo e n tre los e s la b o n a . S in em bargo, e s necesario espedficar el d r c u ito d o n d e está en sam b lad o el m ecan ism o p a ra e n te n d e r el m ovim iento abso lu to y la o p e ra d ó n del m ecanism o.
P ara la o p e ra d ó n del m ecanism o de cuatro b a rra s en el seg u n d o d rc u ito , la e c u a d ó n (4 .11 ) se deb e m o d ifica r lig e ra m ente de la siguiente m anera:
03 = 2 ta n
04 = 2 ta n
1
-1
—¿2 s e n 02 - 1-t s e n y
. L t + L) - L2 COSO2 - L f c o s y
¿2 s e n 0 2 + L y se n y
. L j e o s 0 j + - L\ - L ycos r \
(4 .13)
(4.14)
4.7 PO SICIO N ES LÍM ITE: ANÁLISIS GRÁFICO
La c o n f ig u ra d ó n d e u n m ecan ism o q u e ub ica u n o de lo s a - l a b o n a seg u id o res en u n a p o s id ó n ex trem a se cono ce com o posición lim ite . M u ch as m áq u in as tienen m ecanism os q u e oscilan co n tin u am en te e n tre d o s p o s id o n o lim ite . La fig u ra 4.25 ilu stra las p o s i a o n a lim ite de u n m ecan ism o de m anivela- co rred era d escen tra d a
a) b)
FIG U R A 4 .24 C ircu itos de u n m ecan ism o de cuatro barras.
www.FreeLibros.me

88 CAPITULO CUATRO
O rn era . |A R c U , El d esp lazam ien to del eslabón segu ido r d e u n a posic ión lim ite a o t r a d efine la carrera del segu ido r. En eslabones c o n traslac ión , c o m o el d e la figura 4.25a, la ca rre ra e s lineal. Para eslabones co n ro ta d ó n p u ra , la carrera es u n a cantidad an gular, q u e tam bién se conoce co m o desplazamiento, co m o se in d ica e n la fig u ra 4.25b. La c o n fig u rac ió n de lo s eslabones q u e ub ica u n segu ido r e n u n a posic ión lim ite está asociada con u n a manivela y u n acop lad o r q u e se vuelven colineales. L a figura 4 .2 5 m u e s tra las co n fig u rac io n es lim ite de u n m ecan ism o de m anivela-corredera y u n o de cuatro barras. E l án g u lo d e dese q u iü b rio se define c o m o el ángulo e n tre la configuración del acop lad o r en las dos posic iones lim ite. El ángulo de desequ ilib r io influye e n el r itm o de avance y retroceso de la ca rre ra , el cual se u tilizará extensivam ente en el cap itu lo 5 . <x>n frecuencia se desea con o cer la posic ión d e u n eslabón im pulsor, o eslabón actuador, q u e coloca al eslabón seguidor en u n a posición lim ite o ex trem a. A sim ism o, el m o v im ien to de u n m ecan ism o está co m ú n m en te relacionado co n la p o sic ió n del ac tuador q u e co loca o) segu ido r en u n a posic ión limite.
La lóg ica q u e se ap lica en la so lu c ió n de este p rob lem a es s im ib r a la del análisis d e p o sic ió n q u e se acab a d e efectuar. L os siguientes e jem plos ilu s tra n ese análisis.
PRO B LEM A D E E JE M PL O 4 .6
H m ecanism o m ostrado en la figura 4.26 es el eslabonamiento im pulsor de u n a sierra caladora (de vaivén) reciprocante. Determ ine las configuraciones del m ecansm o que ubican la hoja de la sierra en sus posiciones limite.
f ig u r a 4 J6 M ecanism o de la sie rra ca ladora del p ro b lem a d e e jem plo 4.6.
S O L U C IÓ N : I . Dibuje u n diagram a cinemático
H diagram a cinem ático del m ecanism o de la sierra reciprocante se muestra en la figura 4.27a. Observe q u e se trata de u n m ecanism o de manivela-corredera, como el defin ido en el capitulo 1, que tiene un grado de libertad.
C onstruya la posición lim ite extendida
La hoja de b sierra, el esbbón 4, alcanza su posición extrema hacia abajo cuando los esbbones 2 y 3 se mueven aK- reados colín calmen te. Esta configuración proporciona b distancia máxima entre los puntos A y C Para determ inar b distancia máxima, se deben com binar las longitudes de los esbbones 2 y 3 . l a sum a de estas longitudes da
L¡ + Ly = 0 .5 in + 1.75 in - 2 2 5 in
6 ) C u a tro barras
FIGURA 405 Posiciones lím ite .
Una vez que se obtiene b longitud com binada de las lineas 2 y 3 , se deberia constru ir u n arco con esta lon- g tu d . con cen tro en el p u n to A. C om o se ilustra en la figura 4 2 9 b , la intersección del arco co n la trayectoria
www.FreeLibros.me

A n á lis is d e p o s id ó n y d e sp la z a m ie n to __________89
posible del p u n to C dctcrm ina la posición lím ite extendida de C, denotada por C’.Sc dibujan k » eslabones 2 y 3, luego se determ ina el p u n to B'. E sto se observa en la figura 4.29c.
3. Construya la posición lim ite retraída
Ahora se debe determ inar la configuración que ubica la hoja de la sierra, d eslabón 4, en su posición superior extrema. En esta configuración, los eslabones 2 y 3 son cohneales nuevamente, aunque esta vez se traslapan, lo cual nos brinda la distancia m ínim a entre los puntos A y C de m odo que esta distancia m ín im a es la diferencia entre h s longitudes de los eslabones 3 y 2 . La diferencia de las longitudes de los eslabones es
L > - L ¡ a L75 in - 0 5 in - 125 in
tí
fig u r a 437 f tís id o n e s extrem as del p rob lem a de e jem plo 4.6.
Esta posición lim ite retraída se determ ina usando u n a técnica sim ilar a aquella q u e se u tliz ó para determ i- r n r la posición ex tendida. Recuerde q u e la distancia e n tre A y C \ en b figura 4.27b, representa b longitud sim ad a de los eslabones 2 y 3. De la m ism a forma, b distancia entre los puntos A y C" represento b diferencia entre los eslabones 3 y 2.
Usando la distancia L¡ - L¡ ,se calcula la posición del pun to C en su posición extrem a hacia arriba, representada p o r C " (figura 427b). Finalmente, se dibujan los eslabones 2 y 3 , luego se ubica la posición del p u n to B '.
M ida la carrera del eslabón seguidor
Cóm o se m uestra en la figura 427c, b carrera de la hoja de b sierra se m ide como el desplazamiento extrem o del pun to C A I tom ar en cuento la escala en el diagram a cinemático, se obtiene el siguiente resultado:
lA R jn * . » 127 in
www.FreeLibros.me

9 0 CAPITULO CUATRO
PR O B LEM A D E E JE M PL O 4.7
La figura 4.28 muestra u n m ecanism o q u e opera la boquilla de agua en u n laxado autom ático de vehículos. D eterm ine las posiciones limite del mecanismo que ubica la boquiDa en su s posiciones extremas.
S O L U C IÓ N : I . ¡labore W diagrama cinemático
f h la figura 4.29 se m uestra el diagram a cinem ático del m ecanism o de la boquilla de agua. Observe que es un m ecanismo de cuatro barras co n u n grado de libertad.
2 . C onstruya la posición lim ite extendida
H análisis de este ejem plo es m uy similar al problem a de ejem plo 4.6. La boquiDa, el eslabón 4. alcanza su posición extrem a hacia abajo cuando los eslabones 2 y 3 se vuelven col incales. Esta configuración proporciona la distancia m áxim a entre los p un tos A y C Para determ inar esta distancia máxima, se deben com binar las longitudes de los eslabones 2 y 3. La sum a de tales longitudes nos da
¿ 2 + = 0.75 in + 200 in = 2.75 in
I9
f i g u r a 4 .2 9 I b s i c i o n e s e x t r e m a s d e l p r o b le m a d e e j e m p l o 4.7.
www.FreeLibros.me

A n á l i s i s d e p o s i c i ó n y d c s p l a z a m i e n t o ___________ 91
U ia vez que se determ ina la longitud com binada de las lincas 2 y 3 , se debería construir u n arco de esta lo n gitud con centro en el pun to A. Com o se muestra en la figura 4.28b. la intersección de este arco y la trayectoria posible del p u n to C determ inan la posición extrem a hacia abajo de C, denotada con C '. Se dibujan los eslabones 2 y 3. y se determ ina el p u n to B'. Esto se m uestra en la figura 4.29c.
3. Construya la posición lim ite retraída
Luego se determ ina la configuración que coloca la boquilla, el eslabón 4 e n su posición lim ite superior. Como a i la m anivela-corredera analizada a i el problem a de ejem plo 4,6, la configuración retraída ocurre cuando los eslabones 2 y 3 se vuchén colinc.iles, pero se traslapan. Asi se genera la distancia m ín im a en tre los p un tos A y C, de m odo q u e esta distancia m ínim a es la diferencia en tre las longitudes de los eslabones 3 y 2 . La resta de dichas bng itudcs da
L , - L j = 2.00 in - .75 in = 125 in
Esta distancia m ín im a se construye de m anera parecida a la técnica de la distancia máxima. Recuerde que la d stancia e n tre A y C '.en la figura 4 2 9 c , representa la longitud com binada de los eslabones 2 y 3. Asimismo, b distancia en tre los p un tos A y C* representa la diferencia entre los eslabones 3 y 2.
Usando la distancia L , - L¡. es posible determ inar la posición del pun to C en su posición extrem a hacia arriba, denotada co n C". lo cual se presenta en la figura 4 2 9 b . Finalmente, se d ib u p n los eslabones 2 y 3 , y se lo caliza la posición del p u n to B '.
M ida la carrera del eslabón seguidor
Com o se muestra en b figura 4 2 ^ , la carrera de la boquilla se m ide como el despbzam ioito angular extrem o del eslabón 4 . l a m edición de este form ato gráfico da co m o resultado:
i M j - t o - 4 7 j0 “
4.8 PO SICIO N ES LIM ITE: M ÉTODO ANALÍTICO
L a d e te rm in ac ió n an a lítica d e las p osic iones l im ite de u n m ecan ism o e s u n a com binación de d o s co n cep to s presentados co n an terio ridad e n este capitulo:
I. Ia lógica de la configurac ión d e u n m ecan ism o en u n a configuración limite. Esto se p resen tó en el m étodo gráfico p a ra d e te rm in a r las posic iones lim ite , que se in tro d u jo en la sección 4.7.
O . 0 m éto d o d e descom posición d e u n m ecanism o e n tr iá n - (jilo s convenien tes y el uso de las leyes trigonom étricas, para d e te rm in ar to d o s lo s ángu los y las long itudes del m ecanism o, p re sen tad o en la sección 4.6.
La com binación de esos d o s concep tos para d e te rm in ar la posición d e todos los eslabones de u n m ecanism o en u n a posi- d ó n lím ite se ilu s tra c o n el p ro b lem a d e e jem plo 4.8.
PR O B LEM A D E E JE M PL O 4,8
La figura 4 JO m uestra el m ecanism o de u n a banda transportadora de transferencia, cuya función e s sum in istrar piquetes a u n a estación de em harque en intervalos específicos. Determ ine analíticamente las posiciones extremas del segmento de elevación de la banda transportadora.
S O L U C IÓ N : I . Elabore el diagram a cinemático
&i la figura 431 a se m uestra el diagram a cinem ático de este mecanismo. El extrem o del segm ento transportador* identificó com o el pun to de interés X.
2. Analice la geometría en la posición lim ite extendida
Este mecanismo es o tro eslabonamiento de cuatro barras. Como se v io en el problema de ejemplo 4.7, el seguidor de u n m ecanism o de cuatro barras está en la posición lim ite extendida cuando los eslabones 2 y 3 se vuelven mlincalcs. En la figura 4 J l b se ¡lustra el m ecanism o con el seguidor en su posición superior. Observe q u e los esbbones forman u n triángulo general AAC’D. También advierta q u e b longitud de AC’ es de 20 in (16 + 4).
www.FreeLibros.me

9 2 CAPITULO CUATRO
FIGURA 4.50 B anda tran sp o rtad o ra de sum in istro del p ro b lem a de e jem plo 4.8.
f i g u r a 4 .31 M ecanism o del p rob lem a de ejem plo 4.8.
l a posición límite superior se define com pletam ente determ inando los ángulos interiores. El ángulo inte* ñ o r en la u n ió n A , ¿ .C A D , se calcula co n la ley de los cosenos:
L C A D - eos 1
- e o s - *
AD ¡ + A C - C D ¡
2(AD) (AC 1) J
(18 in )J + (20 in )1 ~ (8 in )J
2(18 in ) (20 in)= 23.6*
Se usa la ley de los senos para calcular cualquiera de los ángulos interiores restantes. Sin em bargo, la ley de los senos quizás origine confusión co n ángulos entre 90* y 180* porque
sen 0 - sen(180" - 0)
Cuando se utiliza h función inversa del seno en u n a calculadora, el ángulo se encuentra en tre 0 o y 90°. No obstante, el resultado q u e se busca puede ser u n ángulo en tre 90° y 180°. Para m inim izar tal contusión, se recomienda d ibu jar los triángulos a u n a escala aproxim ada y verificar los resultados num éricos. A sim ism o, es m ejor usar la ley de los senos con ángulos donde sea evidente q u e se eiK uentran en el rango de 0 o a 90°.
Con este enfoque, el ángulo in terio r en la u n ió n C ', ¿1 ACT),se determ ina usando la ley de los senos, porque es evidente que es m enor de 90*.
L A C D - sen-1 ( |s e n ¿ C A D
sen 18 in\ 8 i a j sen 23.6° 64.1*
Se determ ina el ángulo interior en la u n ió n D. / . ADC'.
L A D C = 180* - ( ¿ C ’A D + ¿.AD C ')
= 180" - (23.6* + 64.1*1 = 92J*
www.FreeLibros.me

A n á l i s i s d e p o s i c i ó n y d e s p U z a m i e n t q ___________ 9 3
3. Analice la geometría en la posición lim ite retraída
l a figura 4.31c muestra este mecanismo con el seguidor en la posición inferior. O tra ver, los eslabones forman u n triángulo AACD. Observe que la longitud de A C es de 12 in ( 1 6 -4 ) .
Para definir com pletam ente esta configuración, se determ inan los ángulos interiores con u n procedimiento idéntico al q u e se acaba de describir.
Para el ángulo interior de la u n ió n A , / . C 'A R
A C '¡ - C 'D 3l C a d = eos- '
AD 1 +
L 2 t2 ( A D ) ( A C )
j (1 8 in )? + (12 in)* - (S in )2 C0Í [ 2(18 in ) ( !2 in) - 20.7°
0 ángulo interior en D está en el intervalo de 0* a 90°. Por lo tanto, para el ángulo interior en Li u n ió n R LA D C
L A D C " - sen sen Z .C "A D |
msen 20.7* 32.1a
0>r último, el ángulo interior en la unión C*. / AC’D , se determ ina de la m anera siguiente:
/ .A C ”D = 180° - ( / .C " A D + /.A D C ")
= 180° - (20.7* + 32.1°) = 1272a
4 . M ida la carrera del eslabón seguidor
Para resumir, el segm ento transportador (ángulo interior en ki unión D. / ADC) recorre u n espacio angular que se encuentra entre los 92 J * y 32.1”, m edido hacia a rriba desde la vertical:
32.1a < < 92 J*
y la carrera es
M m b = 92 J * - 32.1a = 6 0 2 a
4 .9 Á N G U L O D E T R A N S M I S I Ó N
La ventaja m ecánica de un m ecanism o e s la razó n d e la fuerza de salida (o to rque) d iv id id a en tre la fuerza de en trad a (o torque). En u n eslabonam iento , el ángulo de transm isión y cuan tifica la transm isión d e la fiierza a trav és del m ecanism o y a fre ta directam ente la eficiencia mecánica. Evidentem ente, las definiciones del ángulo d e transm isión dependen de la selección del eslabón im pulsor. En la figura 4.32 se presenta el ángulo de transm isión de m ecanism os d e m anivela-corredera y de c u a tro b a rra s im pulsad o s p o r u n a m anivela . En e s to s eslab o n am ien to s, la ventaja m ecánica es p roporc ional al se n o del án g u lo y . C onfo rm e el eslabonam iento se m ueve, el ángulo d e transm isión, ju n to co n los o tro s á n g u lo s de las uniones, y la ven taja m ecán ica, cam bian constan tem ente. C o n frecuencia se desean con o cer los valores a \rem o s del án g u lo de transm isión .
En el eslabonam ien to m anivela-corredera, el án g u lo de transm isión se m ide en tre el acoplador y t i linea norm al a la d irección d e deslizam iento. Los valores m ín im os y m áxim os del ángulo de tran sm isió n se d e te rm in an geom étricam en te construyendo configuraciones com o la m ostrada e n la figura 4 J 2 a . D e m anera alternativa, los ángulos d e transm isión m ín im o y m áx im o d e u n m ecanism o m anivela-corredera se calculan a p a rtir de
= eos - i I , + L>(4 .15)
(4 1 6 )
E n los m ecanism os d e c u a tro b a rra s , el án g u lo de tra n s m isión se m ide e n tre el eslabón de salida y el acoplador. A l igual q u e e n la m an iv e la -co rred era , los valo res de los ángu los de tra n sm is ió n m in im o y m áx im o se d e te rm in a n geo m étrica m en te co n s tru y en d o con figu rac iones co m o la m o strad a en la figura 4 J 2 b . A lternativam ente, los ángulos d e transm isión m ín im o y m áxim o se calcu lan con
ym tn = eos
r m i x = COS
-1
-1
• L \ + - ( L | - l ¡ ) 2
2 L jL 4
‘ I i + ! j - ( L t + L2 ) 2
2 I4 L4
(4 1 7 )
(4 1 8 )
El án g u lo de transm isión e s u n a m ed ida de la calidad de la tra n sm is ió n d e la fuerza e n el m ecan ism o . N o rm a lm e n te , el
www.FreeLibros.me

94 CAPITULO CUATRO
el á n g u lo d e tra n sm is ió n influye en la ven taja m ecán ica del m ecan ism o Las configuraciones d e m ecanism os d e m anivela- co rred era y de c u a tro b a rra s , q u e p roducen á n g u lo s de tra n s m isión m ín im os y m áxim os, ta m b ié n se m uestran e n la figura 4 .32 . Una re g la p rá c tic a c o m ú n es q u e los á n g u lo s de tra n s m isió n d eb e rían p e rm an ecer e n tre lo s 45° y 135*. S e p ro p o rc io n a m ay o r deta lle en el análisis del d iseño del m ecan ism o en el cap itu lo 5.
f i g u r a 4.32 A ngulos d e transm isión .
a c o p la d o r es u n e s b b ó n d e ten s ió n o de co m p resió n . P o r lo tan to , tan so lo p u ed e em p u ja r o j a b r a lo largo de b linea q u e conecta lo s d o s pern o s. C u a n d o se aplica u n a to rq u e al pivote de salida, b transm isión ó p tim a d e b fuerza o c u rre cu an d o el á n g u lo de tra n sm is ió n es de 90°. C o n fo rm e el án g u lo de t r a n s m isión se desvia de los 90°, so lo u n a com po n en te d e la fuerza del a c o p lad o r se convierte en to rq u e en el pivote, de m o d o q u e
4.10 C IC LO CO M PLETO :ANÁLISIS G RÁ FICO DE PO SICIÓ N
La configuración d e u n m ecanism o en u n in stan te especifico se conoce tam bién co m o jtise del m ecanism o. Hasta ah o ra , los análisis de posición se cen traron e n d e te rm in ar b láse del m ecanism o en u n a cierta posición d e u n eslabón de e n tra d a El análisis del cic lo e s tu d b el m ov im ien to del m ecanism o desde u n a fase inicial y a u m en ta gradualm ente a trav és de u n a serie de fases d u ra n te la operación. La asignación de u n a fase inicial se utiliza com o referencia de las fases subsecuentes. Se puede elegir cualqu ier configuración ventajosa co m o b fase iniciaL Es co m ú n usar u n a posición lím ite co m o la fase inicial o de referencia.
Para efectuar el análisis de posic ión de u n d e lo com pleto, la configuración d d m ecanism o se deb e d e te rm in a ra diferentes in tervalos de su c id o . El proced im ien to , ya sea gráfico o a n a lítico , e s exactam ente d descrito en b s secciones an terio res. La ún ica diferencia es q u e estos p roced im ien to s se rep iten a d iferentes intervalos del desplazam iento de entrada. Los problem as d e e jem plo siguientes ilustran d análisis de p o s id ó n de u n d d o c o m p le ta
PR O B LEM A D E E JE M PL O 4.9
la figura 4 3 3 m uestra el m ecanism o im pulsor de unas tijeras para podar m anualm ente. El m ecanism o opera girando d disco grande como se indica. Determ ine gráficamente la posición d d m ecanism o im pulsor en varias fases de su d - d o de operación.
Un motor Caradoras móvilesgira e l d ú c o
1.0* 2.0*
f i g u r a 4 3 3 T i j e r a s p a r a p o d a r d d p r o b l e m a d e e j e m p l o 4.9.
S O L U C IÓ N : I . U abore e l diagrama cinem ático y calcule la m ovilidad
En la figura 4 3 4 a se presenta el diagram a cinemático. El extrem o de la ho ja de corte m edia se identifica com o el pun to de interés X.
l a m ovilidad d d mecanismo se calcula como:
n = 4 j f = (3 pernos + I corredera) = 4 j k = 0
yM = 3(n — 1) - 2j f - f l ,
- 3(4 - 1) - 2(4) - 0 - 1
Por lo tanto, el ún ico esbbón de en trada se m ueve para operar las tijeras.
www.FreeLibros.me
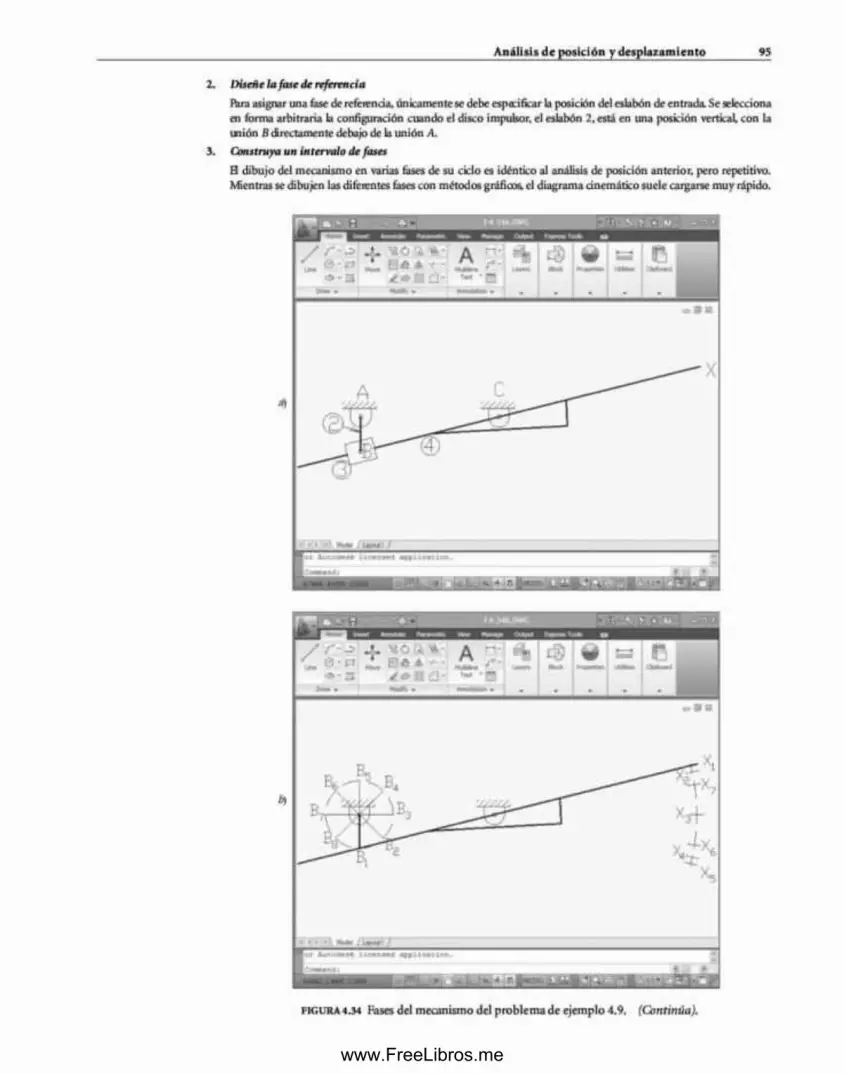
A n á lis is d e p o s ic ió n y d e sp la z a m ie n to __________95
2. Diseñe la fa se de referencia
Rna asignar una fcise de referencia, únicam ente se debe esparificar b posición del esbbón de entrada. Se selecciona en form a arbitraria b configuración cuando el disco impulsor, el esbbón 2. está en una poskión vertical, con la rn ió n B directamente debajo de b unión A.
3. Construya u n in tervalo de fases
B d ibujo del m ecanism o en varias fases de su ciclo es idéntico al análisis de posición anterior, pero repetitivo. Mientras se dibujen las diferentes fases con m étodos gráficos, el diagram a cincm átko suele cargarse m uy rápido.
f i g u r a 4.34 Fases del mecanismo del problem a d e ejem plo 4.9 . (Continúa).
www.FreeLibros.me

9 6 CAPITULO CUATRO
/ r . : " i C A +■C 0 • O J L B34S A
® - n / * 3 8 a -
A _ ? . - ¥- B
“ r •
f i g u r a 4 J 4 ( G m if o iM a d r O
Se recom ienda am pliam ente que se utilicen diferentes colores o fuentes p a ra representar cada fase del ciclo. Cuando se usa el CAD, tam bién es ventajoso colocar cada fase en u n nivel diferente, el cual logre desplegarse u ocultarse rápido.
&i este problem a, el eslabón impulsor, el eslabón 2 , se posiciona en intervalos de 45* a través de su ciclo. Por consiguiente, se construyen ocho fases del mecanismo, las cuales se designan co m o fases I a 8. Las ocho posiciones de los p un tos B y X se m uestran en la figura 4.34b. Observe q u e los puntos se identifican usando sub- hdices del I al 8, de acuerdo con la fase correspondiente. E n la práctica, se utilizan incluso m enores increm entos dependiendo de los detalles que se requieran del m ovim iento del mecanismo.
Construya las posiciones lim ite
También se determ inan las fases asociadas co n las posiciones lim ite. La hoja de corte alcanza s u posición m ás elevada cuando d eslabón 4 g ira al m áxim o ángulo posible. Esto ocurre cuando d eslabón 4 es tangente al circulo que representa las posiciones posibles del p u n to B. El pun to de tangencia se denota com o B 'y la posición correspondiente de las cuchillas se denota co n X '. Esto se muestra en la figura 4.34c.
lai posición inferior de la cuchilla ocurre cuando d eslabón 4 g ira hasta su ángulo m enor. O tra vez, esto ocurre cuando d eslabón 4 es tangente al circulo q u e representa las trayectorias posibles de R Los puntos relacionados co n kt configuración m ás baja se denotan en la figura 4 3 4 c co m o B 'y X*.
El desplazamiento m áxim o del eslabón 4 se m ide a partir de la construcción cinemática:
- 290°
4 .1 1 C I C L O C O M P L E T O :
A N Á L I S I S D E L A P O S I C I Ó N
Para obtener la configuración de u n m ecanism o a través d e u n d - d o . se repite el m étodo analítico para alcanzar varias fases. Suele tra tarse de u n proceso excesivam ente repetitivo , p o r lo c u a l es co m ú n usar program as de software, co m o se verá en el cap ítu lo 8.
Las e c u a d o n e s generadas a p a r t ir de tr iá n g u lo s defin idos p irc ia lm e n te p o r lo s e s b b o n e s d e l m ecan ism o, se resu m en com o las ecu ad o n es (4 .1 ) a (4 .12). Estas ecuaciones se despejan p i r a diferentes valores de la p o sid ó n del im pulsor. Las h o ja s de cálculo co m o las q u e se verán en el capitulo 8 son ideales para tales análisis.
www.FreeLibros.me

A n á lisis d e p o sic ió n y d esp lazam ien to__________97
PR O B LEM A D E E JE M PL O 4 .1 0
L i figura 4.35 ilustra u n m ecanism o que se diseñó para em pu jar piezas de u n transportador a otro. D urante la transferencia, las piezas se deben girar com o se indica. Determine analíticam ente la posición de la varilla de em pu je en varias tases de su m ovimiento.
FIGURA4.35 A lim entador del tra n sp o rta d o r del p rob lem a de e jem plo 4.10.
S O L U C IÓ N : I . IS b u je e¡ diagram a cinemático
El diagrama cinem ático de este m ecanism o se presenta en la figura 4 3 6 . Observe q u e se trata de un mecanismo de m anivela-corredera descentrado q u e tiene u n grado de libertad.
fig u r a 436 D iagram a cinem ático del p rob lem a d e e jem plo 4.10.
2. Diseñe la fase inicial
Se elige de m anera arbitraria q u e la tase inicial sea cuando la manivela está horizontal, colocando el p u n to B d ilectam ente a la izquierda de la u n ió n A.
3. Construya las fases del intervalo
Recuerde q u e tas ecuaciones (4.6), (4.7) y (4.8) describen la posición de u n m ecanism o de manivela-corredera descentrado las cuales se pueden usar en el anáfisis de u n ó d o completo. Las ecuaciones se utilizaron jun to con u n a ho ja de cálculo, lo cual dio los resultados m ostrados en la figura 4 3 7 . Si n o está fam iliarizado con las hojas de cá lcu lo consulte el capitulo 8.
4. Identifique las posiciones lim ite
C entrándonos en la posición del eslabón 4, la opilación de la corredera se aproxim a como
2631 m m < í , < 9335 m m
y el desplazamiento m áxim o como
l A t a U - ( te ín a , ~ W m u , * * 3 3 5 - 2631 = 66.74 m m
Esto e s so lo u n a aproximación porque co n increm entos de 15* la posición lím ite n o se puede detectar con exactitud. C uando se requiere inform ación exacta sobre la posición límite, se recomienda usar las técnicas presentadas en b sección 4 3 .
Quizás haya contusión al observar el valor del ángulo f i en el ángulo de la manivela, 0¡, que es igual a 360°. El valor debería s e t idéntico al valor inicial en 0° del ángulo de la manivela. Observe que los valores difieren durante los 360°. U no m ide d ángulo interior, y el o tro el ángulo exterior. Esto m uestra la necesidad de verificar la inform ación obtenida a partir de las ecuaciones con la del mecanismo fisico.
www.FreeLibros.me

9 8 CAPITULO CUATRO
^ . . . . . . .
s («gal lm< »«» r«f Otfi ■w, V*. 0.. Clt M - - »
* A« .. . r -
U
Uflfw*nt M% A
V*.
3 ) t 12
2 - *■J
n
U '
------------= = — TEt e
u
* ■ 1 c . - T - T . . 1i 0 , L ' o> n3 («g> (mm) «*g> «*g>i 0 9 3 2 5 35.38 1 5 4 8 2
« u «7.92 32.65 1 3 2 3 5
i 4 90 79.60 40.01 109.99
• •15 68.93 47.02 87.98
7 60 57X11 53.10 6 6 90
¿ j „ n 45.47 57.41 47.5990 3 6 0 6 59.00 31.00
10 ios 29.94 5 7 8 1 17.59
u i » 2 7 0 3 S3.10 6 9 0
u i » 26.51 47.02 -2-0211 150 27.64 40.01 -10.01
W 165 29.96 32-65 -1 7 8 5
>» 190 3 3 2 5 25.38 •25.3816 195 3 7 8 0 18.57 -33.52
*7 210 42.39 12-37 42.37225 48.23 7 2 1 -52.21240 5 4 8 8 3.29 8 3 .2 9
zo 255 62.23 0.84 •7 5 8 4Z1 220 70.00 0.00 ■90.00
zz 295 77.76 0 8 4 1 0 5 8 4Z1 KO 8 4 8 8 3.29 •123 29
315 9 0 66 7.21 1 4 2 2 1
» 330 94.35 12.37 •162 37 |z. 345 95.35 18.52 -183.52
¡1 360
n
93.25 25.38 2 0 5 38
f ig u r a 4 J7 Itosiciones d e la varilla d e em pu je del p rob lem a d e e jem plo 4.10.
4 .1 2 D I A G R A M A S D E D E S P L A Z A M I E N T O
U na vez q u e se efectúa el análisis de posic ión d e u n ciclo c o m pleto, es m u y razonable g rafica r el desplazam iento de u n p u n to e n relación co n el desp lazam ien to de o t r o p u n to . Lo m ás fre c u e n te e s g ra fic a r el d esp lazam ien to de u n p u n to so b re el segu ido r e n relación co n el desplazam iento de u n p u n to sob re el im pulsor.
C o m ú n m en te , el desp lazam ien to d e l im p u lso r se g ráfica sob re la h o rizo n ta l. E n el caso d e u n a m anivela , el d esp lazam ien to del im p u lso r es de u n a revo lución . El desp lazam ien to
correspondiente del segu ido r se gráfica a lo largo de la vertical. 3 desplazam iento graficado sob re el eje vertical p u ed e ser lineal o ang u la r, d e p e n d ie n d o d e l m o v im ie n to q u e se o b tie n e del m ecan ism o específica
PR O B LEM A D E E JE M PL O 4.11
La figura 4 3 8 ilustra el m ecanism o im pulsor de u n com presor reciprocante. Elabore u n diagram a de desplazamiento «fcl desplazam iento del pistón en relación con u n g iro d d cigüeñal.
SO L U C IÓ N : 1. Elabore el diagram a cinemático
Después de un exam en rigu rosa el m ecanism o del com presor se identifica como u n m ecanism o de manivela- corredera. Recuerde que este m ecanism o tiene u n grado de libertad y se opera con el g iro de la manivela. En la figura 4 3 9 se muestra el diagram a cinem ático con las dim ensiones adecuadas.
www.FreeLibros.me

A n á lisis d e p o sic ió n y d esp lazam ien to__________99
C a b r a d p i c i ta id o
h g u r a 4.M C o m p reso r del p rob lem a de e jem plo 4.11.
C
2.0Q>
.75r— B 0>
(DHGURA 4.39 D iagram a cinem ático del p rob lem a d e e jem plo 4.11.
IHseile la fa s e d e referencia
Cóm o se observa en la figura 4 J 9 . ia fase de referencia se elige arbitrariam ente co n la manivela en posición vertical, colocando la unión B ¿ rec tam en te arriba de la unión A . La poskión del pistón (el p u n to C) se m ide a partir de esta posición de referencia.
C onstru ya las fases del in terva lo
Los desplazamientos reales se determ inan, analítica o gráficamente, usando los m étodos presentados en las secciones anteriores. Para d m ecanism o de manivela-corredera, el desplazamiento se obtuvo analíticamente con las ecuaciones ( 4 J ) a (4 3 ). C on u n a hoja de cálculo, los resultados se obtuvieron co m o se m uestran en la figura 4.40. El desplazamiento de la manivela (0 ,) se m ide en grados; y el desplazam iento del pistón (ARc), en puli d a s ( in ).
Iden tifiqu e las posiciones lim ite
Centrándose en la posición del pistón, la oscilación se ap rtn im a como
l A ^ U - U O t a
C om o se vio en el problem a anterior, esto es solo u n a aproximación, porque en increm entos de 30* la posid ó n lim ite n o se detecta co n precisión. Sin em bargo, para el m ecanism o de m an i ve la-corredera en linea, u n exam en de la geometría revela q u e las posiciones lim ite se presentan en los ángulos 0* y 180" de la manivela. Por consiguiente, la carrera e s exactamente de 13 0 in .
Elabore e l d ia g ra m a d e desp lazam ien to
Los valores obtenidos en la hoja de cálculo y tabulados en la figura 4.40 se gráfica ron en la figura 4.41 para crear d diagram a de desplazamiento.
www.FreeLibros.me

100 CAPITULO CUATRO
%c* ■►l*I* '•««Ut»* ’amuMi M i « « • **■
•* A r«#iNr»fc- ie •- J »• -•
" - - >• * * t i -W t* ♦ -
COM- r% •
:• > A 21* — « ‘ HuRbat '•
fll • ------- *B A _ 1 ------ L ____
1 Angulo de Desplazamiento
2 la manivela drl pistón
3 (deg) (in )
1 0 0 .0 0 0
5 3 0 0 .1 3 6
6 6 0 0 .4 8 37 9 0 0 .8 9 6
8 1 2 0 1.2339 150 1.435
10 180 1 .500
u 2 1 0 1.43512 2 4 0 1.233
13 2 7 0 0 .8 9 614 3 0 0 0 .4 8 3
15 3 3 0 0 .1 3 6
16
- • * - « * -
3 6 0 0 .0 0 0
•nd m i o rí» m om ii »»io
OfttMO» **»*•' C*U«U4
A > * * * ' r A r x \ro ,« u - * • » T JSana rm ta
FIGURA4.40 (tosido ncs de desplazam ientos del p rob lem a d e e jem plo 4.11.
A ^ a <V U ataai«t»
= F
FIGURA 4.41 D iagram a de desplazam iento del p rob lem a d e e jem plo 4.11.
www.FreeLibros.me

A n á lis is d e p o s ic ió n y d e sp la z a m ie n to _________101
4 . 1 3 C U R V A S D E L A C O P L A D O R
C on frecuencia, la fo n d ó n de u n m ecanism o es gu ia r u n a pieza a lo largo d e u n a trayectoria especifica Las trayectorias generadas p o r los p u n to s d e u n a b iela , o u n acoplador, de u n m ecanism o de cuatro barras co n frecuencia logran lo s m ovim ientos com plejos que se desean , l a ru ta de u n p u n to es la trayectoria q u e sigue el p u n to conform e el m ecanism o se m ueve a través de su d d a La trayectoria t razad a p o r cualquier p u n to del acop lad o r se conoce com o curva de acoplador. Las d o s curvas d e acoplador, e s decir, aquellas trazadas p o r las un iones d e p e rn o d d acoplador, so n a r cos sim ples, co n c e n tro en lo s dos p iv o tes fijos. N o ob stan te , o tro s p un tos d d acop lad o r siguen curvas com plejas. La figura 4.42 ilustra u n m ecanism o de cuatro b a rra s , d o n d e se despliegan las curvas del acop lador de u n o s cuan tos p u n to s seleccionados.
FIGU RA «.42 C urvas d e acoplador.
Los m éto d o s de este cap itu lo sirven p a ra co n s tru ir la ru ta d d m ovim iento d e ciertos p u n to s so b re u n m ecanism o. La secc ión 4.10 in tro d u c e el concepto de la construcción d e la configuración en varias fases d e su d d o . P or la m anera co m o se cons tru y en tales fases, se p u e d e v isualizar la posic ión de ciertos p u n to s . La cu rv a fo rm ad a c u a n d o se u n e n las p o sic io n e s de estos p u n to s en v arias fases del m ecan ism o d e te rm in a la ru ta de ese p u n to . Si los p u n to s se encuen tran en u n eslabón flotante, la ru ta resultante, o cu rv a d d acop lador, es com pleja. Estas rutas se u tilizan para d e te rm in ar los requerim ientos espaciales d e u n m ecanism o.
PROBLEMAS
A u n c u a n d o la s té c n ic a s d e d i b u j o m a n u a le s s o n d id á c t i c a s e n lo s p r o b le m a s q u e r e q u i e r e n s o l u c i ó n g r á f i c a , s e r e c o m ie n d a a m p l i a m e n te d u s o d e u n s i s te m a d e c a d .
D esp lazam ien to e n g en e ra l
4 - 1 . El d ispositivo q u e se m uestra e n la fig u ra P4.1 es u n m ecanism o d e yugo escocés. L a posición h o rizo n ta l d d eslabón 4 se d e fin e c o m o x - 3 eos (5 0 f + 40°), D eterm ine d desplazam iento del eslabón 4 d u ra n te un intervalo de 0 .1 0 a 1.50 s.
4 - 2 En d m ecan ism o de yugo escocés de la fig u ra P4.1, la posición h o rizo n ta l del eslabón 4 se define co m o x = 3 eos (5 0 f + 40°). D eterm ine d desp lazam ien to del eslabón 4 d u ra n te u n intervalo de 3.8 a 4 .7 s.
F IG U R A N .! Problem as 1 y 2.
A nális is g rá fic o d d d e sp la z a m ie n to
4 - 3 . D eterm ine g ráficam ente el desp lazam ien to de los p u n to s P y Q co n fo rm e el eslabón m o stra d o e n la figura P4.3 se d esp laza 25° en se n tid o a n tih o ra r io . Use P - 5 5 ° y y = 30*.
P
Q
FIGU RA P 4 J P r o b le m a s 3 , 4 , 3 8 , 3 9 .
4 - 4 . D eterm ine g ráficam ente el desplazam iento de los p u n to s P y Q co n fo rm e el eslabón m o stra d o en la figura P4.3 se d esp laza 35* en d se n tid o h o ra r io . Use / í ” 65° y y • 15*.
4 - 5 . Posicione gráficamente los eslabones del eslabonam iento com preso r en b configurac ión m o strad a en la figura P4.5. Luego, rep o sid o n e lo s eslabones co n fo rm e la n u n iv e la de 4 5 m m g ira 90° e n se n tid o an tih o ra rio . Determine d desplazam iento resultante d d pistón.
4 - 6 . I Y »idonc gráficamente los eslabones d d com presor en la configuración m ostrada en la figura P 45 . Luego, reposid o n e lo s eslabones conform e la m anivela de 45 m m gira 120° e n d sen tido horario . D eterm ine d desplazam iento resultante d d pistón.
FIGURA P 4 3 Problem as 5 ,6 .4 0 .5 6 ,6 3 ,7 0 ,7 6 .8 2 .
www.FreeLibros.me

102 CAPITULO CUATRO
4 - 7 . l\> sidone g rá fica m e n te lo s eslabones d e l m ecan ism o de c o rte en la configuración m o strad a en la fig u ra P4.7. luego, rep o sid o n e lo s eslabones co n fo rm e la manivela de 0 .75 in g ira 100° en el se n tid o h o rario . D eterm ine d desplazam iento resu ltan te d e la cuchilla.
4 - 1 1. Ifosicione g rá ficam en te los e sb b o n e s d e la p u e rta del h o rn o en la configuración m o strad a en b figura P 4 .11. Luego, re p o s id o n e lo s e sb b o n e s co n fo rm e el mango, que se encuen tra o rig in a lm en te en 10°, g ira has ta los 40* en el se n tid o a n t ih o r a r ia D eterm ine el d esp b za- m icn to resu ltan te de la p u e r ta
FIGU RAP4.7 P rob lem as7 .8 . 4 1 .5 7 . 64. 71 .77 .83 .
4 - 8 . Posicione g rá fica m e n te lo s e sb b o n e s d e l m ecan ism o de c o rte en la co n fig u rad ó n m o strad a en la fig u ra P4.7. lu eg o , rep o sid o n e los eslabones co n fo rm e la cuchilla desdende 0 2 in . D eterm ine el desplazam iento angular resultante d e b m anivela
4 - 9 . to s id o n e g rá fica m e n te lo s eslabones d e l m ecan ism o de e s tam p ad o e n la c o n f ig u ra d ó n m o stra d a en la figura P4.9. Luego, re p o s id o n e lo s eslabones conform e el m ango g ira 15® en el se n tid o h o rario . D eterm ine el desplazam iento resultante del sello y el despbzam ien to lineal del extrem o del m a n g a
4 - 1 2 . ftzsicione g rá ficam en te los e sb b o n e s d e b p u e rta del to rn o en b co n fig u rad ó n m o strad a en b figura P4.11. l u e g a rep o sid o n e los eslabones conform e b p u e rta se d e v a 3 in . D e te rm in e e l d e sp b z a m ie n to a n g u b r ref e r i d o del m ango p a ra elevar b p u e rta 3 in.
4 - 1 3 . En b fig u ra P4.13 se m uestra u n m ecan ism o tr itu ra d o r de rocas. P osic ione g rá ficam en te lo s e s b b o n e s en b c o n f ig u ra d ó n m o stra d a . Luego, rep o sic io n e los esb b o n e s c o n fo rm e la m a n iv e b g ira 30" en el se n tid o h o r a r ia D eterm ine e l desp lazam ien to a n g u b r resultan te del ariete tritu rad o r.
360 mm
FIGURA P 4 .I3 Problem as 13. 14.4 4 .5 8 . 65. 7 2 ,7 8 . 8 4 .
4 - 1 0 . ft> sidone g rá fica m e n te lo s e sb b o n e s d e l m ecan ism o de estam pado e n b configurac ión q u e se presen ta en la figura P4.9, Luego, rep o sid o n e lo s eslabones conform e d m ango g ira 10" en sen tido a n tih o ra r ia D eterm ine el despbzam ien to resultante del sello y el despbzam ien to lineal del ex trem o del mango.
4 - 1 4 . En b figura P4.13 se observa u n m ecan ism o de tr itu rad o r d e rocas. P o sid o n e gráficam ente lo s eslabones en b c o n fig u ra d ó n m o strad a . L u e g a rep o sid o n e lo s esbbon es co n fo rm e b m an iv eb g ira 150“ en se n tid o an- d h o ra r ia D eterm ine el desplazam iento angu la r resultan te del ariete tritu rad o r.
4 - 1 5 . Posicione gráficamente los esb b o n es del m ecan ism o del im p ia d o r autom otriz posterior d e v id rio s m ostrado en b figura P 4 .I5 . L u e g a rep o sid o n e lo s e sb b o n e s c o n form e b m an iveb d e 2 in gira 50“ en el sen tido horario. D eterm ine el d e sp b z a m ie n to a n g u b r resu ltan te del brazo del lim p iador y el desplazam iento lineal en el extrem o de b ho ja del lim piador.
FIGURA P4.9 Problemas 9 .1 0 . 42.
fig u r a P4.11 Problem as 11 ,12 ,43 .
www.FreeLibros.me

A n á lis is d e p o s ic ió n y d e sp la z a m ie n to _________103
Hoja del limpiador
Brazo «VI limpwfcir
Murivcla
f i g u r a P t l 5 Problem as 1 5 ,1 6 .4 5 .5 9 .6 6 ,7 3 ,7 9 .8 5 .
4 - 1 6 . Ifosicione g rá ficam en te los eslabones d e l m ecan ism o del lim p iado r tra se ro de v id rio s m o strad o en la figura P 4 .I5 . Luego, rep o sic io n e los es lab o n es co n fo rm e la m anivela d e 2 in g ira 110® en el se n tid o h o ra rio . D eterm ine el d esp lazam ien to angu la r re su ltan te del brazo del lim p iad o r y el desplazam iento lineal e n el ex trem o de la ho ja del lim piador.
4 - 1 7 . Ifosidone g rá ficam en te lo s eslabones de las pinzas de p re s ió n m o strad as e n la fig u ra P 4 .I7 . Luego, reposiciones los eslabones co n fo rm e la m ordaza su p e rio r se ab re 40° a p a r t ir de la o rien tac ió n m o strad a , en tan to q u e la m o rd aza in fe rio r p e rm a n e c e estac ionaria . D eterm ine el d esp lazam ien to angu la r re su ltan te del m ango superior.
FIGURA P 4 J0 Problem as 2 0 .2 1 ,4 7 ,6 0 ,6 7 ,7 4 ,8 0 ,8 6 .
4 - 2 1 , Ifosicione g rá fica m e n te lo s eslabones del m ecan ism o im p u lso r del tre n de a te rr iz a je d e u n a ae ronave pe- quena q u e se m uestra en la figura P4.20. Luego, reposi- d o n e lo s eslabones conform e la manivela de 12 in g ira 110° e n el s e n tid o h o ra r io a p a r t ir de la o rien tac ió n m ostrada. D eterm ine el desplazam iento a n g u la r resultan te del ensam ble de la rueda.
4 - 2 2 . ftjs ic io n e g rá ficam en te lo s eslabones d e la b o m b a de aire de pedal q u e se ilu s tra en la fig u ra P4.22. Luego, itposic ione los eslabones conform e el pedal gira 25° en sen tido an tiho rario a p a rtir d e la o rien tac ión m ostrada. D e te rm in e el d esp lazam ien to lineal resu ltan te del p u n to X y la d is ta n d a que se retrae el d l in d ro d e aire. Asimismo, co n el d iám etro del c ilindro igual a 25 m m , d e te rm in e el vo lu m en de a ire desplazado p o r este m ovim iento.
4 —18. Ifosidone g rá ficam en te lo s eslabones de las pinzas de p resión m o strad as e n la fig u ra P 4 .I7 . Luego, reposi- d o n e s los eslabones co n fo rm e la m ordaza su p e rio r se ab re 2 0 ° a p a r t ir de la o r ie n ta d ó n m o strad a , en tan to q u e la m o rd aza in fe rio r p e rm a n e c e e s ta d o n a ria . D eterm ine el d esp lazam ien to angu la r re su ltan te del m ango superior.
4 -1 9 . C uando se g ira el to m illo de m ariposa en el m ango in fe rio r d e las pinzas de p re s ió n d e la fig u ra P4.17, se m ueve el p u n to d e p iv o te efectivo del eslabón de 7.0 cm . D u ran te este m ovim ien to , el reso rte evita q u e las m ordazas se m u ev an . Posicione g rá ficam en te los e s labones co n fo rm e el p u n to de pivote electivo se m ueve 2 cm a la d e rech a . Luego, rep o sic io n e los eslabones conform e la m ordaza su p e rio r se a b re 40" a p a r t ir de la nueva o rien tac ió n , en ta n to la m o rd aza in fe rio r p erm anece estado n aria . D eterm ine el desplazam iento an gular resultante del m ango superior.
FIGURA P4J2 Problem as 2 2 ,2 3 ,4 8 .
4 - 2 3 . Posidone gráficamente los eslabones de la b o m b a de aire de pedal que se ilu stra e n la figura P 4 3 2 . Luego, repod d o n e los eslabones conform e el c ilindro de aire se retrae 175 m m . D eterm ine el desp lazam ien to a n g u la r result ó t e del pedal y el desplazam iento lineal del p u n to X.
4 - 2 4 . Posidone g rá ficam en te los eslabones del e levador del h o rn o de m icro o n d as, q u e ay u d a a gen te en silla de ruedas, m o strad o en la figura P4.24. Luego, reposidone los eslabones co n fo rm e el a c tu a d o r lin ea l se re tra e a u n a lon g itu d d e 400 m m . D eterm ine el desplazam iento
4 - 2 0 . ftts ic ione g rá fica m e n te lo s eslabones del m ecan ism o im p u lso r del tre n de a te rr iz a je d e u n a ae ronave p e q u eñ a q u e se m uestra en la figura P4.20. Luego, reposid o n e los eslabones conform e la m anivela de 12 in g ira 60" en el se n tid o h o ra r io a p a r t i r d e la o rien tac ió n m ostrada. D eterm ine el desplazam iento a n g u la r resultan te del ensam ble de la rueda.
www.FreeLibros.me

104 CAPITULO CUATRO
angu la r re su ltan te del e s lab ó n d e so p o r te fron ta l y el desplazam iento lineal de cualqu ier p u n to sobre el p o r ta d o r del h o rn o
4 - 2 5 .
4 - 2 6 .
R>sicione g ráficam ente los eslabones del e levador del Iw rn o de m icroondas, q u e ay u d a a gen te discapacitada, m ostrado en la figura F4.24. Luego, reposicione lo s esb b o n e s co n fo rm e el eslabón d e so p o rte frontal se eleva 45° a p a r t ir d e la o rien tac ió n m o strad a . D eterm ine la distancia q u e necesita re trae rse el a c tu ad o r lineal,
to s id o n e g rá fica m e n te lo s eslabones del c o n ten ed o r del cam ión q u e se usa p a ra c a rg a r su m in is tro s en las aeronaves, co m o se in d ica e n la fig u ra P4.26. Luego, rep o sid o n e lo s eslabones co n fo rm e el p e rn o in fe rio r se desliza 0 .5 m h a d a la cabina. D e te rm in e el d esp lazam ien to lineal resu ltan te de cualqu ier p u n to d e la caja de carga.
4 - 2 8 . Posicione g ráficam ente lo s eslabones d e la p lataform a elevadora m o stra d a en la fig u ra P4.28 . D e te rm in e la longitud del c ilind ro h id rá u lic a L uega rep o sid o n e los eslabones c o n fo rm e la p la ta fo rm a se eleva a 4 0 in. D eterm ine la longitud q u e se deb e extender el c ilindro h idráulico p a ra realizar este m ovim iento.
’ k n a f o r m a
FIGURA P4.M Problem as 28, 29 ,51 .
4 - 2 9 . Ito sidone g ráficam ente lo s eslabones d e la p la tafo rm a elevadora m o stra d a en la fig u ra P4.28 . D e te rm in e la b n g itu d del c ilind ro h id rá u lic a L uega rep o sid o n e los eslabones c o n fo rm e la p la ta fo rm a desciende a 30 in. [>eterm ine la lon g itu d q u e se deb e re trae r el c ilind ro h idráulico para efectuar este m ovim ien to .
4 - 3 0 . H m ecanism o m o strad o en la figura P4.30 se usa e n los proyectores de d n e para avanzar la película. Posicione g ráficam ente lo s e sb b o n e s p a ra b con fig u rac ió n m ostrada. L u e g a reposicione los e sb b o n e s co n fo rm e b m anivela g ira 90° en el sen tido h o rario . D eterm ine el desplazam iento resu ltan te d e la u n a de avance.
F IG U R A P4J6 Problem as 2 6 ,2 7 ,5 0 .
4 - 2 7 . !\>s¡donc g rá fica m e n te lo s e sb b o n e s del c o n ten ed o r del cam ión q u e se usa p a r a c a rg a r su m in is tro s en los aeroplanos, co m o s e ind ica en la fig u ra P4.26. L u e g a reposicione los e sb b o n e s c o n fo rm e e l p e rn o in fe rio r se desliza 0 .75 m alejándose de b cabina. D eterm ine el desplazam iento lineal resu ltan te de cualqu ier p u n to de b caja de carga.
2 8 1
U ó a de — avance
f¥ m o < te d r s ln a m ifn to
4 8 m m
N it n ivela
18 m m
fe lfcu la2 5 mm
fig u r a p«j o f to b le m a s 3 0 ,3 1 ,5 2 ,6 1 ,6 8 .
4 - 3 1 . H m ecanism o m ostrado en b fig u ra P4 JO se utiliza en los proyectores de cine para avanzar b película. ft&icione gráficamente los esb b o n es p a ra b configuración m ostrada . L uega reposicione lo s e s b b o n e s co n fo rm e b m an iveb g ira 130* en el sen tido horario . D eterm ine el desplazam iento resultante de b u n a d e avance.
4 - 3 2 . Ifo s idone g rá fica m e n te lo s eslabones del m ecan ism o de b suspensión delan tera au to m o triz q u e se ilu s tra en
www.FreeLibros.me

A n á lis is d e p o s ic ió n y d e sp la z a m ie n to ________ J05
la figura P4.32. Luego, rep o sid o n e los e sb b o n e s co n form e el b razo d e c o n tro l su p e rio r g ira 20" e n el sentido h o r a r ia C alcule el desp lazam ien to resultante de b ju r te in fe rio r del neum ático . A sim ism o d e te rm in e el cam bio en b lo n g itu d del resorte.
fig u r a P4.32 Problem as 3 2 ,3 3 , 53.
4 -3 3 . Pbsicione g rá ficam en te los e sb b o n e s d e l m ecan ism o en la suspensión delantera au tom otriz q u e se ilu stra en la figura P4.32. L u e g a rep o sid o n e los e sb b o n e s c o n form e el brazo su p e rio r de con tro l g ira 10" en sen tido an tih o ra rio . D e te rm in e el d esp lazam ien to resu ltan te de b p a r te in fe rio r del n eu m ático . D e te rm in e a s im ism o el cam bio en la lon g itu d del resorte.
4 - 3 4 . Ifosicione g rá fica m e n te lo s eslabones del m ecan ism o tr itu ra d o r de rocas q u e se presen ta en b fig u ra P4.34. lu e g a rep o sid o n e los eslabones conform e b manivela gira 120° en el sen tido horario . D eterm ine el despbza- m ien to a n g u b r resultante del ariete tr itu rad o r.
FIGURA P4.34 Problem as 3 4 ,3 5 ,5 4 ,6 2 ,6 9 .7 5 ,8 1 ,8 7 .
4 - 3 5 . POsicione g rá fica m e n te lo s eslabones d e l m ecan ism o tr itu ra d o r de rocas m o strad o en la fig u ra P4.34. L uega re p o s id o n e lo s e s b b o n e s co n fo rm e b m a n iv e b g ira 75* en el se n tid o h o rario . D eterm ine el despbzam ien to angular resultante del a rie te tritu rad o r.
4 - 3 6 . Ifosicione g rá fica m e n te los e sb b o n e s d e l cam ió n de volteo q u e s e ilu s tra en b fig u ra P4.36. Luego, repo- sic io n e los e sb b o n e s c o n fo rm e s e a c o r ta el c ilin d ro
FIG URA P-t-36 Problemas 3 6 .3 7 .5 5 .
www.FreeLibros.me

106 CAPITULO CUATRO
0.15 m . D e te rm in e e l d esp lazam ien to a n g u la r re su ltan te d e cualqu ier p u n to so b re la caja.
4 - 3 7 . Ifosicione g rá fica m e n te los eslabones d e l cam ió n de volteo d e basura m o s tra d o e n b figura P4.36. Luego, rep o sid o n c lo s eslabones c o n fo rm e se a b rg a el c ilindro0.2 m . D eterm ine e l d e sp b z a m ie n to a n g u la r resultante de cualqu ier p u n to so b re la caja.
A nálisis a n a lític o d e l d e sp la z a m ie n to
4 - 3 8 . D ete rm in e an a líticam en te e l d esp lazam ien to de los p u n to s P y Q , c o n fo rm e e l e s lab ó n m o s tra d o en b figura P4.3 se d e sp b z a 30° en sen tido an tih o ra rio . Use P = 55°y y = 30*.
4 - 3 9 . D eterm ine an a líticam en te e l d e s p b z a m ie n to de los p u n to s P y Q , c o n fo rm e e l e s lab ó n m o s tra d o en b fig u ra P4.3 se d e s p b z a 40° en se n tid o h o ra rio . Use P * 6 5 ° y y - 15a.
4 - 4 0 . D eterm ine analíticam ente el desplazam iento lineal del p istón del eslabonam iento co m p reso r m o strad o en la figura P4.5, conform e la manivela d e 4 5 m m g ira 90a a p i r t i r d e su posic ión actual en se n tid o an tiho rario .
4 - 4 1 . D eterm ine analíticam ente el despbzam ien to lineal de la cuch illa d e l m ecan ism o d e c o rte m o s tra d o en b figura P4.7, co n fo rm e b m a n iv e b d e 0 .75 in g ira 50a a p a rtir d e su posic ión actual en se n tid o an tiho rario .
4 - 4 2 . D eterm ine analíticam ente el desplazam iento lineal del sello del m ecanism o m o strad o en b figura P4.9, c o n form e el m ango g ira 20a a p a r t ir de su p o sid ó n actual en el sen tido h o rario .
4 - 4 3 . D eterm ine analíticam en te el despbzam ien to lineal de b p u e r ta d e l h o r n o del m ecan ism o m o s tra d o e n b fig u ra P 4 . l l , c o n fo rm e e l m an g o d e 26 in g ira 25a a p a rtir d e su p o s id ó n actual en se n tid o a n tih o ra r ia
4 - 4 4 . D eterm ine a n a lític a m e n te e l desp lazam ien to a n g u b r del ariete del m ecanism o tr itu ra d o r d e rocas m ostrado en la fig u ra P4.13, co n fo rm e la m anivela d e 60 m m g ira 40a a p a rtir d e su p o s id ó n actual en el sen tido horario .
4 - 4 5 . D eterm ine an a líticam en te e l d e sp b z a m ie n to a n g u b r del b ra z o del lim p ia d o r tra se ro d d m ecan ism o m o strad o e n b figura P4.15, co n fo rm e b m anivela de 2 in g ira 100a a p a r t ir de s u p o s id ó n ac tu a l en el sentido h o ra r ia
4 - 4 6 . D eterm ine an a líticam en te e l d esp b zam ien to a n g u b r del m ango su p e rio r d e las pinzas m ostradas en b figura P 4 .17, co n fo rm e la m ordaza su p e rio r se ab re 25a a p a r t ir d e su posic ión a c tu a l en tan to q u e la m ordaza infer io r perm anece estac io n arb .
4 - 4 7 . D eterm ine an a líticam en te e l d e sp b z a m ie n to a n g u b r d d ensam ble d e la ru e d a d d m ecan ism o im p u lso r del tren de aterrizaje ilu strad o en la figura P4.20, conform e la m an iv eb d e 12 in g ira 60a a p a r t ir d e su p o s id ó n a c tual en se n tid o antihorario .
4 - 4 8 . D eterm ine analíticam ente la d is ta n d a q u e se retrae el d l in d ro de a i r e en b b o m b a de pedal m o strad a en la fig u ra P4.22, c u a n d o el pedal g ira 20a a p a r t i r de su posición actual en se n tid o an tiho rario . A s im ism a con u n d iám etro d d c ilind ro igual a 2 5 m m , calcule el volu m e n d e a ire desplazado d u ra n te este m ovim iento.
4 -4 9 . D eterm ine analíticam ente el desplazam iento angu la r del eslabón del so p o r te fron ta l del d e v a d o r del h o rn o de m icroondas m o strad o e n b fig u ra F4.24, co n fo rm e el actuador lineal se retrae a u n a longitud d e 425 m m .
4 -5 0 . D eterm ine analíticam ente b d is ta n c b vertical q u e desciende d c o n ten ed o r d d cam ión de b fig u ra P4.26, si los p e rn o s in ferio res se se p aran de 2.0 a 1 .5 m.
4 -5 1 . D eterm ine a n a lític a m e n te b ex tensión requerid a del d lin d ro h id ráu lico p a ra elevar la p b ta fo rm a m ostrada en b figura P4.28 u n a a ltu ra d e 45 in .
4 -5 2 . D eterm ine analíticam ente el despbzam ien to de la urta d d m ecan ism o de avance de la p d f c u b m o strad o en b figura P4.30, conform e b m an iv eb g ira 100° en d sentido horario .
4 -5 3 . D eterm ine analíticam ente el desplazam iento de b parte inferior d d neum ático del m ecanism o de la suspensión au to m o triz m o s tra d o en la figura P4.32, co n fo rm e el brazo su p e rio r de con tro l g ira 15a en el sen tido h o ra r ia
4 -54 . D eterm ine a n a lític a m e n te el d e sp b z a m ie n to a n g u b r d d a r ie te t r i tu r a d o r del m ecan ism o m o s tra d o en b figura P4.34, c o n fo rm e la m anivela g ira 95a e n d sentido horario .
4 -5 5 . D eterm ine a n a lític a m e n te el d e sp b z a m ie n to a n g u b r de la caja del cam ión d e volteo m o strad o en la figura P4.36, conform e el d l in d ro se aco rta 0.1 m.
P osic io n es lím ite (m é to d o g rá fico )
4 -5 6 . P o s ia o n e g rá fica m e n te lo s eslabones d d m ecan ism o com preso r m o strad o en la figura P4.5, p a ra b s configuraciones q u e c o lo can a l p is tó n e n su s p osic iones lim ite . D e te rm in e e l d e sp b z a m ie n to lin ea l m áx im o (carrera) d d pistón.
4 -5 7 . f t ts ir io n e g rá fica m e n te lo s e sb b o n e s d d m ecan ism o de corte m o strad o en la figura P4.7, de acuerdo co n b s configuraciones q u e co locan a la cuchilla en su s posiciones lim ite . D eterm ine el desplazam iento lineal máxim o (carrera) d e la cuchilla.
4 -5 8 . ib s id o n e gráficamente los eslabones del m ecanism o tritu rador de rocas m ostrado en ki figura P4.13, de acuerdo con las configuraciones que colocan al tr itu rador en sus posiciones lim ite. D eterm ine el desplazam iento angular (desplazam iento) m áxim o del ariete triturador.
4 -5 9 . Ifo s idone g rá fica m e n te lo s eslabones d d m ecan ism o de lo s lim p iad o res del parabrisas m ostrado en la figura P4.15, d e acuerdo co n las configuraciones que colocan d lim p iad o r en sus posic iones lim ite . D eterm ine d des- p b z a m ie n to a n g u b r (d e sp b z a m ie n to ) m áx im o del im p iad o r.
4 -60 . Posicione g rá fica m e n te lo s e sb b o n e s d d m ecan ism o actuador de b ru e d a m o s tra d o e n la figura P4.20, de acuerdo co n b s configuraciones q u e co locan d en sam ble d e la ru e d a en s u s p osic iones lim ite . D eterm ine el d esp b zam ien to a n g u la r (d e sp b z a m ie n to ) m áxim o d d ensam ble de la rueda.
4 -61 . Posicione g rá fica m e n te lo s e sb b o n e s d d m ecan ism o de avance d e b p d íc u b m o strad o e n b figura P4.30, de acuerdo c o n b s configuraciones q u e co locan el p e rn o de deslizam ien to en sus posic iones lim ite . D eterm ine el desp lazam ien to lineal m áx im o (ca rre ra ) d e l perno.
www.FreeLibros.me

A n ális is d e p o s ic i6 n y d esp la z a m ie n to_________107
4 -6 2 . Ito sidone g rá fica m e n te los eslabones d e l m ecan ism o tr itu ra d o r d e rocas m o s tra d o en la fig u ra P4.34, de c u e r d o co n tas configuraciones q u e colocan el ariete en sus posiciones lim ite . D eterm ine el desplazam iento an i l l a r (desp lazam ien to ) m áx im o del arie te tr itu rad o r.
P osic io n es lím ite (m é to d o a n a lític o )
4 -6 3 . C alcule analíticam ente el desp lazam ien to lineal m áxim o (ca rre ra ) del p is tó n d e l m ecan ism o com preso r m ostrado en la figura P4.5.
4 -6 4 . C alcu le a n a lític a m e n te el d esp lazam ien to lin ea l m á xim o (ca rre ra ) de la cuchilla del m ecan ism o de corte m ostrado en la figura P4.7.
4 -6 5 . C alcu le a n a lític a m e n te el d esp lazam ien to angu la r m áx im o (d esp lazam ien to ) del a r ie te del m ecan ism o t r itu ra d o r d e rocas m o s tra d o e n la fig u ra P4.13.
4 -6 6 . C alcu le a n a lític a m e n te e l d esp lazam ien to angu la r m áx im o (desp lazam ien to ) del m ecan ism o lim p iador del parabrisas m o strad o en la fig u ra P4.15.
4 -6 7 . C alcu le a n a lític a m e n te el d esp lazam ien to angu la r m áxim o (desplazam iento) del ensam ble de la ru ed a del m ecanism o a c tu a d o rd e b ru ed a m o strad o e n b figura W .20.
4 -6 8 . C alcule analíticam ente el desp lazam ien to lineal m áxim o (ca rre ra ) del p e rn o q u e se desliza del m ecanism o d e avance d e b p e líc u b m o s tra d o e n b figura P4.30.
4 -6 9 . C alcu le a n a lític a m e n te el d esp lazam ien to angu la r m áx im o (d esp lazam ien to ) del a r ie te del m ecan ism o tr itu rad o r d e rocas m o s tra d o e n la fig u ra P4.34.
D ia g ra m a s d e d e s p la z a m ie n to (m é to d o g rá fico )
4 -7 0 . to ra el m ecan ism o com preso r m o strad o en b figura B4.5, e lab o re g rá ficam en te u n d iag ram a de desplazam ien to d e b posic ión d e l p istón , co n fo rm e b m an iveb d a u n giro com pleto en el se n tid o horario .
4 -7 1 . Para el m ecanism o d e c o rte m o strad o en b figura P4.7, d a b o re g ráficam ente u n d iag ram a de desplazam iento d e b cuchilla, conform e b m an iv eb d a u n g iro com pleto en el sen tido h o rario .
4 -7 2 . Para el m ecanism o tr itu ra d o r d e rocas m o strad o en la figura P4.13, e labo re gráficam ente u n d iag ram a de des- p b z a m ie n to de la p o sic ió n a n g u la r del a r ie te , co n form e b m a n iv e b d a u n g iro com pleto en el sen tido horario .
4 -7 3 . Para el m ecan ism o lim p iad o r de parabrisas m ostrado en b figura P4.15, elabore g ráficam ente u n d iag ram a d e desp lazam ien to d e la p o s id ó n a n g u la r del lim pia- <for, co n fo rm e la m an iv eb d a u n g iro co m p le to en el sen tido h o rario .
4 -7 4 . to ra el m ecan ism o a c tu ad o r d e la ru ed a m o strad o en la fig u ra P4.20, e lab o re g ráficam ente u n d iag ram a de desplazam iento de la posición angular del ensam ble de b nieda. co n fo rm e la m an iv eb d a u n g iro com pleto en el sen tido h o rario .
4 -7 5 . Para el m ecanism o tr itu ra d o r d e rocas m o strad o en b figura P 4 J4 , elabore gráficam ente u n diagram a d e desp lazam iento de la p o sid ó n angular del ariete, conform e la m an iveb d a u n g iro com pleto e n el se n tid o h o ra r ia
D iag ram as d e d c s p b z a m ic n to (m é to d o an a lítico )
4 -7 6 . Para el m ecan ism o co m p reso r m o s tra d o en la figura 1*4.5, e labo re analíticam ente u n diagram a d e despbza- m ien to p a ra la p o s id ó n del p is tó n , c o n fo rm e la m an iv eb d a u n g iro com pleto en sen tido an tiho rario .
4 - 7 7 . P ara el m ecanism o de corte m o s tra d o en b fig u ra P4.7, d a b o re an a líticam en te u n d tag ram a de d c s p b z a m icn to p a ra b p o s id ó n de la c u c h ilb , c o n fo rm e b m anivela d a u n g iro com pleto e n sen tido an tiho rario .
4 -7 8 . P ara el m ecanism o tr itu ra d o r de rocas m o strad o en la figura P4.13, e labo re an a líticam en te u n d iag ram a de d esp lazam ien to p a ra b p o s id ó n a n g u la r d d a rie te , conform e la m anivela d a u n g iro co m p le to e n sen tido <mt ¡horario .
4 - 7 9 . P ara d m ecanism o lim p iad o r d d parabrisas m ostrado en la figura P4.15, elabore analíticam ente u n diagram a de desplazam iento p a ra b p o s id ó n angu la r d d lim p iador, c o n fo rm e b m an iv eb d a u n g iro com pleto e n se n tid o antihorario .
4 - 8 0 . Para el m ecanism o actuador d e b rueda m ostrado en b figura P 4 2 0 , elabore analíticam ente un diagram a de desp lazam ien to para la p o s id ó n angu la r del ensam ble de la rueda, conform e b m an iveb d a u n g iro com pleto en sen tido antihorario.
4 - 8 1 . Para d m ecanism o tr itu ra d o r de rocas m o strad o en b figura P 4 J4 , elabore analíticam ente un diagram a de desplazam iento de la posid ó n angular del ariete, conform e b manivela da u n giro com pleto en sen tido antihorario .
P ro b le m a s de d e sp la z a m ie n to u s a n d o W o rk in g M o d e l
4 - 8 2 . t o r a d m ecan ism o co m p reso r m o s tra d o e n b figura P4.5, u se el so ftw are W o rk in g M odel p a ra c re a r una á m u la d ó n y e labo rar u n d iag ram a d e desplazam iento p i r a la posic ión d d p is tó n , c o n fo rm e la m an iv eb da u n g iro com pleto en se n tid o a n tih o ra r ia
4 -8 3 . Para el m ecanism o de c o rte m o s tra d o en la figura P4.7, use el softw are W ork ing M odel para crear u n a sim u- ta d ó n y elaborar u n diagram a de desplazam iento para la p o s id ó n d e b c u c h ilb , co n fo rm e b m a n iv e b d a u n giro com pleto en se n tid o an tiho rario .
4 - 8 4 . P ara el m ecanism o tr itu ra d o r de rocas m o strad o en la figura P 4 .13, use el softw are W brking M odel p a ra crear u n a s im u b d ó n y e lab o ra r u n d tag ram a de d esp lazam ien to p a ra la p o s id ó n a n g u b r del ariete, co n fo rm e la m an iv eb d a u n g iro com pleto en sen tido an tiho rario .
4 - 8 5 . P ara d m ecanism o lim p iad o r d d parabrisas m ostrado en la figura P4.15, use el softw are W orking M odel para crear u n a s im u b d ó n y e lab o ra r u n d iag ram a d e desp lazam ien to p a r a b p o s id ó n a n g u b r del l im p b d o r, conform e b m an iv eb d a u n g iro co m p le to e n sen tido a n tih o ra ria
4 -8 6 . P ara el m ecanism o im pulsor de b ru ed a m o strad o en b fig u ra P4.20, use d so ftw are W ork ing M odel para crear u n a s im u b d ó n y e lab o ra r u n d iag ram a d e desp lazam ien to para la posic ión angu la r d d ensam ble de b ru ed a , co n fo rm e b m an iveb da u n g iro com pleto en sen tido an tiho rario .
4 - 8 7 . P ara el m ecanism o tr itu ra d o r de rocas m o strad o en b figura P4.34, use el softw are W brking M odel p a ra crear
www.FreeLibros.me
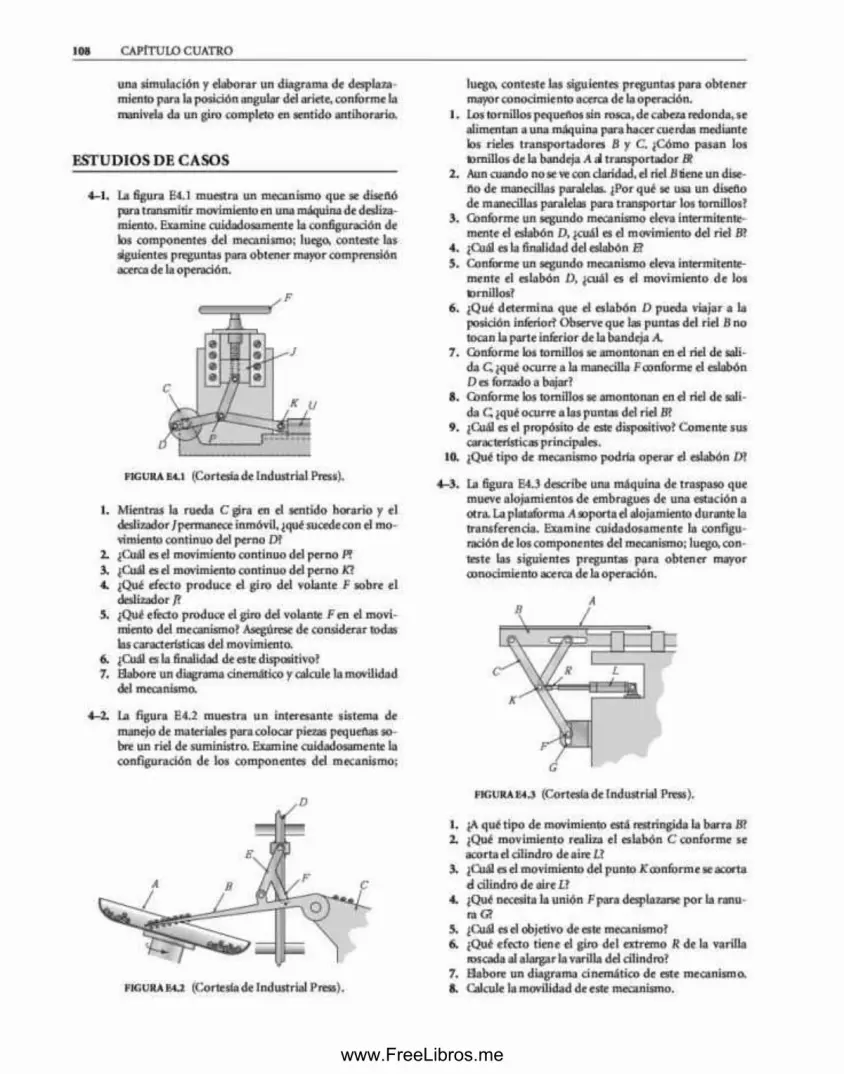
108 CAPITULO CUATRO
u n a sim u lac ió n y e lab o ra r u n d iag ram a de d esp lazam ien to p a ra la posic ión angular del a rie te , co n fo rm e la manivela d a u n g iro com pleto en se n tid o an tiho rario .
ESTUDIOS DE CASOS
f i g u r a E4.I (C ortesía d e In d u str ia l Press).
1. M ientras la ru ed a C p r a en el se n tid o h o ra rio y el d eslizador/perm anece inm óvil, ¿qué sucede co n el m o vim iento c o n tin u o del p e rn o D?
2. ¿Cuál e s el m ovim iento c o n tin u o del p e rn o Pt3. ¿Cuál e s el m ovim iento c o n tin u o del p e rn o X?4. ¿Q ué e fec to p ro d u c e el g iro del vo lan te F so b re el
deslizador 7?5. ¿Q ué efecto p ro d u ce e l g iro del vo lan te F en el m o v i
m ien to del m ecanism o? Asegúrese de co n sid era r todas las características del m ovim iento.
6. ¿Cuál e s la finalidad d e este dispositivo?7. H abore u n d iag ram a cinem ático y calcule la m ovilidad
del m ecan ism o
4 -2 . La fig u ra E4.2 m uestra u n in te resan te sis tem a de m anejo de m ateriales p aro co locar piezas pequeñas so bre u n riel d e sum in is tro . Exam ine cu idadosam ente la con fig u rac ió n d e los co m p o n en tes del m ecan ism o;
FIGURA P.4.2 (Cortesía de Industrial Press).
luego, co n te s te las sigu ien tes p reg u n tas paro o b te n e r m ayor conocim ien to acerca de la operación.
1. Los to rn illo s pequeñ o s sin rosca, de cabeza red o n d a , se alim entan a u n a m áq u in a para hacer cuerdas m ediante los rieles tra n sp o r ta d o re s B y C . ¿C óm o p a sa n los tom illo s de la bandeja A d tra n sp o rta d o r B?
2 . Aun cu an d o n o se ve con claridad, el riel B tiene u n diseñ o de m anecillas paralelas. ¿P or q u é se usa u n diseño de m anecillas paralelas para tra n sp o rta r lo s tom illos?
3 . C onform e u n seg u n d o m ecan ism o eleva in term iten tem en te el eslabón D , ¿cuál es el m ovim iento del riel B?
4 . ¿Cuál e s la finalidad del eslabón £?5 . C onform e u n seg u n d o m ecan ism o eleva interm itente
m en te el e s lab ó n D , ¿cuál es el m o v im ien to d e los tornillos?
6 . ¿Q ué d e te rm in a q u e el e s lab ó n D p u ed a v ia ja r a la posición inferior? O bserve q u e las p u n ta s del riel B no tocan la p a rte in fe rio r de la b an d e ja A
7 . C onform e los tom illo s se am o n to n an en el riel de salida C ¿qué o c u rre a la m anecilla F confo rm e e l eslabón D e s forzado a bajar?
8 . C onform e los tom illo s se am o n to n an en el riel de sa lida C ¿qué o c u rre a las p u n ta s del riel B?
9 . ¿Cuál es el p ro p ó sito d e este dispositivo? C o m en te sus características principales.
10. ¿Qué tip o de m ecan ism o p o d ría o p e ra r el eslabón D?
4 -3 . La figura E4.3 describe u n a m áq u in a d e tra sp aso que m ueve a lo jam ien to s d e em bragues de u n a estac ión a o tra . La p la tafo rm a A soporta el a lo jam ien to du ran te la transferencia . Exam ine cu id ad o sam en te la co n fig u ración de lo s co m p o n en tes del m ecanism o; luego, co n teste las s ig u ien tes p regun tas p a r a o b te n e r m ayor conocim iento acerca de la operación .
1. ¿A q u é tip o de m ovim iento está restring ida la b a r ra B?2. ¿Qué m o v im ie n to realiza e l e s lab ó n C co n fo rm e se
aco rta el c ilind ro de aire L?3. ¿Cuál es el m ov im ien to del p u n to K co n fo rm e se acorta
el c ilind ro de a ire L?4 . ¿Qué necesita la u n ió n F p a ra desplazarse p o r la ra n u
ra G?5 . ¿Cuál es el objetivo d e este m ecanism o?6 . ¿Qué e fec to tie n e el g iro d e l ex trem o R de la varilla
roscada al a largar la varilla del cilindro?7 . H ab o re u n d iag ram a c inem ático de este m ecanism o.8 . Calcule la m ovilidad de este m ecanism o.
4 -1 . La figura E4.1 m uestra u n m ecan ism o q u e se d iseñó pura tran sm itir m ov im ien to en u n a m áquina de deslizam ien to . Exam ine cu idadosam ente la configurac ión de los com ponen tes del m ecanism o; luego, con teste las siguientes preguntas para o b te n e r m ayor com prensión acerca de la operación.
www.FreeLibros.me

C A P I T U L O
C I N C O
DISEÑO DE M ECANISM OS
O B JE T IV O SAl term in a r de estudiar este tapitu lo , el alum nose rá c a p a z d e :
1 . D e s c r ib ir la s ín te s is d e u n m e c a n is m o .
2 . D is e ñ a r u n m e c a n is m o d e m a n iv e la -c o r r e d e r a e n l in c a .
3 . D e te r m in a r u n U nguk) d e d e s e q u i l ib r io a d e c u a d o .c o n o c ie n d o
la r a z ó n d e s e a d a d e t ie m p o d e l m e c a n is m o .
4 . U s a r d ia g r a m a s d e t ie m p o p a r a s in c r o n iz a r e l m o v im ie n to , y c a lc u la r m a g n itu d e s p ic o d e v e lo c id a d y a c e le r a c ió n .
5 . D is e ñ a r m e c a n is m o s d e m a n iv e la -c o r r e d e r a d e s c e n tr a d o s ,
m a n iv e la -b a la n c ín y m a n iv e la -c e p illa d o r a c o n m é to d o s g r á f i c o s .
6 . D is e ñ a r u n s o lo e s la b ó n c o n p iv o te , q u e s e m u e v e e n tr e d o s
p o s ic io n e s d e t e r m in a d a s , u t i l iz a n d o m é t o d o s g r á fic o s .
7 . D is e ñ a r u n m e c a n is m o d e c u a tr o b a r r a s d o n d e e l a c o p la d o r
k m u e v e e n tr e d o s p o s ic io n e s e s ta b le c id a s , u s a n d o m é t o d o s g rá fico s .
8 . D is e ñ a r u n m e c a n is m o d e c u a tr o b a r r a s d o n d e e l a c o p la d o r se m u ev e e n tr e t r e s p o s ic io n e s e s ta b le c id a s , u t i l iz a n d o m é t o d o s
g rá fico s .
5 .1 I N T R O D U C C I Ó N
H asta a h o ra se h a n a n a liz a d o b ás icam en te m ecan ism o s existentes. E n el capitulo an te rio r se exp lo raron m étodos para determ in a r el desplazam iento de u n m ecanism o d o n d e se co n o cen las longitudes d e sus eslabones. C om parado co n este análisis, el d i seno de u n m ecanism o e s la tarea opuesta , es decir, se cono ce el m ov im ien to deseado y se d eb en d e te rm in a r la fo rm a y las d i m ensiones del m ecanism o. Síntesis es el té rm ino que se usa para desc rib ir el p roceso de d ise ñ o d e l m ecan ism o q u e p ro d u ce el m ovim iento de sa lida deseado, d a d o u n m ovim iento de entrada. La elección de u n m ecan ism o específico cap az d e realizar el m ovim iento deseado se conoce co m o dntesis del tipo. EJ objetivo de u n d ise ñ ad o r d eb e rla se r u tiliz a r el m ecan ism o m ás sim ple capaz d e efectuar la ta rca deseada. P or tal razón, los m ecanism os de m anivela-corredera y d e cuatro b a rra s son m uy favorecidos. Este cap ítu lo se enfoca en estas d o s ciases de mecanismos.
Después d e se leccionar u n tipo de m ecanism o, se requiere d e te rm in ar las lo n g itu d es adecu ad as del eslabón m ed ian te u n proceso llam ado síntesis dimensional. Este cap itu lo exam ina la síntesis d im ensional. Para d iseñar u n m ecan ism o se deb e usar la in tu ic ión , ju n to co n lo s m éto d o s de análisis descritos e n cap í
tulos anteriores. Esto im plica co n frecuencia u n a m etodo log ía de análisis-iteración q u e p o d ría volver ineficiente el proceso, sob re «xio cu an d o el d ise ñ ad o r e s in e x p e r ta S in e m b arg a este p ro ceso de iteración tien e su m é r ita sob re todo en p rocesos donde tos p roced im ien to s de síntesis n o existen o n o e s posib le a p ila r lo s . N o ob stan te , se h an desarrollado varios m étodos d e s ín tesis d im en sio n a l, q u e suelen ser b a s ta n te útiles. Este cap itu lo sirve co m o in tro d u c c ió n a ta les procedim ientos. C o m o en oca- s o n e s las técn icas analíticas se vuelven m u y com plejas, el cstu- l io se c e n tra e n las técnicas gráficas. C o m o se señala en to d o el libro, el em pleo de técnicas gráficas en u n sistem a d e c a d d a resultados exactos.
5 . 2 R A Z Ó N D E T I E M P O
M ich o s m ecanism os q u e p ro d u cen m ovim iento reciprocante se d iseñan para genera r m ovim iento s im é tr ic a es decir, la s características del m ovim iento d e la carrera hacia afuera son idénticas a las de la carrera hacia a d e n tra ( to n frecuencia tales mecanismos realizan trabajo en am bas direcciones. El m ecanism o de un m otor de gasolina y de los lim piadores del parabrisas son ejem- [ios de m ecanism os equ ilib rados cinéticam ente.
Sin e m b a rg a o tra s aplicaciones d e d iseño de m áquinas requ ie ren u n a velocidad p ro m e d io d ife ren te e n tre la ca rre ra de avance y la ca rre ra de re to rn o . Estas m á q u in a s n o rm alm en te producen trab a jo so lam ente en la carrera d e avance, de m odo «fie la carrera d e re to rn o necesita ser tan ráp ida c o m o sea p o s ible, para q u e el m ayor tiem p o de operac ió n esté d ispon ib le para la ca rre ra de t r a b a ja Las m áquinas co rtad o ras y em pacadoras son ejem plos de estos m ecanism os de reto rno rápido.
U na m ed ida de la acc ió n d e re to rn o rá p id o de u n m ecan ism o e s la razón de tiem po Q, la cual se define com o:
^ T iem po de la carrera m ás lenta
T iem p o d e la carrera m ás rápida1 (5.1)
El án g u lo d e deseq u ilib rio p e s u n a p ro p ie d a d q u e reto- d o n a la geom etría de u n m ecan ism o específico co n el tiem po d e la carrera. D icho ángulo se relaciona co n la razón de tiem p o Q de la m anera siguiente:
Q =180° 4- p
180° - p(5.2)
l a ecuación 5.2 se rep lan tea p a ra ob ten er el án g u lo de d e sequ ilib rio com o:
p = 180“( Q ~ O
( Q + 1)(5.3)
www.FreeLibros.me

l i o CAPITULO CINCO
ft>r consiguiente , en la síntesis d im ensional d e u n m ecanism o, b razón d e tiem po deseada se convierte en u n a restricción g eo m étrica necesaria a través d d án g u lo de desequ ilib rio p .
El tiem p o to ta l del c id o d d m ecanism o es:
A fado “ tiem p o d e la carrera + tiem p o de la carreram ás len ta m ás ráp ida (5.4)
Para m ecanism os q u e son im pulsados a v e lo d d a d constante p o r u n a c tu a d o r q u e g ira , la v d o c id a d requerid a de la m anivela, "taanrétU. se r e la d o n a c o n el t ie m p o d d c id o de la s igu ien te m anera:
'•'m an**, = (¿ fa id o )" ' (5.5)
PR O B LEM A D E E JE M PL O 5.1
Se \ a a disonar un m ecanism o de re tom o rápido, donde la carrera de avance debe consum ir 1 2 s y la carrera de retom o, 0.8 s. Determine h razón de tiem po, d ángulo de desequilibrio, d tiem po del d d o y la veloddad a b cual de- f rr ia im pulsare! mecanismo.
SO L U C IÓ N : 1. Calcule la razón de tiem po y el ángulo de desequilibrio
La razón de tiem po se determ ina co n la ecuación (5.1):
« - a -B ángulo de desequilibrio resultante se calcula con la ecuación (5.3):
, ( 1 3 - 1)
í = 180 o T T ÍJ = 3 tCalcule e l tiem po del ciclo del mecanismo
0 tiem po total de la carrera de avance y la de retorno es:
¿fad o " 1-2 + 0.8 = 2 0 s/rev
Calcule la \r lo c id a d requerida de la manivela
Como u n d d o de operación de la m áquina im plica tan to la carrera de avance com o la de retom o, d tiem po para que la manivela com plete u n a revolución tam bién es de 2.0 s. La velocidad requerida de la manivela, sedeterm ina como:
a*™ni«d* m ( ^ fcido)
- 0 3 rev/s2 s/rev
= 30 rev/min
\1 m i n /
En el capitulo 6 se in txodudrá form alm ente el concepto de veloddad angular.
5.3 DIAGRAMAS D E T IE M PO
Los d iagram as de tiem p o se usan co n frecuencia en el proceso d e d ise ñ o de u n m ecanism o, co m o ay u d a e n la sincronización del m ovim iento e n tre m ecanism os. P o r ejem plo, cu an d o se u t i lizan d o s m ecan ism o s para tra n s fe r ir paquetes d e u n a b a n da tran sp o rtad o ra a o tra , u n m ecan ism o eleva u n paquete de la tra n sp o r ta d o ra inferior, en ta n to q u e el o tro m ecan ism o e m pu ja e l p aq u e te h a d a la tra n sp o r ta d o ra superio r, m ien tras el prim ero perm anece inm óvil. Luego, am b o s m ecanism os regresa n a la p o s id ó n in id a l y e jecu tan o tro d d o . Se u sa u n d ia g ram a de tiem p o p a ra desplegar g ráficam ente esta in fb rm ad ó n . ft>r o tro lado, los d iagram as de tiem p o sirv en para estim ar las m ag n itu d es de la v e lo d d a d y ace le rac ió n de lo s eslabones seguidores. La v e lo d d ad de u n eslabón es la razó n de tiem p o a la cual cam bia su posic ión . La aceleración e s la razón d e tiem po
a la cual su v e lo d d a d cam b ia y está d irec tam en te re la d o n a d a con las fuerzas requeridas para o p e ra r d m ecanism o. El cap itu lo ó p ro p o rd o n a u n a c o b e rtu ra significativa del análisis d e velocid ad de lo s m ecanism os; el cap itu lo 7 se enfoca en la ace le rad ó n de lo s m ecanism os. T an to la v d o c id a d co m o la ace le rad ó n son cantidades vectoriales; n o ob stan te , tan so lo s u s m agnitudes, vy o, se u tilizan en los d iagram as d e tiem po.
Los d iag ram as d e tie m p o q u e se usan p a ra sincron izar el m ovim iento de m ecanism os m últip les, p o r lo general sup o n en aarle rad ó n constan te . M ien tras q u e lo s valores de la a e d e ra d ó n real p ro d u c id a en d m ecan ism o p o d r ía n se r m u y diferen tes (com o se verá en el cap itu lo 7 ) , el su p u esto de aceleradón c o n stan te g enera ecuaciones polinom iales de la w lo d d a d y la p o s id ó n en f iin d ó n del tiem p o . El diagram a d e tiem p o im plica la graficación de la m ag n itu d de la velocidad de salida c o n tra el tiem po. S uponiendo ace le rad ó n constan te , la gráfica d e v d o c i-
www.FreeLibros.me

D ise rto d e m e c a n is m o s I I I
d a d - tie m p o m u e s tra ú n icam en te líneas rec tas. 0 d esp lazam ien to se relaciona co n b velocidad m áxim a, la aceleración y el tiem p o m edian te b s siguientes ecuaciones.
2 VpkoA í
A R = - | a ( A / ) 2
( 5 .6 )
( 5 .7 )
Para el escenario del m ovim iento d e paquetes descrito a n te riorm ente, se desea q u e el m ecanism o de levantam iento se eleve 8X) in en 1.5 s. que perm anezca inm óvil p o r IX) s y q u e regrese en lX)s. 0 m ecanism o d e em pu je deberta perm anecer inm óvil d u ran te 1A s, em pu jar 6X) in e n 1X) s y regresar en IX» s . Los d iag ram as de tiem po de am b o s m ecanism os se m u estran en la figura 5.1. Las figu ras indican q u e cu an d o u n m ecanism o se eleva ( b velocidad ap arece co m o u n tr iá n g u lo ) , el o t r o perm anece in m óvil (sin velocidad). Además, m ientras el segundo m ecanism o em p u ja , el p r im e ro p e rm an ece in m óv il. P or lo ta n to , b s in cron ización está com probada; tam b ién la velocidad m áx im a y b aceleración se relacionan con el desp lazam ien to y el tiem p o del m ovim iento, p o r lo q u e se reescriben las ecuaciones (5.6) y (5.7), respectivam ente. Para el m ecanism o elevador.
(8.0 m)C arrera de elevación; Vpo, = 2 — = 2 ^ = 10.67 in/s
a = 4
A x
A R = (8 .0 in )
A í 2 (1 .5 s )2= 14 .22 ¡n /s-
C o n cálculos sim ib res, b velocidad p ico del re to rn o e s -16 .00 h /s y b aceleración es d e -32 .00 in/s2. Para el m ecanism o de e m bije , la velocidad pico de b carrera de em puje es igual a 12.00 in/s, en ta n to q u e b aceleración es igual a 24.00 in/s2. Para el mecanism o de em puje, b velocidad p ic o del re tom o es d e - 12.00 in/s y b aceleración es de - 24.00 in/s2.
Se observa q u e co m o la velocidad es la razón d e tiem po del cam bio d e posición , lo s p rinc ip ios de cálculo ind ican q u e el desplazam iento del m ecanism o es el área bajo la lín ea del diagram a v-t. Lo a n te r io r se observa en b ecuac ión (5 .6 ), d o n d e el desplazam iento es el área del triángu lo de velocidad: l/2 (V p,0Af). En la figura 5.1 se iden tifica el d e sp b z a m ie n to d e c a d a m o v imiento. Se deb e hacer énfasis en q u e au n cuando la velocidad y la aceleración so n estim aciones, son ú tiles en b e tap a inicial de diserto, c o m o se adv ierte en el siguiente p rob lem a d e ejemplo.
Tiempo (s)fl>
figura s .i Diagramas d e tiempo.
www.FreeLibros.me

112 CAPITULO CINCO
PRO B LEM A D E E JE M PL O 5.2
0 proceso de inserción del m ango de u n cojinete requiere que u n a transportadora se mueva 8 in en 0.4 s y q u e se de- lengi m ientras el cojinete se presiona hacia u n alojam iento **bre la transportadora. FJ cojinete debe viajar 4 in para encontrar el alojam iento y. luego, se presiona 2.0 in h a d a el alojam iento. La carrera de presión com pleta deberla tom ar 0.6 s y el retom o 0.4 s, m ientras la transportadora está funcionando.
o) Determ ine la razón de tiem po, el tiem po del c iclo y la velocidad del m otor d d m ecanism o de presión.
M Elabore los diagram as de tiem po de sincronización.
c) Calcule la velocidad pico y la aceleración del alojam iento de la transportadora.
d) Determ ine la velocidad pico y la aceleración del m ovim iento de presión del cojinete.
t ) Calcule la velocidad pico y la aceleración del re tom o después de presionar el cojinete.
f i Optimice el movimiento de m odo que b aceleración máxima de cualquier parte sea menor de lg ( Ig - .<86.4 in/»2).
S O L U C IÓ N : I . Calcule la razón de tiempo, W tiem po del ciclo y la velocidad de la i
la razón de tiem po se determ ina con la ecuación (5.1):
liv ela
0 tiem po total de b carrera de avance y el re to rno se calculan com o sigue:
A /Ollo - O ó + 0.4 s/rev
Com o u n ciclo de operación de la m áquina requiere tan to b carrera de avancr com o el retom o, el tiempo para que b manivela complete u n a revolución es d e 1.0 s. La velocidad requerida de la manivela se determ ina de h m anera siguiente:
«™n¡wU = ( A /« i» ) '
11.0 s/rev
= 60J}rev/m in
- IJ) rev/s í— 1\1 r o in /
2. Habore los diagram as de tiem po
Se construyeron los diagram as de tiem po q u e se m uestran e n b figura 5.2.
£ 10
■4------- Movimiento-------- ► sin movimiento--------------►(
:-----------
/ :| ( r \
0.00 0.20 0.40 0.00 0.80Tiempo (s)
a) Diagrama de tiempo de la transportadora
LOO
b) Diagrama de Uempo d rl mecanismo de presión
figura w Diagramas d e tiem po del problem a de ejem plo 5.2.
www.FreeLibros.me

D ise n o d e m e c a n is m o s 113
3. Calcule los parám etros de m ovim iento del alojam iento sobre la transportadora
la s m agnitudes estim adas de velocidad y aceleración del alojam iento sobre la transportadora son:
A * ( 8 0 fa)
A £ (8X3in> . ,
*17? = ‘ ¡o T í? = !ooa‘ M‘
4 . Calcule los parám etros de m ovim iento de la carrera de re torno de presión sobre el cojinete
la s m agnitudes estim adas de velocidad y aceleración de la carrera de retom o de presión sobre el cojinete son:
A R ( -d O in )
v' “ - 2 a í ' 2 - ( o
_ _ » _ 4 ( ^ o b , . ^
A i , <0.4 s)
5. Calcule los parám etros de m ovim iento de la carrera de trabajo de presión sobre el cojinete
la s m agnitudes estim adas de velocidad y aceleración de la carrera de t rabajo de presión sobre el cojinete son:
, A R ,( 6 D in )
A * (6X)in) ,
6 . Optimice e l m ovim iento
La m ayor m agnitud de aceleración e s de 200 in /s2 ~ 20CV386.4 - 0A17g, correspondiente al alojam iento del transportador. El m ovim iento se puede optim izar e increm entar la producción, sustituyendo a ~ 386.4 in/s2 (lg ) en la ecuación (5.7), para obtener u n tiem po de m ovim iento m enor en la transportadora.
L Ü . /4—£̂ !L_- 0 .2 8 8 SV a V <386.4 m/s2(386.4 in/s2)
Manteniendo igual la razón de tiem po, la carrera reducida de la presión sobre el soporte se determ ina re- can tean d o la ecuación (5.1).
A t¡ = Q A /, = 1A (0288 s) = 0432 s
La velocidad increm entada de h manivela se determ ina con la ecuación 5 A:
- (0288 + 0.432 s )" 1
I0.720 s/rcv
= 1A89 rcv/s( I = 833 rev/min6 0 s \
1 m in /
C om o la veloddad de producción está relacionada co n la velocidad de la linea, la producción se increm enta 39% usando diagram as de tiem po y optim izando el m ovimiento, m ientras se m antenga dentro de lim ites de aceleración aceptables.
5.4 D ISEÑ O D E M ECA N ISM O S DE M ANIVELA-CORREDERA
M uchas ap licaciones requ ieren u n a m áq u in a co n m ovim iento de deslizam ien to lineal rec ip ro can te de u n a com p o n en te . Los m otores d e gasolina y lo s com presores necesitan q u e u n pistón se m ueva u n a d is ta n d a p red sa , llam ad a carrera , c o n fo rm e la m anivela g ira en (b rm a constan te . O tra s ap licadones, co m o las m áq u in as de co se r y las s ie rra s d e p o ten c ia p a ra m eta l, requieren u n m ovim iento lineal reciprocante sim ilar. Esta es una fo rm a d e u tilizar el m ecan ism o de m anivela-corredera prácticam en te en to d as las ap licadones.
5.4.1 M e c a n is m o d e m a n iv e la - c o r r e d e ra e n l ín e a
Un m ecanism o d e m anivela-corredera en línea tiene el pivote de la m anivela e n e l m ism o e je de deslizam ien to del p e rn o del p istón . En la figura 5.3 se ilu stra u n m ecan ism o d e m anivela- a tr r rd e ra en línea. La carrera lA R ,!,,^ , se describe co m o la d is tancia lineal q u e recorre el eslabón q u e se desliza en tre las posiciones extrem as. C o m o el m ovim iento d e la m anivela (L j) y el brazo conecto r (L ,) e s sim étrico en relación co n el eje d e deslizam iento, el án g u lo d e la m an iv eb requerido para realizar b carre ra de avance es el m ism o q u e e l requerido p a ra el retom o. P or
www.FreeLibros.me

114 CAPITULO CINCO
FIGURA 5.3 M ecanism o d e m anivela-corredera en linea.
tal razó n , el m ecanism o de m anivela c o rre d e ra en linea p roduce u n m ov im ien to e q u ilib ra d a Si se su p o n e q u e la m anivela « i m pulsa co n u n a fuen te de velocidad constan te , co m o u n m o to r e lé c tr ic a el tiem po tra n sc u rrid o d u ra n te la carrera d e avance es igual al tiem p o de retorno.
H d iseno de u n m ecanism o d e m anivela-corredera en linea im plica la d efin ic ión de la lo n g itu d ad ecu a d a d e lo s d o s es* tabones. L j y ly , p a ra lograr la carrera deseada, lAR4lm íl. C o m o se observa en la fig u ra 5 J , la carrera d e l m ecanism o d e manivela- corredera en linea es d d do b le d e la lon g itu d de la manivela, es decir, la d istanc ia e n tre B , y B . es la m ism a q u e la d istanc ia en tre C | y Cg. Por lo ta n ta la longitud de la m anivda, L¡, en u n meca nism o d e m anivela-corredera en linea se determ ina d e la siguiente m anera;
|A R ,r(5.8)
l a longitud d d brazo conector, L¡, n o afecta la carrera de un m ecanism o de m aniveb-corredera en linea. S in e m b arg a u n b ra zo conecto r pequeño p ro d u ce m ayores valo res d e aceleración. La figura 5.4 m uestra d efecto de b lon g itu d del brazo conecto r y
b distancia del descen trado (si existe), sob re la aceleración m áxim a del eslabón deslizante. Estos d a to s indican Ja ra m e n te q u e la lo n g itu d d d b ra z o conecto r d e b e r b ser t a n g ra n d e co m o sea p osib le . (O b serv e q u e en u n a m an iveb* co rred era e n linea el v a lo r del descen trad o Lt es igual a cero .) C o m o reg b p rác tica general, d b ra z o conecto r d e b e rb ser p o r lo m enos tres veces m ayor q u e b longitud de b manivela. Se tiene q u e llevar a cabo u n análisis d e ta l la d a c o m o d q u e se p resen ta e n d cap itu lo 7, p a ra d e te rm in ar b s aceleraciones exactas de los eslabones y b resu ltan te d e b s cargas inerdales.
5 .4 .2 M e c a n is m o d e m a n iv e la - c o r r e d e ra d e s c e n tr a d o
El m ecanism o ilu strad o en la figura 5.5a es u n m ecanism o de m anivela-corredera d e sc e n tra d a d o n d e se in tro d u c e b d istan - c b del d e s c e n tra d a Este descen trad o Lt e s b d istanc ia e n tre el p ivote de b m an iveb y el eje de deslizam iento. C o n la presencia del d e sc e n tra d a el m ovim iento de b m an iv eb y el b razo conecto r deja d e se r s im é tr ico en relación co n el eje d e des lizam ien ta d e m o d o q u e el ángulo d e b m an iv eb requerido p a ra efectuar b c a rre ra d e avance e s d iferen te del án g u lo de b m an iv eb necesa rio para el r e to rn a U n m ecanism o de m an iv eb co rred era con d escen trado p ro d u ce u n re to rn o ráp id o cu an d o se requiere un avance de trab a jo m ás le n ta
En b figura 5 5 a , se observa q u e A, Q y Q no son colinea- les. P or consiguiente , la carrera d e u n m ecanism o de manivela- co rred era co n descentrado siem pre e s m ayor del d o b le d e la lo n g itu d de la manivela. C onfo rm e el descentrado se increm enta, b carrera se vuelve m ás grande. Si se exam ina la figura 5 5 a , se verá q u e el rango p o sib le del descen trado se expresa com o:
L¡ < L j - L i (5.9)
En la figura 5.5a se m uestran las posic iones lim ite del eslab ó n deslizante, q u e se analizaron en el cap itu lo 4. El d iseño de u n m ecan ism o de m a n iv e b -c o rre d e ra req u ie re el cálcu lo del d e scen tra d o ( b d is tan c ia L ,) y la s lo n g itu d es de lo s d o s eslabones. L j y Ly para o b te n e r b carrera deseada y el
f i g u r a 5 .4 A c e le r a c ió n m á x im a d e b c o r r e d e r a e n m e c a n i s m o s d e m a n iv e la -c o r r e d e r a .
www.FreeLibros.me

D ise n o d e m e c a n is m o s 115
f i g u r a 5 3 M ecanism o de m anivela-corredera co n descentrado.
ángulo d e desequ ilib rio ¡i. El p roced im ien to gráfico de síntesis de u n m ecan ism o de m anivela-corredera es el siguiente:
1. Localizar el eje d e la u n ió n de p e rn o sob re el eslabón deslizante. Esta u n ió n se iden tifica co m o el p u n to (Ten la f ig u ra 5.5a.
2. D ib u ja r la s posic iones extrem as d d eslabón deslizante, separadas p o r la carrera lA R J ^ ,..
3. C onstru ir, en u n a d e las posic iones extrem as, u n a línea M cualquiera que pase p o r la u n ió n d e p e rn o del eslabón deslizante, inclinada u n án g u lo B\(. Este p u n to se iden tifica c o m o C | e n la figura 5.5b.
4. D ibujar, en la o t r a posic ión extrem a, u n a línea N q u e pase a través d e la u n ió n de p e rn o d d eslabón deslizante, id e n tificada co m o C ¡ e n la fig u ra 5.5b, in d in ad a a u n ángulo P e n re la d ó n co n b linea M . O bserve q u e 0 S - 0 W ~ P-
5. L a intersección de las líneas M y N define d p u n to pivote d e b m aniveb, el p u n to A . El descentrado L\ se obtiene a p a rtir de b construcción con la escab adecuada (figura 55b).
6. En la co n stru cc ió n de las posic iones lím ite, se observa q u e b lon g itu d en tre C , y D e s 2L¡. O bserve q u e d arco C jD tien e su c e n tro e n el p u n to A C o m o am b as lincas ( M y N)
son rad io s d d m ism o arco, el ra d io A C, es igual a las lo n gitudes A C, + C |D . R ep lan teando esta relación,
C \D = A C j — A C \
Sustituyendo y reagrupando , la lon g itu d d e b m an iv eb Lj de este m ecanism o d e m an iveb -co rredera co n descentrado se d e te rm in a com o
(5.10)
7 . En b construcción d e las p osic iones lim ite tam b ién se o b serva que
A C i = I j - Lj
R eagrupando, b lo n g itu d L , d d acop lad o r para este mecanism o de m an iveb -co rredera co n descen trado es
L j = A C , + L¡ (5 .11)
En b figura 5 .5 c se m uestra d m ecanism o com pleto . C on el p ro ced im ien to de d ise n o im p lem en tad o en u n s is te m a de c a d , se o b tien en resultados exactos.
O bserve q u e e s posib le d ib u ja r u n a línea M cualqu iera a través d d p u n to C , con u n ángulo de inclinación a rb itra ria Itor lo tan to , se p o d r ía d isertar u n n ú m ero infinito de m ecanismos funcionales. En general, el m ecanism o q u e g enera el brazo conecto r m ás g ran d e tien e aceleraciones m ás bajas y, en consecuencia, m en o res fuerzas inerrialcs. L a figura 5.4 sirve para d e te rm in a r las rep e rcu sio n es a l u s a r u n b ra z o c o n ec to r c o r to . C o m o regla práctica general, el b razo conecto r deb e s e r p o r lo m enos tres veces m ayor q u e la lon g itu d d e b m anivela. Se debe efectuar u n análisis detallado de aceleración, co m o el q u e se realiza en el ca p ítu lo 7 , p a ra d e te rm in a r b s ca rg as in e rcb le s in trínsecas.
Se d ispone de m étodos analíticos u tilizando el tr iá n g u lo de b figura 5.5b, para o b te n e r expresiones p a ra b s long itudes L „ L¡ y L), co m o u n a fu n d ó n de b carrera IAR4 linll, el ángulo de desequilibrio P y b in d in a d ó n de b lín ea a rb itra ria M (0 M).
L , = IA R J ™ ,
¿2 = lA R J n * ,
lA R J n ú x
se n (0 M) s c n ( f lM - p )
se n O )
se n (0 M) - se n (0,,t -
2 s e n ( p )
se n (0 M) + s c n (0 M - p )
2 sc n (0 )
(5 .12)
(5.13)
(5.14)
5.5 DISEÑO DE M ECANISM OS DE MANIVELA-BALANCIN
T am bién se h a analizado en varias ocasiones el m ecan ism o de m anivela-balandn. Es c o m ú n e n m uchas ap licad o n es d o n d e se requ ieren o sc ila d o n e s rep e titiv a s. La fig u ra 5.6a m u e s tra la g e o m e trb de u n m ecan ism o de m an iv eb -b a lan d n . Sem ejante a b carrera d e u n m ecan ism o de m anivela-corredera, el meca nism o de m an iv eb -b a lan d n tien e u n ángulo de desplazamiento (^0«)mdx (figura 5.6), a el cual se define co m o el án g u lo e n tre las p o sid o n es extrem as del b a la n d n .
www.FreeLibros.me

116 CAPITULO CINCO
FIGURA 5 ó M ecanism o de m aniveto-balancín.
Al igual q u e el m ecanism o d e m anivela-corredera con descentrado, el de m anivela-balancín se utiliza co m o u n m ecanism o d e retom o rápido. La razón de tiem po definida en las ecuaciones (5.1) y (5 .2 ) se aplica del m ism o m o d o en u n m ecan ism o de m in iv e to -b a lan d n . 0 á n g u lo d e desequ ilib rio p , de u n m ecanism o d e m anivela-balancín tam bién se presenta en la figura 5.6a.
En la fig u ra 5.6a se m u e s tra n las p o sic io n e s lím ite del m ecan ism o d e m an ivela-balandn . las cuales se analizaron a m pliam ente en el cap ítu lo 4. O bserve q u e to longitud radial en tre las d o s p osic iones ex trem as e s del d o b le de la lo n g itu d de la m anivela. Este c o n o d m ie n to e s im p o rta n te cu an d o se d iseña un m ecan ism o d e m aniveto-balandn.
0 d iseño d e u n m ecan ism o de m anivela-balandn implica la defin ición de las long itudes adecuadas de los cuatro eslabones p a ra o b te n e r el án g u lo de desp lazam ien to deseado (A 04)„ tf, y el ángulo de desequ ilib rio p . 0 proced im ien to gráfico d e la síntesis de u n m ecan ism o de m an ivela-balandn e s co m o sigue:
U bicar el p ivo te D del b a la n d n en la figura 5.6b.
B eg ir u n a longitud posib le L, m alquiera del b a la n d n . La b n g itu d generalm ente está restring ida p o r la to le ra n d a espacial d e l m ecanism o.D ibu jar tos d o s p o sid o n es del balancín , separadas p o r el ángulo de desplazam iento
En u n a d e las posic iones extrem as, co n s tru ir u n a lín ea M m alquiera a través del extrem o del ba lancín , inclinada a un ángulo 0 M. Este p u n to se iden tifica co m o C ¡ en la figura 5.6b.
En la o t r a p o sid ó n extrem a, d ibu jar u n a lín ea N a través «fcl ex trem o del ba lancín , el cual está inc linado a u n ángulo P en relación co n la línea M. O bserve q u e - P-
l a intersección de las líneas M y N define el p u n to pivote d e la m aniveto, el p u n to A l a lo n g itu d L, en tre lo s dos pivotes, L). se o b tien e m id ien d o to co n stru cc ió n co n to escala adecuada (figura 5.6c). E n lo s casos d o n d e se requiere un r i tm o de balanceo equ ilib rado ( Q - 1) , las líneas M y A 'son c o lin t ales. Así, el p u n to pivote A de to m aniveto se ubica en cualqu ier p a rte a lo largo d e las líneas M y Ai
Al co n s tru ir tos posic iones lím ite , se observa q u e 1a lon g itu d en tre Cj y E es 2L]. O bserve q u e este arco C ¡E tiene su cen tro e n A .C o m o am bas líneas (M y N ) so n arcos del m ism o radio , el rad io A C, es igual a tos long itudes AC, + Q £ R eagrupando esta relación se tiene:
C^E = A C j - A C,
Al su s titu ir y reagm par, to lo n g itu d d e to m aniveto L¡ de este m ecan ism o de m anivela-balancín se d e te rm in a co m o
7.
L j = - (A C j - A C , ) (5 .15)
8 . A p a r t ir d e to construcción de tos p osic iones lim ite , se o b serva q u e
AC, = 1 , - 1 2
Re-agrupando, 1a lon g itu d L , del acop lad o r d e este m ecanism o de m anivela-balancín es
L , = A C , + L2 (5 .16)
En 1a figura 5.6c se ilu stra e l m ecan ism o com pleto . En el |w so 4, to línea M se d ibu ja a trav és del p u n to C¡, co n u n ángulo de inclinación a rb itra ria 0 M. P o r lo tan to , e s posib le d iseñar un n ú m ero in fin ito de m ecan ism os íiincionalcs p a ra o b te n e r el án gulo de desp lazam ien to y to razó n d e tiem p o deseados. C o m o en los m ecan ism os de m anivela-corredera, los m ecanism os de cuatro b a r ra s q u e incluyen aco p lad o res m ás g ra n d e s te n d rá n aceleraciones m enores y, e n co n secuencia , fuerzas in e rd a le s m ás bajas.
I h a m ed ida adicional d e to “calidad" d e u n m ecan ism o de cuatro barras es el ángulo de transm isión y , q u e es el ángulo en tre d acop lador y el b a la n d n . co m o se ilu stra en to figura 5 6 c Una fu n d ó n c o m ú n en u n m ecanism o de cuatro b a rra s es convertir
www.FreeLibros.me

D is e r to d e m e c a n i s m o s 117
el m ovim iento g iratorio en oscilatorio . En tales aplicaciones, co n frecuencia e s necesario tra n sm itir g ran d es fuerzas. E n s itu a ciones as i, el án g u lo de tra n sm is ió n es d e vital im p o rtan c ia . C u a n d o el án g u lo d e tra n sm is ió n e s p eq u eñ o , se requieren fuerzas grandes para im p u lsa r el b razo del ba lan d n . Para obtener los m ejores resultados, el ángulo d e transm isión deberla estar lo m ás cerca posible de 90* du ran te el g iro com pleto de la manivela. Asi se reducirá la flexión e n las eslabones y p roducirá las co n d iciones m ás favorables de tra n sm is ió n de la fuerza. Los valores ex trem os del á n g u lo d e tra n sm is ió n se p resen tan c u a n d o b m anivela se encuen tra a lo largo de la linea d e b b ancada . Una regla práctica co m ú n es q u e n o se deberla u tilizar u n m ecanism o de cuatro b a rra s cu an d o el ángulo d e transm isión está fuera de los lim ites de 45° y 135". Se recom ienda u sa r el análisis de fuerza q u e se presenta en lo s capítu los 13 y 14, p a ra determ inar e l efecto del án g u lo d e tran sm isió n real o b te n id a
E n c ierto s casos, b longitud d e u n eslabón deb e tener una d im ensión especifica. Es m uy c o m ú n q u e se especifique u n a lo n g itu d m eta (L ,) d e b bancada. Sin e m b a rg a tan so lo b longitud (L4) del b a b n d n está especificada d ire c ta m e n te en el p ro ced im ien to q u e se acaba de describir. C o m o el m ecanism o d e cuatro b a rra s se d iseñó para o b te n e r resultados angu lares específicos, la longitud d e todos lo s eslabones se deb e m ed ir con la escala adecuada para lograr b d im en sió n deseada d d eslabón y m ante n e r el o b je tiro de diseño. T odos lo s sistem as d e c a d tienen la capacidad d e aplicar la escala adecuada a b g e o m e trfa constru ida de b figura 5.6b.
S e d e b e n ag reg ar m éto d o s an a lítico s p a ra a n a liz a r los triángulos de b figura 5 .6b y o b te n e r expresiones p a ra las lon g itu d es d e lo s eslabones ¿2, y ¿4 en fu n c ió n d d dcspbzam ien to ( A«l )nu, ,d c b lon g itu d ( ¿ () de la bancada, d d án g u lo de desequ ilib rio /? y d e b inclinación 0 M d e la linea a rb itra r ia M.
u =V k
( 5 .1 7 )
D onde:
k = s e n 2/? + 4 s e n 2((A 0 4)mlx/2 ) s e n ?(0 M + /? )
- 4 se n /? sen ((A 0 <)raíx/2 )se n (0 M + /? )
s e n ( (A 0 4W 2 + 0 M))
L ,se n ((A 0 4W 2 )L j = _______ n -----------[se n flM + sen (d .u + /? )J ( 5 .1 8 )
L2 = Ly -
s e n p
2 L 4 sen ((A 0 4)m4x/2 ) s e n 0 M
sen/3( 5 .1 9 )
5.6 D ISEÑ O D E M ECANSM OS DE M ANIVELA-CEPILLO
En b figura 5.7 se m uestra u n m ecan ism o de m anivda-cepillo q u e tiene b capac idad para razones d e tiem p o m ás altas. Se le l a m a asi p o r su u so en m áq u in as cep illado ras lim ad o ras de m etal, d o n d e u n a carrera d e c o rte le n to va seguida p o r u n reto rn o rá p id o c u a n d o n o se efectúa tra b a jo . El d ise ñ o de un m ecan ism o d e m anivela-cepillo im plica la ob ten c ió n de b lo n g itu d ad ecu a d a d e los tres e sb b o n e s p rin c ip a le s { L y L2 y Ly)
FIG U R A 5 .7 M ecanism o d e m a n iv c b - c e p i l l a d o r a .
|xira lo g ra r b carrera deseada lA R fln ^ . El proced im ien to g rá fico de síntesis d e u n m ecan ism o de m aniveb -cep illo e s com o agüe:
1. C o n s tru ir u n a lin ea cuya lon g itu d sea igual a b carrera !A R ílm a deseada. L os p u n to s ex trem os se identifican co m o D | y D j, co m o se ind ica e n b fig u ra 5.7a.
2 . C o n s tru ir u n a lin ca in c lin ad a a p a r t ir de D | y o t r a a p a rtir de D ; co n u n án g u lo igual a pt'2 co m o e n b figura 5.7a.
3 . La intersección d e las d o s lineas inclinadas ub ica el pivote del balancín , el p u n to A en b figura 5 .7a. La linea e n tre los pun tos A y D | o e n tre A y D? representa el b a la n d n y se designa c o m o Ly
4 . D ibu jar u n a linea p erpend icu lar a b linea D , D j a trav és de A . Esta linea se identifica c o m o b linea P e n b figura 5.7a.
5 . El p ivo te de la m anivela, el p u n to C , se ub ica e n cualquier lug ar de b linea P . L a d is ta n c b e n tre lo s p u n to s A y ¿ r e p resen ta la b ancada y se designa co m o L¡.
6 . D ibu jar u n a lin ea p erpend icu lar a b linea A D | a través del pu n to C l o intersección se designa c o m o fí, (figura 5.5a). La linea B, C representa b m anivela y se designa co m o Lj. De m anera sim ilar, se d ibu ja u n a linca p e rp e n d ic u b r a b línea A D ¡ a través del p u n to C. La in te rsecd ó n se designa co m o B¡.
7 . La lon g itu d d e L4, co m o se ind ica e n b figura 5.7b, se hace igual a u n valo r ad ecuado para q u e se ajuste a la apli- «ación. C o m o en lo s m ecanism os de m anivela corredera, b s long itudes m ás g ran d es reducirán las aceleraciones
www.FreeLibros.me

118 CAPITULO CINCO
O b serv e q u e el p ivo te d e I d m anivela, el p u n to C , se u b ic a a lo A-, B¡largo d e la linca P, d e m o d o q u e es posib le d isertar u n n ú m ero fli .in f in ito d e m ecan ism os funcionales. U na Li m ás g ra n d e p ro d u c irá u n a m anivela L j m ás g ran d e , la c u a l p resen ta rá m enos tuerza e n la u n ió n B, a u n q u e m ayores velocidades d e deslizam iento. Es c o m ú n co lo ca r y se leccionar el p u n to C cerca de la m itad d e la linea P.
Se p u e d e n ag reg ar m é to d o s an a lítico s p a ra a n a liz a r el tr iángu lo de la figura 5 .7a, al genera r expresiones p a ra las lon g itu d es de lo s eslabones L j y L} e n función de la ca rre ra IARpL ^ el ángulo de desequ ilib rio f i y la longitud L¡ d e la b a n cad a seleccionada. C o m o se m encionó , LÁ debería se r tan g ra n d e c o m o lo perm ita la aplicación.
« ■ - i S t e= ¿ |S c n ( /3 /2 ) (5 .21)
5.7 M ECANISM O PARA M OVER UN ESLABÓN ENTRE DOS PO SICIO N ES
En las m á q u in a s q u e m a n ip u la n m ate ria les , re su lta com ún te n e r u n eslabón q u e se m ueve d e u n a posic ión c u a lq u ie ra a o íra . C uando se especifican dos posic iones p a ra u n eslabón, los problem as de diserto q u e se gen eran se conocen co m o ántesis de dos posiciones. La tarea se realiza g ira n d o u n eslabón alrededor d e u n p u n to p ivo te único , o b ie n , u sa n d o el a c o p lad o r d e u n m ecan ism o d e cuatro barras.
5 .7 .1 S ín te s is d e d o s p o s ic io n e s c o n u n e s la b ó n q u e p iv o ta
La figura 5.8a ilu stra dos p u n to s , A y f l .q u e se en cu en tran s o b re u n e sb b ó n c o m ú n y se m ueven d e A ,B , a A }B j. Se p o d ría d ise rta r u n so lo eslabón p a ra generar este d esp lazam ien to . El p roblem a se reduce a la o b ten c ió n del p u n to pivote de este esla b ó n y a l á n g u lo q u e deb e g ira r p a ra o b te n e r el d esp laza m ien to d e s e a d a
E l p ro ced im ien to g ráfico de sín tesis p a ra d isertar u n esb b ó n q u e p ivo ta p a ra alcanzar dos posic iones e s el siguiente:
1. C o n s tru ir d o s líneas q u e conecten respectivam ente A, con A j Y Bi c o n B¡.
2. C o n s tru ir u n a bisectriz p erpend icu lar a A | A 3.
3. C o n s tru ir u n a b isec triz p erpend icu lar a B¡ B¡.
4. La intersección de estas d o s bisectrices es la ub icación q u e se requiere para el pivote del eslabón, q u e se identifica co m o el p u n to C e n la figura 5.8b. t í cen tro d e g iro en tre las d o s posic iones requeridas se conoce co m o ¡v io de desplazam iento. t í p u n to C es el p o lo de desp lazam ien to de las posic iones 1 y 2.
5. t í án g u lo e n tre el p u n to p ivo te Q A ( y A¡ es el án g u lo req u erid o q u e el eslabón deb e g ira r para p ro d u c ir el desp lazam ien to deseado. Este án g u lo se iden tifica com o1 0 en la figura 5.8c. Se diserta e n seguida u n eslabon am ien to del tip o m anivela-balancín para o b te n e r este m ov im ien to g ira to rio , si se desea im pulsor el m ecanism o co n el giro c o n tin u o d e u n a manivela.
f i g u r a 5 .8 S í n t e s i s p a r a d o s p o s i c i o n e s c o n u n e s la b ó n
q u e p iv o ta .
5 .7 .2 S ín te s is d e d o s p o s ic io n e s c o n u n a c o p la d o r d e u n m e c a n is m o d e c u a tro b a r r a sLa figura 5.9a m uestra d o s pun to s, A y B, en u n problem a idén tico a l p re sen tad o e n la sección an te rio r, q u e se deben situ ar sobre u n eslabón y m overse de A (B, a A 2B¡. En a lgunas aplicaciones qu izá sea im posible usar u n so lo eslabón co n u n pivote, p o r e jem plo cuando el p u n to pivote es inaccesible. En tales casos, se p u ed e disertar u n acop lad o r de u n m ecanism o de cuatro borras y p ro d u c ir asi el desplazam iento requerido . Se deben dete rm in a r las lo n g itu d es co rrec tas de lo s c u a tro eslabones y la ib ic a d ó n de los p un tos pivote, d e m odo q u e el acop lad o r logre d desplazam iento deseado.
H p roced im ien to gráfico p a ra d isertar u n m ecan ism o de cuatro b a rra s para la síntesis d e dos posic iones e s c o m o sigue:
1 . C o n s tru ir d o s líneas q u e conecten A t co n A ¡ y B , co n B¡, respectivamente.
2 . C o n s tru ir u n a bisectriz p erpend icu lar a A( A j.
3 . C o n s tru ir u n a bisectriz p erpend icu lar a B t Bj.
4 . Los p u n to s pivote d e lo s eslabones de en trad a y salida se ubican en cualquier lugar d e la b isec triz perpend icu lar correspondiente. Estos p u n to s p ivo te se ind ican c o m o los p un tos C y D en la figura 3.9b.
5 . l a lo n g itu d d e lo s d o s eslabones q u e p ivo tan se determ ina m idiendo las long itudes A ,C y B |D con la escala adecuada (figura 5.9c).
En la fig u ra 5.9c se ilu stra el m ecan ism o c o m p le ta C o m o los p un tos p ivo te C y D se p u ed en u b ic a r en cualqu ier lug ar a lo
www.FreeLibros.me

a
FIGURA 5.9 Síntesis d e d o s posiciones co n u n acoplador.
k irgo d e las bisectrices perpend icu lares, e s posib le disertar u n n ú m ero infinito d e m ecanism os para real i /a r el despbzam ien to d e s e a d a A dvierta q u e los eslabones m ás g ran d es q u e p ivotan g iran a ángu los m ás pequeñ o s para m over el acop lad o r en tre las dos p osic iones d esead as . E sto p ro d u ce m ayores á n g u lo s de tran sm isió n y reduce la fuerza requerid a p a ra im p u lsa r el es- b b o n a m ie n ta U n sis tem a de c a d p ro d u ce resu ltados exactos.
5.8 M ECANISM O PARA M O V ER UNESLABÓN ENTRE TRES POSICIONES
En a lgunas m áquinas q u e m anipulan m ateriales, se desea m over u n eslabón en tre tres posiciones. C uando se especifican tres posiciones p a ra u n eslabón, los problem as d e diserto q u e se generan se conocen co m o síntesis de tres posiciones. G eneralm ente n o e s p o sible u tilizar u n so lo eslabón q u e pivote en b síntesis de tres posiciones. Esta tarea se realiza co n el acop lador de u n m ecanism o de cuatro barras.
La f ig u ra 5 .10a m u e s tra d o s p u n to s , A y B . q u e p e r m an ecen so b re u n e s la b ó n y se m uev en de A iB | a A ¡B i y a A ,B ,. Se d eb en d e te rm in ar b s long itudes adecu ad as d e lo s c u a tro eslabones y b ub icación de lo s p u n to s pivote, d e m o d o q u e el a c o p b d o r p roduzca el d esp b zam ien to deseado.
El p roced im ien to g ráfico p a ra d isertar u n m ecan ism o de cuatro b a rra s p a ra b síntesis de tres p u n to s e s c o m o sigue:
1. C o n s tru ir c u a tro líneas q u e u n an A | co n co n B>.A j co n A j y B¡ c o n B¡.
2. C o n s tru ir u n a b isec triz p erpend icu lar a A | A j. u n a bisectr iz p erpend icu lar a B |B2, u n a bisectriz p erpend icu lar a A 2A j y u n a bisectriz p erpend icu lar a BjB>.
3. L a intersección de b b ise c tr iz p erpend icu lar a A tA 2 y b bisectriz p e rp e n d ic u b r a A 2A5 ub ica u n p u n to pivote, el cual se m uestra c o m o el p u n to C e n b figura 5.10b.
v / Ubkaclfln del/ 1 * Ubicación del pív«r I)
p ivo tee b)
d
f i g u r a 5.io S íntesis de tres posic iones co n u n acoplador.
4 . l a intersección d e b b isec triz p erpend icu lar a B | y la b i sectriz p e rp e n d ic u b r a B2B3 ubica el o tro p u n to pivote. Este se m uestra co m o el p u n to D en b fig u ra 5.10b.
5 . La lon g itu d d e lo s dos e sb b o n e s q u e p ivotan se d e te rm in a m idiendo las long itudes A ,C y B ¡D co n b escala adecuada, co m o se ind ica en la fig u ra 5 .7 c
H eslabonam iento com pleto se ilu stra en la figura 5.10c. O tra vez, u n sistem a d e cad p ro d u ce resultados exactos.
5.9 DEFECTOS DE C IR C U ITO Y DE RAM IFICACIÓN
C óm o se v io en el cap ítu lo 4, los circuitos de ensam ble son to das las con figu rac iones posib les q u e p u ed en p ro d u c ir lo s esb b o n e s d e u n m ecan ism o s in d e sa rm a r b s u n iones, l a figura 4.24 presen ta d o s circuitos de ensam ble p a ra u n m ecanism o de c u a tro b a r ra s . C u a n d o se s ig u e el p ro ced im ien to d e b s secciones 5.5 y 5.6, e s posible que u n a posic ión se encuen tre en un circu ito de ensam ble d i t a en te, c o m o b s d em ás posiciones. Esto se conoce co m o defecto de circuito, lo c u a l e s u n e r ro r grave en é diserto de u n m ecanism o. U na vez q u e se sin tetiza u n mecanism o de cuatro b a rra s , se d e b e rb efectuar u n análisis d e p o s ic ión p a ra verificar q u e b posic ión m e ta se logre a p a r t ir de b configuración inicial s in d esa rm ar las uniones.
www.FreeLibros.me

120 CAPITULO CINCO
O cu rre u n defecto de ram ificación c u a n d o el m ecan ism o alcanza u n a posic ión d e b loqueo e n tre posic iones m eta. A d iferencia del defec to de c ircu ito , u n defecto d e ram ificación depen d e d e la se lección del e s b b ó n im p u lso r . E n u n a co n fig u ra c ió n d e b lo q u e o , el m ecan ism o se b lo q u ea y el e sb b ó n im p u lso r es incapaz d e ac tuar. 0 defecto de ram ificación quizá n o sea u n e rro r grave en el d iseño , s i u n eslabón a lte rn o se activa para im p u lsa r el m ecan ism o e n tre las posic iones m eta.
PROBLEMAS_________________________________
C á lc u lo d e razo n es d e tie m p oF.n lo s p ro b lem as 5-1 a 5-3 se va a d iseñ ar u n m ecanism o de reto rn o rápido, d o n d e la carrera de avance to m a u n tiem p o f, y el re to rn o consum e u n tiem p o t¡. D eterm ine b razón de tiem po, el ángulo de desequilibrio y la velocidad a b cual debería im p u lsa rse el mecanismo.
5 -1 . f| = 1.1 s ; t j = 0 .8 s.
5 -2 . í, = 0 .3 5 S í , = 0 .2 0 s.
5 -3 . í, = 0 .041 s ; f , = 0 .027 s.
E n I n p r o b l e m a s 5 - 4 a 5 - 6 , u n m e c a n i s m o d e r e t o m o r á p i d o s e i m p u b a
a a » i p m y t i e n e u n á n g u l o d e d e s e q u i l i b r i o p . D e t e r m i n e la r a z ó n d e
t i e m p o y é t i e m p o j u r a c o m p l e t a r l a s c a r r e r a s d e . n a n c e y d e r e t o r n o .
5 -4 . Oí = 180 r p m ; ( i = 25°.
5 -5 . o> = 7 5 r p m ; f i = 37°.
5 -6 . o> = 5 0 0 rp m ; f¡ = 20°.
D iag ram as d e tie m p o
5-7. Una sie rra reciprocante necesita m over su h o ja 0 .75 in h a d a a b a jo e n 0 .10 s y lo g ra r s u r e to rn o en 0 .0 8 s. D e te rm in e la razó n d e tiem p o y b v e lo d d a d de b m a n iv e b . A sim ism o, e tob o re el d ia g ra m a de tiem po , lu eg o calcule b v e lo d d a d y la a c e le ra d ó n p ico del m ovim iento.
5-8. Una prensa troqueladora necesita m over u n troquel 1 5 in h a d a abajo en 0 6 0 s y su re to m o en 0 5 5 s. D eterm ine b razó n d e tiem p o y b v e lo d d ad d e la m anivela. Asimismo, elabore el diagram a de tiem po, luego calcule la veloddad y b aceleración pico del m ovim iento.
5-9 . LVi p roceso requiere u n a transportado ra p a ra m o v er paquetes 6 .0 in en 0 6 s y q u e se detenga m ien tras se aplica i n se llo al paquete. La cabeza del sello deb e recorrer 8.0 in para h a c e r contacto con el paquete. La carrera com pleta del sello debería d u ra r 0 .8 s. D eterm ine la razón de tiem po y la v e lo d d a d de la m anivela d d m ecanism o. Asimismo, e b b o re lo s d iagram as d e s in c ro n izad ó n de tiem po, luego calcule la veloddad y la ace leradón pico de los diferentes elem entos móviles.
5-10. U n proceso requiere u n a tran sp o rtad o ra para m over lita s 2 .0 in en 0.12 s y q u e el m ovim iento se detenga m ientras se aplica u n a tapa a presión sobre la lata. La tapa debe recorrer 3 .0 in para llegar a b lata. L a carrera com fle ta de b tapa debería d u ra r 0 5 5 s. D eterm ine la razón de tiem po y la velocidad de la manivela del mecanismo. Asimismo, elabo re lo s d iagram as d e s in c ro n izad ó n de tiem po, luego calcule b v e lo d d ad y b aceleración pico de lo s diferentes e lem en tos m óviles.
D i s e n o d e m e c a n i s m o s d e m a n i v c b - c o r r c d c r a
E n l o s p r o b l e m a s 5 - 1 1 a 5 - 1 8 . d i s e ñ e u n m e c a n i s m o d e m a n i v e l a -
c o r r e d e r a c o n u n a r a z ó n d e t i e m p o Q , u n a c a r r e r a ! y u n
t i e m p o p o r d d o i . U s e e l m é t o d o g r á f i c o o e l m é t o d o a n a l í t i c o .
E s p e c i f i q u e l a s l o n g i t u d e s d e l o s e s l a b o n e s L ¡, L j . e l d e s c e n t r a d o L ,
O lí e x i s t e ) y l a v e l o d d a d d e b m a n i v e l a .
5 - 1 1 . Q = 1; = 2 i n ; f = 1 .2 s
5 - 1 2 . Q = 1 ; lA R ,! ,* , = 8 m m ; t = 0 .0 8 s
5 - 1 3 . Q = 1 ; IAR«lraáx = 0 .9 m m ; t = 0 .4 s
5 - 1 4 . Q = 1.25; lA R ,! ,^ , = 2 .75¡n ; t = 0 .6s
5 - 1 5 . Q = 1.37; l A R , ! ^ = 4 6 m m ; t = 3 .4 s
5 - 1 6 . Q = 1.15; lA R ^ n * . = 1 .2 in ; f = 0 .0 1 4 s
5 - 1 7 . Q = 1.20; lA R ,! ,^ , = 0 .3 7 5 in ; r = 0 .0 2 5 s
5 -1 8 . Q = 1 .10; I A R , ! .* = 0 .6 2 5 in ; l = 0 .0 3 3 s
D i s e ñ o d e m e c a n i s m o s d e m a n i v e l a - b a l a n c í n
F h l o s p r o b l e m a s 5 - 1 9 a 5 - 2 8 . d i s e ñ e u n m e c a n i s m o d e m a n i v e b - b a -
b n c í n c o n u n a r a 2 ó n d e t i e m p o Q , u n a á n g u l o d e d e s p l a z a m i e n t o
y “ n t i e m p o p o r c i c l o f . U s e e l m é t o d o g r á f i c o o e l m é t o d o
a n a l í t i c o . E s p e c i f i q u e l a s l o n g i t u d e s d e l o s e s l a b o n e s / . | f L j , L> L « y l a
v e l o c i d a d d e l a m a n i v e l a .
5 - 1 9 . Q = 1; ( A ^ ) ^ = 78°; t = 1 .2 s
5 - 2 0 . Q = 1 ; (Mdmtx = 1 0 0 " ; t = 3 .5 s5 - 2 1 . Q = 1.15; (A 04 )mta = 55°; t = 0 .4 5 s
5 - 2 2 . Q = 1.24; (A 0 4)mix = 85«; t = 1.8$
5 - 2 3 . Q = 1.36; (A 04 )m ii = 45°; t = 1 .2s
5 -2 4 . Q = 1.20; (A 04)m¿ , = 9 6 ° ; í = 0 .3 s
5 -2 5 . Q = 1 .1 8 ;(A 0 4)m4l = 72°; í = 0 .0 8 s ; I , = 8 .0 in
5 - 2 6 . Q = 1.10, (A 04 )mta = 115°; t = 0 .2 s ; L\ = 6 .5 ¡n
5 - 2 7 . Q = 1.22; (A 04 )ralx = 8 8 ° ;/ = 0 .7 5 s ;L , = 8 .0 ¡n
5 - 2 8 . Q = 1 .08; ( A ^ W , = 105°; t = 1.50s;L \ = 100.0 m m
D i s e n o d e m e c a n i s m o s d e m a n i v e l a - c e p i l l o
E n l o s p r o b l e m a s 5 - 2 9 a 5 - 3 2 , d i s e ñ e u n m e c a n i s m o d e m a n i v e l a -
c e p i l l o c o n u n a r a z ó n d e t i e m p o Q , u n a c a r r e r a ! A R,j ra , y u n t i e m p o
p » r c i c l o / . U s e e l m é t o d o g r á f i c o o e l m é t o d o a n a l í t i c o . E s p e d f i q u e l a s
b n g i l u d e i d e l o s e s b b o n e s L j , L¡, L j . L « y b v e l o d d a d d e b m a n i v e b .
5 - 2 9 . Q = 1.50; |A R f |m* = 2 .75 i n ; t = 0 .6 s
5 - 3 0 . Q = 1.75; lA R jJm á. = 46 m m ; t = 3 .4 s
5 - 3 1 . Q = 2 .00; |A R ¿ |max = 0 .375 i n ; f = 0 .014 s
5 - 3 2 . Q = 1.80; l A R ^ = 1.2 ¡ n ; í = 0 .2 5 s
S í n t e s i s d e d o s p o s i c i o n e s , p i v o t e ú n i c o
D i l o s p r o b l e m a s 5 - 3 3 a 5 - 3 6 , u n e s b b ó n q u e c o n t i e n e l o s p u n t o s A y B d e b e s u p o n e r l a s p o s i c i o n e s l i s t a d a s e n l a t a b b d e c a d a p r o b l e m a .
D e t e r m i n e g r á f i c a m e n t e b u b i c a d ó n d e u n p i v o t e f i j o , p a r a u n s o l o e s
b b ó n q u e p i v o t a y p e r m i t a e l m o v i m i e n t o I ñ u d o . D e t e r m i n e U m b i é n
b s g r a d o s q u e d e b e g i r a r e l e s b b ó n p a r a m o v e r s e d e b p o s i c i ó n 1 a U
p » i d ó n 2.
5 - 3 3 .
C oordenad as;
Dairión I R t s i d ó n 2
A,(ln) V I u ) 8» (In)0.00006 J 6 0 0
9 . 0 0 0 0
6 . 3 6 0 0
5 0 0 0 0
9 . 9 0 0 5
9 0 0 0 0
2 6 2 9 5
www.FreeLibros.me

Diserto d e m eca n ism o s 121
5 - 3 4 .
C oorden ad as; 4 , ( 1 » ) V I » ) * , « ■ ) M » )
f o s i d ó n 1 2 .2 8 0 0 5 3 4 0 0 6 3 4 7 4 7 3 7 4 4f o n d ó n 2 9 .7 4 0 0 8 .5 0 0 0 1 2 3 0 4 2 4 3 3 6
5 - 3 5 .
C b o n la u d is ! A , (m m ) A , í m m ) 8 , (m m ) B ,< ,nm >
f o a c i ó n 1 - 5 3 . 0 0 0 41X100 7 5 .2 0 5 1 9 .4 6 9
f o a c i ó n 2 - 3 6 . 0 0 0 40X100 8 7 .7 7 0 - 8 . 1 1 2
5 - 3 6 .
C oorden ad as; A , (m m ) v — , B , (m m )
£ !
f o a c i ó n 1 2 5 .5 0 7 4 7 3 1 2 8 3 .0 0 0 11X100
f o a c i ó n 2 97X100 3 0 .0 0 0 1 5 0 * 7 6 7 1 .7 4 8
S ín tesis de d o s p o s ic io n e s , d o s p ivo tesE n l o s p r o b l e m a s 5 - 3 7 a 5 - 4 0 , u n e s l a b ó n q u e c o n t i e n e l o s p u n t o s A y B d e b e s u p o n e r b s p o s i c i o n e s l i s t a d a s e n b t a b b d e c a d a p r o b l e m a .
D e t e r m i n e g r á f i c a m e n t e b u b i c a c i ó n d e d o s p i v o t e s ( ¡ i o s y b s l o n g i
t u d e s d e l o s c u a t r o e s l a b o n e s d d m e c a n i s m o c o n u n a c o p l a d o r q u e
k r n g a d m o v i m i e n t o l i s t a d a D e t e r m i n e t a m b i é n b c a n t i d a d q u e d e b e n
g i r a r l o s e s b b o n e s q u e p i v o U n p a r a m o v e r e l a c o p b d o r d e b p o s i c i ó n
1 a b p o s i c i ó n 2.
5 - 3 7 .
C o o r d e n a d a s : A . ( l n ) Ay fin ) B ,( i» > B ,< ln )
f o a c i ó n 1 - 0 3 5 3 6 4 .8 5 0 1 4 .4 0 0 0 3 3 0 0 0
f o a c i ó n 2 - 3 . 1 0 0 0 3 2 0 0 0 1 3 5 6 2 5X1220
5 - 3 8 .
C o o r d e n a d a s : 4 . ( 1 » ) 4 ,( 1 » ) « , « ■ ) M » )
f o a c i ó n 1 0 .9 0 0 0 4 3 0 0 0 9X1380 7 .7 1 5 0
f o v b c ió n 2 - 1 . 0 0 0 0 5 .6 0 0 0 5 3 7 2 7 1 1 3 7 6 0
5 - 3 9 .
C o o r d e n a d a s ; A .(m m ) Ay (m m ) B .ím m ) B ,<m m >
f o a c i ó n 1 -4 0 X 1 0 0 - 6 0 . 0 0 0 2 8 .9 3 6 - 3 0 . 4 5 6
f o a c i ó n 2 - 6 5 3 5 0 - 2 6 3 5 2 8 .0 0 0 -4 2 X 1 0 0
5 - 4 0 .
C o o r d e n a d a s ; A ,(m r a )V — >
B . ím m ) B , (m m )
f o a c i ó n 1 - 3 7 2 6 1 —2X341 - 1 8 . 0 0 0 1 .0 0 0
f o a c i ó n 2 — 1 8 .0 0 0 - 3 . 0 0 0 0 3 5 8 - 7 . 9 6 3
g r a r lo s e s b b o n e s q u e p i v o t a n p a r a m o v e r e l a c o p b d o r d e b p o s i c i ó n
I a b p o s i c i ó n 2 y . l u e g o , d e b p o s i c i ó n 2 a b p o s i c i ó n 3 .
5 - 4 1 .
C o o r d e n a d a s : A , ( l a ) 3 , ( 1 » ) B , ( I n ) B ,ü n )
f o a c i ó n I - 1 X 1 0 0 0 - 0 . 9 0 0 0 5 .2 * 6 2 - 1 . 7 9 8 0
f o n d ó n 2 - 2 . 7 0 0 0 - 1 3 0 0 0 3 * 4 2 8 - 0 . 9 9 8 0
f o n d ó n 3 - 4 .4 0 0 0 - 2X1000 1 .7 7 1 9 - 0 3 0 6 8
5 - 4 2 .
C o o r d e n a d a s ; A , f i n ) A , ( ! ■ ) B , ( l n ) * , ( ! ■ >
f o n d ó n 1 —5 5 0 0 0 - 0 . 1 0 0 0 7 .9 8 3 6 5-2331
f o n d ó n 2 - 2 .4 0 0 0 0 .5 0 0 0 1 2 .0831 1 .1 9 9 2
f o n d ó n 3 - 0 . 6 0 0 0 1 .6 0 0 0 1 5 * 4 * 3 - 1 . 0 9 0 2
5 - 4 3 .
C o o r d e n a d a » ; A , ( m m ) A y (m m ) B , ( m m )
f o n d ó n 1 0 .0 0 0 4 0 .0 0 0 5 4 .7 7 4 4 4 .9 8 0
f o n d ó n 2 21X 100 5 1 .0 0 0 7 2 2 0 4 3 0 .9 2 0
f o n d ó n 3 39X 100 4 9 .0 0 0 8 2 .1 4 3 1 4 3 8 7
C o o r d e n a d a s : A , ( m m ) A , ( r a m ) ______» > ■ ) ____ Br ( m r a )
f o n d ó n I 4 3 .0 0 0 - 7 6 . 0 0 0 1 4 9 .8 9 0 - 50 .0 2 7
f o s i d ó n 2 3 .0 0 0 - 5 2 . 0 0 0 1 1 1 .1 2 7 - 7 2 2 1 1
f o n d ó n 3 - 1 2 . 0 0 0 - 3 3 . 0 0 0 9 1 .8 4 0 - 6 9 2 9 4
ESTUDIOS DE CASO
5 - 1 . L a figura E5.1 presen ta u n m ecan ism o q u e im pulsa el H oque /des lizan te , el cual a su vez m ueve la cuchilla de u n a sie rra de po tencia p a r a m etales . Exam ine c u id a d o sa m en te la c o n fig u rac ió n d e las co m p o n en tes del m ecan ism o . Luego, con teste b s p reg u n tas siguientes p i r a o b te n e r u n a m ayor com prensión acerca de b o p erac ión del m ecanism o.
S ín te s is d e tres p o s ic io n e sE n l o s p r o b l e m a s 5 - 4 1 a 5 - 4 4 , u n e s b b ó n q u e c o n t i e n e lo s p u n t o s A y
B d e b e s u p o n e r b s t r e s p o s i c i o n e s l i s t a d a s e n b t a b b d e c a d a p v o b lc m a .
D e t e r m i n e g r á f i c a m e n t e b u b i c a c i ó n d e d o s p i v o t e s f i j o s y b s l o n g i
t u d e s d e l o s c u a t r o e s b b o n e s d e l m e c a n i s m o c o n u n a c o p l a d o r q u e
t e n g a e l m o v i m i e n t o l i s t a d o . D e t e r m i n e t a m b i é n b c a n t i d a d q u e d e b e n
f i g u r a E 5 . I (C ortesía de In d u str ia l Press).
1. C o n fo rm e la m a n iv e b A g ira 90° e n se n tid o h o rario , ¿cuál e s el m ovim iento del ló b u lo B q u e está su jeto a b m anivela A?
www.FreeLibros.me

122 CAPITULO CINCO
2. C onfo rm e la m anivela A g ira 90° en se n tid o h o rario , ¿cuál es el m ovim iento del eslabón C?
3. ¿Se necesita u n a ra n u ra en el rod illo fc?4. C onfo rm e la m anivela A g ira 90° e n se n tid o h o rario ,
¿cuál es el m ovim iento del p e rn o H?5. C onfo rm e la m anivela A g ira 90° e n se n tid o h o rario ,
¿cuál es el m ovim iento del p e rn o 1?6. D eterm ine la m ovilidad de este m ecanism o.7. C onform e la cuerda G g ira p a ra jalar al rodillo E h a d a
abajo, ¿cóm o m odifica eso d m ovim iento del eslabón Q8. C onform e la cuerda G g ira p a ra jalar al rodillo E h a d a
abajo, ¿cóm o m odifica eso el m ovim iento del eslabón H?9. ¿Cuál e s el objetivo d e este m ecanism o?
5 -2 . La figura E5.2 ilu stra u n m ecan ism o q u e ta m b ié n im p u lsa u n b lo q u e B d e s lizan te . Este b lo q u e , a la vez, im p u lsa u n a h e rra m ie n ta de c o rte . E xam ine c u id a d o sa m en te la c o n fig u rac ió n d e las co m p o n en te s del m ecan ism o. Luego, con teste las siguientes p reg u n tas pora o b te n e r u n a m ayor co m p ren sió n so b re la ope- ra d ó n del m ecanism o.
1. C onform e la varilla A se m ueve hacia la derecha, ¿cuál es el m ovim iento del b lo q u e B deslizante?
2. D escriba el m o v im ien to d d b lo q u e B deslizan te cu an d o d rodillo C llega a la r a n u ra D.
3. D escriba el m ov im ien to d d b lo q u e B deslizan te co n form e la varilla A se m ueve a la izquierda, llevando a C fuera de la ra n u ra D.
4 . D escriba d m o v im ien to c o n tin u o del b lo q u e q u e B deslizan te co n fo rm e la v arilla A o s d la h o r iz o n ta lm ente.
5. ¿Cuál e s el p ropósito de este m ecanism o?6 . D escriba u n d ispositivo q u e im pulse la varilla A h a d a
h izquierda y h a d a la derecha.7 . ¿Qué carac terística d a n al m ecan ism o las ra n u ra s de
ajuste en £?
www.FreeLibros.me

C A P I T U L O
S E I S
ANÁLISIS DE VELO C ID A D
O B JE T IV O SAl te r m in a r d e e s tu d ia r e s te c a p itu lo , e l a lu m n os e rá c a p a z d e :
1 . D e f i n i r v e l o c i d a d e s l i n e a l e s , d e g i r o y r e l a t i v o .
2 . C o n v e r t i r v e l o c i d a d e s l i n e a l e s a v e l o c i d a d e s a n g u l a r e s
y v i c e v e r s a .
3 . U t i l i z a r d m é t o d o d e v e l o c i d a d r e l a t i v a p a r a o b t e n e r
g r á f i c a m e n t e l a v d o c i d a d d e u n p u n t o « o b r e u n e s l a b ó n ,
c o n o c i e n d o l a v e l o c i d a d d e o t r o p u n t o s o b r e e l m i s m o
e s l a b ó n .
4 U s a r e l m é t o d o d e v d o c i d a d r e l a t i v a p a r a d e t e r m i n a r , g r á f i c a
y a n a l í t i c a m e n t e , l a v e l o c i d a d d e u n p u n t o d e i n t e r é s s o b r e u n
e s l a b ó n f l o t a n t e .
5 . U t i l i z a r d m é t o d o d e v e l o c i d a d r e l a t i v a p a r a o b t e n e r
a n a l í t i c a m e n t e l a v e l o c i d a d d e u n p u n t o s o b r e u n e s l a b ó n ,
c o n o c i e n d o l a v e l o c i d a d d e o t r o p u n t o s o b r e e s e m i s m o
e s l a b ó n .
6 . U s a r e l m é t o d o d e l c e n t r o i n s t a n t á n e o p a r a d e t e r m i n a r
g r á f i c a y a n a l í t i c a m e n t e l a v e l o c i d a d d e u n p u n t o .
7 . C o n s t r u i r u n a c u r r a d e v d o c i d a d p a r a l o c a l i z a r l o s v a l o r e s
e x t r e m o s d e v e l o c i d a d .
6.1 IN TR O D U C C IÓ NEl análisis de velocidad im p lica calcular “q u é tan ráp ido" viajan ciertos p u n to s sob re lo s eslabones de u n m ecanism o. La v e lo d d a d es im p o rta n te p o rq u e asocia el m o v im ien to d e u n p u n to so b re u n m ecan ism o co n el tiem p o . C o n fre c u e n c ia , la s in - cro n izad ó n es critica en u n a m áquina.
ft»r ejem plo, el m ecanism o q u e “jala" la película de v id eo a través de u n proyector de d n e deb e avanzar la película a u n a velocidad de 30 c u ad ro s p o r segundo . El m ecan ism o q u e alim enta m aterial d e paquetería en u n a caja de em balaje tien e q u e operar en tándem co n la tran sp o rtad o ra q u e m ueve las cajas d e em balaje. El m ecanism o de u n lim p iado r de p arab risas q u e funciona a a l ta velocidad deberla a r ra s tra r el lim p ia d o r sob re el cristal p o r lo m enos 45 veces p o r m in u to .
L a d e te rm in a d ó n d e la velocidad en u n eslabonam iento es d objetivo de este cap itu lo . Se exam inarán d o s procedim ientos de aná lis is co m u n es: el m é to d o d e la v e lo d d a d re la tiv a y el m étodo del cen tro instan táneo . En congruencia co n o tro s cap ítu lo s d e e s te lib ro , s e in d u y e n ta n to técn icas g rá fica s co m o analíticas.
6.2 V ELOCIDAD LINEAL
La vdocidad linea l V de u n p u n to e s el desp lazam ien to lineal de ese p u n to p o r u n id a d de tiem p o . R ecu erd e q u e el d esp lazam ien to lineal AR de u n p u n to es u n vector, q u e se defin ió com o el cam bio en la p o sid ó n d e ese p u n to . Su concepto se in tro d u jo e n la se cd ó n 4.3.
( o rn o se describió en el cap itu lo 4, el desp lazam ien to de un p u n to se considera u n a tra s la d ó n . lo cual ya se analizó en té rm inos lineales. P or defin ición , u n p u n to ún icam ente p u ed e tener desplazam iento lineal. C uando se considera el tiem p o tran scu rrid o d u ra n te u n desplazam iento , es posib le d e te rm in ar la velo d d ad .
C óm o el desplazam iento, la veloddad tam bién es u n vector. Recuerde que los vectores s e representan co n caracteres alfabéti e o s en negritas. A la m agn itud d e la velocidad se le d e n o m in a co n frecu en d a “rapidez." y se representa co m o v m jv|. Paraconocer la dirección de la v e lo d d ad lineal, se requiere d e te rm in a r la dirección en q u e se m ueve u n p u n to en u n in stan te es- pedfico .
M atem áticam ente, la v e lo d d a d lineal d e u n p u n to se ex presa com o:
d RV = lím — (6.1)
S i—0 d r
y p a ra p e rio d o s de tiem p o co rto s com o:
V = f ' (6 .2 ,
C o m o el desp lazam ien to es u n vector, la e c u a d ó n (6 .1 ) in d ica q u e la v e lo d d a d ta m b ié n e s u n vector. C o m o co n todos los vectores, p a ra d e fin ir co m p le tam en te la v d o d d a d se requiere ta m b ié n u n a d ire c d ó n . La velocidad lineal se expresa en un idades de lo n g itu d d iv id as e n tre el tie m p o . E n el sis tem a trad id o n a l d e Estados U nidos, las un idades com unes q u e se u tilizan son pies p o r seg u n d o (ft/s o fps), p ie s p o r m in u to (ft/m in o fpm ) o pu lgadas p o r segundo (in /s o ips). E n el sistem a in te r nacional, las unidades co m u n es q u e se usan so n m etros p o r seg u n d o (m /s ) o m ilím etros p o r segundo (m m /s).
6.2 .1 V e lo c id a d l in e a l d e p u n to s r e c t i l ín e o s
Un p u n to se p u e d e m over a lo la rg o de u n a tray ec to ria recta o u n a tray ec to ria cu rv a . C o m o se vio en c ap ítu lo s an te rio res , m uchos eslabones están restring idos a u n m ovim iento en linea recta (rectilíneo). Para p u n to s q u e están sob re u n eslabón lim itado a m ovim iento rectilíneo, se u tilizan las ecuaciones (6 . 1) y (62 ) para calcular la m agnitud d e la ve loddad . La orientación del v ecto r de v e lo d d a d lineal s im p lem en te está e n la dirección d d m ovim iento, la cual generalm ente es evidente.
www.FreeLibros.me

124 CAPITULO SEIS
PRO B LEM A D E E JE M PL O 6.1
la* cajas de e m b a b u q u e s í encuen tran sobre t i banda transportadora de b figura 6 .1, se mueven had a b izquierda a velocidad constante. Le tom a 40 s recorrer los 25 ft de b banda transportadora. Determ ine b velocidad lineal de b caja.
FIGURA 6.1 T raslado de la caja del p rob lem a de e jem plo 6 .1.
S O L U C IÓ N : C om o las cajas de embalaje v iajan a velocidad constante, se utiliza la ecuación (6 2 ) pura determ inar la velocidadEnea) de la caja.
6 .2 .2 V e lo c id a d l in e a l d e u n p u n to c u a lq u ie r aLas ecuaciones (6.1) y (6 2 ) aú n son válidas en general para p u n tos sob re u n eslabón en m ovim iento. L a dirección d e la velocidad lineal de u n p u n to es la m ism a q u e la dirección de su m ovim iento instantáneo. La figura 6 2 m uestra b velocidad de dos p u n to s sobre u n eslabón. L is velocidades de los p un tos A y fl se denotan res- pectivam ente c o n V * y V » O bserve q u e au n q u e están sob re el m ism o eslabón, am bos p un tos p u ed en tener velocidades lineales diferentes. Los p u n to s q u e están m ás lejos del pivote v iajan más rápido, lo cual se “siente" al sentarse en lo s asientos exteriores de un ju eg o m ecánico q u e g ira en u n parque de diversiones.
Exam inando la figura 6 2 . se ve que la velocidad del p u n to A. V A, está d ir ig id a a lo largo de la trayectoria en q u e se m ueve el pu n to A o í ese instante, es decir, tangente a u n arco con cen tro en O , la cual tam bién es perpend icu lar al eslabón OA. En térm inos casuales, s i el p u n to A se desprendiera del eslabón 2 en ese m o m ento , el p u n to A viajarla en la dirección de su velocidad lineal.
6 .2 .3 P e rf il d e v e lo c id a d d e l m o v im ie n to l in e a lLos avances tecnológicos h an p e rm itid o el c o n tro l preciso del m o v im ie n to e n m uchas ap licac iones, co m o las d e a u to m a tización. p ru eb a y eq u ip o d e m ed ic ió n . Estos sistem as tienen in co rp o rad o s se rvom otores con tro lados p o r u n m icroprocesador. El m o v im ien to d esead o se especifica en u n co n tro lad o r. Los sensores m o n ito re a n el m ov im ien to del e s lab ó n m óvil y p ro p o rd o n a n re troalim en tación al co n tro lad o r. Si se de tec ta u n a diferencia en tre el m ovim iento deseado y el m ovim iento real, el c o n tro lad o r m od ifica rá la señal q u e va al m o to r y corregirá la desviación. P or su precisión, sensibilidad y bajo costo, el uso de servosistem as está creciendo co n rapidez.
Para u n c o n tro l d e m ovim iento óp tim o , e s deseable m ovim ien to de a l ta velocidad suave, co n u n m ín im o esfiierzo del m o tor. E l con tro lad o r debe d ir ig ir el m o to r p a ra cam biar b velod-
f ig u r a 6 2 Velocidades lineales de p un tos sob re u n eslabón.
dad acertadam ente y o b te n e r lo s m ejores resultados. En u n sistem a servo lineal, las características del m ovim iento de traslación de b com po n en te de u n a m áqu ina se especifican generalm ente con u n perfil d e velocidad m odelado . El perfil d e velocidad e s tablece los lapsos d e aceleración, estado estable y desaceleración en b traslac ión del eslabón. El desplazam iento real se ca lcu b a partir d e l perfil d e velocidad. R ep lan teando b ecuación (6.1),
J R = V J l
Al despejar para o b te n e r el desp lazam ien to AR. se obtiene:
A R = f v d t (6.3)
C on u n conocim ien to elem ental de cálculo, se sabe q u e b ecuación (6.3) indica q u e el desplazam iento para d e r to intervalo de tiem po es el área debajo de b cu rv a v-t para ese intervalo de tiempo.
PRO B LEM A D E E JE M PL O 6.2
Los servoactuadores asistidos se program an para moverse deacuerdo con u n perfil de velocidad especificado. El actuad a lineal m ostrado en b figura 6.3a fue program ado para extenderse, de acuerdo con el perfil de velocidad mostrado a i b figura 6 J b . Determ ine el desplazamiento total durante este m ovim iento programado.
www.FreeLibros.me

A n á lisis d e velocidad 125
v « !*)
S O L U C IÓ N : l.
f i g u r a 6 J ftrrfil d e v e lo d d ad del p ro b lem a d e e jem plo 6.2 .
Desplazamiento durante el lapso de aerleración del m ovim iento
Durante el p rim er segundo del m ovimiento, el actuador acelera hasta su estado estable de velocidad. El área debajo de la c u n a v-t fotm a u n triángulo y se calcula com o
A R * * ™ * , = '4 ( v .u a o ^ u b l , ) ( A t a m e t e ) = (4 ÜV*) [(1 - 0 ) s ] = 2 in ----- -
Desplazamiento duran te el lapso de m ovim iento estable
O irán te el intervalo de tiem po de I a 4.5 s, el actuador se m ueve con velocidad estable. El área debajo de la curva v-t form a un rectángulo y se calcula como
A R m a ^ u I i I . = ( v * u a o « u b i » ) ( A i ^ j o « u h w ) = ( 4 i i V s ) I H - 5 - » • ) = u “ -----------
Desplazamiento duran te el lapso de desaceleración del m ovim iento
O irá n te el intervalo de tiem po de 4 3 a 5 3 s, el actuador desacelera a partir de su estado estable de velocidad. El área debajo de la curva v-t form a u n triángulo y se calcula como
AK*MaU»d«n = = V ,(4 in /s ) ( (5 3 - 4.5)$] = 2 in ------►
Desplazamiento to ta l duran te el m ovim iento programado
B desplazamiento total durante el m ovim iento program ado es la sum a de los desplazamientos durante la ace- kración, el estado estable y la desaceleración del m ovimiento.
AR.cui ■ A 4 A R oajoauh i, -f A R ^ ^ ^ p , , - 2 4 14 4 2 - 18 in (extensión)
6.3 VELOCIDAD DE UN ESLABÓN
D iferen tes p u n to s so b re u n eslabón p u ed en te n e r velocidades lineales significativam ente d iferentes. E sto es válido so b re todo cu an d o el eslabón g ira sim p lem en te a lrededor de u n p u n to fijo, com o en la figura 6.2 . En general, el m ovim iento d e u n eslabón suele se r bastante com plejo cu an d o se m ueve (se traslada) y da vueltas (ro ta).
C u a lq u ie r m o v im ie n to , incluso e l co m p le jo , p u e d e ser v isto c o m o u n a com binación de m o v im ien to en lin ea recta y m ov im ien to giratorio . L a descripción co m p le ta del m ovim iento de u n eslabón consiste e n la iden tificación del m o v im ien to l i neal de u n p u n to y el m ovim iento g ira to rio del eslabón.
Aun cuando varios p u n to s de u n e sb b ó n pueden tener diferentes velocidades lineales, co m o se tra ta d e u n cuerpo rígido, el eslabón com pleto tiene la m ism a velocidad angular. La veloci- tkid angular tu de u n eslabón es el desplazam iento angular de esc eslabón p o r unidad d e tiem po. Recuerde q u e e l desplazam iento g iratorio 3 0 de u n eslabón se define co m o e l cam bio angu la r en la o rientación de ese eslabón. Esto se vio en la sección 4.3.
M atem áticam ente, la velocidad a n g u la r d e u n eslabón se expresa com o:
A e d oto = lim — = —
ót-o A r d r(6.4)
y p a ra p e rio d o s co rto s d e tiem po , o cu an d o la ve locidad se supo n e c o m o lineal,
tuA 0
A f(6.5)
La d irección de la v e lo d d a d angu la r es la d ire c d ó n del giro del eslabón . En aná lis is p lanar, se describe co m p le tam en te es p ed fican d o el té rm in o sentido horario o sentido antihorario. P or ejem plo, el eslabón m o stra d o en la figura 6.2 tiene u n a v e lo d dad a n g u la rq u e es consistente c o n las v e lo d d ad es lineales de los puntos q u e están en el eslabón. P o r lo tan to , el eslabón tien e una v e lo d d ad de g iro en sen tido horario .
La v e lo d d a d angu la r se expresa en un idades angulares d i v id idas e n tre el tiem p o . T a n to e n el sis tem a e s tad o u n id en se co m o en el sistem a in ternacional, las u n id ad es d e uso co m ú n son las revoluciones p o r m in u to ( rp m ) , los g rados p o r segundo (deg/s) o lo s rad ianes p o r seg u n d o (rad /s o rp s).
www.FreeLibros.me

126 CAPITULO SEIS
PRO B LEM A D E E JE M PL O 6.3
El engrane m ostrado en la figura 6.4 g ira en sen tido an tiho rario a velocidad constante. Se m ueve 300° en 0 .5 s. [> term ine la velocidad angular del engrane.
fig u r a 6.4 E ngrane g ira to rio del p ro b lem a d e e jem plo 6.3.
S O L U C IÓ N : C om o el eng ran e g ira a velocidad constante, se usa la ecuación (6.4) p a ra d e te rm in ar la velocidad angu la r delengrane.
A i ° O S » " 600 ^ ( í ! ^ ) = 50 en sentido antihorario
6.4 RELACIÓN ENTRE LAS VELOCIDADES LINEAL Y ANGULAR
En u n eslabón co n ro tac ión p u ra , la m agn itud d e la velocidad lineal de cualqu ier p u n to del eslabón se relaciona con la velocidad angu la r del eslabón. Esta relación se expresa com o
v * no (6.6)
donde:
v - IVI = m agn itud de la velocidad lineal del pun to en consideración
r ~ d istancia del c e n tro d e ro tac ión al p u n to en consideración
10 = velocidad angu la r d d eslabón g ira to rio q u e contiene d p u n to en consideración
l a velocidad lineal siem pre e s p erp en d icu la r a la linea q u e u n e el cen tro de ro tac ión del eslabón co n el p u n to en conside ración . P o r consiguiente, la velocidad lineal d e u n p u n to sob re u n e sb b ó n c o n ro tación p u ra se c o n o c e co n frecuencia com o vdocidad tangencial Lo a n te r io r se deb e a q u e la velocidad l i neal es tan g en te a la trayectoria circular del p u n to , o b ien , p erpendicular a la línea q u e u n e el p u n to co n d pivote.
Es ex trem adam ente im p o rta n te recordar q u e la v d o c id ad a n g u la r o> e n la e c u a d ó n (6 .6 ), se deb e expresar en rad ianes p o r u n id a d de tiem p o . El r a d iá n es u n a u n id a d ad im e n s io n a l de m ed ic ión a n g u la r q u e p u ed e o m itirse . L a velocidad lineal se ex
presa e n un idades de lon g itu d p o r tiem p o y n o c o m o lo s u gerirla la ecuac ión (6 .6 ) en ra d ia n e s las un idades d e longitud p o r unidad d e tiem po .
(ienera lm en te se tiene q u e hacer la conversión a la unidad m ás co m ú n de revoluciones p o r m in u to (rpm ):
o » (ra d /m in ) = < o (ra d /m in
= 2 ir [< o (ra d /m in )] (6.7)
o i ( r a d / s ) = [ « ( « , / m i n ) ) [ ( ^ ) ( l ^ ) ]
= ~ [a * (re v /m in )] (6.8)
G im o se m e n c io n ó , u n ra d iá n es u n a m ed id a ad im en- sional de u n ángulo . Para ser precisos, u n án g u lo expresado en rad ianes e s la razón d e la lon g itu d del arco b a rrid o p o r el ángulo al radio . C u a n d o u n án g u lo expresado en rad ianes se m ultiplica p o r o tro valor, se o m ite la designación del radián .
G jm o se estableció en la sección anterior, la velocidad an gular del eslabón y las velocidades lineales d e lo s p u n to s sob re el eslabón so n consistentes, e s decir, las velocidades (ro tacional o lineal) están e n la d irecc ió n e n la q u e el o b je to (eslab ó n o p u n to ) se m ueve instan táneam en te . C o m o se indicó , la velocidad lineal siem pre es p erpend icu lar a la linea q u e u n e el cen tro de ro tac ió n del eslabón c o n el p u n to en consideración.
PRO B LEM A D E E JE M PL O 6.4
la figura 6.5 ilustra u n mecanismo de leva que sirve para im pulsar la válvula de escape de u n m o to r de com bustión interna. El pun to B a un p u n to de interés sobre el balancín. En este instante, la leva fuerza al pun to B h»cia arriba a 3) m m /s. D eterm ine la velocidad angular del balancin y la velocidad del pun to C.
www.FreeLibros.me

A n á lis is d e v e lo c id ad 127
SO L U C IÓ N : I. H a b ó n e l diagram a cinem ático y calcule los grados de libertad
B balancín está conectado a la bancada con una unión de perno en el p u n to A. La velocidad del p u n to B a un vector d irig ido hacia arriba co n una m agnitud igual a 30 mm7s. l a figura 6.6 m uestra el diagrama cinemático.
FIG URA &6 D iagram a cinem ático del p rob lem a de ejem plo 6.4.
2. Calcule la velocidad angular del eslabón 2
Es c laro q u e com o el pun to B viaja hacia arriba, el balancín (eslabón 2) se tuerza a g irar en sentido horario . Por lo tonto, co m o el p u n to B tiene velocidad lineal hacia arriba, el balancín debe tener velocidad angular en sentido horario, l a m agnitud de la velocidad angular se calcula reagrupando la ecuación (63):
us¡AB
30 m m /s
20 m m1.5 rad/s
Esto se convierte a rpm al reagru por la ecuación (6.6):
<uj(rev/m in) = — [<u2 (rad /s )] = — | I 3 rad/s] = 14J rpm
B resultado incluyendo la dirección es:
*Ȓ - 1.5 rad /s, en sen tido horario
3. Calcule la velocidad linea l del pun to C
La velocidad lineal del pun to C tim bién se calcula con la ecuación (6 3 ):
v r = rÁCo n = (15 m m ) ( l á rad /s) = 2 2 5 m m /s
la dirección de h velocidad lineal de C cfcbc ser consistente con la velocidad angular del eslabón 2. La velocidad tam bién es perpendicular a la linca q u e une el cen tro de rotación del eslabón 2, el p u n to A ,con el pun to C P or consiguiente, la velocidad del p u n to C está d irigida 20° (90° - 70*) p o r encim a d e la horizontal. Incluyendo la dirección, el resultado es
V c - 22 5 m m /s A o °
www.FreeLibros.me

128 CAPITULO SEIS
6 3 VELOCIDAD RELATIVALa diferenc ia e n tre e l m o v im ien to de d o s p u n to s se conoce c o m o nvvirm en to re la tiva C onsidere u n a situación d o n d e dos au tom ó v iles v iajan e n u n a carre te ra interestatal. El au tom óv il del c a r r il izquierdo viaja a 65 m illas p o r h o ra (m p h ); y el a u tom óvil d d carril derecho , a 55 m p h . Las v d o c id ad es se m iden en re lac ió n co n u n ra d a r e s tac io n ario , d e m an e ra q u e son m ediciones d e m ovim iento ab io lu ta
A un cu an d o am bos se m ueven hacia adelante, a las personas d d a u to m ó v il m ás ráp id o les parece q u e d o tro a u to m ó v il se mueve realm ente h a d a a trá s e s d ed r, d m ovim iento relativo del au tom óvil m ás len to va en d irecd ó n opuesta al m ovim iento a b so lu to del autom óvil m ás rá p id a ftw el c o n tra r ia a las personas del au tom óvil m ás len to les parece q u e d au tom óvil m ás rápido viaja a 10 m p h . Es d e d r . la velocidad relativa del au tom óvil más ráp id o e s de 10 m p h respecto d d au tom óvil m ás lento.
{ tío d d a d relativa es u n té rm in o q u e se utiliza cu an d o la velo d d ad d e u n o b je to se r d a d o n a con o tro o b je to de referencia, q u e ta m b ié n se p u ed e estar m oviendo . La n o ta c ió n siguiente d iferenc ia la v e lo d d a d abso lu ta d e la v d o d d a d relativa.
- velocidad ab so lu ta del p u n to AV fl - v e lo d d a d abso lu ta d d p u n to B
V b/á = v d o c id ad relativa d d p u n to B co n respecto a A = v e lo d d ad d d p u n to B “observada" desde d p u n to A
El m o v im ien to relativo , e s to es, la d ife ren c ia e n tre d m ovim iento de dos p u n to s , se expresa m atem áticam ente co m o
V » a = V f l - > V /, (6 .9 )
o se rep lan tea com o
V B = V * + > V R* (6 .1 0 )
O bserve q u e las e c u a d o n e s (6 .9 ) y (6 .10 ) so n ecu ad o n es vectoriales. R )r lo t a n t a p a ra u sa r b s ecu ad o n e s, se d eb en elab o ra r polígonos vectoriales de acu erd o c o n las ecuadones. Para d m anejo d e estas ecuaciones se recom ienda em plear las técnicas analizadas en la sección 3.16.
PR O B LEM A D E E JE M PL O 6.5
La figura 6.7 ilustra d m ecanism o para elevar carjp de un cam ión repartidor. En este instante, el p u n to A tiene u n a velocidad de 12 in /s en la direcdón m ostrada, en u n to que el pun to B nene una velocidad de 10.4 in /sen la d irecdón mostrada. Determ ine la veloddad angular del eslabón m ás bajo y la velocidad relativa del p u n to B con respecto al ju n to A.
FIGURA6.7 M ecanism o del p rob lem a d e e jem plo 6.5.
S O L U C IÓ N : 1 . h la b o r t u n d ia g ra m a tin e m d lie o e id e n tifiq u e la m o v ilid a d
l a figura 6 8 a muestra el diagrama cinem ático de este mecanismo. Observe que se trata del conocido m ecanism o de cuatro barras q u e tiene u n grado de libertad.
www.FreeLibros.me

A n á l i s i s d e v e l o c i d a d 129
Calcule la velocidad angular del eslabón 2
Partiendo del diagrama cinemático, resulta claro que el pun to A viaja hacia arriba y a la derecha, en tanto que el eslabón 2 gira en sen tido antihorario. Entonces, el eslabón 2 tiene u n a velocidad angular en sentido antihorario. la m agnitud de la velocidad angular se calcula reagru pando la ecuación (6.6), co m o sigue:
vA (12 in/*) „at¡ ------- ■ - Q j rad /s
rAQ (24 in ) ^
Esto se convierte a rpm reagru pan d o la ecuación (6.7) como
{^(rev /m in ) - ^ [« ^ ra d /s ) ] = * (0.5 rad /s) = 4.8 rpm
Incluyendo la dirección,
a>2 ■ 42) rpm , en sen tido antihorario
Calcule la velocidad linea l del p u n ió B en relación con el p u n to A
La velocidad relativa de B con respecto a A se calcula con la ecuación (6.9):
V a V „ - > V„
Se crea u n polígono vectorial a partir de esta ecuación, q u e se m uestra en la ñgura 6.8b. Observe que este es un triángulo cualquiera. Tanto la solución gráfica como la analítica sirven para determ inar el vector Vb/ a.
Al usar el m étodo analítico, la m agnitud de la velocidad se calcula con la ley de los cosenos.
V W + »*J - 2 (* ) (n » ) < c o s 3 0 - ) |
- ^ ( 1 2 in /s)1 + (10.4 in/*)2 - 2(12 iiV») <10.4 in /s ) (c o s3 0 ‘ ) . 6J} ¡n/ ,
B ángulo entre las m agnitudes de las velocidades vB/A y ve se muestra co m o 0 en la figura 6 2 * . Se calcula con la ley de los senos:
6 in /s90°
I> m anera q u e este polígono vectorial forma en realidad u n triángulo rectángulo. La velocidad relativa de B con respecto a A se expresa form alm ente co m o sigue:
V »* - 6 0 in /$ -
L a velocidad relativa en tre dos p u n to s de u n eslabón es útil para d e te rm in ar las características de la velocidad del eslabón. Específicamente, la velocidad relativa de d o s p u n to s cualesquiera en u n eslabón sirve para d e te rm in ar la velocidad angu la r de ese eslabón. S uponiendo que lo s p u n to s A B , y C perm anecen sobre u n eslabón , la velocidad angular se expresa co m o
_ ^ B C _ ^AJC
rAB r BC ^AC(6 . 11 )
La d irección de la velocidad angular es consisten te c o n la velocidad relativa d e lo s d o s pun to s. La velocidad relativa de B con respecto a A im plica q u e B se vea g iran d o alrededor d e A l\» r consiguiente , la dirección d e la velocidad relativa de f i“vista desde” A sug iere la d irección del g iro del eslabón co m p artid o por los p u n to s A y B . Si se co n sid era la figura 6.9 , cu an d o v&A se d irige h a d a a rrib a y a l a izquierda, la velocidad angu la r del eslabón es en sen tido an tiho rario . P o r el con tra rio , cu an d o vg/Á se d irige hacia abajo y a b derecha, b velocidad a n g u b r del eslab ó n e s en se n tid o h o ra r ia
f i g u r a 6 .9 N f c lo á d a d r e l a t i v a d e d o s p u n t o s s o b r e e l m i s m o e s l a b ó n .
www.FreeLibros.me

130 CAPITULO SEIS
6.6 ANÁLISIS G RÁ FICO D E VELOCIDAD: M ÉTODO DE VELOCIDAD RELATIVA
El análisis g rá fk o de velocidad d e te rm in a la velocidad d e p u n tos d e u n m ecanism o en u n a so la configuración. Se deb e hacer énfasis en q u e los resultados de este análisis co rresponden a la p o sic ió n a c tu a l d e l m ecan ism o . C o n fo rm e el m ecan ism o se m ueve, la configurac ión cam bia al igual q u e las velocidades.
El fu n d am en to del m éto d o de análisis de velocidad relativa se d eriva del hecho siguiente:
Dos puntas q u e residen en el m ism o eslabón tan solo pueden tener u n a velocidad relativa que esté en dirección perpendicular a la linea que u n e los dos puntos.
Este h ech o es u n a am pliación d e la defin ición de velocidad reb tiva . La figura 6 .9 m u e s tra d o s p u n to s . A y B, q u e se encu en tran so b re el m ism o eslabón. Recuerde q u e Vg/A la velocidad d e B “c o m o se observa’ desde A . P ara u n o b se rv ad o r e n A , parece q u e B sim plem ente g ira a lrededor de A, siem pre q u e A y B se encuen tren sob re el m ism o eslabón. D e esta m anera, la velocidad de B c o n respecto a A debe se r p erpend icu lar a la linea q u e u n e a B to n A.
C on este hecho, y las técn icas de análisis vectorial, es p o s ible d e te rm in a r b velocidad d é lo s p u n to s so b re u n m ecanism o.
6 .6 .1 P u n to s s o b r e e s la b o n e s r e s t r in g id o s a ro ta c ió n p u ra o a t r a s la c ió n r e c t i l ín e aEl análisis más sim p le co n el m éto d o d e velocidad relativa im p lica p u n to s q u e residen en eslabones restr in g id o s a ro tación p u ra o a traslac ión rectilínea. La razó n es q u e se cono ce la d irecc ió n del m ovim iento de los p u n to s . Las u n io n es de p ernos son p u n to s conv en ien tes d e análisis p o rq u e residen sob re d o s e s bbon es , u n o d e lo s cuales no rm alm en te está lim itado a rotación p u ra o a traslac ión rectilínea.
La figura 6 .10 ilu stra u n m ecan ism o de m aniveb-correde ra . El p u n to B se en cu en tra sob re lo s eslabones 2 y 3 . O bserve q u e se cono ce b dirección d e la velocidad del p u n to B, p o rq u e el e s lab ó n 2 está re s tr in g id o a ro tac ió n p u ra . El p u n to C se e n c u e n tra en los eslabones 3 y 4. Asimismo, se cono ce b dirección d e b velocidad del p u n to C p o rq u e el eslabón 4 está restringido a u n m ovim iento de traslac ión rectilínea. Si se cono ce b velocid a d d e l p u n to B. b ve locidad del p u n to C s e c a lc u b ráp ida-
i ig u r a 6.10 E sb b o n es restring idos a m ovim ien tos d e ro tación p u ra y traslac ión rectilínea.
m ente p o rq u e ta m b ié n se cono ce la dirección d e su velocidad. Tan so lo se necesitan d e te rm in ar la m agn itud y el sentido.
El p roced im ien to d e so luc ión genera l p a r a los problem as de este tip o se resum e com o:
1. D eterm inar b d irección de la velocidad desconocida con b s restricciones im puestas p o r b un ión , ya sea ro tación p u ra o traslación p u ra .
2 . Establecer b dirección de b velocidad re b tiv a en tre b s dos uniones. P ara dos p u n to s sob re el m ism o eslabón, b velocidad re b tiv a siem p re e s p erpend icu lar a b linea q u e u n e lo s puntos.
3 . Usar la siguiente ecuación de velocidad reb tiv a p a ra traza r un po lígono vectorial:
Vpunto desconocido ^ punto conocido
Apunto desconocido/puico conocido
4 . U ilizar los m étodos descritos en b sección 3.18, y b ecuación vectorial d e arriba, para determ inar las m agnitudes de
^ punto desconocido X Apunto desconocido^pumo conocido
Este procedim iento d e análisis describe la lógica d e trás del análisis gráfico de b velocidad. La so luc ión real se o b tien e em pleando técn icas de d ib u jo m anu a les ( u n tra n sp o rta d o r y u n com pás), o b ien , u n sistem a de c a d (e l c o m a n d o d e ro ta r y copiar). L a lógica es idéntica; sin em bargo, b solución co n c a d n o orig ina las lim itaciones de p recisión e n el d ibujo . Independientem ente del m éto d o ap licado , los concep tos subyacen tes del a iá lisis gráfico de b posición se ilustran m ejor y se am plían con el siguiente problem a de ejem plo.
PRO B LEM A D E E JE M PL O 6 .6
la figura 6.11 ilustra u n mecanismo triturador de rocas. Se usa en u n a máquina donde se coloca una roca grande e n una toba vertical y cae h a d a b cámara de tritu radón . Las rocas del tam año adecuado, que pasan a través de u n cribador, se dcscargm por b parte inferior. Las rocas que n o pasan por el cribador se reintroduccn en b cám ara de trituración.
Determ ine la velocidad angular del ariete triturador, en b configuración m ostrada, conform e b manivela de ffl m m g ira a 120 rpm en sentido horario.
S O L U C IÓ N : 1. Habore el diagrama cinem ático y calcule los grados de libertad
l a figura 6.12a m uestra el diagram a cinem ático d d mecanismo. Observe q u e el m ecanism o es el c o n o d d o estibo rum íenlo de cuatro barras q u e tiene u n solo grado de libertad. C on u n grado de libertad, tal mecanismo fondona totalm ente co n u n solo m ovim iento de entrada. Desde luego, el m ovim iento es b rotación del eslabón 2 a u n a velocidad de 120 rpm.
www.FreeLibros.me

A n á lisis d e v d o c id a d 131
F IG U R A 6 .1 1 M ecanism o del p ro b lem a d e e jem plo 6.6.
© V o » ( t r a z a d a p e r p e n d ic u l a r ala linea S O
x/ V ( - ( t r i n a d a p e r p e n d ic u la r l j _ / a l a l i n e a CD)
'
Vc - V , » V C>B
«
FIGURA 6.12 D iagram as del p rob lem a de e jem plo 6.6.
2. Seleccione la ecuación adecuada de \r lo c id a d relati va
H objetivo del análisis consiste en determ inar la velocidad angular del eslabón 4. El eslabón 2 g enera el m ovim iento de entrada (velocidad). El p u n to Bse encuentra sobre los eslabones 2 y 3. El pun to Cae encuentra sobre los eslabones 3 y 4. Com o los puntos fíyC . lesiden en el eslabón 3 , se utflba el m étodo de la velocidad relativa para relacionar la velocidad d e en trad a (eslabón 2 ) co n la velocidad que se desea conocer (eslabón 4). l a ecuación de velocidad relativa para este análisis es
Vc - V B + > V üfl
www.FreeLibros.me

132 CAPITULO SEIS
3 . D e te r m in e la v e lo c id a d d e l p u n t o d e e n t r a d a
l a velocidad del pun to B se calcula com o
o»} ( ra d /s ) ■ ~ (120 rpm ) - 1236 rad /s, en sen tido horario
V a = cu¡ rAB = ( l2 3 6 rad /s) (60 m m ) = 754 m m /s —
4 . D e te r m in e la s d ir e c c io n e s d e la s v e lo c id a d e s d e s e a d a s
Como el eslabón 4 está fijo a la bancada en R e í esbbón 4 está restringido a girar alrededor de D. Por consiguiente, b velocidad del pun to C debe ser perpendicular a b Hnea CD.
Asimismo, com o se estableció anteriorm ente, los p un tos B y Cse encuentran en el eslabón 3, de m anera que b velocidad relativa de C con respecto a B debe perm anecer perpendicular a la linea B C
5 . D ib u je e l p o líg o n o d e v e lo c id a d
B i b ecuación de velocidad relativa, tan so lo se desconocen las m agnitudes de V c y d e Vq ^. Esto e s idéntico a los problemas de la sección 3.18. El polígono vectorial que se utiliza para resolver este problem a se ilu stra en la figura 6.12b. Las m agnitudes se determ inan al exam inar b intersección de las lincas correspondientes a V c y Vq » El polígono vectorial com pleto se flustra en la figura 6.12c.
6 . M ida las \elocidades desde el polígono de velocidad
Las velocidades se miden con la escala correspondiente en el diagram a de velocidad para obtener:
V c = 7840 m m /s 7 J ) \
V c * - 101.1 m m /s 7 2 .7 * \
7 . C a lc u le la s v e lo c id a d e s a n g u la r e s
ft>r últim o, se desean conocer las velocidades angulares del eslabón 4. Las velocidades angulares de los eslabones 3 y 4 se determ inan co n la ecuación (6.6):
yc (789.4 m m /s)a»4 = — = — = 4 3 6 rad /s , en sentido horario
>a> (180 m m )
*'ob 101.1 m m /sa*. - ----- = — = 0 2 5 ra d /s , en sen tido horario
' kc (400 m m )
6 .6 .2 P u n to s e n g e n e r a l s o b r e u n e s la b ó n f lo ta n teLa determ inación de la velocidad d e p un tos en general sobre un eslabón flotante requiere u n análisis a lgo m ás com plicado. U n eslabón flotante e s sim plem ente u n eslabón q u e n o está restringido a m ovim iento de ro tación o a traslación rectilínea pura. I-a d ificu ltad es triba en q u e n o se conocen la m agnitud n i la dirección d e la velocidad d esco n o c id a Esto e s m u y d iferen te d d análisis presentado e n el problem a d e e jem plo 6.6.
P ara determ inar la velocidad d e u n p u n to cualesquiera s o b re u n eslabón flotante, p rim e ro se deb e d e te rm in ar la v d o d - dad de d o s p u n to s adicionales so b re el eslabón, los cuales p o r lo g en e ra l so n u n io n es de p e rn o restr in g id o s a m o v im ie n to de traslación o d e ro tac ión , co m o se v io en la sección 6.6.1. Las velocidades de estos p u n to s especiales se o b tien en co n facilidad co n u n análisis parecido al del p rob lem a de e jem plo 6.6 .
La figura 6.13a m uestra u n eslabón d o n d e las velocidades de lo s p u n to s A y B ya están d e term inadas. P ara ob ten er b velocidad del p u n to C , se deb e u tilizar el siguiente procedim iento:
I . E scrib ir las d o s ecuaciones:
V c = V A + > V<]A
V c = V „ + > V o s
G im o lo s p u n to s A . B y C están so b re el m ism o esb b ó n , las d irecciones de V 0 a y V o b son perpendiculares a las lineas CA y CB, respectivam ente.
2. Se igualan e n tre si las ecuaciones individuales d e v d o c id ad relativa. En este caso, se obtiene:
V c = y a + > V q a = V fl + > V 0 f l
3 . N uevam ente, las v d o d d a d e s relativas se despejan usando las técnicas descritas en b sección 3.18, lo cual im plica b construcción d e u n po lígono vectorial, co m o el q u e se in dica en la figura 6 .13b.
4 . Las m agnitudes d e la v d o c id a d relativa se m iden en el po lígono vectorial.
5 . C onociendo las velocidades relativas, la v e lo d d a d d d pu n to de interés, el p u n to Q se d e te rm in a usando u n a de las ecu ad o n es individuales d escrita en d paso 1, q u e se c a lc u b co n facilidad a p a r t ir d d po lígono vectorial o r ig inal, c o m o e n b fig u ra 6.13c.
De nueva cuen ta , lo s po líg o n o s vecto rb les se construyen con la m ism a lógica, ya sea co n técn icas de d ib u jo m anuales o el Cad. La lógica detrás del análisis se i lu s tra en el s igu ien te p ro blem a de ejem plo:
www.FreeLibros.me

A n á lisis d e velocid ad 133
«
F IG U R A 6.13 Velocidad de u n p u n ió d e interés.
PR O B LEM A D E E JE M PL O 6.7
l a figura 6.14 ilustra u n mecanismo q u e extiende bobinas d e cable desde u n cam ión repartidor. Es operado por un d lindro hidráulico en A . En este instante,el cilindróse retrae a u n a velocidad de 5 m m /s. Determine b velocidad de b u n ió n superior, el pun to F.
S O L U C IÓ N : 1. D ibuje e l diagram a cinem ático y calcule los grados de libertad
la figura 6.15a muestra el diagrama cinem ático del mecanismo. Para entender cabalmente este mecanismo, se calcub la movilidad.
n = 6 jr = (5 pernos + 2 correderas) = 7 j , = 0
M - 3 (n - I ) - 2jp - * - 3 (6 - I ) - 2 (7) - 0 - 1
FIG U R A 6 .1 4 Mecanismo del problema d e ejem plo 6.7.
www.FreeLibros.me

134 CAPITULO SEIS
FIGURA6.13 D iagram as del p ro b lem a de e jem plo 6.7.
Con u n grado de libertad, este m ecanism o funciona com pletam ente con u n so lo m ovim iento de entrada. Desde luego, tal m ovim iento es la retracción hacia arriba del c ilindro hidráulico a u n a velocidad de 5 mm/s.
Seleccione el m étodo para ob tener la le loc idad deseada
H eslabón 5 transporta tantoel p u n to C(veIocidad conocida) com o el p u n to E( velocidad desconocida). Sin em bargo. el esbbón 5 e s u n esbbón flotante, ya que n o está restringido a u n m ovim iento puro de rotación o de traslación. Por lo tanto, antes de determ inar la velocidad del p u n to £, se debe obtener o tra veloddad sobre esb b ó n 5. El p u n to D es u n p u n to conveniente porque se encuentra sobre el e sb b ó n 5 y o tro eslabón q u e está restringido a m ovim iento de rotación (esbbón 2).
D eterm ine la velocidad del pun to conveniente <p u n to D)
l a ecuación q u e perm ite la ob tendón de b velocidad d d p u n to D se escribe como:
V D = Vc + > V „ c
Atesto que el eslabón 2 está fijo a b bancada en B, d pun to D está restringido a girar a lrededor de B. P or lo tin to , b veloddad del p u n to D debe ser perpendicular a b línea BD.
Asimismo, los puntos D y C icsidcn en d m ism o esbb ó n , es dedr, d eslabón 5. Entonces b veloddad relativa de D con respecto a C d eb e ser perpendicular a la linca DC. A partir de los dos cnu n d ad o s anteriores, se conocen ahora las direcciones de am bas velocidades V „ y \ DJO
www.FreeLibros.me

A n á lisis d e velocidad 135
EJ poligono vectorial que se utiliza para resolver este problem a se muestra en la figura 6.15b. Las m agn itudes se determ inan al exam inar la intersección de las líneas respectivas de V 0 y VD(t. Las m agnitudes de las velocidades se miden con la escala correspondiente, para obtener las siguientes ecuaciones:
Vjwc “ 3.5
V u = 3 5 m m / S y /4 5 ’
D eterm ine la vd o c id a d del pun to tobre el eslabón flo ta n te (eslabón 5)
Ahora que se conocen cabalm ente las velocidades de dos p un tos sobre el eslabón 5. es posible determ inar la velocidad del p u n to E Usando dos formas de la ecuación de velocidad ielativa.se relaciona la velocidad de los pun- to s C D y E
Vf - V c + > VD C - V D t > VBD
Se conocen las velocidades de C y D, asi co m o la dirección de las velocidades relativas. En la figura 6.15c se lu s tra el polígono sectorial.
l i l a vez que se determ inan las m agnitudes de las velocidades relativas, e s posible elaborar el po líg o n a En h figura 6.15 d se muestra el polígono completo. l a velocidad de E se incluye en el polígono de acuerdo con la ecuación vectorial de arriba. Si se m iden los vectores del polígono com pleta
VBD - Z65 m m / s ^ l 6 J “
VBC - 5.95 m m /s ^ 33.0*
Vf = 529 m m /s /1 9 .4 °
6 .6 .3 P u n to s c o in c id c n tc s s o b r e e s la b o n e s d ife re n te sH cálcu lo de velocidades de eslabones móviles que están u n idos a través de u n a u n ió n d e corredera, im plica el uso d e p un tos co in cidentes que se encuen tran en lo s dos cuerpos. I\>r lo general se
conoce la dirección d d m ovim iento de deslizam iento. Entonces, se conoce b d irección d e la velocidad relativa d e los p u n to s coin- d d e n te s . Se tra ta d e in fo rm ació n suficiente para d e te rm in ar el m ovim iento d e lo s eslabones im pulsados. El concepto se ilustra m ejor co n u n problem a de ejemplo.
PR O B LEM A D E E JE M PL O 6.8
l a figura 6.16 presenta u n mecanismo que inclina b plataforma de u n cam ión de volteo. Determine la veloddad requerida del c ilindro hidráuEco para inclinar la plataform a d d cam ión a u n a velocidad de 5 rad/m in.
fig u r a 6.16 M ecanism o del cam ión de volteo del p ro b lem a d e e jem plo 6.8.
S O L U C IÓ N : 1. D ibuje e l d iap-am a cinem ático e iden tifique los grados de libertad
Desde u n p u n to de vista d n c m á tic a tal m ecanism o e s u n a inversión del conocido m ecanism o de manivela- cor redera. La manivela-corredera tiene u n grado de libertad que. en este c a sa es la extensión y la contracción del d lindro hidráulico. La figura 6.17a m uestra el diagram a cinem ático del mecanismo.
El eslabón 1 representa U bancada, el eslabón 4 e s el c ilin d ra el eslabón 3 es b varilla/pistón y el eslabón 2 es b plataform a del cam ión. Observe que b unión de perno q u e une los eslabones 2 y 3 está identificada co m o el pun to B.Sin em bargo, como los esbbones 2,3 y 4 se encuentran en el p u n to & estos puntos coincidentes se identifican com o Bj, B , y B,.
www.FreeLibros.me

136 CAPITULO SEIS
c)
FIGURA 6.17 D iagram as del p ro b lem a de e jem plo 6.8.
H ija e l m étodopara o b ten erla velocidad d o ra d a
0 problem a es determ inar la velocidad del cilindro hidráulico, el cual hará que el eslabón 2 g ire a u n a velocidad de 5 rad/m in en sen tido antihorario. En térm inos del m odelo cinem ático, se debe determ inar la velocidad de B¡ en relación co n B«.
Las velocidades de los puntos coincidentes se relacionan m ediante la ecuación (6.9):
vb> - V * + >
En esta ecuación, la m agn itud de V w se calcula con la velocidad de g iro del eslabón 2. Además, com o lo s esbbones están restringidos al m ovim iento puro de rotación, b s direcciones de \ B¡ y Vg, son perpendiculares a los eslabones 2 y 4 . respectivamente.
Por últim o, co m o B¡ y B , están u n idos a través de la u n ió n de corredera, y se conoce la dirección de la corredera, la velocidad relativa. Vb2/b+ debe se r a lo largo de la dirección de deslizamiento. Por consiguiente, se tiene la inform ación suficiente para construir el polígono de velocidad.
Determ ine la velocidad del p u n to de entrada Ipunto
La velocidad de B¡ se calcula de la m anera siguiente:
va = <o1r ÁB¡ = (5 rad /m in ) (7 ft) = 35 ft/m in
La dilección de la velocidad del punto B¡ es perpendicular al eslabón 2, que e s hacia arriha a la izquierda.
www.FreeLibros.me

A n á lisis d e velocid ad 137
4 . D eterm ine la xelocidad del p u n to sobre el seguidor (p u n to B4)
El pollpm o vectorial que sirve para resolver tal problem a se m uestra en la figura 6.17b. U s m agnitudes se determ inan exam inando la intersección de las lineas correspondientes de vw y »&>*«.
5. M ida las xrlo tidades deseadas en el polígono
la s m agnitudes de las velocidades se pueden m edir con la escala adecuada, e n e l diseño de c a í» de la figura 6.17c, para ob ten er
V ^ a , = 33.1 ft/m in
V « - 11.4 ft/m in A i *
to r lo tanto, en este instante d cilindro se debe extender a u n a velocidad de 33 ft/m in para m antener inclinada la plataform a a u n a velocidad de 5 rad/m in.
6.7 IMAGEN D E VELOCIDAD
U na p rop iedad valiosa en el análisis d e velocidad e s q u e cada eslab ó n en u n m ecan ism o tien e u n a im agen en el po lígono de velocidad. Para ilustrarlo , en la figura 6 .18a se presen ta u n m ecan ism o asociado co n su d iag ram a de velocidad.
Revise el tr iá n g u lo d ib u ja d o u sando b s te rm in a le s de los tres vectores de velocidad abso lu ta . Este triángu lo se fo rm ó co n d im ensiones p roporc ionales del eslabón flo tan te m ism o g irado 90*. L a fo rm a en e l polígono de velocidad se conoce co m o ima- g tn de velocidad del eslabón. L a im agen d e velocidad del eslabón 5 del p rob lem a de ejem plo 6 .7 se ilu s tra en la figura 6 .15d.
Si in id a lm e n te se cono ce este co ncep to de im agen d e velocidad, el p roceso d e so luc ión se reduce d e m an era significativa. U na ve? q u e se d e te rm in a b velocidad de d o s p u n to s sob re d eslabón, b velocidad de cualqu ier o tro p u n to q u e se encu en tre so b re el eslabón se d e te rm in a co n beilidad . Los dos p un tos se u tilizan co m o base de b im agen de velocidad. La fo rm a del eslabón se d ibu ja a escab y se construye sob re el p o lip jn o d e ve- b e id a d . Se deb e te n e r cuidado , s in em bargo, d e n o in v e r tir b form a del eslabón e n tre el d iag ram a cinem ático y el po lígono de velocidad.
FIGURA 6.18 Im agen de velocidad.
6.8 ESTU D IO ANALITICO DE VELOCIDAD: M ÉTODO D E LA V ELOCIDAD RF.I.ATIVA
El e s tu d io an a lítico d e velocidad invo lucra ex ac tam en te b m ism a lóg ica em pleada en el análisis g rá fica Los polígonos vectoriales se crean d e acuerdo co n b s ecuaciones de velocidad re- kitiva ap rop iadas. C u a n d o se u tilizan b s técn icas analíticas, b
ex ac titu d d d p o líg o n o n o tien e m ay o r im p o rta n c b ; n o obstan te , u n a e sc a b , inclusive b u rd a , p erm ite e n ten d e r las so lu ciones. Las ecu ac iones vectoriales se resuelven em p lean d o b s técnicas analíticas estudiadas en d cap itu lo 3.
En lo s siguientes p ro b lem as de e jem plo se presentan so lu ciones analíticas.
PR O B LEM A D E E JE M PL O 6 .9
l a figura 6.19 ilustra u n a bom ba d e pozo rudim entaria que es com ún en áreas poco desarrolladas. P ira m axim izar el •u jo de agua, el pistón deberla moverse hacia arriba a u n a velocidad de 50 m m /s. En la posición que se m uestra, de- ►rmine b velocidad angular que debe aplicarse en el m ango para lograr la velocidad deseada del pistón.
S O L U C IÓ N : I . Elabore e l diagram a cinem ático e iden tifique los grados de libertad
La figura 6.20a m uestra el diagram a cinem ático de este m ecanism o. Observe que es u n a variación del meca- rism o de manivela-corredera co n u n grado de libertad. □ esbbón 2 representa el m a n g a de m anera q u e el o b jetivo de este problem a es determ inar o>¡.
www.FreeLibros.me

138 CAPITULO SEIS
FIG U R A 6 .1 9 Bom ba d e p o zo d d p ro b lem a de e jem plo 6.9 .
f i g u r a 6 .» D iagram as del p rob lem a d e e jem plo 6.9.
2 . A n a lic e l a g e o m e tr ía d e l m e ca n ism o
l a figura 6.20b aís la la geom etría de lo s eslabones principales del m ecanism o. O bserve q u e se u tilizó esta fpometria para form ar dos triángulos rectángulos. Al enfocarse en el trüngu lo superior ABF /em p lear las fond ones trigonométricas, se determ ina l i longitud de los lados BF y AF.
BF = (250 m m )c o s 15° = 311.-18 m m
A F = (250 m m ) sen 15* = 6 4 .70 m m
l a longitud de BE se calcula de la m anera siguiente:
B E - B F EF ■ 241.48 m m 200 m m - 41.48 m m
www.FreeLibros.me

A n á lisis d e velocidad 139
Al enfocarse en el triángulo inferior, el ángulo in terio r en C se calcula como:
L BCE ■ sen-1 ^ -7 .9 5 *
3. Construya r l polígono de te lo (¡dad
Para obtener la velocidad angular del eslabón 2, se tiene que determ inar la velocidad lineal del p u n to B, d cual se encuentra en el eslabón 2. El eslabón 3 es de interós especial, porque contiene tan to el p u n to C (velocidad co n o cida) com o el p u n to B (velocidad desconocida).
C óm o el eslabón 2 está su jeto a la bancada en A, el p u n to B está restringido a girar alrededor de A. Por lo tin to , la velocidad del pun to f ies perpendicular a la linea AB. Además, co m o los puntos B y C se encuentran sobre el m ism o eslabón (eslabón 3), la velocidad relativa de B con respecto a C e s perpendicular a la linea BC
A partir de los dos enunciados anteriores, se conocen las direcciones de las velocidades V a y V&t> La velocidad V B es perpendicular a AB, 15* a partir d e la vertical. La velocidad perpendicular a BC, 7.95* a partirde la horizontal, o bien, 90a - 7.95* - 82.05* a p a r t ir de la vertical. Tales velocidades se relacionan co n la ecuación (6.10):
VB = Vc + > V s c
En esta ecuación, tan so lo se desconocen las m agnitudes d e V fl y Va,c. El polígono sectorial que se utiliza para solucionar el problem a se ilustra en la figura 6.20c. Las m agnitudes se pueden determ inar s i se obtiene la b n g itu d de los lados (m agnitudes sectoriales) del triángulo.
H ángulo in terio r restante de este triángulo vectorial es
180* - 82.05® - 15* - 82.95°
4 . Calcule la velocidad del p u n to B
Se utiliza la ley de los senos para determ inar las m agnitudes vectoriales:
sen 15* \ sen!
vb = Vcf ) = 49.90 m m /s 15*| = 49.9 m m /s 7 ? \\ 3Cn o 2 .v 5 / *1
5 . Determ ine la velocidad angular del eslabón 2
Ahora que se determ inó la velocidad de B. se obtiene b velocidad angular del eslabón 2. Observe que. en con- tyucnda con la dirección de V rc I eslabón 2 debe g irar en sen tido horario:
vB 49.9 m m /sa), = — = --------------- = OJO rad/s. en sen tido horario
250 m m
Este resu ltado se co n v ie rte a rp m de la m anera siguiente:
ai ( rev /m in ) = — [« (ra d /s )] = — [OJO rad /s) = 1.9 r p n \ en sentido horario
PRO B LEM A D E E JE M PL O 6 .1 0
La figura 6 J1 m uestra la banda transportadora de u n cam ión repartidor para colocar m aterb l en u n techo. Se transportan m ateriales pesados de la banda transportadora al techo. La banda transportadora se eleva h a c a su posición, « te n d ie n d o el brazo de un cilindro hidráulico. En este in su m e, el c ilindro se extiende a u n a velocidad de 8 fpm (ft/m in). D eterm ine la velocidad a la q u e se eleva la banda transportadora.
S O L U C IÓ N : 1. Dabore e l diagram a cinem ático e iden tifique los grados de libertad
l a figura 6 J 2 a p resenu el diagram a cinem ático del mecanismo. El eslabón 4 representa la banda transportadora, el eslabón 2 representa el c ilindro y el eslabón 3 represenu la varilla/pistón. Com o se usa una unión de corredera para conectar dos eslabones giratorios, la definición de los puntos coincidentes ayudará a b solución del problema. El p u n to B¡ está su jeto al eslabón 2 ; m ientras el p u n to Bt está sujeto, com o punto de referencia, al eslabón 4 . El objetivo del problem a e s determ inar « 4.
www.FreeLibros.me

140 CAPITULO SEIS
*5.
Polígono (fe wlockhd
VM- V M fl+>V0
V *Traía da perpendicular a AB
PmTrazada a lo largo de A0 a 47.47* (180° - 132.53*) d r fe ho rtam al
V „Trazada perpendicular a BCa 20* de la vertical o70* (90* - 20*) a partir efe fe hwfeonal
FIG U R A 6_u D iagram as del p rob lem a d e e jem plo 6.10.
2 . Analice la geom etría del mecanismo
l a figura 632b aísla fe geometría de los esfebones principales del mecanismo. Observe que se utilizó esta para formar dos triángulos. Al enfocarse en el triángulo de abajo a fe derecha, ACE, se obtiene lo
A C = V | Á F + c F j
= V (1 ñ ) 1 + (3 ft)2 = 3.16 ft
www.FreeLibros.me

A n á lisis d e velocidad 141
Com o el eslabón 4 está inclinado 20® por encim a de la horizontal, d ángulo total en C es
L B C E - SO° 4- 20* " 110°
kiego entonces, el ángulo en C en el triángulo superior es
L A C B = L B C E - L A C E = 110* - 18.43° = 91.57°
La geom etría del triángulo superio r se determ ina con la ley de los cosenos
A B - V Á ^ T b^ 2 { A C ) { B C Ü ^ L A C B
- V (3 .1 6 ft)3 + (6 ft)3 - 2(3.16 ft)(6 fíjeos 9 1 5 7 ° - 6.86 ft
y la le y d e lo s senos
Rrulm ente, el ángulo inclu ido total en A es
L B A E = L C A E + L B A C = 7137“ + 60.96° = 13233°
biabare u n polígono de velocidad
Para obtener la velocidad angular del eslabón 2, se debe determ inar la velocidad lineal del p u n to B¿.el cual se en- o ien tra en el eslabón 2. Se conoce la extensión del cá in d ro hidráulico, b cual representa la velocidad del pun to B sobre el eslabón 4 , en relación co n el pun to B sobre el eslabón 2 (Vbí/ bi)~ S* pueden relacionar estas velocidades usando la ecuación (6 .10):
V » - + > V „
G im o el eslabón 4 está su jeto a la bancada en C, el p u n to B , está restringido a g irar alrededor de G Pbr lo Unto, la velocidad del p u n to B4 es perpendicular a la linea BC.
Asimismo, d eslabón 2 está sujeto a la bancada en A y el p u n to B¡ está restringido a g irar alrededor de A. Por am siguíente, la velocidad del pun to B¡ e s perpendicular a la linea AB.
A partir de los dos enunciados anteriores, se conocen las direcciones de las velocidades y V ^ .B polígono sectorial que se utiliza para resolver este problem a se muestra en la figura 6.22c. Observe que
los vectores forman u n triángulo rectángulo. la s m agnitudes se determ inan al obtener la longitud de los lados (m agnitudes vectoriales) del triángulo rectángulo.
H ángulo in terio r inferior de este triángulo vectorial es
180° - 70° - 47.47° = 6233°
Calcule la velocidad del p u n ió B
La velocidad de B; se calcula a partir de h s siguientes relaciones trigonom étricas de u n triángulo rectángulo:
v- ' ( d w )Determ ine la xelocidad angular del eslabón 2
Ahora que se conoce la velocidad de Bt , se obtiene la velocidad angular del eslabón 4 . Observe q u e p o r congruencia con la dirección de v ^ e l eslabón 4 debe girar en sentido horario:
Vtu 17.43 ft/m in _______ .u»4 = — = -------- = 2 3 9 rad/m in , e n sentido horario
rK b ft
Este resultado se convierte a rpm de la siguiente manera:
/ 239 rad W I rev \<■>4 = I -------- :-- I I ------- I = 0.46 rev/m in , en sentido horario
\ m in / \ 2n rad /
www.FreeLibros.me

142 CAPITULO SEIS
6 .9 S O L U C I O N E S A L G E B R A I C A S P A R A
M E C A N I S M O S C O M U N E S
En d caso de los m ecanism os co m u n es de m anivela-corredera y d e cuatro b a rra s , se h a n desarro llado soluciones algebraicas de form a ce rrad a ¡ref. 12) y se estu d ian en las siguientes secciones.
6 .9 .1 M e c a n is m o d e m a n iv e la - c o r r e d e raEn la figura 4.19 se presen ta u n m ecanism o general de m an iveb co rred era q u e está definido ún icam ente p o r las d im ensiones L¡, L¡ y L y C o n u n g rad o de lib erta d , se especifica el m ovim iento de u n so lo eslabón p a ra im pulsar lo s o tro s eslabones. C o n m ucha frecuencia se im pulsa b manivela, d e m o d o que, conociendo o*¡ y b posición de to d o s lo s eslabones, se de term inan las velocid ad es d e los o tro s eslabones co n las ecu ac iones (4 .6 ) y (4 .7 ). C o m o se v io en el cap itu lo 4, las ecuaciones de posic ión son
LI = ¿2 COs(fl2) + L¡ c o s (S j)
(4.6)
(4.7)
Las ecu ad o n es d e velocidad so n las siguientes |rcfs. 10,11, 12,14]:
( b c o s f lA
v , = se n 0 ] + cüjLj s e n f l j
(6 . 12 )
(6 .13)
6 .9 .2 M e c a n is m o d e c u a t r o b a r r a sEn la figura 4.23 se ilu s tra u n m ecanism o general de cuatro barras, defin id o ún icam en te p o r las d im en sio n es £ | , L * L3 y L«. C o n u n g ra d o de lib e r ta d , se e sp ed fica el m o v im ien to d e un » l o eslabón p a ra im p u lsa r lo s o tros eslabones. C o n m ucha fre- c u e n d a se im pulsa la m an iv eb , de m o d o q u e , c o n o d e n d o 0 2, <i>j, y b posic ión de to d o s lo s e sb b o n es. se d e te rm in a n b s ve- lo d d a d e s d e los o tro s e sb b o n e s co n b s e c u a d o n e s (4 .9 ) a (4.12). C o m o se v io en el cap itu lo 4, b s ecu ad o n es d e p o sid ó n so n b s siguientes;
B D = - 2 ( I , ) ( í* ) c d s e 2
(L ,)2 + ( I* ) ’ - (B D )2y = e o s 1
- i03 = 2tan
0A = 2 tan"1
2 ( L , ) ( t 4 )
- L j s c n O , + L4s e n y
I , + L } - L je o s B j - / .« c o s y JL is e n f l2 - ¿ 3s e n y ]
. l 2 e o s 0 ¡ + L 4 - L | - L j c o s y J
(4.9)
(4.10)
(4 .11 )
(4.12)
Las ecuaciones d e velocidad so n b s sigu ien tes [reís. 10, 11, 12, 14):
o>¡ = -u>¡
0»4 = ~U>2
L?s c n (04 - 02)
L j s e n y
' L fS en (03 - 0 2)
¿ 4 s e n y
(6.14)
(6.15)
6 .1 0 C E N T R O D E R O T A C I Ó N
I N S T A N T Á N E O
Al calcular b velocidad de los p u n to s so b re u n m ecanism o, se utiliza el c o n cep to de cen tro s instantáneos co m o u n m éto d o alternativo al m éto d o de v e lo d d ad relativa. Este enfoque se basa m el hecho d e q u e cualqu ier eslabón, s in im p o rta r b com plejid ad de su m o v im ien to , parece estar in s ta n tá n e a m e n te en ro tación p u ra co n respecto a u n p u n to d e te rm in ad o . Este p u n to p ivo te in s ta n tá n e o se c o n o c e co m o a n t r o instantáneo de ro tación d e u n e sb b ó n en particular. En la fig u ra 6.23 se m uestra c o m o ( 13 ) el cen tro instan táneo , en relación co n b bancada, de u n e s b b ó n flo tan te , es d e d r , el e sb b ó n 3.
En este ¡mame./ 1 el eslabón 3 'parece*
/ ¡ girar alrededor del
FIGURA 6.23 Centro instantáneo.M ediante este concepto se analiza cada eslabón c o m o s i es
tuv iera ex perim en tando ro tac ión p u ra . El cen tro in stan táneo p ie d e estar d en tro o fuera del cuerpo, y su posición n o es fija en d tie m p o C onfo rm e el eslabón se m ueve, su c e n tro instantáneo tam bién lo hace. S in em bargo , las velocidades de los diferentes p un tos d e u n m ecanism o tam bién son instantáneas. D e m anera q u e este hecho n o representa u n a restricción se ria para el análisis.
Este concepto tam bién se aplica al m ov im ien to relativo, es d ed r, el m ovim iento d e cualquier eslabón, en r e b d ó n co n cualqu ie r o tro eslabón, instan táneam ente parece estar so lo g irando alrededor de u n p u n to d e te rm in a d a D e n u e v a el p u n to pivote im aginario se conoce o im o cen tro instan táneo e n tre los d o s e s b b o n e s . P o r e jem p lo , s i d o s eslabones e s tu v ie ran disertados ro m o 1 y 3, el c e n tro instan táneo seria el p u n to d o n d e el eslabón 3 in stan tán eam en te parece g ira r en re la d ó n co n el e s b b ó n 1. Este cen tro instan táneo se designa co m o (13) y se expresa en pa lib ra s c o m o “u n o tres", n o co m o trece. O bserve q u e el cen tro in stan táneo , m o s tra d o e n b fig u ra 6.23, fu e d es ig n ad o co m o (13). Si el e s b b ó n 1 fu era la tu n e a d a , co m o e s b designación típica, este cen tro in stan tán e o describ iría el m ov im ien to absolu to del e sb b ó n 3 . C o n s id e ran d o la inversión c inem ática , este p u n to tam bién es el cen tro del m ovim iento instan táneo del esb b ó n 1 en re la d ó n co n el e sb b ó n 3. P o r ende, el cen tro in stan táneo (13) es lo m ism o que el cen tro in stan táneo (31).
C o m o en c a d a e sb b ó n hay u n cen tro instan táneo co n cada u n o de los o tro s eslabones, todos los m ecanism os tienen varios cen tros in stan táneos. El n ú m e ro to ta l d e cen tro s instan táneos de u n m ecanism o de n eslabones es
N ú m e ro to ta l d e cen tro s in s ta n tá n e o s =n (n - 1)
(6.16)
6 . I I L O C A L I Z A C I Ó N D E C E N T R O S
I N S T A N T Á N E O S
En u n análisis típico, es ra ro q u e se utilicen todos los centros instan táneos. N o o b sta n te , se debería c o n o c e r el p roceso de loca- iz a d ó n de cada cen tro porque se p o d ría u tilizar cualquier c e n tra
www.FreeLibros.me

A n á lisis d e velocidad 143
6.11.1 C e n t r o s p r in c ip a le s
A lgunos cen tros instan táneos se localizan sim p lem en te exam in an d o el m ecanism o. D ichos cen tro s se conocen co m o centros principales. Para ub icarlos se d eb en segu ir las reglas siguientes:
1. C uando d o s eslabones están conectados p o r u n a u n ió n de p e rn o , el cen tro in stan táneo q u e u n e los dos eslabones es este p u n to pivote. L a p rim e ra regla se ilu stra en la figura 6.24a.
2. El c e n tro in stan táneo de d o s eslabones en co n tac to d e r o dam ien to s in deslizam iento se u b ic a e n el p u n to d e co n ta c ta La segunda regla se i lu s tra en la figura 6.24b.
3. El c e n tro in stan táneo de d o s eslabones en co n tac to de deslizam iento en linea recta está en el infin ito , en d irección p erpend icu lar a la dirección de deslizam iento . La velocidad de to d o s lo s p u n to s d e u n eslabón, restring ido a
(23)
m ovim iento d e deslizam iento lineal en relación co n o tro eslabón, es idéntica para to d o s lo s pun to s, en dirección del d es liz am ie n ta P o r lo t a n t a e s posib le im aginar q u e este m ovim iento recto es de ro tac ión a lrededor d e u n pun to q u e se en cu en tra a u n a g ra n d istancia , ya q u e u n a línea recta p u ed e m od ela rse co m o la p a rte de u n c ircu lo c o n un radio d e ta m a ñ o in f in i ta C o m o la velocidad siem p re es perpendicu lar a la lin ea trazad a hacia el pivote, este cen tro instan táneo deb e se r p erpend icu lar a la d irección de deslizam iento. Hay q u e co n sid era r q u e este cen tro se en cu en tra so b re cualqu ier lin ea p erpend icu lar a la dirección del d esp lazarm en ta p o rq u e las lineas s e ju n ta n e n el in f in ita La tercera regla se ilu stra en la fig u ra 6.24c.
B cen tro in stan táneo de dos eslabones co n u n co n tac to de deslizam iento com pleto se en cu en tra en algún lado d e la Unca n o rm a l a la d irección del deslizam iento. L a cuarta regla se ilu s tra n en la fig u ra 6.24d.
P ilm e ra regla
*»)
/ /. " 1 3 a l infinito
(1 3 » )
2 3 a lo largo d e e s ta norm al com ú n
(23)
HG URA 6 J4 Local iza ció n de los cen tros principales.
P R O B If.M A DF. E JE M PL O 6.11
l a figura 6 2 5 ilustra el mecanismo de u n com presor de aire, localice todos los centros instantáneos principales de este mecanismo.
S O L U C IÓ N : I . Elabore e l diagram a cinemático
En la figura 6.26 se presenta el diagrama cinem ático del com presor de aire.
Entrada
FIG U R A 6.25 Com presor d e a i r e d el problem a de ejem plo 6.11.
www.FreeLibros.me

144 CAPITULO SEIS
0
FIGURA 6.26 D iagram a cinem ático del p rob lem a d e e jem plo 6.11.
Aplique la p rim era regla para localizar los centros principales
Se nu m eran los cuatro eslabones del diagram a cinemático. Las un iones d e perno se identifican con letras. La prim era u n ió n de perno. A,conecta el eslabón 1 y el eslabón 2 . Considerando la prim era regla de los centros instantáneos principales, esta unión es la ubicación del cen tro instantáneo (12). Asimismo, la unión de perno B es d cen tro instantáneo (23) y la unión d e perno C es el centro instantáneo (34).
&i el diagram a cinem ático de la figura 6 2 6 resulta evidente que n o hay contacto de rodam iento en ningún eslabón. Por lo tanto, la segunda regla n o se aplica en este mecanismo.
A plique la tercera regla para localizar centros principales
Como hay u n a unión de deslizamiento lineal entre los eslabones 4 y I , este centro instantáneo se visualiza en el hfin ito , en dirección perpendicular a la dirección del deslizamiento. La figura 6 2 7 m uestra b notación q u e se utiliza para identificarlo, jun to con b identificación de los dem ás centros instantáneos principales. Recuerde que este centro instantáneo podría estar sobre una linea paralela a la linea (14«“ ), ya q u e se podría considerar que las Ineas paralelas se intersecan en el infinito.
FIGURA6.27 C en tros instantáneos principales del p rob lem a de ejem plo 6 .1 1.
En d diagrama cinem ático de la figura 6 2 6 se p erabe claram ente que n o hay uniones de deslizamiento general. Por lo tanto, n o se aplica la cuarta regla a este mecanismo.
6 .1 1 .2 T e o re m a d e K e n n e d yLos cen tros instan táneos q u e n o se p u ed en u b ic a r a p a r t ir de las c u a tro reglas de cen tro s principales, se localizan ap lican d o el teorema de Kennedy, q u e establece lo siguiente:
Los tres centros instantáneos correspondientes a tres cuerpos cualesquiera permanecen sobre la m istna recta.
Por ejem plo, im agine tres esb b o n es cualesquiera (esbbones 3 ,4 y 5). El teorem a d e Kennedy establece q u e las cen tro s instantáneos (34), (45) y (35) perm anecen sob re u n a linea recta. C on la a p licación de este teorem a, después de localizar los cen tros instantáneos principales, se pueden determ inar lo s dem ás centros in stan táneos. La ubicación precisa d e los cen tro s instantáneos se realiza usando m étodos gráficos o analíticos. Desde luego, lo s m étodos gráficcs incluyen ta n to técnicas m anuales de d ib u jo com o el c a d .
6 .1 1 .3 D ia g ra m a d e c e n t r o s in s ta n tá n e o sL h diagram a de cen tros instantáneos es u n a técnica gráfica q u e se utiliza para u b icar tan to los centros instantáneos, que ya se hayan localizado, co m o aquellos que aú n necesitan definirse. Asimismo, señala las com binación es de ce n tra s instantáneos q u e e s pasible
utilizar en b aplicación del teo rem a d e Kennedy. Es r a ro q u e se w cesite localizar todos los cen tros instantáneos para ejecutar un atáHsis de velocidad. Se deben estudiar el m ecanism o y el (los) es b b ó n (e s) im pulsor!es), asi com o la salida requerida p a ra determ in a r los cen tro s instan táneos específicos q u e se requ ieren , de m anera q u e el diagram a de cen tro s instan táneos se u tiliza para calcular los centros instantáneos específicos.
H diagram a de cen tro s instan táneos e s u n círculo d iv id ido en segm entos: u n o p o r cada e sb b ó n d d m ecanism o q u e se analiza. Los separad o res de segm en tos se iden tifican co n lo s n ú m ero s co rrespo n d ien tes a lo s e sb b o n es. E n b fig u ra 6.28a se m uestra u n diagram a d e cen tros instan táneos p a ra u n mecan ism o de c u a tro barras.
Q ia lq u ie r linea q u e u n e d o s p u n to s d d d iag ram a rep re sen ta u n c e n tro instantáneo, q u e v in c u b los d o s e sb b o n e s id e n tificados p o r lo s p u n to s de lo s extrem os. P or ejem plo, la línea q u e u n e el p u n to 1 y d p u n to 4 . representa el cen tro instan táneo (14). Para b s cen tro s instantáneos ya localizados, la línea corresp o n d ien te del d iag ram a se m arca co n u n a linea c o n tin u a . La figura 6 2 8 b ind ica q u e ya se localizaron las cen tro s instantáneos(12), (23). (34) y (14). E ntonces, los cen tro s in s tan tán e o s que necesitan identificarse p u e d e n rep re sen ta rse co n lin e a s p u n teadas. La figura 6 2 8 c m uestra q u e los cen tros instan táneos (13) y (24) aú n n o se h an en co n trad o . Todos lo s cen tro s instantáneos
www.FreeLibros.me
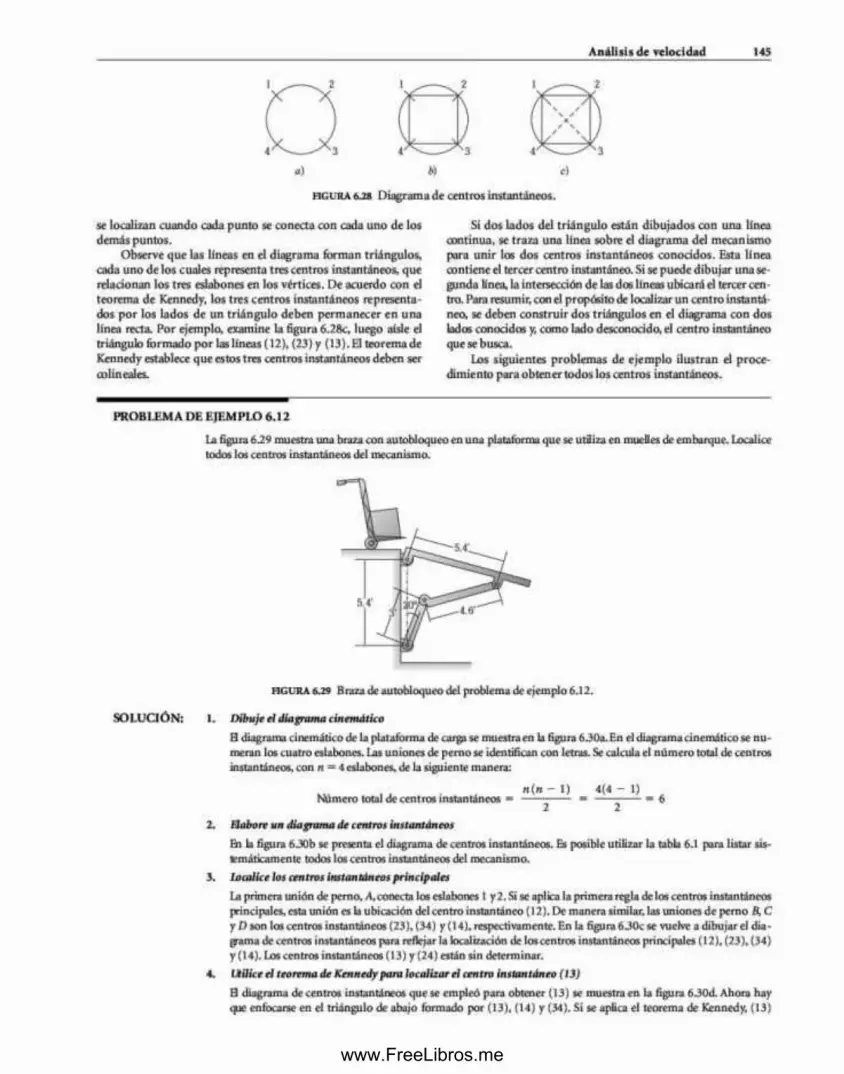
A n á lisis d e velocidad 145
fig u r a &2S D iagram a d e cen tros instantáneos.
se localizan cu an d o cada p u n to se co n ec ta co n cada u n o de los d em ás pun to s.
O bserve q u e las lineas en el d iag ram a fo rm an triángulos, cada u n o de lo s cuales representa tres cen tro s instantáneos, q u e relacionan lo s tres eslabones en lo s vértices. D e acuerdo co n el teorem a de Kennedy, lo s tr e s cen tro s instan táneos represen tados p o r los lad o s d e u n tr iá n g u lo d eb en p e rm a n e c e r e n u n a linea recta. P or ejem plo, exam ine la ñ g u ra 6.28c, luego aísle el triángulo fo rm ad o p o r las lineas (12), (23) y (13). El teorem a de K ennedy establece q u e estos tres cen tro s instan táneos deben ser colin cales.
Si d o s lad o s del tr iá n g u lo están d ib u ja d o s co n u n a linea con tinua , se tra z a u n a lin ea sob re el d ia g ra m a del m ecanism o para u n ir los d o s cen tros in s tan tán e o s conocidos. Esta linea con tiene el te rce r cen tro instan táneo . Si se p u ed e d ib u ja r u n a se gunda línea, la intersección de las dos lineas ubicará el tercer cen tro. Para resum ir, con el p ropósito de localizar u n cen tro in stan táneo, se deben co n s tru ir d o s tr ián g u lo s en el d iag ram a co n dos lados conocidos y, co m o lado desconocido, el cen tro instantáneo q u e se busca.
Los s ig u ien tes p ro b lem as d e e jem p lo ilu s tra n el p ro ced im ien to para o b te n e r to d o s lo s cen tro s instantáneos.
PRO B LEM A D E E JE M PL O 6 .1 2
La figura 6.29 m uestra u n a braza co n autobloqueo en u n a plataforma que se utiliza e n muelles de em barque. Localice todos los centros instantáneos del mecanismo.
S O L U C IÓ N : I .
FIGURA 6 J9 Braza de autobloqueo del problem a de ejem plo 6.12.
IXbuje e l diagram a cinemático
H diagrama cinem ático de la plataform a de carga se muestra en la figura 6.30a. En el diagram a cinem ático se n u m eran los cuatro eslabones. Las un iones de perno se identifican con letras. Se calcula el n ú m ero total de centros
, con n = 4 esbbones, de b siguiente manera:
n (n - I ) 4 ( 4 - 1)N úm ero total de cen tros instantáneos ■ - 6
2 2
Oabore u n diagrama de centros instantáneos
B i la figura 630b se presenta el diagram a de centros instantáneos. Es posible utilizar b tabla 6.1 para listar sistemáticamente todos los centros instantáneos del mecanismo. localice los centros instantáneos principales
l a prim era unión de perno. A,conecta los eslabones 1 y 2 . Si se aplica la prim era regla de los centros instantáneos irincipales, esta unión es h ubicación del cen tro instantáneo (12). D e m anera s im ib r, las uniones de perno B, C y D son los centros instantáneos (23), (34) y (14), respectivamente. En b figura 6 3 0 c se vuelve a dibujar el dia- p a m a de centros instantáneos para reflejar la localización de los centros instantáneos principales ( 12), (23), (34) y (14). Los centros instantáneos ( 13) y (24) están sin determ inar.
I tilic e el teorem a de Kennedy para localizar el centro instantáneo (13)
H diagram a de centros instantáneos q u e se em pleó para obtener (13) se m uestra en b figura 630d . Ahora hay q je enfocarse en el triángulo de abajo form ado por (13), (14) y (34). Si se apbca el teorem a de Kennedy. (13)
www.FreeLibros.me
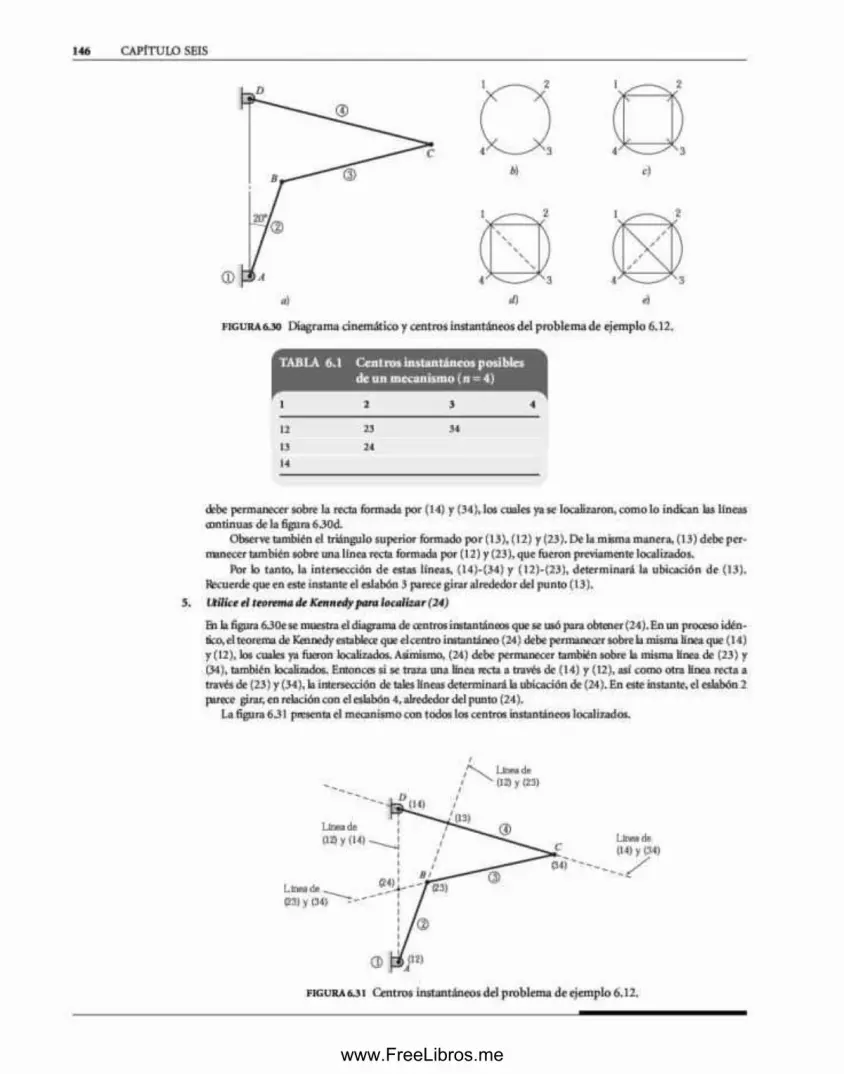
a) d) e>
FIGURA6.30 D iagram a cinem ático y cen tro s instantáneos del p ro b lem a de e jem plo 6.12.
p lA B L A 6.1 C e n tr o s in s ta n tá n e o s p o s ib le s 1 d e u n m e c a n is m o ( n = 4 ) ¡
ri
12 23 34
13 2414
debe perm anecer sobre la recta form ada por (14) y (34), los cuales ya se localizaron, com o lo in d k an b s lineas continuas de la figura 6 JOd.
Observe tam bién el triángulo superior form ado p o r (13). (12) y (23). De la m am a m anera, (13) deb e p ermanecer tam bién sobre una linca recta formada por (12) y (23), que fueron previamente localizados.
Por lo tanto, la intersección de estas lineas, (14)-(34) y (12)-(23), de term inará la ubicación de (13). Recuerde que en este instante el eslabón 3 parece girar alrededor del pun to (13).
5 . I tilic e el teorem a de Kennedy para localizar (24)
B» b figura 6 J0 e s e muestra el diagrama de centros instantáneos que se usó para obtener (24). En un proceso idéntico, el teorem a de Kennedy establea? que elcentro instantáneo (24) debe permanecer sobre b m ism a linea que (14) y (12), los cuales ya fueron localizados. Asimismo, (24) debe permanecer también sobre b m ism a linea de (23) y (34), tam bién localizados. Entonces si se traza u n a linea recta a través de (14) y (12), asi com o otra linca recta a través de (23) y (34), b intersección de tales lincas determ inará b ubicación de (24). En este instante, el csbbón 2 jurcce girar, en rebeión co n el csbbón 4, alrededor del pun to (24).
La figura 6 J 1 presenta el m ecanism o con todos los centros instantáneos localizados.
FIGURA 6.31 C entros instan táneos del p rob lem a d e e jem plo 6.12.
www.FreeLibros.me
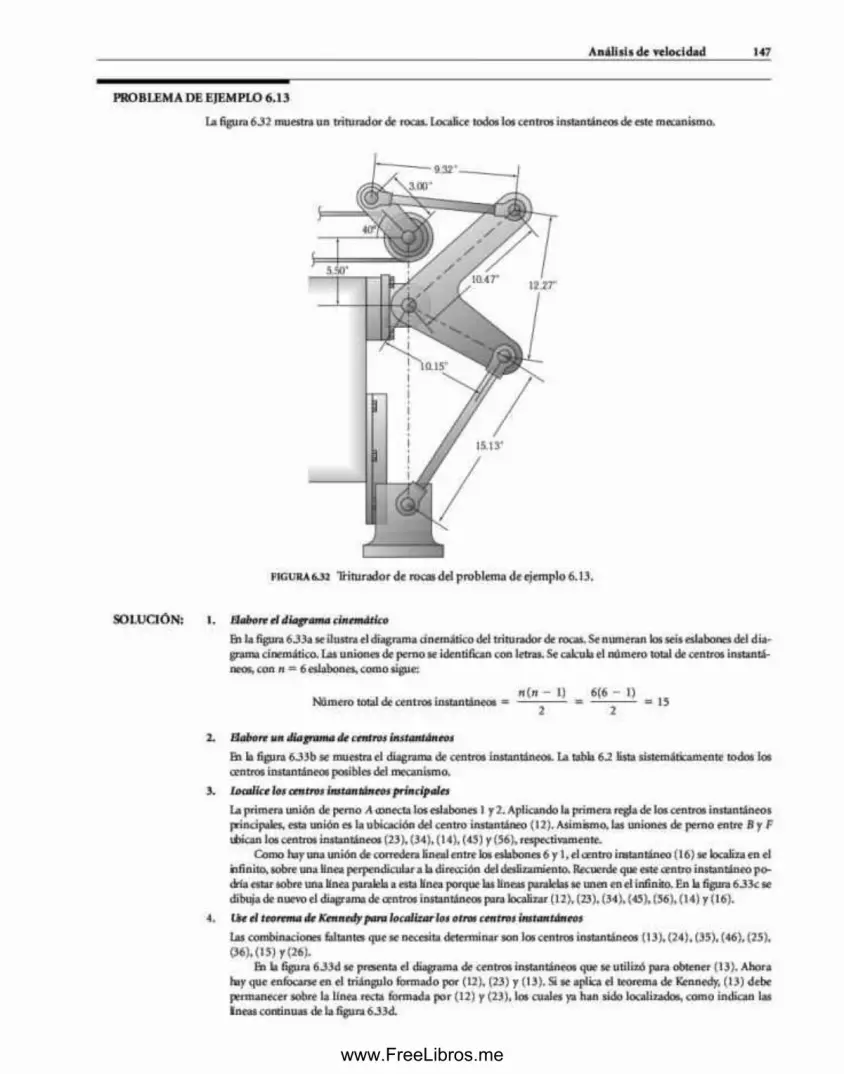
A n á lisis d e velocidad 147
PR O B LEM A D E E JE M PL O 6 .1 3
Id figura 6.32 m uestra u n triturador de rocas. Localice todos los cen tros instantáneos de este mecanismo.
S O L U C IÓ N : 1. H a b ó n e l diagram a cinemático
B i la figura 6.33a se ilustra el diagram a cinem ático del triturador de rocas. Se num eran los seis eslabones del d iagrama cinemático, la s uniones de perno se identifican con letras. Se calcub el núm ero total de centros instantáneos. co n n = 6 eslabones, com o sigue:
N úm ero total de cen tros instantánen ( n - 1) 6 (6 - 1)
15
H a b ó n u n diagrama de centros instantáneos
&i ki figura 6 J 3 b se m uestra el diagrama de centros instantáneos, l a tabla 6 2 Esta sistem áticam ente todos los centros instantáneos posibles del mecanismo.
localice los centros instantáneos principales
l a prim era unión de perno A «onecía los eslabones 1 y 2 . Aplicando la prim era regla de los centros instantáneos principales, esta unión es la ubicación del cen tro instantáneo (12). Asimismo, las uniones de perno en tre B y F tincan los centros instantáneos (23), (34), (14). (45) y (56). respectivamente.
Com o hay u n a unión de corredera Enea! en tre los eslabones 6 y 1. el centro im tantáneo (16) se localiza en el h fin ito , sobre u n a linea perpendicular a la dirección del deslizamiento. Recuerde que este centro instantáneo p o dría estar sobre una Enea paralela a esta Enea porque las Eneas paralelas se unen en el infinito. En la figura 6 3 3 c se dibuja de nuevo el diagrama de centros instantáneos para localizar (12). (23). (34), (45), (56), (14) y (16).
L ie e l teorem a de Kennedy para localizarlos otros centros instantáneos
la s combinaciones fallantes que se necesita determ inar son los centros instantáneos (13), (24), (35), (46), (25), (36). (15) y (26).
En la figura 6 3 3 d se presenta el diagrama de centros instantáneos que se utilizó para obtener (13). Ahora lu y que enfocarse en el triángulo form ado por (12). (23) y (13). Si se aplica el teorem a de Kennedy, (13) debe perm anecer sobre b linea recta form ada p o r (12) y (23). los cuales ya h an sido localizados, com o indican las Incas continuas de b figura 633d .
www.FreeLibros.me

148 CAPITULO SEIS
A) I) J)FIGURA 6 J3 D iagram a cinem ático del p rob lem a d e e jem plo 6.13.
TABLA 6 .2 C e ñ ir o s in s ta n tá n e o s p o sib le s d e u n m e c a n is m o (n = 6)
1 2 3 4 5 6
12 23 34 45 56
13 24 35 4614 25 3615 2616
Observe tam bién el triángulo form ado por (13), (34) y (14). D e m anera sim ilar, (13) debe perm anecer tam bién sobre la recta form ada por (13) y (34), los cuales ya fueron localizados anteriorm ente. Entonces, la intersección de estas líneas, (12)-<23) y (13)-(34), determ inarán la ubicación de (13).
La tabla 6 J se form uló ju ra localizar todos los cen tros instantáneos follantes. Observe que d orden con q u e se A tie n e n los centros instantáneos depende considerablem ente de cuáles son los centros instantáneos q u e ya se hayan bealizado. E sto se vuelve u n proceso bastante iterativo, pero el diagram a de centros instantáneos es raboso en la ap licación de este m étodo, l a figura 6 J 4 ilustra el mecanismo con todos los centros instantáneos localizados.
TABLA 6 .3 U b icac io n es d e lo s c e n t r o s in s ta n tá n e o s d e l p r o b le m a d e e je m p lo 6 .13
Para localizar d centro instantáneo UtiBcr la* hncas que se intersecan Diagrama de a n tro instantáneo
13 (l2M 23)y(l4)-(34) Figura 6J3d24 (12HM)y(23)-(34) Figura 6.3 Je15 (16M 56ty(l4M 45) Figura 6J3Í46 (I4M 16) y (451-156) Figura 6.3 Jg
36 (13M16)y(34)-(46) Figura 6 J3h26 (12).(l6)y(23M36) Figura 6J3i35 (56M36) y (34)-(45) Figura 6J3j25 04)-(45)y(23)-(35) Figura 6J3k
www.FreeLibros.me

A n á lisis d e velocidad 149
6.12 ANÁLISIS G RÁ FICO DE VELOCIDAD: M ÉTODO DEL CENTRO INSTANTÁNEO
El m éto d o del cen tro instan táneo se basa en los siguientes tres principios:
L L a velocidad e n u n cu erp o q u e g ira es p ro p o rc io n a l a la distancia desde el p u n to pivote.
I I . El c e n tro in stan táneo c o m ú n a d o s eslabones se puede considerar su jeto a cualqu iera de ellos.
I II . 1.a velocidad ab so lu ta del p u n to , q u e sirv e co m o cen tro in stan táneo co m ú n , es la m ism a, sin im p o rta r cuál eslabón se considere su je to a ese pun to .
U tilizando estos p rin c ip io s , la velocidad ab so lu ta de cualq u ie r p u n to sob re u n m ecanism o se o b tien e fácilm ente c o n u n m éto d o general, el c u a l se describe en lo s siguientes se is pasos:
1. A islar el eslabón d e velocidad co nocida (eslabón A), el eslabón q u e co n tien e el p u n to cuya veloddadse desea con o cer (eslabón B) y el eslabón fijo (eslabón C ).
2. U b icar el c e n tro in stan táneo co m ú n al eslabón de velocidad c o n o d d a y el eslabón fijo (cen tro instan táneoA Q .
3. Localizar el cen tro in stan táneo co m ú n al eslabón de velocidad c o n o d d a y el eslabón q u e con tiene el
p u n to cuy a v e lo d d a d se desea con o cer (cen tro instantán eo AB).
4 . D eterm ine la veloddad del c e n tro in stan táneo (AB), si se sabe que la v e lo d d ad d e u n p u n to so b re u n eslabón es p ro porcional a la d istanc ia a p a rtir d e l pivote. El cen tro in stan táneo ( AC) sirve co m o pivote. L a velocidad co nocida del eslabón A se m ide co n la p roporc ión y la escala adecuadas para d e te rm in a rla veloddad del cen tro instan táneo (AB).
5 . Localizar el cen tro in stan táneo c o m ú n al eslabón co n el p u n to cuy a v e lo d d a d se desea con o cer y el eslabón fijo (c e n tro instan táneo BC).
6 . D eterm inar la velocidad deseada, si se sa b e q u e la v e lo d d ad d e u n eslabón es p roporc ional la distancia desde el pivote. El cen tro in stan táneo ( B Q s irv e c o m o pivote. La velocidad del c e n tro in stan táneo co m ú n ( AB) se m ide co n la p ro p o rc ió n y la escala adecuadas para d e te rm in ar la v e lo d d ad deseada.
La técn ica g ráfica p a ra m e d ir a u n a escala p ro p o rc io n a l a d e c u a d a u n v ecto r utiliza la línea de centros, LC Esta es u n a linea trazad a desde el p u n to p ivo te d e l eslabón al in id o del vecto r c o n o d d o . T am bién se u tiliza u n a línea de proporción, t í1, que es u n a linea trazad a desde el p u n to pivote hasta el ex trem o del vector c o n o c id a La figura 6.35a ilu stra ta n to la línea d e centros ro m o la línea d e p roporc ión . La distancia del pivote al p u n to d e seado se transfiere a la línea de centros. La m agnitud del vector m ed ida p ro p o rd o n a lm e n te se d efine co m o para le la a l vector c o n o d d o . extendida de t e a l p en la d istanc ia transferida . Lo an te rio r ta m b ié n se m u e s tra e n la fig u ra 6 .35a
www.FreeLibros.me

150 CAPITULO SEIS
>LCi
a) b)
FIGURA 6.35 Uso de u n a línea de cen tros y u n a línea d e proporción .
D esde luego, la m agnitud de la velocidad e s perpendicu lar a la línea q u e u n e el p u n to d e velocidad desconocida y el p u n to pivote. Al calcular la m agn itud y el p o sid o n am ien to de u n vecto r e n la d ire c d ó n adecuada, se define totalm ente e l vector. P or lo tan to , el v ecto r es p ro p o rc io n a l gráficam ente. El resu ltado se ilu stra en la fig u ra 6.35b.
Se ha descrito la lógica d e trás del m étodo del cen tro instantáneo del a n á lis is de velocidad m ed ian te técn icas gráficas. La so lu d ó n real se o b tie n e a l ap lica r u n a ló g ica idén tica co n un d ibujo m anual o d e c a d . Independien tem ente del proceso que se u tilice, los conceptos subyacentes del proced im ien to gráfico del m é to d o d e cen tro in stan tán e o del aná lis is d e v e lo d d a d se ilustran co n los sigu ien tes p rob lem as d e ejem plo.
PR O B LEM A D E E JE M PL O 6 .1 4
La figura 6 2 9 presenta la braza autom ática con autobloqueo en u n a plataform a que se usa en muelles de embarque. En el problem a 6.12 se localizaron todos los centros instantáneos del mecanismo. Determ ine la veloddad angular del eslabón 4, s i se sabe que d eslabón 2 se eleva a u n a velocidad constante de 3 rad/s.
SO L U C IÓ N : I . Elabore el diagrama cinem ático con los centros instantáneos y a localizados
&i la figura 6 3 6 a se reproduce el diagrama cinemático con inform ación de los centros instantáneos y la escala.
Escala:0 31— -4 —— 1-------1
fig u r a 636 D iagram a d n em ático del p rob lem a d e e jem plo 6.14.
2 . D eterm ine la velocidad linea l de u n p u n to co m en ien te (B)
La velocidad lineal del p u n to B se determ ina a partir de la velocidad angular del eslabón 2 . La m e d id ó n del pun to B es de 3 ft desde el pivote del eslabón 2 (p u n to A).
V* - M 3 f t ) ( 3 r * l / s ) - 9 f t /s £ 0 "
www.FreeLibros.me

A n á lisis d e velocidad 151
3. A plique e l procedimiento general de velocidad del centro instantáneo
a) Aislé los eslabones.
B eslabón 2 tiene la velocidad conocida.H eslabón 4 contiene el pun to cuya velocidad se desea conocer.H eslabón 1 es el eslabón fijo.
b) 0 centro instantáneo com ún en tre el eslabón con velocidad conocida y el eslabón fijo es (12).
c) 0 centro instantáneo com ún en tre el eslabón de velocidad conocida y el eslabón de velocidad desconocidaes (24).
d) La velocidad del centro instantáneo (24) se obtiene gráficamente a partir de la velocidad del p u n to B. El eslabón 2 contiene tan to el p u n to B como e l cen tro instantáneo (24); por ello, la velocidad se m ide propor- donalm ente en relación con el cen tro instantáneo (12). Esta construcción se presenta en la figura 636b . la m agnitud escalada de la velocidad, v(24), es de 7.4 ft/s.
e) 0 centro instantáneo com ún en tre el eslabón de velocidad desconocida y el eslabón fijo es (14).
f ) La velocidad del p u n to C se obtiene gráfkam ente a partir de la velocidad del centro instantáneo (24). El eslabón 4 contiene tan to el p u n to C como e l cen tro instantáneo (24); por ella, la velocidad se escala en proporción co n el cen tro instantáneo (14). En la figura 6 3 6 c se muestra esta construcción. La m agnitud vc de esta velocidad se escala a 13.8 ft/s.
4 . Determ ine la velocidad angular del eslabón 4
Rnalm ente. la velocidad angular del eslabón 4 se obtiene a partir de la velocidad del p u n to C La m edición a escala indica q u e e l pun to C está posicionado a u n a distancia de 5.4 ft desde el pivote del eslabón 4 (pun to D).
vc 13.8 ft/s“ 4 = 7 ~ = s i f i = 2 6 ^rCU 5.4 tt
C om o la dirección de la velocidad angular debe se r consistente co n la velocidad del pun to C e l eslabón gira en sentido antihorario . Por lo tanto,
w4 ■ 2.6 rad /s, en sen tido antihorario
Observe q u e esta velocidad angular tambión se determ ina a partir de la velocidad del centro instantáneo (24), ya que este punto se considera parte de los eslabones 2 y 4 . Sin embargo, com o en el primer problema de ejemplo » b r e el tem a, resulta difícil visualizar el p u n to que gira en relación con el eslabón 4.
PR O B LEM A D E E JE M PL O 6.15
la figura 6 3 2 m uestra u n dispositivo triturador de rocas. En el problem a de ejem plo 6.13 se localizaron todos los centros instantáneos del m ecanism o. E n la posición m ostrada, determ ine la velocidad del ariete tritu rador cu an d o la nnnivcla gira a una velocidad constante de 60 rpm en sentido horario.
S O L U C IÓ N : 1. Elabore e l diagram a cinem ático con los centros instantáneos y a ubicados
En la figura 6 3 7 a se reproduce el diagram a cinem ático con inform ación de la escala.
2. Determ ine la selocidad linea l de u n pun to conveniente B
l a velocidad lineal d d p u n to B se determ ina a partir de h velocidad angular del eslabón 2. El p u n to B se ha escalado para p o sid o n a rlo a u n a distancia de 4 3 in a partir del pivote del eslabón 2 (pun to A):
o>j - 60 rp m ^ = 6 2 8 rad/s
■ rABral " (4 *5 in ) (6 3 8 ra d /s ) ■ 2 8 3 in/* / “ >*
0 o b j e t i v o d e l p r o b l e m a e s d e t e r m i n a r l a v e lo c i d a d H n c a l d e l p u n t o C .
www.FreeLibros.me

152 CAPITULO SEIS
Bcala:0I—f —
30H
ir*
fig u r a 6.37 D iagram as del p rob lem a d e e jem plo 6 .15.
3 . A plique el procedim iento general de velocidad del centro inaan túneoa) A b le los eslabones.
B eslabón 2 tiene ia velocidad conocida.El eslabón 5 (o 6 ) contiene el pun to cuya velocidad se desea conocer.H eslabón 1 e s el eslabón fijo.
b) El centro instantáneo com ún entre el eslabón con velocidad conocida y el eslabón fijo es (12).
c) El centro instantáneo com ún en tre el eslabón con velocidad conocida y el eslabón co n velocidad desconocida es (25).
d) La velocidad del centro instantáneo (25) se obtiene gráficam ente a partir de la velocidad del p u n to B. El eslabón 2 contiene tan to el p u n to B com o el cen tro instan táneo (25); p o r ello, la veloddad se m ide p ro- pordonalm cntc en relación con el centro instantáneo (12). Esta construcción se ilustra en h figura 6.37b. l a m edición a escala de la m agnitud de esta veloddad, v(2J), e s de 37.1 in/s.
e) El centro instantáneo com ún entre el eslabón de velocidad desconocida y el eslabón fijo e s (15).
f l La vdocidad del p u n to C se obtiene gráficamente a partir de la velocidad del centro instantáneo (25). Eleslabón 5 contiene tan to el p u n to C como el centro instantáneo (25); por lo tanto, la velocidad del centro hstan tánco (25) se gira a una linca de cen tros creada por el pun to C ye l cen tro instantáneo (15). La vdocidad del centro instantáneo (25) sirve p ira crear u n a Enea de proporciones. Luego, se utiliza esta linea de proporciones para construir la vdocidad C Esta construcción se m uestra en la figura 6 3 7 c La m edición a escala de la m agnitud de la velocidad, v0 es de 3 3 3 in/s.
Establecido formalmente.
Vc - 333 in /s i
6.13 M É T O D O ANALÍTICO PARA VELOCIDAD: M ÉTO D O DEL CEN TR O INSTANTÁNEO
E l m é to d o d d c e n tro in s ta n tá n e o p rác ticam en te n o se a lte ra cu an d o se u tiliza u n m éto d o analítico p a ra ob ten er la so lución . La única diferencia « q u e las posic iones de los cen tro s instantá
neos se d eb en d e te rm in ar aplicando trigonom etría , en vez d e la construcción de lineas y de la ub icación d e p u n to s de intersección. Esto p o d r ía volverse u n a ta rea agobiante, d e m o d o q u e es co m ú n u b icar tan so lo lo s cen tros instantáneos requeridos p o r
d aná lis is de v d o d d a d . M ed ian te el p rob lem a d e e jem plo siguiente, se ilu s tra el m éto d o analítico.
www.FreeLibros.me

A n á lisis d e velocid ad 153
PR O B LEM A D E E JE M PL O 6 .1 6
l a figura 6 3 8 presenta un m ecanism o que se usa en una línea de producción para voltear cajas, de m odo q u e se lo- 0t n adherir etiquetas (rótulos) en la parte inferior de la caja. El brazo im pulsor tiene 15 in de largo y, en el instante m ostrado, está inc linado u n ángulo d e 60*. con u n a velocidad angular de 5 rad /s en se n tid o horario . FJ eslabón seguidor tiene 16 in de largo. La distancia entre lo s pernos del transportador es de 7 in y actualm ente están alineados en form a vvrtkal. Determ ine b velocidad angular del transportador y el brazo impulsado.
Q Z
fig u r a 638 M ecanism o v o lteado r del p rob lem a de e jem plo 6.16.
S O L U C IÓ N : I . D ibuje e l diagram a cinemático
B i la figura 639a se ilustra el diagrama cinemático, En el ex trem o del transportador se incluyó d p u n to de in terés X.
V*3)
FIG URA 6.39 D iagram a cinem ático del p ro b lem a d e e jem p lo 6 . 1 6 .
2. M a tic e la geometría del mecanismo
Se usa la trigonom etría para determ inar las distancias y los ángulos característicos de la configuración de este mecanismo. Para hacer esto, se utilizan los triángulos m ostrados en la figura 6 3 9 b . la s distancia* BM y AAf se pueden determ inar a partir del triángulo ABM.
B M = A B sen (60*) = (15 in ) sen (60*) = 13.0 in
A M - A B eos (60°) - (15 in ) eos (60*) - 7 3 in
Alo largo de b vertical BCM.
C M ■ B M - BC = 13.0 - 7.0 - 6.0 in
H ángulo A D C y la d istan cb D N se determ inan a partir del triángulo CDM.
—■(i)—1 m - 22.0*
Brazoimpulsor
DM - C D cos (22*) - (16 in) eos (22*) - 1 4 3 in
www.FreeLibros.me

154 CAPITULO SEIS
3 . A plique t i procedim iento general de velocidad del centro instantáneo
En este punto, se sigue el m étodo general del centro instantáneo para resolver el problema,
n) Aislé los eslabones.
B eslabón 2 tiene la velocidad conocida.H eslabón 3 contiene el p u n to cuya velocidad se desea conocer.H eslabón 1 e s el eslabón fijo.
b) El centro instantáneo com ún en tre el eslabón de velocidad conocida y el eslabón fijo es (12). Por inspección, se observa que este cen tro instantáneo se encuentra en el pun to A.
c) FJ centro instantáneo com ún en tre el eslabón con velocidad conocida y el eslabón con velocidad desconocida es (23). Por inspección, se observa que este centro instantáneo se ubica en el p u n to B.
d) La velocidad del centro instantáneo (23) es simplemente la velocidad del pun to R que se determina como sigue:
Vg ■ r ÁBo>¡ = (15 in ) (5 rad /s) - 75 in /s
t ) El centro instantáneo com ún en tre el eslabón de velocidad desconocida y d eslabón fijo es (13). Este centro instantáneo se localiza en la intersección de los centros instantáneos (12)—(13) y (14)—(34). Se observa que d centro instantáneo (34) se localiza en d pun to C y el (14) en el p u n to D. Por ello, d centro instantáneo(13) se localiza en la in teracción de los eslabones 2 y 4 . Este pun to se identifica com o N en la figura 639b. lo s ángulos D A N y AND , asi com o la distancia A N se determ inan a partir del triángulo A N D
L D A N - 180° - 60° - 120"
L A N D = 180* - (1 2 0 ° + 22") = 38*
A N sen(¿A D .V )vsen ( ¿ A N D ) /
B N ■ BA - A N - 15 - 5 3 - 9 3 in
Asimismo,
^ 22°( 1 i = 5 3 in. ( 7 3 in V sen (38°)
D N - - 7.7 in
C N - CD D N - 16 - 7 .7 - 8 3 in
f j El eslabón 3 gira instantáneam ente alrededor del centro instantáneo (13). Por lo tanto, la velocidad angular del eslabón 3 se calcula a partir de la velocidad del centro instantáneo com ún (23), en relación con el cen t ro instantáneo (13). Esto se ilustra en la figura 6 3 9 c y se calcula com o sigue:
* <75Ü,/” 7.9 n d / í'■(is)-<2S> <9-5 «")
C om o la d irección de la velocidad a n g u la r deb e se r consistente co n la velocidad del p u n to (23) co n respecto a (13), el eslabón g ira e n sen tido h o ra rio . Entonces,
<o¡ = 7 .9 rad /s, en sentido horario
La velocidad del p u n to (34) tam b ién se o b tien e usando la velocidad angular del e sb b ó n 3 , p o rq u e g ira in stan tán eam en te a lrededor del cen tro instan táneo (13).
V(M - *»3 1(1))-(M) - (7 .9 ra d /j) (8 3 in) - 65.6 in /s - 65.6 in /s /fo "
C o m o el e s b b ó n 4 g ira e n relación co n (14), b velocidad del eslabón im pulsado es
‘'O I 65.6 in /s oí, = ------------ ■ —— — = 4.1 rad /s, en sentido horario
'(14) —(21) 1610
www.FreeLibros.me

A n á lisis d e velocidad 155
6.14 CURVAS DE VELOCIDADL os análisis p resen tados has ta esta parte del cap itu lo sirven para calcular la velocidad d e p un tos sob re u n m ecan ism o en u n instan te especifica A un cu an d o lo s resultados sean útiles, tan solo b rin d an u n a “fo to instantánea” del m ovim iento. El defecto ev id e n te d e este análisis es q u e la de te rm in ac ió n de las condiciones ex trem as e s d ifíc il. Se d eb en investig ar v arias p o sic io n e s del m ecan ism o p a ra iden tificar las fases criticas.
Es conven ien te traza r la m agn itud de velocidad de cierto pun to , o eslabón, co n fo rm e el m ecanism o se m ueve a través de su ciclo. Este tra z o es la curva de velocidad. Una cu rv a de velocid ad se g enera a p a rtir del d iag ram a d e desplazam iento, c o m o el descrito en la sección 4 .11.
Recuerde q u e u n d iag ram a de d esp lazam ien to g rá fica el m ov im ien to de u n p u n to o eslabón co m o u n a función del m o vim iento d e u n ju n to o eslabón de entrada. L a m ed ida del m ovim ie n to de e n tra d a se p u e d e co n v e rtir fác ilm en te e n tiem po . E sto e s b astan te c o m ú n cu an d o el im p u lso r op era a velocidad constante.
C om o se ha v isto a lo largo del cap itu lo , la velocidad es el cam b io en el t ie m p o del d esp lazam ien to . R ep lan teando b s ecuaciones (6 . 1) y (6 .2),
M agnitud de b velocidad lineal ■ v ■ cam bio en el desplazam ien to lineal e n tre cam bio en el tiem p o
d R AR
V ~ d i A l
Al rep lan tear la s ecuaciones (6 .4 ) y (6.5),
Velocidad angu la r = to = cam bio en el desplazam ientoa n g u b r en tre cam bio en el tiem po
d d 1 6(i) = — = £ —
d t A r
C o n frecuencia, d im p u lso r d e u n m ecanism o o p e ra a velocidad constan te . P or ejem plo, u n eslabón de e n tra d a im p u ta d o p o r u n m o to r eléctrico en estado estable op era a v e lo d d ad constan te . La flecha del m o to r p o d ría hacer q u e la m an iv eb gire a 300 rp m , su m in is tran d o asi velocidad a n g u b r constan te. Esta v e lo d d ad constan te del eslabón im p u lso r conv ierte el eje x de un d b g ra m a de d esp b zam ien to , d e desp lazam ien to a n g u b r a tiem po. En té rm in o s lineales, al rep lan tear b e c u a d ó n (6 .2 ) se cbtiene:
A f = —̂ (6.17)
En té rm in o s angulares, re p b n te a n d o b e c u a d ó n (6.5):
A0A f = — (6.18)
OI
De m o d o q u e b s ecuadones (6.17) y (6.18) sirven p a ra co n vertir el increm ento del despbzam ien to del eje x a u n increm ento d e tiem po . E stose ilu s tra con el problem a d e e jem plo 6.17.
PRO B LEM A D E E JE M PL O 6.17
En el problem a de ejem plo 4.11 se graficó el diagram a de desplazamiento de u n pistón q u e opera en u n com presor, en relación con la rotación del ágüeflal. Use esos datos para graficar el desplazam iento del pistón en relación con d tiem po, cuando el cigüeñal es im pulsado por u n m otor eléctrico a 1750 rpm .
S O L U C IÓ N : I . Calcule el tiem po para JO" de giro d é la m anivela
La p rin d p a l tarea d e este problem a es convertir el increm ento del ángulo d e b manivela de b figura 4.41 a tiempo. El increm ento en d eje x es igual a 30°, m ientras el a g ü en a l g ira a 1750 rpm . Para se r consistentes con h s unidades, el increm ento en el eje de las x se convierte a revoluciones.
1 0 = 30° ( ■ y p ) “ 0.08333 rov
B increm ento de tiem po para que ki m aniveb g ire 0.08333 rev (30°) se calcula con la ecuación (6.18).
1 0 (0X18333 rev)I t = —
(1750 rev/m in)
- 0XKXXM76 m in
60 s \ _ 1 m in /
- (0.0000476 m in ) " 0XW286 s
2. Agregue u n a colum na de tiem po en la tabla de desplazamiento
Los resultados del análisis d e posic ión se reproducen en u n a ho ja de cálculo insertando el increm en to del tiem po. Lo anterior se muestra e n la figura 6.40, la cual m uestra d tiem po tab u b d o en milésimas de segundo. Si n o está familiarizado co n u n a hoja de cálculo, consulte el capitulo 8.
3. Use los datos de desplazam iento y tiem po para graficar u n a curva de desplazamiento
Con el uso de b hoja de cálculo, se grafican los valores en la figura 6.41 para obtener un diagram a de desplazamiento en relación con el tiempo.
www.FreeLibros.me

ddph
lóa
(Id)
156 CAPITULO SEIS
* la* .»»*- 10 • -•* ■ ' " *• *'* J _ > A
■ % ■ U * %
A . tí : : ; . t r aa * — - .¿ - % 'C S .*
o » — '- •x* '• ■L——A l
A BA
c D1 ÁDgulodr
bmanheln Tiempo «Mpetn.
3 (deg) <0.001») (in)4h. ■ — A 0 0.00 0.000
5 30 2.86 0.136
6 60 5 J 2 0.4837 90 8.57 0 8 9 68 120 11.43 1233
« 150 1429 1.43510 180 17.15 1.5001 1 210 20.00 1.43512 240 22.86 1-23313 2 ”0 25.72 0.89614 300 2 8 5 8 0.48315 330 31.43 0.13616 360 34.29 0.00017 ■ ____
»«•
f i g u r a 6 .4 0 Valores de tiem p o y desp lazam ien to del p rob lem a de e jem plo 6.17.
A O « O-1T00H« j e . * 1 * 1 P i g o i n f e m u lo O »"* e . . < - .W x O . W e . « d d lm M I H w t O o o g » lo ,O u l f o ia o l >»
linn Mm Ri I “ ■ n , £ I". t»-J ■ Z U A */ _ ¿ A * * ? " a - - ? . * K ¡ £
c»ti u m
’ l f c » Al
0 000 0 005 0.010 0.015 0.020 0.025 0 030 0 035Tiempo (»)
f i g u r a 6.41 D i a g r a m a t i e m p o - d e s p l a z a m i e n t o d e l p r o b l e m a d e e j e m p l o 6 .1 7 .
www.FreeLibros.me

A n á lisis d e velocid ad 157
Estos diagramas de desplazamiento en relación con el tiempo se usan para obtener una curva de velocidad, porque
, J(despkizamicnto)Velocidad - ------- — -------- -------
d(Uempo)
B cálcu lo diferencial ind ica q u e la velocidad e n u n in s tan te especifico e s la pend ien te d e l d iag ram a de desplazam ien to en ese in stan te . E l trabajo consiste en ca lcu la r la pend ien te del d iag ram a d e desp lazam ien to en varios puntos.
6.14 .1 D ife re n c ia le s g rá f ic a sLa p en d ien te en u n p u n to se calcula g rad ean d o u n a línea q u e pase p o r e l p u n to de in terés, tan g en te a la cu rv a de desplazam iento. La pendiente de la línea se o b tien e si se calcula el cam bio de valor en el eje y (desplazam iento) d iv id ido en tre el cam bio de valor en el eje x ( tiem po).
D proced im ien to se ilu stra en la figura 6.42. O bserve en el d iag ram a de desp lazam ien to q u e la linea tangen te e n r, es h o r izontal. La pend ien te de esta línea tan g en te es igual a cero. Por consiguiente, la m agn itud de la velocidad en t , e s igual a c e r a
C o m o se observa en d d iag ram a d e desp lazam ien to , una línea tan g en te e n l¡ tien e u n a inclinación h a d a a r r ib a La p e n d ien te de esta lín ea se calcula co m o el cam b io en el desplazam ie n to d iv id id o e n tre el cam b io c o rre sp o n d ien te de tiem po . O bserve q u e este triángu lo A R, A t se trazó bastante g rande para m e jo ra r la exactitud d e la m edición . La velocidad en t¡ se obtiene com o AR/A/ y es positiv a debido a la pend ien te hacia a rrib a de la línea tangente. O bserve tam bién q u e esta es la sección m ás in clinada d e la parte hacia a r r ib a d e la c u rv a d e desplazam iento. Esto se traduce en la m ayor m agn itud d e velocidad positiva.
Este p ro c e d im ie n to se re p ite e n v arias ub icac io n es a lo b rg o del diagram a d e desplazam iento . S in em bargo, p o r lo ge
neral so lo se desea con o cer las velocidades extrem as y lo s c a m b io s a b ru p to s e n tre e llas . C o n los co n o c im ien to s de cálcu lo d iferencia l y de pen d ien tes , es posib le de tec ta r v isualm ente las posic iones de in te rés . En g enera l, la s u b icac io n es de in terés
■ I «s p artes m ás inclinadas d e l d iag ram a d e desplazam iento , las cuales co rre sp o n d en a las velocidades extrem as.
■ Las ub icaciones del d iag ram a de desp lazam ien to co n b c u r vatu ra m ás grande, q u e co rre sp o n d en a cam bios ab rup tos en las velocidades.
C om o se m encionó , b velocidad en t¡ e s b mayor, p o rq u e t ) 6 b p a rte m ás inclinada del d iag ram a d e desplazam iento. La velocidad en t , es b velocidad m ás g ran d e en b dirección negativa, p o rq u e es b p a r te m ás in c lin ad a h a d a a b a jo d e l dia- g ra m a de despbzam ien to .
La iden tificadón d e las p o sia o n es de veloddadcs extrem as e s invaluable. E n estas u b icad o n es , se deb e efectuar u n análisis com pleto d e v e lo d d ad , co m o el p resen tado en las secciones a n teriores del cap ítu lo , de m o d o q u e ta n so lo se lleva a cab o u n análisis exhaustivo de v e lo d d ad e n las configuraciones im p o rtan tes del m ecanism o.
*«>
f i g u r a 6 .4 2 C urvas d e v e l o d d a d .
PRO B LEM A D E E JE M PL O 6.18
Se construyó u n diagram a de desplazamiento e n relación co n el tiem po para el m ecanism o del com presor del problema de ejem plo 6.17. Use estos datos para graficar la cu rv a de veloddad en relación con el tiem po.
www.FreeLibros.me

(U|) U
W!«I |a
po
*i4
WV
^d
s«]
158 CAPITULO SEIS
SO L U C IÓ N :
I . Identifique las partes horizontales en el diagram a d e desplazam ien to
l a principal tarea en la construcción de u n a curva de velocidad es determ inar la pendiente de m uchos puntos so bre la c u rra de desplazamiento. Esta cu rra se reprodujo com o figura 6.43.
Curva de desplazamiento
Tiempo (s)
fig u r a 6.43 C u rv a de desplazam iento del p rob lem a d e e jem plo 6.18.
Analizando esta curva, es evidente q u e b curva tiene una tangente horizontal o pendiente igual a cero, en t t 0.017 y 0.034 s. Por lo tanto, b velocidad del pistón e s cero e n 0 .0J)17 y 03)34 s, cuyos puntos están identificadas co m o t¡ y ¡4, respectivamente.Calcule la pendiente en las partes m ás sobresalientes del diagram a de desplazamiento
l a pendiente máxima hacia arriba se encuentra en 03KB s. Este pun to se identifica com o t¡. La velocidad se calcub con los valores de AR¡ y Aft, que se Icen en b gráfica, l a velocidad en 0X08 s se calcula como
0.60 in
Asimismo, la pendiente m áxim a hacia abajo se encuentra en 0X127 s. Este pun to se identifica com o De nueva cuenta, el cálculo de b velocidad se hace con los valores de A R , y A h , que se leen en b gráfica. La velocidad en 03)27 s se calcula como
y ( f> )-0 .6 0 in 03)04 s -1 5 0 in /s
B procedim iento de cálculo de la pendiente en b curva de desplazamiento se puede repetir en otros puntos del tiem po.
Grafique la curva de \elocidad
S se recaba la inform ación de pendientes y tiem po, se construye u n a curva de velocidad com o b mostrada en b figura 6.44.
Cirva áe ralor idad
-1 5 0
FIG U R A 6 .4 4 Curva d e velocidad del problema de ejem plo 6.18.
www.FreeLibros.me

A n á lisis d e velocidad 159
6 .1 4 .2 D ife re n c ia le s n u m é r ic a s
En la e lab o rac ió n d e u n a cu rv a d e velocidad co n diferenciales gráficas, se siguen estrictam ente las teorías del cálculo diferencial. S in em b arg o , incluso s i se p o n e m ucha a ten c ió n , p o r lo gen eral su rgen im precisiones cu an d o se elaboran las curvas tangentes, de m o d o q u e co n frecuencia se u tilizan o tro s m étodos, p o r d e d r m étodos num éricos, p a ra d e te rm in a r la derivada de u n a curva d efin ida p o r u n a se rie d e p u n to s co n o c id o s . El m éto d o m ás co m ú n para o b te n e r num éricam en te la derivada e s el m étodo de R ichardson [ref. 2). Es ap licab le en casos d o n d e lo s increm e n to s e n tre b s variables in d ep en d ien te s so n iguales. Esto lim ita el análisis a u n in tervalo de tiem po constan te , lo cual no suele ser dificiL La derivada de b cu rv a desp lazam iento-tiem po se ap rox im a num éricam en te co n b siguiente ecuación:
ARí+1 - ARj-|Vi = 2 A l
A R * ? - 2 A R i. , + 2 A R i _ , - A R , _ I
1 2 A f
donde:i = intervalo de d a to s d e lo s puntos
A R, = desplazam iento e n el d a to del p u n to i A í = % - / , = % — <2 = r4 — i,¡i = tiem p o en el da to del p u n to i
(6 .19 )
Aun cu an d o b fo rm a general q u iz á parezca confusa co n los té rm in o s i, i + I, e tcétera, b su s titu c ió n real e s se n c ilb . Para ilustrar el uso d e esta ecuación, la velocidad en el q u in to dato del p u n to se o b tien e co n b siguiente ecuación:
A R 6 - A R 4 ‘
2 Af
_ [ A R 7 - 2A R 6 + 2 A R 4 - A R ,
12 Af
H iede hab er a lguna con fu sió n al calcular b derivada en los ex trem o s de las cu rv as . E n el a n á lis is de m ecan ism os, el d ia g ram a d e d esp lazam ien to se rep ite c o n cada vuelta d e b manivela. P orconsiguicntc, conform e b c u r v a se repite, lo s datos d e los p u n to s an terio res del in icio del ciclo so n los m ism os p u n tos al final del d d o , de m o d o q u e cu an d o se utilizan 12 puntos p ira genera r la cu rv a d e desplazam iento , el desplazam iento en el pun to I e s idéntico al desplazam iento e n el p u n to 13, p o r lo que bi velocidad en el p u n to I se calcula com o
A R > - A R 12' A R , - 2 A R 2 + 2A R ,< - A R ,,*1 - 2 A í . 12A f
C o m o esta ecu ac ió n e s u n a ap rox im ación n u m érica , el e rro r asociado d ism inuye d rásticam en te co n fo rm e se increm en ta el ángulo de b m an iv eb y se reduce el tiem po.
PR O B LEM A D E E JE M PL O 6 .1 9
B i el problema de ejemplo 4.11 ,se graficó u n diagrama de despbzamiento de u n pistón que opera en un compresor. Este diagrama se convirtió a u n a curva de despbzam iento en relación con el tiem po en el problema de ejemplo 6.17. Emplee estos datos para generar num éricam ente b curva de velocidad.
S O L U C IÓ N : 1. Determine e l increm ento de tiem po entre las posiciones de los datos de los puntos
La hoja de cálculo utilizada en el problem a de ejem plo 6.17 se am plía para insertar u n a colum na adicional para r c h i i r la velocidad del pistón. El increm ento de tiem po se calcula como:
A / - t 2 - t, - (0X0289 - 0.0) - 0.00286$
l i e la ecuación (6.19) para calcular la velocidad de los datos de los p un tos
Para ilustrar el cálculo de las velocidades, se presentan uno s cuantos cálculos de muestra:
f (A R , - AR,) j ' AR, ~ 2A R , 4- 2AR, - AR1;
*12
2Af
(0.483 - 0.0) 2(0X0286) ] -
p A R l 0 - A R ,) j
(0X96 ~ 1.435) 2(0X0286)
12Ar
0X96 - 2(0.483) + 2<0X) - 0.136 12(0X0286)
AR„ ~ 2AR,0 + 2AR> - AR7 | 12Ar
(A R „ ~ AR, 2A t
(0 .0 ~ 0.483)
2(0X0286)
0.483 - 2(0X96) 4 2(1.435) - 1X0 12(0X0286)
AR, - 2A R „ + 2ARn - AR„
12Ar
142X7 iiV$
-9 5 .4 8 in /s
0.136 ~ 2(0X) + 2(0.483) - 0X96
2(0X0286)- 9 1 .4 7 in /s
www.FreeLibros.me
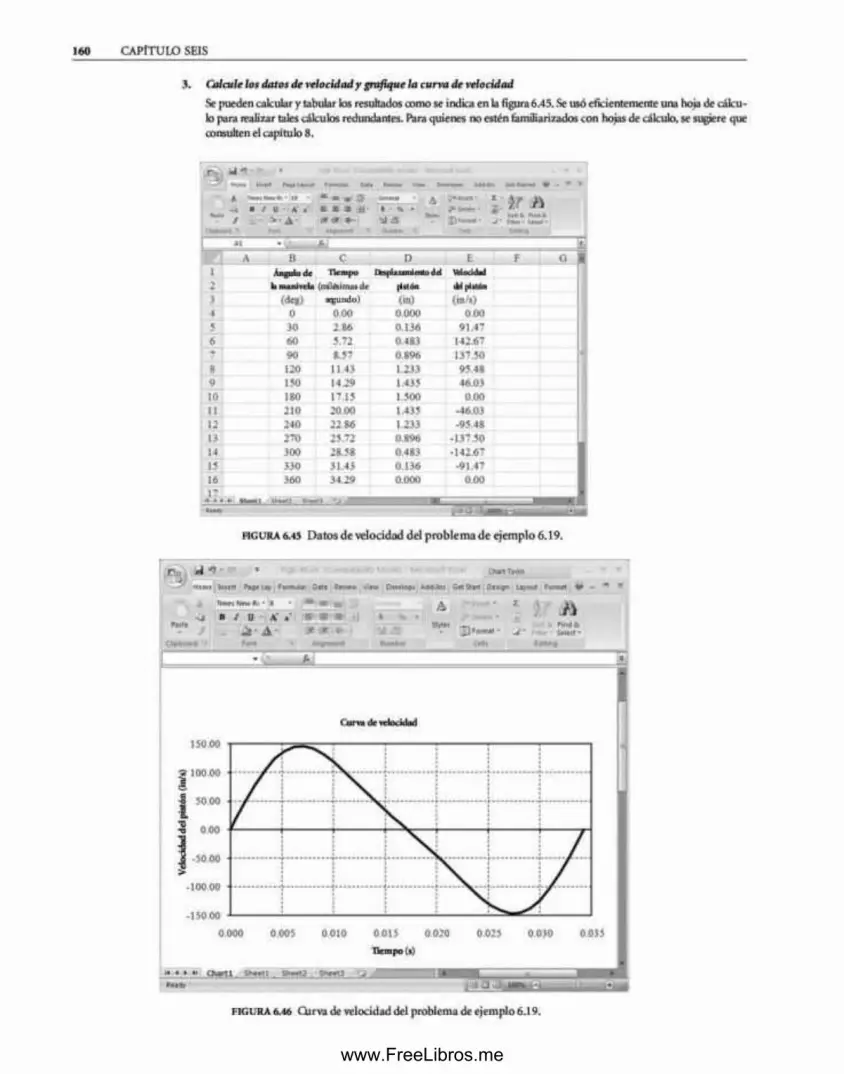
dd
paló
n (t
a/.
)
160 CAPITULO SEIS
3 . Calcule los dalos de \r lo c id a d y grafique la curva de telocidad
Se pueden calcular y tabular los resultados como se indica en la figura 6.43. Se usó eficientemente una hoia de cálculo para lealizar tales cálculos redundantes. Para quienes no estén familiarizados con hojas de cálculo, se sugiere que consulten el capitulo 8.
B C D E
A n g u l o * T V - p o I M p l . u m l n a u d d M o A U
U m i n i i r b ( m M i i n u d f [*"*■ « p l * .
( d e * ) eq jundo) (m > (in /» >
0 0 . 0 0 0 . 0 0 0 0 . 0 0
3 0 2 .8 6 0 .1 3 6 9 1 .4 7
6 0 5 .7 2 0 .4 8 3 1 4 2 .6 7
9 0 8 .5 7 0 .8 9 6 1 3 7 J O
1 2 0 1 1 .4 3 1 .2 3 3 9 5 4 8
1 5 0 1 4 2 9 1 .4 3 5 4 6 0 3
1 8 0 1 7 .1 5 1 .5 0 0 0 . 0 0
2 1 0 2 0 0 0 1 .4 3 5 - 4 6 0 3
2 4 0 2 2 8 6 1 .2 3 3 - 9 5 4 8
2 7 0 2 5 .7 2 0 8 9 6 - 1 3 7 .5 0
3 0 0 2 8 .5 8 0 .4 8 3 - 1 4 2 .6 7
3 3 0 3 1 .4 3 0 .1 3 6 - 9 1 4 7
3 6 0 3 4 .2 9 0 . 0 0 0 0 . 0 0
f i g u r a 6.45 D atos de velocidad del p ro b lem a de e jem plo 6.19.
F IG U R A 6 .4 6 Q i r v a d e v e lo c i d a d d e l p r o b l e m a d e e j e m p l o 6 .1 9 .
www.FreeLibros.me

A n á lisis d e v d o c id a d 161
Estos valores se gradearon en la figura 6.46 para form ar u n diagram a de velocidad en relación con el tiempo. Advierta que la curva aú n es bastante burda. Para electos de precisión, se recom ienda am pliam ente q u e el increm ento del ángulo de la manivela se reduzca a 10* o 15*. C uando se utiliza una hoja de cálculo para generar los datos de velocidad, se recom iendan increm entos todavía m ás pequeflos para reducir la dificultad de la torea.
PROBLEMAS v ( W s )
V elocidad g en e ra l
6 - 1.
6 - 2 .
6 -3 .
6 -4 .
Un p aq u e te se m ueve a velocidad constan te de u n ex trem o a o tro de u n a b a n d a tran sp o rtad o ra h o rizon ta l de 25 ft en 15 s . D eterm ine la v e lo c id ad lineal de la ban d a tran sp o rtad o ra .
U n c ilin d ro h id rá u lic o se ex tien d e a u n a velocidad co n s tan te de 2 fp m ( f t /m in ) . C a lc u le el t ie m p o req u erid o para q u e v iaje su carrera co m p le ta d e 15 in.
D eterm ine la velocidad p ro m e d io (e n m p h ) de un a le ta q u e co rre u n a m illa en 4 m inu tos.
Calcule la velocidad p rom edio (en m p h ) de u n atleta que corre u n a distancia de 100 m a toda velocidad e n 10 s.
6 -5 . Un eng ran e g ira u n ifo rm em en te 270° en se n tid o h o rario , en 2 s. D eterm ine la v e lo d d ad angu la r en rp m y rad/s.
6 -6 . C alcule la v e lo d d a d a n g u la r (en rp m ) del segundero, del m inutero y de la m a n e d lla h o ra ria en u n reloj.
6 -7 . Un a c tu a d o r se rv o im p u lsa d o está p ro g ra m a d o para ex ten d erse de a c u e rd o co n el perfil de velocidad m o s tra d o en la fig u ra P6.7. D e te rm in e el d esp lazam iento total d u ra n te este m ovim iento p ro g ra m a d a
v (W s )
6 - 8 .
6-9 .
6 - 10 .
6 - 11.
L h actuador servoim pulsado está p rogram ado para ex tenderse d e acuerdo co n el perfil de veloddad m ostrado o í la figura P6.7. Use u n a h o ja de cálculo p a ra generar gráficas d e velocidad c o n tra tiem po y de desplazam iento con tra tiem po d u ra n te este m ovim iento program ado.
I h m o to r lineal está p ro g ram ad o p a ra m overse de acuerdo c o n el perfil d e veloddad m ostrado en la figura 1^.9. D e te rm in e el desp lazam ien to total d u ra n te este m ovim iento program ado .
U n m o to r lin ea l está p ro g ra m a d o p a ra m o v erse de ac u e rd o co n el p e rfil de v e lo d d a d m o stra d o e n b figura P6.9. Use u n a ho ja d e cálcu lo para genera r gráficas de velocidad c o n tra tie m p o y d e d e sp b z a m ic n to con tra tiem p o d u ra n te este m ovim iento program ado .
En b fig u ra P 6 .1 1 se m u e s tra el ro d illo im p u lso r de u n a b a n d a tran sp o rtad o ra . D eterm ine b v e lo d d a d an- g u b r del rod illo cu an d o la b an d a fu n d o n a a 10 fpm (10 ft/m in ).
HGURAP6.il P roblem as II y 12.
6 -1 2 . E n la figura P 6 .11 se m uestra el rodillo im p u lso r d e una tu n d a transpo rtado ra . D eterm ine b velocidad lineal de la b an d a cu an d o el rod illo o p e ra a 3 0 rp m en sen tido antihorario .
6 -1 3 . En b figura P6.13 se ilu s tra el eslabón 2 aislado d e un d iag ram a d n e m á tic a El eslabón g ira en se n tid o a n tih o ra rio a u n a v e lo d d ad de 300 rp m . D eterm ine b velo d d a d de los p u n to s A y B . Use y = 50°y / i = 60*.
6 -1 4 . En b figura P 6 .13 se m uestra el eslabón 2 aislado de un d iag ram a c inem ático . El eslabón g ira en se n tid o h o rario im pu lsando el p u n to A a u n a velocidad d e 4 0 ft/s. D eterm ine la velocidad de los p u n to s A y B, así co m o b v e lo d d a d angular d d eslabón 2. Use y = 50°y /3 = 60°.
www.FreeLibros.me

162 CAPITULO SEIS
V elocidad re la tiv a
6-15 . En la figura 1*6.15 se presen ta el d iag ram a cinem ático de u n m ecan ism o d e c u a tro b a rra s . En el in stan te m ostrado , vA = 800 m m /s y vB = 888 m m /s. D eterm ine gráficam ente la velocidad relativa del p u n to t í co n respecto al p u n to A . D eterm ine tam b ién la velocidad a n gular d e lo s eslabones 2 y 4.
6 -16 .
6-17.
fig u r a P6.IJ Problem as 15 y 16.
En la fig u ra P6.15 se ilu stra el d iag ram a cinem ático de u n m ecan ism o d e c u a tro barras. En el in s tan te m ostra d o , vA - 20 m m /s y vB - 22 .2 m m /s . D eterm ine gráficam ente la velocidad relativa del p u n to t í co n re s pecto al p u n to A. C alcule tam bién la velocidad angular de lo s eslabones 2 y 4.
En la figura P6.17 se presen ta el d iag ram a cinem ático de u n m ecan ism o d e m an iv e la -co rred e ra . E n e l instan te m o s tra d o . vÁ = 380 f t /s y v* = 400 f t/s . D eterm ine g ráficam ente la velocidad relativa del p u n to A co n respecto al p u n to f i C alcu le tam bién la velocid ad angu la r d e l eslabón 2.
V-
f ig u r a P6.17 Problem as 17 y 18.
6 -18 . En la fig u ra P6.17 se ilu stra el d iag ram a cinem ático de u n m ecanism o de m anivela-corredera. En el in stan te m ostrado , vA = 20 f t/s y va = 21 ft/s. D eterm ine gráficam ente la velocidad relativa del p u n to A con respecto al p u n to f i C a lc u le tam b ién la velocidad a n g u la r deleslabón 2.
M é to d o g rá fic o de v e lo c id ad re la tiv a
6 -1 9 . P ira el m ecan ism o com preso r de la figura P6.19, use el m étodo de velocidad relativa p a ra d e te rm in ar gráficam en te la ve locidad lin ea l del p is tó n , c o n fo rm e la m anivela g ira a 1 1 5 0 rp m en se n tid o h o ra r ia
Pistón
M u A th
f i g u r a M .I 9 Problem as 1 9 . 2 0 . 4 1 , 5 2 , 6 3 , 7 4 , 8 5 . 9 6 ,
1 0 4 y 1 12 .
6 -2 0 . R ira e l m ecan ism o co m p reso r de la figura P 6 .I9 , use el m éto d o de velocidad relativa para d e te rm in ar gráficam ente la ve locidad lin ea l del p is tó n , co n fo rm e la rronivela g ira a 1 7 7 5 rp m en se n tid o an tiho rario .
6 -2 1 . Para la s ie rra reciprocante m o strad a en b figura P6.21, use el m é to d o de velocidad re b tiv a p a ra d e te rm in a r g ráficam ente b v e lo c id ad lin ea l d e b cuch illa , co n form e b ru e d a de b m an iv eb g ira a 1500 rp m e n sentido a n tih o ra r ia
■5<r K ir d t d r la m an ivela
6- 22.
6-23 .
FIGURA P6J1 Problemas 2 1 .22. 4 2 .5 3 , 64. 7 5 . 86 ,97 ,105 y 113.
P ira b s ie rra reciprocante m o stra d a en b figura P6.21, use el m éto d o de velocidad re b tiv a p a ra d e te rm in a r g ráficam ente b v e lo c id ad lineal d e b c u c h ilb , co n form e b ru ed a d e b m anivela g ira a 900 rp m en sentido horario .
Para b configuración del m ecanism o de corte m ostrado en la fig u ra P6.23, use el m étodo de velocidad reb tiva pura d e te rm in ar g ráficam ente la velocidad lineal d e b cuchilla, conform e b m an iveb g ira a 100 rp m en sentido horario.
FIGURA P 6 JJ Problem as 2 3 ,2 4 ,4 3 , 5 4 ,6 5 ,7 6 ,8 7 , 98. 106y 114.
www.FreeLibros.me

A n á lisis d e velocid ad 163
6 -2 4 . Para la configuración del m ecanism o d eco rte m ostrado en la figura P6.23, use el m éto d o d e velocidad relativa fu ra d e te rm in ar g ráficam ente la velocidad lineal de la cuchilla, co n fo rm e la m anivela g ira a 80 rp m en sen tido antihorario .
6 - 2 5 . P ira el m ecan ism o del l im p ia d o r del crista l trase ro m ostrado en la figura P6.25, use d m étodo de velocidad relativa p a ra d e te rm in ar g ráficam ente la velocidad a ig u b r del brazo del lim piador, co n fo rm e la manivela g ira a 40 rp m en se n tid o an tiho rario .
figuración m o s tra d a , u tilice el m é to d o d e velocidad relativa para d e te rm in a r gráficam ente la velocidad a n gular del ta n q u e de agua, co n fo rm e la manivela e s im pu lsada a 75 rp m en sen tido h o rario .
6 - 2 9 . El d ispositivo de la figura P6.29 es el m ecan ism o im p u lso r del a g ita d o r d e u n a lavadora. P ara la configurac ión m o strad a , use le m é to d o de velocidad reb tiva p a ra d e te rm in ar gráficam ente la velocidad angu la r del segm ento de engrane, co n fo rm e la m anivela e s im p u lsada a 50 rp m e n el sen tido h o rario .
FIGURA P O » Problem as 2 9 .3 0 ,4 6 .5 7 ,6 8 ,7 9 , 90, 101, 109 y 117.
FIGURA P6.23 Problem as 25. 2 6 .4 4 .5 5 ,6 6 .7 7 ,8 8 ,9 9 ,107 y 1 1 5 .
6 - 2 6 . Para el m ecan ism o del l im p ia d o r del crista l trase ro m ostrado en la figura 1*6.25, use el m étodo d e velocidad reb tiva p a ra d e te rm in ar g ráficam ente la velocidad a ig u la r del b razo del lim p iad o r c o n fo rm e b m an iveb g ira a 60 rp m en se n tid o horario .
6 - 2 7 . El d isp o s itiv o de b fig u ra P6.27 es u n ch apo teade ro q u e se usa p a ra b v a r p ro d u c to s vegetales. Para la co n figuración m o strad a , u tilice el m éto d o de la velocidad relativa p a ra determ inar gráficam ente b velocidad an gular del ta n q u e d e agua, co n fo rm e la m an iv eb es im pulsada a 100 rp m en se n tid o a n tih o ra ria
6 -3 0 . El d ispositivo de b figura P6.29 e s el m ecan ism o im p u lso r del ag itad o r d e u n a lavadora. P ara b configurac ión m o strad a , use le m é to d o de velocidad reb tiv a para d e te rm in ar gráficam ente b velocidad a n g u b r del segm ento de engrane, co n fo rm e b m an iv eb es im p u lsada a 35 rp m e n el se n tid o antihorario .
6 -31 . P ira b c o rtad o ra m anual m o stra d a e n b figura P 6 .31, use e l m é to d o de velocidad re b tiv a p a ra d e te rm in ar gráficam ente la velocidad a n g u la r requerid a del m ang a p a ra pasar la h o ja de corte a trav és del m etal a u n a velocidad d e 3 m m /s. C a lc u le a s im ism o la velocidad lineal del p u n to X.
f i g u r a P 6 .2 7 Problem as 2 7 ,2 8 . 4 5 . 5 6 .6 7 .7 8 , 8 9 , 1 0 0 .
108 y 116.
6 -2 8 . El d isp o s itiv o d e b fig u ra P6.27 es u n ch apo teade ro q u e se usa p a ra lavar p rodu c to s vegetales. Para la con-
FICURAP6JI Problem as 3 1 ,3 2 ,4 7 , 5 8 .6 9 ,8 0 y 91.
6 - 3 2 . P ira la c o rtad o ra m anual m o strad a en la figura P 6 .31, use e l m é to d o de velocidad re b tiv a p a ra d e te rm in ar g rá ficam en te b velocidad lineal de la h o ja de co rte , conform e el m an g o g ira a u n a velocidad d e 2 rad /s en sentido h o rario . C alcule tam bién la velocidad lineal del p u n to X.
www.FreeLibros.me

164 CAPITULO SEIS
6 -3 3 . La figura P6.33 m uestra u n a b o m b a de a ire de pedal. Use el m éto d o de velocidad relativa p a ra d e te rm in ar gráficam ente la velocidad angu la r requerida del pedal, p i r a c o n tra e r el c ilin d ro a u n a velocidad de 5 in /s . Calcule, asim ism o, la velocidad lineal del p u n to X
6 -3 4 .
6 -3 5 .
l a fig u ra P6.33 ilu stra u n a b o m b a d e a ire d e pedal. Use d m éto d o d e velocidad relativa para d e te rm in a r g rá ficam en te la ve locidad de co m p resió n del c ilind ro , cuando la velocidad angular del ensam ble del pedal es de 1 ra d /s en se n tid o a n t ih o ra r ia C alcu le ta m b ié n la velocidad lineal del p u n to X
E n la f íg u ra P6.35 se p re se n ta d m ecan ism o de un co m p reso r de d o s cilindros. P ara la configurac ión m ostrada, use el m éto d o de velocidad relativa piara d e te rm in a r gráficam ente la velocidad lineal d e am b o s p is tones, conform e la m anivela de 1.5 in e s im p u lsad a a 1775 rp m en sen tido h o rario . C alcule asim ism o la ve- b d d a d de sa lida del flujo v o lum étrico instan táneo del c ilind ro d e re c h a
0 1 . 0 0 l . t r
f ig u r a P6.35 P rob lem as3 5 ,3 6 .4 9 ,6 0 ,7 1 ,8 2 ,9 3 ,1 0 2 ,110y 118.
6 - 3 6 . En la fig u ra P6.35 se ilu stra el m ecan ism o d e u n c o m p reso r de d o s c ilin d ro s . P ara la c o n fig u rac ió n m o strada , u se el m éto d o de velocidad relativa para determ in a r g rá fica m e n te la ve locidad lin ea l de am b o s pistones, co n fo rm e b m anivela de 1.5 in e s im p u lsad a a 1150 rp m e n se n tid o a n t ih o ra r ia C alcu le ta m b ié n b velocidad d e sa lida d e l flujo v o lum étrico in stan táneo del c ilind ro izquierdo.
6 - 3 7 . En la figura P6.37 se m uestra u n dispositivo q u e m ueve p iq u e tes . Para la configuración ilu strada , use el méto- t b de velocidad relativa co n b finalidad de determ inar gráficam ente b velocidad lineal del paquete, conform e la m an iv eb g ira a 40 rp m e n sen tido h o ra r ia
fig u r a P 6 J7 Problem as 3 7 ,3 8 , 5 0 ,6 1 ,7 2 ,8 3 ,9 4 ,1 0 3 , 111 y 119.
6 - 3 8 .
6 - 3 9 .
En b fig u ra P6.37 se m uestra u n d ispositivo q u e m ueve paquetes. P ara b configurac ión ilustrada, use el m étodo d e velocidad relativa p a ra d e te rm in ar gráficam ente b velocidad lin ea l del paquete, co n fo rm e b m an iv eb gira a 65 rp m en se n tid o horario .
En b fig u ra P6.39 se m uestra u n d ispositivo q u e m ueve paquetes. Para la configuración ilu strada , u tilice el m é- *>do d e velocidad reb tiv a co n la finalidad de determ i- r u r g rá ficam en te la ve locidad lineal de la p b ta fo rm a co n fo rm e e l c ilind ro h id ráu lic o se ex tien d e a u n a velocidad d e 16 fpm.
FIGURA P6.W Problem as 3 9 ,4 0 ,5 1 ,6 2 ,7 3 ,8 4 y 95.
6 - 4 0 . En la fig u ra P6.39 se m uestra u n d ispositivo q u e m ueve puquetes. Para b con fig u rac ió n ilu s trad a , utilice el m étodo d e velocidad relativa co n la finalidad d e d e te rm inar g ráficam ente la velocidad lineal d e b p lataform a conform e el c ilind ro h idráulico se re trae a u n a velocid ad de 12 fpm .
M é to d o a n a lític o d e v e lo c id ad relativa
6 - 4 1 . Para e l m ecan ism o co m p reso r i lu s tra d o e n b figura P6.I9 , utilice el m éto d o de velocidad relativa para dete rm in a r la v e lo c id ad lineal d e l p is tó n c o n fo rm e b m an iveb g ira a 950 rp m en se n tid o h o rario .
6 - 4 2 . P ira b sie rra reciprocante d e b figura P 6 .21, u tilice el m étodo d e velocidad reb tiv a c o n b finalidad d e determ in a r analíticam ente b velocidad lineal d e b cuchilla conform e b ru ed a de b m an iveb g ira a 1700 rp m en sen tido an tiho rario .
www.FreeLibros.me

A n á lisis d e velocidad 165
6 -4 3 . Para la con fig u rac ió n m o stra d a del m ecan ism o de corte de la figura P6.23, u tilice el m étodo d e velocidad relativa co n la finalidad d e d e te rm in a r analíticam ente la velocidad lineal de la cuchilla c o n fo rm e la manivela g ira a 85 rp m en se n tid o h o rario .
6 -4 4 . f tira el m ecan ism o del l im p ia d o r del crista l trase ro m o strad o en la figura P6.25. u tilice el m éto d o d e velo d d a d relativa co n la fina lidad d e d e te rm in a r an alíticam ente la velocidad a n g u la r del b razo del lim p iado r conform e la m anivela g ira a 45 rp m en se n tid o a n tih o rario.
6 -45 . 0 dispositivo de la figura P 62 7 es u n chapo tead ero que sirve p a ra lavar p ro d u c to s vegetales. P ara la configu- ra d ó n m ostrada, utilice el m étodo de velocidad relativa c o n la finalidad de d e te rm in ar analíticam ente la ve lo d d ad angu la r del tanque de agu a conform e la m anivela es im pulsada a 90 rp m e n se n tid o antihorario .
6 -46 . 0 d ispositivo de la figura P6.29 e s el m ecan ism o im p u lso r del ag itad o r d e u n a lavadora. Para la configu- ra d ó n m ostrada, u tilic e el m é to d o de v e lo d d a d relativa co n la fin a lid a d de d e te rm in a r an a líticam en te la ve lo d d ad angu la r del segm ento de eng ran e conform e la m anivela e s im p u lsad a a 60 rp m e n sen tido horario .
6 -4 7 . Ib ra los eslabones d e la c o rtad o ra m anual m o stra d a en la fig u ra P6.31, u tilice el m éto d o d e velocidad relativa con la finalidad de d e te rm in ar analíticam ente la v e lo á - d ad angu la r requerid a del m ango para p asa r la cuchilla a través del m eta l a u n a v e lo d d ad d e 2 m m /s.
6 -48 . lh ra la b o m b a d e a ire de p e d a l m o strad a en la figura P 6 J3 , utilice el m éto d o de velocidad relativa co n la finalidad de d e te rm in a r analíticam en te la v e lo d d a d de com presión d e l d l in d ro conform e e l ensam ble del pedal g ira a u n a v e lo d d ad de 1 rad/s e n sen tido antihorario .
6 -4 9 . En la figura P6.35 se ilu stra u n m ecan ism o com presor de d o s cilindros. P ara la co n figu radón m ostrada, utilice d m éto d o d e velocidad relativa co n la finalidad d e dete rm in a r analíticam en te la velocidad lineal d e am bos pistones c o n fo rm e la manivela d e 1.5 in es im pulsada a 2000 rp m en se n tid o h o ra rio . D e te rm in e tam b ién la v e lo d d a d de sa lida d e l flujo v o lum étrico in stan táneo del d l in d ro d e re c h a
6 -5 0 . En la fig u ra P6.37 se ilu s tra u n dispositivo q u e mueve paquetes. Para la configuración m o strad a , utilice el m étodo de v e lo d d ad relativa co n la finalidad de d e te rm in ar analíticam ente la velocidad lineal del paquete, co n form e la m anivela g ira a 8 0 rp m en sen tido horario .
6 -5 1 . En la fig u ra P6.39 se ilu stra u n d ispositivo q u e m ueve paq u e tes . P ara b c o n fig u rac ió n m o s tra d a , u tilic e el m étodo de veloddad relativa co n b finalidad de determ in a r a n a lític a m e n te b velocidad lin ea l de la p b ta - form a co n fo rm e el d l in d ro h id ráu lico se retrae a unaveloddad d e 10 fpm.
U b icac ió n d e c e n tro s in s ta n tá n e o s : m é to d o g ráfico
6 -5 2 . Ib ra el m ecan ism o com preso r m o strad o en la figura P6.19, d e te rm in e g rá ficam en te b u b icac ió n de to d o s los cen tros instantáneos.
6 -5 3 . Para b sie rra r td p ro c a n te m o stra d a en la figura P 6 .21, d e te rm in e gráficam ente b u b ic a d ó n d e to d o s lo s cen tro s instantáneos.
6 -5 4 . Para b c o n f ig u ra d ó n del m ecan ism o d e c o rte mos tra d a en b figura P6.23, de term ine gráficam ente la u b icación d e to d o s los cen tro s instantáneos.
6 -5 5 . Para el m ecan ism o d e l lim p iad o r del c ris ta l tra se ro m o strad o e n b figura P6.25, de term ine g ráficam ente b u b ic a d ó n d e to d o s los cen tros instantáneos.
6 -5 6 . Fbra el ch apo tcade ro d e b v a d o d e vegetales m ostrado en la figura P6.27, d e te rm in e gráficam ente la ubicación de to d o s lo s cen tro s instantáneos.
6 -5 7 . Para el m ecan ism o ag itad o r d e la lavadora m o strad o en b figura P6.29, d e te rm in e gráficam ente b ubicación de to d o s lo s cen tro s instantáneos.
6 -5 8 . Para la c o rtad o ra m anual m o s tra d a e n b figura P6.31, de term ine gráficam ente b u b ic a d ó n de to d o s lo s cen tros instantáneos.
6 -5 9 . R ira b b o m b a d e a ire d e pedal m o strad a en b figura P6.33, d e te rm in e g rá ficam en te b u b ic a d ó n d e todos los cen tro s instantáneos.
6 - 60. lb r a el m ecan ism o co m p reso r de d o s c ilin d ro s m ostra d o en la fig u ra P6.35 , d e te rm in e g rá ficam en te b u b ic a d ó n d e to d o s los cen tros instantáneos.
6 -6 1 . Para el d ispositivo q u e m ueve paquetes m o s tra d o e n la figura P6.37, d e te rm in e g rá ficam en te b u b ic a d ó n de todos los cen tro s instantáneos.
6 - 62. Ib ra el d ispositivo q u e m ueve paquetes m o strad o en la figura P6.39, d e te rm in e g rá ficam en te b u b ic a d ó n de todos los cen tro s instantáneos.
U b icac ió n de c e n tro s in s ta n tá n e o s :
m é to d o an a lítico
6 -6 3 . Ib ra el m ecan ism o co m p reso r m o s tra d o en b figura 1*6.19, d e te rm in e analíticam ente la ubicación de todos los cen tro s instantáneos.
6 - 6 4 . Para b sie rra red p ro c an te m o stra d a en b figura P6.21, d e te rm in e a n a lític a m e n te b u b icac ió n de to d o s los cen tros instantáneos.
6 -6 5 . Para b configuración del m ecan ism o de c o rte m o stra da en la fig u ra P6.23, d e te rm in e analíticam ente la u b icación d e to d o s los cen tro s instantáneos.
6 -6 6 . I b r a el m ecan ism o d e l lim p iad o r del c ris ta l tra se ro m ostrado en b figura P6.25, de term ine analíticam ente b u b ic a d ó n d e to d o s lo s cen tro s instantáneos.
6 - 6 7 . Para el chapotcadero del lavad o r de vegetales m ostrado en b fig u ra P 6 .2 7 , d e te rm in e a n a lític a m e n te b u b icación de to d o s los cen tro s instantáneos.
6 -6 8 . Ib ra el m ecan ism o ag itad o r d e la lavadora m o strad o en b fig u ra P6.29, d e te rm in e a n a lític a m e n te b u b icación d e to d o s los cen tro s instantáneos.
6 - 6 9 . I b r a b c o rtad o ra m anual m o s tra d a en b fig u ra P6.31, d e te rm in e a n a lític a m e n te b u b icac ió n de to d o s los cen tros instantáneos.
6 -7 0 . R ira b b o m b a de a ire d e pedal m o strad a en b figura P6.33, d e te rm in e analíticam ente la ubicación de todos los cen tro s instantáneos.
6 -7 1 . l b r a e l m ecanism o com preso r d e d o s c ilin d ro s m ostra- <b en la fig u ra P6.35, de term ine analíticam ente b u b icación de to d o s los cen tro s instantáneos.
www.FreeLibros.me

166 CAPITULO SEIS
6 -7 2 . Para el m ecanism o q u e m ueve paquetes m o strad o en la figura P6.37, d e te rm in e analíticam ente la ubicación de lodos los cen tros instantáneos.
6 -7 3 . Para el m ecanism o q u e m ueve paquetes m o strad o en la figura P6.39, d e te rm in e analíticam ente la ub icación de todos los cen tros instantáneos.
M é to d o g rá fic o d e l c e n tro in s ta n tá n e o
6 -7 4 . R ira el m ecan ism o co m p reso r m o s tra d o e n la figura P 3 .19 .use el m étodo del cen tro in stan táneo p a ra d e te rm in a r gráficam ente la v d o c id ad lineal del p is tó n , c o n form e la m anivela g ira a 1500 rp m en se n tid o a n tih o rario.
6 -7 5 . Para la sie rra reciprocante m o strad a e n la figura P6.21, utilice d m éto d o d e l c e n tro in stan tán e o c o n la finalid ad de d e te rm in a r g ráficam ente la velocidad lineal de b cu ch illa , co n fo rm e la ru e d a d e la m anivela g ira a 1200 rp m en se n tid o h o rario .
6 -7 6 . P ira la configuración del m ecan ism o de c o rte m o stra da en la figura P6.23, u tilice el m éto d o del c e n tro instan tán eo co n la finalidad de d e te rm in a r g ráficam ente b velocidad lineal de la cuchilla, co n fo rm e la manivela g ira a 65 rp m en se n tid o an tiho rario .
6 -7 7 . R ira d m ecan ism o d d lim p iad o r del cristal trase ro m ostrado en la fig u ra P 6 2 5 , utilice d m éto d o del centro instantáneo co n la finalidad de d e te rm in ar gráficam ente la velocidad a n g u la r del b ra z o d d lim p iador, c o n form e la manivela g ira a 55 rp m en sen tido horario .
6 -78 . Para el m ecan ism o del chapoteadero d e lavado de ven t i l e s m ostrado en la figura P6.27, utilice el m étodo in s tan tán eo co n la finalidad de d e te rm in a r g ráficam ente ki velocidad angu la r del ta n q u e d e ag u a , c o n fo rm e la manivela es im pulsada a 110 rp m en sen tido horario .
6 -79 . P ira el m ecanism o agitador de la lavadora m ostrado en b figura P 6 2 9 , utilice el m étodo del cen tro instantáneo con la finalidad d e d e te rm in ar gráficam ente la velocidad angular del segm ento de engrane, conform e la manivela es im pulsada a 7 0 rp m en sen tido antihorario .
6 - 80. Ib ra la configuración de la co rtad o ra m anual m ostrada en la fig u ra 1*6.31, u tilice el m étodo del c e n tro instantáneo c o n la finalidad de d e te rm in ar gráficam ente la velo d d a d a n g u la r re q u e r id a del m ango , para p a s a r la cuchilla a través d d m etal a u n a v d o d d a d de 4 m m /s.
6 - 81. P ira la b o m b a d e a ire d e pedal m o strad a en la figura PS.33, utilice d m éto d o del c e n tro in stan táneo c o n la finalidad de d e te rm in ar g rá ficam en te la velocidad de co m p resió n del d l in d ro , c o n fo rm e el ensam ble del pedal g ira a u n a veloddad de 0 .75 rad /s en se n tid o a n tihorario.
6 -8 2 . 0 m ecanism o de u n com presor de dos d lin d ru s e s mostrad o en la fig u ra P 6 J5 . Para la c o n fig u ra d ó n m o stra da. u tilice el m éto d o del cen tro instan táneo co n la finalidad de d e te rm in a r gráficam ente la v e lo d d a d lineal de am b o s pistones, co n fo rm e la manivela d e 1.5 in es im pulsada a 2200 rp m . C alcule asim ism o la v e lo d d ad in stan tánea del fligo volum étrico d e salida del c ilindro derecho.
6 -8 3 . En la figura 1*6.37 se m uestra u n dispositivo q u e m ueve p iq u e te s . P ara la c o n fig u rac ió n m o s tra d a , u tilice le
m éto d o gráfico de c e n tro instan táneo co n la finalidad de d e te rm in a r la ve locidad lin ea l del p aq u e te , co n fo rm e la m an iv eb g ira a 70 rp m en se n tid o horario .
6 -8 4 . En la figura P6.39 se m uestra u n dispositivo q u e m ueve paquetes. Para b c o n f ig u ra d ó n ilustrada, u tilice el m éto d o de cen tro in stan tán e o co n b finalidad d e dete rm in a r g rá ficam en te la v e lo d d a d lineal de b p la ta form a, c o n fo rm e el c ilin d ro h id rá u lic o se e x tie n d e a u n a v e lo d d ad d e 8 fp m .
M é to d o a n a lític o d e l c e n tro in s ta n tá n e o
6 -8 5 . P ira el m ecan ism o co m p reso r m o strad o en la fig u ra P6.I9 , u tilice el m éto d o del cen tro in stan tán e o co n b fin a lid a d d e d e te rm in a r an a líticam en te la v e lo d d a d lineal del p istón , c o n fo rm e b m an iv eb g ira a 1100 rp m en se n tid o h o rario .
6 -8 6 . Para b s ie r r a red p ro c an te m o stra d a en b figura P6.21, utilice el m étodo del cen tro instan táneo p a ra d e te rm in a r an a líticam en te b velocidad lin ea l de la cuchilla, conform e la ru ed a de b m an iveb g ira a 1375 rp m en sen tido antihorario .
6 -8 7 . Para b c o n f ig u ra d ó n d e l m ecan ism o d e c o rte m ostra d a en b figura P6.23, utilice el m éto d o d e l cen tro instan táneo co n b finalidad d e determ inar analíticam ente b veloddad lineal de b cuchilla, co n fo rm e b m an iveb gira a 55 rp m en se n tid o horario .
6 -8 8 . P ira el m ecan ism o del lim p iado r del cristal trase ro m ostrado en la figura P6.25, utilice el m étodo d d cen tro in stan tán e o co n b fin a lid a d de d e te rm in ar an a lítica m ente la veloddad angu la r del brazo del lim piador, conform e b m an iveb g ira a 35 rp m en sen tido antihorario.
6 -8 9 . P ira d chapo teadero b v a d o r de vegetales m o strad o en b figura P6.27, utilice d m éto d o del cen tro in stan táneo con la finalidad d e d e te rm in a r analíticam ente la v d o d d ad a n g u b r del ta n q u e de agua, conform e b m an iveb es im pulsada a 9 5 rp m en se n tid o antihorario .
6 -9 0 . Para el m ecanism o agitador de b lavadora m ostrado en b figura P6.29, utilice el m étodo d d cen tro instantáneo con b finalidad d e determ inar analíticam ente la veloddad a n g u b r del seg m en to de en g ran e , co n fo rm e la m an iveb e s im p u lsad a a 8 5 rp m en sen tido an tih o ra ria
6 -9 1 . P ira b co n figu radón d e b co rtad o ra m anual m ostrada en b figura P 6 J 1, utilice e l m étodo d d cen tro instantáneo con b finalidad de determ inar analíticam ente la velocidad angular requerida en el m a n g a para pasar b hoja de corte a través del metal a u n a velocidad de 2 5 m m /s.
6 -9 2 . Para b b o m b a de a ire de pedal m o stra d a en b figura P 6 J3 , utilice d m éto d o d d cen tro instan táneo con la fina lidad d e d e te rm in a r analíticam en te b velocidad de com presión del cilindro, conform e d ensam ble del pedal gira a u n a vdocidad d e 0.6 rad/s en sen tido antihorario.
6 -9 3 . En b figura P6.35 se ilu s tra el m ecan ism o com presor de d o s cilindros. P ara b configuración m ostrada, u tilice el m éto d o de cen tro instan táneo co n b finalidad de d e te rm in ar analíticam ente la velocidad lineal de am bos p istones, co n fo rm e la m an iv eb d e 1.5 in es im pulsada a 1775 rpm en sen tido h o ra r ia (b lc u le , a s im ism a b velocidad d e salida d d flu jo volum étrico instan táneo del d lin d ro derecho.
www.FreeLibros.me

A n á lisis d e velocidad 167
6 -9 4 . En la figura P6.37 se m uestra u n d ispositivo para m o ver paquetes. Para la configuración ilustrada, utilice el m étodo gráfico del cen tro in stan táneo co n la finalidad d e d e te rm in a r la v e lo d d a d lineal del p aq u e te , co n ta rm e la m anivela g ira a 3 0 rp m en sen tido horario .
6 -9 5 . En la fig u ra P6.39 se m u e s tra u n d ispositivo para m o ver paquetes. P ara la con figu rarión ilustrada, utilice el m étodo d e l c e n tro in stan táneo co n la finalidad de determ inar analíticam en te la v e lo d d a d lineal de la p la- t i fo r m a , c o n fo rm e el c ilind ro h id ráu lic o se r e t r a e a una v e lo d d a d de 7 fpm.
C urv as d e v e lo c id ad : m é to d o g ráfico
6 -9 6 . l a manivela d d m ecan ism o com preso r m o strad o en la figura P 6 .19 e s im pulsada a u n a v e lo d d a d constan te de 1750 rp m en se n tid o horario . E labore g ráficam ente la a i r v a d d desp lazam ien to lineal del p is tó n en fu n d ó n d d án g u lo de la m a n iv d a . C o n v ie rta d á n g u lo de b m an iveb a tiem po. Luego, calcule g ráficam ente la p en d ien te co n la finalidad de o b te n e r b cu rv a de v e lo d d ad del p is tó n en fu n d ó n del tiem po.
6 -9 7 . l a ru ed a de b m a n iv e b de la sie rra re d p ro c a n te m ostrada en la figura P6.21 es im p u lsad a a u n a ve lo d d ad constan te de 1500 rp m en se n tid o a n tih o ra rio . Elabore gráficam ente la cu rv a del desplazam iento lineal d e b h o ja de la sie rra e n f u n d ó n del án g u lo d e b manivela. C onvierta e l ángulo de la m an iveb a tiem po. Luego» calcule g ráficam ente b pend ien te c o n la finalid ad de ob ten er b cu rv a de v e lo d d a d de b ho ja de b á e r r a en fu n d ó n del tiem po.
6 -9 8 . La m a n iv d a del m ecan ism o d e c o rte m o s tra d o en b figura P6.23 e s im p u lsad a a u n a v e lo d d a d constan te de 8 0 rp m en se n tid o h o ra r io . E b b o re g rá fica m e n te la curva d d desp lazam ien to lineal de b c u c h ilb en fund ó n del án g u lo de b m anivela. C onvierta d ángulo de la m a n iv d a a tiem po . Luego, calcule g rá fica m e n te b p en d ien te co n b fina lidad d e o b te n e r b cu rv a de velo d d a d d e b c u c h ilb en f u n d ó n d d tiem po.
6 -9 9 . La m an iveb del m ecanism o lim p iador del cristal trasero m ostrado en la figura P6.25 e s im pulsada a u n a ve lo d d ad c o n s tan te d e 6 5 rp m en se n tid o h o r a r ia Elabore gráficamente b cu rv a del desplazam iento angu la r de b h o ja del lim p iad o r en f u n d ó n d d án g u lo de la m a n ivela. Convierta d ángulo d e b manivela a tiem po. luego, calcule g rá ficam en te b p en d ien te c o n b fina lidad de o b te n e r la c u rv a de v d o c id a d a n g u b r de b h o ja del lim p iad o r e n f u n d ó n d d t ie m p a
6-100 . La m a n iv e b del c h a p o te a d e ro m o s tra d o e n b figura P6.27 es im pulsada a 90 rp m e n se n tid o a n t ih o ra r ia Elabore g ráficam ente la c u rv a del desplazam iento a n g u b r del ch ap o tead e ro en fu n c ió n del á n g u lo d e b manivela. C o n v ie rta el án g u lo de b m an iv eb a t ie m p a L uega calcule g ráficam ente b pend ien te c o n la finalid ad d e o b te n e r la cu rv a d e velocidad a n g u b r del tanque en f u n d ó n d d tiem po.
6 -1 0 1 . La m a n iv e b d d m ecan ism o a g ita d o r de b b v a d o ra m ostrado en b figura P6.29 e s im pulsada a u n a v d o d - dad d e 8 0 rp m e n sen tido horario . E b b o re gráficam ente la cu rv a d e l desp lazam ien to a n g u b r del segm ento d e eng ran e en fu n c ió n del á n g u lo d e la m an iveb . C onv ie rta e l á n g u lo de b m a n iv d a a tiem p o . Luego,
calcule g rá ficam en te la pend ien te co n b fina lidad de ob ten er la velocidad a n g u la r d d segm ento d e engrane en función d d t ie m p a
6 -1 0 2 . La m an iv eb d e l m ecan ism o co m p reso r de dos c ilin d ro s m o s tra d o en b figura P6.35 es im p u lsad a a u n a v d o d d a d de 1250 rp m en se n tid o h o rario . Elabore g rá ficam ente la cu rv a del despbzam ien to lineal de am bos p is to n es en f u n d ó n del á n g u lo d e b m anivela . C onv ie rta d á n g u lo de la m an iv d a a tiem po . Luego, calcule g rá ficam en te la p en d ien te co n la fina lidad de ob ten er las curvas de v e lo d d a d de am b o s p istones en función del tiem po .
6 - 1 0 3 . L a m an iv eb del d ispositivo q u e m ueve paquetes m o strad o en b figura P 6 J7 es im pulsada a u n a v d o d d a d de 25 rp m en se n tid o h o r a r i a E labore g rá ficam en te la cu rv a d d d esp b zam ien to lineal del a rie te e n fu n d ó n del án g u lo d e b m anivela. C o n v ie rta d á n g u lo de b m an ivda a t ie m p a L uega calcule gráficamente b p en d ien te co n b finalidad de ob ten er la cu rv a d e vdocidad del arie te en fu n d ó n d d tiem po.
C urv as de v e lo c id ad : m é to d o a n a lít ic o
6 - 1 0 4 . L a m an iv eb del m ecan ism o co m p reso r m o strad o e n b fig u ra P6.19 es im p u lsad a a u n a v e lo d d a d constan te de 2150 rp m e n sen tido antihorario . Utilice u n a h o ja de cálculo p a ra d a b o r a r analíticam en te la cu rv a d e desplazam iento lineal d d p istón en función del ángulo de la m anivela. C onv ie rta a tiem p o el án g u lo d e la m aniv d a so b re el e je . Luego, u se d ife ren d a le s num éricas con b fina lidad de o b te n e r b cu rv a d e v e lo d d a d del p is tó n e n f u n d ó n del t ie m p a
6 - 1 0 5 . La ru e d a de la m an iv eb de b s ie rra red p ro c an te m o s tra d a e n la figura P6.21 es im pulsada a u n a v e lo d d ad constante de 1900 rp m en sen tido h o r a r ia U tilice una ho ja de cálcu lo co n b finalidad d e e labo rar analíticam en te la cu rv a de desplazam iento lineal d e la ho ja d e la á e r ra en fu n d ó n del ángulo de b manivela. C onvierta a tiem p o el án g u lo de la m an iv eb so b re el eje. L uega utilice d iferenciales num éricas co n la finalidad d e o b tener la cu rv a d e veloddad de b ho ja de b sie rra en fu n d ó n del t ie m p a
6 - 1 0 6 . L a m an iv eb d e l m ecan ism o de c o rte m o s tra d o e n b figura P6.23 es im p u lsad a a u n a velocidad constan te de 80 rp m en sen tido h o rario . U tilice u n a h o ja de cálculo con la finalidad d e e labo rar analíticam ente la cu rv a de desplazam iento lineal de b cuchilla en función del á n gulo de b m anivela. C onv ie rta a tiem p o el ángulo d e la m an iveb so b re el e je. l u e g a use diferenciales n u m é ricas co n la finalidad d e ob ten er b cu rv a de v e lo d d a d de b c u c h ilb en f u n d ó n del tiem po.
6 - 1 0 7 . La m a n iv e b d e l m ecan ism o l im p b d o r d d crista l t r a sero m o s tra d o en b fig u ra P6.25 es im p u lsad a a una veloddad constante d e 55 rp m e n sen tido an tiho rario . U ilic é u n a h o ja de cálculo co n b finalidad de d a b o ra r analíticam ente la cu rv a de desplazam iento a n g u b r de L> h o ja d e l lim p iad o r, en fu n c ió n del á n g u lo de la manivela. C onv ie rta a tiem po el ángulo d e la m an iveb sob re el e je. Luego, u se d ife ren d a le s num éricas para o b te n e r b cu rv a d e v e lo d d a d a n g u b r de la ho ja del lim p iador en fu n d ó n d d t ie m p a
www.FreeLibros.me

168 CAPITULO SEIS
6 -1 0 8 . La m anivela d e l ch ap o tead e ro m o s tra d o en la figura P6.27 es im p u lsad a a u n a velocidad de 6 5 rp m en se n tido h o ra r ia Utilice u n a h o ja de cálcu lo co n la finalid ad de e lab o ra r an a líticam en te la cu rv a de d esp lazam ien to a n g u b r del c h a p o te a d e ro e n fu n c ió n del ángulo de la m anivela. C onv ie rta a tiem p o el ángulo de La m anivela sob re e l e je. L u e g a use d iferenc ia les n u m éricas c o n la finalidad d e ob ten er la cu rv a de velocid ad angu la r d e l tanque en fu n d ó n del tiem po .
6 -109 . La manivela del ag itado r de la lavadora m ostrado en la figura P6.29 es im p u lsad a a 6 5 rp m en se n tid o a n tih o r a r ia U tilice u n a h o ja d e cálcu lo co n la fina lidad de e labo rar analíticam en te la cu rv a d e desp lazam ien to angu la r del segm ento d e e n g ra n e en f u n d ó n del á n gulo d e la manivela. C onvierta a tiem po el ángulo de la m anivela so b re el e je. L uega use diferenciales n u m é ricas c o n la finalidad d e ob ten er la cu rv a de velocidad a n gular del segm ento d e engrane e n f u n d ó n del tiem po.
6 -110 . La m anivela del m ecan ism o co m p reso r de d o s c ilin d ros m ostrado en la fig u ra P6.35 es im p u lsad a a 1500 rp m en se n tid o an tih o ra rio . U tilice u n a h o ja de cálculo con la finalidad de e lab o ra r analíticam ente la cu rv a de d esp lazam ien to lin ea l de am b o s p is to n es en fu n d ó n del án g u lo de la m anivela. C onv ie rta a tiem p o el á n g u lo de la m a n iv e b so b re el e je. Luego, u se d ife re n ciales num éricas co n b finalidad de o b te n e r b s curvas de velocidad de am b o s p istones en fu n d ó n del tiem po.
6 - 1 I I . La m a n iv e b del m ecan ism o q u e m ueve p aq u e tes m ostrado en b fig u ra P6.37 e s im pulsada a 30 rp m en sen tido an tiho rario . U tilice u n a h o ja de cálculo c o n la finalidad de e labo rar an a líticam en te la cu rv a d e d e splazam iento lineal del ariete en fu n d ó n del ángulo d e la m anivela. C onv ie rta a tiem p o el án g u lo d e b m anive- b sob re el e je. L uega use diferenciales num éricas co n b finalidad de o b te n e r la cu rv a de velocidad del ariete en f u n d ó n del tiem po.
V elocidad c o n W o rk in g M o d e l
6 -112 . La m an iveb del m ecan ism o com preso r m ostrado en b figura P6.19 e s im pulsada a u n a velocidad constante de 1750 rp m en sen tido h o ra r ia Utilice el software W orking Model para crear u n a sim ulación y graficar la veloddad Ineal del pistón en función del án g u lo d e la manivela.
6 -1 1 3 . l a ru e d a de b m an iveb d e la sie rra reciprocante mostra d a en b figura 1*6.21 e s im pulsada a u n a v e lo d d ad constante de 1500 rp m e n se n tid o a n t ih o ra r ia Utilice el so ftw are W ork ing M odel co n b fin a lid a d de crear u n a s im u la d ó n y graficar b velocidad lineal de b ho ja de la sie rra en fu n c ió n del ángulo d e la manivela.
6 -114 . La m an iv eb del m ecanism o d e c o rte m o strad o en b fig u ra P6.23 es im pulsada a u n a v e lo d d ad constan te de 80 rp m en se n tid o h o ra r ia U tilice el softw are W orking M odel co n la fin a lid a d d e c re a r u n a s im u b d ó n y graficar b v e lo d d ad a n g u b r d e b cuchilla en función del án g u lo de la m aniveb.
6 -1 1 5 . La m an iveb del m ecanism o lim p iador del cristal trasero m ostrado en la fig u ra P6.25 es im pulsada a u n a v d o a - <bd constan te d e 65 rp m e n sen tido horario . U tilice el softw are W brking M odel co n la finalidad de crear una sim ulación y graficar la velocidad angular de la ho ja del im p ia d o r en fu n d ó n del án g u lo de b manivela.
6 - 1 1 6 . La m an iv eb del c h a p o te a d e ro m o s tra d o en la figura P6.27 e s im p u lsad a a 9 0 rp m en se n tid o an tih o ra rio . U tilice el softw are W orking M odel co n b finalidad de crear u n a s im u la d ó n y g rafica r b v e lo d d ad a n g u b r del tanque en fu n d ó n del án g u lo d e b m an iveb .
6 - 1 1 7 . La m a n iv e b del m ecan ism o ag itad o r de u n a lavadora m ostrado e n b figura P6.29 es im pulsada a u n a v e lo d d ad d e 80 rp m en se n tid o horario . U tilice el softw are W ork ing M odel co n b fin a lid a d de c re a r u n a s im u b d ó n y g rafica r b velocidad a n g u b r del segm ento de engrane en fu n d ó n del án g u lo de la manivela.
6 - 1 1 8 . La m anivela del m ecanism o com presor de dos d lin d ro s m ostrado en b figura P 6 J5 es im p u lsad a a u n a velod- cbd de 1250 rp m en sen tido h o ra r ia Utilice el softw are W orking M odel c o n la fin a lid a d de crear u n a s im u b d ó n y graficar b velocidad a n g u b r d e am b o s p istones en fu n d ó n del ángulo d e b manivela.
6 - 1 1 9 . La m anivela del d ispositivo q u e m ueve paquetes m o strad o en la figura P 6 J7 « im pulsada a u n a velocidad de 25 rp m en sen tido horario . Utilice el software W brking M odel co n la finalidad d e e rra r u n a s im u la d ó n y g ra ficar b veloddad lineal del ariete en fu n d ó n del ángulo de b m anivela
ESTUDIOS D E CASO_________________________
6 -1 . En b figura E6.1 se m uestra u n m ecan ism o q u e se u tiliza p a ra im p u lsa r u n a sierra d e p o te n d a p a ra metales. H m ecanism o e s im pulsado p o r el eje d e u n m o to r eléc- trico acop lada al eng ran e A . Exam ine cu idadosam ente b con f ig u rad ó n en cuestión. L uega conteste b s sigu ientes p regun tas c o n b fina lidad de o b te n e r m ayor co nocim iento acerca d e la operación del mecanismo.
fig u r a F6.I (C o rte sb d e Industria l Press).
1. ( b a n d o el engrane A se f u e r a a g ira r en sen tido an tiho r a r ia ¿cuál e s el m ov im ien to del eng ran e acop lado B?
2. ( b a n d o el engrane A s e fuerza a girar en se n tid o antih o ra r ia ¿cuál es el m ovim iento del p e rn o incrustado C?
3 . C uando el eng ran e A se fuerza a g irar en se n tid o a n tih o ra rio , ¿cuál es el m ov im ien to de b p a b n c a D t
4 . ¿C ó m o d if ie re el m o v im ien to de la p a b n c a D del m ov im ien to d e b p a b n c a £?
www.FreeLibros.me

A n á lisis d e velocidad 169
7.
6 - 2.
1.
D eterm ine la p o sic ió n del eng ran e B q u e co lo carla a b palanca D e n su posic ión ex trem a inferior. D eterm ine la posic ión del engrane B que co locaría a la p ilan ca D en s u posición ex trem a superior.D eterm ine la can tidad d e g iros del engrane B para elevar la p a la n c a D y el n ú m e ro d e giros p a ra b a ja r la palanca.A proxim adam ente, ¿cuál es la diferencia e n tre el tiem po pora e lev arla palanca D y el tiem p o para bajarla? C o m en te acerca del m o v im ien to c o n tin u o d e la pa- b n c a £
La figura E6.2 ilu stra u n m ecan ism o q u e im p u lsa una mesa p a ra u n a operac ió n especial d e a f ila d a Examine cu idadosam en te la con fig u rac ió n en cuestión. L u e g a con teste las s ig u ien tes p reg u n tas co n la f in a lid a d de o b te n e r m ay o r co n o c im ien to acerca de la operac ió n del mecanismo.
f i g u r a E6.2 (C ortesía de In d u stria l Press).
C u a n d o la ru ed a C se fuerza a g ir a r en se n tid o a n t i h o ra r ia ¿cuál e s el m ov im ien to del p e rn o D?
2 . ( l ia n d o la ru e d a C s e fuerza a g irar e n sen tido a n tih o r a r ia ¿cuál es el m ovim iento del eslabón G?
3 . D eterm ine la p o sic ió n d e la ru ed a C q u e co locarla d p u n to / e n s u posic ión ex trem a superior.
4 . D eterm ine la posic ión de b ru e d a C q u e c d o c a r b el pu n to / e n su posic ión ex trem a inferior.
5. D eterm ine b cantidad de g iros de b ru e d a C para e le var el p u n to / y b can tidad de g iros para bajarlo.
6 A proxim adam ente, ¿cuál es b d iferenc ia e n tre el tiem p o p a ra elevar el p u n to / y el tiem p o para bajarlo?
7 . ( lím e n te acerca del m ovim iento cíclico de b palanca £
8 . D escriba el m ov im ien to d e la m esa R.9 . ¿Cuál es b función de este mecanismo?
10. ¿Por q u é h ay cu erd as de to rn illo en los ex trem os del esb b ó n H?
11. C alcule b m ovilidad d e este m ecanism o.
6 - 3 . L a fig u ra E6.3 i lu s tra u n m ecan ism o q u e im p u lsa el fuelle en u n a m áquina d e respiración artificial. Examine cu idadosam ente b configurac ión en cuestión . L uega co n te s te b s sigu ien tes p reg u n tas co n la fina lidad de o b te n e r m ay o r co n o c im ien to acerca de la o p e rac ió n del m ecanism o.
Visa froreal
f ig u r a B6.3 (C o rtesía de In d u stria l Press).
1. C u a n d o el e s b b ó n E g ira c o n tin u a m e n te e n se n tid o a it¿h o rario y recorre b ra n u ra / en el in stan te m o s tra d a ¿cuál es el m ovim iento del d isco P.
2. C u a n d o el e s b b ó n E g ira c o n tin u a m e n te e n se n tid o an tiho rario y recorre b ra n u ra / en el instante m ostra d a ¿cuál es el m ovim iento de b b an d a G?
3 . C u a n d o el e s b b ó n E g ira c o n tin u a m e n te e n se n tid o an tiho rario y recorre b ra n u ra / o í el instante m o stra d a ¿cuál es el m ovim iento de b co rred era A?
4 . C onfo rm e el e sb b ó n E se aproxim a a la r a m p a Af,¿qué sucede co n el resorte N?
5 . C onform e el e sb b ó n E hace con tac to c o n b ra m p a Af, ¿qué sucede co n el e sb b ó n E?
6 C onform e el e s b b ó n E hace con tac to c o n la ra m p a M, ¿cuál e s el m ovim iento del d isco R
7 . C onform e el eslabón E hace c o n ta d o co n la r a m p a Af, ¿cuál e s el m ovim iento d e b co rred era A?
8. C onfo rm e el eslabón E c o n tin ú a g ira n d o m ás a lb d e b ra m p a Af, ¿cuál e s el m ov im ien to del d isco R
9. C onfo rm e el eslabón £ a trap a b r a n u ra K , ¿cuál es el m ov im ien to del d isco E?D escriba el m ovim iento c o n tin u o d e b co rred era A , b cual im pulsa u n extrem o del fuelle.
10.
www.FreeLibros.me

C A P I T U L O
S I E T E
ANÁLISIS DE ACELERACIÓN
O B J E T I V O S
Al terminar d t estudiar a te (apiado, t i alumnoserá capaz de:
1. Definir l o ik d rn o o n c s lineal, angular, norm al, tangencial, <lr Corioli* y relativa.
2. Utilizar d método de aceleración relativa para obtener gráficamente la aceleración de un pun to sobre un eslabón, conociendo la aceleración de o tro punto sobre el mismo eslabón.
3. Utilizar d método de acdcración relativa para determ inar gráficamente la aceleración de un punto de interés sobre un eslabón flotante.
4. Saber cuándo se presenta la aceleración de Corioh.v e incluirla a i el análisis.
5. Usar el método de aceleración relativa para obtener m lilic am cn tc la acdcración de u n punto.
6. Usar el método de aceleración relativa para obtener analíticamente la acdcración del punto de interés sobre un eslabón flotante.
7. C onstru ir una curva de aceleración para localizar los valores extremos de aceleración.
7.1 IN TR O D U C C IÓ NEl análisis d e aceleración incluye d e te rm in ar la m anera en q u e d e r to s p u n to s sob re los eslabones d e u n m ecan ism o " se aceleran* o “se desaceleran". La a c e le ra d ó n e s u n a p ro p ie d a d critica p o r las fuerzas inerciales q u e se le asocian. En el e s tu d io de las fuerzas, S ir Isaac N ew to n d escu b rió q u e la fu e rz a inercia! es p ro p o rc io n a l a la a c e le ra d ó n q u e a d q u ie re u n cu erp o . Este fen ó m en o se o b se rv a c a d a vez q u e u ste d avanza en s u a u tom óv il rá p id a m e n te hacia a d e la n te y ap lica los frenos con m ucha fuerza.
D esde luego, u n a parte im portan te del diserto de m ecanism os e s garan tizar q u e la resistencia de los eslabones y las u n io nes sea su fid en te para so p o r ta r b s fuerzas a q u e se som eten . Es im p o rtan te la com prensión d e todas las fuerzas, sob re to d o las d e inercia. E l análisis d e fuerzas se p resen ta e n lo s cap ítu los 13 y 14. S in em b arg o , co m o paso p re lim in ar, se deb e e fec tu ar el análisis d e ace le rad ó n d e lo s eslabones de u n m ecanism o.
El objetivo d e este cap itu lo es la d e te rm in a d ó n de la a c e le ra d ó n en u n eslabonam iento. El proced im ien to p r in d p a l q u e
se usa e n este aná lis is es el m é to d o de a c e le ra d ó n relativa, el cual utiliza lo s resultados del m éto d o de v d o d d a d relativa presen tado e n el cap itu lo 6 . En congru en c ia con o tros capítu los de este libro, se u tilizan técnicas ta n to gráficas co m o analíticas.
7.2 ACELERACIÓN LINEALLa aceleradón linea l A de u n p u n to es el cam bio de la velocidad lineal d e ese p u n to p o r u n id ad d e tiem po . E l ca p itu lo 6 se d ed icó a l aná lis is de velocidad. La velocidad es u n a can tidad vectorial q u e se define p o r su m agn itud y s u d ire c d ó n . P or lo tan to , u n cam bio en la m agn itud o e n la d irecd ó n de la velocid ad p ro d u ce u n a aceleración . L a m ag n itu d del v ecto r de acele ra d ó n se designa co m o a = | Al.
7.2.1 A c e le ra c ió n l in e a l d e p u n to s q u e se m u e v e n e n l ín e a re c ta
C onsidere u n p u n to q u e tiene m ovim iento rectilíneo o en línea recta. U n p u n to as í se en cu en tra co n m ás frecuencia sob re u n eslabón q u e está su jeto a la b ancada p o r m e d io d e u n a u n ió n de corredera. E n este caso, tan so lo p u ed e cam biar la m agn itud del v ecto r de v elocidad . La a c e le ra d ó n s e desc rib e m a tem á tica m ente como:
A VA = lím ——
a»—o A t
d v
d t ( 7 . 1 )
Sin em bargo, com o
entonces.
A =S R
d i2(7.2)
Para periodos de tiem p o cortos, o cu an d o la ace le rad ó n se supo n e lineal, se u tiliza la siguiente re ladón :
A -A V
A i(7.3)
C om o la velocidad es u n vector, la e c u a d ó n (7 .1 ) establece q u e la aceleración tam b ién es u n vector. La dirección de la acele ra d ó n lineal es en la d ire c d ó n del m ovim iento lineal cuando el eslabón acelera. P or el con tra rio , c u a n d o el eslabón desacelera. la d ire c d ó n d e la a c e le ra d ó n lineal e s opuesta a la d irecd ó n del m ov im ien to lineal.
www.FreeLibros.me

A n álisis d e a celerac ión 171
La aceleración lineal se expresa en un idades d e velocidad ( lo n g itu d p o r tiem p o ) d iv id idas e n tre u n id ad es de tiem p o , o longitud p o r tiem p o al cuadrado . En el sistem a trad ic io n a l estadounidense, b s unidades de uso co m ú n son pies p o r seg u n d o al cu ad rad o (ft/s2) o pulgadas p o r segundo a l cu ad rad o (in /s2) . En el sis tem a in ternacional, b s un idades de uso c o m ú n son m etros p o r seg u n d o a l c u a d ra d o (m /s ‘) o m ilím e tro s p o r seg u n d o al c u a d ra d o (m m /s2). P ara fines d e com paración , b aceleración lineal se expresa co n frecuencia e n relación c o n b aceleración de b gravedad: g = 32.17 ft/s2 - 386.4 in /s2 = 9.81 m /s2.D e m odo q u e u n a aceleración de 10# es igual a 3864 in /s2.
7 .2 .2 A c e le ra c ió n r e c t i l ín e a c o n s ta n teR eplanteándola ecuación (7 3 ) ,el cam bio de velocidad q u e ocurre du ran te u n periodo d e aceleración constante se expresa como
A V = Vfínai - V ^ - y = A A i (7.4)
A sim ism o, el desp lazam ien to co rrespond ien te q u e o cu rre d u ra n te u n p e rio d o de aceleración constan te se escribe com o:
A R = ^ A A í2 + V « k y A r (7.5)
Las ecuaciones (7 .4 ) y (7 .5 ) se com b in an para obtener:
(V fBy ) 2 = (V lnkW)2 + 2 A A R (7.6)
C o m o el m o v im ien to rec tilíneo se da a lo la rg o de u n a línea recta , la d irecc ió n del d esp lazam ien to , la ve locidad y b aceleración ( r , v, a ) se especifican co n u n signo algebraico a lo largo d e u n eje de coo rdenadas. D e m o d o q u e b s ecu ac iones (7 .4 ), (7 .5 ) y (7 .6 ) se expresan en té rm in o s d e b s m agnitudes vectoriales ( r , v, a ).
PRO B LEM A D E E JE M PL O 7.1
B elevador exprés de un edificio alto puede alcanzar u n a velocidad total de 15 m p h en 3 s. Suponiendo que el elevador experim enta aceleración constante, determ ine la aceleración y el desplazam iento durante los 3 s.
S O L U C IÓ N : 1. Calcúlela aceleración
Suponiendo q u e la aceleración es constante, se debe usar básicamente la ecuación (7 3 ). C om o el elevador parte del reposo, el cam bio de velocidad se calcula como:
A V - (15 m p h - 0) = 15 m ph
Entonces, b aceleración se calcula como:
A t 3 s
Normalice la aceleración con respecto a la gravedad
Cuando Las personas se aceleran en u n elevador, b aceleración "se normaliza" con frecuencia en relación con b ace- k ración de la gravedad. l a aceleración estándar de la gravedad (g) sobre b tierra e s de 32.17 ft/s2 o bien 9.81 m/s2. Rtr consiguiente, b aceleración del elevador se expresa como:
3. Calcule el desplazam iento durante el intervalo de 3 segundos
H desplazamiento se determ ina co n la ecuación (73).
AR = - (jA l2 + vmkU1A I = j ( 7 3 ft/s2)(3 s)2 + (0 )(3 s)
- 32.9 ft T (o aproxim adam ente 3 pisos)
7 .2 .3 A c e le ra c ió n y e l p e r f i l d e v e lo c id a d
C o m o se establece en b ecuac ión (7 .1 ), la aceleración in stan tánea es b p r im e ra derivada de b velocidad instantánea c o n respecto al tiem po . O casionalm ente se en co n tró u n a ecuac ión de fo rm a cerrada p a ra b velocidad in stan tán e a d e u n p u n ta En tales casos, b derivada de b ecuación, evaluada e n el tiem p o es
pecificad a p ro p o rc io n ará b aceleración instantánea. C o n más frecuencia, sob re to d o e n los ac tu ad o res p ro g ram ab les q u e se usan en tareas autom atizadas, lo s perfiles de velocidad se especifican c o m o se h izo en el cap ítu lo 6. Recuerde q u e el despbza- m ien to en cierto in tervalo de tiem po es el á re a d ebajo de b curva v - t En c a m b ia b aceleración e n un cierto tiem po e s b pendiente d e la cu rv a v-L
www.FreeLibros.me

172 CAPITULO SIETE
PRO B LEM A D E E JE M PL O 7.2
Una operación autom atizada de ensam ble requiere m ovim iento lineal de u n servom otor El desplazam iento total tfebe ser de 10 in . Por razones de diseno, la velocidad m áxim a está lim itada a 2 in/s, y la aceleración o la desaceleración ntíxim as n o deben exceder 4 in /s2. O rifique el perfil de velocidad para esta aplicación.
S O L U C IÓ N : I . Determine los parám etros del m ovim ien to duran Ir la aceleración
B i el perfil estándar de velocidad de u n servomotor, la parle de aceleración del m ovim iento es aceleración constante. Reagrupando y sustituyendo las m agnitudes de la velocidad v y de la aceleración u en la ecuación <7 3 ) . se obtiene el tiem po transcurrido durante la aceleración.
¿ v (2 - 0) in /sA i = — = ------------ — = 0 3 s
a 4 in/s2
Se usa la ecuación (7 3 ) para calcular la m agn itud del desplazamiento durante la aceleración.
A R = ^ u A í2 + Vfiuúi A t
= i (4 in/s2) ( 3 s )2 + < 0)(3 s) — 0 3 in
2 . Calcule los parám etros de m ovim ien to durante la desaceleración
&i d perfil estándar de velocidad, la parte de desaceleración del m ovim iento es aceleración constante. El tiem po transcurrido durante la desaceleración es:
A v (0 - 2 ) in/sA t = — t — y - 0 3 s
a - á m / s 2
l a m agnitud del desplazim icnto durante la desaceleración es:
AR = ^ u A / 2 + v BUu1A I
- ( —4in/s2 ) ( 3 s ) 2 + 22 in /s (3 s) = 0 3 i n2
Determ ine los parám etros del m ovim ien to duran te el estado estacionario
Como durante la aceleración d desplazamiento es igual a 0 3 in y de otras 0 3 in durante la desaceleración, las 9 in restantes de desplazamiento ocurren durante el m ovim iento de velocidad constante. Se usa la ecuación (6.2) para calcular el tiem po transcurrido durante la parte de velocidad constante.
A ft 9 ¡n A r =» — - —— * 4 3 s
v 2 in /s
Calcule los parám etros del m ovim iento duran te el estado estacionario
Usando la inform ación de velocidad y tiem po de esta sccucncé, se genera el perfil de velocidad m ostrado en la figura 7.1.
Mió»)
F IG U R A 7.1 Perfil de velocidad del problema de ejem plo 7 .2 .
www.FreeLibros.me

A n álisis d e a celerac ión 173
7 .2 .4 A c e le ra c ió n l in e a l d e u n p u n to en g e n e ra lC o m o se m enc io n ó an te rio rm en te , la v e lo d d a d d e u n p u n to co n m ov im ien to e n general sue le cam b iar de d o s m aneras:
1. U n cam bio en la m agn itud d e la velocidad. Este produce u n a aceleración q u e actúa a lo la rg o de la trayectoria del m ovim ien to , co m o se señaló en b sección an terio r. Esta a ce le rad ó n se cono ce co m o aceleradón tangenc ia l A'.
2. L a d ire c d ó n del vector v e lo d d ad p u ed e cam b iar conform e p asa el tiem po . Esto o c u rre c u a n d o el e sb b ó n . co n el cual está asociado el p u n to , experim enta m ov im ien to g iratorio q u e p ro d u ce u n a ace le rad ó n centrifuga, b cual actúa p e rp en d icu b rm e n te a la d ire c d ó n de la trayectoria del m ovim ien to . La aceleración se cono ce co m o aceleración norm al A".
La figura 72 m uestra el p u n to A m oviéndose a lo largo de u n a trayectoria curva. L a aceleradón tangencial del p u n to A, A'a, es la ace leradón lineal a lo largo de b d ire c d ó n del m ovim iento. O bserve q u e el vector a p u n ta en b d ire c d ó n del m ovim iento p o rq u e el p u n to A está acelerando. Si el p u n to A estuviera desacelerando, el v e c to r de la a c e le ra d ó n a p u n ta r b e n sen tido opuesto a la d ire c d ó n del m ovim iento. D esde luego, el vector de veloddad siem pre a p u n ta en b d ire c d ó n del m ovim iento. P o r lo tan to , u n p u n to q u e acelera está asociado co n u n vector d e acelerad ó n tangencial que es consistente con el vector d e veloddad. Por el contrario , la desaceleración está asodada co n u n vector de aceleradón tangencial opuesto al vector de velocidad. La m agnitu d de b aceleradón tangencial se de term ina u sando b s ecua- d o n e s (7 .1 ), (7 .2 ) o (7.3).
A ¿ (accbiación tangencial d d punto A)
V A (velocidad dd punto A)
X Trayectoria dd movimicn
, A,4 (aceleración normal d d punto A)
f i g u r a 7 J A celeradón del p u n to A.
a ese pun to . C o m o co n b v e lo d d ad , varios p u n to s sob re u n eslabón p u ed en te n e r ac e le ra d o n e s d iferen tes, a u n c u a n d o el e sb b ó n com pleto tenga b m ism a aceleración giratoria.
7.3.1 A c e le ra c ió n a n g u la rLa aceleración angular a de u n e sb b ó n es b v e lo d d a d a n g u b r d e ese e sb b ó n p o r u n id a d de tiem po . M atem áticam ente, b a c e leración angu la r d e u n eslabón se describe com o:
Acó dúi a = lim — — = —
d r — o A f d t(7.7)
Sin em bargo, com o
entonces.
ifio
d t(7.8)
Para p e rio d o s de tiem po cortos, o c u a n d o se su p o n e q u e b aceleración a n g u b r e s lineal, se u tiliza la siguiente re ladón :
Acó
A f(7 .9 )
Al igual q u e e n el análisis d e b sección 7.2, b d ire c d ó n de t i a c e le ra d ó n a n g u b r está en b d irecc ió n del m o v im ien to cuando la velocidad angu la r se increm enta, o el e sb b ó n acelera. Por el c o n tra rio , b aceleración a n g u b r tien e dirección opuesta al m ovim iento cuando b v e lo d d ad a n g u b r d ism inuye, o el eslab ó n desacelera. En los análisis sob re u n p lan o , b d ire c d ó n se describe co m o e n sen tido h o rario o en se n tid o an tiho rario .
La ace le rad ó n a n g u b r se expresa en u n id ad es d e velocidad a n g u b r (ángulo p o r tiem p o ) divididas en tre un idades de tiem po, o ángulo p o r tiem p o al cuadrado. Tanto en el sistem a trad i- d o n a l e s ta d o u n id e n se co m o en el s is te m a in te rn ac io n a l, b s unidades q u e se usan co m ú n m en te son g rados p o r seg u n d o al c u a d ra d o (d eg /s2), rev o lu c io n es p o r se g u n d o a l cu ad rad o (rev /s2) o la u n id a d p re fe rid a de ra d ia n e s p o r se g u n d o al a la d ra d o (rad /s2).
1.a ace lerac ión n o rm a l del p u n to A, A¡}> e s re su lta d o del cam bio en la dirección del vector de velocidad. Actúa a lo largo de b línea p e rp e n d ic u b r a la dirección del m ovim iento y had a el cen tro de c u rv a tu ra de b trayectoria. En b se cd ó n 7.4 se p re se n ta n detalles ad ic io n a les de b s ace le rad o n es ta n g e n c b l y norm al.
7.3 ACELERACIÓN D E UN ESLABÓNR ecuerde q u e en b s e c d ó n 6.3 se v io q u e cu a lq u ie r m o v im ien to , in d u so u n m ov im ien to com plejo , se p u ed e visualizar co m o u n a co m b in ac ió n d e m o v im ien to e n linea recta y m o vim iento g ir a to r ia La descripción co m p le ta del m ov im ien to de u n eslabón consiste en la esp ed fica d ó n del m ov im ien to lineal de u n p u n ta y el m ov im ien to g ira to rio del eslabón co n respecto
7 .3 .2 A c e le ra c ió n a n g u la r c o n s ta n teR epbn teando b e c u a d ó n (7 .7 ), el cam bio d e velocidad a n g u b r q u e o c u rre d u ra n te u n p e rio d o de a c e le ra d ó n a n g u b r c o n stante se expresa com o:
A to = a»f1(B| - o iú ú tu = a A f (7 .10)
Asimismo, el desp lazam ien to angu la r co rre sp o n d ien te que o cu rre d u ra n te u n periodo d e aceleración angular constan te se expresa com o:
1 0 = “ « A l 2 + tu-m itéiA í (7 .11)
Las ccu ad o n es (7.10) y (7 .11) se c o m b in an p a ra obtener:
= fo n ic U )2 + 2 a l O (7 .12)
www.FreeLibros.me

174 CAPITULO SIETE
PRO B LEM A D E E JE M PL O 7.3
Un m otor eléctrico impulsa la rueda de u n afilador en sentido horario, com o se indica en la figura 7 3 . l a rueda acelera hasta 1800 rpm en 2 s cuando se enciende é m otor. Suponiendo q u e esta aceleración e s constante, determ ine la aceleración angular de la rueda afiladora. Determ ine asim ism o el núm ero de resoluciones q u e la rueda g ira antes de alcanzar la velocidad final.
F I G U R A 7 J R u e d a d e l a f i l a d o r d e l p r o b l e m a d e e j e m p l o 7 . 3 .
S O L U C IÓ N : I . Calcule la aceleración
G a m o l a a c e l e r a c i ó n n o r m a l m e n t e s e e s p e c i f i c a e n r a d / s 2 , s e c o n v i e r t e l a v e l o c i d a d d e l a r u e d a d e l a f i l a d o r a
r a d / s d e l a s i g u i e n t e m a n e r a :
/ 2w ra d N / I m in \A ai = 1800 r p m l II — I = 188 ó rad/s, en sen tido horario
V I rev A « ) s /
Con aceleración constante, se debe usar la ecuación (7.9) para ob ten er
A oj
A /
( 188-5 n d f t - 0 ) . ^ en sentido horario
L a d i r e c c i ó n d e l a a c e l e r a c i ó n e s e n s e n t i d o h o r a r i o y t i e n e l a d i r e c c i ó n d e l m o v i m i e n t o p o r q u e l a r u e d a d e l
a f i l a d o r e s t á a c e l e r a n d o .
2. Calcule e l desplazam iento durante e l in tervalo de 2 segundos
H núm ero de revoluciones durante este periodo de aceleración se determ ina con la ecuación (7.11).
A0 = '- a A l2 + riH n ^ iA /= ~ (94.2 rad/s*)(2s)^ + (0 )<2 s)
= 188.4 rad( 7 >eV. ) = 30.0 revoluciones \ 2w rad /
7.4 ACELERACIÓN NORMAL Y TANGENCIAL
C o m o se expuso en la sección 7.2.4, la velocidad de u n p u n to que se m ueve en u n a trayectoria cualquiera cam bia de dos m aneras independientes: la m agnitud o b d irección del vector de v e lo d dad p u ed en cam biar en el tiem po. Desde luego, b aceleradón es el cam bio de v e lo d d ad d u ra n te el tiem po transcu rrido , de manera q u e b a c e le ra d ó n generalm ente se d iv ide e n d o s c o m p o nentes: no rm al y tangencial. La co m p o n en te n o rm a l se form a co m o resultado del cam bio en b d ire c d ó n del vector de v e lo d
d ad . La co m p o n en te tang en c ia l se fo rm a co m o resu ltado del cam bio en b m agnitud del vector de veloddad.
7.4 .1 A c e le ra c ió n ta n g e n c ia lPara u n p u n to sob re u n e sb b ó n g ira to rio , se requiere p o co esfuerzo para d e te rm in ar b d ire c d ó n de estos com ponen tes d e b aceleradón . Recuerde que b veloddad instantánea de u n p u n to sob re u n e s b b ó n q u e g ira es p e rp e n d ic u b r a b línea q u e conecta e se p u n to co n el c e n tro de ro ta d ó n . C u a lq u ie r cam bio en la m agnitud de esta v e lo d d ad crea u n a aceleradón tangencial, que
www.FreeLibros.me

A n álisis d e a celerac ión 175
tam bién es p erpend icu lar a la lin ea q u e u n e el p u n to c o n el cen t ro d e ro tac ió n . La m agn itud de la aceleración tang en c ia l del p u n to A sob re u n eslabón 2 q u e g ira se expresa com o:
A d i« W o i ) M _ n . , ,— t rO A— - rOA°2 (7-13)
Es m u y im p o rta n te reco rd ar q u e la aceleración angu la r o en la ecuación (7.13) se deb e expresar e n unidades de radianes p o r tiem p o al c u a d ra d a Los radianes p o r segundo al cuadrado son la u n id ad más com ún. A l igual q u e en el análisis d e la secc ió n 7.2 , la aceleración tangencial a c tú a en la d irecc ió n del m ov im ien to cuando la velocidad se increm enta o el p u n to acelera. P o r el c o n tr a r ia la aceleración tangencial ac tú a en d irecc ión o p u esta al m ovim iento cu an d o la velocidad dism inuye o el p u n to d e s acele ra
7 .4 .2 A c e le ra c ió n n o r m a l
C ualqu ier cam bio en la dirección d e la velocidad crea u n a aceleración n o rm a l, la cual siem p re se d ir ig e hacia el c e n tro de ro tac ión . La fig u ra 7.4a m uestra u n eslabón q u e g ira a velocidad c o n s tan te . La velocidad del p u n to A se m uestra u n in s tan te antes y u n in s tan te desp u és d e la c o n fig u rac ió n en co n sid erac ión , separada p o r u n p eq u eñ o án g u lo dB¡. C o m o el eslabón gira a ve locidad c o n s tan te , so n iguales las m ag n itu d es de VA' y V * . D e m o d o q u e V A' = V / .
L a figura 7 .4b ilu s tra u n po lígono d e velocidades resuelto v ec to ria lm en te p a ra o b te n e r e l cam b io d v de la v e locidad . O bserve q u e el cam bio d v en el vector d e velocidad está d irig ido hacia el c e n tro de ro tac ió n del eslabón . D e h e c h a la aceleración no rm al siem pre estará d ir ig id a hacia el c e n tro d e ro tac ió n del eslabón. Esto e s así p o rq u e co m o el p u n to g ira alrededor d e un pivote f i j a el vector de velocidad cam biará a lo largo de la cu rv a tu ra del m o v im ien to . P or consigu ien te , e l v ecto r n o rm a l a esta c u rv a tu ra siem pre estará d irig id o hacia el p ivo te f ija
C om o Afl es pequeño en la figura 7.4a. se establece la siguiente relación:
dvA = vÁdQ¡
D ebido a q u e h aceleración se defin ió co m o el cam b io de velocidad d u ra n te el tiem p o t r a n s c u r r id a al d iv id ir am bos lados d e la expresión an te rio r e n tre el t ie m p a se ob tiene:
- dvA dO,
** = ~ d i = V/1T = Vá“ *
U a n d o la ecuación (6.6), q u e relaciona las m agnitudes de la velocidad lineal y la velocidad ang u la r, se deriv an las siguientes ecuaciones de la m agnitud d e la aceleración no rm al de u n punto:
“ 3 = V/t*2 = (<O2r0A)a>2 = u>l rOA (7 .14)
«2 = vAo*2 = ~ (7.15)V a * / rIM
7.4 .3 A c e le ra c ió n to ta lC o m o se m enc io n ó an te rio rm en te , el análisis de aceleración es im p o rta n te p o rq u e las ace lerac iones gen eran fuerzas inercia- les. Se d e b e n d e te rm in a r estas cargas p a r a a se g u ra rse q u e la m áqu ina se d iseñ e adecu ad am en te p a ra m a n e ja r estas cargas d inám icas. Las fu erz as inerciales so n p ro p o rc io n a les a la aceleración to ta l de u n cu erp o . L a axlcración total A es el v e c to r resu ltan te d e las co m p o n en tes tangencial y n o rm a l. M atem ática m ente, e s to se expresa como:
Aa = A l + > AÁ (7.16)
©
u .
f i g u r a 7 .4 Aceleración n o r m a l .
PRO B LEM A D E E JE M PL O 7 .4
El m ecanism o que se presenta en la figura 7 5 se usa en un cen tro de distribución para em pujar cajas a lo largo de una plataform a hacia el área de cargi. El eslabón de en trada es impulsado p o r un m o to r eléctrico el cual, en el instante mostrado, tiene una velocidad de 25 rad/s yacclcra a 500 ra d /f .S i el eslabón de entrada tiene u n a longitud de 250 m m , determine la aceleración instantánea del extrem o del eslabón de entrada en b posición que se muestra.
www.FreeLibros.me
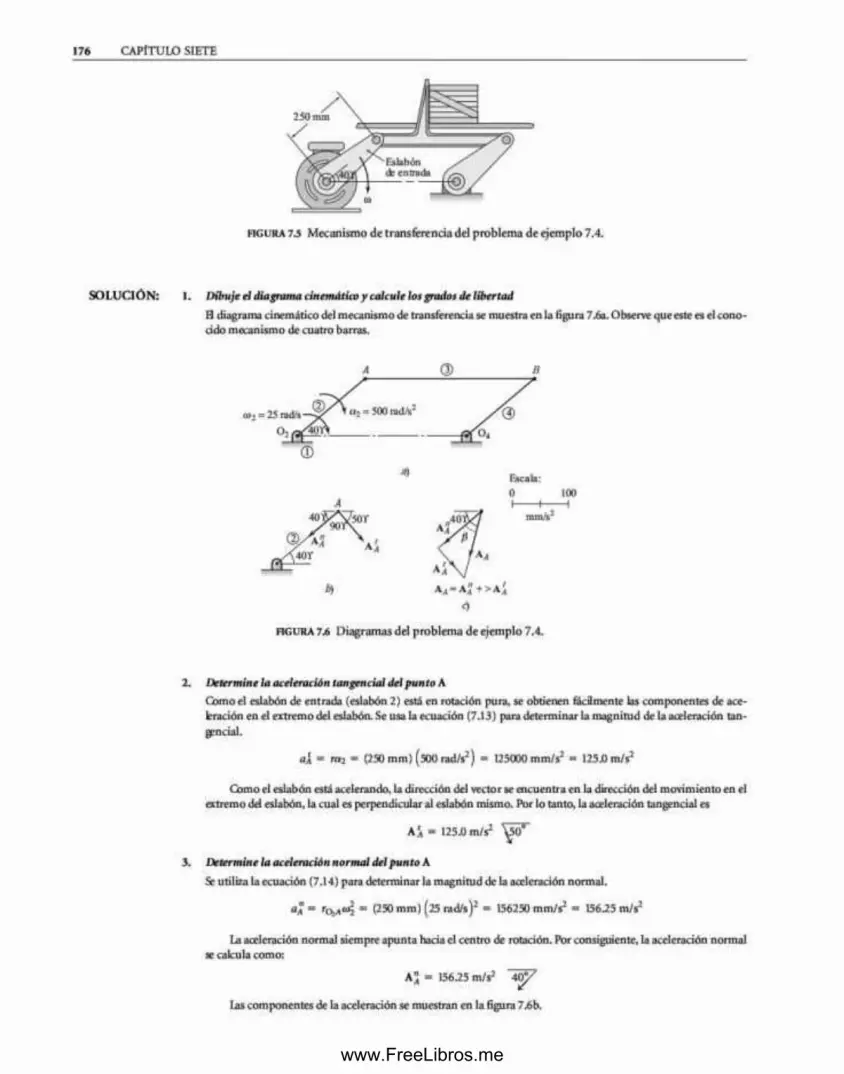
176 CAPITULO SIETE
SO L U C IÓ N :
f ig u r a 7 J M ecanism o d e transferencia del p rob lem a d e e jem plo 7.4.
1. D ibuje el diagrama cinemático y calcule lo t grados de libertad
B diagrama cinem ático del mecanismo de transferencia se m uestra en la figura 7.6a. Observe q u e este es el co n o cido m ecanism o de cuatro barras.
(D
100
mmA!
FIGURA 7.6 D iagram as del p rob lem a de e jem plo 7.4.
2. Determine la aceleración tangencial del p u n to A
Como el eslabón de en trada (eslabón 2) está en rotación pura, se obtienen fácilmente las com ponentes de aceleración en el ex trem o del eslabón. Se usa la ecuación (7.13) para determ inar la m agnitud de la aceleración tan-
<*a - ra¡ - (250 m m ) (500 rad/s2) - 125000 m m /i1 - 125.0 m /*2
Com o el eslabón está acelerando, la dirección del vector se encuentra en la dirección del m ovim iento en el extremo d d eslabón, la cual es perpendicular al eslabón m ism o. Por lo tanto, la aceleración tangencial es
A j, - 125b m /s2 ^50-
3. Determ ine la aceleración n o rm a l del p u n to A
Se utiliza la ecuación (7.14) para determ inar la m agnitud de la aceleración norm al.
* a " ' o a “ j " (250 m m ) (25 rad /s)2 - 156250 m m /s2 - 156.25 m /s2
La aceleración norm al siem pre apun ta hacia el centro de rotación. Por consiguiente, la aceleración normal se calcula como:
A l - 156.25 m /s2 4 0 /
la s com ponentes de la aceleración se m uestran en la figura 7.6b.
www.FreeLibros.me

A n álisis d e a celerac ión 177
Determine la aceleración to ta l del p u n to A
l a aceleración total se calcula con los m étodos analíticos presentados en el capitulo 3 . E n la figura 7Xc se m uestra u n diagram a de la su m a de vectores. C om o las com ponentes norm al y tangencial son ortogonales, la m agnitu d de la aceleración total se calcula como:
- a " + ( a W
- V (l25X )m /s2)2 + (2156-25 mi»1)2 - 200.10 m /s2
B á n g u l o d d v e c t o r d e a c e l e r a c i ó n t o t a l a p a r t i r d e la c o m p o n e n t e n o r m a l s e c a l c u l a d e l a s i g u i e n t e m a n e r a :
a - « . - ' ( 4 ) - . 3 8 J *V n ; / V. 136.23 m /sV
La dirección del vector de aceleración total a partir del eje horizontal es
40X* + 38.7* = 78.7*
Formalmente, b aceleración total se escribe como:
Aa = 200.10 m /s2 7 8 ^
La a c e l e r a c i ó n t o t a l t a m b i é n s e d e t e r m i n a c o n u n p r o c e d i m i e n t o g r á f i c o u t i l i z a n d o e l c a d o l a s t é c n i c a s d e
d i b u j o t r a d k i o n a l , c o m o s e e x p l i c ó e n e l c a p í t u l o 3 .
1 5 M OVIM IENTO RELATIVO
C o m o s e v io e n deta lle en el cap itu lo 6, la diferencia e n tre el m o v im ien to de d o s p u n to s se cono ce co m o m o vim ien to relativo . La velocidad relativa se defin ió co m o la velocidad de u n o b je to obse rv ad o desde o tro o b je to d e referencia q u e tam b ién se está m oviendo . D el m ism o m odo, la aceleración relativa e s la aceleración de u n o b je to obse rv ad o desde o t r o o b je to d e referencia q u e tam b ién se está m oviendo.
7.5 .1 A c e le ra c ió n re la t iv aC o m o co n la velocidad, se em p lea la s igu ien te n o tac ió n para d istingu ir e n tre ace le rad ó n ab so lu ta y ace le rad ó n relativa:
A* = aceleración ab so lu ta (to ta l) del p u n to A Ag - aceleración ab so lu ta ( to ta l) del p u n to B
A b/A = a ce le rad ó n relativa ( to ta l) del p u n to B en relación co n A
= a ce le rad ó n (to ta l) del p u n to B "com o se observa’ desde el p u n to A
Partiendo de la ecuación (6 .10), la relación en tre la velod- dad ab so lu ta y la velocidad relativa se escribe com o:
v B = VA+ > V ^
D erivando c o n respecto al tiem p o la c c u a d ó n de v c lo d d ad relativa, se o b tie n e la e c u a d ó n d e a c e le ra d ó n re la tiv a . M atem áticam ente e s to se escribe com o:
Ab = Aa + > A sm (7.17)
N orm alm en te , re su lta m ás conven ien te se p a ra r las acelera- d o n e s totales de la e c u a d ó n (7 .17 ) e n su s co m p o n en tes no rm al y tangencial, de m o d o q u e se separa cada aceleradón en su s dos com ponentes:
AS + > A b = A¿ + >A'a + > A naÁ + > A ¿ m (7.18)
Cfoserve q u e las ecu ad o n es (7.17) y (7 .18) son ecuadones vectoriales y se deben u sa r las técnicas analizadas en el cap ítu lo 3 para el m anejo de tales ecuadones.
PR O B LEM A D E E JE M PL O 7.5
La figura 7.7 m uestra u n a sierra d e po ten d a para metales. En este instante, el m o to r eléctrico g ira en sen tido antiho- rario e impulsa d extrem o libre de la manivela d d m otor (p u n to B) a una velocidad de 12 in/s. Además, la manivela está acrlcrando a 37 rad/s2. La parte superior de la sierra se mueve b a d a b izquierda con u n a velocidad de 9X in /s y acelera a 82 in/s2. Determ ine la aceleradón relativa del p u n to C c o n respecto al p u n to B.
S O L U C IÓ N : 1. Elabore e l diagram a cinem ático e iden tifique los grados de libertad
l a figura 7X a presenta el diagram a cinem ático de la sierra de potencia para metales. Observe que este es d conocido m ecanism o de m anivela-corredera con u n grado de libertad.
www.FreeLibros.me
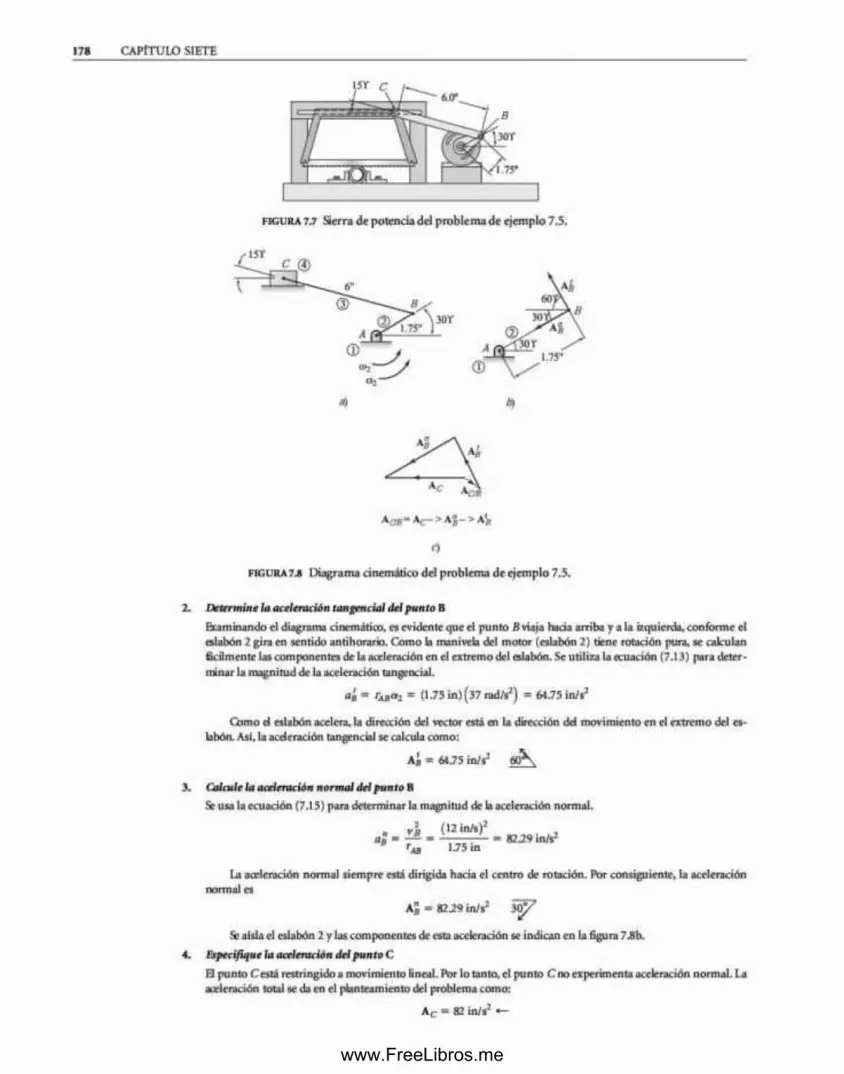
178 CAPITULO SIETE
AOT- A c -> A S - > A 'fl
cy
f ig u r a 7 3 D iagram a cinem ático del p rob lem a d e e jem plo 7.5.
2 . Determ ine la aceleración tangencial del p u n to B
Examinando el diagrama cinem ático,« evidente q u e el p u n to B viaja hada arriba y a la izquierda, conform e el eslabón 2 g ira en sentido antihorario. C om o la manivela del m otor (eslabón 2) tiene rotación pura, se calculan ficilm ente las com ponentes de la aceleración en el extrem o del eslabón. Se utiliza la ecuación (7.13) para determinar la m agnitud de la aceleración tangencial.
“ s = rABa j = (1.75 in ) (3 7 rad/s2) = M .75 in/s2
Com o d eslabón acelera, la dirección del vector está en la dirección d d movimiento en el ex trem o del esbbón . Asi, la acderación tangencnl se calcula com o:
Afl = 61.75 in/s2 6 p \
3 . Calcule la aceleración norm al del p u n to B
Se usa la ecuación (7.15) para determ inar la m agnitud de b aceleración norm al.
(12 in /,)2
1.75 in- 82.29 in/s2
La aceleración norm al siem pre está dirigida hacia el centro de rotación. Por consiguiente, la aceleración norm ales
Ag ■ 82.29 in /s2 3 0 ^
Se aisla el eslabón 2 y las com ponentes de esta aceleración se indican en la figura 7 3 b .
4 . Especifique la aceleración del p u n to C
H punto C está restringido a m ovim iento lineal. Por lo tanto, el pun to C no experim enta aceleración norm al. La aceleración total se da en el pbn team ien todel problem a como:
A c = 82 in/s2 —
www.FreeLibros.me

A n álisis d e a celerac ión 179
5 . Construya el poligono de aceleración de la aceleración de C relativa con B
Para determ inar la aceleración relativa, se plantea b ecuación (7.16) en térm inos de los p un tos fl y C y se rea- grupa como;
Ana = Ao- > AflC óm o el p u n to B tiene su s dos com ponentes de aceleración, la ecuación se escribe como:
a o b ** A c - > ( A ¡? + > A ¿ ) “ A c — > a b — > A Á
A partir de esta ecuación se forma un poligono vectorial (figura 7,8c). El vector desconocido se determ ina con los m étodos presentados en el capitulo 3. Para determ inar el vector A a f r se puede aplicar u n a solución gráfica o analítica.
6 . Obtenga las m agnitudes del lec to r desconocido
Usando u n m étodo analítico, b aceleración A OBse calcula separando los vectores en sus com ponentes vertical y horizontal. Consulte la tabla 7.1.
r TABLA 7.1 C o m p o n e n te s v e c to r ia le s h o r iz o n ta l y v e r t ic a l d e la a c e le ra c ió n Ac/ b tir Angulo de Compo nenie ho rizo ntal Componente vertical
Vector reverenda («,) a , - aten 0 ,
K IDO* - 82.00 0
V 210* - 71.26 - 41.15
Afl' 120* - 32.83 56.08
Se escriben ecuaciones algebraicas separadas de b s componentes horizontal y vertical de b siguiente manera;
A o s = Ac - > A« ~ > A«
com p.horizontal:A * ^ . - ( -8 2 .0 ) - ( -7 1 .2 7 ) - (-32 .38)
- + 21.35 = 21J 5 in/s2
com p. vertical: A vc ,a = (0) - ( -4 1 .1 5 ) - (+56.08) = -1 4 .9 3 in/s1
l a m agnitud de la aceleración se calcula com o:
a c / b = V ( < í o b ) : + ( d ó a ) :
- V (21 _35)2 + ( —14.93)1 - 26J)5 in/s?
La dirección del v e c to r se d e te rm in a com o:
H ■ t a n - **A?b
■ h n - 1- 1 4 . 9 3 in/s3 ¡
w, " tan a'oB. ^ tan2135 in/s2 ]
fim lm cntc, la aceleración relativa de C a » n respecto a B es
Ao b - 26X>5 in/sJ ^ 5 ^
7 .5 .2 C o m p o n e n te s d e la a c e le ra c ió n re la t iv a
La aceleración d e lo s p u n to s de u n m ecan ism o se analiza m ucho m ás fácilm ente cu an d o se separa en su s com ponen tes no rm al y tangencial. P ara eslabones q u e están su je tos d irec tam en te a la bancada, la dirección d e las com ponentes d e la aceleración es ev idente, co m o se v io en la sección anterior. La com po n en te norm al siem pre está d irig ida h a d a el cen tro d e ro ta d ó n ; m ien tras q u e la com po n en te tangencial es p erpend icu lar a la co m p o n en te n o r
m al, y está en u n a d ire c d ó n consistente c o n la acele ra d ó n o con la desaceleración del p u n to . Recuerde q u e la ace leradón tangen - d a l está en la d ire c d ó n del m ovim iento cuando el p u n to acelera I b r el c o n tra rio , la aceleración tan g cn d a l es o p u esta a la d irecd ó n del m ovim iento cu an d o el p u n to desacelera.
En p u n to s q u e se encuen tran so b re el m ism o eslabón , un eslabón q u e n o está su jeto d irec tam en te a la bancada, el análisis se cen tra en las ace leradones relativas d e esos pun to s. La figura 7 .9 m uestra u n eslabón co m o este, q u e n o está d irec tam en te suje to a la b ancada , genera lm en te llam ad o e s lab ó n d o ta n te . Se
www.FreeLibros.me

180 CAPITULO SIETE
m uestra la aceleración relativa en tre d o s p un tos q u e se e n c u e n tra n sob re ese eslabón . O bserve q u e tam b ién se p resen tan las co m p o n en tes n o rm a l y tangencial de esta aceleración, y están d irig idas a lo largo del eslabón (n o rm a l) y son perpendiculares a l eslabón ( tan g en c ia l). R eiterando , la ace lerac ión relativa de dos p u n to s es la ace lerac ión de u n p u n to obse rv ad o d esd e el o tro p u n to d e referencia.
C o m o en el análisis de velocidad, e l m ov im ien to relativo consiste en ro tación relativa p u ra del p u n to observado en rela-
d ó n co n el p u n to de referencia. En o tra s palabras, el m ovim ien - to relativo de B co n respecto a A se visualiza c o m o si el p u n to B estuviera g iran d o a lrededor del p u n to A . P or lo tan to , la co m p o n e n te n o rm a l de la ace lerac ión relativa e s tá d ir ig id a hacia el cen tro de ro tac ión relativa, o p u n to de referencia. La ace le rad ó n tangencial relativa es p erpend icu lar a la ace le rad ó n n o rm a l rela tiva. Las m ag n itu d es d e e s ta s co m p o n en te s se c a lc u la n de m o d o sim ilar a la ace le rad ó n abso lu ta d e lo s p u n to s q u e g iran a lrededor de p un tos fijos.
di d i
< ** » )’'BA
(7 .19)
(7.20)
La d ire c d ó n de la a c e le ra d ó n tangencial relativa deb e ser con sisten te co n la a c e le ra d ó n a n g u la r del e s lab ó n f lo ta n te , y viceversa. En referencia a la figura 7.9 , la ace leradón tangencial relativa m uestra la ace le rad ó n tangencial del p u n to B conform e g r a a lrededor d d p u n to A d irig ida h a d a a rrib a a la d e re c h a de lo cual se dedu ce u n a aceleradón angular del eslabón 3 en se n tido horario .
PR O B LEM A D E E JE M PL O 7 .6
Para la sierra de p o te n d a para metales del problem a de ejem plo 7 5 , determine la aceleración angular del eslabón o n c c to r de 6 in (eslabón 3).
SO L U C IÓ N : I . Identifique la geom etría d d eslabón relevante
l a aceleradón relativa de C c o n respecto a B se determ inó como:
A OB - 26.05 in /s2 ^35*”
En la figura 7.7 observe asim ism o que el eslabón conector tiene u n ángulo de inclinación de 15a. Em pleando esos datos, la aceleración relativa total se obtiene a partir de las com ponentes norm al y tangencial, las cuales se ilustran en la figura 7.10.
FIGURA 7.10 A celeraaones relativas del p rob lem a de e jem plo 7.6.
Obtenga la aceleración to ta l relativa a p a r tir de las componentes norm al y tangencial
l a figura 7.10 muestra que son 20a (35a - 1 5a) los que separan al vector de aceleración total relativa y la com ponente nom uL Entonces, lis m agnitudes de b s componentes de b aceleración relativa se determinan analíticamente con
A o * - *>c/fl(sen 20*) - 26.05 in /s2 (sen 20a) - &9I in/s2 ^¡5*r
A c/fl = flc/fl(ca>8 20*) = 2S05 in/s2 (eos 20*) = 24.48 in/s2 7 j /
www.FreeLibros.me

A n álisis d e a celerac ión 181
C aku le la aceleración angular del eslabón 3
En la figura 7.10 se observa q u e b aceleración tangencial del p u n to C con respecto a Bes hacia abajo a la derecha. Esto implica q u e la aceleración angular del eslabón 3 tiene sentido antihorario. Id m agnitud se determ ina como:
a'oB 8.91 in /s26 in
- 1.49 rad/s2
Por lo tanto, la aceleración angular del eslabón conector se determ ina de la siguiente m anera:
o , = 1.49 rad/s2, en sentido antihorario
7.6 ANÁLISIS DE ACELERACIÓN RELATIVA: M ÉTODO G RÁ FICO
El análisis de aceleración generalm ente se em plea para d e te rm inar la aceleración de varios p u n to s sob re u n m ecan ism o en u n a configuración especifica. D ebe en tenderse q u e los resultados de este análisis so n las características del m ov im ien to instan táneo . C o n fo rm e el m ecan ism o se m ueve, incluso u n a d is ta n d a in fin itesim al, cam b ian las características d e l m o v im ien to . S in e m bargo, se necesitan las características in stan táneas, so b re to d o los valores ex trem os. Se ha h ech o énfasis en q u e la aceleración p ro d u ce fu e ra s inerciales so b re lo s eslabones d e u n m ecan ism o. Se d eb en en tender com pletam ente lo s esfuerzos resultantes para g aran tiza r la o p e rac ió n segura de u n a m áquina.
l o estrategia para determ inar la aceleración de u n p u n to im plica conocer l i aceleración de crtro p u n to sobre el m ism o eslabón. Asimismo, se debe conocer tam bién la velocidad del p u n to q u e se desea calcular y la velocidad reb tiva en tre los dos pun to s. Esta in- fo rm adón p o d ría requerir u n análisis de velocidad relativa com o d descrito en el cap itu lo 6.
0 análisis p u ed e realizarse e n to d o el m ecan ism o usando pun tos q u e son com unes a d o s eslabones. P o r e jem plo , u n p u n to q u e se en cu en tra e n u n a u n ió n es c o m ú n a d o s e sb b o n es. Pbr lo ta n to , d e te rm in ar b a c e le ra d ó n de este p u n to fa d lita d e te rm in a r p o s te rio rm e n te b a c e le ra d ó n de o t r o p u n to so b re cualqu ier eslabón . E n tonces, se p u ed e d e te rm in a r b ac e le ra d ó n de cu a lq u ie r p u n to so b re u n m ecan ism o tra b a ja n d o h a d a lucra, a p a r t ir del e s b b ó n d e en trad a .
Recuerde d e la e c u a d ó n (7.18) q u e b ecuación de ace le r a d ó n relativa se am plía para in d u i r las com ponen tes n o rm a l y
+ > A g = A£ + > A ¿ +>A% a + > A'b a
S u p o n g a q u e se necesita d e te rm in a r b acelerac ión del p u n to B y se cono ce la aceleración del p u n to A. Suponga ta m b ién q u e ya s e realizó u n a n á lis is co m p le to de v e lo d d a d in cluyendo los d o s pun to s. En u n a situación típica, se conocen las d irecdones de b s seis com ponentes. Todas b s com ponen tes n o rmales están d irig idas h a d a el cen tro de ro tación relativa. Todas las com ponen tes tangenciales son perpendiculares a las co m p o nentes norm ales. Asimismo, b s m agnitudes d e todos lo s vectores d e aceleradón n o rm ales se calculan co n b e c u a d ó n (7.14) o la (7 .15 ). Desde luego, b m agnitud de b ace le rad ó n tangencial del p u n to conocido (p u n to A ) se ha determ inado tam bién. P o r c o n sigu ien te , el aná lis is v e c to rb l t a n so lo necesita d e te rm in a r b m ag n itu d de la co m p o n en te tang en c ia l del p u n to d esead o y b m agn itud d e la com po n en te tangencial rebtiva.
El análisis d e aceleradón relativa es u n problem a de vectores idén tico a los p rob lem as generales p resen tados en b s se cd o - nes 3,18 y 3.19. Son posibles ta n to b s soluciones gráficas com o las analíticas, com o se v io e n el cap ítu lo 3. En m uchos problem as, el valor de d e rto s térm inos puede se r a r o , elim inando d e esta m anera a lg u n as de b s se is co m p o n en tes vectoriales de la e c u a d ó n (7 .18). P or ejem plo, cuando el p u n to conocido se en cu en tra en u n a u n ió n q u e e s c o m ú n a u n eslabón co n v e lo d d a d angu la r constante, el p u n to n o tiene aceleradón tangencial. O tro ejem plo se presenta cuando u n p u n to es co m ú n a u n e s b b ó n q u e está restrin g id o a m ovim iento lineal. La veloddad del p u n to n o cam bb d e d ire c d ó n y p o r e llo el p u n to n o tiene aceleradón norm al.
C o m o en el análisis d e veloddad , b so luc ión gráfica de los polígonos d e ace le rad ó n s e realiza usando técn icas m anuales de d ib u jo o u n sistem a de c a d . L a lógica e s idéntica; n o ob stan te , b so luc ión co n c a d n o está lim ita d a p o r b exactitud del dibujo. Ind ep en d ien tem en te del m é to d o q u e se u tilice, lo s conceptos subyacentes del análisis gráfico d e posic ión se ilu stran y se a m p lían m e jo r co n lo s siguientes problem as de ejem plo.
PROBLEM A D E E JE M PL O 7.7
0 m ecanism o m ostrado en b figura 7.11 se disertó para m over objetos a lo largo de u n transportador de bandeja y, luego, voltearlos y bajarlos a o tra banda transportadora, l a rueda im pulsora g ira co n u n a velocidad angular constante de 12 rpm . Determ ine b velocidad angular del balancín que g ira y baja las partes.
S O L U C IÓ N : 1. Elabore el diagrama cinem ático e iden tifique los grados de libertad
La parte del mecanismo que está en consideración incluye la rueda im pulsora, el brazo seguidor y el eslabón que u n e ambos. Observe que, nuevamente, este es d conocido m ecanism o de cuatro barras que tiene un grado de libertad. En la figura 7.12a se presenta el diagrama cinem ático a escala.
www.FreeLibros.me

182 CAPITULO SIETE
2, H ija e l m étodo para ob tener la aceleración deseada
l a aceleración angular del balancín (eslabón 4) se obtiene a partir de la com ponente de aceleración tangencial del p u n to C POr consiguiente, b esencia del problem a es determ inar b aceleración del p u n to C. En su momento, b aceleración del p u n to C , la cual se encuen tra tam bién sobre el eslabón 3 . se determ ina conociendo b aceleración del pun to B. FJ pun to B está ubicado en los esbbones 2 y 3. P or ende, b aceleración del p u n to fi se o b tiene conociendo el m ovim iento del eslabón de entrada, el esbbón 2 .
f i g u r a 7 .1 1 M ecanism o del p rob lem a d e e jem plo 7 .7 .
<W
A)
L !“ A i « — •
f i g u r a 7 .12 Diagramas del problema d e ejem plo 7 .7 .
www.FreeLibros.me

A n álisis d e a celerac ión 183
n_ a 4¡ 1 ® , ® J 2 i £ . i
' O * " ’ ' " l
f i g u r a 7 .1 2 (C o n tin u a c ió n ) .
3. D eterm ine la \eiocida¿ de los p un tos B yC
El prim er paso es construir u n diagram a de velocidad que incluya los puntos B y C El cálculo de la m agnitud de b velocidad del pun to B se realiza de la siguiente m anera:
w 2( rad /s) = — (tu rpm ) = — (12 rpm ) = 1.26 rad/s, en sentido antihorario 30 30
Vfl = <o} r»B = (1 2 6 rad /s)(0 7 5 ft) = .943 ft/s ^ 5 * '
la dirección de V B« perpendicular al eslabón 2 y en una d irecdón consistente con at¡. la c ia abajo y a la derecha. Utilizando el CAD.se traza un vectora escala a partir del origen del diagrama de velocidad, para representar esta velocidad.
U ecuación de velocidad relativa para los puntos B y C s e escribe como:
Vc » V * + > V o s
A s, en el origen del diagram a de velocidad, se traza u n a linea que represente la dirección del vector Vc . Esta es perpendicular al eslabón 4 porque el pun to C se encuentra sobre el eslabón q u e pivota alrededor de un cen tro fijo. En el extrem o del sector V * tam bién se traza u n a linea para representar la dirección de V o » C om o con los sectores de velocidad relativa, b dirección es perpendicular a la linea que u n e los p un tos C y B. l a intersección de las lineas de dirección de V c y V Cj b determ ina las m agnitudes de am bos vectores. En la figura 7.12b se m uestra el diagram a de velocidad completo.
Midiendo con la escala adecuada lo s vectores del diagram a se obtiene lo siguiente:
V C - 1290 ft/s /7 6 *
Va a = 1 .9 5 0 f t / S 8 o \
4 . Cala/le las componentes de aceleración
El paso siguiente es constru ir u n diagram a de aceleración que incluya lo s puntos B y C El cálculo de las m agnitudes de las aceleraciones conocidas se hace de la siguiente manera:
■' A(dirigida hacia el centro d e rotación, p u n to A)
www.FreeLibros.me

184 CAPITULO SIETE
a'a = a , r A B = (0) (0.75 ft) = 0 ft/s2
(V0fl) J (1.950 ft/*)2 /a o b - - 7 — - - ^oo ft/s A se .
TCB 4.75 II( d i r i g i d a d e C h a c i a B , m e d i d a a
p a r t i r d e l c a d )
(Ve)1 O ^ O f t /* ) 1
C “ 'a> l-5 ft( d i r i g i d a h a c i a e l c e n t r o d e r o t a c i ó n ,
p u n t o D , m e d i d a a p a r t i r d e l C a d )
- 1.109 ft/s2
C onstruya e l diagram a de aceleración
l a ecuación de aceleración relativa de los p un tos B y C es
\ nc + > A 'c = A ; + > A¡, + > A ^ b + > A ¡ , ¡
En la elaboración del diagrama de aceleradón, b construedón del vector se inicia arbitrariam ente con el se- g in d o m iem bro de b ecuación. Se traza u n a linea en el o rijp n del dngram a de aceleración que represente el vector A j que es totalm ente conocido. Com o tiene m agnitud igual a cero, el vector Aj, se elim ina del diagram a de aceleración. Entonces, en el ex trem o del vector Ajjse traza otra linea que represente el vector A ^ e l cual tam bién es totalmente conocido. En el ex trem o d e este vector, se traza u n a linea que represente la d irecdón del vecto r A¡j,». La m agnitud n o se conoce, pero la dirección e s perpendicular a la com ponente norm al A?j b.
C entrándonos en el lado izquierdo de la ecuación, se inicia u n a nueva serie de vectores a partir del origen del diagrama de aceleradón. Se dibuja una linca para representar el vector A q el cual es totalm ente co noddo . En d extrem o de este vector, se traza una linca q u e represente la dirección del vector A jj sin embarga, la m agnitud drl vector es desconodda. La linca se dirige perpendicular a la com ponente norm al A© Finalmente, la intcrsec- d ó n de las direcciones de las lineas A ^ y AÓfidetermina las m agnitudes de am bos vectores. En la figura 7.12c se m uestra el diagram a de aceleración completo.
M ida las componentes de la aceleración q u e se desea conocer
h C d i c n d o c o n l a e s c a l a a d e c u a d a l a s m a g n i t u d e s e n e l d i a g r a m a , s e o b t i e n e l o s i g u i e n t e :
A¡7 = 1.879
A o a = 585 ft/s2 8 o \
Advierta q u e la aceleración tangencial del pun to C está en la m ism a dirección q u e la velocidad. Ello indica que el p u n to C está acelerando (increm entado su velocidad), n o desacelerando.
C alcule la aceleración a n g u la r q u e se desea conocer
Finalm ente, se calcula la aceleración a n g u la r del eslabón 4. O bservando la d irección d e la co m p o n en te t a n gencial d e la ace le rad ó n del p u n to C (arriba y a la d erecha), es evidente q u e el eslabón 4 acelera en d irecd ó n h o ra ria . La m agn itud de esta aceleración angu la r se calcula d e la siguiente m anera:
• (1 8 7 9 ft/s2)" 125 r»d/»2’CD 1 .5 l t
Entonces, la ace le rad ó n angu la r del ba lancín es
a 4 * 1.25 rad/s2, en sentido horario
PR O B LEM A D E E JE M PL O 7.8
H m ecanism o m ostrado en la figura 7.13 es u n a troqueladora disertada para realizar operaciones de estam pado sucesivas. La m áquina acaba de encenderse y en d instante m ostrado (u n d o n a a tc»da velocidad. 0 eje m o to r g ira en sentido horario co n u n a velocidad angular de 72 rad/s y acelera a 250 rad/s2. En el instante m ostrado, determ ine la aceleradón de la m atriz d e estam pado q u e golpea la pieza de trabajo.
www.FreeLibros.me
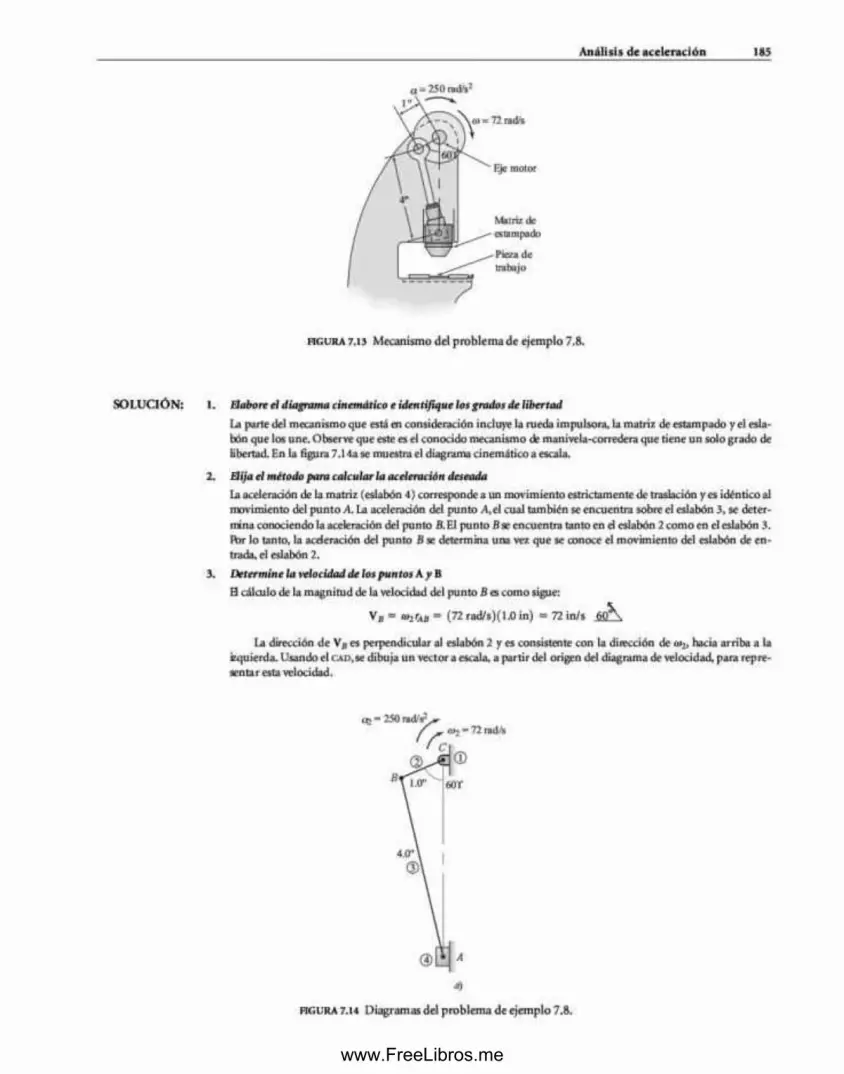
A n álisis d e a celerac ión 185
SO L U C IÓ N :
a - 2 5 0 i n d i " '
f i g u r a 7.13 M ecanism o del p ro b lem a de ejem plo 7.8.
Babore el diagram a cinem ático e iden tifique los grados de libertad
l a parle del m ecanism o q u e está en consideración incluye la rueda im pulsora, la m atriz de estam pado y el eslabón q u e los u n e . Observe q u e esle es el conocido m ecanism o efe m anivela-corredera que tiene u n solo g rad o de libertad. En la figura 7.14a se m uestra el diagrama cinem ático a escala.
B ija el método para calcular la aceleración deseada
la aceleradón de la m atriz (eslabón 4) corresponde a un m ovim iento estrictam ente de traslación y es idéntico al m ovim iento del p u n to A . La aceleradón del p u n to A, el cual tam bién se encuen tra sobre el eslabón 3, se determ ina conociendo la aceleración del pun to fl. El pun to B se encuentra tanto en el eslabón 2 com o en el eslabón 3. Ib r lo tanto, la aceleración del p u n to B se determ ina una vez q u e se conoce el m ovim iento del eslabón de en trada, el eslabón 2.
Determ ine la telocidad de los p un tos A y B
H cálculo de la m agnitud de la velocidad del p u n to B es com o sigue:
Vfl - o>¡rÁB - (72 ra d /s ) ( lá ) in) = 72 in/s
La dirección de VB es perpendicular al eslabón 2 y es consistente con la d irecdón de a>¡, hacia a rriba a la vqu ierda. U sando el cxo .se dibuja u n vector a escala, a partir del origen del diagram a de velocidad, para representar esta veloddad.
f ig u r a 7.14 Diagramas del problema de ejem plo 7.8.
www.FreeLibros.me

186 CAPITULO SIETE
f i g u r a 7.14 {Continuación),
0 paso siguiente es construir un diagram a de velocidad que incluya los p un tos A y B. l a ecuación de velocidad relativa de los p un tos A y Bes
Va = V s + > V A/B
Asi en d origen del diagrama de velocidad, se traza una línea que represente la dirección del vector VA. Esta es paralela a la superficie de deslizamiento porque el eslabón 4 está restringido al m ovim iento de deslizamiento
www.FreeLibros.me

A n álisis d e a celerac ión 187
vertical. En el extremo del vector V#, se traza una línea que represente la dirección de Com o con todos los vectores de velocidad relativa entre dos puntos sobre la m ism a línea, b d itred ó n es perpendicular a b Enea que une los puntos A y R U intersección de las lineas de dirección de VAy V v e determina las magnitudes de am bos vectores. En b figura 7.14b se ilustra el diagrama de velocidad completo.
Midiendo co n la escala adecuada las m agnitudes de los vectores del diagrama, se obtiene lo siguiente:
V A = 7 0 3 in /s í
= 36.8 in /s / f 3 °
4 . Calcule las componentes de la aceleración
El paso siguiente es constru ir u n diagram a de aceleración que incluya los puntos A y B.EI cálculo de las m agnitudes de las aceleraciones conocidas se realiza con las ecuaciones:
(dirigida hacia el cen tro de rotación, p in to Q
- a 2 rAB - (250 rad/sJ )(1 .0 in) - 250 in/s2 6 o \(en dirección perpendicular a B C en la dirección de la areleración angular)
( va>b) J ( 3 6 .8 in /s )2 *
4 C ta 3 5 8 1 ^(dirigida d e A hacia B, m edida delCAD)
Observe q u e el pun to A n o tiene aceleración norm al porque el m ovim iento es estrictam ente de traslación.
5. Construya el diagram a de aceleración
l a ecuación de aceleración relativa de los p un tos A y B se escribe como:
a - + > a ; - a s + > a ¿ + > a ; „ * -> A ;/fl
Al elaborar el diagram a de aceleración, la construcción vectorial iniciará arb itrariam ente en el segundo m iem bro de b ecuación. En el o rigen del diagram a de aceleración se traza u n a linea q u e represente el vector AS que se conoce. En el extrem o d e A ¿se traza u n a línea q u e represente el vector A ¿ q u e tam bién se conoce. En el ex trem o d e este vector, se traza u n a línea que represente la dirección del vector A ^/» Este es perpendicu- b r a la com po n en te norm al A *,a, p e ro tien e m agnitud desconocida.
Centrándose en el lado izquierdo de la ecuación, se m ida u n a nueva serie de vectores a partir del origen del dugram a de aceleración. El vector A ^tiene m agnitud igual a cero y se ignora. Se traza u n a linca q u e represente b dirección del vector A'*; sin em bargo, la m agn itud es dcsconodda. La línea es paralela al m ov im ien to de deslizamiento del eslabón 4 . Finalmente, la intersección de las direcciones de A *y a '^ b determ ina las m agnitudes de am bos vectores. El diagram a de aceleración term inado se m uestra en la figura 7.14c.
6 . M ídalas componentes de la aceleración q u e se desea obtener
M idiendo co n la escala adecuada las m agnitudes de los vectores en el diagram a, se obtiene lo siguiente:
A[ jB = 4404 in/s2 1 ^ 7
A¿ = 2138 in /s2 !
Cb m o d o que la aceleración total del p u n to A es
A a = A'a = 2138 in/s2 = 178 ft/s2 = 5 3 3 g T
Observe que la aceleración tangencial del pun to A se encuentra m la m ism a dirección q u e la velocidad. Esto indica q u e e l pun to A ¡xelera (aum enta de velocidad), n o desacelera.
www.FreeLibros.me
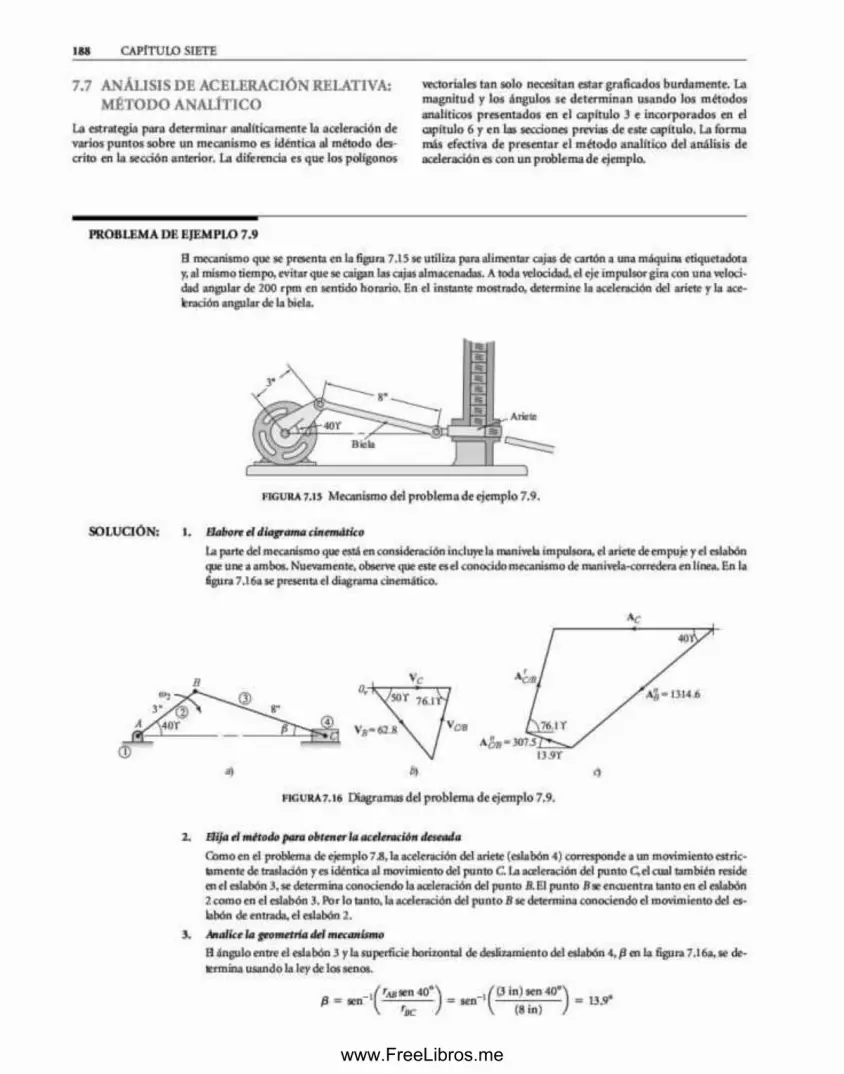
188 CAPITULO SIETE
7.7 ANÁLISIS DE ACELERACIÓN RELATIVA: M ÉTODO ANALÍTICO
La estrategia p a ra d e te rm in ar analíticam ente la aceleración de v a rio s p u n to s sob re u n m ecan ism o es idéntica al m éto d o desc rito en la sección an terio r. L a diferencia e s q u e lo s polígonos
vectoriales t a n so lo necesitan estar g raficados bu rdam en te . La m a g n itu d y los ángu los se d e te rm in a n u sa n d o los m étodos analíticos p re sen tad o s en e l ca p ítu lo 3 e in c o rp o ra d o s en el cap ítu lo 6 y e n las secciones previas de este cap ítu lo . La fo rm a m is efectiva de p re se n ta r e l m é to d o an a lítico del aná lis is de aceleración e s co n u n p ro b lem a de ejem plo.
PR O B LEM A D E E JE M PL O 7.9
H m ecanism o que se presenta en la figura 7.15 so útil ira para alim entar cajas de cartón a u n a m áquina etiquetadota y. al m ism o tiem po, ev ita r q u e se caigan las cajas almacenadas. A toda velocidad, el eje im pulsor g ira con u n a velocidad angular de 200 rp m en sentido horario . En el instante m ostrado, determ ine la aceleración del ariete y la acc- krración angular de la biela.
FIGURA 7.15 M ecanism o del p ro b lem a de e jem plo 7.9.
S O L U C IÓ N : 1. hlabo re el diagram a cinemático
l a parte del m ecanism o que está en consideración incluye la m aniveb impulsora, el ariete de em puje y el eslabón «jue une a am bos. Nuevamente, observe que este es el conocido mecanismo de manivela-corredera en línea. En la figura 7.16a se presenta el diagram a cinemático.
fig u r a 7.16 D iagram as d d p rob lem a de e jem plo 7.9.
2. B ija el m ito d o para ob tener la aceleración deseada
C om o en el problema de ejem plo 7.8. la aceleración del ariete (eslabón 4) corresponde a un m ovim iento estric- ü m en te de traslación y e s idéntica al m ovim iento del pun to C. La aceleración del pun to C ,d cual tam bién reside en el eslabón 3, se determ ina conociendo la aceleración del pun to B. El p u n to B se encuentra tanto en el eslabón 2 com o en el eslabón 3. P or lo tanto, la aceleración del p u n to B se determ ina conociendo el m ovim iento del es- h bón de entrada, el eslabón 2.
3 . Analice la geom etría del mecanismo
B ángulo en tre el eslabón 3 y la superficie horizontal de deslizamiento del eslabón 4 ./J en la figura 7.16a, se de- trm in a u sando la ley de los senos.
www.FreeLibros.me

A n álisis d e a celerac ión 189
Determ ine la velocidad de los p u n to s B y C
Sr calcula la m agnitud de la velocidad del p u n to B usando la siguiente ecuación:
« 2 ■ ^ (200 rpm ) • 20.9 rad/s
V B = U jr jv =* (20.9 rad/s) (3.0 in ) = 62.8 in/s ^50*
la dirección de Vs es perpendicular al eslabón 2 y es consistente con la dirección de <o¡, hacia abajo y a la derecha. La velocidad del p u n to C e s paralela a la superficie horizontal de deslizamiento, y la velocidad de C con respecto a Bes perpendicular al eslabón q u e une los p un tos B y C. Cal cu lando este ángulo:
90’ + ( - 0 ) « 90* + (-13 .9*) - 76.1*
C onociéndolas direcciones de los vectores de interés se ensam bla d poligono de velocidad (figura 7.16b). l a m agnitud del tercer ángulo en el polígono de velocidad se determ ina porque la sum a de todos los ángulos en u n triángulo e s de 180°.
180* - (50* + 76.1’) = 53.9*
las m agnitudes de las velocidades se determ inan con la ley de los senos.
la s velocidades desconocidas se obtienen de la siguiente m anera:
v ° ' - * • ( = £ ? ) • * « ■ 4 , í i-*Calcule las com ponentes de aceleración
B paso siguiente es construir u n diagram a de aceleración que incluya los puntos B y C Calcule las m agnitudes de las aceleraciones conocidas usando las siguientes ecuadones:
_ ( VB)2 (62.8 in /s)2 , _Ab - - 1314.6 in/á2 4C7 7
AB 3 .0 in(dirigida hacia el cen tro d e ro tadón , pu n to A)
A B = o i ' ab — (0 rad/s1) (3J3 in ) = 0(porque el eslabón im pulsor g ira a v d o d d ad constante)
( V o s ) 1 (4 9 A in /s )1 , «A&* - — --------- r r — - 3073 in /¿ 13.A ,
rBC 8 .0 in(dirigida de C h a d a B)
Advierta q u e e l pun to C n o tím e aceleradón norm al porque el m ovim iento es estrictam ente de trasladón.
l i e m étodos vectoriales para resolverla ecuación de aceleración relatUa
l a ecuación de aceleradón relativa para los puntos B y C se escribe como:
A£ +> A ¿ - A j +> A ¿ +> A2* + > A 'o b
Al elaborar d diagram a de aceleración, la ubicación vectorial inicia arbitrariamente en el lado derecho de la ecu ad ó n . En el origen del diagram a de aceleración, se coloca el vector Aj| q u e es com pletam ente co noddo . Cóm o n o hay com ponente tangenda! de la aceleradón del p u n to B, se ignora e l térm ino A ¿ El vector A fraque tam bién es com pletam ente conocido se coloca en el ex trem o de A% En el extrem o del vector A?;Bse coloca el sector A (¡¿ sin embargo, solamente se conoce la d irecd ó n de este vector. Es pcrpendkukir a la com ponente n o rmal A q B y. p o r lo tanto, perpendicular a la linca q u e u n e B y G E I ángulo se calcula como:
90" + ( - 0 ) = 90° + (—13.4*) = 76.1*
Se ig n o ra el p rim e r té rm in o del p rim e r m iem bro d e la ecu ad ó n p o rq u e n o existe com po n en te no rm al de la ace le rad ó n del p u n to C E ntonces, el vector q u e represen ta la ace leradón tangencial del p u n to C se coloca en el o rig en . S in em bargo, ún icam en te se cono ce la dirección de este vector: es paralelo a la superficie h o rizo n ta l e n la cual está re strin g id o el deslizam iento del eslabón 4. E n la figura 7 .16c s e m uestra el
www.FreeLibros.me

190 CAPITULO SIETE
p o l l i n o vectorial. Las m agnitudes vectoriales desconocidas, y A ^ s e d e te rm in an u sando los m étodos p resen tados en el cap itu lo 3. P rim ero se sep ara cada v ecto r en su s com ponen tes h o rizo n ta l y vertical, co m o se ind ica en la ta b la 7.2.
J TABLA 7 .2 C o m p o n e n te s d e a c e le r a c ió n d e l p r o b le m a d e e j e m p lo 7 .9 1r
VectorAngulo de
referend* (0,)Componente horizontal
•» = aatsO ,Componente vertical
a , - o te n » .
* ; a ; 220* 10075 8455
A ¿ a 166.1* -2985 73.9
76.1* 240 .971 a i *
Ac 180* -*«C 0
Se escriben ecuaciones algebraicas separadas de las com ponen tes h o rizon ta l y vertical.
A c ■ Ag + > A q B + > A c /8
com p. horizontal- + ac - (-1 0 0 7 .0 ) + ( -2 9 8 5 ) + (+ 0 2 4 0 u ó n )
com p. vertical: 0 - ( -8 4 5 .0 ) + (+ 73.9) + ( +0.971 a'aB )
La ecuac ión d e la co m p o n en te vertical se resuelve algebraicam ente para o b tener:
a'on - 794.1 in/*1
Este resu ltado se sustituye lu eg o en la ecuac ión d e la com po n en te h o rizon ta l p a ra d a rn o s la m agnitud
Oc - 1496.1 in /s2
7 . Especifique con claridad los resultados deseados
La respuesta form al del m ovim iento del ariete es
V , - 5 2 5 in /s —
A( “ 1496.1 in /s «—
Advierta que co m o la aceleración tiene dirección opuesta al m ovim iento y a la velocidad del ariete, el ariete desacelera.
8 . Calcule la aceleración angular
finalm ente, se calcula el m ovim iento de la biela.
Vo b 4 9 5 in/s _ „n*3 ------ ■ — -------= 6.2 rad/s, en sentido anühorano
rCB 8 in
donde la dirección es consistente con la velocidad de C relativa co n B, en sentido antihorario. Asimismo,
í»q b 794.1 in /s , , ,.a , --------- — - ■ ■----- ■ 9 9 5 rad/s‘ , en sen tido an tihorano
rCfl 8 .0 in
donde la dirección es consistente co n la aceleración tangencial de C relativa con B en sentido antihorario.
7.8 SOLUCIONES ALGEBRAICAS DE M ECANISM OS CO M U N ES
Para lo s conocidos m ecanism os de m anivela-corredera y d e cuat ro b a rra s , se d isp o n e d e so luc iones a lgeb ra icas de fo rm a cerrad a |re £ 12). Estas se p ro p o rc io n an en las siguientes secciones.
7 . 8 . 1 M e c a n i s m o d e m a n i v e l a - c o r r e d e r a
En la figura 4 2 0 se presen ta u n m ecanism o de manivela c o rre d era en general que se define ta n so lo p o r las d im ensiones L¡, L ¡ y l * C o n u n grado d e libertad , ún icam ente se deb e especificar el m ov im ien to d e u n eslabón p a ra im p u lsa r los o tro s eslabones. C on m ucha frecuencia es la manivela la q u e se im pulsa y se especifican 0 2, y i t j . Para resolver fácilm ente u n m ecanism o de
www.FreeLibros.me

A n álisis d e a celerac ión 191
m an ivela-co rredera , están d ispon ib les las ecu ac iones de posid ó n , v e lo d d ad y aceleradón (en (unción de coj y a¿). C om o se v io en el cap itu lo 4 , las ecuadones de p o s id ó n son:
_ , / T , + L2 sc n f l2\0 3 = se n ^ — j (4.6)
L a = L j c o s (0 2) + c o s (0 j) (4 .7 )
C o m o se expuso en el cap itu lo 6 . las ecu ad o n es de v e lo d d ad son :
( ¡ 2 COS 9 A
^ U c o s b J
a , = (7.21)
(6. 12)
v« = -<o¡L¡ s e n + coyLySendy (6 .13 )
Las ecuaciones d e ace le rad ó n están d ad as p o r (re£ 12]
11$ L j s e n 0, + ¿ 3 s e n 6 , - a 7L j eos 0}
LyCOS 6 y
a« = - d j L j s e n f l* - a y L y se n d y- tu jL j e o s 6 , - UtyLy to s 63 (7 .22 )
O bserve q u e el análisis d e u n a m an ivela-co rredera en linca serealiza h a d e n d o L, igual a cero en la e c u a d ó n (4.6).
7 .8 .2 M e c a n is m o d e c u a t r o b a r r a sEn la figura 4.22 se ilu s tra u n m ecan ism o d e cuatro b a rra s en general q u e se d efine ún icam en te co n las d im ensiones L \,L j ,L y y l+. C o n u n g ra d o d e libertad , t a n so lo se deb e esped fica r el m ov im ien to de u n eslabón pora im p u lsa r lo s o tro s eslabones. C o n m ucha frecuencia, es la m anivela la q u e se im pulsa, y se es- ped fican 0¡. co jy o j . Para resolver fá d lm e n te u n m ecan ism o de cuatro barras, están d isponib les las ecu ad o n es de p o sid ó n . velo d d a d y ace le rad ó n (en (unción de 0 ,. u * y a } ). C o m o se in d icó en el cap itu lo 4. las e c u a d o n e s de p o s id ó n son:
(4.9)B D = V L ¡ + L } - 2 ( L , ) ( L 2) c o s ( 6 2)
- M + L \ - B D ' \
y COS [ 2( I , ) ( L , ) )
» , = 2. a n - " + L* X n y
d t = 2 ta n - i
L | + I 3 - L j cosQj — L , c o s y
L j se n fl2 - I j s e n y
L jc o s d j + L4 - L , - L jc o s y
(4.10)
(4.11)
(4.12)
C o m o se expuso en el cap itu lo 6 , las ecuaciones d e v e lo d d ad son :
COy = -CO j
co4 - ~ t» i
(6.14)
(6.15)
L j se n (0 4 - fl2) j
L , s e n y JL j s e n (63 ~ d j)
L a se n y
Las e c u a d o n e s d e aceleradón se p resen tan com o:
a ,L , «tn(8; - fl.) «j¿,cos(fl, - »«) - tojU * «jl,cos(g« - 0,) L,sm [0, - »,)
(7.23)
o , l , «n< » , - 0 , ) * w } L , a * ( * , - - o . f c to r té . - > .) +
(7.24)
«*»
7.9 ACELERACIÓN DE UN PU N TOEN GENERAL SOBRE UN ESLABÓN FLOTANTE
Recuerde q u e u n eslabón flo tan te n o está u n id o d irec tam en te al edabón fijo. P o r lo ta n to , el m ovim iento de u n eslabón flotante n o está lim itado so lam en te a ro tac ión o a tra s la d ó n , s in o a u n a co m b in ad ó n de am bos. A su vez, p o r lo general n o se cono ce la d ire c d ó n del m ov im ien to de lo s p u n to s q u e se en cu en tran so b re u n eslabón flo tan te . C o m p áre lo co n el m ov im ien to de un pun to q u e se en cu en tra sob re u n eslabón u n id o al eslabón fijo. 0 m ovim iento d e ese p u n to deb e pivotar a u n a d istanc ia fija de b u n ió n de p e rn o . P or consiguiente, se conoce la d ire c d ó n del m ovim iento.
b i los análisis d e aceleración presentados en las secdones a n teriores, la prem isa subyacente d e la solución es q u e se conoce la d re c d ó n del m ovim iento. Para un p u n to en general sobre u n esb b ó n flotante, esto n o es válido. En dichos casas, se deben usar y despejar sim ultáneam ente dos ecuadones de aceleradón relativa.
Para con o cer la estrategia d e o b ten c ió n de la ace le rad ó n de un p u n to en general so b re u n eslabón flo tan te , considere el d ia g ram a d n em ático del m ecanism o d e cuatro barras m o s tra d o en b fig u ra 7.17.
El e sb b ó n 3 e s u n eslabón flo ta n te p o rq u e n o está su jeto directam ente al eslabón 1, el eslabón f i ja C o m o lo s p un tos A y B se e n c u e n tra n so b re eslabones su je to s a u n eslabón fijo, la ac e le ra d ó n d e estos p u n to s se d e te rm in a tád lm en te . Es d ed r, usando lo s m éto d o s d e las d o s se cdones an te rio res , se calcula ta n to la dirección co m o la m agn itud de A j , A*, AJJ y Ap.
S in e m b a rg a el p u n to C n o se en cu en tra sobre u n eslabón sujeto d irectam ente a u n eslabón fijo. P or consiguiente, n o e s ev iden te la trayectoria exacta del m ovim iento del p u n to C N o obstante. se escriben dos ecuaciones de aceleración relativa com o:
Ac = A g + > A'B + > K ho b + > A b a (7.25)
AC = AS + > A*i + > A nO Á + > A’cja (7-26)
En la ecu ac ió n (7 .25 ) se desconocen ta n to la m ag n itu d co m o la d ire c d ó n de «ic ju n to co n la m ag n itu d de Oq * La ecuación (7 3 6 ) presenta u n a incógn ita ad idonal; a saber, la m agn itu d de A jy ¿ En g enera l, se p u ed en e sc rib ir d o s e c u a d o nes vectoriales, c a d a u n a co n la c a p a d d a d de d e te rm in a r dos
www.FreeLibros.me

192 CAPITULO SIETE
incógnitas. En u n análisis típico, « t a s e c u a c io n e p resen tan cua- del p u n to C ap licando ya sea u n p ro ced im ien to g rá fic o o u ntro c a n t id a d » desconocidas, d e m an era q u e a l u sa r las d o s proced im ien to analítico. El siguiente p rob lem a d e e jem plo ilus-ecuaciones sim ultáneam ente , se log ra d e te rm in ar la aceleración tra este m étodo.
PRO B LEM A DE E JE M PL O 7.10
B m ecanism o m ostrado en la figura 7.18 sirve para jalar película cinem atográfica a través de u n proyector. El meca- nismo es activado por b rueda im pulsora giratoria a una velocidad constante de 560 rp m . En el instante mostrado, determ ine gráficamente la aceleración de la u n a q u e se enguteha en la película.
f ig u r a 7.18 M ecanism o d e avance de la película del p rob lem a de e jem plo 7.10.
SO L U C IÓ N : 1. Elabore ei diagram a cinemático
B i b figura 7.19a se ilustra d diagram a cinem ático a escala de este mecanismo. Observe que se tra ta del m ecanism o básico de m anivela-corredera con u n punto de interés, el p u n to X,ubicado en la ufta.
El prim er paso es constru ir u n diagram a de velocidad que incluya los puntos B, C y X. Calcule la m agnitud de la velocidad del pun to B de b siguiente m anera:
oí = (560 rpm ) = 58.6 ra d /s en sentido antihorario
y 8 ■ « 2 'a * ■ 258.6 rad 's(18 m m ) - 1055 m m /s - 1.055 m m /s \3 0 °
La dirección de \ B] es perpendicular al eslabón 2 y es consistente con la dirección de ut¡, hacia abajo y a la derecha. P or lo tanto, se dibuja u n vector a escala a partir del origen en el diagram a de velocidad para representar esta velocidad.
l a ecuación de velocidad relativa de los puntos B y C se escribe como:Vc " V„ ♦ > VOB
La velocidad d e C está restringida a traslación en dirección vertical. Desde luego, la velocidad relativa de C oso respecto a B e s perpendicular a b linea q u e u n e C y B .Se d ibujó el diagram a de velocidad m ostrado en la figura 7.19b y se m idieron b s m a g n itu d » vectorial» para obtener:Vc - 1.087 m /s i
V OB - 1.072 m /s 7 T 3 J 7
fig u r a 7.19 Diagramas del problema d e ejem plo 7.10.
www.FreeLibros.me

A n ális is d e a c e le ra c ió n 193
b)
/ / ■ o J . A M ‘ ^ y a T i
« * - b é + n o- — - n
= ia n
V = V + > Y
% a m
•: / B
V c / r - 1 . 0 7 2
/£■-§ + S2ff5: A 5* *% « « -v « * 8 ? a - * - - n
f i g u r a 7.19 {Continuación).
www.FreeLibros.me

194 CAPITULO SIETE
FIGURA 7.19 (G tramitación).
C om o se l rata de u n p u n to en general sobre u n eslabón flotante, la velocidad del p u n to X se determ ina resolviendo las ecuaciones vectoriales simultáneas.
Vx = Vfl + > Vx/fl
Vx - Vc + > V „ c
www.FreeLibros.me

A n álisis d e a celerac ión 195
Vi se conocen las velocidades de los puntos B y C en tanto que b s direcciones d e V x/a Y v x / t a» 1 perpen- deu lares a b s lincas que conectan los puntos X y B, y X y C respectivamente. Sus velocidades se trazaron a escala y se ag regí ron al polígono de velocidad. En la figura 7.19c se muestra el diagram a de velocidad completo. I.as m agnitudes de las velocidades desconocidas se calcularon como:
V * c - 0825 m /s ^5 -2 *
Vjefl = 1846 m /s 6 6 .4 /
Calcule las com ponentes de la aceleración
B paso siguiente es construir u n diagram a de aceleración que incluya los puntos A y B y a final de cuentas, X Calcule las m agnitudes de las aceleraciones conocidas de b siguiente m anera:
„ (vB)2 (1055 m m /i)1 ,A„ = -------- —----------- = 61834 m m /s2 = 6 1 8 m /s ÁAP
’ab 18 m m
(d irig ida h a d a el c e n tro de ro ta d ó n , p u n to A)
is = 0 (porque a ,
_ ( vOfl)J (1072 m m /s)2____________________________ _____A n o » — ----- = = 23941 m m /s2 = 23.9 m /s2 \58 .5"
rc g '18 m m V
(d ir ig id a d e C h a d a B m e d id a s o b r e d d ia g r a m a d e c a d )
Observe que el p u n to C no tiene aceleración norm al, ya que el m ovim iento es estrictam ente de trasladón.
(*046 m m /s)2 , , , ______Ax/b " — — — - 24313 m m /s2 - 2 4 5 m /s2 \ 2 3 8 '
r „ 4 5 m m \
( d ir ig id a d e X h a c ia B m e d id a s o b r e e ld ia g r a m a d e c a d )
( v* c ) 2 (625 m m /s)2 , , .Aw c - — -------- — -- 13950 m m /s2 - 13.9 m/s2 / » 4 8 °
< a 28 m m --------------
(d ir ig id a de X h a c ia C m e d id a s o b r e
d d ia g r a m a d e c a d )
C onstruir el diagram a de aceleración
S se sabe q u e n o existen las com ponentes A¿ y A* de aederadón , b ecuación de acderación relativa de los puntos B y C se escribe como:
A C * A C * A B * ■ > A c / a * * A (J B
En b figura 7.19 d se m uestra el diagram a de aceleración a escala.
4 . M ida las componentes desconocidas
M idiendo con la escala adecuada las m agnitudes del diagrama, se obtienen los siguientes resultados.
Ao b ■ 50.9 3 1 5 ^
Ac = A¿ = 65 m/s2 T
5 . C ontinúe el diagram a de aceleración
Com o con las velocidades, debido a q u e el p u n to X es un pun to en general sobre u n eslabón flotante, su aceleración se debe determ inar despejando las ecuadones vectoriales simultáneas.
Ax = AS + > A ¿ + > A ; , B + > A Í /b
A x = A J + > A ¿ + > A J /c + > A x /c
Com o se vio, las aceleraciones A ¿ y A ? son iguales a cero. Asimismo, ya se determ inaron AB, A ^ , A*,B yA x t c
www.FreeLibros.me

196 CAPITULO SIETE
C* nueva cuenta, de m anera sim ilar al anáüss de velocidad, las dos ecuaciones de aceleración se superpo- i r n en el polígono de aceleración original. Las aceleraciones se dibujaron a escala, y d diagram a com pleto de aceleración se ilustra en la figura 7.19c.
M ida las com ponen les q u e se desean conocer
la s m agnitudes de las aceleraciones desconocidas se m idieron como:
A ¿ / c = 31.6 m /s2
A i/B - 48.1 m /s2 6 6 ^
y, finalmente,
A* - 33.8 m /s3 \ f)3 *
7 .1 0 I M A G E N D E A C E L E R A C I Ó N
C o m o en el p o líg o n o d e velocidad, cada eslabón d e u n m ecanism o tiene u n a im agen en el p o líg o n o de aceleración [ref. 10). Para ilu stra rlo , en la figura 7.20a se p resen ta u n m ecanism o, con su d iag ram a d e velocidad asociado en la figura 7,20b, y los d iag ram as d e ace le rad ó n e n las figu ras 7.20c y 7.20d.
En la figura 7 .20c se d ib u jó u n triángu lo u sando todos los vectores de acelerac ión d e los p u n to s B y X O bserve q u e este triángulo es u n a im agen proporcional del eslabón q u e con tiene
lo s p un tos B y X . D e m an e ra sim ilar, la figura 7 .20d m uestra un triángu lo q u e se c o n s tru y ó a p a r t ir d e to d o s los vectores d e aceleración de los p u n to s B, C y Y. O tra vez, este tr iá n g u lo e s u n a im agen p ro p o rc io n a l del eslabón q u e co n tien e lo s p u n to s R C y Y. Estas form as de los polígonos de ace le rad ó n se conocen justificadam en te co m o imágenes de aceleración de los eslabones.
Este concepto ofrece m edios convenientes p a ra co n s tru ir el po líg o n o d e ace le rad ó n de u n m ecan ism o co n eslabones com plejos. Las m ag n itu d es d e lo s vecto res de aceleradón relativa de to d o s lo s p u n to s sob re u n eslabón so n p roporc ionales a la dis
www.FreeLibros.me

A n álisis d e a celerac ión 197
ta n d a e n tre b s pun to s, lo cual significa q u e lo s p u n to s del d iag ram a de ace le rad ó n fo rm arán u n a imagen co n los p u n to s co rrespondien tes del d iag ram a d n e m á tic o . Una vez q u e se determ ina la aceleradón de dos p un tos sobre u n eslabón, la aceleradón de o tro p u n to cualesquiera se de term ina fácilm ente. Los dos p u n tos sirven com o bose de b im agen d e b aceleradón. S in embargo, com o co n b im agen de veloddad , se deb e tener cu id ad o d e no hacer sim étrica b form a del e sb b ó n en tre d d iag ram a dnem ático y el polígono d e aceleradón.
7.11 ACELERACIÓN DE C O R IO LIS
A través de lo s análisis a n te rio re s , se ex am in a ro n exhaustivam ente las dos com ponen tes de u n v ecto r de aceleración (es decir, b no rm al y b tan g en c ia l). En a e r ta s condiciones, se presen ta u n a tercera com po n en te d e la aceleradón. Esta com po n en te adi- d o n a l se conoce c o m o componente de aceleración de Coriolis y se presen ta en casos d o n d e existe co n tac to d e deslizam iento en tre dos e sb b o n e s giratorios.
Se sa b e q u e a lg u n o s m ecan ism os u tilizad o s en m áquinas h a n follado d eb id o a la folta de c o n s id e ra d ó n d e esta c o m p o n en te . L a o m is ió n d e b co m p o n en te d e C o rio lis su b estim a b aceleradón de u n e sb b ó n y las fuerzas in e rd a le s asociadas. Los esfuerzos reales en las com ponen tes d e b m áqu ina pueden ser m ayores d e b q u e el d iseno perm ite , y p o d ría o c u r r ir u n a folla. I b r lo ta n to , en c a d a s itu a d ó n se deb e evaluar si existe o n o b com po n en te de ace le rad ó n d e C oriolis.
E spedficam ente, la co m p o n en te d e C o rio lis se encuen tra en b ace le rad ó n reb tiv a d e d o s p u n to s cuando se p resen tan s im u ltáneam en te b s tres co n d id o n e s siguientes:
1. L os d o s p u n to s so n co indden tes, p e ro se encuen tran en diferentes eslabones;
2. El p u n to so b re u n e sb b ó n sigue u n a tray ec to ria q u e se en cu en tra so b re el o tro e sb b ó n , y
3. G ira el eslabón sob re e l cual se en cu en tra la tray ec to ria
La fig u ra 7.21 m uestra b v e n ta n i lb tra se ra d e u n am in iv an y el d iag ram a d n e m á tic o re lad o n ad o . O bserve q u e el p u n to B se p u e d e r e b d o n a r co n lo s e sb b o n e s 2, 3 o 4. P ara a c b r a r b asociad ó n co n u n e s b b ó n , el p u n to B * identifica c o m o B¡ y B4. Hasta esta p a rte del capitulo, se sabe q u e u n p u n to co in d - d e n te so b re e sb b o n e s d ife ren tes t ie n e b m ism a ace le rad ó n p o rq u e t a n so lo se u sa n u n io n es de p e rn o p a ra u n ir d o s e s labones g ira to rio s . En la figura 7.21 se usan ta n to u n io n es de p e rn o co m o de deslizam iento p a ra co n ec ta r d o s e sb b o n e s g irato rios, lo s eslabones 2 y 4. En este caso, las velocidades y b s acele rad o n es de lo s p u n to s co in d d en te s B¿ y B« n o son las m ism as.
Se p u e d e n u sa r b s ecuaciones d e m ov im ien to relativo para re la d o na r b s v e lo d d a d e s y b s acelerac iones de b m an e ra s iguiente:
V w = V S 4 - f > V iC(S1
Afl2 = Ag* + > A B?/B,
Esta s i tu a d ó n represen ta d caso de análisis de u n m ecanism o donde se debe in d u i r b com ponente d e Coriolis e n d térm ino de a e d e ra d ó n relativa A ® ,#,. O bserve que
■ L os p u n to s so n co in d d en tes , p e ro n o so b re d m ism o eslabón (condición 1);
■ El p u n to B¿ se desliza a lo largo de u n a trayecto ria sob re el eslabón 4 (cond ición 2 ) y
■ El e sb b ó n so b re el q u e se en cu en tra la trayectoria, d eslabón 4 , g ira (cond ición 3).
Separando d té rm in o d e aceleración rd a tiv a en su s c o m ponentes,
A 8 ¿ /8 4 = A ffl/5 , + > A b j / 8 4 + > A 'b j / b í ( 7 .2 7 )
donde
A ® /jm = com ponente d e a e d e ra d ó n d e Coriolis
La m agn itud d e b co m p o n en te de ace le rad ó n d e Coriolis se defin ió [re£ 4 ] co m o
í / H 4 - 2 v ® / 5 , a > 4 ( 7 .2 8 )
’lan to b v e lo d d ad lineal rd a tiv a co m o b v e lo d d ad a n g u b r ab so lu ta se d e te rm in an a p a r t ir d e u n análisis exhaustivo de b v e lo d d ad del m ecanism o. La v d o d d a d a n g u b r <o deb e ser b del eslabón q u e co n tien e b trayectoria d d p u n to q u e se desliza. Hay q u e te n e r cu id ad o p o rq u e u n e r ro r c o m ú n en d cálcu lo de b com ponente de C o rio lis es la sd ccc ió n de b v d o d d a d a n g u b r incorrec ta
La d ire c d ó n d e la co m p o n en te de C o rio lis es perp en d icu la r al v ecto r d e velocidad reb tiv a v« / bz. 0 se n tid o se o b tien e g irando el vector d e velocidad relativa, de m o d o q u e b p u n ta del vector esté o rien tad a en b d ire c d ó n de b v e lo d d a d angular de b tray ec to ria . E ntonces, cu an d o b v e lo d d a d a n g u b r ru4 d e la tray ec to rb g ira en se n tid o h o ra rio , b d ire c d ó n de C o rio lis se ob tiene g ira n d o el vector d e v e lo d d a d reb tiv a 90a en sen tido h o ra rio . P or el c o n tra rio , cu an d o b v e lo d d a d a n g u b r de b t ra y e c to rb , o*«, g ira en se n tid o a n tih o ra r io , la d ire c d ó n de C oriolis se o b tien e g iran d o el vector de velocidad reb tiv a 90“ en se n tid o a n tih o ra r io . La f ig u ra 7 .22 p re se n ta los c u a tro casos d o n d e se determ ina la dirección de la com po n en te d e C oriolis.
C o m o la m ag n itu d y la d irecc ió n d e la co m p o n en te de C orio lis se calcu lan fo d lm e n te a p a r t ir d e los d a lo s de v e lo d dad, n o se agregan incógnitas ad id o n a le s a la e c u a d ó n de acele ra d ó n . S in em bargo , en la so lu d ó n d e p ro b le m a s .e s m ás c o n ven ien te escrib ir b ecuac ión de aceleración co n el p u n to q u e d escrib e b tra y e c to rb d e l la d o izqu ie rd o . La técn ica d e este análisis d e ace le rad ó n se ilu stra m e jo r a trav és del siguiente p rob lem a de ejemplo.
a) b)
f i g u r a 7 2 1 C aso d o n d e está presen te l a ace le rad ó n de C oriolis.
www.FreeLibros.me

198 CAPITULO SIETE
Movimiento relativo de b corredera Pumo C
®Movimiento rebino d? b corredera ^
tyej
Girado 90* en se mi do ant ¿horario
tu, (en sentido ant ¡horario)
fig u r a 7.22 Direcciones d e la co m p o n en te de aceleración de Coriolis.
PRO B LEM A D E E JE M PL O 7.11
La figura 7 2 3 ilustra unas tijeras m anuales para co rtar maleza o pora co rtar césped en áreas d i& ilcs de alcanzar con podadoras ordinarias. La rueda impulsora g ira a 400 rpm en sentido antihorario. Determ ine la aceleración angular de bs cuchillas oscilantes en el m om ento mostrado.
f ig u r a 723 T ijeras para c o r ta r césped del p rob lem a d e e jem plo 7.11.
S O L U C IÓ N : 1. Elabore e l diagram a cinemático
En la figura 7 2 4 a se presenta el diagrama cinem ático a escala de este mecanismo.
2. H ija e l m tto d o para ob tener la aceleración deseada
L i aceleración de B , se determina Ékilm ente a partir de la información de entrada del eslabón 2 . Se debe obtener la aceleración de B4 para calcular b aceleración angular del csbbón 4. Observe que existe deslizamiento en tre los esbbones giratorios (2 y 4); por consiguiente, se cumplen b s tres condiciones de Coriolis. l a aceleración del eslabón 4 se obtendrá usando b s ecuaciones (727) y (728).
www.FreeLibros.me

A n álisis d e a celerac ión 199
2.7-
a )
FIGURA 7.24 Diagram as del problema de ejem plo 7.11.
3. RealU e u n análisis completo de velocidad
El prim er paso es construir u n diagram a de w lo d d a d q u e incluya los puntos B¡ y B4. Calcule b m agnitud de b velocidad del pun to B¡ de la m anera siguiente:
o>2 = (400 rp m ) = 41.9 rad/s, en sentido antihorario
Vm = = 241.9 rad/s (1.4 in ) = 58.6 in/s
La dirección de VBJ es perpend icubr al eslabón 2 y es consistente con b dirección de <o2, hacia abajo y a la derecha. Por lo tanto, se dibuja u n vector a escab a p a rtir del origen del diagram a de velocidad para representar a t a velocidad.
la ecu ad ó n de velocidad relativa de los puntos B? y B« se escribe como:
V m - V * *•> V * ,*
Cóm o el eslabón 4 está su jeto con u n perno al eslabón fijo, la vcloddad de B* o perpendicubr a la linea que conecta B4 con el centro de rotación (el pun to Q . En este caso, b velocidad relativa de B¡ con respecto a B4 es
www.FreeLibros.me

200 CAPITULO SIETE
c)
f i g u r a 7 .24 [C o n tin u a c ió n ) .
paralela al eslabón 4 porque & * desliza a lo larga del eslabón 4. El diagram a de velocidad m ostrado en la figura 7 24b se elaboró a escala para obtener b s m agnitudes de velocidad de
Vw - 50.7 in /s ^5*"
V m » = 29J in /s 7 ^ /
l a distancia a i trc los p un tos C y B4 de 3.8 in so obtuvo m idiendo con c a d . Por consiguiente, la velocidad angular del eslabón 4 se calcula como:
Va, 50.7 in/sa i, ------ ■ _____ — ■ 13-3 rad/s, en sentido antihorario
'c m i-o m
Com o se determ inó que la velocidad de B4 está hada abajo y a la derecha, b velocidad angular de B, debe estar en sen tido antihorario.
4 . Calcule las componente* de la aceleración
Ltetermine las m agnitudes de las aceleraciones conocidas com o sigue:
= (58-b^ s ) . = 2 i53 ¡n/sí = 204 ft/s1 / ¿ *
(dirigida hacia el ce rotación, p u n to A)
r<ac , -4 ' n(dirigida hacia el centro de
A f c - 0 ( a , - 0 )
A£. - . <_3l̂ n /s>_ . a 6 inJs! m 5 6 ft/s2 / ¡ yrCB* ,n
(dirigida hacia el cen tro de rotación, el p u n to Q
a L « * " 0
(ya q u e B¡ se desli/a sobre B« y el m ovim iento relativo es de traslación pura)
AIz/m - 2(vm,flt)(a>4/ " 2(293 in /s) (13 J rad/s)
= 779 in/s* = 65 ft/sJ
www.FreeLibros.me

A n á lis i s d e a c e le r a c ió n 201
La dirección de la com ponente de Coriolis es v®/*,, que es paralela a la trayectoria de B¡ en relación co n B, (7W '’), girada 90* en la dirección d e ca« (sentid o an tihorario). Entonces, la com ponente de Coriolis es perpendicular al eslabón 4, hacia abajo y a la derecha 0 ^ 5 °).
Construya el diagram a de aceleración
El paso siguiente es construir el diagram a de acderación q u e incluya los puntos B¡ y Bt . C om o se m encionó, generalmente resulta m ás conveniente escribir la ecuación de aceleración con el punto que recorre la trayectoria, Bj, del primer m iem bro. Con esta directriz, la ecuación de la aceleración se escribe como:
A j í + > A ® - A j J , + > A r , + > A ¡¡¡/¿ , + > A¡(J/g^ + > A ) n / f l ,
la s incógnitas en h ecuación de aceleración son Aj* y A foj». Reagrupando la ecuación de aceleración de m anera q u e cada incógnita sea el últim o térm ino de <~a<b m iem bro de la ecuación:
A'b, * > A fc ,* - A f o * + > A fc ,* ♦ > A L + > A¿,
El diagram a de aceleración dibujado a escala se presenta en la figura 7.24c.
M ida las componentes de la aceleración q u e se desea conocer
Se obtienen a escala las m agnitudes de los vectores del diagram a usando las siguientes ecuaciones:
A ’bu bí = » 2 t U i / & *
A ¿ = 37 ft/s2 = « 4 in/s2
y, finalmente.
rcw in
C om o se determ inó q u e la aceleración tangencial de B , es hacia abajo y a la derecha, la aceleración angular correspondiente del eslabón 4 debe ser en el sen tido antihorario: p o r lo tanto,
r»« = 177 r a d i e n sentido antihorario
7.12 M ECANISM OS EQUIVALENTESH asta o t e p u n to d e l libro, lo s e jem plos de a n á lis is de m o vim iento h an inc lu ido ta n so lo m ecanism os co n u n io n o p r in cipales; o d e d r , u n io n o d e p e rn o y d e c o rre d e ra Recuerde del cap ítu lo 1 q u e u n a u n ió n de o rd en superior, co m o u n a u n ió n de leva o de en g ran e , im p lica m ov im ien to de rodam ien to y deslizam ien to . Tanto las levas co m o los en g ran es son el tem a d e e s tu d io en capítu los posterio res. S in em bargo , el análisis d e m o v im ien to de m ecanism os co n un iones de o rd en su p e rio r se realiza u sando los concep tos ya estudiados.
El análisis de velocidad y aceleración de m ecanism os q u e u tilizan u n io n es de o rd e n su p e rio r se sim plifica significativam en te co n la co n stru cc ió n de u n m ecanism o equivalente. Este m étodo convierte la configurac ión in stan tánea d e u n m ecanism o e n u n m ecanism o equivalente, d o n d e los eslabones están conectados co n un iones principales. La figura 7 .25 ilu stra dos m ecan ism o s de leva q u e tien en u n io n es de ro d a m ie n to y deslizam iento . Las líneas p u n tead as represen tan los m ecan ism o s equivalentes.
O bserve q u e el acop lad o r de estos m ecanism os equivalentes está d ib u jad o desde lo s cen tros d e c u rv a tu ra respectivos de los dos eslabones aparejados. Para u n periodo de tiem po finito , los dos cen tro s de c u rv a tu ra de lo s eslabones ap a re jad o s p e r m anecerán separados a u n a distancia constante. E n la figura 7 2 5 observe q u e el acoplador se utiliza p a ra sustitu ir la unión de o r
d en superior. Este acop lad o r se extiende en tre el cen tro de curvatura de las superficies en c o n ta c to d e los dos eslabones aparejados. P ara u n periodo de tiem p o finito , los cen tro s de curvatura de d o s superficies aparejadas perm anecerán separados a u n a d is tancia constante. El fu n d am en to prov iene del concepto de centro instantáneo in tro d u c id o en la sección 6 .10. ft>r lo tanto, se puede usar u n eslabón acoplador, con dos uniones de p e rn o p a ra reem plazar la unión de orden superior. Es im portan te observar q u e la ubicación del cen tro d e curvatu ra cam biará conform e el m ecanism o se m ueve. S in e m b a rg o u n a vez q u e se haya co n s tru id o el m ecanism o equ ivalen te , el m éto d o d e análisis es id én tico a los problem as expuestos an teriorm ente en este texto.
f i g u r a 7-25 M ec a n ism o s eq u iv a len te s .
www.FreeLibros.me

202 CAPITULO SIETE
7.13 CURVAS D E ACELERACIÓNLos análisis presentados hasta a h o ra sirven p a ra calcular la <*e le ra d ó n d e p u n to s so b re u n m ecanism o en u n instante especif ic a A un c u a n d o so n im portan tes , los resu ltados o frecen tan so lo u n a fo to in s ta n tá n e a del m o v im ien to . L a desventaja e v iden te d e este análisis es q u e se dificulta la ob ten c ió n de las c o n d iciones extrem as d u ra n te u n ciclo. Se requieren investigar varias posiciones del m ecan ism o p a ra descubrir las lases críticas.
C om o se m ostró c o n la velocidad, tam b ién es conveniente segu ir la m ^ n itu d d e la aceleración de d e r to p u n ta o eslabón, co n fo rm e el m ecan ism o se m ueve a trav és de su ¿ d o . Tal se g u im ien to b r in d a in form ación acerca de las foses críticas del a - d o . La cu rv a d e ace le rad ó n p ro p o rd o n a ese t r a z a La cu rv a de ace le rad ó n gráfica la aceleración de u n p u n to o u n eslabón en fu n d ó n del tiem po . Se p u ed e g e n e ra r a p a r t ir de la cu rv a d e velo d d a d , la cual se p resen tó en la se c d ó n 6.14.
Recuerde q u e la c u rv a d e veloddad gráfica la m agn itud de la velocidad d e u n p u n to o u n eslabón en fu n d ó n del tiem po. La c u rv a d e v e lo d d a d se genera a p a rtir de la cu rv a de d esp lazam ien to . la cual se p resen tó en la se cd ó n 4.11. ft>r consiguiente, se utiliza u n a curva d e desplazam iento p a ra generar la cu rv a de veloddad que, a la vez, sirve para generar la cu rv a d e aceleración. Esto se deb e a q u e la ace le rad ó n se p u ed e expresar com o:
A c e le ra d ó n -ii( v e lo d d a d )
El cálculo diferencial sugiere q u e la ace le rad ó n en u n instante p a rtic u la r e s la p en d ien te de la c u rv a de v e lo d d a d en ese instante. C o m o la velocidad e s la derivada del desplazam iento c o n respecto al tiem p o , la aceleración tam b ién s e expresa com o:
Acele r a c ió n =(d esp laza m ien to )
Esta e c u a d ó n sugiere q u e la ace le rad ó n en u n in stan te p articular es la c u rv a tu ra en la cu rv a de desp lazam ien to . Se debe a d m itir q u e la c u rv a tu ra qu izá n o sea m u y co n v en ien te para ca lcu la r la p end ien te . S in e m b a rg a e s fodl v isualizar las u b ica- d o n e s de aceleradones extrem as, localizando las regiones p u n tiag u d as de las curvas so b re el d ia g ra m a d e d esp lazam ien to . Aun cuando lo s valores sean d ifid les d e calcular, el m ecanism o se p u ed e configurar en la p o s id ó n deseada y, lu e g a ejecutar un
análisis de a c e le ra d ó n e x h au s tiv a co m o se p resen tó en las secciones anteriores.
Para d e te rm in ar los valores de las curvas de aceleración, es m ejo r d e te rm in ar la p en d ien te en varias regiones de la cu rv a de v e lo d d a d (véase la se c d ó n 6.14).
7.13.1 DIFERENCIALES GRÁFICASLa ta rea consiste e n e s tim ar la p en d ien te de la cu rv a d e velocid ad en varios p u n to s . La p en d ien te d e u n a cu rv a en u n p u n to se estim a gráficam ente d ib u jan d o u n a línea tangente a la cu rv a en el p u n to d e interés. La p en d ien te de la línea se d e te rm in a calculan d o el cam bio m ed id o en la "elevación" (v e lo d d ad ) d iv id ido e n tre el cam bio m ed id o en la “co rrid a” (tiem po).
Este p roced im ien to se p u ed e repetir en varios p u n to s a lo largo del d iag ram a d e v e lo d d a d . S in em bargo, generalm ente ta n so lo se d esean con o cer lo s cam b io s a b ru p to s y ex trem os e n la aceleración . U sando los co n cep to s de cá lcu lo d ife re n d a l y de p endien tes, la s p o s id o n e s de in terés se lo g ra n detec ta r v isualm ente. Estas incluyen:
■ l a s p artes m ás in d in a d a s del d iag ram a de velocidad, que co rresponden a las ace leradones extrem as, y
■ Las ubicaciones del d iag ram a de v e lo d d a d co n la cu rva tu ra m ás grande, las cuales co rre sp o n d en a lo s cam bios ab rup tos de las aceleradones.
Se deb e d estacar q u e qu izá o c u r ra n fá d lm e n te erro res en la d e te rm in ac ió n de la p en d ien te de u n a cu rv a . Tales e rro re s se m ag n ific an co n fo rm e la p en d ien te se m id e en u n a c u rv a derivada. Este es el caso cu an d o la cu rv a de aceleración se ob tiene a p a r t ir de la cu rv a de velocidad, la cual prov iene a la vez de una cu rv a de desplazam iento . P o r ende, lo s valo res o b ten id o s para del d iag ram a d e a c e le ra d ó n se deberían u sa r co n p recau d ó n .
N o o b sta n te , e s invaluab le la iden tificac ión de las p o s id o n e s extrem as de ace le rad ó n . Se debería realizar entonces u n aná lis is d e acelerac ión e x h a u s tiv a co m o el p re sen tad o en las secciones an terio res d e este c a p i tu la en esas o r ie n ta d o n e s del m ecan ism o p a ra o b te n e r valo res de acelerac ión p re d so s . El benefic io d e la cu rv a de acelerac ión e s u b ic a r las c o n f ig u ra c io n es im p o rta n te s del m ecanism o: p o r lo t a n t a se tie n e que rea liza r u n análisis m eticu loso d e la aceleración.
PRO B LEM A D E E JE M PL O 7.12
En el problem a de ejem plo 6.18 se construyó la curva de veloddad de u n m ecanism o com presor. C on esos datos gnifique u n a curva de aceleración.
S O L U C IÓ N : 1. Identifique Im p a rte s horizontales del diagram a d e ¡eloeidad
La tarea principal en la constm cdón de u n a curva de aceleradón es determ inar la pendiente d e muchos puntos de la curva de velocidad. Esta curva de veloddad se construyó en el problema de ejem plo 6.18 y se reproduce en b figura 7.26.
En esta curva es evidente q u e hay tangentes horizontales, o de pendiente igual a cero, en 0.007 y 0 0 2 7 s. Entonces, la aceleradón del pistón es cero en 0.007 y 0X127 s, cuyos p un tos están identificados com o t¡ y t,. respectivamente.
www.FreeLibros.me

A n álisis d e a celerac ión 203
O ír» , de velocidad
( V n d l c n l e 1 0 0
p o s i t i v a
«n*ndc. <,
M á x im a
p en iten te negativa , l¡
á t j m .0 0 5 s
f i g u r a 7 0 6 C u r v a d e v e lo c i d a d d e l p r o b l e m a d e e j e m p l o 7 .1 2 .
2. Calcule la pend ien te en las partes sobresalientes de la c u r ra de telocidad
La pendiente m áxim a lu c ia a rriba se encuentra en 0 s. Este p u n to se identifica co m o to. Se puede hacer u n estim ado de la velocidad a partir de los valores de Av^ y A(q leídos en la gráfica. La aceleración en 0 se estim a como:
| a . ¡ 2 S L . a c o t a dA lo 00025 s
Asimismo, la pendiente m áxim a hacia abajo aparece en 0.017 s. Este p u n to se identifica com o t¡. Nuevamente, el estimado de la aceleración se hace a pa r tir de los valores de A*j y Aí2 H dos en la gráfica. La aceleradón en 0 .017 s se estim a como:
«■ - i r - ^A *2 0.003 s
3. Dibuje la curva de aceleración
B procedim iento para determ inar la pendiente de la curva de veloddad se repite con otros valores de tiem po. Recopilando la inform ación de la pendiente y el tiem po, se construye la curva de aceleración (figura 7 27).
f i g u r a 7 0 7 C u r v a d e a c e l e r a c i ó n d e l p r o b l e m a d e e j e m p l o 7 .1 2 .
www.FreeLibros.me

204 CAPITULO SIETE
7 .1 3 .2 D ife re n c ia le s n u m é r ic a sC om o en la sección 6.14.2, la cu rv a d e aceleración se d e te rm in a a p a rtir de los d a to s de velocidad m edian te diferenciales n u m é ricas. N uevam ente, se usa el m éto d o de R ichardson [ref. 3 ) para obtener la derivada de u n a serie de datos puntuales, a intervalos iguales, d e la variable independiente. l)e m o d o q u e la derivada de la cu rv a d e velo c id ad -tiem p o se ap rox im a num éricam en te c o n la siguiente ecuación:
= h - t , = b - h = U - hr, - tiem po en el d a to p u n tu a l i
T am bién se p u e d e d e te rm in a r la se g u n d a d e riv ad a m ed ian te aprox im ación n um érica . A un c u a n d o n o e s exacta, esto p erm ite q u e la cu rv a d e aceleración se d erive d irec tam en te d e la curva de d esp lazam ien to -tiem po . D e nuevo, se usa el m éto d o de R ichardson para d e te rm in a r num éricam ente la segunda derivada c o n la siguiente ecuación:
2 A I
vi+ J - 2 v ,+ | + 2 v¿_| - 2
1 2 A i(7 .29)
d o n d e :i ™ sub índ ice de d a to s puntuales v, = v d o c id a d en el da to p u n tu a l i
A R 1+, - 2 A R , + A
A r2
dande, adem ás de la n o tac ió n anterior.AR, = desplazam iento en el da to p u n tu a l i
(7 .30)
PRO B LEM A D E E JE M PL O 7.13
En el problem a de ejem plo 4.11 se graficó u n diagram a de desplazamiento de u n pistón q u e hinciona e n u n com presor. Partiendo de este diagram a, se derivó la curva de velocidad en el problem a de ejem plo 6.18. Use estos datos para g m crar num éricam ente la c u rra de aceleración.
SO L U C IÓ N : 1. D eterm ine e lin crem en to de tiem po entre lo* datos puntuales
Los datos de la hoja de cálculo del problem a de ejem plo 6.17 (figura 6.40) se am plían para insertar u n a colum na adicional q u e incluya la m agnitud de la aceleración del pistón. Asimismo, en el problem a de ejem plo 6.18 e l in crem ento de tiem po se calculó como:
A t = t , - t, = (0.00286 - 0X1) = 0X0286 s
2 . l i e la ecuación (7 J 9 ) para calcular lo i dato* puntuales de aceleración
Para ilustrar el cálculo de las aceleraciones, a continuación se presentan uno s cuan tos ejem plos de cálculo u&an- <k» la ecuación (729):
v , - V, v4 - 2 v j + 2 v, - v,j"a¡ -
2A í 1 12 A r
142.67 - 0 0 [13730 - 2(14237) ♦ 2 (0 0 ) - (-9 1 .4 7 )1
2(.OG286) .! i 12(00286) ]
- 26898 in/s2
vio “ ‘b v „ - 2v 10 + 2 v , - v i•'*» ■ 2Ar 12 Ar
(-1 4 2 .6 7 ) - [-9 5 .4 8 )- (-9 1 .4 7 ) - 2 ( - 142.67) + 2 ( -9 5 .4 8 ) -
2(00286) 12(00286)
- -17305 in/s2
«12 -[ **i> - *’ii
■ v¡ - 2 v is + 2 v „ - v10][ 2A» 12 Ar
f (0.0) - ( -1 4 2 3 7 )" (91.47) -2 (0 .0 ) + 2 (-9 1 .4 7 ) - (1 4 2 3 7 )
l 2(00286) 12(00286)
- 26898 in/s2
www.FreeLibros.me

A n á l i s i s d e a c e l e r a c ió n 205
3. Reúna los m u lta d o s de aceleración y grafique la c u n a
l.i inform ación resultante, con todas las m agnitudes de aceleración calculadas, se proporciona en la figura 7.28. Estos valores están graficados en la figura 7.29 para form ar el diagram a de aceleración en rebción con el tiempo.
Observe que esta c u n a es todavía muy burda. Para efectos de exactitud, se recom ienda am pliam ente que el in cremento en el ángulo de la manivela se reduzca a 10* o 15*. C uando se usa u n a hoja de cálculo para generar los datos de aceleración, son aconsejables incluso increm entos m enores para n o volver la tarea m ás difícil.
- J O < >
M t
A taai N .-» - 10 •J • / U A «, _ V A -
- ■ » *
■ rir
rmm 1 l m i U l> .
;------ A *. % . s•AÍX • a -
4 r í s
Hit £1 l ____ ____ _________
1W \ A B C I> 1
------------- 1------------- - . ■
*1 D ata C ran k Ptvtop Plvton P h to a
2 l’ Hnt A ngle Tim e D H p lacrtnrn l V rlo c ltv A cce lera tlo n
i l a d r t (deg) (0 .0 0 1 k c > ( m ) ( m ic e ) ( i a w c : )4 1 0 0 .0 0 2 .0 0 0 0 0 0 3 4 6 5 5
5 V 3 0 2 .8 6 0 .1 3 6 9 1 .4 7 2 6 8 9 8
6 3 60 5 .72 0 .4 8 3 1 4 2 6 7 7 9 0 17 4 90 8 .57 0 .8 9 6 1 3 7 .5 0 -1 0 1 8 18 5 1 2 0 1 1 4 3 1.233 9 5 48 -1 7 3 0 5
9 6 1 5 0 1 4 .2 9 1.435 4 6 .0 3 -1 6 7 6 110 7 1 8 0 17.15 1 .5 0 0 0 0 0 - 1 5 7 5 9
II 8 2 1 0 2 0 .0 0 1.435 -4 6 .0 3 -1 6 7 6 1
12 9 2 4 0 2 2 8 6 1.233 - 9 5 48 -1 7 3 0 513 10 2 7 0 2 5 .7 2 0 .8 9 6 - 1 3 7 .5 0 -1 0 1 8 114 II 3 0 0 2 8 58 0 .4 8 3 - 1 4 2 6 7 7901
15 12 3 3 0 3 1 .4 3 0 .1 3 6 - 9 1 .4 7 2 6 8 9 816> -
• • •
13
* « M I .
3 6 0 3 4 2 9 0 .0 0 0 0 .0 0 3 4 6 5 5
f i g u r a 7 .28 D a t o s d e a c e le r a c ió n d e l p r o b l e m a d e e j e m p l o 7 .1 3 .
figura 7.29 Curva de aceleración del problema d e ejem plo 7.13.
www.FreeLibros.me

206 CAPITULO SIETE
PROBLEMAS r(ín*>
Las técn icas m anu a les de d ib u jo so n m u y d idácticas en los problem as d o n d e se requieren so luciones gráficas; n o obstan te , se recom ienda am pliam en te el uso de u n sistem a de cad.
A celerac ión e n g e n e ra l
7-1 .
7 -2 .
7 -3 .
7-4 .
7-8 .
7-9 .
7-5 .
7-6 .
7-7 .
C uando se activa u n a b an d a tran sp o rtad o ra , h ay a lgu nos ca jas en c im a d e ella q u e se m uev en h ac ia la derecha . La b a n d a a lcan za u n a velocidad to ta l de 45 fp m (ft/m in ) e n 0.5 s . D eterm ine la aceleración lineal «le las ca jas , su p o n ie n d o q u e la ace lerac ión es c o n stan te . D eterm ine tam b ién el desp lazam ien to lineal de b s cajas d u ra n te este p e rio d o de aceleración.
Un veh ícu lo d e a l to ren d im ie n to va de 0 a 60 (m ph) en u n tiem po d e 8 3 s. D eterm ine la aceleración lineal del vehículo y la distancia recorrida para alcanzar 60 m ph.
Un e levador se m ueve hacia a rrib a a u n a velocidad «le 12 f t/s . D eterm ine la d istanc ia requerid a para d e te nerlo , s i la desacelerac ión c o n s ta n te n o excede los10 f t/s2.
B p u n to A se encuen tra sob re u n a co rred era q u e acelera u n ifo rm em en te hacia a r r ib a a lo la rg o d e una trayectoria recta vertical. La co rred era tien e u n a velocidad de 100 m m /s cu an d o pasa p o r u n p u n to , y d e 300 m m /s cu an d o p asa p o r u n seg u n d o p u n to , 0 .2 s m ás ta rd e . D e te rm in e la a c e le ra d ó n lin ea l y el d esp lazam ien to lin ea l del p u n to A d u ra n te e s te in te rv a lo de tiem po.
Se usa u n a c tu ad o r lineal para em p u ja r u n a carga hacia b izquierda. P a rtie n d o d e l repo so , se requ ieren 1.5 s p i r a alcanzar u n a v e lo d d ad to ta l de 0 .75 m /s. D e te rm in e la ace le rad ó n lineal de la carga. C alcule asim ism o d desplazam iento lin ea l de la carga d u ra n te esta fase de aceleradón del m ovim iento.
Partiendo del repo so , u n a leva acelera un ifo rm em ente has ta 750 rp m en 8 s e n sen tido h o r a r ia D eterm ine la ace le rad ó n a n g u la r de la leva.
0 ro to r de u n m o to r d e re a e d ó n g ira e n se n tid o h o rario y se estabiliza en 10000 rp m . C uando se c o rta el sum in istro de com bustib le , el m o to r dism inuye la ve- b d d a d hasta de ten erse en 2 m in . S u p o n ien d o q u e la velocidad se reduce u n ifo rm em en te , d e te rm in e la a c e le ra d ó n a n g u la r del m o to r. C alcu le as im ism o el desp lazam iento angular del ro to r d u ra n te este p e rio d o de
La v e lo d d ad angu la r de u n eje se increm enta co n ace lerad ó n constante de 1000 a 2500 rp m en 2 0 s e n sentido h o ra r ia D eterm ine la aceleradón angular del eje.
Una ru e d a g ira 400 rev o lu c io n es en se n tid o a n tih o ra rio m ie n tra s desacelera de 1100 a 800 rp m . D ete rm in e la aceleración angular d e la rueda.
P erfiles de velociilad
7 -1 0 . I b a c tu a d o r se rv o im p u lsa d o está p ro g ra m a d o p a ra ex tenderse d e a c u e rd o c o n el perfil d e velocidad m o strad o e n la figura P7.10. D eterm ine la aceleración m áxim a, la d esaceleradón m áxim a y el desplazam iento lineal d u ra n te ese m ovim iento program ado .
f ig u r a P7.I0 Problem as 1 0 y I I.
7 -1 1 . U n actuador servoim pulsado está p rog ram ado p a ra extenderse d e acu erd o con el perfil d e veloddad m ostrado en la figura P7.10. Use u n a h o ja de cálculo p a ra generar las gráficas de desplazam iento c o n tra t ie m p a veloci«lad con tra tiem po y aceleradón c o n tra t ie m p a d u ra n te este m «m m icnto p ro g ram ad a
7 -1 2 . U n m o to r lin ea l está p ro g ram ad o p a ra m overse hacia b derecha de a c u e rd o co n el perfil de v e lo d d a d m ostrado en la fig u ra P7.12. D eterm ine la ace le rad ó n m áxim a, la desaceleración m áxim a y el desplazam iento lineal d u ra n te este m ovim iento p ro g ra m a d a
r(U .)
7 -13 . Un m o to r lineal está p rog ram ado p a ra m overse h a d a la derecha d e acuerdo co n el perfil de v e lo d d ad m ostrado en la figura P7.12. Use u n a h o ja de cálculo p a ra generar b s gráficas de desplazam iento c o n tra t ie m p a velocidad con tra tiem po y aceleración c o n tra tiem po d u ra n te este m ovim iento program ado .
7 -14 . I b a c tu a d o r lineal está p ro g ra m a d o para m overse 10 in. La veloddad m áxim a e s «le 4 in /s , y ta aceleración y la desaceleradón constan tes están lim itadas a 6 in/s2. Use u n a h o ja de cálcu lo p a ra genera r las g rá ficas de d e splazam iento c o n tra t ie m p a velocidad c o n tra tiem p o y ace le rad ó n c o n tra tiem p o d u ra n te este m ov im ien to program ado.
7 -1 5 . I b a c tu a d o r lineal está p ro g ram ad o para m overse 75 m m . L a v e lo d d a d m áxim a es de 50 m m /s, y la acele ra d ó n y la desaceleradón constan tes están lim itadas a 100 m m /s2. Use u n a ho ja de cálcu lo p a ra generar las gráficas d e desp lazam ien to c o n tra t ie m p a velocidad con tra tie m p o y acelerac ión c o n tra tiem p o d u ra n te este m ovim iento p rog ram ado .
A ce le rac ió n n o rm a l y ta n g en c ia l
7 -1 6 . En la figura P7.16 se m uestra el eslabón 2 q u e se aisló de u n d iag ram a d n em ático y g ira a u n a veloddad constante de 300 rp m en sen tido an tiho rario . D eterm ine la
www.FreeLibros.me

A n ális is d e a c e le ra c ió n 207
B
¡celeración lineal total d e lo s p un tos A y B . Use y ■* 50*y P m 6 0 °.
7 -1 7 . En la fig u ra P 7 .I6 se p resen ta el eslabón 2 q u e se aisló de u n d iag ram a c in e m á tic a El eslabón g ira a u n a velocidad de 200 rp m en sen tido a n tih o ra r ia y acele ra a 400 rad /s2. D eterm ine la acd crac ió n lineal to ta l de los p un tos A y B Utilice y = 50* y 0 = 60°.
7 -1 8 . En la fig u ra P7.16 se presen ta el eslabón 2 q u e se aisló de u n d iag ram a c in e m á tic a EJ eslabón g ira a u n a velocidad d e 300 rp m en sen tido an tih o ra rio y desacelera a 800 rad/s2. D eterm ine la ace le rad ó n lineal total d e los puntos A y B U tilice y = 50"y ( i = 60“.
La figura P7.19 ilu s tra u n e m b rag u e cen trifu g o q u e acop la d o s ejes a u n a velocidad angu la r critica.
H G U R A P 7 . I 9 Problem as 1 9 .2 0 y 2 1 .
7 - 1 9 . D eterm ine la ace le rad ó n total del p u n to A sob re la zapata d e l e m b rag u e cen trifu g o m o s tra d o en la figura P7.19. En el in s tan te m o s t r a d a el eje im p u lso r g ira a 300 rp m constan tes en se n tid o horario .
7 -2 0 . D eterm ine la ace le rad ó n total del p u n to A sob re b zapata d e l e m b ra g u e cen trifu g o m o s tra d o en b figura P7.19. En el in s tan te m o s t r a d a el eje im pulsor g ira a 300 rp m en se n tid o h o ra rio y acelera a 300 rad/s2!
7 - 2 1 . D eterm ine la ace leradón total del p u n to A sob re la zap a ta d e l e m b rag u e cen trifu g o m o s tra d o en b figura
P 7 .I9 . En el in s tan te m o s t r a d a el e je im p u lso r g ira a 300 rp m en se n tid o h o rario y desacelera a 300 rad /s2.
A celerac ión re b t iv a
7 - 2 2 . E n el d b g r a m a c inem ático m o s tra d o en la figura P7.22. b longitud del eslabón A B es de 100 m m y 0 = 35°. El b lo q u e A se m ueve h a d a a r r ib a a u n a v e lo d d ad de 10 m m /s y acelera a 5 m m /s2. Al m ism o tiem po , b velocidad del b lo q u e B es de 7 m m /s y acelera a 25 m m /s2. D eterm ine g ráficam ente la v e lo d d a d lineal de A con respecto a B y la ace leradón lineal de A con re s pecto a B.
f i g u r a P 7 J 2 Problem as 2 2 y 23.
7 - 2 3 . En el d b g r a m a c inem ático m o s tra d o en b figura P7.22, b longitud del eslabón A B e s de 15 in y 0 = 40°. H b lo q u e A se m ueve h a d a a rrib a a u n a v e lo d d ad de 50 in /s y desacelera a 125 in/s2. Al m ism o tiem po , b velo d d a d del b lo q u e 6 es de 42 in /s y acelera a 48 .6 in /s2. D eterm ine analíticam ente b velocidad lineal de A con respecto a B y la a c e le ra d ó n lineal de A con respecto a B.
7 - 2 4 . En la figura P7.24 se ilu stra u n d ispositivo p a ra a b r ir v en tan as q u e se en cu en tra co m ú n m en te en s itio s elev a d o s de g im nasios y fáb rica s. En e l in s tan te en q u e 0 = 25°, b tu e rca im p u lso ra se m ueve a la derecha a u n a v e lo d d a d d e 1 f t/s y acele ra a 1 f t /s 2. A l m ism o t ie m p a b v e lo d d a d de b zapata es d e 0 .47 f t/s , y acelera a u n a v e lo d d a d d e 0 .91 f t/s2. D e te rm in e g rá fica m e n te la ve locidad lin ea l de C co n resp ec to a B y la aceleración lineal de C c o n respecto a B.
7 -2 5 . En b figura P7.24 se m uestra u n d ispositivo p a ra ab rir ventanas. En el in stan te en q u e 0 = 55*. la tuerca im pu lso ra se m ueve a b derecha a u n a velocidad d e 2 ft/s y acelera a 1 ft/s2. Al m ism o t ie m p a b v e lo d d a d de la
www.FreeLibros.me

208 CAPITULO SIETE
zapata o d e 2 .85 f t/s . y acelera a 8.51 ft/s2. D eterm ine gráficam ente la velocidad lineal d e C c o n respecto a B y t i aceleración lineal de C c o n respecto a B
M é to d o de a c la ra c ió n re la tiv a : g rá fic o
7 -2 6 . fó ra d m ecan ism o co m p reso r m o s tra d o e n la figura P7.26, u tilice el m éto d o d e aceleración relativa para d e te rm in a r g rá ficam en te la ve locidad lineal y la aceleración lineal del p is tó n co n fo rm e la m anivela g ira a u n a velocidad c o n s tan te de 1150 rp m en se n tid o h o ra r ia
Pistón
FIG URA P 7 J 6 Problem as 2 6 . 2 7 . 2 8 . 4 4 . 7 5 . 8 1 y 8 7 .
7-27.
7-28.
7-29.
Ih ra el m ecan ism o co m p reso r m o s tra d o e n la figura P7.26, en el in stan te m o s tra d a la m anivela g ira a 2000 rp m en se n tid o a n tih o ra r io y acele ra a 10000 ra d /s2. Use el m éto d o de la aceleración relativa para determ i t u r g rá fica m e n te la ve locidad lineal y la aceleración lineal del p istón .
Ih ra el m ecan ism o co m p reso r m o s tra d o e n la figura P7.26, en el in stan te m o s tra d a b m an iv eb g ira a 1500 rp m e n se n tid o h o ra r io y d csace le ra a 12000 rad /s2. Use el m éto d o de aceleración relativa p a ra determ inar g ráficam ente b velocidad lineal y b aceleración lineal del p istón .
Para el m ecanism o d e la m áqu ina de coser m ostrado en b figura P 7 2 9 , en el in stan te e n q u e 0 ■ 30*. la rueda im pulsora g ira a 200 rp m constantes en sen tido a n tih o rario . Use el m éto d o d e b aceleración relativa para dete rm in a r g rá fica m e n te b velocidad lineal y la acelerac ión lineal de b aguja.
7-30. R ira el m ecan ism o d e la m áq u in a d e coser m o strad o en la fig u ra P7.29. en el in s ta n te e n q u e 0 - 30°. la ru ed a im pulsora g ira a 300 rp m e n sen tido h o ra rio y acelera a 8 0 0 rad /s2. Use el m éto d o de aceleración relativa para d e te rm in a r gráficam ente b v e lo d d a d lineal y la a c e le ra d ó n lineal d e b aguja.
7-31. R ira el m ecan ism o d e la m áq u in a d e coser m o strad o en b fig u ra P7.29. en el in s tan te e n q u e 8 » 120°. b ru ed a im pulsora g ira a 200 rp m e n se n tid o h o ra rio y desacelera a 400 ra d /s2. Use el m éto d o de ace le rad ó n relativa p a ra d e te rm in ar gráficam ente la veloddad lineal y b ace le rad ó n lineal d e la aguja.
7-32. En b sie rra d e p o te n d a para m etales de b figura P7.32, en el in s tan te m o s tra d a b m an iv eb d e 1.75 in g ira a 830 rp m constan tes en se n tid o h o ra rio . Use el m étodo de ace le rad ó n relativa p a ra d e te rm in ar gráficam ente la s d o a d a d lineal y la ace le rad ó n lineal d e b cuchilla de b sierra.
7 -3 3 . En la sie rra d e p o te n c b p a ra m etales de b figura P7.32, en el in s tan te m o s tra d a b m an iv eb d e 1.75 in g ira a (O rp m en sen tido h o rario y acele ra a 4 0 rad /s2. Use el m éto d o de ace le rad ó n relativa para d e te rm in ar gráficam ente la v e lo d d ad lineal y la aceleración lineal d e b cuchilla de b s ie rra .
FIG U R A P7J2 Problem as 3 2 .3 3 ,3 4 .4 6 .7 7 ,8 3 y 89.
7-34. En b sie rra d e p o te n c b para m etales de b figura P7.32, en el in s tan te m o s tra d a b m a n iv e b d e 1.75 in g ira a 70 rp m en se n tid o h o ra rio y desacelera a 45 r a d /s '. Use el m é to d o de b a c e le ra d ó n relativa p a ra d e te rm in ar gráficam ente b v e lo d d ad lin ea l y b ace le rad ó n lineal de b cuchilla d e la sierra.
7-35. El m o to r del caballo trag am o n ed as de b fig u ra P7.35 gira a u n a v e lo d d a d c o n s tan te de 9 0 rp m en se n tid o
F IG U R A P7J5 Problemas 3 5 . 3 6 , 3 7 , 4 7 . 7 8 . 8 4 y 9 0 .
www.FreeLibros.me

A n ális is d e a c e le ra c ió n 209
7 - 3 6 .
7 - 3 7 .
7 - 3 8 .
ta ra rio . E n el in stan te en q u e 0 = 30*. u se el m étodo d e aceleración relativa para d e te rm in a r g ráficam ente la v e lo d d ad angu la r y la ace leradón angu la r del caballo.
En el instante e n q u e 0 = 45*. e l m o to r del caballo tra- gun o n cd as de la figura P7.35 g ira a 6 0 rp m en sen tido horario y acelera a 30 ra d /s2. Use el m éto d o de acele ra d ó n relativa p a ra d e te rm in ar gráficam ente la v e lo d d ad angu la r y la ace leradón angu la r del caballo.
En el in s ta n te en q u e 0 = 120°, el m o to r del caballo tragam onedas de la figura P7.35 g ira a 40 rp m en sentido h o ra rio y desacelera a 2 0 rad /s2. Use el m étodo de la ace le rad ó n relativa p a ra determ inar gráficam ente la ve lo d d ad angular y la ace le rad ó n a n g u la r del caballo.
El m o to r del r o d a d o r p a r a lavar au to m ó v ile s d e la figura P7.38 g ira a u n a v e lo d d a d constan te d e 120 rpm en se n tid o a n tih o ra rio . Use el m é to d o de ace le rad ó n relativa, en el m om en to en q u e 0 - 40°, para d e te rm in ar gráficam ente la v e lo d d ad angu la r y b aceleradón a ig u la r del b razo d e la boquilla. m éto d o d e b ace le rad ó n relativa para d e te rm in ar g rá
ficam ente la v e lo d d a d angu la r y la ace le rad ó n angular de b ru ed a del ensam ble.
7 - 4 2 . En el in stan te m o strad o , b m an iv eb de 12 in sob re el engrane im p u lso r del tre n de aterrizaje de u n av ió n pequeño, m o strad o e n la figura 1*7.41, g ira a 15 rp m en srn tido an tih o ra rio y acelera a 4 rad/s2. Use el m étodo de ace le rad ó n reb tiv a p a ra d e te rm in ar g ráficam ente b velocidad angu la r y b ace le rad ó n angu la r de b ru ed a del ensam ble.
7 - 4 3 . En el in stan te m ostrado , la m an iv eb de 12 in sob re el engrane im p u lso r del tre n de aterrizaje de u n avión pequeño, m o strad o e n la figura P7.41, g ira a 18 rp m en se n tid o a n tih o ra r io y desacelera a 3 .5 ra d /s2. Use el m éto d o de a c e le ra d ó n reb tiv a p a ra d e te rm in ar g rá ficam ente b v e lo d d ad a n g u b r y b ace le rad ó n angular de b ru e d a del ensam ble.
f i g u r a P7J« Problem as 3 8 .3 9 ,4 0 ,4 8 ,7 9 ,8 5 y 91.
7 - 3 9 . En el m om en to en q u e 0 “ 90", el m o to r del rociador jxira lavar au tom óviles de la fig u ra P7.38 g ira a u n a velo d d ad de 150 rp m en se n tid o a n tih o ra rio y acelera a 200 rad/s2. Use el m éto d o d e aceleradón re b tiv a para d e te rm in ar gráficam ente b velocidad a n g u b r y b acele ra d ó n a n g u b r del b razo de b boquilla.
7 - 4 0 . En el m o m en to en q u e 0 = 120°. el m o to r del ro d ad o r pora b v a r au tom óviles de b fig u ra P7.38 g ira a u n a velo d d ad d e 100 rp m en se n tid o an tih o ra rio y desacelera a 100 rad/s2. Use el m éto d o d e ace le rad ó n relativa para d e te rm in ar gráficam ente b velocidad angu la r y la aceleración a n g u b r del b razo de b boquilla.
7 - 4 1 . La m anivela de 12 in sob re el engrane im p u lso r del tren d e a te rr iz a je d e u n a v ió n pequeño , m o s tra d o en b figura P7.41, g ira a u n a v e lo d d ad constan te de 20 rp m en se n tid o an tiho rario . E n el in stan te m ostrado , use el
M é to d o a n a lít ic o de la ace le rac ió n re b tiv a
7 - 4 4 . En e l m ecan ism o com preso r d e b figura P7.26, en el in stan te m ostrado , b m an iv eb g ira a 1800 rp m en se n tido h o rario y acelera a 12000 rad/s2. Use el m éto d o de aceleradón relativa para d e te rm in ar analíticam ente b v e lo d d ad lineal y la ace le rad ó n lineal del pistón.
7 -4 5 . P ira el m ecan ism o de b m áq u in a d e coser de b figura P7.29, e n el instante en q u e 6 - 30°. b ru ed a im pulsora g ira a 2 5 0 rp m en se n tid o h o ra r io y acelera a 6000 rad/s2. Use el m é to d o d e b ace le rad ó n reb tiv a para de- te rm in a r a n a lític a m e n te b velocidad lin ea l y la acele ra d ó n lineal d e b aguja.
7 - 4 6 . P ira b s ie r ra de p o te n d a p a ra m etales de la figura P7.32, e n el in stan te m ostrado , b m an iv eb de 1.75 in g ira a 55 rp m e n se n tid o h o ra r io y d esace le ra a 35 rad/s2. Use el m éto d o d e b ace le rad ó n reb tiv a para d e te rm in a r analíticam en te b v e lo d d ad lin ea l y b acelera d ó n lineal de b sierra.
7 -4 7 . En el instante en q u e 0 = 45°, el m o to r del caballo tra- g im onedas d e b figura P7.35 g ira a 45 rp m en sen tido Iw rario y acelera a 25 rad /s2. Use el m éto d o d e b acele ra d ó n reb tiv a p a ra d e te rm in a r analíticam ente b velo d d a d a n g u b r y la ace le rad ó n a n g u b r del caballo.
FIG URA P7.41 Problem as 4 1 , 4 2 . 4 3 . 4 9 , 8 0 , 8 6 y 9 2 .
www.FreeLibros.me

210 CAPITULO SIETE
7 -4 * . En el m om en to en q u e 0 = 90", el m o to r del rociador p i r a lavar au to m ó v ile s de la fig u ra P 7 .3 8 g ira a 130 rp m en se n tid o a n tih o ra rio y desacelera a 180 ra d /s2. Use el m éto d o de aceleración relativa p a ra determ inar analíticam ente la velocidad angu la r y la a a d e ra d ó n a n gular del brozo de la boquilla.
7 -4 9 . En el in stan te m ostrado , la m anivela de 12 in sob re el eng ran e im p u lso r del tren d e a te rriza je del av ió n peq u eñ o m o stra d o en la fig u ra P 7 .4 I g ira a 12 rp m en sentido an tih o ra rio y acelera a 3 rad/s2. Use el m étodo de aceleradón relativa para d e te rm in ar analíticam ente la ve locidad a n g u la r y la ace le rac ió n a n g u la r d e la ru ed a del ensam ble.
A celerac ión de p u n to s so b re u n e s lab ó n flo tan te :
m é to d o g ráfico
H eslabón de 3 .25 in del m ecan ism o de la troqueladora de la figura P7.50 g ira a u n a v e lo d d ad constante de 20 rp m en se n tid o h o ra r io . E n el m o m e n to e n q u e 8 = 60". d e te rm in e g ráficam ente b a c e le ra d ó n lineal del p u n to X s ib r e la troqueladora.
7-50.
4.32*
7-51 .
7 -52 .
7 -53 .
7-54.
FIGURA P7j o Problem as 50 a 5 3 ,5 8 .
0 eslabón d e 3.25 in del m ecan ism o de la troqueladora de la figura P7.50 g ira a u n a v e lo d d ad constante de 20 rp m en se n tid o h o ra r io . E n el m o m e n to e n q u e 8 = 120", de term ine g ráficam ente la ace le rad ó n lineal del p u n to X sob re la troqueladora.
0 eslabón de 3 .25 in del m ecan ism o de la troqueladora de la figura P7.50 g ira a 3 0 rp m en sen tido h o ra rio y acelera a 6 rad/s2. En el m om en to en q u e 8 = 90". d e te rm in e gráficam ente la aceleración lineal del p u n to X sobre la troqueladora.
0 eslabón d e 3.25 in del m ecanism o de la troqueladora de la fig u ra P 7 3 0 g ira a 3 0 rp m en sentido h o ra rio y desacelera a 6 r a d /s 2. E n el m o m en to en q u e 8 = 90°, de term ine gráficamente la ace le rad ó n lineal del p u n to X sobre b troqueladora.
0 e s lab ó n d e 0.5 m d e l m ecan ism o levad izo d e la figura P7.54 g ira a u n a velocidad constan te de 12 rp m en sen tido a n t ih o ra r ia E n el in stan te en q u e 8 = 20", d e te rm in e g rá fica m e n te la a c e le ra d ó n lin ea l del p u n to X
f i g u r a P 7 J 4 P r o b le m a s 54 a 57,59.
7 -5 5 . H e s b b ó n de 0.5 m del m ecan ism o levad izo de b figura P7.54 g ira a u n a v e lo d d ad constan te d e 20 rp m en sen tido h o rario . E n e l in s tan te en q u e 8 = 30", de term ine g ráficam ente b a c e le ra d ó n lineal del p u n to X
7 -5 6 . 0 e s b b ó n de 0 .5 m del m ecan ism o levad izo de la figura P7.54 g ira a 3 0 rp m en se n tid o h o rario y acelera a 5 rad /s2. En el in stan te en q u e 8 - 20", d e te rm in e g rá ficam ente la aceleración lineal del p u n to X.
7 -5 7 . 0 e s b b ó n de 0.5 m del m ecan ism o levad izo de b figura P7.54 g ira a 18 rp m en se n tid o an tih o ra rio y de- sacelera a 5 rad /s2. En el instante en q u e 8 = 0°, determ ine g ráficam ente b ace le rad ó n lineal del p u n to X
A celerac ión d e p u n to s so b re u n e s la b ó n f lo ta n te :
m é to d o a n a lít ic o
7-58 .
7-59.
0 eslabón de 3.25 in del m ecan ism o de la troqueladora de b fig u ra 1*7.50 g ira a u n a veloddad constan te de 20 rp m en sentido h o rario . En el m om en to en que 8 = 60", d e te rm in e a n a lític a m e n te b ace le rac ió n lin ea l del p u n to X sob re b troqueladora.
El e s b b ó n de 0.5 m del m ecan ism o lev ad izo de b figura P7.54 g ira a u n a v e lo d d ad constan te d e 12 rp m en se n tid o an tih o ra rio . En el in stan te e n q u e 8 = 20", d e te rm in e an a líticam en te la ace lerac ión lineal del pu n to X
A cele rac ió n d e C o rio lis
7 -6 0 . Para e l d iag ram a c in em á tico m o s tra d o e n la figura P7.60, en el in stan te en q u e 8 = 60", la v e lo d d a d angub r del eslabón 2 e s d e 30 rad /s en se n tid o h o rario . La corredera 3 tam b ién se m ueve hacia afuera so b re el esb b ó n 2 a u n a v e lo d d a d de 15 m m /s. D eterm ine b acelerad ó n de C orio lis del p u n to fi sob re el eslabón 3 relativa co n el e sb b ó n 2 .
150 m m
f i g u r a P 7 J O P r o b l e m a s 6 0 a 6 2 .
www.FreeLibros.me

A n álisis d e a celerac ión 211
7 -6 1 . P ira el d iag ram a c in em á tico m o s tra d o en la figura P7.60. en el in stan te en q u e f l - 45®. la velocidad an g u lar del eslabón 2 es de 3 0 ra d /s en se n tid o a n tih o ra r ia La co rred era 3 tam b ién se m ueve h ac ia afuera sob re el e la b ó n 2 a u n a velocidad d e 15 m m /s. D eterm ine b a :e le ra d ó n de C o rio lis del p u n to t í m b re el e sb b ó n 3 relativa co n el e sb b ó n 2 .
7-62. Para el d b g ra m a c in em ático m o s tra d o e n b figura P7.60, en el in stan te en q u e 8 ■ 30°, la velocidad angu lar del e sb b ó n 2 es de 30 rad /s en se n tid o h o rario . La co rred era 3 ta m b ié n s e m ueve hacia a d e n tro so b re el eslabón 2 a u n a velocidad d e 15 m m /s. D eterm ine la x e le ra c ió n de C o rio lis del p u n to tí a» b re el e sb b ó n 3 relativa co n el eslabón 2 .
M e c a n ism o c o n ace le rac ió n de C o rio lis : m é to d o g ráfico
7 -6 3 . Para el d b g ra m a c in em á tico m o s tra d o e n b figura P7.63, la velocidad angu la r del eslabón 2 e s de 20 rad/s en sen tido an tiho rario . D eterm ine g ráficam ente la velocidad a n g u b r del eslabón 4, la velocidad d e deslizam ien to del e sb b ó n 3 so b re el eslabón 4 y la aceleración a ig u la rd e l eslabón 4.
se n tid o h o ra r io y acelera a u n a ta s a d e 4 5 ra d /s2. D eterm ine g rá fica m e n te la ace lerac ión lin ea l de la cu ch ilb d e la sierra.
7-67. La figura P7.67 presen ta el m ecan ism o d e u n a b o m b a para b icicleta. En el in stan te m o s tra d a el c ilind ro se retra e a u n a velocidad c o n s tan te d e 2 in /s . D eterm ine g ráficam ente la aceleración a n g u b r del ensam ble del pedal y la aceleración lin ea l d e l p u n to X
p i n t o X
H G U R A P 7 6 7 Problem as 6 7 ,6 8 y 73.
7-64.
7-65.
h g u r a P7.63 f t o b l e m a s 6 3 ,6 4 y 7 1 .
P ira el d b g ra m a c in em ático m o s tra d o en b figura P7.63, b velocidad angu la r del esbbón 2 e s de 20 rad/s en se n tid o a n tih o ra r ia y acelera a 5 ra d /s2. D eterm ine gráficam ente la velocidad angu la r del eslabón 4 , b velocidad d e deslizam iento del eslabón 3 so b re el eslabón 4 y b aceleración a n g u b r del e sb b ó n 4.
La figura P7.65 ilu stra el m ecanism o im p u lso r de una sie rra ca lad o ra . E n e l in s tan te m o s t r a d a b m an iveb p r a a u n a velocidad c o n s tan te de 300 rp m e n sen tido h o ra r ia D e te rm in e g ráficam ente ki aceleración lineal de b c u c h ilb de la sierra.
7-66. En el m ecan ism o de b sie rra ca ladora de la figura P7.65. b m an iv eb g ira a u n a velocidad de 200 rp m en
7-68.
7-69.
En la b o m b a para bicicleta de la figura P7.67. el c ilin d ro se r e t r a e a u n a velocidad de 2 in /s y acelera a 3 in /s2. D eterm ine g rá ficam en te la aceleración a n g u lar d e l ensam ble del p e d a l y b acelerac ión lineal del p u n to X
La fig u ra P7.69 p resen ta el m ecan ism o del tim ó n usad o e n b co n d u cc ió n de em barcaciones. En el instante m o s tra d a el im p u lso r se está ex tend iendo a u n a v e lo d d ad c o n s tan te de 0.1 m /s. D eterm ine g rá ficam en te la v e lo d d ad y b a c e le ra d ó n a n g u b re s d e l ensam ble del tim ón.
0 . 3 m 0 .4 r a
7-70. E n el m ecan ism o del tim ó n de b fig u ra P7.69, el im p u lso r se está extendiendo a u n a v e lo d d a d d e 0 .1 m /s y desacelera a u n a v e lo d d ad de 0.3 m /s2. D eterm ine g rá ficam en te b v e lo d d a d y b a c e le ra d ó n a n g u b re s del ensam ble del tim ón .
www.FreeLibros.me
212 CAPITULO SIETE
M e c a n ism o c o n a c e le ra c ió n de C o rio lis :
m é to d o an a lítico
7 -7 1 . Para e l d ia g ra m a c in e m á tic o m o s tra d o en la figura P7.63, la velocidad angu la r del eslabón 2 es de 2 0 rad /s en se n tid o a n tih o ra rio . D e te rm in e an a líticam en te la velocidad a n g u la r del e s b b ó n 4 , b v e lo c id ad de deslizam iento del eslabón 3 sob re el e sb b ó n 4 , y b aceleración angular del eslabón 4.
7 -7 2 . l a fig u ra 1*7.65 m uestra el m ecan ism o im p u lso r d e u n a sierra ca lad o ra . E n el in s tan te m o strad o , b m an iv eb g ira a u n a velocidad constan te de 300 rp m e n sen tido h o rario . D eterm ine analíticam ente b aceleración lineal de b cuchilla de b s ie rra .
7-73. l a figura P7.67 m u e s tra el m ecan ism o de u n a b o m b a p i r a b icicleta. En el instante m ostrado , el c ilind ro se retra e a u n a v e lo c id ad c o n s tan te d e 2 in /s . D eterm ine analíticam ente b aceleración angu la r del ensam ble del pedal y la aceleración lineal del p u n to X.
7 -7 4 . La fig u ra P7.69 presen ta el m ecanism o del tim ó n usad o e n la co n d u cc ió n de em barcaciones. En el instante m ostrado, el im p u lso r se extiende a u n a velocidad conso m é de 0.1 m /s. D eterm ine an a líticam en te b v e lo d dad y la ace le rad ó n angulares del ensam ble del tim ón .
C u rv a s d e a c e le ra c ió n : m é to d o g ráfico
7-75. l a m an iv eb del m ecanism o com preso r m o strad o en la figura P7.26 es im p u lsad a a u n a v e lo d d a d constan te de 1750 rp m en se n tid o h o ra r io . E b b o re g rá ficam en te u n a cu rv a de despbzam ien to lineal del p is tó n e n fu n d ó n del án g u lo de b manivela. C onv ie rta a tiem p o el eje del án g u lo de la m anivela . Luego, calcule gráfica m en te la pend ien te para o b te n e r b s curvas de v e lo d dad y de ace le rad ó n del p is tó n en fu n d ó n del tiem po.
7 -7 6 . l a m an iv eb del m ecan ism o de b m áq u in a de coser m o strad a en b figura P7.29 es im pulsada a u n a v e lo d d ad c o n s ta n te d e 175 rp m e n se n tid o a n tih o ra rio . H abore g ráficam ente b c u rv a d e desp lazam ien to lineal de la a g u ja e n fu n c ió n d e l á n g u lo d e la m an iv e la. C onv ie rta a tiem po el eje del ángulo d e la m an iveb . Luego, calcule g ráficam ente b p en d ien te p a ra ob ten er b s curvas d e velocidad y de ace le rad ó n de b aguja en fu n d ó n del t ie m p a
7 -7 7 . l a m a n iv e b de b s ie rra d e p o te n d a p a ra m etales m o strad a en b figura P7.32 e s im pulsada a u n a v e lo d d ad constan te de 9 0 rp m en sen tido h o r a r ia E b b o re g táficam en te la cu rv a d e d e sp b z a m ie n to lineal de la sierra en fu n d ó n del ángulo d e la m anivela. C onvierta a tiem p o el eje del án g u lo d e b m an iv e la L u e g a ca lcu le gráficam ente la pend ien te para o b te n e r b s cu rv as de velocidad y de a c e le ra d ó n d e b sie rra en f u n d ó n del tiem po.
7-78. 0 m o to rd e l caballo trag am o n ed asd e la figura P7.35 es im p u lsad o a u n a v e lo d d a d c o n s tan te d e 7 0 rp m en sentido h o rario . Elabore g ráficam ente la cu rv a de desp b zam ien to a n g u b r del caballo en función del ángulo de la m anivela. C onvierta a tiem p o el eje del ángulo de b m anivela. Luego, calcule g ráficam ente b pend ien te para o b te n e r b s curvas d e v e lo d d a d angular y d e aceler a d ó n angu la r del caballo en fu n d ó n del tiem po.
7-79. El m o to r del m ecanism o ro d ad o r para lavar automóviles de b figura P 7 J 8 e s im pulsado a u n a velocidad constante d e 100 rp m en se n tid o a n tih o ra r ia Elabore gráficam ente b c u rra d e despbzam ien to angular del b razo de b boquilb en fu n d ó n del ángulo d e b m anivela Convierta a tiem po el eje del ángulo d e b m anivela Luego, calcule gráficamente b pendiente para obtener b s curras de velocidad a n g u b r y de aceleradón a n g u b r del brazo de b boquilb en fu n d ó n del tie m p a
7-80. La m an iveb so b re el engrane del m ecan ism o del tren de aterrizaje m o strad o en la fig u ra P7.4I es im pulsada a u n a v e lo d d ad constan te d e 18 rp m en se n tid o a n tih o ra rio . E b b o re g rá fica m e n te b cu rv a de d e s p b z a m ien to a n g u la r d e l ensam ble de b ru ed a en f u n d ó n del ángulo d e b m anivela. C onv ie rta a tiem p o d eje del ángulo de b m an iv eb . L u e g a calcule g rá ficam en te b pendiente p a ra ob ten er las curvas de v e lo d d ad angular y d e a e d e ra d ó n a n g u b r d e b ru ed a del ensam ble en función del tiem po .
C urv as de a c e le ra c ió n : m é to d o a n a lít ic o
7 -8 1 . La m an iv eb d d m ecan ism o com preso r m o strad o en b figura P7.26 es im p u lsad a a u n a velocidad constan te de 1450 rp m en se n tid o h o rario . Use u n a h o ja de cálculo p i r a o b te n e r an a líticam en te la cu rv a d e d e s p b z a m ie n to lin ea l del p is tó n en fu n c ió n d e l án g u lo d e la m anivela. C onv ie rta a tiem p o el án g u lo de la manivela. Luego, u se d iferencia les num éricas p a ra o b te n e r las curvas de v e lo d d ad y de a e d e ra d ó n d d p is tó n en fund ó n d d tiem po.
7-82. La m a n iv e b d d m ecan ism o de b m áq u in a de coser m ostrado e n b figura P7.29 es im pulsada a u n a v d o d dad constan te de 160 rp m en sen tido an tiho rario . Use u n a h o ja de cálcu lo p a ra o b te n e r a n a lític a m e n te la curva de d e sp b z a m ie n to lineal d e la agu ja en fu n d ó n del án g u lo d e la m anivela. C onvierta a tiem p o d eje del án g u lo d e b m an iv e la . Luego, u se d iferenc ia les n u m éricas p a ra o b te n e r las curvas de velocidad y d e acele ra d ó n d e la aguja en fu n d ó n d d tiem po.
7-83. La m a n iv e b de b sie rra de p o d e r p a ra m etales m ostra d a en b figura P7.32 es im p u lsad a a u n a v e lo d d ad constante d e 85 rp m e n se n tid o horario . Use u n a ho ja de cálculo para o b te n e r analíticam ente b cu rv a de d e splazam iento lineal d e b cuchilla de b sierra en fu n d ó n del án g u lo d e la manivela. C onvierta a tiem p o el eje del ángulo d e la m an iveb . Luego, use d iferendales num éricas p a ra o b te n e r las cu rv as d e v e lo d d a d y de a e d e - ración de la cuchiDa de b sierra en fu n d ó n d d tiem po.
7 -8 4 . El m o to r d d cab a llo trag am o n ed as m o s tra d o e n la figura P7.35 es im pulsado a u n a v d o d d a d constan te de 80 rp m en se n tid o h o ra rio . U se u n a h o ja de cálcu lo para o b te n e r an a líticam en te b cu rv a d e d e s p b z a m ien to a n g u b r del caballo e n función del án g u lo d e b manivela. C onvierta a tiem po el eje del ángulo d e la ma nivela. Luego, use d ife ren d a le s num éricas para ob ten er b s cu rv as d e v e lo d d a d a n g u b r y de acelerac ión a n g u b r del caballo en fu n d ó n d d tiem po.
7 -8 5 . H m o to r del m ecanism o ro d a d o r p a ra lavar a u tomóviles de b figura P 7 J 8 es im pulsado a u n a veloddad constan te de 110 rp m en sen tido an tiho rario . Use u n a ho ja d e cálculo para obtener analíticam ente la curva
www.FreeLibros.me

A n álisis d e a celerac ión 213
de desplazam iento angu la r de la boquilla en (unción del ángulo d e la manivela. Convierta a tiem po el eje del án gulo d e la m anivela, lu eg o , use diferenciación num érica p rra obtener las curvas de velocidad angu la r y d e aceleración angular de la boquilla en función del tiem po.
7 -86 . La m anivela sob re el engrane del m ecanism o del tre n de a terriza je m o s tra d o en la figura P 7 .41 e s im p u lsad a a una veloddad constan te d e 16 rp m en sen tido antiho- rario . Use u n a h o ja de cá lcu lo p a ra o b te n e r analíticam ente la cu rv a d e desplazam iento angular del ensam ble d e la ru ed a e n fu n d ó n del án g u lo de la m anivela. C onv ie rta a tie m p o el e je del án g u lo de la m an ivela. lu eg o , use diferenciación num érica para o b te n e r las curvas de v e lo d d a d angu la r y de a c e le ra d ó n angu la r del ensam ble d e la ru ed a en fu n d ó n del tiem po.
A celerac ión u s a n d o W o rk in g M odel
7 -8 7 . La manivela del m ecan ism o com preso r m o strad o en la figura P7.26 e s im p u lsad a a u n a v e lo d d ad constan te de 1750 rp m en sen tido h o rario . Use el softw are W brking M odel para crear u n a s im u la d ó n y graficar la cu rv a de a ce le rad ó n lineal del p is tó n en fu n d ó n del tiem po .
7 -88 . l a m anivela del m ecan ism o de la m áq u in a d e coser m ostrada en la figura P7.29 es im pulsada a u n a v e lo d dad constan te de 175 rp m en se n tid o an tih o ra rio . Use d softw are W orking M odel para crear u n a s im u lad ó n y graficar la cu rv a d e ace le rad ó n lineal d e la agu ja en fu n d ó n del tiem po.
7 -8 9 . La m anivela d e la s ie rra d e p o ten c ia p a ra m etales m ostrada en la figura P7.32 es im pulsada a u n a v e lo d d ad c o n s ta n te d e 90 rp m en se n tid o h o ra r io . U se el softw are W orking M odel para crear u n a sim ulación y graficar la cu rv a d e aceleración lineal d e la cuchilla de b sie rra e n fu n d ó n del tiem po.
7 -9 0 . H m o to r del caballo tragam onedas de la figura 17.35 es im pulsado a u n a v e lo d d a d c o n s tan te d e 7 0 rp m en sen tido h o r a r ia Use el softw are W orking M odel para c rear u n a sim ulación y g rafica r la cu rv a d e aceleración a ig u la rd e l caballo en fu n d ó n del tiem po.
7 -9 1 . El m o to r del m ecan ism o r o d a d o r p a ra lavar a u tom óviles de la figura P7.38 e s im pulsado a u n a v e lo d dad constan te de 100 rp m en se n tid o an tih o ra rio . Use é softw are W orking M odel para crear u n a s im u lad ó n y graficar la cu rv a de ace le rad ó n angu la r del b razo de b b o q u illa en fu n d ó n del tiem po.
7 -9 2 . La m a n iv e b sob re el eng ran e del m ecan ism o del tren d e aterrizaje m o strad o en la figura P7.41 e s im pulsada a u n a velocidad constan te de 18 rp m e n se n tid o an tt- h o r a r ia Use el softw are W orking M odel para c re a r una s im u la d ó n y g rafica r la cu rv a de a c e le ra d ó n angu la r d e la ru e d a del ensam ble en fu n d ó n del tiem po.
ESTUDIOS DE CASO_________________________
7 -1 . La figura E7.1 m uestra u n a m áqu ina especializada im pulsada p o r dgO enal /. L a sa lien te su p e rio r H d e la m áquina im pulsa otro m ecan ism a el cual n o se muestra. Exam ine cu idadosam ente las com ponen tes d e l m ecanism o y, luego, con teste las p reg u n tas siguientes para obtener m ayor conocim iento acerca d e s u operación.
fig u r a E7.I (C ortesía de In d u stria l Press).
1. C o n fo rm e el cigüeftal I g ira 30° e n se n tid o h o ra r io a p a rtir de b posic ión m o strad a , ¿cuál es e l m ovim iento de b co rred era /?
2 . C onfo rm e el cigüeñal / gira uno s cu an to s g rados más en sen tido h o r a r ia ¿qu é sucede co n el m ecanism o?
3 . ¿Para q u é sirve b p a rte C?4. C o n fo rm e e l d g ü e n a l / c o n tin ú a g i r a n d a describa el
m ov im ien to de b co rred era .5 . ¿Para q u é sirve la p a rte B?6 . D escriba el objetivo d e este m ecanism o.
7 -2 . L a fig u ra E7.2 p resen ta u n a m áq u in a q u e a lim e n ta rem aches a u n a m áqu ina e n sa m b b d o ra a u to m a tizad». Exam ine cu idadosam ente b s com ponen tes del m ecan ism o y, lu e g a conteste b s p reg u n tas siguientes p i r a o b te n e r m ay o r conocim ien to acerca d e su o p eración.
f i g u r a E7.2 (C ortesía de In d u stria l Press).
1. C onform e b m esa g ira to ria d e b m áqu ina g ira en se n tido a n tih o ra r ia ¿qué sucede c o n la palanca £?
2. ¿Para q u é sirve el resorte A?
www.FreeLibros.me

214 CAPITULO SIETE
3. C o n fo rm e g ira la m esa ro ta to ria , ¿cuál es el m o v im ien to d e la p a rte D?
4. ¿Para q u é sirve el resorte U5. ¿Cuál e s el n o m b re general del tipo de u n ió n en tre las
p i n es B y IX D escriba lo s detalles d e su Junción.6. ¿Cuál es el objetivo de las co m p o n en tes de la parte H?7. D escriba el m ov im ien to y las acciones q u e o cu rren d u
ra n te la operac ió n de esta m áquina.
7 -3 . La figura E7.3 ilu stra u n a m áq u in a especializada q u e acepta cajas enro lladas parcialm ente desde la ran u ra B. la m áqu ina pliega lo s desenrolladores su p e rio r e inferior, y m ueve la caja h a d a o t r a o p e ra d ó n . En la p o s id ó n q u e se ilu stra , se m u e s tra u n a caja en A q u e está sa liendo d e la m áqu ina . Exam ine cu idadosam en te las co m p o n en tes del m ecanism o y, luego, con teste las s iguientes p regun tas p a ra o b te n e r m ayor co n o d m ien to acerca de su o p e ra d ó n .
1. C o n fo rm e el e s b b ó n / g ira 90“ e n se n tid o h o ra r io a p a rtir d e la posic ión m ostrada, ¿cuál e s el m ovim iento de b palanca acodada H?
2. C o n fo rm e e l e s b b ó n / g ira 90“ e n se n tid o h o ra r io a p u t i r d e b p o s id ó n m ostrada, ¿cuál e s el m ovim iento del a lim en tad o r E y de b p b e a O
3. C o n fo rm e e l e s b b ó n / g ira 90“ e n se n tid o h o ra r io a partir d e b p o s id ó n m ostrada, ¿cuál es el m ovim iento del p e rn o S i (O b serv e q u e el p e rn o S es tá su je to a la co rred era D y n o está restringido a m overse en b r a nura).
4. C o n fo rm e el e s b b ó n / g ira 90“ e n se n tid o h o ra r io a p a rtir d e la p o s id ó n m ostrada, ¿cuál e s el m ov im ien to d e l p e rn o g u b R? (O bserve q u e e l p e rn o R está lim ita d o a m overse en la ran u ra ).
FIGURAE7J (C o r tc s b d e Industria l Press).
5 . C o n fo rm e el e s b b ó n / g ira 90° en se n tid o h o ra rio a p a rtir de b p o sid ó n m ostrada, ¿cuál es el m ovim iento d e b palanca acodada
6 . C o n fo rm e el e s b b ó n / g ira 90" en se n tid o h o ra rio a p a rtir de b posic ión m o strad a , ¿cuál es el m ovim iento d e b c o rre d e ra L y de b p b e a M i
7 . ¿Por q u é e s necesario el eslabón c o r to N i ¿Puede el esb b ó n P co n ec ta rse d irec tam en te a b co rred era ü
8 . C om en te a lgo acerca del esp ad am ien to re b tiv o entre b s p lacas C y M d e sp u é sd e q u e el eslabón / g ira 90" en sen tido horario .
9 . C om ente a lgo acerca del m ovim iento c o n tin u o de b s placas C y Af a lo largo del a lim en tad o r E.
www.FreeLibros.me

C A P I T U L O
O C H O
ANÁLISIS DE M ECA N ISM O S ASISTID O P O R C O M PU TA D O R A
O B J E T I V O S
Al te r m in a r d e e s tu d ia r e s te c a p itu lo , e l a lu m n os e rá c a p a z d e :
1 . E n t e n d e r l o s f u n d a m e n t o s d e u n a h o j a d e c á l c u l o e n g e n e r a l .
2 . C o m p r e n d e r l a e s t r a t e g i a p o r a u s a r u n a h o j a d e c á l c u l o e n
g rn e rm l e n d a n á l i s i s d e m e c a n i s m o s .
3 . C r e a r r u t i n a s d e c ó m p u t o p a r a d e t e r m i n a r l a s p r o p i e d a d e s
c i n e m á t i c a s d e m e c a n i s m o s d e c u a t r o b a r i a s o d e m a n i r c l a -
t o r r e d e r a .
8.1 IN TR O D U C C IÓ NA lo larg o del l ib ro , se h a n presen tado técn icas ta n to g rá ficas c o m o analíticas p a ra el análisis de m ecanism os. C o m o son m ás precisas, es m ejor u tilizar soluciones analíticas para diversas posiciones de u n m ecan ism o, au n q u e el n ú m e ro d e cálculos se p o d ría volver difícil de m anejar. En tales situaciones, lo m ás adecu ad o son las so luciones p o r co m p u tad o ra , las cuales tam bién son valiosas cu an d o se deben analizar varias iteraciones del d i serto. En la se cd ó n 2 2 , “S im u lad ó n p o r com p u tad o ra de mecanism os'. se m en d o n aro n sistemas de software d ed icado al análi
sis dinám ico. Este capitulo se cen tra en o tros m étodos p o r co m p u tadora para el análisis d e meconismos. D ichos m étodos incluyen d uso de hojas de cálculo y la cread ó n de rutinas co n el uso de lenguajes de program ación.
8.2 HOJAS DE CÁI.CUI.Ola s hojas de cálculo, com o Excel de M icrosoft*, son m u y p o p u lares e n el am bien te p rofesional para u n a m ultitud d e tareas. Las hojas d e cálcu lo tienen m u ch as fu n d o n e s num éricas integradas, facilidad para graficar lo s resultados y capaddad p a ra reconocer fórm ulas. S on características analíticas q u e fav o re d ero n el uso generalizado de las hojas de cálcu lo para resolver los problem as d e m ecanism os m ás ru tinarios. Se h an utilizado h o ja s de cálculo en varias d e las s o lu a o n e s de lo s p rob lem as de este texto. Esta secdón describe los fundam entos en el uso d e h o ja s de cálculo. Desde luego, se recom ienda consu ltar lo s m anuales del softw are especifico p a ra m ayores detalles.
U na h o ja de cálcu lo e s tá co n fig u rad a co m o u n a m atriz g lande de filas y colum nas. El n ú m ero d e filas y co lu m n as varía en tre los diferentes p rodu c to s de softw are. Los encabezados de las co lum ñas se iden tifican co n caracteres alfabéticos de la A a la Z luego d e la AA a la AZ, luego de la BA a la BZ, y asi sucesivam ente. Las filas se id en tifica n n u m erán d o la s co m o 1, 2 , 3,
F IG U R A 8.1 Hoja de c á l c u l o en general.
www.FreeLibros.me

216 CAPITULO OCHO
etcétera. En la figura 8.1 se m uestra la esqu ina su p e rio r d e una hoja de cálculo en general. L a intersección de u n a co lum na con u n a fila se conoce c o m o celda. C ad a celda se identifica co n una d ire c d ó n . q u e se c o m p o n e co n la c o lu m n a y la fila q u e la definen . La celda D 3 está d efin ida p o r la c u a r ta c o lu m n a (D ) y la tercera fila . El c u rso r se m ueve a trav és de las ce ldas c o n el teclado (ted as de Hechas) o co n el ra tó n .
El v a lo r de u n a h o ja d e cálcu lo rad ica en el a lm a c e n am ien to , la m an ip u lac ió n y el d esp leg ad o d e los d a to s c o n tenidos en u n a celda. L os d a to s generalm ente so n texto, núm eros o fórm ulas. La ho ja d e cálcu lo q u e se m uestra en la figura 8.2 tiene texto en las celdas A l, F1 y F2, asi c o m o núm eros en las celdas A2 a A24, G1 y G2.
A unque quizás haya d iferencias sutiles en la sin tax is en tre los p rog ram as de h o ja de cálculo, la lógica subyacente p a ra crear las fó rm u las e s id én tica . La s in tax is q u e a q u í se p ro p o rc io n a co rresp o n d e a Excel d e M icrosoft. Se recom ienda co n su lta r el m an u a l del u su a rio de a lg ú n o tro p ro d u c to p a ra con o cer las d iferencias e n la sintaxis.
L a in tro d u c c ió n de u n a fó rm u la en u n a celda inicia c o n el signo igual ( ■ ) . Luego, se construye la fó rm u la co n el u so d e valores, o p e ra d o re s ( + , *, / ) , referencias a celdas (p. e j. G2) yfunciones (p. e j. SENO, PRO M ED IO , ATAN y RADIANES). Las fó rm ulas del análisis cinem ático su e len s e r bastan tes com plejas. C o m o u n ejem plo, se coloca u n a fó rm u la sim p le en la celda A8:
= A7 + 10 (8.1)
A un cuando la celda con tendría esta fó rm ula, m ostrarla v isualm en te el n ú m e ro 6 0 en la ce ld a A8. E l cálcu lo se rea liza en form a au to m ática . C o m o o tro e jem plo , se in se rta la siguiente expresión en la celda B2:
= A SEN O (G l 4 SENO(A2 * PI( V 180)/G 2) * 180/PI() (8.2)
La exp resión represen ta el án g u lo e n tre la b iela y el p lan o de deslizam iento de u n m ecanism o de m anivela-corredera en linea q u e se m o stró c o m o la ecuac ión (4 .3 ) en el cap itu lo 4:
La fó rm u la en la h o ja de cálcu lo su p o n e q u e se in tro d u jeron lo s siguientes valores:
■ d¡ en la celda A2
■ £ ; en la celda G 1
■ L¡ en la celda G2
Se d eb e rla o b se rv a r que, c o m o en la m ayoría de las fu n ciones de com putadora, cualqu ier referencia a valores angulares se tiene q u e especificar en radianes. O bserve q u e A2, u n ángulo a p re sa d o en g rados.se m u ltip lica p o r i r /180 para convertirlo en radianes. D espués d e usar la función inversa del seno, ASENO, el valor resultante tam bién es u n ángulo en radianes. P or lo tanto, se deb e convertir de nuevo a grados m ultiplicándolo p o r 180/rr. Excel tam bién tiene predefinidas las funciones de RADIANES y G RA DOS q u e p u ed en se r de ayuda en las conversiones. l a e c u a d ó n (4 .3 ) se in se rta a lte rn a tiv a m e n te e n la celda B2 de b h o ja de cálcu lo com o:
- GRADOS(ASENO(G 1 * SENO <RADIANES(A2»/G2)) (8.3)
Si la expresión (8 .1 ) se ted eara en A 8 y la expresión (8 .2 ) u (8 .3 ) se ted eara en B2, la ho ja d e cálculo resu ltan te se ría co m o b q u e se ilu s tra e n la fig u ra 8.3. Es im p o rta n te reco rd ar q u e c u a n d o se m od ifica el c o n ten id o de u n a ce ld a q u e con ten ía datos de en trad a , todos los resultados se actualizan. Lo an terio r p erm ite q u e se efectúen ite rad o n es de d iseño co n fadlidad .
$A *»
A - * * W * • m rn 9- j ■ / u A . » V. •/ _ • * A -4 .1
c m A ¡ - * — r V
a »
« “ iA .
A B C D E F Gi C r a n k A n g U n k 2 1 52 0 U n k 3 4 53 104 205 30e 407 508 609 7010 8011 9012 10013 11014 12015 13016 140
"i ^ 5 Sf i g u r a 8 J Hoja d e c á l c u l o c o n t e x t o y n ú m e r o s e n l a s c e l d a s .
www.FreeLibros.me

A n álisis d e m e c a n ism o s a sistid o por co m pu tadora_________217
f ig u r a 8.3 H oja d e cálculo co n fórm ulas in tro d u c id as en A 8 y B2.
O tra característica im p o rtan te de u n a ho ja d e cálcu lo es la (unción d e cop iar y pegar. EJ con ten id o de u n a celda se puede d up licar e in se rta r en o tra celda. La característica de cop iar y peg ar e lim in a la in tro d u c c ió n re d u n d a n te de ecu ac iones e n las celdas.
L a referencia a celdas en u n a fó rm u la es relativa o absoluta. Las referencias relativas se a ju s tan au tom áticam en te cu an d o la cop ia de u n a celda s e coloca e n u n a nueva celda. C onsidere la siguiente fó rm u la in tro d u c id a en la celda A8:
= A7 + 10
La referencia a la celda A7 e s u n a referencia relativa a la celda in m ediatam ente a rriba d e la celda A8 q u e con tiene la fó rm u la . Si esta ecuac ión se cop iara y se co locara en la celda A9, la fórm ula nueva se convertiría en:
= A8 + 10
O tra vez. la referencia a b celda A 8 es relativa; p o r lo tan to , b ho ja de cálcu lo ajusta rla au tom áticam en te b fó rm ula.
La dirección abso lu ta n o m od ifica autom áticam ente la refe- re n c b a la celda desp u és d e u sa r la (unción de c o p ia r y pegar. Sin em bargo , para especificar u n a referencia ab so lu ta , se debe colocar u n s ím b o lo de peso s an tes de b fila y la co lum na. Por ejem plo, u n a refe ren cb ab so lu ta a la celda G 1 tien e q u e aparecer co m o SGS1.
S uponga q u e b exp resión (8 .2 ) se va a co lo ca r en b celda B2. Para hacerlo d e u n a m anera m ás eficiente , esta f ó rm u b se m odificaría ligeram ente;
*= A SEN O ($G $l *(SE N O (A 2* P I()/180)/$G $2))* 180/PIQ
Así, ta n so lo el ángulo d e b celda A2 es u n a d ire c d ó n relativa. Si ki f ó rm u b se fu era a c o p ia r en b celda B3, la n u ev a fó rm u b sería:
= A SEN O ($G $l *(SE N O (A 3* P l() /1 8 0 )/$ í¡$ 2 ))* 180/PIO
O bserve q u e el d ireccio n am ien to de la celda A2 se a ju s tó a u to m áticam en te p a ra leer "A3". El án g u lo de la b iela se calcula fwra el án g u lo de la m an iveb especificado e n la celda A3.
P ira c o n tin u a r co n el análisis d e u n m ecanism o, se debe te d e a r b siguiente fó rm u b en la celda C2 :
= 180 - (A 2 + B2)
Esta fó rm ula, m o strad a en b fig u ra 8.4 , calcula d án g u lo in terio r e n tre b m an iv eb y b b iela (e c u a d ó n 4 .4):
y = 180° - {0 j + 0 ,) (4.4)
C om o lo s ángulos sim p lem en te se sum an, y b fu n d ó n n o se ha requerido, n o se necesita el equivalente en radianes.
’lám bién se deb e teclear b siguiente fó rm u b en la c d d a D2:
= RAIZ(($G$1)A2 + (SGS2)A2 - (2 * $G$ I * $ G $ 2 * COS(C2 • P I( ) /1 8 0 )))
Esta fó rm u la ca lcu b la d is ta n d a del pivote de b m anivela a b unión de p e rn o de la co rred era (e c u a d ó n 4.5):
L , = V l ¡ + L \ - 2 ( I ?) (L ,) c o s y (4.5)
Si las d o s fó rm u las se teclearan en C 2 y D 2 , y se te d e a ra n des c r ip d o n e s de texto en las celdas B l , C1 y D I , b h o ja de cálculo resultante serfo c o m o b de la figura 8.4.
R>r ú ltim o , co m o se deb e tener m u ch o cu id ad o al usar di- recdones abso lu tas y relativas d e celdas al crear b s fó rm ulas en B2, C 2 y D2, e s p o sib le cop iar en b s cd d as de abajo en s u s resp ectivas co lu m n as. Se re c o m ie n d a co n su lta r e l m a n u a l del usuario p a ra los pasos reales necesarios p a ra c o p ia r los d a to s en las cd d as restan tes lo s cuales n o rm alm en te son procedim ientos sencillos de d o s o tres pasos. L a ho ja de cá lcu lo resu ltan te se m uestra en b figura 8.5.
www.FreeLibros.me

218 CAPITULO OCHO
FIGURAS.* fó rm u la agregada a la celda C2.
a- * ■ ' H
• J - • > •
■ 10 A •
A■ ■ ■ >¡(ir * *>■ * %
•4 .1 * í " V-v-
i | /•¡ n4 '
m n
GA B . .. . J e ...... o [ E 7 F1 C ra n k A ng Theta3 G am m a S lk le r D ts t U n k 2 1.52 0 0 0 1 8 0 0 6 0 0 U n k 3 4 53 10 3 3 1 6 6 7 5 974 20 6 5 153 5 5 885 30 9 6 140 4 5 7 46 40 1 2 4 127 6 5 5 47 50 1 4 8 1 1 5 2 5 326 60 1 6 8 1 0 3 2 5 0 69 70 1 8 3 9 1 7 4 791 0 80 1 9 2 8 0 8 4 5 1
90 1 9 5 7 0 5 4 241 2 100 1 9 2 6 0 8 3 9 913 110 18 3 51 7 3 7614 120 16 8 4 3 2 3 5 61 5 130 14 8 3 5 2 3 3916 140 12 4 2 7 6 3 25
— * ------------->--------
FIGURA s ¿ H oja d e cálcu lo final.
PR O B LEM A D E E JE M PL O 8.1
La figura 8.6 ilustra u n m ecanism o que opera u n a boquilla de agua en u n lavado autom ático de autom óviles. C on el uso de u n a hoja d e cálculo, de term ine analíticam ente el m ovim iento angu la r de la boquilla a través del ciclo de rotación de la manivela.
SO LU C IÓ N :0 m ecanism o de la boquilla e s el conocido m ecanism o de cuatro barras. La figura 8.7 m uestra la representación cinemática de este mecanismo. Se ctcó una hoja de cálculo para este análisis y se ilustra la porción superior en la figurad^.
www.FreeLibros.me

A n álisis d e m eca n ism o s asistid o po r co m putadora_________219
f i g u r a s ¿ M e c a n i s m o d e l a b o q u i l l a d e a g u a d e l p r o b l e m a d e e j e m p l o 8 . 1 .
F I G U R A 8 . 7 D i a g r a m a c i n e m á t i c o d e l p r o b l e m a d e e j e m p l o 8 . 1 .
»——» 1—• •«— —
r ú d % J ~ — •»<4 - - n
w ¡ A B C D E F G H1 C rankA ng BC Gamma TH3 TH4 U nk2 1.52 0 Unk3 4 53 104 205 306 407 508 609 7010 6011 9012 10013 11014 12015 13016 140
F I G U R A 8 . 8 M o j a d e c á l c u l o p a r a l a s o l u c i ó n d e l p r o b l e m a d e e j e m p l o 8 . 1 .
l a s e c u a d o n e s g e n e r a l e s q u e r i g e n e l m o v i m i e n t o d e l o s e s l a b o n e s d e u n m e c a n i s m o d e c u a t r o b a r r a s s e p r e s e n t a r o n e n
d c a p i t u l o 4 . l a e c u a d ó n 4 . 9 e s L a e c u a c i ó n p n e r a l d e L i d i a g o n a l d e l p u n t o B a l p u n t o D , c o m o s e i n d i c a e n L a f i g u r a 8 . 7 :
BD= V i ? + L\ - 2 ( l ,) ( ío )c o s (e ,)
I d v e r s i ó n p a r a h o j a d e c á l c u l o d e e s t a e c u a c i ó n s e c o l o c a y s e c o p i a h a c i a a b a j o d e l a c o l u m n a B . E n l a c e l d a B 2 s e i n
s e r t a l a s i g u i e n t e f ó r m u l a :
= RAIZ(SHS1A2 + $ H S 2 A2 - 2 - SH Sl • SHS2 * CQS(RADIANES(A2)))
www.FreeLibros.me

220 CAPITULO OCHO
Observe q u e se utilizan direcciones absolutas y relativas para facilitar el copiado de la fórm ula. La ecuación 4.10 es la ecuación general del ángulo de transm isión y ,co m o se indica en la figura 8.7:
y = c o s - « ^L ¡ + BD2
Esta ecuación se coloca y se copia abajo de Li co lum na C en la form a adecuada para hoja de cálculo. En la celda C 2 se inserta la siguiente fórmula:
= CRADOS(ACOS(($HS3A2 + $H S4A2 - B2A2)/(2 • SHS3 • SHS4)))
Replanteando la ecuación (4.11), se obtiene la ecuación general para el ángulo 0 , del eslabón 4. com o se muestra en la figura 8.7:
04 - 2 tan” 't j s e n f i , “ ^ « n y
L ¡e o s + I « - L¡ - Lycos y
Esta ecuación se coloca y se copia abajo de la colum na F. en la form a adecuada para hoja de cálculo. En la celda E2 se inserta la siguiente fórmula:
- GRADOS(2 * ATAN((SH$2 * SENO(RADIANES(A2)) - $H S3 * SENO(RADIANES(C2)))/
(&HS2 • COS(RADIANES(A2)) + S H S 4 - S H S I - SHS3 • COS(RADIANES(C2))»J
finalmente, la ecuación (4.12) nos da b ecuación general para el án g u lo # , del eslabón 3, como se muestra en la figura 8.7:
- L , s e n 0 2 + i , sen y- 2 u n -1
¿ , + L y - L¡COS01 - L , co sy
Esta ecuación se coloca y se copia abajo de la colum na D en la form a adecuada para hoja de cálculo. E n la celda D2 se inserta la siguiente fórmula:
- GRADOS(2 * ATAN(( $H S2 • SENO(RADlANES(A2)) ♦ $H $4 • SENO(RADIANES(C2))V
(S H S I + SH S3 - $H S2'C O S(R A D IA N ES(A 2)) - SHS4 » COS(RADIANES(C2)))))
Las fórmulas de las celdas B2. C 2. D2 y E2 se copian y pegin en sus colum nas respectivas. En la figura 8.9 se ilustra la porción superio r de la hoja de cálculo resultante.
• * — • io " - - o— • A r P-J -j • / ■ a . ■ ■ ■ i i » * • _ *>«— • i - n
/ _ ■ * a - * * * *ÍX S — - a-*— V W —im ■*—«• «__________ < 1
* ¿ - J u
m . A B _ C D E F G H |i i:ra n k Ang B C Gamma TM3 TH4 LlnK 1 6 52 0 6.0 44 4 340 78 5 U nk 2 1 53 10 5 0 44 8 31 1 76 0 U nk 3 7 04 20 5.1 46 1 28 5 74 6 Llnk 4 4 05 30 5 3 48 1 26 3 74 46 40 5 4 5 0 7 245 75 37 50 5 7 53 9 23 1 7 7 0e 60 5 9 57 3 22 1 79 49 70 6 2 6 1 0 21.4 82 410 80 6 4 648 210 85811 90 6 7 6 8 5 209 89 412 100 6 9 72 2 21.1 93 313 110 7 2 75 7 21.4 97 114 120 7 4 78 9 22 0 101015 130 7.6 81 8 229 104.716 • • • 140 7 7
> — > ....... ■J 0 0 2
figura 8-9 Hoja d e cálculo terminada del problema de ejem plo 8.1.
www.FreeLibros.me

A n álisis d e m eca n ism o s as is t id o po r co m putadora_________221
8.3 PROGRAMAS DE C Ó M PU TODESARROLLADOS PO R EL USUARIO
Para resolver p rob lem as d e m ecanism os, el usuario puede desarro llar ru tinas u sando softw are co m o MATHCAD O MÁTLAB, o bien, u n lenguaje d e alto nivel co m o Visual Basic o V isualC + + . El lenguaje d e p ro g ram ac ió n seleccionado deb e te n e r acceso directo a las fu n d o n es trigonom étricas norm ales e inversas. Por el tiem po y el esfuerzo requeridos p a ra escrib ir u n p ro g ram a es- p e d a l, ún icam en te se u tilizan cu an d o es necesario resolver u n problem a com plejo q u e se encuen tra co n frecuencia.
L a lógica subyacente e n lo s p rog ram as desarrollados e n es- pedal p a ra realizar análisis c inem áticos es prácticam ente idéntica a la de la ho ja de cálculo. L a estructura y la sintaxis de los diferentes lenguajes de p rogram ación d e alto nivel varían e n form a agnificativa. I.as siguientes secciones ofrecen u n a estrategia para escribir program as de có m p u to para obtener las p ropiedades d - nem áticas de los dos m ecanism os más com unes: el d e manivela- corredera y el d e c u a tro barras.
8.3 .1 M e c a n is m o d e m a n iv e la - c o r r e d e ra d e s c e n tr a d oEl siguiente a lg o ritm o calcula p o sid ó n , v e lo d d ad y aceleradón de todos los eslabones d e u n m ecanism o de m anivela-corredera descentrado conform e la manivela g ira a veloddad constan te. En la figura 8.10 se ilu stra el d iag ram a d n em ático de u n m ecanism o genera l d e m an iv e la -co rred era d e sc e n tra d a Las re la d o n e s d - ncm áticas en general, u sadas e n el a lg o r i tm a se p resen tan en varias se cdones de este l ib ro [ r e t 12).
fig u r a 8.10 M ecanism o de m anivela-corredera descentrado,
la s dim ensiones del m ecanism o se introducen co m o datos y el a lgoritm o efectúa los cábula» de u n d d o com pleto d e l g iro d e la manivela. L a sa lida puede im prim irse o escribirse e n u n archivo. L uega este archivo se convierte en ho ja de c á b u la s i asi se desea.
Paso 1: A ceptar los datos num éricos de ¿ j , L * L$ y o»*, y alm acenarlos
Paso 2: C alcu la r i r - 4 ta n '(1 .0 )Paso 3 : E n tra r a u n a ite ra d ó n co n el Indice i desde 0 hasta 360 Paso 4: C alcu la r a = K w /180)Paso 5: C alcu la r b = L¡ sen a Paso 6 : C alcu la r c = L} eos a Paso 7: C alcu la r d = sen U t t i + M/Ljl Paso 8: C alcu la r 0 , = * 180/rr)Paso 9: C alcu la r t = L¡ sen d Paso 10: C a lc u la r / = L¡ eos d Paso 11: C a lc u la r g ~ L j se n d Paso 12: C a lc u la r h ~ L j «os d Paso 13: C a lc u la r L« ■ c + h Paso 14: C a lc u la r « , = -to j{ d f)Paso 15: C a lc u la r = -«2(1») - a>j(g)Paso 16: C a lc u la ra , = + ¿ « a ) 2)/*Paso 17: C a lc u la r «i, = - J g f a , ) + 4 * # + « « i ) 2}Paso 18: Im p rim ir (o escribir en u n archivo) i, 9 j. <*j. I* . vt , o*Paso 19: In cre m e n ta r i y regresar a l paso 3
Recuerde q u e las fo n d o n e s de u n a co m p u tad o ra suponen «jue los ángulos están dados en radianes. Ifor lo ta n ta es necesario convertir la en trada y la salida angulares co m o se h izo en los pesos 4 y 8. Este algoritm o tam bién funciona para u n m ecanism o de m anivela-corredera en linea especificando L, = 0 com o en trad a
8 .3 .2 M e c a n is m o d e c u a t r o b a r r a sEl siguiente a lgo ritm o calcula p o sid ó n , velocidad y aceleración d e todos los eslabones d e u n m ecanism o d e cuatro barras, e n el cual la m anivela g ira a v e lo d d ad constan te . En la figura 8.11 se m uestra el d iag ram a d n e m á tic o de u n m ecan ism o de cuatro b arras en general. D e nueva cuen ta , la s re lad o n es cinem áticas g rn era le s q u e se u tilizan en este a lg o r itm o se p re se n ta ro n en varias se cd o n es d e este tex to (ref. I2 | .
C om o en el a lgo ritm o an terio r, las d im ensiones del m ecan ism o se in tro d u c en co m o datos, m ien tra s el a lgo ritm o realiza los cálculos del c id o com pleto d e u n g iro d e la m an iveb . La salid a p u e d e im p rim irse o e sc rib irse en u n arch iv o . Luego, este archivo se conv ierte en u n a ho ja de cálculo, s i asi se desea.
Paso 1: A ceptar lo s datos num éricos d e L t, L¡, L» L , y « 2, y a lm acenarlos
Paso 2 : C alcu la r ir = 4 ta iH ( 1.0)Paso 3 : E n tra r a u n a iteración co n el Indice i desde 0 has ta 360 Paso 4 : C alcu la r a = i(tr/180)Paso 5: C a lc u b r b - (L,* + L ¿ - W ~ W V U h U )Paso 6 : C a lc u b r c = L¡/L)L,Paso 7 : C a lc u b r d = L¡ sen a Paso 8 : C a lc u b r e = L , eos «1 Paso 9 : C a lc u b r f = eos < (b + ce)Paso 10: C alcu la r y = /(1 8 Q /ir)Paso 11: C alcu la r g - sen /Paso 12: C a lc u b r h - e o s /Paso 13: C a lc u b rp - 2 t a i r ' ( ( - d + L*g)/( - e + £* + 1* -£«h)} Paso 14: C a lc u b r 9 , - p( 180/ít)Paso 15: C alcu la r q a 2 ta n - > |(d - L*g)/(e +Paso 16: C a lc u b r 9« = «j( 180/ n )Paso 17: C a lc u la rlo , = ü>2L]Sen{q - a)HLyg)Paso 18: C a lc u b r u>, = a»2L2s e n ( p - ú ) / ( L ^ )Paso 19: Im p rim ir (o escrib ir en u n archivo) i. y , 9 , . « , , 94, oja Paso 20: In cre m e n ta r i y regresar al paso 3
R ecuerde q u e b s c o m p u ta d o ra s a su m en q u e lo s ángulos están dados en radianes. P o r e l l a es necesario convertir la s e n trad as y salidas angulares, co m o se h izo en lo s paso s 4 ,1 0 ,1 4 y 16. Este a lgo ritm o p ro p o rc io n a la so luc ión p a ra u n m ecanism o d e c u a tro b a rra s en el p r im e r c irc u ita Si el m ecanism o estuviera e n sam b lad o en el se g u n d o d rc u i to , ta l ru t in a se m odifica rla ráp idam ente p a ra represen tar esa configuración, lo cual se llev a d a a cab o s i se cam biaran los signos m ás y m enos en lo s n u m eradores de los paso s 13 y 15.
FIGURA 8.11 M ecanism o de cuatro barras.
www.FreeLibros.me

2 2 2 C A P IT U L O O C H O
PROBLEMAS
En los problem as 8-1 y 8-2 desarrolle u n a ho ja de cálculo donde se analice la posición d e to d o s lo s eslabones d e u n m ecanism o de m anivela-corredera descentrado en u n rango de los ángulos de b manivela d e O a 360°. H ágab flexible, d e m o d o que sea posible m odificar rápidam ente b longitud d e cualquier eslabón. Use los valores listados p a ra e labo rar u n a g ráfica de la d is ta n d a de la corredera con tra el án g u lo d e U manivela.
8 -1 descen trado - 0 .5 in ; m an iv eb = 1.25 in ; a c o p b d o r * 7 .0 in
8 -2 descentrado “ 10 m m ; m anivela ” 25 m m ; acop lador ■ 140 m m
En lo s p ro b lem as 8 -3 y 8 -4 desarro lle u n a h o ja de cálculo q u e analice la p o s id ó n d e to d o s lo s esb b o n es de u n m ecan ism o de c u a tro b a rra s en los ángu los de b m an iv eb q u e v an de 0 a 360". H ág ab flexible, d e m o d o q u e se m od ifiq u e ráp idam ente b lo n g itu d d e cualqu ier e s b b ó n . Use los valores listados p a ra elabo ra r u n a gráfica del á n g u lo del seguidor c o n tra el án g u lo de b m an iveb .
8 -3 tu n e a d a = 750 m m ; m a n iv e b “ 5 0 m m ; a c o p b d o r = 750 m m ; segu ido r = 75 m m
8 -4 tu n ead a = 14 in ; m anivela = 1 in ; acop lad o r = 16 in; seguidor = 4.0 in
En lo s p ro b lem as 8 -5 y 8 -6 desarro lle u n a h o ja de cálculo q u e d e te rm in e posic ión , velocidad y aceleración de b co rred era en los á n g u lo s de la m a n iv e b q u e se e n c u e n tra n e n tre 0 y 360". H ágala flexible , d e m o d o q u e s e m o d ifiq u en ráp id am en te b lo n g itu d de cualqu ier e s b b ó n . Use lo s valo res lis tad o s para e lab o ra r u n a gráfica de la velocidad d e b co rred era c o n tra el á n g u lo de la manivela.
8 -5 d e scen tra d o 1.25 in ; m a n iv e b = 3.25 in ; a c o p b d o r = 17 .5 in ; velocidad de b m a n iv e b = 20 ra d /s : a c e leración de b m an iv eb = 0 rad /s2
8 - 6 d e scen tra d o 3 0 m m ; m a n iv e b - 75 m m ; a c o p b d o r =■ 420 m m ; velocidad de b m anivela = 35 rad /s: aceleración d e b m an iv eb ” 100 rad /s2
En los p rob lem as 8 -7 y 8-8 desarrolle u n a h o ja de cáku lo que determ ine b posic ión y veloddad del sep jidor, en lo s ángu los de la m a n iv e b q u e se en cu en tran e n tre 0 y 360". H á¿p b flexible, de m o d o q u e se m odifique ráp idam ente b lon g itu d de cualquier e s b b ó n . Use lo s valores listados para e labo rar u n a gráfica d e b veloddad del segu ido r c o n tra el án g u lo de b manivela.
8 -7 tu n ead a " 9 in ; m an iv eb • 1 in ; a c o p b d o r ■ 10 in; se g u id o r = 3.5 in ; ve locidad de la m a n iv e b = 200 rad/s; aceleración de la m an iveb “ 0 rad /s2
8 -8 b ancada = 360 m m ; m a n iv e b = 4 0 m m ; a c o p b d o r = 400 m m ; seguidor = 140 m m ; veloddad de b m aniv eb = 6 rad/s; aceleradón de b m an iveb = 2 0 rad/s2
Fn lo s p ro b lem as 8 -9 y 8-10 elabo re u n p ro g ra m a de có m p u to q u e determ ine po sid ó n , velocidad y ace le rad ó n de todos lo s eslabones de u n m ecanism o d e m anivela-corredera en lo s ángulos d e la m an iveb q u e van de 0 a 360". Hágala flexible, d e m odo q u e se m odifique rápidam ente b lon g itu d d e cualqu ier eslabón. Use los v a lo res lis tad o s p a ra d e te rm in a r el á n g u lo de la m an iv eb q u e p roduce la aceleración de deslizam iento m áxim a.
8 -9 d e scen tra d o = 3 in ; m a n iv e b = 7.5 in ; a c o p b d o r = 52 .5 in ; ve locidad d e b m an iv eb = 4 rad/s; aceler a d ó n d e la m an iv eb = 0 rad /s2
8 - 1 0 descentrado » 40 m m ; m an iv eb • 94 m m ; acop lador “ 525 m m ; velocidad d e la m an iv eb “ 10 rad/s; aceler a d ó n de la m anivela " 10 rad /s2
En los p ro b lem as 8-11 y 8-12 elabo re u n p ro g ram a de có m p u to q u e d e te rm in e la p o s id ó n y v e lo d d a d de to d o s lo s eslabones de u n m ecanism o d e cuatro b a rra s para los ángu los de la manivela q u e van de 0 a 360". Use los valores listados p a ra d e te rm in ar el án g u lo de b m a n iv e b q u e p ro d u ce b a c e le ra d ó n de deslizam ien to m áxim a.
8 - 1 1 bancada = 18 in ; manivela = 2 in; acop lad o r = 20 in; seguidor = 7 in ; v e lo d d ad d e la m anivela = 150 rad/s; aceleración d e b m an iv eb = 0 rad /s2
8 - 1 2 b a n cad a « 60 m m ; m a n iv e b » 18 m m ; a c o p b d o r = 70 m m ; segu ido r — 32 m m ; velocidad de b manive- b = 360 rad/s; ace le rad ó n d e la m an iv eb = 2 0 rad /s2
ESTUDIO D E CASO
8 - 1 . 0 m ecanism o m ostrado en la figura E8.1 son el cigüeñal y la m an iveb d e u n m ecanism o de m an ¡vela-corredera elaborado q u e n o se m uestra, d o n d e K es b biela. Exam ine cu idadosam ente los com ponentes del m ecanism o luego, con teste b s sigu ien tes p regun tas para ob ten er m ayor cono d m ien to acerca de b operadón .
1. En b p o sid ó n m ostrada, co n fo rm e b co rred era E jala l u d a la izquierda, ¿cuál es el m ovim iento del e sb b ó n D?
2 . En b p o sid ó n m ostrada, co n fo rm e b co rred era E j a b h id a b izquierda, ¿cuál e s el m ov im ien to de deslizam ien to del b lo q u e P
3 . La po lea / e s tá su je ta al eje A . C o n fo rm e la po lea / gira, ¿cuál es el m ovim iento d e la espiga d e la m an iveb Cdel cigüeñal?
4 . C onform e la p o le a / gira, ¿cuál es el m ovim iento d e la barra fc'que s e desliza?
5 . ¿Qué efecto tien e el m ovim iento h a d a b izqu ierda de L> b a rra £ q u e se desliza so b re b espiga de b m aniv eb C y so b re el m ov im ien to del m ecan ism o de m anivela-corredera q u e impulsa?
6 . El m angu ito F es tá su je to a b carcasa H. C o n fo rm e b polea / im p u lsa la flecha A , ¿cuál es el m ovim iento del m anguito R
7 . El m angu ito /e s tá m oldeado in tegralm ente co n b parte G. ¿Qué e s la p a r te G?
8 . El m anguito / tiene u n a cuerda in te rn a en su extrem o derecho , en ta n to q u e el m angu ito F tiene u n a cuerda externa en su ex trem o d e re c h a (Conform e b p a r te G gira, ¿qué su ced e c o n el m an g u ito P.
9 . C onfó rm e b p a rte G g ira , ¿qué su ced e co n b b a rra £ que se desliza?
10. ¿Cuál es el p ro p ó sito de este m ecan ism o y có m o fun- d o n a?
www.FreeLibros.me

C A P I T U L O
N U E V E
LEVAS: D ISE Ñ O Y ANÁLISIS C IN E M Á T IC O
O B JE T IV O SAl t e r m in a r d e e s tu d ia r e s t e c a p i tu lo , e l a lu m n os e r á c a p a z d e :
1. Identificar los diferentes tipos de leras y seguidores de levas.
2. C reare! diagrama de desplazamiento del seguidor, a partir d r criterios prescritos de movimiento del seguidor.
3. Entender los beneficios de diferentes esquemas de movimiento del seguidor.
4 . Utilizar ecuaciones para construir diagramas de desplazamiento del seguidor de la leva.
5. C onstru ir geométricamente diagramas de desplazamiento del seguidor de la leva.
6. C onstru ir gráfica y analíticamente perfiles de levas d r disco con varios tipos de seguidores.
7. C onstru ir gráfica y analíticamente perfile» de levas cilindricas.
O-sor* de h válvula
FIG U R A 9 . 1 T r e n d e v á l v u l a s d e u n m o t o r d e g a s o l i n a .
9.1 IN TR O D U C C IÓ NU na leva es u n elem ento co m ú n de u n m ecanism o q u e im p u lsa u n a com po n en te aparejada co nocida co m o seguidor. Desde u n p u n to de vista funcional, u n arreglo de leva-segu idores muy sim ilar a los eslabonam ientos estud iados a lo largo del libro. La leva a c e p ta u n m o v im ie n to de e n tra d a p a rec id o a l d e u n a m anivela e im p arte m ov im ien to al seguidor.
L a fig u ra 9.1 m uestra u n a de las ap licaciones m ás com unes — a saber, el tre n de válvulas d e u n m o to r a u to m o triz — . En esta aplicación, la leva de form a ovalada está m aqu inada so b re un eje. El árb o l de leva e s im pulsado p o r el m otor. C o n fo rm e la leva gira, u n balancín se barre so b re la superficie ovalada. El b a la n cín, a la ve?, im p arte m ov im ien to lineal reciprocante a la espiga de la válvula. El m o v im ien to de la válvula deb e ser ta l q u e la trayectoria de escape esté cerrada d u ra n te u n m o m en to del ciclo d e co m b u stió n y a b ie r ta d u ra n te o t r o m o m e n to d is t in ta E ntonces, la aplicación es perfecta para u n a leva p o rq u e el ritm o y el m ovim iento d e b e n e s ta r secuen ciad o s co n precisión.
O bserve q u e se utiliza u n resorte a lrededor d e la espiga de la válvula. El b a la n d n segu ido r necesita estar en con tac to co n la s u perficie d e la leva para o b te n e r el m ovim iento d e se a d a Así, en la m ayoría de las aplicaciones de levas, el seguidor se fuerza con tra la superficie de la leva a través de algunos m edios m ecánicos. Los reso rtes so n m uy com unes p a ra d ich o p ropó sito . E n los casos d o n d e el segu ido r se encuen tra en el p la n o vertical, el peso del
seguidor p u ed e se r suficiente para m an ten e r el c o n ta c ta En a lb in o s disertos de levas, el se g u id o r está a trapado en u n a ranura p i r a m an ten e r el c o n ta c ta El p u n to im p o rtan te es q u e el c o n tacto e n tre la leva y el segu ido r deb e se r perm anente.
La característica ún ica d e u n a leva e s q u e p u ed e im p artir movimientos m u y diferentes a su seguidor. D e h e c h a las levas sirven para obtener m ovim iento inusual o irregular quesería dificil o im posible d e consegu ir c o n el uso de o tro s eslabonam ientos. C om o el m ovim iento d e las levas es program able, son m u y adecuadas para aplicaciones d o n d e desplazam ientos diferentes y su ancro n izad ó n son de im portancia fundam ental. Las levas se e m plean c o n frecuencia en eq u ip o industria l a u to m á tico , porque program an los desplazam ientos a u n costo razonable. Las levas son com ponen tes d e m áquinas d e precisión q u e p o r lo general cuestan m ás q u e lo s eslabonam ientos convencionales. La figura 9.2 presenta u n g ru p o de levas disertadas co n requerim ientos de m ovim iento especiales. Observe la p recisión del m aquinado del perfil exterior. Este cap itu lo es u n a introducción a la s fundam entas del diseño d e levas.
9.2 T IP O S D E LEVASLiiy u n a g ran variedad de levas d e com partías especializadas en su d iserto y m an u fac tu ra . Los fab rican tes clasifican las levas en subeategorfas y las com ercializan según las d iferen tes aplica-
www.FreeLibros.me

224 CAPITULO NUEVE
f ig u r a 9j Varias levas especiales. (C ortesía de DE-STA-Co C A M C O Products).
d o n e s o configuraciones. N o ob stan te , la g ran m ayoría de las levas se ag ru p an en los tres tip o s generales siguientes:
l a s levas de placa o de disco son el tip o d e levas m ás simples y com unes. En la figura 9 J a se ilu stra u n a leva d e placa. Este tipo d e leva se m o ldea sob re u n d isco o u n a p laca. La distancia rad ia l a p a r t i r d e l c e n tro del d isco varía a lo b rg o de la d rc u n fe re n d a de la leva. Si se hace q u e un seguidor se m ueva sob re el ex trem o exterior, se p ro p o r d o n a al segu ido r u n m ovim iento radial.
E n la fig u ra 9 .3b se presen ta u n a írvu cilindrica o de tambor. Esta clase d e leva se m o ldea sob re u n cilindro . Se c o rta u n a ra n u ra en el c ilin d ro co n u n em plazam ien to varia b le a lo largo d e su eje de giro. E nganchando u n seguidor q u e se m ueve en la ra n u ra , se d a a l segu ido r u n m o v im ien to a lo largo del eje rotación.
En la fig u ra 9.3c se m uestra u n a lesu lin ea l Este t ip o de leva se m o ldea sob re u n b lo q u e de tras lac ió n . Se corta una ra n u ra en el b lo q u e con u n a d istan c ia q u e varia desde el p lano d e traslación . A l su je ta r u n segu ido r q u e se m ueve en la ran u ra , se p ro p o rc io n a al segu ido r u n m ovim iento p erpend icu lar al p la n o de traslad ó n .
C om o ya s e seftaló , las levas de placa s o n el tip o m ás co m ú n . U na vez q u e se en tiende la teo ría subyacente, tam bién e s p o sib le ap licar a o tro s tip o s d e levas.
9.3 T IP O S D E SEGUIDORES
Los segu idores se clasifican p o r su m ovim ien to , s u fo rm a y su posición. En la figura 9.4 se p resen tan los detalles de las clasificaciones y se analizan a con tinuación .
9.3.1 M o v im ie n to d e l s e g u id o r
El m o v im ie n to del se g u id o r s e d o sif ic a en las d o s categorías siguientes:
Los seguidores de traslación están restring idos a m ovim iento en linea recta, q u e se ilu stran en las figuras 9 .4 a y c
Los seguidores con brazo oscilante o con p ivo te e s tá n re s tr in g id o s a m ov im ien to g ira to rio y se m u estran e n las figuras 9 .4 b y d.
9 .3 .2 P o s ic ió n d e l s e g u id o r
l a posic ión del seguidor, e n relación co n el cen tro de ro ta d ó n de la leva, se ve afectada generalm ente p o r los requerim ientos
ó ) S e g u i d o r d e r o d i l l o , c o n p i v o t e
a) L e v a d e p l a c a i L e v a c i l i n d r i c a
afgana
* — • M o v i m i e n t o d e l a l e v a
e l L e v a l in e a l
f ig u r a 9.3 T ipos de levas.
a) S e g u i d o r d e e u f t a . e n l i n e a
e) Seguidor <fc cara plana. d) Seguidor de cara esférica, descentrado con pivole
FIG U R A 9 .4 T i p o s d e s e g u id o r .
www.FreeLibros.me

I.evas: d iserto y a n á lisis c in em ático_________225
de e s p a d o de la m áqu ina . La p o s id ó n d e lo s seg u id o res de traslación se d iv ide en d o s categorías:
U n seguidor en linea tien e m o v im ie n to e n lin ea recta , de m odo q u e la lin ea d e t r a s ia d ó n se ex tiende a través del c e n tro de ro ta c ió n de la leva y se ilu s tra e n la figu ra 9.4a.
Un seguidor descentrado tien e m ovim iento e n linea recta, de m odo q u e la lín ea de m ovim iento n o pasa p o r el centro d e ro ta d ó n de la leva (se presen ta e n la figura 9.4c).
E n e l c a s o d e s e g u i d o r e s c o n p i v o t e , n o h a y n e c e s i d a d d e
d i s t i n g u i r e n t r e s e g u i d o r e s e n l i n e a y d e s c e n t r a d o s , y a q u e t i e n e n
l a m i s m a d n e m á t i c a .
9 .3 .3 F o rm a d e l s e g u id o rFinalm ente, la form a del segu ido r se ag ru p a en las cuatro categorías siguientes:
El seguidor de cuña consiste en u n segu ido r fo rm ado p o r un p u n to , q u e se a r ra s tra so b re el b o rd e d e la leva. El seguidor de la figura 9.4a es u n segu ido r de curta. Es la form a m ás sim ple, pero el ex trem o pun tiagudo p roduce a lto s es tílen o s de co n tac to y se desgasta ráp idam ente. En consecuencia, este tipo d e seguidor se utiliza raras veces.
E l seguidor de rodillo consiste en u n segu ido r q u e tiene una p a rte separada: el rod illo q u e está sujeto a la espiga del seg u id o r. El se g u id o r m o s tra d o en la fig u ra 9 .4 b es u n seguidor de rodillo. C o n fo rm e la leva g ira , el rod illo se m antiene en co n tac to co n la leva y ru e d a sob re la su p e rficie de e s ta . Es el se g u id o r m ás c o m ú n m e n te u sado , ya q u e la fricc ió n y los esfuerzo s de co n tac to son m enores q u e lo s del segu ido r d e curta. Sin em bargo, un se g u id o r d e ro d illo se p o d r ía a ta sca r d u ra n te u n d e sp lazam ien to a b ru p to d e la leva. U n e s tu d io m ás d e ta llado de la tendencia de u n se g u id o ra b loquearse se p re sen ta m ás adelante.
Un seguidor de cara p lana consiste en u n segu ido r form ado p o r u n a superficie g rande y p lana d e con tac to co n la leva. El se g u id o r de la fig u ra 9.4c es u n se g u id o r de cara p lana . Este tip o d e segu ido r se u tiliza co n u n m o v im ien to ab ru p to de la lesa s in q u e se atasque. Entonces, este tip o de se g u id o r es útU c u a n d o se requ ieren m ovim ientos rápidos. N o obstan te , cualqu ier deflexión o desalineación del segu ido r causa g randes esfuerzos su perficiales. A sim ism o, las fuerzas de fricción so n mayores q u e las del segu ido r de rodillo d eb id o a l in tenso co n tac to d e deslizam iento en tre la leva y el seguidor.
U n seguidor d e cara esférica consiste e n u n segu ido r f o r m ado co n u n rad io d e la cara q u e e n tra en co n tac to con la leva. El se g u id o r m o s tra d o en la fig u ra 9 .4d es un seguidor co n ca ra esférica. C o m o co n el segu ido r de cara p la n a , el de ca ra esférica se u tiliz a co n m ov im ien to i i r u p to d e la leva s in q u e se atasque. El rad io de la cara c o m p en sa la deflexión o la desalineación . C o m o e n el segu ido r de cara p la n a , las fu erz as de fricción todavía so n m ayores q u e las d e l segu ido r d e rodillo.
O b serv e q u e estas carac te rís ticas del segu ido r so n in te rcam biables. Es d e d r , se p u e d e c o m b in a r cu a lq u ie r fo rm a de segu ido r co n cualesquiera d e sus m ovim ientos o p o sid ó n .
9.4 M O V IM IEN TO PRESCRITO DEL SEG U ID O R
C om o se ha indicado, la característica ún ica de u n a leva e s que im p arte m ov im ien to s m u y d ife ren tes a s u segu ido r. D esde luego, el m ovim iento del segu ido r dep en d e d e la tarea requerida y p u ed e defin irse c o n to d o detalle.
f t > r e j e m p l o , s u p o n g a q u e s e u t i l i z a u n s e g u i d o r p a r a i m
p u l s a r l a s m a n e c i l l a s r e c o l e c t o r a s d e u n a m á q u i n a q u e m a n e j a
p a p e l . L a p r e s c r i p c i ó n d e s e a d a d e l s e g u i d o r i m p l i c a l a s e p a -
r a d ó n d e l m o v i m i e n t o e n s e g m e n t o s , asi c o m o l a d e f i n i c i ó n d e
l a a c d ó n q u e d e b e o c u r r i r d u r a n t e c a d a u n o d e l o s s e g m e n t o s .
P a ra d e s c r i b i r e s t e p r o c e s o s u p o n g a q u e l a s m a n e c i l l a s r e c o l e c
t a r a s d e b e n :
1. Perm anecer ce rrad o s p o r 0 .03 s.2 . A b r i r s e u n a d i s t a n c i a d e 0 . 2 5 i n , a p a r t i r d e l a p o s i c i ó n
c e r r a d a , e n 0.01 s .
3 . f t r m a n e c e r e n p o s i c i ó n a b i e r t a d u r a n t e 0 . 0 2 s .
4 . M overse a la p o sid ó n ce rrad a e n 0.01 s.
D e m o d o q u e , lis tan d o lo s requerim ien to s p recisos de las m anecillas recolectoras, se prescribe el m ovim iento del seguidor.
En la realidad, el m o v im ien to d e l segu ido r se expresa en té rm in o s del d esp lazam ien to a n g u b r de b leva en vez de tie m p o , lo c u a l es m ás co n v en ien te en ap licac io n es d o n d e el m ovim iento deb e estar sincronizado, ta l co m o el tren de válvulas de b figura 9.1.
Para las m anecillas recolectoras q u e se acaban d e describir, el m ovim iento prescrito , es tab lead o e n té rm in o s d e b ro ta d ó n d e la leva, se lista co m o sigue:
1 . Perm anecen cerrados e n 154.3® de ro ta d ó n de b leva.2 . Se a b re n u n a d is ta n d a de 0 .25 in , a p a r t ir d e b p o sid ó n
cerrada, e n 51.4® d e ro ta d ó n d e b leva
3. P erm anecen en esta posic ión ab ie rta e n 102.9® d e ro ta d ó n de b leva.
4 . Se m ueven a b p o sic ió n ce rrad a en 51.4® d e ro ta d ó n d e b leva.
U na vez q u e el m ovim iento del segu ido r está p rescrito , es c o n veniente registrarlo en fo rm a gráfica.
La gráfica d e despbzam ien to del segu ido r c o n tra el tiem po, o el despbzam ien to angu la r de b leva, se conoce co m o diagrama de desplazam iento del seguidor. Este d b g ra m a es indispensable p ara exp lo ra r el m ovim iento y la dnem ática del segu ido r independ ien tem en te de b fo rm a d e la leva m ism a. El eje vertical de este d iag ram a representa el despbzam ien to lineal del seguidor, expresado e n pulgadas o m ilím etros. E l eje h o rizon ta l representa el tiem po , m ed id o e n segundos o m inu tos, o b ien , desplazam iento s angulares de b leva, m edidos en g rados o en fracciones de u n a revolución. Este d iag ram a n o rm alm en te se construye a es c a b y, ju n to co n d análisis d n e m á tic o del segu ido r, e s ex trem adam en te útil al d e te rm in a r la fo rm a d e la leva.
E n d análisis c inem ático , es m e jo r b cu rv a de d e s p b z a m ien to del segu ido r con tra el t ie m p a C o m o ay u d a en la tarea d e d iserto de la fo rm a d e la leva, se prefiere la cu rv a del desp b zam ien to d d seguidor c o n tra d án g u lo de b leva. La relación d d g iro d e la leva co n d tiem p o es u n proceso sencillo cuando se u tiliza b teo ría p resen tada en d cap itu lo 6. La ecuación (6.4) d a lo siguiente:
A0
- 1 7 <M )
www.FreeLibros.me

226 CAPITULO NUEVE
C uando la leva g ira a velocidad constante, lo cual sucede en la inm ensa m ayoría de las aplicaciones, el tiem p o se p u ed e relac io n a r co n el m ovim iento angu la r y viceversa. La ro tación de la leva d u ra n te u n in te rv a lo del m o v im ie n to del segu ido r se ex presa usualm ente p o r el s ím b o lo (i. A sim ism o, el tiem p o tran sc u rrid o d u ra n te u n in tervalo d e l m ov im ien to d d se g u id o r se designa co m o T. L a elevación o caída d d segu ido r d u ra n te un intervalo se designa c o m o H . Al rep lan tear la ecuación (6.4), y u sa r la n o m en cla tu ra de levas, se o b tien e la relación e n tre d giro d e la leva y d tiem po en u n in tervalo arb itrario ¿
/ * , - = ( * 0 ( 7 ) ) ( 9 . 1 )
La ecuación (9.1) s irv e tam b ién p a ra d e te rm in ar la rap idez req u e rid a de la leva, co nsiderando d tiem p o transcu rrido d u ra n te u n d d o .
donde2 7 ; - tiem po total d e todos los intervalos d e m ov im ien to que com prende u n c ic la
El p e r io d o de ro ta c ió n d e la leva, c u a n d o n o hay m ovim ien to del seguidor, se cono ce co m o detención. Los detalles d d m ovim iento du ran te los intervalos d e elevación y descenso del seg u id o r se r ig e n p rin c ip a lm e n te p o r la ta rea q u e necesita rea liza rse y p o r co n sid erac io n es d inám icas. C o m o las fuerzas g ran d es están a so c iad as co n ace le rac io n es g ran d es , resu lta benéfico d ism in u ir la acdcración .
PRO B LEM A D E E JE M PL O 9.1
Se utiliza u n a leva en u n a plataform a q u e constantem ente levanta cajas desde u n transportador inferior hacia u n transportador superior. Esta m áqu ina se ilustra en la figura 9.5. Elabore u n diagram a de desplazam iento y determ ine la rapidez requerida de la leva cuando la secuencia de m ovim iento del seguidor es com o sigue:
|t
h g u r a 9 .5 Sistem a de leva d d p ro b lem a de e jem plo 9 .1 .
1. Elevar 2 in en U r .2. re ten c ió n durante O3 s.3 . CW ccnder 1 in en 0.9 s.4 . Detención durante 0.6 s.5 . rw c e n d e r 1 in en 0.9 s.
S O L U C IÓ N : 1. Calcule e l tiem po de u n ciclo completo
Es necesario el tiem po total de u n d e lo com pleto para determ inar la rapidez requerida de la leva.
2 T, = T , + T, + T , + Tt + T , = ( 1 2 + O J + 0.9 + 0.6 + 0 .9 )s = 3.9s
2 . Determ ine la velocidad angular requerida de la /evo
De la ecuación (9 2 ).
= t t t : = 0256rev /s = 1 5 J 8 r PmIrev _ Irev Z T , 3.9 s
Calcule e l giro d e la leva para cada in tervalo de m ovim iento del seguidor
H increm ento angular consum ido por la leva pora cada secuencia de m ovim iento del seguidor se determ ina con b ecuación (9.1).
f l i - <«!«*.>< T.) - ( 0 2 5 6 rc v /s ) ( l2 s ) - 0 .307rev
- (0 J0 7 rev )(3 6 0 * /l rev) - 1103*
www.FreeLibros.me

Leva»: d iserto y a ná lis is c in em á tico_________227
02 - (0 2 5 6 rcv /s)(0 Js) = 0 0 7 7 rcv - 270*
0 , - (0.256 rev/s)<0.9s) - 0 2 3 0 rev - 82.9"
04 - (OJ56rev/s)(OOs) - O .I54rev - 55J "
0 , = (0256 rev/s) (0.9s) = 023 0 r* v = 82.9*
4 . d e ifiq u e el diagram a d e desplazamiento
En la figura 9 0 se muestra el diagram a de desplazamiento resultante, tan to con el Angulo de la leva com o con el tiem po desplegido en el eje horizontal. Observe que se construyó el perfil de la curva de desplazam iento durante b s secuencias de elevación y descenso Consideraciones dinám icas determ inan la form a real de las secciones de elevación y descenso.
C tro d rh 3¿0» bva (deg)
IVmpo 0»)
9 3 ESQUEM AS DE M OVIM IENTO DEL SEGUIDOR
H objetivo en el diserto de u n a leva es identificar su fo rm a adecuada. El interés p rinc ipal consiste e n garan tizar q u e el seguidor logre lo s desp lazam ien tos deseados. D esde luego, ta les desplazam ien to s se d esc rib en en e l d ia g ra m a d e d esp lazam ien to . La fo rm a de la leva e s s im p lem en te el m ed io p a ra o b te n e r este m ovim iento.
E n la sección an terio r, el m ov im ien to del segu ido r d u ra n te las secuencias d e e levación y d escenso n o se iden tificó to ta l m en te . Se m e n c io n ó q u e las carac te rís ticas d inám icas del seguidor so n im portan tes . Aceleraciones g randes causan fuerzas grandes y, p o r consiguiente , altos esfuerzos. El cam bio ráp id o de b s acelerac iones p ro v o ca v ib rac ió n y, p o r lo ta n to , ru id o . D eb ido a lo s p rin c ip io s d inám icos fundam entales, los periodos de elevación y descenso del d iag ram a de desp lazam ien to d e una leva son de vital im portancia .
Para levas co n m ovim iento lento, las grandes aceleraciones n o son u n prob lem a. P or e l lo la leva se diserta con la finalidad de genera r s im p lem en te los desp lazam ien tos d a d o s en el in s ta n te especificado . La m an era en la c u a l el se g u id o r llega al p u n to deseado n o es relevante. En estos casos, la leva se fabrica del m o d o m ás conveniente, siem pre y cu an d o se ob ten g a el desp lazam ien to req u erid o . Una le v a d e p laca p u e d e se r t a n solo u n a com binación de arcos circulares y lineas rectas, la s cuales se fab rican co n facilidad.
En aplicaciones de a lta velocidad, n o es suficiente p ro p o rc io n a r únicam ente el desplazam iento re q u e r id o Las características d inám icas del segu ido r d u ra n te las secuencias d e elevación y descenso se d eb en especificar co n m u ch o detalle p a ra m in im izar las fuerzas y vibraciones.
Hay u n a g ran variedad d e esquem as d e m ovim iento p a ra el m ovim iento del seguidor. El objetivo d e estos esquem as es p ro d uc ir el m ovim iento co n aceleraciones suaves. En el e s tu d io de b s características d inám icas del segu ido r p a ra diferentes esquemas de m ovim ien to , se u tiliza la siguiente notación:
H*~ D esp lazam ien to to ta l del segu ido r d u ra n te el in te r valo de elevación o descenso en consideración. E n el caso d e u n se g u id o r co n pivote, e s te es el d esp lazam ie n to a n g u la r to ta l del e s lab ó n segu ido r, d u ra n te el intervalo particular.
T - P eriodo total d e tiem p o p a ra el intervalo d e elevación o descenso en consideración.
t - Intervalo de tiem p o de elevación o descenso q u e define las p ropiedades in stan tán eas del seguidor.
0 - Ángulo de ro tac ión de la leva d u ra n te el intervalo de elevación o descenso en considerac ión (grados).
- A ngulo d u ra n te el in tervalo d e elevación o descenso q u e d efine las p rop iedades instan táneas del seguidor (grados).
<o^r a r- V e lo c id a d d e la le v a ( g r a d o s p o r u n i d a d d e t i e m p o ) .
www.FreeLibros.me

228 CAPITULO NUEVE
A R - M agnitud del desplazam iento instantáneo del seguidor en el tiem po t o án g u lo p de la leva. En el caso d e un segu ido r co n pivote, esto es sim ilar al desplazam iento an g u b r instantáneo A 0¿del eslabón seguidor.
v - m agn itud de b v e lo d d a d in s ta n tá n e a del se g u id o r ■ dRJdt. En el caso d e u n segu ido r co n p ivo te esto es s im ilar a la ro tac ión del e sb b ó n seguidor.
a ■= M a g n itu d de b a c e le ra d ó n in s ta n tá n e a del se g u id o r = th ld t.
9.5 .1 V e lo c id a d c o n s ta n teEl esquem a m ás se n d llo de m ov im ien to del segu ido r d u ra n te u n a c le v a d ó n o u n descenso es e l d e v e lo d d a d constan te . El m ovim iento c o n v e lo d d a d constan te se caracteriza p o r u n d ia g ra m a de d esp b zam ien to en lin ea recta, porque b v e lo d d a d es un ifo rm e. Las características d inám icas de u n a elevación a velocidad constante se listan e n la ta b b 9.1.
A un cu an d o b idea d e u n a aceleración igual a cero es a tra c tiva, los ex trem os de este esquem a de m ovim iento a tu san p ro blem as. T eóricam ente , el s a lto in s ta n tá n e o d e cu a lq u ie r va lo r constan te d e v e lo d d ad a o tro valo r constan te de velocidad genera u n a aceleradón in fin ita . C om o las m áquinas im pulsadas p o r el segu ido r siem pre tend rán m asa, esto resu lta teóricam ente en u n a tuerza infinita. En b práctica, es im posib le u n cam bio in s tan táneo en la v e lo d d ad d e b id o a b flexibilidad de lo s elem entos de u n a m á q u in a N o ob stan te , cualqu ier sacud ida es im p o rta n te y se deb e m a n te n e r e n el m ín im o . P or lo ta n to , este m ovim iento en su fo rm a p u ra n o se p resen ta , excepto en aplica d o n e s de baja velocidad.
En la figura 9.7 se m uestra u n d iag ram a d e desplazam iento co n v e lo d d a d constan te , ju n to co n b s curvas de v e lo d d a d y ace le rad ó n .
9 .5 .2 A c e le ra c ió n c o n s ta n teEl m ovim iento co n aceleradón c o n s tan te d u ra n te u n a secuencia d e elevación o descenso genera los m enores valores posib les de aceleración en u n intervalo d e tiem po y elevación determ inados. El d iag ram a d e desplazam iento de u n intervalo d e elevación o d escenso se d iv ide en d o s m itad es iguales, u n a de aceleración c o n s tan te y la o t r a de d esace le rad ó n constan te . Las fo rm as de c a d a m itad del d iag ram a de d e sp b z a m ie n to so n p aráb o las de im ágenes especulares. l a s características d inám icas de u n a elevación co n aceleración constan te se listan en b ta b b 9.2.
E ste esq u em a d e m o v im ien to , c o n o c id o ta m b ié n co m o m ovim iento parabólico o d e gravedad, tien e aceleraciones constan tes positivas y negativas. N o o b sta n te , p resen ta u n cam bio b rusco de aceleración al final del m ov im ien to y en el p u n to de
transición e n tre las m itades d e aceleración y desaceleración. Los cam bios b r a s a » provocan u n cam bio b rusco en las fuerzas iner- ciales, lo s cuales p o r lo genera l causan vibraciones indeseables, de m o d o q u e este m ovim iento en fo rm a p u ra n o es co m ú n , salvo en aplicaciones de baja velocidad. En b figura 9.8 se m uestra un d a g ra m a de d e sp b z a m ie n to c o n aceleración constan te , ju n to co n las curvas de velocidad y aceleradón.
Se requ iere u n d b g ra m a de d e sp b z a m ie n to a escala p a ra constru ir el perfil real de b leva. Se p u ed en u tilizar b s ecuadones presentadas en b ta b b 9 2 con u n a ho ja d e cálculo, o cualquier o tro so ftw are q u e g ra fiq u e ecu ad o n e s, para e lab o ra r este dia- ¡yam a. A unque este m éto d o analítico e s p re d so , se deb e tener cuidado p a ra graficar el d iag ram a a escala.
La construcción gráfica de u n diagram a de despbzam ien to es u n m éto d o alternativo p a ra e labo rar u n diagram a de desplazam ien to a escala. Su co n s tru c d ó n se realiza u sando u n esquem a de m ovim iento c o n aceleradón constan te , rem itiéndose a b figura 9.9 y aplicando el siguiente procedim iento:
1. D ividir la secu en d a de e lev ad ó n (o descenso) del seguidor en d o s m itades iguales. En la figura 9.9 , A E representaé p e rio d o de tiem p o y Ü F b m agn itud de la e lev ad ó n de la p r im e ra m itad de este esq u em a d e m ovim iento.
2 . D ividir en p artes iguales ta n to el eje h o rizon ta l c o m o el vertical del cu ad ran te AEFH.
3. Trazar lineas verticales a partir d e las divisiones horizontales.
4 . Trazar lineas rectas a p a rtir de la esqu ina A h a d a b s d iv isiones verticales.
5 . D ibu jar u n a c u rv a suave a través de los p un tos de in tersección d e b s lineas verticales y d e las lineas dibujadas a p a r t i r d e la e sq u in a A.
6 . Repetir los pasos 2 a 5 para b o t r a m itad d e b cu rv a que se m uestra en el cu ad ran te FJCG en b fig u ra 9.9.
El descenso co n a c e le ra d ó n c o n s tan te se construye co m o u n a im agen especular d e la figura 9.9.
9 .5 .3 M o v im ie n to a r m ó n ic o
C om o se vio en los esquem as polinom iales del seguidor q u e se acaban de describir, se presentan p ro b lem as inerdales en las discon tin u id ad es de b s cu rv as de m ovim ien to . Para a b o rd a r esa desventaja, se deb e e s tu d b r el m ov im ien to a rm ó n ico , e l cual tiene su o rigen en las fu n d o n e s trigonom étricas y, p o r en d e , p re senta curvas m u y suaves de m ovim iento. D esde el p u n to de vista físico, es la p ro y e c d ó n del m o v im ien to d e u n p u n to sob re un disco q u e g ira proyectado en u n a linea recta. Las características d inám icas de u n a d e v a d ó n a rm ó n ic a se listan en b tab la 9.3.
Este esq u em a de m ov im ien to m e jo ra in d u d ab lem en te las curvas an terio res p o rq u e tie n e u n a aceleración c o n tin u a suave.
r ^ A B I - A 9 . 1 C in em ática d e l seg u id o r d e b leva para m o v im ien to c o n v e lo c id a d co n sta n te |
rE l e v a d ó n D e sc e n so
D esplazan)a m l o : ^ ^ + + " £
‘ i P ,A Ky - H , + 1
U r l o d d a d : » , H /o »
V' " T , “ p ,
- H ,
* - T
- H f
fil
A celeración: a = 0 (o o e n Lb tra n sid o n e s ) a = 0 ( o o í 1* transí d a n e t )
www.FreeLibros.me

Levas: d iserto y a ná lis is c in em á tico_________229
FVriodode elevación. Periodo de descenso
ai
Ii41
1J S
*
<¡r
Ii*&I
I
' / O f
- 4 Í .
H G U R A 9 .7 C u r v a s d e m o v im i e n t o c o n v e lo c i d a d c o n s t a n t e .
j T ^ I A B L A 9 . 2 C i n e m á t i c a d e l s e g u i d o r d e b l e v a p a r a m o v i m i e n t o c o n a c e l e r a c i ó n c o n s t a n t e |
f -------------------------------------------------------------------E le v a c ió n D e t c e m o
R u a O < r < Q 5 T(0< < f> < 03Pfr
D r t f i l m i n i r n l o :A R , - H r + H ,
- ' O ' m H r + H ,
' /
V t l o á d a d : 4 H A 4
V' “ 7 f 0 ?
- 4 H > ,
v ' - ^ r A *
A c e le ra c ió n : 4 / / , 4 / W - 4 II, - 4 » y
n ■* )
R in i 0 J T < l < T ( Q 5 /» < tf t < 0 1
D c t p b n m i r o t o :S R , - H > + H , - 2 h ( 1 -
~ H , *■ H j * 2 H , ( 1 - £ y
A R , - H , ♦ 111
- I I , * 2 II
(■-I,)’
H r\ t l o ó d * J : 4 H , / f , \ 4 f W
V í " t , V 1 " t J " a V " A ) v a i p , )A c e le ra c ió n : - 4 H , - 4 / W 4H, * H f ^
~ ¿ r
www.FreeLibros.me

230 CAPITULO NUEVE
P e r ta to d e e le v a c ió n Periodo d e d e v e n s o ,
4 Hj
'J °* ¡
-2H,
T]
FIGURA 9 ¿ ( i irv a s de m ovim iento co n aceleración constan te.
fig u r a 9.9 C onstrucción de u n d iag ram a de desplazam iento c o n a c e le ra d ó n constan te .
S in em bargo, tiene u n cam bio repen tino de a c e le ra d ó n en los ex trem os del m ovim ien to . N uevam ente, este cam bio repentino p o d ria ser inaceptable a g randes velocidades.
&i la figura 9.10 se m uestra u n diagram a d e desplazam iento arm ónico , ju n to con las curvas de veloddad y aceleración.
C om o en o tro s esquem as, se requiere u n d iag ram a de desp lazam ien to a escala p a r a co n s tru ir el perfil real de la leva. Se pueden usar las ecu ad o n es de la tab la 9 .3 , ju n to c o n u n a ho ja de cálcu lo u o t r o p aq u e te q u e grafique ecu ad o n e s, para e labo rar este d iag ram a. A un cu an d o este m éto d o analítico e s preciso, se deb e te n e r cu id ad o en e lab o ra r el d iag ram a c o n exactitud.
La c o n s tru c d ó n gráfica de u n d iag ram a de desplazam iento es u n m éto d o alternativo p a ra genera r el d iag ram a de desplazam ien to a escala. E sta co n s tru cc ió n u sa n d o el e sq u e m a de m o v im ien to a rm ó n ic o s e realiza o b se rv an d o la fig u ra 9.11 y aplicando el siguiente procedim iento:
1 . C o n s tru ir u n se m id reu lo co n d iám etro igual a la e lev ad ó n (o descenso) desead a
2. D iv id ir el tiem po d e elevación en increm entos iguales y sucesivos.
3. D iv id ir el sem id reu lo en el m ism o n ú m ero de divisiones iguales del p e r io d o de e lev ad ó n del seguidor.
4 . T razar líneas verticales a p a r t ir d e las d iv isiones sobre el eje d e tiem po.
5 . T razar lincas ho rizo n ta les desde lo s p u n to s d e las d iv is iones sob re el sem id reu lo h a s ta las lineas d e división correspondien tes sob re el eje de tiem po.
6 . T razar u n a cu rv a suave a través d e los p u n to s de intersec- d ó n o b ten id o s en el p a so anterior.
El descenso a rm ó n ico se construye co m o u n a imagen especular de la figura 9.11,
9 .5 .4 M o v im ie n to c ic lo id a lEl m o v im ien to c id o id a l es o tro esq u em a de m o v im ie n to d e rivado de fu n d o n e s tr ig o n o m étrica s . Este esq u em a tam b ién
FVvación drl seguid™.
R -rtodo d e e le v a c ió n
www.FreeLibros.me

I .e v u : d ise n o y an á lis is c in em á tico 231
T A B L A 9 . 3 C in e m á t i c a d e l s e g u i d o r d e u n a le v a c o n m o v im ie n to a r m ó n i c o j¡r i
E k v a d ú n D o t m w
— ( ? ) ]( t ' ) i
V d ocid ad : i r / / , f - » H j
*m- s l - l n ) l *- 2T)
w H t m \ (w+,\ 1Vt l “ V fi, )J " 2 0 ,
- mn n
ftno(k) dr elevación, Periocto dr <kscriBo.
FIGURA9.10 C urvas de m ov im ien to arm ónico .
presen ta cu rv as de m ovim iento m uy suaves y n o tien e cam bios rep en tin o s d e aceleración en los ex trem o s del m ovim ien to , lo cual lo vuelve p o p u la r en ap licaciones de a lta velocidad. Tiene escaso desgaste p o r v ibración y características de esfuerzo d e to das las curvas básicas descritas. Desde u n p u n to d e vista fisico, es el m ovim iento de u n p u n to sob re u n d isco q u e ru e d a sobre
una lin ea re c ta Las características d inám icas d e b elevación d - d o id a l se listan en la tab la 9.4. En b figura 9.12 se presen ta un d iag ram a de desp lazam ien to cicloidal, ju n to co n las curvas de v e lo d d ad y aceleradón .
(i>m o a n te s , se requiere u n d iag ram a de desp lazam ien to a escala p a ra co n s tru ir el p e rfil re a l d e b leva. Se u tiliz a n las
www.FreeLibros.me

232 CAPITULO NUEVE
f i g u r a 9 .1 1 C onstrucción de u n d iag ram a de desp lazam ien to a rm ó n ic a
ecu ac iones p resen tadas en la tab la 9.4, ju n to co n u n a ho ja de cá lcu lo o u n p aq u e te q u e g ra fíq u e ecuaciones p a ra com pletar este d iag ram a . A un q u e este m éto d o an a lítico e s p re c is a se debe tener cu id ad o de g ra fica r el d iag ram a to ta lm en te a escala, s i se em p lean técn icas de co n stru cc ió n gráfica p a ra d iseñ ar la leva.
La construcción gráfica d e u n d iag ram a d e desplazam iento e s u n m éto d o alternativo para g e n e ra r el d iag ram a d e desplaza m ien to a escala . Esta co n s tru cc ió n , u sa n d o el esq u em a de m ov im ien to cicloidal, se realiza rem itiéndose a la figura 9 .13 y ap licando el siguiente procedim iento:
1. Sobre u n a cuadrícu la de u n d iag ram a de desplazam iento, traza r u n a linea del p u n to inicial de la elevación (o d e scenso) al p u n to final. L a lin ea se d ib u ja de A a C e n la figura 9,13.
2. E xtender la línea d ibu jada en el paso an te rio r y traza r un circulo d e rad io r = H l2 it, c o n c e n tro en cualqu ier lug ar sob re la Unta.
3. C o n s tru ir u n a línea vertical a través del c e n tro d e l d rc u lo .
4 . D ividir el c ircu lo en u n n ú m ero p a r de partes.
5 . U nir las lineas q u e d iv id en al c ircu lo c o m o se ind ica en la figura 9.13 (1 a 4 .2 a 5. etcétera).
6 . M arcar los p u n to s de intersección de las líneas d ibu jadas en el paso 5 co n la lin ea vertical tra z a d a en el paso 3.
7 . D ividir el tiem p o en el m ism o n ú m ero de partes iguales c o m o el c ir c u la T razar líneas verticales a p a r t ir d e estos p u n to s de división.
8 . P royectar lo s p un tos iden tificados e n el paso 6 a lo largo d e u n a línea paralela a la linea c o n s tru id a en el p a so I .
9 . M arcar los p un tos de intersección de las líneas constru ida» en el paso 8 co n las líneas verticales d ib u jad as e n el p a so 7, c o m o se ind ica en la fig u ra 9 .13.
10. C o n s tru ir u n a c u rv a suave a trav és de los p u n to s iden tificados en el paso 9.
El descenso cicloidal se construye co m o u n a im agen especula r de la figura 9.13.
T A B L A 9 .4 C in e m á t i c a d e l s e g u id o r d e u n a le v a c o n m o v i m i e n t o c ic lo id a l
PJevadón D « c a i t o
D oplaim knto:
VCIocidad:
Aceleración:
^ ) ]
- ( ¥ ) ]
w r ( ! ? ) ,
« iT<
f i ,
I - cas
I
fi2,
- * ■ i t - * - & ) ]
- 3 1 — ( * ) ]
fi,fi,-2 * H ,
r f
- 2 v H y
t ')1
www.FreeLibros.me
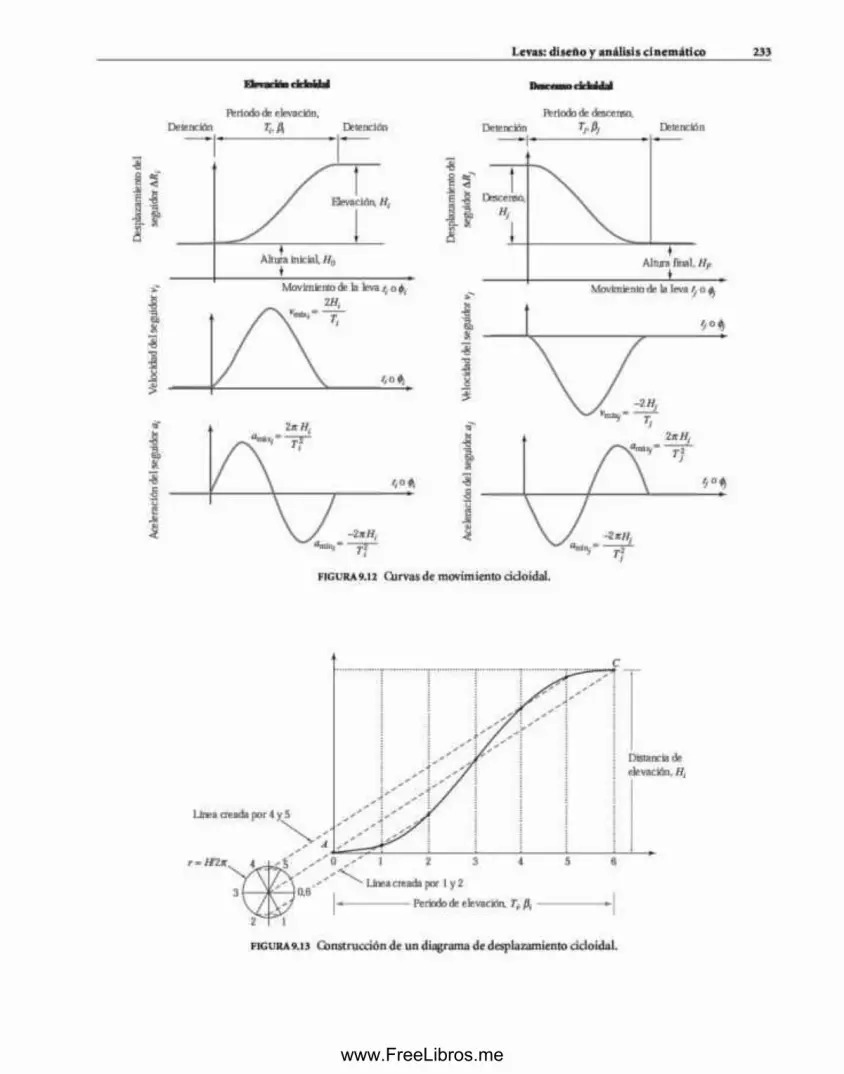
Des
plaz
amie
nto
del
Acr
fcra
cidn
«leí
seg
uid»
a,
Veloc
kfed
de
l seg
uido
r v,
segu
idor
Art,
Levas: d iserto y a ná lis is c in em á tico_________233
R>rio(k)deok\ación. ftriodo de descenso.
FIGURA9.12 ( l ir v a s d e m ov im ien to cicloidal.
f i g u r a 9 .1 3 C o n s t r u c c ió n d e u n d i a g r a m a d e d e s p la z a m ie n to c ic lo id a l .
www.FreeLibros.me

234 CAPITULO NUEVE
PRO B LEM A DE E JE M PL O 9.2
Se va a disertar u n a leva para u n a parte de u n cargador autom ático, com o se m uestra en la figura 9.14. Empleando las ecuaciones de m ovim iento, construya u n a tabla q u e ilustre los desplazam ientos del seguidor contra el tiem po y co n tra la rotación de la lesa. Tam bién grañque estos datos cuando el m ovim iento prescrito de esta aplicación sea como sigue:
1. Bevación de 50 m m en 1 3 s con el esquem a de m ovim iento de velocidad constante.2 . Retom o en 2.0 s co n el uso d d esquem a de m ovim iento cicloidal.3 . Detención de 0.75 s.4 . Se repite la secuencia.
FIGURA 9.14 fó r te d e l cargador del p ro b lem a d e e jem plo 9.2 .
S O L U C IÓ N : I . Calcule e l tiem po para com pletar un ciclo completo
B tiem po transcurrido para com pletar u n ciclo es necesario para determ inar la velocidad requerida de la leva.
2 T , = T, + T, + T,
= 1.5 + 2X1 + 0.75 = 4 2 5 s
2. Calcule la velocidad angular requerida de la lesa
Si se parte de la ecuación (92),
‘ s í ‘ ■ u n ,p mDetermine la rotación d e la leva para cada in tervalo de m ovim iento del seguidor
B increm ento angular de la leva consum ido por cada secuencia de m ovim iento del seguidor se calcula con la ecuación (9.1).
0 , - h J ( T , ) - (<X235 rev/s) ( 1.5s) - 0353 rev - 127.0*
p ¡ = (0 2 3 5 rev/s) (2 JJs) = 0.470rev = 169.3*
P s = (Q 235rcv/s) (0.75$) » 0.177rev = 63.7*
Calcule e l desplazam iento durante cada in tervalo de m ovim iento del seguidor
0 primer intervalo del m ovim iento tiene H j = 50 m m y T, = 13 s. Para u n a elevación co n velocidad constante, b ecuación del desplazam iento está dada por
u , . %
B segundo intervalo del m ovim iento tiene l f* - 50 m m y T2 - 2-0 s. Para d descenso cicloidal, la ecuación de desplazamiento está dada por
A R , - H j
B últim o intervalo de m ovim iento es una detención, donde AR es constante. Esta detención ocurre en la posición retraída del seguidor, por lo tanto, ARj - 0.
www.FreeLibros.me

I .e v a s : d is e r to y a n á l is i s c i n e m á t ic o 235
Estas ecuaciones se introdujeron en la hoja de cálculo (figura 9.15). Los datos se usaron para generar la gráfica de h figura 9.16.
A -7
Im « f1 •>»«» f o t * » C u l i «ni» Vt*w D * v » l I G » tS ‘
J¡R—sHt*»Ri • 10
B I U A' □ * \
* % A
« l i g n « » o I N u m t> «
£ - l<- 2 - H-Z ■
20
E 7
_ _ A _ B C D E ■tteopo A ^odrU Ira UopUwtoco dd Xptáx
to> C^D (wm)0.00 0.0 0000 25 : i : 833050 42.4 1667075 63 5 25.00100 S47 33 33125 105 9 41 671 50 127.1 50 00 *1.75 148 2 49 38200 169 4 45 46225 1906 36 882.50 211 8 25002 75 232 9 13.123.00 254 1 4543.25 275.3 062350 2965 0003.75 317.6 000400 338 8 000425 360 0 000
f i g u r a 9.15 H o ja de cálculo del p ro b lem a d e e jem plo 9.2.
f i g u r a 9 .1 6 D i a g r a m a d e d e s p l a z a m i e n t o d e l s e g u i d o r d e l p r o b l e m a d e e j e m p l o 9 .2 .
www.FreeLibros.me

236 CAPITULO NUEVE
PRO B LEM A D E E JE M PL O 9.3
Construya gráficamente el diagram a de desplazam iento del seguidor para la aplicación del problem a de ejem plo 9.2.
S O L U C IÓ N : Con los datos del problem a de ejem plo 9 2 . se construye el diagram a de desplazamiento m ostrado a i h figura 9.17.Observe que el d re u lo usado para construir d descenso cidoidal tiene u n radio de:
H , (50 mm)r ■ — - — ------ ■ 7.96 mm
2 i r 2 ir
9 .5 .5 E s q u e m a s d e m o v im ie n to c o m b in a d oEn b selección de u n esquem a de m ovim iento particular, u n o b jetivo es m in im izar b s fuerzas d inám icas inducidas du ran te el in tervalo d e elevación o descenso. Lo an terio r se logra al m inim izar la m ag n itu d de la aceleración del segu ido r y m a n ten e rla c o n tinua. Asimismo, la energía cinética alm acenada en el segu ido r es proporcional al cuadrado de b velocidad. P or lo tanto, m inim izar la velocidad m áxim a es o tro o b je tivo q u e d e b e r b considerarse cu an d o se especifica u n esquem a d e m ovim iento.
Adem ás d e estos objetivos, en ap licaciones de a lta v e lo d d ad , e s aconsejable m an ten e r u n a ace le rad ó n suave para e lim in a r lo s cam bios b ruscos en b s cargas dinám icas. La d e riv ad a de b aceleradón co n respecto al tiem p o se cono ce c o m o tirón. Los cam b io s repen tinos en la ace le rad ó n se cuantifican co m o m ag n itu d es a ltas de u n tiró n . Así, r e d u d r b m agnitud y m an tener c o n tin u a b cu rv a del t iró n c o n tra el tiem p o d a ventajas so b re la carga de b m áquina.
C o n frecuencia se a ju s tan lo s aspectos n eg itiv o s d e b velo d d ad constan te y b aceleración constan te , así co m o lo s esquem as a rm ó n ic o y cicloidal, p a ra m e jo ra r b s características del m ovim iento. El m ovim iento resultante se conoce co m o esquem a com binado . M ás adelan te se presentan descripciones de algunos de los esquem as co m b in ad o s más com unes. Se recom ienda c o n su lta r fuentes m ás com pletas d e diserto d e levas para ob ten er los detalles d e b s ecuaciones d e m ovim iento [refe. 5 ,1 1 ,1 4 ] , Existe softw are co m o D ynacam , A nalytix/Cam s y Cam Trax para constru ir d iagram as de m ovim iento del desplazam iento del seguidor d e estos y o tro s esquem as.
La a c e l e r a d ó n t r a p e z o i d a l es u n esq u em a q u e m ejora el e s q u e m a d e aceleradón constante q u e se presen ta en b figura 9,10,
d o n d e b c u rv a d e a c e le ra d ó n c o n tra el tiem p o ap arece co m o u n a o n d a cuadrada. La d ificu ltad c o n b o n d a cu ad rada e s que b aceleración y p o r ende, la fuerza inercial cam bian bruscam ente, de m o d o q u e se induce u n tiró n en b m áqu ina . El esquem a de aceleradón trapezo idal suaviza las tran sic io n es d o n d e la cu rv a de aceleración c o n tra el tiem p o aparece c o m o u n trapecio . Sin em bargo, el área perd id a al e lim in ar b s esquinas se deb e sustituir increm entando la aceleración m áxim a.
La a c e l e r a c i ó n t r a p e z o i d a l m o d i f i c a d a m ejo ra el esq u em a trap ezo id a l su s titu y en d o los b d o s in d in a d o s de la cu rv a de ic c ic ra d ó n c o n tra el tiem p o co n p artes d e u n a o n d a senoidal. E lim inando b s esquinas, se crea u n a c u rv a de ace le rad ó n suave. La p en d ien te c o n tin u a ( tiró n ) g a ra n tiz a q u e el cam bio en las tuerzas d in ám icas sea suave.
H d esp lazam ien to p o li n o m ía I 3 -4 -5 es o tro esquem a q u e me- p r a el esquem a d e ace le rad ó n constan te . C o m o e s u n p o lin o m io d e seg u n d o o rd en , el esquem a de aceleración constan te se ve o b sta c u liz a d o co n u n a c u rv a d isc o n tin u a de aceleración . C o m o en el esquem a trapezo idal, u n m éto d o p a ra e lim in ar b d isc o n tin u id ad e s u tilizar u n p o lin o m io d e o rd en superio r, de m o d o que se fo rm u b u n esquem a q u e in c o rp o ra té rm in o s de tercer, c u a r to y q u in to ó rdenes. C o n u n té rm in o de q u in to o rden , este esquem a d a u n a pendiente c o n tin u a de la cu rv a de aceleración c o n tra el tiem po . S in em bargo , la cu rv a del l iró n con tra el tiem p o te n d rá d iscontinuidades.
El d e sp la z a m ie n to p o lin o m ia i 4-5-Ó -7 a m p lb el esq u em a fu lin o m ia l 3-4-5, el cual indu> e u n té rm in o de séptim o o rd en pora su m in is tra r u n t i ró n c o n tin u o y suave.
www.FreeLibros.me

lev a » : d iserto y an á lis is c in em á tico 237
La a c e le ra d ó n sen o id a l m od ificada m ejora el esquem a cicloidal in co rporando u n segundo térm ino senoidal co n u n a frecuencia diferente; de este m odo , la suavidad del m ovim iento cicloidal se retiene y el m áx im o se reduce.
E n la tab la 9 .5 se m uestra u n resum en de la velocidad pico, la aceleración p ico y el t i ró n p ico d e lo s d iferen tes esquem as de m ovim ien to , en fu n d ó n de la e levadón H y del p e rio d o d d in tervalo T.
r TABLA 9 . 5 C o m p a r a c i o n e s d e l o s e s q u e m a s1
d e m o v i m i e n t o
E squ em a d e V e lo d d a d A c e ler a d ó n T ir ó nm o v im ien to p ico p ic o p ic o
Ytloddad constante 1.000 HIT 00 co
Aceleración constante 2.000 HIT 4.000 HIT3 00
Armónico 1371 117 4.945 HIT* 00Cicloidal 2.000 10 T 6M JI0 T* 40 t a rHapezoidal 2.000 HIT 5.300 HIT* 4 4 ¡ a rTrapezoidal modificado 2.000 HIT 6i w r ’folinomial 3-4-3 1.875 tVT 5.777 H/T* 60folinomól 4-S-6-7 2.188 HtT 7326 tBT* 52 IBT*Senoidal modificado 1.760 H/T 3328 HIT3 69 HIT0
9.6 DISEÑO G RÁ FICO DEL PERFIL DE UNA LEVA DE DISCO
U na ve* q u e en u n d iag ram a d e d esp lazam ien to se define el m ov im ien to deseado d e u n a leva y su seguidor, es p o sib le disertar la fo rm a real de la leva. La fo rm a d e la leva dep en d e de su tam arto y de la c o n fig u ra d ó n d d seguidor. A ntes d e d iseñ ar d perfil d e u n a leva de disco, se d eb en d efin ir a lgunas características geom étricas. En la figura 9 .18 se ilu stran las siguientes c a racterísticas.
El dreu lo base es d d re u lo m ás p eq u eñ o c o n c e n tro en d eje d e ro tac ión d e la leva y e s tangen te a la superficie d e la leva.
El tam añ o d d c ircu lo b ase está su p ed itad o n o rm a lm e n te a las restriedones espaciales de la ap licadón . En general, u n d re u lo base g ran d e o rig in a m enos p rob lem as co n la transm isión de la f u e r a . S in em bargo, u n c ircu lo base g ran d e y, p o r consiguiente, u n a leva g ran d e se co n trap o n en co n el o b je tivo usual d e d iseñar p rodu c to s pequeños.
El punto de trazo s r v e c o m o referencia p a ra d e te rm in a r la ub icac ió n efectiva d d seguidor. E n u n se g u id o r de curta es d p u n to d o n d e e n tra n en co n tac to e l se g u id o r y la leva. E n un se g u id o r d e rodillo , d p u n to d e tra z o se ub ica en d cen tro d d rod illo . E n u n se g u id o r de ca ra p la n a o esférica , el p u n to de tra z o se u b ic a sob re la superficie d e co n tac to del seguidor.
L a posidón de entrada de la leva e s la o rien tac ión q u e corresp o n d e a u n a posic ión d e referencia d e 0 * en u n diagram a de desplazam iento.
El dreulo p n m a rio es u n d re u lo q u e se d ib u ja a trav és del p u n to d e tra z o d d seguidor, m ien tra s la leva está e n su p o sid ó n de entrada.
La curva de paso es la trayecto ria d d c e n tro del seguidor.
P ara fiid litar la construcción del perfil d e la leva, se utiliza la inversión d n em ática . Se su p o n e q u e la leva está inm óvil. Luego se g ira el seguidor en d ire c d ó n opuesta al g iro d e la leva. L a p o s id ó n deseada d d seguidor, en varias u b icad o n es , se construye a p a rtir del c írcu lo base. C o n c ep tu a lm e n te , e s to e s com parab le a en ro llar el d iag ram a de desp lazam ien to a lrededor del d re u lo base, creando así la fo rm a de la leva
E n las se cd o n es sigu ien tes se ilu s tra n lo s p roced im ien tos específicos para diversas co n fig u rad o n e s del seguidor. E n todas las construcciones se em plea d d iag ram a general d e desplazam ien to d e la figura 9.19. O bserve q u e se h an identificado d iferen tes desplazam ientos del segu ido r en ángu los específicos d e la leva, en las secuencias de d e v a c ió n y descenso d d d iag ram a. Estos desplazam ientos prescritos se convierten en el perfil de la leva.
9.6 .1 S e g u id o r d e c u ñ a e n l ín e a
La fo rm a m ás efiden te d e describ ir la construcción de u n a leva c o n u n segu ido r de curta es a tra v é s de la c o n s tru c a ó n real. C on é d iag ram a de desp lazam ien to de la figura 9.19, se h a constru i- d o d perfil d e u n a leva q u e se utiliza con u n seguidor d e curta, que se m uestra e n la fig u ra 9.20.
P ira co n s tru ir g rá fica m e n te u n perfil de este tip o se d ispone d d siguiente p roced im ien to general;
1. 'l ía z a r el d re u lo b ase d e rad io El tam añ o no rm alm en te está e n f u n d ó n d e las re s tr ie d o n e s espaciales d e la aplicad ó n .
2 . D ibu jar el segu ido r e n la p o s id ó n d e en trada .
3. Trazar líneas radiales del cen tro d e la leva, en co rre sp o n dencia co n los ángu los de la leva identificados sob re el d iag ra m a de desplazam iento. Para efectos d e co n s tru c d ó n , la leva perm anecerá inm óvil y el segu ido r g ira rá en d irecd ó n o p u esta al giro real de la leva.
4 . T ransferir lo s desplazam ientos del d iag ram a de desplazam ien to a las líneas radiales. Estos desplazam ientos se m id e n desde el d re u lo base.
H G U R A 9 .I8 h f o m e n d a tu r a d e l a leva .5 . D ibu jar u n a cu rv a suave a través de lo s desplazam ientos
prescritos.
www.FreeLibros.me

238 CAPITULO NUEVE
f i g u r a 9 .1 9 D iagram a general de desplazam iento del seguidor.
f i g u r a 9 j o D iseño del perfil d e u n a leva: se g u id o r d e c u ñ a e n linea.
6 . Para co n s tru ir u n perfil co n u n a precisión consisten te con el d iag ram a d e desplazam iento, es necesario tran sfe rir p u n to s in term ed io s ad icionales de los in tervalos de elevación y descenso.
9 .6 .2 S e g u id o r d e ro d i l lo e n l ín e aD e nuevo, la fo rm a m ás eficiente de describ ir la co n stru cc ió n de u n a leva co n u n segu ido r d e rod illo e n linca es c o n su co n s tru cc ió n reaL C o n e l d iag ram a de desplazam iento de la fig u ra 9.19, se c o n s tru y ó el perfil de u n a leva q u e se u tiliza rá co n u n se g u id o r d e rodillo en linea, el cual se ilu s tra en la figura 9 .21 . Para c o n s tru ir u n perfil a s i, se u sa e l s ig u ien te p ro ced im ien to general:
1. T razar el circulo b ase d e rad io R(, El tam añ o no rm alm en te está en fo n d ó n d e las restricciones espaciales de la aplicación.
2. D ib u ja r el ra d io d d seguidor f y e n la p o s id ó n d e en trada , tangen te al d re u lo base.
3. Trazar líneas radiales a p a r t ir del cen tro de la leva, e n c o rrespondencia co n lo s ángu los de esta, iden tificados en el
d iag ram a de desplazam iento . Para fines de construcción, la leva perm anece inm óv il y el segu ido r g ira e n d ire c d ó n o p u esta al g iro real de la leva.
4 . Identificar el p u n to d e tra z o en su posic ión de entrada.En u n segu ido r d e rod illo , este e s el p u n to en el centro del rodillo.
5 . T razar el d re u lo p r im a rio a través del p u n to d e tra z o en su p o s id ó n de en trada .
6 . T ransfe rir lo s desplazam ientos del d iag ram a d e desplazam ien to a las lineas radiales. Estos desplazam ientos se m iden a p a r t ir del c ircu lo p rim ario .
7 . D ibu jar el c o n to m o del rod illo de ra d io Rf, co n cen tro en los desplazam ientos p rescrito s iden tificados en el paso anterior.
8 . TVazar u n a cu rv a suave tan g en te a lo s c o n to rn o s del rodillo en lo s desplazam ientos prescritos.
9 . Para c o n s tru ir u n perfil c o n u n a p recisión consistente con el d iag ram a d e desplazam iento, es necesario tran sfe rir pun tos in term edios ad id o n a les d e lo s intervalos d e ele - vación y descenso.
www.FreeLibros.me

Levas: d is e ñ o y a n á lis is c in e m á tico_________239
0o (Entrada)
180°
F IG U R A 9 J I D i s e ñ o d e l p e r f i l d e u n a le v a : s e g u i d o r d e r o d i l l o e n l in e a .
9 .6 .3 S e g u id o r d e ro d il lo d e s c e n tr a d oLa fo rm a m ás eficiente de describ ir la co n stru cc ió n de u n a leva con u n seguidor de rodillo co n descen trado es m edrante una construcción real. C o n el d iag ram a de d e sp b z a m ie n to d e la figura 9.19, se construyó el perfil de u n a leva q u e se utilizará con un seguidor d e rod illo co n descentrado, el cual se m uestra en la figura 9 2 2 . Se tiene el siguiente procedim iento general para constru ir d ich o perfil:
1. D ibu jar el c ircu lo base d e rad io El tam añ o n o rm a lm en te está en (unción de las restricciones espaciales de la aplicación.
2. Trazar b linea central del seguidor en b posición de entrada.
3. D ib u ja r el c ircu lo p rim a rio cuyo rad io es igual a b sum a d e lo s rad io s del d re u lo base y del rod illo del seguidor( R b < Rj).
4 . H a zar el segu ido r de rad io fy en posic ión d e en trada , con cen tro en d o n d e b lín ea central del segu ido r in terseca el d re u lo prim ario .
5 . Identificar el p u n to d e tra z o en posic ión de en trad a . E n un segu ido r de rodillo , este es el p u n to q u e se en cu en tra en el cen tro del rodillo.
6 . D ibu jar el d re u lo co n descen trado de ra d io e, co n cen tro en el e je d e ro ta d ó n de la leva. Es tan g en te a b linea cen tral del seguidor.
7 . Trazar lineas tangen tes al c ircu lo d e descentrado, en co rre spondencia co n lo s ángu los d e referencia d e b leva del dra- g ra m a de despbzam ien to . P ara fines de construcción , b leva perm anece inm óv il y d segu ido r g ira en d irecd ó n o p u esta al giro real d e b leva.
8 . T ransferir lo s desplazam ientos del d iag ram a de desplazam ien to a las líneas de descentrado. Tales d espbzam ien tos se m iden a p a r t ir del d re u lo prim ario .
www.FreeLibros.me

240 CAPITULO NUEVE
FIGURA 9J1 D iseño del perfil de u n a leva: segu ido r d e rodillo co n descentrado.
9 . D ibujar el c o n to m o del rodillo de rad io f y co n centro en los desplazam ientos prescritos identificados en el paso anterior.
10. I t a z a r u n a cu rv a suave tangen te al rodillo en los desplazam ien to s prescritos.
11. P ara co n s tru ir u n perfil co n u n a p recisión consisten te con el d iag ram a d e desplazam iento, es necesario tran sfe rir p u n to s in term ed io s ad icionales de los in tervalos de elevación y descenso.
9 .6 .4 S e g u id o r d e t r a s la c ió n c o n c a r a p la n a
La fo rm a m ás eficiente d e describ ir la construcción de u n a leva c o n u n segu ido r d e ca ra p la n a e s m ed ian te u n a construcción real. C o n el diagram a d e desplazam iento d e la figura 9.19, se ha co n s tru id o el perfil de u n a leva q u e se u tilizará co n u n seguidor d e traslación d e ca ra p lana y se ilu stra en la figura 9.23.
Para co n s tru ir g ráficam ente u n perfil co m o este se tie n e el siguiente p roced im ien to general:
I . T razar el circulo b ase d e rad io R f. El tam añ o no rm alm en te está en fu n d ó n d e las restricciones espádales de la apli-
c a d ó n . Recuerde q u e para este tip o de seguidor, el d re u lo base tam bién sirve co m o d re u lo prim ario .
2. D ib u ja r el se g u id o r e n p o s id ó n d e en trad a , tangen te al d re u lo base.
3. T razar lincas rad ia les del cen tro de la leva, en co rrc sp o n - dencia co n los ángu los de la leva del diagram a de d e sp lazam ien to Para efectos de co n s tru cd ó n , la leva p e r m anece inm óv il y el segu ido r g ira e n d ire c d ó n o p u esta al g iro real de la leva.
4 . T ransferir los desplazam ientos del diagram a de desplaza m ien to a las lineas radiales m edidas a partir del d re u lo base.
5 . D ib u ja r el co n to rn o d e ca ra p lana constru y en d o u n a línea p erpend icu lar a las lineas radiales en lo s desplazam ientos prescritos.
6 . T razar u n a c u rv a suave tangen te a lo s c o n to rn o s de cara plana.
7 . Para co n s tru ir u n perfil c o n u n a p recisión consisten te con el d iag ram a d e desplazam iento, es necesario tran sfe rir pun tos in term edios ad id o n a le s d e lo s m ovim ientos de e lev ad ó n y descenso.
www.FreeLibros.me

L e w : d iserto y a ná lis is c in em á tico_________241
0"< Entrada)
f i g u r a 9 .2 5 D is e r to d e l p e r f i l d e u n a le v a : s e g u i d o r c o n c a r a p la n a .
9 .6 .5 S e g u id o r d e ro d i l lo c o n p iv o teH seguidor co n pivote p roporciona m ov im ien to rotacional en la salida del sistem a leva-seguidor. E n los seguidores co n traslación, se utilizan las ecuaciones presentadas en la sección 9 5 para calcular la m agnitud del desplazam iento lineal instan táneo A R j, la velocidad vr y la ace le rad ó n a F del c e n tro del seguidor, el p u n to F. Para seguidores con pivote se usan las ecuadones presentadas en la sección 9 5 para calcular la m agnitud instantánea del desplazam iento rotacional 5 0 ^ la v e lo d d ad <uf y la ace leradón o h del eslabón seguidor. Al em plear las ecuadones de la se cd ó n 9 5 en el análisis de m ovim iento g ira to rio , el desp lazam ien to p rescrito del segu ido r debe se r el angu la r A 9¡ . e n vez del lineal H.
O tra vez, la form a m ás efiden tc d e describir la construcción de u n a leva c o n u n segu ido r d e ro d illo co n pivote es m ediante u n a c o n s tru c d ó n real. C o n el d iag ram a d e d e sp b z a m ie n to de b figura 9.19, se ha co n s tru id o d perfil de u n a leva q u e se u tilizará con u n segu ido r d e rodillo con pivote, q u e se m uestra en b figura 9.24.
Para co n s tru ir u n perfil a s i, se u tiliza el siguiente p roced im ien to general:
1. D ib u ja r d circulo base de ra d io R& d o n d e d tam año está e n fu n d ó n de las restricciones espaciales de b ap licadón .
2. D ib u ja r el d re u lo p rim a rio , cuyo rad io e s igual a b sum a de los rad io s del d re u lo base y del rod illo del seguidor.
3. D ib u ja r d d re u lo d d p ivo te d e rad io Rr La d is ta n d a en tre d p isó te y el eje de b leva tam bién e s u n a fu n d ó n d e las re stried o n es espaciales de la ap licad ó n .
4 . U bicar b p o s id ó n de en trad a del pivote.
5. T razar u n arco cen trado en d pivote de en trada , c o n un rad io igual a b lon g itu d R¡ d d e sb b ó n segu ido r que p iv o ta
6 . D ib u ja r d segu ido r de rad io Rt, en p o s id ó n d e en trada , co n cen tro d o n d e el arco d ib u jad o en el p a so 5 in terseca d d re u lo prim ario .
7 . T razar lincas radiales d d c e n tro d e b leva al c ircu lo d d pivote, e n co rrespondencia co n lo s ángu los d e la levadel d iag ram a de desplazam iento. Recuerde q u e el segu ido r g ira en dirección o p u esta al g iro de b leva.
www.FreeLibros.me

242 CAPITULO NUEVE
8 . D esde cada p u n to pivote, d ib u ja r u n arco de rad io igual a b longitud del brazo del seguidor RL hacia a fuera del circulo prim ario .
9. T ransfe rir lo s desplazam ientos del d iag ram a de desplazam ien to a los a rco s del pivote d ib u jad o s en el paso 8 . C om o se m encionó, los desplazam ientos p rescrito s para u n segu ido r q u e pivota so n a n g u b res . Se u tiliza la ecuac ión (9.3) para convertir el desplazam iento angular
del e sb b ó n seguidor, a desplazam iento lineal A R¡. del cen tro del ro d illa
A R f = R ¿ \ / 2 (1 - e o s A 0 ¿). (9.3)
10. D ib u ja r el c o n to m o del rod illo c o n c e n tro e n lo s desplazam ien to s prescritos identificados e n el paso anterior.
11. T razar u n a cu rv a suave tangen te al rodillo en estos des- p b zam ien to s prescritos.
12. Para co n s tru ir u n perfil co n u n a precisión consisten te con el d iag ram a d e d esp b zam ien to .q u izá sea necesario tran sferir p u n to s in term edios adicionales de los m ovim ientos de elevación y descenso.
9.7 ÁNGULO DE PRESIÓN
C o m o b fuerza siem p re se tra n sm ite d e m o d o p e rp e n d ic u b r a b s su p e rfic ies en c o n ta c ta b leva n o s ie m p re em p u ja al se g u id o r en b d irección de su m o v im ien to . C o m o se v io en la sección anterior, b c u rv a tu ra de b leva afecta b posic ión d e b linea cen tra l del segu ido r y el p u n to real d e contacto .
La fuerza requerid a para em p u ja r el segu ido r depende de la indicación d o n d e se usa el sistem a d e leva. No ob stan te , la fuerza de con tac to en tre b leva y el seguidor p u ed e ser m u y grande, lo cual d e p e n d e de b ub icación del p u n to de co n tac to . En realidad, tan so lo u n a co m p o n en te d e la fuerza d e co n tac to p roduce el m ov im ien to d e l seguidor. La o t r a co m p o n en te de fuerza es indeseable, pues causa u n a carga b te ra l. b cual es abso rb ida p o r los co jine tes q u e g u b n al seguidor.
0 ángulo depresión 8 correlaciona las d o s com ponentes de la fuerza de contacto. El ángulo de presión en cualquier p u n to sobre d perfil d e b leva es el án g u lo en tre el m ovim iento del segu ido r y b dirección en q u e la leva lo em pu ja . M ás precisam ente, es el án- g ilo e n tre b tray ec to rb del m ovim iento del segu ido r y b linea p e rp e n d ic u b r al perfil d e b leva en el p u n to de co n tac to del seguidor. C ada p u n to sob re b superficie d e b leva tien e u n án- 91I0 d e presión . En b figura 9 2 5 se indica el án g u lo de presión.
Después de co n s tru ir g ráficam ente el perfil de u n a leva, b m agn itud del ángulo de presión se visualiza ob se rv an d o b u b icación del p u n to de con tac to e n relación co n b lin ea cen tra l del seguidor. Se d eb en iden tificar b s regiones d o n d e el perfil d e la leva presenta b c u rv a tu ra m ás g ra n d e . Se tien en q u e o b te n e r m ediciones d e lo s ángu los de presión en esta región. En general, el án g u lo d e presión se d e b e rb m an tener ta n p eq u eñ o co m o sea pasib le sin exceder lo s 30*. La m agn itud del án g u lo d e presión se reduce d e la siguiente m anera:
1. Increm en tan d o el tam añ o del d re u lo base,
2. D ism inuyendo la m agn itud del d esp b zam ien to del seguidor.
3 . Increm en tan d o el án g u lo de ro tac ió n de b leva prescrito para la elevación o descenso del seguidor,
www.FreeLibros.me
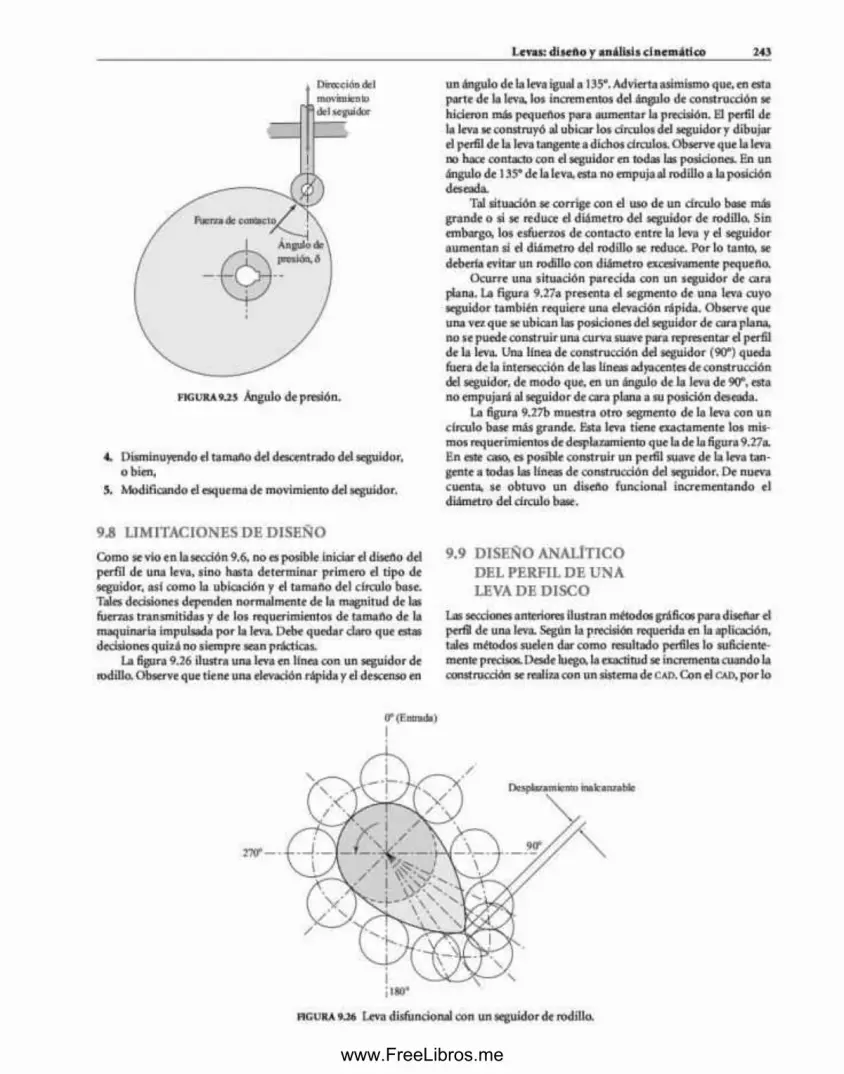
Levas: d iserto y an á lis is c in em á tico _________243
f i g u r a 9 .25 A n g u lo d e p r e s ió n .
D ism inuyendo el tam añ o del descen trado del seguidor, o bien.
M odificando el esquem a d e m ov im ien to del seguidor.
u n ángulo d e la leva igual a 135°. A dvierta asim ism o q u e , en esta p a rte d e la leva, lo s increm entos del ángulo d e co n stru cc ió n se hicieron m ás pequeños para a u m e n ta r la precisión. El perfil de la leva se constru y ó al u b icar lo s circuios del segu ido r y d ibu jar el perfil d e la leva tangente a d ichos círculos. O bserve q u e la leva no hace con tac to co n el segu ido r en todas las posiciones. En un án g u lo de 135* de la leva, esta n o em p u ja al rod illo a la posición
Tal s ituac ión se co rrig e co n el uso de u n c írcu lo base más g ra n d e o s i se reduce el d iá m e tro d e l segu ido r d e rodillo . S in em bargo, lo s esfuerzos d e c o n ta c to e n tre la leva y el seguidor a u m e n ta n si el d iám etro del rod illo se reduce. P o r lo tan to , se deberla ev ita r u n rodillo co n d iám etro excesivam ente pequeño .
O cu rre u n a s itu ac ió n p a rec id a co n u n se g u id o r d e cara p lana. L a f ig u ra 9 .27a p resen ta el seg m en to de u n a leva cuyo seguidor tam b ién req u ie re u n a elevación rá p id a . O bserve que u n a vez q u e se u b ican las posic iones d d segu ido r d e cara plana, n o se p u ed e co n s tru ir u n a cu rv a suave para representar d perfil d e la leva. Una linea d e co n stru cc ió n d d segu ido r (90°) q u ed a fuera d e la intersección de las lineas adyacentes d e construcción del seguidor, de m o d o q u e . en u n ángulo d e la leva de 90°, esta n o em pu jará al segu ido r d e cara p la n a a su posición deseada.
La fig u ra 9.27b m uestra o tro segm ento de la leva co n u n c ircu lo b ase m ás g ran d e . Esta leva tiene exactam ente los m ism os requerim ien tos d e desplazam iento q u e la d e la fig u ra 9.27a. E n este caso, es posib le co n s tru ir u n perfil suave de la leva ta n g e n te a to d as las lineas d e construcción del seguidor. D e nueva cu en ta , se o b tu v o u n d ise ñ o fu n c io n a l in c rem en tan d o el d iám etro del c ircu lo base.
9.8 LIM ITACIONES DE DISEÑO
C om o se vio e n la sección 9.6 , n o es posib le in iciar el d iseño del perfil de u n a leva, s in o hasta d e te rm in a r p rim e ro el tip o de seguidor, a s i c o m o la ub icación y el ta m a ñ o d e l c ircu lo base. Tales decisiones d ep en d en n o rm alm en te de la m agn itud d e las fuerzas tra n sm itid a s y de lo s requerim ien to s de ta m a ñ o de la m aqu inaria im pulsada p o r la le v a D ebe q u e d a r claro q u e estas decisiones q u iz á n o siem p re sean prácticas.
La figura 9.26 ilu s tra u n a leva en linea co n u n segu ido r de ro d illa O bserve q u e tie n e u n a elevación ráp ida y el descenso en
9.9 D ISEÑ O ANALÍTICO DEL PERFIL D E UNA LEVA DE DISCO
Las secciones an terio res ilu stran m étodos gráficos p a ra d iseñar el perfil d e u n a leva. Según la precisión requerida en la aplicación, tales m éto d o s suelen d ar co m o resu ltado perfiles lo suficientem ente precisos. D esde luego, la exactitud se increm enta cu an d o la construcción se realiza co n u n sistem a de cad . C on el Cad, p o r lo
0* (Entrada)
FIG U R A 9 0 6 L e v a d i s f u n c i o n a l c o n u n s e g u i d o r d e r o d i l l o .
www.FreeLibros.me

244 CAPITULO NUEVE
• 0" (Entrada)
F IG U R A 9 2 7 L e v a d i s f ú n d o n a l c o n u n s e g u i d o r d e c a r a p la n a .
general se utilizan lineas radiales p a ra constru ir la cu rv a suave del perfil d e la leva, ( io n frecuencia, las lineas radiales tien en errores de p recisión q u e p o d r ía n tra n sg re d ir las restricciones d e t a n gencia. P ara a u m e n ta r la exactitud , se em plean m enores increm en to s del án g u lo de la leva.
En algunas situaciones se requieren levas de a l ta precisión, d o n d e es deseable d e te rm in a r an a líticam en te las co o rdenadas d e los p un tos sob re la superficie d e la leva, asi c o m o las co o rd enadas del co rtad o r q u e se usará para fabricar la leva. Se h an desa rro llad o ecuaciones para las co o rdenadas d e d iferen tes tip o s d e seguidores. Esta sección solam ente m uestra estas ecuaciones, y el lecto r deb e co n su lta r fuentes m ás deta lladas p a ra las d ed u cciones [ref. 4 ] , La inco rp o rac ió n d e las ecuaciones a u n a ho ja de cálcu lo o a algún o tro d ispositivo p rog ram ab le genera rápidam ente las co o rdenadas del perfil.
E n g en e ra l, se u tiliza u n s is te m a de co o rd e n a d a s c a r te sianas, d e m o d o q u e el o rig en sea el cen tro de la leva. El eje y positivo se encuen tra a lo largo d e la dirección del m ovim iento del segu ido r en la posic ión de en trad a . El eje x positivo se e n c u e n tra a 90° en sen tido h o ra rio a p a r t ir del e je y , en co n g ru en c ia co n u n sistem a d e co o rdenadas de m an o derecha. La figura 9 .28 p resen ta este sistem a d e coordenadas.
9.9 .1 S e g u id o r d e c u ñ aLas coordenadas x y y del perfil d e u n a leva e s tá n dadas por:
R , = (R f r + A R ) s c n * (9.4)
R y = (R * + A W co stf. (9.5)
d o n d e se usa la siguiente notación:R, ~ C o o rd en ad a x del perfil de la superficie de la leva Ry. C o o rd e n a d a y d d perfil de la superficie de la leva Ri, R adio del d re u lo base4> - A ngulo d e ro tac ión de la leva, m edido c o n tra la dirección
de giro de la le va a p a r t ir de la posic ión de en trada AR - D esplazam iento del segu ido r en el án g u lo de la leva <£
l a m ayoría de las levas se o b tien en a trav és d e u n a o p era c ió n de c o rte u sa n d o m áq u in as c o r ta d o ra s de c o n tro l num érico p o r com p u tad o ra . Estas m áquinas son capaces de g ira r la leva u n a frac c ió n d e g rad o , m ien tra s q u e el c o r ta d o r avanza m ilésim as de m ilím etro. C o n u n m étodo asi, el perfil de b leva se fab rica c o n g ran precisión.
www.FreeLibros.me

Levas: d iserto y a n á lisis c in em ático_________245
Las co ordenadas x y y del cen tro de la m áqu ina c o rtad o ra , d o n d e se agrega la siguiente no tac ión :o ru e d a d e co rte , están dadas p o r: C x = c o o rd e n a d a * del cen tro del co rtad o r
Cx = (R.- + R* + A R )sen<¿ (9 .6 ) Cy C o o r d e n a d a y del c e n tro del co rtad o rR, = Radio del c o rta d o r
C ^ Í R , + R* + A R ) c o s ¿ (9.7)
P R O B IÍM A DF. E JE M PL O 9 .4
Para la aplicación del problem a de ejem plo 9 2 , determ ine analíticamente las coordenadas del perfil de la leva cuando se incorpora u n seguidor de cuna. Debido a las restricciones d e tam año de la m áquina, se debe em plear u n a leva con un d reu lo base de diám etro igual a 200 m m . La leva gira en sen tido antihorario.
S O L U C IÓ N : 1. Calcule las coordenadas del perfil de la leva
El radio del circulo base es la m itad de su d iám etro; por lo tanto:
Rft = 100 mm
Sustituyendo en las ccuadoncs (9.4) y (9 3 ),
R , - (R* ♦ AR)sen<¿ - |(IOOmm) ♦ A R )se n ¿
R y = (Rft + AR)cos«A = ((100 m m ) + AR)cos<¿
2. Obtenga las coordenadas del p e r fil para varios ángulos de la lesa
Usando estas ecuaciones en u n a hoja de cálculo, se obtienen los resultados listados e n la figura 9 2 9 ,
3. Grafu¡ue las coordenadas del perfil
Se debe usar una hoja de cálculo para obtener feeilmente una gráfica con Las coordenadas del perfil Esta gráfica se muestra en la figura 9 3 0 y presenta el perfil de la leva.
•°5>A O
* >-* -4 » / □
10 • A' »•
& SI i v i - M
U l .0 1 6 • . 1
-c H i
1 i A ot
(*>
«-
*<M)
DA R
io n . )
tR t
< an>
fR>
*
o _ c * _
0 03 0 0 0 0 0 0 0 1 0 0 00 2 5 2 1 2 8 33 3 9 1 1 0 1 0
0 5 0 4 2 4 1 6 65 * 8 6 8 6 20 55 6 3 5 25 00 1 1 1 9 55 '
1 0 3 8 4 * 33 33 1 3 2 8 1 2 31 2 5 1 0 5 9 4 1 6 * 1 3 6 3 -3 8 8
1 50 125 1 5 0 0 3 1 1 9 - -9 0 4
1 *5 148 2 4 9 38 5 8 6 • 125 0
12 2 0 0 169 4 45 46 2 6 5 -1 4 3 0
U 2 2 5 1 9 0 6 3 6 U -2 5 2 -1 3 4 5i* 2 5 0 211 8 25 03 -65 8 -1 0 6 3
15 2 *5 2 3 2 9 13 12 -90 3 -6 8 2
16 3 0 0 2 5 4 ) 4 5 4 - 1 0 0 6 -2 8 6
n 3 25 2’ 5 3 0 62 • 1 0 0 2 9 3
u 3 50 2 9 6 5 0 0 0 -8 9 5 4 4 6
19 3 T5 31’ 6 0 0 3 -6 * 4 53 9:o 4 0 0 3 3 8 8 0 0 3 • 3 6 1 9 3 2
4 116 '•**>4 25
O » *
3 6 0 0
t .
0 0 3 0 0 1 0 0 0
f i g u r a 9 .2 9 C o o r d e n a d a s d e l p r o b l e m a d e e j e m p l o 9 . 4 .
www.FreeLibros.me

246 CAPITULO NUEVE
O j j A *> - c •
y « g . Kim f é t ta> D i i > n M r O n « a i C«1 i r * ram . • v - ~ r
t**” — • ; . t0 : “ - - ' 4 2 'a ■ / h a a ■ • « ............ a/ □ - i - A - .« » * |* • • u
FIGURA 9.30 Perfil de la leva de! p rob lem a d e e jem plo 9.4.
9 .9 .2 S e g u id o r d e ro d i l lo e n l ín e aEn general, u n segu ido r de rod illo es com plicado cu an d o el p u n to d e contacto con la leva n o está en linea co n el centro d d ro d illa El ángulo e n tre la linea central del segu ido r y el p u n to de contacto c o n la leva varia según la c u rv a tu ra del perfil de la leva. En un seguidor de rodillo en linea, este án g u lo es el ángulo d e presión. El ángulo instan táneo se calcula com o:
a = ta n - l ‘ y < K /+ * + AR)
. " i ™ (Rf + Rf, + A R )2= 5 (9.8)
En u n seguidor d e ro d illo en linea, este án g u lo es el án g u lo de p resión . A dem ás d e la n o ta c ió n usada en la secc ió n 9.9.1, los siguientes té rm in o s se definen com o:
R j " R adio del segu ido r de rodillo v ■ M agnitud d e b velocidad instantánea del seguidor
d e b leva en el ángulo <f> de b leva
o»iÍT1 “ V e lo d d ad a n g u b r de b leva en r a d b n e s p o r u n id ad d e tiem po
El té rm in o (v/roj,.») e s u n a m ed ida de la razó n de cam bio del d esp lazam ien to del segu ido r co n resp ec to a l án g u lo de b
leva. E n s i tu a d o n e s d o n d e l a v e lo c id a d in s ta n tá n e a d e l s e g u id o r n o se o b t ie n e c o n facilidad , b p e n d ie n te d e l d ia g ra m a d e d e s p la z am ie n to s e e s tim a c o n b e c u a d ó n (9 .7 ).
y dR A R
A«*>(9.9)
E n to n ces , b s c o o rd e n a d a s x y y d e l p e rfil d e b leva e s tá n d a d a s p o r:
R* = - ( R / + R b + A R ]sen « £ + R /s e n íd * - a ) (9 .1 0 )
Ry - [ R / + Rf, + A R j c o s ^ + f y c o s ( $ - a ) (9 .1 1 )
Las c o o rd e n a d a s x y y del c o r ta d o r e s tá n d ad as p o r :
C x = - I R , + R„ + A R ) scnd> + [ R t - R ^ s c n ( « - a )
(9 .12)
= [ t y + R b + A R ) e o s (f> - [R , - cos(«f> - a )
(9 .13)
www.FreeLibros.me

Levas: d ise rto y a n á lis is c in e m á tic o _________247
PR O B LEM A D E E JE M PL O 9.5
Se utilizan dos levas para im pulsar la pinza de u n m anipulador mecánico de partes, la s dos levas generan m ovim ientos horizontales y verticales independientes en la pinza. Estas m áquinas pueden reubicar partes de m anera sim ilar a un robot en u n a fracción del costo. En la figura 9 3 1 se muestra el m anipulador de partes.
B m ovim iento prescrito de u n o de los seguidores de u n a leva es el siguiente:
1. Elevación de 1 3 in e n 1 3 s usando u n esquem a de m ovim iento arm ónico.2. O ten c ió n d e 2 s.5. Regreso en 1 3 s usando u n esquem a de m ovim iento arm ónico.4 . Detención d e 2 s.5 . Se repite la secuencia.
I h seguidor de rodillo en linea con u n radio de 0 3 in se em plea sobre u n a leva co n u n circulo base de radio igual a 3 3 in . Tabule el m ovim iento del seguidor y especifique las coordenadas del perfil de la leva.
FIG U R A 9 3 1 M á q u i n a m a n ip u la d o r a d e p a r t e s d e l p r o b l e m a d e e j e m p l o 9 . 5 .
S O L U C IÓ N : I . Calcule el tiem po de u n ciclo completo
Es necesario determ inar el tiem po total de u n ciclo com pleto para calcular la velocidad requerida de la leva.
I T - T , + T2 + T , + T4
- 1 3 + 2 .0 + 1 3 + 2.0 - 7.0s
2. Calcule la veloddad a n g u la , requerida de la I n a
E* la ecuación (93).
"w * " 4 r ~ ■ ~ ~ ■ 0.143 rev/s - 0 3 9 9 rad/s ■ 8 3 7 rpm¿ 7¿ 7 s
3. lie term ine e l g iro de la leva para cada intervalo de m ovim iento del seguidor
El increm ento angular de la leva recorrido por cada secuencia de m ovim iento del seguidor se calcula co n la colación (9.1).
01 - (« ita J (T i) - (0 .143rev /s)(13$) “ 0 3 1 4 rev - 773*
0 , = (0.143 rev/s) (2.0$) = 0 3 8 6 rev = 1023"
0 , = (0.143 rev/s) (1.5$) = 0 3 1 4 rev = 773*
0 4 - (0.143 rev/s) (2.0$) - 0 3 8 6 rev - 1023*
4 . Calcule el desplazam iento durante cada intervalo de m ovim ien to del seguidor
l a ecuación de la elevación y el descenso arm ónicos se proporcionaron en la tabla 9 3 . Si se sustituyen en lascolaciones de elevación arm ónica,
AR, - ? I I -
www.FreeLibros.me

248 CAPITULO NUEVE
” H ' \ / ' " M i Tr<l-5 in ) I ( n , < \ 41 “ 2 T , 2 (1 J s ) [ “ " l l J . J
Al sustitu ir en las ecuaciones de descenso arm ónico:
5 . Calcule las coordenadas del perfil de la lesa
Sustituyendo en las ecuaciones (9.8), (9.10) y (9.11),
« a h n " 1V I f y + R b + s l V 1(0.5in) + (3.5in) t s)
a e tan«%v, [R , + Rb + *1* .
- tan(0 8 9 9 rad/s) |( 0 5 in ) + (3 5 in ) + s)1
R , = - | f y + R|, + AR)sen<£ + Rfxn{<¡> - a ) = - ) 0 .5 + 3 3 + A R |s e n ¿ + 03sen(<¿ - a )
Ry - - \ R ¡ ♦ R,, + A R] eos ó ♦ fy«xis(* - a ) - - |0 .5 + 3 5 *■ A R ]co s¿ - 0 .5cos(* - a )
6 . Obtenga las coordenadas del perfil para to rios ángulos de la lera
Si se introducen estas ecuaciones en u n a hoja de cálculo, se obtienen los resultados listados en la figura 9 5 2 .
7 . tira fiq u e las coordenadas del perfil
Se utiliza u n a hoja de cálculo para obtener ftc ilm ente la gráfica de las coordenadas del perfil. Esta gráfica se muestra en la figura 9 5 3 e ilustra el perfil de la leva.
A - > • > •
W im r ¡ y l m « •■ m u U i 0W . *»~r» rt«w O r ^ io p .. » * i i n
* r * n i « « .« 10 • ■ - ■ ^ • A - i : \ i -
J B / u - A* ■ ■ m ¿ i - s % • a - n/ □
*an|k* *
‘*o— " '•
• J .*|W e *
- í *
1 n o __ • : ________iH ______
A B c O E f G ~ ~ H • 2 1 K |: r e i t V s Xx *> 1
3 W W i . ) I r . . ) ,áef) < - ) ( . 34 0 0 0 0 0 0 0 0 0 0 0 0 3 500
i 0 33 i* 0 19 105 1 5 6 -1 2 7 4 3 4SSt 0 7 0 36 0 6 ’ 1 5 6 2 0 4 •2611 3 29*7 105 54 1 19 1 2 7 1 5 2 -3 *16 2 661
1 I «0 »2 1 <1 0 33 3 1 •4 731 1 5 0 9
* I 75 90 1 40 •0 79 - 9 2 •4 906 0 0*010 2 1 0 10» 1 50 0 00 0 0 •4 755 -1 54}11 2 4 } 126 1 50 0 0 0 0 0 •4 045 - 2 939
12 : n 144 1 50 oco 0 0 •2 939 -4 045
13 3 15 162 1 50 0 M 0 0 •1 5 4 } •4 75514 3 50 1*0 150 0 0 0 0 0 0 0 » -5CO0
n 3 * 5 19* 131 -1 0 5 -1 2 4 1 3*7 - 4 61616 4 2 0 216 0 1 3 -1 56 -1 9 1 2 4 2 5 -3 625
17 4 55 234 0 31 -1 2 7 •1 * 2 3 010 - 2 3*011 4 9 0 252 0 02 0 33 - 5 2 3 332 -1 13019 5 25 270 0 0 0 0 0 0 0 0 1 5 0 0 0 00020 5 6 0 :* * 0 0 0 ooo 0 0 3 1 2 9 10*221 5 95 306 0 0 0 ooo 0 0 2 * 3 2 2 05722 6 JO 324 0 0 0 0 0 0 0 0 2 057 2 * 3 223 6 6 5 342 0 0 0 ooo 0 0 1 0 * 2 3 32924 7.C0 360 0 0 0 ooo 0 0 0 0 » ■ n a
FIGURA9.32 Coordenadas del perfil d e la leva d d problema de ejem plo 9.5.
www.FreeLibros.me

I.evas: d iserto y an á lis is c in em ático_________249
FIGURA 9 J3 Perfil de la leva del p rob lem a d e e jem plo 9.5.
9 .9 .3 S e g u id o r d e ro d i l lo d e s c e n t r a d oU n segu ido r d e rod illo descen trad o o m ás com plicado porque e l m o v im ie n to del segu ido r n o está e n lín ea c o n el p u n to de con tac to de la leva la cual, a su vez. n o está en lin ea c o n el centro del rod illo . E n tonces, las ecu ac iones d e l p e rfil se vuelven u n poco m ás com plejas. El ángulo e n tre las lineas q u e u n en el cen tro del segu ido r co n el p u n to de con tac to d e la leva y el centro del se g u id o r co n el c e n tro de la leva, se o b tie n e com o:
a = tan f e )( r
R, 4 R * 4 AR
{Rf + Ry + AR)2 - e(p/tü\rya))] (9 .14)
C om o en la ecuación (9.8), el té rm in o (v /ti* -^ es la m ed id a de la razó n de cam b io del desp lazam ien to del se g u id o r co n res p e d o al án g u lo de la leva. En situaciones d o n d e la velocidad instan tán ea del se g u id o r n o se o b tien e fácilm ente, la pend ien te del d iag ram a de desp lazam ien to se estim a co n la ecuac ión (9 .9 ). El án g u lo de p resión d se calcula d e la siguiente m anera:
S = a - t a n '1^ R ,+ Rb + \R (9 .15)
C o m o antes, la distancia e del descentrado, se define com o la d is tan c ia e n tre la lin ea central del se g u id o r y d cen tro de la leva. Un descen trado positivo se define en la dirección positiva de x P o r el con tra rio , u n descentrado negativo se define en la d i rección negativa d e x El descen trado m ostrado en la figura 9 2 8
tiene u n valo r positivo, de m o d o q u e las co o rdenadas x y y del perfil d e la leva están dadas p o r:
Rx = (e)cos4 - [Rf + Rf, 4 AR]scnd> 4 Rfxn{t¡> - a)( 9 .1 6 )
R , = (e)sen<¿ - |Ry 4 Rj, 4 A R) e o s 4 4 fy c o s (<¿ - a )
(9.17)
Las co o rdenadas * y y del c o r ta d o r están dadas p o r:
Cg = (e)cos<#> - [ R f+ Rj, 4 A R] se n d> ( 9 .1 8 )
4 [R , - Ry| s e n ( 4 - a )
Cy = (t’)scn<¿ - [R f 4 R h 4 A R ] eos ( 9 .1 9 )
- [R( - IV) eos (* - a)
9 .9 .4 S e g u id o r d e c a r a p la n a c o n tra s la c ió nla construcción an a lítica d e u n segu ido r de ca ra p la n a con traslación tam bién presen ta u n p u n to d e con tac to que n o está en linca con la linea central d e la leva El án g u lo en tre la linca central del seguidor y la linca q u e u n e el p u n to de contacto d e la leva con d c e n tro de la leva varia co n la cu rva tu ra del perfil de la leva y se calcula como:
(9.20)
www.FreeLibros.me

250 CAPITULO NUEVE
C o m o en las ecuadones (9.8) y (9 .14),el té rm in o ( r f w ^ ) es la m ed ida d e la razó n d e cam bio del desp lazam ien to del seguidor co n respecto al án g u lo de la leva. En situaciones d o n d e la v e lo d d ad in stan tán e a del segu ido r n o se o b tien e fácilm ente, la p en dien te del d iag ram a d e d esp b zam ien to se estim a c o n la ecuad ó n (9.9).
E ntonces, las co o rdenadas x y y del perfil de la leva están dadas p o r:
\ c o s a /
„ / R * + A R \ , ,R r = I -------------- )sen(d>
' \ c o s a /
cos(d> + a ) ( 9 .2 1 )
+ a ) ( 9 . 2 2 )
Las co ordenadas x y y del c o r ta d o r están d ad as p o r:
[ + A R + co sy
c o s ( ¿ + y )
s e n (* + y )
( 9 .2 3 )
( 9 .2 4 )
Se usa la siguiente notación:
R£ = Longitud del eslabón segu ido r co n pivote R P “ D istancia e n tre el cen tro d e la leva y la u b ic a d ó n del
pivote
A0¿ “ fcsic ió n a n g u la r in stan tánea d e l eslabón seguidor con pivote
(Oí - V eloddad angu la r in stan tánea del eslabón seguidor co n pivote
a £ = A ce le rad ó n a n g u la r in s ta n tá n e a d e l e s la b ó n se g u id o r co n pivote
La diferencia p r in d p a l en u n segu ido r q u e p ivo ta es q u e su m o v im ien to es g ira to rio y el m o v im ien to p re sc rito genera lm ente e s la p o s id ó n angu la r del segu ido r c o n tra el tiem po, o el á n g u lo d e la leva. La e c u a d ó n (9.3) d a la re la d ó n e n tre el desp lazam ien to a n g u la r d e l eslabón segu ido r y el desplazam iento lineal del cen tro del rodillo , e l p u n to F.
AR f = Rl V 2 { \ - eosA0¿) ( 9 .3 )
La v e lo d d a d del c e n tro del segu ido r está re ladonada co n la velo d d a d angular del eslabón seguidor.
donde
y = ta n -I ' (Rfr + A R )la n (q )
. Rt + Rf, + A R( 9 .2 5 )
9 .9 .5 S e g u id o r d e ro d i l lo c o n p iv o teLa c o n s tru c d ó n analítica de u n segu ido r de rod illo co n pivote e s sim ilar a la del segu ido r de tra s la d ó n d e sc e n tra d a S in e m bargo, la g eo m etría y las d e f in id o n e s son a lgo d iferen tes. l a figura 9 .34 p resen ta la n o m e n d a tu ra u tilizada en u n a leva con segu ido r d e rod illo co n pivote.
vr = Rl ^ í ( 9 .2 6 )
N uevam ente, el án g u lo e n tre las lincas q u e u n en el cen tro d d segu ido r co n el p u n to de co n tac to de la leva y d cen tro d d segu ido r co n d cen tro d e la leva varia co n la c u rv a tu ra d d perfil d e la leva y se calcula com o:
- )v " Wa i = ta n
- f t
1( R f + AR + Rfc) - ( í f t ü ^ J c o s y )] ( 9 .2 7 )
www.FreeLibros.me

lev a » : d iserto y a ná lis is c in em á tico_________251
C o m o antes, el té rm ino ( v¡l<o es la m ed ida de la razón de cam bio del desplazam iento del segu ido r co n respecto al án gulo d e la leva. En situaciones d o n d e la velocidad in stan tánea del seguidor n o se ob tiene fácilm ente, la pendiente del d iag ram a de desplazam iento se estim a co n la ecuación (9.9).
Los ángu los in te rn o s están dados p o r;
<t> = e o s -1
R ¡ + (R* + R f+ A R ) 1 - R 1
2 < R J (R b + R* + s)
R j - f ( R , + ^ + AR ) , - R Í
2 (R p )(R b + R b + s)
)]
) ]P = - + <¡> + a
( 9 .2 8 )
( 9 .2 9 )
( 9 .3 0 )
h> r ú ltim o , las co o rdenadas x y y del perfil de la leva están dadas por:
R, = - [ R f + R/, + A R ] c o s /3 ~ R f s e n ( /3 - a ) (9 .31 )
R , = - [Rf + Rf, + A R] s e n /? - Rf co s ( 0 - a ) { 9 .3 2 )
y el án g u lo de presión está d ad o p o r:
( 9 .3 3 )
Las co ordenadas x y y del c o r ta d o r están d ad as por:
Cx = [ R f + R t + A R ] c o s 0 - [Rc - Ry] s e n ( 0 - a )
( 9 .3 4 )
Cy = [Ry + R h + A R ] s c n 0 - |R , - Ry]c o s ( f i - a )
( 9 .3 5 )
9 .I 0 . I D is e ñ o g rá f ic o d e l p e rf il de u n a le v a c i l in d r ic aLa fo rm a m ás eficiente p a ra d e sc rib ir la co n stru cc ió n de u n a leva c ilin d rica es a través de u n a co n stru cc ió n real. C o n el d iag ram a de desp lazam ien to de la figura 9.19, se c o n s tru y ó el perfil d e u n a leva cilindrica y se m uestra en la figura 9 .35 . P ara c o n stru ir este perfil se tien e el siguiente proced im ien to general:
1. T a z a r u n a linea recta igual a la circunferencia de la leva cilindrica.
2 . D iv id ir esta línea en secciones q u e co rre sp o n d an co n los ángu los de referencia de la leva del d iag ram a de desplazamiento.
3 . T ransferir lo s desplazam ientos del d iag ram a de d esp lazam ien to a las líneas q u e co rre sp o n d en co n los ángu los de referencia de la leva.
4 . D ibu jar el segu ido r de rod illo en lo s desplazam ientos prescritos.
5 . Trazar u n a cu rv a suave tangente a los con tornos del rodillo.
6 . Para co n s tru ir u n perfil co n u n a precisión consisten te con d d iag ram a d e desplazam iento , e s necesario tran sfe rir pun tos in term ed io s ad icionales de los m ovim ien tos de d e v a a ó n y descenso.
0 9 0 180 2 7 0 360
f i g u r a 9 .3 5 D iseño del perfil de u n a leva cilindrica .
9.10 LEVAS C ILIN D RICA S
A un cu an d o el tip o m ás co m ú n d e levas es la leva d e d isco , las levas cilindricas tam b ién se usan am pliam ente. C o m o se indicó en la sección 9.2 y se ilustró en la figura 9.3b, u n a leva cilindrica consiste en u n a ra n u ra a lrededor d e u n cilindro . U na leva cilind ric a es u n a leva d e m ovim iento positivo en la cual el seguidor está cau tiv o en u n a ra n u ra , p o r lo q u e n o se necesita u n e le m en to externo p a ra m an tener el con tac to en tre el seguidor y b leva. H ay m uchas ap licac iones d o n d e e s necesario q u e b leva ejerza u n con tro l positivo del seguidor d u ra n te b s secuencias de elevación o descenso.
C on frecuencia se em plea u n seguidor d e rod illo en form a de c u ñ a c o m o el q u e se m u e s tra e n la fig u ra 9 .3b , p o rq u e el borde su p e rio r de b ra n u ra viaja a u n a velocidad m ayor q u e b p a r te in fe rio r, de m o d o q u e la c u n a co m p en sa la ve locidad diferencial, lo cual im pide cualqu ier deslizam iento y a rra s tre del rodillo. C uando se usa u n rodillo c ilindrico , es aconsejable usar u n a a n c h u ra angosta p a ra m in im izar b diferencia de velocidad a través d e b cara del rodillo.
E n g enera l, lo s p ro c e d im ie n to s d e cá lcu lo y trazad o son s im ib res a lo s de b leva de d isco . En b s siguientes secciones se analizan las técnicas de generación de perfiles de u n a leva cilind ric a co n u n segu ido r d e traslac ión . La g eneración del perfil para o tro s tip o s de segu idores es parecida.
9 .1 0 .2 D ise ñ o a n a l í t ic o d e l p e rf il d e u n a le v a c i l in d r ic aC o m o u n a leva c ilin d rica está en ro llada a lrededor d e u n c ilin dro , se u tiliza u n sistem a d e coordenadas c ilindricas p a ra definir d perfil de b ra n u ra . La co o rd en ad a a n g u b r 6 es el ángulo a lrededor de la leva, m ien tra s el eje z es la posición axial de la leva. El án g u lo e n tre la línea central del segu ido r y el p u n to de c o n ta d o d e la leva varía co n b c u rv a tu ra del perfil de la ranura , q u e se calcula com o:
a L = ta n ' ( £ ) ( 9 .3 6 )
La no tac ión q u e se usa e s b m ism a d e las secciones an terio res. E n u n segu ido r co n traslac ión , este án g u lo tam b ién es el án- g ilo de p resión . C o m o en b s levas de disco, el ángulo de presión d e b e rb se r m ín im o sin exceder los 30°.
La co o rd en ad a z del perfil su p e rio r d e la ran u ra , cuando el cen tro del se g u id o r está en <b, es tá d a d a p o r:
R , = A R + R e c o sa
= © - tan- m
( 9 .3 7 )
( 9 .3 8 )
www.FreeLibros.me

252 CAPITULO NUEVE
A quí, Rf, es el rad io la leva cilindrica.La co o rd en ad a z del perfil m ás bajo de la ra n u ra , cu an d o el
c e n tro del segu ido r está en r¡>, es tá dad a por:
S < d - a ( 9 .4 7 )
R , = A R - R f t o s a
= d» + ta n_ / R fc o s ac o s a \
r T )
Las co ordenadas del c o r ta d o r están d ad as p o r:
Cz = A R
( 9 .3 9 )
( 9 .4 0 )
( 9 .4 1 )
( 9 .4 2 )
9.11 EL M ECANISM O DE GINEBRA
El m ecan ism o de G inebra es u n d ise ñ o ún ico q u e p roduce un m ovim iento interm itente a p a r t ir d e m ovim iento g ira to rio constan te . D eb ido a este m ovim ien to , el m ecanism o de G in eb ra se clasifica co m ú n m en te c o m o leva. E n la figura 9.36 se presen ta u n m ecan ism o de G in eb ra co n c u a tro estaciones.
El m ecanism o d e G in eb ra consiste en u n rodillo im p u lso r y u n a ru e d a d e G in eb ra . Esta ú ltim a e s u n d isc o co n v arias r a nu ras radiales, q u e está su je ta a u n eje de salida. El rod illo im p u lso r está su jeto a u n b razo q u e . a la vez. se sujeta a u n eje de e n t r a d a El b razo p o r lo general está su jeto a u n d isco d e b lo q u eo , q u e im pide q u e la ru e d a gire cu an d o el rodillo im pulsor no reco rre la r a n u ra El d isco de b loqueo se a ju sta a u n recorte so b re la ru e d a
El m o v im ie n to del m ecan ism o de G in eb ra se c a ra c te r iza p o r el rodillo q u e e n tra a la ra n u ra de la ru ed a y la im pulsa. ( Alando el rod illo se sa le d e la ra n u ra , la ru e d a se b lo q u ea en esa posic ión has ta q u e el rod illo e n tra en la s igu ien te ra n u ra . En la fig u ra 9 .36a el rodillo g ira en se n tid o h o ra rio y está a p u n to de e n tra r a la ru e d a de Ginebra. En la figura 9.36b, el rod illo ya e n tró a la ra n u ra y g ira la ru ed a en se n tid o a n tih o ra r ia O bserve q u e e l d isco de b lo q u eo se va alejando de la ru e d a y le perm ite
C u a n d o se d iseñ a u n a ru ed a , es im p o rta n te q u e el rodillo e n tre a la ra n u ra tangencialm ente. D e o t r a m anera , se crean c a r gas d e im pacto y el m ecanism o f tin d o n a rá d e m an era deficiente a a ltas velocidades o a cargas g randes. D eb ido a esta restricción, se ded u cen las sigu ien tes re lac iones g eom étricas |r e f . 7). Rem ítase a la figura 9.36 p a ra las definiciones de las p ropiedades geom étricas.
360°
donde:n = N úm ero d e estaciones en la ru ed a de G inebra
y o = 9o°- ya = d s e n
R = d eos
( ? )
( ? )
( 9 .4 3 )
( 9 .4 4 )
( 9 .4 5 )
( 9 .4 6 )
La c in em ática d e la ru e d a de G in eb ra ta m b ié n se determ ina analíticam ente. El á n g u lo del ro d illo A y se d efine a p a r t ir del inicio de su recorrido en la r a n u ra El án g u lo de b ru ed a , m ed id o a p a r t i r del in icio d e l re c o r r id a está defin id o p o r f i y se ca lcu b com o:
0 = s e r r , [ ( ^ ) s e n ( 1 8 0 o - * ) ) ( 9 .4 8 )
donde
r = V a 2 + d* - 2 a d e o s ( 1 8 0 - * ) (9.49)* = 180° - y 0 + A y (9.50)
dondeA y = C antidad d e ro tac ión del im pulso a p a r t ir d e la posición d o n d e el rodillo acaba de e n tra r a b ran u ra .
La v e lo d d a d y a c e le ra d ó n in s ta n tá n e a s d e b ru e d a de G inebra se calculan ¡reí. 7] con:
* W d . = ( * ) ( ' ■ V < w « r » d . ) c o s ( 0 - * ) ( 9 .5 1 )
< * n * d . = - ( 7 ) ( * V d e « . t » . d » > J i * n ( / ? - * ) ( 9 .5 2 )
df ranada) « * ( 0 - * )
+ ( f ) K e d e e « r a « k ) 2 s e n ( 2 / ? - 2 * )
Estas ecuaciones se d ed u je ro n co n el uso de la co n v en d ó n típica d e signos angulares, e s d e d r , 10 y a son positivas e n se n tido an tih o ra rio y negativas en sen tido h o ra r ia
Rodad?Q n o b r a
E ro d i l lo im p u l s a e n t r a a la o r . u a d a La n i n f a d a C im b r a
figura 9.36 M ecanismo de Ginebra c o n cuatro estacones.
www.FreeLibros.me

Levas: d iserto y a ná lis is c in em á tico_________253
PR O B LEM A D E E JE M PL O 9 .6
En la figura 9 3 7 se m uestra el diserto de u n m ecanism o de G inebra con seis estaciones. I.a distancia entre los ejes im-fxjlsor e im pulsado es de 80 m m . El brazo im pulsor gira a u n a velocidad constante de 80 rpm en sentido horario.Extermine b velocidad y b aceleración angulares de b rueda cuando el brazo im pulsor gira 15* a partir de la posición donde el rodillo acaba de en trar a la ranura.
S O L U C IÓ N : I . Calcule la geom etría del mecanismo
Se usan b s ecuaciones (9.43) a (9.47) para calcular las propiedades geométricas de este m ecanism o de Ginebra.
S ° - „ - 6
To - 90“ - = 90» - - - 60"
a - d scn^ y ) ■ (8 0 m m )srn ^ y ) ■ 40m m
R = d eos ̂ y ) = (8 0 m m )co s^ = 69.3 m m
S < d - a = 80 - 40 = -10 m m
2. Calcule las propiedades cinem áticas del mecanismo
Se usan b s ecuaciones (9.48) a (9.52) para determ inar las relaciones cinem áticas cuando el brazo im pulsor gira 15“ a partir de b posición donde el rodillo acaba de en trar a b ranura.
A y = 15"
* - 180* - y , + A y - 180" - 60" + 15" - 135"
r - W + d 2 — 2 a d e o s ! 18 0 - * )
- \ / ( 4 0 m m ) 2 ♦ ( 8 0 m m ) 2 - 2 ( 4 0 m m ) ( 8 0 m m ) c o s ( 4 5 " ) - 5 8 . 9 4 m m
4 0 m m- i. 5 8 . 9 4 m m
" n « < U « n i r » d í “ 8 0 r p m ■ - 8 /1 r a d / s . e n s e n t i d o h o r a r i o
s e n 4 5 " = 2 8 . 7 "
FIG URA 9 .3 7 M e c a n i s m o d e G i n e b r a d e l p r o b l e m a d e e j e m p l o 9 .6 .
www.FreeLibros.me

254 CAPITULO NUEVE
= I “ J (® -« í..« n ü .)co sO - <H = ( - ) ( -8 .4 rad /s)a»(2 8 .7 " - 135*) = + 1.6rad/s = I5.3rpm, en sentido anlihorario \ r / \ » .9 4 m m /
“ «•¿♦«niradj “ 0 (velocidad angular constante del eje de entrada)
- a ) - )(«Vaeenw.u)‘CS(0 - <*)
+ ( 7 ) (w«id.«n<™4.),» ,'(2 0 - 2a)
( ^ ^ ) 2( - 8-4rad/l),‘ín(287° - ,350)- 0
¿ " " 7 ; ) ( -& 4 ra d /s )Js c n [2 (2 8 .D - 2<135«)1
= +67.1 rad/s* = +67.1 rad/s1, e n sentido antihorario
PROBLEMASEn b s so luc iones gráficas, las técnicas m anuales suelen ser m uy didácticas, p e ro se recom ienda am p liam en te el u so de u n sistem a de CAD.
D iag ram as g rá fico s de d e sp la z a m ie n to
9 -1 . Se requiere u n a leva para u n m ecanism o de transieren- d a autom ático. El seguidor de la leva se debe elevar hacia afuera 1.0 in a velocidad constan te en 3 .0 s . hacer u n a d e te n d ó n de 5 s descender a ve locidad c o n s tan te en2.0 s y, luego, repetir la secuencia. D eterm ine b v e lo d dad requerid a d e b leva y elabo re g ráficam ente el d b g ram a d e despbzam ien to del seguidor.
9 - 2 Se requ iere u n a leva p a ra el segu ido r re d p ro c a n te del m ecan ism o m an ip u lad o r de u n b razo ro b ó tico . El se & iidor d e la leva se deb e elevar h a d a afuera 0.75 in a ve lo d d a d c o n s tan te en 1.4 s, hacer u n a d e te n d ó n de 2 3 s , descender a v e lo d d ad constan te en 0 .8 s , hacer u n a d e te n d ó n de 1.9 s y, luego, rep e tir la secu en d a .1 »etermine La v d o d d a d requerida de la leva y e b b o re g rá ficam ente el d iag ram a de desplazam iento del seguidor.
9 -3 . Se requiere u n a leva p a ra im p u lsa r u n a p la tafo rm a de em barque q u e se utiliza para evaluar b efic iencb de e m barque d e los paquetes. E l seguidor de b leva se debe elevar h a d a a fuera 1X) in co n aceleradón constante en 0.7 s, h icer u n a detención d e 0 2 s, descender co n aceleración constante en 0 .5 s y, luego, rep e tir la secuencia. D eter m ine la veloddad requerida de b leva y elabore gráficam ente el diagram a de desplazam iento del seguidor.
9 -4 . Se requiere u n a leva p a ra im p u lsa r u n m ecanism o q u e alim enta papel e n u n a im pren ta . El segu ido r d e b leva se deb e elevar h a d a afuera 1.0 in c o n a c e le ra d ó n constan te en 1.7 s , hacer u n a d e te n d ó n de 0 .8 s, descender0.5 in c o n ace le rad ó n constan te en 0.8 s, hacer u n a dete n d ó n de 0.3 s, descender 0 .5 in c o n ace le rad ó n cons tan te en 0 .8 s y, luego, repetir la se c u e n d a . D eterm ine b v e lo d d ad requerid a d e la leva y e b b o re gráficam ente d d iag ram a de desplazam iento del seguidor.
9 -5 . Se req u ie re u n a leva p a ra im p u lsa r u n deslizador a u tom ático sobre u n a m áquina d e to m illo que gira partes in trincadas. El segu ido r d e b leva se deb e elevar h a d a
afuera 1.5 in co n ace le rad ó n constan te en 1.2 s, hacer u n a detención d e 0.7 s, d escen d er 0 .5 in co n aceleradón constante en 0.9 s, hacer u n a d e te n d ó n de 0.5 s, descender 1 in co n aceleradón constante e n 12 S y , luego, repet ir b secuencia. D eterm ine la veloddad requerida d e la leva y e b b o re g rá ficam en te el d b g r a m a de desplazam iento del seguidor.
9-6 . Se usa u n a leva p a ra im p u lsa r u n m ecan ism o q u e im pulsa a su vez u n a m áqu ina ensam blador.! autom ática. El seguidor de b leva se debe elevar had a afuera 13 m m con velocidad constante en 3 s> hacer u n a detención de 3 s, descender 5 m m co n aceleración constante en 2 s, hacer u n a detención de 3 s, descender 8 m m con aceleradón constante en 2 s y, luego, repetir la secuencia. Determ ine b veloddad requerida d e b leva y e b b o re gráficamente el db g ram a d e despbzam ien to del seguidor.
9 -7 . Se usa u n a leva para im pulsar u n m ecanism o q u e prueba li d u rab ilid a d de b s p u ertas d e d e r to s h o rn o s . El segu id o r d e b leva se deb e elevar h a d a a fu e ra 2 in con m ovim iento arm ónico en 1 s, hacer u n a d e te n d ó n de 0.5 s, descender 2 in con m ovim iento arm ónico en 1 s , hacer u n a detención d e I s y, luego, repetir la secuenda. D eterm ine la velocidad requerida d e la leva y elabore gráficam ente el d b g ra m a de desplazam iento del seguidor.
9-6 . Se usa u n a leva para im pulsar u n m ecanism o q u e mueve u n a h erram ien ta en u n proceso au tom ático d e m aqu inado d e tom illos. El seguidor de b leva se debe elevar h a d a afuera 24 m m co n m ovim iento a im ó n ico en 0 2 s. hacer u n a d e ten d ó n d e 0 3 s. descender 10 m m con m ovim iento arm ónico e n 0 3 s, hacer u n a detención de0.2 s, descender 14 m m c o n m ovim iento a rm ón ico en 0.2 s y, luego, repetir b secuenda. D eterm ine b velocidad requerida de b leva y elabo re gráficam ente el d iagrama de despbzam iento del seguidor.
9 -9 . Se u sa u n a leva p a ra im p u lsa r u n m ecan ism o que coloca relleno en cajas p a ra em barque. El segu ido r de b leva se deb e elevar h a d a afuera 1 in co n m ovim iento cicloidal en 1.5 s descender 1 in c o n m o v im ien to d - d o id a l e n 1 s, hacer u n a d e ten c ió n de 0 .5 s y, luego, repetir la secuencia. D eterm ine la velocidad requerida de b leva y elabo re g rá ficam en te el d iag ram a de desplazam iento del seguidor.
www.FreeLibros.me

I.evas: d iserto y a n á lisis c in em ático_________255
9 -1 0 . Se usa u n a leva para im p u lsa r u n m ecan ism o incorporado a u n a m áqu ina q u e cose zapatos. El seguidor de la leva se debe elevar hacia aJuera 0 5 in c o n m ovim iento cicloidal en 0.7 s . hacer u n a detención de 0 2 s , descender Q?S in co n m ovim iento cicloidal e n 0 5 s, hacer u n a detención de 0.2 s, descender 0 2 5 in co n m ov im ien to cicloidal e n 0 5 s y, luego, repetir la secuencia Determ ine la velocidad requerida de la leva y elabore gráficamente d diagram a de desplazam iento del seguidor.
9 -1 1 , Se requiere u n a leva im p u lso ra p a ra sin c ro n izar los m ovim ientos de u n d ispositiva de transferencia a u tom ático . El segu ido r de la leva se deb e elevar hacia afiiera 10 m m co n aceleración c o n s tan te en 90° de rotación de la leva, hacer u n a detención a los 30", descender 10 m m eo n aceleración constante en 18CT de rotación de la leva y; luego, hacer u n a detención d e 60*. Elabore gráficam ente d d iag ram a de desp lazam ien to d d se- ¡jii-dor.
9 -1 2 . Se usa u n a leva para u n a válvula de escape en u n m otor de gasolina. El segu ido r de la leva se deb e elevar hacia afuera 0 .5 in c o n m o v im ien to a rm ó n ic o e n 150° de ro tación de la leva, hacer u n a detención de 30" y. luego, descender 0 .5 in co n m ov im ien to a rm ó n ico en 180® de ro tac ión d e la leva. E labo re g ráficam ente el d iag ram a de desplazam iento d d seguidor.
9 -1 3 . Se usa u n a leva para u n d ispositivo recolector d e p e r ió dico. El segu ido r de la leva se debe d e v a r hacia afuera0.5 in co n m ovim iento d d o id a l en 120“ d e ro ta d ó n de b leva, h a c e r u n a detención d e 30". descender 0 .5 in co n m o v im ien to ciclo idal e n 120" de ro ta c ió n d e la leva, hacer u n a detención de 30® y. luego, descender 0 .5 in c o n m o v im ien to d d o id a l en 60" de ro ta d ó n de la leva. E labore g rá fica m e n te el d ia g ra m a d e d esp lazam ien to d d seguidor.
D iag ram a de d e sp la z a m ie n to a n a lf tic o
En los problem as 9-14 a 9-23, determ ine ia veloddad d e la leva; además, use las ecuaciones d e m ovim iento y u n a hoja d e cálculo para elaborar el diagram a d e desplazam iento del seguidor. Calcule asim ism o la veloddad y la aceleración m áxim as d d seguidor.
9 -1 4 . Use el m o v im ien to re q u e r id o d e l se g u id o r de la leva espedficada e n el p rob lem a 9-1.
9 -1 5 . Use d m ovim iento requerido d d segu ido r de la leva espedficada en d p ro b lem a 9 -2 .
9 -1 6 . Use el m o v im ien to req u erid o d e l se g u id o r de la leva espedficada en el p rob lem a 9-3 .
9 -1 7 . Use d m ovim iento requerido del segu ido r de la leva especificada en el p rob lem a 9 -4 .
9 -1 8 . Use el m o v im ien to req u erid o d e l se g u id o r de la leva esped ficada en d p rob lem a 9-5 .
9 -1 9 . Use d m ovim iento requerido del segu ido r de la leva espedficada en el p ro b lem a 9 -6 .
9 -2 0 . Use el m o v im ien to req u erid o d e l se g u id o r de la leva espedficada en d problem a 9-7 .
9 -2 1 . Use d m ovim iento requerido del segu ido r de la leva especificada en d p ro b lem a 9-8 .
9 -2 2 . Use d m o v im ien to req u erid o d e l se g u id o r de la leva espedficada en d p rob lem a 9-9 .
9 -2 3 . Use d m ovim iento requerido d d segu ido r de b leva especificada en el p rob lem a 9 -10 .
En los p rob lem as 9 -2 4 a 9 -26 , use b s ecuaciones d e m ovim iento y u n a h o ja de cálcu lo p a ra e b b o ra r el d b g ra m a de d e s p b z a m iento d d seguidor.
9 -2 4 . Use el m ov im ien to requerido d d segu ido r d e la leva esp ed ficad a en el p ro b lem a 9-11.
9 -2 5 . Use e l m o v im ie n to req u erid o d d se g u id o r de b leva especificada en el p rob lem a 9 -1 2 .
9 - 2 6 . Use el m ovim iento requerido del segu ido r d e la leva esp ed ficad a en el p ro b lem a 9-13.
C u rv a s de m o v im ie n to analíticasEn los p rob lem as 9 -2 7 a 9 -36 , use b s ecuaciones d e m ovim iento y u n a ho ja de cálcu lo p a r a genera r g rá ficas de desp lazam ien to, v d o c id a d y a e d e ra d ó n d e l se g u id o r c o n tra d tiem po .
9 - 2 7 . Use d m ov im ien to requerido d d segu ido r d e la leva esp ed ficad a en el p ro b lem a 9-1 .
9 - 2 8 . Use el m ov im ien to req u erid o del se g u id o r de la leva espedficada en el p rob lem a 9 -2 .
9 - 2 9 . Use el m ov im ien to requerido d e l segu ido r d e la leva esp ed ficad a en d p ro b lem a 9-3 .
9 - 3 0 . Use el m o v im ien to req u erid o d d se g u id o r de la leva especificada en el p rob lem a 9 -4 .
9 - 3 1 . Use el m ov im ien to requerido d d segu ido r d e la leva esp ed ficad a en el p ro b lem a 9-5 .
9 -3 2 . Use e l m o v im ie n to req u erid o d d se g u id o r d e b leva espedficada en el p rob lem a 9 -6 .
9 - 3 3 . Use e l m ovim iento requerido d d segu ido r d e b leva esp ed ficad a en el p ro b lem a 9-7 .
9 - 3 4 . U se el m o v im ie n to req u erid o d d se g u id o r de b leva especificada en el p rob lem a 9 -8 .
9 -3 5 . Use el m ov im ien to requerido d d segu ido r d e la leva esp ed ficad a en el p ro b lem a 9-9 .
9 -3 6 . Use el m o v im ien to req u erid o del se g u id o r de b leva espedficada en el p rob lem a 9 -10 .
D ise ñ o g ráfico d e l perfil d e u n a leva de p b e a
9 - 3 7 . U na leva d e p laca tien e q u e p ro p o rd o n a r el d e sp b z a m ien to q u e se m u e s tra en b fig u ra P9.37 p a ra un segu ido r d e curta rec ip ro can te en línea. La leva debe tener u n c ircu lo base d e 3.0 in y g ira r e n se n tid o h o rario . C on stru y a el perfil gráficam ente.
9 - 3 8 . Una leva d e p b e a tiene q u e p ro p o rd o n a r el d e sp b z a m ien to q u e se m u e s tra en b fig u ra P 9 .3 7 p a ra un segu ido r d e curta rec ip ro can te en línea. L a leva debe tener u n d re u lo base d e 2.0 in y g irar en se n tid o a n tihorario . C on stru y a el perfil gráficam ente.
9 - 3 9 . U na leva d e p b e a tien e q u e p ro p o rd o n a r el d e sp b z a m ien to q u e se m u e s tra e n b fig u ra P9.37 p a ra un seguidor de rod illo re d p ro c a n te e n línea. El d iám etro del rodillo es d e 1 in . 1.a leva deb e te n e r u n d re u lo base de 3 .0 in y g irar en se n tid o h o ra r ia C on stru y a gráficam en te el perfil y calcule el m ay o r án g u lo d e presión.
9 - 4 0 . Una leva d e p laca tien e q u e p ro p o rd o n a r el d e sp b z a m ien to q u e se m u e s tra en b fig u ra P 9 .3 7 p a ra un seguidor de rod illo re d p ro c a n te e n línea. El d iám etro del rod illo es d e 0 .75 in . La leva deb e te n e r u n d re u lo base d e 2 .0 in y g irar en sen tido an tiho rario . C onstruya gráficam ente el perfil y calcule m ay o r el án g u lo de pre- sión.
www.FreeLibros.me

256 CAPITULO NUEVE
Ángulo d* b leva (deg)
Angulo de
b leva
Císplazam.
del seguid*
* g ) <P)
0 0.000
10 0.000
20 0.000
30 0.000
40 0.004
50 0.029
60 0.091
70 0.196
80 0.337
90 0.500
100 0.683
110 0.804
120 0.909
Ángubde
b leva
ftsptaram.
* 1 seguidor
1*8) (in)
130 0.971
140 0.996
150 1.000
160 1.000
170 1.000
180 1.000
190 0.996
200 0.971
210 0.909
220 0.804
230 0.683
240 0.500
Ángubde
b leva
EMptazam
A l seguida
(deg) N
250 0.337
260 0.196
270 0.091
280 0.029
290 0.004
300 0 000
310 0.000
320 0.000
330 0 000
340 0.000
350 0 000
360 0.000
FIGURA P9.J7 Problem as 37 a 44 y 47 a 54.
9 - 4 1 . U na leva d e p laca deb e p roporc ionar el desplazam iento q u e se m uestra en la figura P93 7 a u n segu ido r reciprocante de rodillo descentrado. El segu ido r se encuen tra en el p la n o vertical c o n ta c ta n d o la p a rte su p e rio r de b leva. La d istanc ia del descen trad o es d e 0 .75 in a la úq u ie rd a del cen tro de la le v a El d iám etro del rod illo es de 1 in . La leva deb e tener u n c írcu lo base de 3.0 in y g ira r en sen tido h o rario . C onstruya el perfil gráficam ente y calcule el m ay o r án g u lo de p resión m ás grande.
9 - 4 2 . Una leva d e p laca deb e p roporc ionar el desplazam iento q u e se m uestra en la figura P93 7 a u n segu ido r reciprocante d e rod illo c o n d escen trad o . El se g u id o r se e n cuen tra en el p lan o vertical contactando la parte superio r de la leva. La distancia del descentrado es d e 0.5 in a la derecha del c e n tro de la leva. El d iám etro del rodillo o de 0.75 in. L a leva deb e tener u n c írcu lo base de 2.0 in y g irar en sen tido a n tih o ra ria C on stru y a el perfil gráfi cam cnte y calcule el m ayor án g u lo d e presión.
9 - 4 3 . Una leva d e p laca deb e p roporc ionar el desplazam iento q u e se m uestra en la figura P 9 J7 a u n segu ido r rec ip ro cante de ca ra p lana . La leva deb e te n e r u n circulo base
de 5.0 in y g ira r en se n tid o h o ra rio . C onstruya el perfil p á ficam en te y calcule el m ayor ángulo de presión.
9 - 4 4 . U na leva de placa deb e p ro p o rc io n ar el desplazam iento que se m uestra en b fig u ra P9.37 a u n se g u id o r re c ip rocan te d e ca ra p lana . La leva deb e te n e r u n c írcu lo base d e 6 .0 in y g ira r en se n tid o a n tih o ra r ia C on stru y a d perfil g ráficam ente y calcule el m ay o r án g u lo de p re sión.
9 - 4 5 . U na leva de placa deb e p ro p o rc io n ar el desplazam iento q u e se m u e s tra en b fig u ra P9.45 a u n segu ido r de rodillo c o n pivote. L a lon g itu d del eslabón segu ido r es de 4 in y p ivo ta a 5 in del eje de ro tac ión d e b leva. El d iám etro del rod illo e s de 1 in . L a leva d e b e te n e r un circulo b ase de 3.0 in y g ira r en se n tid o h o rario . C onstruya el perfil g ráficam ente y calcule el m ayor án gulo de presión.
9 - 4 6 . U na leva de placa deb e p ro p o rc io n ar el desplazam iento q u e se m u e s tra en b fig u ra P9.45 a u n se g u id o r de rodillo co n pivote. La lon g itu d del eslabón segu ido r es de 3 in y p ivo ta a 3 .5 in del e je de ro tac ión de la leva. El diám etro del rodillo es d e 0 .75 in . L a leva deb e tener un
www.FreeLibros.me

Levas: d iserto y a ná lis is c in em á tico_________257
Á n g u lo d e t i lev a (d eg )
Á n g u lo d e
la leva
D c sp b z a m .
d e l segu id or
(d eg ) (m m )
0 0 .0 0 0
10 0 .1 1 3
20 0 .8 6 5
30 2 .7 2 5
4 0 5.865
50 10.113
6 0 15 .000
70 19.887
80 2 4 .1 3 5
9 0 27 .275
100 29 .135
110 2 9 .8 8 7
120 3 0 .0 0 0
ÁnguVj d e D csplazam
la leva d e l seg u id o r
♦deg) (m m )
130 3 0 .0 0 0
140 30 .000
150 3 0 .0 0 0
160 3 0 .0 0 0
170 3 0 .0 0 0
180 3 0 .0 0 0
190 29 .966
200 2 9 .7 3 6
210 29 .135
220 28 .035
230 2 6 .3 6 9
240 24 .135
Á n g u lo d e Desplana m
la leva d e l segui«kir
(d eg ) (m m )
2 5 0 2 1 .4 0 2
2 6 0 18 .300
2 7 0 1 5 0 0 0
2 8 0 11 .700
2 9 0 8 5 9 8
3 0 0 5 .8 6 5
3 1 0 3.631
3 2 0 1.965
3 3 0 0 .8 6 5
3 4 0 0 .2 6 4
3 5 0 0 0 3 4
3 6 0 0 .0 0 0
f i g u r a P 9 .4 5 P r o b l e m a s 4 5 , 4 6 , 5 5 y 5 6 .
d r e u lo b ase de 2 .0 in y g ira r e n se n tid o a n tih o ra rio , (b n s tru y a e l perfil g ráficam ente y calcule el m ay o r án gulo d e presión .
D ise n o a n a lí t ic o d e l perfil de u n a leva d e placa
E n lo s p ro b lem as 9-47 a 9 -5 6 use las ecuaciones especificas del perfil de la leva y u n a h o ja d e cálcu lo para genera r u n a tab la con las co o rd en ad as del perfil para cada 10° del á n g u lo de la leva.
9 -4 7 . Use la leva d escrita en el p rob lem a 9 -37 .
9 -4 8 . Use la leva d escrita en el p rob lem a 9 -38 .9 -4 9 . Use la leva d escrita en el p rob lem a 9 -39 .
9 -5 0 . Use la leva d escrita en el p rob lem a 9 -40 .
9 -5 1 . Use b leva d escrita en el p rob lem a 9 -41 .
9 -5 2 . Use b leva d escrita en el p rob lem a 9 -42 .
9 -5 3 . Use b le s a d escrita en el p rob lem a 9 -43 .
9 -5 4 . U sela leva d escrita en el p rob lem a 9 -44 .
9 -5 5 . Use b leva d escrita en d p ro b lem a 9 -45 .
9 -5 6 . Use b leva d escrita en d p ro b lem a 9 -46 .
D iseno g ráfico d e u n a leva c ilin d rica
9 -5 7 . U na leva c ilin d rica d e b e p ro p o rc io n a r el desplaza- m iento q u e se m uestra en la figura P9.37 a u n seguidor rec ip ro can te de rodillo . El d iá m e tro d e l rod illo e s de1.0 in. El d iám etro del c ilind ro es d e 5 in y g ira en sentido h o r a r ia C on stru y a el perfil g ráficam ente y calcule d m ayor án g u lo d e p resión .
9 -5 8 . U na leva c ilin d rica d e b e p ro p o rc io n a r e l d e s p b z a m ien to q u e se m uestra en la figura P9.37 a u n seguidor rec ip ro can te de rodillo . El d iá m e tro d e l rod illo e s de 30 m m . El d iám etro del d l in d ro es d e 150 m m y g ira en se n tid o h o rario . C on stru y a el perfil g ráficam ente y calcule el m ayor án g u lo de presión .
www.FreeLibros.me

258 CAPITULO NUEVE
D ise n o a n a lí t ic o de u n a leva c ilin d rica E n los p ro b lem as 9 -5 9 y 9 -6 0 u se las ecuaciones del perfil de levas c ilindricas y u n a ho ja de cálcu lo p a ra genera r u n a tab la co n las co o rdenadas del perfil para cada ángulo de 10° de la leva.
9 -5 9 . Use la leva d escrita en el p rob lem a 9.57.
9 -6 0 . Use la leva d escrita en el p rob lem a 9.58.
P ro b le m a s de m e c a n ism o de G in e b ra
9 -61 . Se d iseñó u n m ecan ism o de G inebra co n cuatro esta- d o n e s . La distancia e n tre los ejes im p u lso r e im pulsado es de 3 in . El b razo im pulsor g ira a u n a velocidad constan te de 6 0 rp m en se n tid o an tih o ra rio . D eterm ine la velocidad y la aceleración angulares de la ru ed a , c u a n d o el b ra z o im p u lso r g ira 25“ a p a r t i r d e la posición d o n d e el rodillo acaba d e e n t r a r a la ran u ra .
9 -6 2 . Se d iseñó u n m ecan ism o d e G in eb ra co n cinco esta- d o n e s . La distancia e n tre los ejes im p u lso r e im pulsado es d e 60 m m . El b razo im p u lso r g ira a u n a v e lo d d ad constante de 7 0 rp m en se n tid o h o ra rio . D eterm ine la velocidad y la ace lerac ión an g u la res de la ru ed a , cu an d o el b razo im p u lso r g ira 20" a p a r t ir de la p o s id ó n d o n d e el rod illo acaba d e e n tra r a la ran u ra .
9 -6 3 . Se d ise ñ ó u n m ecan ism o de G in e b ra co n se is esta- d o n e s . La distancia e n tre los ejes im p u lso r e im pulsado es de 4 in . El b razo im p u lso r g ira a u n a velocidad constan te de 9 0 rp m en se n tid o an tih o ra rio . D eterm ine la velocidad y la ace lerac ión an g u la res de la ru ed a , cu an d o el b razo im p u lso r g ira 25° a p a r t ir de la p o s id ó n d o n d e el rod illo acaba de e n tra r a la ran u ra .
HGURA F.9.1 (C ortesía d e Industria l Press).
ESTUDIOS DE CASO
9 -1 . l a leva m o strad a en la figura E9.1 sirve para alim entar popel a u n a im p re n ta . Exam ine cu id ad o sam en te las co m p o n en tes del m ecanism o; luego, con teste b s p re guntas s ig u ien tes p a ra o b te n e r m ay o r co n o c im ien to acerca de su operación .
1. C onform e el eje G se fuerza a g irar en sen tido horario , de term ine el m ovim iento d e la parte E
2. ¿Cuál e s el n o m b re de la u n ió n e n tre las p a rtes E y P.3. ¿Q ué hace q u e la p ila d e p a p e l, ub icada en / . p e r
m anezca al nivel d o n d e u n m ecanism o en B p u ed a e n a n c h a r lo ?
4. ¿Por q u é cam bia el ra d io d e b p a rte H?5. ¿Q ué característica p erm ite q u e b ro tac ión de b parte
H se tran sm ita a b p a rte G?6. D escriba el m ecan ism o q u e realiza b m ism a función
de esta leva en pilas m ás pequeñas de papeles en im presa ras d e c o m p u ta d o ra y fotocopiadoras.
9 -2 . La leva de b figura E9.2 im p u lsa el eslabón I que, a la vez, im pulsa o tro m ecanism o q u e n o se m uestra. El eslabón A p ivota e n la parte in fe rio r de b bancada de la m áqu ina . Un esp á rrag o se extiende del e s b b ó n A a través de u n a r a n u ra e n el e sb b ó n f t Exam ine cuidadosam ente b s com ponentes del m ecanism o; luego, co n teste b s siguientes p regun tas para o b te n e r m ayor conocim iento acerca d e su o p e rad ó n .
1. D escriba el m ovim iento del eslabón B conform e b leva D g ira en sen tido h o rario .
2 . ¿Qué tip o de leva e s IX3 . ¿Qué tip o de segu ido r es C?4 . ¿Qué tipo d e co m p o n en te es b p a rte f?5 . D escriba la a c d ó n d e b p a rte F.6 . ¿Qué tipo d e co m p o n en te es b p a rte R7 . D escriba la función d e la p a rte E
H G U R A E 9 J ( C o r t e s b d e I n d u s t r i a l Press).
www.FreeLibros.me

Leva»: d iserto y a ná lis is c in em á tico_________259
FIGURA E 9J (C ortesía de In d u stria l Press).
8. D escriba el m ov im ien to cíclico de la p a rte tí.9. ¿Q ué cam bio o c u rrir ía e n el m o v im ie n to d e t í s i se
a largara la parte E?10. ¿Q ué cam bio o c u rrir ía e n d m o v im ie n to d e t í s i se
x o r t a r a el espárrago en la parte £?9 -3 . La m áq u in a m o strad a en la fig u ra E9.3 troquela
y m o ldea p a r te s de acero . Exam ine cu id ad o sam en te las com ponen tes del m ecanism o; luego, conteste las s iguien tes preguntas para o b te n e r m ayor conocim iento acerca de su operación.
1. C o n fo rm e la varilla C com ienza a desliza rse hacia abajo, ¿cuál e s el m ov im ien to d e la leva fc?
2 . ¿Cuál e s d m ov im ien to d d ém bolo H i3 . ¿Q ué sucede co n la t i r a de m etal su je ta en W?4. C onfo rm e ia varilla C c o n tin ú a deslizándose hacia aba
jo, ¿cuál e s el m ovim iento del ém bolo?5 . ¿Cuál e s el m ov im ien to del deslizador P.6. ¿Q ué sucede co n la t i r a d e acero en VV?
7 . C o n fo rm e la v arilla C com ienza a desliza rse h a d a arriba , ¿cuál es d m ovim iento d d ém b o lo H?
8 . ¿Cuál es d o b je tivo d e este m ecanism o?9 . ¿Por q u é hay resortes e n co n tac to c o n d deslizador 7?
10. ¿ P o rq u é u n resorte so p o rta la p a rte K?.11. ¿Qué t ip o de m ecan ism o p o d ría im pulsar la varilla C?
9 -4 . En la fig u ra E9.4 se m uestra u n a m áq u in a . Exam inecu id ad o sam en te las co m p o n en tes del m ecanism o; luego, co n te s te las sigu ien tes p reg u n tas para o b te n e r m ay u rco n o c im ien to acerca de su operación .
1. D escriba el m ov im ien to d d eslabón f , c u a n d o e l e n g ran e K g ira en se n tid o horario .
2 . C o m en te los detalles del m o v im ien to c íd ic o d d es Libón F.
3 . D escriba el m o v im ien to d e la co rred era D, c u a n d o el engrane K gira en sen tido horario .
4 . Describa d m ovim iento del e n g ra n e N . cu an d o el e n g ran e K g ira en sen tido horario .
5 . Describa el m ovim iento del eslabón Q , cu an d o el engrane K g ira en sen tido horario .
6 . ¿A q u é tip o d e co m p o n en te pertenece la parte Pt7 . D escrita d m ovim iento al que está restringida la parte V.8 . C om ente c o n precisión la m anera en q u e d eslabón Q
está su je to a la parte V.9 . C om en te el m ov im ien to d d ic o de toda la m áquina.
10. Explique la necesidad de u n a m áq u in a así.
FIGURA F9.4 (C ortesía de In d u stria l Press).
www.FreeLibros.me

C A P I T U L O
D I E Z
ENGRANES: ANÁLISIS C IN E M Á TIC O Y SELECCIÓN
O B J E T I V O S
A l te r m in a r d e e s tu d ia r e s te c a p itu la , e l a lu m n os e r á c a p a z de:
1. Reconocerlos diferente* tipos «le engrane*.
2 . Id e n t if ic a r y u sa r la s c a r a c te r ís t ic a s g e o m é tr ic a ? e s tá n d a r e s ( ir l o s e n g r a n e s .
3 . C a lc u la r la d is ta n c ia e n t r e c e n t r o s , la r a t ó n d e c o n t a c t o , la s l im ita c io n e s p o r la in te r fe r e n c ia y l a s v a r ia c io n e s e n h o lg u r a
4. Calcular y usar la razón de velocidad para determ inar las propiedades cinemáticas de los engranes acoplados.
5 . D e te r m in a r la s p r o p ie d a d e s c in e m á t ic a s d e e n g r a n e s y I
d e e n g r a n e s p la n e ta r io s .
10.1 IN TR O D U C C IÓ NLos engranes so n com ponen tes sum am ente com unes utilizados en m uchas m áquinas. La figura 10.1 ilustra el m ecanism o im p u lso r d e los rod illos alim entadores d e papel d e u n escáner. En tal aplicación, u n m o to r eléctrico im pulsa u n pequeño engrane que, a la vez, im pulsa engranes m ás g randes para hacer g irar lo s ro d illos alim entadores. Después, lo s rodillos alim entadores jalan del d ocum ento hacia el dispositivo d e escaneado d e la m áquina.
En general, la fu n c ió n de u n e n g ra n e es tra n sm itir m o v im ien to de u n eje g ira to rio a o tro. En el caso del a lim en tad o r de la fig u ra 10. 1, d m ovim iento del m o to r se tran sm ite a lo s ejes q u e tra n sp o rta n los rodillos. Adem ás de tran sm itir m ov im ien to, lo s eng ranes se u tilizan co n frecuencia p a r a increm entar o
d ism in u ir la velocidad, o b ien , p a r a cam b iar la d irecc ió n del m ovim iento de u n eje a o tro.
Son sum am ente com unes en la salida d e ftientes d e po ten cia m ecán ica , c o m o m o to re s eléctricos y m o to re s de com bustión interna, q u e g iran a velocidades m u ch o m ayores de lo q u e la ap licación requiere. P o r ejem plo, u n a m áqu ina fax necesita q u e lo s rod illos a lim e n te n el d o c u m en to a través d e la m í q u in a a u n a rap id ez c o m p a tib le c o n el d ispositivo d e escaneado. N o ob stan te , u n m o to r eléctrico típ ico g ira a velocidades m ayores de las necesarias en lo s rodillos. P or ello, la velo d d a d del m o to r se deb e re d u c ir co n fo rm e se tra n sm ite a los ejes de los rod illos de a lim en tad ó n . A sim ism o, lo s ro d illo s s u perio res tienen q u e g ira r en d ire c d ó n o p u esta a la de lo s rodi- lo s inferiores, de m o d o q u e los eng ranes so n u n a e lecd ó n natu ral para esta aplicación.
La figura 10.2a m uestra d o s eng ranes rectos acoplados, d iseñados p a ra tran sm itir m ov im ien to en tre s u s respectivos ejes. La figura 10.2b p resen ta d o s ro d illo s o discos d e fr ie d ó n , que Q m b ié n fu e ro n d ise ñ a d o s p a ra tr a n s m it i r m o v im ie n to e n tre los ejes. Es ev iden te q u e estos discos so n m enos costosos que Las com plejas configuradones d e lo s engranes. S in em bargo, los discos d ep en d en d e b fricción p a ra tran sm itir b s tuerzas que aco m p añ an el m o v im ien to . Ya q u e m uchas ap licac iones requieren transm isión de p o te n d a (m ov im ien to y fuerzas), las su- perfides lisas de los discos qu izá n o sean capaces de generar b s fuerzas d e fricción sufidentes y, p o r lo ta n to , se desliza rb n con m ayores cargas.
Ifcra e lim in ar b posib ilid ad de deslizam iento , se crea un eng ran e d e m o d o ta l q u e b s su p e rf id e s lisas de los discos se sustituyen p o r d ientes, q u e ofrecen u n acop lam ien to positivo y d im in an el deslizam iento. Desde u n p u n to d e v ista anem ático ,
Rodiltas de ahmereaclón
f i g u r a 10.1 R o d i l l o s d e a l i m e n t a d ó n d e u n e s c á n e r .
www.FreeLibros.me

Engrane»: an á lis is c in e m á tico y selección_________261
FIG URA 10J E n g r a n e s y r o d i l l o s .
el p ar de eng ranes de la figura 10.2 a reem plazaría lo s discos de la figura 10.2 b, ya q u e lo s d iám etro s efectivos so n idénticos.
En este capítulo se estudian los p rinc ip ios generales del en granaje y las relaciones cinem áticas asociadas. El enfoque del l i bro es el análisis y el d iseno d e m ecanism os que so n necesarios para su m in is tra r el m ov im ien to requerido p o r u ñ a m áqu ina . En congruencia co n tal objetivo, el enfoque del presente cap ítu lo es la selección de engranes están d ar para p ro d u c ir el m ovim iento necesario en las m áquinas industriales. C o m o son los engranes m ás u tilizados y m enos com plicados, se hace énfasis en lo s en granes rectos. Se inv ita al lecto r a co n su lta r o tra s fuen tes p a ra un m ayor detalle sob re lo s perfiles de d ien tes de engranes, m anufactu ra . ca lid ad , d iseño de resistencia y en g ran es m ás com plejos [refe. 4 .1 3 y 15).
a ) H f?»"» racto
c) tztvno
MPlhOnyr»m»]l*M
4 Hnpar* hclltad il
10.2 T IP O S DE ENGRANESa Eryfar» <fc « p ú a d i
Ihiltcoutol d * le )
L os engranes reetos son lo s m ás sencillos y, p o r consiguiente , el tipo m ás co m ú n de los engranes. I-os d ientes de u n eng ran e recto son paralelos a l eje de ro tación . Los eng ranes rectos s irv en par a tra n sm itir m ovim iento en tre ejes paralelos, las cuales se en c u e n tra n en la m ayoría d e ap licaciones. En la fig u ra 10.3a se observa u n p ar d e engranes rectos acoplados.
Una cremallera es u n caso especial de eng ran e recto d o n d e los d ientes n o están configurados a lrededor de u n d re u lo , sino en u n a base p lana . La crem allera se visualiza c o m o u n engrane re c to co n u n d iá m e tro in fin ita m e n te largo . C u a n d o la crem allera se acop la co n u n e n g ra n e rec to , se p roduce m ovim iento de traslac ión . En la figura 10.3b se o b se rvan u n a crem allera y un engrane recto acoplados.
l o s engranes oiremos o anulares tienen los d ientes co n s tru idos sob re la superficie in te rio r de u n d re u lo . C u a n d o se acoplan co n u n eng ran e recto, el eng ran e in terno a p o r ta la ven taja d e reduc ir la d istanc ia e n tre los cen tros d e lo s eng ranes p a ra lograr d e r ta variación d e velocidad. E n la fig u ra 10.3c se ilu stra u n en g ran e in te rn o acoplado co n u n eng ran e recto tradicional.
Los engranes helicoidales so n p a re a d o s a los eng ranes rectos, q u e sirven en las m ism as aplicaciones q u e estos. La diferen- d a es q u e lo s d ientes de u n engrane helicoidal se inclinan hacia el eje de ro tación . El ángulo de inclinación se conoce c o m o el <ln- prlo de hélice (p. Este ángulo b r in d a u n acop lam ien to m ás g ra dual de lo s d ien tes du ran te el acoplam iento y p ro d u ce im pacto y ru id o m enores. P or su accionam iento m ás suave, en las aplica- d o n e s de a lta v e lo d d a d se prefieren engranes helicoidales. Sin em bargo, el ángulo d e hélice p ro d u ce h ie ra s de em pu je y pares de flexión, q u e n o se g en e ra rían e n lo s eng ranes rectos. E n la figura 10 J d se ilu stra u n p a r d e engranes helicoidales acoplados.
A) E w a m «p. 8n
FIG URA 1 0 J T ipos d e e n g r a n e s .
Los engranes de espina de pescado se u tilizan en las mismas aplicaciones q u e las engranes rectos y helicoidales. D e hecho, ta m bién se conocen co m o engranes helicoidales dobles El engrane de espina d r pescado se parece a d e s engranes helicoidales opuestos con los extrem os colocadas u n o con tra o tro. Esta configuración com pleja sirve de contrapeso a la h i e r a de em pu je d e u n engrane helicoidal L a figura 10 J e ilustra u n engrane deesp in a de pescado.
Los engranes clínicos tienen lo s d ientes m oldeados sob re u n a superficie cónica y sirven para tran sm itir m ovim iento en tre ejes n o paralelas. A un cu an d o b mayoría de sus aplicaciones im plican b conex ión de ejes perpend icu lares, lo s eng ranes cón icos ta m b ién se u tilizan en aplicaciones c o n ejes cuyas ángu los so n mayores y m enores d e 90". C uando los engranes cónicos se acoplan, sus conos p resen tan u n vértice co m ú n . S in em bargo, el ángulo real del co n o de cada engrane depende d e la razón d e engrane de los en g ran es acop lados. P o r consigu ien te , los eng ranes cón icos se
<r) E n gran es r e d a s
f l E i y f a i B C ú n x o
www.FreeLibros.me

262 CAPITULO DIEZ
disertan en co n ju n to , p o r lo q u e n o es posib le su s titu ir u n e n g ran e para m odificar la ra z ó n de engrane. En la fig u ra 10.3f se ilustra u n p ar de engranes cónicos acoplados.
L os engranes de ir íse te so n u n caso especial d e eng ranes cónicos, d o n d e los eng ranes son del m ism o tam añ o y el ángulo d e los ejes e s d e 90*. En la figura 10.3g se presen ta u n p a r de e n g ranes d e inglete acoplados.
U n tom illo s in f in y u n engrane sin f in s rv e n p a ra transm itir m o v im ien to e n tre e jes n o p a ra le lo s q u e n o se in tersecan . El tom illo sin fin tiene u n d ien te en form a de espiral a lrededor de un c ilind ro d e paso . Este d ien te tam bién se cono ce co m o cuerda, p orque se asem eja a la cuerda de u n tom illo . Sim ilar al engrane helicoidal, la espiral de paso del to m illo sin fin genera u n a fuerza axial que se deb e to m a r en c u e n ta E n la m ayoría d e las aplicaciones, el to m illo s in fin im p u lsa al engrane s in fin p a ra efectuar grandes reducciones d e v d o d d a d . l\>r lo general, u n engrane sin fin n o e s rev en irle , e s d e d r , d engrane s in fin n o p u ed e im pulsar d to m illo s in fin. En la figura 10.3h se m u estran acop lados un tom illo s in fin y u n engrane s in fin.
10.3 TERM IN O LO G IA DE U N ENGRANE RECTO
C o m o ya se m encionó , lo s engranes rectos so n el tipo de engrane m ás co m ú n . A dem ás, la term inología q u e se usa para describ ir los eng ranes rectos tam bién se aplica a o tro s tip o s d e engranes. R>r lo ta n to , se requiere u n análisis concienzudo de las ca rac terísticas y la term inología de lo s engranes rectos.
E n la figura 10.4 se in d ican las características p rin d p a le s del d ien te d e u n eng ran e re c ta0 dreulo de paso de u n engrane es d c írcu lo q u e representa el tam ailo d d rod illo de fricción correspondien te q u e p o d ría su s titu ir a l engrane. Tales rod illos equivalen tes se p resentaron en la figura 102b . C uando dos engranes se acoplan , sus d reu lo s d e paso son tangentes en d p u n to d e con tac to sobre b línea que u n e el cen t r o d é am bos d reu lo s . En la figura 10.4 se observa d d re u lo de paso.El fu n to de paso e s el p u n to d e con tac to d e lo s d o s d reu lo s de paso.
0 paso diametral d de u n engrane es sim plem ente el diám etro d rl d re u lo d e paso. C o m o b cinem ática d e u n engrane red o es idéntica a la de u n rodillo de fricción a n á lo g a el paso d iam etral e s u n p arám etro del eng ran e m u y u tilizad a S in em b a rg a co m o d d re u lo d e paso está ubicado cerca d e la m itad d e lo s d ien tes del en g ran e , d p a so d iam e tra l n o e s posible m edirlo en fo rm a directa en d engrane.
El núm ero de dientes N es sim p lem en te d n ú m ero to ta l de d ientes del engrane. Es ev iden te q u e este va lo r h a b rá de ser u n e n te ra p o rq u e n o se p u ed en u tilizar frae d o n es de diente.
El paso circular p e s la distancia m ed ida a lo largo del círculo d e p a so d e u n p u n to sob re u n d ien te a l p u n to co rre sp o n d ien te, en d d ien te adyacente del engrane. El paso d re u la r se calcula a p a r t ir d d n ú m e ro de d ien tes y el paso diam etral d d engrane. La e c u a d ó n aplicable es:
P =n d
N( 10 . 1)
El dreulo base de u n eng ran e es d d re u lo a p a r t ir d d cual se construye la fo rm a cu rv a d d d ien te del engrane. En la sigu ien te se cd ó n se ex p o n en los detalles acerca d e la gene r a d ó n del perfil cu rv o d d diente.
El diám etro base d k e s e l d iá m e tro del d re u lo a p a r t ir d d cual se genera d perfil d d d ien te d d engrane. En la secdón10.4 se exp lica com pletam ente d d re u lo base.
El ancho de cara F e¡ la lo n g itu d d d d ie n te d e l eng ran e p a ra ld a al eje de La ficcha.
El adendo a e s la d istanc ia ra d ia l d d d re u lo de p a so a la parte su p e rio r del d ien te del engrane.El dedendo b es la d is tan c ia rad ia l d d d re u lo de p a s o a la p a rte in fe rio r del d ien te d d engrane.
La profundidad total h T es la a ltu ra del d ien te d d engrane, que es igual a la su m a del ad en d o y d d e d e n d a
La tolerancia c e s la can tidad en la cual el d ed en d o excede al adendo. Este es d e sp ad o e n tre la parte su p e rio r d d d ien te d e l e n g ra n e y la p a r te in fe r io r d e l d ie n te d d eng ran e aco p lad a
La holgura t í e s la can tidad q u e d an ch o d d espacio en tre d ientes excede al espesor d d d ien te d d en g ran e , m ed id a sob re d d re u lo d e p a s a
C h c u b d e l d e d e id o
F IG U R A 1 0 .4 Características d d diente de un engrane recto.
www.FreeLibros.me

E ngran e» : a n á lis is c in e m á tic o y se lecció n 263
Q/VVV}
48 32 24 20
1012
5 4
f i g u r a 105 T am añ o s están d ar d e diente.
H fuso diam etral P j, o s im plem ente pasa, se refiere en reali- cbd al tam año d d diente, que se ha convertido en u n estándar de especificación p a ra d tam año d d m ism o. Form alm ente, d paso d iam etra l e s el n ú m e ro d e d ientes p o r pulgada d d paso d iam etral.
« - 10 0 . 2)
El paso diam etral es u n p arám etro de eng ranes q u e se usa com únm en te en las unidades estadounidenses tradicionales. De nueva cuenta, es u n a m ed ida relacionada con el tam año d d d ien te de u n engrane. En la figura 1 0 5 se m uestran las tam años estánd ar d e d ien tes y sus pasos diam etrales. A un cu an d o las engranes acopladas suelen tener diferentes diám etros y diferente núm ero de dientes, los engranes alopiados deben tener e l m ism o paso d iam etral. Lo anterior debería ser evidente porque d paso diam etral es u n a m ed ida del tam año d d diente.
El p a so d iam e tra l n o se m ide d ire c ta m e n te so b re el e n grane, au n q u e e s u n valo r d e referencia ex trem adam ente com ún. En teoría, es posib le p ro d u c ir casi cualquier tam año d e dientes de engrane; n o obstan te , en aras de la estandarización d e h e rra m ien tas, la A sociación E stadoun idense d e F ab rican tes de Eng ranes ( a g m a , p o r las siglas d e A m erican G ear M anutactu rer's Associadon) designó las pasas d iam etrales m ás usados, las cuales se m uestran en la tab la 10.1. A un cu an d o n o hay u n significado
fisico, los pasos d iam etrales estándar p refe ridos están dados en en teros pares. Hay calibradores q u e m iden los pasos d iam etrales estándar. Las u n id ad es del p a so d iam e tra l so n el rec íp roco de pulgadas (in -1); de cualquier m odo , n o es (recuente especificar unidades cu an d o se expresan los valores num éricos.
El m ódulo m es u n p a rám e tro de e n g ra n e q u e se utiliza com únm ente en el sistem a in ternacional ( s t)d e unidades. E l m ó d u lo tam bién es u n a m ed ida relativa al tam año del d ien te . Se d e fine c o m o la razón e n tre el paso diam etral y el n ú m ero de dientes del engrane.
d
m= Ñ (10.3)
El m ó d u lo tam bién es u n a m ed ida relativa del tam añ o del d ien te y, en teoría , el recíproco del paso d iam etra l. S in em bargo, c u an d o se em plea en el s i, se m ide en m ilím etros. Entonces, el m ódulo y el paso diam etral n o so n recíprocos num éricam ente. La relación e n tre e l p a so d iam e tra l y e l m ó d u lo , to m a n d o en cuen ta las un idades, es
m =25.4
P j(10.4)
( a m o co n el paso d iam etral, lo s eng ranes rectos m étricos c o m erc ia lm en te d ispon ib les se fab rica n co n m ó d u lo s e s ta n darizados. Los valores co m u n es se p resen tan en la tab la 10.2.
T A B L A 1 0 .1 P a s o s d i a m e t r a l e s e s t á n d a r
P uagracM Huoflao T A B L A 1 0 .2 M ó d u lo s m é t r i c o s e s ta n d a r iz a d o s
2 6 20 80r
■ 4 16
2 .2 5 8 24 96 L 29 5 20
2 5 10 32 120 L5 6 25
3 12 40 150 2 8 32
3 5 16 48 2 0 0 2 5 10 40
4 64 3 12 50
www.FreeLibros.me

264 CAPITULO DIEZ
Si « s u s t i tu y e n las ecuaciones (10.2) y (10.3) en (10.1), el paso circu lar tam bién se expresa com o:
Tld
NP = T 7 = ñ ; - * « (10.5)
El ángulo de presión 4> ts el án g u lo en tre u n a lin ea tangente a am bos circuios de paso d e lo s engranes acoplados y u n a linea perpendicular a lo s d ientes en el p u n to de contacto . La linea tangen te a los d rcu lo s d e p a so se conoce co m o línea de paso. La linca perpendicu lar a la superficie d e lo s d ien tes en el p u n to de c o n tacto se conoce co m o I nea de presión o línea de contado. í\» r lo tanto, el án g u lo de presión se m ide e n tre la lin ea de paso y la linca d e presión. En la fig u ra 10.6 se m uestra el ángulo d e presión.
H ángulo de presión afecta la form a relativa de u n diente de en g ran e , c o m o se ind ica en la figura 10.7. A un c u a n d o lo s e n granes se fabrican en u n rango am p lio de ángulos de presión, la mayoría de los engranes están estandarizados e n 20° y 25°. Los e n granes con u n ángulo de presión de 14'A°se usaron pródigam ente, a u n q u e a h o ra se consideran obsoletos. Se fabrican todav ía solo co m o sustitutos en trenes de engranes viejos q u e aú n se utilizan. C om o el ángulo d e presión afecta la form a del diente, dos engranes acoplados también deben tener d m ism o ángulo de p ro tón .
Recuerde q u e las fuerzas se transm iten de m anera p e rp e n d icu la r a las superficies en c o n ta c ta P o r ello , la fuerza q u e actúa so b re u n d ien te lo hace a k> largo d e la linea d e presión . C o m o se verá e n la s ig u ien te sección, lo s d ien tes de u n e n g ra n e están m oldeados p a ra m an ten e r u n án g u lo d e p resión constan te d u ra n te el aco p lam ien to . Los eng ranes c o n m en o res á n g u lo s de p resión tran sm iten eficientem ente el to rq u e y generan m enores cargas rad ia les so b re e l eje y lo s co jine tes d e so p o rte . S in e m bargo . c o n fo rm e lo s á n g u lo s de p re s ió n se re d u c e n , hay u n a m ay o r ten d en c ia d e lo s d ien tes del e n g ra n e a in tcrferirse c o n fo rm e se engranan.
1 0 . 4 P E R F I L E S D E D I E N T E S D E I N V O L U T A
Para o b te n e r u n m ov im ien to suave, el d ien te del eng ran e debe tener u n a form a q u e m an tenga el eng ran e im pulsado g irando a veloddad constan te a través del proceso de engranaje y desengranaje. Para d e d r lo d e m anera concisa, lo s eng ranes necesitan u n a relación de velocidad constan te . E sta c o n d id ó n requiere q u e la tray ec to ria del c o n ta c to del d ien te del eng ran e sea u n a línea recta, la cual ta m b ié n deb e in tersecar el p u n to c o m ú n a am bos c ircu io s d e p a so . La fig u ra 10.8 m u e s tra d o s d ien tes «sop lados en tres m o m en to s d ife ren tes d e l p roceso d e en g ranaje. O bserve q u e el p u n to d e co n tac to tra z a u n a recta, cono- d d a c o m o línea de contacto . Esta linea ta m b ié n in te rseca el p u n to tan g en te a a m b o s círculos d e p a s a lo cual es necesario p i r a q u e lo s en g ran es m an ten g an u n a r e la d ó n d e v e lo d d ad constante.
0 descubrim ien to de u n a form a d e d ien te q u e cum pliera ® n el com etido n o fue tarea se n d lla ; sin em bargo , se h an iden tificado v arias fo rm as co m o posib les cand idatos. D e las form as posibles, la ¡nvo lu ta de u n d re u lo se ha convertido en u n están d a r e n la m ayoría de las ap licad o n es de eng ranes. L a fo rm a de n v o lu ta se construye d esen ro llando u n a lam bre ten so a p a rtir de u n circulo base d e d iám etro d f. La trayectoria trazad a p o r el extrem o del alam bre se d e n o m in a curva de im vlu ta de u n dreulo. E n la figura 10.9a se ilu s tra u n perfil d e invo lu ta . Se utiliza u n segm ento de esta cu rv a d e inw Ju ta para form ar el perfil del d ien te del engrane.
C o m o se estableció en la se c d ó n anterior, e n u n perfil de involuta la linea de con tac to es idéntica a la linea de presión . El ángulo d e p resión , o inclinación de la linea d e c o n ta c ta se dete rm in a a p a r t ir del segm ento d e la cu rv a d e involuta usado p o r el d ien te del engrane. El ángulo de p resión se increm en ta co n fo rm e a u m e n ta la d is ta n c ia e n tre el d re u lo b ase y e l c írcu lo de paso. E sto se m uestra e n la figura 10.9b. La re la d ó n e n tre el
tTkr ( V n r a li v , r e LAL.VJI
b a s e
4 * *
:Brutoi*
' B r u t a ! b a s e
♦ -20*
b a s e
♦-25*
F IG U R A 1 0 .7 I n f l u e n c i a d e l á n g u l o d e p r e s i ó n s o b r e l a s f o r m a s d e l d i e n t e .
www.FreeLibros.me

Engrane»: an á lis is d n e m á tico y selección_________265
án g u lo d e p resión , d p a so d iam e tra l y el d iá m e tro del círculo base se expresa com o:
df, = d e o s ó (10.6)
( a m o p o r defin ición u n a in w lu ta se ex tiende a p a r t ir del c írcu lo b ase , cu a lq u ie r p o rc ió n del perfil del d ie n te d e n tro d d c írcu lo base n o es d e involuta. Es usual m aqu inar esta parte co m o u n a línea rad ial co n u n filete en d circulo del dedendo . La porción d d d ien te d e n tro d d c írcu lo base n o íue d iseñada para e n tra r en con tac to co n d d ien te del eng ran e acoplado. Este c o n tacto p rovocarla interferencia.
La desventaja m ás significativa en d u so d e d ientes de e n granes co n perfiles d e invo lu ta es la posibilidad de q u e haya in terferencia e n tre la p u n ta del d ien te del eng ran e y el flanco del engrane acop lado . Esto o cu rre cu an d o el engrane m ás pequeño tiene pocos d ientes. En a e r ta s c ircunstancias, e s posible m o d ificar la fo rm a d d d ien te a cos ta de la fo rm a de la p rofundidad total (figura 10.9b) p a ra e lim in ar la interferencia. En b sección 10.6.3 se analizarán la in terferencia y el em pleo d e perfiles a lte rnativos.
o) II
H G U K A 1 0 .9 D i e n t e d e e n g r a n e d e i n v o l u t a .
www.FreeLibros.me

266 CAPITULO DIEZ
PRO B LEM A DE E JE M PL O 10.1
I h engrane recto de ¡nvoluta con 35 dientes y 20* profundidad total tiene u n paso diam etral de 10. D eterm ine los diám etros del circulo de paso, del paso circular y del c írcu lo base.
SO L U C IÓ N : I . Calcule e l paso diam etral
0 paso d iam etra l se c a lcu la re ag ru p an d o la e cu ac ió n ( 1 0 2 ).
2 Determ ine el paso circular
H paso circular se calcula con la ecuación (10 3 ) .
3 . Calcule e l d iám etro del circulo base
0 diám etro del d rcu lo base se cabu la directam ente co n la ecuación ( 10 .6 ).
dh = d e o s ó = 3 3 cos(20*) = 3 2 8 9 in
Es e l d iám etro del d r c u lo d o n d e se o rig in a la fo rm a d e involu ta, q u e n o es u n a carac te rís tica ev id en te c u a n d o se in s pecciona u n engrane real.
TABLA 10 .3 E sp e c if ic a c io n e s d e la m i m a d e l d i e n t e
d e e n g r a n e d e p r o f u n d i d a d t o t a l
1 0 . 5 E N G R A N E S E S T Á N D A R
Los en g ran es se fab rica n m e d ia n te v a rio s procesos. Para e n g ranes metálicos, los p rocesos m is com unes son c o rte con m o ldeadores o m áquinas cortadoras, fundición y m oldeado a través de procesos co n polvo m etalúrgico. Los engranes de plástico p o r lo general se fabrican c o n procesos d e inyección. S e recom ienda a l lec to r co n su lta r fuen tes e sp e d fic a s de m an u fac tu ra de e n g ranes para b s detalles sob re las proceses ind iv iduales [rcf. 13|.
C om o e n la m ayoría d e los procesos se utilizan herram ientas especializadas, las cuales son únicas p a ra c a d a tam afto de e n grane, desde el p u n to de vista económ ico es deseable estandarizar el tam añ o d e lo s engranes. Los engranes estandarizados se en a i en tran fácilm ente en la mayoría d e los catálogos de eq u ip o in d u str ia l. E stos en g ran es se v en d en in d is tin tam en te y pueden acoplarse con o tros engranes que tengan el m ism o paso d iam etral y el m ism o ángulo d e presión . Desde luego, para hacerio, los fabricantes deben segu ir u n a convención están d ar para m oldear los detalles del perfil del d ien te del engrane. La a g m a es la p rinc ipal organización que supervisa este esquem a de estandarización. Es u n a agrupación com ercial d e serv icio com pleto q u e representa a cerca de 400 fabricantes, asf com o usu a rio s de eng ranes y e n granajes, adem ás d e a proveedores d e equipo.
C om o se estableció an te rio rm en te , dos eng ranes de in v o lu ta cualesquiera, co n el m ism o paso diam etral y el m ism o án- g u b de presión , se acoplarán . I\>r lo tanto, los d ien tes de engrane se h an estandarizado con base en el paso diam etral y el ángulo de presión. C o m o se expuso en la sección 103 , b s ángu los de pres ió n estándar son 1456°, 20° y 25*. EJ ángulo d e presión d e 14'A* se h a vuelto obso le to y sirve básicam ente p a ra su s titu ir u n engrane usado.
El p a s o d ia m e tra l e s u n a m e d id a d e l ta m a f lo d e l d ien te . En a p lic a c io n e s d o n d e la s fu e rz a s q u e se t r a n s m i te n s o n a l ta s , se
Paso grueso Paso finoCaradetfstiau d d diente {P i< 2 0) <Ps*20)para un ángulo de presión <fc Mfc, o20*o25' 20°
.Viendo, a 1.000 1.000
Pj PjR dendo, b 1030 ___ „ , 12
Pd0.002 + —
Pd
Profundidad de trahija. h¡ 2.000 2.000Pj Pd
Profundidad tou l. h, 2250 22000.002 *Pj Pd
Espesor circular de diente, r 1371 1371
Pá Pd
Ridiodel fílete, ry 0300Pj
no estandarizado
Tolerancia mínima, c 02300.002 * ^
Pj PjToleranc»i c (al fondo dd 0350 0.002 * ^diente) Pd Pd
Anchura min. en la parte 0250 no estandarizadosuperior PjEstándar de la at.ma 201X12 207.04Ancho de cara ]2 12
Pd Pd
www.FreeLibros.me

E n g r a n e s : a n á l i s i s d n e m á t i c o y s e le c c ió n __________ 267
requ ieren d ientes m ás g randes, co n m en o res valo res d e l paso d iam e tra l. Los eng ranes se u tilizan en u n a g ra n variedad de ap licac iones, desde re lo jes m ecánicos co n fuerzas pequeñas, has ta m o lin o s co n g randes rod illos de acero p a ra fu erz as ex trem ad am en te g randes. P o r consigu ien te , h ay d ispon ib le una g ran variedad de pasos d iam etrales. Los valores estandarizados del paso d iam etra l se indican en la tab la 10.1.
L a m ayoría de las características de u n d ien te de engrane, com o las q u e se identifican e n la sección 103 y e n la fig u ra 103,
están estandarizadas en relación con el paso diam etral y el ángulo d e presión . Las relaciones aplicables se presentan en la tab la 103. Estas relaciones son actualizadas por la agma, q u e revisa y publica los estándares nuevos cada año, b mayoría de los cuales están certificados p o r el In stitu to Nacional Estadounidense d e Estándares (ansí, p o r b siglas d e A m erican N ational Standards Institute). Los estándares de b a c m a ejercen gran influencia en los m ercados a nivel m undial.
PR O B LEM A D E E JE M PL O 10.2
Considere el engrane recto de involuta con 35 dientes, a 20", profundidad total y con u n paso diam etral igual a 10 del problema de ejem plo 10.1. D eterm ine el diám etro del círculo del adendo, del d re u lo del dedendo y la tolerancia.
S O L U C IÓ N : I . Calcule el adendo
B circulo del adendo e s el diám etro exterior del engrane. El adendo e s la distancia desde el círculo de paso sobre u n diente del engrane hasta la parte superior del diente. La distancia estándar de este engrane se ca lcu b a partir <le las ecuaciones de la tabla 103.
4 * ■ “ ■ O.lOOinP¿ 10
2. Calcule el d iám etro del adendo
Observe que el adendo es b distancia en tre los radios del d reulo de paso y el d reulo del adendo, de m odo que el dbm etro del d re u lo del adendo está descentrado una d istan d a a en am bos bdo s del d reu lo de p asa En el problema de ejemplo 10.1, el paso diametral e s de 3 3 in. Entonces, el diám etro d eld rcu lo del adendo se calcub conto:
da - d + 2 a - 3 .5 + 2(0.100) - 3 .7 in
3. Calcule el d iám etro del dedendo
Cfc m odo sim iar, el dedendo es la distancia entre los radios del d re u lo de paso y el d re u lo del dedendo. Por lo tanto, el dedendo se calcula como:
P j 10
en tan to q u e el diám etro del d reu lo del dedendo es:
db - d - 2b - 3 3 - 2(0.125) - 3 2 5 in
4 . Calcule la ca n tid a d del perfil del d ien te q u e no es de im v lu ta
Observe que el diámetro del d re u lo base de este problem a de ejem plo es de 3389 in . C om parando este con el del d reu lo del dedendo, se obsecra q u e una pequeña porción del perfil del d ien te del engrane se encuentra dentro d d d reu lo base. Al considerar u n a distancia radial, b longitud de esta pequeña porción del perfil del diente se determina pon
(3289) (3250)Longitud radial q u e n o es insolu ta “ — -— - — -— “ 0.019
Recuerde q u e por definición u n a involuta se extiende únicam ente a partir del d reu lo hase. Esta pequeña p o rdón del perfil del diente n o e s u n a involuta, por lo que n o deberla fncer c o n ta d o con el diente d d engrane acoplado.
5 . Calcule la tolerancia
f ttr ú ltim o, la tolerancia es la distancia que el dedendo excede a l adendo. Es el espacio entre la parte superior de ixi diente de un engrane y la parte inferior del diente del engrane acopbdo. La d istan cb estándar para este en grane se ca lcub con las ccuadones de la tabla 10 3 .
0 2 5 025C - — - - —— - 0.025in
P d 0
Observe que la to lcranda es m ayor que la d is tan d a de la partcquc n o es i m o l u ta del diente del engrane. Por consiguiente, n o se espera q u e haya contacto en tre los dientes de los engranes en esta pordón.
www.FreeLibros.me

268 CAPITULO DIEZ
En la práctica, lo s perfiles m an u fac tu rad o s del d ien te del eng ran e se desvian del perfil teórico q u e se acaba d e exam inar. la com posic ión del e r ro r to m a en cuen ta las im perfecciones de m anufactu ra del perfil del d ien te , asi co m o d e l espaciam icnto e n tre u n d ien te y o tro . La a g m a [estándar 2000-A 88| define un espectro de Índices d e calidad q u e v an d esd e la m e n o r precisión (3 ) has ta la m ayor p recisión (16). La velocidad de lo s d ien tes de en g ran es acoplados, la cual se analizará en la sección 10.7, es un fac to r q u e d e te rm in a la calidad requerid a . E v iden tem ente , el costo del e n g ra n e estará en (unción de la calidad.
10.6 RELACIONES D E LOS ENGRANES ACOPLADOS
En la figura 10J se m uestran dos engranes en contacto . (Atando das engranes se acoplan, p o r lo general el engrane m ás pequeño se deno m in a piñón, el m ás g rande se conoce com o engrane principal o s im plem ente engrane. Recuerde q u e p a ra q u e d o s engranes se acoplen, deben tener el m ism o p a so diam etral y el m ism o án g u lo de presión . En las siguientes secciones, se analizarán las reía d o n e s de d a s engranes acopladas.
10.6.1 D is ta n c ia e n t r e c e n t r o sLa distancia entre centros C se d efine co m o la d is ta n d a d e un c e n tro a o tro e n tre d o s eng ranes acoplados, q u e tam b ién e s la
PR O B LEM A DF. E JE M PL O 10.3
Ltas engranes de profundidad total a 20*. paso 5, se usan e n u n a pequeña mezcladora de concreto para construcción. Los engranes transm iten potencia de u n pequeño m o to r de com bustión interna a la olla m ezcladora. En la figura 10.10 se ilustra esta m áquina. El p inón tiene 15 dientes y el engrane 30. Determine la distancia en tre centros.
f i g u r a t a t o M ezcladora de concreto del p rob lem a de e jem plo 1 0 . 3 .
S O L U C IÓ N : 1. Calcule los diám etros de paso
Los d iám etros de paso para am bos engranes se determ ina con la ecu ad ó n (102).
d is ta n d a e n tre los ejes q u e so p o rtan lo s engranes. E n la confi- g u ra d ó n co m ú n de engranes ex ternos (figura 10.3), la d is tan d a se expresa com o:
« e ra o s = r , + r2 = <d' - ~ 2) (10.7)
y aq u e
La e c u a d ó n (10.7) se rep lan tea com o:
W + Ni) 2 Pj
( 10 . 8 )
En en g ran es in te rn o s (f ig u ra 10.3c), la d is ta n d a e n tre cen tros e s la d iferenc ia e n tre lo s rad io s de p a so y se expresa como:
r ( 4 - dt) _ (Afe - Nt)''Cognac* mtrr-KB ’l M ^ ~ 2 P¡
(10.9)
www.FreeLibros.me

Engranes: an á lis is c in em á tico y selección_________269
4 .
2. Calcule la distancia entre centros
Com o los engranes son externos, la distancia entre centros se calcula con la ecuación (10.7).
(d, + d¡) (33) in + ó.Oin)C = ----- = ----------- ----------- = 4.3 m
3. Verifique la distancia entre centros
Desde luego, se utiliza la e c u a d ó n (10.8) para a lc u la r directam ente la distancia en tre centros a partir de la inform ación dada.
„ {N l + N 1) (15 + 30) . . .
c = ^ « ¡ r ° 4-5,°
10 .6 .2 R a z ó n d e c o n ta c toLa m zón de contacto es el n ú m ero p ro m ed io de d ientes q u e está n e n co n tac to e n u n m om en to determ inado. Evidentem ente, la razón d e con tac to deb e s e r m ayor q u e 1, p o rq u e n o es posible que se p ierda el contacto e n tre las engranes. En la práctica, las razones de con tac to deberían se r m ayores que 1 2 . Los diseños robustos tienen razones de co n tac to de 1.4 o 15. Para iu s t r a r este p r in d - p i a u n a razón d e con tac to de 1.2 ind ica q u e u n p a r d e dientes siem pre está en contacto , m ien tras u n seg u n d o p ar está en co n tacto 20% de las veces.
Los valo res m ás g ran d es de razones d e co n tac to im plican m ay o r suavidad, pues o tro d ien te del eng ran e co m p arte la carga d u ra n te m ás tiem p o en el p roceso de engranaje/desengranaje. A sim ism o, c o n m ás d ien tes q u e c o m p a rte n la carga , se suele tra n sm itir m ás po tencia . C o m o q u ie ra q u e sea, la razó n de co n tacto se increm enta de fo rm a m ás d irec ta co n el uso de e n g ra n a m ás g randes. S in em bargo, a t o se c o n trap o n e a la m ayoría de las m etas de d iseño de com pactib ilidad .
N u m éricam en te , la ra z ó n d e c o n ta c to se expresa co m o la longitud de la tray ec to ria de con tac to d iv id ida e n tre el paso base Pf. el cual, a la vez, se d efine c o m o la d istanc ia en tre p un tos
c o r re sp o n d ie n ta d e d i e n t a a d y a c e n ta , m ed ida sob re d d re u lo base. El paso base se calcula d e la siguiente m anera:
Pb =TTdt cos<f» v d jc o s d »
■V, N }( 10. 10 )
D esde luego, la tray ec to ria del p u n to de c o n ta c to en los d ie n ta de in so lu ta a u n a línea recta (secd ó n 10.4). L a lon g itu d Z de esta tray ec to ria d e c o n ta d o se dedu ce d e las in tm e c d o n a d e los respectivos d re u lo s del ad en d o y la línea d e con tac to . Esta b n g itu d e s (reí. 9]:
Z = V ( r 2 + a i)1 - ( r 2cos«*>)2 - r2s c n ¿
+ V ( r i + « i)2 - ( r , cos<¿)2 - ri sen<f> ( 1 0 . 1 1 )
De m o d o q u e u n a expresión d e la razón d e co n tac to en té r m inos de la g eo m etría del d ien te d e eng ran e está dad a por:
Z
Pb( 10 . 12 )
PR O B LEM A D E E JE M PL O 10.4
Para los e n g ra n a de la m ezcladora de concreto del problem a de ejem plo 1 0 5 , determ ine la razón de contacto.
S O L U C IÓ N : 1. Calcule las propiedades básicas del diente
Los radios de paso de am bos e n g ra n a se calculan a partir de los diám etros de paso.
d, 3.0¡n
r ' " T " 1 " - 1 3 ,n
d i 6 .0 in . r , - — - - y - - 33) m
Observando la tabla 105 , el adendo para d ie n ta de profundidad total a 20a a :
\_
P ja » r " t ■ 0 2 0 in
www.FreeLibros.me

270 CAPITULO DIEZ
Calcule e l paso base
H paso hase se calcula con la ecuación ( 10.10).
j r d ,c a s ¿ tt(3.0 in>CGs(20”)- 0.6890 in
N, 15
Calcule la longitud de contacto
la longitud de la linea de contacto se calcula con la ecuación ( 10.11).
Z - V ( r j ♦ aj)2 - ( f ic o s ^ )2 - r j x n d t ♦ V ( n + m)1 - ( r , c o s ¿ )2 - n s e n ó
= \ / ( 3 . 0 + 0.2)1 - (3.0cos20°)2 - 3 .0sen20*
+ V ( \ 5 + 0 2 ) 1 - (15cos20°)J - U s e n 20”
= 09255 in
luego, la ra /ó n de contacto se determ ina con la ecuación ( 10.12).
Z 09255 in= 1.3433
r pb 0.6890 m
Aun cuando esta razón es aceptable, mayores valores serian mejores (1.4 a U ) .
10.6.3 In te r f e r e n c ia
C o m o se m enc io n ó an terio rm en te , b desventaja m ás significativa en el u so de perfiles de d ien te de eng ranes de in so lu ta es b posibilidad de in terferencia. Los d ientes del eng ran e tienen p erfiles d e in v o lu ta e n tre el c ircu lo base y e l c ircu lo d e l ad en d o . C u a n d o se construye u n engrane con p o c o s d ientes y ángu los de presión pequeños, el circulo del dedendo es considerab lem ente m e n o r q u e el d re u lo base de b in v o lu ta P o r lo ta n to , el d i e n te e n tre el d re u lo base y el d ed en d o n o es u n a invo lu ta . Si el d ien te del engrane acop lado con tac ta ra esta porción del diente, se in fringiría b condición fundam ental de b razó n de v e lo d d ad constan te , 'la l condición se cono ce co m o interferencia y, cuando o cu rre , los d ien tes p u e d e n g e n e ra r ru ido , v ib ra d ó n y desgaste excesivos.
Los d iseñadores provocan la in te rfe ren cb cu an d o in ten tan ob ten er ensam bles com p ac to s usando m u y p o c o s d ien tes en los engranes. La in terferencia se presen ta usualm ente cu an d o u n e n g ran e pequeño se a c o p b co n u n o m u ch o m ás g ran d e . Se logró
ob ten er u n a relación q u e se em plea p a ra d e te rm in ar el núm ero de d ientes necesario en el eng ran e para elim in a r la interferencia |ref. 9 ] . La ecuación (10 .13) de term ina el n ú m ero m ás g ran d e de d ien tes en el engrane para asegura r q u e n o hay a in terferencia. La re la d ó n está dad a co m o u n a función del núm ero d e d ien tes e n el p iñ ó n a c o p b d o , ju n to co n el á n g u lo de p re s ió n y el tam añ o d e l adendo .
{■V?scn2d> - 4 ^ 1
41c - 2 N ,s e n 24>
d o n d e k es tá defin ida p o r la relación del adendo:
(10.13)
a =
l a ecuación (10.13) sirve p a ra tab u la r com binaciones adecuadas de engranes q u e e lim in en b in terferencb . 'Iáles com binaciones se p resen tan e n b t a b b 10.4.
TABI.A 10 .4 C om b in acion es d e d ien tes d e en g ra n e para e lim in a r b in terferen cia
r - 1 4 ° ó = 20* * = 2 5 ”
N ú m e r o d e d í c a l e s N ú m e r o m á x i m o d e N ú m e r o d e d i e n t e s N ú m e r o m d x l m o N ú m e r o d e N ú m e r o m á x i m o d e
« W p i f i ó n • f i e m e s d e l e n g r a n e d e l p l A ú n d e d i e n t e s d e l e n g r a n e • f i e n ! e s d e l p i f i ó n d e n t e s d e l e n g r a n e
<23 bitcrfrtmci* < 13 IntcrfeimcM < 9 Interferencia
23 2 6 13 1 6 9 1 3
2 4 3 2 1 4 2 6 1 0 3 2
2 3 4 0 1 3 4 5 I I 2 4 9
2 6 3 1 1 6 1 0 1 1 2 0 0
2 7 6 7 1 7 1 3 0 9
2 8 9 2 1 8 00
2 9 1 3 3
3 0 2 1 9
3 1 4 9 6
32 00
www.FreeLibros.me

Engra n o : an á lis is c in em á tico y selección_________271
O bserve en la lab ia 10.4 q u e los pifiones d e 1414*co n más de 32 d ien tes se a co p lan , s in in terferencia , co n cualqu ier tam añ o d e en g ran e . T am bién q u e u n p iñ ó n están d ar d e 14'/i* co n m enos de 23 d ientes su fre interferencia, in d is tin tam en te del ta m a ñ o d e l eng ran e a c o p lad o . Estos lim ites se o b tie n e n para o tros ángulos de p resión estándar.
E n la tab la 10.4 e s evidente que u n p iñ ó n de in vo lu tacon u n ángulo d e presión de 25° perm ite el uso de engranes co n m enos d ientes sin interferencia. C o m o consecuencia, e s posible lograr ensam bles m ás com pactos. Este e s el m otivo principal de la p o p u laridad de los d ien tes a 25° y la obsolescencia de los d ientes a 14 V,".
En el caso extrem o d o n d e u n p iñ ó n se acop la co n cualquier o tro engrane, se sustituye N j = o o e n la ecuac ión (10.13). Esto
da el ta m a ñ o del p iñ ó n q u e se acop la co n cu a lq u ie r engrane. C o m o ya se m en c io n ó , u n p iñ ó n a I4>í* co n 32 d ie n te s tiene tales propiedades. U na vez q u e se sustituye = oo, se dedu ce lasg u ie n te relación:
N t >2 k
sen? <f>(10.14)
Se debería no ta r q u e u n engrane co n N ¡ = o o tam bién tend ría u n radio de paso infinito. Este es el concepto subyacente de una crem allera , c o m o la q u e se m uestra e n la figura 10.3d. Entonces, se deb e satisfacer la ecuación (10 .14) para garantizar q u e u n eng ran e se acop la con la crem allera y elim ina la interferencia.
PR O B LEM A D E E JE M PL O 10.5
Para los engranes de la m ezcladora de concreto descrita en el problem a de ejem plo 10.3, determ ine si la interferencia deberla ser u n a preocupación.
S O L U C IÓ N : I . IH lice la ta b la d e in terferen cia p a ra ver ificar criterio*
En la tabla 10.4 se observa q u e u n p iñ ó n de 15 d ientes, co n d ien tes d e p ro fun d id ad to ta l a 20°. n o puede acoplarse con u n engrane con m ás de 45 dientes sin interferencia. C on tan so lo 30 dientes, la interferencia n o es u n problem a previsible.
2. l i e la e cu a tió n d e in terferen c ia para ver ificar lo t criterios
Se obtiene el m k m o resultado co n b ecuación (10.13). De b tabla 10 J , el adendo es:
13 P
Por lo tanto,
1
Se utiliza b ecuación (10.13) para verificar los problemas de interferencia.
_ |N fscn: «6 - 4 * J)1V7 ^ --------------------z----
4* - 2 N |i tn
|15?sen?20* ~ 4(1)*1
* * < 4(1) - 2 ( l5 ) « n 220*
N ¡ < 45.48
B n ú m ero de d ientes del engrane im pulsado, 30, es m en o r que el valor limite de 45.48, por lo q u e la interferencia n o es u n problema.
Com o se m encionó anteriorm ente, el perfil del d ien te se puede modificar a costa de la forma de h profundidad total, con la finalidad de p e rm itir el acoplam iento de engranes pequeños con en granes grandes. Desde luego, esto minimiza el tam año total del sistema de engranes, el cual es un objetivo de diseño usual. l a acma ha incluido previsiones estándar para modificar ios perfiles de invohita.
Se desarrollaron d e n la de m uñón (cortos) co n u n ángulo de presión grande y dientes pequeños. El sistema de m uñón tiene d ien tes m ás fuertes, pero u n a profundidad de trabajo usualm ente 20% m enor q u e los clientes d e profundidad total.
O tro sistema alternativo es el sistema de adendos largo y corto. En estos perfiles, aum enta el adendo de u n engrane y disminuye el adendo del engrane acoplado.
El resultado, desde luego, es que tales engranes n o estandarizados ya n o son intercambiables co n los engranes estándar. Los en
granes especializados se usan raras veces en el diseño de m áquinas a i general y los detalles están más allá del alcance de este libro. Se deben consu ltar b s referencias para el análisis de perfiles n o estandarizados (refs. 4 ,9 ,1 3 ,1 5 ).
10.6.4 R e b a je
La interferencia tam bién se elim ina al rem over material d d diente <fel engrane en tre d d re u lo base y d d re u lo del dedendo . Esta es la porción del d ien te del engrane q u e n o es de im o lu ta e in te rferiría co n el d ien te del eng ran e acoplado. En la figura 10.11 se m uestra d d ien te rebajado de u n engrane.
0 rebaje reduce ev identem ente la resistencia d e u n engrane, co n lo cual d ism inuye la po tencia q u e se p u ed e tran sm itir con seguridad. A dem ás, tam b ién reduce b lo n g itu d de con tac to , lo
www.FreeLibros.me

272 CAPITULO DIEZ
Perfil estándar del diente de engrane
Rebaje para eliminar la Interferencia (ociare en el área de mayor e s te n o )
F I G U R A 1 0 . 1 1 D i e n t e r e b a j a d o d e u n e n g r a n e .
c u a l d i s m i n u y e l a r a z ó n d e c o n t a c t o , m i e n t r a s g e n e r a u n a c -
d o n a m i c n t o m á s b u r d o y r u i d o s a f t » r l o t a n t a s e d e b e r i a e v i t a r
d r e b a j e a m e n o s q u e l a a p l i c a c i ó n r e q u i e r a d e f i n i t i v a m e n t e u n
e n g r a n a j e c o m p a c t o . E n t a l e s c a s o s , e s n e c e s a r i o r e a l i z a r a n á l i
s i s , a s i c o m o e x p e r i m e n t o s c i n e m á t i c o s y d e r e s i s t e n c i a a v a n z a
d o s p a r a g a r a n t i z a r u n a o p e r a c i ó n a d e c u a d a .
10 .6 .5 H o lg u ra ( ju e g o )
C o m o se estableció en la sección ÍO J . la ho lgura es la cantidad q u e el an ch o del espacio en tre d ientes excede al espesor del diente del engrane, m ed ida sob re el c írcu lo de paso. En té rm in o s más prácticos, e s el espacio q u e u n engrane p u ed e g ira r sin q u e s u e n g ran e acoplado gire. Si bien la ho lgura quizá parezca indeseable, e s necesaria cierta ho lgura para efectos d e lubricación de los d ie n tes del engrane. Los engranes q u e funcionan con tinuam en te en una dirección pueden tener realm ente h o lg u ra considerable. Los engranes d e a rra nque/parada frecuente o q u e invierten su direcc ió n , deberían te n e r u n a ho lgura m u y controlada.
0 p e r f i l d e d i e n t e d e u n e n g r a n e s e d i s e ñ a c o n u n v a l o r d e
h o l g u r a n o m i n a l . E i t a m a ñ o d e l a h o l g u r a d e t e r m i n a e l e s p e s o r
del d ien te del engrane, ya q u e la ho lgura e s u n a m ed ida del espe sor del d ien te en el espacio del d ien te . La agma especifica valores de holguras recom endadas [estándar 2002-B88). A un cu an d o estos valores so n a lgo conservadores, lo s engranes de transm isión de p o ten c ia e n general tienen valores recom endados d e holgura de
0.05
Pj< B
0.1
- " ■ ¡ 5En lo s engranes d isponib les com ercialm ente, lo s valores de
b ho lgura son m ucho m ayores p a ra p e rm itir m ayor flexibilidad en las aplicaciones. Los valores d e la ho lgura en estos engranes son p o r lo general:
0 .3 0 .5< « e n g r a n a - d í - n m n u r i o <
D e m an era q u e se deb e te n e r cu id ad o c u a n d o se especifiquen engranes de inven tario p a ra las aplicaciones co n inversión d e las d irecciones o co n secuencias frecuentes de arranque/parada .
Los valores de la h o lg u ra están m u y influ idos p o r cualquier variación d e la distancia en tre los cen tros d e los engranes. Desde b e g a en cualquier am bien te de producción, varia la distancia en tre cen tro s de dos engranes. S in em bargo, u n a desviación en la distancia n om inal e n tre cen tros p u ed e especificarse a p ropósito p o r un diseñador, para a ju sta r b holgura a u n rango deseado. La variación d e h o lg u ra AB que se obtendrá co n u n a variación AC en la distancia e n tre cen tros se aproxim a co n la siguiente relación:
A B « 2 ( A C ) t a n ¿ (10.15)
La ecuación (10 .15) se usa co n la ecuación (10 .7 ) o (10.8) para especificar b distan c ia en tre cen tro s q u e p ro d u ce los valores de h o lg u ra q u e se d eb en m an ten e r en u n ra n g o d e te rm in a d a La reducc ió n d e b d istanc ia e n tre cen tro s d ism in u y e la holgura, y viceversa.
PR O B LEM A DF. E JE M PL O 10 .6
lo s engranes de b m ezcladora de concreto descrito en el problem a de ejem plo 10.3 son artículos de catálogo co n una holgura de diseño igual a 0.4/Pj. Especifique b distancia en tre centros q u e reduce b holgura a u n valor d e 0.1 IP j re com endado por la a c m a.
S O L U C IÓ N : 1. Calcule la holgura del diseño
/ W u a . - " T " 0,08in
2 . D eterm ine la holgura recomendada
0 .1 a i«rcamodadj “ “ 0Á)2,n
3. Calcule la distancia entre centros ajustada
Reagrupando la ecuación (10.15):
A B (0.02 - 0.08)A C =3 ------------ = -------------------- = 0.0824 in
(2 ta n * ) 2 tan (20")
En el problem a de ejem plo 1 0 J , b distancia nom inal entre centros se determ inó igual a 4 5 in . P or lo to n ta para ajustar el valor de la holgura, la distancia entre centros se deberia reducir a
Canuda = 4 5 - 0 0 8 2 4 = 4 .4 1 7 6in
www.FreeLibros.me

Engrane»: an á lis is d n e m á tico y selección_________273
Se tiene que poner énfesis en que la reducción de la distancia entre cen tros producirá un engranaje m uy apretado, adem ás de que podría causar m ucho ruido, sobrecalentam iento y so b re c a ra estructural. Sin em b arg o algunas aplicaciones requieren holgura m ínim a. Desde lu e g o hay que efectuar pruebas para confirm ar el diserto.
10 .6 .6 Á n g u lo d e p r e s ió n d e o p e ra c ió n
C om o se m enc io n ó en las secciones anteriores, el án g u lo de p re sión d efine la línea d e acción d e la fuerza so b re el d ien te del en grane. H1 án g u lo d e p resión del diserto se c o r ta o m o ldea en el d ien te del e n g ra n e y afecta la fo rm a real del d ien te (figura 10.7).
D ebe m encionarse q u e co n fo rm e la d istanc ia e n tre cen tros de los eng ranes acop lados se desvia de su valo r n o m in a l, el án g u lo d e p resión real d u ra n te la o p e rac ió n d ifie re d d v a lo r de diserto. En o t r a s p a lab ras, d o s eng ranes a 20° te n d r ía n r e a lm en te u n án g u lo d e p resión m ayor d u ra n te la operac ió n al in
c re m e n ta r el v a lo r n o m in a l d e la d is tan c ia e n tre cen tro s. La relación q u e se utiliza p a ra d e te rm in ar la m agn itud de la d is crepancia se expresa [ref. 9 ] com o:
'^operación { c o p , | (10.16)
fcn las ap licac iones d o n d e se req u ie re ca lcu la r c o n pre- d s ió n la f u e r a real q u e se tran sm ite , se deberla usar d ángulo d e presión en operación , ya q u e refleja el desem peño real de las fuerzas e n d engrane.
PR O B L E M A D E E JE M PL O 10.7
Para los engranes de la m ezcladora de concreto descrita en el problem a de ejem plo 10.3, determ ine el ángulo de presión en operación cuando la distancia entre cen tros es de 4.4176 in. co m o en el problem a de ejem plo 10A.
S O L U C IÓ N : Si se parte de los núm eros d d problem a de ejem plo 10.6 y de la ecuación (10.16), se calcula lo siguiente:
} « * * - — ■ ■ { i ^ } 4» 20- - 09571
7
= 16.82»
10.7 CINEM ÁTICA DE UN ENGRANE RECTO
U na fu n c ió n b ásica de los en g ran es co n s iste en p ro p o rc io n ar u n a razón d e velocidad constan te e n tre sus respectivos ejes. C uando u n p ar d e engranes tien e u n a razón de v d o d d a d constan te significa q u e d eng ran e im pulsado m antiene u n a v d o d d a d u n ifo rm e, m ien tra s d eng ran e im p u lso r g ire a v d o d d a d constan te. Esta c o n d id ó n lleva al desarro llo del perfil d e invo- lu ta del d ien te . En la figura 10.12 se m uestra u n p a r de engranes rectos acoplados.
Form alm ente, la razón de velocidad VR se define co m o la velocidad a n g u la r del e n g ra n e im p u lso r (en g ran e 1) div id ida en tre la v d o d d a d angu la r d d e n g ra n e im pulsado (en g ran e 2 ).
V R =rt^unpubor
w n i p u la d o
OJ,(10 .17 )
C o m o la razó n e s válida independ ien tem en te d e las un id ades, la razó n de v e lo d d a d se define, asim ism o, en té rm in o s de revo luciones p o r m in u to , rad ian es p o r u n id a d d e tie m p o o cualqu ier o tro co n ju n to conveniente d e un idades d e v e lo d d ad angular. En la práctica, u n a razó n d e velocidad igual a 3 se represen tarla c o m o 3:1, q u e se lee co m o “tres a uno". D e igual m a nera , u n a razó n de velocidad d e 1/3 se represen tarla co m o 1:3 y se leerla co m o “u n o a tres".
f i g u r a 1 0 . 1 2 C i n e m á t i c a d e e n g r a n e s a c o p l a d o s .
La v d o d d a d en la Unta de paso v , se define c o m o la m agn itu d de la velocidad del p u n to de paso de los d o s engranes acop lados. Esta velocidad tam bién se observa en la figura 10.12. Es ev id e n te q u e la v e lo d d a d en la línea de paso de am b o s engranes e s id én tica , p o rq u e el d ie n te de u n eng ran e em p u ja el d ie n te acoplado. P or lo tanto, la veloddad en b lin ea d e paso es u n a
www.FreeLibros.me

274 CAPITULO DIEZ
m edida lineal y está relacionada co n las velocidades angulares de los engranes y su s rad ios d e paso m edian te la e c u a d ó n (6 5 ) .
y, = r¡oj, = Tja*i (10 .18)
A dvierta que, co m o en el cap itu lo 6, la v e lo d d a d angular en esta e c u a d ó n se deb e espedficar en rad ianes p o r u n id ad de tiem po.
l a co m b in ac ió n d e las ecuaciones (10 .17) y (10 .18) da la s igu ien te re lad ó n :
^ = VRIO¡ Ti
Si se in tro d u cen lo s d iám etro s de paso,
É l = ™ = H = V Rdi (2 r ,) I
as i co m o el paso d iam etra l y el n ú m ero d e dientes,
* 2
É l = f á = y n d t
P j
C o m o el paso d iam etra l de los d o s eng ranes deb e se r idéntico p ara q u e los d ientes se aco p len .se elim ina P je n la e c u a d ó n a n terior:
É l = !É l = y od i N , ™
R euniendo to d a s las relaciones an te rio re s se o b tien e u n a o p re s ió n integral de la razó n de veloddad .
a = * = £ = £ri d¡ Nt
La convención de signos algebraicos define la d ire c d ó n re- h tiv a del giro del en g ran e . En el engranaje e x te rn o típico, los cen tros d e lo s e jes están en lad o s op u esto s de la tangen te co m ú n a lo s d re u lo s d e paso, lo cual establece q u e lo s eng ranes g iran en direcciones opuestas. Para expresar tal hecho, la ra z ó n d e v e lo d d ad se p ro p o rd o n a co n u n valo r negativo.
Para en g ran es in te rn o s , c o m o el m o s tra d o e n la figura 10.3c, lo s cen tro s d e lo s e jes están del m ism o lado de la tangente co m ú n a lo s d re u lo s d e p a s o E sto ind ica q u e lo s eng ranes g iran en la m ism a d ire c d ó n . P o r lo tan to , la razó n de velocidad se ex presa co n valo r positivo.
C om o se m encionó en la in troducción , m uchos eng ranes se usan en aplicaciones d o n d e se deb e re d u d r la velocidad d e una fuente de potencia. Entonces, e s no rm al tener razones de ve lo d dad m ayores que 1. C om o se observa en la e c u a d ó n (10.17), esto indica q u e el engrane im p u lso r g ira m ás ráp id o q u e el engrane im pulsado, lo cual e s el caso en las red u ed o n es d e veloddad .
PR O B LEM A DF. E JE M PL O 10.8
Se utiliza u n g rupo de engranes para reducir la velocidad de u n m otor eléctrico q u e impulsa el eje de u n transportador. en la caja registradora de u n superm ercado (figura 10.13). E l engrane sobre el eje del m o to r es u n pifión de paso 10, con 15 dientes y funciona a 1800 rpm en sen tido horario. Determ ine la velocidad d d engrane acoplado, el cual tiene 45 dientes. Calcule tam bién la velocidad en la línea de paso.
o*j • I S O O r p m
- 15 dientes
F IG U R A 1 0 .1 3 T ransportado r d e la caja reg istradora del p rob lem a de e jem plo 1 0 . 8 .
SO L U C IÓ N : 1. Calcule la razón de itloc idad
La razón de velocidad se calcula con la ecuación (10.19).
VR = — = — N , 15
- 3
En la práctica. este valor se expresa com únm ente com o razón de engrane de 3:1. Observe que el valor negitivo h d ic a q u e los engranes giran en direcciones opuestas, lo cual es congruente co n los engranes extem os.
www.FreeLibros.me

F n g r a n o : a n á l i s i s d n e m á t i c o y s e l e c c ió n __________^ 7 5
2. D eterm in e la tr lo c id a d an gu lar d e l engrane im pulsado
l a v e lo c id a d a n g u la r d e l e n g r a n e im p u ls a d o s e c a lc u la r e a g r u p a n d o la e c u a c ió n ( 1 0 .1 7 ) .
to i 1800 rp mo>< = — = — — —— ■ - 600rpm = 6 0 0 rpm, en sentido an tihorano
3. Calcule la velocidad en la lin ea d e paso
L o s d iá m e t r o s d e p a s o s e c a lc u la n c o n la e c u a d ó n ( 1 0 3 ) .
N i 15
* ■ ü ■ » " u -
N ¡ 45
L a v e lo d d a d e n b l ín e a d e p a s o s e c a lc u la c o n la e c u a c ió n ( 1 0 .1 8 ) .
v , - r[üi¡
r , ■ ■ 0 .7 5 in
2 i r r a d- ( 1 8 0 0 r p m ) - I I 3 0 9 .7 r a d /m in
I r ev
v , - ( 0 . 7 5 i n ) ( H 3 0 9 .7 r a d / m i n ) - 8 4 8 2 3 i n /m in
A l c o n v e r t ir la s u n id a d e s .
v , - 8 4 8 2 3 i n / m i n | — - - 7 0 6 .9 f t /m in
T A B L A 1 0 . 6 P a s o s d i a m e t r a l e s a d e c u a d o s p a r a
e n g r a n e s a 2 0 ° d e a c e r o d u l c e , c o n
a n c h o d e c a r a e s t á n d a r
C o m o s e i n d ic ó a n t e r io r m e n t e , b a g m a d e f in e |e s tá n d a r 2 0 0 0 -
A 8 8 ) u n c o n j u n t o d e n ú m e r o s d e c o n t r o l d e c a lid a d q u e v a n d e 3 a 1 6 . E sta s c h s i f k a c i o n e s n u m é r ic a s r e fle ja n b p r e c is ió n d e l p e r f i l d e l
d ie n te , e l e s p a d a d o d ie n t e a d i e n t e y e l a c a b a d o s u p e r f ic ia l . La v e
lo c id a d v , e n b l in e a d e p a s o e s u n ta c to r q u e d e t e r m in a la ca lid a d
r e q u e r id a d e l e n g r a n e . La t a b b 1 0 3 p r e s e n ta b c a lid a d d e l e n g r a n e
r e c o m e n d a d a e n s is t e m a s im p u ls o r e s m e c á n ic o s d e p r e c is ió n .
T A B 1 A 1 0 .5 C a l i d a d d e e n g r a n e 1
r e c o m e n d a d a p o r l a a g m a 9
V e lo d d a d « b h n a d e p u s o( ft /m in , fp m )
C alidad su gerida d d en g ra n e
(d a s if ic a d ó n d e b a g u a )
0 -8 0 0 6 -8
8 0 0 -2000 8 -1 0
3 0 0 - 4 0 0 0 10-12
M ás d e 4000 12-14
1 0 .8 S E L E C C I Ó N D E U N E N G R A N E R E C T O
E n u n p r o c e s o d e d i s e ñ o , s e d e b e n e le g i r l o s e n g r a n e s p a r a r e a l iz a r d e r l a ta r e a . C o n f r e c u e n c ia , la t a r e a e s o b t e n e r u n a r a z ó n
d e v e l o d d a d d e t e r m in a d a . D e b i d o a q u e l a m a y o r ía d e l o s e n
g r a n e s e n o p e r a c ió n c u m p l e n c o n e l e s t á n d a r d e l a a g m a , e l d i s e
ñ a d o r t a n s o l o n e c e s i t a d e t e r m in a r l o s p a r á m e t r o s c la v e : e l p a s o
d ia m e t r a l , e l á n g u l o d e p r e s ió n y e l n ú m e r o d e d i e n t e s e n c a d a
e n g r a n e . L a m a y o r ía d e o t r a s c a r a c t e r í s t ic a s d e u n e n g r a n e se
« b le n d a rp m d d p ifió n
50 100 300 600 9 0 0 1200 1800 2400 3 6 0 0
0 .05 20 20 24 32 32 32 32 32 32
0 .10 16 20 20 24 24 24 32 32 32
0 2 5 12 16 20 20 24 24 24 24 24
0 3 3 10 12 16 20 20 24 24 24 24
0 3 0 10 12 16 20 20 20 20 24 24
0 .75 8 10 12 16 16 20 20 20 20
U ) 6 10 12 16 16 16 20 20 20
1 3 6 8 12 12 16 16 16 16 20
2 a 6 6 10 12 12 12 16 16 16
3 a 5 6 8 10 12 12 12 12 16
5.0 4 5 6 8 10 10 12 12 12
7 3 4 5 6 8 8 8 10 10 10
10 3 4 6 6 6 8 8 8 10
15 2 4 5 6 6 6 6 6 8
20 2 3 4 5 6 6 6 6 —
25 — 3 4 5 5 5 6 5 —
30 — 2 4 4 5 5 5 — —
40 — 2 3 4 4 — — — —
50 — — 3 4 4 — — — —
www.FreeLibros.me

276 CAPITULO DIEZ
d e te rm in a con el uso de las relaciones estándar de la agma p re sen tadas en secciones anteriores.
10.8.1 P aso d ia m c t ra lEn u n proceso típ ico de diseño, el p rim e r p a rám e tro a eleg ir es d p a so d iam e tra l a d ecu a d o . C o m o el p a so d iam e tra l es el ta m a ñ o relativo del d ie n te d e l en g ran e , se m a n tie n e el a rg u m e n to d e q u e las fuerzas transm itid as y las p ropiedades del m a terial del eng ran e afectan tal d ed s ió n . Los c rite rio s precisos de selección requieren el cálculo de los esfuerzos en el d ien te y las presiones de con tac to del engrane. L os p roced im ien tos d e cálculo se incluyen en las especificaciones d e la agma. Este nivel de detalle va m ás allá del a lcance de este libro.
Se pueden o b te n e r fácilm ente estim aciones conservadoras de paso s d iam etrales ad ecu ad o s co n la m ayoría de los p roveedores d e engranes com erciales. Los proveedores u tilizan los están d ares de la AGMA p i r a d e te rm in ar la capac idad para tra n s po rta r po tencia de sus engranes d e inventario. P artiendo d e estos datos, se log ra u n a estim ación del paso d iam etra l adecuado, ya q u e se conocen la po tencia nom inal tran sm itid a p o r el p a r d e en granes, la velocidad angu la r del p iñ ó n y el m aterial d d engrane. G im o ejem plo, se in d u v en estos d a to s en la tab la 106 . Esta tabla Esta pasos d iam etrales adecuados para engranes, a 20°, d e acero dulce co n a n c h o d e cara estándar, co n b ase en la velocidad del p iñón y la potencia transm itida . Hay tablas similares para ángu- b s d e p resión y m ateriales alternativos. E l u so de estas tablas se lu s t r a con u n ejem plo.
PRO B LEM A DF. E JE M PL O 10.9
Se va a seleccionar un p ar de engranes de acero d u k e para b mezcladora de concreto descrita en el problem a de ejemplo 10.3. La m ezebdora e s im pulsada por un m otor de com bustión interna de 10 hp, a u n a velocidad de 1800 rpm. C tterm inc un paso diam etral adecuado.
SO LU C IÓ N : Están especificados los engranes de acero dulce que son capaces de funcionar a 10 h p con una veloddad del piñón de 1800ipm. Tom ando en cuenta criterios de interferencia, b tabb 10 J indica que un p iñón de 18 dientes con un ángulo de presión de 20° se puede acopbr con cualquier o tro engrane. La tabb 10.6 sugiere que se debe utilizar u n paso diametral igual a ocho para transmitir b potencia. Por ello, u n piñón de acero dulce de 18 dientes con un paso diam etral de ocho debería resultar adecuado. Para una selección más confiable, e s necesario efectuar u n análisis de resistencia completo.
1 0 .8 .2 Á n g u lo d e p re s ió nH segundo p arám etro que se debería seleccionar es el ángulo de presión. C o m o se m encionó , los valores estándar de los ángulos de p resión son \A'A*, 20* y 25°. Recuerde q u e lo s engranes de 14/í° se recom iendan únicam ente para sustitu irlos engranes de 14!4®en las m áquinas ya existentes. Los engranes co n ángulos de presión iguales a 20" se adaptan bien a las aplicaciones generales. Los e n granes con ángulos de presión de 25° p u ed en se r m ás pequeños, sin preocuparse p o r la interferencia, pero su eficiencia e s m enor en la transm isión d e la tu e rza P or lo tan to , están m ejo r adaptados para aplicaciones d e alta velocidad y baja potencia.
1 0 .8 .3 N ú m e ro d e d ie n te sFinalm ente, se d e b e d e te rm in a r e l n ú m e ro de d ie n te s del e n g ran e . Esta decisión p o r lo general dep en d e de la ra z ó n de ve
locidad deseada. Se suelen p refe rir los e n g r a n e m ás pequeños porque m in im izan el tam año, el peso y el costo. D esde luego, el tam añ o m ín im o lo d e te rm in a n lo s crite rio s d e in terferencia . El n ú m e ro d e d ien tes d e u n eng ran e tien e q u e se r u n entero . A un cu an d o esta prem isa parece evidente, deb e s e r u n a considerac ión p erm anen te , ya q u e la ob ten c ió n de u n n ú m e ro entero se d if ic u lta ría , adem ás de q u e los fab rican tes de en g ran es n o tienen en inven tario eng ranes c o n increm entos de u n d ien te. La tib ia 10.7 lista los e n g r a n a c o m u n e s d ispon ib les com erc ia lm ente. Se recom ienda co n su lta r u n ca tá logo específico, co m o Boston Gear. Brow ning G ears o M artin Sprocket 8c Gear, para elegir el n ú m ero d e d ientes, com o o p c io n a ad icionales a las listad as e n la tab la 10.7,
TABIA 10.7 N ú m e r o d e d ien tes d e e n g r a n e s e n in ven tar io com erc ia lm cn te d isp o n ib les
Rb m d ia m etra l d e 32
12 1 6 20
14 18 24
( t o o d i a m e t r a l d e 2 4
12 18 24
1 5 21 27
R e o d i a m e t r a l d e 2 0
12 16 24
14 18 25
1 5 2 0 30
2 8 3 6 48
32 4 0 56
3 0 42 54
3 6 4 8 60
3 5 5 0 80
4 0 6 0 84
4 5 7 0 90
6 4 8 0 112
7 2 9 6 128
7 2 9 6 144
8 4 120
1 0 0 160
120 180
140 200
www.FreeLibros.me

E n g r a n e s : a n á l i s i s c i n e m á t i c o y s e le c c ió n __________ 277
P T A B L A 1 0 . 7 (C o n tin u a c ió n ) |
rP i s o d i a m e t r a l d e 16
12 16 2 4 3 2 4 8 6 4 9 6 160
1 4 18 2 8 3 6 5 6 7 2 128 1 9 2
1 3 2 0 3 0 4 0 6 0 8 0 144
P u o d i a m e t r a l d e 12
1 2 15 2 0 2 8 4 2 6 0 8 4 120 1 6 8
13 16 21 3 0 4 8 6 6 9 6 132 1 9 2
1 4 18 2 4 3 6 5 4 7 2 108 144 2 1 6
A n o d i a m e t r a l d e 10
12 16 2 4 3 0 4 5 5 5 8 0 120 2 0 0
1 4 18 2 5 3 5 4 8 6 0 9 0 140
1 5 2 0 2 8 4 0 5 0 7 0 100 160
H i t o d i a m e t r a l d e 8
1 2 16 2 2 3 2 4 4 6 0 8 0 1 1 2
1 4 18 2 4 3 6 4 8 6 4 8 8 120
1 5 2 0 2 8 4 0 5 6 7 2 9 6 128
P u to d i a m e t r a l d e 6
1 2 16 2 4 3 3 4 8 6 6 9 6
1 4 18 2 7 3 6 5 4 7 2 106
1 5 21 3 0 4 2 6 0 8 4 1 2 0
A l t o d i a m e t r a l d e 3
1 2 16 24 3 0 4 5 7 0 110 1 6 0
U 18 2 5 3 5 5 0 8 0 120 180
1 5 2 0 2 8 4 0 6 0 100 140
PR O B LEM A D E E JE M PL O 10.10
Se utiliza u n engranaje reductor para u n pequeño m otor en u n bote de pesca. I-os engranes deben transm itir 5 h p de m m otor eléctrico q u e gira a 900 rpm a la hélice que gira a 320 rpm . Seleccione u n con jun to de engranes para realizar esta tarea.
S O L U C IÓ N : I . D eterm ine el paso d iam etral y el ángulo de presión adecuados
Como esta aplicación requiere engranajes en general, se usa un ángulo de presión de 20". Si se parte de la tabb 10.6, m estim ado del paso diam etral adecuado es:
Pj - 10
2. Emplee la razón de velocidad requerida para iterar y determ inar el núm ero de d ientes adecuado
La razón de velocidad requerida es
= 2 ll2 5"bitpukadj 3 2 0 ip m
Reagrupando la ecuación (10.19)
N ) = = N^ 2M2>>C om o generalm ente se prefiere u n ensam blaje m ás pequeño, se sustituyen los valores de los d ientes del
piñón (im pulsor), in iciando con u n p iñón lo m ás pequeño posible. O bserve q u e se debe aplicar u n proceso iterativo, porque el núm ero de dientes debe ser u n entero. Usando:
NmfuUo, - 13, Nmiuh4do - 13 - 3656
N tnp lw r = 14. Nimpukedo = h ( ^ ) = 3958
www.FreeLibros.me

278 CAPITULO DIEZ
^np d ao f “ 15,
Nm.pubor = 16. H * * * " i í ( ü ) - 45
l a com binación de enteros m ás pequeña es de 16 y 45 dientes. Asimismo, si se parte del análisis anterior, u n paso ciam etral adecuado es de 10. l a tabla 10.7 confirma que estos engranes están disponibles com ercialm ente.
3 . Calcule lo t diám etros de paso y la distancia en tre centros
Ib r últim o, los diám etros de paso correspondientes y la distancia en tre cen tros son:
d , =Ni 16 — = — = 1.6 in P j 1 0
4 = ^ 4 5 , = •- - - . 4 3 m
^«ngrína cucmcB BId, + d ,) (1.6 + 4 3 ) ____
2 2
C o n frecuencia , los en g ran es se eligen p a ra m o d ifica r la razó n de velocidad e n tre lo s e jes de u n m áq u in a existente . O cu rre u n a situación parecida cu an d o los ejes de los engranes se d e b e n espaciar u n a d istanc ia específica d eb id o a o tra s restricciones. A m bas situaciones lim itan la d istanc ia en tre cen tros de los eng ranes. En casos as í, el n ú m e ro de d ie n te s elegido para c a d a e n g ra n e q u iz á n o sea el m ás pequeAo posib le , s in o el necesa rio p a ra satisfacer el req u erim ien to d e d istan c ia e n tre los ejes.
Tam bién se p u ed e u sa r u n d ien te m ás g ran d e q u e el necesario p i r a cu m p lir co n la distancia e n tre ejes. F inalm ente, es posible q u e se requ iera alguna desviación de la razón m eta para especificar lo s eng ranes estándar. En general, las relaciones explicadas a lo largo d e este capítulo sirven p a ra especificar cualqu ier co n ju n to d e engranes. Los e jem plos siguientes m u e s tra n algunos escenarios posibles.
PR O B LEM A D E E JE M PL O 10.11
Un p ar de engranes e s im pulsado p o r u n m otor eléctrico y se usan para im pulsar el eje de u n to m o a 200 rpm . En la figura 10.14 se ilustra este sistem a impulsor. El m otor de 1 h p se sustituirá p o r u n m otor m ás eficiente, pero de a lta velocidad. co n velocidad de 600 rpm. Para llevar a cabo tal m odificación, se debe seleccionar un nuevo coiqunto de en granes que m an teng in la velocidad del husillo a 200 rpm . S in em bargo, los engranes están m ontados en u n a carcasa com plicada q u e n o se puede modificar. Por lo tanto, la distancia en tre centros de los engranes debe perm anecer o í 7 5 in . Especifique el con jun to de engranes a utilizar.
Engrano
figura t o .u Impulsor del torn o del problema de ejem plo 10.11.
www.FreeLibros.me

Engranes: an á lis is c in em á tico y selección_________279
S O L U C IÓ N : I . tspecifique la razón de engrane y la distancia en tre centros
Los principales parám etros de este problem a son la razón de velocidad y la distancia en tre centros, l a razón de velocidad requerida es:
“ •ím r u b o r » 6 0 0 r p mV R = — = ------ — = 3J)
•Ovnpdud» 200 rpm
Entonces,
VR - y - 3.04
lo cual se replantea como:
4 - 3 4
Adicionalmcntc, la distancia entre centros es:
2. Determ ine el diám etro requerido de los eng ra n a
Usando estas relaciones, se determ inan algebraicam ente los diám etros de paso adecuados mediante:
4 + J , 4 + 3 4 < 4 _ .j " 2 “ 2 " 7 3
Despejando,
4 - 3.75 in
yd¡ - 3(3.75) - 1125 in
3. Determ ine el paso d iam etral adecuado
Ahora el problem a se reduce al cálculo del paso diam etral adecuado y del núm ero de dientes que resultan del paso diametral requerido. Com o esta aplkación implica engranajes en general se utiliza u n ángulo de presión de 20*. Remitiéndose a la tabla 10.6, un estimado del paso diametral adecuado es de 14. Por consiguiente, se consideran tan solo valores de P jt£ 14. Al relacionar el paso d iam etra l el paso diam etral y el núm ero de dientes, se calcula lo siguiente:
= ( 4 ) ( P ¿ = 3.75 Pj
Náufámio - (Vfi)Nmpabo. - 3NU,ubo, - 3(3.75 P d - 1125Prf
Se sustitu>'en los pasos diam etrales de 14 y m enores en estas dos ecuaciones. Recuerde q u e tan so lo son váii- d is las soluciones con núm eros de dientes enteros. D e la iteración a través de todas las combinaciones, solamente tres son los factibles.
La m ejo r alternativa dependería de la disponibilidad de engranes estándar, el costo y el peso del engranaje. Advierta que la velocidad de salida será exactamente de 200 rpm . En muchas situaciones, n o se logra obtener exactamente la velocidad impulsada. En el siguiente problem a se ilustra este casa
PRO B LEM A D E E JE M PL O 10.12
En la figura 10.15 se ilustra el ventilador de escape de un engrane im p u lsad a v la carcasa. Para m ejorar el flujo de aire, h velocidad del ventilador necesita incrementarse a 460 rpm, o bien, acercarse a esta velocidad tan to com o sea posible. Se utilizará el m otor existente de 3 h p que fimeiona a 1750 rpm . La carcasa n o se deberla alterar, pues tiene u n sistema de soporte con una distancia entre centros de 9 5 in. Seleccione un conjunto de engranes para esta aplicación.
www.FreeLibros.me

280 CAPITULO DIEZ
SO L U C IÓ N :
h g u r a 10.15 V entilador del escape del p rob lem a de e jem plo 10.12.
Especifique la razón de engrane y la distancia entre centros
Como en el problem a de ejem plo 10.11. lo* parámetro* principales de este problem a son b razón de velocidad y la distancia en tre centros. L a razón de velocidad requerida es:
«"ra pu1k> r« 1750 rpm
VR= ■ T ü ¡ 5 = r - M0
Este escenario de d iserto se com plica p o r u n a ra z ó n d e velocidad n o frac c io n a ria . Es im po sib le o b ten er u n a velocidad im p u lsad a de 460 rp m exactam ente, u sando u n núm ero e n te ro d e d ientes d e en grane. Lo an te rio r s e resuelve si se redondea la razó n d e velocidad a u n valor fraccionario.
(})VR - ( - r | *» 3.75
Este redondeo dará u n a velocidad inducida de:
/ n,ra puliera \ /1 7 5 0 rpm \- 1 . - 5 5 5 “ J - « ' P -
S se supone q u e el ventilador funciona adecuadam ente a esta velocidad,
J ¡ = 3.75 d,
Como antes, la distancia entre centros es:
(4 + 4)‘-ragrinc. m m « - j ~ 5-5 111
2 . D eterm ine los diám etros requeridos de los engranes
Con el uso de tales relaciones, se determ inan algcbrakam ente los diám etros de paso adecuados.
(di + 3.75d|) 4.75d|C i n c n i M i M H M i ■ ~ “ ~ m
Despejando,
d¡ = 4 i n
r
d¡ = 3.75(4) = 15 in
www.FreeLibros.me

F n jra ne>: an á lis is c in em á tico y selección_________281
3. Determ ine u n paso d iam etra l adecuada
Com o ante», el problem a se reduce ahora al cálculo de u n paso diam etral adecuado y del núm ero de diente» que resulte de los diám etro» de paso requeridos. Com o se m encionó, el cálculo de diente» enteros es im probable debido a la razón de la velocidad decimal. Se necesita u n a solución iterativa.
Com o esta aplicación implica engranajes en general, se usa u n ángulo de presión de 20*. Remitiéndose a la tabla 1 0 6 u n estim ado del paso diam etral adecuado a de 12. Por lo tanto, se consideran tan solo valores de Pj s 12. Al relacionar la velocidad, el (« so diam etral el paso diam etral y d núm ero de dientes, se calcula lo sígnente:
Nrapubo, - W W " 2P4
N npuW o = = 3 .75N tapuhor = 3.75(2 P J = 7 5 P j
Se sustituyen los pasos diam etrales de 12 y m enores en estas dos ecuaciones. Recuerde q u e tan so lo son váli- ctas las soluciones con núm eros de dientes enteros. Al calcular todas las com binaciones, tres son factibles.
l-by o tra s com binaciones posib les co n engranes q u e tienen u n paso d iam etra l m e n o r de 8. O tra vez, la m e jo r alternativa dependería d e la d isponibilidad d e eng ranes estándar, el costo y el peso del c o n ju n to de
10.9 C IN EM Á TIC A D E LA CREMALLERA Y EL PIÑ Ó N
En la sección 10.2 se analizó b revem ente u n sistem a d e p iflón- crem allera, que se m uestra en la figura 10.3b. Sirve para convertir el m ovim iento g ira to rio de u n p ifión en m o v im ien to d e tr a s lación d e la cremallera. La aplicación m ás d ig n a de m ención del sistem a crem allera-pifión está en la dirección de lo s autom óviles, d o n d e el m ovim iento g ira to rio del vo lan te de la d irección em pu ja b p a r te p o ste rio r de las ruedas delan teras, d irig ien d o al vehículo en u n a nueva d irección. Entonces, el m ovim iento g irato rio se convierte en lineal. U na crem allera y u n p ifión tam bién funcionan de ta l m anera q u e el m ov im ien to lineal d e la crem allera haga g ira r el pifión.
C o m o se m enc io n ó b revem ente e n la sección 10.5.3, una crem allera es u n caso especial de eng ran e re c to . C u a n d o el d iám etro d e u n engrane se vuelve m u y g ran d e , el perfil local de lo s d ien tes se asem eja a u n a c rem a lle ra . D e h ech o , u n a crem alle ra se p u e d e tra ta r m a tem á ticam en te c o m o u n eng ran e
recto co n paso d iam e tra l in fin ito . P or consigu ien te , to d as las p ropiedades g eo m étricas de u n eng ran e recto q u e se p re sen ta ro n a n te r io rm e n te ta m b ié n se a p lic a n a u n a crem allera . La única diferencia es q u e en vez de referirse a u n paso d iam etral, la crem allera tiene u n a línea de paso.
Desde el p u n to d e vista cinem ático , el m ovim iento g ira to rio del pifión y el lineal de la crem allera se relacionan m ediante los co n cep to s p resen tad o s en el cap ítu lo 6, ecuac ión (6 .5 ). La ecuación de desplazam iento de b crem allera está dad a p o r:
A R oonaü = r(A 0> =(*Wn)<A<W«>
( 10 . 2 0 )
d o n d e A0pift6o se deb e especificar en radianes. La m agn itud de b v e lo d d ad lineal d e la crem allera está dad a por:
b u l l e n = «"pútónrpémsn = ------------ (1 0 .2 1 )
PR O B LEM A D E E JE M PL O 10.13
Se utilizan u n a cremallera y un pifión sobre u m prensa para taladrar com o se indica en b figura 10.16. El pifión tia ie 16 «Scntcs y paso igual a 16. Determ ine b distancia que dcbe(n) girar el m ango (y el pifión) para avanzar el taladro 0.75 in.
S O L U C IÓ N : De b ecuación (10.20), la rotación q u e se desea del pifión es:
Y
V a n 16
* “ ■ • * t í ■ IJJ,n2(0.75in) . . ,
r'n6n = iL O b j" =A l c o n v e r t i r a g r a d o s .
www.FreeLibros.me

282 CAPITULO DIEZ
Cremallera
f i g u r a 1 0 .1 6 Prensa ta la d ra d o ra de p i ñ ó n y crem allera.
PRO B LEM A DF, E JE M PL O 10.14
Para la prensa taladradora descrita en el problem a de ejem plo 10.13, determ ine la velocidad a la que debe g irar el piñón para avanzar el taladro a u n a velocidad de 12 in/m in.
S O L U C IÓ N : l > la ecuación (105 1 ), la velocidad angular del p iñón se determ ina p o r
2 V a m m 2( 1 2 in;m ¡n)“ ' r ioon “ — i " — — ■ 2 4 r a d / m m
n d p n a n 0 0 i n )
C onvirtiendo a revoluciones por m inuto,
“ [ .fw " 24 " 3<82 T m
10.10 CIN EM Á TICA DE U N ENGRANE HELICOIDAL
En la sección 10.2 se p resentaron lo s engranes helicoidales, q u e se m u estran en la figura 10.3d. El desarrollo de lo s engranes helicoidales en realidad se d io cuando lo s o peradores de m áquinas d escu b rie ro n q u e lo s eng ranes escalonados fu n c io n ab an m ás suavem ente y co n m enos ru id o q u e los eng ranes rectos. U n e n g ran e escalonado consistía en varios eng ranes rectos delgados colocados lado a lado, d o n d e cada eng ran e g iraba a u n ángulo p equeño en relación c o n el eng ran e adyacente. El eng ran e a p ilado resultante n o ejercía el m ism o im pacto fuerte q u e n o rm a lm ente tienen d o s d ientes cu an d o e n tra n en co n tac to (p . e j. los eng ranes rectos o rd inario s).
L os engranes helicoidales so n el caso ex trem o de engranes escalonados, ya q u e los d ientes n o están escalonados, s in o in d i nados hacia el eje del engrane. C uando se utilizan sob re ejes paralelos, los engranes helicoidales proporcionan u n con tac to trasto p odo d e lo s d ientes, e s d e d r , c u a n d o el ex trem o fron ta l d e un d ien te e n tra en contacto y com ienza a llevar la carga transm itida, d extrem o posterior del d ien te an terio r tam bién está en contacto. E sto ocasiona u n a operac ió n m ás suave y m enos ru idosa , c o n
form e u n d ien te se carga de m anera gradual. P o r tales motivos, con frecuencia se prefieren los engranes helicoidales, au n cuando son m ás difíciles de fabricar y, com o resultado, son m ás costosos.
Los engranes helicoidales se diseñan h ac ia la derecha o h a d a b izquierda, según la p en d ien te de in d in a d ó n del d ien te . Los dientes helicoidales, cuya pend ien te baja h a d a la izquierda, se d i señan co n u n a hélice h a d a la izquierda. Por el con trario , u n e n grane helicoidal co n d ien tes hacia abajo a la derecha, se diseña con u n a hélice h a d a la derecha. El engrane helicoidal su p e rio r m ostrado en la figura 10J d es u n engrane h a d a la izqu ierda
Los engranes helicoidales tam bién se usan en ejes n o parale- b s sin m od ifica r s u geom etría intrínseca. Tal configuración se co noce co m o engranes helicoidales cruzados. S in em bargo , e n las configuradones cruzadas, las fuerzas requeridas para im pulsar d c o n ju n to de eng ranes se increm en ta d ram áticam en te co n el ángulo del e je. Por lo tanto, configuraciones asf se recom iendan en ap licad o n es de transm isión d e m en o r potencia.
la s relaciones g eom étricas y cinem áticas de los eng ranes helicoidales so n m u y p a re a d a s a las d e lo s engranes rectos. La diferencia p rinc ipal es la defin ición del ángulo de hélice <¿,que es d ángulo de in d in a d ó n de los d ientes. Este án g u lo se m uestra en el engrane helicoidal h a d a la izquierda d e la fig u ra 10.17.
www.FreeLibros.me

Engrane»: análisi» d n e m á tico y selección 283
mal se relaciona asim ism o con el ángulo de presión transversal m ediante
L a vista d e la sección transversal d e u n eng ran e helicoidal, p erpend icu lar al eje del en g ran e , parece idéntica a la de u n en g ran e r e c ta Esta vista es p ro d u c to de la sección A-A de la (¡gura 10.17, llam ada sección transversal. la s p ropiedades geom étricas del d ien te defin idas para lo s en g ran es rectos se u tilizan en los en g ran es helicoidales. P ara e lim in a r con fu sió n , estas p ro p iedades se designan c o m o p rop iedades transversa les. El paso circular transversal, el án g u lo de presión transversal y el p a so d iam etra l transversa l so n idén ticos a las defin iciones c o rre sp o n d ien tes d e lo s eng ranes rectos. En la fig u ra 10.17 s e ilu s tra el paso circu lar transversal.
A lgunas p ro p ied ad es g eom étricas ad ic io n a les se definen observando la sección transversa l, no rm al a los d ien tes del en grane. Esta vista se genera p o r b sección B-B en la figura 10.17, llam ada sección norm al
El p iso circular norm al p n se d efine co m o la d is tan d a en tre p un tos correspondientes de u n engrane, m edidos sobre el d reu lo de paso y norm al al d ien te del engrane. El paso circu lar norm al tam bién se m uestra en ki figura 10.17. El paso á rc u la r norm al se re la d o n a co n el paso á rc u la r transversa l p o r m ed io de t r i gonom etría.
p " = p e o s 4> ( 10. 2 2 )
El p iso diam etral n o rm a l P¿".se define usando el paso á r c u lar norm al, de m odo p a re a d o a la ecuación (10.5).
P3 =
El módulo norm al m " se d efine asim ism o com o:
m n = ir p n
T am bién p o r trigonom etría ,
P j - P jjcos 4>
m "m = -e o s 4»
(10.23)
(10.24)
(10.25)
(10.26)
t a n ^ " = t a n 0cosd> (10.27)
Los engranes helicoidales r a ra vez se in tercam bian : p o r lo ta n ta n o hay sistem as de d ientes estándares c o m o los descritos p ara lo s eng ranes rectos. Las d im ensiones preferidas dependen usualm ente del m o d o en q u e se crean los eng ranes helicoidales. C u a n d o el e n g ra n e s e c o rta a trav és de u n a o p e ra d ó n d e fre s a d a el paso diam etral n o rm a l deberla a justarse a lo s estándares is ta d o s en b tabla 10.1. P or el c o n t r a r ia cuando u n engrane se a m a co n u n co rtad o r, el paso d iam etra l transversa l tien e q u e a justarse a lo s valores d e b tab la 10. 1.
O ángulo de hélice en b m ayoría d e lo s engranes varía e n tre 15* y 45°. C o m o los d ien tes se en cu en tran a d e r to án g u lo del eje. se p ro d u ce u n a carga de em pu je e n los engranes helicoidales acoplados. La fuerza d e em pu je varía d irectam ente c o n b ta n gen te d d á n g u lo d e hélice; p o r consigu ien te , lo s ángu los de hélice m ás g randes requ ieren suficiente so p o r te axial en d e n grane y en d eje.
En aplicaciones co n ejes paralelos, b razón de v e lo d d ad de h ecuación (10.19) tam b ién se aplica a lo s engranes helicoidales. D os requerim ientos ad id o n a lcs a los de los engranes rectos, para un acoplam iento adecuado de engranes helicoidales, son :
1. L os eng ranes d eb en te n e r ángu los de hélice iguales.
2 . Las hélices de los d o s eng ranes acoplados deben ser de sen tidos opuestos. Es d e d r , u n eng ran e deb e tener la hélice h a d a b izquierda y el o tro h a c b la derecha.
La presencia d e u n ángulo d e hélice tam bién ayuda a e lim in ar la in te rfe ren c ia . Ya se d ed u jo u n a e c u a d ó n s im ib r a b e c u a d ó n (10 .13) para lo s engranes helicoidales, de m o d o q u e el n ú m e ro m ín im o de d ie n te s en e l p ifló n q u e se p u e d e usar —c u a n d o se a c o p b co n u n e n g ra n e d e cualqu ier ta m a f la sin preocuparse p o r b interferencia— se determ ina com o:
> ( , a 2 8 ) sen*d>
Los valores ob ten idos c o n esta e c u a d ó n se resum en en b lá b il 10.8 .
El ángulo de presión norm al 0" tam b ién se d efine a p a rtir de b vista no rm al d e b fo rm a d e l d ien te . E l án g u lo de p resión nor-
T A B L A 1 0 .8 D i e n t e s m í n i m o s p a r a e l i m i n a r l a ¡j
i n t e r f e r e n c i a e n u n e n g r a n e h e l i c o i d a l H
rA n g u l o d e h d l c t
A n g u l o d c p r c s i A n n o r u M l . ¿ <1
1 4 ' * 20“ 25*
0( en g ran e recio) 32 17 12
T
W
15*
32 17 12
31 17 12
29 16 II
a r
22J*
25'
27 15 10
25 14 10
24 13 9
30-1QI
21 12 8
1 t i IA 7
« •
IB I U 7
■5 8 6
« • 12 7 3
F IG U R A 10.17 G e o m e t r í a d e u n e n g r a n e h e l ic o i d a l .
www.FreeLibros.me

284 CAPITULO DIEZ
PRO B LEM A D E E JE M PL O 10.15
Para reducirel m id o en u n engrane impulsor, je sustituyen dos engranes de paso 12, co n 20 y 65 dientes, por engranes helicoidales. El nuevo con jun to de engranes debe tener la m ism a razón de velocidad. C om o se usará la m ism a carcasa, la distancia en tre centros tam bién debe perm anecer igual. S upongi que los engranes helicoidales se fabricaron por fresado.
S O L U C IÓ N : I . Calcule la razón de selocidad deseada y la distancia entre centros
La razón de velocidad original y la distancia entre centros se calcula como:
^mpubKlo 65 VR = = 3.25
(N , + Nj) (20 + 65)C ngnna«ttcraat " ^ ^ « 3.4m
2 . Determ ine u n paso d iam etral adecuado
Como los engranes se cortarán co n una fresa, el paso diam etral norm al se deberla ajustar a los estándares Estados en h tabla 10.1. Los engranes originales tienen un paso diam etral de 12; por lo tanto, se supone que los d ientes son b su frien te resistentes. Entonces, se seleccionan los engranes heEcoidales con u n paso diam etral de 12.
3. Determine el núm ero adecuado de dientes
Al sustitu ir b ecuación (10.22) en b ecuación (10.7), se realizan los siguientes cálculos:
_ w + lf r ) _ w +^-eigrsim nlRROt ¿PJcO S? 2(12cOS?) ‘ “
Asimismo.
Por lo tanto.
lo cual se reduce a:
Ny
N,
(N t + 3 2 5 N ;)
24eosv
A192
Esta ecuación ind ica q u e Ni deb e ser m en o r que 192 en la aplicación. P or ensayo y e rro r se consideran las sgu icn tcs com binaciones d e b tabla 10.9.
Se utiliza la prim era solución para generar núm eros enteros para am bos dientes. Se seleccionan u n p inón de 16 dientes y u n engrane de 52 dientes co n u n ángulo de héEce de 33.55°. Observe q u e al aplicar los criterios de interferencia de b tabla 103, se utiliza u n ángulo de presión norm al de 20° o de 25°.
T A B L A 1 0 . 9 I t e r a c i o n e s d e l p r o b l e m a
d e e j e m p l o 1 0 . 1 5
D i a n a D i e n t a P a t o A n g u l o P a s o
d e l p i f i ó n d d e n g r a n e d i a m e t r a l d e h d i c e d i a m e t r a l
N , N , n o r m a l P J 9 E í
19 61.75 12 827 113818 5830 12 2036 112517 5525 12 27.70 93216 52 12 3335 9.00
www.FreeLibros.me

Engrane»: an á lis is d n c m á tico y selección_________285
10.11 CINEM ÁTICA D E ENGRANES CÓ N IC O S
Ix b engranes cónicos se presentaron en la sección 102 y se ilustran en la fig u ra 10J f . Ixxs eng ranes cónicos son útiles en la tran sm isión d e m ovim iento en tre d o s ejes q u e se intersecan. Una de b s p rop iedades m ás im p o rtan te s d e u n a con fig u rac ió n d e en g ranes cón icos e s el ángulo de eje £ . El ángulo de eje se define com o el án g u lo en tre 1as lineas centrales d e lo s ejes de soporte. Las aplicaciones com unes de engranes cón icos consisten en ejes q u e se in tersecan en ángu los rectos o q u e tien en u n án g u lo de ejes de 90*.
C o m o se expuso en la sección 10.1 y se m uestra en la figura 10.2, lo s eng ranes rectos tien en la m ism a cinem ática q u e la de dos rodillos de fricción , l íe m o d o sim ilar, es posible su s titu ir los eng ranes cón icos p o r d o s c o n o s d e fricción . C o n esta geom etría cónica, la p ro fu n d id a d d e lo s d ien tes del e n g ra n e se estrecha desde a iu e ra h ac ia la parte m edia. La m ayoría de las característica g eo m étricas del d ie n te u tiliz a d a s e n lo s en g ran es rectos, tales co m o el paso d iam etra l y el adendo , se ap lican p a ra los en granes cónicos. Lo a n te r io r se observa en la sección axial de los d o s eng ranes cón icos a c o p la d o s m o stra d a e n la fig u ra 10. 18. C o m o los d ien tes se an g o s tan , la s características del d ien te se m iden en el b o rd e ex terio r del diente.
L a razó n d e velocidad angular, co m o se p resen tó para los eng ranes rectos d e la ecuac ión (10.19), tam b ién es ap licab le a lo s eng ranes cónicos. El paso diam etral y el án g u lo de presión tam b ién tien en la m ism a defin ición q u e en lo s engranes rectos y d eb en se r idénticos en lo s engranes cón icos para q u e se acoplen. 0 paso diam etral d e lo s engranes cónicos generalm ente sigue el estándar d e valores p resentado e n la ta b b 10.1. La m ayoría d e los engranes cón icos se fabrican co n u n án g u lo de p resión de 20°; sin em bargo, b form a del d ien te n o es usualm ente u n a involuta debido a la d ificu ltad de s u m anufactu ra . Se h an d esa rro lb d o perfiles a lternativos, q u e so n m arcas registradas d e lo s v en d edo res y sirven co m o ventajas com petitivas.
A dem ás del paso diam etral y del ángulo de presión , lo s en granes cón icos se clasifican p o r su ángulo de paso y . El ángulo de paso e s el án g u lo g en erad o p o r el co n o sob re el cual se construye el engrane. Se h a n identificado lo s ángu los d e paso de los
dos engranes acop lados m ostrados en la figura 10.18. El ángulo d e paso de cada eng ran e es u n a (unción de la razón d e velocidad y se expresa com o:
s e n S
(t a n - y ^ ^ =
- « * f e ) }
s e n l
(1 0 .2 9 )
(1 0 .3 0 )
C om o el co n o de paso es u n a fu n d ó n de b razó n d e v e lo d d ad , n o se puede su s titu ir u n e n g ra n e cón ico ind iv idual para m odificar la razón, c o m o es el caso en los en g ran es rectos. P or lo tan to , lo s eng ranes cón icos se com ercializan en paquete.
B i la figura 10.18 e s evidente que b su m a de los ángu lo ; de poso d e los dos engranes acoplados debe ser igual al ángulo d e eje. Entonces,
^ Y p tftd n y engrane (1 0 .3 1 )
Un engrane de inglete, com o el m ostrado e n la figura 10 Jg , es u n caso especial d e eng ran e cón ico con u n án g u lo de eje d e 90° y u n a razó n d e velocidad de 1, C o n b s e c u a d o n e s (10 .29) y (10 JO ), el án g u lo de paso d e am bos engranes de inglete es d e 45°.
El m ontaje de lo s engranes cón icos e s critico. Para lograr un ¡x o p b m ic n to ideal, el vértice d e lo s conos d e am bos engranes deb e estar e n b m ism a ub icación. C ualqu ier d esv iad ó n p o d ría causar h o lg u ra excesiva o in terferencia. D eb ido a b geom etría intrínseca de los engranes cónicos, p o r lo m enos u n o de los e n granes deb e estar su jeto en el ex trem o d e u n eje en voladizo. Esta configuración trae p o r si m ism a deflexiones excesivas, b s cuales tam bién suelen causar p rob lem as de holgura.
l a s cargas de em p u je axial desarro lladas p o r los eng ranes cónicos acop lados siem pre tienden a sep ara r lo s engranes. Esto puede c o n tr ib u ir a la deflexión del e je y tam bién se deb e tom ar en cuenta. Desde luego, los cojinetes d e soporte del eje tam bién se tienen q u e co n fig u ra r p a ra so p o rta r esta fuerza de em pu je .
figura 10.18 Engranes cónicos acoplados.
www.FreeLibros.me

286 CAPITULO DIEZ
PRO B LEM A D E E JE M PL O 10.16
I h par de engranes cónicos tienen 18 y 27 dientes, que se usan en ejes q u e se intersecan entre s( a un ángulo de 70*. [> term ine la razón de velocidad y los ángulos de paso de am bos engranes.
S O L U C IÓ N : I . Calcule la razón de velocidad
l a r a z ó n d e v e lo c id a d s e d e t e r m in a c o n la e c u a c ió n ( 1 0 .1 7 ) .
VR - - 27dÍCn,CS - ,.5Njinán 18 dientes
2 . Calcule los ángulos de paso
Los ángulos de paso se calculan con kisecuaciones (10.29) y (1030).
s e n Ilanypnón
^ [ s e n (7 0 * )
ypBfln [ ( e o s 7 0 * ) + ( 2 7 /1 8 )2 7 .0 2 *
s e n S•anyBigran« =
k * ® ],1 sen (70*)
' 1 (00,70*) M - / 2 7 ) J = 42 9 r
10.12 CIN EM Á TICA DE UN ENGRANE SIN FIN
En la sección 10.2 se describ ieron u n to rn illo s in fin y u n e n g ran e sin fin, q u e se ilu stran en la figura 10.3h. El to rn illo s in fin y el eng ran e s in fin se em plean para tra n sm itir m ov im ien to e n tre ejes n o paralelos q u e n o se intersecan. C o n u n e n g ra n e sin fin, se p o d rían ob ten er razones d e velocidad g ran d es en u n espacio m u y lim itad o . El e n g ra n e p e q u e ñ o se cono ce co m o tornillo s in fin ', el e n g ra n e m ás g ran d e , c o m o engrane sin fin , rueda s in f in o sim p lem en te engrane
El to rn illo s in fin se asem eja a u n sim ple to rn illo , p o r lo q u e c o n frecuencia lo s d ientes d d to m illo s in fin se denom inan cuerdas (figura 10.3b). Los to rn illo s s in fin se fabrican c o m ú n m ente co n u n a , d o s o cuatro cuerdas, de m o d o q u e el núm ero de dientes (cuerdas) de u n tomiHo sin fin , N „ es u n a p ro p ied ad im portan te . FJ concepto de cuerdas m ú ltip les su p e rp u estas en un to rn illo sin fin indiv idual se ilu stra en la fig u ra 10.19.
■ aC u e r d a « to b le
FIG U R A 1 0 .1 9 C oncepto d e c u e r d a s m ú lt ip le s .
La fo rm a del d ien te del eng ran e sin fin e s usualm ente u n a involuta. Tam bién es co m ú n c o r ta r cóncavos lo s d ien tes a través d e la cara, de m o d o q u e se ajusten m e jo r al to m illo sin fin c ilin d rico . Esta técn ica se deno m in a diente de engrane s in f in em o l
iente. Es u n in ten to p o r te n e r u n a m ay o r huella de con tac to so bre la q u e se tran sfie ren las fuerzas. El to m illo sin fin tam bién se p u ed e c o r ta r co n u n a lon g itu d cóncava, d e tal m anera q u e se ajuste m e jo r a la redondez, del e n g ra n e sin fin. C u a n d o se inco rp o ran a m b a s o p c io n es , el en g ran a je s in fin se d e n o m in a de ibb le-em vltu ra y b r in d a la huella de con tac to más g ran d e y la m ayor tra n sm is ió n de p o ten c ia . En ta le s co n fig u rac io n es, el to m illo s in fin y el engrane s in fin n o so n in tercam biab les, de m o d o q u e se adqu ie ren en paquete.
0 engrane s in fin e s en realidad el caso ex trem o d e u n e n grane helicoidal co n u n ángulo d e hélice grande, el cual enro lla d d ien te a lrededor del engrane. P o r lo tan to , el to m illo s in fin se describe co n todas b s p ropiedades g eom étricas d e u n engrane helicoidal dadas en la sección 10.6 . L os valores del paso d iam etral n o rm alm en te se ajustan a lo s estándares de la tab la 10. 1. Los ángulos d e p resión tam bién se ajustan a lo s estándares d e 14’/* , 20* y 25* usados e n lo s engranes helicoidales. En b práctica, el ángulo de presión tam b ién se elige co n b ase en el án g u lo d e desplazam iento del to m illo s in fin, co m o se co m en ta rá poste rio rm ente.
0 to m illo sin fin se describe p o r el n ú m ero de cuerdas, el ¡aso diametral del tom illo sin f in paso p w y el ángulo de des-fia za m ien to E l paso d b m e tr a l del to rn illo s in fin se d e te r m in a de m o d o p a rec id o a l d e los eng ranes re c to s , c o m o el d iám etro del c ircu lo tangen te al paso diam etral del eng ran e sin fin. El p a so del to rn illo s in fin tam b ién es sim ilar a b definición de lo s eng ranes rectos, es decir, es b d is ta n c b e n tre p u n to s co rrespon d ien tes so b re d ien tes (cuerdas) adyacen tes. Estas p ro piedades geom étricas del tornillo s in fin se ilu stran en b figura 10.20 .
www.FreeLibros.me

Engrane»: a nálisi» c in e m á tico y selección_________287
FÍBO
Cbble cuerda -
fó s i diametral
Angulo de desplazamiento
f i g u r a 10 J O G eom etría d e u n to rn illo sin fin.
E n la fig u ra 10.20 ta m b ié n se m u e s tra e l án g u lo de d e splazam iento , el cual es el á n g u lo d e inclinación de los d ientes (cu e rd as) . D icho án g u lo se calcula a través d e la relación trig o n o m étrica co n o tra s características del to m illo s in fin.
t a n A = (10 .32 )
Para u n engranaje sin fin a c o p la d a el paso del to m illo sin fin deb e ser el m ism o p a so del engrane s in fin. E ntonces, de laecuac ión ( 10. 1),
P w = P,t r
P j(10 .33 )
E n ejes q u e están a 90°, lo cual e s m u y usual, el ángulo de d esp lazam ien to del to rn illo s in fin e s igual a l án g u lo de hélice del engrane s in fin.
La razó n d e velocidad de u n engranaje sin fin se calcula co m o el n ú m ero d e d ientes del engrane sin fin d iv id ido e n tre el n ú m ero d e cuerdas del to rn illo sin fin.
V R =N w
(10 .34)
E sto tam bién es igual en la aplicación del eng ran e recto.En la m ayoría d e lo s engranajes, el to m illo sin fin es el im
pulsor, conv irtien d o de ese m o d o al co n ju n to en u n red u c to r de velocidad. La m ayoría de los engranajes son irreversibles en el se n tid o de q u e el e n g ra n e s in fin n o p u ed e hacer g ira r el to r n illo . p o rq u e se d esa rro lla u n a g ra n fuerza de fricc ió n e n tre los d ien tes . L os im pulsores irreversib les ta m b ié n se conocen c o m o d e autobloquea L os to rn illo s sin fin d eb en te n e r u n á n g u lo de desp lazam ien to m ay o r de 10° ap ro x im ad am en te para se r im pulsados p o r el eng ran e sin fin acop lado . E sto daría lugar a u n engranaje reversible, p e ro e s m u y r a r a
A un c u a n d o la irrev ers ib ilid ad q u iz á su e n e c o m o u n a desven ta ja , h ay a lgunos ben efic io s. P o r e jem p lo , los equ ipos levadizos p o r lo general requieren q u e la carga se sostenga en u n a a ltu ra determ inada, incluso c u a n d o se desactiva la fuente d e energía, co m o u n m o to r q u e se apaga. C o m o el to m illo sin fin ya n o p u ed e hacer g ira r al eng ran e s in fin, la carga se b loquea a c ie rta a l tu r a Esta acción de freno se u tiliza en varios d ispositivos m ecánicos c o m o m ontacargas, g a to s y p la ta fo rm as levadizas. E n casos asi, se d eb en ana liza r la resistencia de los dientes y la fricción prevista p a ra g aran tiza r la seguridad.
PR O B LEM A D E E JE M PL O 10.17
Se necesita un engranaje sin fin para reducir la velocidad de u n m otor eléctrico de 1800 a 50 rpm. Consideraciones de resistencia requieren que se utilice u n engrane de paso 12, y se desea q u e el conjunto ten jp autobloquoo. Seleccione un juego que realice esta tarea.
S O L U C IÓ N : I . Identifique el núm ero de d ientes adem ado
La razón de velocidad se calcuLi con la ecuación (10.17).
IHOOrpm ^ afeen ..' 50 rpm
Cuando se sek cd o n a u n tornillo sin fin de u n a cuerda, el engrane sin fin deb e tener
V R (36) „ a-• = • £ " 7 T 7
rx> la ecuación (10 J 3 ) y usando u n paso diam etral de 12, el paso del tom illo se determ ina con:
2. Calcule el tam año del conjunto de engranes
C om o se desea au tob loquea se utiliza u n ángulo de desplazamiento conservador de 5°. C on la ecuación (10.32), se determ ina lo siguiente:
■ u - ü *n d w
(11(02618) tan 5 o = ----------------
www.FreeLibros.me

288 CAPITULO DIEZ
Al despejar,
d , - IXM99 in
El paso diam etral d d engrane sin fin es:
w«n*r*n« 36 dientes
Iter últim o, la distancia en tre centros es:
(«Anillo + 4m r»r.) (1.0499 ♦ 3.0)c = -------------' ------------------------------ = 2.0250 in
10.13 TRENES DE ENGRANES
U n tre n d e en g ran es e s u n a se rie d e co n ju n to s d e eng ranes acoplados. Los tren es de eng ranes se utilizan com únm en te para lo g ra r reducciones de v e lo d d a d significativas. M uchas luentes de po tencia m ecánica, c o m o los m otores de co m b u stió n interna, las tu rb inas y lo s m otores eléctricos, o p e ra n e n fo rm a efiden te a a lta s velocidades (1800 a 10000 rp m ). M uchas ap licad o n es de esta p o ten c ia , co m o las p u e r ta s au to m á ticas d e lo s estac ionam ien tos, la s ruedas im pu lso ras de los au to m ó v ile s y los ven tilad o res d e techo , requ ieren ba jas velocidades ( 1 0 a 100 rp m ) para su operación . P or ello, la reducción d e g randes v e lo a - dades es u n requerim iento usual, d o n d e el uso de tren es de e n g ranes es m u y com ún.
P or ejem plo, p o d r ía requerirse la re d u e d ó n de la v e lo d d ad d e u n eje d e 1800 a 10 rp m : u n a re d u e d ó n d e v e lo d d a d de 180:1. Si se in ten ta ra esta reducción c o n u n solo c o n ju n to de en granes, la e c u a d ó n (10.19) m o stra rla q u e el engrane im pulsado se rla 180 veces m ás g ra n d e q u e e l eng ran e im pu lso r. Evidentem ente, el eng ran e im pulsado seria dem asiado g ran d e , pesadoy
Una segunda o p d ó n , m ás lógica, seria r e d u d r la velocidad en pasos, m ed ian te u n a serie de p a res de engranes. Se tra ta de u n a estrategia q u e hace ca e r en cascadas las velocidades an g u lares has ta la velocidad de salida deseada. Es exactam ente la lóg ica subyacente en lo s trenes de engranes.
O tán d o se usan m últiples pares de engranes en serie, la razón de velocidad total se conoce co m o valor d d tren TV, el cual se define co m o la velocidad de entrada al tren d e engranes div id ida en tre la velocidad de salida del tren. Estoes congruente con b definición d e la razón de veloñdad. El valor del tren es el p roducto de la razón d e velocidad de los pares individuales d e engranes acoplados que in tegran el tren . E n form a de ecuación, se expresa como:
7 — = (V R ,)(V R I ) ( V R , ) . . . (10.35)w «i
0 signo algebraico resultante de la m ultip licación de las r a zones individuales de velocidad d e te rm in a la dirección relativa de giro de los e jes d e en trad a y d e salida. Los valores positivos ind ican q u e los ejes de en trad a y de salida g ira n en la m ism a d irección, en ta n to los valores n eg itiv o s in d ican g iros opuestos.
PR O B LEM A D E E JE M PL O 10.18
En la figura 10 2 1 se m uestra u n tren de engranes. Los engranes tim en las siguientes propiedades:
f i g u r a 10.21 T r e n d e e n g r a n e s d e l p r o b l e m a d e e j e m p l o 1 0 .1 8 .
www.FreeLibros.me

Engranes: análisi» d n e m á t ic o y selección_________289
Engrane 2:N ¡ - 12 dientes y P¿ - 12 Engrane 3 : d t = 2 5 in Engrane 4 : N t = 15 dientes Engrane 5 : dy = 30 in y P j - 10 Engrane 6 : d6 = 13 in y Pj = 8 Engrane 7 : - 32 dientes
Determ ine la velocidad angu la r del engrane 7 cuando el engrane 2 im pulsa a 1800 rp m en sen tido antihorario . Calcule asim ism o la distancia entre los ejes que transportan los engranes 2 y 7.
S O L U C IÓ N : 1. Calcule las dim ensiones adecuadas de los engranes
Para calcular el valor del tren, se deben determ inar las propiedades adecuadas de los engranes. En este problema se utilizan y se deben calcular los d iám etros de paso de los engranes.
a * * 12 ,
H engrane 4 se acopla con el engrane 5 y debe tener u n paso diam etral idéntico.
a N * 15 .< •a , = — = — = I j m P¿ 10
Bitonces. e l engrane 7 se acopla con el engrane 6 y debe tener u n paso diam etral idéntico.
N r 32 4in
2. Calcule las velocidades y las razones
El valor del tren se calcula como:
T V = ( V R ^ X V R ^ X V V t ) = ( - ^ ) ( - £ ) ( - | )
La velocidad del engrane 7 se determ ina con este valor del tren.
u>2
" 72 2 = r v
W , 1800 rp mto, - — - 13^ 3) - - 135 rpm - 135 rpm ,en sentido horario
La distancia en tre los centros de los engranes 2 y 7 se determ ina sum ando los nidios de paso de todos los en granes de 2 a 7 , lo cual se observa en la figura 10.21.
C = r2 + r, + r4 + r5 + r6 + r7
PRO B LEM A D E E JE M PL O 10.19
Disene u n tren de engranes que tenp i u n valor del tren de +300:1. Al aplicar los criterios de interferencia, ningún en grane debería tener menos de 15 dientes y, por restricciones de tamaño, ningún engrane puede tener más de 75 dientes.
S O L U C IÓ N : 1. Descomponer e l va lor del tren en razones de \r lo c id a d individuales
Con las restricciones de tam año de los engranes usados en este tren, la razón de velocidad individual m áxim a se determ ina p o r
C om o en todos los problem as de diseno, hay m ás d e u n a solución. Ya q u e el valor del tren es el p roducto de las razones d e velocidad individuales, u n a solución se obtiene facto rizando el valor del tre n co n valores
www.FreeLibros.me

290 CAPITULO DIEZ
no m ayores que las razón d e velocidad indiv idual m áxim a. En este problem a, n in g ú n factor p u ed e ser m a yor d e 5.
TV = 300 = ( 5 ) ( 60) = ( -5 ) (-5 > < 1 2 ) = ( - 5 ) ( - 5 ) < -4 )< -3 )
Por lo tanto, u n tren de engranes co n pares de engranes co n razones individuales de velocidad de - 5 , - 5 , -4 y - 3 dan u n valor total de tren de 300. Se utiliza u n valor ne^itivo para las razones individuales de velocidad, porque se desean usar los engranes extem os m ás comunes.
2 . I d e n tif iq u e e l n ú m e r o d e d ie n te s d e c a d a e n g r a n e
VR,_ 2 ■ - 5,use engranes externos con N¡ ■ 15 y m 75
VR,_4 - - 5 ,use engranes externos co n N , = 15 y Nt = 75
VR5- 6 =* - 4, use engranes externos c o n . = 15 y.V6 “ 60
VR7_ b ■ - 3 ,use engranes externos c o n N , - 15 y N , = 45
En general, cuando se usan engranes ex tem os para producir giros opuestos, se debe em plear u n n ú m ero p ar de pires de engranes para obtener u n valor positivo del tren de engranes. C om o la solución de este ejem plo tiene cuatro pares de engranes, la rotación de salida tiene la m ism a dirección que la de entrada.
10.14 ENGRANES LOCOS
C onsidere el t r e n de en g ran es q u e se m uestra en la figura 10.22. O b serv e q u e el eng ran e m ed io se acop la c o n el eng ran e m ás peq u eñ o p a ra fo rm a r la p r im e ra razó n . El eng ran e m ed io tam bién se aco p la co n e l eng ran e m ás g ra n d e p a ra fo rm a r la segunda razón. C o m o siem pre, el va lo r del tre n se calcula co m o el p ro d u c to de las razo n es d e velocidad.
FIG U R A 1 0 0 2 T r e n d e e n g r a n e s c o n u n e n g r a n e l o c a
T V - W m X H w ) - ( - ■ * ) ( - A )
O bserve q u e d , aparece ta n to en el n u m e ra d o r c o m o en el denom inador. En esta situac ió n , se a n u la la influencia del e n g ran e m edio. U na configuración de eng ranes asi crea u n valor d e l tren igual a:
- ( - S ( - f ) - * íf t j r lo ta n to , el va lo r del t r e n d e p e n d e ú n icam en te del
ta m a ñ o d e l p r im e r eng ran e y d e l ú ltim o . E l d iám e tro , o d n ú m ero d e d ientes del engrane c e n tra l n o influye en el valor del tre n . El eng ran e cen tra l se conoce c o m o engrane loco, cuya fo n d ó n e s m odificar la dirección del m ovim iento de salida, sin
afectar la m agnitud del m ovim iento. Para ilu s tra r esta fond ó n , considere u n a c o n f ig u ra rá n d o n d e el eng ran e 2 se aco p la directam ente co n el e n g ra n e 4 . El valor d d tre n resultante seria:
7 V = ( - V R 2_ < ) = - ^
Asi, d eng ran e lo c o sirve ún icam en te para invertir la direcd ó n d e la sa lida . C o m o se m e n d o n ó , e l ta m a ñ o del eng ran e b c o n o influye en la c inem ática del tre n . En la práctica, se d e te rm ina el tam año este engrane co n la finalidad d e u b icar de m aneta conveniente los cen tro s d e lo s engranes d e en trad a y de sa lida. Desde luego, c o m o los tres eng ranes están acoplados, deben tener pasos d iam etrales y ángu los de p resión idénticos.
10.15 TRENES DF. ENGRANES PLANETARIOSLos tren es d e eng ranes p resen tados en las se cd o n es an terio res tienen los cen tros d e los eng ranes sujetos a cuerpos fijos. En los trenes de eng ranes p lanetario s, se e lim in a ta l re s tr ie d ó n , pues al eslabón q u e so s tien e lo s cen tros d e lo s en g ran es se le perm ite m overse. En la fig u ra 10.23 se ilu s tra u n tren de eng ranes p laneta r ia el cual tam b ién se cono ce co m o tren epicidico.
Los tren es p lanetarios se usan para o b te n e r g randes reduc- ó o n e s d e v e lo d d ad es en u n espacio m e n o r q u e el d e u n t r e n de eng ranes convencional. S in e m b a rg a el m ayor benefic io e s la capad d ad p a ra m od ifica r fád lm en te el va lo r del tren . G o m o to dos lo s eslabones son capaces d e m overse, es factible m odificar d valor del tre n a l su je ta r d iferen tes engranes o transportado res. En b práctica, b conexión del e sb b ó n fijo se realiza con m ecanism os d e fren o o de em brague, co n lo q u e libera u n e sb b ó n y fija o tro. P o r ta l m o tiv a lo s engranes de trenes p lanetarios so n m uy com unes en las transm isiones autom otrices.
C o m o el m o v im ien to se asem eja a los p lan e ta s q u e g iran a lrededor del Sol d e nuestro sistem a so la r, se ap licó a este sistem a el té rm in o d e tren d e engranes planetario. A l a m p lia r la co m p arad ó n , el e n g ra n e central se cono ce c o m o solar. Los en granes q u e g iran a lrededor del eng ran e s o b r se co n o cen co m o planetas. Un tra n sp o rta d o r m antiene a los engranes p lanetarios en ó rb ita a lrededor del Sol. P o r ú l t im a el tren suele estar encerrad o en u n engrane in terno llam ado engrane a nu lar o de anillo. E n la figura 10.23 se p resen tan estos engranes.
www.FreeLibros.me

En g r a n e » : a n á l i s i s c in e m á t i c o y s e le c c ió n _________ 291
Taitiportattor (2)
FJedrsalib (sujeta al enffane anubr)
FIGURA 10.23 Tren de engranes p lanetario .
10.15.1 A n á lis is d e e n g r a n e s p la n e ta r io s p o r s u p e rp o s ic ió nH m ovim iento de u n tren de engranes planetario n o siem pre es tan tácil de d iscern ir co m o en lo s trenes d e cen tro f i ja C onform e los eng ranes y lo s tra n sp o rta d o re s g iran , el m o v im ien to p a re cería m u y com plejo . P ara analizar el m ovim iento de u n tre n de engranes planetarios, se utiliza el m étodo de superposición para "pasar a través de” lo s m ovim ientos de lo s engranes.
El m étodo d e superposición consiste en lo siguiente:
P aso unoEl p r im e r p a so es flexibilizar la re s tr icc ió n del eslabón fijo y su p o n e r tem poralm ente que el tran sp o rtad o r está b loqueado. Se g ira u n a revolución el eng ran e q u e estaba fijo an tes y se calcula el efecto en el tre n com pleto.
Paso dos
El segundo paso e s elim inar todas las restricciones y reg istra r el m ovim iento al g ira r cada eslabón u n a revo lución e n dirección o p u esta al g iro d d paso uno . C uando este m ovim iento se c o m bina c o n d m ovim iento d d p r im e r paso, d m ovim iento superpuesto del eng ran e fijo es igual a cero.
P aso tresEl m ovim iento de todos los eslabones se determ ina com binando los giros de los p rim eros dos pasos. Finalm ente, las vdocidades son proporcionales a los m ovim ientos d e rotación.
D icho e n té rm in o s generales, a u n q u e este m éto d o parece com plejo , e s b as tan te sencillo . El m é to d o se ilu s tra m ejo r con u n p rob lem a d e ejem plo.
PR O B LEM A D E E JE M PL O 10.20
En la figura 1024 se observa un tren de engranes planetario. El transportador (esbbón 2) es b entrada al tren. El solar (engrane I) e s el engrane fijo y tiene 30 dientes. El engrane pbnetario (engrane 3) tiene 35 dientes. El engrane anu- b r sirve com o h salida del tren y tiene 100 dientes. Determine b velocidad angubr de todos los miembros de este tren de engranes, cuando el eje de entrada gira a 1200 rpm en sen tido horario.
S O L U C IÓ N : 1. fra ilee e l paso I
H prim er paso consiste en fijar tem poralmente el transportador y, luego, ca lcub r los movim ientos de todos los engranes, cuando d engrane previamente fijado gira u n a revolución. De este m odo se determ ina lo siguiente:
H engrane 1 g ira u n a revolución.
A&i = +1 rev
F IG U R A 1 0 2 4 T r e n p l a n e t a r i o d e l p r o b l e m a d e e j e m p l o 1 0 .2 0 .
www.FreeLibros.me

292 CAPITULO DIEZ
&i relación co n el engrane 1, el engrane 3 ( VR, j ) g ira lanío como:
A «s - (V R ,-j)(A fl,) - ^ ) ( + ! rev) - - 0 8 5 7 rev
Efe acuerdo co n el engrane 3, el engrane 4 ( VRj^) gira tan to como:
¿0< = ( VRj _4)(A 0 j) = (VR,_a)(V ,_ 3)(A ^1) = ( ^ ¿ ) ( - ^ ) ( + , rev ) = - 0 J rev
2 . Realice el paso 2
0 segundo paso e s g irar lodos los eslabones -1 revolución. Esto regresa al engrane so lar a su posición origi-nal, generando asi u n movimiento neto igual a cero.
3 . Realice el paso 3
H m étodo de superposic ión im plica la com binación d e estos d o s m ovim ientos, lo cual da co m o resultado el m ov im ien to real del tre n de eng ranes p la n e ta r ia Asi, lo s g iros de am b o s paso s se su m a n algebraicam ente. Los dos pasos se resum en e n la tab la 10.10.
TABLA 10 .10 T a b u la c ió n d e l a n á lis is d e e n g r a n e s p la n c tu rú d e l p ro b le m a d e e je m p lo 10.20
E s l a b d n S o l a r P l a n e t a A n u l a r T r a n s p o r t a d o r
R i s o 1:
Giro con d transportador fijo +1 -0-837 -0 3 0
R i s o 2 :
Giro de todos los eslabones -1 -1 -1 -1R i s o ) :
Giren totales 0 “ 1857 -1 3 -1
4 . Determ ine las velocidades de todos los eslabones
Las velocidades se determ inan con las razones de lo s desplazamientos angulares.
*w ' ( axÜ Ü L . ) ” '™ '” -*" ■ ( r r ) ‘,20°T "’> ■ «'I™
“ |W .ñ o “ ( - ! f f 7 ) <Jmnyo»udcr " (+1*857) (1200rpm ) «■ + 2 2 2 8 rp m - 2228 rpm . en sen tido horario
“ millo = ~ ^ “ rm .pauJor = ( + 1 3 ) (120Orpm) = + 1560 rpm = 1560rpm . en sentido horario
PRO B LEM A D E E JE M PL O 10.21
En la figura 1035 se m uestra u n tren de engranes planetario. El transportado r (eslabón 2) sirve com o en trada al tren. El engrane anu lar (engrane 1) es el engrane fijo y tiene 120 dientes. FJ engrane planetario (engrane 4) tiene 40 dientes. El engrane so lar (engrane 3) sirve com o la salida del tren y tiene 30 dientes. D eterm ine b velocidad angular d e todos los m iem bros de este tren de engranes, cu an d o el eje de en trada g ira a 1200 rpm en sen tido horario.
SO L U C IÓ N : 1. Realice los pasos I a 3
0 p rim er paso es fija r tem poralm ente el transportador. Luego se calculan los m ovim ientos de todos lo s en granes. cuando el engrane fijado con anterioridad gira u n a revolución.
0 segundo paso es girar todos los esbbones -1 revolución. Esto regresa el engrane an u b r a su posición origi- ru l, generando asi u n m ovim iento neto igual a ce ra
Estos dos pasos se resum en en b tabla 10.11.
www.FreeLibros.me

Engrane»: an á lis is c in e m á tico y selección_________293
pTA B LA 10.11 P a so s de la so lu c ió n d e l p r o b le m a de e je m p lo 10.21 ]r -------------------------------
EakM a S o la r ( e n g r a n e 3 ) P la n e ta ( e n g ra n e » ) A n il lo ( e n g ra n e 1) T r a n s p o r t a d o r ( e n g ra n e 2 )
P i* o 1:
Giro con el transportadorfoo ( m > - ( 5 ) - “
+1 0
B w l :
Giro de todos los eslabones - i -1 -1 -1R»*o MGiros totales - 5 .0 +2J> 0 -1
2. Calcule la velocidad de lodos los eslabones
1 as ve locidades se d e te rm im n m e d ia n te las razones d e los desp lazam ien tos angulares.
“ ’rt“0 = ( p ^ l dor) = ( r f ) ( 0 , Pm ) = 0 ,Pm
“•mn^artod® “ I200rpm .sentido horario
“ V in r t .n o “ ^ - ^ 7 p ^ a ,r» u r**t.d o r ■ ( “ 2 .0 ) (1 2 0 0 r p m ) = - 2 4 0 0 r p m - 2 4 0 0 rp m , se n t id o a n t ih o ra r io
“Vrfar ” í — J “’irampatiJof ~ (+ 5 .0 ) (1200 rpm) = + 6000rp m = 6000 rpm , sen tido horario
10.15 .2 A n á lis is p o r e c u a c ió n d e e n g r a n e s p la n e ta r io s
Adem ás d d m éto d o tab u la r , el m ov im ien to de u n t r e n d e en g ran es p la n e ta r io ta m b ié n se analiza m e d ia n te u n a ecuac ión q u e se dedu ce de las velocidades angulares relativas. P ara desarro llar el m éto d o de la fó rm ula, se exam ina el m ovim iento de los engranes acoplados en relación co n el transpo rtado r. Así, se u tiliza la inversión cinem ática para v isualizar el tre n c o m o si el transportado r estuviera fijo. Se designa el engrane d e u n extrem o del tren co m o d p rim e r engrane. El engrane del ex trem o opuesto d d tre n se designa co m o d ú ltim o engrane.
El tre n está fo rm ado p o r pares de engranes acoplados co n sistentes en engranes im pulsores e im pulsados. El p rim er engrane se designa c o m o d engrane im pulsor, el ú ltim o engrane, co m o d eng ran e im pu lsado . Los en g ran es in term ed io s se identifican
co m o corresponda, depend iendo d e si im pulsan o son im pulsados. Al calcular la razón de o d a par, la razón e s negativa en engranes ex tem os acoplados y positiva en engranes con acoplam iento interno.
Al cam biar d enfoque a velocidades absolu tas, el p rim e r e n gran e tien e u n a velocidad a n g u la r d es ig n ad a u>f y e l ú ltim o engrane, u n a v d o c id ad angu la r denom in ad a cof. El tran sp o rta d o r tiene u n a v d o c id ad a n g u la r «>*|r, nip<Mt,aOI. L a relación en tre las velocidades angulares y el n ú m ero de d ien tes es co m o sigue:
t ra n s p o r ta d o »---------------------------- = ( 1 0 .3 6 )
« t r a n s p o r ta d o »
producto del núm ero de dientes de los engranes impulsores
producto del núm ero de dientes de los engranes impulsados <■*/. ~ “ transportado.
" F ~ “ > ira m p o r ta d o r
www.FreeLibros.me

294 CAPITULO DIEZ
C o n la ecuac ión (10 .36) se o b tien e cu a lq u ie r té rm in o de velocidad angular, conociendo los o tros dos. C o n frecuencia, se fija ya sea el p rim e r engrane, el ú ltim o o el tran sp o rtad o r, y ese térm ino se hace igual a cero. A un cu an d o e s m enos com plicado q u e el m éto d o tabu lar, el m éto d o de la fó rm u la se lim ita a casos
d o n d e la trayectoria d e acop lam ien to u n e el p rim e ro y el ú ltim o engranes. El m é to d o se ilu stra e n los siguientes p ro b lem as de ejem plo.
PR O B LEM A D E EJEM PLLO 10.22
&i b figura 10.24 se muestra u n tren de engranes planetarios El transportador (eslabón 2) sirve com o la entrada al tre a E l solar (engrane I ) es el engrane fijo y tiene 30 dientes. B engrane planetario (engrane 3) tiene 35 dientes. El en grane anular sirve com o salida del tren y tiene 100 dientes. En el problem a de ejem plo 10.20 se determ inó que la velocidad angular del engrane anular es de 1560 rpm e n sentido horario, m ientras que el eje de entrada gira a 1200 rpm en sen tido horario. Use el m étodo de la fórmula para verificar este resultado.
SO L U C IÓ N : I . Especifique el primero y el ú ltim o engrane*
B solar (engrane 1) se designa como el prim er engrane. A l estar en el otro extrem o del tren, el engrane anular (engrane 4) se designa com o el ú ltim o engrane.
2. Sustituya las razones de engrane en la fó rm u la del tren planetario
B engrane 1 (prim ero) se acopfa con el engrane 3, d cual a la v a se acopla con el engrane4 (últim o). Al sustituir o í la ecuación (1036):
• ‘ • W o . u d o -
I -3 X -8 ) - — OI
Identifique los térm inos de velocidad angular
B solar está fijo y. por lo tanto, - 0. El transportador g ira a 1200 rpm en sentido horario. Considerando el sentido horario como u n a dirección negativa, o*I.nVorUd<r “ -1 200. El engrane anular se debe calcular, de modo « g ie « ¿ - ?
destituya los valores en la fó rm u la del tren planetario y despeje
Al sustitu ir los valores en la ecuación (1036):
( - m ) 0 - ( -1 2 0 0 )
Ltespejando,
io[ = 1200^—^ í o o ) -1 2 0 0 = - 1560 = 1560 rpm , en sentido horario
PR O B LEM A D E E JE M PL O 10.23
En la figura 1025 se ilustra un tren de engranes planetario. El transportador (eslabón 2) sirve como la entrada al tren. El engrane anular (engrane 1) es el engrane fijo y tiene 120 dientes. El engrane planetario (engrane 4 ) tiene 40 dientes. B engrane solar (engrane 3) sirve co m o salida del tren y tiene 30 dientes. En el problema de ejemplo 1021 se determinó que b velocidad angubr del engrane so b r es de 6000 rpm en sen tido horario, mientras que el eje de entrada gira a1200 rpm en sentido horario. Use el m étodo de b fó rm ub para verificar este resultado.
SO L U C IÓ N : I . Especifique e l primero y e l ú ltim o engranes
B solar (engrane 3) se designa como el prim er engrane. Al estar en el otro extrem o del tren, el engrane anular (engrane 1) se designa com o el ú ltim o engrane.
2 . Sustituya las razones de engrane en la fórm ula del tren planetario
B engrane 2 (p rim ero ) se acop la con el eng ran e 4, el cual a la v a se acopla con el engrane 1 (últim o). Sustituyendo en b ecuación (1036):
( _ W + N A _ W‘ ~ tl,P»n»pom4cr\ N , ) \ N , J <ü [ - « V .n .p o .u d c
www.FreeLibros.me
Fn gran es: an á lis is c in em á tico y se lección 295
3. ¡den i ¡fique ios t trm in os de velocidad angular
El anillo está fijo; por lo tanto, « i “ (XEI transportador gira a 1200 rpm en son ido horario. Considerando el sentido horario como u n dirección negativa, atm apm dor " ” 1200. Se debe calcular el engrane solar, de m odo que to / - ?
4 . S u ti tu y a los valora en la fó rm u la del tren planetario y despeje
Sustituyendo los valores e n la ecuación (10J6 ):
0 ~ (-12 0 0 ) «>f — ( — 1200)
Despejando,
: » y + «C 4 0 / \ 120.
a i f - 1200^ - ~ 1200 ■ -6 0 0 0 = 6 0 0 0 rp m ,e n sentido horario
PROBLEMAS
G e o m e tr ía de e n g ra n e s re c to s
En lo s p rob lem as 10-1 a 10-4, de term ine lo siguiente:
a ) El d iá m e tro del d re u lo de pasob) El d iá m e tro del d re u lo basec) El d iá m e tro del d re u lo del ad en d od) El d iá m e tro d e l d re u lo del dedendoe) El paso circular
1 0-1 . Un e n g ra n e recto de invo lu ta d e p ro fu n d id a d to ta l a 20°, co n 18 dientes, q u e tien e u n paso d iam etra l de 12.
1 0-2 . U n e n g ra n e recto de in v o lu ta d e p ro fu n d id a d to ta l a 20", co n 48 d ien tes , q u e tien e u n paso diam etral d e 8.
1 0 - 3 . U n e n g ra n e recto de in v o lu ta d e p ro fu n d id a d to ta l a 14'/4",con 4 0 d ientes, que tiene u n paso diam etral d e 16.
10 -4 . Un eng ran e recto a 25*. con 21 d ientes, que tiene u n m ó d u lo m étrico d e 4 . D eterm ine el d iám etro del d re u lo de posa
En los p rob lem as 10-5 a 10-8, d e te rm in e lo siguiente:
n ) La d istanc ia e n tre cen trosb) L a ra z ó n de con tac toc) Si hay in terferenciad) L a d is ta n d a e n tre cen tros q u e reduce la h o lg u ra de
u n valo r de catálogo de 0.4 / P j a u n valor de 0 .1 /P j recom endado p o r la mima.
1 0 - 5 . D os engranes rectos d e invo lu ta de p ro fun d id ad to ta l a 20”, co n paso de 12, q u e se u tilizan en u n a sie rra circu- lar industrial para co rtar m adera. El p ifión tiene 18 d ien tes y el engrane, 42.
10-8 . Etos en g ran es rectos d e invo lu ta d e p ro fu n d id ad total a 20", co n paso igual a 4, se u tilizan en u n a volteadora para e lim in a r las rebabas de acero de p a r te s tro q u e - bdas. El p ifió n tien e 12 d ie n te s y el engrane, 28.
1 0 - 7 . D os en g ran es rectos d e p lls tico de invo lu ta , co n p ro fund idad total, a 25”, co n paso igual a 48, se u tiliz a n en u n a m á q u in a d e a fe ita r e léc trica . El p ifió n tie n e 18 d ientes y el engrane, 42.
10-8 . Dos engranes rectos de in v o lu ta d e p ro fun d id ad total a 1454°, co n paso igual a 16, se u tilizan e n el to m o de un ta lle r m ecánico . El p ifión tie n e 16 d ien tes y el en grane 72.
En lo s p rob lem as 10-9 a 10-14, d e te rm ine lo siguiente:
á ) Los d iám etro s de paso b) La d istanc ia en tre centros
1 0 - 9 . Dos en g ran es acoplados co n paso igual a 12 tienen 18 d ientes ex tem o s y 4 8 d ien tes in ternos, respectivamente.
10-10. Dos en g ran es acoplados co n paso igual a 2 0 tien en 15 d ientes ex tem o s y 6 0 d ien tes in ternos, respectivamente.
1 0 - 1 1. D os engranes acoplados tienen 18 y 48 dientes, respectivamente, asi co m o u n a distancia e n tre cen tros d e 4.125.
10-12. Dos eng ranes acoplados tienen 20 y 45 d ien tes , respectivam ente, asi co m o u n a distancia e n tre cen tro s d e 3.25.
1 ( 3 -1 3 . Un p ifió n de 18 d ien tes co n u n paso igual a 8 se acopla co n u n eng ran e in te rn o de 6 4 dientes.
1 0 - 1 4 . U n p if ió n de 2 4 d ien tes c o n u n p a so igual a 12 se ¡ to p la co n u n eng ran e in terno de 108 d ientes.
G n c m á tic a d e en g ran es
En lo s p ro b lem as 10-15 a 10-18, de term ine lo siguiente:
a ) La velocidad del engraneb ) La v e lo d d ad en la línea de paso
1 0 - 1 5 . Un pifión d e 18 d ien tes co n u n paso igual a 8 g ira en sen tido h o ra rio a 1150 rp m y se acop la co n u n engrane de 64 dientes.
10 -1 6 . Lto p ifió n d e 15 d ientes co n u n paso igual a 20 g ira en sen tido h o rario a 1725 rp m y se aco p la co n u n engranede 60 dientes.
1 0 - 1 7 . U n pifión d e 21 d ien tes co n u n paso igual a 6 g ira en sen tido h o ra rio a 850 rp m y se acop la co n u n engrane de 42 dientes.
1 0 - 1 8 . L h p ifió n d e 24 d ientes co n u n paso igual a 24 g ira en sen tido h o rario a 1725 rp m y se aco p la co n u n engrane de 144 dientes.
S elección d e u n e n g ra n e co n u n a d istan c ia
e n tre c e n tro s d efin ida
1 0 - 1 9 . Dos engranes co n u n paso igual a 10 se van a m on tar con u n a separación de 12 in y tienen u n a razó n de velocidad de 5:1. C a lc u le los d iám e tro s d e p a so y el n ú m ero de d ientes de am bos engranes.
10 -20 . D os eng ranes co n u n paso igual a 16 se van a m on tar co n u n a separac ió n d e 3 .7 5 in y tie n e n u n a razó n de
www.FreeLibros.me

296 CAPITULO DIEZ
velocidad de 4:1. C a lc u le lo s d iá m e tro s de p a so y el n ú m ero de d ien tes de am bos engranes.
S elección de u n e n g ra n e co n u n a d istan c ia
e n tre c e n tro s d e fin id a
10-21. Dos en g ran es co n u n paso igual a 3 2 se v an a m on tar con u n a separac ió n d e 2 .25 in y tien en u n a ra z ó n de velocidad de 8:1. C a lc u le lo s d iám e tro s de p a so y el n ú m ero de d ien tes de am bos engranes.
10-22. Dos eng ranes se van a m o n ta r c o n u n a separac ió n de 5 in y tienen u n a razó n de velocidad d e 4:1. C alcu le los d iám etro s de paso, lo s pasos d iam etrales y el núm ero de d ien tes adecuados en am b o s engranes.
10-23. Dos eng ranes se van a m o n ta r c o n u n a separac ió n de 3.5 in y tien en u n a razó n de velocidad de 6:1. C alcule los d iám e tro s de paso , los paso s d iam etra les y el n ú m ero de d ien tes adecuados en am b o s engranes.
10-24. D os en g ran es se van a m o n ta r c o n u n a separac ió n de 10 in y tien en u n a ra z ó n d e velocidad de 3:1. C alcule los d iám e tro s de paso , los paso s d iam etra les y el n ú m ero de d ien tes adecuados en am b o s engranes.
S elección de u n e n g ra n e de ca tá lo g o
10-25. Se va a seleccionar u n p a r d e en g ran es de acero d u lce , a 20", p a ra u n a ap licación d o n d e se necesita tran sm itir 5 hp. El p ifió n im pulsa a 1800 rp m y el eng ran e debe g irar tan cerca co m o sea posib le d e 480 rp m . D eterm ine u n c o n ju n to adecuado d e eng ranes de catálogo para esta aplicación, u sando la tabla 10.7.
10-26. Se va a seleccionar u n p ar de eng ranes d e acero du lce a 20", p a ra u n a ap licación d o n d e se necesita tran sm itir 2 5 h p . El p ifión im pulsa a 1500 rp m y el engrane debe g ira r t a n cerca co m o sea posib le d e 500 rp m . D ete rm in e u n c o n ju n to ad ecuado de en g ran es d e catálogo p i r a esta aplicación, u sando la tabla 10.7.
10-27. Se va a seleccionar u n p ar de eng ranes de acero du lce a 20", p a ra u n a ap licación d o n d e se necesita tran sm itir 8 hp. El p ifió n im pulsa a 1500 rp m y el eng ran e debe g irar t a n cerca co m o sea posib le d e 200 rp m . D ete rm in e u n c o n ju n to ad ecuado de en g ran es d e catálogo jo r a esta aplicación, u sando la tab la 10.7.
10-28. Se va a seleccionar u n p ar de engranes de acero du lce a 20", para u n a ap licación d o n d e se necesita tran sm itir 10 h p . El pifión im pulsa a 800 rp m y el engrane deb e g ira r ta n cerca c o m o sea posible d e 180 rp m . D etem iine u n c o n ju n to ad ecuado de eng ranes d e ca tá logo para esta aplicación, usando la ta b b 10.7.
10-29. Se va a se leccionar u n p ar de engranes d e acero du lce a 20", para u n a ap licación d o n d e se necesita tran sm itir 1 hp. El p ifión im pulsa a 1725 rp m y el engrane deb e g ira r ta n cerca c o m o sea posible d e 560 rp m . D eterm ine u n c o n ju n to ad ecuado de eng ranes d e ca tá logo p a ra esta aplicación, usando la ta b b 10.7.
10 -30 . Se va a seleccionar u n p ar de engranes de acero du lce a 20", para u n a aplicación d o n d e se necesitan transm itir 10 hp. El p ifión im p u lsa a 1175 rp m y el engrane debe g irar ta n cerca co m o sea posible de 230 rp m . D eterm ine u n c o n ju n to ad ecuado d e eng ranes d e ca tá logo para esta aplicación, u sando b ta b b 10.7.
10 -31 . Se va a se leccionar u n p a r de eng ranes de acero d u lc e a 7 0 para u n a ap licac ió n d o n d e se necesita tra n sm itir 10 hp. El p ifión im pulsa a 1175 rp m y el eng ran e debe girar ta n cerca co m o sea posible de 170 rp m . D eterm in e u n c o n ju n to ad ecuado de engranes d e catálogo para esta aplicación, u sa n d o la t a b b 10.7.
1 0 -32 . Se va a se leccionar u n p a r de eng ranes de acero d u lc e a 20", para u n a ap licac ió n d o n d e se necesita tra n sm itir 3 hp. El p ifión im p u lsa a 1750 rp m y el engrane debe girar ta n cerca co m o sea posible de 290 rp m . D eterm in e u n c o n ju n to ad ecuado de engranes d e catálogo para esta aplicación, u sa n d o la t a b b 10.7.
1 0 -3 3 . Se va a se leccionar u n p a r d e eng ranes de acero dulce a 20", para u n a aplicación d o n d e se necesita tran sm itir 20 hp. El p ifió n im p u lsa a 825 rp m y el engrane debe girar ta n cerca co m o sea posible de 205 rp m . D eterm ine u n co n ju n to ad ecuado de engranes d e catálogo para esta aplicación, m a n d o la t a b b 10.7.
Pifión y c re m a lle ra
10 -34 . Se usan u n a crem allera y u n p ifió n p a ra a ju sta r b altu ra de u n a cám ara d e p ie . El p ifión tien e 18 d ien tes y un poso igual a 24. D eterm ine el ángulo q u e d e b e (n ) girar el m ango (y el p ifió n ) para elevar b cám ara 5 in.
10 -35 . Se u sa n u n a crem allera y u n p ifió n para bajar el taladro de u n a p rensa ta lad rad o ra . El p ifió n tiene 2 0 d ien tes y u n p a so igual a 16. D eterm ine el án g u lo q u e dcbe(n) g irar el m ango (y el p ifió n ) p a ra b a ja r el ta ladro 3 in.
10 -36 . Se usan u n p ifión de 18 d ientesy paso igual a 8 para im pulsar u n a cremallera. D eterm ine b distancia q u e viaja b crem allera cu an d o el p ifión g ira 3 revoluciones.
10 -37 . Se usan u n p ifió n de 24 d ien tes y paso igual a 12 para im p u lsa r u n a crem allera . D e te rm in e b d istanc ia q u e viaja b crem allera cu an d o e l p ifión g ira 5 revoluciones.
10 -38 . Se u sa n u n p ifió n y u n a crem allera p a r a d ir ig ir u n m ecanism o. El p ifión tien e 18 d ien tes y u n paso igual a 12. D e te rm in e la velocidad requerid a del p ifión para im pulsar b crem allera a u n a velocidad d e 50 in /m in .
1 0 -39 , Se u sa n u n p iñ ó n y u n a crem allera p a r a d ir ig ir u n m ecanism o. E l p iñ ó n tien e 2 0 d ien tes y u n paso igual a10. D eterm ine b velocidad requerid a de b crem allera, s i el p ifión g ira a u n a velocidad de 80 rpm .
E n g ran es h e lico id a les
En los p rob lem as 10-40 a 10-41, de term ine lo siguiente:
a) Los d iám etro s d e pasob) El paso d iam etra l norm alc) El paso c ircu la r no rm ald) Si la in terferencia es u n problem a
1 0-40 . U n p a r d e eng ranes helicoidales tien en u n án g u lo de p resión de 20", u n án g u lo de hélice de 45° y u n paso d iam etral igual a 8 . El p ifió n tien e 16 d ien tes y el e n g ran e 32.
1 0 -41 . U n p a r de eng ranes helico idales tien e u n á n g u lo de p resión d e 14'A°. u n án g u lo de hélice d e 30" y u n paso d iam etral igual a 12. El p ifió n tiene 16 d ientes y e l en g ran e 48.
www.FreeLibros.me

Engrane»: an á lis is d n e m á tico y selección_________297
10-42 . Para reducir el ru id o d e u n eng ran e im pu lso r, se van a su s titu ir d o s eng ranes rectos co n paso igual a 8 ,2 0 y 40 d ientes, p o r d o s eng ranes helico idales. El c o n ju n to nuevo deb e te n e r la m ism a ra z ó n de velocidad y d is tancia e n tre cen tros. Especifique los d o s engranes helicoidales, los cuales se fab rica ro n co n u n a fresado ra , [ tira realizar la tarca.
1 0 - 4 3 . Para reducir el ru id o en u n eng ran e im pu lso r, se van a su s titu ir d o s eng ranes rectos co n paso igual a 12, 18 y 54 dientes, p o r d o s engranes helicoidales. El co n ju n to nuevo deb e te n e r la m ism a ra z ó n de velocidad y d is tancia e n tre cen tros. Especifique los d o s engranes helicoidales, lo s cuales se fab rica ro n co n u n a fresado ra , jxira realizar la tarea.
E n g ran es có n ico s
1 0 - 4 4 . Un p a r d e engranes cón icos q u e tienen 20 y 7 5 dientes se u tilizan en ejes q u e se intersecan e n u n ángulo de 90°. D eterm ine la razón de velocidad y los ángulos de paso d e am b o s engranes.
1 0 - 4 5 . I h p a r d e engranes cón icos q u e tienen 20 y 7 5 dientes se u tilizan en ejes q u e se intersecan en u n ángulo de 60°. D eterm ine la razón de velocidad y lo s ángulos de paso d e am b o s engranes.
10-46. U i p a r d e engranes cón icos q u e tienen 18 y 9 0 dientes se u tilizan en ejes q u e se intersecan en u n ángulo de 75°. D eterm ine la razón de velocidad y lo s ángulos de paso de am b o s engranes.
E n g ran es s in fin
1 0 - 4 7 . Se necesita u n engranaje s in fin para reducir la velocid ad d e u n m o to r eléctrico de 3600 a 6 0 rp m . C onsideraciones de resistencia requieren q u e se usen engranes co n u n paso igual a 16, y se desea q u e el c o n ju n to sea de au to b b q u e o . Especifique u n co n ju n to q u e realice esta
1 0 - 4 8 . Se necesita u n engranaje s in fin para reducir la velocidad de u n m o to r eléctrico de 1800 a 18 rp m . C onsideraciones de resistencia requieren q u e se usen engranes c o n u n paso igual a 12, y se desea q u e el co n ju n to sea de a ito b lo q u e o . Especifique u n co n ju n to q u e realice esta
1 0 - 4 9 . Se necesita u n engranaje s in fin para reducir la velocid ad d e u n m o to r eléctrico d e 3600 a 4 0 rp m . C onsideraciones d e resistencia requieren q u e se usen engranes con u n paso igual a 20, y se desea q u e el c o n ju n to sea de au tob loqueo . Especifique u n co n ju n to q u e realice estatarea.
T ren es d e e n g ra n e s
1 0 - 5 0 . En la figura P10.50 se m uestra u n tre n d e engranes. Los en g ran es t ie n e n las sigu ien tes p ro p ied ad es: N 2 = 18
dientes; Ny - 72 d ien tes y P j • 10; N« ” 16 d ien tes y P j ■ 8; y m 48 d ientes. D eterm ine la velocidad del engrane 5 cu an d o el eng ran e 2 im pulsa a 1200 rp m en 9entido h o r a r ia D eterm ine asim ism o la d is tan c ia e n tre cen tros de lo s eng ranes 2 y 5.
1 0 - 5 1. E n la figura P10.50 se m uestra u n tre n de engranes. Los en g ran es tien en las sigu ien tes p ro p ied ad es: N 2 = 20 d ientes y P j = 10; d , = 6 in; 4 = 2 in y P j = & y Ny = 48 d ientes. D e te rm in e la ve locidad del e n g ra n e 5 c u a n d o el e n g ra n e 2 im p u lsa a 1800 rp m en se n tid o a n tih o ra rio . D e te rm in e as im ism o la d is ta n c ia e n tre cen tro s de lo s eng ranes 2 y 5.
10-52. En la figura P 10.52 se m uestra u n tren de engranes. Los en g ran es tien en b s s ig u ien tes p ro p ied ad es: N t = 15 dientes; Ny = 90 d ientes y Pj = 16; Ny = 15 dientes; N f = 7 5 dientes; N6 = 7 5 d ien tes y P j = 12; N 7 = 15 dientes; y N a = 60 d ien tes y P j = 8 . D eterm ine b velo d d a d d e l eng ran e 8 cu an d o el e n g ra n e 2 im p u lsa a 3600 rp m en se n tid o h o rario . D eterm ine asim ism o la d is ta n d a e n tre cen tros d e lo s en g ran es 2 y 8.
FIGURA P 1032 Problem as 52 y 53.
10-53. E n la figura P I0 .52 se m uestra u n tren de engranes. Los en g ran es tie n e n b s s ig u ien tes p rop iedades: N2 = 16 dientes y P j “ 16; dy ■ 8 in ; 4 - 1 5 in ; N , - 50 d ientes y P j - 10; 4 - 5 .5 in ; N ? - 1.5 in y P j - 8; y N ¡ - 56 dientes. D eterm ine b v e lo d d ad del eng ran e 8 cuando el e n g ra n e 2 im pulsa a 1200 rp m e n se n tid o a n t ih o r a r i a D eterm ine as im ism o b d is ta n d a e n tre cen tros de lo s engranes 2 y 8.
1 0 - 5 4 . En b figura P I0 .54 se m uestra u n tren de engranes. Los en g ran es tie n e n b s s ig u ien tes p ro p ied ad es: N \ ~ 20 d ientes y P j = 16; d2 ■ 8 in ; y d¡ " 1.5 in y P j = 10. D eterm ine la d is ta n c b q u e se m ueve b crem allera con cada rev o lu d ó n del e n g ra n e . D eterm ine as im ism o la d is ta n d a e n tre cen tros e n tre los eng ranes 1 y 3.
1 0 - 5 5 . En b figura P I0 5 4 se m uestra u n tren de engranes. Los eng ranes tien en b s siguientes p rop iedades: N , = 18
f i g u r a P l 0 5 0 P r o b l e m a s 5 0 y 3 1 . F IG U R A P 1 0 3 4 P r o b l e m a s 5 4 - 5 6 .
www.FreeLibros.me

298 CAPITULO DIEZ
dientes y Pj ■ 20; d¡ ■ 5 3 in ; y d , • 2 3 in y P j • 8. Determine la velocidad requerida del engrane I p a ra que ki crem allera se m ueva a u n a velocidad de 50 in /m in .
10-56. En la fig u ra P10.54 se m uestra u n tre n de engranes. Los engranes tienen las siguientes p rop iedades: d t = 2 .5 in; N ¡ = 75 d ien tes y P j = 10: y N j = 24 d ien tes . D eterm ine el paso d iam etra l requerido de la crem allera para q u e esta se m ueva 0.5 in co n cada revolución del eng ran e 1.
1 0 -5 7 . E n la figura P10.57 se m uestra u n tre n de engranes. Los en g ran es tie n e n las s ig u ien tes p rop iedades: N , “ 16 d ientes y P j ■ 16; d¡ = 8 in ; N} ■ 20 dientes; y N , - 50 d ien tes . D e te rm in e la ve locidad d e l e n g ra n e 4 cu an d o el eng ran e I im p u lsa a 1800 rp m .
f i g u r a P l 0 3 7 Problem as 5 7 y 5 8 .
D iseno d e tr e n e s d e e n g ra n e s
10-61. Diserte u n tren de eng ranes co n u n valo r del tre n de 400:1. Especifique el n ú m ero de d ientes en cada engrane. Según los criterios d e interferencia, ningún engrane de- beria tener m enos de 17 dientes. D eb ido a restricciones de tam año, n ingún engrane deb e tener m ás de 75 d ien tes. Bosqueje asim ism o el concepto d e l tren.
1 0 -6 2 . Diserte u n tren de eng ranes c o n u n v a lo r d d tre n de -200:1. Especifique d n ú m ero d e d ientes en cada en g rane. Según los criterios d e interferencia, n in g ú n engrane deberia tener m enos d e 17 dientes. D ebido a restricciones de tam arto, n in g ú n engrane deb e tener m ás d e 75 dientes. Bosqueje asim ism o el concepto del tren.
10-63. Diserte u n tren de eng ranes co n u n v a lo r d d tre n de -900:1. Especifique d n ú m ero d e d ientes en cada engrane. Según los criterios d e interferencia, n in g ú n engrane deberla te n e r m enos de 17 dientes. D eb ido a restricciones d e tam arto, n in g ú n eng ran e deb e tener m ás de 75 dientes. Bosqueje asim ism o el concepto del tren.
M ecan ism o s d e e n g ra n e s im p u lsa d o s
10-64 . En la figura P10.64 se presen ta el m ecanism o d e apertu ra de u n a ven tana c o n bisagras. L os engranes tienen las siguientes propiedades: d , = 1 in ; N 2 = 30 d ien tes y P j = 20; N} = 18 d ien tes y P j = 18; y = 4 in . Según b c o n fig u rac ió n m o stra d a , co n 0 = 20*. d e te rm in e gráficamente (usando técnicas m anuales de d ib u jo o el c a d ) la ro tac ió n a n g u la r de la ven tana c u a n d o la m anivela g ira u n a revolución.
1 0 - 5 8 . En e l tren de en g ran es m o s tra d o e n la fig u ra P10.57. los eng ranes tie n e n las siguientes propiedades: N ( = 17 d ientes y P j ■ 20; d i - 4 in ; ■ 18 dientes; y N t ■ 36 d ientes. D eterm ine la velocidad del eng ran e 1 para q u e el engrane 4 im pulse a 380 rp m .
10-59. En el tre n de engranes m ostrado en la figura P 1039, los engranes tienen las siguientes p ropiedades: N ^ ja a iU k i = 1 cuerda; N ¡ = 45 dientes; N j = 18 d ientes y P j = 16; d , = 6 in ; y rt/5 = 8 0 d ientes. D eterm ine la velocidad del eng ran e 5 c u a n d o el e n g ra n e 1 im p u lsa a 1800 rp m . D eterm ine asim ism o la d is tan c ia e n tre cen tros d e los engranes 2 y 5.
10-60. En el tre n de engranes m ostrado en la figura P 1 0 3 9 , los engranes tienen las siguientes p ropiedades: A’,»„iilownfin = 2 cuerdas; N , = (O d ientes: N , = 18 d ien tes y P j = 12; d t = 6 in ; y N f = 54 d ientes. D eterm ine la veloddad requerida del engrane 1 (el to m illo s in fin) para q u e el eng ran e 5 im p u lse a 2 8 rp m . D eterm ine a s im ism o la distancia e n tre cen tro s d e lo s engranes 2 y 5.
FIG U R A P I 0 8 4 Problem as 64 a 67.
1 0 -6 5 . Para el m ecan ism o d e a p e r tu ra de u n a ven tana m ostrado e n la figura P 1 0 6 4 , de term ine analíticam ente la ro ta d ó n angu la r d e la ven tana , cu an d o la m anivela gira u n a revtdudón, usando b co n fig u rad ó n m ostradaO - 20•).
10-66. En el m ecan ism o de a p e rtu ra d e u n a ventana m ostrado en la figura P 10.64. los eng ranes tien en b s siguientes propiedades: d , = 0.75 in ; N¡ = 48 d ientes y Pj = 32; <V, = 16 dientes y P j = 32; = 4 in . P artiendo d e bco nfigu radón m o strad a ((¡ = 20°), de term ine gráficam ente (u san d o técnicas m anuales d e d ib u jo o el c a d ) b ve lo d d ad d e a n g u b r de b v en tan a c o n b q u e se ab re b v en tan a , cu an d o b m an iv e la g ira a u n a v e lo d d a d constante d e 2 0 rp m .
www.FreeLibros.me

Engrane»: an á lis is d n e m á tico y selección_________299
10-67 . f t r a el p rob lem a 10-66, d e te rm in e an a líticam en te la v e lo d d ad angu la r co n la cual se ab re la ven tana a partir d e la co n fig u rad ó n m o stra d a ( fl = 20°), cu an d o la m anivela g ira a u n a v e lo d d ad constan te de 20 rpm .
T ren es de e n g ra n e s p la n e ta r io s
10-68. En la figura P 10.68 se m uestra u n tren d e engranes p lanetario. El tran sp o rtad o r (eslabón 2 ) sirve c o m o entrada d tre n . El so la r (engrane 1) está fijo y tiene 16 dientes con u n paso diam etral de 16. El eng ran e p lanetario (en grane 3) tiene u n paso diam etral de 2 in . El anillo sirve co m o salida del tren y tiene u n paso d iam etra l de 5 in. D eterm ine la veloddad angular d e todos los m iem bros d r este tren de engranes, cu an d o el eje de en trad a gira a 1800 rp m en sen tido horario .
1 0 -69 . En el tren d e engranes p lan e ta rio m o strad o en la figura P10.68, d t r a n s p o r ta d o r (eslab ó n 2) s irv e c o m o e n tra d a al tre n . El so la r (en g ran e 1) sirve c o m o el engrane de sa lida y tie n e 18 d ien tes co n u n p a so d iam e tra l de 12. El engrane p lanetario (engrane 3 ) tiene u n paso d ia m etral d e 2.5 in . El eng ran e a n u la r está fijo y tien e un fu so d iam etra l de 6 .5 in . D eterm ine la velocidad an g u lar d e to d o s lo s m iem bros d e este tre n de eng ranes, cu an d o el eje d e en trad a g ira a 800 rp m en se n tid o an tihorario .
10-70. En la fig u ra P 10.70 se m u e s tra u n tre n de eng ranes p lan e ta ria El tra n sp o rta d o r (eslabón 2) sirve co m o en trada al tren . El so la r ( engrane 1) está (50 y tien e 12 5 in d e paso diam etral co n u n paso diam etral d e 16. El e n g ran e 3 tiene 42 d ientes, y el eng ran e 4, 21 d ientes. El engrane 5 tiene 32 d ientes y está acunado al m ism o eje que el engrane 4 . El engrane 5 se acopla co n el engrane anu lar (engrane 6), el cual sirve co m o salida del tre n y tiene 144 dientes. D eterm ine la velocidad angular d e to dos los m iem bros de este tre n de eng ranes, cu an d o el eje de en trada g ira a 680 rp m en sen tido h o ra r ia
10 -71 . En la fig u ra P10.70 se m u e s tra u n t r e n de eng ranes p lan e ta ria El tra n sp o r ta d o r (eslabón 2) sirve co m o en tra d a al tren . El so lar (engrane I) s irv e co m o la salida d d tren y tiene u n paso diam etral de 1.0 in co n u n paso diam etral de 20. El engrane 3 tien e 45 d ien tes , y el en c a n e 4 ,2 0 . El engrane 5 tien e 3 0 d ien tes y está su jeto a b m ism a flecha q u e el eng ran e 4. El eng ran e 5 se acopla
co n d e n g ra n e a n u la r (e n g ra n e 6 ) , el cual e s tá fijo y tien e 150 d ientes. D eterm ine la v d o d d a d a n g u la r de todos los m iem bros d e este tre n de eng ranes, cu an d o el eje d e en trad a g ira a 1125 rp m en sen tido an tiho rario .
10 -72 . En la fig u ra P 10.72 se m uestra u n t r e n d e en g ran es p lanetario . El tra n sp o rta d o r (eslabón 2 ) sirve c o m o e n tra d a a l tre n . El eng ran e 2 está fijo y tien e 4 8 d ien tes co n u n p a so d iam e tra l de 12. E l e n g ra n e 1 tien e 24 dientes, el eng ran e 3 tien e u n paso d iam etra l de 2.5 in, m ien tras el eng ran e 4 tiene 35 d ien tes y u n paso d ia m etral de 10. D eterm ine la v d o c id ad angu la r de todos los m iem bros de este tre n d e eng ranes, cu an d o el eje de en trad a g ira a 900 rp m en se n tid o h o rario .
FIG URA p 10.72 Problem as 72 y 73.
10 -73 . E n la fig u ra P10.72 se m uestra u n t r e n d e eng ranes p lanetario . El tra n sp o rta d o r (eslabón 2 ) sirve c o m o e n tra d a al tre n . El engrane 2 está fijo y tien e 4 .0 in d e paso d iam etra l co n u n p a so d iam e tra l de 10. E l eng ran e 1 tien e 25 d ientes, d eng ran e 3 tien e u n paso diam etral de 2.5 in , y d engrane 4 tien e 32 d ientes y u n paso d ia m etra l de 8 . D eterm ine la velocidad angu la r d e todos los m iem bros de este tren d e eng ranes, cu an d o d e je de salida g ira a 210 rp m en sen tido h o rario .
E S T U D I O S D E C A S O
10-1 . E n la figura E10.1 se m uestra u n m ecanism o q u e usa dos engranes rectos y u n a crem allera. Exam ine cu idad o sa m en te las co m p o n en tes d d m ecan ism o y, lue- &>, conteste las siguientes preguntas para obtener mayor conocim iento acerca d e su funcionam iento .
www.FreeLibros.me

300 CAPITULO DIEZ
FIGURA P.io.1 (C ortesía de In d u stria l Press).
FIGURA EICU (C ortesía de In d u stria l Press).
1. C o n fo rm e e l e s la b ó n A se m ueve hacia la izqu ierda , ¿cuál e s el m ov im ien to del eslabón B?
2. C o n fo rm e e l e s la b ó n A se m ueve hacia la izqu ierda , ¿cuál e s el m ov im ien to del engrane Q
3. C o n fo rm e el e s la b ó n A se m ueve hacia la izqu ierda , ¿cuál es el m ovim iento del eng ran e IX
4 . C o n fo rm e el e s lab ó n A se m ueve hacia la izqu ierda , ¿cuál e s el m ovim iento del eslabón fc?
5. C o n fo rm e e l e s lab ó n A s e m ueve hacia la izqu ierda , ¿cuál e s el m ovim iento del eslabón P
6. C o n fo rm e e l e s b b ó n A se m ueve h a d a la izqu ierda , ¿cuál e s el m ov im ien to del eslabón G?
7. D escriba específicam ente el m o v im ie n to p ro p o rd o n ad o a G . cu an d o e l eslabón A oscila h a d a a trás y h a d a adelante.
8 . ¿C óm o se m odifica rla el m ovim iento del eslabón G , si el m e c a n ism o se en sam b la ra d e m o d o ta l q u e to d o q ued ara idén tico , excep to q u e e l eslabón E g irara 90* en se n tid o horario?
1(3-3. En la fig u ra E10.3 se ilu s tra u n d ispositivo q u e c o n tro b el m o v im ie n to d e u n e n g ra n e su je to a l e n g ra n e D. E xam ine cu idadosam en te las co m p o n en tes del m ecan ism o y, luego, con teste las sigu ien tes p reg u n tas p a ra o b te n e r m ay o r co n o c im ien to acerca de su fu n d o n a - m iento.
1. C onfo rm e el eng ran e A gira e n se n tid o h o ra rio , ¿cuál es el m ov im ien to del engrane R
2. C onfo rm e el eng ran e A gira e n se n tid o h o ra rio , ¿cuál es el m ov im ien to del engrane C?
3. C onfo rm e el eng ran e A gira e n se n tid o h o ra rio , ¿cuál es el m ov im ien to del engrane IX
4 . C o n fo rm e el m an g o f es to r ra d o h a d a a r r ib a , ¿qué posa co n lo s engranes acoplados?
5 . C onfo rm e el eng ran e A g ira en se n tid o h o rario , ¿cuáles s>n lo s m ovim ien tos de los engranes B, C y IX
6 . ¿Cuál es el p ropósito de este m ecanism o?7 . ¿Qué prob lem as o c u rrir ía n cu an d o se o p e re este meca
nismo?I ( 3 - 4 . En la fig u ra E10.4 se ilu stra u n d ispositivo q u e im pulsa
u n p is tó n (G ). Exam ine cu id ad o sam en te las co m p o nentes del m ecanism o y, luego, con teste las siguientes p reguntas p a ra ob ten er m ayor co n o c im ien to acerca de su funcionam iento .
f i g u r a E l o. 4 (C o rte sb de In d u stria l Press).
1. C onform e el e n g ra n e B g ira en sen tido h o ra rio , ¿cuál es d m ovim iento del eng ran e C?
2. C onfo rm e el e n g ra n e B g ira en se n tid o h o rario , ¿cuál es el m ov im ien to del engrane IX
1. C uando u n segm ento del eng ran e A g ira en se n tid o a n tih o ra rio a p a r t ir de b p o s id ó n m o strad a , ¿cuál e s el m ovim iento de b crem allera C?
2. C uando u n segm ento del eng ran e A g ira en sen tido a n tih o ra rio a p a r t ir de la p o s id ó n m o strad a , ¿cuál e s el m ovim iento del engrane R
3 . C uando el e n g ra n e A g ira has ta q u e el d ien te E se d e - a c o p b de b crem allera C , ¿qué m ovim iento presenta d engrane R
4. ¿Cuál es el ran g o total de m ovim iento del eng ran e R5. ¿Cuál es el rango total d e m ovim iento de la crem allera C?6. ¿Cuál e s el p ropósito d e este m ecanism o?7. ¿Cuáles son los p robab les problem as de operación con
este m ecanism o?10-2. En la fig u ra E10.2 se m u e s tra el d ispositivo de u n a
m áqu ina m oldeadora de alam bre. El eslabón B y el e n c a n e recto C están sujetos al m ism o eje. A sim ism o, el e sb b ó n E y el engrane recto D están acuñados al m ism o eje. E xam ine cu id ad o sam en te b s co m p o n en tes del m ecan ism o y, luego, co n te s te las sigu ien tes p regun tas pura o b te n e r m ayor co n o c im ien to acerca de su fun- donamiento.
www.FreeLibros.me
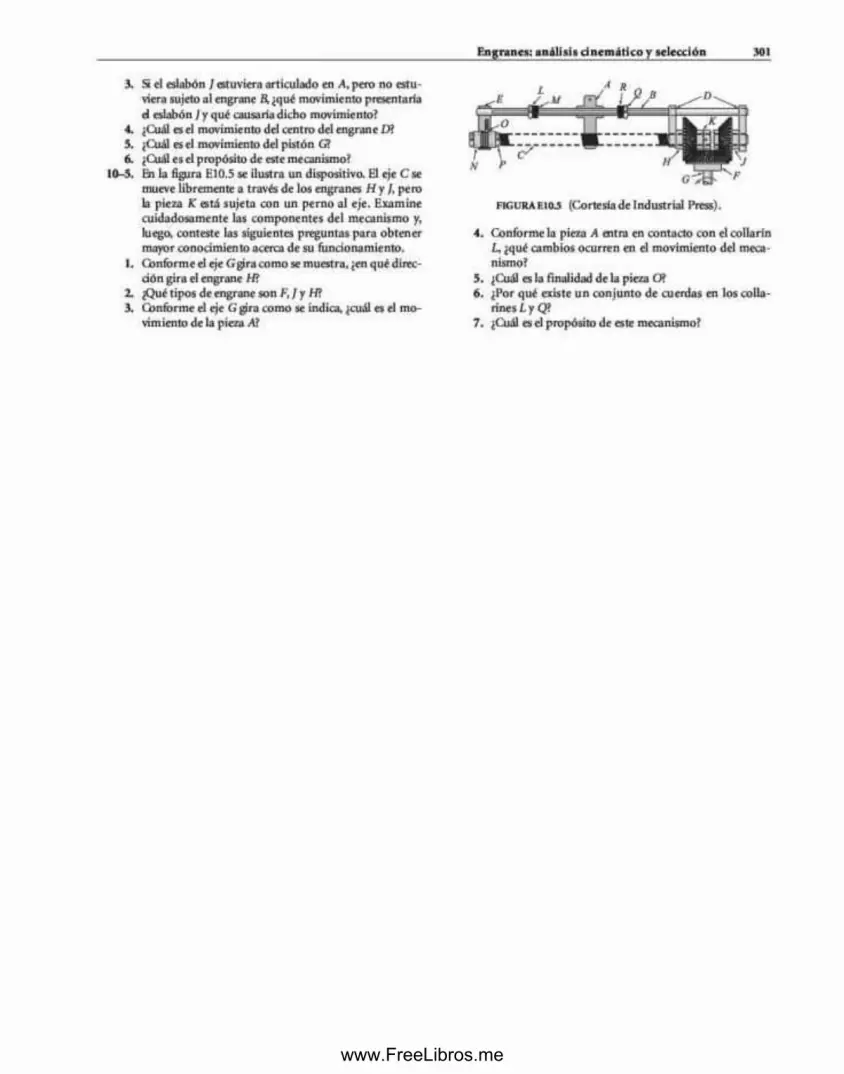
Engrane»: análisi» c in e m á tico y selección_________301
3 . Si el eslabón /e s tu v ie ra a rticu lad o en A , pero n o e s tu viera su je to a l eng ran e f t¿ q u é m ov im ien to presentaría d eslabón / y q u é causaría d ich o m ovim iento?
4. ¿Cuál es el m ov im ien to del cen tro del eng ran e ü?5 . ¿Cuál es el m ovim iento del p is tó n G?6 . ¿Cuál e s el p ro p ó sito d e este mecanismo?
1 0 - 5 . En la figura E10.5 se ¡lustra u n d ispositivo . El eje C se m ueve lib rem en te a trav és de los eng ranes H y / . pero la pieza K es tá su je ta c o n u n p e rn o a l e je . Exam ine cu id ad o sam en te las co m p o n en te s d e l m ecan ism o y, luego, con teste las sigu ien tes p regun tas p a r a o b te n e r m ayor co n o c im ien to acerca d e su funcionam ien to .
1. C onfo rm e el eje G g jra co m o se m u estra , ¿en q u é d irecd ó n g ira el engrane H?
2. ¿Qué tip o s d e eng ran e so n FJyHl3 . C onfo rm e el e je G g ira co m o se indica, ¿cuál es el m o
v im ien to de la pieza M
4 . C o n fó rm e la pieza A e i tru en co n tac to co n el co llarín L, ¿qu é cam b io s o c u rre n en el m ov im ien to del meca nismo?
5 . ¿Coál e s la finalidad d e la pieza O?6 . ¿P or q u é ex iste u n c o n ju n to d e cu erd as en lo s co lla
r in es L y Q?7 . ¿Cuál es el p ropósito d e este m ecanism o?
www.FreeLibros.me

C A P Í T U L O
O N C E
TRA N SM ISIO N ES DE CORREA Y DE CADENA
O B J E T I V O S
Al term inar de estudiar este capitula, el alumno será capaz de:
L D e s c r ib ir la s v e n ia )* * d e u n t r a iu n m ió n d e co rrea .
2 . Id e n t if ic a r v a r io s t ip o s d e d is e n o d e u n a c o r r e a .
1 D e te r m in a r la s r e la c io n e s g e o m é tr ic a s d e u n a tr a n s m is ió n
d e t
4 . A m i n a r la s r e la c io n e s c in e m á t ic a s d e d o s e j e s a c o p la d o s c o n u n a t r a n s m is ió n d e co rrea .
5 . D e s c r ib ir la s v e n ta ja s d e u n a t r a n s m is ió n d e c a d e n a .
6 . Id e n t if ic a r v a r io s t ip o s d e d is e ñ o d e u n a c a d e n a .
7 . D e t e r m in a r la s r e la c io n e s g e o m é tr ic a s d e u n a tr a n s m is ió n d e .
8 . A n a liz a r la s r e b e lo n e s c in e m á t ic a s d e d o s e j e s a c o p la d o s c o n u n a tr a n s m is ió n d e c a d e n a .
11.1 IN TR O D U C C IÓ NLa fu n d ó n p rincipal d e u n a transm isión d e co rrea o de cadena e s la m ism a q u e e n u n a tra n sm is ió n de en g ran es . Los tres m ecanism os sirven para transm itir po tencia e n tre ejes q u e giran . Sin em bargo, el uso de engranes se vuelve im práctico cu an d o la d istanc ia en tre los e jes es significativa. T an to la tran sm isió n de co rrea co m o la d e cadena ofrecen flexibilidad al o p e ra r co n efi- d e n d a a d istancias g randes y pequeñas e n tre centros.
C onsidere la cadena d e u n a bicicleta: se u tiliza para transm itir m ov im ien to y fuerzas d d ensam ble g ira to rio del pedal a la ru ed a trasera. La distancia e n tre estos d o s com ponentes giratorios es considerable, p o r lo que u n a transm isión d e engranes n o serla razonable. Asimismo, la razón de veloddad d e la transm isión de cadena se m odifica fácilm ente al cam biar la cadena p o r u n co n ju n to d e catarinas. D e este m odo, se necesita u n g iro m ás len to del pedal —p ero mayores fuerzas para m an tener la rotación idén tica de la ru ed a trasera. La razón de velocidad de u n a transm isión d e co rrea se m odifica de form a sim ilar. C am biar la razón de velocidad en u n a transm isión de engranes es u n proceso m u ch o más com plejo, co m o en u n a transm isión autom otriz.
Las tra n sm is io n e s d e co rrea y de c ad en a se co n o cen co m ú n m en te co m o conecto res flexibles. Ambos tip o s de m ecanism os p u ed en i r “e n el m ism o paquete” p o rq u e s u cinem ática es idéntica. La determ inación d e la c inem ática y las fuerzas en las transm isiones de co rrea y de cadena e s el p ropósito d e este cap ítulo. C o m o el m ov im ien to p rim a rio de los ejes es d e ro tación pu ra , las so luciones gráficas n o a p o r ta n m ayor com prensión .
ft>r lo ta n to , únicam ente resultan prácticas b s técnicas an alíticas q u e se p resen tan en este c a p itu la
11.2 CORREAS
La fu n c ió n d e u n a tra n sm is ió n de co rrea es tra n sm itir m o v im ien to g ira to rio y to rq u e d e u n e je a o t r o suavem en te , sin ra id o y d e m anera económ ica. l a s transm isiones de c o rre a p ro p o rc io n an b m ejo r co m b in ac ió n integral de flexib ilidad en el d is e ñ a b a jo c o s ta p o co m a n te n im ie n ta facilidad de en sam blaje y a h o rro de e sp ac ia
C om paradas co n o tra s fo rm as de transm isión de potencia. Lis transm isiones de co rrea tie n e n las siguientes ventajas:
■ S on m enos costosas q u e b s transm isiones de engranes o de cadena.
■ La d istanc ia en tre cen tros de los ejes es flexible, m ientras q u e en las transm isiones d e engranes está restringida.
■ O peran suavem ente y con m enos ru id o a grandes velocidades.
■ Se pueden d iseñ ar p a ra q u e se deslicen cu an d o se presenta u n a sobrecarga en b m áquina.
■ N o requieren lubricación, c o m o e s el caso de b s cadenas y lo s engranes.
■ Se suelen u tilizar en m ás de u n p b n o .
■ S on fáciles de en sa m b b r e instalar, adem ás de q u e tienen to lerancias flexibles.
■ R equieren escaso m antenim iento .■ F uncionan b ien en b absorción d e cargas de choque.
Las correas p o r lo general se fabrican com o u n a sola pieza sin uniones, con m ateriales co m o te b recubierta co n c a u c h a cuerdas tecubiertas co n c a u c h a p lástico refo rzad a p i d y t e b (p. ej* a lg a d ó n o t e b s in tética). C om erria lm en te hay m uchas fo rm as de correas, las cuales se listan en segu ida
1 . En b figura 11. l a se m uestra u n a correa plana, q u e es el tipo m ás sim ple, pero p o r lo c o m ú n ta n so lo se usa en ¿fricaciones co n p o co torque, ya q u e la f u e r a im pulsora está restring ida a fricción p u ra e n tre la c o rre a y b polea.
2 . En b figura 11.1 b se p resen ta u n a correa en V , la cual e s el tipo de c o rre a m ás u tiliz a d a sob re to d o en m áquinas a u tom otrices e industriales. L a fo rm a en V hace q u e la correa se ajuste m u y tensa en la p o lea , lo cual inc rem en ta la fricc ión y p e rm ite b operac ió n co n m ayor torque.
3 . En b figura 11. 1c se ilu stra u n a correa e n V múltiple. Este d iseno d e c o rre a equivale a co locar varias co rre as en V, u n a a l lado de b o tra , p e ro un idas in tegralm ente. Se usa p ara increm entar b can tidad de p o te n d a transm itida.
www.FreeLibros.me

T r a n s m i s i o n e s d e c o r r e a y d e c a d e n a __________ 303
a) Carrea plana
elCWTM enV múltiple
e) C om a de distribución
F I G U R A 11.1 T ipos d e c o r r e a .
se m uestra en la figura 11.2. Las poleas industria les se m aquinan en acero o h ie rro tu n d id o , depend iendo del d iám e tro . P ara un trabajo m ás ligero, las poleas acanaladas suelen fabricarse d e a lu m inio. p lástico o zinc v ac iad a Su construcción es só lid a o con rayos radiales, según el tamarto. Las poleas grandes p o r lo general tien en rayos radiales constru idos d e h ie rro colado.
Las p o leas acanaladas se clasifican p o r su d iám etro d e p a s a ¿ cual e s u n d iám etro ligeram ente m e n o r q u e el b o rd e d e la r a nura. co rrespond ien te co n la ubicación del c e n tro d e la correa. Las poleas acan a la d as com erciales se v en d en e n fracciones de pulgada del d iám etro in te rio r d e la ra n u ra . La tab la 11.1 lista los d iám etro s d e las poleas d isponibles.
(L iando las correas están en operación, se estiran con el paso del tiem po. Las m áquinas q u e utilizan u n a transm isión de correa necesitan a lgo q u e com pense el estiram iento de la correa, como una base ajustaW e del m o to r o u n a polea loca. Esta ú ltim a sirve p i r a m antener u n a tensión constante en la correa. Por lo general se coloca en el lado flojo de la correa y se precaiga, sob re to d o con resortes, p a ra m an tener la correa ajustada.
C o m o ya se m en c io n ó , la co rrea e n V es el t ip o m ás u tilizad a Las correas e n V industriales com ercialm entc disponibles están hechas en u n o de los ta m a ñ o s e s tá n d a r m o strad o s e n la figura 11J . D esde lu e g a las secciones transversales más grandes p u ed en tra n sm itir m ayores potencias. C o n frecuencia se usan varias correas sobre poleas co n ranuras m últip les p a ra increm entar la can tid ad d e po tencia tra n sm itid a p o r la tra n sm is ió n de
TA BLA 11.1 P o lc a s a c a n a l a d a s c o m e rc ia le s
4. E n la fig u ra 11.1 d se observa u n a correa corrugada. El d i seño de la co rrea es sim ilar al de la co rrea en V, p ero tiene ran u ra s en la superficie in terior. Esta característica increm en ta la flexibilidad d e la correa, perm itiéndo le g ir a re n rad io s m enores. P o rc o n sig u ien te .se usa en poleas m ás pequeñas, reduciendo asi el tam añ o de la transm isión.
5. En la fig u ra 11.1 e s e m uestra u n a correa de distribución, q u e tien e d ien tes co m o u n engrane q u e se acop lan co n los d ien tes d e la polea. Su configurac ión com bina la flexibilidad de u n a co rrea co n el agarre positivo de u n a tran sm isió n d e engranes. Esta c o rre a s e usa am p liam en te en ap lic a á o n e s d o n d e se requiere u n posic ionam ien to relativo de los ejes respectivos.
Las poleas, c o n o c id a s ta m b ié n c o m o acanaladas, so n las ruedas q u e se su je tan a lo s ejes y tran sp o rtan la c o rre a . Las p o leas tien en u n a ra n u ra a lre d e d o r del b o rd e , cuy a fo rm a se acopla co n la co rrea . U na p o le a acanalada p a ra u n a co rrea en V
D iá m e tro s d e p a s o d e la s p o le a s a c a n a b d a s ( la )
C o rrea 3V C o rrea 5V C o rrea 8V
1 2 5 J 4 J 8.4 I 2 J
2-3 5.6 4 3 8.9 1 3 0
1 * 6 0 4 3 9 3 1 3 3
2 3 6 3 4.9 9.7 1 4 3
2 3 6.9 5.1 1 0 3 1 5 3
3 0 8 0 5.4 11.1 1 6 3
3.1 10.6 5 3 1 2 3 1 7 3
3 J 1 4 0 5 3 13.9 1 8 3
3 .6 1 9 0 5.9 1 5 3 1 9 3
4.1 2 5 0 6-2 16.1 2 1 0
4-5 3 3 3 6 3 1 8 3 2 2 2
4.7 6 3 20.1 2 9 3
5 0 6 .7 2 3 3 3 9 3
7 0 25.1 4 7 3
7.1 2 7 .9 5 2 3
7 3 5 7 3
8.1 6 3 3
5 ' . I- 1' “ 1
. 3* ,_ m J 1
W j '
f i g u r a 113 Secciones transversales d e correas en V industriales.
303
di Correa ro n upada
www.FreeLibros.me

304 CAPITULO ONCE
sexo uno 3450 3CD0 2500 2CC0
o '«O £ 1500
■g nao
300
200
mi
3V
Z
sv //
/
2 3 4 5 10 20 50 100 200 300
Cahnllm * pottnrk» de di»ré> (por correa)
f i g u r a 1 1.4 D iagram a de selección de u n a c o rre a en V industrial.
500 1000
correa. En la figura 11.4 se presen ta u n a gu la para la selección de u n a c o rre a e n V. Los v a lo res de p o te n c ia se lis ta n “p o r cada correa”. C u a n d o la tran sm isió n de co rrea deb e tran sm itir 6 h p con u n a co rrea d e tres ranuras, cada u n a de las tres correas debe ser capaz de tra n sm itir 2 hp.
C abe aclarar q u e la figura 11.4 só lo es u n a gu la aproxim ada p i r a se leccionar el tam afto adecuado d e la co rrea . Es im portan te seleccionar la transm isión de co rrea m ás adecuada, co n b ase en u n e s tu d io m inucioso de la aplicación y los requerim ien tos de tran sm isió n d e p o ten c ia . Estos p ro ced im ien to s d e selección detallada se en cu en tran e n lo s catálogos de los fabricantes.
11.3 G EO M ETR ÍA DE LA TRANSM ISIÓN DE CORREA
Una tra n sm isió n de c o rre a está hecha p a ra su m in is tra r u n a razó n de velocidad c o n s tan te e n tre los e jes respectivos. En la figura 11.5 se observa u n d ia g ra m a d e la g eo m etría b ásica de u n a transm isión d e correa.
C o m o ya se m en c io n ó , el diámetro de paso d de la po lea se m id e e n el p u n to d e la ra n u ra d o n d e se asienta el c e n tro d e la correa. Este es ligeram en te m ás p eq u eñ o q u e el d iám etro ex ter io r d e la p o lea . O b serv e q u e lo s d iám e tro s m o s tra d o s de las poleas d e las figuras 11.2 y 11.5 so n los d iám etro s de paso.
La distancia entre centros C e s la d is tan c ia e n tre el centro de las polcas im p u lso ra e im pulsada. D esde luego, esta tam bién es la d istanc ia e n tre lo s d o s ejes acop lados p o r la tran sm isió n de
co rrea . Las d is tan c ia s pequeñas e n tre cen tro s p o d r ía n causar fatiga c o i carga m áxim a frecuente sobre las secciones d e la correa c u an d o e n tra a la po lea pequeña. Las d is ta n d a s g ran d es en tre c en tro s, co n u n a larga d istan c ia p o r so s te n e r , su e len cau sar latigazos y v ib ra d o n e s en la co rrea . L a d istan c ia n o rm a l entre c en tro s p a ra co rre as en V debería e s ta re n d ran g o de
d j < C < 3(d¡ + d 2)
La longitt/d de la correa i e s la lon g itu d total de la correa. En resum en, se especifica p o r lo general b longitud exterior. Esta es b d im ensión q u e se o b tien e al en ro llar u n a d n ta m étrica alreded o r del lado ex terio r d e b c o rre a en p o sid ó n d e operación . Las correas están disponibles com ercialm ente en long itudes especificas. La t a b b 112 i n d u je b s longitudes disponibles de correas en V industriales. La d is ta n d a e n tre cen tros y lo s d iám etro s d e paso se re lad o n an m atem áticam ente p o r ( r e í 2 |.
L = 2 C + d 2 + d ,) + {d i ~ d t )24 C
C =B + V t f - 3 2 ( d } - d ,) ’
16
donde
B = 4L - 27r(<ij + d |)
( 1 1 . 1 )
(1 1 . 2 )
(11.3)
El ángulo de contacto 0 es b m edida del acoplam iento angular de b correa sobre cada polca. Se calcula p a ra cada polea como:
0 , = 180° - 2 s e n _l
d 2 = 180° + 2 se n '
(11.4)
(11.5)
FIGURA I U Geometría de una transmisión de correa.
Las clasificaciones de po tencia de b s co rre as disponibles com erdalm en te , co m o las m ostradas en b figura 11.4, so n para transm isiones con poleas del m ism o ta m a ñ a P or lo ta n ta el án gu lo de c o n ta c to “nom in a l" es de 180°. Para ángu los m ás peq u e ñ o s , se reduce la can tid ad de fr ie d ó n q u e se desarro llaría
www.FreeLibros.me

Transm isio n e s d e co rrea y de cadena_________305
T A B L A 1 1 .2 lo n g i t u d e s d e c o r re a s e n V d is p o n ib le s ]c o m e r c ia lm e n te ( i n )
rlongitudes de la correa 3V
25.0 400 63 Al 100.0263 42-5 67 Al 106.028-0 450 71AI II2A)30 A) 47.5 75AI 1 ISA)
31.5 50.0 80 Al 125 Al33.5 53 A) 85 Al 132 A)35.5 560 90 Al 140 Al37.5 60 A) 95A)
longitudes de la correa 5V50.0 90.0 160.0 280.0530 95.0 170 Al 300A)560 100A) 180 Al 3I5AI60.0 106.0 190 Al 335AI630 112A» 200A» 355A)670 USA) 2I2AI710 125 Al 224AI75.0 132A) 236.080.0 140 Al 250A)85.0 150AI 265AI
Longitudes de la correa 8V100.0 160 A) 236AI 355Al112-0 170Al 250A) 400.0118.0 180 A) 265Al 450.0125.0 190Al 280.0132.0 2000 300Al
140.0 212.0 3I5AI150 O 224AI 335.0
alrededor de la polea; p o r lo tanto, dism inuye la cantidad d e p o tencia q u e la correa transm ite. La tab la 1 13 m uestra el porcentaje de po tencia n om inal real q u e se p u ed e tran sm itir p o r u n a correa que funciona sob re u n a po lea con u n ángulo de con tac to m enor de 180*. Los fabricantes de correas sug ie ren m an tener el án g u lo d e c o n ta d o m ayor de 120° cu an d o sea pasible.
1 1 .4 C I N E M Á T I C A D E U N A T R A N S M I S I Ó N
D E C O R R E A
Al igual q u e en las transm isiones de engranes, la razón de vdocidad V R se define co m o la velocidad angular d e la po lea im p u lsora (p o le a I) d iv id ida e n tre la velocidad a n g u la r de la polea im pulsada (polea 2),
V R ='•'impulsora W,
(11-6)"bnpulMda
C o m o u n a r a z ó n e s v á l i d a i n d e p e n d i e n t e m e n t e d e l a s u n i d a d e s ,
l a r a z ó n d e v e l o c i d a d s e d e f i n e e n t é r m i n o s d e r e v o l u c i o n e s p o r
m inuto , ra d ia n e s p o r u n id ad de tiem p o , o cualesqu iera o tro s (yupos convenientes de unidades de velocidad angular. U sando b m ism a lóg ica de deducción de la ecuación (10 .19), se ob tiene la siguiente ecuación;
5 - 3 - "Al in tro d u c ir lo s d iám etro s de paso,
4 = 2f2 = r , = d i 2 r , r ,
E n t o n c e s , u n a d e f i n i c i ó n g e n e r a l d e l a r a z ó n d e v e l o c i d a d e s t á
d a d a p o r ;
' * = - = 7 = 7o»2 r , d i(11.7)
N ote q u e p a ra u n a configuración típ ica, co m o fas m ostradas en la figura 113 , fas poleas giran en la m ism a dirección. Las tran sm isiones cruzadas o de serpen tina, c o m o fas q u e se lu s t r a n en la figura 11.6 , se u tilizan p a ra invertir fa d irección del g iro de b polea.
Muchas aplicaciones industriales requieren poleas para re- «iicir fa velocidad de u n a fuente d e potencia. P or lo tan to , e s usual tener razones d e velocidad m ayores que 1. C om o se observa en fa ecuación ( 11.6 ), lo a n te r io r in d ica q u e fa po lea im p u lso ra g ira más rápido q u e fa polea im pulsada, lo cual e s el caso en las red u cciones de velocidad.
La w locidad de la correa vj, se define co m o 1a velocidad l i neal de fa c o r re a La m agnitud de esta velocidad corresponde a fa m agnitud de fa velocidad lineal de u n p u n to sob re el diám etro d e paso d e cada p o le a P or lo tan to , fa velocidad d e fa c o rre a está
al Transmisión cruzada
b) Transmisión de serpentina
F IG U R A 11 .6 F o r m a s a l t e r n a s d e t r a n s m i s i o n e s d e c o r r e a .
T A B L A 1 1 .3 R e d u c c ió n d e l a c a p a c id a d d e p o t e n c ia p o r e l á n g u lo d e c o n ta c to
A n g u lo d e c o n t a c t a s
C a p a c id a d m i ( % d e p o te n c ia
180*
100 95
140"
89
120*
82
100"
74 63
www.FreeLibros.me

506 CAPITULO ONCE
relacionada c o n las velocidades d e g iro d e las p o leas y sus rad ios d e paso m ed ian te la ecuación (6.5).
d \ d]vb = Tt io j = — cü| = rjíü = - < u j (11.8)
A dvierta q u e . c o m o en el cap itu lo 6, la v e lo d d a d angular en esta ecuac ión se deb e espedficar en rad ianes p o r u n id ad d e tiem po .
U na co rrea tran sm ite la m áxim a po tencia a ve loddades de ‘1000 a 5000 fp m (ft/m in ), de m an era q u e e s m e jo r d isertar una
transm isión d e co rrea p a ra q u e op ere en este ran g o . Las poleas g randes de uso industria l están fabricadas co n h ie rro colado y generalm ente tien en u n a v e lo d d ad lim ite m áxim a d e la co rrea d e 6500 fpm . E sto s e deb e a q u e las fuerzas d e inercia creadas p o r la ace le rad ó n no rm al se vuelven excesivas. Q uizá sea necesa rio u n equilibrio especial p a ra velocidades p o r a rrib a de 5000 fp m , cu an d o la v ib ra d ó n es provocada p o r la a c e le ra d ó n centrífu g a . F inalm ente, es deseable o tro tip o d e transm isión , sob re to d o de cadena, p a ra velocidades p o r d ebajo de 1000 fpm .
PR O B LEM A D E E JE M PL O 11.1
Se usa u n a transm isión de correa para transm itir potencia de u n m otor eléctrico al com presor de u n cam ión refrigerador. El com presor debe funcionar au n cuando el cam ión esté detenido sin el m otor encendido. El m otor eléctrico de 10 hp tiene u n a velocidad nom inal de 3550 rpm , m ientras el diám etro de la polea del m otor es de 5 in. La polea del com presor tiene 7.5 in de diámetro. D eterm ine el tam año adecuado de u n a correa industrial, la velocidad de o p eración del com presor y la velocidad de la correa.
SO L U C IÓ N : 1. Seleccione el tam año adecuado de la correa
I¿i figura 11.4 sugiere q u e para u n m o to r de lO h p q u e funciona a 3550 rpm .se utilice u n a correa 3V.
2 . Calcule la velocidad d e la polea impulsora
Con la ecuación (11.8), la razón de velocidad se determ ina como:
V * = í = H Ü - ud | 5 in
l a velocidad del com presor se calcula replanteando la ecuación ( 11.8).
d|Cü, (5 in) (3550 rpm ) ____
” 1 ‘ ü < « ta > 2367
las unidades de la velocidad angular del eje del m otor se convierten a radianes por u n id ad de tiem po.
( 2 trrad
■ It s tíi»i ■ 3550 rev/m in [ ^ ■ 22305 rad/m in
3 . Calcule la velocidad de la correa
La velocidad de la correa se obtiene con la ecuación (1 1.7).
va = ( y )o»i = - y (22305 rad/m in) = 56762 in /m in = 4647fpm
PR O B LEM A D E E JE M PL O 11.2
Se requiere u n a transm isión de correa para reducir la velocidad del m otor eléctrico de u n a rueda de esm eril, com o en b figura 11.7. El m otor eléctrico de 50 hp tiene u n a velocidad nom inal de 1725 rpm , por lo q u e se requiere u n a velocidad en la rueda de esm eril de 600 rpm aproximadamente. Determ ine el tamafto adecuado de la correa y calcule d á m e n o s adecuados de la polea del inventario de poleas listado en la tabla 11.1. Seleccione, asim ism o, u n a longitud adecuada de la correa de la tabla 112 y calcule la distancia en tre centros correspondiente.
S O L U C IÓ N : I . D etermine e l tam a ñ o adecuado de la correa
La figura 11.4 sugiere q u e para u n m o to r de 50 hp q u e funciona a 1725 tpm , se use u n a correa 5V.
2 . Calcule e l d iám etro ideal de la polea impulsora
Las velocidades angulares de los ejes respectivos son com o sigue:
. / 2jt rad \
,UW )1725 rev/m in — = 10838 rev/m in
www.FreeLibros.me

Transm isio n e s d e co rrea y de cadena_________307
a>i = «DO rev/m in I — I = 3770 rev/min* ( S )en tre 40O(La velocidad óptim a de la correa se encuentra en tre 4000 y 5000 fpm. Al replantear la ecuación (1 1.7),
« 0 0 ft/m in \10838 ra d /m in /
- 0 8 3 ft - 9.96 in
3. Seleccione u n a polea de ¡m entario
l a elección de u n a polca im pulsora de 1030 in de la tab la 11.1 produce u n a velocidad de:
di 1030 in , . . . . . .vb = y o » , = — -— (10838 rad/m in) = 55274 m /m in = 4606 fpm
4. B ija u n a polea im pulsada de ¡m entario
Partiendo de la ecuación (118). la razón de velocidad deseada se determ ina p o r
y p „ ÍÜ _ 10838 rad/m in _ ^ os¡ 3770 rad/m in
0 diám etro resultan le de la polea impulsada se calcula como:
d¡ - <VR)(*/,> - 287 (1 0 3 in) - 2 9 3 in
Se elige b polea de inventario m ás cercana de 27.9 in . Replanteando b ecu ad ó n ( 11 8 ), b velocidad real de b esm eriladora es
«o.d, (1725 rp m )( I0 3 in ) ____“ ' T T --------- 2 7 T 5 -------------
5 . Seleccione u n a correa disponible
La distanda en tre centros recom endada para transm isiones de correa está dentro del siguiente rango:
d ¡ < C < 3 (d | + d¡)
27.9in < C < U 4 3 in
Se selecciona tentativam ente el valor m edio de 72 in . Al sustituir en la ecuación (11.1),
www.FreeLibros.me

308 CAPITULO ONCE
L - 2 C + | ( * + d x) + - —
n , . (27.9 - I 0 2 )1= 2(72 m) + - ( 2 7 . 9 + 1 0 2 ) + ------ — ------- = 204.9 m
Como se b isca u n a lo i^ i tu d estándar de correa, se elige u n a de 212 in de la tabla 112 . Con las ecuaciones (11J ) y ( 11.4), se calcula la distancia real en tre centros requerida.
B 4- V i l 2 - 32(4, - rf,)2
16
580.2 + \ / (5802)J - 32(27.9 - 102 ) J 7 1 .9 8 »
donde
B - 4L - 2 ir(d¡ *• d,)
= 4(204.9) - 2 i r (27.9 + 1 0 2 ) = 5802 in
11.5 CADENAS
C o m o las correas, la s transm isiones d e cadena se em plean para transm itir m ovim iento g ira to rio y torque de u n eje a o tro, suave y álenciosam entc, asi co m o a bajo c o s ta Las transm isiones d e cad e n a p roporc ionan la flexibilidad d e u n a transm isión de correa co n la característica de acoplam iento positivo d e u n a transm isión de engranes, f t x consiguiente, las transm isiones de cadena están bien adap tadas p a ra aplicaciones co n distancias grandes en tre los ejes, baja velocidad y to rques grandes.
C om paradas co n o tra s form as d e transm isión d e potencia, las transm isiones d e cadena tien en b s siguientes ventajas;
■ S on m enos costosas q u e las transm isiones de engranes.
■ N o sufren deslizam iento, co m o las correas, y b r in d a n una transm isión d e p o ten c ia m ás eficiente.
■ T ienen d istancias flexibles e n tre los cen tro s d e lo s ejes, m ien tras q u e en las transm isiones d e eng ran e ta les d is tan cias están restringidas.
■ S on m ás eficientes a bajas velocidades q u e las correas.
■ Sus cargas sob re los cojinetes d e lo s ejes so n m ás pequeñas, p o rq u e n o se requ iere tensión inicial, co m o en el caso de las correas.
■ O frecen u n a m ay o r v ida ú til y n o se d e terio ran co n el calor, el aceite o b antigüedad , co m o sucede co n b s correas.
a Requieren p o co ajuste , m ien tras q u e b s co rre as necesitan ajustes frecuentes.
11.5.1 T ip o s d e c a d e n a sLas cadenas están hechas de u n a serie de e sb b o n e s interconec- tados. C om erdalm en te , hay m uchos tip o s d e d iseño de cadenas, q u e se listan a con tinuación .
1. En b figura 11.8 ase m uestra u n a cadena de rodillos. Es el tipo m ás c o m ú n de cadena q u e sirve p a ra tran sm itir po tencia . Las cadenas m ás g randes d e ro d illo s tienen u n a po tencia n om inal de m ás de 600 h p . El diseño de u n a c ad en a de rod illos b r in d a u n a o p e rac ió n silenciosa y eficiente, p e ro deb e lubricarse.
2 . En b figura 11.8 b se ilu stra u n a cadena de rodillos de tram os múltiples. Este d ise ñ o utiÜ2a m últip les cadenas está n d a r d e rodillos co nstru idas en tra m o s paralelos, lo cual increm enta b capacidad d e p o ten c ia de la tran sm isió n de c a d e n a
a i s:cí C*Vna dr rodillos con barra lateral descentrada
d) Cadena silenciosa
fig u r a i ia T ipos de cadenas.
a) Cadena rodillas
b) Caleña de rodillo* de tramen múltiples
www.FreeLibros.me

T r a n s m i s i o n e s d e c o r r e a y d e c a d e n a __________ 309
En la fig u ra 1 1.8c se ilu s tra u n a cadena de rodillos con barra lateral descentrada. Es m en o s costosa q u e una cadena d e rodillos, p e ro tien e ligeram ente m en o r capacidad d e potencia. T am bién m uestra u n a construcción ab ie rta q u e le p erm ite so p o rta r suciedad y con tam inan tes, lo s cuales suelen desgastar o tra s cadenas. Tales cadenas se u sa n co n frecuencia en eq u ip o d e construcción .
L a fig u ra 11.8d p resen ta u n a cadena silenciosa de d ien te in - vertido. Es la cadena m ás costo sa d e fab rica r y se utiliza efic ientem ente en aplicaciones q u e requieren a lta velocid ad , suavidad y transm isión d e potencia silenciosa. Se necesita lubricación p a ra m an tener las cad en as en op era ción confiable. S on co m u n es en m áquinas herram ien tas, b o m b as y u n id ad es de transm isión de potencia.
FIGURA 11.9 Paso d e u n a cadena.
co n pasos m ás g ran d es o frecen m ayor cap ac id ad d e po tencia . La selección del p a so d e u n a cadena de rod illos depende ta n to d e la p o ten c ia tra n sm itid i co m o de la velocidad del sistem a. En la fig u ra 11.10 se ilu stra u n a gu la general p a ra la selección del paso a d ecu a d o de u n a cadena. Los catálogos de lo s fabricantes señalan procedim ientos detallados para elegir las transm isiones de cadena m ás adecuadas, con base en un estud io detallado d e la a p licación y los requerim ientos d e transm isión de potencia.
11 .5 .2 P a s o d e c a d e n aAlgunas organizaciones técnicas tienen estándares (p.ej. el estánd ar ANSI B29-1) para el d iseño y las dim ensiones de cadenas de transm isión de potencia p a ra p e rm itir los intercam bios. Las cadenas de rodillos se clasifican p o r el foso p , q u e es b distancia entre los p ernos q u e unen los eslabones adyacentes. En la figura 11.9 se m uestra el paso. Las cadenas de rodillos tienen denom inaciones del tam año q u e van de 25 a 240. La denom inación del tam año se refiere al paso de la cadena, en ochentavos de pulgada, de m odo que u n a cadena 120 tiene un paso de 120/83 o 1 \ in . l a s cadenas
11 .5 .3 C a d e n a s m u l t i t r a m o sD e m o d o parecido a las correas, las cadenas m u ltitram o s sirven p a ra in c rem en ta r b can tid ad de po tenefa tr a n sm itid a p o r la tran sm isió n de cadena . S in em bargo , u n a cadena m u ltitram o no p ro p o rc io n a u n m últip lo exacto d e la capacidad d e u n tra m o indiv idual. C u a n d o la tra n sm is ió n d e cadena requiere tra m o s m últiples, se u tiliza la ecuación (11.9) para calcular la po tencia transm itida a través d e cada cadena. Se h a determ inado experi- m en ta lm cn te u n fa c to r m u ltitram o , q u e se t a b u b en b tab la11.4.
N j w n i * t4 3 2 I
ICCO - * 0 : 700
r/ws
5 0 0 - x n
. 3 0 0
SCO -4CD - 3CD 2 0 0
3 0 0 -203
i ®a>
2 0 0 -
100
1®
« 0
6 0 5 0 4 0
100 - 80 50 3 0
(O -
9
€ 0
40
40
3 02 0
15
§ 4 0 -
s " :
30
20
20
15108
0 1 5 -
15
10
108
8
854
3 io - 8 5 3
3 •
5 -
a54
4
12
1.54 -
5 -3
2
21 5
1.00 8
7 - 1 5 -
1.5 1 0
0 8
0 80 5
1.00 8
Q 4
1 0 - 0 8 0 5 0 3
2 ' - 2 0 - 2 5 - 7 4 —
0 8OS 0 4
A 7
0 4
0 3
0 ?
Q 2
Uáa i
Nim en» de aidem
3 0 4 0 5 0 7 0 100 40) reo 800 1200 an o so® soco ico» 1 0 » 1750 rooo
d m i i t a t k « * n « u f H f j r p m
F IG U R A i i . i o G u b d e s e l e c c i ó n d e l p a s o d e c a d e n a .
www.FreeLibros.me
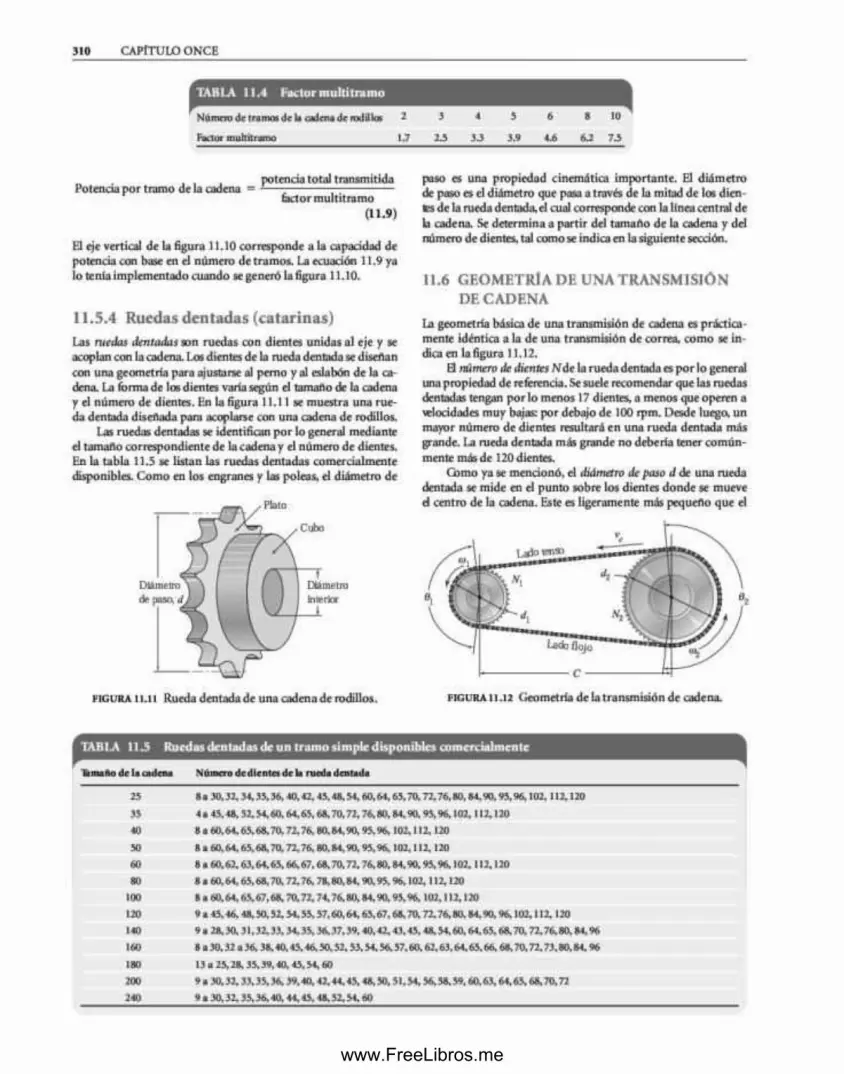
310 CAPITULO ONCE
T A B L A 1 1 .4 F a c to r m u l t i t r a m o
N ú m ero d e tra m es d e la cad en a d e rodillo* 2 3 4 5 6 8 10
Factor m ok feram o 1.7 2 .5 3 J 3 .9 6 J 7 .5
„ . . . potencia to ta l transm itidaP o tencia p o r tram o d e la cadena = ------ —---------------
tac to r m u ltitram o(11.9)
El eje vertical de la figura 11.10 co rresp o n d e a la capacidad de po tencia co n base e n el n ú m ero de tram o s. La ecuación 11.9 ya lo ten ia im plem en tado cuando se generó la fig u ra 11. 10.
1 1 .5 .4 R u ed as d e n ta d a s ( c a ta r in a s )Las ruedas dentadas » n ru ed as co n d ien tes u n id as a l eje y se acoplan con la c ad en a Los d ientes de la ru ed a den tada se diseñan co n u n a geom etría p a ra ajustarse al perno y al eslabón de la cadena. l a form a de los d ientes varia según el tam año de la cadena y el n ú m ero d e d ientes. En la figura 11.11 se m uestra u n a ru ed a den tada d iseñ ad a para acoplarse con u n a cadena de rodillos.
Las ruedas den tadas se identifican p o r lo general m edian te d tam año co rrespond ien te de la c ad en a y el n ú m ero de dientes. En la ta b la 11.5 se listan las ru ed as d e n ta d a s com ercialm ente disponibles. C o m o en lo s engranes y las poleas, d d iám etro de
paso es u n a p ro p ied ad c in em ática im p o rta n te . E l d iám etro de paso es el d iám etro q u e pasa a través de la m itad d e los d ie n tes de la ru ed a dentada, el cual corresponde co n la linea central de b cadena. Se d e te rm in a a p a r t ir d d tam añ o d e la cadena y del núm ero d e dientes, tal co m o se ind ica en la siguiente secdón .
11.6 GEOM ETRIA DE UNA TRANSM ISIÓN DE CADENA
La geom etría básica de u n a transm isión de cadena es p rác tica m ente idén tica a la de u n a transm isión de co rrea , co m o se in dica en la figura 11.12.
El núm ero de dientes N d e la ru e d a den tada e s p o r lo general u n a p ro p ied ad de referencia. Se suele recom endar q u e las ruedas dentadas tengan p o r lo m enos 17 dientes, a m enos que operen a velocidades m u y bajas: p o r d ebajo d e 100 rp m . Desde luego, u n m ayor n ú m ero de d ien tes resu ltará e n u n a ru e d a den tada más grande. La rueda d en tad a m ás g ran d e n o d eb e ría tener co m ú n m ente m ás de 120 dientes.
G am o ya se m en c io n ó , el diámetro de paso d de u n a rueda den tada se m id e en el p u n to sob re los d ientes d o n d e se m ueve d cen tro de la cadena. Este es ligeram ente m ás pequeño q u e el
f i g u r a l l . u Rueda d en tad a d e u n a cadena d e rodillos. f i g u r a 1 1 . 1 2 G eom etría d e la tran sm isió n d e cadena.
la m a n o d e la cad en a
T A B L A 1 1 5 R u e d a s d e n ta d a s d e u n t r a m o s im p le d is p o n ib le s c o m e r c ia lm e n te
N ú m ero d e d i e n t o d e la rueda d e n u d a
2 5 8 a 3 0 .3 2 ,3 4 .3 5 .3 6 ,4 0 .4 2 ,4 5 .4 8 .5 4 ,6 0 .6 4 .6 5 .7 0 ,7 2 .7 6 .8 0 .8 4 .9 0 .9 5 ,9 6 .1 0 2 . 1 1 2 .1 2 0
3 5 4 a 4 5 ,4 8 ,5 2 ,5 4 ,6 0 ,6 4 ,6 5 ,6 8 ,7 0 ,7 2 ,7 6 ,8 0 ,8 4 .9 0 .9 5 ,9 6 .1 0 2 ,1 1 2 ,1 2 0
4 0 8 a 6 0 .6 4 .6 5 ,6 8 .7 0 ,7 2 ,7 6 .8 0 ,8 4 ,9 0 ,9 5 .9 6 .1 0 2 ,1 1 2 , 120
5 0 8 a 6 0 .6 4 .6 5 .6 8 .7 0 ,7 2 ,7 6 .8 0 .8 4 ,9 0 , 9 5 .9 6 . 1 0 2 ,1 1 2 .1 2 0
6 0 8 a 6 0 .6 2 , 6 3 ,6 4 ,6 5 ,6 6 ,6 7 ,6 8 ,7 0 ,7 2 ,7 6 ,8 0 ,8 4 ,9 0 ,9 5 ,9 6 ,1 0 2 ,1 1 2 ,1 2 0
8 0 8 a 6 0 .6 4 .6 5 .6 8 .7 0 ,7 2 .7 6 . 7 8 ,8 0 .8 4 .9 0 .9 5 .9 6 .1 0 2 ,1 1 2 ,1 2 0
100 8 a 6 0 .6 4 .6 5 ,6 7 .6 8 ,7 0 .7 2 ,7 4 ,7 6 ,8 0 ,8 4 .9 0 ,9 5 .9 6 .1 0 2 ,1 1 2 ,1 2 0
120 9 a 4 5 .4 6 . 4 8 .5 0 .5 2 .5 4 ,5 5 .5 7 .6 0 .6 4 .6 5 .6 7 ,6 8 .7 0 ,7 2 .7 6 ,8 0 .8 4 .9 0 ,9 6 ,1 0 2 ,1 12. 120
14 0 9 a 2 8 .3 0 . 3 1.3 2 ,3 3 . 3 4 .3 5 . 3 6 .3 7 .3 9 .4 0 .4 2 ,4 3 .4 5 . 4 8 ,5 4 .6 0 .6 4 .6 5 .6 8 .7 0 ,7 2 , 7 6 .8 0 .8 4 .9 6
160 8 a 3 0 .3 2 a 3 6 ,3 8 .4 0 .4 5 ,4 6 .5 0 .5 2 ,5 3 .5 4 .5 6 .5 7 .6 0 ,6 2 .6 3 ,6 4 .6 5 ,6 6 ,6 8 ,7 0 .7 2 ,7 3 .8 0 .8 4 .9 6
180 13 a 2 5 ,2 8 ,3 5 ,3 9 ,4 0 . 4 5 .5 4 .6 0
2 0 0 9 a 3 0 .3 2 ,3 3 ,3 5 ,3 6 ,3 9 ,4 0 .4 2 ,4 4 .4 5 .4 8 ,5 0 ,5 1 .5 4 ,5 6 .5 8 .5 9 ,6 0 .6 3 ,6 4 ,6 5 .6 8 .7 0 ,7 2
2 4 0 9 a 3 0 .3 2 ,3 5 .3 6 .4 0 .4 4 .4 5 . 4 8 .5 2 ,5 4 .6 0
www.FreeLibros.me

Transm isio n es d e correa y de cadena_________311
d iá m e tro e x te r io r d e l a r u e d a d e n ta d a . N o te q u e lo s d iá m e tro s m o s tra d o s d e la s ru e d a s e n la fig u ra 1 1 .1 1 s o n los d iá m e tro s d e p a s a El d iá m e tro d e p aso d e u n a ru e d a d e n ta d a c o n N d ien tes p a ra u n a c ad e n a co n u n d iá m e tro d e p a so p se d e te rm in a p o r
q j e d e e n l a p a r te in fe rio r. Ya q u e la d ire c c ió n d e l g iro d e l e je y a las posic io n es re la tivas d e lo s e je s im p u ls o r e im p u ls a d a la c o n figurac ión d e la fig u ra 11.12 tie n e e l la d o f lo jo e n l a p a r te in ferio r.
d =s e n ( 1 8 0 7 N )
( 11. 10 )
La d b ta n c ia e n tr e centros C e s l a d is ta n c ia e n t r e d c e n t r o de la ru e d a d e n ta d a im p u ls o ra y la ru e d a d e n ta d a im p u lsa d a . D esd e l u e g a e sta ta m b ié n es la d is ta n c ia e n t r e lo s d o s e je s aco p lad o s p o r l a tra n s m is ió n d e c a d e n a E n a p lic ac io n es típ icas, la d is tan c ia e n tre c e n tro s d e b e r ía e s ta r e n e l s ig u ien te ra n g o :
3 0 p < C < 50p
La lo n g itu d d e c a d e n a e s l a lo n g i tu d to ta l d e l a c a d e n a . C o m o l a c a d e n a e s tá fo rm a d a p o r e s lab o n es in te rc o n e c ta d o s , la lo n g i tu d d e l a c ad e n a d e b e se r u n m ú ltip lo e n te ro d e l p a so . Es p re fe r ib le te n e r u n n ú m e r o im p a r d e d ie n te s e n l a r u e d a d e n ta d a im p u ls o ra (1 7 , 19, e tc .) y u n n ú m e ro p a r d e p a s o s ( e s la b o n e s) e n la c a d e n a p a r a e v ita r u n e s la b ó n especial. La lo n g itu d d e la c a d e n a L , e x p re s a d a e n e l n ú m e r o d e e s b b o n e s o paso s , s e c a lc u b c o m o :
2 C + + N \ ) + ( p ( N 2 - N t ) 2 \
P 2 l 4 t t 2C I(11 .11 )
La d is ta n c ia e n t r e c e n t ro s p a ra u n a lo n g i tu d d e cad e n a d e te rm in a d a s e c a l c u b co m o :
Cm p L _ 2 h ± H ¡ ) + <*>» *■> j* »<^ ~ N,>*j
(11.12)
S e d e b e r la d e c ir n u e v a m e n te q u e b lo n g i tu d d e b c a d e n a L e n la e c u a c ió n ( 11 . 12 ) t ie n e q u e p la n te a r s e e n n ú m e ro d e e s b bones.
E l á n g u lo d e contacto 9 e s b m e d id a d d a c o p la m ie n to a n g u b r d e b c a d e n a e n c a d a d ie n te . Se c a lc u b co m o :
= 180° - 2 s e n - '{ } (1 1 .1 3 )
- , Í P W - N , )9 í = 1 8 0 ° + 2 s e n ~ * | — j ( 1 1 .1 4 )
L os fa b ric a n te s d e c a d e n a s re c o m ie n d an m a n te n e r d á n g u lo de c o n ta c to p o r a r r ib a d e 120° c u a n d o sea posib le .
F in a lm e n te , c u a n d o o p e r a n , b s c a d e n a s tie n e n u n lad o te n so y u n lad o flojo. E n la m ayoría d e ap licac io n es, b s tra n s m is io n es d e cad e n a se d e b e r ía n d is e ñ a r d e m o d o q u e e l la d o flo jo
1 1 .7 C I N E M Á T I C A D E I . A T R A N S M I S I Ó N
D E C A D E N A
D e n u e v a b m z ó n d e velocidad V R s e d e fin e c o m o b v e lo d d a d a n g u la r d e b ru e d a d e n ta d a im p u ls o ra ( r u e d a 1) d iv id id a e n tre b v e lo d d a d a n g u la r d e l a r u e d a d e n ta d a im p u ls a d a ( r u e d a 2). C o n e l u s o d e la s m ism as d e d u cc io n e s d e las t r a n s m is io n e s de e n g ra n e y d e c o r re a , b ra z ó n d e v e lo c id ad es:
VR =^impulsora _ <d|
" i mpUU*fci <*>2 ( , U 5 >
C o m o u n a ra z ó n e s v á lid a in d e p e n d ien te m e n te d e las u n id a d e s , b razón d e v e loc idad s e d e fin e e n té rm in o s d e revo luc iones p o r m in u to , rad ianes p o r u n id a d d e t ie m p o o c u a lq u ie r o t r o g ru p o c o n v e n ie n te d e u n id a d e s d e v e lo c id ad a n g u b r . M u ch as a p lic a c io n es in d u s tr ia le s n ece s itan cad en a s p a ra re d u c ir b v e loc idad d e u n a fu e n te d e p o te n c ia . P o r l o t a n t a es n o r m a l te n e r ra z o n e s d e v e lo c id ad m a y o re s q u e 1. C o m o s e o b s e rv a e n l a e c u a c ió n(1 1 .1 5 ) , e s to in d ic a q u e b ru e d a d e n ta d a im p u ls o ra g i r a m á s rá p id o q u e b ru e d a im p u ls a d a , l o c u a l e s e l c a so e n las re d u c c io n es d e velocidad.
( ¡ o m o e n las c o rre a s , la v e lo c id ad linea l d e u n a c a d e n a , o te b c id a d de cadena, se d e fin o c o m o vc La m a g n itu d d e e s ta ve- b e id a d c o r re s p o n d e a b m a g n itu d d e b v e lo c id ad lin e a l d e u n p u n to s o b re e l d iá m e tro d e p a so d e c a d a ru e d a . C o m o b v e lo c id a d d e u n a c o rre a , b v e lo c id a d d e u n a c a d e n a se c a l c u b co m o :
d i d 2vc = T a , , = y e * (1 1 .1 6 )
E n la e c u a c ió n (1 1 .1 6 ) , b s v e lo c id ad e s a n g u la re s s e d e b en estab lece r e n r a d b n e s p o r u n id a d d e tie m p o .
La lu b ric a c ió n d e b s c a d e n a s es im p o r ta n te p a ra d a r larga v id a a b t ra n s m is ió n . L os m é to d o s d e fa b r ic a c ió n a d ec u a d o s se d e te rm in a n p r in c ip a lm e n te p o r l a v e lo c id a d d e b c ad e n a . La l u b ric a c ió n re c o m e n d a d a es c o m o sigue:
■ B aja v e lo c id ad (vc < 6 5 0 fp m ): fa b r ic a c ió n m a n u a l, d o n d e d lu b r ic a n te se a p lic a p e r ió d ic a m e n te a lo s e s lab o n esd e la c a d e n a .
■ V e locidad m o d e ra d a (6 5 0 < vc < 1500 fp m ): b a fto lu b r i c an te , d o n d e la p a r te in fe r io r d e b c a d e n a e stá su m e rg id a e n u n b a ñ o d e lu b rica n te .
■ A lta v e lo c id ad (1 5 0 0 fp m < vt): fa b r ic a c ió n a c h o rro , d o n d e u n a b o m b a g e n e ra u n c h o r ro c o n t in u o s o b re b cad en a .
P R O B L E M A D E E J E M P L O 1 1 .3
Una transm isión de cadena de rodillos, d e u n tra m o sim ple, conecta u n m otor de com bustión in terna d e 10 hp a u n a trituradora de residuos de césped, com o se indica en b figura 11.13. C uando el m otor opera a 1200 rpm , los dientes trituradores deberían g irar a 240 rp m . La rueda im pulsora tiene 18 dientes. Determ ine el paso adecuado de b cadena, el núm ero de dientes de la rueda impulsada, los diám etros de p iso de ambas ruedas y la velocidad de la cadena. Indique tam bién el núm ero de esbbones de u n a cadena razonable y especifique la distancia en tre cen tros re-
www.FreeLibros.me

312 CAPITULO ONCE
SO L U C IÓ N :
f i g u r a 11.13 T ritu radora d d p rob lem a de ejem plo 11.3.
1. Seleccione e l paso adecuado de la cadena
Para el m o to r de com bustión in terna de 10 h p q u e im pulsa la rueda dentada a 1200 rpm , la figura 11.10 especifica q u e u n a cadena de u n so lo tram o, con paso igual a 40, e s la cadena adecuada.
2. Determine e l núm ero de dientes de la rueda den tada im pulsada
Replanteando la ecuación (11.15), se calcula d núm ero de dientes necesarios en la rueda dentada impulsada.
240 rpm
Note en la tabla 1 15 que com erdalm ente hay u n a rueda dentada de 90 dientes para u n a cadena del núm ero 40.
3. Calcule e l d iám etro de paso de las ruedas dentadas
Una cadena de rodillos del núm ero 40 tiene u n paso de:
40p - - - 0 3 m
I > la ecuación ( 11.10), los diám etros de paso de las ruedas dentadas son:
18 dientes
0 5 in
m - ü )14.33 in
4. Determine la velocidad de la cadena
La veloddad de la cadena se calcula con la ecuación (11.16):
( 2v r a d \««i ■ 1200 rev/m in y - — I ■ 10838 rad/m in
v , = = ( 2J<2 m ) 10833 rad/m in = 15603 in /m in = 1300 fpm
Con u n a velocidad de la cadena igual a 1300 fpm. se recom ienda u n sistema de bafto de lubricante.
5. Calcule la distancia adecuada entre centrosLa distancia en tre centros sugerida para la transm isión de cadena es
30p < C < 50p
15in < C < 25in
www.FreeLibros.me

T ra n s m is io n es d e c o r r e a y d e c a d e n a__________313
Se elige tentativamente u n valor m edio de 20 in . Si se sustituye en la ecuación (11.11):
2C (Afr + N ,) ( p iH , ~ N |)? )P 2 \ \ i r !C I
- ^ ♦ < S ± “ > - U W h t a .(0 5 in ) 2 l 4w (20 In) J
Se especifica un núm ero par de eslabones igual a 138. La correspondiente distancia real en tre centros se calcula © n la ecuación ( 11.12).
. p \ . ( * & + * . ) . / í . W + AT,)V * 1 * 2 - N x ) *c 4 L - — J — + V l L ----- i - / ....... S ? - -
(0.5 in) (90 + 18) //,_ (90 4 18) 1 1 8(90 - 1 8 ) 2
4(1 3 8 )--- --- + ̂ /i"3»’ - 2 ) - 4„* = 20.187 in
PROBLEMAS
C in e m á tic a d e co rre as
1 1-1 . I h m o to r q u e o p e ra a 1725 rp m en sen tido h o ra rio se acopla a través d e u n a transm isión de c o rre a para hacer g irar la m anivela d e u n a m áqu ina de co se r industria l. 0 d iám etro de la po lea del m o to r e s de 3.5 in y la polea de la m anivela de la m á q u in a d e co se r e s de 8 in . D eterm ine la velocidad d e la p o le a im p u lsad a y la velo d d a d d e la correa.
1 1 - 2 I h m o to r q u e o p e ra a 1150 rp m en sen tido h o rario se acopla a través d e u n a tran sm isió n d e c o rre a p a ra hacer g irar el ventilador industria l de u n escape. El d iám etro de la po lea del m o to r es d e 5 in y el d e la po lea d e l v en tilad o r es de 12 in . D eterm ine la v e lo d d a d de la polea im pulsada y la v e lo d d a d de la correa.
11-3 . Un m o to r de com bustión in te rn a está acop lado a través de u n a transm isión d e co rrea para hacer girar u n com presor d e aire , el cual deb e o p e ra r a 1200 rp m en sentido h o ra rio . El d iám etro de la po lea del m o to r e s de 4 in y el de la po lea del co m p reso r e s de 10 in . D eterm ine la velocidad requerid a del m o to r de com bustión interna y la velocidad de la correa.
11—4 . Un m o to r que op era a 1125 rp m e n se n tid o antihorario <stá acop lado a trav és de u n a tra n sm is ió n de co rrea p ira hacer g irar u n a prensa taladradora. El d iám etro de la po lea del m o to r es de 2.5 in y la po lea del vástago del t i la d ro e s d e 9 in . D eterm ine la velocidad de la polea im pulsada y la velocidad d e la correa.
11-5 . I h m o to r que op era a 1750 rp m en sen tido antihorario está acop lado a trav és de u n a tran sm isió n de co rrea para hacer g irar el sop lado r de u n h o m o de calefacción. 0 d iám etro d e la po lea del m o to r e s d e 6.5 in y la polea del sop lador es de 105 in . D eterm ine la v e lo d d ad de la po lea im pulsada y la v e lo d d ad de la correa.
11-6 . Un m o to r de com bustión in te rn a está acop lado a través de u n a transm isión d e correa para hacer g irar u n genera- <br, el c u a l d e b e g ira r a 1800 rp m en se n tid o a n tih o - rurio. El d iám etro d e la po lea del m o to r es de 6 in y el de la po lea del g en erad o r es de 9 in . D eterm ine la ve lo d dad requerida de la po lea del m o to r d e com bustión in terna y la velocidad de la correa.
G e o m e tr ía d e u n a tr a n sm is ió n de c o rre a
11-7 . Dos p o leas tienen d iám etros de 3 5 in y 8 in , m ien tras la d is ta n d a e n tre cen tros e s de 23 in . C o m p are la distancia en tre cen tro s co n el rango ideal y d e te rm in e la longitud correspondiente d e la correa. Calcule , asim ism o, el á n gulo de contacto d e la po lea m ás pequeña.
11 -8 . D os poleas tienen d iám etro s d e 5 y 12 in . D eterm ine la d is ta n d a en tre cen tros de la transm isión , al u tilizar u n a correa d e 72 in , luego com pare la d istanc ia e n tre cen tro s co n el ra n g o ideal. D eterm ine ta m b ié n el ángulo de co n tac to de b po lea m ás pequeña.
11-9 . D os poleas tien en d iám etro s de 8 y 12 in . D eterm ine la d istanc ia e n tre cen tros d e la tran sm isió n al u tilizar una correa d e 88 in. luego com pare b d is ta n d a e n tre cen tros co n el ran g o ideal. D eterm ine, asim ism o, el ángulo de co n tac to de b po lea m ás pequeña.
1 1—10. D os poleas tienen d iám etro s de 8 y 24 in . D eterm ine b d is ta n d a e n tre cen tros de la transm isión al u tilizar una correa de 104 in, luego com pare la d istanc ia e n tre cen tro s c o n el ra n g o ideal. D eterm ine ta m b ié n el ángulo de co n tac to de b po lea m ás pequeña.
S elección d e u n a tr a n s m is ió n de c o rre a
11-11 . M ediante u n a transm isión de co rrea , se desea acoplar u n m o to r co n u n m c z d a d o r p a r a p rocesar ja ra b e de m aíz. El m o to r eléctrico d e 10 h p tien e u n a velocidad n om inal de 3550 rp m y el m ezclador deb e o p e ra r tan cerca de 900 rp m co m o sea p o sib le . S e le c d o n e el ta m a ñ o ad ecuado de la co rrea , las poleas y la co rrea co m erc ia lm en te d isp o n ib le s para esta ap licación . Calcule , asim ism o, la velocidad real d e b c o rre a y la d is ta n d a e n tre centros.
1 1 -1 2 M ediante u n a transm isión de correa se desea acop lar un m o to r co n u n m ezclador p a ra procesar jarabe de maíz. 0 m otor eléctrico de 25 h p tiene u n a veloddad nom inal de 950 rp m y el m ezclador d e b e o p era r tan cerca de 250 rp m co m o sea posib le . E lija el tam añ o adecuado de b correa, las poicas y b banda com crcialm ente disponibles p a ra esta aplicación. C alcule tam bién la v e lo d d ad real de b correa y la d is ta n d a en tre centros.
11-13. M ediante u n a transm isión de correa se desea acop lar un m o to r con u n transportador. El m o to r eléctrico d e 5 h p
www.FreeLibros.me

314 CAPITULO ONCE
Cene u n a velocidad nom inal de 1150 rp m y el eje im p u lsor del tran sp o rtad o r debe o p era r tan cerca d e 250 rpm co m o sea posible. Seleccione el ta m a ñ o a d ecu a d o de la co rrea , las polcas y la b a n d a com crd a lm cn te d isp o nibles para esta aplicación. Calcule, asim ism o, la ve lo d dad real d e la correa y la distancia e n tre centros.
11-14. M ediante u n a transm isión de correa se desea acop lar un m o to r de com bustión in terna co n el eje de la cud iilla de u n a p o d ad o ra d e césped com ercial. E l m o to r d e 10 hp tiene u n a veloddad nom inal d e 2000 rpm y el eje de la cuchilla deb e o p e ra r t a n cerca de 540 rp m co m o sea posible. Elija el tam añ o adecuado d e la correa, las poleas y la b an d a com ercial m ente d isponib les p a ra esta a p licación. C alcule tam bién la velocidad real de la correa y la distancia e n tre centros.
11-15. Kfcdfante u n a transm isión d e correa, se desea acop lar un m o to r d e co m b u stió n in te rn a co n d sistem a de tra n s m isión de u n a m otonieve. El m o to r d e 7 0 h p funciona a 3000 rp m y el eje de transm isión deb e o p era r tan cerca de 750 rp m co m o sea pasible. S elecdanc e l tam año adecuado de la cor rea. las poleas y fa banda com ercialm ente d isponib les p a ra esta ap lic a d ó n . Calcule, asim ism o, fa veloddad real de fa co rrea y la distancia e n tre centros.
11-16. M ediante u n a transm isión d e correa, se desea acoplar un m o to r eléctrico co n el cabezal d e u n t o r n a El m o to r eléctrico de 2 h p op era a 200 rp m y el cabezal deb e fun d o n a r ta n cerca de 6 0 rp m c o m o sea posib le . Elija el tam añ o adecuado de fa co rrea , fas p o leas y fa b a n da c o m e rd a lm e n tc d ispon ib les p a ra esta ap lic a d ó n . Calcule tam bién fa veloddad real d e fa correa y fa d is tan d a en tre centros.
C in e m á t i c a d e u n a c a d e n a
11-17. 0 e je d e u n a caja d e tra n sm isió n de eng ranes está s o p la d a a través de u n a transm isión de cadena del n ú m ero 60, m ien tra s hace g ira r u n a m e z d a d o ra de c o n creto a 180 rp m en se n tid o h o rario . L a ru ed a den tada knpulsora tiene 19 d ientes y fa ru ed a den tada d e fa mezclado ra tien e 8 4 . D eterm ine fa v e lo d d a d d e fa ru ed a d en tad a im pulsora , fa v e lo d d a d de fa c ad en a y el m éto d o de lubricación reco m en d ad a
11-18. U n m o to r d e engranes, q u e o p e ra a 220 rp m en sen tido h o r a r ia está a c o p lad o a u n ag itad o r de liqu idos m ed ian te u n a tran sm isió n de cadena del n ú m e ro 40. La ru ed a den tada im pulsora tie n e 19 d ien tes y 1a ru ed a dentada d e l ag itado r tiene 50. D eterm ine fa velocidad de la ru ed a den tada im pulsada, 1a velocidad de fa cadena y d m éto d o de lub ricación reco m en d ad a
11-19. Un m o to r d e engranes, q u e o p e ra a 180 rp m en sen tido h o ra r ia está acoplado a u n a escaladora m edian te una transm isión de c ad en a del n ú m e ro 80. La ru e d a d e n tada im pulsora tien e 27 d ientes y fa ru ed a d en tad a del escalador tien e 68. D eterm ine fa velocidad de fa rueda d en tad a im p u lsad a , fa v e lo c id ad d e fa c ad en a y el m éto d o de lubricación reco m en d ad a
1 1-20 . El e je d e u n a caja de tra n sm is ió n de en g ran es está acoplada a trav és d e u n a tr a n sm is ió n d e c ad en a del núm ero 100, p o r lo q u e hace g irar al eje de u n aplasta- d o r d e pu lp a en u n a p lan ta p ro d u c to ra d e papel. El eje del a p la s tad o r g ira a 250 rp m en se n tid o h o ra rio . La ru e d a d en tad a im p u lso ra tien e 2 5 d ien tes y 1a ru e d a d en tad a del ap las tad o r tie n e 76. D e te rm in e fa velocid ad de fa ru e d a den tada im pulsora , fa v e lo d d ad de fa cadena y el m éto d o d e lub ricación recom endado.
G eo m etría d e u n a tr a n s m is ió n de c a d e n a
1 1 -2 1 . D os ruedas d en tad as para u n a cadena del n ú m ero 60 tienen 17 y 56 d ientes. La cadena tie n e 120 eslabones. D eterm ine el d iám etro d e paso de c a d a ru e d a dentada, su distancia e n tre cen tro s y el án g u lo de co n tac to d e 1a ru ed a d en tad a más p eq u eñ a . Tam bién com pare la distancia e n tre cen tro s c o n el ran g o ideal.
1 1 -22 . D os ruedas d en tad as para u n a cadena del núm ero 80 tienen 19 y 64 d ientes. La cadena tie n e 140 eslabones. D eterm ine el d iám etro de paso de cada ru ed a dentada, su distancia e n tre cen tro s y el án g u lo de con tac to d e 1a ru ed a d en tad a m ás p eq u eñ a . Tam bién com pare 1a distancia e n tre cen tro s c o n el ran g o ideal.
11 -23 . D os ruedas d en tad as para u n a cadena del núm ero 40 tienen 21 y 84 d ientes. La cadena tie n e 200 eslabones. D eterm ine el d iám etro de paso de cada ru ed a dentada, su distancia e n tre cen tro s y el án g u lo de con tac to d e fa ru ed a d en tad a m ás p eq u eñ a . Tam bién com pare 1a distancia e n tre cen tro s co n el ran g o ideal.
11 -24 . D os ru ed as den tadas para u n a cadena del n ú m e ro 120 tienen 25 y 72 d ientes. La cadena tie n e 150 eslabones. D eterm ine el d iám etro de paso de c a d a ru e d a dentada, su distancia e n tre cen tro s y el án g u lo de con tac to d e fa ru ed a d en tad a m ás p e q u e ñ a Tam bién com pare la distancia e n tre cen tro s c o n el ran g o ideal.
S elección d e u n a tr a n s m is ió n de c a d e n a
11-25 . Se desea aco p la r u n m o to r d e eng ranes al cu b o de un elevador, a través d e u n a transm isión de c a d e n a El m o to r de engranes d e 40 h p operará a 350 rp m y la transm isión del elevador debe funcionar tan cerca d e 60 rpm com o sea posible. Seleccione el tam año adecuado d e fa cadena, fas ru ed as d en tad as y el n ú m ero d e eslabones de b cadena comercialmente disponibles. Calcule tam bién b velocidad real de b cadena y b distancb en tre centros.
1 1 -26 . Se desea u n a transm isión de cadena e n u n recolector de n u lz para acoplar u n m o to r h idráulico con u n eje im pu lsar. El m o to r de 30 h p o p e ra rá a 550 rp m y el eje im p u lso r deb e funcionar t a n cerca d e 100 rp m co m o sea posible Seleccione u n tam año adecuado de 1a cadena, fas ruedas dentadas y el n ú m ero d e eslabones de fa cadena comercial m ente disponibles. Calcule tam bién 1a velocidad real d e fa cadena y fa distancia en tre centros.
1 1 -27 . Se desea u n a tran sm isió n d e cadena p a ra aco p la r un m otor de gasolina y 1a caja d e transm isión con las ruedas im pulsoras de u n vehículo to d o terreno. C u a n d o d sistem a m otor/transm isión de 130 h p funcione a 600 rpm, d eje im pulsor deb e o p era r tan cerca d e 140 rp m com o sea posible. S decc io n e u n tam añ o ad ecuado de fa cadena, fas ruedas d en tad as y el n ú m ero de eslabones de fa cadena com ercialm ente d isponibles. C alcu le tam b ién b vdocidad real d e fa cadena y fa distancia e n tre centros.
11 -28 . Se desea u n a tran sm isió n de cadena p a ra aco p la r un m o to r d e engranes co n fa transm isión de to m illo de u n a prensa. El m o to r d e eng ranes de 50 h p o p e ra rá a 600 rp m y fa tran sm isió n de to rn illo deb e fu n c io n ar ta n cerca de 100 rp m c o m o sea posib le . Seleccione un tam año adecuado d e fa cadena. las ruedas den tadas y el n ú m ero de eslabones d e fa c ad en a com ercialm ente disponibles. C alcu le tam bién fa velocidad real d e fa cadena y la distancia en tre centros.
11-29. Se desea u n a tran sm isió n d e cadena p a ra aco p la r u n m o to r d e gasolina y fa caja de transm isión co n el taladro
www.FreeLibros.me

Transm isio n e s d e co rrea y de cadena_________315
de u n a rem ovedora de nieve. C u a n d o el sistem a m o tor/ c ^ a d e transm isión de 8 h p op ere a 300 rp m . el talad ro debe funcionar tan cerca de 4 0 rp m co m o sea posible. Seleccione u n tam añ o a d ecu a d o de la cadena , las m edas den tadas y el n ú m ero de eslabones d e la cadena com ercialm ente d isponibles. C alcule tam bién la velocidad real de la cadena y la distancia e n tre centros.
1 1 - 3 0 . Se desea u n a tra n sm is ió n d e cadena para aco p la r u n m otor de engranes con u n carrusel de alm acenam iento de partes. El m o to r de engranes de 10 h p opera rá a 425 rp m y la flecha del carru se l deb e o p e ra r ta n cerca de 75 rp m com o sea posible. Elija u n tam año adecuado de la cadena, las ruedas dentadas y el n ú m ero de eslabones de b cadena com ercialm ente disponibles. C a l i lle tam bién la velocidad real d e la cadena y la distancia e n tre centros.
ESTUDIOS D E CASO_________________________
11 -1 . H dispositivo m o strad o en b figura E l 1.1 im pulsa una ram pa q u e canaliza b o te lla s ind iv id u a les de b eb ida g ise o sa hacia co n ten ed o res de 12 piezas. E l p e rn o C está su jeto ríg id am en te a u n eslabón de la cadena . El yugo D e t á so ldado ríg idam ente a la varilla £ b cual se a t i e n d e hacia la ra m p a (q u e n o se m u estra ). Examine cu id ad o sam en te los co m p o n en tes del m ecan ism o, lu eg o co n te s te las p re g u n ta s sigu ien tes p a r a o b te n e r m ayor conocim iento acerca de su funcionam iento.
1. D eterm ine el m ovim iento de la ru e d a den tada f t co n form e la ru ed a d en tad a A im pulsa en sen tido h o ra r ia
2 . Especifique el m o v im ien to in s ta n tá n e o del p e rn o C, co n fo rm e la ru e d a d en tad a A im p u lsa en se n tid o to ra rio .
3 . Especifique e l m o v im ien to in s ta n tá n e o del y u g o D, conform e la ru e d a d en tad a A im pulsa e n se n tid o h o rario.
4 . ¿C u á n to deb e g ira r la ru e d a d en tad a A p a ra m over é p e rn o C so b re la rueda?
5 . ¿Qué le sucede al m ovim iento de la varilla £ cu an d o el pe rn o se m ueve so b re la rueda?
6. ¿Q ué le sucede a la varilla E cu an d o el p e rn o C está so b re la p a rte su p e rio r de la transm isión d e cadena?
7 . C om ente las características del m ovim iento general de la varilla £
11—2 . l a po lea m o strad a en la figura E l 1.2 im pulsa la flecha A, la cual a la vez im pulsa u n c o rta d o r d e leña (q u e no se incluye). O bserve q u e la po lea se d iv ide en d o s m itades, identificadas co m o B y C . Las dos m itades están enroscadas en D. Exam ine cu idadosam ente las c o m p o nentes del m ecan ism o , lu eg o co n te s te las sigu ien tes preguntas p a ra o b te n e r m ayor conocim iento acerca de su fiindonam ien to .
1. ( l ia n d o g ira el m ango H , ¿cuál e s el m ovim iento del eje 1?2. ( l ia n d o g ira el m ango H , ¿cuál es el mov im ien to de la
m itad derecha C d e la polea?
fig u r a F.l 1.2 (C ortesía de In d u stria l Press).
M ovim ien to a la rampa
3 . ¿Cuál es el efecto re su ltan te sob re la po lea a l g ir a r el m ango H?
4 . ¿Q ué e s la pieza / y cuál es s u fundón?5 . ¿C uál e s el p ro p ó s ito d e la pieza R ¿D ebe ésta p er
m anecer en con tac to co n la pieza fc?6 . ¿Q ué e s b pieza G y c u á l es su fundón?7 . ¿Q ué n o m b re daría a este dispositivo?
11-3 . La po lea m o stra d a en la fig u ra E l 1.3 im p u lsa u n m ecan ism o (q u e n o se incluye) en u n a m áq u in a que agita la tas de p in tu ra . Estas m á q u in a s s e u sa n para m ezclar com pletam ente la p in tu ra en el m om en to d e la com pra y son com unes en b m ayoría d e las tie n d a s de p in tu ra m inoris tas. Exam ine cu idadosam ente b s c o m ponen tes del m ecanism o, lu eg o con teste las siguientes preguntas para o b te n e r m ayor co n o c im ien to acerca de su funcionam iento .
1. D eterm ine el m o v im ien to de b pieza D , co n fo rm e b ceja B se fuerza h a d a a rrib a h a d a b palanca C.
2 . D eterm ine b a c d ó n resu ltan te d e b p o le a G, conform e b ceja t í se fuerza hacia a rrib a h a d a b palanca G
3. D eterm ine b acción resultante del m ecan ism o agitador de p in tu ra , conform e b ceja B se fuerza h a d a a rrib a hacia la palanca G
4 . La pieza A es b p u e rta del com p artim ien to ag itado r de p in tu ra ; com ente el p ro p ó sito de este m ecanism o.
5. C om en te la razó n de ta n ta s m uescas, £ en la p o le a G.6 . C om en te el o b je tivo del resorte H.7 . ¿Q ué n o m b re daría a este dispositivo?
FIGURA Eli.! (Cortesía d e Industrial Press). F IG U R A E l i J M e c a n i s m o d e l estudio d e caso 1 1 .3 .
www.FreeLibros.me

C A P Í T U L O
D O C E
M ECANISM OS DE TORNILLO
O B J E T I V O S
A l term inar de estudiar este capitula, el alumnoserá capaz de:
1 . D e s c r ib ir la o p e r a c ió n d e u n m e c a n is m o d e t o r n i l lo .
Z F a m ilia r iz a r se c o n la s c a r a c te r ís t ic a s d e la s c u erd a s y la s f o r m a s e s l in d a r d e e s ta s .
3 . C o n o c e r la fu n c ió n d e l t o r n il lo d e b o la s .
4 . D e te r m in a r s i u n a c u e r d a e s d e a u to b lo q u e o .
5 . C a lc u la r e l to r q u e r e q u e r id o p a r a h a c e r g ir a r u n to r n il lo y la e f i c ie n c ia d e u n a u n ió n d e to r n il lo .
6 . C a lc u la r la s r e la c io n e » c in e m á t ic a s d e u n m e c a n is m o d e t o r n il lo e n g e n e r a l.
7 . E n te n d e r la o p e r a c ió n d e u n t o r n i l lo d i fe r e n c ia l y c a lc u la r
s u s r e la c io n e s c in e m á t ic a s .
8 . E n ten d er La o p e r a c ió n d e u n ta la d r o y c a lc u la r s u s r e la c io n e »
c in e m á t ic a s .
ñas están roscadas en el in te rio r de u n a pieza, co m o u n a carcasa fu n d id a , o m ás c o m ú n m e n te , d e n tro d e u n a tuerca. S iem pre q u e sea posib le , se d eb e rla e leg ir u n a cuerda e s tá n d a r para m e jo ra r el in te rcam b io e n el m an ten im ien to o la sustitución , l a s cuerdas, in ternas o ex ternas, se clasifican de acuerdo co n las siguientes características.
la s d o s características m ás com unes d e u n a cuerda son el fu so y el d iám etro de paso . El paso p es la d istanc ia paralela al eje (U tom illo , m ed ida desde u n p u n to sobre u n h ilo , has ta el p u n to correspondien te del h ilo adyacente . El diám etro de paso d es la d is ta n d a m ed ida desde el p u n to m ed io en tre la p u n ta y la rafz del perfil d e la cuerda, pasando p o r la linea del e je, has ta el p u n to co rre sp o n d ien te del la d o o p u e s ta L a fig u ra 12.1 ilu stra ta les propiedades.
O tras p rop iedades de la cuerda d e u n to m illo (figura 12.1) inc luyen el diám etro m ayor, e l diám etro m enor, e l ángulo de avance y el ángulo inclu ido . E n e l sistem a tra d ic io n a l es tad o unidense, es m ás co m ú n usar el n ú m ero d e cuerdas por pulgada n a lo largo de la longitud del torn illo , q u e el paso . El va lo r de los h ilo s p o r pu lg ad a está relacionado co n el paso m edian te la siguiente ecuación:
12.1 IN TR O D U C C IÓ NEn g en e ra l, los m ecanism os d e to rn illo están d iseñados para c o n v e r tir m o v im ien to g ira to rio e n m o v im ien to lineal. C o n sidere la b a rra d e u n d esodoran te sólido. C onfo rm e g ira la p e r illa. la barra d e d eso d o ran te se ex tiende o se retrae d e n tro del e n vase. En el in te r io r del envase g ira u n to m illo q u e em pu ja una tuerca y la b a rra de d esodoran te a lo la rp j de la cuerda. D e este m o d a se em plea u n m ecan ism o “desechable" de to m illo en el envase d e l d esodoran te . El m ism o co ncep to se u tiliza genera lm ente en lo s gatos m ecánicos au tom otrice s, en a lgunos m ecanism os d t apertu ra de puertas, en m ecanism os de ajuste en asientos de autom óviles y en las m esas de trabajo d e las fresadoras.
B objetivo de este cap itu lo e s la determ inación de la cinem ática y d e las fuerzas en u n m ecan ism o de to rn il la C o m o el m ov im ien to de u n a tuerca so b re u n a cuerda es es tric tam en te lineal, la s so luc iones gráficas n o a p o r ta n m ayor com prensión . Ifor lo t a n t a so la m e n te las técnicas analíticas son ú tiles y se presen tan e n este capitulo.
12.2 CARACTERÍSTICAS DE LAS CUERDAS
Para q u e u n to rn illo funcione, deb e hab er dos p artes acopladas: u n a co n cuerda in te rn a y o t r a c o n c u e rd a externa. Las cuerdas ex te rn as están superpuestas en la superficie de u n eje o u n p r i sionero , c o m o en u n p e rn o o en u n to rn il la Las cuerdas ín ter
n = - ( 12 . 1 )
12.3 FORMAS DF. CUERDA
L a f o r m a d e l h i l o d e f in e la f o r m a d e la c u e r d a . L a s c a r a c t e r ís t i
c a s d e la c u e r d a p r e s e n t a d a s e n l a s e c c i ó n a n t e r i o r c o r r e s p o n
d e n a u n a f o r m a d e c u e r d a u n i f ic a d a . N o o b s t a n t e , e s a s d e f i n i
c i o n e s s o n a p l ic a b le s a t o d a s l a s f o r m a s d e c u e r d a s . L a s f o r m a s
d e c u e r d a m á s p o p u l a r e s in c lu y e n la u n i f ic a d o , l a m é t r ic a , la
c u a d r a d a y la a c m é .
f i g u r a 1 Z I P e r f i l d e u n a c u e r d a .
www.FreeLibros.me

M ecanism os d e to r n illo 317
12.3.1 C u e rd a s u n if ic a d a s
Las cuerdas unificadas son las cuerdas m ás com unes q u e se em p lean en su je tado res y m ecanism os pequeños. T am bién se u tilizan g en e ra lm en te e n m ecan ism os de p o s id o n a m ie n to . La fig u ra 12.2a ilu s tra el perfil de u n a cuerda un ificada, la cual se p re se n ta c o m o u n d ie n te tr ia n g u la r p u n tia g u d a Las d im e n siones de u n a cuerda unificada se h an estandarizado y se o b se rvan en b tab la 12.1. Las cuerdas unificadas se d e n o m in an com o de paso g rueso ( u n c ) o de paso fino ( u n f ).
U na cuerda un ificada están d ar se especifica p o r tam arto , h ilo s p o r pu lg ad a , y p a so f in o o paso grueso . Las d e n o m in a - d o n e s de cuerdas estándar se p resen tan com o:
10 -32 U N F1/2-13 UNC
U na cuerda m étrica e s tá n d a r se espedfica co n b d e n o m inación m étrica " M", el d iám etro n om inal m ayor y el p a s a La d e nom inación d e la cuerda están d ar se presen ta com o:
M IO X 1 5
12.3.3 C u e rd a s c u a d r a d a sLas cuerdas cuadradas, co m o su n o m b re lo indica, so n cuerdas cuadradas y p lan as en b parte superio r. S on resistentes y se disertaron o rig in a lm en te p a ra tra n sm itir po tencia . En b figura 12.2c se m uestra u n a cuerda d e form a c u ad rad a . A un c u a n d o tra n s m iten co n e f id e n c b cargas g randes, estas cuerdas so n difíc iles de m aqu inar p o r sus lados perpendiculares. En general, las cuerdas ACME h a n sustitu ido las cu erd as cuadradas.
6 0 '
v wa) Unificada
W Vb) Métrica
M H
c) Cuadrada
FIG U R A 12.2 f o r m a s d e c u e r d a .
1 2 .3 .2 C u e rd a s m é tr ic a sLas aierdas de fo rm a métrica tam bién están definidas co m o form as triangu lares y puntiagudas, p e ro co n la raíz p lana . S in em b a r g a b s d im en sio n es están d ar so n v a lo res m étricos conven ien tes y superv isados p o r la O rgan izac ió n In te rn ac io n a l de Estandarización (ISO . p o r las siglas de In ternational O rganization for S tan d ariza tio n ). La fo rm a de esta cuerda se presen ta en b figura 12.2b. Las d im ensiones están d ar d e b cuerda m étrica se observan e n b ta b b 123.
12 .3 .4 C u e rd a s acmé
Las cuerdas a c s i s son parecidas a b s cu erd as cuadradas, p e ro con lad o s inc lin ad o s. Se u sa n g en e ra lm en te c u a n d o se req u ie re n m ovim ien tos rápidos o b transm isión de foerzas g randes. E n b figura 12.2d se ilu stra u n a c u e rd a a c m é . Las d im ensiones están d a r d e la cuerda a c m é de u n to rn illo se listan en b t a b b 12.3. Esta cuerda e s b fo rm a m ás usual u tilizada en m ecan ism os de lo m illo en m áquinas industriales. Sus v e n te a s so n u n costo bajo y fácil m an u fac tu ra . Sus desven tajas so n u n a e f id e n c b baja , co m o se verá m ás adelan te , y b d ificu ltad p a ra d e te rm in a r su vida útil.
12.4 TORNILLOS DE BOLASLos tornillos de b o la s están disertados tam b ién p a ra convertir el m ovim iento g ira to rio del to rn illo o b tuerca en m ovim iento l i neal relativam ente le n ta del m iem bro acop lado , a lo largo del eje del to rn illo . N o ob stan te , u n to rn illo de bolas tiene, p o r m ucho, m enos fricción q u e u n to m illo de c o n f i^ ira d ó n trad ic io n a l. El con tac to d e deslizam iento en tre el to rn illo y la tu e rca se ha su s titu id o p o r con tac to d e rodam ien to de b s b o la s en b s ran u ra s a lo largo del to rn illo . P or consiguiente, u n to rn illo de b o b s requiere m enos p o te n c b p a ra im p u lsa r u n a carga. E n b figura 12.3 se o b serva u n to rn illo d e b o b s .
La operac ió n de u n to m illo d e b o b s es suave porque el ro dam iento d e b s b o b s elim ina el m ovim iento de "deslizam iento de la curta", causado p o r b fricción de u n to m illo y b tuerca tra d ic io n a l» . S in e m b arg a d eb id o a la baja fricción de u n to m illo de b o b s , se suele u sa r u n freno para m antener la carga en su lugar.
I d cinem ática de u n to m illo d e bolas es idén tica a la de un « m il lo trad icional, de m anera q u e n o hay diferencia cu an d o se realiza su análisis c in e m á tic a Los concep tos siguientes se aplican ta n to a to rn illos trad icionales co m o a to rn illos de b o b s .
12.5 AVANCEEn b d e te rm in ac ió n del m o v im ien to de u n m ecan ism o de « m i l lo , el avance del to m illo es u n p arám etro critico y deb e e n tenderse. El o s u n a L es b d is ta n d a q u e viaja la tuerca a lo largo del eje del to m illo co n u n a revo ludón del to rn illo . En la mayoria d e lo s torn illos, el avance es igual al paso. N o ob stan te , lo s to rn illos se fab rican co n u n a o d o s cuerdas. E ntonces, el núm ero de cuerdas N , superpuestas en u n to rn illo es u n a p rop iedad im p o rtan te . En b figura 12.4 se ilu stra el co ncep to de cuerdas m ú ltiples superpuestas en u n to r a i l la
www.FreeLibros.me

318 CAPITULO DOCE
TABLA 12 .1 D im e n s io n e s e s tá n d a r «Je u n a c u e rd a u n if ic a d a
C U cn las g ru e s a s O r e n la s A n a s
D iá m e tro P a so D iá m e tro Paso D iá m e t rom a y a r H i lo s p o r ( tu ) n o m in a l H i lo s p o r (ln ) d e p a s o
n o m in a l p u lg m la .■
d e p aso p u lg m l . .1
n o m in a l
T am alto f ln ) n•
(ln> H8
fln )
0 02)600 — — — 80 0.0125 02)519
1 0.0730 64 0.0156 0.0629 72 02)139 02)6402 0.0860 56 0.0179 021744 64 02)156 02)7593 00990 48 0.0208 0.0855 56 0.0179 02)8744 0.1120 40 0.0250 0.0958 48 0.0208 0.09855 0.1250 40 0.0250 0.1088 44 02)227 0.11026 0.1380 32 0.0313 0.1177 40 02)250 0.12188 0.1640 32 0.0313 0.1437 36 02)278 0.1460
10 0.1900 24 02)417 0.1629 32 02)313 0.169712 0-2160 24 02)417 0.1889 28 02)357 0.1928
0.2500 20 02)500 00175 28 0.0357 0.2268'A* 0.3125 18 0.0556 00764 24 02)417 0.2854
'A 0-3750 16 02)625 0.3344 24 0.0417 0.3479
’A* 0.4375 14 0.0714 0.3911 20 02)500 0.4050
‘A 0.5000 13 0.0769 0.4500 20 0.0500 0.4675
'A* 0.5625 12 021833 0.5084 18 02)556 0.5264
'A 0.6250 11 0.0909 0.5660 18 0.0556 03889
/ 0.7500 10 0.1000 0.6850 16 02)625 0.7094
A 0.8750 9 0.1111 0.8028 14 02)714 08286i 1.0000 8 0.1250 0.9188 12 0.0833 0.9459
V A 1.2500 7 0.1429 1.1572 12 02)833 1.1959
V A 1.5000 6 0.1667 IJ9 1 7 12 02)833 1.4459
V A 1.7500 5 0.2000 1.6201 — — —2 2.0000 4'A 00222 1.8557 — — —
Q ava n ce se c a lc u la c o m o :
L = N , p (1 2 .2 )
E n la f ig u ra 12.1 se m u e s tra e l á n g u lo d e a v a n c e A y se d e f in e c o m o e l á n g u lo d e in d in a d ó n d e las cue rdas. Se c a lc u la a p a r t i r d e re la d o n e s tr ig o n o m é tr ic a s c o n o tra s ca ra c te rís t ic a s d e l t o r n i l lo .
C u a n d o la cu e rd a d e u n t o m i l l o es m u y p ro n u n c ia d a y tie n e á n g u lo s d e ava n ce g ra n d e s , p u e d e s e r g ra n d e e l to r« |u e re q u e r id o p a ra e m p u ja r u n a ca rg a a l o la rg o d e l to m i l lo . L o s to m i l lo s t í p i co s tie n e n á n g u lo s d e ava n ce q u e va n a p ro x im a d a m e n te d e 2* a 6 * . A d e m á s , lo s á n g u lo s d e a v a n c e p e q u e ñ o s e v i ta n q u e u n a c a rg a se “ d e s lic e h a c ia a b a jo d e l t o r n i l l o " p o r la g ra v e d a d . La f u e r a d e fr ic c ió n y la escasa in c lin a c ió n d e la cu e rd a se c o m b in a n p a ra m a n te n e r la carga e n su lu g a r . E s to se c o n o c e c o m o au - to b lo q u e o y es deseable e n d is p o s it iv o s le v a d iz o s . P o r e je m p lo , el g a to m e c á n ic o d e u n a u to m ó v i l re q u ie re q u e la ca rg a se m a n te n ga a c ie r ta a ltu ra , in c lu s o c u a n d o la fu e n te d e p o te n c ia cesa. C u a n d o la c u e rd a es d e a u to b lo q u e o , la c a rg a se b lo q u e a en c ie r ta p o s ic ió n v e r t ic a l. Esta c a ra c te r ís t ic a d e fre n a d o se usa
e n v a r io s d is p o s it iv o s m e c á n ic o s , p e ro se d e b e n a n a liz a r la res is te n c ia d e la c u e rd a y la f u e r a d e f r ic c ió n p a ra g a ra n t iz a r la s e g u r id a d . M a te m á tic a m e n te , la c o n d ic ió n q u e se d e b e c u m p li r p a ra o b te n e r e l a u to b lo q u e o es:
H > ta n A (1 2 .4 )
E n la e c u a c ió n 12.4, n « e l c o e fic ie n te d e f r ic c ió n d e la in - te rfa se tu e rc a -c u e rd a . E n c u e rd a s tra d ic io n a le s , lo s va lo re s c o m u n e s d e l co e fic ie n te d e f r ic c ió n so n :
fL = 0.10 p a ra s u p e r f ic ie s m u y lisa s , b ie n lu b r ic a d a s
/ ¿ ■ 0 .1 5 p a ra t o m i l l o s c o n m a q u in a d o n o r m a l , c o n s u p e r f ic ie s b ie n lu b r ic a d a s
¡l = 0.20 p a ra t o m i l lo s c o n m a q u in a d o n o rm a l, c o n su p e rfic ie s o rd in a r ia s
Ix ts t r a ta m ie n to s s u p e r f ic ia le s especia les y lo s re c u b r im ie n to s su e len re d u c ir e s to s va lo re s , p o r lo m e n o s , a la m ita d L o s to m il lo s d e b o la s , c o n b a ja f r i c c ió n in tr ín s e c a , p rá c t ic a m e n te n u n c a se a u to b lo q u e a n .
12.6 CIN EM Á TICA DE TORNILLOS
Desde u n p u n to d e v is ta c in e m á tic o , la u n ió n d e t o m i l l o u n e dos c u e rp o s y lo s a c o p la c o n d o s g ra d o s d e lib e r ta d . G e n e ra lm e n te ,
www.FreeLibros.me

M e c a n i s m o s d e t o r n i l l o 319
TARI-A 1 1 2 D im ensiones estándar d e una cuerda mátrica
Q i e r d a a g r u e a a t Q i e r d a a f i n a s
I S á r a e t r o P a r o D iá m e t r o P a a o D i á m e t r o
m a y o r ( m m ) d e p a s o ( m m ) d e p a s o
n o m in a ) n o m i n a l n o m i n a l1 1
( m m ) ■ a
1 (m m ) ( m m )
1 025 0.84 _U 035 1-37 050 1.472 040 1.74 055 154
2 5 045 2-20 055 2573 OJO 167 055 2.774 0.70 354 OJO 3575 OJO 4.47 OJO 4576 1.00 554 0.75 5 J I
8 155 7.18 12)0 75410 IJO 92)1 155 9.1812 1.75 10.85 155 11.1816 2.00 1458 IJO 152)1
» 2J0 1855 1 JO 192)12* 3.00 222)2 22» 22.6830 350 2759 2.00 28.6836 4.00 3356 32» 342)242 4.50 392)3 — —
« 5JJ0 44.70 — —
la u n ió n se co n fig u ra d e m o d o tal q u e u n cu erp o se trasladará con el m ovim iento d e giro del o tro cuerpo. D ependiendo d e las restricciones de lo s d o s c u e rp o s , so n posib les lo s siguientes m ovim ientos relativos:
I. Traslación de la tuerca conform e gira el tom illo: Sucede cu an d o el to rn illo está im ped ido p a ra traslad arse y la tuerca n o p u ed e girar.
II. Traslación del tom illo conform e gira la tuerca: O curre cu an d o la tuerca está im ped ida p a ra trasladarse y el to rn illo n o p u ed e girar.
I II . Traslación del tom illo m ientras gira: Sucede cuando la tuerca está com pletam en te im ped ida p a ra moverse.
IV. Traslación de la tuerca m ientras gira: O cu rre cu an d o el to rn illo está com pletam ente im ped ido para m overse.
In depend ien tem en te d e la con fig u rac ió n real del sistem a, el m ovim iento relativo es el m ism a U n g iro específico p roduce u n a traslación. P o r consiguiente , se h an desarro llado ecuaciones p u ra d e sc rib ir e l m o v im ie n to relativo, en ta n to q u e el m o v im ien to abso lu to se d e te rm in a exam inando la configuración real del sistem a. Se usa la n o tac ió n siguiente:
A es la p a r te q u e p u ed e girar.B es la o t r a p a rte un id a p o r b u n ió n de to rn il la
C o m o ya se defin ió , el avance d e u n to m illo es b d is ta n c b que viaja b tuerca a lo largo del eje del tornillo co n u n a reso luc ión d d to rn illo . Entonces, b m agn itud d d desplazam iento de B en relación c o n A se ca lcu b com o:
A R B A = L M Á (1 2 .5 )
TABLA 12.3 D im e n sio n e s están d ar de una cu erd a ¡ACME
r
Diámetro ■ arar nominal (In)
Hilo* por pulgada.-
Faro (In) 1
Diámetro de pato nominal (In)
16 0.0625 05043
Yu 14 02)714 05614
y. 12 0.083J 05161Yu 12 0.0833 05783
'A 10 0.1000 0.4306
y. 8 0.125 0-5406
*/. 6 0.1667 05424
y> 6 0.1667 0.7663i 5 05000 05726va 5 0.2000 0.9967
IV. 05000 1.12104 0.2500 15188
VA 4 05500 15429
1 / i 4 0.2500 1J9162 4 0.2500 154022/« 3 05333 2.0450
2'/ 3 05333 259392% 3 05333 254273 2 0.5000 2.7044
sA 2 OJOOO 350264 2 0.5000 3.7008
4A 2 0.5000 4.19915 2 OJOOO 45973
f i g u r a 1 2 .4 C o n c e p to d e c u e rd a m ú ltip le .
www.FreeLibros.me

320 CAPITULO DOCE
La diferenciación p ro d u ce las ecuaciones de la m agn itud de la velocidad y de la aceleración.
VíUA = la iA
Hb a =
( 12 . 6 )
(12.7)
Advierta que el avance i se especifica com o el desplazam iento re lativo p o r revolución. P or ello, en esta instancia, el m ovim iento a n g u la r se deb e especificar en revoluciones, d e m anera q u e ioÁ tendria q u e especificarse en revoluciones p o r m in u to (o segund o ), y a A en revoluciones p o r m inu to al cuadrado (o seg u n d o al cuadrado).
La dirección del m ov im ien to relativo depende de la orientación de la cuerda. Los to rn ilo s y las tuercas acop ladas se clasifican c o m o h a d a la d e rech a o hacia la izqu ierda . La c u e rd a d erecha es la m ás c o m ú n . En esta u n ió n ro scad a , el to rn illo avanza h a d a la tu e rca cu an d o el to rn illo g ira en sen tido horario . La c u e rd a derecha se in d in a h ac ia abajo a la izqu ierda e n u n a c u e rd a ex te rn a , cu an d o el e je es ho rizon ta l. La in d in a d ó n es o p u esta en u n a cuerda in terna . P o r el c o n tr a r io u n a configu- r a d ó n h a d a la izquierda genera d m ovim iento o puesto .
Los siguientes ejem plos ilu stran la determ inación de la d - nem ática d e u n tom illo .
PRO B LEM A D E E JE M PL O 12.1
En la figura 1 2 3 se m uestra u n a corredera im pulsada por u n to m illo que se utiliza en u n a m áquina de producción que mueve la hoja de u n a sie rra para co rtar el material sobrante en u n a linea de partes tundidas. Un eje roscado con una cuerda *A-6 a c m é mueve la corredera. El tom illo g ira a 8 0 rp m , m oviendo la corredera hacia la derecha. Determ ine la veloddad de la corredera. Calcule asim ism o el núm ero de revoludones para mover la corredera 3 3 in.
( MotorSoporte del eje rmearte
Gula lineal
FIGURA 123 C o rred era del p ro b lem a de e jem plo 12.1.
S O L U C IÓ N : I . D eterm ine e l m ovim ien to relativo
f ii esta configuración, el m otor gira el tom illo sobre los cojinetes, pero los hom bros del eje evitan b traslación del tom illo. La tuerca está im pedida para b ro tad ó n , aunque se le permite b traslación a lo b rg o de b s guias lineales. Este es el caso I previamente descrito. Se usará b síguem e notadón:
La parte A es el tom illo.U p a r te H a la tuerca.
Calcule la geom etría del tornillo
U ta cuerda ’/.-6 a t m f de tom illo tiene las siguientes propiedades:
N úm ero de hilos: N, = 1 hilo/rev N úm ero de hilos por pulgada: n = 6
Paso: p = - = j = 0167 in/hilo n 6
Avance: i. = N , p - 0.167 irúrev
D eterm ine el desplazamiento del tornillo
8 desplazamiento angular del tom illo para producir u n desplazamiento lineal de 3 3 in de b tuerca y la corredera se calcula replanteando la ecu ad ó n (123).
En ausencia de mayor inform ación, se supo n e q u e esta es u n a cuerda derecha estándar. P or lo tanto, el tomiDo g ira en sen tido antihorario, visto del extrem o derecho, para m over la tuerca a la derecha.
www.FreeLibros.me

M ecanism os d e to r n illo 321
4 . Calcule la velocidad de la tuerca
l a velocidad lineal de la tuerca se determ ina con la ecuación ( 12 .6 ).
V » a = LaiÁ = (0 .167 in /rev )(80 rev/m in) = 1 3 J6 in /m in —►
Com o el tom illo está im pedido para la traslación, la velocidad calculada es b velocidad absoluta de la tuerca.
PRO B LEM A D E E JE M PL O 12 .2
En la figura 12.6 se ilustra u n a prensa operada p o r u n tom illo . El tornillo tiene u n a cuerda / X 10 a c m é , con orí e n - tíc ión tan to a b derecha com o a la izquierda, com o se indica. El m ango g ira en sentido antihorario a 45 rpm , para im pulsar la placa de presión h a d a abajo. En la posid ó n m ostrada, con ¡3 = 25", determ ine la veloddad de la placa de p re sión.
FIGURA 1X6 P rensa del p rob lem a de e jem plo 12.2
S O L U C IÓ N : 1. lis te las propiedades del tom illo
Ih a cuerda 'A X 10 a c m é tiene las siguientes propiedades:
N úm ero de d ientes por pulgada: n = 10
Paso: p ■ - ■ 7 - ■ O.lOin r n 10
N úm ero d e hilos: N, = 1
Avance: L = N ,p = 0.10 in/rev
X Ü abo re e l diagram a cinem ático e iden tifique los grados de libertad
En la figura 12.7 se ilustra el diagram a cinem ático de este mecanismo. Al calcular la m ovilidad de este m ecanismo. se identifican cinco eslabones. También existen cinco un iones de perno. P or lo tanto.
r t = 5 jp = 5 (3 pernos y 2 uniones de corredera) j b = 0
M - 3 (n - 1) - 2jr - ;» — 3<5 — 1) — 2(5) - 0 - 12 - 10 - 2
Con dos grados de libertad, am bas tuercas se m ueven. La configuradón del torniDo mostrada en b figura 12.6 i n pulsa am bas tuercas.
A
FIG U R A 1X 7 D i a g r a m a c i n e m á t i c o d e l p r o b l e m a d e e j e m p l o 1 2 .2 .
www.FreeLibros.me

322 CAPITULO DOCE
3 . Determine la velocidad de las tuercas
O bservando la figura 12.6, el to m illo es lib re de girar pero está im pedido para desplazam iento axial. Con las cuerdas en orientaciones opuestas, las dos tuercas se mueven también en direcciones opuestas. ft>r consiguiente, b velocidad relativa de t i tuerca, co n respecto a la ecuación ( 12.6 ) del tom illo, es la velocidad absoluta de cada tuerca. C uando e l tornillo gira a u n a velocidad de 45 rpm , la tuerca avanza a:
•Wa/iormiio = k*W U!o = (O .lO in/rev) (45rev /m in) = 4 3 in/m in
Entonces:
VA - 4 .5 in /m in • - y V c ■ 4 .5 in /m in - •
4 . Calcule la \r lo c id a d de la placa
l a ecuación de velocidad se escribe c o m a
vfl- v * + > v , A- vc + > v jrc
Se form a u n diagram a de velocidad a p a rtir de am bas ecuaciones. Observe que debido a la sim etría, el desplazam iento y la velocidad B son verticales (figura 12.8).
f i g u r a 12_8 D ia g r a m a d e v e lo c id a d d d p r o b le m a d e e j e m p l o 12.2.
l i a n d o tr ig o n o m e tr ía , s e o b t i e n e la s ig u ie n te r e la c ió n :
ta n ( 9 0 - 0 ) - ^
Para el caso m o strad a
0 = 25’
V fl - v* ta n (9 0 - 0 ) - ( 4 3 in / m in ) t a n ( 9 0 " - 2 0 - ) - 12 .4 i n / m in i
12.7 FUERZAS Y TORQUES EN EL TORNILLO
En la figura 12.9 se p resen tan la tuerza y el to rq u e q u e ac tú a sob re d to rn illo y la tuerca.
Se h a n d ed u c id o las relaciones e n tre la tuerza y el to rq u e [re£ 2 ] , en las cuales el coeficiente d e fricc ión en tre la cuerda y la tuerca, tiene u n a g ran influencia. La fricción se analizó en la se c d ó n 12.5. C uando se utilizan m ecanism os roscados, se p ierde u n a gran cantidad d e energía p o r la fried ó n .
H p rim e r caso a estu d ia r es aquel d o n d e el m ovim iento de la tu e rca o c u rre e n la d irecc ió n o p u esta de la fuerza aplicada q u e ac tú a sob re la tu e rca . Este es d caso co m ú n m en te c o n o d d o co m o de e lev ad ó n o em pu je de u n a carga. E l to rq u e requerido para realizar este m ov im ien to se calcula com o:
/ F d \ r ( ¿ + w /x j ) i
V 2 J l ( n d - n L ) J
§ p
1 j ¡ l F
\1
< *(1 2 .8 )
f i g u r a 1 2 .9 Fuerza y torque s o b r e u n tornillo.
www.FreeLibros.me

M e c a n i s m o s d e t o r n i l l o 323
donde;F = m agn itud d e la fuerza aplicada so b re la tuerca d = d iám etro de paso d e las cuerdas L = avance d e las cuerda/ i = coeficiente d e fricc ión e n tre la tuerca y las cuerda
El seg u n d o caso a e s tu d ia r es aquel d o n d e el m ovim iento de la tu e rca está en la m ism a d irección q u e la fuerza q u e actúa sob re la tuerca. En esencia, la carga favorece el m ov im ien to de b tuerca. E sto se cono ce co m ú n m en te co m o el caso de descenso de i ota carga. El torque requerido para realizar este m ovim iento es el siguiente:
= ( ? ) (TTd + f lL )(12.9)
La eficiencia e se d e fin e co m o el p o rc e n ta je d e po tencia tran sfe rid a a trav és de las cu erd as h a d a b tuerca. Es la razón del to rq u e req u erid o para elevar b carga , en ausencia de fric- a ó n , al to rq u e requerido p a ra elevar la carga c o n fricd ó n . De nueva cu en ta , s e ha d e d u d d o u n a e c u a d ó n d e fo rm a cerrada para b e f id e n d a .
-tai( i r d c o s a - n L )
( n f i d + ¿ c o s a )( 12 . 1 0 )
A dem ás de las can tidades ya defin idas, se em plea el ángulo de cuerda incluido, a . Este á n g u lo se ilustra en la figura 12.2. Los valores están d ar son:
C uerda unificada: a - 30°C uerda m étrica : a ■ 30®C uerda cuad rada: o = 0“
C u e rd a a c m é : a = 14.5°
Los tom illo s roscados suelen te n e r e fidencias e n tre 2 0 y 50% . I\>r lo ta n to , se p ie rd e u n a g ran can tid ad d e energía p o r fric- d ó n . E n oposic ión a lo s to rn illos roscados, lo s to m illo s d e bolas tien en e f id e n d a s p o r a r r ib a de 90% . P ara los to rn illo s d e b o las, las ecuaciones de to rq u e o pera tivo se estim an com o:
T = 0 .177 F L (p a ra elevar u n a c a rg a ) (12 .11)
T = 0 .143F Z .(para b a ja r u n a carga) (12 .12)
PRO B LEM A D E E JE M PL O 12 .3
En la figura 12.10 se ilustra el m ecanism o de tom illo de u n g ito mecánico. Para elevar el gato se utiliza u n sistema de correa/polea para girar u n a tuerca acopbda con u n tornillo con u n a cuerda I -5 a cm é . Observe el pem o en una ranura sirve para evitar que el tom illo gire. La m erca g ira a 300 rpm . Determ ine b velocidad de elevación del gato, el torque tequerido y b efic ienda del gito.
FIGURA 12.10 G ato m ecánico del p ro b lem a d e e jem plo 12.3.
S O L U C IÓ N : I . lis te las propiedades del tornillo
Un tom illo con u n a cuerda 1 - 5 a c m é tiene las siguientes propiedades:
N úm ero de d ientes por pulgada: n = 5
Paso: p = - = - = 0 2 0 in n 5
N úm ero de h ilos: N , - 1
Avance: L m N , p - 0 .20 in/rev
www.FreeLibros.me

324 CAPITULO DOCE
2 . Calcule la ir lo c id a d del tom illo
En la figura 12.10, la tuerca está im pedida para la traslación. Por lo tanto, la velocidad calculada co n la ecuación (12.6) es la de avance del tornillo. Conform e la tuerca g ira con u n a velocidad de 300 rpm , la cuerda avanza a través de la tuerca a u n a velocidad de:
VuxiíUo " k**tum » " (0 .20 in /rev)(300rev/m in) - é f lin /m in t
3 . D eterm ine el u rq u e requerido
H torque requerido para elevar la carp í depende del coeficiente estim ado de fricción entre las cuerdas y la tuerca. Como esta configuración del gato se em plea en entornos industriales estándar, se supone u n coeficiente de fríe- dón de 0.2 .E n la tabb 12 J , el diám etro de paso nom inal para cuerdas 1 - 5 atm e es de 0.8726 in . Asimismo, para b s cuerdas « m e .e l ángulo inclu ido es de 29°. Entonces, el torque se calcula con la ecuación (12.8).
/ F d ) q n y d ) m \ 2 j ( * d - u L i
(500Ib)(0.8726 in) f 1(0.20 4 ¡7¡0.2) (0.8726)1 1
2 ( [«(0.8726) - (0.2) (0 .2)| / = 6 0 A ia
4. Calcule la eficiencia
finalm ente, la eficiencia se ca lcub con la ecuación ( 12.10).
„ ( L \ [ (V iJcoso ~ m D ]C \ v d ) [ ( i r n d + L e m a ) J
H I0 -2 ) / b (0 J7 2 6 )c o s (2 9 ) - (0-2)(0-2)l 1“ sr(0^726) 1 |w (0 2 ) (0.8726) + <0-2)(cos29“) | J "
U m eficiencia de 0 2 4 indica q u e tan solo el 24% de la potencia transferida p o r la tuerca se usa para elevar el peso. El restante 76% se pierde por fricción. Si estos valores n o son aceptables, se debe sustituir la cuerda acmf por u n tom illo de bolas. Este último n o únicam ente tiene una eficiencia aproximada de 9 0 % sino que tam bién s u costo e s m ucho ntís alto. Sin em barga, recuerde que u n tom illo de bolas n o es de autobloqueo y n o m antiene la carp í a una altu ra determinada.
12.8 TORNILLOS DIFERENCIALESU n to m illo diferencial es u n m ecan ism o d iseñado p a ra p ro p o rc io n a r m ovim ien tos m u y finos. A un cu an d o suelen te n e r varias form as, e n la figura 12.11 se m uestra u n a fo rm a c o m ú n . Esta configurac ión especifica de to rn illo diferencial consiste en dos cu erd as d iferen tes sob re el m ism o eje y u n a u n ió n d e corredera.
HGURA I2 .ll Tbrnillo diferencial.
&i la figura 12.11, cuando el m ango g ira u n a revolución, la c u e rd a A g ira u n a revo lu c ió n y avanza u n a d istanc ia igual al avance d e la cuerda A. D esde luego, el m ovim iento de la cuerda tí e s id én tico al de la cuerda A p o rq u e está m aq u in ad a so b re el m ism o eje q u e A. Entonces, la cuerda t í tam bién g ira u n a revoluc ió n y avanza u n a d istanc ia igual al avance de la cuerda A. C onfo rm e la cuerda t í g ira u n a revolución, la tuerca C s e retrae p orque está im p ed id a p a ra g ira r. Específicam ente, co n fo rm e la
c u e rd a t í g ira u n a revolución, b tu e rca C se re trae u n a d istan d a igual al avance de b cuerda tí.S in em bargo, co m o b cuerda tí ya avanzó u n a revo ludón , el m ovim iento neto de b tuerca C es la diferencia en tre el avance de b s cuerdas A y tí. P o r tal razón, esta co n fig u rad ó n de to m illo co n avances d iferen tes se conoce co m o u m i l o diferencial.
Ib ra lo s to rn illo s diferenciales, b s re lad o n es cinem áticas e n tre b m ag n itu d del m ov im ien to a n g u b r y b m ag n itu d del m ovim iento lineal se m od ifican c o m o sigue:
A Rtum » = (¿A - ¿B )A 0!oraluo (12 .13)
''tu n a = (L a - (12 .14)
«rara - = (L a “ L r f a , ^ (12 .15)
N uevam ente observe q u e el avance L se especifica co m o el desp b z a m ie n to d e b tu e rca p o r revolución. I\>r lo ta n to , e n este caso ex trañ o , el m ov im ien to a n g u b r se d e b e rb esped fica r en revoluciones.
C u a n d o los avances de b s d o s cuerdas son m ás o m enos de la m ism a m agnitud , se p u ed en generar m ovim ientos pequeños d e la tuerca. Esta c o n fig u ra d ó n es frecuente en ajustes finos o en e q u ip o de precisión a u n costo reb tiv am en te b a ja
www.FreeLibros.me

M ecanism os d e to r n illo 325
PR O B LEM A D E E JE M PL O 12 .4
Un dispositivo hecho pura calibrar la longitud de panes se m uestra en la figura 12.12. El dbefto u tilira u n tom illo diferencial, de m odo que el giro de la perilla A desliza la tuerca D hasta que se presiona firm em ente contra la piexa E l a tuerca D tam bién tiene u n apuntador q u e sirve para determ inar la longitud de la piexa £ El objetivo e s configurar el sistema, de m odo q u e un giro de la perilla A a u s e q u e la tuerca D avance0.1 m m . Seleccione las cuerdas B y C para Oevar a cabo este requerimiento.
f i g u r a 12.12 D ispositivo d e m edición del p rob lem a d e e jem plo 12.4.
S O L U C IÓ N : l i e la siguiente ecuación cinem ática diferencial del tomillo:
= d a - t e ) A e ^ u .0
0.1 m m = ( i . * - L e )(1 rev)
(L „ - Lc ) ■ 0.1 m m /rev
Son factibles varias configuraciones. Se utilizan las cuerdas estándar listadas en la tab la 12.2. F.etas tienen u n a sola cuerda, de m odo que el avance y el paso son idénticos. Entonces, se necesitan seleccionar dos cuerdas q u e teng in una diferencia en el p iso ig iu l a 0.1 m m . A un cuando son factibles algunas opciones, arbitrariam ente se seleccionan cuerdas de paso grueso.
Para la cuerda f t M5 X 0.8 Para la cuerda C M 4 X 0.7
12.9 TORNILLOS D E TALADROH ace m uchos s ig los, A rqu ím ed es u só in g en io sa m e n te u n m ecan ism o de to rn illo p a ra elevar agua, el cual a h o ra se conoce c o m o “to rn il lo d e A rqu ím edes” (f ig u ra 12 .13). C u a n d o el to rn illo g ira , c a d a cuerda del to rn illo tra n sp o rta cierto vo lum en de a g u a . En este m ecan ism o d e to rn illo , la tuerca aco p lad a es realm ente el liq u id o q u e se tran sp o rta . Esta fo rm a aú n se utiliza actualm ente para tra n sp o rta r d iferen tes tip o s de m ateriales. Las ap licac iones co m u n es incluyen el tra n sp o r te d e p lá s tico fu n d id o h a d a m o ld es, m o v er sa l a través d e e sp á tu la s d e los cam iones recolectores h a d a cam inos cu b ie rto s d e h ie lo , excavar hoyos e n la tie r ra p a ra p ostes de cercas y abastecer el alim ento del g a n a d o a trav és d e com ederos largos. Este m ecan ism o de to rn illo se cono ce m ás co m ú n m en te co m o taladro.
Se p o d r ia n usar las ecuaciones (12 .16). (12 .17) y (12 .18) para d e te rm in a r el m ov im ien to del m ateria l q u e está se tra n s
p o rta , co n o d e n d o el m ov im ien to del taladro. E n congruencia c o n los to rn illo s e s tá n d a r, s e d e fin e el p a so o avance de la cuchilla d e u n ta lad ro . La c a n tid a d de tra n sp o rte volum étrico e s , en tonces, u n a fu n d ó n del espacio e n tre las cuch illas del ta la d ro , las cuales a tra p a n el m a te ria l q u e se está tra n sp o rta n d o . Esto se escribe m atem áticam ente com o:
Volum en a través del ta lad ro ■(vo lum en a trap ad o e n tre las cuchillas del ta lad ro )
(12.16)
(12 .17 )
(12.18)
Hujo v o lum étrico a través del ta lad ro =(volum en a trapado e n tre las cuchillas del ta lad ro )( L ^ l i d r o W t o m i l l o
Aceleración vo lum étrica a través del ta ladro = (volum en a trap ad o e n tre las cuchillas del ta lad ro )( L u h á i o ) * * 5 o m i l i o
PROBLEMAS
G e o m e tr ía d e la c u e rd a d e u n to m il lo
12-1 . Calcule el avance y el án g u lo d e avance d e u n a cuerda de / - 2 0 u n c . D eterm ine ta m b ié n s i es de au tob loqueo , cuando la cuerda tiene la calidad d e u n m aquinado general.
www.FreeLibros.me

326 CAPITULO DOCE
1 2 - 3 .
12-2 . D e te rm in e el avance y el án g u lo d e a v an ce d e u n a cuerda de Vi - 2 8 u n c . D eterm ine asim ism o s i e s de au- to b lo q u eo , c u a n d o la cuerda tien e la ca lid ad d e un m aq u in ad o general.
Calcule el avance y el ángulo de avance de u n a cuerda M 1 6 X 1 0 . D eterm ine ta m b ié n si es de au tobloqueo, cu an d o la c u e rd a tien e la ca lid ad d e u n m a q u in ad o general.
1 2-4 . D eterm ine el avance y el án g u lo d e avance d e u n a cuerda de 1 - 'A - 5 a c m f . D eterm ine asim ism o s i es de au tobloqueo, c u a n d o la cuerda tien e la calidad d e un m aquinado general.
D e sp la z a m ie n to c o n to m i l lo im p u lsa d o
12-5. 0 envase de u n d esodoran te só lid o utiliza u n to rn illo para ex trae r y re tra e r la b a r ra del d e so d o ra n te . La ru ed a m anual g ira u n a cuerda d e '/. - 2 0 están d ar q u e m ueve la tu e rca y la b a rra del d esodoran te . C alcule la distancia q u e avanza la b a rra cu an d o la ru e d a m anual g ira 3 revoluciones.
En la figura P12.16 se ilustra u n a m áquina d e pruchos a La tensión . U n tom illo de u n a so la cuerda d e 2 - 4 a c m é
m ueve la tuerca. D eterm ine el desplazam iento del ariete kvadizo q u e se eleva cu an d o el tom illo g ira 10 revolu- dones.
H uidlos
12-Ó.
1 2 - 7 .
fig u r a P I2 4 P rob lem as6 ,1 8 y 25.
En la figura P12.7 se m uestra el m ecan ism o q u e ab re la p u e rta de u n a cochera. U n to m illo de u n a so la cuerda de 1—5 a c m é m ueve la tuerca. D e te rm in e el d esp lazam ien to de la p a rte in fe rio r de la p u e rta q u e desciende cu an d o el to rn illo g ira 10 revoluciones.
12-8 . En la fig u ra P12.8 se p re se n ta u n a m esa de tra b a jo ajustable. El eje de en trad a está acoplado, a través d e un con jun to de eng ranes cónicos, a u n a tu e rca . l a tuerca gira em p u jan d o u n to rn illo hacia a rrib a y hacia a b a ja Los eng ranes cón icos tien en u n a ra z ó n d e 5 : 1 . El to m illo tie n e u n a c u e rd a de 'A -1 3 u n c . D eterm ine el desp lazam ien to d e la m esa q u e se eleva cu an d o el eje de e n tra d a g ira 10 revoluciones.
f ig u r a Pl 2-8 Problem as 8 ,2 0 y 27.
12-9 . En la figura P12.9 se m uestra u n a p rensa operad a p o r un to rn illo . El to m illo tie n e u n a so la cuerda d e 'A -1 0 a c m é , co n o rie n ta c ió n ta n to a la derecha co m o a la izquierda, co m o se indica. La prensa e s tá configurada in icialm ente co n p = 2 5 ° . D eterm ine g ráficam ente el d esp lazam ien to d e la p laca d e p re s ió n q u e desciende c u an d o la m anivela g ira 2 0 revoluciones.
f ig u r a P 12.9 Problem as 9 a 11 y 21.
12 -10 . La p ren sa d escrita en el p ro b lem a 12-9 se configura ini- d a lm c n te c o n ( i = 45*. D eterm ine g ráficam ente d desp lazam ien to d e la p laca de p re s ió n q u e desciende, c u a n d o la m anivela g ira 15 revoluciones.
12-11. La p rensa d escrita en el p ro b lem a 12-9 se configura in ic ia lm en te co n p = 6 5 " . D ete rm in e g rá fica m e n te el desp lazam ien to d e la placa de p resión q u e desciende, c u a n d o la manivela g ira 3 0 revoluciones.
www.FreeLibros.me

12—12- Una varilla co n u n a cuerda d e y> - 10 u n c im pulsa una plataform a, c o m o se ind ica en la figura P12 .I2 . D eterm ine g ráficam ente el desplazam iento d e la p lataform a q u e desciende, c u a n d o la m anivela g ira 12 re v o lu ciones.
P l a t a f o r m a
6 ‘ —~ 1 0 ’
F IG U R A P I 2 . I 2 Problem as 12. 13 y 22.
12—13- Ri ra la p la tafo rm a descrita en el problem a 12- 12,deter- m ine g ráficam ente el desplazam iento d e la p lataform a levadiza, cu an d o la manivela gira 8 revoluciones.
1 2 - 1 4 . Ü m o to r m o strad o en la fig u ra P 12.I4 hace g ira r una varilla co n u n a cuerda d e V, - 1 0 UNC para vo ltear una p lataform a q u e se usa para llenar cajas d e embalaje. Determ ine gráficam ente el desplazam iento angu la r de la p lataform a levadiza, asi c o m o el desplazam iento lineal del ex trem o superio r, cu an d o el m o to r g ira 25 revoluciones.
Plataforma
M otor
■ l i lU ---------- 24- *1
f i g u r a P 1 2 . I 4 Problem as 14 .1 5 ,2 3 y 28.
1 2 - 1 5 . Para la p la tafo rm a d escrita en el p ro b lem a 12-14, dete rm in e gráficam ente el d esp b zam ien to angu la r de b p lataform a q u e desciende, asi co m o el despbzam ien to lineal del b o rd e superio r, cu an d o el m o to r g ira 15 revoluciones.
12- 16. l a a ltu ra y e l án g u lo de b m esa de d ib u jo m o strad a en b fig u ra P 1 2 .1 6 se a ju s ta g ira n d o b m a n iv e b b cual, a b vez, g ira u n to rn illo m o v ien d o b tu e rca y m odificando b d is ta n d a L El to rn illo tiene u n a cuerda de ’A - 14 u n f . L a m esa se co n fig u ra in icialm ente co n
f i g u r a p i 2 . 1 6 Problem as 16 ,17 y 24.
L = 9 in. D eterm ine g ráficam ente el d esp b zam ien to de b s b o rd e s su p e rio r e in fe rio r d e b m esa levadiza, cu an d o b m an iv eb g ira 5 revoluciones.
1 2 - 1 7 . L a m esa d e d ib u jo m o strad a en b figura P 12 .16se c o n figura in icialm ente co n L • 8 in. El to rn illo tien e una cuerda d e 7A - 1 4 u n f. D eterm ine g ráficam ente el desp b z a m ie n to d e lo s b o rd e s su p e rio r e in fe rio r de la m esa q u e desciende, cu an d o b m an iv eb g ira 30 revoluciones.
Nfelocidad co n to rn il lo im p u lsa d o
12-18 . 13 to rn illo de b m áq u in a de p ru eb as de ten s ió n desc rita en el p ro b lem a 12-6 g ira a ‘10 rp m , haciendo bajar el ariete. D eterm ine b v d o c id a d lineal d d ariete.
12 -19 . 0 to m illo q u e abre b p u e rta d e la cochera descrito en é p rob lem a 12-7 g ira a 1200 rp m , ab rien d o la p u e r ta Determ ine la velocidad lineal d e b parte in fe rio r de b p u e r ta
12 -20 . El e je de e n tra d a d e b m esa de tra b a jo d escrita en el p rob lem a 12-8 g ira a 600 rp m , d e v a n d o b m e sa D ete rm in e la v d o c id a d lineal de b m esa
12-21 . El to rn illo de la p rensa d escrita en el problem a 12-9 g ira a 45 rp m , h aciendo bajar b p laca d e presión . La p rensa está configurada co n p = 25*. D eterm ine la velo d d a d lineal d e b placa de presión .
12 -22 . La m a n iv e b d e la p la ta fo rm a d escrita e n el problem a12-12 g ira a 3 0 rp m , elevando b p la tafo rm a. D eterm ine b v d o c id a d lin ea l de b p la ta fo rm a
0 to m illo n o está K Urtngklo
t a r t a n a lm en te
www.FreeLibros.me

328 CAPITULO DOCE
12-23. El m o to r en el m ecanism o de la p la ta fo rm a d e volteo descrito e n el p rob lem a 12-14 g ira a 1800 rp m , e le vando la p la ta fo rm a. D eterm ine la velocidad angu la r de la plataform a.
12-24. La m anivela d e la m esa de d ib u jo d esc rita e n e l p ro b lem a 12-16 g ira a 20 r p m , h a c ien d o d escen d er la mesa, la c u a l se configura in ic ia lm ente co n L ■ 9 in. D eterm ine la v e lo d d ad d e lo s b o rdes su p e rio r e infe r io rd e la mesa.
A celerac ión co n to rn il lo im p u lsa d o
1 2 - 2 5 . El to rn illo d e la m áqu ina d e p ru eb as de ten sió n desc rita en el p rob lem a 12-6 g ira a <10 rp m , h a d e n d o bajar el a r ie te . El m o to r se apaga y le to m a 1.7 s detenerse com pletam ente. C alcu le la ace le rad ó n lineal del ariete d u ra n te el p e rio d o d e a p ag ad a
12- 26. 0 to rn illo q u e ab re la p uerta d e la cochera descrito en é p ro b lem a 12-7 se activa para ab rir la p u e rta . A l m o to r le to m a 0.7 s alcanzar s u e s ta d o es tab le de fun- d o n a m ie n to a 1200 rp m . D eterm ine la ace leradón l i neal d e la p a rte in fe rio r d e la p u e rta , e n el m om en to de k activadón.
12-27. 0 m o to r de la m esa d e trab a jo d escrita en el problem a12-8 se activa para elevar la tab la . Le to m a 20 revolu- d o n e s del eje de en trad a alcanzar su estado estable de funcionam ien to a 1200 rp m . D eterm ine la aceleración lineal de la mesa.
12-28. El m o to r en el m ecanism o de la p la ta fo rm a d e volteo descrito en el p rob lem a 12-14 g ira a 900 rp m , elevando k p la ta fo rm a y. lu e g a se apaga. Le to m a 4 revo ludones deten erse co m p le tam en te . C a lc u le la v e lo d d a d y la ace le rad ó n angulares d e la p lataform a.
soporta 75 libras; d e te rm in e el to rq u e transferido a la tuerca.
1 2 - 3 4 . C alcule la eficiencia del to rn illo q u e se usa en la mesa descrita en el p rob lem a 12- 16.
T o rn illo s d ife ren c ia le s
1 2 -3 5 . Se usa u n to rn illo d iferencia l e n u n d isp o s itiv o de m e d id ó n sim ilar al descrito en el p rob lem a de ejem plo12.4. Seleccione d o s cuerdas e s tá n d a r ta les q u e u n a ro ta d ó n d e la p erilla dé co m o re su lta d o 0 .5 m m de avance d e la tuerca.
12-36. Se usa u n to rn il lo d iferencia l en u n d isp o s itiv o de m e d id ó n sim ilar al descrito en el p rob lem a de ejem plo12.4. Seleccione d o s cuerdas e s tá n d a r ta les q u e u n a ro ta d ó n de la p erilla dé co m o re su lta d o 0 .25 in de avance d e la tuerca.
1 2 -37 . Se usa u n to rn il lo d iferencia l en u n d isp o s itiv o de m ed ic ión sim ilar al descrito en el p rob lem a de ejem plo12.4. S eleccione d o s cuerdas e s tá n d a r ta les q u e u n a ro ta d ó n de la p erilla dé co m o re su lta d o 0 .05 in de avance d e la tuerca.
ESTUDIOS D E CASO_________________________
12-1 . El d ispositivo m o s tra d o en la fig u ra E12.1 u tiliza un m ecan ism o de to rn illo . Exam ine cu id ad o sam en te k s co m p o n en tes del m ecanism o y, luego, co n te s te las siguientes preguntas para o b te n e r m ayor c o n o d m ie n to acerca d e su funcionam iento.
F u erza y to rq u e e n e l to m illo
12-29. Una cuerda atmf están d ar d e H in se em plea en una iforazadera-C. Esta cuerda tiene u n a calidad general de m aquinado co n lu b ric a n te m in im o . P ara q u e la ab razadera ejerza u n a fuerza de 500 Ib sob re lo s m ateriales q u e se su je tan , de term ine e l to rq u e requerido.
1 2 - 3 0 . C alcule la e fic ien d a d e la ab razad e ra -C descrita en el problem a 12-29.
1 2 - 3 1 . Un gato m ecánico u tiliza u n a cuerda a c m é de dos h ilos co n el d iá m e tro m ayor igual a 25 m m y u n p a so de 5 m m . El g a to está co n s tru id o p a ra lev an ta r 4000 N. Determ ined án g u lo d e avance, s i el ga to es d e au to b loqueo, d to rq u e p a ra elevar la carga, d to rq u e p a ra b a ja r b carga y b e fic ien cb del g a ta
12-32. U n gato m ecánico utiliza u n a cuerda a c m é 1 - 5 d e dos h ilos. El ga to está co n s tru id o para lev an ta r 2000 Ib. Determ ined án g u lo d e avance, s i el ga to es d e au tobloqueo, d to rq u e para elevar b carga, d to rq u e para b a ja r b carga y b e fic ien d a del gato.
12-33. E n la m esa del p rob lem a 12-8, b cuerda es d e calidad general d e m aq u in ad o c o n lu b rican te m ín im o . L a mesa
1. ¿Cuál es b o rien tac ió n de b cuerda ¡9.2 . ¿Cuál es b o rien tac ión de la cuerda £?3 . C uando el m ango A gira en sen tido a n tih o ra r ia ¿cuál
es el m ov im ien to de la tu e rca C?4 . C uando el m ango A gira en sen tido a n t ih o ra r ia ¿cuál
es el m ov im ien to de b co rred era H?5 . (á ia n d o el m ango A g ira en sen tido a n t ih o ra r ia ¿cuál
es el m ov im ien to de b tu e rca D?6 . C uando el m ango A gira en sen tido a n t ih o ra r ia ¿cuál
es el m ov im ien to de b c o rre d e ra /?7 . ¿Cuál es b fu n c ió n d e lo s e sb b o n e s iden tificados
com o R8 . ¿Qué e s la co m p o n en te G y cuál es su fundón?9 . ¿Cuál e s b función de este d isp o s itiv a y c ó m o lo lla
maría?1 2-2 . El d ispositivo m o s tra d o en la fig u ra E12.2 u tiliza u n
m ecan ism o d e to rn illo . Exam ine cu idadosam en te las
f ig u r a E12.I (C o rtesíad e In d u stria l Press).
www.FreeLibros.me

M e c a n i s m o s d e t o r n i l l o 329
FIGURA P.I2J (C ortesía d e Industria l Press).
com ponen tes del m ecan ism o y, luego, con teste las s iguien tes p regun tas para o b te n e r m ayor conocim ien to acerca de su funcionam ien to .C u a n d o la m a n iv e b A g ira en se n tid o a n tih o ra rio , ¿cuál es el m ov im ien to del eje /?
2. ¿Cuál e s la (unción del p e rn o H?3. C u a n d o b m a n iv e b A gira en se n tid o a n tih o ra r io ,
¿cuál e s el m ovim iento del m angu ito roscado B?4 . ¿Q ué p rovoca rea lm en te el m o v im ien to c o n ju n to del
eje / y el m angu ito roscado B?5. 13 m anguito roscado B tien e cuerdas derechas; cuando
b m a n iv e b A g ira en se n tid o a n tih o ra rio , ¿cuál e s el m ov im ien to de b tu e rca Q
6. ¿Q ué su ced e co n e s te d isp o s itiv o c u a n d o b s a lm o- h id i lb s l i y E e n tra n en contacto?
7. ¿Q ué c lase d e co m p o n e n te es F y c u á l es su (unción?
8. ¿Cuál e s b (unción de este dispositivo?9. ¿Qué pasarla s i se inm ovilizara b tu e rca G?
10. ¿Q ué o c u rr id a co n este d ispositivo , si b inferíase / se disertara c o n u n a inclinación m ás vertical?
www.FreeLibros.me

C A P I T U L O
T R E C E
ANÁLISIS DE FUERZAS ESTÁTICAS
O B J E T I V O S
Al term inar de estudiar este capitulo, el alumnoserá capaz de:
L Definir c identificar una fuem u
2. Calcular el momento de una fuerza.
1 Com prender U diferencia entre m ata y peso.
4. Entender y aplicar las tres leyes de New Ion del movimiento.
5. C rear un diagrama de cuerpo libre de la componente d r u n máquina en general.
6. Identificar y usar las condiciones especiales de equilibrio de un elemento con dos fuerzas.
7. Calcular la fuerza de fricción de deslizamiento e identificar su dirección.
8. D eterm inarlas fuerzas que ac túan en todo un mecanismo.
13.1 IN TR O D U C C IÓ Nl a fu n d ó n general d e u n a m áqu ina e s tran sm itir m ovim iento y fu e ra s d e u n a c tu ad o r a las com ponen tes q u e realizan la tarea deseada. C o n s id e re las escaleras m ecánicas q u e se em p lean en m uchos edificios co m erdales: la energía eléc trica se alim enta a los m otores, lo s cuales im p u lsan m ecanism os q u e m ueven y despliegan los peldaños. La finalidad es m over a la gente hacia a r r i ba y hacia abajo de lo s edificios de varios niveles, co n seguridad y eficiencia.
H as ta esta p a rte del lib ro , el enfoque ha estado en el m o v im ien to d e u n a m áq u in a . Este ca p itu lo y el s igu ien te están ded icados a la presentación de las fuerzas en u n a m áquina. Una tarea esencial en el d iseño de m áq u in as consiste en g aran tiza r q u e la re s is te n d a de lo s eslabones y las u n io n es sea su fid e n te para so p o r ta r las f u e r a s e jeradas sobre ellas. P o r consiguiente, e l c o n o d m ie n to co m p le to d e las fu erz as so b re las d ife ren tes com ponen tes de la m áq u in a es d e v ita l im portanc ia .
C om o se señ a ló en el cap itu lo 7 , u n a fuerza in e rd a l e s p ro d u c to de la ace lerac ión p re se n te e n u n e s lab o n am ien to . Este cap itu lo tra ta co n el análisis de fuerzas en m ecanism os s in acele- rad o n es , o d o n d e b s aceleraciones n o sean significativas. Esta c o n d id ó n se conoce co m o a¡uilibrio estático, q u e e s aplicable a d iversas m áquinas en b s cuales los cam bios e n el m ovim iento
s>n g rad u a les o la m asa d e b s co m p o n en tes e s m u y pequeña, fe to incluye abrazaderas, pasadores (pestillos), so p o rte de es- h b o n a m ie n to s y m u ch as o tra s h e rra m ien ta s m anuales, co m o alicates y navajas.
El s igu ien te ca p itu lo tra ta sob re el aná lis is de fuerzas en m ecanism os co n g ran d es ace le rad o n es . En m u ch as m áquinas de a lta velocidad, b s fuerzas in e rd a le s cread as p o r el m ovim ien to d e u n a m áqu ina exceden b s fuerzas requeridas para ejec u ta r b ta rea a s ig n a d a Esta c o n d id ó n se cono ce co m o equilibrio dinám ico. E n el análisis del equ ilib rio d inám ico se u tilizan m uchos concep tos d e e q u ilib rio estático. P o r ello, el equ ilib rio estático (capitulo 13) se presen ta antes de proceder co n el equi- i b r io d inám ico (cap itu lo 14).
13.2 FUERZAS
Una fuerza , F , e s u n a can tidad vectorial q u e representa b a c d ó n de em p u ja r o jalar u n a pieza. Jalar a u n n iñ o en u n ca rr ito im plica aplicar u n a fuerza (a c d ó n d e ja lar) al t i ra d o r del ca rr ito . Al ser u n vector, esta f u e r a se define co n b m agn itud P y la direc- a ó n en q u e se jala. En e l sistem a tr a d id o n a l estadounidense, b unidad c o m ú n p a ra b m agn itud de u n a f u e r a es b lib ra inglesa o sim plem ente lib ra (Ib). En el sistem a in ternacional, b p r in d - p d u n id ad q u e se usa e s el new ton (N ).
Una d e b s operaciones m ás com unes e s b d e te rm in a d ó n del efecto neto de varias fuerzas. D os o m ás fu e ra s q u e se aplican a u n a pieza se p u ed en c o m b in a r para d e te rm in ar el efecto resultante de las f u e ra s . La co m b in ad ó n d e f u e r a s p a ra calcub r b resultante e s u n p roced im ien to idéntico a la sum a de vecto re s de d esp lazam ien to , v e lo d d a d o a c e le ra d ó n q u e se p re sentó e n las se cdones 3.9 y 3 .1 1. b> r el c o n tra rio , u n a f u e r a se puede desglosar en dos co m p o n en tes a lo largo d e ejes perpen- d icubres. Esto se p resen tó en b s e c d ó n 3.10. C o n frecuencia, el uso de b s com ponen tes de u n a fu e ra , ju n to co n los ejes de c o o rdenadas convenientes, facilitan el análisis. T ratándose de can tidades vectoriales, b s f u e r a s se lo g ran m an ipu lar ap licando los m étodos estud iados en el cap itu lo 3.
13.3 M OM ENTOS Y TORQUESU n m om en to , o to rq u e , es b a c d ó n de to rs ió n p r o d u d d a p o r u n a f u e r a El em pu je so b re el m ango de u n a llave p roduce u n a acd ó n q u e tien d e a hacer g ira r b tu e rca de u n p e rn o . D e m o d o q u e la f u e r a cau sa u n a acción de to rsión a lrededor del cen tro del p e rn o . El resultado d e esta acción se conoce c o m o momento o torque. La figura 13.1 ilu s tra u n a f u e r a co m o esta, la cual genera u n a a c d ó n de torsión.
www.FreeLibros.me

A n ális is d e fu e rz a s e s tá t ic a s 331
En m ecán ica p lana , el m o m en to es u n a p rop iedad q u e se d efine en relación co n u n p u n to de referencia. En la llave de la figura 13.1, el objetivo de la fuerza e s p ro p o rc io n ar u n a acción de to rsión a la tuerca. l\>r lo tan to , u n p u n to d e referencia adecu ad o e s el cen tro de la tuerca, el p u n to A. L a m agn itud del m o m e n to en relación co n el p u n to A, M ¿, creado p o r la fuerza, se calcula com o:
M a = <F)(d) 0 3 .1 )
D onde F e s la m agnitud d e la fuerza, d es la d istanc ia p e rp e n d icu la r en tre la fuerza y el p u n to d e referencia A. L os m om entos se expresan en un idades de ftierza m u ltip licadas p o r la d istan cia. En el sistem a trad ic io n a l estadounidenses, las un idades co m u n es de los m o m en to s so n pu lgada-lib ra ( in - lb ) o p ie-lib ra (lb -ft). En e l sistem a in te rn ac io n a l, la s u n id ad es co m u n es son new ton-m illm etro (N m m ) o n ew ton-m ctro (N m ).
Además de m agnitud , el m o m en to de u n a fuerza tien e d i rección, q u e dep en d e de la posic ión relativa de la fuerza y del pu n to de referencia. L a d irección de u n m om en to , o acción de torsión, en relación co n el p u n to d e referencia se designa sim plem ente c o m o sen tido h o ra rio o se n tid o an tiho rario . Esta d i rección deb e ser c o n g ru en te co n la d irección de to rs ió n de la f u e r a a lrededor del p u n to d e referencia. L a acción de to rsión de la f u e r a ilu strada en la figura 13.1, en relación c o n la tuerca, es u n m om en to en sen tido h o rario . C onvencionalm ente, lo s m o m en to s se co n sid eran positivos cu an d o a c tú a n en sen tido a n t i h o ra rio y negativos cu an d o ac túan en se n tid o horario .
La d iferenc ia e n tre u n m om en to y u n to rq u e es m uy sutil. E l m o m e n to es cu a lq u ie r acc ió n d e to rs ió n d e la fu e rz a . El to rq u e es u n tip o especifico de m om en to . En las ap licac iones d e m áquinas, u n to rq u e es cualqu ier m om en to d o n d e el p u n to d e referencia está en el c e n tro d e u n eje u o t r a conex ión de t ip o pem o.
PRO B LEM A D E E JE M PL O 13.1
t h mecanismo q u e abre autom áticam ente u n a puerta ejerce una f u e r a de 37 Ib sobre la puerta, aplicada en la direc- d ó n q u e se indica en t i figura 132 . Determ ine el m om ento creado por la f u e ra , en relación con d pivote de la puerta.
f i g u r a 1 3 .2 P u erta del p ro b lem a de e jem plo 13.1.
S O L U C IÓ N : 1. Calcule la d istancia perpendicular
0 m om ento se calcula co n la ecuación (13.1). Aun cuando se conoce la fuerza, se debe exam inar la geometría de La p uerta para determ inar la distancia perpendicular d .E n la figura 133 se aisló la geom etría y se descom puso en dos triángulos. Observe q u e am bos triángulos se construyeron com o triángulos rectángulos. El lado com ún a am bos triángulos, identificado com o el lado c, se de term ina con los datos conocidos del triángulo superior. A partir del teorem a de Pitágoras,
< = \ / ( 1 2 in ) a + (3 in )? = 1237 in
0 ángulo inclu ido 0 O m bién se calcula a partir de relaciones trigonométricas.
www.FreeLibros.me

332 CAPITULO TRECE
FIGURA 13.3 Geom etría de la puerta del problem a de ejem plo 13.1.
Al enfocarse en el triángulo inferior, el ángulo incluido y puede calcularse porque se conoce el ángulo total de 40*; por lo ta n ta
y - 40* - 0 - 26“
finalm ente, la distancia perpendicular se determ ina a prartir de relaciones trigonom étricas del triángulo in ferior.
d - csen (y ) - ( 1 2 J 7 in )* n (2 6 ') - 5 4 2 in
2 . Calcule e l m om ento
0 m om ento en relación con el pivote A se calcula con la ecuación (13.1). La dirección debe ser congruente con la acción de torsión de la h ierra en relación co n el privóte A. la cual es en sentido horario en este caso.
M a - F (d ) - 37 Ib (542 in) - 2005 in Ib, en sen tido horario
S O L U C IÓ N ALTERNATIVA:I . Descomponga la fuerza en tu s componente* rectangulares
En la solución anterior, el cálculo de la distancia perpendicular fue bastante complejo. Se podría aplicar u n a solución alternativa que im plique la definición de un sistem a de coordenadas conveniente alineado con las dim ensiones dadas. Las com ponentes d e Li tuerza original F se identifican com o F1 y F2. y se m uestran en la figura 134.
l a m agnitud d e F: y F* se calcula como:
fig u r a 134 C o m ponen tes de fuerza del p rob lem a d e e jem plo 13.1.
P 1 = (37 Ib) sen 40* = 2351b
P2 = (37 Ib) cas 40* - 2851b
Identifique la distancia perpendicular de cada com ponente
Observe que am bas com ponentes causan u n m om ento en rdación co n el p u n to A.Sin embargo, la distancia p erpendicular de cada m om ento es evidente. En la figura 1 3 4 se observa q u e la distancia perpendicular d e F 1 yF2 es de 12 y 3 in , rcspvcctivamentc. Advierta tam bién q u e F 1 causa u n a acción de torsión alrededor del pninto A en
www.FreeLibros.me

A n ális is d e fu e rz a s e s tá t ic a s 333
sentido horario. 0 m om ento causado p o r P2 a en sen tido antihorario. La convención tradicional de signos es asignar u n valor positivo a los m om entos en sentido antihorario.
3. Calcule el m om ento
Se calcula el m om ento en re b d ó n con el p u n to A,
M* = —F*(12 in) + P2(3 in)
- - [(23.81b)(12in ) | ■* «28 .3 lb )(3 in »
= -2 0 0 .5 in lb
• 200.5 in lb , en sen tido horario
1 3 .4 L E Y E S D E L M O V I M I E N T O
Sir Isaac N ew to n p o s tu ló tres leyes d e m ov im ien to q u e sirven co m o b ase del a n á lis is de las fuerzas q u e ac tú an so b re b s m áq u in as y su s co m p o n en tes . Estas leyes se estab lecen co m o sigue:
PRIMERA LEY: Todos lo s cuerpos p erm anecen en reposo, o en m ovim iento a velocidad c o n s tan te , a m enos q u e actúe sob re ellos u n a fuerza desequilibrante.SEGU NDA LEY: U n cu erp o so m etid o a u n a tuerza desequ ilib ran te tiene
4t) Aceleración proporc ional a la tuerza.
b) Aceleración en dirección a la tuerza y
c) A celeración q u e es inversam ente p ro p o rc io n a l a la m asa del cuerpo.
TERCERA LEY: A cada acción co rre sp o n d e u n a reacción igual y e n sen tido opuesto.
Las tres leyes se u tilizan en el e s tu d io d e m ecanism os. No obstan te , en este cap itu lo d o n d e se tra ta co n el análisis d e fuerzas estáticas, únicam ente so n aplicables la p rim e ra y la tercera leyes. En el siguiente cap itu lo b se g u n d a ley se in c o rp o ra al análisis.
1 3 .5 D I A G R A M A S D E C U E R P O L I B R E
P ara en tender cabalm ente b seguridad de u n a m áquina, se deb e ría n ex am in a r to d as b s fuerzas q u e ac tú an so b re lo s e s labones. Es am pliam ente aceptado q u e b m e jo r fo rm a de iden tifica r estas fuerzas e s m edian te b construcción d e u n diagrama d e cuerpo libre, q u e e s u n a fo tografía de u n e lem en to aislado, c o m o s i es tuv ie ra f lo ta n d o lib re m e n te . L a pieza p a rece estar flo tando p o rq u e se elim inan todos lo s soportes y con tac to s con o tra s p iezas. Todos estos so p o r te s y c o n tac to s se sustituyen luego c o n tuerzas q u e represen tan b acción de soporte . P o r co n siguiente, el d iag ram a de cuerpo lib re del e lem ento m uestra todas Lis fuerzas q u e ac túan sob re él.
13.5.1 E la b o ra c ió n d e u n d ia g ra m a d e c u e r p o l ib r e
La figura 13.5 p resen ta u n d iag ram a d e cu erp o lib re d e u n esb b ó n aislado. O bserve q u e esta p a rte se designa c o m o el e s b b ó n 3. Es esencial q u e se m u estren to d a s las fuerzas en el d b - g ram a de cuerpo libre. U na no tac ión conveniente e s identificar b s fuerzas en congru en c ia co n e l n ú m e ro d e l e s lab ó n sob re el
q u e ac túan y c o n el n ú m ero del c sb b ó n q u e im p u lsa la acd ó n . Entonces, u n a fuerza designada co m o es u n a fuerza q u e actú a so b re el e s b b ó n 3 p o r el co n tac to co n el eslabón 4.
C o m o las fuerzas so n vectores, b d e te rm in ac ió n de una tuerza requiere q u e se co nozcan la m agn itud y b d irección de b tuerza. Si se conoce b dirección d e la tuerza, se debería in d ic a r so b re el diagram a de cu erp o lib re . Este e s el caso de Fu en b fig u ra 13.5. C uando n o se conoce la dirección de u n a fuerza, es c o m ú n d ib u ja r b s d o s co m p o n en tes p e rp e n d ic u b re s de la tuerza desconocida. Estas d o s com ponen tes represen tan lo s dos d a to s q u e se necesitan d e te rm in ar p a ra con o cer com pletam ente b tuerza. O bserve q u e este es el caso d e Fn en b figura 13.5.
Los s ig u ien tes paso s ay u d an a l d ib u jo s is tem ático de un d iag ram a d e cu erp o libre:
I . Aislé b ( s ) com ponen te!* ) q u e se vaya(n) a estudiar.
U . D ibuje b co m p o n en te co m o s i e s tuv ie ra flo tan d o lib rem ente en el espado , e lim inando asi to d o s los so p o rtes visibles y el co n tac to fisico q u e tien e co n o tro s objetos.
I II . Sustituya lo s soportes, o con tac to s físicos, c o n las fuerzas yto los m om entos adecuados, lo s cuales tienen el m ism o efecto q u e los soportes.
13.5.2 D e te rm in a c ió n d e la s fu e rz a s d e c o n ta c to
0 establecim iento de b s tuerzas de so p o r te requiere de cuidado. C o m o r e g b g enera l, s i b n a tu ra leza del co n tac to im p id e el m o v im ien to e n d e r ta d irecc ió n , d e b e h a b e r u n a fu e rz a de
www.FreeLibros.me

334 CAPITULO TRECE
e) La reacción Impide la traslación y la rotación
f ig u r a 13A Fuerzas d e reacción.
so p o rte en esa d ire c d ó n . L os tip o s de reacd o n es se d iv id en en tres g ru p o s de acu erd o c o n el tip o de co n tac to físico.
a) Se conoce la dirección de la reacción: las co m p o n en tes de este g ru p o incluyen rodillos, correderas, p ernos en ran u ra s y cables. C ad a u n o de estos so p o r te s evita el m ovim ien to en ta n so lo u n a d ire c d ó n . Las reacd o n es de este g ru p o im plican solam ente u n a incógnita; a saber, la m agn itu d d e la fuerza de reacción. La figura 13.6a ilu s tra este tipo d e con tac to .
b ) Se desconoce la dirección de la reacción: lascom po nentes de este g ru p o incluyen p e rn o s sin fricción , bisagras y correderas sob re superficies ásperas. C ad a u n o de estos « p o r te s evita la traslac ión en am bas d irecciones del
plano. Las reacdones de este g rupo in d u y e n d o s incógnitas que, p o r lo general, se m u e s tra n co m o las co m p o nentes x y y d e la fuerza d e re a e d ó n . La figura 13.6b ilu stra este tip o de contacto.
c) Rotación impedida por la reaedón: b s com ponen tes de este g ru p o incluyen so p o rte s fijos y u n io n es de p e rn o en u n ind u c to r (m o to r eléctrico o de com bustión in terna). C ada u n o de estos so p o r te s im p id e la tra s la d ó n en am bas d irecd o n es del p lan o y la ro ta d ó n lib re . Las reacciones de este g ru p o son d e tres incógnitas, generalm ente conod d as co m o las co m p o n en tes x y y de b fuerza de reaed ó n , y el m om en to de la reaedón . La figura 13.6c m uestra este tipo d e contacto .
PRO B LEM A DE E JE M PL O 13.2
Fh b figura 13.7 se presenta un m o n tacar^u que levanta un m otor. El m otor que se levanta pesa 250 Ib. E bbore el d iagram a de cuerpo libre del montacargss completo.
S O L U C IÓ N : Para constru ir el diagram a de cuerpo lib re del m ontacargis completo, prim ero se deb e aislar y dibujarse, co m o siestuviera flotando librem ente en el espacio. Esto se hace elim inando el piso, q u e e s el único m ed io q u e soporta el montacargas. FJ m o to r tam bién se elim ina, ya que n o form a parte integral del m ontacargas.
Una vez q u e se haya dibujado de nuevo el m ontacargas sin el m otor y s in el piso, se colocan las h ierras de reac- o ó n en los p un tos de contacto de las piezas eliminadas. Prim ero, co m o el m otor pesa 250 Ib. u n a fuerza de m agnitud y dirección conocidas sustituye el efecto del m otor.
Segundo, se debe replicar la acción del piso. El rodillo d d frente se encuentra en el caso a), donde se conoce la d irección de b fuerza de reacción. C ualquier rodillo sobre u n a superficie lisa evita b traslación perpendicular a la superficie. La reacción en el rodillo d d frente se identifica com o Fjia*
www.FreeLibros.me

A n ális is d e fu e rz a s e s tá t ic a s 335
l a diferencia con el rodillo trasero es que tiene im plcm entado u n dispositivo de frenado. Además de presentar una tuerza de reacción vertical, k configuración rueda-freno tam bién evita la tra tac ió n a lo largo del piso. Por consiguiente, la reacción en el rodillo trasero tiene ambos com ponentes x y y. Las reacciones en el rodillo trasero se iden- tifiian com o F j i s y f J | P En la figura 1 3 8 se muestra u n diagram a de cuerpo libre completo.
M onsergas completo
■ 5 , .
t Uf i g u r a b a D iagram a d e c u e rp o lib re del p rob lem a d e e jem plo 13 .2 .
13.6 EQ U ILIBRIO ESTÁTICOLa p r im e ra ley d e N ew to n se aplica a to d o s los eslabones q u e están en reposo o se m ueven a velocidad constante: p o r lo q u e b situación se cono ce co m o equilibrio estático. P ara q u e u n o b je to esté en e q u ilib rio estático, se d eb en cu m p lir b s siguientes dos condic iones necesarias y suficientes:
C o n d ic ió n I :La com binación , o resultan te, d e to d as b s tuerzas externas q u e a c tú a n sob re u n o b je to e s igual a cero y n o cau sa traslac ión . M a tem áticam en te , b p r im e ra c o n d ic ió n de e q u ilib rio se resu m e com o:
(13.2)Esta cond ic ió n ind ica q u e to d as b s fuerzas externas q u e a c
tú a n so b re b co m p o n en te están en eq u ilib rio . El sím bolo £ im p lica b sum a d e todas las tuerzas q u e ac túan en el diagram a de cu erp o libre. C o m o se señaló en el cap itu lo 3 , b s fuerzas son vectores, y la ecuación (13.2) se p u ed e escrib ir com o:
F , + > F¡ + > F , + > + > 0
'lodos los m étodos p a ra el m anejo de vectores q u e se p re sen taron en el cap itu lo 3 se utilizan c o n esta ecuación vectorial p a ra despejar b s tuerzas desconocidas. Se pueden usar m étodos gráficos o analíticos, p e ro el análisis de tuerzas es m ás adecuado co n m éto d o s analíticos. P o r lo tan to , la p rim e ra cond ic ió n de
equ ilib rio e s tá tico se d escom pone, g en eran d o d o s ecuaciones dgebraicas.
2 F * = 0 (1 3 .3 )
2 F r = 0 (1 3 .4 )
C o n d ic ió n II:El m o m en to d e b id o a cualquier tuerza ex terna se c a n c e b con los m o m en to s de b s o tra s fuerzas q u e ac túan sob re el o b je to y no causan s u giro a lrededor de p u n to a lg u n a La segunda c o n d ic ión d e e q u ilib rio se resum e m atem áticam ente com o:
2 M . = 0 (1 3 .5 )
Esta condición ind ica q u e todos los m om entos q u e ac túan sa b ré la com po n en te están equilibrados. 1-3 ubicación del p u n to A es arb itrario .
13.7 ANÁLISIS DE UN ELEM ENTO C O N DOS FUERZAS
Un caso especial de eq u ilib rio , el cual e s m u y in teresante, es el d e u n e lem en to su je to a so la m e n te d o s fuerzas. Este t ip o de com ponente de u n a m áqu ina se cono ce co m o dem ento con dos fuerzas. M uchos e sb b o n e s de m ecanism os, sob re to d o acoplado res y bielas, so n elem entos co n d o s tuerzas. En b fig u ra 13.9 se p resen ta u n elem ento c o n dos fuerzas.
www.FreeLibros.me

336 CAPITULO TRECE
FIG U R A 1 3 .9 E lem ento co n d o s fuerzas.
P ara q u e u n elem ento co n dos fuerzas esté en equ ilibrio , las d o s fu era is deben:
2. A ctuar a lo largo d e la m ism a línea y
3 . Tener sen tidos opuestos.
C om o las d o s fuerzas d eb en ac tu a r a lo largo de la m ism a línea, h ún ica línea q u e p u ed e satisfacer esta restricción e s aquella que se extiende en tre los p un tos d o n d e se ap lican las fuerzas. P or lo ta n to , u n eslabón co n ta n so lo d o s fu erz as s im p lem en te presen ta ten sió n o com presión.
Este h ech o e s ex trem adam ente ú til en el análisis d e fuerzas, (á ia n d o s e conocen las ub icaciones d e las fuerzas, la dirección de las fuerzas está defin ida. C uando se conocen la m agn itud y el sen tido de u n a so la fuerza, la m agn itud y el se n tid o d e la o tra fuerza se d e te rm in an inm ediatam ente. E ntonces, el análisis de u n elem ento co n dos fuerzas es sencillo.
I . Ser d e la m ism a m agnitud ,
PRO B LEM A D E E JE M PL O 13.3
En b figura 13.10 se m uestra u n novedoso cascanueces. Se aplica una fuerza de 5 b al m ango superior, com o se ind ica. yel m ecanism o n o se mueve (queda estático). Dibuje u n diagram a de cuerpo libre y determ ine las fuerzas sobre cada eslabón. Para este análisis, el peso de cada eslabón se considera insignificante.
f i g u r a 13 .10 Cascanueces del p rob lem a d e e jem plo 13.3.
SO L U C IÓ N : 1. B a b ó n los diagram as de cuerpo libre de los eslabones del mecanismo
Observe q u e el eslabón 3 (AC) es un eslabón sim ple, que solo contiene dos un iones d e perno. Además, ninguna otra fuerza actúa sobre este esbb ó n . Por lo tanto, es u n elem ento con dos fuerzas, m ientras que las fuerzas que actúan sobre el eslabón deben ser iguales y a lo largo <fe la línea que une los dos pernos. En la figura 13.1 l a se m uestra el diagram a de cuerpo libre del eslabón 3. Com o se ind icó anteriorm ente, la notación q u e se u sa es Fy, m a fuerza aplicada al eslabón 3 com o resultado del contacto con el eslabón 2.
Al ser u n elem ento con dos fuerzas, la dirección de las dos fuerzas, F * y PS2, está a lo largo de b linca que m e lo s dos pernos. Se puede determ inar el ángulo de inclinación 0 de esta Hnca.
« - « . " ( f f ) - w r
8 eslabón 2 tam bién es u n eslabón sim ple q u e so lo contiene dos uniones de perno; sin em bargo, se aplica una fuerza adicional al mango. Por lo tanto, este eslabón n o e s u n elem ento d e dos fuerzas. La tercera ley de Ncwton establece que u n a fuerza que actúa en A será igual y opuesta a F y . Por consiguiente, la dirección de F y se conoce com o resultado de la figura 13.1 la . l a unión grneral de perno en el p u n to R indica q u e se usarán dos fuerzas de reacción. En la figura 13.11 b se flust ra el diagram a de cuerpo libre del eslabón 2.
8 eslabón 4 tiene u n contacto de corredera co n el eslabón 1. Despreciando cualquier fuerza de fricción, esta b e rz a de contacto actúa perpendicularmente a la superficie de contacto. L i fuerza de contacto de b nuez m ism a
www.FreeLibros.me

f i g u r a í x i i D i a g r a m a s d e c u e r p o l i b r e d e l p r o b l e m a d e e j e m p l o 1 3 .3 .
actuará perpendicular a la superficie aparejada. Asimismo, la tercera ley de Newton estipula q u e la tuerza q u e actúa en B es igual y opuesta a FM. Por lo tanto, la dirección de Fi3 se conoce por la figura 13.1 la . Fji la figura 13.11c se ilustra el diagram a de cuerpo libre del eslabón 4.
Obtenga las ecuaciones de equilibrio del eslabón 2
Se exam ina prim ero el eslabón 2 porque contiene la tuerza aplicada. Las tres tuerzas desconocidas sobre este eslabón (figura 13.1 I b ) se despejan en las tres ecuaciones de equilibrio.
S F ’WO:
P2,cos59.0” + P y = 0
+ T £F r= 0:
P a se n 59X>- + F^i - 5 Ib - 0
+ } ZAÍb = 0:
(51b)(8in) - (Fu co s5 9 á )* )(l3 in ) - (Fü scn59.0*)(3in) - 0
Resolviendo las tres ecuaciones;
Fa - + 11.96 Ib ■ 11.96 Ib A f
F ji - — 6.16 Ib = 6.16 Ib —
Fj’i - - 5 2 5 1 b - 5 2 5 Ib i
Obtenga las ecuaciones de equilibrio del eslabón 3
Com o el eslabón 3 es u n elem ento de dos tuerzas (figura 13.1 la ) , las ecuaciones de equilibrio indican q u e lastuerzas son de la m ism a m agnitud, ac túan a lo largo de la m ism a linea y tienen sentidos opuestos. Desde luego, la tercera ley de Newton ind ica q u e Fj> = F y . Por lo tanto, las tuerzas que ac túan sobre el eslabón 3 son:
F j j - H .9 6 lb "59J7
Fm = 11.961b A f
Obtenga las ecuaciones de equilibrio del eslabón 4
H diagrama de cu erp o libre del eslabón 4 (figura 13.11 c) revela la tuerza ejercida sobre la nuez.. Por supuesto, la tercera ley de Newton establece que FM - F43.C om o las tuerzas sobre el eslabón 4 convergen en u n punto , n o se
www.FreeLibros.me

338 CAPITULO TRECE
aplka la ecuación de equilibrio de m om ento. Las dos Hierras desconocidas sobre este eslabón se obtienen usando b s dos ecuaciones de b s com ponentes de equilibrio.
X F '- O :
F«i - F „ eos 59D* = 0
+T SF^O:
Fnua - F t í sen 59.0° ■ 0
Resolviendo las dos ecuaciones se obtiene:
F „ = + 6.161b = 6.16 Ib —•
PM - + 1035 Ib - 1025 Ib t
PR O B LEM A DF. F.JEM PI.O 13.4
La figura 13.12 ilustra u n m ecanism o q u e se emplea para tr itu ra r rocas, l a manivela del m ecanism o de 60 m m se n u ev e lentam ente, por lo q u e se pueden ignorar b s filenas inerdales. En la posición indicada, determ ine el torque requerido para im pulsar la manivela de 6 0 m m y triturar las rocas.
S O L U C IO N : 1. Elabore los diagram as de cuerpo libre de los eslabones del mecanismo
Se usa trigonom etría para determ inar los ángulos internos de este m ecanism o de cuatro barras y completarlo, como se hizo en el capitulo 4. U na alternativa e s constru ir el diagrama cinem ático usando e l GU>. Se m idieron los ángulos internos y los resultados se presentan en la figura 13.13. Observe que el eslabón 3 (B Q es u n eslabón simple, que tan sólo contiene dos uniones de pem o. Además, n inguna otra fuerza actúa sobre este eslabón. Por lo tanto, se trata de un elem ento con dos fuerzas y las fuerzas que actúan sobre el eslabón deben ser iguales y estar a lo largo de la linea que une los dos pernos. El diagram a d r cuerpo lib re d d eslabón 3 se presenta en la figura 13.14a. Com o se señaló anteriorm ente, la notación usada e s q u e F>; o una fuerza aplicada al eslabón 3, co m o resultado del contacto co n el eslabón 2 .
El eslabón 2 tam bién es u n eslabón sim ple q u e só lo contiene dos uniones de perno: sin em bargo, se aplica u n torque im pulsor en el eje (pun to A ) , por lo q u e este eslabón n o es u n elem ento de dos tuerzas. La tercera ley de Newton estipula q u e la fuerza que actúa sobre el eslabón 2 en e l p u n to B a igual y opuesta a F (2. Por ende, h dirección d e P y se obtiene com o resultado e n la figura 13.14c. La unión general de pem o en el pun to A in dica q u e se usarán dos fuerzas de reacción. En la figura 13.14b se m uestra el diagram a de cuerpo líb re del esb b ó n 2.
www.FreeLibros.me

A n ális is d e f a e n a s e s tá r ic s s 339
FIG URA 1 3 .1 3 D i a g r a m a d e c a d d d p r o b l e m a d e e j e m p l o 1 3 .4 .
FIG URA 1 3 .1 4 D ia g r a m a s d e c u e r p o l ib r e d d p r o b l e m a d e e j e m p l o 1 3 .4 .
H e s la b ó n 4 t a m b ié n c o n t i e n e d o s u n i o n e s d e p e r n o p e r o n o e s u n e l e m e n t o c o n d o s fu e r z a s . La f u e r z a q u e
tr itu ra la s r o c a s s e a p lic a e n u n ter c e r p u n t o s o b r e e l e s la b ó n . E l á n g u lo d e e s ta f u e r z a tr itu r a d o r a , a p a r tir d e
h o r iz o n ta l , s e c a lc u la a p a r t ir d e l o s á n g u lo s m o s tr a d o s e n la f ig u r a 1 3 .1 3 . A l in e a n d o l o s á n g u lo s a l o la rg o
la h o r iz o n ta l .
i80* - 970° - 70* = 130*
8- 5T
www.FreeLibros.me

340 CAPITULO TRECE
La tercera ley de Newton estipula tam bién que la fuerza q u e actúa sobre el eslabón 4 en el p u n to C es igual y con sentido opuesto a FM. La unión general del perno D indica que se deben usar dos fuerzas de reacción. En la figura 13.14a se m uestra el diagram a de cuerpo libre del eslabón 4.
Obtenga las ecuaciones de equilibrio del eslabón 4
H eslabón 4 se exam ina prim ero porque contiene la fuerza aplicada. Las tres fuerzas desconocidas sobre este es- Libón (figura 13.11a) se obtienen usando las tres ecuaciones de equilibrio.
2 F '= 0 :
4 Í l ¥ r - 0:
(9000 N ) eos 13Ü- - F4,cas 17 .3 ' - F4', - 0
(9000 N Jsrn 13J)* - t a s e n 17.3* 4- F4X, - 0
• O Z M p = 0 :
(9000N )(130m m ) - (F ^ s c n 65.7*)(180m m ) - 0
La solución de las tres ecuaciones produce:
F«, = + 7132N = 7132N 1 7 ^
F 'i = + 1960 N = 1960N —
F4T, - + 9 6 3 N « 9 6 3 N |
Obtenga las ecuaciones de equilibrio del eslabón 3
Como el eslabón 3 es u n elem ento con dos fuerzas (figura 13.14c), las ecuaciones de equilibrio indican q u e las tuerzas son de la m ism a m agnitud , actúan a lo largo de la m ism a línea y tienen sentidos opuestos. Desde luego, la tercera ley de Newton ind ica q u e FM = F4J. Por lo tanto, las fuerzas que ac túan sobre el eslabón 3 son:
F * - 7132 N A l i *
F „ = 7132 N 1 7 ^
Obtenga las ecuaciones de equilibrio del eslabón 4
H diagrama de cuerpo libre del eslabón 2 (figura 13.14b) revela el torque instantáneo requerido para operar el dispositivo. Por supuesto, la tercera ley de Newton indica q u e Fu = Fn .
-±* S F * = 0:
+ t I F 1 = a
- Fj* + F*, eos 173* - 0
- f J, + F u sen 173 '
- O S M * = 0 :
- T „ + (P y c a s l7 3 ° ) (6 0 m m ) - 0
La solución de las tres ecuaciones produce:
F?, - ♦ 6809 N - 6809 N —
f / , = + 2121 N = 212 N i
T2| “ + 4D8561 N m m ■ 409 N m , en sen tido horario
Com o el valor deseado es el torque, únicam ente es necesario resolver la ecuación del m om ento.
www.FreeLibros.me

A n ális is d e f a e n a s e s tá t ic a s 341
T A B L A 13.1 C o e f ic ie n te s a p r o x im a d o s d e f r i c c ió n d e d e s l iz a m ie n to
13.8 FUERZA DE FRICCIÓ N D E DESLIZAMIENTO
C o m o se in d ic ó en la sección 13.5, u n a fuerza de con tac to , co m o resultado d e u n a u n ió n d e co rred era , siem pre actúa p erp en d icu lar a la superficie d e co n tac to . E sta fuerza se cono ce c o m ú n m ente c o m o fuerza norm al p o rq u e actúa p erpend ieu larm en te a las superficies en c o n ta c ta
C u a n d o n o se p u e d e ig n o ra r la fuerza de fricc ió n en el análisis de u n a m áqu ina , se incluye u n a fuerza a d ic io n a l, b fuerza de fricción F f. La fricción siem p re ac tú a p a ra im p ed ir el m ovim iento. P o r lo t a n t a la fuerza de fricción ac tú a so b re un eslabón q u e se desliza, p erpend icu lar a la fuerza no rm al, y en d i rección o p u esta al m ovim iento (velocidad).
E n u n cuerpo inm óvil, la fricción fu n c io n a para im ped ir el m ov im ien to has ta q u e se alcanza b m áxim a fuerza d e fricción. Este va lo r m áxim o es u n a función del c o e f d e n le de fricción f i , q u e es u n a p ro p ied ad q u e se d e te rm in a ex p crim en ta lm cn te y depende de lo s m ateriales y b s condic iones de b superficie de los e sb b o n e s en c o n ta c ta E n b tab la 13.1 se incluyen valores p ro m e d io d e los coefic ien tes de fricc ión p a ra m ate ria les co m unes. La m agn itud de b fuerza de fricción q u e ac tú a sob re b s com ponen tes deslizantes se ca lcu b co m o :
Seto lubricado
A c e ro d u l c e
I f i e r r o c o la d o
F , = MNA h í m in io
S o b r e a c e r o e n d u r e c i d o 0 .4 5 0 * 8
S o b r e B ab b rt 0 J 5 0 .1 5
S o b r e a c e r o d u l c e 0 * 0 0 .1 2
S o b r e b r o n c e 0 3 4 0 .1 7
S o b r e I t f ó n 0 4 4 —S o b c r c o b r e c o n p lo m o 0 -3 6 0 .1 5
S o b r e h i e r r o c o la d o 0 .2 3 0 1 3
S o b r e p l o m o 0 9 5 O J O
S o b r o a lu m in io 0 5 0 —S o b r o p l á s t i c o la m in a d o 0 J 5 0 .0 3
S o b r o t r f l ó n — 0 * 1
S o b r o h i e r r o c o la d o 0 .1 5 0 .0 7
S o b r e b r o n c e 0 2 2 0 .0 7
S o b r o b a ú n 0 3 0 —
S o b r o c o b r e 0 2 9 —S o b r e ó n c 0 2 1 —
S o b r e a lu m in io L 4 0 _(13 .6 )
C o m o se m encionó , en ob jetos q u e se m ueven , b fuerza de fricción ac tú a en se n tid o opuesto a b dirección del m ovim iento deslizante relativo.
PRO B LEM A D E EJEM PLO 13 .5
0 m ecanism o de yugo escocés m ostrado en b figura 13.15 sirve para im pulsar u n a válvub. Conform e el fluido se bombea e n el c ilin d ra b presión creciente impulsa el m ecanism o y aplica u n torque al eje de salida. Este torque se u tiliza para activar (abrir y cerrar) las válvulas. En el instante mostrado, b carp í de presión sobre el pistón es de 25 Ib. [>Mermine el torque generado sobre el eje de salida. 0 coeficiente de fricción en tre el pem o seguidor y la ran u ra en b cruceta e s de 0. 15.
Entrada de fluido
FIG U R A 1 3 .1 5 I m p u ls o r d e b v á l v u b d e l p r o b le m a d e e j e m p l o 13.5.
S O L U C IÓ N : 1. Habore el diagram a cinem ático del mecanismo
En b figura 13.16 se presenta el diagram a cinem ático del m ecanism o d e yugo escocés.
www.FreeLibros.me

542 CAPITULO TRECE
f i g u r a l 3 .1 6 D iagram a cinem ático del p ro b lem a de e jem plo 13.5.
2. t la b o r f los diagramas de cuerpo libre de los eslabones del mecanismo
B eslabón 2 es el ensam ble de cruceta en la ranura y el pistóny varilla. El eslabón 4 es el seguidor. Observe q u e el eslabón 3 n o e s u n eslabón tangible. Se u t i l i a com o una simulación cinem ática para separar la unión de giro sobre el seguidor y la unión de corredera en L> ranura de la cruceta. Entonces, el m ecanism o se m odda con todas hs uniones de m en o r o rd e a 0 diagrama cinem ático tiene cuatro eslabones, dos uniones de perno y, p o r ende, un grado de libertad. El im pulsor de este m ecanism o e s d m ovim iento del flu ido dentro del cilindro.
B i la figura 13.17 se ilustran los diagram as de cuerpo libre de los eslabones 2 y 4. El eslabón 3 n o se requiere en el análisis de fu e ra . Advierta q u e la f u e r a de fricción se m uestra en sentido opuesto al m ovim iento relativo. La dirección quizá parezca confusa y necesite u n a explicación adicional.
f i g u r a 13.17 D iagram as d e c u e rp o lib re del p rob lem a de e jem plo 13.5.
Considere el eslabón 4 (figura 13.17b). El perno se mueve hacia arriba en relación con la ran u ra de la c ru ceta. Por lo tanto, la fricción actúa hacia abajo para im pedir este m ovim iento del perno. Asimismo, considere el « lab ó n 2 (figura 13.17a). l a ranura se m ueve hacia abajo en relación con el perno (recuerde la definición de movimiento relativo). Entonces, la fricción actuará hacia a rriba para evitar este m ovim iento de la ranura.
3 . Obtenga las ecuaciones de equilibrio del eslabón 2
B eslabón 2 (figura 13.17a) se exam ina prim ero porque condene la f u e r a aplicada. En este análisis, so lo se requiere la ecuación de equilibrio en x.
^ Z F * - 0 :
F2, = 3001b —
4 . Obtenga las ecuaciones de equilibrio del eslabón 4
B diagram a de cuerpo libre del eslabón 4 (figura 13.17b) m ostrará el torque en el eje de salida. Desde luego, la prim era ley de Newton indica q u e Ft í = FM.
P/42 * n f* 2 = (0.15) (300 Ib) = 451b
0 torque se determ ina usando la ecuación de m om ento de equilibrio.
O I M a = 0:
- (F42cos45*)(33 in ) + (MF«2C«45’) (3 3 in ) + T2, - 0
www.FreeLibros.me

A n álisis d e fu erzas está ticas 343
- |(3 0 0 Ib )c g s 4 5 “ ) ( 3 J i n ) + ( (4 5 lb )cos45°(38 in)) + T2, - 0
R iulm entc. el to ique ejercido sobre el eje de salida es:
r 21 = + 631 lb-in = 631 lb -in , en sen tido horario
PROBLEMAS
F u erza re su lta n te
1 3 - 1 . D eterm ine la resultante de las fuerzas q u e se ilu stran en la fig u ra P l 3 .1 . c u a n d o /? = 2 5 ° .
13 -2 . D eterm ine la resultante d e las fuerzas q u e se m uestran en la fig u ra P 1 3 .I, cu an d o /3 " 65*.
1 3 -3 . D eterm ine la resultante de las fuerzas m ostradas en la figura P13.1, c u a n d o /? = 105*.
M o m e n to de u n a fuerza
1 3 -4 . Se ap lica u n a fuerza a u n a llave de caja c o m o la m ostrada en la figura P13.4. D eterm ine el m om en to , a i relación co n el cen tro de la tuerca, cuando /? " 90°.
1 3 -5 . Se ap lica u n a fuerza a u n a llave de caja c o m o la m ostrada en la figura P I3 .4 . D eterm ine el m om en to , en relación co n el cen tro de b tu e rca , cu an d o /3 ” 75°.
13 -6 . Se ap lica u n a fuerza a u n a llave d e caja c o m o b m ostrada en la figura P13.4. D eterm ine el m om en to , en relación c o n d c e n tro de b tuerca, cu an d o /? = 110°.
1 3 - 7 . Se aplica u n a fuerza a b p a b n c a d e c o n tro l m ostrada en la figura P13.7. D eterm ine el m o m en to en relación con el p ivo te fijo, cu an d o f i - 0*.
f i g u r a P I3 .7 Problem as 7 a 9 .
1 3 -8 . Se aplica u n a fuerza a la palanca d e con tro l m ostrada en b figura P13.7. D eterm ine el m o m en to e n relación con el p ivo te fijo, cu an d o f i = 60*.
1 3 -9 . Se aplica u n a fuerza a b p a b n c a d e c o n tro l m ostrada en b figura P13.7. D eterm ine el m o m en to e n relación con el p ivo te fijo, cu an d o f i * 130®.
R ierzas e s tá tic a s en u n a m á q u in a
1 3 -1 0 . La figura P 13 .10 presen ta u n dispositivo levadizo . Si se aplica u n a fuerza de 600 Ib e n la p a r te superio r de b g rú a m ien tras e l m ecan ism o está inm óvil, de term ine b fuerza re q u e r id a en e l c ilin d ro . La p a rte su p e rio r de b g rú a pesa 8 0 Ib y el peso del c ilind ro e s insignificante.
f i g u r a P I 3 .I0 Problem a 10.
1 3 - 1 1. L a figura P I3 .1 1 m uestra u n m ecanism o q u e eleva paquetes en u n m ecanism o de transferencia. Si u n paquete de 100 N descansa sobre el eslabón horizontal m ientras el m ecanism o está inm óvil, determ ine el to rq u e requerid o del motor. Los pesos de los esb b o n es son insignificantes.
www.FreeLibros.me

344 CAPITULO TRECE
F l G U R A P 1 3 . i l P rob lem a 11.
13—12. l a figura P13.12 presen ta u n m ecanism o q u e sirve para co rtar h o ja s de metal delgadas. Si se aplica u n a h ierra de 200 N co m o se indica, de term ine la fuerza so b re la ho ja de m etal. L os pesos de los eslabones so n insignificantes.
f i g u r a P I 3 . I 4 Problem a 1 4 .
13—15. En la figura P13.15 se presenta u n vehículo u tilitario con u n a grúa. D eterm ine la tuerza requerida p o r el d lin d ro h idráulico para m an ten e r la p o sid ó n de la cesta.
f i g u r a P 1 3 .I2 Problem a 12.
13-13. La figura P13.13 ilu stra u n a p la tafo rm a aju stab le q u e sirve para cargar y descargar cam iones-refrigeradores. A ctualm en te está ub icad o u n c o n ten ed o r de 1200 Ib com o se indica. La p la tafo rm a pesa 400 Ib. y el peso de los d em ás eslabones se considera insignificante.
1 3 -1 4 . El su je ta d o r m o s tra d o e n la fig u ra P 13.14 tien e una caiga n om inal d e 1500 Ib. D eterm ine la fuerza d e c o m presión q u e esto c re a e n la varilla roscada, A R
f i g u r a P I 3 . 1 S Problem a 15.
1 3 -1 6 . En la fig u ra P13.16 se ilu s tra u n c a rg a d o r frontal. D e te rm in e la fuerza re q u e r id a p o r a m b o s d lin d ro s h id ráu licos p a ra m an tener la p o sid ó n d e la pala.
F IG U R A P 1 3 .1 6 Problem a 16.
1 3 -17 . U na a y a de em balaje d e 500 Ib está so p o rtad a p o r una m esa levad iza, co m o se in d ica en la fig u ra P I3 .1 7 . D eterm ine la fuerza requerid a en el d lin d ro hidráulico, p ara m an ten e r la p la ta fo rm a en la p o s id ó n m ostrada.
www.FreeLibros.me
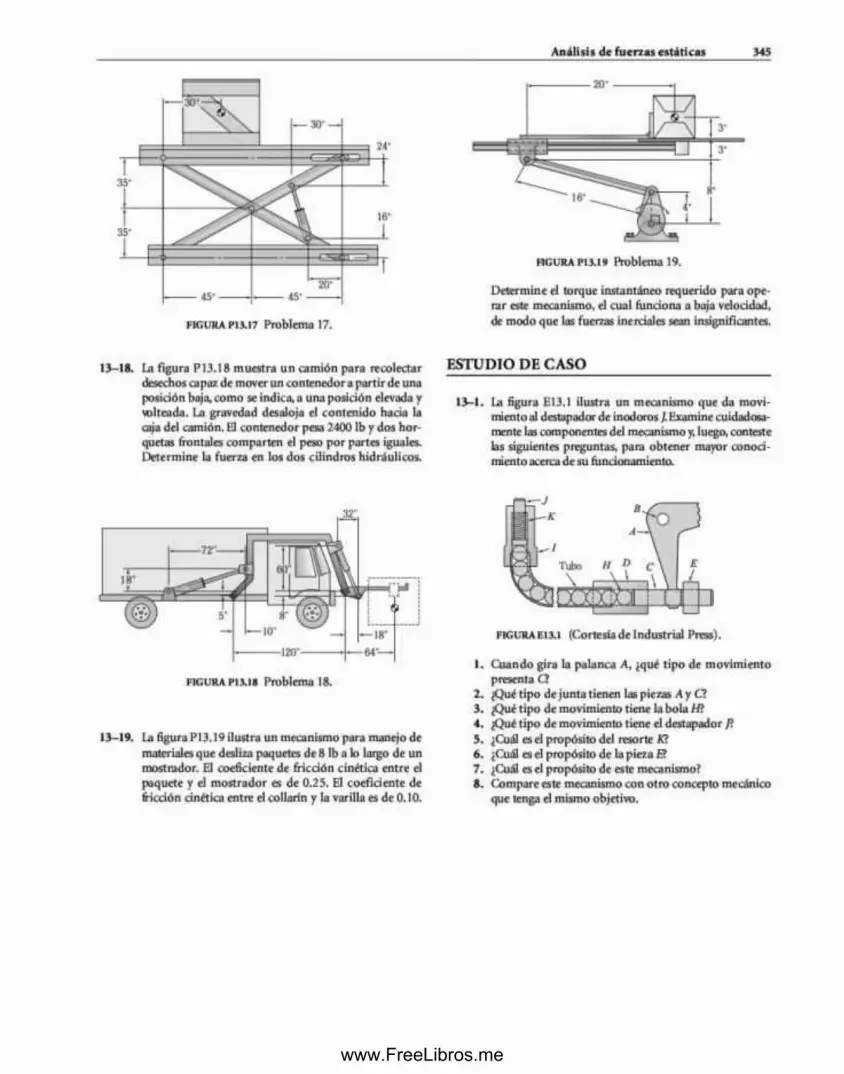
A n á l i s i s d e f u e r z a s e s t á t i c a s 345
FIG U R A P 1 3 .I7 P roblem a 17.
D eterm ine el to rq u e in stan tán e o req u erid o para o p e r a r este m ecanism o, el cual fu n c io n a a baja ve loddad , de m o d o q u e las fuerzas inerdales sean insignificantes.
13-18. La fig u ra P 13.18 m u e s tra u n cam ió n p a ra recolectar desechos capaz de m over u n con ten ed o r a p a rtir de una p o sid ó n baja, c o m o se ind ica, a u n a posic ión elevada y volteada. La g rav ed ad d esalo ja el c o n te n id o hacia la a j a del cam ión . HJ con ten ed o r pesa 2400 Ib y d o s h o rquetas frontales co m p arten el peso p o r partes iguales. D eterm ine la fuerza en los d o s c ilin d ro s h id ráu lico s.
ESTUDIO DE CASO
15-1 . l a figura E13.1 ilu stra u n m ecan ism o q u e d a m ovim ien to al destapador d e inodoros /. Exam ine cuidadosam ente las com ponentes del m ecanism o y, luego, conteste las siguientes p regun tas, p a ra o b te n e r m ayor co n o d - m ien to acerca d e su fundonam icnto.
13-19. La fig u ra P13.19 ilu s tra u n m ecan ism o p a ra m anejo de m ateriales q u e desliza paquetes de 8 Ib a lo largo d e un m ostrador. El coeficien te de f r ie d ó n c inética e n tre el p aq u e te y el m o s tra d o r e s d e 0 .25 . El c o e fid e n tc de fried ó n c inética en tre d co llarín y la varilla es d e 0 . 10.
1. C u a n d o g ira la p a la n c a A, ¿qué t ip o d e m o v im ien to presen ta C?
2 . ¿Qué t ip o d e ju n ta tien en las piezas A y C?3 . ¿Qué t ip o d e m ovim iento tien e la b o la H>4 . ¿Qué t ip o d e m ov im ien to tien e d destapador /?5 . ¿Cuál es el p ropósito del resorte K?6 . ¿Cuál «s el p ropósito d e la pieza Et7 . ¿Cuál e s el p ropósito d e este m ecanism o?8 . C o m p are este m ecanism o co n o tro co ncep to m ecánico
q u e tenga el m ism o objetivo.
www.FreeLibros.me

C A P Í T U L O
C A T O R C E
ANÁLISIS DE FUERZAS D IN Á M ICA S
O B J E T I V O S
A l term inar de estudiar este capitula, el alumno será capaz de:
1 . Entender la diferenria cnlrc masa y peto.
2. Calcular el m om ento de inerda de un cuerpo suponiendo un parecido con una form a básica o a p a rtir del radiod r giro.
3 . Transferir el m om ento de inerda a un eje de referencia d tentativo.
4. Calcular las fuer/as y lo» to rq u o inerciales.
5. D eterm inar las fuerzas, incluyendo la inercia, que actúan
14.1 IN TR O D U C C IÓ NEn e l d ise ñ o de u n a m áqu ina , la d e te rm in ac ió n d e b s fuerzas q u e o p eran e s u n a ta rea fundam ental. C onsidere el desarrollo de u n sistem a de lim piadores p a ra autom óvil. U na tarea dav e c o n s is te en b se lección del m o to r eléc trico q u e im p u lsa rá los lim p b d o re s . E l to rq u e req u erid o p a ra o p e ra r el sis tem a es el a tr ib u to p rincipal en este proceso de selección. Se d eb en co n s id era r diferentes escenarios, c o m o el h ech o d e q u e el au tom óvil p o d rb estacionarse d ebajo de u n árb o l de m aple. El aum en to de la fricción en los lim piadores co m o p ro d u c to de la sa v b q u e cae del á rb o l d em an d ad a u n m ayor to rq u e al m otor. Un escenario c o m ú n se p resen ta du ran te los p e rio d o s de fuertes lluvias. Los lim piadores tienen q u e o p e ra r en u n en to rn o d e a lta vdocidad . C uando los lim piadores oscilan a velocidades m ayores, se generan aceleraciones m ás g randes. C o m o p ro d u c to de b s grandes aceleraciones, se crearán fuerzas inerciales. Estas fuerzas podrían se r lo su fic ien tem en te g randes co m o para d a ñ a r las c o m p o n en tes d e l sistem a de lim p b d o re s . D e hecho, b s fuerzas iner- d a le s creadas p o r el m o v im ien to de m uchas m áquinas d e alta velocidad exceden b s fuerzas requeridas para ejecutar b ta rea en co m en d ad a . En u n m o to r rec ip rocan te d e co m b u stió n in terna. com o el d e u n autom óvil, b s fuerzas inerciales p o d r ía n ser m ás g randes que la fuerza p roducida p o r b p resión del gas. En u n a tu rb in a de gas. las fuerzas inerdales sob re los cojinetes, de b id as a l d eseq u ilib rio del ro to r p u ed en se r m ag n itu d es m ás g randes que el peso m ism o del ro to r.
f t j r lo ta n to , e n m áquinas co n aceleraciones significativas, e s necesario u n análisis de fuerzas dinám icas. En el cap itu lo a n
terio r se t r a tó el análisis de fuerzas en m ecanism os s in acelera d o n e s . Este cap itu lo exam ina el análisis d e fuerzas e n m áquinas con aceleraciones considerables. Esta situación se cono ce co m o a¡uilibrio d inám ico. El aná lis is d e e q u ilib rio d in á m ic o utiliza m uchos conceptos de e q u ilib rio estático, d e m anera q u e antes de estu d ia r este cap itu lo es necesario con o cer lo s tem as p resentados en el cap itu lo anterior.
14.2 MASA Y PESO
La m asa y el peso n o son idénticos. L a m asa , m m ide la cantidad de m ate ria de u n cuerpo . La m asa tam bién se describe co m o la resis tencia d e u n o b je to a la ace lerac ió n . Resulta m ás difícil “acelerar” u n o b je to co n m asa grande.
H peso W de u n cu erp o e s la m ed ida d e la a tracc ió n d e b gravedad sob re él. P or en d e , el peso es u n a f u e r a d ir ig id a had a el cen tro d e la tie r ra . La aceleradón de ¡a g ra n d a d g varia d ep en d iendo de b u b ic a d ó n relativa d e b a tr a e d ó n d e b gravedad. Entonces, el peso de u n o b je to varía. La m asa, sin em bargo, es u n a can tid ad q u e n o c a m b b co n b a tr a e d ó n d e la gravedad. C o m o ya se d ijo , sirve para describ ir b can tidad de m ate ria en u n objeto .
Las m agnitudes del peso y de la m asa están reb e io n ad as p o r la ley d e N ew to n de la g rav itad ó n .
W = m g (14.1)
En b m ayoría d e lo s análisis sob re b tie rra , b ace le rad ó n d e b gravedad se supo n e com o:
g = 32 .2 f t / s 2 = 386 .4 in /s2 = 9.81 m /s2 = 9810 m m /s2
Este su p u esto e s aplicable a todas b s m áquinas y los m ecanism os estud iados en este libro. D esde luego, en el caso del diseño de m áquinas para uso en el e sp a d o exterior, existen diferentes a traed o n es gravitacionales.
l a m asa y el peso co n f rec u en d a se co n fu n d en en el sistem a tr a d id o n a l estadounidense: es m ás conven ien te u sa r una unidad d e riv ad a de b masa: el slug , q u e e s resu ltado d irec to de b e c u a d ó n (14.1):
slug = [ lb /f t/s2) = Ib s 2/ f t
O casionalm ente, ta m b ié n se em p lea b lib ra -m asa (lbn,) co m o m ed ida de b m asa. Esta es b m asa q u e pesa u n a l ib ra en b su- perfid e de b T ie rra . S uponiendo q u e se aplica el va lo r estándar
www.FreeLibros.me

A n álisis d e fu erzas d in á m ica s 347
de la gravedad, la lib ra -m asa se conv ierte a slug d e la siguiente m anera:
1 s lu g = 32.2 lbra
E n g en e ra l, cu a lq u ie r cálcu lo en el s is te m a trad ic io n a l e s ta d oun idense debería usar el s lu g co m o unidad d e masa. E n el sistem a in ternacional, la u n id ad de m asa q u e se usa com únm en te es el k ilo g ram o (kg = N
14.3 CEN TR O DE GRAVEDADEl centro d e gravetlad cg d e u n cuerpo e s el p u n to de equilibrio de ese cuerpo. Es decir, es el ún ico p u n to d o n d e es posib le sostener el peso del o b je to y perm anecer en equ ilib rio en to d as las d irecciones. En com ponentes hechos de m aterial h om ogéneo , el cg es d cen tro geom étrico trid im ensional d e la com p o n en te . E n m u chos elem entos sim ples, c o m o u n cilindro , el cen tro geom étrico es evidente. En el análisis de tuerzas, la ubicación del cen tro de
gravedad se vuelve im p o rta n te , p o rq u e esta es la ubicación d e la f u e r a de g ravedad , o peso . En el análisis d e f u e r a s dinám icas, cu a lq u ie r efecto d e inercia d eb id o a la a c e le ra d ó n d e la p a rte tam bién actuará e n este pun to .
E n e lem en to s com plejos, la u b ic a d ó n del c e n tro d e g ra vedad n o es obvia. Un m éto d o co m ú n p a ra u b icar el c e n tro de g rav ed ad es d iv id ir el e le m e n to co m p le jo e n fo rm as sim ples, d o n d e e l c e n tro de g ravedad de cada u n a sea evidente. El centro d e g ravedad co m p u e s to se d e te rm in a a p a r t i r del p ro m ed io ponderado de las coordenadas de lo s centros de gravedad ind ividuales. P or ejem plo, la com po n en te x del cen tro d e gravedad d e u n a fo rm a com puesta se calcula co n la siguiente ecuación:
m »*<*! + + ...■*<rtoisl - . , . (14.2)n i | r m j + m j t ...
C o m o la ace le rac ió n d e la g ravedad es la m ism a en to d o el cu erp o , el peso s e sustituye p o r la m asa e n la ecuación (14.2). D esde lu eg o , se p u ed en escrib ir ecu ac iones sim ilares p a r a las co o rdenadas y y z del cen tro de gravedad.
PRO B LEM A D E EJEM PLO 14.1
l a p a rte m ostrada en la figura 14.1 está hecha de acero (0.283 Ib /in ’). D eterm ine las coordenadas del cen tro de gravedad.
S O L U C IÓ N : I . V iv ida e l eslabón en fo rm a s básicas
Esta parte se divide fckilmente en dos com ponentes. La placa de abajo se designará com o com ponente l .y e le je de arriba se designará co m o com ponente 2 .
2. Calcule el peso de las fo rm a s básicas
El peso de las partes se determ ina caku lando el volum en de las partes y m ultiplicándolo por la densidad delarcro.
W , 10383 lb/in ((10 in ) (4 in ) (0 3 in )) = 5.66 Ib
W 2 = (0383 lb /in ') - ( 2 i n ) J(3 in ) 533 ib
E s to s p e s o s y l a s c o o r d e n a d a s d e l c g s e o b s e r v a n e n b t a b l a 1 4 .1 .
www.FreeLibros.me

348 C A P I T U L O C A T O R C E
TABLA 14.1 D atos d e las fo rm as b ás icas d d p ro b lem a de e je m p lo 14.1
C o m p o n e n te (Ib) r „ 0 " )
5.665 JJ
(ion - 2) • 3
o(0.3/2) • 025 (0.5/2) * 025
3 . Con la ecuación < 1 4 3 ) calcule las coordenadas del centro de gravedad
Se calculan las coordenadas del cen tro de gravedad.
W p ir i f i A q f p a n e l + W p . r w t ^ p a n e J
(5.66 Ib) (3 in ) ♦ <533 lb> <0 in>— --------------------------------------------- — 1345 in
(5.66 + 5 3 3 ) Ib
Wp.n.i/̂ p.n.1 + W j / , p.,*,* VVp.n,;
(5.66 Ib )(0 2 5 in ) + (533 Ib) <2 in)(5.66 + 5 3 3 ) Ib - 1-099 in
H cen tro de gravedad de am bas paites permanece sobre el eje z . Por consiguiente, el centro de gravedad de la parte com puesta (total) tam bién permanece sobre el eje z . Entonces,
z ct x<*d 5 0
14.4 M O M EN TO DE INERCIAEl iw m e n to de inercia I de u n a p a rte m id e la resistencia de la parte a la acderación angular. Es m ás dificil “aederar" u n objeto q u e gira con u n m om ento de inercia grande. El m om en to de inerc ia d e u n a masa, o sim plem ente m om en to d e inercia, depende de la masa del objeto adem ás de la form a y el tam arto del mismo. Asimismo, la inercia es u n a p rop iedad que se d efine en relación co n u n p u n to d e referencia (o u n eje, cuando se consideran tres d im ensiones). Este p u n to d e referencia es generalm ente el centro d e gravedad de la parte.
La figura 142 m uestra u n objeto só lido cualquiera. O bserve q u e se resalta u n pequeño elem ento del objeto . El m om en to de inercia d e este e lem ento pequefto se de term ina m ultip licando su
m asa, dm , p o r e l cuadrado d e la d istancia , r, a u n eje de referencia, z. Esta distancia es la d istanc ia p erpend icu lar d e l eje al elem e n to a rb itra r io dm.
El m om en to de inercia del o b je to en tero es la su m a de to dos los m om entos de todas las p a rtícu la s q u e in teg ran el objeto . M atem áticam ente, el m om en to de inercia se expresa com o:
r2d m (14.3)
F IG U R A 1 4 2 U n o b j e t o s ó l i d o g e n e r a l .
C o m o la d efin ic ión im plica r, el va lo r del m om en to de inercia es diferente para cada eje. Por ejem plo, considere u n a varilla delgada. El m om ento de inercia en relación co n su eje lon g itud inal será pequeño porque r e s pequerto para cada elem ento de la varilla. Para u n eje perpend icubr a la varilla, el m om ento de inercia será g rande p o rq u e r es g ran d e para los elem entos m ás alejados del eje.
El m om en to d e inercia de u n a m asa se expresa e n unidades d e m asa p o r u n id ad es de lon g itu d a l c u a d ra d o . E n el sistem a trad icional es tadounidense, b s un idades co m u n es son slug-pies cu ad rad o s (slug ft2), q u e se conv ierten a libras-p ies-segundos a l c u a d ra d o (Ib ft s2). E n e l sis tem a in te rn ac io n a l, las u n id a d e s com unes q u e se u tilizan so n k ilog ram o-m etros cuadrados (k g m 2).
14.4.1 M o m e n to d e in e rc ia d e fo rm a s b á s ic a s
Se u só la ecuación (14.2) p a ra d e d u c ir las ecuaciones defo rm as p rim arias . La tab la 14.2 p ro p o rc io n a estas ecuaciones, las cuales sirven p a ra calcular el m o m en to d e inercia d e fo rm as só lidas co m u n es co n densidad un ifo rm e.
www.FreeLibros.me

A n álisis d e fu erzas d in ám icas 349
TABLA 14.2 M o m e n to s d e in e rc ia
N o m b r e d e b f o r m a M o m e n t o d e l n e r d a
C ilindro
V arilla delgada
{ [ " ' ‘ I
V - ¿ W 3 r 1 4 - r t |
4 - ¿ W 3 r > 4 . p ) l
0
D b c o delgado/ . - j |mrl l
/ , « ± |« r > |
B loq ue rectangular " ¿ I * A1)]
/. - ¿ l - t * 1 * f1)!
PR O B LEM A D E E JE M PL O 14.2
L» parte de la figura 14 3 pesa 3 Ib. Determ ine el m om ento de inercia de la parte, en relación co n el eje x en el centro de la parte.
FIGURA 143 P artedel p ro b lem a d e e jem plo 14.2.
S O L U C IÓ N : 1. D eterm ine la masa de la parte
l a parte pesa 3 Ib y se supone q u e se usará en la superficie de la tierra. La masa se calcula usando la ecuación( 1 4 . 1 ) .
™ ■ 7 * n i ¡ ? ‘ 0JW,,l"g
www.FreeLibros.me

3 5 0 C A P I T U L O C A T O R C E
2 . Calcule e l m om ento de inercia (cilindro sólido)
En sentido « t r id o , esta parte « un cilindro sólido con:
r = 1 3 in = 0 .1 2 5 ft
/ = 18 in = 1 3 ft
B eje zen la tabla 14 2 « equivalente al e je x d d análisis. El m om ento de inercia en relación con « t e eje en el cen tro de la parte es:
í , - ^ [m (3rJ + l J)J - -¡j[0 .093dug(3(0 .125ft)2 + (I.S ft)1)]
= 0 .0 1 7 8 d u g fr = 081781b f tsJ
3 . Calcule e l m om ento de inercia (varilla delgada)
Esta parte se aproxim a com o u n a varilla delgada. Usando « t e supuesto, el m om ento de inercia se cabu la a p artir de la tabla 142 como:
/x = ^ | n . ( l ) , ] = ^ [0 X )9 3 d u g (1 3 f t) J]
- 0.0174dug ft* - 001741b f tsJ
l a suposición de la varilla delgada subestima el m om ento de inercia real por so lo 1.15%. Aparentemente, « ta parte podría aproximarse co m o u n a varilla delgtda.
14 .4 .2 R a d io d e g iroEn o cas io n o , el m o m en to d e inercia d e u n a parte co n respecto a u n eje especifico se en cu en tra en m anuales q u e usan el radio de giro k . C onccp tuaim entc. el ra d io d e g iro es la d istanc ia del centro de g ravedad al p u n to d o n d e p o d r ía concentrarse el total de la m asa y ten ere l m ism o m o m en to de inercia.
0 rad io de g iro se u tiliza para ca lcu la r el m om en to de in e rcia, de la siguiente m anera:
I = m k 2 (14.4)
El ra d io de g iro se e x p r o a en u n id a d o de lo n g itu d . En el sistem a trad ic io n a l es tadoun idense , las u n id a d o com unes so n p ie s (ft) o pu lgadas ( in ) . En el sistem a in te rn ac io n a l, b s u n id a d e s co m u n es q u e se u sa n so n m e tro s (m ) o m ilím e tro s (m m ).
14 .4 .3 T e o re m a d e lo s e je s p a ra le lo s0 m om en to de in e rria se define en relación co n u n eje. A veces se requerirá el m om en to de inerria e n relación co n u n eje p a r a lelo a lte rn a tiv o . P ara realizar d ic h a tarea, se ha d e riv a d o una ecuación de tran sfe ren cb a u n eje paralelo (ref. 11). Para tran sferir el m o m e n to d e in e r r ia del e je x a u n e je p a ra le lo x \ la ecuación de tran sfe ren cb o :
Ix . = lx ± m t f (14.5)
0 valo r d en b ecuación (14.5) o la d is ta n c b p e rp en d icu lar e n tre los d o s ejes. O b serv e q u e el se g u n d o té rm in o de b ecuación (14.5) se su m a o se resta. El té rm in o se su m a cuando d eje de refe ren cb se aleja del c e n tro d e gravedad d e b form a básica. P or el con tra rio , el té rm in o se r o t a cuando b transferen- cia se acerca h ac ia el cen tro de gravedad.
PR O B LEM A D E E JE M PL O 14.3
Para b parte mostrada en b figura 14.4, determ ine el m om ento de in e rc u de la parte en relación co n el eje x en el extremo de b parle.
FIG URA 1 4 .4 P a r t e d e l p r o b l e m a d e e j e m p l o 1 4 .3 .
www.FreeLibros.me

A n á l i s i s d e f u e r z a s d i n á m i c a s 351
S O L U C IÓ N : H m om ento de inercia en relación con el cen tro de la parte se determ inó en el problem a de ejem plo 142 como:
/ , - OQ178 s lu g f t2
l a distancia de la transferencia del cen tro al extrem o de la parte es:
d = 9 in = 0.75 ft
Se usa la ecuación (145) para transferir el eje de referencia al ex trem o de la parte. Observe q u e el segundo term inóse sum a porque la transferencia se aleja del centro de gravedad.
/ ,• - + m d! - 0 .0178slugft2 + (0.093s lu g )(0.75 f t ) 2
= 03)701 d u g f t2 = 00701 Ib ft s2
14 .4 .4 C u e r p o s c o m p u e s to s
En la práctica, las p artes n o siem pre p u ed en aproxim arse sim plem en te a las fo rm as básicas d e la tab la 14.2. S in em bargo, para partes m ás com plejas, la determ inación del m om en to de inercia
se ob tiene d iv id iendo las partes com plejas en varias fo rm as básicas d e la tabla 142 . Se calcula el m om en to d e cada form a básica en re la d ó n co n u n eje q u e pase a trav és del cen tro de la parte com pleta. F inalm ente, se d e te rm in a el m o m en to de in e rd a to- tü co m b in an d o los valores de las fo rm as individuales.
PRO B LEM A D E E JE M PL O 14.4
l a parte m ostrada en b figura 145 está hecha de acero. Determine el m om ento de in e rd a de la parte en relación co n el eje y en el centro de b parte.
FIGURA 14J Parte del p ro b lem a d e e jem plo 14.4.
S O L U C IÓ N : 1. Identifique las fo rm as básicas y de term ine su masa
La parte se divide en dos formas com ponentes, com o en el problem a de ejem plo 14.1. Usando las pesos determ inados en esc problema, la m asa de las dos partes es:
m,
m¡
*
W i
S
5561b
3 2 2 ft/s2
5 3 3 Ib
- a i 7 6 slug
- a i 6 5 slug3 2 2 ft/s2
IXetrrmine e l m om ento de inercia centroidal de las fo rm a s básicas
la com ponente 1 es u n bloque rectangular y el com ponente 2 es u n cilindro. Usando la ta b b 14 2 . d m om ento de in e rc b de cada parte se determ ina en relación co n sus centros de gravedad individuales.
Com ponente 1:
tr = y 2 l/n lre2 + I2) ] = (0.176 slug |(4 in)2 + (10 in )2)
- 0.701 slug in2 - 0 0 1 1 8 slu g ft2 - 0.0118 lb f t s2
www.FreeLibros.me

352 CAPITULO CATORCE
Com ponente 2:
ly ■ l /n ( r J)] (q c longitudinal) - [0.165 slug(l in )2J
= 0.0138 slug in2 - 0.0001 slug ft2 = 0.0001 Ib f ts2
3. A plique el teorem a del eje paralelo
La inform ación del cen tro de gravedad, determ inada en el problem a de ejem plo 14.1, sirve para calcular el m o m ento de inercia de cada com ponente en relación con el cen tro de gravedad compuesto. Se usa d teorem a del eje p iralelo para realizar esto. Observe que la distancia perpendicular en medio del eje y está a lo largo de la dirección x
C om ponente 1:
di - ( 3 0 - 1099) in - 1.901 in - 0.138 ft
— u i) = + 'M i* = 0.0118 slug ft2 + (0.176 s l u g ) ( a i 58 ft)2
- 0O 162d u g ft2 - 001621b ft s2
C om ponente 2:
d¡ - (1 0 9 9 - 0 ) in - 1 0 9 9 in - 0O92ft
V<o»p<— 1*2) = pamauti + " A * = 0.0001 slug ft2 + (0.165 slug) (00923 ft)2
= 0.0015slug ft2 = 000151b f t s 2
4 . Calcule e l m om ento de inercia com puesto
V ~ ^ i ' i a n f o n m n I ) + ^ ' ( a m p o n m i» 2)
= (00162 + 0OO15)slugft2 = 0.0177stug ft2 = 001771b f ts2
14 .4 .5 M o m e n to d e in e rc ia : d e te r m in a c ió n e x p e r im e n ta lU n m étodo p o p u la r experim ental p a ra d e te rm in ar el m om en to d e in erc ia de u n a p a r te consiste e n hacer g ira r esta co m o un péndulo . Este m éto d o se ilu stra en la figura 14.6.
FIG URA 1 4 .6 E x p e r im e n t o d e l m o m e n t o d e in e r c ia .
La parte oscilará s i se desplaza u n ángulo pequeño y se libera . El m o m en to d e inercia se de term ina m id iendo el tiem po A r para com pletar u n a oscilación. El m om en to de inercia de la parte, en relación con u n eje que pase a través del cen tro de gravedad, se h a establecido [ref. 11 ] como:
14.5 FUERZA INERCIAL
E n la sección 13.4 se e n u n c ia ro n las tres p rin c ip a le s ley es de N ew ton d e m ecán ica. La segunda ley es fu ndam en ta l p a ra las partes q u e experim en tan aceleración y establece lo siguiente:
SEGUNDA LEY: Un cu erp o co n u n a tuerza desequ ilib ran te tiene:
a ) A celeración p ro p o rc io n a l a la tuerza,
W A celeración en dirección de la tuerza y
c ) A celeración inversam ente p roporc ional a la masa del objeto .
Para m ov im ien to lineal, esta ley se establece en té rm in o s d e la aceleración A£del centro de gravedad del eslabón: de m o d o que.
2 F = mA, (14.7)La ec uación (14.7) se escribe com o:
£ F - > m A s = 0 (14.8)
A dvierta q u e se em plea el s ím b o lo d e sustracción ( - > ) porque ta n to la tuerza co m o la aceleración son vectores.
www.FreeLibros.me

A n á lis i s d e f u e r z a s d in á m ic a s 353
El segundo té rm in o de la ecuación (14.8) se cono ce com o la inercia de u n cuerpo . Este té rm in o se d efine c o m o la fuerza inerciaI F¿
F ; = - > mAf (14 .9 )
El signo negativo indicia q u e la f i le n a inercial se o p o n e a la aceleración (actúa en dirección o p u esta a la aceleración). La inercia es u n a p ro p ied ad pasiva q u e n o ay u d a a u n c u e rp o a h a c e r algo, excepto a o p o n e rse a la ace leradón .
Este concepto se observa fácilm ente. Im ag ine có m o u n em pu je sú b ito so b re el pedal del ace lerador de u n au tom óv il acelera v io len tam en te el v eh ícu lo . Im ag ine la te n d e n c ia de su cabeza a m overse hacia atrás du ran te la ace le rad ó n . Esta es una f u e r a inercia] q u e actúa en d ire c d ó n o p u esta a b aceleradón del a u to m ó v il. A dem ás, la m ag n itu d del m o v im ie n to d e la
cabeza h a d a a tr á s es p ro p o rc io n a l a la m ag n itu d d e la ace le ra d ó n . D e m anera sim ilar, cu an d o se fren a sú b itam en te en un vehículo, el vehículo se desacelera y su cabeza da u n a sacudida h a d a delante, o t r a vez en d irecd ó n o p u esta a b aceleración del au tom óv il. Esta e s b segunda ley d e N ew ton en b práctica.
La e c u a d ó n (14.8) se reexp resacom o
2 F + > F ¿ = 0 (14 .10)
El co ncep to d e rep lan tear la e c u a d ó n (14.7) en la fo rm a de la ecuac ión (14 .8 ) se cono ce co m o principio de d 1 A te m b e n cuyo uso en el análisis de f u e r a s se d e n o m in a método de la fuerza de inerda del equilibrio dinámico. En el análisis de e sb b o n e s acelerados, p erm ite el uso de los m ism os m étodos que se u tilizan en el análisis estático.
P R O B IÜ M A D E E JE M PL O 14.5
0 m ecanism o com presor m ostrado en b figura 14.7 es im pulsado en sen tido horario por u n m o to r d e corriente directa, a u n a veloddad constan te de 600 rp m . E n b p o sid ó n m ostrada, la presión del c ilin d ro es de 45 psi. El pistón pesa 0 5 Ib, y el coeficiente de fixc ión en tre el p is tó n y el c ilind ro del com presor es de 0.1. E l peso de los dem ás esbbones e s insignificante. Determ ine, e n el instante m ostrado, el torque requerido del m otor para operar d compresor.
f i g u r a 14.7 M ecanism o del p rob lem a de e jem plo 14.5.
S O L U C IÓ N : 1. B a b ó n e l diagram a cinem ático e iden tifique lo tg ra d o i de libertad
Este es un mecanismo com ún de m anivela-corredera en línea, que tiene u n solo grado de libertad. En b figura 145a se m uestra u n diagram a cinem ático a escab.
f i g u r a 145 D iagram as del p ro b lem a d e e jem plo 14.5. (G m tinúa).
2. H ija el m étodo para ob tener el torque requerido del motor
Com o el pistón es el único com ponente con peso significativo, se deben determ inar la f i ie ra inercial y b ace- tru c ió n de este com ponente. La aceleración d d pistón (eslabón 4 ) es de traslación pura e idéntica a l m ovim iento del pun to C. Este análisis de aceleración se presentó am p lu m en le en el capítulo 7.
Una vez q u e se haya obten ido b aceleración del p is tó n , se calculan las tuerzas inerciales subsecuentes. Finalm ente, los d iagram as d e cu erp o libre y las ecuaciones correspondientes se u tilizan para determ inar el torque requerido.
www.FreeLibros.me

354
3 . Determ ine la velocidad de los p un tos B y C
l i t e tipo de análisis se estudió am pliam ente en los prim eros capítulos del libro. La manivela de 2 in g ira a 600 rpm . La velocidad del p u n to B es:
un = - ^ (600 rev/m in) = 6 2 8 rad/s. en sentido horario
V a - «2 ' ab = (6 2 8 rad /s) (2 in ) = 1258 in /s A f
l a dirección d e V B es perpendicular al eslabón 2 y congruente con b dirección de f i ¡ , bacia arriba a la derecha. Usando el CAD se dibuja un vector a escala, a partir del origen del diagrama de velocidad, para representar esta velocidad. La ecuación de velocidad relativa de los p un tos B y C se escribe como:
V c = V a + > V a n
&i la figura 148b se ilustra u n diagrama de velocidad completo. Escalando las m agnitudes vcctorbles del d iagrama,
VC - *>3 in /s —
V OB = 8 2 2 in /s l ' J 7
CAPÍTULO CATORCE______________________________________________________________________________________________
Vc 80 .5
M
FIGURA 148 {Continuación).
www.FreeLibros.me

A n álisis d e fu erzas d in á m ica s 355
4 . D etermine las componentes de la aceleración
H paso siguiente es constru ir u n diagram a de aceleradón, el cual incluya los p un tos B y C Calculando las m agnitudes de las aceleraciones conocidas,
<V„)3 (125.6in/s)J . ------A„ = = — ---- = 7888 in/s \5 0 a (dirigida hacia e l centro
t ÁB 2.0in de rotación, el p u n to A)
a'B = 0 (no hay aceleración angular en la manivela de 2 in)
a £ b " " < 8 2 Q ~n - T /> ) " 8 4 4 i n / $ 2 ld i2 $ ¡ Í a ^ h a c i a B .f g c 8.0 in m edida con el c a d )
Observe q u e el pun to A no tiene aceleración norm al porque el m ovim iento es estrictam ente d e traslación.
5 . Construya u n diagram a de aceleración
l a ecuación de aceleración relativa de los p un tos B y C ae escribe como:
A " + > A ¿ = A i + > A ¿ + > A ¿ « + > A ¿a
En la figura 14.8c se m uestra el diagram a de aceleración completo.
6 . M ida la aceleración del pistón
Escalando las m agnitudes sectoriales del diagrama,
A ¿ a - 3985 in /s2
\ ' c = 5378 in/s3 —
Com o la aceleración tangencial del pun to B tiene la m ism a dirección que la velocidad, el pistón está acelerando (increm entando su velocidad), n o desacelerando.
7 . Calcule la fuerza inercial
Cóm o el pistón es el único eslabón con peso significativo, su fuerza inercial se calcula com binando las ecuaciones <14.9)y(14.1).
w* ;* = - > ">.a , 4 = — a , 4)
<° ’5 lb ) (5378 in/s3) = 6 .9 6 1 b * -386 in/s3
Cóm o el pistón n o tiene acderación angular, n o se considera la inercia angular.
8 . Elabore los diagram as de cuerpo libre de los eslabones del mecanismo
Observe q u e el eslabón 3 ( B Q es u n eslabón sim p le que tan so lo contiene d o s un iones de perno. Además, ninguna otra fuerza actúa sobre el eslabón. Por lo tanto, es un elem ento con dos fuerzas y las fuerzas q u e actúan sobre el eslabón deben ser iguales y estar a lo largo de la línea «jse conecta los dos pernos. El diagrama de cuerpo libre del eslabón 3 se m uestra en la figura 14.8d. C om o antes, la notación em pleada indica q u e F ,j es u n a fuerza aplicada al eslabón 3 , com o resultado del contacto co n el eslabón 2.
H eslabón 2 tam b an es un eslabón sim ple y únicam ente tiene dco un iones de perno. S in embargo, tam bién x aplica un m om ento (torque) a esta manivela. Entonces, este eslabón n o e s u n elem ento sim ple con dos fuerzas, l a tercera ley de Newton estipula que una fuerza q u e actúa e n B es de igual m agnitud y opuesta en dirección a F)2. Por ello, la dirección de F j j se conoce co m o resultado de la figura M B d El ángulo en tre los eslabones 2 y 3 se m id ió en d m odelo del cad . La unión general de perno en el pun to A ridica que dos fuerzas de reacción estarán presentes. El diagram a de cuerpo libre del eslabón 2 se ilustra en la figura 14Be.
B eslabón 4 tiene u n contacto de corredera con el eslabón I . Esta fuerza de c o n ta d o actúa perpendicular a b superficie «le contacto. Asimismo, la fuerza de com presión del g is actuará perpendicular a la superficie del lis tó n . La fuerza de fricción se opone al m ovim iento (velocidad) del eslabón 4 . l a tercera ley de Newton tam bién estipula q u e la fuerza q u e actúa en C e s igual y opuesta a FM. Por lo tanto, la dirección de F4, se conoce com o resultado de la figura M Bd. El diagram a de cuerpo libre del eslabón 4 se presenta en la figura 148C
9 . Resuelta las ecuaciones de equilibrio dinám ico del eslabón 4
Se exam ina prim ero el eslabón 4 porque contiene la fuerza aplicada. La fuerza del gis se calcula com o:
*■(1.5 in )2f p , = P ^ A ^ = Pg*[ — = 45 lb /in3 795 Ib-
www.FreeLibros.me
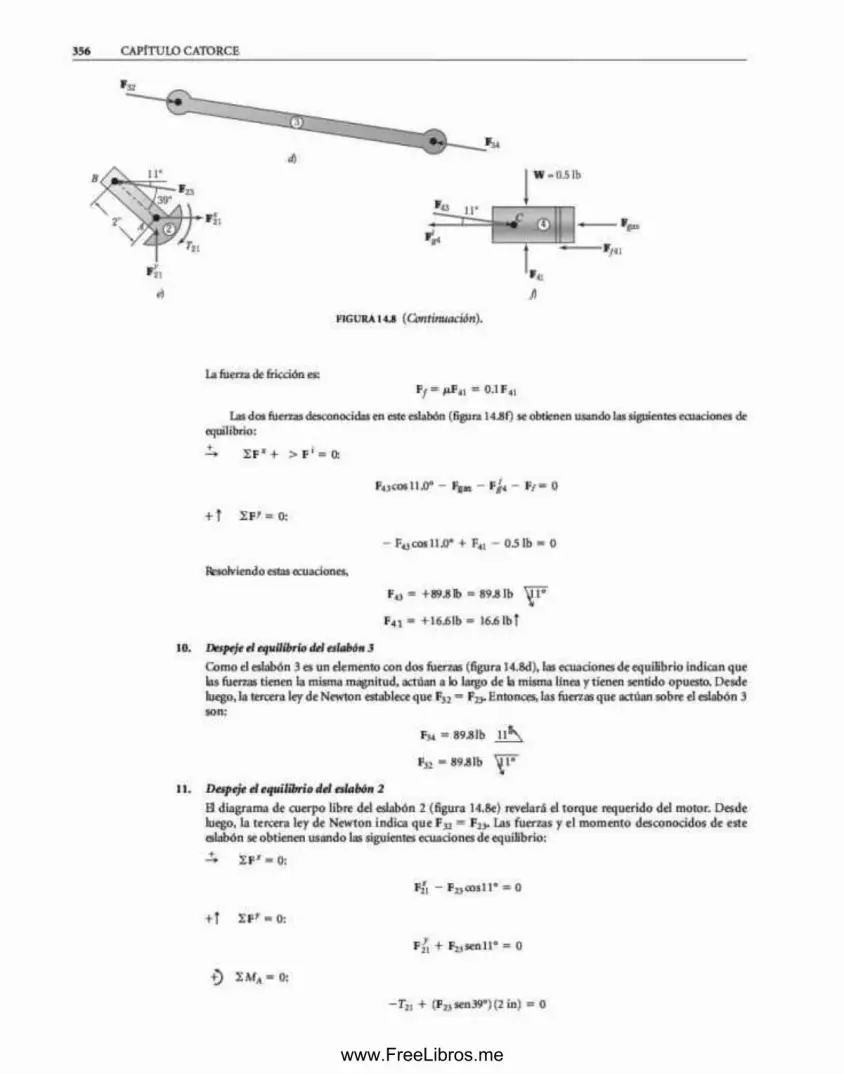
356 CAPITULO CATORCE
FIG URA 1 4 5 (C jm tin U M ÍÓ lt).
L i fuerza de fricción es: F/= MF4 1 = O.IF4 ,Las dos f u m a s desconocidas en este eslabón (figura 145f) se obtienen usando las siguientes ecuaciones de
equilibrio:
2 F * + > P ' = O
t X F ' = 0:
F « <0411.0" - Fg„ - F¿« - F / - 0
Resolviendo estas ecuaciones.
- eos 11X)* + F41 - 0 5 1 b - 0
F u - *89.8 Ib = 8 9 5 1 b ^7®
F4 , ** + 16.61b - 165 Ib T
10. Despeje el equilibrio del eslabón 3
C om o el eslabón 3 es u n elem ento co n dos fuerzas (figura I4 .8d ), las ecuaciones d e equ ilib rio ind ican que b s fuerzas tienen la m ism a m agnitud , ac túan a lo largo de b m ism a linea y tienen sen tido o p u e s ta Desde luego, la tercera ley de N ew ton establece q u e FJ2 ” F¡y E ntonces, las fuerzas q u e ac túan so b re el eslabón 3 son:
Fm = 8 9 5 1 b l l K
Fj j - 8951b
11. D espeje e l equ ilib rio d e l eslabón 2
0 d iag ram a d e cu erp o lib re del eslabón 2 (fig u ra 14.8e) revelará d to rq u e req u erid o del m o to r. Desde luego, la te rcera ley d e N ew to n in d ica q u e Fn * F2> Las fuerzas y e l m o m e n to desco n o c id o s d e este eslabón se ob tienen u sando las siguientes ecuaciones de equilibrio :
S P X - 0:
+ í 2 P ' - ( h
* ) Z M a - 0:
F j i - P j j c o s l l " = 0
F j | + F jjs e n l l* = 0
- T j , + (P j, sen39®)(2 in ) = 0
www.FreeLibros.me

A n á l i s i s d e f u e r z a s d i n á m i c a s 357
Resolviendo las tres ecuaciones se obtiene:
P J, - *88.1 Ib - 88.1 Ib —
F¡, - -17.1 Ib - 17.1 Ib i
T2, = +113.0 Ib in = 113.01b in .c n sen tido horario
Com o el torque e s el valor deseado, tan so lo es necesario resolver la ecuación de m om ento.
14.6 TO R Q U E INERCIAL
El concepto de fuerza in e rd a l. co m o se describe en la ecuación (14 .7 ), es u n a ex tensión d e la segunda ley de N ew to n p a ra el m o v im ien to lineal. E n e l caso del m ov im ien to ang u la r, la se* g u n d a ley se resum e en té rm in o s d e la ace le rad ó n angular y el m o m en to de inercia, en relación c o n u n eje q u e pase p o r el cen t ro de gravedad.
2 M g = f ga ( 1 4 .1 1 )
O tra vez , el su b ín d ice “g” se refiere al p u n to d e referencia e n el cen tro de gravedad del eslabón.
S im ila r a l m o v im ien to lineal, la ecu ac ió n (14 .11 ) se rep lan tea com o:
Z M s - > T ¿ = 0 (1 4 .1 2 )
O bserve q u e se utiliza el sím bolo de sustracción ( - > ) , ya q u e d eb en to m a rse e n cuen ta las d irecciones del m o m en to y de la
a:eleración angular. El segundo té rm in o d e la ecuación (14.12) se llam a inercia angular de u n cuerpo. E ste té rm in o sirve p a ra defin ir el torque inerciaí T ‘¿
T ¡ = - > l g a (1 4 1 3 )
N uevam ente, el signo negativo ind ica q u e el to rq u e in e rd a l está en d ire c d ó n o p u esta a la aceleración angular,
l a e c u a d ó n (14 .12) se replantea com o:
2 A Í + > r ¿ = 0 ( 1 4 1 4 )
La e c u a c ió n (14 .14) s e c o n o c e c o m o ecuación d e m om ento de equilibrio dinánaco. Es el equivalente angu la r del p r in d p io de d A lem bert descrito e n la se cd ó n 14.5. Perm ite el análisis de eslabones acelerados, u til iz a n d o lo s m ism os m éto d o s q u e en el análisis estático.
H siguiente p rob lem a de e jem plo com bina varios conceptos del análisis de tuerzas d inám icas presentados en este capítulo.
PRO B LEM A D E E JE M PL O 14.6
H m ecanism o presentado en la figura 14.9 se utiliza para bajar y sub ir el tren de aterrizaje de pequeños aeroplanos. El eslabón del ensamble de la rueda pesa 100 fc, y tiene su centro de gravedad co m o se indica. El radio de giro del en samble, en relación co n el centro de gravedad, se ha determ inado experim entalm ente igual a 1 2 ft. El eslabón m otriz gjra en sentido antihorario a 3 rad/s y co n una aceleración de 10 ra d /s \ Para estim ar las propiedades de la masa, la im nivcla m otriz pesa aproxim adam ente 15 Ib y tiene 2 ft de largo, 1 f t de an ch o y 0 2 5 ft de espesor. Se estim a que el peso del eslabón conector es de 20 Ib y se m odela co m o u n a varilla d e lu d a de 3.5 ft. D eterm ine todas las fuerzas que actúan sobre las uniones de todos los eslabones y el torque requerido para im pulsar el eslabón m otriz.
f i g u r a 1 4 . 9 Tren d e a t e r r i z a j e d e l p r o b l e m a d e e j e m p l o 1 4 . 6 .
www.FreeLibros.me

3 5 8 C A P I T U L O C A T O R C E
SO L U C IÓ N : I . ¡labore r l diagrama cinem ático e iden tifique los grados de libertad
B le e s e l c o n o c i d o m e c a n s m o d e c u a t r o b a r r a s q u e t i e n e u n s o l o g r a d o d e l i b e r t a d . 0 d i a g r a m a c i n e m á t i c o s e
p r e s e n t a e n l a f i g u r a 1 4 . 1 0 a .
FIGURA 14.10 D ia g ra m a d d p rob lem a d e e jem plo 14.6.
2 . B ija el m étodo para ob tener el torque requerido del m otor
Gomo todos los eslabones tienen u n peso sgnificativo, se debe determ inar la aceleración del centro de gravedad de todos los eslabones. Este análisis de acdcración se estudió exhaustivamente en el capitulo 7. Una vez q u e se luyan obtenido las aceleraciones, se calculan las fu e ra s inerdales y los torques subsecuentes. Por últim o, se usan los diagram as de cuerpo libre y las ecuaciones correspondientes para determ inar el torque requerido.
3. Determine la velocidad de los pun tosH y C
Este tipo de análisis se estud ió exhaustivamente en los prim eros capítulos del libro. La manivela de 1.77 ft gira a 3 rad/s. La velocidad del p u n to B es:
V « = m i t o B (3 rad /s)(1 .77 ft) = 531 ft/s A o *
l a dirección de V B es perpendicular al eslabón 2 y es congruente con la dirección de Mí. hacia arriba a la derecha. Usando el c a d se puede dibujar u n vector a escala, a partir del origen del diagram a de velocidad, para representar esta velocidad.
l a ecuación de velocidad relativa de los puntos B y C se escribe ccmio:VC - VB + > VOBEn la figura 14.10b se observa el diagram a secto ria l Escalando las m agnitudes vectoriales del diagrama,
V c * 5 0 0 f t/s A o J *
V OB - 2.63 f t/s Y 1 4 "
4 . Calcule las componentes de aceleración
0 paso siguiente es constru ir u n diagram a de aceleración, el cual incluya los puntos B y C . Calculando las m agnitudes de las aceleraciones conocidas,
A ? i 1 — ■ 15.93 ft/s2 3 0 ^ \ (dirigida hacia d centrorAB 1.77 ft de rotación, el p u n to A)
A «*2 rAH s (1 0 rad/s7) (1.77ft) * 17.70 ft/s2
„ (Vo*)? (2*63 ft/s)2 í /* . (dirigida de C hacia Ba c b r JJ 2 3 0 ft/s ¿ A ° A .. m edida con el cad)
www.FreeLibros.me

t i
f i g u r a u . i o (Continuación).
A c - - 10.72 ft/*2 59. 3 \ (dirigida de C hacia D.rcD " medida c o n el c a d )
Construya u n diagram a de aceleración
l a ecuación de aceleración relativa de los p un tos B y C se escribe como:
A£ + > A¿: - Ag 4- > A¿ + > A&b +• > A ¿ b
Bs b figura 14.10c se m uestra el polígono de aceleradón. Observe q u e se utilizó el concepto de imagen de aceleración q u e se presentó en la sección 7.10, para determ inar la aceleración del centro de gravedad de los tres esbbones móviles.
M ida la aceleración del centro de grosedad de todos los eslabones
b e a b n d o las m agnitudes sectoriales del diagrama,
A ¿ 8 = 12.28 ft/s2 ^ 5 Ü F A ¿ = 1180 ft/s2 /& .6 °
óFIGURA 14.10 (Continuación).
www.FreeLibros.me

360 C A P IT U L O CA TO RCE
A ,j = 11.91 ft/s3 78X >\ A p = 19.21 ft/s2 & 9Á K
A ^ = 2032 ft/s2 / t í .A'
Se determ inan la» aceleraciones angulares de los eslabones.
1228 ft/s2 . , .o» - —— ■ — r r r r — - 4.1 rad/s , en sentido antihorario
'BC ó ii lt
a , - — = ■ 5.0 rad/s2, en sentido antihorariorCD 233 ft
7 . Calcule las propiedades de la masa
la manivela motriz se puede considerar u n b loque rectangular. En la tabla 142 .el m om ento de ineren , en el cen tro de masa, en relación con u n eje norm al al lado ancho del eslabón, es:
V - ¿ W wí + '2)1 “ ¿ (¿ i7 ¿ ? ) [<2ft)? + 0 ft)2*" al94lbfts2
H brazo conector (biela) se puede considerar u n a w i l a delgada. En la tabla 1 4 2 . el m om ento de inercia, en el centro de masa, en relación a u n eje norm al a la longitud del eslabón, es:
0 radio de giro del ensam ble de la rueda se obtuvo experim entalm ente. A partir de la ecuación (14.4). d m o m ento de inercia en d cent ro de masa en relación con u n eje norm al a la longitud del ensam ble es:
Jg4 = m f = ( ^ ~ ^ ) ( | -2 ft)2 = 4.472 Ib fts2
8 . Calcule la fu e rza inercia!
Para los tres eslabones móviles, la fuerza inercia! se calcula com binando Las ecuaciones (14.9) y (14.1).
F¿2 - > m 2A ,2 - ^ ( - > A ,j)
F ' , - - > m ykgs - >)
- (1921 ft/s2) = 11.931b
F ‘t = - > m4A ,4 = y ( - > A ^ )
" S ? í2032fttf) " 6311 lb9 . Calcule el torque inertial
Para los tres eslabones móviles, el torque inercial se calcula con la ecuación (14.13).
T ¿ ,= ~ > I't ¡ a ¡ = (0.1941b f ts2) (lO rad/s2)
= 1.94 f t l b , en sentido horario
T ; , - - > / ,y » j - (0.634 Ib ft s2) <4.1 rad/s2 )
■ 2.60 ft lb , en sen tido horario
www.FreeLibros.me

A n álisis d e fu erzas d in á m ica s 361
Tt* m ~ > ’t*0 * = M-472Ib f ts2) (5 rad/s2)
• 22 J ó ft Ib. en sen tido horario
1 0 . Babore los diagram as de cuerpo libre de los eslabones del mecanismo
C om o el peso de todos los eslabones se va a incluir en el análisis, n o hay elem entos co n dos fuerzas. P or con- aguíente, todas las fuerzas de contacto en las un iones son generales y están representadas por sus componentes ortogonales. En la figura 14.1 Od se m uestra el diagram a de cuerpo libre del eslabón 4. El diagram a de cuerpo libre del eslabón 3 se presen ta en la figura U .IO e. Desde luego, la tercera ley de Newton ind ica que F * y P*» tienen la m ism a m agnitud y direcciones opuestas. Finalmente, el diagram a de cu erp o lib re del eslabón 2 se ilustra en la figura 14.1 Of. C om o cada eslabón tiene m ás de tres tuerzas desconocidas, las ecuaciones de equilibrio de todos los eslabones necesitarán resolverse sim ultáneam ente.
11. Genere las ecuaciones de equilibrio del eslabón 4
l a s s ig u ie n t e s e c u a c io n e s d e e q u i l ib r io d in á m ic o s e g e n e r a n a p a r tir d e l d ia g r a m a d e c u e r p o l ib r e d e l e s la b ó n 4
( f ig u r a 1 4 .1 0 d ) .
2 F * + > F ¿ - 0 :
F Íl - F ¿ - F¿4 eos 73.4* = 0
V*\ “ F ¿ - 18.03 Ib - 0
*«1 - F ' - W , - F¿sen73.4° - 0
p Il “ Fü " l60-48 Ib - 0
+ 5 1 M d + > T ¿ - ( k
- F ¿ [ 2 J 3 f t (sen 59.4o» - F ¿ J 2 J 3 ft (cas 59.4o» - W ,|3 .0 ft(cos59.4°))
- F¿, |cos (73.4° - 30.6o» (3.0 ft] - = 0
+ T 2Fr + > F¿ = 0:
Y e)
f i g u r a 14.10 IContinuación).
www.FreeLibros.me

362 C A P IT U L O CA TO RCE
Sustituyendo lo s valores dados
- 2 .0 0 0 * 0 - I.I861*¿ - 313.98 f tlb - O
12. Genere las ecuadones de equilibrio del eslabón 3
Las siguientes ecuaciones de equilibrio dinám ico se generaron a partir del diagram a de cuerpo lib re del eslabón 3 (figura 14.10e).
-*• 2 F ‘ + > F ¿ = a
+ T SF ' + > F¿ - 0:
P Í» ~ F»2 - F á je o s 8 9 .4 * = 0
P „ - Fj2 - a i 3 l b = 0
F* “ F¿ " W , - F ¿ sen 89.4* - 0
F ¿ - P j j - 31.93 Ib - 0
+ ) 1 M b + > T ¿ - 0 :
F ¿ I3.0ft(cos 3 8 5 ') ) - F ¿ [3.0ft(scn38.6°))(2.33 ft) 4 W ,[1 5 ft(cos38.6">)
+ F¿3 (eos(38.6* - 0 5 * ) | [1 5 ft) - T¡,> - 0
Sustituyendo lo s valores,
2 3 4 4 F £ - 1 5 7 2 F J , + 34.95 f tlb - 0
13. Genere las ecuadones de equilibrio del eslabón 2
Las siguientes ecuaciones de equilibrio dinám ico se generaron a partir del diagram a de cuerpo libre del eslabón 2 (figura 14.10f).
s f * + > f ; = O
+ t X F + > F¿ = 0:
F u + *2Í + F ;2 £ O s7 8 ° = 0
Fú + F í i + 115 Ib = 0
Fu + F/ í “ W a - F j j se n 78* - 0
F ¿ 4- F,r, - 20.43 Ib - 0
t > 2 M | - F > T f ' - 0:
T 2j 4- F ¿ |1.77 ft(scn 30°)1 * F ¿ ¡1.77 ft(cos30*)l - W 2 [059ft(cos30*)|
F ¿ ,|scn (7 8 ° - 30®)] [059 f t | - T¿¡ = 0
Sustituyendo lo s valores:
T¡, + 0 5 8 5 F2*3 4- 1 5 3 3 F J , - 17.17 f tlb = 0
14. Resuelva las ecuadones de equilibrio
Se generó u n total de nueve ecuaciones de equilibrio. Com o se indicó anteriorm ente, la tercera ley de Newton estipula que las siguientes m agnitudes son iguales.
F ¿ = P.M F *J = F34
F¿ = F£ F¿ = F¿
www.FreeLibros.me

A n á lis i s d e f u e r z a s d in á m ic a s 363
De m odo que permanecen nueve cantidades desconocidas. Resolviendo sim ultáneam ente las nueve ecuaciones de equilibrio, se obtienen los siguientes resultados:
F«'. " -78.41 Ib - 78.41 Ib —
F£ - + 58.38 b - 58J8 Ib T
F ¿ " - %.44 Ib - %-44 B) — *’ F j , - 96.44 b —
F ¿ - - 1 0 2 .0 9 b - 1 0 2 .0 9 b f r P j , - 1 0 2 .0 9 b l
Pj>“ -96.32 b - 96.32 Ib — r F,', - 9 6 J 2 b -
F*z " - 134X13 b - 1 3 4 .0 3 b T y P j , - 134X13 b i
F / . - ♦ 9 5 .1 7 b - 9 5 .1 7 b —
F Í , - * 1 5 4 .4 6 b - 1 5 4 .4 6 b T
- ♦ 307.88 ft Ib - 307.88 ft Ib. en sentido horario
PROBLEMAS
M asa y m o m e n to d e in e rc ia
1 4 - 1 . Se ha d e term inado q u e la m asa de la b ie la de u n m o to r de c o m b u s tió n in te rn a es d e 2.3 kg. C alcule el peso de la biela.
14-2 . U na tenaza ro b ó tica d e su jeción pesa 4.5 Ib. D eterm ine la m asa de la tenaza.
14-3 . U na tenaza ro b ó tic a de su jeción pesa 4.5 Ib y tien e u n rad io d e g iro de 5 in e n re lac ió n co n a lg ú n e je e n el cen tro de g ravedad . D eterm ine el m om en to de inercia de la p a rte e n relación co n ese eje.
1 4 -4 . 0 eslabón d e 6 kg de u n m ecanism o tiene u n ra d io de giro de 150 m m en relación co n a lg ú n eje en el centro de g ravedad . D eterm ine el m o m e n to d e inercia de la [wrte e n relación co n ese eje.
1 4 -5 . Para la p a r te m o stra d a en la figura P14.5 , calcule é m om en to de inercia y el rad io d e giro, respecto al eje lo n g itu d in a l cen tro id a l de u n e je de tra n sm is ió n de 14 in de la rg o q u e p esa 5 Ib y tien e u n d iám etro de 0.625 in.
( J b | H -------- longitudinal
E )e perpendicular a la longitud
f i g u r a p u j Problem as 5 a 8.
14-6. P ira la p a r te m o stra d a en la fig u ra P14.5 , ca lcu le el m om en to de inercia y el rad io d e g iro respecto a u n eje lo n g itu d in a l cen tro id a l de u n e je de tra n sm is ió n de 1200 m m d e largo, cuy a m asa es de 100 kg y tien e un d iám etro de 5 0 mm.
1 4 -7 . La p a r te m o s tra d a en la fig u ra P I4 .5 es u n c ilind ro sólido d e 2 ft de d iám etro , 3 ft de largo y q u e pesa 48 Ib.
D e te rm in e el m o m e n to d e in erc ia resp ec to a su eje centroidal axial.
1 4 -8 . La p a r te m o stra d a en la fig u ra P 14.5 e s u n c ilin d ro só lido de 2 ft d e d iám etro , 3 ft d e largo y q u e pesa 4 8 Ib. D eterm ine el m om en to d e inercia respecto al e je cen tro idal p erpend icu lar a su longitud.
1 4 -9 . La parte m o strad a en la figura P14.9 es u n a varilla d e lgada de 14 in de largo, q u e g ira a lrededor de u n eje perpend icu lar a s u lon g itu d de 3 in , a p a rtir d e su centro de gravedad. Si la varilla pesa 2 Ib y tiene u n d iám etro de 1.25 in . d e te rm in e su m o m e n to d e inercia a lrededor de ese eje.
- L -
■ . . J -
FIG U R A P 1 4 .9 Problem as 9 y 10.
1 4 -1 0 . La p a rte m ostrada e n la figura P14.9 e s u n a varilla d e lgada de 0.4 m d e largo, que g ira alrededor de u n eje p erpend icu lar a su lon g itu d y a 0.12 m d e su c e n tro de gravedad. Sabiendo que la varilla tiene u n a m asa d e 6 kg, de term ine su m om ento de inercia alrededor de ese eje.
14 -11 . D eterm ine el m om en to de inercia del eslabón de acero ( p " 0 .183 lb /in J ) m o s tra d o en la fig u ra P 1 4 .ll con res- p e c to al e je y.
0 0.375’
F I G U R A P l4 . l l P r o b l e m a I I .
www.FreeLibros.me

364 CAPITULO CATORCE
1 4 - IX D eterm ine el m om en to d e inercia d d eslabón de acero ( p " 0183 Ib /in ’) m ostrado en la figura P14.12 co n respecto a l eje y.
Ü 3 75*
F uerzas in c rc ia lcs
1 4-13 . com preso r m o strad o e n la figura P 14 .13 es im p u lsad o en se n tid o h o ra r io p o r u n m o to r d é c - trico de co rrien te directa, a u n a v d o c id a d constan te de 800 rp m . En la p o s id ó n m ostrada, la presión d d a l i n d o es d e 7 0 p s i y d p istón pesa 0.75 Ib. El coefiden te de f r ie d ó n e n tre el p is tó n y el d l in d ro d d co m p reso r es de 0.1 . El peso d e lo s d em ás eslabones es insignificante. E n el instante m o strad o , de term ine el to rq u e requerido d d m o to r para o p e ra r el com presor.
1 4 -1 4 . f e r a d m ecan ism o com preso r descrito e n d problem a 14-13, de term ine d to rq u e requerido d d m otor, s i este g ira a 800 rp m y acelera a ra z ó n d e 3000 Tadls’.
1 4 -1 5 . f ttra el m ecan ism o com preso r descrito en d problem a 14-13, de term ine el to rq u e requerido d d m otor, si este g ira a 800 rp m y desacelera a razó n de 5000 rad /s2.
14—16. El m ecanism o m a n ip u la d o r de m ate ria les p resen tado en la figura P 1 4 .I6 desliza paquetes de 4 kg a lo largo de u n m o strad o r. La m áq u in a fu n c io n a c o n la m a n ivela q u e g ira e n se n tid o a n tih o ra r io a u n a velocidad constante d e 120 rp m . El coeficiente d e fricc ión cinética e n tre d paquete y d m o strad o r es d e 0.15. El peso de to d o s los eslabones del m ecanism o es insignificante. D eterm ine d to rq u e in stan tán e o requerido del m o to r pora o p e ra r este m ecanism o.
1 4 -1 7 . Para el m ecan ism o m an ip u lad o r d e m ateriales descrito en d p ro b le m a 14-16, d e te rm in e d to rq u e re q u e r id o del m o to r, s i e s te g ira a 120 rp m y acelera a u n a razón d e 100 rad /s2.
1 4 -1 8 . f tira el m ecan ism o m an ip u lad o r d e m ateriales descrito en e l p rob lem a 14-16, d e te rm in e d to rq u e req u erid o del m o to r, s i e s te g ira a 120 rp m y d esace le ra a u n a razó n d e 100 rad /s .
f ig u r a P 14.16 Problem as 1 6 a 18.
T brques in erc ia lesLa fig u ra P 1 4 .1 9 ilu stra u n e s la b ó n q u e p e sa 4 Ib y gira e n se m id o h o c i n o a 2 0 r a d /s . E n lo s p r o b le m a s 1 4 -1 9 y 1 4 -2 0 d e te r m in e t i m a g n itu d
i k la fu erza in e r d a l y e l t o iq u e in c r d a l e n e l c rn ln » d e g ra v e d a d , si:
f ig u r a P 14.19 Problem as 19 y 20.
1 4 -1 9 . El eslabón a e d e ra a 600 rad /s2.
1 4 -2 0 . El eslabón desaed era a 600 rad /s2.La fig u ra P14.21 m uestra u n eslabón de 10 kg q u e g ira en
se n tid o a n tih o ra r io a 1 5 ra d /s . D eterm ine la m a g n itu d de la fuerza in e rd a l y d to rq u e in e rd a l e n d cen tro de gravedad, sú
1 4 -2 1 . El eslabón a e d e ra a 400 rad /s2.
14 -2 2 . El eslabón desaed era a 400 rad /s2.
14 -23 . La figura P14.23 p resen ta u n m ecanism o de manivela- corredera. E l e s lab ó n 2 g ira e n sen tido h o ra r io a u n a veloddad constan te de 200 rad /s . El peso d d eslabón 2 es insign ifican te , d e s lab ó n 3 pesa 3 Ib y d e s lab ó n 4 pesa 2 Ib. El rad io d e g iro d d eslabón 3 respecto al cen-
www.FreeLibros.me

A n álisis d e fu erzas d in á m ica s 363
3 . La fuerza y el to rq u e inercialesdel eslabón 4,
4 . Las fuerzas en los p e rn o s d e B y C y
5 . 0 to rq u e para im p u lsa r el m ecan ism o en esta posición .
14 -26 . R epita el p ro b lem a 14-25 co n p = 90®.
1 4 -2 7 . La fig u ra P14.27 ilu s tra u n pequeño g a to h idráulico . En este instante, se aplica al m ango u n a fuerza d e 10 Ib, lo cual provoca q u e el eslabón de 3.5 in gire en sen tido h o rario a razón constante de 5 rad /s . E l peso de lo s eslabones 2 y 3 e s insignificante, y el eslabón 4 pesa 1.5 Ib. D eterm ine lo siguiente:
1 5 0 m m v * y
—¡ l~ - 1 5 m m
f i g u r a P I 4 J 1 Problem as 21 y 22.
f i g u r a Pi 0 3 Problem as 23 y 24.
tro d e g ravedad e s d e 3 in . P ara P - 45°, d e te rm in e lo siguiente:
1. La aceleración lineal del eslabón 4 y el cen tro d e g rav ed ad del eslabón 3,
2 . La aceleración angu la r del eslabón 3,
3 . l a fuerza y el to rq u e inerciales del acoplador,
4 . Las fuerzas en lo s p ernos d e B y C y
5 . 0 to rq u e p a ra im p u lsa r el m ecan ism o en esta posición .
U - 2 4 . Repita el p rob lem a 14-23 co n p = 120°.
1 4 -2 5 . La figura P14.25 m uestra u n m ecanism o d e cuatro barras. El eslabón 2 g ira en sen tido a n tih o ra rio a u n a ve- b d d a d constan te de 10 rad /s . El peso de los eslabones 2 y 3 e s insignificante, y el eslabón 4 p esa 17 kg. El radio d e g iro del e s la b ó n 4 en re lac ió n co n el c e n tro de gravedad es de 45 m m . P ara P - 45*, d e te rm in e lo siguiente:
1. La aceleración lineal d d cen tro de g ravedad d e l eslab ó n 4,
2 . La a c d e ra d ó n angu la r del eslabón 4,
f i g u r a P 1 4 J S P r o b l e m a s 2 5 y 2 6 .
fig u r a PI4.27 Problem a 27.
1. L a a c d e ra d ó n lineal del p istón ,
2 . L a fuerza in e rd a l d d eslabón 4,
3 . Las fuerzas en los p e rn o s y
4 . L a fuerza desarro llad a so b re el p is tó n p o r e l flu ido hidráulico.
1 4 -2 8 . L a figura P14.28 ilu stra u n m ecan ism o tran sp o rtad o r de transferencia . El eslabón im p u lso r g ira en sen tido an tih o ran o a u n a razón constante d e 2 5 rp m . C o m o se indica, la caja pesa 50 Ib. F.1 peso d d eslabón im p u lso r y d aco p lad o res insignificante. El peso del eslabón tra n s p o r ta d o r e s de 28 Ib y el cen tro de gravedad está en su p u n to m edio . El ra d io de giro del eslabón tra n sp o rta d o r en relación co n d c e n tro d e gravedad es d e 26 in. Para p = 30°, d e te rm in e gráficam ente lo siguiente:
FIG URA P 14-28 P r o b le m a s 2 8 y 29.
1. L a aceleración lineal d d cen tro d e gravedad d d eslabón transportador,
2. La aceleración angu la r d d eslabón transportado r,
3 . l a fuerza y el to rq u e inerciales del eslabón tra n sp o rtador.
4 . Las fuerzas en los p e rn o s y
5 . El to rq u e requerido p a ra im p u lsa r d m ecanism o.
14-29. Repita el p rob lem a 14- 28 co n 0 - 100*.
www.FreeLibros.me

366 CAPITULO CATORCE
ESTUDIO DE CASO
14-1 La fig u ra E l4.1 es u n m ecan ism o q u e p ro p o rc io - m m ov im ien to a las co rre d eras C y D y se utiliza en u n a m áqu ina de desm onta je d e alam bre. Exam ine cu i-
h g u r a F.I4.I (C ortesía de In d u stria l Press).
d ado sam en te las com ponen tes del m ecan ism o y, lu e go, conteste las siguientes preguntas para o b te n e r m ayor conocim ien to acerca d e su funcionam iento.
1. D escriba el m ov im ien to del e n g ra n e H cu an d o e l en grane A g ira en se n tid o horario .
2 . C uando el engrane A g ira en sen tido h o rario , ¿cuál es el m ov im ien to inm ediato d e la co rred era C?
3 . C om en te la acción q u e o cu rre c u a n d o el p e rn o E alcanza el ex trem o d e la ran u ra .
4 . C om ente co n exactitud el m ovim iento c o n tin u o d e las correderas C y E.
5 . C o m en te có m o se u sa rla p o sib le m e n te e s te m ovim ien to en u n a m áqu ina de desm onta je de alam bre.
6 . ¿Cuál es el p ropósito del resorte G?
7 . ¿C óm o cam b iarla este m ecan ism o s i se insta lara u n resorte “m ás ríg ido”?
www.FreeLibros.me

RESPUESTAS A PROBLEM AS PARES SELECCIO N A D OS
C a p i t u l o I1-26. n = 4. jp = 4 .* , = 0 , M = 11-28. n = 4, ; p = 4 , j , = 0 . M = 1
1-30. n = 4, jy = 4 , /h = 0 , M = 1
1-32. „ - 6 , / p - 7 , / h - 0 . M - 11-34. n - 4 , ¿ - 4 . Á - 0 , M - 11-36. n = 4, jp = 4, j¡, = 0, M = 1
1-38. rt = 6, jp = 7. ñ , = 0, M = 11-40. n = 6, jp = 7 . j h = 0 . M = 1
1-42. n = 6. jp = 7, j), = 0. M = 11-44. n - 9 , ) p - l l , ) h - 0 . M - 21-46. n - 4 , j p ~ 4 , j h - 0 , M - l
1-48. n = 8 ,/p = 1 0 .;h = O .M = 11-50. n = 6 , jp = 7 , jh = 0. M = 11—5 2 M anivela-balandn1—5 4 Manivela-balancín
C a p i t u l o 33 -2 . A = 173 in
3 -4 . R - 12 in
3 -6 . i - 156.6 m m3 -8 . x - 113 in y - 16.4 in
3-10. s ■ 175 m m3-12. L = 8 f t . 8 i n
3-14. h - l l j f t
3-16. y * 11.7 ft3-18. h - 83.1 in3-20. R - 24.183-22. R = 212.13
3-24. R - 221.203-26. R = 24.183-28. R = 212.13
3-30. R = 2212
3-32. | - 8.074
3-34. 1 = 5587
3-36. I = 212.13
3-38. I = 8.074
3-40. J - 5587
3-12. |
3-44. I = 26X194
3-46. | = 109.76
3-48. I = 101.68
3-52. 1 - 26.10
3-54. I - 109.8
3-56. | - 101.68
3-58 . C - 1922 E = 1752
3 -60 . B - 881 C - 117.7
3 -62 . D - 38.12 F - 238.9
C a p ítu lo 44-2 . A x - 2.189 in —*4-4 . A Rv « 8.420 in \g 7 5 °
4-6 . AApuan = 47.10 m m * —4-8. A0ram^ = 23.0°, sen tido antihorario 4 -10 . A R rtVfmo = 2029 in 55.1C\
4-12 . &0n „go - 222". sen tido antihorario 4 -14 . A 0 ,,clt - 176*. sen tido antihorario
4-16 . A R a n e o - 22644 in 4 4 .9 * \4-18 . A0Mngo = 34.4". sen tido antihorario4-20 . A f i ^ , = 165", sen tido horario4-22 . A J U ™ = 203.4 7 3 ^
4-24 . ARr a u j <ff - 249.7 m m /3 s .5 "
4-26 . ARa - - 0 5 7 9 m i
4-28 . A ¿alma™ - 1366 in4-30 . ARj j - 2962 m m 8 5 . 2 * \4 -32 . A Í 1M1I = 1.118 in . m ás corto
4 -34 . A 0 ,!,!, = 383*. sen tido horario
4 -36 . A0a j , = 148*. sen tid o antihorario4 -38 . ARP - 7247 10.<£/4 -40 . ARj„Mn - 6682 m m * -4 -42 . AR.no = 1570 in i
4 -44 . A®«iíU. = 14.4*. sen tido horario
4 -46 . A 0 m a0 tm fu ltr = 168". cw4 -48 . A ¿ dlnd[0 ■ 68.1 m m . m ás corto
4 -50 . ARanimaloi - 0 5 6 2 m i4 -52 . A R e . ■ 3087 m m / 1 6 5 2 a
4 -54 . A " 5 5 " . sentido horario4 -56 . ( A R p .a J ,* , = 9 0 8 m m
4 -58 . = 465"
4 -60 . ( A f i e ^ U . ** 576"4 -62 . ( A e . ic J m a = 295"
4 -64 . (ARO.CÜI.U, - 1513 in
4 -66 . (AflnoanmoolirapúdofJnU = 724 -68 . ( A R ^ ^ U , = 4450 m m
C a p itu lo 53-2 . P = 49.1°, <u = 109 rpm
5-4. / , = a i 88S.ÍJ = 0 .1 4 2 s5-6 . M = 0 0 6 7 s . í j = 0 5 3 s
5-8. Q = 1.7! 4 ,w = 6 3 2 rpm5-10. Q - 2883.o» - 1622 rpm
www.FreeLibros.me

36 8 R e s p u e s ta s » p r o b le m a s p a r e s s e le c c io n a d o s
5-12. L j = 4 m m , o> = 750 rpm5-14. 0 = 20*. o» = 100 rpm
5-16. p = 12.6°, tu = 4286 rpm5-18. P - 85® ,« - 1818 rpm
5-20. p - 0®.a» = 17.14 rpm5-22. p - 195®, o. - 33J rpm5-24. 0 - 16.36®, w = 200 rpm5-26. P = 857", ü> = 300 rpm5-28. p = 692®. o> = 40 rpm
5-30. 0 = 49.09®, <u = 175 rpm
5-32. p - 5143®, m - 240 rpm
C a p itu lo 66 -2 . A l - 37.5 s 6 -4 . v ■ 2257 m in/h
6 -6 - «"rato ” -0167 rpm 6 -8 . ARS0Ui - 7 2 i n 6 -10 . ARgou) = 7 5 in 6 -12 . V = 12556 ft/m in
6 -14 . V f l - 9 0 ft/s ^ 2 0 *6-16 . V ft(, - 5.94 ft/s /5 9 .4 ®
£-18 . V A. * - 15.72 ft/s 2 5 .9 * \6 -20 . V - 27255 in /s —6-22 . V ^ a u = 5953 in /s —6-24 . = 5.94 in /s l
6 -26 . “ bnwiimpjOo, = 2 5 0 rad/s, sentido antihorario
6 -28 . í ^ n ^ i í ■ 0 8 5 rad/s, sen tido horario6 -30 . - 2532 rad/s, sen tido antihorario6 -32 . V tojd<aifU = 112.91 m m /sí6 -34 . Váiind(0 = 4 5 9 in/s, compresión
6-36 . V riliand„ « ho = 15058 in /s 4 5 ¿ /6 -38 . V , . ^ , = 775 m m /s —*6-40 . - 15.99 ft/m in / 2 . 9 °
6-42 . V ^ a u - 11254 in/s -
6 -44 . «W cluntuOor = 188 ra d /s sentido horario6 -46 . w*BnMnto«i*r»n« ■ 3827 rad/s, sen tido horario6 -48 . Vannaro = 4 5 9 in/s, compresión
6-50 . V w , = 953 m m /s —6-74 . VpáujH - 2305 in/s •—
6-76 . V ^ a u - 482 in /s l
6 -78 . war-(iirdc»gvií “ 1545 rad/s, sen tido horario6 -80 . = 0.071 rad /s, sentid o an tihorario
6 -82 . = 2885 in /s 4 5 £ /6 -84 . V ^ a ^ - 12.79 ft/m in /^2.9®
6-86 . Vonhau = 91.11 in / s —»
6-88 . a»br.íolinijúdoi “ 3146 rad/s, sentido horario6 -90 . Wnsmcntodccngmcí - 5.421 rad/s, sentido horario6 -92 . VáUnan, = 254 in/s, compresión6-94 . V - 2 .A ,» ^ ,a = 10.60 ft/s2
C a p itu lo 77 -4 . A R , - 40 m m t7 -6 . = 9 8 2 rad/s2, sentido horario
7-8 . = 7 8 5 rad/s*. sen tido horario
7 -10 . A V m ador - 85 in7-12. A R * ^ ^ - 1 5 in l7-14. ARMUMjor = 10 in
7-16. AS = 17,770 in/s1 7 0 ^ /
7-18. A„ = 22872 in/s* ^ 1 0 *7-20. A , - 5158 in/s2 6.9* \7-22. A ** - 25.46 m m /*2 1 1 5 ® \7-24 . AOJI - 155 ft/s2 425® \
7-26. A^wn - 31541 in/s2 - *
7-28. A p ,^ = 37,194 in/s2 - »7 -30 . A , ul< = 29571 m m /s 'f
7-32. A ^ ^ im - 58.97 in/s2 —7-34. A ^ u ! , - 103.73 in/s2 -
7-36. Oahtiio ■ 5 5 2 rad/s2, sen tido horario7-38. a >w^.,iu 3 9 8 0 rad/s2, sen tido antihorario7-40. o»^r .! . = 7 8 5 5 rad/s2, sentido horario
7 -42 . = 2 0 8 rad/s2, sentido horario7-44. ApIt0n = 93,195 in/s2 —
7-60. A ^ ff l - 900 m m /s2 / V7-62. A'gva; - 900 m m /s2 6 0 ¿ /
C a p itu lo 8(Los resultados del program a/hoja de cálculo se presentan con u n
ángulo de manivela de 120°)
8-2 . A R, = 123.9 m m a 9¡ = 120®8-4. 6 , = 165* a 0 , = 120“
8-6 . V , - -2577 m m /s a f l , - 120"8-8 . o», ■ 3 5 7 ra d fc a 0 2 ■ 120®8-10. A , = 2349 m m /s2 a0¡ - 120®
8-12. o», - 204.4 rad/s afl2 = 120®
C a p itu lo 99-14. = 10.9 rpm . V ^ , = 0 5 in/s
9 -16 . - 42.9 rpm , Vm j, - 4.0 in/s9-18. o»I t J - 13.3 rpm . - 2 5 in/s
9 -20 . o * , . - 17.1 rpm . V m u - 3.1 in/s9-22. a v . . = 20 rpm , V ^ , = 2 0 in /s9 -28 . a v ,a = 9.4 rpm . V ^ , = a 9 4 in/s
9-30. V ^ . - 155 in /s , A ^ , = 3.13 in/s29 -32 . V™,, - 8 0 m m /s. AmJl - 8 0 m m /s2
9-34 . Vnu, - 189 m m /s. A»*, - 2961 mm/s29-36. Vmj, - 143 in /s , A ,^ , - 641 in /s29 -62 . = 7.46 rad/s, o ^ i = 123 rad/s2
C ap itu lo 1010-2. p = 0 5 9 3 in
10-4. D = 81 m m10-6. mp - 15310-8. mp = 1.4710-10. C = 1.125 in
10-12. D, = 2 ¡n ,D j = 4 5 in10-14. C - 3 5 in
www.FreeLibros.me

R esp uestas a p ro b lem a* pare» se lecc ió nados_________369
10-16. V , = 67.7 in/s
10-18. V , = 903 in/s10-20. N , = 24 dientes. N ¡ = 96 dientes
10-22. Pd - 8. N, - 16. N , « 6110-24. P j = 4. N, - 20. N¡ « 60
10-26. P j - 1210-28. D, = 3 .0 in , D¡ = 1333 in
10-30. D , = 2X» in . D¡ = 1025 in 10-32. Pj = 12, D, = 40» in . D¡ = 24.0 in
10-34. A0 = 2.12 rev
10-36. As - 42.4 in 10-38. cu - 106 rpm10-40. p n = 0 2 8 in
10-42. Pj m T&, N\ = 19. N , = 38 10-44. y , = 14.9", y , = 75.1*10-46. y , = 10.4". y g = 64 6*
10-48. Pj - 12, N„. - 2. N , - 50, A - 5 '10-50. cu5 - 100 rpm . sen tido hoarío c ■ 8 3 in
10-52. oia - 30 rpm , sen tido horario; C - 17.97 in10-54. s , = 0.74 in. c = 4625 in
10-56. Pj = 810-58. cu, = 3576 rpm10-60. « , - 2520 rpm. C - 9 in
10-62. N ■ 17 - 6 8 .1 7 - 6 8 .1 8 - 45 ,18 - 45 .17 - 3410-64. A flw-..-. - 8° sentido antihorario10-6 6 . A O ^ u n , = 106° sentido antihorario
10- 68. cu4 = 2160 rpm . sentido horario10-70. cu6 = 536 rpm , sen tido horario
10-72. cu» = 378 rpm , sen tido antihorario
C a p ítu lo 1111-2. cu,, = 479 rpm . sentido horario11 -4 . cu„| - 3 1 3 rpm . sentido antihorario11-6. cu,,, ■ 2700 rp m . sen tido antihorario11-8. c - 22375 in , T = 162*
11-10. c = 25618 in ,0 * 144'11-12. 5V correa
11-14. 3V correa11-16. 3V correa11-18. cu,, - 84 rpm . sen tido horario
11-20. tu<m ■ 760 rpm , sen tido horario11-22. c = 48.724 in . 0 = 125'11-24. c = 52.424 in . 0 = 9 6 '
11-26. N o . 80 cadena11-28. N o . 100 cadena
C a p ítu lo 1212-2. p - .0357 in . A - 2.87°12-4. p - .020 in , A - 3 6 5 '
12-6. A R.no, - 2 3 in t12-8. A Rra,^ = 0.154 in t12-10. ARpUa = 2.756 in i12-12. ARpUtarariTu “ 2 3 6 4 in 2 9 . $ /12-14. A Rrioono " &445 in / 2 8 . 3 '12-16. A K ^ m - 0.921 in A b .7 '12-18. V .n « - 0.167 in /s i12-20. V maa = 0.154 in . /s t12-22. V fiM A nM » 7 2 3 6 in /s f a .8"12-34. e = 26%12-36. t = 47.2%
12-38. t - 24.5%12-40. MIO X 1 3 0 y M8 X \2 5
C a p ítu lo 1313-2. R - 248 /6 6 *13-4. Ai = 200 in Ibs, sentido horario
13-6. Af = 188 in Ibs. sentido horario
13-8. Af = 18.9 N m . sentido horario
13-10. F,„ - 3733 lbs(C)13-12. »W .I - 868 N i13-14. F w lli randa “ 120Olb(C>13-16. d i . frontal - 2137 lbs(C>
a l . trasero = 7182 Ibs(C)13-18. d i . frontal = 5000lbs(T)
d i . trasero = U .110lbs(C)
C a p ítu lo 1414-2. m = 0.14 slugs
14-4. / = 0.135 k g m 1
14-6. I , - 31 -25 l g m 114-8. / , - l.49lb f ts214-10. I , = 0.166 k g m 2
14-12. lylg = 0.00626 Ib in s114-14. Tmclc, = 199.49 in Ibs, sentido horario
14-16. Tm c ta = 14.04 N m . sen tido antihorario14-18. Tmaor - 10.22 N m , sen tido antihorario
14-20. FJ* = 5225 Ibs f 3.7*
T¡g = 1323 in Ibs, sentido horario
14-22. F;s = 1377 N ^49.4°
T¡t = 1 9 3 Nm . sen tido antihorario
www.FreeLibros.me

REFERENCIAS
1. Barloo. Lyndon, Mechanism Analyás: Sim plified Graphical and Analytúal Techniques 2a. ed., M arcel Dekker Inc.. Nueva York. 1993.
2. Baumeister, Theodorc III, Avallooe, Eugene, an d Sadegh, A i, Mark's Standard Handbook fo r Mechamcal Engitiecrs. 1 la . ed., McGraw-Hill Book Company. Nueva York, 2006.
3. Chironis, Nicholas an d Sdatcr, Ncil, Mcchamsms and M echoneaI D rivtS Sourcebook, 4 a ccL, McGraw-Hill Book Company, Nueva York, 2007.
4. E rdm an, Aurthur, Sandor, George, an d Kola. Sridhar, Mechanism Deágn, Vol I: A nalyái and Syntheás, 4a. ed., FVentice H all. U pper Saddle River, NJ, 2001.
5. Kepler. H a r o l i Baác Graphical Kinem atics 2a. ed., McGraw-Hill Book Company, Nueva York, 1973.
6. Jensen, Preben, G im Design and Manufacture, 2a. ed - Marcel Dekker, Nueva York, 1987.
7. Jcnscn, Preben, Clasácal M odem Mechan isms fo r Engineers and Inventors Marcel Dckkcr, Inc., Nueva York, 1991.
8. Iones. Franklin, Holbrook, H orton, and Newell, John, Ingenious Methamsms fo r Deágners and Inventors, Volt l- IV , Industrial Press Inc. Nueva York, 1930.
9. Mabie. H am ilion an d Reinholtz. Charles, Mechanisms and Dynamics o f Machinery, 4a. e d - Idhn Wfley an d Sons In c , Nueva York. 1987.
10. M artin, George, IGnematics a n d Dynamics o f Machines, 2a. ed - Waveland Press Inc., LongG roow , IL, 2002.
11. N orton, Robcrt. D tágn o f Machinery, 4 a . cd - McGraw-Hill Book Company, Nueva York, 2008.
12. Uickcr, John, Pcnnock, G ordon, an d Shiglcy, loseph, Theory o f M achino and M cchamsms 4a. cd - Oxford Univcrsity Press. Nueva York, 2010.
13. Townsend. D ennis an d Dudley, Darle, Dudleys Gtur Handbook, 2a. ed., McGraw-Hill Book Company, Nueva York, 1991.
14. Waldron, Kenneth an d Kinzel, Gary, Kinematics Dynamics and Deágn o f Machinery, 2a. ed., John W iley an d Sons Inc- H obokcn, NJ, 2004.
15. Wflson, Charles an d Sadler, Petcr, Kinematics and Dynamics o f Machinery, 3a. cd., Pcarson Education, Upper Saddle Rivcr, NJ, 2003.
16. H brbng Model Demonstraron Guide, Knowledgc Revolution Inc- San M ateo, CA, 1995.
www.FreeLibros.me

ÍN D IC E ANALÍTICO
A
A c e le r a c ió n , 1 7 0 .1 7 8 . 3 4 6
a n á l is i s d e , 1 7 0 .1 8 8
re la t iv o . 188
« s g u l a r , 1 7 3 ,1 8 4
c o n t a n t e . 173
c o m p o n e n te s d e b . 187
c o n s t a n t e . 171
c o n t o r n i l l o i m p u ls a d o , 3 2 8
c u r v a s d e . 2 1 2
d e C o r i o h s , 1 9 7 .2 1 0
m e c a n i s m o c o n , 211
d e U g r a v e d a d , 3 4 6
d r p u n t a s s o b r e u n e s l a b ó n , 2 1 0
d e u n e s la b ó n , 1 7 3
d r u n p u n t o e n g e n e r a l , 191
d e s e a J a , 198
d ü g r a m a d e , 1 8 4 .3 5 9
e n g e n e r a l , 2 0 6
im a g e n d e . 196
l in e a l . 1 7 0 ,1 7 1 ,1 7 3
tfc p u n t o s q u e s e m u e r e n e n l i n e a r e c ta ,
1 7 0
n o r m a l . 1 7 3 ,1 7 5 ,1 7 6 ,1 7 8
y t a n g e n c ia l . 1 7 4 ,1 7 6 .2 0 6
p u r i r o r t r o s d e m o v im ie n to d u r a n t e l x 172
p e r f i l d e v e lo c id a d y , 171
p o l íg o n o d e , 1 7 9
r e c t i l í n e a c o n s t a n t e . 171
r e la t iv a . 177
c o m p o n e n te s d e la , 1 7 9
e c u a c ió n d e . 1 8 9
ta n g e n c ia l . 1 7 3 ,1 7 4 .1 7 8
t o t a l . 175
u s a n d o W o r k in g M o d e U l 3
A c tu a d o c l e s ) . 4
d e t o m a i o . 13
e i m p u ls o r e s , 12
A d e n d o , 2 6 2 ,2 6 7
A n á lis is , 2
d n c m á t k o , 2 2 3
d i s e ñ o y , 2 2 3
y s e l e c c ió n , 2M
c o m p l e t o d e v e lo c id a d . 199
d e a c e le r a c ió n , 170
r e la t iv o , 181
d r f u e r a s e s tá t ic a s , 3 3 0
d e l d e s p l a z a m i e n t o . 1 0 6
d e m e o m á m o s a s i s t i d o p o r c o m p u t a d o r a ,
2 1 5
d e p o s i c i ó n y d e s p l a z a m ie n to . 72
d e v e lo c id a d . 123
c o m p le to , 1 9 9
p r o m é t r i c o d e l a c o n f ig u r a c ió n o r ig in a l . 82
g r á f i c o , 8 7
d e p o s i d ó n , 9 4
d e v d o d d a d . 1 3 0 ,1 4 9
v e c to r i a l g r á f i c o , 4 3
c a n o á m i e n t o d e t r i g o n o m e t r í a r e q u e r i
d o » p a r a c L 44
c o n o c i m i e n to r e q u e r i d o s p a r a e l . 4 4
c o n o c i m i e n to r e q u e r i d o s d e C A D p a r a
e l . 4 4
t é c n ic a s d e d i b u j o r e q u e r id a s p a r a e l , 4 4
A n c h o d e c a r a , 262
A n g u lo !» )
d e a v a n c e , 3 1 6
d r c o n t a c t o . 3 0 4
d e c u e r d a i n c l u i d o . 3 2 3
d e d e s p l a z a m ie n to , 115
d r h é l ic e . 261
d é l a m a n i v e l a ,48
d e p r e s i ó n , 2 4 2 ,2 6 4 ,2 7 6
d e o p e r a c i ó n , 2 7 3
d r t r a n s m i s i ó n , 116
d d e je . 2 8 5
m d u i d o , 3 1 6
n t e r i o r ( e s ) , 4 8 ,5 8
A r m a d u r a , 8
A u to b lo q u e o , 2 8 7
A v a n c e ,3 1 7 ,3 1 8
BB a f a n e tn
b r a z o d e . 4
d o b le , 2 0
m a n iv e f a - , 2 0
t r ip le , 2 0
B a n c a d a , 2 , 8 . U , 1 3 .1 5 ,1 7
B ra z o d e b a l a n d n , 4
cC a d e n a ! s ) , 3 0 8
a b i e r t a s o c e r r a d a s , 4
d e r o d i l lo . 3 0 8
d e t r a m o m ú l t ip le s , 3 0 8
b n g t t u d d e c a d e n a , 311
m u l t i t r a m o s 3 0 9
p a t o d e . 3 0 9
t i p o s d e , 3 0 8
C a m i ó n d e a r r a s t r e . 4 6
C a r r e r a , 113
d e u n m e c a n i s m o d e m a n iv e la - c o r r e d e r a ,
114
C e n t r o ! » )
d e g r a v e d a d , 3 4 7 ,3 5 9
d e r o t a c ió n , 142
d i s ta n c i a e n t r e , 2 6 8 ,3 0 4 .3 1 1
i n s t a n t á n e o , 1 4 3 ,1 4 4 , 1 6 6
d i a g r a m a d e . 1 4 4 ,1 4 5 ,1 4 7
p r in c ip a le s . 1 4 5 .1 4 7
u b ic a c ió n d e . 165
lo c a liz a c ió n d e , i n s t a n t á n e o s 142
p r in c ip a le s , 143
C ie l o c o m p l e t o . 9 4 ,9 6
C i l i n d r o s h id r á u l i c o s o n e u m á t i c o » , 12
C in e m á t i c a , 1 ,2
d e l a c r e m a l le r a y e l p i f i ó n , 281
d d s e g u id o r , 232
d e t o r n i l l o s 3 1 8
d e u n a c a d e n a , 3 1 4
d e u n a c o r r e a , 3 1 3
d e u n a t r a n s m is ió n
d e c o r r e a . 3 0 5
d e c a d e n a , 3 1 1 ,3 1 4
cfc u n e n g r a n e ! t ) , 2 7 3
c ó n i c o s 2 8 5
h e l ic o id a l , 2 8 2
á n f i n . 2 8 6
m v e n ¿ 6 n .8
r e p r e s e n ta c ió n , 5
C ir c u lo
d e p a s o . 2 6 2
p r i m a r io , 2 3 7
C ir c u i to
d e f e c to d e . 119
d e u n m e c a n i s m o d e c u a t r o b a r r a s 8 7
C o e f i c ie n t e d e f r ic c ió n , 341
C o m p o n e n t e s d e fa a c e l e r a c ió n , 1 8 7 .1 9 5
C o n f ig u r a c ió n d e l m e c a n i s m o , 74
C o n s ta n t e
a c e le r a c ió n , 2 2 8
m o v i m i e n to c o n , 2 2 9
v e lo c id a d , 2 2 8
C o r r e a ! t ) . 3 0 2
d n e m á t i c a d e u n a t r a n s m i s i ó n d e , 3 0 5
c o r r u g a d a , 303
d e d s t r f c u c i ó n , 303
p t o m e t r f a d e l a t r a n s m i s i ó n d e , 3 0 4
b n g u t u d d e b , 3 0 4
v e lo d d a d d e la . 3 0 1
C r e m a l l e r a y p i f i ó n . 2 9 6
C r i t e r i o d e G r a s h o f , 1 9
C u e n l a l s ) , 2 6 2
A C M E , 3 1 7
c a n s í c r is t i c a s d e l a s 3 1 6
ú i * l r a d a s 3 1 7
d i m e n s io n e s e s t á n d a r d e u n a , 3 1 9
f o r m a s d e , 3 1 6
m é t r i c a s 3 1 7
n ú m e r o d e , 3 1 7
www.FreeLibros.me

372 In d ice a n a lítico
o r i e n t a c ió n d e 1 * 3 2 0
u n i f ic a d a s , 3 1 7
C u e r p o ! s )
c o m p u e s t o s , 351
U b re , d i a g r a m a d e , 333
O i r v a í s )
d e i n s o l u t a , d e u n c i r c u l o , 2 6 4
d e p a s o , 2 3 7
d e v e lo c id a d . 1 5 5 ,1 6 7
d e l a c o p la d o r . 101
D e d e n d o , 2 6 2
D e fe c to
d e c i r c u i to , 1 19
d e r a m i f ic a c ió n , 1 2 0
D e s c e n s o
a r m ó n i c o , 231
c ic lo id a l . 2 3 3
D e s p la z a m ie n to , 171
a n á f is is d e . 7 4 .1 0 6
c i tg u la r . 7 3 ,1 7 3
d e lo s e s l a b o n e s i m p u l s a d o s , 7 5
d e l t o r n i l l o . 3 2 0
d e u n s im p le e s l a b ó n i m p ú l s a l o , 7 4
d e s e a d o , 81
d ú g r a m i d c l , 2 2 7
a r m ó n i c o , 2 3 2
l i n e a l , 7 3
p o s i d ó n y , a n á l is i s d e , 7 2
p o h n o m ia L 2 3 6
p r o b le m a s d e . u s a n d o W o r k in g M o d e l , 1 0 7
r e s u l t a n te , 8 3 .8 7
D e te n c ió n . 2 2 6
D ia g r a m a ! s)
d n e m á t i c o ! s> . 5 , 8 - 1 1 , 1 4 - 1 7 ,7 8 - 8 4 ,9 0 - 9 1 ,
1 2 7 - 1 3 3 ,1 3 5 - 1 3 7 , 1 7 7 ,1 8 3 , 1 9 2 ,3 5 8
d e a c e le r a c ió n . 1 8 7 , 1 9 5 ,3 5 9
d e c e n t r o s i n s ta n t á n e o s , 144
d e c u e r p o I fc re . 3 3 3 ,3 3 8 ,3 4 2 ,3 5 5 ,3 6 1
d e d e s p l a z a m ie n to . 9 8 , 9 9 , 1 0 7
a r m ó n i c o , 2 3 2
d e l s e g u id o r . 2 2 5
d e t i e r o p o . U O . 112
d e v e c t o r a . 4 9 .5 0
s e c t o r i a l 5 6 , 5 7 , 5 8
D iá m e t r o
b a s e . 2 6 2
d e p a s o . 2 6 8 .3 0 4 , 3 1 0 ,3 1 6
■ Je a l d e l i p o le a i m p u ls o r a . 3 0 6
m a y o r . 3 16
m e n o r . 3 1 6
D ie n te s
d e e n g r a n e s i n f í n . 2 8 6
d e m u A ó n , 271
n ú m e r o d e . 2 6 2 , 2 6 4 ,2 7 6 .3 1 0
p e r f i l e s d e . 2 6 7 ,
d e m v o h l t* 2 6 4
( j i c n o s o n i n v o l u t * 2 6 7
D ife r e n c ia le s
g rá f ic a s , 157
r u m í r i c a s , 159
D im e n s io n e s e s t á n d a r d e u n a c u e r d a , 3 1 9
D i r e c c ió n d e l a r e a c c ió n , 3 3 4
D i s c n o ( s )
a n á l is i s c in e m á t ic o y , 2 2 3
a n a l í t i c o d e t p e r f i l d e u n a le v a d e d i s c o , 2 4 3
d e m e c a n i s m o s , 1 0 9
d e m a n í s e l a - t u l a n d n . 120
d e m a n is e la -c e p i l lo , 1 1 7 ,1 2 0
d e m a n iv c l a - c o r t e d e r * 113
d e t r e n e s d e e n g r a n e s . 2 9 8
p i f i o d e l p e r f i l d e u n a le v a d e d i s c o , 2 3 7
l im i t a c io n e s d e l , 243
e n t r e c e n t r o s , 3 0 4 ,3 1 1
l e r p e n d i c u l a r , 331
d e c a d a c o m p o n e n te , 3 3 2
E c u a d ó n ( e s )
d e a n á l is i s d e p o s i c ió n , 8 1 ,8 4
d e e n g r a n e s p l a n e ta r i o s , 2 9 3
d e e q u i l i b r i o . 3 3 7 . 3 4 0 ,3 4 2 ,3 5 5 , 361
d r G r u e b l e r , 8 ,1 6
a c e p c i ó n d e 1 * 1 8
d e m o v i l i d a d , 16
d e p o s i d ó n p a r a u n m e c a n i s m o c e r r a d a
d e c u a t r o b u r r a s , 87
d e t e l o d d a d r e la t iv a , a d e c u a d * 131
g e n e r a l e s , 2 1 9
v e c t o r i a l e s ) , 6 0 6 5
a p l i c a c ió n d e , 62
g e n e ra le s , 70
E f ic ie n c ia . 3 2 3
E l e m e n t o c o n d o s f u e r a s , 3 3 5
E le v a c ió n
a r m ó n i c * 231
d d o i d a l 2 3 3
E n g r a n e ! s ) , 2 6 0
a c o p l a d o s , 263
a n á l is i s p o r e c u a c ió n d e . p l a n e t a r i a s , 2 9 1
m u l a r ! e s ) , 261
o d e a n i l l o , 2 9 0
c i n e m á t ic a d e . 2 9 5
t a n u n a d t s U n c u e n t r e c e n t r o s , 2 9 5
c ó n i c o s , 2 6 1 ,2 9 7
d e c a t i k g o , 2 9 6
d e e s p i n a d e p e s c a d o , 261
d e i n g l e t e .2 6 2
d B e f lo d e t r e n e s d e , 2 9 8
e s t á n d a r . 2 6 6
p o m e t r k a d e , r e c to s , 2 9 5
h e l i c o i d a l e s ) , 261
c in e m á t ic a d e u n , 2 8 2
d o b le s , 261
« s t e m o s . 261
m e c a n i s m o d e , im p u ls a d o s . 2 9 8
r e c to , 2 6 2
r e la c io n e s d e lo s , 2 6 8
re v e r s ib le . 2 8 7
s e le c c ió n d e u n , 2 7 5
s in f i n . 2 6 2 ,2 9 7
d i e n t e s d e . 2 8 6
t i p o s d e , 261
t r e n e s d e , 2 9 7
v d o d d a d d e u n . 2 7 5
E q u i l ib r io
d in á m ic o , 3 3 0 ,3 4 6
e c u a c io n e s d e . 3 3 7
e s tá t ic o , 3 3 0 ,3 3 5
E s c a l a r l e s ) , 43
y v e c to r e s , 43
E s f a b ó n ( e s ) , 2 . 8 , 1 0 , 1 1 , 1 4 .1 6 ,1 7
c o m p le jo , 4 , 5
c r e a r u n , 37
d e t e n s i ó n o d e c o m p r e s ió n , 9 4
d e s p l a z a m ie n to d e l 78
f l o ta n te , 1 7 9
k n p u l s o r . 7 7 ,7 8
r e d i m e r o ió n d e . 3 6
s e g u id o r . 8 9
s im p le . 3 . 5
t r a y e c to r ia d e lo s , 7 7
E s l a b o n a m ie n to , 2 , 8
E s q u e m a d e m o v i m i e n to c o m b i n a d o , 2 3 6
E s t r u c t u r a , 10
d e r e f e r e n c i a , 9 5 , 9 9
i i t c r v a l o d e . 9 5 . 9 9
F r i c c ió n , c o e f ic ie n te d e , 3 4 1
F u e r a i s ) , 3 3 0
d e f r i c c i ó n , 341
d e te r m in a c ió n d e lo s , d e c o n t a c t o . 333
d in á m ic a s , 3 4 6
d e m e n t o c o n d o s . 3 3 5
en s u s c o m p o n e n te s r e c ta n g u la r e s . 3 3 2
i n e r c k i l e s ) , 1 7 0 ,3 5 2 ,3 5 3 ,3 6 0 .3 6 4
m d o d o d e 1 * d e i n e r c i a d e l e q u i l i b r ó
d i n á m i c o . 3 5 3
r e í r m a l 341
r e s u l t a n te , 3 4 3
y t o r q u e e n e l t o m i l l o , 3 2 8
G r a d a s d e l i b e r t a d in a c t iv o s . 18
G e o m e t r í a d e l a c o n f ig u r a c ió n
d e l m e c a n i s m o , 1 3 8 ,1 4 1
4*1 t o r a A lo . 3 2 0
d e s p l a z a d * 8 1 , 8 3 , 8 6
d e u n a t r a n s m is ió n
d e c o r r e * 3 0 4 .3 1 3
d e c * J c r u , 3 10
o r i g i n a l 81
G i r o d e l a l e v a . 2 2 6
G r á f i c o d e v e lo c id a d , a n á f is is . 1 3 0
www.FreeLibros.me

In d ice a n a lítico 373
HH o j s d e c á k u la 2 4 ,2 1 5 H olgura, 2 6 2 ,2 7 2
IImoftn
d e aceleración , 196
d e v t k x id j i l . 137
Inercia. 170
Interferencia. 2 7 0
Inversiones geo m étr ica s , 74 ln w s t ig * j ó n c in em ática . 74
LLeva. 223
cilindrica. 2 2 4 ,2 5 1
c in em ática d d seguidor d e U 2 3 1 .2 3 2
d e piara o d e d isco . 224
•fce flo
an a lítico d d perfil d e u n a . 2 5 1 g r á fv o d d perfil d r u n a , 2 3 7 ,2 5 1
p r o d e b . 226 lineal, 224
p osición d e en trad a d e la , 237
t ip o s d e . 223
v d ocid ad an gu lar requerida d e b . 226 le y (e s )
d e l m o v im ie n to , 333
d e lo s co sen o s, 46
d e lo s sen os, 4 6 ,4 7
L im itaciones d e d is e n a 243
Linea
d e c o n ta c ta 264 d e p a s a 273
d e p r e s ió n . 264
lo n g itu d d e cadena, 311
MM a g n itu d , 331
d e b f u e r a 331
d e la resu ltante, 5 1 ,5 8
dirección d e U , 5 1 ,5 8
vectoria les. 6 6 ,7 0
determ in ación grifara d e , 63
M a n ejo d e vectores, 48
M anivela , 3 .2 2 -b a la n d n . 2 0 ,1 1 5
- c e p il la 117
•corredera, 1 1 3 ,1 4 2 , 190 ,221
d e cam pana. 4
d o b le , 20excén trica, 14
m ecan ism os d e . -corredera en Hnea. 1 1 3
velocidad d e la . 110M áq uin as, I
M asa. 3 4 6
momento de inercia y , 363
p eso y. 3 4 6
propiedades d e b m asa, 360
M eca n ism o ! s ) , i
b loqu ead as, 8
co m u n es, so lu cio n es algeb raicas para, 142
d e c u a tro barras. 1 9 ,1 4 2 . 191 ,221
d e e n g ra n es, im pu lsadas, 298
d e G inebra, 252
del m o to r d e gaso lin a . 48
d e l in e a r e c ta 22
de m an iveb -b a lan cín , 115
de m a n iv cb -cep illo , 1 17
de m anivela-corred era . 1 4 2 .1 9 0 , 221
d escen tra d a 114
e n U n es , 113
d e p a r a k lo g r a m a 22 de p u n ta d e c a m b ia 20
de retorn o r á p id o , 23
d e t o r n d la 3 ! 6 d e y u g a 23
d isen o d e . 109
equivalentes, 201
p r o m e lr b d e l .1 3 8 m anuales, 13
para m over u n es la b ó n , 1 18 en tre d o s p o s ic io n e s , 119
en tre tres p o s ic io n e s , 1 19
para p ro p ó sito s e sp e cu le s , 22 so lu cio n es algebra tras d e . 190
técn icas d r análisis d e , 23
lerm in o iag la d e , 2 M edia u n ió n ,3
M é to d o ! s)
an a lítico para v elocidad . 152
relativa, 164
d e ace lera d ó n relativa. 208
a n a lít ic a 209 de co m p o n en tes , 59
d e iá n g u la 5 3 .6 6
d e l cen tro in s ta n tá n e a 149 del tr iá n g u la 5 0 .5 7
g r á fic a 1 0 6 ,1 6 5
d e l centro in sta n tá n ea 166 por com p u tad ora , 24
p u n ta co n co la . 48
M ó d u lo . 263
M o m en to ! s ) . 332
d e in c id a , 3 4 8 ,3 5 2
e m e r c a . 348
y t o r q u e , 330
M otarle»)
dr a ire o h id r á u lic o ,' 12
d e c s b b o n a m ic n ta 35 de gaso lin a , 12 e léctricos d e corriente
alterna, 12 con tin u a . 12
M ovilid ad . 8 . 1 1 ,1 4 .1 6 -1 7 .7 6 ,9 4
ecu a ció n d e , 16 M ovim ien to
a b s o lu ta 8
a r m ó n ic a 228
ciclo idaL 230co n a cd era d ó n con stan te, 231
del seguid or. 2 2 6 ,2 2 7
esquem as d e , c o m b in a d a 236
leyes deL 333
lineal. 172
p erfil d e vdocid ad d eL 124
parám etros d e l 172
p rescrito d d seguid or. 225
r e c t ilín e a 171
r e b in a 8 .1 7 7 ,3 2 0
NN ú m ero
de c u n d a s . 317
d e d ien tes . 2 6 2 .2 7 6 , 3 1 0
PP ab cargadora, «5
Paso
circular. 262norm al, 283
c irculo d e , 262 diam etral, 2 6 2 ,2 6 3 , 276
p in t o d e . 262 f trrn a u n ió n d e . 5 .1 4 , 38
P e s a 346
m asa y . 346
Pifión y crem allera. 296
Pivote. 116
ú n ico , 120 Poleas, 302
acanaladas, 303 de in v en ta r ía 307 «n p u lsora , 3 0 6 ,3 0 7
P olíg o n o d e v e lo c id a d . 1 3 2 .1 3 9 ,1 4 1
P o s id ó n !es ) , 72
® ig u b r ,7 2
d e en trad a d e b leva , 237
de u n m eca n ism o . 73 i u n p u n to . 72
l im ite . 8 7 .9 1 ,9 9 .1 0 6 -1 0 7
exten d id a . 90
retraída, 8 9 .9 0 ,9 1
m ecan ism o para m over u n eslab ón en tre dos,
118
m éto d o an a lítico y , 79,91
sín tesis d e d o s .1 18.120 o m u n esla b ó n , 118
con u n sop lad or, 118 sín tesis d e tres, 121 y desplaza m ie n ta análisis d e , 72
P rim era ley d e N e w to n , 335
Prism a, u n ió n d e , 3
Profundidad to ta l, 262
Program a! s)
d e an á lis is d in á m ic o com ercia les, 24
d c c ó m p u ta 221escrito p o r e l u su a rio , 24
www.FreeLibros.me

3 7 4 I n d i c e a n a l í t i c o
P r o p i e d a d » d d t o r n i l l o . 321
P u n í a c o n c o l a , m é to d o , 4 8
P u n to ! s )
c o in c id e n te s , 1 3 5
d e c a m in o , m e c a n i s m o d e , 2 0
d e i n t e r é s , 4 , 8 . 1 0 . 1 1 , 1 4 . 1 7 , 3 3
d e t r a » , 2 3 7
n r d i r la p o s i c ió n d e u n . 36
p a s o . 2 6 2
s o b r e e s l a b o n a . 1 3 0
t r a y e c to r i a d e u n . d e i n t e r é s . 3 7
RR a d iá n . 126
R a d io d e g i r a 3 5 0
R a n u r a , 3 8
R a z ó n ( e s )
d e c o n t a c t a 2 6 9
d e t i e m p o . 1 0 9 .1 2 0
d e v e l o c id a d .2 7 3 ,2 7 4 .2 8 5 .3 1 1
R e a c c ió n
d i r e c c ió n d e t i , 3 3 4
r o t a c i ó n im p e d i d a p o r l a . 3 3 4
R e b a je . 271
R e s u l ta n te . 4 9 ,5 0 ,5 3
c o m p o n e n te s d e b, 54
m i g n i t u d d e la . 51
R u e d a s d e n t a d a s ( c a t a r in a s ) , 3 1 0
sS e c c ió n
n o r m a l , 2 8 3
t r a n s v e r s a l , 2 8 3
S e g u id o r» e s )
c in e m á t ic a d e l . d e u n a l e v a . 2 3 2
c o n b r e o o s c i l a n t e . 2 2 4
c o n p iv o te . 2 2 5
d e c a ra
e s f é r ic a . 2 2 5
p l a n a . 2 2 5
d e c u n a . 2 2 5 .2 4 4
e n l i n e a , 2 3 7
d e U le v a , 2 3 1 .2 3 2
d e m u n ó n , 271
d e r o d i l l a 2 2 5
a m p iv o te . 2 4 1 ,2 5 0
d e s c e n t r a d a 2 3 9 ,2 4 6
a i l i n c a . 2 3 8 ,2 4 6
d e t r a s k a d ó n , 2 2 4
c o n c a r a p l a n a . 2 4 0
d e s c e n t r a d a 2 2 5
d ia g r a m a d e d e s p l a z a m i e n t o d e t 2 2 5
e n l i n e a . 2 2 5
t u r m a d e l , 2 2 5
m o v i m i e n to d e t 2 2 4 ,2 2 6 .2 2 7
p r e s c r i t a 2 2 5
p o s i c ió n d e t 2 2 4
t i p o s d e . 2 2 4
S e g u n d a le y d e N e w t o n .3 5 2
S e n t id o
a n t i h o r a r i a 125
h o r a r i o , 125
S e r v o m o to r e s , 12
S im u la c ió n p o r c o m p u t a d o r a , 31
S ín te s i s . 2
d e d o s p o s ic io n e s , 1 1 8 .1 2 0
c o n u n e s l a b ó n . 118
c o n u n « i p b d o r , 118
d e t r e s p o s i c io n e s , 121
S is te m a
d e a d e n d o s , 271
d e C A D . 2 4
S o f tw a r e W b r k in g M o d e t 32
S o lu c io n e s a lg e b r a ic a s p a r a m e c a n i s m o s , 190
c o m u n e s . 142
S u je t a d o r a d e a b r a z a d e r a . 8
S u je t a d o s p a r a m a q u i n a d a 72
S u m a
a n a l í t i c a d e v e c to r e s , 5 0
g r á f ic a d e v e c to r e s , 4 8 ,6 9
o s u s t r a c c ió n v e c t o r b t 5 5
v e c to r i a l a n a l í t i c a . 6 9
S u s tr a c c ió n g r á f ic a d e v e c t o r e s . 55
TT é e n k a í s )
a n a l í t i c a . 2 4
d e a ñ i l á i s d e m e c a n i s m o s , 2 3
t r a d i c io n a l e s d e r e p r e s e n ta c ió n g r á f i c a . 24
T e o r e m a
d e K e n n e d y . 1 4 4 -1 4 7
d e lo s e je s p a r a l e lo s , 3 5 0
d e P i t i g o n i s ,4 5
T i e m p o
d e l c ic lo
c o m p l e t a 2 2 6
d e l m c c a n á m a 110
y b v e lo c id a d d e l a m a n iv e la . 112
d i a g r a m a d e . 1 1 0 , 1 1 2 ,1 2 0
r a z ó n d e , 1 1 0
y e l á n g u lo d e d e s e q u ü í b r i a 1 1 0
T ip o s
d e l e v » , 223
d e s e g u id o r e s , 224
T o le r a n c ia , 2 6 2 , 2 6 7
T o m f l lo ( s )
a c e l e r a c ió n c o n , i m p u l s a d a 3 2 8
a v a n c e d e l . 3 1 7
d e b o l a s , 3 1 7
d e t a b d r a 3 2 5
d e s p b z a m i e n t o d e t 3 2 0
d e s p b z a m i e n t o c o n t o m i l l o i m p u l s a d a 3 2 6
d i f e r e n c ia l e s . 3 2 4 .3 2 8
f u e r z a s y t o t q u e s e n e t 3 2 2 ,3 2 8
g e o m e l r b d e t 3 2 0
i m p u l s a d a a c e l e r a c ió n c o n , 3 2 8
sán f i n , 2 6 2 ,2 8 6
u n i ó n d e . 15
v e lo c id a d c o n , i m p u l s a d a 3 2 7
T o tq u e ( s )
i n e r e b t 3 5 7
y m o m e n t o s , 3 3 0
T r a n s m is ió n ( e s )
c in e m á t ic a d e u n a . d e c o r r e a , 3 0 5
d e c o r t e a y d e c a d e n a , 3 0 2
s e le c c ió n d e u n a , d e c o r r e o , 313
T r a s la c ió n
d e b t u e r c a . 3 1 9
d e l t a r a d l a 3 1 9
T r iá n g u lo
m é t o d o d e t 5 0 .5 1
o b l i c u a 46
t r a b a j o c o n , 67
r e c t á n g u l a 44
T r e n t e s ) , 2 9 3
d e e n g r a n c ( s ) , 2 8 8 ,2 9 8
p l a n e t a r i a s . 2 9 0 .2 9 9
A v e n o d e . d e e n g r a n e s , 2 9 8
v a lo r d e l . 2 8 S
T r ig o n o m e t r í a . 4 7
ul ) n i ó n ( e s ) , S , 8 , 1 0 . I I . 1 4 ,1 6 ,1 7
c a m ó d e n l e s . 16
d e c o r r e d e r a , 3 . 6
áe e n g r a n e s . 6
d e l e v a . 6
d e o r d e n s u p e r io r . 3
d t p e r n o . 5 , 1 4 , 3 8
o í u n a r a n u r a . 14
d e p i s tó n o p r i s m á t i c a . 3
d e p r i s m a , 3
d e r a n u r a , 3 8
d e r e s o lu t a , 3
d e t o r a a l o , 15
VV e c to r í e s ) . 4 3 . 4 8 . 4 9
c o m p o n e n te s d e . 52
d e s c o n o c i d a s 6 4 ,6 5
d e v e l o c id a d . 173
d i a g r a m a d e v e c t o r e s 4 9 ,5 0
m a n e jo d e , 4 8
n g a t i v o , 5 5
s im p le . 51
s u m a
a n a l í t i c o d e . 53
g rá f ic a d e . 4 8
V d o á d a d ( e s ) . 1 7 0 ,2 7 3
a c e l e r a c ió n y e l p e r f i l d e . 171
a n á l is is d e . 123
a n á l is is g r á f i c o d e , 1 4 9
« v g u b r ( e s ) . 1 2 5 ,1 2 9 ,1 3 2 , 141
d e b le v a . 2 2 6
d e l e n g r a n e . 2 7 5
c o n s t a n t e . 2 2 8
a i n N to rk in g M o d e t 1 6 8
a i r v o s d e . 1 5 5 . I 6 7
www.FreeLibros.me
I n d i c e a n a l í t i c o 375
d e ca d en a ,311
d e b m a n iv e b , 1 10t iem p o d e l c ic lo y b , 112
d e b s tu e r c a s 3 2 1 ,3 2 2
<WD r u n to (s ) , 1 32 , MI
d e entrad a, 1 3 2 ,1 3 6
sob re e l e sb b ó n , 135
sob re e l seg u id o r, 137
<k u n en g ra n e , 2 7 5
d e u n e sb b ó n , 125
d fa g ra m a d c , 183
e n b lin ca d e p a so , 2 7 5
e s tu d io a n a lít ico d e , 137
im agen d e , 137
l in ea l, 123. 1 2 6 ,1 2 7 , 12»
d e p u n to s rectilín eos, 123
d e u n p u n to cualquiera , 124
perfil d e . 2 0 6 ,1 7 1
d e l m o v im ien to lineal. 124
p o líg o n o d e . 1 3 2 ,1 3 9
razón d e . 2 7 3 ,2 7 4 ,3 1 1
relación en tre b s lineal y a n g u b r , 126
teb liv a . 128ecu a ció n adecuada d e . 131
ím gcn ciaL 126 vector d e . 173
wVforking M o d e l 3 2 ,3 7 ,1 0 7 ,1 6 8 ,2 1 3
www.FreeLibros.me

www.FreeLibros.me

www.FreeLibros.me

M Á Q U I N A S Y M E C A N I S M O S
C u a rta ed ic ió n
D avid 11. M yszka
El propósito d e este libro es ofrecer los técnicas n e ce saria s poro estudiar e l m ovi
miento de la s m áq u in as. El texto se enfoca en la a p lic a c ió n de teorías c inem áti
c a s a m a q u in a ria del m undo real, p o r lo q u e intenta ce rra r la bre ch a entre el
estudio teórico d e la cin em ática y la a p lica c ió n a m ecanism os prácticos. Los
tem as q u e se presentan en esta o b ra son fundam entales en e l proceso d e diseño
d e m áquinas.
Entre la s características distintivas d e este libro destacan:
• Ilustraciones y bocetos d e m á q u in a s q u e incluyen los m ecanism os estudiados
en el texto.
• U so d e m étodos a n a lít ic o s y té c n ic a s g rá f ic a s e n e l a n á lis is d e los m e c a
nismos.
• Ejercicios en W o rk in g M o d e l', un paquete d e software d in á m ico d isponible
com ercialm ente.
• Sugerencias p a ra im plem entar la s técnicas g rá fica s de sistem as d e diseño
asistidos p o r com putadora (c a d ) .
El lib ro hace énfasis en los estudios d e caso , lo cual ofrece una excelente oportu
n id a d p a ra centrar la atención en el funcionam iento d e las m áqu in as.
P a ra m a yo r inform ación visite la p á g in a W e b d e este libro:
w w w .p e a rs o n e n e n e s p a ñ o l.c o m /m y s z k a
V is íte n o s e n :w w w .pearso nene spano l.co m
www.FreeLibros.me